Metodi numerici per la risoluzione di Sistemi...
69
Metodi diretti Metodi Iterativi Metodi numerici per la risoluzione di Sistemi Lineari Stefano Berrone Dipartimento di Matematica tel. 011 0907503 [email protected] http://calvino.polito.it/~sberrone Laboratorio di modellazione e progettazione materiali Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Transcript of Metodi numerici per la risoluzione di Sistemi...
Metodi direttiMetodi Iterativi
Metodi numerici per la risoluzione di SistemiLineari
Stefano Berrone
Dipartimento di Matematicatel. 011 0907503
http://calvino.polito.it/~sberrone
Laboratorio di modellazione e progettazione materiali
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
Problemi triangolariEliminazione GaussianaFattorizzazione LUPivoting
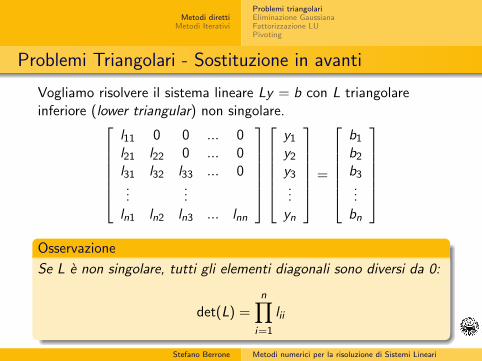
Problemi Triangolari - Sostituzione in avanti
Vogliamo risolvere il sistema lineare Ly = b con L triangolareinferiore (lower triangular) non singolare.
l11 0 0 ... 0l21 l22 0 ... 0l31 l32 l33 ... 0...
...ln1 ln2 ln3 ... lnn
y1
y2
y3...
yn
=
b1
b2
b3...
bn
Osservazione
Se L e non singolare, tutti gli elementi diagonali sono diversi da 0:
det(L) =n∏
i=1
lii
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari

Metodi direttiMetodi Iterativi
Problemi triangolariEliminazione GaussianaFattorizzazione LUPivoting
Esplicitando le equazioni:l11y1 = b1,l21y1 + l22y2 = b2,...ln1y1 + ln2y2 + ...+ lnnyn = bn.
=⇒ y1 = b1/l11
=⇒ y2 = (b2 − l21y1)/l22
=⇒ yi = (bi −i−1∑j=1
lijyj)/lii
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
Problemi triangolariEliminazione GaussianaFattorizzazione LUPivoting
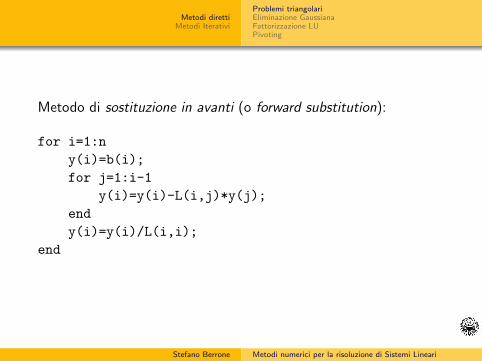
Metodo di sostituzione in avanti (o forward substitution):
for i=1:ny(i)=b(i);for j=1:i-1
y(i)=y(i)-L(i,j)*y(j);endy(i)=y(i)/L(i,i);
end
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
Problemi triangolariEliminazione GaussianaFattorizzazione LUPivoting
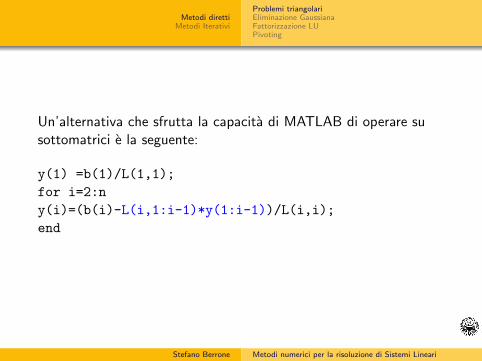
Un’alternativa che sfrutta la capacita di MATLAB di operare susottomatrici e la seguente:
y(1) =b(1)/L(1,1);for i=2:ny(i)=(b(i)-L(i,1:i-1)*y(1:i-1))/L(i,i);end
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
Problemi triangolariEliminazione GaussianaFattorizzazione LUPivoting
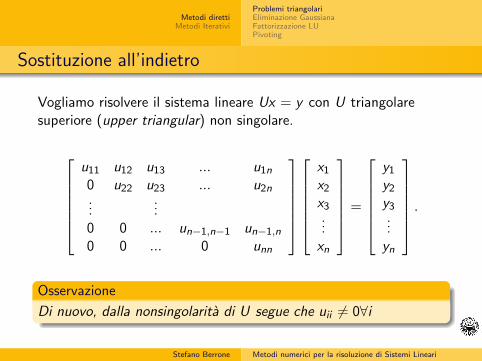
Sostituzione all’indietro
Vogliamo risolvere il sistema lineare Ux = y con U triangolaresuperiore (upper triangular) non singolare.
u11 u12 u13 ... u1n
0 u22 u23 ... u2n...
...0 0 ... un−1,n−1 un−1,n
0 0 ... 0 unn
x1
x2
x3...
xn
=
y1
y2
y3...
yn
.
Osservazione
Di nuovo, dalla nonsingolarita di U segue che uii 6= 0∀i
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
Problemi triangolariEliminazione GaussianaFattorizzazione LUPivoting
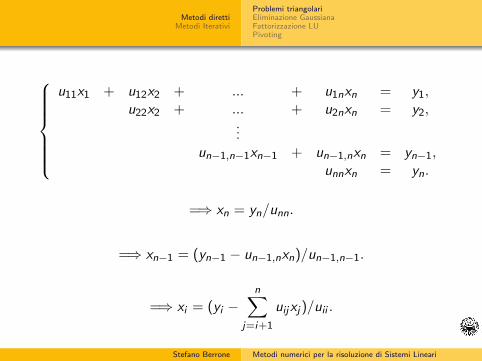
u11x1 + u12x2 + ... + u1nxn = y1,u22x2 + ... + u2nxn = y2,
...un−1,n−1xn−1 + un−1,nxn = yn−1,
unnxn = yn.
=⇒ xn = yn/unn.
=⇒ xn−1 = (yn−1 − un−1,nxn)/un−1,n−1.
=⇒ xi = (yi −n∑
j=i+1
uijxj)/uii .
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
Problemi triangolariEliminazione GaussianaFattorizzazione LUPivoting
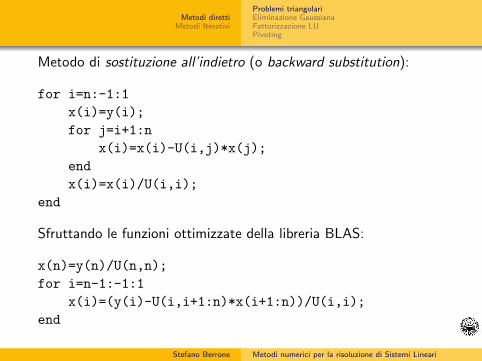
Metodo di sostituzione all’indietro (o backward substitution):
for i=n:-1:1x(i)=y(i);for j=i+1:n
x(i)=x(i)-U(i,j)*x(j);endx(i)=x(i)/U(i,i);
end
Sfruttando le funzioni ottimizzate della libreria BLAS:
x(n)=y(n)/U(n,n);for i=n-1:-1:1
x(i)=(y(i)-U(i,i+1:n)*x(i+1:n))/U(i,i);end
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
Problemi triangolariEliminazione GaussianaFattorizzazione LUPivoting
Eliminazione Gaussiana
La risoluzione di sistemi triangolari e quindi un problemaparticolarmente semplice da trattare.Idea: Nel caso di sistemi non triangolari, cercare di ricondursi aduno o piu sistemi equivalenti di forma triangolare.Dato un sistema lineare Ax = b le seguenti operazioni conduconoad un sistema equivalente (ovvero con la stessa soluzione):
1 scambiare due equazioni;
2 moltiplicare un’equazione per uno scalare;
3 sostituire un’equazione con una combinazione lineare dellastessa e di un’altra equazione.
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
Problemi triangolariEliminazione GaussianaFattorizzazione LUPivoting
Metodo di eliminazione di Gauss:
consiste nell’applicare ripetutamente l’operazione 3 in modo da:
1 trasformare il sistema assegnato in un sistema a matricetriangolare superiore
2 e quindi nel risolvere il sistema equivalente cosı ottenuto conuna backward substitution.
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
Problemi triangolariEliminazione GaussianaFattorizzazione LUPivoting
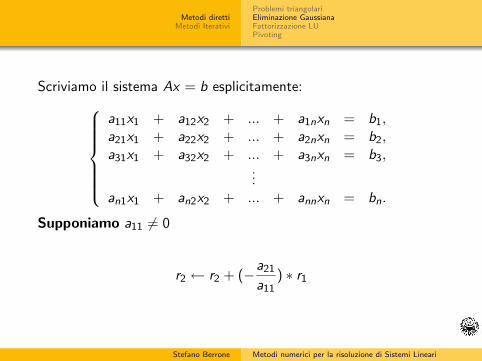
Scriviamo il sistema Ax = b esplicitamente:
a11x1 + a12x2 + ... + a1nxn = b1,a21x1 + a22x2 + ... + a2nxn = b2,a31x1 + a32x2 + ... + a3nxn = b3,
...an1x1 + an2x2 + ... + annxn = bn.
Supponiamo a11 6= 0
r2 ← r2 + (−a21
a11) ∗ r1
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
Problemi triangolariEliminazione GaussianaFattorizzazione LUPivoting
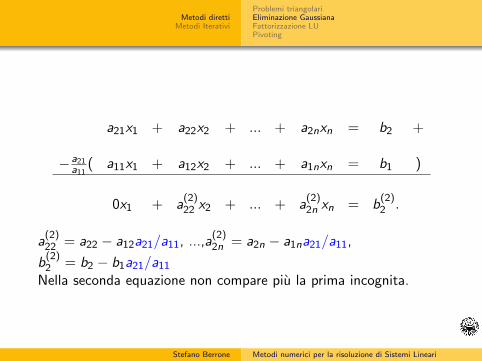
a21x1 + a22x2 + ... + a2nxn = b2 +
−a21a11
( a11x1 + a12x2 + ... + a1nxn = b1 )
0x1 + a(2)22 x2 + ... + a
(2)2n xn = b
(2)2 .
a(2)22 = a22 − a12a21/a11, ...,a
(2)2n = a2n − a1na21/a11,
b(2)2 = b2 − b1a21/a11
Nella seconda equazione non compare piu la prima incognita.
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari

Metodi direttiMetodi Iterativi
Problemi triangolariEliminazione GaussianaFattorizzazione LUPivoting
Procediamo con tutte le ultime n − 1 equazioni:
ri ← ri + mi1 ∗ r1, i = 2, ..., n
mi1 = − ai1
a11, i = 2, ..., n.
=⇒
a(1)11 x1 + a
(1)12 x2 + ... + a
(1)1n xn = b
(1)1
0 + a(2)22 x2 + ... + a
(2)2n xn = b
(2)2
0 + a(2)32 x2 + ... + a
(2)3n xn = b
(2)3
...
0 + a(2)n2 x2 + ... + a
(2)nn xn = b
(2)n
a(1)ij = aij , b
(1)i = bi , i , j = 1, ..., n;
a(2)ij = a
(1)ij + mi1a
(1)1j , b
(2)i = b
(1)i + mi1b
(1)1 , i , j = 2, ..., n.
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
Problemi triangolariEliminazione GaussianaFattorizzazione LUPivoting
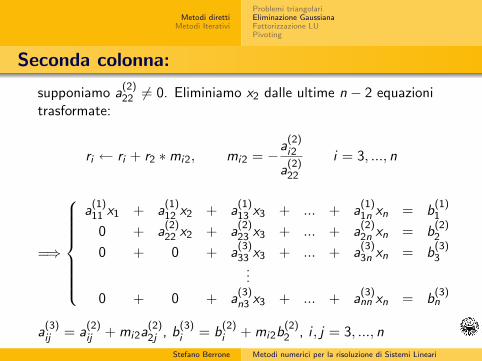
Seconda colonna:
supponiamo a(2)22 6= 0. Eliminiamo x2 dalle ultime n − 2 equazioni
trasformate:
ri ← ri + r2 ∗mi2, mi2 = −a
(2)i2
a(2)22
i = 3, ..., n
=⇒
a(1)11 x1 + a
(1)12 x2 + a
(1)13 x3 + ... + a
(1)1n xn = b
(1)1
0 + a(2)22 x2 + a
(2)23 x3 + ... + a
(2)2n xn = b
(2)2
0 + 0 + a(3)33 x3 + ... + a
(3)3n xn = b
(3)3
...
0 + 0 + a(3)n3 x3 + ... + a
(3)nn xn = b
(3)n
a(3)ij = a
(2)ij + mi2a
(2)2j , b
(3)i = b
(2)i + mi2b
(2)2 , i , j = 3, ..., n
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
Problemi triangolariEliminazione GaussianaFattorizzazione LUPivoting
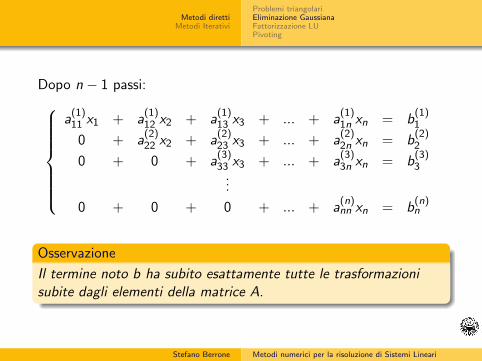
Dopo n − 1 passi:
a(1)11 x1 + a
(1)12 x2 + a
(1)13 x3 + ... + a
(1)1n xn = b
(1)1
0 + a(2)22 x2 + a
(2)23 x3 + ... + a
(2)2n xn = b
(2)2
0 + 0 + a(3)33 x3 + ... + a
(3)3n xn = b
(3)3
...
0 + 0 + 0 + ... + a(n)nn xn = b
(n)n
Osservazione
Il termine noto b ha subito esattamente tutte le trasformazionisubite dagli elementi della matrice A.
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
Problemi triangolariEliminazione GaussianaFattorizzazione LUPivoting
Definizione (pivot e moltiplicatori)
L’elemento a11 e i successivi elementi a(i)ii sono detti elementi
pivot. I coefficienti mij sono detti moltiplicatori.
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
Problemi triangolariEliminazione GaussianaFattorizzazione LUPivoting
Metodo di eliminazione di Gauss e fattorizzazione LU
In notazione matriciale, il k-esimo passo di eliminazione Gaussianapuo essere rappresentato come segue:
A(k+1) = MkA(k)
con
Mk =
1
1mk+1,k 1
.... . .
mn,k 1
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
Problemi triangolariEliminazione GaussianaFattorizzazione LUPivoting
Dopo n − 1 passi:
A(n) = Mn−1A(n−1) = Mn−1Mn−2A(n−2) = . . . = Mn−1 . . .M2M1︸ ︷︷ ︸M
A
b(n) = Mn−1 . . .M2M1b
eA(n)x = b(n)
con A(n) triangolare superiore
⇓Ax = b ⇔ MAx = Mb
Posto U = MA, si puo scrivere
Ux = Mb
da cui ottengo la soluzione con sostituzione all’indietro.Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
Problemi triangolariEliminazione GaussianaFattorizzazione LUPivoting
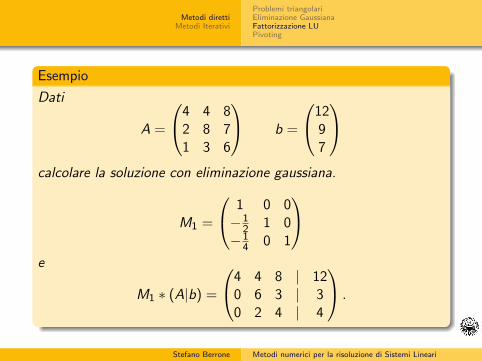
Esempio
Dati
A =
4 4 82 8 71 3 6
b =
1297
calcolare la soluzione con eliminazione gaussiana.
M1 =
1 0 0−1
2 1 0−1
4 0 1
e
M1 ∗ (A|b) =
4 4 8 | 120 6 3 | 30 2 4 | 4
.
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
Problemi triangolariEliminazione GaussianaFattorizzazione LUPivoting
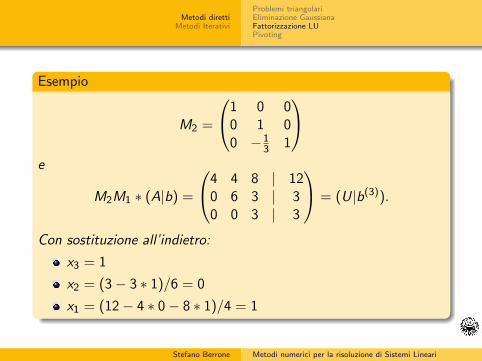
Esempio
M2 =
1 0 00 1 00 −1
3 1
e
M2M1 ∗ (A|b) =
4 4 8 | 120 6 3 | 30 0 3 | 3
= (U|b(3)).
Con sostituzione all’indietro:
x3 = 1
x2 = (3− 3 ∗ 1)/6 = 0
x1 = (12− 4 ∗ 0− 8 ∗ 1)/4 = 1
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
Problemi triangolariEliminazione GaussianaFattorizzazione LUPivoting
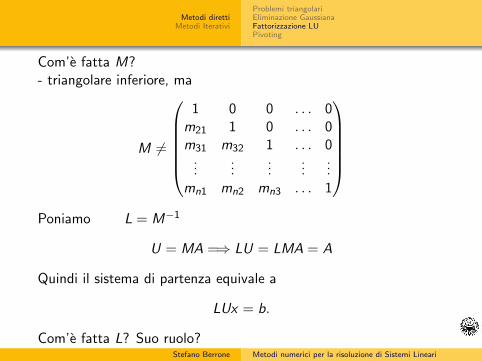
Com’e fatta M?- triangolare inferiore, ma
M 6=
1 0 0 . . . 0
m21 1 0 . . . 0m31 m32 1 . . . 0
......
......
...mn1 mn2 mn3 . . . 1
Poniamo L = M−1
U = MA =⇒ LU = LMA = A
Quindi il sistema di partenza equivale a
LUx = b.
Com’e fatta L? Suo ruolo?Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
Problemi triangolariEliminazione GaussianaFattorizzazione LUPivoting
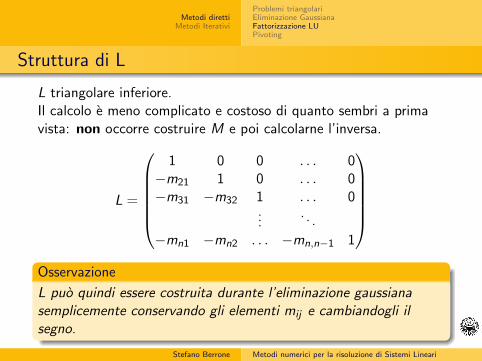
Struttura di L
L triangolare inferiore.Il calcolo e meno complicato e costoso di quanto sembri a primavista: non occorre costruire M e poi calcolarne l’inversa.
L =
1 0 0 . . . 0−m21 1 0 . . . 0−m31 −m32 1 . . . 0
.... . .
−mn1 −mn2 . . . −mn,n−1 1
Osservazione
L puo quindi essere costruita durante l’eliminazione gaussianasemplicemente conservando gli elementi mij e cambiandogli ilsegno.
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
Problemi triangolariEliminazione GaussianaFattorizzazione LUPivoting
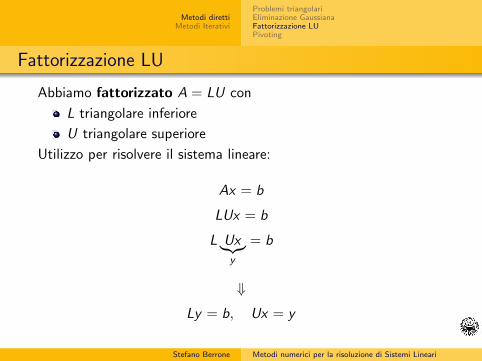
Fattorizzazione LU
Abbiamo fattorizzato A = LU con
L triangolare inferiore
U triangolare superiore
Utilizzo per risolvere il sistema lineare:
Ax = b
LUx = b
L Ux︸︷︷︸y
= b
⇓
Ly = b, Ux = y
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
Problemi triangolariEliminazione GaussianaFattorizzazione LUPivoting
Il problema di partenza puo essere affrontato in due fasi, risolvendodue sistemi a matrice triangolare:
1 prima determiniamo y risolvendo Ly = b;
2 una volta noto y , determiniamo x risolvendo Ux = y .
Osservazione
La risoluzione del sistema lineare Ly = b e del tutto equivalente adeffettuare sul vettore b le trasformazioni dell’eliminazionegaussiana. Quindi il vettore y calcolato come soluzione del sistemalineare Ly = b coincide con b(n)!
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
Problemi triangolariEliminazione GaussianaFattorizzazione LUPivoting
Meglio fattorizzazione LU + 2 sistemi lineari triangolari, oeliminazione gaussiana senza costruire esplicitamente L?Con l’eliminazione Gaussiana, b subisce le stesse trasformazioni diA. Su un solo sistema sono equivalenti. Se devo risolvere unsecondo sistema lineare
Ax = c
con eliminazione gaussiana devo rieseguire tutto ilprocedimento per effettuare le trasformazioni su c e ottenerec(n);
con fattorizzazione LU gia calcolata devo solo risolvere isistemi Ly = c e Ux = y .
E veramente piu conveniente fare cosı piuttosto che rieffettuareex-novo l’eliminazione gaussiana sul sistema Ax = c?
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
Problemi triangolariEliminazione GaussianaFattorizzazione LUPivoting
Costo computazionale
Per costo computazionale di un algoritmo intendiamo l’ordine digrandezza del numero di moltiplicazioni o divisioni effettuate,calcolato in funzione della dimensione n del problema (in questocaso l’ordine della matrice).
Costo computazionale per calcolo fattorizzazione LU(coincidente con quello della sola eliminazione gaussiana):
O(
n3
3
)moltiplicazioni.
Il costo computazionale soluzione di un sistema triangolare(superiore o inferiore indifferentemente):
O(
n2
2
)moltiplicazioni.
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
Problemi triangolariEliminazione GaussianaFattorizzazione LUPivoting
Risolvendo un sistema lineare con fattorizzazione LU la maggiorparte del costo risiede nella fattorizzazione e non nella soluzionedei sistemi triangolari ottenuti: il costo totale e infatti di
O(n3
3) +O(n2) ' O(
n3
3)
operazioni, essendo (per n grande) n2 trascurabile rispetto a n3.
Osservazione
I metodi di fattorizzazione sono quindi particolarmente convenientiquando si debbano risolvere un certo numero di sistemi lineari incui la matrice dei coefficienti e sempre la stessa e cambia solo ilvettore dei termini noti.
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
Problemi triangolariEliminazione GaussianaFattorizzazione LUPivoting
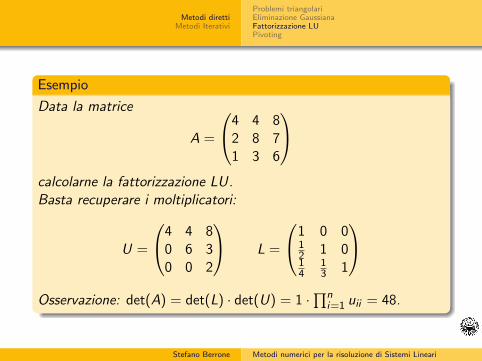
Esempio
Data la matrice
A =
4 4 82 8 71 3 6
calcolarne la fattorizzazione LU.Basta recuperare i moltiplicatori:
U =
4 4 80 6 30 0 2
L =
1 0 012 1 014
13 1
Osservazione: det(A) = det(L) · det(U) = 1 ·
∏ni=1 uii = 48.
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
Problemi triangolariEliminazione GaussianaFattorizzazione LUPivoting
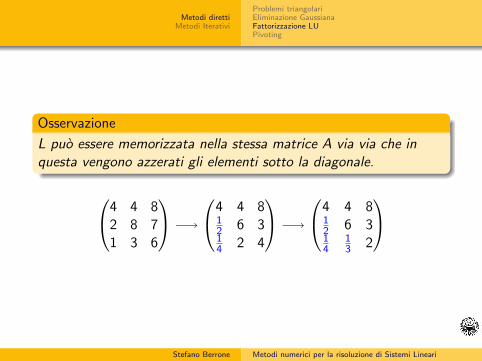
Osservazione
L puo essere memorizzata nella stessa matrice A via via che inquesta vengono azzerati gli elementi sotto la diagonale.
4 4 82 8 71 3 6
−→4 4 8
12 6 314 2 4
−→4 4 8
12 6 314
13 2
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
Problemi triangolariEliminazione GaussianaFattorizzazione LUPivoting
L’eliminazione di Gauss / fattorizzazione LU puo essere sempreportata a termine con successo?
Definizione
Sia A ∈ Rn×n; definiamo Ak , con k = 1, ..., n, sottomatriceprincipale di testa di ordine k la matrice ottenuta intersecando leprime k righe e k colonne di A.
Teorema
Sia A una matrice di ordine n. Se Ak e non singolare perk = 1, ..., n − 1 allora esiste ed e unica la fattorizzazione LU di A.
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
Problemi triangolariEliminazione GaussianaFattorizzazione LUPivoting
Osservazione
Le matrici a diagonale dominante per righe o per colonne e lematrici simmetriche definite positive soddisfano le ipotesi delteorema precedente.
Osservazione
Il teorema precedente non esclude che la matrice A sia singolare.Se anche A e singolare, ma det(Ak) 6= 0, k = 1, ..., n − 1, esistecomunque la fattorizzazione LU, con la matrice U che avra unelemento uii nullo.
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
Problemi triangolariEliminazione GaussianaFattorizzazione LUPivoting
La Strategia del Pivoting
Esempio
Che sucede se voglio applicare eliminazione gaussiana a
A =
(0 11 0
)?
Occorre ricorrere alle matrici di permutazione.
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
Problemi triangolariEliminazione GaussianaFattorizzazione LUPivoting
Definizione
Sia Pij la matrice ottenuta dalla matrice identita permutando lai-esima e la j-esima riga:
Pij =
i j
1 0 0 . . . 0 . . . 0 . . . 00 1 0 . . . 0 . . . 0 . . . 00 0 1 . . . 0 . . . 0 . . . 0
......
i 0 0 0 . . . 0 . . . 1 . . . 0...
...j 0 0 0 . . . 1 . . . 0 . . . 0
......
0 0 0 . . . 0 . . . 0 . . . 1
.
Le matrici Pij sono dette matrici di permutazione semplice.Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari

Metodi direttiMetodi Iterativi
Problemi triangolariEliminazione GaussianaFattorizzazione LUPivoting
Data una matrice A
la moltiplicazione a sinistra di A per Pij (PijA) produce loscambio della i-esima e j-esima riga di A;
la moltiplicazione a destra di A per Pij (APij) produce loscambio della i-esima e j-esima colonna di A.
Se moltiplichiamo piu matrici di permutazione semplice fra loro,otteniamo una matrice (che indicheremo con P e che chiameremomatrice di permutazione) il cui effetto su una matrice A saraquello di effettuare tutti gli scambi di righe (colonne) associate allematrici di permutazione semplice.
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
Problemi triangolariEliminazione GaussianaFattorizzazione LUPivoting
Teorema
Sia A una matrice di ordine n. Allora esiste una matrice dipermutazione P per cui si puo ottenere la fattorizzazione LU di A,cioe:
PA = LU.
Si osservi che, data A, vi possono essere diverse matrici dipermutazione P tali che PA ammette fattorizzazione LU.
Come individuare una matrice di permutazione?
⇓
Strategia di pivoting parziale.
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
Problemi triangolariEliminazione GaussianaFattorizzazione LUPivoting
Pivoting Parziale
Se durante l’eliminazione di Gauss al passo k-esimo risulta
a(k)kk = 0, scambiamo due equazioni in modo che il nuovo
elemento pivot a(k)kk = 0 sia diverso da zero.
La scelta e sempre tra le equazioni che seguono la k-esima.
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
Problemi triangolariEliminazione GaussianaFattorizzazione LUPivoting
Esempio
Consideriamo il seguente sistema lineare:x1 + x2 + x3 = 1x1 + x2 + 2x3 = 2x1 + 2x2 + 2x3 = 1
Eliminazione gaussiana: m21 = −1 e m31 = −1 =⇒x1 + x2 + x3 = 10 + 0 + x3 = 10 + x2 + x3 = 0
a(2)22 = 0!
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
Problemi triangolariEliminazione GaussianaFattorizzazione LUPivoting
Esempio (segue)
;
x1 + x2 + x3 = 10 + x2 + x3 = 00 + 0 + x3 = 1
Questo e gia in forma triangolare e si puo ottenere per sostituzioneall’indietro la soluzione:
x3 = 1x2 = −x3 = −1x1 = 1− x2 − x3 = 1
Abbiamo det(A) = − det(U) = −1; in generale,det(A) = (−1)s · det(U), dove s e il numero di permutazioni diriga effettuate.
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
Problemi triangolariEliminazione GaussianaFattorizzazione LUPivoting
Fattorizzazione PA = LU
Cosa accade alla fattorizzazione LU con il pivoting?
A(k+1) = MkPkA(k)
n − 1 passi:
A(n) = Mn−1Pn−1A(n−1) = ... = Mn−1Pn−1Mn−2Pn−2 . . .M2P2M1P1A
U = Mn−1Pn−1Mn−2Pn−2Mn−3 . . .M2P2M1P1A
= Mn−1Mn−2Pn−1Pn−2Mn−3 . . .M2P2M1P1A
= Mn−1Mn−2 . . . M2M1︸ ︷︷ ︸M
Pn−1Pn−2 . . .P2P1︸ ︷︷ ︸P
A
= MPA
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
Problemi triangolariEliminazione GaussianaFattorizzazione LUPivoting
U = MPA
M−1U = PA
Posto L = M−1 abbiamo determinato fattorizzazione LU di PA,i.e. fattorizzazione PA = LU.Fattorizzazione PA = LU per risolvere un sistema lineare:
1 Ly = Pb
2 Ux = y
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
Problemi triangolariEliminazione GaussianaFattorizzazione LUPivoting
In generale la strategia di permutare equazioni/righe viene usataanche se si incontrano elementi pivot diversi da zero peraumentare la stabilita dell’eliminazione gaussiana.Si puo infatti dimostrare che per aumentare la stabilita e opportunoevitare moltiplicatori troppo grandi, poiche amplificano gli erroridi arrotondamento, con conseguente instabilita dell’algoritmo.Per prevenire la crescita dei moltiplicatori e necessario prevenireelementi pivot troppo piccoli.Per raggiungere questo obiettivo possiamo applicare la strategiadel pivoting parziale ammettendo scambi di righe anche se al
passo k l’elemento pivot a(k)kk non e nullo.
Piu precisamente, al passo k si determina l’elemento di modulo
massimo fra tutti gli elementi a(k)rk , con r ≥ k; una volta
individuato l’indice r corrispondente all’elemento di modulomassimo si scambiano fra loro la riga k-esima e r -esima.
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
Problemi triangolariEliminazione GaussianaFattorizzazione LUPivoting
In questo modo ci si assicura che ad ogni passo si sta usandol’elemento pivot piu grande possibile. Questa strategiaincrementa in modo significativo la stabilita dell’algoritmo.
Osservazione
Se la matrice A e a diagonale dominante per colonne e possibiledimostrare che la strategia del pivoting parziale e del tuttosuperflua in quanto non provoca alcun scambio diequazioni.Inoltre, se la matrice A e simmetrica e definita positiva, ilmetodo di Gauss senza pivoting risulta numericamente stabile,quindi non c’e bisogno di effettuare pivoting. Per tale classe dimatrici esiste una diversa fattorizzazione molto piu conveniente dausare (la fattorizzazione di Cholesky).
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
Problemi triangolariEliminazione GaussianaFattorizzazione LUPivoting
Come costruire L
P = Pn−1 . . .P1
U = A(n)
L =?
E facilmente ottenibile con l’eliminazione gaussiana tenendo contodelle permutazione anche nell’immagazzinamento dei moltiplicatorisotto la diagonale.
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
Problemi triangolariEliminazione GaussianaFattorizzazione LUPivoting
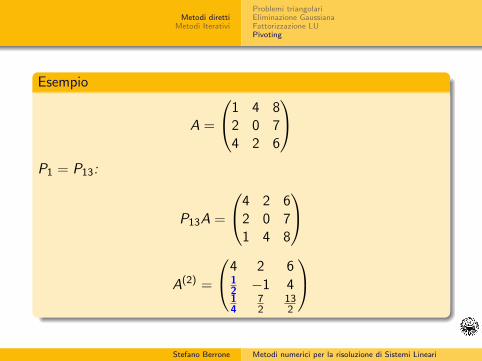
Esempio
A =
1 4 82 0 74 2 6
P1 = P13:
P13A =
4 2 62 0 71 4 8
A(2) =
4 2 612 −1 414
72
132
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
Problemi triangolariEliminazione GaussianaFattorizzazione LUPivoting
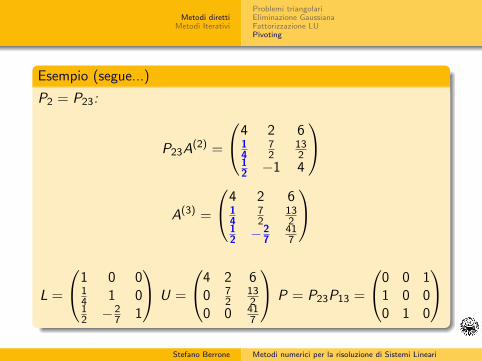
Esempio (segue...)
P2 = P23:
P23A(2) =
4 2 614
72
132
12 −1 4
A(3) =
4 2 614
72
132
12 −2
7417
L =
1 0 014 1 012 −2
7 1
U =
4 2 60 7
2132
0 0 417
P = P23P13 =
0 0 11 0 00 1 0
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
Problemi triangolariEliminazione GaussianaFattorizzazione LUPivoting
Fattorizzazione di Cholesky
Se A e simmetrica e definita positiva, essendo l’eliminazionegaussiana stabile senza pivoting, si puo sfruttare la simmetria di Aper ridurre il costo computazionale del calcolo della fattorizzazioneusando la fattorizzazione di Cholesky anziche fattorizzazione LU.
Teorema (Fattorizzazione di Cholesky)
Sia A una matrice di ordine n simmetrica e definita positiva. Alloraesiste un’unica matrice triangolare superiore R con elementidiagonali positivi tale che
A = RT R.
Costo computazionale per fattorizzazione di Cholesky:
O(n3
6)
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
Problemi triangolariEliminazione GaussianaFattorizzazione LUPivoting
Comandi MATLAB
1 [L,U,P]=lu(A)
2 R=chol(A) Attenzione! chol assume che A sia simmetricadefinita positiva e usa solo la parte triangolare superiore!
3 \
Altre fattorizzazioni
1 Fattorizzazione QR (qr(A)): Q e ortogonale, R e triangolaresuperiore. Molto stabile ma anche piu costosa dellafattorizzazione PA = LU. Utile per altre applicazioni.
Varie
1 norm(x), norm(A): calcolo di norme
2 cond(A): numero di condizionamento
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
GeneralitaMetodo di JacobiMetodo di Gauss-SeidelTest di arrestoCondizioni di convergenza per Jacobi e Gauss-Seidel
Metodi iterativi
I metodi diretti consentono la costruzione della soluzione esatta,a meno degli errori di arrotondamento, in un numero finito dipassi.Per sistemi con matrici dense i metodi diretti sono generalmentepreferibili.Per sistemi con matrici sparse e di ordine elevato, i metodi direttidiventano impraticabili a causa del fill in ⇒ non puo esseresfruttata la sparsita della matrice.
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
GeneralitaMetodo di JacobiMetodo di Gauss-SeidelTest di arrestoCondizioni di convergenza per Jacobi e Gauss-Seidel
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
GeneralitaMetodo di JacobiMetodo di Gauss-SeidelTest di arrestoCondizioni di convergenza per Jacobi e Gauss-Seidel
I metodi iterativi lasciano inalterata la struttura di A ecostruiscono una successione infinita di vettori {x (k)}k≥0, chesotto opportune ipotesi converge alla soluzione x .Per i metodi iterativi dovremo discutere:
1 condizioni di applicabilita
2 costo computazionale (di ogni iterazione)
3 problemi connessi alla convergenza: convergenza si/no evelocita di convergenza.
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
GeneralitaMetodo di JacobiMetodo di Gauss-SeidelTest di arrestoCondizioni di convergenza per Jacobi e Gauss-Seidel
Definizione
Una successione di vettori {x (k)}k≥0 di Rn si dice convergente adun vettore x ∈ Rn se esiste una norma per cui
limk→∞
‖x (k) − x‖ = 0,
ed in tal caso si ponelim
k→∞x (k) = x .
Osservazione
Grazie all’equivalenza delle norme su Rn tale definizione risultaindipendente dalla norma scelta in Rn; se una successione di vettoriconverge in una norma di Rn, allora converge in tutte le norme diRn.
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
GeneralitaMetodo di JacobiMetodo di Gauss-SeidelTest di arrestoCondizioni di convergenza per Jacobi e Gauss-Seidel
Osservazione
La condizione di convergenza in una qualunque norma di Rn sitraduce in una condizione di convergenza per componenti:
limk→∞
x (k) = x ⇐⇒ limk→∞
x(k)i = xi , ∀i = 1, ..., n.
Simili argomenti valgono anche per successioni di matrici{A(k)}k≥0. Inoltre vale il seguente teorema:
Teorema
Sia A ∈ Rn×n. Allora indicando con ρ(A) il raggio spettrale di A
limk→∞
Ak = 0 ∈ Rn×n ⇐⇒ ρ(A) < 1
Ricordiamo che per ogni norma di matrice compatibile con unanorma di vettore si ha ρ(A) ≤ ‖A‖.
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
GeneralitaMetodo di JacobiMetodo di Gauss-SeidelTest di arrestoCondizioni di convergenza per Jacobi e Gauss-Seidel
Generalita sui metodi iterativi
Idea base: data una stima iniziale x (0) della soluzione del sistemalineare Ax = b, con A ∈ Rn×n, det(A) 6= 0, b ∈ Rn, si costruisceuna successione di vettori {x (k)}k≥0 che converga (si spera) ad x ,risolvendo ad ogni iterazione dei sistemi lineari molto piu semplicidi quello di partenza.Come?Consideriamo uno splitting della matrice A del tipo
A = M + N, det(M) 6= 0.
Allora si ha
Ax = (M + N) x = b ⇐⇒ Mx = −Nx + b.
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
GeneralitaMetodo di JacobiMetodo di Gauss-SeidelTest di arrestoCondizioni di convergenza per Jacobi e Gauss-Seidel
Supponiamo di essere all’iterazione k + 1, di avere quindi adisposizione x (k) e di voler calcolare x (k+1).Definiamo x (k+1) in modo che valga
Mx (k+1) = −Nx (k) + b
Allora abbiamo
x (k+1) = −M−1Nx (k) + M−1b
che puo essere scritto in forma compatta come
x (k+1) = Bx (k) + c ,
avendo posto B = −M−1N e c = M−1b. La matrice
B = −M−1N
e la matrice d’iterazione ed individua il particolare metodo; efondamentale nello stabilire le condizioni e la velocita diconvergenza.
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
GeneralitaMetodo di JacobiMetodo di Gauss-SeidelTest di arrestoCondizioni di convergenza per Jacobi e Gauss-Seidel
Proprieta (consistenza)
Se x (k) → x , allora x soddisfa l’equazione
x = Bx + c
e quindi il limite della successione x e proprio la soluzione x diMx = −Nx + b (cioe di Ax = b).
Osservazione
Al variare della stima iniziale x (0) si ottengono diverse successioni{x (k)}k≥0.
Definizione
Un metodo iterativo si dice convergente se per ogni stima inizialex (0) la successione {x (k)}k≥0 e convergente.
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
GeneralitaMetodo di JacobiMetodo di Gauss-SeidelTest di arrestoCondizioni di convergenza per Jacobi e Gauss-Seidel
Studio della convergenza dei metodi iterativi
Sotto quali condizioni la successione {x (k)}k≥0 generata da unmetodo iterativo converge?Se la successione converge ad un vettore x , questo e senz’altrosoluzione del sistema lineare. Definiamo l’errore e(k) commesso alpasso k come la differenza fra l’approssimazione corrente e lasoluzione:
e(k) = x (k) − x .
Chiaramente, x (k) → x ⇐⇒ e(k) → 0.Studiamo l’errore:
e(k) = x (k) − x = Bx (k−1) + c − x
= Bx (k−1) + c − (Bx + c) = B(x (k−1) − x) = Be(k−1).
Allora
e(k) = Be(k−1) = B(Be(k−2)) = B2e(k−2) = ... = Bke(1) = Bke(0).Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
GeneralitaMetodo di JacobiMetodo di Gauss-SeidelTest di arrestoCondizioni di convergenza per Jacobi e Gauss-Seidel
Poichee(k) = Bke(0)
abbiamo
limk→∞
x (k) = x ⇔ limk→∞
e(k) = 0⇔ limk→∞
Bke(0) = 0⇔ limk→∞
Bk = 0
Quindi c’e convergenza se e solo se ρ(B) < 1.
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
GeneralitaMetodo di JacobiMetodo di Gauss-SeidelTest di arrestoCondizioni di convergenza per Jacobi e Gauss-Seidel
Teorema
Il metodo iterativo definito dalla matrice di iterazione B convergeper ogni x (0) ∈ Rn se e solo se
ρ(B) < 1.
La condizione necessaria e sufficiente espressa dal teorema per laconvergenza non e di facile verifica. Una condizione sufficiente eespressa dal seguente Teorema.
Teorema
Sia ‖ · ‖ una norma di matrice naturale. Se ‖B‖ < 1 il metodoiterativo converge.Dimostrazione: E sufficiente ricordare che per ogni norma naturale
ρ(B) ≤ ‖B‖
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
GeneralitaMetodo di JacobiMetodo di Gauss-SeidelTest di arrestoCondizioni di convergenza per Jacobi e Gauss-Seidel
Il raggio spettrale indica non solo se il metodo iterativoconverge ma anche quanto velocemente converge.
Intuitivamente, la velocita di convergenza e una misura diquanto velocemente l’errore tende a zero.
La velocita di convergenza di un metodo iterativo e tantomaggiore quanto piu il raggio spettrale della matrice diiterazione e vicino a 0; viceversa e tanto piu lenta quanto piue vicino a 1.
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
GeneralitaMetodo di JacobiMetodo di Gauss-SeidelTest di arrestoCondizioni di convergenza per Jacobi e Gauss-Seidel
Metodo di Jacobi
Detto anche metodo delle sostituzioni simultanee.Consideriamo il seguente splitting di A:
A = E + D + F , A =
FD
E
dove
1 E e la parte di A sotto la diagonale,
2 D e la diagonale di A,
3 F e la parte di A sopra la diagonale
Prendiamo M = D, N = E + F . Matrice d’iterazione BJ :
BJ = −D−1(E + F )
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
GeneralitaMetodo di JacobiMetodo di Gauss-SeidelTest di arrestoCondizioni di convergenza per Jacobi e Gauss-Seidel
Data l’iterata corrente x (k) ∈ Rn, la x (k+1) ∈ Rn viene calcolatatramite il seguente algoritmo:
for i = 1 : nx
(k+1)i =
(bi −
∑i−1j=1 aijx
(k)j −
∑nj=i+1 aijx
(k)j
)/aii
endIn forma compatta, puo essere scritto
x (k+1) = D−1(
b − Ex (k) − Fx (k)).
Osservazione
Se aii = 0 per qualche i , D non e invertibile. Si possono peropreliminarmente riordinare le equazioni del sistema lineare in mododa portare in posizione ii un elemento non nullo. Cio e semprepossibile se A e non singolare.
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
GeneralitaMetodo di JacobiMetodo di Gauss-SeidelTest di arrestoCondizioni di convergenza per Jacobi e Gauss-Seidel
Metodo di Gauss-Seidel
Consideriamo sempre lo splitting
A = E + D + F ,
ma M = E + D e N = F .La matrice di iterazione:
BGS = −(E + D)−1F
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari

Metodi direttiMetodi Iterativi
GeneralitaMetodo di JacobiMetodo di Gauss-SeidelTest di arrestoCondizioni di convergenza per Jacobi e Gauss-Seidel
Data l’iterata corrente x (k) ∈ Rn, la x (k+1) ∈ Rn viene calcolatatramite il seguente algoritmo:
for i = 1 : nx
(k+1)i =
(bi −
∑i−1j=1 aijx
(k+1)j −
∑nj=i+1 aijx
(k)j
)/aii
endIn forma compatta, puo essere scritto
x (k+1) = D−1(
b − Ex (k+1) − Fx (k)).
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
GeneralitaMetodo di JacobiMetodo di Gauss-SeidelTest di arrestoCondizioni di convergenza per Jacobi e Gauss-Seidel
Test di arresto
Un metodo iterativo fornisce una successione infinita di iterate x (k).Questo diventera un algoritmo solo se stabiliremo in modo precisoquando interrompere il procedimento di generazione di iterate.Dobbiamo ovvero stabilire un criterio di arresto delle iterazioni.
1 si arresta il processo iterativo quando risulta∥∥ x (k+1) − x (k)∥∥∥∥ x (k+1)
∥∥ ≤ tol,
dove tol e una tolleranza relativa fissata sulla base diopportuni criteri di utilizzo della soluzione.
2 oppure se ∥∥∥ x (k+1) − x (k)∥∥∥ ≤ tol,
dove tol e questa volta una tolleranza assoluta.
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
GeneralitaMetodo di JacobiMetodo di Gauss-SeidelTest di arrestoCondizioni di convergenza per Jacobi e Gauss-Seidel
Una strada alternativa per definire un test d’arresto consiste nelcontrollo del residuo dell’equazione. Sia x (k+1) la soluzioneottenuta al passo k + 1, il residuo corrispondente e definito come
r (k+1) = b − Ax (k+1).
Test di arresto relativo sul residuo:∥∥ b − Ax (k+1)∥∥
‖ b ‖≤ tol.
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
GeneralitaMetodo di JacobiMetodo di Gauss-SeidelTest di arrestoCondizioni di convergenza per Jacobi e Gauss-Seidel
Osservazione
Residuo ”piccolo” non garantisce errore ”piccolo”.∥∥∥ e(k)∥∥∥ =
∥∥∥ x (k) − x∥∥∥ =
∥∥∥ x (k) − A−1b∥∥∥ =
∥∥∥A−1(
Ax (k) − b)∥∥∥
=∥∥∥−A−1r (k)
∥∥∥ ≤ ∥∥A−1∥∥∥∥∥ r (k)
∥∥∥ .Ricordando 1
‖ x ‖ ≤‖A ‖‖ b ‖ (v. conti su condizionamento) abbiamo∥∥ e(k)
∥∥‖ x ‖
≤∥∥A−1
∥∥∥∥∥ r (k)∥∥∥ ‖A ‖‖ b ‖
= K (A)
∥∥ r (k)∥∥
‖ b ‖
Quindi∥∥ r (k)∥∥
‖ b ‖≤ tol =⇒
∥∥ e(k)∥∥
‖ x ‖≤ K (A)
∥∥ r (k)∥∥
‖ b ‖≤ K (A)tol
Osservazione
In ogni caso, qualsiasi test di arresto si usi e sempre indispensabileprevedere un numero massimo di iterazioni.
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
GeneralitaMetodo di JacobiMetodo di Gauss-SeidelTest di arrestoCondizioni di convergenza per Jacobi e Gauss-Seidel
Teorema (Condizioni di convergenza per il metodo di Jacobi)
Per matrici a predominanza diagonale stretta (per righe o percolonne indifferentemente) il metodo di Jacobi converge.
Teorema (Condizioni di convergenza per il metodo di Gauss-Seidel)
Per matrici a predominanza diagonale stretta (per righe o percolonne) il metodo di Gauss-Seidel converge.
Teorema (Condizioni di convergenza per il metodo di Gauss-Seidel)
Per matrici simmetriche definite positive il metodo di Gauss-Seidelconverge.
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
GeneralitaMetodo di JacobiMetodo di Gauss-SeidelTest di arrestoCondizioni di convergenza per Jacobi e Gauss-Seidel
Confronto delle proprieta di convergenza del metodo diJacobi e di Gauss-Sidel
In generale la convergenza di uno dei metodi non implica laconvergenza dell’altro e viceversa.Tuttavia quando entrambi convergono la velocita di convergenzadel metodo di Gauss-Seidel e generalmente superiore.
Teorema (Teorema di Stein-Rosenberg)
Sia A ∈ Rn×n con aij ≤ 0, ∀i 6= j e aii > 0, allora si verifica uno euno solo dei seguenti risultati:
1 0 < ρ(BGS) < ρ(BJ) < 1,
2 1 < ρ(BJ) < ρ(BGS),
3 ρ(BGS) = ρ(BJ) = 0,
4 ρ(BGS) = ρ(BJ) = 1.
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari
Metodi direttiMetodi Iterativi
GeneralitaMetodo di JacobiMetodo di Gauss-SeidelTest di arrestoCondizioni di convergenza per Jacobi e Gauss-Seidel
Teorema
Sia A ∈ Rn×n una matrice tridiagonale con elementi diagonali nonnulli, allora
ρ(BGS) = ρ2(BJ),
cioe il metodo di Gauss-Seidel ed il metodo di Jacobi convergono odivergono simultaneamente e il tasso asintotico di convergenza delmetodo di Gauss-Seidel e doppio di quello del metodo di Jacobi.
Stefano Berrone Metodi numerici per la risoluzione di Sistemi Lineari