MECCANICA E DINAMICA DELLE MACCHINE LM { Parte...
252
Universit` a degli Studi di Bologna Scuola di Ingegneria e Architettura Corso di Laurea Magistrale in INGEGNERIA MECCANICA Sede di Forl` ı MECCANICA E DINAMICA DELLE MACCHINE LM – Parte II – prof. Alessandro Rivola [email protected] http://www.unibo.it/docenti/alessandro.rivola http://diem1.ing.unibo.it/mechmach/rivola https://campus.unibo.it
Transcript of MECCANICA E DINAMICA DELLE MACCHINE LM { Parte...

Universita degli Studi di Bologna
Scuola di Ingegneria e Architettura
Corso di Laurea Magistrale in INGEGNERIA MECCANICA
Sede di Forlı
MECCANICA E DINAMICADELLE MACCHINE LM
– Parte II –
prof. Alessandro [email protected]
http://www.unibo.it/docenti/alessandro.rivola
http://diem1.ing.unibo.it/mechmach/rivola
https://campus.unibo.it

Indice
4 Dinamica e MdV: Introduzione e Richiami 7
4.1 Dinamica delle Macchine e Meccanica delle Vibrazioni . . . . . . . . . . . . 7
4.2 Sistemi meccanici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
4.3 La Modellazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
4.3.1 Il Modello Fisico . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
4.3.2 Il Modello Matematico . . . . . . . . . . . . . . . . . . . . . . . . . 11
4.3.3 Interpretazione dei risultati ed analisi . . . . . . . . . . . . . . . . . 11
4.4 Richiami di Dinamica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
4.4.1 Analisi Dinamica Diretta e Inversa . . . . . . . . . . . . . . . . . . 12
4.4.2 Richiami di Dinamica . . . . . . . . . . . . . . . . . . . . . . . . . . 12
4.5 Fondamenti di Meccanica delle Vibrazioni . . . . . . . . . . . . . . . . . . 13
4.5.1 Modelli Continui e Discreti . . . . . . . . . . . . . . . . . . . . . . . 13
4.5.2 Modelli Discreti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
4.5.2.1 Elementi Elastici . . . . . . . . . . . . . . . . . . . . . . . 15
4.5.2.2 Elementi Dissipativi . . . . . . . . . . . . . . . . . . . . . 18
4.5.3 Moto Armonico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4.5.3.1 Rappresentazione vettoriale . . . . . . . . . . . . . . . . . 20
4.5.3.2 Rappresentazione con numeri complessi . . . . . . . . . . 21
4.5.3.3 Lavoro compiuto in moti armonici . . . . . . . . . . . . . 22
4.5.4 Ottava . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.5.5 Decibel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Riferimenti Bibliografici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
5 Sistemi a un grado di liberta 25
5.1 Vibrazioni Libere . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
5.1.1 Sistema Molla–Smorzatore . . . . . . . . . . . . . . . . . . . . . . . 25
5.1.2 Sistema Massa–Smorzatore . . . . . . . . . . . . . . . . . . . . . . . 26
5.1.3 Sistema Massa–Molla . . . . . . . . . . . . . . . . . . . . . . . . . . 26
5.1.3.1 Piano delle fasi . . . . . . . . . . . . . . . . . . . . . . . . 27
5.1.4 Sistema Massa–Molla–Smorzatore . . . . . . . . . . . . . . . . . . . 28
5.1.4.1 Sistemi “sotto–smorzati”: ζ < 1 (c < ccr) . . . . . . . . . . 29
5.1.4.2 Smorzamento critico: ζ = 1 (c = ccr) . . . . . . . . . . . . 30
1

2 INDICE
5.1.4.3 Sistemi “sovra–smorzati”: ζ > 1 (c > ccr) . . . . . . . . . 30
5.1.5 Osservazioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
5.1.6 Metodo del Decremento Logaritmico . . . . . . . . . . . . . . . . . 31
5.1.7 Presenza di attrito Coulombiano . . . . . . . . . . . . . . . . . . . . 33
5.1.8 Smorzamento strutturale (Isteretico) . . . . . . . . . . . . . . . . . 34
5.1.9 Metodi Energetici (Metodo di Rayleigh) . . . . . . . . . . . . . . . 36
5.1.9.1 Sistema con molla avente massa non trascurabile . . . . . 37
5.1.9.2 Manometro . . . . . . . . . . . . . . . . . . . . . . . . . . 38
5.1.9.3 Pulsazione naturale di una trave appoggiata . . . . . . . . 39
5.2 Vibrazioni Forzate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
5.2.1 Scrittura delle equazioni del moto . . . . . . . . . . . . . . . . . . . 40
5.2.1.1 Principio di d’Alembert . . . . . . . . . . . . . . . . . . . 40
5.2.1.2 Principio dei lavori virtuali . . . . . . . . . . . . . . . . . 41
5.2.1.3 Equazioni di Lagrange . . . . . . . . . . . . . . . . . . . . 41
5.2.2 Eccitazione Armonica . . . . . . . . . . . . . . . . . . . . . . . . . . 42
5.2.3 Funzione Risposta in Frequenza (FRF) . . . . . . . . . . . . . . . . 44
5.2.4 Funzione di Trasferimento . . . . . . . . . . . . . . . . . . . . . . . 45
5.2.5 Metodo della Banda di mezza potenza . . . . . . . . . . . . . . . . 45
5.2.6 Eccitazione armonica in risonanza . . . . . . . . . . . . . . . . . . . 47
5.2.6.1 Sistema non smorzato . . . . . . . . . . . . . . . . . . . . 47
5.2.6.2 Sistema smorzato . . . . . . . . . . . . . . . . . . . . . . . 47
5.2.7 Fenomeno del Battimento . . . . . . . . . . . . . . . . . . . . . . . 48
5.2.8 Eccitazione proporzionale al quadrato della frequenza . . . . . . . . 50
5.2.9 Smorzamento Strutturale (Isteretico) . . . . . . . . . . . . . . . . . 51
5.2.10 Risposta all’Impulso . . . . . . . . . . . . . . . . . . . . . . . . . . 52
5.2.11 Risposta all’eccitazione generica . . . . . . . . . . . . . . . . . . . . 53
Riferimenti Bibliografici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
6 Sistemi a due gradi di liberta 55
6.1 Equazioni del moto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
6.1.1 Esempio (introduzione alle coordinate modali) . . . . . . . . . . . . 56
6.2 Vibrazioni libere . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
6.2.1 Condizioni iniziali . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
6.3 Moti rigidi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
6.4 Vibrazioni forzate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
6.4.1 Esempio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
6.5 Smorzatore dinamico (Mass Dumper) . . . . . . . . . . . . . . . . . . . . . 63
Riferimenti Bibliografici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
7 Sistemi a N gradi di liberta 67
7.1 Sistemi non smorzati . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67

INDICE 3
7.1.1 Vibrazioni libere . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
7.1.2 Proprieta di ortogonalita . . . . . . . . . . . . . . . . . . . . . . . . 69
7.1.3 Normalizzazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
7.1.4 La matrice modale . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
7.1.5 Disaccoppiamento delle equazioni del moto . . . . . . . . . . . . . . 71
7.1.6 Moti di corpo rigido . . . . . . . . . . . . . . . . . . . . . . . . . . 71
7.2 Sistemi con smorzamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
7.3 Vibrazioni forzate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
7.3.1 Metodo modale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
7.3.2 Metodo pseudo-modale . . . . . . . . . . . . . . . . . . . . . . . . . 74
7.4 Quoziente di Rayleigh . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
7.5 Metodo di Rayleigh-Ritz . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
7.5.1 Esempio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
7.6 Modifiche strutturali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
7.6.1 Esempio 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
7.6.2 Esempio 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
7.7 Esempio - Sistema a 3 gdl . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
Riferimenti Bibliografici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
8 Sistemi continui 85
8.1 Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
8.2 Vibrazioni trasversali nelle funi . . . . . . . . . . . . . . . . . . . . . . . . 86
8.2.1 Equazione del moto . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
8.2.2 Pulsazioni e modi . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
8.2.3 Moto libero . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
8.2.4 Condizioni iniziali: esempio . . . . . . . . . . . . . . . . . . . . . . 89
8.3 Vibrazioni longitudinali nelle travi . . . . . . . . . . . . . . . . . . . . . . . 90
8.3.1 Equazione del moto . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
8.3.2 Trave a mensola . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
8.3.3 Altre condizioni al contorno . . . . . . . . . . . . . . . . . . . . . . 91
8.3.4 Ortogonalita delle forme modali . . . . . . . . . . . . . . . . . . . . 92
8.4 Vibrazioni torsionali nelle travi . . . . . . . . . . . . . . . . . . . . . . . . 94
8.4.1 Equazione del moto . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
8.5 Vibrazioni flessionali nelle travi . . . . . . . . . . . . . . . . . . . . . . . . 95
8.5.1 Equazione del moto . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
8.5.2 Trave a mensola . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
8.5.3 Trave appoggiata . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
8.5.4 Altre condizioni al contorno . . . . . . . . . . . . . . . . . . . . . . 98
8.5.5 Ortogonalita, masse e rigidezze modali . . . . . . . . . . . . . . . . 99
8.6 Riepilogo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100

4 INDICE
8.7 Metodi approssimati di Rayleigh e di Rayleigh-Ritz . . . . . . . . . . . . . 101
8.7.1 Metodo di Rayeigh: applicazione alla trave a mensola . . . . . . . . 101
8.7.2 Metodo di Rayeigh-Ritz: applicazione alla trave a mensola . . . . . 102
8.8 Vibrazioni forzate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
8.8.1 Vibrazioni forzate longitudinali: trave a mensola . . . . . . . . . . . 105
8.8.2 Vibrazioni forzate flessionali: trave appoggiata . . . . . . . . . . . . 106
Riferimenti Bibliografici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
9 Misura di vibrazioni e Analisi Modale 110
9.1 La catena di misura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
9.2 Analisi in frequenza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
9.2.1 Serie di Fourier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
9.2.2 Trasformata di Fourier . . . . . . . . . . . . . . . . . . . . . . . . . 112
9.2.3 Trasformata finita e Leakage . . . . . . . . . . . . . . . . . . . . . . 113
9.2.4 Campionamento e Aliasing . . . . . . . . . . . . . . . . . . . . . . . 115
9.2.5 Trasformata Discreta di Fourier . . . . . . . . . . . . . . . . . . . . 116
9.3 Introduzione all’analisi modale sperimentale . . . . . . . . . . . . . . . . . 117
9.3.1 Funzione di Trasferimento e FRF . . . . . . . . . . . . . . . . . . . 117
9.3.2 Rilievo sperimentale della FRF . . . . . . . . . . . . . . . . . . . . 119
9.3.3 Fondamenti dell’analisi modale sperimentale . . . . . . . . . . . . . 120
9.3.4 Schema del procedimento . . . . . . . . . . . . . . . . . . . . . . . 123
9.3.5 Esempio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
9.4 Esempio no. 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
9.5 Esempio no. 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
9.6 Esempio no. 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
Riferimenti Bibliografici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
10 Modellazione 130
10.1 Esempi di modelli a PC . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
10.1.1 Asta soggetta a vibrazioni assiali . . . . . . . . . . . . . . . . . . . 130
10.1.2 Vibrazioni flessionali di una trave appoggiata . . . . . . . . . . . . 134
10.1.3 Modello di un aereo . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
10.1.4 Modello di un autoveicolo . . . . . . . . . . . . . . . . . . . . . . . 137
10.1.5 Modello di una pressa . . . . . . . . . . . . . . . . . . . . . . . . . 140
10.1.6 Modello di un meccanismo con gioco . . . . . . . . . . . . . . . . . 142
10.1.7 Modello di un azionamento . . . . . . . . . . . . . . . . . . . . . . . 144
10.2 Modellazione di meccanismi . . . . . . . . . . . . . . . . . . . . . . . . . . 149
10.2.1 Perche studiare il comportamento dinamico di un meccanismo? . . 149
10.2.2 Modellare i meccanismi . . . . . . . . . . . . . . . . . . . . . . . . . 151
10.2.3 Il modello a Parametri Concentrati . . . . . . . . . . . . . . . . . . 155
10.2.4 Integrazione delle equazioni . . . . . . . . . . . . . . . . . . . . . . 161

INDICE 5
10.2.5 La validazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162
10.2.6 Impiego del modello . . . . . . . . . . . . . . . . . . . . . . . . . . 163
10.2.7 Esempio no.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165
10.2.8 Esempio no.2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171
10.2.9 Esempio no.3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173
10.3 Integrazione delle equazioni del moto . . . . . . . . . . . . . . . . . . . . . 178
10.4 Il metodo degli elementi finiti (FEM) . . . . . . . . . . . . . . . . . . . . . 178
Riferimenti Bibliografici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 179
A Richiami di Dinamica 181
A.1 Baricentro e Quantita di moto . . . . . . . . . . . . . . . . . . . . . . . . . 181
A.2 Azioni di inerzia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182
A.2.1 Caso del Corpo rigido continuo . . . . . . . . . . . . . . . . . . . . 182
A.2.2 Applicazione ai rotori . . . . . . . . . . . . . . . . . . . . . . . . . . 183
A.3 Energia cinetica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 184
A.4 Gradi di Liberta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 185
A.5 Principio di d’Alembert . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 185
A.6 Principio dei Lavori Virtuali . . . . . . . . . . . . . . . . . . . . . . . . . . 186
A.6.1 Principio dei Lavori Virtuali in Dinamica . . . . . . . . . . . . . . . 186
A.7 Equazione energetica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 187
A.7.1 Conservazione dell’Energia Meccanica . . . . . . . . . . . . . . . . . 187
A.8 Equazioni di Lagrange . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 188
A.9 Equivalenza dinamica: riduzione . . . . . . . . . . . . . . . . . . . . . . . . 188
B Serie di Taylor 190
C Rigidezze e Momenti di inerzia 191
C.1 Rigidezze equivalenti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192
C.2 Momenti di inerzia di massa . . . . . . . . . . . . . . . . . . . . . . . . . . 194
D Equazioni differenziali ordinarie 195
E Sistema massa–molla con attrito Coulombiano 196
F Deformata trave appoggiata 199
G Problema agli autovalori simmetrico 200
H Smorzamento proporzionale 201
I Eccitazione in un nodo 203
J Fune tesa: condizioni al contorno ed iniziali 205

J.1 Condizioni al contorno . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 205
J.2 Condizioni iniziali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 207
K Scelta dei Parametri di acquisizione 210
L Stima sperimentale della FRF 212
L.1 Autocorrelazione e Autospettro . . . . . . . . . . . . . . . . . . . . . . . . 212
L.2 Correlazione incrociata e Spettro incrociato . . . . . . . . . . . . . . . . . 212
L.3 Stima della FRF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 213
M Simulink 215
M.1 Introduzione a Simulink . . . . . . . . . . . . . . . . . . . . . . . . . . . . 215
M.2 Istruzioni di base di Simulink . . . . . . . . . . . . . . . . . . . . . . . . . 215
M.2.1 Libreria SOURCES . . . . . . . . . . . . . . . . . . . . . . . . . . . 216
M.2.2 Libreria SINKS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 217
M.2.3 Libreria CONTINUOUS . . . . . . . . . . . . . . . . . . . . . . . . 218
M.2.4 Libreria DISCONTINUITIES . . . . . . . . . . . . . . . . . . . . . 219
M.2.5 Libreria MATH OPERATIONS . . . . . . . . . . . . . . . . . . . . 220
M.2.6 Libreria LOOKUP TABLES . . . . . . . . . . . . . . . . . . . . . . 222
M.2.7 Libreria SIGNAL ROUTING . . . . . . . . . . . . . . . . . . . . . 223
M.3 Esempi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 225
N Il metodo degli elementi finiti (FEM) 234
N.1 Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 234
N.1.1 Schema generale del metodo . . . . . . . . . . . . . . . . . . . . . . 234
N.1.2 Discretizzazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 235
N.2 Equazioni del moto di un elemento . . . . . . . . . . . . . . . . . . . . . . 235
N.3 Matrice rigidezza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 237
N.4 Matrice massa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 238
N.5 Vibrazioni longitudinali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 239
N.5.1 Matrice rigidezza . . . . . . . . . . . . . . . . . . . . . . . . . . . . 240
N.5.2 Matrice massa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 240
N.5.3 Vettore forze nodali . . . . . . . . . . . . . . . . . . . . . . . . . . . 241
N.6 Vibrazioni torsionali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 242
N.7 Vibrazioni flessionali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 244
N.8 Assemblaggio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 247
N.8.1 Esempio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 247
N.9 Frequenze e modi di vibrare . . . . . . . . . . . . . . . . . . . . . . . . . . 249
Riferimenti Bibliografici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 249

Capitolo 4
Richiami di Dinamica e Fondamentidi Meccanica delle Vibrazioni
4.1 Dinamica delle Macchine e Meccanica delle Vi-
brazioni
In conseguenza del movimento impresso agli organi delle macchine, nascono in questiultimi delle azioni d’inerzia, alle quali sono connessi molti importanti problemi.
Quelli che possono venire studiati prescindendo, almeno in linea di principio, dalladeformabilita dei corpi, vengono studiati nella Dinamica delle macchine: si tratta deiproblemi relativi al calcolo e al bilanciamento delle azioni di inerzia, all’accoppiamentofra motore e macchina utilizzatrice, al funzionamento delle macchine e degli impianti aregime periodico, ai transitori meccanici.
I problemi strettamente connessi con la deformabilita elastica dei corpi vengono invecetrattati nella Meccanica delle vibrazioni, che affronta problemi di grande rilevanza tecnicacome, fra gli altri, l’isolamento delle vibrazioni, l’analisi modale, la diagnostica industriale.
Una grande rilevanza tecnica hanno infine, come e evidente, i problemi relativi alla Di-namica dei rotori, quali il bilanciamento statico e dinamico, le velocita critiche flessionali,le oscillazioni torsionali, i problemi di instabilita.
4.2 Sistemi meccanici
Un sistema e un insieme di oggetti materiali che interagiscono a ben determinati fini. Glioggetti materiali costituenti il sistema sono connessi fisicamente fra loro.
E facile vedere come dalla definizione precedente possano essere esclusi molti sistemi,anche di grande interesse per l’ingegneria meccanica. Cos, per esempio, mentre il sistemacostituito da un motore a combustione interna rientra nella definizione data, quello diun’officina per il collaudo del motore non vi ricade: in questo caso infatti fanno partedel sistema anche le procedure di collaudo che si intendono adottate e queste non sonoindividuabili come oggetti materiali, anche se il sistema, nel suo complesso, e fisicamenterealizzabile.
Con il termine sistemi meccanici si intendono, in conformita alla definizione di sistema,quei sistemi in cui le connessioni fisiche fra gli oggetti costituenti diano luogo a conside-
7

8 CAPITOLO 4. DINAMICA E MDV: INTRODUZIONE E RICHIAMI
revoli scambi energetici in forma di energia meccanica – quindi esprimibili attraverso levariabili forza e velocita, momento e velocita angolare – e nei quali si possano verificarevariazioni dell’energia potenziale e cinetica del sistema.
Dato che nella definizione sopra riportata un sistema e inteso come costituito da og-getti materiali, e possibile definire tutto cio che non fa parte di tali oggetti come esterno(o ambiente) del sistema, riconoscendo una superficie fisica (o concettuale) di separazionefra sistema e ambiente esterno. Gli oggetti costituenti un sistema possono essere indicaticome sottosistemi, ossia come parti di un sistema a loro volta rispondenti alla definizionegia data, o come componenti, ossia come enti primitivi caratterizzati da opportuni para-metri che, per un dato fine, non e necessario ritenere ulteriormente suddivisibili. Si notiche la definizione di componente dipende dal fine che ci si propone nell’effettuare la sche-matizzazione: per esempio nello studio dinamico di un motore alternativo il pattino delmeccanismo articolato puo essere considerato come un componente unico quando e irrile-vante, ai fini dello studio in oggetto, l’interazione dinamica fra stantuffo e fasce elastiche;altrimenti il pattino e un sottosistema, mentre stantuffo e fasce ne sono i componenti. Allostesso modo il meccanismo articolato biella-manovella puo costituire un sistema qualorase ne voglia studiare la dinamica; diventa un sotto sistema se si vuol compiere l’analisidell’intero motore; questo e a sua volta un sottosistema se, per esempio, si sta analizzandola macchina su cui tale motore e operante, e cosı via. Il fatto che uno stesso ente possaessere considerato sotto differenti aspetti e un punto fondamentale della dinamica e devefin d’ora essere tenuto presente.
Figura 4.1: Modeling of a forging hammer ([Rao10])

4.3. LA MODELLAZIONE 9
4.3 La Modellazione
Vedere un sistema come un insieme di elementi interconnessi tra loro, ci porta a doverstabilire come il comportamento dei singoli elementi e quello delle connessioni tra essiinfluenza il comportamento dell’intero sistema. Dal punto di vista metodologico l’elementocaratterizzante e la modellazione dei sistemi meccanici, che fornisce il mezzo fondamentaleper affrontare in modo corretto ed efficiente l’ampia gamma dei problemi di dinamica dellemacchine.
4.3.1 Il Modello Fisico
Per affrontare lo studio di un qualsiasi sistema meccanico e necessario infatti formularnedapprima un adeguato modello fisico e successivamente dedurre da questo il relativomodello matematico. Per modello fisico si intende qui un sistema fisico immaginario chesia equivalente al sistema reale nell’ambito di una prefissata approssimazione e rispettoalle caratteristiche che riguardano lo studio a cui si e interessati. Prerogativa essenzialedel modello fisico, ai fini della sua effettiva utilita, deve essere la possibilita di studiarlocon gli strumenti a disposizione, di regola di tipo matematico. Il passaggio dal sistemareale al suo modello fisico comporta un certo numero di approssimazioni consapevolmenteaccettate, la piu importante delle quali consiste nel trascurare tutto quanto provoca effettipiccoli, o comunque ritenuti trascurabili, sul comportamento del sistema.
Figura 4.2: Modellazione di un motociclo con pilota ([Rao10])
Il modello fisico deve includere un numero sufficiente di effetti e dettagli in modo dapoter descrivere il meglio possibile il sistema in termini di equazioni, senza divenire allo

10 CAPITOLO 4. DINAMICA E MDV: INTRODUZIONE E RICHIAMI
Figura 4.3: Sistema di controllo computerizzato per impianto con turbina a vapore pergenerazione di energia elettrica ([Pal99])
stesso tempo troppo complesso. Il modello fisico puo essere lineare o non lineare, infunzione del comportamento dei componenti del sistema. Modelli lineari permettono unasoluzione rapida e sono semplici da trattare. Modelli non lineari a volte rivelano certecaratteristiche del sistema che non possono essere correttamente predette impiegandomodelli lineari.
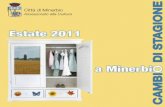
A volte il modello viene gradualmente migliorato in modo da ottenere risultati piuaccurati. Le Figg. 4.1 e 4.2 mostrano alcuni esempi. Inizialmente viene usato un modelloelementare per investigare rapidamente il comportamento globale del sistema. Successi-vamente il modello viene raffinato includendo altri componenti ed effetti in modo che ilcomportamento del sistema possa essere osservato piu nel dettaglio.
Spesso un sistema che opera sotto azioni esterne e in condizioni mutevoli nel tempo,richiede un sistema di controllo, in modo da produrre i risultati desiderati. Il ruolo delsistema di controllo e duplice: deve portare le condizioni operative del sistema ai valoridesiderati e deve mantenerle anche in presenza di disturbi e/o variazioni delle condizioniesterne (vedi ad esempio il sistema di Fig. 4.3).
Il progetto di un sistema dinamico spesso implica anche lo studio del sistema di control-lo piu appropriato. D’altra parte i progettisti del sistema di controllo richiedono modelliche descrivano le proprieta dinamiche dominanti del sistema da controllare. Pertanto,modellazione e controllo dei sistemi dinamici costituiscono una unica area di studio.

4.3. LA MODELLAZIONE 11
4.3.2 Il Modello Matematico
Una volta individuato il modello fisico del sistema, si puo procedere a determinarne ilmodello matematico, cioe un insieme di relazioni matematiche che descrivono il compor-tamento del modello fisico stesso. La scrittura di tali equazioni avviene impiegando iprincipi della dinamica: si possono seguire approcci differenti tra i quali il principio did’Alembert, il principio dei lavori virtuali, il principio di conservazione dell’energia, leequazioni di Lagrange.
Le equazioni del moto sono solitamente equazioni differenziali ordinarie, per un siste-ma discreto (vedi §4.5.1), ed equazioni differenziali alle derivate parziali, per un sistemacontinuo (vedi §4.5.1). Le equazioni possono essere lineari o non lineari a seconda dellatipologia dei componenti il sistema.
Si passa infine alla realizzazione di un algoritmo di risoluzione delle equazioni delmodello matematico. Solo in casi semplici la soluzione puo venire ottenuta in formachiusa: di solito si ottiene la soluzione per via numerica, mediante l’uso di un calcolatore.In funzione della natura del problema si puo usare una delle seguenti tecniche per trovarela soluzione: metodi standard per la soluzione di equazioni differenziali, metodi basatisulla trasformata di Laplace, metodi matriciali, metodi numerici. Se le equazioni sononon lineari difficilmente possono essere risolte in forma chiusa.
0 0.005 0.01 0.015tempo [s]
acc
[m/s
^2]
rilevamento sperimentale
(a)
0.015 0.02 0.025 0.03tempo [s]
acc [
m/s^
2]
modello validato
(b)
Figura 4.4: Esempio di validazione - moto del cedente di un meccanismo: a) rilievosperimentale; b) modello validato
4.3.3 Interpretazione dei risultati ed analisi
La soluzione delle equazioni del moto fornisce il comportamento del modello del sistema.Il modello deve ora essere verificato, in altre parole vanno verificate le ipotesi fatte nel mo-dellare il sistema reale. Tale verifica puo essere condotta tramite prove sperimentali; taleprocedura e fondamentale per una corretta progettazione, ma puo non essere necessariase si stanno considerando componenti il cui comportamento e noto essere ben descritto da

12 CAPITOLO 4. DINAMICA E MDV: INTRODUZIONE E RICHIAMI
modelli specifici sulla base dell’esperienza acquisita. Per esempio si e sicuri di poter usareil modello di resistenza v = Ri senza bisogno di alcuna verifica, almeno fino a quando lecondizioni operative (tensione, temperatura, . . . ) si mantengono entro certi limiti.
La Fig. 4.4 mostra un esempio di validazione per quanto riguarda il modello del motodel cedente di un meccanismo, mentre la Fig. 4.5 mostra la comparazione tra la formamodale di un componente meccanico ottenuta tramite il modello ad elementi finiti (reticoloblu) e quella ottenuta dall’analisi sperimentale (reticolo rosso). Una volta che il modelloe validato, puo essere usato per prevedere il comportamento del sistema in questione.
Figura 4.5: Esempio di validazione - forma modale: blu) reticolo FEM; rosso) reticolosperimentale
4.4 Richiami di Dinamica
4.4.1 Analisi Dinamica Diretta e Inversa
Analisi Inversa (Cinetostatica)Assegnato il moto ed alcune azioni attive, si devono determinare le azioni ulteriori da ap-plicare per realizzare il moto desiderato. Questo problema e spesso definito come analisicinetostatica. Rientrano tra gli argomenti che riguardano il problema inverso la determi-nazione delle azioni di inerzia, il bilanciamento di tali azioni e l’analisi cinetostatica deimeccanismi.
Analisi Diretta (Dinamica)Assegnate tutte le azioni attive agenti sul sistema meccanico (sia le azioni resistenti, siaquelle motrici) e le condizioni iniziali, si deve determinare la legge di moto dei membri infunzione del tempo. In questo caso si parla di analisi dinamica in senso stretto. Rientranotra gli argomenti che riguardano il problema diretto lo studio dei transitori di avviamentoo di arresto di macchinari, lo studio del moto delle macchine funzionanti a regime periodicoe l’analisi della risposta dei sistemi vibranti.
4.4.2 Richiami di Dinamica
Si rimanda all’Appendice A.

4.5. FONDAMENTI DI MECCANICA DELLE VIBRAZIONI 13
4.5 Fondamenti di Meccanica delle Vibrazioni
4.5.1 Modelli Continui e Discreti
Figura 4.6: Single-degree of freedom (SDOF) systems ([Rao10])
Figura 4.7: Two degree of freedom systems ([Rao10])
Un gran numero di sistemi meccanici puo essere descritto impiegando un numero finitodi gdl; cio accade quando sono presenti elementi dotati di elevata elasticita e scarsa massae, al contempo, elementi di notevole massa ed elevata rigidezza, come nel caso dei sistemidi Fig. 4.1b, Fig. 4.2b e Fig. 4.3b. Quando, al contrario, il sistema ha un numero infinitodi “punti di massa” e/o non presenta “concentrazioni” di zone o membri deformabili, enecessario un numero infinito di coordinate per specificare la sua configurazione deformata.
Modelli aventi un numero di gdl finito sono detti discreti o a parametri concentrati,mentre quelli con un numero infinito di gradi di liberta sono detti continui. Ai primi vienedato particolare risalto in §10, mentre i secondi sono trattati in §8.
Spesso, i sistemi continui sono approssimati tramite modelli discreti; in tal modo e piusemplice ottenere la soluzione del problema dinamico. Sebbene trattare un sistema comecontinuo dia risultati esatti, i metodi di analisi che impiegano modelli continui sono limitatiad una tipologia di sistemi molto ridotta, come ad esempio travi a sezione uniforme,piastre sottili, membrane, etc. Di conseguenza, la maggior parte dei sistemi viene studiataimpiegando modelli discreti. In generale, risultati piu accurati sono ottenibili aumentandoil numero di gdl.

14 CAPITOLO 4. DINAMICA E MDV: INTRODUZIONE E RICHIAMI
Figura 4.8: Three degree of freedom systems ([Rao10])
Figura 4.9: An infinite number of dof system: a cantilever beam ([Rao10])
Figura 4.10: Esempio di modellazione mediante il metodo degli elementi finiti (FEM)
Tra le tecniche automatiche di discretizzazione la piu diffusa e costituita dalla model-lazione ad elementi finiti (vedi Appendice N) che da luogo a modelli aventi in generale unnumero di gradi di liberta finito ma molto elevato (vedi Fig. 4.10).
Lo schema di Fig. 4.11 riassume le varie metodologie di modellazione citate.

4.5. FONDAMENTI DI MECCANICA DELLE VIBRAZIONI 15
Dinamica delle Macchine e dei Sistemi Meccanici
Fondamenti di Meccanica delle Vibrazioni
Modelli Continui e Discreti
Sistema da modellare
Parametri concentrati
Parametri distribuiti
Equazioni differenziali alle derivate ordinarie
Discretizzazione FEM
Equazioni differenziali alle derivate parziali
Scelta del modello
Figura 4.11: Metodologie di modellazione
4.5.2 Modelli Discreti
I modelli discreti (o a parametri concentrati) saranno oggetto dei Capitoli § 5, § 6, § 7e § 10, fatta eccezione per i modelli ad elementi finiti a cui e riservata l’Appendice N.Tali modelli prevedono in generale la presenza di masse o inerzie, di elementi elastici e dielementi dissipativi. Degli ultimi due elementi vengono forniti dettagli nel seguito.
4.5.2.1 Elementi Elastici
Diversi sono i modelli impiegati per i membri dotati di elevata elasticita rispetto aglialtri elementi del sistema meccanico. Tali membri non si considerano dissipare energia esolitamente sono considerati privi di massa.
Molle lineari Se la molla funziona nel campo elastico entro il limite di proporzionalita,la forza che si sviluppa quando la molla si deforma e proporzionale alla deformazionestessa. La costante di proporzionalita e detta rigidezza ed il suo inverso e chiamatocedevolezza.
La forza F che deforma una molla di rigidezza k e proporzionale allo spostamentorelativo x = x1−x2 degli estremi, e il lavoro compiuto viene immagazzinato come energiapotenziale V :
V =1
2kx2 (4.1)
Anche altri elementi elastici, quali ad esempio travi, si comportano come molle. Peresempio si consideri la trave incastrata di figura, avente all’estremo libero una massaconcentrata m e si assuma per semplicita che la massa della trave sia trascurabile nei

16 CAPITOLO 4. DINAMICA E MDV: INTRODUZIONE E RICHIAMI
Figura 4.12: Molla lineare
Figura 4.13: Cantilever with end mass ([Rao10])
confronti della massa m. La freccia statica all’estremo libero vale:
δst =Wl3
3EI(4.2)
dove W = mg e il peso della massa m, E e il modulo di Young del materiale, I e ilmomento di inerzia di sezione e l e la lunghezza della trave. Di conseguenza la costanteelastica (la rigidezza) della trave vale:
k =W
δst=
3EI
l3(4.3)
Molle non lineari Gli elementi elastici seguono un comportamento lineare solo entrocerti limiti della deformazione. Oltre certi valori di deformazione, la tensione eccede illimite di proporzionalita del materiale e la relazione tra fora e deformazione diviene nonlineare.
In molte applicazioni pratiche si assume che le deformazioni siano piccole e pertanto siconsiderano le molle come aventi comportamento lineare. In altri casi, anche se la mollae non lineare, si approssima ad una molla lineare mediante un processo di linearizzazione:
Sia F un carico statico agente su una molla non lineare causandone una deformazionex∗. Se la forza F viene incrementata di una quantita ∆F , la molla si deforma ulteriormente

4.5. FONDAMENTI DI MECCANICA DELLE VIBRAZIONI 17
di una quantita ∆x. La nuova forza F +∆F puo essere espressa in serie di Taylor (vediAppendice B) attorno alla posizione di equilibrio statico:
F +∆F = F (x∗+∆x) = F (x∗)+∆xdF
dx
∣∣∣∣x∗+
1
2!∆x2
d2F
dx2
∣∣∣∣x∗+ . . .+
1
n!∆xn
dnF
dxn
∣∣∣∣x∗
(4.4)
Per piccoli valori di ∆x, i termini contenenti derivate di ordine elevato possono esseretrascurati ottenendo:
F +∆F = F (x∗ +∆x) = F (x∗) + ∆xdF
dx
∣∣∣∣x∗
(4.5)
e poiche F = F (x∗), si puo esprimere ∆F come: ∆F = k∆x, dove k e la rigidezzalinearizzata della molla in corrispondenza della deformazione x∗:
k =dF
dx
∣∣∣∣x∗
(4.6)
Molle in serie La disposizione delle molle e mostrata in Fig. 4.14. La rigidezzaequivalente keq si ottiene invertendo la:
1
keq=
1
k1+
1
k2+ . . .+
1
kn(4.7)
Figura 4.14: Molle in serie
Molle in parallelo La disposizione delle molle e mostrata in Fig. 4.15. La rigidezzaequivalente keq si ottiene dalla:
keq = k1 + k2 + . . .+ kn (4.8)

18 CAPITOLO 4. DINAMICA E MDV: INTRODUZIONE E RICHIAMI
Figura 4.15: Molle in parallelo
Figura 4.16: Smorzamento viscoso
4.5.2.2 Elementi Dissipativi
In molti sistemi meccanici, l’energia di vibrazione e gradualmente convertita in energiatermica o energia acustica. A causa della riduzione di energia, la risposta vibratoria delsistema subisce un graduale decremento. Tale meccanismo prende il nome di smorzamentodelle vibrazioni.
Sebbene la quantita di energia convertita in calore o suono sia relativamente piccola,considerare lo smorzamento e di fondamentale importanza per una adeguata previsione delcomportamento vibratorio del sistema. Solitamente si assume che un elemento smorzantesia privo di massa ed elasticita.
La forza che esercita uno smorzatore esiste solo in presenza di velocita relativa tra idue estremi dello smorzatore stesso.
E piuttosto difficile determinare le cause di smorzamento nei sistemi meccanici; solita-mente lo smorzamento viene modellato come una combinazione dei seguenti:
• Smorzamento viscoso
• Attrito Coulombiano
• Smorzamento isteretico ( o strutturale)
Smorzamento Viscoso E quello usato piu frequentemente nello studio delle vibrazioni.

4.5. FONDAMENTI DI MECCANICA DELLE VIBRAZIONI 19
Figura 4.17: Attrito Coulombiano
Quando un sistema meccanico si muove in un fluido, la resistenza che il fluido offreal movimento dei corpi causa dissipazione di energia. L’ammontare di questa energiadipende da molti fattori quali ad esempio le dimensioni e la forma dei corpi, la viscositadel fluido, la velocita dei corpi. Nello smorzamento di tipo viscoso, la forza e proporzionalealla velocita relativa dei corpi e la costante di proporzionalita dipende dalla viscosita delfluido e dalla geometria dei corpi (vedi Fig. 4.16).
Attrito Coulombiano (Attrito secco) La forza e costante in ampiezza ma ha versoopposto a quello della velocita relativa tra i corpi, come espresso dalla seguente (vediFig. 4.17):
|T | = fN, F = −sign(V )|T | (4.9)
Smorzamento Isteretico (Smorzamento strutturale) Quando un corpo si deforma,l’energia di deformazione e assorbita e dissipata dal materiale. Tale effetto e dovutoall’attrito nello scorrimento tra le fibre interne del materiale all’atto della deformazione.Quando un corpo soggetto a questo tipo di fenomeno e sottoposto alternativamente atrazione e compressione o, nello specifico, vibra, la relazione tra tensione e deformazionee del tipo rappresentato in Fig. 4.18. L’energia dissipata ad ogni ciclo vale:
D =
∫L
σdε−∫U
σdε (4.10)
Figura 4.18: Smorzamento Isteretico

20 CAPITOLO 4. DINAMICA E MDV: INTRODUZIONE E RICHIAMI
Figura 4.19: Meccanismo per moto armonico ([Rao10])
4.5.3 Moto Armonico
In Fig. 4.19 e rappresentato un meccanismo mediante il quale alla massa m e impartitoun moto armonico semplice (l’accelerazione e proporzionale allo spostamento) quandoalla manovella OP si impone un moto rotatorio continuo uniforme. Se ω e la velocitaangolare della manovella e A e la sua lunghezza, la massa si muove con legge di motox(t) = A sinωt, con ω pulsazione del moto armonico. Si ha inoltre:
dx
dt= x = ωAcosωt,
dx2
dt2= x = −ω2Asinωt = −ω2x (4.11)
4.5.3.1 Rappresentazione vettoriale
Un moto armonico puo anche essere rappresentato mediante un vettore OP , di ampiezzaA, rotante con velocita angolare ω. Con riferimento alla Fig. 4.20, le proiezioni di questo

4.5. FONDAMENTI DI MECCANICA DELLE VIBRAZIONI 21
Figura 4.20: Proiezioni di un vettore rotante ([Rao10])
vettore lungo le due direzioni x e y forniscono:
y(t) = A sinωt, x(t) = A cosωt (4.12)
4.5.3.2 Rappresentazione con numeri complessi
Si puo ricorrere anche alla rappresentazione mediante numeri complessi. Infatti, ognivettore X nel piano xy puo essere rappresentato con il numero complesso: X = a + ib,dove a e b sono rispettivamente la parte reale e la parte immaginaria.
Se si indica (vedi Fig. 4.21) con A l’ampiezza del vettore X e con θ il suo argomento(l’angolo compreso tra il vettore e l’asse x), X puo essere espresso come:
X = A cos θ + iA sin θ (4.13)
con:
A =√a2 + b2; θ = tan−1
(b
a
)(4.14)

22 CAPITOLO 4. DINAMICA E MDV: INTRODUZIONE E RICHIAMI
Figura 4.21: Vettore rotante (fasore)
Figura 4.22: Spostamento, velocita e accelerazione come vettori rotanti ([Rao10])
Introducendo le relazioni di Eulero, si ha anche:
X = A cos θ + iA sin θ = Aeiθ (4.15)
Usando la rappresentazione con numeri complessi, il vettore rotante di Fig. 4.21 puoessere scritto come:
X = Aeiωt (4.16)
dove ω e anche detta frequenza circolare di rotazione ed e espressa in rad/s. Derivandorispetto al tempo si ha:
dX
dt=
d
dt
(Aeiωt
)= iωAeiωt = iωX (4.17)
dX2
dt2=
d2
dt2(Aeiωt
)=
d
dt
(iωAeiωt
)= −ω2Aeiωt = −ω2X (4.18)
da cui si vede che l’operazione di derivazione si traduce nel moltiplicare il vettore per iω,od anche nel moltiplicare l’ampiezza del vettore per ω e ruotarlo in avanti di 90 gradi(vedi Fig. 4.22).
4.5.3.3 Lavoro compiuto in moti armonici
Un importante concetto in molte applicazioni e quello del lavoro compiuto da una forza,che varia armonicamente con una certa pulsazione, per uno moto armonico avente la

4.5. FONDAMENTI DI MECCANICA DELLE VIBRAZIONI 23
stessa pulsazione. Sia data la forza P = P0 sin(ωt+ϕ) agente su un corpo dotato di leggedi moto x = x0 sinωt. Il lavoro compiuto dalla forza in un periodo 2π/ω vale:
W =
∫ 2π/ω
0
Pdx =
∫ 2π/ω
0
Pdx
dtdt =
1
ω
∫ 2π
0
Pdx
dtd(ωt) =
P0x0
∫ 2π
0
sin(ωt+ ϕ) cos(ωt)d(ωt) =
P0x0
∫ 2π
0
cosωt[sin(ωt) cosϕ) + cos(ωt) sinϕ)]d(ωt) =
P0x0 cosϕ
∫ 2π
0
[sin(ωt) cos(ωt)]d(ωt) + P0x0 sinϕ
∫ 2π
0
cos2(ωt)d(ωt).
(4.19)
Il primo integrale nell’ultima delle (4.19) e nullo mentre il secondo vale π per cui indefinitiva si ha:
W = πP0x0 sinϕ (4.20)
4.5.4 Ottava
Quando il massimo valore di una banda di frequenza e il doppio del minimo, tale banda edetta banda d’ottava. Ad esempio, ciascuna banda 75–150 Hz, 150–300 Hz, e 300–600 Hz,e una banda d’ottava. In ciascun caso, il massimo ed il minimo valore della frequenza,che hanno un rapporto pari a 2:1, si dice che differiscono di un’ottava.
4.5.5 Decibel
Le varie quantita che si incontrano nel campo delle vibrazioni e del rumore, come ad esem-pio, spostamento, velocita, accelerazione, pressione, potenza, sono spesso rappresentateusando la notazione dB (decibel). In origine il decibel e stato definito con riferimento apotenze elettriche come: dB = 10 log(P/P0), dove P0 e un valore di riferimento.
Poiche la potenza elettrica e proporzionale al quadrato della tensione (X), il decibelpuo anche essere espresso come:
dB = 10 log
(X
X0
)2
= 20 log
(X
X0
)(4.21)
dove X0 e un valore di riferimento. Naturalmente il dB e usato anche per esprimere ilrapporto tra altre quantita (spostamenti, velocita, accelerazioni, pressioni, . . . ).

24 CAPITOLO 4. DINAMICA E MDV: INTRODUZIONE E RICHIAMI
Riferimenti Bibliografici
[Fab91] M. Fabrizio. La meccanica razionale e i suoi metodi matematici, volume 1 ofCollana di matematica. Testi e manuali. Zanichelli, Bologna, 1991.
[FMM05] E. Funaioli, A. Maggiore, and U. Meneghetti. Lezioni di Meccanica applicataalle macchine - Prima parte - Fondamenti di meccanica delle macchine. Patroneditore S.r.l., Bologna, 2005.
[GG86] R. Ghigliazza and C. U. Galletti. Meccanica applicata alle macchine. UTET,Torino, 1986.
[MMF11] U. Meneghetti, A. Maggiore, and E. Funaioli. Lezioni di meccanica applicataalle macchine - Terza parte - Dinamica e vibrazioni delle macchine. Patroneditore S.r.l., Bologna, 2011.
[Pal99] William J. Palm. Modeling, Analysis, and Control of Dynamic Systems. JohnWiley & Sons Inc, Toronto, 2nd edition edition, 1999.
[Pen09] E. Pennestrı. Dinamica tecnica e computazionale. Vol. 1: Sistemi lineari. CEACasa Editrice Ambrosiana, Milano, 2 edizione edition, 2009.
[Rao10] Singiresu S. Rao. Mechanical Vibrations. Prentice Hall, Upper Saddle River,N.J, 5th edition edition, 2010.

Capitolo 5
Sistemi a un grado di liberta
5.1 Vibrazioni Libere
5.1.1 Sistema MOLLA–SMORZATORE
L’equazione del moto del sistema e:
cx+ kx = 0 (5.1)
Si tratta di un’equazione differenziale del primo ordine, la cui equazione caratteristica e:
cz + k = 0 (5.2)
con radice reale negativa: z1 = −k/c. La soluzione dell’equazione del moto e pertanto:
x(t) = A1e−kct (5.3)
in cui la costante A1 si determina in funzione della condizione iniziale sullo spostamento(x(0) = x0). L’integrale generale (un esempio e riportato in Fig. 5.1) e pertanto:
x(t) = x0e−kct (5.4)
0 0.05 0.10
0.5
1
Figura 5.1: Esempio di risposta del sistema Molla-Smorzatore
25

26 CAPITOLO 5. SISTEMI A UN GRADO DI LIBERTA
m c
x(t)
0 0.2 0.4 0.60
0.5
1
1.5
x0>0 v
0>0
x0>0 v
0<0
Figura 5.2: Sistema Massa–Smorzatore: schema e risposta libera
5.1.2 Sistema MASSA–SMORZATORE
L’equazione del moto del sistema (rappresentato in Fig. 5.2) e:
mx+ cx = 0 (5.5)
Si tratta di un sistema del primo ordine, infatti si puo scrivere:my + cy = 0
y = x(5.6)
L’equazione caratteristica della prima delle (5.6) e:
mz + c = 0 (5.7)
la cui radice (reale e negativa) e: z1 = −c/m. La soluzione dell’equazione del moto iny(t) e pertanto:
y(t) = B1e− cmt (5.8)
in cui la costante B1 si determina in funzione della condizione iniziale sulla velocita(x(0) = v0) ottenendo:
y(t) = v0e− cmt, (5.9)
da cui risulta:
x(t) = B2 −m
cv0e
− cmt. (5.10)
La costante B2 si determina in funzione della condizione iniziale sullo spostamento, x(0) =x0, ottenendo l’integrale generale della eq. (5.5):
x(t) = x0 +m
cv0
(1− e−
cmt). (5.11)
5.1.3 Sistema MASSA–MOLLA
L’equazione del moto del sistema (rappresentato in Fig. 5.3) e:
mx+ kx = 0 (5.12)

5.1. VIBRAZIONI LIBERE 27
m
kx(t)
0 0.5 1
−1
−0.5
0
0.5
1
Figura 5.3: Sistema Massa–Molla: schema e risposta libera
con equazione caratteristica:mz2 + k = 0 (5.13)
le cui radici immaginarie e coniugate sono:
z1,2 = −√± k
m= iωn. (5.14)
Il rapporto ωn =√k/m viene detto pulsazione naturale del sistema. La soluzione
dell’equazione del moto e:x(t) = C1e
iωnt + C2e−iωnt (5.15)
Introducendo le relazioni di Eulero (e±iωnt=cosωnt±i sinωnt) si ottiene:
x(t) = (C1 + C2) cosωnt+ i(C1 − C2) sinωnt (5.16)
da cui:x(t) = D cosωnt+ E sinωnt. (5.17)
Imponendo le condizioni iniziali x(0) = x0 e x(0) = v0 si ottiene:
x(t) = x0 cosωnt+v0ωn
sinωnt. (5.18)
Si noti che, posto: D = G sinψ e E = G cosψ, si ha:
x(t) = G sin (ωnt+ ψ) ; (5.19)
oppure ponendo: D = F cosφ e E = F sinφ, si ha:
x(t) = F cos (ωnt− φ) ; (5.20)
5.1.3.1 Piano delle fasi
La risposta di un sistema ad un gdl puo essere rappresentata nel piano spostamento–velocita, noto anche come spazio degli stati o piano delle fasi.
Considerando la risposta libera del sistema massa–molla nella forma (5.20), e la suaderivata prima rispetto al tempo, si possono ricavare (avendo sostituito F con A):
x(t) = A cos (ωnt− φ) ; − x(t)ωn
= A sin (ωnt− φ) . (5.21)

28 CAPITOLO 5. SISTEMI A UN GRADO DI LIBERTA
Quadrando e sommando membro a membro le (5.21) si ottiene:
x2 +x2
ω2n
= A2; (5.22)
ossia l’equazione di una circonferenza centrata nell’origine del piano delle fasi e aventeraggio pari alla costante A da determinarsi in funzione delle condizioni iniziali.
Figura 5.4: Vibrazioni libere del sistema Massa–Molla nel piano delle fasi
5.1.4 Sistema MASSA–MOLLA–SMORZATORE
m
c
kx(t)
Figura 5.5: Sistema Massa–Molla–Smorzatore
L’equazione del moto del sistema (rappresentato in Fig. 5.5) e:
mx+ cx+ kx = 0 (5.23)
con equazione caratteristica:mz2 + cz + k = 0 (5.24)
le cui radici sono:
z1,2 = − c
2m±√( c
2m
)2− k
m. (5.25)

5.1. VIBRAZIONI LIBERE 29
La soluzione dell’equazione del moto e:
x(t) = C1ez1t + C2e
z2t (5.26)
Si definisce smorzamento critico ccr il valore della costante di smorzamento per il quale siha: ( c
2m
)2− k
m= 0;
risulta quindi:
ccr = 2m
√k
m= 2
√km = 2mωn. (5.27)
Per un sistema smorzato si definisce fattore di smorzamento ζ il rapporto tra la costantedi smorzamento c e lo smorzamento critico ccr, cioe:
ζ =c
ccr=
c
2mωn. (5.28)
Utilizzando il fattore di smorzamento, le due radici (5.25) dell’equazione caratteristica(5.24) diventano:
z1,2 = ωn
(−ζ ±
√ζ2 − 1
). (5.29)
La natura delle due radici, e di conseguenza il comportamento del sistema, dipendedall’ammontare dello smorzamento. Si distinguono i tre casi che seguono.
5.1.4.1 Sistemi “sotto–smorzati”: ζ < 1 (c < ccr)
Il radicando che compare nella (5.29), (ζ2 − 1), e negativo e le due radici (5.29) risultanopertanto complesse e coniugate e si possono esprimere come:
z1,2 = ωn
(−ζ ± i
√1− ζ2
). (5.30)
Introducendo la cosiddetta pulsazione naturale del sistema smorzato ωs = ωn
(√1− ζ2
),
si ha: z1,2 = −ζωn ± iωs e l’integrale dell’equazione del moto diventa:
x(t) = e−ζωnt(C1e
iωst + C2e−iωst
)(5.31)
0 0.5 1
−1
0
1
Figura 5.6: Risposta libera di un sistema “sotto–smorzato”

30 CAPITOLO 5. SISTEMI A UN GRADO DI LIBERTA
Introducendo le relazioni di Eulero (e±iωst=cosωst±i sinωst) si ottiene:
x(t) = e−ζωnt [(C1 + C2) cosωst+ i(C1− C2) sinωst] =
= e−ζωnt (D cosωst+ E sinωst)(5.32)
L’ultima espressione puo anche assumere la forma:
x(t) = Xe−ζωnt (sinωst+ φ) (5.33)
Le costanti (D,E) , (X,φ) si trovano imponendo le condizioni iniziali:
x(0) = x0 e x(0) = v0.
Si ottiene:
D = x0, E =v0 + ζωnx0
ωs(5.34)
Il moto risulta oscillatorio, pseudoperiodico, smorzato:
x(t) = e−ζωnt
(x0 cosωst+
v0 + ζωnx0ωs
sinωst
)(5.35)
5.1.4.2 Smorzamento critico: ζ = 1 (c = ccr)
Le due radici dell’equazione caratteristica sono reali, coincidenti, negative e pari a −ωn.Il moto che ne risulta e aperiodico smorzato, ma il caso non ha alcun interesse pratico inquanto, data l’estrema particolarita, non si verifica mai.
5.1.4.3 Sistemi “sovra–smorzati”: ζ > 1 (c > ccr)
0 0.2 0.40
0.05
0.1
0.15
Figura 5.7: Risposta libera di un sistema “sovra–smorzato”
Le due radici (5.29) risultano reali distinte e negative:
z1,2 = ωn
(−ζ ±
√ζ2 − 1
). (5.36)
L’integrale dell’equazione del moto e nella forma (5.26) e le costanti C1 e C2 si trovanointroducendo le condizioni iniziali x(0) = x0 e x(0) = v0, ottenendo:
C1 + C2 = x0 z1C1 + z2C2 = v0. (5.37)

5.1. VIBRAZIONI LIBERE 31
Figura 5.8: Risposta libera del sistema a un grado di liberta
Il moto risulta aperiodico smorzato (Fig. 5.7):
x(t) =x0ωn
(ζ +
√ζ2 − 1
)+ v0
2ωn√ζ2 − 1
ez1t +−x0ωn
(ζ −
√ζ2 − 1
)− v0
2ωn√ζ2 − 1
ez2t (5.38)
5.1.5 Osservazioni
La Fig. 5.8 confronta il moto del sistema massa–molla–smorzatore nei tre differenti casiappena esaminati (sistema “sotto–smorzato”; sistema con smorzamento critico; sistema“sovra–smorzato”).
Le due radici dell’equazione caratteristica (5.24), z1 e z2, con i corrispondenti valori delfattore di smorzamento ζ, possono essere rappresentati in un piano complesso (Fig. 5.9).La semicirconferenza di raggio ωn rappresenta il luogo delle radici per valori di ζ compresitra 0 ed 1. Questo tipo di rappresentazione consente di vedere l’effetto del fattore dismorzamento ζ sul comportamento del sistema. Infatti, per ζ = 0 si hanno le due radiciimmaginarie z1,2 = ±iωn; per 0 < ζ < 1, le radici sono complesse e coniugate e collocatesimmetricamente rispetto all’asse reale; quando ζ = 1, le due radici sono coincidenti epari a ωn; infine, per ζ > 1, entrambe giacciono sull’asse reale (per ζ che tende a ∞, unatende a 0 mentre l’altra tende a −∞).
La risposta libera del sistema massa–molla–smorzatore puo essere rappresentata nelpiano delle fasi, come indicato in Fig. 5.10.
5.1.6 Metodo del Decremento Logaritmico
Dopo aver studiato la risposta libera di un sistema ad un grado di liberta, vediamo comesia possibile determinarne lo smorzamento. A differenza dei componenti massa e rigi-dezza, lo smorzamento non puo essere determinato mediante prove statiche. Il valoredel fattore di smorzamento per sistemi “sotto–smorzati” puo essere ricavato sperimen-talmente misurando l’ampiezza decrescente di oscillazioni successive. Si consideri infattil’oscillazione libera di un sistema con smorzamento inferiore a quello critico (ζ < 1). Presi

32 CAPITOLO 5. SISTEMI A UN GRADO DI LIBERTA
Figura 5.9: Luogo delle radici dell’equazione caratteristica (5.24)
due istanti di tempo corrispondenti a due massimi consecutivi, il rapporto tra le ampiezzedell’oscillazione risulta:
x(t1)
x(t2)=x1x2
=X0e
−ζωnt1 sin(ωst1 − φ)
X0e−ζωnt2 sin(ωst2 − φ)(5.39)
Ma t2 = t1 + T , essendo T il periodo dell’oscillazione (T = 2π/ωs); di conseguenza si ha:
x1x2
=e−ζωnt1
e−ζωn(t1+T )= eζωnT (5.40)
Si definisce decremento logaritmico il logaritmo naturale del rapporto x1/x2:
δ = ln
(x1x2
)= ζωnT =
2πζωnωs
=2πζ√1− ζ2
(5.41)
Per valori del fattore di smorzamento sufficientemente piccoli (ζ < 0.4), si puo porre conbuona approssimazione: δ =≃ 2πζ.
Se si considerano, anziche due oscillazioni successive, n oscillazioni successive, si ot-tiene: x1/xn+1 = enζωnT , il cui logaritmo naturale vale: ln (x1/xn+1) = nζωnT = nδ. Indefinitiva risulta:
δ =1
nln
(x1xn+1
)(5.42)
In conclusione, se si riesce a misurare in via sperimentale il rapporto x1/xn+1 e poi possibilerisalire al valore del fattore di smorzamento ζ.

5.1. VIBRAZIONI LIBERE 33
Figura 5.10: Risposta libera del sistema a un grado di liberta nel piano delle fasi
5.1.7 Presenza di attrito Coulombiano
Una comune causa di smorzamento nei sistemi meccanici e l’attrito secco, denominatoanche attrito coulombiano. L’attrito Coulombiano e caratterizzato dalla relazione:
F =
µN x > 00 x = 0
−µN x < 0(5.43)
dove F e la forza d’attrito, N la forza normale alla superficie di contatto e µ il coefficientedi attrito cinetico. La forza di attrito F si oppone sempre alla velocita relativa tra i corpia contatto. Facendo riferimento alla Fig. 5.11, l’equazione del moto si modifica a seconda
Figura 5.11: Sistema massa–molla con attrito coulombiano
del verso della velocita della massa m e dunque si puo scrivere nella forma:
mx+ µmg sgn(x) + kx = 0 (5.44)
dove sgn(τ), detta funzione segno, e definita come segue:
sgn(τ) =
1 τ > 00 τ = 0−1 τ < 0
(5.45)

34 CAPITOLO 5. SISTEMI A UN GRADO DI LIBERTA
L’equazione del moto e pertanto una equazione differenziale non lineare e, in quantotale, non puo essere risolta con i metodi tradizionali. Si puo procedere suddividendo ildominio dei tempi in intervalli corrispondenti ai cambiamenti di verso della velocita (vediAppendice E). In alternativa, si puo procedere con metodi numerici di integrazione.
Un sistema con attrito coulombiano (vedi Fig. 5.12) presenta le seguenti caratteristiche:
• L’equazione del moto e non lineare (e lineare se il sistema ha smorzamento viscoso).
• Il sistema conserva la frequenza naturale del sistema non smorzato (la frequenzanaturale del sistema con smorzamento viscoso e inferiore a quella del sistema nonsmorzato).
• Il moto e periodico (in un sistema con smorzamento viscoso puo essere aperiodico).
• Il sistema giunge all’arresto in maniera lineare (se lo smorzamento e viscoso il sistemasi avvicina asintoticamente alla quiete, senza raggiungerla mai).
Figura 5.12: Risposta libera del sistema massa–molla con attrito coulombiano
5.1.8 Smorzamento strutturale (Isteretico)
Si prendano in esame la molla e lo smorzatore viscoso disposti in parallelo come inFig. 5.13a). Se si considera un moto armonico x(t) = X sinωt, la forza esercitata vale:
F (t) = kx+cx = xX sinωt+cXω cosωt = kx±cω√X2 − (X sinωt)2 = kx±cω
√X2 − x2
(5.46)L’andamento della forza F (t) in funzione della deformazione x e una curva chiusa comeillustrato in Fig. 5.13b). L’area interna a tale curva corrisponde all’energia dissipata dallosmorzatore in un ciclo del moto armonico ed e data da:
∆W =
∮Fdx =
∫ 2π/ω
0
Fdx = πωcX2 (5.47)

5.1. VIBRAZIONI LIBERE 35
Figura 5.13: Molla–smorzatore viscoso
Figura 5.14: Molla–smorzatore isteretico
Come accennato in precedenza, quando un corpo e sottoposto alternativamente a tra-zione e compressione, lo smorzamento causato dall’attrito nello scorrimento tra le fibreinterne del materiale all’atto della deformazione e chiamato smorzamento isteretico ostrutturale. Il fenomeno da luogo ad un loop nella curva tensione - deformazione (o forzae spostamento), come rappresentato in Fig. 5.14a). L’energia dissipata ad ogni ciclo dicarico e scarico del materiale e uguale all’area racchiusa dal loop di isteresi. L’analogiatra le Figg. 5.13b) e 5.14a) puo essere impiegata per definire una costante di smorzamentostrutturale equivalente dal punto di vista energetico alla costante di smorzamento viscoso.Infatti, sperimentalmente, si trova che l’energia perduta per ciclo a causa dello smor-zamento strutturale e indipendente dalla frequenza del carico, ma approssimativamenteproporzionale al quadrato della sua ampiezza. Pertanto si puo porre:
∆W = aX2 = πωceqX2; ceq =
a
ωπ=h
ω. (5.48)

36 CAPITOLO 5. SISTEMI A UN GRADO DI LIBERTA
Introducendo la rappresentazione del moto armonico mediante numeri complessi,
x(t) = Xeiωt,
la forza nel sistema di 5.13a) vale:
F (t) = kx+ cx = Xeiωt + icωXeiωt = (k + icω)x. (5.49)
Analogamente, la forza nel sistema molla–smorzatore isteretico di 5.14b), puo essereespressa come:
F (t) = (k + ih)x = k
(1 + i
h
k
)x = k(1 + iη)x = kx (5.50)
dove k e nota come rigidezza complessa del sistema e η e una costante adimensionaledetta fattore di smorzamento strutturale.
5.1.9 Metodi Energetici (Metodo di Rayleigh)
In sistemi non smorzati, come il sistema massa–molla, l’equazione del moto puo esserescritta sfruttando il principio di conservazione dell’energia. Infatti, in assenza di forze nonconservative, l’energia totale del sistema si mantiene costante, ovvero:
d
dt(T + V ) = 0.
Nel caso specifico del sistema massa–molla si ha:
T =1
2mx2; V =
1
2kx2
da cui si ottiene:
d
dt
(1
2mx2 +
1
2kx2)
= mxx+ kxx = x(mx+ kx) = 0
e, infine, la nota equazione di equilibrio: mx+ kx = 0.
Il principio di conservazione dell’energia puo essere impiegato anche per determinaredirettamente la pulsazione naturale del sistema. Indicate con 1 e 2 le configurazioni delsistema corrispondenti a due istanti generici, si ha: T1 + V1 = T2 + V2.Se si considera come istante 1 quello in cui il sistema passa per la posizione di equilibriostatico (scelta come riferimento per l’energia potenziale) e, di conseguenza, l’energia ci-netica e massima, si avra: U1 = 0 e T1 = TMAX . Se come istante 2 si prende quello in cuie massimo lo spostamento del sistema dalla sua posizione di equilibrio statico (e quindi enulla la velocita), l’energia potenziale e massima e si annulla l’energia cinetica: T2 = 0 eU2 = UMAX . Per il principio di conservazione dell’energia segue che:
TMAX = VMAX (5.51)
L’applicazione della (5.51) permette di determinare direttamente la frequenza naturaledel sistema. Ci si proponga infatti di trovare la pulsazione naturale del sistema conser-vativo massa–molla. Se si assume il moto armonico nella forma x(t) = A cos(ωnt − φ),allora risulta:
TMAX =1
2mx2MAX =
1
2mω2
nA2 VMAX =
1
2kx2MAX =
1
2kA2 (5.52)

5.1. VIBRAZIONI LIBERE 37
che eguagliate forniscono mω2n = k, da cui: ωn =
√k/m.
Il metodo energetico per il calcolo della frequenza naturale e di fondamentale impor-tanza. Infatti, per sistemi piu complessi, la determinazione delle frequenze naturali spessoe cosı complicata da divenire praticamente impossibile. In tali casi, una generalizzazionedel metodo energetico, nota come metodo di Rayleigh conduce, anche se con una certaapprossimazione, alla determinazione della prima pulsazione naturale del sistema.
In particolare, il metodo di Rayleigh consiste nell’esprimere una ragionevole ipotesisulla forma del primo modo di vibrare del sistema. In base a tale ipotesi vengono determi-nati ed eguagliati i valori massimi di energia cinetica e potenziale. L’uguaglianza fornisceuna stima della prima pulszione naturale che sara tanto piu accurata quanto piu la formaassunta per il primo modo si avvicina a quella reale.
Vengono ora presentati alcuni esempi di applicazione del metodo.
5.1.9.1 Sistema con molla avente massa non trascurabile
m
x(t)
dy
y
l k, M
Figura 5.15: Sistema massa–molla con molla dotata di massa
Si consideri il sistema massa-molla di Fig. 5.15 in cui la molla ha massa non trascurabile.L’origine delle oscillazioni x(t) della massa concentrata m sia la posizione di equilibriostatico e si indichi con l la lunghezza della molla in tale posizione. Se la massa M dellamolla e distribuita uniformemente, la massa dm di un tratto infinitesimo dy di molla valedm = (M/l)dy.
Volendo stimare la prima pulsazione naturale del sistema occorre, secondo il metododi Rayleigh, formulare una ragionevole ipotesi sulla forma del primo modo di vibrare.A tal scopo, si puo ragionevolmente ipotizzare che, nel primo modo di vibrare, le variesezioni della molla si distribuiscano linearmente lungo di essa: in altre parole si assumela deformata statica come approssimazione della prima forma modale.Per piccole oscillazioni, l’ipotesi formulata implica che lo spostamento della sezione dimolla alla generica distanza y dall’estremo fisso e pari a g(t, y) = (x/l)y, ossia e esprimibilecome prodotto di due funzioni: z(y) = y/l funzione lineare della sola variabile y, e x(t)funzione solo del tempo t: g(t, y) = z(y) x(t).
L’energia cinetica e potenziale del sistema si esprimono rispettivamente come:

38 CAPITOLO 5. SISTEMI A UN GRADO DI LIBERTA
T =1
2mx2 +
1
2
∫ (∂g
∂t
)2
dm =1
2mx2 +
M
2lx2∫ l
0
(yl
)2dy =
1
2
(m+
M
3
)x2
V =1
2k [g(t, y)y=l]
2 =1
2kx2
(5.53)
Se si assume il moto armonico della massa m nella forma x(t) = A cosωnt, si ha:
TMAX =1
2A2ω2
n
(m+
M
3
)= VMAX =
1
2A2 k (5.54)
da cui si ricava la pulsazione naturale del sistema:
ωn =
√k
m+M/3. (5.55)
In conclusione l’effetto della massa della molla puo essere messo in conto aggiungendo unterzo della sua massa M alla massa concentrata m.
5.1.9.2 Manometro
I sistemi fluidi, come quelli solidi, sono soggetti a moti vibratori. Con riferimento almanometro a tubo illustrato in Fig. 5.16, impiegando il metodo energetico, si puo calcolarela frequenza naturale di oscillazione del fluido nel tubo. Detta S la sezione del tubo, ρla densita del fluido e g l’accelerazione di gravita, se x e lo spostamento del liquido dallaposizione di equilibrio, l’energia cinetica e potenziale del fluido sono date da:
T =1
2ρSlx2; V = ρgSx
x
2+ ρgSx
x
2= ρgSx2. (5.56)
x
x
l
Figura 5.16: Manometro a tubo
Assunto un moto armonico del liquido nella forma x(t) = A cosωnt, si ha:
TMAX =1
2ρSlA2ω2
n = VMAX = ρgSA2 (5.57)
da cui si ricava la pulsazione naturale del fluido:
ωn =
√2g
l. (5.58)
Si osserva che la pulsazione naturale e indipendente dalla natura del fluido, ma dipendesolo dalla lunghezza del tubo. Ad esempio per un tubo avente lunghezza pari a l = 0.5m, la pulsazione naturale e circa uguale a 1 Hz.

5.1. VIBRAZIONI LIBERE 39
5.1.9.3 Pulsazione naturale di una trave appoggiata
x
ly(x)
Figura 5.17: Trave appoggiata con massa concentrata in mezzeria
Si consideri la trave appoggiata di Fig. 5.17, avente massa m, con una massa concen-trata M in mezzeria. Volendo stimare la prima pulsazione naturale del sistema, si trattadi assumere una ragionevole deformata per la trave vibrante. A questo scopo si puo con-siderare la deformata statica corrispondente ad un carico in mezzeria (vedi AppendiceF):
y(x) =
[3x
l− 4
(xl
)3]ymax; 0 ≤ x ≤ l
2(5.59)
Quando la trave vibra nel primo modo, il moto di una sua generica sezione a distanzax dall’appoggio di sinistra si puo allora esprimere come [v(x, t) = y(x)γ(t)], essendoγ(t) = cosωnt un moto armonico alla pulsazione del primo modo.L’energia cinetica si puo scrivere come:
T =1
2M
[(∂v
∂t
)x=l/2
]2+
1
2
∫ (∂v
∂t
)2
dm =
1
2M[
˙γ(t) ymax
]2+
1
2
m
l˙γ(t)
22
∫ l/2
0
y(x)2dx =1
2γ2 y2max
(M +
17
35m
) (5.60)
Mentre per l’energia potenziale si ha:
V =1
2k[v(t, x)x=l/2
]2=
1
2k [γ ymax]
2 (5.61)
dove k e la rigidezza flessionale della trave pari a: k =48EI
l3.
Uguagliando i massimi di energia cinetica e potenziale si ottiene:
TMAX =1
2ω2n
(M +
17
35m
)y2max = VMAX =
1
2
(48EI
l3
)y2max (5.62)
da cui in conclusione risulta:
ωn =
√√√√√ 48EI
l3(M +
17m
35
) . (5.63)
In assenza della massa concentrata M , tale risultato puo essere confrontato con l’espres-sione esatta della prima pulsazione di una trave appoggiata (si veda § 8.5.3), mostrandouna differenza inferiore all’1%. Da cio emerge la grande potenza del metodo energeticodi Rayleigh.

40 CAPITOLO 5. SISTEMI A UN GRADO DI LIBERTA
5.2 Vibrazioni Forzate
5.2.1 Scrittura delle equazioni del moto
Si consideri il semplice sistema di Fig. 5.18 costituito da un disco omogeneo di raggio R,massa m e momento di inerzia baricentrico JG. Si analizzi per semplicita il solo motopiano e si supponga che il disco rotoli senza strisciare su una guida rettilinea richiamatoda una molla di costante elastica k e da uno smorzatore viscoso di caratteristica c. Nelbaricentro del disco e applicata una forza esterna f(t). Il moto del sistema e descritto dadue variabili fisiche, ad esempio, la traslazione x del baricentro del disco e la rotazioneθ subita dallo stesso, ma poiche il disco rotola senza strisciare, il sistema e dotato di unsolo gdl, essendo la coordinate x e θ correlate dalla relazione: x(t) = Rθ(t).
m, J
c
k
F(t)
G
G
R
x
θ
Figura 5.18: Sistema ad 1 gdl forzato
Assunta ora, come variabile indipendente per descrivere il moto del sistema vibrante, latraslazione x del baricentro, si procede alla scrittura dell’equazione del moto impiegandodiversi metodi.
5.2.1.1 Principio di d’Alembert
La risultante delle forze applicate ad un sistema meccanico, comprese quelle di inerzia,e nulla; pertanto, scrivendo le equazioni di equilibrio dinamico nelle direzioni orizzontalee verticale, e imponendo l’equilibrio alla rotazione rispetto al baricentro G del disco, siottengono:
−mx− cx− kx+ f(t) + T = 0
−JGθ − TR = 0
mg −N = 0
(5.64)
dove g e l’accelerazione di gravita, mentre N e T sono rispettivamente la componentenormale e tangenziale della reazione esercitata dal vincolo sul disco. Tenendo conto dellegame tra x e θ, si ha:
−mx− cx− kx+ f(t) + T = 0
−JGx
R− TR = 0
mg −N = 0
(5.65)
ossia tre equazioni, di cui due differenziali, a coefficienti costanti, nelle tre incognite x, Te N ; la terza equazione e disaccoppiata dalle prime due. L’applicazione del principio di

5.2. VIBRAZIONI FORZATE 41
d’Alembert presenta percio uno svantaggio e un vantaggio: si ha un numero di equazionisuperiore al numero di gdl, ma insieme alla legge di moto si riescono a determinare anchele reazioni vincolari T e N . Dalle prime due equazioni si riesce ad eliminare l’incognita Tgiungendo alla: (
m+JGR2
)x+ cx+ kx = f(t). (5.66)
Essendo il sistema particolarmente semplice, era possibile giungere direttamente all’equa-zione del moto scrivendo l’equilibrio dinamico alla rotazione rispetto al centro di istantanearotazione tra disco e guida.
5.2.1.2 Principio dei lavori virtuali
Considerato uno spostamento infinitesimo e compatibile con i vincoli δx, si ha:
• lavoro virtuale compiuto dalle forze inerziali: δWi = −mxδx− JGθδθ
• lavoro virtuale compiuto dalle forze elastiche e viscose: δWkc = −kxδx− cxδx
• lavoro virtuale compiuto dalle forze esterne: δWe = f(t)δx.
Applicando il PLV, si ha:
δWi + δWkc + δWe = −mxδx− JGθδθ − kxδx− cxδx+ f(t)δx = 0 (5.67)
Che, tenuto conto del legame tra x e θ e della δθ =∂θ
∂xδx =
1
Rδx diventa:(
−mx− JGx
R2− kx− cx+ f(t)
)δx = 0 (5.68)
In altre parole l’equazione del moto e di nuovo la (5.66).
5.2.1.3 Equazioni di Lagrange
Per un sistema ad un gdl l’equazione di Lagrange puo essere scritta come segue (vediAppendice A.8):
d
dt
(∂T
∂q
)− ∂T
∂q+∂V
∂q= Q, (5.69)
in cui q e la generica coordinata indipendente scelta per descrivere il moto del sistema.Risulta conveniente scrivere le varie forme di energia esprimendole dapprima in funzione dicoordinate fisiche: tali coordinate possono essere per esempio spostamenti dei baricentri (orotazioni) dei diversi corpi che compongono il sistema, allungamenti relativi delle estremitadi elementi elastici, spostamenti dei punti di applicazione delle forze, ecc . . . . In seguitosi introducano i legami tra le variabili fisiche e la coordinata generalizzata prescelta.
Se si considera, come unica variabile indipendente, lo spostamento x del baricentro deldisco: q = x, e come variabili fisiche la rotazione θ e l’allungamento ∆l della molla, leespressioni dell’energia cinetica e dell’energia potenziale risultano:
T =1
2mx2 +
1
2JGθ
2; V =1
2k∆l2. (5.70)
Il lavoro virtuale compiuto dalla forza dissipativa viscosa e: δWd = −c∆lδxe quello compiuto dalla forza esterna e: δWe = f(t)δx.

42 CAPITOLO 5. SISTEMI A UN GRADO DI LIBERTA
Introducendo i legami tra le variabili fisiche e la coordinata generalizzata q = x, i varitermini dell’equazione di Lagrange risultano:
d
dt
(∂T
∂x
)=
d
dt
[∂
∂x
(1
2mx2 +
1
2JG
x2
R2
)]=
d
dt
(mx+
JGR2x
)= mx+
JGR2x
d
dt
(∂T
∂x
)=
∂
∂x
(1
2mx2 +
1
2JG
x2
R2
)= 0
∂V
∂x=
∂
∂x
(1
2kx2)
= kx
Q =δw
δx= −cx+ f(t)
(5.71)
In definitiva, come ovvio, l’equazione del moto e di nuovo la (5.66).
5.2.2 Eccitazione Armonica
Si consideri il sistema ad un gdl di Fig. 5.19, dove la massa m e soggetta ad una forzaarmonica F (t) = F0 cosωt. L’equazione del moto e:
mx+ cx+ kx = F0 cosωt (5.72)
L’integrale e somma dell’integrale dell’omogenea associata e di un integrale particolareche, visto che l’eccitazione e armonica, sara anch’esso di tipo armonico e avra la stessapulsazione ω:
x(t) = xgo(t) + xp(t) = xgo(t) +X0 cos(ωt− ψ). (5.73)
m
c k
F(t)
x(t)
Figura 5.19: Sistema ad 1 gdl forzato
In particolare, l’integrale della omogenea (che caratterizza la fase di transitorio), pervalori di smorzamento inferiori a quello critico, si puo esprimere nella forma:
xgo(t) = e−ζωnt (A1 cosωst+ A2 sinωst) . (5.74)
dove A1 e A2 sono costanti che dipendono dalle condizioni iniziali e ωs e la pulsazione
naturale del sistema smorzato(ωs = ωn
√1− ζ2
).
Si tratta di un moto periodico smorzato che, dopo un certo tempo, si annulla. Trascorsoil transitorio, resta l’integrale particolare le cui costanti X0 e ψ dipendono dalle carat-teristiche del sistema e dell’eccitazione. Si trova facilmente, ad esempio impiegando la

5.2. VIBRAZIONI FORZATE 43
rappresentazione di Fig. 5.20, che:
X0 =F0√
(k −mω2)2 + c2ω2=
F0/k√(1− ω2
ω2n
)2
+
(2ζ
ω
ωn
)2;
tanψ =cω
(k −mω2)=
2ζω
ωn
1−(ω
ωn
)2 .
(5.75)
Figura 5.20: Rappresentazione dell’equazione del moto (5.72) nel piano complesso
Gli andamenti, corrispondenti a diversi valori del fattore di smorzamento ζ, di ampiezzaX0 e fase ψ della risposta forzata a regime, sono riportati in Fig. 5.21, in funzione delrapporto (ω/ωn)
2. In Fig. 5.21a), l’ampiezza e stata divisa per la freccia statica F0/k,ossia per la deformazione della molla sotto l’azione della forza statica F0.
0 0.5 1 1.5 2 2.5 30
1
2
3
4
(ω / ωn)2
X0 /
(F0/k
)
(a)0 0.5 1 1.5 2 2.5 3
0
0.5
1
1.5
2
2.5
3
(ω / ωn)2
ψ
(b)
Figura 5.21: Ampiezza (a) e fase (b) della risposta forzata a regime, in funzione delrapporto (ω/ωn)
2.

44 CAPITOLO 5. SISTEMI A UN GRADO DI LIBERTA
Si parla di risonanza di ampiezza quando l’ampiezza dell’oscillazione a regime X0
raggiunge il valore massimo. Tale condizione si raggiunge per (ω/ωn)2 = 1 − 2ζ2. Si
parla, invece, di risonanza di fase quando (ω/ωn)2 = 1, ovvero quando la fase ψ e pari a
π/2. In tali condizioni il valore dell’ampiezza a regime vale rispettivamente:
XRA =F0/k
2ζ√1− ζ2
; XRF =F0/k
2ζ. (5.76)
In Fig. 5.22 e riportato l’andamento del rapporto XRF/XRA in funzione del fattore dismorzamento ζ. Si nota come le due risonanze tendono a coincidere al diminuire di ζ.
0 0.2 0.4 0.6 0.8 1 1.20
0.2
0.4
0.6
0.8
1
ζ
XR
F /
XR
A
Figura 5.22: Rapporto XRF/XRA in funzione del fattore di smorzamento ζ
5.2.3 Funzione Risposta in Frequenza (FRF)
Si consideri l’eccitazione armonica rappresentata in forma complessa F (t) = F0eiωt.
L’equazione del moto per un sistema ad un grado di liberta con smorzamento viscosorisulta nella forma: mz + cz + kz = Foe
iωt;
Poiche l’effettiva eccitazione e costituita dalla sola parte reale di F (t), la risposta delsistema sara anch’essa costituita dalla sola parte reale, x(t) = ℜ[z(t)], dove z(t) e unaquantita complessa che soddisfa l’equazione differenziale del moto.Ipotizzata una soluzione particolare del tipo: z = Z0e
i(ωt−ψ) = Z0e−iψeiωt = Zeiωt, se la
si sostituisce nella equazione differenziale, si ha: −mω2Z + icωZ + kZ = F0 e si ottiene:
Z =F0
k −mω2 + icω. (5.77)
Quest’ultima puo essere scritta come:
Z
F0
=1
k −mω2 + icω=
1/k
1− ω2
ω2n
+ i2ζω
ωn
= H(iω). (5.78)
che e nota come Funzione Risposta in Frequenza (FRF) del sistema.
Si tratta naturalmente di una quantita complessa: H(iω) = |H(iω)| e−iψ, in cui:
|H(iω)| = 1/k√(1− ω2
ω2n
)2
+
(2ζ
ω
ωn
)2; tanψ =
2ζω
ωn
1− ω2
ω2n
. (5.79)

5.2. VIBRAZIONI FORZATE 45
Infine, ricordando che Z = Z0e−iψ, risulta:
Z0 =F0/k√(
1− ω2
ω2n
)2
+
(2ζ
ω
ωn
)2; tanψ =
2ζω
ωn
1− ω2
ω2n
. (5.80)
La risposta del sistema e, come detto, costituita dalla sola parte reale di z(t), ovvero:x(t) = ℜ[z(t)] = ℜ
[Z0e
i(ωt−ψ)] = Z0 cos(ωt− ψ).In definitiva, come atteso, si ritrova il risultato delle (5.75).
5.2.4 Funzione di Trasferimento
Si consideri nuovamente il modello ad un gdl di Fig. 5.19, sulla cui massa m agisca laforzante armonica F (t) = F0 cosωt.
Introducendo la Trasformata di Laplace, l’equazione del moto (5.72) si scrive:
L mx+ cx+ kx = L f(t)
o anche, posto X(s) = L x(t) e F (s) = L f(t):(ms2 + cs+ k
)X(s) = F (s) + [msx(0) +mx(0) + cx(0)]
che, se le condizioni iniziali sono tutte nulle, diventa:(ms2 + cs+ k
)X(s) = F (s)
Risulta dunque:
H(s) =X(s)
F (s)=
1
ms2 + cs+ k
che e la Funzione di Trasferimento (FT) del sistema.
Nella pratica, si impiega la Trasformata di Fourier. Quindi, in luogo della variabile diLaplace s = σ + iω si usa la variabile complessa iω. In altre parole, la FRF non e altroche un caso particolare della FT. Infatti, operata la sostituzione, la H(s) assume la stessaespressione delle FRF (5.78):
H(iω) =1
−mω2 + icω + k=
1/k
1− ω2
ωn2+ i2ζ
ω
ωn
5.2.5 Metodo della Banda di mezza potenza
Si considerino i valori del rapporto r = ω/ωn per i quali l’ampiezza della risposta a regimevale 1/
√2 volte l’ampiezza in condizioni di risonanza di fase. In altre parole:
F0/k√(1− r2)2 + (2ζr)2
=XRF√
2=F0/k
2ζ√2; (5.81)
Si ottiene l’equazione:
(1− r2)2 + (2ζr)2 = 8ζ2, cioe: r4 + 2(2ζ2 − 1)r2 + 1− 8ζ2 = 0,

46 CAPITOLO 5. SISTEMI A UN GRADO DI LIBERTA
le cui radici sono:
r21,2 = 1− 2ζ2 ±√1 + 4ζ4 − 4ζ2 − 1 + 8ζ2 = 1− 2ζ2 ± 2ζ
√1− ζ2.
Figura 5.23: Banda di mezza potenza
Per valori piccoli dello smorzamento si ha ζ2 << 1 per cui si puo approssimare:r1,2 ≃ 1± 2ζ, da cui si ricava il valore del fattore di smorzamento:
ζ =r22 − r21
4. (5.82)
In particolare, se si approssima ωn ≃ (ω2 + ω1)/2, si ha:
ζ =ω22 − ω2
1
4ω2n
≃ (ω2 − ω1)(ω2 + ω1)
(ω2 + ω1)2≃ ω2 − ω1
2ωn. (5.83)
L’intervallo di pulsazioni comprese tra ω1 e ω2 viene chiamato banda di mezza potenza.Tale denominazione deriva dal fatto che la potenza media dissipata ad ogni ciclo pereffetto dell’attrito viscoso, in corrispondenza di ω1 e ω2, e approssimativamente la metadi quella dissipata in condizioni di risonanza di fase. Infatti, in generale, l’espressionedella potenza media dissipata in un ciclo dallo smorzatore viscoso per un moto armonicox(t) = X cos(ωt− ψ) e:
Pm =1
T
∫ T
0
cx2dt =1
2cX2ω2.
Si ha quindi:Pm1,2
PmRF
=cX2
1,2ω21,2
cX2RFω
2n
=r21,22
≃ 1± 2ζ
2≃ 1
2(5.84)
Quanto detto fornisce la base per un metodo di rilevazione sperimentale dello smor-zamento. Infatti, trovato sperimentalmente l’andamento dell’ampiezza della risposta aregime in funzione del rapporto r, si possono determinare ω1, ω2 e ωn, e quindi si puocalcolare ζ.

5.2. VIBRAZIONI FORZATE 47
5.2.6 Eccitazione armonica in risonanza
Si consideri il caso particolare in cui la forza eccitatrice ha pulsazione ω coincidente conla pulsazione naturale ωn del sistema. In altre parole siamo in condizione di risonanza difase.
5.2.6.1 Sistema non smorzato
Figura 5.24: Risposta del sistema non smorzato all’eccitazione armonica in risonanza
Per il sistema non smorzato, l’equazione del moto e:
mx+ kx = F0 cosωnt.
L’integrale generale dell’omogenea associata e del tipo:
xgo = A1 cosωnt+ A2 sinωnt,
mentre l’integrale particolare e:
xp(t) = Xtωn sinωnt con: X = F0/(2k).
Introducendo le condizioni iniziali nell’integrale generale dell’equazione completa si ottie-ne:
x(t) = x0 cosωnt+x0ωn
sinωnt+F0
2kωnt sinωnt (5.85)
Si puo osservare che l’integrale particolare dell’equazione completa e una oscillazione diampiezza che cresce linearmente nel tempo. Il suo andamento e rappresentato in Fig. 5.24.
5.2.6.2 Sistema smorzato
Per il sistema non smorzato, l’equazione del moto e:
mx+ cx+ kx = F0 cosωnt.

48 CAPITOLO 5. SISTEMI A UN GRADO DI LIBERTA
0 0.5 1 1.5 2 2.5 3−1
−0.5
0
0.5
1
Time
x(t)
Figura 5.25: Risposta del sistema smorzato all’eccitazione armonica in risonanza
L’integrale generale dell’omogenea associata e del tipo:
xgo = e−ζωnt (A1 cosωst+ A2 sinωst) ,
mentre l’integrale particolare e:
xp(t) = X sinωnt con: X = F0/(2kζ).
Introducendo condizioni iniziali entrambe nulle nell’integrale generale dell’equazione com-pleta si ottiene:
A1 = 0 A2 = − F0/k
2ζ√
1− ζ2(5.86)
Pertanto, l’integrale generale dell’equazione completa, il cui andamento e riportato inFig. 5.25, e:
x(t) =F0/k
2ζ
(− e−ζωnt√
1− ζ2sinωst+ sinωst
). (5.87)
5.2.7 Fenomeno del Battimento
Si consideri il caso dell’eccitazione armonica in cui il sistema sia privo di smorzamento.L’equazione del moto si riduce alla seguente:
mx+ kx = F0 cosωt.
L’integrale generale dell’omogenea associata e del tipo:
xgo = A1 cosωnt+ A2 sinωnt,
mentre l’integrale particolare e:
xp(t) = X0 cosωt con: X0 =F0/k
|1− ω2/ω2n|.

5.2. VIBRAZIONI FORZATE 49
Introducendo le condizioni iniziali nell’integrale generale dell’equazione completa si ottie-ne:
x(t) = (x0 −X0) cosωnt+x0ωn
sinωnt+X0 cosωt. (5.88)
Figura 5.26: Risposta del sistema non smorzato all’eccitazione armonica (ω < ωn)
Figura 5.27: Risposta del sistema non smorzato all’eccitazione armonica (ω > ωn)
Il moto risulta la sovrapposizione di due moti: uno ha pulsazione pari a quella dellaforzante, l’altro ha pulsazione pari a quella naturale del sistema. La Fig. 5.26 rappresentail caso in cui la pulsazione della forzante e inferiore a ωn(ω < ωn), mentre la situazioneopposta e rappresentata in Fig. 5.27 (ω > ωn).
Ora, se la pulsazione ω della forzante e molto vicina alla pulsazione naturale del sistema,pur mantenendosi distinta da quest’ultima, nasce un fenomeno noto come battimento. Inquesto tipo di vibrazione l’ampiezza aumenta e diminuisce con andamento regolare. Ilfenomeno puo essere spiegato considerando il caso in cui entrambe le condizioni inizialisiano nulle; allora si ha:
x(t) = X0(cosωt − cosωnt) =F0/m
|ω2n − ω2|
cos(ωt− cosωnt), (5.89)
che si puo scrivere anche come:
x(t) =F0/m
|ω2n − ω2|
(2 sin
ωn + ω
2t sin
ωn − ω
2t
)., (5.90)
Ipotizzando che ω sia poco piu piccola di ωn e ponendo: ωn − ω = 2ϵ, dove ϵ e unapiccola quantita positiva, risulta ωn ≃ ω e ωn + ω ≃ 2ω. Pertanto: ω2
n − ω2 = 4ϵ. Inconclusione la legge di moto assume la forma:
x(t) =
(F0/m
2ϵωsin ϵt
)sinωt. (5.91)

50 CAPITOLO 5. SISTEMI A UN GRADO DI LIBERTA
Il moto puo essere inteso come un moto avente pulsazione ω la cui ampiezza varia len-tamente (ϵ e piccolo) con periodo 2π/ϵ (vedi Fig. 5.28). La frequenza di battimento ωb edefinita come ωb = 2ϵ = ωn − ω.
Figura 5.28: Fenomeno del battimento
5.2.8 Eccitazione proporzionale al quadrato della frequenza
0 0.5 1 1.5 2 2.5 30
1
2
3
4
5
6
(ω / ωn)2
X0 /
(A/m
)
Figura 5.29: Ampiezza del rapporto X0m/A in funzione del rapporto (ω/ωn)2 nel caso di
oscillazioni forzate con eccitazione sinusoidale di ampiezza proporzionale a ω
Un caso particolare si ha quando la forza eccitatrice ha ampiezza proporzionale alquadrato della pulsazione ω. Tale situazione si verifica, ad esempio, nelle macchine conrotori squilibrati. L’equazione del moto e:
mx+ cx+ kx = Aω2 cosωt.
La risposta a regime risulta del tipo: x(t) = X0 cos(ωt− ψ), con:
X0 =(A/m)(ω/ωn)
2√(1− ω2/ω2
n)2 + (2ζω/ωn)
2. tanψ =
2ζω/ωn1− ω2/ω2
n
. (5.92)

5.2. VIBRAZIONI FORZATE 51
5.2.9 Smorzamento Strutturale (Isteretico)
L’equazione del moto per un sistema ad un grado di liberta con smorzamento strutturalee data dalla (5.93a). Se si introduce la variabile complessa z, con x = ℜ(z), si ottiene la(5.93b).
mx+ (h/ω)x+ kx = F0 cosωt; (5.93a)
mz + (h/ω)z + kz = F0eiωt (5.93b)
Ipotizzata una soluzione particolare del tipo:
z = Zei(ωt−ψ) = Z0e−iψeiωt = Zeiωt,
se si sostituisce nella equazione differenziale (5.93b), si ottiene:
−mω2Z + ihZ + kZ = F0
che, introducendo il fattore di smorzamento strutturale η (definito al §5.1.8), si puoscrivere come: −mω2Z + k(1 + iη)Z = F0, ottenendo:
Z =F0
−mω+k + iηk. (5.94)
Ricordando che Z = Z0e−iψ, risulta:
Z0 =F0√
(k −mω2)2 + (ηk)2=
F0/k√(1− ω2
ω2n
)2
+ η2
; tanψ =ηk
k −mω2=
η
1−(ω
ωn
)2 .
(5.95)La risposta del sistema, x(t), e costituita dalla sola parte reale di z(t), ovvero:
x(t) = ℜ[z(t)] = ℜ[Z0e
i(ωt−ψ)] = Z0 cos(ωt− ψ).
0 0.5 1 1.5 2 2.5 30
1
2
3
4
(ω / ωn)2
X0 /
(F0/k
)
(a)0 0.5 1 1.5 2 2.5 3
0
0.5
1
1.5
2
2.5
3
(ω / ωn)2
ψ
(b)
Figura 5.30: Smorzamento strutturale: ampiezza (a) e fase (b) della risposta forzata aregime, in funzione del rapporto (ω/ωn)
2
Si puo notare che, nel caso di smorzamento strutturale, la risposta x(t) raggiunge ilsuo valore massimo, F0/(kη), in corrispondenza della risonanza ω = ωn, al contrario diquanto avviene nel caso di smorzamento viscoso in cui il massimo e raggiunto per ω < ωn.Inoltre, per valori non nulli di η, l’angolo ψ non si annulla mai (nemmeno per η = 0). Nelcaso di smorzamento struturale l’eccitazione e la risposta non sono pertanto mai in fase.

52 CAPITOLO 5. SISTEMI A UN GRADO DI LIBERTA
5.2.10 Risposta all’Impulso
Si consideri una forza F nulla ovunque tranne che per l’intervallo di tempo ∆t in cui haun’ampiezza costante F0. La quantita:
I =
∫ +∞
−∞F (t)dt = F0∆t
si dice impulso della forza F . Si faccia ora tendere a zero l’intervallo ∆t, imponendo chesia:
lim∆t→0
=
∫ +∞
−∞F (t)dt = I.
La forza F (t) che soddisfa questa condizione si dice impulsiva.
Ricordando che l’impulso di una forza e uguale alla variazione della quantita di moto, seuna forza trasmette un impulso I ad un corpo di massa m inizialmente in quiete, il corpostesso acquista una quantita di moto Q = I, e quindi una velocita data da v0 = I/m.Ne segue che la risposta forzata ad un’eccitazione impulsiva di impulso I di un corpo dimassa m, inizialmente fermo, coincide con il moto libero relativo alle condizioni iniziali:x(0) = 0 e x(0) = I/m. Infatti, a causa della durata molto breve (teoricamente nulla)della forza impulsiva, durante la sua applicazione il corpo rimane nella posizione iniziale.Pertanto si avra per il sistema non smorzato e per il sistema smorzato (con ζ < 1),rispettivamente:
x(t) =I
mωnsinωnt x(t) =
I
mωse−ζωnt sinωst (5.96)
Ovvero: x(t) = Ih(t), avendo indicato con h(t) la risposta del sistema ad un impulsounitario.
F( )
=td
F( )
=t
d
t-
x
Figura 5.31: Forza eccitatrice di forma arbitraria e risposta del sistema all’impulso F (τ)dτ

5.2. VIBRAZIONI FORZATE 53
5.2.11 Risposta all’eccitazione generica
Si consideri una forza eccitatrice F (t) di forma arbitraria. Essa puo essere immaginatacome una successione di forze impulsive, ciascuna agente per un intervallo di tempo ele-mentare dτ , alle quali corrispondono gli impulsi elementari F (τ)dτ (vedi Fig. 5.31). Larisposta del sistema, all’istante t, per effetto dell’impulso elementare F (τ)dτ agente altempo τ , sara:
dx(t) =F (τ)dτ
mωse−ζωn(t−τ) sinωs(t− τ) = F (τ) h(t− τ) dτ, (5.97)
essendo h(t) la risposta del sistema all’impulso unitario.
Se il sistema e lineare, la risposta sara la somma delle risposte ai singoli impulsielementari, ovvero:
x(t) =
∫ t
0
dx(t) =
∫ t
0
F (τ)h(t− τ)dτ. (5.98)
L’integrale a secondo membro della (5.98) viene detto integrale di convoluzione o integraledi Duhamel.

54 CAPITOLO 5. SISTEMI A UN GRADO DI LIBERTA
Riferimenti Bibliografici
[FMM05] E. Funaioli, A. Maggiore, and U. Meneghetti. Lezioni di Meccanica applicataalle macchine - Prima parte - Fondamenti di meccanica delle macchine. Patroneditore S.r.l., Bologna, 2005.
[MMF11] U. Meneghetti, A. Maggiore, and E. Funaioli. Lezioni di meccanica applicataalle macchine - Terza parte - Dinamica e vibrazioni delle macchine. Patroneditore S.r.l., Bologna, 2011.
[Pal99] William J. Palm. Modeling, Analysis, and Control of Dynamic Systems. JohnWiley & Sons Inc, Toronto, 2nd edition edition, 1999.
[Pen09] E. Pennestrı. Dinamica tecnica e computazionale. Vol. 1: Sistemi lineari. CEACasa Editrice Ambrosiana, Milano, 2 edizione edition, 2009.
[Rao10] Singiresu S. Rao. Mechanical Vibrations. Prentice Hall, Upper Saddle River,N.J, 5th edition edition, 2010.

Capitolo 6
Sistemi a due gradi di liberta
6.1 Equazioni del moto
m1 m2 k3
x1(t)
c3F1(t)
x2(t)
F2(t)
k2
c2
k1
c1
Figura 6.1: Sistema vibrante a due gradi di liberta: schema e diagrammi di corpo libero
Si consideri il sistema a due gdl rappresentato in Fig. 6.1, costituito da masse molle esmorzatori viscosi. Il moto del sistema e completamente descritto dalle coordinate x1(t) ex2(t), che definiscono la posizione delle masse m1 e m2 a partire dalle rispettive posizionidi equilibrio statico.
L’applicazione del principio di d’Alembert fornisce le equazioni del moto:
m1x1 + (c1 + c2) x1 − c2x2 + (k1 + k2) x1 − k2x2 = F1(t)
m2x2 + (c2 + c3) x2 − c2 ˙x21 + (k2 + k3)x2 − k2x1 = F2(t)(6.1)
che possono essere scritte in forma matriciale:
[M ] ¨x(t)+ [C] ˙x(t)+ [K]x(t) = F (t) (6.2)
dove:
[M ] =
[m1 00 m2
], [K] =
[k1 + k2 −k2−k2 k2 + k3
], [C] =
[c1 + c2 −c2−c2 c2 + c3
]
55

56 CAPITOLO 6. SISTEMI A DUE GRADI DI LIBERTA
sono dette rispettivamente matrice massa, rigidezza e smorzamento, e:
x(t) =
x1(t)x2(t)
, F (t) =
F1(t)F2(t)
sono chiamati rispettivamente vettore spostamento e vettore forza.
Le matrici possono risultare, a seconda delle coordinate scelte: complete e non simme-triche; simmetriche; diagonali.
6.1.1 Esempio (introduzione alle coordinate modali)
m1 m2
k1 k2 k3
x1(t) x2(t)
Figura 6.2: Esempio di sistema vibrante a due gradi di liberta
Si consideri il sistema di Fig. 6.2 e si assumano le nuove coordinate z1 e z2 definitedalle relazioni: x1 = (z1 − z2) e x1 = (z1 − z2). Sostituendo nelle equazioni del moto (6.1)si ottiene:
m1z1 −m1z2 + k1z1 − (k1 + 2k2)z2 = 0
m2z1 +m2z2 + k3z1 + (k3 + 2k2)z2 = 0(6.3)
Risulta pertanto:
[M ] =
[m1 −m1
m2 m2
], [K] =
[k1 −(k1 + 2k2)k3 k3 + 2k2
]cioe le due matrici sono complete e non simmetriche.
Se, in particolare, m1 = m2 = m e k1 = k2 = k3 = k, le due equazioni diventano:
mz1 −mz2 + kz1 − 3kz2 = 0
mz1 +mz2 + 3kz2 = 0(6.4)
e le matrici:
[M ] =
[m −mm m
], [K] =
[k −3kk 3k
]Sommando e sottraendo membro a membro le (6.4) si ottiene:
mz1 + kz1 = 0
mz2 + 3kz2 = 0(6.5)
con:
[M ] =
[m 00 m
], [K] =
[k 00 3k
]Le matrici massa e rigidezza sono ora diagonali e le due equazioni sono disaccoppiate.Inoltre, dalle Eqq. (6.7), si vede subito che le due pulsazioni naturali si ricavano dalle:
ω21 =
k
m, ω2
2 =3k
m.
Le coordinate z1 e z2 si dicono coordinate modali o coordinate principali.

6.2. VIBRAZIONI LIBERE 57
6.2 Vibrazioni libere
Per l’analisi delle vibrazioni libere del sistema mostrato in Fig. 6.1, si ponga F1(t) = 0e F2(t) = 0. Inoltre, se si trascura lo smorzamento (c1 = c2 = c3 = 0), le equazioni delmoto (6.1) si riducono a:
m1x1 + (k1 + k2) x1 − k2x2 = 0
m2x2 − k2x1 + (k2 + k3) x2 = 0(6.6)
Assumendo che sia possibile avere un moto armonico delle masse m1 e m2 alla medesimapulsazione ω, con la stessa fase ϕ, ma con ampiezze differenti, si considerino le soluzionidelle Eqq. (6.6) nella forma:
x1(t) = X1 cos(ωt+ ϕ)
x2(t) = X2 cos(ωt+ ϕ)(6.7)
dove le costanti X1 e X2 sono le ampiezze delle oscillazioni di x1(t) e x2(t), e ϕ e la fase.Sostituendo le (6.7) nelle equazioni del moto (6.6), si ottiene:([
−m1ω2 + (k1 + k2)
]X1 − k2X2
)cos(ωt+ ϕ) = 0(
−k2X1 +[−m2ω
2 + (k2 + k3)]X2
)cos(ωt+ ϕ) = 0
(6.8)
Poiche le Eqq. (6.8) devono essere soddisfatte per tutti i valori di t, i termini tra parentesidevono annullarsi, il che conduce a:[
−m1ω2 + (k1 + k2)
]X1 − k2X2 = 0
−k2X1 +[−m2ω
2 + (k2 + k3)]X2 = 0
(6.9)
cioe ad un sistema omogeneo di equazioni algebriche nelle oncognite X1 e X2. Si puovedere che le Eqq. (6.9) sono soddisfatte dalla soluzione banale X1 = X2 = 0, che implical’assenza di vibrazioni. Una soluzione non banale si ottiene ponendo uguale a zero ildeterminante della matrice dei coefficienti di X1 e X2:
det
[−m1ω
2 + (k1 + k2) −k2−k2 −m2ω
2 + (k2 + k3)
]= 0
(m1m2)ω4 − [(k1 + k2)m2 + (k2 + k3)m1]ω
2 + [(k1 + k2)(k2 + k3)− k22] = 0 (6.10)
L’Eq. (6.10) e detta equazione caratteristica o equazione delle frequenze poiche la suasoluzione conduce alle frequenze proprie del sistema. Le radici della Eq. (6.10) sono:
ω21, ω
22 =
1
2
((k1 + k2)m2 + (k2 + k3)m1
m1m2
)∓1
2
√((k1 + k2)m2 + (k2 + k3)m1
m1m2
)2
− 4
((k1 + k2)(k2 + k3)− k22
m1m2
) (6.11)
Questo mostra che per il sistema e possibile avere una vibrazione libera nella forma (6.7)quando ω e uguale a ω1 e ω2 date dalla (6.11). Le ω1 e ω2 sono dette pulsazioni naturalidel sistema.
Restano da determinare i valori delle ampiezze X1 e X2, che dipendono dalle pulsazioninaturali ω1 e ω2. Denominati i valori di X1 e X2 corrispondenti a ω1 come X11 e X21 e

58 CAPITOLO 6. SISTEMI A DUE GRADI DI LIBERTA
quelli corrispondenti a ω2 come X12 e X22, risultano determinati solamente i rapportir1 = X21/X11 e r2 = X22/X12, poiche le Eqq. (6.9) sono omogenee. Per ω2 = ω2
1 eω2 = ω2
2 le (6.9) forniscono:
r1 =X21
X11
=−m1ω
21 + (k1 + k2)
k2=
k2−m2ω2
1 + (k2 + k3)
r2 =X22
X12
=−m1ω
22 + (k1 + k2)
k2=
k2−m2ω2
2 + (k2 + k3)
(6.12)
I vettori seguenti, corrispondenti alle pulsazioni ω1 e ω2, sono i modi di vibrare del sistemae possono essere espressi come:
X1 =
X11
X21
=
X11
r1X11
X2 =
X12
X22
=
X12
r2X12
(6.13)
i modi possono essere denominati come modi normali (normal modes) della vibrazione ovettori modali (modal vectors) del sistema.
La vibrazione libera del sistema puo essere espressa come:
x1(t) = X11 cos(ω1t+ ϕ1) +X12 cos(ω2t+ ϕ2)
x2(t) = X21 cos(ω1t+ ϕ1) +X22 cos(ω2t+ ϕ2) =
= r1X11 cos(ω1t+ ϕ1) + r2X12 cos(ω2t+ ϕ2)
(6.14)
dove le costanti X11, X12, ϕ1 e ϕ2 sono determinate dalle condizioni iniziali.
6.2.1 Condizioni iniziali
Ciascuna delle Eqq. (6.6) e un’equazione differenziale del secondo ordine, percio vannospecificate due condizioni iniziali per ogni grado di liberta (per ogni massa). Per con-dizioni iniziali generiche, entrambi i modi vengono eccitati e il moto che ne risulta euna sovrapposizione dei due modi normali di vibrare, come mostrato dalle (6.14). Se lecondizioni iniziali sono date da:
x1(t = 0) = x1(0), x1(t = 0) = x1(0)x2(t = 0) = x2(0), x2(t = 0) = x2(0)
(6.15)
le costanti X11, X12, ϕ1 e ϕ2 possono essere trovate risolvendo le seguenti equazioni(ottenute sostituendo le (6.15) nelle Eqq. (6.14)):
x1(0) = X11 cosϕ1 +X12 cosϕ2
x1(0) = −ω1X11 sinϕ1 − ω2X12 sinϕ2
x2(0) = r1X11 cosϕ1 + r2X12 cosϕ2
x2(0) = −ω1r1X11 sinϕ1 − ω2r2X12 sinϕ2
(6.16)
Le Eqq. le (6.16) possono essere viste come un sistema di quattro equazioni algebrichenelle quattro incognite:
A = X11 cosϕ1, B = X12 cosϕ2
C = X11 sinϕ1, D = X12 sinϕ2

6.3. MOTI RIGIDI 59
Le soluzioni delle (6.16) sono espresse dalle:
A =
(r2x1(0)− x2(0)
r2 − r1
), B =
(−r1x1(0) + x2(0)
r2 − r1
)C =
(−r2x1(0) + x2(0)
ω1(r2 − r1)
), D =
(r1x1(0)− x2(0)
ω2(r2 − r1)
) (6.17)
dalle quali si ricavano:
X11 =√A2 + C2, ϕ1 = tan−1
(C
A
)X12 =
√B2 +D2, ϕ2 = tan−1
(D
B
) (6.18)
6.3 Moti rigidi
m1 m2
k
x1(t) x2(t)
Figura 6.3: Sistema a due gradi di liberta con moto rigido
Si consideri il sistema a due 2 gdl rappresentato in Fig. 6.3 (ad esempio, potrebbeessere il modello di due vagoni ferroviari). Le equazioni del moto libero sono le seguenti:[
m1 00 m2
]x1x2
+
[k −k−k k
]x1x2
=
00
Assunto il moto nella forma:
xj(t) = Xj cos(ωt+ ϕ) j = 1, 2
risulta: [−m1ω
2 + k −k−k −m2ω
2 + k
]X1
X2
=
00
e l’equazione caratteristica diviene:
ω2[m1m2ω
2 − k(m1 +m2)]= 0
da cui si ottengono i quadrati delle pulsazioni naturali:
ω21 = 0 ω2
2 =k(m1 +m2)
m1m2
Una delle due pulsazioni e nulla: il sistema non vibra a tale pulsazione. In altre parole ilsistema si muove come un unico corpo rigido senza moto relativo tra le due masse; si dicepertanto che il sistema ha un moto rigido.Come ovvio, alla pulsazione ω1 corrisponde il modo di vibrare r1 = X2/X11 = 1 (ilmoto e rigido).Alla pulsazione ω2 corrisponde il modo di vibrare r2 = X2/X12 = −m1/m2. Il rapportoe negativo, il che significa che il secondo modo ha un nodo.

60 CAPITOLO 6. SISTEMI A DUE GRADI DI LIBERTA
6.4 Vibrazioni forzate
Le equazioni del moto per un generico sistema a due gdl soggetto a forzanti esterne possonoessere scritte come:[
m11 m12
m21 m22
]x1x2
+
[c11 c12c21 c22
]x1x2
+
[k11 k12k21 k22
]x1x2
=
F1(t)F2(t)
(6.19)
Se si considerano forzanti armoniche complesse di pulsazione ω:
Fj(t) = Fj0eiωt j = 1, 2
le soluzioni a regime sono del tipo:
yj(t) = Yjeiωt j = 1, 2
dove Y1 e Y2 sono, in generale, quantita complesse che dipendono da ω e dai parametridel sistema. Sostituendo le soluzioni nelle Eqq. (6.19) si ha:[
−ω2m11 + iωc11 + k11 −ω2m12 + iωc12 + k12−ω2m21 + iωc21 + k21 −ω2m22 + iωc22 + k2
]Y1Y2
=
F10
F20
(6.20)
Se si definisce la quantita:
Zrs(iω) = −ω2mrs + iωcrs + krs
le Eqq. (6.20) possono scriversi:
[Z(iω)]Y = F0 (6.21)
dove:
[Z(iω)] =
[Z11(iω) Z12(iω)Z21(iω) Z22(iω)
]; Y =
Y1Y2
; F0 =
F10
F20
.
La matrice [Z(iω)] e detta matrice impedenza. La soluzione della Eq. (6.21) e data dalla:
Y = [Z(iω)]−1F0 (6.22)
dove l’inversa della matrice impedenza e data da:
[Z(iω)]−1 =1
Z11(iω)Z22(iω)− Z12(iω)Z21(iω)
[Z22(iω) −Z12(iω)−Z21(iω) Z11(iω)
](6.23)
Le Eqq. (6.22) e (6.23) conducono alla soluzione:
Y1(iω) =Z22(iω)F10 − Z12(iω)F20
Z11(iω)Z22(iω)− Z12(iω)Z21(iω)
Y2(iω) =−Z21(iω)F10 + Z11(iω)F20
Z11(iω)Z22(iω)− Z12(iω)Z21(iω)
(6.24)
Le Eqq. (6.24) sostituite nelle yj(t) (j=1, 2) forniscono le soluzioni delle Eqq. (6.19). Lerisposte reali xj(t) sono la parte reale delle risposte complesse yj(t).

6.4. VIBRAZIONI FORZATE 61
m mk k
k
x1(t) x2(t)
cFcos ωt
Figura 6.4: Esempio di sistema vibrante a due gradi di liberta forzato
6.4.1 Esempio
Si debba trovare la risposta a regime del sistema di Fig. 6.4 quando la massa associata algrado di liberta x1 e eccitata dalla forzante armonica F1(t) = F cosωt. Le equazioni delmoto sono: [
m 00 m
]x1x2
+
[0 00 c
]x1x2
+
[2k −k−k 2k
]x1x2
=
F cosωt
0
Se si considera la forzante nella forma complessa F (t) = Feiωt, si possono assumere comesoluzioni le: yj(t) = Yje
iωt (j = 1, 2), con xj(t) = ℜ[yj(t)] = ℜ[Yjeiωt].Se, in prima istanza, non si considera la presenza dello smorzatore (c = 0), il sistema
risulta quello di Fig. 6.2 nel caso in cui m1 = m2 = m e k1 = k2 = k3 = k, per il quale lepulsazioni naturali al quadrato erano fornite dalle (vedi §6.1.1):
ω21 =
k
m, ω2
2 =3k
m.
In tale caso, le funzioni Zrs(iω) valgono:
Z11(ω) = Z22(ω) = −mω2 + 2k; Z12(ω) = Z21(ω) = −k.
e, di conseguenza, le ampiezze Yj (j = 1, 2), in generale complesse, risultano ora reali edespresse dalle:
Y1(ω) =(−mω2 + 2k)F
(−mω2 + 2k)2 − k2=
(−mω2 + 2k)F
(−mω2 + 3k)(−mω2 + k)
Y2(ω) =kF
(−mω2 + 2k)2 − k2=
kF
(−mω2 + 3k)(−mω2 + k)
Come ovvio, da tali espressioni, risulta che le pulsazioni naturali sono quelle particolaripulsazioni che, annullando le quantita a denominatore, portano le ampiezza all’infinito.
Ponendo: ω20 =
k
me sostituendo nelle relazioni che forniscono Y1 e Y2, si ha:
Y1(ω) =
(2− ω2
ω20
)F
k(2− ω2
ω20
)2
− 1
=
(2− ω2
ω20
)F
k(3− ω2
ω20
)(1− ω2
ω20
)
Y2(ω) =
F
k(2− ω2
ω20
)2
− 1
=
F
k(3− ω2
ω20
)(1− ω2
ω20
)

62 CAPITOLO 6. SISTEMI A DUE GRADI DI LIBERTA
che possono essere analizzate in funzione, ad esempio, del rapporto adimensionale ω/ω0
(vedi Fig. 6.5).
0 0.5 1 1.5 2 2.5 30
1
2
3
4
5
ω / ω0
|Y1| /
(F
/ k)
0 0.5 1 1.5 2 2.5 30
1
2
3
4
5
ω / ω0
|Y2| /
(F
/ k)
Figura 6.5: Ampiezza delle risposte per il sistema di Fig. 6.4 nel caso in cui c = 0
Nel caso di presnza dello smorzatore viscoso tra la massa m2 ed il telaio, le funzioniZrs(iω) diventano:
Z11(iω) = −mω2 + 2k; Z22(iω) = −mω2 + icω + 2k; Z12(iω) = Z21(iω) = −k.Di conseguenza, le ampiezze Yj (j = 1, 2) risultano ora complesse ed espresse dalle:
Y1(iω) =(−mω2 + icω + 2k)F
(−mω2 + icω + 2k)(−mω2 + 2k)− k2
Y2(iω) =kF
(−mω2 + icω + 2k)(−mω2 + 2k)− k2
Al solito, ponendo: ω20 =
k
me introducendo il parametro adimensionale:
a =c
2mω0
=c
2√km
possono essere poste nella seguente forma:
Y1(iω) =
(−ω
2
ω20
+ i2aω
ω0
+ 2
)F
k(−ω
2
ω20
+ i2aω
ω0
+ 2
)(2− ω2
ω20
)− 1
;
Y2(iω) =
F
k(−ω
2
ω20
+ i2aω
ω0
+ 2
)(2− ω2
ω20
)− 1
.
La Fig. 6.6 mostra l’andamento del modulo dell’ampiezza della risposta del primo gradodi liberta in funzione del rapporto adimensionale ω/ω0 e per diversi valori del parametroa. Si vede che quando a ≫ 1 il sistema tende a comportarsi come un sistema ad un gdlcon un’unica risonanza che vale ωn =
√2k/m (ω/ω0 =
√2). In effetti, all’aumentare
della costante di smorzamento c (e quindi del parametro a), e come se la massa m2 fossesolidale al telaio.

6.5. SMORZATORE DINAMICO (MASS DUMPER) 63
0 0.5 1 1.5 2 2.5 30
2
4
6
8
10
12
14
16
a=0.2
a=10
a=1
ω / ω0
|Y1| /
(F
/ k)
Figura 6.6: Ampiezza della risposta x1(t) per il sistema vibrante di Fig. 6.4 all’aumentaredello smorzamento
6.5 Smorzatore dinamico (Mass Dumper)
Machine (m1)
k1/2
x1
m2k1/2
k2
x2
Fcos t
Figura 6.7: Smorzatore dinamico
Si consideri il caso di un macchinario sottoposto ad una eccitazione con pulsazione mol-to prossima ad una pulsazione naturale del macchinario stesso. In tale caso, le vibrazionieccessive del sistema possono essere ridotte impiegando un cosiddetto smorzatore dinami-co di vibrazioni (o assorbitore dinamico), costituito da una massa collegata al macchinarioda una molla. Lo smorzatore dinamico deve essere progettato in modo che le frequenzenaturali del sistema siano il piu possibile lontane dalla frequenza dell’eccitazione.
Per studiare il problema si schematizzi la macchina come un sistema ad un gradodi liberta (vedi Fig. 6.7) sottoposto ad una forzante armonica F (t) = F cosωt, in cuiω =
√k1/m1, ossia il sistema e in risonanza. A questo punto si supponga di collegare al
macchinario una seconda massa m2 mediante una molla di costante elastica k2.
Le equazioni del moto sono:[m1 00 m2
]x1x2
+
[k1 + k2 −k2−k2 k2
]x1x2
=
F cosωt
0

64 CAPITOLO 6. SISTEMI A DUE GRADI DI LIBERTA
Assunte come soluzioni le:
xj(t) = Xj cosωt j = 1, 2
le funzioni Zrs(iω) sono:
Z11(ω) = −m1ω2 + (k1 + k2); Z22(ω) = −m2ω
2 + k2; Z12(ω) = Z21(ω) = −k2.
Di conseguenza risulta:
X1(ω) =(−m2ω
2 + k2)F
(−m1ω2 + k1 + k2)(−m2ω2 + k2)− k22
X2(ω) =k2F
(−m1ω2 + k1 + k2)(−m2ω2 + k2)− k22
Se e soddisfatta la condizione:
ω2 =k1m1
=k2m2
si ha per x1(t) una antirisonanza, ossia la massa m1 non vibra. Posto:
ω210 =
k1m1
; ω220 =
k2m2
le espressioni di X1(ω) e X2(ω) risultano:
X1(ω) =
(1− ω2
ω220
)F
k1(1− ω2
ω210
+k2k1
)(1− ω2
ω210
)− k2k1
; X2(ω) =
F
k1(1− ω2
ω210
+k2k1
)(1− ω2
ω210
)− k2k1
;
che possono essere diagrammate in funzione del rapporto adimensionale ω/ω10 (vediFig. 6.8).
0 0.5 1 1.5 20
1
2
3
4
5
6
ω / ω10
|X1| /
(F
/ k 1)
0 0.5 1 1.5 20
1
2
3
4
5
6
ω / ω10
|X2| /
(F
/ k 1)
Figura 6.8: Ampiezza delle risposte nello smorzatore dinamico
Si nota che quando ω10 = ω20 = ω, risulta:
X1(ω) = 0; X2(ω) = −F
k2.

6.5. SMORZATORE DINAMICO (MASS DUMPER) 65
In altre parole, la massa m1 non oscilla poiche la massa m2 trasmette alla massa m1 unaforza uguale ed opposta all’eccitazione; infatti:
k2(x2 − x1) = −m2x2 = m2ω2X2 cosωt = −m2
k2Fω2 cosωt = − ω2
ω220
F cosωt = −F cosωt.
0 0.2 0.4 0.6 0.8 10.5
1
1.5
2
m2 / m
1
ω /
ω10
Figura 6.9: Pulsazioni naturali dello smorzatore dinamico in funzione del rapportom2/m1
L’aggiunta di una massa introduce pero nel sistema una seconda risonanza. Le duerisonanze si possono trovare ponendo a zero il denominatore di X1(ω) (o di X2(ω)):(
1− ω2
ω210
+k2k1
)(1− ω2
ω210
)− k2k1
= 0; ossia:ω4
ω410
− ω2
ω210
(2 +
k2k1
)+ 1 = 0.
Osservando che quando ω10 = ω20 = ω si ha k2/k1 = m2/m1, le due pulsazioni sono tantopiu lontane da ω10 =
√k1/m1 quanto piu grande e il rapporto m2/m1 (vedi Fig. 6.9):
(ω2
ω210
)1,2
=
(2 +
m2
m1
)±
√(2 +
m2
m1
)2
− 4
2.

66 CAPITOLO 6. SISTEMI A DUE GRADI DI LIBERTA
Riferimenti Bibliografici
[MMF11] U. Meneghetti, A. Maggiore, and E. Funaioli. Lezioni di meccanica applicataalle macchine - Terza parte - Dinamica e vibrazioni delle macchine. Patroneditore S.r.l., Bologna, 2011.
[Rao10] Singiresu S. Rao. Mechanical Vibrations. Prentice Hall, Upper Saddle River,N.J, 5th edition edition, 2010.

Capitolo 7
Sistemi a N gradi di liberta
7.1 Sistemi non smorzati
Le equazioni del moto si scrivono applicando il principio di D’Alembert, il principio deilavori virtuali o le equazioni di Lagrange. Per le vibrazioni libere di un sistema nonsmorzato le equazioni del moto sono del tipo:
[M ] ¨x(t)+ [K]x(t) = 0 (7.1)
dove [M ] e [K]sono rispettivamente la matrice massa e la matrice rigidezza:
[M ] =
m11 m12 ... m1n
m21 m22 ... m2n
... ... ... ...mn1 mn2 ... mnn
, [K] =
k11 k12 ... k1nk21 k22 ... k2n... ... ... ...kn1 kn2 ... knn
e x(t) e il vettore delle coordinate.
La matrice massa [M ] e la matrice rigidezza [K] possono essere, in generale, completee non simmetriche. Se pero ad ogni massa e associata una coordinata, allora la matricemassa risulta diagonale. Analogamente, se ogni molla ha ogni estremo mobile collegato aduna massa (cioe posto in corrispondenza dell’origine di una coordinata), allora la matricerigidezza risulta simmetrica. Nel seguito, supporremo sempre che la matrice massa e lamatrice rigidezza siano simmetriche. Cio e lecito, in quanto scegliendo opportunamentele coordinate e sempre possibile ricondursi a tale situazione.
Gli elementi mij e kij che compongono le matrici massa e rigidezza hanno il significatoche ci si appresta a chiarire. Scritta per esteso l’equazione del moto della massa i-esima,si ha:
n∑j=1
mij xj +n∑j=1
kij xj = 0 (7.2)
Come si puo vedere dalla Eq. (7.2), gli elementi mij della matrice massa rappresentanol’azione inerziale agente sulla massa i-esima in corrispondenza di una accelerazione unita-ria della coordinata in cui e concentrata la massa j-esima (essendo nulle le accelerazionidelle restanti n-1 coordinate). Gli elementi mij sono detti coefficienti di influenza iner-ziali. Gli elementi kij della matrice rigidezza rappresentano l’azione elastica agente sullamassa i-esima in corrispondenza di uno spostamento unitario della coordinata in cui e
67

68 CAPITOLO 7. SISTEMI A N GRADI DI LIBERTA
concentrata la massa j-esima (essendo nulli gli spostamenti delle restanti n-1 coordinate).Essi sono noti anche come coefficienti di influenza per la rigidezza.
Al fine di determinare i modi propri di vibrare del sistema si assuma una risposta nellaforma:
xj(t) = Xjeiωt j = 1, 2, . . . , n
Si ottiene:
− ω2[M ]X+ [K]X = 0 (7.3)
dove: X = X1 X2 ... XnT e il vettore delle ampiezze di oscillazione delle masse.Si perviene ad un sistema di equazioni analogo a quello gia visto nel caso dei sistemi adue gradi di liberta:
[A− µI] X = 0 (7.4)
per il quale deve essere:
det [A− µI] = 0 (7.5)
avendo posto [A] = [M ]−1[K] (matrice dinamica).
Le radici µi dell’equazione caratteristica (7.5) sono gli autovalori della matrice [A] esono pari al quadrato delle pulsazioni naturali del sistema: ω2
i = µi. Sostituendo gliautovalori µi nella Eq. (7.4) si ottengono i corrispondenti autovettori, che forniscono imodi di vibrare:
X1 =
X11
X21
...Xn1
, X2 =
X12
X22
...Xn2
, . . . Xn =
X1n
X2n
...Xnn
.
Si noti che, essendo la Eq. (7.4) un sistema di n equazioni omogenee, gli autovettoririsultano definiti a meno di una costante arbitraria.
Talvolta puo essere utile formulare le equazioni del moto delle masse del sistema inmodo diverso dalle (7.1). A cio si perviene utilizzando i coefficienti di influenza per lacedevolezza (flessibilita) δij. Essi vengono definiti come lo spostamento della coordinatai-esima provocato da una forza unitaria applicata nella coordinata j-esima. Nel caso delleoscillazioni libere di un sistema ad n gradi di liberta, le azioni applicate sono solo quelleinerziali e pertanto lo spostamento della massa i-esima vale:
xi = −n∑j=1
δij
n∑j=1
mij xj (i = 1, 2, . . . , n) (7.6)
La (7.6) puo essere scritta nella forma matriciale:
x = −[D][M ]x (7.7)
La matrice:
[D] =
δ11 δ12 ... δ1nδ21 δ22 ... δ2n... ... ... ...δn1 δn2 ... δnn
e detta matrice cedevolezza (flessibilita).

7.1. SISTEMI NON SMORZATI 69
Confrontando la Eq. (7.7) con la Eq. (7.1) scritta nel modo seguente:
x = −[K]−1[M ]x
si riconosce che: [D] = [K]−1 ossia la matrice flessibilita [D] e l’inversa della matricerigidezza [K]. Se si sostituiscono le soluzioni xj(t) nella Eq. (7.7), si ottiene:
X = ω2[D][M ]X (7.8)
dalla quale si perviene al sistema di equazioni:
[A− µI]X = 0 (7.9)
con: [A] = [D][M ] e [µi] = 1/ω2i .
Come si vede, la Eq. (7.9) e analoga alla Eq. (7.4). Inoltre, essendo:
[A][A] = [M ]−1[K][K]−1[M ] = [I]
risulta che: [A] = [A]−1.
In conclusione, sia partendo dalle Eqq. (7.1), sia impiegando le Eqq. (7.7), il problemadella determinazione delle frequenza proprie e dei modi di vibrare viene ricondotto a quellodella ricerca degli autovalori e autovettori di una matrice, per il quale sono disponibilialgoritmi assai efficienti. Occorre pero osservare che in generale tale matrice (sia essa[A] o [A]), non e simmetrica, il che comporta un costo computazionale piu elevato nellasoluzione dell’autoproblema. A questo proposito, esistono diverse tecniche per aggirare ilproblema: una di esse e riportata in Appendice G.
7.1.1 Vibrazioni libere
Il piu generale moto libero e la sovrapposizione di tutti i modi propri. Ogni modo vipartecipa in una certa porzione, dipendente dalle condizioni iniziali. Se le condizioniiniziali eccitano un solo modo, alle vibrazioni libere partecipa solo quel modo.
7.1.2 Proprieta di ortogonalita
Gli autovettori godono di una proprieta, detta di ortogonalita, rispetto alle matrici massae rigidezza. Consideriamo le equazioni del moto scritte per il modo i-esimo:
[K]Xi = µi[M ]Xi (7.10)
Premoltiplicando per il trasposto dell’autovettore j-esimo, si ottiene:
XjT [K]Xi = µiXjT [M ]Xi (7.11)
Si ripeta l’operazione scambiando i modi i-esimo e j-esimo:
XiT [K]Xj = µjXiT [M ]Xj (7.12)
Poiche le matrici [K] e [M ] sono simmetriche, valgono le:
XjT [K]Xi = XiT [K]XjXjT [M ]Xi = XiT [M ]Xj

70 CAPITOLO 7. SISTEMI A N GRADI DI LIBERTA
tenendo conto delle quali, se si sottrae la (7.12) dalla (7.11) si ottiene:
0 = (µi − µj)XjT [M ]Xi (7.13)
Per due modi diversi (i = j), essendo µi = µj, risulta necessariamente che:
0 = XjT [M ]Xi (7.14)
ed anche:0 = XjT [K]Xi (7.15)
Le Eqq. (7.14) e (7.15) definiscono il carattere di ortogonalita dei modi propri di vibrarenei confronti delle matrici massa e rigidezza. Tale proprieta e di fondamentale importanzaper procedere al disaccoppiamento delle equazioni del moto del sistema (vedi §7.1.5).
Nel caso in cui i = j, la Eq. (7.13) risulta soddisfatta per ogni valore finito del termineXiT [M ]Xi. Si definisconomassa modale e rigidezza modale rispettivamente gli scalariforniti dai prodotti:
Mi = XiT [M ]Xi Ki = XiT [K]Xi (7.16)
7.1.3 Normalizzazione
Ricordando che gli autovettori sono definiti a meno di una costante arbitraria, e possibileoperare diverse normalizzazioni degli autovettori medesimi. Ad esempio, osservando larelazione che definisce la massa modale, si vede come sia possibile individuare per ogniautovettore Xi lo scalare pi tale da rendere unitaria la rispettiva massa modale Mi:
Mi = pi XiT [M ] pi Xi = 1; pi =1√
XiT [M ]Xi
; (i = 1, 2, . . . , n).
Adottando tale normalizzazione (nota come normalizzazione rispetto alla matrice massa),dalla (7.11) scritta per i = j, risulta che ogni rigidezza modale Ki e pari al quadrato dellarelativa pulsazione naturale ωi:
Ki = XjT [K]Xi = µiXjT [M ]Xi = µi = ωi2.
7.1.4 La matrice modale
Se si raccolgono gli n autovettori in una matrice, si ottiene la cosiddetta matrice modale:
[Φ] =
X11 X12 ... X1n
X21 X22 ... X2n
... ... ... ...Xn1 Xn2 ... Xnn
(7.17)
Per l’ortogonalita dei modi propri, il seguente prodotto e una matrice diagonale:
[Φ]T [M ][Φ] =
M1 0 ... 00 M2 ... 0... ... ... ...0 0 ... Mn
= [M ]P (7.18)

7.1. SISTEMI NON SMORZATI 71
Gli elementi della diagonale principale della (7.18) sono lemasse modali ; la matrice prendeil nome di matrice massa modale (principale). Analogamente si ha:
[Φ]T [K][Φ] =
K1 0 ... 00 K2 ... 0... ... ... ...0 0 ... Kn
= [K]P (7.19)
In questo caso gli elementi della diagonale principale sono le rigidezze modali e la matriceprende il nome di matrice rigidezza modale (principale).
La matrice massa principale e la matrice rigidezza principale permettono di disaccop-piare le equazioni del moto.Se si adotta la normalizzazione rispetto alla matrice massa, le matrici massa principale erigidezza principale diventano, rispettivamente:
[M ]P =
1 0 ... 00 1 ... 0... ... ... ...0 0 ... 1
= [I]; [K]P =
ω1
2 0 ... 00 ω2
2 ... 0... ... ... ...0 0 ... ωn
2
7.1.5 Disaccoppiamento delle equazioni del moto
Si scrivano le Eqq. del moto (7.1) premoltiplicando i termini per [Φ]T e postmoltiplicandoliper [Φ][Φ]−1 = [I]. Si ottiene:
[Φ]T [M ][Φ][Φ]−1x+ [Φ]T [K][Φ][Φ]−1x = 0 (7.20)
ossia:[M ]Pq+ [K]Pq = 0 (7.21)
avendo posto:q = [Φ]−1x (7.22)
Le (7.22) definiscono le coordinate modali (principali). Poiche, come visto (§7.1.4),[M ]P e [K]P sono matrici diagonali, le equazioni del moto (7.21) risultano disaccoppiate.Risolte le (7.21) in termini di coordinate modali, si passa da queste alle coordinate diorigine con la trasformazione:
x = [Φ]q (7.23)
7.1.6 Moti di corpo rigido
Si consideri un sistema a n gdl che ammetta piu moti rigidi, siano per esempio i primidue: ω1 = ω2 = 0. Risultera:
[K]X1 = 0 [K]X2 = 0
[K]Xi = ωi2[M ]Xi (i = 3, 4, . . . , n)
Dalle prime due si ricava:
XiT [K]X1 = XiT [K]X2 = 0

72 CAPITOLO 7. SISTEMI A N GRADI DI LIBERTA
e risulta altresı:
X1T [K]X2 = 0
che, assieme alla precedente, costituisce la relazione di ortogonalita nei confronti dellamatrice rigidezza. Per contro, nella relazione da cui si ricava l’ortogonalita nei confrontidella matrice massa (Eq. (7.13)), per i primi due modi la differenza (µ2−µ1) e nulla, ossiain generale si ha:
X1T [M ]X2 = 0
Pertanto, la presenza di moti di corpo rigido puo dare luogo alla presenza nella matricemassa modale di termini al di fuori della diagonale.
7.2 Sistemi con smorzamento
Se nel sistema c’e smorzamento, le equazioni del moto diventano:
[M ]x+ [C]x+ [K]x = 0
La matrice [C] e di regola simmetrica.Introducendo le coordinate principali, q = [Φ]−1x si ottiene:
[M ]Pq+ [Φ]T [C][Φ]q+ [K]Pq = 0
In generale, la matrice [Φ]T [C][Φ] e simmetrica ma non diagonale, per cui le equazionidel moto non sono piu disaccoppiate. Se pero per lo smorzamento si adotta l’ipotesi dismorzamento proporzionale, cioe si esprime la matrice [C] attraverso la:
[C] = α[M ] + β[K] (7.24)
con α e β parametri scalari (veddi Appendice H), allora valgono le seguenti:
[Φ]T [C][Φ] = α[Φ]T [M ][Φ] + β[Φ]T [K][Φ] = α[M ]P + β[K]P = [C]P
in cui la matrice [C]P e una matrice diagonale detta matrice smorzamento modale (prin-cipale):
[C]P =
C1 0 ... 00 C2 ... 0... ... ... ...0 0 ... Cn
e Ci = XiT [C]Xi sono gli smorzamenti modali. Le equazioni del moto risultanopertanto completamente disaccoppiate.
In analogia a quanto fatto per il sistema ad un gdl, si possono definire lo smorzamento(modale) critico e il fattore di smorzamento modale attraverso le:
ζi =CiCCRi
=Ci
2√KiMi
=Ci
2Miωi=
α
2ωi+βωi2
(7.25)

7.3. VIBRAZIONI FORZATE 73
7.3 Vibrazioni forzate
Le equazioni del moto di un sistema ad n gdl, con smorzamento viscoso, si possono scriverenel modo seguente:
[M ]x+ [C]x+ [K]x = f(t) (7.26)
dove [M ] e [K] sono le matrici massa e rigidezza, [C] e la matrice smorzamento, x e ilvettore degli spostamenti ed f(t) e il vettore delle forze applicate:
f(t)T =f1(t) f2(t) . . . fn(t)
T(7.27)
Introducendo nelle (7.26) le coordinate principali definite dalle (7.22), si ottiene:
[M ][Φ]q+ [C][Φ]q+ [K][Φ]q = f(t) (7.28)
Premoltiplicando ambo i membri della (7.28) per [Φ]T , si ha:
[Φ]T [M ][Φ]q+ [Φ]T [C][Φ]q+ [Φ]T [K][Φ]q = [Φ]Tf(t) (7.29)
Facendo l’ipotesi di smorzamento proporzionale, le (7.29) divengono:
[M ]Pq+ [C]Pq+ [K]Pq = [Φ]Tf(t) (7.30)
Le (7.30) costituiscono un sistema di equazioni disaccoppiate. Le componenti del vettore[Φ]Tf(t) sono dette forzanti modali :
[Φ]Tf(t) =
X11f1(t) +X21f2(t) + ...+Xn1fn(t)X12f1(t) +X22f2(t) + ...+Xn2fn(t)X1nf1(t) +X2nf2(t) + ...+Xnnfn(t)
(7.31)
Risulta: M1q1 + C1q1 +K1q1 = X11f1(t) +X21f2(t) + ...+Xn1fn(t)M2q2 + C2q2 +K2q2 = X12f1(t) +X22f2(t) + ...+Xn2fn(t)
. . .Mnqn + Cnqn +Knqn = X1nf1(t) +X2nf2(t) + ...+Xnnfn(t)
(7.32)
Le equazioni differenziali del sistema (7.32) vengono risolte singolarmente con i proce-dimenti visti nel caso dei sistemi ad un singolo grado di liberta. In tal modo si ottengonole componenti del vettore delle coordinate modali e, tramite la (7.23), quelle del vettoredelle coordinate effettive.
Si fa notare che se un determinato modo di vibrare presente un nodo in corrispondenzadi una certa coordinata, andando ad eccitare il sistema in tale nodo. alla risposta delsistema non contribuisce il modo di vibrare a cui il nodo appartiene (vedi Appendice I).
7.3.1 Metodo modale
Il sistema sia non smorzato o con smorzamento proporzionale ed abbia n gdl. Trovatii primi r autovalori ed autovettori (con r ≪ n) si introducano le coordinate modaliq1, q2, . . . , qr definite dalla:
x1x2...xn
=
X11 X12 ... X1r
X21 X22 ... X2r
... ... ... ...Xn1 Xn2 ... Xnr
q1q2...qr
= [Φ]q

74 CAPITOLO 7. SISTEMI A N GRADI DI LIBERTA
Inserite nelle equazioni del moto (7.26), premoltiplicando per [Φ]T si ha:
[Φ]T [M ][Φ]q+ [Φ]T [C][Φ]q+ [Φ]T [K][Φ]q = [Φ]Tf(t)
Si ottengono cosı r (r ≪ n) equazioni disaccoppiate (e quindi semplici da integrare). Unavolta trovata la risposta in coordinate modali q(t), la risposta in coordinate effettive sitrova mediante la x = [Φ]q.Il metodo e valido se la massima pulsazione presente nella forzante e sufficientementeinferiore alla pulsazione ωr del modo r-esimo.
7.3.2 Metodo pseudo-modale
Se lo smorzamento e piccolo ma non proporzionale (come capita abbastanza spesso), sipuo usare un metodo pseudo-modale. Si trovano prima gli n autovalori ed autovettoritrascurando lo smorzamento, e se ne utilizzano − come prima − i primi r, con r ≪ n:
x1x2...xn
=
X11 X12 ... X1r
X21 X22 ... X2r
... ... ... ...Xn1 Xn2 ... Xnr
q1q2...qr
= [Φ]q
Questa volta si ottiene un sistema di r equazioni accoppiate per i termini in q, ma inte-grabili abbastanza facilmente perche r ≪ n. Anche in questo caso, come per il metodomodale, la soluzione e valida solo se la massima pulsazione presente nella forzante esufficientemente inferiore alla pulsazione ωr del modo r-esimo.
7.4 Quoziente di Rayleigh
Per un sistema a n gdl, l’energia cinetica e l’energia potenziale sono rispettivamenteespresse dalle:
T =1
2xT [M ] x ; V =
1
2xT [K] x
che, inserita la soluzione armonica: x(t) = X eiωt, diventano:
T = −1
2ω2XT [M ] X ei2ωt; V =
1
2XT [M ] X ei2ωt
Se il sistema e conservativo vale il principio di conservazione dell’energia meccanica(TMAX = VMAX), per cui si ottiene:
TMAX =1
2ω2XT [M ] X = VMAX =
1
2XT [K] X
da cui si puo ricavare il seguente rapporto:
ω2 =XT [K] XXT [M ] X
= R (X) (7.33)
noto come quoziente di Rayleigh.

7.5. METODO DI RAYLEIGH-RITZ 75
Si puo dimostrare che il quoziente di Rayleigh e stazionario in un intorno di Xj. Inaltre parole, se:
R(Xj
)= ωj
2 allora risulta: R (X) = ωj2[1 +O(ε2)
]con X arbitrario in un intorno di Xj.
Questa proprieta e molto utile in quanto permette di usare il quoziente di Rayleigh perdeterminare un valore approssimato della prima frequenza naturale di un sistema. Infatti,e sufficiente assumere un ragionevole primo modo di vibrare (l’autovettore X1) ed ilquoziente di Rayleigh fornira una buona approssimazione del quadrato della pulsazionenaturale ω1. Ovviamente la stima di ω1 sara tanto migliore quanto piu il primo modoipotizzato e vicino a quello vero.
Si noti che il quoziente di Rayleigh si ottiene anche dall’equazione del moto del sistemalibero non smorzato:
[M ]x+ [K]x = 0Infatti, una volta sostituita una soluzione armonica si ottiene la:
−ω2[M ] X+ [M ] X = 0
in cui e sufficiente pre-moltiplicare per XT per ottenere il quoziente di Rayleigh.
7.5 Metodo di Rayleigh-Ritz
Si tratta di una generalizzazione, dovuta a Ritz, del metodo di Rayleigh. Il metodo vieneimpiegato per valutare le prime (le piu basse) frequenze proprie di un sistema.
Il procedimento si basa sulla scelta di una ragionevole deformata per i primi r modidel sistema a n gdl (r ≪ n). E evidente che, nel caso in cui r = 1, il metodo di Ritzcoincide con quello di Rayleigh.Sia [γ] la matrice contenente le stime dei primi r modi. Si puo scrivere:
x = [γ]p
dove x e il vettore di dimensione n delle coordinate fisiche, [γ] e una matrice di di-mensioni n × r le cui colonne sono le ragionevoli forme modali, e p e un vettore didimensione r ≪ n. Naturalmente, la deformata prescelta deve soddisfare le condizioni alcontorno.
Le espressioni dell’energia cinetica T e dell’energia potenziale V assumono la forma:
T =1
2xT [M ] x =
1
2pT [γ]T [M ][γ] p ;
V =1
2xT [K] x =
1
2pT [γ]T [K][γ] p .
e pertanto le equazioni di Lagrange assumono la forma:
[γ]T [M ][γ] p+ [γ]T [K][γ] p = 0
Il sistema cosı ottenuto e costituito da r equazioni, mentre quello di partenza ne contenevan ≫ r. La soluzione del sistema fornira una stima delle prime r pulsazioni proprie delsistema.

76 CAPITOLO 7. SISTEMI A N GRADI DI LIBERTA
7.5.1 Esempio
!
" #
#
#
!
" !
Figura 7.1: Esempio di applicazione del metodo di Rayleigh-Ritz
Come esempio di applicazione del metodo si consideri il sistema a n = 3 gdl. rappre-sentato in Fig. 7.1, le cui pulsazioni e modi (soluzioni esatte) sono:
ω1 = 0.4450
√k
mω2 = 1.2470
√k
mω3 = 1.8019
√k
m
X1 =
1
2.80203.4940
X2 =
1
1.4451−2.6040
X3 =
1
−0.14700.1099
Caso r = 1 (metodo di Rayleigh). Si assuma come ragionevole deformata, la de-formata statica sotto l’azione della forza peso. Risulta:
γT =2 5 6
Tche, normalizzato, diventa:
γT =1 2.5 3
Te si ottiene:
γT [M ]γ = 1 2.5 3
m 0 00 2m 00 0 m
12.53
= 22.5 m
γT [K]γ = 1 2.5 3
3k −k 0−k 2k −k0 −k k
12.53
= 4.5 k
da cui l’equazione del moto diventa:
22.5 m p+ 4.5 k p = 0
La stima della prima pulsazione del sistema e pertanto:
ω1 =
√4.5 k
22.5 m=
√k
5 m== 0.4472
√k
m

7.5. METODO DI RAYLEIGH-RITZ 77
con un errore dello 0.5% rispetto al valore esatto.
Caso r = 2 (metodo di Ritz). Considerando lo stesso sistema dell’esempio precedente,si vogliano ora stimare le prime due frequenze proprie. Si assumano come ragionevoliforme modali, quella appena impiegata:
γT1 =1 2.5 3
Te, arbitrariamente: γT2 =
1 2 −1
Tcioe in definitiva:
[γ] =
1 12.5 23 −1
ovvero:
x1x2x3
=
1 12.5 23 −1
p1p2
Si ottiene allora:
[γ]T [M ][γ] =
[1 2.5 31 2 −1
]m 0 00 2m 00 0 m
1 12.5 23 −1
=
[22.5 88 10
]m
[γ]T [K][γ] =
[1 2.5 31 2 −1
]3k −k 0−k 2k −k0 −k k
1 12.5 23 −1
=
[4.5 22 12
]k
Le equazioni del moto sono pertanto:
m
[22.5 88 10
]p+ k
[4.5 22 12
]p = 0
L’equazione caratteristica e:
161 m2 ω4 − 283 k mω2 + 50 k2 = 0
Si ottengono dunque le seguenti stime delle prime due pulsazioni naturali:
ω1 = 0.4464
√k
mω2 = 1.2484
√k
m
con un errore sulla prima pulsazione dello 0.3% e sulla seconda dello 0.1% rispetto aivalore esatti. I corrispondenti modi sono:
P1
P2
1
=
1
−0.0405
P1
P2
2
=
1
−2.9199
da cui si ricavano:
X1 = [γ]P1 =
1
2.5213.169
X2 = [γ]P2 =
1
1.739−3.084

78 CAPITOLO 7. SISTEMI A N GRADI DI LIBERTA
Si osservi che se si fosse assunto:
[γ] =
1 12.5 23 1
si sarebbe ottenuto:
[γ]T [M ][γ] =
[22.5 1414 10
]m [γ]T [K][γ] =
[4.5 33 4
]k
da cui:
ω1 = 0.4461
√k
mω2 = 1.2488
√k
m
con un errore sulla prima pulsazione dello 0.25% e sulla seconda dello 0.15% rispetto aivalore esatti. I corrispondenti modi sono:
P1
P2
1
=
1
−0.1066
P1
P2
2
=
1
−1.6242
da cui si ricavano:
X1 = [γ]P1 =
1
2.55963.2386
X2 = [γ]P2 =
1
1.199−2.204
7.6 Modifiche strutturali
Il quoziente di Rayleigh puo venire impiegato per valutare l’effetto di piccole modifichestrutturali. Si consideri il quoziente di Rayleigh per il modo j-esimo:
ωj2 =
XjT [K]Xj
XjT [M ]Xj
= R(Xj
)esso non e altro che il rapporto tra la rigidezza modale Kj e la massa modale Mj.
Se alcune masse e/o rigidezze del sistema subiscono una modifica, ovviamente anche lefrequenze e i modi cambiano. Se con [M +∆M ] e [K +∆K] si indicano rispettivamentele nuove matrici massa e rigidezza, si avra:
ωj∗ = ωj +∆ωj X∗j = Xj +∆Xj
La nuova pulsazione j-esima e dunque:
ω∗2j =
X ∗jT [K +∆K] X∗j
X ∗jT [M +∆M ] X∗j
= R(X∗j
)Se ora si assume che sia X∗j = Xj, ossia che la forma modale conseguente allemodifiche coincida con quella relativa al sistema senza modifiche, si puo scrivere:
ω∗2j
∼=Xj
T [K +∆K]XjXj
T [M +∆M ]Xj=
XjT [K]Xj + Xj
T [∆K]XjXj
T [M ]Xj + XjT [∆M ]Xj

7.6. MODIFICHE STRUTTURALI 79
ovvero:
ω∗2j
∼= ωj2
1 +Xj
T [∆K]XjXj
T [K]Xj
1 +Xj
T [∆M ]XjXj
T [M ]Xj
7.6.1 Esempio 1
Come esempio di applicazione del metodo si consideri il sistema a n=3 gdl rappresentatoin Fig. 7.2, le cui matrici massa e rigidezza sono:
[M ] =
2m 0 00 m 00 0 3m
[K] =
3k −2k 0−2k 3k −k0 −k k
Le soluzioni esatte sono le seguenti:
ω1 = 0.3243
√k
mω2 = 0.8992
√k
mω3 = 1.9798
√k
m
X1 =
1
1.39482.0378
X2 =
1
0.6914−0.4849
X3 =
1
−2.41950.2249
Si impieghi il metodo di Rayleigh per trovare il nuovo valore ω∗
3 della terza pulsazio-ne naturale se la rigidezza della seconda molla viene portata da 2k a 2.5k. L’energiapotenziale e cinetica massime del terzo modo sono rispettivamente:
V3MAX=
1
2X3
T [K]X3 =1
2K3; T3MAX
=1
2ω3
2X3T [M ]X3 =
1
2ω3
2M3
dove K3 e M3 sono rispettivamente la terza rigidezza modale e la terza massa modale.A seguito della modifica di rigidezza, si ha:
V ∗3MAX
=1
2X3
T [K +∆K]X3; T ∗3MAX
=1
2ω3
∗2X3T [M ]X3 =
1
2ω3
∗2M3
!
"
# "
"
# !
$ !
Figura 7.2: Modifiche strutturali

80 CAPITOLO 7. SISTEMI A N GRADI DI LIBERTA
Applicando il metodo di Rayleigh, risulta:
V3MAX= T3MAX
V ∗3MAX
= T ∗3MAX
.
Dividendo membro a membro si ha poi:
ω3∗2
ω32=T ∗3MAX
T3MAX
=V ∗3MAX
V3MAX
=X3
T [K +∆K]X3X3
T [K]X3o anche:
ω3∗2
ω32=
X3T [K +∆K]X3
K3
= 1 +X3
T [∆K]X3K3
.
Ora, sostituendo i valori, la variazione di matrice rigidezza vale:
[∆K] =
0.5k −0.5k 0−0.5k 0.5k 0
0 0 0
=
δk −δk 0−δk δk 00 0 0
.La terza rigidezza modale K3 e:
K3 = X3T [K]X3 = 31.38 k.
Inoltre e:X3
T [∆K]X3 = δk(X13 −X23)2 = 0.5 k (1 + 2.4195)2.
Infine:
ω3∗ = ω3
√1 +
X3T [∆K]X3K3
= 1.9798
√1 +
0.5 k (1 + 2.4195)2
31.38 k
√k
m= 2.1563
√k
m.
Il valore esatto della terza pulsazione a seguito della variazione della rigidezza dellaseconda molla e: ω3
∗ESATTO = 2.1549
√k/m ovvero si e compiuto un errore pari a 0.1%.
7.6.2 Esempio 2
Si consideri ancora lo stesso sistema di Fig. 7.2 ma si calcoli la terza frequenza naturalequalora la seconda massa passi al valore 1.3 m. Questa volta risulta:
ω3∗2
ω32=
1
X3T [M +∆M ]X3
M3
=1
1 +X3
T [∆M ]X3M3
[∆M ] =
0 0 00 0.3m 00 0 0
=
0 0 00 δm 00 0 0
La terza massa modale M3 e:
M3 = X3T [M ]X3 = 8.006m.
Inoltre e:X3
T [∆M ]X3 = δm(X23)2 = 0.3m (−2.4195)2
ω3∗ = ω3
√√√√√ 1
1 +X3
T [∆M ]X3M3
= 1.9798
√k
m
√√√√√ 1
1 +0.3m (−2.4195)2
8.006m
= 1.793
√k
m.
Il valore esatto della terza pulsazione a seguito della variazione della seconda massa e:ω3
∗ESATTO = 1.807
√k/m ovvero si e compiuto un errore pari a 0.77%.

7.7. ESEMPIO - SISTEMA A 3 GDL 81
7.7 Esempio - Sistema a 3 gdl: vibrazioni libere e
forzate
Si consideri il sistema a n=3 gdl rappresentato in Fig. 7.3, le cui matrici massa e rigidezzasono:
[M ] =
2m 0 00 m 00 0 3m
[K] =
3k −2k 0−2k 3k −k0 −k k
Le pulsazioni e i modi (normalizzati) sono i seguenti:
ω1 = 0.3243
√k
mω2 = 0.8992
√k
mω3 = 1.9798
√k
m
X1 =
1
1.39482.0378
X2 =
1
0.6914−0.4849
X3 =
1
−2.41950.2249
La matrice modale e pertanto:
[Φ] =
1 1 11.3948 0.6914 −2.41952.0378 −0.4849 0.2249
Si possono ricavare le masse e le rigidezze modali:
diag([Φ]T [M ][Φ]) =
M1
M2
M3
=
16.4033.1838.006
m, diag([Φ]T [K][Φ]) =
K1
K2
K3
=
1.7252.57431.38
k
Il moto libero generale e:
x1(t) = X11 cos(ω1 t+ ϕ1) +X12 cos(ω2 t+ ϕ2) +X13 cos(ω3 t+ ϕ3)
x2(t) = X21 cos(ω1 t+ ϕ1) +X22 cos(ω2 t+ ϕ2) +X23 cos(ω3 t+ ϕ3)
x3(t) = X31 cos(ω1 t+ ϕ1) +X32 cos(ω2 t+ ϕ2) +X33 cos(ω3 t+ ϕ3)
!
"
# "
"
# !
$ !
Figura 7.3: Esempio di sistema a 3 gdl

82 CAPITOLO 7. SISTEMI A N GRADI DI LIBERTA
cioe:
x1(t) = X11 cos(ω1 t+ ϕ1) +X12 cos(ω2 t+ ϕ2) +X13 cos(ω3 t+ ϕ3)
x2(t) = 1.3948X11 cos(ω1 t+ ϕ1) + 0.6914X12 cos(ω2 t+ ϕ2)− 2.4195X13 cos(ω3 t+ ϕ3)
x3(t) = 2.0378X11 cos(ω1 t+ ϕ1)− 0.4849X12 cos(ω2 t+ ϕ2) + 0.2249X13 cos(ω3 t+ ϕ3)
dove X11, ϕ1, X12, ϕ2, X13, ϕ3 sono costanti che soddisfano le condizioni iniziali.
Per lo studio delle vibrazioni forzate, si consideri una forzante armonica applicataalla massa centrale. Il vettore delle forzanti e dunque:
F (t) =
F1
F2
F3
sinΩt =
0F2
0
sinΩt
Il vettore delle forzanti modali risulta:
[Φ]TF (t) =
1.39480.6914−2.4195
F2 sinΩt
Introducendo le coordinate modali: q(t) = [Φ]−1x(t) il sistema di equazioni diequilibrio si disaccoppia:
M1 q1 +K1 q1 = 1.3948 F2 sinΩ t
M2 q2 +K2 q2 = 0.6914 F2 sinΩ t
M3 q3 +K3 q3 = −2.4195 F2 sinΩ t
Le soluzioni modali sono:q1(t) = Q1 sinΩ t
q2(t) = Q2 sinΩ t
q3(t) = Q3 sinΩ t
con:
Q1 =1.3948 F2
K1 −M1Ω2=
1.3948(F2/K1)
1− (Ω2/ω12)
=0.8085(F2/k)
1− (Ω2/ω12)
Q2 =0.6914 F2
K2 −M2Ω2=
0.6914(F2/K2)
1− (Ω2/ω22)
=0.2686(F2/k)
1− (Ω2/ω22)
Q3 =−2.4195 F2
K3 −M3Ω2=
−2.4195(F2/K3)
1− (Ω2/ω32)
=−0.0711(F2/k)
1− (Ω2/ω32)
Tornando alla coordinate fisiche: x(t) = [Φ] q(t) essendo anche: X = [Φ] Qrisulta:
x1(t) = X1 sinΩ t
x2(t) = X2 sinΩ t
x3(t) = X3 sinΩ t
con:
X1 = Q1 +Q2 +Q3 =F2
k
(0.8085
1− (Ω2/ω12)
+0.2686
1− (Ω2/ω22)
− 0.0711
1− (Ω2/ω32)
)X2 = 1.3948Q1 + 0.6914Q2 − 2.4195Q3
X3 = 2.0378Q1 − 0.4849Q2 + 0.2249Q3

7.7. ESEMPIO - SISTEMA A 3 GDL 83
0 10 20 30−1
−0.5
0
0.5
1
Time [s]
x1x2x3
(a)0 10 20 30
−0.4
−0.2
0
0.2
0.4
Time [s]
x1x2x3
(b)
Figura 7.4: Risposte del sistema a 3 gdl di Fig. 7.3: a) Ω=1.1 rad/s; b) Ω=2.5 rad/s
Posto m=1, k=1, F2=2, l’andamento delle oscillazioni delle tre masse per due valori dellapulsazione della forzante (Ω=1.1 rad/s e Ω=2.5 rad/s) e riportato in Fig. 7.4.La Fig. 7.5 riporta il modulo delle FRF tra un generico grado di liberta ed il grado diliberta in cui e applicata la forzante.
0 1 2 310
−4
10−2
100
102
104
FRF − Amplitude
[rad/s]
|H
12|
|H22
|
|H32
|
Figura 7.5: FRF del sistema a 3 gdl di Fig. 7.3

84 CAPITOLO 7. SISTEMI A N GRADI DI LIBERTA
Riferimenti Bibliografici
[Inm13] D. J. Inman. Engineering Vibration. Prentice Hall, Boston, 4 edition edition,2013.
[LBDH83] M. Lalanne, P. Berthier, and J. Der Hagopian. Mechanical Vibrations forEngineers. John Wiley & Sons Inc, Chichester West Sussex ; New York, 1983.
[MMF11] U. Meneghetti, A. Maggiore, and E. Funaioli. Lezioni di meccanica applicataalle macchine - Terza parte - Dinamica e vibrazioni delle macchine. Patroneditore S.r.l., Bologna, 2011.
[Rao10] Singiresu S. Rao. Mechanical Vibrations. Prentice Hall, Upper Saddle River,N.J, 5th edition edition, 2010.

Capitolo 8
Sistemi continui
8.1 Introduzione
L’analisi di un sistema continuo (ossia a infiniti gradi di liberta) puo essere vista comeestrapolazione, per n tendente a infinito, dell’analisi di sistemi discreti a n gdl: il pro-blema e quello di realizzare analiticamente questo passo formale in quanto, nel continuo,le equazioni saranno, a differenza del caso dei discreti, alle derivate parziali, poiche legrandezze che definiscono il moto del sistema in questo caso dipendono sia dal tempo t,sia dallo spazio.
Tutti i sistemi reali dovrebbero essere studiati mediante modelli continui. La soluzionerigorosa si ha pero soltanto in casi particolarmente semplici, mentre per strutture comples-se la soluzione analitica, utilizzando le equazioni proprie del continuo, non e ottenibile. Intali situazioni diventa percio indispensabile ricondursi a schemi discreti, mediante oppor-tune metodologie: a parametri concentrati o a elementi finiti. Lo studio che verra condottosul continuo assume percio un aspetto principalmente didattico, propedeutico anche al-la descrizione dei metodi di discretizzazione; ci si limitera inoltre a casi particolarmentesemplici, per i quali sia possibile una trattazione analitica in forma chiusa.
85

86 CAPITOLO 8. SISTEMI CONTINUI
8.2 Vibrazioni trasversali nelle funi
8.2.1 Equazione del moto
Con riferimento alla Fig. 8.1, detta x l’ascissa corrente lungo la fune di lunghezza l, siintroducono alcune ipotesi semplificative:
a) Si assume costante lungo la fune la tensione T , ottenuta precaricando assialmentela fune.
b) Il moto della fune avviene in un piano qualunque contenente l’asse della fune: a talescopo si deve ritenere la fune dotata di simmetria rispetto al suo asse baricentrico.
l
dx
T T
x
T
T
y(x,t)
Figura 8.1: Fune tesa
Indicata con y(x, t) la variabile del moto, l’equazione di equilibrio di un elemento difune di lunghezza infinitesime dx e massa ρ dx e la seguente:
ρ dx∂2y
∂t2= −T ∂y
∂x+ T
(∂y
∂x+∂2y
∂x2dx
)(8.1)
cioe:∂2y
∂t2=T
ρ
∂2y
∂x2(8.2)
essendo ρ la massa della fune per unita di lunghezza.L’integrale generale della (8.1) si puo porre nella forma:
y(x, t) = f1(x− ct) + f2(x+ ct) (8.3)
ed e percio rappresentato da due onde che si propagano in versi opposti con velocita
c =
√T
ρ.
Conviene pero cercare l’integrale della (8.2) nella forma:
y(x, t) = φ(x) f(t) (8.4)
Sostituendo la (8.4) nella (8.2) si ottiene:
φ(x)d2f(t)
dt2=T
ρf(t)
d2φ(x)
dx2(8.5)
che si puo scrivere:1
f(t)
d2f(t)
dt2=T
ρ
1
φ(x)
d2φ(x)
dx2(8.6)

8.2. VIBRAZIONI TRASVERSALI NELLE FUNI 87
Perche possa essere verificata la (8.6), entrambi i membri non possono che essere ugualiad una medesima costante, che puo essere indicata come −ω2 (si dimostra infatti che talecostante e negativa); si ottengono dunque le seguenti:
d2f(t)
dt2+ ω2f(t) = 0;
d2φ(x)
dt2+ρ
Tω2φ(x) = 0 (8.7)
Gli integrali delle (8.7) sono:
f(t) = A sinωt+B cosωt; φ(x) = C sin γx+D cos γx (8.8)
con γ2 =ρ
Tω2.
8.2.2 Pulsazioni e modi
Se le condizioni al contorno sono quelle di Fig. 8.1 risulta: y(0, t) = 0 = φ(0) f(t) ey(l, t) = 0 = φ(l) f(t), ossia: φ(0) = 0 e φ(l) = 0. In altre parole deve essere:
D = 0; C sin γ l = 0.
Non potendo essere C = 0 (essendo D nullo) deve annullarsi il seno di γ l, ossia deveessere:
γl = iπ (i = 0, 1, 2, . . . )
Escludendo il valore i = 0 (a cui corrisponde una pulsazione nulla), le infinite pulsazioniproprie risultano:
ωi =iπ
l
√T
ρ(i = 1, 2, . . . ) (8.9)
Dalla (8.9) si vede che le infinite ωi risultano tutte multiple di una pulsazione fonda-mentale:
ω1 =π
l
√T
ρ
A ogni pulsazione propria ωi, corrisponde un modo proprio di vibrare [φ(x)]i definito dalladeformata spaziale assunta dal sistema in corrispondenza della ωi ad esso associata:
[φ(x)]i = [φ(x)]ω=ωi= sin γi x = sinωi
√ρ
Tx = sin
iπ
lx = sin
2π
λix (8.10)
avendo definito con:
λi =2l
i(8.11)
la lunghezza d’onda corrispondente al generico i-esimo modo di vibrare, intesa comedistanza fra punti omologhi in periodi spaziali successivi della deformata.
La deformata del generico modo di vibrare e descritta da una funzione, nel caso analiz-zato di tipo sinusoidale, e non da un numero finito di termini (elementi di un autovettore)come avveniva per i sistemi discreti, in quanto trattasi di un sistema continuo, cioe aventeinfiniti gdl (e non un numero finito come per i sistemi discreti).

88 CAPITOLO 8. SISTEMI CONTINUI
Si consideri, ad esempio, la deformata del primo modo:
[φ(x)]1 = sin γ1 x = sinω1
√ρ
Tx = sin
π
lx = sin
2π
λ1x
Si osserva che essa ha un solo massimo (ventre o antinodo) in centro campata essendo lalunghezza d’onda del primo modo pari a λ1 = 2l.Per l’i-esimo modo di vibrare, dalla (8.10) appare invece evidente come la forma modalepresenti i ventri o antinodi e i+ 1 nodi, ossia punti con spostamento nullo.
La definizione di lunghezza d’onda λi (vedi (8.11)) puo entrare nella scrittura dellapulsazione propria del sistema:
ωi = γi
√T
ρ=iπ
l
√T
ρ=
2π
λi
√T
ρ(8.12)
Si osservi che il valore della generica pulsazione, oltre a crescere con la tensione T e adecrescere con ρ (massa per unita di lunghezza della fune), risulta anche inversamenteproporzionale alla lunghezza d’onda del modo associato.
Studiando un sistema continuo qualunque si avranno, dunque, infinite pulsazioni pro-prie e, corrispondentemente, infiniti modi di vibrare. Nella Figura 8.2 si riportano, atitolo di esempio, le prime cinque frequenze proprie e relative deformate di una fune tesaavente i seguenti dati:lunghezza l = 30 m; tiro T = 30000 N ; massa per unita di lunghezza ρ = 1.5 kg/m.
Figura 8.2: Pulsazioni e forme modali della fune tesa

8.2. VIBRAZIONI TRASVERSALI NELLE FUNI 89
8.2.3 Moto libero
L’espressione del moto libero a regime risulta una combinazione lineare degli infiniti modipropri di vibrare:
y(x, t) =∞∑i=1
φi(x)fi(t) =∞∑i=1
(Ci sin γix+Di cos γix) (Ai sinωit+Bi cosωit) (8.13)
8.2.4 Condizioni iniziali: esempio
Con le condizioni al contorno introdotte precedentemente (vedi §8.2.2), l’integrale della(8.2) risulta (vedi (8.13)):
y(x, t) =∞∑i=1
Ci siniπx
l(Ai sinωit+Bi cosωit)
Se si pongono come condizioni iniziali (t = 0):
y(x, 0) = Y sinπx
l;
∂y(x, 0)
∂t= 0
deve essere:
y(x, 0) =∞∑i=1
Ci siniπx
l(0 +Bi) = Y sin
πx
l
∂y(x, 0)
∂t=
∞∑i=1
Ci siniπx
l(ωiAi − 0) = 0
Dalla prima risulta: i = 1 e B1C1 = BC = Y e dalla seconda: A1 = A = 0.In altre parole, l’integrale della (8.2) e:
y(x, t) = C sin γx B cosωt = Y sin γx cosωt
che si puo scrivere:
y(x, t) =1
2Y (sin γ x cosωt+ cos γ x sinωt+ sin γ x cosωt− cos γ x sinωt)
cioe:
y(x, t) =Y
2sin (γ x− ωt) +
Y
2sin (γ x+ ωt)
che e la forma (8.3) dell’integrale della (8.2).
Casi con altre condizioni al contorno ed un altro esempio con condizioni iniziali sonoriportati in Appendice J.

90 CAPITOLO 8. SISTEMI CONTINUI
8.3 Vibrazioni longitudinali nelle travi
8.3.1 Equazione del moto
Si analizzino le vibrazioni longitudinali nell’intorno della condizione di equilibrio staticoin travi aventi una dimensione, quella longitudinale, preponderante rispetto alle altre.Indicato con u(x, t) lo spostamento assiale, con N lo sforzo assiale, con S l’area dellasezione trasversale, con ρ la densita, con E il modulo di Young, si faccia l’ipotesi che sitratti di travi omogenee, ossia a densita ρ uniforme, con sezione S e rigidezza assiale EScostanti.
dx
N
u(x,t)u
xu+ dx
N
xN+ dx
Figura 8.3: Vibrazioni longitudinali: equazione di equilibrio
Per l’equilibrio assiale di un elemento di lunghezza infinitesima dx si ha (vedi Fig. 8.3):
ρS dx∂2u
∂t2= −N +N +
∂N
∂xdx
ossia:
ρS∂2u
∂t2=∂N
∂x(8.14)
Come e noto lo sforzo assiale N e legato alla deformazione dalla: N = ES∂u
∂x, per cui
risulta:
ρS∂2u
∂t2=
∂
∂x
(ES
∂u
∂x
)(8.15)
Se, come ipotizzato, la rigidezza assiale ES e costante, l’equazione di equilibrio diventa:
∂2u
∂t2− E
ρ
∂2u
∂x2= 0 (8.16)
Posto: u(x, t) = φ(x)f(t), sostituendo nella (8.16), si ottiene:
1
f(t)
d2f(t)
dt2=E
ρ
1
φ(x)
d2φ(x)
dx2
in cui entrambi i membri non possono che essere uguali ad una medesima costante, chepuo essere indicata come −ω2. Si ottengono dunque le due seguenti equazioni ordinarie:
d2f(t)
dt2+ ω2f(t) = 0;
d2φ(x)
dx2+ρ
Eω2φ(x) = 0 (8.17)
che ammettono le soluzioni:
f(t) = A sinωt+B cosωt; φ(x) = C sinω
√ρ
Ex+D cosω
√ρ
Ex (8.18)
La pulsazione ω si determina una volta note le condizioni al contorno.

8.3. VIBRAZIONI LONGITUDINALI NELLE TRAVI 91
8.3.2 Trave a mensola
L
x
Figura 8.4: Vibrazioni longitudinali: trave a mensola
Se le condizioni al contorno sono quelle della trave a mensola (vedi Fig. 8.4): per x = 0deve aversi u = 0, mentre all’estremo libero (x = L) e N = 0. Si ottiene:
u(0, t) = φ(0) f(t) = 0 N(L, t) = ES
(∂u
∂x
)L,t
= 0
ossia:
φ(0) = 0 e
(dφ(x)
dx
)x=L
= 0.
In altre parole, in base alla seconda delle (8.18) deve essere:
D = 0; C cos
√ρ
EωL = 0.
Esclusa la soluzione C = 0 (essendo D nullo), deve annullarsi il coseno di
√ρ
EωL, ossia
deve essere: √ρ
EωL = (2i− 1)π (i = 1, 2, . . . )
ossia, le infinite pulsazioni proprie risultano:
ωi = (2i− 1)π
2L
√E
ρ(i = 1, 2, . . . ) (8.19)
e i corrispondenti modi di vibrare hanno l’espressione:
[φ(x)]i = Ci sin[(2i− 1)
πx
2L
]. (8.20)
L’integrale generale delle vibrazioni longitudinali libere di una trave a mensola epertanto dato dalla:
u(x, t) =∞∑i=1
φi(x)fi(t) =∞∑i=1
sin[(2i− 1)
πx
2L
](Di sinωit+ Ei cosωit) (8.21)
dove le costanti Di = CiAi e Ei = CiBi dipendono dalle condizion iniziali.
8.3.3 Altre condizioni al contorno
La Tabella 8.1 riporta le espressioni delle pulsazioni naturali e delle forme modali per
alcune condizioni di vincolo (condizioni al contorno), essendo c =
√E
ρ.

92 CAPITOLO 8. SISTEMI CONTINUI
Tabella 8.1: Vibrazioni longitudinali: diverse condizioni al contorno
8.3.4 Ortogonalita delle forme modali
Si riprenda la seconda delle (8.17) scrivendola come segue:
d
dx
(ES
dφ(x)
dx
)= −ρS ω2φ(x) (8.22)
e vi si introduca una volta la forma modale φi(x) e una volta la forma modale φj(x):
d
dx
(ES
dφi(x)
dx
)= −ρS ω2
iφi(x);d
dx
(ES
dφj(x)
dx
)= −ρS ω2
jφj(x) (8.23)
Si moltiplichi ora la prima delle (8.23) per φj(x) e la seconda per φi(x) e si vada adintegrare tra 0 ed L. Si ottiene:∫ L
0
φjd
dx
(ES
dφidx
)dx = −ω2
i
∫ L
0
ρSφiφj dx∫ L
0
φid
dx
(ES
dφjdx
)dx = −ω2
j
∫ L
0
ρSφjφi dx
(8.24)
Con riferimento al caso della trave a mensola, la soluzione dei due integrali (8.24),integrando per parti, porta a:∫ L
0
ESdφidx
dφjdx
dx = ω2i
∫ L
0
ρSφiφj dx∫ L
0
ESdφidx
dφjdx
dx = ω2j
∫ L
0
ρSφiφj dx
(8.25)
Sottraendo membro a membro, si ha:(ω2i − ω2
j
) ∫ L
0
ρSφiφj dx = 0 (8.26)
che, per ωi = ωj, conduce alla: ∫ L
0
ρSφiφj dx = 0 (8.27)

8.3. VIBRAZIONI LONGITUDINALI NELLE TRAVI 93
e, tenuto conto della (8.25), alla: ∫ L
0
ESdφidx
dφjdx
dx (8.28)
La (8.27) e la (8.28) costituiscono le relazioni di ortogonalita per il sistema considerato evalgono qualunque siano le condizioni al controno. Infatti, pur al variare di queste ultime,la soluzione degli integrali (8.24) porta sempre alle (8.25) e, quindi, alle (8.27) e (8.28).
Si osservi ora che moltiplicando la prima delle (8.23) per φi(x) e integrando tra 0 edL si ottiene: ∫ L
0
φid
dx
(ES
dφidx
)dx = −ω2
i
∫ L
0
ρS φ2i dx (8.29)
da cui, integrando per parti, per qualunque condizione al contorno (per quanto dettosopra), risulta:
ω2i =
∫ L0ES
(dφidx
)2
dx∫ L0ρS φ2
i dx=Ki
Mi
(8.30)
dove Ki e Mi sono rispettivamente la rigidezza e la massa modale per il sistema conside-rato. In altre parole, si ha:
Ki =
∫ L
0
ES
(dφidx
)2
dx Mi =
∫ L
0
ρS φ2i dx (8.31)
Si noti come, in base alla (8.30), sia evidente che la costante ω2 e positiva, ossia −ω2
e una quantita negativa, come assunto (ma non ancora dimostrato) gia a partire dallaintroduzione di tale costante nello studio delle vibrazioni della fune tesa (§8.2.1).

94 CAPITOLO 8. SISTEMI CONTINUI
8.4 Vibrazioni torsionali nelle travi
8.4.1 Equazione del moto
Si analizzino le vibrazioni torsionali in travi aventi una dimensione, quella longitudinale,preponderante rispetto alle altre.Con riferimento alla Fig. 8.5, si indichi con θ(x, t) l’angolo di torsione, conMt il momentotorcente, con Jo il momento polare di inerzia di massa per unita di lunghezza, con Ipil momento polare di inerza della sezione e con G il modulo di elasticita trasversale delmateriale. Si faccia l’ipotesi che si tratti di travi omogenee, ossia a densita ρ uniforme, consezione trasversale e rigidezza torsionale GIp costanti. Si supponga inoltre che il centrodi torsione coincida con il baricentro della trave in modo tale che la torsione si possaconsiderare disaccoppiata dalla flessione.
dx
Mt
ϑ
ϑ
xϑ+ dx
Mt
xMt+ dx
Figura 8.5: Vibrazioni torsionali: equazione di equilibrio
Per l’equilibrio alla rotazione attorno all’asse x di un elemento di trave di lunghezzainfinitesima dx si ha (vedi Fig. 8.5):
J0 dx∂2ϑ
∂t2=Mt +
∂Mt
∂xdx−Mt (8.32)
ossia:
J0∂2ϑ
∂t2=∂Mt
∂x(8.33)
Come e noto il momento torcente Mt e legato alla deformazione dalla: Mt = GIp∂ϑ
∂x, per
cui risulta:
J0∂2ϑ
∂t2=
∂
∂x
(GIp
∂ϑ
∂x
)(8.34)
Se, come ipotizzato, la rigidezza torsionale GIp e costante, l’equazione di equilibrioprecedente diventa:
J0∂2ϑ
∂t2−GIp
∂2ϑ
∂x2= 0 (8.35)
La (8.35) e formalmente identica alla (8.16) in §8.3.1 e si integra allo stesso modo, ponendoϑ(x, t) = φ(x)f(t).
In particolare, per travi di sezione circolare, come e noto si puo porre J0 = ρIp che,sostituita nella fornisce:
∂2ϑ
∂t2− G
ρ
∂2ϑ
∂x2= 0
Al solito, le pulsazioni si determinano una volta note le condizioni al contorno.

8.5. VIBRAZIONI FLESSIONALI NELLE TRAVI 95
8.5 Vibrazioni flessionali nelle travi
8.5.1 Equazione del moto
Si analizzino le piccole oscillazioni trasversali nell’intorno della condizione di equilibriostatico in una trave ad asse rettilineo, analizzando il moto solo in direzione trasversale,coincidente con una direzione principale di inerzia della trave.Indicato con v(x, t) lo spostamento trasversale, con ϑ(x, t) la rotazione, con M(x, t) ilmomento flettente, con T (x, t) il taglio, con S(x) l’area della sezione trasversale, con I(x)il momento di inerzia della sezione resistente, con γ il fattore di taglio, con E il modulodi Young, con G il modulo di elasticita tangenziale e con ρ la densita del materiale, sifaccia l’ipotesi che si tratti di travi omogenee, ossia a densita ρ uniforme, con sezione S erigidezza flessionale EI costanti.
dx
M
T
v(x,t)
M
xM+ dx
T
xT+ dx
Figura 8.6: Vibrazioni flessionali: equazione di equilibrio
L’equilibrio alla traslazione di un elemento di lunghezza infinitesima dx porta a (vediFig. 8.6): (
T (x, t) +∂T (x, t)
∂xdx
)− T (x, t) = ρS(x)dx
∂2v(x, t)
∂t2
L’equilibrio alla rotazione fornisce:(M(x, t) +
∂M(x, t)
∂xdx
)−M(x, t) +
[T (x, t) +
∂T (x, t)
∂xdx
]dx = ρ I(x)
∂2ϑ(x, t)
∂t2dx
Semplificando si ottengono le seguenti:
∂T (x, t)
∂x= ρS(x)
∂2v(x, t)
∂t2(8.36)
∂M(x, t)
∂x+ T (x, t) = ρ I(x)
∂2ϑ(x, t)
∂t2(8.37)
in cui:
M(x, t) = EI(x)∂ϑ(x, t)
∂x;
T (x, t)
γSG= ϑ(x, t)− ∂v(x, t)
∂x(8.38)
Quella espressa e nota come teoria di Timoshenko. Secondo, invece, la teoria di Eulero(valida in particolare per le travi snelle), si possono trascurare alcuni effetti come le azioniinerziali rotazionali. Inoltre, sempre secondo la teoria di Eulero, nella seconda delle (8.38)si puo trascurare il contributo del taglio, cioe:
ϑ(x, t) =∂v(x, t)
∂x(8.39)

96 CAPITOLO 8. SISTEMI CONTINUI
L’equazione di equilibrio alla rotazione (8.37) diventa quindi:
∂M(x, t)
∂x+ T (x, t) = 0 (8.40)
che, sostituita nella (8.36) fornisce:
ρS(x)∂2v(x, t)
∂t2+
∂2
∂x2
[EI(x)
∂2v(x, t)
∂x2
]= 0
Nel caso ipotizzato di rigidezza flessionale EI costante si ha infine:
ρS(x)∂2v(x, t)
∂t2+ EI
∂4v(x, t)
∂x4= 0 (8.41)
Posto ora: v(x, t) = φ(x)f(t), sostituendo nella (8.41), si ottiene:
−EIρS
1
φ(x)
d4φ(x)
dx4=
1
f(t)
d2f(t)
dt2
in cui entrambi i membri non possono che essere uguali ad una medesima costante, chepuo essere indicata come −ω2. Si ottengono dunque le due seguenti equazioni ordinarie:
d2f(t)
dt2+ ω2f(t) = 0;
d4φ(x)
dt4+ρS
EIω2φ(x) = 0 (8.42)
che ammettono le soluzioni:
f(t) = A sinωt+B cosωt; φ(x) = C sin βx+D cos βx+E sinh βx+ F cosh βx (8.43)
con: β = 4
√ρS
EIω2. La pulsazione ω si determina una volta note le condizioni al contorno.
8.5.2 Trave a mensola
l
x
Figura 8.7: Vibrazioni flessionali: trave a mensola
Per la trave a mensola, incastrata in x = 0 e libera all’estremo x = l, si ha (vediFig. 8.7):
v(0, t) = 0 M(l, t) = 0
ϑ(0, t) = 0 T (l, t) = 0
da cui risulta:
φ(0) = 0
[dφ(x)
dx
]x=0
= 0[d2φ(x)
dx2
]x=l
= 0
[d3φ(x)
dx3
]x=l
= 0

8.5. VIBRAZIONI FLESSIONALI NELLE TRAVI 97
Introdotte nella seconda delle (8.43) e nelle corrispondenti derivate rispetto ad x, siottiene:
D + F = 0
C + E = 0
−C sin βl −D cos βl + E sinh βl + F cosh βl = 0
−C cos βl +D sin βl + E cosh βl + F sinh βl = 0
(8.44)
vale a dire un sistema omogeneo nelle quattro incognite C, D, E, F . Esprimendo D eC in funzione di F e E, la terza e quarta equazione costituiscono un sistema omogeneonelle due incognite E ed F che ha soluzione diversa da quella banale (E = F = 0) se ildeterminante dei coefficienti e nullo, cioe se (ricordando che sinh2 − cosh2 = −1):∣∣∣∣sin βl + sinh βl cos βl + cosh βl
cos βl + cosh βl − sin βl + sinh βl
∣∣∣∣ = −2− 2 (cos βl · cosh βl) = 0
ossia:cos βl · cosh βl = −1
Questa, una volta risolta, fornisce una infinita discreta di prodotti βl da cui si ricavanole infinite pulsazioni ω.
8.5.3 Trave appoggiata
l
x
Figura 8.8: Vibrazioni flessionali: trave appoggiata
Per la trave appoggiata in x = 0 e x = l, si ha (vedi Fig. 8.8):
v(0, t) = 0 M(0, t) = 0
v(l, t) = 0 M(l, t) = 0
Introdotte nella seconda delle (8.43) e nelle corrispondenti derivate rispetto ad x, siottiene:
D + F = 0
C sin βl +D cos βl + E sinh βl + F cosh βl = 0
−D + F = 0
−C sin βl −D cos βl + E sinh βl + F cosh βl = 0
(8.45)
Dalla prima e dalla terza delle (8.45) si ricava D = F = 0, mentre la seconda e quartaequazione costituiscono un sistema omogeneo nelle due incognite C ed E che ha soluzionediversa da quella banale (C = E = 0) se il determinante dei coefficienti e nullo, cioe se:∣∣∣∣sin βl sinh βl
sin βl − sinh βl
∣∣∣∣ = 2 (sin βl · sinh βl) = 0
Ricordando che il seno iperbolico si annulla solo per valori nulli del suo argomento, nonpuo essere sinh βl = 0 (ne risulterebbe infatti β = 0), deve quindi essere sin βl = 0, ossiadeve aversi:
βil = iπ (i = 1, 2, . . . )

98 CAPITOLO 8. SISTEMI CONTINUI
Le infinite pulsazioni proprie risultano dunque:
ωi =
(iπ
l
)2√EI
ρS(i = 1, 2, . . . )
La quarta delle (8.45) diviene: E sinh βl = C sin βl = 0, da cui (essendo sinh βl = 0)risulta E = 0. Di conseguenza, l’unica costante non nulla e C e i modi di vibrare hannol’espressione:
[φ(x)]i = Ci siniπx
l.
L’integrale generale delle vibrazioni flessionali libere di una trave appoggiata e pertantodato dalla:
v(x, t) =∞∑i=1
φi(x)fi(t) =∞∑i=1
siniπx
l(Ki sinωit+Hi cosωit)
dove le costanti Ki = CiAi e Hi = CiBi dipendono dalle condizion iniziali.
8.5.4 Altre condizioni al contorno
La Fig. 8.9 riporta la forma dei primi cinque modi flessionali per alcune condizioni divincolo. La Tabella 8.2 riporta le espressioni del prodotto βil per le condizioni al contornopiu comuni.
Figura 8.9: Vibrazioni flessionali: forme modali

8.5. VIBRAZIONI FLESSIONALI NELLE TRAVI 99
Tabella 8.2: Vibrazioni flessionali: diverse condizioni al contorno
8.5.5 Ortogonalita, masse e rigidezze modali
Le relazioni di ortogonalita delle forme modali sono espresse dalle:∫ l
0
ρS φiφj dx = 0;
∫ l
0
EId2φidx2
d2φjdx2
dx = 0; (i = j)
La massa modale e la rigidezza modale sono rispettivamente:
Mi =
∫ l
0
ρS φ2i dx; Ki =
∫ l
0
EI
(d2φidx2
)2
dx
e risulta: ω2i =
Ki
Mi

100 CAPITOLO 8. SISTEMI CONTINUI
8.6 Riepilogo
Si riepilogano in Tabella 8.3 le equazioni di equilibrio, i quadrati delle pulsazioni proprieespresse some rapporto tra rigidezza e massa modale, le espressioni dell’energia cineticaT e potenziale V per i sistemi continui precedentemente studiati (§8.3, §8.4, §8.5).
Vib. longitudinali Vib. torsionali Vib. flessionali
ρS∂2u
∂t2= ES
∂2u
∂x2Jo∂2ϑ
∂t2= GIp
∂2ϑ
∂x2ρS∂2v
∂t2+ EI
∂4v
∂x4= 0
ωi2 =
∫ L0ES(dφi
dx
)2dx∫ L
0ρSφi2dx
ωi2 =
∫ L0GIp
(dφi
dx
)2dx∫ L
0Joφi2dx
ωi2 =
∫ L0EI(d2φi
dx2
)2dx∫ L
0ρSφi2dx
T = 12
∫ L0ρS(∂u∂t
)2dx T = 1
2
∫ L0Jo(∂ϑ∂t
)2dx T = 1
2
∫ L0ρS(∂v∂t
)2dx
V = 12
∫ L0ES(∂u∂x
)2dx V = 1
2
∫ L0GIp
(∂ϑ∂x
)2dx V = 1
2
∫ l0EI(∂2v∂x2
)2dx
Tabella 8.3: Sistemi continui: riepilogo

8.7. METODI APPROSSIMATI DI RAYLEIGH E DI RAYLEIGH-RITZ 101
8.7 Metodi approssimati di Rayleigh e di Rayleigh-
Ritz
Procedimento:
a) si formula una “ragionevole” ipotesi sulla deformata (che rispetti le condizioni alcontorno);
b) si esprimono, sulla base di tale ipotesi, l’energia cinetica e quella potenziale (dideformazione);
c) si scrivono le equazioni del moto (equazioni di Lagrange);
d) si ricavano frequenza proprie e modi di vibrare.
8.7.1 Metodo di Rayeigh: applicazione alla trave a mensola
l
x
Figura 8.10: Metodo approssimato di Rayleigh: trave a mensola
Con riferimento alla trave a mensola di Fig. 8.10 e ricordando quanto visto al §8.5, siassuma la seguente deformata:
φ(x) =
[3(xl
)2−(xl
)3]per cui risulta:
v(x, t) =
[3(xl
)2−(xl
)3]p(t) = φ(x)p(t)
Innanzitutto si noti che sono soddisfatte le condizioni geometriche al contorno:
v(0, t) = 0;
[∂v(x, t)
∂x
]0
= p(t)
[dφ(x)
dt
]0
=
[3(xl
)2−(xl
)3]0
p(t) = 0
Essendo poi:∂v(x, t)
∂t= φ(x)
dp(t)
dt=
[3(xl
)2−(xl
)3] dp(t)dt
∂2v(x, t)
∂x2=d2φ(x)
dx2p(t) =
[6
l2− 6x
l3
]p(t)
risulta:
T =1
2
∫ l
0
ρS
(∂v
∂t
)2
dx =1
2ρS
(dp(t)
dt
)2 ∫ l
0
φ(x)2dx =1
2ρS
(dp(t)
dt
)233
35l
V =1
2
∫ l
0
EI
(∂2v
∂x2
)2
dx =1
2EI p(t)2
∫ l
0
(d2φ(x)
dx2
)2
dx =1
2EI p(t)2
12
l3

102 CAPITOLO 8. SISTEMI CONTINUI
Se si scrive l’equazione del moto secondo Lagrange, si ha:
d
dt
(∂T
∂p
)+∂V
∂p= 0
dove:∂T
∂p= ρSl
33
35p;
d
dt
(∂T
∂p
)= ρSl
33
35p;
∂V
∂p= EI
12
l3p
da cui:
ρSl33
35p+ EI
12
l3p = 0 ossia:
33
35p+
420
33
EI
ρSl4p = 0
Dall’ultima si ricava la stima ω della prima pulsazione naturale della trave a mensola:
ω2 =420
33
EI
ρSl4ω =
3.5675
l2
√EI
ρS
Ricordando che il valore esatto della prima pulsazione e ω =3.5160
l2
√EI
ρS(si vedano la
Tabella 8.2 e la (8.43) in §8.5), risulta un errore del 2 %.
In alternativa, la prima pulsazione naturale si puo ricavare anche dal principio diconservazione dell’energia meccanica TMAX = VMAX , in cui:
TMAX =1
2ρS
(dp(t)
dt
)2
MAX
33
35l =
1
2ρS
33
35l ω2 VMAX =
1
2EI p(t)2MAX
12
l3=
1
2EI
12
l3
Risulta nuovamente:
ω2 =420
33
EI
ρSl4
8.7.2 Metodo di Rayeigh-Ritz: applicazione alla trave a mensola
Si assuma questa volta una ragionevole deformata esprimendola come funzione di piuparametri (due nello specifico):
φ(x) =
[(xl
)2 (xl
)3]= [φ1(x) φ2(x)]
Risulta pertanto:
v(x, t) = φ1(x) p1(t) + φ2(x) p2(t) =(xl
)2p1(t) +
(xl
)3p2(t)
Essendo poi:∂v(x, t)
∂t=(xl
)2p1(t) +
(xl
)3p2(t)
∂2v(x, t)
∂x2=
2
l2p1(t) +
6x
l3p2(t)
risulta:
T =1
2
∫ l
0
ρS
(∂v
∂t
)2
dx =1
2ρSl
(1
5p21 +
1
7p22 +
1
3p1p2
)

8.7. METODI APPROSSIMATI DI RAYLEIGH E DI RAYLEIGH-RITZ 103
V =1
2
∫ l
0
EI
(∂2v
∂x2
)2
dx =1
2
EI
l3(4p1
2 + 12p22 + 12p1p2
)Se si scrive l’equazione del moto secondo Lagrange, si ha:
d
dt
(∂T
∂pi
)+∂V
∂pi= 0
dove:
∂T
∂p1= ρSl
(1
5p1 +
1
6p2
);
d
dt
(∂T
∂p1
)= ρSl
(1
5p1 +
1
6p2
);
∂V
∂p1=
EI
l3(4p1 + 6p2)
∂T
∂p2= ρSl
(1
7p2 +
1
6p1
);
d
dt
(∂T
∂p2
)= ρSl
(1
7p2 +
1
6p1
);
∂V
∂p2=
EI
l3(12p2 + 6p1)
Le equazioni del moto risultano dunque:
ρSl
(1
5p1 +
1
6p2
)+EI
l3(4p1 + 6p2) = 0
ρSl
(1
6p1 +
1
7p2
)+EI
l3(6p1 + 12p2) = 0
che, poste in forma mattriciale, forniscono:
ρSl
[1/5 1/61/6 1/7
]p+ EI
l3
[4 66 12
]p = 0
Da quest’ultima si ricava la stima delle prime due pulsazioni naturali della trave a mensola:
ω1 =3.533
l2
√EI
ρSω2 =
34.81
l2
√EI
ρS
Ricordando che i valori esatti sono (si vedano la Tabella 8.2 e la (8.43) in §8.5):
ω1 =3.5160
l2
√EI
ρSω2 =
22.0345
l2
√EI
ρS
risultano rispettivamente degli errori pari a 0.5% e 58%.
Volendo determinare i modi di vibrare approssimati, si devono prima determinare gliautovettori P e poi sostituirli nell’espressione generale dei modi approssimati:
ϕ1(x) ϕ2(x)P1
P2
1
ϕ1(x) ϕ2(x)
P1
P2
2
Gli autovettori P risultano:P1
P2
1
=
1
−0.3837
P1
P2
2
=
−0.8221
1
e l’espressione dei modi approssimati e:
ϕ1(x) ϕ2(x)P1
P2
1
=
(xl
)2 (xl
)3P1
P2
1
=(xl
)2− 0.3837
(xl
)3

104 CAPITOLO 8. SISTEMI CONTINUI
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
x/l
ApprossimataEsatta
(a)0 0.2 0.4 0.6 0.8 1
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
x/l
ApprossimataEsatta
(b)
Figura 8.11: Forme modali esatte (–) e approssimate (*) per la trave a mensola: a) primomodo; b) secondo modo
ϕ1(x) ϕ2(x)
P1
P2
2
=
(xl
)2 (xl
)3P1
P2
2
=(xl
)2(−0.8221) +
(xl
)3In Fig. 8.11 e riportato il confronto tra le forme modali esatte e quelle approssimateappena ottenute.
Infine, l’equazione del moto approssimato e:
v(x, t) =∑i=1,2
φi(x)pi(t) = φ1(x)p1(t) + φ2(x)p2(t) = v1(x, t) + v2(x, t)
con:v1(x, t) = φ1(x)P11 sinω1t+ φ2(x)P21 sinω1t
v2(x, t) = φ1(x)P12 sinω2t+ φ2(x)P22 sinω2t

8.8. VIBRAZIONI FORZATE 105
8.8 Vibrazioni forzate
8.8.1 Vibrazioni forzate longitudinali: trave a mensola
Ricordando quanto visto al §8.3, si vogliano studiare le vibrazioni forzate longitudinaliper la trave a mensola mostrata in Fig. 8.12.
Figura 8.12: Vibrazioni forzate longitudinali: trave a mensola
L’equazione del moto (Eq. (8.16)) e:
∂2u(x, t)
∂t2=E
ρ
∂2u(x, t)
∂x2
il cui integrale e: u(x, t) = φ(x)f(t), con:
φ(x) = C sin
(Ω
√ρ
Ex
)+D cos
(Ω
√ρ
Ex
); f(t) = A sinΩt+B cosΩt
Le condizioni al contorno forniscono:
u(0, t) = φ(0)f(t) = 0
N(l, t) = ES
(∂u
∂x
)x=l
= ES f(t)
(dφ
dx
)x=l
= F sinΩt
da cui risulta:φ(0) = D = 0
e:
ES f(t)
(dφ
dx
)x=l
=
= ES (A sinΩt+B cosΩt) C Ω
√ρ
Ecos
(Ω
√ρ
El
)=
= ES (H sinΩt+K cosΩt) Ω
√ρ
Ecos
(Ω
√ρ
El
)= F sinΩt
con: H = A C e K = B C.Deve quindi essere:
ES K Ω
√ρ
Ecos
(Ω
√ρ
El
)= 0 → K = 0
ES H Ω
√ρ
Ecos
(Ω
√ρ
El
)= F → H =
F
ES Ω
√ρ
Ecos
(Ω
√ρ
El
)

106 CAPITOLO 8. SISTEMI CONTINUI
Si vede quindi che H tende ad ∞ per Ω
√ρ
El = (2i− 1)
π
2(i = 1, 2, . . . ), cioe quando la
pulsazione Ω della forzante coincide con una delle pulsazioni naturali del sistema (si vedala (8.19) in §8.3.2).
L’oscillazione alla generica ascissa x vale:
u(x, t) = φ(x)f(t) = H sin
(Ω
√ρ
Ex
)sinΩt = U(x) sinΩt
con U(x) ampiezza dell’oscillazione: U(x) =
F sin
(Ω
√ρ
Ex
)ES Ω
√ρ
Ecos
(Ω
√ρ
El
) .
La Fig. 8.13 riporta l’andamento di:|U(l)| ES
Fl=
sin(Ω∗π
2
)Ω∗π
2cos(Ω∗π
2
) in funzione del
rapporto adimensionale:
Ω∗ =Ω(2i− 1)
ωi=
2Ω
π
√ρ
El
0 1 2 3 4 5 6 7 8 9 100
0.5
1
1.5
2
2.5
3
Ω*
abs(U(l)) ES / Fl
Figura 8.13: Ampiezza della risposta forzata della trave a mensola
8.8.2 Vibrazioni forzate flessionali: trave appoggiata
Ricordando quanto visto al §8.5.3, si vogliano studiare le vibrazioni forzate flessionali perla trave appoggiata mostrata in Fig. 8.14.
L’i-esima pulsazione e: ωi =(iπ)2
l2
√EI
ρSe l’i-esimo modo e: φi(x) = sin
iπ
lx.
Il moto vibratorio e espresso dalla: v(x, t) =∑i
vi(x, t) =∑i
ϕi(x)fi(t).
Conseguentemente, valgono le seguenti:

8.8. VIBRAZIONI FORZATE 107
Figura 8.14: Vibrazioni forzate flessionali: trave appoggiata
• Energia cinetica: T =∑i
Ti =1
2
∑i
∫ L0ρS
(∂vi∂t
)2
dx =1
4ρ S l
∑i
f 2i (t)
• Energia potenziale: V =∑i
Vi =1
2
∑i
∫ L0EI
(∂2vi∂x2
)2
dx =1
4EI
i4π4
l3∑i
fi2(t)
• Massa Modale i-esima: Mi =∫ L0ρS φi(x)
2dx =1
2ρSl
• Rigidezza Modale i-esima: Ki =∫ L0EI
(∂2φi(x)
∂x2
)2
dx =i4π4EI
2l3
La k-esima equazione di Lagrange (ce ne sono infinite) e:
d
dt
(∂T
∂fk
)− ∂T
∂fk+∂V
∂fk= Qk
dove:
Qk = F sinΩt∂ v(l/2, t)
∂fkin cui:
∂ v(l/2, t)
∂ fk=
∂∑i
vi(l/2, t)
∂ fk=
∂∑i
φi(l/2)fi(t)
∂ fk= φk(l/2) = sin
kπ
2
Quindi risulta:
Qk = F sinΩt · sin kπ2
=
0 k pari
F sinΩt · (−1)k−12 k dispari
Si ottengono pertanto infinite equazioni disaccoppiate nella seguente forma:
1
2ρ S l fk(t) +
1
2EI
k4π4
l3fk(t) =
0 k = 2, 4, 6, . . .
F sinΩt · (−1)k−12 k = 1, 3, 5, . . .
Introducendo le masse e le rigidezze modali risulta:
Mk fk(t) +Kk fk(t) =
0 k = 2, 4, 6, . . .
F sinΩt · (−1)k−12 k = 1, 3, 5, . . .
In conclusione, i modi pari non risultano eccitati (d’altra parte la forzante e in mezzeria).Al contrario, per quelli dispari, l’integrale particolare e:
fk(t) =F/Kk
1−(
Ωωk
)2 (−1)k−12 sinΩt =
2l3
π4k4EI
(−1)k−12
1−(
Ωωk
)2 F sinΩt

108 CAPITOLO 8. SISTEMI CONTINUI
In conclusione, la risposta e:
v(x, t) =∑
k=1,3,5,...
φk(x)fk(t) =∑
k=1,3,5,...
sin
(kπx
l
)fk(t) =
=∑
k=1,3,5,...
sin
(kπx
l
)2l3
π4k4EI
(−1)k−12
1−(
Ωωk
)2F sinΩt
Che si puo scrivere anche come: v(x, t) = V (x) sinΩt, con:
V (x) = F2l3
π4EI
∑k=1,3,5,...
sin
(kπx
l
)1
k4(−1)
k−12
1−(
Ωωk
)2La Fig. 8.15 riporta, con scala di ascisse logaritmica, l’andamento di:
V (l/2) EI
F l3in
funzione del rapporto adimensionale:
Ω∗ =Ωωk
(kπ)2
=Ω
1
l2
√EI
ρS
100
101
102
103
10−6
10−4
10−2
100
Ω*
abs(V(l/2)) EI / Fl3
Figura 8.15: Ampiezza della risposta forzata della trave appoggiata

RIFERIMENTI BIBLIOGRAFICI 109
Riferimenti Bibliografici
[DC93] G. Diana and F. Cheli. Dinamica e vibrazioni dei sistemi meccanici. Vol. 1.,volume 1. UTET Universita, Torino, 1993.
[LBDH83] M. Lalanne, P. Berthier, and J. Der Hagopian. Mechanical Vibrations forEngineers. John Wiley & Sons Inc, Chichester West Sussex ; New York, 1983.
[Rao10] Singiresu S. Rao. Mechanical Vibrations. Prentice Hall, Upper Saddle River,N.J, 5th edition edition, 2010.
[TD97] William T. Thomson and Marie Dillon Dahleh. Theory of Vibration withApplications. Prentice Hall, Upper Saddle River, N.J, 5 edition edition, 1997.

Capitolo 9
Misura di vibrazioni e AnalisiModale Sperimentale
9.1 La catena di misura
Le misure di vibrazioni possono essere effettuate con mezzi e fini diversi. Ad esempio:
• per vedere se un sistema meccanico rispetta le norme di sicurezza o di igiene dellavoro, se ne rileva il livello di vibrazione;
• per dimensionare le sospensioni di una macchina, si esegue la misura delle azionieccitatrici che nascono nella macchina stessa;
• se si vuole trovare un adeguato modello matematico del sistema meccanico vibrante,si effettua la misura della sua risposta ad una eccitazione nota.
La strumentazione per rilevare le vibrazioni comprende almeno un trasduttore, unamplificatore ed un indicatore (ad esempio un oscilloscopio). La catena di misura piucompleta e costituita da:
• trasduttore
• amplificatore
• indicatore
• condizionatore di segnale
• convertitore analogico - digitale
• analizzatore di segnale
• altri dispositivi (stampante, plotter, hard disk, . . . )
Spesso e presente anche un registratore magnetico (oggi sostituito quasi sempre dallamemoria del calcolatore o da un hard disk esterno), che puo essere situato prima o dopoil condizionatore di segnale e, nella pratica odierna, e sempre presente un convertitoreanalogico–digitale.
Il trasduttore fornisce in uscita un segnale elettrico (una tensione o una carica elet-trica) proporzionale alla grandezza meccanica da rilevare. Spesso il trasduttore e unaccelerometro, per cui in uscita si ha una tensione (o un segnale di carica) proporzionaleall’accelerazione.
110

9.1. LA CATENA DI MISURA 111
L’amplificatore amplifica l’ampiezza del segnale proveniente dall’accelerometro, che disolito e molto debole. Il segnale viene poi trattato dal condizionatore di segnale che compiealcune eventuali operazioni, come il filtraggio, una ulteriore amplificazione, l’integrazione ola derivazione nel tempo, e cosı via. Il filtro permette il passaggio solo di certe componenti:un filtro passa–basso, ad esempio, permette il passaggio delle sole componenti a frequenzapiu bassa. L’integrazione permette il passaggio dall’accelerazione alla velocita e/o dallavelocita allo spostamento.
! " # $ % & ' ' ( " ) * + , - . / . 0 # ' ( " )1 ( 2 % . 3 . ( 2 # ' ( " )
% . 4 $ ) 5 2 # - )
1 ( 2 6 ) " ' . ' ( " )
* 7 8
* 2 # - . 3 3 # ' ( " )
9 - ( ' ' ) "
: ' # + , # 2 ' )
; # " % 4 % . $ <
= ) 5 . $ ' " # ' ( " )
> 2 % . 0 # ' ( " )
Figura 9.1: Catena di misura
Il convertitore analogico digitale (A/D) e uno strumento a rigore non indispensabile, mausualmente presente perche permette di trattare il segnale con un calcolatore: il segnaleproveniente dal trasduttore e un segnale “analogico” continuo, il cui andamento e analogoa quello della grandezza misurata; il convertitore A/D rileva il valore istantaneo del segnalea intervalli regolari di tempo, trasformandolo in un insieme discreto di numeri (segnale“digitale”). In questo modo in uscita si hanno dei numeri che possono essere gestiti edelaborati da un calcolatore che, dotato di software per l’elaborazione del segnale, viene asvolgere il ruolo di analizzatore di segnale.
Un altro strumento non indispensabile ma molto utile e il registratore (oggi sostituitoda un hard disk esterno disposto a valle del convertitore A/D), che permette di conservarei dati sperimentali.

112 CAPITOLO 9. MISURA DI VIBRAZIONI E ANALISI MODALE
9.2 Analisi in frequenza
9.2.1 Serie di Fourier
Come e noto, una funzione x(t) periodica di periodo T si puo rappresentare medianteserie di Fourier :
x(t) = X0 +∞∑n=1
Xn cos(2π nf1t+ ϕn) (9.1)
dove:
• f1 e la frequenza fondamentale (frequenza dell’armonica fondamentale, di ampiezzaX1)
• X0 e il valore medio di x(t)
• Xn e l’ampiezza della n-esima armonica, di frequenza nf1• ϕn e la fase della n-esima armonica
Nella (9.1) si e riportata la formulazione piu usata, cioe quella nella funzione cosenoma, naturalmente, si puo trovarla anche nel seno o in seno e coseno.
Se si ha una funzione periodica, effettuarne l’analisi di Fourier significa ricavare leampiezze Xn e le fasi ϕn. Si puo pensare di compiere l’analisi di Fourier con un filtropassa-banda molto stretto, ossia avente la caratteristica di lasciar passare solo le compo-nenti comprese tra una certa frequenza f1 e la f1 piu un piccolo incremento. In Fig. 9.2e rappresentato un filtro passa-banda ideale; nella realta e sempre presente una certadispersione.
! " # $ % # & ' (
) ( * * + " , +
% - . / , ( 0 / & 1 " # - - +
23
24
Figura 9.2: Filtro passa-banda ideale
9.2.2 Trasformata di Fourier
Per una funzione x(t) non periodica, con la condizione che l’integrale da −∞ a +∞ delvalore assoluto di x(t) sia una quantita finita, al posto della serie si definisce la Trasformatadi Fourier :
X(f) = F x(t) =
∞∫0
x(t) e−i2πftdt (9.2)
La trasformata di Fourier e una funzione complessa, per cui si rappresenta mediante laparte reale e la parte immaginaria: X(f) = ℜ[X(f)]+ iℑ[X(f), oppure mediante moduloe fase: X(f) = |X(f)| eiΦ(f), in cui:
|X(f)| =√
ℜ[X(f)]2 + ℑ[X(f)]2 tan[Φ(f)] =ℑ[X(f)]
ℜ[X(f)]

9.2. ANALISI IN FREQUENZA 113
La X(f) si rappresenta graficamente mediante gli andamenti della parte reale e di quellaimmaginaria, o di ampiezza e fase in funzione della frequenza.
9.2.3 Trasformata finita e Leakage
Nella pratica, il segnale che si ha a disposizione non permette, a rigore, di calcolare latrasformata di Fourier. Infatti, cio che si possiede e un segnale rilevato per un tempo T ∗
finito. Innanzitutto, l’integrale:
X(f) = F x(t) = limT→∞
T∫0
x(t) e−i2πftdt
puo non esistere. Inoltre, se si elabora il segnale calcolandone la trasformata di Fourier,e come se lo si considerasse “prolungato” da −∞ a +∞ prima e dopo l’intervallo diacquisizione T ∗. Cioe, e come se il segnale si ripetesse periodicamente, con periodo T ∗,per t da −∞ a +∞.
Si deve percio calcolare la cosiddetta Trasformata Finita di Fourier:
X(f, T ∗) = F x(t) =
T∗∫0
x(t) e−i2πftdt (9.3)
In questo modo la funzione che si considera non e piu non periodica, ma “periodica” diperiodo T ∗, definita da −∞ a +∞.
Se si riportano le ampiezze in funzione delle frequenze, si ottiene uno spettro discreto,appunto per il fatto che la funzione viene trattata come periodica di periodo T*. Inaltre parole, lo spettro ha una certa risoluzione (distanza tra due linee contigue) pari a:∆f = 1/T ∗.
E importante sottolineare che la frequenza ∆f dipende solo dal tempo di acquisi-zione T ∗. Non e detto pertanto che tale frequenza, o qualcuno dei suoi multipli, sianoeffettivamente presenti nel segnale.
Figura 9.3: Fenomeno del leakage (dispersione)

114 CAPITOLO 9. MISURA DI VIBRAZIONI E ANALISI MODALE
Supponiamo, ad esempio, di considerare un sistema meccanico perturbato dalla posi-zione di equilibrio statico: esso vibrera con un moto caratterizzato dalle frequenze proprie.Se si rileva il segnale ponendo un trasduttore in un punto del sistema e si misura il segnaleper un tempo T ∗, nello spettro (ottenuto mediante la Trasformata Finita) compariran-no componenti alle frequenze pari ad un multiplo intero della frequenza fondamentale∆f = 1/T ∗. Di regola le frequenze proprie non sono dei multipli di ∆f : nello spettro sitrovera un “addensamento” attorno a tali frequenze. In altre parole, in corrispondenza ditali frequenze compaiono delle linee spettrali vicine (vedi Fig. 9.3), la cui energia totalecoincide con quella delle frequenze che lo spettro discreto non e in grado di rappresentare.
Questo fenomeno e detto leakage (dispersione): poiche si rileva il segnale in un tempoT ∗ finito, cioe osservandolo attraverso una finestra rettangolare, le frequenze effettiva-mente presenti si “disperdono” nelle frequenze prossime ad esse, ma sempre multipledella risoluzione ∆f = 1/T ∗.
0 0.2 0.4 0.6 0.8 1
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2(a)
0 2 4 6 8 100
0.5
1
1.5
2 (b)
0 0.2 0.4 0.6 0.8 1
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2(c)
Time [s]0 2 4 6 8 10
0
0.5
1
1.5
2
(d)
Frequency [Hz]
Figura 9.4: Effetto della “finestratura”: segnale (blu), finestra (verde), segnale“finestrato” (rosso)
Per diminuire la dispersione si puo “finestrare” il segnale applicando finestre di formadiversa; uno dei tipi piu usati e la finestra Hanning, che ha la proprieta di annullare ilsegnale all’inizio e alla fine dell’acquisizione, per cui si elimina la discontinuita che altri-menti si avrebbe all’inizio del periodo. Utilizzando le finestre si ottengono degli spettri piuvicini alla realta rispetto alla finestra rettangolare, che invece fornisce spettri piu dispersi.La Fig. 9.4 mostra l’effetto della “finestratura”: in Fig. 9.4a un segnale armonico aventefrequenza pari a 5 Hz viene acquisito per un tempo T ∗ multiplo del periodo del segnale,con conseguente assenza di dispersione nella Trasformata finita (Fig. 9.4b); lo stesso se-gnale, acquisito per un tempo T ∗ differente (Fig. 9.4c) ha una Trasformata finita affettada dispersione (Fig. 9.4d). Nelle Figg. 9.4c e 9.4d e mostrato l’effetto della applicazione

9.2. ANALISI IN FREQUENZA 115
della finestra (linea di colore verde): nel segnale “finestrato” (linea di colore rosso) vieneeliminata la discontinuita e diminuisce conseguentemente la dispersione.
9.2.4 Campionamento e Aliasing
Se nella catena di misura e presente un convertitore A/D, allora e possibile analizzareil segnale con un computer. L’operazione eseguita dal convertitore viene chiamata cam-pionamento: ad intervalli regolari di tempo il convertitore legge il valore istantaneo delsegnale e gli assegna un valore numerico. All’uscita dal convertitore A/D non si ha piuun segnale continuo ma un segnale discreto. L’intervallo di tempo ∆t tra due acquisizionisuccessive e detto intervallo di campionamento; il suo inverso fc = 1/∆t e detto frequenzadi campionamento. Il campionamento permette un’analisi del segnale veloce e sofisticata,ma occorre che la fc sia adeguata per non alterare l’interpretazione del segnale.
Considerando ad esempio un segnale armonico avente frequenza pari a 5Hz (vedi 9.5a),se lo si campiona con una fc adeguata (Figg. 9.5b e 9.5c) non viene alterata la frequenza,ma se fc e troppo bassa (Fig. 9.5d) il segnale viene interpretato come un segnale aventefrequenza inferiore a quella reale e qualsiasi analisi successiva fornira risultati errati. Ilfenomeno e noto come aliasing (alterazione).
Per evitare l’aliasing deve essere soddisfatto il Teorema di Shannon o del campiona-mento, secondo il quale deve essere:
fc ≥ 2fmax (9.4)
essendo fmax la piu alta frequenza contenuta nel segnale.
0 0.2 0.4 0.6 0.8 1
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2(a)
0 0.2 0.4 0.6 0.8 1
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2(b)
0 0.2 0.4 0.6 0.8 1
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
Time [s]
(c)
0 0.2 0.4 0.6 0.8 1
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
Time [s]
(d)
Figura 9.5: Fenomeno dell’aliasing : segnale analogico (blu), segnale campionato (rosso)
Dato che non si conosce a priori il contenuto in frequenza del segnale da analizzare,affinche sia soddisfatta la condizione (9.4) occorre usare un filtro antialiasing (AA), ossia

116 CAPITOLO 9. MISURA DI VIBRAZIONI E ANALISI MODALE
un filtro passa-basso che lascia passare solo le componenti con frequenza inferiore allafrequenza massima di interesse fmax. La frequenza di campionamento dovra essere noninferiore a 2 fmax. Solitamente, per tenere conto delle imperfezioni del filtro, si assumefc = 2.5fmax. Valgono le seguenti relazioni:
T ∗ = N ∆t = N1
fc=
1
∆f(9.5)
in cui:
• ∆f e la risoluzione dello spettro
• fc e la frequenza di campionamento
• T ∗ e il tempo di acquisizione
• ∆t e l’intervallo di campionamento
• N e il numero di campioni
In Appendice K e riportato un esempio di scelta dei parametri di acquisizione.
9.2.5 Trasformata Discreta di Fourier
Ritornando all’analisi di Fourier, nel caso di un segnale campionato si parla di Trasfor-mata Discreta di Fourier (DFT), perche l’analisi viene effettuata su una funzione discreta(segnale campionato):
X(k ∆f) = ∆tN−1∑n=0
xn e−i 2πk n
N (9.6)
dove:
• xn e il campione n-esimo di x(t), cioe x(t) = x(n∆t)
• X(k∆f) rappresenta il termine k-esimo dello spettro di x(t)
• N e il numero di campioni
• k e l’ordine dell’armonica dello spettro, che va da 0 a (N − 1)/2.
Se il numero di campioni elaborati e una potenza di 2, il calcolo viene effettuato conalgoritmi chiamati FFT (Fast Fourier Transform), che velocizzano l’operazione (sono da100 a 200 piu veloci della procedura normale) e consentono di avere la trasformata diFourier praticamente in tempo reale.

9.3. INTRODUZIONE ALL’ANALISI MODALE SPERIMENTALE 117
9.3 Introduzione all’analisi modale sperimentale
L’analisi modale e un procedimento sperimentale per l’identificazione dei sistemi mediantela determinazione di:
• frequenze proprie
• smorzamenti
• modi di vibrare
L’analisi modale viene impiegata soprattutto per validare modelli a parametri con-centrato o ad elementi finiti o valutare l’effetto di modifiche strutturali ed e eseguitausualmente mediante il rilievo sperimentale della Funzione Risposta in Frequenza. Leipotesi fondamentali alla base dell’analisi modale sono:
• sistema lineare
• sistema tempo-invariante
• sistema osservabile
9.3.1 Funzione di Trasferimento e Funzione Risposta in Fre-quenza (FRF)
Un sistema puo essere identificato con l’uscita che corrisponde ad un determinato ingresso(Fig. 9.6). Nel caso di sistemi meccanici e piu comune parlare di eccitazione e di risposta.
! " # $ % & '
( # ) " $ '* + , - % # # .
! " # $ % & '
/ " # 0 . # $ '1 ) ) " $ ' 2 " . + %
3 4 $ 5 6 4 $ 5
Figura 9.6: Sistema
Si consideri un sistema ideale ossia un sistema a parametri costanti e e lineare tradue punti di interesse chiaramente definiti (l’ingresso, o punto di eccitazione, e l’uscita, opunto di risposta). Un sistema ha parametri costanti se tutte le proprieta fondamentalidel sistema sono invarianti rispetto al tempo. Un sistema si dice lineare se le caratteri-stiche della risposta sono additive ed omogenee. Il termine additivo significa che l’uscitacorrispondente alla somma di piu ingressi e uguale alla somma delle uscite prodotte daciascun ingresso individualmente. Il termine omogeneo significa che l’uscita prodotta daun ingresso moltiplicato per una costante e uguale alla costante per l’uscita prodotta dalsolo ingresso.L’ipotesi relativa alla costanza dei parametri e ragionevolmente valida per molti sistemifisici. L-ipotesi di linearita per i sistemi reali e, in qualche modo, piu critica. Tutti i si-stemi fisici manifestano caratteristiche di risposta non lineari in condizioni di eccitazioneestreme. Tuttavia, per molti sistemi fisici e lecito assumere l’ipotesi di linearita, almenoper campi di valori limitati dell’ingresso, senza commettere errori significativi.
Le caratteristiche di un sistema lineare a parametri costanti possono essere descrittedalla funzione risposta all’impulso unitario h(τ), definita come la risposta del sistema indato istante t ad un impulso unitario applicato all’istante t − τ . L’utilita della funzionerisposta all’impulso unitario deriva dal fatto che la risposta x(t) di un sistema ad un

118 CAPITOLO 9. MISURA DI VIBRAZIONI E ANALISI MODALE
ingresso arbitrario f(t) e fornita dall’integrale di convoluzione:
x(t) =
∞∫−∞
f(τ) h(t− τ) dτ = f(t)⊗ h(t) (9.7)
Un sistema lineare a parametri costanti puo anche essere caratterizzato dalla Funzionedi Trasferimento H(s), che e definita come la trasformata di Laplace della h(τ):
H(s) =
∫ ∞
0
h(τ)e−sτdτ s = σ + jω (9.8)
Le caratteristiche dinamiche del sistema possono essere descritte anche dalla FunzioneRisposta in Frequenza (FRF) H(ω), che e definita come la trasformata di Fourier dellah(τ):
H(ω) =
∫ ∞
0
h(τ)e−jωτdτ (9.9)
La funzione risposta in frequenza H(ω) e semplicemente un caso particolare dellafunzione di trasferimento H(s) in cui la variabile di Laplace, s = σ + jω, ha parte realenulla (σ = 0). Per sistemi fisici la funzione risposta in frequenza puo sostituire la funzionedi trasferimento senza alcuna perdita di informazione.
Una importante proprieta della funzione risposta in frequenza dei sistemi lineari aparametri costanti e evidenziata operando la trasformata di Fourier su entrambi i membridell’integrale di convoluzione (vedi (9.7)):
X(ω) =
∫ +∞
−∞x(t)e−jωtdt =
∫ +∞
−∞(
∫ ∞
−∞f(τ) h(t− τ)dτ)e−jωtdt =
=
∫ +∞
−∞f(τ) (
∫ +∞
−∞h(t− τ)e−jωtdt) dτ =
=
∫ +∞
−∞f(τ) (
∫ +∞
−∞h(η)e−jω(τ+η)dη) dτ =
=
∫ +∞
−∞f(τ) (
∫ +∞
−∞h(η)e−jωηdη) e−jωτ dτ =
=
∫ +∞
−∞f(τ) (H(ω)) e−jωτ dτ =
= H(ω)
∫ +∞
−∞f(τ)e−jωτdτ = H(ω)F (ω)
(9.10)
Nella (9.10) X(ω) e F (ω) sono, rispettivamente, le trasformate di Fourier dell’uscita edell’ingresso. La FRF di un sistema e dunque il rapporto fra le trasformate di Fourierdella risposta e dell’eccitazione:
H(ω) =X(ω)
F (ω)(9.11)
Come si vede, nel dominio delle frequenze l’integrale di convoluzione si riduce ad unasemplice espressione algebrica (vedi anche Fig. 9.7):
x(t) = f(t)⊗ h(t) ⇒ X(ω) = F (ω)H(ω) (9.12)
La risposta puo essere costituita dallo spostamento, dalla velocita o dall’accelerazione.Valgono le seguenti denominazioni (essendo l’eccitazione sempre una forza):

9.3. INTRODUZIONE ALL’ANALISI MODALE SPERIMENTALE 119
! " # $ % " # $
& " # $
' " ! $( " ! $
) " ! $
Figura 9.7: Sistema: dominio del tempo e dominio di frequenza
Risposta FRF 1/FRFAccelerazione Inertanza Massa apparenteVelocita Mobilita ImpedenzaSpostamento Ricettanza Rigidezza dinamica
9.3.2 Rilievo sperimentale della FRF
Per rilevare la FRF Hlk = |Hlk|ejφlk tra il punto di ingresso k e quello di uscita l di unastruttura o di un componente meccanico, teoricamente occorre:
• eccitare il componente nel punto k con una forza sinusoidale di ampiezza e frequenzanota;
• rilevare la vibrazione del componente nel punto l;
• valutare il modulo |Hlk| della FRF come rapporto tra l’ampiezza della risposta el’ampiezza dell’eccitazione, e la fase φlk come differenza fra la fase della risposta equella della forzante;
• ripetere l’operazione facendo variare il valore della frequenza della forzante.
Nella pratica, non occorre eseguire l’operazione per ogni singola frequenza. Bastainfatti eccitare nel punto k con una eccitazione che abbia adeguato contenuto in frequenzasu tutto il campo che interessa e, rilevate sperimentalmente l’eccitazione e la risposta, sene calcolano le trasformate di Fourier e se ne esegue il rapporto, ottenendo in tal modola FRF cercata.
Nel condurre i rilievi sperimentali delle FRF, per diminuire gli errori di misura siimpiegano degli stimatori della FRF, andando ad effettuare la media di piu misure (vediAppendice L).
Un sistema con n gradi di liberta (gdl) si puo pensare come costituito da n sistemi adun singolo gdl. Ad ogni modo corrispondono: una pulsazione propria; uno smorzamentomodale; una forma modale.Se in un punto del sistema si applica una forzante armonica f(t) = F0 cosωt, tutto ilsistema vibra con pulsazione ω; le ampiezze (e le fasi) delle risposte dipendono da ω e sihanno n condizioni di risonanza. La risposta del sistema e una combinazione delle rispostedegli n sistemi ad un gdl a cui puo essere ricondotto. Il sistema e caratterizzato da n× nFRF Hlk ciascuna delle quali presenta n picchi di risonanza ed e una combinazione dellen FRF degli n sistemi ad un gdl.
Un sistema continuo ha infiniti gradi di liberta e infiniti modi propri, cioe infinite pul-sazioni proprie e infinite forme modali. Le pulsazioni proprie sono distinte e costituisconopertanto una infinita discreta. Inoltre, al di sopra di una certa frequenza, i modi di vibrarenon hanno piu senso fisico e, comunque, non vengono mai eccitati.Quando ad un sistema continuo si applica una forzante armonica, il sistema vibra con lastessa pulsazione della forzante e tutti i punti si muovono in fase fra loro, ma con un certosfasamento rispetto alla forzante. Se si e interessati al comportamento del sistema fino ad

120 CAPITOLO 9. MISURA DI VIBRAZIONI E ANALISI MODALE
Figura 9.8: Esempio di FRF sperimentale
una certa pulsazione ω∗, e sufficiente tenere conto solo dei modi - siano N - con pulsazionenon superiore ad ω∗. La risposta del sistema ad una forzante di pulsazione inferiore adω∗ e data dalla somma delle risposte di N sistemi ad un solo gdl, corrispondenti ai primiN modi propri.La Fig. 9.8 riporta il modulo di una FRF rilevata sperimentalmente sun un sistema mec-canico. L’eccitazione utilizzata era in grado di fornire energia fino alla frequenza di 5 kHz.Si vede che in tale range il sistema presenta almeno 9 modi di vibrare (sono presenti 9chiari picchi di risonananza nella FRF). Oltre i 5 kHz, la FRF risulta molto “sporca” inquanto la risposta del sistema, non essendo presente eccitazione, e di fatto costituita solodal rumore di misura.
9.3.3 Fondamenti dell’analisi modale sperimentale
Un sistema continuo puo essere modellato con un sistema discreto, con un numero finitodi gdl, ad esempio mediante:
• un modello a parametri concentrati;
• un modello a elementi finiti;
• un modello modale.
Il modello modale e costituito da tanti sistemi ad un solo gdl quanti sono i modi che sivogliono mettere in conto. Il modello modale rappresenta bene il sistema per frequenzeinferiori alla massima presente nel modello, cioe a quella del modo piu alto.
Per condurre una analisi modale sperimentale (al fine di ottenere un modello modale),si sceglie sulla struttura in esame un certo numero di punti (griglia sperimentale), tali dadefinire adeguatamente la geometria della struttura e le sue forme modali (vedi Fig. 9.9).Si eccita in un punto (tipicamente mediante uno shaker elettrodinamico, Fig. 9.10a) esi rilevano le risposte negli altri punti; oppure si rileva la risposta in un punto e si ec-

9.3. INTRODUZIONE ALL’ANALISI MODALE SPERIMENTALE 121
cita in corrispondenza degli altri punti (tipicamente mediante un martello strumentato,Fig. 9.10b).
Figura 9.9: Esempio di griglia di punti per analisi modale sperimentale
(a) (b)
Figura 9.10: Eccitatori per analisi modale sperimentale: a) shaker; b) martellostrumentato
Stabilito il campo di frequenze di interesse, l’eccitazione deve essere in grado di fornireenergia sufficiente al sistema in tale campo; analogamente, il rilievo sperimentale vieneeffettuato in tale intervallo. I modi che si andranno a rilevare (siano N) saranno tutti esolo quelli interni al campo di frequenze analizzato. Siano n i punti scelti sulla strutturae a questi si facciano corrispondere altrettanti gdl del modello modale.
Scritta l’equazione del moto per un sistema a n gdl:
[M ]x+ [K]x = f(t)
introducendo le coordinate modali, x = [Φ]q (la matrice modale [Φ] ha dimensionin×N), si ottiene:
[M ][Φ] q+ [K][Φ]q = f(t)
e premoltiplicando per [Φ]T :
[M ]P q+ [K]Pq = [Φ]Tf(t) (9.13)

122 CAPITOLO 9. MISURA DI VIBRAZIONI E ANALISI MODALE
Se si eccita nel punto corrispondente al grado di liberta k:
fk(t) = 0, 0, . . . , Fk, 0, . . . , 0T · ejωt
normalizzando gli autovettori rispetto alla matrice massa, la generica r-esima equazionerisulta:
qr + ωr2 qr = Xkr Fk e
jωt
in cui, sostituendo la soluzione nella forma qr = Qr ejωt, si ha:
−ω2Qr ejωt + ωr
2Qr ejωt = Xkr Fk e
jωt
da cui:
Qr =Xkr Fkωr2 − ω2
ed infine:
qr =Xkr Fkω2r − ω2
ejωt
Tornando alle coordinate fisiche, la risposta nel punto l vale dunque:
xl(t) =N∑r=1
Xlrqr =N∑r=1
Xlr Xkr Fkω2r − ω2
ejωt = Xl(ω) ejωt
Per definizione di FRF (vedi Eq. (9.1)), tra il punto di risposta l e quello di eccitazionek essa e rappresentata dal rapporto:
Hlk(ω) =Xl(ω)
Fk=
N∑r=1
Xlr Xkr
ω2r − ω2
(9.14)
Adottando un modello modale con smorzamento, la risposta in l risulta:
xl(t) =N∑r=1
Xlr Xkr Fk(ω2
r − ω2) + j (2ζrωωr)ejωt = Xl(ω) e
jωt
e, di conseguenza, la FRF assume la forma:
Hlk(ω) =Xl(ω)
Fk=
N∑r=1
Xlr Xkr
(ω2r − ω2) + j (2ζrωωr)
(9.15)
L’espressione (9.15) mostra chiaramente che una FRF, oltre che essere naturalmentefunzione di ω, risulta somma di termini relativi a tutti gli N modi di vibrare del sistema.Mettendo in evidenza il contributo di un particolare modo s-esimo, l’espressione di Hlk(ω)puo essere scritta nella forma:
Hlk(ω) =Xls Xks
(ω2s − ω2) + j (2ζsωωs)
+N∑
r=1(r =s)
Xlr Xkr
(ω2r − ω2) + j (2ζrωωr)
(9.16)
Nell’ipotesi (non sempre accettabile) che, quando ω = ωs, i contributi degli altri modisiano trascurabili rispetto a quelli del modo s-esimo, la (9.16) diventa:
Hlk (ω) =Xls Xks
2jζsω2s
Ponendo k = l, si ricava: Xls = ωs√2ζs|Hll(ωs)| e, infine: Xks =
2ζsω2s |Hlk(ω)|Xls
cioe le
forme modali.

9.3. INTRODUZIONE ALL’ANALISI MODALE SPERIMENTALE 123
9.3.4 Schema del procedimento
1 Si scelgono i vincoli della struttura: dovendo eseguire l’analisi modale di un compo-nente libero-libero, si preferiscono vincoli molto cedevoli, a cui corrispondono motidi corpo rigido a frequenze molto basse, che non interferiscono con i modi di vibraredel componente;
2 Si scelgono i punti sulla struttura (e quindi i corrispondenti n gradi di liberta delmodello modale);
3 Si eccita in un punto (ad es. con uno shaker elettrodinamico) e si rilevano (ades. con accelerometri) le risposte negli altri punti; oppure si rileva la risposta in unpunto (ad es. con un accelerometro) e si eccita (ad es. con un martello strumentato)in corrispondenza di tutti gli altri punti;
4 L’eccitazione ed il rilievo vengono rispettivamente forniti ed effettuati in un inter-vallo di frequenze: i modi rilevati sono tutti e solo quelli interni a tale intervallo;
5 Si trovano cosı n× n FRF;
6 In ciascuna delle FRF ottenute sono presenti N picchi, corrispondenti alle N pul-sazioni proprie comprese nel campo di frequenze considerato, salvo l’eventuale pre-senza di nodi: in tal caso, se un gdl l cade in corrispondenza di un nodo del modo s,nelle FRF che coinvolgono il punto l il picco in corrispondenza di ωs non compare.
7 Si ricavano, con la semplice osservazione dei picchi di risonanza (metodo “peakpicking”), le N pulsazioni proprie del sistema nell’intervallo di interesse;
8 Nell’intorno di ogni pulsazione naturale ωs, trattando il sistema come se fosse ad unsolo gdl, si ricava il coefficiente di smorzamento ζs (per esempio con il metodo dellabanda di mezza potenza visto in § 5.2.5);
9 Con il metodo mostrato in § 9.3.3 (metodo “single dof”), si ricavano infine Xls eXks, ossia le forme modali.
E opportuno mettere bene in evidenza che:
• il numero di modi che si determinano dipende solo dal campo di frequenza;
• il numero e la posizione dei punti di misura di risposta ed eccitazione (unitamentealla direzione) vanno scelti in modo da rappresentare in modo accurato e correttole forme modali della struttura.
9.3.5 Esempio
La Fig. 9.11 illustra sommariamente l’attrezzatura ed il procedimento: la trave a mensolaviene eccitata nel punto 1, gli accelerometri A1, A2, A3 rilevano le risposte nei punti 1, 2,3 e l’analizzatore di segnale calcola le tre FRF H11, H21, H31.I picchi delle FRF individuano le frequenze proprie. L’acutezza delle FRF in corrispon-denza di ciascuna frequenza propria permette di valutare il corrispondente smorzamen-to. Le ampiezze e le fasi delle tre FRF in corrispondenza di ciascuna frequenza propriapermettono di determinare la corrispondente forma modale.

124 CAPITOLO 9. MISURA DI VIBRAZIONI E ANALISI MODALE
Figura 9.11: Esempio di analisi modale sperimentale ([Inm13])

9.4. ESEMPIO NO. 1 125
9.4 Esempio no. 1
Si vogliono misurare le frequenze naturali di un tratto di tubo a sezione circolare (libero-libero). Una prima indagine con il metodo degli elementi finiti ha portato al risultatosintetizzato nella Fig. 9.12.
1454 Hz
1813 Hz
4085 Hz
4630 Hz
Figura 9.12: Esempio no. 1: Analisi modale di un tubo a sezione circolare

126 CAPITOLO 9. MISURA DI VIBRAZIONI E ANALISI MODALE
9.5 Esempio no. 2
Misura delle frequenze naturali di un componente ad “elle” in acciaio (libero-libero).
600 Hz 755 Hz
1465 Hz 2070 Hz
Figura 9.13: Esempio no. 2: Analisi modale di un componente ad “elle”

9.6. ESEMPIO NO. 3 127
9.6 Esempio no. 3
Prove con shaker elettrodinamico su lamina in alluminio.Dimensioni e materiale:Larghezza = 34 mmSpessore = 1 mmLunghezza = 245 mmAlluminio ⇒ E = 7.110 N/m2, ρ = 2770 kg/m3
Preventivamente, le frequenze possono essere calcolate con la teoria delle vibrazioni deisistemi continui. Dalla teoria delle vibrazioni flessionali di una trave, nel caso di condizionial contorno “incastro-libero”, risulta:
cos β l + cosh β l + 1 = 0 con: βi =4
√ρSωi2
EI(i = 1, 2, . . . )
Risolvendo nel termine βl si determinano le pulsazioni naturali:
ωi =(βil)
2
l2
√EI
ρS
La Fig. 9.14 mostra le prime cinque forme modali, mentre la Tab. 9.1 riporta i risultatiin termini dipulsazioni e frequenze per i primi otto modi.In alternativa, le frequenze e i modi si possono valutare tramite una semplice analisi aglielementi finiti: la Fig. 9.15 mostra la II e la III forme modali cosı ottenute.
Figura 9.14: Forme modali flessionali della lamina incastrata

128 CAPITOLO 9. MISURA DI VIBRAZIONI E ANALISI MODALE
(a) (b)
Figura 9.15: Analisi FEM: II (a) e III (b) forma modale della lamina incastrata
i βil ωi [rad/s] fi [Hz]1 1.875104069 85.61 13.632 4.694091133 536.50 85.393 7.854757438 1502.21 239.084 10.99554073 2943.74 468.515 14.13716839 4866.22 774.486 17.27875953 7269.28 1156.947 20.42035225 10152.97 1615.898 23.56194490 13517.26 2151.34
Tabella 9.1: Frequenze flessionali della lamina incastrata

RIFERIMENTI BIBLIOGRAFICI 129
Riferimenti Bibliografici
[Inm13] D. J. Inman. Engineering Vibration. Prentice Hall, Boston, 4 edition edition,2013.
[Rao10] Singiresu S. Rao. Mechanical Vibrations. Prentice Hall, Upper Saddle River,N.J, 5th edition edition, 2010.

Capitolo 10
Modellazione
10.1 Esempi di modelli a PC
10.1.1 Asta soggetta a vibrazioni assiali
Si consideri una trave omogenea ad asse rettilineo, incastrata ad un estremo e liberaall’estremo opposto (Fig. 10.1), avente modulo di Young E, densita ρ, area della sezionetrasversale S e lunghezza pari a L.
L
Figura 10.1: Trave a sbalzo ad asse rettilineo
Le pulsazioni naturali calcolate con il modello continuo risultano:
ωi =(2i− 1)π
2L
√E
ρ
La Tabella 10.1 riassume i risultati per le prime tre pulsazioni naturali.
Tabella 10.1: Prime tre pulsazioni della trave di Fig. 10.1
1 2 3
Pulsazioni modello continuo1.571
L
√E
ρ
4.712
L
√E
ρ
7.854
L
√E
ρ
Inoltre, essendo la rigidezza assiale e la massa rispettivamente pari a:
k =ES
L; m = ρSL
il rapporto1
L
√E
ρrisulta uguale a
√k
m.
130

10.1. ESEMPI DI MODELLI A PC 131
Modello no. 3
m/3 m/3 m/3
[M ] =
m/3 0 00 m/3 00 0 m/3
[K] =
2k −k 0−k 2k −k0 −k k
[A] = [M ]−1[K] =k
m
6 −3 0−3 6 −30 −3 3
Tabella 10.2: Risultati Modello no. 3
1 2 3
Pulsazioni modello PC 1.335
√k
m3.741
√k
m5.406
√k
m
Errore % -15.0 -20.6 -31.2
Modello no. 2
m/3 m/3 m/3
[M ] =
m/3 0 00 m/3 00 0 m/3
[K] =
3k −k 0−k 2k −k0 −k k
[A] = [M ]−1[K] =k
m
9 −3 0−3 6 −30 −3 3
Tabella 10.3: Risultati Modello no. 2
1 2 3
Pulsazioni modello PC 1.553
√k
m4.243
√k
m5.796
√k
m
Errore % -1.14 -9.97 -26.2

132 CAPITOLO 10. MODELLAZIONE
Modello no. 1
m/3 m/3 m/6
[M ] =
m/3 0 00 m/3 00 0 m/6
[K] =
2k −k 0−k 2k −k0 −k k
[A] = [M ]−1[K] =k
m
6 −3 0−3 6 −30 −6 6
Tabella 10.4: Risultati Modello no. 1
1 2 3
Pulsazioni modello PC 1.553
√k
m4.243
√k
m5.796
√k
m
Errore % -1.14 -9.97 -26.2

10.1. ESEMPI DI MODELLI A PC 133
Modello no. 1-bis
m/N m/N m/N m/2N
Se si segue lo stesso approccio di modellazione del Modello 1 (§10.1.1) e si impieganoN masse, le matrici massa e rigidezza risultano:
[M ] =
m/N 0 ... ... 00 m/N 0 ... ...... 0 ... 0 ...... ... 0 ... 00 ... ... 0 m/2N
; [K] =
2k −k 0 ... 0−k 2k −k 0 ...0 −k ... −k 0... 0 −k 2k −k0 ... 0 −k k
dove m e la massa della trave e k =
NES
Le la rigidezza assiale dell’i-esimo tratto.
Ricordando che le pulsazioni naturali valutate con il modello continuo erano:
ωi =(2i− 1)π
2L
√E
ρ=
(2i− 1)π
2
√k
m
il confronto con quelle del modello a Parametri Concentrati nel caso in cui N=10 e
riportato in Tabella 10.5, dove le pulsazioni sono valutate a meno del fattore1
L
√E
ρ.
Tabella 10.5: Risultati Modello a N dof (N=10)
i(2i− 1)π
2Modello PC Errore %
1 1.5708 1.5692 –0.10
2 4.7124 4.6689 –0.923 7.8540 7.6537 –2.554 10.9956 10.4500 –4.965 14.1372 12.9890 –8.126 17.2788 15.2081 –11.987 20.4204 17.0528 –16.498 23.5619 18.4776 –21.589 26.7035 19.4474 –27.1710 29.8451 19.9383 –33.19

134 CAPITOLO 10. MODELLAZIONE
10.1.2 Vibrazioni flessionali di una trave appoggiata
Si consideri una trave appoggiata omogenea ad asse rettilineo (Fig. 10.2), avente leseguenti caratteristiche:
Dati:
Modulo di Young E = 2.1× 1011 N/m2
Massa m = 226.4 kgMomento di inerzia della sezione trasversale I = 7.2× 10−7 m4
Lunghezza L = 12 m
m/4 m/4 m/4
a=L-b bx
y(x)
P
L/4 L/4 L/4 L/4
Figura 10.2: Trave appoggiata e relativo modello a PC
Se alla trave e applicata una forza trasversale P , per x ≤ a l’equazione della lineaelastica e:
y(x) =P
6EI
b x
l
(l2 − b2 − x2
)e il generico termine δij della matrice cedevolezza trasversale [D] vale:
δij = [y(x)]P=1 =1
6EI
bjxil
(l2 − b2j − x2i
)Riferendosi al moto libero, i valori delle prime quattro pulsazioni naturali calcolate con
il modello continuo sono riportati nella prima riga della Tabella 10.6.
Tabella 10.6: Prime quattro pulsazioni della trave di Fig. 10.2
1 2 3 4
Pulsazioni modello continuo [rad/s] 6.136 24.543 55.221 98.172
Pulsazioni modello PC a 3 masse [rad/s] 6.134 24.365 51.732 –
Errore % –0.03 –0.73 –6.32 –
Pulsazioni modello PC a 4 masse [rad/s] 6.135 24.482 54.197 89.246
Errore % –0.01 –0.25 –1.86 –9.09
Se si modella la trave a parametri concentrati utilizzando rispettivamente tre (Modellodi Fig. 10.2) e quattro masse, si ottengono i risultati riportati nella seconda e quarta rigadella medesima Tabella. Se invece si ricorre ad un modello a dieci masse, si ottengono irisultati riportati in Tabella 10.7.

10.1. ESEMPI DI MODELLI A PC 135
Tabella 10.7: Prime dieci pulsazioni della trave di Fig. 10.2
Pulsazioni modello Pulsazioni modello Errore
continuo [rad/s] PC a 10 masse [rad/s] %
1 6.136 6.136 0.00
2 24.541 24.543 –0.008
3 55.197 55.221 –0.044
4 98.015 98.172 –0.159
5 152.696 153.393 –0.454
6 218.394 220.886 –1.128
7 293.000 300.650 –2.544
8 371.809 392.686 –5.316
9 445.719 496.993 –10.317
10 500.568 612.572 –18.417

136 CAPITOLO 10. MODELLAZIONE
10.1.3 Modello di un aereo
Per studiare le vibrazioni verticali di un aereo e delle sue ali si puo utilizzare il modelloelementare a tre gdl di Fig. 10.3. Le masse sono quelle della fusoliera e delle ali piu imotori; le rigidezze sono quelle delle ali.
Figura 10.3: Modello di un aereo
L’equazione del moto e:Mx+Kx = 0
cioe:
m
1 0 00 4 00 0 1
x1x2x3
+EI
l3
3 −3 0−3 6 −30 −3 3
x1x2x3
=
000
Si ha:
M−1K =3EI
ml3
1 −1 0−1/4 1/2 −1/40 −1 1
Con i seguenti dati numerici:
E = 6.9× 109 N/m2, l = 2 m, m = 3000 kg, I = 5.2× 10−6 m4
le pulsazioni naturali e i modi di vibrare risultano:
Tabella 10.8: Modello di un aereo: risultati
Autovalori: 0 4.49 (rad/s)2 6.73 (rad/s)2
Pulsazioni proprie: 0 2.12 rad/s (0.34 Hz) 2.59 rad/s (0.41 Hz)
Autovettori: [1 1 1]T [1 0 −1]T [1 −0.5 1]T

10.1. ESEMPI DI MODELLI A PC 137
10.1.4 Modello di un autoveicolo
Per studiare i moti di saltellamento e di beccheggio di un autoveicolo si puo utilizzare ilmodello a due gdl di Fig. 10.4.
Figura 10.4: Modello di un autoveicolo
Dati:
Massa m = 4000 kgMomento di inerzia di massa JG = 2560 kg m2
Distanza delle sospensioni dal baricentro l1 = 0.9 m l2 = 1.4 mCostanti elastiche delle molle k1 = k2 = 20000 N/mCostanti degli ammortizzatori c1 = c2 = 2000 Ns/m
A) Equazioni del moto:mx+ c1
(x− l1ϑ
)+ c2
(x− l2ϑ
)+ k1 (x− l1ϑ) + k2 (x− l2ϑ) = 0
JGϑ+ c1
(x− l1ϑ
)+ c2l2
(x− l2ϑ
)− k1l1 (x− l1ϑ) + k2l2 (x− l2ϑ) = 0
B) Scrittura delle equazioni in forma matriciale: ⇒ matrici M,C,K.
C) Introduzione dei dati numerici
D) Autovalori ed autovettori
- Matrice dinamica A = M−1 ·K- Autovalori di A ⇒ Pulsazioni: ω1 = 3.0355 rad/s, ω2 = 4.7357 rad/s
- Autovettori di A ⇒ Modi: ⇒ Matrice modale Φ
E) Matrice modale e matrici principali (si sono normalizzati i modi rispetto alla matricemassa):
[Φ] =
[−0.0153 0.00390.0048 0.0192
][M ]P = [Φ]T [M ][Φ] = [I]
[K]P = [Φ]T [K][Φ] =
[9.2141 0
0 22.4265
][C]P = [Φ]T [C][Φ] =
[0.9214 0
0 2.2426
]F) Fattori di smorzamento modali e pulsazioni smorzate
ζi =cpi
2 mpiωiωsi = ωi
√1− ζi
2
Risulta: ζ1 = 0.152 ζ2 = 0.237 ωs1 = 3.00 rad/s ωs2 = 4.60 rad/s.

138 CAPITOLO 10. MODELLAZIONE
Risposta ad un momento impulsivo
Pensando all’attraversamento di un avvallamento del terreno da parte dell’assale ante-riore del veicolo, l’eccitazione puo essere modellata come un momento impulsivo positivo(orario): M(t) =M0 δ(t)
G) Forzante: ΦT ·
0M0 δ(t)
=
0.0048M0 δ(t)0.0192M0 δ(t)
H) Equazioni del moto
q1 + 0.9214q1 + 9.2141 q1 = 0.0048M0 δ(t)
q2 + 2.2436q2 + 22.4265 q2 = 0.0192M0 δ(t)
I) Integrali (vedi §5.2.10)
q1(t) =0.0048M0
ωs1e−ζ1ω1t sin(ωs1 t) q2(t) =
0.0192M0
ωs2e−ζ2ω2t sin(ωs2 t)
J) Coordinate fisiche:
x(t)ϑ(t)
= Φ ·
q1(t)q2(t)
.
La figura seguente mostra la risposta delle coordinate fisiche del modello per M0 = 1.
0 2 4 6 8 10−0.02
−0.01
0
0.01
0.02Coordinata x [mm]
Time [s]0 2 4 6 8 10
−2
−1
0
1
2
3
4Coordinata θ [deg × 10−3]
Time [s]

10.1. ESEMPI DI MODELLI A PC 139
Caso disaccoppiato
Si osservi la struttura delle matrici: C e K.
M =
[m 00 JG
]K =
[k1 + k2 −k1l1 + k2l2
−k1l1 + k2l2 −k1l21 + k2l22
]C =
[c1 + c2 −c1l1 + c2l2
−c1l1 + c2l2 −c1l21 + c2l22
]Se −k1l1 + k2l2 = 0, e, analogamente, −c1l1 + c2l2 = 0, le matrici K e C risultano
diagonali. In tal caso le equazioni del moto sono disaccoppiate nelle coordinate fisiche.In pratica, significa che se si applica una coppia non si ha traslazione lungo l’asse x e,viceversa, se si applica una forza lungo x non si hanno rotazioni.
Poiche nei dati e k1 = k2, e c1 = c2, che tale condizione e soddisfatta quando l1 = l2.Se, ad esempio, si assume l1 = l2=1.15 m, risulta (le seguenti matrici sono normalizzatedividendo i termini sulla diagonale per gli elementi della diagonale di [M]):
[M ]P =
[1 00 1
][K]P =
[10.00 00 20.66
][C]P =
[1.000 00 2.066
]
f(t)P =
0
M0δ(t)
/diag [M ] =
0
M0δ(t)/2560
Pulsazioni naturali: ω1 = 3.162 rad/s ω2 = 4.546 rad/sFattori di smorzamento modali: ζ1 = 0.1581 ζ2 = 0.2273Pulsazioni del sistema smorzato: ωs1 = 3.123 rad/s ωs2 = 4.427 rad/s
Equazioni del moto:
x+ 1.000 x+ 10.00 x = 0
θ + 2.066 θ + 20.66 θ =M0 δ(t)/2560
Integrali (vedi §5.2.10):
x(t) = 0 θ(t) =M0/2650
ωs2e−ζ2ω2t sin(ωs2 t)
La figura seguente mostra la risposta delle coordinate fisiche del modello per M0 = 1.
0 2 4 6 8 10−1
−0.5
0
0.5
1Coordinata x [mm]
Time [s]0 2 4 6 8 10
−2
−1
0
1
2
3
4Coordinata θ [deg × 10−3]
Time [s]

140 CAPITOLO 10. MODELLAZIONE
10.1.5 Modello di una pressa
Per studiare le vibrazioni di una pressa si considera il modello a tre gdl di Fig. 10.5.
Figura 10.5: Modello di una pressa
Dati:
Masse m1 = 400 kg m2 = 2000 kg m3 = 8000 kgRigidezze k1 = 3× 106 N/m k2 = 8× 105 N/m k3 = 8× 106 N/m
Per lo smorzamento si adotta l’ipotesi di smorzamento proporzionale, cioe: C = αM+βK,con α = 1 e β = 0.004.
A) Scrittura delle equazioni in forma matriciale: matrici M,C,K:
[M ] =
m1 0 00 m2 00 0 m3
[K] =
k1 −k1 0−k1 k1 + k2 −k20 −k2 k2 + k3
B) Autovalori ed autovettori (con il metodo di Appendice G):
• I = M−1/2 ·M ·M−1/2 K = M−1/2 ·K ·M−1/2
• Autovalori di K ⇒ ω1 = 17.036 rad/s, ω2 = 33.759 rad/s, ω3 = 95.237 rad/s
• Autovettori di K ⇒ Matrice modale: Φ =
0.4146 −0.1021 0.90560.8848 −0.1935 −0.42390.2185 0.9758 0.0106
C) Matrici principali:
[M ]P = [Φ]T [I][Φ] = [I] [K]P = [Φ]T [K][Φ] =
290.2 0 00 1139.7 00 0 9070.1
[C]P = [Φ]T [C][Φ] =
2.161 0 00 5.559 00 0 37.280

10.1. ESEMPI DI MODELLI A PC 141
D) Fattori di smorzamento modali e pulsazioni smorzate:ζ1 = 0.0634 ζ2 = 0.0823 ζ3 = 0.1957ωs1 = 17.00 rad/s ωs2 = 33.64 rad/s ωs3 = 93.40 rad/s
E) Considerando di applicare una eccitazione impulsiva F (t) = 1000 δ(t) alla coordi-nata x1, il vettore delle forzanti modali risulta:
ΦT ·M−1/2
1000 δ(t)
00
=
−20.5805−5.102645.2814
δ(t)
F) Equazioni del moto
q1 + 2.161 q1 + 290.2 q1 = −20.5805 δ(t)
q2 + 5.559 q2 + 1139.7 q2 = −51026 δ(t)
q3 + 37.280 q3 + 9070.1 q3 = 45.2814 δ(t)
G) Integraliq1(t) = −1.2105 e−1.0804 t sin(17.00 t)
q2(t) = −0.1517 e−2.7793 t sin(33.64 t)
q3(t) = +0.4848 e−18.6402 t sin(93.40 t)
H) Coordinate fisiche:
x1(t)x2(t)x3(t)
= M−1/2 ·Φ
q1(t)q2(t)q3(t)
La figura mostra l’andamento della risposta del modello (sinistra) e il moto relativo
tra le masse m1 ed m2 (destra).
0 1 2 3 4 5−30
−20
−10
0
10
20
30
Time [s]
[mm
]
x
1
x2
x3
0 1 2 3 4 5−20
−10
0
10
20
x 1−x 2 [m
m]
Time [s]

142 CAPITOLO 10. MODELLAZIONE
10.1.6 Modello di un meccanismo con gioco
Un modello matematico a parametri concentrati viene impiegato per simulare il com-portamento elastodinamico di un meccanismo. La legge di moto imposta al meccanismo(teorica) ha un profilo cicloidale ed e rappresentata in Fig. 10.6 in termini di spostamento(a) ed accelerazione (b).
Il modello, mostrato in Fig. 10.7, consente di tener conto dei giochi presenti nelmeccanismo.
0 50 100 150 200 250 300 3500
20
40
60
80
100
120
Angolo [deg]
Corsa [mm]
(a)0 50 100 150 200 250 300 350
−150
−100
−50
0
50
100
150
Angolo [deg]
Accelerazione [m/s2]
(b)
Figura 10.6: Legge di moto teorica: a) spostamento; b) accelerazione
m1 m2
x1 x2k2
c2
k1
c1
x0
g2g1
Figura 10.7: Modello a due gradi di liberta di un meccanismo con gioco
Dati:
Masse m1 = 1.5 kg m2 = 1 kgRigidezze k1 = 1.5× 106 N/m k2 = 1.8× 106 N/mSmorzamento q = c/k = 10−4 sLegge di cicloidale Corsa = 120 mmDue condizioni simulate g1 = g2 = 0 g1 = g2 = 0.02 mm
Le due frequenze proprie del modello risultano pari a f1 = 114 Hz e f2 = 297 Hz.La Fig. 10.8 mostra il risultato della simulazione per quanto riguarda l’accelerazione dellamassa m2 del modello (rappresentativa del cedente del meccanismo).
La Fig. 10.9 mostra lo spettro in frequenza dell’accelerazione teorica e gli spettridell’accelerazione della massa m2 del modello nelle due condizioni simulate.

10.1. ESEMPI DI MODELLI A PC 143
0 50 100 150 200 250 300 350−150
−100
−50
0
50
100
150
Angolo [deg]
Accelerazione massa m2 [m/s2]
(a)0 50 100 150 200 250 300 350
−150
−100
−50
0
50
100
150
Angolo [deg]
Accelerazione massa m2 [m/s2]
(b)
Figura 10.8: Accelerazione della massa m2: a) gioco nullo; b) con gioco
0 50 100 150 200 250 300 350 4000
5
10
15
20
25
30
35
40
45
50
Frequenza [Hz]
Spettro accelerazione teorica
(a)
0 50 100 150 200 250 300 350 4000
5
10
15
20
25
30
35
40
45
50
Frequenza [Hz]
Spettro accelerazione massa m2
(b)0 50 100 150 200 250 300 350 400
0
5
10
15
20
25
30
35
40
45
50
Frequenza [Hz]
Spettro accelerazione massa m2
(c)
Figura 10.9: Spettri accelerazione: a) teorica; massa m2: b) gioco nullo; c) con gioco
0 50 100 150 200 250 300 350−0.1
−0.08
−0.06
−0.04
−0.02
0
0.02
0.04
0.06
0.08
0.1
Angolo [deg]
Spostamento relativo X2−X1 [mm]
(b)
Figura 10.10: Condizione con gioco: spostamento relativo x2 − x1

144 CAPITOLO 10. MODELLAZIONE
10.1.7 Modello di un azionamento controllato
Nel seguito viene mostrato un esempio di modello di una trasmissione meccanica e delrelativo azionamento. L’azionamento, mostrato in Fig. 10.11, e costituito da un motoreelettrico a corrente continua con controllo in loop di corrente che applica una coppiamotrice ad un mandrino che, a sua volta, trasmette il moto ad una pinza terminaleattraverso un albero intermedio. Il moto viene controllato in posizione ed in velocitaconfrontando le letture di posizione e velocita fornite da due encoder montati in prossimitadel mandrino. La legge di moto in termini di rotazione e velocita angolare e mostratanella Fig. 10.12. Il modello comprende il motore elettrico, la parte meccanica e gli anellidi regolazione.
! " # $ %
& % # ' ( " # )
!*
& ) + ) ( ,
-!
, # . ) ' , (
/!
Figura 10.11: Schema della trasmissione
Figura 10.12: Legge di moto
Figura 10.13: Schema dell’intero azionamento

10.1. ESEMPI DI MODELLI A PC 145
Figura 10.14: Legge di moto, regolatore di posizione e di velocita
Modello del Motore Elettrico a Corrente Continua
Lo schema del motore elettrico e mostrato in Fig. 10.15. L’equazione del circuito d’ar-matura (iq corrente di armatura, vq forza contro-elettromotrice, eq tensione ai capi delcircuito di armatura, R resistenza di armatura, L induttanza di armatura) e la seguente:
R iq(t) + Ldiq(t)
dt+ vq(t) = eq(t) R Iq(s) + L s Iq (s) + Vq (s) = Eq (s)
La forza contro-elettromotrice si puo esprimere in funzione della velocita del rotore (Kb
costante di forza contro-elettromotrice):
vq(t) = Kb ϑm(t) Vq(s) = Kb s Θm(s)
La coppia motrice Cm e proporzionale alla corrente (Kc costante di coppia):
Cm(t) = Kc iq(t) Cm(s) = Kc Iq(s)
Le due precedenti, sostituite nell’equazione del circuito di armatura, forniscono:
(R + L s)Cm(s)
Kc
= Eq(s)−Kb s Θm(s) Cm(s) = KcEq(s)−Kb s Θm(s)
R + L s
Il controllo in loop di corrente del motore elettrico e schematizzato in Fig. 10.16.
Figura 10.15: Schema del motore elettrico

146 CAPITOLO 10. MODELLAZIONE
Figura 10.16: Modello del Motore Elettrico con controllo in loop di corrente
Modello Meccanico
Il modello meccanico ha tre gradi di liberta. Il suo schema e rappresentato in Fig. 10.17.La prima coordinata Jm e associata all’inerzia del motore elettrico. La seconda J2 ela terza J3 sono associate a due inerzie della trasmissione meccanica a valle del motoreelettrico. Le equazioni del moto sono le seguenti:
Jmϑm = Cm + k1 (ϑ2 − ϑm) + c1
(ϑ2 − ϑm
)J2ϑ2 = −k1 (ϑ2 − ϑm)− c1
(ϑ2 − ϑm
)+ k2 (ϑ3 − ϑ2) + c2
(ϑ3 − ϑ2
)J3ϑ3 = −k2 (ϑ3 − ϑ2)− c2
(ϑ3 − ϑ2
)I trasduttori di posizione e velocita sono montati in corrispondenza dell’inerzia J2 per
cui si ha:ϑE = ϑ2 ϑE = ϑ2
Figura 10.17: Schema del modello meccanico

10.1. ESEMPI DI MODELLI A PC 147
Dati numerici del modello
Lo schema dell’intero azionamento e rappresentato in Fig. 10.18.
Figura 10.18: Schema dell’intero modello
Dati del motore elettrico:
L = 0.003V s
A; R = 0.4 Ohm; Jm = 0.6 kg m2; Kc = 5
Nm
A; Kb = 5
V s
rad
Parametri dei controllori ad azione Proporzionale–Integrale: G(s) = Kp
(1 +
1
Ti s
)Anello di corrente:
Kpc = 8V
A; Tic = 0.002 s
Anello di velocita:
Kpv = 95Nm
rad/s; Tiv = 0.1 s
Anello di posizione (di fatto e un controllo ad azione Proporzionale):
Kpp = 721
s; Tip = 1000 s
Parametri del modello meccanico:
Velocita di rotazione 20 rpmIerzie J2 = 0.085 kgm2 J3 = 0.085 kgm2
Rigidezze k1 = 1.15 ×106 Nm/rad k2 = 1.15 ×105 Nm/radCostanti smorzatori c1 = q · k1 c2 = q × k2 q = 10−5 s

148 CAPITOLO 10. MODELLAZIONE
Risultati
Nella Fig. 10.19 sono mostrati gli errori meccanici. In particolare, a sinistra vi e ladifferenza tra la coordinata θ2 e la posizione del motore θm, mentre a destra e mostratala differenza tra la coordinata θ3 e la coordinata θ2.
Il regolatore di posizione e ad azione proporzionale. Ne consegue un moto effettivoritardato rispetto a quello imposto. Sarebbe improprio considerare come errore la semplicedifferenza tra la coordinata θ2 e il moto imposto (vedi Fig. 10.20a). E piu opportunoconsiderare l’errore a meno del ritardo (vedi Fig. 10.20b).
(a) (b)
Figura 10.19: Errori meccanici: a) θ2 − θm; b) θ3 − θ2
Figura 10.20: Errore θ2 − θrif

10.2. MODELLAZIONE DI MECCANISMI 149
10.2 Modellazione di meccanismi
10.2.1 Perche studiare il comportamento dinamico di un mec-canismo?
PerchPerchéé studiare il comportamento studiare il comportamento dinamico di un meccanismo ?dinamico di un meccanismo ? Un meccanismo, in linea teorica, deve seguire una Un meccanismo, in linea teorica, deve seguire una
determinata determinata legge di motolegge di moto.. Nella realtNella realtàà esiste uno esiste uno scostamento tra il moto scostamento tra il moto
effettivo e la legge di moto teoricaeffettivo e la legge di moto teorica del cedente.del cedente. Il meccanismo Il meccanismo vibravibra con oscillazioni che si con oscillazioni che si
sovrappongono al moto di corpo rigido.sovrappongono al moto di corpo rigido. Possono aversi Possono aversi picchi di accelerazionepicchi di accelerazione indesiderati ai indesiderati ai
quali sono associate elevate quali sono associate elevate forze di inerziaforze di inerzia e e fenomeni dinamici che:fenomeni dinamici che:
producono producono elevate sollecitazionielevate sollecitazioni e possibili e possibili guastiguasti
peggiorano la peggiorano la qualitqualitàà del prodottodel prodotto producono producono vibrazionivibrazioni e e rumorerumore
EsempioEsempio
Accelerazione teoricaAccelerazione teorica
1
2
3
45
tangentialaccelerometer
CAM MECHANISM
FLYWHEEL
MOTOR
ROCKER
CAMSHAFT AXIS
CAM FOLLOWER AXIS
ROCKER AXIS
Ra
0 0.05 0.1Time [s]
Theoretical

150 CAPITOLO 10. MODELLAZIONE
Accelerazione Accelerazione
teoricateorica
0 0.05 0.1
Time [s]
Theoretical
Rilievi sperimentali a diverse
velocità di funzionamento
0 0.1 0.2 0.3
Time [s]
Experimental - 160 rpm
0 0.05 0.1 0.15 0.2
Time [s]
Experimental - 240 rpm
0 0.05 0.1 0.15
Time [s]
Experimental - 320 rpm
0 0.05 0.1
Time [s]
Experimental - 400 rpm
OsservazioniOsservazioni
I fenomeni dinamici risultano I fenomeni dinamici risultano pipiùù intensi con lintensi con l’’aumentare della aumentare della
velocitvelocitàà della macchinadella macchina e possono risultare inaccettabili per e possono risultare inaccettabili per
macchine di elevate prestazioni (velocitmacchine di elevate prestazioni (velocitàà, precisione)., precisione).
Occorre Occorre individuare le causeindividuare le cause che danno origine agli effetti dinamici che danno origine agli effetti dinamici
indesiderati, al fine di ridurli entro limiti accettabili per leindesiderati, al fine di ridurli entro limiti accettabili per le specifiche specifiche
funzionali della macchina.funzionali della macchina.
A questo scopo, A questo scopo, èè particolarmente utile l'impiego di particolarmente utile l'impiego di modellimodelli atti a atti a
simulare adeguatamente l'effettivo comportamento dinamico dei simulare adeguatamente l'effettivo comportamento dinamico dei
meccanismi; infatti risulta possibile:meccanismi; infatti risulta possibile:
individuare i individuare i parametri costruttivi criticiparametri costruttivi critici per il comportamento dinamicoper il comportamento dinamico
verificare gli verificare gli effetti della modificaeffetti della modifica di tali parametri a livello di simulazionedi tali parametri a livello di simulazione

10.2. MODELLAZIONE DI MECCANISMI 151
10.2.2 Modellare i meccanismi
Il 'dilemma' della modellazioneIl 'dilemma' della modellazione Cosa includereCosa includere nel modello fisico per renderlo sufficientemente preciso nel modello fisico per renderlo sufficientemente preciso
?? Come mantenerlo Come mantenerlo semplicesemplice per rendere possibile e ragionevolmente per rendere possibile e ragionevolmente
rapidarapida la soluzione del corrispondente modello matematico con gli la soluzione del corrispondente modello matematico con gli strumenti di calcolo a disposizione ?strumenti di calcolo a disposizione ?
Quale Quale èè il il ““MIGLIOR MODELLOMIGLIOR MODELLO”” ??
Il miglior modello Il miglior modello èè sempre il pisempre il piùù semplice modello che semplice modello che risponde agli scopi e ai criteri che lo studio si propone.risponde agli scopi e ai criteri che lo studio si propone.
Il passaggio dal sistema reale al modello fisico comporta
necessariamente delle approssimazioni consapevolmente accettate, che consistono principalmente nel trascurare tutto
quanto provoca effetti piccoli sul comportamento del sistema.
Modellare i meccanismiModellare i meccanismi Il modello fisico per lo studio del comportamento vibratorio di Il modello fisico per lo studio del comportamento vibratorio di un un
meccanismo meccanismo èè necessariamente pinecessariamente piùù complesso di quello impiegato per complesso di quello impiegato per l'l'analisi cinematicaanalisi cinematica o per l'o per l'analisi dinamica di corpo rigidoanalisi dinamica di corpo rigido, nelle , nelle quali si fanno le seguenti quali si fanno le seguenti approssimazioniapprossimazioni:: membri perfettamente rigidimembri perfettamente rigidi assenza di gioco nelle coppie cinematicheassenza di gioco nelle coppie cinematiche
I meccanismi sono composti da membri elasticiche si deformano sotto l'azione delle forze trasmesse e delle forze di inerzia.

152 CAPITOLO 10. MODELLAZIONE
Modellare i meccanismiModellare i meccanismi
TrascurareTrascurare tale deformabilittale deformabilitàà(cedevolezza) elastica(cedevolezza) elastica èè possibile solo possibile solo
sese
le le forzeforze trasmesse sono trasmesse sono piccolepiccole
velocitvelocitàà ed accelerazionied accelerazioni sono sono ridotteridotte..
Un meccanismo progettato “cinematicamente” può non essere in grado di svolgere correttamente la propria funzione se fatto operare ad alte velocità.
Modellare i meccanismiModellare i meccanismi
Per macchine automatiche di Per macchine automatiche di elevate prestazionielevate prestazioni, l'attenzione va rivolta , l'attenzione va rivolta all'analisi all'analisi CINETOCINETO--ELASTOELASTO--DINAMICADINAMICA dei meccanismi, che permette di dei meccanismi, che permette di simulare adeguatamente l'effettivo simulare adeguatamente l'effettivo comportamento dinamico e comportamento dinamico e
vibratoriovibratorio..
In tale analisi si tiene sempre conto di:In tale analisi si tiene sempre conto di: cedevolezzacedevolezza elastica dei membrielastica dei membri proprietproprietàà inerzialiinerziali dei membridei membri
Diverse indagini hanno inoltre mostrato che il comportamento vibDiverse indagini hanno inoltre mostrato che il comportamento vibratorio ratorio èèinfluenzato in modo determinante da:influenzato in modo determinante da: giochigiochi nelle coppie cinematichenelle coppie cinematiche attritiattriti
variabilitvariabilitàà dei parametridei parametri con la configurazione del meccanismocon la configurazione del meccanismo

10.2. MODELLAZIONE DI MECCANISMI 153
Cedevolezza elastica e proprietCedevolezza elastica e proprietàà inerzialiinerziali
Sono messe in conto correttamente se il modello Sono messe in conto correttamente se il modello èè in in grado di grado di riprodurre i primi modi di vibrareriprodurre i primi modi di vibrare di di ciascuno membro (spesso ciascuno membro (spesso èè sufficiente tenere conto sufficiente tenere conto del primo modo), le cui frequenze proprie cadono nel del primo modo), le cui frequenze proprie cadono nel campo di frequenza di effettivo interesse.campo di frequenza di effettivo interesse.
GiochiGiochi
Durante il moto possono aversi Durante il moto possono aversi perdite di contattoperdite di contatto tra due membri:tra due membri: il sistema si modifica (il sistema si modifica (non linearitnon linearitàà !!)) si hanno si hanno urtiurti che eccitano che eccitano vibrazionivibrazioni
I giochi sono destinati ad aumentare per usura:I giochi sono destinati ad aumentare per usura: occorre tenerne conto per occorre tenerne conto per prevedere l'evoluzioneprevedere l'evoluzione temporale del temporale del
comportamento del meccanismo in conseguenza dell'comportamento del meccanismo in conseguenza dell'usurausura..

154 CAPITOLO 10. MODELLAZIONE
AttritiAttriti Non possono essere trascuratiNon possono essere trascurati (determinano lo smorzamento delle (determinano lo smorzamento delle
vibrazioni libere e influenzano l'ampiezza delle vibrazioni forzvibrazioni libere e influenzano l'ampiezza delle vibrazioni forzate).ate).
Le resistenze passive :Le resistenze passive : smorzamento strutturalesmorzamento strutturale resistenza di fluidiresistenza di fluidi attriti nelle coppie cinematicheattriti nelle coppie cinematiche ........................................
possono essere spesso modellate in maniera 'globale' con possono essere spesso modellate in maniera 'globale' con resistenze resistenze viscose equivalentiviscose equivalenti..
A volte A volte èè necessario modellare alcune azioni dissipative in maniera necessario modellare alcune azioni dissipative in maniera specifica, in particolare nel caso di specifica, in particolare nel caso di attrito seccoattrito secco (di tipo Coulombiano): (di tipo Coulombiano): ciò introduce non linearitciò introduce non linearitàà..
VariabilitVariabilitàà dei parametridei parametri Spesso Spesso èè necessario considerare i valori numerici di alcuni parametri necessario considerare i valori numerici di alcuni parametri
del modello come variabili (non linearitdel modello come variabili (non linearitàà).).

10.2. MODELLAZIONE DI MECCANISMI 155
10.2.3 Il modello a Parametri Concentrati
Metodologie di modellazioneMetodologie di modellazione
Realtà fisica
Modello a
Parametri
Concentrati
Modello a Elementi Finiti
Il Modello a Parametri ConcentratiIl Modello a Parametri Concentrati EE’’ caratterizzato dai soli g.d.l. essenziali (generalmente non picaratterizzato dai soli g.d.l. essenziali (generalmente non piùù di 3 g.d.l. di 3 g.d.l.
per membro)per membro)
Ha un significato fisico chiaro ed intuitivo dei g.d.l.Ha un significato fisico chiaro ed intuitivo dei g.d.l.
EE’’ facile modellare le non linearitfacile modellare le non linearitàà
EE’’ facile includere nel modello le caratteristiche di componenti facile includere nel modello le caratteristiche di componenti
elettromeccanici e gli algoritmi di controllo, ottenendo un modeelettromeccanici e gli algoritmi di controllo, ottenendo un modello llo
dinamico omogeneodinamico omogeneo
EE’’ una metodologia 'classica' e molto impiegata per l'analisi una metodologia 'classica' e molto impiegata per l'analisi
cinetoelastodinamica di meccanismi a camma e di meccanismi per cinetoelastodinamica di meccanismi a camma e di meccanismi per
macchine automatichemacchine automatiche

156 CAPITOLO 10. MODELLAZIONE
Gradi di libertGradi di libertàà ed elementi inerzialied elementi inerziali Di solito si considera il primo modo di Di solito si considera il primo modo di
vibrare di ciascun membro, al pivibrare di ciascun membro, al piùù anche il anche il secondo.secondo.
Teoricamente i risultati possono essere Teoricamente i risultati possono essere migliorati aggiungendo ulteriori gradi di migliorati aggiungendo ulteriori gradi di libertlibertàà..
Per i campi di frequenze solitamente Per i campi di frequenze solitamente considerati, si ottiene generalmente una considerati, si ottiene generalmente una adeguata modellazione di un meccanismo adeguata modellazione di un meccanismo con l'impiego di un numero relativamente con l'impiego di un numero relativamente basso di g.d.l.basso di g.d.l.
Gli elementi inerziali devono possedere la Gli elementi inerziali devono possedere la stessa energia cinetica del sistema reale, stessa energia cinetica del sistema reale, sia per il moto rigido, che per i moti vibratori sia per il moto rigido, che per i moti vibratori ad esso sovrapposti.ad esso sovrapposti.
Tra due masse sono sempre interposti: Rigidezze Elementi
dissipativi(smorzamenti)
Giochi(eventualmente)
Come valutare i parametri inerzialiCome valutare i parametri inerziali
Elementi associati a coordinate lineari Elementi associati a coordinate lineari ------> masse> masse
JD h MD
z = = 4 2
32 8
h
D
z
Elementi associati a coordinate angolari ---> momenti di inerzia forma semplice forma complessa (modellatore solido)

10.2. MODELLAZIONE DI MECCANISMI 157
RigidezzeRigidezze Le rigidezze modellano la Le rigidezze modellano la deformabilitdeformabilitàà elasticaelastica dei membri, che fa sdei membri, che fa sìì
che lo spostamento relativo tra le coordinate sia diverso da queche lo spostamento relativo tra le coordinate sia diverso da quello llo cinematico.cinematico.
Una Una rigidezzarigidezza interposta tra due masse (momenti di inerzia) si valuta interposta tra due masse (momenti di inerzia) si valuta come la forza (coppia) necessaria a produrre lo spostamento come la forza (coppia) necessaria a produrre lo spostamento (rotazione) relativo unitario tra le coordinate delle due masse (rotazione) relativo unitario tra le coordinate delle due masse (momenti (momenti di inerzia).di inerzia).
La La cedevolezzacedevolezza èè l'inverso della rigidezza (1/K).l'inverso della rigidezza (1/K).
Un membro può considerarsi perfettamente rigido, se si può ritenUn membro può considerarsi perfettamente rigido, se si può ritenere ere che la sua deformazione influenzi poco i modi di vibrare del che la sua deformazione influenzi poco i modi di vibrare del meccanismo assemblato: in tal caso se ne ripartisce la massa frameccanismo assemblato: in tal caso se ne ripartisce la massa fra i i membri adiacenti.membri adiacenti.
RigidezzeRigidezze
Forma sempliceForma semplice
1K
lGIp
=
Forma complessa (FEM)
1 1
K
l1 1
K

158 CAPITOLO 10. MODELLAZIONE
RigidezzeRigidezze Si tenga presente che:Si tenga presente che: Le rigidezze ottenute dal calcolo sono spesso Le rigidezze ottenute dal calcolo sono spesso superiorisuperiori alle rigidezze alle rigidezze
effettive. In letteratura si afferma che può esistere un effettive. In letteratura si afferma che può esistere un rapporto 2rapporto 2--44 tra tra le rigidezze stimate e quello effettive.le rigidezze stimate e quello effettive.
Ciò Ciò èè dovuto alla presenza di:dovuto alla presenza di: coppie cinematichecoppie cinematiche cedevolezze locali (cedevolezze di contatto)cedevolezze locali (cedevolezze di contatto) distribuzione delle tensioni in prossimitdistribuzione delle tensioni in prossimitàà dei carichi di cui dei carichi di cui èè difficile tenere difficile tenere
conto con accuratezza.conto con accuratezza. Le rigidezze del sistema si possono valutare in maniera accurataLe rigidezze del sistema si possono valutare in maniera accurata solo solo
mediante mediante prove sperimentaliprove sperimentali (su prototipi o meccanismi gi(su prototipi o meccanismi giàà esistenti).esistenti). E' necessario operare una E' necessario operare una validazione sperimentalevalidazione sperimentale del modello.del modello.
Attriti e fenomeni dissipativiAttriti e fenomeni dissipativi
Le resistenze passive possono essere modellate in vari modi:Le resistenze passive possono essere modellate in vari modi: smorzatori viscosismorzatori viscosi smorzatori nonsmorzatori non--linearilineari attrito coulombianoattrito coulombiano
Generalmente il primo e lGeneralmente il primo e l’’ultimo utilizzati in combinazione danno buoni ultimo utilizzati in combinazione danno buoni risultati.risultati.
Il punto chiave Il punto chiave èè la la stima dellstima dell’’entitentitàà dello smorzamentodello smorzamento:: In letteratura si afferma che In letteratura si afferma che non esistono regole chiarenon esistono regole chiare per per
quantificarne il valore.quantificarne il valore. Anche su questo punto Anche su questo punto èè necessario operare una necessario operare una validazione validazione
sperimentalesperimentale del modello.del modello.

10.2. MODELLAZIONE DI MECCANISMI 159
Smorzatore ViscosoSmorzatore Viscoso La forza La forza èè proporzionale alla velocitproporzionale alla velocitàà..
C
X2X1F C X XV = ( )2 1
Per un modello a più gradi di libertà è comune adottare l’ipotesi di smorzamento proporzionale: si considera la costante dello smorzamento proporzionale alla rigidezza corrispondente.
Ci
Ki
Ci = q Ki Il coefficiente qi può essere
determinato mediante il confronto con i dati sperimentali nel corso della validazione.
Attrito CoulombianoAttrito Coulombiano
Esempi:Esempi: Attrito tra slitte e guideAttrito tra slitte e guide Attrito tra organi in moto e tenuteAttrito tra organi in moto e tenute
A volte si dispone di dati di catalogoA volte si dispone di dati di catalogo
V
N
T
V
T
-T
T f NF sign V T=
= ( )

160 CAPITOLO 10. MODELLAZIONE
GiochiGiochi
K
C
M
g
X0 X1
X1-X0
-g/2
g/2
FEL
F K X X g X g
F K X X g X g
F X g
EL
EL
EL
= >
= + <
=
( / ) /( / ) /
/
1 0 1 0
1 0 1 0
1 0
2 22 2
0 2
XX
X
Contatto HertzianoContatto Hertziano
K
C
M
g
KH
X0 X1
F K X X g
K K K
EL
H
=
= +
~ ( / )
~
1 0 21 1 1
Kb E
D
a
H=
12 2
'
ln '
= ; =-
aF D
b E D D DE
Ec=
+ =
4 1 1 11 11 2
2'; ' ; '
Fc
Fc
a
D1
D2
a
b

10.2. MODELLAZIONE DI MECCANISMI 161
10.2.4 Integrazione delle equazioni
Schiacciamento del LubrificanteSchiacciamento del Lubrificante
K
C
M
g
KH
X0 X1
F C X X X g
F Csq X X X gV
V
= >
=
( ) /
( ) /1 0 1 0
1 0 1 0
2
2
X
X
[ ]Csq b D h= 12 4 3 2 µ / ( ) / 1 1 1
1 2D D D= +
µ = viscosità dinamica
del lubrificante
h = altezza del meato
Integrazione delle equazioni:Integrazione delle equazioni:impiego di SIMULINKimpiego di SIMULINK
K
C
M
g
X0 X1
M X K X X C X X ( ) ( )1 1 0 1 0=

162 CAPITOLO 10. MODELLAZIONE
10.2.5 La validazione
La validazioneLa validazioneMECCANISMO
MODELLORILIEVI
SPERIMENTALI
CONFRONTO
AGGIORNAMENTO
DEL MODELLO
Si tratta di "aggiustare" i valori dei parametri del modello in base al confronto del risultato numerico
con il rilievosperimentale
della legge di moto.
La validazione del modello è una fase essenziale, a causa delle incertezze presenti nel calcolo dei parametri, soprattutto rigidezze e smorzamenti.
Esempio di Esempio di
validazionevalidazione
0 0.005 0.01 0.015tempo [s]
acc
[m/s
^2]
rilevamento sperimentale
0 0.005 0.01 0.015tempo [s]
acc
[m/s
^2]
modello non validato
0.015 0.02 0.025 0.03tempo [s]
acc
[m/s
^2]
modello validato

10.2. MODELLAZIONE DI MECCANISMI 163
10.2.6 Impiego del modello
Impiego del modelloImpiego del modello
Dopo la validazione il modello è utilizzabile per:
prevedere il comportamento del meccanismo:• a seguito di modifiche di alcuni suoi
componenti• in altre condizioni operative
come base di partenza per la modellazione di meccanismi simili (in cui la struttura generale resta invariata), senza la necessità di ulteriore validazione.
Impiego del modelloImpiego del modello
I risultati della simulazione forniscono informazioni su:I risultati della simulazione forniscono informazioni su: effettiva legge di moto del cedenteeffettiva legge di moto del cedente effettivo moto degli organi del meccanismo, in effettivo moto degli organi del meccanismo, in
corrispondenza delle coordinate del modellocorrispondenza delle coordinate del modello forze (coppie) scambiate tra gli organi del forze (coppie) scambiate tra gli organi del
meccanismomeccanismo
Questi risultati possono risultare molto utili per la Questi risultati possono risultare molto utili per la risoluzione di problemi funzionali, riscontrati sia su risoluzione di problemi funzionali, riscontrati sia su macchine in eserciziomacchine in esercizio sia su sia su prototipoprototipo, e permettono , e permettono di individuare i possibili problemi dinamici e la loro di individuare i possibili problemi dinamici e la loro soluzione anche nella fase di soluzione anche nella fase di progettoprogetto..

164 CAPITOLO 10. MODELLAZIONE
Impiego del modello: sul prototipoImpiego del modello: sul prototipo
MECCANISMO
MODELLO
PRESTAZIONIFUNZIONALI
SIMULAZIONEPRESTAZIONI
MODIFICHE SULMECCANISMO
MODIFICHE SUL MODELLO
OK ?
OK ?
SI' NO
SI'
NO
Impiego del modello: in fase di progettoImpiego del modello: in fase di progetto
MODELLO
MODIFICHE SUL MODELLO
OK ?SI' NO
DISEGNO
SIMULAZIONE
MODIFICHE SULDISEGNO
(EVENTUALI)

10.2. MODELLAZIONE DI MECCANISMI 165
10.2.7 Esempio no.1
Meccanismo per moto Meccanismo per moto rettilineo alternorettilineo alterno
Con riferimento alla coppia cinematica cammaCon riferimento alla coppia cinematica camma--rulli, sono state rulli, sono state esaminate due condizioni:esaminate due condizioni:
Condizioni Condizioni NormaliNormali
GiocoGioco IncrementatoIncrementato•• èè stato introdotto artificialmente un gioco quattro volte stato introdotto artificialmente un gioco quattro volte
superiore a quello in condizioni normali;superiore a quello in condizioni normali;la condizione la condizione èè ancora accettabile per il funzionamento in ancora accettabile per il funzionamento in produzione ma richiede ispezioni piproduzione ma richiede ispezioni piùù frequenti;frequenti;la condizione simula il malfunzionamento dovuto a usura.la condizione simula il malfunzionamento dovuto a usura.
Condizioni di provaCondizioni di prova

166 CAPITOLO 10. MODELLAZIONE
Analisi SperimentaleAnalisi Sperimentale
Legge di moto Legge di moto
TeoricaTeorica
0 20 40 60 80 100 120
Time [ms]
0 20 40 60 80 100 120
Time [ms]
acc.
Y3
0 20 40 60 80 100 120
Time [ms]a
cc.
Y3
Legge di moto
Sperimentale del cedente
Analisi Sperimentale in frequenzaAnalisi Sperimentale in frequenza
0 100 200 300 400 5000
50
100
150
Frequency [Hz]
0 100 200 300 400 5000
50
100
150
Frequency [Hz]
FF
T a
cc.
Y3
0 100 200 300 400 5000
50
100
150
Frequency [Hz]
FF
T a
cc.
Y3
Legge di moto Legge di moto
TeoricaTeorica
Legge di moto
Sperimentale del cedente

10.2. MODELLAZIONE DI MECCANISMI 167
Modello a Parametri ConcentratiModello a Parametri Concentrati
Y3
X2
Y2
Z0, Z1
Riduzione delle coordinateRiduzione delle coordinate
X2
Y3
Y2
M2
M3
K1
K3
X0 X1
M1 K2

168 CAPITOLO 10. MODELLAZIONE
Rapporto di RiduzioneRapporto di Riduzione
X2
Y2
2
2
2
2
XY
dXdYi
==
0 100 200 3000.7
0.8
0.9
1
1.1
[deg]
La rigidezza KLa rigidezza K33
X21
Y3
1
tg
0 100 200 3005
6
7
8
9
10
11
12x 10
6
[deg]
K3
[N/m
]
La cedevolezza 1/K3 si valuta come lo spostamento Y3prodotto da una forza unitaria agente sulla coordinata Y3(mantenendo fissa la coordinata X2).

10.2. MODELLAZIONE DI MECCANISMI 169
La forza di attrito FaLa forza di attrito Fa33
F T resistenza tenute
f coefficiente di attrito
N componente normale forza di contatto perno-boccola
0 20 40 60 80 100 120Time [ms]
acc.
Y3
)()( 33 NfFysignF Ta +=
333
33333
a
ave
FymFFFym
=++=
Integrazione equazioni del moto: Integrazione equazioni del moto: SIMULINKSIMULINK
33333
332222
221111
)()(
ave
veve
veve
FFFymFFiFFxm
FFFFxm
++=
++=++=
Leggedi moto
X0
kc_10
MASSA 2X2
kc_32
MASSA 3Y3
kc_21
MASSA 1X1

170 CAPITOLO 10. MODELLAZIONE
ValidazioneValidazione
0 20 40 60 80 100 120Time [ms]
acc.
Y3
0 20 40 60 80 100 120Time [ms]
acc.
Y3
0 20 40 60 80 100 120Time [ms]
acc.
Y3
Velocità rotazione camma: 500 rpm
Risultati: tempoRisultati: tempo
0 20 40 60 80 100 120Time [ms]
acc.
Y3
0 20 40 60 80 100 120Time [ms]
acc.
Y3
0 20 40 60 80 100 120Time [ms]
acc.
Y3
0 20 40 60 80 100 120Time [ms]
acc.
Y3

10.2. MODELLAZIONE DI MECCANISMI 171
10.2.8 Esempio no.2
Risultati: frequenzaRisultati: frequenza
0 100 200 300 400 5000
50
100
150
Frequency [Hz]
FF
T a
cc.
Y3
0 100 200 300 400 5000
50
100
150
Frequency [Hz]
FF
T a
cc.
Y3
0 100 200 300 400 5000
50
100
150
Frequency [Hz]
FF
T a
cc.
Y3
0 100 200 300 400 5000
50
100
150
Frequency [Hz]
FF
T a
cc.
Y3
Modellazione di unaModellazione di unadistribuzione desmodromicadistribuzione desmodromica
Conjugate cam
Rocker spring
Negative rocker
Positive rocker
Adjuster
Valve-head
1 2
x8
3
6
k6
x4
x5
,
x7

172 CAPITOLO 10. MODELLAZIONE
Modello a Modello a parametri parametri
concentraticoncentratiConjugate cam
Rocker spring
Negative rocker
Positive rocker
Adjuster
Valve-head
1 2x8
3 6
k6
x4
x5
,
x7
Rilievo Rilievo sperimentalesperimentale
Risultato numerico
0 0.005 0.01 0.015tempo [s]
acc
[m/s
^2]
rilevamento sperimentale
0.015 0.02 0.025 0.03tempo [s]
acc
[m/s
^2]
modello validato
Risultati: Risultati: accelerazione accelerazione valvolavalvola

10.2. MODELLAZIONE DI MECCANISMI 173
10.2.9 Esempio no.3
Modellazione Modellazione di un di un meccanismo meccanismo per moto per moto rotatorio rotatorio alternoalterno1
2
3
45
tangentialaccelerometer
CAM MECHANISM
FLYWHEEL
MOTOR
ROCKER
CAMSHAFT AXIS
CAM FOLLOWER AXIS
ROCKER AXIS
Ra
Modello a parametri Modello a parametri concentraticoncentrati
1
2
3
45
tangentialaccelerometer
CAM MECHANISM
FLYWHEEL
MOTOR
ROCKER
CAMSHAFT AXIS
CAM FOLLOWER AXIS
ROCKER AXIS
Ra

174 CAPITOLO 10. MODELLAZIONE
Analisi Analisi
preliminarepreliminare
Indagine sulle cause
dello scostamento
della legge di moto
effettiva da quella
teorica.
Experimental
Theoretical
a
1 ciclo camma
Accelerazione angolare [rad/s2]
160
rpm
a
Experimental
Theoretical
400
rpm
Frequency [Hz]
An
gu
lar
accele
rati
on
[d
B]
0
20
40
0 50 100 150 200
20
40
60
Experimental
Theoretical
Experimental
Theoretical
160 rpm
400 rpm
Banda di risonanza tra 100 e 200 HzBanda di risonanza tra 100 e 200 Hz
L’interazione
tra le
frequenze
della legge di
moto teorica e
le risonanze
del
meccanismo
nel campo di
frequenze
100- 200 Hz
produce
oscillazioni
nella
accelerazione
del levetto.

10.2. MODELLAZIONE DI MECCANISMI 175
Frequency [Hz]
An
gu
lar a
ccele
rati
on [
dB
]
0
20
0 5 10 15 20
0
20
40
1 2 3 4 5 6 7
1 2 3
160
rpm
400
r pm
Altre risonanze: 6 e 14 Hz Altre risonanze: 6 e 14 Hz
Le oscillazioni ad
alta frequenza non
sono esattamente
sovrapposte al
valore teorico. Cio è
dovuto per lo più ad
oscillazioni a bassa
frequenza della
velocità angolare
dell’albero a
camme. Tali
oscillazioni sono
legate alle proprietà
dinamiche della
trasmissione
meccanica a monte
dell’oscillatore.
Validazione: modifica dei parametriValidazione: modifica dei parametri
Si sono ridotte le rigidezze Si sono ridotte le rigidezze
K3, K4, K5 del 40% in K3, K4, K5 del 40% in
modo da far cadere la terza modo da far cadere la terza
frequenza naturale nel frequenza naturale nel
range 100range 100--200 Hz.200 Hz.
Si sono modificati opportunamente i
parametri J1, J2, K1, K2 in modo da
far coincidere le prime due
frequenze del modello con le due
basse risonanze del meccanismo.
J1 = 0.12060 kg m2
J2 = 0.09220 kg m2
J3 = 0.01304 kg m2
J4 = 0.00049 kg m2 fn1 = 5.6 - 6.0 Hz
J5 = 0.00131 kg m2 fn2 = 13.8 - 14.2 Hz
k1 = 391.00 Nm/rad fn3 = 131.7 - 163.7 Hz
k2 = 319.00 Nm/rad fn4 = 367.5 - 422.5 Hz
k3 = 22346 - 51498 Nm/rad fn5 = 938.6 - 939.4 Hz
k4 = 4378.0 Nm/rad
k5 = 9745.0 Nm/rad
q = 1.2 10-4 s

176 CAPITOLO 10. MODELLAZIONE
RisultatiRisultati
Velocità albero a camme 400 rpm
Time [s]0.00 0.05 0.10 0.15
Ang
ular
acc
eler
atio
n [r
ad/s
2 ]
a
b
ExperimentalTheoretical
NumericalTheoretical
RisultatiRisultati
Time [s]0.0 0.1 0.2 0.3
Ang
ular
acc
eler
atio
n [r
ad/s2 ]
ExperimentalTheoretical
a
b
NumericalTheoretical
Velocità albero a camme 160 rpm

10.2. MODELLAZIONE DI MECCANISMI 177
Impiego del Impiego del modello: modello:
inerzia del volanoinerzia del volano
Ang
ular
acc
eler
atio
n [r
ad/s
2 ]
Time [s]0.0 0.1 0.2 0.3Time [s]
0.0 0.1 0.2 0.3
Cam
shaf
t spe
ed [r
pm]
100
120
140
160
180
200
Nominal speed
Velocità albero a camme 160 rpm
Inerzia del volano aumentata di un fattore 3
Impiego del Impiego del modello: modello:
usura e giochiusura e giochi
Previsione del comportamento in vista dell’usura nelle coppie cinematiche camma-rullo dell’intermittore.
Time [s]0.00 0.05 0.10 0.15
Ang
ular
acc
eler
atio
n [r
ad/s
2 ]
a
b
Theoretical
NumericalTheoretical
Numerical Gioco = 0 mm
Gioco = 0.1 mm
Velocità albero a camme 400 rpm
Gioco = 0.1 mm

178 CAPITOLO 10. MODELLAZIONE
10.3 Integrazione delle equazioni del moto
Le equazioni del moto relative ai modelli di meccanismo mostrati in precedenza (§10.1 e§10.2) possono presentare numerose non linearita. Occorre pertanto ricorrere a metodi disoluzione numerici. A tale scopo, in Appendice M viene mostrato brevemente l’impiegodel software Simulink R⃝.
10.4 Il metodo degli elementi finiti (FEM)
Si rimanda alla Appendice N.

RIFERIMENTI BIBLIOGRAFICI 179
Riferimenti Bibliografici
[DN93] T. L. Dresner and R. L. Norton. Modern Kinematics: Developments in theLast Forty Years. John Wiley, New York:, 1993.
[DR95] G. Dalpiaz and A. Rivola. A kineto-elastodynamic model of a mechanismfor automatic machine. In Proceedings of the Ninth World Congress on theTheory of Machines and Mechanisms, volume 1, pages 327–332, Milano, 1995.Edizioni Unicopli SpA.
[DR00] G. Dalpiaz and A. Rivola. A non-linear elastodynamic model of a desmodromicvalve train. Mechanism and machine theory, 35(11):1551–1562, 2000.
[Inm13] D. J. Inman. Engineering Vibration. Prentice Hall, Boston, 4 edition edition,2013.
[Joh85] K. L. Johnson. Contact Mechanics. Cambridge University Press, 1985.
[Kos74] M. P. Koster. Vibrations in Cam Mechanisms. McMillan Press, London, 1974.
[LBDH83] M. Lalanne, P. Berthier, and J. Der Hagopian. Mechanical Vibrations forEngineers. John Wiley & Sons Inc, Chichester West Sussex ; New York, 1983.
[LW76] S. Levy and J. P. Wilkinson. The Component Element Method in Dynamics.McGraw-Hill, New York, 1976.
[Rao10] Singiresu S. Rao. Mechanical Vibrations. Prentice Hall, Upper Saddle River,N.J, 5th edition edition, 2010.
[RD93] A. Rivola and G. Dalpiaz. Analisi dinamica di un meccanismo per macchinaautomatica. Pubbl. DIEM 76, University of Bologna, 1993.
[RTDC07] A. Rivola, M. Troncossi, G. Dalpiaz, and A. Carlini. Elastodynamic analysis ofthe desmodromic valve train of a racing motorbike engine by means of a com-bined lumped/finite element model. Mechanical systems and signal processing,21(2):735–760, 2007.

APPENDICI
180

Appendice A
Richiami di Dinamica
A.1 Baricentro e Quantita di moto
In uno spazio euclideo sia dato un generico sistema di punti materiali Pj, essendo la massadi ciascuno mj. La massa totale del sistema e ovviamente:
m =∑j
mj
Il baricentro G del sistema e definito dalla:∑j
mj(Pj −G) = 0 G =
∑jmjPj
m(A.1)
Valgono le seguenti proprieta:
• G non dipende dalla posizione del punto assunto come origine dello spazio euclideo;
• se il corpo e omogeneo, G non dipende dalla densita;
• se le masse sono distribuite lungo una retta o su una superficie piana, G appartienea quella retta o a quella superficie;
• se il sistema e dotato di un piano di simmetria, G giace su di esso;
• comunque si scomponga il sistema in sottosistemi, G coincide con il baricentro deipunti materiali che costituiscono i baricentri dei singoli sottosistemi.
La quantita di moto del sistema e definita come:
Q =∑j
mjdPjdt
(A.2)
Dalla definizione di baricentro si ricava:
Q =∑j
mjPj = mG = mvG (A.3)
Il momento della quantita di moto rispetto ad un generico punto O risulta:
KO =∑j
(Pj −O) ∧mjPj (A.4)
181

182 APPENDICE A. RICHIAMI DI DINAMICA
A.2 Azioni di inerzia
La risultante delle forze d’inerzia e:
Fi = −∑j
mjPj (A.5)
Dalla definizione di baricentro (A.1) e quantita di moto (A.2) si ricava:
Fi = −mG = −maG = −dQdt
(A.6)
Il momento risultante delle forze d’inerzia rispetto a O e:
Mi,O = −∑j
(Pj −O) ∧mjPj (A.7)
Derivando rispetto al tempo l’espressione del momento della quantita di moto si ottiene:
dKO
dt=∑j
(Pj −O) ∧mjPj +∑j
(Pj −O) ∧mjPj =
=∑j
mjPj ∧ Pj − O ∧∑j
mjPj +∑j
(Pj −O) ∧mjPj
(A.8)
Osservando che il primo addendo a secondo membro della (A.8) e nullo e tenendo presentela definizione di baricentro e la (A.7), si ricava:
dKO
dt= −O ∧mG−Mi,O (A.9)
ossia:
Mi,O = −dKO
dt− vO ∧Q (A.10)
Se O un punto fisso (O = 0) oppure la velocita di O e parallela a quella di G (ovveroquando O coincide con G), la (A.10) diventa:
Mi,O = −dKO
dt(A.11)
Risulta dunque sempre conveniente assumere O coincidente con un punto fisso o con ilbaricentro.
A.2.1 Caso del Corpo rigido continuo
Sia ω la velocita angolare del corpo rispetto ad un riferimento inerziale e sia O un puntoappartenente al corpo. La velocita di un qualunque altro punto e data da:
P = O + ω ∧ (P −O) (A.12)
Assumendo come polo dei momenti lo stesso punto O, si ha:
KO = −∫m
(P −O) ∧ P dm =
=
∫m
(P −O) ∧ O dm+
∫m
(P −O) ∧ [ω ∧ (P −O)] dm =
=
∫m
(P −O)dm ∧ O −∫m
(P −O) ∧ [(P −O) ∧ ω] dm.
(A.13)

A.2. AZIONI DI INERZIA 183
Assumiamo che O coincida con un punto fisso (qualora esista) ovvero con il baricentro.Nel primo caso si ha: O = 0; nel secondo:∫
m
(P −O) dm =
∫m
(P −G) dm = 0 (A.14)
Comunque, il primo addendo che compare a secondo membro della (A.13) diventa nullo,per cui risulta:
KO = −∫m
(P −O) ∧ [(P −O) ∧ ω] dm (A.15)
La (A.15) si puo derivare rispetto al tempo ottenendo:
dKO
dt= −
∫m
(P −O) ∧ [(P −O) ∧ ω] dm+ ω ∧KO (A.16)
Le quantita vettoriali considerate sinora possono essere proiettate in un sistema diriferimento, fisso o mobile. Nel sistema di rifermento assunto, le componenti del vettore(P −O) siano:
(P −O) =[x y z
]T.
La (A.15) diventa:
KO = [JO] ω (A.17)
dove la matrice simmetrica:
[JO] =
Jx −Jxy −Jxz−Jxy Jy −Jyz−Jxz −Jyz Jz
(A.18)
e detta tensore di inerzia. Tale matrice dipende dal polo O e dall’orientamento del sistemadi riferimento assunto. I suoi elementi (momenti di inerzia di massa) sono costanti solose tale sistema e solidale al corpo rigido.La (A.16) si puo anche scrivere nella seguente forma:
dKO
dt= [JO]ω + [ω][JO]ω (A.19)
dove [ω] e la matrice antisimmetrica:
[ω] =
0 −ωz ωyωz 0 −ωx−ωy ωx 0
(A.20)
Per la (A.11) risulta infine:
Mi,O = −[JO]ω − [ω][JO]ω (A.21)
A.2.2 Applicazione ai rotori
Consideriamo la particolare applicazione, frequente nella dinamica delle macchine, ad uncorpo rigido rotante attorno ad un asse fisso (sia questo l’asse z del riferimento fisso e

184 APPENDICE A. RICHIAMI DI DINAMICA
del riferimento solidale al corpo). Il corpo viene definito in tal caso rotore. La (A.21)consente di scrivere:
Mi,O = −[JO]
00ω
−
0 −ω 0ω 0 00 0 0
[JO]
00ω
=
JxzJyz−Jz
ω +
−JyzJxz0
ω2 (A.22)
La (A.22) rappresenta le componenti di Mi,O tanto nel riferimento fisso quanto in
quello mobile. E chiaro che, mentre nel primo caso i momenti di inerzia sono dipendentidal tempo, nel secondo caso sono costanti.
Nel caso aprticolare in cui l’asse di rotazione sia principale di inerzia, la (A.22) diventa:
Mi,O =
00
−Jz
ω (A.23)
Per quanto riguarda la risultante delle forza di inerzia, essa vale:
Fi = −mG (A.24)
Se il baricentro cade sull’asse di rotazione e evidentemente: Fi = 0.
A.3 Energia cinetica
L’energia cinetica di un sistema di punti materiali e per definizione:
T =1
2
∑j
mjP2j (A.25)
Nel caso particolare del corpo rigido continuo, la (A.25) diventa:
T =1
2
∫m
[O + ω ∧ (P −O)
]2dm (A.26)
Se si assume che O sia fisso (O = 0) o coincidente con G (∫m(P −G)dm = 0) e si espande
la (A.26):
T =1
2mO2 + O · ω ∧
∫m
(P −O)dm+1
2
∫m
[ω ∧ (P −O)] [ω ∧ (P −O)] dm (A.27)
Nelle ipotesi assunte, il secondo addendo della (A.27) e nullo, per cui:
T =1
2mO2 +
1
2ω
∫m
(P −O) ∧ [ω ∧ (P −O)] dm
=1
2mO2 − 1
2ω
∫m
(P −O) ∧ [(P −O) ∧ ω] dm
(A.28)
Proiettando la (A.28) nel sistema di riferimento assunto, si ottiene:
T =1
2mO2 +
1
2ωT [JO]ω =
=1
2
[mO2 + Jxω
2x + Jyω
2y + Jzω
2z − 2Jxyωxωy − 2Jxzωxωz − 2Jyzωyωz
] (A.29)

A.4. GRADI DI LIBERTA 185
ovvero:
T =1
2ωT [JO]ω (A.30)
se O e un punto fisso, e:
T =1
2mv2
G +1
2ωT [JG]ω (A.31)
se O = G.
A.4 Gradi di Liberta
Il minimo numero di coordinate indipendenti richiesto per determinare univocamente laposizione di tutti gli elementi di un sistema ad ogni istante di tempo, definisce il numerodi gradi di liberta del sistema. Nel seguito si parlera indifferentemente di gradi di liberta(gdl) o, nell’accezione anglosassone, di degrees of freedom (dof).
Indicato con n il numero di gdl di un generico sistema e sempre possibile definire unset di cosiddette coordinate generalizzate, usualmente indicate con qk (k=1,2,. . . ,n), ossiadi coordinate indipendenti in numero uguale a quello dei gdl del sistema.
A.5 Principio di d’Alembert
Le equazioni cardinali della Statica si possono generalizzare al caso della Dinamica, ossiaal caso in cui la configuraaizone del sistema meccanico varia nel tempo. Questo risultatoviene ottenuto attraverso il principio di D’Alembert1 che consente di studiare la condizionedinamica come una condizione statica equivalente.
Nel caso di un punto materiale di massam, il secondo principio della dinamica (secondalegge di Newton) afferma che l’accelerazione del punto dipende dalla risultante di tutte leforze (attive e reattive) su di esso agenti attraverso la relazione:∑
j
Fj = ma (A.32)
che naturalmente puo riscriversi nella forma:∑j
Fj −ma = 0 (A.33)
Se si definisce il forza di inerzia Fin il prodotto della massa per l’accelerazione del puntocambiata di segno:
Fin = −ma (A.34)
la (A.33) puo essere riscritta nella forma di una equazione di equilibrio, nella quale alleforze agenti sul punto si aggiunge la forza di inerzia definita dalla (A.34):∑
j
Fj + Fin = 0 (A.35)
Apparentemente nulla si e guadagnato da tale semplice operazione algebrica, tuttaviacio che rende geniale il principio di d’Alembert e l’interpretazione della relazione (A.33)
1Parigi 16 Novembre 1717 - Ottobre 1783

186 APPENDICE A. RICHIAMI DI DINAMICA
quale condizione di equilibrio. In altri termini, da quest’ultima relazione si deduce che lasomma delle forze d’inerzia a tutte le altre forze agenti sul sistema produce equilibrio.
Cio introduce la possibilita di trattare problemi di dinamica avvalendosi delle metodo-logie proprie della Statica e, in particolare, del PLV.
A.6 Principio dei Lavori Virtuali
Lo studio della Statica di un sistema di corpi puo essere affrontato con un approccio checonsiste nell’imporre l’annullamento del lavoro virtuale compiuto complessivamente datutte le azioni attive per qualsiasi spostamento virtuale del sistema. In altre parole sitratta del principio dei lavori virtuali (PLV), che puo enunciarsi asserendo che:
in un sistema meccanico con vincoli bilaterali fissi e non dissipativi (ideali),condizione necessaria e sufficiente per l’equilibrio e che sia nullo il lavorovirtuale delle forze e delle coppie attive su di esso agenti a seguito di qualsiasispostamento virtuale del sistema.
Per spostamenti virtuali si intende spostamenti infinitesimi, compatibili con i vincoli ereversibili. In altri termini, si ha:
δL =nc∑k
(nF∑j
Fk,j · δrk,j +nM∑l
Mk,l · δθk,l
)= 0 (A.36)
dove nc e il numero dei corpi rigidi che costituiscono il sistema, nF e nM sono rispettiva-mente il numero di forze e momenti agenti sul k-esimo corpo, mentre δrk,j e δθk,l rappre-sentano rispettivamente gli spostamenti virtuali dei punti di applicazione delle forze Fk,j
e le rotazioni virtuali dei corpi su cui sono applicati i momenti Mk,l.
A.6.1 Principio dei Lavori Virtuali in Dinamica
In Dinamica, sulla base del principio di d’Alembert (§A.5), l’enunciato del PLV dovraritenersi valido a condizione di includere nell’espressione del lavoro virtuale i terminirelativi alle azioni inerziali:
δL+ δLin =nc∑k
(nF∑j
Fk,j · δrk,j +nM∑l
Mk,l · δθk,l −mkaGk· δGk +Min,Gkk · δθk
)= 0
(A.37)
dove mk e Gk sono rispettivamente la massa e il baricentro del k-esimo corpo e Min,Gkk
e il momento risultante delle forze di inerzia sul k-esimo corpo rispetto a Gk.
L’osservazione del perche una massa in movimento possa essere trattata come una inequilibrio viene superata considerando il significato di spostamenti virtuali. Come e noto,il criterio di equilibrio di un arbitrario sistema di forze richiede che sia nullo il lavorovirtuale di tutte le forze agenti. Pertanto, essendo gli spostamenti virtuali e non effettiviil principio e applicabile tanto alle masse in movimento quanto a quelle a riposo.
Nello studio della dinamica delle macchine il PLV viene, di regola, utilizzato per ladeterminazione delle forze incognite: si sceglie arbitrariamente un insieme di spostamenti

A.7. EQUAZIONE ENERGETICA 187
virtuali e si uguaglia a zero la somma dei lavori virtuali delle forze applicate al sistema,imponendo cosı che le forze stesse siano in equilibrio. Volendo calcolare il valore del-la reazione incognita, si puo sostituire il vincolo con la reazione stessa, dando al sistemaspostamenti virtuali per i quali la razione incognita compia lavoro non nullo. Nell’applica-zione allo studio dinamico delle macchine ad un grado di liberta, si prendono comunementecome spostamenti virtuali gli spostamenti che il sistema effettivamente subisce durante ilmovimento. Allora l’equazione dei lavori virtuali si riconduce a quella dell’energia (§A.7).
A.7 Equazione energetica
L’equazione energetica e una formulazione particolare del PLV, a cui ci si riconduce allor-quando si scelgono come spostamenti virtuali gli spostamenti che il sistema effettivamentesubisce durante il movimento. Se si suppone che l’energia interna (elastica, termica, ecc.)del sistema in studio non subisca modifiche (e quindi in particolare, che i membri che co-stituiscono il sistema siano rigidi) e che il sistema stesso non scambi energia con l’esternose non sotto forma di energia meccanica, l’equazione dell’energia si scrive:
dW + dLin = dV (A.38)
dove dW e dLin sono i lavori elementari compiuti rispettivamente dalle forze attive esternenon conservative (che non ammettono potenziale) e da quelle d’inerzia, mentre dV e lavariazione d’energia potenziale del sistema. La (A.38) si puo scrivere anche nella forma:
dLm + dLr + dLp + dLin = dV (A.39)
dove dLm, dLr, dLp sono i lavori elementari compiuti rispettivamente dalle forze motricie da quelle resistenti utili e passive. D’altro canto, il lavoro elementare compiuto dalleforze d’inerzia e uguale all’opposto della variazione d’energia cinetica del sistema:
− dLin =∑j
mjPjdPj =∑j
mjdPjdt
dPj =∑j
mjPjdPj = d
(1
2
∑j
mjP2j
)= dT
(A.40)per cui l’eq. (A.39) puo essere scritta nella forma:
|dLm| − |dLr| − |dLp| = dV + dT (A.41)
dove si e evidenziato il fatto che il lavoro compiuto dalle forze motrici e positivo, mentrequello compiuto dalle forze resistenti utili e passive e negativo. Se poi si suppone che sulsistema non agiscano forze conservative (che ammettono potenziale), la (A.41) diventa:
|dLm| − |dLr| − |dLp| = dT (A.42)
A.7.1 Conservazione dell’Energia Meccanica
Quando in un sistema vincolato le forze attive sono conservative, ovvero ammettonopotenziale U , allora si ha:
dU = dT (A.43)

188 APPENDICE A. RICHIAMI DI DINAMICA
da cui la quantita (T − U) si mantiene costante nel tempo. Considerando l’energiapotenziale V = −U il teorema di conservazione dell’energia meccanica assume la forma:
T (t) + V (t) = E (A.44)
dove E e una costante che rappresenta l’energia totale del sistema e che possiamo calcolaremediante le condizioni iniziali.
A.8 Equazioni di Lagrange
Oltre ai citati mezzi di indagine, nello studio dinamico delle macchine altri mezzi trova-no conveniente impiego allorche si debbano studiare sistemi complessi a molti gdl. Perlo studio di questi problemi e ad esempio particolarmente utile l’uso delle equazioni diLagrange.
Se n e il numero di gdl del sistema considerato, n sono le equazioni di Lagrange chene individuano il moto. La generica di queste equazioni puo essere scritta nella forma:
d
dt
(∂T
∂qk
)− ∂T
∂qk+∂V
∂qk= Qk, k = 1, . . . , n (A.45)
dove: qk e la generica coordinata generalizzata, T e V sono rispettivamente l’energiacinetica e l’energia potenziale e la quantita:
Qk =∑j
Fj ·∂r
j
∂qk(A.46)
e la generica forza generalizzata di tipo non conservativo. In altri termini e la compo-nente lagrangiana delle azioni agenti sul sistema, escluse quelle inerziali (il cui effetto econsiderato in T ) e quelle che ammettono potenziale, tipicamente le forze peso e le forzeelastiche (queste ultime sono considerate in V ).
L’impiego delle equazioni di Lagrange nello studio dei sistemi complessi e vantaggiosorispetto a quello delle equazioni di d’Alembert perche presenta minori difficolta concet-tuali; come contropartita l’interpretazione fisica delle equazioni di Lagrange non e sempreimmediata.
A.9 Equivalenza dinamica: riduzione
Nello studio dinamico di un sistema puo essere conveniente ricondursi allo studio dell’equi-librio di un particolare membro, la cui posizione caratterizzi facilmente la configurazionedel sistema stesso. La sostituzione del sistema reale con uno piu semplice e lecita purchei due sistemi siano equivalenti dinamicamente.
Due sistemi di masse sono dinamicamente equivalenti se posseggono la medesima ener-gia cinetica e le medesime risultanti delle forze d’inerzia per qualunque atto di moto.In questo caso, infatti, essi ammettono le medesime equazioni del moto (sia nella formadi Lagrange sia in quella di D’Alembert). Le Eqq. (A.6), (A.21) e (A.29) provano checondizione necessaria e sufficiente affinche cio avvenga e che i due sistemi abbiano:
• lo stesso baricentro

A.9. EQUIVALENZA DINAMICA: RIDUZIONE 189
• la stessa massa totale
• lo stesso tensore d’inerzia rispetto ad un medesimo polo
Facendo riferimento all’Equazione energetica (A.41) l’equivalenza dinamica si ottieneimponendo che i due sistemi diano origine, per spostamenti corrispondenti, ad ugualivalori dei lavori elementari delle azioni applicate e ad uguali valori dell’energia cinetica.A questo scopo viene effettuata la riduzione delle forze (o dei momenti) e delle masse (odei momenti di inerzia) ad un punto (o ad un asse) del sistema semplificato.
La riduzione di una o piu forze (o momenti) si ottiene sostituendo le forze stesse (imomenti stessi) con un’unica forza applicata nel punto di riduzione (un unico momentoattorno all’asse di riduzione), in modo che il lavoro della forza ridotta (del momento ri-dotto) per uno spostamento (rotazione) elementare del sistema uguagli quello delle forze(dei momenti) prese in esame.La riduzione di una o piu masse ad un punto di riduzione si ottiene sostituendo le mas-se stesse con un’unica massa, tale che non venga alterata l’energia cinetica del sistemanell’intorno della configurazione desiderata.
Effettuata la riduzione delle forze e delle masse, lo studio dinamico del sistema puoessere effettuato applicando l’equazione dell’energia, ovvero il principio dei lavori virtuali,allo schema meccanico semplificato.

Appendice B
Serie di Taylor
Il teorema di Taylor afferma che una funzione puo essere rappresentata in prossimita diun punto x = x0, dall’espansione:
f(x) = f(x0) + (x− x0)dF
dx
∣∣∣∣x=x0
+1
2!(x− x0)
2d2f
dx2
∣∣∣∣x=x0
+ . . .
· · ·+ 1
k!(x− x0)
k dkf
dxk
∣∣∣∣x=x0
+ . . .+Rn
(B.1)
dove il termine Rn e dato da:
f(x) =1
n!(x− x0)
ndnf
dxn
∣∣∣∣x=b
(B.2)
con b compreso tra x0 e x. Il risultato e valido se la funzione ammette derivate continuefino all’ordine n. Se Rn tende a zero, l’espansione e detta serie di Taylor della funzionef(x) attorno a x = x0. Se x0 = 0, la serie e anche detta serie di McLaurin.
Esempio:
sinx = x− x3
3!+x5
5!− x7
7!+ . . . (B.3a)
cos x = 1− x2
2!+x4
4!− x6
6!+ . . . (B.3b)
ex = 1 + x+x2
2!+x3
3!+x4
4!+ . . . (B.3c)
dove x0 = 0. Si noti che se x e piccolo le prime due danno luogo a due approssimazionilargamente usate delle funzioni seno e coseno: sinx ≈ x e cos x ≈ 1.Inoltre, se nella terza si considera x = iθ, si ottiene:
eiθ = 1 + iθ − θ2
2!− i
θ3
3!+θ4
4!+ . . . ; (B.4)
separando la parte reale da quella immaginaria:
eiθ =
(1− θ2
2!+θ4
4!− θ6
6!+ . . .
)+ i
(θ − θ3
3!+θ5
5!− θ7
7!+ . . .
), (B.5)
si ottengono le identita di Eulero:
eiθ = cos θ + i sin θ e−iθ = cos θ − i sin θ. (B.6)
190

Appendice C
Rigidezze equivalenti e Momenti diinerzia di massa
191

192 APPENDICE C. RIGIDEZZE E MOMENTI DI INERZIA
C.1 Rigidezze equivalenti
Figura C.1: Rigidezze flessionali

C.1. RIGIDEZZE EQUIVALENTI 193
Figura C.2: Rigidezze torsionali

194 APPENDICE C. RIGIDEZZE E MOMENTI DI INERZIA
C.2 Momenti di inerzia di massa
Figura C.3: Momenti di inerzia di massa

Appendice D
Equazioni differenziali ordinarie
Data l’equazione differenziale ordinaria (EDO) seguente:
andnx(t)
dtn+ an−1
dn−1x(t)
dtn−1 + . . .+ a1dx(t)
dt+ a0x(t) = F (t) (D.1)
il suo integrale generale e:x(t) = xgo(t) + xp(t)
dove xgo(t) e l’integrale dell’equazione omogenea associata, mentre xp(t) e un’integraleparticolare della EDO.
Integrale generale dell’omogenea associata
x0(t) = C1ez1t + C2e
z2t + . . .+ Cneznt, (D.2)
dove z1, z2, . . . , zn sono radici distinte dell’equazione caratteristica:
anzn + an−1z
n−1 + an−2zn−2 + . . .+ a1z + a0 = 0 (D.3)
e C1, C2, . . . , Cn sono in generale numeri complessi.
Se l’equazione caratteristica ha m radici coincidenti, allora:
x0(t) = C1ez1t + C2te
z1t + . . .+ Cmtm−1ezmt + Cm+1t
mezmt + . . .+ Cneznt, (D.4)
Le eventuali radici complesse vanno a coppie: z1 = a + ib; z2 = a − ib. Le costanti diintegrazione si determinano in funzione delle condizioni iniziali che possono riguardare laposizione e/o la velocita: x(0) = x0 e x(0) = v0.
Integrale particolare
L’integrale particolare xp(t) dell’equazione completa (D.1) dipende dal termine F (t).
195

Appendice E
Sistema massa–molla con attritoCoulombiano
Per studiare il moto del sistema massa-molla in presenza di attrito Coulombiano (Fig. E.1)si considerino i due casi seguenti:
Figura E.1: Sistema massa–molla con attrito coulombiano
Caso 1
Quando lo spostamento x e positivo e la velocita dx/dt e positiva, o quando x e negativoe la velocita dx/dt e positiva (ad esempio quando la massa si muove da sinistra versodestra) l’equazione del moto vale:
mx+ kx = −µmg (E.1)
La (E.1) e una equazione differenziale del secondo ordine non omogenea, la cui soluzionee nella forma:
x(t) = A1 cosωnt+ A2 sinωnt−µN
k(E.2)
dove ωn =√k/m e la pulsazione della vibrazione e A1 eA2 sono costanti i cui valori
dipendono dalle condizioni iniziali.
Caso 2
Quando lo spostamento x e positivo e la velocita dx/dt e negativa, o quando x e negativoe la velocita dx/dt e negativa (ad esempio quando la massa si muove da destra verso
196

197
sinistra) l’equazione del moto vale:
mx+ kx = µmg (E.3)
La soluzione della (E.3) e data dalla:
x(t) = A3 cosωnt+ A4 sinωnt+µN
k(E.4)
dove A3 eA4 sono costanti i cui valori dipendono dalle condizioni iniziali.
Il termine µN/k che appare nelle Eqq. (E.2) e (E.4) e una costante che rappresentail cedimento della molla sotto l’azione della forza µN . Le Eqq. (E.2) e (E.4) mostranoche il moto e armonico, che ciascuna equazione vale per un mezzo ciclo π/ωn, e che ognimezzo ciclo la posizione di equilibrio statico varia da µN/k a −µN/k, come mostrato inE.2.
Figura E.2: Risposta libera del sistema massa–molla con attrito coulombiano
Esempio
Per analizzare le caratteristiche del moto, si assumano ad esempio le condizioni iniziali:
x(t = 0) = x0 x(t = 0) = 0;
in altre parole il sistema parte con velocita nulla e spostamento x0. Il moto si sviluppada destra verso sinistra: si ricade quindi nel “Caso 2”. Siano x0, x1, x2, . . . le ampiezzedel moto nei successivi mezzi periodi. Sostituendo le condizioni iniziali nella Eq. (E.4) enella sua derivata rispetto al tempo, si ottengono le costanti A3 e A4:
A3 = x0 −µN
k, A4 = 0
e la (E.4) diventa:
x(t) =
(x0 −
µN
k
)cosωnt+
µN
k. (E.5)

198 APPENDICE E. SISTEMA MASSA–MOLLA CON ATTRITO COULOMBIANO
Questa soluzione e valida solo per il primo mezzo periodo (0 ≤ t ≤ π/ωn). Quandot = π/ωn, la massa e nella sua estrema posizione di sinistra:
−x1 = x
(t =
π
ωn
)=
(x0 −
µN
k
)cosπ +
µN
k= −
(x0 −
2µN
k
).
Poiche il moto e partito con uno spostamento x = x0 e in un mezzo periodo il valore di xe divenuto −(x0 − 2µN/k), la riduzione di ampiezza nel semi–periodo e pari a: 2µN/k.
Nel secondo semi–periodo la massa si muove da sinistra a destra: va quindi usata la(E.2). Le condizioni iniziali per questo secondo tratto sono:
x = (t = 0) = −x1 = −(x0 −
2µN
k
); x(t = 0) = 0.
Percio le costanti A1 e A2 nella (E.2) assumono i valori:
A1 = x0 −3µN
k, A2 = 0
e la (E.2) diventa:
x(t) =
(x0 −
3µN
k
)cosωnt−
µN
k. (E.6)
Questa soluzione e valida solo per il secondo mezzo periodo (π/ωn ≤ t ≤ 2π/ωn). Altermine di questo semi–periodo lo spostamento della massa vale:
x2 = x0 −4µN
k.
mentre la velocita e nulla. Queste ultime divengono le condizioni iniziali per il terzo mezzociclo e la procedura puo essere continuata fino a quando il moto si arresta. In particolare,il moto si arresta quando xn ≤ µN/k, dal momento che la forza immagazzinata nellamolla (kx) risulta inferiore alla forza di attrito µN . Quindi, il numero di semi–periodi rche si sviluppano prima che il moto si arresti e fornito dalla:
x0 − r2µN
k≤ µN
k
vale a dire:
r ≥
x0 − µN
k2µN
k
.

Appendice F
Deformata trave appoggiata
Con riferimento alla Fig. F.1 l’equazione della linea elastica e per il tratto AC:
y(x) =Pl3
6EI
l2l
[1−
(l2l
)2
−(xl
)2](xl
); (F.1)
per il tratto CB:
y(x) =Pl3
6EI
l2l
[1−
(l2l
)2
−(l − x
l
)2](
l − x
l
); (F.2)
e, infine, nel punto C:
y(x = l1) =1
3
Pl21l22
EIl(F.3)
x
ly(x)
PA B
C
l2l1
Figura F.1: Trave appoggiata
Se l1 = l2 = l/2, la (F.1) diventa:
y(x) =Pl3
12EI
[3x
4l−(xl
)3]; (F.4)
e in mezzeria si ha:
y(x =l
2) = ymax =
Pl3
48EI(F.5)
Pertanto la freccia in una sezione a distanza x e:
y(x) =Pl3
48EI
[3x
l− 4
(xl
)3]= ymax
[3x
l− 4
(xl
)3]; (F.6)
Essendo la rigidezza pari all’inverso della freccia corrispondente ad un carico unitario,
la rigidezza flessionale della trave con carico in mezzeria vale k =48EI
l3(vedi Eq. (F.5)).
199

Appendice G
Problema agli autovalori simmetrico
Si considerino le equazioni del moto di un sistema a n gradi di liberta:
[M ]x+ [K]x = 0
La matrice massa [M ] sia diagonale e la matrice rigidezza [K] sia simmetrica. In generale,la matrice dinamica [A] = [M ]−1[K] non e simmetrica. Dal punto di vista computazionale,la determinazione degli autovalori e piu rapida ed accurata se si ha a che fare con unamatrice simmetrica. Conviene quindi procedere come segue:Si definisce la matrice [M ]1/2:
[M ]1/2[M ]1/2 = [M ]
Si pone:x = [M ]−1/2q
Si sostituisce nell’equazione del moto e si premoltiplica per [M ]−1/2:
[M ]−1/2[M ][M ]−1/2q+ [M ]−1/2[K][M ]−1/2q = 0Poiche [M ]−1/2[M ][M ]1/2 = [I], l’ultima espressione diventa:
[I]q+ [K]q = 0La matrice:
[K] = [M ]−1/2[K][M ]−1/2
e simmetrica.
Posto q = Qeiωt, sostituendo nella penultima equazione scritta, si ottiene:
[K]Q = ω2Q;([K]− λ[I]
)Q = 0
Il problema e stato pertanto ricondotto alla determinazione degli autovalori e autovettoridella matrice simmetrica [K]. Il legame tra gli autovettori di [K] e quelli di [K] e fornitodalla:
X = [M ]−1/2Q
Se si desidera che gli autovettori X siano normalizzati rispetto alla matrice massa[M ] occorre che gli autovettori Q abbiano norma unitaria. Infatti:
1 = XTi [M ]Xi =([M ]−1/2Qi
)T[M ][M ]−1/2Qi =
= QTi [M ]−1/2[M ][M ]−1/2Qi = QTi [I]Qi = QTi Qi = ∥Q∥2i
200

Appendice H
Smorzamento proporzionale
L’ipotesi di smorzamento proporzionale (vedi §7.2) prevede che la matrice smorzamento[C] sia legata alle matrici massa [M ] e rigidezza [K] dalla:
[C] = α[M ] + β[K]
Pertanto, ad ogni modo di vibrare e associato un fattore di smorzamento modale:
ζi =α
2ωi+βωi2
la cui dipendenza dalla pulsazione ωi e data dalla somma di due contributi: uno inversa-mente proporzionale a ωi e uno proporzionale a ωi (vedi Fig. H.1).
pulsazione ω
fatto
re d
i sm
orza
men
to ζ
ζα
ζβ
ζ=ζα+ζβ
Figura H.1: Dipendenza del fattore di smorzamento modale dalla pulsazione
I due parametri α e β possono essere individuati mediante una procedura sperimentale.Infatti, esistono tecniche (ad esempio il metodo della banda di mezza potenza visto in§ 5.2.5) che consentono di stimare il fattore di smorzamento modale per ciascun modocompreso nella banda in cui si conduce l’indagine sperimentale. Pertanto, a valle dellasperimentazione, si dispone di un set di fattori di smorzamento, ciascuno associato allapulsazione del corrispondente modo:
α + β ωi2 = 2ζi ωi (i = . . . , N)
dove N e il numero di modi contenuti nella banda dove si e svolta l’indagine.
201

202 APPENDICE H. SMORZAMENTO PROPORZIONALE
Possono pertanto essere scritte N equazioni:1 ω2
1...
......
...1 ω2
N
αβ
= 2
ζ1ω
21
...
...ζNω
2N
[ω]
αβ
= b
in cui la matrice [ω] e una matrice rettangolare di dimensioni N×2. L’indagine seprimen-tale viene svolta in modo che la banda esaminata contenga un numero di modi N > 2. Ilproblema della stima di α e β si presenta pertanto sovradimensionato e i due parametriincogniti si determinano con il metodo dei minimi quadrati, ossia attraverso la matricepseudo-inversa 1 [ω]+ della matrice [ω]:
αβ
= [ω]+b
1 Se [ω] ha rango massimo, ossia pari a 2, la sua pseudo-inversa puo essere determinata attraversol’espressione algebrica:
[ω]+ =([ω]T [ω]
)−1[ω]T

Appendice I
Eccitazione in un nodo
Si supponga che il secondo modo di vibrare di un sistema a 4 gdl abbia un nodo incorrispondenza della terza coordinata e si vada ad eccitare il sistema in tale nodo. Efacile verificare che alla risposta del sistema non contribuisce il secondo modo di vibrare.
Infatti, la matrice modale e il vettore delle forzanti avranno la seguente forma:
[Φ] =
X11 X12 X13 X14
X21 X22 X23 X24
X31 0 X33 X34
X41 X42 X43 X44
f(t) =
00
f3(t)0
=
00
F3eiΩt
0
Di conseguenza, la trasposta della matrice modale ed il vettore delle forzanti modaliassummo la forma:
[Φ]T =
X11 X21 X31 X41
X12 X22 0 X42
X13 X23 X33 X43
X14 X24 X34 X44
[Φ]Tf(t) =
X31
0X33
X34
F3eiΩ t
Le quazioni del moto disaccoppiate (per semplicita si omette lo smorzamento) sono:
[M ]Pq+ [K]Pq = [Φ]Tf(t)
M1 q1 +K1 q1 = X31F3eiΩt
M2 q2 +K2 q2 = 0
M3 q3 +K3 q3 = X33F3eiΩt
M4 q4 +K4 q4 = X34F3eiΩt
La risposta in coordinate modali ha la seconda componente nulla. Infatti:
q(t) = Q eiΩ t
con:
Q1 =X31(F3/K1)
1− (Ω2/ω12)
Q2 = 0 Q3 =X33(F3/K3)
1− (Ω2/ω32)
Q4 =X34(F3/K4)
1− (Ω2/ω42)
essendo ωi le pulsazioni naturali del sistema.Tornando alle coordinate originarie:
x = [Φ]q = [Φ]QeiΩ t = XeiΩ t
203

204 APPENDICE I. ECCITAZIONE IN UN NODO
dove:
X = [Φ]Q =
X11 X12 X13 X14
X21 X22 X23 X24
X31 0 X33 X34
X41 X42 X43 X44
Q1
0Q3
Q4
=
X11Q1 + 0 +X13Q3 +X14Q4
X21Q1 + 0 +X23Q3 +X24Q4
X31Q1 + 0 +X33Q3 +X34Q4
X41Q1 + 0 +X43Q3 +X44Q4
da cui si desume che nella risposta di tutti e 4 i gdl manca il contributo del secondo mododi vibrare.

Appendice J
Fune tesa: condizioni al contorno ediniziali
Riassumendo quanto visto nel §8.2, l’equazione del moto:
∂2y(x, t)
∂t2=T
ρ
∂2y(x, t)
∂x2
si risolve esprimendo la variabile del moto y(x, t) come prodotto di due funzioni di unasola variabile: y(x, t) = φ(x)f(t). Si ottiene infatti:
d2f(t)
dt2+ ω2f(t) = 0;
d2φ(x)
dx2+ρ
Tω2φ(x) = 0
da cui:f(t) = A sinωt+B cosωt; φ(x) = C sin γx+D cos γx
con:
γ2 =ρ
Tω2 =
ω2
c2
La soluzione generale e:
y(x, t) =∞∑i=1
φi(x)fi(t) =∞∑i=1
(Ci sin γix+Di cos γix) (Ai sinωit+Bi cosωit) (J.1)
J.1 Condizioni al contorno
Di seguito si riportano tre casi relativi a diverse condizioni al contorno.
Caso 1
Gli estremi sono fissi (Fig. J.1), deve quindi essere:
y(0, t) = φ(0)f(t) = 0 ⇒ φ(0) = 0
y(l, t) = φ(l)f(t) = 0 ⇒ φ(l) = 0
205

206 APPENDICE J. FUNE TESA: CONDIZIONI AL CONTORNO ED INIZIALI
l
T T
x
y(x,t)
Figura J.1: Fune tesa: caso 1
Caso 2
Un estremo e scorrevole e l’altro e fisso (Fig. J.2):
T∂y(0, t)
∂x= 0 ⇒ dφ(0)
dx= 0
y(l, t) = φ(l)f(t) = 0 ⇒ φ(l) = 0
l
T
Tx
y(x,t)
Figura J.2: Fune tesa: caso 2
Caso 3
Un estremo e fisso e l’altro e collegato ad una molla (Fig. J.3)
y(0, t) = φ(0)f(t) = 0 ⇒ φ(0) = 0
T∂y(l, t)
∂x− k y(l, t) = 0 ⇒ T
dφ(l)
∂x− k φ(l) = 0
l
T
T
x
y(x,t)k
Figura J.3: Fune tesa: caso 3

J.2. CONDIZIONI INIZIALI 207
J.2 Condizioni iniziali
Con riferimento alle condizioni al contorno del Caso 1 (§J.1), cioe ad una fune i cui estremisono fissi, deve aversi:
y(0, t) =∞∑i=1
(Di) (Ai sinωit+Bi cosωit) = 0
ovvero: Di = 0 e:
y(l, t) =∞∑i=1
(Ci sin γil) (Ai sinωit+Bi cosωit) = 0
ovvero:
γi =iπ
lωi = c
iπ
l(i = 1, 2, . . . )
Quindi la (J.1) diventa:
y(x, t) =∞∑i=1
φi(x)fi(t) =∞∑i=1
(Ci sin
iπ
lx
)(Ai sinωit+Bi cosωit)
ossia:
y(x, t) =∞∑i=1
sin
(iπ
lx
)[Ei sin
(iπ
lct
)+ Fi cos
(iπ
lct
)](J.2)
dove: Ei = CiAi e Fi = CiBi.
All’istante iniziale t = 0 si ha:
y(x, 0) =∞∑i=1
Fi sin
(iπ
lx
)(J.3)
(∂y(x, t)
∂t
)t=0
=∞∑i=1
Ei ciπ
lsin
(iπ
lx
)(J.4)
Ricordando ora che una arbitraria funzione g(x) della variabile indipendente x com-presa nell’intervallo [0, l] puo essere sviluppata in serie di Fourier nel seno secondola:
g(x) =∞∑i=1
Gi siniπ x
l
con:
Gi =2
l
∫ l
0
g(x) siniπ x
ldx
i coefficienti Fi e Ei che compaiono nelle (J.3) e (J.4) possono essere scritti come:
Fi =2
l
∫ l
0
y(x, 0) sin
(iπ
lx
)dx
Ei =2
iπ c
∫ l
0
(∂y(x, t)
∂t
)t=0
sin
(iπ
lx
)dx

208 APPENDICE J. FUNE TESA: CONDIZIONI AL CONTORNO ED INIZIALI
Se si assume che all’istante iniziale la velocita sia nulla, dalla (J.4) risulta Ei = 0 e la(J.2) diventa:
y(x, t) =∞∑i=1
sin
(iπ
lx
)[Fi cos
(iπ
lct
)]
Esempio
Si supponga di afferrare la fune in mezzeria (vedi deformata di Fig. J.4) e di rilasciarla.La deformata iniziale e esprimibile come:
l
x
y(x,0)
h
l/2 l/2
Figura J.4: Fune tesa: esempio di condizioni iniziali
y(x, 0) =
2hx
l0 ≤ x ≤ l/2
2h− 2hx
ll/2 ≤ x ≤ l
che sostituita nell’espressione dei coefficienti Fi fornisce:
Fi =2
l
∫ l/2
0
2h
lx sin
(iπ
lx
)dx+
2
l
∫ l
l/2
(2h− 2h
lx
)sin
(iπ
lx
)dx =
=2
l
[2h
l
(l
iπ
)2
sin
(iπ
lx
)− 2h
l
l
iπx cos
(iπ
lx
)]l/20
+
+
[−2hl
iπcos
(iπ
lx
)− 2h
l
(l
iπ
)2
sin
(iπ
lx
)+
2h
iπx cos
(iπ
lx
)]ll/2
=
=2
l
[4h
l
(l
iπ
)2
sin
(iπ
2
)]=
[8h
i2π2sin
(iπ
2
)]
In definitiva:
Fi =8h
i2π2sin
iπ
2=
8h
i2π2sin
iπ
2i = dispari
0 i = pari
Per i dispari si puo scrivere anche:
Fi =8h
i2π2(−1)(i−1)/2 (i = 1, 3, 5, . . . )

J.2. CONDIZIONI INIZIALI 209
In conclusione, vengono eccitate solo le armoniche dispari. Per le prime armoniche (i =1, 3, 5, . . . ) risulta:
y(x, t) =∞∑i=1
sin
(iπ
lx
)[Fi cos
(iπ
lct
)]=
8h
π2
[sin(πlx)cos(πlct)− 1
9sin
(3π
lx
)cos
(3π
lct
)+
1
25sin
(5π
lx
)cos
(5π
lct
)− . . .
]La Fig. J.5 rappresenta la deformata della fune ad un istante generico (linea grossa)
ottenuta considerando solo la prima (), la terza (∗) e la quinta (+) armonica.
Figura J.5: Deformata per le condizioni iniziali di Fig. J.5 (prime tre armoniche)

Appendice K
Scelta dei Parametri di acquisizione
Individuata la frequenza di interesse, futile, risulta determinata la minima Frequenza dicampionamento fs. Per evitare il fenomeno dell’aliasing deve essere: fs ≥ 2 futile (dalteorema di Shannon). Nella pratica:
fs ≥ 2.5 futile
per tener conto dellimperfezione del filtro anti-aliasing.
La risoluzione dello spettro e pari a:
∆f = 1/T ∗
essendo T ∗ la durata di acquisizione. In pratica, ∆f e nello spettro la distanza tra duelinee spettrali. Se ∆f risulta “piccolo” si parla di elevata risoluzione dello spettro.
Scelte la frequenza di campionamento e la risoluzione, il numero di campioni risulta:
N =T ∗
∆t= T ∗ fs =
fs∆f
Generalmente il numero N di campioni deve essere potenza di 2, in modo da poter applica-re l’algoritmo veloce per il calcolo della trasformata di Fourier: la Fast Fourier Transform(FFT).
Esempio
Si vogliano rilevare le frequenze proprie di un sistema libero-libero nel range 0-3000 Hz.Da uno studio preliminare (eseguito utilizzando, per esempio, il metodo degli elementifiniti) tali frequenze risultano essere le seguenti (espresse in Hz):f1 = 800; f2 = 1300; f3 = 1500; f4 = 2300; f5 = 2315; f6 = 2800.
Si fissa innanzitutto la frequenza di campionamento. Per evitare il fenomeno dell’alia-sing deve essere:fs ≥ 2.5futile, futile = 3000Hz ⇒ fs ≥ 2.5 · 3000 = 7500Hz.
Per quanto riguarda la risoluzione dello spettro, dal momento che la quarta e la quintafrequenza differiscono tra loro di 15 Hz, e necessario che essa sia piuttosto alta (∆fsufficientemente piccolo). Se, ad esempio, si impone che sia: ∆f = 2 Hz, ne consegueuna durata dell’acquisizione pari a T ∗ = 1/∆f = 0.5 s.
210

211
A questo punto il numero di campioni che sono contenuti in 0.5 secondi vale:N = T ∗ fs = 3750.
Affinche possa essere eseguita la FFT, il numero N di campioni deve necessariamenteessere potenza di 2. Si sceglie quindi il primo numero potenza di 2 superiore a 3750, valea dire N = 4096.
A questo punto abbiamo si hanno due possibilita:1) mantenere la risoluzione pari a ∆f = 2 Hz, andando cosı a modificare la frequenzadi campionamento: fs = N∆f = 8192 Hz, ed estendendo la frequenza utile: futile =fs/2.5 = 3276.8 Hz;2) mantenere la frequenza di campionamento pari a fs = 7500 Hz, andando a prolungarela durata dell’acquisizione: T ∗ = N/fs = 0.546 s, e a migliorare la risoluzione dellospettro: ∆f = fs/N = 1.831 Hz.

Appendice L
Stima sperimentale della FRF
L.1 Autocorrelazione e Autospettro
L’autocorrelazione Rxx(τ) di una funzione x(t) indica quanto la funzione stessa e correlatacon se stessa. La sua definizione e:
Rxx(τ) = limT→∞
1
T
T/2∫−T/2
x(t)x(t+ τ)dt
L’autocorrelazione di una funzione periodica e periodica. L’autocorrelazione di unafunzione casuale tende a zero per τ = 0.
La trasformata di Fourier di Rxx(τ) e detta densita di potenza spettrale (PSD) o densitadi autospettro (ASD) e si indica di solito con Sxx(ω):
Sxx(ω) = F Rxx(τ)
La funzione Sxx(ω) e legata alla trasformata di Fourier di x(t) dalla relazione:
Sxx(ω) = X∗(ω)X(ω) = |X(ω)|2
dove il simbolo [∗] indica il complesso coniugato. La funzione Sxx(ω) e reale e contiene leinformazioni sulle frequenze presenti in x(t), ma non quelle sulle fasi.Per diminuire gli errori di misura, l’autospettro viene stimato effettuando la media di piumisure:
Sxx(ω) =1
N
N∑k=1
Xk∗(ω)Xk(ω)
L.2 Correlazione incrociata e Spettro incrociato
La correlazione incrociata Rxy(τ) di due funzioni x(t) e y(t) indica quanto le due funzionisono correlate fra loro. La sua definizione e:
Rxy(τ) = limT→∞
1
T
T/2∫−T/2
x(t)y(t+ τ)dt
212

L.3. STIMA DELLA FRF 213
La trasformata di Fourier di Rxy(τ) e detta densita di spettro incrociato (CSD) e siindica di solito con Sxy(ω):
Sxy(ω) = F Rxy(τ)La funzione Sxy(ω) e legata alle trasformate di Fourier di x(t) e y(t) dalla relazione:
Sxy(ω) = X∗(ω)Y (ω)
La funzione Sxy(ω) e complessa e contiene le informazioni sulle frequenze e sulle fasi.Inolte risulta:
Sxy(ω) = Sxy∗(ω)
Per diminuire gli errori di misura, lo spettro incrociato viene stimato effettuando la mediadi piu misure:
Sxy(ω) =1
N
N∑k=1
Xk∗(ω)Yk(ω)
L.3 Stima della FRF
Se f(t) e l’eccitazione e x(t) la risposta del sistema, la FRF si definisce come rapportodelle loro trasformate di Fourier:
H(ω) =X(ω)
F (ω)
Per diminuire gli errori di misura, si impiegano degli stimatori della FRF effettuandola media di piu misure. Esistono diverse formulazioni degli stimatori.Lo stimatore H1 che riduce gli effetti dei disturbi all’uscita:
H(ω) =F ∗(ω)X(ω)
F ∗(ω)F (ω)=Sfx(ω)
Sff (ω)= H1(ω)
Lo stimatore H2 che riduce gli effetti dei disturbi all’ingresso:
H(ω) =X∗(ω)X(ω)
X∗(ω)F (ω)=Sxx(ω)
Sxf (ω)= H2(ω)
In assenza di errori di misura, risulta naturalmente: H1(ω) = H2(ω) = H(ω).
Per giudicare l’attendibilita della misura si pu usare la funzione coerenza γ2 che indicaquanto la risposta e coerente con l’eccitazione:
γ2(ω) =H1(ω)
H2(ω)=
|Sfx(ω)|2
Sff (ω)Sxx(ω)
Si puo dimostrare che risulta: 0 ≤ γ2 ≤ 1.
Se γ2 ≤ 0.75, i risultati sono poco attendibili, cioe il rapporto segnale/rumore e basso.Altre cause che danno luogo a bassi valori della coerenza sono le seguenti:-) sono presenti altre eccitazioni che pero non vengono misurate;-) il sistema presenta delle non linearita.
La Fig. L.1 mostra un esempio di FRF rilevate sperimentalmente su di un sistemameccanico, unitamente alle rispettive coerenze. In particolare, in L.1a) si ha il caso di

214 APPENDICE L. STIMA SPERIMENTALE DELLA FRF
una FRF puntuale, ossia di una FRF in cui il punto di eccitazione e quello di rispostacoincidono: come noto, ogni picco di risonanza e seguito da una antirisonanza; la presenzadelle antirisonanze e inoltre denotata dalle brusche e localizzate diminuzioni della funzionecoerenza. La Fig. L.1b) mostra una FRF rilevata tra due punti distinti del medesimosistema: la posizione dei picchi di risonanza coincide con quella di Fig. L.1a).
(a)
(b)
Figura L.1: FRF sperimentali: a) FRF puntuale; b) FRF tra due punti distinti

Appendice M
Simulink
M.1 Introduzione a Simulink
Simulink, prodotto dalla Mathworks Inc. e un programma per la simulazione di sistemidinamici. Estende le potenzialita di Matlab, aggiungendo molte funzioni specifiche e man-tenendo le caratteristiche generali.Simulink viene utilizzato attraverso due fasi: quella di definizione del modello da simularee quella di analisi del sistema stesso. Spesso questi due passi vengono eseguiti sequenzial-mente modificando i parametri del sistema al fine di ottenere il comportamento desiderato.Affinche la definizione del modello possa essere immediata, Simulink utilizza un ambientea finestre, chiamate Block diagram windows attraverso cui creare i modelli semplicementeimpiegando il mouse. L’analisi del modello avviene sia scegliendo le opzioni dai menu diSimulink che riutilizzando i comandi Matlab attraverso la Matlab Command Windows. Irisultati della simulazione sono disponibili durante la fase di simulazione stessa e l’esitofinale disponibile nello spazio di lavoro di Matlab.
M.2 Istruzioni di base di Simulink
Per aprire Simulink si deve digitare all’interno della Matlab Command Windows il co-mando: >> simulink che provoca la visualizzazione della finestra (Simulink LibraryBrowser) contenente le icone delle librerie standard di Simulink (vedi Fig. M.1).
L’istruzione New della tendina File apre un nuovo file Simulink, mentre Open caricaun file Simulink salvato precedentemente. Creando un nuovo file si apre una seconda fi-nestra in cui costruire il modello del sistema da simulare. I blocchi possono essere copiatidalla prima finestra alla seconda trascinandoli col mouse nella posizione desiderata. Taliblocchi possono essere connessi da linee disegnate sempre col mouse: tenendo premuto iltasto sinistro, partendo dall’uscita di un blocco, col puntatore si crea una nuova connes-sione all’ingresso ad un altro blocco, mentre premendo il tasto destro posizionati su unaconnessione preesistente, si genera una diramazione per collegare un altro blocco.
Lo schema viene salvato utilizzando le istruzioni Save e Save as della tendina File.Ciascuna icona della Fig. M.1 contiene i blocchi relativi alla libreria a cui si riferisce.Per aprire una libreria basta cliccare due volte sulla relativa icona oppure premere il tastodestro del mouse per aprire la libreria in una nuova finestra. In seguito verranno descrittibrevemente i blocchi contenuti in ciascuna libreria.
215

216 APPENDICE M. SIMULINK
Figura M.1: Simulink Library Browser
M.2.1 Libreria SOURCES
La libreria Sources contiene alcuni generatori di segnale come si vede nella Fig. M.2.
• Constant genera un valore costante programmabile.
• Signal Generator generatore di segnali sinusoidali, onde quadre, denti di sega esegnali casuali. Si possono impostare ampiezza e frequenza.
• Step genera un gradino di ampiezza prefissata, specificando il valore iniziale e quellofinale.
• Sine Wave genera un’onda sinusoidale di ampiezza, frequenza e fase determinate.
• Repeating Sequence ripete una sequenza di valori e ad istanti predeterminati.
• Discrete Pulse Generator genera impulsi ad intervalli regolari, specificando l’ampiez-za, il periodo e ritardo di fase come interi multipli del tempo di campionamento.
• Pulse Generator genera impulsi, specificando il periodo in secondi, il duty cicle(percentuale del periodo), l’ampiezza e l’istante di partenza.
• Chirp Signal genera un segnale sinusoidale con frequenza crescente. Si devono spe-cificare la frequenza iniziale e dopo quanti secondi deve essere raggiunta una certafrequenza predeterminata.
• Clock genera la base dei tempi.

M.2. ISTRUZIONI DI BASE DI SIMULINK 217
Figura M.2: Signal Source Library
• Digital Clock genera il tempo di simulazione secondo il tempo di campionamentoimpostato. Durante il periodo di campionamento vengono mantenuti i valori dellasimulazione fino al successivo istante di campionamento.
• From File legge il contenuto di una matrice specificata dal <file>.mat. La primariga della matrice deve contenere i valori degli istanti di campionamento e in quellesuccessive sono memorizzati i corrispondenti valori delle uscite.
• From Workspace legge i valori specificati in una matrice presente nel WorkSpace diMatlab. La matrice deve contenere nella prima colonna i valori corrispondenti agliistanti di campionamento. Le successive colonne rappresentano i valori delle uscite.
• Random Number genera valori con distribuzione normale gaussiana, dati il valoremedio, la varianza e un valore iniziale per il seme.
• Uniform Random Number genera numeri aventi distribuzione uniforme tra due valoriprefissati. Si deve specificare anche il seme.
• Band-Limited White Noise genera rumore bianco per sistemi continui. Si specificala potenza del rumore, istante di campionamento e il seme.
M.2.2 Libreria SINKS
La libreria Sinks contiene alcuni rilevatori di segnale come si vede nella Fig. M.3.
• Scope visualizza in funzione del tempo il segnale di ingresso applicato.

218 APPENDICE M. SIMULINK
Figura M.3: Signal Sinks Library
• XY Graph visualizza un grafico (x, y) utilizzando la finestra grafica di Matlab. Ilprimo ingresso corrisponde all’ascissa del grafico e generalmente coincide con la basedei tempi. Si possono introdurre i valori del range del grafico.
• Display display numerico dei valori dell’ingresso. Si specifica il formato del parame-tro da visualizzare.
• To File salva gli ingressi in una matrice all’interno di un file <untitled>.mat. Sispecifica il nome del file e il nome della variabile. I valori vengono salvati per righe.La prima riga della matrice contiene la base dei tempi.
• To Workspace vengono scritti gli ingressi applicato nel WorkSpace di Matlab. Lamatrice ha una colonna per ciascun ingresso ed una riga per ogni istante dellasimulazione. Il dato si perde se la simulazione viene interrotta o messa in pausa. Sispecifica il nome della variabile di ingresso e il massimo numero di righe.
• Stop arresta la simulazione quando l’ingresso applicato e diverso da zero.
M.2.3 Libreria CONTINUOUS
La Libreria Continuous contiene i blocchi necessari all’analisi dei sistemi lineari tempo-continui evidenziati nella Fig. M.4.
• Integrator calcola l’integrazione tempo continua del segnale di ingresso, stabilite lecondizioni iniziali ed eventuali limiti superiore ed inferiore di saturazione.
• Transfer Fnc espressione per la funzione di trasferimento, in cui il numeratore vienerappresentato da una matrice e il denominatore da un vettore. Il numero delleuscite eguaglia il numero delle righe della matrice al numeratore, i cui elementi sonoi coefficienti del polinomio secondo potenze decrescenti di s. Anche il vettore aldenominatore rappresenta i coefficienti del polinomio secondo potenze decrescentidi s.
• State-Space modello nello spazio degli stati. Occorre inserire le matrici del modello(A,B,C,D) e le relative condizioni iniziali.

M.2. ISTRUZIONI DI BASE DI SIMULINK 219
Figura M.4: Continuous Library
• Zero-Pole funzione Guadagno, Zeri e Poli. Gli zeri vengono rappresentati da unamatrice, mentre i poli da un vettore. Il numero delle uscite coincide con il numerodelle colonne della matrice degli zeri.
• Derivative effettua la derivata numerica dell’ingresso.
• Memory rappresenta un ritardo di durata unitaria. L’uscita coincide con il valoreassunto precedentemente dall’ingresso. Occorre specificare le condizioni iniziali.
• Transport Delay ritarda di una quantita specificata il segnale di ingresso. Il ritardodeve essere piu grande del passo utilizzato nella simulazione.
• Variable Transport Delay ritarda il primo segnale di ingresso di una quantita spe-cificata dal secondo ingresso. Il ritardo deve essere piu grande del passo utilizzatonella simulazione.
M.2.4 Libreria DISCONTINUITIES
La libreria Discontintinuities contiene i blocchi che svolgono funzioni non lineari (vediFig. M.5).
• Rate limiter limita lo slew-rate (velocita di variazione) del segnale di ingresso. Siimposta lo slew-rate positivo e negativo.
• Saturation limita superiormente ed inferiormente il segnale di ingresso secondo duelimiti prefissati.
• Quantizer quantizza l’ingresso all’interno di un intervallo prefissato.
• Backlash simula una zona d’isteresi o un certo gioco di ampiezza prefissata.
• Dead Zone l’uscita rimane a zero per valori interni alla deadzone. Si specifica l’inizioe la fine dell’intervallo.

220 APPENDICE M. SIMULINK
Figura M.5: Discontintinuities Library
• Relay l’uscita assume due valori impostati se l’ingresso e maggiore dell’estremosuperiore o minore dell’estremo inferiore di un certo intervallo specificato attraversodue parametri. Lo stato del Relay non dipende dall’ingresso quando questo assumeun valore interno dell’intervallo.
• Switch l’uscita coincide con il primo ingresso quando il secondo ingresso e maggioreod uguale ad una certa soglia, altrimenti assume i valori del terzo ingresso.
• Manual Switch commutatore regolabile col mouse senza parametri.
• Multiport Switch coincide con gli ingressi secondo i valori arrotondati assunti dalprimo di questi.
• Coulomb & Viscous Friction funzione di attrito viscoso e forza di Coulomb. Laforza coulombiana e modellata da una discontinuita nello zero y = sign(x) men-tre l’attrito viscoso e rappresentato da una relazione lineare [Gain*abs(x)+Offset].Complessivamente l’uscita risulta [y=sign(x)*(Gain*abs(x)+Offset)]. Gain e Offsetsono parametri del blocco.
M.2.5 Libreria MATH OPERATIONS
La libreria Math Operations contiene blocchi per le funzioni matematiche e relazionilogiche (vedi Fig. M.6).
• Sum effettua la somma o la differenza degli ingressi. Si deve inserire la lista deisegni con cui ogni ingresso entra nel blocco.
• Product Moltiplica o divide gli ingressi. Occorre specificare il numero degli ingressi.
• Dot Product effettua il prodotto (prodotto scalare) elemento per elemento degliingressi u1 e u2 secondo l’espressione y = sum(u1 · u2).

M.2. ISTRUZIONI DI BASE DI SIMULINK 221
Figura M.6: Math Operations Library
• Gain guadagno scalare o vettoriale. Si imposta il guadagno k e il blocco calcolal’uscita y dato l’ingresso u secondo l’espressione y = k · u.
• Slider Gain guadagno regolabile tra un valore superiore ed uno inferiore.
• Matrix Gain restituisce in uscita l’ingresso moltiplicato per una matrice predefinita.
• Math Function implementa funzioni matematiche come quelle logaritmiche, espo-nenziali, potenze e modulo.
• Trigonometric Function implementa diverse funzioni trigonometriche ed iperboliche:sin, cos, tan, asin, acos, atan, atan2, sinh, cosh e tanh.
• MinMax restituisce il minimo od il massimo dell’ingresso. Prevede la scelta delnumero degli ingressi e quale operazione deve essere svolta su ogni ingresso.
• Abs dato l’ingresso u, calcola l’uscita y =| u |.
• Sign signum. Restituisce il valore +1 se l’ingresso e positivo, −1 per ingressonegativo e 0 per ingresso nullo.

222 APPENDICE M. SIMULINK
• Rounding Function contiene le operazioni di arrotondamento: floor, ceil, round efix.
• Combinatorial Logic ricerca gli elementi specificati nel vettore d’ingresso (trattaticome valori booleani) nella tabella della verita impostata e restituisce le righe dellatabella della verita stessa.
• Logical Operator effettua una operazione logica per un prefissato numero di ingres-si: AND, OR, NAND, NOR, XOR, NOT. Per un singolo ingresso, l’operazione ieneeffettuata tra tutti i valori dell’ingresso memorizzati in un vettore. Per ingressi mul-tipli, l’operazione logica viene eseguita sugli elementi dei diversi vettori di ingressoche occupano la stessa posizione.
• Relational Operator effettua confronti tra gli ingressi: ==, =, >, >=, < e <=.
• Algebraic Constrain vincola il segnale d’ingresso f(z) a zero e restituisce il corrispon-dente valore algebrico z. Quindi il blocco fornisce il valore z tale per cui f(z) = 0.L’uscita deve influenzare l’ingresso attraverso una certa retroazione. Occorre fornireun valore di tentativo per z.
M.2.6 Libreria LOOKUP TABLES
La libreria Lookup Tables contiene i blocchi riportati in Fig. M.7.
Figura M.7: Lookup Tables Library
• Look-Up Table effettua una interpolazione mono-dimensionale dei valori dell’ingressousando quelli nella tabella specificata. I valori esterni a quelli della tabella vengonoestrapolati.
• Look-Up Table (2D) effettua una interpolazione bidimensionale dei valori dell’in-gresso usando quelli nella tabella specificata. I valori esterni a quelli della tabellavengono estrapolati.
• Fnc permette di specificare una funzione arbitraria dell’ingresso u, y = f(u).

M.2. ISTRUZIONI DI BASE DI SIMULINK 223
• MATLAB function passa i valori dell’ingresso ad una funzione Matlab affinche possaessere valutata. La funzione Matlab deve restituire un vettore la cui lunghezza deveessere definita.
• S-Function blocco che puo essere progettato dall’utente in Matlab, C, Fortran ousando le funzioni di Simulink standard. I parametri t, x, u e flag sono passatiautomaticamente alla funzione di Simulink. Possono essere specificati anche altriparametri.
M.2.7 Libreria SIGNAL ROUTING
La libreria Signal Routing contiene i blocchi riportati in Fig. M.8.
Figura M.8: Signal Routing Library
• In fornisce una porta d’ingresso per un modello. Occorre specificare il tempo dicampionamento.
• Out fornisce una porta d’uscita per un modello. Quando il modello non e disabili-tato, occorre fornire il corrispondente valore dell’uscita.
• Enable il blocco viene posto all’interno di un modello affinche sia abilitato.
• Trigger il blocco fornisce una porta di trigger predefinito.
• Mux raggruppa scalari o vettori in un vettore di dimensioni maggiori.

224 APPENDICE M. SIMULINK
• Demux disaggrega i vettori d’ingresso in scalari o vettori di dimensioni inferiori.
• Selector seleziona e riordina gli elementi specificati del vettore d’ingresso.
• From riceve i segnali dal blocco Goto secondo l’etichetta (tag) specificata.
• Goto Tag Visibility viene usato con i blocchi From e Goto e permette di specificarela visibilita di una etichetta.
• Goto invia i segnali al blocco From avente l’etichetta specificata. Permette di definirela visibilita dell’etichetta.
• Data Store Read legge i dati memorizzati in una certa regione definita dal bloccoData Store Memory secondo un nome prefissato. Occorre definire il nome della zonadi memoria e il tempo di campionamento.
• Data Store Memory permette di definire nome e valore iniziale di una regione dimemoria utilizzata dai blocchi Data Store Read e Data Store Write.
• Data Store Write scrive la zona di memoria specificata dal nome. Viene definitoanche il tempo di campionamento.
• Ground viene utilizzato per mettere a zero i segnali di ingresso. Si evitano i problemidovuti agli ingressi non collegati. Fornisce una uscita nulla.
• Terminator usato per isolare un segnale di uscita e per prevenire cosı i problemiprovocati dalle uscite non connesse.
• Subsystem fornisce una finestra in cui costruire un modello di subsystem.
• Hit Crossing segnala quando il segnale di ingresso attraversa lo zero secondo uncerto margine prefissato. Si puo specificare la direzione di attraversamento dellozero.
• IC permette di specificare le condizioni iniziali per un segnale.
• Width fornisce in uscita l’ampiezza del segnale d’ingresso.

M.3. ESEMPI 225
M.3 Esempi
Esempio 1
Implementazione dell’equazione differenziale: x(t) = u(t)
Figura M.9: Simulink: esempio 1
Esempio 2
Implementazione dell’equazione differenziale: x(t) = −2x(t) + u(t)
Figura M.10: Simulink: esempio 2

226 APPENDICE M. SIMULINK
Esempio 3
Implementazione dell’equazione differenziale: m x(t) + c x(t) + k x(t) = F (t).L’equazione si riscrive nella forma: m x(t) = −c x(t)− k x(t) + F (t)
Figura M.11: Simulink: esempio 3

M.3. ESEMPI 227
Esempio 4
Sistema ad un gdl con gioco: moto imposto della base.Se non vi fosse il gioco si tratterebbe semplicemente di implementare l’equazione differen-ziale:
M X1 = −K(X1 −X0)− C (X1 − X0)
con i parametri M , C e K costanti.Con la presenza del gioco, la forza elastica FEL assume un andamento lineare a trattiespresso come segue:
FEL = −K(X1 −X0 − g/2) se X1 −X0 > g/2
FEL = −K(X1 −X0 + g/2) se X1 −X0 < −g/2FEL = 0 se | X1 −X0 |≤ g/2
Figura M.12: Simulink: esempio 4

228 APPENDICE M. SIMULINK
Esempio 5
Impiego della Look-up Table.L’impiego e mostrato in Fig. M.13a. Occorre definire nel workspace una matrice di duecolonne (nell’esempio si tratta della matrice A):dt = 1/100;time = [0:dt:1];x = sin(2*pi*time);A = [time; x].’;
Con un doppio click sul blocco Look-Up Table si apre la finestra di dialogo (vediFig. M.13b) in cui andare ad inserire i valori di input (ascissa) e output (ordinata) dellatable.
(a)
(b)
Figura M.13: Simulink: esempio 5

M.3. ESEMPI 229
Esempio 6
Sistema ad un gdl con gioco: moto della base (legge arbitraria).Si tratta dell’esempio 4 (§M.3), ma in questo caso non si utilizza il blocco signal generatorper generare la legge di moto. Quest’ultima viene infatti caricata in workspace e poiopportunamente interpolata (mediante la look-up table).
Figura M.14: Simulink: esempio 6
M X1 = −K(X1 −X0)− C (X1 − X0)

230 APPENDICE M. SIMULINK
Esempio 7
Accorpamento di blocchi.Se nell’esempio 6 (§M.3) i blocchi necessari per definire la legge di moto vengono accorpatiin un unico blocco denominato legge di moto, si ottiene no schema di Fig. M.15a. Ilcontenuto del blocco legge di moto e mostrato in Fig. M.15b.
(a)
(b)
Figura M.15: Simulink: esempio 7

M.3. ESEMPI 231
Esempio 8
Accorpamento di blocchi.Si tratta dell’esempio 7 (§M.3), ma in questo caso i blocchi necessari per calcolare la forzaelasto-viscosa e quelli per integrare sono accorpati in due soli blocchi: il blocco Forzaelasto-viscosa (Fig. M.16a) e il blocco integrazione (Fig. M.16b). Il risultato e mostratoin Fig. Fig. M.16c.
(a)
(b)
(c)
Figura M.16: Simulink: esempio 8

232 APPENDICE M. SIMULINK
Esempio 9
Sistema ad due gdl con gioco: moto della base.
Figura M.17: Simulink: esempio 9
Esempio 10
Impiego di S-function.E possibile inserire delle funzioni utilizzando il blocco S-function come mostrato in M.18.
Figura M.18: Simulink: esempio 10 (impiego di S-function)
In particolare, occorre scrivere uno script.
function[out, aux1, aux2, aux3] = sfunctiones10(t, x, u, flag, gain);if flag = = 0out = [0,0,2,1,0,1,0];aux1 = [];aux2 = [];

M.3. ESEMPI 233
aux3 = [];elseif flag = = 3,out(1) = u;out(2) = gain*u;end
Nello script si ha:
• u variabile in ingresso
• out variabile di uscita
• flag == 0 il terzo e quarto campo della variabile di uscita devono essere rispetti-vamente la dimensione dell’output e dell’input. Devono inoltre essere definite comevettore vuoto ([]) tre variabili di uscita ausiliarie (aux1, aux2, aux3).
• flag == 3 cuore dell’algoritmo
Con un doppio click sul blocco S-function si apre la finestra di dialogo mostrata inFig. M.19 in cui andare ad inserire il nome della function ed, eventualmente, i parametriaggiuntivi (gain nell’esempio).
Figura M.19: Simulink: esempio 10 (definizione dei parametri della S-function)

Appendice N
Il metodo degli elementi finiti (FEM)
N.1 Introduzione
Quando si devono studiare sistemi continui - come sono le strutture e gli organi dellemacchine - nella maggior parte dei casi di interesse pratico la forma geometrica e lecondizioni al contorno sono troppo complesse per poter applicare procedimenti analitici:per analisi sia statiche sia dinamiche si deve allora fare ricorso ad altri metodi, per lopibasati sull’uso del calcolatore. Tra tali metodi, ampiamente impiegato e quello deglielementi finiti, che considera il sistema continuo costituito da elementi “finiti”, cioe didimensioni finite, anziche di dimensioni infinitesime, come nel caso dei metodi analitici.
Il metodo degli elementi finiti (MEF o FEM ) e strettamente collegato con il metododi Rayleigh-Ritz, del quale anzi si puo considerare, in senso lato, una versione “a tratti”.Infatti, mentre nel metodo di Rayleigh-Ritz la deformata dell’intera struttura e appros-simata mediante una somma di funzioni, il metodo degli elementi finiti impiega moltedi tali funzioni, ciascuna relativa ad una parte della struttura stessa. In altre parole ilmetodo degli elementi finiti suddivide la struttura in tante parti e applica a ciascuna ilmetodo di Rayleigh-Ritz.
L’idea di definire non un’unica funzione per l’intera struttura, ma una funzione perciascun tratto della struttura stessa, permette di applicare il metodo a strutture anchemolto complesse, adottando peraltro funzioni di forma molto semplici. Il principio e chese le funzioni di forma assunte per i vari elementi sono scelte opportunamente, la soluzionepuo convergere a quella esatta per l’intera struttura al diminuire delle dimensioni deglielementi finiti. Durante il processo di risoluzione, vengono soddisfatti l’equilibrio e lacongruenza degli spostamenti ai nodi, cosı che l’intera struttura si comporta come un’unicaentita.
N.1.1 Schema generale del metodo
Il metodo degli elementi finiti puo venire riassunto nel modo seguente:
1 la struttura da analizzare viene suddivisa in parti di dimensioni finite, ciascuna dellequali costituisce appunto un elemento finito; i vari elementi sono collegati fra lorosolo in alcuni punti dei rispettivi contorni, detti punti nodali o nodi ;
2 si formula un’ipotesi ragionevole sull’andamento delle deformazioni all’interno diciascun elemento (funzione di spostamento o funzione di forma) e - tenendo presenti
234

N.2. EQUAZIONI DEL MOTO DI UN ELEMENTO 235
le caratteristiche fisiche del materiale - si trovano, per il generico elemento i-esimo,le espressioni dell’energia cinetica Ti e dell’energia di deformazione Ui in funzionedegli spostamenti nei nodi;
3 se N e il numero degli elementi in cui e stata suddivisa la struttura, l’energia cineticae l’energia di deformazione dell’intera struttura saranno rispettivamente:
T =N∑i=1
Ti U =N∑i=1
Ui (N.1)
Utilizzando le (N.1) per scrivere le equazioni di Lagrange, si ottengono le equazionidel moto libero dell’intera struttura, che permettono di determinarne le frequenze edi modi propri. Eventuali azioni generalizzate esterne (forze o momenti) si potrannopure introdurre nelle equazioni di Lagrange, esprimendole attraverso il loro lavorovirtuale.
N.1.2 Discretizzazione
Per discretizzazione si intende la suddivisione in elementi finiti della struttura data. Perprima cosa occorre scegliere il tipo e la distribuzione degli elementi. Queste scelte devonotenere conto sia della geometria della struttura, sia del suo comportamento: una buonadiscretizzazione richiede percio molta attenzione ed una certa esperienza. In particolare,occorre che la discretizzazione sia fatta tenendo conto delle discontinuita geometriche edi quelle del materiale, delle condizioni al contorno e delle forze agenti.
Per una valutazione ragionevolmente precisa delle frequenze e dei modi propri o per ladeterminazione della risposta dinamica di una struttura, la distribuzione degli elementifiniti (reticolo o mesh) puo anche essere a maglie relativamente grandi. In altri casi,ad esempio quando il FEM viene impiegato per il calcolo delle tensioni, il reticolo deveinvece essere piu fine, con un infittimento ancora maggiore nelle zone di concentrazionedelle tensioni.
N.2 Equazioni del moto di un elemento
A scopo illustrativo, la Fig. N.1 mostra come puo essere modellata una macchina utensile.Le colonne ed il montante superiore sono modellati con elementi triangolari piani, mentrela slitta trasversale ed il braccio porta-utensile sono modellati con elementi trave (elementibeam).
Gli elementi sono connessi gli uni agli altri ai nodi. Ogni nodo di un elemento possiedeuno o piu gradi di liberta, a ciascuno dei quali corrisponde uno spostamento o una suaderivata spaziale. L’insieme di tali spostamenti e derivate viene detto vettore spostamentinodali δ di quell’elemento. Esprimendo gli spostamenti all’interno di un elemento infunzione degli spostamenti nodali dei suoi nodi, in ogni punto dell’elemento resta definitoun vettore degli spostamenti d, funzione delle coordinate del punto stesso.
La relazione fra lo spostamento d di un generico punto dell’elemento e il vettoreδ degli spostamenti nodali dell’elemento stesso sara esprimibile mediante un’opportunamatrice [N ]:
d = [N ]δ (N.2)

236 APPENDICE N. IL METODO DEGLI ELEMENTI FINITI (FEM)
Figura N.1: Modellazione FEM di una macchina utensile
In altre parole, il vettore d che rappresenta lo spostamento di un punto interno del-l’elemento, e esprimibile, mediante [N ], in funzione del vettore δ che rappresenta glispostamenti dei nodi. La matrice [N ] dipende dall’ipotesi che si adotta riguardo l’anda-mento dello spostamento entro l’elemento e prende il nome di funzione di forma.A chiarimento, si faccia riferimento al generico elemento triangolare di Fig. N.1b). Conw(x, y, t) si indichi lo spostamento di un punto interno in direzione normale. I valori diw e delle sue derivate spaziali nei nodi sono trattati come incognite e si possono indicarecome:
w(x1, y1, t)∂w/∂x (x1, y1, t)∂w/∂y (x1, y1, t)w(x2, y2, t)
∂w/∂x (x2, y2, t)∂w/∂y (x2, y2, t)w(x3, y3, t)
∂w/∂x (x3, y3, t)∂w/∂y (x3, y3, t)
=
δ1(t)δ2(t)δ3(t)...............δ9(t)
Lo spostamento di un punto interno all’elemento, w(x, y, t), puo essere espresso in
termini degli spostamenti incogniti δr(t) nella forma:
w(x, y, t) =n∑r=1
Nr(x, y) δr(t) (N.3)
Per determinare il vettore δ degli spostamenti nodali, occorre scrivere le equazionidel moto. L’energia cinetica Ti e l’energia di deformazione Ui dell’elemento possono essereespresse rispettivamente come:
Ti =1
2δT [m]δ Ui =
1
2δT [k] δ

N.3. MATRICE RIGIDEZZA 237
dove [m] e [k] sono le matrici massa e rigidezza dell’elemento. Ora, applicando l’equazionedi Lagrange, l’equazione del moto risulta:
[m]δ+ [k]δ = f(t)
dove f(t) e il vettore delle forze nodali. A tale proposito occorre osservare che, sesull’elemento agisce un carico distribuito f(x, y, t), questo puo essere facilmente ricondottoa forze equivalenti agenti sui nodi.
Sebbene le equazioni del moto di un singolo elemento non siano direttamente utili, lematrici massa e rigidezza ed il vettore delle forze nodali sono necessarie per pervenire allasoluzione dell’intera struttura.Si noti infine che la forma dell’elemento finito ed il numero di incognite (componenti delvettore spostamenti nodali) differisce a seconda dei casi.
Di seguito, si vanno a determinare le matrici rigidezza [k] e massa [m] del genericoelemento finito i-esimo. Per semplificare le notazioni, si omettera il pedice i (che dovrebbecontraddistinguere le quantita relative all’elemento i-esimo), tranne che per le energieelastica e potenziale (Ti e Ui).
N.3 Matrice rigidezza
Ci si proponga di esprimere l’energia potenziale elastica (energia di deformazione) di unelemento generico. Le tensioni sono legate alle deformazioni, e quindi agli spostamenti, dalegami dipendenti dal comportamento fisico dei materiali: in ogni punto di un elemento epertanto definito un vettore deformazione. Differenziando la (N.2) rispetto alle coordinatesi ottiene la relazione fra le deformazioni ϵ all’interno dell’elemento e gli spostamentinodali (nell’ipotesi di piccoli spostamenti e piccoli gradienti di spostamento):
ϵ = [B]δ (N.4)
Per un materiale elastico lineare isotropo, se non ci sono tensioni iniziali (cioe se nel-l’elemento non vi sono tensioni fino a che alla struttura non vengono applicate dellesollecitazioni), fra tensioni e deformazioni sussiste la relazione:
σ = [D]ϵ (N.5)
dove [D] e una matrice quadrata simmetrica i cui elementi dipendono dalle caratteristichedel materiale, cioe - di solito - dal modulo di Young E e dal coefficiente di Poisson ν.
Come e noto, l’energia potenziale di deformazione elastica di un elemento si puoesprimere nella forma:
Ui =1
2
∫V
εT σ dV (N.6)
dove ϵ e il vettore delle deformazioni, σ e il vettore delle tensioni e V e il volumedell’elemento. Introducendo la (N.4) e la (N.5) nella (N.6) si ottiene:
Ui =1
2
∫V
[B]δT [D] [B]δ dV = δT 12
∫V
[B]T [D] [B] dV δ (N.7)

238 APPENDICE N. IL METODO DEGLI ELEMENTI FINITI (FEM)
che si puo scrivere:
Ui =1
2δT [k] δ (N.8)
dove:
[k] =
∫V
[B]T [D] [B] dV (N.9)
e la matrice rigidezza dell’elemento. La matrice [k] e simmetrica perche, essendo simme-trica [D], e simmetrica anche la matrice prodotto [B]T [D][B].
N.4 Matrice massa
L’espressione generale dell’energia cinetica di un elemento di volume V e densita ρ e:
Ti =1
2
∫V
ρ dTd dV (N.10)
dove d e la derivata rispetto al tempo del vettore spostamento d. Utilizzando la(N.2), e tenendo conto che la matrice [N ] e costante, si ricava l’espressione:
d = [N ]δ (N.11)
Sostituendo la (N.11) nella (N.10) si ottiene:
Ti =1
2
∫V
ρ [N ]δT [N ]δ dV =1
2δT
∫V
ρ [N ]T [N ] dV δ (N.12)
che si puo scrivere:
Ti =1
2δT [m]δ (N.13)
dove:
[m] =
∫V
ρ [N ]T [N ] dV (N.14)
e una matrice simmetrica e costituisce la matrice massa dell’elemento. La matrice definitadalla (N.14) e dettamatrice massa coerente se viene ottenuta utilizzando la stessa funzionedi forma impiegata per ottenere la matrice rigidezza (le determinazioni di [k] ed [m] sonocoerenti tra loro).
Spesso, al posto di una matrice massa coerente viene impiegata una matrice massaconcentrata. Questa matrice e ottenuta assumendo che la massa dell’elemento sia concen-trata ai nodi dell’elemento stesso. Il vantaggio di concentrare la massa e che la matriceche ne deriva e facile da costruire e, soprattutto, e diagonale. Una matrice diagonale pre-senta diverse vantaggi quali ad esempio il minor costo computazionale e la semplificazionemaggiore degli algoritmi per la soluzione dell’autoproblema. Per alcuni elementi, come adesempio le aste vibranti longitudinalmente, la matrice massa concentrata si rivela essereefficiente quanto la matrice massa coerente.

N.5. VIBRAZIONI LONGITUDINALI 239
Figura N.2: Elemento asta con moto longitudinale
N.5 Vibrazioni longitudinali
La Fig. N.2 mostra un elemento soggetto a vibrazioni assiali (asta con moto longitudinale).Esso ha due nodi, 1 e 2, ciascuno con un solo grado di liberta, cioe lo spostamentolongitudinale u. Il vettore spostamento nodale in questo caso e:
δ =
u1u2
(N.15)
Poiche vi sono due spostamenti nodali, la funzione spostamento va scelta con almenodue costanti:
u(x) = a1 + a2x (N.16)
Le costanti al, a2 si ottengono dai valori di u(x) in corrispondenza dei due nodi:
u(0) = u1
u(l) = u2(N.17)
dove con l si e indicata la lunghezza dell’elemento; dalle (N.17) si ricava:
a1 = u1
a1 + a2l = u2(N.18)
Le (N.18) permettono di esprimere al e a2 in funzione di ul, u2:
a1 = u1
a2 = (u2 − u1)/l(N.19)
Introducendo le espressioni (N.19) nella (N.16) si ottiene:
u(x) =[1− x
l
x
l
]u1u2
(N.20)
La (N.20) corrisponde, per il particolare elemento considerato, all’espressione generale(N.2). I polinomi che compaiono nella matrice [N ], in questo caso (1− x/l) e (x/l), sonole funzioni di forma. Puo risultare comodo scrivere:
u(x) = [N1(x) N2(x)]
u1u2
(N.21)
con:[N ] = [N1(x) N2(x)] =
[1− x
l
x
l
](N.22)
Vengono ora determinate l’energia di deformazione Ui, la matrice rigidezza [k], l’energiacinetica Ti e la matrice massa [m].

240 APPENDICE N. IL METODO DEGLI ELEMENTI FINITI (FEM)
N.5.1 Matrice rigidezza
Poiche e:
σ ≡ σx = Eεx ≡ Eε (N.23)
con:
ε =∂u
∂x(N.24)
La matrice [D] si riduce in questo caso alla quantita scalare E. Per la (N.21), la (N.24)diventa:
ε =
[−1
l
1
l
]u1u2
(N.25)
che corrisponde alla espressione generale (N.4), per cui in questo caso la matrice [B] e:
[B] =
[dN1
dx
dN2
dx
]=
[−1
l
1
l
](N.26)
Sostituendo la (N.26) nella (N.7) ed eseguendo il prodotto [B]T [D][B] si ottiene:
Ui =1
2u1 u2
l∫0
EA
[dN1/dxdN2/dx
] [dN1
dx
dN2
dx
]dx
u1u2
=
=1
2u1 u2
l∫0
EA
[1/l2 −l2−1/l2 1/l2
]dx
u1u2
=
=1
2
EA
lu1 u2
[1 −1−1 1
]u1u2
(N.27)
per cui, la matrice rigidezza dell’elemento “asta con moto longitudinale” e:
[k] =EA
l
[1 −1−1 1
](N.28)
Come si vede, questa matrice e singolare, cioe il suo determinante e nullo. Cio econseguenza del fatto che la funzione di forma (21) permette anche un moto (traslatorio)di corpo rigido.
N.5.2 Matrice massa
Impiegando le stesse funzioni di forma usate per la determinazione della matrice rigidezza,inserendo la (N.22) direttamente nell’espressione (N.14), si ottiene:
[m] = ρA
l∫0
(1− x
l
)2 x
l
(1− x
l
)x
l
(1− x
l
) (xl
)2 dx (N.29)
cioe:
[m] = ρAl
[1/3 1/61/6 1/3
](N.30)

N.5. VIBRAZIONI LONGITUDINALI 241
Pertanto la matrice massa e:
[m] =ρAl
6
[2 11 2
](N.31)
La matrice definita dalla (N.31) e una matrice massa coerente poiche e stata ottenutautilizzando la stessa funzione di forma impiegata per ottenere la matrice rigidezza (N.28).
La matrice massa concentrata si puo ottenere concentrando la massa dell’elemento ainodi e scrivendo l’energia cinetica in forma matriciale:
Ti =1
2
ρAl
2(u21 + u22) =
1
2
ρAl
2u1 u2
[1 00 1
]u1u2
(N.32)
da cui risulta immediatamente:
[m] =ρAl
2
[1 00 1
](N.33)
N.5.3 Vettore forze nodali
Il vettore delle forze nodali puo essere ricavato tramite l’espressione del lavoro virtuale.Se l’asta e soggetta ad una forza distribuita f(x, t), il lavoro virtuale puo essere scrittocome:
δW (t) =
l∫0
f(x, t) δu(x, t) dx =
=
l∫0
f(x, t)[(
1− x
l
)δu1(t) +
(xl
)δu2(t)
]dx =
=
l∫0
f(x, t)(1− x
l
)dx
δu1(t) + l∫
0
f(x, t)(xl
)dx
δu2(t)(N.34)
Esprimendo la (N.34) in forma matriciale, si ha:
δW (t) = δu1(t) δu2(t)f1(t)f2(t)
(N.35)
Pertanto il vettore delle forze nodali e:
f(t) =
f1(t)f2(t)
=
l∫0
f(x, t)(1− x
l
)dx
l∫0
f(x, t)(xl
)dx
(N.36)

242 APPENDICE N. IL METODO DEGLI ELEMENTI FINITI (FEM)
N.6 Vibrazioni torsionali
Consideriamo un elemento di trave di sezione uniforme soggetto a vibrazioni torsionali eavente l’asse x diretto come in Fig. N.3. Sia G il modulo di elasticita tangenziale e conGJ si indichi la rigidezza torsionale essendo J la costante di torsione della sezione (persezioni circolari J si riduce al momento d’inerzia polare della sezione).
Figura N.3: Elemento trave soggetto a vibrazioni torsionali
L’elemento ha due nodi, l e 2, ciascuno con un solo grado di liberta, ciove la rotazione.Il vettore spostamento (rotazione) nodale in questo caso e:
δ =
θ1(t)θ2(t)
(N.37)
La rotazione allinterno dell’elemento pu essere assunta lineare in x, ovvero puo essereespressa come segue:
θ(x, t) = a(t) + b(t)x
o, in alternativa, anche come:
θ(x, t) = [N1(x) N2(x)]
θ1(t)θ2(t)
(N.38)
dove N1(x) e N2(x) si determinano in maniera analoga a quanto fatto per le vibrazio-ni longitudinali, ossia imponendo le condizioni al contorno (vedi Eqq. (N.16)-(N.22)).Risulta:
[N ] = [N1(x) N2(x)] =[1− x
l
x
l
](N.39)
Scriviamo ora le espressioni dell’energia cinetica, dell’energia di deformazione e dellavoro virtuale; si ha rispettivamente:
T =1
2
l∫0
J0
∂θ(x, t)
∂t
2
dx =1
2δT [m]δ
U =1
2
l∫0
GJ
∂θ(x, t)
∂x
2
dx =1
2δT [k]δ
δW =
l∫0
f(x, t) δθ(x, t) = δδTf(t)
(N.40)

N.6. VIBRAZIONI TORSIONALI 243
dove f(x, t) e una coppia distribuita per unita di lunghezza.
Sostituendo l’espressione di θ(x, t) ed eseguendo le operazioni di integrazione, si otten-gono le matrici massa e rigidezza ed il vettore delle forze nodali:
[k] =GJ
l
[1 −1−1 1
](N.41)
[m] =J0 l
6
[2 11 2
](N.42)
f(t) =
f1(t)f2(t)
=
l∫0
f(x, t)(1− x
l
)dx
l∫0
f(x, t)(xl
)dx
(N.43)
Nel caso di sezione circolare risulta essere:
• J = Ip con Ip momento di inerzia polare della sezione
• J0 = ρIp, con ρ densita del materiale
per cui le matrici rigidezza e massa diventano rispettivamente:
[k] =GIpl
[1 −1−1 1
][m] =
ρ Ip l
6
[2 11 2
](N.44)
Nel caso di sezione generica, la costante di torsione J si puo ricavare in base allaespressione approssimata:
J ≈ 0.025A4 Ip (N.45)
dove A e l’area della sezione, oppure impiegando apposite tabelle (vedi, ad esempio, laTabella N.1).
Tabella N.1: Valori della costante di torsione per sezioni non circolari

244 APPENDICE N. IL METODO DEGLI ELEMENTI FINITI (FEM)
N.7 Vibrazioni flessionali
Consideriamo ora un elemento trave secondo la teoria di Eulero-Bernoulli (si trascuranol’effetto taglio e l’inerzia rotazionale). La Fig. N.4 mostra un elemento trave soggetto aduna forza trasversale distribuita f(x, t).
Figura N.4: Elemento beam flessionale
I nodi possiedono due gradi di libert ciascuno: la traslazione in direzione trasversale ela rotazione. Pertanto, il vettore degli spostamenti nodali il seguente:
δ =
w1(t)w2(t)w3(t)w4(t)
(N.46)
Si avranno pertanto due forze nodali f1(t) e f3(t) corrispondenti ai due spostamentinodali w1(t) e w3(t) e due momenti flettenti f2(t) e f4(t) corrispondenti rispettivamentealle rotazioni nodali w2(t) e w4(t).
Per lo spostamento trasversale di un generico punto dell’elemento trave pu essereassunto un polinomio di terzo grado in x, come nel caso della deformata statica:
w(x, t) = a(t) + b(t)x+ c(t)x2 + d(t)x3
Le quattro costanti a, b, c, d, si ricavano dai valori assunti da w(x, t) e dalla suaderivata spaziale in corrispondenza dei due nodi:
w(0, t) = w1(t)∂w
∂x(0, t) = w2(t)
w(l, t) = w3(t)∂w
∂x(l, t) = w4(t)
Si ha dunque:
a(t) = w1(t) b(t) = w2(t)
c(t) =1
l2[−3w1(t)− 2w2(t)l + 3w3(t)− w4(t)l]
d(t) =1
l3[2w1(t) + w2(t)l − 2w3(t) + w4(t)l]

N.7. VIBRAZIONI FLESSIONALI 245
Che sostituite nell’espressione di w(x, t) forniscono:
w(x, t) =[N1(x) N2(x) N3(x) N4(x)
]w1
w2
w3
w4
Dove le funzioni Ni(x) (i=1, 2, 3, 4) sono le funzioni di forma:
N1(x) = 1− 3(xl
)2+ 2(xl
)3N3(x) = 3
(xl
)2− 2(xl
)3N2(x) = x− 2l
(xl
)2+ l(xl
)3N4(x) = −l
(xl
)2+ l(xl
)3L’energia cinetica, quella di deformazione ed il lavoro virtuale compiuto dalla forza
distribuita f(x, t), si possono esprimere rispettivamente come:
T =1
2
l∫0
ρA
∂w(x, t)
∂t
2
dx =1
2δT [m]δ
U =1
2
l∫0
EI
∂2w(x, t)
∂x2
2
dx =1
2δT [k]δ
δW =
l∫0
f(x, t) δw(x, t) = δδTf(t)
con ρ densit del materiale, E modulo di Young, I momento di inerzia della sezionetrasversale, A area della sezione trasversale della trave e dove:
δδ =
δw1(t)δw2(t)δw3(t)δw4(t)
f(t) =
f1(t)f2(t)f3(t)f4(t)
Sostituendo lespressione di w(x, t) ed eseguendo le operazioni di integrazione, si otten-
gono le matrici massa e rigidezza ed il vettore delle forze nodali:
[m] =ρAl
420
156 22l 54 −13l22l 4l2 13l −3l2
54 13l 156 −22l−13l −3l2 −22l 4l2
[k] =EI
l3
12 6l −12 6l6l 4l2 −6l 2l2
−12 −6l 12 −6l6l 2l2 −6l 4l2
fi(t) =
l∫0
f(x, t)Ni(x) dx i = 1, 2, 3, 4.
Si osservi che la matrice rigidezza [k] singolare e ha rango 2; ci significa che solo due
dei vettori che compongono [k] sono linearmente indipendenti. Il motivo che la funzione

246 APPENDICE N. IL METODO DEGLI ELEMENTI FINITI (FEM)
spostamento w(x, t) assunta permette due moti di corpo rigido, una traslazione ed unarotazione.
La matrice massa concentrata si pu ottenere concentrando la massa dell’elemento ainodi e scrivendo l’energia cinetica in forma matriciale:
T =1
2
ρAl
2(w2
1 + w23) =
1
2
ρAl
2 w1 w2 w3 w4
1 0 0 00 0 0 00 0 1 00 0 0 0
w1
w2
w3
w4
da cui risulta immediatamente:
[m] =ρAl
2
1 0 0 00 0 0 00 0 1 00 0 0 0
Al contrario di quanto avviene per le vibrazioni longitudinali, nel caso della flessione
la matrice massa coerente molto pi efficace di quella concentrata poich quest’ultima nontiene conto delleffetto di rotazione dellelemento.

N.8. ASSEMBLAGGIO 247
N.8 Assemblaggio
Per passare dai singoli elementi all’intera struttura, si scrivono le espressioni dell’ener-gia cinetica e dell’energia di deformazione della struttura secondo le relazioni (N.1). Inaltre parole l’energia cinetica e l’energia di deformazione della struttura sono la sommarispettivamente delle energie cinetiche e di quelle di deformazione di ciascun elemento. Leequazioni di Lagrange, infine, permettono di scrivere le equazioni differenziali del moto.
N.8.1 Esempio
Per illustrare il procedimento dell’assemblaggio, consideriamo l’asta di lunghezza L rap-presentata in Fig. N.5. L’asta ha un estremo incastrato e l’altro libero ed e soggetta adun moto longitudinale. L’asta viene discretizzata con tre elementi finiti del tipo trattatoin §N.5 (Fig. N.2), ciascuno di lunghezza l = L/3.
Figura N.5: Asta con un estremo fisso modellata con tre elementi uguali
L’energia di deformazione della struttura si ottiene sommando le energie di deforma-zione dei tre elementi e tenendo conto della condizione al contorno (condizione di vincolo)u1 = 0. Impiegando le matrici rigidezza (N.28) dei singoli elementi, si ha:
U =1
2
3EA
L0 u2
[1 −1−1 1
]0u2
+
1
2
3EA
Lu2 u3
[1 −1−1 1
]u2u3
+
+1
2
3EA
Lu3 u4
[1 −1−1 1
]u3u4
Scrivendo l’equazione di Lagrange si ottiene:
∂U/∂u2∂U/∂u3∂U/∂u4
=3EA
L
2 −1 0−1 2 10 −1 1
u2u3u4
La matrice di rigidezza [K] della struttura, ottenuta assemblando i tre elementi, e per-tanto:
[K] =3EA
L
2 −1 0−1 2 10 −1 1
E fondamentale osservare che la matrice della struttura si puo ottenere senza scrivere
esplicitamente ne l’espressione di U , ne l’equazione di Lagrange, bensı sovrapponendo letre matrici rigidezza (N.28) dei singoli elementi ed eliminando la prima riga e la primacolonna, cioe le righe e le colonne corrispondenti alla condizione u1 = 0:
[K] =3EA
L
1 −1 0 0−1 1 + 1 −1 00 −1 1 + 1 −10 0 −1 1

248 APPENDICE N. IL METODO DEGLI ELEMENTI FINITI (FEM)
Per quanto riguarda l’energia cinetica, impiegando le matrici massa (N.31) dei singolielementi, risulta:
T =1
2
ρAl
60 u2
[2 11 2
]0u2
+
1
2
ρAl
6u2 u3
[2 11 2
]u2u3
+
+1
2
ρAl
6u3 u4
[2 11 2
]u3u4
e scrivendo l’equazione di Lagrange si ottiene:
d
dt
(∂T
∂u2
)d
dt
(∂T
∂u3
)d
dt
(∂T
∂u4
)
=ρAl
6
4 1 01 4 10 1 2
u2u3u4
La matrice massa dell’intera struttura e pertanto:
[M ] =ρAl
6
4 1 01 4 10 1 2
Si vede immediatamente che anche la matrice massa della struttura si puo ottenere so-vrapponendo le matrici massa dei singoli elementi ed eliminando le righe e le colonnecorrispondenti alla condizione u1 = 0.
E opportuno rilevare che, una volta effettuato l’assemblaggio, i vari elementi finitirisultano collegati fra loro nei nodi, nel senso che essi si trasmettono forze attraverso inodi e che nei nodi sono soddisfatte le condizioni di congruenza (cioe tutti gli elementiche confluiscono in un nodo hanno ivi gli stessi spostamenti). Osserviamo anche che sipossono assemblare tra loro anche elementi diversi, o addirittura parti di sistemi modellaticon tecniche diverse, per esempio ad elementi finiti ed a parametri concentrati.

N.9. FREQUENZE E MODI DI VIBRARE 249
N.9 Frequenze e modi di vibrare
Una volta eseguito l’assemblaggio e ottenute dunque le matrici rigidezza [K] e massa [M ]dell’intera struttura o componente, le frequenze naturali e i modi di vibrare si ottengonodall’equazione del moto omogenea:
[M ]δ+ [K]δ = 0
dove, naturalmente, δ e il vettore degli spostamenti nodali dell’assemblato. Ipotizzandouna soluzione nella forma:
δ = δ0 ejωt
l’equazione diviene:
−ω2[M ]δ0+ [K]δ0 =(−ω2[M ] + [K]
)δ0 = 0
ossia il classico problema agli autovalori ed autovettori. Anche per sistemi relativamentesemplici e di piccole dimensioni, le matrici [K] e [M ] possono avere diverse centinaia dielementi. La soluzione dell’autoproblema risulta pertanto essere non banale e richiedeopportuni algoritmi atti a minimizzare il costo computazionale e la richiesta di memoria.La trattazione di tali problematiche esula dagli scopi della presente dispensa e per essa sirimanda a testi specializzati.
Riferimenti Bibliografici
[Inm13] D. J. Inman. Engineering Vibration. Prentice Hall, Boston, 4 edition edition,2013.
[LBDH83] M. Lalanne, P. Berthier, and J. Der Hagopian. Mechanical Vibrations forEngineers. John Wiley & Sons Inc, Chichester West Sussex ; New York, 1983.
[Rao10] Singiresu S. Rao. Mechanical Vibrations. Prentice Hall, Upper Saddle River,N.J, 5th edition edition, 2010.

Bibliografia
[1] S. S. Rao, Mechanical Vibrations. Upper Saddle River, N.J: Prentice Hall, 5thedition ed., 2010.
[2] W. J. Palm, Modeling, Analysis, and Control of Dynamic Systems. Toronto: JohnWiley & Sons Inc, 2nd edition ed., 1999.
[3] E. Funaioli, A. Maggiore, and U. Meneghetti, Lezioni di Meccanica applicata allemacchine - Prima parte - Fondamenti di meccanica delle macchine. Bologna: Patroneditore S.r.l., 2005.
[4] U. Meneghetti, A. Maggiore, and E. Funaioli, Lezioni di meccanica applicata allemacchine - Terza parte - Dinamica e vibrazioni delle macchine. Bologna: Patroneditore S.r.l., 2011.
[5] R. Ghigliazza and C. U. Galletti, Meccanica applicata alle macchine. Torino: UTET,1986.
[6] E. Pennestrı, Dinamica tecnica e computazionale. Vol. 1: Sistemi lineari. Milano:CEA Casa Editrice Ambrosiana, 2 edizione ed., 2009.
[7] M. Fabrizio, La meccanica razionale e i suoi metodi matematici, vol. 1 of Collana dimatematica. Testi e manuali. Bologna: Zanichelli, 1991.
[8] D. J. Inman, Engineering Vibration. Boston: Prentice Hall, 4 edition ed., 2013.
[9] M. Lalanne, P. Berthier, and J. Der Hagopian, Mechanical Vibrations for Engineers.Chichester West Sussex ; New York: John Wiley & Sons Inc, 1983.
[10] W. T. Thomson and M. D. Dahleh, Theory of Vibration with Applications. UpperSaddle River, N.J: Prentice Hall, 5 edition ed., 1997.
[11] G. Diana and F. Cheli, Dinamica e vibrazioni dei sistemi meccanici. Vol. 1., vol. 1.Torino: UTET Universita, 1993.
[12] M. P. Koster, Vibrations in Cam Mechanisms. London: McMillan Press, 1974.
[13] S. Levy and J. P. Wilkinson, The Component Element Method in Dynamics. NewYork: McGraw-Hill, 1976.
[14] K. L. Johnson, Contact Mechanics. Cambridge University Press, 1985.
[15] T. L. Dresner and R. L. Norton, Modern Kinematics: Developments in the Last FortyYears. New York:: John Wiley, 1993.
250

BIBLIOGRAFIA 251
[16] A. Rivola and G. Dalpiaz, “Analisi dinamica di un meccanismo per macchinaautomatica,” Pubbl. DIEM 76, University of Bologna, 1993.
[17] G. Dalpiaz and A. Rivola, “A kineto-elastodynamic model of a mechanism for au-tomatic machine,” in Proceedings of the Ninth World Congress on the Theory ofMachines and Mechanisms, vol. 1, (Milano), pp. 327–332, Edizioni Unicopli SpA,1995.
[18] G. Dalpiaz and A. Rivola, “A non-linear elastodynamic model of a desmodromicvalve train,” Mechanism and machine theory, vol. 35, no. 11, pp. 1551–1562, 2000.
[19] A. Rivola, M. Troncossi, G. Dalpiaz, and A. Carlini, “Elastodynamic analysis ofthe desmodromic valve train of a racing motorbike engine by means of a combinedlumped/finite element model,” Mechanical systems and signal processing, vol. 21,no. 2, pp. 735–760, 2007.