MECCANICA DEGLI AZIONAMENTI - core.ac.uk · •Cambi a doppia frizione (semi-automatici o...
46
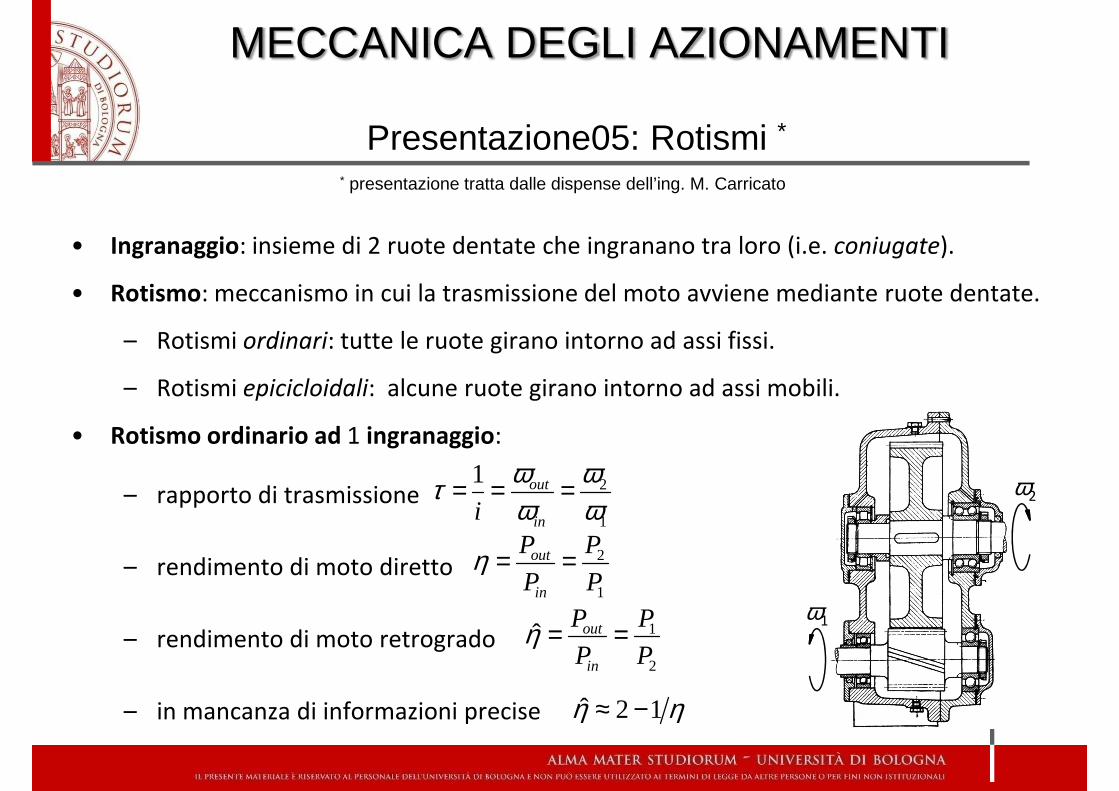
MECCANICA DEGLI AZIONAMENTI Presentazione05: Rotismi * * presentazione tratta dalle dispense dell’ing. M. Carricato • Ingranaggio: insieme di 2 ruote dentate che ingranano tra loro (i.e. coniugate). • Rotismo: meccanismo in cui la trasmissione del moto avviene mediante ruote dentate. – Rotismi ordinari: tutte le ruote girano intorno ad assi fissi. – Rotismi epicicloidali: alcune ruote girano intorno ad assi mobili. • Rotismo ordinario ad 1 ingranaggio: – rapporto di trasmissione ϖ 2 2 1 1 ϖ ϖ τ ϖ ϖ = = = out in i – rendimento di moto diretto – rendimento di moto retrogrado – in mancanza di informazioni precise ϖ 1 ˆ 2 1 η η ≈ - 2 1 η = = out in P P P P 1 2 ˆ η = = out in P P P P
Transcript of MECCANICA DEGLI AZIONAMENTI - core.ac.uk · •Cambi a doppia frizione (semi-automatici o...
MECCANICA DEGLI AZIONAMENTI
Presentazione05: Rotismi ** presentazione tratta dalle dispense dell’ing. M. Carricato
• Ingranaggio: insieme di 2 ruote dentate che ingranano tra loro (i.e. coniugate).
• Rotismo: meccanismo in cui la trasmissione del moto avviene mediante ruote dentate.
– Rotismi ordinari: tutte le ruote girano intorno ad assi fissi.
– Rotismi epicicloidali: alcune ruote girano intorno ad assi mobili.
• Rotismo ordinario ad 1 ingranaggio:
– rapporto di trasmissione ω22
1
1 ω ωτω ω
= = =out
ini
– rendimento di moto diretto
– rendimento di moto retrogrado
– in mancanza di informazioni precise
ω1
1in
ˆ 2 1η η≈ −
2
1
η = =out
in
P P
P P
1
2
η = =out
in
P P
P P
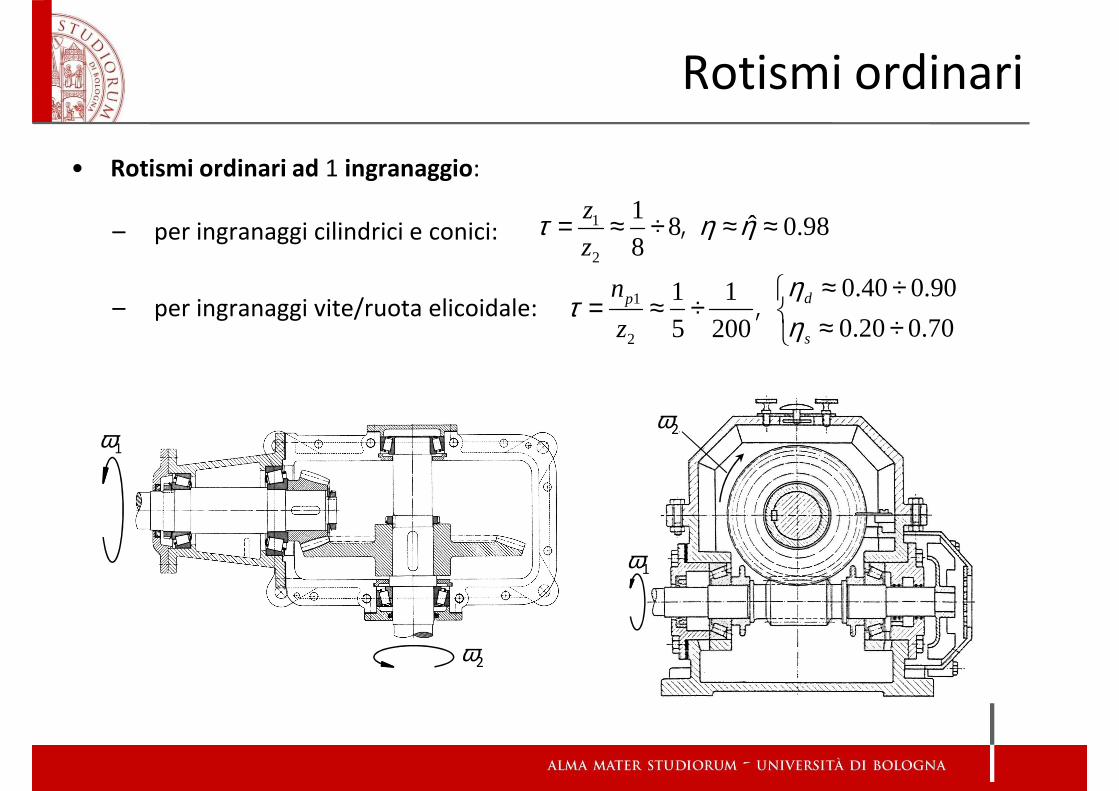
• Rotismi ordinari ad 1 ingranaggio:
– per ingranaggi cilindrici e conici: 1
2
1ˆ8 0.98
8
z
zτ η η= ≈ ÷ ≈ ≈,
Rotismi ordinari
– per ingranaggi vite/ruota elicoidale:
2
1
2
0.40 0.901 10.20 0.705 200
dp
s
n
z
ητ
η≈ ÷
= ≈ ÷ ≈ ÷,
ω2ω1
ω1
ω2
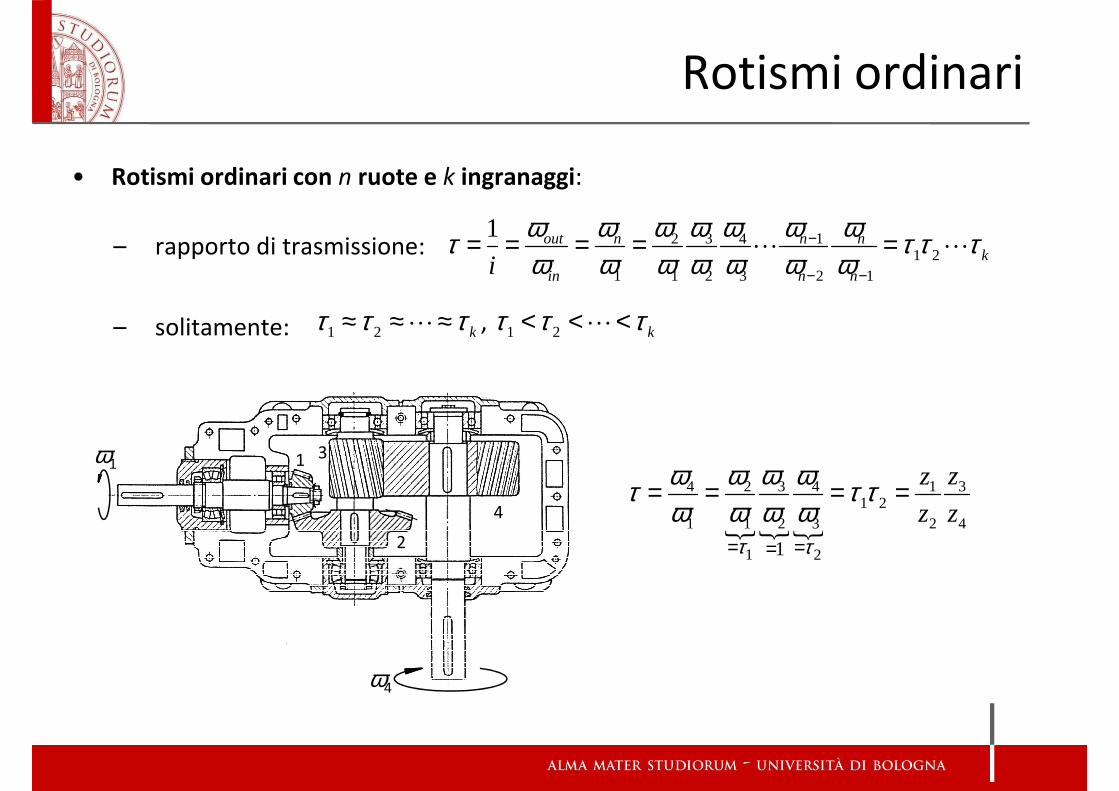
• Rotismi ordinari con n ruote e k ingranaggi:
– rapporto di trasmissione: 3 12 41 2
1 ω ω ω ω ωω ωτ τ τ τω ω ω ω ω ω ω
−= = = = =⋯ ⋯out n n nki
Rotismi ordinari
– solitamente:
1 21 1 2 3 2 1ω ω ω ω ω ω ω− −
kin n ni
3 34 2 4 11 2
1 1 2 3 2 4
zz
z z
ωω ω ωτ τ τω ω ω ω
= = = =ω1 1 3
4
1 2 1 2τ τ τ τ τ τ≈ ≈ ≈ < < <⋯ ⋯k k,
1 1 2 3 2 4
1 21
z zτ τ
ω ω ω ω= ==
ω4
2
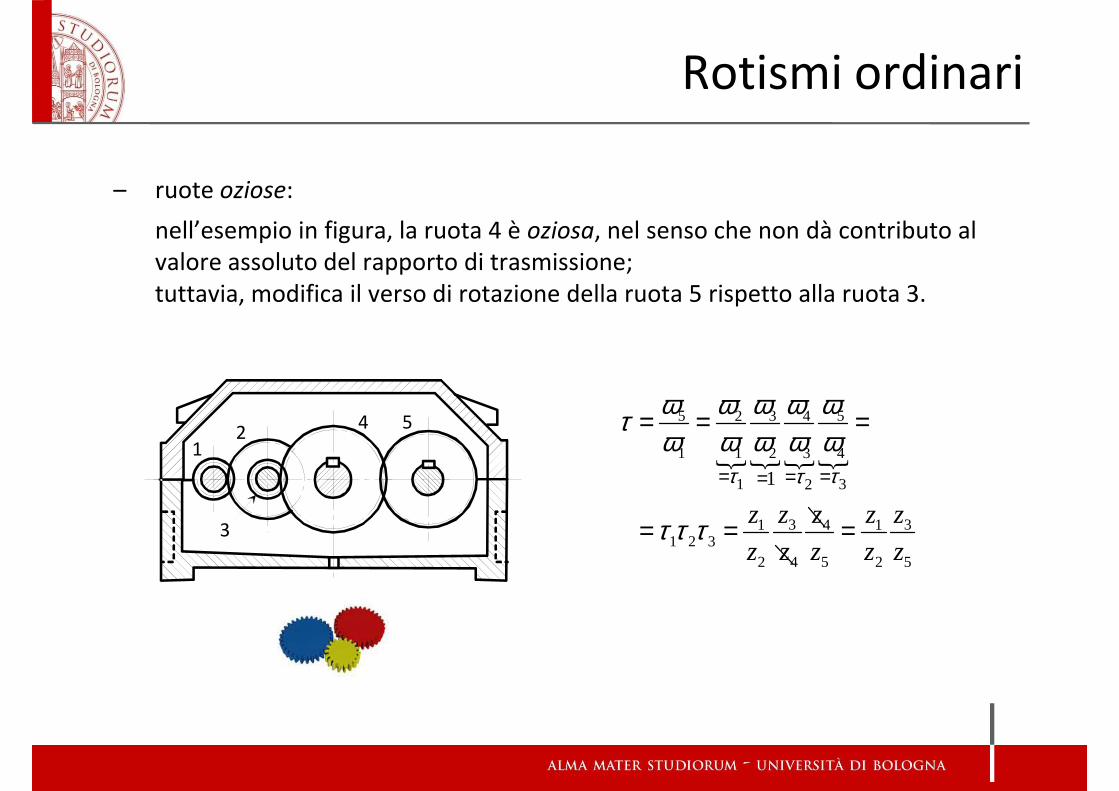
– ruote oziose:
nell’esempio in figura, la ruota 4 è oziosa, nel senso che non dà contributo al valore assoluto del rapporto di trasmissione;
Rotismi ordinari
12
3
4 5
valore assoluto del rapporto di trasmissione;tuttavia, modifica il verso di rotazione della ruota 5 rispetto alla ruota 3.
5 3 52 4
1 1 2 3 4
3 31 4 1
1 321τ ττ
ω ω ωω ωτω ω ω ω ω
τ τ τ
= ===
= = =
= = =z zz z z3 3 31 4 1
1 2 32 4 5 2 5
τ τ τ= = =z zz z z
z z z z z
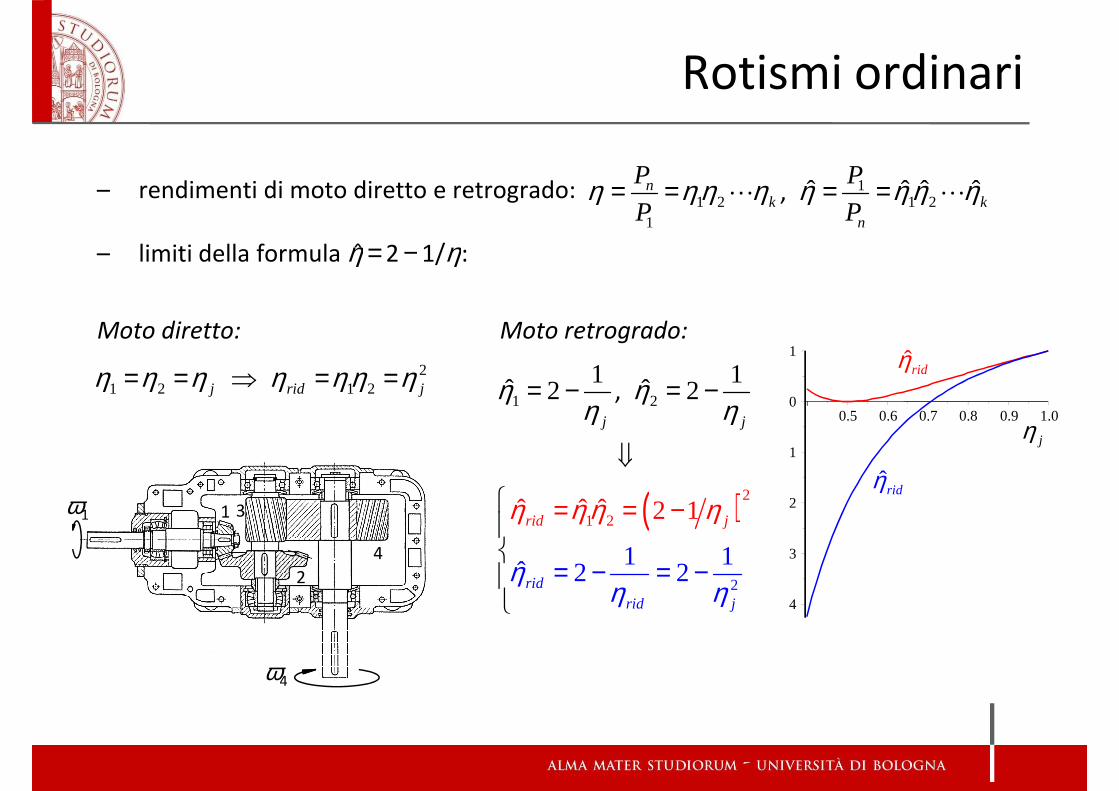
– rendimenti di moto diretto e retrogrado:
– limiti della formula η = 2 − 1/η:
Rotismi ordinari
11 2 1 2
1
ˆ ˆ ˆ ˆnk k
n
P P
P Pη η η η η η η η= = = =, ⋯ ⋯
– limiti della formula η = 2 − 1/η:
ω1 1 3
21 2 1 2 η η η η η η η= = ⇒ = =j rid j
Moto diretto:
( )
21
2
1 2ˆ ˆ ˆ 2
1 1ˆ ˆ2 2
1η η η
η ηη η
η
= − = −
⇓
== −id
j j
r j
, 0.5 0.6 0.7 0.8 0.9 1.0
2
1
0
1 ηrid
ηrid
η j
Moto retrogrado:
ω4
2
4
( )
2
1 2
1ˆ 2
12η
ηη= − = −
rid
rid j
idr j
4
3

– momenti esterni nel moto diretto:
Rotismi ordinari
1
11 1 1 1
n
n n n n
n
P M MM
P M M M
ω τωωη τ ηω
τ
== = = ⇒ =
– momenti esterni nel moto retrogrado:
τ
11 1 1 1
1
ˆ ˆ
n
n n n nn
P M M
P M MM M
ωωωη τω τ ητ
== = = ⇒ =
ω1 1 3
4
M1
ω4
2
4
M4
• Il cambio è un riduttore a rapporto di trasmissione selezionabile.
– I cambi ad azionamento manuale sono costituiti, tipicamente, da rotismi ordinari.
– Gli alberi di un cambio ordinario sono generalmente allineati lungo due assi, detti primario e secondario.
Cambi ordinari
primario e secondario.Il primario è coassiale con l'albero conduttore; il secondario è parallelo a questo, ma non necessariamente coincide con l'asse dell'albero condotto.
– Le ruote di tutti gli ingranaggi del cambio sono, generalmente, sempre ‘in presa’.
– Nella configurazione folle (τ = 0), una ruota di ciascun ingranaggio è ‘folle’ sul proprio albero.
– In ogni altra configurazione, una ruota precedentemente folle è resa solidale al proprio albero (di norma mediante un innesto sincronizzatore), trasmettendo così il proprio albero (di norma mediante un innesto sincronizzatore), trasmettendo così il movimento.
– Nelle autovetture, tipicamente:
• Numero di marce: 5÷6 + R (retromarcia, τR ha segno opposto a τj).
• Rapporto di trasmissione massimo: 1/τmax = 1.
• Rapporto di trasmissione minimo: 1/τmin = 4÷6.
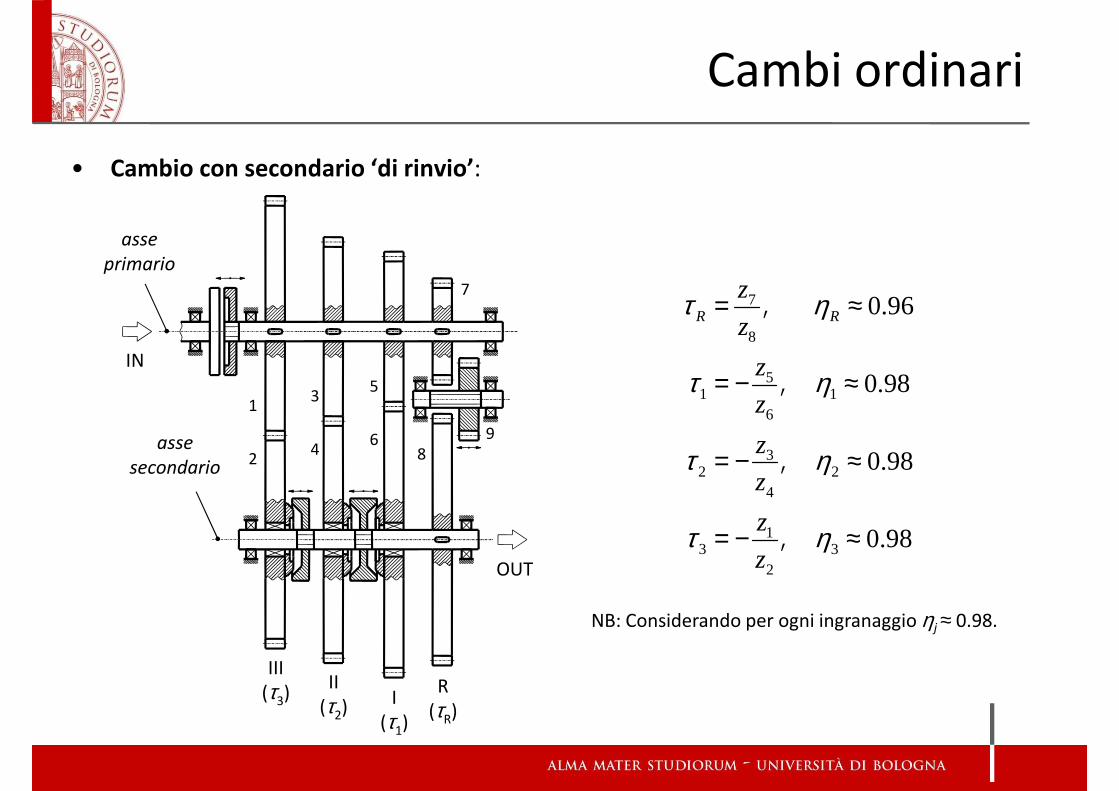
• Cambio con secondario ‘di rinvio’:
Cambi ordinari
asse
primario
7
8
51 1
6
32 2
4
1
0.96
0.98
0.98
0.98
R R
z
z
z
z
z
z
z
τ η
τ η
τ η
τ η
= ≈
= − ≈
= − ≈
= − ≈
,
,
,
,
IN
asse
secondario
primario
13
5
7
24
68
9
13 3
2
0.98z
zτ η= − ≈,
II(τ2)
III(τ3) R
(τR)I
(τ1)
OUT
NB: Considerando per ogni ingranaggio ηj ≈ 0.98.
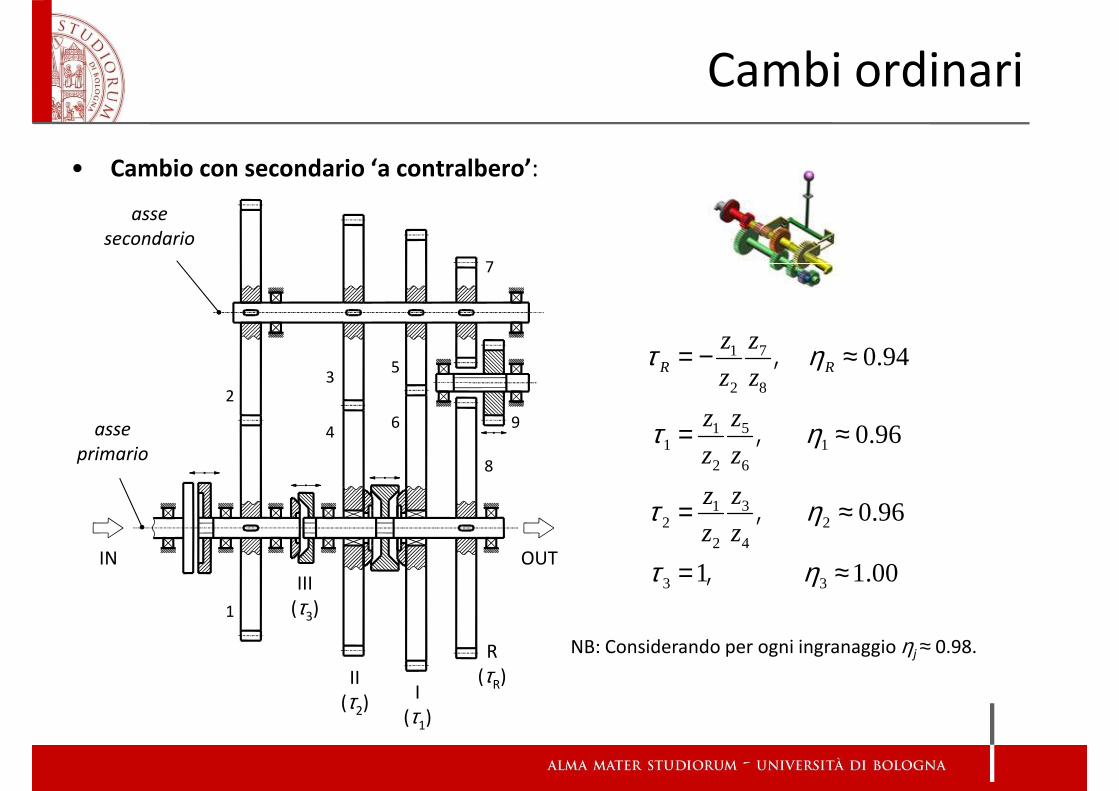
• Cambio con secondario ‘a contralbero’:
Cambi ordinari
7
asse
secondario
71
2 8
511 1
2 6
312 2
0.94
0.96
0.96
R R
zz
z z
zz
z z
zz
z z
τ η
τ η
τ η
= − ≈
= ≈
= ≈
,
,
,
35
7
2
46
8
asse
primario
9
2 22 4
3 31 1.00
z z
τ η= ≈
,
,
1
I(τ1)
II(τ2)
III(τ3)
R(τR)
IN OUT
NB: Considerando per ogni ingranaggio ηj ≈ 0.98.
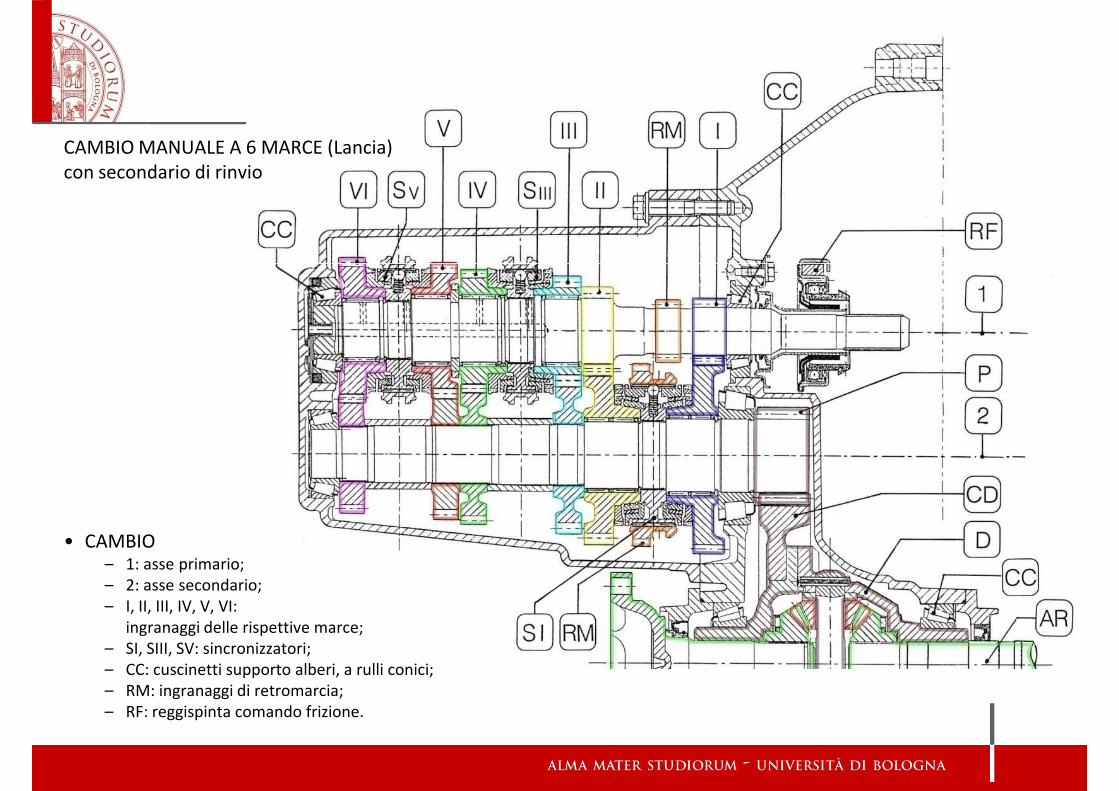
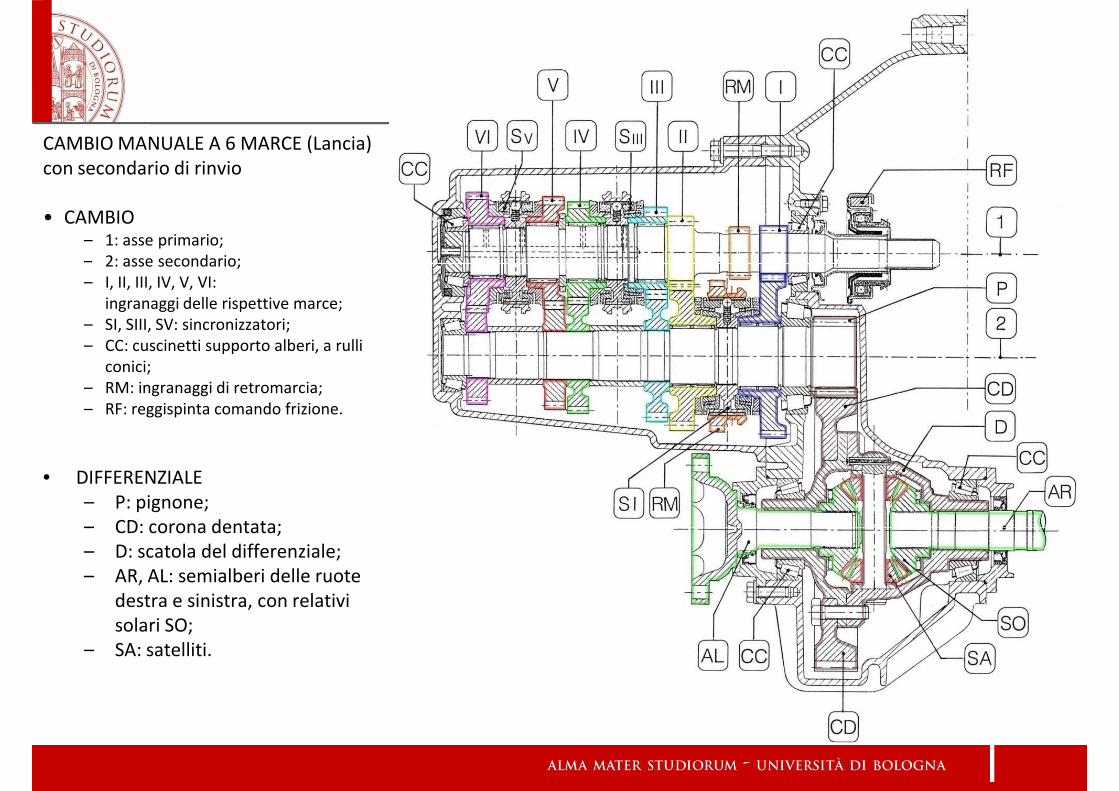
CAMBIO MANUALE A 6 MARCE (Lancia)con secondario di rinvio
• CAMBIO – 1: asse primario;– 2: asse secondario;– I, II, III, IV, V, VI:
ingranaggi delle rispettive marce;– SI, SIII, SV: sincronizzatori;– CC: cuscinetti supporto alberi, a rulli conici;– RM: ingranaggi di retromarcia;– RF: reggispinta comando frizione.
• Cambi semi-automatici (o semi-manuali o robotizzati):
– La trasmissione ad ingranaggi è uguale a quella dei cambi ad azionamento manuale.
Cambi ordinari
– La trasmissione ad ingranaggi è uguale a quella dei cambi ad azionamento manuale.
– Il cambio delle marce richiede il disinnesto della frizione e, dunque, l’interruzione della trasmissione di coppia alle ruote motrici.
– Il cambio delle marce ed il disinnesto della frizione sono realizzati mediante azionamenti elettrici, oleodinamici o pneumatici, comandati elettronicamente.
– Il controllo del conducente è realizzato mediante levette o pulsanti ± sullo sterzo.
– Sono impiegati in camion, autobus, vetture sportive, vetture da competizione.
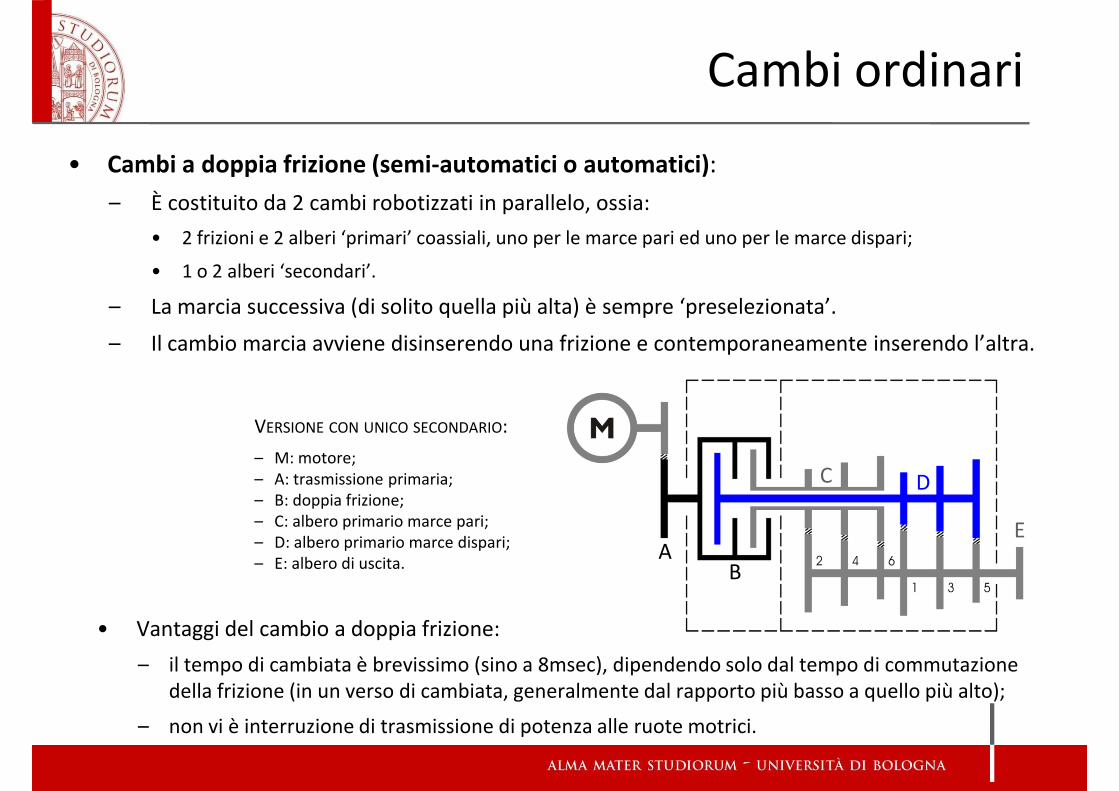
• Cambi a doppia frizione (semi-automatici o automatici):
– È costituito da 2 cambi robotizzati in parallelo, ossia:
• 2 frizioni e 2 alberi ‘primari’ coassiali, uno per le marce pari ed uno per le marce dispari;
• 1 o 2 alberi ‘secondari’.
Cambi ordinari
• 1 o 2 alberi ‘secondari’.
– La marcia successiva (di solito quella più alta) è sempre ‘preselezionata’.
– Il cambio marcia avviene disinserendo una frizione e contemporaneamente inserendo l’altra.
VERSIONE CON UNICO SECONDARIO:
– M: motore;– A: trasmissione primaria;– B: doppia frizione;– C: albero primario marce pari;
C D
E– C: albero primario marce pari;– D: albero primario marce dispari;– E: albero di uscita. B
AE
• Vantaggi del cambio a doppia frizione:
– il tempo di cambiata è brevissimo (sino a 8msec), dipendendo solo dal tempo di commutazione della frizione (in un verso di cambiata, generalmente dal rapporto più basso a quello più alto);
– non vi è interruzione di trasmissione di potenza alle ruote motrici.
Bibliografia
Rotismi e Cambi ordinari
• E. Funaioli, A. Maggiore, U. Meneghetti, Lezioni di Meccanica Applicata alleMacchine - Seconda Parte: Elementi di Meccanica degli Azionamenti, Patron, Bologna, 2009.
• A. Morelli, Progetto dell’autoveicolo, Celid, Torino, 1999
• Bosch GmbH, Automotive Handbook, Wiley, Chichester, 2011• Bosch GmbH, Automotive Handbook, Wiley, Chichester, 2011
Rotismi epicicloidali
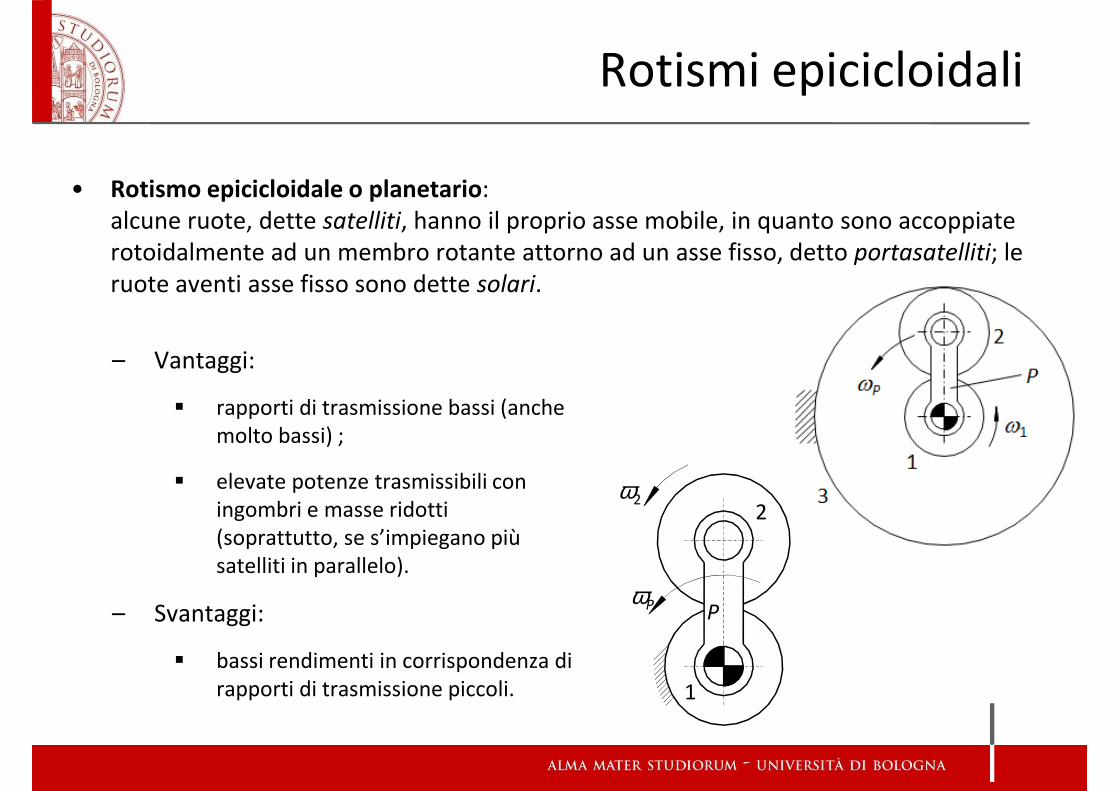
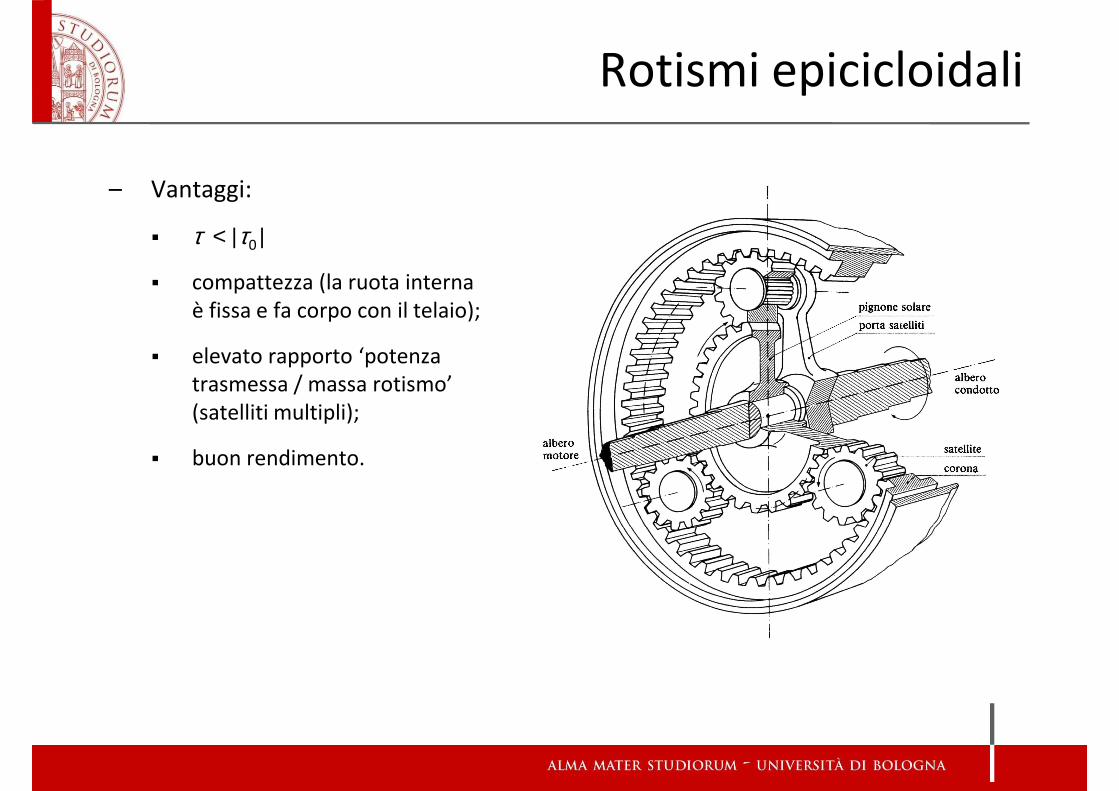
• Rotismo epicicloidale o planetario:alcune ruote, dette satelliti, hanno il proprio asse mobile, in quanto sono accoppiate rotoidalmente ad un membro rotante attorno ad un asse fisso, detto portasatelliti; le rotoidalmente ad un membro rotante attorno ad un asse fisso, detto portasatelliti; le ruote aventi asse fisso sono dette solari.
– Vantaggi:
rapporti di trasmissione bassi (anche molto bassi) ;
elevate potenze trasmissibili con ingombri e masse ridotti(soprattutto, se s’impiegano più
ω22
(soprattutto, se s’impiegano più satelliti in parallelo).
– Svantaggi:
bassi rendimenti in corrispondenza di rapporti di trasmissione piccoli.
ωP
1
P
Rotismi epicicloidali
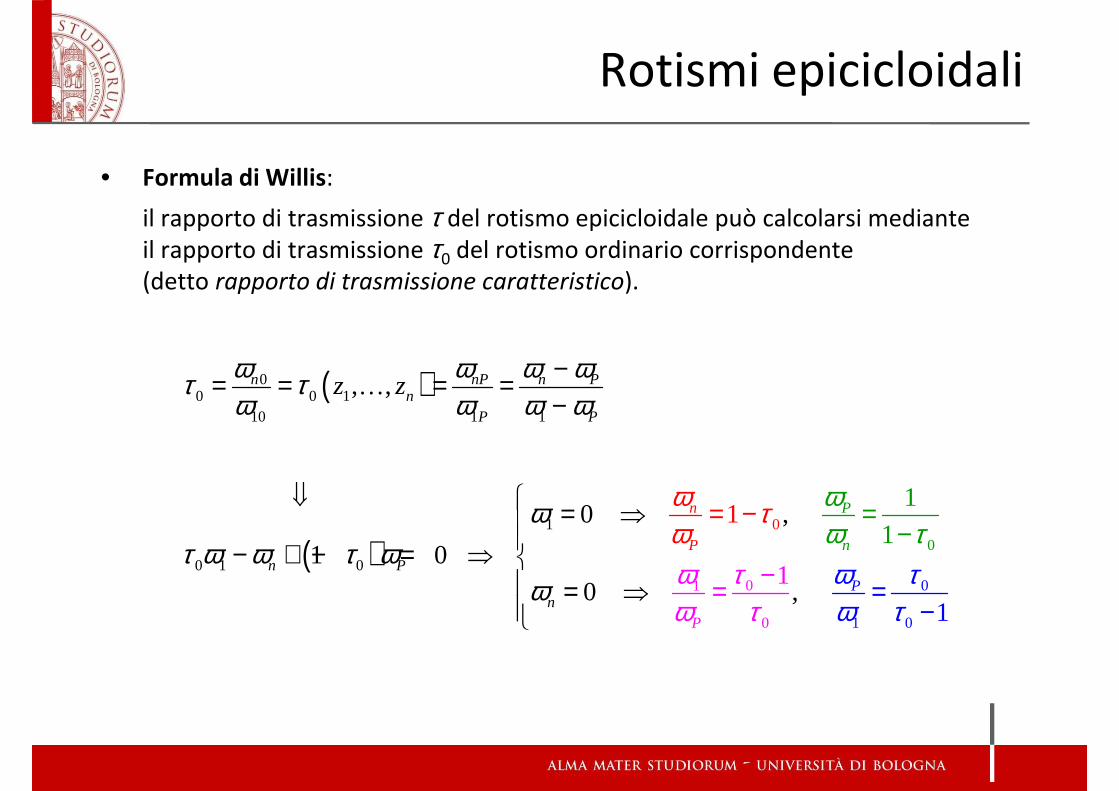
• Formula di Willis:
il rapporto di trasmissione τ del rotismo epicicloidale può calcolarsi mediante il rapporto di trasmissione τ0 del rotismo ordinario corrispondente
( )00 0 1
10 1 1
, ,n nP n Pn
P P
z zω ω ω ωτ τω ω ω ω
−= = = =−
…
il rapporto di trasmissione 0 del rotismo ordinario corrispondente (detto rapporto di trasmissione caratteristico).
1 00 , 1
11
n Pω ωω
τω τω = = ⇒
= −
−⇓
( )0
1 0
0
1
0 11
0
00
0
0 ,
1 0
0 1
1 ,
11
Pn P
n
n
P
P
τωτω
ω
ω
ωτ ω ω τ ω
τω
ω
τ
ω ττ
== ⇒− + − = ⇒ = ⇒
= −
=
−
−=
−
Rotismi epicicloidali
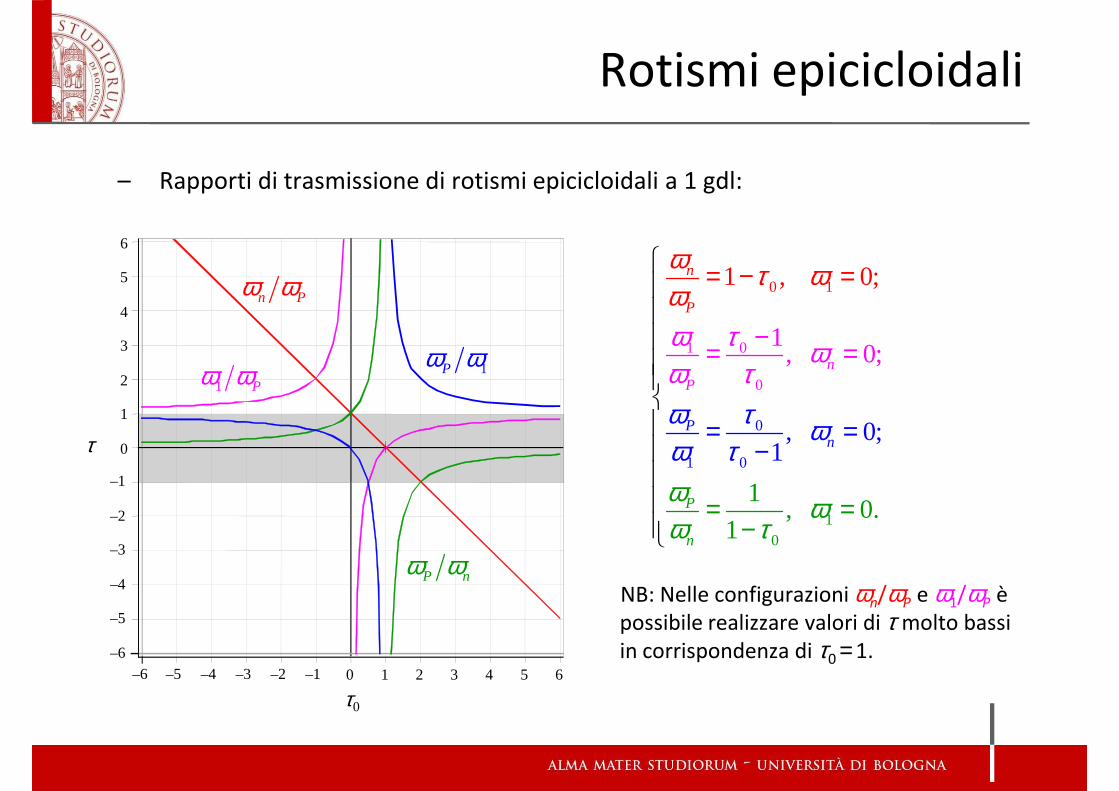
– Rapporti di trasmissione di rotismi epicicloidali a 1 gdl:
1 , 0;nω τ ω = − =6
0
1
1
0
1
01
0
0
,
1 , 0;
0
1,
1, 0.
1
;1
;
0nP
n
P
P
P
n
ω τ
τω ωω
ω ωω τ
ω
ω
τω ωτ
τ
ω−
= =−
= −
=−
=
=
=
=
–2
–1
0
1
2
3
4
5n Pω ω
1 Pω ω 1Pω ω
τ
101nω τ −
NB: Nelle configurazioni ωn/ωP e ω1/ωP è possibile realizzare valori di τ molto bassi in corrispondenza di τ0 = 1.
τ0
–6 –5 –4 –3 –2 –1 0 1 2 3 4 5 6
–6
–5
–4
–3
P nω ω
Rotismi epicicloidali
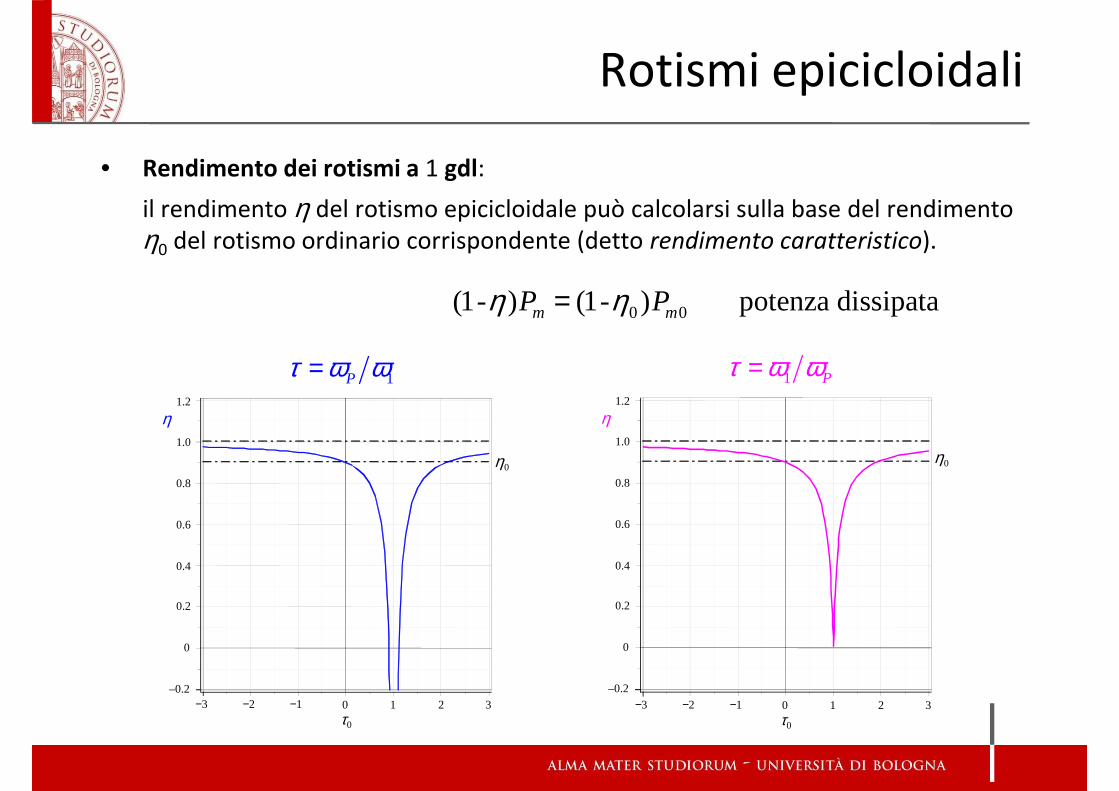
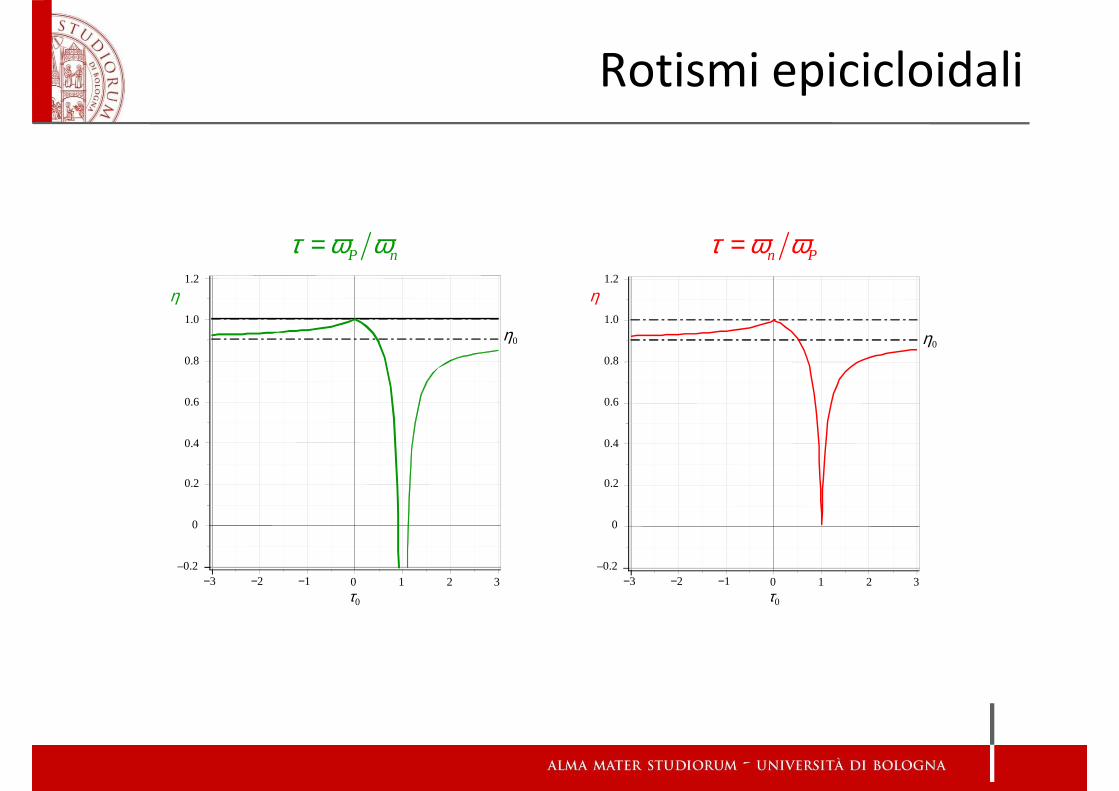
• Rendimento dei rotismi a 1 gdl:
il rendimento η del rotismo epicicloidale può calcolarsi sulla base del rendimento η0 del rotismo ordinario corrispondente (detto rendimento caratteristico).
0.6
0.8
1.0
1.2
η
η0
1 Pτ ω ω=
0.6
0.8
1.0
1.2
η
η0
1 Pτ ω ω=
0 0 (1- ) (1- ) potenza dissipatam mP Pη η=
τ0
−3 −2 −1 0 1 2 3–0.2
0
0.2
0.4
0.6
–0.2
0
0.2
0.4
0.6
τ0
−3 −2 −1 0 1 2 3
Rotismi epicicloidali
n Pτ ω ω=P nτ ω ω=
0
0.2
0.4
0.6
0.8
1.0
1.2
η
η0
0
0.2
0.4
0.6
0.8
1.0
1.2
η
η0
τ0
−3 −2 −1 0 1 2 3–0.2
0
τ0
−3 −2 −1 0 1 2 3–0.2
0
Rotismi epicicloidali
2ω2
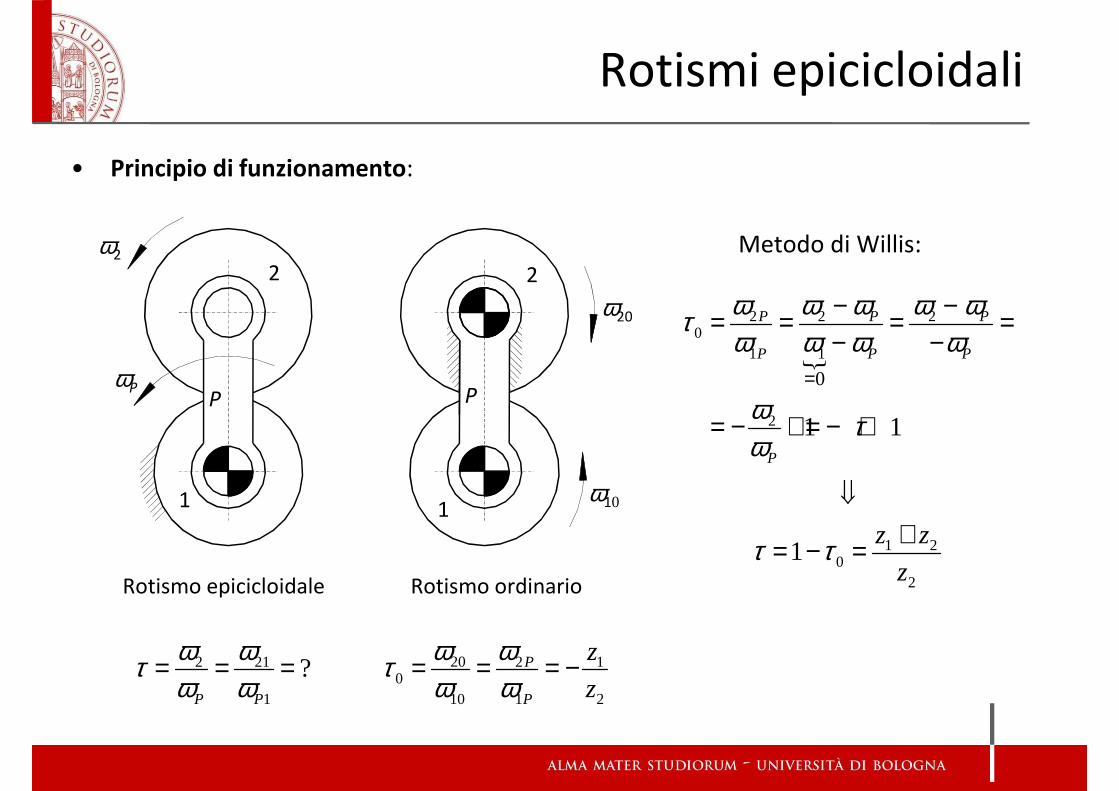
2Metodo di Willis:
• Principio di funzionamento:
2
1
P
ω10
ω20
2 2 20
1 1
2
0
1 1
P P P
P P P
P
ω ω ω ω ωτω ω ω ω
ω τω
=
− −= = = =− −
= − + = − +
ωP
2
1
P
z z
⇓
+
Rotismo ordinario
20 2 10
10 1 2
ω ωτω ω
= = = −P
P
z
z2 21
1
?ω ωτω ω
= = =P P
Rotismo epicicloidale
1 20
2
1z z
zτ τ += − =
Rotismi epicicloidali
2
3
2
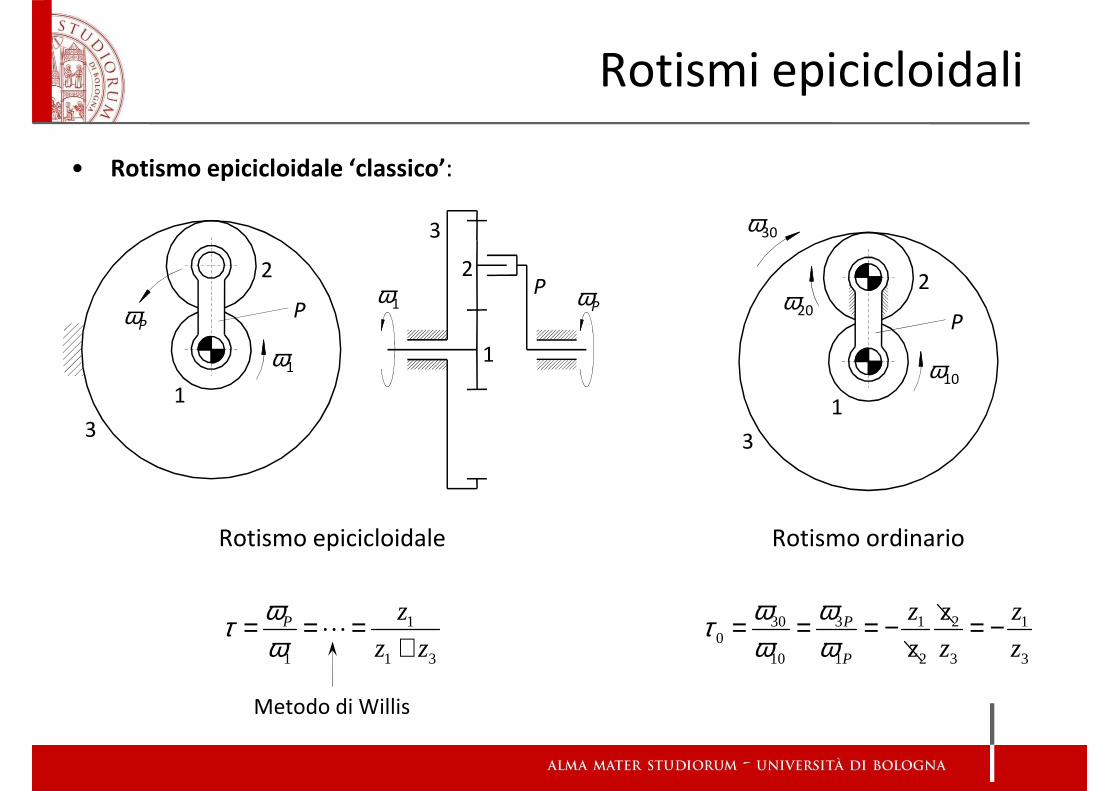
• Rotismo epicicloidale ‘classico’:
ω30
Rotismo ordinarioRotismo epicicloidale
3
2
1
P
ω1
ωP
2
1
Pω1 ωP
3
2
1
P
ω10
ω20
Metodo di Willis
Rotismo ordinario
30 3 1 2 10
10 1 2 3 3
ω ωτω ω
= = = − = −P
P
z z z
z z z
Rotismo epicicloidale
1
1 1 3
P z
z z
ωτω
= = =+
⋯
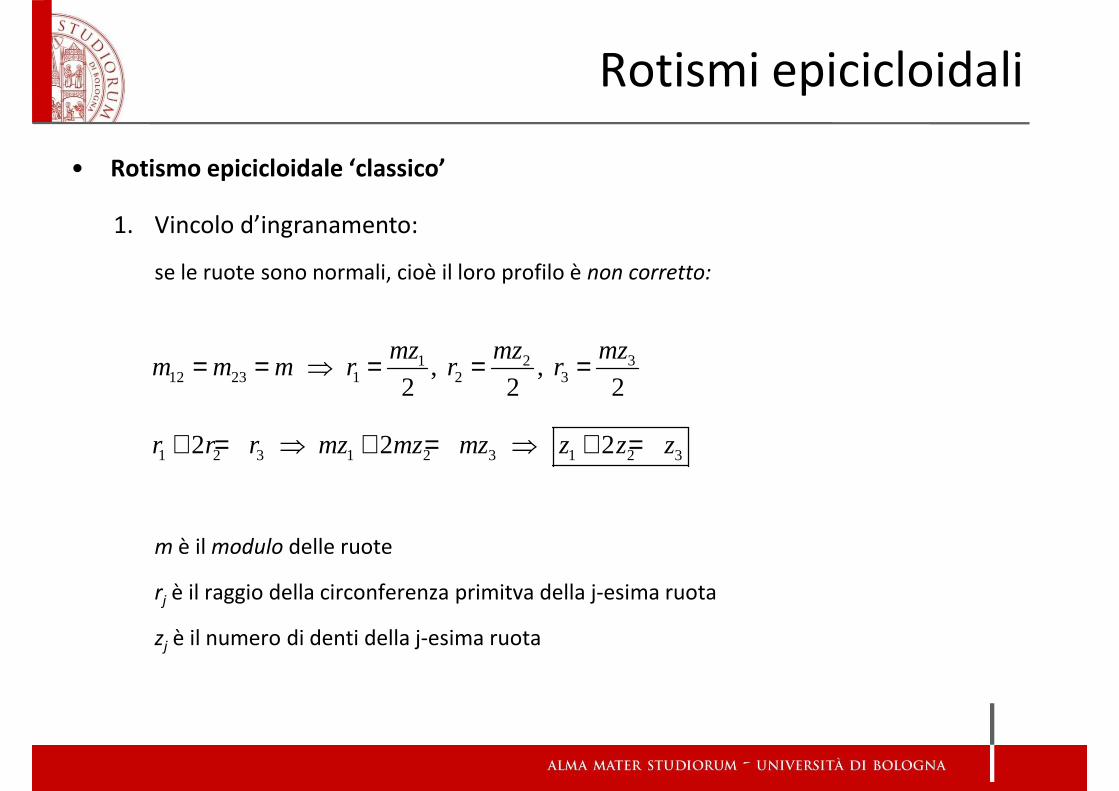
1. Vincolo d’ingranamento:
se le ruote sono normali, cioè il loro profilo è non corretto:
• Rotismo epicicloidale ‘classico’
Rotismi epicicloidali
se le ruote sono normali, cioè il loro profilo è non corretto:
1 2 3 1 2 3 1 2 32 2 2r r r mz mz mz z z z+ = ⇒ + = ⇒ + =
31 212 23 1 2 3 , ,
2 2 2= = ⇒ = = = mzmz mz
m m m r r r
m è il modulo delle ruote
rj è il raggio della circonferenza primitva della j-esima ruota
zj è il numero di denti della j-esima ruota
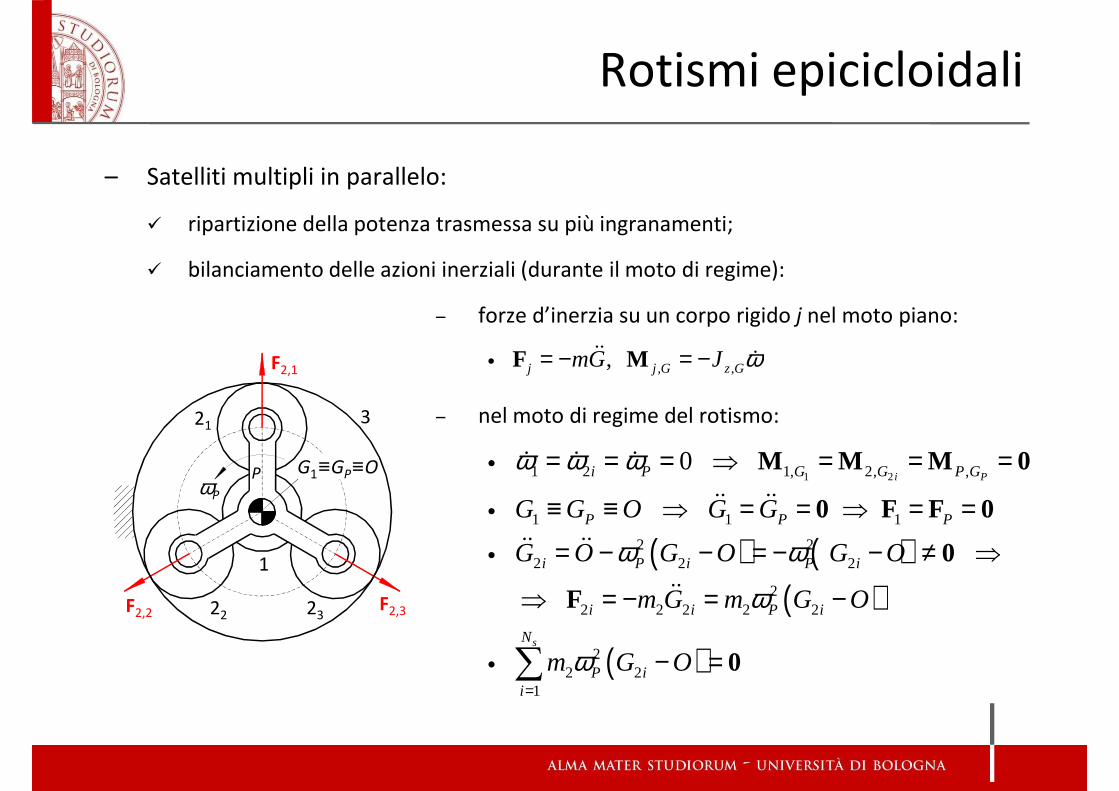
– Satelliti multipli in parallelo:
ripartizione della potenza trasmessa su più ingranamenti;
bilanciamento delle azioni inerziali (durante il moto di regime):
Rotismi epicicloidali
bilanciamento delle azioni inerziali (durante il moto di regime):
– forze d’inerzia su un corpo rigido j nel moto piano:
– nel moto di regime del rotismo:
, ,, ω= − = −• ɺɺ ɺj j G z GmG JF M
1 21 2 1, 2, ,
1 1 1
0
i Pi P G G P G
P P PG G O G G
ω ω ω= = = ⇒ = = =
≡ ≡ ⇒ = = ⇒ = =
M M M 0
0 F F 0
ɺ ɺ ɺ
ɺɺ ɺɺ
•
•
321
1ωP
F2,1
G1≡GP≡OP
( ) ( )( )
( )
1 1 1
2 22 2 2
22 2 2 2 2
22 2
1
s
P P P
i P i P i
i i P i
N
P ii
G O G O G O
m G m G O
m G O
ω ω
ω
ω=
= − − = − − ≠ ⇒
⇒ = − = −
− =∑
0
F
0
ɺɺ ɺɺ
ɺɺ
•
•
2322
1
F2,3F2,2
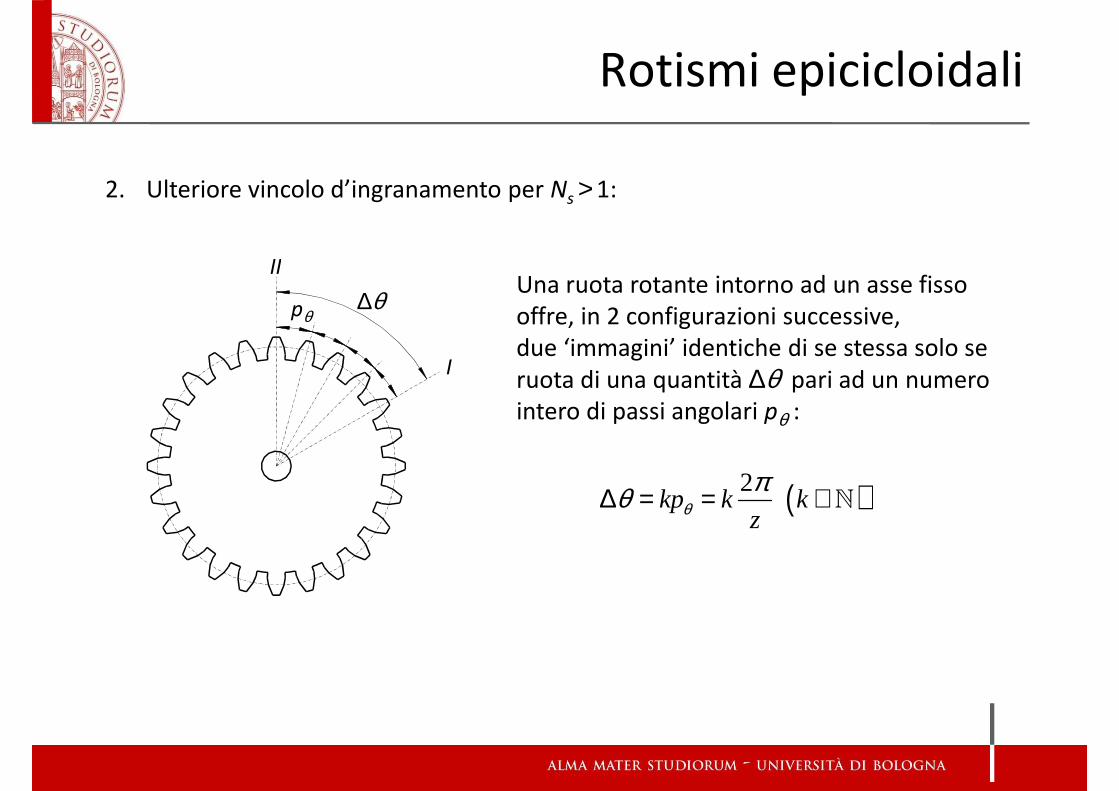
2. Ulteriore vincolo d’ingranamento per Ns > 1:
II
Rotismi epicicloidali
Una ruota rotante intorno ad un asse fisso offre, in 2 configurazioni successive, due ‘immagini’ identiche di se stessa solo se ruota di una quantità ∆θ pari ad un numero intero di passi angolari pθ :
( )2 kp k k
zθπθ∆ = = ∈ℕ
pθ∆θ
I
II
z
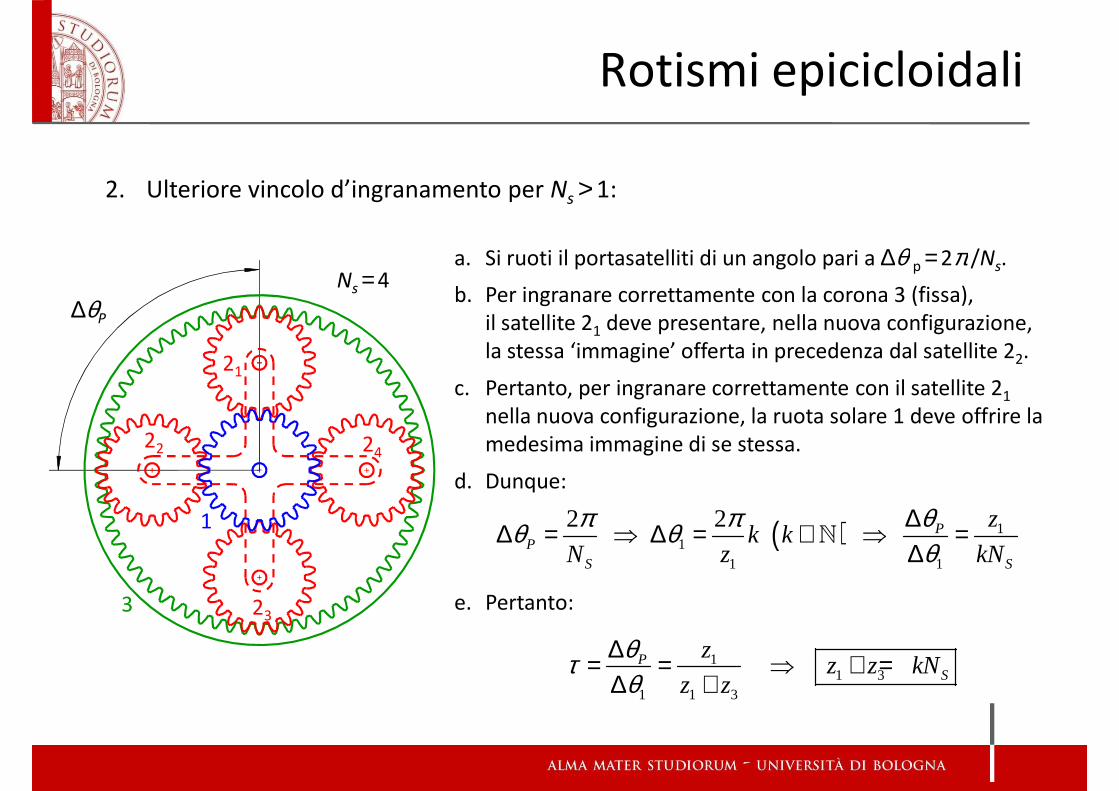
2. Ulteriore vincolo d’ingranamento per Ns > 1:
a. Si ruoti il portasatelliti di un angolo pari a ∆θ p = 2π /Ns.
Rotismi epicicloidali
a. Si ruoti il portasatelliti di un angolo pari a ∆θ p = 2π /Ns.
b. Per ingranare correttamente con la corona 3 (fissa),il satellite 21 deve presentare, nella nuova configurazione,la stessa ‘immagine’ offerta in precedenza dal satellite 22.
c. Pertanto, per ingranare correttamente con il satellite 21
nella nuova configurazione, la ruota solare 1 deve offrire la medesima immagine di se stessa.
d. Dunque:
( ) 12 2 P z
k kπ π θθ θ ∆∆ = ⇒ ∆ = ∈ ⇒ =ℕ
∆θP
21
22
1
24
Ns = 4
e. Pertanto:
( ) 11
1 1
2 2 P
PS S
zk k
N z kN
π π θθ θθ
∆∆ = ⇒ ∆ = ∈ ⇒ =∆
ℕ
3 23
1
11 3
1 1 3
PS
zz z kN
z z
θτθ
∆= = ⇒ + =∆ +
Rotismi epicicloidali
– Vantaggi:
τ < |τ0|
compattezza (la ruota internaè fissa e fa corpo con il telaio);
elevato rapporto ‘potenza trasmessa / massa rotismo’ (satelliti multipli);
buon rendimento.
Rotismi epicicloidali
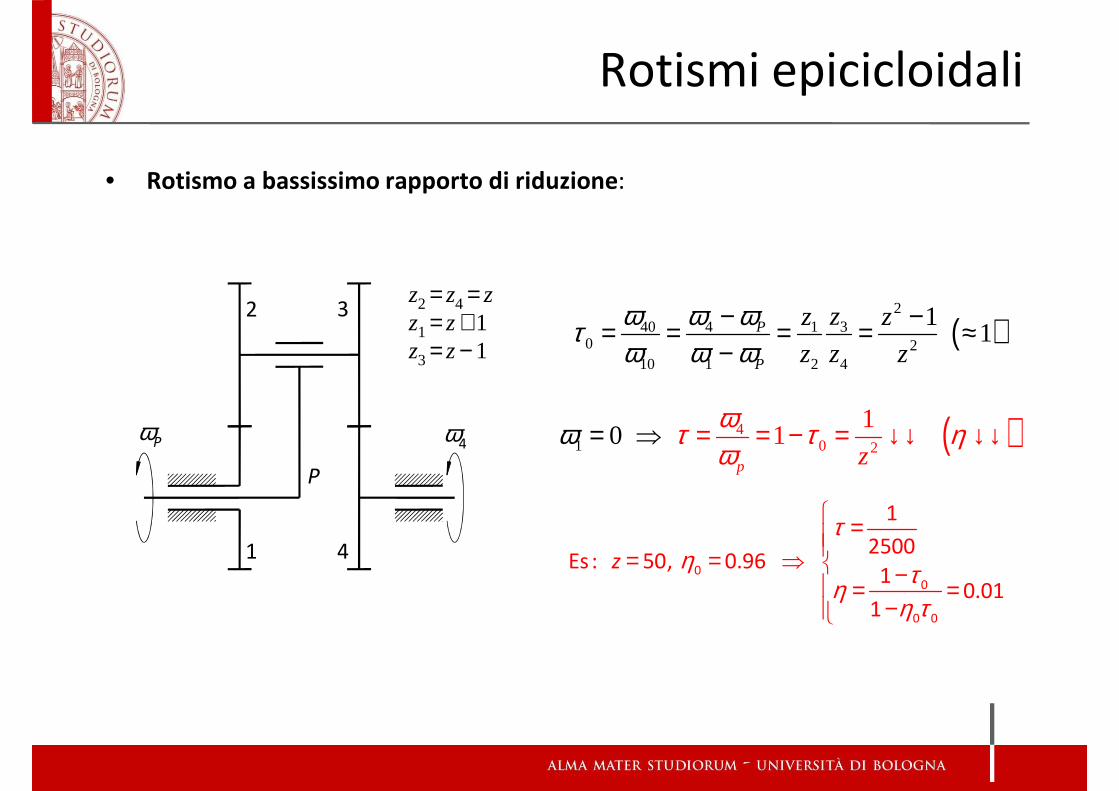
• Rotismo a bassissimo rapporto di riduzione:
( )2
40 34 10 2
10 1 2 4
1 1P
P
zz z
z z z
ω ω ωτω ω ω
− −= = = = ≈−
32
P
ωP ω4
z2 = z4 = zz1 = z + 1z3 = z − 1
( )41 0 2
110
p zω ωτ τ η
ω= = − = ↓↓= ⇒ ↓↓
τ =1
41τ
η τηη τ
== = ⇒ − = =
−
00
0 0
2500Es: 50, 0.96
10.01
1
z
Rotismi epicicloidali
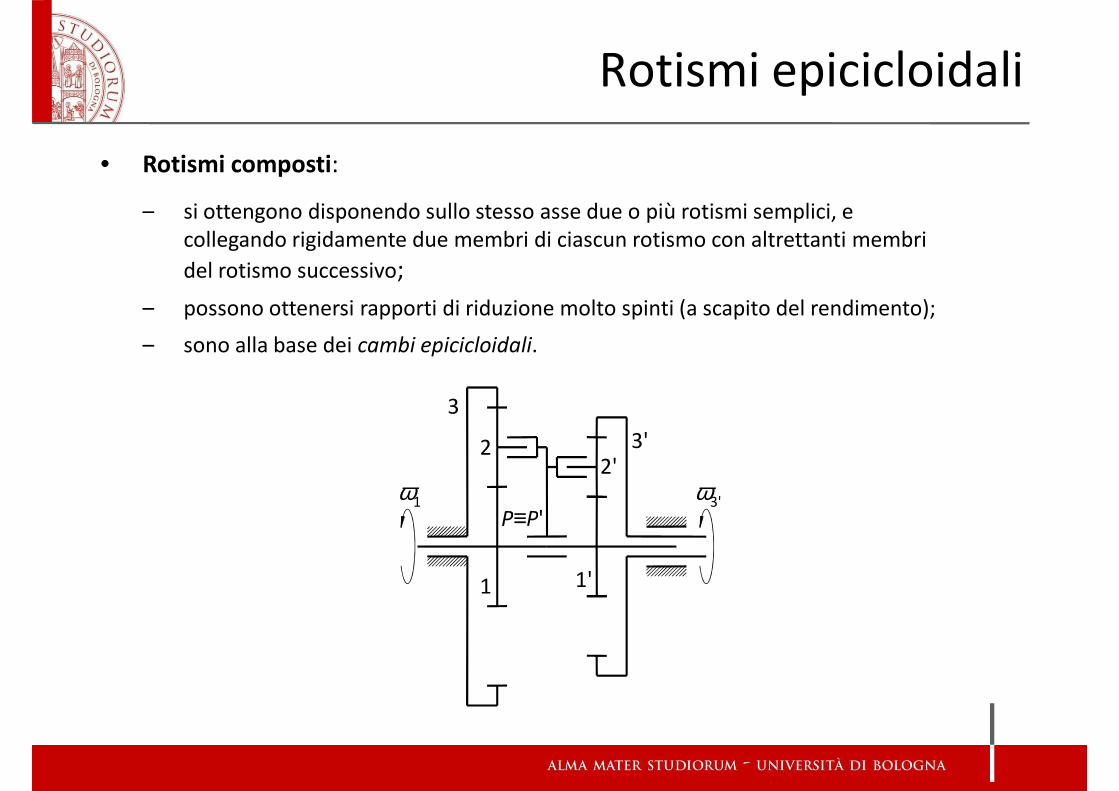
• Rotismi composti:
– si ottengono disponendo sullo stesso asse due o più rotismi semplici, e collegando rigidamente due membri di ciascun rotismo con altrettanti membri
del rotismo successivo;del rotismo successivo;
– possono ottenersi rapporti di riduzione molto spinti (a scapito del rendimento);
– sono alla base dei cambi epicicloidali.
3
2
P≡P'ω1 ω3'
3'2'
1
P≡P'
1'
Rotismi epicicloidali
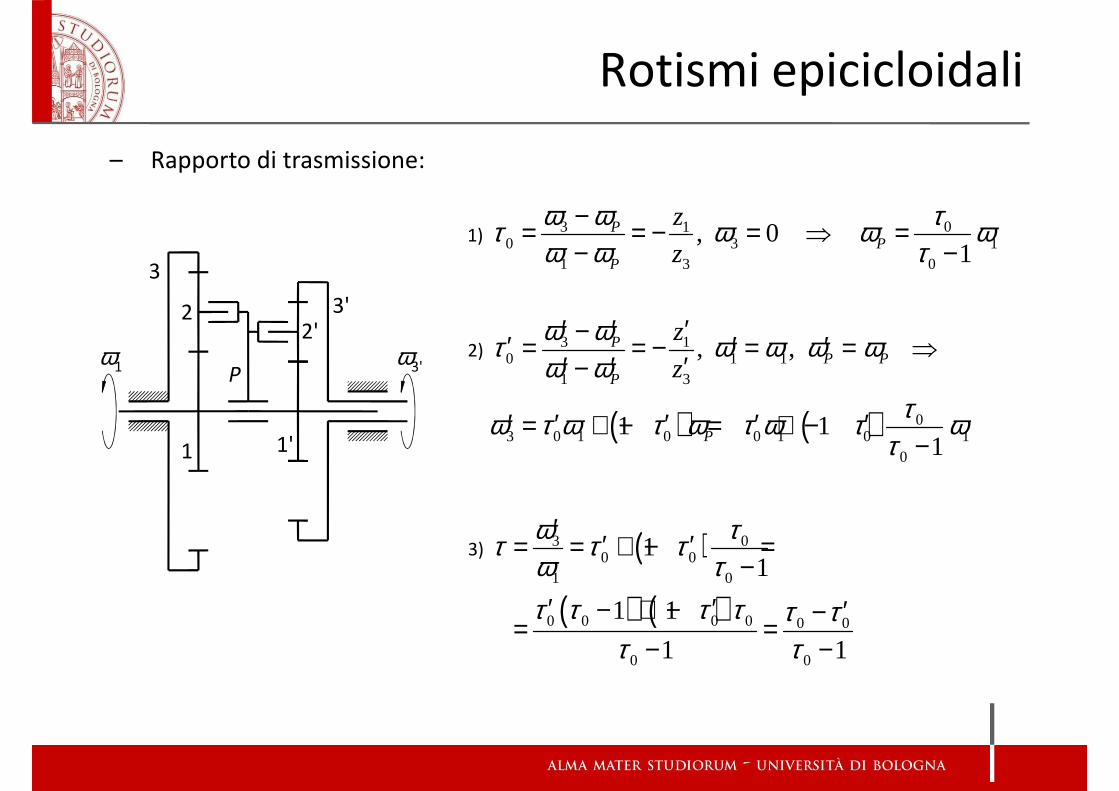
– Rapporto di trasmissione:
3 010 3 1
1 3 0
, 0 1
PP
P
z
z
ω ω ττ ω ω ωω ω τ
−= = − = ⇒ =− −
1)
3 1 3 0 1P zω ω τ− −
( ) ( )
3 10 1 1
1 3
03 0 1 0 0 1 0 1
0
, ,
1 11
PP P
P
P
z
z
ω ωτ ω ω ω ωω ω
τω τ ω τ ω τ ω τ ωτ
′ ′ ′−′ ′ ′= = − = = ⇒′ ′ ′−
′ ′ ′ ′ ′= + − = + −−
2)
3
2
1
Pω1 ω3'
3'2'
1'
( )ω τ′ ( )
( ) ( )
3 00 0
1 0
0 0 0 0 0 0
0 0
11
1 1
1 1
ω ττ τ τω ττ τ τ τ τ τ
τ τ
′ ′ ′= = + − =−
′ ′− + − ′−= =− −
3)
Rotismi epicicloidali
• Rotismi epicicloidali a 2 gdl:
– nessuna ruota è fissa;– nessuna ruota è fissa;
– sono differenziali, se posseggono 1 movente (tipicamente, il portasatellite) e
2 cedenti (tipicamente, le ruote 1 e n);
– sono combinatori, se posseggono 2 moventi (tipicamente, le ruote 1 e n) e1 cedente (tipicamente, il portasatellite).
Rotismi epicicloidali
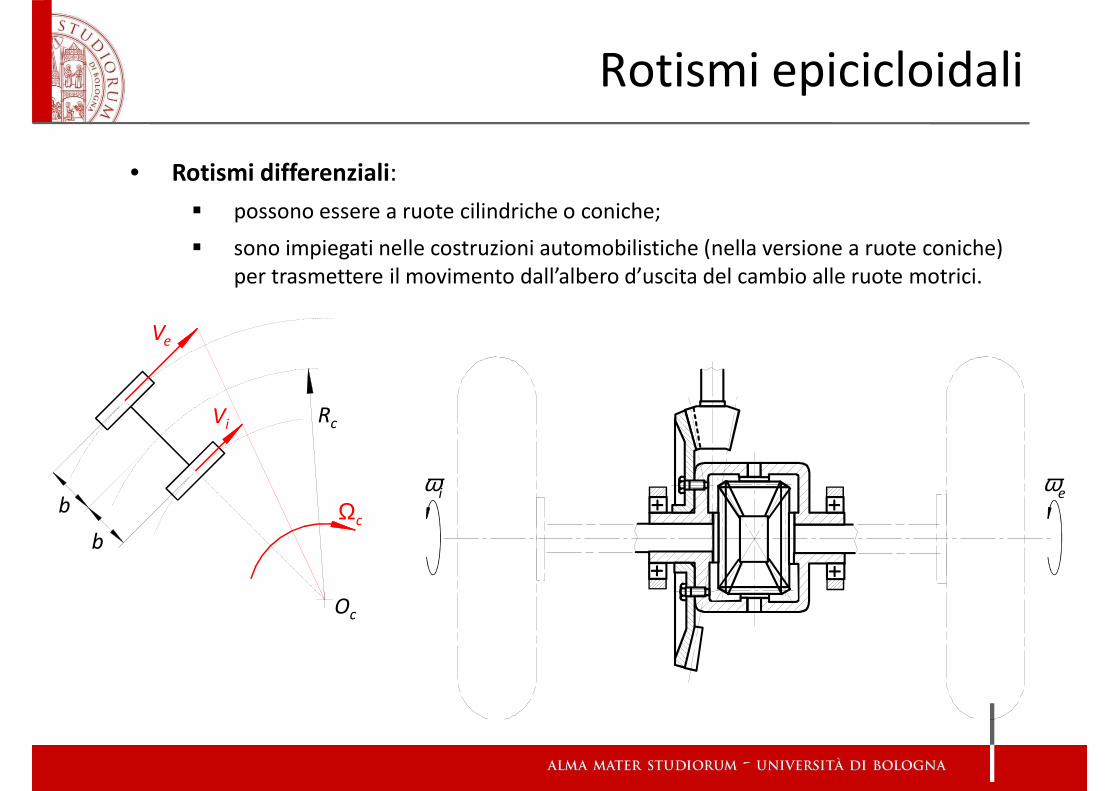
• Rotismi differenziali:
possono essere a ruote cilindriche o coniche;
sono impiegati nelle costruzioni automobilistiche (nella versione a ruote coniche) per trasmettere il movimento dall’albero d’uscita del cambio alle ruote motrici.per trasmettere il movimento dall’albero d’uscita del cambio alle ruote motrici.
b
Rc
b
Ve
Vi
Ωc
ωi
ωe
b
Oc
Rotismi epicicloidali
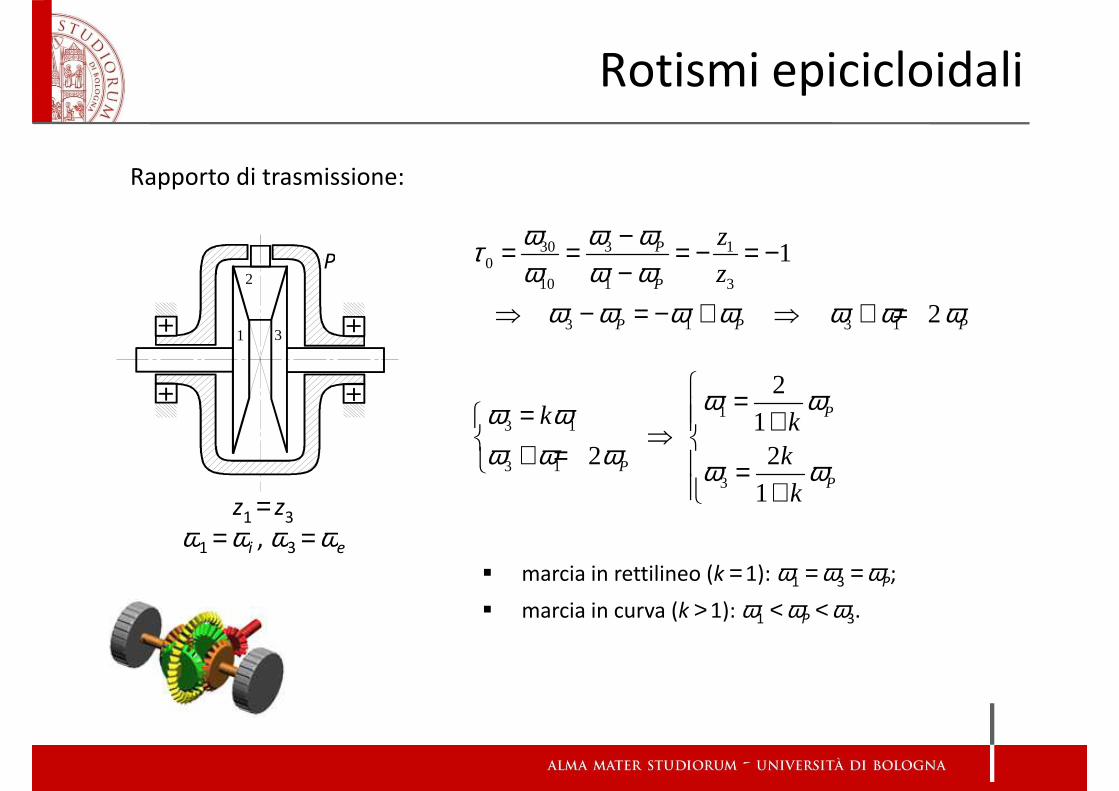
Rapporto di trasmissione:
30 3 10 1P z
z
ω ω ωτω ω ω
−= = = − = −−
4P
13 1
3 13
2
1 2 2
1
P
PP
k kk
k
ω ωω ωω ω ω ω ω
== +⇒ + = =
+
010 1 3
3 1 3 1
1
2P
P P P
zτ
ω ω ωω ω ω ω ω ω ω
= = = − = −−
⇒ − = − + ⇒ + =1
2
3
4P
z1 = z3
ω = ω , ω = ω marcia in rettilineo (k = 1): ω1 = ω3 = ωP;
marcia in curva (k > 1): ω1 < ωP < ω3.
1 3
ω1 = ωi , ω3 = ωe
Rotismi epicicloidali
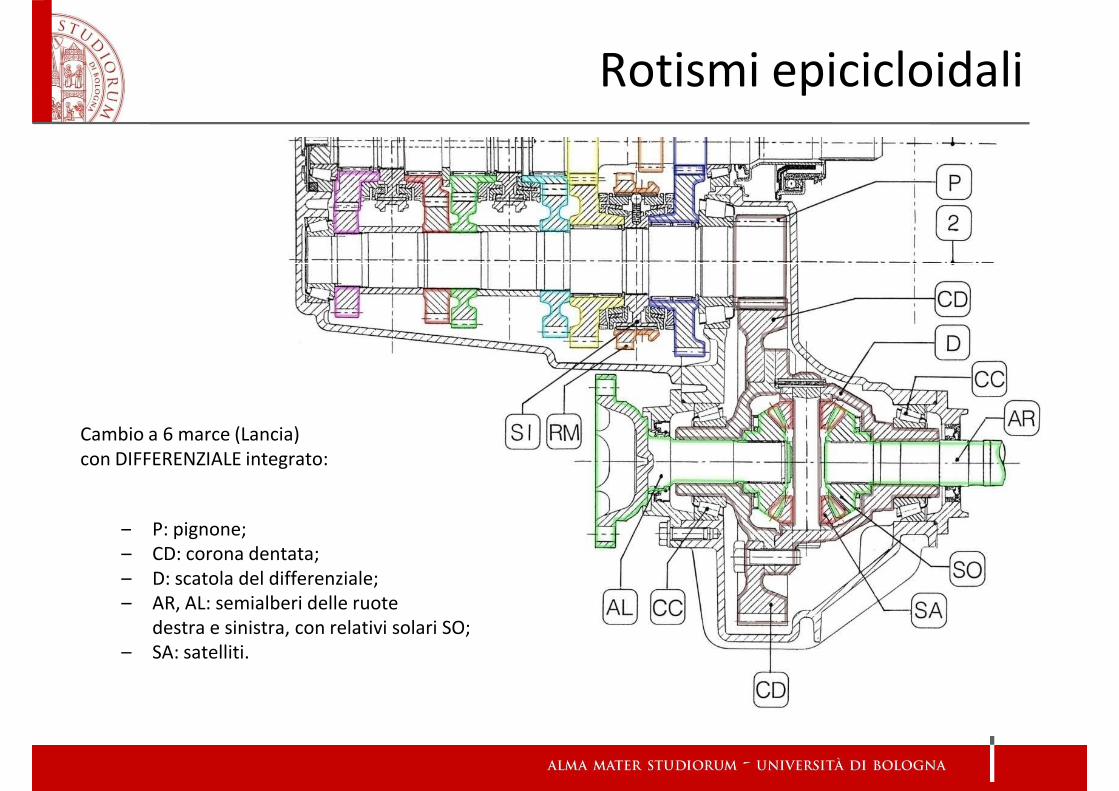
Cambio a 6 marce (Lancia)con DIFFERENZIALE integrato:
– P: pignone;– P: pignone;– CD: corona dentata;– D: scatola del differenziale;– AR, AL: semialberi delle ruote
destra e sinistra, con relativi solari SO;– SA: satelliti.
CAMBIO MANUALE A 6 MARCE (Lancia)con secondario di rinvio
• CAMBIO – 1: asse primario;– 2: asse secondario;– 2: asse secondario;– I, II, III, IV, V, VI:
ingranaggi delle rispettive marce;– SI, SIII, SV: sincronizzatori;– CC: cuscinetti supporto alberi, a rulli
conici;– RM: ingranaggi di retromarcia;– RF: reggispinta comando frizione.
• DIFFERENZIALE– P: pignone;– CD: corona dentata;– CD: corona dentata;– D: scatola del differenziale;– AR, AL: semialberi delle ruote
destra e sinistra, con relativi solari SO;
– SA: satelliti.
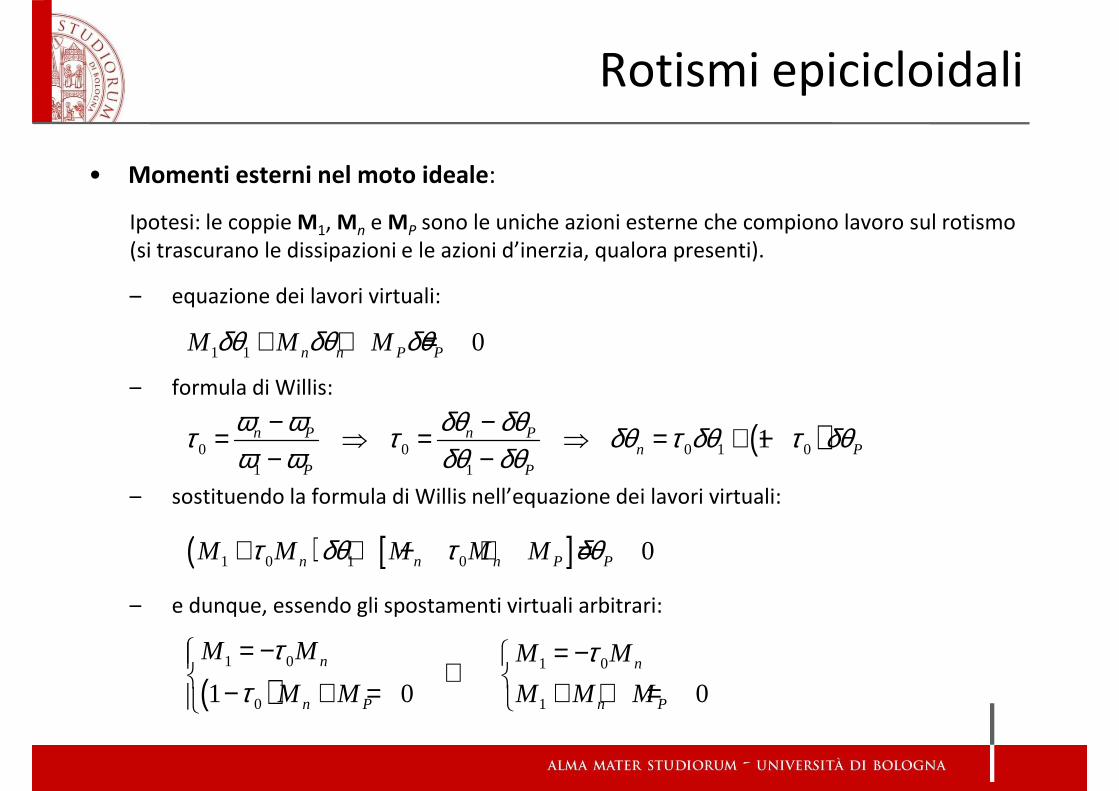
• Momenti esterni nel moto ideale:
Ipotesi: le coppie M1, Mn e MP sono le uniche azioni esterne che compiono lavoro sul rotismo (si trascurano le dissipazioni e le azioni d’inerzia, qualora presenti).
Rotismi epicicloidali
– equazione dei lavori virtuali:
– formula di Willis:
– sostituendo la formula di Willis nell’equazione dei lavori virtuali:
1 1 0n n P PM M Mδθ δθ δθ+ + =
( )0 0 0 1 01 1
1n P n Pn P
P P
ω ω δθ δθτ τ δθ τ δθ τ δθω ω δθ δθ
− −= ⇒ = ⇒ = + −− −
– e dunque, essendo gli spostamenti virtuali arbitrari:
( ) [ ]1 0 1 0 0n n n P PM M M M Mτ δθ τ δθ+ + − + =
( )1 0 1 0
10
01 0
τ ττ= − = − ⇔ + + =− + =
n n
n Pn P
M M M M
M M MM M
Rotismi epicicloidali
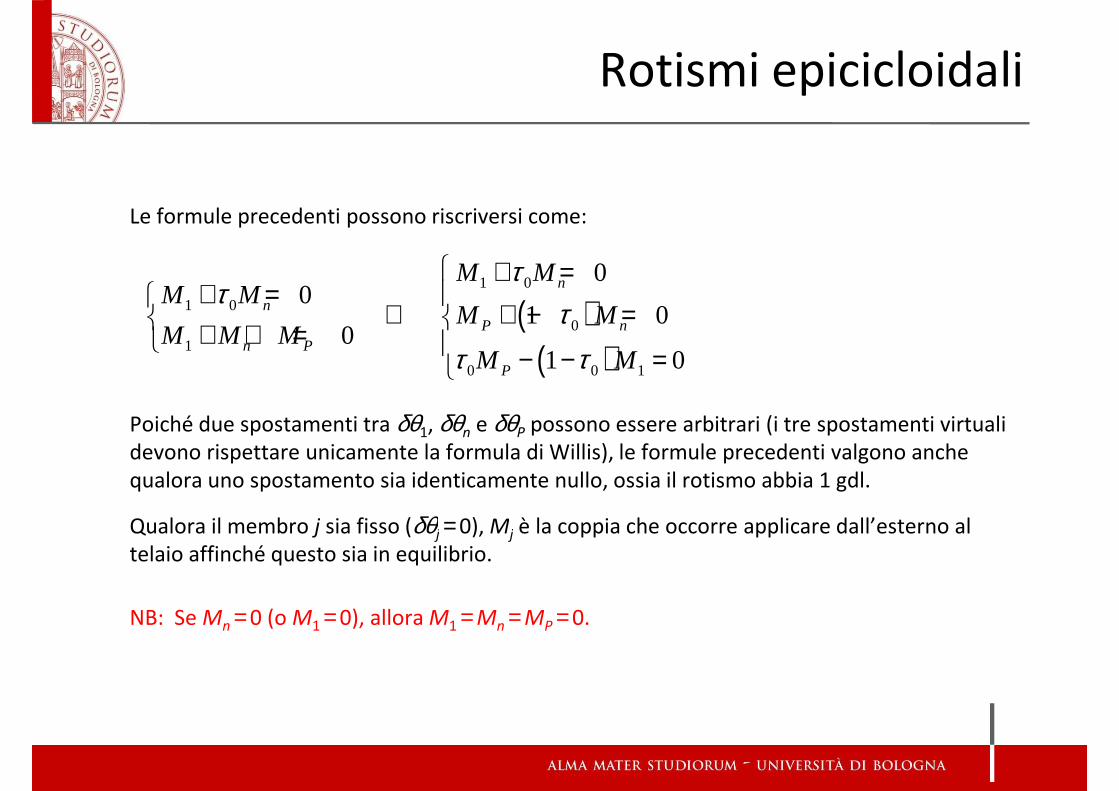
Le formule precedenti possono riscriversi come:
0M Mτ + =
Poiché due spostamenti tra δθ1, δθn e δθP possono essere arbitrari (i tre spostamenti virtuali devono rispettare unicamente la formula di Willis), le formule precedenti valgono anche qualora uno spostamento sia identicamente nullo, ossia il rotismo abbia 1 gdl.
Qualora il membro j sia fisso (δθj = 0), Mj è la coppia che occorre applicare dall’esterno al
( )( )
1 0
1 00
1
0 0 1
00
1 00
1 0
n
nP n
n P
P
M MM M
M MM M M
M M
ττ
ττ τ
+ =+ =
⇔ + − = + + = − − =
Qualora il membro j sia fisso (δθj = 0), Mj è la coppia che occorre applicare dall’esterno al telaio affinché questo sia in equilibrio.
NB: Se Mn = 0 (o M1 = 0), allora M1 = Mn = MP = 0.
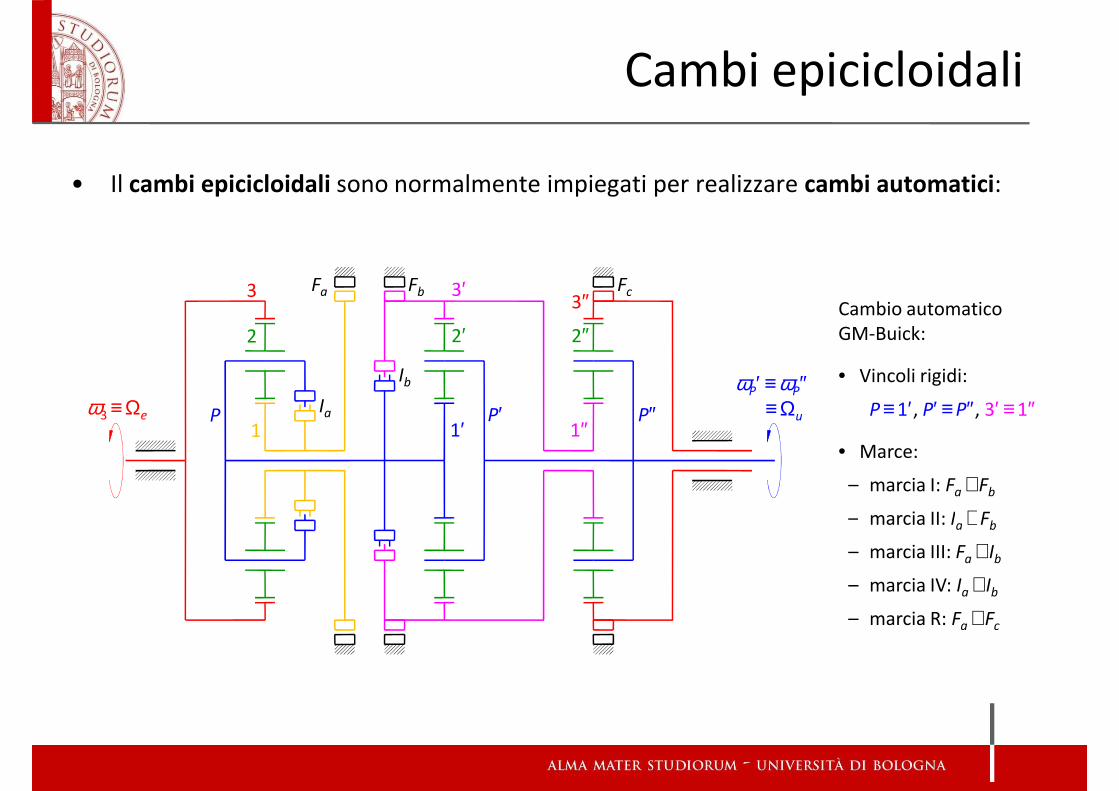
• Il cambi epicicloidali sono normalmente impiegati per realizzare cambi automatici:
Cambi epicicloidali
Cambio automatico GM-Buick:
• Vincoli rigidi:
P ≡ 1′, P′ ≡ P″, 3′ ≡ 1″
• Marce:
– marcia I: Fa + Fb
– marcia II: Ia + Fb
3
2
1Pω3 ≡ Ωe
Ia
Fa FcFb
Ib
3′
2′
1′
3″
2″
1″P′ P″
ωP′ ≡ ωP″≡ Ωu
– marcia II: Ia + Fb
– marcia III: Fa + Ib
– marcia IV: Ia + Ib
– marcia R: Fa + Fc
Cambi epicicloidali
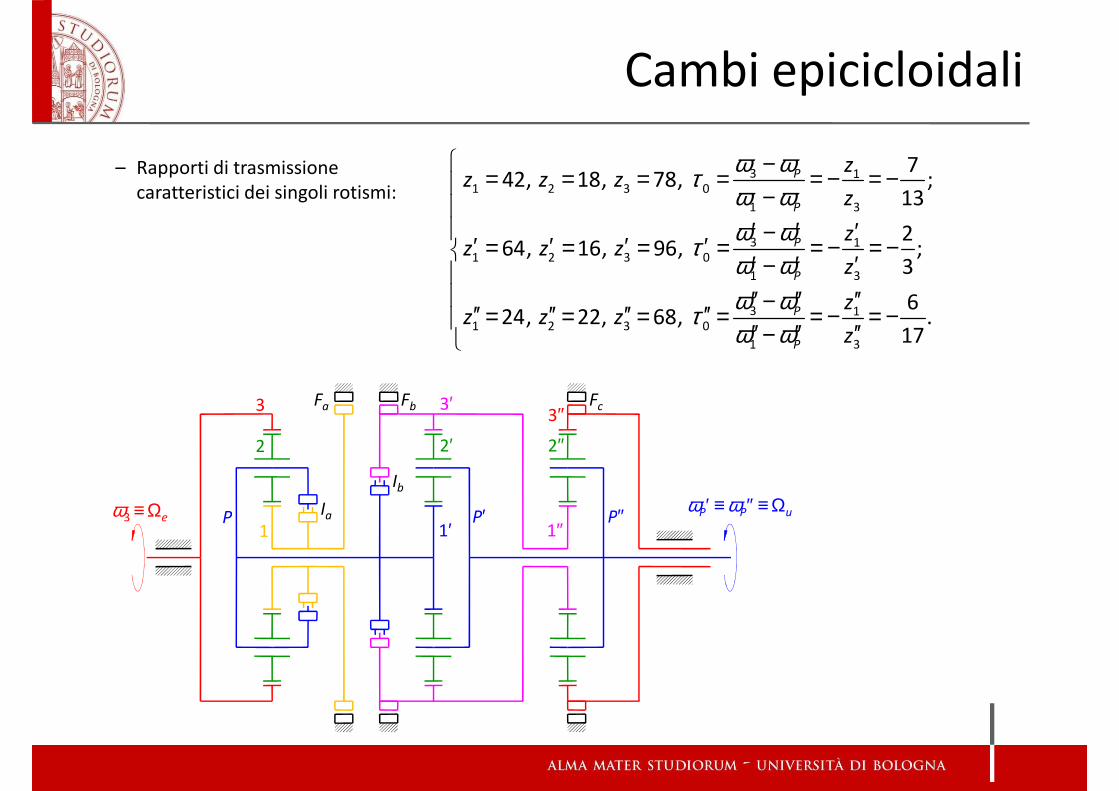
– Rapporti di trasmissione caratteristici dei singoli rotismi:
ω ωτω ωω ωτω ω
−= = = = = − = − − ′ ′ ′−′ ′ ′ ′= = = = = − = − ′ ′ ′−
3 11 2 3 0
1 3
3 11 2 3 0
742, 18, 78, ;
13
264, 16, 96, ;
3
P
P
P
zz z z
z
zz z z
z
3
2
1Pω3 ≡ Ωe
Ia
Fa FcFb
Ib
3′
2′
1′
3″2″
1″P′ P″ ωP′ ≡ ωP″ ≡ Ωu
ω ωω ωτω ω
′ ′ ′− ′′ ′′ ′′−′′ ′′ ′′ ′′= = = = = − = − ′′ ′′ ′′−
1 2 3 0
1 3
3 11 2 3 0
1 3
3
624, 22, 68, .
17
P
P
P
z
zz z z
z
1P
1′ 1″P P
Cambi epicicloidali
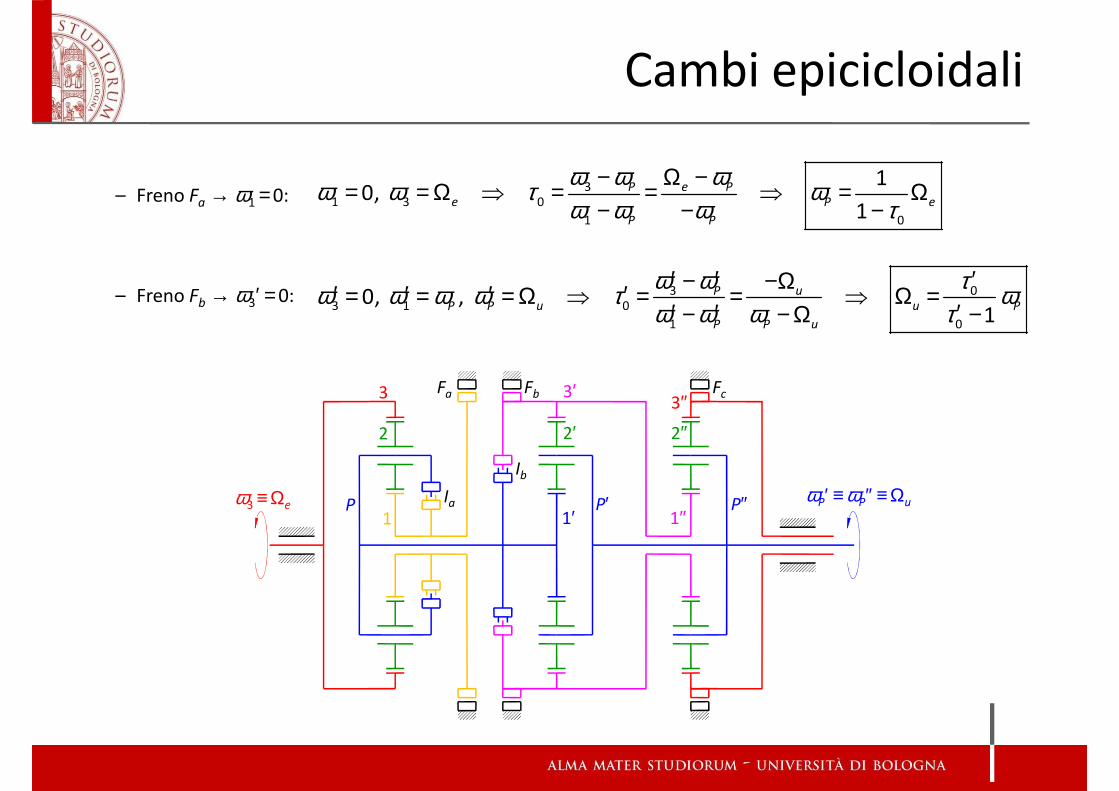
– Freno Fa → ω1 = 0:ω ω ωω ω τ ωω ω ω τ
− Ω −= = Ω ⇒ = = ⇒ = Ω− − −
31 3 0
1 0
10,
1P e P
e P e
P P
– Freno Fb → ω3′ = 0:ω ω τω ω ω ω τ ωω ω ω τ
′ ′ ′− −Ω′ ′ ′ ′= = = Ω ⇒ = = ⇒ Ω =′ ′ ′− − Ω −3 0
3 1 0
1 0
0, , 1
P u
P P u u P
P P u
3
2
1Pω3 ≡ Ωe
Ia
Fa FcFb
Ib
3′
2′
1′
3″2″
1″P′ P″ ωP′ ≡ ωP″ ≡ Ωu
1 1′ 1″
Cambi epicicloidali
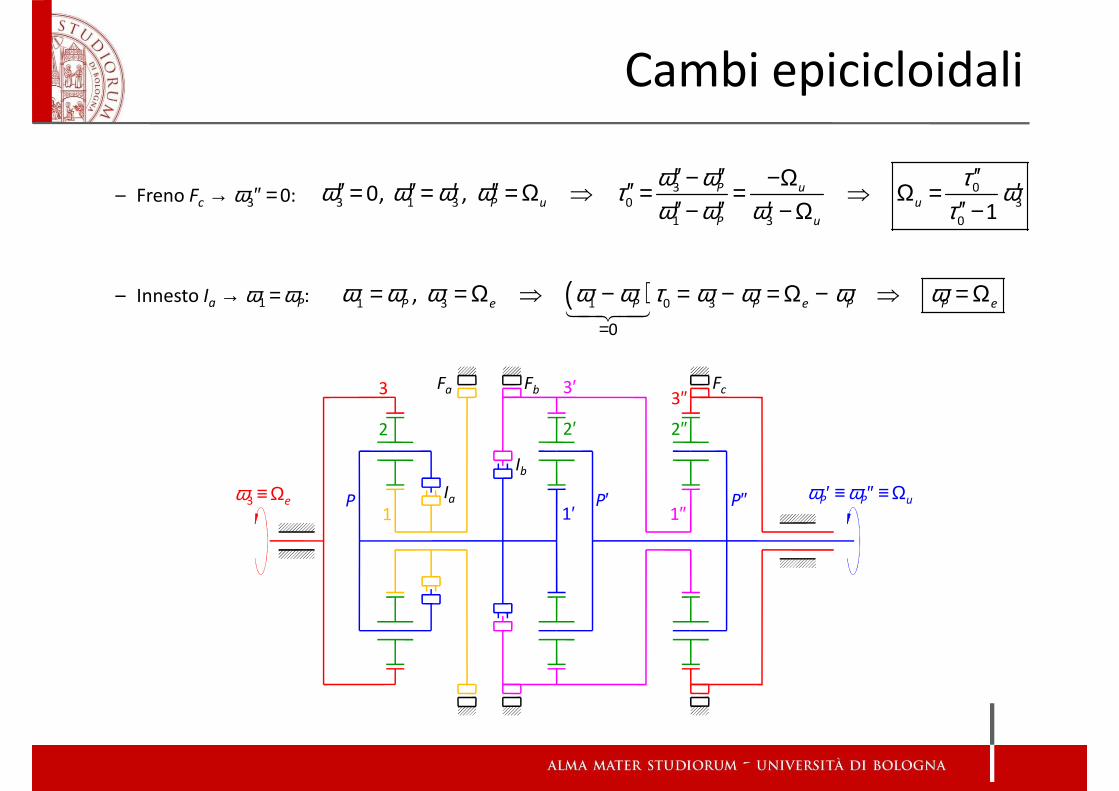
– Freno Fc → ω3″ = 0:ω ω τω ω ω ω τ ωω ω ω τ
′′ ′′ ′′− −Ω′′ ′′ ′ ′′ ′′ ′= = = Ω ⇒ = = ⇒ Ω =′′ ′′ ′ ′′− − Ω −3 0
3 1 3 0 3
1 3 0
0, , 1
P u
P u u
P u
– Innesto Ia → ω1 = ωP: ( )ω ω ω ω ω τ ω ω ω ω=
= = Ω ⇒ − = − = Ω − ⇒ = Ω1 3 1 0 3
0
, P e P P e P P e
3
2
1Pω3 ≡ Ωe
Ia
Fa FcFb
Ib
3′
2′
1′
3″2″
1″P′ P″ ωP′ ≡ ωP″ ≡ Ωu
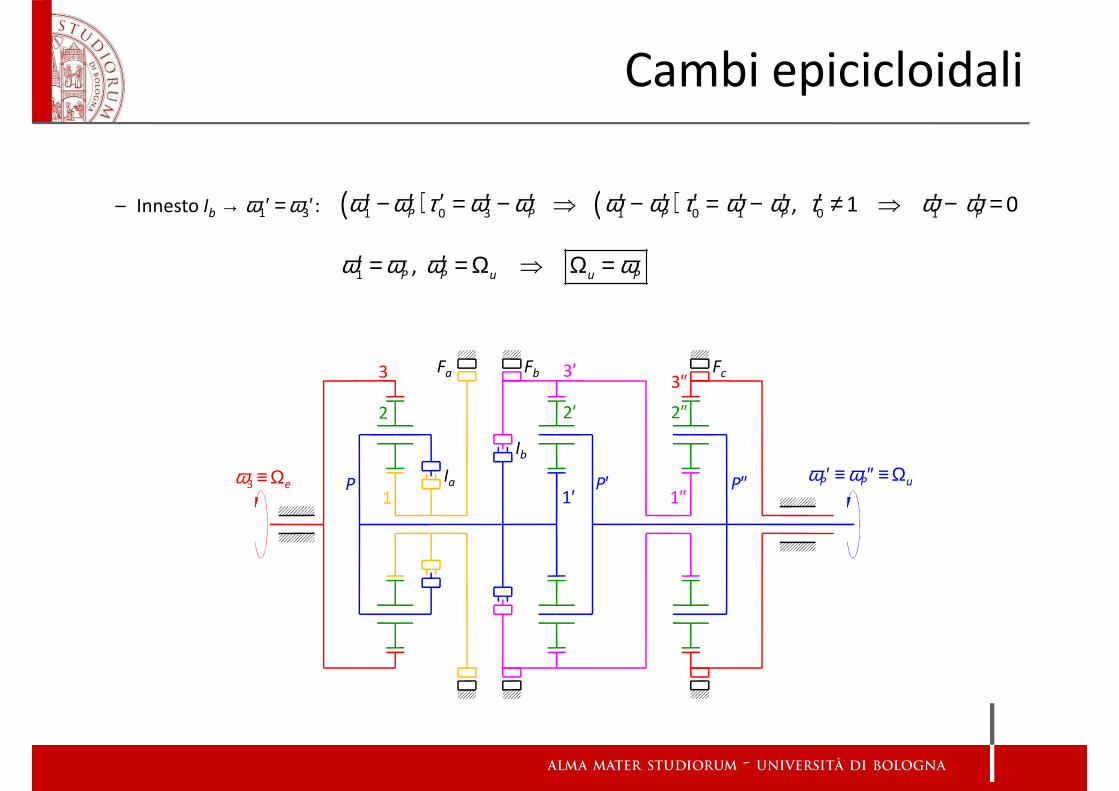
Cambi epicicloidali
– Innesto Ib → ω1′ = ω3′: ( ) ( )ω ω τ ω ω ω ω τ ω ω τ ω ω′ ′ ′ ′ ′ ′ ′ ′ ′ ′ ′ ′ ′− = − ⇒ − = − ≠ ⇒ − =1 0 3 1 0 1 0 1 , 1 0P P P P P
ω ω ω ω′ ′= = Ω ⇒ Ω =, ω ω ω ω′ ′= = Ω ⇒ Ω =1 , P P u u P
3
2
1Pω3 ≡ Ωe
Ia
Fa FcFb
Ib
3′
2′
1′
3″2″
1″P′ P″ ωP′ ≡ ωP″ ≡ Ωu
Cambi epicicloidali
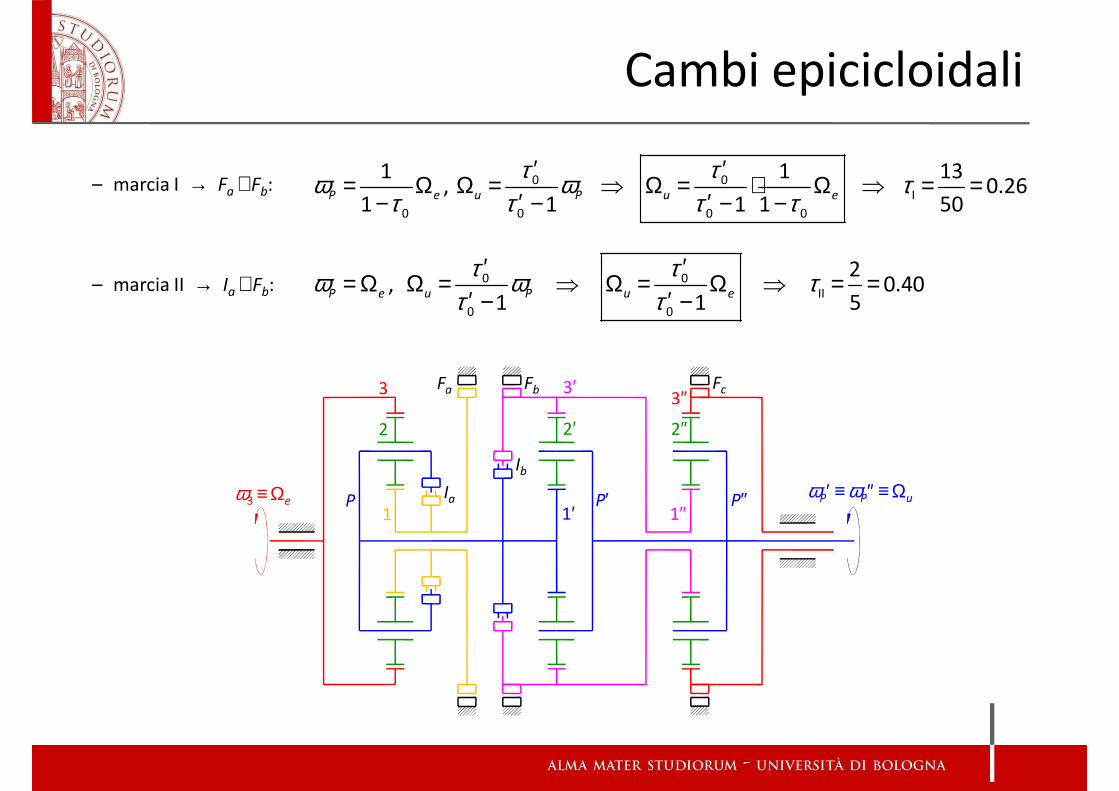
– marcia I → Fa + Fb:τ τω ω τ
τ τ τ τ′ ′
= Ω Ω = ⇒ Ω = ⋅ Ω ⇒ = =′ ′− − − −
0 0I
0 0 0 0
1 1 13, 0.26
1 1 1 1 50P e u P u e
τ τ′ ′ 2– marcia II → Ia + Fb:
τ τω ω ττ τ
′ ′= Ω Ω = ⇒ Ω = Ω ⇒ = =
′ ′− −0 0
II
0 0
2, 0.40
1 1 5P e u P u e
3
2
1Pω3 ≡ Ωe
Ia
Fa FcFb
Ib
3′
2′
1′
3″2″
1″P′ P″ ωP′ ≡ ωP″ ≡ Ωu

Cambi epicicloidali
– marcia III → Fa + Ib: ω ω ττ τ
= Ω Ω = ⇒ Ω = Ω ⇒ = =− − III
0 0
1 1 13, 0.65
1 1 20P e u P u e
– marcia IV (presa diretta) → Ia + Ib: ω ω τ= Ω Ω = ⇒ Ω = Ω ⇒ =IV, 1P e u P u e
3
2
1Pω3 ≡ Ωe
Ia
Fa FcFb
Ib
3′
2′
1′
3″2″
1″P′ P″ ωP′ ≡ ωP″ ≡ Ωu
Cambi epicicloidali
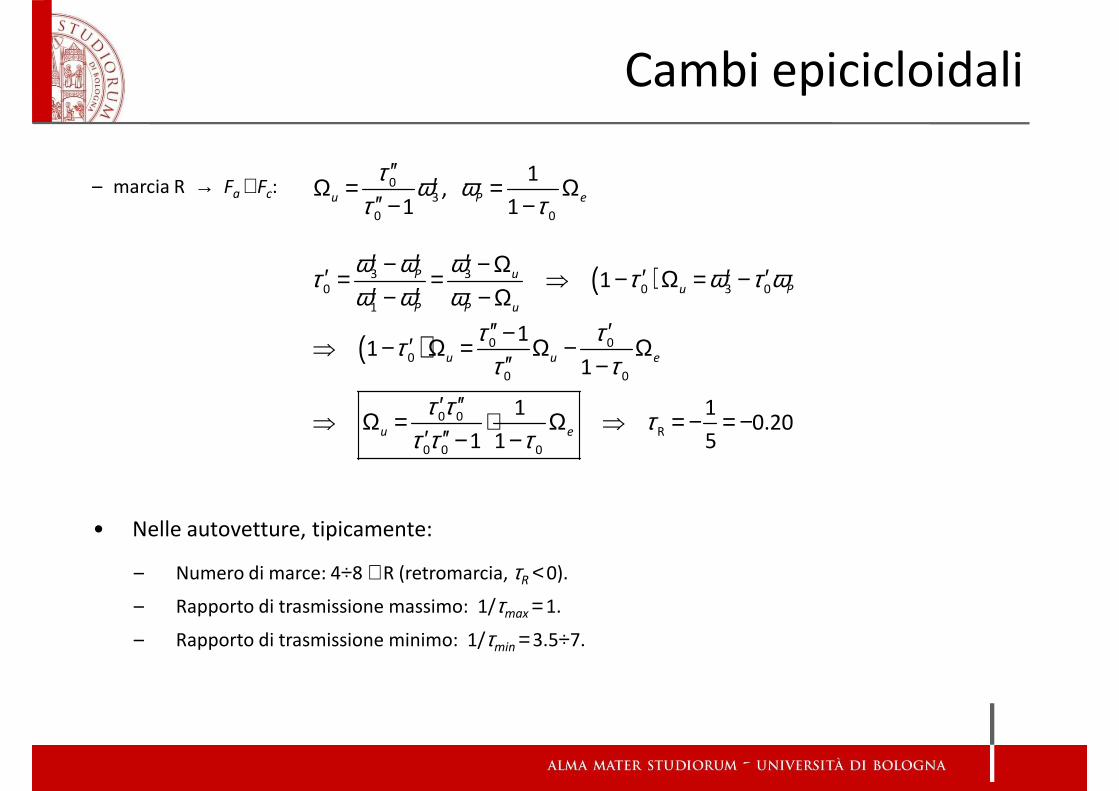
– marcia R → Fa + Fc:τ ω ω
τ τ′′ ′Ω = = Ω
′′ − −0
3
0 0
1,
1 1u P e
( )ω ω ωτ τ ω τ ω′ ′ ′− − Ω′ ′ ′ ′= = ⇒ − Ω = −( )
( )
ω ω ωτ τ ω τ ωω ω ω
τ τττ τ
τ τ ττ τ τ
′ ′ ′− − Ω′ ′ ′ ′= = ⇒ − Ω = −′ ′− − Ω
′′ ′−′⇒ − Ω = Ω − Ω′′ −
′ ′′⇒ Ω = ⋅ Ω ⇒ = − = −
′ ′′ − −
3 30 0 3 0
1
0 00
0 0
0 0R
0 0 0
1
1 1
1
1 1 0.20
1 1 5
P u
u P
P P u
u u e
u e
• Nelle autovetture, tipicamente:• Nelle autovetture, tipicamente:
– Numero di marce: 4÷8 + R (retromarcia, τR < 0).
– Rapporto di trasmissione massimo: 1/τmax = 1.
– Rapporto di trasmissione minimo: 1/τmin = 3.5÷7.

Cambi epicicloidalip
Fb
PINA
B
21
2 2
2
P3
B
C
OUT
1Fa Ia
• Cambi (completamente) automatici:
La trasmissione ad ingranaggi è realizzata, tipicamente, mediante un cambio epicicloidale:
– L’ingombro è modesto.
– Il cambio delle marce avviene senza interrompere la trasmissione di coppia alle ruote motrici:
Cambi epicicloidali
– Il cambio delle marce avviene senza interrompere la trasmissione di coppia alle ruote motrici:
• La frizione è (tipicamente) sostituita da un convertitore di coppia oleodinamico.
• La marcia è variata comandando opportunamente gruppi di freni e frizioni (ad azionamento oleodinamico) i quali agiscono sui membri dei rotismi epicicloidali.
– Il cambio delle marce è governato automaticamente in funzione di:
• posizione dell’acceleratore (segnale Sacc) e velocità del veicolo (segnale Svel):
i. Marcia stazionaria (‘equilibrio’): Sacc = Svel ;
ii. Acceleratore invariato, strada in salita (vel. ↓): Svel < Sacc → si passa alla marcia inferiore;
iii. Acceleratore invariato, strada in piano (vel. ↑): S > S → si passa alla marcia superiore.iii. Acceleratore invariato, strada in piano (vel. ↑): Svel > Sacc → si passa alla marcia superiore.
• condizioni operative del motore e del veicolo;
• pulsante ‘stile’ di guida (sportivo, comfort, ecc.).
– Sono impiegati quando l’interruzione della trasmissione di potenza motrice è:
• associata a significative riduzioni del comfort di marcia (autovetture con accelerazioni importanti);
• inaccettabile per ragioni di controllo della guida (fuoristrada).

Bibliografia
Rotismi e Cambi epicicloidali
• E. Funaioli, A. Maggiore, U. Meneghetti, Lezioni di Meccanica Applicata alleMacchine - Prima Parte: Fondamenti di Meccanica Applicata alle Macchine, Patron, Bologna, 2005.
• E. Funaioli, A. Maggiore, U. Meneghetti, Lezioni di Meccanica Applicata alleMacchine - Seconda Parte: Elementi di Meccanica degli Azionamenti, Patron, Bologna, 2009.
• G. Ruggieri, Rotismi Epicicloidali, McGraw-Hill, Milano, 2003• G. Ruggieri, Rotismi Epicicloidali, McGraw-Hill, Milano, 2003