La Percezione del Tatto - percro.sssup.itpercro.sssup.it/marcello/didattica/18_Haptics.pdf · che...
25
Interfacce Aptiche Interfacce Aptiche Haptic Interfaces Haptic Interfaces http://percro.sssup.it/~marcello/didattica [email protected]
Transcript of La Percezione del Tatto - percro.sssup.itpercro.sssup.it/marcello/didattica/18_Haptics.pdf · che...

Realtà Virtuale: il presente, il passato, il futuroRealtà Virtuale: il presente, il passato, il futuro Interfacce ApticheInterfacce Aptiche
Haptic InterfacesHaptic Interfaces
http://percro.sssup.it/~marcello/didattica [email protected]

Realtà Virtuale: il presente, il passato, il futuroRealtà Virtuale: il presente, il passato, il futuro Interfacce ApticheInterfacce Aptiche
InterfacciaInterfaccia ApticaAptica:: DispositivoDispositivo roboticorobotico cheche èè capacecapace didi
esercitareesercitare inin modomodo interattivointerattivo deglidegli stimolistimoli cheche induconoinducono
percezionipercezioni tattilitattili..
HAPTICS: “The science of appling touch to human interaction with computers” (Haptics Comunity)
Interfacce Interfacce apticheaptiche

Realtà Virtuale: il presente, il passato, il futuroRealtà Virtuale: il presente, il passato, il futuro Interfacce ApticheInterfacce Aptiche
TattiliTattili (Display(Display Tattili)Tattili)::
PermettonoPermettono didi trasmetteretrasmettere sensazionisensazioni
attraversoattraverso ii recettorirecettori tattilitattili delladella pellepelle
(rugosità(rugosità ee rilievirilievi didi superfici,superfici,
temperatura,temperatura, ......))
• Cinestetiche (o Propriocettive): Trasmettono sensazioni di forza (FFD)
risultante su parti del corpo dell’utente. La distribuzione superficiale delle forze viene filtrata (forze di inerzia,forze risultanti di contatto, campi di forza.. )
ClassificazioneClassificazione

Realtà Virtuale: il presente, il passato, il futuroRealtà Virtuale: il presente, il passato, il futuro Interfacce ApticheInterfacce Aptiche
InteragisconoInteragiscono concon l’utentel’utente attraversoattraverso l’apparatol’apparato sensorialesensoriale
cinesteticocinestetico::
RecettoriRecettori didi posizioneposizione ee velocitàvelocità
RecettoriRecettori didi forzaforza ee deformazionedeformazione
DispostiDisposti sottosotto lala pelle,pelle, inin corrispondenzacorrispondenza delledelle articolazioniarticolazioni ee
neinei muscolimuscoli (più(più rilevanti)rilevanti)
IlIl sistemasistema nervosonervoso centralecentrale “elabora”“elabora” tuttetutte lele informazioniinformazioni
stimandostimando lele forzeforze risultantirisultanti ee generandogenerando lala sensazionesensazione didi forzaforza
adad essoesso legatalegata
Funzionalità fondamentali di un’IAC:
• Esercitare una forza e/o coppia nota e controllabile;
• Misurare la posizione della parte del corpo dell’utente
coinvolta nell’interazione.
Interfacce Interfacce ApticheAptiche CinesteticheCinestetiche

Realtà Virtuale: il presente, il passato, il futuroRealtà Virtuale: il presente, il passato, il futuro Interfacce ApticheInterfacce Aptiche
Come si presentanoCome si presentano
F
Motors with postition sensors

Realtà Virtuale: il presente, il passato, il futuroRealtà Virtuale: il presente, il passato, il futuro Interfacce ApticheInterfacce Aptiche
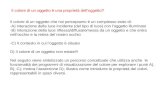
The Raymond Goertz con il primo manipolatore meccanico master-slave M1 (a sinistra) e con il primo manipolatore master-slave elettrico E1 (a destra)
Le prime IA vennero sviluppate nell’ambito della teleoperazione in applicazioni di manipolazione di sostanze radioative.
Origini storicheOrigini storiche

Realtà Virtuale: il presente, il passato, il futuroRealtà Virtuale: il presente, il passato, il futuro Interfacce ApticheInterfacce Aptiche
In base al numero dei Gradi Di Libertà:
• Low DOF (LDOF): Fino a 3DOF, i più comuni generano forze in tre direzioni dello spazio.
• High DOF (HDOF): Fino a 6DOF, possono generare forze e coppie nello spazio.
• Very High DOF (VHDOF): Più di 6GDL servono per particolari applicazioni in cui è necessario esercitare forze in vari punti del corpo (ed esempio Esoscheletri per braccio, gamba o mano)no)
In base al tipo di cinematica:
• Seriale: Costituite da link disposti in serie collegati da giunti
• Parallela: Costituite da catene cinematiche chiuse
• Mista
ClassificazioniClassificazioni

Realtà Virtuale: il presente, il passato, il futuroRealtà Virtuale: il presente, il passato, il futuro Interfacce ApticheInterfacce Aptiche
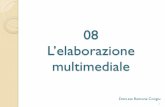
DOFDOF
Low
Manopole Aptiche
Very high
10 DoF
high
5 DoF

Realtà Virtuale: il presente, il passato, il futuroRealtà Virtuale: il presente, il passato, il futuro Interfacce ApticheInterfacce Aptiche
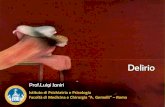
Cinematica Parallela e SerialeCinematica Parallela e Seriale
Seriale
Parallela

Realtà Virtuale: il presente, il passato, il futuroRealtà Virtuale: il presente, il passato, il futuro Interfacce ApticheInterfacce Aptiche
• Workspace o MotionRange : Lo spazio in cui l’utente o la parte del corpo dell’utente si può muovere durante l’interazione.
• Forza di picco (PKF) e forza di picco continua (CPKF): Sono rispettivamente la forza massima esercitabile dall’IA sull’utente e la forza massima continua.
• Rigidezza meccanica: spostamento dovuto deformazione della struttura meccanica a fronte di una forza unitaria.
• Inerzia e attrito percepito: Sono caratteristiche meccaniche che vengono difficilmente compensate dal sistema di controllo e quindi devono essere ridotte al minimo in fase di progetto.
• Forma del tensore dell’inerzia percepita: Il tensore di inerzia deve essere rotondo in modo da garantire la codirezionalità di forze e accelerazioni
• Peso del dispositivo: Per i dispositivi portabili.
• Precisione: Di posizionamento e di forza
Parametri di PerformanceParametri di Performance

Realtà Virtuale: il presente, il passato, il futuroRealtà Virtuale: il presente, il passato, il futuro Interfacce ApticheInterfacce Aptiche
In base ai punti di contatto
- Single Point: il sistema è connesso e può esercitare forze sull’utente
attraverso un solo punto di contatto;
- Multiple Point: i punti di contatto sono almeno due (esempio pollice
indice);
- Task Replica: L’HI è connessa all’utente grazie ad un utensile di
forma analoga a quello necessario ad eseguire le operazioni (esempio
penna o strumento chirurgico)
Altre classificazioniAltre classificazioni

Realtà Virtuale: il presente, il passato, il futuroRealtà Virtuale: il presente, il passato, il futuro Interfacce ApticheInterfacce Aptiche
Punti di contattoPunti di contatto
Single
Multipoint
Task Replica

Realtà Virtuale: il presente, il passato, il futuroRealtà Virtuale: il presente, il passato, il futuro Interfacce ApticheInterfacce Aptiche
In base alla morfologia costruttiva:
Antropomorfe: Riproducono fedelmente la struttura cinematica
dell’arto con il quale interagiscono.
Portabili: Non sono dotate di struttura di sostegno “a terra” (la forza
di picco è pertanto bassa)
Desktop: Uno dei link della catena cinematica e’ fisso.
Encountered: L’interfaccia non è sempre in contatto con l’utente, ma
“si fa trovare al posto giusto nel momento giusto”
Altre classificazioniAltre classificazioni

Realtà Virtuale: il presente, il passato, il futuroRealtà Virtuale: il presente, il passato, il futuro Interfacce ApticheInterfacce Aptiche
MorfologiaMorfologia
Desktop
Antropomorfa

Realtà Virtuale: il presente, il passato, il futuroRealtà Virtuale: il presente, il passato, il futuro Interfacce ApticheInterfacce Aptiche
MorfologiaMorfologia
Encountered
Portabile

Realtà Virtuale: il presente, il passato, il futuroRealtà Virtuale: il presente, il passato, il futuro Interfacce ApticheInterfacce Aptiche
• Giochi e divertimenti: joystick con FF, controlli per simulatori
di guida etc.
• Portable/Handeset devices: cellulari, lettori Mp3, Plamari
etc.
• Educazione ed Addestramento: apprendimento della scrittura
e di attività manuali, addestramento di piloti, autisti,
assemblatori etc…
• Industriali: Virtual Prototyping (.e. prove di assemblbilità di
macchine)
• Scientifiche: visualizzazioni di grafici a più di 3 dimensioni.
• Mediche chirurgiche: simulazione ed intervento, riabilitazione
• Teleoperazione: interazione con ambienti remoti
• Beni Culturali: interazione aptica con opere d’arte
• Special Users: Non vedenti, Non udenti, persone con handicap
motori etc.
ApplicazioniApplicazioni

Realtà Virtuale: il presente, il passato, il futuroRealtà Virtuale: il presente, il passato, il futuro Interfacce ApticheInterfacce Aptiche
Motion Based Simulators
o Vestibular Interfaces

Realtà Virtuale: il presente, il passato, il futuroRealtà Virtuale: il presente, il passato, il futuro Interfacce ApticheInterfacce Aptiche
I dispositivi elettromeccanici utilizzati nei MBS non possono essere definite interfacce aptiche (non riguardano il tatto).
Questi sistemi hanno lo scopo di permettere all’utente di percepire un feedback inerziale (ovvero dei movimenti) in accordo con le azioni e movimenti effettuati nell’ambiente virtuale.
MotionMotion BasedBased SimulatorsSimulators

Realtà Virtuale: il presente, il passato, il futuroRealtà Virtuale: il presente, il passato, il futuro Interfacce ApticheInterfacce Aptiche
•Locomozione: utilizzati per addestramento di militari, polizia etc...
•Simulatori di guida: possono simulare vari tipi di veicolo (Auto, TIR, )
•Simulatori per applicazioni particolari: possono simulare la guida di particolari veicoli come Carriponti, scavatori, ruspe etc...
Applicazioni :
•Addestramento ed educazione
•Studi di ergonomia
Nastro trasportatore bidirezionale
Tipologia e applicazioniTipologia e applicazioni

Realtà Virtuale: il presente, il passato, il futuroRealtà Virtuale: il presente, il passato, il futuro Interfacce ApticheInterfacce Aptiche
Ricreare in modo esattamente fedele le forze di inerzia non è possibile: l’utente dovrebbe effettivamente compiere gli spostamenti che avvengono nell’ambiente virtuale (in un simulatore di volo ad esempio).
Lo spazio di lavoro dei dispositivi robotici utilizzati nella movimentazione traslazionale dell’utente è limitato. Quindi si utilizzano dei “trucchi” per creare delle illusioni. Il più diffuso è quello di utilizzare il vettore “g” per creare delle accelerazioni orizzontali.
TiltingTilting strategystrategy
Homing: procedura di “reset” allo zero iniziale, utilizzabile anche in tempo reale (a velocità costante e ridotta, dunque “impercettibile”) per riottenere la massima estensione possibile sui movimenti di traslazione.

Realtà Virtuale: il presente, il passato, il futuroRealtà Virtuale: il presente, il passato, il futuro Interfacce ApticheInterfacce Aptiche
•L’Haptic Rendering è l’operazione con la quale si
forniscono forze all’utente a partire dalla sua interazione
con l’ambiente virtuale
•In particolare data la posizione del punto di contatto
nell’ambiente virtuale è necessario fornire la forza
generata
•Questa operazione ha grandi similitudini rispetto
all’operazione di Graphic Rendering
HapticHaptic renderingrendering

Realtà Virtuale: il presente, il passato, il futuroRealtà Virtuale: il presente, il passato, il futuro Interfacce ApticheInterfacce Aptiche
-- Trovare ilTrovare il punto di contattopunto di contatto Problema di collision detection, con complessità proporzionale alla complessità del modello dell'ambiente virtuale.
- Generazione diGenerazione di forze di contatto.forze di contatto. Crea la "sensazione" dell'oggetto. Le forze di contatto rappresentano la rigidità dell'oggetto, lo smorzamento, l’attrito, la struttura superficiale, ecc
- Frequenza di aggiornamentoFrequenza di aggiornamento Deve essere alta (meglio a 1 kHz o superiore) e la latenza deve essere bassa. Valori inappropriati di entrambe queste variabili possono causare errati comportamenti (superfici rigide percepite come “morbide”) e creare instabilità al sistema (tremolii etc.)
HapticHaptic renderingrendering

Realtà Virtuale: il presente, il passato, il futuroRealtà Virtuale: il presente, il passato, il futuro Interfacce ApticheInterfacce Aptiche
L’Haptic Rendering avviene
attraverso un modello molto
semplice a penalizzazione
Più il punto di contatto è
all’interno dell’oggetto più
l’utente percepisce una
forza che si oppone alla
penetrazione
Modello a penalizzazioneModello a penalizzazione

Realtà Virtuale: il presente, il passato, il futuroRealtà Virtuale: il presente, il passato, il futuro Interfacce ApticheInterfacce Aptiche
●La forza generata è proporzionale alla penetrazione.
Si possono generare bruschi cambiamenti di
forza su spigoli o quando la direzione cambia
Approccio basato sulla distanzaApproccio basato sulla distanza

Realtà Virtuale: il presente, il passato, il futuroRealtà Virtuale: il presente, il passato, il futuro Interfacce ApticheInterfacce Aptiche
L’interazione a punto singolo viene estesa ad una piccola sfera (proxy del dito)
che si muove SEMPRE sulla superficie dell’oggetto. Questa soluzione risolve il
problema di piccoli “buchi” nella superficie dell’oggetto ed evita che il dito entri
nell’oggetto
VirtualVirtual ProxyProxy