La Meccanica Delle Strutture Prof. Bruno Zan
90
I.U.A.V. Clasa LABORATORIO INTEGRATO DI PROGETTAZIONE 2 La MECCANICA delle STRUTTURE prof. Bruno Zan ing. Claudio Bertocco - LO SCHEMA STATICO - LA TEORIA DELLE TRAVI INFLESSE - LE STRUTTURE ISOSTATICHE - LA DEFORMAZIONE DELLE TRAVI INFLESSE - LE STRUTTURE IPERSTATICHE - IL METODO DELLE FORZE - IL METODO DELLE ROTAZIONI - IL METODO DI CROSS - LE STRUTTURE RETICOLARI
-
Upload
andrei-leu -
Category
Documents
-
view
237 -
download
7
Transcript of La Meccanica Delle Strutture Prof. Bruno Zan

I.U.A.V. Clasa
LABORATORIO INTEGRATO DI PROGETTAZIONE 2
La MECCANICA delle STRUTTURE prof. Bruno Zan ing. Claudio Bertocco
- LO SCHEMA STATICO - LA TEORIA DELLE TRAVI INFLESSE - LE STRUTTURE ISOSTATICHE - LA DEFORMAZIONE DELLE TRAVI INFLESSE - LE STRUTTURE IPERSTATICHE - IL METODO DELLE FORZE - IL METODO DELLE ROTAZIONI - IL METODO DI CROSS - LE STRUTTURE RETICOLARI

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
2
1. PREMESSA La struttura è l’organismo costruttivo che ha il compito di sostenere i carichi e di trasferirli a terra attraverso i vari meccanismi di resistenza del materiale di cui è composta. Una struttura per poter essere valutata e risolta viene rappresentata dallo SCHEMA STATICO che definisce la geometria generale, le dimensioni delle sezioni, le caratteristiche del materiale, le condizioni di vincolo e le condizioni di carico che la struttura stessa deve sopportare. Calcolare o risolvere una struttura significa trovare, per il SISTEMA DI FORZE ATTIVO (condizioni di carico) applicato allo SCHEMA STATICO, il sistema di FORZE REATTIVO (le reazioni vincolari), l’andamento delle SOLLECITAZIONI in ciascuna sezione (diagrammi di Momento, Taglio e Sforzo Normale) e le DEFORMAFIONI in punti significativi (spostamenti orizzontali e verticali, rotazioni). La struttura nello svolgere il proprio compito di sostegno dei carichi non deve deformarsi eccessivamente e deve sempre mantenere un certo grado di sicurezza nei riguardi della fruibilità e del crollo. Per rispondere alle necessità di cui sopra la struttura deve soddisfare tre condizioni base:
EQUILIBRIO RESISTENZA
DEFORMABILITA’
L’EQUILIBRIO definisce la forma della struttura, il modo in cui è vincolata a terra e i carichi che essa deve sostenere, l’EQUILIBRIO è il sistema di FORZE ATTIVO e REATTIVO che agiscono sullo SCHEMA STATICO.
La RESISTENZA rappresenta la capacità della struttura, configurata secondo l’equilibrio, cioè secondo lo schema statico definito, di sostenere i carichi con i diversi comportamenti virtuosi dei materiali scelti per realizzarla. La RESISTENZA è definita dai modi di resistere dei materiali alle sollecitazioni indotte nello schema statico dai carichi da sostenere.
La DEFORMABILITA’ è la capacità di sostenere i carichi senza eccessive deformazioni che potrebbero rendere la struttura non utilizzabile per gli scopi e gli usi per cui è stata realizzata.

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
3
INCASTRO
CERNIERA
CARRELLO
3 gradi di vincolo X=0 Y=0 =0
2 gradi di vincolo X=0 Y=0
1 grado di vincolo Y=0
CARRELLO1 grado di vincolo
X=0
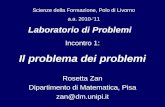
2. LO SCHEMA SATICO Lo SCHEMA STATICO interpreta e definisce una STRUTTURA mediante la geometria complessiva, le dimensioni delle sezioni, le caratteristiche del materiale, le condizioni di vincolo e le condizioni di carico e le ipotesi di deformabilità. Di seguito si fa riferimento alle STRUTTURE PIANE che rappresentano la tipologia strutturale più semplice che è descrivibile da uno schema statico nel piano. Le STRUTTURE SPAZIALI sono rappresentate, invece, da schemi statici più complessi che interpretano il comportamento strutturale nello spazio. GEOMETRIA COMPLESSIVA
La geometria complessiva della struttura è rappresentata dalle ASTE collegate tra loro dai NODI di estremità. Le ASTE sono le unità componenti della struttura e sono caratterizzate dalla lunghezza ma anche dalle dimensioni della sezione trasversale. I NODI sono le estremità delle aste e sono individuati dal baricentro della sezione trasversale delle aste. Ciascun NODO, immaginato materialmente come baricentro delle sezioni di estremità di un asta, può essere collegato ad un'altra asta oppure può essere direttamente collegato a terra. Ogni NODO e la sezione trasversale di estremità dell’asta ad esso riferita, può spostarsi liberamente sul piano. Il NODO, trascinando le aste a lui collegate, può spostarsi lungo l’asse delle X, lungo l’asse delle Y o può ruotare, coinvolgendo negli spostamenti e nella rotazione le sezioni di estremità delle aste ad esso collegate.
LE CONDIZIONI DI VINCOLO
Le condizioni di VINCOLO sono fissate e definite dagli spostamenti impediti per ciascun nodo e per la sezione ad esso collegata. Esistono le CONDIZIONI di VINCOLO ESTERNE, cioè gli impedimenti assoluti posti per i nodi di estremità vincolati a terra. Esistono le CONDIZIONI di VINCOLO INTERNE, cioè gli impedimenti relativi posti per le sezioni d’estremità delle aste che concorrono nei vari nodi. I VINCOLI ESTERNI impediscono gli SPOSTAMENTI ASSOLUTI della sezione di estremità dell’asta lungo le direzioni X e Y e la rotazione φ della sezione attorno al nodo. Se si bloccano tutti
e tre gli spostamenti si parla INCASTRO con 3 gradi di vincolo, se si bloccano solo gli spostamenti X e Y si parla di CERNIERA con 2 gradi di vincolo, se si blocca solo uno spostamento X o Y si parla di CARRELLO (o APPOGGIO SEMPLICE) con 1 grado di vincolo. Altre modalità di vincolo, meno diffuse nell’ambito delle costruzioni sono rappresentate dagli INCASTRI CEDEVOLI dove si blocca la rotazione φ e uno solo degli spostamenti X o Y. Negli schemi statici i vincoli esterni possono essere rappresentati in vario modo. Per indicare il vincolo agli spostamenti X e Y frequentemente si utilizza il triangolo al quale si applicano le ruote per indicare che è vincolato solo lo

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
4
spostamento in una direzione. Per indicare l’incastro spesso si aggiunge alla cerniera (triangolo) un quadrato per indicare che è bloccata anche la rotazione φ.
I VINCOLI INTERNI impediscono gli SPOSTAMENTI RELATIVI tra le sezioni di estremità delle aste che concorrono nel nodo. In particolare si può parlare di vincolo a CERNIERA quando le sezioni di estremità delle aste non si possono allontanare tra loro ma possono ruotare indipendentemente, Si parla invece di vincolo ad INCASTRO quando le sezioni di estremità non possono né allontanarsi né ruotare tra loro. Una struttura definita da vincoli interni a cerniera individua una struttura di tipo RETICOLARE, mentre una struttura definita da vincoli interni ad incastro individua una struttura a TELAIO.
VINCOLO INTERNO - CERNIERA
VINCOLO ESTERNO - CERNIERA
VINCOLO ESTERNO - APPOGGIO
STRUTTURA RETICOLARE in APPOGGIO
VINCOLO ESTERNO CERNIERA
VINCOLO ESTERNO APPOGGIO VINCOLO ESTERNO
INCASTRO
VINCOLO INTERNO - INCASTRO
STRUTTURA A TELAIO
Gli spostamenti delle Strutture Reticolari sono principalmente dovuti alle deformazioni assiali (per Sforzo Normale) delle aste componenti, mentre gli spostamenti delle strutture a Telaio sono principalmente dovuti alle deformazioni flessionale (per Momento Flettente) delle aste componenti. LE CONDIZIONI DI CARICO Lo schema statico, definito dalla geometria complessiva e dalle condizioni di vincolo, è soggetto alle condizioni di carico esterne che lo sollecitano e lo deformano. Nell’ambito delle strutture tali condizioni di carico sono dovute alle forze peso della struttura e dei materiali che compongono l’opera (pavimenti, sottofondi, coperture, ecc.), alle forze che riproducono gli agenti atmosferici come neve e vento, alle forze che riproducono gli effetti di un sisma, ai carichi di progetto che la struttura deve portare. I carichi sono rappresentati da momenti (o coppie), forze verticali e orizzontali isolate e concentrate nei nodi, oppure, da forze distribuite lungo le aste. L’insieme delle condizioni di carico su una struttura rappresenta il SISTEMA DI FORZE ATTIVO che agisce sulla struttura stessa.
q= carico distribuito in copertura
q=carico distribuito
P=carico concentrato
P=carico concentratoeffetto del vento
effetto del ventoP=carico concentrato
La determinazione dei carichi rappresenta uno degli aspetti fondamentali della definizione di uno schema statico per il progetto di qualsiasi elemento strutturale. Non è possibile dimensionare un elemento costruttivo senza conoscere i carichi e lo schema statico secondo il quale l’elemento costruttivo lavora.

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
5
LE IPOTESI DI DEFORMABILITA’ La soluzione di uno schema statico inizia con il calcolo del SISTEMA di FORZE REATTIVO, rappresentato dalle REAZIONI dei VINCOLI ESTERNI, che equilibra il SISTEMA DI FORZE ATTIVO rappresentato dai CARICHI. I due sistemi di forze trovano l’equilibrio attraverso la deformazione della struttura, quindi per interpretare una struttura in generale è necessario fissare anche le regole di deformabilità della stessa. Il modello di riferimento più semplice e utilizzato è il MODELLO ELASTICO-LINEARE che fissa le regole di deformabilità semplicemente attraverso il LEGAME LINEARE tra le tensioni e le deformazioni del materiale (legge di Hooke).
εσ ·E= dove: σ è la tensione normale sul materiale ε è deformazione unitaria del materiale E è il modulo elastico del materiale di cui è composta la struttura
Conseguenza immediata dell’utilizzo del modello ad elasticità lineare e il principio fondamentale della SOVRAPPOSIZIONE DEGLI EFFETTI secondo cui è sempre possibile risolvere una struttura scomponendo e sovrapponendo i singoli carichi oppure le singole deformazioni.
La soluzione di una struttura soggetta a varie condizioni di carico è raggiungibile sommando le soluzioni di ciascuna condizione di carico. Intendendo per soluzione della struttura la determinazione del SISTEMA di FORZE REATTIVO (reazioni vincolari), la determinazione dei diagrammi di sollecitazione (Diagrammi di Momento, Taglio e Sforzo Normale), la determinazione delle DEFORMAZIONI (abbassamenti e rotazioni) Per una trave le funzioni che definiscono i diagrammi delle sollecitazioni di Momento e Taglio sono tra loro, e con il carico q, legate dal rispetto delle condizioni di equilibrio che forniscono le seguenti relazioni, che analizzeremo nei capitoli successivi:
qdx
dT −=
Tdx
dM =
Le relazioni stabiliscono che, la derivata della funzione che rappresenta lo sforzo di taglio è uguale alla funzione che rappresenta il carico unitario cambiato di segno; la derivata della funzione che rappresenta il diagramma del momento flettente è uguale alla funzione che rappresenta lo sforzo di taglio. Mettendo assieme le due relazioni si ottiene anche:
²
²
dx
Mdq −=
per la quale il carico unitario è la derivata seconda del momento cambiata di segno.

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
6
Per il MODELLO ELASTICO LINEARE le deformazioni di una struttura vengono determinate in campo elastico con i carichi di esercizio, cioè nella ipotesi di comportamento del materiale secondo il modello elastico-lineare, alla base del quale c’è la legge di Hooke che stabilisce la proporzionalità diretta tra deformazioni e tensioni. SFORZO NORMALE e DEFORMAZIONE ASSIALE Per un’asta della struttura sollecitata da Sforzo Normale (carico di trazione o compressione posizionato nel baricentro della sezione trasversale dell’asta), il modello elastico-lineare individua la seguente deformazione (allungamento o accorciamento dell’asta), che analizzeremo nei capitoli successivi:
AE
LNLL
··
· ==∆ ε
dove: ∆L è la deformazione complessiva dell’asta (accorciamento o allungamento) ε è la deformazione unitaria N è lo Sforzo Normale baricentrico sulla sezione trasversale dell’asta A è l’area della sezione trasversale dell’asta L è la lunghezza dell’asta E è il modulo elastico del materiale dell’asta La determinazione della deformazione assiale delle aste è importante per poter trovare le deformazioni complessive di una struttura reticolare. Nel Capitolo 15 vengono trattate le strutture reticolari che si deformano per gli sforzi di trazione e compressione nelle singole aste. MOMENTO FLETTENTE e DEFORMAZIONE FLESSIONALE Per un’asta della struttura sollecitata da Momento Flettente, la deformazione flessionale è governate dall’equazione della linea elastica, che analizzeremo nei capitoli successivi:
JE
M
dx
d
r ·1
2
2
== η
dx
dηϕ = JE
M
dx
d
·=ϕ
dove: 1/r è la curvatura della funzione η che rappresenta la deformata η è lo spostamento delle sezioni della struttura φ è la rotazione delle sezioni della struttura M è il momento flettente sulle sezioni E è il modulo elastico del materiale dell’asta J è il momento d’inerzia della sezione trasversale dell’asta Per determinare le deformazioni flessionali complessive (spostamenti o rotazioni delle sezioni dell’asta) si possono utilizzare diversi metodi di calcolo che analizzeremo nei capitoli successivi: 1) la doppia integrazione dell’equazione della linea elastica utilizzando i tradizionali
metodi di integrazione della matematica; 2) il Principio dei Lavori Virtuali che fa riferimento ad un sistema di forze e tensioni
virtuali equilibrato e un sistema di spostamenti e deformazioni congruente; 3) il teorema e il corollario di Mohr che consente di risolvere la doppia integrazione con
l’aiuto di una trave ausiliaria caricata con il diagramma di curvatura per la quale il momento equivale alla freccia della trave principale e il taglio equivale alla rotazione.

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
7
X
Y
O
P
TANGENTE
X
Y
O
x=a
x=b
a b
AREA
3. L’ ANALISI DI UNA CURVA e DELLA SUA FUNZION E Prima di avventurarci nello studio delle strutture è necessario recuperare alcuni importanti concetti di analisi matematica e di studio delle funzioni. DERIVATE e INTEGRALI
I concetti di DERIVATA e di INTEGRALE di una funzione rappresentano uno dei cardini dell'analisi matematica e del calcolo infinitesimale. DERIVATA e INTEGRALE sono due operazioni matematiche inverse. La DERIVATA è un operatore che trasforma la funzione f(x) in una nuova funzione f’(x):
)(')(·
xfdx
xfd =
L’INTEGRALE è l’operatore inverso che trasforma la funzione f’(x) in una famiglia di funzioni f(x), a meno di una costante C, detta costante di integrazione:
Cxfdxxf +=∫ )(·)('
Per integrare una funzione è in genere necessario definire il valore della costante di integrazione C, al fine trovare, all’interno della famiglia definita da C, la funzione che si ricerca . La costante C viene calcolata mediante una condizione al contorno che è individuata da particolari requisiti ai quali deve sottostare la funzione cercata, come ad esempio il passaggio per un punto dato.
Esempi di funzioni derivate e integrate: f(x)=a derivata D(a)=0 integrale I(0) = C f(x)=x derivata D(x)=1 integrale I(1) = x+C f(x)=x² derivata D(x²)=2·x integrale I(2·x) = x²+C f(x)=x3 derivata D(x3)=3·x² integrale I(3·x²) = x3+C f(x)=xn derivata D(xn)=n·x(n-1) integrale I(n·x(n-1)) = xn+C
Nell’analisi matematica il calcolo della DERIVATA di una funzione in un punto individua il valore del coefficiente angolare della retta tangente nel punto della curva di equazione f(x).
Nell’analisi matematica l’INTEGRALE rappresenta la sommatoria di elementi infinitesimi è può essere calcolato in un intervallo finito, in questo caso rappresenta un area:
∫ =b
a
areaxdxf )()·(
L’elemento infinitesimo f(x)·dx è l’area infinitesima di base d(x) e altezza f(x), quindi il calcolo dell’integrale al variare di x da a a b individua l'area compresa tra la curva di equazione f(x), l’asse delle x e le rette verticali passanti per i due punti.

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
8
LA CURVA Una linea curva è caratterizzata in ogni suo punto dalla pendenza e dalla curvatura.
A
B
A
B
B
r
A
r
La pendenza è rappresentata dall’angolo φ che la retta tangente alla curva nel punto fa con l’orizzonte. Quando la tangente forma un angolo φ positivo la curva è in salita; quando la tangente forma un angolo φ negativo la curva è in discesa. La curvatura è rappresentata dal rapporto 1/r , con r uguale al raggio cerchio tangente nel punto alla curva (detto cerchio osculatore). Quando il raggio r del cerchio tangente è grande la curvatura 1/r è piccola; quando il raggio r è piccolo la curvatura 1/r è grande. Il segno della curvatura indica il verso della concavità, curvatura positiva per la curva rivolta verso l’alto, curvatura negativa per la curva rivolta verso il basso. Nel punto A di figura la retta tangente indica una pendenza in salita cioè positiva, mentre il raggio del cerchio tangente è grande e indica una curvatura 1/r piccola. Nel punto B la retta tangente indica una pendenza in discesa cioè negativa, mentre il raggio del cerchio tangente è piccolo e indica una curvatura 1/r grande. Per definire in modo completo una curva bisogna individuare per ogni suo punto la pendenza e la curvatura. LE FUNZIONI Una linea curva è rappresentabile nel piano cartesiano X, Y dalla funzione:
)(xfy =
A
B
TANGENTE in A
A
B
TANGENTE in B
X
Y
O
A
r
B
cerchio
TANGENTE in A
cerchio
TANGENTE in B
y=f(x)

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
9
X
Y
O
y=5
y=3x
+2
= tg
= 3
X
Y
O
y=x²
La pendenza, cioè l’angolo φ della tangente alla curva in un punto generico, è individuata dalla derivata prima della funzione y=f(x) calcolata nel punto:
dx
xfdxfytg
)(·)('')( ===≅ ϕϕ
La curvatura 1/r, cioè il reciproco del raggio del cerchio tangente alla curva in un punto generico, è individuata dalla derivata seconda della funzione y=f(x) calcolata nel punto:
2
2 )()(''''
1dx
xfdxfy
r===
Esempio: - curva definita dalla funzione y=5 - la funzione rappresenta una retta orizzontale; - la derivata prima y’=0 indica che le tangenti in qualsiasi punto alla curva sono orizzontali; - la derivata seconda y’’=0 indica che la curvatura è nulla e che il cerchio tangente ha raggio infinito. Esempio: - curva definita dalla funzione y=3x+2 - la funzione rappresenta una retta inclinata - la derivata prima y’=3 indica che le tangenti in qualsiasi punto alla curva formano un angolo φ costante pari a 3; - la derivata seconda y’’=0 indica che la curvatura è nulla e che il cerchio tangente ha raggio infinito.
Esempio: - curva definita dalla funzione y= x²
- La funzione rappresenta una parabola simmetrica rispetto l’asse delle Y con il vertice nell’origine (0,0) del sistema cartesiano e concavità rivolta verso l’alto.
- La derivata prima y’=2x indica che le tangenti in qualsiasi punto alla curva variano con funzione lineare e rappresentabile da una retta. La derivata prima si annulla per x=0 e, quindi, nel punto (x=0, y=0) la curva ha tangente orizzontale e il punto è per la parabola un punto di inversione di pendenza (massimo o minimo).
- La derivata seconda y’’=2 indica che la curvatura è costante e positiva, quindi con concavità rivolta verso l’alto. Il punto (0,0) dove si inverte la pendenza è quindi un punto di minimo.
IL CALCOLO DELL’AREA Per trovare l’Area della figura geometrica delimitata dall’asse delle X , dalla curva f(x) e da due rette verticali passanti per i punti x=a e x=b, si deve calcolare l’integrale definito della funzione che rappresenta la curva nell’intervallo a-b:

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
10
X
Y
O
a
b
AR
EA
x
dx
f(x)
∫=b
a
dxxfArea )·(
Per trovare il baricentro xG della stessa figura geometrica è necessario applicare il teorema di Varignon:
A
SxG =
dove S è il momento statico dell’area rispetto l’asse x =a:
∫=b
a
dxxxfS ·)·(
Come esempio calcoliamo l’area delimitata da una parabola rappresentata dalla funzione y=n·x² (il risultato sarà utilizzati negli esempi successivi).
X
Y
O
a
b
B
C
A
y=n·x²
abanCxndxxnAaa
OAC ·3
1·
3
1·
3
1²·· 3
0
3
0
==
+== ∫
dove abbiamo sostituito b = n·a²
Il momento statico S dell’area OAC calcolato rispetto l’asse delle Y risulta:
²·4
1·
4
1·
4
1·²·· 4
0
4
0
abanCxndxxxnSaa
OAC ==
+== ∫
La coordinata xG del baricentro, utilizzando il teorema di Varignon, risulta:
aab
ab
A
SxG 4
3
··3/1
²··4/1 ===
Per differenza l’area del settore triangolare OBC risulta :
abababAOBC ·3
2·
3
1· =−=

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
11
4. LA TEORIA DELLE TRAVI INFLESSE Una trave (struttura composta da aste ad asse lineare soggette a flessione) soggetta ad un carico ripartito lungo il suo sviluppo longitudinale è sollecitata, in ogni sua sezione trasversale, dagli sforzi di Taglio e di Momento flettente. Queste sollecitazioni variano lungo la trave e sono rappresentabili da funzioni di Momento e di Taglio, dette diagrammi di sollecitazione. Le funzioni che rappresentano il carico q , il diagramma di Momento M e il diagramma di Taglio T, sono tra loro correlate.
q=carico
M = momento
T= taglio
Si consideri un tratto di trave di lunghezza dx soggetta ad un carico q uniforme ripartito e si indichino con M e T il momento e il taglio nella sezione A e con M1 e T1 il momento e il taglio nella sezione B posta a distanza dx dalla sezione A.
dx
q
q·dx
T
M
T 1
M 1
A B L’elemento di trave di lunghezza dx è in equilibrio, cioè il sistema di forze ad esso applicato è un sistema di forze in equilibrio. Scriviamo allora l’equilibrio delle forze verticali e l’equilibrio dei momenti rispetto il punto B:

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
12
T - q·dx - T1= 0
M + T·dx – q·dx·dx/2 – M1= 0 da cui, trascurando l’infinitesimo di secondo ordine q·d2x/2, si ottiene
T1-T = - q·dx dT = - q·dx
M1 – M = T·dx dM = T·dx
risultano così le relazioni cercate tra le funzioni che rappresentano il Carico q, il diagramma di Momento M e il diagramma di Taglio T:
qdx
dT −= Tdx
dM =
ossia, la derivata dello sforzo di taglio è uguale al carico unitario cambiato di segno; la derivata del momento flettente è uguale allo sforzo di taglio. Mettendo assieme le due relazioni si ottiene anche:
²²
dx
Mdq −=
il carico unitario è la derivata seconda del momento cambiata di segno. Tra le funzioni q, T, M sono valide anche le espressioni inverse che si possono utilizzare determinano le costanti di integrazione C1 e C2 con l’aiuto delle condizioni al contorno, come esposto nel paragrafo successivo :
1· CdxqT +−= ∫ 2· CdxTM += ∫
4. 1 I DIAGRAMMI di MOMENTO e TAGLIO - Relazio ni q T M Le relazioni q, T, M sopra riportate sono molto utili per disegnare l’andamento dei diagrammi di momento e taglio con diverse condizioni di carico. Come esempio disegniamo i diagrammi di Taglio e Momento per un tratto di trave di lunghezza l con carico uniforme q, sollecitazioni MA e TA nell’estremo A e MB e TB nell’estremo B.

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
13
l
q
x +
-
diagramma di Taglio
A B
x
M
T
T A
M A
T B
M B
1
2
3
4
5
5
4
3
2
1
1/8
q·l
²
1/8 q·l²
M A M B
T A
T B diagramma di Momento
x x
S
c
d
e
Il diagramma di Taglio si ricava dalla seguente espressione
11 ·· CxqCdxqT +−=+−= ∫
che individua una fascio di rette parallele al variare di C1. La condizione al contorno, per individuare C1 è, nel nostro caso, rappresentata dal valore TA che assume il Taglio per x=0:
C1=TA+q·0 = TA L’equazione del Taglio è allora la retta:
T=-q·x+ TA
Il diagramma di Taglio è la retta che parte dal valore TA per x=0 in A, e arriva al valore TB, per x=l in B.
Il diagramma di Momento si ricava dalla seguente espressione:
222 2
²·)·(· CxT
xqCdxTxqCdxTM AA ++−=++−=+= ∫∫
che individua una fascio di parabole al variare di C2. La condizione al contorno, per individuare C2
è rappresentata, nel nostro caso, dal valore MA del Momento per x=0, quindi risulta:
C2=-MA
AA MxTxq
M −+−=2
²·
il diagramma che individua il Momento è una parabola che parte dal valore MA, per x=0 e arriva al valore MB per x=l ed ha il suo valore massimo dove si annulla il Taglio.

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
14
q A T A
M A
T S
M S x
x
S
4. 2 LE FUNZIONI di MOMENTO e TAGLIO - L’EQUILIBRIO Il tratto di trave di lunghezza l, con carico uniforme q , con le sollecitazioni di taglio TA e TB e di momento MA e MB agli estremi A e B, rappresenta una struttura (trave A-B) con applicato un sistema di forze in equilibrio. Un sistema di forze è in equilibrio quando:
- la risultante delle forze orizzontali è nulla - la risultante delle forze verticali è nulla - la risultante dei momenti rispetto qualsiasi punto del piano è nulla Nel nostro caso la prima equazione di equilibrio non esiste perché non ci sono forze orizzontali, mentre la seconda equazione di equilibrio delle forze verticali e la terza di equilibrio dei momenti rispetto il punto B, risultano:
TA + TB – q·l = 0
-MA+MB- q·l·l/2 + TA·l = 0
Le equazioni che definiscono le funzioni e i diagrammi di Momento e Taglio, cioè la variazione del Momento e Taglio per la generica sezione S, possono essere determinate senza utilizzare gli integrali, come sopra riportato, ma più semplicemente utilizzando le condizioni di equilibrio tra le forze applicate e le sollecitazioni.
l
q A B T A
M A
T B
M B x
x
S
La sezione generica S , indicata dalla ascissa x, individua una struttura (trave A-S) alla quale è applicato un sistema di forze in equilibrio formato dal Momento e il Taglio in A, dal Momento e il
Taglio in S e dal carico q nel tratto x. Le sollecitazioni in S, Momento MS e Taglio TS , sono quindi determinabili con le condizioni di equilibro per il tratto di struttura A-S. Il Taglio nella sezione S, che dista x dalla sezione
A, è rappresentato dalla somma delle forze verticali che stanno a sinistra della sezione tra A e S:
TS = - q·x+ TA Il Momento nella sezione S, che dista x dalla sezione A, è rappresentato dalla somma dei momenti prodotti dalle forze che stanno a sinistra della sezione tra A e S:
AAS MxTxq
M −+−=2
²·
I valori così determinati sono uguali a quelli trovati integrando le funzioni T ed M.

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
15
4. 3 IL DISEGNO DELLA PARABOLA di MOMENTO L’ampiezza della parabola che rappresenta il diagramma di momento è individuata dal segmento
decdce += misurato verticalmente tra il punto medio della linea che unisce MA e MB e la parabola
x
M
1
2
3
4
5
5
4
3
2
1
1/8
q·l
²
1/8 q·l²
M A M B
c
d
e
a
b
f
l/2 l/2 l
L’ampiezza della parabola dipende solo dal carico q e dalla luce l e vale sempre:
²·8
1lqce=
di seguito si riporta il calcolo dell’ampiezza:
]2/·2
)²2/·([)(
2
1AABA MlT
lqMMcecdce −+−++=+=
AABA Ml
Tlq
MMce −+−+=2
·8
²·)(
21
2·
8
²·)(
2
1 lT
lqMMce AAB +−−=
2·
8
²·)
2
²·(
2
1 lT
lqMM
qllTce AAAA +−−++−= ²·
8
1
8
²·
4
²lq
lqqlce =−+=
L’ampiezza costante, pari a 1/8q·l², della parabola del diagramma di momento per un carico q su un tratto di trave l consente la costruzione della parabola in modo semplice:
- riportare i valori dei momenti MA ed MB nella scala scelta per il disegno - tracciare la linea che unisce i vertici a e b - individuare il punto c in asse della linea - calcolare il valore 1/8 q·l² e definire l’ampiezza nella scala dei momenti scelta per il disegno - riportare verticalmente due volte l’ampiezza della parabola nel disegno - individuare così i punti e , f - tracciare le linee f-a e f-b - dividere le linee in parti uguali, nel disegno sono sei e si individuano 5 punti per linea - numerare e collegare i punti 1-1, 2-2 ,… 5,5 come riportato nel disegno - la parabola è individuata dalla curva tangente all’inviluppo delle linee disegnate.

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
16
5. LE STRUTTURE ISOSTATICHE
La soluzione di una struttura è la soluzione dello Schema Statico che la rappresenta. La prima fase della soluzione è la determinazione del sistema di FORZE REATTIVE, rappresentato dalle reazioni vincolari, che equilibra il sistema di FORZE ATTIVE, rappresentato dai carichi e dalle azioni esterne agenti sulla struttura. Nei riguardi dell’equilibrio tra i sistemi di FORZE ATTIVO e REATTIVO le strutture possono essere ISOSTATICHE o IPERSTATICHE. Le strutture ISOSTATICHE sono caratterizzata dall’avere un numero di gradi di vincoli esterni, cioè di Reazioni Vincolari, strettamente necessario e uguale al numero dei gradi di labilità delle strutture stesse. Poiché il numero delle labilità, o movimenti, è uguale al numero dei vincoli, o reazioni vincolari, la determinazione del sistema di FORZE REATTIVO avviene utilizzando le semplici condizioni di equilibrio con il sistema di FORZE ATTIVO. La ricerca del sistema delle REAZIONI VINCOLARI ESTERNE per uno schema statico che rappresenta una struttura ISOSTATICA è la ricerca del sistema di FORZE REATTIVE equilibrante.
P
q
A
B
L1 L2
L
YA YB
XA
Lo schema statico di figura rappresenta un struttura composta da un’asta di lunghezza L e due nodi di estremità A e B. Il vincolo esterno nel nodo A è una CERNIERA, mentre il vincolo esterno nel nodo B è un CARRELLO (o APPOGGIO SEMPLICE). L’asta nel piano ha 3 gradi di libertà ed è vincolata esternamente con 3 gradi di vincolo (2 per la cerniera e 1 per l’appoggio), quindi, la struttura rappresentata in figura è ISOSTATICA. Il sistema di FORZE ATTIVO è rappresentato dalla forza concentrata P e dal carico distribuito q. Il sistema di FORZE REATTIVO che equilibra la struttura è rappresentato dalle reazioni vincolari XA, YA e YB . Per il calcolo del sistema di FORZE REATTIVO si utilizzano le tre condizioni di equilibrio della struttura.
1) Equilibrio delle forze orizzontali : XA = 0 2) Equilibrio delle forze verticali : YA+YB = P+q·L 3) Equilibrio alla rotazione (es. in A) : YB·L = P·L1 + q·L²/2
Elaborando le tre equazioni del sistema si determinano i valori delle forze passive XA, YA e YB .

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
17
L’equilibrio alla rotazione è sempre valido per qualsiasi punto del piano. si è utilizzato il punto A semplicemente per azzerare il contributo delle forze XA e YA e poter determinare YB in modo più rapido. Dopo la determinazione del sistema di FORZE REATTIVO è possibile trovare le sollecitazione di Sforzo Normale, Taglio e Momento Flettente per ciascuna sezione della struttura. Per il tracciamento dei diagrammi bisogna calcolare, con le condizioni di equilibrio, le sollecitazioni in alcune sezioni particolari della struttura. Per il nostro esempio riportato in figura le sezioni significative, per il tracciamento dei diagrammi, sono gli estremi e la sezione sotto il carico concentrato P. Per il calcolo si inizia da un estremo e si sommano progressivamente le Forze dei sistemi ATTIVO e REATTIVO, fissando un segno di riferimento, ad esempio positive le forze verso l’alto e positivi i momenti destrogiri:
Sollecitazioni all’estremo A : TA = YA MA = 0 Sollecitazioni sotto P a sinistra : TPs = YA-q·L1 MPs = YA·L1 – q·L2
1/2 Sollecitazioni sotto P a destra : TPd = YA-q·L1-P MPd = -YA·L1 + q·L2
1/2 Sollecitazione all’estremo B: TB = YA-P-q·L MB = 0 Per disegnare i diagrammi è sufficiente raccordare le varie sollecitazioni determinate secondo le indicazioni fornite dalle relazioni fondamentali tra carico q , taglio T e momento M:
qdx
dT −= Tdx
dM = qdx
Md −=2
2
Tali relazioni stabiliscono che: - quando q=0 - il diagramma di Taglio è costante - il digramma di momento è lineare - quando q=costante - il diagramma di taglio è lineare – il diagramma di momento è parabolico - quando T=0 - il diagramma di Momento ha un punto di massimo o minimo Il diagramma di Momento ha concavità di segno contrario al carico e la parabola che lo rappresenta è rivolta verso l’alto e, il tratto di parabola a sinistra di P ha ampiezza 1/8·q·L1², mentre il tratto a destra di P ha ampiezza 1/8·q·L2² . Per concludere lo studio di una struttura ISOSTATICA è spesso necessario trovare anche le deformazioni, in particolare, per le travi è significativo, ai fini di una verifica completa della struttura, il calcolo del massimo abbassamento in campata (freccia massima). Per il calcolo delle DEFORMAZIONI è necessario introdurre le IPOTESI DI DEFORMABILITA’ e le modalità di deformazione della struttura secondo il MODELLO ELASTICO LINEARE (vedi capitoli successivi) che è governato dalla relazione:
JE
M
dx
d
·2
2
=η
Anche questa relazione è utile per il disegno del diagramma di Momento e per il disegno della deformata, infatti, quando il Momento si annulla la deformata ha un punto di flesso con cambiamento di curvatura.

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
18
5.1 ESEMPIO – TRAVE ISOSTATICA Di seguito si espone il calcolo per la trave isostatica di figura .
415
120
P=800 kg
q=500 kg/m
diagramma di Taglio
diagramma di Momento
A
B
161
295
Calcolo del sistema di FORZE REATTIVO: equilibrio alla rotazione in B YA = (800·2.95+500·4.15²/2) / 4.15 = 1606 kg equilibrio forze verticali YB = 800+500·4.15 – 1606 = 1269 kg equilibrio forze orizzontali XA = 0 Dalle relazioni q, T e M, si ricava che il Momento è massimo nella sezione in cui il Taglio è nullo. Ricerchiamo allora la sezione per la quale il Taglio è nullo: T=1606 – 500·x – 800 =0 si ricava x = (1606-800)/ 500 = 1.61 m Calcoliamo il valore del Momento massimo nella sezione individuata da x =1,61 m:
Mmax = 1606·1.61-500·1.61²/2-800·(1.61-1.20) = 1609 kgm
Calcoliamo anche i valori del taglio e del momento in corrispondenza al carico P
Taglio a sinistra di P: Ts = 1606-500·1.2 = 1006 kg Taglio a destra di P : Td = 1606-500·1.2-800 = 206 kg Momento sotto P: MP = 1606·1.2-500·1.2²/2 = 1567 kgm Per il disegno del diagramma di momento e taglio si procede come esposto nei paragrafi precedenti. Per il calcolo delle deformazioni è invece necessario introdurre la Teoria dell’elasticità .

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
19
6. LA DEFORMAZIONE DELLE TRAVI INFL ESSE Una trave inflessa soggetta ad una condizione di carico si deforma. Tale deformazione avviene poiché ogni sezione S della trave è soggette a Momento Flettente e a Taglio, distribuiti secondo i relativi diagrammi di momento lungo la trave. Ad esempio: per una trave a mensola con un carico concentrato all’estremità i digrammi di Momento e Taglio che deformano la struttura sono riportati in figura.
f
L P
M=P·L
T=P
S S'A
A'
MS
T S
Il Momento Flettente e il Taglio provocano gli spostamenti delle sezioni S in S’ e,
conseguentemente, lo spostamento della sezione A in A’ , cioè l’abbassamento f e la rotazione φ della sezione di estremità.
P
f f
P
La mensola può essere realizzata come trave reticolare, oppure, come trave a parete piena. Nel primo caso le sollecitazioni di Momento e Taglio sono equilibrate dagli Sforzi Normali di Trazione e Compressione che nascono nelle aste componenti della reticolare, e la deformazione f all’estremità è dovuta al progressivo allungamento e accorciamento delle aste componenti. Nel secondo caso la deformazione prodotta dal Momento Flettente è molto più importante della deformazione prodotta dal Taglio e, in una trattazione semplificata, si può trascurare. Il Momento
Flettente è equilibrato, in ciascuna sezione, da una distribuzione lineare di tensioni normali σ che producono le progressive rotazioni delle sezioni e la deformazione f all’estremità della mensola. Per Calcolare le deformazioni prodotte dagli Sforzi Normali (nel caso di travature reticolari) o le deformazioni per Momento Flettente (travature a parete piena) è necessario introdurre il modello di comportamento elastico-lineare del materiale.

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
20
N
N
L'
L
SS
1
2
L
1-
La teoria elastico-lineare che interpreta le deformazioni per le strutture ha origine dalla relazione teorizzata da Hooke:
εσ ·E= ; E=εσ
che stabilisce che un materiale ha comportamento elastico-lineare, quando il rapporto tra la tensione σ (la forza ortogonale su un area unitaria) e la deformazione unitaria ε è costante e vale E, detto modulo di elasticità o modulo di Young del materiale. La seconda importante ipotesi che sta alla base del modello elastico-lineare è quella del “mantenimento delle sezioni piane” ipotizzata da Navier. Secondo tale ipotesi nelle deformazioni le
sezioni si spostano ma rimangono piane e, quindi, la deformazione unitaria ε per ciascuna sezione è sempre rappresentata da una funzione costante o lineare
6.1 LA DEFORMAZIONE per SFORZO NORMALE Un’asta di una struttura sollecitata da Sforzo Normale (carico di trazione o compressione posizionato nel baricentro della sezione trasversale dell’asta), si deforma semplicemente allungandosi o accorciandosi. Nel modello elastico-lineare viene posta anche l’ipotesi che nella
deformazione che l’asta subisce, la sezione trasversale, inizialmente piana, rimanga piana. L’asta di figura, sollecitata a Sforzo Normale di compressione N si accorcia complessivamente di una quantità ∆L. Ogni tratto di asta di lunghezza pari a 1, come tra le sezioni S1 e S2 , dopo la deformazione si accorcia della quantità ε . Tale deformazione ε è costante secondo l’ipotesi del mantenimento delle sezioni piane. Sommando gli spostamenti ε lungo l’intera asta di lunghezza L si ottiene lo spostamento della sezione di estremità, cioè l’accorciamento dell’asta:
ε·LL =∆
Le tensioni normali σ, in ogni sezione trasversale A, equilibrano lo sforzo Normale; possiamo perciò scrivere:
NdAA
=∫ ·σ
Ricordando che il materiale si comporta in modo elastico lineare secondo la legge di Hooke:
εσ ·E=
e che le sezioni rimangono piane (la quantità E·ε e, quindi, anche la tensione σ, sono costanti su ogni

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
21
N
sezione) possiamo elaborare la condizione di equilibrio sopra riportata:
NAEdAEdAEdAAAA
==== ∫∫∫ ······· εεεσ
possiamo scrivere le due relazioni che definiscono l’accorciamento unitario e la tensione:
AE
N
·=ε
A
N=σ
Sommando gli spostamenti ε lungo l’intera asta di lunghezza L si ottiene lo spostamento della sezione di estremità, cioè l’accorciamento dell’asta:
AE
LNLL
··
· ==∆ ε
dove: N è lo Sforzo Normale baricentrico sulla sezione A è l’area della sezione trasversale dell’asta L è la lunghezza dell’asta E è il modulo elastico del materiale σ è la tensione normale sulla sezione trasversale dell’asta ε è lo spostamento unitario Le deformazioni per sforzo normale sono in genere piccole e si possono trascurare nelle strutture a Telaio dove sono più importanti le deformazioni per flessione. Nelle strutture reticolari, dove il funzionamento è affidato agli sforzi di compressione e trazione delle singole aste che compongono la struttura, Le deformazioni assiali delle aste diventano essenziali per valutare le deformazioni complessive della struttura reticolare.
P
f
Nella struttura reticolare di figura si può calcolare la freccia f, prodotta dal carico P, a partire dalle deformazioni assiali delle aste componenti soggette a compressione e trazione.

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
22
6.2 LA DEFORMAZIONE per MOMENTO FLETTENT E Un’asta soggetta a Momento Flettente si deforma in modo evidente assumendo una configurazione curva caratterizzata in ogni punto dalla curvatura 1/r, cioè dall’inverso del raggio del cerchio tangente alla curva nel punto.
S 1 S 2
S 1 S 2
1
1+
11-
r
M
C
y
1
1+
11-
y
S 2S 1
S 2S 1
x
l
f
Prima della deformazione prodotta dalla flessione le fibre del solido tra le sezioni S1 e S2 hanno
lunghezza pari a 1 ; dopo la deformazione le fibre esterne si allungano di una quantità ε mentre le
fibre interne si accorciano di una quantità -ε; le uniche fibre che non si allungano e non si accorciano a causa della deformazione sono le fibre che stanno nel baricentro della sezione. L’allungamento delle fibre esterne e l’accorciamento delle fibre interne provocano le rotazioni φ delle sezioni con conseguente deformazione η dell’asse della trave. La curva della deformazione η viene detta linea elastica e possiamo scrivere le relazioni:
2
21dx
d
r
η= dx
d ηϕ ·= dx
d
r
ϕ=1

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
23
1+
1-
y1
yM
nn
Per la teoria dell’elasticità, secondo il principio di Navier le sezioni S1 e S2 dopo la deformazione prodotta dalla flessione rimangono piane, quindi le fibre contenute tra S1 e S2 si allungano e si accorciano secondo la legge lineare
.costy
=ε
in particolare, osservando la figura precedente, possiamo scrivere la seguente proporzione
1: r = (1 + ε) : ( r + y)
che deriva dalla similitudine dei triangoli che hanno vertice in C, centro del raggio di curvatura. Dalla proporzione si ottiene:
yr·
1=ε e quindi ry
1=ε
La curvatura della linea elastica 1/r è uguale al rapporto tra la
deformazione ε di una fibra e la sua distanza y dal baricentro della sezione. La relazione scritta in questo modo è poco utile, ma possiamo utilizzare l’espressione che definisce il comportamento elastico lineare del materiale:
εσ ·E=
e sostituire nella relazione della curvatura ε con σ/E :
ryE 1=
σ ;
ryE
1·
=σ quindi y
r
E·=σ
in questo modo abbiamo scritto la legge di variabilità delle tensioni prodotte dalla flessione M sulla sezione generica in funzione della curvatura:
Il sistema di forze-tensioni σ deve essere in equilibrio con la sollecitazione M che lo ha prodotto, possiamo scrivere l’equilibrio delle forze orizzontali e l’equilibrio dei momenti rispetto l’asse n-n con le tensioni nulle. L’equilibrio delle tensioni orizzontali, esteso all’area A della sezione,
0···· === ∫∫∫ dAyr
EdAy
r
EdA
AAA
xσ
si annulla quando l’integrale di y·dA vale zero. Tale integrale è il momento statico della sezione A rispetto l’asse n-n e stabilisce che l’asse con le tensioni nulle è l’asse baricentrico della sezione. L’equilibrio dei momenti rispetto l’asse baricentrico n-n , detto asse neutro risulta:

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
24
M
max
min
n
n
n
nysup
y inf
MdAyr
EdAy
r
EdAy
AAA
x === ∫∫∫ ····· 22σ
L’integrale di y²·dA rappresenta il Momento d’inerzia J della sezione A rispetto l’asse baricentrico, quindi possiamo scrivere:
MJr
E =· JE
M
r ·1 =
Aggiorniamo l’equazione della linea elastica dopo aver aggiunto le condizioni di elasticità lineare del materiale:
JE
M
dx
d
·2
2
=η
dalla relazione precedente, sostituendo yEr ·
1 σ= , si ottiene anche la seguente relazione:
JE
M
yE ··=σ
; J
yM ·=σ
La relazione, detta equazione di Navier, individua la legge di variabilità delle tensioni σ nella sezione soggetta a momento flettente M.
Per una sezione non simmetrica rispetto l’asse orizzontale (vedi sezione a T di figura), il baricentro della sezione, e quindi l’asse neutro delle tensioni, è individuato dalle due distanze
ysup e ying , rispettivamente dal bordo teso e dal bordo compresso della sezione. Utilizzando l’equazione di Navier si individuano la tensione massima e la tensione minima sui due bordi. La tensione massima di trazione e la tensione minima di compressione risultano :
sup
sup·
W
M
J
yMMAX +=+=σ
inf
inf·
W
M
J
yMMIN −=−=σ
dove le grandezze geometriche Wsup=J/ysup e Winf=J/yinf sono dette Moduli Resistenti della sezione .

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
25
A
l
maxf
q=kg/m
B
BA
B
MA
AB
AV
xS
S
7. IL CALCOLO DELLE DEFORMAZIONI PER FLESSIONE La deformazione di un’asta soggetta a flessione è governata dall’equazione della linea elastica:
JE
M
dx
d
r ·1
2
2
== η
ϕη =dx
d
JE
M
dx
d
·=ϕ
dove: 1/r è la curvatura della funzione η che rappresenta la deformata η è la deformazione della struttura lungo x M è il momento flettente sulla struttura lungo x E è il modulo elastico del materiale di cui è composta la struttura J è il momento d’inerzia della sezione della struttura φ è la rotazione della sezione della struttura Per determinare le deformazioni si possono utilizzare diversi metodi:
1) risolvere la doppia integrazione dell’equazione della linea elastica utilizzando i tradizionali metodi di integrazione della matematica;
2) utilizzare il Principio dei Lavori Virtuali che fa riferimento ad un sistema di forze e tensioni virtuali equilibrato e un sistema di spostamenti e deformazioni congruente;
3) utilizzare il teorema di Mohr che consente di risolvere la doppia integrazione con l’aiuto di una trave ausiliaria caricata con il diagramma di curvatura per la quale il momento equivale alla freccia della trave principale e il taglio equivale alla rotazione.
7. 1 L’ INTEGRAZIONE DELLA LINEA ELAST ICA Come esempio calcoliamo l’abbassamento massimo fB e la rotazione φB della sezione di estremità della mensola rappresentata in figura.
Inseriamo il sistema di riferimento cartesiano (x,η) come indicato in figura. Per la sezione S generica, individuata dalla ascissa x, possiamo scrivere le equazioni che definiscono il Momento e il Taglio:
T=q·x M= 1/2 q·x²
Per la deformata l’equazione della linea elastica risulta:
2²·
··1
2
2 xq
JEdx
d =η
e integrando due volte si ottiene:
1
3
6
·'···· C
xqJEJE +== ηϕ
21
4
·24·
·· CxCxq
JE ++=η

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
26
l
Bf
q=kg/m
B
BA x
le incognite di integrazione C1 e C2 si possono determinare imponendo le condizioni al contorno della deformata con i vincoli dello schema statico. In particolare trattandosi di una mensola la rotazione φ e l’abbassamento η nella sezione A , individuata per x=l, valgono:
φA=0 ηA=0 quindi per trovare C1 e C2 si scrive:
06
···'·· 1
3
=+== Clq
JEJE ϕη
6
· 3
1
lqC −=
0·624
··· 2
34
=+−= Clqllq
JE η 8
· 4
2
lqC =
le equazioni della linea elastica per le rotazioni e per gli abbassamenti risultano:
6
·
6
···'··
33 lqxqJEJE −== ϕη
8·
624
···
434 qlx
qlxqJE +−=η
nella sezione B, per x=0, si ricavano la rotazione e l’abbassamento cercato :
JE
lqB ··6
· 3
−=ϕ JE
lqfB ··8
· 4
=
I dati sono quelli dello schema statico B1 riportato nella Tabella 1.
7. 2 IL PRINCIPIO DEI LAVORI VIRTUALI Utilizziamo il PRINCIPIO DEI LAVORI VIRTUALI per calcolare l’abbassamento massimo fB e la rotazione φB della sezione di estremità della mensola dell’esempio precedente. Il P.L.V. stabilisce che il Lavoro virtuale esterno è uguale al Lavoro virtuale interno:
Le = Li
Condizione necessaria e sufficiente perché un sistema sia in equilibrio è che il lavoro virtuale interno sia uguale al lavoro virtuale esterno per qualunque sistema di spostamenti virtuali congruenti, cioè compatibili con i vincoli. Per lavoro esterno si intende il lavoro prodotto
dalle forze esterne, cioè i carichi, per lavoro interno si intende il lavoro prodotto dalle forze interne, cioè dalle sollecitazioni di Momento e di Taglio . Nel caso di strutture inflesse il lavoro prodotto dal Taglio è trascurabile e si conteggia solo il lavoro prodotto dal Momento. La mensola di figura, soggetta al carico uniforme rappresenta il SISTEMA NORMALE per il quale non riusciamo a scrivere il Lavoro esterno perché rappresentato dal prodotto del carico q per le deformazioni η che non conosciamo. Possiamo però definire un SISTEMA VIRTUALE rappresentato dalla mensola con un carico P (con posizione e verso nella sezione B per la quale vogliamo trovare la deformazione fB ). Questo struttura è un sistema equilibrato, infatti è una struttura isostatica che ha una sua configurazione di equilibrio, al quale applichiamo la deformata congruente del SISTEMA NORMALE, cioè la deformata dovuta al carico q.

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
27
l
A xB
P
M=P·l
Bf
M =
P·x
x
x
l
A xB
M
M
B
A questa nuova struttura virtuale, in quanto la deformata non è quella prodotta dal carico P ma è quella prodotta dal carico q, possiamo però applicare il Principio dei Lavori Virtuali.
Le = Li
Il Lavoro esterno risulta (Forza per spostamento) :
Le = P· fB
Il lavoro interno L i prodotto dal momento Mx=P·x per le rotazioni φ della deformata prodotta dal carico uniforme q risulta :
dxEJ
qxdx
EJ
Md ·
2·
2
==ϕ
EJ
lqP
l
EJ
qPdxx
EJ
qPdx
EJ
qxxPdML
lll
i 8·
·4
·2
·2
··
2²
···44
3 ===== ∫∫∫ ϕ
quindi, confrontando il Lavoro esterno e il Lavoro interno e semplificando P , si ottiene il valore dell’abbassamento fB dell’esercizio precedente:
EJ
lqfB 8
· 4
=
Per calcolare la rotazione φB in B prodotta dal carico q all’estremità della mensola, è necessario utilizzare un diverso SISTEMA VIRTUALE rappresentato dalla mensola con una coppia M applicata all’estremo B, dove vogliamo calcolare la rotazione φB. Applichiamo ora il P.L.V. per le forze esterne e interne della mensola con la coppia M e per gli spostamenti della mensola con il carico distribuito. Il Lavoro esterno risulta:
Le = M· φB
Il lavoro interno Li prodotto dal momento M per le rotazioni φ prodotte dal carico uniforme q risulta:
dxEJ
qxdx
EJ
Md ·
2·
2
==ϕ
EJ
lqM
l
EJ
qMdxx
EJ
qMdx
EJ
qxMdML
lll
i 6
··
3·
2
·
2
··
2
²··
332 ===== ∫∫∫ ϕ
quindi, confrontando il Lavoro esterno e il Lavoro interno e semplificando M, si ottiene il valore dell’esercizio precedente:
EJ
lqB 6
· 3
=ϕ

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
28
7. 3 IL TEOREMA E IL COROLLARIO DI MOHR Il calcolo delle deformazioni utilizzando il teorema e il corollario di Mohr trae origine dall’osservazione dei legami differenziali tra le varie grandezze che caratterizzano la meccanica di una trave.
qdx
dT −= Tdx
dM = qdx
Md −=²
²
JE
M
dx
d
·=ϕ
ϕη =dx
d
JE
M
dx
d
·2
2
=η
Va notata l’analogia tra i legami che regolano il Taglio T , il Momento M e il carico q con quelli che regolano la rotazione φ lo spostamento η e la curvatura M/EJ Si possono quindi utilizzare, nella ricerca di η e φ, gli stessi procedimenti usati per tracciare i diagrammi di Momento e Taglio con l’avvertenza di partire dalla curvatura M/EJ anziché dal carico q.
Per calcolare il Taglio e Momento in una sezione generica, a partire dal carico q, abbiamo utilizzato le condizioni di equilibrio applicate ad una trave reale, imponendo le condizioni al contorno rappresentate dalle reazioni vincolari (Taglio e Momento) agli estremi. Il teorema e il corollario di Mohr stabiliscono che, per calcolare la rotazione (Taglio fittizio T* ) e l’abbassamento (Momento fittizio M* ) in una sezione generica, a partire dalla curvatura (carico fittizio q*=-M/EJ), possiamo utilizzare una trave ausiliaria per la quale i vincoli devono simulare le condizioni al contorno poste da rotazione e abbassamento della trave reale.
A B
=0 A
=0 B
A B
A M* =0
B M* =0
trave reale - carico q
trave ausiliaria - carico q*
A B
=0 A
=0 B
A B
A M* =0
B M* =0
A =0 B =0
A T* =0
B T* =0
B =0 A =0
B T* =0
A T* =0
trave reale - carico q
trave ausiliaria - carico q*
Utilizziamo il Teorema e il Corollario di Mohr, per calcolare l’abbassamento massimo fB e la rotazione φB della sezione di estremità della mensola degli esempi precedenti .

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
29
La trave ausiliaria riportata in figura è caricata con un carico ausiliario
EJ
Mq −=*
B
q*=-M/EJ
trave reale
trave ausiliaria
R3/4 l
=q·l²/2
q*A =-M /EJA
A
l
maxf
q B
BA
B
MA
A
l
il carico q* massimo nell’estremo A si ricava dal momento massimo MA della trave reale:
EJ
lq
EJ
Mq A
A ·2
²·* −=−=
Il diagramma di momento e di carico fittizio è una parabola con area (vedi esempio paragrafo3):
Area parabola = 1/3· l· q*A La risultante del carico fittizio risulta perciò:
EJ
lq
EJ
lq
EJ
MlR A
·6·
2·
·31
··31
*33
===
Calcoliamo, infine, il taglio fittizio e il momento fittizio in B che rappresentano rispettivamente la rotazione e l’abbassamento in B della trave reale:
EJ
lqT BB ·6
· 3* == ϕ
EJ
lql
EJ
lqfM BB ·8
··
4
3·
·6
· 43* ===

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
30
8. TABELLA 1 – LE STRUTTURE ISOSTATICHE AD UNA CAMPATA Per le strutture ISOSTATICHE composte da un’unica asta (trave) il calcolo delle deformazioni è utile, non solo per verificare le massime deformazioni della trave, ma anche per utilizzarle nella ricerca delle soluzioni di strutture più complesse. Nella seguente TABELLA si riportano le soluzioni per la trave appoggiata e per la trave incastrata con diverse condizioni di carico. Il calcolo del sistema delle FORZE REATTIVE (reazioni vincolari) viene fatto utilizzando le tre condizioni di equilibrio, mentre, per determinare gli spostamenti (frecce e rotazioni), è necessario risolvere l’EQUAZIONE DELLA LINEA ELASTICA con uno dei metodi prima enunciati.
TABELLA 1 – soluzione schemi isostatici
SCHEMA A1
Trave appoggiata con carico uniforme q
JE
LqBA ··24
· 3
== ϕϕ
JE
Lqf
·
··
384
5 4
max =
8
· 2
max
LqM =
2
·LqVV BA ==
SCHEMA A2
Trave appoggiata con carico concentrato P in asse
JE
LPBA ··16
· 2
== ϕϕ
JE
LPf
·
··
384
8 3
max =
4
·max
LPM =
2
PVV BA ==

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
31
SCHEMA A3
Trave appoggiata con un coppia M sull’appoggio B
JE
LMA ··6
·=ϕ JE
LMB ··3
·=ϕ
JE
LMfL ·
··
16
1 2
2/ = 2/·2064,1 LMAX ff =
0=AM MM B =
L
MVV BA =−=
SCHEMA B1
Trave a mensola con carico uniforme q
JE
LqB ··6
· 3
=ϕ
JE
Lqf
·
··
8
1 4
max =
2
· 2LqM A =
LqVA ·=
SCHEMA B2
Trave a mensola con carico concentrato P in B
JE
LPB ··2
· 2
=ϕ
JE
LPfB ·
··
3
1 3
=
LPM A ·=
PVV BA =−=
SCHEMA B3
Trave a mensola con una coppia M in B
JE
LMB ·
·=ϕ
JE
LMfB ··2
· 2
=
MM A = 0=AV

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
32
L
q
Y B
X
YA
AMA
=0
M A
A
x =0 A
=0 A =0 B
X A
Y A
y y
Y B
q
9. LE STRUTTURE IPERSTATICHE Le strutture IPERSTATICHE sono caratterizzate dall’avere un numero di gradi di vincoli esterni superiore al numero dei gradi di labilità delle strutture stesse. Quindi per una struttura IPERSTATICA le condizioni di equilibrio, che derivano dai gradi di labilità, non sono sufficienti a determinare tutte le reazioni vincolari, che derivano dai gradi di vincolo della struttura stessa. Le sole condizioni di equilibrio per una struttura IPERSTATICA non sono sufficienti a definire il sistema di FORZE REATTIVO. La struttura una volta IPERSTATICA di figura è rappresentata da una singola asta (con 3 gradi di libertà) vincolata a terra con un INCASTRO in A (3 gradi di vincolo) e un APPOGGIO SEMPLICE in B (1 grado di vincolo). I vincoli, e quindi le REAZIONI VINCOLARI, sono 4 (XA, YA YB MA), mentre, le equazioni dell’equilibrio sono solo 3, la struttura è perciò UNA VOLTA IPERSTATICA. Le tre condizioni di equilibrio per la struttura sono:
1) Equilibrio delle forze orizzontali : XA = 0 2) Equilibrio delle forze verticali: YA+YB = q·L 3) Equilibrio alla rotazione (es. in A) : MA+ YB·L = q·L²/2
Le tre equazioni di equilibrio non sono sufficienti a determinare le quattro reazioni incognite. Il sistema di tre equazioni con quattro incognite è indeterminato. E’ necessario trovare una quarta equazione per rendere il sistema determinato. I sistemi di FORZE ATTIVE e di FORZE REATTIVE devono essere in equilibrio, ma anche la deformata prodotta da tutte le forze deve essere coerente, conforme o CONGRUENTE con i vincoli della struttura. La deformata deve rispettare la forma imposta dai vincoli. Per il nostro esempio, nella sezione A, la rotazione deve essere φA=0, e gli spostamenti devono
risultare xA=0 e yA=0, mentre nella sezione B lo spostamento deve essere yB=0. La soluzione di una struttura iperstatica deriva non solo dalla condizione di equilibrio delle forze, ma anche dalle condizione di CONGRUENZA della deformata con i vincoli.
Le condizione poste dai vincoli alla deformata rappresentano le condizioni di CONGRUENZA e, per esempio di figura, abbiamo a disposizione quattro equazioni, ma per risolvere la struttura sarà sufficiente sceglierne una.

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
33
Possiamo riportare l’importante enunciato per la soluzione delle strutture IPERSTATICHE:
per risolvere una struttura IPERSTATICA bisogna trovare
l’unica soluzione EQUILIBRATA e CONGRUENTE. Questa dicotomia porta all’individuazione di due distinti metodi per la ricerca della soluzione delle strutture IPERSTATICHE.
1) il METODO DELLE FORZE che ricerca tra le infinite soluzioni equilibrate l’unica congruente.
2) il METODO DEGLI SPOSTAMENTI che ricerca tra le infinite soluzioni congruenti
l’unica equilibrata.

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
34
10. IL METODO DELLE FORZE
Il METODO DELLE FORZE ricerca tra le infinite soluzioni equilibrate l’unica congruente. Per risolvere la struttura iperstatica di figura operiamo, ad esempio, sulla equazione di congruenza posta dal vincolo in B e, in un primo momento, rendiamo la struttura isostatica semplicemente sostituendo l’appoggio in B con la sua reazione vincolare YB ancora incognita.
A
B
q
A
B
q
Y B
L
L
In questo modo otteniamo una mensola ISOSTATICA incastrata in A con un carico uniforme q e una forza concentrata nel vertice B pari a YB.
Per la mensola è possibile scrivere le tre equazioni di equilibrio e trovare i valori di MA, XA e YA tutti in funzione del valore incognito di YB:
XA = 0 YA = q·L-YB MA = q·L²/2- YB·L
Le relazioni esprimono le infinite soluzioni, al variare di YB, del sistema equilibrato per la mensola.
=0
M A
A
x =0 A
=0 A =0 B
X A
Y A
y y
Y B
q
Tra le infinite soluzioni equilibrate dobbiamo cercare l’unica congruente con lo schema statico iniziale e, quindi, con l’appoggio in B. Dobbiamo cercare per la mensola la soluzione per la quale nel punto B lo spostamento è nullo, yB =0 .
Per le strutture che operano secondo il modello elastico lineare, come già detto, vale il PRINCIPIO DI SOVRAPPOSIZIONE DEGLI EFFETTI, quindi, possiamo scomporre il carico della mensola ponendo da una parte il carico q e dall’altra il carico YB.
L
q
LBYf
f
schema 1 schema 2

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
35
La condizione di CONGRUENZA yB =0 si può facilmente scrivere uguagliando le due frecce della mensola dovute al carico q (schema 1) e alla forza YB (schema 2)
f1=f2
Per determinare le due frecce bisogna calcolarle con uno dei sistemi esposti nel paragrafo 7. Per semplicità i valori sono stati inseriti nella TABELLA 1 al paragrafo 8, in particolare i valori delle frecce sono quelli riportati negli schemi B1 e B2.
EJ
Lqf
8
· 4
1 = EJ
LYf B
3
· 3
2 =
L’equazione di Congruenza f1=f2 per individuare la REAZIONE YB risulta, quindi:
EJ
Lq
EJ
LYB
8
·
3
· 43
= e semplificando LqYB ·83=
Trovata la quarta incognita YB si possono ora utilizzare le tre equazioni di equilibrio già scritte per trovare le altre forze MA , XA e YA che compongono il SISTEMA DI FORZE REATTIVO:
0=AX LqYA ·85= 2·
81
LqM A =
Per risolvere la struttura IPERSTATICA possiamo utilizzare anche un’altra equazione di congruenza posta da un vincolo diverso dall’appoggio in B. Come già detto la scelta del vincolo da utilizzare per scrivere l’equazione di congruenza è del tutto arbitraria. Risolviamo nuovamente la struttura iperstatica di figura lavorando sul vincolo che blocca la rotazione in A
A
B
q
L
Eliminando la condizione di vincolo alla rotazione del nodo A trasformiamo l’incastro in una CERNIERA. La Reazione vincolare da considerare diventa il Momento MA e i due schemi isostatici risultano:
LL
q
M A
schema 1 schema 2
La condizione di congruenza è posta dall’uguaglianza delle due rotazioni in A φ1=φ2 nei due schemi isostatici individuati.

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
36
Scriviamo allora le espressioni che individuano le due rotazioni, φ1 per il primo schema e φ2 per il secondo schema, riportando i valori degli schemi A1 e A3 della TABELLA1 delle strutture isostatiche :
EJ
Lq
24
· 3
1 =ϕ EJ
LM A
3·
2 =ϕ
L’equazione di Congruenza φ1=φ2 per individua la REAZIONE MA risulta:
EJ
LM
EJ
Lq A
3
·
24
· 3
= e semplificando 2·8
1LqM A =
Ovviamente utilizzando adesso le equazioni di equilibrio si ricavano i valori delle altre reazioni vincolari :
XA=0 ; YA=5/8 q·L ; YB=3/8 q·L
Il METODO delle FORZE rappresenta un valido aiuto per la soluzione di strutture iperstatiche semplici come quelle a campata unica. Mentre, per strutture iperstatiche più complesse i calcoli con il metodo delle forze risultano particolarmente pesanti e complessi, diventano allora più utili metodi di calcolo come il Metodo delle Rotazioni e il Metodo di Cross.

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
37
11. TABELLA 2 -LE STRUTTURE ISPERSTATICHE AD UNA CAMPATA Per la soluzioni degli schemi elementari IPERSTATICI, riportati nella TABELLA 2, è stato utilizzato il METODO DELLE FORZE mediante le tre condizioni dell’equilibrio e la condizione di congruenza. Queste schematizzazioni elementari forniscono importanti valori da utilizzare nel calcolo per la ricerca delle soluzioni di strutture più complesse.
TABELLA 2 – soluzione schemi iperstatici
SCHEMA C1
Trave incastro-appoggio con carico uniforme q
JE
LqB ··48
· 3
=ϕ
JE
LqfL ·
··
384
2 4
2/ = 2/max ·04,1 Lff =
8
· 2LqM A =
22,14
²··8/5
LqM L =
LqVA ··8
5= LqVB ··8
3=
SCHEMA C2
Trave incastro-appoggio con carico concentrato P in mezzeria
JE
LPB ··32
· 2
=ϕ
JE
LPfL ·
··
384
5,3 3
2/ = 2/max ·022,1 Lff =
LPM A ··16
3= LPM L ··16
5,22/ =
PVA ·16
11= PVB ·16
5=

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
38
SCHEMA C3
Trave incastro-appoggio con una coppia M in B
JE
LMB ··4
·=ϕ
2
MM A = MM B =
L
MVV BA ·2
·3=−=
SCHEMA D1
Trave doppiamente incastrata
con carico uniforme
JE
LqfMAX ·
··
384
1 4
=
12
· 2LqMM BA ==
24
· 2
2/
LqM L =
2
·LqVV BA ==
SCHEMA D2
Trave doppiamente incastrata con carico concentrato P in asse
JE
LPfMax ·
··
384
2 3
=
8
·LPMM BA ==
8
·2/
LPM L =
2
PVV BA ==

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
39
12. IL METODO DELLE ROTAZIONI Nell’ambito delle costruzioni, le strutture a TELAIO o a TRAVE continua rappresentano le più diffuse tipologie di strutture IPERSTATICHE e la loro soluzione può avvenire in modo vantaggioso mediante il METODO DEGLI SPOSTAMENTI o il più semplice METODO DELLE ROTAZIONI. Il METODO DELLE ROTAZIONI si può utilizzare quando i NODI della struttura (sezioni d’incontro delle estremità delle aste) si possono considerare FISSI. I NODI FISSI sono quelli che, per una qualsiasi deformazione della struttura, non si possono spostare lungo le direzioni X e Y ma permettono solo le rotazioni φ delle sezioni.
STRUTTURA A TELAIO A NODI FISSI
Per la struttura a telaio a nodi fissi di figura, qualsiasi condizione di carico può deformare le singole aste ma non può spostare i nodi lungo X e lungo Y. I nodi si possono considerare fissi quando sussistono adeguate condizioni di vincoli esterni che bloccano tutti gli spostamenti lungo X e lungo Y. Nel caso della figura, la presenza dei carrelli orizzontali ai piani impedisce qualsiasi spostamento orizzontale dei nodi del telaio. L’ipotesi di nodi fissi nelle strutture a telaio e a trave è nella pratica molto utilizzata poiché, soprattutto per le strutture in acciaio, per convenienza costruttiva ed economica, si cerca sempre di utilizzare sistemi controventanti per bloccare gli spostamenti dei nodi. I carrelli orizzontali di figura simulano proprio il comportamento di bloccaggio prodotto da un sistema controventante. Le strutture IPERSTATICHE a NODI FISSI si possono vantaggiosamente risolvere utilizzando il METODO DELLE ROTAZIONI che ricerca tra le infinite soluzioni CONGRUENTI l’unica EQUILIBRATA. La trave a due campate di figura è una struttura due volte iperstatica a nodi fissi. Per risolverla con il METODO DELLE FORZE dovremmo scrivere due complicate equazioni di congruenza e risolvere un sistema a due equazioni con due incognite.
A
B
C

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
40
Se utilizziamo, invece, il METODO DELLE ROTAZIONI l’incognita è rappresentata solo dalla rotazione φ delle sezioni nel nodo B. Per le strutture vale il principio di SOVRAPPOSIZIONE DEGLI EFFETTI, intendendo che è sempre possibile suddividere i carichi, ma anche le deformazioni, e risolvere la struttura per ciascuna condizioni parziale. Per il nostro esempio, la deformazione complessiva della trave soggetta al carico uniforme, soluzione (1), è il risultato della somma della deformazione prodotta dal carico q quando si impedisce al nodo B di ruotare, condizione (2), e la deformazione prodotta dalla rotazione φ del nodo B, condizione (3).
A
B
C
A
B
C
=0
A
B
C
(1)
(2)
(3)
Tutte le deformazioni (1), (2) e (3) sono congruenti con i vincoli, infatti, per l’incastro in A le rotazioni e gli spostamenti sono nulli e, per gli appoggi B e C, gli abbassamenti sono nulli. Tra le infinite soluzioni congruenti, dovute al variare di φ nello schema (3), bisogna trovare l’unica equilibrata. Bisogna determinare la vera rotazione φ attraverso l’equilibrio dei momenti che si creano al nodo B per le due deformate (2) e (3). Le deformazioni della trave producono le sollecitazioni flessionali, oppure, le sollecitazioni flessionali sulla trave producono le deformazioni. E’indifferente stabilirlo poiché le deformazioni e le sollecitazioni flessionali sono una la conseguenza dell’altra, come evidenziato dall’espressione della linea elastica che relaziona direttamente la deformata con il momento sollecitante:
JE
M
dx
d
·2
2
=η
Osservando le deformate possiamo disegnare qualitativamente i diagrammi di momento per la trave:

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
41
A B
C
A B
C
A
B
C
m
m
m
2A
m
m (1)
(2)
(3)
m
m
3A
2B2B
SD
1A 1B
1B S m
1B D
m
3BS
m
3BD
Per la trave nello schema (1) l’equilibrio al nodo B risulta soddisfatto poiché il momento di sinistra nella sezione di appoggio B è uguale al momento di destra:
m1Bs + m1Bd = 0
Per gli schemi (2) e (3) l’equilibrio dei momenti in B dipende dal valore della rotazione φB e dovrà essere:
m2B + m2Bd + m3Bs + m3Bd = 0
Questa condizione di equilibrio permette di trovare tra le infinite soluzioni CONGRENTI, dovute al variare di φB, l’unica soluzione EQUILIBRATA. Per risolvere i due schemi statici e scrivere la condizione di equilibrio dei momenti nel nodo B dobbiamo porre la seguente convenzione per il segno dei momenti:
momenti destrogiri = POSITIVI momenti sinistrogiri = NEGATIVI SOLUZIONE DELLO SCHEMA STATICO (2) Ricerchiamo le sollecitazioni flessionale prodotte dal carico q nell’ipotesi di rotazione nulla in B. Questa ipotesi (2) viene comunemente detta “ la condizione d’incastro perfetto”. La campata di sinistra è una trave doppiamente incastrata con carico uniforme, come quella rappresentata nello schema statico D1 riportato dalla TABELLA 2 del capitolo 11, e avremo i seguenti momenti: nel nodo A: m2A = -1/12 qL² nel nodo B a sinistra : m2Bs= +1/12 qL²
La campata a destra è una trave caricata uniforemente con l’incastro in B e l’appoggio in C, come quella dello schema statico C1 riportato dalla TABELLA 2, e avremo i seguenti momenti:

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
42
nel nodo B a destra : m2Bd= - 1/8 qL² nel modo C: m2C= 0 SOLUZIONE DELLO SCHEMA STATICO (3) Ricerchiamo le sollecitazioni flessionale prodotte dalla rotazione φ del nodo B. La campata di sinistra è una trave incastrata in A e appoggiata in B con rotazione φ in B , come quella dello schema statico C3 riportato dalla TABELLA 2, e avremo i seguenti momenti:
nel nodo A: m3A = + ½ m3Bs= +φ·2EJ/L nel nodo B a sinistra : m3Bs= + φ·4EJ/L
La campata a destra è una trave appoggiata in B e in C con la rotazione φ in B, come quella dello schema statico A3 riportato dalla TABELLA 1, e avremo i seguenti momenti:
nel nodo B a destra : m3Bd= + φ·3EJ/L nel modo C: m3C= 0 Possiamo ora scrivere la condizione di equilibrio dei momenti al nodo B :
m2B + m2Bd + m3Bs + m3Bd = 0 sostituire i valori trovati:
+1/12·qL² - 1/8·qL² + φB·4EJ/L + φB·3EJ/L =0
determinare la rotazione in B:
φB = (1/8·qL²-1/12·qL²)/(4EJ/L+3EJ/L)
LEJLEJ
qLB /3/4
²24/1+
=ϕ
Per determinare i momenti nella condizione (3) sostituiamo il valore della rotazione φB :
LEJLEJ
LEJqLm A /3/4
/2²
241
3 +=
LEJLEJ
LEJqLm Bs /3/4
/4²
241
3 +=
LEJLEJ
LEJqLm Bd /3/4
/3²
24
13 +
=
Le grandezze 2EJ/L, 3EJ/L, 4EJ/L sono dette RIGIDEZZE A FLESSIONE e definiscono il rapporto tra momento e rotazione nei diversi schemi statici utilizzati:
rigidezza a flessione delle aste : Wi=M/φ
La somma delle rigidezze delle aste che concorrono in un nodo è detta RIGIDEZZA DEL NODO:
rigidezza del nodo: Wnodo= Σi Wi

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
43
Utilizzando la definizione di Rigidezza flessionale delle aste e del nodo possiamo scrivere:
BA W
WqLm
2/²
24
1 13 =
BBs W
WqLm 1
3 ²24
1=
BBd W
WqLm 2
3 ²24
1=
Le espressioni indicano che i due momenti nel nodo B sono rispettivamente proporzionali alle rigidezze delle due aste che concorrono al nodo. Tale osservazione risulta molto utile per stabilire che se si modificano le rigidezze delle aste che concorrono ad un nodo, si modificano proporzionalmente anche i momenti che ciascuna asta assorbe.
SOLUZIONE DELLO SCHEMA STATICO (1) Infine, per trovare i momenti flettenti dello schema statico (1) si sommano i valori degli schemi (2) e (3): m1 A= + m2A + m3A m1Bs= + m2Bs + m3Bs m1Bd = + m3Bs+ m3Bd

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
44
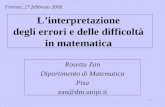
12.1 ESEMPIO - METODO DELLE ROTAZIONI Con il metodo delle ROTAZIONI risolviamo la TRAVE rappresentata dallo schema statico di figura per il quale l’unica incognita è la rotazione φ del nodo B. La rotazione nel nodo C non rappresenta un’incognita poiché i momenti nell’appoggio C sono nulli e, quindi, l’equilibrio è sempre garantito indipendentemente dall’entità della rotazione.
A
B
C 420
530
q=1200 kg/mtrave HEA180B
La trave è realizzata con un profilo in acciaio tipo HEA180 con le seguenti caratteristiche: Modulo elastico dell’acciaio: E= 2.100.000 kg/cm² Momento d’inerzia del profilo HEA180: J =2510 cm4 Luce della prima campata : L1 = 420 cm = 4.2 m Luce della seconda campata : L2 = 530 cm = 5.3 m Carico uniformemente distribuito: q=1200 kg/m Calcoliamo i momenti per la condizione (2) d’incastro perfetto dovuti al carico q:
nodo A: MA = - 1/12·qL21 = - 1/12·1200·4.2² = -1764 kgm nodo B: MB = + 1/12·qL21 - 1/8·qL22 = +1764 -4213= -2449 kgm nodo C: MC = 0
Calcoliamo i momenti per la condizione (3) dovuti la rotazione φ in B:
nodo A: MA = + φB·2EJ/L1 = + φB · 2EJ/4.2 = + φB ·0.476·EJ nodo B: MB= + φB ·4EJ/L1 + φB ·3EJ/L2 = + φB ·4EJ/4.2+ φB·3EJ/5.3 = + φB ·1.518·EJ nodo C: MC= 0
Scriviamo l’equazione di equilibrio dei momenti in B per trovare la rotazione φB :
nodo B: Σ MB=0 -2449 + φB ·1.518·EJ =0 φB = 2449/1.518 EJ = 1613/EJ
Determiniamo i momenti per ogni sezione sovrapponendo le condizioni (2) e (3):
Campata AB nodo A : MA = - 1/12·qL21 + φB·2EJ/L1 = - 1764 +1613·2/4.2 = - 996 kgm nodo B : MBs= + 1/12·qL21 + φB ·4EJ/L1 = +1764 +1613·4/4.2 = 3299 kgm
Campata BC nodo B : MBd= - 1/8·qL22 + φB ·3EJ/L2 = - 4213 + 1613·3/5.3 = - 3299 kgm nodo C : MC = 0 Ovviamente per l’equilibrio il momento a destra e il momento a sinistra nel nodo B assumono lo stesso valore con segno contrario, ciò rappresenta un controllo del calcolo eseguito.

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
45
Il diagramma di momento finale risulta:
A
B
C 420
530
Per calcolare le reazioni e il diagramma di Taglio è necessario scrivere le condizioni di equilibrio per le due campate AB e BC. CAMPATA AB equilibrio dei momenti in B : YA·4.2 – 1200·4.2²/2 + 3299 - 996 = 0 YA = 1972 kg equilibrio forze verticali : 1972 – 1200·4.2 + YB =0 YB = 3068 kg Ascissa da A in cui si annulla il Taglio: x = T/q= 1972/1200 x = 1.64 m Momento massimo in campata: Mmax= 1972·1.64 – 1200·1.64²/2-996 Mmax= 624 kgm CAMPATA BC equilibrio dei momenti in B : YC·5.3 – 1200·5.3²/2 + 3299 = 0 YC = 2557 kg equilibrio forze verticali: 2557 – 1200·5.3 + YB =0 YB = 3803 kg Ascissa da B in cui si annulla il Taglio: x =T/q= 3803/1200 x = 3.17 m Momento massimo in campata: Mmax= 3803·3.17 – 1200·3.17²/2-3299 Mmax= 2725 kgm Il SISTEMA di FORZE REATTIVO ossia le REAZIONI VINCOLARI risulta: Incastro in A: XA=0 ; YA= 1972 kg ; MA=-996 kgm Appoggio in B: YB = 3068+3803 = 6871 kg Appoggio in C: YC = 2557 kg
B
C 530
M=3
299
q=1200 kg/m
M=3
299
M=
996
A
B
420
164317
M=2
725
M=
624
T=
1972
T=
3068 T=
3803
T=2
557

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
46
13. LE STRUTTURE A NODI FISSI
1
2
3
q1 q2
q3 P
L1 L2
H
Il MEDODO delle ROTAZIONI è molto efficace per risolvere le strutture a Telaio a nodi fissi caratterizzate da un elevato grado di iperstaticità. Il telaio in figura ha 6 gradi di iperstaticità e, per la sua soluzione con il METODO delle FORZE, sarebbe necessario scrivere un complesso sistema di 6 equazioni con 6 incognite. La struttura di figura è caratterizzata da tre NODI FISSI, nodi 1, 2 e 3, con il metodo delle rotazioni possiamo allora scrivere il sistema con le 3 equazioni di equilibrio dei nodi. La scrittura delle equazioni di equilibrio è semplice e pressoché automatica. Per questo motivo tutti i codici o programmi di calcolo automatico per le strutture si basano principalmente sul metodo delle rotazioni, o meglio sul più completo METODO DEGLI SPOSTAMENTI. I diversi codici di calcolo si differenziano essenzialmente per i diversi modi di risoluzione del sistema di equazioni lineari. Per scrivere in modo semplice il sistema delle equazioni di equilibrio dei nodi 1, 2 e 3 si individuano le quattro deformazioni congruenti della struttura.
(0) deformazione prodotta dai carichi bloccando tutti i nodi (1) deformazione prodotta applicando una rotazione al nodo 1 con gli altri nodi bloccati (2) deformazione prodotta applicando una rotazione al nodo 2 con gli altri nodi bloccati (3) deformazione prodotta applicando una rotazione al nodo 3 con gli altri nodi bloccati
Lo schema statico (0), detta condizione di incastro perfetto, definisce la deformazione prodotta dai carichi bloccando tutti i nodi:
1
2 3
q1 q2
q3 P
L1 L2
H
schema statico (0)

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
47
Utilizzando le soluzioni degli schemi statici semplici riportati nella TABELLA 2 del capitolo 11, la determinazione dei momenti d’incastro indicati in figura è immediata. Per scrivere i momenti si utilizza la convenzione di segno positivo per i momenti destrogiro e negativo per i momenti sinistrogiro. Utilizzando gli schemi D1, D2 e C1 possiamo scrivere i momenti presenti in ciascun nodo dello schema statica (0):
nodo 1: M01= -1/12·q1·L21
nodo 2 : M02 = +1/12·q1·L21-1/12 q2·L
22+ 1/8·P·H
nodo 3 : M03= +1/12 q2·L22- 1/8·q3·H
2
Lo schema statico (1) è rappresentato dalla rotazione del solo nodo 1, mantenendo bloccati i nodi 2 e 3. Per semplicità le rotazioni sono ipotizzate destrogire in modo tale che tutti i momenti prodotti siano anche essi destrogiri e quindi positivi.
1
2
L1 L2
H
3
1
schema statico (1)
Con l’aiuto degli schemi statici riportati nella TABELLA 2 possiamo scrivere i momenti presenti in ciascun nodo dello schema statico (1):
nodo 1: M11= + φ1·4·EJ/L1 + φ1·4·EJ/H nodo 2 : M12= + φ1·2·EJ/L1 nodo 3 : M13 = 0
Per le aste, lo schema statico a cui si fa riferimento è lo schema C3 dove la rotazione imposta all’appoggio crea una deformata e un conseguente digramma di Momento con valori M all’appoggio e M/2 all’incastro:
M
M/2

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
48
Lo schema statico (2) è rappresentato dalla rotazione del solo nodo 2, mantenendo bloccati i nodi 1 e 3.
1
2
L1 L2
H
3
2
schema statico (2)
Con l’aiuto dello schema statico C3 riportato nella TABELLA 2 possiamo scrivere i momenti presenti in ciascun nodo: nodo 1: M21= + φ2·2·EJ/L1 nodo 2 : M22 = + φ2·4·EJ/L1 + φ2·4·EJ/L2 + φ2·4·EJ/H nodo 3 : M23 = + φ2·2·EJ/L2 Lo schema statico (3) è rappresentato dalla rotazione del solo nodo 3, mantenendo bloccati i nodi 1 e 2.
1
2
L1 L2
H
3
3
schema statico (3)
Con l’aiuto degli schemi statici C1 e A3 riportatI nelle TABELLE 1 e 2 possiamo scrivere i momenti presenti in ciascun nodo: nodo 1: M31= 0 nodo 2 : M32 = + φ3·2·EJ/L2 nodo 3 : M33 = + φ3·4·EJ/L2+ φ3·3·EJ/H

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
49
Ora possiamo scrivere le tre equazioni di equilibrio dei 3 nodi sommando l’effetto delle quattro deformazioni congruenti: la prima equazione è la somma di tutti i momenti nel nodo 1, la seconda è la somma dei momenti del nodo 2, la terza è la somma dei momenti del nodo 3. -1/12·q1·L
21 + φ1·4·EJ/L1 + φ1·4·EJ/H + φ2·2·EJ/L1 = 0
+1/12·q1·L
21-1/12 q2·L
22+ 1/8·P·H + φ1·2·EJ/L1+φ2·4·EJ/L1 +φ2·4·EJ/L2 +φ2·4·EJ/H +φ3·2·EJ/L2 = 0
+1/12 q2·L
22- 1/8·q3·H
2 + φ2·2·EJ/L2 + φ3·4·EJ/L2+ φ3·3·EJ/H = 0
Il sistema di equazioni è un sistema lineare con incognite φ1 , φ2 e φ3 che possiamo scrivere in modo più organico in forma matriciale:
K·X = -Yo
Dove: K è la matrice delle rigidezza della struttura X è il vettore delle rotazioni Yo è il vettore dei termini noti Di seguito riportiamo le matrici del sistema: +4·EJ/L1+4·EJ/H +2·EJ/L1 0 K = +2·EJ/L1 +4·EJ/L1+4·EJ/L2+4·EJ/H + 2·EJ/L2 0 + 2·EJ/L2 + 4·EJ/L2+ 3·EJ/H
φ1 -1/12·q1·L21
X = φ2 Yo = +1/12·q1·L21-1/12 q2·L
22+ 1/8·P·H
φ3 +1/12 q2·L22- 1/8·q3·H
2 Esistono diversi metodi per risolvere un sistema di equazioni lineari, tra questi vi sono l'algoritmo di Gauss, la regola di Cramer ed il metodo di riduzione. E’ interessante notare che la matrice delle rigidezze è una matrice simmetrica, cioè i valori si ripetono simmetricamente rispetto la diagonale, Questa proprietà della matrice K permette la soluzione del sistema attraverso il Metodo Cholesky utilizzato frequentemente nel calcolo automatico delle strutture per risolvere il sistema di equazioni.
Trovati i valori delle rotazioni incognite φ1, φ 2, φ3 è possibile determinare le sollecitazioni flessionali della struttura semplicemente sommando i vari contributi degli schemi statici (0), (1), (2), (3), ad esempio: Momenti per l’asta 1-2 : nodo 1 M1= -1/12·q1·L
21 + φ1·4·EJ/L1 + φ2·2·EJ/L1
nodo 2 M2= +1/12·q1·L21 + φ1·2·EJ/L1 + φ2·4·EJ/L1
Momenti per l’asta 2-3: nodo 2 M2= -1/12 q2·L
22 + φ2·4·EJ/L2 + φ3·2·EJ/L2
nodo 3 M3= +1/12 q2·L22 + φ2·2·EJ/L2 + φ3·4·EJ/L2

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
50
Va notato che i momenti in ciascuna asta sono quelli prodotti dalla condizione di incastro perfetto alla quale vengono sottratti o aggiunti (a seconda del segno della rotazione) i contributi delle rotazioni moltiplicati per le quantità 2EJ/L, 3EJ/L e 4EJ/L, queste grandezze sono dette rigidezze flessionale. Questa osservazione ha permesso al Prof. Hardy Cross dell’Università di Yale di sviluppare nel 1935 un metodo di calcolo iterativo che parte dalla condizione d’incastro non equilibrata e per successiva approssimazione trova il risultato equilibrato aggiungendo il contributo delle varie rotazioni. Questo metodo di calcolo è stato superato dall’uso dei computer e dai programmi automatici di calcolo, tuttavia, per la sua semplicità è ancora utilizzato per strutture fino a quattro o cinque nodi.

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
51
13.1 ESEMPIO - METODO DELLE ROTAZIONI Con il metodo delle ROTAZIONI risolviamo la struttura rappresentata dallo schema statico di figura. Le due incognite sono rappresentate dalle rotazioni φ del nodo B e del nodo C.
A
B
420
530
q=1200 kg/mtrave HEA180
D
B C
330
C
pilastro HEA180
La trave e il pilastro sono profili in acciaio tipo HEA 180 con le seguenti caratteristiche: Modulo elastico dell’acciaio: E= 2.100.000 kg/cm² momento d’inerzia del profilo HEA180: J = 2510 cm4 Luce della prima campata : L1 = 420 cm = 4.2 m Luce della seconda campata : L2 = 530 cm = 5.3 m Luce pilastro : L3 = 330 cm = 3.3 m Carico uniformemente distribuito sulla trave: q=1200 kg/m Calcoliamo i momenti per la condizione d’incastro perfetto (con i nodi B e C bloccati): nodo A: M0A= –1/12·qL21 = –1/12·1200·4.2² = –1764 kgm nodo B: M0B = + 1/12·qL21–1/12·qL22 = +1764–2809 = –1045 kgm nodo C: M0C = + 1/12·qL22 = +1/12·1200·5.3² = + 2809 kgm Calcoliamo i momenti prodotti dalla rotazione arbitraria φB in B (con il nodo C bloccato): nodo A : M1A = + φB·2EJ/L1 = + φB·0.476 EJ nodo B: M1B = + φB·4EJ/L1+φB·4EJ/L2 = + φB·1.707 EJ nodo C: M1C= +φB·2EJ/L2 = +φB·2EJ/5.3 = + φB·0.377 EJ Calcoliamo i momenti prodotti dalla rotazione arbitraria φC in C (con il nodo B bloccato): nodo A : M2A = 0 nodo B: M2B = + φC·2EJ/L2 = + φC·0.377 EJ nodo C: M2C = + φC·4EJ/L2+φC·3EJ/H = +φC·1.664 EJ Scriviamo il sistema delle due equazioni di equilibrio dei nodi B e C: nodo B: Σ MB=0 –1045 + φB·1.707 EJ + φC·0.377 EJ = 0 nodo C: Σ MC=0 + 2809 + φB·0.377 EJ + φC·1.664 EJ = 0

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
52
Troviamo la rotazione φC utilizzando il metodo della sottrazione per risolvere il sistema – 1045 + φB·1.707 EJ + φC·0.377 EJ = 0 x [-4.528] –12719 –φB· 1.707 EJ – φC·7.534 EJ = 0 –13764 + 0 – φC·7.157 EJ = 0 φC = –13764/7.157 EJ = –1923/EJ
Troviamo la rotazione φB utilizzando il metodo della sottrazione per risolvere il sistema
x [-4.414] +4612 – φB·7.534 EJ – φC·1.664 EJ = 0 + 2809 + φB·0.377 EJ + φC·1.664 EJ = 0 +7421 – φB·7.157 EJ + 0 = 0 φB = +7421/7.157 EJ = +1036/ EJ Calcoliamo i momenti per ogni sezione sovrapponendo gli effetti e sostituendo i valori numerici: Campata AB nodo A : M= – 1/12·qL21 + φB·2·EJ/L1 = –1764+1036·2/4.2 = –1270 kgm nodo B : M= +1/12·qL21 + φB·4·EJ/L1 = +1764+1036·4/4.2 = + 2752 kgm Campata BC nodo B: M= – 1/12·qL22 +φB·4·EJ/L2 + φC·2·EJ/L2= –2809+1036·4/5.3–1923·2/5.3 = –2752 kgm nodo C: M= + 1/12·qL22+ φB·2·EJ/L2 + φC·4·EJ/L2=+2809+1036·2/5.3–1923·4/5.3 = +1749 kgm Pilastro CD nodo C: M= φC·3EJ/H = –1923·3/3.3 = -1749 nodo D: M= 0 Disegniamo il diagramma di momento:
A
B
420
530
D
330
C
M=
2752
M=
1270
M=
1749
M=1749

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
53
14. IL METODO DI CROSS Il METODO DI CROSS, studiato dal Prof. Hardy Cross dell’Università di Yale nel 1935, rappresenta ancora oggi un significativo strumento per il calcolo delle strutture. Nella sua versione semplificata, che deriva direttamente dal METODO DELLE ROTAZIONI, permette un rapido calcolo delle strutture a nodi fissi e, soprattutto, consente una lucida interpretazione della struttura attraverso l’uso delle RIGIDEZZE e dei COEFFICIENTI DI RIPARTIZIONE. Non si tratta di un metodo di calcolo approssimato ma di un metodo di calcolo iterativo che converge alla soluzione esatta. Per illustrare il Metodo di Cross è prima necessario risolvere il semplice problema statico illustrato dalla figura: trovare la ripartizione del Momento MB tra le due o più aste che convergono nel nodo.
A
B
C L1 L2
m
m
m
B1 B2A1
M
B
Si tratta di trovare i momenti mB1 ed mB2, rispettivamente alle estremità dell’asta B-A e dell’asta B-C, provocati dal momento esterno MB in B e dalla conseguente rotazione φ che deforma le due aste. La struttura può essere scomposta in due aste separate, da un lato la trave (1) dall’altro la trave (2).
A
B
L1
m
B1
B
C L2
m
B2m
A1
M
B
trave (1) trave (2)
Per poter affermare che le due travi equivalgono alla struttura iniziale le due rotazioni φ devono essere uguali (condizione di congruenza) e la somma dei momenti mB1 e mB2 deve essere uguale al Momento MB (condizione di equilibrio). In questo caso le reazioni vincolari, i diagrammi delle sollecitazioni e le deformate delle due travi coincidono con quelli della struttura iniziale. La trave (1) di sinistra è rappresentata dallo schema C3 riporta nella TABELLA 2 del capitolo 11, mentre la trave (2) di destra è rappresentata dallo schema statico A3 riportato nella TABELLA 1 del capitolo 8. Con l’aiuto delle TABELLE 1 e 2 scriviamo i valori dei due momenti dovuti alla rotazione φ:

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
54
per la trave (1): ϕ··4
1
11 L
EJmB =
per la trave 2 : ϕ··3
2
22 L
EJmB =
L’equazione di equilibrio dei momenti sul nodo B fornisce il valore della rotazione:
BBB ML
EJ
L
EJmm =+=+ ϕϕ ·
·3·
·4
2
2
1
121
2211 /·3/·4
1·
LEJLEJM B +
=ϕ
Le due grandezze 4EJ/L e 3EJ/L rappresentano per le travi (1) e (2) il rapporto tra il momento applicato all’estremo m e la conseguente rotazione φ. Esse esprimono la capacità della trave di opporsi alla rotazione imposta dal momento. Queste grandezze sono le RIGIDEZZE FLESSIONALI di ciascuna trave. Rigidezze elevate rappresentano travi robuste difficili da deformare a flessione; rigidezze minori rappresentano travi che hanno minor capacità di resistere alle deformazioni. Nel nostro caso, a parità di dimensioni L (luce) e J (inerzia della sezione trasversale), la trave (1) di rigidezza 4·EJ/L è meno deformabile, più rigida della trave (2) di rigidezza 3·EJ/L. Tale differenza è dovuta alla presenza, nell’estremo opposto, dell’incastro per la trave (1) e della cerniera per la trave (2). Le RIGIDEZZE, indicate con il simbolo W, assumono una particolare importanza perché evidenziano le capacità di deformarsi e di resistenza delle travi.
La rigidezza della trave (1) è : 1
11
·4
L
EJW =
La rigidezza della trave (2) è: 2
22
·3
L
EJW =
Scriviamo la rotazione φ del nodo sollecitato dal momento M usando le rigidezze:
21 WW
M B
+=ϕ
La rotazione φ è il rapporto tra il momento applicato MB e la somma delle rigidezze W1 e W2 delle aste che convergono nel nodo B. Tale somma W1 + W2 è anche detta RIGIDEZZA DEL NODO. Nota la rotazione φ ricaviamo i due momenti mB1 e mB2
121
1
211
1
11 ··
·4 αϕ BBB
B MWW
WM
WW
MW
L
EJm =
+=
+==
221
2
212
2
22 ··
·3 αϕ BBB
B MWW
WM
WW
MW
L
EJm =
+=
+==
dove α1 e α2 sono i COEFFICIENTI DI RIPARTIZIONE, rapporto tra la rigidezza dell’asta e la rigidezza complessiva del nodo. Questi coefficienti esprimono le quote percentuali di suddivisione del momento MB tra le aste che convergono nel nodo.

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
55
14.1 ESEMPIO - RIGIDEZZE E COEFF. DI RIPARTIZ IONE Ripartiamo tra le aste del nodo B il Momento M=6000 kgm utilizzando i concetti di RIGIDEZZA e i COEFFICIENTI DI RIPARTIZIONE AL NODO.
A
B
420
530
D
330
C
trave 50x30trave 50x30
pila
stro
30x
30
M=6000 kgm
Trave e pilastro sono in Calcestruzzo armato con le seguenti caratteristiche: Modulo Elastico del calcestruzzo: E=280.000 kg/cm² Trave BA : LBA = 420 cm Sezione 50x30 cm Inerzia JBA= 503·30/12 = 312500 cm4 Trave BC : LBC = 530 cm Sezione 50x30 cm Inerzia JBC= 503·30/12 = 312500 cm4 Pilastro BD: LBD = 330 cm Sezione 30x30 cm Inerzia JBD= 303·30/12 = 67500 cm4
Calcoliamo le RIGIDEZZE delle aste che convergono nel nodo e, quindi, la rigidezza del nodo B: Rigidezza asta BA WBA = 4·EJBA/LBA = 4·E·312500/420 = 2976 E Rigidezza asta BC WBC = 3·EJBC/LBC = 3·E·312500/530 = 1769 E Rigidezza asta BD WBD = 3·EJBD/LBD = 3·E·67500/330 = 614 E Rigidezza del nodo B Wtot = 5359 E
Calcoliamo i COEFFICIENTI DI RIPARTIZIONE delle aste: Coefficiente di ripartizione asta BA : αBA = WBA/Wtot = (2976 E)/(5359 E) = 0.555 Coefficiente di ripartizione asta BC : αBC = WBC/Wtot = (1769 E)/(5359 E) = 0.330 Coefficiente di ripartizione asta BD : αBD = WBD/Wtot = (614 E)/(5359 E) = 0.115 Σα = 1.000 Trattandosi di coefficienti percentuali la loro somma deve essere pari a 1. Calcoliamo i valori dei momenti per ciascuna asta: Momento sull’asta BA mBA = αBA·M = 0.555·6000 = + 3330 kgm Momento sull’asta BC mBC = αBC·M = 0.330·6000 = + 1980 kgm Momento sull’asta BD mBD = αBD·M = 0.115·6000 = + 690 kgm Somma = + 6000 kgm
A
B
420
530
D
330
C
M=6000 kgm

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
56
14.2 IL METODO DI CROSS CON UN NODO Il METODO DI CROSS semplificato, è un metodo iterativo per risolvere le strutture a NODI FISSI. La soluzione è ricercata attraverso la successiva sovrapposizione di soluzioni congruenti e non equilibrate che convergono alla soluzione equilibrata.
A
B
C
A
B
C
=0
A
B C
m I m I m I
m I
m II m II
m III
m A
m B
m B
La soluzione della struttura di figura, come già illustrato per il metodo delle rotazioni, è raggiungibile sommando le due deformate nella condizione di equilibrio del nodo. Il primo schema statico è quello rappresentato dai carichi sulla struttura con il nodo B bloccato. Alle estremità delle aste nel nodo B si formano i MOMENTI PRIMI ( I ), momenti d’incastro perfetto calcolati considerando la convenzione per la quale sono positivi i momenti destrogiri. Il METODO DI CROSS è caratterizzato dal particolare modo di scrivere e riportare le soluzioni delle varie fasi di calcolo. In particolare si riportano i dati su uno schema della struttura scrivendo ordinatamente i momenti nelle varie sezioni. Nello schema seguente riportiamo la prima fase di calcolo con i MOMENTI PRIMI (I) d’incastro perfetto dovuti ai carichi sulla struttura.
B
C
I -1/8·ql²I +1/12·ql²I -1/12·ql²
A
I MOMENTI PRIMI non sono equilibrati, il momento di sinistra e il momento di destra nel nodo sono tra loro diversi, e nel nodo B nasce un MOMENTO SQUILIBRATO dovuto proprio alla differenza tra i momenti. MOMENTO SQUILIBRATO: ∆m I = + 1/12·ql² - 1/8·ql²

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
57
Per equilibrare questo momento nel nodo B applichiamo un MOMENTO EQUILIBRANTE uguale e contrario a ∆m I MOMENTO EQUILIBRANTE: - ∆m I Come precedentemente illustrato, per ripartire il momento equilibrante tra le aste è necessario individuare per esse i COEFFICIENTI di RIPARTIZIONE nel nodo. Anche in questo caso è utile organizzare i dati per il calcolo dei coefficienti nel nodo con un schema:
nodo Asta Lunghezza L i
Inerzia Ji
Rigidezza Wi
Coeff.di ripartizione α = Wi/ΣWi
AB LAB JAB 4·EJ/L αAB
BC LBC JBC 3·EJ/L αBC B
Σ Wi = WAB+WBC Σ α =1 I coefficienti di ripartizione calcolati per ciascuna asta nel nodo vanno riportati nello schema di calcolo del Cross. Moltiplicando il MOMENTO EQUILIBRANTE per i vari COEFFICIENTI DI RIPARTIZIONE si determinano, per ciascuna asta, i MOMENTI SECONDI di equilibrio al nodo.
B
C
I -1/8·ql²I +1/12·ql²I -1/12·ql²
A
AB
BC
II ( m I · AB
) II ( m I · BC
) III (1/2 II)
m B
m B
m A
Per indicare le raggiunte condizioni di equilibrio, si riporta nello schema una riga orizzontale. I MOMENTI SECONDI sono quelli che fanno ruotare il nodo B e quindi producono dei MOMENTI TERZI (III) nell’estremità opposta delle aste.
A
B C
m I
m II m II
m III
Per la campata AB lo schema statico è lo schema C3 riportato nella TABELLA 2, quindi, il MOMENTO TERZO nell’estremo incastrato è uguale alla metà del MOMENTO SECONDO e mantiene lo stesso segno. Per la campata BC lo schema statico è lo schema A3 riportato nella TABELLA 1 e quindi, nell’estremo appoggiato il momento è nullo. I momenti finali sulla struttura si ottengono sommando, agli estremi delle aste, tutti i momenti PRIMI, SECONDI e TERZI che si trovano al disotto delle righe orizzontali che individuano l’equilibrio. Ovviamente, per l’equilibrio, i momenti mB, a destra e a sinistra nel nodo B, avranno lo stesso valore ma con segno opposto.

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
58
14.3 ESEMPIO - METODO DI CROSS CON UN NODO Risolviamo con il METODO di CROSS la TRAVE già calcolata nell’esempio al paragrafo 12.1.
A
B
C 420
530
q=1200 kg/mtrave HEA180B
La trave è realizzata con un profilo in acciaio tipo HEA180 con le seguenti caratteristiche: Modulo elastico dell’acciaio: E= 2.100.000 kg/cm² Momento d’inerzia del profilo HEA180 J =2510 cm4 Luce della prima campata : L1 = 420 cm = 4.2 m Luce della seconda campata : L2 = 530 cm = 5.3 m Carico uniformemente distribuito: q=1200 kg/m Calcoliamo le rigidezze e i coefficienti di ripartizione nel nodo:
nodo Asta Lunghezza L i
Inerzia Ji
Rigidezza Wi Coeff.di ripartizione α = Wi/ΣWi
AB 420 2510 4·EJ/L= 23.90·E 0.627
BC 530 2510 3·EJ/L = 14.21·E 0.373 B
Σ Wi = 38.11·E 1,000 Calcoliamo i MOMENTI PRIMI d’incastro perfetto ai nodi per le varie aste:
asta Lunghezza L i
Carico q
nodo MOMENTO PRIMO di incastro
A -1/12·qL1²= - 1764 AB 4,20 1200 B +1/12·qL1²= + 1764
B -1/8·qL2²= - 4213 BC 5,30 1200 C 0
Riportiamo i dati nello schema ed eseguiamo il calcolo secondo CROSS:
B
C
I -4213I +1764I
A
II
0,627 0,373
+1535 II +914
+3299 -3299
III +767
-1764
-997
0
MOMENTO SECONDO per l’asta AB : II = - (1764-4213)· 0.627 = +1535 kgm MOMENTO TERZO per l’asta AB : III = +1535/2 = + 767 kgm MOMENTO SECONDO per l’asta BC : II = - (1764-4213)·0.373 = + 914 kgm I risultati sono uguali (salvo le piccole differenze dovute alle approssimazioni numeriche dell’unità) a quelli riportati per l’esempio precedentemente svolto con il metodo delle rotazioni.

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
59
14.4 ESEMPIO - METODO DI CROSS CON SBALZO Risolviamo con il METODO di CROSS la TRAVE dell’esercizio precedente con uno sbalzo all’appoggio C
120
A
B
C 420
530
q=1200 kg/mtrave HEA180B
I dati geometrici della trave e i coefficienti di ripartizione al nodo sono quelli dell’esercizio precedente. La condizione d’incastro perfetto, sostituendo lo sbalzo con il momento prodotto nel appoggio C, è la seguente:
A
B
C 420
530
M=q·l²/2
Il momento dello sbalzo Ms=1200·1.2²/2=+864 kgm produce un momento III in B :
M III=+1/2 ·864 = +432 kgm Riportiamo questo valore nello schema di calcolo del CROSS
B
C
I -4213I +1764I
A
II
0,627 0,373
+1265
II +752+3029
-3029
III +632
-1764
-1132
Ms +864III +432
MOMENTO TERZO dovuto allo sbalzo: III= +864/2 =+432 kgm MOMENTO SECONDO per l’asta AB : II = - (1764-4213+432)· 0.627 = +1265 kgm MOMENTO TERZO per l’asta AB : III = +1265/2 = + 632 kgm MOMENTO SECONDO per l’asta BC : II = - (1764-4213+432)·0.373 = + 752 kgm

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
60
14.5 IL METODO DI CROSS CON PIU’ NODI Il METODO DI CROSS per strutture a nodi fissi ricerca la soluzione equilibrata sovrapponendo soluzioni congruenti che hanno la caratteristica di essere ripetibili e facilmente sommabili.
P
q
q
P
A
E D
B
C
Dopo aver preparato lo schema di lavoro per la struttura da calcolare e aver trovato tutti i coefficienti di ripartizione per ciascun nodo si inizia il procedimento di calcolo: 1) Si inizia dalla configurazione di carico con tutti i nodi BLOCCATI; Si calcolano i MOMENTI PRIMI d’incastro alle estremità delle aste. 2) Si SBLOCCA un solo nodo (è indifferente quale); Si calcola il MOMENTO EQUILIBRANTE del nodo; Si determinano i MOMENTI SECONDI di equilibrio al nodo; Si marca con una linea l’equilibrio raggiunto al nodo. 3) Si mandano ai vertici opposti di ciascuna asta i MOMENTI TERZI. 4) Si BLOCCA nuovamente il nodo equilibrato; Si ripetono le operazioni 2) e 3) per eseguire un altro GIRO DI CROSS. Nel ripetere le operazioni di equilibrio dei vari nodi il MOMENTO SQUILIBRANTE ad ogni GIRO DI CROSS diminuisce, fino a quando assume valori molto piccoli per i quali si può ritenere di aver raggiunto un sufficiente grado di approssimazione nel calcolo. A questo punto per ottenere il risultato finale si sommano tutti i valori presenti ad ogni estremità delle aste. Dopo aver preparato lo schema di lavoro ed aver bloccato i nodi B e C si calcolano per tutte le aste i MOMENTI PRIMI ed è iniziato il primo GIRO DI CROSS. Concluso il PRIMO GIRO la situazione è la seguente: - il nodo sbloccato è il nodo B ; - si sono calcolati i MOMENTI SECONDI di equilibrio; - si è marcato l’equilibrio del nodo B con le righe; - i MOMENTI SECONDI hanno inviato agli estremi opposti i MOMENTI TERZI; - il C è squilibrato dai MOMENTI PRIMI e dal MOMENTO TERZO inviato da B.

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
61
I III
I AB
BC
CB
BD
CE B
I I I
A
II II III
E
C
I III
II I
D
Primo giro di Cross
Possiamo ora fare il SECONDO GIRO DI CROSS bloccando nuovamente il nodo B e sbloccando il nodo C.
B
I I I
A
II II III
E
C
I III
II I
D
I III
I AB
BC
CB
BD
CE
II III
II
Secondo giro di Cross
Conclusi il PRIMO e SECONDO GIRO la situazione è la seguente: - il nodo sbloccato è il nodo C ; - si sono calcolati i MOMENTI SECONDI di equilibrio; - si è marcato l’equilibrio del nodo C con le righe; - i MOMENTI SECONDI hanno inviato agli estremi opposti i MOMENTI TERZI; - nodo B è squilibrato dal MOMENTO TERZO inviato da C. Possiamo continuare i GIRI di CROSS fino a quando il MOMENTO TERZO che squilibra i nodi assume un valore molto piccolo per il quale si può ritenere di aver raggiunto un sufficiente grado di approssimazione nel calcolo.

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
62
14.6 ESEMPIO - METODO DI CROSS CON PIU’ NODI Risolviamo con il METODO di CROSS la struttura già calcolata con il metodo delle rotazioni nell’esempio riportato al paragrafo 13.1.
A
B
420
530
q=1200 kg/mtrave HEA180
D
330
C
pilastro HEA180
Trave e pilastro in acciaio con profilo tipo HEA 180 con le seguenti caratteristiche: Modulo elastico dell’acciaio E= 2.100.000 kg/cm² momento d’inerzia del profilo HEA180 J = 2510 cm4 Luce della prima campata : L1 = 420 cm = 4.2 m Luce della seconda campata : L2 = 530 cm = 5.3 m Luce pilastro : L3 = 330 cm = 3.3 m Carico uniformemente distribuito sulla trave: q=1200 kg/m Calcoliamo le rigidezze e i coefficienti di ripartizione nei nodi:
nodo Asta Lunghezza L i
Inerzia Ji
Rigidezza Wi Coeff.di ripartizione α = Wi/ΣWi
BA 420 2510 4·EJ/L= 23.90·E 0.558
BC 530 2510 4·EJ/L = 18.94·E 0.442 B
Σ Wi = 42.84·E 1,000
CB 530 2510 4·EJ/L= 18.94·E 0.454
CD 330 2510 3·EJ/L = 22.82·E 0.546 C
Σ Wi = 41.76·E 1,000 Calcoliamo i MOMENTI PRIMI d’incastro perfetto ai nodi per le varie aste:
asta Lunghezza L i
Carico q
nodo MOMENTO PRIMO di incastro
A -1/12·qL1²= - 1764 AB 4,20 1200 B +1/12·qL1²= +1764
B -1/12·qL2²= - 2809 BC 5,30 1200 C +1/12·qL2²= +2809

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
63
Riportiamo i dati nello schema ed eseguiamo il calcolo secondo CROSS:
B
I -2809I +1764I
A
II
0,558 0,442
II III -1764
D
C
0,454
0,546
I +2809
+583 +462 III +231+292
II
II -1380
-1660
III -690II +305
II +385III +192
III +152
II -69
II -83
III -35II +16
II +19III +9
III +8II -4
II -4
III -2
II +1
II +1
III 0
+1271 +2752
-2752
-1747
+1747
I risultati sono uguali (salvo le piccole differenze dovute alle approssimazioni numeriche dell’unità) a quelli riportati per l’esempio precedentemente svolto con il metodo delle rotazioni:
A
B
420
530
D
330
C
M=2
752
M=
1270
M=
1749
M=1749

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
64
14.7 ESEMPIO - METODO DI CROSS – TRAVE CONTINUA
q=1500 kg/m
A
B C
D
E
q=2000 kg/mP=3000 kg
410 410 520 400
Trave in calcestruzzo armato (modulo elastico del calcestruzzo E= 280.000 kg/cm² ) di dimensioni costanti 28x100 cm con le caratteristiche riportate in figura. Calcoliamo le rigidezze e i coefficienti di ripartizione nei nodi:
nodo Asta Lunghezza L i
Inerzia Ji
Rigidezza Wi Coeff.di ripartizione α = Wi/ΣWi
BA 410 183.000 4·EJ/L= 1785·E 0.500
BC 410 183.000 4·EJ/L = 1785·E 0.500 B
Σ Wi = 3570·E 1,000
CB 410 183.000 4·EJ/L= 1785·E 0.559
CD 520 183.000 4·EJ/L = 1407·E 0.441 C
Σ Wi = 3192·E 1,000
DC 520 183.000 4·EJ/L= 1407·E 0.506
DE 400 183.000 3·EJ/L = 1372·E 0.494 D
Σ Wi = 2779·E 1,000 Calcoliamo i MOMENTI PRIMI d’incastro perfetto ai nodi per le varie aste:
asta Lunghezza L i
Carico
nodo MOMENTO PRIMO di incastro
A -1/12·qL²= - 2802 AB 4,10 q=2000 B +1/12·qL²= +2802
B -1/8·PL= - 1537 BC 4,10 P=3000 C +1/8·PL= +1537
C -1/12·qL²= - 3380 CD 5,20 q=1500 D +1/12·qL²= +3380
D -1/8·qL²= - 3000 DE 4,00 q=1500 E 0

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
65
Di seguito si riporta lo schema di calcolo del CROSS e il diagramma del Momento flettente.
A
B C
D
E
I -1537I -2802 I +2802 I +1537 I -3380 I +3380 I -3000II -632
0,500 0,500 0,559 0.441 0,506 0.494
II -632III -316 III -316II +1207 II +952III +604 III +476
II -431 II -425III -215II +120 II +95III +60 III +47
II -332 II -332III -166 III -166II +93 II +73III +46 III +36
II -42 II -41III -21II -23 II -23III -11 III -11II +18 II +14 III +7III +9
-4 -4III -2 III -2II II II +2 II +2
II -4 II -3III -2III +1III +1
-1809+1811 -2482+2482 -3469+3470-3297
DIAGRAMMA DI MOMENTO FINALE
DIAGRAMMA DI MOMENTO D'INCASTRO
Dal confronto tra il diagramma di momento nella condizione iniziale con i nodi incastrati (MOMENTI PRIMI) e il diagramma di momento finale si evince che gli equilibri dei nodi nei vari GIRI DI CROSS, semplicemente tendono ad annullare le differenze tra i momenti di destra e di sinistra di ciascun nodo. L’equilibrio del nodo B tra +2802 e -1537 è raggiunto con il valore ± 1809, quindi il valore di sinistra scende di circa 1000 per incontrare il valore di destra che sale di circa 300. Poiché il valore di sinistra è sceso di 1000 automaticamente il valore in A -2802 cresce di circa -500 (la metà di 1000) e sale fino a -3297. L’equilibrio nel nodo C tra +1537 e -3380 è raggiunto con un valore ±2482, in questo caso i due valori si incontrano a metà strada, quello di sinistra sale di circa 900 e quello di destra scende di circa 900. Sono sufficienti anche solo due giri di CROSS per capire verso quali valori finali la struttura si sta dirigendo.

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
66
15. LE STRUTTURE RETICOLARI Per realizzare travi di grande luce si possono convenientemente utilizzare le STRUTTURE RETICOLARI. Queste strutture sono leggere e quindi vantaggiose per risolvere il problema di copertura di grandi spazi. Le travature reticolari che trattiamo sono composte da un sistema piano di aste rettilinee collegate tra loro alle estremità (nodi). Esse sono del tipo triangolato, cioè generate a partire da un triangolo per successive aggiunte di aste a costituire altri triangoli.
asta asta
nodo
Il triangolo è la forma strutturale più semplice che ha la caratteristica di essere indeformabile, mentre il quadrilatero è un sistema deformabile.
La realizzazione di strutture reticolari può avvenire semplicemente per aggregazione successiva di triangoli. Componendo le strutture a triangolo si ottengono forme sempre indeformabili definite sistemi reticolari o strutture reticolari.
VINCOLO INTERNO - CERNIERA
VINCOLO ESTERNO - CERNIERA
VINCOLO ESTERNO - APPOGGIO
ASTE RETTILINEE NODI
Le Strutture Reticolari sono costituite da aste rettilinee vincolate fra loro mediante cerniere in modo da formare un sistema indeformabile vincolato a terra attraverso i vincoli esterni.

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
67
I punti di collegamento tra le aste si chiamano “nodi” e le aste che vi concorrono sono articolate, cioè sono libere di ruotare, tra loro (vincolo interno a cerniera).
I sistemi reticolari sono anche interpretabili come un sistema piano di n punti, detti nodi, che sono liberi di muoversi sul piano. I gradi di libertà al movimento del sistema di punti è paria a:
g.d.l. = 2·n
I punti o nodi sono collegati da a aste che ne impediscono l’avvicinamento o l’allontanamento. Le aste rappresentano ciascuna un grado di vincolo al movimento del sistema di punti nel piano :
g.d.v. = a
Se il numero di aste è sufficiente ad impedire tutti i movimenti relativi dei nodi allora il sistema triangolare è una “struttura indeformabile”. Un sistema triangolare indeformabile nel piano ha ancora 3 gradi di libertà, infatti, l’intera struttura può traslare verticalmente, orizzontalmente o ruotare. Quindi, il numero totale della aste occorrenti per formare un sistema triangolare indeformabile risulta:
2·n = a + 3 a = 2·n - 3
Nel caso in cui : 1) a=2·n–3: Il sistema presenta un numero di aste sufficienti per
essere indeformabile, ossia isostatico
2) a>2·n–3: Il sistema presenta un numero di aste sovrabbondanti e
quindi è iperstatico
3) a<2·n–3: Il sistema presenta un numero di aste non sufficienti e
quindi è deformabile, ossia labile
I sistemi labili non sono strutture reticolari e dovranno essere trasformati in sistemi indeformabili. I sistemi iperstatici possono essere risolti con procedimenti di calcolo che non vengono riportati nella presente trattazione.

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
68
Un sistema reticolare triangolare, indeformabile nel piano, è vincolato al piano con i Vincoli esterni. Il numero di vincoli esterni per bloccare sul piano una struttura indeformabile è:
v=3
Un sistema indeformabile triangolare vincolato esternamente è una Struttura Reticolare, che può essere:
- esternamente isostatica v=3 - esternamente iperstatica v>3 con grado di iperstaticità i=v-3 - esternamente labile: v<3
La figura (a) rappresenta una trave reticolari (internamente isostatica) vincolata a terra in modo isostatico. In questo caso la determinazione delle reazioni vincolai a terra può avvenire applicando le tre condizioni di equilibrio all’intera trave reticolare. La figura (b) rappresenta una trave reticolari (internamente isostatica) vincolata a terra in modo iperstatico. In questo caso per la determinazione delle reazioni vincolai a terra è necessario utilizzare il “metodo delle forze”.
A B
A B C
(a) : Struttura reticolare isostatica per i vincoli esterni
(b) : Struttura reticolare iperstatica per i vincoli esterni Per le strutture reticolari si ipotizza che le forze esterne (carichi) siano applicate nei nodi. Le aste si suppongono scariche concentrando anche i pesi propri nei nodi. Con queste ipotesi di carico le aste di una Struttura Reticolare sono sollecitate soltanto da Sforzo Normale di trazione o di compressione. Se la trave reticolare è internamente isostatica, dopo aver trovato le reazioni vincolari a terra si possono individuare gli sforzi normali di trazione e di compressione sulle singole aste utilizzando le tre condizioni di equilibrio con il “metodo dei nodi” o con il “metodo delle sezioni di Ritter”.

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
69
Le strutture reticolari con il corrente superiore e inferiore orizzontali sono dette Travi Reticolari, mentre, le strutture reticolari con il corrente superiore inclinato sono dette Capriate. Di seguito riportiamo alcune forme di Travi Reticolari e di Capriate:
Howe
Neville
Howe Mohnie
Semplice
Semplice Warren
Pratt
Fink Pratt
Le strutture reticolari possono anche assumere la configurazione ad arco.
ARCO A DUE CERNIERE ARCO A TRE CERNIERE

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
70
15.1 IL METODO DEI NODI Per determinare le forze di compressione e/o di trazione che agiscono sulle aste di una struttura reticolare internamente isostatica è necessario individuare prima le reazioni vincolari esterne. Nel caso di strutture vincolate esternamente in modo isostatico, le reazioni vincolari si trovano ponendo le condizioni di equilibrio del sistema reticolare considerata come “corpo rigido indeformabile”.
250 kg
250 kg250 kg
YBYA
XA
100 kg
100 kg
100 kg
A B
1
2
3
4
56
Per la capriata di figura le reazioni vincolari esterne risultano: 1) equilibrio delle forze orizzontali:
XA - 100 - 100 - 100 = 0 XA= 300 kg
2) equilibrio ai momenti in A : -YB·1020+ (100+100)·173+100·260+250·340+250·510+250·680=0
YB= 434 kg 3) equilibrio delle forze verticali:
YB+YA-250-250-250=0 YA=750-434= 316 kg
Con il “METODO DEI NODI” si possono ora trovare le forze di compressione e/o trazione nelle aste. Si inizia dall’equilibrio di un nodo dove concorrono due aste.

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
71
300
316
N1-2
N1-6
250
100
696
N 2-3
N2-6
asta 1-2
Cominciamo con il nodo 1 :
Le forze che agiscono sul nodo 1 sono le reazioni vincolari esterne e le forze nelle aste 1-2 e 1-6 allineate ovviamente come l’asta. Per scrivere l’equilibrio di queste forze dobbiamo individuare le componenti orizzontale e verticale di N1-2 . Possiamo usare le relazioni trigonometriche con l’angolo di 26.9° oppure le relazioni di proporzionalità tra i triangoli: N1-2 (orizzontale) = N1-2· 340/381 = N1-2·0.892 N1-2 (verticale) = N1-2· 173/381 = N1-2·0.454
Dalle equazioni di equilibrio: 1) equilibrio delle forze orizzontali: -300+N1-6+N1-2·0.892 = 0 2) equilibrio delle forze verticali: +316+N1-2·0.454 = 0 possiamo ricavare: N1-2 = -696 kg (il segno negativo indica che la forza N1-2 è orientata nel verso
opposto a quello riportato nel disegno) N1-6 = +920 kg
300
316
696
920
asta 1-2
asta 1-6
Nelle aste agiscono le forze uguali e contrarie di quelle sul nodo. Quindi l’asta 1-2 è compressa con una forza pari a 696 kg, mentre, l’asta 1-6 è tesa con una forza pari a 920 kg. Passiamo ora al nodo 2 :
Le forze che agiscono nel nodo 2 sono riportate in figura. Per scrivere l’equilibrio delle forze bisogna prima trovare le componenti delle forze N2-3 e N2-6 . Utilizziamo ancora la similitudine tra i triangoli: N2-3 (orizzontale) = N2-3· 170/191 = N2-3·0.89 N2-3 (verticale) = N2-3· 87/191 = N2-3·0.45 N2-6 (orizzontale) = N2-6· 170/243 = N2-6·0.70 N2-6 (verticale) = N2-6· 173/243 = N2-6·0.71
Per l’equilibrio ci servono anche le componenti orizzontali e verticali di N1-2 = 696 kg:
N1-2 (orizzontale) = 696·0.892 = 620 kg N1-2 (verticale) = 696·0.454 = 316 kg

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
72
Dalle equazioni di equilibrio del nodo 2: 1) equilibrio delle forze orizzontali: +100+620+ N2-3·0.89+ N2-6·0.70=0 2) equilibrio delle forze verticali: -250+316+ N2-3·0.45- N2-6·0.71=0 Possiamo ricavare: N2-3 = -586 kg (il segno negativo indica che la forza N2-3 è orientata nel verso
opposto a quello riportato nel disegno) N2-6 = -283 kg (il segno negativo indica che la forza N2-6 è orientata nel verso
opposto a quello riportato nel disegno) Nelle aste agiscono le forze uguali e contrarie a quelle sul nodo. Perciò l’asta 2-3 è compressa con una forza pari a 586 kg e l’asta 2-6 è compressa con una forza pari a 283 kg. Si può ora continuare con i restanti nodi. In conclusione le sollecitazioni assiali nelle aste della capriata risultano:
aste di falda
asta 1-2 N1-2 = 696 kg (compressione)
asta 2-3 N2-3 = 586 kg (compressione)
asta 3-4 N3-4 = 698 kg (compressione)
asta 4-5 N4-5 = 958 kg (compressione)
aste di parete
asta 2-6 N2-6 = 283 kg (compressione)
asta 3-6 N3-6 = 335 kg (trazione)
asta 4-6 N4-6 = 187 kg (compressione)
tirante inferiore
asta 1-6 N1-6 = 920 kg (trazione)
asta 6-5 N6-5 = 853 kg (trazione)

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
73
15.2 IL METODO DELLE SEZIONI DI RITTER
Per determinare le forze di compressione e/o di trazione che agiscono sulle aste di una struttura reticolare internamente ed esternamente isostatica, dopo aver determinato le reazioni vincolari esterne, si può utilizzare, in alternativa al METODO DEI NODI, il METODO delle SEZIONI o METODO di RITTER, dal nome del suo ideatore ing. August Ritter 1826-1908.
100
300
316
434
1
2
3
4
5
6
250
100100
250
250
S
S
La SEZIONE di RITTER è una linea ideale che taglia la struttura reticolare e la divide in due parti. Su ciascuna parte agiscono le forze assiali delle aste tagliate e ciascuna parte con queste forze applicate deve essere in equilibrio.
300316
1
2
6
250
100
N1-6
N2-6
N 2-3 100
434
3
4
5
6
100
250
250
N1-6
N2-6
N 2-3
Con la sezione di Ritter di figura possiamo trovare la forza N2-3 se scriviamo l’equilibrio della parte sinistra della capriata rispetto il nodo 6, nodo dove concorrono le altre aste tagliate 2-6 e 1-6:
-N2-3·232+316·5.10+100·1.73-250·1.70=0 N2-3= +586 (forza di compressione per l’asta)
Allo stesso risultato si arriva se si pone in equilibrio, rispetto in nodo 6, la parte destra della capriata:
N2-3·232-434·5.10+100·1.73+100·2.6+250·1.70=0 N2-3= +586 (forza di compressione per l’asta)
Con la stessa sezione di Ritter possiamo trovare lo sforzo N2-6 scrivendo l’equilibrio della parte sinistra rispetto il nodo 1, dove concorrono le aste N1-6 e N2-3. Per scrivere l’equilibrio bisogna prima individuare il braccio di leva “b” della forza N2-6 rispetto il nodo 1: è sufficiente notare che l’area del triangolo 1-2-6 si può calcolare in due modi:
b ·242/2=510·173/2 b=364
dove 242 è la lunghezza del lato 2-6.

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
74
300
316
1
2
6
250
100
N1-6
N2-6
N 2-3
L’equilibrio rispetto il nodo 1 risulta:
-N2-6·3.64+250·3.40+100·1.73=0
N2-6= +281 (forza di compressione per l’asta) Sempre con la stessa sezione possiamo trovare la forza N1-6 scrivendo l’equilibrio rispetto il nodo 2:
N1-6·1.73+316·3.40+300·1.73=0
N1-6= -921 (forza di trazione nell’asta) Il segno negativo indica che la forza N1-6 è orientata nel verso opposto a quello riportato nel disegno. Con la sezione di Ritter S-S di figura si può calcolare la forza sull’asta 1-2 scrivendo l’equilibrio rispetto il nodo 6:
300
316
1
2
3
4
5
6N1-6
S
S
N 1-2
-N1-2·2.32+316·5.10=0
N1-2= + 694 (forza di compressione per l’asta) Con la nuova sezione S-S di figura si possono trovare le forze N3-4 , N6-4 e N6-5 :
434
1
2
3
4
5
6
100
250
S
S
N3-4
N6-5
N 6-4

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
75
L’equilibrio rispetto il nodo 6 permette di trovare N3-4 :
N3-4·2.32+250·1.70+100·1.73-434·5.1=0 N3-4= +696 (forza di compressione per l’asta)
L’equilibrio rispetto il nodo 5 permette di torvare N6-4 :
N6-4·3.64+100·1.73-250·3.40=0
N6-4 = + 185 (forza di compressione per l’asta)
L’equilibrio rispetto il nodo 4 permette di torvare N6-5 :
-N6-5·1.73-434·3.4=0 N6-5= - 853 (forza di trazione nell’asta)
Con la nuova sezione S-S di figura si può trovare le forze N4-5 :
434
1
2
3
4
5
6
S
S
N4-5
N6-5
L’equilibrio rispetto il nodo 6 permette di torvare N4-5 :
N4-5·2.32-434·5.1=0
N4-5= + 954 (forza di compressione nell’asta) Con la nuova sezione S-S di figura si può trovare le forze N3-6 :
434
1
2
3
4
5
6
100
250
S
S
281N2-6
N3-4
N1-6
921
N3-
6
L’equilibrio rispetto il nodo 4 permette di torvare N3-6 :
-N3-6·1.70-434·3.4-281·2.42+921·1.73=0 N3-6= - 331 (forza di trazione nell’asta)

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
76
In conclusione le sollecitazioni assiali nelle aste della capriata risultano:
aste di falda
asta 1-2 N1-2 = 694 kg (compressione)
asta 2-3 N2-3 = 586 kg (compressione)
asta 3-4 N3-4 = 696 kg (compressione)
asta 4-5 N4-5 = 954 kg (compressione)
aste di parete
asta 2-6 N2-6 = 281 kg (compressione)
asta 3-6 N3-6 = 331 kg (trazione)
asta 4-6 N4-6 = 185 kg (compressione)
tirante inferiore
asta 1-6 N1-6 = 921 kg (trazione)
asta 6-5 N6-5 = 853 kg (trazione)
Le piccole differenze nei risultati tra il metodo delle sezioni e il metodo dei nodi sono dovute alle approssimazioni numeriche introdotte nel calcolo.
15.3 LA DEFORMAZIONE DELLE STRUTTURE RETICOLARI Per calcolare le deformazioni di una struttura reticolare si utilizza il PRINCIPIO DEI LAVORI VIRTUALI che è già stato esposto nel paragrafo 7.2. Per determinare le deformazioni è necessario definire la struttura reticolare in tutte le sue componenti. Bisogna definire le dimensioni e il materiale di costruzione di ciascuna asta componente. A titolo di esempio riprendiamo la capriata del paragrafo precedente per trovare l’abbassamento lungo Y del nodo 6, detto freccia f .
250 kg
250 kg250 kg
100 kg
100 kg
100 kg
f Struttura Normale
La capriata è realizzata con tubi in alluminio di diametro 40 mm e spessore 2.5 mm, con area della sezione trasversale A=2.95 cm². Il modulo elastico per la lega di alluminio risulta E=700.000 daN/cm²

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
77
Il Principio dei Lavori Virtuali stabilisce che il Lavoro esterno è uguale al Lavoro interno:
Le=Li Il Lavoro esterno è la somma del lavoro prodotto dalle forze esterne (applicate alla struttura) per lo spostamento lungo la direzione di ciascuna forza. Ogni forza esterna produce una quota di lavoro esterno quando è moltiplicata per lo spostamento dei nodi dove è applicata. La reazione Vincolare YB non produce lavoro perché lo spostamento è perpendicolare alla direzione della forza e quindi il prodotto scalare è nullo. Per la struttura caricata, detta SISTEMA NORMALE, non conosciamo gli spostamenti dei nodi e quindi non possiamo trovare il Lavoro esterno. Possiamo però determinare l’allungamento e/o l’accorciamento di ogni asta:
AE
LNL
··=∆
dove : N è la forza assiale sull’asta L è la lunghezza dell’asta E è il modulo elastico del materiale A è sezione trasversale dell’asta Per il SISTEMA NORMALE, la capriata caricata che stiamo analizzando, determiniamo le seguenti deformazioni della aste (- accorciamento ; + allungamento) dovute alle forze assiali nelle aste stesse:
asta forza N
daN lunghezza L
cm area A
cm² modulo E
cm4 allungamento ∆L cm
1-2 -694 381 2,95 700.000 -0,1280
2-3 -586 191 2,95 700.000 -0,0542
3-4 -696 191 2,95 700.000 -0,0644
4-5 -954 381 2,95 700.000 -0,1760
2-6 -281 242 2,95 700.000 -0,0329
3-6 331 260 2,95 700.000 0,0417
4-6 -185 242 2,95 700.000 -0,0217
1-6 921 510 2,95 700.000 0,2275
6-5 853 510 2,95 700.000 0,2107
Applichiamo ora il Principio dei Lavori Virtuali che dice: Condizione necessaria e sufficiente perché un sistema sia in equilibrio è che il lavoro virtuale interno sia uguale al lavoro virtuale esterno per qualunque sistema di spostamenti virtuali congruenti, cioè compatibili con i vincoli. Prendiamo allora la capriata, togliamo i carichi, e applichiamo un carico verticale P al nodo 6 (nodo del quale ricerchiamo lo spostamento verticale). La capriata con il carico P rappresenta un sistema equilibrato, quindi, qualsiasi deformata della capriata (compatibile con i vincoli) è virtualmente applicabile.

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
78
Creiamo allora un SISTEMA VIRTUALE dove le forze esterne sono rappresentate dalla forza verticale P e la deformata congruente è quella prodotta dalle forze verticali e orizzontali del SISTEMA NORMALE.
P f
Struttura Virtuale
Per questo SISTEMA VIRTUALE vale il Principio del Lavori Virtuali: il Lavoro Esterno prodotto dalla forza P è uguale al Lavoro Interno prodotto dall’allungamento e/o accorciamento delle aste nel Sistema Normale ad opera delle forze interne assiali del Sistema Virtuale.
Lest=Lint Il Lavoro esterno prodotto dalla forza P nel SISTEMA VIRTUALE risulta:
Lest = P·f dove f è lo spostamento verticale del nodo 6 nel SISTEMA NORMALE. Il Lavoro Virtuale Interno è espresso dalla seguente sommatoria:
a
n
aa lNL ∆=∑
=
·1
int
dove: Na è lo sforzo normale delle aste nel SISTEMA VIRTUALE
∆la è l’allungamento o accorciamento dell’asta per la deformata del SISTEMA NORMALE
Gli allungamenti ∆la nel sistema normale sono stati già determinati, ora dobbiamo trovare le forze assiali prodotte nel sistema virtuale dalla forza P.
P/2P
1
2
3
4
56
P/2

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
79
Risolvendo con il metodo delle sezioni di Ritter la struttura di figura otteniamo le seguenti forze assiali (- compressione; + trazione) :
asta forza N
daN
1-2 P x -1,099
2-3 P x -1,099
3-4 P x -1,099
4-5 P x -1,099
2-6 P x 0
3-6 P x 1
4-6 P x 0
1-6 P x 0,983
6-5 P x 0,983 Possiamo ora trovare il Lavoro Interno del SISTEMA VIRTUALE :
asta forza N
daN allungamento ∆L
cm
Lavoro Interno daN·cm
1-2 P x -1,099 -0,1280 P x 0,1407
2-3 P x -1,099 -0,0542 P x 0,0596
3-4 P x -1,099 -0,0644 P x 0,0708
4-5 P x -1,099 -0,1760 P x 0,1934
2-6 P x 0 -0,0329 P x 0,0000
3-6 P x 1 0,0417 P x 0,0417
4-6 P x 0 -0,0217 P x 0,0000
1-6 P x 0,983 0,2275 P x 0,2236
6-5 P x 0,983 0,2107 P x 0,2071
L INTERNO = P x 0,9369 Per calcolare lo spostamento verticale del nodo 6 (freccia f) della Capriata applichiamo al SISTEMA VIRTUALE il Principio dei Lavori Virtuali:
Lest =Lint
P·f = P·0.9369
f = 0.9369 [cm] Se si vuole trovare anche lo spostamento orizzontale del nodo 6 si dovrà costruire un altro SISTEMA VIRTUALE dove la forza P sarà orizzontale, cioè avrà il verso dello spostamento da ricercare. Per qualsiasi altro spostamento bisogna creare un SISTEMA VIRTUALE con la forza P applicata nel punto e con orientamento e verso dello spostamento da ricercare.

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
80
15.4 ESEMPIO - TRAVE RETICOLARE A SBALZO Risolviamo la trave reticolare di figura vincolata a sbalzo, isostatica internamente ed esternamente.
1 2 3 4 5 6
7 8 9 10 11 12
900 kg 900 kg 900 kg 900 kg 900 kg
Il primo passo è l’individuazione delle Reazioni Vincolari nei nodi 1 e 7 : l’equilibrio delle forze verticali fornisce la reazione Y1 :
Y1 – 900-900-900-900-900=0 Y1 = +4500 kg
l’equilibrio dei momenti rispetto il nodo 1 fornisce la reazione orizzontale X7: -X7·0.70+900·6+900·4.80+900·3.60+900·2.40+900·1.20=0
X7= 23.142 kg l’equilibrio delle forze orizzontali fornisce la reazione X1:
X1-23142=0 X1=23412 kg
Il verso delle reazioni è quello riportato in figura:
4500 kg
23.142 kg
23.142 kg
S1
S1
S2S3S4S5
S2S3S4S5
1 2 3 4 5 6
7 8 9 10 11 12
900 kg 900 kg 900 kg 900 kg 900 kg
Il secondo passo è la determinazione degli sforzi assiali sulle aste utilizzando il metodo delle Sezioni di Ritter. Con la sezione di Ritter S1 si trovano le forze assiali: N11-12 scrivendo l’equilibrio ai momenti nel nodo 6 della parte destra:
N11-12= 0 N11-6 facendo l’equilibrio ai momenti nel nodo 5 della parte destra:
N11-12·0.7+900·1.2-N11-6·0.605=0 N11-6= +1785 (trazione)
N5-6 facendo l’equilibrio ai momenti nel nodo 11 della parte destra:

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
81
900·1.2+N5-6·0.7 =0 N5-6= -1542 (compressione)
Con la sezione di Ritter S2 si trovano le forze assiali: N10-11 scrivendo l’equilibrio ai momenti nel nodo 5 della parte destra:
-N10-11·0.7+900·1.20 = 0 N10-11= +1542 (trazione)
N10-5 facendo l’equilibrio ai momenti nel nodo 4 della parte destra: -1542·0.7+900·2.40+900·1.2-N10-5·0.605=0
N10-5= +3571 (trazione) N4-5 facendo l’equilibrio ai momenti nel nodo 10 della parte destra:
900·2.4+900·1.2+N4-5·0.7 =0 N5-6= - 4628 (compressione)
Con la sezione di Ritter S3 si trovano le forze assiali: N9-10 scrivendo l’equilibrio ai momenti nel nodo 4 della parte destra:
-N9-10·0.7+900·2.4+900·1.20 = 0 N9-10= +4628 (trazione)
N9-4 facendo l’equilibrio ai momenti nel nodo 3 della parte destra: -4628·0.7+900·3.6+900·2.40+900·1.2-N9-4·0.605=0
N9-4= +5356 (trazione) N3-4 facendo l’equilibrio ai momenti nel nodo 9 della parte destra:
900·3.6+900·2.4+900·1.2+N3-4·0.7 =0 N3.-4= - 9257 (compressione)
Con la sezione di Ritter S4 si trovano le forze assiali: N8-9 scrivendo l’equilibrio ai momenti nel nodo 3 della parte destra:
-N8-9·0.7+900·3.6+900·2.4+900·1.20 = 0 N8-9= +9257 (trazione)
N8-3 facendo l’equilibrio ai momenti nel nodo 2 della parte destra: -9257·0.7+900·4.8+900·3.6+900·2.40+900·1.2-N8.3·0.605=0
N8-3= +7140 (trazione) N2-3 facendo l’equilibrio ai momenti nel nodo 8 della parte destra:
900·4.8+900·3.6+900·2.4+900·1.2+N2-3·0.7 =0 N2-3= - 15428 (compressione)
Con la sezione di Ritter S5 si trovano le forze assiali: N7-8 scrivendo l’equilibrio ai momenti nel nodo 2 della parte destra:
-N7-8·0.7+900·4.8+900·3.6+900·2.4+900·1.20 = 0 N8-9= +15428 (trazione)
N7-2 facendo l’equilibrio ai momenti nel nodo 1 della parte destra: -15428·0.7+900·6+900·4.8+900·3.6+900·2.40+900·1.2-N7-2·0.605=0
N7.2= +8930 (trazione) N1-2 facendo l’equilibrio ai momenti nel nodo 7 della parte destra:
900·6+900·4.8+900·3.6+900·2.4+900·1.2+N1-2·0.7 =0 N1-2= - 23142 (compressione)

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
82
4500 kg
23.142 kg
23.142 kg
S6
1 2 3 4 5 6
7 8 9 10 11 12
900 kg 900 kg 900 kg 900 kg 900 kg
S7S8S9S10
S6S7S8S9S10
Con la sezione di Ritter S6 si trova la forza assiale: N11-5 scrivendo l’equilibrio delle forze verticali della parte destra:
N11-5 +900+900 = 0 N11-5 = - 1800 (compressione)
Con la sezione di Ritter S7 si trova la forza assiale: N10-4 scrivendo l’equilibrio delle forze verticali della parte destra:
N10-4 +900+900+900 = 0 N10-4 = - 2700 (compressione)
Con la sezione di Ritter S8 si trova la forza assiale: N9-3 scrivendo l’equilibrio delle forze verticali della parte destra:
N9-3 +900+900+900+900 = 0 N9-3 = -3600 (compressione)
Con la sezione di Ritter S9si trova la forza assiale: N8-2 scrivendo l’equilibrio delle forze verticali della parte destra:
N8-2 +900+900+900+900+900 = 0 N8-2 = - 4500 (compressione)
Con la sezione di Ritter S10 si trova: N7-1 scrivendo l’equilibrio delle forze verticali della parte destra:
N7-1 +900+900+900+900+900 = 0 N7-1 = - 4500 (compressione)

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
83
Per concludere l’esercizio cerchiamo l’abbassamento verticale massimo della mensola sul nodo 6.
1 2 3 4 56
78 9 10 11 12
900 kg 900 kg 900 kg 900 kg 900 kg
f
P Sistema NORMALE e Sistema VIRTUALE
Utilizziamo il Principio dei Lavori Virtuali e costruiamo un SISTEMA VIRTUALE con una forza P posizionata nel nodo e nella direzione dello spostamento che vogliamo trovare. Per trovare la deformazione è necessario definire le dimensioni delle aste e il materiale di costruzione: tutte le aste sono realizzate con profilo quadro cavo 110x110 mm, spessore 6 mm e area della sezione trasversale A=23.38 cm²; le aste sono in acciaio con modulo elastico E=2.100.000 daN/cm². Per il SISTEMA NORMALE, la trave reticolare a sbalzo con il carico, determiniamo le deformazioni ∆L della aste (- accorciamento ; + allungamento) dovute alle forze assiali nelle aste stesse (- compressione; + trazione):
asta forza N
daN lunghezza L
cm area A
cm² modulo E
cm4 allungamento ∆L cm
Corrente superiore
7-8 15428 120 23,38 2.100.000 0,0377
8-9 9257 120 23,38 2.100.000 0,0226
9-10 4628 120 23,38 2.100.000 0,0113
10-11 1542 120 23,38 2.100.000 0,0038
11-12 0 120 23,38 2.100.000 0,0000
Corrente inferiore
1-2 -23143 120 23,38 2.100.000 -0,0566
2-3 -15428 120 23,38 2.100.000 -0,0377
3-4 -9257 120 23,38 2.100.000 -0,0226
4-5 -4628 120 23,38 2.100.000 -0,0113
5-6 -1542 120 23,38 2.100.000 -0,0038
Montani verticali
7-1 -4500 70 23,38 2.100.000 -0,0064
8-2 -4500 70 23,38 2.100.000 -0,0064
9-3 -3600 70 23,38 2.100.000 -0,0051
10-4 -2700 70 23,38 2.100.000 -0,0038
11-5 -1800 70 23,38 2.100.000 -0,0026
12-6 -900 70 23,38 2.100.000 -0,0013
diagonali
7-2 8930 139 23,38 2.100.000 0,0253 8-3 7140 139 23,38 2.100.000 0,0202 9-4 5356 139 23,38 2.100.000 0,0152
10-5 3571 139 23,38 2.100.000 0,0101
11-6 1786 139 23,38 2.100.000 0,0051

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
84
Per calcolare il Lavoro interno del SISTEMA VIRTUALE è necessario calcolare gli sforzi normali sulle aste dovuti al carico verticale P applicato nel nodo 6. Dopo il calcolo degli forze assiali utilizzando il metodo delle sezioni di Ritter, si può calcolare il lavoro interno del SISTEMA VIRTUALE.
asta forza N
daN allungamento ∆L
cm Lavoro Interno
daN·cm 7-8 P x 6,857 0,0377 P x 0,2585 8-9 P x 5,143 0,0226 P x 0,1162
9-10 P x 3,42 0,0113 P x 0,0386 10-11 P x 1,714 0,0038 P x 0,0065 11-12 P x 0 0,0000 P x 0,0000 1-2 P x -8,571 -0,0566 P x 0,4851 2-3 P x -6,857 -0,0377 P x 0,2585 3-4 P x -5,143 -0,0226 P x 0,1162
4-5 P x -3,42 -0,0113 P x 0,0386 5-6 P x -1,714 -0,0038 P x 0,0065 7-1 P x -1 -0,0064 P x 0,0064 8-2 P x -1 -0,0064 P x 0,0064 9-3 P x -1 -0,0051 P x 0,0051 10-4 P x -1 -0,0038 P x 0,0038
11-5 P x -1 -0,0026 P x 0,0026 12-6 P x 0 -0,0013 P x 0,0000 7-2 P x 1,985 0,0253 P x 0,0502 8-3 P x 1,985 0,0202 P x 0,0401 9-4 P x 1,985 0,0152 P x 0,0302 10-5 P x 1,985 0,0101 P x 0,0200
11-6 P x 1,985 0,0051 P x 0,0101 L INTERNO = P x 1,4999
Possiamo infine scrivere la relazione del PLV e trovare la freccia f massima della mensola:
Lest =Lint
P·f = P·1.4999
f = 1.4999 [cm]

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
85
15.5 LE STRUTTURE RETICOLARI IPERSTATIC HE Le Reticolari IPERSTATICHE sono sistemi reticolari indeformabili, internamente isostatici, vincolati a terra in modo iperstatico. Per la determinazione delle reazioni vincolai a terra è necessario utilizzare il METODO DELLE FORZE così come esposto nel Capitolo 10. Per esporre il Metodo delle Forze per le strutture reticolari, risolviamo la trave reticolare iperstatica di figura, ottenuta aggiungendo un appoggio alla mensola dell’esercizio precedente.
1 2 3 4 5 6
7 8 9 10 11 12
900 kg 900 kg 900 kg 900 kg 900 kg
CA
B
La reticolare è vincolata esternamente con 4 vincoli: cerniera in A (2 gradi di vincolo), carrello orizzontale in B (1 grado di vincolo), carrello verticale in C (1 grado di vincolo). La reticolare risulta perciò UNA VOLTA IPERSTATICA:
i=v-3=4-1=1
Le tre condizioni di equilibrio non sono sufficienti per determinare le quattro reazioni vincolari esterne. E’ necessario introdurre una quarta equazione di congruenza e risolvere la struttura utilizzando il METODO DELLE FORZE. Trasformiamo la reticolare iperstatica in un sistema isostatico sostituendo il vincolo in C con la reazione vincolare incognita YC .
1 2 3 4 5 6
7 8 9 10 11 12
900 kg 900 kg 900 kg 900 kg 900 kg
YC
CA
B
Possiamo determinare la reazione YC imponendo la condizione di CONGRUENZA del vincolo sostituito, cioè l’annullamento dello spostamento verticale y in C :
yC=0

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
86
La condizione di CONGRUENZA (yC=0) si può individuare dividendo i carichi del sistema isostatico in due parti e utilizzando il PRINCIPIO DI SOVRAPPOSIZIONE DEGLI EFFETTI.
1 2 3 4 56
78 9 10 11 12
900 kg 900 kg 900 kg 900 kg 900 kg
f1
SCHEMA 1
12 3 4 5 6
78 9 10 11 12
YC
f2
SCHEMA 2
L’equazione di CONGRUENZA si ottiene uguagliando le due frecce delle mensole sottoposte ai carichi e alla reazione YC :
yc = f1 - f2 = 0
La freccia f1 dello schema 1 è la stessa determinata nell’esercizio precedente :
f1 = 1.4999 [cm]
La freccia f2 dello schema 2 è determinabile applicando il Principio dei Lavori Virtuali allo Schema 2. In questo caso il Sistema Virtuale è lo stesso Sistema Normale poiché il Lavoro esterno è esprimibile dalla relazione:
Lest = YC · f2
Per calcolare il Lavoro interno bisogna trovare gli sforzi normali sulle aste dovuti al carico verticale YC applicato nel nodo 6. Tale calcolo è già stato fatto nell’esercizio precedente con una forza P orientata in verso opposto. Possiamo allora calcolare le deformazioni della aste (- accorciamento ; + allungamento) dovute alle forze assiali nelle aste stesse (- compressione; + trazione):
∆L=N·L/E·A

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
87
asta forza N
daN lunghezza L
cm area A
cm² modulo E
cm4 allungamento ∆L cm
7-8 Yc x -6,857 120 23,38 2.100.000 Yc x -1,676E-05 8-9 Yc x -5,143 120 23,38 2.100.000 Yc x -1,257E-05 9-10 Yc x -3,42 120 23,38 2.100.000 Yc x -8,359E-06 10-11 Yc x -1,714 120 23,38 2.100.000 Yc x -4,189E-06 11-12 Yc x 0 120 23,38 2.100.000 Yc x 0,000E+00 1-2 Yc x 8,571 120 23,38 2.100.000 Yc x 2,095E-05 2-3 Yc x 6,857 120 23,38 2.100.000 Yc x 1,676E-05 3-4 Yc x 5,143 120 23,38 2.100.000 Yc x 1,257E-05 4-5 Yc x 3,42 120 23,38 2.100.000 Yc x 8,359E-06 5-6 Yc x 1,714 120 23,38 2.100.000 Yc x 4,189E-06 7-1 Yc x -1 70 23,38 2.100.000 Yc x -1,426E-06 8-2 Yc x -1 70 23,38 2.100.000 Yc x -1,426E-06 9-3 Yc x -1 70 23,38 2.100.000 Yc x -1,426E-06 10-4 Yc x -1 70 23,38 2.100.000 Yc x -1,426E-06 11-5 Yc x -1 70 23,38 2.100.000 Yc x -1,426E-06 12-6 Yc x 0 70 23,38 2.100.000 Yc x 0,000E+00 7-2 Yc x -1,985 139 23,38 2.100.000 Yc x -5,620E-06 8-3 Yc x -1,985 139 23,38 2.100.000 Yc x -5,620E-06 9-4 Yc x -1,985 139 23,38 2.100.000 Yc x -5,620E-06 10-5 Yc x -1,985 139 23,38 2.100.000 Yc x -5,620E-06 11-6 Yc x -1,985 139 23,38 2.100.000 Yc x -5,620E-06
Ora possiamo calcolare il Lavoro interno Lint dello SCHEMA 2:
asta forza N
daN allungamento ∆L
cm Lavoro Interno
daN·cm 7-8 Yc x -6,857 Yc x -1,676E-05 (Yc)² x 1,149E-04 8-9 Yc x -5,143 Yc x -1,257E-05 (Yc)² x 6,465E-05 9-10 Yc x -3,42 Yc x -8,359E-06 (Yc)² x 2,859E-05 10-11 Yc x -1,714 Yc x -4,189E-06 (Yc)² x 7,180E-06 11-12 Yc x 0 Yc x 0,000E+00 (Yc)² x 0,000E+00 1-2 Yc x 8,571 Yc x 2,095E-05 (Yc)² x 1,795E-04 2-3 Yc x 6,857 Yc x 1,676E-05 (Yc)² x 1,149E-04 3-4 Yc x 5,143 Yc x 1,257E-05 (Yc)² x 6,465E-05 4-5 Yc x 3,42 Yc x 8,359E-06 (Yc)² x 2,859E-05 5-6 Yc x 1,714 Yc x 4,189E-06 (Yc)² x 7,180E-06 7-1 Yc x -1 Yc x -1,426E-06 (Yc)² x 1,426E-06 8-2 Yc x -1 Yc x -1,426E-06 (Yc)² x 1,426E-06 9-3 Yc x -1 Yc x -1,426E-06 (Yc)² x 1,426E-06 10-4 Yc x -1 Yc x -1,426E-06 (Yc)² x 1,426E-06 11-5 Yc x -1 Yc x -1,426E-06 (Yc)² x 1,426E-06 12-6 Yc x 0 Yc x 0,000E+00 (Yc)² x 0,000E+00 7-2 Yc x -1,985 Yc x -5,620E-06 (Yc)² x 1,116E-05 8-3 Yc x -1,985 Yc x -5,620E-06 (Yc)² x 1,116E-05 9-4 Yc x -1,985 Yc x -5,620E-06 (Yc)² x 1,116E-05 10-5 Yc x -1,985 Yc x -5,620E-06 (Yc)² x 1,116E-05 11-6 Yc x -1,985 Yc x -5,620E-06 (Yc)² x 1,116E-05
Lavoro Interno = (Yc)² x 6,731E-04

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
88
Scriviamo la relazione del PLV e troviamo la freccia f2 :
Lest = Lint
YC · f2 = (YC)² · 0,0006731
f2 = YC· 0,0006731 [cm]
per concludere troviamo la Reazione Vincolare YC con l’equazione di congruenza:
f1 - f2 = 0
1.4999 - YC · 0.0006731 =0
YC =2228 [daN] Per trovare le restanti Reazioni Vincolari usiamo le equazioni di equilibrio: 1) equilibrio delle forze verticali:
YC+YA-900x5=0 YA=4500-2228= 227 kg
2) equilibrio ai momenti in A : 2228·6-900·6-900·4.8-900·3.6-900·2.4-900·1.2+XB·0.7 =0
XB= 4045 kg 3) equilibrio delle forze orizzontali:
XA - 4045 = 0 XA= 4045 kg
2272 kg
4045 kg
4045 kg
900 kg 900 kg 900 kg 900 kg 900 kg
2228 kg
1 2 3 4 5 6
7 8 9 10 11 12
CA
B
Per concludere si possono trovare le forze assiali nelle aste utilizzando il Metodo delle Sezioni di Ritter (- compressione; + trazione): Corrente inferiore Asta 1-2: -4049 daN Asta 2-3: -153 daN Asta 3-4: +2199 daN Asta 4-5: +3009 daN Asta 5-6: +2276 daN Corrente superiore Asta 7-8: +153 daN Asta 8-9: +2199 daN Asta 9-10: -3009 daN Asta 10-11: -2276 daN Asta 11-12: +0 daN Montanti verticali Asta 7-1: -2272 daN Asta 8-2: -2272 daN Asta 9-3: -1372 daN Asta 10-4: -472 daN Asta 11-5: +427 daN Asta 12-6: -900 daN Diagonali di parete Asta 7-2: +4510 daN Asta 8-3: +2724 daN Asta 9-4: +937 daN Asta 10-5: -848 daN Asta 11-6: -2635 daN

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
89
E’ interessante notare la grande differenza tra le forze nelle aste nella struttura a sbalzo (vedi esempio 15.4) e della struttura con un appoggio in C. In particolare l’asta maggiormente sollecitata della struttura a sbalzo è l’asta 1-2 con una compressione:
N1-2 = - 23142 daN Invece, per la struttura con l’appoggio in C l’asta maggiormente sollecitata e l’asta 7-2 con una forza di trazione:
N7.2 = + 4500 daN. Ovviamente la struttura con l’appoggio in C potrà essere dimensionata con profili molto più leggeri della struttura a sbalzo.

I.U.A.V. prof. Bruno Zan – ing. Claudio Bertocco La Meccanica delle strutture -Novembre 2012
90
INDICE
1. PREMESSA …………………………………………….…..……………… pag. 2
2. LO SCHEMA STATICO ……………………………………..................... pag. 3
3. ANALISI DI UNA CURVA E DELLA SUA FUNZIONE……………….. pag. 7
4. LA TEORIA DELLE TRAVI NFLESSE …………………………………. pag. 11
4.1 I DIAGRAMMI di MOMENTO e TAGLIO – Relazioni q T M .. pag. 12
4.2 LE FUNZIONI di MOMENO e TAGLIO - L’EQUILIBRIO…. pag. 14
4.3 IL DISEGNO DELLA PARABOLA di MOMENTO….………. pag. 15
5. LE STRUTTURE ISOSTATICHE …………………………....………….. pag. 16
5.1 ESEMPIO – TRAVE ISOSTATICA ……………..…………… pag. 18
6. LA DEFORMAZIONE DELLE TRAVI INFLESSE..…………………… pag. 19
6.1 LA DEFORMAZIONE PER SFORZO NORMALE………….. pag. 20
6.2 LA DEFORMAZIONE PER MOMENTO FLETTENTE……… pag. 22
7. IL CALCOLO DELLE DEFORMAZIONI PER FLESSIONE……………. pag. 25
7.1 L’INTEGRAZIONE DELLA LINEA ELASTICA……………. pag. 25
7.2 IL PRINCIPIO DEI LAVORI VIRTUALI……………………. pag. 26
7.3 IL TEOREMA E IL COROLLARIO DI MOHR………………. pag. 28
8. TABELLA 1 -LE STRUTTURE ISOSTATICE AD UNA CAMPATA ….. pag. 30
9. LE STRUTTURE IPERSTATICHE ………………………………………. pag. 32
10. IL METODO DELLE FORZE ………….……………………………. pag. 34
11. TABELLA 2 -LE STRUTTURE IPERSTATICHE AD UNA CAMPATA…. pag. 37
12. IL METODO DELLE ROTAZIONI …………………………………. …… pag. 39
12.1 ESEMPIO – METODO DELLE ROTAZIONI……………………. pag. 44
13. LE STRUTTURE A NODI FISSI …………………………………………. pag. 46
13.1 ESEMPIO – METODO DELLE ROTAZIONI………………….. pag. 51
14. IL METODO DI CROSS …………………………………………………. pag. 53
14.1 ESEMPIO – RIGIDEZZE E COEFF. DI RIPARTIZIONE……………… pag. 55
14.2 IL MEODO DI CROSS CON UN NODO………………………………… pag. 56
14.3 ESEMPIO – METODO DI CROSS CON UN NODO……………..…… pag. 58
14.4 ESEMPIO – METODO DI CROSS CON SBALZO……………… …… pag. 59
14.5 IL METODO DI CROSS CON PIU’ NODI ……………………….. ……. pag. 60
14.6 ESEMPIO – METODO DI CROSS CON PIU’ NODI …………………. pag. 62
14.7 ESEMPIO – METODO DI CROSS – TRAVE CONTINUA…………… pag. 64
15. LE STRUTTURE RETICOLARI……………………………………. ….. pag. 66
15.1 IL METODO DEI NODI …….…………………………………………. pag. 69
15.2 IL MEODO DELLE SEZIONI DI RITTER…………………………… pag. 72
15.3 LA DEFORMAZIONE DELLE STRUTTURE RETICOLARI………… pag. 75
15.4 ESEMPIO – TRAVE RETICOLARE A SBALZO……….…………….. pag. 80
15.5 LE STRUTTURE RETICOLARI IPERSTATICHE……….…………….. pag. 85