Il linguaggio SFC - schoolofnerd · 2016-01-26 · 10 Prof. P. Levi - Laboratorio di Informatica...
38
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 1 Il linguaggio SFC Esercizi Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 2 Isola di foratura
Transcript of Il linguaggio SFC - schoolofnerd · 2016-01-26 · 10 Prof. P. Levi - Laboratorio di Informatica...
1
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 1
Il linguaggio SFC
Esercizi
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 2
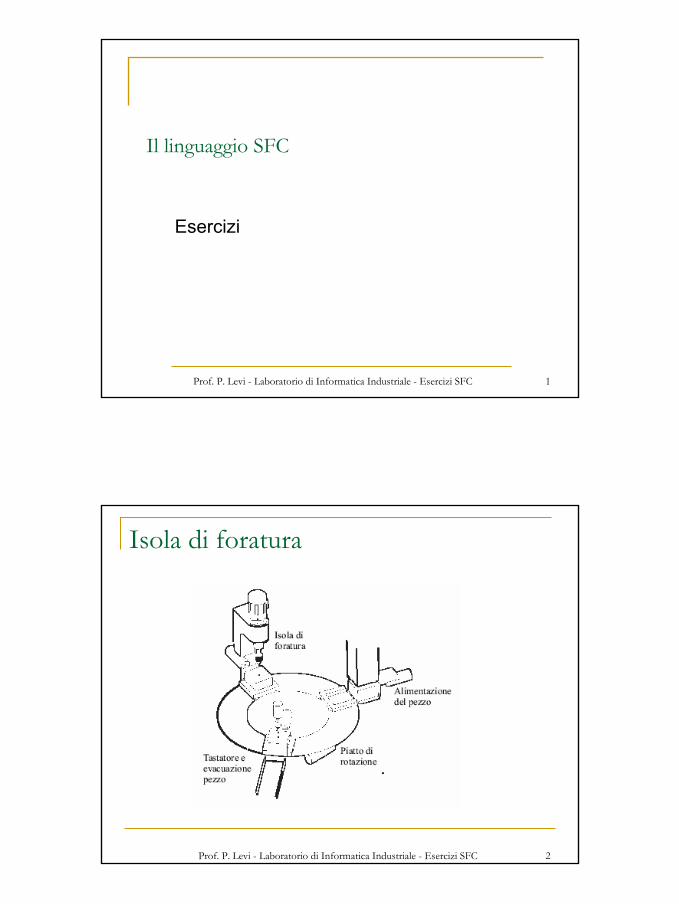
Isola di foratura

2
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 3
Isola diforatura
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 4
Isola di foratura (gerarchica)

3
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 5
Isola di foratura (gerarchica)
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 6
Sistema irrigazione
4
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 7
Sistema irrigazione
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 8
Sistema irrigazione
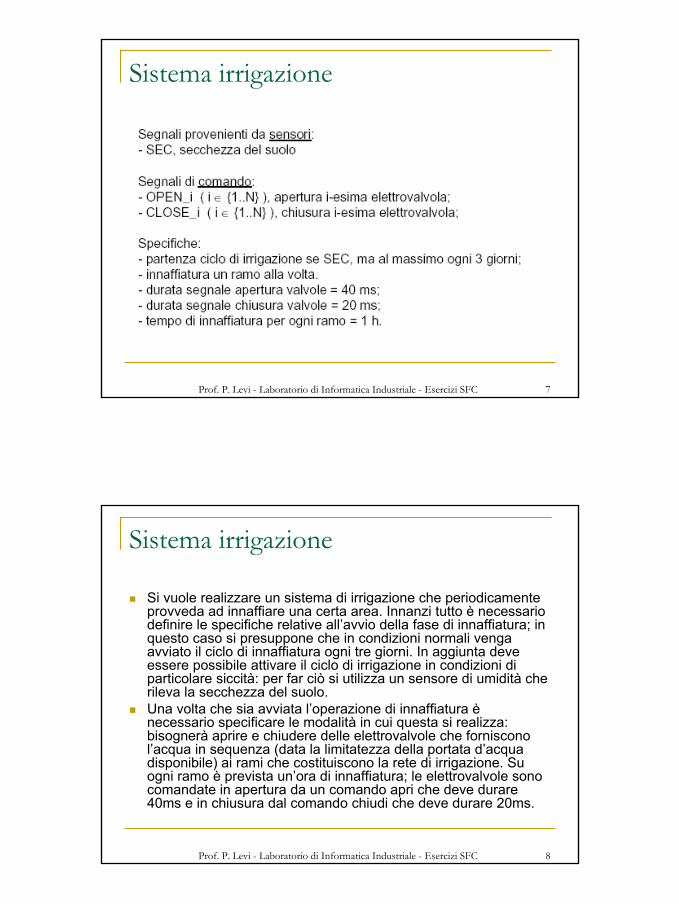
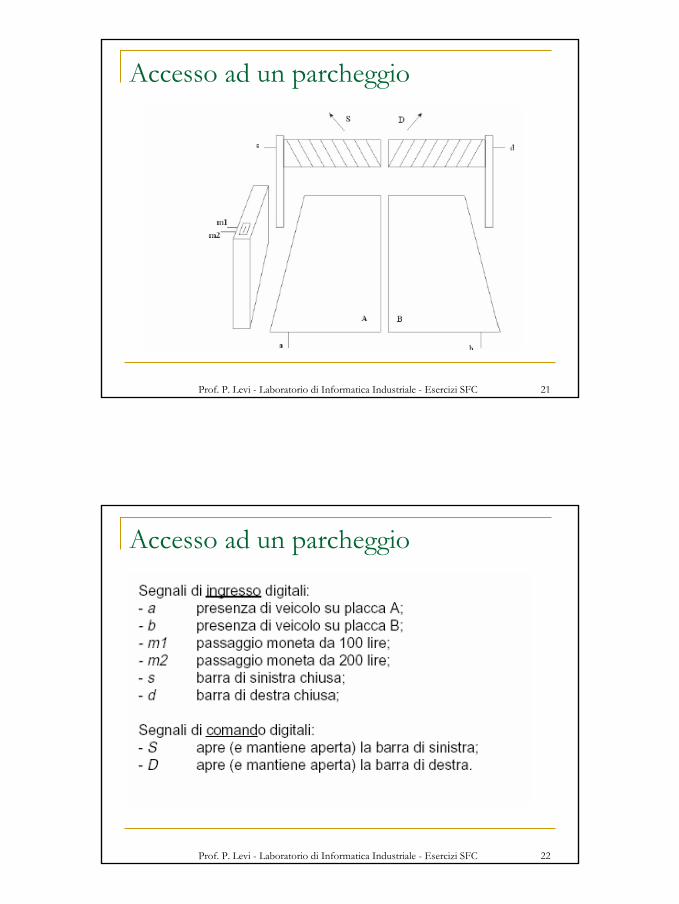
Si vuole realizzare un sistema di irrigazione che periodicamenteprovveda ad innaffiare una certa area. Innanzi tutto è necessario definire le specifiche relative all’avvio della fase di innaffiatura; in questo caso si presuppone che in condizioni normali venga avviato il ciclo di innaffiatura ogni tre giorni. In aggiunta deve essere possibile attivare il ciclo di irrigazione in condizioni di particolare siccità: per far ciò si utilizza un sensore di umidità che rileva la secchezza del suolo. Una volta che sia avviata l’operazione di innaffiatura è necessario specificare le modalità in cui questa si realizza: bisognerà aprire e chiudere delle elettrovalvole che forniscono l’acqua in sequenza (data la limitatezza della portata d’acqua disponibile) ai rami che costituiscono la rete di irrigazione. Su ogni ramo è prevista un’ora di innaffiatura; le elettrovalvole sono comandate in apertura da un comando apri che deve durare 40ms e in chiusura dal comando chiudi che deve durare 20ms.
5
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 9
Sistema irrigazione
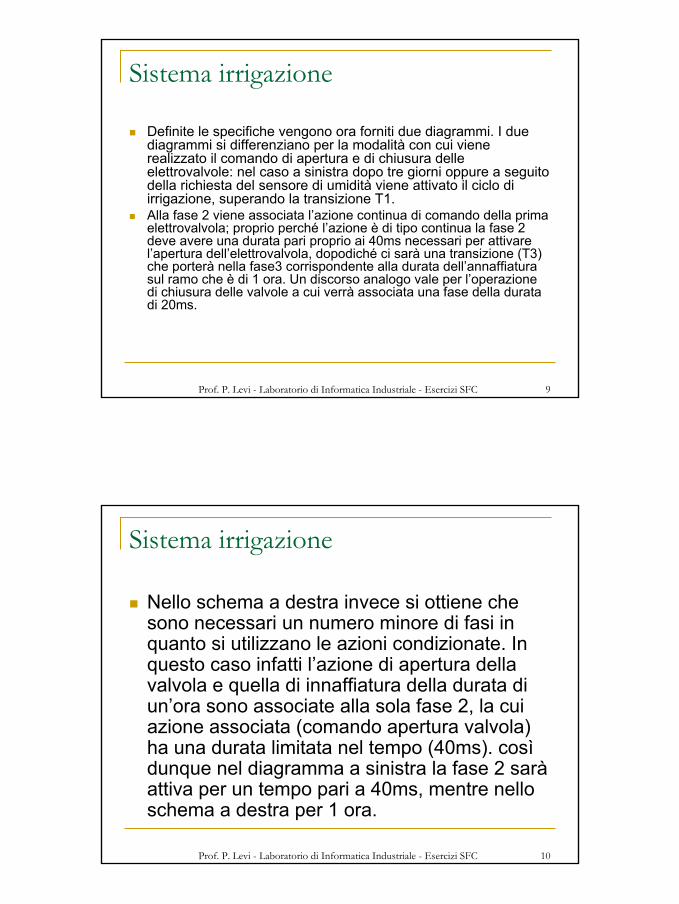
Definite le specifiche vengono ora forniti due diagrammi. I due diagrammi si differenziano per la modalità con cui viene realizzato il comando di apertura e di chiusura delle elettrovalvole: nel caso a sinistra dopo tre giorni oppure a seguito della richiesta del sensore di umidità viene attivato il ciclo di irrigazione, superando la transizione T1. Alla fase 2 viene associata l’azione continua di comando della prima elettrovalvola; proprio perché l’azione è di tipo continua la fase 2 deve avere una durata pari proprio ai 40ms necessari per attivare l’apertura dell’elettrovalvola, dopodiché ci sarà una transizione (T3) che porterà nella fase3 corrispondente alla durata dell’annaffiatura sul ramo che è di 1 ora. Un discorso analogo vale per l’operazione di chiusura delle valvole a cui verrà associata una fase della durata di 20ms.
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 10
Sistema irrigazione
Nello schema a destra invece si ottiene che sono necessari un numero minore di fasi in quanto si utilizzano le azioni condizionate. In questo caso infatti l’azione di apertura della valvola e quella di innaffiatura della durata di un’ora sono associate alla sola fase 2, la cui azione associata (comando apertura valvola) ha una durata limitata nel tempo (40ms). così dunque nel diagramma a sinistra la fase 2 sarà attiva per un tempo pari a 40ms, mentre nello schema a destra per 1 ora.

6
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 11
Sistema irrigazione
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 12
Trapano automatico
7
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 13
Trapano automatico
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 14
Trapano automatico
8
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 15
Trapano automatico
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 16
SFC gerarchico – trapano automatico
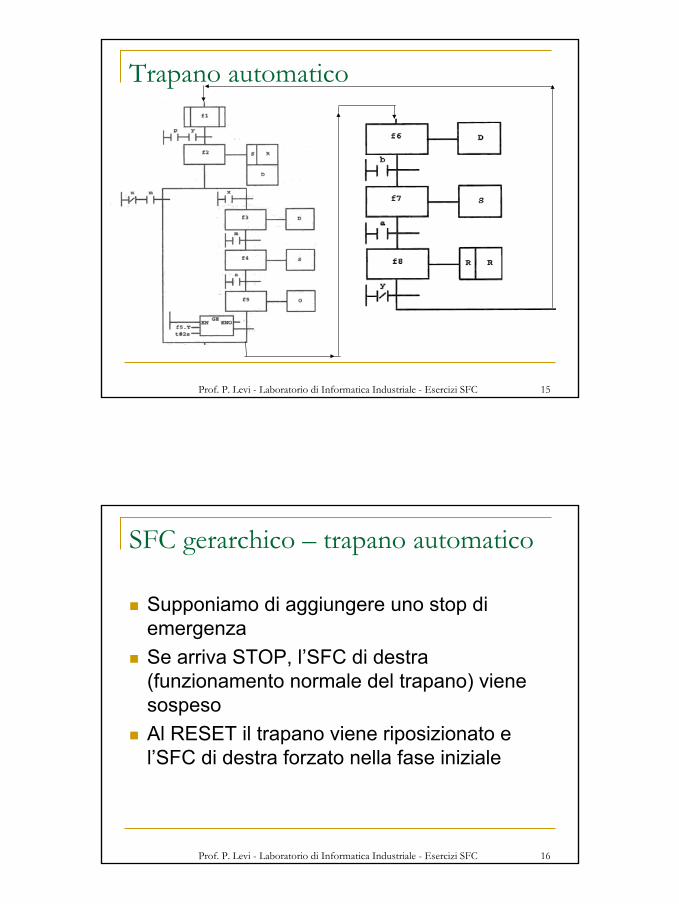
Supponiamo di aggiungere uno stop di emergenzaSe arriva STOP, l’SFC di destra (funzionamento normale del trapano) viene sospesoAl RESET il trapano viene riposizionato e l’SFC di destra forzato nella fase iniziale

9
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 17
SFC gerarchico – trapano automatico
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 18
Distributore di bibite

10
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 19
Distributore di bibite
Si vuole realizzare l' automatismo in modo che, alI' inserimento di una moneta, una sola bibita sia fatta cadere nel vano e sia possibile prelevarla.Gli ingressi della parte di controllo sono il segnale moneta dalla gettoniera e il segnale aperto che indica che il vano di prelievo è stato aperto. Le uscite sono i segnali BLOCCA e SBLOCCA che agiscono sulla porta del vano di prelievo, e i segnali SA e SB per il comando dei due pistoncini lineari (se il segnale è presente il pistoncino va a destra, altrimenti una molla di richiamo lo riporta a sinistra). SFC di controllo: l'inserimento della moneta provoca l'attivazione di due sequenze in parallelo, una per la gestione dei pistoncini al fine di far cadere una bibita nel vano di prelievo e l' altra per gestire la porta di accesso al vano di prelievo. La transizione in uscita alle due fasi di attesa f12 e f23, la cui condizione è sempre vera, serve a sincronizzare le due sequenze in maniera tale che la macchina si predisponga per un nuovo ciclo dopo che la bibita è stata fatta cadere e il vano è stato aperto. Nella sequenza di attivazione dei pistoncini, non essendo previsti sensori di finecorsa, le fasi terminano dopo un tempo ritenuto sufficiente al completamento delle rispettive azioni.
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 20
Distributore di bibite
11
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 21
Accesso ad un parcheggio
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 22
Accesso ad un parcheggio
12
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 23
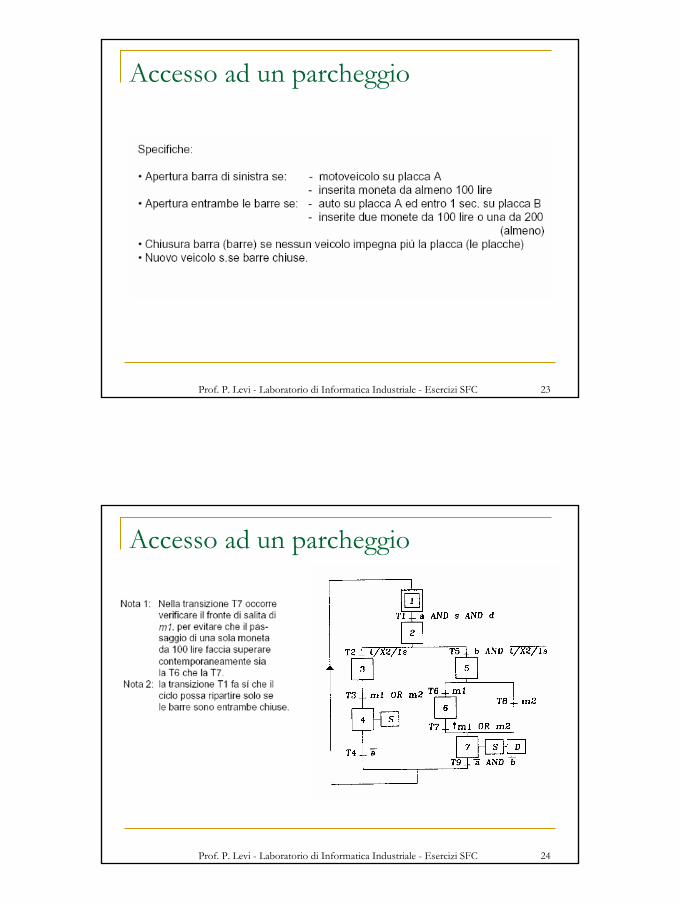
Accesso ad un parcheggio
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 24
Accesso ad un parcheggio
13
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 25
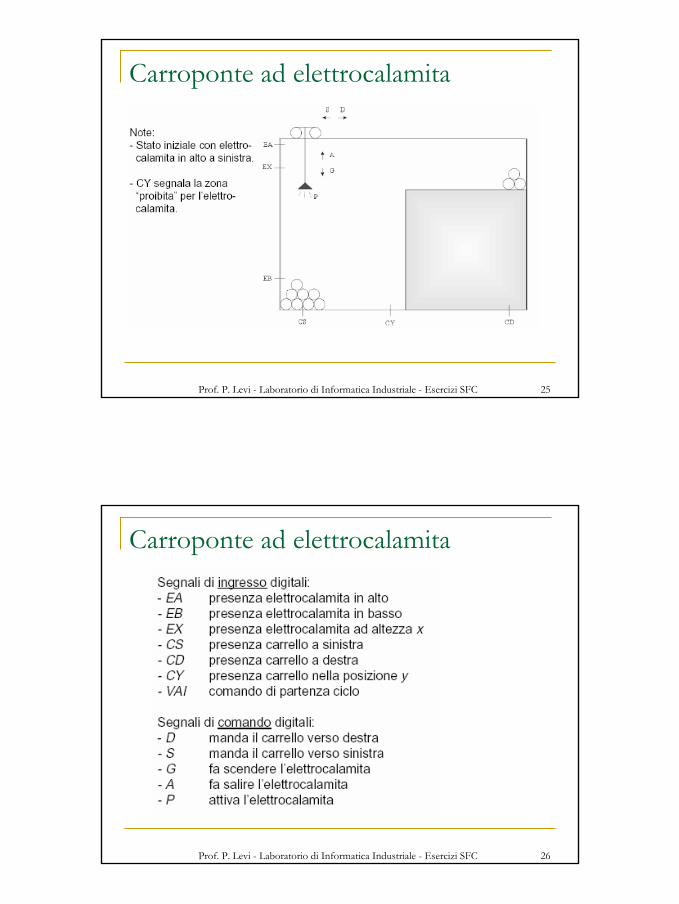
Carroponte ad elettrocalamita
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 26
Carroponte ad elettrocalamita
14
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 27
Carroponte ad elettrocalamita
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 28
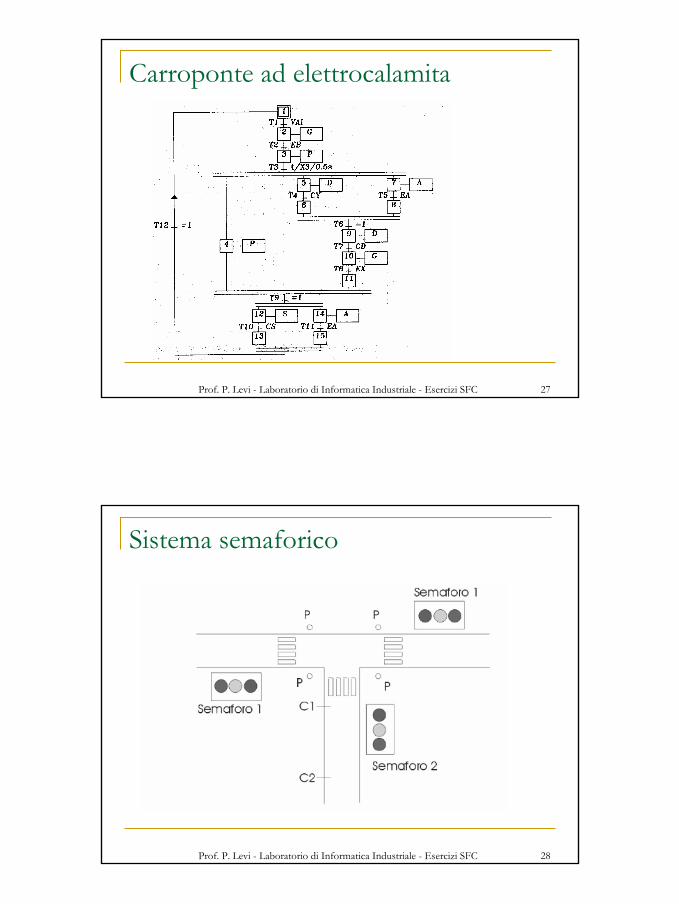
Sistema semaforico
15
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 29
Sistema semaforico
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 30
Sistema semaforico

16
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 31
Sistema semaforico
In questo esempio viene gestito mediante un sistema semaforico un incrocio tra 2 strade; di queste strade una è ad elevato volume di traffico (è regolata dal semaforo, mentre l’altra è una strada secondaria con scarso afflusso di automobili (è abbinata al semaforo2). Infine è prevista anche la gestione di un attraversamento pedonale. Per quanto detto si cercherà di mantenere sul verde il semaforo1 e rosso il semaforo2, salvo poi invertire la situazione nel caso in cui si presentino al semaforo2 un certo numero di auto oppure venga inviata una richiesta da parte di un pedone. Per realizzare un monitoraggio delle condizioni di traffico all’incrocio si utilizzeranno due rilevatori di presenza di auto C1 e C2 posti sulla strada secondaria. L’utilizzo di una coppia di sensori digitali permette di rilevare casi di picchi di auto che accedono al semaforo2 e il formarsi di code. Verrà avviato il ciclo semaforico, consistente nel passaggio al rosso del semaforo1 e al verde del semaforo2, a condizione che siano passati 300 secondi di permanenza del verde al semaforo1 e che si verifichi una delle seguenti richieste: i rilevatori C1 e C2 segnalano la presenza continua di auto (coda al semaforo2): il ciclo semaforico sarà avviato immediatamente. vi è una richiesta da parte di un pedone: il ciclo verrà avviato dopo 30 secondi. il solo rilevatore C1 segnala la presenza continua di auto: il ciclo verrà avviato dopo 240 secondi.
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 32
Sistema semaforico
Il ciclo semaforico è quello usuale, composto , da ogni semaforo dalla sequenza verde-giallo-rosso-verde. Il giallo deve durare 5 secondi, mentre il verde del semaforo2 sessanta. Un rilievo importante è che le richieste al sistema di controllo sono state presentate in ordine di priorità da riuscire a rispettare nella realizzazione. A questo punto si sono elencati gli ingressi di cui abbiamo bisogno: un pulsante P di richiesta pedonale, due rilevatori C1 e C2 di presenza continua auto; per le uscite di comando (digitali) sono previste le uscite V1, G1, R1 relative alle luci verde, gialla e rossa del semaforo1 e le uscite V2, G2 e R2 relative al semaforo2. Il diagramma SFC:
innanzitutto si è rappresentato il ciclo semaforico mediante le fasi 4, 5, 6. La fase 1 che rappresenta la fase iniziale (assieme alla fase10) come pure la fase attiva del sistema in assenza di richieste presenta un comando di verde sul semaforo1 e di rosso sul semaforo2. l’avvio del ciclo semaforico è possibile solo attraversando le transizioni T3 e T5; per entrambe però l’attraversamento avrà luogo solo a condizione che sia attiva la fase 12. Tale fase è relativa a quella parte del diagramma che realizza il timer di watchdog. Il conteggio inizia quando il sistema è nella fase 1 corrispondente al verde sul semaforo1; dopo 300 secondi viene attivata la fase 12 che permette di accettare le richieste presenti; infine nel caso in cui una richiesta venga esaudita si transiterà attraverso la fase 4 che permetterà di superare la transizione T12 e di resettare il timer.
17
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 33
Sistema semaforico
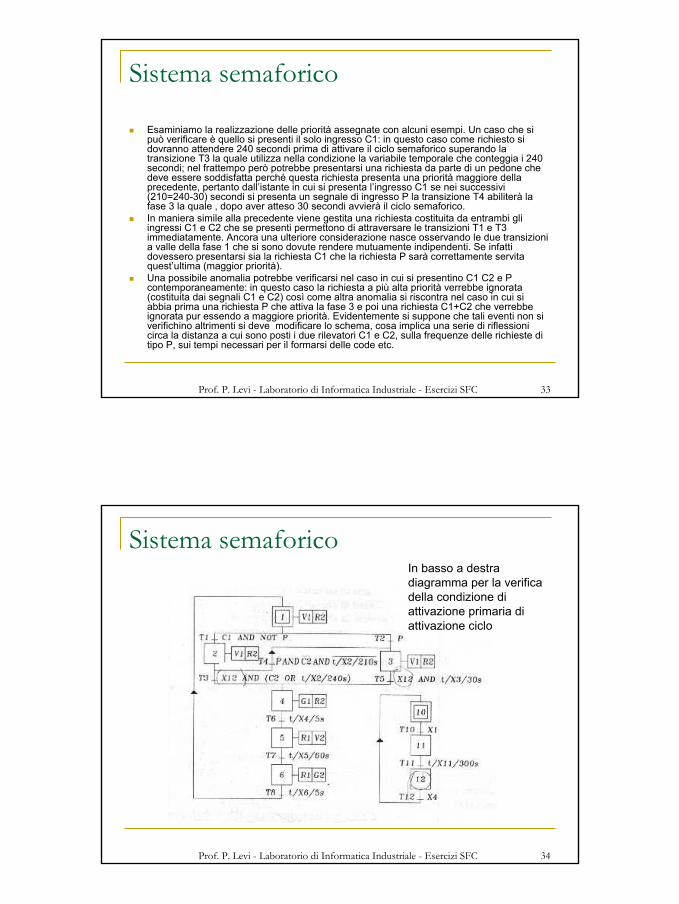
Esaminiamo la realizzazione delle priorità assegnate con alcuni esempi. Un caso che si può verificare è quello si presenti il solo ingresso C1: in questo caso come richiesto si dovranno attendere 240 secondi prima di attivare il ciclo semaforico superando la transizione T3 la quale utilizza nella condizione la variabile temporale che conteggia i 240 secondi; nel frattempo però potrebbe presentarsi una richiesta da parte di un pedone che deve essere soddisfatta perché questa richiesta presenta una priorità maggiore della precedente, pertanto dall’istante in cui si presenta l’ingresso C1 se nei successivi (210=240-30) secondi si presenta un segnale di ingresso P la transizione T4 abiliterà la fase 3 la quale , dopo aver atteso 30 secondi avvierà il ciclo semaforico. In maniera simile alla precedente viene gestita una richiesta costituita da entrambi gli ingressi C1 e C2 che se presenti permettono di attraversare le transizioni T1 e T3 immediatamente. Ancora una ulteriore considerazione nasce osservando le due transizioni a valle della fase 1 che si sono dovute rendere mutuamente indipendenti. Se infatti dovessero presentarsi sia la richiesta C1 che la richiesta P sarà correttamente servita quest’ultima (maggior priorità). Una possibile anomalia potrebbe verificarsi nel caso in cui si presentino C1 C2 e P contemporaneamente: in questo caso la richiesta a più alta priorità verrebbe ignorata (costituita dai segnali C1 e C2) così come altra anomalia si riscontra nel caso in cui si abbia prima una richiesta P che attiva la fase 3 e poi una richiesta C1+C2 che verrebbe ignorata pur essendo a maggiore priorità. Evidentemente si suppone che tali eventi non si verifichino altrimenti si deve modificare lo schema, cosa implica una serie di riflessioni circa la distanza a cui sono posti i due rilevatori C1 e C2, sulla frequenze delle richieste di tipo P, sui tempi necessari per il formarsi delle code etc.
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 34
Sistema semaforicoIn basso a destra diagramma per la verifica della condizione di attivazione primaria di attivazione ciclo

18
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 35
Girello automatico
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 36
Girello automatico

19
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 37
Girello automatico
Un sistema piuttosto semplice da studiare inerente alla realtà industriale: questo esempio riguarda lo spostamento di merci tradue nastri trasportatori. Vi sono due nastri trasportatori (nastro1 e nastro2) così organizzati: il nastro1 è sempre acceso; quando un pezzo viene caricato verrà spostato fino alla sua estremità destra, quindi il movimento del nastro dovrà essere fermato. A questo punto assicuratisi che il girello sia nella posizione di riposo, bisognerà provvedere a spostare il pezzo sul girello mediante il movimento sia del nastro1 che tramite comando dei rulli del girello. Finito di caricare il pezzo bisognerà provvedere ad arrestare il movimento dei suoi rulli e avviare la rotazione del girello verso sinistra, dopodiché di effettuerà il trasferimento del pezzo sul nastro 2 in maniera analoga a quanto già fatto, azionando questa volta sia i rulli del girello che del nastro 2. Una volta terminata questa operazione sarà necessario riportare il girello nella posizione di partenza ed arrestare il movimento del nastro2 quando il pezzo raggiunge la sua estremità.
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 38
Girello automatico
In questo esempio è facile individuare vari sottosistemi: il nastro1, il girello, il nastro2 che si possono controllare con SFC distinti. Ovviamente tali sottosistemi presentano delle dipendenze da considerare:
il passaggio del pezzo sul girello può avvenire se questo è nella posizione di riposo il passaggio del pezzo dal girello al nastro2 verrà eseguito solo nel caso in cui il nastro2 non presenti un pezzo alla sua estremità perché in caso contrario il movimento del nastro2 provocherebbe la caduta del nastro posto alla sua estremità.
I segnali (digitali) di ingresso a disposizione del sistema di controllo sono: P1, P2, PG relativi alla presenza di un pezzo alla fine rispettivamente del nastro1, del nastro2 e del girello; il segnale Px che segnala il disimpegno del girello da parte del pezzo; i segnali FCS e FCD di finecorsa rotazione a sinistra/destra del girello. I segnali di comando (digitali) sono invece: M1, M2 ed MG dei motori dei rulli del nastro1, nastro2 e del girello; S e D per la rotazione del girello verso sinistra/destra.
20
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 39
Girello automatico
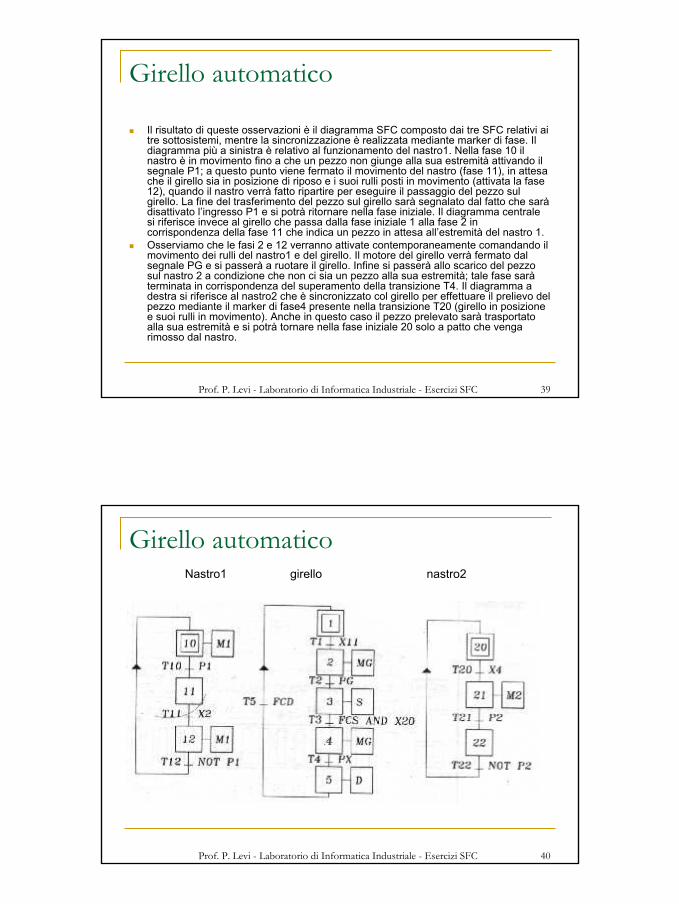
Il risultato di queste osservazioni è il diagramma SFC composto dai tre SFC relativi ai tre sottosistemi, mentre la sincronizzazione è realizzata mediante marker di fase. Il diagramma più a sinistra è relativo al funzionamento del nastro1. Nella fase 10 il nastro è in movimento fino a che un pezzo non giunge alla sua estremità attivando il segnale P1; a questo punto viene fermato il movimento del nastro (fase 11), in attesa che il girello sia in posizione di riposo e i suoi rulli posti in movimento (attivata la fase 12), quando il nastro verrà fatto ripartire per eseguire il passaggio del pezzo sul girello. La fine del trasferimento del pezzo sul girello sarà segnalato dal fatto che sarà disattivato l’ingresso P1 e si potrà ritornare nella fase iniziale. Il diagramma centrale si riferisce invece al girello che passa dalla fase iniziale 1 alla fase 2 in corrispondenza della fase 11 che indica un pezzo in attesa all’estremità del nastro 1. Osserviamo che le fasi 2 e 12 verranno attivate contemporaneamente comandando il movimento dei rulli del nastro1 e del girello. Il motore del girello verrà fermato dal segnale PG e si passerà a ruotare il girello. Infine si passerà allo scarico del pezzo sul nastro 2 a condizione che non ci sia un pezzo alla sua estremità; tale fase sarà terminata in corrispondenza del superamento della transizione T4. Il diagramma a destra si riferisce al nastro2 che è sincronizzato col girello per effettuare il prelievo del pezzo mediante il marker di fase4 presente nella transizione T20 (girello in posizione e suoi rulli in movimento). Anche in questo caso il pezzo prelevato sarà trasportato alla sua estremità e si potrà tornare nella fase iniziale 20 solo a patto che venga rimosso dal nastro.
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 40
Girello automaticoNastro1 girello nastro2

21
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 41
Cella robotizzata
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 42
Cella robotizzata
22
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 43
Cella robotizzata
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 44
Cella robotizzata

23
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 45
Scambio ferroviario
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 46
Scambio ferroviario
24
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 47
Scambio ferroviario
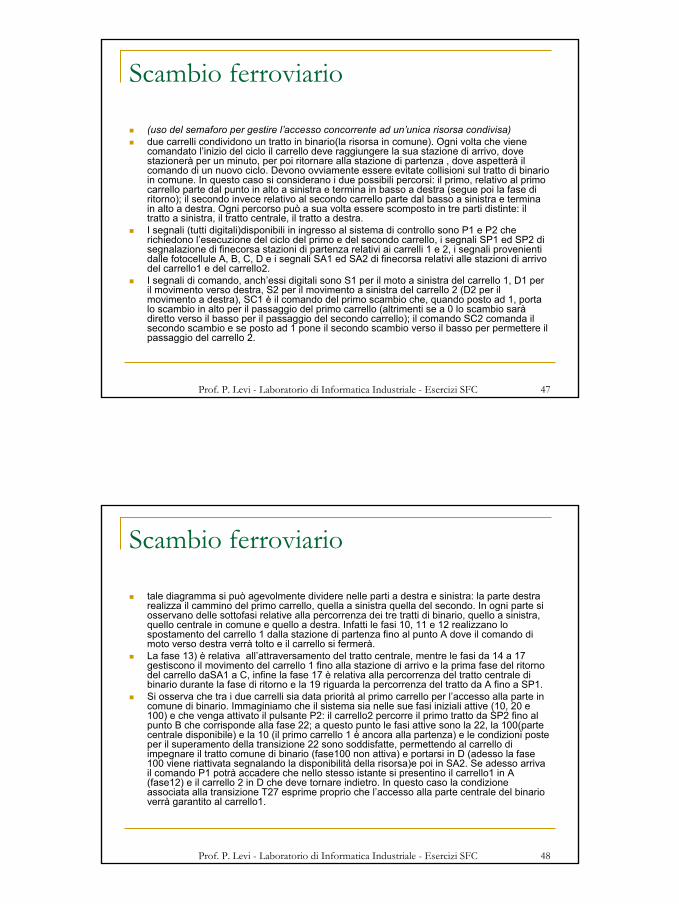
(uso del semaforo per gestire l’accesso concorrente ad un’unica risorsa condivisa)due carrelli condividono un tratto in binario(la risorsa in comune). Ogni volta che viene comandato l’inizio del ciclo il carrello deve raggiungere la sua stazione di arrivo, dove stazionerà per un minuto, per poi ritornare alla stazione di partenza , dove aspetterà il comando di un nuovo ciclo. Devono ovviamente essere evitate collisioni sul tratto di binario in comune. In questo caso si considerano i due possibili percorsi: il primo, relativo al primo carrello parte dal punto in alto a sinistra e termina in basso a destra (segue poi la fase di ritorno); il secondo invece relativo al secondo carrello parte dal basso a sinistra e termina in alto a destra. Ogni percorso può a sua volta essere scomposto in tre parti distinte: il tratto a sinistra, il tratto centrale, il tratto a destra. I segnali (tutti digitali)disponibili in ingresso al sistema di controllo sono P1 e P2 che richiedono l’esecuzione del ciclo del primo e del secondo carrello, i segnali SP1 ed SP2 di segnalazione di finecorsa stazioni di partenza relativi ai carrelli 1 e 2, i segnali provenienti dalle fotocellule A, B, C, D e i segnali SA1 ed SA2 di finecorsa relativi alle stazioni di arrivo del carrello1 e del carrello2. I segnali di comando, anch’essi digitali sono S1 per il moto a sinistra del carrello 1, D1 per il movimento verso destra, S2 per il movimento a sinistra del carrello 2 (D2 per il movimento a destra), SC1 è il comando del primo scambio che, quando posto ad 1, porta lo scambio in alto per il passaggio del primo carrello (altrimenti se a 0 lo scambio sarà diretto verso il basso per il passaggio del secondo carrello); il comando SC2 comanda il secondo scambio e se posto ad 1 pone il secondo scambio verso il basso per permettere il passaggio del carrello 2.
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 48
Scambio ferroviario
tale diagramma si può agevolmente dividere nelle parti a destra e sinistra: la parte destra realizza il cammino del primo carrello, quella a sinistra quella del secondo. In ogni parte si osservano delle sottofasi relative alla percorrenza dei tre tratti di binario, quello a sinistra, quello centrale in comune e quello a destra. Infatti le fasi 10, 11 e 12 realizzano lo spostamento del carrello 1 dalla stazione di partenza fino al punto A dove il comando di moto verso destra verrà tolto e il carrello si fermerà.La fase 13) è relativa all’attraversamento del tratto centrale, mentre le fasi da 14 a 17 gestiscono il movimento del carrello 1 fino alla stazione di arrivo e la prima fase del ritorno del carrello daSA1 a C, infine la fase 17 è relativa alla percorrenza del tratto centrale di binario durante la fase di ritorno e la 19 riguarda la percorrenza del tratto da A fino a SP1. Si osserva che tra i due carrelli sia data priorità al primo carrello per l’accesso alla parte in comune di binario. Immaginiamo che il sistema sia nelle sue fasi iniziali attive (10, 20 e 100) e che venga attivato il pulsante P2: il carrello2 percorre il primo tratto da SP2 fino al punto B che corrisponde alla fase 22; a questo punto le fasi attive sono la 22, la 100(parte centrale disponibile) e la 10 (il primo carrello 1 è ancora alla partenza) e le condizioni poste per il superamento della transizione 22 sono soddisfatte, permettendo al carrello di impegnare il tratto comune di binario (fase100 non attiva) e portarsi in D (adesso la fase 100 viene riattivata segnalando la disponibilità della risorsa)e poi in SA2. Se adesso arriva il comando P1 potrà accadere che nello stesso istante si presentino il carrello1 in A (fase12) e il carrello 2 in D che deve tornare indietro. In questo caso la condizione associata alla transizione T27 esprime proprio che l’accesso alla parte centrale del binario verrà garantito al carrello1.

25
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 49
Scambio ferroviario
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 50
Esercizi di traduzione SFC/Ladder
26
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 51
Esercizi di traduzione SFC/Ladder
Si presentano ora le traduzioni in linguaggio LCV dei programmi in SFC presentati in precedenza. In tutti gli esempi si supporranno effettuate le assegnazioni delle variabili ai bit dimemoria in questo modo: i marker di fase, assegnati nell’area utente, saranno indicati col numero della fase corrispondente cosicché si supporrà che sia stata effettuata la posizione 3=W3:2 per indicare che il marker della fase 3 è associato al bit dell’area utente W3:2. i marker di transizione , assegnati nell’area utente, saranno indicati con la sigla Trx ove x è il numero della transizione cosicché si supporrà che sia stata effettuata la posizione Tr10=W10:2 per indicare che il marker della transizione 10 è associato al bit dell’area utente W10:2. gli ingressi e le uscite, disponibili nelle aree di memoria lororiservate saranno indicati con gli stessi nomi simbolici utilizzati negli SFC.
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 52
Il sistema di irrigazione
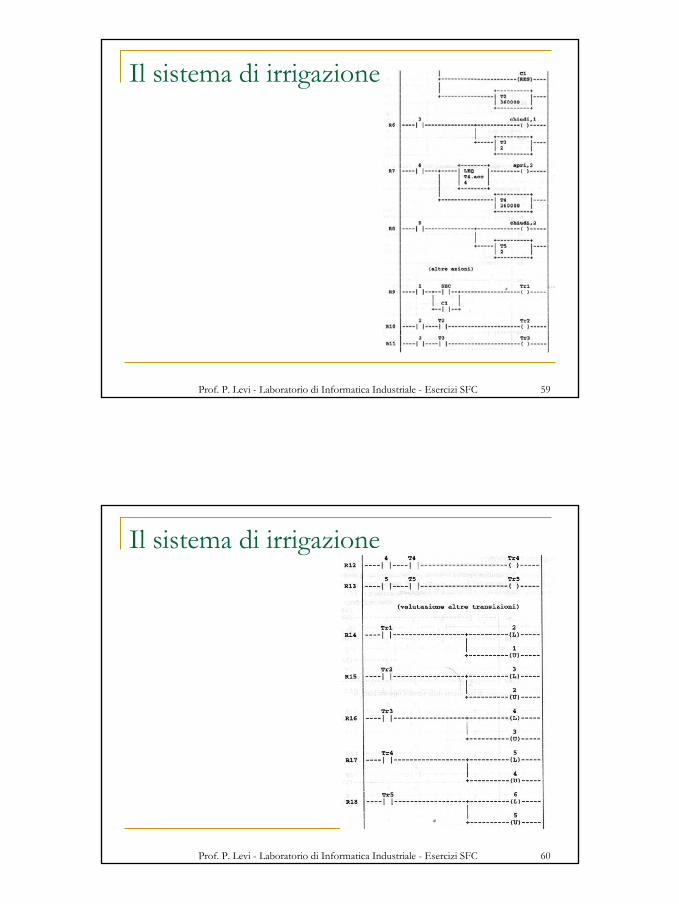
Nel seguito si riporta il programma in linguaggio a contatti virtuale per il primo SFC suddiviso nelle sue quattro sezioni. Sezione di inizializzazione (rung R1-R3): al primo ciclo di esecuzione del programma la sezione verrà eseguita in quanto il bit W1:1 non è ancora stato attivato. La sezione attiva la fase 1 che è la fase iniziale. Sezione delle azioni (rung R4-R10) ad ogni azione è associato un rung; osserviamo come la realizzazione di variabili temporali associate alle varie fasi si traduca in azioni che abilitano timer. Ad esempio il rung R4 relativo alla fase 1 realizza la variabile temporale t/X1/72h; infatti il contatore C1 avrà stato pari ad 1 dopo le 72 ore. Similmente il rung R5 relativo alle azioni associate alla fase2 contiene tre azioni: il comando di apertura per l’elettrovalvola del primo ramo, la realizzazione della variabile temporale t/X2/4ms ottenuta dallo stato di T2 e il resettaggio del contatore C1.Sezione valutazione delle transizioni: 7 possibili transizioni, quindi 7 rung. Il primo in particolare (R11) realizza l’OR logico mettendo in parallelo il bit associato all’ingresso SEC e il bit che realizza la variabile temporale t/X1/72h.Sezione aggiornamento della condizione avendo sette transizioni la sezione è costituita da altrettanti rung :si osservi come sia necessario l’uso di bobine a ritenuta.
27
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 53
Il sistema di irrigazione
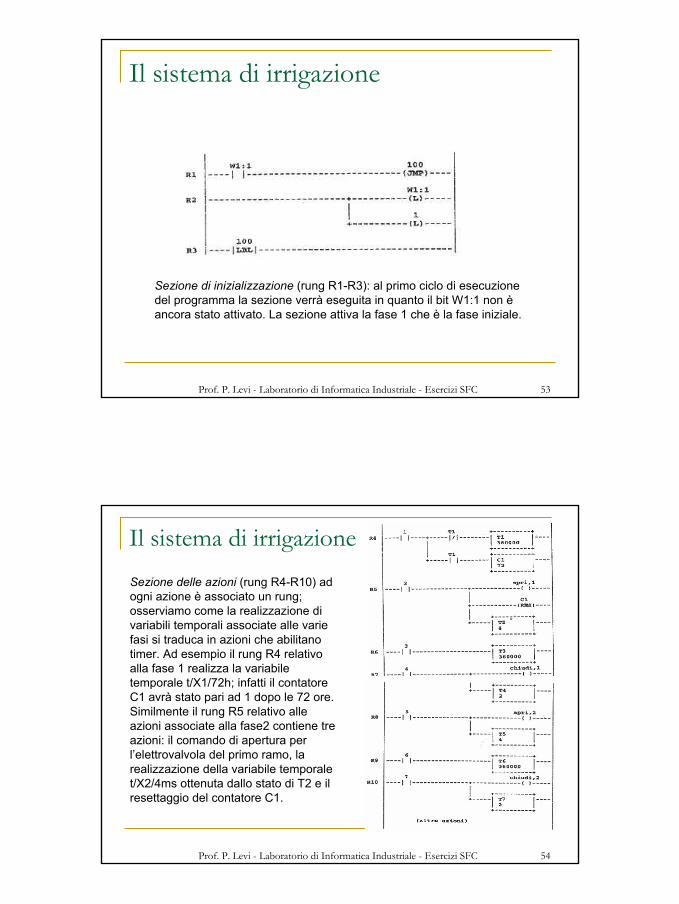
Sezione di inizializzazione (rung R1-R3): al primo ciclo di esecuzione del programma la sezione verrà eseguita in quanto il bit W1:1 non è ancora stato attivato. La sezione attiva la fase 1 che è la fase iniziale.
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 54
Il sistema di irrigazioneSezione delle azioni (rung R4-R10) ad ogni azione è associato un rung; osserviamo come la realizzazione di variabili temporali associate alle varie fasi si traduca in azioni che abilitano timer. Ad esempio il rung R4 relativo alla fase 1 realizza la variabile temporale t/X1/72h; infatti il contatore C1 avrà stato pari ad 1 dopo le 72 ore. Similmente il rung R5 relativo alle azioni associate alla fase2 contiene tre azioni: il comando di apertura per l’elettrovalvola del primo ramo, la realizzazione della variabile temporale t/X2/4ms ottenuta dallo stato di T2 e il resettaggio del contatore C1.

28
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 55
Il sistema di irrigazione
Sezione valutazione delle transizioni: 7 possibili transizioni, quindi 7 rung. Il primo in particolare (R11) realizza l’OR logico mettendo in parallelo il bit associato all’ingresso SEC e il bit che realizza la variabile temporale t/X1/72h.
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 56
Il sistema di irrigazione
:Sezione aggiornamento della condizione avendo sette transizioni la sezione è costituita da altrettanti rung :si osservi come sia necessario l’uso di bobine a ritenuta.
29
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 57
Il sistema di irrigazione
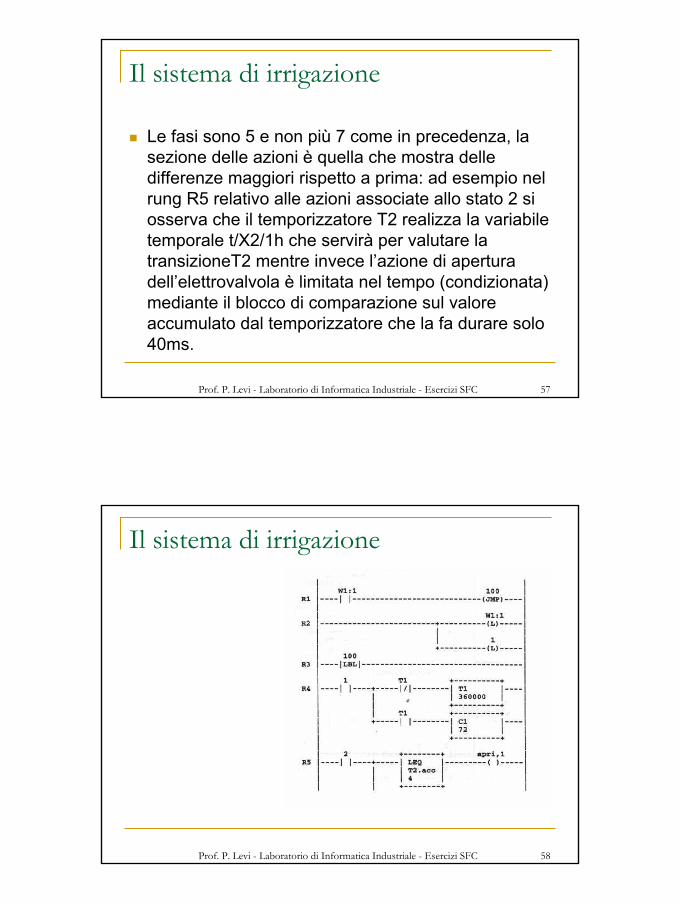
Le fasi sono 5 e non più 7 come in precedenza, la sezione delle azioni è quella che mostra delle differenze maggiori rispetto a prima: ad esempio nel rung R5 relativo alle azioni associate allo stato 2 si osserva che il temporizzatore T2 realizza la variabile temporale t/X2/1h che servirà per valutare la transizioneT2 mentre invece l’azione di apertura dell’elettrovalvola è limitata nel tempo (condizionata) mediante il blocco di comparazione sul valore accumulato dal temporizzatore che la fa durare solo 40ms.
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 58
Il sistema di irrigazione
30
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 59
Il sistema di irrigazione
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 60
Il sistema di irrigazione
31
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 61
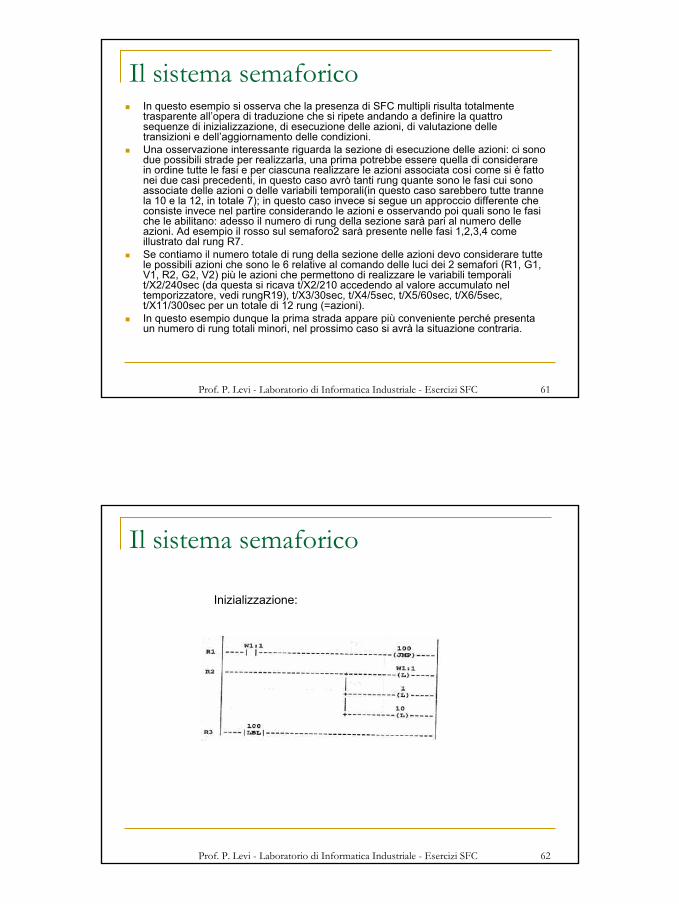
Il sistema semaforico In questo esempio si osserva che la presenza di SFC multipli risulta totalmente trasparente all’opera di traduzione che si ripete andando a definire la quattro sequenze di inizializzazione, di esecuzione delle azioni, di valutazione delle transizioni e dell’aggiornamento delle condizioni.Una osservazione interessante riguarda la sezione di esecuzione delle azioni: ci sono due possibili strade per realizzarla, una prima potrebbe essere quella di considerare in ordine tutte le fasi e per ciascuna realizzare le azioni associata così come si è fatto nei due casi precedenti, in questo caso avrò tanti rung quante sono le fasi cui sono associate delle azioni o delle variabili temporali(in questo caso sarebbero tutte tranne la 10 e la 12, in totale 7); in questo caso invece si segue un approccio differente che consiste invece nel partire considerando le azioni e osservando poi quali sono le fasi che le abilitano: adesso il numero di rung della sezione sarà pari al numero delle azioni. Ad esempio il rosso sul semaforo2 sarà presente nelle fasi 1,2,3,4 come illustrato dal rung R7. Se contiamo il numero totale di rung della sezione delle azioni devo considerare tutte le possibili azioni che sono le 6 relative al comando delle luci dei 2 semafori (R1, G1, V1, R2, G2, V2) più le azioni che permettono di realizzare le variabili temporali t/X2/240sec (da questa si ricava t/X2/210 accedendo al valore accumulato nel temporizzatore, vedi rungR19), t/X3/30sec, t/X4/5sec, t/X5/60sec, t/X6/5sec, t/X11/300sec per un totale di 12 rung (=azioni). In questo esempio dunque la prima strada appare più conveniente perché presenta un numero di rung totali minori, nel prossimo caso si avrà la situazione contraria.
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 62
Il sistema semaforico
Inizializzazione:
32
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 63
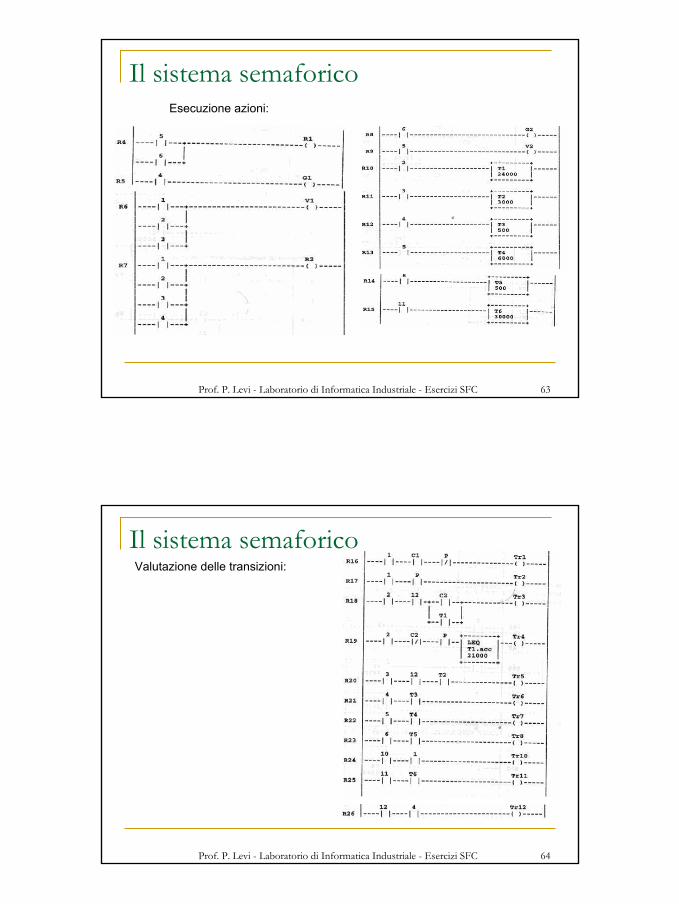
Il sistema semaforicoEsecuzione azioni:
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 64
Il sistema semaforicoValutazione delle transizioni:

33
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 65
Il sistema semaforico
Aggiornamento della condizione:
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 66
Il girello automatico
Se partiamo dall’esame delle fasi che presentano azioni ad esse associate esse sono la 2, 3, 4, 5, 10,12 e la 21, che comportano 7 rung in totaleSe invece partiamo dall’esame delle azioni in totale sono 5 (M1, M2, MG, S, D, non sono realizzate variabili temporali)

34
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 67
Il girello automatico
Sezione inizializzazione:
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 68
Il girello automatico
Esecuzione delle azioni:
35
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 69
Il girello automatico
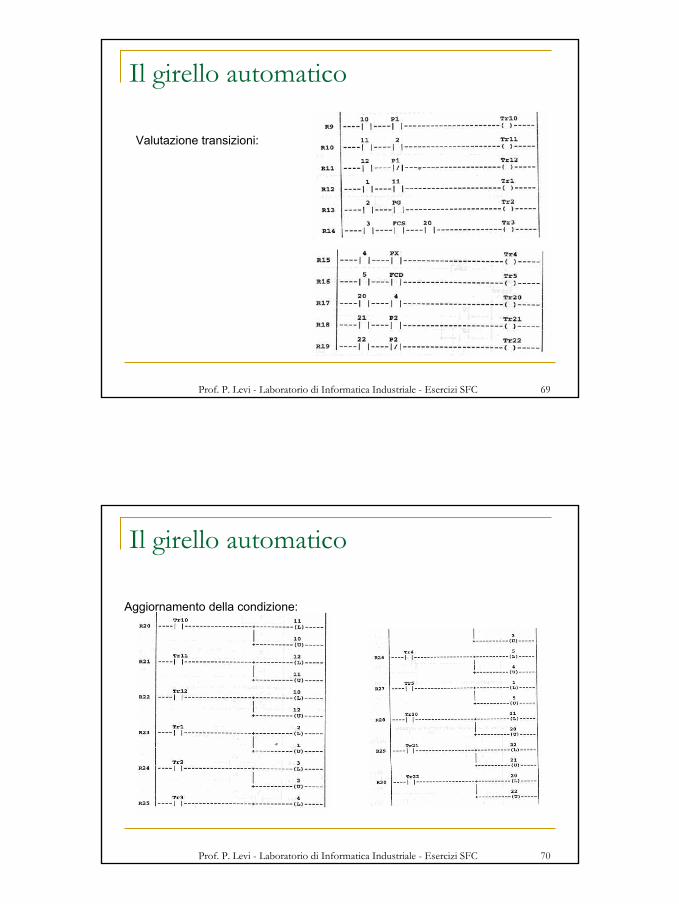
Valutazione transizioni:
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 70
Il girello automatico
Aggiornamento della condizione:
36
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 71
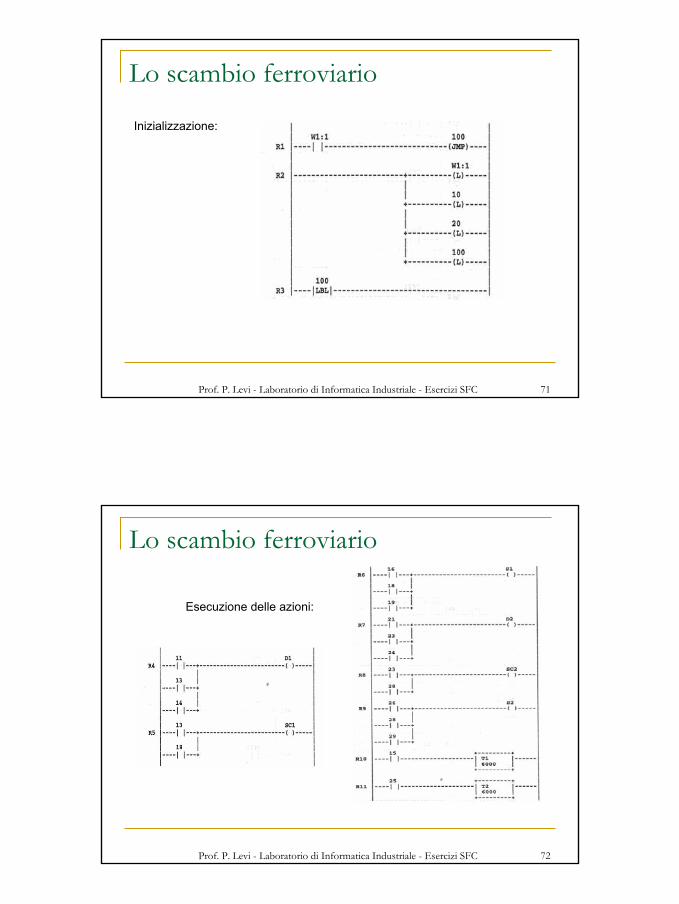
Lo scambio ferroviario
Inizializzazione:
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 72
Lo scambio ferroviario
Esecuzione delle azioni:
37
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 73
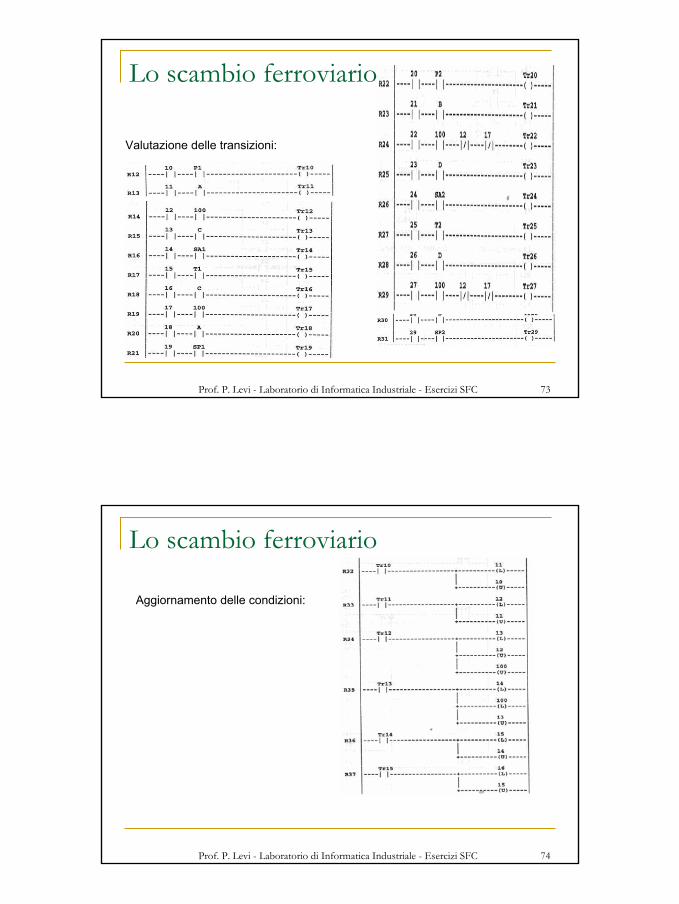
Lo scambio ferroviario
Valutazione delle transizioni:
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 74
Lo scambio ferroviario
Aggiornamento delle condizioni:
38
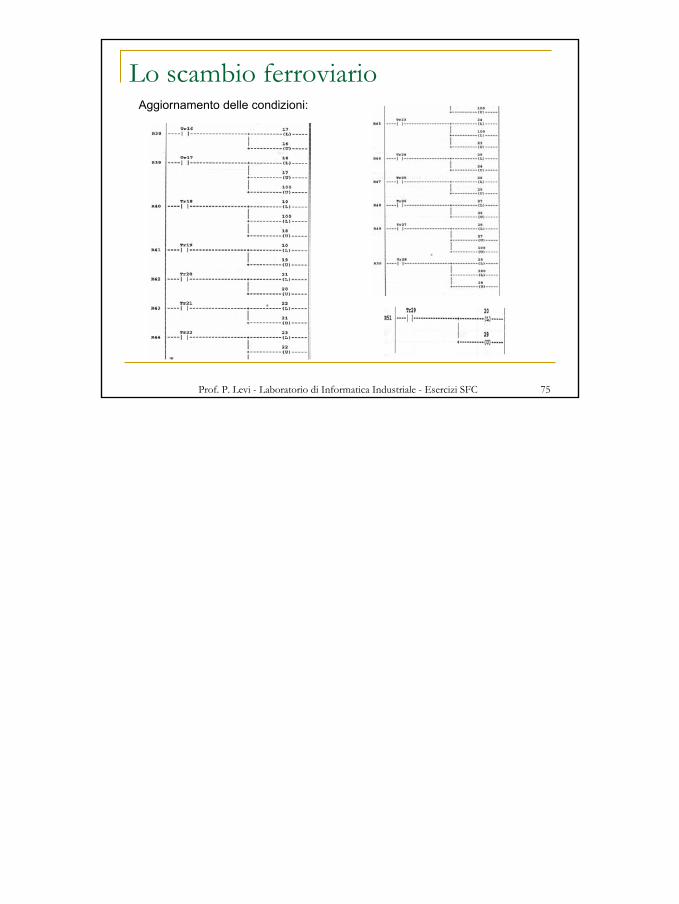
Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 75
Lo scambio ferroviarioAggiornamento delle condizioni:



![[Med ITA] Fisiologia - Automatismo Cardiaco](https://static.fdocumenti.com/doc/165x107/55cf9aab550346d033a2d4c1/med-ita-fisiologia-automatismo-cardiaco.jpg)