Dispositivi e Strumenti Software per l'Automazione PLC e SFC · Prof. C. Rossi - DEIS Univ. di...
103
Dispositivi e Dispositivi e Strumenti Software Strumenti Software per l'Automazione per l'Automazione PLC PLC e SFC e SFC Prof. Prof. Carlo Rossi Carlo Rossi Università di Bologna Università di Bologna
-
Upload
truongdieu -
Category
Documents
-
view
220 -
download
4
Transcript of Dispositivi e Strumenti Software per l'Automazione PLC e SFC · Prof. C. Rossi - DEIS Univ. di...

Dispositivi e Dispositivi e Strumenti Software Strumenti Software per l'Automazioneper l'Automazione
PLCPLC e SFCe SFC
Prof. Prof. Carlo RossiCarlo RossiUniversità di BolognaUniversità di Bologna
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 22
Collocazione del corsoCollocazione del corso
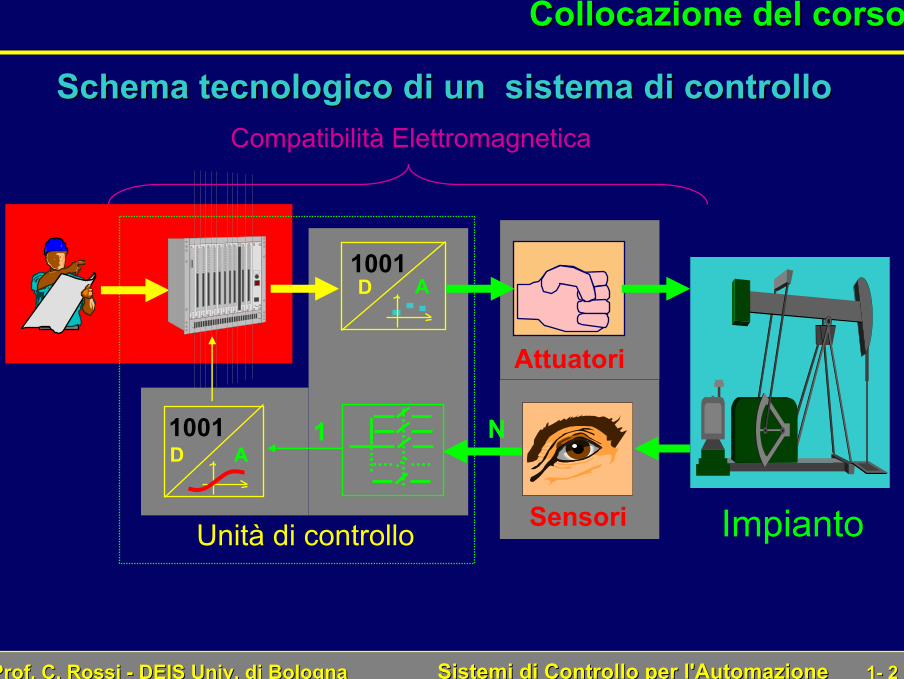
Schema tecnologico di un sistema di controlloSchema tecnologico di un sistema di controllo
Sensori
N
Unità di controllo
Attuatori
AD1001
Impianto
Compatibilità Elettromagnetica
1A
1001D

Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 33
Indice della presentazioneIndice della presentazione
Parte 1Parte 1Dispositivi per il Controllo Logico: PLCDispositivi per il Controllo Logico: PLC
Architettura del Sistema di controllo di una macchina Architettura del Sistema di controllo di una macchina architettura internaarchitettura internamoduli specialimoduli specialiprogrammazioneprogrammazione
Progettazione di controlli Progettazione di controlli sequenzialisequenzialiun esempioun esempio
Lo standard IEC 1131Lo standard IEC 1131strumenti e linguaggi di programmazionestrumenti e linguaggi di programmazione
Sequential functional chart Sequential functional chart (SFC)(SFC)concetti baseconcetti basesintassisintassistrutturestrutture

Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 44
Indice della presentazioneIndice della presentazione
Parte 2Parte 2Sequential functional chartSequential functional chart (SFC)(SFC)
esempi di utilizzo delle esempi di utilizzo delle strutturestruttureOrganizzazioneOrganizzazione generale del software di un PLCgenerale del software di un PLC
la scansione ciclicala scansione ciclicala gestione la gestione dell' dell' I/OI/O
Un linguaggio testuale di basso livelloUn linguaggio testuale di basso livelloAWLAWL
caratteristiche del linguaggiocaratteristiche del linguaggio
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 55
Dispositivi per il Controllo LogicoDispositivi per il Controllo Logico
Programmable Logic Controller Programmable Logic Controller o PLCo PLCControllore con architetturaControllore con architettura generalgeneral--purposepurpose dedicato al dedicato al controllo logicocontrollo logico sequenzialesequenzialeComponente fondamentale di ogni sistema di Componente fondamentale di ogni sistema di automazioneautomazioneLa filosofia del PLC ha avuto origine alla fine degli anni La filosofia del PLC ha avuto origine alla fine degli anni ‘60 da una specifica della‘60 da una specifica della General MotorsGeneral Motors relativa ai relativa ai sistemi di controllo da utilizzarsi nei suoi impianti per la sistemi di controllo da utilizzarsi nei suoi impianti per la produzione delle vettureproduzione delle vetture
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 66
Dispositivi per il Controllo LogicoDispositivi per il Controllo Logico
Definizione di PLCDefinizione di PLCDispositivo o sistema digitaleDispositivo o sistema digitale programmabileprogrammabile con un set con un set di istruzioni atte ad implementare specifiche funzioni di istruzioni atte ad implementare specifiche funzioni qualiquali
logica combinatorialogica combinatoriacontrollicontrolli sequenzialisequenzialitemporizzazionitemporizzazioni e conteggie conteggicalcoli aritmeticicalcoli aritmetici
con riferimento al controllo di macchine e di con riferimento al controllo di macchine e di processiprocessi
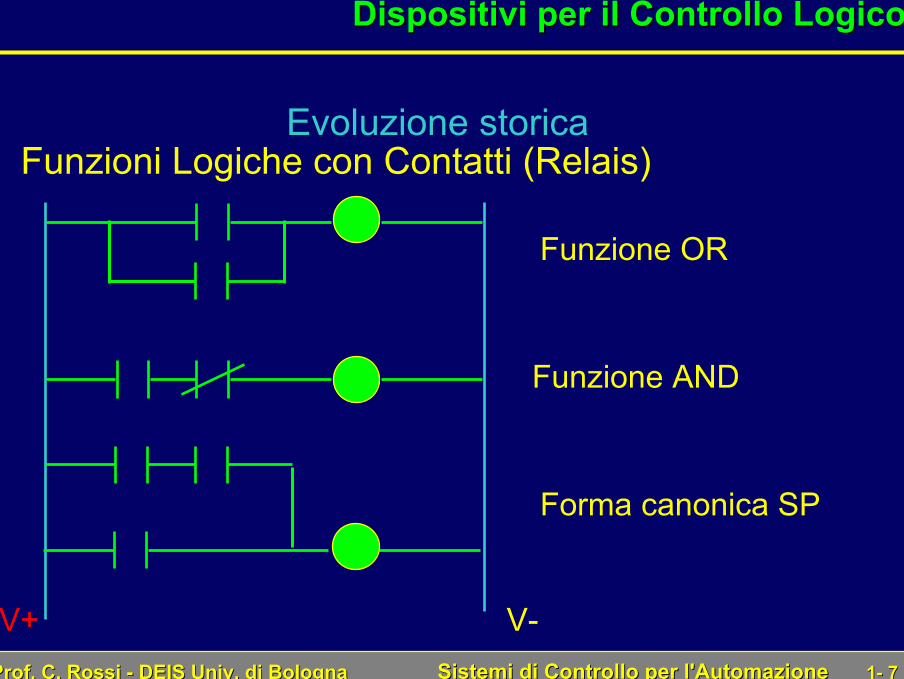
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 77
V+ V-
Funzioni Logiche con Contatti (Relais)Evoluzione storica
Funzione OR
Funzione AND
Forma canonica SP
Dispositivi per il Controllo LogicoDispositivi per il Controllo Logico

Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 88
Consenso
Prossimità
Motore on
Indicatore on
misure
comandi
Dispositivi per il Controllo LogicoDispositivi per il Controllo Logico
Evoluzione storicaEvoluzione storicaIl PLC è nato per sostituire sistemi di automazione Il PLC è nato per sostituire sistemi di automazione realizzati con logicherealizzati con logiche cablatecablate a Relaisa Relais
Esempio: comando motoreEsempio: comando motore
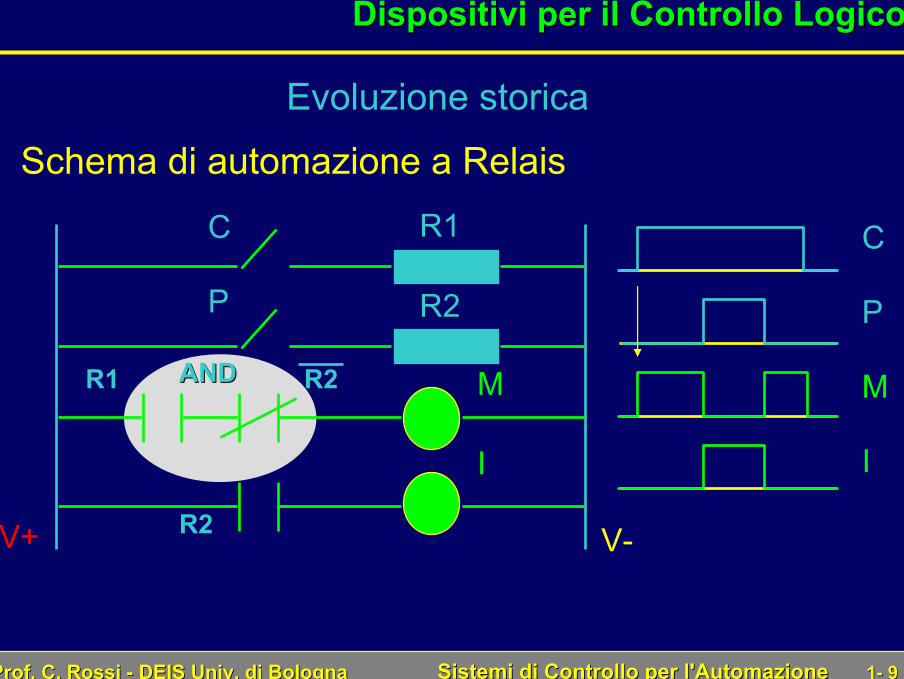
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 99
ANDAND
V+ V-
CR1C
PR2P
II
R2
R2R1 MM
Schema di automazione a Relais
Evoluzione storica
Dispositivi per il Controllo LogicoDispositivi per il Controllo Logico

Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 1010
Dispositivi per il Controllo LogicoDispositivi per il Controllo Logico
Evoluzione storicaEvoluzione storicaIl Relais industriale è il mattone elementare per la Il Relais industriale è il mattone elementare per la
realizzazione di funzioni logicherealizzazione di funzioni logiche
Schema
in
out
V F
I
FContatti
N.A.in chiusura
N.C.in apertura
A B

Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 1111
Contatti
N.A.in chiusura
N.C.in apertura
FA B
Dispositivi per il Controllo LogicoDispositivi per il Controllo Logico
Evoluzione storicaEvoluzione storicaIl Relais industriale è il mattone elementare per la Il Relais industriale è il mattone elementare per la
realizzazione di funzioni logicherealizzazione di funzioni logiche
Schema
in
out
V
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 1212
PLC: origine PLC: origine
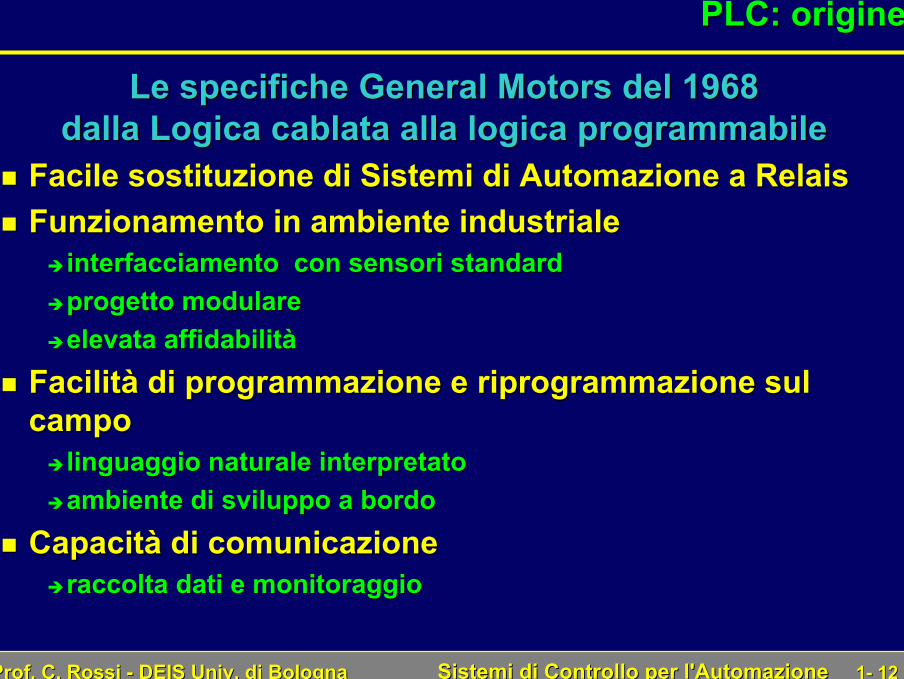
Le specificheLe specifiche General MotorsGeneral Motors del 1968 del 1968 dalla Logica dalla Logica cablatacablata allaalla logicalogica programmabileprogrammabile
Facile sostituzione di Sistemi di Automazione a RelaisFacile sostituzione di Sistemi di Automazione a RelaisFunzionamento in ambiente industrialeFunzionamento in ambiente industriale
interfacciamentointerfacciamento con sensori standardcon sensori standardprogetto modulareprogetto modulareelevata affidabilitàelevata affidabilità
Facilità di programmazione eFacilità di programmazione e riprogrammazioneriprogrammazione sul sul campocampo
linguaggio naturale interpretatolinguaggio naturale interpretatoambiente di sviluppo a bordoambiente di sviluppo a bordo
Capacità di comunicazioneCapacità di comunicazioneraccolta dati e monitoraggioraccolta dati e monitoraggio
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 1313
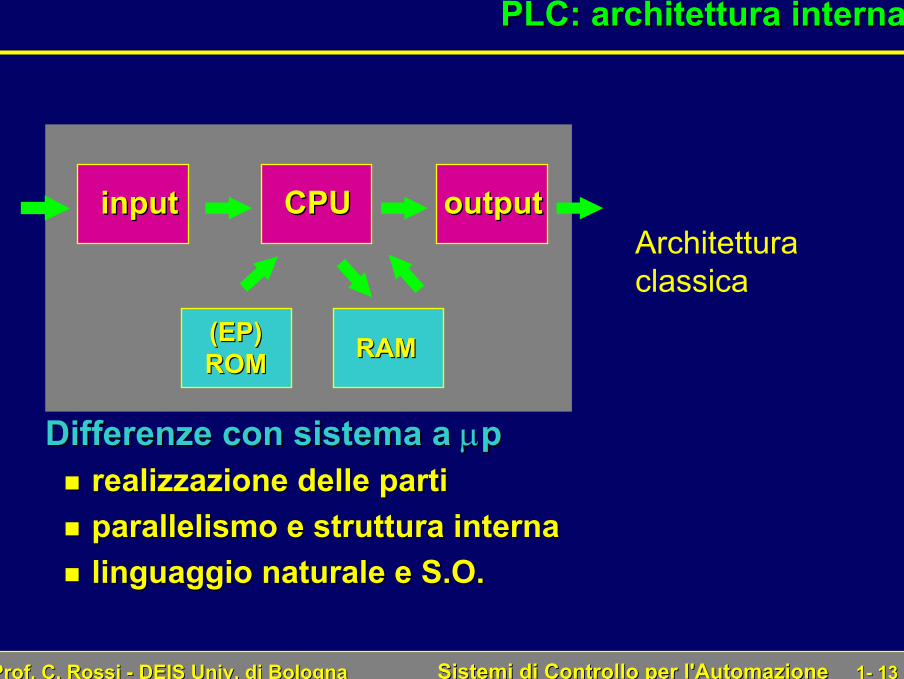
Architettura classica
CPUCPUinputinput outputoutput
(EP)(EP)ROMROM RAMRAM
PLC: architettura internaPLC: architettura interna
Differenze con sistema a Differenze con sistema a µµpprealizzazione delle partirealizzazione delle partiparallelismo e struttura interna parallelismo e struttura interna linguaggio naturale e S.O.linguaggio naturale e S.O.
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 1414
PLC: caratteristiche HardwarePLC: caratteristiche Hardware
CPUCPUrealizzazioni “realizzazioni “customcustom” con processore ad 1 bit per ” con processore ad 1 bit per l’esecuzione dei controlli logicil’esecuzione dei controlli logici
grandissima efficienzagrandissima efficienzalinguaggio naturalelinguaggio naturale microcodificatomicrocodificato
scarsa flessibilitàscarsa flessibilitàsolo per sistemi ad elevatissime prestazionisolo per sistemi ad elevatissime prestazioni
uso di uso di µµp standardp standardset di istruzioni più ampioset di istruzioni più ampioprogetto standardprogetto standardnecessità di un interpretenecessità di un interprete
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 1515
PLC: caratteristiche HardwarePLC: caratteristiche Hardware
Sezione di ingresso/uscitaSezione di ingresso/uscitapossibilità acquisizione segnali analogicipossibilità acquisizione segnali analogici
ingressi standard ± 10Vingressi standard ± 10Vinterfacciamentointerfacciamento con sensori particolaricon sensori particolari
termocoppie,termocoppie, termoresistenzetermoresistenzeestensimetriestensimetri
ampio corredo di schede per segnali logiciampio corredo di schede per segnali logiciisolamento galvanicoisolamento galvanicovisualizzazione dello statovisualizzazione dello statointerfacciamentointerfacciamento con sensori con sensori
DC 5DC 5-- 12 12 -- 24 24 -- 48 V48 VAC 110 AC 110 -- 280 V280 V
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 1616
PLC: caratteristiche HardwarePLC: caratteristiche Hardware
Memoria programmiMemoria programmiRAMRAM batterizzatabatterizzata per lo sviluppo del programmaper lo sviluppo del programmaEPROM per la versione definitivaEPROM per la versione definitiva
Memoria datiMemoria datisuddivisa insuddivisa in
sezione di ingressosezione di ingressosezione di uscitasezione di uscitasezione di statosezione di stato
accessoaccessobit, byte, wordbit, byte, word

Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 1717
PLC: caratteristiche HardwarePLC: caratteristiche Hardware
Moduli specialiModuli specialiInterfaccia di rete localeInterfaccia di rete locale
ethernetethernet, proprietaria, proprietariaInterfaccia per Bus di campoInterfaccia per Bus di campo
di solito proprietaria, standarddi solito proprietaria, standard ProfibusProfibus,, InterbusInterbus,, CanBusCanBus,..,..Processori ausiliariProcessori ausiliari
regolazione PID, controllo assiregolazione PID, controllo assiProcessori di visualizzazioneProcessori di visualizzazione
sinottici di impianto, interfaccia operatoresinottici di impianto, interfaccia operatoreUnità di programmazioneUnità di programmazione
proprietaria, più spesso PCproprietaria, più spesso PCUnità diUnità di backback--upup
nelle applicazioni che richiedono alta sicurezza di funzionamentnelle applicazioni che richiedono alta sicurezza di funzionamentoo

Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 1818
PLC: programmazionePLC: programmazione
Filosofia originariaFilosofia originarialinguaggio orientato alla specifica applicazionelinguaggio orientato alla specifica applicazione“naturale” per tecnici esperti del problema“naturale” per tecnici esperti del problemaeliminare l’intermediazione dell’esperto informaticoeliminare l’intermediazione dell’esperto informatico
Soluzioni originarieSoluzioni originarieLadder DiagramLadder Diagram -- schemi a Relaisschemi a RelaisFunctional BlockFunctional Block -- schemi logicischemi logici
Soluzione più recenteSoluzione più recenteBoolean LanguageBoolean Language -- lista istruzioni lista istruzioni -- pseudo Pascalpseudo Pascalcompatibilità col passatocompatibilità col passato
Strumenti per la progettazione di controlliStrumenti per la progettazione di controlli sequenzialisequenzialiStateState Function ChartFunction Chart
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 1919
Progettazione di ControlliProgettazione di Controlli SequenzialiSequenziali
IntroduzioneIntroduzioneLa progettazione del Software di Automazione per una La progettazione del Software di Automazione per una Macchina Automatica è un compito complessoMacchina Automatica è un compito complessoLa metodologia generale di soluzione esula dagli scopi di La metodologia generale di soluzione esula dagli scopi di questo corsoquesto corsoMediante un esempio verranno presentati i passi logici Mediante un esempio verranno presentati i passi logici della soluzionedella soluzione
Chiarimento del compito e strutturazione del sistemaChiarimento del compito e strutturazione del sistemaElaborazione dei documenti di specificaElaborazione dei documenti di specificaRealizzazione del ProgettoRealizzazione del ProgettoCollaudo del sistema di controllo e messa in funzione della Collaudo del sistema di controllo e messa in funzione della macchinamacchinaStesura della documentazioneStesura della documentazione
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 2020
Progettazione di ControlliProgettazione di Controlli SequenzialiSequenziali
Chiarimento del compito e strutturazione del sistemaChiarimento del compito e strutturazione del sistemaDescrizione generale della macchina da automatizzareDescrizione generale della macchina da automatizzareDescrizione del funzionamentoDescrizione del funzionamentoDescrizione dettagliata della macchinaDescrizione dettagliata della macchina
liste sensoriliste sensorilisteliste attuatoriattuatori
Strutturazione della macchina in parti omogeneeStrutturazione della macchina in parti omogeneefunzionalmente funzionalmente
correlazione nel processo produttivocorrelazione nel processo produttivospazialmentespazialmente
collocazione fisica adiacentecollocazione fisica adiacenteGrado di automazione delle partiGrado di automazione delle parti

Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 2121
Progettazione di ControlliProgettazione di Controlli SequenzialiSequenziali
Descrizione del processo produttivoDescrizione del processo produttivoimpacchettatriceimpacchettatrice
AlimentazioneAlimentazionedel prodottodel prodotto
Formazione Formazione del paccodel pacco
MovimentazioneMovimentazionedel pacco e stesuradel pacco e stesura
del film del film
AvvolgimentoAvvolgimentodel paccodel pacco
SaldaturaSaldatura EvacuazioneEvacuazionePacco finitoPacco finito

Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 2222
Progettazione di ControlliProgettazione di Controlli SequenzialiSequenziali
Elaborazione dei documenti di specificaElaborazione dei documenti di specificaCruciale per la buona riuscita del progettoCruciale per la buona riuscita del progetto
Distribuzione Hardware/Software dei compitiDistribuzione Hardware/Software dei compiti
Scelta dei sensori e degli Scelta dei sensori e degli attuatoriattuatori
Lavoro di gruppoLavoro di gruppospecifiche chiare e non ambiguespecifiche chiare e non ambigue
interfaccieinterfaccie ben definiteben definite
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 2323
Progettazione di ControlliProgettazione di Controlli SequenzialiSequenziali
Realizzazione del ProgettoRealizzazione del ProgettoHardwareHardware
acquistoacquistoacquisto + progettazione di parti specificheacquisto + progettazione di parti specificheprogettazione completaprogettazione completa
SoftwareSoftwarenormalmente va progettatonormalmente va progettatosoftware per uso industrialesoftware per uso industriale
realizzazionerealizzazionegruppo di lavorogruppo di lavoro
manutenzione, aggiornamento, riutilizzomanutenzione, aggiornamento, riutilizzonoi o altre personenoi o altre persone
Controllo digitale diretto, Controllo digitale diretto, controllo di sequenzecontrollo di sequenze
Attività crucialeAttività cruciale
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 2424
Progettazione di ControlliProgettazione di Controlli SequenzialiSequenziali
Collaudo del sistema di controllo e messa in funzione Collaudo del sistema di controllo e messa in funzione dell'impiantodell'impianto
Fase costosa e delicataFase costosa e delicatarealizzata da altre personerealizzata da altre personerealizzata presso il clienterealizzata presso il clienteesigenze di avvio della produzioneesigenze di avvio della produzione
tempi e costi dipendono fortemente dalla qualità della tempi e costi dipendono fortemente dalla qualità della fase di progettazionefase di progettazione
meglio investire tempo e risorse sulla progettazione che spendermeglio investire tempo e risorse sulla progettazione che spendere e poi nel collaudo e nella messa in serviziopoi nel collaudo e nella messa in servizio
Nella pratica industriale raramente viene seguita questa Nella pratica industriale raramente viene seguita questa filosofia per diverse motivazioni, solitamente non filosofia per diverse motivazioni, solitamente non
tecnichetecniche
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 2525
Progettazione di ControlliProgettazione di Controlli SequenzialiSequenziali
Stesura della documentazioneStesura della documentazioneLa documentazione è parte integrante e fondamentale di La documentazione è parte integrante e fondamentale di un progetto industrialeun progetto industriale
un progetto non è completato finché non è corredato da adeguata un progetto non è completato finché non è corredato da adeguata documentazionedocumentazione
La predisposizione della documentazione va effettuata La predisposizione della documentazione va effettuata congiuntamente con lo sviluppo di ogni fase della congiuntamente con lo sviluppo di ogni fase della progettazioneprogettazioneTecniche di progettazione che Tecniche di progettazione che intrinsecamente intrinsecamente producono documentazione sono da privilegiareproducono documentazione sono da privilegiare
CADCADprogrammazione strutturataprogrammazione strutturataSFCSFCGEMMAGEMMA
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 2626
Progettazione di ControlliProgettazione di Controlli SequenzialiSequenziali
Strumenti diStrumenti di modellazionemodellazione per il controllo logico per il controllo logico descrizione letterale (a parole)descrizione letterale (a parole)
lunga, imprecisa, troppo personalelunga, imprecisa, troppo personaledescrizione puramente logicadescrizione puramente logica
troppo particolareggiatatroppo particolareggiatalegata alla tecnologialegata alla tecnologia implementativaimplementativa
diagrammi temporalidiagrammi temporalicarenza nella descrizione degli elementicarenza nella descrizione degli elementi sequenzialisequenzialinon consente di mettere in evidenza sequenze simultaneenon consente di mettere in evidenza sequenze simultanee
diagramma degli statidiagramma degli statistrumento idoneo per sistemi di modesta complessità perché strumento idoneo per sistemi di modesta complessità perché troppo particolareggiatotroppo particolareggiatoidoneo con una opportuna idoneo con una opportuna ridefinizioneridefinizione del concetto di statodel concetto di stato

Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 2727
Lo Standard IEC 1131Lo Standard IEC 1131--33
Strumenti software standardizzati per la descrizione e la Strumenti software standardizzati per la descrizione e la progettazione del ciclo operativo di macchine ed progettazione del ciclo operativo di macchine ed
impiantiimpiantiscoposcopo
stimolare una normalizzazione della sintassi dei linguaggi di stimolare una normalizzazione della sintassi dei linguaggi di programmazione per l'automazioneprogrammazione per l'automazione
obiettiviobiettiviprogrammazione strutturataprogrammazione strutturatamodularità del softwaremodularità del softwareriusabilitàriusabilità del softwaredel softwareportabilitàportabilità del codice tra macchine diversedel codice tra macchine diversesemplicità di programmazionesemplicità di programmazionetempi e costi di sviluppo ridottitempi e costi di sviluppo ridotti
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 2828
Lo Standard IEC 1131Lo Standard IEC 1131--33
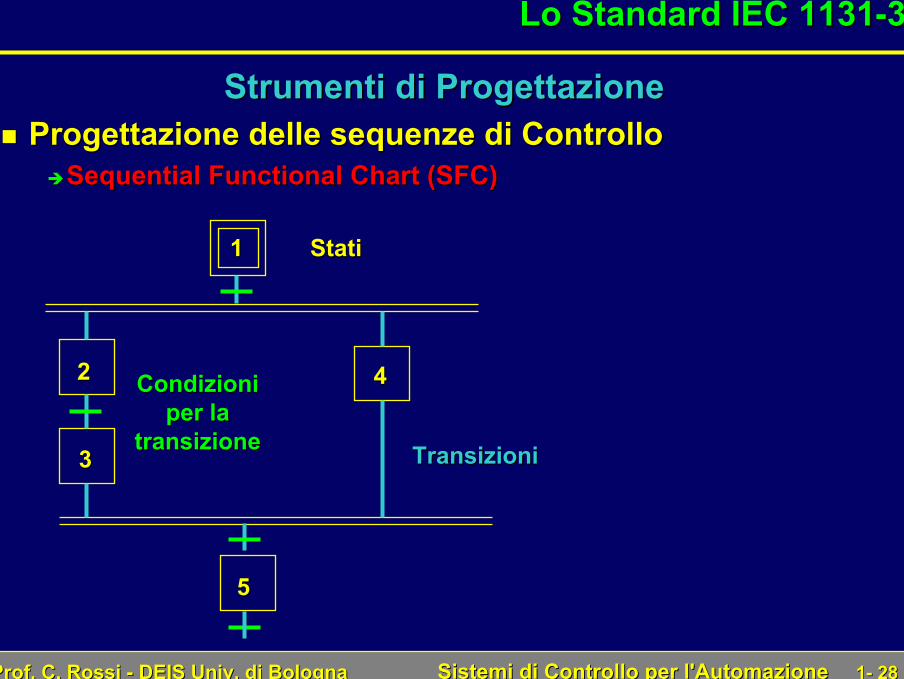
Strumenti di Progettazione Strumenti di Progettazione Progettazione delle sequenze di ControlloProgettazione delle sequenze di Controllo
Sequential Functional ChartSequential Functional Chart (SFC)(SFC)
11
22
33
44
55
StatiStati
TransizioniTransizioni
CondizioniCondizioniper laper la
transizionetransizione
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 2929
Lo Standard IEC 1131Lo Standard IEC 1131--33
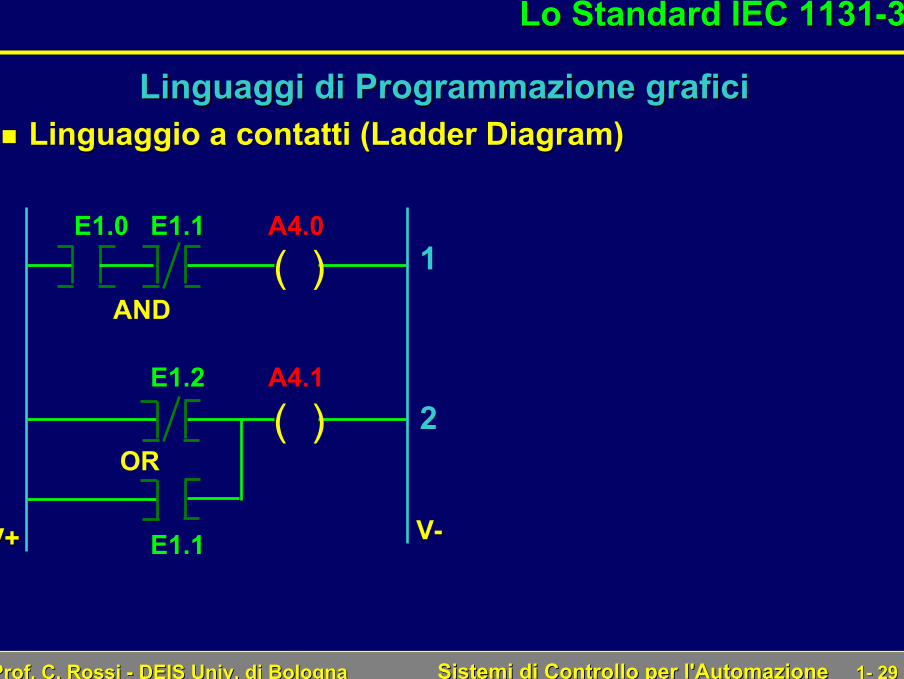
Linguaggi di Programmazione graficiLinguaggi di Programmazione graficiLinguaggio a contatti (Linguaggio a contatti (Ladder DiagramLadder Diagram))
AND( )
E1.0 E1.1 A4.01
( )OR
E1.2
E1.1
A4.12
V+V+ VV--

Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 3030
Lo Standard IEC 1131Lo Standard IEC 1131--33
Linguaggi di Programmazione graficiLinguaggi di Programmazione graficiSchemi a blocchi funzionali (Schemi a blocchi funzionali (Function Block DiagramFunction Block Diagram))
&E1.0E1.1
A4.01
>= 1A4.1
E1.2
E1.12
V+V+ VV--
( )( )
( )( )
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 3131
Lo Standard IEC 1131Lo Standard IEC 1131--33
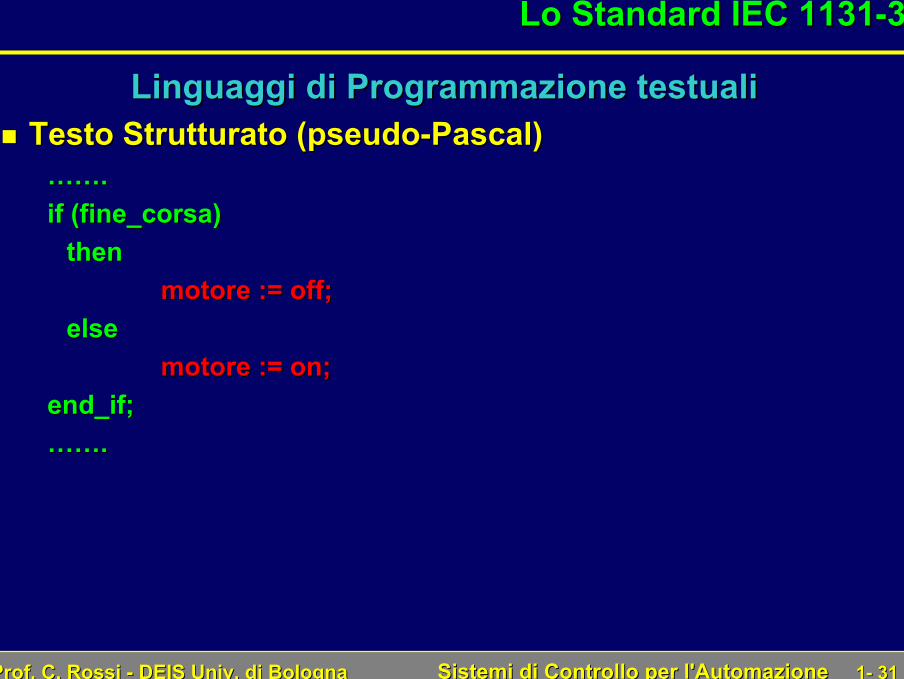
Linguaggi di Programmazione testualiLinguaggi di Programmazione testualiTesto Strutturato (Testo Strutturato (pseudopseudo--PascalPascal))
…….…….ifif (fine_corsa)(fine_corsa)
thenthenmotore :=motore := offoff;;
else else motore :=motore := onon;;
endend__ifif;;…….…….

Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 3232
Lo Standard IEC 1131Lo Standard IEC 1131--33
Linguaggi di Programmazione testualiLinguaggi di Programmazione testualiLista di istruzioni (AWL)Lista di istruzioni (AWL)
……….……….AND FINE_CORSAAND FINE_CORSASET MOTORESET MOTOREANDN FINE_CORSAANDN FINE_CORSARESET MOTORERESET MOTORE……….. ………..
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 3333
Strumento per la Progettazione di ControlliStrumento per la Progettazione di Controlli SequenzialiSequenziali
Sequential Functional ChartSequential Functional ChartFormalismo gerarchicamente superiore agli altri Formalismo gerarchicamente superiore agli altri linguaggilinguaggi
serve per serve per progettare il controlloprogettare il controllo sequenzialesequenzialegli altri linguaggi, a discrezione del progettista, servono per gli altri linguaggi, a discrezione del progettista, servono per implementare il controlloimplementare il controllo
Descrizione e progettazione del ciclo operativo di Descrizione e progettazione del ciclo operativo di macchine ed impiantimacchine ed impiantiassimilabile ad un diagramma degli statiassimilabile ad un diagramma degli statiindipendente dalla tecnologia utilizzata per indipendente dalla tecnologia utilizzata per l’implementazionel’implementazione
formalismo astrattoformalismo astrattosemplifica la rappresentazione stimolando la semplifica la rappresentazione stimolando la scomposizione in scomposizione in sottoproblemisottoproblemi
in ogni situazione operativa solo un in ogni situazione operativa solo un sottoinsiemesottoinsieme delle delle informazioni è indispensabile per il controlloinformazioni è indispensabile per il controllo
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 3434
Strumenti Software Strumenti Software -- SFCSFC
Concetti baseConcetti baseStato (fase, tappa, passo)Stato (fase, tappa, passo)
l’evoluzione temporale del funzionamento di un impianto l’evoluzione temporale del funzionamento di un impianto complesso è descrivibile mediante una complesso è descrivibile mediante una successione temporale di successione temporale di situazioni operative più semplicisituazioni operative più semplici (fasi), nelle quali solo un(fasi), nelle quali solo unsottoinsiemesottoinsieme dei comandi e delle misure è attivodei comandi e delle misure è attivo
definizione di Statodefinizione di Statouno Stato è una condizione operativa della macchina alla quale èuno Stato è una condizione operativa della macchina alla quale èassociato un ben preciso associato un ben preciso algoritmo di controllo (Azioni)algoritmo di controllo (Azioni), diverso , diverso da quelli associati agli altri Stati. da quelli associati agli altri Stati. il verificarsi di un particolare evento forza il il verificarsi di un particolare evento forza il passaggio passaggio (Transizione)(Transizione) ad un altro Statoad un altro Statoin generale, durante il tempo di permanenza in uno Stato le usciin generale, durante il tempo di permanenza in uno Stato le uscite te del controllo (comandi) possono variare in risposta alle variazidel controllo (comandi) possono variare in risposta alle variazioni oni degli ingressi (sensori) o allo scorrere del tempodegli ingressi (sensori) o allo scorrere del tempo
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 3535
Strumenti Software Strumenti Software -- SFCSFC
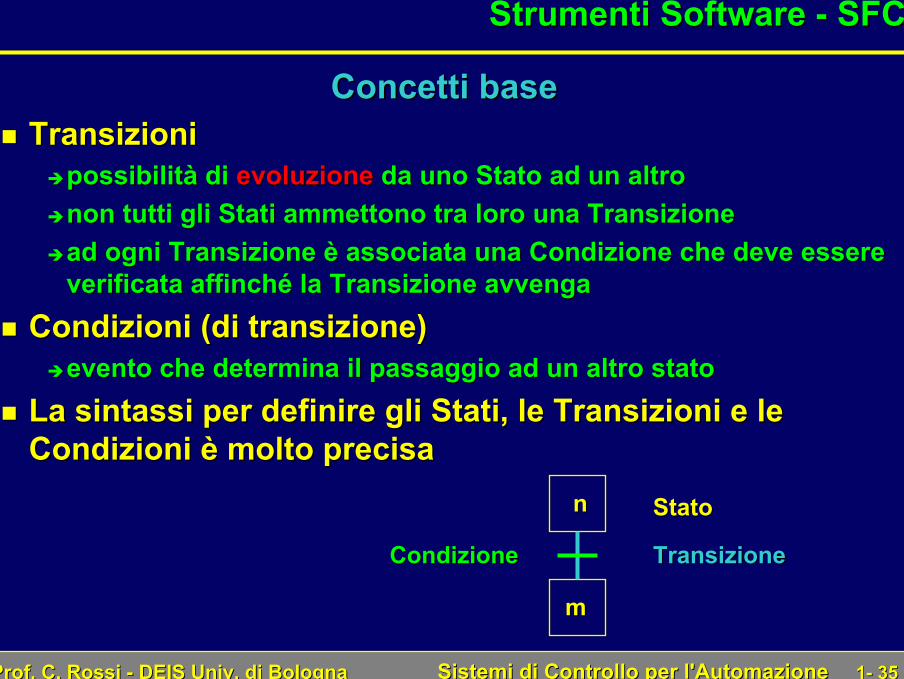
Concetti baseConcetti baseTransizioniTransizioni
possibilità di possibilità di evoluzioneevoluzione da uno Stato ad un altroda uno Stato ad un altronon tutti gli Stati ammettono tra loro una Transizionenon tutti gli Stati ammettono tra loro una Transizionead ogni Transizione è associata una Condizione che deve essere ad ogni Transizione è associata una Condizione che deve essere verificata affinché la Transizione avvengaverificata affinché la Transizione avvenga
Condizioni (di transizione)Condizioni (di transizione)evento che determina il passaggio ad un altro statoevento che determina il passaggio ad un altro stato
La sintassi per definire gli Stati, le Transizioni e le La sintassi per definire gli Stati, le Transizioni e le Condizioni è molto precisaCondizioni è molto precisa
nn StatoStato
mm
TransizioneTransizioneCondizioneCondizione
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 3636
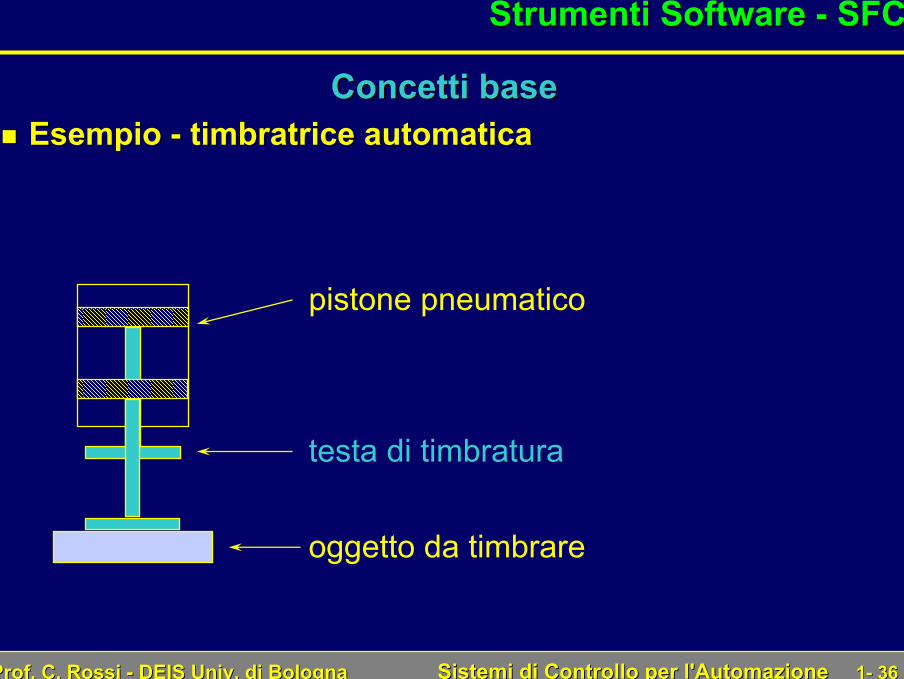
pistone pneumatico
testa di timbratura
oggetto da timbrare
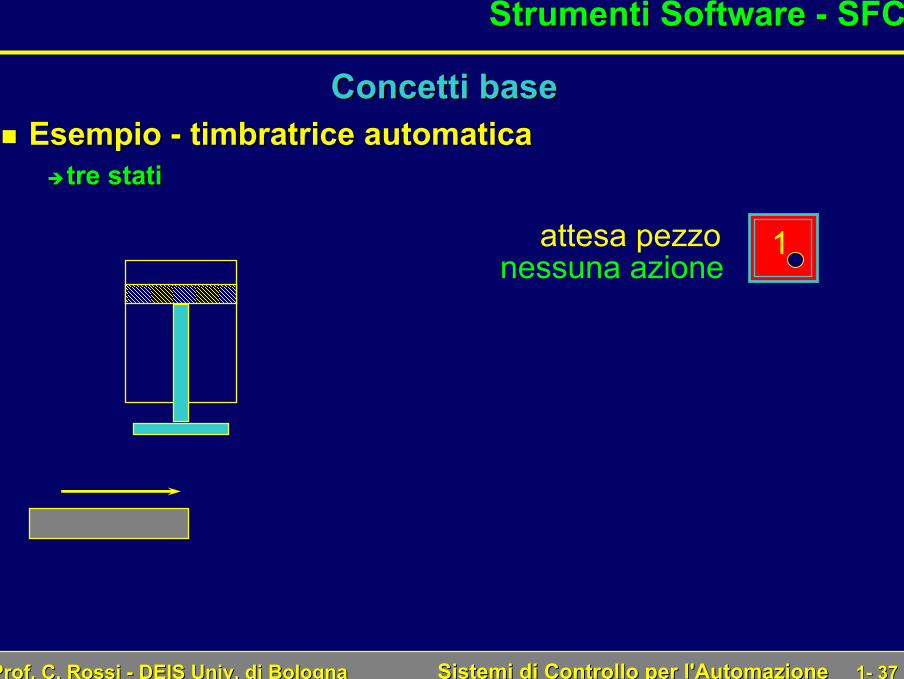
Strumenti Software Strumenti Software -- SFCSFC
Concetti baseConcetti baseEsempio Esempio -- timbratrice automaticatimbratrice automatica
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 3737
attesa pezzonessuna azione
1
Strumenti Software Strumenti Software -- SFCSFC
Concetti baseConcetti baseEsempio Esempio -- timbratrice automaticatimbratrice automatica
tre statitre stati
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 3838
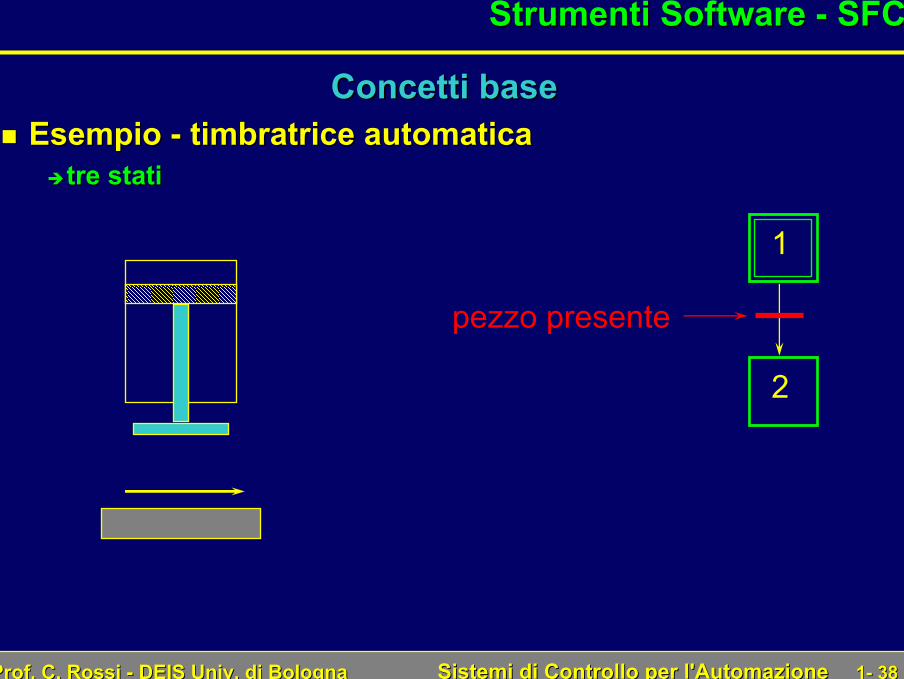
pezzo presente
1
2
Strumenti Software Strumenti Software -- SFCSFC
Concetti baseConcetti baseEsempio Esempio -- timbratrice automaticatimbratrice automatica
tre statitre stati

Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 3939
esecuzione timbraturacomando pistone avanti
1
2
Strumenti Software Strumenti Software -- SFCSFC
Concetti baseConcetti baseEsempio Esempio -- timbratrice automaticatimbratrice automatica
tre statitre stati
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 4040
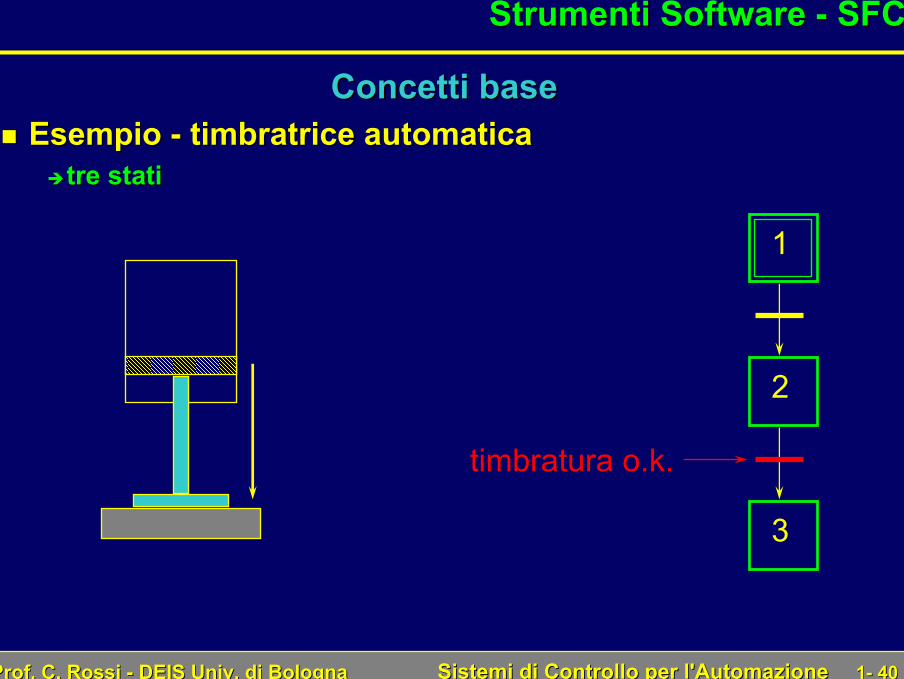
timbratura o.k.
1
2
3
Strumenti Software Strumenti Software -- SFCSFC
Concetti baseConcetti baseEsempio Esempio -- timbratrice automaticatimbratrice automatica
tre statitre stati
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 4141
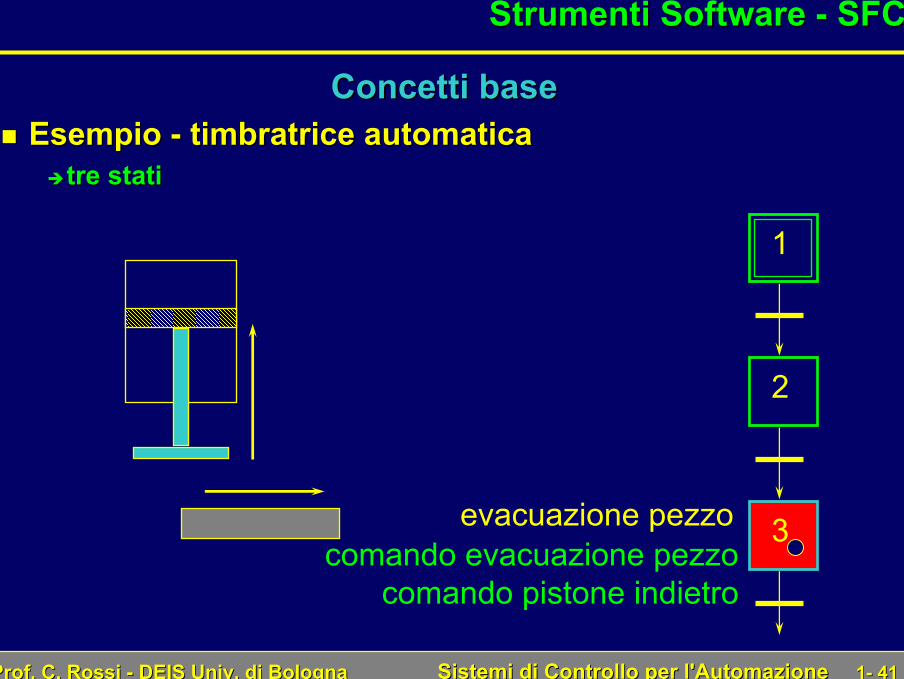
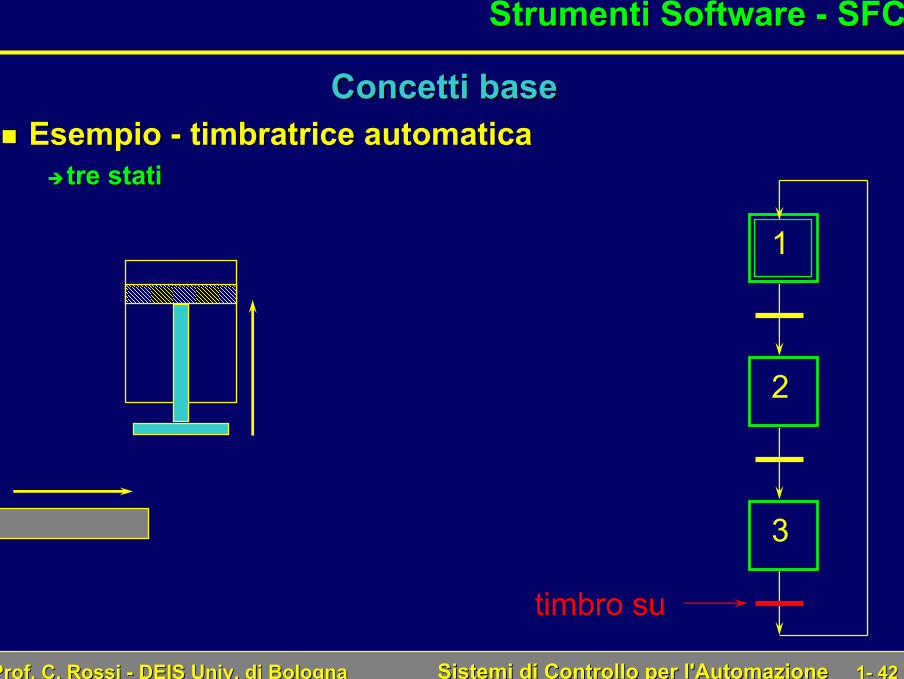
evacuazione pezzocomando evacuazione pezzo
comando pistone indietro
1
2
3
Strumenti Software Strumenti Software -- SFCSFC
Concetti baseConcetti baseEsempio Esempio -- timbratrice automaticatimbratrice automatica
tre statitre stati
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 4242
1
2
3
timbro su
Strumenti Software Strumenti Software -- SFCSFC
Concetti baseConcetti baseEsempio Esempio -- timbratrice automaticatimbratrice automatica
tre statitre stati
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 4343
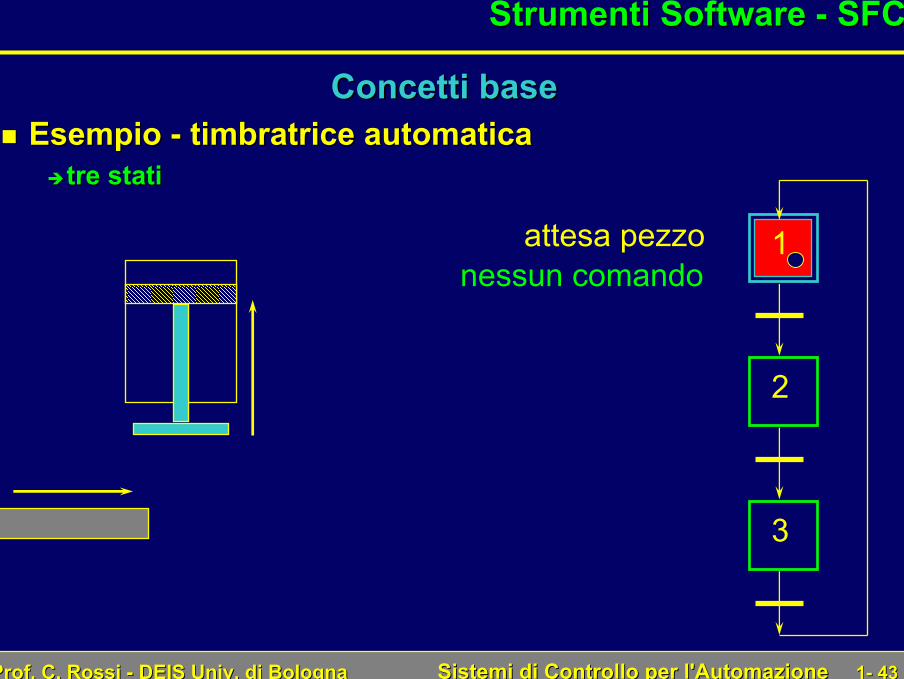
attesa pezzonessun comando
1
2
3
Strumenti Software Strumenti Software -- SFCSFC
Concetti baseConcetti baseEsempio Esempio -- timbratrice automaticatimbratrice automatica
tre statitre stati
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 4444
Strumenti Software Strumenti Software -- SFCSFC
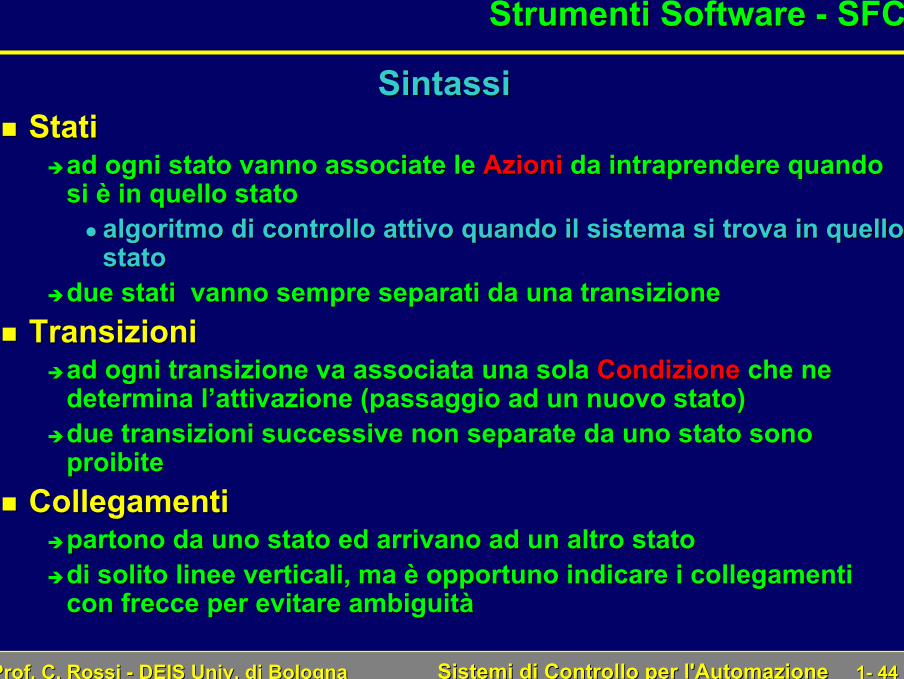
SintassiSintassiStatiStati
ad ogni stato vanno associate le ad ogni stato vanno associate le AzioniAzioni da intraprendere quando da intraprendere quando si è in quello stato si è in quello stato
algoritmo di controllo attivo quando il sistema si trova in quelalgoritmo di controllo attivo quando il sistema si trova in quello lo statostato
due stati vanno sempre separati da una transizionedue stati vanno sempre separati da una transizioneTransizioniTransizioni
ad ogni transizione va associata una sola ad ogni transizione va associata una sola CondizioneCondizione che ne che ne determina l’attivazione (passaggio ad un nuovo stato)determina l’attivazione (passaggio ad un nuovo stato)due transizioni successive non separate da uno stato sono due transizioni successive non separate da uno stato sono proibiteproibite
CollegamentiCollegamentipartono da uno stato ed arrivano ad un altro statopartono da uno stato ed arrivano ad un altro statodi solito linee verticali, ma è opportuno indicare i collegamentdi solito linee verticali, ma è opportuno indicare i collegamenti i con frecce per evitare ambiguitàcon frecce per evitare ambiguità
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 4545
Strumenti Software Strumenti Software -- SFCSFC
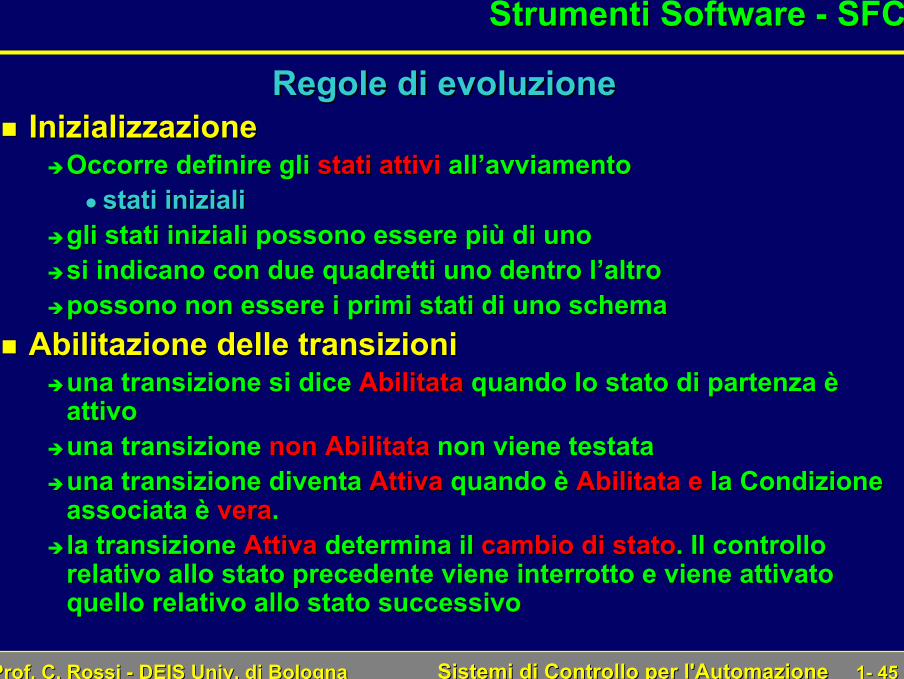
Regole di evoluzioneRegole di evoluzioneInizializzazioneInizializzazione
Occorre definire gli Occorre definire gli stati attivistati attivi all’avviamentoall’avviamentostati inizialistati iniziali
gli stati iniziali possono essere più di unogli stati iniziali possono essere più di unosi indicano con due quadretti uno dentro l’altrosi indicano con due quadretti uno dentro l’altropossono non essere i primi stati di uno schemapossono non essere i primi stati di uno schema
Abilitazione delle transizioniAbilitazione delle transizioniuna transizione si dice una transizione si dice AbilitataAbilitata quando lo stato di partenza è quando lo stato di partenza è attivoattivouna transizione una transizione non Abilitatanon Abilitata non viene testatanon viene testatauna transizione diventa una transizione diventa AttivaAttiva quando è quando è Abilitata eAbilitata e la Condizione la Condizione associata è associata è veravera. . la transizione la transizione AttivaAttiva determina il determina il cambio di statocambio di stato. Il controllo . Il controllo relativo allo stato precedente viene interrotto e viene attivatorelativo allo stato precedente viene interrotto e viene attivatoquello relativo allo stato successivoquello relativo allo stato successivo
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 4646
Strumenti Software Strumenti Software -- SFCSFC
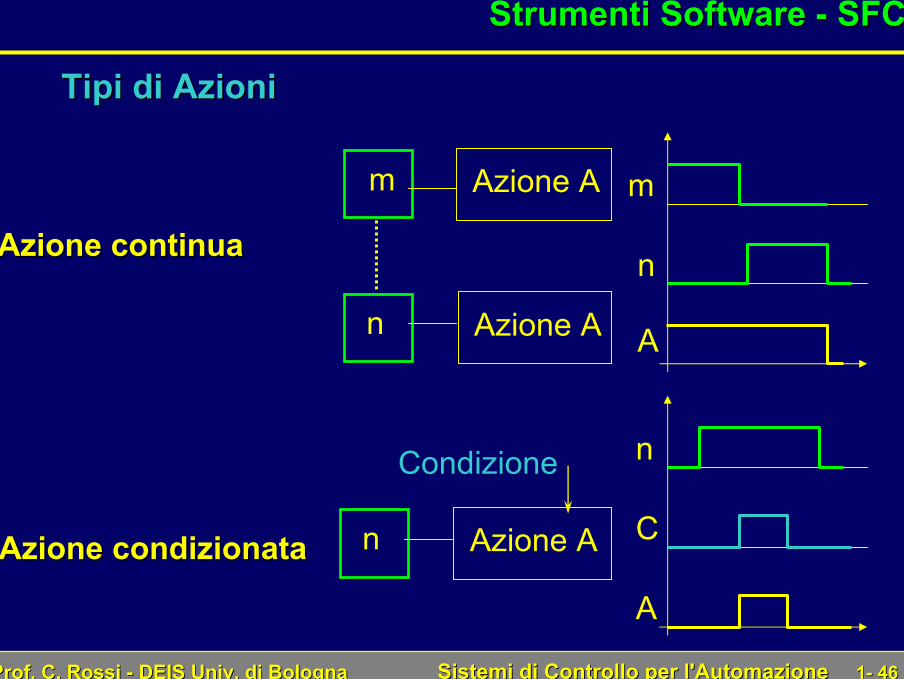
Tipi di AzioniTipi di Azioni
n Azione A
Condizione n
C
A
Azione condizionataAzione condizionata
m
n
Azione A
Azione A
m
n
A
Azione continuaAzione continua
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 4747
Strumenti Software Strumenti Software -- SFCSFC
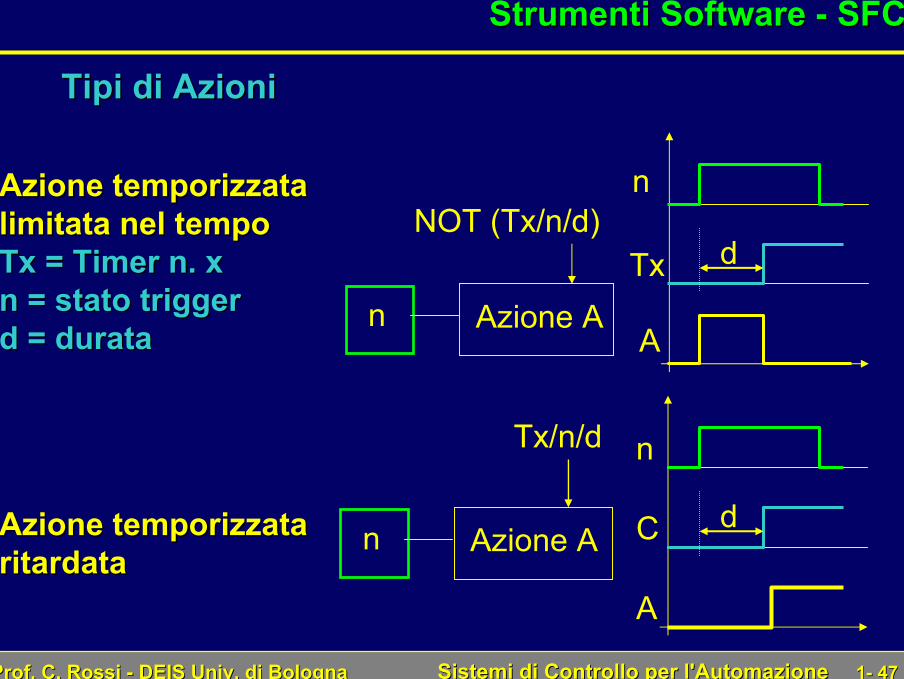
Tipi di AzioniTipi di Azioni
Azione Azione temporizzatatemporizzatalimitata nel tempolimitata nel tempoTx Tx = = Timer Timer n. xn. xn = stato n = stato triggertriggerd = duratad = durata
n Azione A
n
A
TxNOT (Tx/n/d)
d
Azione Azione temporizzatatemporizzataritardataritardata
n Azione A
n
C
A
Tx/n/d
d
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 4848
No No
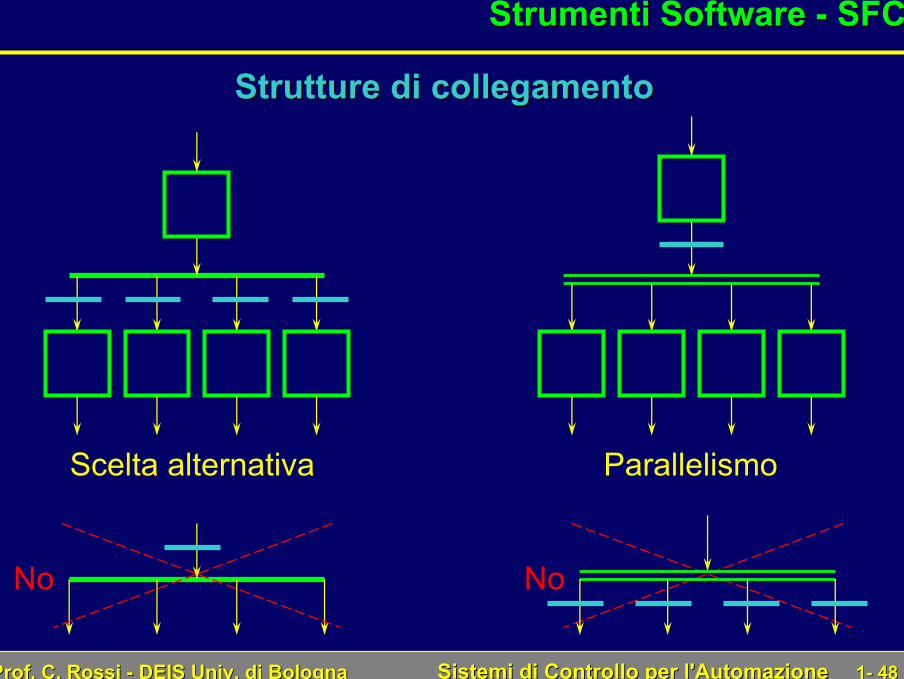
Strumenti Software Strumenti Software -- SFCSFC
Strutture di collegamentoStrutture di collegamento
Scelta alternativa Parallelismo
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 4949
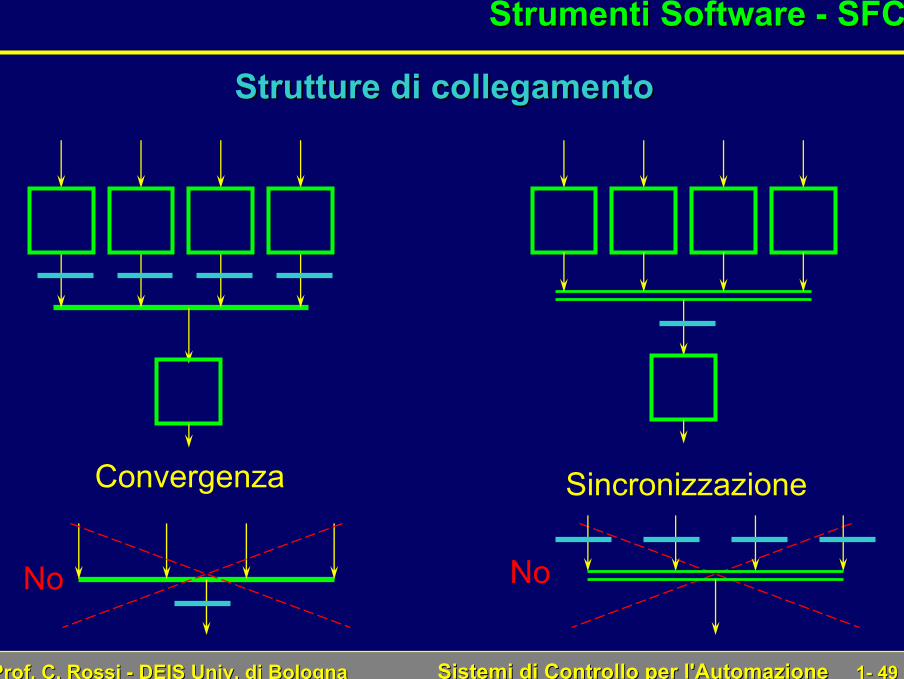
No No
Strumenti Software Strumenti Software -- SFCSFC
Strutture di collegamentoStrutture di collegamento
SincronizzazioneConvergenza
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 5050
Strumenti Software Strumenti Software -- SFCSFC
Strutture di collegamentoStrutture di collegamento
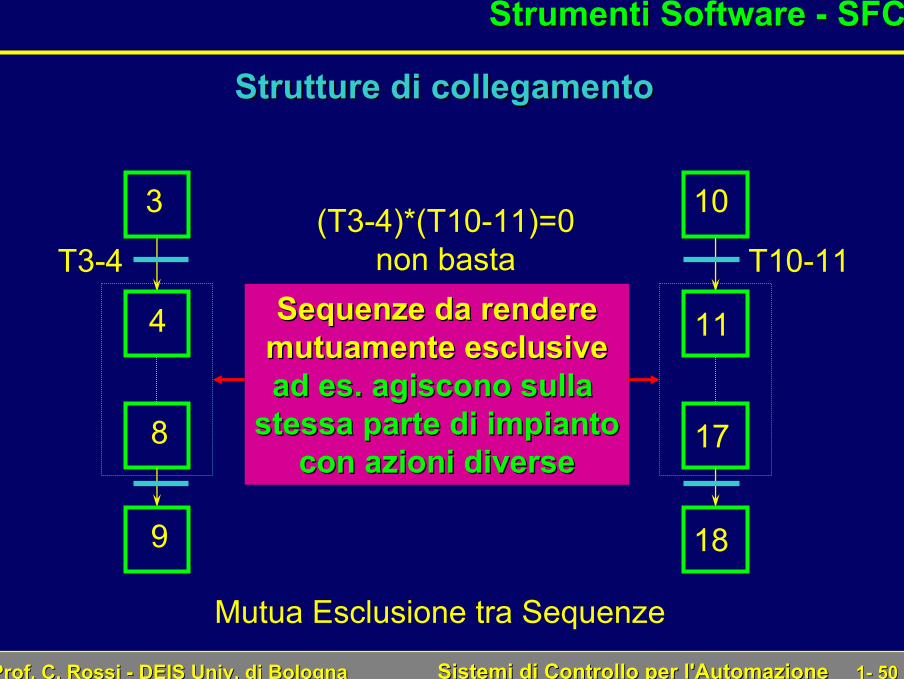
Mutua Esclusione tra Sequenze
Sequenze da rendereSequenze da renderemutuamente esclusivemutuamente esclusivead ad eses. agiscono sulla . agiscono sulla
stessa parte di impiantostessa parte di impiantocon azioni diversecon azioni diverse
4
8
T3-4
3
9
11
17
T10-11
10
18
(T3-4)*(T10-11)=0non basta

Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 5151
Strumenti Software Strumenti Software -- SFCSFC
Strutture di collegamentoStrutture di collegamento
Mutua Esclusione tra Sequenze
4
8
T3-4
3
9
11
17
T10-11
10
18
(T3-4)*(T10-11)=0non basta
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 5252
Strumenti Software Strumenti Software -- SFCSFC
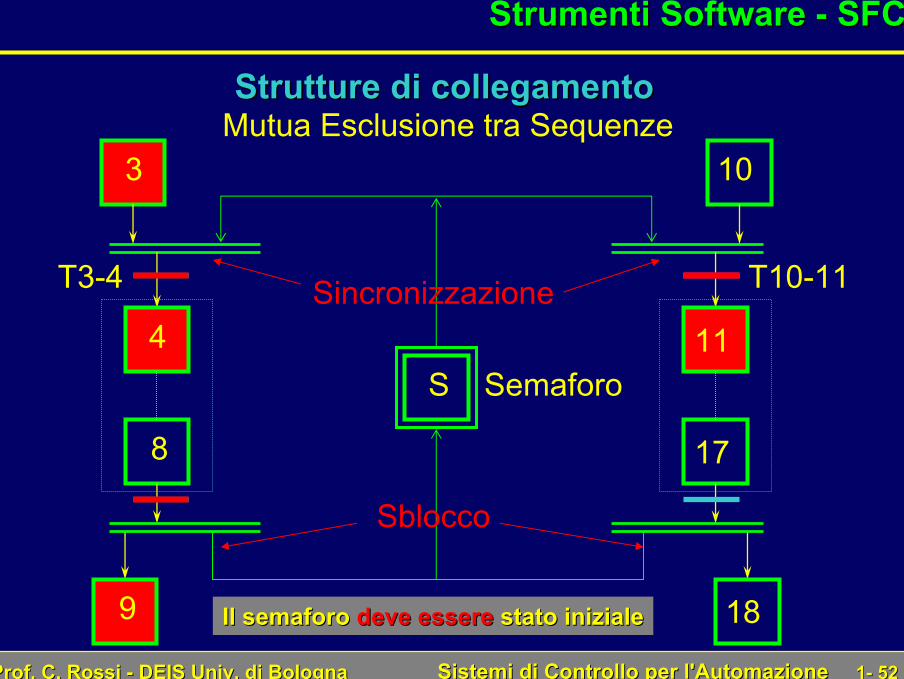
Strutture di collegamentoStrutture di collegamentoMutua Esclusione tra Sequenze
3
4
8
9
T3-4
10
11
17
18
T10-11
S Semaforo
Sincronizzazione
Sblocco
Il semaforo Il semaforo deve esseredeve essere stato inizialestato iniziale
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 5353
Strumenti Software Strumenti Software -- SFCSFC
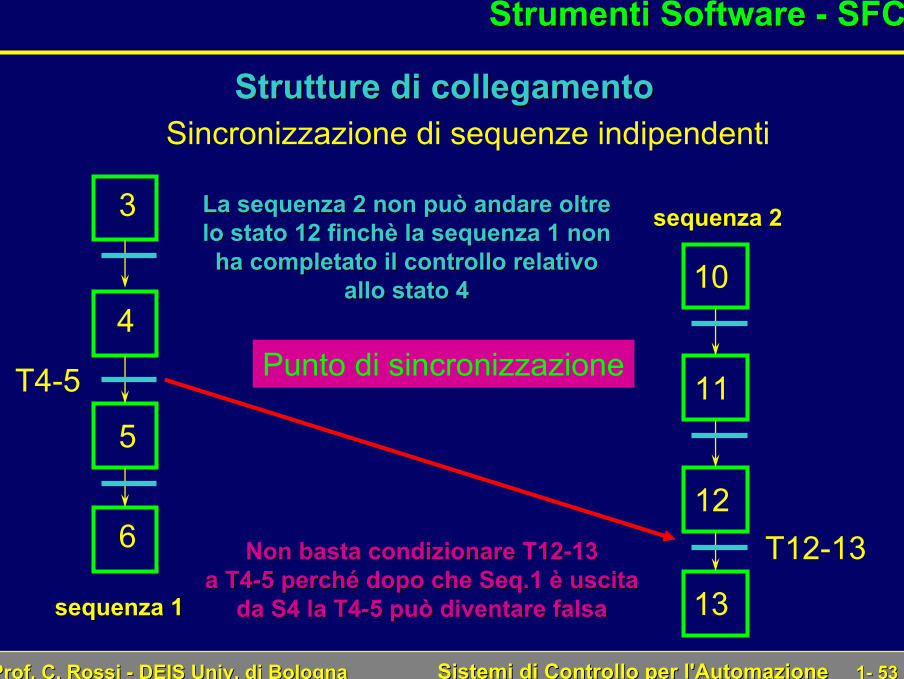
Strutture di collegamentoStrutture di collegamentoSincronizzazione di sequenze indipendenti
10
11
12
13
4
5
6
3
Punto di sincronizzazioneT4-5
T12-13
sequenza 1sequenza 1
sequenza 2sequenza 2La sequenza 2 non può andare oltreLa sequenza 2 non può andare oltrelo stato 12 lo stato 12 finchè finchè la sequenza 1 nonla sequenza 1 nonha completato il controllo relativo ha completato il controllo relativo
allo stato 4allo stato 4
Non basta condizionare T12Non basta condizionare T12--1313a T4a T4--5 perché dopo che 5 perché dopo che SeqSeq.1 è uscita.1 è uscita
da S4 la T4da S4 la T4--5 può diventare falsa5 può diventare falsa
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 5454
Strumenti Software Strumenti Software -- SFCSFC
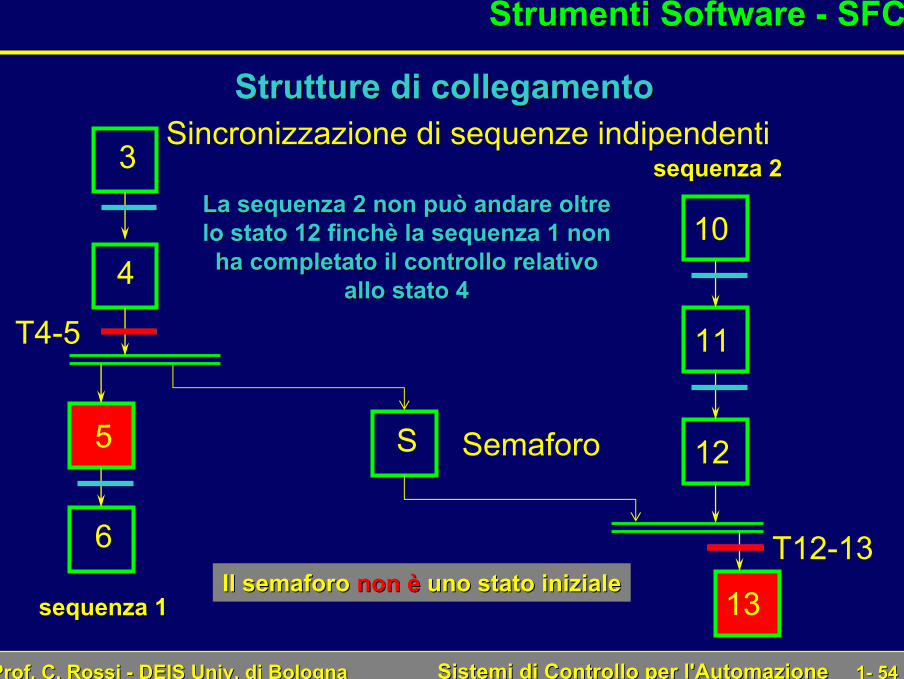
Strutture di collegamentoStrutture di collegamento
S Semaforo
4
5
6
3
T4-5
10
11
12
13
T12-13
La sequenza 2 non può andare oltreLa sequenza 2 non può andare oltrelo stato 12 lo stato 12 finchè finchè la sequenza 1 nonla sequenza 1 nonha completato il controllo relativo ha completato il controllo relativo
allo stato 4allo stato 4
sequenza 1sequenza 1
sequenza 2sequenza 2Sincronizzazione di sequenze indipendenti
Il semaforo Il semaforo non ènon è uno stato inizialeuno stato iniziale
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 5555
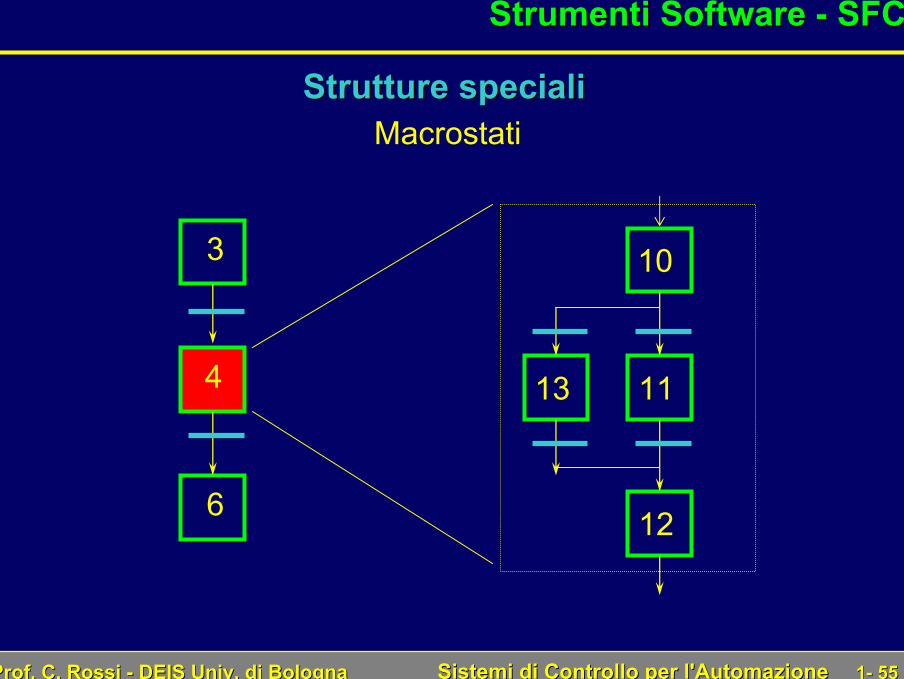
Strumenti Software Strumenti Software -- SFCSFC
Strutture specialiStrutture specialiMacrostati
4
6
3 10
11
12
13
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 5656
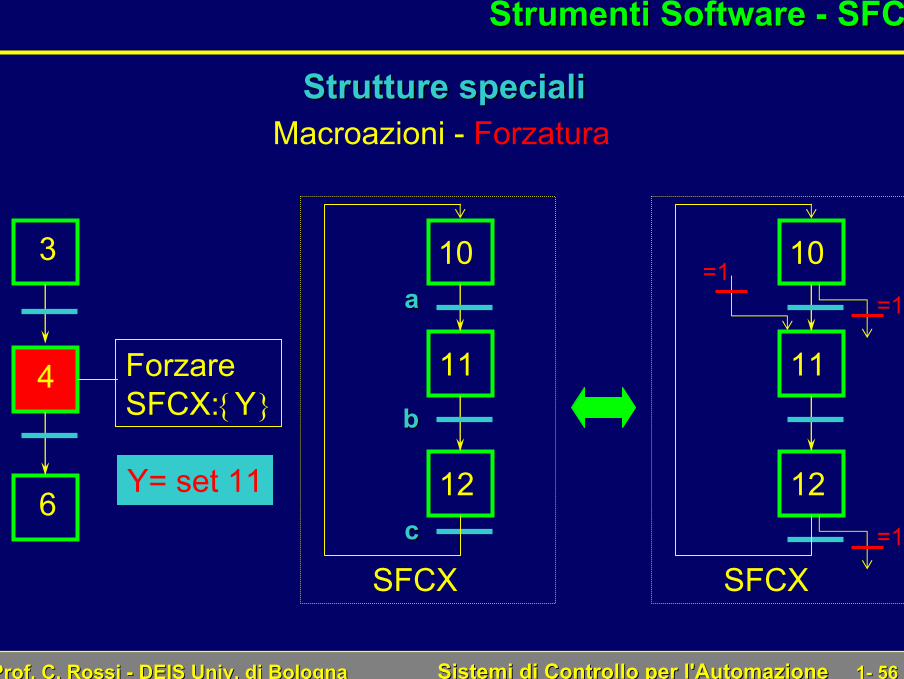
Strumenti Software Strumenti Software -- SFCSFC
Strutture specialiStrutture specialiMacroazioni - Forzatura
4
6
3
ForzareSFCX:{Y}
10
11
12
SFCX
=1=1
=1
Y= set 11
10
11
12
SFCX
aa
bb
cc

Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 5757
Strumenti Software Strumenti Software -- SFCSFC
Strutture specialiStrutture specialiMacroazioni - Forzatura in Sospensione
4
6
3
ForzareSFCX:{}
10
11
12
SFCX
Y= vuoto
=1
=1
=1
10
11
12
SFCX
aa
bb
cc
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 5858
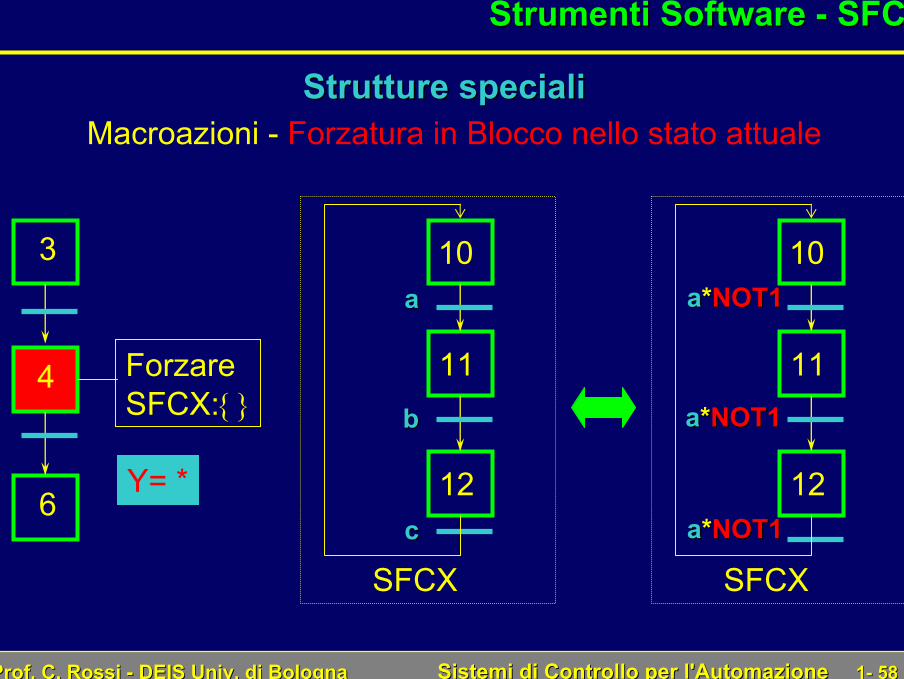
Strumenti Software Strumenti Software -- SFCSFC
Strutture specialiStrutture specialiMacroazioni - Forzatura in Blocco nello stato attuale
4
6
3
ForzareSFCX:{}
10
11
12
SFCX
Y= *
10
11
12
SFCX
aa
bb
cc
aa**NOT1NOT1
aa**NOT1NOT1
aa**NOT1NOT1

Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 5959
Indice della presentazioneIndice della presentazione
Parte 2Parte 2Sequential functional chartSequential functional chart (SFC)(SFC)
esempi di utilizzo delle struttureesempi di utilizzo delle struttureStrumenti per la gestione delle eccezioniStrumenti per la gestione delle eccezioni
GEMMAGEMMAUn linguaggio testuale di basso livelloUn linguaggio testuale di basso livello
AWLAWLdai diagrammi a relais alla programmazionedai diagrammi a relais alla programmazionecaratteristiche del linguaggiocaratteristiche del linguaggio
Organizzazione generale del software di un PLCOrganizzazione generale del software di un PLCla scansione ciclicala scansione ciclicala gestione la gestione dell' dell' I/OI/O
Da un SFC alla ProgrammazioneDa un SFC alla Programmazioneuna possibile soluzioneuna possibile soluzione

Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 6060
a
b
c
treno in arrivo
treno presente
Strumenti Software Strumenti Software -- SFCSFC
Esempi di utilizzo delle StruttureEsempi di utilizzo delle StruttureSequenza unicaSequenza unica
successione di stati che si possono attivare uno dopo l’altrosuccessione di stati che si possono attivare uno dopo l’altroesempio: passaggio a livello su binario unico a doppio sensoesempio: passaggio a livello su binario unico a doppio senso

Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 6161
treno in a oppure c
treno in b
treno in a oppure c
1 attesa trenocomando: barriere su
arrivo trenobarriere giù2
allontanamento trenobarriere su
4
treno fuori da b
treno in transitobarriere giù3
Strumenti Software Strumenti Software -- SFCSFC
Sequenza unicaSequenza unicapassaggio a livello su binario unico a doppio sensopassaggio a livello su binario unico a doppio senso
aa
bb
cc
Attenzione !!Attenzione !!nel diagrammanel diagrammac'è un errorec'è un errore
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 6262
Strumenti Software Strumenti Software -- SFCSFC
Esempi di utilizzo di StruttureEsempi di utilizzo di StruttureSequenze alternativeSequenze alternative
Esempio: Esempio: serratura a combinazioneserratura a combinazionel’apertura è condizionata dalla digitazione di un l’apertura è condizionata dalla digitazione di un codice numericocodice numericosu una tastierasu una tastierala successione delle cifre la successione delle cifre 66--77--88--99 porterà all’aperturaporterà all’aperturaqualunque errore nella sequenza porta al blocco della porta ed qualunque errore nella sequenza porta al blocco della porta ed all’attivazione di un segnale sonoro di allarme. La condizione dall’attivazione di un segnale sonoro di allarme. La condizione di i allarmeallarme può essere può essere disattivato solo manualmentedisattivato solo manualmente da operatore da operatore abilitato con chiaveabilitato con chiaveil meccanismo di accettazione della combinazione è il meccanismo di accettazione della combinazione è attivo attivo solamente a porta chiusasolamente a porta chiusa

Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 6363
1
2
3
sblocca5
4
allarme6
≠ 6
6
≠ 7
7
≠ 8
8
≠ 99
Strumenti Software Strumenti Software -- SFCSFC
Sequenze alternativeSequenze alternativeEsempio: serratura a combinazione (6Esempio: serratura a combinazione (6--77--88--9)9)
riarmo manualechiusura
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 6464
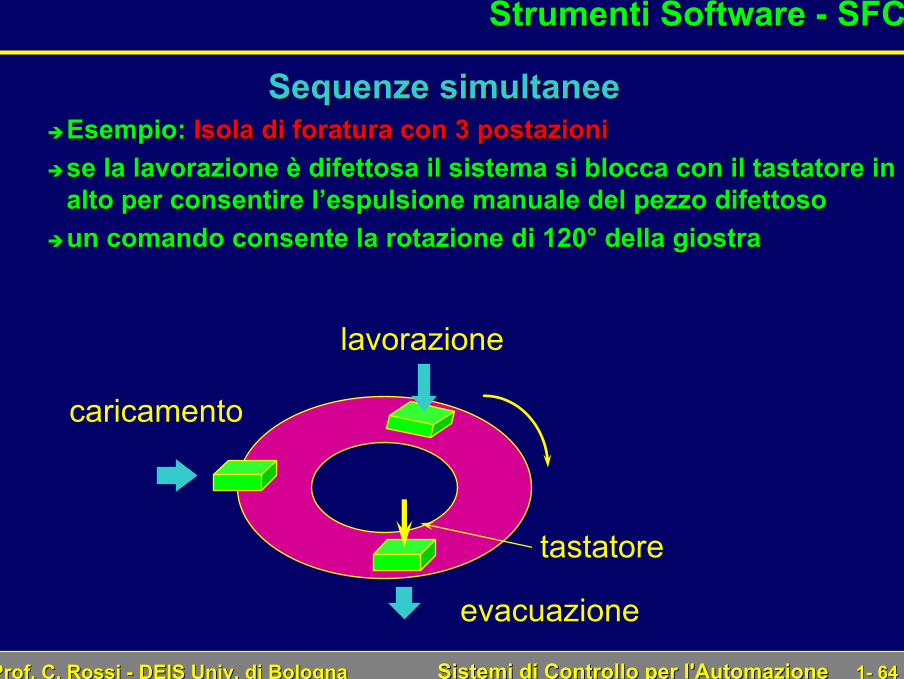
caricamento
lavorazione
evacuazione
tastatore
Strumenti Software Strumenti Software -- SFCSFC
Sequenze simultaneeSequenze simultaneeEsempio: Esempio: Isola di foratura con 3 postazioniIsola di foratura con 3 postazionise la lavorazione è difettosa il sistema si blocca con ilse la lavorazione è difettosa il sistema si blocca con il tastatoretastatore in in alto per consentire l’espulsione manuale del pezzo difettosoalto per consentire l’espulsione manuale del pezzo difettosoun comando consente la rotazione di 120° della giostraun comando consente la rotazione di 120° della giostra

Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 6565
Strumenti Software Strumenti Software -- SFCSFC
Isola di foraturaIsola di foratura
CaricamentoCaricamento Misura edMisura edespulsioneespulsione2 3
Rotazionegiostra5
tutto O.K
1 Attesa
4
Tutti fermi
Fine rotazione
LavorazioneLavorazione
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 6666
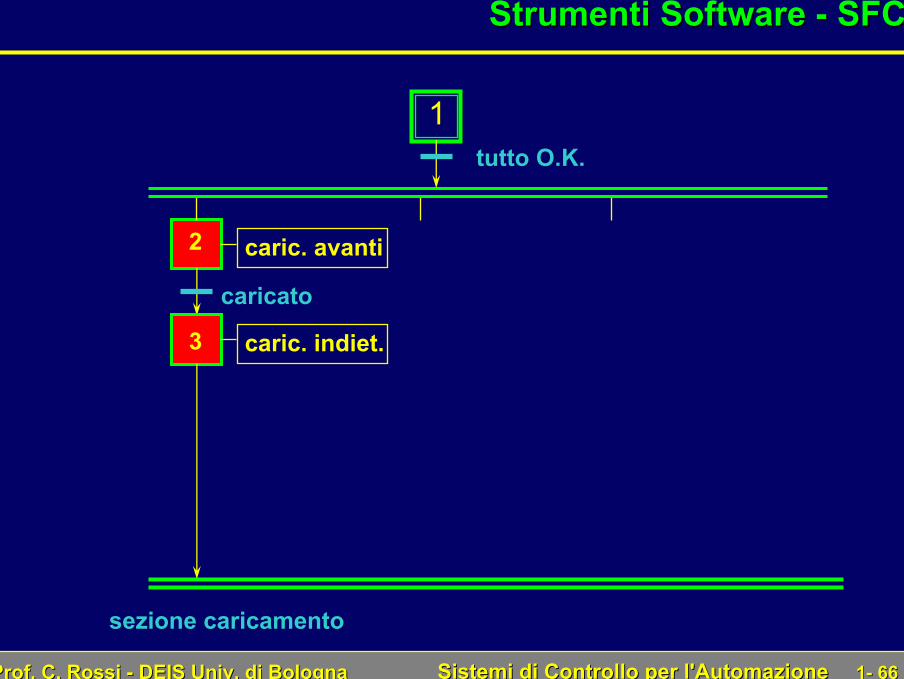
2 caric. avanti
3 caric. indiet.
caricato
sezione caricamento
Strumenti Software Strumenti Software -- SFCSFC
tutto O.K.
1

Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 6767
5 foratura
serrato
forato
6 risalitarisalito
sezione lavorazione
Strumenti Software Strumenti Software -- SFCSFC
tutto O.K.
1
4 serraggio
sblocco7
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 6868
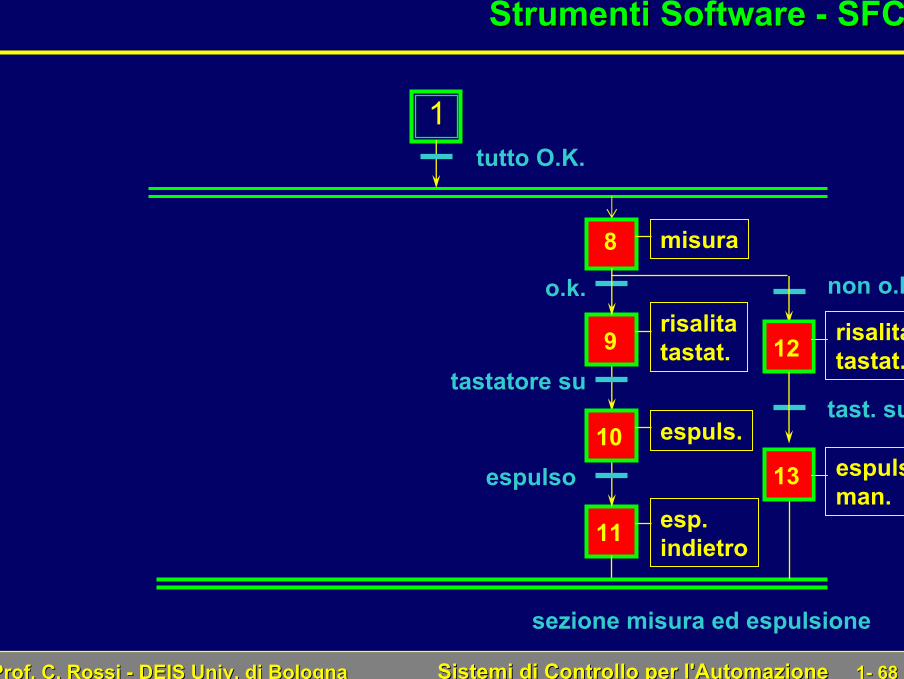
11 esp. indietro
9risalitatastat.
o.k.
tastatore su
10 espuls.
espulso
non o.k.
tast. su
sezione misura ed espulsione
Strumenti Software Strumenti Software -- SFCSFC
tutto O.K.
1
8 misura
13 espuls.man.
12 risalitatastat.
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 6969
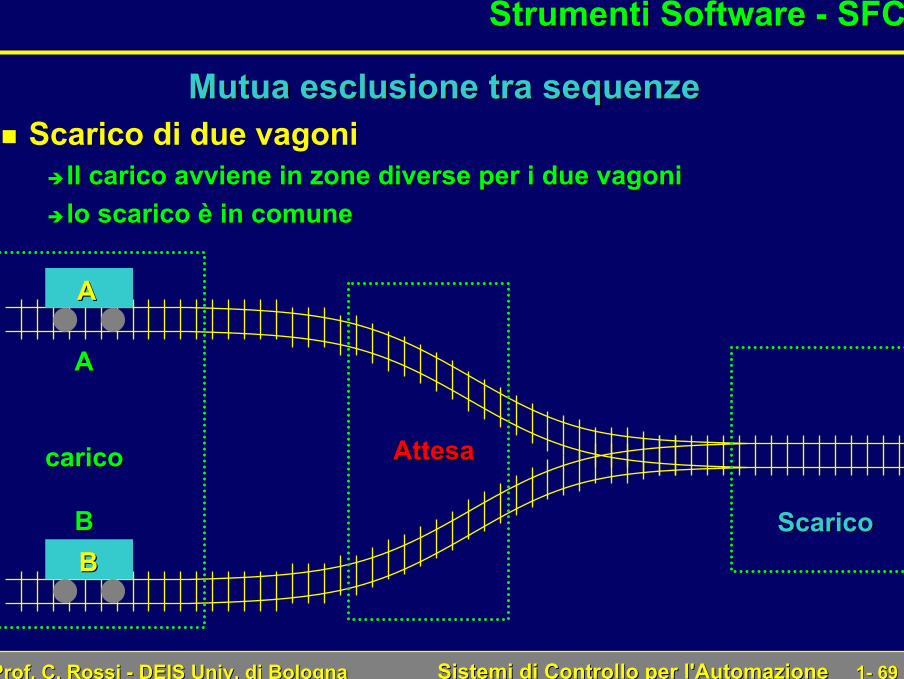
Strumenti Software Strumenti Software -- SFCSFC
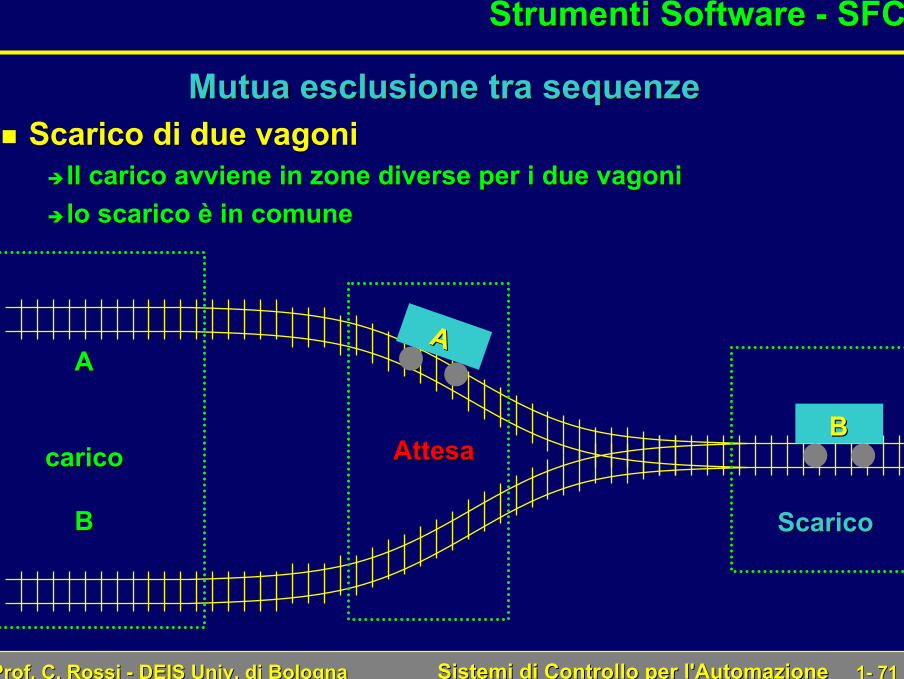
Mutua esclusione tra sequenzeMutua esclusione tra sequenzeScarico di due vagoniScarico di due vagoni
Il carico avviene in zone diverse per i due vagoniIl carico avviene in zone diverse per i due vagonilo scarico è in comunelo scarico è in comune
AA
caricocarico
BB ScaricoScarico
AttesaAttesa
AA
BB

Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 7070
Strumenti Software Strumenti Software -- SFCSFC
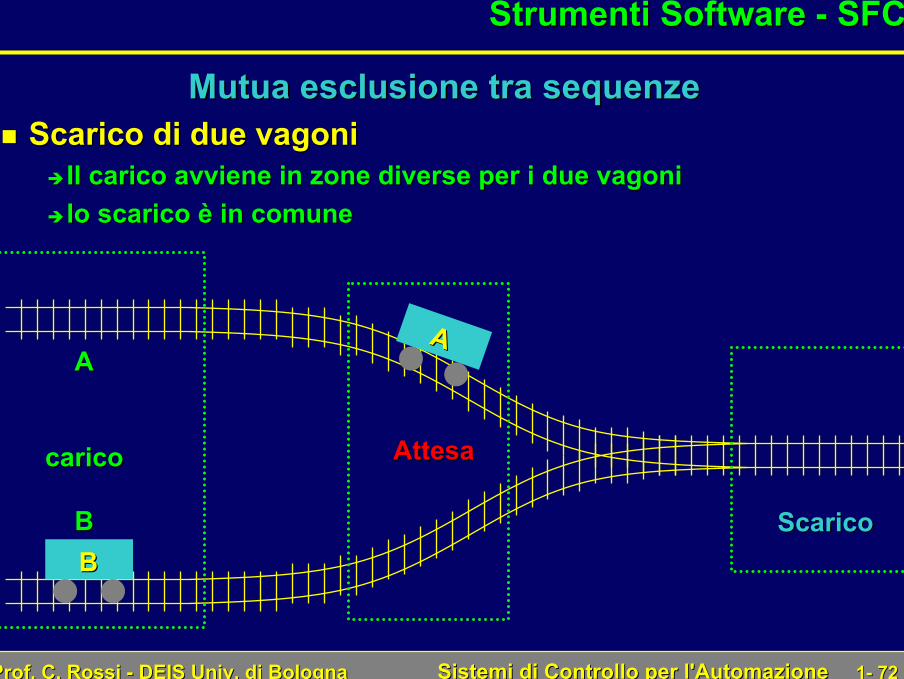
Mutua esclusione tra sequenzeMutua esclusione tra sequenzeScarico di due vagoniScarico di due vagoni
Il carico avviene in zone diverse per i due vagoniIl carico avviene in zone diverse per i due vagonilo scarico è in comunelo scarico è in comune
AA
BB
AA
caricocarico
BB ScaricoScarico
AttesaAttesa
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 7171
Strumenti Software Strumenti Software -- SFCSFC
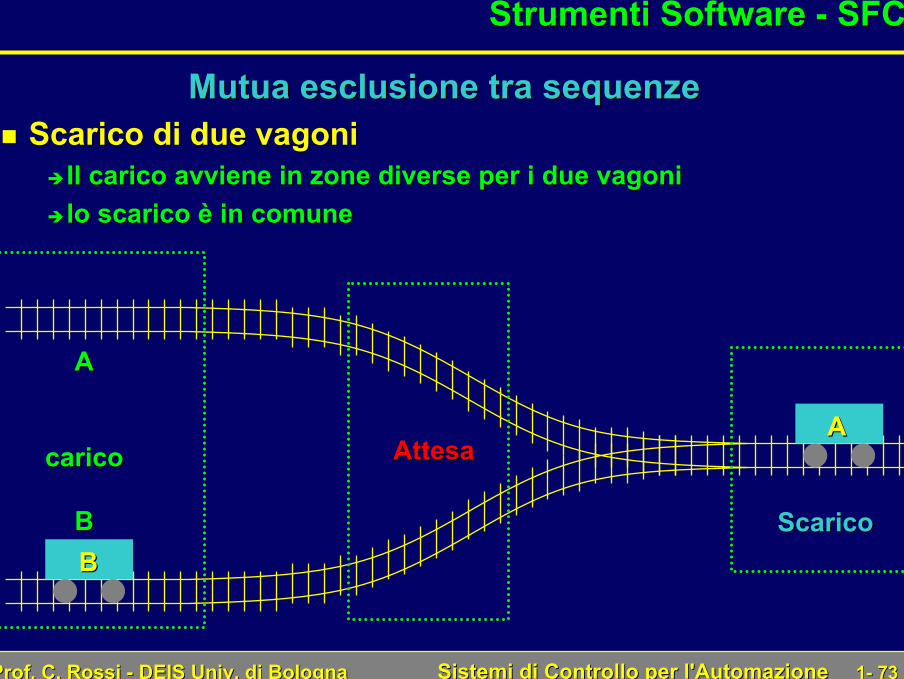
Mutua esclusione tra sequenzeMutua esclusione tra sequenzeScarico di due vagoniScarico di due vagoni
Il carico avviene in zone diverse per i due vagoniIl carico avviene in zone diverse per i due vagonilo scarico è in comunelo scarico è in comune
BB
AA
caricocarico
BB ScaricoScarico
AttesaAttesa
AA
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 7272
Strumenti Software Strumenti Software -- SFCSFC
Mutua esclusione tra sequenzeMutua esclusione tra sequenzeScarico di due vagoniScarico di due vagoni
Il carico avviene in zone diverse per i due vagoniIl carico avviene in zone diverse per i due vagonilo scarico è in comunelo scarico è in comune
AA
caricocarico
BB ScaricoScarico
AttesaAttesa
AA
BB
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 7373
Strumenti Software Strumenti Software -- SFCSFC
Mutua esclusione tra sequenzeMutua esclusione tra sequenzeScarico di due vagoniScarico di due vagoni
Il carico avviene in zone diverse per i due vagoniIl carico avviene in zone diverse per i due vagonilo scarico è in comunelo scarico è in comune
AA
caricocarico
BB ScaricoScarico
AttesaAttesaAA
BB
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 7474
Strumenti Software Strumenti Software -- SFCSFC
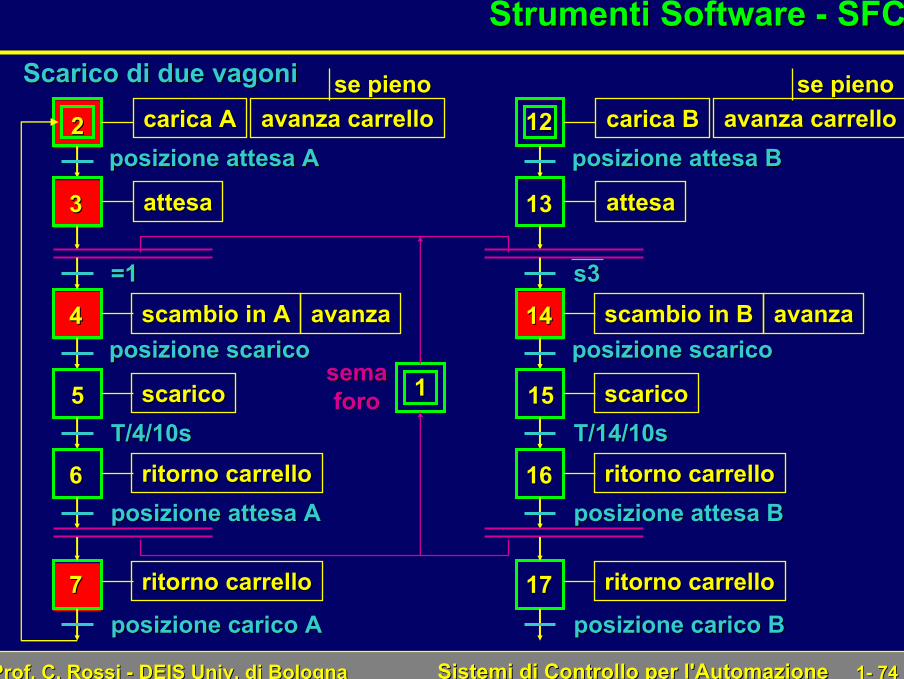
22posizione attesa Aposizione attesa A
posizione scaricoposizione scarico
attesaattesa
=1=1
scambio in Ascambio in A avanzaavanza
scaricoscaricoT/4/10sT/4/10s
ritorno carrelloritorno carrelloposizione attesa Aposizione attesa A
ritorno carrelloritorno carrello
posizione carico Aposizione carico A
carica Acarica A avanza carrelloavanza carrellose pienose pieno
33
44
55
66
77
1212posizione attesa Bposizione attesa B
posizione scaricoposizione scarico
attesaattesa
s3s3
scambio in Bscambio in B avanzaavanza
scaricoscaricoT/14/10sT/14/10s
ritorno carrelloritorno carrelloposizione attesa Bposizione attesa B
ritorno carrelloritorno carrello
posizione carico Bposizione carico B
carica Bcarica B avanza carrelloavanza carrellose pienose pieno
1313
1414
1515
1616
1717
11semasemaforoforo
Scarico di due vagoniScarico di due vagoni
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 7575
Software di controllo in Tempo RealeSoftware di controllo in Tempo Reale
DefinizioneDefinizioneLa correttezza del risultato di un algoritmo di controllo in La correttezza del risultato di un algoritmo di controllo in tempo reale è garantita se:tempo reale è garantita se:
l'uscita corretta è applicata all'impiantol'uscita corretta è applicata all'impiantoee
il risultato è fornito entro un tempo massimo stabilitoil risultato è fornito entro un tempo massimo stabilitotempo di campionamentotempo di campionamento
L'implementazione di software in tempo reale richiede L'implementazione di software in tempo reale richiede cautele aggiuntive rispetto a quello tradizionalecautele aggiuntive rispetto a quello tradizionale
la verifica di correttezza può risultare complessala verifica di correttezza può risultare complessamolto importante la fase di progettazionemolto importante la fase di progettazione
è richiesta una elevata strutturazioneè richiesta una elevata strutturazioneuna procedura non può occupare una risorsa a tempo una procedura non può occupare una risorsa a tempo indeterminatoindeterminato
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 7676
Software di controllo in Tempo RealeSoftware di controllo in Tempo Reale
Caratteristiche generaliCaratteristiche generaliStrutturazione in processi semplici e ben definitiStrutturazione in processi semplici e ben definiti
la stessa struttura del diagramma SFCla stessa struttura del diagramma SFCil tempo massimo di esecuzione della procedura deve essere ben il tempo massimo di esecuzione della procedura deve essere ben definito per garantire il rispetto del tempo totale di esecuziondefinito per garantire il rispetto del tempo totale di esecuzionee
Esecuzione ciclicaEsecuzione ciclicaad ogni processo è garantita la risorsa di elaborazione entro ilad ogni processo è garantita la risorsa di elaborazione entro iltempo necessariotempo necessario
Attesa di eventi con interrogazione ad ogni ciclo Attesa di eventi con interrogazione ad ogni ciclo attenzione ai loop interniattenzione ai loop interniviolazione dei vincoli di tempo realeviolazione dei vincoli di tempo reale
Separazione tra gestione I/O ed elaborazioneSeparazione tra gestione I/O ed elaborazioneI/O gestito dal Sistema OperativoI/O gestito dal Sistema Operativo
rete sincronarete sincronaI/O ad I/O ad interrupt interrupt o a o a polling polling da programmada programma
attenzione, rete attenzione, rete asincronaasincrona
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 7777
PLC: ambiente di programmazionePLC: ambiente di programmazione
Il Sistema Operativo garantisceIl Sistema Operativo garantiscescansione ciclica programmascansione ciclica programma
il programma viene eseguito in tempo realeil programma viene eseguito in tempo realenon si devono programmare loop di attesanon si devono programmare loop di attesail S.O. garantisce la costanza del tempo di campionamento per il S.O. garantisce la costanza del tempo di campionamento per l’algoritmo di controllo l’algoritmo di controllo
gestione automatica I/Ogestione automatica I/Oall’inizio di ogni ciclo il S.O.all’inizio di ogni ciclo il S.O.
legge gli ingressilegge gli ingressiaggiorna le usciteaggiorna le uscite
gestione deigestione dei timertimer e deie dei countercounter
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 7878
Istruzioni logiche
Istruzioni di esecuzione
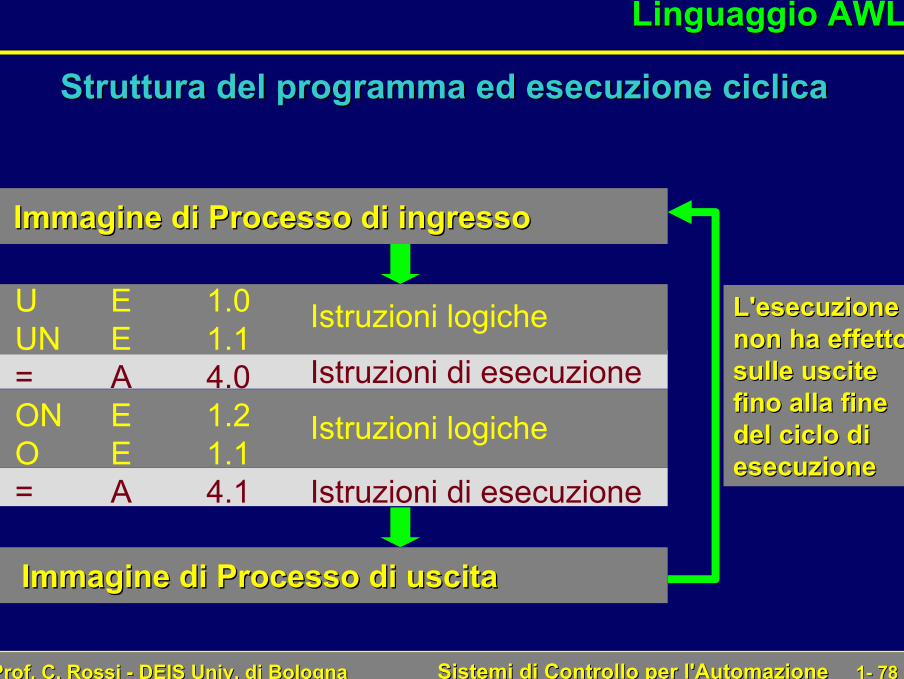
U E 1.0UN E 1.1= A 4.0ON E 1.2O E 1.1= A 4.1
Istruzioni logiche
Istruzioni di esecuzione
Linguaggio AWLLinguaggio AWL
Struttura del programma ed esecuzione ciclicaStruttura del programma ed esecuzione ciclica
Immagine di Processo di ingressoImmagine di Processo di ingresso
Immagine di Processo di uscitaImmagine di Processo di uscita
L'esecuzioneL'esecuzionenon ha effettonon ha effettosulle uscitesulle uscitefino alla finefino alla finedel ciclo didel ciclo diesecuzioneesecuzione
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 7979
Linguaggio AWLLinguaggio AWL
ProcedureProcedureVengono definite BLOCCHI nello STEP5Vengono definite BLOCCHI nello STEP5Sono definiti diversi tipi di blocchiSono definiti diversi tipi di blocchi
Blocchi Organizzativi (OB)Blocchi Organizzativi (OB)servono per la gestione del programma applicativoservono per la gestione del programma applicativo
Blocchi di Programma (PB)Blocchi di Programma (PB)strutturazione del programma applicativostrutturazione del programma applicativononnon parametrizzabiliparametrizzabili
Blocchi di Passo (SB)Blocchi di Passo (SB)come PB per comandi come PB per comandi sequenziali sequenziali
BlocchiBlocchi Funzionali (FB)Funzionali (FB)procedure utente procedure utente parametrizzabiliparametrizzabiliset istruzioni estesoset istruzioni esteso
Blocchi datiBlocchi datiparametri utenteparametri utente

Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 8080
Linguaggio AWLLinguaggio AWL
Blocchi Organizzativi ImportantiBlocchi Organizzativi ImportantiOB 1OB 1
Programma principale chiamato ciclicamente dal S.O.Programma principale chiamato ciclicamente dal S.O.
OB 2 OB 2 ÷÷ OB 5OB 5Gestione di allarmi attivati da allarmi (Gestione di allarmi attivati da allarmi (InterruptInterrupt))
OB 10 OB 10 ÷÷ OB 13OB 13Procedure attivate a tempoProcedure attivate a tempo
OB 21 OB 21 ÷÷ OB 22OB 22Inizializzazione di reti Inizializzazione di reti sequenziali sequenziali (eseguite una sola volta (eseguite una sola volta all'avviamento)all'avviamento)
OB 23 OB 23 ÷÷ OB 34OB 34Procedure attivate da erroriProcedure attivate da errori
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 8181
PLC: ambiente di programmazionePLC: ambiente di programmazione
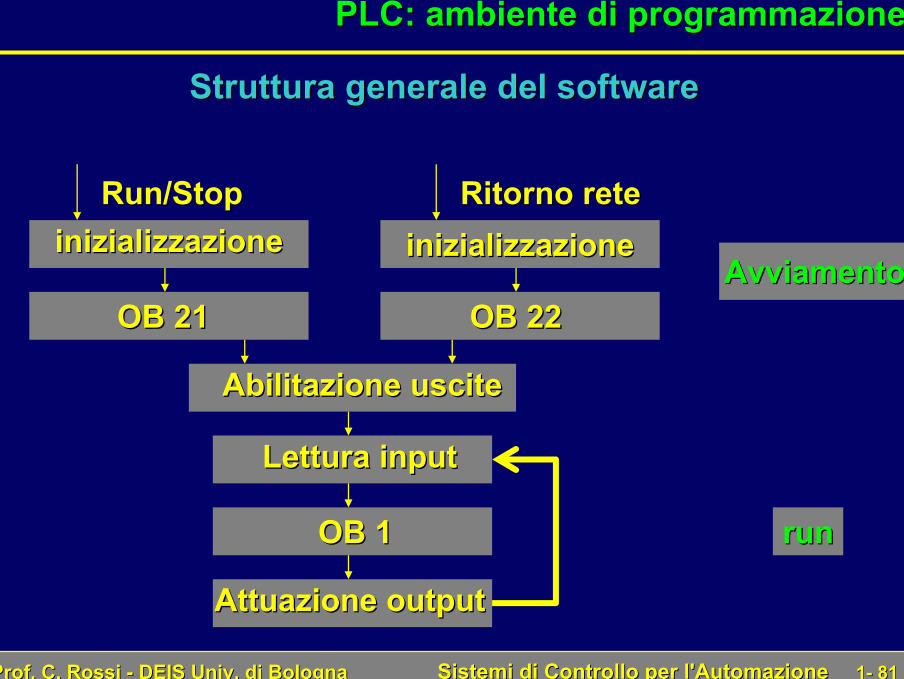
Struttura generale del softwareStruttura generale del software
AvviamentoAvviamento
Ritorno reteRitorno reteinizializzazioneinizializzazione
OB 22OB 22
RunRun/Stop/Stopinizializzazioneinizializzazione
OB 21OB 21
Abilitazione usciteAbilitazione uscite
Lettura inputLettura input
OB 1OB 1
Attuazione outputAttuazione output
runrun

Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 8282
Linguaggio AWLLinguaggio AWL
Blocchi FunzionaliBlocchi FunzionaliProprietàProprietà
sono sono parametrizzabiliparametrizzabiliammettono il set esteso di istruzioniammettono il set esteso di istruzionisi programmano solo in AWLsi programmano solo in AWLnon si possono generare per trasformazione di blocchi PBnon si possono generare per trasformazione di blocchi PB
TipologieTipologieprogrammabili programmabili dall'utentedall'utentedi sistemadi sistemadi libreria (acquistabili separatamente)di libreria (acquistabili separatamente)
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 8383
Linguaggio AWLLinguaggio AWL
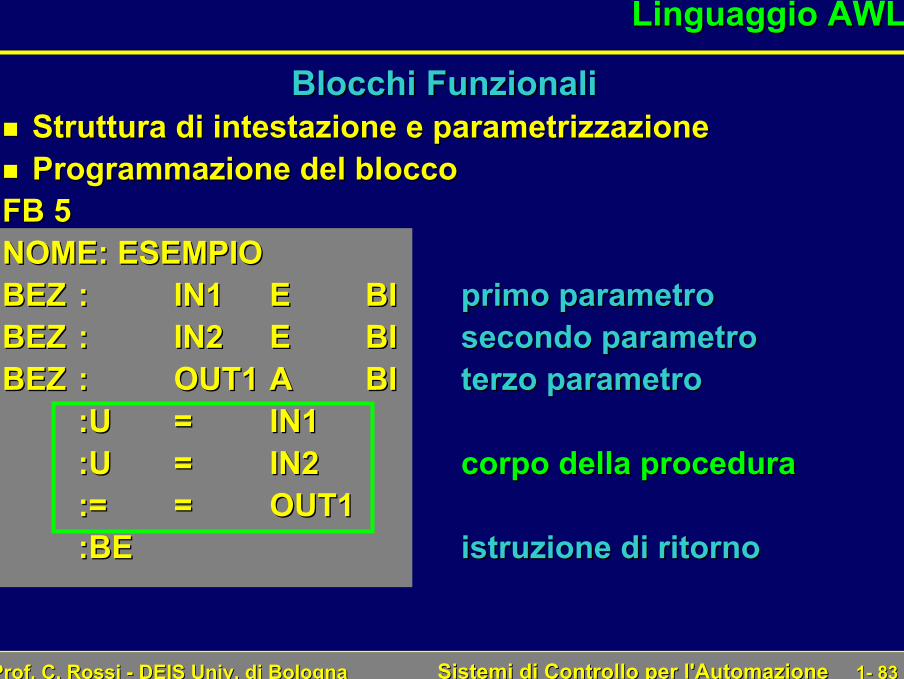
Blocchi FunzionaliBlocchi FunzionaliStruttura di intestazione e Struttura di intestazione e parametrizzazioneparametrizzazioneProgrammazione del bloccoProgrammazione del blocco
FB 5FB 5NOME: ESEMPIONOME: ESEMPIOBEZBEZ :: IN1IN1 EE BIBI primo parametroprimo parametroBEZBEZ :: IN2IN2 EE BIBI secondo parametrosecondo parametroBEZBEZ :: OUT1OUT1 AA BIBI terzo parametroterzo parametro
:U:U == IN1IN1:U:U == IN2IN2 corpo della proceduracorpo della procedura:=:= == OUT1OUT1:BE:BE istruzione di ritornoistruzione di ritorno
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 8484
Linguaggio AWLLinguaggio AWL
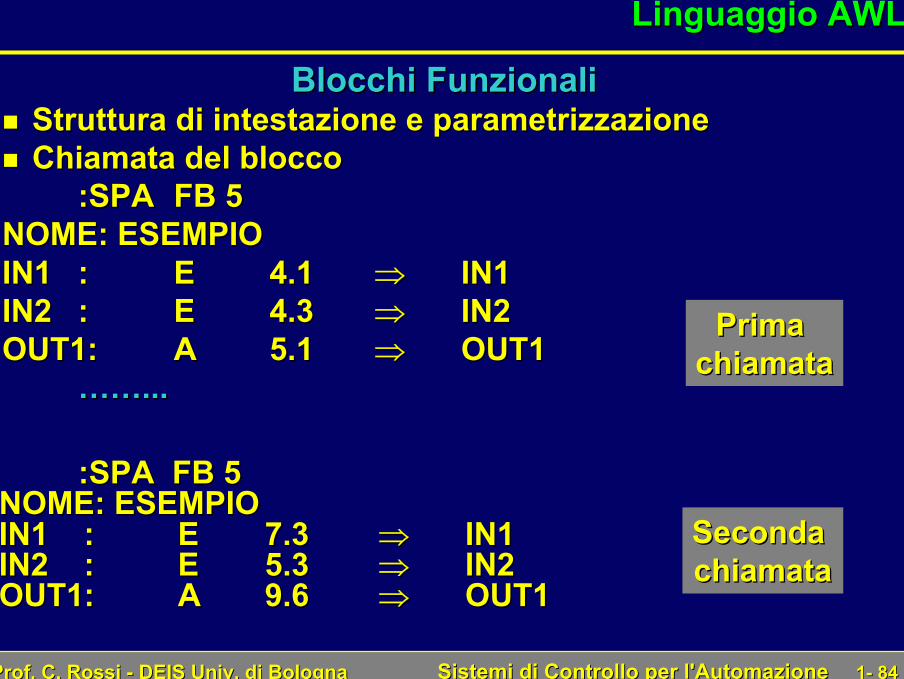
Blocchi FunzionaliBlocchi FunzionaliStruttura di intestazione e Struttura di intestazione e parametrizzazioneparametrizzazioneChiamata del bloccoChiamata del blocco
:SPA:SPA FB 5FB 5NOME: ESEMPIONOME: ESEMPIOIN1IN1 :: EE 4.14.1 ⇒⇒ IN1IN1IN2IN2 :: EE 4.34.3 ⇒⇒ IN2IN2OUT1:OUT1: AA 5.15.1 ⇒⇒ OUT1OUT1
……...……...
Prima Prima chiamatachiamata
Seconda Seconda chiamatachiamata
:SPA FB 5:SPA FB 5NOME: ESEMPIONOME: ESEMPIOIN1 :IN1 : EE 7.37.3 ⇒⇒ IN1IN1IN2 :IN2 : EE 5.35.3 ⇒⇒ IN2IN2OUT1:OUT1: AA 9.69.6 ⇒⇒ OUT1OUT1
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 8585
Linguaggio AWLLinguaggio AWL
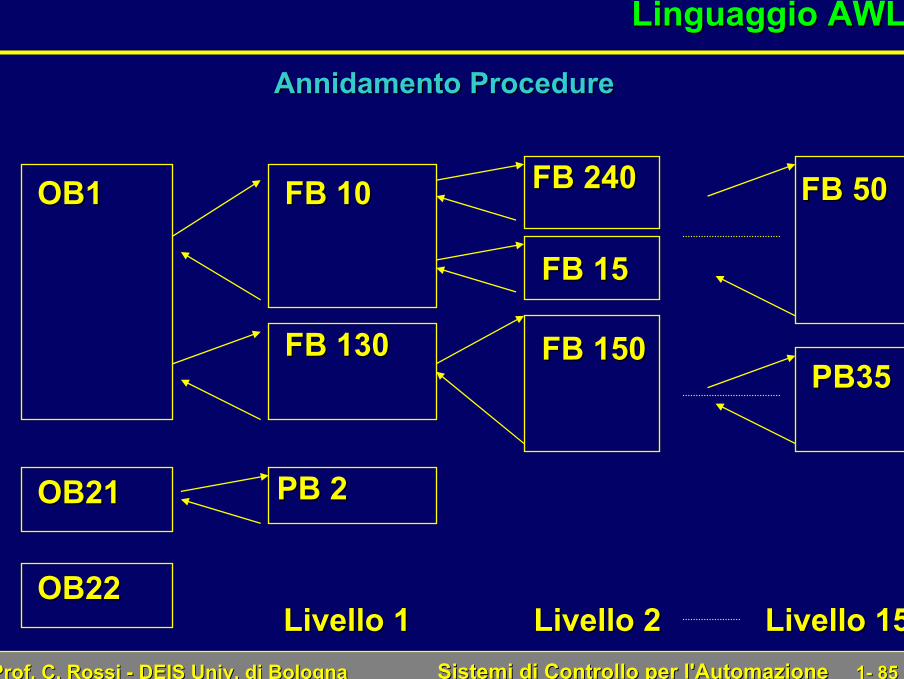
Annidamento ProcedureAnnidamento Procedure
OB1OB1
OB21OB21
OB22OB22Livello 1Livello 1
FB 10FB 10
FB 130FB 130
PB 2PB 2
Livello 2Livello 2
FB 240FB 240
FB 150FB 150
FB 15FB 15
FB 50FB 50
PB35PB35
Livello 15Livello 15

Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 8686
Linguaggio AWLLinguaggio AWL
Classi di istruzioni Classi di istruzioni logichelogiche
AND, OR, NOTAND, OR, NOTesecuzioneesecuzione
assegnamentoassegnamentosequenzialisequenziali
SET, RESETSET, RESETconteggio econteggio e temporizzazionetemporizzazione
256256 timertimer e 256e 256 countercounteraritmetichearitmeticheconfrontoconfrontocontrollo del programmacontrollo del programma
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 8787
Linguaggio AWLLinguaggio AWL
Tipi di variabiliTipi di variabiliLogicheLogiche
EE IngressiIngressiAA UsciteUsciteMM Flag interniFlag interni
WordWordTT TimersTimersZZ ContatoriContatoriDD Parametri di uso generaleParametri di uso generale
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 8888
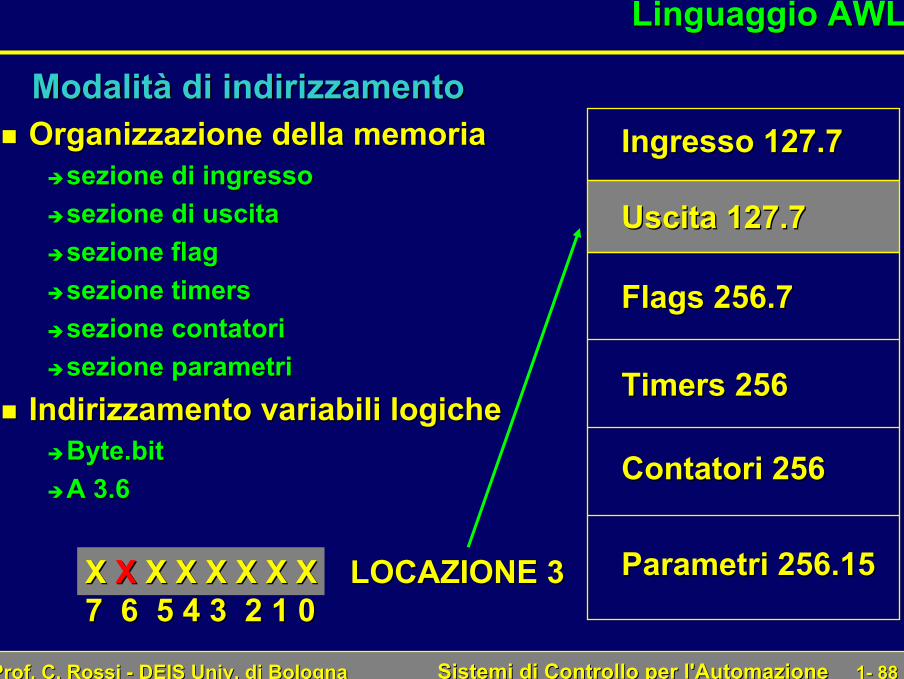
Linguaggio AWLLinguaggio AWL
Modalità di indirizzamentoModalità di indirizzamentoOrganizzazione della memoriaOrganizzazione della memoria
sezione di ingressosezione di ingressosezione di uscitasezione di uscitasezione flagsezione flagsezione sezione timerstimerssezione contatorisezione contatorisezione parametrisezione parametri
Indirizzamento variabili logicheIndirizzamento variabili logicheByte.bitByte.bitA 3.6A 3.6
Ingresso 127.7Ingresso 127.7
Uscita 127.7Uscita 127.7
Flags Flags 256.7256.7
Timers Timers 256256
Contatori 256Contatori 256
Parametri 256.15Parametri 256.15X X XX X X X X X XX X X X X X7 6 5 4 3 2 1 07 6 5 4 3 2 1 0
LOCAZIONE 3LOCAZIONE 3
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 8989
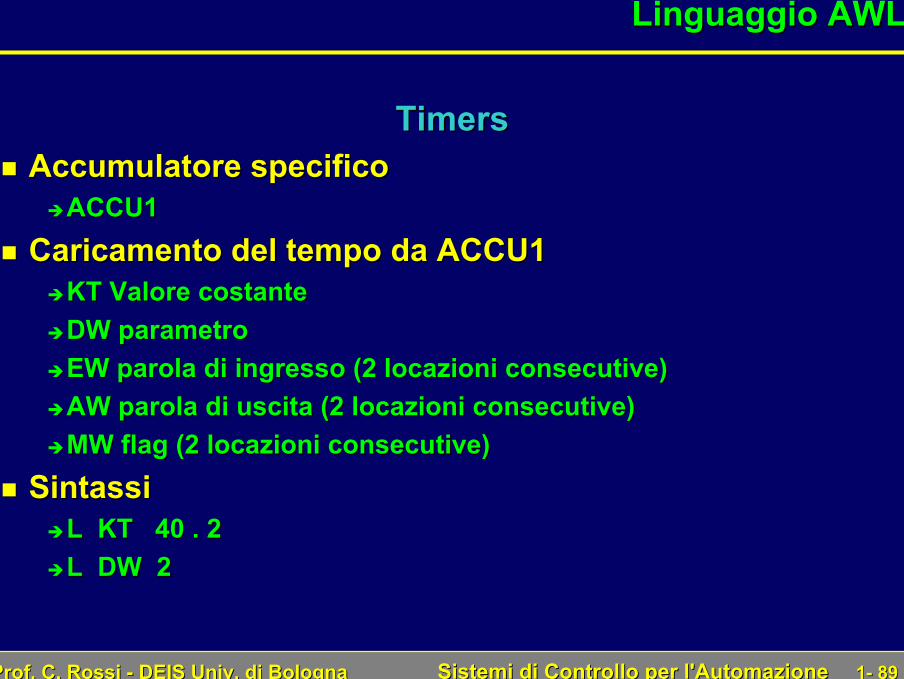
Linguaggio AWLLinguaggio AWL
TimersTimersAccumulatore specificoAccumulatore specifico
ACCU1ACCU1Caricamento del tempo da ACCU1Caricamento del tempo da ACCU1
KT Valore costanteKT Valore costanteDW parametroDW parametroEW parola di ingresso (2 locazioni consecutive)EW parola di ingresso (2 locazioni consecutive)AW parola di uscita (2 locazioni consecutive)AW parola di uscita (2 locazioni consecutive)MW flag (2 locazioni consecutive)MW flag (2 locazioni consecutive)
SintassiSintassiL KT 40 . 2L KT 40 . 2L DW 2L DW 2
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 9090
Linguaggio AWLLinguaggio AWL
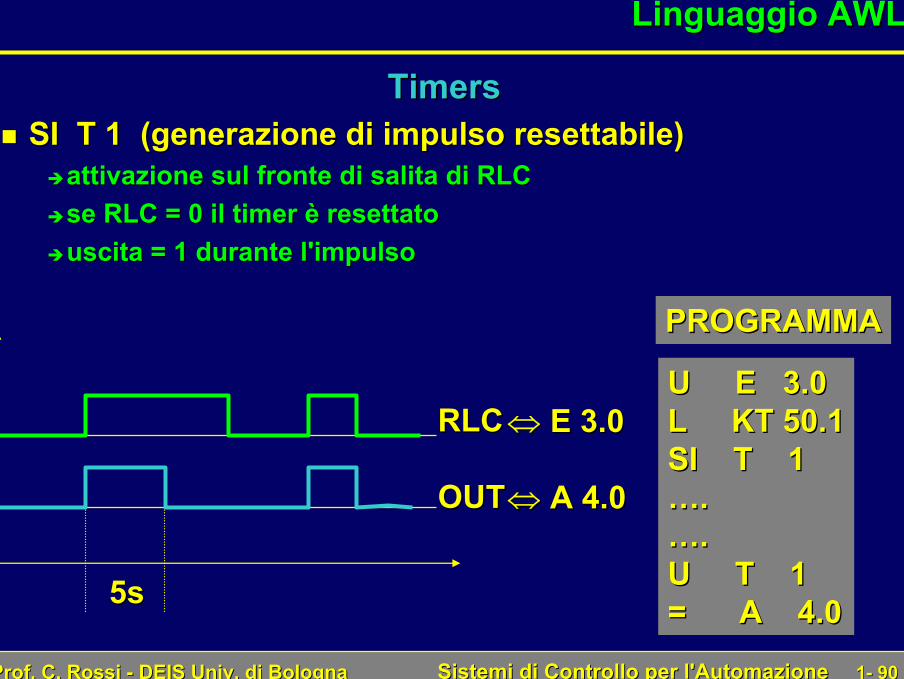
TimersTimersSI T 1 (generazione di impulso SI T 1 (generazione di impulso resettabileresettabile))
attivazione sul fronte di salita di RLCattivazione sul fronte di salita di RLCse RLC = 0 il se RLC = 0 il timertimer è è resettatoresettatouscita = 1 durante l'impulsouscita = 1 durante l'impulso
RLCRLC
OUTOUT
U E 3.0U E 3.0L KT 50.1L KT 50.1SI T 1SI T 1….….….….U T 1U T 1= A 4.0= A 4.0
PROGRAMMAPROGRAMMA
⇔⇔ E 3.0E 3.0
⇔⇔ A 4.0A 4.0
5s5s

Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 9191
Linguaggio AWLLinguaggio AWL
TimersTimersSV T 1 (generazione di impulso nonSV T 1 (generazione di impulso non resettabileresettabile))
attivazione sul fronte di salita di RLCattivazione sul fronte di salita di RLCse RLC = 0 il se RLC = 0 il timertimer non viene toccatonon viene toccatouscita = 1 durante l'impulsouscita = 1 durante l'impulso
RLCRLC
OUTOUT
U E 3.0U E 3.0L KT 50.1L KT 50.1SV T 1SV T 1….….….….U T 1U T 1= A 4.0= A 4.0
PROGRAMMAPROGRAMMA
⇔⇔ E 3.0E 3.0
⇔⇔ A 4.0A 4.0
5s5s 5s5s
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 9292
Linguaggio AWLLinguaggio AWL
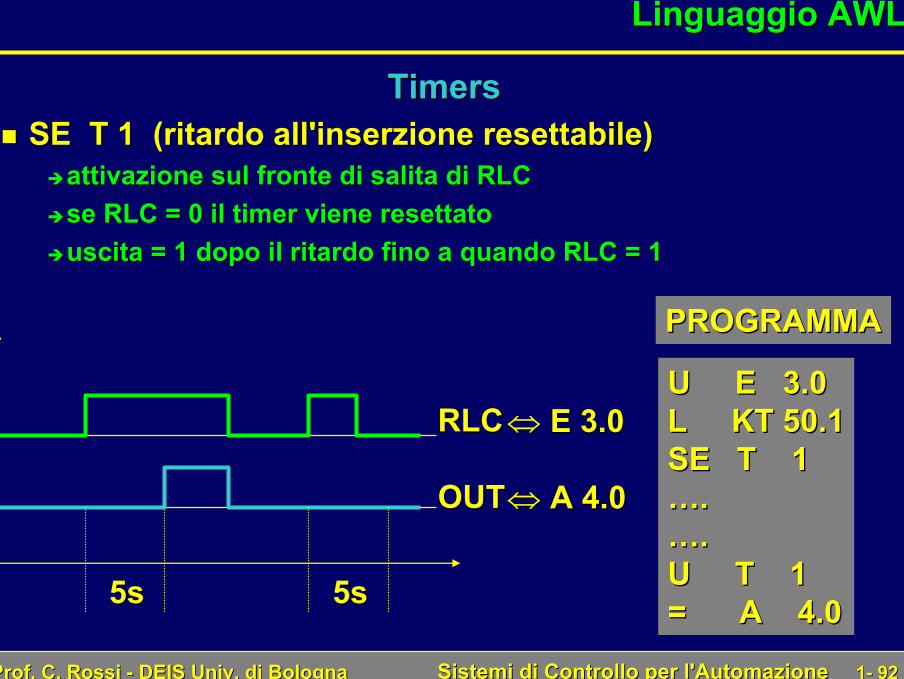
TimersTimersSE T 1 (ritardo all'inserzione SE T 1 (ritardo all'inserzione resettabileresettabile))
attivazione sul fronte di salita di RLCattivazione sul fronte di salita di RLCse RLC = 0 il se RLC = 0 il timertimer viene viene resettatoresettatouscita = 1 dopo il ritardo fino a quando RLC = 1uscita = 1 dopo il ritardo fino a quando RLC = 1
RLCRLC
OUTOUT
U E 3.0U E 3.0L KT 50.1L KT 50.1SE T 1SE T 1….….….….U T 1U T 1= A 4.0= A 4.0
PROGRAMMAPROGRAMMA
⇔⇔ E 3.0E 3.0
⇔⇔ A 4.0A 4.0
5s5s 5s5s

Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 9393
Linguaggio AWLLinguaggio AWL
TimersTimersSS T 1 (ritardo all'inserzione con memoriaSS T 1 (ritardo all'inserzione con memoria resettabileresettabile))
attivazione sul fronte di salita di RLCattivazione sul fronte di salita di RLCse RLC = 0 il se RLC = 0 il timertimer non viene influenzatonon viene influenzatouscita = 1 dopo il ritardouscita = 1 dopo il ritardouscita = 0 quando T viene uscita = 0 quando T viene resettatoresettato
RLCRLC
OUTOUT
RESETRESET
U E 3.0U E 3.0L KT 50.1L KT 50.1SS T 1SS T 1U E 3.2U E 3.2R T 1R T 1….….U T 1U T 1= A 4.0= A 4.0
PROGRAMMAPROGRAMMA
⇔⇔ E 3.0E 3.0
⇔⇔ A 4.0A 4.0
⇔⇔ E 3.2E 3.25s5s 5s5s
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 9494
Linguaggio AWLLinguaggio AWL
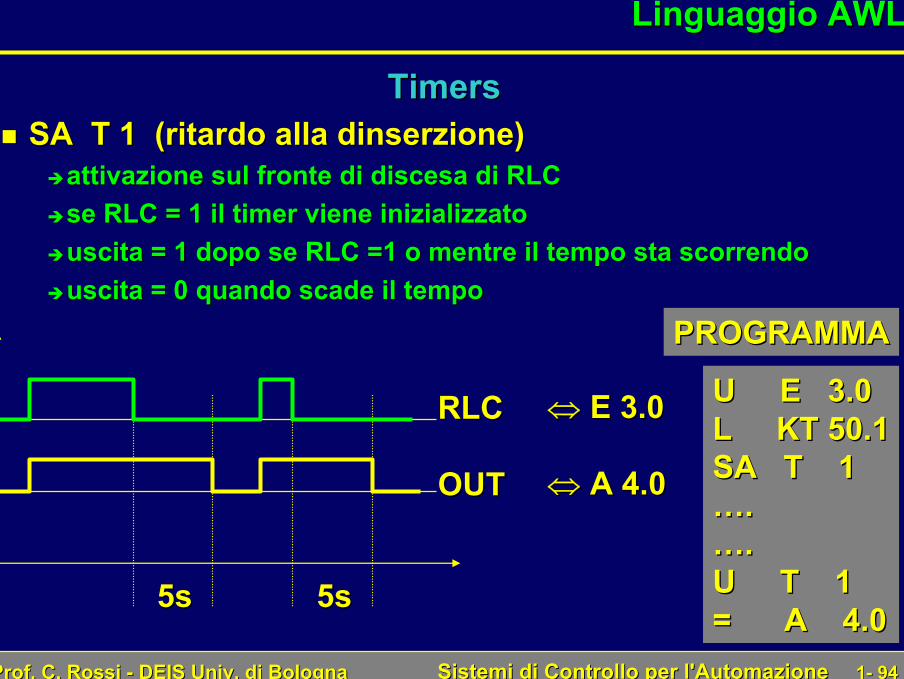
TimersTimersSA T 1 (ritardo alla dinserzione)SA T 1 (ritardo alla dinserzione)
attivazione sul fronte di discesa di RLCattivazione sul fronte di discesa di RLCse RLC = 1 il se RLC = 1 il timertimer viene viene inizializzatoinizializzatouscita = 1 dopo se RLC =1 o mentre il tempo sta scorrendouscita = 1 dopo se RLC =1 o mentre il tempo sta scorrendouscita = 0 quando scade il tempouscita = 0 quando scade il tempo
RLCRLC
OUTOUT
U E 3.0U E 3.0L KT 50.1L KT 50.1SA T 1SA T 1….….….….U T 1U T 1= A 4.0= A 4.0
PROGRAMMAPROGRAMMA
⇔⇔ E 3.0E 3.0
⇔⇔ A 4.0A 4.0
5s5s 5s5s

Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 9595
Linguaggio AWLLinguaggio AWL
ContatoriContatoriSintassiSintassi
L KZ 7L KZ 7
OperazioneOperazione OperandoOperando Valore (0…9999)Valore (0…9999)
L DW 2L DW 2
OperazioneOperazione OperandoOperando IndirizzoIndirizzo
1 0 1 01 0 1 0 DW 2DW 21 1 1 01 1 1 00 0 1 00 0 1 0 1 1 1 01 1 1 0Valore (BCD)Valore (BCD)

Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 9696
Linguaggio AWLLinguaggio AWL
ContatoriContatoriIstruzioni Istruzioni S Z 2S Z 2
Caricamento di un contatoreCaricamento di un contatoreattivo sul fronte di salita di RLCattivo sul fronte di salita di RLC
R Z 2R Z 2ResetReset di un contatoredi un contatoreattivo se RLC=1attivo se RLC=1
ZV Z 2ZV Z 2Incrementa contatoreIncrementa contatoreattivo sul fronte di salitaattivo sul fronte di salitauscita = 0 se valore = 0uscita = 0 se valore = 0
ZR Z 2ZR Z 2Come ZV ma Come ZV ma decrementadecrementa contatorecontatore
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 9797
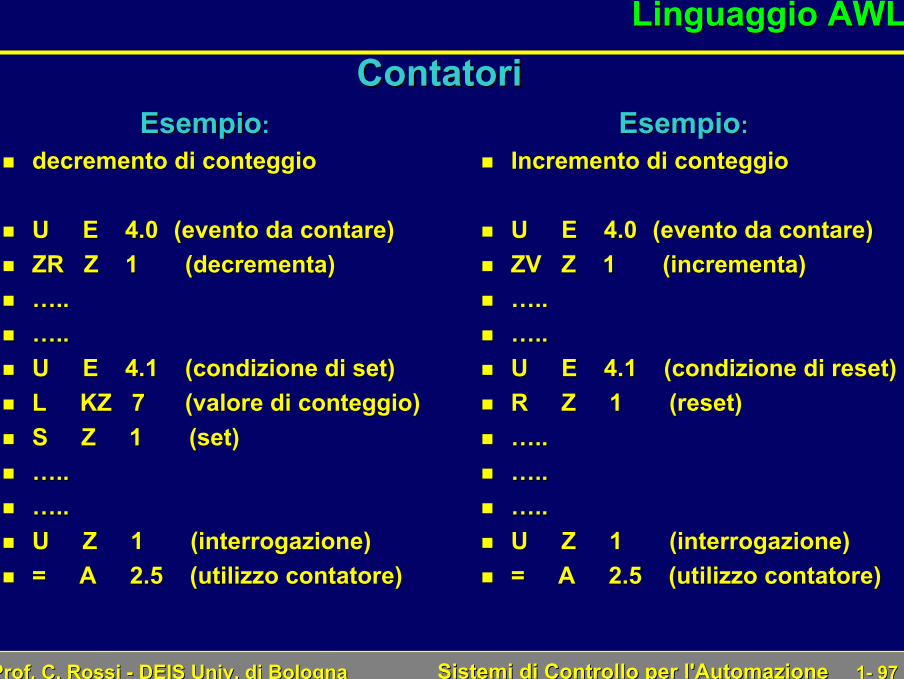
ContatoriContatoriLinguaggio AWLLinguaggio AWL
EsempioEsempio: : decremento di conteggiodecremento di conteggio
U E 4.0 U E 4.0 (evento da contare)(evento da contare)ZR Z 1 (ZR Z 1 (decrementadecrementa))…..…..…..…..U E 4.1 (condizione di set)U E 4.1 (condizione di set)L KZ 7 (valore di conteggio)L KZ 7 (valore di conteggio)S Z 1 S Z 1 (set)(set)…..…..…..…..U Z 1 (interrogazione)U Z 1 (interrogazione)= A 2.5 (utilizzo contatore) = A 2.5 (utilizzo contatore)
EsempioEsempio::Incremento di conteggioIncremento di conteggio
U E 4.0 U E 4.0 (evento da contare)(evento da contare)ZV Z 1 (incrementa)ZV Z 1 (incrementa)…..…..…..…..U E 4.1 (condizione di U E 4.1 (condizione di resetreset))R Z 1 (R Z 1 (resetreset))…..…..…..…..…..…..U Z 1 (interrogazione)U Z 1 (interrogazione)= A 2.5 (utilizzo contatore) = A 2.5 (utilizzo contatore)

Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 9898
Dall'Dall' SFC al programma AWLSFC al programma AWL
Due alternativeDue alternativeAmbiente di programmazione SFC Ambiente di programmazione SFC disponibiledisponibile
interfaccia graficainterfaccia graficaper ogni stato e per ogni transizione il progettista deve per ogni stato e per ogni transizione il progettista deve predisporre (in AWL) il programma che implementa il controllo o predisporre (in AWL) il programma che implementa il controllo o verifica la condizione di transizioneverifica la condizione di transizione22 timerstimers possono essere associati ad ogni statopossono essere associati ad ogni stato
TIMETIME--OUTOUTinizializzato inizializzato a + a + ∞∞ dal S.O. (disabilitato)dal S.O. (disabilitato)serve per evitare situazioni di deadserve per evitare situazioni di dead--lock dell'lock dell' SFC causate da errori SFC causate da errori di programmazione o da guasti nei sensori o negli di programmazione o da guasti nei sensori o negli attuatoriattuatori
DELAYDELAYinizializzatoinizializzato a 0 a 0 dal S.O. (disabilitato)dal S.O. (disabilitato)serve per ritardare l'attivazione delle transizioni in uscitaserve per ritardare l'attivazione delle transizioni in uscita

Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 9999
Dall'Dall' SFC al programma AWLSFC al programma AWL
Due alternativeDue alternativeAmbiente di programmazione SFC Ambiente di programmazione SFC non disponibilenon disponibile
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 100100
Sistemi PLC:Sistemi PLC: multiprocessoremultiprocessore
CPU specializzateCPU specializzatebasso costobasso costo
utilizzo genericoutilizzo genericogestione ottimizzata funzioni logichegestione ottimizzata funzioni logiche
tempi di ciclo molto bassi tempi di ciclo molto bassi gestione integrata funzioni logiche e funzioni gestione integrata funzioni logiche e funzioni matematichematematiche
per automazioni complesseper automazioni complessegestione delle comunicazionigestione delle comunicazioni
reti proprietariereti proprietariereti standard per l’automazionereti standard per l’automazione
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 101101
Moduli Ingresso/Uscita intelligentiModuli Ingresso/Uscita intelligenti
Con processore a bordoCon processore a bordoGestione conteggi conGestione conteggi con encoderencoder
interfaccie Encoderinterfaccie Encoder + contatori hardware+ contatori hardwareControllo di temperaturaControllo di temperatura
interfaccieinterfaccie per termocoppie/per termocoppie/termoresistenzetermoresistenzeinterfaccieinterfaccie per amplificatore di potenzaper amplificatore di potenza
Controllo di posizioneControllo di posizioneingressiingressi encoderencoderuscite analogiche/PWMuscite analogiche/PWM
Controllo digitale genericoControllo digitale genericocanali I/O analogicicanali I/O analogici
Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione 11-- 102102
Tendenza alla unificazione
Sistemi di automazione e di processoSistemi di automazione e di processo
Moderni PLCModerni PLCsistemisistemi multiprocessoremultiprocessoreambiente di programmazione ambiente di programmazione dedicatodedicatocontrollicontrolli sequenzialisequenzialicomplessicomplessiintegrazione di controlli integrazione di controlli digitalidigitalicollegamento in rete locale collegamento in rete locale
Controllori di processoControllori di processosistemisistemi multiprocessoremultiprocessoreambiente di programmazione ambiente di programmazione standardstandardalgoritmi digitali complessialgoritmi digitali complessiintegrazione di controlli logiciintegrazione di controlli logicicollegamento in rete localecollegamento in rete locale

Prof. Prof. C. RossiC. Rossi -- DEIS DEIS UnivUniv. di Bologna. di Bologna Sistemi di Controllo per l'AutomazioneSistemi di Controllo per l'Automazione
Dispositivi e Dispositivi e Strumenti Software Strumenti Software per l'Automazioneper l'Automazione
Prof. Prof. Carlo RossiCarlo RossiUniversità di BolognaUniversità di Bologna