IdentiÞcazione e sintesi di reti compatte di feedback ... · Capitolo 2 Problematiche termiche nei...
62
Universit` a degli Studi di Napoli Federico II FACOLT ` A DI INGEGNERIA Corso di Laurea Triennale in Ingegneria Elettronica Tesi di laurea Identificazione e sintesi di reti compatte di feedback elettrotermico: confronto di topologie ed analisi di prestazioni in SPICE Relatore: Ch.mo Prof. Massimiliano de Magistris Correlatore: Ing. Alessandro Magnani Candidato: Andrea Stefanelli Matricola 528/1519 Anno Accademico 2011–2012
Transcript of IdentiÞcazione e sintesi di reti compatte di feedback ... · Capitolo 2 Problematiche termiche nei...

Universita degli Studi di Napoli Federico II
FACOLTA DI INGEGNERIA
Corso di Laurea Triennale in Ingegneria Elettronica
Tesi di laurea
Identificazione e sintesi di reti compatte di
feedback elettrotermico: confronto di
topologie ed analisi di prestazioni in SPICE
Relatore:
Ch.mo Prof.
Massimiliano de Magistris
Correlatore:
Ing. Alessandro Magnani
Candidato:
Andrea Stefanelli
Matricola 528/1519
Anno Accademico 2011–2012

alla mia famiglia...


Indice
1 Introduzione 1
2 Problematiche termiche nei sistemi elettronici 3
2.1 Resistenze e impedenze termiche. . . . . . . . . . . . . . . . 4
2.2 Multiporta termici e matrice delle impedenze . . . . . . . . 6
3 Identificazione di modelli equivalenti ridotti 10
3.1 Processi di identificazione . . . . . . . . . . . . . . . . . . . 12
3.2 Identificazione nel dominio della Frequenza . . . . . . . . 14
3.3 Identificazione nel dominio del tempo . . . . . . . . . . . . 16
3.4 Topologie di reti elettriche per la sintesi di impedenze ter-
miche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.4.1 Foster Standard . . . . . . . . . . . . . . . . . . . . . 22
3.4.2 Foster Generalizzata . . . . . . . . . . . . . . . . . . 25
3.4.3 Rete compatta di Walkey . . . . . . . . . . . . . . . 30
IV

4 Co-simulazioni elettrotermiche in Spice ed onere computazio-
nale 33
4.1 Ottimizzazione delle topologie per sostituzione . . . . . . . 37
4.2 Casi di studio . . . . . . . . . . . . . . . . . . . . . . . . . . 43
4.2.1 Sistemi elettronici ad alta integrazione . . . . . . . . 43
4.2.2 Array di transistori bipolari ad eterogiunzione su
substrato di GaAs . . . . . . . . . . . . . . . . . . . . 48
4.3 Confronto Complessivo . . . . . . . . . . . . . . . . . . . . 51
4.4 Conclusioni . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
Bibliografia 55
V

Capitolo 1
Introduzione
In questa tesi vengono analizzate diverse topologie circuitali per la
realizzazione di reti di feedback elettrotermico e ne vengono confronta-
te le prestazioni in SPICE. Nelle attuali tecniche di progettazione elet-
tronica, a causa dell’integrazione sempre più spinta dei componenti, la
dissipazione di potenza ha raggiunto e superato le capacità dei moderni
dissipatori di calore di limitare la temperatura dei chip. Di conseguenza,
i problemi termici sono passati in primo piano e le tecniche di progetta-
zione sono sempre più orientate al minor consumo di energia. “Smaller
and faster” è questo che il mercato chiede per i prodotti elettronici e ciò
come detto si traduce in alte dissipazioni di potenza, temperature di fun-
zionamento più elevate e riduzione dell’affidabilità. Se il calore non viene
adeguatamente smaltito, le temperature crescono riducendo l’affidabilità
dei dispositivi elettronici. Nasce quindi la necessità di capire l’effetto che
1

1 – Introduzione
la temperatura ha sull’affidabilità e sulle prestazioni, studiarne i metodi
di gestione, di trasferimento, e mettere a punto tecniche per modellare e
analizzare tali trasferimenti di calore. È infatti ben noto che il surriscal-
damento influisce negativamente sia sulle prestazioni che sulla affidabi-
lità dei sistemi elettronici. Vari metodi sono stati proposti per derivare
efficienti modelli termici dinamici di dispositivi e sistemi. Al fine di de-
scrivere correttamente il comportamento dei sistemi elettronici è richiesta
una soluzione del problema elettrico accoppiata con il problema termico:
il problema congiunto è detto elettrotermico. Le analisi elettrotermiche
possono essere eseguite con una molteplicità di tecniche caratterizzate
da un diverso trade-off tra complessità ed accuratezza. L’elaborato è così
strutturato: nel Capitolo 2 sono introdotte le problematiche termiche dei
sistemi elettronici. Nel Capitolo 3 viene affrontato il problema della iden-
tificazione dei modelli, sia nel dominio del tempo che della frequenza e
vengono introdotte alcune topologie circuitali per la sintesi delle reti di
feedback elettrotermico. Nel Capitolo 4 si applicano alcune tecniche di
ottimizzazione delle topologie introdotte nel Capitolo 3 e si procede al-
la simulazione di due casi di studio, infine viene riportato un confronto
finale tra le topologie.
2

Capitolo 2
Problematiche termiche nei
sistemi elettronici
Nelle moderne tecniche di progettazione l’aumento del grado di in-
tegrazione e dei particolari materiali usati, il meccanismo di conduzione
del calore sta assumendo un ruolo sempre più importante, mentre la con-
vezione ha un ruolo sempre più piccolo, l’onere della della gestione del
calore sta passando quindi dal progettista di package al progettista dei
chip stessi. In oltre l’avvento di nuove tecniche di integrazione, per esem-
pio quella tridimensionale ha reso i circuiti integrati ancora più sensibili
agli effetti termici. L’architettura 3-D se da un lato offre vantaggi unici
in termini di dimensioni e performance, dall’altro assorbe maggiore den-
sità di potenza raggiungendo temperature che possono essere parecchio
3

2 – Problematiche termiche nei sistemi elettronici
elevate. La gestione della temperatura in queste strutture assume quin-
di un ruolo fondamentale. Infatti molti dei guasti che si manifestano nei
circuiti elettronici sono causati o legati alle temperature elevate, alle im-
provvise variazioni di temperatura spaziali o temporali e alla presenza di
hot spot. Le variazioni di temperatura in un circuito VLSI possono cau-
sare significative incertezze sul timing, aumento dei margini di rumore e
quindi degradare le prestazioni dei circuiti.
2.1 Resistenze e impedenze termiche.
Per modellare il legame tra dissipazione di potenza e il relativo au-
mento di temperatura del dispositivo è stato introdotto il concetto di resi-
stenza termica e impedenza termica. Si parla di resistenza termica se siamo
in regime stazionario, essa quantifica l’attitudine di un percorso termico
di trasferire calore. La definizione generale della resistenza di un per-
corso termico, che comprende i tre differenti metodi di trasferimento del
calore (conduzione, convezione, irraggiamento), è il rapporto tra l’incre-
mento di temperatura misurato in un punto di riferimento e la potenza
dissipata.
RTH =
�T
P
(2.1)
la cui unità di misura è [K/W]. È quindi possibile sfruttare un equivalente
elettrico per il trasferimento del calore in regime stazionario, alle correnti
si fa corrispondere la potenza P e alla tensione il relativo incremento di
4

2 – Problematiche termiche nei sistemi elettronici
temperatura e ovviamente alla resistenza elettrica si fa corrispondere la
resistenza termica. Quindi la legge di Ohm V = RI si traduce, per il
modello elettrico equivalente del problema termico, in:
�T = T � T0 = RTHPD (2.2)
Per descrivere gli effetti del riscaldamento in transitorio si introduce
il concetto di impedenza termica. Supponiamo di applicare ad un siste-
ma un gradino di potenza unitario all’istante t = 0, l’impedenza termica
ZTH è l’incremento di temperatura dinamico, rispetto alla temperatura
ambiente, normalizzato all’ampiezza del gradino applicato.
ZTH(t) =
T (t)� T0
PD! �T (t) = ZTH(t)PD (2.3)
Figura 2.1: Illustrazione schematica della definizione diimpedenza termica
Le definizioni viste valgono se si considera un solo dispositivo, ovvero
5

2 – Problematiche termiche nei sistemi elettronici
se si misura l’incremento di temperatura del dispositivo dovuto all’atti-
vazione del dispositivo stesso; in questo caso si parla di resistenza/impe-
denza di auto-riscaldamento.
Quando uno dei dispositivi è attivo, dissipa potenza, ciò causa un au-
mento della sua temperatura e di quella dei dispositivi che lo circondano,
si instaura quindi un accoppiamento termico e tali interazioni termiche
sono descritte dall’impedenza termica mutua Zij (t) definita come l’incre-
mento di temperatura dell’i-esimo dispositivo dovuto all’applicazione di
un gradino di potenza al j-esimo dispositivo, normalizzato alla potenza
dissipata.
Zij (t) =Ti(t)� TAMB
Pj(2.4)
2.2 Multiporta termici e matrice delle impedenze
La diretta generalizzazione delle resistenze e impedenze termiche è
la matrice delle resistenze/impedenze termiche, che descrive completa-
mente i dispositivi con più sorgenti di calore. Per esempio un dispositivo
con due fonti di calore in regime stazionario è descritto dalle seguenti
relazioni:�T = R11PD1 +R12PD2
�T = R21PD1 +R22PD2
(2.5)
6

2 – Problematiche termiche nei sistemi elettronici
da cui si ricava la matrice
RTH =
0
B@R11 R12
R21 R22
1
CA (2.6)
In transitorio invece abbiamo:
�T1(s) = Z11(s)PD1(s) + Z12(s)PD2(s)
�T2(s) = Z21(s)PD1(s) + Z22(s)PD2(s)
(2.7)
da cui
ZTH =
0
B@Z11 Z12
Z21 Z22
1
CA (2.8)
Z11, Z22 self-heating impedances
Z12, Z21 muthual-heating impedances
L’impedenza termica può essere caratterizzata nel dominio della fre-
quenza dalla frequenza di cutoff termico e nel dominio del tempo dal riseti-
me termico:
• La frequenza di cutoff termico fTH è definita dalla frequenza a 3db di
|ZTH(f)|, ovvero è la frequenza alla quale lo spettro dell’impedenza
termica si è ridotto rispetto al valore di regime di un fattorep2
|ZTH(f)| = RTHp2
(2.9)
7

2 – Problematiche termiche nei sistemi elettronici
• Il risetime termico tR è definito come la differenza tra l’istante di tem-
po in cui l’impedenza termica raggiunge il 90% del suo valore di
regime e l’istante di tempo in cui raggiunge il 10%.
tR = t90% � t10% (2.10)
Attraverso opportune misurazioni o simulazioni è possibile ottenente
l’andamento dell’impedenza termica nel tempo o in frequenza. Median-
te opportune tecniche di identificazione e sintesi è possibile ricavare una
rete di feedback termico che consente, date le potenze in ingresso, di otte-
nere in uscita i relativi incrementi di temperatura. Questa rete accoppiata
opportunamente a macromodelli elettrici del sistema da analizzare, dota-
ti di terminali di temperatura e di potenza, consente di effettuare una si-
mulazione elettrotermica completa all’interno di un simulatore circuitale
standard.
Nel corso di questo lavoro di tesi verranno considerate alcune topolo-
gie di rete per la sintesi impedenze termiche, con l’obiettivo di valutare
comparativamente rispetto alla loro identificazione ed all’utilizzo finale.
In particolare il lavoro sarà strutturato come segue:
• Analizzare le diverse topologie di reti termiche dal punto di vista
della struttura e delle proprietà.
• Descrivere gli specifici algoritmi di estrazione per l’identificazione
8

2 – Problematiche termiche nei sistemi elettronici
(a)
(b)
Figura 2.2: (a) frequenza di cutoff termico e (b) risetimetermico
di parametri termici Ri e Ci, ottimizzati per ogni topologia di rete
termica.
• Analizzare e confrontare le differenti topologie in termini di accu-
ratezza, efficienza e numero di parametri estratti.
9

Capitolo 3
Identificazione di modelli
equivalenti ridotti
Per una progettazione orientata a minimizzare le riduzioni di presta-
zioni e affidabilità dovute agli effetti termici, l’analisi elettrotermica dei
dispositivi sta assumendo un ruolo chiave nelle moderne tecniche di pro-
gettazione. Gli effetti termici infatti assumono grande importanza nelle
tecnologie allo stato dell’arte a causa della spinta scala di integrazione e
della crescita delle potenze in gioco. In letteratura sono stati introdotti di-
versi metodi per eseguire co-simulazioni elettrotermiche, ovvero per po-
ter simulare l’effetto termico che un dispositivo produce su se stesso o su
altri dispositivi vicini. Tali metodi possono essere suddivisi in diverse ca-
tegorie caratterizzate da gradi di precisione e complessità differenti. Per
10

3 – Identificazione di modelli equivalenti ridotti
strutture semplici le co-simulazioni elettrotermiche possono essere realiz-
zate attraverso software che sfruttando algoritmi quali il Finite Element
Method (FEM), calcolano il campo di temperatura dell’intero sistema per
ogni step di simulazione. Tali risultati abbinati poi ad una simulazione
elettrica del circuito realizzano una simulazione elettrotermica comple-
ta. Tale procedura è eseguita per ogni step di simulazione ed è evidente
che se la complessità del sistema aumenta risolvere le equazioni del ca-
lore ad ogni step diventa estremamente dispendioso dal punto di vista
dell’onere computazionale.
Fintanto che la struttura è semplice calcolare il campo di temperatura
in ogni punto è fattibile ed utile in termini di accuratezza di simulazione,
ma se la struttura si complica diventa necessario cambiare approccio. Di
solito infatti si è interessati a simulare l’effetto che un dispositivo attivo
ha su se stesso e sui dispositivi ad esso adiacenti, quindi si è interessati
a calcolare il campo di temperatura esclusivamente in determinati pun-
ti della struttura, si è inoltre interessati a calcolare in maniera veloce e
rapida l’aumento della temperatura in un punto per effetto dell’applica-
zione di potenza in un altro. La struttura quindi può essere considerata
come un sistema multiporta che attraverso equivalenti elettrici modella il
sistema dal punto di vista termico, essendo i problemi termici a parame-
tri distribuiti il sistema equivalente sarà caratterizzato da infiniti poli. È
evidente l’impossibilità di simulare un sistema del genere se non si ridu-
ce il suo ordine. Si adottano quindi tecniche dette di riduzione d’ordine,
11

3 – Identificazione di modelli equivalenti ridotti
si identifica cioè il sistema multiporta con un set di poli limitato. È ben
noto infatti che i problemi di diffusione del calore, una volta discretiz-
zati, possono essere interpretati mediante delle reti elettriche equivalenti
passive, caratterizzate da un numero limitato di poli. Nei casi più sem-
plici si può modellare l’effetto dovuto all’autoriscaldamento attraverso
una semplice cella RC (e.g. reti RC) [2], mentre nei casi più complessi si
adoperano sistemi multiporta caratterizzati da una matrice di impedenze
termiche. Le impedenze saranno identificate sfruttando alternativamen-
te due diverse tecniche di identificazione (una nel domino del tempo e
una in quello della frequenza) e tre diverse topologie per la sintesi circui-
tale. A valle dei processi di identificazione si passa ad una fase di sintesi
circuitale, ovvero la realizzazione pratica del circuito implementato in un
blocchetto SPICE che accoppiato al macromodello del circuito consente di
effettuare una simulazione elettrotermica completa della struttura senza
fare ricorso a tecniche complesse come il precedentemente citato FEM.
Tali tecniche in oltre devono garantire la conservazione delle proprietà
del sistema: stabilità, passività, fisica realizzabilità ecc. . .
3.1 Processi di identificazione
Il processo di identificazione per sistemi lineari consiste nel determi-
nare una forma approssimata per la matrice o funzione di trasferimento
del sistema. L’espressione trovata analiticamente è in termini di rapporto
12

3 – Identificazione di modelli equivalenti ridotti
tra polinomi o in termini di poli e residui e deve approssimare in maniera
accurata la risposta del sistema conservandone le caratteristiche fisiche.
Tra gli algoritmi proposti in letteratura per la procedura di identificazione
troviamo il Vector Fitting [], algoritmo iterativo basato sulla ricollocazio-
ne dei poli; ad ogni iterazione viene risolto un problema lineare, fino a
quando non si raggiunge la migliore accuratezza possibile. Questo algo-
ritmo suddivide il problema di partenza non lineare in due stadi, ognuno
dei quali risolve un problema lineare. Riferendoci all’algoritmo del Vec-
tor Fitting per l’espansione approssimata di una funzione, si giunge a
questo tipo di approssimazione per la f(s)
f(s) =
NX
m=1
cm
s� pm+ d+ sh (3.1)
Le incognite da determinare sono cm, pm, d, h e la non linearità del
problema sta nella presenza delle incognite pm al denominatore. Il pro-
blema però è suddivisibile in due problemi lineari: in un primo stadio si
determinano i poli della f(s), mentre in un secondo di calcolano i residui
della f(s) con i poli fissati calcolati nel primo stadio. Questa procedu-
ra porta ad una funzione con poli stabili ma non assicura la passività,
proprietà indispensabile al successo di una simulazione di una rete di
grandi dimensioni, poiché anche se un circuito è stabile ma non passivo,
inserito in un macro-modello può generare un comportamento instabile.
13

3 – Identificazione di modelli equivalenti ridotti
Per tanto si ricorre alle metodologie di forzamento della passività. Esi-
stono due tipologie di approcci nell’identificazione passiva: un approc-
cio a-posteriori che consiste nel correggere le violazioni di passività del
modello identificato con tecniche perturbative [1] [9], e un approccio a-
priori nel quale si giunge ad un modello passivo imponendo dei vincoli
durante la fase di identificazione [3]. Un approccio a-priori è il Positi-
ve Fraction Vector Fitting (PFVF) [12] [13]. Per questa procedura, i poli
sono identificati mediante il Vector Fitting [5], formulando il calcolo dei
residui come un problema di ottimizzazione convessa, e la matrice che si
ottiene è un’espansione in frazione positiva.
3.2 Identificazione nel dominio della Frequenza
Supponiamo di avere a disposizione le caratteristiche ai terminali di
un generico sistema multi-porta lineare, da tali caratteristiche come det-
to si vuole ricavare la matrice di trasferimento del sistema attraverso la
procedura del PFVF. Nel dominio della frequenza a valle del PFVF la
generica matrice H(s) (matrice delle impedenze, ammettenze o al più
matrice ibrida) di un sistema ad M porte è rappresentata dalla seguente
espansione [13]:
H(s) = R0 +
NcpX
n=1
rn
s� pn+
r
⇤n
s� p
⇤n
�An +
NrpX
n=1
rn
s� pnAn (3.2)
14

3 – Identificazione di modelli equivalenti ridotti
dove s è la frequenza complessa, Ncp è il numero di poli complessi co-
niugati, Nrp è il numero di quelli reali, R0 e An sono matrici M ⇥ M
con M numero di porte del sistema. L’espressione (3.2) può essere ri-
scritta considerando solo i poli reali, nei problemi termici infatti non si
hanno picchi di risonanza, quindi non sono mai presenti poli comples-
si coniugati. Si giunge quindi alla rappresentazione della matrice delle
impedenze secondo la seguente espansione:
Zn(s) =
NpX
n=1
Rn
s� pn(3.3)
dove Np è il numero di poli reali e Rn = rnAn sono le corrispondenti
matrici di residui. Tali matrici per le proprietà del sistema devono essere
reali simmetriche e definite positive con il termine a11 = (An)11 che può
essere fissato ad 1 nella fattorizzazione di rn. L’equivalente elettrico per
il problema termico è una rete di celle RC, in quanto tutti i poli sono
reali. Empiricamente si è dimostrato che l’assunzione di un unico, ma
limitato, set di poli per tutte le impedenze termiche associate al sistema,
è ragionevole in quanto, quando si lavora con problemi di propagazione
termica si manifesta sempre una collezione di poli dominanti. Se tutte
le condizioni sono rispettate, la passività è garantita con un criterio a-
priori su tutto lo spettro di frequenze determinando le matrici di residui
15

3 – Identificazione di modelli equivalenti ridotti
attraverso un processo di ottimizzazione convessa
{Rn} = argmin
���Zn(j!k)� ˜Zn(j!k)
���2
Rn � 0
(3.4)
dove ˜Z sono i dati dell’impedenza termica e Rn � 0 è il vincolo di passi-
vità. Quindi per problemi termici che coinvolgono un numero limitato di
porte e un numero relativamente basso di poli, l’onere computazionale
richiesto dal problema di identificazione è piuttosto basso, anche se va
osservato, che deve essere eseguita una serie di misurazioni o una pre-
liminare simulazione termica 3-D che può essere onerosa. Una volta ot-
tenuta la matrice delle impedenze nella forma (3.3) deve essere eseguito
un processo di diagonalizzazione alle matrici An in modo da poter espri-
mere ogni termine di (3.3) come la somma di matrici di rango unitario.
Tale rappresentazione corrisponde a celle elementari RC opportunamen-
te collegate a trasformatori ideali, come mostrato nella Figura 3.1, dove
N = Np⇥M è il numero delle celle RC utilizzate [6], a causa del processo
di diagonalizzazione.
3.3 Identificazione nel dominio del tempo
Da un punto di vista teorico è possibile, forzando il sistema con un
gradino di potenza unitario, esprimere nel dominio del tempo, la solu-
zione dell’equazione del calore sotto particolari condizioni iniziali e al
16

3 – Identificazione di modelli equivalenti ridotti
Figura 3.1: Sintesi della matrice delle impedenze termichenel caso di poli reali (impedenze RC)
contorno, mediante una serie infinita di esponenziali
Zij(t) =
1X
k=1
R
ijk
1� exp
✓� t
⌧k
◆�⌧k = RkCk (3.5)
Da un punto di vista circuitale la (3.5) corrisponde ad una serie infinita
di cappi RC [7]. A livello pratico però non è possibile simulare un’im-
pedenza di questo tipo per questo la serie viene troncata a Np cappi:
17

3 – Identificazione di modelli equivalenti ridotti
Zij(t) =
1X
k=1
R
ijk
1� exp
✓� t
⌧k
◆�! Zij(t) =
NpX
k=1
R
ijk
"1� exp
� t
⌧
ijk
!#
(3.6)
Il processo di identificazione consiste nel determinare la rete di feed-
back termico necessaria per le simulazioni, si vogliono quindi determina-
re i vettori delle resistenze e delle costanti di tempo. L’identificazione par-
te dalla misurazione o più in generale dalla simulazione degli andamenti
delle impedenze termiche. Supponiamo di avere a disposizione l’anda-
mento di un’impedenza termica, il processo di identificazione è costituito
da due step:
1. Fissare opportunamente un set di costanti di tempo ⌧k e ricava-
re il corrispondente vettore R attraverso un problema ai minimi
quadrati a costanti di tempo fissate.
2. selezionare il vettore delle costanti di tempo che minimizza lo scar-
to con la Zthin vedi (3.15)
nel primo step si ricava il vettore delle resistenze termiche R, per le fis-
sate costanti di tempo ⌧k, conoscendo R e ⌧k si può ricavare il vettore
delle capacità C. Dai tre vettori calcolati è possibile ricavare l’impedenza
termica identificata Zthid.
Il primo step si ripete per un numero elevato di volte (N), ottenendo
quindi N Zthid, di queste si sceglie quella avente costanti di tempo tali da
18

3 – Identificazione di modelli equivalenti ridotti
minimizzare lo scarto con la Zthin .
Si riporta per il primo step la procedura analitica:
Abbiamo visto che la risposta in transitorio ad un gradino unitario di
potenza è data dall’equazione (3.6). Le costanti ti tempo vengono scel-
te con probabilità logaritmica uniforme nell’intervallo tR Figura 4.10(b).
Fissate le costanti di tempo si procede con il calcolo del vettore R. Si im-
posta quindi un problema lineare ai minimi quadrati a costanti di tempo
fissate: la distanza quadratica da Zthin è data da
S =
NtX
i=1
(Zthin(ti)�
ncX
k=1
Rk
1� exp
✓� ti
⌧k
◆�)2
=
NtX
i=1
(Zthin(ti)�
ncX
k=1
Rkc (k, ti)
)2(3.7)
dove Zthin(ti) sono i campioni (noti) agli istanti ti dell’andamento nel
tempo di Zthin , Nt è il numero di campioni e c (k, ti) sono dei coefficienti
noti dall’equazione:
c (k, ti) =
1� exp
✓� ti
⌧k
◆�(3.8)
Si ricordi che in ingresso è stato applicato un gradino di potenza quin-
di a regime tutte le capacità diventano dei circuiti aperti, si fa notare con
riferimento alla Figura 3.2 che la somma delle Rk è esattamente pari al
valore di regime Rth della Zthin .
19

3 – Identificazione di modelli equivalenti ridotti
A questo punto si minimizza la (3.7) annullando le derivate rispetto ai
singoli valori di R
@S
@R
⇤k
=
NtX
i=1
("�Zth(ti) +
ncX
k=1
Rkc (k⇤, ti)
#2c (k
⇤, ti)
)= 0 (3.9)
dove con R
⇤k indica un Rk fissato.
Dall’equazione (3.9) si ricava
NtX
i=1
c (k
⇤, ti)Zth(ti) =
ncX
k=1
Rk
NtX
i=1
c (k, ti) c (k⇤, ti) (3.10)
che può essere visto come un problema lineare sovradimensionato del
tipo
A · x = b
@S
@R
⇤k
= 0 !
2
66664
ak⇤k · · · · · ·... . . . ...
1 · · · 1
3
77775R =
2
66664
bk⇤
...
Rth
3
77775(3.11)
con
ak⇤k =
NtX
i=1
c (k, ti) c (k⇤, ti) (3.12)
bk⇤ =
NtX
i=1
Zth(ti)c (k⇤, ti) (3.13)
20

3 – Identificazione di modelli equivalenti ridotti
unito alla condizionencX
k1
Rk = Rth (3.14)
risolto il problema per R si ripete lo step 1 per un numero ragionevolmen-
te elevato di volte. Si passa quindi allo step finale valutando le quantità
err =
vuutNtX
i=1
[Zthin(ti)� Zthid(ti)] (3.15)
si seleziona quindi il vettore di costanti di tempo a cui corrisponde una
Zthidcon il più basso scarto (errore) rispetto alla Zthin .
3.4 Topologie di reti elettriche per la sintesi di
impedenze termiche
Nei paragrafi precedenti si è visto come è possibile identificare nel
dominio del tempo o della frequenza le impedenze termiche. Nel se-
guente paragrafo invece, sono presentate diverse topologie di sintesi: Tali
topologie sono caratterizzate da differenti:
• Ipotesi sulle costanti di tempo
• Metodi di identificazione
• Numero di componenti e di parametri da estrarre
• Tempi di simulazione
21

3 – Identificazione di modelli equivalenti ridotti
Di seguito viene riportata la descrizione delle diverse topologie:
3.4.1 Foster Standard
La rete di Foster Standard implementa una singola impedenza attra-
verso una serie di Np cappi RC come mostrato in Figura 3.2. Le mutue
interazioni tra diverse fonti di calore sono modellate estendendo la rete
di Figura 3.2 come mostrato in Figura 3.3 per una matrice di impedenze
2⇥ 2.
Figura 3.2: Rete di Foster per una singola impedenzatermica
Ogni Zij è realizzata con Npij cappi RC, ogni serie di cappi poi, at-
traverso il proprio incremento di temperatura �T11, �T12 ecc., pilota un
generatore di tensione controllato.
Generalizzando per una matrice M ⇥M otteniamo la seguente rete
Nella topologia standard non si fanno ipotesi sulle costanti di tem-
po: ogni elemento della matrice delle impedenze termiche è identificato
22

3 – Identificazione di modelli equivalenti ridotti
Figura 3.3: Rete di Foster per due dispositivi
separatamente e con costanti di tempo in partenza diverse. Nei casi con-
siderati l’identificazione è stata realizzata nel dominio del tempo attra-
verso una procedura che consente di: trovare il minimo numero di poli
per un’assegnata accuratezza oppure ottenere la massima accuratezza da
un assegnato numero dipoli.
Sia NpS il numero medio delle celle RC che compongono la singola Zij
NpS =
1
M
2
MX
i=1
MX
j=1
Npij (3.16)
la rete di Foster Standard richiede:
23

3 – Identificazione di modelli equivalenti ridotti
Figura 3.4: Rete di Foster per M dispositivi
• NpSM2 coppie RC
• M
2 generatori controllati
• l’estrazione di NpS
⇣M2+M
2
⌘parametri se Zij = Zji con (i /= j)
altrimenti vanno estratti NpS (M2+M) parametri
24

3 – Identificazione di modelli equivalenti ridotti
3.4.2 Foster Generalizzata
Nella topologia Standard ogni impedenza è realizzata con un diverso
numero di cappi RC quindi con un diverso numero di costanti di tempo.
La topologia generalizzata invece implementa le impedenze a partire da
un set comune di costanti di tempo. L’ipotesi che si fa sulle costanti di
tempo è che ogni impedenza condivide lo stesso set di ⌧k.
A differenza della topologia Standard per l’identificazione e la sintesi
nella topologia Generalizzata si opera nel domino della frequenza. A val-
le del processo di sintesi circuitale, si perviene alla rete mostrata in Figura
3.5. Il processo di identificazione è stato effettuato nel dominio della fre-
quenza, si basa sulle tecniche del Vector Fitting e sull’imposizione a priori
della passività attraverso processi di ottimizzazione convessa. La sintesi
circuitale, che analizzeremo in seguito, viene realizzata solo dopo aver
trasformato ogni polo della matrice identificata in M celle RC. Si può
immediatamente notare la differenza con la topologia Standard, le NpG
celle RC in questo caso sono comuni a tutte le impedenze (stesse costanti
di tempo). Come sarà più chiaro in seguito i GCCC e i GTCT apparte-
nenti alla stessa riga sono l’implementazione circuitale del trasformatore
ideale che realizza le impedenze viste dalle altre porte.
Come per la topologia Standard analizziamo il numero di componen-
ti e parametri richiesti per implementare la rete di Foster Generalizzata.
25

3 – Identificazione di modelli equivalenti ridotti
Assumiamo che sia già avvenuta la fase di identificazione per una ma-
trice con M fonti di calore realizzata con un set di NpG poli comuni, il
circuito teorico comprende:
• NpGM celle RC
• 2NpG
�M
2 �M
�generatori controllati
26

3 – Identificazione di modelli equivalenti ridotti
Figura 3.5: Rete di Foster Generalizzata
27

3 – Identificazione di modelli equivalenti ridotti
Procedura di Sintesi
Data la matrice delle impedenze termiche nella forma (3.3), la sintesi
richiede la diagonalizzazione delle matrici Rn in modo da poter espri-
mere ogni termine della (3.3) come somma di matrici di rango unitario.
Supponiamo che Rn sia diagonalizzabile attraverso la matrice colonna
degli autovettori Tn
R⇤n = T�1
n RnTn (3.17)
dove R⇤n è una matrice diagonale
R⇤n =
0
BBBB@
r
⇤n,1 · · · 0
... . . . ...
0 · · · r
⇤n,M
1
CCCCA(3.18)
i cui coefficienti non nulli sono gli autovalori della matrice R⇤n
�Rn � a
⇤n,mI
�un,m = 0 (3.19)
Ogni Rn può essere espressa come somma di M matrici di rango 1 con
un solo elemento non nullo lungo la diagonale
Rn =
MX
m=1
Rn,m Rn = T�1n R⇤
n,mTn (3.20)
28

3 – Identificazione di modelli equivalenti ridotti
La singola impedenza della matrice (3.3) ha una forma del tipo
Zn =
rn
s� pn(3.21)
può essere sintetizzata con una singola cella RC con il polo pn e il resi-
duo rn legati rispettivamente alla resistenza e alla capacità dalle seguenti
equazioni
Zn =
1/C
1/(RC) + s
=
rn
s� pnC =
1
rnR = � rn
pn(3.22)
Tutte le celle RC nella parte sinistra della Figura 3.1 sono realizzate in
questo modo e a causa del processo di diagonalizzazione, ad ogni polo
corrispondono M coppie RC, dato che la matrice Rn è stata espressa co-
me somma di M elementi (matrici a rango unitario). Si spiega in questo
modo perchè il numero delle celle RC utilizzate per questa topologia è
pari a NpGM . I rapporti di trasformazione dei trasformatori ideali si ot-
tengono dalla prima colonna della matrice Rn raccogliendo l’elemento
(1,1) 0
BBBBBBB@
1 kn,1,1 · · · kn,1,M�1
kn,1,1 k
2n,1,1 · · · kn,1,1kn,1,M�1
...... . . . ...
kn,1,M�1 kn,1,1kn,1,M�1 · · · k
2n,1,M�1
1
CCCCCCCA
m
(3.23)
Le librerie SPICE non contengono il componente trasformatore ideale.
29

3 – Identificazione di modelli equivalenti ridotti
Ma un trasformatore ideale di rapporto k può essere implementato con
un generatore di corrente controllato in corrente (GCCC) alla porta 1 e un
generatore di tensione controllato in tensione (GTCT) alla porta 2 come
mostrato in Figura
8><
>:
V1 = kV2
i2 = �ki1
!
8><
>:
V2 =1
k
V1
i1 = �1
k
i2
(3.24)
Figura 3.6: Implementazione in SPICE del componentetrasformatore ideale
Questo conferma perchè il numero di generatori controllati è pari a
2NpG(M2 � M) in quanto il numero di celle RC è pari a NpGM ad ogni
cella sono collegati M �1 trasformatori, ad ogni trasformatore corrispon-
dono due generatori controllati e quindi NpGM · 2(M � 1) = 2NpG(M2 �
M).
3.4.3 Rete compatta di Walkey
L’ultima topologia analizzata è quella Compatta di Walkey [8] [14] nel-
la quale le impedenze termiche mutue Zij sono descritte con le stesse con-
stanti di tempo delle impedente di auto-riscaldamento Zii, i /= j, tale rete
30

3 – Identificazione di modelli equivalenti ridotti
può essere estesa anche al caso dinamico come mostrato in Figura 3.7.
Ogni impedenza di auto-risaldamento Zii definisce le costanti di tempo
da identificare per le impedenze mutue appartenenti alla stessa colonna.
Figura 3.7: Rete compatta di Walkey
Per quanto riguarda i processi di identificazione questi avvengono co-
me descritto per la Topologia Foster Standard. Vale la pena notare che
nella topologia Walkey il numero medio dei poli NpC utilizzato per le
impedenze di auto-riscaldamento Zii è leggermente superiore rispetto a
quello utilizzato, a parità di accuratezza, nella topologia Standard per le
31

3 – Identificazione di modelli equivalenti ridotti
auto-impedenze.
Al solito assumiamo che sia già avvenuta l’identificazione della matri-
ce delle impedenze termiche per un sistema con M fonti di calore, realiz-
zata con una media NpC poli per ogni impedenza di auto-riscaldamento.
La rete richiede:
• NpCM celle RC
• NpC
�M
2 �M
�generatori controllati (il numero decresce per deboli
accoppiamenti termici)
• 2NpCM parametri per le Zii e NpC
�M
2 �M
�parametri ’R’ per le
Zij
32

Capitolo 4
Co-simulazioni
elettrotermiche in Spice ed
onere computazionale
In questo capitolo le diverse topologie di sintesi viste precedentemen-
te vengono valutate attraverso co-simulazioni elettrotermiche nell’am-
biente SPICE. Obiettivo preliminare del capitolo è quello di stimare l’o-
nere computazionale delle simulazioni delle topologie nella forma in cui
vengono ricavate dalle procedure di sintesi viste nel Capitolo 3 e si for-
nisce una ottimizzazione a livello di simulazione. Nelle varie topologie
viste si può notare la presenza di generatori controllati, la risoluzione in
33

4 – Co-simulazioni elettrotermiche in Spice ed onere computazionale
SPICE di tali reti necessita dell’introduzione di ulteriori variabili. Infat-
ti nei circuiti contenenti generatori di tensione, siano essi indipendenti o
controllati, SPICE, risolvendo il circuito con il metodo dei potenziali ai
nodi modificato, introduce come incognite le correnti che scorrono nei
generatori di tensione e parallelamente aggiunge al set di equazioni le re-
lazioni costitutive dei generatori per chiudere il sistema. È evidente che
aggiungere altre equazioni influisce sulla velocità di risoluzione del cir-
cuito, quindi le diverse topologie verranno simulate più o meno veloce-
mente a causa dei particolari generatori che ne costituiscono la struttura.
In un precedente lavoro sono state valutate le prestazioni di SPICE nella
simulazione di diversi tipi di generatori controllati, confrontando diffe-
renti topologie regolari di rete a parità di numero di nodi. Il confronto è
stato effettuato rispetto ad una rete di riferimento di soli resistori lineari,
dopodiché sono stati valutati i tempi di simulaizione delle diverse topo-
logie in SPICE, prima nel caso statico e poi in quello dinamico. In Figura
4.1 sono riportati i circuiti oggetto del confronto, per quanto riguarda la
rete di riferimento, quella di soli resistori, il numero di incognite teori-
che e quelle in SPICE coincidono, lo stesso vale per la rete formata dai
GCCT. Le reti formate invece dai GTCT, GCCC e GTCC a causa del me-
todo di risoluzione usato (potenziale ai nodi modificato) presentano un
numero di incognite maggiore. Inoltre SPICE per poter simulare i ge-
neratori controllati in corrente introduce ulteriori generatori di tensione
nulla (generatori di sense) tale procedura aumenta ulteriormente l’ordine
34

4 – Co-simulazioni elettrotermiche in Spice ed onere computazionale
del sistema. La simulazione è stata realizzata facendo variare il numero
di nodi da 5000 a 25000 in 6 step in modo da ottenere tempi significativi,
il risultato di tale analisi dimostra che il componente che meglio viene
implementato in SPICE risulta essere il generatore di corrente controllato
in tensione (GCCT). Alla luce di tale risultato nei paragrafi successivi si
mostra come ottimizzare le topologie viste (Foster standard, Foster gene-
ralizzata e Walkey) sostituendo ai vari generatori controllati i GCCT, e at-
traverso due casi di studio verranno simulate reti di feedback termico con
e senza ottimizzazione per verificare se c’è un effettivo miglioramento
nelle prestazioni.
35

4 – Co-simulazioni elettrotermiche in Spice ed onere computazionale
Figura 4.1: Tabella dei circuiti di confronto
36

4 – Co-simulazioni elettrotermiche in Spice ed onere computazionale
4.1 Ottimizzazione delle topologie per sostituzione
Nel Capitolo 3 sono state introdotte tre diverse topologie per la sin-
tesi circuitale di sistemi multi-porta lineari. Come evidenziato nel pa-
ragrafo precedente effettuiamo delle sostituzioni per equivalenza con i
GCCT, che sono risultati essere i componenti con le migliori prestazioni
in SPICE. Di seguito vengono mostrare le sostituzione per i tre tipi di rete:
• Foster Standard
Alla serie degli M GTCT in uscita, si sostituisce il parallelo di
M GCCT e di una resistenza di valore unitario, pilotati dalle stesse
tensioni che pilotavano i GTCT.
Figura 4.2: sostituzione dei generatori nella topologiaFoster Standard
37

4 – Co-simulazioni elettrotermiche in Spice ed onere computazionale
• Foster Generalizzata
Come visto nel paragrafo 3.4.2 Figura 3.6 i trasformatori ideali
in SPICE vengono implementati alla porta 1 del trasformatore come
un GCCC controllato dalla corrente della porta 2, ed un GTCT alla
porta 2 controllato dalla tensione alla porta 1. Sostituiamo i GCCC
con i GCCT e inseriamo una resistenza di valore unitario agli in-
gressi pi per poter prelevare la tensione di pilotaggio. Come fatto
per la topologia Foster Standard alla serie degli M ⇥ Np GTCT so-
stituiamo un parallelo di M ⇥Np GCCT che termina su un resistore
di valore unitario.
Figura 4.3: sostituzione dei generatori nella topologiaFoster Generalizzata
38

4 – Co-simulazioni elettrotermiche in Spice ed onere computazionale
• Rete Compatta di Walkey
Come illustrato nel paragrafo 3.4.3 le impedenze di auto-riscaldamento
definiscono il numero delle costanti di tempo da identificare per le
impedenze mutue appartenenti alla stessa colonna, realizzate da
una serie di GTCT. La serie di N GTCT viene sostituita con un
parallelo di N GCCT chiuso su una resistenza di valore unitario.
Figura 4.4: sostituzione dei generatori nella topologiaWalkey
39

4 – Co-simulazioni elettrotermiche in Spice ed onere computazionale
Prima di analizzare i casi di studio, viene riportato un riepilogo delle
topologie viste:
• Foster Standard
L’identificazione delle singole impedenze è stata realizzata nel do-
minio del tempo, per come è definita la topologia ogni impedenza
viene identificata separatamente. Per la simulazione e la sintesi la
rete di Foster Standard richiede:
– NpSM2 coppie RC
– M
2 generatori controllati
– l’estrazione di NpS (M2+M) parametri
• Foster Generalizzata
Nel caso della rete generalizzata, l’identificazione è stata realizzata
nel dominio della frequenza e tutte le impedenze sono identificate
a poli comuni. Per una matrice con M fonti di calore realizzata con
un set di NpG poli comuni, il circuito teorico comprende:
– NpGM celle RC
– 2NpG
�M
2 �M
�generatori controllati
• Rete compatta di Walkey
Anche questo caso l’identificazione è effettuata nel dominio del tem-
po, per un sistema con M fonti di calore l’identificazione è realizzata
40

4 – Co-simulazioni elettrotermiche in Spice ed onere computazionale
con una media NpC poli per ogni impedenza di auto-riscaldamento.
La rete richiede:
– NpCM celle RC
– NpC
�M
2 �M
�generatori controllati (il numero decresce per
deboli accoppiamenti termici)
– 2NpCM parametri per le Zii e NpC
�M
2 �M
�parametri ’R’ per
le Zij
La tabella 4.1 riassume per ogni topologia di rete il numero di celle
RC necessarie a sintetizzare la rete di feedback termico, il numero di ge-
neratori controllati per la simulazione, gli elementi totali e i parametri da
estrarre per eseguire le simulazioni in SPICE.
41

4 – Co-simulazioni elettrotermiche in Spice ed onere computazionale
celle
RC
gene
rato
ri
cont
rolla
tiel
emen
tipa
ram
etri
da
estr
arre
Fost
erst
anda
rdN
pS⇥M
2M
2(2⇥N
pS+1)⇥M
2N
pS⇥� M
2+M
�
Fost
erge
nera
lizza
taN
pG⇥M
2⇥N
pG⇥� M
2�M
�2⇥N
pG⇥M
2N
pG⇥� M
2+1
�
Wal
key
com
patt
aN
pC⇥M
N
pC⇥� M
2�M
�N
pCS⇥(M
2+
M)
N
pC⇥� M
2+M
�
Tabe
lla4.
1
42

4 – Co-simulazioni elettrotermiche in Spice ed onere computazionale
4.2 Casi di studio
Le architetture 3-D nelle quali più die vengono sovrapposti e oppor-
tunamente collegati, sono concepite per aumentare l’integrazione dei cir-
cuiti a semiconduttore, portando quindi alla realizzazione di prodotti più
piccoli, più leggeri e più economici. Tuttavia tali strutture sono partico-
larmente soggette agli effetti termici poiché l’aumento di potenza dissi-
pata non è accompagnato da un corrispondente miglioramento nell’effi-
cienza di raffreddamento.
4.2.1 Sistemi elettronici ad alta integrazione
Gli effetti termici sono ancora più amplificati nei moduli di chip realiz-
zati in tecnologia UTCS (ultra-thin chip stacking) principalmente a causa
dello strato di benzociclobutene (BCB) [4] utilizzato per isolare
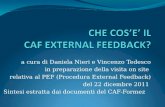
Figura 4.5: Sezione trasversale del modulodi 2 chip realizzato in tecnologiaUTCS
elettricamente i chip (delle
dimensioni di 10 µm) in-
tegrati verticalmente. Una
conseguenza ben nota del
riscaldamento di tale mo-
dulo è l’aumento del ritar-
do di propagazione dei se-
gnali che attraversano la
43

4 – Co-simulazioni elettrotermiche in Spice ed onere computazionale
linea di interconnessione dei chip, dovuta alla crescita, a causa della tem-
peratura, del valore della resistenza distribuita. La struttura del modulo
UTCS è illustrata in Figura 4.5, dall’alto osserviamo che le interconnessio-
ni tra i chip attivi sono realizzate mediante vias in tugsteno e una linea di
rame dello spessore di 2 µm; il chip sepolto (1st-level) è fissato al substra-
to di silicio attraverso uno strato di BCB a sua volta saldato al package
attraverso uno strato di Piombo (Pb) o Stagno (Sn). La Figura 4.6 mostra
invece una rappresentazione 3D dei due chip e della linea di intercon-
nessione. Il modello termico del modulo è stato realizzato utilizzando la
Figura 4.6: Vista 3D del collegamento tra i due chip
seguente strategia. La linea di rame è stata divisa in sette elementi, identi-
ficati nella Figura 4.5 con le lettere a, b, . . . , g ognuno dei quali è associato
ad una fonte di calore, sono in oltre state considerate due ulteriori fonti
44

4 – Co-simulazioni elettrotermiche in Spice ed onere computazionale
di calore per descrivere la circuiteria integrata nei chip. Tutte le impeden-
ze sia auto che mutue definite dalle (2.4) sono state valutate preventiva-
mente attraverso una simulazione termica 3D basata sul Finite-Element
Method (FEM) [?] attivando alternativamente solo una fonte di calore per
volta.
La simulazione ha richiesto circa 1.7 ⇥ 10
6 elementi (tetraedri) per la
mesh della struttura sfruttando 2.4⇥ 10
6 gradi di libertà e la simulazione
finale del transitorio su 64 istanti di tempo spaziati logaritmicamente ha
richiesto 10 ore di lavoro da parte di una workstation equipaggiata con 2
CPU hexacore a 2.43 GHz e 100GB di RAM.
Figura 4.7: Step della simula-zione
Una volta noti gli andamenti delle im-
pedenze termiche è possibile generare la
rete termica equivalente. Attraverso pro-
cedure come la network identification by
deconvolution [10], [11] vengono valutate
tutte le costanti di tempo delle impeden-
ze, in particolare sono state valutate in
questo stadio circa 600 costanti di tempo
RC. Sfruttando le tecniche di riduzione
dell’ordine dei modelli come il Vector Fit-
ting (VF) è possibile identificare un set ri-
dotto di poli, in particolare per questa si-
mulazione, è stato dimostrato che un set
45

4 – Co-simulazioni elettrotermiche in Spice ed onere computazionale
di 7 poli è più che sufficiente per raggiungere una buona accuratezza. Ta-
le procedura è stata realizzata senza la necessità di imporre che i poli sia-
no reali, infatti non appaiono mai poli complessi coniugati quando si vo-
gliono rappresentare impedenze termiche ottenute attraverso simulazio-
ni 3D che sfruttano le tecniche FEM. A questo punto è possibile passare
alla fase dell’identificazione passiva della matrice dei residui e come fase
finale la sintesi del circuito equivalente incluso in un blocco di feedback
termico compatibile con il software di simulazione PSPICE. Tale blocco
calcola, per tutte le fonti di calore, l’aumento della temperatura rispetto a
quella ambiente dovuto alla potenza dissipata. Il circuito di sintesi è rea-
lizzato con M = 9 porte, considerando come porte i sette segmenti della
linea di interconnessione e i due chip. In base al tipo di topologia scelta
il numero di poli necessario ad identificare la struttura varia:
• per la topologia Foster standard, dove ogni impedenza è identifica-
ta separatamente, si considera il numero medio di poli necessario
all’identificazione, per questa simulazione è sufficiente considerare
NpS = 1.60
• per la Foster generalizzata sono sufficienti Np = 7 poli
• infine per la topologia compatta di Walkey, dove vanno identificate
solo le impedenze di autoriscaldamento, queste sono state identifi-
cate con NpC = 3
46

4 – Co-simulazioni elettrotermiche in Spice ed onere computazionale
All’inizio di questo capitolo è stata effettuata un’analisi per verificare
quale generatore controllato sia effettivamente meglio implementato in
SPICE. Le simulazioni sono state realizzare alla luce di tali dati, si simula
la rete di feedback termico sintetizzata senza sostituzioni e in un secondo
momento si effettuano le sostituzioni. Sono state effettuate in un primo
Figura 4.8: Simulazione termica della linea di interconnes-sione del modello UTCS
momento le simulazioni della rete di feedback sintetizzata con la topo-
logia Foster Generalizzata. La simulazione consiste nel porre in ingresso
un gradino di potenza alla porta 1 e misurare il tempo impiegato affi-
ché le uscite vadano a regime. Si è simulato prima il circuito senza le
47

4 – Co-simulazioni elettrotermiche in Spice ed onere computazionale
sostituzioni e il tempo di simulazione, come mostrato in Figura 4.8, è ri-
sultato essere di 78,72s dopo le sostituzioni (sostituzione dei GCCT solo
sulle uscite) il tempo misurato è di 77.99s con un risparmio di meno di
un secondo. Lo stesso è stato fatto per la topologia Standard, in questo
caso il risparmio è leggermente maggiore, ma comunque non considere-
vole. Alla luce dei risultati ottenuti simulazioni si è deciso di simulare la
topologia di Walkey senza effettuare le sostituzioni, perché il risparmio
si è dimostrato essere trascurabile. Il definitiva risultato di tale analisi
ha evidenziato che sostituire i generatori controllati con i GCCT compor-
ta dei piccoli miglioramenti in termini di onere computazione, e che la
topologia standard risulta essere quella con le prestazioni migliori.
4.2.2 Array di transistori bipolari ad eterogiunzione su
substrato di GaAs
Come secondo caso di studio si sono presi in considerazione due array
di transistori bipolari adottati nello stadio di uscita di un amplificatore di
potenza in tecnologia GaAs illustrati schematicamente in Figura 4.9, ca-
ratterizzati da diversi valori di accoppiamento termico, debole nel primo
array e forte nel secondo. Il numero M di transistori (quindi delle fonti
di calore) è fatto variare nelle simulazioni.
L’identificazione è stata eseguita a parità di accuratezza. Le reti di
feedback termico ottenute sono state sottoposte ad una simulazione esclu-
sivamente termica: ponendo in ingresso alla rete un gradino di potenza e
48

4 – Co-simulazioni elettrotermiche in Spice ed onere computazionale
Figura 4.9: array di transistori
misurando il tempo impiegato per effettuare la simulazione del transito-
rio di accensione a parità di step di simulazione, per un numero variabile
di sorgenti di calore (HBT) e considerando due diversi valori di accop-
piamento termico, debole (array #1) e forte (array #2). Le simulazioni
sono state eseguite in questo modo: la topologia generalizzata, essendo
la topologia con più generatori controllati, è stata simulata sia nella forma
non ottimizzata sia in quella ottimizzata, procedendo cioè alla sostituzio-
ne dei generatori. Anche in questo caso il guadagno ottenuto dalle sosti-
tuzioni è stato minimo, quindi si è deciso di procedere alle simulazioni
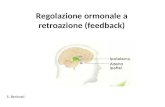
delle altre reti senza ottimizzare i circuiti. In Figura ?? vengono riporta-
ti i tempi di simulazione: le reti sintetizzate con le topologie standard e
compatta, fatta eccezione nel caso di accoppiamento debole, hanno pre-
stazioni comparabili, mentre la generalizzata a causa del forte incremento
di generatori controllati che aumentano l’onere computazionale di SPICE
ha le prestazioni peggiori.
49

4 – Co-simulazioni elettrotermiche in Spice ed onere computazionale
(a)
(b)
Figura 4.10: (a) accoppiamento debole e (b) accoppiamentoforte
50

4 – Co-simulazioni elettrotermiche in Spice ed onere computazionale
4.3 Confronto Complessivo
In questo paragrafo viene proposto un confronto complessivo sulle
topologie viste. Nel corso di questo lavoro i passi seguiti per analizzare e
confrontare le topologie di sintesi sono sostanzialmente tre:
1. Fase di identificazione: a partire da dati noti nel dominio del tempo
o in frequenza, attraverso tecniche come il Vector Fitting nel domi-
nio della frequenza e il Time Domain Vector Fitting in quello del
tempo, si ricavano i modelli del sistema sotto forma di matrice di
trasferimento.
2. Fase di sintesi: legata alle ipotesi fatte nella fase di identificazione,
si deciderà di sintetizzare il circuito sfruttando una delle tre topo-
logie viste a seconda se le impedenze vengono identificate a poli
distinti (Foster Standard) a poli comuni (Foster Generalizzata) op-
pure come ipotesi intermedia si identificano separatamente le im-
pedenze di autoriscaldamento e si identificano a poli comuni le im-
pedenze appartenenti alla stessa colonna, in numero uguale ai poli
necessari a sintetizzare l’impedenza di autoriscaldamento di quella
colonna (Rete compatta di Walkey).
3. Verifica SPICE della sintesi: si simulano i circuiti sintetizzati e se ne
verifica la convergenza e le prestazioni.
51

4 – Co-simulazioni elettrotermiche in Spice ed onere computazionale
A valle dei primi due step otteniamo la rete di feedback termico che se
accoppiata a macromodelli elettrici del sistema consente di eseguire una
simulazione elettrotermica completa in SPICE.
La fase di identificazione può avvenire sia nel dominio del tempo che
della frequenza e come detto in base alle ipotesi assunte nella fase di
identificazione, si sintetizzerà il circuito sfruttando la topologia scelta.
In questo lavoro, per motivi di disponibilità del software la topologia Fo-
ster generalizzata è stata nel dominio della frequenza mentre le topologie
Foster Standard e Walkey sono state identificate nel dominio del tempo.
Nei casi di studio analizzati si sono ottenuti i seguenti risultati elencati
di seguito per le diverse topologie:
• Foster Standard
– Simulazione interconnessione modulo UTCS
Le singole impedenze sono state identificate con una media
di NpS = 1.6. Si osserva che il tempo di simulazione richie-
sto è risultato essere il più piccolo di tutte le prove eseguite
19.66s nel caso senza la sostituzione dei generatori e 17.00s con
le sostituzioni.
– Array di transistori bipolari
Anche nel caso degli array di HBT la rete si è dimostrata es-
sere la più veloce ed è risultata essere particolarmente adat-
ta a descrivere sistemi caratterizzati da debole accoppiamento
52

4 – Co-simulazioni elettrotermiche in Spice ed onere computazionale
termico.
• Foster Generalizzata
– Simulazione interconnessione modulo UTCS
Le impedenze sono state identificate nel con Np = 7 poli co-
muni, si vede che il tempo di simulazione è il più alto (78,72s e
77,99s) e le ottimizzazioni non comportano particolari miglio-
ramenti in termini di velocità di simulazione.
– Array di transistori
Nel caso dell’array sia per il caso di accoppiamento debole
che forte, anche in questo caso i tempi sono i più alti, que-
sto per effetto dell’elevato numero di generatori controllati che
aumentano sensibilmente l’onere computazionale di SPICE.
• Rete compatta di Walkey L’identificazione nel caso UTCS è stata
eseguita sfruttando NpC = 3 poli per ogni impedenza di autoriscal-
damento. Il tempo di simulazione richiesto sia nel caso del modulo
UTCS sia nella simulazione dell’array di HBT è superiore rispetto
alla Foster standard, il numero di generatori controllati è maggiore.
La procedura di identificazione però è più semplice e meno onerosa
rispetto alla Foster Standard.
53

4 – Co-simulazioni elettrotermiche in Spice ed onere computazionale
4.4 Conclusioni
In questo lavoro sono state presentate tre diverse topologie circuitali
per la sintesi di reti di feedback termico. Sono stati applicati metodi per
l’ottimizzazione delle reti attraverso opportune sostituzioni dei genera-
tori controllati presenti nelle topologie. È stato eseguito infine un insieme
di simulazioni riguardanti in particolare due casi di studio.
I risultati di tali simulazioni hanno evidenziato che la topologia Foster
Generalizzata è risultata essere quella con i tempi di simulazione più alti,
a causa del numero elevato di generatori controllati. Le topologie Foster
standard e compatta di Walkey invece sono caratterizzate da tempi più
brevi. In particolare la topologia Foster Standard richiede una procedura
di identificazione onerosa, tutte le impedenze sono identificate separata-
mente, ma offre tempi di simulazione più brevi. La topologia compatta
invece è identificata attraverso una procedura più semplice, richiedendo
però dei tempi di simulazione leggermente maggiori. Si mette a questo
punto in evidenza che i risultati ottenuti sono estremamente dipendenti
dalla topologia utilizzata e dal metodo di identificazione, non è possibi-
le quinti trarre conclusioni generali ma solamente conclusioni legate ai
particolari casi di studio considerati.
54

Bibliografia
[1] Gustavsen B. Computer code for passivity enforcement of ratio-
nal macromodels by residue perturbation. IEEE Transactions and
Advanced Packaging, 30(2):209–215, 2007.
[2] L. Codecasa. Compact models of dynamic thermal networks wi-
th many heat sources. IEEE Trans. Components and Packaging
Technologies, vol. 30, no. 4, pp. 653-659, Dec. 2007.
[3] CP. Coelho, J. Phillips, and Silveira LM. A convex programming ap-
proach for generating guaranteed passive approximations to tabula-
ted frequency-data. IEEE Transactions on Computer-aided Design of
Integrated Circuits and Systems, 23(2):293–301, 2004.
[4] V. d’Alessandro, M. de Magistris, A. Magnani, N. Rinaldi, and Russo
S. An application to signal integrity analysis in highly integrated
electronic systems. Electrothermal Dynamical Macromodeling.
55

Bibliografia
[5] M. de Magistris and Nicolazzo M. On the concretely passive reali-
zation of reduced circuits models based on convex constrained po-
sitive real fraction identification. Fiftheenth IEEE Workshop on Signal
Porpagation on Interconnects, 2011.
[6] M. de Magistris and M. Nicolazzo. On the concretely passive reali-
zation of reduced circuit models based on convex constrained po-
sitive real fractions identification. Proc. IEEE workshop on Signal
Propagation on Interconnects (SPI), pp. 29-32, 2011.
[7] E. J. Diebold and W. Luft. Transient thermal impedance of
semiconductor devices. AIEE Trans., vol. 79, 1961.
[8] D.Walkey, T.Smy, R.Dickson, J.Brodsky, D.Zweidinger, and R.Fox.
Equivalentcircuitmodelingofstatic substrate thermal coupling using
vcvs representation. Solid-State Circuits, IEEE Journal of, vol. 37, no. 9,
pp. 1198–1206, 2002.
[9] S. Grivet-Talocia and Ubolli A. Passivity enforcment with relative
error control. IEEE Transactions on Microwave Theory and Techniques,
55(11):2374–2383, 2007.
[10] V. Székely. On the representation of infinite-length distributed rc
one-ports. IEEE Trans. Circuits and Systems, vol. 38, no. 7, pp. 711-719,
Jul. 1991.
[11] V. Székely. Identification of rc networks by deconvolution: Chances
and limits. IEEE Trans. Circuits and Systems, vol. 45, no. 3, pp. 244-258,
Mar. 1998.
56

Bibliografia
[12] L. De Tommasi, M. de Magistris, D. Deschrijver, and Dhaene
T. Single-input-single-output passive macromodeling via positive
fractions vector fitting. Twelfth IEEE Workshop on Signal Propagation
on Interconnects, 2008.
[13] L. De Tommasi, D. Deschrijver, and Dhaene T. An algorithm for
direct identification of passive transfer matrices with positive real
fractions via convex programming. numerical modelling: Electronic
networks. Int. J. Numer. Modeling, vol. 24, no. 4, pp. 375-386, 2011.
[14] D. Walkey, T. Smy, D. Celo, T. MacElwee, and M. Maliepaard.
Compact, netlist-based representation of thermal transient coupling
using controlled sources. Computer-Aided Design of Integrated Circui-
ts and Systems, IEEE Transactions on, vol. 23, no. 11, pp. 1593–1596,
2004.
57