Hybrid Systems course - Intranet...
96
ESERCITAZIONE RIASSUNTIVA
Transcript of Hybrid Systems course - Intranet...

ESERCITAZIONE RIASSUNTIVA

ESERCIZIO 1
Si consideri il sistema lineare con funzione di trasferimento
controllato da un relè con zona morta come mostrato in figura
Noto che la funzione descrittiva dell’elemento non lineare è
valutare come deve essere scelto il parametro a in modo che il
metodo della funzione descrittiva non preveda alcuna oscillazione
permanente.
y y° u e N
a
-a
1
-1
e
u

ESERCIZIO 1: SOLUZIONE
Il metodo della funzione descrittiva (a singolo ingresso sinusoidale)
prevede che non ci siano oscillazioni permanenti se l’equazione di
bilancio armonico
non ammette soluzioni, cioè se il diagramma polare di G(s) non
interseca il luogo dei punti critici H(E) associato alla non linearità.
Osserviamo che
è una funzione che assume valori reali (positivi), è nulla per E = a e
tende a zero per E + , quindi il luogo dei punti critici sarà della
forma
Re
Im H(E)

ESERCIZIO 1: SOLUZIONE
Il metodo della funzione descrittiva (a singolo ingresso sinusoidale)
prevede che non ci siano oscillazioni permanenti se l’equazione di
bilancio armonico
non ammette soluzioni, cioè se il diagramma polare di G(s) non
interseca il luogo dei punti critici H(E) associato alla non linearità.
Osserviamo inoltre che
ha diagramma polare che attraversa il semiasse reale negativo
ESERCIZIO 1: SOLUZIONE
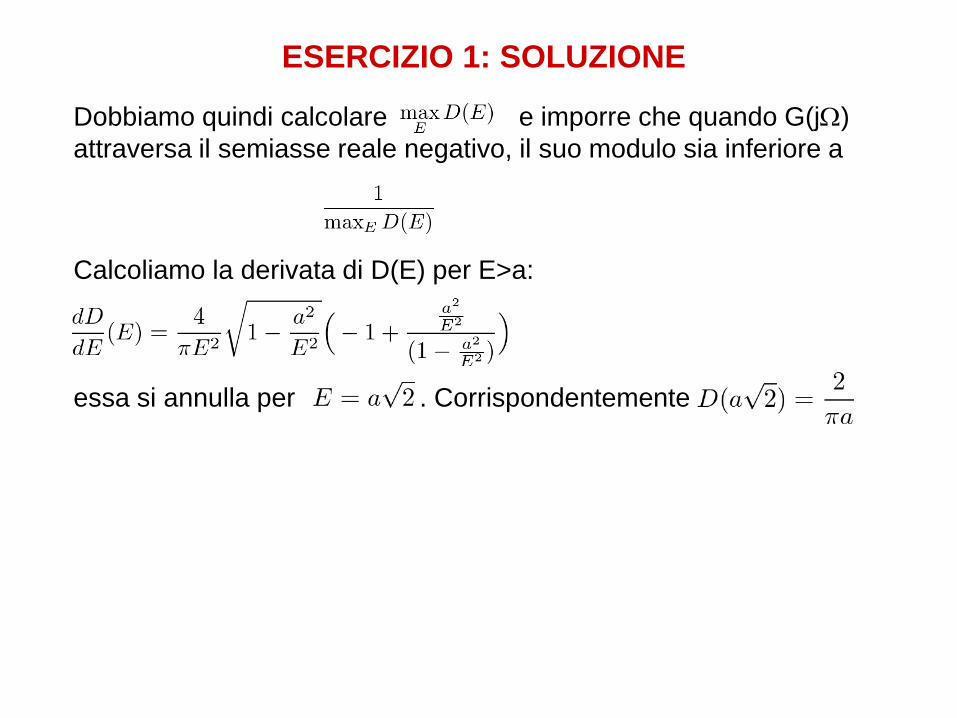
Dobbiamo quindi calcolare e imporre che quando G(j)
attraversa il semiasse reale negativo, il suo modulo sia inferiore a
Calcoliamo la derivata di D(E) per E>a:
essa si annulla per . Corrispondentemente
ESERCIZIO 1: SOLUZIONE
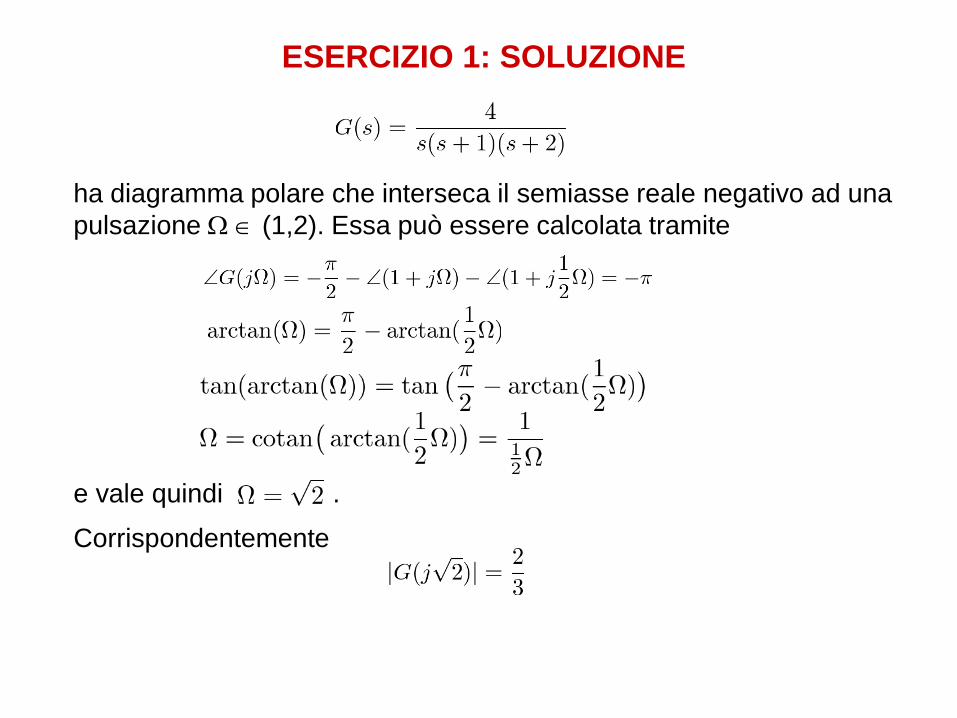
ha diagramma polare che interseca il semiasse reale negativo ad una
pulsazione (1,2). Essa può essere calcolata tramite
e vale quindi .
Corrispondentemente
ESERCIZIO 1: SOLUZIONE
Dobbiamo quindi trovare i valori di a che soddisfano
cioè
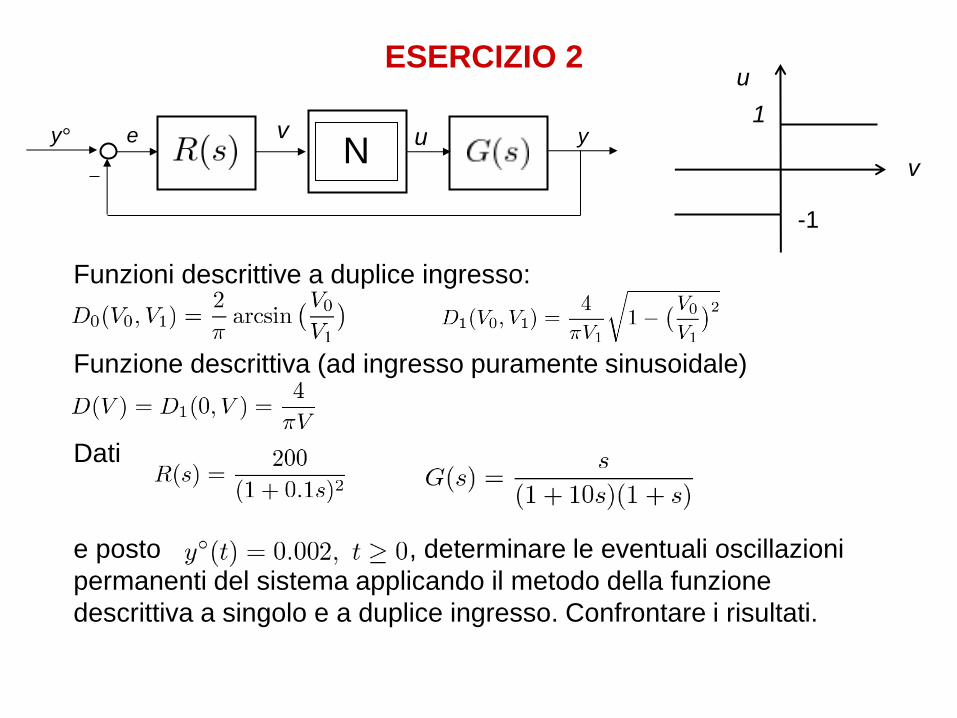
ESERCIZIO 2
Funzioni descrittive a duplice ingresso:
Funzione descrittiva (ad ingresso puramente sinusoidale)
Dati
e posto , determinare le eventuali oscillazioni
permanenti del sistema applicando il metodo della funzione
descrittiva a singolo e a duplice ingresso. Confrontare i risultati.
u e y N
v y° 1
-1
v
u
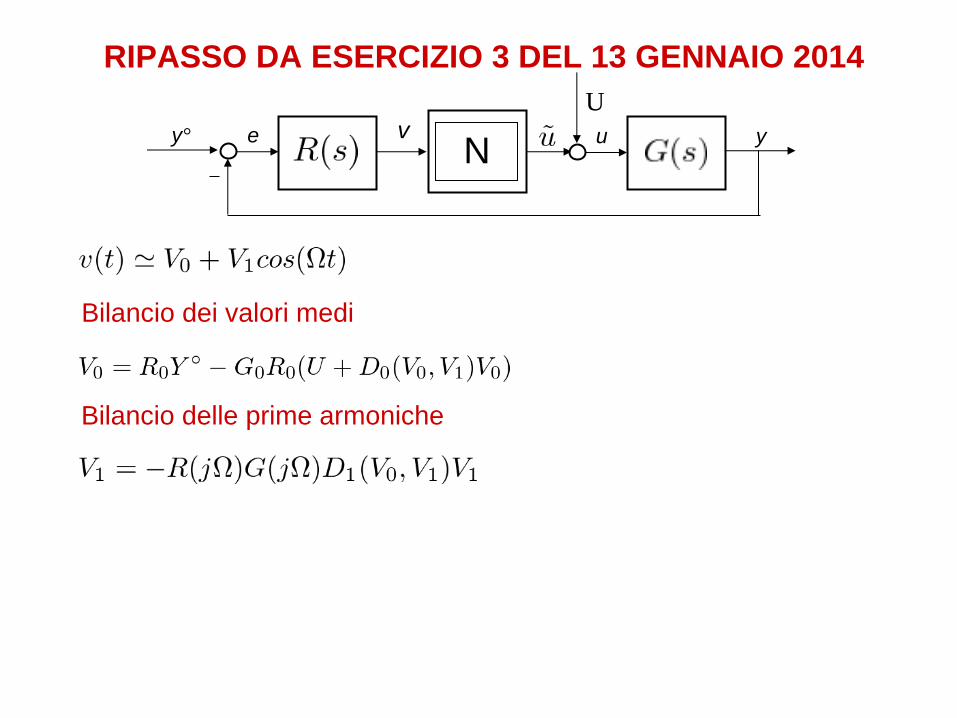
RIPASSO DA ESERCIZIO 3 DEL 13 GENNAIO 2014
e y N
v y° u
U
Bilancio dei valori medi
Bilancio delle prime armoniche

ESERCIZIO 2: SOLUZIONE
e y N
v y° u
U
Bilancio dei valori medi
Bilancio delle prime armoniche
Se si assume V0=0, allora dalla seconda equazione segue:
, dove
Metodo della funzione descrittiva a singolo ingresso sinusoidale

ESERCIZIO 2: SOLUZIONE
Metodo della funzione descrittiva ad ingresso puramente sinusoidale:
determiniamo tale che la fase di R(j)G(j) sia - e poi calcoliamo
il modulo di R(j)G(j), da cui ricaviamo V:
u e y N
v y° 1
-1
v
u

10
|R(j)G(j) | = 1
ESERCIZIO 2: SOLUZIONE

ESERCIZIO 2: SOLUZIONE
Metodo della funzione descrittiva ad ingresso puramente sinusoidale:
determiniamo tale che la fase di R(j)G(j) sia - e poi calcolo il
modulo di R(j)G(j), da cui ricavo V:
u e y N
v y° 1
-1
v
u
ESERCIZIO 2: SOLUZIONE
e y N
v y° u
U
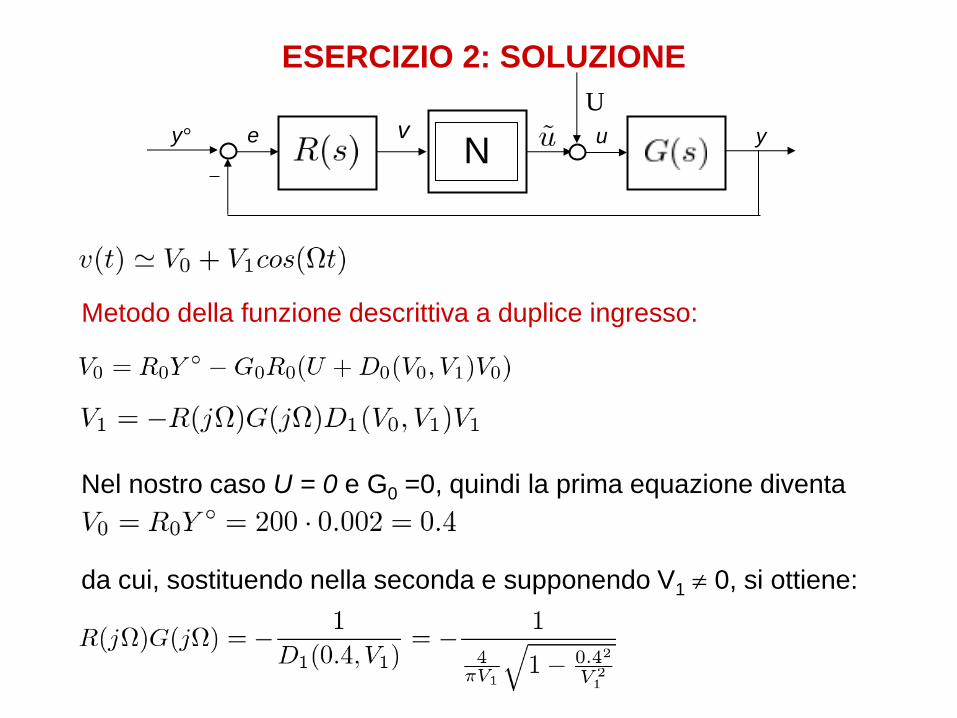
Metodo della funzione descrittiva a duplice ingresso:
Nel nostro caso U = 0 e G0 =0, quindi la prima equazione diventa
da cui, sostituendo nella seconda e supponendo V1 0, si ottiene:
ESERCIZIO 2: SOLUZIONE
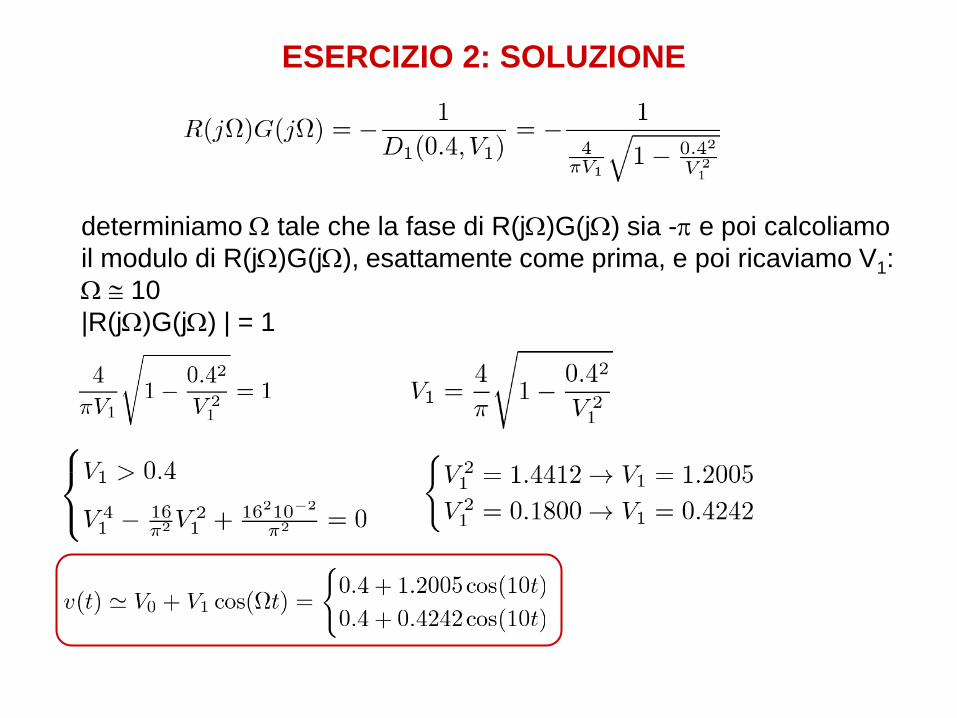
determiniamo tale che la fase di R(j)G(j) sia - e poi calcoliamo
il modulo di R(j)G(j), esattamente come prima, e poi ricaviamo V1:
10
|R(j)G(j) | = 1

ESERCIZIO 2: SOLUZIONE
determiniamo tale che la fase di R(j)G(j) sia - e poi calcoliamo
il modulo di R(j)G(j), esattamente come prima, e poi ricaviamo V1:
10
|R(j)G(j) | = 1
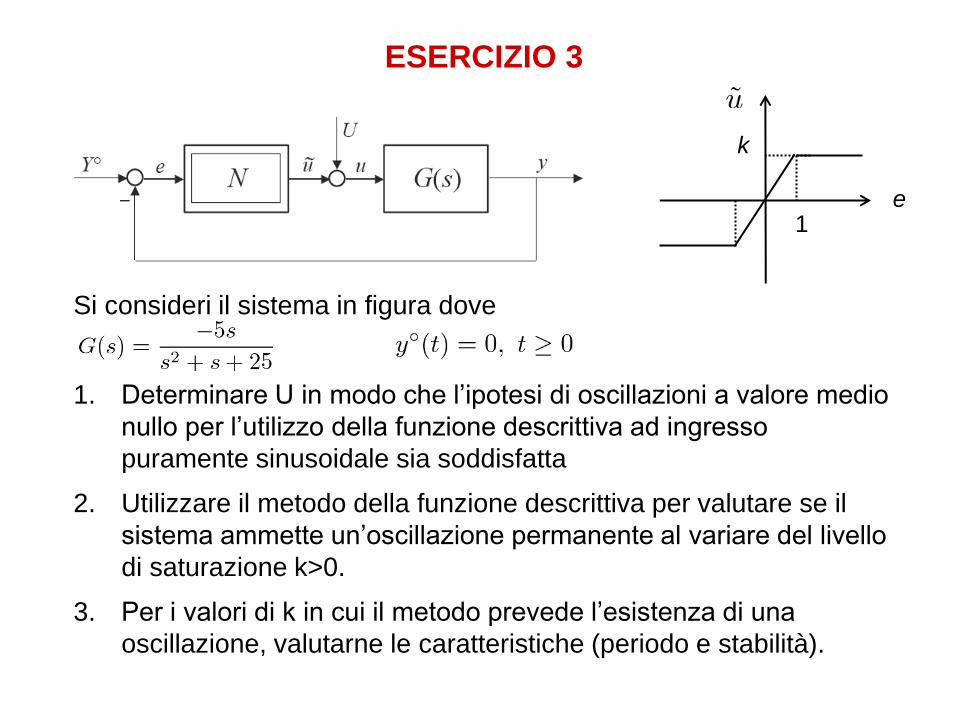
ESERCIZIO 3
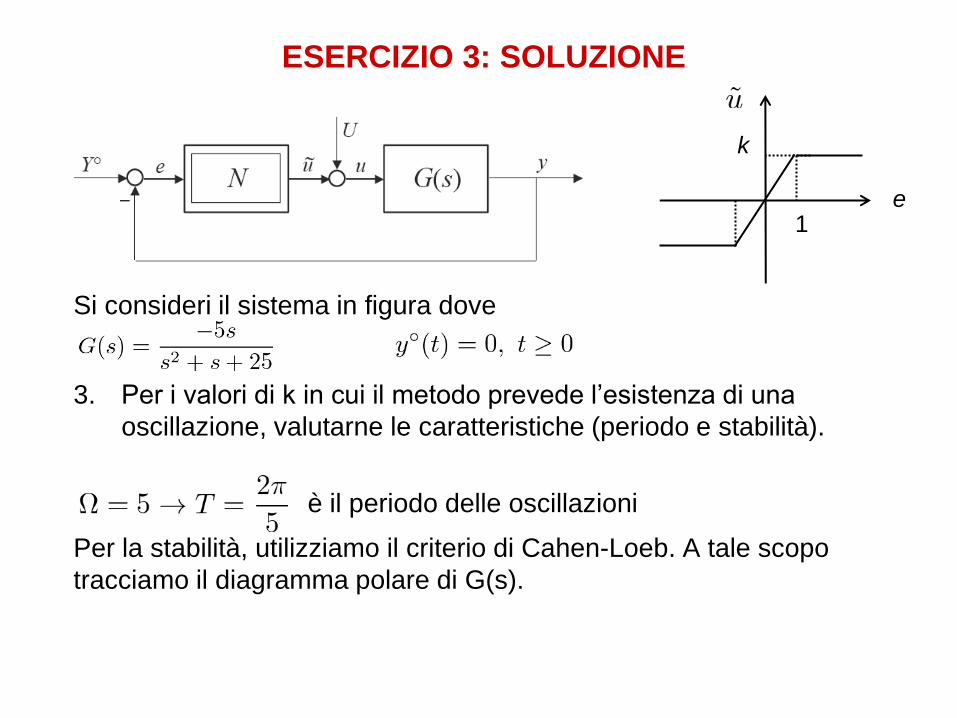
Si consideri il sistema in figura dove
1. Determinare U in modo che l’ipotesi di oscillazioni a valore medio
nullo per l’utilizzo della funzione descrittiva ad ingresso
puramente sinusoidale sia soddisfatta
2. Utilizzare il metodo della funzione descrittiva per valutare se il
sistema ammette un’oscillazione permanente al variare del livello
di saturazione k>0.
3. Per i valori di k in cui il metodo prevede l’esistenza di una
oscillazione, valutarne le caratteristiche (periodo e stabilità).
k
1 e

ESERCIZIO 3
D(E)/k
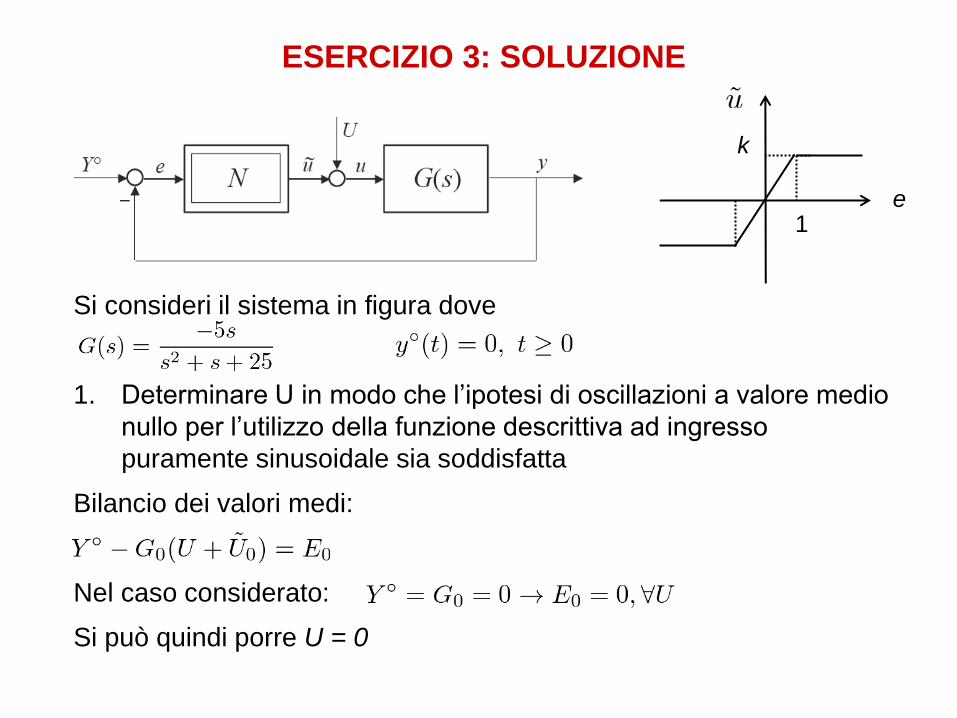
ESERCIZIO 3: SOLUZIONE
Si consideri il sistema in figura dove
1. Determinare U in modo che l’ipotesi di oscillazioni a valore medio
nullo per l’utilizzo della funzione descrittiva ad ingresso
puramente sinusoidale sia soddisfatta
Bilancio dei valori medi:
Nel caso considerato:
Si può quindi porre U = 0
k
1 e
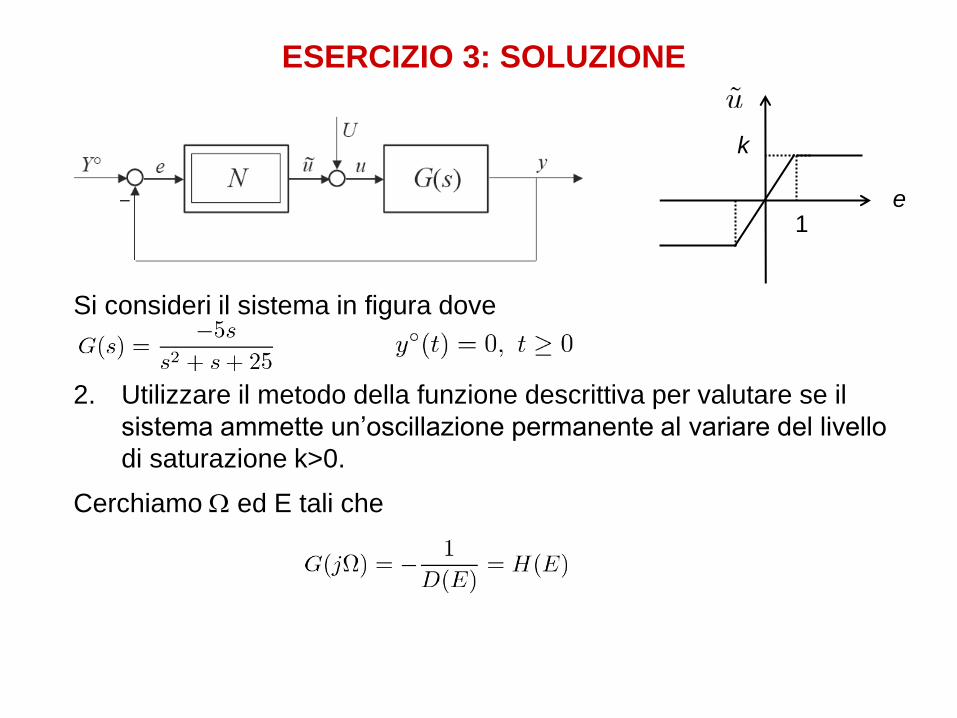
ESERCIZIO 3: SOLUZIONE
Si consideri il sistema in figura dove
2. Utilizzare il metodo della funzione descrittiva per valutare se il
sistema ammette un’oscillazione permanente al variare del livello
di saturazione k>0.
Cerchiamo ed E tali che
k
1 e

ESERCIZIO 3: SOLUZIONE
D(E)/k
Re
Im
H(E) -1/k

ESERCIZIO 3: SOLUZIONE
Re
Im
H(E) -1/k
Determiniamo tale che la fase di G(j) sia - e poi calcoliamo il
modulo di G(j). Se |G(j)| 1/k, allora il metodo prevede
un’oscillazione, altrimenti non ne prevede nessuna.
ESERCIZIO 3: SOLUZIONE
Si consideri il sistema in figura dove
3. Per i valori di k in cui il metodo prevede l’esistenza di una
oscillazione, valutarne le caratteristiche (periodo e stabilità).
è il periodo delle oscillazioni
Per la stabilità, utilizziamo il criterio di Cahen-Loeb. A tale scopo
tracciamo il diagramma polare di G(s).
k
1 e

ESERCIZIO 3: SOLUZIONE

ESERCIZIO 3: SOLUZIONE
Esiste un’intersezione tra il diagramma polare ed il luogo dei punti
critici e dato che essa è stabile per il criterio di Cahen-Loeb
N T
H(E)

ESERCIZIO 4
Con riferimento al sistema di Lur’e autonomo
dove L rappresenta un sistema lineare completamente raggiungibile
ed osservabile con funzione di trasferimento
valutare se la congettura di Aizerman relativamente ad un settore
[0,k] può ritenersi corretta.
L u e y

PROBLEMA DI LUR’E
u e
S : y
Problema di Lur’e
Data la funzione di trasferimento G(s) del sistema lineare L,
trovare condizioni necessarie e/o sufficienti di assoluta stabilità di S
in un settore [k1, k2].
Definizione
Il sistema S è assolutamente stabile nel settore [k1, k2] se x = 0 è uno
stato di equilibrio globalmente asintoticamente stabile di S, per ogni

UNA CONDIZIONE NECESSARIA
u e
S : y
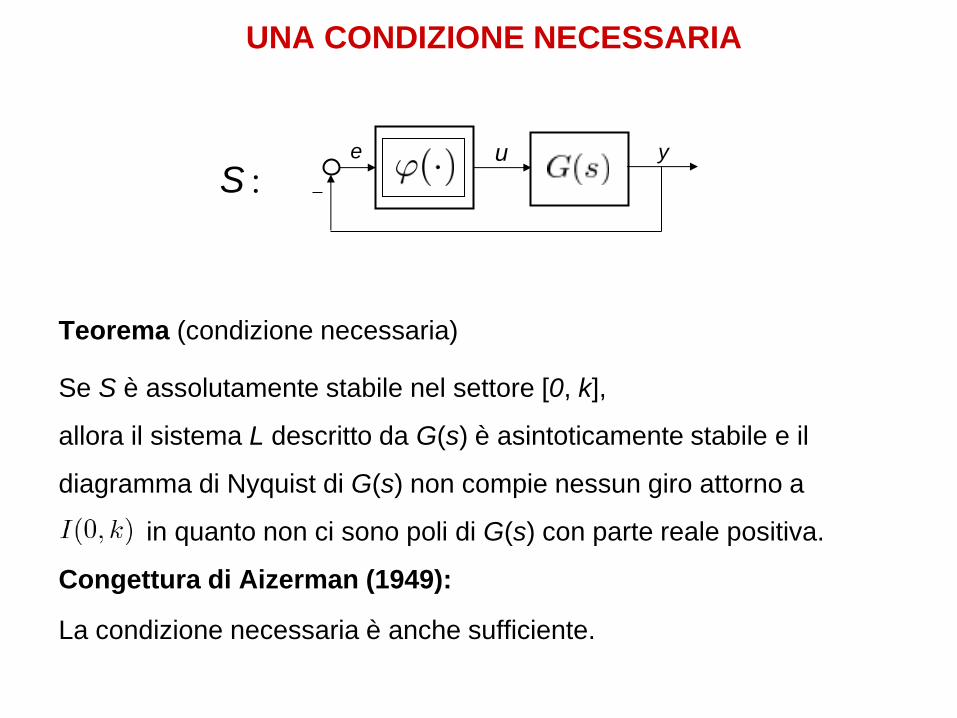
Teorema (condizione necessaria)
Se S è assolutamente stabile nel settore [0, k],
allora il sistema L descritto da G(s) è asintoticamente stabile e il
diagramma di Nyquist di G(s) non compie nessun giro attorno a
in quanto non ci sono poli di G(s) con parte reale positiva.

Re
Im
G(jw)
G w
UNA CONDIZIONE NECESSARIA
u e
S : y
Teorema (condizione necessaria)
Se S è assolutamente stabile nel settore [0, k],
allora il sistema L descritto da G(s) è asintoticamente stabile e il
diagramma di Nyquist di G(s) non compie nessun giro attorno a
in quanto non ci sono poli di G(s) con parte reale positiva.
Congettura di Aizerman (1949):
La condizione necessaria è anche sufficiente.
CRITERIO DI POPOV
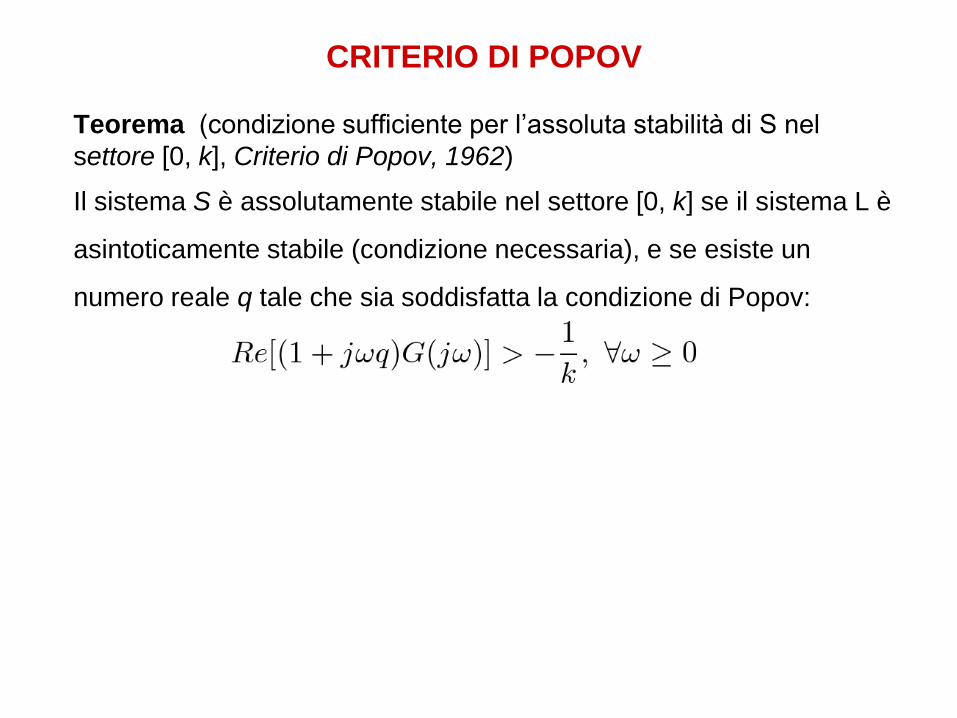
Teorema (condizione sufficiente per l’assoluta stabilità di S nel
settore [0, k], Criterio di Popov, 1962)
Il sistema S è assolutamente stabile nel settore [0, k] se il sistema L è
asintoticamente stabile (condizione necessaria), e se esiste un
numero reale q tale che sia soddisfatta la condizione di Popov:

CRITERIO DI POPOV
Re
Im
G*
retta di
Popov
diagramma di Popov
• stabilire se esiste una retta passante per -1/k (retta di Popov) che
lasci G* strettamente alla sua destra (tranne, al più, il punto di G*
corrispondente a w, che può appartenere alla retta di Popov).
• Il coefficiente angolare della retta è 1/q
VERIFICA DELLA VALIDITA’ DELLA CONGETTURA
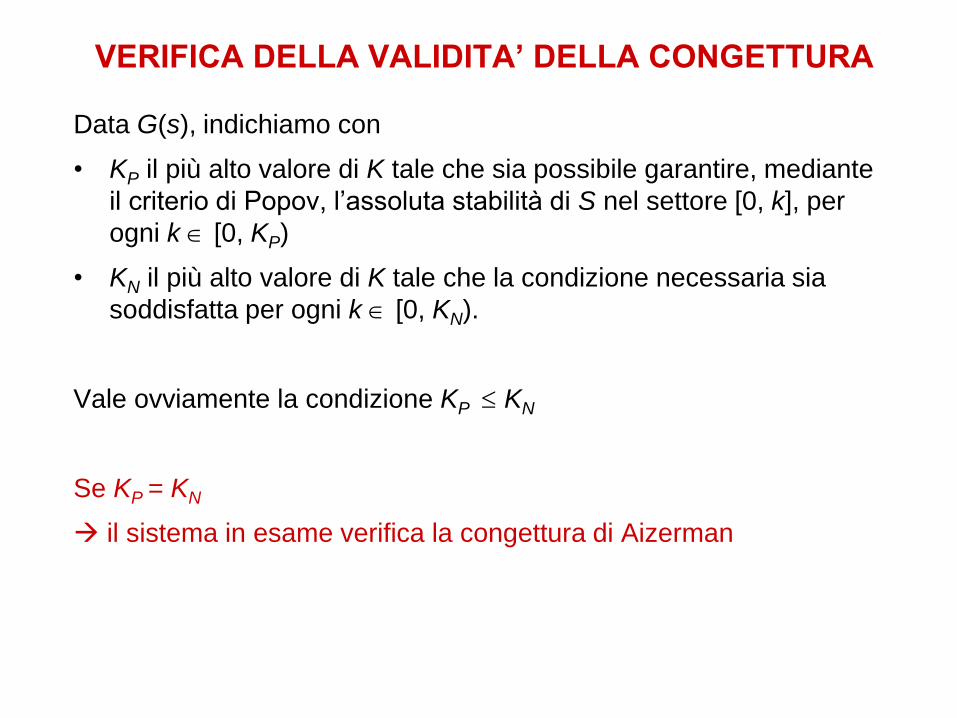
Data G(s), indichiamo con
• KP il più alto valore di K tale che sia possibile garantire, mediante
il criterio di Popov, l’assoluta stabilità di S nel settore [0, k], per
ogni k [0, KP)
• KN il più alto valore di K tale che la condizione necessaria sia
soddisfatta per ogni k [0, KN).
Vale ovviamente la condizione KP KN
Se KP = KN
il sistema in esame verifica la congettura di Aizerman

ESERCIZIO 4: SOLUZIONE
Con riferimento al sistema di Lur’e autonomo
dove L rappresenta un sistema lineare completamente raggiungibile
ed osservabile con funzione di trasferimento
valutare se la congettura di Aizerman relativamente ad un settore
[0,k] può ritenersi corretta.
Tracciamo il diagramma polare e il diagramma di Popov di G(s)
L u e y

ESERCIZIO 4: SOLUZIONE
La congettura di Aizerman è valida in questo caso perché KP = KN
G*
G

ESERCIZIO 4: SOLUZIONE
La congettura di Aizerman è valida in questo caso perché KP = KN
punto più a destra sul semiasse reale
negativo per il quale passa una retta
tangente a (ma non intersecante) G*
è -1/KP
G*
intersezione più a sinistra di G
(o G*) con l’asse reale è -1/KN
G
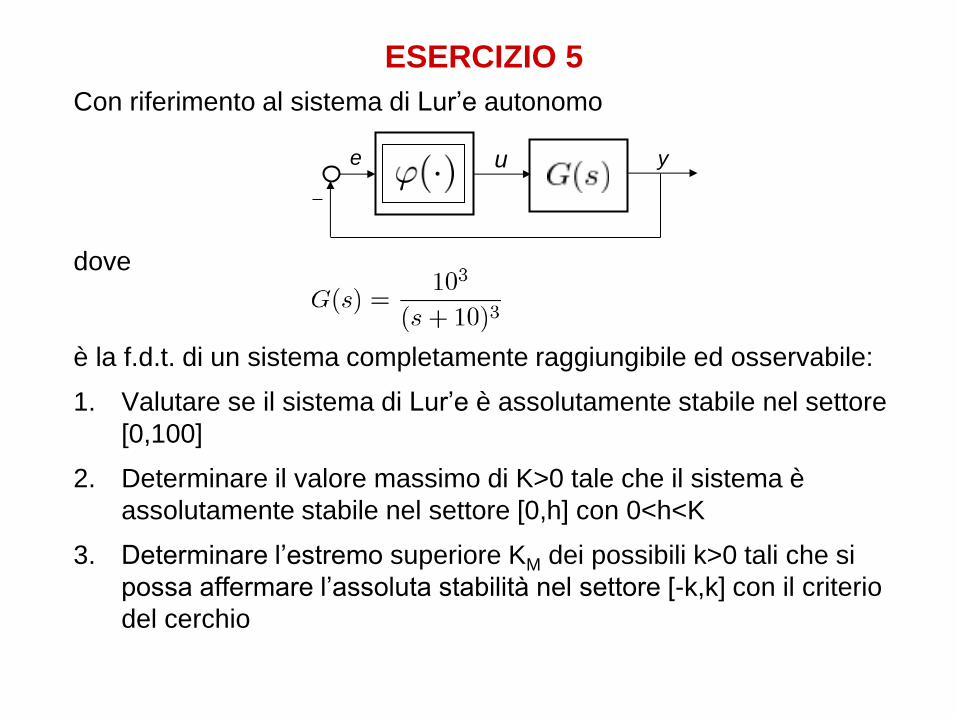
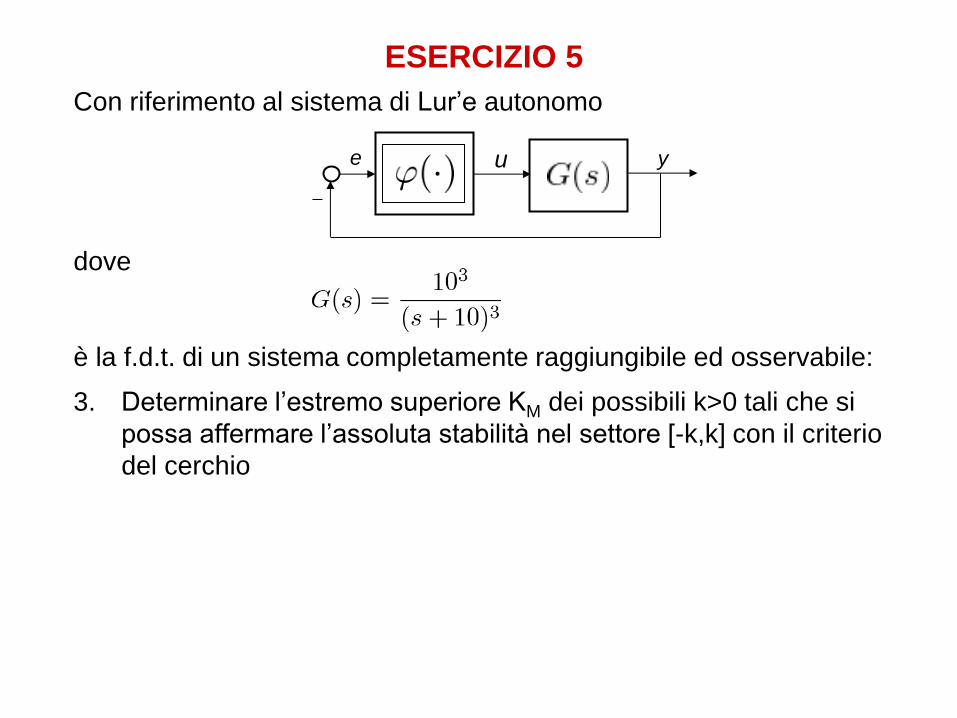
ESERCIZIO 5
Con riferimento al sistema di Lur’e autonomo
dove
è la f.d.t. di un sistema completamente raggiungibile ed osservabile:
1. Valutare se il sistema di Lur’e è assolutamente stabile nel settore
[0,100]
2. Determinare il valore massimo di K>0 tale che il sistema è
assolutamente stabile nel settore [0,h] con 0<h<K
3. Determinare l’estremo superiore KM dei possibili k>0 tali che si
possa affermare l’assoluta stabilità nel settore [-k,k] con il criterio
del cerchio
u e y
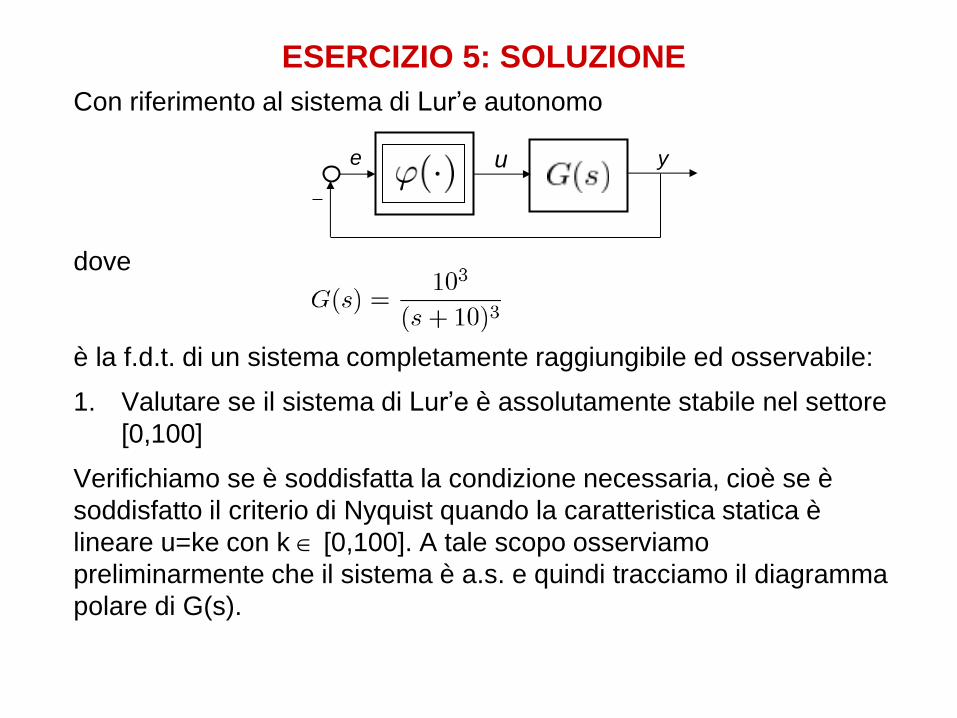
ESERCIZIO 5: SOLUZIONE
Con riferimento al sistema di Lur’e autonomo
dove
è la f.d.t. di un sistema completamente raggiungibile ed osservabile:
1. Valutare se il sistema di Lur’e è assolutamente stabile nel settore
[0,100]
Verifichiamo se è soddisfatta la condizione necessaria, cioè se è
soddisfatto il criterio di Nyquist quando la caratteristica statica è
lineare u=ke con k [0,100]. A tale scopo osserviamo
preliminarmente che il sistema è a.s. e quindi tracciamo il diagramma
polare di G(s).
u e y

ESERCIZIO 5: SOLUZIONE
> 0.1 margine di
guadagno
<10
fase -180°

ESERCIZIO 5: SOLUZIONE
-1/100
la condizione necessaria NON è soddisfatta
il sistema di Lur’e non è assolutamente stabile nel settore [0,100]
ESERCIZIO 5: SOLUZIONE
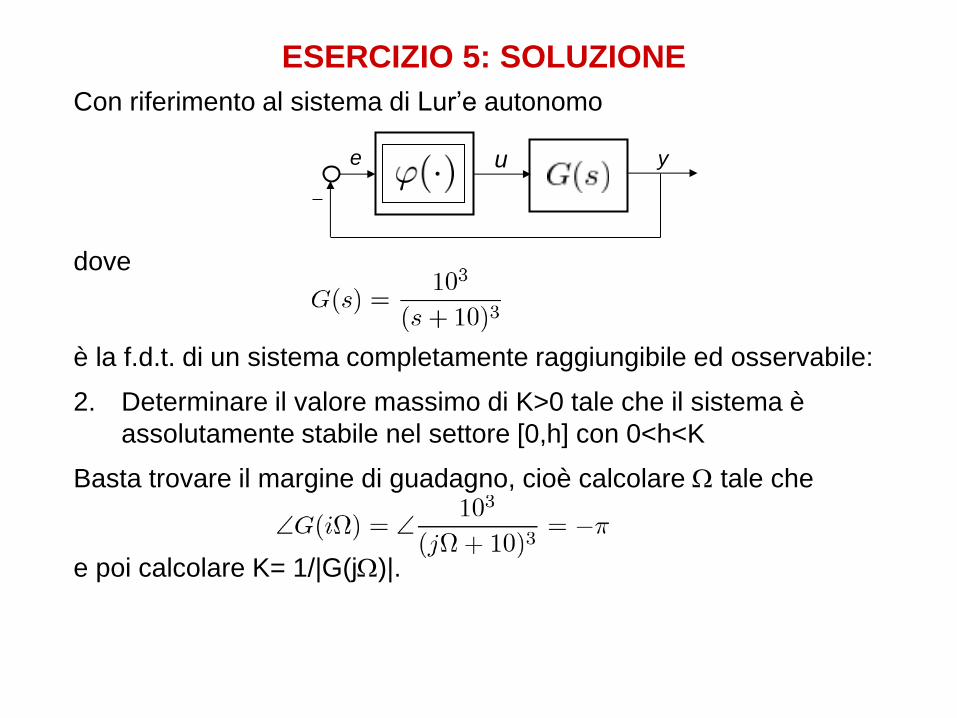
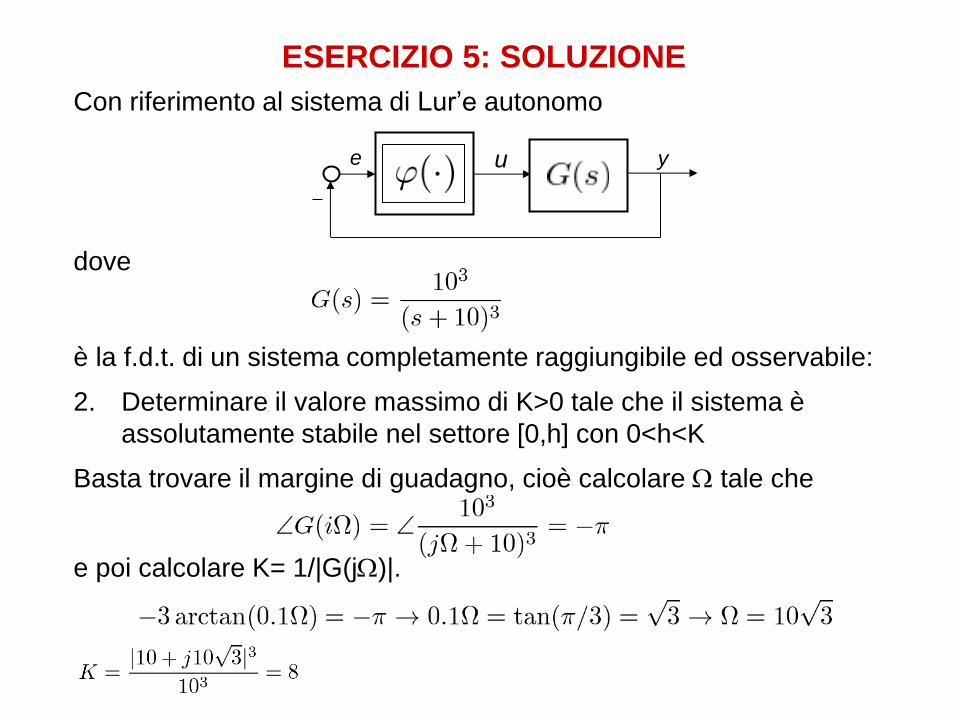
Con riferimento al sistema di Lur’e autonomo
dove
è la f.d.t. di un sistema completamente raggiungibile ed osservabile:
2. Determinare il valore massimo di K>0 tale che il sistema è
assolutamente stabile nel settore [0,h] con 0<h<K
Basta trovare il margine di guadagno, cioè calcolare tale che
e poi calcolare K= 1/|G(j)|.
u e y

ESERCIZIO 5: SOLUZIONE
Con riferimento al sistema di Lur’e autonomo
dove
è la f.d.t. di un sistema completamente raggiungibile ed osservabile:
2. Determinare il valore massimo di K>0 tale che il sistema è
assolutamente stabile nel settore [0,h] con 0<h<K
Basta trovare il margine di guadagno, cioè calcolare tale che
e poi calcolare K= 1/|G(j)|.
u e y
ESERCIZIO 5: SOLUZIONE
Con riferimento al sistema di Lur’e autonomo
dove
è la f.d.t. di un sistema completamente raggiungibile ed osservabile:
2. Determinare il valore massimo di K>0 tale che il sistema è
assolutamente stabile nel settore [0,h] con 0<h<K
Basta trovare il margine di guadagno, cioè calcolare tale che
e poi calcolare K= 1/|G(j)|.
u e y
ESERCIZIO 5
Con riferimento al sistema di Lur’e autonomo
dove
è la f.d.t. di un sistema completamente raggiungibile ed osservabile:
3. Determinare l’estremo superiore KM dei possibili k>0 tali che si
possa affermare l’assoluta stabilità nel settore [-k,k] con il criterio
del cerchio
u e y
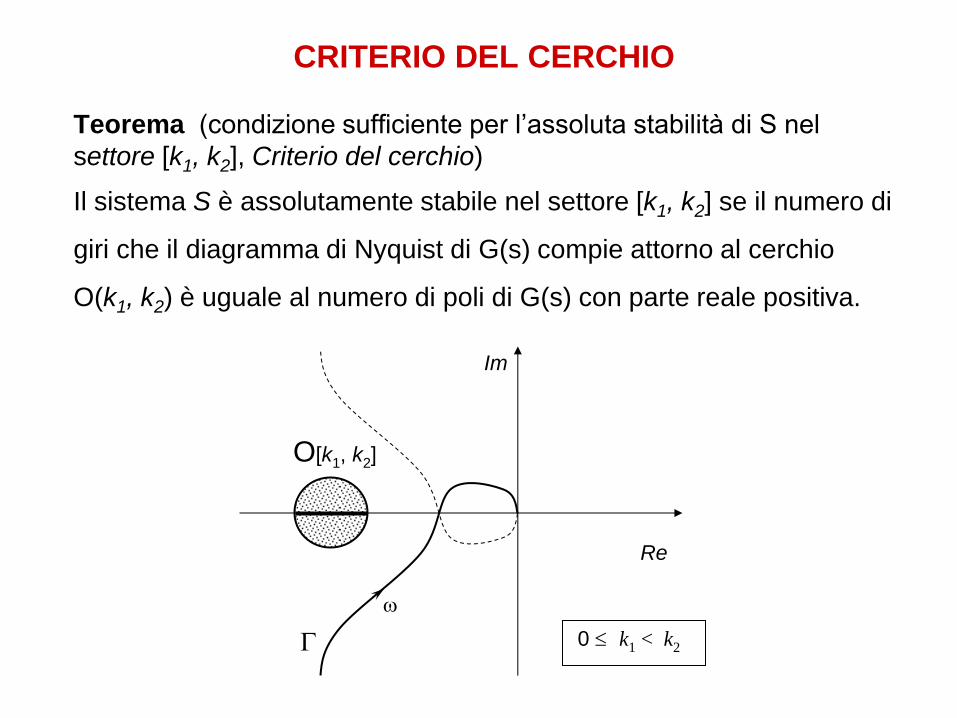
CRITERIO DEL CERCHIO
Teorema (condizione sufficiente per l’assoluta stabilità di S nel
settore [k1, k2], Criterio del cerchio)
Il sistema S è assolutamente stabile nel settore [k1, k2] se il numero di
giri che il diagramma di Nyquist di G(s) compie attorno al cerchio
O(k1, k2) è uguale al numero di poli di G(s) con parte reale positiva.
Re
Im
G
w
O[k1, k2]
0 k1 < k2

CRITERIO DEL CERCHIO
Re
Im
-1
k2
-1
k1
k1 < 0 < k2
Re
Im
k1 < k2 0
-1
k1
-1
k2
Re
Im
0 k1< k2

CRITERIO DEL CERCHIO
Re
Im
-1
k2
-1
k1
k1 < 0 < k2
Re
Im
k1 < k2 0
-1
k1
-1
k2
Re
Im
0 k1< k2
Nel caso di settore [-k,k], la condizione da verificare è che il diagramma
di Nyquist di G(s) sia strettamente contenuto nella circonferenza di raggio
1/k centrata nell’origine del piano complesso
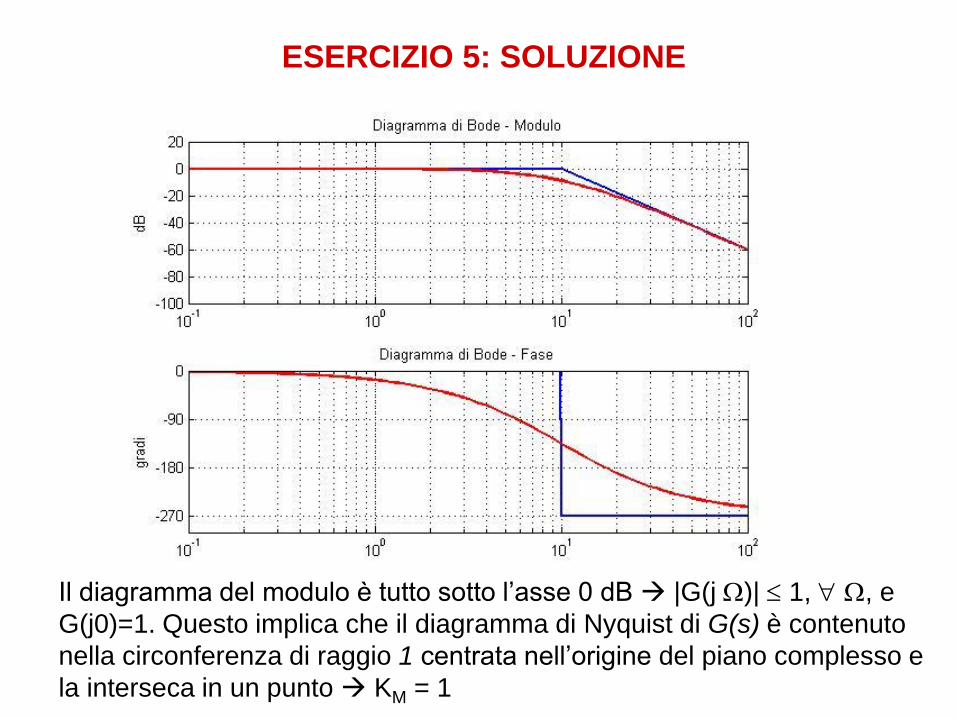
ESERCIZIO 5: SOLUZIONE
Il diagramma del modulo è tutto sotto l’asse 0 dB |G(j )| 1, , e
G(j0)=1. Questo implica che il diagramma di Nyquist di G(s) è contenuto
nella circonferenza di raggio 1 centrata nell’origine del piano complesso e
la interseca in un punto KM = 1

ESERCIZIO 6
Calcolare le norme e per i segnali:
a)
b)
c)
Dire quale tra di essi è:
1. ad energia limitata
2. uniformemente limitato

NORMA DI UN SEGNALE
• Segnale a tempo continuo
continuo a tratti
•
Segnali a norma finita:
p = 1 segnali assolutamente integrabili
p = 2 segnali ad energia finita
p = segnali uniformemente limitati

ESERCIZIO 6: SOLUZIONE
a)
•
•
Segnale uniformemente limitato, ma non ad energia limitata

ESERCIZIO 6: SOLUZIONE
b)
•
•
Segnale uniformemente limitato, ad energia finita

ESERCIZIO 6: SOLUZIONE
c)
•
•
Segnale uniformemente limitato, ad energia finita

ESERCIZIO 7
Si consideri il sistema lineare di ordine 2 descritto dalla funzione di
trasferimento
con
Determinare il guadagno 2(H) dell’operatore ingresso/uscita H ad
esso associato
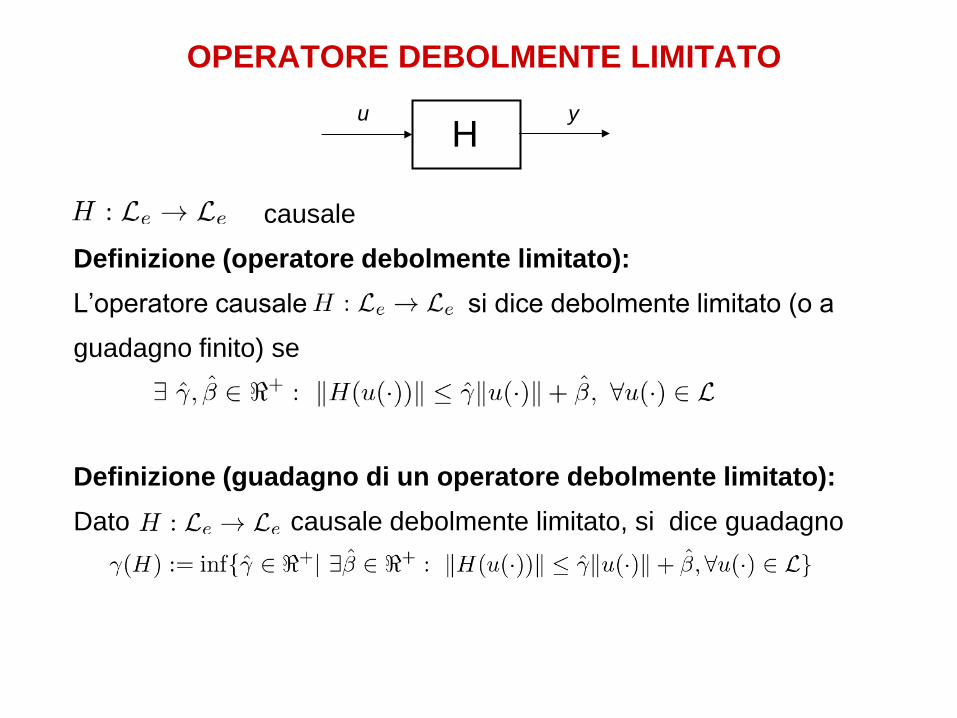
OPERATORE DEBOLMENTE LIMITATO
H u y
causale
Definizione (operatore debolmente limitato):
L’operatore causale si dice debolmente limitato (o a
guadagno finito) se
Definizione (guadagno di un operatore debolmente limitato):
Dato causale debolmente limitato, si dice guadagno

Caso
In conclusione:
H è limitato e debolmente limitato con guadagno
ESEMPIO: SISTEMA DINAMICO LINEARE
ASINTOTICAMENTE STABILE
norma della f.d.t. F(s)

ESERCIZIO 7: SOLUZIONE
Si consideri il sistema lineare di ordine 2 descritto dalla funzione di
trasferimento
con
Determinare il guadagno 2(H) dell’operatore ingresso/uscita H ad
esso associato.
Si tratta di un sistema lineare asintoticamente stabile. Dobbiamo
valutare la norma di F(s).
È una f.d.t. con guadagno F(0)=1 a poli complessi coniugati se
con picco di risonanza presente solo se
Quindi:
•
•
ESERCIZIO 8
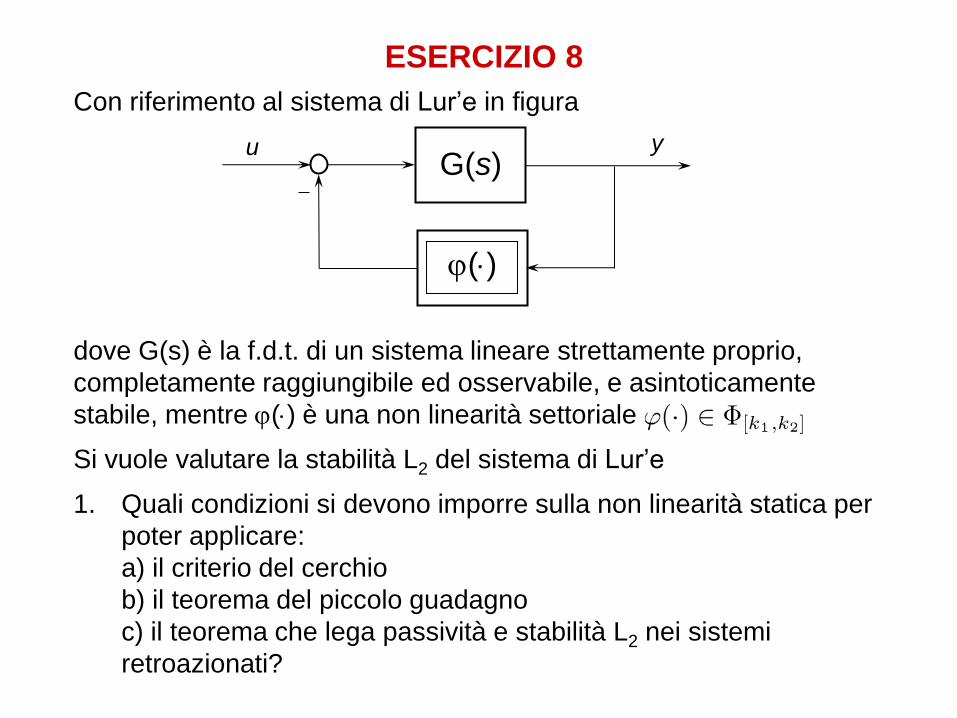
Con riferimento al sistema di Lur’e in figura
dove G(s) è la f.d.t. di un sistema lineare strettamente proprio,
completamente raggiungibile ed osservabile, e asintoticamente
stabile, mentre () è una non linearità settoriale
Si vuole valutare la stabilità L2 del sistema di Lur’e
1. Quali condizioni si devono imporre sulla non linearità statica per
poter applicare:
a) il criterio del cerchio
b) il teorema del piccolo guadagno
c) il teorema che lega passività e stabilità L2 nei sistemi
retroazionati?
()
u y G(s)
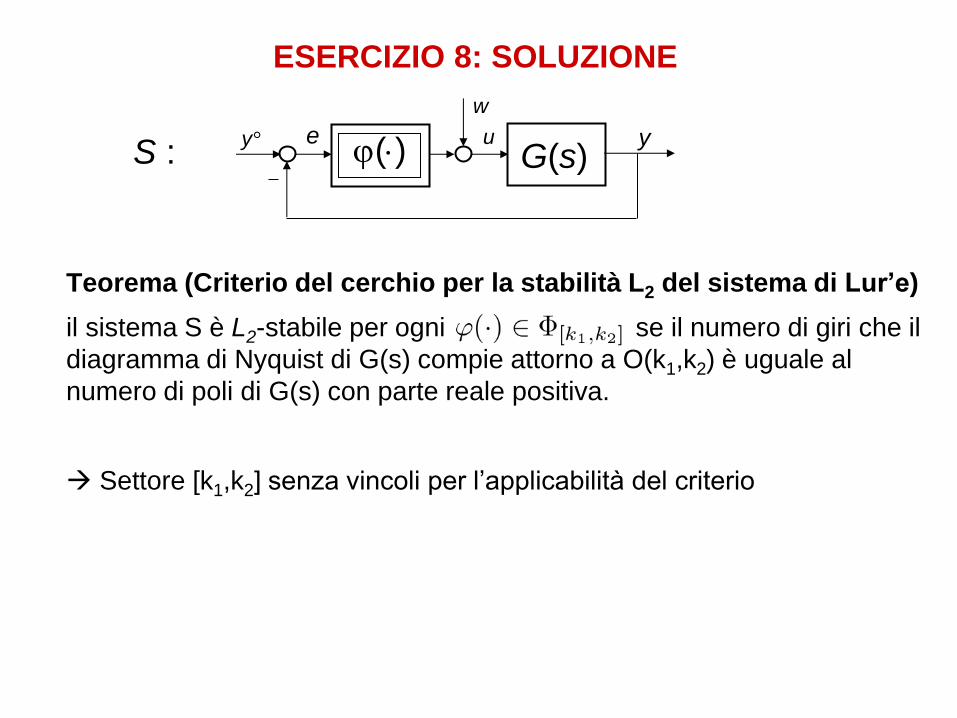
ESERCIZIO 8: SOLUZIONE
() G(s) e u y y°
w
S :
Teorema (Criterio del cerchio per la stabilità L2 del sistema di Lur’e)
il sistema S è L2-stabile per ogni se il numero di giri che il
diagramma di Nyquist di G(s) compie attorno a O(k1,k2) è uguale al
numero di poli di G(s) con parte reale positiva.
Settore [k1,k2] senza vincoli per l’applicabilità del criterio
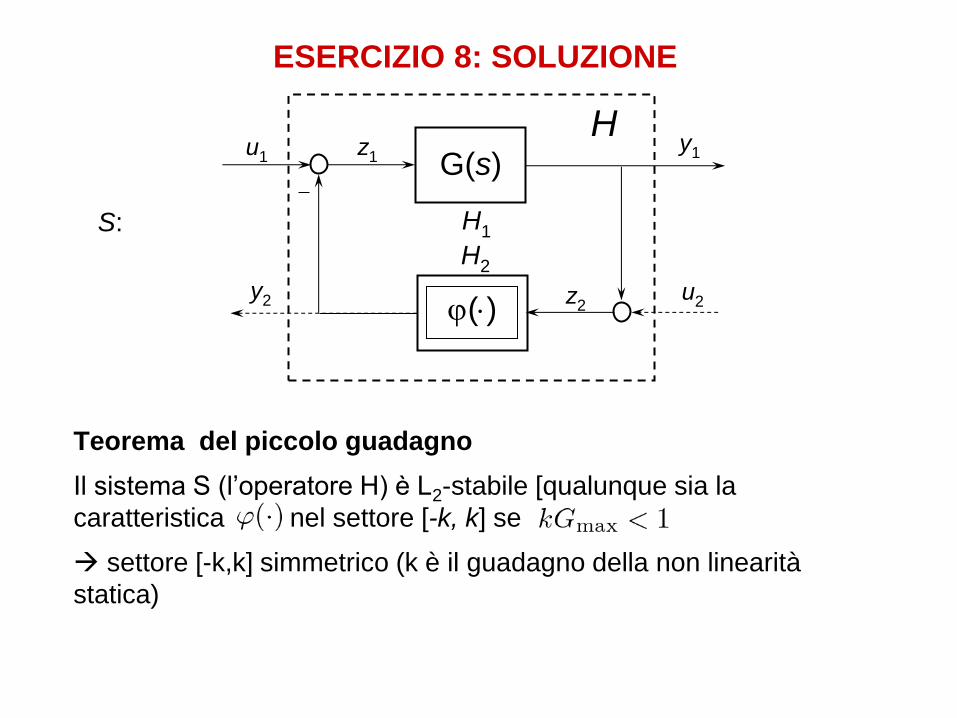
ESERCIZIO 8: SOLUZIONE
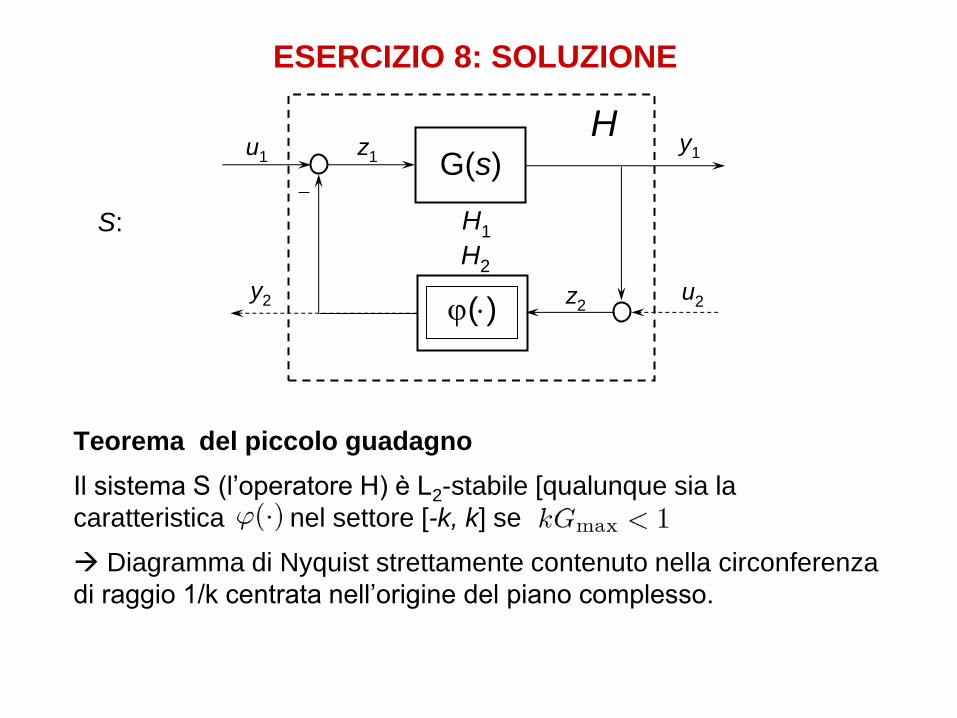
Teorema del piccolo guadagno
Il sistema S (l’operatore H) è L2-stabile [qualunque sia la
caratteristica nel settore [-k, k] se
settore [-k,k] simmetrico (k è il guadagno della non linearità
statica)
()
z1
z2
u1 y1
H1
u2 y2
H2
H G(s)
S:

ESERCIZIO 8: SOLUZIONE
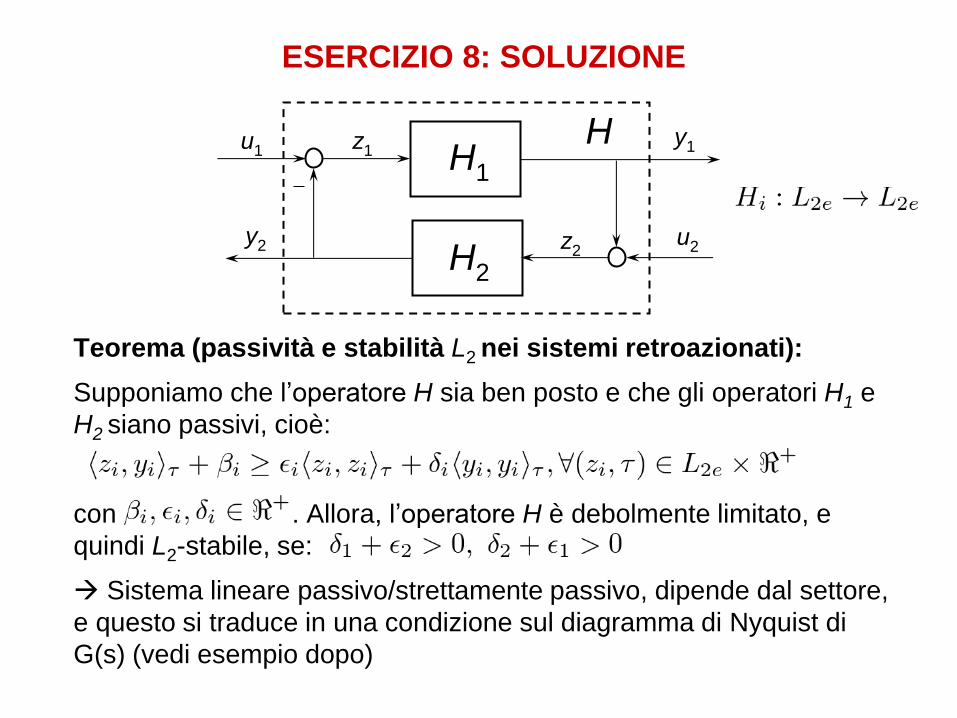
Teorema (passività e stabilità L2 nei sistemi retroazionati):
Supponiamo che l’operatore H sia ben posto e che gli operatori H1 e
H2 siano passivi, cioè:
con . Allora, l’operatore H è debolmente limitato, e
quindi L2-stabile, se:
Settore [k1,k2] nel I e III quadrante perchè l’operatore statico sia
passivo (strettamente passivo relativamente all’ingresso se k1>0,
strettamente passivo relativamente all’uscita se k2 < )
z1
z2
u1 y1 H1
u2 y2 H2
H

ESERCIZIO 8: SOLUZIONE
a) criterio del cerchio b) teorema del piccolo
guadagno
c) teorema che lega
passività e stabilità L2

ESERCIZIO 8
Con riferimento al sistema di Lur’e in figura
dove G(s) è la f.d.t. di un sistema lineare strettamente proprio,
completamente raggiungibile ed osservabile, e asintoticamente
stabile, mentre () è una non linearità settoriale
Si vuole valutare la stabilità L2 del sistema di Lur’e
2. Posto che le condizioni al punto precedente siano soddisfatte,
quali condizioni deve soddisfare il diagramma di Nyquist di G(s)
affinchè il sistema di Lur’e sia L2-stabile?
()
u y G(s)
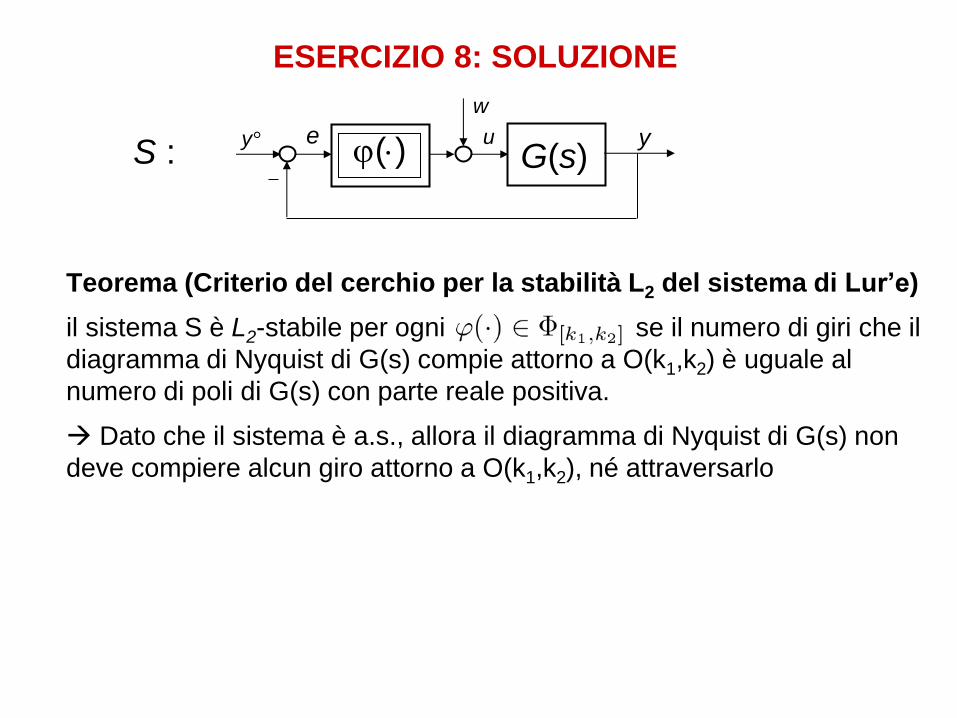
ESERCIZIO 8: SOLUZIONE
() G(s) e u y y°
w
S :
Teorema (Criterio del cerchio per la stabilità L2 del sistema di Lur’e)
il sistema S è L2-stabile per ogni se il numero di giri che il
diagramma di Nyquist di G(s) compie attorno a O(k1,k2) è uguale al
numero di poli di G(s) con parte reale positiva.
Dato che il sistema è a.s., allora il diagramma di Nyquist di G(s) non
deve compiere alcun giro attorno a O(k1,k2), né attraversarlo
ESERCIZIO 8: SOLUZIONE
Teorema del piccolo guadagno
Il sistema S (l’operatore H) è L2-stabile [qualunque sia la
caratteristica nel settore [-k, k] se
Diagramma di Nyquist strettamente contenuto nella circonferenza
di raggio 1/k centrata nell’origine del piano complesso.
()
z1
z2
u1 y1
H1
u2 y2
H2
H G(s)
S:
ESERCIZIO 8: SOLUZIONE
Teorema (passività e stabilità L2 nei sistemi retroazionati):
Supponiamo che l’operatore H sia ben posto e che gli operatori H1 e
H2 siano passivi, cioè:
con . Allora, l’operatore H è debolmente limitato, e
quindi L2-stabile, se:
Sistema lineare passivo/strettamente passivo, dipende dal settore,
e questo si traduce in una condizione sul diagramma di Nyquist di
G(s) (vedi esempio dopo)
z1
z2
u1 y1 H1
u2 y2 H2
H

-s
Re
Im
Teorema (stabilità L2 nel settore [0,k]): Supponiamo che
• H1 corrisponda ad un sistema non dinamico tempo-invariante con
caratteristica ingresso-uscita ();
• H2 corrisponda ad un sistema dinamico lineare tempo-invariante
asintoticamente stabile con f.d.t. ed esista
tale che
Allora l’operatore H è debolmente limitato, e quindi L2-stabile, per
ogni con k >0 tale che
ESEMPIO: SISTEMA DI LUR’E
STABILITA’ L2 NEL SETTORE [0,k]

ESERCIZIO 9
Data A, matrice di Hurwitz, sia P=P’>0 la soluzione di
Si dimostri che il sistema con f.d.t.
è passivo.

ESERCIZIO 9: SOLUZIONE
Data A, matrice di Hurwitz, sia P=P’>0 la soluzione di
Si dimostri che il sistema con f.d.t.
è passivo.
Una possibile realizzazione in variabili di stato di G(s) è:
Per dimostrare che il sistema è passivo, basta trovare una storage
function
SISTEMA DINAMICO PASSIVO
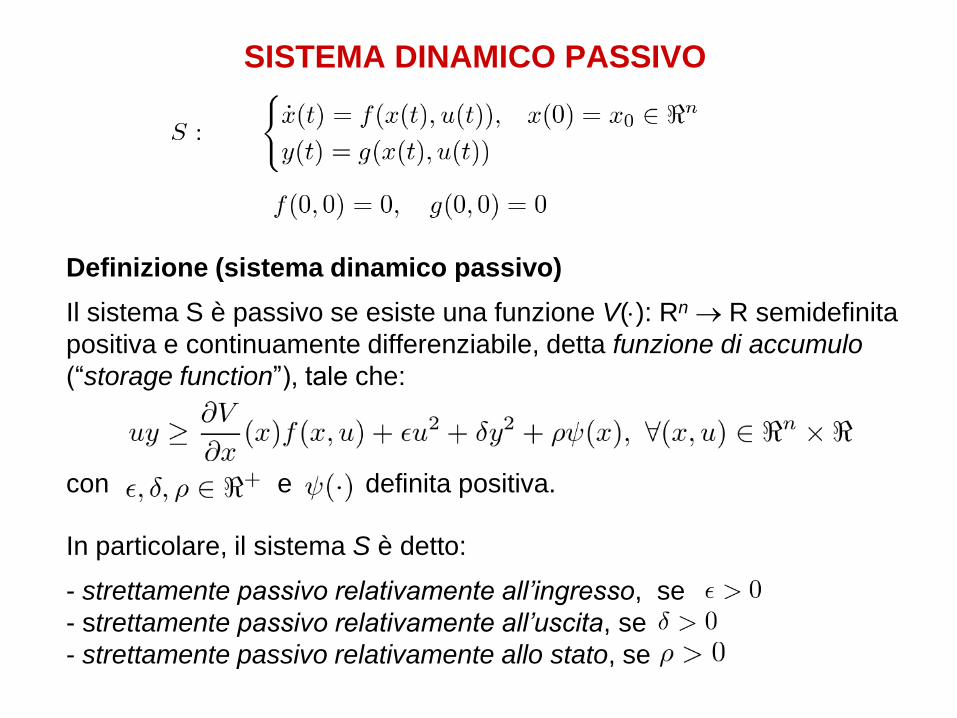
Definizione (sistema dinamico passivo)
Il sistema S è passivo se esiste una funzione V(): Rn R semidefinita
positiva e continuamente differenziabile, detta funzione di accumulo
(“storage function”), tale che:
con e definita positiva.
In particolare, il sistema S è detto:
- strettamente passivo relativamente all’ingresso, se
- strettamente passivo relativamente all’uscita, se
- strettamente passivo relativamente allo stato, se

ESERCIZIO 9: SOLUZIONE
Data A, matrice di Hurwitz, sia P=P’>0 la soluzione di
Si dimostri che il sistema con f.d.t.
è passivo.
Una possibile realizzazione in variabili di stato di G(s) è:
Per dimostrare che il sistema è passivo, basta trovare una storage
function. Proviamo con
il sistema è strettamente passivo relativamente allo stato

ESERCIZIO 10
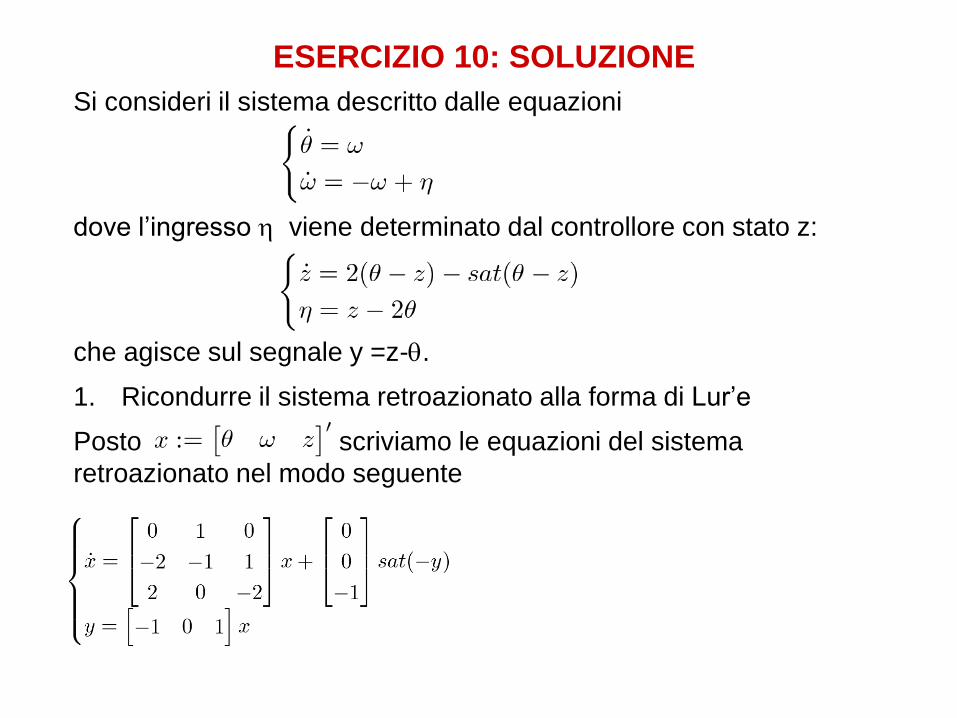
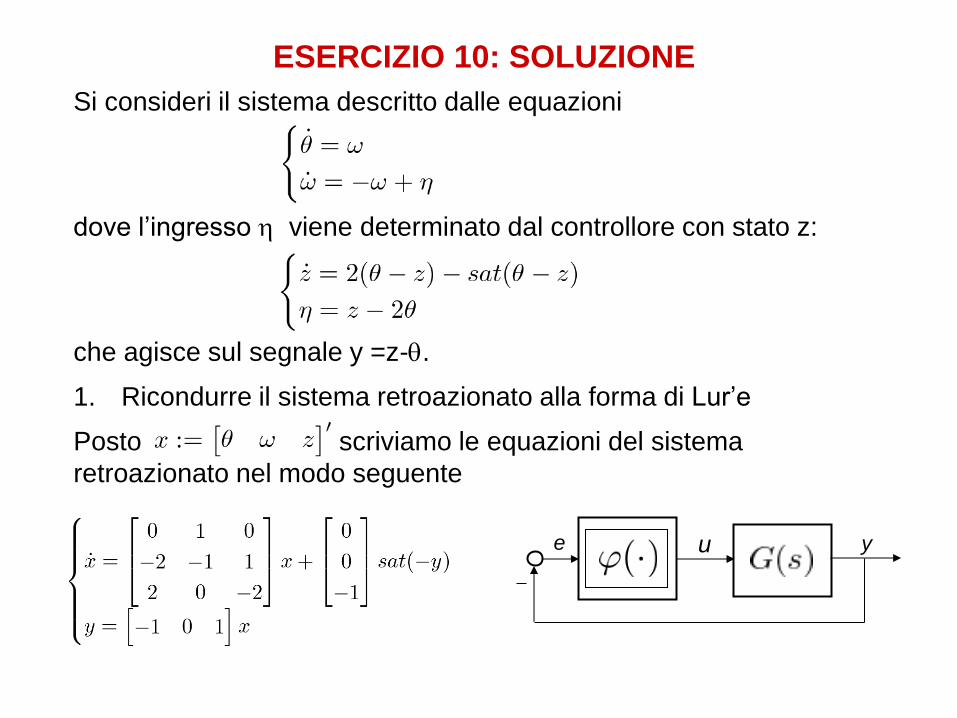
Si consideri il sistema descritto dalle equazioni
dove l’ingresso viene determinato dal controllore con stato z:
che agisce sul segnale y =z-.
1. Ricondurre il sistema retroazionato alla forma di Lur’e
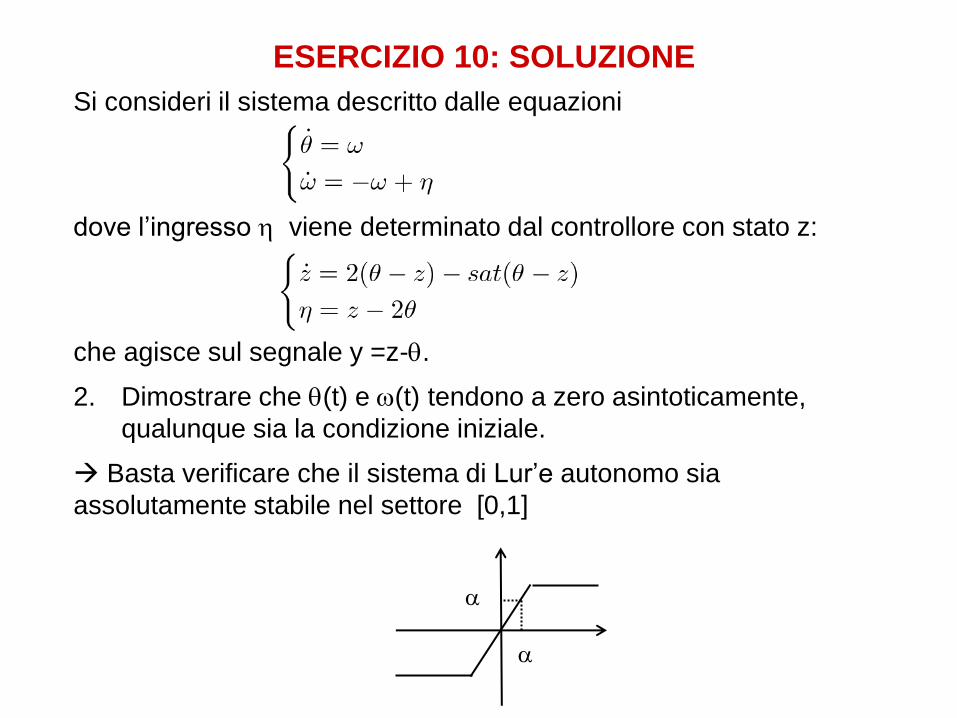
2. Dimostrare che (t) e w(t) tendono a zero asintoticamente,
qualunque sia la condizione iniziale.
u e y
ESERCIZIO 10: SOLUZIONE
Si consideri il sistema descritto dalle equazioni
dove l’ingresso viene determinato dal controllore con stato z:
che agisce sul segnale y =z-.
1. Ricondurre il sistema retroazionato alla forma di Lur’e
Posto scriviamo le equazioni del sistema
retroazionato nel modo seguente
ESERCIZIO 10: SOLUZIONE
Si consideri il sistema descritto dalle equazioni
dove l’ingresso viene determinato dal controllore con stato z:
che agisce sul segnale y =z-.
1. Ricondurre il sistema retroazionato alla forma di Lur’e
Posto scriviamo le equazioni del sistema
retroazionato nel modo seguente
u e y

ESERCIZIO 10: SOLUZIONE
Si consideri il sistema descritto dalle equazioni
dove l’ingresso viene determinato dal controllore con stato z:
che agisce sul segnale y =z-.
1. Ricondurre il sistema retroazionato alla forma di Lur’e
Posto scriviamo le equazioni del sistema
retroazionato nel modo seguente
asintoticamente stabile, completamente raggiungibile e osservabile
u e y
ESERCIZIO 10: SOLUZIONE
Si consideri il sistema descritto dalle equazioni
dove l’ingresso viene determinato dal controllore con stato z:
che agisce sul segnale y =z-.
2. Dimostrare che (t) e w(t) tendono a zero asintoticamente,
qualunque sia la condizione iniziale.
Basta verificare che il sistema di Lur’e autonomo sia
assolutamente stabile nel settore [0,1]
CRITERIO DI POPOV
Teorema (condizione sufficiente per l’assoluta stabilità di S nel
settore [0, k], Criterio di Popov, 1962)
Il sistema S è assolutamente stabile nel settore [0, k] se il sistema L è
asintoticamente stabile (condizione necessaria), e se esiste un
numero reale q tale che sia soddisfatta la condizione di Popov:
con q = 0 basta verificare che il diagramma polare stia a destra
dell’asse parallelo all’asse immaginario che interseca l’asse reale
in -1/k (stessa condizione con criterio del cerchio, ovviamente)
nel nostro caso -1/k = -1

ESERCIZIO 10: SOLUZIONE

ESERCIZIO 11
Dato un operatore H() passivo ed un segnale uc(t), mostrare che
l’operatore
da u ad y è passivo.
OPERATORE PASSIVO
Definizione (operatore passivo)
Un operatore causale è passivo se esistono
tali che:
In particolare, si ha:

ESERCIZIO 11: SOLUZIONE
Dato un operatore H() passivo ed un segnale uc(t), mostrare che
l’operatore
da u ad y è passivo.
Allora la passività del nuovo operatore segue da quella di H()
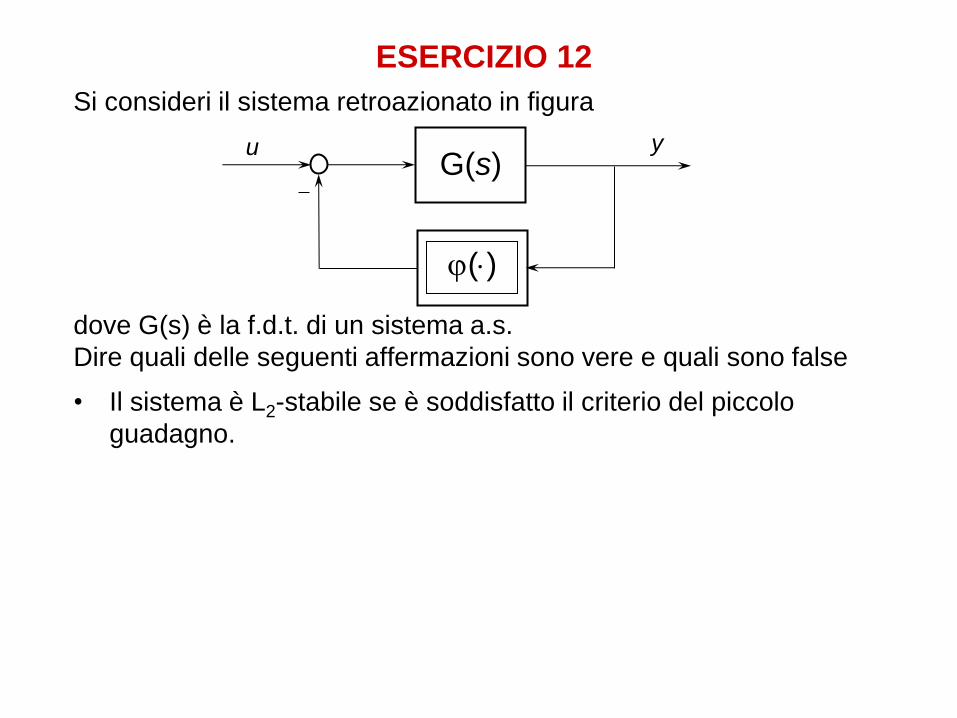
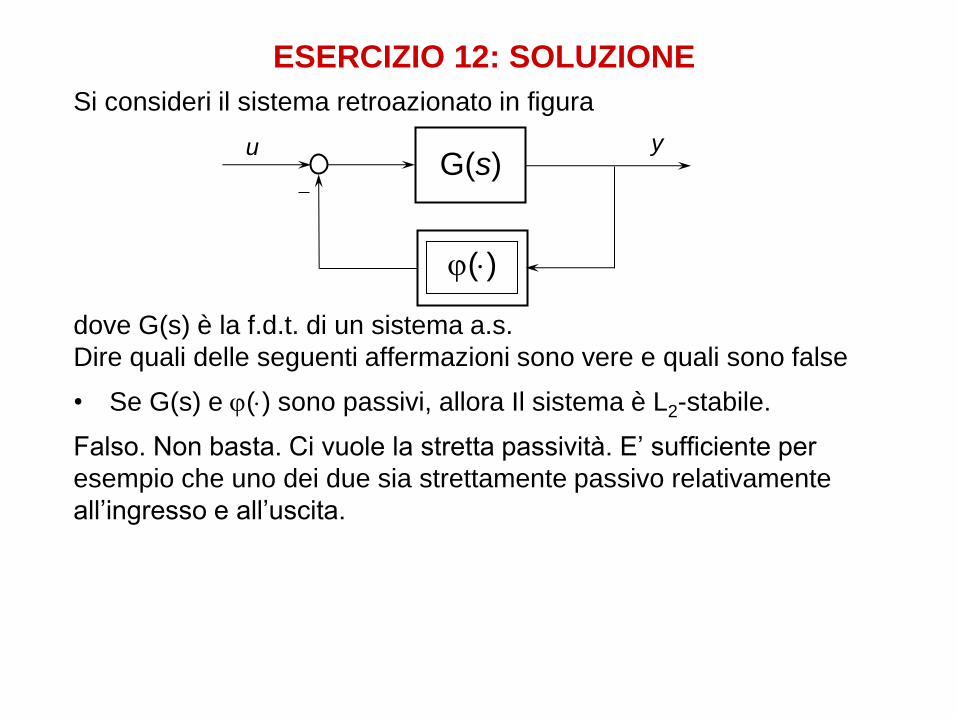
ESERCIZIO 12
Si consideri il sistema retroazionato in figura
dove G(s) è la f.d.t. di un sistema a.s.
Dire quali delle seguenti affermazioni sono vere e quali sono false
• Il sistema è L2-stabile se è soddisfatto il criterio del piccolo
guadagno.
()
u y G(s)
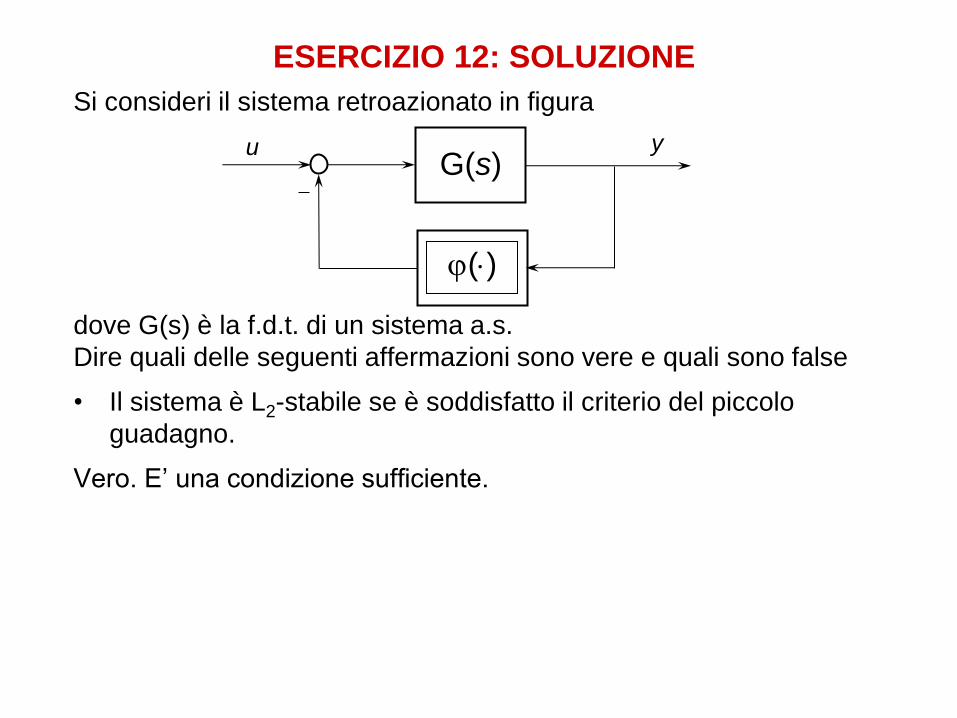
ESERCIZIO 12: SOLUZIONE
Si consideri il sistema retroazionato in figura
dove G(s) è la f.d.t. di un sistema a.s.
Dire quali delle seguenti affermazioni sono vere e quali sono false
• Il sistema è L2-stabile se è soddisfatto il criterio del piccolo
guadagno.
Vero. E’ una condizione sufficiente.
()
u y G(s)
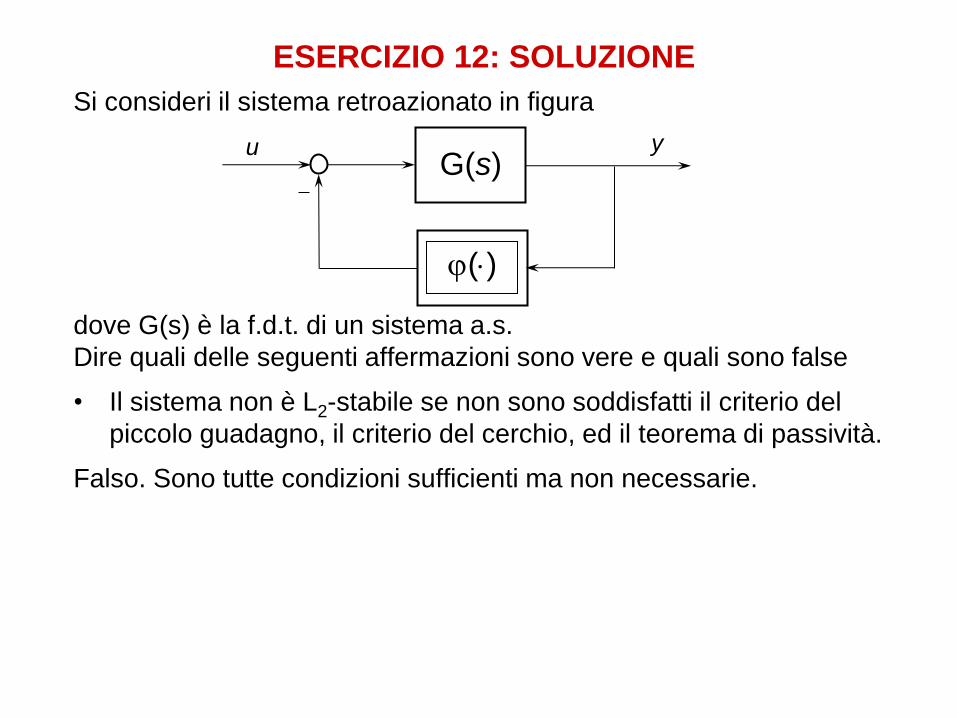
ESERCIZIO 12: SOLUZIONE
Si consideri il sistema retroazionato in figura
dove G(s) è la f.d.t. di un sistema a.s.
Dire quali delle seguenti affermazioni sono vere e quali sono false
• Il sistema non è L2-stabile se non sono soddisfatti il criterio del
piccolo guadagno, il criterio del cerchio, ed il teorema di passività.
Falso. Sono tutte condizioni sufficienti ma non necessarie.
()
u y G(s)
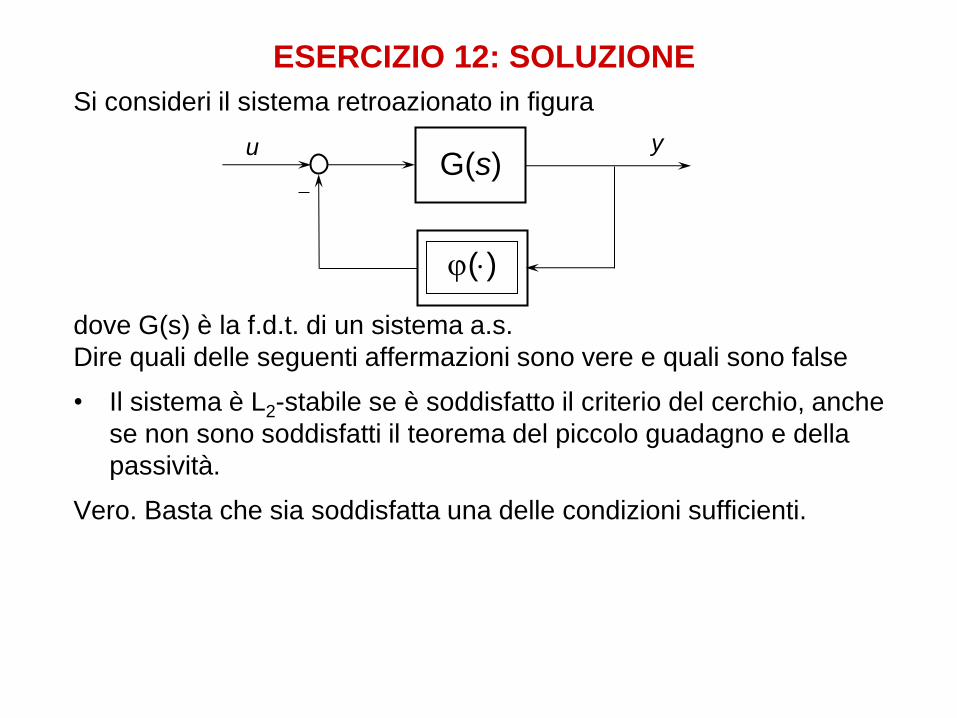
ESERCIZIO 12: SOLUZIONE
Si consideri il sistema retroazionato in figura
dove G(s) è la f.d.t. di un sistema a.s.
Dire quali delle seguenti affermazioni sono vere e quali sono false
• Il sistema è L2-stabile se è soddisfatto il criterio del cerchio, anche
se non sono soddisfatti il teorema del piccolo guadagno e della
passività.
Vero. Basta che sia soddisfatta una delle condizioni sufficienti.
()
u y G(s)
ESERCIZIO 12: SOLUZIONE
Si consideri il sistema retroazionato in figura
dove G(s) è la f.d.t. di un sistema a.s.
Dire quali delle seguenti affermazioni sono vere e quali sono false
• Se G(s) e () sono passivi, allora Il sistema è L2-stabile.
Falso. Non basta. Ci vuole la stretta passività. E’ sufficiente per
esempio che uno dei due sia strettamente passivo relativamente
all’ingresso e all’uscita.
()
u y G(s)
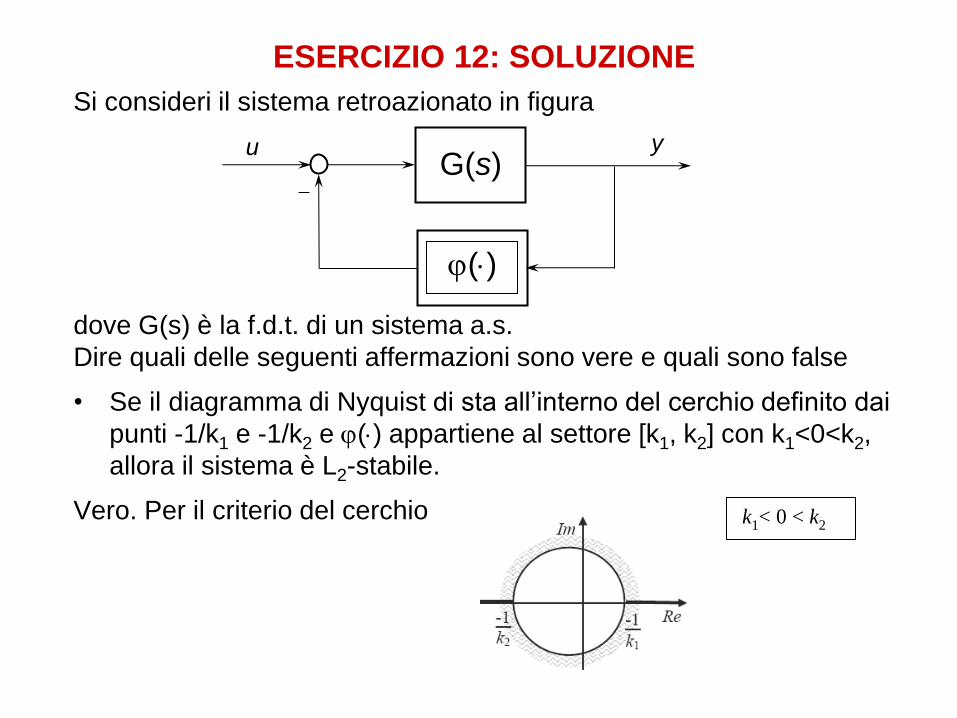
ESERCIZIO 12: SOLUZIONE
Si consideri il sistema retroazionato in figura
dove G(s) è la f.d.t. di un sistema a.s.
Dire quali delle seguenti affermazioni sono vere e quali sono false
• Se il diagramma di Nyquist di sta all’interno del cerchio definito dai
punti -1/k1 e -1/k2 e () appartiene al settore [k1, k2] con k1<0<k2,
allora il sistema è L2-stabile.
Vero. Per il criterio del cerchio
()
u y G(s)
k1< 0 < k2

ESERCIZIO 13
Dato il sistema lineare completamente raggiungibile e osservabile
descritto dalla f.d.t.
1. Progettare il controllore sliding mode per risolvere il problema
della regolazione dell’uscita al set-point y°, preservando nella
dinamica di scivolamento, gli autovalori stabili del sistema
2. Valutare il tempo impiegato dal sistema a raggiungere la
superficie di scivolamento quando lo stato iniziale è 0 e y°=1.

ESERCIZIO 13: SOLUZIONE
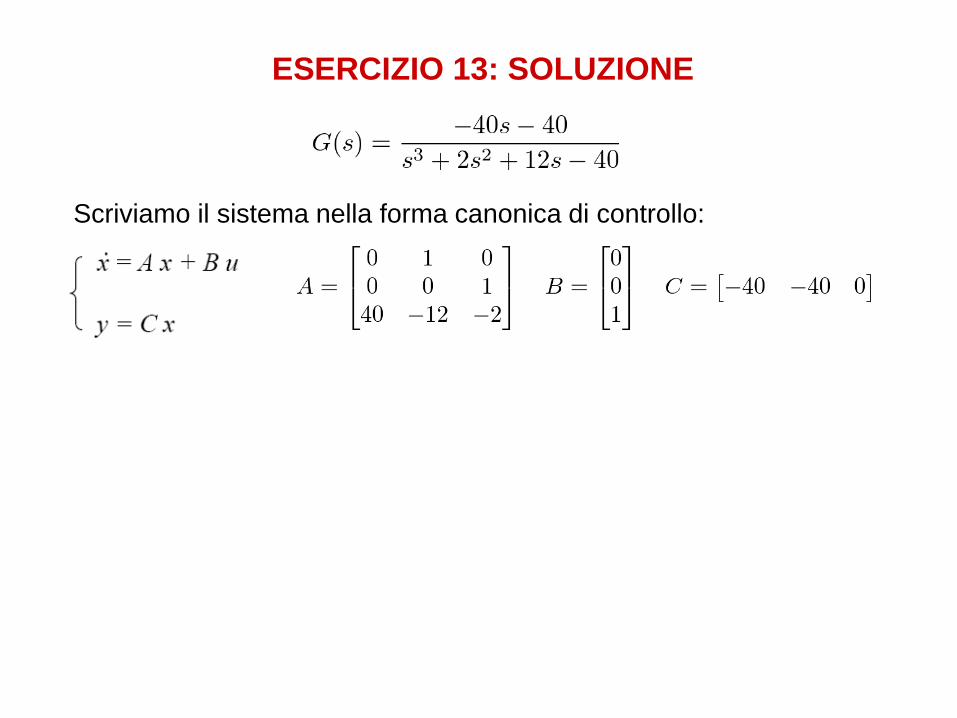
Scriviamo il sistema nella forma canonica di controllo:
ESERCIZIO 13: SOLUZIONE
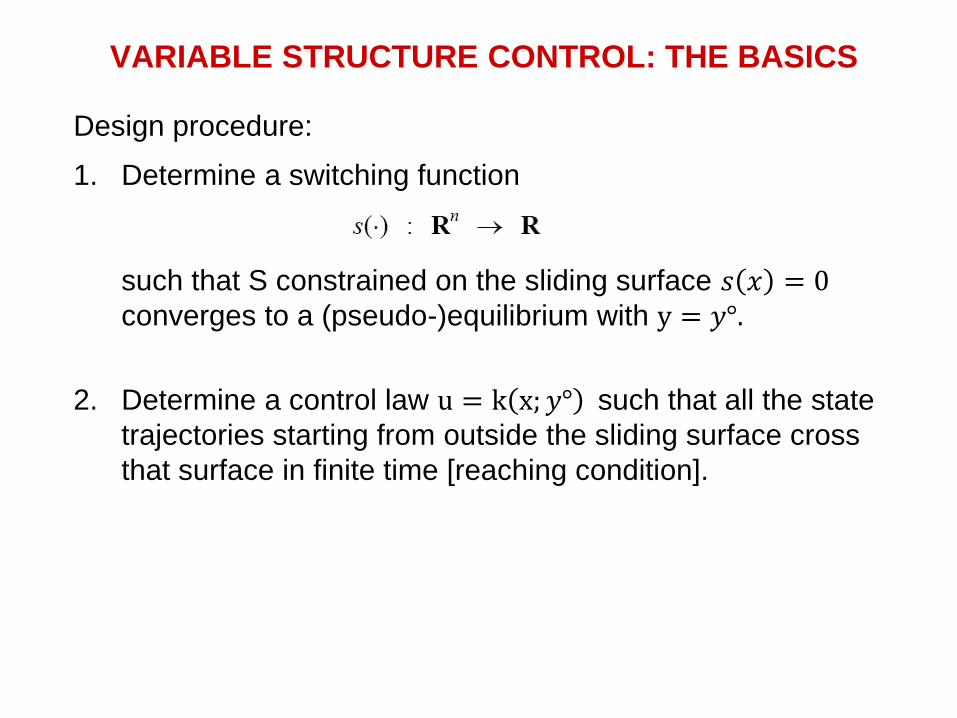
VARIABLE STRUCTURE CONTROL: THE BASICS
Design procedure:
1. Determine a switching function
such that S constrained on the sliding surface 𝑠 𝑥 = 0 converges to a (pseudo-)equilibrium with y = 𝑦°.
2. Determine a control law u = k x; 𝑦° such that all the state
trajectories starting from outside the sliding surface cross
that surface in finite time [reaching condition].
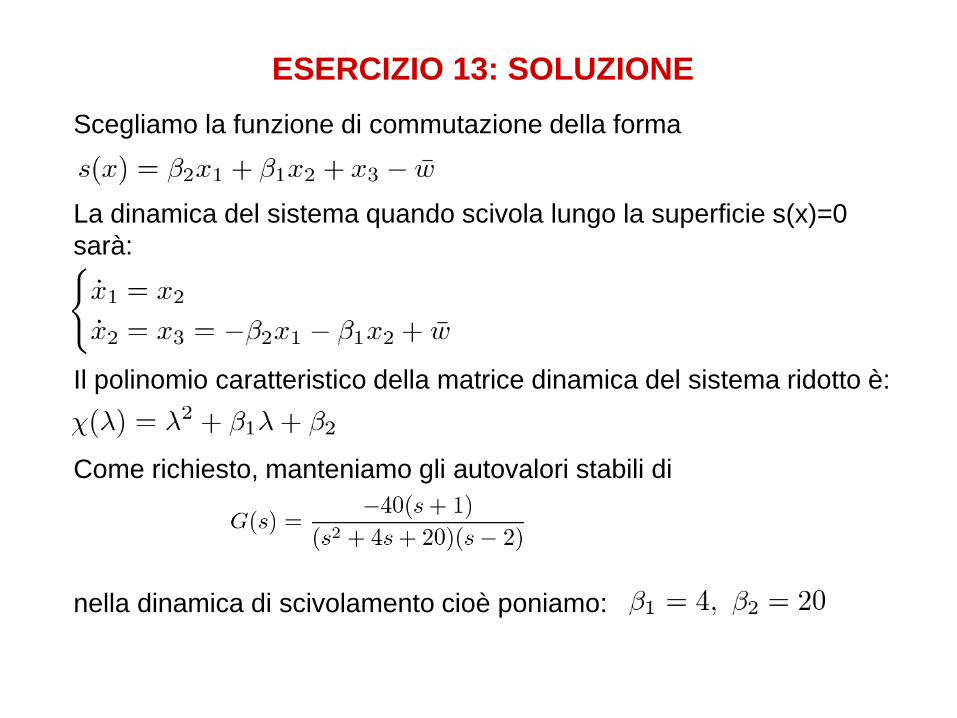
Scegliamo la funzione di commutazione della forma
La dinamica del sistema quando scivola lungo la superficie s(x)=0
sarà:
Il polinomio caratteristico della matrice dinamica del sistema ridotto è:
Come richiesto, manteniamo gli autovalori stabili di
nella dinamica di scivolamento cioè poniamo:
ESERCIZIO 13: SOLUZIONE
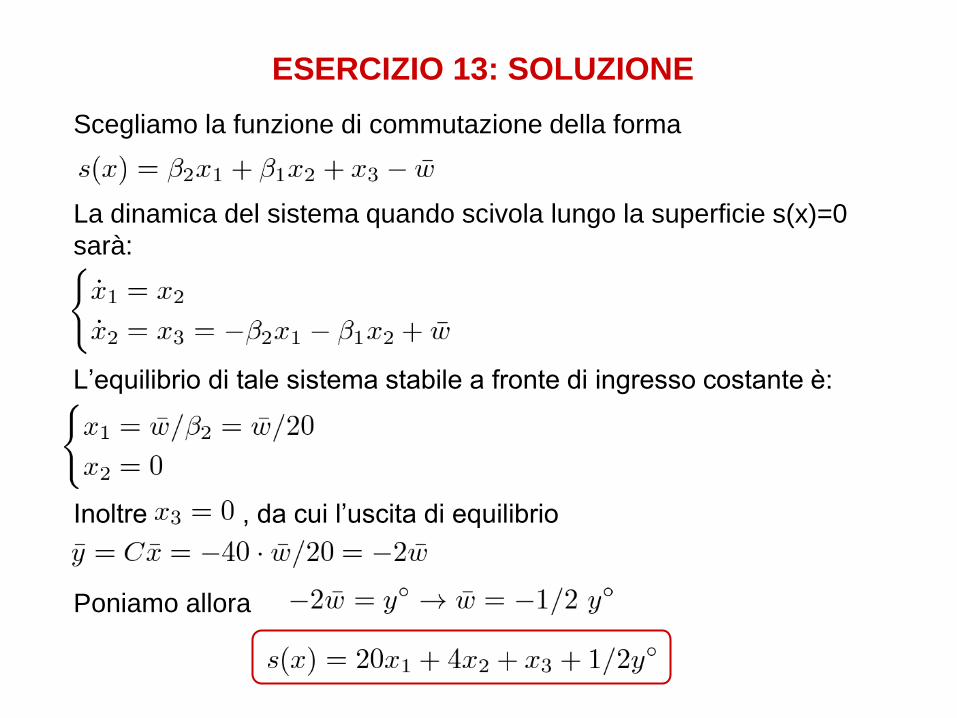
Scegliamo la funzione di commutazione della forma
La dinamica del sistema quando scivola lungo la superficie s(x)=0
sarà:
L’equilibrio di tale sistema stabile a fronte di ingresso costante è:
Inoltre , da cui l’uscita di equilibrio
Poniamo allora
ESERCIZIO 13: SOLUZIONE

ESERCIZIO 13: SOLUZIONE
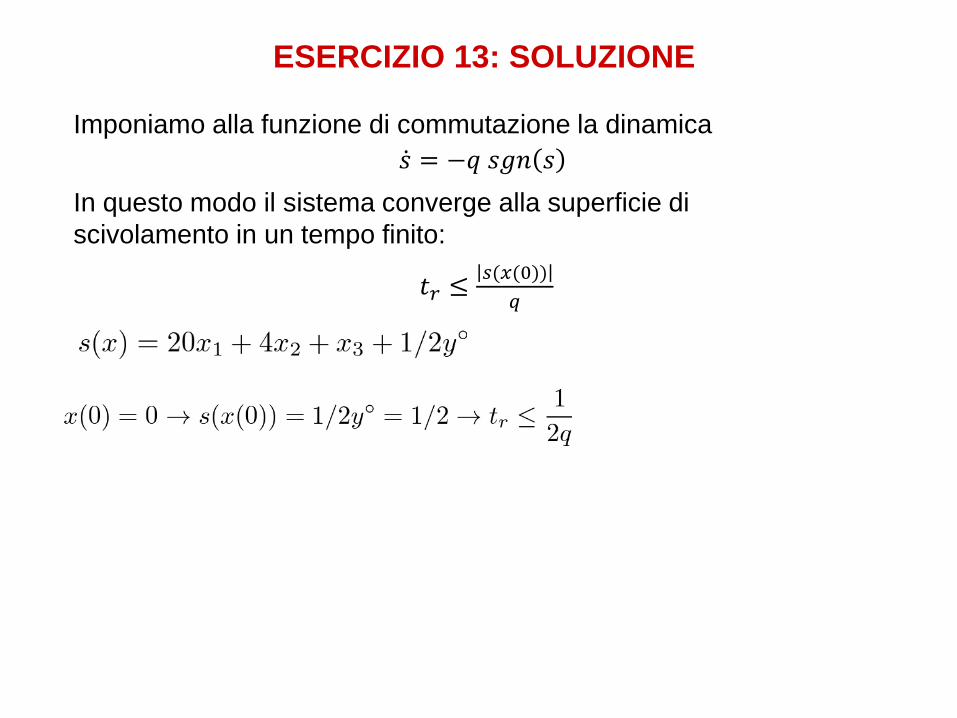
Imponiamo alla funzione di commutazione la dinamica
𝑠 = −𝑞 𝑠𝑔𝑛 𝑠
In questo modo il sistema converge alla superficie di
scivolamento in un tempo finito:
𝑡𝑟 ≤𝑠(𝑥(0))
𝑞
Ora sappiamo che
facendo la derivata, si ottiene
Uguagliando con l’espressione sopra ed esplicitando rispetto ad u, si
ottiene:

ESERCIZIO 13
Dato il sistema lineare completamente raggiungibile e osservabile
descritto dalla f.d.t.
1. Progettare il controllore sliding mode per risolvere il problema
della regolazione dell’uscita al set-point y°, preservando nella
dinamica di scivolamento, gli autovalori stabili del sistema
2. Valutare il tempo impiegato dal sistema a raggiungere la
superficie di scivolamento quando lo stato iniziale è 0 e y°=1.
ESERCIZIO 13: SOLUZIONE
Imponiamo alla funzione di commutazione la dinamica
𝑠 = −𝑞 𝑠𝑔𝑛 𝑠
In questo modo il sistema converge alla superficie di
scivolamento in un tempo finito:
𝑡𝑟 ≤𝑠(𝑥(0))
𝑞