Equazioni di osservazione da un ricevitore a un satellite...
24
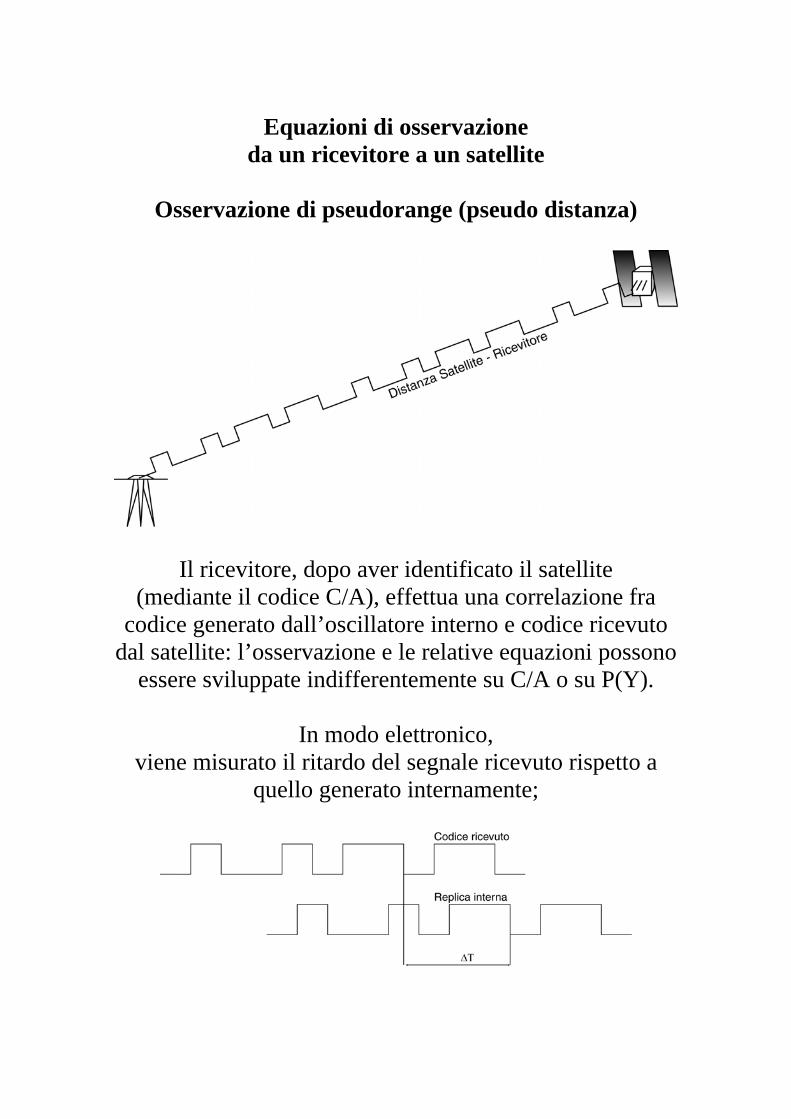
Equazioni di osservazione da un ricevitore a un satellite Osservazione di pseudorange (pseudo distanza) Il ricevitore, dopo aver identificato il satellite (mediante il codice C/A), effettua una correlazione fra codice generato dall’oscillatore interno e codice ricevuto dal satellite: l’osservazione e le relative equazioni possono essere sviluppate indifferentemente su C/A o su P(Y). In modo elettronico, viene misurato il ritardo del segnale ricevuto rispetto a quello generato internamente;
Transcript of Equazioni di osservazione da un ricevitore a un satellite...
Equazioni di osservazione da un ricevitore a un satellite
Osservazione di pseudorange (pseudo distanza)
Il ricevitore, dopo aver identificato il satellite (mediante il codice C/A), effettua una correlazione fra
codice generato dall’oscillatore interno e codice ricevuto dal satellite: l’osservazione e le relative equazioni possono
essere sviluppate indifferentemente su C/A o su P(Y).
In modo elettronico, viene misurato il ritardo del segnale ricevuto rispetto a
quello generato internamente;

l’epoca di partenza del codice è registrata dall’orologio del satellite,
quella di ricezione è registrata dall’orologio del ricevitore: quindi sono epoche relative al tempo locale dei due
orologi, ovvero affette dal loro offset.
Sia t l’epoca di osservazione; sia il ritardo osservato dal ricevitore R al satellite S. L’equazione di
osservazione è data dalla
)(tT SR∆
)(
)()( SSRR
SR tttT −=∆
ove:
tR(R) indica l’epoca di ricezione nel ricevitore R secondo l’orologio del ricevitore R,
tS(S) indica l’epoca di invio dal satellite S secondo l’orologio del satellite S.
L’orologio del satellite non è allineato al tempo GPS;
si ha:
)()( tdttt SSSS +=
ove tS indica l’epoca GPS di invio dal satellite S,
dtS indica l’offset d’orologio del satellite;
analogamente, per l’orologio del ricevitore,
)()( tdttt RRRR +=

ove
tR indica l’epoca GPS di ricezione nel ricevitore R, dtR indica l’offset d’orologio del ricevitore;
Avremo quindi
)()(
)()()(
tdttdt
tdttdttttTS
RSR
SR
SR
SR
−+τ=
−+−=∆
ove si è indicato con (≅ 66 ms) il tempo di tragitto del
segnale dal satellite al ricevitore.
SRτ
L’osservazione di tempo, moltiplicata per la velocità di
propagazione del segnale nel vuoto, fornisce la cosiddetta osservazione di pseudorange (PR o
pseudodistanza) , la cui equazione di osservazione è SRP
))()(()()( tdttdtcctTctP S
RSR
SR
SR −+τ=∆=
Il rumore di osservazione ν per le osservazioni di codice è di circa 10-30 cm per le osservazioni sul codice P(Y); va
da 1-2 m a 30-40 cm (a seconda della qualità del ricevitore) per le osservazioni sul codice C/A.

Osservazione di fase
Concetti base
L’osservazione di PR è una misura di differenza di stato fra codice binario ricevuto dal satellite e
un uguale codice generato internamente al ricevitore;
analogamente può essere effettuata un’osservazione di differenza di fase in cicli fra
portante ricevuta dal satellite (ad es. L1) e una sinusoide di uguale frequenza f
generata da un oscillatore interno al ricevitore.
L’equazione di osservazione all’epoca t è data dalla
))(()()( ttt SRRR
SR Φ−Φ=Φ
ove
)(tSRΦ è l’osservazione di differenza di fase all’epoca t
)(tRΦ è la fase generata internamente al ricevitore all’epoca t
))(( tSRRΦ indica la fase ricevuta in R dal satellite S
all’epoca t

Ma la fase ricevuta in R da S all’epoca t è uguale alla fase
nel satellite all’epoca di invio del segnale, ovvero
)())(( SR
SSRR tt τ−Φ=Φ
(nota che è il tempo di tragitto del segnale) S
Rτricordando che,
per un oscillatore stabile e a frequenza costante,
dtdf Φ
= ,
si applica alla precedente uno sviluppo di Taylor, ottenendo
)()(
)()(
tNftdt
dtt
SR
SR
S
SR
SSS
RS
−τ−Φ=
τΦ
−Φ=τ−Φ
ove N rappresenta il numero intero di cicli trascorsi fra fase del satellite all’epoca di invio e fase del satellite
all’epoca di osservazione, non misurabile;

si ha dunque
)()()()( tNfttt SR
SR
SR +τ+Φ−Φ=Φ
evidentemente, per l’offset fra oscillatore del ricevitore e
oscillatore del satellite, )()( tt SR Φ≠Φ .
Si può però dimostrare che
)()()( tfdttt SS +Φ=Φ )()()( tfdttt RR +Φ=Φ
ove Φ(t) indica la fase di un ipotetico oscillatore sincronizzato
alla scala dei tempi GPS; i dt rappresentano gli usuali offset d’orologio.
Si ha dunque, la seguente equazione di osservazione
)())()(()( tNtdttdtfft S
RS
RSR
SR +−+τ=Φ
che, moltiplicata per la lunghezza d’onda

del segnale, fornisce la cosiddetta osservazione di fase:
)())()(()()()( tNtdttdtctcttL SR
SR
SR
SR
SR λ+−+τ=Φλ=
Il rumore di osservazione per le osservazioni di fase è
dell’ordine del mm, sia per L1 sia per L2.
Disturbo atmosferico
Premessa In assenza di atmosfera il segnale si muoverebbe con
velocità costante c lungo tutto il tragitto; si avrebbe dunque
222 )()()( S
RS
RS
RSR
SR ZZYYXXc −+−+−=ρ=τ⋅
ove X, Y, Z sono le coordinate cartesiane di ricevitore (R) e satellite (S)
Però,
nell’atmosfera terrestre, la velocità di propagazione del segnale subisce variazioni
dovute allo stato fisico del mezzo attraversato; questo fenomeno
(indicato come disturbo o ritardo atmosferico) deve essere considerato nell’equazione poiché
il disturbo atmosferico ha sempre entità superiore a 5 metri e può arrivare anche a 200 metri.
Curvatura del percorso
Qualunque segnale elettromagnetico, nell’attraversare un
mezzo, segue il percorso di minimo tempo (legge di Fermat) che non necessariamente coincide con la distanza
geometrica.
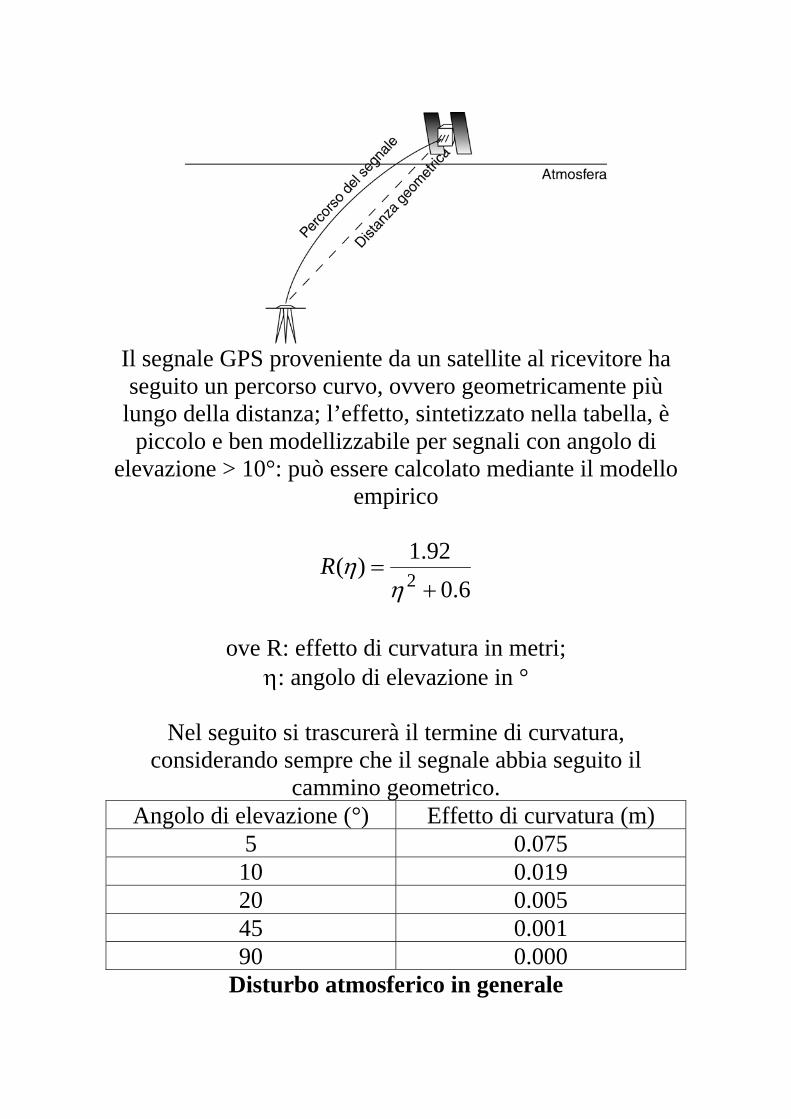
Il segnale GPS proveniente da un satellite al ricevitore ha seguito un percorso curvo, ovvero geometricamente più
lungo della distanza; l’effetto, sintetizzato nella tabella, è piccolo e ben modellizzabile per segnali con angolo di
elevazione > 10°: può essere calcolato mediante il modello empirico
6.092.1)(
2 +=η
ηR
ove R: effetto di curvatura in metri;
η: angolo di elevazione in °
Nel seguito si trascurerà il termine di curvatura, considerando sempre che il segnale abbia seguito il
cammino geometrico. Angolo di elevazione (°) Effetto di curvatura (m)
5 0.075 10 0.019 20 0.005 45 0.001 90 0.000
Disturbo atmosferico in generale

Il tempo di tragitto del segnale elettromagnetico dipende
dalla sua velocità di propagazione v; nello spazio esterno all’atmosfera questa è costante e uguale a c; nell’atmosfera viceversa varia da punto a
punto: si può quindi scrivere
∫ρ
=τSR
rvdrS
R )(
ove ρ è il cammino geometrico del segnale,
r rappresenta il punto di integrazione lungo il cammino, v(r) la velocità di propagazione in r.
Si ha quindi
SR
SR
SR
SR
SR
SR
SR
drrndr
drrnrv
cdrc
∆+ρ=−+
===τ
∫∫
∫∫
ρρ
ρρ
)1)((
)()(
ove n(r) è l’indice di rifrazione del mezzo nel punto r,
definito dalla n(r) = c/v(r), ovvero il rapporto fra velocità di propagazione nel vuoto e
velocità di propagazione nel mezzo; SRρ rappresenta la distanza fra satellite e ricevitore;
con (disturbo atmosferico) si indica la differenza SR∆

∫ρ
−=ρ−τSR
rdrnc SR
SR )1)(( (in unità metriche).
Disturbo ionosferico (I)
E’ dovuto agli strati di atmosfera fra 100 e 1000 km di quota;
causato dalla presenza di elettroni liberi
2)(1)(
frNArn E⋅
±=
ove
A: 40.3 m3s-2; f: frequenza del segnale (Hz); NE(r):densità di elettroni (n/m3) nel punto;
il segno è positivo per i codici,
negativo per le portanti.
Integrando lungo il percorso attraverso la ionosfera si ottiene, in unità metriche
22
2
)(
)()1)((
f
TECAdrrN
fA
drf
rNAdrrnI
SR
SRIono
E
SRIono
ESRIono
SR
±=±=
±=−=
∫
∫∫
ove
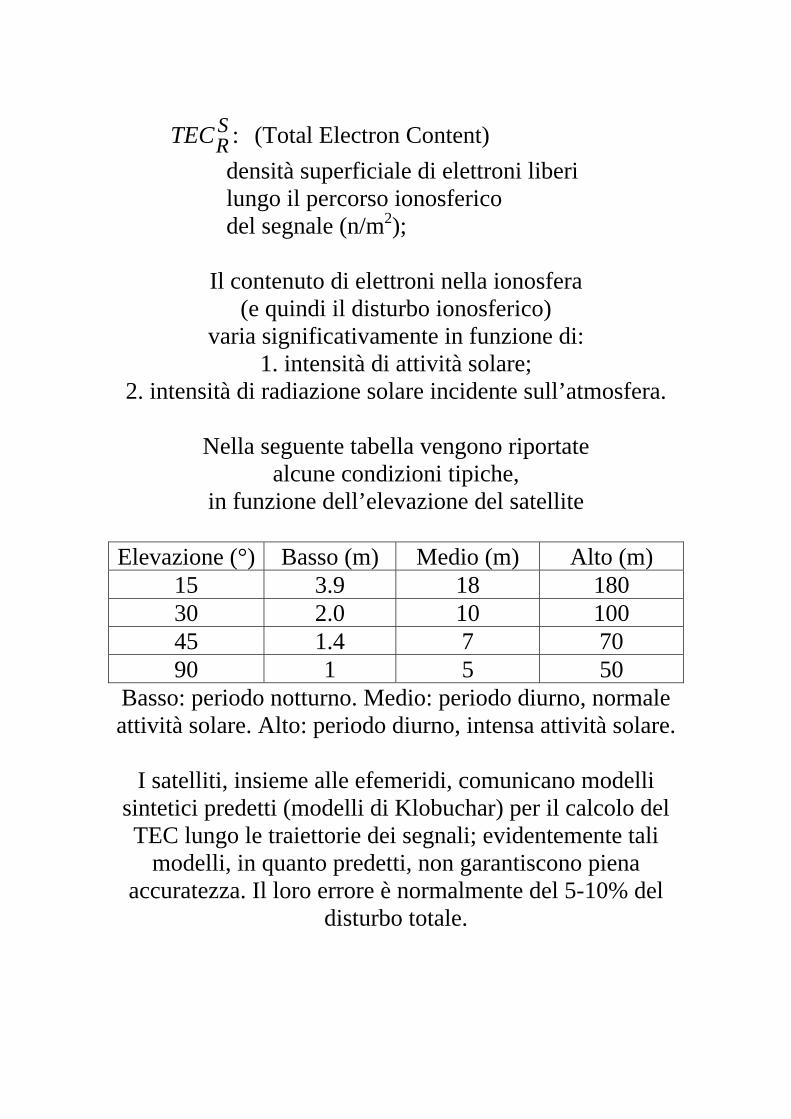
SRTEC : (Total Electron Content) densità superficiale di elettroni liberi lungo il percorso ionosferico del segnale (n/m2);
Il contenuto di elettroni nella ionosfera
(e quindi il disturbo ionosferico) varia significativamente in funzione di:
1. intensità di attività solare; 2. intensità di radiazione solare incidente sull’atmosfera.
Nella seguente tabella vengono riportate
alcune condizioni tipiche, in funzione dell’elevazione del satellite
Elevazione (°) Basso (m) Medio (m) Alto (m)
15 3.9 18 180 30 2.0 10 100 45 1.4 7 70 90 1 5 50
Basso: periodo notturno. Medio: periodo diurno, normale attività solare. Alto: periodo diurno, intensa attività solare.
I satelliti, insieme alle efemeridi, comunicano modelli
sintetici predetti (modelli di Klobuchar) per il calcolo del TEC lungo le traiettorie dei segnali; evidentemente tali
modelli, in quanto predetti, non garantiscono piena accuratezza. Il loro errore è normalmente del 5-10% del
disturbo totale.

Altri modelli, calcolati a posteriori e quindi più accurati, vengono prodotti dalla rete IGS e distribuiti in rete: nella
pagina seguente sono riportate due mappe relative alle ore 01.00 e 13.00 UTC del 30.3.2001: nota le differenze fra
notte (basso TEC) e pieno giorno (alto TEC).
Fonte: Astronomisches Institut Universität Bern (CH)
Nota: il disturbo ionosferico è positivo (rallentamento) sui codici, negativo (accelerazione) sulle portanti.

Disturbo troposferico (T)
Dovuto agli strati compresi fra il suolo e i 40 km di quota: causato dalla presenza di aria e vapor d’acqua.
L’indice di rifrazione locale è dato, in prima
approssimazione, dalla (Smith-Weinstrauss, 1953):
)(
)()()(1)( 221
rT
rekrTrPkrn ++=
ove
P: pressione (mbar) Τ: temperatura (°K) e: pressione di vapor d’acqua (mbar) k1 e k2: costanti determinate sperimentalmente
Integrando si ottiene
∫∫
∫
+=
+=
SR
SR
SR
TropoTropo
Tropo
SR
drrT
rekdrrTrPk
drrT
rekrTrPkT
)(
)()()(
))(
)()()((
221
221
ove il primo integrale è detto componente secca di T:
termine dovuto a P/Τ, circa il 90° del disturbo;
il secondo è detto componente umida di T: termine dovuto a e/Τ2, circa il 10% del disturbo.

Esistono modelli standard per la stima degli integrali che
esprimono il disturbo troposferico. Tipicamente sono basati su ipotesi di atmosfera in condizioni ideali, ovvero
senza variazioni nel tempo e variazioni orizzontali.
Si ha cioè
)()()()(),()(),()( hnrnherehTrThPrP =⇒===
ove h indica semplicemente la quota del punto r.
In tale forma l’espressione di T può essere scritta come (ad esempio modello di Saastamoinen)
)(),,(90
SRRRR
SR FTePTT η⋅= °
ove

),,(90 RRR TePT ° è detto disturbo troposferico zenitale, ed è funzione calcolabile di pressione PR, temperatura ΤR e umidità eR nel sito del ricevitore R: esprime il disturbo
troposferico per un satellite allo zenit del ricevitore;
F è detta mapping function ed esprime la dipendenza del disturbo dall’elevazione del satellite; ad esempio, in
approssimazione piana si avrebbe
)(sin/1)( SR
SRF η≅η )
Si noti che per il calcolo di T devono essere noti PR, ΤR e
eR: questi possono essere misurati o desunti mediante modelli standard di propagazione in quota, ovvero del tipo
)(),(),( RRRRRR heehTThPP ===
ove hR è la quota del ricevitore.
I modelli troposferici, come quelli ionosferici, non sono mai pienamente rappresentativi della reale condizione meteorologica al momento e nel luogo della misura;
come per I, qualunque modellazione di T lascia un errore residuo dell’ordine del 5% del disturbo totale.
Valori tipici di T in funzione dell’elevazione del satellite
Elevazione (°) Basso (m) Medio (m) Alto (m) 15 8.9 9.2 10.4 30 4.6 4.8 5.4 45 3.3 3.4 3.8 90 2.3 2.4 2.7
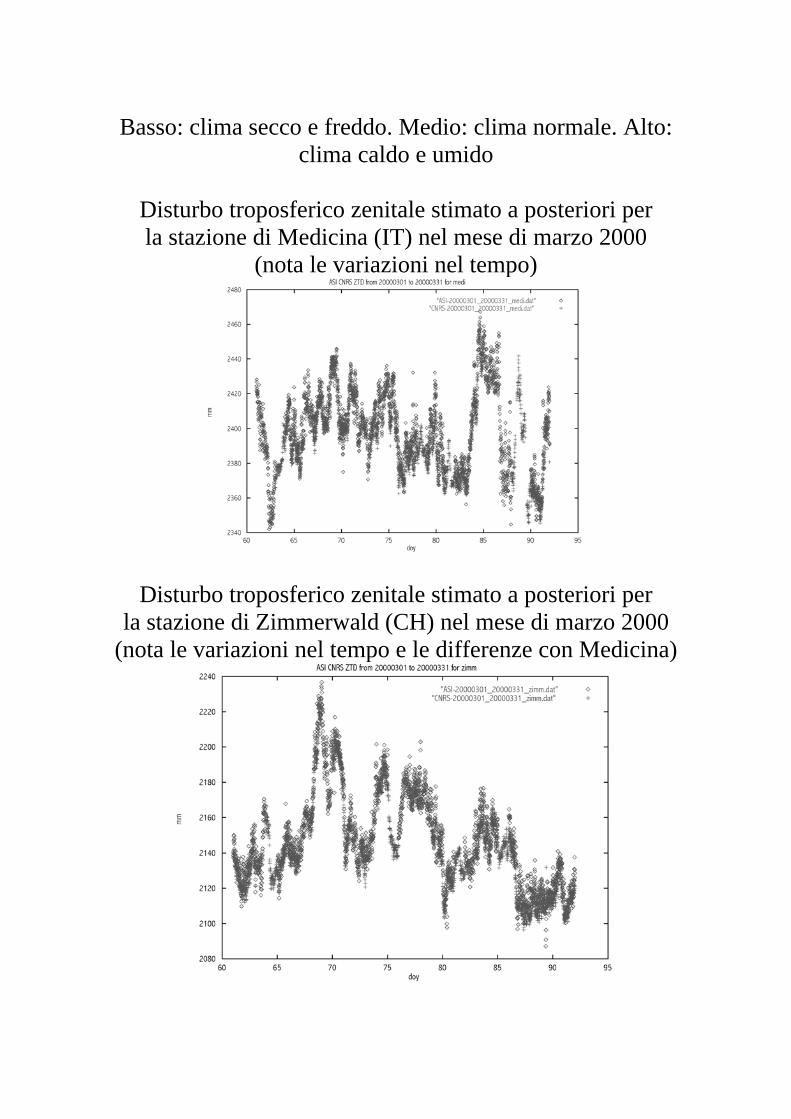
Basso: clima secco e freddo. Medio: clima normale. Alto: clima caldo e umido
Disturbo troposferico zenitale stimato a posteriori per la stazione di Medicina (IT) nel mese di marzo 2000
(nota le variazioni nel tempo)
Disturbo troposferico zenitale stimato a posteriori per la stazione di Zimmerwald (CH) nel mese di marzo 2000
(nota le variazioni nel tempo e le differenze con Medicina)

Fonte: ASI, Centro di Geodesia Spaziale di Matera (IT)
Note: T è sempre positivo (rallentamento).
Nota finale sul disturbo atmosferico
Ricordando che e che SR
SR
SRc ∆+ρ=τ S
RSR
SR IT +=∆
si ottiene la
SR
SR
SR
SR ITc ++ρ=τ
L’equazione di osservazione finale di pseudorange
)()())()(()(
))()(()(
tTtItdttdtct
tdttdtcctPSR
SR
SR
SR
SR
SR
SR
++−+ρ=
−+τ=
Analisi dei termini contenuti nell’equazione:
(in ρ) posizione del satellite [XS, YS, ZS]:
considerata nota dalle efemeridi (a meno dei relativi errori);
(in ρ): posizione del ricevitore [XR, YR, ZR]:
incognita;
offset dell’orologio del ricevitore (dtR): incognito;
offset dell’orologio del satellite (dtS):
considerato noto dalle efemeridi (a meno dei relativi errori);
disturbi ionosferico e troposferico (I e T):
considerati noti dai modelli standard (a meno dei relativi errori).
Quindi
l’equazione contiene 4 incognite ([XR, YR, ZR, dtR]) dipendenti dal ricevitore e non dal satellite.
L’equazione di osservazione finale di fase
)()()())()(()()( tNtTtItdttdtcttL S
RSR
SR
SR
SR
SR λ++−−+ρ=
Analisi dei termini
L’equazione d’osservazione ricorda quella di PR,
ma contiene il termine , che dipende dal satellite SRN
ed è incognito.
SRNλ è detta ambiguità intera e rappresenta
geometricamente il numero intero di cicli compresi fra satellite e ricevitore all’epoca di osservazione.

Consideriamo due epoche consecutive di misura, t1 e t2 e le osservazioni relative
)()()())()(()()( 1111111 tNtTtItdttdtcttL S
R λ++−−+ρ=
)()()())()(()()( 2222222 tNtTtItdttdtcttL SR λ++−−+ρ=
(si sono omessi indici di satellite e ricevitore)
L’ambiguità relativa a t2 è data da
),()()( 2112 ttntNtN +=
dove n(t1,t2) è il numero intero di cicli trascorsi nell’intervallo di tempo (t1, t2).
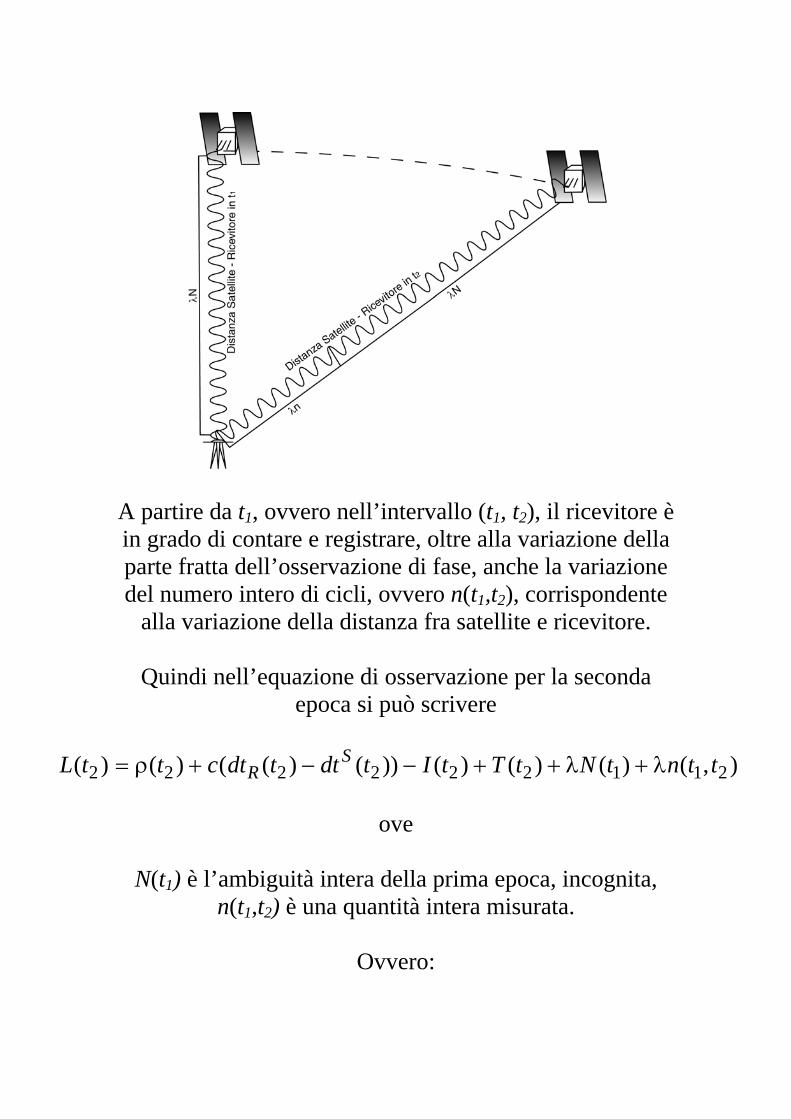
A partire da t1, ovvero nell’intervallo (t1, t2), il ricevitore è in grado di contare e registrare, oltre alla variazione della parte fratta dell’osservazione di fase, anche la variazione del numero intero di cicli, ovvero n(t1,t2), corrispondente
alla variazione della distanza fra satellite e ricevitore.
Quindi nell’equazione di osservazione per la seconda epoca si può scrivere
),()()()())()(()()( 211222222 ttntNtTtItdttdtcttL S
R λ+λ++−−+ρ= ove
N(t1) è l’ambiguità intera della prima epoca, incognita,
n(t1,t2) è una quantità intera misurata.
Ovvero:

per una coppia satellite - ricevitore, esiste un’unica ambiguità incognita, relativa alla prima epoca di
osservazione; perciò l’ambiguità intera è detta anche ambiguità intera iniziale; è incognita ma costante nel
tempo, finché non viene perso il contatto fra satellite e ricevitore (Cycle Slip): in tal caso si interrompe il
conteggio di n e, per le epoche successive all’interruzione, si deve considerare una nuova ambiguità intera iniziale
incognita.
Nota:
Tipicamente si ha un Cycle Slip (nel seguito CS) allorché: la linea di mira dal satellite al ricevitore incontra
un’ostruzione fisica (muri, pali, automezzi,…); si verificano fenomeni anomali a livello ionosferico,
che causano le cosiddette scintillazioni del segnale; si verificano problemi di elettronica nel ricevitore che
fanno “saltare” il conteggio (ormai piuttosto raro).
Per capire intuitivamente il significato dell’ambiguità iniziale di fase e dei CS possiamo pensare al seguente
esempio: supponiamo di disporre di un orologio digitale sul quale sia possibile leggere le cifre relative ai minuti e
ai secondi, ma siano coperte le cifre relative alle ore.
Se guardiamo l’orologio non sapremo che ora è ma avremo solo l’indicazione delle frazioni d’ora (quindi un’informazione più precisa di quella oraria, ma con
un’ambiguità iniziale rispetto al numero intero di ore).

Se continuiamo a guardare l’orologio possiamo però sapere, semplicemente osservando i minuti e i secondi,
quando è passata un’ora dalla prima osservazione: l’unica ambiguità è quindi quella iniziale. Se da informazioni
esterne conosciamo il numero intero di ore iniziali, possiamo rimuovere completamente l’ambiguità.
Se viceversa per un certo intervallo di tempo non
guardiamo l’orologio, quando ricominceremo a guardarlo avremo una nuova ambiguità perché non potremo sapere quante ore intere sono passate. Questa nuova ambiguità è
l’equivalente nel caso GPS al CS.
Quesiti di autovalutazione
Ricava e spiega le equazioni di osservazione per le osservazioni di codice e fase;
indica l’entità del rumore di osservazione per codice e
fase.
Disturbo ionosferico e troposferico: dai una descrizione sintetica dei due fenomeni, indicane l’ordine di grandezza e l’effetto sulle osservazioni GPS;
come possono essere calcolati e con quale
approssimazione?
Descrivi il contenuto finale dell’equazione di osservazione di codice e fase;
spiega cosa s’intende per ambiguità iniziale intera e perché questa è incognita solo per la prima epoca di osservazione;
cos’è un Cycle Slip e che effetto ha?