Dispensa del corso Sistemi di...
34
1 Dispensa del corso Sistemi di Trasporto Professor Ponti Marco – A.A. 2004/2005 CENTRO PER LO SVILUPPO DEL POLO DI PIACENZA Ing. Marco Brambilla La locomotiva Rocket di Stephenson (1829) La presente dispensa è disponibile sul portale del Laboratorio di Politica dei Trasporti (TRASPOL) all’indirizzo www.traspol.polimi.it RESEARCH CENTER ON TRANSPORT POLICY LABORATORIO DI POLITICA DEI TRASPORTI
Transcript of Dispensa del corso Sistemi di...

1
Dispensa del corso
Sistemi di Trasporto
Professor Ponti Marco – A.A. 2004/2005
CENTRO PER LO SVILUPPO DEL POLO DI PIACENZA
Ing. Marco Brambilla����
����� ���������� ���������� ���������� ���������� ���������� ���������� ���������� �����
� ������������� � �� ���� ������������� � �� ���� ������������� � �� ���� ������������� � �� �������
����La locomotiva Rocket di Stephenson (1829)
La presente dispensa è disponibile sul portale del Laboratorio di Politica dei Trasporti (TRASPOL)
all’indirizzo www.traspol.polimi.it
�� � ��� �RESEARCH CENTER ON TRANSPORT POLICY
LABORATORIO DI POLITICA DEI TRASPORTI
2
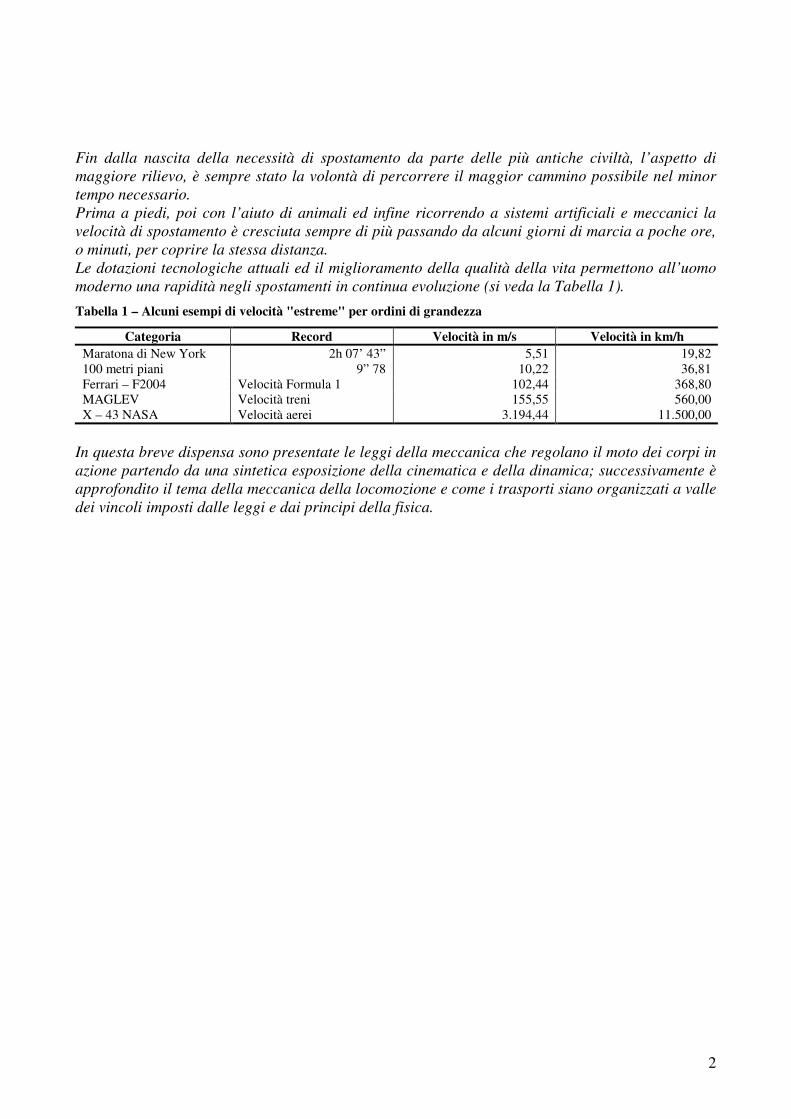
Fin dalla nascita della necessità di spostamento da parte delle più antiche civiltà, l’aspetto di maggiore rilievo, è sempre stato la volontà di percorrere il maggior cammino possibile nel minor tempo necessario. Prima a piedi, poi con l’aiuto di animali ed infine ricorrendo a sistemi artificiali e meccanici la velocità di spostamento è cresciuta sempre di più passando da alcuni giorni di marcia a poche ore, o minuti, per coprire la stessa distanza. Le dotazioni tecnologiche attuali ed il miglioramento della qualità della vita permettono all’uomo moderno una rapidità negli spostamenti in continua evoluzione (si veda la Tabella 1).
Tabella 1 – Alcuni esempi di velocità "estreme" per ordini di grandezza
Categoria Record Velocità in m/s Velocità in km/h Maratona di New York 2h 07’ 43” 5,51 19,82 100 metri piani 9” 78 10,22 36,81 Ferrari – F2004 Velocità Formula 1 102,44 368,80 MAGLEV Velocità treni 155,55 560,00 X – 43 NASA Velocità aerei 3.194,44 11.500,00
In questa breve dispensa sono presentate le leggi della meccanica che regolano il moto dei corpi in azione partendo da una sintetica esposizione della cinematica e della dinamica; successivamente è approfondito il tema della meccanica della locomozione e come i trasporti siano organizzati a valle dei vincoli imposti dalle leggi e dai principi della fisica.

3
s
t
t
v
a
t
1. QUESTIONI DI CINEMATICA
Aspetti generali
Le relazioni della cinematica assumono il tempo come una variabile indipendente e lo spazio (o le sue derivate) come una variabile dipendente. Il tempo è solitamente indicato sull’asse delle ascisse e lo spazio (e le sue derivate velocità ed accelerazione) sull’asse delle ordinate.
Figura 1 – Relazioni cinematiche
Il primo diagramma della Figura 1 descrive un esempio di funzione che lega lo spazio percorso al tempo nella generica forma: ( )tfs = . Essa mostra che un veicolo, nella fase di avviamento, aumenta progressivamente la propria velocità (la funzione dello spazio è concava verso l’alto), quindi procede a velocità costante (la funzione ha forma rettilinea) ed infine rallenta fino ad arrestarsi (la funzione si appiattisce sempre di più fino ad avere la tangente orizzontale). La descrizione del moto del veicolo emerge ancor più chiaramente sul secondo diagramma: ( )tfv = . Nella fase centrale la velocità rimane costante, in quella iniziale aumenta fino al valore costante e nella fase finale si riduce fino ad azzerarsi. La variazione della velocità in funzione del tempo ( )tfa = , ovvero la accelerazione, è positiva della fase di avviamento (progressivo incremento di velocità), è nulla nella fase centrale (moto a regime con velocità costante) ed è negativa nella fase finale per il progressivo rallentamento del veicolo nella fase terminale di arresto. In virtù delle considerazioni qualitative ora elencate è possibile trasformare queste valutazioni in modo quantitativo: l’accelerazione (variazione della velocità nell’unità di tempo) è la derivata seconda dello spazio rispetto al tempo. Se il moto è uniforme la velocità è costante ed ha il valore della tangente trigonometrica dell’angolo che la retta ( )tfs = forma con l’asse delle ascisse. Il grafico della funzione ( )tfv = mostra in corrispondenza del moto uniforme un andamento rettilineo parallelo all’asse delle ascisse; perché nel moto uniforme la velocità rispetto all’ordinata rimane costante. Nella fase iniziale del moto (avviamento) la velocità cresce e si ha una accelerazione positiva; se l’accelerazione è costante (moto uniformemente accelerato) la curva della velocità, nella fase di avviamento è rettilinea, a sua volta con inclinazione costante e pari al valore della accelerazione. Se la funzione è crescente la sua derivata è positiva; poiché lo spazio non può essere che crescente la velocità è positiva (ma può essere evidentemente crescente o decrescente). La accelerazione può essere di conseguenza positiva (per velocità crescente ) o negativa (per velocità decrescente) oltre che nulla (per velocità costante).
4
a
t
t
v
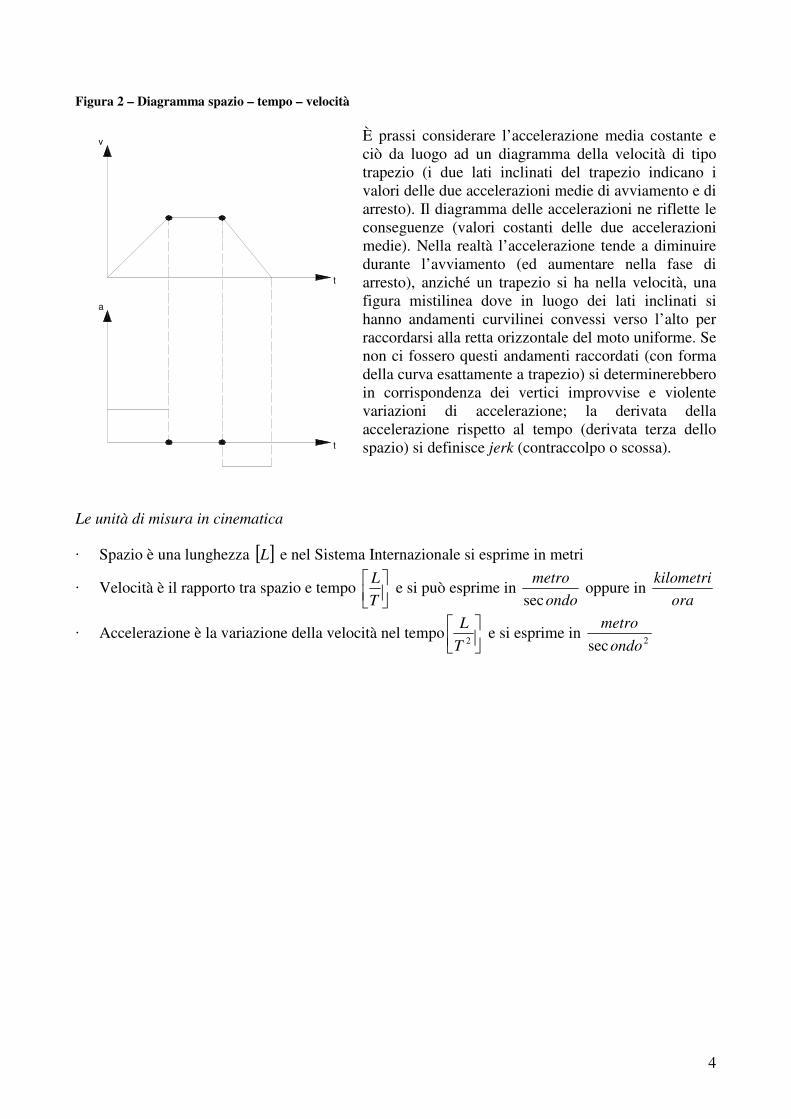
Figura 2 – Diagramma spazio – tempo – velocità
È prassi considerare l’accelerazione media costante e ciò da luogo ad un diagramma della velocità di tipo trapezio (i due lati inclinati del trapezio indicano i valori delle due accelerazioni medie di avviamento e di arresto). Il diagramma delle accelerazioni ne riflette le conseguenze (valori costanti delle due accelerazioni medie). Nella realtà l’accelerazione tende a diminuire durante l’avviamento (ed aumentare nella fase di arresto), anziché un trapezio si ha nella velocità, una figura mistilinea dove in luogo dei lati inclinati si hanno andamenti curvilinei convessi verso l’alto per raccordarsi alla retta orizzontale del moto uniforme. Se non ci fossero questi andamenti raccordati (con forma della curva esattamente a trapezio) si determinerebbero in corrispondenza dei vertici improvvise e violente variazioni di accelerazione; la derivata della accelerazione rispetto al tempo (derivata terza dello spazio) si definisce jerk (contraccolpo o scossa).
Le unità di misura in cinematica
� Spazio è una lunghezza [ ]L e nel Sistema Internazionale si esprime in metri
� Velocità è il rapporto tra spazio e tempo ��
���
�
TL
e si può esprime in ondo
metrosec
oppure in ora
kilometri
� Accelerazione è la variazione della velocità nel tempo ��
���
�2T
L e si esprime in 2secondo
metro

5
G
P
cF
2. QUESTIONI DI DINAMICA
Forza, lavoro e potenza – teoria ed unità di misura
La cinematica coinvolge le dimensioni spazio, tempo e le loro relazioni. Si passa alla dinamica quando si introduce il concetto di forza, ovvero il prodotto della massa per l’accelerazione:
Equazione 1
amF ⋅= Alle dimensioni spazio e tempo si aggiunge dunque nella dinamica la massa m necessaria per introdurre la nozione di forza; dalle definizioni cinematiche e da quelle dinamiche derivano le seguenti unità di misura:
� Forza è il prodotto tra la massa e l’accelerazione del corpo in movimento ��
���
� ⋅ 2TL
M e si esprime
in Newton � Lavoro è il prodotto tra forza e la lunghezza del percorso coperto dal corpo in movimento
��
���
� ⋅⋅ LTL
M 2 e si esprime in Newton�metro
� Potenza è il lavoro compito dal corpo in movimento nell’unità di tempo ��
���
� ⋅⋅⋅T
LTL
M1
2 e si
esprime in Watt
Accelerazione centrifuga per i veicoli stradali
Nella curve si deve contrastare la forza centrifuga, ovvero il prodotto della massa per la componente radiale della accelerazione centrifuga:
Equazione 2
rv
gP
Fc
2
⋅=
Figura 3 – Forze agenti su un veicolo stradale in curva
Nel caso stradale la stabilità in curva (contro lo sbandamento) è affidata all’aderenza trasversale, prodotto del coefficiente di aderenza trasversale per il peso del veicolo; il coefficiente di aderenza trasversale è soggetto a rilevanti variazioni con lo stato della pavimentazione e degli pneumatici. Per il calcolo della velocità ammissibile in curva, in condizioni di sicurezza contro lo sbandamento, si adotta un coefficiente trasversale ft cautelativo pari a 0,16. La sicurezza contro il rischio di sbandamento richiede che la forza centrifuga non superi l’aderenza trasversale:
Equazione 3
Pfr
vgP
F tc ⋅≤⋅=2
Da cui di ricava che:
6
G
P
cF
b
P
FcG
h
d
Equazione 4
rfgv t ⋅⋅≤ Ciò significa che, per esempio, in una curva di raggio pari a 150metri non si dovrebbe superare una
velocità di sm
34,15 pari a h
km20,55 (sempre con un coefficiente di aderenza trasversale pari a
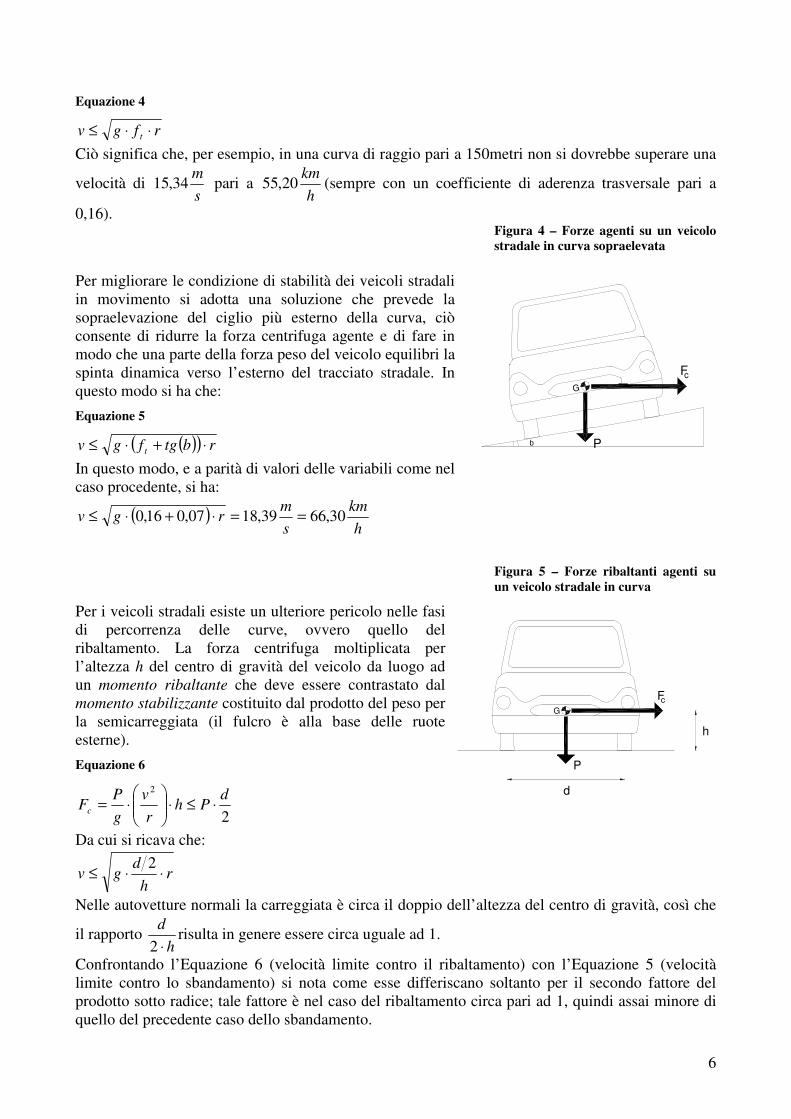
0,16). Figura 4 – Forze agenti su un veicolo stradale in curva sopraelevata
Per migliorare le condizione di stabilità dei veicoli stradali in movimento si adotta una soluzione che prevede la sopraelevazione del ciglio più esterno della curva, ciò consente di ridurre la forza centrifuga agente e di fare in modo che una parte della forza peso del veicolo equilibri la spinta dinamica verso l’esterno del tracciato stradale. In questo modo si ha che:
Equazione 5
( )( ) rbtgfgv t ⋅+⋅≤ In questo modo, e a parità di valori delle variabili come nel caso procedente, si ha:
( )h
kmsm
rgv 30,6639,1807,016,0 ==⋅+⋅≤
Figura 5 – Forze ribaltanti agenti su un veicolo stradale in curva
Per i veicoli stradali esiste un ulteriore pericolo nelle fasi di percorrenza delle curve, ovvero quello del ribaltamento. La forza centrifuga moltiplicata per l’altezza h del centro di gravità del veicolo da luogo ad un momento ribaltante che deve essere contrastato dal momento stabilizzante costituito dal prodotto del peso per la semicarreggiata (il fulcro è alla base delle ruote esterne).
Equazione 6
2
2 dPh
rv
gP
Fc ⋅≤⋅���
�
�⋅=
Da cui si ricava che:
rh
dgv ⋅⋅≤ 2
Nelle autovetture normali la carreggiata è circa il doppio dell’altezza del centro di gravità, così che
il rapporto h
d⋅2
risulta in genere essere circa uguale ad 1.
Confrontando l’Equazione 6 (velocità limite contro il ribaltamento) con l’Equazione 5 (velocità limite contro lo sbandamento) si nota come esse differiscano soltanto per il secondo fattore del prodotto sotto radice; tale fattore è nel caso del ribaltamento circa pari ad 1, quindi assai minore di quello del precedente caso dello sbandamento.

7
G
P
cF
d
h
La velocità limite allo sbandamento consente di cautelarsi anche contro i rischi del ribaltamento; questo almeno per le autovetture, poiché gli autocarri carichi possono avere un centro di gravità molto alto e dunque essere più vulnerabili al ribaltamento.
Accelerazione centrifuga per i veicoli ferroviari
Nelle ferrovie è molto importante ridurre gli effetti della forza centrifuga per motivi di sicurezza e di comfort di viaggio per i passeggeri. Nelle curve ferroviarie la sopraelevazione della rotaia esterna compensa in qualche misura l’accelerazione centrifuga. Ottenere la piena compensazione è difficile perché richiederebbe la percorrenza della linea da parte di treni viaggianti tutti alla medesima velocità (omotachicità); tale condizione è assai difficile da raggiungere sulle linee tradizionali dove prevale un traffico promiscuo con convogli a breve percorrenza, a lunga percorrenza e merci aventi velocità diverse in funzione del tipo di servizio (eterotachicità). Dovendo convivere sulla stessa linea treni diversi è necessario trovare un compromesso in modo da compensare solo parzialmente i treni veloci e lasciando una accelerazione centripeta residua per i treni lenti.
Figura 6 – Forze agenti su un veicolo ferroviario in curva
La sopraelevazione della rotaia esterna rispetto a quella interna si indica con H e d si riferisce alla distanza di appoggio delle due ruote di un asse sulle rotaie. La condizione di piena compensazione si ha quando:
Equazione 7
dH
Pr
vgP
PFc =
⋅=
2
Dividendo sopra e sotto per P si ha:
dH
rgv =⋅
2
da cui r
vrg
vdH
22
153,0 ⋅=⋅
⋅=
Passando da sm
a h
km si ottiene la relazione espressa in metri:
rV
H2
0118,0 ⋅= dove H è la
sopraelevazione della rotaia esterna che consente la piena compensazione alla velocità V ; a velocità superiori a V si ha insufficienza di compensazione (accelerazione centrifuga non compensata), a velocità inferiori a V si ha un eccesso di sopraelevazione (e dunque accelerazione centripeta residua). Rovesciando i termini del problema, per ciascuna sopraelevazione H si ottiene dalla stessa relazione la corrispondente velocità di piena compensazione:
Equazione 8
RHv ⋅⋅= 55,2 Assumendo per H il valore di 16cm (massimo assunto dalle Ferrovie dello Stato) ed esprimendo il tutto il metri si ha la velocità di piena compensazione, per quella sopraelevazione, alle varie velocità:
Equazione 9
RRv ⋅=⋅⋅= 02,116,055,2
Passando ai km/h si ha: RV ⋅= 672,3

8
Stabilito il limite ammissibile della accelerazione non compensata si determina la velocità massima, imponendo che la differenza tra l’accelerazione centrifuga massima e l’accelerazione compensata della sopraelevazione sia uguale alla accelerazione non compensata anc ammissibile:
Equazione 10
ncc aar
v=−
2max
Assumendo la massima sopraelevazione italiana si ha: 2046,1sm
ac = . Pertanto ammettendo una
accelerazione non compensata di 26,0sm
si ha 646,12max =r
v, da cui ancora rv ⋅= 283,1max in
sm
e
rV 6,4max = in h
km.
Su curva di 300metri di raggio, con una sopraelevazione di 16cm la velocità massima, per una
accelerazione non compensata di 26,0sm
, risulta di 80km/h (principali linee di valico transalpine
realizzata alla fine del secolo scorso).

9
3. QUESTIONI DI MECCANICA DELLA LOCOMOZIONE
Aspetti generali
La meccanica della locomozione fornisce le relazioni che governano le interazioni scambiate tra i corpi in azione (per nostre applicazioni i veicoli) e l’ambiente in cui si muovono. In condizioni dinamiche le forze che agiscono sui veicoli sono classificate in: � forze attive (o di trazione) � forze passive (o resistenze) I veicoli in movimento si trovano in condizioni di equilibrio dinamico rispetto alle forze a cui sono sottoposti, in particolare vale il secondo principio della dinamica per il quale:
Equazione 11
amF ⋅= dove: � F rappresenta la risultante di tutte le forze agenti sul corpo in movimento
� a rappresenta la risultante delle accelerazioni agenti sul corpo in movimento � m rappresenta la massa del corpo in movimento L’Equazione 11 può essere specializzata per le applicazioni che seguiranno come indicato:
Equazione 12
dtvd
MRF e ⋅=−
nella quale:
� F rappresenta la risultante delle forze attive agenti sul corpo in movimento
� R rappresenta la risultante delle forze passive agenti sul corpo in movimento �
eM rappresenta la massa equivalente del corpo in movimento e che tiene conto sia delle masse traslanti che di quelle rotanti (si pensi ad esempio alle ruote o agli organi meccanici all’interno di in motore)
� v è la velocità del corpo nella direzione del percorso (nel caso più generale zyx vvvv ++= ) La Meccanica della locomozione valuta in particolare i fenomeni di aderenza e conseguentemente i limiti che derivano in merito ai massimi valori della forza F . I due più importanti sistemi di trasporto terrestre (su strada e su ferrovia) sono definiti ad aderenza naturale in quanto le forze attive si trasmettono sulle vie (rotaia metallica o strada) per mezzo di organi di rotolamento (ruote) che trasferiscono al terreno il peso del veicolo. In questo caso la forza attiva, o di trazione, trasmessa da una ruota su cui agisce un peso P (si veda la Figura 7) ha un limite superiore imposto dal fenomeno dell’aderenza, per il quale vale la relazione:
Equazione 13
PfF ⋅= dove: � f rappresenta il coefficiente di aderenza

10
Figura 7 – Il fenomeno dell'aderenza per una ruota in movimento
Q
Pm
f
Si dicono invece ad aderenza artificiale quei sistemi di trasporto le cui forze attive sono trasmesse al terreno anche da altri organi (ad esempio ruote dentate). Con riferimento alle resistenze è necessario mettere in evidenza che la resistenza totale è composta da differenti termini ed in particolare si può scrivere che:
Equazione 14
eo RRR += dove:
� oR è la resistenza in rettilineo orizzontale (derivante dal moto dei veicoli)
� eR è la resistenza dovuta alla accidentalità del tracciato (curve e pendenze) A loro volta oR ed eR si suddividono in diversi termini.
Equazione 15
21 RRRo += con:
� 1R resistenza al rotolamento � 2R resistenza del mezzo in cui si muove il veicolo La resistenza al rotolamento si suddivide a sua volta nella componente relativa alla coppia
cinematica perno – cuscinetto '1R e nella componente dell’accoppiamento ruota – via ''
1R . In merito alle resistenze accidentali si pone:
Equazione 16
cie RRR += dove: � iR è la resistenza dovuta alle pendenze
� cR è la resistenza dovuta alle curve A valle delle considerazioni ora esposte l’Equazione 14 può essere riscritta completamente come segue:

11
Equazione 17
( )ci RRRRRR ++��
�� ++= 2
''1
'1
Descritta l’equazione fondamentale che regola la dinamica dei veicoli possiamo distinguere quattro diverse fasi nei possibili atti di movimento. L’avviamento in cui, a partire dalla posizione di arresto ( 0=v ) la forza attiva F supera la resistenza
R e si da luogo alla progressiva accelerazione dtdv
in valore positivo.
La fase di regime in cui vale l’equilibrio RF = , l’accelerazione è nulla, ed il moto è uniforme. La fase di coasting (movimento per inerzia) in cui è nulla la forza attiva F e si ha una accelerazione in valore negativo (o decelerazione) provocata dalle resistenze. La fase di frenatura in cui alle resistenze si aggiunge una forza frenante artificiale tale da portare all’arresto governato del veicolo.
Resistenza al rotolamento
� Resistenza della coppia perno – cuscinetto
Questa resistenza, definita '1R , dipende dal tipo costruttivo di cuscinetto (o boccola); in particolare
si distinguono due tipi di cuscinetti: ad attrito ed a rotolamento. Nel primo caso le superfici del cuscinetto e del perno sono separate da un velo di olio lubrificante, nel secondo tra le superfici sono interposte sfere o rulli. Il tipo più diffuso di cuscinetto ad attrito è la boccola (molto utilizzata in ambito ferroviario). Essa è costituita (si veda la Figura 8)da una scatola metallica nella quale è alloggiato il perno dell’asse (sala); il cuscinetto è realizzato in bronzo od in acciaio, mentre la superficie su cui avviene il contatto strisciante è in metallo antifrizione (metallo bianco o rosa1) e deve essere tale da garantire elevata resistenza a compressione, basso coefficiente di attrito e basso punto di fusione. Nella parte inferiore della scatola (o carter) è contenuto l’olio lubrificante che deve essere portato a contatto tra le parti striscianti. Il meccanismo di lubrificazione avviene per capillarità se l’olio è trasportato per mezzo di fibre tessili o (si veda la Figura 9) meccanicamente se il dispositivo lubrificatore (generalmente un cucchiaio) porta l’olio verso le parti in contatto per rotolamento.
Figura 8 – Schema di boccola ad attrito
1 Metallo bianco è una lega a base di stagno (83%), antimonio (11%) e rame (6%); metallo rosa è una lega di piombo (30%), rame (68,5%) e zinco (1,5%)

12
Figura 9 – Schema di boccola con lubrificazione per capillarità
Nonostante il largo utilizzo, le boccole ad attrito presentato comunque due inconvenienti: in primo luogo l’elevata resistenza all’avviamento, con conseguente necessità di incremento della forza di trazione F, ed in secondo luogo il pericolo di rottura del velo di olio che può verificarsi ad elevata velocità in seguito all’eccessivo riscaldamento (per effetto della riduzione della viscosità intrinseca del materiale). La Tabella 2 riporta i valori dei principali parametri da considerare nell’utilizzo delle boccole ad attrito maturati nelle esperienze condotte dalle Ferrovie dello Stato. I cuscinetti a rotolamento possono essere a sfere o a rulli. Questi dispositivi si sono ampiamente diffusi nei veicoli stradali e generalmente sono montati alle estremità dei mozzi, oppure per le ruote posteriori, alle estremità dei semiasse. Per i carichi di livello elevato si preferisce ricorrere all’utilizzo dei cuscinetti a rulli.
Figura 10 – Schema di cuscinetti a rulli
Tabella 2 – Valore del coefficiente d'attrito f' per boccole ferroviarie
Numero di giri al
secondo
Velocità periferica del fusello [m/sec]
Velocità di marcia [km/h]
f’ Temperatura
al contatto [°C]
Temperatura al carter [°C]
Viscosità al contatto
[km�sec/m2] 0,545 0,192 6 0,039 15 15 - 1,770 0,637 20 0,027 25 16 0,0160 3,450 1,275 40 0,022 40 26 0,0105 6,200 2,226 70 0,018 58 39 0,0050 8,000 2,870 90 0,016 62 44 0,0038 9,800 3,510 110 0,014 68 48 0,0028
11,500 4,140 130 0,013 72 52 0,0023

13
� Resistenza della coppia ruota – via In generale questa resistenza è dovuta al fenomeno dell’attrito volvente tra ruota e via ed alle inevitabili irregolarità del moto. Il fenomeno dell’attrito volvente (si veda la Figura 11) richiama il fenomeno della isteresi elastica dei materiali. Le ruote a contatto con la via trasmettono le forze su di loro agenti attraverso le aree di impronta (più o meno estese in funzione delle caratteristiche meccaniche dei materiali); se il veicolo è fermo si può ipotizzare ragionevolmente che la reazione opposta dalla via sia sulla stessa retta di applicazione della forza agente sulla ruota, in quanto la superficie di impronta è di forma simmetrica. Se però la ruota è in movimento la superficie di impronta non si mantiene simmetrica, ma assume una forma diversa e spostata verso il senso di avanzamento del veicolo. Si genera in questo modo una eccentricità e della reazione della via sulla ruota: il prodotto della reazione per l’eccentricità fornisce un momento opposto rispetto al senso di rotazione che oppone resistenza.
Figura 11 – Attrito volvente
P
R R
P
e
Le Ferrovie dello Stato, nell’ambito delle verifiche di trazione, ricorrono alle seguenti relazioni:
per materiale rotabile leggero passeggeri: 2
''1 100
6,29,1 ��
�
�⋅+= VR
per materiale rotabile normale passeggeri: 2
''1 100
8,22 ��
�
�⋅+= VR
per locomotori e materiale rotabile merci: 2
''1 100
35,2 ��
�
�⋅+= VR
Le irregolarità planimetriche della marcia in rettifilo generano anche un moto di serpeggio particolarmente evidente nei mezzi ferroviari; questo fenomeno è dovuto alla conicità dei cerchioni ed al gioco esistente tra i bordini dei cerchioni e le rotaie. Si può dimostrare che il moto naturale dei cerchioni dei mezzi ferroviari è una sinusoide il cui asse coincide con quello del binario e la cui ampiezza è pari al gioco esistente.

14
Resistenza dell’aria
Un veicolo che si muove immerso in un mezzo fluido (aria) con velocità v rispetto al terreno (supponendo altresì che l’aria sia ferma rispetto al terreno) genera una resistenza che può ritenersi funzione delle seguenti variabili: � forma e dimensioni del veicolo L � densità � e viscosità � del mezzo fluido � velocità v La resistenza si può esprimere nella forma della seguente funzione:
Equazione 18
( )vLfR ,,,2 µρ= Nella Equazione 18 le quattro variabili che compaiono sono tra di loro indipendenti e a loro volta sono esprimibili con tre grandezze fondamentali (lunghezza L, massa M e tempo T), ciò significa che l’espressione della 2R deve contenere la funzione incognita di un parametro dimensionale. Scrivendo l’espressione della resistenza in una serie di potenze come nella Equazione 19 si ha:
Equazione 19
⋅⋅⋅⋅= dcba vLtR µρcos2 Imponendo l’omogeneità dimensionale si ha:
Equazione 20
[ ] [ ] [ ] [ ] [ ]dba TLMTLLMLTMLR 111322
−−−−− ⋅⋅⋅⋅⋅⋅⋅=⋅⋅= in cui:
��
��
�
−=−−=−+−
=+
213
1
dc
dcba
db
Pertanto l’Equazione 19 può essere riscritta nella forma:
Equazione 21
dvL
vLtR ���
�
� ⋅⋅⋅⋅⋅⋅=µρρ 22
2 cos
O più comunemente si può scrivere, essendo d esponente incognito:
Equazione 22
���
�
� ⋅⋅⋅⋅⋅⋅=µρϕρ vL
vLtR 222 cos
dove � è una funzione incognita del Numero di Reynolds µρ vL
N⋅⋅=
L’Equazione 22 compare molto spesso scritta nella forma:
15
Equazione 23
( ) 22 2
1vSNCR ⋅⋅⋅⋅= ρ
nella quale: � S è la sezione maestra del veicolo � C è il coefficiente di forma del veicolo a sua volta funzione del Numero di Reynolds Il coefficiente ½ della Equazione 23 discende dalla considerazione che un disco di sezione S sottoposto ad una corrente di un fluido ad una velocità v presenta una resistenza R data dalla Equazione 23 in cui 1=C . Inoltre essendo 1,225 il peso specifico dell’aria a 15 °C e pressione atmosferica si ha 125,0=ρ si ottiene:
Equazione 24
( ) 22 0625,0 vSNCR ⋅⋅⋅= (con v espressa in m/sec)
( ) 22 0048,0 VSNCR ⋅⋅⋅= (con V espressa in km/h)
Tabella 3 – Valori del coefficiente di forma per alcuni tipi di mezzi di trasporto
Tipo di veicolo Coefficiente di forma C Autovetture 0,25 – 0,50 Autocarri a cassone 0,80 – 0,90 Furgoni ed autobus 0,40 – 0,70 Autoarticolati 1,00 – 1,10 Autotreni 1,20 – 1,40 Materiale ferroviario carenato 0,30 – 0,60 Materiale ferroviario tradizionale 1,20 – 1,40
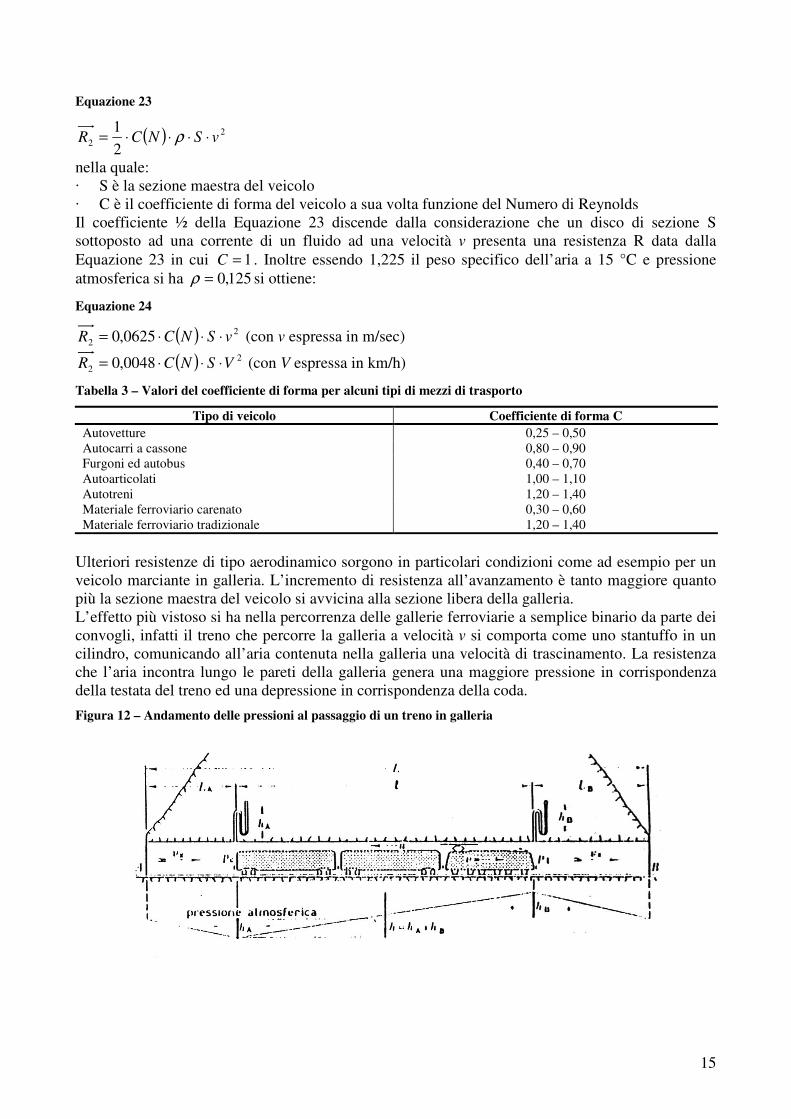
Ulteriori resistenze di tipo aerodinamico sorgono in particolari condizioni come ad esempio per un veicolo marciante in galleria. L’incremento di resistenza all’avanzamento è tanto maggiore quanto più la sezione maestra del veicolo si avvicina alla sezione libera della galleria. L’effetto più vistoso si ha nella percorrenza delle gallerie ferroviarie a semplice binario da parte dei convogli, infatti il treno che percorre la galleria a velocità v si comporta come uno stantuffo in un cilindro, comunicando all’aria contenuta nella galleria una velocità di trascinamento. La resistenza che l’aria incontra lungo le pareti della galleria genera una maggiore pressione in corrispondenza della testata del treno ed una depressione in corrispondenza della coda.
Figura 12 – Andamento delle pressioni al passaggio di un treno in galleria
16
Resistenze accidentali, pendenza e curva
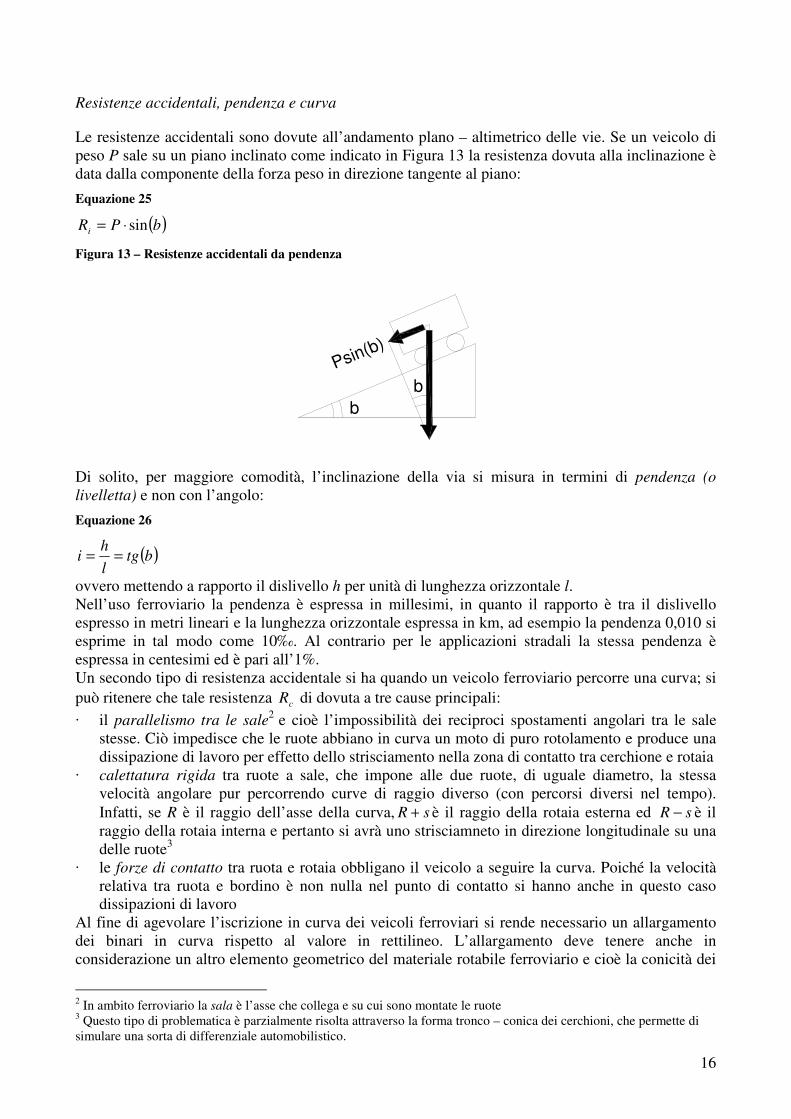
Le resistenze accidentali sono dovute all’andamento plano – altimetrico delle vie. Se un veicolo di peso P sale su un piano inclinato come indicato in Figura 13 la resistenza dovuta alla inclinazione è data dalla componente della forza peso in direzione tangente al piano:
Equazione 25
( )bPRi sin⋅=
Figura 13 – Resistenze accidentali da pendenza
bb
Psin(b)
Di solito, per maggiore comodità, l’inclinazione della via si misura in termini di pendenza (o livelletta) e non con l’angolo:
Equazione 26
( )btglh
i ==
ovvero mettendo a rapporto il dislivello h per unità di lunghezza orizzontale l. Nell’uso ferroviario la pendenza è espressa in millesimi, in quanto il rapporto è tra il dislivello espresso in metri lineari e la lunghezza orizzontale espressa in km, ad esempio la pendenza 0,010 si esprime in tal modo come 10‰. Al contrario per le applicazioni stradali la stessa pendenza è espressa in centesimi ed è pari all’1%. Un secondo tipo di resistenza accidentale si ha quando un veicolo ferroviario percorre una curva; si può ritenere che tale resistenza cR di dovuta a tre cause principali: � il parallelismo tra le sale2 e cioè l’impossibilità dei reciproci spostamenti angolari tra le sale
stesse. Ciò impedisce che le ruote abbiano in curva un moto di puro rotolamento e produce una dissipazione di lavoro per effetto dello strisciamento nella zona di contatto tra cerchione e rotaia
� calettatura rigida tra ruote a sale, che impone alle due ruote, di uguale diametro, la stessa velocità angolare pur percorrendo curve di raggio diverso (con percorsi diversi nel tempo). Infatti, se R è il raggio dell’asse della curva, sR + è il raggio della rotaia esterna ed sR − è il raggio della rotaia interna e pertanto si avrà uno strisciamneto in direzione longitudinale su una delle ruote3
� le forze di contatto tra ruota e rotaia obbligano il veicolo a seguire la curva. Poiché la velocità relativa tra ruota e bordino è non nulla nel punto di contatto si hanno anche in questo caso dissipazioni di lavoro
Al fine di agevolare l’iscrizione in curva dei veicoli ferroviari si rende necessario un allargamento dei binari in curva rispetto al valore in rettilineo. L’allargamento deve tenere anche in considerazione un altro elemento geometrico del materiale rotabile ferroviario e cioè la conicità dei
2 In ambito ferroviario la sala è l’asse che collega e su cui sono montate le ruote 3 Questo tipo di problematica è parzialmente risolta attraverso la forma tronco – conica dei cerchioni, che permette di simulare una sorta di differenziale automobilistico.
17
cerchioni necessaria per fare variare le velocità di rotolamento delle ruote visti i vincoli di rigidità delle sale.
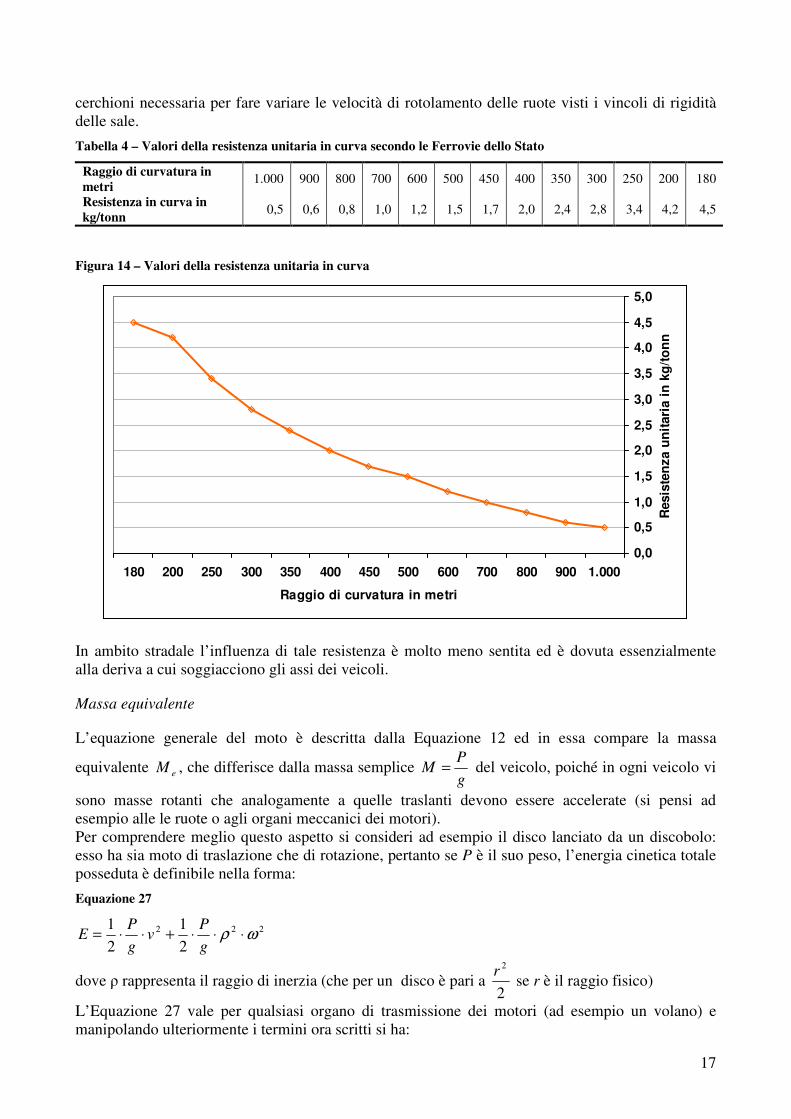
Tabella 4 – Valori della resistenza unitaria in curva secondo le Ferrovie dello Stato
Raggio di curvatura in metri 1.000 900 800 700 600 500 450 400 350 300 250 200 180
Resistenza in curva in kg/tonn 0,5 0,6 0,8 1,0 1,2 1,5 1,7 2,0 2,4 2,8 3,4 4,2 4,5
Figura 14 – Valori della resistenza unitaria in curva
0,0
0,5
1,0
1,5
2,0
2,5
3,0
3,5
4,0
4,5
5,0
1.000900800700600500450400350300250200180
Raggio di curvatura in metri
Res
iste
nza
unita
ria
in k
g/to
nn
In ambito stradale l’influenza di tale resistenza è molto meno sentita ed è dovuta essenzialmente alla deriva a cui soggiacciono gli assi dei veicoli.
Massa equivalente
L’equazione generale del moto è descritta dalla Equazione 12 ed in essa compare la massa
equivalente eM , che differisce dalla massa semplice gP
M = del veicolo, poiché in ogni veicolo vi
sono masse rotanti che analogamente a quelle traslanti devono essere accelerate (si pensi ad esempio alle le ruote o agli organi meccanici dei motori). Per comprendere meglio questo aspetto si consideri ad esempio il disco lanciato da un discobolo: esso ha sia moto di traslazione che di rotazione, pertanto se P è il suo peso, l’energia cinetica totale posseduta è definibile nella forma:
Equazione 27
222
21
21 ωρ ⋅⋅⋅+⋅⋅=
gP
vgP
E
dove � rappresenta il raggio di inerzia (che per un disco è pari a 2
2r se r è il raggio fisico)
L’Equazione 27 vale per qualsiasi organo di trasmissione dei motori (ad esempio un volano) e manipolando ulteriormente i termini ora scritti si ha:

18
22
22
21
21
vv
rgP
E ⋅���
�
�
⋅⋅+⋅⋅= ω
Equazione 28
( ) 2121
vgP
E ⋅+⋅⋅= µ
assumendo 2
21
��
�
� ⋅⋅=v
r ωµ si ha che l’Equazione 28 riduce tutte le masse rotanti in masse traslanti e
pertanto la massa equivalente risulta essere pari a ( )µ+⋅= 1MM e .
Tabella 5 – Valore del coefficiente � per alcuni tipi di veicoli
Tipo di veicolo Coefficiente � Materiale ferroviario rimorchiato e merci 0,08 – 0,07 Locomotive elettriche a corrente continua 0,18 – 0,20 Locomotive elettriche monofasi 0,35 – 0,45 Autovetture in prima marcia 0,25 – 0,40 Autovetture in presa diretta 0,05 – 0,08 Autoveicoli pesanti in presa diretta 0,60 – 0,80
Frenatura ed aderenza
L’Equazione 12 nel caso di moto durante frenatura può porsi nella seguente forma:
Equazione 29
dtvd
MRF e ⋅−=+
che può essere riscritta nella forma:
dsvd
vMdt
sd
sd
vdMRF ee ⋅−=⋅⋅−=+
da cui si ricava che lo spazio di arresto del veicolo ha equazione:
Equazione 30
� +⋅−=
0
0vef RF
dvvMS
Mettendo in evidenza le resistenze presenti durante l’atto di moto si può riscrivere l’Equazione 30 come segue:
Equazione 31
( )�
±+
⋅⋅+−=0
00
1
vf
irPF
dvvg
Sµ
dove:
� 0r è la resistenza unitaria in rettilineo orizzontale � i è la resistenza accidentale per pendenza e curva
� PF
è il rapporto tra la forza frenante totale e il peso del veicolo e si definisce come efficienza frenante ed il suo valore massimo è pari al coefficiente di aderenza f

19
Nella prassi operativa il termine r0 è di piccola entità e normalmente può essere trascurato; ipotizzando una decelerazione � costante lo spazio di frenatura assume la seguente espressione:
Equazione 32
γ⋅=
2
20v
S f ponendo ��
�
� ±⋅+
= iPFg
µγ
1
Lo spazio di frenatura si compone non solo del termine indicato nella Equazione 32, in quanto nella guida dei veicoli si assume che il conducente necessiti di alcuni istanti per azionare gli organi di frenatura; in questi attimi, che dipendono essenzialmente dai riflessi individuali, il veicolo percorre una distanza definita spazio morto.
Equazione 33
000 tvs ⋅= Nella Equazione 33 il tempo che trascorre nello spazio morto è somma del tempo di reazione del conducente tr e del tempo meccanico tm di azionamento degli organi di frenatura. Pertanto complessivamente si ha:
γ⋅+⋅=+=
2
20
000
vtvsss f
Nella trazione ferroviaria il denominatore della Equazione 31 non può essere considerato costante con la velocità v del veicolo e pertanto l’integrale deve essere calcolato con metodo grafici od approssimati. Per un treno composto da n assi indicando con Fi e Pi i valori della forza frenante e del peso del singolo asse, e con F e P i valori totali per l’intero treno, si pone, ammettendo che il coefficiente f’ sia uguale per tutti gli assi:
Equazione 34
⋅=⋅⋅=⋅
= ri
i
ii fPP
PH
fP
Hf
PF λ''
'
Nella Equazione 34 la sommatoria �r si definisce peso frenato reale ed Hi rappresenta la forza radiale agente sulle ruote e generata dalla azione degli organi di frenatura. Il termine f’ dipende da fattori quali la velocità e la temperatura. Anche nella fase di frenatura interviene il coefficiente di aderenza f, in quanto durante questa fase esistono condizioni di limitazione dello sforzo frenante. Facendo riferimento alla Figura 7 la condizione di aderenza si esprime nella forma seguente:
Equazione 35
PfQm ⋅≤⋅ dove: � m è il coefficiente di attrito caratteristico del materiale frenante � f è il coefficiente di aderenza Se non viene rispettata la condizione di aderenza si bloccano le ruote e l’azione frenante si sposta dagli apparati frenanti al contatto tra le ruote e le vie; nel punto di contatto tra ruota e via non esiste più un coefficiente di aderenza, ma un vero e proprio coefficiente di attrito radente. I coefficienti di attrito redente sono di valore inferiore (e meno stabili) rispetto ai coefficienti di aderenza, ne deriva pertanto che la frenatura con slittamento delle ruote è meno efficace (minore decelerazione) e lo spazio di arresto necessario risulta essere maggiore.
20
I materiali impiegati per i pattini o per le pastiglie sono scelti in modo da avere un elevato valore di m (nei confronti dei tamburi o dei dischi) e soprattutto in vista della massima stabilità di m al variare della temperatura; il coefficiente di attrito nei materiali normalmente impiegati è dell’ordine di 0,40 ad ogni velocità.
Diagramma di trazione
L’integrazione della Equazione 12 permette di determinare le grandezze caratteristiche del moto di un veicolo attraverso le sue varie fasi: avviamento, regime, lancio e arresto. Da quanto esposto nei paragrafi precedenti è possibile determinare con un buon grado di precisione il termine R; del termine F invece si conosce a priori solamente il limite superiore imposto dalle condizioni di aderenza. La forza F rappresenta dal punto di vista fisico l’azione agente alla periferia delle ruote del veicolo, che ne consente gli spostamenti e può essere convenientemente rappresentata per mezzo di una curva caratteristica che determina un legame tra la forza stessa la velocità v di traslazione del veicolo. Il tipo di curva caratteristica più comune è quello definito a potenza costante (tipico dei sistemi a trazione termica) in cui la potenza a bordo dei veicoli W corrisponde, ad esempio, alla potenza dei motori a combustione interna. La potenza W è trasmessa alla periferia delle ruote con organi intermedi di trasmissione attraverso un rendimento �; in questi sistemi di trazione la curva caratteristica meccanica è una iperbole equilatera avente equazione:
Equazione 36
WVF ⋅⋅=⋅ η270 se W è espressa in HP (cavalli vapore) WVF ⋅⋅=⋅ η198 se W è espressa in Watt
La potenza W è generalmente legata alla dimensione degli apparati motore (per esempio nei motori a combustione interna) ed a fattori di utilizzazione che non devono essere superati per motivi di sicurezza. Nei motori a trazione elettrica con trasmissione dell’energia da un impianto fisso (sottostazione e linea di contatto) la potenza disponibile non è legata alle dimensioni del motore, ma ad alcuni fattori di sicurezza (come l’isolamento ed il massimo numero di giri) ed in particolare alla temperatura degli avvolgimenti elettrici. Molto frequentemente è la caratteristica tipo serie avente Equazione 37 propria dei motori a collettore eccitati in serie a corrente continua alternata monofase, alimentati a tensione costante.
Equazione 37
tVF n cos=⋅ con n > 1 In una caratteristica di questo tipo si ha una potenza continuativa cW per una certa velocità corrispondente cV ; per cVV < si hanno valori cWW > e per tempi di funzionamenti via via decrescenti; per cVV > si hanno valori cWW < e per tempi illimitati. La caratteristica del tipo derivazione, o a velocità costante, è propria dei motori a corrente continua e dei motori asincroni a campo rotante; tale curva caratteristica è antisimmetrica rispetto ad una velocità 0V in cui è 0=F ; per 0VV < si hanno F positive di trazione rapidamente crescenti al decrescere della velocità; per 0VV > si hanno F negative di frenatura. E’ evidente che una caratteristica tipo derivazione realizza in modo completamente automatico la frenatura elettrica. La prima parte del diagramma di trazione, ovvero il diagramma di avviamento, si determina scrivendo l’Equazione 12 in forma di differenze finite:
Equazione 38
tv
MRF e ∆∆⋅=−

21
Un metodo assai facile consiste nel prefissare valori equidistanti delle velocità: 0, 1v , …, nv tali che v∆ sia un intervallo costante fra un valore ed il successivo; si determinerà pertanto il tempo t∆
necessario a passare dalla velocità 0 a 1v , da 1v a 2v e così via:
Equazione 39
vRF
Mt e ∆⋅
−=∆
La differenza RF − si definisce sforzo acceleratore. Lo spazio percorso in funzione del tempo si ottiene ancora per differenze finite:
Equazione 40
tvs ∆⋅=∆ Si consideri ad esempio un locomotore ferroviario con una curva caratteristica teorica (curva limite di aderenza) come riportato in Figura 15, una caratteristica a potenza costante per HPWi 2000=⋅η ai cerchioni, una caratteristica tipo serie avente potenza continuativa HPWc 2000=⋅η per una velocità continuativa hkmVc /90= ed una caratteristica tipo derivazione per hkmV /900 = .

22
Figura 15 – Tipi di caratteristica meccanica per locomotiva di 100t di peso aderente
Tabella 6 – Determinazione tabellare di avviamento per un treno di 500 tonnellate trainato da locomotore da 2000 HP di potenza ai cerchioni con caratteristiche a potenza costante
v∆∆∆∆ [km/h] F [kg] R [kg] Y [kg] PF
y ==== (((( ))))µµµµγγγγ
++++⋅⋅⋅⋅⋅⋅⋅⋅====11000yg
∆∆∆∆t [sec] t [sec] V media s [m] ∆∆∆∆==== sS
0 10 20.000 1.000 19.000 38,00 0,34 8,10 8,10 5 11 11 10 20 20.000 1.000 19.000 38,00 0,34 8,10 16,20 15 34 45 20 30 20.000 1.050 18.950 37,90 0,34 8,20 24,40 25 57 102 30 40 15.400 1.150 14.250 28,50 0,27 10,40 34,80 35 101 203 40 50 12.000 1.300 10.700 21,40 0,19 14,40 49,20 45 179 382 50 60 9.850 1.450 8.400 16,80 0,15 18,50 67,70 55 283 665 60 70 8.300 1.650 6.650 13,30 0,12 23,30 90,00 65 419 1.084 70 80 7.200 1.850 5.350 10,70 0,10 28,80 118,80 75 602 1.686 80 90 6.350 2.100 4.250 8,50 0,08 36,50 155,30 85 861 2.547 90 100 5.700 2.350 3.350 6,70 0,06 45,50 200,80 95 1.226 3.772
100 110 5.650 2.650 3.000 6,00 0,05 51,20 251,00 105 1.495 5.267 110 120 4.700 3.000 1.700 3,40 0,03 91,00 342,00 115 2.910 8.177
Il Errore. L'origine riferimento non è stata trovata. riporta l’andamento delle grandezze caratteristiche per la fase di avviamento descritta nella
Tabella 6.

23
Figura 16 – Diagramma di avviamento in forma grafica
0
5.000
10.000
15.000
20.000
25.000
10 20 30 40 50 60 70 80 90 100 110 120
[km/h]
[kg]
F R
0
1.000
2.000
3.000
4.000
5.000
6.000
7.000
8.000
9.000
0 50 100 150 200 250 300 350 400
[met
ri]
0
20
40
60
80
100
120
140
[km
/h]
Spazio [m] Velocità [km/h]
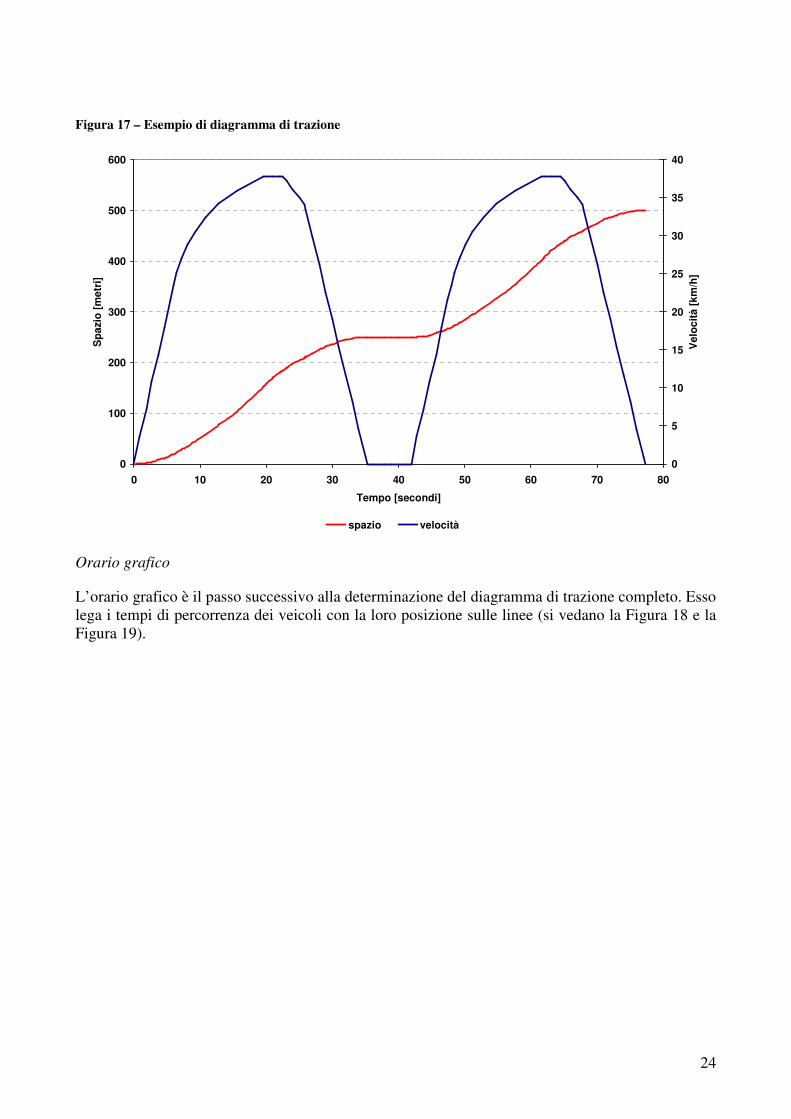
Successivamente alla fase di avviamento, il diagramma di trazione continua con la fase di coasting (per inerzia) e termina con la fase di frenatura. La Figura 17 riporta un esempio di diagramma di trazione completo con tutte le fasi del ciclo di trazione tra due punti successivi del percorso, che possono essere ad esempio due fermate, o due stazioni, servite da un mezzo di trasporto pubblico.
24
Figura 17 – Esempio di diagramma di trazione
0
100
200
300
400
500
600
0 10 20 30 40 50 60 70 80
Tempo [secondi]
Spa
zio
[met
ri]
0
5
10
15
20
25
30
35
40
Vel
ocità
[km
/h]
spazio velocità
Orario grafico
L’orario grafico è il passo successivo alla determinazione del diagramma di trazione completo. Esso lega i tempi di percorrenza dei veicoli con la loro posizione sulle linee (si vedano la Figura 18 e la Figura 19).

25
Figura 18 – Orario grafico di linea a doppio binario
1 2 30
Tempo [ore]
Stazione 1
Stazione 2
Stazione 3
Stazione 4
Stazione 5
Stazione 6
Stazione 7
Treno 1
Treno 2
Treno 3 Treno 4
� Treno 1 – si ferma in tutte le stazioni e da la precedenza al Treno 3 in corrispondenza della
Stazione 5 � Treno 3 – si ferma solamente nella Stazione 4, transita in tutte le altre, e ha la precedenza del
Treno 1 in corrispondenza della Stazione 5 � Treno 2 – si ferma in tutte le stazioni e da la precedenza al Treno 4 in corrispondenza della
Stazione 4 � Treno 4 – si ferma solamente nella Stazione 4 dove ha la precedenza del Treno 2 e transita in
tutte le altre stazioni

26
Figura 19 – Orario grafico di linea a semplice binario
Stazione 7
Stazione 6
Stazione 5
Stazione 4
Stazione 3
Stazione 2
Stazione 1
Tempo [ore]
3210
Treno 1
Treno 2
Treno 3
Treno 4
� Treno 1 – ferma in tutte le stazioni, incrocia alla Stazione 4 i treni 2 e 4 e da la precedenza al
Treno 3 in corrispondenza della Stazione 5 � Treno 2 – ferma in tutte le stazioni, incrocia il Treno 1 in corrispondenza della Stazione 4, il
Treno 3 in corrispondenza della Stazione 3 e nella stessa stazione da la precedenza al Treno 4 � Treno 3 – si ferma solo nelle stazioni 4 e 6 e favorisce della precedenza dei treni 2 e 4 in
corrispondenza della Stazione 3 � Treno 4 – si ferma solo nelle stazioni 3 e 5, favorisce della precedenza del Treno 1 nella
Stazione 4 e del Treno 3 nella Stazione 3; incrocia il Treno 3 nella Stazione 3

27
4. QUESTIONI DI PORTATA E DI POTENZIALITÀ
Questioni di densità e di portata
Su una corsia stradale o su un binario ferroviario, o su ogni altra possibile via elementare, la densità dei veicoli è indicata con D (veicoli contemporaneamente presenti in un km). Nelle strade il valore di D può raggiungere valori assai elevati (si pensi ad esempio ad una strada congestionata nell’ora di punta); nelle ferrovie invece si avrà generalmente un valore di D inferiore ad 1 in quanto i treni sono distanziati di più di un kilometro. La portata di una via (corsia stradale, binario ferroviario, o altro) è, secondo una immagine idraulica, il numero di veicoli che passano attraverso una sezione (normale alla strada) nell’unità di
tempo. Tale grandezza si può esprimere in ora
veicoli, oppure in
giornoveicoli
.
In primissima approssimazione, sempre sulla base delle conoscenze dell’idraulica, si dovrebbe esprimere la portata come il prodotto della densità per la velocità di deflusso:
Equazione 41
oraveicoli
orakm
kmveicoli
VDP =⋅=⋅=
L’Equazione 41 ha un immediato significato fisico quando la densità resta costante all’aumentare della velocità. Esistono casi dove questo si verifica, come per esempio nelle seggiovie, dove il distanziamento tra un veicolo ed il successivo è assicurato da una connessione fisica. Nella seggiovia monofune l’arresto di una cabina comporta l’arresto di tutte le cabine, ed allora la portata della seggiovia aumenta in ragione diretta della velocità. Dove, invece, tutti i veicoli sono indipendenti nel proprio moto, la relazione della portata è meno espressiva perché all’aumentare della velocità aumenta la distanza fisica tra i veicoli (aumentano gli spazi di frenatura) cosicché diminuisce la densità. Una fotografia aerea di una strada congestionata induce a ritenere che la velocità sia assai ridotta e che conseguentemente la portata sia prossima a zero; pertanto se la densità è prossima a zero, il prodotto VD ⋅ è ovviamente zero, ma se la densità è così alta che tutti devono stare fermi (dunque V è zero) la portata è ancora zero. Espressiva o non espressiva, l’Equazione 41 definisce in modo univoco il numero di veicoli che transitano attraverso una sezione normale della via in una unità di tempo. La portata P è data dal rapporto tra il tempo dell’unità temporale di riferimento (ore, secondi) è l’intervallo temporale medio che intercorre tra il passaggio (nella sezione prescelta) di un veicolo ed il passaggio del veicolo successivo:
Equazione 42
hP
3600=
dove h rappresenta il tempo (in secondi) di distanziamento di due veicoli successivi. Si consideri ora un flusso omogeneo ed ordinato nel quale i veicoli tutti uguali marciano in moto uniforme tutti alla stessa velocità. Nella Figura 20 compaiono le seguenti variabili: � lunghezza L di ciascun veicolo � distanza lineare S tra le teste di due veicoli successivi � distanza temporale h tra le teste di due veicoli successivi � distanza lineare s tra la coda di un veicolo e la testa del successivo

28
P
V
P=36
00*v
/L
P=7200*a/vPmax
cV
Figura 20 – Veicoli uguali in moto uniforme
h (sec)
S (m)
s (m)
L (m)
Partendo dalla definizione introdotta con l’Equazione 42 e moltiplicando il numeratore ed denominatore per v si ha:
Equazione 43
Lsv
Sv
vhv
P+
⋅=⋅=⋅
⋅= 360036003600
Se si vuole definire la portata massima alla velocità v occorre che la separazione s sia la minima possibile per quella velocità e si può ritenere che essa coincida con lo spazio per arrestarsi (spazio di frenatura) a quella velocità:
Equazione 44
av
ss f ⋅==
2
2
In questo modo l’Equazione 43 diventa:
Equazione 45
La
vv
P+
⋅
⋅=
2
36002
e dividendo sopra e sotto per v si ottiene
vL
av
P+
⋅
=
2
3600
Figura 21 – Legame tra Portata e Velocità
Come si può vedere dalla Figura 21 al limite delle basse velocità le vetture sono quasi attaccate una all’altra (densità altissima) per cui la separazione s diventa trascurabile rispetto alla lunghezza L e dunque anche il primo termine del denominatore della Equazione 45 può essere trascurato. Sul versante delle velocità si assume allora la
forma:L
vP
⋅= 3600
Al limite delle alte velocità le vetture devono risultare così distanziate l’una dall’altra in modo tale che questa volta è la lunghezza L a diventare trascurabile rispetto alla separazione s; in questo caso è il secondo termine della Equazione 45 che può essere trascurato e sul versante delle velocità

29
può essere assunta le relazione: v
aP
⋅= 7200. Tale relazione rappresenta una iperbole equilatera la
cui costante è a⋅7200 . Individuate queste due curve estreme è legittimo raccordarle come indicato nella Figura 21; si nota che nella funzione ( )vfP = la portata inizialmente aumenta e raggiunge un valore massimo ad una velocità “critica” ; successivamente la portata diminuisce ad ogni ulteriore incremento di velocità. Si tratta ora di definire la portata massima di una corsia di marcia, ovvero ciò che si definisce con il termine capacità. Per definire questa condizione è necessario individuare il punto massimo della funzione indicata in Figura 21. La condizione di portata massima si ha quando il valore di h è minimo nella Equazione 42:
Equazione 46
vL
av
h +⋅
=2
dove h è funzione di v
Per ottenere il valore minimo è necessario uguagliare a zero la derivata prima rispetto a v
221
vL
advdh −
⋅= e risolvendo rispetto a v si ha il valore della velocità critica Lavc ⋅⋅= 2 .
Sostituendo il valore della velocità critica nella Equazione 46 si determina il valore minimo di h e di conseguenza la massima portata (capacità):
Equazione 47
La
P ⋅= 2546max
A conclusione, si consideri ancora la condizione di minimo imposta nella derivazione precedente:
221
vL
advdh −
⋅= cioè a
Lv ⋅= 2
2
Questa ultima può essere riscritta nella forma La
v =⋅2
2
da cui ancora Ls = . La portata massima si
ottiene a quella velocità che, per una data decelerazione a, da luogo a distanze di frenatura e quindi a separazioni s esattamente uguali alla lunghezza L dei veicoli. Il flusso di massima portata è quello caratterizzato da separazioni di veicoli uguali alla lunghezza dei veicoli: la portata massima si ha per quella velocità in cui la densità è tale che i vuoti sono uguali ai pieni. Occorre tuttavia tenere conto del cosiddetto tempo tecnico di reazione che si perde tra l’istante in cui si avverte la necessità di frenare e quello in cui la frenatura inizia effettivamente. In questi istanti il moto continua alla velocità v e ciò si traduce in una necessità di maggiore separazione (valore di h più elevato) e in una minore portata massima. Assumere la separazione esattamente uguale ad h significa non avere margini di sicurezza; se si vuole avere un coefficiente di sicurezza confortante, ad esempio 1,3 o 1,5 (da indicarsi con k) si avrà una separazione maggiore dello spazio di frenatura.
Equazione 48
kLa
vc
⋅⋅= 2 con una capacità pari a
Lka
P⋅
= 2546max
Il Manuale della Capacità delle Strade (Highway Capacity Manual) indica che per una corsia
stradale (in condizioni di traffico ininterrotto) una capacità di ora
eautovettur2000 alla velocità di

30
Pmax
[km
/h]
V lim
ite
AB
CD
E
P[veic/h]
48km/h; in queste condizioni l’intervallo temporale tra due veicoli è di 1,8 secondi e l’intervallo spaziale di 24metri.
Portata e livello di servizio
Il Manuale americano Highway Capacity Manual affronta il problema della capacità delle strade in base a numerose osservazioni che sono state condotte direttamente sulle reti stradali. In esso si assume che la capacità sia il massimo flusso garantito da una strada in condizioni di massima portata. Successivamente a tale definizione indica sei possibili livelli di servizio a cui corrispondono differenti livelli di rapporto flusso/capacità (A, B, C, D, E ed F); la capacità è in sostanza il flusso che si raggiunge in corrispondenza del livello di servizio E. l’ultimo livello di servizio F, corrisponde a flussi instabili, in condizione di congestione, con contestuale crollo della portata e della velocità.
Figura 22 – Definizione dei livelli di servizio per una strada
Il traffico al livello E è duramente condizionato (l’automobilista deve andare nel flusso e con la velocità del flusso stesso); meno condizionato è il livello D e meno ancora al livello di servizio C. Il traffico è pressoché libero da condizionamenti in corrispondenza del livello B ed è tutto libero in corrispondenza del livello A. La Figura 22 mette in evidenza che la velocità diminuisce all’aumentare della portata dal livello di servizio A fino al livello di servizio F (funzione crescente tratteggiata). Le relazioni che consentono di determinare la capacità di una strada o di un tronco di
essa devono però tenere in considerazione anche di fattori correttivi. In particolare limitazioni alla massima capacità teorica possono venire da restringimenti della sede stradale, dalle contestuale circolazione di veicoli con dimensioni differenti (traffico pesante), dall’andamento plano – altimetrico del tracciato, ecc.
Tabella 7 – Livelli di servizio per una autostrada a quattro corsie con velocità di progetto di 112km/h
Livello di servizio
Velocità di deflusso [Km/h]
Rapporto flusso/capacità ora
corsiaveicoli
⋅⋅⋅⋅ orasezioneveicoli ⋅⋅⋅⋅
giornoveicoli
A 96 0,35 700 2.800 33.600 B 88 0,50 1.000 4.000 48.000 C 80 0,75 1.500 6.000 72.000 D 64 0,90 1.800 7.200 86.400 E 48 – 56 1,00 2.000 8.000 96.000 F Flusso instabile
31
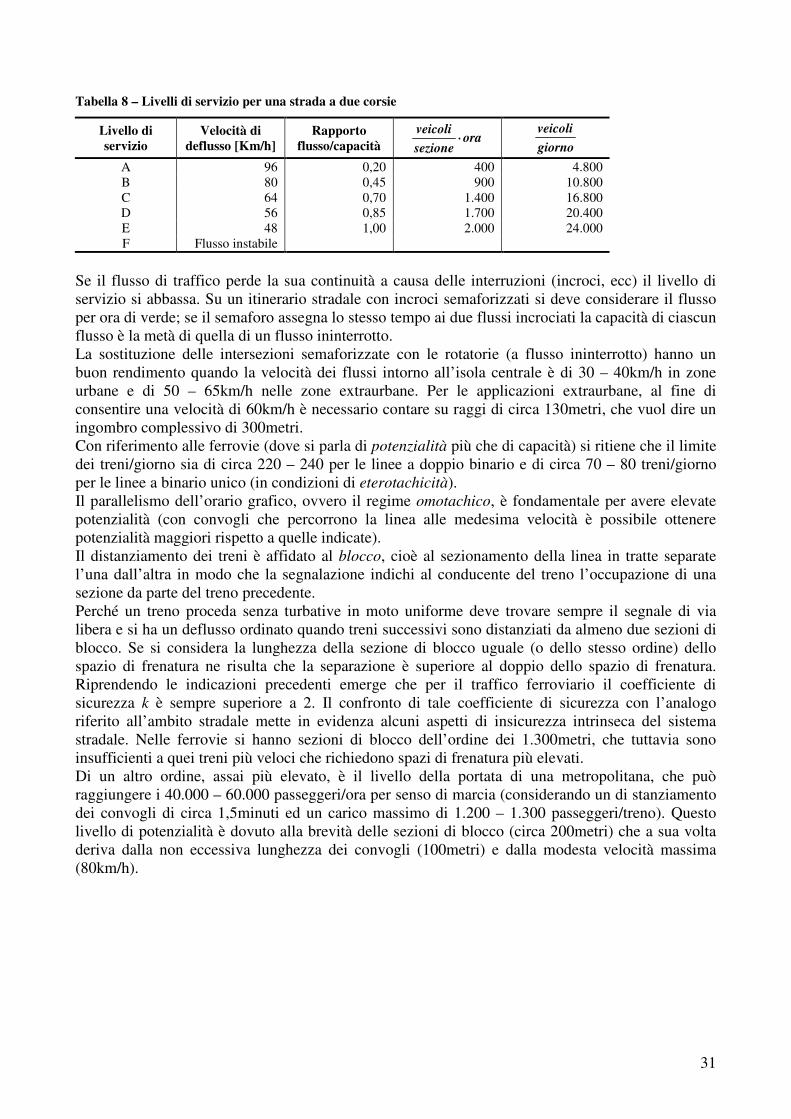
Tabella 8 – Livelli di servizio per una strada a due corsie
Livello di servizio
Velocità di deflusso [Km/h]
Rapporto flusso/capacità ora
sezioneveicoli ⋅⋅⋅⋅
giornoveicoli
A 96 0,20 400 4.800 B 80 0,45 900 10.800 C 64 0,70 1.400 16.800 D 56 0,85 1.700 20.400 E 48 1,00 2.000 24.000 F Flusso instabile
Se il flusso di traffico perde la sua continuità a causa delle interruzioni (incroci, ecc) il livello di servizio si abbassa. Su un itinerario stradale con incroci semaforizzati si deve considerare il flusso per ora di verde; se il semaforo assegna lo stesso tempo ai due flussi incrociati la capacità di ciascun flusso è la metà di quella di un flusso ininterrotto. La sostituzione delle intersezioni semaforizzate con le rotatorie (a flusso ininterrotto) hanno un buon rendimento quando la velocità dei flussi intorno all’isola centrale è di 30 – 40km/h in zone urbane e di 50 – 65km/h nelle zone extraurbane. Per le applicazioni extraurbane, al fine di consentire una velocità di 60km/h è necessario contare su raggi di circa 130metri, che vuol dire un ingombro complessivo di 300metri. Con riferimento alle ferrovie (dove si parla di potenzialità più che di capacità) si ritiene che il limite dei treni/giorno sia di circa 220 – 240 per le linee a doppio binario e di circa 70 – 80 treni/giorno per le linee a binario unico (in condizioni di eterotachicità). Il parallelismo dell’orario grafico, ovvero il regime omotachico, è fondamentale per avere elevate potenzialità (con convogli che percorrono la linea alle medesima velocità è possibile ottenere potenzialità maggiori rispetto a quelle indicate). Il distanziamento dei treni è affidato al blocco, cioè al sezionamento della linea in tratte separate l’una dall’altra in modo che la segnalazione indichi al conducente del treno l’occupazione di una sezione da parte del treno precedente. Perché un treno proceda senza turbative in moto uniforme deve trovare sempre il segnale di via libera e si ha un deflusso ordinato quando treni successivi sono distanziati da almeno due sezioni di blocco. Se si considera la lunghezza della sezione di blocco uguale (o dello stesso ordine) dello spazio di frenatura ne risulta che la separazione è superiore al doppio dello spazio di frenatura. Riprendendo le indicazioni precedenti emerge che per il traffico ferroviario il coefficiente di sicurezza k è sempre superiore a 2. Il confronto di tale coefficiente di sicurezza con l’analogo riferito all’ambito stradale mette in evidenza alcuni aspetti di insicurezza intrinseca del sistema stradale. Nelle ferrovie si hanno sezioni di blocco dell’ordine dei 1.300metri, che tuttavia sono insufficienti a quei treni più veloci che richiedono spazi di frenatura più elevati. Di un altro ordine, assai più elevato, è il livello della portata di una metropolitana, che può raggiungere i 40.000 – 60.000 passeggeri/ora per senso di marcia (considerando un di stanziamento dei convogli di circa 1,5minuti ed un carico massimo di 1.200 – 1.300 passeggeri/treno). Questo livello di potenzialità è dovuto alla brevità delle sezioni di blocco (circa 200metri) che a sua volta deriva dalla non eccessiva lunghezza dei convogli (100metri) e dalla modesta velocità massima (80km/h).

32
5. BIBLIOGRAFIA Alonso – Finn, Elementi di fisica per l'Università, Masson Editore, Milano
Da Rios G., Progetto di intersezioni stradali, UTET, Torino, 1999
Highway Capacity Manual, 2000
Rinelli S., Intersezioni stradali semaforizzate, UTET Torino, 2000
Stagni E, Meccanica della locomozione, Patron Editore, 1980, Bologna
Tesoriere G., Strade Ferrovie Aeroporti Volume 1, UTET, Torino
33
6. INDICE DELLE FIGURE Figura 1 – Relazioni cinematiche.........................................................................................................3 Figura 2 – Diagramma spazio – tempo – velocità ...............................................................................4 Figura 3 – Forze agenti su un veicolo stradale in curva.......................................................................5 Figura 4 – Forze agenti su un veicolo stradale in curva sopraelevata..................................................6 Figura 5 – Forze ribaltanti agenti su un veicolo stradale in curva .......................................................6 Figura 6 – Forze agenti su un veicolo ferroviario in curva..................................................................7 Figura 7 – Il fenomeno dell'aderenza per una ruota in movimento ...................................................10 Figura 8 – Schema di boccola ad attrito.............................................................................................11 Figura 9 – Schema di boccola con lubrificazione per capillarità .......................................................12 Figura 10 – Schema di cuscinetti a rulli.............................................................................................12 Figura 11 – Attrito volvente...............................................................................................................13 Figura 12 – Andamento delle pressioni al passaggio di un treno in galleria .....................................15 Figura 13 – Resistenze accidentali da pendenza................................................................................16 Figura 14 – Valori della resistenza unitaria in curva .........................................................................17 Figura 15 – Tipi di caratteristica meccanica per locomotiva di 100t di peso aderente......................22 Figura 16 – Diagramma di avviamento in forma grafica...................................................................23 Figura 17 – Esempio di diagramma di trazione .................................................................................24 Figura 18 – Orario grafico di linea a doppio binario .........................................................................25 Figura 19 – Orario grafico di linea a semplice binario ......................................................................26 Figura 20 – Veicoli uguali in moto uniforme ....................................................................................28 Figura 21 – Legame tra Portata e Velocità ........................................................................................28 Figura 22 – Definizione dei livelli di servizio per una strada............................................................30
7. INDICE DELLE TABELLE Tabella 1 – Alcuni esempi di velocità "estreme" per ordini di grandezza ...........................................2 Tabella 2 – Valore del coefficiente d'attrito f' per boccole ferroviarie ..............................................12 Tabella 3 – Valori del coefficiente di forma per alcuni tipi di mezzi di trasporto.............................15 Tabella 4 – Valori della resistenza unitaria in curva secondo le Ferrovie dello Stato.......................17 Tabella 5 – Valore del coefficiente � per alcuni tipi di veicoli..........................................................18 Tabella 6 – Determinazione tabellare di avviamento per un treno di 500 tonnellate trainato da locomotore da 2000 HP di potenza ai cerchioni con caratteristiche a potenza costante....................22 Tabella 7 – Livelli di servizio per una autostrada a quattro corsie con velocità di progetto di 112km/h .............................................................................................................................................30 Tabella 8 – Livelli di servizio per una strada a due corsie.................................................................31

34
8. INDICE DEI PARAGRAFI 1. QUESTIONI DI CINEMATICA 3 2. QUESTIONI DI DINAMICA 5 3. QUESTIONI DI MECCANICA DELLA LOCOMOZIONE 9 4. QUESTIONI DI PORTATA E DI POTENZIALITÀ 27 5. BIBLIOGRAFIA 32 6. INDICE DELLE FIGURE 33 7. INDICE DELLE TABELLE 33 8. INDICE DEI PARAGRAFI 34