Design of robotic hands and grippers for underwater...
31
ISME January 11, 2016 Design of robotic hands and grippers for underwater manipulation tasks Claudio Melchiorri DEI – Department of Electrical, Electronic and Information Engineering University of Bologna, Italy
Transcript of Design of robotic hands and grippers for underwater...

ISME
January 11, 2016
Design of robotic hands and grippers for underwater manipulation tasks
Claudio Melchiorri DEI – Department of Electrical, Electronic and Information Engineering
University of Bologna, Italy

Summary
l Hands for underwater applications
l UAV (Sherpa)

L'Ateneo, in attuazione degli articoli 3 e 34 della Costituzione della Repubblica Italiana, si adopera affinché il pieno esercizio del diritto allo studio non sia impedito da ostacoli di ordine economico e sociale e affinché l'impegno e il merito siano costantemente riconosciuti e premiati. Statuto di Ateneo, Principi di indirizzo, Art. 2 comma 1
Robot Hands

4
L.A.R. - Group Expertise
l The research group in robotics is active since the early 80’s, with interdisciplinary competencies (automatic control, mechanics, hw/sw design, computer science, motion control)
l About 35-40 researchers (staff, post-doc, PhD students) l Several robotic prototypes have been designed and realized: grippers,
articulated hands, mobile robots, serial/parallel manipulators, telemanipulation systems, haptic devices, biomedical robots, UAVs, sensors, actuators, hw/sw control systems, …

UB Robotic Hands/Grippers: Designed for a number of applications
Some of them are reference in the research community
Robot Hands

• 1986-1990: UBH 1
UB Hands: a short history

• 1986-1990: UBH 1 • 1992-1995: UBH 2
UB Hands: a short history

• 1986-1990: UBH 1 • 1992-1995: UBH 2
UB Hands: a short history

• 1986-1990: UBH 1 • 1992-1995: UBH 2 • 1998-2000: ASI Gripper
UB Hands: a short history

• 1986-1990: UBH 1 • 1992-1995: UBH 2 • 1998-2000: ASI Gripper • 2002-2005: UBH 3
UB Hands: a short history

• 1986-1990: UBH 1 • 1992-1995: UBH 2 • 1998-2000: ASI Gripper • 2002-2005: UBH 3 • 2008-2012: UBH 4
(Dexmart)
UB Hands: a short history

UBH4: sensors
Force (tension) sensors Position sensors
Tactile sensors
In cooperation with SUN – Seconda Università di Napoli (C. Natale, S. Pirozzi, G. De Maria)
All the sensors are based on the same technology: optoelectronics

• 1986-1990: UBH 1 • 1992-1995: UBH 2 • 1998-2000: ASI Gripper • 2002-2005: UBH 3 • 2008-2012: UBH 4 • 2010-2012: TRIDENT
Gripper
UB Hands: a short history

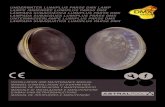
Tactile sensors
Each sensor: 1 dof
3 sensors for each fingertip
Based on on optoelectronic components: • low power • low noise • simplified electronics • simple installation
Photodetector
LED
Tactile sensors

• 1986-1990: UBH 1 • 1992-1995: UBH 2 • 1998-2000: ASI Gripper • 2002-2005: UBH 3 • 2008-2012: UBH 4 • 2010-2012: TRIDENT • 2013-2014: MARIS 1
UB Hands: a short history

• 1986-1990: UBH 1 • 1992-1995: UBH 2 • 1998-2000: ASI Gripper • 2002-2005: UBH 3 • 2008-2012: UBH 4 • 2010-2012: TRIDENT • 2013-2014: MARIS 1 • 2014-2015: MARIS 2
UB Hands: a short history

BaseConnettore
RS
Cover
Flessibi
PCB
• 1986-1990: UBH 1 • 1992-1995: UBH 2 • 1998-2000: ASI Gripper • 2002-2005: UBH 3 • 2008-2012: UBH 4 • 2010-2012: TRIDENT • 2013-2014: MARIS 1 • 2014-2015: MARIS 2
UB Hands: a short history
linear
sensorobject
load ce
linearmotor 1
motor 2
6-axis F/T sensor: • fingertip • wrist

• 1986-1990: UBH 1 • 1992-1995: UBH 2 • 1998-2000: ASI Gripper • 2002-2005: UBH 3 • 2008-2012: UBH 4 • 2010-2012: TRIDENT • 2013-2014: MARIS 1 • 2014-2015: MARIS 2 • 2015- … : DexGrip
UB Hands: a short history

• 1986-1990: UBH 1 • 1992-1995: UBH 2 • 1998-2000: ASI Gripper • 2002-2005: UBH 3 • 2008-2012: UBH 4 • 2010-2012: TRIDENT • 2013-2014: MARIS 1 • 2014-2015: MARIS 2 • 2015- … : DexGrip
UB Hands: a short history

Control aspects
(Low-level) control challenges are generated by the following aspects:
• Structural compliance • Soft pads • Compliant joints • Tendons • Actuation systems
• Friction • Joints • Tendon path
• Actuation/Transmission system • Nonlinear motion/force transmission system • Tendon net (N+1) • Actuation/Joint/Workspace mapping

Other control aspects
Control challenges: • Contact point modelling (friction, …)
• Grasp configuration (e,g. optimization of contact positions)
• Manipulation
• Hand/Arm coordination
• Interaction with human beings
• …

Other control aspects
In cooperation with UNINA – F. Ficuciello, B. Siciliano

Hand/Arm coordination

www.sherpa-project.eu
Sherpa - Logo A01sHere is a c i rcular logo elaborated from the Kant ipur (Sherpa language) t ransl i terat ion of the let ter “s” :
By rotat ing i t , you can see the si louhette of a mountain emerging under blue skyes.

Search and rescue in unfriendly and possibly hostile
environments, like the ones in which civil protection, alpine rescuers and forest guards
usually operate
Features: • Unstructured environments
• Severe operative conditions (weather, terrain,..) • Presence of human (rescuer) often “focused” on demanding tasks
• Team (Human & Machine) capabilities • Emotional aspects
SHERPA in Short SHERPA

The SHERPA animals
Patrolling hawks
Busy Genius
Intelligent donkey
Trained wasps

The SHERPA wasp

Ulisse (Rai 3)

Other Aerial ConfiguraAons
Dimensions 900 x 900 mm MTOW 6 kg Installed Power 2100 W Motors BCM450 Propellers 15 x 4 Climb rate 6 m/s Lateral speed 15 m/s Rate of turn 60 deg/s Max altitude 13000 ft Operating range 1000 m Temperature range -10 ÷ 35 °C Payload: up to 2 Kg Max wind speed 30 kts
Esacopter

ApplicaAon: 3D reconstrucAon