Dal modello ligneo alla forma: studio, riproduzione e ... · Dal modello ligneo alla forma: studio,...
42
Dal modello ligneo alla forma: studio, riproduzione e simulazione Il caso studio del progetto di F. L. Wright per Venezia Relatore: F. Guerra Correlatori: A. Adami, C. Balletti Laureanda: Chiara Gortani Corso di Laurea specialistica in Architettura per la Conservazione Anno accademico: 2009 - 2010
Transcript of Dal modello ligneo alla forma: studio, riproduzione e ... · Dal modello ligneo alla forma: studio,...

Dal modello ligneo alla forma: studio, riproduzione e simulazione Il caso studio del progetto di F. L. Wright per Venezia Relatore: F. Guerra Correlatori: A. Adami, C. Balletti Laureanda: Chiara Gortani Corso di Laurea specialistica in Architettura per la Conservazione Anno accademico: 2009 - 2010

1
Perché realizzare una maquette: Conoscenza e comunicazione nella
progettazione di un oggetto o di un’architettura; Rendere reale un’idea difficile da far
comprendere e da studiare; Strumento di progetto Caratteristiche : materiali; tecnologie costruttive; grado di dettaglio.
IL MODELLO LIGNEO
Il modello dunque diventa:
Database per la ricostruzione dell’architettura;
Esso stesso ha valore come opera d’arte.
Walt Disney Concert hall
Gehry, 2003
Cupola S.Pietro
Michelangelo,1550
Basilica di S.Pietro
Sangallo,1530
Obiettivi
Analisi e confronto
Possibili applicazioni
Il progetto
Il rilievo fotogrammetrico
Il rilievo laser scanner
Introduzione

2
GEOMATICA studio e analisi del territorio e dell’ambiente attraverso il ruolo determinante dell’Informatica e dell’elettonica topografia; fotogrammetria (analogica o digitale); telerilevamento da aerei o satelliti; cartografia numerica sistemi informativi territoriali.
Innovazione software e hardware Applicazioni legate al settore dei Beni Culturali: conservazione; recupero; restauro; riproduzione; prototipazione.
La realtà e il suo complesso funzionamento possono essere riprodotti sottoforma di modello digitale, il quale li descrive in forma semplificata e più facilmente accessibile.
GEOMATICA MODERNA
Obiettivi
Analisi e confronto
Possibili applicazioni
Il progetto
Il rilievo fotogrammetrico
Il rilievo laser scanner
Introduzione

Il progetto
IL MODELLO LIGNEO OGGETTO DELLA TESI Il modello reso disponibile dall’Archivio Progetti IUAV, si presenta in scala 1:25, con dettagli e finestrature in materiale plastico, ed è datato 1992. Lo stato di conservazione è buono, nonostante la presenza di angoli smussati, e di alcune parti che hanno perso la loro verticalità
Modello oggetto della tesi Dettaglio delle lampade angolari
3
Obiettivi
Analisi e confronto
Il rilievo fotogrammetrico
Il rilievo laser scanner
Introduzione
Possibili applicazioni

INQUADRAMENTO La “volta de Canal” si trova nel punto in cui il Rio Novo incontra, nella sua parte centrale, il Canal Grande. Vi si trovano alcuni tra i più importanti e affascinanti palazzi veneziani, tra cui Cà Foscari e Palazzo Balbi, rispettivamente di fronte e adiacente alla palazzina della famiglia Masieri.
4
Il progetto
Obiettivi
Analisi e confronto
Il rilievo fotogrammetrico
Il rilievo laser scanner
Introduzione
Possibili applicazioni

Il progetto di Wright fu mal interpretato fin dall’inizio. La piccola architettura era stata mal publicizzata, il che implicò un forte rifiuto da parte dei veneziani.
gennaio 1953 febbraio 1953 marzo 1954
5
Il progetto
Obiettivi
Analisi e confronto
Il rilievo fotogrammetrico
Il rilievo laser scanner
Introduzione
Possibili applicazioni

Fotogrammetria digitale; Laser scanner a triangolazione. Due metodologie per l’ottenimento di modelli numerici confrontabili ed analizzabili dal punto di vista delle procedure e della precisione. Entrambe le metodologie vengono considerate non invasive , riducendo al minimo l’iterazione con l’oggetto. Analisi e considerazioni sulla scelta del tipo di rilievo in base al modello e alle finalità del rilievo stesso. Contestualizzazione urbana territoriale del progetto.
La scelta delle metodologie di rilievo
6
IL MODELLO LIGNEO
IL RILIEVO LASER SCANNER
IL RILIEVO FOTOGRAMMETRICO
3D
3D
SISTEMA DI RIFERIMENTO
ANALISI CONFRONTO
Il progetto
Obiettivi
Analisi e confronto
Il rilievo fotogrammetrico
Il rilievo laser scanner
Introduzione
Possibili applicazioni

7
le coordinate 3D (X,Y,Z) dell’oggetto
R³ R²
I tre tipi di grandezze individuabili in fotogrammetria
le coordinate 2D (x,y) dell’immagine
i valori dei parametri di orientamento Г
Il progetto
Obiettivi
Analisi e confronto
Il rilievo fotogrammetrico
Il rilievo laser scanner
Introduzione
Possibili applicazioni
spazio 3D spazio 2D

9
FASE DI CALIBRAZIONE Attraverso la calibrazione, si ottengono per via digitale i parametri interni della camera al momento della presa, dai quali si ricostruiranno il fascio di rette proiettive che uniscono immagine, centro di presa e oggetto.
Residuo dalla calibrazione 0,24 px. Dimensione px: 0,33 mm
Il progetto
Obiettivi
Analisi e confronto
Il rilievo fotogrammetrico
Il rilievo laser scanner
Introduzione
Possibili applicazioni

8
FASE DI PRESA Noti: Oggetto del rilievo (X,Y,Z) Posizione e tipo di fotocamera Incognite: Coordinate dello spazio immagine
Il progetto
Obiettivi
Analisi e confronto
Il rilievo fotogrammetrico
Il rilievo laser scanner
Introduzione
Possibili applicazioni

10
Da uno spazio oggetto (X,Y,Z) si genera lo spazio immagine (x,y); Dalllo spazio immagine non è possibile risalire allo spazio oggetto che lo ha generato. Tutti i punti che giacciono sulla retta che passa per il punto O e per l’immagine hanno infinite possibili proiezioni.
La determinazione univoca spaziale del punto tridimensionale si ottiene dall’intersezione di raggi omologhi , cioè riferiti allo stesso punto oggetto, provenienti da differenti fotogrammi.
Il progetto
Obiettivi
Analisi e confronto
Il rilievo fotogrammetrico
Il rilievo laser scanner
Introduzione
Possibili applicazioni
CONSIDERAZIONI SULLA RESTITUZIONE IN FOTOGRAMMETRIA

Raggi omologhi provenienti da due fotogrammi Orientamento eseguito con il software di fotogrammetria digitale Photomodeler Scanner
Il progetto
Obiettivi
Analisi e confronto
Il rilievo fotogrammetrico
Il rilievo laser scanner
Introduzione
Possibili applicazioni
FASE DI ORIENTAMENTO Noti: Oggetto del rilievo (X,Y,Z) Coordinate dello spazio immagine. Incognite: Parametri della camera al momento della presa
11

FASE DI RESTITUZIONE Noti: Parametri della camera da presa al momento
della acquisizione; Coordinate dello spazio immagine. Incognite: Coordinate (X,Y,Z) dell’oggetto da restituire.
Dal modello stereoscopico fotogramemtrico si ottiene la minuta di restituzione.
Minuta di restituzione. Unione di 22 immagini Restituzione dal software Photomodeler Scanner
La misura della posizione di un punto avviene per intersezione in avanti.
Il progetto
Obiettivi
Analisi e confronto
Il rilievo fotogrammetrico
Il rilievo laser scanner
Introduzione
Possibili applicazioni
12

Viste dello stato di avanzamento della fase di editing del modello solido finale
FASE DI EDITING Attraverso la fase di editing, la minuta di restituzione viene elaborata attraverso il software Autocad, estraendo delle polilinee che vengono poi estruse nell’elaborazione del modello solido. Individuazione del miglior UCS per la
proiezione delle linee restituite precedentemente;
Proiezione delle linee restituite in UCS piani;
Creazione di polilinee;
Estruzione delle polilinee.
Il progetto
Obiettivi
Analisi e confronto
Il rilievo fotogrammetrico
Il rilievo laser scanner
Introduzione
Possibili applicazioni
13

Il modello solido restituito in tutte le sue parti esterne, è stato poi integrato da alcune parti (solai e balaustre interne) per poterlo completare.
Precisione media da minuta di restituzione ± 1/2 mm
Precisione media post-editing
± 3 mm
Il progetto
Obiettivi
Analisi e confronto
Il rilievo fotogrammetrico
Il rilievo laser scanner
Introduzione
Possibili applicazioni
14

Le fasi di progetto del rilievo laser scanner
Un rilievo laser-scanner necessita di una progettazione e organizzazione delle varie fasi, ed è generalmente suddiviso in: Calibrazione;
Acquisizione;
Orientamento;
Pulitura del dato;
Meshing;
Elaborazioni.
Metodo di misurazione Triangolazione con metodo a sezione ottica
Sorgente luminosa Laser a semiconduttore/ Lunghezza d'onda: 660 nm
Numero dei pixel 1,31 megapixel (1280 × 1024) Distanza di misurazione da 450 a 800 mm Lenti di ricezione TELE, WIDE Range di misurazione (unità: mm)
Distanza TELE 450 mm
TELE 800 mm
WIDE 450 mm
WIDE 800 mm
Direzione X Y 79 × 99 141 × 176 150 × 188 267 × 334
Z 54 97 109 194 Accuratezza (distanza tra le sfere)*1
±40 µm
Precisione (Z, ?)*2 4 µm Tempo di scansione Circa 2 secondi o più (1 scansione) Dimensioni della macchina 295 (L) × 190 (A) × 200 (P) mm
(impugnature e lenti escluse) Peso circa 6,7 kg Temperatura di esercizio / umidità
da 10 a 40 °C; umidità relativa del 65% o meno (non condensante)
Il progetto
Obiettivi
Analisi e confronto
Il rilievo fotogrammetrico
Il rilievo laser scanner
Introduzione
Possibili applicazioni
RANGE 7 KONICA MINOLTA Laser a triangolazione con sensore a lama di luce.
15

RANGE 7 KONICA MINOLTA Laser a triangolazione con sensore a lama di luce. Il laser esegue la scansione secondo il metodo topografico dell’intersezione in avanti partendo da due punti noti.
Metodo dell’intersezione in avanti che è alla base del funzionamento del laser scanner a triangolazione
Il progetto
Obiettivi
Analisi e confronto
Il rilievo fotogrammetrico
Il rilievo laser scanner
Introduzione
Possibili applicazioni
16

laser
CCD
oggetto
immagine
L’oggetto viene analizzato mediante una “lama” di luce ed una telecamera CCD ne registra il profilo da un punto di vista diverso;
La posizione spaziale dei punti sul
profilo è ricavata per triangolazione; La linea viene mossa rispetto
all’oggetto e viene registrato un insieme di profili.
Il progetto
Obiettivi
Analisi e confronto
Il rilievo fotogrammetrico
Il rilievo laser scanner
Introduzione
Possibili applicazioni
17

FASE DI CALIBRAZIONE Con la fase di calibrazione si determinano quei parametri geometrici che nel corso della scansione laser vengono dati per noti per poter trarre le coordinate spaziali da una misura di parallasse. Si può affermare che il processo di calibrazione consente di misurare, in fase preventiva alle scansioni, i parametri interni dello scanner. Fasi operative: Scelta della focale da utilizzare per il rilievo;
Multiple scansioni, predefinite nella modalità
descritta dal costruttore, del pannello di
calibrazione in dotazione certificato dal
costruttore;
Ottenimento dei parametri dell’orientamento
interno dello scanner.
Schermata del software Range viewer durante la fase di calibrazione
Il progetto
Obiettivi
Analisi e confronto
Il rilievo fotogrammetrico
Il rilievo laser scanner
Introduzione
Possibili applicazioni
18

FASE DI ACQUISIZIONE Ogni prospetto del modello è stato acquisito con un numero elevato di scansioni le quali sono state orientante attraverso il software di gestione Range Viewer in dotazione. Fasi operative: Posizionamento opzionale dei target sulla
facciata priva di punti notevoli per eseguire un
allineamento manuale.
Scansione del modello ligneo con ricoprimento
del 30- 40%. Dimensione di acquisizione A4 dato
dall’obiettivo wide utilizzato.
Il progetto
Obiettivi
Analisi e confronto
Il rilievo fotogrammetrico
Il rilievo laser scanner
Introduzione
Possibili applicazioni
Sistema interno della macchina
19

FASE DI ORIENTAMENTO ALLINEAMENTO NUVOLA SU NUVOLA Le scansioni di ogni prospetto sono state orientate col sistema nuvola su nuvola. Fasi operative: riconoscimento dei “punti omologhi” sulle nuvole;
rototraslazione di ogni nuvola nel sistema “nuvola
di riferimento”.
Il progetto
Obiettivi
Analisi e confronto
Il rilievo fotogrammetrico
Il rilievo laser scanner
Introduzione
Possibili applicazioni
Nuvola di riferimento
Nuvola da allineare
Le due nuvole sullo stesso sistema di riferimento
20

Esempio di sovrapposizione e allineamento delle nuvole
FASE DI ORIENTAMENTO ALLINEAMENTO NUVOLA SU NUVOLA
Prospetto sud composto da tutte le scansioni
ICP (Iteractive Closest Point) Algoritmo utilizzato per l’allineamento dei due modelli. Si basa sull’individuazione del miglior allineamento tra due superfici, ricercando attraverso un procedimento iterativo, la minor distanza tra esse. Il progetto
Obiettivi
Analisi e confronto
Il rilievo fotogrammetrico
Il rilievo laser scanner
Introduzione
Possibili applicazioni
21

FASE DI ORIENTAMENTO ALLINEAMENTO NUVOLA SU NUVOLA ICP (Iteractive Closest Point) Algoritmo utilizzato per l’allineamento dei due modelli.
Prospetto est Prospetto nord Prospetto ovest
Il progetto
Obiettivi
Analisi e confronto
Il rilievo fotogrammetrico
Il rilievo laser scanner
Introduzione
Possibili applicazioni
22

FASE DI PULITURA DEL DATO E DECIMAZIONE Il dato ottenuto dalle scansioni necessita di essere pulito e decimato nelle aree di elevata ridondanza.
FILTRATURA. ELIMINAZIONE DEL RUMORE. Viene eliminato il disturbo (rumore) di entità inferiore alla precisione dichiarata dallo strumento, dovuto alla divergenza del raggio laser, che porta ad una non corretta valutazione della distanza dell’oggetto rispetto al laser.
DECIMAZIONE Si tratta diminuire la densità spaziale dei punti (ricampionamento) per eliminare il dato ridondante, rendendo la nuvola congruente rispetto alla scala nominale del rilievo da svolgere.
Il progetto
Obiettivi
Analisi e confronto
Il rilievo fotogrammetrico
Il rilievo laser scanner
Introduzione
Possibili applicazioni
SELEZIONE DEL DATO
Selezione dell’area di interesse all’interno della nuvola, eliminando i punti che non fanno parte dell’oggetto interessato.
23

FASE DI ORIENTAMENTO DA SISTEMA LOCALE A SISTEMA GLOBALE
Il progetto
Obiettivi
Analisi e confronto
Il rilievo fotogrammetrico
Il rilievo laser scanner
Introduzione
Possibili applicazioni
24

FASE DI ANALISI E CONFRONTABILITA’ DEL DATO L’analisi è stata eseguita sui modelli derivati dalle due metodologie di rilievo.
Modello solido da fotogrammetria: rappresenta completamente la realtà concetto di pieno e vuoto oggetti consistenti e non ambigui potente e facile per geometrie regolari Precisione: iniziale: dimensione pixel 0,9 mm; pre-editing: ± 2 mm.
Modello mesh da laser scanner a triangolazione: costituito da superfici adatto alla modellazione di geometrie a forma libera non rappresenta la realtà pesante da calcolare
Precisione: iniziale: 40 μ post orientamento: 0,4 mm
Il progetto
Obiettivi
Analisi e confronto
Il rilievo fotogrammetrico
Il rilievo laser scanner
Introduzione
Possibili applicazioni
25

Il progetto
Obiettivi
Analisi e confronto
Il rilievo fotogrammetrico
Il rilievo laser scanner
Introduzione
Possibili applicazioni
OSSERVAZIONI NELLE DUE METODOLOGIE RISPETTO ALLE VARIE FASI DI ESECUZIONE Dopo aver analizzato le procedure, sono state fatte alcune osservazioni, considerando anche le tempistiche di ogni fase procedurale.
FASI LASER Range 7 Minolta
OSSERVAZIONI
FOTOGRAMMETRIA software Photomodeler
OSSERVAZIONI CALIBRAZIONE La calibrazione obbligatoria pre-acquisizione.
Tempi esecuzione 10 minuti
La calibrazione può essere eseguita pre o post acquisizione Tempi di esecuzione 25 minuti
ACQUISIZIONE Fase di presa lenta dato dalla portata del laser. Tempi di esecuzione 4 ore
L’acquisizione delle prese, veloce. Tempi di esecuzione 1,5 ore
REGISTRAZIONE LOCALE E GLOBALE ORIENTAMENTO INTERNO, RELATIVO ED ASSOLUTO
Il numero elevato di scansioni ha portato ad errori di registrazione nell’orientamento su s.r. globale. Tempi di esecuzione 20 ore
Particolare attenzione nella fase di collimazione dei punti, con controllo continuo del residuo finale. Tempi di esecuzione 1,5 ore
RESTITUZIONE Particolare attenzione da parte dell’operatore al momento della collimazione e di controllo continuo del valore dei residui. Tempi di esecuzione 15 ore
EDITING Le operazioni di editing, devono essere eseguite da operatori in possesso di una formazione specifica Tempi di esecuzione 25 ore
L’editing della minuta di restituzione si può considerare come il risultato di una serie di scelte soggettive dell’operatore. Tempi di esecuzione 25 ore
TEMPI DI REALIZZAZIONE TOTALI
Tempo totale: 49 ore
Tempo totale: 43.5 ore
26

-
CONFRONTO TRA MESH E MODELLO SOLIDO L’analisi tra le due metodologie attraverso i pro e i contro sintetizzati per le varie fasi di rilievo.
Il progetto
Obiettivi
Analisi e confronto
Il rilievo fotogrammetrico
Il rilievo laser scanner
Introduzione
Possibili applicazioni
elevata precisione
lettura dei dettagli
range di acquisizone limitato
lentezza rispetto alle prese
fotografiche
+ + - ACQUISIZIONE
LASER SCANNING
accessibilità maggiore per
la fotografia +
CALIBRAZIONE veloce e automatizzata + può essere eseguita pre o post
acquisizione +
ORIENTAMENTO procedimento costoso in
termini di tempo - procedimento semplificato
nella parte di collimazione +
EDITING eliminazione di informazione
ridondante attraverso un procedimento parametrico
+ scelte soggettive dell’operatore
nel passaggio tra minuta e
modello solido
-
FOTOGRAMMETRIA
27

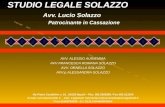
CONFRONTO TRA MISURE DA RILIEVO DIRETTO, MESH E MINUTA DI RESTITUZIONE È stato eseguito un confronto su alcune misure campione prese direttamente sul modello mesh da laser scanner, dalla minuta di restituzione e congiuntamente alle misure prese con il rilievo diretto.
rilievo diretto oggetto reale
modello laser mesh
modello Photomodeler
minuta restituzione
misura A 368 mm 368 mm 369 mm
misura B 649 mm 649 mm 648 mm
misura C 69 mm 69 mm 68 mm
rilievo diretto oggetto reale
modello laser mesh
modello Photomodeler
minuta restituzione
misura D 446 mm 446 mm 448 mm
misura E 47 mm 47 mm 47 mm
misura F 757 mm 757 mm 757 mm
misura G 593 mm 593 mm 592 mm
misura A
misura B
misura C
misura D
misura E
misura F
misura G
Il progetto
Obiettivi
Analisi e confronto
Il rilievo fotogrammetrico
Il rilievo laser scanner
Introduzione
Possibili applicazioni
28

CONFRONTO TRA MESH E MODELLO SOLIDO Il modello mesh è stato roto-traslato, attraverso il software di prototipazione rapida Geomagic 11, sul modello solido con procedura ai minimi quadrati, portando così entrambi i modelli sullo stesso sistema di riferimento.
ICP (Iteractive Closest Point) Algoritmo utilizzato per l’allineamento dei due modelli. Si basa sull’individuazione del miglior allineamento tra due superfici, ricercando attraverso un procedimento iterativo, la minor distanza tra esse.
Il progetto
Obiettivi
Analisi e confronto
Il rilievo fotogrammetrico
Il rilievo laser scanner
Introduzione
Possibili applicazioni
29

CONFRONTO TRA MESH E MODELLO SOLIDO
3D compare tra mesh e modello solido Errore minimo: 0,5 mm Errore massimo: 4 mm Nel risultato bisogna considerare che sul modello fotogrammetrico, elaborato in fase di editing, sono state eseguite delle semplificazioni da parte dell’operatore che hanno portato a non considerare l’usura e le parti danneggiate del modello ligneo di partenza.
Il progetto
Obiettivi
Analisi e confronto
Il rilievo fotogrammetrico
Il rilievo laser scanner
Introduzione
Possibili applicazioni
30

CONSIDERAZIONI SULLE PROBLEMATICHE SORTE DURANTE I RILIEVI Durante la fase di analisi sono state considerate alcune possibili alternative nella gestione dei rilievi per migliorare il dato finale.
Il progetto
Obiettivi
Analisi e confronto
Il rilievo fotogrammetrico
Il rilievo laser scanner
Introduzione
Possibili applicazioni
PROBLEMA CAUSA SOLUZIONE
Allineamento tra i prospetti
Poca sovrapposizione
nei punti angolari
Appoggio fotogrammetrico
Appoggio su scansioni laser TOF
LASE
R SC
AN
NIN
G
Fase di editing Scelte di tipo
soggettivo
Necessità di semplificare la
minuta Operatore
specializzato
FOTO
GRA
MM
ETRI
A
31

SOLUZIONI RISCONTRATE A FRONTE DELLE PROBLEMATICHE SORTE DURANTE LA FASE DI ANALISI A. Appoggio fotogrammetrico La prima alternativa, consiste nell’utilizzare un appoggio fotogrammetrico determinato sulla scena, per poter orientare su di esso ogni singola scansione del modello, eliminando così l’effetto di trasmissione dell’errore che porta ad un errore conclusivo importante, causato da piccoli errori locali.
Target da applicare all’oggetto o a supporti fissi sulla scena.
Il progetto
Obiettivi
Analisi e confronto
Il rilievo fotogrammetrico
Il rilievo laser scanner
Introduzione
Possibili applicazioni
Allineamento Poca
sovrapposizione
Appoggio fotogrammetrico
Appoggio su scansioni laser
TOF
PROBLEMA CAUSA SOLUZIONE
32

SOLUZIONI RISCONTRATE A FRONTE DELLE PROBLEMATICHE SORTE DURANTE LA FASE DI ANALISI B. Appoggio su scansioni con laser a TOF La seconda alternativa vede la possibilità di eseguire delle scansioni che abbraccino gran parte della scena con un laser scanner a tempo di volo, e di orientare successivamente su queste, le scansioni singole effettuate con il laser a triangolazione.
Il progetto
Obiettivi
Analisi e confronto
Il rilievo fotogrammetrico
Il rilievo laser scanner
Introduzione
Possibili applicazioni
Allineamento Poca
sovrapposizione
Appoggio fotogrammetrico
Appoggio su scansioni laser
TOF
PROBLEMA CAUSA SOLUZIONE
33

CONCLUSIONI GENERALI Dall’analisi si è considerato che la scelta del tipo di metodologia per il rilievo di un modello ligneo è influenzata dalla finalità del progetto di rilievo, e dal grado di dettaglio presente sul modello.
Il progetto
Obiettivi
Analisi e confronto
Il rilievo fotogrammetrico
Il rilievo laser scanner
Introduzione
Possibili applicazioni
34

POSSIBILI APPLICAZIONI IL CITY MODEL PER L’INSERIMENTO DEL MODELLO NEL CONTESTO URBANO TERRITORIALE Riproduzione in forma digitale della Volta de Canal al fine di valutare l’immagine prodotta dell’architettura progettata.
Il progetto
Obiettivi
Analisi e confronto
Possibili applicazioni
Il rilievo fotogrammetrico
Il rilievo laser scanner
Introduzione
35

POSSIBILI APPLICAZIONI IL CITY MODEL PER L’INSERIMENTO DEL MODELLO NEL CONTESTO URBANO TERRITORIALE Il city model è stato costruito a partire dalla carta tecnica comunale ed estraendo informazioni dalle nuvole di punti ricavate dalle scansioni effettuate con laser scanner a tempo di volo.
Scans_01
Scans_02
Scansione 02, lato sinistro.
Scansione 01, lato destro.
36
Il progetto
Obiettivi
Analisi e confronto
Possibili applicazioni
Il rilievo fotogrammetrico
Il rilievo laser scanner
Introduzione

Scansione 01, lato destro.
POSSIBILI APPLICAZIONI IL RILIEVO CON LASER TOF RIEGL LMS-Z390i
Il progetto
Obiettivi
Analisi e confronto
Possibili applicazioni
Il rilievo fotogrammetrico
Il rilievo laser scanner
Introduzione
Nuvola di punti vista dal Canal Grande
37

Raddrizzamenti dei prospetti sul Canal Grande estratti da:Venezia, Il canal Grande. Resini Daniele. Vianello Libri.
City model work in progress a texturizzazione ultimata.
Il progetto
Obiettivi
Analisi e confronto
Possibili applicazioni
Il rilievo fotogrammetrico
Il rilievo laser scanner
Introduzione
38

Il progetto
Obiettivi
Analisi e confronto
Possibili applicazioni
Il rilievo fotogrammetrico
Il rilievo laser scanner
Introduzione
39
CAMERA MATCH
RENDER

Il progetto
Obiettivi
Analisi e confronto
Possibili applicazioni
Il rilievo fotogrammetrico
Il rilievo laser scanner
Introduzione
40
CAMERA MATCH RENDER

Il progetto
Obiettivi
Analisi e confronto
Possibili applicazioni
Il rilievo fotogrammetrico
Il rilievo laser scanner
Introduzione
41
CAMERA MATCH
RENDER