Corso di Percezione Robotica (PRo) Modulo A....
41
Prof.ssa Prof.ssa Cecilia Laschi Cecilia Laschi Scuola Superiore Scuola Superiore Sant’ Sant’ Anna, Pisa Anna, Pisa ARTS Lab ARTS Lab Advanced Robotics Technology & Advanced Robotics Technology & Systems Systems Laboratory Laboratory Corso di Laurea Specialistica in Informatica Università di Pisa Corso di Percezione Robotica ( Corso di Percezione Robotica ( PRo PRo ) ) Modulo A. Introduzione all’Ingegneria Modulo A. Introduzione all’Ingegneria Biomedica e alla Biomedica e alla Biorobotica Biorobotica
Transcript of Corso di Percezione Robotica (PRo) Modulo A....

Prof.ssaProf.ssa Cecilia LaschiCecilia LaschiScuola Superiore Scuola Superiore Sant’Sant’Anna, PisaAnna, Pisa
ARTS LabARTS LabAdvanced Robotics Technology & Advanced Robotics Technology & Systems Systems LaboratoryLaboratory
Corso di Laurea Specialistica in InformaticaUniversità di Pisa
Corso di Percezione Robotica (Corso di Percezione Robotica (PRoPRo))Modulo A. Introduzione all’Ingegneria Modulo A. Introduzione all’Ingegneria Biomedica e alla Biomedica e alla BioroboticaBiorobotica

Automazione Industriale: la nascita e lo Automazione Industriale: la nascita e lo sviluppo della Roboticasviluppo della Robotica

La robotica oggi La robotica oggi ––alcuni esempialcuni esempi
Sommario della lezioneSommario della lezione
• Definizione di Ingegneria Biomedica o Bioingegneria
• Definizione di Biorobotica e sue relazioni con l’Ingegneria Biomedica
• Illustrazione dei vari domini applicativi della Biorobotica
• Lo schema comune di un sistema roboticotipico

L’ingegneria biomedica L’ingegneria biomedica (bioingegneria)(bioingegneria)
Applicazione di metodi e tecniche quantitativi, propri dell’ingegneria, nella
comprensione, determinazione e risoluzione di problematiche di carattere medico-fisico
Obiettivi della bioingegneriaObiettivi della bioingegneria• Miglioramento delle conoscenze sul funzionamento dei
sistemi biologici, attraverso:• modelli matematici• metodi di elaborazione delle informazioni• strumentazione
• Sviluppo di nuove metodologie ed apparati diagnostici, terapeutici e riabilitativi, di nuovi organi artificiali, nuovi dispositivi di supporto a funzioni alterate, nuovi ausili e dispositivi protesici per disabili
BioroboticaBiorobotica e bioingegneriae bioingegneria
• La bioingegneria costituisce un ambito di fondamentale importanza per lo sviluppo della biorobotica perché:• La medicina e la biologia costituiscono
importanti settori applicativi per la robotica avanzata (robotica biomedica)
• La robotica può contribuire alla comprensione dei meccanismi neuroscientifici che presiedono alla coordinazione senso-motoria e alla sintesi dei comportamenti nell’uomo (neuro-robotica)

La robotica biomedicaLa robotica biomedica
Applicazione della robotica in ambito biomedico, come supporto alla
pratica clinica o come strumento di ricerca

NeuroNeuro--RoboticaRobotica
Applicazione della robotica nello studio di sistemi biologici
Uso di robot biomorfi come strumento sperimentale e modello fisico nella ricerca,
principalmente in neuroscienze

NeuroNeuro--RoboticaRobotica
• Le capacità sensoriali e reattive dell’uomo e dei sistemi biologici sono ancora in gran parte ineguagliate dai robot
• I modelli percettivi e di ragionamento dell’uomo costituiscono ancora oggi un ambito di ricerca aperto
• Lo studio dei meccanismi di elaborazione sensoriale e di sintesi del comportamento (coordinazione senso-motoria) nell’uomo e nei sistemi biologici è fondamentale sia per il progresso della robotica che per la comprensione del funzionamento del cervello umano (neuroscienze)

Robotica Robotica BioBio--ispirataispirata
• Non può esistere una macchina con un’intelligenza e un comportamento simili all’uomo che non sia dotata di un sistema sensoriale con prestazioni simili a quelle umane (embodiment)
Rodney A. Brooks, 1998Direttore Artificial Intelligence LaboratoryMIT - Massachussettes Institute of TechnologyBoston, USA

Robotica Robotica biobio--ispirataispirata e neuroe neuro--roboticarobotica
Studio e modellazione bioingegneristici
Studio e modellazione Studio e modellazione bioingegneristicibioingegneristici
Modello fisicoModello fisico
Robot biomimetico
Robot biomimetico
Sistema biologicoSistema biologicoSistema biologico
Robot bioispirato
Robot bioispirato
ValidazioneValidazione
ApplicazioniApplicazioni
Robot biomedicoRobot biomedico

NeuroroboticsNeurorobotics vs. vs. simulationssimulations and and animalanimal modelsmodels
Interaction
Human modelHumanHuman modelmodel
Model of interactionModel of Model of
interactioninteraction
World modelWorld modelWorld modelWorldWorld

ROBOTICAROBOTICA
Bioingegneria e bioroboticaBioingegneria e biorobotica
BIOINGEGNERIABIOINGEGNERIA
BIOBIO--ROBOTICAROBOTICA
STRUMENTI PER LO STRUMENTI PER LO STUDIO DEI SISTEMI STUDIO DEI SISTEMI
BIOLOGICIBIOLOGICI
STRUMENTAZIONE STRUMENTAZIONE BIOMEDICABIOMEDICA
NEURONEURO--ROBOTICA ROBOTICA BIOMEDICAROBOTICA ROBOTICA BIOMEDICA
Sistemi robotici Sistemi robotici biomorfibiomorfi come modelli come modelli
fisicifisici
Robotica riabilitativa e Robotica riabilitativa e chirurgica/diagnosticachirurgica/diagnostica

Definizioni di Robotica• A robot is a re-programmable, multi-functional, manipulator designed to move
material, parts, or specialized devices through variable programmed motions forthe performance of a task
• Un robot è un manipolatore multifunzionale riprogrammabile progettato per muovere materiali, componenti, o dispositivi specializzati, attraverso movimenti variabili programmati per lo svolgimento del compito
Robotics Industry Association (~ 1980)• Robotics is the intelligent connection of perception to action• Robotica è la connessione intelligente della percezione all’azione
Michael Brady (~1985)• A robot is a machine able to extract information from its environment and use
knowledge about its world to move safely in a meaningful and purposefulmanner
• Un robot è una macchina in grado di estrarre informazioni dall’ambiente e di usare la conoscenza sul mondo per muoversi in maniera sicura, significativa e intenzionale
Maja Mataric (~ 1990)• Robotics is the science and technology of the design of mechatronic systems
capable of generating and controlling motion and force• Robotica è la scienza e tecnologia della progettazione di sistemi
meccatronici capaci di generare e controllare movimento e forzaPaolo Dario (~ 2000)

EvoluzioneEvoluzione delladella RoboticaRoboticaAutomazioneindustriale
RoboticaIndustriale
BISOGNO BISOGNO didi
macchinemacchineutiliutili

Scenario robotico industrialeScenario robotico industrialeAmbiente
strutturato sui bisogni del robot
Posizioni predefinite degli
oggetti da manipolare
Procedure ben definite ripetitive
Operatori esperti (formati all’uso)
Manipolatori ad elevate prestazioni in termini di accuratezza, ripetibilità,
velocità, robustezza
Presenza umana umana nell’ambiente di lavoro ben delimitata

Analisi comparativa delle Analisi comparativa delle prestazioni dell’Uomo e del robotprestazioni dell’Uomo e del robot
[A. Murata, 2000]
•Debolezza nei compiti ripetitivi, monotoni e di lunga durata
•Mancanza di resistenza• Inferiore nell’accuratezza e nella velocità•L’affidabilità dipende dagli stati mentali, dalla motivazione, dal livello di attenzione e da fattori fisiologici e psicologici
•È sicuro di commettere errori•L’abilità di rilevare quantità fisiche è variabile•Non può operare intuitivamente•La memoria è inaccurata
•Più alto livello di abilità cognitiva•Maggiore flessibilità di pensiero•Superiore nell’elaborazione cognitiva dell’informazione, come l’estrazione di caratteristiche ed il riconoscimento
•Maggior numero di gradi di libertà nella braccia e nelle mani e capacità di svolgere movimenti complessi e accurati
•Facile comunicazione reciproca (capacità di comunicare anche senza il supporto di un linguaggio)
•Capacità di rilevare stimoli minimi e le loro variazioni•Superiore nell’intuizione
Uomo
•Mancanza di abilità e flessibilità di pensiero•Limitati mezzi di comunicazione con l’uomo•Incapacità di reagire ad eventi imprevisti•Scarsa capacità di estrazione di caratteristiche e riconoscimento
•Minore numero di gradi di libertà
•Rilevamento accurato di quantità fisiche su un rangeampio
•Rilevamento di quantità fisiche, come le onde elettromagnetiche, che l’uomo non può rilevare
•Velocità, accuratezza, potenza e resistenza maggiori•Memorizzazione accurata•Adatta allo svolgimento di task monotoni e ripetitivi•Affidabilità nello svolgimento di uno specifico compito•Possibilità di operare in ambienti pericolosi
Macchina (Robot)
SvantaggiVantaggi
BISOGNO BISOGNO didi
macchinemacchineutiliutili
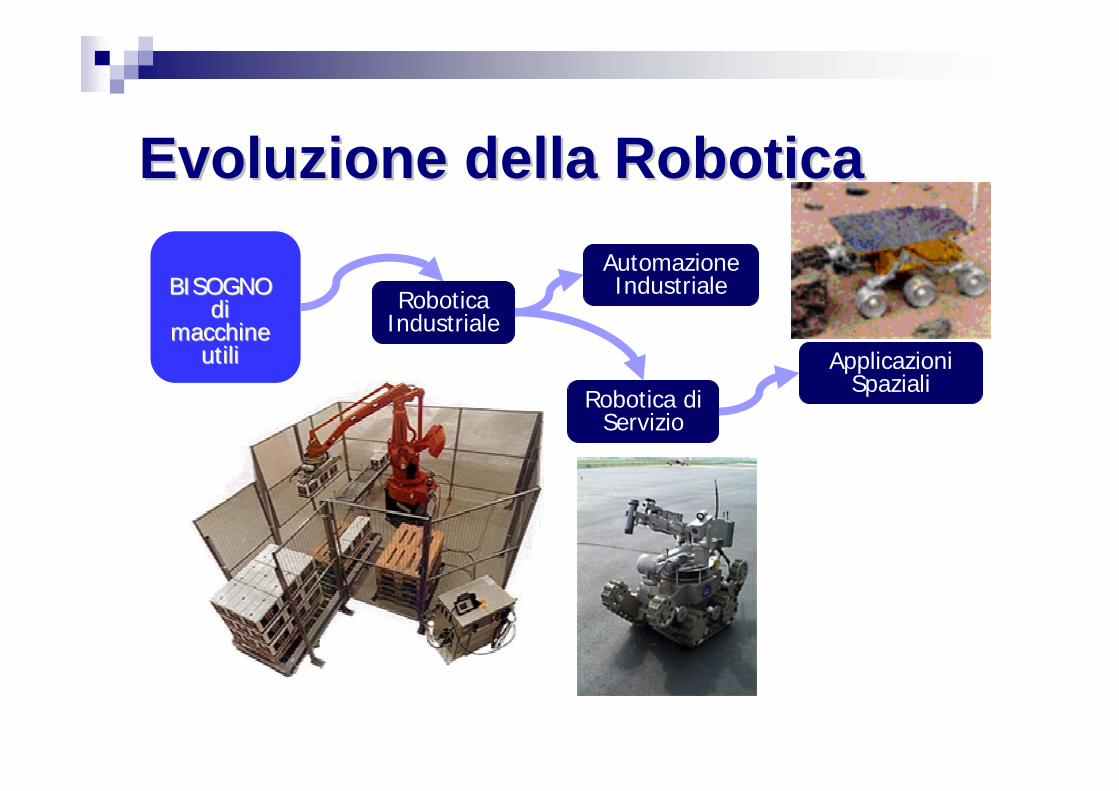
EvoluzioneEvoluzione delladella RoboticaRobotica
RoboticaIndustriale
Robotica diServizio
AutomazioneIndustriale
Applicazioni Spaziali

I robot fuori dalle I robot fuori dalle fabbriche…fabbriche…
• Condivisione dello spazio di lavoro tra uomo e robot
• Maggiori capacità percettive• Comportamento reattivo
Servizi
Ambienti ostili
Photo: Center for Robot-Assisted Search and Rescue

Esplorazioni spazialiEsplorazioni spazialiSpiritSpirit, , OpportunityOpportunity (2003) e il (2003) e il RobonautaRobonauta

Robot sottomariniRobot sottomarini

Robot da Guerra Robot da Guerra

Applicazioni domesticheApplicazioni domestiche

Robot per intrattenimento Robot per intrattenimento e e edutainmentedutainment
BISOGNO BISOGNO didi
macchinemacchineutiliutili
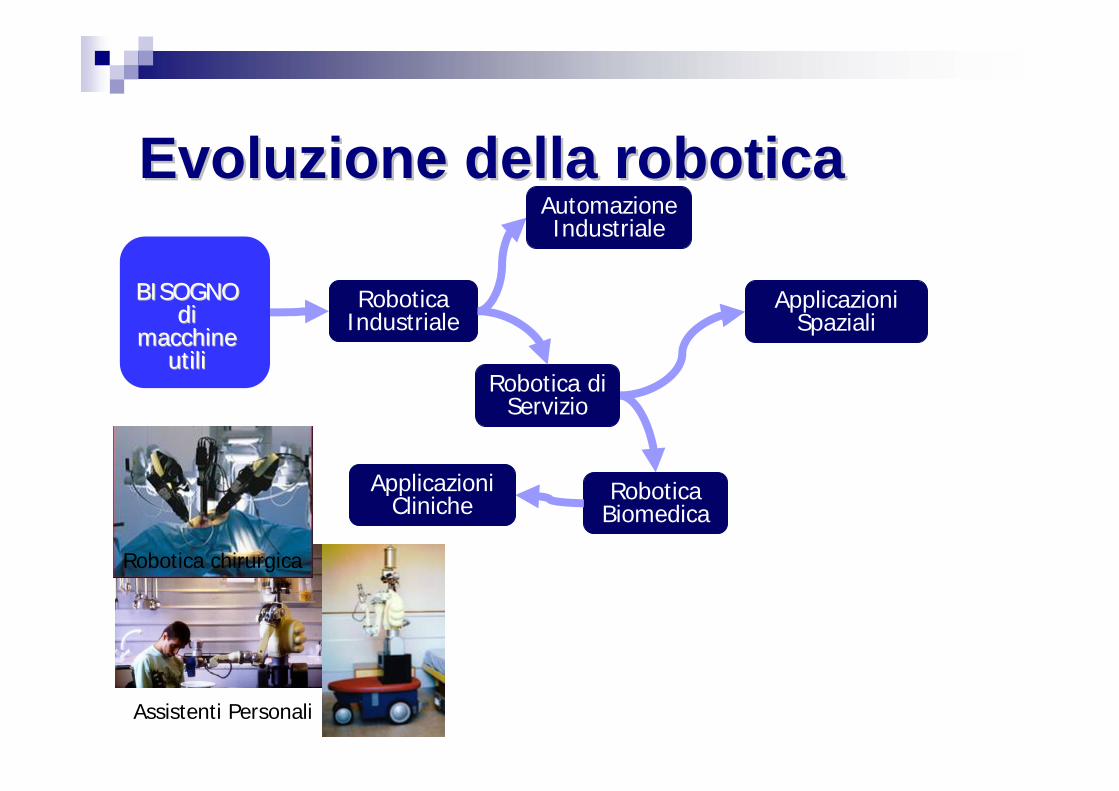
EvoluzioneEvoluzione delladella roboticarobotica
RoboticaIndustriale
Robotica diServizio
AutomazioneIndustriale
Applicazioni Spaziali
Robotica Biomedica
ApplicazioniCliniche
Assistenti Personali
Robotica chirurgica

Robotica in Robotica in chirurgiachirurgia

Il robot Il robot chirurgicochirurgico “Da Vinci”“Da Vinci”

Da Vinci System,Intuitive Surgical Inc.
• Master-slave manipulator equipped with 2 articulated joints at the tip of the surgical instruments allowing 7 degrees of freedom
• Mimics the movements of surgeon’s wrist and fingers in the abdominal or thoracic cavity

The Evolution of SurgeryTRADITIONAL
SURGERYMINIMALLY INVASIVE SURGERY
Da Vinci CAS system
ENDOLUMINAL SURGERY
EndoscopiccapsulesReconfigurablesurgicalsystems
Micro-endoscopefor spinalcord
FETAL SURGERY
Force-feedbackscissor for fetalsurgery
CELL SURGERY
Artificial virus for cell therapy

Integrated Tool
Cognitive Unit
Mechatronic Endoscope
Human Machine Interface
Visual interfaceHaptic interface
Patient(with localization
sensors)
Surgeon
Intelligent Drive Unit
Sensorized and actuated probe
Interchangeable instrumentation
Processing Unit
External device for insertionand actuation
Localization System
Virtual model
A system for spinal endoscopy

Neurobotics - The fusion of Neuroscience and Robotics, FP6-IST-001917 (www.neurobotics.info). A project funded by the Future and Emerging Technologies arm of the IST programmeFuture and Emerging
Technologies
Information Society Technologies
The MiNOSC robotic endoscopic platform
3
1 2
3
1
2
MrollMpitch
3
1 2
3
1
2
MrollMpitch
Schematic view of the 2 DoF motor unit; on the right: section of the catheter; the dotted channels are used by the cables.
T h e r o b o t - a s s i s t e d endoscopic platform is set in the operat ing room.
The motor unit and the steerable catheter tip

Segmentazione delle immagini Segmentazione delle immagini endoscopicheendoscopiche
Risultati:Risultati:•• L’algoritmo di segmentazione riesce L’algoritmo di segmentazione riesce
sempre ad isolare correttamente le sempre ad isolare correttamente le regioni lumen le quali non vengono regioni lumen le quali non vengono mai sovradimensionatemai sovradimensionate
•• Le vene vengono riconosciute Le vene vengono riconosciute correttamentecorrettamente
•• I nervi vengono isolati correttamente I nervi vengono isolati correttamente anche se esistono possibili anche se esistono possibili interpretazioni sbagliate di bolle d’aria interpretazioni sbagliate di bolle d’aria con riflessi molto luminosicon riflessi molto luminosi
•• L’impiego del software su filmati di L’impiego del software su filmati di endoscopia su animale hanno endoscopia su animale hanno evidenziato le capacità dell’algoritmo evidenziato le capacità dell’algoritmo di essere impiegato in applicazioni in di essere impiegato in applicazioni in tempo realetempo reale

“Inchworm” locomotion
Typical colonoscopy prototypeDiameter : 24 mmRetracted Length : 115 mmElongated Length : 195 mmStroke: 80 mm
Distal clamper
Proximal clamper
Central elongator

Scuola Superiore Sant’Anna, Pisa
Una capsula roboticaper esplorare il corpo
umano

Rivestimento del tronco con materiale morbido
Tagli ricavati sul materiale di rivestimento
COLON

COLON

GASTRO
Soluzione per il rallentamento: struttura lamellare; materiale morbido (es. gomma)

Microrobot riconfigurabiliper l’esplorazione del corpo umano
Scuola Superiore Sant’Anna, Pisa

A prototype cellular vector
What is a cellular vector?
= ?+ +
FIB image of CNTs AFM image of plasmids Optical image of a cell
Images acquired at the CRIM Lab
•It is basically a nano-device composed by:
An artificial carriere.g. a nanoparticle, a nanoshell, a nanosfere, a carbon nanotube, etc..
A coatingable to dissolve intra or extra-cellularly, depending if the drug release is inside or outside the cell
Cell
• Cell ligands,able to bind a surface receptor of the target cell to transfect
• Drugs , e.g. genes for cell transfection

Cell Transfection _ via Cellular Uptake
Cell Transfection _ via Electroporation
External source