Corso di Idraulica - people.unica.it...Corso di Idraulica per allievi Ingegneri Civili Esercitazione...
16
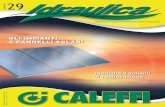
Corso di Idraulica per allievi Ingegneri Civili Esercitazione n° 4 La condotta di diametro D raffigurata in Figura 1 termina con un convergente ed un ugello di diametro d. Davanti al getto ad asse orizzontale uscente dall'ugello, avente coefficiente di contrazione C c , si ponga successivamente: a) una piastra piana perpendicolare al getto (Figura 1); b) una canaletta rettilinea di sezione rettangolare larga quanto la sezione contratta, avente l'asse orizzontale e formante l'angolo β 1 con la direzione del getto (Figura 7a); c) una canaletta come quella del caso b), ma con l'asse giacente nel piano verticale del getto ed inclinato di un angolo β 2 rispetto alla verticale (Figura 7b); d) una ruota Pelton ad asse orizzontale di raggio R p , ruotante alla velocità angolare ω (Figura 8). Assegnate le dimensioni geometriche della parte terminale della condotta e l'indicazione del manometro semplice a mercurio ∆, calcolare: 1) la portata effluente dall'ugello, q; 2) l'indicazione del manometro metallico collegato al tubo di Pitot; 3) le spinte sul convergente e sulla curva AB della condotta; 4) le spinte sulla piastra piana e sulla canaletta nelle due posizioni b) e c); 5) le frazioni di portata effluenti dalle due estremità della canaletta nelle situazioni b) e c); 6) la spinta S p r mediamente subita da una pala della ruota Pelton, la coppia motrice C p e la potenza W p erogata dalla turbina in funzione di ω. Dati: − R = 20 m − z M = 0,50 m − α = 45° − D = 0,50 m − a = 0,30 m − β 1 = 60° − d = 0,125 m − b = 0,06 m − β 2 = 30° − γ = 9'806 Nm -3 − ∆ = 0,20 m − C c = 0,85 − γ m = 132'970 Nm -3 − R p = 1,5 m Schema di soluzione 1) Assumendo come piano di riferimento per le quote il piano orizzontale contenente l'asse della condotta nel suo tratto terminale, applicando il teorema di Bernoulli tra la sezione in cui è posto il manometro a mercurio e la sezione contratta, ove la pressione risulta nulla, si ha: g U g U h c 2 2 2 = + 2 , in cui U ed U c sono le velocità medie della corrente rispettivamente nella tubazione di diametro D e nella sezione contratta; h è la quota piezometrica della corrente, esprimibile in funzione della misura del manometro a mercurio: 1
Transcript of Corso di Idraulica - people.unica.it...Corso di Idraulica per allievi Ingegneri Civili Esercitazione...

Corso di Idraulica per allievi Ingegneri Civili
Esercitazione n° 4 La condotta di diametro D raffigurata in Figura 1 termina con un convergente ed un ugello di diametro d. Davanti al getto ad asse orizzontale uscente dall'ugello, avente coefficiente di contrazione Cc, si ponga successivamente:
a) una piastra piana perpendicolare al getto (Figura 1); b) una canaletta rettilinea di sezione rettangolare larga quanto la sezione contratta, avente l'asse
orizzontale e formante l'angolo β1 con la direzione del getto (Figura 7a); c) una canaletta come quella del caso b), ma con l'asse giacente nel piano verticale del getto ed
inclinato di un angolo β2 rispetto alla verticale (Figura 7b);
d) una ruota Pelton ad asse orizzontale di raggio Rp, ruotante alla velocità angolare ω (Figura 8). Assegnate le dimensioni geometriche della parte terminale della condotta e l'indicazione del
manometro semplice a mercurio ∆, calcolare: 1) la portata effluente dall'ugello, q; 2) l'indicazione del manometro metallico collegato al tubo di Pitot; 3) le spinte sul convergente e sulla curva AB della condotta; 4) le spinte sulla piastra piana e sulla canaletta nelle due posizioni b) e c); 5) le frazioni di portata effluenti dalle due estremità della canaletta nelle situazioni b) e c);
6) la spinta S p
rmediamente subita da una pala della ruota Pelton, la coppia motrice Cp e la
potenza Wp erogata dalla turbina in funzione di ω.
Dati:
− R = 20 m − zM = 0,50 m − α = 45°
− D = 0,50 m − a = 0,30 m − β1 = 60°
− d = 0,125 m − b = 0,06 m − β2 = 30°
− γ = 9'806 Nm-3 − ∆ = 0,20 m − Cc = 0,85
− γm = 132'970 Nm-3 − Rp
= 1,5 m
Schema di soluzione
1) Assumendo come piano di riferimento per le quote il piano orizzontale contenente l'asse della condotta nel suo tratto terminale, applicando il teorema di Bernoulli tra la sezione in cui è posto il manometro a mercurio e la sezione contratta, ove la pressione risulta nulla, si ha:
g
Ug
Uh c
22
2
=+2
,
in cui U ed Uc sono le velocità medie della corrente rispettivamente nella tubazione di diametro D e nella sezione contratta; h è la quota piezometrica della corrente, esprimibile in funzione della misura del manometro a mercurio:
1

γ
γ∆ mah += .
Introducendo le aree delle sezioni corrispondenti, Ω e Ωc, ed utilizzando le espressioni delle velocità medie in funzione della portata q, U = q/Ω e U c
= q/Ωc, si ottiene l'espressione della portata:
ghqc
c 222 ΩΩ
ΩΩ
−= .
2) Il liquido in quiete all'interno di un tubo di Pitot possiede carico piezometrico pari al carico totale della particella nel punto di ristagno posto sulla bocca dello strumento, il quale può approssimativamente considerarsi pari al carico totale della corrente. La pressione misurata dal manometro metallico collegato al tubo di Pitot è pertanto data da:
−+= MM z
gUhp2
2
γ .
3) Le spinte esercitate da un liquido in movimento si determinano mediante l'equazione globale del moto per un fluido incomprimibile, riferito alle grandezze medie:
Πrrrr
+=+ GMI ,
con:
α
Mzg
Uh −+2
2
γ
h
Figura 1. Sezione longitudinale della condotta con terminale coinvestita dal getto.
2
γ∆ m
U 2
nvergente e piastr
gc
2
a

( ) ( )
∫∫
∫∫
==
⋅=∂
∂=
cc
cc
Sn
Vm
SV
SVfG
SnuuMVtuI
dd
dd
τΠρ
ρρ
rrrr
rrrrrr
, (1)
in cui Ir
è l'inerzia locale del liquido contenuto nel volume di controllo Vc; ρ è la densità del fluido considerato; M
r è il flusso di quantità di moto che attraversa la superficie di contorno del volume di
controllo, Sc; è la normale esterna alla superficie di contorno; Gnrr
è il risultante delle forze di massa – nel caso in questione costituito dal peso del volume di controllo (la forza specifica di massa è quindi data dall'accelerazione di gravità: zgf m ∇−=
r); Π
r è il risultante delle forze di superficie
(spinta complessivamente esercitata sul volume di controllo attraverso la superficie di contorno); nτr è lo sforzo locale totale agente sulla faccia esterna della superficie di contorno, inclusivo di pressione, sforzi viscosi e sforzi turbolenti.
In tutti i casi di moto stazionario, come nel problema in esame, risulta nullo il termine di inerzia locale. Inoltre, per una sezione regolare (sezione piana, ortogonale in ogni suo punto al vettore velocità) il flusso di quantità di moto e la spinta possono essere calcolati in modo particolarmente semplice. Il modulo del flusso di quantità di moto si può esprimere con riferimento alla velocità media della corrente come segue:
, (2) ΩβρβρΩβρ /22 qUqUM ===
in cui β è il coefficiente di ragguaglio delle quantità di moto, dato da:
Ω
Ωβ Ω
2
2 d
U
u∫= ,
che assume valori prossimi all'unità nel caso di moto turbolento; Nella espressione degli sforzi assiali, le componenti viscosa e turbolenta risultano trascurabili in
confronto alla pressione. Poiché, inoltre, in una sezione regolare la pressione è distribuita con legge idrostatica, il problema si riduce al calcolo di una spinta idrostatica su una superficie piana, eseguibile con tutti i metodi e le regole studiate in Idrostatica.
Nella applicazione dell'equazione globale del moto ad un volume di controllo, è generalmente conveniente decomporre la superficie di contorno, alla quale sono estesi gli integrali delle forze di superficie e del flusso di quantità di moto, in superfici elementari caratterizzate da proprietà utili allo sviluppo dell'equazione.
Per quanto riguarda la spinta sul convergente, conviene applicare l'equazione globale al volume liquido compreso tra la sezione FF e la sezione contratta CC e suddividere la superficie di contorno nelle seguenti quattro superfici (vedi schema di Figura 2):
– la sezione regolare corrispondente alla sezione di area massima del convergente, sezione FF; – la sezione contratta, sezione CC; – la superficie laterale del tronco di cono a contatto con le pareti del convergente; – la parte di superficie laterale del volume di controllo compresa fra l’ugello del convergente e
la sezione contratta, esposta alla pressione atmosferica. Esplicitando le spinte ed i flussi di quantità di moto relativi alle quattro superfici, l'equazione
globale del moto assume la forma:
aocFaocFFC MMMMGrrrrrrrrr
+++=++++ ΠΠΠΠ ,
3

FΠr
FMr
− cMr
−
0≡aΠr
CSrr
−=0Π
FCGr 0≡cΠ
r
EVc
F
C
ξ0F
Figura 2. Schema di applicazione dell'equazione globale del moto per il calcolo della spinta sul convergente.
Figura 2
nella quale G è il peso del volume liquido, FC
rFΠr
è la spinta che il liquido a sinistra della sezione
FF esercita sul volume considerato, è la spinta che il liquido a destra della sezione contratta CC
esercita sul volume, e sono le spinte che il volume subisce lungo le parti della superficie
laterale a contatto rispettivamente con la parete del convergente e con l'atmosfera; M
cΠr
oΠr
aΠr
F
r, , CMr
oMr
e
sono i flussi di quantità di moto che attraversano rispettivamente le sezioni FF, CC e le parti della superficie laterale a contatto con la parete del convergente e con l'atmosfera.
aMr
rPoiché nella sezione contratta agisce la pressione atmosferica è 0=cΠ . Per lo stesso motivo è
nulla la spinta esercitata dall'atmosfera sulla superficie laterale del tronchetto EC. aΠr
oΠr
è la spinta esercitata sul volume di controllo dalla parete solida del convergente. Per il principio di azione e reazione, tale spinta risulta uguale è contraria alla spinta CS
rche il liquido contenuto nel
volume di controllo esercita sul convergente1. FΠr
è parallela all’asse della condotta e rivolta nel senso della corrente, perché la piezometrica sovrasta il baricentro della sezione FF; essa ha modulo:
ΩγΩΠ hp FGF ==
ed è applicata lungo l’asse verticale della sezione circolare, ad una distanza dal centro pari a:
s
xxF M
I 00 =ξ ,
in cui è il momento di inerzia della sezione rispetto all'asse orizzontale contenuto sul piano della sezione, passante per il baricentro della stessa; M
64/40 DI xx π=
s = Ωh è il momento statico della
sezione rispetto alla retta di sponda, intersezione del piano contenente la sezione e del piano orizzontale posto a quota pari alla quota piezometrica nella sezione considerata.
Nella parte di superficie laterale a contatto con la parete del convergente la velocità è nulla per la condizione di aderenza, propria di un fluido reale. La parte di superficie laterale esposta all’aria costituisce un tubo di flusso, cui le velocità sono tangenti. Per entrambe le superfici si ha pertanto:
0=⋅ nu rr ,
4
1 Di tutte le forze evidenziate in , è l'unica per la quale non sia possibile stabilire a priori direzione e verso, essendo legata all'incognita del problema. Il vettore è stato quindi tracciato a sentimento.
oΠr

col che risultano nulli i relativi flussi di quantità di moto. Nelle sezioni FF e CC le velocità hanno versi rispettivamente opposto e concorde con la normale
esterna e ortogonali alle sezioni stesse, per cui i relativi flussi di quantità di moto sono dati da:
∫−=F
dSuuM FΩ
ρ rrr ; ∫=
C
dSuuM cΩ
ρ rrr ,
di moduli MF = ρq2/ΩF e Mc = ρq2/Ωc, avendo assunto unitario il coefficiente di ragguaglio β.
L'espressione del risultante della spinta agente sul convergente è data pertanto da:
CFFFCoC MMGSrrrrrr
−−+=−= ΠΠ , (3)
in cui il peso è, ovviamente, verticale e rivolto verso il basso, mentre le rimanenti forze sono tutte orizzontali. Assunto positivo il verso da sinistra verso destra per le componenti orizzontali e verso il basso per le componenti verticali, le componenti orizzontale e verticale della spinta sono date da:
FCvC
cFFoC
GS
MMS
=
−+= Π. (4)
Il peso del volume di controllo può valutarsi approssimando il volume compreso fra l'ugello e la sezione contratta con un tronco di cono, da sommare al volume, questo rigorosamente tronco-conico, contenuto all'interno del convergente.
Il modulo della spinta è dato da:
22vCoCC SSS += . (5)
L'angolo che essa forma rispetto all'orizzontale è pari a:
( )oCvCc SS /arctan=β . (6)
La somma vettoriale (3) si rappresenta graficamente con il poligono delle forze di Figura 3.2
FCGr
FMr
−
CSr
cMr
−
FΠr
βC
Figura 3. Rappresentazione grafica della determinazione del risultante della spinta eseguita attraverso la somma vettoriale di cui all'espressione (3).
Per definire compiutamente la spinta cSr
occorre fare riferimento alle condizioni di equivalenza dei sistemi di forze. Due sistemi di forze si dicono equivalenti se possiedono uguali risultante e momento risultante rispetto ad un qualunque punto dello spazio. La scelta del punto (detto polo) è arbitraria e può quindi essere effettuata nel modo più conveniente. Se ad un sistema di forze applicate ad un corpo rigido si sostituisce un sistema equivalente, non si altera lo stato di quiete o di moto del corpo. I due sistemi sono quindi intercambiabili. 2 Qualora si debba eseguire, come nel caso in oggetto, la somma di più di due vettori, conviene disporre i vettori da sommare uno in coda all'altro, con il vettore somma avente "coda" e "punta" rispettivamente nella coda del primo vettore e nella punta dell'ultimo vettore. Ovviamente, il procedimento è equivalente alla somma ripetuta di vettori a due a due con il metodo del parallelogramma; esso consente però di evitare il tracciamento dei parallelogrammi.
5

Ogni sistema di forze nello spazio può essere ridotto ad un sistema equivalente costituito da una forza e una coppia, o da due forze sghembe (non complanari). Un sistema di forze giacenti su un piano con vettore risultante non nullo è equivalente ad una sola forza (applicata in un punto opportuno), che in tal caso è detta la risultante del sistema; se il vettore risultante è nullo, il sistema equivale ad una coppia; se, oltre al vettore risultante, è nullo anche il momento risultante, il sistema di forze è equilibrato e non modifica le condizioni di quiete o di moto del corpo al quale è applicato.
Nel caso in questione, poiché tutte le forze giacciono sul piano verticale contenente l'asse della condotta, la spinta è equivalente al risultante cS
r, applicato in un punto tale che il suo momento
rispetto ad un qualunque polo sia uguale al momento risultante del sistema di forze reali rispetto allo stesso punto3.
Dalle condizioni di equivalenza consegue che, dato un sistema di forze, facendo scorrere una delle forze del sistema lungo la propria retta d’azione si ottiene ancora un sistema equivalente. Infatti, in tal modo rimangono invariati il vettore risultante ed il momento risultante del sistema. Un sistema equivalente si ottiene anche eseguendo la somma di due forze del sistema applicate nel medesimo punto, dal momento che, anche in questo caso, non variano né il vettore risultante né, per la proprietà distributiva del prodotto vettoriale rispetto alla somma di vettori, il momento risultante.
Nel caso del convergente si potrà quindi procedere nel seguente modo per ridurre il sistema di forze ad una unica forza (risultante) agente lungo la corretta retta d'azione (v. Figura 4):
1) si fanno scorrere le forze BMr
− e CMr
− , giacenti sull’asse della condotta4, fino al baricentro del volume di controllo;
2) si sommano le due forze;
3) il vettore risultante dalla somma di BMr
− e CMr
− viene sommato alla forza peso Gr
, applicata nello stesso punto;
4) il vettore risultante dalla somma di cui al punto 3 e la forza Bπr vengono fatte scorrere lungo le rispettive rette d’azione fino al punto di intersezione delle stesse;
5) le due forze vengono sommate. In un caso tridimensionale generale, il sistema di forze equivarrà ad una coppia di momento pari
al momento risultante del sistema di forze rispetto ad un qualunque punto dello spazio e da un vettore uguale al vettore risultante del sistema, applicato nel punto utilizzato per il calcolo del momento risultante.
In questo modo è stata determinata sia la risultante (in modulo, direzione e verso) che la sua retta d’azione. Avendo costruito il poligono delle forze di Figura 3, la sola determinazione della retta d’azione della risultante può anche effettuarsi imponendo direttamente che il momento della risultante rispetto ad un qualunque punto dello spazio sia uguale al momento dei vettori componenti rispetto allo stesso punto. Per l’arbitrarietà della scelta del punto rispetto al quale calcolare i momenti, lo si potrà scegliere nel modo più conveniente. In pratica, nel caso sotto esame, sarà conveniente scegliere come polo per il calcolo dei momenti il baricentro del volume di controllo. Rispetto a tale punto risultano infatti nulli i momenti dei due flussi di quantità di moto e della forza peso. Il momento risultante del sistema di forze ha pertanto modulo pari a:
FFr 0ξΠΜ =
3 A loro volta, le singole forze che compaiono nella (3) ammettono punti di applicazione determinati sulla base dell'equivalenza alle distribuzioni di forze elementari di cui esse costituiscono le risultanti, equazioni (1). 4 I due flussi di quantità di moto hanno per retta d'azione l'asse della condotta, in quanto rispetto ad un qualunque punto di tale asse è nullo il momento risultante dei flussi elementari contenuti negli integrali che definiscono
r− e BM CM
r− .
6

FΠr
FMr
−cMr
−
FCGr
1
ξ0F Vc
F
C
FΠr
Fc MMrr
−−
FCGr
2
ξ0F Vc
F
C
FΠr
Fc MMrr
−−
FCGr
FCFc GMMrrr
+−−
3
ξ0F Vc
F
C
FΠr
FCFc GMMrrr
+−−FFCFcC GMMS Π
rrrrr++−−=
4-5
ξ0F
Vc
F
C
Figura 4. Determinazione della retta d'azione della spinta per via grafica.
7

e verso di rotazione antiorario. La retta d’azione della risultante CSr
, di direzione individuata dalla costruzione del poligono delle forze, dovrà pertanto trovarsi ad una distanza δ dal baricentro del volume di controllo, tale che risulti:
δξΠ CFF S=0
r (7)
e il verso di rotazione antiorario, come mostrato in Figura 5. Dalla equazione (7) si ricava il valore del braccio δ.
FCGr
C
B
FMr
−
FΠr
cMr
−Vc
FCGr
ξ0F
FMr
−
βC
FΠr
cMr
−CSr
CSr
δ
Figura 5. Determinazione della retta d'azione della spinta per via semi-analitica.
Utilizzando strumenti di calcolo automatico (codici di calcolo, fogli elettronici, etc..) può tornare comodo disporre di un metodo che non richieda operazioni manuali.
A parte la possibilità di implementare i procedimenti grafici illustrati mediante le equazioni della Geometria Analitica, un modo più semplice per determinare uno dei possibili punti di applicazione della risultante di un sistema di forze piano evitando qualunque operazione grafica consiste nell’imporre separatamente le uguaglianze dei momenti dei singoli componenti nelle due direzioni degli assi coordinati (nel caso in questione: orizzontale e verticale), del sistema di forze e della risultante rispetto ad un qualunque punto.
Sulla base dei valori dei moduli dei componenti orizzontale e verticale della spinta, determinati dalle relazioni (4), scegliendo ancora il baricentro del volume di controllo, di coordinate xG e yG, come polo per il calcolo dei momenti si impongono le seguenti uguaglianze di momenti:
( ) BFPGoC yyS 0ξΠ=− ; ( ) 0=− PGvC xxS ,
da cui si determinano le coordinate xP, yP di un punto della retta d'azione della risultante determinata precedentemente con il metodo grafico (v. Figura 6):
−=
=
oC
FFGP
GP
Syy
xx
0ξΠ ,
In generale, qualora nell'equazione globale compaiano forze non aventi direzione né orizzontale né verticale, occorrerà operare preventivamente la decomposizione di tali forze.
8

cMr
−C
B
FΠr
FMr
− Vc
Gr
ξ0F
CSrδ
oCSr
vCSr
FMr
−
FCGr
CSr
cMr
−
FΠr
βC vCS
r
oC
FF
S0ξΠoCS
r
Figura 6. Determinazione della retta d'azione della spinta per via analitica.
La spinta ABSr
sulla curva AB si ottiene applicando l'equazione globale al volume liquido che la occupa:
BABAAB MMGrrrrrr
+=+++ 1ΠΠΠ ,
ove ABGr
è il peso del volume liquido, AΠr
e BΠr
sono le spinte esercitate sul volume di controllo dal liquido posto rispettivamente a sinistra della sezione AA e a destra della sezione BB, 1Π
r è la
spinta che l'involucro torico esercita sul volume in questione; AMr
e BMr
i flussi di quantità di moto che attraversano rispettivamente le sezioni AA e BB. Per il principio di azione e reazione, la spinta che il liquido esercita sulla parete interna della curva è data da:
BABAABAB MMGSrrrrrrr
−−++=−= ΠΠΠ 1 .
La spinta è contenuta in un piano verticale. Le componenti orizzontale e verticale sono date da:
( ) ( )
( ) ABAAvc
BBAAoAB
GMS
MMS
++=
+−+=
αΠ
ΠαΠ
sin
cos
Il volume toroidale, necessario per il calcolo del peso del volume liquido, è dato dal prodotto della sezione per lo sviluppo in asse della curva. I moduli dei flussi di quantità di moto MA e MB sono identici e uguali al modulo del flusso MF determinato in precedenza. ΠB
= ΠF, mentre il modulo della spinta agente sulla sezione A è dato da:
( ) ( )[ ]ΩαγΩγΩΠ cos1 −−=−== Rhzhp AAGA .
Modulo e direzione della spinta si determinano da relazioni analoghe alle (5) e (6).
4.a) la spinta 1Sr
sulla piastra si calcola applicando l'equazione globale al volume liquido compreso tra la sezione contratta del getto e la piastra (vedi Figura 1):
ucaucP MMGrrrrrrr
+=++++ 2ΠΠΠΠ ,
9

in cui PGr
è il peso del volume liquido, cΠr
e uΠr
sono le spinte esercitate sul volume di controllo dalle parti di liquido poste rispettivamente a sinistra della sezione contratta CC ed esternamente alla sezione in cui il liquido cessa di essere a contatto con la piastra (sezione di uscita), entrambe nulle in quanto su entrambe risulta nulla la pressione; 0=aΠ
r è la spinta esercitata sul volume di
controllo attraverso la superficie a contatto con l'atmosfera, 2Πr
è la spinta subita dal volume di controllo attraverso la superficie di contatto con la piastra; cM
r e uM
r sono i flussi di quantità di
moto che attraversano rispettivamente la sezione contratta CC e la sezione di uscita. In considerazione del limitato sviluppo del percorso che le particelle fluide compiono fra la
sezione contratta e la sezione di uscita, le perdite di carico possono ritenersi trascurabili ed il liquido può quindi considerarsi perfetto. Conseguentemente, non potendo esso esercitare azioni tangenziali, la spinta esercitata sulla piastra risulta perpendicolare a quest'ultima. Poiché 22 Π
rr−=S per il
principio di azione e reazione, GP
r e uM
r risultano entrambi perpendicolari a 2S
r, per cui deve
essere necessariamente 0=u+P MGrr
. La spinta cercata è data pertanto da:
cMSrr
−=2 ,
di modulo S2 = ρqUc
= ρq2/Ωc.
4.b) L'equazione globale si applica al volume compreso fra la sezione contratta CC e le sezioni 1-1 e 2-2 (vedi Figura 7a). Su tutte e tre le sezioni citate, così come sulla superficie del volume di controllo a contatto con l'atmosfera, agisce la pressione atmosferica, col che le spinte corrispondenti risultano nulle. L'equazione globale assume pertanto la forma:
213 MMMG cC
rrrrr++=+ Π
in cui G è il peso del volume liquido, C
r3Πr
è la spinta esercitata dalle pareti e dal fondo della
canaletta sul volume liquido; , cMr
1Mr
e 2Mr
sono i flussi di quantità di moto che attraversano
rispettivamente le sezioni CC, 1 e 2. Per l'ipotesi di liquido perfetto, non ha componenti tangenziali ed è pertanto contenuta in un piano verticale perpendicolare all'asse della canaletta. Ancora in forza del principio di azione e reazione, la spinta subita dalla canaletta vale:
3Πr
2133 MMMGS cC
rrrrrr−−−=−= Π . (8)
β1
β2
(a) (b)
Figura 7. Sezioni della canaletta investita dal getto con asse (a) in posizione orizzontale e (b) contenuto in un piano verticale.
10

Poiché i flussi di quantità di moto sono tutti e tre orizzontali, il componente verticale della spinta è pari al peso del volume di controllo:
Cv GSrr
=3 .
Il modulo del componente orizzontale oS3
r si ottiene proiettando l'equazione su un asse orizzontale
perpendicolare all'asse della canaletta. Poiché i flussi 1Mr
e 2Mr
sono paralleli all'asse della canaletta, e pertanto anche perpendicolari alla spinta 3S
r, si ottiene:
13 sin βco MS = .
Infine, si ha:
oC SGS 33
rrr+= .
Il calcolo numerico si potrà effettuare una volta calcolato il peso GC
r. Gli elementi che consentono
di effettuare tale valutazione vengono presentati al punto 5.1).
4.c) L'equazione globale si applica in modo del tutto analogo al caso precedente, con riferimento allo schema di Figura 7b, ottenendo una equazione formalmente identica alla (8). In questo caso, tuttavia, essendo l'asse della canaletta contenuto in un piano verticale, tali risultano anche tutte le forze presenti nell'equazione. Il modulo della spinta si ottiene proiettando l'equazione globale su un asse perpendicolare all'asse della canaletta, contenuto in un piano verticale. Anche in questo caso, i flussi di quantità di moto attraverso le sezioni di estremità della canaletta risultano paralleli a tale asse e pertanto perpendicolari alla spinta. La proiezione fornisce quindi:
224 cossin' ββ cC MGS += .
Per il calcolo numerico del peso G'C vale quanto detto al punto precedente.
5.1) Nel caso della canaletta ad asse orizzontale, l'asse del getto sulla sezione contratta e le estremità della canaletta sono alla stessa quota ed alla stessa pressione (nulla). La legge di Bernoulli:
cost2
2
=++g
upzγ
porta pertanto ad affermare che le velocità nelle tre sezioni sono identiche5: uc = u1
= u2. Dall'equazione di continuità:
21 qqq +=
scritta nella forma
2211 uuucc ΩΩΩ +=
si ottiene pertanto:
21 ΩΩΩ +=c . (9)
5 Si osservi che dall'ipotesi di fluido ideale consegue l'uniformità delle distribuzioni di velocità in sezioni regolari, e pertanto anche la coincidenza fra velocità puntuali e velocità media della corrente.
11

Proiettando l'equazione globale (8) sull'asse della canaletta si ottiene:
211cos MMM c −=β ,
ossia:
, 22
212
112 cos ΩρΩρβΩρ uuu cc −=
da cui, eliminando i fattori comuni (densità e quadrati delle velocità):
211cos ΩΩβΩ −=c .
Questa equazione, in sistema con la (9), consente la determinazione delle sezioni Ω1 e Ω2 e, quindi, delle frazioni di portata q1
= Ω1u1 e q2 = Ω2u2 che fuoriescono dalle due sezioni di estremità della
canaletta:
( )
( )12
11
cos12
cos12
βΩ
Ω
βΩ
Ω
−=
+=
c
c
.
Si determinano quindi anche gli spessori della corrente in uscita, h1 = Ω1/dc e h2
= Ω2/dc. Su tale base, si può determinare, in via approssimata, il peso del volume di controllo:
( )21 hhLdG cC += γ . (10)
5.2) Nel caso della canaletta ad asse verticale, il problema si risolve applicando il teorema di Bernoulli due volte tra la sezione contratta e le sezioni di uscita Ω1 e Ω2, l'equazione di continuità e l'equazione globale proiettata lungo l'asse della canaletta. Si scrivono così le seguenti equazioni:
g
uhL
guc
2sin
2cos
2
21
21
2
2
++= ββ (Bernoulli) (11)
g
uhL
guc
2sin
2cos
2
22
22
2
2
++−= ββ (Bernoulli) (12)
(continuità) (13) 2211 udhudhq cc +=
2122 cos'sin MMGM Cc −+= ββ (equazione globale) (14)
Poiché è lecito trascurare i termini (h1/2)sinβ2 e (h2/2)sinβ2, data la loro modesta entità, dalle prime due equazioni si ricavano le velocità:
22
2,1 cos2 βgLuu c m= ,
le quali, insieme con la , introdotte, insieme con la (10), nelle (13) e (14), portano ad un sistema lineare nelle due incognite h1 e h2, la cui risoluzione fornisce i due spessori della corrente alle due estremità della canaletta. Si ottengono pertanto anche le sezioni Ω1 e Ω2 e le frazioni di portata q1
= Ω1u1 e q2 = Ω2u2 (oltre agli elementi per il calcolo di G'C nel punto 4.c).
6) La turbina di un impianto idroelettrico consente di produrre energia elettrica sottraendo energia meccanica all'acqua convogliata in una condotta forzata da un bacino posto a monte della macchina (bacino di carico). In generale, il trasferimento di energia dall'acqua alla macchina avviene per
12

effetto della spinta che il liquido esercita sulle pale di un organo rotante (girante), il cui asse è collegato ad un alternatore atto alla trasformazione dell'energia meccanica in energia elettrica.
La ruota Pelton è un particolare tipo di turbina, utilizzato in presenza di dislivelli rilevanti fra i peli liberi del bacino di carico e del bacino di restituzione posto a valle della macchina, costituito da una ruota ad asse orizzontale o verticale, sulla cui circonferenza sono calettate pale di forma a doppio cucchiaio, rappresentate sommariamente in Figura 8, che vengono investite da un getto libero in atmosfera, erogato dall'ugello di un convergente (distributore) posto all'estremo di valle della condotta forzata6. Nella stessa figura è riportato lo schema per l'applicazione dell'equazione globale del moto, che consente di determinare la spinta che il getto esercita sulla pala. Per chiarezza, l'impostazione del calcolo per il caso reale, in cui la ruota è in movimento rotatorio, viene presentata con riferimento ai due casi di singola pala ferma investita dal getto e di singola pala in movimento traslatorio negli stessi direzione e verso del getto.
pSr
1uMr
−
2uMr
−
cMr
−
vp ω
W
W Cp Sto Spo
Sto
Spo, Cp
vp = uc/2 vp = uc
Sezione trasversale di pala di turbina Pelton,fatta secondo un piano parallelo all'asse etangente alla circonferenza di Pelton.
Figura 8. Schema di sistema condotta-distributore-ruota Pelton, con curve caratteristiche della turbina e schema di applicazione dell'equazione globale del moto.
Analogamente ai casi esaminati in precedenza, l'equazione globale si applica ad un volume di controllo compreso fra la sezione contratta del getto, posta a valle dell'ugello del distributore, e le sezioni nelle quali il flusso abbandona le pale, con moto nella stessa direzione ma in verso opposto rispetto al getto nella sezione contratta (vedi sezione trasversale nella parte inferiore di Figura 8).
Nel caso di pala ferma, l'equazione globale si scrive:
2121 uuaocuuaocP MMMMMGrrrrrrrrrrr
++++=+++++ ΠΠΠΠΠ ,
in cui PGr
è il peso del volume di controllo e, nei simboli utilizzati per le forze di superficie e per i flussi di quantità di moto, i pedici c, o, a, u1 e u2 sono riferiti rispettivamente alla sezione contratta,
13
6 Si tratta, evidentemente, di null'altro che una versione tecnologicamente aggiornata della ruota di un mulino ad acqua.

alle parti della superficie di controllo a contatto con la pala e con l'atmosfera, ed alle due sezioni di uscita del liquido. In forza di considerazioni analoghe a quelle illustrate diffusamente al punto 3, risulta
rrrr e 021 ==== uuac ΠΠΠΠ 0== ao MM
rr, mentre la forza oΠ
r è uguale e contraria alla
spinta fSr
che il getto esercita sulla pala. La spinta è data pertanto da:
cPf MGrr
−−=
uu
cc
MM
quM ρ
21 ==
=
ofS ρ2=
ur
uu rr−=*
cc uu −=*
ccii uu ΩΩ =≅ **q*
21 uu MMSrrr
− . (15)
I baricentri delle sezioni di uscita sono posti alla medesima quota del baricentro della sezione contratta. In forza del teorema di Bernoulli e dell'ipotesi di liquido perfetto, con ragionamento analogo a quello esposto al punto 5.1 si conclude che i moduli delle velocità nella sezione contratta e nelle due sezioni di uscita sono identici: uc
= uu1 = uu2. Inoltre, poiché, per simmetria, la portata del
getto si suddivide in parti uguali fra le due sezioni di uscita, i moduli dei flussi di quantità di moto sulle sezioni di uscita risultano pari alla metà del valore che si ha sulla sezione contratta:
cquρ
21 .
La componente orizzontale della spinta sulla pala, l'unica utile ai fini del calcolo della coppia motrice, si ottiene proiettando l'espressione (15) sull'orizzontale:
cqu .
Si osservi che tale spinta è doppia rispetto alla spinta sulla piastra piana di cui al punto 4.a.7 Nel caso in cui la pala sia animata da moto traslatorio nella direzione del getto con velocità pvr , il
problema può analizzarsi più convenientemente dal punto di vista di un osservatore solidale con la pala8, il quale misurerà velocità relative, da intendersi in senso vettoriale, ottenute dalle velocità misurate da un osservatore fisso (velocità assolute, considerate in precedenza) sottraendovi la velocità della pala (velocità di trascinamento), secondo lo schema di Figura 9. Per una generica velocità assoluta , la corrispondente velocità relativa *ur è quindi data da:
pvr . (16)
Considerato che la velocità di trascinamento è concorde con la velocità nella sezione contratta, il modulo della velocità relativa in tale sezione è dato da:
. pv
Poiché l'equazione globale è riferita ad un volume di controllo fisso, questo deve essere delimitato verso monte da una sezione di ingresso, anch'essa in movimento con velocità u pi vrr
= (v. Figura 9) L'osservatore solidale con la pala misurerà quindi una portata del getto che investe la pala pari a:
( ) cpc vu Ω−= ,
7 Ciò è dovuto al fatto che nel caso della piastra piana i flussi di quantità di moto in uscita risultano ortogonali al flusso di quantità di moto del getto nella sezione contratta, mentre nel caso della pala Pelton l'angolo fra i primi ed il secondo è di 180°. Si può mostrare facilmente che, per un angolo di uscita qualunque βP, la spinta orizzontale sulla pala Pelton vale Sc
= ρquc(1 – cosβP). 8 Trattandosi di moto traslatorio, un sistema di riferimento solidale con la pala è anch'esso inerziale. Le corrispondenti formulazioni di equazioni dinamiche (quali l'equazione globale del moto e la legge di Bernoulli) non richiedono pertanto l'introduzione di forze di inerzia aggiuntive.
14

pcu vuu rrr 22 +−=
u1pcu vuu rrr 21 +−=
C
C
u2
i
i
cur
pvrci uu rr
=
Velocità assolute
pcc vuu rrr−=*
**ci uu rr
=
)(**1 pccu vuuu rrrr
−−=−=
)(**2 pccu vuuu rrrr
−−=−=
Velocità relative
i
i
u2
u1
C
C
Figura 9. Velocità relative e velocità assolute
mentre la differenza rispetto alla portata q alimenta il tronco di corrente, di sviluppo crescente al trascorrere del tempo, compreso fra la sezione contratta e la pala.
Applicando il teorema di Bernoulli fra la sezione contratta e ciascuna delle due sezioni di uscita, poste alla medesima quota, si ottiene, come già nel caso di pala ferma, l'uguaglianza dei moduli delle velocità, questa volta in termini di velocità relative:
. *2
*1
*uuc uuu ==
L'applicazione dell'equazione globale con riferimento alle velocità relative fornisce l'espressione della spinta sulla pala in moto traslatorio:
*2
*1
*uuctt MMMGS
rrrrr−−−=
di componente orizzontale
( ) cpccot vuuqS Ωρρ 2** 22 −== .
La trattazione esposta è valida per brevi intervalli di tempo, giacché con l'allontanarsi della pala dalla sezione contratta il getto deflette verso il basso (assumendo una forma essenzialmente parabolica con asse verticale), cessando di investire la pala dopo un certo lasso di tempo, mentre la sezione del getto accelerato di portata costante deve necessariamente diminuire per distanze crescenti dalla sezione contratta. Il risultato ottenuto riflette tuttavia, anche se parzialmente, quanto accade ad una pala nel breve intervallo di tempo in cui essa, trovandosi in prossimità del punto di
15

quota minima rispetto alla rotazione di una ruota Pelton ad asse orizzontale, è investita dal getto mentre percorre un segmento di traiettoria approssimativamente orizzontale. La velocità periferica della pala di una turbina Pelton ruotante alla velocità angolare ω, valutata in corrispondenza di una circonferenza caratteristica di raggio Rp (circonferenza di Pelton), è data da:
pp Rv ω= .
Contrariamente al caso ideale di pala in moto traslatorio, non viene perduta alcuna frazione (o, comunque solo frazioni trascurabili) della portata erogata dal distributore, poiché quando una pala comincia ad allontanarsi dalla sezione contratta e a non essere quindi più investita dall'intero getto, la pala successiva incide il getto e incomincia a sottrarle una parte della portata totale. Il tronco di corrente compreso fra la sezione contratta e la pala, che nel caso ideale di pala in moto traslatorio aumentava la sua lunghezza, e quindi il volume, indefinitamente al trascorrere del tempo, nel caso reale mantiene quindi lunghezza e volume mediamente costanti. In altri termini, in ogni istante il getto viene completamente intercettato e deviato dalle pale che sono contemporaneamente in presa, sicché tutto si svolge come se vi fosse una sola pala, investita da tutta la portata q, invece che dalla sola portata relativa q*. La componente orizzontale della spinta esercitata sul complesso delle pale contemporaneamente in presa si può ottenere ancora dall'applicazione dell'equazione globale al moto relativo, purché si introduca nei flussi di quantità di moto l'intera portata q in luogo di q
opS
*:
( )pccop vuqquS −== ρρ 22 * .
Conseguentemente, la coppia agente sulla ruota vale:
( ) ppcpopp RvuqRSC −== ρ2
e quindi la potenza che la ruota sottrae al getto è
( ) ωρω ppcp RvuqCW −== 2 ,
ossia:
( ) ppcp vvuqCW −== ρω 2 . (17)
Le relazioni scritte riflettono varie schematizzazioni del fenomeno. Nella realtà, deviazioni dalle ipotesi ammesse – ad esempio quelle che portano a trascurare i modesti sforzi viscosi (liquido perfetto) e le piccole perdite di portata effettivamente turbinata – determinano una riduzione della potenza effettivamente resa all'asse della ruota, Wp. Introdotto il rendimento della macchina
WWp=η ,
valutato sperimentalmente dal costruttore e fornito nelle specifiche della macchina, si ottiene quindi l'espressione della potenza resa:
WWp η=
Secondo la (17), la potenza è una funzione parabolica della velocità vp, che ammette un massimo per vp
= uc/2 (v. Figura 8). In tali condizioni, per la (16) la velocità assoluta di uscita dalla pala vale:
( ) 02* =+−=+−−=+= pcppcpuu vuvvuvuu rrrrrrrr ,
il che significa che la ruota ha sottratto al getto tutta la sua energia cinetica (che è tutta l'energia meccanica posseduta dal getto, essendo esso a pressione nulla ed alla stessa quota della pala).
16