Controlli Automatici A - ce.unipr.it · Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile...
61
1 4. Stabilità e Sistemi in Retroazione Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003 Controlli Automatici A Corsi di laurea triennali in Ingegneria Elettronica, Informatica, Telecomunicazioni a.a. 2001/2002 Docente: Prof. Aurelio Piazzi Email: [email protected] http://www.ce.unipr.it/people/piazzi/
-
Upload
nguyenkhanh -
Category
Documents
-
view
230 -
download
1
Transcript of Controlli Automatici A - ce.unipr.it · Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile...

1
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
Controlli Automatici A
Corsi di laurea triennali in Ingegneria Elettronica, Informatica, Telecomunicazioni
a.a. 2001/2002Docente: Prof. Aurelio Piazzi
Email: [email protected]://www.ce.unipr.it/people/piazzi/

2
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
4.1 Stabilità: definizioni e teoremi
4.2 Il criterio di Routh
4.3 Proprietà generali dei sistemi in retroazione
4.4 Analisi a regime dei sistemi in retroazione
4.5 Il criterio di Nyquist
4.6 Margini di stabilità

3
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
4.1 Stabilità: definizioni e teoremi
Si consideri un punto di equilibrio del sistema Σ (tutte le variabili del sistema sono costanti nel tempo) con u = 0 e y = 0.
• Def. Perturbazione (introdotta dall’ingresso)
É un segnale u(t) non identicamente nullo su di un intervallo finito[t0 , t1] e tale che u(t) = 0 ∀ t > t1.

4
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
• Def. (Stabilità a seguito di perturbazione)
Un punto di equilibrio, dopo l’introduzione di una perturbazionesull’ingresso, si dice:
1. STABILE se esiste My ∈ R+ ∋ | y(t) | ≤ My ∀ t ≥ t1 .
2. INSTABILE se non è stabile.
3. ASINTOTICAMENTE STABILE se il punto di equilibrio è stabile (vedi 1) ed inoltre vale limt→∞y(t) = 0.
Osservazioni:
• Le definizioni sono del tutto simili se il punto di equilibrio corrisponde all’ingresso costante uC e all’uscita costante yC (per esempio nei sistemi lineari e stazionari yC = G(0) uC ovvero yC = K uC ).

5
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
• Per i sistemi non lineari l’analisi di stabilità può variare sia al variare del punto di equilibri che al variare della “grandezza” della perturbazione.
• Proprietà
Per i sistemi lineari (e stazionari) l’analisi di stabilità fatta per un punto di equilibrio rimane la medesima per ogni punto di equilibrio del sistema.
Dim. (cenno)
Il punto di equilibrio corrispondente ad u = 0 e y = 0 sia, per esempio, asin. stabile a seguito della perturbazione u~(t). Allora anche il punto di equilibrio u = uC e y = yC è asin. stabile a seguito della perturbazione u(t) = uC + u~(t).
Infatti, eseguendo il cambio di variabili congiunto u(t) = uC + u~(t) e y(t) = yC + y~(t) con (u~(t) , y~(t) ) ∈ B ….

6
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
• Def. (stabilità di un sistema dinamico)
Un sistema lineare e stazionario Σ si dice
1. STABILE se per ogni perturbazione introdotta l’evoluzione libera è limitata su [t1 , +∞).
2. INSTABILE se non è stabile.
3. ASINTOTICAMENTE STABILE se è stabile ed inoltre l’evoluzione libera è convergente a zero per t → +∞ .

7
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
• Teorema (poli di Σ e stabilità)
Un sistema lineare e stazionario Σ con f.d.t. razionale è stabile se e solo se Σ non presenta alcun polo a parte reale positiva e gli eventuali poli puramente immaginari siano semplici.
Σ è asintoticamente stabile se e solo se tutti i poli hanno parte reale negativa.
2
4
Esempi:
1( ) è stabile (ma non asintoticamente)
( 5)
( 2)( 5)G(s)= è instabile
( 12)( 50)
( 2)( 5)G(s)= è asintoticamente stabile
( 7) ( 50)
( 2)( 5)G(s)= è instabile
( 3)( 50)
sG s
s s
s s
s s s
s s
s s
s s
s s
+=++ −+ ++ −+ ++ −− +

8
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
Dim.
Sufficienza: Senza perdita di generalità possiamo fissare t1 = 0, quindi ⇒
1 1 2 2( ) ( ) ( ) ( )
( ) -esimo modo di , 1, 2, ,
{ordine di } {numero di poli complessi (con molteplicità) diviso due}
Se è un polo reale di molteplicità i modi assoc
q q
i
y t c m t c m t c m t
m t i i q
q
p h
= + + +
Σ =≡ Σ −
…
1
1 1 2
iati sono:
, , ,
Se è una coppia di poli complessi coniugati di molteplicità i modi ass. sono:
sen( ), sen( ), , sen( )
Quindi
pt pt h pt
t t h th
e te t e
j h
e t te t t e tσ σ σ
σ ωω ϕ ω ϕ ω ϕ
−
−
±+ + +
Re
la sufficienza di entrambe le proposizioni è provata osservando che con Re 0
lim 0 h p t
t
p
t e h⋅
→+∞
<= ∀ ∈
Necessità: É omessa perchè la prova è molto “tecnica”. Ragionando per assurdo, basterebbe mostrare che esiste una perturbazione per la quale:
1 1 10, , 0, 0, 0, , 0 ... e quindi ...i i i qc c c c c− += = ≠ = =… …

9
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
• Stabilità ingresso-limitato uscita-limitata (stabilità ILUL o BIBO, bounded-input bounded-output)
Si considera un sistema Σ lineare e stazionario.
• Def. (stabilità ILUL)
Σ è stabile ILUL se per ogni azione forzante limitata la corrispondente evoluzione forzata è anch’essa limitata.
( )Formalmente:
( ), ( ) u(t) ( )con ( ) 0 0 e u t y t y tu t t∞ ∞
∀ ∈ < +∞ ⇒ < +∞= ∀ <В
• Teorema (Stabilità ILUL)
Σ è stabile ILUL se e solo se 0
( )g dτ τ+∞
< +∞∫

10
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
Dim.
Sufficienza: 0
0 0
( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
y t g u t d
y t g u t d g d u t
τ τ τ
τ τ τ τ τ
+∞
+∞ +∞
∞
= −
≤ − ≤ ⋅
∫
∫ ∫
Necessità: Occorre provare che la stabilità ILUL implica la limitatezza dell’integrale improprio. Si ragiona per assurdo: si ipotizza che l’integrale sia illimitato e quindi per M > 0 grande a piacere esiste t1 > 0 tale che 1
0
( )t
g d Mτ τ =∫1
1 1
1 1 1 1
0
1
0 0
( ) ( ) ( ) si sceglie ( ) ( ) sign ( ) [0, ]
( ) ( )sign ( ) ( )
l'uscita assume valori illimitati in risposta ad un ingresso limitato... QE
t
t t
y t g u t d u t u t g t
y t g g d g d M
τ τ τ τ τ τ
τ τ τ τ τ
= − ∋ − = ∀ ∈
= = =
∫
∫ ∫D

11
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
• Teorema (Equivalenza Stabilità ILUL e Stabilità Asintotica)Σ è stabile ILUL se e solo se Σ è asintoticamente stabile.
Dim.
Necessità: Si prova che la stabilità ILUL implica la stabilità asintotica.
{ }0 0
0
( ) ( ) ( )
Si noti che Re 0 1 ; : : Re 0
( ) ( ) ovvero ( ) è analitica su tutto il semipiano positivo chiuso...
st st
st
G s g t e dt g t e dt
s e s s
s G s g t dt G s
+∞ +∞− −
−⊕
+∞
⊕
= ≤
≥ ⇒ ≤ = ∈ ≥
∀ ∈ ⇒ ≤ < +∞
∫ ∫
∫
Sufficienza: si prova che {tutti i poli a parte reale negativa} ⇒ {Σ stabile ILUL}
1 11
10 0
( ) ( ) ( ) ; ( ) ( )
( ) ( ) i integrali che appaiono sono tutti finiti
q
q q i ii
q
i ii
g t c m t c m t g t c m t
g t dt c m t dt q
=
+∞ +∞
=
= + + ≤
≤
∑
∑∫ ∫
…

12
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
10 0
Infatti si consideri, per esempio,
( ) sin( )
!sin( ) quando 0 QED
( )
h ti
h t h th
m t t e t
ht e t dt t e dt
σ
σ σ
ω ϕ
ω ϕ σσ
+∞ +∞
+
= +
+ ≤ = <−∫ ∫

13
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
4.2 Il Criterio di Routh
Si considera un sistema Σ con f.d.t. razionale G(s) = b(s)/a(s) dove a(s) e b(s) sono coprimi fra loro.
• Def. (Eq. caratteristica)
11 1 0
Dato il sistema l'eq. ( ) 0 ovvero
0
è detta equazione caratteristica di .
n nn n
a s
a s a s a s a−−
Σ =+ + + + =
Σ
Osservazione: La stabilità di Σ è associata alle radici dell’eq. caratteristica.

14
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
• Def. (Polinomi di Hurwitz)
Un polinomio a(s) è detto di Hurwitz o hurwitziano se tutte le sue radici hanno parte reale negativa.
• Proprietà
Si assuma an > 0. Il polinomio a(s) è hurwitziano solo se tutti i suoi coefficienti sono positivi.
Dim.
( ) ( )2 2 2 21 2 1 1 1
Se le radici di ( ) hanno tutte parte reale negativa allora
( ) ( )( ) ( ) 2 2
0 1, ,
0 1, ,
(0,1) 1, ,
Quindi sviluppando tutti i prodot
n k n n l nl nl
i
ni
i
a s
a s a s s s s s s s
i k
i l
i l
η η η δ ω ω δ ω ω
ηωδ
= + + + + + + +
> => =∈ =
………
ti si deduce che i coefficienti sono positivi
in quanto somme di termini positivi... QED

15
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
É possibile determinare il segno delle radici di a(s) (Re > 0, Re = 0, Re < 0) mediante la cosiddetta Tabella di Routh.
• Costruzione della Tabella di Routh
0,1 0,2 0,3
1,1 1,2 1,3
2,1 2,2 2,3
3,1 3,2 3,3
2,1 2,1
1,1
,1
1
2
3
2
1
0
n n
n
n
n
n
n
n
γ γ γγ γ γγ γ γγ γ γ
γ γγγ
− −
−
−−−

16
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
• Regole di costruzione della T.d.R. (algoritmo base)
1. Le prime due righe riportano in modo alterno i coefficienti di a(s):
0,1 0,2 2 0,3 4
1,1 1 1,2 3 1,3 5
Ove non esplicitamente definiti i coefficienti gamma assumono il valore di zero.
n n n
n n n
a a a
a a a
γ γ γγ γ γ
− −
− − −
= = == = =
2. Le righe successive vengono definite dalla regola (k = 2, 3,… , n):
2,1 2, 1
1,1 1, 1 1,1 2, 1 2,1 1, 1,
1,1 1,1
k k j
k k j k k j k k jk j
k k
γ γγ γ γ γ γ γ
γγ γ
− − +
− − + − − + − − +
− −
−= − =

17
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
• Teorema (di Routh)
Si assuma che la tabella di Routh possa essere completata. Allora ad ogni variazione di segno, degli elementi consecutivi della primacolonna, corrisponde una radice a parte reale positiva, ad ogni permanenza corrisponde una radice a parte reale negativa.
• Criterio di Routh
Il polinomio a(s) è hurwitziano se e solo se l’associata tabella di Routh può essere completata (con l’algoritmo base) e presenta nella prima colonna solo permanenze di segno.

18
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
Esempi:
{ }{ }
3 24 6 0 (radici 1,2,3)
3 1 1 0
2 4 6 0due variazioni n. radici 2
4 6 5 una permanenza n. radici 1 1 0
4 20 6
s s s
+
−
− + + = −
− ⇒ ∈ =− − ⇒ ∈ ==−
{ }{ }
4 3 22 3 5 10 0 (radici 0.7555 1.4444, 1.0055 0.9331)
4 2 3 10 0
3 1 5 0 0due variazioni n. radici 22 7 10 0
due permanenze n. radici 2 45
1 07
0 10
s s s s j j
+
−
+ + + + = ± − ±
⇒ ∈ =−⇒ ∈ =

19
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
• Proprietà
Durante la costruzione della tabella di Routh i termini di una stessa riga possono essere moltiplicati tutti per uno stesso coefficiente positivo senza che ciò modifichi le variazioni (o permanenze) disegno nella prima colonna.
4 3 24 3 5 2 1 0
4 4 5 1 0
3 3 2 0 0
2 7 3 0 (non si è diviso per 3)
1 5 0 (non si è diviso per 7)
0 3
Tutte permanenze tutte radici con parte reale negativa
s s s s+ + + + =
⇒

20
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
{ }{ }
4 3 23 7 6 15 0
4 1 7 15 0
3 1 2 0 0 (si è diviso per 3)
2 1 3 0 (si è diviso per 5)
1 1 0
0 3
due variazioni n. radici 2
due permanenze n. radici 2
s s s s
+
−
+ + + + =
−
⇒ ∈ =
⇒ ∈ =

21
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
• Casi singolari nella Costruzione della Tabella di Routh
a) Il primo elemento di una riga è zero.
b) Tutti gli elementi di una riga sono nulli.
• Prosecuzione della tabella nel caso a)
1. Metodo ε (è obsoleto: algoritmicamente complesso e non sempre risolutivo)
2. Metodo di Benedir-Pincibono (1990): algoritmicamentesemplice e sempre risolutivo.

22
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
• Metodo di Benedir-Pincibono
Ogni riga, non nulla, che inizia con p zeri viene sommata con la riga da questa ottenuta moltiplicandola per (-1)p e traslandola verso sinistra di p posizioni. La tabella di Routh viene poi continuata ed interpretata nel modo usuale.
{ }{ }
3Esempio: 3 2 0
3 1 3 0
2 0 2 0
una variazione n. radici 12 2 0 0
due permanenze n. radici 2 2 2 2 0
1 4 0
0 2
s s
+
−
+ − =
′ −′′ ⇒ ∈ =
⇒ ∈ =−
−

23
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
• Prosecuzione della tabella nel caso b)
Tutti gli elementi di una riga sono nulli: quando il polinomio a(s) non ha radici nell’origine questo accade sempre su di una riga dispari.
2 ,1 2 ,2 2 ,3 2 , 1
2
2 2 2 2 4 22 2 ,1 2 ,2 2 ,3 2 , 2 , 1
2
2 0
2 1 0 0 0 0 0
Def. polinomio ausiliario ( )
( ) :
L'eq. ausiliaria è quindi ( ) 0
n i n i n i n i i
i i in i n i n i n i i n i i
i
i
a s
a s s s s s
a s
γ γ γ γ
γ γ γ γ γ
− − − − +
− −− − − − − +
−
= + + + + +
=

24
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
• Proprietà
1. Il polinomio ausiliario a2(s) divide a(s). Quindi ∃ a1(s) ∋ a(s) = a1(s) a2(s) .
2. La prima parte della tabella (fino alla riga 2i) da informazioni sul segno delle radici di a1(s) .
• Proprietà (simmetria delle radici del p. ausiliario)
Le radici del polinomio ausiliario a2(s) sono disposte simmetricamente rispetto all’origine del piano complesso.
Dim. (cenno) Nel polinomio a2(s) mancano i termini dispari …
Quindi σ ± jω è radice di a2(s) se e solo se - σ ± jω è radice di a2(s)

25
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
• Corollario
L’equazione ausiliaria a2(s) = 0 ha tante radici a parte reale negativa quante sono quelle a parte reale positiva e può anche presentare radici puramente immaginarie.
• Come proseguire la costruzione della Tabella nel caso b)
1. Si deriva il polinomio ausiliario.
2. I coefficienti del polinomio così ottenuto sostituiscono gli zeri della riga nulla.
3. Si prosegue la Tabella con l’algoritmo usuale: in questo caso però le permanenze corrispondono anche a radici puramente immaginarie.

26
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
{ }{ }
6 5 4 3 2
4 22
32
0
Esempio: 2 3 7 4 4 0
6 1 2 7 4 0
5 1 3 4 0 0
4 1 3 4 0 polinomio ausiliario ( ) 3 4
3 2 3 0 0 ( ) 4 6 (si è diviso per 2)
2 3 8 0
1 25 0
0 8
n. radici 1
n. radici
s s s s s s
a s s s
Da s s s
+
+ − − − − − =− − −− −− − = − −− = −
− −−−
∈ =
∈ =
{ }2 (calcolato come 4 1 1)
n. radici 2 1 3−
− −
∈ = + =

27
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
4.3 Proprietà generali dei sistemi in retroazione
• Regola rapida per il calcolo della f.d.t. nei sistemi retroazionati(singolo anello con il segnale retroazionato sottratto nella giunzione sommante):
{ } f.d.t. del percorso di segnale direttof.d.t.
1+guadagno di anello
=
r +−
( )G s
( )H s
y( )
( )1 ( ) ( )ry
G sT s
G s H s=+

28
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
d
( )D s
( )P s( )C s
( )H s
−r y
( ) ( )
1 ( ) ( ) ( )
( ) ( )
1 ( ) ( ) ( )
ry
dy
C s P sT
C s P s H s
D s P sT
C s P s H s
=+
=+

29
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
• Sensibilità a variazioni di parametri nei sistemi retroazionati
r
−( )G s
( )H s
y( )
( )1 ( ) ( )
G sT s
G s H s=+
• 1° caso: variazione di un parametro nella catena diretta
{ }0 0
00
00
( ) è in realtà ( ; ) con , valore nominale del p.
variazione: ( ; ) ( ; )
relativa di G( ; )
variazione: ( ; ) ( ; )
relativa di T( ; )
G s G s
GG G s G s
G s
TT T s T s
T s
α α α α α
α α αα
α α αα
= + ∆ ≡
∆∆ →∆ = − → ≡ ∆∆ →∆ = − → ≡

30
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
0
0
0
0
0
2
0
Sensibilità di T ( ; ):
a variazioni di G( ; )
Si consideri variazione infinitesimale
( ; )
( ; )
1 ( ) 1
(1 ) 1 1
1
1 ( ; ) ( )
TG
TG
TG
TG
T
T sS
G
G s
G sdTS
dG T s
GH G H GS
GH G GH GH
SG s H s
α α
α
αα
αα
α
=
∆
≡ = ∆
∆
⇒ =
+ −= ⋅ =+ + +
=+

31
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
Quindi se il guadagno di anello è molto elevato la variazione relativa di T è molto più piccola della variazione relativa di G.
0
0 0
In termini frequenziali:
se ( ; ) ( ) 1
( ) ( ) <<
( ; ) ( ; )
G j H j
T j G j
T j G j
ω α ω
ω ωω α ω α
>>
∆ ∆⇒
Conclusione: Un guadagno di anello elevato rende (relativamente) insensibile la f.d.t. del sistema retroazionato a variazioni della f.d.t. del sistema controllato.

32
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
• 2° caso: variazione di un parametro nella catena di retroazione
{ }0 0
00
00
( ) è in realtà ( ; ) con , valore nominale del p.
variazione: ( ; ) ( ; )
relativa di H( ; )
variazione: ( ; ) ( ; )
relativa di T( ; )
H s H s
HH H s H s
H s
TT T s T s
T s
β β β β β
β β ββ
β β ββ
= + ∆ ≡
∆∆ →∆ = − → ≡
∆∆ →∆ = − → ≡
0
0 0
0 0
0 0
Sensibilità di T:
a variazioni di H ( ; ) ( ; )
Considerando variazione infinitesimale
( ; ) ( ) ( ; )
( ; ) 1 ( ) ( ; )
TH
T TH H
T HS
T s H s
H s G s H sdTS S
dH T s G s H sβ β
β ββ
β ββ β=
∆ ∆≡ =
∆
⇒ = ⇒ = −+

33
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
Quindi se il guadagno di anello è elevato la variazione relativa di T è circa uguale (in modulo) alla variazione relativa di H.
0
0 0
In termini frequenziali:
se ( ) ( ; ) 1
( ) ( )
( ; ) ( ; )
G j H j
T j H j
T j H j
ω ω β
ω ωω β ω β
>>
∆ ∆⇒ ≅
Conclusione: Variazioni della f.d.t. nella catena di retroazione si riverberano senza attenuazione in variazioni della f.d.t. del sistema retroazionato.

34
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
• Attenuazione dei disturbidisturbo agente su “impianto” ad anello aperto:
( )P s( )Y s
( )D s
( )R s
{ }{ }uscita determinata dal segnale utile ( ) ( )
uscita determinata dal disturbo ( ) ( )
segnale ( )
disturbo ( )
P s R s
P s D s
R s
D s
≡
≡
⇒ =

35
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
Ipotizziamo che il disturbo sia indipendente dal segnale “manipolabile” R(s) e mostriamo come sia possibile migliorare il rapporto segnale/disturbo introducendo la retroazione:
( )P s( )Y s
( )D s( )R s
( )H s
( )C s
Per un confronto omogeneo si richiede 1
1 questo è possibile quando 1 e 1
guadagno di anello elevatoovvero
f.d.t. della catena di retroazione sistema inverso di P
CPP
CPHC CPH CPH H P
≅+
⇒ ≅ + >> ≅
≅

36
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
{ }
{ }
( )
uscita determinata dal segnale utile ( ) ( )
( )uscita determinata dal disturbo ( )
1 ( ) ( ) ( )
segnale ( ) 1 ( ) ( ) ( )
disturbo ( )
P s R s
P sD s
C s P s H s
R sC s P s H s
D s
≅
=+
⇒ ≅ +
Il rapporto segnale/disturbo viene modificato nel rapporto di 1 a |1+C(jω)P(jω)H(jω)| e quindi fortemente aumentato se nella banda di frequenze del disturbo vale |C(jω)P(jω)H(jω)|>>1.
Conclusione: Se il guadagno di anello è elevato il rapporto segnale/disturbo si eleva all’incirca del medesimo fattore passando dallo schema in catena aperta a quello in catena chiusa. Quindi, a parità di segnale utile, il disturbo viene grandemente attenuato nel sistema in retroazione.

37
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
• Allargamento della banda passante
Ipotizziamo che ( )
( )( )
1 ( )
Se ( ) 1 ( ) 1
H s h
G jT j
hG j
h G j T j h
ωωω
ω ω
+= ∈
=+>> ⇒ ≅
r
−( )G s
h
y
Un guadagno di anello elevato implica un allargamento della banda passante.
(log)ω
3 db
3 db
( ) (db)G jω
( ) (db)T jω
Gω Tω

38
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
{ }
{ }
Esempio:
1 1( ) banda passante
1
1 111 1( )
1 11 11 1
1banda passante
Se 1
G
T
T G
G jj
j hT jj hh j
j h
h
h
ω ωτ ω τ
τ ωω ττ ω ωτ ω
ωτ
ω ω
= ≡ =+
+ += = =+ ++ +
+ ++≡ =
>> ⇒ >>

39
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
4.4 Analisi a regime dei sistemi in retroazione
( )G syer
−Studio dell’errore di regolazione a regime in risposta a segnali tipici.
Assunzioni: sistema in retroazione unitaria, sistema retroazionatoasintoticamente stabile,
2
0 0 0( ) 1( ), 1( ), 1( )2
tr t r t r t t r t
∈
1( ) : ( ) ( ) ( ) ( )
1 ( )
:= lim ( ) : tipo (di sistema) di ( )rt
e t r t y t E s R sG s
e e t h G s→∞
= − =+
=

40
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
• Gradino: 00( ) 1( ), ( )
rr t r t R s
s= =
t
0rre
0
0 0
0
0
1lim ( ) lim
1 ( )
dove : lim ( ) (costante di posizione)1
rs s
r ps
p
re sE s s
G s s
re K G s
K
→ →
→
= = ⋅+
= =+
• Rampa: 00 2
( ) 1( ), ( )r
r t r t t R ss
= =
t
re
0 020 0 0
0
0
1lim ( ) lim lim
1 ( ) ( )
dove : lim ( ) (costante di velocità)
rs s s
r vs
v
r re sE s s
G s s s sG s
re K sG s
K
→ → →
→
= = ⋅ =+ +
= =

41
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
• Parabola: 2
00 3
( ) 1( ), ( )2
t rr t r t R s
s= = re
t
0 03 2 20 0 0
20
0
1lim ( ) lim lim
1 ( ) ( )
dove : lim ( ) (costante di accelerazione)
r s s s
r as
a
r re sE s s
G s s s s G s
re K s G s
K
→ → →
→
= = ⋅ =+ +
= =
Quadro riassuntivo:
1
1
(1 )( )
(1 )h
sG s K
s s
ττ′+=
+
Tipo di
sistema
0 0 0
1 0
2
p v aK K K
K
K
K
∞∞ ∞
|
0
0
0
01
1 0
2 0 0
Tipo Ingresso gradino rampa parabola
r r r
r r r
r r r
re e e
Kr
e e eK
re e e
K
= = ∞ = ∞+
= = = ∞
= = =

42
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
• Errore a regime con retroazione non unitaria
r
−( )G s
( )H s
yLa variabile controllata y è in generale dimensionalmente diversa dal segnale di set-point r e quindi occorre definire la condizione ideale di controllo:
( ) ( ) : costante di controllo o regolazioneC Cy t K r t K≡ =
La difformità dalla condizione ideale può essere misurata da unavariabile errore, per esempio così definita:
( ) : ( ) ( ) ; : 1
( ) 0 ( ) ( )C
C
e t r t y t K
e t y t K r t
γ γ= − =≡ ⇔ ≡

43
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
( )EG syγer
−
Lo schema in retroazione non unitaria può essere ricondotto allo schema a fianco con retroazione unitaria. Quest’ultimo incorpora la definizione di errore assegnata.
Affinché i due schemi siano equivalenti occorre e basta che la f.d.t. fra r ed y del primo schema moltiplicata per γ sia uguale alla f.d.t. fra r e γy del secondo schema.
1 1
E
E
G G
GH Gγ⋅ = ⇒
+ + ( )( )
( )1 ( ) ( )E
G sG s
G s H s
γγ
=+ −
Esempio: Se ( ) e 1 ( ) ( )C EH s h K h G s G s h= = ⇒ =

44
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
4.5 Il criterio di Nyquist
È un criterio grafico per lo studio della stabilità asintotica deisistemi retroazionati.
r
−( )G s
( )H s
y ( )( )
1 ( )ry
G sT s
L s=+
( )( ) : ( ) ( ) guadagno di anelloL s G s H s=
• Il sistema retroazionato è stabile asintoticamente se e solo se l’eq. caratteristica 1 + L(s) = 0 ha tutte le radici a parte reale negativa.
• Il criterio di N. richiede il tracciamento del diagramma polare(o di N.) di L(jω).

45
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
Teorema dell’indice logaritmico (Principle of the Argument)
Sia Γ una curva chiusa del piano complesso e D la regione ad esso interna ( Γ = ∂D ). Sia F(s) una funzione analitica su D ad eccezione di un numero finito di poli. Inoltre F(s) non abbia su Γné poli né zeri. Vale quindi la relazione:
1arg ( )
2 z pF s n nπ∆ = −
dove ∆arg F(s) denota la variazione dell’argomento di F(s) al variare di s lungo Γ per un giro completo in senso antiorario ed nz e np sono rispettivamente il numero degli zeri e dei poli di F(s) su D computati con le loro molteplicità.

46
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
Nota: Se la curva Γ fosse percorsa in senso orario la relazione sarebbe: 1
arg ( )2 z pF s n nπ
− ∆ = −
Esempio:
piano ss
Γpiano immagine
( )F siθ
curva immagine
( )
( ) ( )
arg ( ) 2 2 4
3, 1 (zeri e polo con molteplicità unitaria)
14 3 1
21
Con la percorrenza oraria di avremmo: arg ( ) 2 2 4 4 3 12
f i i i
z p
f i i i
F s
n n
F s
θ θ θ π θ π
ππ
θ θ θ π θ π ππ
∆ = − = + ⋅ − =
= =
⋅ = −
Γ ∆ = − = − ⋅ − = − ⇒ − ⋅ − = −

47
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
Corollario (formulazione geometrica del teorema dell’indice log.)
Assunte le ipotesi del teorema dell’indice log. con la percorrenza di Γ antioraria vale la relazione:
numero di giri, in senso antiorario,
della curva immagine intorno all'origine z pn n
= −
oppure, assunte le ipotesi del teorema dell’indice log. con la percorrenza di Γ oraria vale la relazione:
numero di giri, in senso orario,
della curva immagine intorno all'origine z pn n
= −

48
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
• Applicazione del teorema dell’indice log. alla stabilità dei sistemi retroazionati:
R
ρ
R →∞
0ρ →
La curva chiusa di figura percorsa in senso orario è detta contorno di Nyquist: è composta da una semicirconferenza all’infinito, semicirconferenze infinitesime aggiranti poli o zeri immaginari di L(s) e da segmenti dell’asse immaginario.

49
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
Applichiamo il teorema dell’indice log. nella sua formulazione geometrica scegliendo il contorno di Nyquist quale curva del piano complesso e le funzioni L(s) e 1 + L(s):
+
+
+
: numero degli zeri di ( ) appartenenti a
numero degli zeri di 1 ( ) appartenenti a
: numero dei poli di ( ) (o di 1 ( ) ) appartenenti a
numero di giri in senso orario della c:
z
z
p
n L s
n L s
n L s L s
ξ
=′ = += +
=urva immagine di ( )
sul contorno di Nyquist intorno all'origine
numero di giri in senso orario della curva immagine di 1 ( ) :
sul contorno di Nyquist intorno all'origine
z p
z p
L sn n
L sn nψ
= −
+ ′= = −

50
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
• Def. (diagramma polare completo)
Il diagramma polare completo è la curva chiusa immagine di L(s) sul contorno di Nyquist.
Quindi
z p
z p
n n
n n
ξψ= −
′= −
dove
{ }{ }numero di giri in senso orario del d.p.c. intorno all'origine
numero di giri in senso orario del d.p.c. intorno al punto 1 0j
ξψ=
= − +

51
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
• Deduzione del Criterio di Nyquist
Il sistema in retroazione è asintoticamente stabile se e solo se
1. Non esistono radici puramente immaginarie di 1 + L(s) = 0.
2. 0zn′ =
∃{ } { }{ } { }{ }{ } { }
0 01 ( ) 0 1 ( ) 0
1 ( ) 0 ( ) 1
Il diagramma polare di ( ) passa per 1 0
Il d.p.c. passa per 1 0 Il d.p.c. non passa per 1 0
j L j j L j
L j L j
L j j
j j
ω ω ω ω
ω ω ω ω
ω
∈ ∋ + = ⇔ ∃ ∈ ∋ + =
⇔ ∃ ∈ ∋ + = ⇔ ∃ ∈ ∋ = −
⇔ − +
⇔ − + ⇔ − +
L’affermazione 1. può essere trasformata in accordo alla seguente catena di equivalenze:
L’affermazione 2. può essere sostituita: { } { }0z pn nψ′ = ⇔ − =

52
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
È quindi provata la proposizione: Il sistema in retroazione èasintoticamente stabile se e solo se (1) il d.p.c. non tocca −1+ j0 e (2) pnψ− =
Criterio di Nyquist
Condizione necessaria e sufficiente affinché il sistema in retroazione sia asintoticamente stabile è che il diagramma polare completo non tocchi il punto critico −1 ma lo circondi tante volte in senso antiorario quanti sono i poli del guadagno di anello con parte reale positiva.
Nota: Il criterio di Nyquist è valido per una classe di funzioni L(s) più ampia delle sole funzioni razionali: in particolare è valido per L(s) = R(s) e−Ts con R(s) funzione razionale…

53
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
Dal criterio generale discende immediatamente il corollario:
Corollario (caso particolare del Criterio di Nyquist)
Nell’ipotesi che il guadagno di anello non abbia poli a parte reale positiva, condizione necessaria e sufficiente affinché il sistema in retroazione sia asintoticamente stabile è che il diagramma polare completo non tocchi né circondi il punto critico − 1.
Nota: Il corollario non è da associarsi ai sistemi stabili ad anello aperto…

54
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
4.6 Margini di stabilità
La proprietà di stabilità (asintotica) di un sistema retroazionato èdi per sé una proprietà on/off. Tuttavia è opportuno e necessario inserire nelle specifiche tecniche associate ad un sistema retroazionato una misura della distanza dall’instabilità.
Esempio: L(s) asintoticamente stabile …
1−
sistema r. vicino all’instabilità
1−
sistema r. distante dall’instabilità

55
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
• La distanza dall’instabilità nei sistemi retroazionati ètradizionalmente affidata ai cosiddetti margini di stabilitàfrequenziali ovvero il margine di ampiezza (MA) e il margine di fase (MF).
1−
1
AM
FM
1: dove arg ( )
( )
pulsazione di fase pi greco
: dove arg ( ) e ( ) 1
( ,0) e pulsazione critica
A p p
p
p
F c c c c c
c c
M L jL j
M L j L j
ω ω πω
ωπ ϕ ϕ ω ω ω
ϕ π ω
= ∋ = −
≡
= − = ∋ =∈ − ≡
(1, ) a volte espresso in decibel: 20log (db)
0 espresso usualmente in gradi sessagesimaliA A A
F
M M M
M
∈ +∞ ≡>

56
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
Margini di ampiezza e di fase misurati sui diagrammi di Bode AM
FMπ−
(log)ω
(log)ω
( ) (db)L jω
arg ( )L jω20log 20log ( )A pM L jω= −

57
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
• Problemi con le definizioni tradizionali dei margini di stabilità
( )
( )
( )
22
2
22
22
Esempio
1.2( )
11 1 2
20 3 3
1.2
1 130 9
1.2( )
1 19 30
1.11
8 ,59 e non 127 ,65A
o oF
L ss s
s
s ss
L jj
j
M
M
ωω ωω
= = + + ⋅ ⋅ +
= + + +
= + − +
=
=
1−
1.2598 ,°
65127 ,°

58
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
• Definizioni generalizzate dei margini di stabilità
Il sistema retroazionato sia stabile asintoticamente:
[ ]{ }
1: sup 1: 1 ( ) 0 , e 0
: sup 0 : 1 ( ) 0 , e 0
A
jF
M M L j MM
M e L jϕ
γ ω γ ω
φ ω ϕ φ φ ω−
= > + > ∀ ∈ ∀ ≥
= > + > ∀ ∈ − + ∀ ≥
I margini di stabilità sono “norme” che misurano la distanza del punto critico −1+j0 dal diagramma polare di L(jω).

59
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
Proprietà1
Vale la disequazione 1 ( ) 0 , e 0 se e solo se
il segmento dell'asse reale compreso fra e 1 non interseca il diagramma polare di ( ).
L j MM
M M L j
γ ω γ ω
ω
+ > ∀ ∈ ∀ ≥ − −
( )L jω
M− 1 M−1 γ−
1( )L jω
γ+
Dim.
11 ( ) 0 , e 0
1 1( ) 0 , e 0
L j MM
L j MM
γ ω γ ω
ω γ ωγ
+ > ∀ ∈ ∀ ≥
+ > ∀ ∈ ∀ ≥

60
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
[ ]( ) [ ]
Vale la disequazione 1 ( ) 0 , e 0 se e solo se
l'arco di circonferenza di equazione , , non interseca il diagramma polare di ( ).
j
j
e L j
e L j
ϕ
π ϕ
ω ϕ φ φ ω
ϕ φ φ ω
−
+
+ > ∀ ∈ − + ∀ ≥
∈ − +
( )L jω( )( ) jL j e π ϕω +−
[ ]{ }
( ) [ ]{ }
[ ]{ }
( ) [ ]{ }
Dim.
1 ( ) 0 , e 0
1 ( ) 0 , e 0
( ) 0 , e 0
( ) 0 , e 0
j
j j
j
j
e L j
e L j e
L j e
L j e
ϕ
ϕ ϕ
ϕ
π ϕ
ω ϕ φ φ ω
ω ϕ φ φ ω
ω ϕ φ φ ω
ω ϕ φ φ ω
−
−
+
+ > ∀ ∈ − + ∀ ≥
+ > ∀ ∈ − + ∀ ≥
+ > ∀ ∈ − + ∀ ≥
− > ∀ ∈ − + ∀ ≥
Proprietà
φ
φ
( )je π ϕ+
1−

61
4. Stabilità e Sistemi in Retroazione
Controlli Automatici A – Prof. Aurelio Piazzi 27 aprile 2003
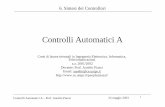
• Procedura generale per il calcolo dei margini di stabilità
1φ
2φ
1−1
1
M−
2M−
{ }1 2min ,AM M M=
{ }1 2min ,FM φ φ=