CONSORZIO NETTUNO POLITECNICO DI TORINOcorsiadistanza.polito.it/corsi/pdf/9330H/Libro_controlli...F....
22
F. Dabbene, P. Gay Politecnico di Torino − Elementi di Controllo Digitale 1 CONSORZIO NETTUNO POLITECNICO DI TORINO DIPLOMI UNIVERSITARI A DISTANZA Fabrizio DABBENE − Paolo GAY Elementi di Controllo Digitale Giugno 2000
Transcript of CONSORZIO NETTUNO POLITECNICO DI TORINOcorsiadistanza.polito.it/corsi/pdf/9330H/Libro_controlli...F....
F. Dabbene, P. Gay
Politecnico di Torino − Elementi di Controllo Digitale 1
CONSORZIO NETTUNO
POLITECNICO DI TORINO
DIPLOMI UNIVERSITARI A DISTANZA
Fabrizio DABBENE − Paolo GAY
Elementi di Controllo Digitale
Giugno 2000

F. Dabbene, P. Gay
Politecnico di Torino − Elementi di Controllo Digitale 2
Questa raccolta di esercizi e note viene utilizzata per i tutorati dell’insegnamento di Controlli Automatici II dei Corsi di Diploma Universitario Teledidattico in Ingegneria Elettrica. Nel corso della stesura si è fatto riferimento ai testi consigliati….
FABRIZIO DABBENE
PAOLO GAY
Torino, giugno 2000 Vietate la riproduzione e qualsiasi forma di commercializzazione (NON AUTORIZZATA!!).

F. Dabbene, P. Gay
Politecnico di Torino − Elementi di Controllo Digitale 3
Elementi di Controllo Digitale Contenuti • La trasformata zeta. • Schemi a blocchi di sistemi digitali. • Progetto di compensatori digitali. • Progetto di compensatori PID. • Sistemi PLC. Testi di riferimento • C. Bonivento, C. Melchiorri, R. Zanasi, Sistemi di Controllo Digitale, Esculapio Editrice,
Bologna, 1995.
• C. Bonivento, C. Melchiorri, R. Zanasi, Controllo dei Processi: schemi di lezione, Pitagora Editrice, Bologna, 1996.
F. Dabbene, P. Gay
Politecnico di Torino − Elementi di Controllo Digitale 4
SOMMARIO
SOMMARIO..............................................................................................................................4 Trasformata zeta .........................................................................................................................1
La trasformata zeta .................................................................................................................1 Trasformata unilatera di una sequenza discreta.................................................................... 1 Trasformata unilatera di un segnale campionato.................................................................. 1
Proprietà della trasformata zeta ............................................................................................... 1 Esercizi risolti .....................................................................................................................2
Schemi a blocchi di funzioni digitali ........................................................................................... 1 Schemi a blocchi misti ............................................................................................................1
Esercizi svolti .....................................................................................................................2 Il progetto per discretizzazione ...................................................................................................1
Discretizzazione di funzioni di trasferimento continue ............................................................1 Metodi di integrazione numerica............................................................................................. 1
Metodo delle differenze all’avanti.......................................................................................1 Metodo delle differenze all’indietro .................................................................................... 1 Metodo di Tustin o della trasformazione bilineare............................................................... 2
Metodi di invarianza a determinati segnali di ingresso ............................................................3 Metodo di invarianza all’impulso........................................................................................ 3 Metodo di invarianza al gradino..........................................................................................3
Approssimazione mediante corrispondenza zeri-poli............................................................... 4 Progetto di compensatori pid ...................................................................................................... 1
Progetto in catena aperta .........................................................................................................1 Esercizi svolti .....................................................................................................................1 Soluzioni............................................................................................................................. 2
Progetto in catena chiusa.........................................................................................................2 Esercizi svolti .........................................................................................................................2
Sistemi PLC ............................................................................................................................... 3 Esercizi svolti .........................................................................................................................3 Esercizi proposti .....................................................................................................................5

F. Dabbene, P. Gay
Politecnico di Torino − Elementi di Controllo Digitale 1
TRASFORMATA ZETA
LA TRASFORMATA ZETA
TRASFORMATA UNILATERA DI UNA SEQUENZA DISCRETA
Dato un segnale a tempo discreto Rxk ∈ , definito per k=0,1,2,... e nullo per k<0, la trasformata
zeta è definita come
∑∞
=
−==0
)(k
kkk zxzXxZ
dove z è una variabile complessa. La trasformata è detta unilatera, poiché la sommatoria va da 0 ad ∞.
TRASFORMATA UNILATERA DI UN SEGNALE CAMPIONATO
Se x(t), t≥0 è segnale continuo campionato uniformemente con periodo T, la sua trasformata zeta è definita come la trasformata della sequenza discreta )(kTxxk =
∑∞
=
−===0
)()()()(k
kzkTxzXkTxZtxZ
Espandendo la precedente relazione si ottiene ...)2()()0()( 210 +++= −− zTzzTxzxzX
da cui risulta evidente che l’indice k associato a z-k specifica l’istante temporale
PROPRIETÀ DELLA TRASFORMATA ZETA
Linearità )()()()( zYzXkykxZ βαβα +=+ Traslazione a sinistra )()( zXznkxZ n−=− Traslazione a destra
−=+ ∑
−
=
−1
0
)()(n
k
kk
n zxzXznkxZ
Valore iniziale )(lim)0( zXxz ∞→
=
Valore finale )()1(lim)(lim 1
1zXzkx
zk
−
→∞→−=

F. Dabbene, P. Gay
Politecnico di Torino − Elementi di Controllo Digitale 2
ESERCIZI RISOLTI
ESERCIZIO 1 (TRASFORMATA DI UN IMPULSO DISCRETO)
Calcolare la trasformata zeta della funzione impulso discreto, definita nel seguente modo
≠=
=0 if 0
0 if1)(
k
kkTδ
ESERCIZIO 2 (TRASFORMATA DI UNA RAMPA)
Un segnale continuo a rampa unitaria è campionato con periodo di campionamento T. Calcolare la trasformata zeta del segnale digitale così ottenuto. La rampa unitaria è definita nel seguente modo
<≥
=0per 0
0per t)(
t
ttx
La trasformata zeta di x(t) è data da
2)1(
)()(−
==z
TzkTxZzX ,
infatti, dalla definizione di trasformata zeta si ha
2
321
0 )1()32()()(
−=+++=== −−−−
∞
=∑
z
TzzzzTkTzkTxZzX k
k
ESERCIZIO 3 (SOLUZIONE DI UN’EQUAZIONE ALLE DIFFERENZE)
Si consideri la seguente equazione alle differenze 0)(2)1(3)2( =++++ kykyky
con valori iniziali y(0)=0 e y(1)=1. Trovare una rappresentazione in forma chiusa di y(k) facendo ricorso alle proprietà della trasformata zeta. SOLUZIONE DELL’ESERCIZIO 1
La trasformata zeta di )(kTδ è data da 1( =kTZ δ , infatti, dalla definizione di trasformata zeta si ha
+++== ∑∞
=
− 001)()(0k
kzkTzX δ
SOLUZIONE DELL’ESERCIZIO 2
La trasformata zeta di x(t) è data da
2)1(
)()(−
==z
TzkTxZzX ,
0
1
1

F. Dabbene, P. Gay
Politecnico di Torino − Elementi di Controllo Digitale 3
infatti, dalla definizione di trasformata zeta si ha
2
321
0 )1()32()()(
−=+++=== −−−−
∞
=∑
z
TzzzzTkTzkTxZzX k
k
SOLUZIONE DELL’ESERCIZIO 3
Ricordando che
−=+ ∑
−
=
−1
0
)()(n
k
kk
n zxzXznkxZ , si ha
)1()0()()2(
)0()()1(2 yzyzzYzkyZ
yzzzYkyZ
−−=+−=+
Sostituendo le condizioni iniziali, si ottiene
0)23)(( 2 =−++ zzzzY
23)( 2 ++
=zz
zzY
Un’espansione in fratti semplici della quantità sopra espressa porta a
11 21
1
1
1
21)( −− +
−+
=+
−+
=zzz
z
z
zzY
Le antitrasformate dei due termini sopra espressi sono date da
k
zZ )1(
1
11
1 −=
+ −−
k
zZ )2(
21
11
1 −=
+ −−
La soluzione dell’equazione alle differenze è perciò data da kkky )2()1()( −−−=
Il comportamento di y(k) per k=1,…,15 è rappresentato in figura. Si può notare che i valori di y(k) sono divergenti. Avete idea del perché?
0 2 4 6 8 1 0 1 2 1 4 1 6- 2
- 1
0
1
2
3
4x 1 0
4
F. Dabbene, P. Gay
Politecnico di Torino − Elementi di Controllo Digitale 4
ESERCIZI PROPOSTI
ESERCIZIO 5
Si determini la trasformata zeta di ESERCIZIO 6
Si determini la trasformata zeta di ESERCIZIO 7
Si determini la trasformata zeta di ESERCIZIO 8
Si determini la trasformata zeta di

F. Dabbene, P. Gay
Politecnico di Torino − Elementi di Controllo Digitale 1
SCHEMI A BLOCCHI DI FUNZIONI DIGITALI
SCHEMI A BLOCCHI MISTI
Si consideri il sistema rappresentato in figura
)(sG X(s)
x*(t) x(t)
X*(s) Y(s)
Y*(s)
L'ingresso del sistema continuo (in quiete) con funzione di trasferimento G(s) è dato dal segnale campionato x*(t). La trasformata di Laplace dell'uscita campionata y*(t) è data dalla funzione
∑∞
∞−
−−= )()(1
)( **SS jksXjksG
TsY ωω
Siccome il segnale X*(s) è il risultato di un campionamento con tempo di campionamento T, sarà anch'esso periodico di periodo TS
πω 2= , cioè ,2,1)()( ** =±= kjksXsX Sω Si può perciò scrivere
)()()()(1
)( **** sXsGsXjksGT
sY S =
−= ∑
∞
∞−
ω
dove G*(s) rappresenta la trasformata di Laplace della funzione di trasferimento tra segnali
campionati. La funzione di trasferimento digitale )()(
)(zX
zYzG = fra i segnali X(z) ed Y(z) si può
quindi ottenere dalla relazione
zsT
sGzGln1)()(
==

F. Dabbene, P. Gay
Politecnico di Torino − Elementi di Controllo Digitale 2
ESERCIZI SVOLTI
ESERCIZIO 1
Si consideri lo schema in figure, con 4
4)(1 +
=s
sG e s
sG3
)(2 =
X(s) X*(s) Y(s)
Y*(s)
Y1(s) Y1*(s)
G1(s) G2(z)
Determinare (se possibile) la funzione di trasferimento digitale )()(
zX
zY
ESERCIZIO 2
Considerare le funzioni di trasferimento precedenti applicate allo schema in figura
X(s) X*(s) Y(s)
Y*(s)
Y1(s) G1(s) G2(s)
Determinare (se possibile) la funzione di trasferimento digitale )()(
zX
zY.
ESERCIZIO 3
Si consideri la seguente configurazione
R(s) E*(s)
Y(s)
Y*(s)
G(s)E(s)
Determinare la funzione di trasferimento discreta )()(
zR
zY
ESERCIZIO 4
Si consideri la seguente configurazione
R(s) E*(s)
Y(s)
Y*(s)
G(s)E(s)
H(s)

F. Dabbene, P. Gay
Politecnico di Torino − Elementi di Controllo Digitale 3
Determinare la funzione di trasferimento discreta tra R(z) e Y(z). SOLUZIONE ESERCIZIO 1
Come visto in precedenza, dalla relazione )()()( *
11 sXsGsY = si ottiene la relazione fra i segnali campionati
)()()( **1
*1 sXsGsY =
Analogamente la relazione )()()( *122 sYsGsY = dà luogo all’identità
)()()()()()( **1
*2
*1
*2
*2 sXsGsGsYsGsY ==
Da cui si può immediatamente scrivere
== )()()()(
12 zGzGzX
zYzs
T
sGln1 1)(
= zsT
sGln2 1)(
=.
Il corrispondente schema a blocchi nel discreto è perciò dato da
X(z) Y(z)
G1(z) G2(z)
Si può ricavare G1(z) e G2(z) direttamente da G1(s) e G2(s) usando le tabelle.
Tez
zzGsGZ 411
4)()( −−
==
1
3)()( 22 −
==z
zzGsGZ
( )( )112
)()( 4
2
21 −−= − zez
zzGzG T
SOLUZIONE ESERCIZIO 2
Si nota immediatamente che lo schema a blocchi considerato differisce da quello dell'esercizio precedente per il fatto che è assente il campionatore tra G1(s) e G2(s). Analogamente a quanto visto prima, scriviamo le relazioni )()()( *
11 sXsGsY = e ).()()( 122 sYsGsY = Otteniamo
)()()()( *122 sXsGsGsY =
Il segnale Y*(s) sarà perciò dato da [ ] )()()()()()( **
12*
1*2
*2 sXsGsGsYsGsY ==
Che corrisponde, in pratica, a campionare F=G1G2. Effettuando la sostituzione zs T ln1= , si ottiene [ ] )()()( 12 zXzGGzY = , cioè
[ ] )()(
)(12* zGG
zX
zY =
Si deve ricavare [G1G2](z) (tramite le tabelle delle trasformate) calcolando ZG1G2(s). NB: La trasformata Z di un prodotto è in generale diversa dal prodotto delle trasformate.
( ) .2
5.05.0
2
1)()()( 21 +
−=+
==ssss
sGsGsF
( )( ) )()(818.01
096.0
818.0
5.0
1
5.0)()( 21 zGzG
zz
z
z
z
z
zsFZzF ≠
−−=
−−
−==

F. Dabbene, P. Gay
Politecnico di Torino − Elementi di Controllo Digitale 4
SOLUZIONE ESERCIZIO 3
Si ha YRE −= . Essendo l’operazione di campionamento lineare, si può scrivere *** YRE −= .
********* *)( YGRGEGYYRGGEY −=⇒−==
)(1
)(
)(
)(
1 *
*
*
*
zG
zG
zR
zY
G
G
R
Y Zatrasformat
+= →
+=
SOLUZIONE ESERCIZIO 4:
Si ha *HGERHYRE −=−=

F. Dabbene, P. Gay
Politecnico di Torino − Elementi di Controllo Digitale 1
IL PROGETTO PER DISCRETIZZAZIONE
DISCRETIZZAZIONE DI FUNZIONI DI TRASFERIMENTO CONTINUE
Il progetto per discretizzazione, detto anche progetto indiretto, parte dalla progettazione del controllo nel dominio di Laplace. Si assume cioè che un controllore tempo-continuo C(s) sia dato. Lo scopo è progettare un algoritmo, da implementare su computer o dsp, in maniera tale che alcune caratteristiche del controllore continuo C(s) siano mantenute dal corrispondente controllore digitale. Si vuole cioè trovare una funzione di trasferimento discreta H(z) che si comporti in maniera il più possibile simile a C(s).
METODI DI INTEGRAZIONE NUMERICA
Questi meodi partono dalla considerazione che qualsiasi funzione di trasferimento può essere vista come la rappresentazione nel dominio di Laplace di una equazione differenziale. Ad esempio il sistema
as
asC
sU
sY
+== )(
)(
)(
è equivalente all’equazione differenziale )()()( tuatyaty =+ .
METODO DELLE DIFFERENZE ALL’AVANTI
Consiste nell’approssimare la precedente l’equazione differenziale con un’equazione alle differenze, approssimando la derivata con una differenza in avanti
)(1)()()(
)( tyT
z
T
tyTty
dt
tdyty
−=−+≈= .
Questo procedimento corrisponde ad integrare numericamente l’equazione differenziale applicando il metodo di Eulero. In pratica, si effettua la sostituzione
T
zs
1−→ .
L’approssimazione alle differenze all’avanti può anche essere vista come il troncamento della seguente espansione in serie
sTsTez Ts +≈++== 11 .
METODO DELLE DIFFERENZE ALL’INDIETRO
Equivalentemente, è possibile approssimare la precedente l’equazione differenziale con un’equazione alle differenze, approssimando la derivata con una differenza in indietro
F. Dabbene, P. Gay
Politecnico di Torino − Elementi di Controllo Digitale 2
)(1)()()(
)( tyzT
z
T
Ttyty
dt
tdyty
−=−−≈= .
In pratica, si effettua la sostituzione
zT
zs
1−→ .
L’approssimazione alle differenze all’avanti può anche essere vista come il troncamento della seguente espansione in serie
sTsTeez
sTsT
−≈
+−=== − 1
1
1
11
.
METODO DI TUSTIN O DELLA TRASFORMAZIONE BILINEARE
Un’altra approssimazione, che corrisponde al metodo di integrazione numerica noto come trapezoidale, è data da
2/1
2/1
sT
sTez sT
−+≈= .
Questa approssimazione, nota come Metodo di Tustin o della trasformazione bilineare, dà luogo alla seguente sostituzione
1
12+−→
z
z
Ts .
Non tutte le frequenze sono mappate in maniera uniforme dalla trasformazione di Tustin. Infatti, se si considera una frequenza Ω , allora la distorsione introdotta dal filtro digitale è data da
( )T
jjT2tan2 ω
=Ω .
Se Tπω << allora ω≈Ω .
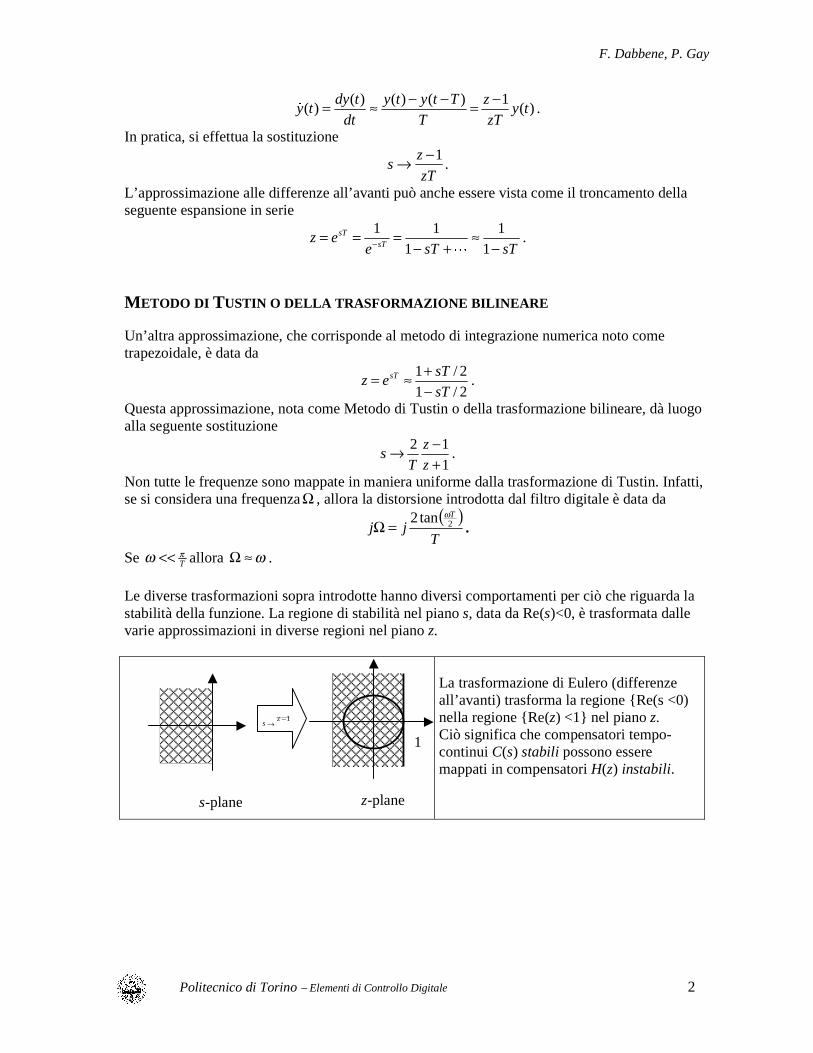
Le diverse trasformazioni sopra introdotte hanno diversi comportamenti per ciò che riguarda la stabilità della funzione. La regione di stabilità nel piano s, data da Re(s)<0, è trasformata dalle varie approssimazioni in diverse regioni nel piano z.
La trasformazione di Eulero (differenze all’avanti) trasforma la regione Re(s <0) nella regione Re(z) <1 nel piano z. Ciò significa che compensatori tempo-continui C(s) stabili possono essere mappati in compensatori H(z) instabili.
s-plane z-plane
zs
1−→
1
F. Dabbene, P. Gay
Politecnico di Torino − Elementi di Controllo Digitale 3
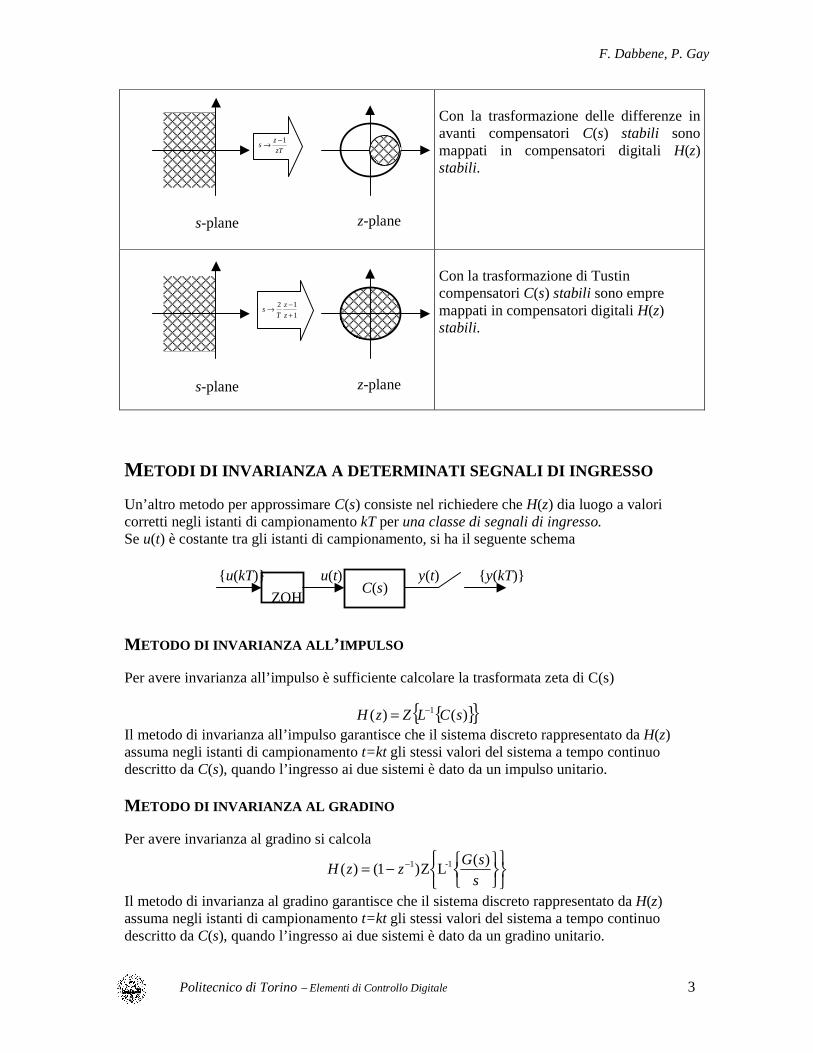
Con la trasformazione delle differenze in avanti compensatori C(s) stabili sono mappati in compensatori digitali H(z) stabili.
Con la trasformazione di Tustin compensatori C(s) stabili sono empre mappati in compensatori digitali H(z) stabili.
METODI DI INVARIANZA A DETERMINATI SEGNALI DI INGRESSO
Un’altro metodo per approssimare C(s) consiste nel richiedere che H(z) dia luogo a valori corretti negli istanti di campionamento kT per una classe di segnali di ingresso. Se u(t) è costante tra gli istanti di campionamento, si ha il seguente schema
METODO DI INVARIANZA ALL’IMPULSO
Per avere invarianza all’impulso è sufficiente calcolare la trasformata zeta di C(s)
)()( 1 sCLZzH −= Il metodo di invarianza all’impulso garantisce che il sistema discreto rappresentato da H(z) assuma negli istanti di campionamento t=kt gli stessi valori del sistema a tempo continuo descritto da C(s), quando l’ingresso ai due sistemi è dato da un impulso unitario.
METODO DI INVARIANZA AL GRADINO
Per avere invarianza al gradino si calcola
−= −
s
sGzzH
)(LZ)1()( 1-1
Il metodo di invarianza al gradino garantisce che il sistema discreto rappresentato da H(z) assuma negli istanti di campionamento t=kt gli stessi valori del sistema a tempo continuo descritto da C(s), quando l’ingresso ai due sistemi è dato da un gradino unitario.
s-plane z-plane
1
12
+−→
z
z
Ts
s-plane z-plane
zT
zs
1−→
C(s) ZOH
u(t) y(t) y(kT) u(kT)

F. Dabbene, P. Gay
Politecnico di Torino − Elementi di Controllo Digitale 4
APPROSSIMAZIONE MEDIANTE CORRISPONDENZA ZERI-POLI
Questo metodo prevede che ogni polo o zero in s della funzione C(s) sia mappato in un polo o zero in z della funzione H(z) attraverso la trasformazione z=esT. Si procede cioè alla fattorizzazione del numeratore e denominatore C(s)
)cos21()(
)1()(221
1
−−−−
−−
+−→±+−→+
zezbTejbas
zeasaTaT
aT
Occorre poi aggiungere tanti zeri in z=-1 quanto è l’eccesso poli-zeri (se C(s) ha m zeri ed n poli, allora si aggiungono n-m poli in z=-1. I poli in eccesso possono essere infatti visti come zeri in s=∞. Occorre poi aggiustare il guadagno statico per far sì che
)(lim)(lim10
zHsCzs →→
=
Esercizio 1
Dato un filtro analogico con funzione di trasferimento as
asC
+=)( , si progetti un filtro digitale
ottenuto per discretizzazione, utilizzando tutti i metodi proposti. Esercizio 2 Applicando il metodo delle differenze all’avanti, si ottiene
a
azH
Tz +
=−1
)(
Applicando il metodo delle differenze all’indietro, si ottiene
a
azH
zTz +
=−1
)(
L’eccesso zeri-poli è n-m=1-0=1, per cui
1
1
1
)1()( −−
−
−−=
ze
zakzH
aT
dove k tiene conto del guadagno statico del filtro, e può essere calcolando imponendo l’equivalenza dei guadagni statici
1)(lim1
2)(lim
01==
−=
→−→sC
e
akzH
saTz.
Si ottiene a
ek
aT
2
1 −−= , da cui
1
1
11
21
)( −−
−−
−−−
ze
zezH aT
aT
.
PROGETTO DI COMPENSATORI PID
PROGETTO IN CATENA APERTA
ESERCIZI SVOLTI
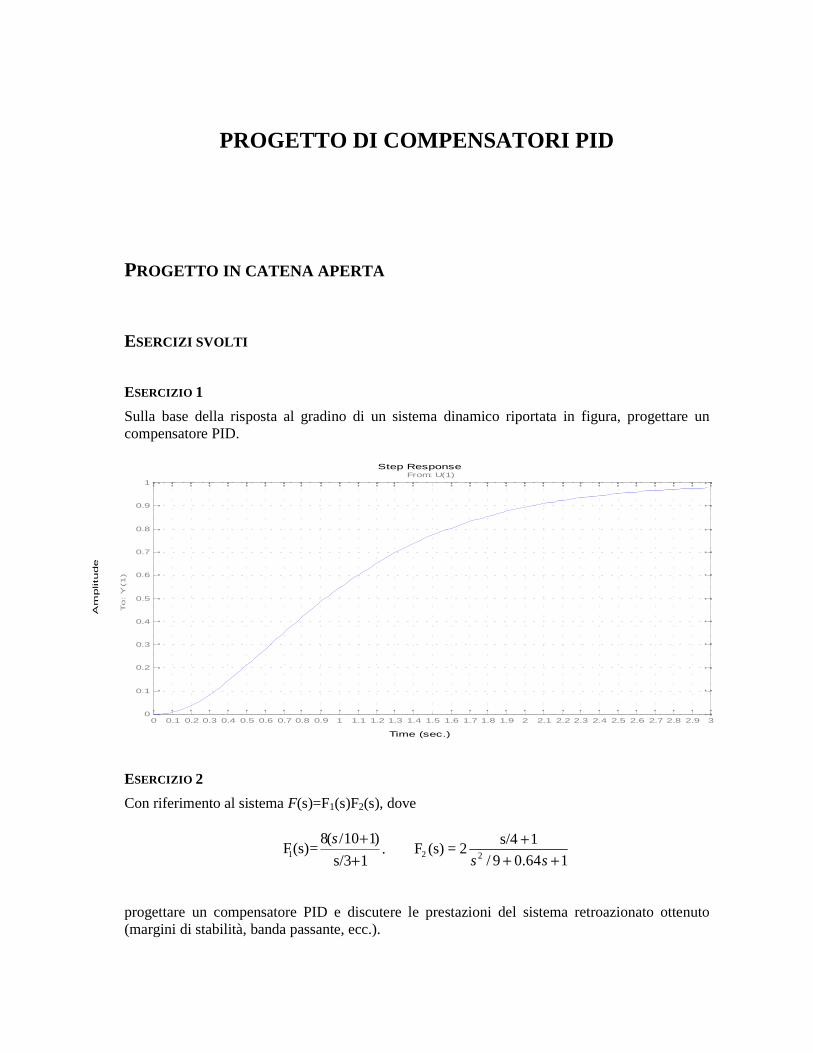
ESERCIZIO 1
Sulla base della risposta al gradino di un sistema dinamico riportata in figura, progettare un compensatore PID.
ESERCIZIO 2
Con riferimento al sistema F(s)=F1(s)F2(s), dove
1s/3
)110/(8 = (s)F1 +
+s.
164.09/
1s/42 = (s)F
22 +++
ss
progettare un compensatore PID e discutere le prestazioni del sistema retroazionato ottenuto (margini di stabilità, banda passante, ecc.).
Time (sec.)
Am
plitu
de
Step Response
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2 2.1 2.2 2.3 2.4 2.5 2.6 2.7 2.8 2.9 30
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1From: U(1)
To: Y
(1)

SOLUZIONI
PROGETTO IN CATENA CHIUSA
ESERCIZI SVOLTI
ESERCIZIO 3
Progettare un compensatore PID per il sistema descritto dalla funzione di trasferimento G(s)
144) s 20.4 +5)(ss(s
1) +1800(s = G(s)
2 ++
e valutare le prestazioni del sistema retroazionato ottenuto (margini di stabilità, banda passante, picco di risonanza, tempo di salita e sovraelongazione massima della risposta al gradino). ESERCIZIO 4
Progettare un compensatore PID per il sistema descritto dalla funzione di trasferimento
100) + s 15 + (s 2)2.5s + (s s 20) + (s 0.05
= G(s) 22 +
e valutare le prestazioni del sistema retroazionato ottenuto (margini di stabilità, banda passante, picco di risonanza, tempo di salita e sovraelongazione massima della risposta al gradino).

SISTEMI PLC
ESERCIZI SVOLTI
ESERCIZIO 1
Progettare il Sequential Functional Chart per l’automazione di un casello di accesso ad una tangenziale a costo fisso di L. 2000; il pagamento può essere effettuato in contanti (senza corresponsione di resto) oppure mediante Telepass. Il sistema è costituito da una sbarra e da una consolle per il pagamento in contanti. Sono disponibili: un segnale RT proveniente da un ricevitore Telepass per il riconoscimento di vetture dotate di tale sistema, attivo quando è stata riconosciuta una vettura e l’operazione di addebito elettronico è stata completata, ed un segnale P di avvenuto passaggio della vettura sotto la sbarra alzata. La consolle per il pagamento accetta solo banconote da L. 1000 (corrispondenti ad un segnale B1 attivo) o da L. 2000 (segnale B2 attivo). La sbarra deve essere sollevata solo a pagamento avvenuto in una delle due forme consentite e riabbassata dopo il passaggio della vettura. ESERCIZIO 2
Progettare il Sequential Functional Chart (SFC) per l’automazione di una macchina utensile flessibile in grado di effettuare le lavorazioni di tipo La ed Lb a seconda che le siano presentati pezzi di tipo A oppure B rispettivamente. Attraverso un opportuno sensore S, che puo’ assumere i valori Sa o Sb, la macchina e’ in grado di riconoscere il tipo di pezzo che le e’ stato presentato. Un secondo sensore U, in grado di assumere i valori Ua ed Ub, rileva alla macchina il tipo di utensile attualmente montato (Ua per la lavorazione di pezzi A e Ub per i pezzi b). La macchina deve, una volta rilevato il tipo di pezzo da trattare, verificare se l’utensile montato e’ quello corretto ed eventualmente modificarlo attraverso i comandi Ca e Cb. Successivamente deve essere avviata corretta lavorazione con i comandi La e Lb. Formulare un SFC che preveda l’automazione della macchina evitando inutili cambi utensili. ESERCIZIO 3
Progettare il Sequential Functional Chart (SFC) per l’automazione di una macchina utensile flessibile in grado di effettuare le lavorazioni di tipo La ed Lb a seconda che le siano presentati pezzi di tipo A oppure B rispettivamente. Attraverso un opportuno sensore S, che può assumere i valori Sa o Sb, la macchina è in grado di riconoscere il tipo di pezzo che le è stato presentato. Un secondo sensore U, in grado di assumere i valori Ua ed Ub, rileva alla macchina il tipo di utensile attualmente montato (Ua per la lavorazione di pezzi A e Ub per i pezzi B).

La macchina deve, una volta rilevato il tipo di pezzo da trattare, verificare se l’utensile montato è quello corretto ed eventualmente modificarlo attraverso i comandi Ca e Cb (Ca per montare l’utensile per la lavorazione di pezzi A, Cb per l’utensile per i pezzi B). Successivamente deve essere avviata la corretta lavorazione con i comandi La e Lb (il tempo di lavorazione è in entrambi i casi di 30 secondi). Formulare un SFC che preveda l’automazione della macchina evitando inutili cambi utensili. ESERCIZIO 4
Progettare il Sequential Functional Chart (SFC) per l’automazione di una macchina per il confezionamento di prodotti alimentari liquidi in contenitori brick. Tale macchina, riportata in figura xxx, è costituita da una tanica tarata dotata di due valvole, una per inibire il liquido in entrata (valvola a) ed una per inibire il liquido in uscita (valvola b). Nel condotto di entrata alla tanica è stato calettato un sensore di pressione p, attivo quando la tanica è piena. Il brick vuoto raggiunge l’ugello della tanica calibrata su di un nastro trasportatore comandato dal segnale m. Un opportuno sensore r avverte la presenza del brick nella posizione ritenuta ottimale per il suo riempimento. Il confezionamento avviene trasferendo il liquido dalla tanica calibrata, precedentemente riempita agendo sulla valvola a, al brick, agendo sulla valvola b. Formulare un SFC che preveda, per velocizzare le operazioni di confezionamento, il riempimento della tanica calibrata e l’avanzamento del nastro trasportatore in parallelo.
p a
b
prodotto
r m
bbrriicc
tanica calibrata
ESERCIZI PROPOSTI
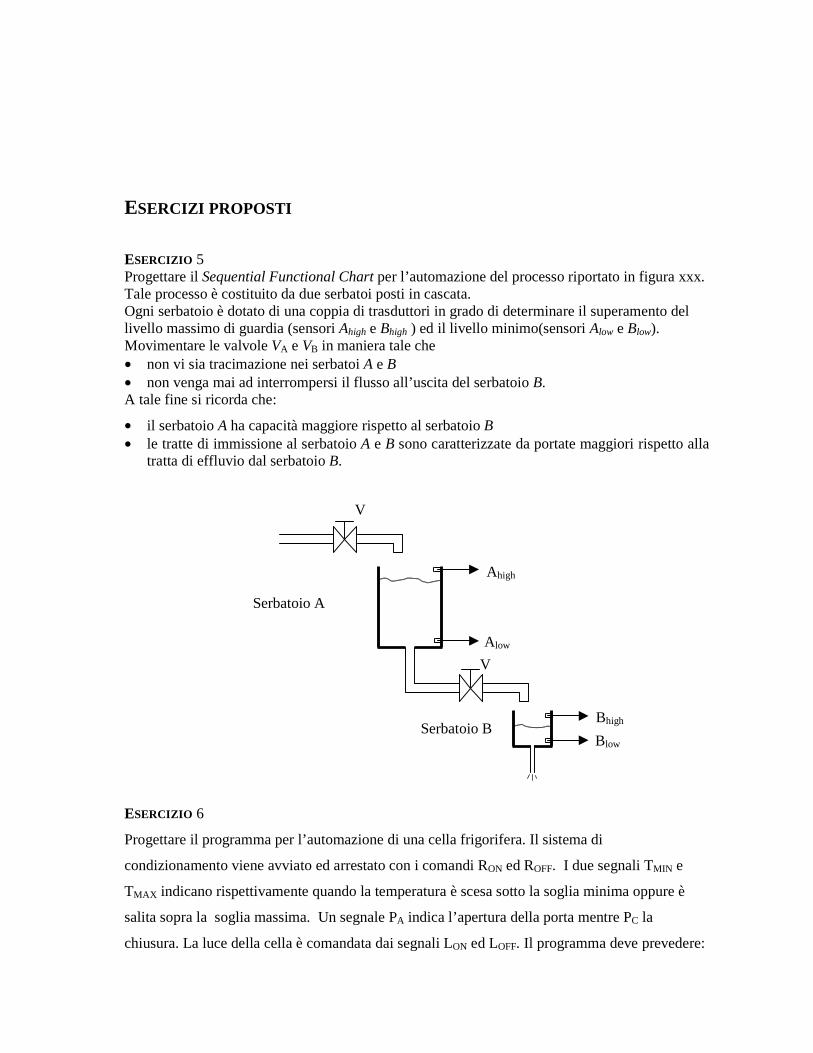
ESERCIZIO 5 Progettare il Sequential Functional Chart per l’automazione del processo riportato in figura xxx. Tale processo è costituito da due serbatoi posti in cascata. Ogni serbatoio è dotato di una coppia di trasduttori in grado di determinare il superamento del livello massimo di guardia (sensori Ahigh e Bhigh ) ed il livello minimo(sensori Alow e Blow). Movimentare le valvole VA e VB in maniera tale che • non vi sia tracimazione nei serbatoi A e B • non venga mai ad interrompersi il flusso all’uscita del serbatoio B. A tale fine si ricorda che:
• il serbatoio A ha capacità maggiore rispetto al serbatoio B • le tratte di immissione al serbatoio A e B sono caratterizzate da portate maggiori rispetto alla
tratta di effluvio dal serbatoio B.
ESERCIZIO 6
Progettare il programma per l’automazione di una cella frigorifera. Il sistema di
condizionamento viene avviato ed arrestato con i comandi RON ed ROFF. I due segnali TMIN e
TMAX indicano rispettivamente quando la temperatura è scesa sotto la soglia minima oppure è
salita sopra la soglia massima. Un segnale PA indica l’apertura della porta mentre PC la
chiusura. La luce della cella è comandata dai segnali LON ed LOFF. Il programma deve prevedere:
V
V
Serbatoio A
Serbatoio B
Alow
Blow
Bhigh
Ahigh

• che la temperatura all’interno della cella venga mantenuta compresa tra TMIN e TMAX;
• che quando un operatore è all’interno della cella il sistema di condizionamento sia spento e che la luce sia accesa;
• che, immediatamente dopo l’uscita dell’operatore dalla cella, l’impianto di
condizionamento rimanga acceso per 10 minuti per compensare lo scambio termico avvenuto durante il periodo di apertura delle porte.