COMPORTAMENTO MECCANICO DEI MATERIALI - Politecnico di...
102
Dipartimento di Meccanica Politecnico di Torino CeTeM Luca Goglio COMPORTAMENTO MECCANICO DEI MATERIALI Dispense per il modulo teledidattico Versione provvisoria – febbraio 2002
Transcript of COMPORTAMENTO MECCANICO DEI MATERIALI - Politecnico di...

Dipartimento
di Meccanica Politecnico di Torino
CeTeM
Luca Goglio
COMPORTAMENTO MECCANICO DEI MATERIALI
Dispense per il modulo teledidattico
Versione provvisoria – febbraio 2002

1. RICHIAMI DI STATICA
1.1. Grandezze e operazioni fondamentali
La grandezza fondamentale della statica è la forza, che ha natura vettoriale in quanto è definita
assegnandone modulo, direzione e verso. Essa costituisce la causa che altera lo stato di quiete o
moto rettilineo uniforme di un corpo.
Di un sistema di forze è possibile ottenere la risultante Rr
applicando le consuete regole di somma
dei vettori, ad esempio considerando le componenti cartesiane: ∑=
i xiFx FR ∑=i yiFy FR ∑=
i ziFz FR
La risultante è un vettore libero, cioè non applicato.Il momento OM
r rispetto a un punto O di una forza F
r applicata nel punto P è dato dal prodotto
esterno( ) FOPMO
rr∧−=
Anche il momento è un vettore di tipo libero. Per la definizione stessa di prodotto esterno il vettore
OMr
risulta perpendicolare sia a Fr
sia a (P-O); inoltre il momento non cambia se la forza viene
spostata lungo la sua retta d'azione.
F
M
O
P
b
FO
P
b
MO
O
Una rappresentazione grafica del momento non del tutto rigorosa, ma molto comoda e utilizzata
(soprattutto nel caso di problemi piani), è costituita da un arco di cerchio con l'aggiunta di una
freccia per indicare il verso di rotazione (v. figura)
La distanza dal punto O alla retta d'azione della forza rappresenta il braccio b, che fornisce la
relazione tra le intensità della forza e del momento:FbMO =
Si definisce momento risultante rispetto al punto O di un sistema di forze la somma dei singolimomenti di ogni forza iF
r e dei momenti puri iC
r:
( ) ( )∑∑ +∧−=+=i iiii iOiM CFOPCMR
O
rrrrr)(
Si può dimostrare che i momenti risultanti di un sistema di forze rispetto a due diversi punti O e O'
sono legati dalla relazione seguente

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
2
FMM ROORROO
rrr∧−+= )'(
'
Un corpo è in equilibrio se le somme vettoriali sia delle forze (equilibrio alla traslazione) sia dei
momenti rispetto ad un punto qualsiasi (equilibrio alla rotazione) sono nulle:0rr
=∑i iF ( ) 0rrr
=+∑i iOi CM
Nel caso dei sistemi piani le condizioni suddette si riducono alle tre equazioni scalari:0=∑i xiF 0=∑i yiF ( ) 0=++−∑i iyiixii CFxFy
Nell'ultima equazione i due termini relativi ai contributi delle forze hanno segno discorde perché
corrispondono a versi di momento rispettivamente orario e antiorario
Due sistemi di forze sono equivalenti (ai fini dell'equilibrio) quando hanno stessa risultante e stesso
momento risultante. Due conseguenze di tale proprietà di cui faremo uso sono le seguenti:
i) è possibile trasportare una forza perpendicolarmente alla propria direzione aggiungendo un
momento "di trasporto" pari al prodotto della forza stessa per la distanza fra le due rette di
azione
d
F
F
M = Fd
ii) un sistema di forze può essere sostituito con la sua risultante, applicata in un certo punto, e
con un momento pari al momento risultante valutato rispetto allo stesso punto.
Per sistemi di forze piani esiste una retta, detta asse centrale, tale che il momento risultante rispetto
ai punti di essa è nullo. Risulta allora possibile sostituire il sistema di forze con il solo risultante
applicato in corrispondenza dell'asse centrale.
RR
F
F
F
1
2
3
O O'
R
ξ
FF
MO
Per determinare l'asse centrale si riduce il sistema di forze alla risultante FRr
applicata in un punto
arbitrario O e al momento risultante OMR
r, successivamente sfruttando la formula di trasposizione dei
momenti si cerca un altro punto O' tale che 0'
rr=
OMR :
0'
=ξ−= FMM RRROO
(relazione scritta senza notazione vettoriale, superflua in questo caso) da cui si ottiene

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
3
FM RRO
/=ξ
1.2. Carichi e vincoli
Carichi
I carichi rappresentano le azioni esterne, forze e momenti, applicate sulla struttura; tradizionalmente
si distingue tra carichi concentrati, cioè applicati puntualmente, e carichi distribuiti, che interessano
una zona significativamente estesa della struttura in esame. I carichi distribuiti vengono ancora
suddivisi in carichi di linea (si pensi ad esempio al peso per unità di lunghezza di un albero di
trasmissione), carichi di superficie (ad esempio la pressione idrostatica) e carichi di volume (ad
esempio il peso specifico del materiale in cui la struttura è realizzata).
La distinzione tra carichi concentrati e distribuiti è in realtà convenzionale, in quanto a rigore
l'applicazione di un qualunque carico interessa una zona più o meno estesa ma comunque finita della
struttura. Ai fini pratici assumiamo che un carico sia concentrato quanto la zona in cui è applicato è
di estensione trascurabile rispetto alle dimensioni caratteristiche della struttura.
Vincoli
I vincoli hanno lo scopo di collegare gli elementi delle strutture tra di loro o al telaio; nel primo caso
si parla di vincoli interni, nel secondo di vincoli esterni. E' possibile descrivere il ruolo dei vincoli in
due modi diversi, a seconda che si consideri l'aspetto cinematico o quello statico del comportamento
delle strutture.
Dal punto di vista cinematico i vincoli riducono le possibilità di movimento degli elementi delle
strutture; nel caso di vincoli interni si obbligano punti diversi (appartenenti a corpi diversi della
struttura) ad assumere componenti di spostamento e/o rotazione uguali; nel caso di vincoli esterni
alcune componenti di spostamento e/o rotazione vengono annullate.
Dal punto di vista statico i vincoli trasmettono reazioni agli elementi delle strutture; i vincoli interni
trasmettono forze e momenti tra un elemento e l'altro; i vincoli esterni forniscono le reazioni che
globalmente equilibrano i carichi applicati.
I più comuni vincoli nel piano sono schematizzati nelle figure seguenti; definiamo i vincoli come
singoli, doppi o tripli, a seconda del numero di componenti di reazione trasmesse (rispettivamente
una, due o tre), o, il che è lo stesso, a seconda del numero di componenti di spostamento o rotazione
obbligate.
appoggio (v. semplice) cerniera (v. doppio) incastro (v. triplo)

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
4
Grado di iperstaticità
Un corpo o un sistema di corpi può essere vincolato in modo insufficiente, sufficiente o
sovrabbondante a fissarne la posizione. Nel caso dei problemi piani definiamo il grado di iperstaticità
h con l'espressione seguente:
mvh 3−=Il termine v rappresenta il numero totale di reazioni vincolari (interne o esterne) calcolabile con
l'espressione:( ) apciv +++= 23
in cui i è il numero di incastri (ognuno dei quali introduce 3 reazioni), c è il numero di cerniere
(ognuna delle quali introduce 2 reazioni), p è il numero di coppie prismatiche (ognuna delle quali
introduce 2 reazioni), a è il numero di appoggi (ognuno dei quali introduce 1 reazione).
Il termine m rappresenta il numero totale di corpi semplici da cui è costituita la struttura, per ognuno
dei quali si possono scrivere 3 equazioni di equilibrio.
Si distinguono 3 situazioni:
• h < 0 sistema labile (meccanismo), la posizione dei corpi non è completamente determinata dai
vincoli;
• h = 0 sistema isostatico (o staticamente determinato), le equazioni di equilibrio sono sufficienti
per determinare tutte le reazioni vincolari;
• h > 0 sistema iperstatico (o staticamente indeterminato), le equazioni di equilibrio non sono
sufficienti per determinare tutte le reazioni vincolari.
Le figure seguenti mostrano alcuni esempi di sistemi labili, isostatici e iperstatici.
m = 1
h = -3v = 0
m = 1
h = -2v = 1
a = 1
m = 1
h = -1v = 2
c = 1
cerniera interna (v. doppio) coppia prismatica (v. doppio)

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
5
m = 1
h = 0v = 3
c = 1a = 1
m = 1
h = 0v = 3
i = 1
m = 1
h = 1v = 4
c = 2
m = 1
h = 1v = 4
i = 1a = 1
m = 1
h = 2v = 5
i = 1c = 1
m = 1
h = 3v = 6
i = 2
m = 2
h = -1v = 5
c = 2a = 1
m = 2
h = 0v = 6
c = 3
m = 2
h = 0v = 6
c = 2a = 2
cerniera doppia
1.3. Scrittura delle equazioni di equilibrio
Il punto di partenza per la scrittura delle equazioni di equilibrio consiste nel liberare un sistema di
massa, costituito da uno o più corpi semplici, dai vincoli che lo collegano ad ulteriori corpi o al
telaio. Nel caso di sistemi piani si immagina di racchiudere il sistema considerato con una linea di
distacco chiusa: dove tale linea interseca i vincoli vengono messe in evidenza le corrispondenti
reazioni (che prima del distacco costituivano delle azioni interne), per le quali si assumono dei versi

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
6
positivi convenzionali. Si possono quindi scrivere le equazioni di equilibrio tra carichi applicati e
reazioni vincolari per il sistema così isolato.
Ad esempio, nel caso di un corpo semplice vincolato da una cerniera e da un appoggio si opera nel
modo indicato nelle figure seguenti. L'interruzione dei vincoli da parte della linea di distacco
(tratteggiata in figura) mette in evidenza le reazioni della cerniera OA e VA e quella dell'appoggio VB.
F
F
1
2
A
B
linea didistacco
F
F
1
2
VA
VBOA
Nel caso di vincoli interni (cioè congiungenti corpi della struttura) le azioni messe in evidenza su un
corpo sono evidentemente uguali in modulo e direzione e opposte in verso a quelle messe in
evidenza su un altro corpo collegato; se ne tiene conto semplicemente cambiando il verso
convenzionale delle reazioni (v. figure).
FF
12
BA
CF
F1
2
VAVB
OA OBVC
O COC
VC
Nel piano si possono scrivere tre equazioni di equilibrio indipendenti per ogni corpo libero; queste
potranno esprimere l'equilibrio alla traslazione lungo direzioni opportune e l'equilibrio alla rotazione
intorno a punti opportuni.
Nella scrittura delle equazioni si deve però evitare di scrivere equazioni non linearmente indipendenti
fra di loro; le scelte possibili si possono classificare in tre gruppi:
a) 2 equazioni di equilibrio alla traslazione lungo direzioni non parallele + 1 equazione di equilibrio
alla rotazione intorno ad un punto arbitrario;
b) 2 equazioni di equilibrio alla rotazione + 1 equazione di equilibrio alla traslazione lungo una
direzione non perpendicolare alla congiungente i punti rispetto ai quali si calcolano i momenti;
c) 3 equazioni di equilibrio alla rotazione intorno a punti non allineati.

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
7
2. STATO DI TENSIONE
2.1. Tensioni
Al fine di determinare la resistenza di un elemento strutturale, ad esempio un organo di macchina,
non è sufficiente la semplice conoscenza dei carichi a cui esso è sottoposto. E' infatti evidente che a
parità di carichi trasmessi l'elemento sarà più o meno sollecitato a seconda della propria forma e
dimensione; si pone quindi la necessità di definire delle grandezze che riferiscano i carichi all'unità di
superficie su cui agiscono.
Consideriamo la sezione di un elemento soggetto a dei carichi; essa può essere pensata come formata
da una somma di areole elementari, di area ∆A normale al versore nr
, ognuna delle quali trasmette un
contributo di forza Fr
∆ e di momento Mr
∆ . Considerando i rapporti tra questi ultimi e l'area e
facendo tendere a zero l'estensione di essa si assume che:
fAF
A
rr
=∆∆
→∆ 0lim 0lim
0
rr
=∆∆
→∆ AM
A
Questa ipotesi ammette che i carichi si trasmettano all'interno del materiale con un meccanismo
analogo al caso delle pressioni nei fluidi, ma in senso generalizzato, con azioni sia normali siatangenti alle superfici. La quantità f
r è detta vettore della tensione, esso in generale non è parallelo
alla normale alla superficie passante per il punto P ma presenta sia una componente normale σ sia
una componente tangenziale τ.n
F
στ
∆ A
f∆
P
L'operazione matematica di passaggio al limite per dimensioni che tendono a zero presuppone che il
materiale costituisca un continuo, ciò implica che dal punto di vista fisico questa trattazione è
applicabile finché le dimensioni in gioco sono sufficientemente grandi da non far intervenire la natura
discreta della materia.
Considerando le facce perpendicolari agli assi di un sistema di riferimento cartesiano xyz, su ognuna
di esse possiamo individuare una componente normale e due tangenziali; le componenti di tensione in
tale riferimento vengono individuate con due pedici (x, y, z): il primo identifica la direzione normale
alla faccia, il secondo indica la direzione lungo la quale la componente agisce.

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
8
Si possono quindi distinguere 9 componenti; le tre componenti σ indicano tensioni normali
rispettivamente di trazione o compressione a seconda che i valori siano positivi o negativi, le 6
componenti τ indicano invece tensioni tangenziali (dette anche di taglio)1.
σxxτxy
τxzσ
yxτ yy
τyz
τ zxτzy
σzz
xy
z
Consideriamo l'equilibrio alla rotazione intorno all'asse z di un elemento infinitesimo di materiale
nell'intorno del punto P. Sulle facce cosiddette positive, cioè quelle da cui gli assi coordinati escono
attraversando l'elementino, le componenti hanno versi positivi se concordi con quelli degli assi stessi;
viceversa sulle facce negative le componenti hanno versi positivi opposti. Ciò permette di soddisfare
il principio di azione e reazione rispetto alle tensioni mutuamente esercitate tra elementi adiacenti.
Poiché le componenti sono in generale funzione della posizione, nell'incremento di coordinata dx o
dy queste subiscono un corrispondente incremento (v. figura).
σyy
τxy
τyx
x
y
z
+dσyyσyy +dτyxτyx
+dσxxσxx
+dτxyτxyσxx
dy
dx
P
Nell'equazione di equilibrio alla rotazione compaiono le forze elementari date dalle tensioni
moltiplicate per le aree infinitesime su cui esse agiscono. Le componenti normali e l'eventuale forza
di volume hanno braccio nullo, l'equazione si riduce quindi a:
( ) ( ) 02222
=τ+τ−τ+τ+τ−τdy
ddzdxdx
ddzdydy
dzdxdx
dzdy yxyxxyxyyxxy
Semplificando e trascurando gli infinitesimi di ordine superiore dτij rispetto ai termini finiti τij (i, j =
x, y) si ottiene
1Si noti che il segno delle τ, contrariamente al caso delle σ, non indica una diversa situazione fisica.

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
9
yxxy τ=τ
Analogamente, ripetendo il medesimo ragionamento per l'equilibrio alla rotazione intorno agli assi x e
y si ottiene:
zxxz τ=τ zyyz τ=τ
Si trova cioè che le componenti tangenziali contraddistinte da pedici omologhi sono uguali; di
conseguenza le componenti di tensione diverse si riducono da 9 a 6.
Si è visto precedentemente che su una faccia elementare generica, passante per il punto P e normaleal versore n
r agisce il vettore della tensione f
r; vogliamo valutare come variano le componenti di
quest'ultimo al variare dell'orientazione della faccia. A questo scopo consideriamo un tetraedro
infinitesimo di volume dV avente tre facce dAx, dAy, dAz perpendicolari agli assi coordinati e la quarta
faccia dA perpendicolare al versore nr
, avente come componenti i coseni direttori nx, ny, nz.
x
y
z
fz
fx
fy
f
P
L'equazione vettoriale di equilibrio alla traslazione assume la forma:0rrrrrr
=Φ++++ Vzzyyxx dVfdAfdAfdAfdA
L'ultimo termine, corrispondente alla forza di volume, è infinitesimo di ordine superiore rispetto ai
primi ed è quindi trascurabile; i vettori tensione che compaiono sono definiti nel modo seguente:
=
nz
ny
nx
f
f
f
fr
τ
τ
σ
=
xz
xy
xx
xfr
τ
σ
τ
=
yz
yy
xy
yfr
σ
σ
τ
=
zz
yz
xz
zfr
Le aree delle facce sono legate dalle relazioni seguenti
xx ndAdA ⋅= yy ndAdA ⋅= zz ndAdA ⋅=
Sostituendo nell'equazione di equilibrio precedente si ottiene0rrrrr
=+++ zzyyxx fnfnfnf
In termini scalari l'equazione corrisponde al sistema seguente
=σ−τ−τ−
=τ−σ−τ−
=τ−τ−σ−
0
0
0
zzzyyzxxznz
zyzyyyxxyny
zxzyxyxxxnx
nnnf
nnnf
nnnf

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
10
dove i segni - sono dovuti al fatto che le facce normali agli assi coordinati sono di tipo negativo (nel
senso precedentemente definito). In termini matriciali il sistema assume la forma:
σττ
τστττσ
=
z
y
x
zzyzxz
yzyyxy
xzxyxx
z
y
x
n
n
n
f
f
f
In notazione compatta possiamo scrivere [ ] nf σ=
La matrice [σ], avente per colonne i vettori di tensione agenti sulle facce perpendicolari agli assi
coordinati, costituisce il tensore delle tensioni agenti nel punto P. Si deve notare che la conoscenza
di essa permette di ottenere le componenti di tensione (cioè il vettore di tensione) su una qualunque
faccia, identificata dalla normale nr
; quindi si può concludere che [σ] definisce completamente lo
stato di tensione nel punto P.
2.2. Tensioni principali
Si è visto che in caso generale i vettori nr
e fr
non sono paralleli a causa della presenza di
componenti di tensione di tipo tangenziale; ci si domanda quindi se esistano orientazioni privilegiate
delle facce tali che i vettori tensione agenti su di esse siano paralleli alle normali e quindi sulle
corrispondenti facce non agiscano tensioni tangenziali. La risposta è affermativa e il problema
corrisponde alla ricerca degli autovalori/autovettori di una matrice; infatti, per definizione, λ e v
sono rispettivamente un autovalore e un autovettore della matrice [A] se[ ] vvA λ=
Nel caso delle tensioni si deve verificare che vf λ= e ciò corrisponde alla ricerca degli
autovalori/autovettori di [σ]:[ ] vv λ=σ
cioè[ ] [ ]( ) 0=λ−σ vI
dove [I] è la matrice identità. Il sistema omogeneo ammette soluzione non banale se
0det =
λ−σττ
τλ−στττλ−σ
zzyzxz
yzyyxy
xzxyxx
L'annullarsi del polinomio caratteristico permette di determinare gli autovalori. Poiché [σ] è reale esimmetrica esistono sempre tre autovalori reali 1σ , σ2 , 3σ detti tensioni principali; i corrispondenti
autovettori individuano le direzioni principali2.
Quindi una direzione è detta principale se sulla faccia perpendicolare ad essa non agiscono tensioni
tangenziali. Adottando come sistema di riferimento una terna principale il tensore [σ] assume la
seguente forma diagonale
2Se non diversamente specificato si denominano le tensioni principali in ordine decrescente: σ3 ≤ σ2 ≤ σ1.

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
11
σσ
σ
3
2
1
00
00
00
Si può osservare che se una certa riga (e colonna, data la simmetria) presenta i termini fuori
diagonale nulli allora la corrispondente direzione è principale.
2.3. Cerchi di Mohr
E' possibile eseguire una rappresentazione grafica di come variano le componenti normale e
tangenziale su una faccia, al variare dell'orientazione della faccia stessa.
σ
α τσ1
dl
2
2
dl 1
σ
dl
n
p1
p2
p3
Assumiamo come sistema di riferimento la terna principale p1p2p3 e consideriamo la direzione nr
contenuta nel piano p1p2; poiché la direzione p3 è principale il vettore della tensione fr
agente sulla
faccia normale a nr
è pure contenuto nel piano p1p2 e può essere descritto dalle due componenti σ eτ. Queste ultime possono essere espresse utilizzando la relazione [ ] nf σ= in cui:
[ ]
σσ
σ=σ
3
2
1
00
00
00
αα
=0
sen
cos
n
La componente σ è data dalla proiezione di fr
lungo nr
:
[ ]
ασ+ασ=
αα
σσ
σαα=σ==⋅=σ
22
21
3
2
1
sencos
0
sen
cos
00
00
00
0sencosnnfnfn TTrr
La componente τ può essere espressa usando la relazione pitagorica:
( ) αασ−σ=
αασσ−ασ−ασ−ασ+ασ=σ−=τ222
21
2221
422
421
222
221
222
sencos
sencos2sencossencosf
Ponendo sotto radice quadrata entrambi i membri si ottiene( ) αασ−σ=τ sencos21
Si verifica agevolmente che σ e τ stanno tra di loro come le coordinate dei punti di una
circonferenza. Infatti, ricordando le trasformazioni trigonometriche
22cos1
sen 2 α−=α
22cos1
cos2 α+=α
22sen
cossenα
=αα

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
12
le relazioni trovate per σ e τ assumono la forma seguente:
ασ−σ
=τ
ασ−σ
=σ+σ
−σ
2sen2
2cos22
21
2121
Quadrando e sommando si ottiene2
2122
21
22
σ−σ=τ+
σ+σ−σ
che rappresenta l'equazione di una circonferenza (cerchio di Mohr), in un piano di coordinate στ,
avente centro C e raggio r pari a:
σ+σ= 0,
221C
221 σ−σ
=r
Quindi, considerando il fascio di piani aventi in comune l'asse principale p3 nel punto P, le
componenti di tensione messe in evidenza dalla sezione eseguita con un piano di tale fascio sono date
dalle coordinate σ e τ della circonferenza; inoltre l'angolo descritto dal raggio sul cerchio è il doppio
dell'angolo tra nr
e l'asse p1.
Si osserva che per α=0 ( nr
parallelo all'asse principale p1) si ha σ=σ1 e τ=0, mentre per α=π/2 ( nr
parallelo all'asse p2) si ha σ=σ2 e τ=0; quindi le intersezioni della circonferenza con l'asse delle
ascisse corrispondono alle facce normali alle direzioni principali.
2α
α
σ
σ
1
2
σ
τ
(σ +σ )/21 2
(σ −σ )/21 2
Il procedimento seguito per ottenere il cerchio relativo al fascio di piani aventi in comune l'asse p3
può essere ripetuto, in modo analogo, considerando gli assi p1 e p2. Si ottengono così altri due
cerchi, che intersecano l'asse delle ascisse rispettivamente rispettivamente nei punti (σ2 ,0), (σ3 ,0) e
(σ1 ,0), (σ3 ,0).

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
13
σ3 σ
τ
1σσ2
2α
1
2
3
α
p
p
p
σ3 σ
τ
1σσ2
α
1
2
3
2α
p
p
p
σ3 σ
τ
1σσ2
α1
2
3
2α
p
p
p

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
14
I valori di σ e τ su una sezione qualunque, non contenente uno degli assi principali, sono contenuti
all'interno del cerchio maggiore e all'esterno dei due cerchi minori, come indicato in figura.
σ3 σ
τ
1σσ2
Dall'osservazione dei cerchi di Mohr si ricavano alcune proprietà significative dello stato di tensione
agente in un punto P e caratterizzato dalle tensioni principali σ1, σ 2, σ 3:
• a seconda del piano considerato la tensione normale σ varia tra σ1 e σ3 e non può assumere valori
all'esterno di tale intervallo;
• a seconda del piano considerato la tensione tangenziale τ varia in modulo tra 0 (piani normali alle
direzioni principali) e (σ1- σ3)/2.
In caso generale il tracciamento dei cerchi di Mohr richiede la conoscenza delle tensioni principali (e
quindi di aver risolto l'autoproblema relativo a [σ]), è possibile però un tracciamento immediato
quando si verificano contemporaneamente le due condizioni seguenti:
1) una direzione principale e la corrispondente tensione principale sono note;
2) si conoscono le componenti di tensione su due facce perpendicolari tra di loro e appartenenti
al fascio di piani aventi in comune l'asse principale noto.
Per illustrare il procedimento supponiamo che z sia la direzione principale detta pc3 (e quindi σzz=σc),
il tensore delle tensioni assumerà quindi la forma seguente:
[ ]
σσττσ
=σ
zz
yyxy
xyxx
00
0
0
σxxτxy
σxyτ yy
σzz
xy
z
Sul piano στ si posizionano i punti (σxx, τxy) e (σyy, - τxy), questi devono corrispondere ai due estremi
di un diametro del cerchio relativo ai piani avente in comune l'asse pc≡z. E' immediato ricavare
l'ascissa c del centro e il raggio r del cerchio:
3 Non essendo inizialmente noti tutti i valori delle tensioni principali non è possibile utilizzare la nomenclatura inordine decrescente (σ1≥σ2≥σ3);si adotta quindi una nomenclatura provvisoria (σa,σb,σc) senza imposizioni sullagrandezza dei termini.

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
15
2yyxxc
σ+σ= 2
2
2 xyyyxxr τ+
σ−σ=
Per ottenere le due tensioni principali relative al cerchio in esame è sufficiente aggiungere o sottrarre
il valore del raggio all'ascissa del centro:
22
, 22 xyyyxxyyxx
ba τ+
σ−σ±
σ+σ=σ
Anche le direzioni principali papb possono essere determinate per mezzo del cerchio (v. figura).
2α
α
σσab
σ
τ , τ ) (σ yy xy
,−τ ) (σ xx xy
α rappresenta l'angolo tra l'asse pa e l'asse x, si può risalire ad esso dalla relazione
yyxx
xy
σ−σ
τ=α
22tan
Infine, ricordando il valore della tensione principale inizialmente nota (σzz), si può completare la
costruzione con i rimanenti due cerchi.
Il procedimento si applica in maniera formalmente analoga se la direzione principale nota
preliminarmente è x o y, semplicamente scambiando in modo opportuno gli indici degli assi.
L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
16
3. STATO DI DEFORMAZIONE
3.1. Spostamento e deformazione
Sotto l'azione dei carichi le strutture cambiano, in maniera più o meno marcata, la propria forma
rispetto alla configurazione originale. Ad esempio nel campo meccanico tale fenomeno è ben
evidente per componenti come le molle, ma si verifica, seppur in misura minore, in tutti gli elementi
strutturali. Nei problemi relativi al comportamento meccanico dei materiali si deve quindi introdurre
il concetto di corpo deformabile, essendo insufficiente la trattazione, tipica della meccanica, in
termini di corpo rigido. Il tener conto della deformabilità ci permette di ottenere due risultati:
• è possibile verificare il comportamento delle strutture non solo in termini di resistenza alle
sollecitazioni, ma anche di rigidezza (ad esempio per valutare se il cambiamento di forma dovuto
ai carichi è compatibile col funzionamento della struttura);
• si possono risolvere i problemi di tipo iperstatico, per i quali le sole equazioni della statica non
sono sufficienti.
Si ricorda che la posizione di un punto è data dalle sue coordinate xyz in un sistema di riferimento, lo
spostamento di un punto è dato dalla differenza di coordinate tra due istanti successivi t e t' ed è una
grandezza di tipo vettoriale:
−−−
=
=
zz
yy
xx
w
v
u
U
'
'
'r
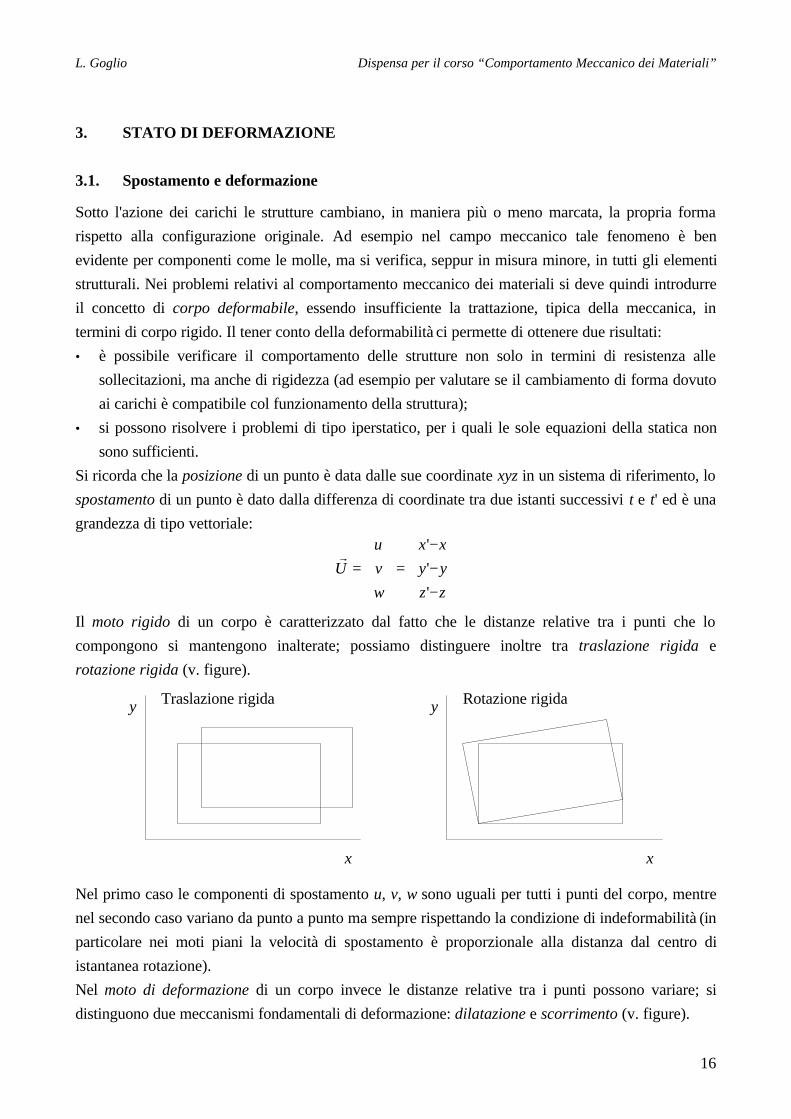
Il moto rigido di un corpo è caratterizzato dal fatto che le distanze relative tra i punti che lo
compongono si mantengono inalterate; possiamo distinguere inoltre tra traslazione rigida e
rotazione rigida (v. figure).
x
y Traslazione rigida
x
y Rotazione rigida
Nel primo caso le componenti di spostamento u, v, w sono uguali per tutti i punti del corpo, mentre
nel secondo caso variano da punto a punto ma sempre rispettando la condizione di indeformabilità (in
particolare nei moti piani la velocità di spostamento è proporzionale alla distanza dal centro di
istantanea rotazione).
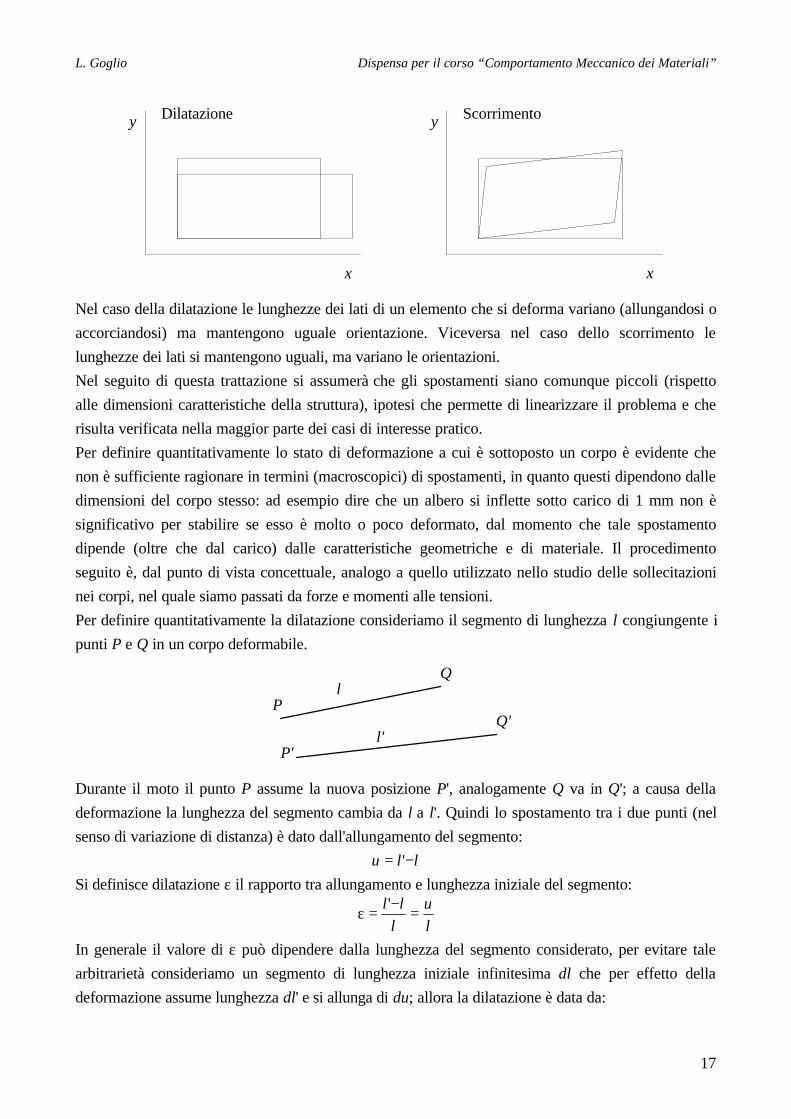
Nel moto di deformazione di un corpo invece le distanze relative tra i punti possono variare; si
distinguono due meccanismi fondamentali di deformazione: dilatazione e scorrimento (v. figure).
L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
17
x
y Dilatazione
x
y Scorrimento
Nel caso della dilatazione le lunghezze dei lati di un elemento che si deforma variano (allungandosi o
accorciandosi) ma mantengono uguale orientazione. Viceversa nel caso dello scorrimento le
lunghezze dei lati si mantengono uguali, ma variano le orientazioni.
Nel seguito di questa trattazione si assumerà che gli spostamenti siano comunque piccoli (rispetto
alle dimensioni caratteristiche della struttura), ipotesi che permette di linearizzare il problema e che
risulta verificata nella maggior parte dei casi di interesse pratico.
Per definire quantitativamente lo stato di deformazione a cui è sottoposto un corpo è evidente che
non è sufficiente ragionare in termini (macroscopici) di spostamenti, in quanto questi dipendono dalle
dimensioni del corpo stesso: ad esempio dire che un albero si inflette sotto carico di 1 mm non è
significativo per stabilire se esso è molto o poco deformato, dal momento che tale spostamento
dipende (oltre che dal carico) dalle caratteristiche geometriche e di materiale. Il procedimento
seguito è, dal punto di vista concettuale, analogo a quello utilizzato nello studio delle sollecitazioni
nei corpi, nel quale siamo passati da forze e momenti alle tensioni.
Per definire quantitativamente la dilatazione consideriamo il segmento di lunghezza l congiungente i
punti P e Q in un corpo deformabile.
P
Ql
P'
Q'l'
Durante il moto il punto P assume la nuova posizione P', analogamente Q va in Q'; a causa della
deformazione la lunghezza del segmento cambia da l a l'. Quindi lo spostamento tra i due punti (nel
senso di variazione di distanza) è dato dall'allungamento del segmento:
llu −= '
Si definisce dilatazione ε il rapporto tra allungamento e lunghezza iniziale del segmento:
lu
lll
=−
=ε'
In generale il valore di ε può dipendere dalla lunghezza del segmento considerato, per evitare tale
arbitrarietà consideriamo un segmento di lunghezza iniziale infinitesima dl che per effetto della
deformazione assume lunghezza dl' e si allunga di du; allora la dilatazione è data da:

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
18
dldu
dldldl
=−
=ε'
Per definire quantitativamente lo scorrimento consideriamo due segmenti inizialmente ortogonali, OP
e OQ, aventi lunghezze rispettivamente pari a l e h. Durante il moto i punti O, P, Q si spostano in O',
P', Q' ; rispetto alle direzioni originali i segmenti formano gli angoli α e β
O'
Q'
P'
v
u
α
β
π/2 − γ
O
Q
P
h
l
π/2
Poiché gli spostamenti sono piccoli si può approssimare
lv
=αhu
=β
Si definisce scorrimento γ il complemento a π/2 dell'angolo formato dopo deformazione tra due
segmenti inizialmente ortogonali, pari quindi alla somma:
hu
lv
+=β+α=γ
Considerando anche in questo caso segmenti di lunghezza infinitesima dl, dh si ottiene:
dhdu
dldv
+=γ
Si fa notare che per definire lo scorrimento abbiamo bisogno di considerare due segmenti di
riferimento; infatti considerandone uno solo non potremmo separare la rotazione rigida da quella di
deformazione.
3.2. Tensore delle deformazioni
Introdotte in forma elementare le definizioni di dilatazione e scorrimento, affrontiamo il fenomeno
della deformazione in forma analitica generale. Per questo scopo consideriamo un segmento vettore
infinitesimo Xdr
che dopo lo spostamento si trasforma in un segmento 'Xdr
; nel caso più generale si
verificano sia traslazione e rotazione rigide, sia deformazione e scorrimento. Supponendo che il
campo di spostamenti sia continuo e derivabile, se il primo estremo del segmento è soggetto a uno
spostamento Ur
, il secondo estremo è soggetto ad uno spostamento UdUrr
+ .
Vale quindi l'eguaglianza vettoriale
UdUXdXdUrrrrr
++=+ '
da cui si ottiene
UdXdXdrrr
+='Si noti che semplificare lo spostamento U
r, comune ai due estremi del segmento, corrisponde a
depurare lo spostamento complessivo della traslazione rigida, che dal punto di vista dello studio della

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
19
deformazione è ininfluente. Nel termine Udr
rimangono quindi i contributi dovuti sia alla rotazione
rigida sia alla deformazione.
dX'
dX
U U+dU
Udr
può essere scritto come differenziale del campo di spostamenti:
[ ] dXJ
dz
dy
dx
zw
yw
xw
zv
yv
xv
zu
yu
xu
dw
dv
du
=
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
=
La matrice jacobiana [J] può essere scomposta nella somma di due termini sfruttando la seguente
identità:
[ ] [ ] [ ]
[ ] [ ] [ ] [ ]TT JJJJ
JJJ
21
21
21
21
21
21
++−=
+=
Poniamo ora:
[ ] [ ] [ ]
∂∂
−∂∂
∂∂
−∂∂
∂∂
−∂∂
∂∂
−∂∂
∂∂
−∂∂
∂∂
−∂∂
=−=Ω
021
21
21
021
21
21
0
21
21
zv
yw
zu
xw
yw
zv
yu
xv
xw
zu
xv
yu
JJ T
[ ] [ ] [ ]
∂∂
∂∂
+∂∂
∂∂
+∂∂
∂∂
+∂∂
∂∂
∂∂
+∂∂
∂∂
+∂∂
∂∂
+∂∂
∂∂
=+=ε
zw
zv
yw
zu
xw
yw
zv
yv
yu
xv
xw
zu
xv
yu
xu
JJ T
21
21
21
21
21
21
21
21
Si può dimostrare che la matrice [Ω] rappresenta (nell'ambito dell'ipotesi di spostamenti piccoli) la
quota di Udr
corrispondente alla rotazione rigida, contributo che non vogliamo considerare.

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
20
I coefficienti della matrice [ε] rappresentano invece delle dilatazioni (termini sulla diagonale) o degli
scorrimenti divisi per 2 (termini fuori diagonale), secondo le definizioni viste in precedenza; [ε]
rappresenta quindi il tensore delle deformazioni, simmetrico e contenente 6 componenti diverse
xu
xx ∂∂
=ε xyyxxy xv
yu
γ=
∂∂
+∂∂
=ε=ε21
21
yv
yy ∂∂
=ε xzzxxz xw
zu
γ=
∂∂
+∂∂
=ε=ε21
21
zw
zz ∂∂
=ε yzzyyz yw
zv
γ=
∂∂
+∂∂
=ε=ε21
21
Esso permette di calcolare lo spostamento infinitesimo Udr
dovuto alla sola deformazione del corpo,
escludendo i contributi del moto rigido: [ ] dXdU ε=
Le deformazioni, sia dilatazioni sia scorrimenti, sono dei numeri puri in quanto rappresentano
rapporti di lunghezze (m/m); poiché i valori tipici sono molto piccoli (10-6 ÷ 10-3), per lavorare con
numeri più comodi da rappresentare le si esprime talvolta (soprattutto nell'analisi sperimentale delle
deformazioni) in µm/m.
3.3. Direzioni principali di deformazione
Analogamente al caso della tensione, anche il tensore della deformazione ammette 3 autovalori reali
e i corrispondenti autovettori; essi rappresentano le deformazioni principali e le direzioni principali
di deformazione. Il significato fisico in questo caso è il seguente: segmenti orientati lungo direzioni
principali si dilatano (allungandosi o accorciandosi) senza subire distorsioni (escludendo le rotazioni
rigide); inoltre, per ogni punto della struttura, la massima e la minima dilatazione principale
costituiscono la massima e la minima dilatazione possibile che un segmento può subire a seconda
della sua l'orientazione.
Anche per le deformazioni è possibile la rappresentazione grafica mediante cerchi di Mohr; in questo
caso sugli assi si pongono la dilatazione e la metà dello scorrimento. Le procedure per la costruzione
e l'utilizzo dei cerchi sono analoghe al caso delle tensioni.
3 ε
γ
12εεε
2

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
21
3.4. Relazione tra tensioni e deformazioni
I parametri che rappresentano gli stati di tensione e deformazione, cioè i coefficienti dei rispettivi
tensori, sono legati tra di loro dal comportamento del materiale. L'esperienza fisica ci mostra che se
si sottopone un materiale a degli sforzi questo si deforma, viceversa se si impone al materiale di
deformarsi questo reagisce opponendo degli sforzi.
Consideriamo ad esempio il caso di una molla sospesa verticalmente ad un estremo. Se (a)
all'estremo libero si applica un carico assiale F questo presenta uno spostamento δ, proporzionale al
carico stesso; se invece (b) si costringe l'estremo libero ad spostarsi di una quantità δ la molla oppone
una forza resistente F proporzionale allo spostamento imposto. Inoltre si osserva che rimuovendo la
causa (carico applicato o spostamento imposto) l'effetto (spostamento sotto carico o forza
resistente) si annulla.
Un comportamento di questo tipo è detto lineare elastico; si intende cioè che vi è una semplice legge
lineare tra causa ed effetto e il fenomeno è inoltre reversibile.
F∝δ
Fk1
=δ
Fδ
δ∝F
δ= kF
Nel caso in esame la costante di proporzionalità k costituisce la cosiddetta rigidezza della molla.
Per caratterizzare dal punto di vista elastico il materiale, indipendentemente dalle caratteristiche
geometriche della struttura, si deve studiarne il comportamento in termini di tensioni e deformazioni.
Consideriamo un elemento infinitesimo di materiale e supponiamo di poter applicare su di esso le
diverse componenti di tensione separatamente e di misurare le componenti di deformazione che
nascono.
σxxτxy
σxyτ yy
σzz
xy
zyzτ
yzτ
xzτ
xzτ
Applicando la componente σxx si osserva che la deformazione εxx risulta proporzionale alla tensione:
xxxx σ∝ε xxxx Eσ=ε
1

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
22
La costante E è detta modulo elastico (o modulo di Young) e ha il significato fisico di rigidezza del
materiale; dimensionalmente essa costituisce una tensione (espressa solitamente in MPa o N/mm2).
Applicando la sola componente σyy si osserva che la deformazione εxx risulta proporzionale anche a
questa componente di tensione:
yyxx σ∝ε yyxx Eσ
ν−=ε
La costante ν è detta coefficiente di contrazione trasversale (o coefficiente di Poisson) e rappresenta
la "disponibilità" del materiale alla dilatazione in direzione perpendicolare a quella in cui agisce una
tensione di tipo normale; dimensionalmente è un numero puro.
Lo stesso comportamento si riscontra applicando la sola componente σzz:
zzxx σ∝ε zzxx Eσ
ν−=ε
Viceversa si riscontra che la deformazione εxx è insensibile all'applicazione delle componenti di
tensione tangenziali τxy, τxz, τyz.
Misurando le componenti di dilatazione εyy, εzz si riscontrano comportamenti analoghi (scambiando
debitamente gli indici degli assi) nei confronti delle diverse componenti di tensione.
Applicando simultaneamente σxx, σyy, σzz, si osserva che vale la sovrapposizione degli effetti:
zzyyxxxx EEEσ
ν−σ
ν−σ=ε
1
Per quando riguarda gli scorrimenti, si osserva che ognuno di essi è proporzionale alla sola
componente di tensione tangenziale corrispondente (cioè con gli stessi indici); ad esempio:
xyxy τ∝γ xyxy Gτ=γ
1
La costante G è detta modulo elastico a taglio e rappresenta la rigidezza del materiale rispetto alla
deformazione per scorrimento; anche essa ha le dimensioni una tensione. Si può verificare che G non
è indipendente dalle costanti E, ν del materiale ma è legata ad esse dalla relazione
( )ν+=
12E
G
Un materiale che presenta un comportamento del tipo descritto è definito, oltre che elastico lineare,
isotropo, cioè le proprietà meccaniche sono le stesse in tutte le direzioni.
Oltre alle tensioni, un'ulteriore causa di deformazione nei problemi strutturali è rappresentata dalla
temperatura; questa provoca solo dilatazioni, uguali in tutte le direzioni, ma non causa scorrimenti:Tzzyyxx ∆α=ε=ε=ε
Il termine α costituisce il coefficiente di dilatazione termica del materiale, avente le dimensioni
dell'inverso di una temperatura (1/°C), mentre ∆T è la variazione di temperatura del materiale
rispetto ad una configurazione di riferimento.
Complessivamente la relazione fra tensioni e deformazioni, detta legge di Hooke, costituisce un
sistema di 6 equazioni che legano le componenti ε,γ alle σ,τ e alla variazione di temperatura ∆T:

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
23
τ=γ
τ=γ
τ=γ
∆α+σ+σν
−σν
−=ε
∆α+σν
−σ+σν
−=ε
∆α+σν
−σν
−σ+=ε
yzyz
xzxz
xyxy
zzyyxxzz
zzyyxxyy
zzyyxxxx
G
G
G
TEEE
TEEE
TEEE
1
1
1
1
1
1
Poiché le σ e ε sono disaccoppiate dalle τ e γ, se un sistema di riferimento è principale per le tensioniallora lo è anche per le deformazioni e viceversa; in coordinate principali la legge di Hooke si riducea:
∆α+σ+σν
−σν
−=ε
∆α+σν
−σ+σν
−=ε
∆α+σν
−σν
−σ+=ε
TEEE
TEEE
TEEE
3213
3212
3211
1
1
1
3.5. Energia di deformazione
E' noto dalla fisica che un corpo che si deforma sotto carico accumula energia potenziale in forma
elastica; ad esempio nel caso di una molla l'energia accumulata è pari a
δ= F21
E
F
δed è visualizzabile graficamente come area sottesa dalla retta nel diagramma forza-allungamento.
Per calcolare l'energia elastica a livello di materiale, studiamo la deformazione di un elemento
infinitesimo. Consideriamo prima il caso in cui agisca la sola tensione σxx sulla faccia di area dydz , la
risultante elementare vale:dydzdF xxx σ=
Lo spostamento elementare per cui tale tensione compie lavoro è dato da:dxdu xxε=
Si può quindi calcolare la corrispondente energia elastica:
dVdxdydzdudFd xxxxxxxxx εσ=εσ==21
21
21
E

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
24
Definiamo quindi l'energia di deformazione per unità di volume η:
xxxxdVd
εσ==η21E
Considerando invece il caso in cui agisca la sola tensione tangenziale τxy sulle facce dxdz e dydz
questa genera le risultanti elementaridxdzdF xyx τ= dydzdF xyy τ=
I corrispondenti spostamenti per cui tale tensione compie lavoro sono dati dadydu xyε= dxdv xyε=
Anche in questo caso si calcola l'energia elastica:
( ) ( ) dVdxdydzdvdFdudFd xyxyxyxyxyxyyx γτ=ετ+ετ=+=21
21
21
E
mentre l'energia per unità di volume è:
xyxydVd
γτ==η21E
dFx du
dFx du
dFy
dv
In caso generale l'energia elastica di deformazione per unità di volume è ottenuta semplicemente
sommando i contributi di tutte le componenti (le tensioni normali non producono lavoro con gli
spostamenti dovuti agli scorrimenti, le tensioni tangenziali non producono lavoro con gli spostamenti
dovuti alle dilatazioni):
( )yzyzxzxzxyxyzzzzyyyyxxxx γτ+γτ+γτ+εσ+εσ+εσ=η21
In coordinate principali l'espressione dell'energia assume la forma più compatta:
( )33221121
εσ+εσ+εσ=η

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
25
4. CEDIMENTO STATICO DEI MATERIALI METALLICI
4.1. Prova di trazione
Il metodo più comune per valutare sperimentalmente le caratteristiche meccaniche di un materiale
strutturale è rappresentato dalla prova di trazione. Essa consiste nel sottoporre una provetta
(normalmente di forma cilindrica o prismatica) a carico di trazione assiale crescente, generalmente
fino a produrne la rottura; durante la prova si registrano le coppie di valori carico-allungamento per
costruire il relativo diagramma.
L'esecuzione delle prove è regolata da norme dedicate che prescrivono i parametri geometrici delle
provette, le modalità di applicazione del carico e i procedimenti per l'elaborazione dei risultati (v.
UNI EN 10002 Materiali metallici – Prova di trazione).
Provette
Le provette da impiegare per le prove di trazione hanno forma e dimensioni unificate; ciò è dettato
non solo da motivi di ordine pratico (facilità di realizzazione delle provette, compatibilità con le
macchine di prova), ma anche dal fatto che i risultati ottenuti possono essere in una certa misura
influenzati dalla geometria della provetta. La sezione delle provette può essere di tipo circolare (per
materiale in barre) o rettangolare (lamiere); in entrambi i casi si distinguono: la parte calibrata, le due
teste di afferraggio e le due zone di raccordo.
La parte calibrata è la zona a sezione costante con dimensioni controllate (si impongono tolleranze
dimensionali e di forma) e di lunghezza Lc, che viene utilizzata per le misure; nell'interno della zona
calibrata si tracciano due linee trasversali di riferimento distanti tra di loro L0. Le provette impiegate
sono usualmente di tipo proporzionale, cioè soddisfano la condizione:
00 65.5 SL =
che corrisponde ad un tratto calibrato di lunghezza pari a 5 diametri nel caso di sezione circolare.
Le teste di afferraggio sono gli estremi della provetta, aventi sezione maggiore rispetto alla parte
calibrata, che vengono afferrati dai morsetti della macchina per l'applicazione del carico di trazione.
Le zone di raccordo collegano la parte calibrata alle teste di afferraggio, evitando brusche variazioni
di sezione.
Provetta a sezione piatta
LL
0
ctratto calibrato
teste di afferraggiozone di raccordo
S0
Provetta a sezione circolare
LL
0
ctratto calibrato
teste di afferraggiozone di raccordo
S0
L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
26
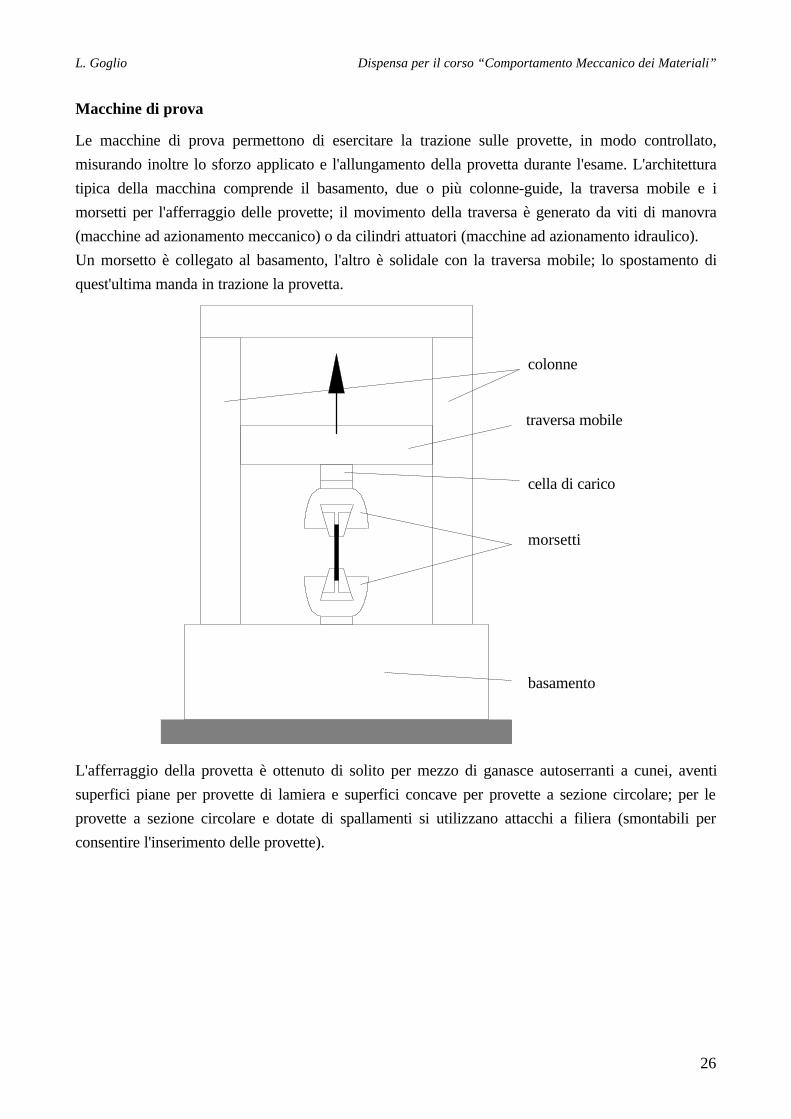
Macchine di prova
Le macchine di prova permettono di esercitare la trazione sulle provette, in modo controllato,
misurando inoltre lo sforzo applicato e l'allungamento della provetta durante l'esame. L'architettura
tipica della macchina comprende il basamento, due o più colonne-guide, la traversa mobile e i
morsetti per l'afferraggio delle provette; il movimento della traversa è generato da viti di manovra
(macchine ad azionamento meccanico) o da cilindri attuatori (macchine ad azionamento idraulico).
Un morsetto è collegato al basamento, l'altro è solidale con la traversa mobile; lo spostamento di
quest'ultima manda in trazione la provetta.
basamento
traversa mobile
morsetti
colonne
cella di carico
L'afferraggio della provetta è ottenuto di solito per mezzo di ganasce autoserranti a cunei, aventi
superfici piane per provette di lamiera e superfici concave per provette a sezione circolare; per le
provette a sezione circolare e dotate di spallamenti si utilizzano attacchi a filiera (smontabili per
consentire l'inserimento delle provette).

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
27
A ASez. A-A provette piatte
provette circolari
Attacchi a filiera
La misura della forza è ottenuta per mezzo di un apposito dinamometro (cella di carico) posto in
serie sul sistema di applicazione della forza di trazione oppure, nel caso di macchine idrauliche,
rilevando la pressione nel circuito.
La misura dell'allungamento della provetta è eseguita in due modi diversi, a seconda della precisione
richiesta e dell'entità dell'allungamento stesso:
• misurando lo spostamento della traversa mobile si rileva qualunque livello di allungamento (fino
all'eventuale rottura), ma la precisione non è elevata (errori dovuti ai giochi meccanici, alla
deformabilità della traversa, ecc.);
• utilizzando un estensometro, apposito strumento che viene agganciato alla provetta e che misura
l'allontanamento tra due sezioni di riferimento, la precisione è molto elevata ma la corsa
misurabile è breve (pochi mm), questa tecnica è quindi impiegata per misurare gli allungamenti
elastici che hanno piccola entità.
Comportamento dei materiali durante la prova
La risposta dei materiali metallici sottoposti a trazione è evidentemente assai diversa a seconda del
tipo di materiale e dei trattamenti che questo ha subito, in termini sia qualitativi (tipi di
comportamento presentato) sia quantitativi (valori dei parametri caratteristici). Nel seguito si
cercherà di illustrare i concetti fondamentali, cercando di classificare i comportamenti dal punto di
vista strutturale.
E' necessario definire alcune grandezze che vengono impiegate per descrivere le caratteristiche
meccaniche del materiale.
• Deformazione convenzionale: è il rapporto tra la variazione di lunghezza del tratto compreso tra
i due riferimenti e la lunghezza iniziale del tratto stessoε = ∆L L/ 0
invece della deformazione frequentemente si utilizza l'allungamento percentuale:
0/100 LL∆⋅
• Tensione convenzionale (o carico unitario): è il rapporto tra la forza di trazione applicata e l'area
iniziale della sezione retta del tratto calibratoσ = F S/ 0
• Carico di scostamento dalla proporzionalità (totale o unitario): è il carico al quale corrisponde
un allungamento non proporzionale pari alla percentuale p della distanza tra ai riferimenti; ad

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
28
esempio Fp0,2 (e, analogamente, Rp0,2=Fp0,2/S0) è il carico che determina un allungamento avente
una quota non proporzionale pari allo 0,2% della distanza tra i riferimenti.
Durante la prova la sezione retta del provino è sollecitata dall'unica componente di tensione
perpendicolare σ e tale tensione è principale, inoltre le due restanti tensioni principali sono nulle e il
materiale è quindi in condizioni di tensione monoassiale.
I dati rilevati nel corso della prova sono riportati su un diagramma forza-allungamento o, dividendo
la prima per la sezione iniziale del tratto calibrato, tensione-allungamento.
Nella fase iniziale della prova, finché il carico si mantiene sufficientemente basso, il comportamento
del materiale è elastico e il corrispondente tratto del diagramma è lineare. La pendenza di tale retta
nel diagramma σ- ε rappresenta il modulo elastico E.
Continuando ad esercitare la trazione sulla provetta si arriva ad un certo livello per il quale la forza e
l'allungamento cessano di essere proporzionali e il diagramma si scosta dalla linearità; da questo
punto in poi il comportamento si differenzia a seconda del tipo di materiale in esame.
Per alcuni materiali, come gli acciai a basso contenuto di carbonio, ciò è particolarmente evidente: la
forza cessa improvvisamente di salire (addirittura decresce leggermente) mentre la provetta continua
ad allungarsi. Il fenomeno è detto snervamento, esso segna la fine del comportamento elastico del
materiale e l'inizio delle deformazioni plastiche permanenti; si definisce carico di snervamento
superiore FeH il valore di picco della forza di trazione corrispondente alla fine del comportamento
elastico, mentre il carico di snervamento inferiore FeL è il valore a cui la forza scende (assestandosi
dopo alcune oscillazioni) quando il fenomeno si è manifestato.
Successivamente, continuando a esercitare la trazione sulla provetta la forza riprende a salire, ma con
pendenza molto inferiore a quella del tratto elastico: siamo nella fase delle deformazioni plastiche
aventi entità assai superiore di quelle elastiche. In tale fase il volume del materiale si mantiene
approssimativamente costante, quindi l'allungamento è compensato da una contrazione trasversale. Il
fatto che la forza continui a salire, malgrado la riduzione della sezione, indica che il carico unitario
(cioè la tensione) necessario per deformare il materiale cresce in misura tale da compensare la perdita
di sezione resistente: tale fenomeno è noto come incrudimento. Questo comportamento prosegue
finché la curva presenta un massimo Fm, detto anche carico di rottura; da questo punto in poi si la
riduzione della sezione si verifica in una zona localizzata, tale fenomeno è noto come strizione. La
forza necessaria ad allungare ulteriormente la provetta diminuisce perché l'incrudimento del materiale
non basta più a compensare la riduzione di sezione. Infine la provetta si rompe, dividendosi in due
parti in corrispondenza della sezione ristretta.

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
29
FeH
FeL
F
(%)
Fm
rottura
deform. plast. uniforme
deform. plast. localizzata
allungamento
Per altri materiali, come ad esempio gli acciai a medio contenuto di carbonio, il fenomeno dello
snervamento non è più evidente, ma si osserva semplicemente una progressiva deviazione dalla
linearità; in questo caso, invece del carico di snervamento FeH si determina il carico di scostamento
dalla proporzionalità, di solito allo 0,2%: Fp0,2. La procedura consiste nel tracciare la retta parallela al
tratto elastico del diagramma e distante in orizzontale 0,2%; l'intersezione con la curva fornisce il
valore di Fp0,2. Col procedere della prova si osservano anche in questo caso la crescita della curva
dovuta all'incrudimento e il successivo calo dovuto alla strizione.
Fp0,2
F
(%)allungamento
Fm
0,2%
deform. plast. uniforme
deform. plast. localizzata
rottura
Per alcuni materiali, come ad esempio le ghise grigie, la fase delle deformazioni plastiche è assente o
praticamente trascurabile; la rottura si manifesta immediatamente alla fine del tratto elastico della
curva.F
(%)allungamento
Fm
rottura
L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
30
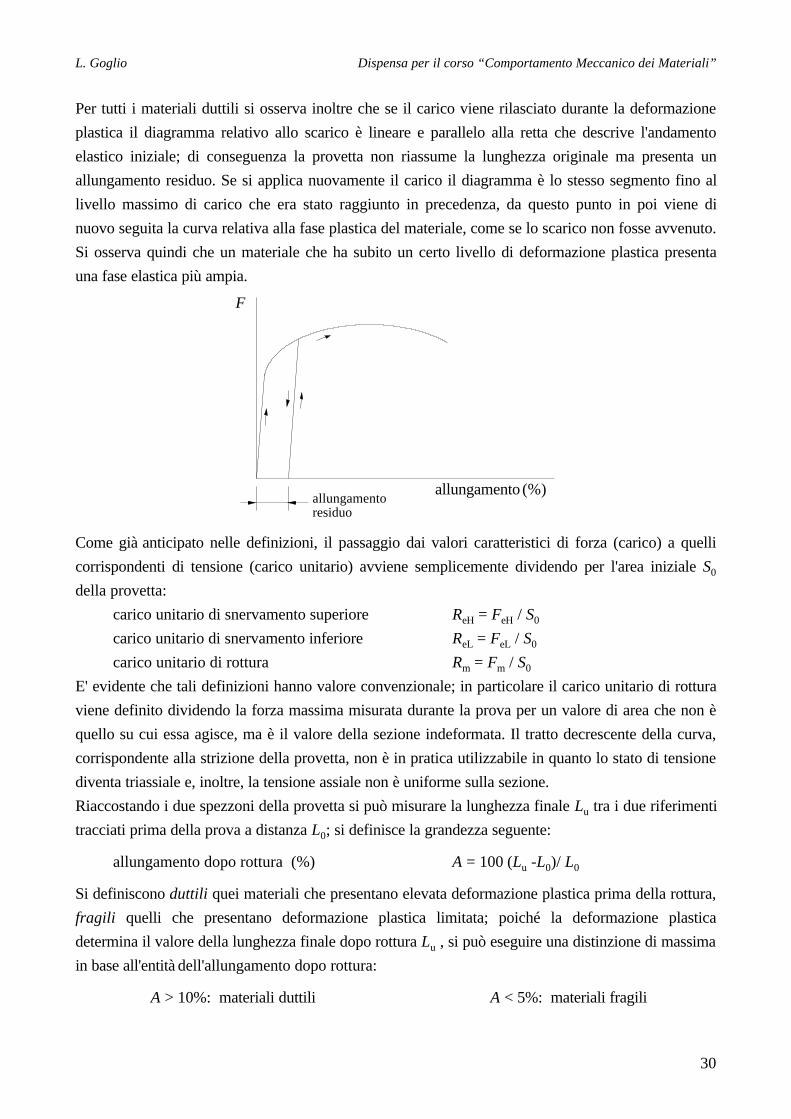
Per tutti i materiali duttili si osserva inoltre che se il carico viene rilasciato durante la deformazione
plastica il diagramma relativo allo scarico è lineare e parallelo alla retta che descrive l'andamento
elastico iniziale; di conseguenza la provetta non riassume la lunghezza originale ma presenta un
allungamento residuo. Se si applica nuovamente il carico il diagramma è lo stesso segmento fino al
livello massimo di carico che era stato raggiunto in precedenza, da questo punto in poi viene di
nuovo seguita la curva relativa alla fase plastica del materiale, come se lo scarico non fosse avvenuto.
Si osserva quindi che un materiale che ha subito un certo livello di deformazione plastica presenta
una fase elastica più ampia.
F
(%)allungamentoallungamentoresiduo
Come già anticipato nelle definizioni, il passaggio dai valori caratteristici di forza (carico) a quelli
corrispondenti di tensione (carico unitario) avviene semplicemente dividendo per l'area iniziale S0
della provetta:
carico unitario di snervamento superiore ReH = FeH / S0
carico unitario di snervamento inferiore ReL = FeL / S0
carico unitario di rottura Rm = Fm / S0
E' evidente che tali definizioni hanno valore convenzionale; in particolare il carico unitario di rottura
viene definito dividendo la forza massima misurata durante la prova per un valore di area che non è
quello su cui essa agisce, ma è il valore della sezione indeformata. Il tratto decrescente della curva,
corrispondente alla strizione della provetta, non è in pratica utilizzabile in quanto lo stato di tensione
diventa triassiale e, inoltre, la tensione assiale non è uniforme sulla sezione.
Riaccostando i due spezzoni della provetta si può misurare la lunghezza finale Lu tra i due riferimenti
tracciati prima della prova a distanza L0; si definisce la grandezza seguente:
allungamento dopo rottura (%) A = 100⋅(Lu -L0)/ L0
Si definiscono duttili quei materiali che presentano elevata deformazione plastica prima della rottura,
fragili quelli che presentano deformazione plastica limitata; poiché la deformazione plastica
determina il valore della lunghezza finale dopo rottura Lu , si può eseguire una distinzione di massima
in base all'entità dell'allungamento dopo rottura:
A > 10%: materiali duttili A < 5%: materiali fragili

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
31
Per valori di A compresi tra 5% e 10% si osserva un comportamento intermedio tra fragilità e
duttilità.
La tabella seguente riporta, a titolo di esempio, i valori tipici delle caratteristiche di resistenza per
alcuni materiali ferrosi utilizzati nelle costruzioni meccaniche; dati completi per le diverse tipologie di
materiali possono essere trovati nelle corrispondenti tabelle UNI.
Materiale ReH (Rp0,2)
(MPa)
Rm
(MPa)
A
%acciai per carpenteria S235 ≥ 235 ≥ 360 ≥ 26
S275 ≥ 275 ≥ 430 ≥ 23S355 ≥ 355 ≥ 510 ≥ 21
acciai da bonifica C30 325 540 20C40 370 590 18
41Cr4 540 740 1439NiCrMo3 540 740 13
ghise grigie GJL-100 - 100 -GJL-200 - 200 -GJL-300 - 300 -
ghise sferoidali GJS-350-22 230 350 22GS-500-7 370 500 7GS-700-2 420 700 2
Dall'esame della tabella si osserva che per gli acciai le caratteristiche di resistenza (carichi unitari di
snervamento e di rottura) sono in generale inversamente proporzionali all'allungamento a rottura,
inoltre per gli acciai ad alta resistenza il limite di snervamento è (proporzionalmente) più vicino a
quello di rottura che per gli acciai a bassa resistenza.
4.2. Ipotesi di cedimento
I dati relativi alla resistenza dei materiali ottenuti mediante la prova di trazione corrispondono al
cedimento in condizioni di tensione monoassiale. In generale ogni punto di un elemento di macchina
può essere soggetto ad uno stato di tensione pluriassiale, definito dal tensore delle tensioni cartesiane
[σ] o dalle tensioni principali σ1, σ2, σ3. Al fine di stabilire se lo stato di tensione agente nel punto
considerato è compatibile con la resistenza del materiale si pone quindi il problema di definire un
unico valore (scalare) equivalente, da confrontare con il valore che esprime il limite caratteristico del
materiale.
Si deve cioè definire una tensione, detta ideale o equivalente, funzione delle 3 tensioni principali
effettivamente agenti e che equivalga dal punto di vista del pericolo di cedimento allo stato di
tensione vero:( )321 ,, σσσ=σ fid
Tale funzione non è univoca e dipende dal comportamento tipico del materiale; per la sua
determinazione si deve analizzare più dettagliatamente ciò che si verifica nel materiale in condizioni
di cedimento.

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
32
Il differente comportamento, duttile o fragile, del materiale durante la prova di trazione corrisponde
ai diversi fenomeni che si producono nel materiale quando la sollecitazione cresce.
Nel caso dei materiali fragili il cedimento consiste nella perdita di coesione fra gli atomi del reticolo
cristallino del metallo, fenomeno che porta al distacco frontale del materiale. L'intuizione fisica ci
porta a presumere che tale distacco si verifichi per effetto delle tensioni di tipo normale (σ), tale
ipotesi è confermata sperimentalmente dal fatto che le superfici di rottura a trazione di materiali di
questo tipo sono perpendicolari alla direzione della forza.
Nel caso dei materiali duttili il cedimento che mette fine al comportamento elastico è causato dallo
scorrimento dei piani cristallini, che si verifica su piani inclinati di circa 45° rispetto alla direzione di
applicazione della forza dove le tensioni di tipo tangenziale (τ) sono massime. Esaminando le
superfici di rottura a trazione di un materiale di questo tipo si riscontra infatti che esse, almeno nella
zona esterna del provino, sono inclinate dell'angolo suddetto rispetto alla direzione della forza.
σ σ
materiali fragili: decoesione frontale
σ σ
materiali duttili: scorrimento plastico
Numerose ipotesi di cedimento sono state proposte dai ricercatori che si sono occupati di resistenza
dei materiali; in questa trattazione ci si limiterà a presentare quelle più comunemente adottate per i
materiali metallici impiegati nelle costruzioni meccaniche.
Ipotesi della massima tensione normale (Galileo, Rankine)
Si suppone che il materiale ceda quando la massima delle tensioni principali, che è la massima
tensione normale tra quelle agenti sugli infiniti piani passanti per il punto in cui si esegue la verifica,
raggiunge un valore limite:
σid = σ1
Per quanto discusso in precedenza, questa ipotesi risulta applicabile ai materiali che presentano
comportamento fragile.
Ipotesi della massima tensione tangenziale (Tresca, Guest)
L'ipotesi è applicabile ai materiali di tipo duttile. Si suppone che il materiale ceda, nel senso di
iniziare a deformarsi plasticamente, quando la massima tensione tangenziale tra quelle agenti sugli
infiniti piani passanti per il punto in cui si esegue la verifica raggiunge un valore limite.
Dall'esame dei cerchi di Mohr si ricava immediatamente che la tensione tangenziale massima è il
raggio del maggiore dei cerchi e vale:
231
maxσ−σ
=τ

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
33
σ3 σ
τ
1σσ2
maxτ
limiti di cedimento
Nel caso dello stato di tensione monoassiale che si ha nella prova di trazione, due cerchi di Mohr
coincidono e il terzo degenera in un punto; la massima tensione tangenziale vale quindi:
2max,id
idσ
=τ
Confrontando le due espressioni si ottiene:
31 σ−σ=σ id
Si noti che secondo questa ipotesi la tensione principale intermedia non influisce sul valore della
tensione ideale; inoltre se a tutte le tensioni principali si aggiunge una costante (cosa che corrisponde
a traslare orizzontalmente i cerchi di Mohr) il valore della tensione ideale non cambia.
Ipotesi dell'energia di distorsione (Huber, Hencky, Von Mises)
Anche questa ipotesi è applicabile ai materiali di tipo duttile. Si suppone che il materiale inizi a
deformarsi plasticamente quando la quota di energia potenziale elastica di deformazione (cfr. §3.5.)
che corrisponde al puro cambiamento di forma (distorsione) raggiunge un valore critico.
σ3 σ
τ
1σσ2
cτ
bττa
Si può dimostrare che l'energia D corrispondente alla pura distorsione del materiale è data dalla
semisomma dei tre prodotti delle tensioni tangenziali massime per le corrispondenti deformazioni:
( )ccbbaa γτ+γτ+γτ21
=D
Per la legge di Hooke γ = τ/G e quindi:

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
34
( )222
21
= cbaGτ+τ+τD
Esprimendo le tensioni tangenziali massime in funzione di quelle principali si ottiene:
σ−σ+
σ−σ+
σ−σ
=2
312
322
21
22221G
D
Nel caso della prova di trazione due tensioni tangenziali massime coincidono e la restante è nulla:
σ=
−σ+
−
+
−σ=
2222
22
21
2
0
200
2
0
21 ididid
GGD
Confrontando le due espressioni si ottiene:
( ) ( ) ( )231
232
221
2
1σ−σ+σ−σ+σ−σ=σ id
Questa ipotesi tiene conto del contributo da parte di tutte le tre tensioni principali; anche in questo
caso se a tutte le tensioni principali si aggiunge una costante il valore della tensione ideale non
cambia, ciò è giustificato dal fatto che in questo modo si aggiungerebbe energia di deformazione
associata ad un cambiamento di volume ma non di forma.
Confronto tra le ipotesi della massima tensione tangenziale e dell'energia di distorsione
Poiché entrambe le ipotesi suddette sono state formulate per rappresentare il cedimento dei materiali
duttili, si pone il problema di valutare di quanto esse differiscano e di stabilire quale delle due sia più
adeguata a rappresentare le condizioni limite.
Un confronto diretto tra le due ipotesi può essere eseguito in forma grafica considerando uno spazio
cartesiano in cui le coordinate rappresentano i valori assunti dalle tensioni principali. In questo spazio
ad ogni ipotesi corrisponde una superficie limite; se il punto rappresentativo dello stato di tensione
sta all'interno di tale superficie non si verifica il cedimento, se sta all'esterno il materiale cede. Di
conseguenza, a parità di resistenza del materiale, un'ipotesi è tanto più cautelativa quanto più la zona
ammessa è limitata. Adottando questa rappresentazione si trova che:
• l'ipotesi dell'energia di distorsione corrisponde ad un cilindro, il cui asse è la retta trisettrice dello
spazio avente come coordinate le tensioni principali e la cui sezione ha forma circolare;
• l'ipotesi della massima tensione tangenziale corrisponde ad un cilindro, il cui asse è la retta
trisettrice dello spazio avente come coordinate le tensioni principali e la cui sezione ha forma
esagonale.
Una situazione di particolare interesse dal punto di vista applicativo è quella di tensione piana in cui
una delle tensioni principali è uguale a zero; tale è lo stato di sollecitazione che si verifica ad esempio
negli alberi, nei dischi, nelle piastre, nei gusci e sulla superficie di tutti elementi strutturali.
Graficamente, in un piano cartesiano avente per coordinate le due restanti tensioni principali4 σa e σb,
4Come già fatto in un caso precedente, si adotta questa notazione perché i simboli σ1, σ2, σ3 corrispondono ai valoriordinati in senso decrescente.

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
35
i limiti corrispondenti alle due ipotesi di rottura sono rappresentati da un'ellisse per l'energia di
distorsione e da un esagono per la massima tensione tangenziale.
σb
σa
σ = σ1 b
σ = σ2 a
σ = 03σ = σ1 a
σ = σ2 b
σ = 03
σ = σ1 a
σ = 02
σ = σ3 b
σ = σ1 b
σ = 02
σ = σ3 a
σ = 01
σ = σ2 a
σ = σ3 b
σ = 01
σ = σ2 b
σ = σ3 a
Dal confronto grafico si deduce che la curva limite corrispondente alla massima tensione tangenziale
è completamente inscritta in quella corrispondente all'energia di distorsione, la prima ipotesi risulta
quindi più cautelativa. La discrepanza tra le due curve è in generale abbastanza limitata; esse
coincidono quando σa=0 o σb=0 e per σa= σb; la massima differenza si verifica per σa= - σ b e in tali
condizioni si verifica che
866.023
)max (
dist.) en.(==
τσσ
id
id
Sperimentalmente si osserva che i punti di cedimento ottenuti esercitando contemporaneamente
tensione su due direzioni si dispongono approssimativamente in posizione intermedia tra le curve
corrispondenti alle due ipotesi.
Si può quindi concludere che la scelta dell'una o dell'altra ipotesi viene effettuata principalmente per
motivi di comodità. L'ipotesi dell'energia di distorsione porta a un'unica formula, valida in ogni caso,
che però presenta lo svantaggio di essere non-lineare nelle tensioni; l'ipotesi della massima tensione
tangenziale presenta il vantaggio di essere lineare, ma l'equazione della superficie limite non è unica
in quanto questa consta di diversi segmenti.
4.3. Coefficiente di sicurezza di una struttura
Per quanto esposto finora la resistenza strutturale di un componente risulta verificata quando in tutti
i suoi punti (e in particolare in quello più sollecitato) la tensione ideale (che, come già detto,
rappresenta con un unico numero le tensioni applicate nel punto) è inferiore alla tensione limite del
materiale:σid ≤ σlim
L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
36
La tensione limite che si assume per il materiale corrisponde al carico unitario di rottura nel caso di
materiale fragile e al carico unitario di snervamento nel caso di materiale duttile. Quest'ultima
assunzione è motivata dal fatto che in un componente meccanico non è accettabile che si produca
snervamento; infatti anche se non avviene la rottura il cambiamento permanente di forma associato
alle deformazioni plastiche potrebbe essere incompatibile col funzionamento.
Affinché l'elemento strutturale operi con sufficiente sicurezza la diseguaglianza precedente deve
essere soddisfatta con un certo margine; si deve infatti considerare che:
• i carichi applicati possono essere soggetti a incertezze di tipo statistico, inoltre si potrebbero
presentare condizioni di carico non previste in sede di progetto;
• anche le caratteristiche di resistenza del materiale, essendo frutto dei procedimenti di
fabbricazione, sono soggette a incertezze di tipo statistico;
• i valori delle tensioni agenti che si considerano sono in generale ottenuti per mezzo di modelli
teorici di calcolo, più o meno affetti da approssimazioni.
Per tenere conto di questi fattori si deve confrontare la tensione ideale (che, come già detto,
rappresenta con un unico numero le tensioni applicate nel punto) con la cosiddetta tensione
ammissibile σamm, pari alla tensione limite del materiale divisa per un numero CS, maggiore di uno,
detto coefficiente (o fattore) di sicurezza5:
Slimammid Cσ=σ≤σ
I valori di CS sono di solito imposti dalle norme che regolano i diversi settori applicativi (es.:
strutture in carpenteria metallica, recipienti in pressione, apparecchi di sollevamento); tali valori sono
stati scelti principalmente in base all'esperienza specifica nei vari settori delle costruzioni, tenendo
inoltre conto delle caratteristiche della struttura e delle perdite (in termini economici e umani)
causate da un eventuale raggiungimento delle condizioni limite. Ad esempio, valori tipici di CS sono:
1.5 per elementi sollecitati staticamente, 3 per elementi soggetti a sollecitazioni variabili nel tempo
(di "fatica"), per le quali l'incertezza di comportamento è più elevata, e addirittura 10 nel caso delle
funi, per le quali il calcolo è estremamente incerto.
Si deve ancora osservare che il comportamento duttile contiene un margine di sicurezza intrinseco, in
quanto se si supera la tensione limite σlim si produce snervamento ma il componente non si spezza ed
è ancora in grado di sopportare carichi superiori, pur deformandosi in modo irreversibile. Viceversa
nel caso di comportamento fragile il raggiungimento della condizione limite comporta la rottura del
componente, con effetti potenzialmente più gravi. Di conseguenza i coefficienti di sicurezza da
adottare nel caso di materiale fragile dovranno essere opportunamente più elevati che nel caso di
materiale duttile.
5Un approccio più moderno e corretto consiste nel valutare le distribuzioni statistiche del carico applicato e dellaresistenza del materiale; da esse si può stimare la probabilità di rottura, che viene limitata al valore desiderato.

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
37
5. RICHIAMI DI GEOMETRIA DELLE AREE
5.1. Definizioni
E' necessario definire alcune grandezze caratteristiche, che descrivono le proprietà geometriche
dell'area della sezione di un elemento strutturale e che saranno utilizzate nel seguito della trattazione.
Considerando una figura nel piano, preso un generico riferimento xy si definiscono le seguenti
grandezze:area ∫=
AdAA
momenti statici ∫=Ax ydAS ∫=
Ay xdAS
momenti d'inerzia ∫=Axx dAyJ 2 ∫=
Ayy dAxJ 2
momento d'inerzia polare ( )∫ +=Ap dAyxJ 22
momento centrifugo ∫=Axy xydAJ
Trattandosi di momenti riferiti ad aree (e non a masse) le dimensioni fisiche sono di una lunghezza al
cubo per i momenti statici e di una lunghezza alla quarta per i momenti d'inerzia.
La conoscenza dei momenti statici permette di calcolare la posizione del baricentro G della sezione:
A
Sx
yG =
A
Sy x
G =
x
y
G
xG
Gy
Se l'origine del sistema di riferimento si trova nel baricentro della sezione gli assi sono detti centrali
(ovviamente in tale caso le coordinate di G sono nulle). Si dimostra inoltre che se la figura ammette
un asse di simmetria il baricentro deve trovarsi su tale asse, infatti il momento statico della metà
figura che si trova da un lato dell'asse ha modulo uguale e segno opposto a quello della rimanente
metà e il momento statico complessivo è nullo; se gli assi di simmetria sono due il baricentro si trova
in corrispondenza della loro intersezione.

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
38
5.2. Figure composte
Nelle applicazioni pratiche si incontrano spesso casi in cui la sezione dell'elemento strutturale che si
considera è una figura composta da parti semplici, le cui caratteristiche sono già note o facilmente
determinabili.
Consideriamo allora un sistema di riferimento xy globale, cioè relativo a tutta la figura, mentre ξiηi
sono i riferimenti centrali delle singole parti. Valgono le seguenti relazioni:
area A Aii= ∑
(Ai area della parte i-esima)
momenti statici ∑=i iix AyS ∑=
i iix AxS
(xi, yi coordinate globali del baricentro della parte i-esima)
momenti d'inerzia ( )∑ ξξ+=i iixx ii
JAyJ 2 ( )∑ ηη+=i iiyy ii
JAxJ 2
(Jξiξi, Jηiηi momenti d'inerzia della parte i-esima rispetto agli assi locali)
momento centrifugo ( )∑ ηξ+=i iiixy ii
JAyxJ
(Jξiηi, momento centrifugo della parte i-esima rispetto agli assi locali)
Le formule precedenti esprimono la semplice proprietà additiva delle aree e dei momenti, con una
distinzione:
• per quanto riguarda le aree, i contributi delle singole parti vengono semplicemente sommati par
formare l'area totale della figura;
• per quanto riguarda i momenti, è necessario esprimere il termine dovuto a ogni singola parte nel
sistema di riferimento globale xy, successivamente i contributi delle singole parti possono essere
sommati.
Nel caso dei momenti statici, i valori corrispondenti alle singole parti espressi nei sistemi di
riferimento locali sono nulli, perché tali sistemi sono (per ipotesi) centrali; rimangono soltanto i
valori "di trasporto" xiAi e yiAi che permettono di esprimere tutti i contributi nello stesso riferimento
globale in cui si può eseguire la somma.
Nel caso dei momenti d'inerzia e centrifugo, i termini espressi nei sistemi di riferimento locali Jξiξi,
Jηiηi, Jξiηi vengono corretti con i valori "di trasporto" xi2Ai, yi
2Ai, xiyiAi (formula di Huygens) che
permettono di esprimere tutti i contributi nello stesso riferimento globale in cui si può eseguire la
somma.
La tabella seguente riporta i valori dei momenti d'inerzia per alcune figure elementari, di utilizzo
frequente nel calcolo di elementi di macchine.

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
39
5.3. Rotazione degli assi
Si può dimostrare che i momenti d'inerzia e centrifughi di una figura piana rappresentano i
coefficienti di un tensore [J], simmetrico 2×2, costruito nella maniera seguente:
[ ]
−
−=
yyxy
xyxx
JJ
JJJ
Analogamente a quanto visto in precedenza per i tensori delle tensioni e delle deformazioni, anche in
questo caso esiste un sistema di riferimento privilegiato, avente stessa origine di xy e assi ruotati, tale
che calcolando i momenti rispetto ai suoi assi, detti principali d'inerzia, il tensore diventa diagonale:
2
1
0
0
J
J
E' utile calcolare i valori che assumono i momenti d'inerzia Jxx, Jyy e centrifugo Jxy in un sistema di
riferimento xy ruotato del generico angolo α rispetto al riferimento principale p1p2.
Figura Momento d'inerzia Schema
rettangolo Jbh
ξξ =3
12
ξ
b
h
triangolo Jbh
ξξ =3
12
ξb
h
cerchio Jr d
ξξ π π= =4 4
4 64
ξ
rd=2r
semicerchio Jr d
ξξ π π= =4 4
8 128
ξ
rd=2r

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
40
x
y
1
α
α
p
2p
La relazione tra le coordinate x, y e quelle p1, p2 è data da:
α+α−=
α+α=
cossen
sencos
21
21
ppy
ppx
I momenti d'inerzia e centrifugo nel riferimento xy valgono, per definizione:
∫=Axx dAyJ 2 ∫=
Ayy dAxJ 2 ∫=Axy xydAJ
Sostituendo le espressioni per x e y in funzione di p1 e p2 nelle definizioni dei momenti si ottiene:
( )
( )
( )( )
α−α+
+αα−αα=α+α−α+α=
αα+α+α=α+α=
αα−α+α=α+α−=
∫∫
∫∫∫
∫∫ ∫∫
∫∫∫ ∫
AA
AAAxy
AA AAyy
AAA Axx
dAppdApp
dApdApdAppppJ
dAppdApdApdAppJ
dAppdApdApdAppJ
212
212
21
222121
212
122
222
21
212
122
222
21
sencos
sencossencoscossensencos
sencos2cossensencos
sencos2sencoscossen
Ricordando che il riferimento p1p2 è principale le relazioni precedenti si riducono a:
αα−αα=
α+α=
α+α=
sencossencos
cossen
sencos
21
22
21
22
21
JJJ
JJJ
JJJ
xy
yy
xx
E' conveniente esprimere le funzioni trigonometriche in funzione dell'angolo 2α:
22cos1
sen 2 α−=α
22cos1
cos2 α+=α
22sen
cossenα
=αα
Sostituendo nelle equazioni precedenti e mettendo in evidenza i momenti J1, J2 si ottengono le
relazioni seguenti:
α−
=
α−
−+
=
α−
++
=
2sen2
2cos22
2cos22
21
2121
2121
JJJ
JJJJJ
JJJJJ
xy
yy
xx

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
41
Si verifica agevolmente che in un piano cartesiano in cui l'ascissa è il momento d'inerzia Ji e l'ordinata
il momento centrifugo Jc, i punti di coordinate (Jxx, Jxy) e (Jyy, -Jxy) stanno su una circonferenza, in
posizioni diametralmente opposte.
Si è infatti ottenuto il cerchio di Mohr per i momenti d'inerzia, che rappresenta i valori assunti dai
momenti d'inerzia e centrifugo al ruotare del sistema di riferimento generico xy rispetto al sistema
principale p1p2 .
1J2J iJ
cJ
2α
(xx
Jxy
, J )
(yy
Jxy, -J )
Le intersezioni del cerchio con l'asse orizzontale hanno ascisse pari ai momenti principali d'inerzia J1
e J2, che rappresentano rispettivamente il massimo e il minimo fra tutti i momenti d'inerzia calcolabili
al ruotare dell'asse di riferimento.
Se la figura presenta un asse di simmetria, sicuramente questo è uno degli assi principali d'inerzia.
Se il sistema di riferimento oltre ad essere principale ha anche l'origine nel baricentro gli assi sono
detti centrali principali; è questo il tipo di riferimento più utilizzato nei problemi strutturali.
In pratica, la determinazione dei momenti principali d'inerzia e dei relativi assi avviene mediante la
procedura seguente:
• nel generico riferimento xy si calcolano i momenti d'inerzia Jxx, Jyy e centrifugo Jxy;
• si calcolano i momenti d'inerzia principali J1 e J2, con le formule
22
1 22 xyyyxxyyxx J
JJJJJ +
−+
+= 2
2
2 22 xyyyxxyyxx J
JJJJJ +
−−
+= ;
• si ottiene l'angolo α tra l'asse principale p1 e l'asse x dalla relazione
yyxx
xy
JJ
J
−=α
22tan
Per determinare il segno dell'angolo α si devono considerare i valori di Jxx, Jyy e Jxy; si possono
presentare i casi illustrati negli schemi seguenti:

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
42
Un procedimento alternativo per determinazione del riferimento principale consiste nel calcolare
autovalori e autovettori della matrice [J]: i momenti principali J1, J2 sono dati dai due autovalori λ1,
λ2; le direzioni degli assi principali d'inerzia p1, p2 sono definite dagli autovettori v1, v2, come
mostrato in figura.
x
y
p1
p2
v1v 2
Jxy > 0
Jxx ≥ Jyy Jxx ≤ Jyy
1J2Ji
J
cJ
2α
(xx
Jxy
, J )
(yy
Jxy
, -J )
1J2Ji
J
cJ
2α(
xxJ
xy, J )
(yy
Jxy
, -J )
0° < α ≤ 45° 45° ≤ α < 90°
Jxy < 0
Jxx ≥ Jyy Jxx ≤ Jyy
1J2Ji
J
cJ
2α
(xx
Jxy
, J )
(yy
Jxy
, -J )
1J2Ji
J
cJ
2α(
xxJ
xy, J )
(yyJ xy, -J )
-45° ≤ α < 0° -90° < α ≤ -45°

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
43
6. SOLIDO DI SAINT VENANT
La determinazione per via analitica degli stati di deformazione e tensione nei punti dei corpi
sollecitati è possibile solo per alcuni tipi di elementi strutturali. Tra di essi un posto di primo piano
spetta al cosiddetto solido di Saint Venant6, che fornisce la soluzione per elementi di tipo
monodimensionale, cioè dotati di una dimensione molto maggiore delle altre due. A questo modello
di calcolo si possono ricondurre molti elementi strutturali di comune impiego, come ad esempio le
travi dei telai, gli alberi delle macchine, ecc.
6.1. Ipotesi
Si devono formulare alcune ipotesi di partenza sulle caratteristiche del solido e sulle sue condizioni di
carico e vincolo:
• il solido è un cilindro ottenuto per traslazione di una figura piana in direzione della propria
normale, l'estensione in tale direzione è molto maggiore delle dimensioni nel piano della figura
generatrice;
• carichi e vincoli sono applicati solo in corrispondenza delle basi;
• in tutto il solido il materiale è elastico, omogeneo, isotropo.
x
y
z
Si sceglie un sistema di riferimento cartesiano xyz avente gli assi x e y contenuti nel piano della figura
che genera il solido e l'origine posta nel baricentro di quest'ultima; l'asse z rappresenta la traiettoria
del baricentro durante il moto di generazione e costituisce la cosiddetta linea d'asse del solido.
Evidentemente tutte le sezioni normali all'asse z sono sezioni rette del solido e sono tutte identiche
alla figura generatrice.
A causa dell'assenza di carichi applicati sulla superficie cilindrica e delle limitate dimensioni
trasversali si può ammettere che:
σxx = 0 σyy = 0 τxy = 0
Possono invece essere presenti le tensioni:
σzz τxz τyz
6Adhémar Jean Claude Barré de Saint Venant (Villiers-en-Brie 1797 - St. Ouen 1886); suo è il merito di aversistematizzato le soluzioni relative alle sollecitazioni nel solido prismatico.

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
44
6.2. Caratteristiche di sollecitazione
Consideriamo la generica sezione retta (cioè normale all'asse z) del solido di Saint Venant; su di essa
agiscono le componenti di tensione σzz, τxz, τyz la cui distribuzione deve essere calcolata per le
possibili condizioni di sollecitazione. Indipendentemente dalla distribuzione delle tensioni, è lecito
sostituire a quest'ultima un insieme di forze e momenti staticamente equivalenti; si definiscono quindi
le cosiddette caratteristiche di sollecitazione della sezione:
forza normale ∫σ=A
zzdAN
tagli ∫ τ=A
xzx dAT ∫ τ=A
yzy dAT
momenti flettenti ∫σ=A
zzx ydAM ∫σ−=A
zzy xdAM
momento torcente ( )∫ τ−τ=A
xzyzz dAyxM
Le definizioni della forza normale N e dei tagli Tx, Ty rappresentano semplicemente le risultanti di
tutte le forze infinitesime σzzdA, τxzdA, τyzdA rispettivamente agenti lungo x, y, z e ottenute
integrando i contributi di tutti i punti della sezione.
x
y
σ dAzz
zx
y
τ dAxz
zx
y
τ dAyz
z
I momenti flettenti Mx e My sono definiti come momenti risultanti delle forze infinitesime σzzdA,
aventi braccio y dall'asse x e braccio x dall'asse y, ottenuti integrando i contributi di tutti i punti della
sezione. Il momento torcente Mz è definito come momento risultante delle forze infinitesime τxzdA,
τyzdA aventi bracci dall'asse z pari rispettivamente a y e x.
x
y σ dAzz
z
x
y
σ dAzz
z x
y
τ dAyz
z
τ dAxz
Le componenti di sollecitazione possono essere messe in evidenza interrompendo il solido in una
sezione generica mediante una superficie di distacco; il procedimento è analogo a quello seguito
quando si taglia la struttura dai vincoli per mettere in evidenza le reazioni.

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
45
Sulle due sezioni generate dal taglio e reciprocamente affacciate agiscono componenti (forze e
momenti) uguali in modulo e opposte in verso, in virtù del principio di azione e reazione. Di
conseguenza, se sulla cosiddetta faccia positiva, (quella da cui l'asse z è uscente), si assumono come
versi positivi per le forze (N, Tx, Ty) quelli degli assi e come versi positivi per i momenti (Mx, My, Mz)
quelli dati dalla regola della vite (destra), sulla faccia negativa (asse z entrante) si assumono versi
positivi opposti.
x
y
z
Ty
My
Tx
Mx
Mz
N
Ty
My
Tx
Mx
Mz
N
x
y
z
6.3. Principio di Saint Venant
Il modo in cui i carichi sono effettivamente applicati sulle sezioni di estremità del solido dipende dal
caso tecnico considerato; in particolare la distribuzione delle tensioni localmente prodotta dal carico
esterno può essere diversa da quella prevista dalle soluzioni di Saint Venant che verranno presentate
nei paragrafi successivi.
Si osserva che a una distanza dalla sezione di applicazione del carico circa pari alle dimensioni
trasversali del solido il particolare modo in cui il carico è applicato non influisce più; diventano
quindi significative solo le risultanti (forze e momenti) che il carico genera e la distribuzione delle
tensioni torna a essere quelle prevista dalle soluzioni di Saint Venant. Questa proprietà, nota come
principio di Saint Venant, consente notevoli semplificazioni nella soluzione di problemi strutturali:
• le non-conformità all'ipotesi sulla geometria (solido cilindrico generato per traslazione di una
figura) che interessano zone limitate, ad esempio brusche variazioni di sezione o presenza di fori,
causano perturbazioni di carattere solo locale nella distribuzione delle tensioni;
• le modalità con cui vincoli e carichi sono imposti hanno influenza solo sulla zona di applicazione.
A titolo di esempio, le immagini successive mostrano due casi di conferma sperimentale, per mezzo
del metodo fotoelastico, del principio di Saint Venant. Tale metodo consente di visualizzare lo stato
di tensione in un modello della struttura realizzato in materiale trasparente e si basa su particolari

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
46
fenomeni a cui è soggetta la luce che attraversa un materiale sottoposto a sforzi; nelle immagini le
frange scure indicano l'intensità delle sollecitazioni.
Il primo caso si riferisce alla regione di incastro di un elemento sottoposto a flessione, si osserva che
appena al di sopra della sezione del vincolo le frange presentano andamento regolare, corrispondente
alla distribuzione di tensioni del solido di Saint Venant.
Il secondo caso si riferisce ad un albero, soggetto a trazione assiale, in cui è ricavata una gola che
causa un variazione locale della sezione; si osserva che nella zona della gola l'andamento delle
tensioni risulta perturbato, ma a breve distanza la situazione ritorna regolare.
Anche se tali perturbazioni dello stato di tensione e deformazione hanno carattere locale, nondimeno
sono importanti dal punto di vista strutturale; infatti proprio in corrispondenza di esse si presentano
dei massimi di tensione e quindi si possono superare i limiti di resistenza del materiale. La trattazione
di questi fenomeni, noti come effetti di intaglio, non è affrontata in questa sede essendo oggetto di
corsi specifici.
6.4. Comportamento estensionale (trazione-compressione)
Consideriamo il caso in cui il moto di deformazione elastica del solido di Saint Venant è tale che tutti
i punti di una generica sezione traslano, in direzione della linea d'asse, della stessa quantità w,
proporzionale alla distanza z dall'origine, posta nella base che si considera fissa7:
7Essendo interessati alla sola quotaparte elastica del moto, questa assunzione non costituisce un caso particolare.

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
47
x
y
w
zw k z= 0
x
y
w
z
Ricordando la definizione delle deformazioni, si può immediatamente calcolare la dilatazione in
direzione z:
0kzw
zz =∂∂
=ε
Il termine costante k0 ha quindi il significato fisico di dilatazione assiale. Applicando la legge di
Hooke e ricordando che per ipotesi σxx=σyy=0 si ricava che (E= modulo di Young):
0EkE zzzz =ε=σ
Si possono quindi calcolare le caratteristiche di sollecitazione, agenti sulle sezioni, corrispondenti alla
tensione ricavata; i tagli e il momento torcente sono ovviamente nulli in quanto non legati a σzz, per
quanto riguarda forza normale e momenti flettenti si ha
AEkAdAdAN zzA
zzA
zz 0=σ=σ=σ= ∫∫0=σ=σ= ∫∫
Azz
Azzx ydAydAM 0=σ−=σ−= ∫∫
Azz
Azzy xdAxdAM
L'annullarsi dei due momenti è dovuto al fatto che in ogni sezione il riferimento xy ha l'origine nel
baricentro. Quindi la distribuzione di tensione considerata corrisponde a una condizione di trazione o
compressione semplice, a cui è equivalente la sola forza normale applicata in corrispondenza del
baricentro della sezione.
Utilizzando le relazioni trovate si può determinare la costante k0 in funzione della forza normale N:
EAN
k =0
Sostituendo nella relazione per la tensione assiali σzz si lega quest'ultima alla forza normale:
AN
Ekzz ==σ 0
E' comune rappresentare la distribuzione della tensione in una sezione del solido mediante un
diagramma riportato a fianco del profilo della sezione stessa. L'asse delle ascise di tale diagramma è
parallelo al profilo della sezione, l'asse delle ordinate è rivolto come la linea d'asse del solido, così
come lo è, nella realtà fisica, la tensione σzz.

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
48
x
y
z
N
σzzx
y z
N
σzz
Si ricava inoltre che i punti delle generica sezione subiscono, oltre allo spostamento elastico w in
direzione assiale già citato, anche degli spostamenti trasversali u e v rispettivamente lungo x e y
dovuti alla contrazione trasversale (ν coefficiente di Poisson):u k x= −ν 0 ykv 0ν−=
Da queste due relazioni si deduce che la sezione, oltre a traslare assialmente, si contrae o si espande
intorno al proprio baricentro.
In queste particolari condizioni di sollecitazione (solo forza normale) il solido di Saint Venant è detto
asta. In campo meccanico esempi tipici di questo comportamento sono costituiti dai tiranti di
fissaggio.
6.5. Comportamento flessionale
Per semplificare la trattazione è conveniente assumere che per la sezione retta del solido di Saint
Venant gli assi xy siano, oltre che centrali, anche principali d'inerzia. In generale, nel moto elastico di
flessione la sezione può ruotare intorno ad un asse qualsiasi; è conveniente studiare il fenomeno
separatamente nei due piani coordinati e considerare il caso generale mediante la sovrapposizione
degli effetti.
Flessione nel piano zy
Per quanto riguarda la flessione nel piano zy si determina la soluzione assumendo che la generica
sezione ruoti dell'angolo αx (piccolo) intorno all'asse x rimanendo piana; ciò implica che lo
spostamento assiale dei punti della sezione segua la legge:
x
yw
z
αx yw xα=
La corrispondente dilatazione assiale è data da:
ykydz
d
zw
xx
zz =α
=∂∂
=ε

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
49
Si mostrerà in seguito che il termine kx, qui utilizzato per indicare la derivata della rotazione rispetto
alla coordinata assiale, ha il significato fisico di curvatura del solido nel piano zy.
Applicando la legge di Hooke e ricordando che per ipotesi σxx=σyy=0 si ricava che:
yEkydz
dEE x
xzzzz =
α=ε=σ
Il tipo di moto elastico assunto per la sezione porta quindi a una distribuzione di tensione assiale di
tipo lineare; si possono calcolare la forza normale e i momenti flettenti a cui essa dà luogo (tagli e
momento torcente sono ovviamente nulli)
0==σ= ∫∫A
xA
zz ydAEkdAN
xxxA
xA
zzx JEkdAyEkydAM ==σ= ∫∫ 2 0=−=σ−= ∫∫A
xA
zzy yxdAEkxdAM
Si deduce quindi che la sezione ruota intorno all'asse x ed è soggetta al solo momento Mx; tale
proprietà non è ovvia ma deriva dall'avere assunto assi xy centrali e principali d'inerzia.
Dalla definizione di Mx si ottiene
xx
xx EJ
Mk =
Sostituendo kx nella formula della tensione σzz si lega quest'ultima al momento:
yJ
MyEk
xx
xxzz ==σ
Anche nel caso della flessione si usa rappresentare la distribuzione della tensione in una sezione del
solido mediante un diagramma, riportato a fianco del profilo della sezione stessa.
x
y
z
Mx
σzz
Si verifica agevolmente che la tensione σzz raggiunge valori massimi in modulo e opposti in segno
agli estremi della sezione ed è nulla in corrispondenza della retta y=0 (asse x) che costituisce l'asse
neutro.
Flessione nel piano zx
La flessione nel piano zx viene trattata, fatte le debite sostituzioni di simboli, in modo identico a
quella nel piano zy; in questo caso si ottiene la soluzione assumendo che la generica sezione ruoti
dell'angolo αy (piccolo) intorno all'asse y rimanendo piana:

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
50
x
y z
w
α y
xw yα−=
La corrispondente dilatazione assiale è data da:
xkxdz
d
zw
yy
zz −=α
−=∂∂
=ε
Il termine ky, come si vedrà successivamente, ha il significato fisico di curvatura del solido nel piano
zx. Applicando la legge di Hooke e ricordando che per ipotesi σxx=σyy=0 si ricava che:
xEkxdz
dEE y
yzzzz −=
α−=ε=σ
Si possono quindi calcolare la forza normale e i momenti flettenti:
0=−=σ= ∫∫A
yA
zz xdAEkdAN
0=−=σ= ∫∫A
yA
zzx yxdAEkydAM yyy
A
y
A
zzy JEkdAxEkxdAM ==σ−= ∫∫ 2
Quindi in questo caso la sezione ruota intorno all'asse y ed è soggetta al solo momento My;
dall'ultima equazione si ottiene:
yy
yy EJ
Mk =
Sostituendo ky nella formula della tensione σzz si lega quest'ultima al momento:
xJ
MxEk
yy
yyzz −=−=σ
Anche in questo caso il diagramma della tensione σzz è lineare tra gli estremi della sezione, in cui
raggiunge valori rispettivamente massimo e minimo, l'asse neutro è rappresentato dalla retta x=0.
x
y z
My
σzz
Flessione combinata
Nel caso in cui agiscano simultaneamente entrambi i momenti flettenti Mx, My la distribuzione della
tensione σzz sulla sezione si ottiene per sovrapposizione degli effetti:

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
51
xJ
My
J
M
yy
y
xx
xzz −=σ
In questo caso l'asse neutro non coincide più con uno degli assi coordinati, si può determinarlo
considerando i punti per i quali σzz=0:
0=− xJ
My
J
M
yy
y
xx
x
L'andamento della tensione può essere riportato graficamente misurando i valori di σzz a partire dalla
normale all'asse neutro, come mostrato in figura. Dalla costruzione grafica si individua agevolmente
la tensione nel punto più sollecitato, come indicato in figura.
x
y
asse neutro
σzz
Il momento flettente risultante Mf può essere ottenuto come somma vettoriale delle componenti Mx,
My:22
yxf MMM +=
Il vettore Mf è inclinato rispetto all'asse x dell'angolo ϕ, definito dalla relazione:
x
y
M
M=ϕtan
Invece la rotazione della sezione avviene intorno all'asse neutro, la cui inclinazione ψ rispetto all'asse
x è definita da:
yy
xx
x
y
J
J
M
M⋅=ψtan
In generale Jxx ≠ Jyy e quindi ϕ ≠ ψ ; l'asse intorno a cui la sezione ruota non è parallelo a quello del
momento ma ha una diversa inclinazione, che dipende dalle caratteristiche di sezione Jxx e Jyy. Tale
fenomeno è noto come flessione deviata.

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
52
Mx
My Mf
ϕψ
asse neutro
La sezione circolare rappresenta un caso che si incontra frequentemente nei componenti delle
macchine (alberi, assi, ...); per questa particolare geometria qualunque riferimento centrale è anche
principale e la flessione non è mai deviata. Si può quindi adottare un sistema di riferimento avente un
asse parallelo al momento risultante che agisce sulla sezione, la rotazione di quest'ultima avviene
intorno allo stesso asse.
y
asse neutro
σzz
X
Y
M
x
x
6.6. Caso generale: comportamento estensionale e flessionale
Nel caso più generale, in cui agiscano simultaneamente sia la forza normale N sia i momenti flettenti
Mz e My, la distribuzione della tensione σzz può essere ottenuta ancora per sovrapposizione degli
effetti:
xJ
My
J
M
AN
yy
y
xx
xzz −+=σ
Dal punto di vista grafico, il diagramma della tensione sulla sezione è la somma della distribuzione
uniforme dovuta alla forza normale e di quella con andamento lineare dovuta alla flessione.

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
53
x
y
σzz
+
+
-
L'asse intorno a cui avviene la rotazione della sezione non passa per il baricentro ma può trovarsi
anche al di fuori della sezione stessa.
6.7. Comportamento torsionale
Si considera un moto di deformazione in cui la generica sezione del solido ruota intorno a un asse
parallelo a z. La determinazione della soluzione esatta è possibile in forma elementare solo per il caso
della sezione a forma circolare (peraltro assai comune nelle costruzioni meccaniche); per altri tipi di
sezione la soluzione non è ottenibile in forma altrettanto semplice, nell'ambito di questa trattazione ci
si limiterà a considerare formule approssimate per il calcolo della rigidezza e delle tensioni.
Sezione circolare
Si considera che la sezione ruoti di un angolo θ intorno
all'asse z rimanendo piana; le componenti di spostamento
valgono quindi:
0
cos
sen
=θ=βθ=
θ−=βθ−=
w
xrv
yru
Le dilatazioni εxx , εyy , εzz sono evidentemente nulle, per
quanto riguarda gli scorrimenti si ha:
vu
x
y
θβ
r
rθ

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
54
xxdzd
yw
zv
yydzd
xw
zu
xv
yu
yz
xz
xy
'
'
0
θ=θ
=∂∂
+∂∂
=γ
θ−=θ
−=∂∂
+∂∂
=γ
=θ+θ−=∂∂
+∂∂
=γ
Il termine θ'=d θ/dz è detto gradiente di torsione e rappresenta la rotazione per unità di lunghezza
della linea d'asse. Applicando la legge di Hooke si ottiene (G= modulo elastico tangenziale):
xGG
yGG
yzyz
xzxz
'
'
θ=γ=τ
θ−=γ=τ
Il tipo di moto assunto porta quindi a una distribuzione di tipo lineare delle tensioni τxz , τyz. Forza
normale e momenti flettenti sono nulli perché σzz=0, per tagli e momento torcente si ottiene:0' =θ−=τ= ∫ ∫A Axzx ydAGdAT 0' =θ=τ= ∫ ∫A Ayzy xdAGdAT
( ) ( ) ∫∫ ∫ θ=θ=+θ=τ−τ=A pA Axzyzz JGdArGdAyxGdAyxM ''' 222
Nella formula precedente Jp è il momento d'inerzia polare della sezione, pari al doppio del momento
diametrale. La distribuzione delle tensioni τxz , τyz dovute alla torsione ha risultante nulla e momento
(torcente) risultante il cui valore è indipendente dal polo scelto. Fin qui si è indicato con Mz il
momento torcente valutato rispetto all'asse baricentrico della sezione (asse z); nel seguito si utilizzerà
anche il simbolo Mt per indicare il momento torcente valutato rispetto a un asse parallelo a z e
passante per il centro di taglio o centro di torsione della sezione (il cui significato viene descritto nel
paragrafo successivo).
Dall'ultima relazione trovata si può ricavare il gradiente di torsione:
p
z
GJ
M=θ'
Poiché nel solido di Saint Venant i carichi sono applicati soltanto in corrispondenza delle estremità, il
momento torcente Mz è costante, e quindi lo è anche θ'. Di conseguenza la rotazione θ cresce
linearmente lungo la linea d'asse.
Sostituendo nelle formule che danno le tensioni τxz , τyz si ottiene:
yJ
M
p
zxz −=τ x
J
M
p
zyz =τ
τ
x
y
xz
τyz
τcz
Grazie all'assialsimmetria della sezione, l'orientazione del sistema di
riferimento è ininfluente; si può quindi considerare un riferimento
cilindrico per il quale si identificano nel piano della sezione le
direzioni radiale (r) e circonferenziale (c). La tensione agente in
ogni punto risulta diretta (come lo spostamento) in direzione
circonferenziale ed è data da:
rJ
M
p
zcz =τ

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
55
In conclusione si osserva che la tensione ha andamento lineare rispetto al raggio e presenta simmetria
polare, il massimo si presenta sul bordo esterno. I casi di sezione piena e cava differiscono
evidentemente per il momento polare Jp ma la forma del campo di spostamenti e di tensione rimane
la stessa.τcz τcz
Sezione rettangolare e sezioni aperte a parete sottile
Si consideri una sezione rettangolare di lati l e s, con l >> s e soggetta ad un
momento torcente Mt. A causa della limitatezza della dimensione s è lecito
assumere che le tensioni tangenziali dovute alla torsione siano, tranne che nelle
zone vicine ai lati corti, parallele al lato lungo (e cioè del tipo τyz). Si può
dimostrare che il gradiente di torsione θ' in questo caso è dato da:
t
t
GJ
M=θ'
Il termine Jt , avente le dimensioni di un momento d'inerzia d'area, è pari a:3
31
lsJ t =
La distribuzione della tensione è lineare lungo x e costante lungo y, secondo la
formula
xJ
M
t
tyz 2=τ
I massimi di sollecitazione si verificano quindi, come nel caso della flessione, in corrispondenza dei
bordi. Nel caso in cui la sezione non sia sottile, cioè non sia più vero che l >> s , le espressioni
precedenti rimangono valide con buona approssimazione se si corregge la formula di Jt nel modo
seguente:
( ) 33.0231
sslJ t ⋅−=
Tale correzione corrisponde a eliminare una fascia di altezza 0.3s per ogni estremo del rettangolo; il
confronto con la soluzione esatta mostra che gli errori commessi utilizzando questa formula
approssimata sono estremamente ridotti (< 3%) in tutto il campo di variazione di l/s da 1 a ∞.
Per considerare sezioni sottili aventi il lato maggiore parallelo all'asse x si utilizzano formule
analoghe alle precedenti scambiando i ruoli di x con y (tensioni di tipo τxz massime per y = ± s/2).
x
y0.3s
0.3 s
τyz
s
l

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
56
In generale una sezione aperta a parete sottile (profilati a C, doppio T, ecc.) può essere trattata come
insieme di sezioni rettangolari, che lavorano in parallelo contribuendo a sopportare
complessivamente il momento torcente Mt :
∑=i tit MM
La rotazione delle singole sezioni rettangolari deve essere la stessa, quindi
ti tii tit GJJGGJM ''' θ=θ=θ= ∑∑Il fattore Jt , corrispondente alla sezione completa è la somma di quelli relativi alle singole sezioni
rettangolari Jti :
∑=i tit JJ
La correzione 0.3s viene eseguita in questi casi eliminando i margini liberi, come mostrato in figura.
Sezioni cave a parete sottile
Queste sezioni sono definite geometricamente da due linee
chiuse, una interna e una esterna; nel caso di spessore s sottile,
cioè piccolo rispetto alle dimensioni della sezione, è possibile una
trattazione approssimata basata su un'analogia con l'idrodinamica.
Per semplificare la descrizione geometrica la sezione può essere
approssimata con la sua linea media, a cui la tensione τ, risultante
di τxz e τyz , deve essere tangente.
Definiamo flusso della tensione τ, attraverso una corda di
lunghezza pari allo spessore s della parete, la quantità seguente:
∫ τ=s
dst
Si immagini che i profili interno ed esterno della sezione
rappresentino due pareti impermeabili attraverso le quali scorre
un liquido incompressibile, con velocità v tangente alla linea media del profilo. Se nella formula
precedente invece della tensione τ si considera la velocità v, allora il risultato dell'integrazione è la
portata di liquido attraverso la corda; tale analogia è concettualmente valida perché l'equazione di
equilibrio che lega τxz e τyz è formalmente analoga alla condizione di incompressibilità che lega vx e
vy nel caso dell'idrodinamica. Per la proprietà di conservazione della portata il flusso deve essere lo
x
y
s
τ
linea media

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
57
stesso attraverso qualunque corda (congiungente il profilo esterno e quello interno) considerata
nella sezione.
Su un tratto infinitesimo di linea media avente lunghezza ldr
agisce la forza elementare ldtr
⋅ , in
direzione tangente al profilo; poiché la linea si chiude su sé stessa si verifica che:0rrr
==⋅ ∫∫ llldtldt
Quindi la distribuzione di tensione considerata ha risultante nulla. Preso un polo generico O il
momento torcente elementare dovuto a ldtr
⋅ , la cui retta d'azione è distante r da O, è pari a:
Ω⋅=⋅⋅ dtrdlt 2
dove dΩ è l'area infinitesima del triangolo di altezza r e base dl. Integrando su tutta la lunghezza
della linea media si ottiene il momento torcente Mt:Ω=Ω=⋅⋅= ∫∫ tdtrdltM
llt 22
Indipendentemente dalla scelta di O, Ω rappresenta l'area racchiusa dalla linea media del profilo della
sezione. Ciò è ovvio se O giace all'interno della sezione; se O è esterno alla linea media
l'affermazione è ancora vera perché l'area della zona triangolare OAB (doppiamente tratteggiata in
figura) è considerata due volte nell'integrazione: una quando si percorre la linea media da A a B,
l'altra nel percorso da B a A. I versi con cui tale area viene considerata sono opposti e quindi i
relativi contributi si elidono.
O
O
AB
Dalla formula precedente si esprime il flusso della tensione t in funzione del momento torcente Mt:
Ω=
2tM
t
Per calcolare la tensione τ si ammette che essa sia uniforme nello spessore della parete:
s
M
st t
Ω==τ
2

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
58
Per il calcolo della rigidezza torsionale delle sezioni cave a parete sottile, si consideri la deformazione
di un tratto di solido di Saint Venant di lunghezza dz sollecitato dal momento torcente (costante) Mt
e le cui sezioni di estremità ruotano dell'angolo relativo dθ. L'energia di deformazione elastica vale:
θ= dMd t21
E
La stessa energia di deformazione può essere calcolata a partire da tensioni e deformazioni:
∫∫∫∫ =τ=τ
=τγ=llAA sdl
dzG
tsdldz
GdA
GdzdAdzd
221
21
21 2
22
E
L'ultimo passaggio è stato ottenuto approssimando t=τs (costante lungo il profilo); l'integrale è
esteso alla linea media del profilo, di cui dl rappresenta un tratto infinitesimo e s lo spessore locale.
Eguagliando l'energia ottenuta nei due modi si ottiene:
∫=θlt sdl
dzGt
dM2
Sostituendo a t l'espressione trovata in precedenza e ponendo anche in questo caso θ'=dθ/dz si
ottiene:
t
t
l
t
GJ
M
sdl
G
M=
Ω=θ ∫24
'
Si è quindi ottenuta l'espressione per il modulo caratteristico della sezione Jt :
∫Ω
=
l
t
sdl
J24
Di solito nei casi pratici lo spessore è costante in ognuna delle pareti da cui la sezione è composta e
la formula precedente assume la forma:
∑Ω
=
ii
it
s
lJ
24
dove la sommatoria è estesa su ognuna delle pareti a spessore uniforme si e lunghezza li .
6.8. Sollecitazioni dovute ai tagli
Il comportamento della generica sezione del solido di Saint Venant sotto l'azione delle forze di taglio
Ty , Tx non può essere descritto in maniera semplice come nei casi di comportamento estensionale o
flessionale; in questa trattazione ci si limiterà a valutare l'andamento delle tensioni tangenziali τyz , τxz
che agiscono sulla sezione. Per semplificare l'analisi conviene studiare separatamente il
comportamento nei due piani yz e xz, il caso generale può essere risolto applicando la
sovrapposizione degli effetti.

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
59
Comportamento nel piano zy - taglio Ty
Si consideri un elemento infinitesimo del solido di Saint
Venant compreso tra due sezioni distanti dz. Mancando per
ipotesi i carichi distribuiti, la forza di taglio Ty deve essere
uguale sulle due sezioni per garantire l'equilibrio alla
traslazione verticale, invece il momento Mx passando da un
estremo all'altro può subire un incremento infinitesimo
dMx.
Per l'equilibrio alla rotazione intorno a x possiamo scrivere:0=−++− dzTdMMM yxxx
Da essa si ottiene
dz
dMT x
y =
Si è quindi mostrato che il taglio rappresenta, in ogni sezione del solido, la derivata del momento
flettente rispetto alla coordinata z della linea d'asse.
x
y
tyz
A*
c
dz
yz
zz
z
y
x
σ
t
zzσ )∫A*
dA zz(σ∫A*
dA+ d
dz
Si consideri una parte A* di sezione, delimitata superiormente dal contorno e inferiormente da un
segmento, detto corda, parallelo a x; non conoscendo quale sia la distribuzione della tensione τyz si
definisce il suo flusso tyz attraverso la corda c nel modo seguente:
∫ τ=c yzyz dxt
Come verso positivo di tale flusso si assume quello entrante nell'area A*. Imponendo l'equilibrio alla
traslazione assiale della parte di materiale compresa tra le due aree A* poste sulle sezioni distanti dz
si scrive l'equazione:( ) 0
**=σ+σ+−σ− ∫∫ A zzzzyzA zz dAddztdA
Semplificando e ricordando che il differenziale dσzz è dovuto alla sola variazione della coordinata z si
ottiene:
∫ ∂∂σ
=*A
zzyz dA
zt
Avendo adottato un riferimento centrale principale la tensione σzz è data da
yJM
xx
xzz =σ
dzTy
Mx + dMx
Ty
Mx z
y
x

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
60
Sostituendo nell'espressione di tyz si ottiene
∫∫ ⋅=
∂∂
=**
1A
x
xxA
xx
xyz ydA
dzdM
JdAy
JM
zt
L'ultimo integrale della formula precedente è semplicemente il momento statico rispetto a x dell'area
A*, indicando questo con Sx* e ricordando che la derivata del momento è pari al taglio si può
scrivere:
xx
xyyz J
STt
*=
Comportamento nel piano zx - taglio Tx
Lo studio viene eseguito in maniera formalmente analoga al
caso precedente, semplicemente scambiando gli assi. In
questo caso l'equilibrio alla rotazione dell'elemento
infinitesimo di solido di Saint Venant porta all'equazione
seguente:0=+++− dzTdMMM xyyy
Da essa si ottiene
dz
dMT y
x −=
Anche in questo caso il taglio rappresenta la derivata rispetto a z del momento flettente (il segno "-"
è dovuto al differente verso positivo del momento).
x
y
txz
A*
c
xz
zz
zy
x
σ
t
zzσ )∫A*
dA zz(σ∫A*
dA+ ddz
In questo caso si considera una parte A* di sezione delimitata dal contorno esterno e da una corda
parallela a y; non conoscendo quale sia la distribuzione della tensione τxz si definisce il suo flusso txz
attraverso la corda c:
∫ τ=c xzxz dyt
Il verso positivo del flusso è ancora quello entrante nell'area A*. Imponendo l'equilibrio alla
traslazione assiale della parte di materiale considerata si scrive l'equazione:( ) 0
**=σ+σ+−σ− ∫∫ A zzzzxzA zz dAddztdA
Semplificando e ricordando che il differenziale dσzz è dovuto alla sola variazione della coordinata z si
ottiene:
dzTx
My + dMy
Tx
My zy
x

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
61
∫ ∂∂σ
=*A
zzxz dA
zt
In questo caso la tensione σzz è data da:
xJ
M
yy
yzz −=σ
Sostituendo nell'espressione di txz si ottiene
∫∫ ⋅−=
−
∂∂
=**
1A
y
yyA
yy
yxz ydA
dz
dM
JdAy
J
M
zt
L'ultimo integrale della formula precedente è il momento statico rispetto a y dell'area A*, indicando
questo con Sy* e ricordando che la derivata del momento è pari al taglio cambiato di segno si ricava:
yy
yxxz J
STt
*=
Sezioni a parete sottile
Nelle costruzioni meccaniche è frequente l'uso di elementi la cui sezione è formata da pareti sottili,
cioè di spessore piccolo rispetto alle dimensioni della sezione. Esempi tipici sono costituiti dai
profilati (ottenuti per laminazione) a C o doppio T e dai longheroni dei veicoli.
x
y
ξ
A*
t
linea media
s
x
y
τ
Per il calcolo del flusso t della tensione tangenziale τ dovuta ai tagli si assume una coordinata locale
ξ (lungo la linea media del profilo) che definisce la posizione della corda che stacca l'area A*; la
corda non è parallela ad un asse ma è normale alla linea media ed è quindi pari allo spessore locale s
della parete. Come verso positivo del flusso t si assume quello entrante nell'area A*.
In questi casi è lecito ammettere che la tensione sia uniforme nello spessore della parete e diretta
come la linea media di quest'ultima; si ottiene quindi la tensione dividendo il flusso per la corda s:
yy
yx
xx
xy
sJ
ST
sJ
ST **+=τ
Per semplificare il calcolo delle caratteristiche geometriche della sezione (momenti statici e d'inerzia)
si considera che l'area sia concentrata nella linea media del profilo; come in precedenza i momenti

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
62
statici Sx* e Sy* si riferiscono alla parte di sezione staccata dalla corda, i momenti d'inerzia Jxx e Jyy si
riferiscono all'intera sezione.
Esempi di calcolo delle tensioni dovute ai tagli
1. Sezione rettangolare sottoposta a taglio nella direzione del lato maggiore.
ax
y
ξ
b
A*
+
τ
b
x
y
ξ
a
A*
+τ
yz
xz
Nel caso in cui sia a > b e agisca il solo taglio Ty si calcola la tensione τyz dividendo il flusso
per la lunghezza b della corda:
xx
xyyzyz bJ
ST
b
t *==τ dove
12
3baJ xx = ,
ξ
−ξ=22
*a
bS x
Tale relazione è esatta per b/a→0 in quanto assume che la tensione τyz sia distribuita
uniformemente lungo la corda; essa può quindi essere usata per un calcolo approssimato finché
il rapporto b/a è piccolo rispetto all'unità. L'andamento della τyz è parabolico, il valore massimo
si presenta sulla corda che stacca metà sezione (ξ= a/2)e vale:
A
T
ba
T
ab
baT yyyyz 2
3
2
3
12/
8/32
2
===τ
Nel caso in cui sia b > a e agisca il solo taglio Tx si calcola la tensione τxz dividendo il flusso
per la lunghezza a della corda:
yy
yxxzxz aJ
ST
at *
==τ dove 12
3abJ yy = ,
ξ
−ξ=22
*b
aS y
Analogamente al caso precedente, la relazione è esatta per a/b→0 e può essere usata per un
calcolo approssimato finché il rapporto a/b è piccolo rispetto all'unità. L'andamento della τyz è
ancora parabolico e il valore massimo, che si presenta sulla corda che stacca metà sezione (ξ=
b/2), vale:
A
T
ba
T
ba
abT xxxxz 2
3
2
3
12/
8/32
2
===τ
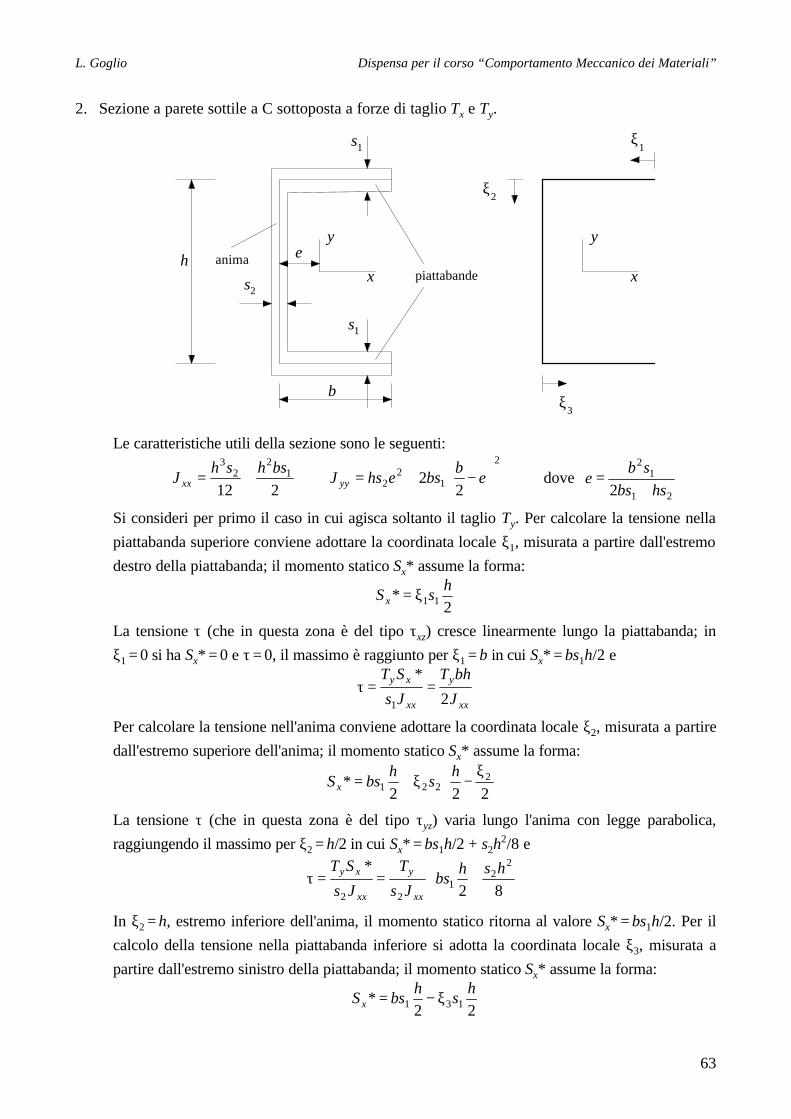
L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
63
2. Sezione a parete sottile a C sottoposta a forze di taglio Tx e Ty.
x
y
s1
s1
s2
h e
x
yanima
piattabande
ξ1
ξ2
ξ3
b
Le caratteristiche utili della sezione sono le seguenti:
2121
22
3 bshshJ xx +=
2
12
2 22
−+= e
bbsehsJ yy dove
21
12
2 hsbssb
e+
=
Si consideri per primo il caso in cui agisca soltanto il taglio Ty. Per calcolare la tensione nella
piattabanda superiore conviene adottare la coordinata locale ξ1, misurata a partire dall'estremo
destro della piattabanda; il momento statico Sx* assume la forma:
2* 11
hsS x ξ=
La tensione τ (che in questa zona è del tipo τxz) cresce linearmente lungo la piattabanda; in
ξ1 = 0 si ha Sx* = 0 e τ = 0, il massimo è raggiunto per ξ1 = b in cui Sx* = bs1h/2 e
xx
y
xx
xy
J
bhT
Js
ST
2
*
1
==τ
Per calcolare la tensione nell'anima conviene adottare la coordinata locale ξ2, misurata a partire
dall'estremo superiore dell'anima; il momento statico Sx* assume la forma:
ξ
−ξ+=222
* 2221
hs
hbsS x
La tensione τ (che in questa zona è del tipo τyz) varia lungo l'anima con legge parabolica,
raggiungendo il massimo per ξ2 = h/2 in cui Sx* = bs1h/2 + s2h2/8 e
+==τ
82
* 22
122
hshbs
Js
T
Js
ST
xx
y
xx
xy
In ξ2 = h, estremo inferiore dell'anima, il momento statico ritorna al valore Sx* = bs1h/2. Per il
calcolo della tensione nella piattabanda inferiore si adotta la coordinata locale ξ3, misurata a
partire dall'estremo sinistro della piattabanda; il momento statico Sx* assume la forma:
22* 131
hs
hbsS x ξ−=

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
64
La tensione τ (che in questa zona è del tipo τxz) decresce linearmente lungo la piattabanda;
parte dal valore massimo per ξ3 = 0 in cui Sx* = bs1h/2 e
xx
y
xx
xy
J
bhT
Js
ST
2
*
1
==τ
mentre per ξ3 = b si ha Sx* = 0 e τ = 0
Si consideri ora il caso in cui agisca soltanto il taglio Tx. Nella piattabanda superiore il
momento statico Sy* assume la forma:
( )22
*21
1111
11ξ
−ξ−=
ξ
−−ξ= sebsebsS y
La tensione τ (che in questa zona è del tipo τxz) varia con legge parabolica lungo la
piattabanda; per ξ1 = 0 si ha Sy* = 0 e τ = 0, il massimo è raggiunto per ξ1 = b-e (in
corrispondenza dell'asse y) in cui Sy* = s1(b-e)2/2 e
( )2
* 2
1
ebJ
T
Js
ST
yy
x
yy
yx −⋅==τ
All'estremo sinistro della piattabanda ξ1 = b si ha Sy* = bs1(b/2-e) e la tensione vale:
−==τ e
bb
JT
Js
ST
yy
x
yy
yx
2
*
1
Nell'anima il momento statico Sy* assume la forma:
eseb
bsS y 221 2* ξ−
−=
La tensione τ (che in questa zona è del tipo τyz) varia lungo l'anima con legge lineare;
nell'estremo superiore ξ2 = 0 si ha Sy* = bs1(b/2-e) e
−==τ e
bbs
JsT
Js
ST
yy
x
yy
yx
2
*1
22
Per ξ2 = h/2 (in corrispondenza dell'asse x), il momento statico assume valore nullo:
( )
( ) ( ) 02222
22222
*
1212
12
12
121
2
21
=++
−=
+−=−
−=
bshsbshs
sbsb
bshsesb
esh
eb
bsS y
Nell'estremo inferiore dell'anima ξ2 = h , il momento statico assume il valore Sy* = -bs1(b/2-e) e
quindi la tensione vale:
−−==τ e
bbs
JsT
Js
ST
yy
x
yy
yx
2
*1
22
Nella piattabanda inferiore il momento statico Sy* assume la forma:
−ξ
ξ+−= esh
bsS y 22* 3
131
La tensione τ (che in questa zona è del tipo τxz) varia lungo la piattabanda inferiore con legge
parabolica; all'estremo sinistro τ3 = 0 si ha Sy* = -bs1(b/2-e) e quindi la tensione vale:
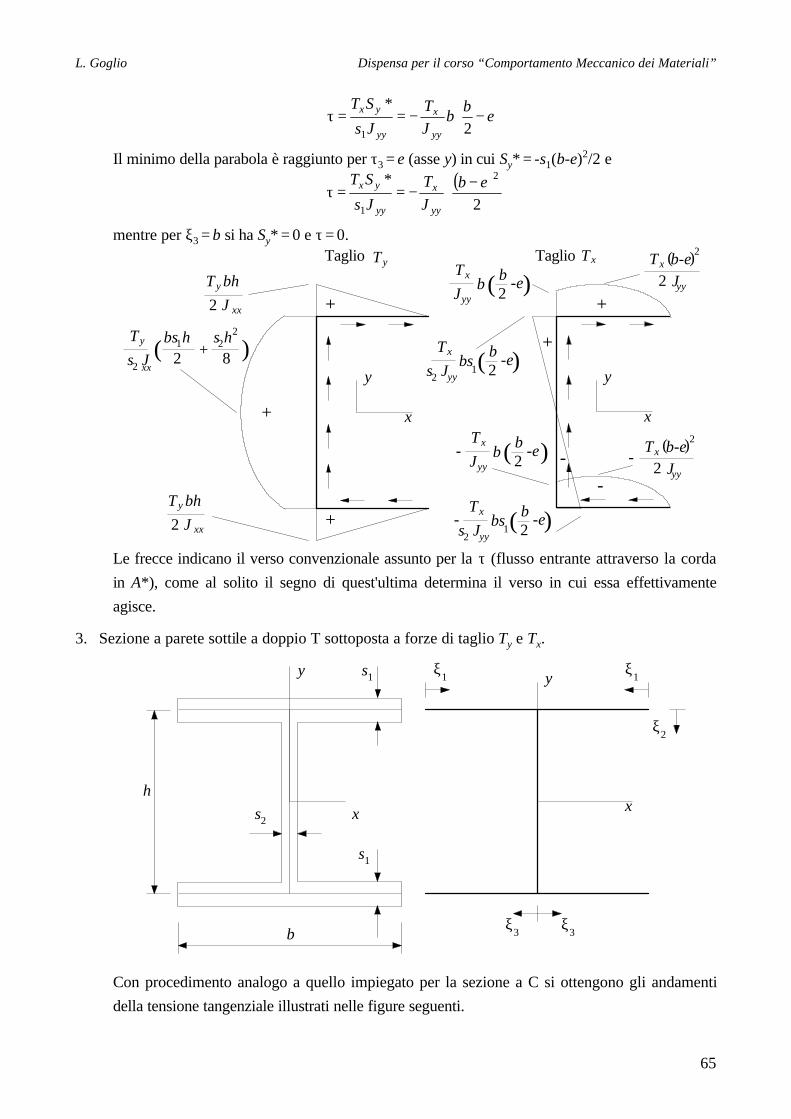
L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
65
−−==τ e
bb
JT
Js
ST
yy
x
yy
yx
2
*
1
Il minimo della parabola è raggiunto per τ3 = e (asse y) in cui Sy* = -s1(b-e)2/2 e
( )2
* 2
1
ebJ
T
Js
ST
yy
x
yy
yx −⋅−==τ
mentre per ξ3 = b si ha Sy* = 0 e τ = 0.
x
y
Taglio Ty
x
y
Taglio Tx
-
-
+
++
+
+
T bhy
J xx
Ty
s Jxx2
bs h1
2s h2
2
8+( )
T b-ex
Jyy
2
2
2
( )Tx
Jyy 2(bb -e)
Tx
s Jyy2 2(bsb -e)1
T b-ex
Jyy
2
2
( )-
Tx
Jyy 2(bb -e
Tx
s Jyy2 2(bsb -e)1
)-
-T bhy
J xx2
Le frecce indicano il verso convenzionale assunto per la τ (flusso entrante attraverso la corda
in A*), come al solito il segno di quest'ultima determina il verso in cui essa effettivamente
agisce.
3. Sezione a parete sottile a doppio T sottoposta a forze di taglio Ty e Tx.
x
y s1
s1
s2
hx
yξ
1
ξ2
ξ3
ξ1
ξ3b
Con procedimento analogo a quello impiegato per la sezione a C si ottengono gli andamenti
della tensione tangenziale illustrati nelle figure seguenti.

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
66
x
yTaglio Ty
+
+
+
T bhy
4 J xx
Ty
s Jxx2
bs h1
2s h2
2
8+( )
x
yTaglio Tx
+
+
T bx
Jyy
2
8
T bhy
4 J xx
T bx
Jyy
2
8
In conclusione di questi esempi, si fa notare che ciascuna componente di taglio Tx o Ty può causare
entrambe le tensioni tangenziali τxz, τyz ; i valori massimi (in modulo) di tensione si raggiungono dove
il profilo interseca l'asse normale a quello in direzione del quale agisce il taglio.
Centro di taglio o di torsione
Si consideri la sezione a C per la quale si è ricavato l'andamento della tensione tangenziale τ (τxz,, τyz)
corrispondente all'applicazione dei tagli Tx , Ty .
Se agisce solo il taglio Ty si è trovato che la distribuzione delle τ ha andamento lineare nelle
piattabande e parabolico nell'anima.
x
y
s1
s1
s2
heFy
Fx
Fx
Ty
g
x
y
+
+
+
C t
b
T bhy
J xx2
T bhy
J xx2
La distribuzione di tensione in ciascuna piattabanda può essere sostituita da una forza Fy applicata
sulla linea media e pari al semiprodotto del valore massimo di τ assunto dalla distribuzione
triangolare per l'area della piattabanda stessa:

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
67
xx
y
xx
yx J
hsbTbs
J
bhTF
4221 1
2
1 ==
Le tensioni τ nell'anima possono essere sostituite da una forza verticale Fy applicata sulla linea media
dell'anima stessa e pari al taglio:
yy TF =
Al sistema di forze formato dalle due componenti Fx e dalla Fy deve essere equivalente il solo taglio
Ty applicato su una retta d'azione (asse centrale) la cui posizione g rispetto al riferimento xy si trova
imponendo l'eguaglianza dei momenti:hFeFgT xyy +=
Sostituendo a Fx e Fy le loro espressioni in funzione di Ty si ottiene:
12
122
3/24 bshsb
eJ
shbeg
xx ++=+=
Se agisce solo il taglio Tx l'andamento delle τ è parabolico nelle ali e lineare nell'anima; la
distribuzione delle tensioni è simmetrica rispetto a x e quindi la loro risultante, pari a Tx , è applicata
sull'asse x.
Il punto Ct di coordinate (-g,0) costituisce il centro di taglio della sezione; per tale punto devono
infatti passare i tagli Tx , Ty affinché nella sezione si abbiano le distribuzioni di tensioni τcorrispondenti alle condizioni di taglio puro. Di conseguenza, se la retta d'azione della risultante T
dei tagli dista da tale punto del valore (eccentricità) ec si producono nella sezione anche delle
sollecitazioni aggiuntive dovute al momento torcente Mt pari a:
ct TeM = dove 22yx TTT +=
Il punto Ct costituisce anche il centro di torsione della sezione; tale denominazione è dovuta al fatto
che la sezione sotto l'applicazione del momento torcente ruota intorno a un asse parallelo a z e
passante per tale punto.
Con procedimento analogo a quello qui mostrato nel caso della sezione a C il centro di taglio può
essere determinato per una generica sezione. Per alcuni casi particolari, ma di notevole interesse
pratico, il centro di taglio coincide col baricentro della sezione; ad esempio ciò si verifica nel caso di
sezione doppiamente simmetrica (rettangolare, circolare, a I, ecc.).
6.9. Tensioni principali e ipotesi di cedimento
Per le ipotesi effettuate, il tensore della tensione agente in un qualsiasi punto di una sezione del
solido di Saint Venant assume la forma seguente:
στττ
τ
zzyzxz
yz
xz
00
00
Note le componenti di tensione σzz , τxz , τyz , calcolabili utilizzando le formule presentate nei paragrafi
6.1÷6.8, si possono calcolare le tensioni principali come autovalori del tensore:
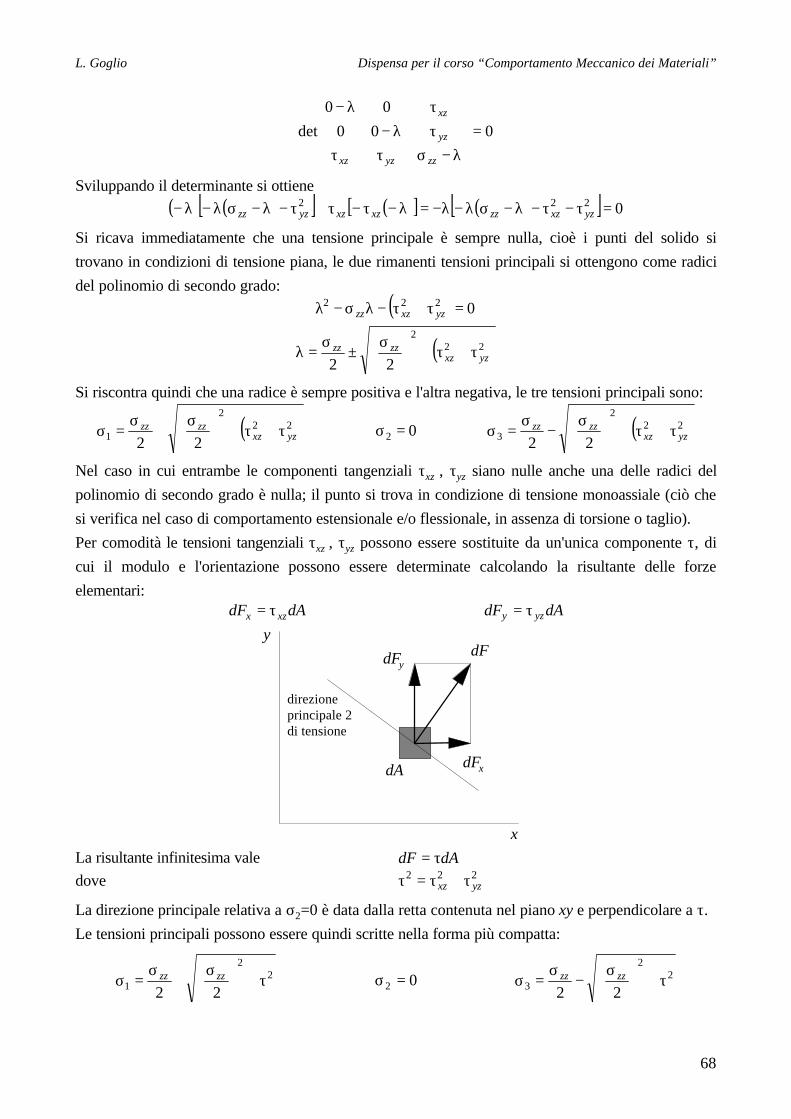
L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
68
000
00
det =
λ−στττλ−
τλ−
zzyzxz
yz
xz
Sviluppando il determinante si ottiene( ) ( )[ ] ( )[ ] ( )[ ] 0222 =τ−τ−λ−σλ−λ−=λ−τ−τ+τ−λ−σλ−λ− yzxzzzxzxzyzzz
Si ricava immediatamente che una tensione principale è sempre nulla, cioè i punti del solido si
trovano in condizioni di tensione piana, le due rimanenti tensioni principali si ottengono come radici
del polinomio di secondo grado:( ) 0222 =τ+τ−λσ−λ yzxzzz
( )222
22 yzxzzzzz τ+τ+
σ
±σ
=λ
Si riscontra quindi che una radice è sempre positiva e l'altra negativa, le tre tensioni principali sono:
( )222
1 22 yzxzzzzz τ+τ+
σ
+σ
=σ 02 =σ ( )222
3 22 yzxzzzzz τ+τ+
σ
−σ
=σ
Nel caso in cui entrambe le componenti tangenziali τxz , τyz siano nulle anche una delle radici del
polinomio di secondo grado è nulla; il punto si trova in condizione di tensione monoassiale (ciò che
si verifica nel caso di comportamento estensionale e/o flessionale, in assenza di torsione o taglio).
Per comodità le tensioni tangenziali τxz , τyz possono essere sostituite da un'unica componente τ, di
cui il modulo e l'orientazione possono essere determinate calcolando la risultante delle forze
elementari:dAdF xzx τ= dAdF yzy τ=
x
ydF
dFx
dFy
dA
direzioneprincipale 2di tensione
La risultante infinitesima vale dAdF τ=dove 222
yzxz τ+τ=τ
La direzione principale relativa a σ2=0 è data dalla retta contenuta nel piano xy e perpendicolare a τ.
Le tensioni principali possono essere quindi scritte nella forma più compatta:
22
1 22τ+
σ
+σ
=σ zzzz 02 =σ 22
3 22τ+
σ
−σ
=σ zzzz

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
69
I cerchi di Mohr per un punto qualsiasi di una sezione del solido di Saint Venant assumono la forma
mostrata in figura. E' possibile tracciare direttamente i cerchi (senza aver determinato
preliminarmente le tensioni principali) in quanto si conoscono le componenti di tensione su due piani
perpendicolari tra di loro e appartenenti al fascio che ha in comune la direzione principale 2. Il primo
piano è quello della sezione del solido (piano xy) su cui agiscono le componenti (σzz , τ), il secondo
piano è parallelo a z e su esso agisce la sola τ. Si hanno quindi gli elementi per costruire il cerchio
passante per σ1 , σ3 ; i cerchi rimanenti vengono tracciati ricordando che σ2=0.
σ3 σ
τ
1σσ2
(σ , τ)zz
(0 , −τ)
τmax
=0
Come già mostrato in precedenza, la massima tensione tangenziale agisce su un piano del fascio
avente in comune la direzione principale 2 ed è pari al raggio del cerchio passante per σ1 , σ3 :
22
max 2τ+
σ
=τ zz
Utilizzando questi risultati si possono calcolare le tensioni ideali, le cui formule sono state ottenute al
par. 4.2 in funzione delle tensioni principali, direttamente in termini di σzz e τ.
Materiali fragili
Ipotesi della massima tensione normale: 22
1 22τ+
σ
+σ
=σ=σ zzzzid
Materiali duttili
Ipotesi della massima tensione tangenziale: 2231 4τ+σ=σ−σ=σ zzid
Ipotesi dell'energia di distorsione: ( ) ( ) ( )[ ] 3123
21
231
23
21
2 0021
σσ−σ+σ=σ−σ+σ−+−σ=σid
Ponendo, per semplicità di notazione, 2zza
σ= , 2
2
2τ+
σ
= zzb , si ottiene l'espressione:
( ) ( ) ( )( ) 22222
22222 32
32
3 τ+σ=
τ+
σ
+
σ
=+=−+−−++=σ zzzzzz
id bababababa
Si ricava quindi: 22 3τ+σ=σ zzid

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
70
7. APPLICAZIONE DELLE SOLUZIONI PER IL SOLIDO DI SAINT VENANT AL
CALCOLO DI STRUTTURE ELEMENTARI
Gli elementi strutturali di tipo monodimensionale (cioè, come già detto, aventi una dimensione molto
maggiore delle altre due) usati nelle costruzioni meccaniche spesso si discostano dalle ipotesi sotto
cui si sono ottenute le soluzioni per il solido di Saint Venant. In aggiunta a quanto già detto al
capitolo 6 circa le variazioni di sezione, si nota che nei casi pratici carichi e vincoli possono essere
applicati non solo agli estremi (si pensi al caso di un albero di trasmissione con linea d'asse
orizzontale e cuscinetti intermedi).
Le azioni applicate, sia da enti esterni sia dai vincoli, causano nelle sezioni di tali elementi strutturali
caratteristiche di sollecitazione (forza normale, tagli, momenti flettenti, momento torcente) variabili
in caso generale lungo la linea d'asse. Ogni sezione viene trattata come sezione di un solido di Saint
Venant in cui agiscono le caratteristiche di sollecitazione corrispondenti alla sua posizione lungo
l'elemento ed equivalenti alle tensioni σzz , τxz , τyz , ciascuna variabile secondo la sua distribuzione
caratteristica. Le altre componenti di tensione, ad esempio quelle (locali) di contatto dovute
all'applicazione di carichi distribuiti, sono di solito trascurabili o comunque calcolabili separatamente.
7.1. Diagrammi delle caratteristiche di sollecitazione
Noti i carichi esterni e calcolate le reazioni vincolari, i valori assunti dalle caratteristiche di
sollecitazione N, Tx , Ty , Mx , My , Mz , in una generica sezione S di un elemento strutturale possono
essere determinati per mezzo di equazioni di equilibrio.
E' sufficiente infatti isolare una parte di struttura con una linea che la distacca dagli eventuali vincoli
e interrompe l'elemento nella sezione S. Le equazioni di equilibrio della parte così isolata forniscono
i valori delle caratteristiche di sollecitazione cercate. Tale modo di procedere costituisce
semplicemente la generalizzazione di quanto già visto nel capitolo 1 per la determinazione delle
reazioni vincolari.
Scrivendo le equazioni di equilibrio si considera la geometria della struttura indeformata (ad esempio
per adottare i bracci di momento), cioè si trascurano le variazioni geometriche dovute alla
deformabilità elastica degli elementi. Tale approssimazione, necessaria per ottenere delle relazioni
lineari, è corretta in quanto gli spostamenti elastici sono di solito estremamente piccoli rispetto alle
dimensioni caratteristiche della struttura.
Per visualizzare l'andamento delle caratteristiche di sollecitazione nelle parti delle struttura è utile
costruire dei diagrammi, che riportano il valore di ogni componente in funzione della posizione. Tali
diagrammi vengono di solito tracciati sulla struttura stessa; su ogni elemento la caratteristica
diagrammata viene misurata perpendicolarmente alla linea d'asse, che funge da ascissa.
Nel seguito sono riportati alcuni esempi in cui si mostra la costruzione dei diagrammi delle
caratteristiche di sollecitazione per strutture elementari. Per semplicità la trattazione è limitata a
problemi piani.

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
71
Esempio 1
F
a
l
b c
1
F2C=F l
z
F1
F2VA
RB
OA
A B
1
C=F l1
Si vuole determinare l'andamento delle caratteristiche di sollecitazione nella struttura schematizzata
in figura.
Mediante tre equazioni di equilibrio si determinano le reazioni vincolari.→: 02A =+ FO 2A FO −=
A : 0B1 =++ lRCaF( )
+−=
+−=
+−= 11
11B l
aF
l
laF
l
CaFR
B : ( ) 01A =−−+ CalFlV( )
la
Fl
aFlFlFl
CalFV 1
1111A =
+−=
+−−=
Per il calcolo delle caratteristiche di sollecitazione è necessario distinguere in quale tratto
dell'elemento si trova la sezione S considerata; sono infatti diversi i carichi da includere nelle
equazioni di equilibrio.
0 ≤ z < a V
A
OA
Ty
Mx
N
z
S
→: 0A =+ NO 2A FON =−=
↑: 0A =+ yTVla
FVTy 1A −=−=
S : 0A =+ xMzV zla
FzVM x 1A −=−=
Si osserva quindi che forza normale e taglio sono costanti, il momento flettente varia linearmente; si
riscontra che, come già dimostrato, il taglio è la derivata del momento.
a ≤ z < a+b V
A
OA
Ty
Mx
N
z
S
F1
→: 0A =+ NO 2A FON =−=

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
72
↑: 01A =++ yTFV
+−=−−= 111A l
aFFVTy
S : ( ) 01A =+−+ xMazFzV ( ) aFzla
FaFzFVM x 1111A 1 +
+−=++−=
Gli andamenti di N, Ty , Mx sono ancora rispettivamente costante, costante, lineare; si nota però che
N ha lo stesso valore del tratto precedente, Ty è variato, Mx è variato ma in z = a assume lo stesso
valore (-F1a2/l) fornito dalla formula valida per z < a.
a+b ≤ z < l V
A
OA
Ty
Mx
N
z
S
F1
C
→: 0A =+ NO 2A FON =−=
↑: 01A =++ yTFV
+−=−−= 111A l
aFFVTy
S : ( ) 01A =+−−+ xMCazFzV ( ) lFaFzla
FCaFzFVM x 11111A 1 ++
+−=+++−=
In quest'ultimo tratto solo l'andamento di Mx risulta modificato, per effetto del termine C = F1l; nella
sezione z = a+b, in cui è applicata la coppia concentrata, il valore di Mx presenta una discontinuità
pari a C.
Identici risultati si sarebbero ottenuti includendo nella linea di distacco le parte di struttura situata a
destra della sezione in cui si esegue il taglio; per esempio, per l'ultimo tratto si sarebbe scritto (si noti
che la faccia messa in evidenza è negativa e quindi i versi delle caratteristiche di sollecitazione sono
invertiti):
a+b ≤ z < l
RBT
y
Mx
N
z
SF
2
←: 02 =− FN 2FN =
↓: 0B =− RTy
+−== 11B l
aFRTy
S : ( ) 0B =−+ zlRM x ( ) ( ) lFaFzla
Fzlla
FzlRM x 1111B 11 ++
+−=−
+=−−=
Diagrammi delle caratteristiche di sollecitazione N, Ty , Mx (le rimanenti caratteristiche sono nulle):

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
73
F2
+
F1
-F1
al -F
1al
+1( )
forza normale
taglio
momento flettente
-
-F1al
2-F
1al
+b[ ]a+b( )-
+F
1al
+1( ) c
C=F l1
Esempio 2
q
l
z
VB
A B
MB
qO
B
Reazioni vincolari→: 0B =O
↑: 0B =+Vql qlV −=B
B : 02 B =+− Ml
ql2
2
Bl
qM =
Caratteristiche di sollecitazione
0 ≤ z ≤ l T
yMx
N
z
S
q
→: 0=N↑: 0=+ qzTy qzTy −=

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
74
S : 02
=+z
qzM x 2
2zqM x −=
Diagrammi delle caratteristiche di sollecitazione Ty , Mx (le rimanenti caratteristiche sono nulle):
-qltaglio
momento flettente
-
--q l
2
2
Esempio 3
A
B
O
a
b
q
C
V C
q
R B
C
Reazioni vincolari→: 0C =+ qaO qaO −=C
B : 02 C =+− bVa
qab
aqV
2
2
C =
C : 02 B =+ bRa
qab
aqR
2
2
B −=

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
75
Caratteristiche di sollecitazione
E' conveniente trattare separatamente i due tratti AB e BC, assumendo ogni volta un sistema di
riferimento con asse z parallelo alla linea d'asse del tratto considerato.
tratto verticale 0 ≤ z ≤ a T
y
Mx
N
z
S
q
↓: N = 0→: 0=+ qzTy qzTy −=
S : 02
=+z
qzM x 2
2zqM x −=
tratto orizzontale 0 ≤ z ≤ b T
y
Mx
N
z
SOC
V C
(per rendere più semplice la scrittura delle equazioni si considera l'equilibrio della parte di struttura a
destra della generica sezione S)←: 0C =− ON qaON −== C
↓: 0C =−VTy ba
qVTy 2
2
C ==
S : ( ) 0C =−+ zbVM x ( ) ( )zbb
aqzbVM x −−=−−=
2
2
C
-
forza normale
-qa

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
76
-+
taglio
-qa
q2ba2
-
--q2a 2
momento flettente
Alcune proprietà dei diagrammi del taglio e del momento flettente
Per facilitare il tracciamento (e il controllo!) dei diagrammi di taglio e momento flettente, si può far
uso delle seguenti proprietà:
• nelle zone in cui non agiscono carichi trasversali il diagramma del taglio è costante e quello del
momento è lineare;
• in corrispondenza di una forza trasversale concentrata il diagramma del taglio presenta una
discontinuità (pari alla forza stessa) e quello del momento cambia pendenza;
• nelle zone in cui agiscono carichi trasversali uniformemente distribuiti il diagramma del taglio è
lineare e quello del momento è parabolico;
• in corrispondenza di una coppia concentrata il diagramma del taglio non varia e quello del
momento presenta una discontinuità (pari alla coppia stessa);
• in corrispondenza degli appoggi di estremità e delle cerniere il diagramma del momento si annulla
(salvo che siano applicate coppie concentrate).
7.2. Equazione della linea elastica
E' già stata mostrata nel paragrafo 6.8 la relazione di tipo differenziale che intercorre tra taglio e
momento flettente. Si vedrà ora che tale proprietà si colloca nell'ambito di un gruppo di relazioni, di
tipo differenziale, che descrivono il comportamento flessionale e che coinvolgono sia le grandezze di
tipo statico (momento flettente, taglio, carico distribuito), sia quelle di tipo cinematico (spostamento
trasversale, rotazione della sezione, curvatura).

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
77
Si consideri un tratto infinitesimo di un elemento strutturale monodimensionale, per il quale siano
utilizzabili le soluzioni del solido di Saint Venant, soggetto a flessione nel piano zy. Le equazioni di
equilibrio alla traslazione lungo y e alla rotazione intorno a x sono le seguenti:
dz
Ty
Mx + dMx
Ty
Mx z
y
x
qy
+dTy ( ) 02
0
=−+−−+
=+−+
dzdzqdzdTTMdMM
dzqTdTT
yyyxxx
yyyy
Semplificando e trascurando infinitesimi di ordine
superiore si ottengono le relazioni:
yy q
dz
dT−= y
x Tdz
dM=
Si è quindi ottenuto che in presenza di carico distribuito il taglio è variabile lungo la linea d'asse e la
sua derivata rispetto a z è uguale al carico distribuito (cambiato di segno); risulta ancora vero che la
derivata del momento flettente è pari al taglio. Combinando questi due risultati si ottiene:
yx q
dz
Md−=
2
2
Considerando la deformazione elastica dell'elemento inflesso, la rotazione relativa tra le sue due
facce è pari a dαx . Ammettendo che la deformazione sia dovuta alla sola
flessione, trascurando cioè la deformabilità a taglio, le sezioni ruotate sono
normali alla linea d'asse, che è diventata curva e localmente può essere
approssimata con il suo cerchio osculatore. Il raggio di quest'ultimo, cioè il
raggio di curvatura locale rx , può essere espresso come rapporto tra la
lunghezza dz dell'arco costituito dalla fibra baricentrica (che in flessione
pura, senza forza normale, non varia) e l'angolo tra le facce dαx :
xx
x kr
ddz 1
==α
L'ultima eguaglianza definisce semplicemente la curvatura come inverso del raggio del cerchio
osculatore; trattando il comportamento flessionale si è mostrato che la curvatura è legata al momento
flettente dalla relazione:
xx
xxx EJ
Mdz
dk =
α=
Rappresentando lo spostamento trasversale v della linea d'asse, usualmente detto freccia, in funzione
della coordinata z si ottiene una curva detta linea elastica; essa rappresenta la configurazione assunta
dalla linea d'asse di un elemento monodimensionale sottoposto a flessione.
dz
α α+d xxαx
rx

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
78
y
z
linea elastica dvdz
αx
La pendenza di tale curva nel piano zy è data dalla derivata dv/dz ; poiché essa è molto piccola si può
confondere la tangente con l'angolo:
xdzdv
α−=
Derivando entrambi i membri si ottiene:
xx k
dz
d
dz
vd−=
α−=
2
2
Sostituendo quest'ultimo risultato nell'equazione che lega momento flettente e curvatura si può
scrivere:
xx
x
EJ
M
dz
vd−=
2
2
Quest'ultima costituisce l'equazione differenziale della linea elastica; da essa si nota che integrando
due volte la funzione Mx/EJxx si può ricavare l'andamento dello spostamento v in funzione di z. Le
costanti di integrazione necessarie vengono determinate in base ai vincoli presenti, che assegnano il
valore (di solito nullo), nei punti in cui sono applicati, allo spostamento trasversale e/o alla rotazione.
Le stesse proprietà valgono per la flessione nel piano zx, sostituendo nelle formule x e u
rispettivamente a y e v e tenendo conto del differente verso positivo di momenti e rotazioni
dz
Tx
My + dMy
Tx
My zy
x
qx
+dTx ( ) 02
0
=+++−+
=+−+
dzdzqdzdTTMdMM
dzqTdTT
xxxyyy
xxxx
xx q
dz
dT−= x
y Tdz
dM−=
Considerando la linea elastica u(z) si ottiene
ydzdu
α= yy k
dz
d
dz
ud=
α=
2
2
L'equazione differenziale che lega momento e curvatura in questo caso è:
yy
y
EJ
M
dz
ud=
2
2
Nel seguito sono riportati alcuni esempi in cui si mostra la determinazione della linea elastica per
strutture elementari; anche in questo caso ci si limita a considerare problemi piani.

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
79
Esempio 1
l
z
VA
A B
MOF
AA
F
Reazioni vincolari→: 0A =O
↑: 0A =+ FV FV −=A
A : 0A =+ FlM FlM −=A
Caratteristiche di sollecitazione
0 ≤ z ≤ l Ty
Mx
N
z
S
F
←: 0=N↓: T Fy − = 0 FTy =
S : ( ) 0=−+ zlFM x ( )zlFM x −−=
Diagrammi delle caratteristiche di sollecitazione Ty , Mx
taglio
momento flettente
+F
-
-Fl
Nota la funzione Mx(z), si scrive l'equazione differenziale della linea elastica:
( )zlEJ
FEJM
dz
vddz
d
xxxx
xx −=−==α
−2
2
Integrando una prima volta si ottiene la rotazione αx(z):
1
2
2C
zlz
EJF
dzEJ
M
xxxx
xx +
−−==α ∫
Con un'ulteriore integrazione si ottiene lo spostamento trasversale (freccia) v(z):
21
32
62CzC
zzl
EJF
dzvxx
x +−
−=α−= ∫
Le costanti di integrazione C1 e C2 si determinano imponendo che nell'incastro lo spostamento e la
rotazione siano nulli:

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
80
z = 0 ⇒ αx = 0 , v = 0
Le due condizioni sono soddisfatte se C1 = 0 e C2 = 0, le funzioni che descrivono spostamento e
rotazione sono quindi:
( )
−−=α
2
2zlz
EJF
zxx
x ( )
−=
32
32 z
lzEJF
zvxx
Nel punto B, corrispondente a z = l, rotazione e spostamento assumono i valori seguenti:
( )xx
xx EJFl
l2
2B −=α=α ( )
xxEJFl
lvv3
3B ==
La linea elastica, cioè la configurazione deformata della linea d'asse, assume l'andamento mostrato in
figura.
zA
B
FlEJ
3
3 xx
FlEJ
2
2 xx-
Esempio 2
L
z
VA
AB R
OC
B
AC
Reazioni vincolari→: 0A =O
B : 0A =+− LVC LCV /A =A : 0B =+ CLR LCR /B −=
Caratteristiche di sollecitazione
0 ≤ z ≤ L
Ty
Mx
N
z
S
VA
OA
→: 0A =+ ON 0A =−= ON
↑: 0A =+ VTy LC
VTy −=−= A
S : 0A =+ zVM x zLC
zVM x −=−= A

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
81
Diagrammi delle caratteristiche di sollecitazione Ty , Mx
taglio
momento flettente
-
- C
CL
-
Equazione differenziale della linea elastica:Lz
EJC
EJM
dz
vddz
d
xxxx
xx =−==α
−2
2
Rotazione αx(z): 1
2
2C
Lz
EJC
dzEJM
xxxx
xx +−==α ∫
Spostamento v(z): 21
3
6CzC
Lz
EJC
dzvxx
x +−=α−= ∫Le costanti di integrazione C1 e C2 si determinano imponendo che in corrispondenza di entrambi gli
appoggi lo spostamento sia nullo:
z = 0 ⇒ v = 0 z = L ⇒ v = 0
La prima condizione è soddisfatta se C2 = 0, la seconda implica che:
06 1
3
=− LCL
LEJ
C
xx
⇒xxEJ
CLC
61 =
Le funzioni rotazione e spostamento sono quindi:
( )
−=+−=α
2
22
31
262 L
zEJCL
EJCL
Lz
EJC
zxxxxxx
x ( )
−=−= z
L
zEJCL
zEJCL
Lz
EJC
zvxxxxxx
2
33
666
Si ricava facilmente che
3
Lz = ⇒ 0=α x
xxxx EJ
CLL
L
LEJCL
v393336
2
2
3
−=
−=
Negli estremi A e B, corrispondenti a z = 0 e z = L, la rotazione assume rispettivamente i valori:
( )xx
xx EJCL
60A =α=α ( )
xxxx EJ
CLL
3B −=α=α
La linea elastica assume l'andamento mostrato in figura.
z
CLEJ
2
9 3 xx
CLEJ3 xx
-
AB
CLEJ6 xx
-
3
L

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
82
Esempio 3
L
z
VA
B
R
O
B
A
l
C
FFz
1A
Reazioni vincolari→: 0A =O
B : 0A =− FlLVLl
FV =A
A : ( ) 0B =++ lLFLR
+−=
Ll
FR 1B
Caratteristiche di sollecitazione - tratto AB
0 ≤ z ≤ L
Ty
Mx
N
z
S
VA
OA
→: 0A =+ ON 0A =−= ON
↑: 0A =+ VTy Ll
FVTy −=−= A
S : 0A =+ zVM x zLl
FzVM x −=−= A
Caratteristiche di sollecitazione - tratto BC
Le equazioni risultano più compatte adottando per la linea d'asse la coordinata, misurata a partire dal
punto B, z1 = z-L.
0 ≤ z1 ≤ l T
y
Mx
N
z
S
F
1
←: 0=N↓: 0=− FTy FTy =
S : ( ) 01 =−+ zlFM x ( )lzFM x −= 1

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
83
Diagrammi delle caratteristiche di sollecitazione Ty , Mx
taglio
momento flettente
-
- -Fl
lLF 1+( )
lL-F
F
Calcolo della deformata - tratto AB
Equazione differenziale della linea elastica: zLEJ
FlEJM
dz
vddz
d
xxxx
xx =−==α
−2
2
Rotazione αx(z): 1
2
2C
zLEJ
Fldz
EJM
xxxx
xx +−==α ∫
Spostamento v(z): 21
3
6CzC
zLEJ
Fldzv
xxx +−=α−= ∫
Le costanti di integrazione C1 e C2 si determinano imponendo che in corrispondenza di entrambi gli
appoggi lo spostamento sia nullo:
z = 0 ⇒ v = 0 z = L ⇒ v =0
La prima condizione è soddisfatta se C2 = 0, la seconda implica che:
06 1
3
=− LCL
LEJFl
xx
⇒xxEJ
FlLC
61 =
Le funzioni rotazione e spostamento per il tratto AB sono quindi:
( )
−=+−=α
2
22
31
262 L
zEJFlL
EJFlLz
LEJFl
zxxxxxx
x ( )
−=−= z
L
zEJFlL
zEJFlLz
LEJFl
zvxxxxxx
2
33
666
In corrispondenza dell'appoggio B la rotazione assume il valore
z = L ⇒ ( )xx
xx EJFlL
L3
B −=α=α
Calcolo della deformata - tratto BC
Equazione differenziale della linea elastica: ( )lzEJ
FEJM
dz
vddzd
xxxx
xx −−=−==α
− 121
2
1
Rotazione αx(z1): 11
21
1 2Dz
EJFlz
EJF
dzEJM
xxxxxx
xx +−==α ∫
Spostamento v(z1): 211
21
31
1 26DzD
zEJFlz
EJF
dzvxxxx
x +−+−=α−= ∫

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
84
Le costanti di integrazione D1 e D2 si determinano imponendo che in corrispondenza dell'appoggio B
lo spostamento sia nullo e la rotazione assuma lo stesso valore ottenuto utilizzando la formula valida
per il tratto AB:
z1 = 0 ⇒ ( )xx
xx EJFlL
30B −=α=α ( ) 00B == vv
xxEJFlL
D31 −= 02 =D
Le funzioni rotazione e spostamento per il tratto BC sono quindi:
( ) ( )lLlzzEJFlL
lzz
EJF
zxxxx
x 263632 1
211
21
1 −−=
−−=α
( ) ( )121
31
121
312
1 236326
lzlzzEJFlLzlzz
EJF
zvxxxx
++−=
++−=
La linea elastica assume l'andamento mostrato in figura.
z
FlLEJ3 xx
-
AB z1
Fl l LEJ3 xx
( )+2
C
Nel punto C, corrispondente a z1 = l, lo spostamento assume il valore:
( ) ( )xxxx EJ
LlFlLlll
EJF
v3
236
2233C +
=++−=
E' interessante notare che quest'ultimo risultato può essere ottenuto componendo le soluzioni trovate
negli esempi 1 e 2, ponendo in quest'ultimo C = Fl. Infatti il tratto BC può essere pensato come un
elemento a mensola analogo a quello dell'esempio 1 in cui la sezione di incastro è ruotata dell'angolo
αxB calcolato nell'esempio 2; la freccia del punto C risulta essere la somma della rotazione rigida e
della deformabilità del tratto BC.
( )l
EJFl
EJFlLl
EJFl
EJLlFl
vxxxxxxxx
B332
C
3333α−=+=
+=
α B −αBl
FlEJ3 xx
3
B
C
x x =FlLEJ3 xx
l
Con metodi di questo tipo, basati sulla sovrapposizione degli effetti, è possibile studiare casi
complessi come combinazione di soluzioni semplici.
7.3. Strutture reticolari
Si definiscono strutture reticolari gli insiemi di elementi rettilinei, connessi reciprocamente alle loro
estremità per mezzo di cerniere in punti di giunzione detti nodi; solo in corrispondenza di questi

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
85
ultimi vengono applicate le forze esterne. Sotto queste ipotesi si verifica che gli elementi sono
soggetti al solo comportamento estensionale (costituiscono cioè delle aste) e quindi l'unica
caratteristica di sollecitazione agente è la forza normale N.
Nella pratica costruttiva le ipotesi precedenti non sono completamente verificate, infatti gli elementi
sono collegati da bullonature o saldature e quindi mutuamente incastrati, esistono inoltre carichi
agenti anche fuori dai nodi, come il peso proprio. Ciò malgrado, la semplificazione adottata si
dimostra sufficientemente approssimata, in quanto le tensioni indotte dalle componenti di
sollecitazione trascurate (momenti flettenti e tagli) sono di ordine di grandezza inferiore rispetto a
quelle dovute alla forza normale.
In molti casi reali tali strutture sono contenute in un piano, in cui si trovano tutti i nodi e gli elementi;
se anche i carichi agiscono nello stesso piano il comportamento della struttura si riduce ad un
problema bidimensionale. I casi di strutture reticolari spaziali non presentano aspetti concettualmente
diversi ma piuttosto maggiori complicazioni di calcolo dovute alla necessità di considerare le
equazioni di equilibrio nello spazio; nell'ambito di questa trattazione ci si limiterà al caso delle
strutture reticolari piane.
Grado di iperstaticità
Il calcolo del grado di iperstaticità h può essere eseguito mediante la formula generale già vista al
cap. 1, ammettendo solo la presenza di cerniere (interne o esterne, di cui alcune multiple) e appoggi
(esterni):
h v m c a m= − = + −3 2 3La formula può essere particolarizzata per il caso delle strutture reticolari osservando che il numero
complessivo delle incognite statiche da determinare è dato dalla somma del numero di aste na (per
ognuna delle quali si deve calcolare la forza normale incognita) e del numero di reazioni vincolari
esterne ve; il numero di equazioni di equilibrio utilizzabile è pari a 2n, dove n è il numero dei nodi, e
quindi si ha:nnvh ae 2−+=
I metodi presentati nel seguito si riferiscono al caso delle strutture reticolari isostatiche.
Ad esempio, si calcoli il grado di iperstaticità della struttura schematizzata nella figura seguente.
A CB
D E
Volendo calcolare il grado di iperstaticità h utilizzando la formula generale, si deve calcolare il
numero di cerniere semplici corrispondenti a ogni nodo, pari al numero di elementi connessi nel nodo
stesso (conteggiando anche il telaio esterno) diminuito di uno.

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
86
( ) 2111322222 =+++++=+= acv 037213 =⋅−=−= mvh
Per applicare la formula delle strutture reticolari basta osservare che la struttura comprende 5 nodi e
7 aste, le reazione dei vincoli esterni sono 3 (due nella cerniera esterna e una nell'appoggio) e quindi:052732 =⋅−+=−+= nnvh ae
Si verifica che se una struttura reticolare piana è formata da maglie tutte triangolari e il numero di
vincoli esterni è pari a 3 allora essa è isostatica.
Equazioni di equilibrio
Si immagini di separare, mediante una linea di distacco, un nodo J dal resto della struttura reticolare.
Tale nodo dovrà essere in equilibrio sotto l'azione delle componenti di forza esterna e delle forze
normali (il cui verso convenzionale è, come al solito, quello uscente) esercitate dalle aste che in esso
convergono. Si possono quindi scrivere le due equazioni equilibrio alla traslazione verticale e
orizzontale, rispettivamente lungo gli assi X e Y di un sistema di riferimento globale adottato per
tutta la struttura.
L
J
K
I
N1
N2
N3
N4
F X
FY
X
Y
→: 0cos =+δ∑ Xi ii FN
↑: 0sen =+δ∑ Yi ii FN
Nelle equazioni precedenti le sommatorie sono estese a tutte le aste che hanno un estremo nel nodo
J, δi rappresenta l'angolo formato dall'asta (e quindi dalla forza) i-esima rispetto all'asse X.
L'equilibrio alla rotazione del nodo è comunque soddisfatto in quanto le rette d'azione di tutte le
forze passano per esso.
nodo A cA=2 2 aste + telaio
nodo B cB=2 3 aste
nodo C cC=2 a=1 3 aste + appoggio
nodo D cD=3 4 aste
nodo E cE=1 2 aste
numero di elementi m=7

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
87
Può risultare conveniente esprimere le funzioni trigonometriche in funzione delle coordinate dei nodi
e delle lunghezze delle aste:
i
ii l
XX Jcos−
=δi
ii l
YY Jsen−
=δ
Xi , Yi rappresentano le coordinate del nodo in cui termina l'i-esima asta uscente dal nodo J, li è la
lunghezza dell'asta stessa. Le equazioni di equilibrio si trasformano in:
→: 0J =+−∑ Xii
ii F
lXX
N
↑: 0J =+−∑ Yii
ii F
lYY
N
Tale coppia di equazioni può essere scritta per ognuno degli n nodi della struttura, nel caso di un
nodo in cui siano applicati vincoli esterni FX e/o FY rappresentano le corrispondenti reazioni. Si
ottiene quindi un sistema di 2n equazioni in 2n incognite la cui soluzione fornisce le forze normali
nelle aste e le reazioni vincolari; tale approccio sistematico è particolarmente adatto al calcolo
automatico delle strutture.
Adottando un procedimento di soluzione manuale, risulta preferibile considerare dei sistemi parziali
con ridotto numero di equazioni e di incognite; in particolare se per un nodo sono incogniti i valori di
due sole forze (le direzioni sono evidentemente note, dal momento che coincidono con quelle delle
aste) questi sono facilmente determinabili mediante la costruzione del poligono che esprime in forma
grafica l'equilibrio vettoriale.
Per mostrare l'applicazione pratica dei concetti fin qui esposti, si farà uso dell'esempio illustrato nella
figura seguente.
l
l2
AC
B
D E
l2
F2F
45° 45°
90°
45°
90°
45°
90°
45°
45°
2
1 3
4
5
6
7 l/ 2
l2
La struttura reticolare in esame è formata da 7 aste connesse in 5 nodi ed è vincolata esternamente
da una cerniera e da un carrello; il grado di iperstaticità vale quindi:052732 =⋅−+=−+= nnvh ae

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
88
AC
D EF2F
B
RAVB
OB
l2 l2
l/ 2
Reazioni vincolari esterne→: 0B =− FO FO =B
A : 022
2222B =+
++
lF
llFlV F
FV
47
2
222
2
1
22B −=
++−=
B : 022
222A =−+l
Fl
FlR FF
R41
2
2
2
1
22A −=
+−−=
Per semplificare la costruzione dei poligoni delle forze relativi ai nodi vincolati è preferibile
considerare le reazioni RA , OB , VB come forze note disegnandole sulla struttura con i loro versi
effettivi.
AC
D EF2F
B
14
F 74
F
F
1
2
3
4
5
6
7
Il procedimento di soluzione può iniziare dal nodo A, dove sono incogniti i valori delle forze normali
trasmesse dalle aste 1 e 2, mentre le direzioni sono quelle delle aste stesse. Il segno di ciascuna forza
normale viene stabilito distinguendo se essa entra o esce dal nodo: nel primo caso il segno è negativo
e l'asta è in compressione (puntone), nel secondo caso il segno è positivo e l'asta è in trazione
(tirante). Per il nodo A si determina:

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
89
N14
F1
N2
45°14
F
14
F
24
F
A
Poligonodelle forze
Posizione delleforze sul nodo
FN42
1 = FN42
1 =
FN41
2 = FN41
2 −=
A questo punto si può passare al nodo D, per il quale le incognite sono rappresentate dai valori delle
forze normali delle aste 3 e 4; si noti che considerando N1 si deve invertirne il verso rispetto a quello
relativo al nodo A:
N
24
F
4
N3
45°
Poligonodelle forze
F
45°
24
F
DFPosizione delleforze sul nodo 2
4F
32
F(fuori scala) (fuori scala)
FN42
3 = FN42
3 −=
FFFN23
42
2
124 =+= FN
23
4 =
Per quanto riguarda il nodo C, risultano incogniti i valori delle forze normali delle aste 5 e 6:
N5
N645°
F
45°
14
F24Poligono
delle forze

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
90
24
F
F14
34 F
24
F
C
Posizione delleforze sul nodo
FN42
5 = FN42
5 =
FFFN43
42
2
12
41
6 =+= FN23
6 −=
Considerando infine il nodo B, si determina l'ultima forza normale incognita N7:
N
34
F
7Poligonodelle forze
F
45°
74
F(scala 1:2)

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
91
34
F
Posizione delleforze sul nodo
F
74
F
74
F2
(scala 1:2)
(fuori scala)
(fuori scala)
B
FN47
27 = FN47
27 =
A titolo di verifica, si controlla l'equilibrio del nodo E:
Posizione delleforze sul nodo
32
F
(scala 1:4)
2F
74
F24
F2
E
→: 04
76147
23
41
=
+−−
=+−− FFFF ↑: 04
78147
241
=
−+−
=−+− FFFF
Sezione di Ritter
Invece di includere nella linea di distacco un solo nodo, può essere vantaggioso in alcuni casi
comprenderne due o più. In particolare è conveniente separare una parte di struttura tagliando tre
aste: le relative forze normali incognite possono essere determinate utilizzando tre equazioni di
equilibrio del sistema così isolato (se le rette d'azione delle tre forze passano per un unico punto la
struttura è anomala e non può essere risolta).
Ad esempio, nel caso della struttura precedente, si possono determinare direttamente le forze
normali nelle aste 2, 3, 4 per mezzo di una linea di distacco che racchiude i nodi A e D:

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
92
A
DF
RAl
2
N4
N3
N2
l
2
D : 022
A2 =−l
Rl
N FRN41
A2 −==
C : 02
22
A4 =−+l
FlRl
N FFRN23
2 A4 =+−=
↓: 02
1A3 =− RN FRN
42
2 A3 −==
Nello studio delle strutture reticolari l'utilità del metodo della sezione di Ritter si presenta in due
differenti situazioni:
• quando si desidera calcolare le forze normali soltanto per alcune aste;
• quando, utilizzando il procedimento di soluzione basato sui poligoni delle forze, si incontra un
nodo per il quale sono incognite più di due forze normali.
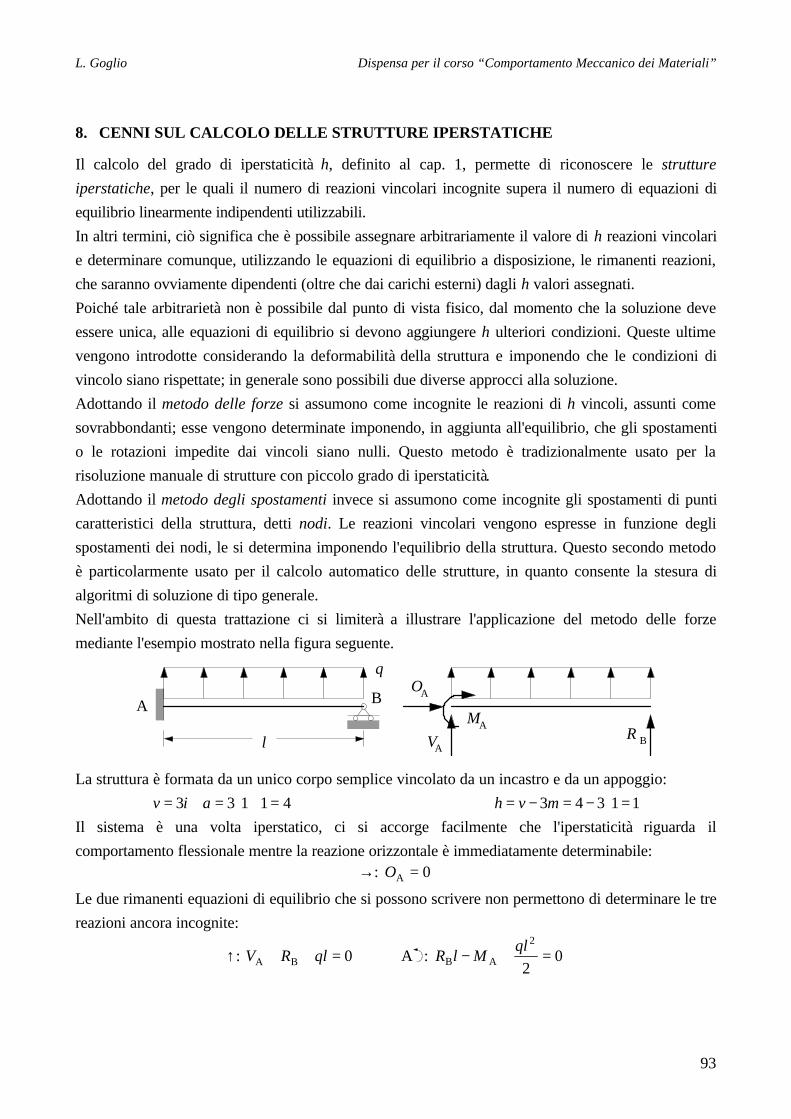
L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
93
8. CENNI SUL CALCOLO DELLE STRUTTURE IPERSTATICHE
Il calcolo del grado di iperstaticità h, definito al cap. 1, permette di riconoscere le strutture
iperstatiche, per le quali il numero di reazioni vincolari incognite supera il numero di equazioni di
equilibrio linearmente indipendenti utilizzabili.
In altri termini, ciò significa che è possibile assegnare arbitrariamente il valore di h reazioni vincolari
e determinare comunque, utilizzando le equazioni di equilibrio a disposizione, le rimanenti reazioni,
che saranno ovviamente dipendenti (oltre che dai carichi esterni) dagli h valori assegnati.
Poiché tale arbitrarietà non è possibile dal punto di vista fisico, dal momento che la soluzione deve
essere unica, alle equazioni di equilibrio si devono aggiungere h ulteriori condizioni. Queste ultime
vengono introdotte considerando la deformabilità della struttura e imponendo che le condizioni di
vincolo siano rispettate; in generale sono possibili due diverse approcci alla soluzione.
Adottando il metodo delle forze si assumono come incognite le reazioni di h vincoli, assunti come
sovrabbondanti; esse vengono determinate imponendo, in aggiunta all'equilibrio, che gli spostamenti
o le rotazioni impedite dai vincoli siano nulli. Questo metodo è tradizionalmente usato per la
risoluzione manuale di strutture con piccolo grado di iperstaticità.
Adottando il metodo degli spostamenti invece si assumono come incognite gli spostamenti di punti
caratteristici della struttura, detti nodi. Le reazioni vincolari vengono espresse in funzione degli
spostamenti dei nodi, le si determina imponendo l'equilibrio della struttura. Questo secondo metodo
è particolarmente usato per il calcolo automatico delle strutture, in quanto consente la stesura di
algoritmi di soluzione di tipo generale.
Nell'ambito di questa trattazione ci si limiterà a illustrare l'applicazione del metodo delle forze
mediante l'esempio mostrato nella figura seguente.
A B
l
q
VAR B
OA
MA
La struttura è formata da un unico corpo semplice vincolato da un incastro e da un appoggio:
41133 =+⋅=+= aiv 11343 =⋅−=−= mvh
Il sistema è una volta iperstatico, ci si accorge facilmente che l'iperstaticità riguarda il
comportamento flessionale mentre la reazione orizzontale è immediatamente determinabile:→: 0A =O
Le due rimanenti equazioni di equilibrio che si possono scrivere non permettono di determinare le tre
reazioni ancora incognite:
↑: 0BA =++ qlRV A : 02
2
AB =+−ql
MlR

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
94
Utilizzando il metodo delle forze si sostituisce alla struttura reale una struttura da essa ottenuta
eliminando un vincolo sovrabbondante; tale struttura resa isostatica viene detta sistema ridotto8. La
scelta del sistema ridotto non è univoca, ad esempio due possibili sistemi ridotti per il caso in esame
sono mostrati nelle figure seguenti.
A B
q
A B
q(I) (II)
Le reazioni vincolari e le caratteristiche di sollecitazione per il sistema ridotto possono essere
calcolate utilizzando le sole equazioni della statica; determinandone anche la configurazione
deformata ci si accorge che spostamenti (o rotazioni) bloccati dai vincoli nella struttura reale sono
non nulli nel sistema ridotto. Nel caso in esame, se si adotta il sistema ridotto (I) risulta possibile la
rotazione dell'estremo A, che nella struttura reale è impedita dall'incastro; se si adotta invece il
sistema ridotto (II) risulta possibile le spostamento verticale dell'estremo B, che nella struttura reale è
impedito dall'appoggio.
Per correggere tali effetti e rispettare le condizioni di vincolo imposte nella struttura reale si deve
considerare un'ulteriore struttura, detta sistema supplementare. Quest'ultimo è costituito dalla stessa
struttura isostatica adottata per il sistema ridotto, su cui non agiscono i carichi reali bensì una
componente (incognita) di forza o momento corrispondente alla reazione del vincolo eliminato. Per il
caso in esame i sistemi supplementari corrispondenti ai due diversi sistemi ridotti sono i seguenti:
A B A B
(I) (II)MA
R B
Le reazioni incognite (MA oppure RB) vengono allora determinate imponendo che nel sistema
supplementare si produca, in corrispondenza del vincolo eliminato, uno spostamento (o una
rotazione) uguale in modulo e opposto in segno a quello prodotto dal carico reale nel sistema
ridotto. Questo procedimento si basa sulla sovrapposizione degli effetti tra sistema ridotto e sistema
supplementare e permette di risolvere la struttura iperstatica di partenza. Per i due sistemi ridotti
mostrati nel caso in esame si ottengono, rispettivamente, le equazioni seguenti.
8Nei testi di calcolo strutturale si parla più comunemente di sistema principale; si è preferito non adottare taledenominazione per evitare possibili confusioni (puramente linguistiche!) con i sistemi di riferimento principale per letensioni e le deformazioni o per i momenti d'inerzia.

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
95
(I) 0AA)1(A)0( =α=α+α xxx
(0)αxA: rotazione dell'estremo A nel
sistema ridotto (0)(1)αx
A: rotazione dell'estremo A nelsistema supplementare (1)
αxA: rotazione dell'estremo A nel
sistema reale (=0 perchéimpedita dall'incastro)
(II) 0BB)1(B)0( ==+ vvv(0)vB: freccia dell'estremo B nel sistema
ridotto (0)(1)vB: freccia dell'estremo B nel sistema
supplementare (1)vB: freccia dell'estremo B nel sistema
reale (=0 perché impeditadall'appoggio)
Una volta determinata la reazione vincolare incognita, la stessa legge di sovrapposizione degli effetti
può essere utilizzata per calcolare le caratteristiche del sistema reale in una qualsiasi sezione della
struttura; ad esempio nel caso dei momenti flettenti si avrà:)()()( )1()0( zMzMzM xxx +=
A titolo di esempio, si mostra la soluzione dell'iperstatica adottando la scelta (I).
Sistema ridotto
A B
R BVA
OA
q
Ty Mx
N
z
S
qA
VA
OA(0)
(0) (0) (0)
(0)
(0)
(0)
(0)
Reazioni vincolari→: 0A
)0( =O
B : 02A
)0( =+l
qlV2A
)0( qlV −=
A : 02B
)0( =+l
qlR2B
)0( qlR −=
Momento flettente
S : 02A
)0()0( =++z
qzzVM x 222
22
A)0()0( qzqlzqz
zVM x −=−=−
Equazione differenziale della linea elastica:xx
xx
EJ
M
dz
vddz
d )0(
2
)0(2)0(
−==α
−
Rotazione (0)αx(z): 1)0(
23)0()0(
2232C
zEJqlz
EJq
dzEJ
M
xxxxxx
xx ++−==α ∫
Spostamento (0)v(z): 2)0(
1)0(
34)0()0(
3446CzC
zEJqlz
EJq
dzvxxxx
x +−−=α−= ∫Si determinano le costanti di integrazione annullando gli spostamenti in A e B:
( ) ( ) ( )0 0 0 0v vA= = ⇒ ( )02 0C =
( ) ( ) ( )0 0 0v v lB= = ⇒ ( )01
3
24C
qlEJxx
= −
L'andamento di rotazione e spostamento nel sistema ridotto è quindi descritto dalle funzioni:

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
96
−+−=α
121
232)(
2
2
3
33)0(
l
z
l
zEJql
zxx
x
+−=
lz
l
z
l
zEJql
zvxx 2212
)(3
3
4
44)0(
In corrispondenza del vincolo soppresso la rotazione vale:
xxxx EJ
ql24
)0(3
)0(A)0( −=α=α
Sistema supplementare
A B
RBVA
OA
Ty
Mx
N
z
S
RB
(1)
(1) (1) (1)
(1)
(1)
(1)
MAB
Reazioni vincolari→: ( )1 0OA =
B : 0AA)1( =+ MlV
lM
V AA
)1( −=
A : 0AB)1( =− MlR
lM
R AB
)1( =
Momento flettente
S : ( ) 0B)1()1( =−+ zlRM x ( ) A
AB
)1()1( Mzl
MzlRM x −=−=−
Equazione differenziale della linea elastica:xx
xx
EJ
M
dz
vddz
d )1(
2
)1(2)1(
−==α
−
Rotazione (1)αx(z): 1)1(A
2A
)1()1(
2Cz
EJMz
lEJM
dzEJ
M
xxxxxx
xx +−==α ∫
Spostamento (1)v(z): 2)1(
1)1(
2A
3A)1()1(
232CzC
zEJMz
lEJM
dzvxxxx
x +−+−=α−= ∫Si determinano le costanti di integrazione annullando gli spostamenti in A e B:
0)0()1(A)1( == vv ⇒ 02)1( =C
0)()1(B)1( == lvv ⇒xxEJlM
C3
A1
)1( =
L'andamento di rotazione e spostamento nel sistema ridotto è quindi descritto dalle funzioni:
+−=α
31
2)(
2
2A)1(
lz
l
zEJ
lMz
xxx
−+−=
lz
l
z
l
zEJ
lMzv
xx 326)(
2
2
3
32A)1(
In corrispondenza del vincolo soppresso la rotazione vale:
xxxx EJ
lM3
)0( A)1(A)1( =α=α
Note le soluzioni relative al sistema ridotto e a quello supplementare, si può calcolare la reazione
incognita MA imponendo che nella struttura reale la rotazione in A sia nulla:0AA)1(A)0( =α=α+α xxx

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
97
0324
A3
=+−xxxx EJlM
EJql
⇒8
2
Aql
M =
L'andamento del momento flettente (come di ogni altra caratteristica di sollecitazione) nella struttura
reale può essere ottenuto per sovrapposizione degli effetti:
AA
2)1()0(
22)()()( Mz
lMqlzqz
zMzMzM xxx −++−=+=
+−−=−++−=
41
45
28822)(
2
22222
lz
l
zqlqlz
lql
zql
zq
zM x
Sistema ridotto
ql 218
12
l
+
Mx
(0)
Sistema supplementare
ql 218
-
-
Mx
(1)
Struttura reale
ql 29128
ql 218
-
-
+
58
l14
l
Mx
Nel caso di strutture con grado di iperstaticità h > 1 il procedimento è concettualmente identico: si
eliminano h vincoli semplici per ottenere il sistema ridotto isostatico e le reazioni iperstatiche
incognite vengono determinate utilizzando h sistemi supplementari.
Nella letteratura tecnica sono disponibili, su manuali o prontuari, le soluzioni in forma tabellare e
grafica per le più comuni strutture iperstatiche sottoposte a varie condizioni di carico; queste
possono essere utilizzate, oltre che direttamente, anche per determinare le soluzioni di casi complessi
come combinazione lineari di soluzioni relative a casi semplici.
In conclusione, va inoltre detto che l'attuale larghissima diffusione dei programmi di calcolo
strutturale (adatti anche a microcalcolatori) ha progressivamente diminuito l'importanza dei metodi
tradizionali di soluzione delle iperstatiche; per tale motivo, oltre che per la limitatezza dello spazio
disponibile, questa trattazione è limitata ad un semplice cenno volto soprattutto a presentare l'aspetto
fisico del problema.

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
98
9. INSTABILITÀ ELASTICA DI ELEMENTI COMPRESSI: IL CARICO DI PUNTA
Nel caso di elementi soggetti a forza normale di compressione si può verificare un tipo di collasso
differente dal semplice cedimento del materiale per superamento del limite di resistenza a
compressione. Per trattare questo fenomeno non è più accettabile la semplificazione consistente nel
calcolare l'equilibrio della struttura (e quindi anche le caratteristiche di sollecitazione) nella
configurazione indeformata, ma è necessario tenere conto della variazione geometrica dovuta
all'applicazione del carico.
A B P
v z( )
A B P
RBVA
OA
l 0
→: 0A =− PO PO =A
B : 00A =lV 0A =V
A : 00B =lR 0B =R
Il caso rappresentato in figura costituisce l'asta di Eulero, vincolata in A da una cerniera e in B da un
appoggio; in quest'ultimo estremo agisce una forza esterna assiale P che produce compressione
nell'elemento. Ammettendo che l'asta si infletta, nel modo che sarà chiarito successivamente, il
momento agente in una generica sezione S vale:
S : ( ) 00B =−+− zlRPvM x PvM x = P
RB
SMx
z
v
In questa situazione è quindi l'inflessione trasversale v dell'asta che "fornisce" al carico assiale P il
braccio che genera il momento flettente. Scrivendo l'equazione differenziale della linea elastica si
ottiene:
xxxx
x
EJPv
EJ
M
dz
vd−=−=
2
2
Si è quindi ottenuta un'equazione differenziale del secondo ordine, omogenea, di tipo lineare a
coefficienti costanti:
0=+′′ vEJ
Pv
xx
Essa ammette la soluzione ( )ϕ+ω= zVv sen , dove xxEJP /2 =ω mentre V e ϕ si determinano in
base alle condizioni al contorno:
z = 0 ⇒ v = 0 , z = l0 ⇒ v = 0
Tali condizioni possono essere soddisfatte da due forme diverse di soluzione.
i) V = 0, ϕ arbitrario: l'asta non si inflette e rimane rettilinea

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
99
ii) se ωl0 = π (o un multiplo intero di π) si può avere ϕ = 0, V arbitrario: l'asta si inflette come una
sinusoide.
Quindi, finché il carico assiale P è sufficientemente basso è possibile la sola configurazione rettilinea
i); la soluzione flessionale ii) diventa possibile quando si raggiunge la condizione critica:
π==ω 00 lEJ
Pl
xx
Quadrando entrambi i membri la condizione critica trasforma in
220 π=xxEJ
Pl
Da quest'ultima eguaglianza si ottiene il valore del carico critico di compressione Pcr:
20
2
crl
EJP xxπ
=
Il diagramma mostra le possibili configurazioni di carico assiale e spostamento trasversale per l'asta
sottoposta a compressione. Finché P < Pcr (condizioni subcritiche) l'unica configurazione possibile è
quella di tipo i) V = 0 (asse rettilineo); quando P ≥ Pcr (condizioni critiche) diventa possibile anche la
configurazione di tipo ii) con V ≠ 0.
P
V
i)
i)ii)
Pcr
instabile
stabile
È importante notare che in quest'ultimo caso le due configurazioni non sono equivalenti: infatti la i) è
instabile e basta quindi una piccola perturbazione, come un lieve carico trasversale o un'imperfezione
geometrica, perché si verifichi la ii). Tale fenomeno è noto come instabilità elastica o anche collasso
per carico di punta, esso costituisce nella maggior parte dei casi pratici il principale pericolo per
elementi soggetti a compressione.
Il problema è stato impostato considerando il comportamento nel piano zy, in pratica la flessione per
instabilità avviene nel piano in cui l'asta presenta la minore rigidezza flessionale e quindi il minore
momento d'inerzia della sezione. In termini generali si può quindi scrivere:
PEJ
lcr =π2
02
min
Per confrontare tale fenomeno con il collasso corrispondente allo snervamento del materiale
conviene spostare la trattazione in termini di tensione; si definisce quindi la tensione critica σcr
dividendo il carico critico Pcr per l'area A dell'asta:
20
2min2
20
min2
crcr
lE
Al
EJA
P ρπ=
π==σ

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
100
dove AJ /minmin =ρ è il minimo raggio d'inerzia della sezione; si definisce snellezza dell'asta il
rapporto:
min
0
ρ=λ
l
Sostituendo quest'ultima definizione nella formula della tensione critica si ottiene
2
2
crλ
π=σ
E
σ = λ 2
π 2Ecr
R p0,2
λ
σcr
Dall'esame del grafico si ricava che per valori di snellezza elevati il collasso a compressione si verifica
per instabilità (cioè l'asta si inflette lateralmente), viceversa per bassi valori di snellezza (elementi
corti e tozzi) il fenomeno dell'instabilità non può verificarsi perché il collasso avviene per
snervamento del materiale. Tale transizione improvvisa dall'instabilità elastica allo snervamento è
evidentemente una semplificazione; nella realtà si ha un intervallo di transizione nell'ambito del quale
il collasso avviene per instabilità, ma di tipo elasto-plastica.
Si noti che nel caso dell'instabilità elastica il valore della tensione critica è legato al modulo di Young
del materiale e alla snellezza (e quindi alla geometria dell'asta), ma non dipende dal limite di
resistenza del materiale. Di conseguenza, nei confronti di tale pericolo, non si aumenta la sicurezza
adottando un materiale avente caratteristiche di resistenza maggiori; ad esempio è inutile passare da
un acciaio a basso limite di snervamento ad un altro con limite più elevato, dal momento che il
modulo di Young è praticamente uguale per tutti gli acciai.
l0 = 2 ll
P
0 = ll2
P
0 = 0.7ll
incastro
libero
incastro incastro
appoggiocoppiaprismatica
P

L. Goglio Dispensa per il corso “Comportamento Meccanico dei Materiali”
101
Nell'esempio utilizzato per presentare l'argomento (asta incernierata agli estremi) l0 coincide con la
lunghezza dell'asta; in generale l0 rappresenta la distanza tra due sezioni in cui il momento flettente è
nullo ed è pari alla semilunghezza d'onda della deformata. Il valore di l0 dipende dalle condizioni di
vincolo agli estremi; la figura precedente riporta i valori per alcuni casi notevoli.
Nella verifica degli elementi strutturali, in particolare nel caso delle strutture reticolari, gli elementi
soggetti a carico assiale di compressione devono essere verificati anche rispetto all'instabilità:
crσ<σ zz
Poiché tale tipo di collasso può avere conseguenze gravi e avviene in modo improvviso, senza
deformazioni progressive che avvertono del raggiungimento della condizione limite (ciò che capita
invece nel caso dello snervamento), i coefficienti di sicurezza da adottare devono essere elevati.