Capitolo 1 - quattromaggio.altervista.org · vedremo nel dettaglio come questa operazione di...
101
5 Capitolo 1 La conversione Analogico/Digitale Introduzione Come già visto nell'introduzione, l’uso di strumentazione numerica per la misura e l’elaborazione dei segnali elettrici corrispondenti alle più svariate grandezze fisiche analogiche tra le molteplici esistenti nel mondo che ci circonda, comporta la realizzazione di una importante e ineludibile operazione preliminare: la conversione analogico/digitale; questa operazione funge da vero e proprio ponte di collegamento tra il mondo analogico e il mondo numerico ed è realizzata mediante dispositivi noti con l’acronimo ADC (Analog to Digital Converters). Nel seguito vedremo nel dettaglio come questa operazione di conversione venga compiuta. 1.1 Il processo di conversione da analogico a digitale Il processo di conversione da analogico a digitale è materialmente diviso in tre fasi distinte: campionamento, quantizzazione e codifica, come evidenziato nella successiva Figura 1.1.
Transcript of Capitolo 1 - quattromaggio.altervista.org · vedremo nel dettaglio come questa operazione di...
5
Capitolo 1
La conversione Analogico/Digitale
Introduzione
Come già visto nell'introduzione, l’uso di strumentazione numerica per la
misura e l’elaborazione dei segnali elettrici corrispondenti alle più svariate
grandezze fisiche analogiche tra le molteplici esistenti nel mondo che ci circonda,
comporta la realizzazione di una importante e ineludibile operazione preliminare: la
conversione analogico/digitale; questa operazione funge da vero e proprio ponte di
collegamento tra il mondo analogico e il mondo numerico ed è realizzata mediante
dispositivi noti con l’acronimo ADC (Analog to Digital Converters). Nel seguito
vedremo nel dettaglio come questa operazione di conversione venga compiuta.
1.1 Il processo di conversione da analogico a digitale
Il processo di conversione da analogico a digitale è materialmente diviso in
tre fasi distinte: campionamento, quantizzazione e codifica, come evidenziato nella
successiva Figura 1.1.
Capitolo 1 Il campionamento
6
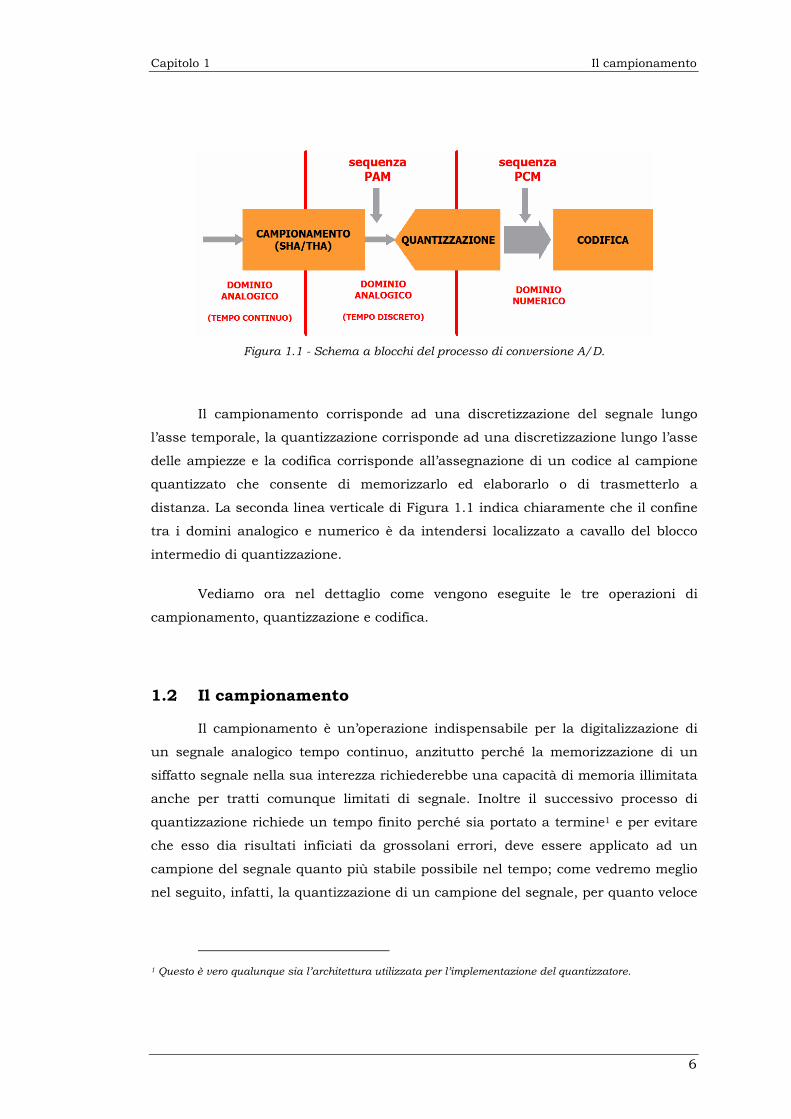
Figura 1.1 - Schema a blocchi del processo di conversione A/D.
Il campionamento corrisponde ad una discretizzazione del segnale lungo
l’asse temporale, la quantizzazione corrisponde ad una discretizzazione lungo l’asse
delle ampiezze e la codifica corrisponde all’assegnazione di un codice al campione
quantizzato che consente di memorizzarlo ed elaborarlo o di trasmetterlo a
distanza. La seconda linea verticale di Figura 1.1 indica chiaramente che il confine
tra i domini analogico e numerico è da intendersi localizzato a cavallo del blocco
intermedio di quantizzazione.
Vediamo ora nel dettaglio come vengono eseguite le tre operazioni di
campionamento, quantizzazione e codifica.
1.2 Il campionamento
Il campionamento è un’operazione indispensabile per la digitalizzazione di
un segnale analogico tempo continuo, anzitutto perché la memorizzazione di un
siffatto segnale nella sua interezza richiederebbe una capacità di memoria illimitata
anche per tratti comunque limitati di segnale. Inoltre il successivo processo di
quantizzazione richiede un tempo finito perché sia portato a termine1 e per evitare
che esso dia risultati inficiati da grossolani errori, deve essere applicato ad un
campione del segnale quanto più stabile possibile nel tempo; come vedremo meglio
nel seguito, infatti, la quantizzazione di un campione del segnale, per quanto veloce
1 Questo è vero qualunque sia l’architettura utilizzata per l’implementazione del quantizzatore.
Capitolo 1 Il campionamento
7
possa essere, non è un’operazione istantanea, cioè essa richiede un tempo non
nullo perché sia portata a termine.
Nella sua forma più semplice il campionamento di un segnale tempo
continuo è realizzato acquisendo dei campioni del segnale ad istanti temporali che
siano multipli interi di un fissato periodo di campionamento che indicheremo con
Tc; questo tipo di campionamento è detto uniforme. Dato quindi un segnale x(t)
funzione della variabile continua tempo t, campionare x(t) significa ottenere una
sequenza )( CC Tkx ⋅ con k ∈ ( ≡ insieme dei numeri interi relativi). Seguendo
una convenzione di ampio uso nella letteratura dedicata all’elaborazione numerica
dei segnali, da questo punto in poi la sequenza )( CC Tkx ⋅ sarà indicata con la
notazione abbreviata [ ]Cx k .
Ribadiamo che in questa prima fase del processo di digitalizzazione ciò che
viene discretizzato è solo il tempo t; la sequenza di campioni così ottenuta è infatti
ancora continua lungo l’asse delle ampiezze ed è detta sequenza a modulazione
d’ampiezza di x(t) di periodo TC (dall’acronimo in lingua inglese PAM = Pulse
Amplitude Modulation). La successiva Figura 1.2 mostra schematicamente questo
processo:
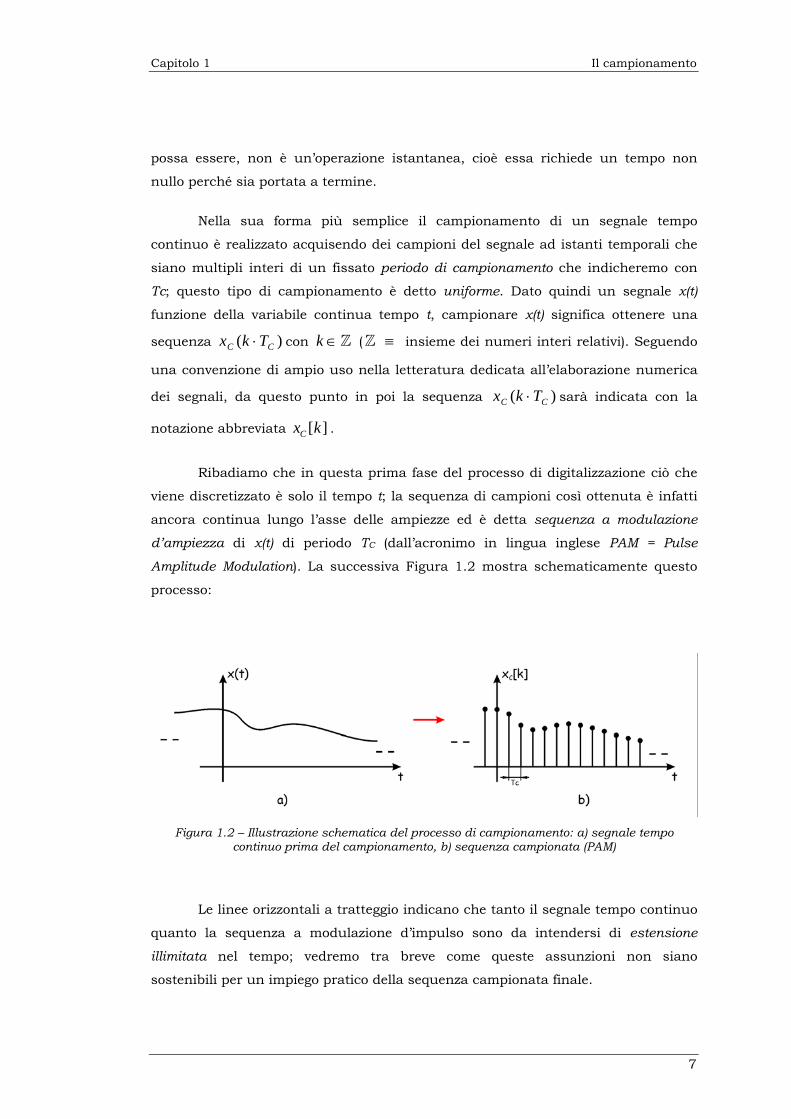
Figura 1.2 – Illustrazione schematica del processo di campionamento: a) segnale tempo
continuo prima del campionamento, b) sequenza campionata (PAM)
Le linee orizzontali a tratteggio indicano che tanto il segnale tempo continuo
quanto la sequenza a modulazione d’impulso sono da intendersi di estensione
illimitata nel tempo; vedremo tra breve come queste assunzioni non siano
sostenibili per un impiego pratico della sequenza campionata finale.
Capitolo 1 Il campionamento
8
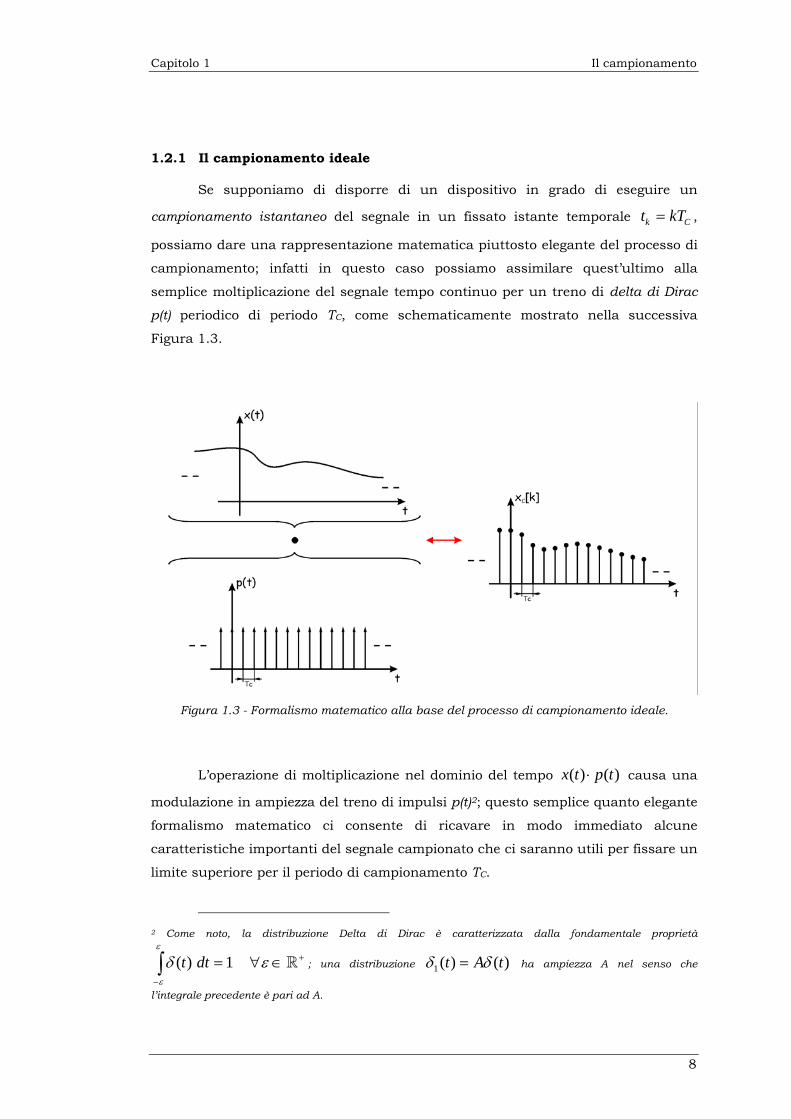
1.2.1 Il campionamento ideale
Se supponiamo di disporre di un dispositivo in grado di eseguire un
campionamento istantaneo del segnale in un fissato istante temporale k Ct kT= ,
possiamo dare una rappresentazione matematica piuttosto elegante del processo di
campionamento; infatti in questo caso possiamo assimilare quest’ultimo alla
semplice moltiplicazione del segnale tempo continuo per un treno di delta di Dirac
p(t) periodico di periodo TC, come schematicamente mostrato nella successiva
Figura 1.3.
Figura 1.3 - Formalismo matematico alla base del processo di campionamento ideale.
L’operazione di moltiplicazione nel dominio del tempo )()( tptx ⋅ causa una
modulazione in ampiezza del treno di impulsi p(t)2; questo semplice quanto elegante
formalismo matematico ci consente di ricavare in modo immediato alcune
caratteristiche importanti del segnale campionato che ci saranno utili per fissare un
limite superiore per il periodo di campionamento TC.
2 Come noto, la distribuzione Delta di Dirac è caratterizzata dalla fondamentale proprietà
( ) 1 t dtε
ε
δ ε +
−
= ∀ ∈∫ ; una distribuzione 1 ( ) ( )t A tδ δ= ha ampiezza A nel senso che
l’integrale precedente è pari ad A.

Capitolo 1 Il campionamento
9
Se spostiamo la nostra attenzione al dominio della frequenza e se ricordiamo
un risultato fondamentale della Teoria dei Segnali ([1]), giungiamo ad un primo
interessante risultato. Sappiamo infatti che l’operazione di moltiplicazione di due
segnali nel dominio del tempo equivale all’operazione di convoluzione tra i rispettivi
spettri nel dominio della frequenza; se usiamo la convenzione di indicare lo spettro
di un segnale come una funzione della frequenza avente nome uguale a quello del
segnale nel dominio del tempo ma reso al maiuscolo, possiamo infatti scrivere:
( ) ( ) ( ) ( )Fx t p t X f P f⎯⎯→⋅ ∗←⎯⎯
dove il simbolo F⎯⎯→←⎯⎯ indica l’operazione di trasformazione di Fourier e il simbolo
∗ indica l’operazione di convoluzione data da:
∫∫+∞
∞−
+∞
∞−
−⋅=∗=−⋅=∗ ϕϕϕϕϕϕ dfXPfXfPdfPXfPfXdef
)()()()( )()()()(
Richiamiamo ora altri due risultati della Teoria dei Segnali ([1]) che ci
saranno utili nel seguito:
1. la trasformata di Fourier di un treno di impulsi ideali (Delta di Dirac) di
ampiezza A e periodico di periodo TC è ancora un treno di impulsi di
periodo fC = 1/TC e ampiezza A/TC :
( ) ( ) ( ) ( )FC C
k Z k ZC
Ap t A t - kT P f f - kfT
δ δ∈ ∈
⎯⎯→= ⋅ = ⋅←⎯⎯∑ ∑
2. la convoluzione di una qualsiasi funzione ( )f ⋅ con una funzione Delta di
Dirac traslata è la stessa funzione ( )f ⋅ traslata a cavallo dell’impulso:
0( ) ( 0) ( )f t t t f t tδ∗ ± = ±
Dati questi ultimi due risultati, per lo spettro di frequenza della sequenza
campionata xC[k] possiamo senz’altro scrivere:
Capitolo 1 Il campionamento
10
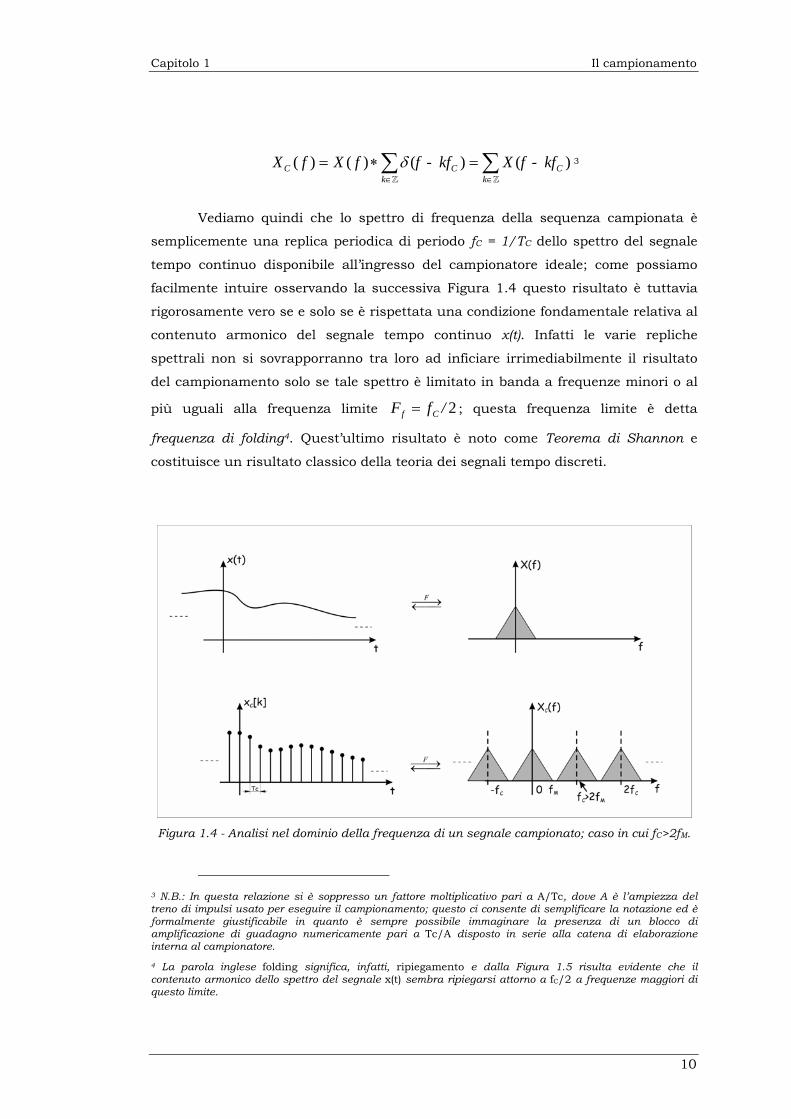
( ) ( ) ( ) ( )C C Ck k
X f X f f - kf X f - kfδ∈ ∈
= ∗ =∑ ∑ 3
Vediamo quindi che lo spettro di frequenza della sequenza campionata è
semplicemente una replica periodica di periodo fC = 1/TC dello spettro del segnale
tempo continuo disponibile all’ingresso del campionatore ideale; come possiamo
facilmente intuire osservando la successiva Figura 1.4 questo risultato è tuttavia
rigorosamente vero se e solo se è rispettata una condizione fondamentale relativa al
contenuto armonico del segnale tempo continuo x(t). Infatti le varie repliche
spettrali non si sovrapporranno tra loro ad inficiare irrimediabilmente il risultato
del campionamento solo se tale spettro è limitato in banda a frequenze minori o al
più uguali alla frequenza limite 2/fF Cf = ; questa frequenza limite è detta
frequenza di folding4. Quest’ultimo risultato è noto come Teorema di Shannon e
costituisce un risultato classico della teoria dei segnali tempo discreti.
Figura 1.4 - Analisi nel dominio della frequenza di un segnale campionato; caso in cui fC>2fM.
3 N.B.: In questa relazione si è soppresso un fattore moltiplicativo pari a A/Tc, dove A è l’ampiezza del treno di impulsi usato per eseguire il campionamento; questo ci consente di semplificare la notazione ed è formalmente giustificabile in quanto è sempre possibile immaginare la presenza di un blocco di amplificazione di guadagno numericamente pari a Tc/A disposto in serie alla catena di elaborazione interna al campionatore.
4 La parola inglese folding significa, infatti, ripiegamento e dalla Figura 1.5 risulta evidente che il contenuto armonico dello spettro del segnale x(t) sembra ripiegarsi attorno a fC/2 a frequenze maggiori di questo limite.
Capitolo 1 Il campionamento
11
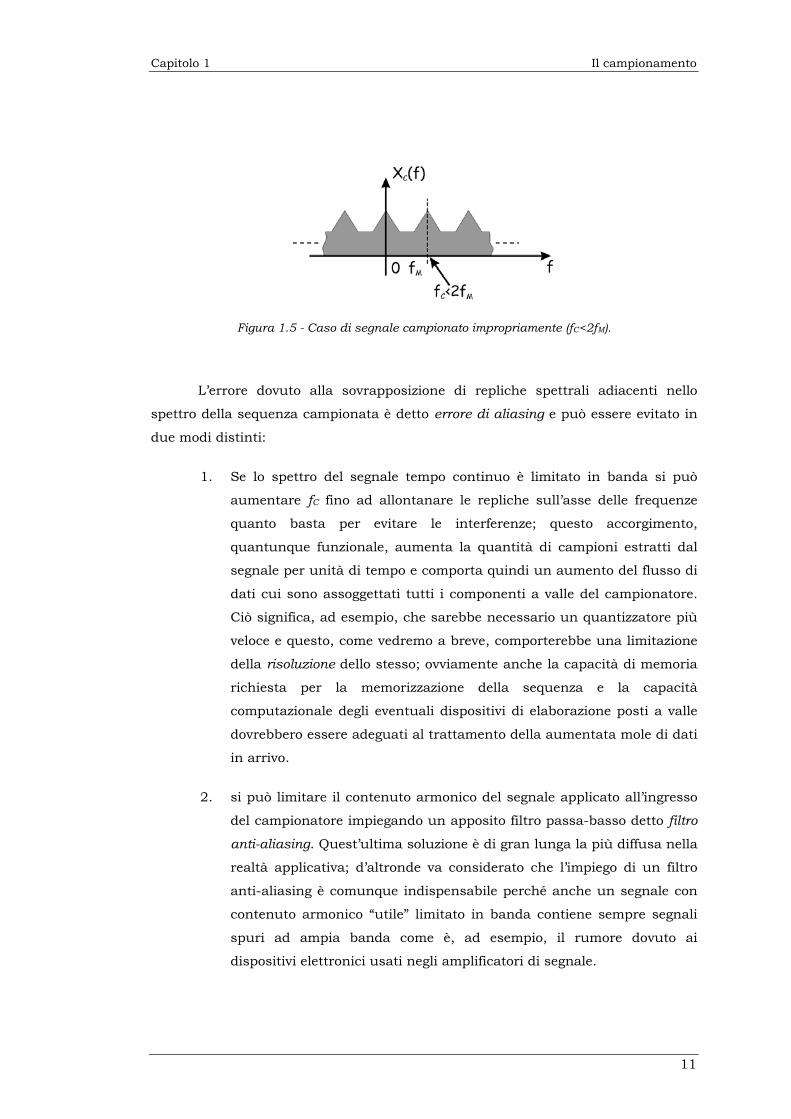
Figura 1.5 - Caso di segnale campionato impropriamente (fC<2fM).
L’errore dovuto alla sovrapposizione di repliche spettrali adiacenti nello
spettro della sequenza campionata è detto errore di aliasing e può essere evitato in
due modi distinti:
1. Se lo spettro del segnale tempo continuo è limitato in banda si può
aumentare fC fino ad allontanare le repliche sull’asse delle frequenze
quanto basta per evitare le interferenze; questo accorgimento,
quantunque funzionale, aumenta la quantità di campioni estratti dal
segnale per unità di tempo e comporta quindi un aumento del flusso di
dati cui sono assoggettati tutti i componenti a valle del campionatore.
Ciò significa, ad esempio, che sarebbe necessario un quantizzatore più
veloce e questo, come vedremo a breve, comporterebbe una limitazione
della risoluzione dello stesso; ovviamente anche la capacità di memoria
richiesta per la memorizzazione della sequenza e la capacità
computazionale degli eventuali dispositivi di elaborazione posti a valle
dovrebbero essere adeguati al trattamento della aumentata mole di dati
in arrivo.
2. si può limitare il contenuto armonico del segnale applicato all’ingresso
del campionatore impiegando un apposito filtro passa-basso detto filtro
anti-aliasing. Quest’ultima soluzione è di gran lunga la più diffusa nella
realtà applicativa; d’altronde va considerato che l’impiego di un filtro
anti-aliasing è comunque indispensabile perché anche un segnale con
contenuto armonico “utile” limitato in banda contiene sempre segnali
spuri ad ampia banda come è, ad esempio, il rumore dovuto ai
dispositivi elettronici usati negli amplificatori di segnale.
Capitolo 1 Il campionamento
12
Notiamo che una sequenza [ ]Cx k di lunghezza infinita ottenuta
campionando nel rispetto del teorema di Shannon un segnale tempo-continuo
consente di ricostruire esattamente il segnale stesso per semplice filtraggio passa
basso della stessa sequenza; a tale scopo sarebbe, in teoria, sufficiente applicare
alla sequenza un filtro con banda di transizione sufficientemente stretta, comunque
interamente contenuta nel range di frequenze [fM, fC/2] (cfr. Figura 1.4). Poiché i
filtri analogici reali hanno bande di transizione di ampiezza non nulla e poiché
l’eccessiva restrizione di quest’ultima comporta sempre serie alterazioni delle fasi
delle componenti armoniche del segnale di ingresso poste in prossimità dei confini
della banda passante, sarà comunque necessario adottare frequenze di
campionamento tali da tenere le varie repliche spettrali a distanza sufficiente lungo
l’asse delle frequenze, in modo da consentire l’ottenimento di risultati soddisfacenti
anche con filtri di ordine contenuto.
Tuttavia per ricostruire esattamente il segnale corrispondente ad una
sequenza campionata sarebbe necessario filtrare quest’ultima mediante un filtro
passa basso ideale; poiché questo ha una risposta all’impulso di lunghezza infinita
[una funzione ( )sinc ⋅ ], per ottenere un segnale di uscita valido si dovrebbero
elaborare infiniti campioni di ingresso, quindi aspettare un tempo infinito e ciò è,
ovviamente, improponibile!
D’altronde, nella maggior parte dei casi, il troncamento tout-court della
sequenza di ingresso ad un numero finito di campioni porterebbe alla comparsa di
sicuri ed inevitabili fenomeni di aliasing nel dominio della frequenza. Per
giustificare questa asserzione è sufficiente ricordare dalla Teoria dei Segnali che lo
spettro di un segnale di durata temporale limitata ha estensione illimitata in
frequenza ([1]); questo significa che le repliche dello spettro di un siffatto segnale
generate dall’operazione di campionamento si sovrapporrebbero sempre e
comunque qualunque fosse la frequenza di campionamento usata. L’unico caso in
cui è possibile ricostruire esattamente un segnale dallo spettro complesso a partire
da un numero finito di suoi campioni è quando sussistono (contemporaneamente)
le seguenti due condizioni:
1. lo spettro del segnale è dato dalla somma di un numero finito di
armoniche con frequenze che stiano tra loro a due a due in rapporto
razionale.

Capitolo 1 Il campionamento
13
2. il campionamento è eseguito in modo sincrono, ossia in modo che
nella sequenza campionata sia compreso un numero intero di periodi
del segnale di partenza.
In tutti gli altri casi per limitare5 gli effetti deleteri dovuti alla limitatezza
della lunghezza delle sequenze campionate è comune nella realtà applicativa il
ricorso a finestre di pesatura in grado di limitare il contenuto armonico ad alta
frequenza dello spettro del segnale in uscita dal campionatore. La letteratura
scientifica in questo ambito è piuttosto ampia; esistono infatti numerosissime
funzioni finestra impiegate nella realtà applicativa attuale. E’ necessario notare che
anche la scelta di una funzione finestra piuttosto che di un’altra è il risultato di un
compromesso tra due esigenze contrastanti; infatti l’applicazione di una finestra di
pesatura ai dati, essendo un’operazione di moltiplicazione nel dominio del tempo,
corrisponde alla convoluzione tra i rispettivi spettri nel dominio della frequenza.
Una finestra di pesatura però, avendo durata limitata nel tempo, ha uno
spettro di estensione illimitata che è, tipicamente, costituito da un lobo principale a
bassa frequenza e da una serie (infinita) di lobi secondari ad alta frequenza di
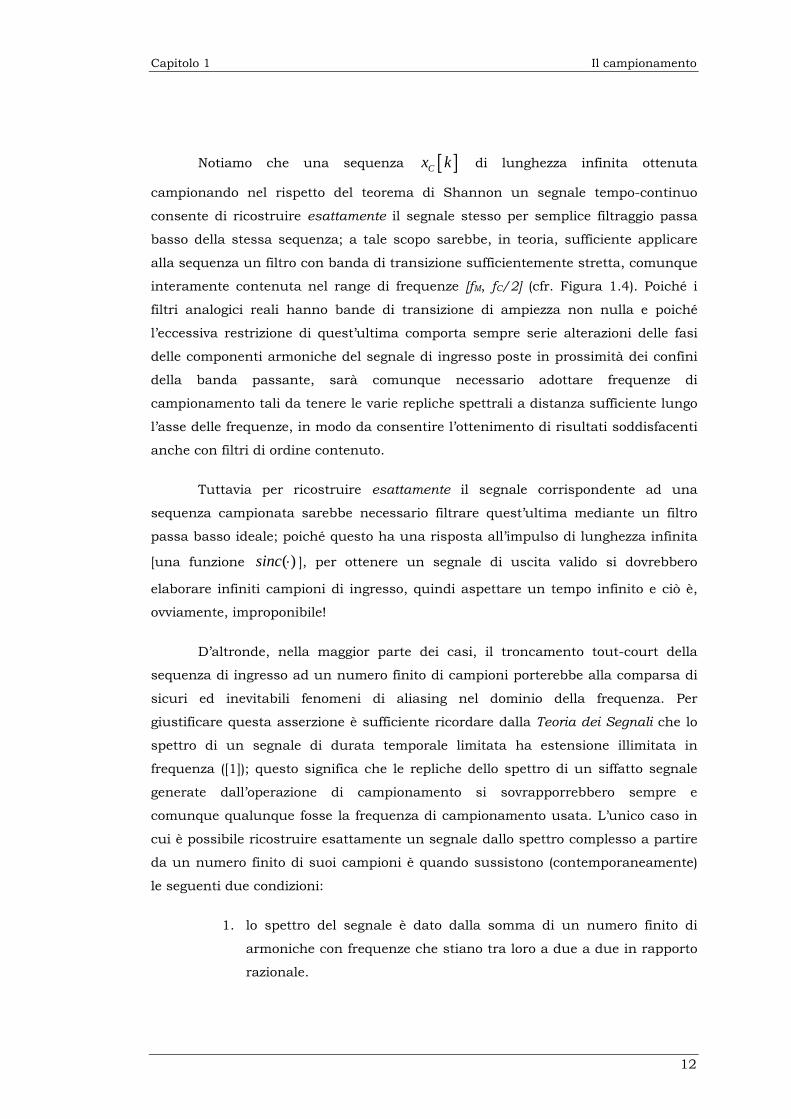
ampiezza progressivamente decrescente (si veda la Figura 1.6 per i grafici degli
spettri di ampiezza di una piccola selezione di finestre di pesatura comunemente in
uso nella elaborazione numerica dei segnali).
L’operazione di convoluzione tra gli spettri del segnale e della finestra
comporta quindi due effetti di interferenza distinti e complementari l’uno all’altro:
una interferenza a corto raggio dovuta al lobo principale che tende a confondere tra
loro armoniche vicine dello spettro del segnale e una interferenza a lungo raggio
dovuta ai lobi secondari che comporta una dispersione di energia delle singole
armoniche a frequenze elevate. Il primo fenomeno di interferenza limita la
risoluzione di frequenza finale ad un valore minore o uguale alla larghezza del lobo
principale6; il secondo pone un limite superiore all’accuratezza raggiungibile nella
stima dell’ampiezza delle armoniche dello spettro del segnale. Questi due fenomeni
sono complementari l’uno all’altro, nel senso che un ampio lobo principale (bassa
risoluzione spettrale) sarà associato a code laterali decadenti più rapidamente
(elevata risoluzione di ampiezza) mentre un lobo principale stretto (elevata
5 Si badi bene, <per limitare>, non per eliminare!
Capitolo 1 Il campionamento
14
risoluzione di frequenza) corrisponderà a code laterali decadenti più lentamente
(elevato errore di ampiezza); per una verifica qualitativa di questo fenomeno si veda
ancora la Figura 1.6.
Queste, ovviamente, sono problematiche piuttosto importanti in una
disciplina come le Misure Elettriche che vede un uso sempre più diffuso della
elaborazione numerica del segnale nella moderna strumentazione digitale.
Figura 1.6 – Spettri di frequenza di alcune finestre di pesatura usate in elaborazione numerica
dei segnali.
1.2.2 Il campionamento reale
Sin qui abbiamo considerato il caso di un campionatore ideale, in grado,
cioè, di ottenere campioni istantanei perfettamente equispaziati del segnale tempo
continuo applicato al suo ingresso; nella realtà applicativa un siffatto dispositivo è
del tutto irrealizzabile e molteplici sono le cause di nonidealità dei dispositivi reali.
In questo paragrafo vedremo una trattazione più realistica del processo di
campionamento che ci condurrà alla definizione di un modello per questo
importante stadio di un sistema di conversione analogico/digitale.
Capitolo 1 Il campionamento
15
1.2.2.1 Analisi semplificata
Se ci si limita ad una analisi piuttosto approssimata del funzionamento dei
dispositivi reali di campionamento si possono estendere ad essi adattandoli
opportunamente i risultati appena ottenuti per il caso di campionamento ideale; ciò
è possibile se ci si limita a considerare una sola delle cause di nonidealità: il tempo
di apertura finito del campionatore. Un campionatore reale, infatti, non può
restituire un campione istantaneo del segnale analogico di ingresso ma ne fornisce
un valore che dipende in modo più o meno complesso dall’andamento del segnale in
un intervallo di tempo finito che, per il momento, riterremo iniziare nell’istante
teorico di campionamento. Anche se le moderne tecnologie elettroniche consentono
di realizzare campionatori con tempi di apertura dell’ordine della decina di
nanosecondi, l’effetto del tempo di apertura finito non è trascurabile.
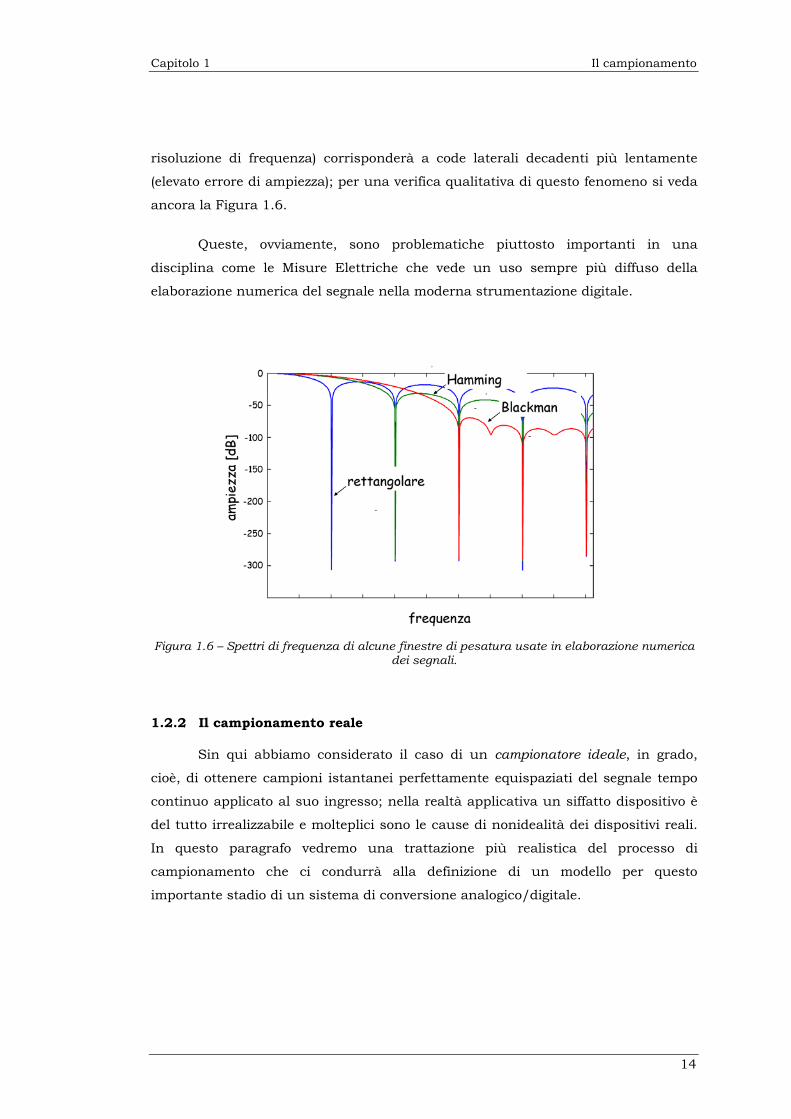
Vediamo come si esegue l’analisi di un siffatto dispositivo; è sufficiente
osservare che un tempo di apertura non nullo del campionatore corrisponde alla
moltiplicazione del segnale tempo continuo per un treno periodico di impulsi di
durata finita τ e di periodo TC. Poiché si tratta di un segnale periodico, il suo spettro
di frequenza è costituito da un treno di impulsi modulato in ampiezza dallo spettro
del segnale corrispondente ad un singolo periodo dello stesso segnale ([1]); la
restrizione ad un singolo periodo del segnale di campionamento ed il relativo
spettro sono riportati in Figura 1.7, mentre lo spettro del segnale periodico è
riportato in Figura 1.8.
Figura 1.7 - Impulso rettangolare e relativo spettro di frequenza.
Capitolo 1 Il campionamento
16
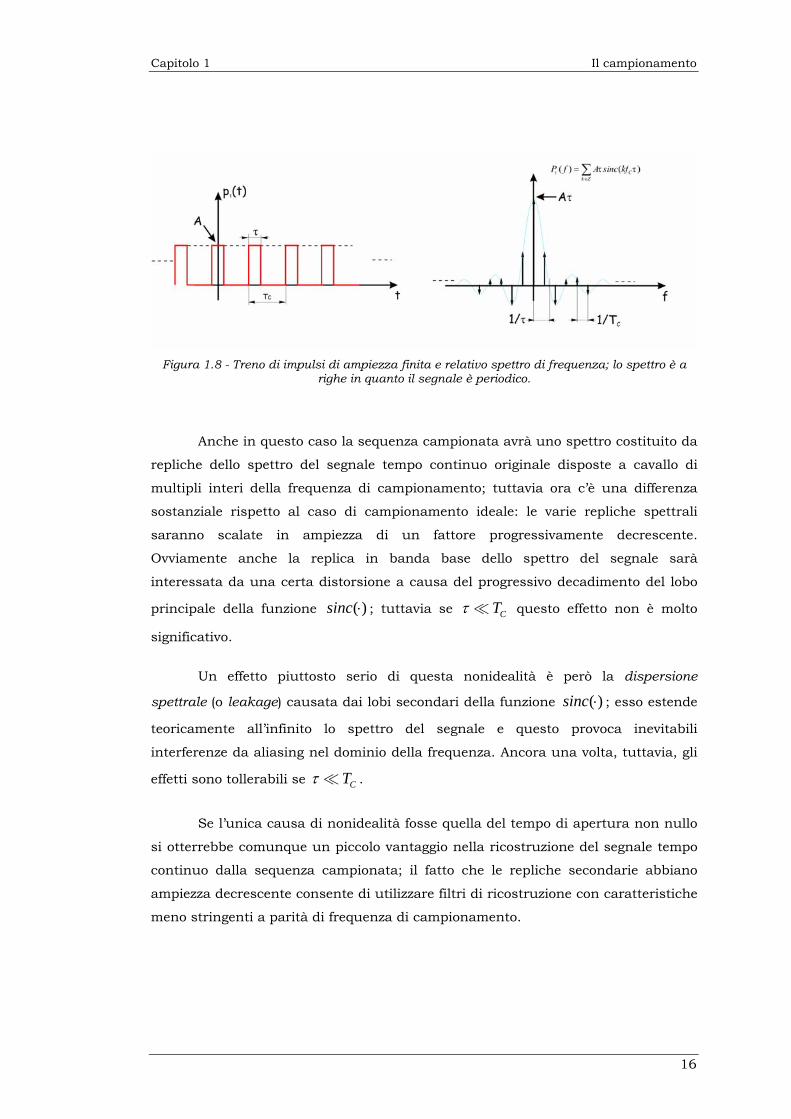
Figura 1.8 - Treno di impulsi di ampiezza finita e relativo spettro di frequenza; lo spettro è a
righe in quanto il segnale è periodico.
Anche in questo caso la sequenza campionata avrà uno spettro costituito da
repliche dello spettro del segnale tempo continuo originale disposte a cavallo di
multipli interi della frequenza di campionamento; tuttavia ora c’è una differenza
sostanziale rispetto al caso di campionamento ideale: le varie repliche spettrali
saranno scalate in ampiezza di un fattore progressivamente decrescente.
Ovviamente anche la replica in banda base dello spettro del segnale sarà
interessata da una certa distorsione a causa del progressivo decadimento del lobo
principale della funzione ( )sinc ⋅ ; tuttavia se CTτ questo effetto non è molto
significativo.
Un effetto piuttosto serio di questa nonidealità è però la dispersione
spettrale (o leakage) causata dai lobi secondari della funzione ( )sinc ⋅ ; esso estende
teoricamente all’infinito lo spettro del segnale e questo provoca inevitabili
interferenze da aliasing nel dominio della frequenza. Ancora una volta, tuttavia, gli
effetti sono tollerabili se CTτ .
Se l’unica causa di nonidealità fosse quella del tempo di apertura non nullo
si otterrebbe comunque un piccolo vantaggio nella ricostruzione del segnale tempo
continuo dalla sequenza campionata; il fatto che le repliche secondarie abbiano
ampiezza decrescente consente di utilizzare filtri di ricostruzione con caratteristiche
meno stringenti a parità di frequenza di campionamento.
Capitolo 1 Il campionamento
17
1.2.2.2 Analisi avanzata
Il tempo di apertura non nullo è solo una delle molteplici cause di non
idealità nel comportamento dei campionatori reali; in questo paragrafo
analizzeremo in dettaglio tutte le altre cause e giungeremo ad una espressione
completa della sequenza di campionamento reale.
Cominciamo con l’osservare che essendo il segnale di campionamento
generato da dispositivi non ideali7 non ci si può certamente aspettare una assoluta
precisione e invariabilità temporale nel suo periodo, ossia nell’intervallo di
campionamento; in effetti il treno di impulsi di campionamento deve essere inteso
come un processo casuale e sarà, per questo, caratterizzabile solo statisticamente.
Ad esempio lo stesso periodo di campionamento reale CT∼
, come manifestazione di
un processo casuale, sarà caratterizzato da una certa funzione densità di
probabilità ( )C
CT
f T∼
∼, da un valore atteso CE T⎡ ⎤
⎢ ⎥⎣ ⎦
∼ e da una deviazione standard
CTσ ∼ ;
ovviamente sarebbe desiderabile che fosse C CE T T⎡ ⎤ =⎢ ⎥⎣ ⎦
∼8 e 0
CTσ =∼ , ma ciò
purtroppo non è vero neanche per il più accurato dei generatori di impulsi.
Per verificare quanto appena detto è sufficiente eseguire più acquisizioni
ripetute dello stesso segnale nelle medesime condizioni; questo richiede anzitutto la
sincronizzazione della base dei tempi con il segnale mediante un circuito di trigger
di elevata precisione. Supponiamo allora di acquisire M record distinti di dati
ciascuno costituito da N campioni.
Si osserverà che gli istanti di campionamento saranno sempre diversi da
scansione a scansione; dunque anche se il segnale campionato fosse generato da
una sorgente perfetta, ossia del tutto priva di rumore, e se il quantizzatore che
7 Lo stadio di un dispositivo di campionamento che genera il treno di impulsi di campionamento è detto base dei tempi ed è costituito da un oscillatore di elevata accuratezza (normalmente al quarzo) e stabilità nel tempo e compensato per gli effetti di variabili di influenza quali la temperatura e l’umidità. Normalmente questo stadio è costituito da un oscillatore primario ad elevata frequenza e da un divisore programmabile a PLL per l’ottenimento di frequenze di campionamento variabili.
8 In realtà un valore di CE T⎡ ⎤⎢ ⎥⎣ ⎦
∼ diverso dal periodo di campionamento ideale sarebbe comunque
accettabile in quanto compensabile con una opportuna operazione di calibrazione.
Capitolo 1 Il campionamento
18
segue il campionatore fosse ideale, i campioni dei vari record acquisiti
corrispondenti allo stesso istante di campionamento nominale sarebbero diversi tra
loro. Per rendere conto di ciò in una analisi accurata del fenomeno, il k-esimo
istante di campionamento reale (k = 1, 2, ..., N) della i-esima acquisizione ripetuta
(i=1, 2, ..., M), che indicheremo con ,k iτ , può essere visto come somma dell’istante di
campionamento ideale kt e di un termine di errore casuale ,k ie :
, ,k i k k it eτ = + .
Gli M treni di impulsi corrispondenti ai vari record acquisiti costituiscono
dunque delle realizzazioni di un processo casuale; in generale, dunque, il k-esimo
istante di campionamento reale kτ è una variabile casuale ed è conveniente
esprimerla come somma dell’istante di campionamento nominale (o ideale) kt e di
un termine di errore casuale ke :
k k kt eτ = +
E’ poi conveniente scindere ke in due componenti distinte: una sistematica
e l’altra puramente casuale; la componente sistematica è data da
[ ] [ ] [ ] ,1
1 M
Sk k k k k k k i kM i
E E e E t E t lim tM
τ τ τ→+∞
=
= = − = − = −∑
mentre la componente casuale è data da
Ck k SkE e E= − .
Con questa notazione l’istante di campionamento reale è dato da:
k k Sk Ckt E Eτ = + +
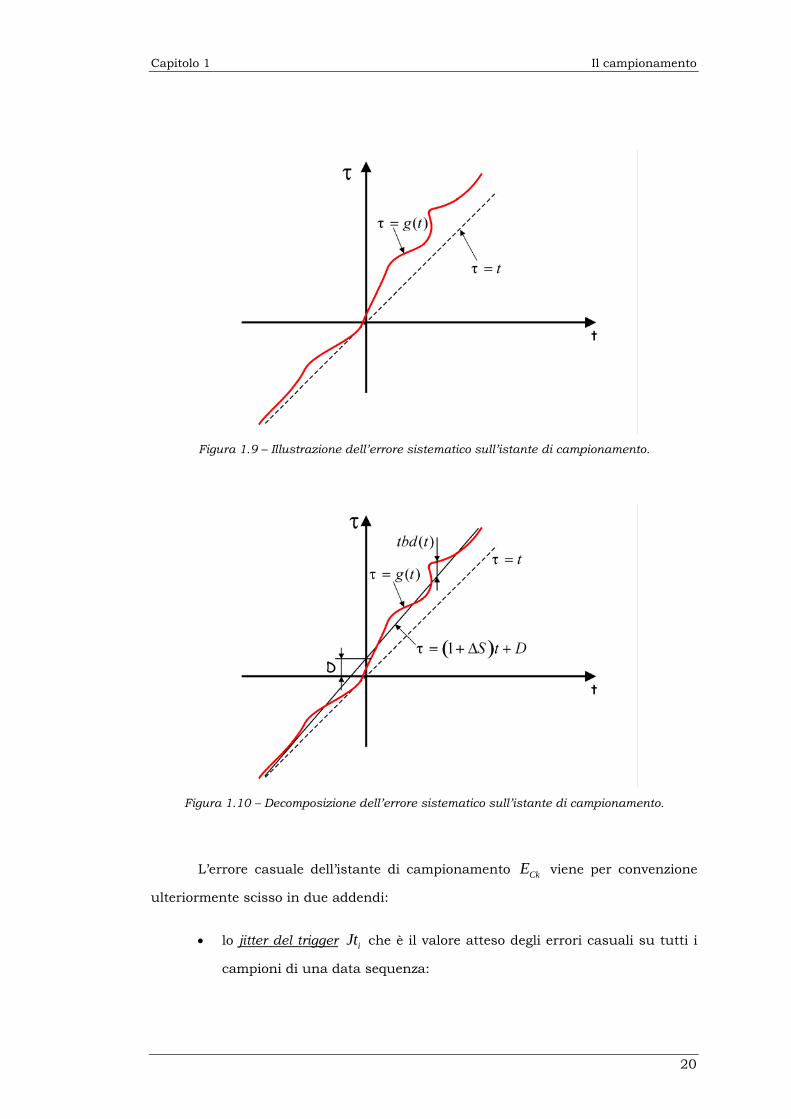
Il fatto che l’errore sistematico sull’istante di campionamento reale dipenda
esclusivamente dall’indice k o, il che è lo stesso, dal solo istante di campionamento
ideale k Ct kT= , ci consente di scrivere ( )k k Ckg t Eτ = + , con ( )g ⋅ funzione non
lineare ad un solo valore del tempo t che approssima più o meno bene una retta di

Capitolo 1 Il campionamento
19
pendenza unitaria nel piano ( ),t τ come in Figura 1.9. Se ( )g ⋅ fosse nota (il che
non è anche se essa rappresenta un errore sistematico), con una semplice
operazione di regressione lineare potremmo definire coefficiente angolare e
intercetta di una sua retta interpolante nel senso dei minimi quadrati; se
indichiamo con S∆ la differenza tra la pendenza della retta interpolante e la
pendenza della caratteristica ideale (pari a 1), e con D la sua intercetta sull’asse
delle ordinate (Figura 1.10), possiamo scrivere:
( )( ) 1 ( )k k Ck k k Ckg t E S t D tbd t Eτ = + = + ∆ ⋅ + + +
Nella precedente:
• S∆ è detto errore di velocità di spazzolamento (sweep speed error) ed è
l’errore sistematico sulla frequenza di campionamento,
• D è detto errore di ritardo del trigger (trigger delay error) ed è l’errore
sistematico sull’istante di effettiva partenza del campionamento dopo
l’istante nominale t0 = 0;
• ( )ktbd t è detto errore di distorsione della base dei tempi (timebase distortion
error) e rende conto della distorsione esistente rispetto alla retta interpolante
della caratteristica.
Queste tre quantità sono effettivamente errori che, anche se sistematici, non
sono mai completamente noti; se lo fossero si potrebbero correggere mediante
opportune elaborazioni numeriche sui dati ottenuti dal campionamento. Purtroppo
essi possono essere solo stimati (per maggiorazione) in base alle specifiche di
accuratezza fornite dal costruttore del dispositivo. Tuttavia non sempre queste
ultime sono complete; spesso viene fornita la sola incertezza sulla velocità di sweep
US e vengono invece omesse le incertezze di ritardo del trigger UD e di distorsione
della base tempi Utbd.
Capitolo 1 Il campionamento
20
Figura 1.9 – Illustrazione dell’errore sistematico sull’istante di campionamento.
Figura 1.10 – Decomposizione dell’errore sistematico sull’istante di campionamento.
L’errore casuale dell’istante di campionamento CkE viene per convenzione
ulteriormente scisso in due addendi:
• lo jitter del trigger iJt che è il valore atteso degli errori casuali su tutti i
campioni di una data sequenza:

Capitolo 1 Il campionamento
21
[ ] ,1
1 Ndef
i Ck Ck iN kJt E E lim E
N→+∞=
= = ∑
esso è dunque costante per un dato record e il pedice i serve a
ricordarcelo.
• lo jitter dell’istante di campionamento ,k iNt dato da:
,k i Ck iNt E Jt= −
e quest’ultimo è anche noto come rumore di fase o incertezza di apertura.
Se D quantifica il ritardo (sistematico) con cui il campionamento parte dopo
l’istante effettivo di trigger, iJt quantifica la variazione (aleatoria) di questo istante
attorno a D in più acquisizioni distinte. Il rumore di fase, invece, quantifica
l’ulteriore variazione casuale degli effettivi istanti di campionamento in più
acquisizioni distinte attorno ai valori dati dalla relazione
( ), 1 ( )k i k i kS t D Jt tbd tτ = + ∆ + + + .
In definitiva il k-esimo istante di campionamento della i-esima acquisizione
di una serie di M acquisizioni tutte ripetute nelle stesse identiche condizioni è dato
da:
( ), ,1 ( )k i k k i k iS t D tbd t Jt Ntτ = + ∆ + + + +
Dei due termini aleatori iJt e ,k iNt si possono valutare le rispettive varianze
che possono fungere da utili indicatori delle accuratezze delle rispettive quantità:
( )22
1
1 M
Jti tiM i
lim JM
σ→+∞
=
= ∑
( ),
22,
1
1k i
M
Nt k iM i
lim NtM
σ→+∞
=
= ∑
Capitolo 1 Il campionamento
22
In definitiva, dato il segnale analogico tempo continuo x(t), dopo il
campionamento invece di avere la sequenza ideale [ ] ( ) ( )C kx k x kT x t= = abbiamo la
sequenza alterata
,[ ] (1 ) ( )k k i k ix k x S t D tbd t Jt Nt⎡ ⎤= + ∆ ⋅ + + + +⎣ ⎦∼
Gli errori più semplici da analizzare sono senz’altro quello di ritardo del
trigger D e quello di velocità dello sweep ∆S; infatti il primo causa una traslazione
nel tempo di D secondi della sequenza campionata rispetto a quella ideale, mentre il
secondo causa il fenomeno duale, ossia una traslazione in frequenza di C
ST∆
hertz di
tutte le componenti armoniche.
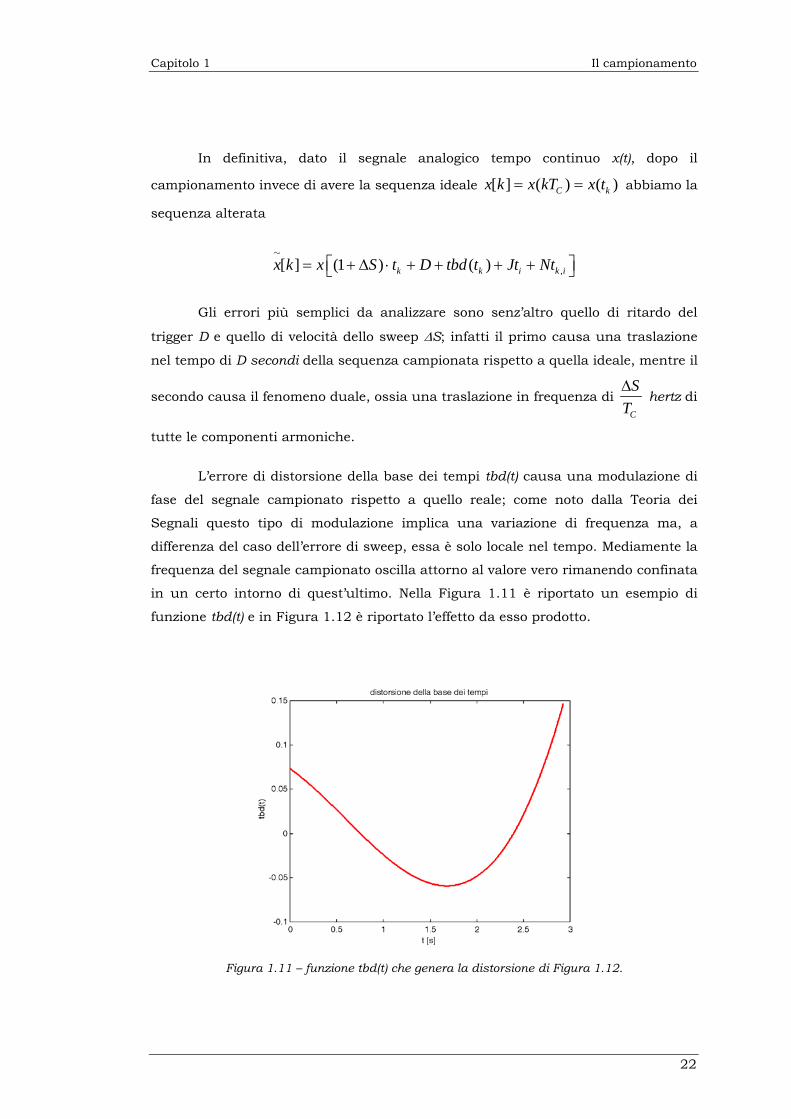
L’errore di distorsione della base dei tempi tbd(t) causa una modulazione di
fase del segnale campionato rispetto a quello reale; come noto dalla Teoria dei
Segnali questo tipo di modulazione implica una variazione di frequenza ma, a
differenza del caso dell’errore di sweep, essa è solo locale nel tempo. Mediamente la
frequenza del segnale campionato oscilla attorno al valore vero rimanendo confinata
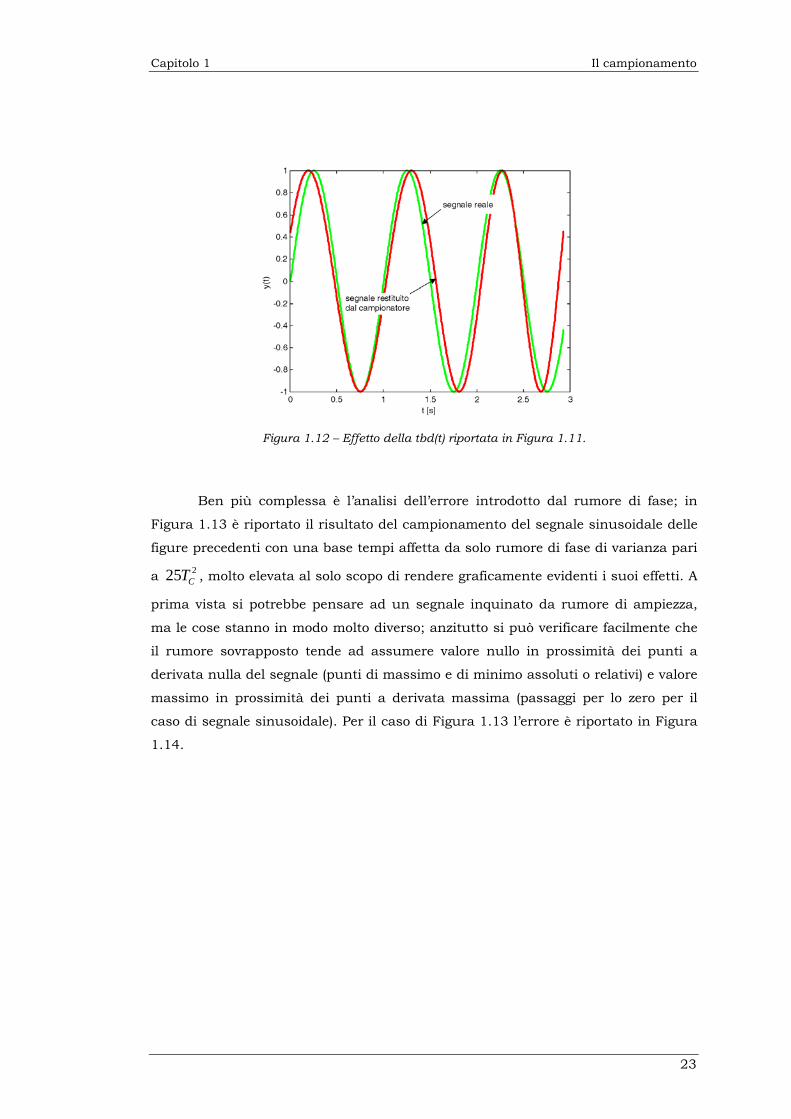
in un certo intorno di quest’ultimo. Nella Figura 1.11 è riportato un esempio di
funzione tbd(t) e in Figura 1.12 è riportato l’effetto da esso prodotto.
Figura 1.11 – funzione tbd(t) che genera la distorsione di Figura 1.12.
Capitolo 1 Il campionamento
23
Figura 1.12 – Effetto della tbd(t) riportata in Figura 1.11.
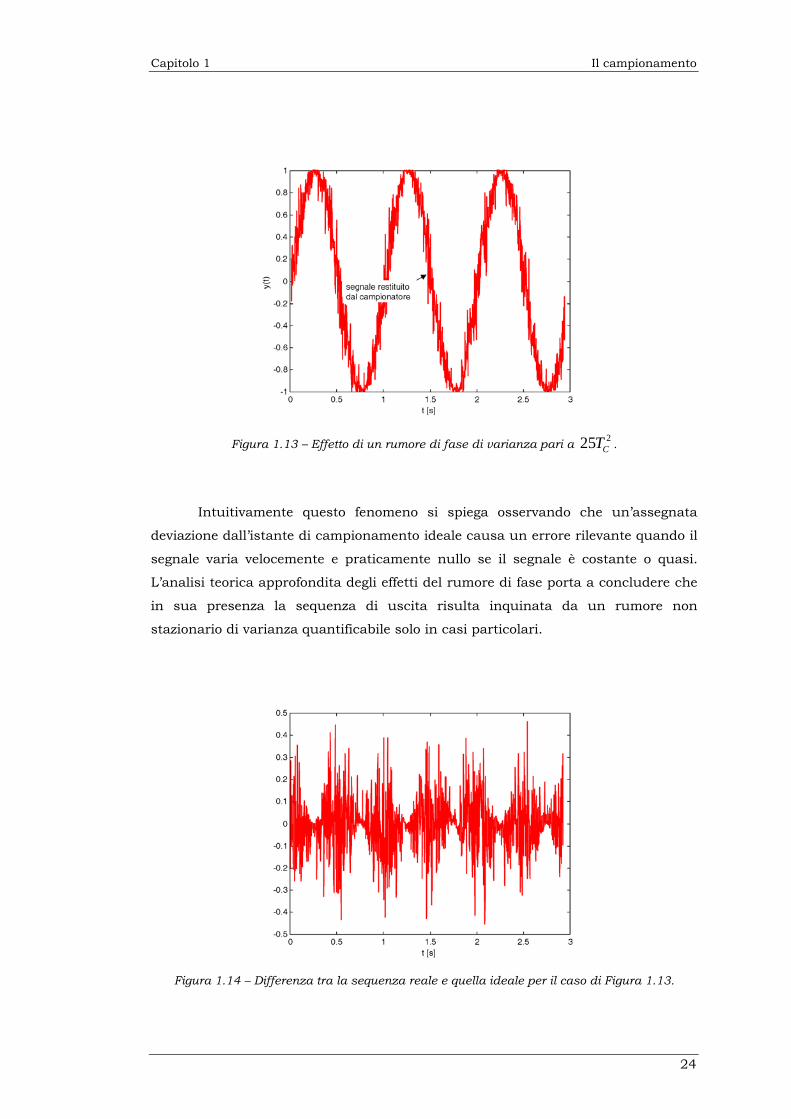
Ben più complessa è l’analisi dell’errore introdotto dal rumore di fase; in
Figura 1.13 è riportato il risultato del campionamento del segnale sinusoidale delle
figure precedenti con una base tempi affetta da solo rumore di fase di varianza pari
a 225 CT , molto elevata al solo scopo di rendere graficamente evidenti i suoi effetti. A
prima vista si potrebbe pensare ad un segnale inquinato da rumore di ampiezza,
ma le cose stanno in modo molto diverso; anzitutto si può verificare facilmente che
il rumore sovrapposto tende ad assumere valore nullo in prossimità dei punti a
derivata nulla del segnale (punti di massimo e di minimo assoluti o relativi) e valore
massimo in prossimità dei punti a derivata massima (passaggi per lo zero per il
caso di segnale sinusoidale). Per il caso di Figura 1.13 l’errore è riportato in Figura
1.14.
Capitolo 1 Il campionamento
24
Figura 1.13 – Effetto di un rumore di fase di varianza pari a 225 CT .
Intuitivamente questo fenomeno si spiega osservando che un’assegnata
deviazione dall’istante di campionamento ideale causa un errore rilevante quando il
segnale varia velocemente e praticamente nullo se il segnale è costante o quasi.
L’analisi teorica approfondita degli effetti del rumore di fase porta a concludere che
in sua presenza la sequenza di uscita risulta inquinata da un rumore non
stazionario di varianza quantificabile solo in casi particolari.
Figura 1.14 – Differenza tra la sequenza reale e quella ideale per il caso di Figura 1.13.

Capitolo 1 Il campionamento
25
L’errore introdotto dal rumore di fase è solo parzialmente correggibile
mediante media di più acquisizioni consecutive; si dimostra infatti che, se il
numero di medie è sufficientemente alto, questo processo causa il filtraggio della
sequenza di uscita con la funzione densità di probabilità del rumore di fase.
Tipicamente la funzione densità di probabilità del rumore di fase è gaussiana (a
media nulla per quanto sopra detto) e il filtraggio che ne risulta è quindi passa-
basso9; si verifica facilmente che la frequenza di taglio del filtro è 0.13
COs
fσ
hertz.
Per segnali sinusoidali puri questo filtraggio si traduce in una attenuazione più o
meno marcata in funzione della frequenza del segnale e della varianza del rumore di
fase; invece per segnali complessi con contenuto armonico significativo ad alta
frequenza, gli effetti potrebbero essere più significativi. Caso tipico è quello dei
segnali digitali che presentano discontinuità finite di valore; in questo caso il
segnale risultato della media presenterà delle tipiche smussature proprio in
corrispondenza delle discontinuità. La Figura 1.15, ad esempio, riporta il risultato
della media di 500 record di un segnale ad onda quadra perfetta (tempi di
transizione nulli) di f = 0.25 Hz campionato a fC = 625 Hz con un segnale avente un
rumore di fase di deviazione standard pari a 0.08 s; la frequenza di taglio del filtro
passa basso equivalente alla operazione di media è 1.62 COf Hz .
L’arrotondamento degli spigoli e la modificata pendenza dei fronti di salita e discesa
è piuttosto evidente e in un caso reale sarebbe causa di errori considerevoli sulle
misure dei tempi di transizione.
9 Per definizione un impulso gaussiano è una funzione della forma ( )2( )g t exp tπ= − e per un teorema
della Teoria dei Segnali ([1]) è noto che la trasformata di Fourier di una siffatta funzione è ancora un
impulso gaussiano: ( ) ( )2 2Fexp t exp fπ π− − ; una variabile gaussiana di media 0 e varianza
2σ ha
però funzione densità di probabilità 2
2
1( )
22
tf t exp
σπσ= −
⎛ ⎞⎜ ⎟⎝ ⎠
; per determinarne la trasformata di
Fourier sfruttiamo la nota proprietà di time scaling:
( )( )1( ) F F
g t gfG f a t G con a
a a⎛ ⎞⇒ ⋅ ∈⎜ ⎟⎝ ⎠
.
Si ha quindi: ( )2 2 2( ) 2( )Ff t expF f fπ σ−=
Capitolo 1 Il campionamento
26
Figura 1.15 – Risultato della media di più record di un segnale ad onda quadra campionato
con una base tempi affetta da significativo rumore di fase (vedi testo ↑).
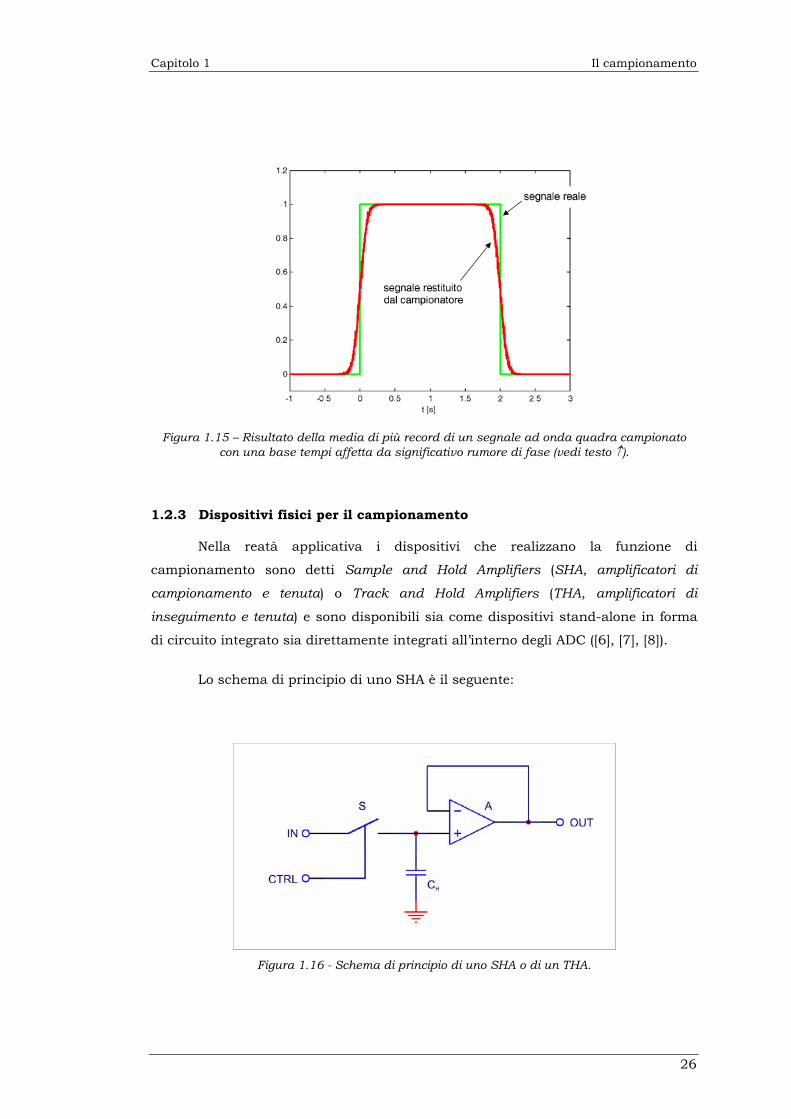
1.2.3 Dispositivi fisici per il campionamento
Nella reatà applicativa i dispositivi che realizzano la funzione di
campionamento sono detti Sample and Hold Amplifiers (SHA, amplificatori di
campionamento e tenuta) o Track and Hold Amplifiers (THA, amplificatori di
inseguimento e tenuta) e sono disponibili sia come dispositivi stand-alone in forma
di circuito integrato sia direttamente integrati all’interno degli ADC ([6], [7], [8]).
Lo schema di principio di uno SHA è il seguente:
Figura 1.16 - Schema di principio di uno SHA o di un THA.
Capitolo 1 Il campionamento
27
Il circuito è costituito dai seguenti elementi:
• un condensatore CH che implementa la funzione di memoria del valore
del segnale all’ingresso dell’ADC durante la fase di quantizzazione;
• un interruttore a comando elettronico S che consente di eseguire
l’operazione di campionamento e ritenzione del valore del segnale di
ingresso ad un certo istante temporale; convenzionalmente uno stato
logico 1 del segnale di controllo CTRL causa la chiusura di S.
• un amplificatore operazionale A che ha la funzione di separatore di
impedenza;
Il circuito può funzionare secondo due modalità distinte:
• modalità di tracking durante la quale l’interruttore S è chiuso e la
tensione ai capi di CH, quindi anche quella al terminale di uscita, è una
riproduzione più o meno fedele della tensione di ingresso in funzione
delle specifiche di errore dello SHA. Questa modalità è in realtà
caratteristica dei soli THA mentre negli SHA propriamente detti, per i
quali il segnale di controllo è accoppiato in alternata, l’interruttore S
resta chiuso solo per un brevissimo intervallo di tempo in corrispondenza
della transizione 0→1 di CTRL e questa modalità è detta di sample.
Quando il segnale di controllo è accoppiato in continua ad S i due tipi di
campionatori sono indistinguibili l’uno dall’altro; gli SHA sono
normalmente utilizzati in applicazioni ad alta frequenza di
campionamento ([8]).
• modalità di mantenimento (hold) durante la quale l’interruttore S è aperto
e la tensione ai capi di CH mantiene stabilmente il valore raggiunto
immediatamente prima dell’apertura di S.
La funzione dello SHA in un sistema di conversione analogico/digitale è
fondamentale; infatti il processo di quantizzazione che vedremo nel seguito non è
istantaneo anche nel caso di ADC di tipo Flash, ossia la più veloce tra le
architetture di ADC oggi disponibili; se il segnale di ingresso all’ADC continuasse a
variare durante il processo di conversione si verificherebbero errori significativi
anche in presenza di segnali di frequenza molto bassa rispetto alla frequenza di

Capitolo 1 Il campionamento
28
campionamento. Un semplice esempio numerico può servire a verificare che uno
SHA è praticamente indispensabile:
supponiamo di applicare un segnale sinusoidale di frequenza f direttamente
all’ingresso di un ADC bipolare con risoluzione di N bit (cfr. paragrafo 1.3 a pag. 35) e
che l’ampiezza di picco del segnale di ingresso sia pari al range dinamico (fondo
scala) dell’ADC:
(2 1)( ) (2 ) (2 )2 2
NFSR
INV LSBV t sin ft sin ftπ π−
= =
Come noto, un segnale sinusoidale assume la massima velocità di variazione in
corrispondenza del passaggio per lo zero della forma d’onda:
0( ) 0
( ) ( )(2 1) (2 ) (2 1)
IN
N NIN INtMAX V t
dV t dV tf LSB cos ft f LSB
dt dtπ π π
==
= = − ⋅ = −
quindi se ∆T è il tempo che l’ADC impiega per portare a termine la conversione, la
variazione massima del segnale sarà pari a , (2 1)NIN MAXV f LSB Tπ∆ = − ⋅ ∆ ; la
conversione non sarà corretta se questa variazione supera il valore limite di ½ LSB,
quindi se la frequenza del segnale è maggiore di:
, 0.5 1(2 1) (2 1) 2 (2 1)
IN MAXMAX N N N
V LSBfLSB T LSB T Tπ π π
∆= = =
− ∆ ⋅ − ⋅ ∆ ⋅ − ⋅ ∆
Per un ADC a N=12 bit e con un tempo di conversione ∆T=1µs, la massima frequenza
ammessa sarebbe quindi di appena 38.9 Hz, quando il limite teorico previsto dal
teorema di Shannon è invece di ben 500 kHz!
Capitolo 1 Il campionamento
29
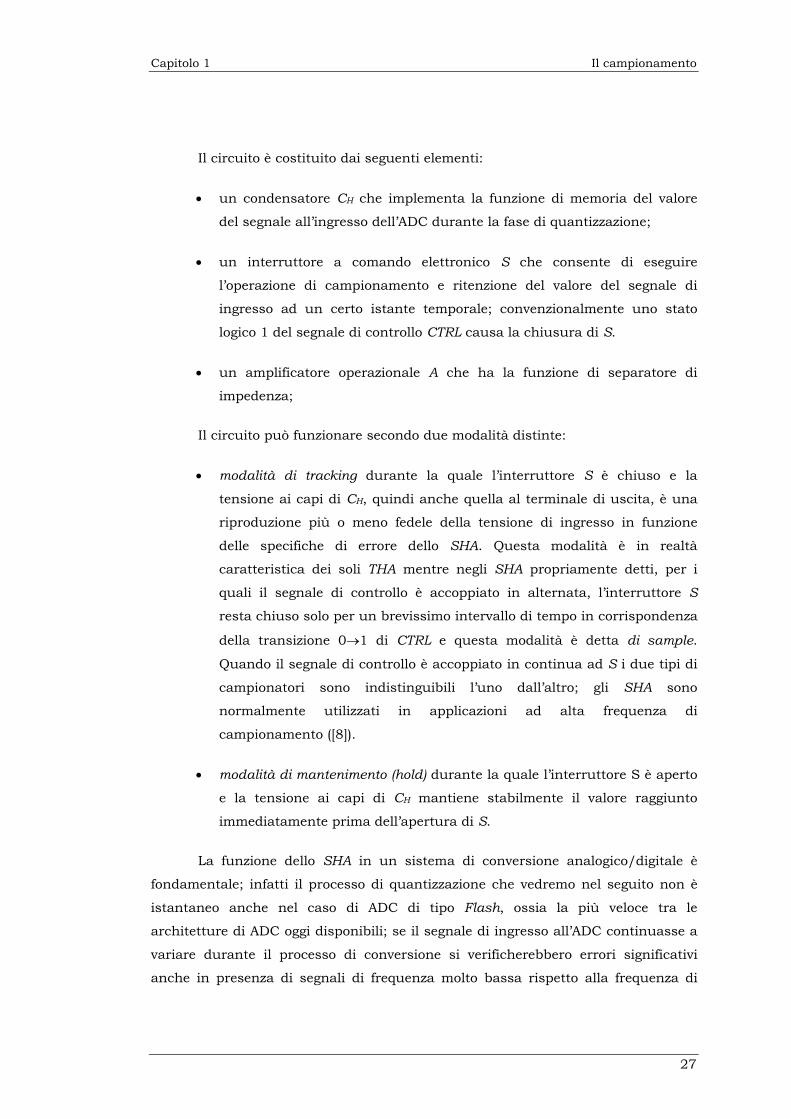
Figura 1.17 – Forme d’onda corrispondenti al funzionamento di uno SHA (in rosso) e di un THA
(in verde) ideali
Le forme d’onda corrispondenti al funzionamento di uno SHA e di un THA
ideali sono riportate in Figura 1.17; un siffatto dispositivo è in grado di inseguire
fedelmente il segnale di ingresso quando è nella fase di tracking e di memorizzarne
il valore senza alcun errore, senza alcun ritardo dall’imposizione del comando di
hold e per un tempo indefinito. Tuttavia un THA reale presenta diversi problemi che
portano ad alterazioni della forma d’onda del segnale di uscita; i principali errori
sono i seguenti:
• Errori nella transizione dallo stato di tracking a quello di hold. Questi
errori sono generalmente dominati dal ritardo all’apertura
dell’interruttore S a partire dall’istante di effettiva transizione 1→0 del
segnale di controllo; questo significa che il segnale di ingresso continuerà
ad influenzare quello di uscita anche dopo che il comando di hold è stato
imposto. In altre parole l’istante di campionamento effettivo non coincide
Capitolo 1 Il campionamento
30
con quello nominale e questo è causa di rilevanti errori nel caso di
ingressi rapidamente variabili.
• Errori nella fase di hold. Idealmente nello stato di hold l’uscita dovrebbe
permanere indefinitamente al valore raggiunto un istante prima della
transizione tracking→hold; in uno THA reale però il segnale di uscita
subisce una deriva più o meno rapida a causa di diversi fattori:
l’interruttore S, ad esempio, non realizza un perfetto isolamento tra
ingresso ed uscita quando è aperto, soprattutto per segnali rapidamente
variabili; S infatti è comunemente realizzato con dispositivi MOS che
presentano capacità parassite tra ingresso ed uscita. Inoltre il dielettrico
del condensatore CH presenterà sempre un angolo di perdita non nullo, il
che significa che esso tende a scaricarsi. Come vedremo in seguito,
inoltre, nonostante quello di Figura 1.16 sia solo uno schema di
principio, nella realtà applicativa gli SHA sono piuttosto simili ad esso
soprattutto nella sezione di uscita; questo significa che la corrente di
polarizzazione di ingresso dell’amplificatore operazionale contribuisce
alla deriva della tensione ai capi di CH. La deriva della tensione ai capi
del condensatore può essere sia positiva che negativa in funzione del
segno della corrente parassita complessiva IL. Per una data capacità del
condensatore CH la deriva della tensione ai suoi capi in un intervallo di
tempo T∆ è data da:
L
H
IV T
C∆ = ∆
Poiché (normalmente) il condensatore CH è connesso esternamente
all’SHA dall’utente finale, è sempre possibile far sì che l’errore di deriva
sia adeguato alle esigenze della specifica applicazione. Osservando la
precedente relazione si potrebbe pensare che sia possibile utilizzare un
condensatore di capacità comunque elevata, per ottenere errori di deriva
arbitrariamente piccoli; questo purtroppo non è vero in quanto al
crescere di CH aumenta anche il tempo di acquisizione. Normalmente,
infatti, a monte dell’interruttore S è presente un ulteriore amplificatore
operazionale connesso ad inseguitore e questo limita la massima
corrente disponibile per la carica di CH (slew-rate finita).

Capitolo 1 Il campionamento
31
Normalmente il contributo dominante alla corrente di dispersione IL è
dovuto alla corrente di polarizzazione di ingresso dell’amplificatore
operazionale di uscita; questo spiega perché per questa funzione si
preferisce impiegare operazionali con stadio di ingresso a FET.
• Errori nella transizione dallo stato di hold a quello di tracking. Questo
errore è principalmente dovuto al settling-time del segnale di uscita,
ossia al tempo necessario affinché esso rientri e permanga
definitivamente in una banda di specificata ampiezza centrata attorno al
valore nominale; a causa di ciò il tempo di apertura dell’SHA non potrà
essere inferiore ad un limite dipendente proprio dall’accuratezza finale
richiesta al segnale di uscita.
• Errori nella fase di tracking. La resistenza offerta dall’interruttore S nello
stato di ON è sempre non nulla e ciò significa che il segnale ai capi di CH
potrà solo inseguire il segnale di ingresso senza mai uguagliarlo
esattamente. Alcuni SHA, inoltre, consentono di impostare un guadagno
non unitario mediante appositi resistori esterni; ovviamente anche questi
ultimi possono essere responsabili di errori aggiuntivi a causa delle
rispettive tolleranze.
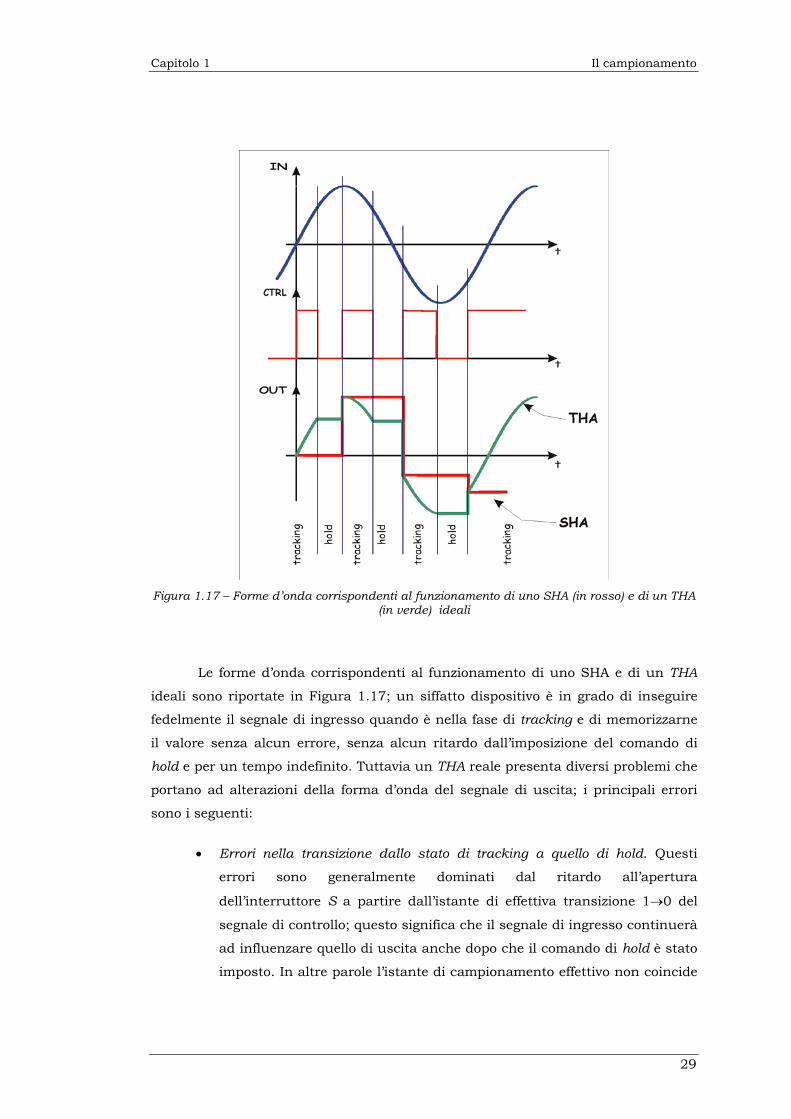
Le realizzazioni circuitali reali di uno SHA sono sostanzialmente di soli tre
tipi distinti e sono riportare nelle successive figure.
La realizzazione in anello aperto (Figura 1.18) è la più semplice delle tre e
presenta il vantaggio di avere rapidi tempi di risposta il che ne consente l’impiego in
applicazioni ad alta frequenza di campionamento; al tempo stesso, però le sue
prestazioni sono compromesse da un maggiore errore di offset a regime.
La realizzazione in anello chiuso con uscita ad inseguitore (Figura 1.19)
consente una riduzione complessiva degli errori a regime grazie alla retroazione
dell’uscita sull’ingresso nella fase di tracking ma causa qualche problema
(incremento del tempo di assestamento) a causa della presenza di due stadi
dinamici tra loro connessi in serie.
Il secondo tipo di realizzazione in anello chiuso ha l’operazionale di uscita
connesso ad integratore (Figura 1.20) e presenta caratteristiche molto simili a
Capitolo 1 Il campionamento
32
quelle della realizzazione precedente ma offre in più la possibilità di limitare gli
effetti negativi dovuti alle capacità parassite dell’interruttore S.
Figura 1.18 – SHA in architettura open loop.
Figura 1.19 – SHA in architettura closed loop con uscita ad inseguitore.
Figura 1.20 – SHA in architettura closed loop con uscita ad integratore.
Capitolo 1 Il campionamento
33
Nelle applicazioni ad alta velocità di campionamento è possibile trovare
architetture specificamente studiate per ottimizzare parametri quali il settling-time
o lo jitter del tempo di apertura; un’interessante esempio è quello dell’architettura a
bilanciamento di corrente illustrato in [8] che consente di eliminare l’errore di
deriva della tensione durante la fase di hold.
1.2.4 Metodi di campionamento alternativi
Sin qui abbiamo considerato il metodo di campionamento classico o
ripetitivo; in esso il periodo di campionamento TC è (almeno idealmente) costante nel
tempo e quindi i campioni acquisiti hanno tra loro distanza temporale costante e
pari a TC.
Nel settore delle Misure Elettriche ed Elettroniche, dove è spesso necessario
rilevare ed analizzare segnali di frequenza anche molto elevata, sono stati da tempo
introdotti metodi di campionamento alternativi che consentono di raggiungere nella
moderna strumentazione di misura numerica bande passanti elevatissime; tipico
esempio di strumenti di misura di questo tipo sono i moderni oscilloscopi digitali
che raggiungono bande passanti dell’ordine della decina di gigahertz.
Nella realtà applicativa attuale il metodo di campionamento classico
analizzato nel paragrafo precedente viene spesso indicato come campionamento in
tempo reale (real-time sampling) ed è l’unico praticamente utilizzabile per l’analisi di
segnali elettrici impulsivi non ripetitivi o, comunque, con frequenza di ripetizione
casuale come sono, ad esempio, gli spikes di rumore indotti su segnali elettrici
dalla commutazione di carichi induttivi sulla rete elettrica di potenza.
Uno dei metodi di campionamento alternativi più diffusi nella realtà
applicativa corrente è quello detto in tempo equivalente; esso è utilizzabile solo per il
campionamento di segnali ripetitivi e consente di ottenere bande passanti
equivalenti molto elevate. Questo metodo di campionamento è implementato
secondo due modalità distinte: campionamento casuale e campionamento
sequenziale; tuttavia l’idea alla base delle due modalità di acquisizione è
sostanzialmente la stessa: si tratta di sfruttare la ripetitività del segnale analogico
di ingresso acquisendo e visualizzando campioni che appartengono a periodi diversi
e (nel solo caso del campionamento casuale) anche a distanza temporale non
costante ma variabile.

Capitolo 1 Il campionamento
34
Quello che si fa, in sostanza, è di suddividere il processo di campionamento
di una forma d’onda in più passaggi intermedi in ciascuno dei quali il clock di
campionamento risulti opportunamente traslato rispetto ai passaggi precedenti; se
lo shift temporale tra acquisizioni consecutive è casuale si ha il campionamento in
tempo equivalente casuale mentre se esso è progressivamente crescente in modo
deterministico si ha il campionamento in tempo equivalente ripetitivo. In entrambe
le modalità un’apposita circuiterìa, detta di trigger, sincronizza il sistema di clock di
campionamento al segnale di ingresso fornendo un impulso di start quando questo
assume un determinato valore e una determinata pendenza; un ulteriore circuito
genera poi il ritardo temporale per l’inizio del campionamento che si protrae per un
certo numero di campioni, dopo di che si arresta in attesa del successivo evento di
trigger. Ovviamente della relazione temporale tra il treno di impulsi di
campionamento e l’impulso di start sarà necessario tenere conto nella fase di
ricostruzione della corretta sequenza campionata (riordino dei campioni prima della
memorizzazione e della visualizzazione).
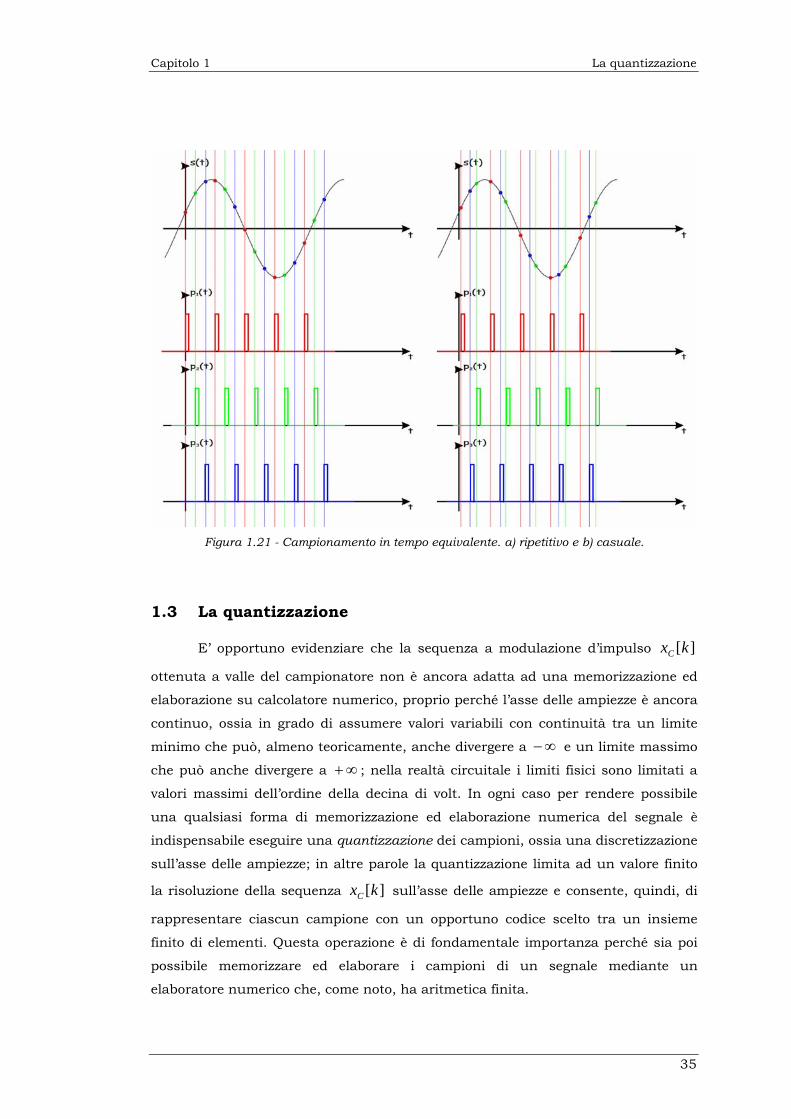
I due tipi di campionamento in tempo equivalente sono schematicamente
illustrati in Figura 1.21; in questa figura le diverse forme d’onda del segnale di
campionamento si riferiscono ad eventi di trigger distinti e consecutivi l’uno all’altro
dall’alto verso il basso.
Capitolo 1 La quantizzazione
35
Figura 1.21 - Campionamento in tempo equivalente. a) ripetitivo e b) casuale.
1.3 La quantizzazione
E’ opportuno evidenziare che la sequenza a modulazione d’impulso ][kxC
ottenuta a valle del campionatore non è ancora adatta ad una memorizzazione ed
elaborazione su calcolatore numerico, proprio perché l’asse delle ampiezze è ancora
continuo, ossia in grado di assumere valori variabili con continuità tra un limite
minimo che può, almeno teoricamente, anche divergere a ∞− e un limite massimo
che può anche divergere a ∞+ ; nella realtà circuitale i limiti fisici sono limitati a
valori massimi dell’ordine della decina di volt. In ogni caso per rendere possibile
una qualsiasi forma di memorizzazione ed elaborazione numerica del segnale è
indispensabile eseguire una quantizzazione dei campioni, ossia una discretizzazione
sull’asse delle ampiezze; in altre parole la quantizzazione limita ad un valore finito
la risoluzione della sequenza ][kxC sull’asse delle ampiezze e consente, quindi, di
rappresentare ciascun campione con un opportuno codice scelto tra un insieme
finito di elementi. Questa operazione è di fondamentale importanza perché sia poi
possibile memorizzare ed elaborare i campioni di un segnale mediante un
elaboratore numerico che, come noto, ha aritmetica finita.
Capitolo 1 La quantizzazione
36
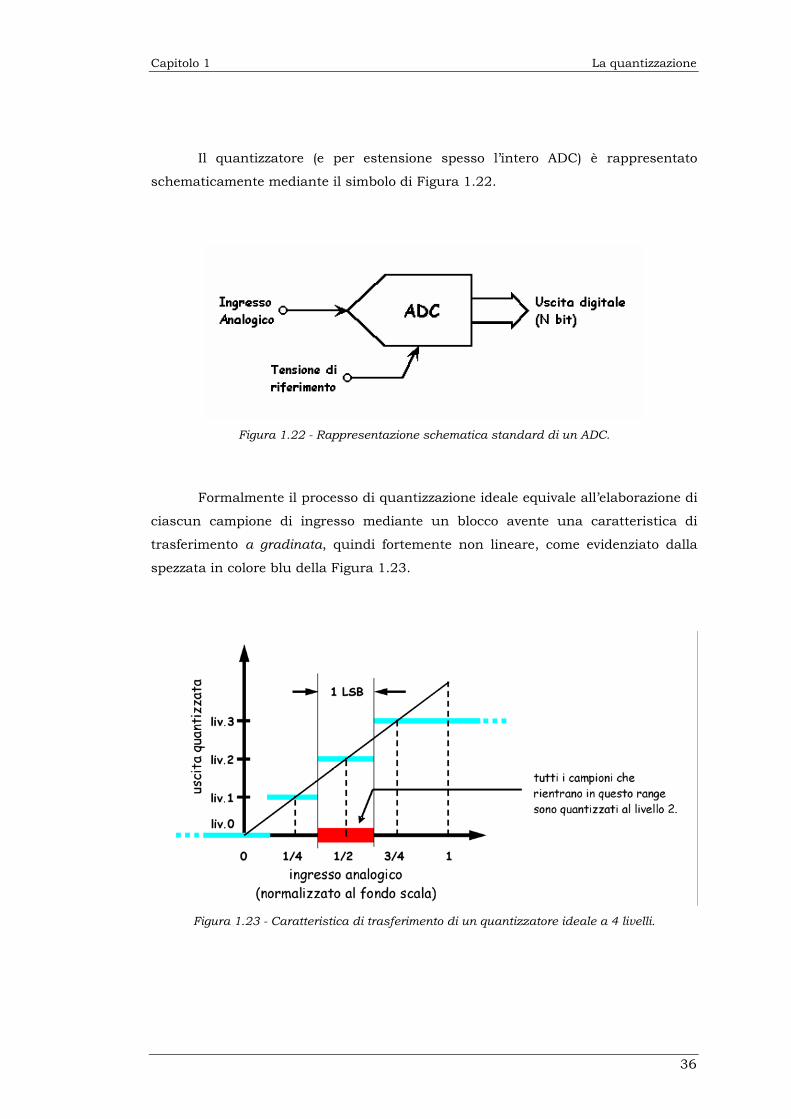
Il quantizzatore (e per estensione spesso l’intero ADC) è rappresentato
schematicamente mediante il simbolo di Figura 1.22.
Figura 1.22 - Rappresentazione schematica standard di un ADC.
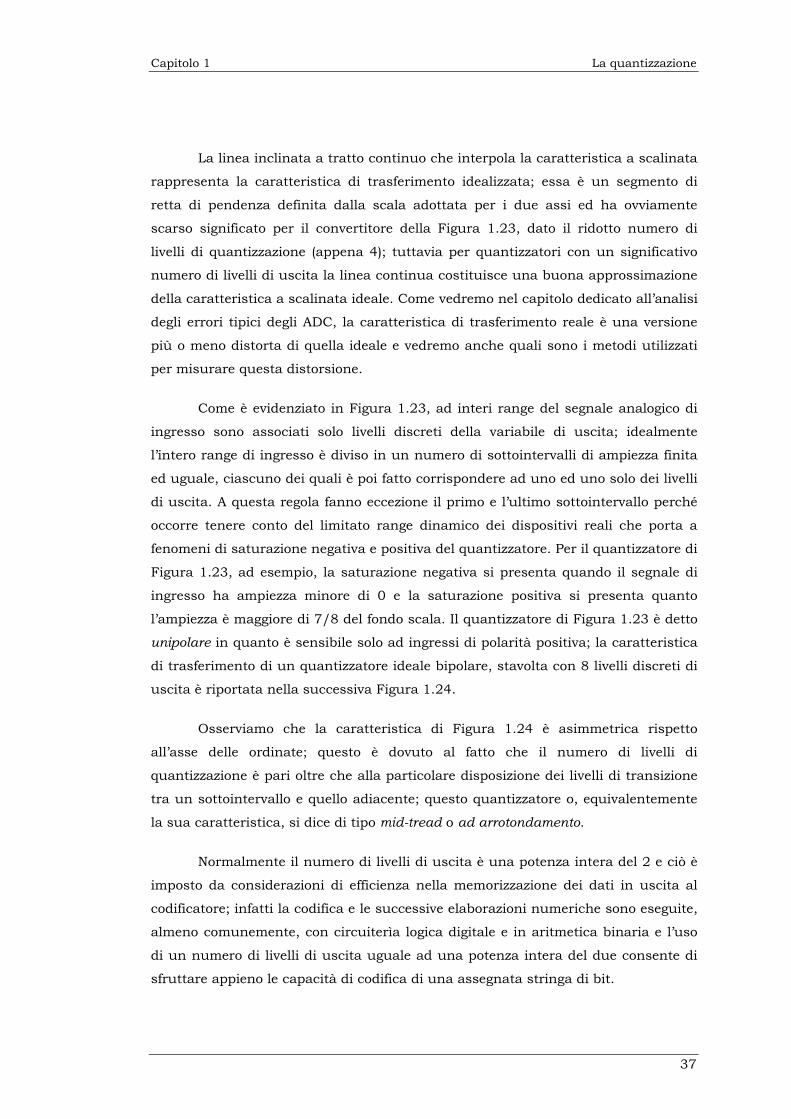
Formalmente il processo di quantizzazione ideale equivale all’elaborazione di
ciascun campione di ingresso mediante un blocco avente una caratteristica di
trasferimento a gradinata, quindi fortemente non lineare, come evidenziato dalla
spezzata in colore blu della Figura 1.23.
Figura 1.23 - Caratteristica di trasferimento di un quantizzatore ideale a 4 livelli.
Capitolo 1 La quantizzazione
37
La linea inclinata a tratto continuo che interpola la caratteristica a scalinata
rappresenta la caratteristica di trasferimento idealizzata; essa è un segmento di
retta di pendenza definita dalla scala adottata per i due assi ed ha ovviamente
scarso significato per il convertitore della Figura 1.23, dato il ridotto numero di
livelli di quantizzazione (appena 4); tuttavia per quantizzatori con un significativo
numero di livelli di uscita la linea continua costituisce una buona approssimazione
della caratteristica a scalinata ideale. Come vedremo nel capitolo dedicato all’analisi
degli errori tipici degli ADC, la caratteristica di trasferimento reale è una versione
più o meno distorta di quella ideale e vedremo anche quali sono i metodi utilizzati
per misurare questa distorsione.
Come è evidenziato in Figura 1.23, ad interi range del segnale analogico di
ingresso sono associati solo livelli discreti della variabile di uscita; idealmente
l’intero range di ingresso è diviso in un numero di sottointervalli di ampiezza finita
ed uguale, ciascuno dei quali è poi fatto corrispondere ad uno ed uno solo dei livelli
di uscita. A questa regola fanno eccezione il primo e l’ultimo sottointervallo perché
occorre tenere conto del limitato range dinamico dei dispositivi reali che porta a
fenomeni di saturazione negativa e positiva del quantizzatore. Per il quantizzatore di
Figura 1.23, ad esempio, la saturazione negativa si presenta quando il segnale di
ingresso ha ampiezza minore di 0 e la saturazione positiva si presenta quanto
l’ampiezza è maggiore di 7/8 del fondo scala. Il quantizzatore di Figura 1.23 è detto
unipolare in quanto è sensibile solo ad ingressi di polarità positiva; la caratteristica
di trasferimento di un quantizzatore ideale bipolare, stavolta con 8 livelli discreti di
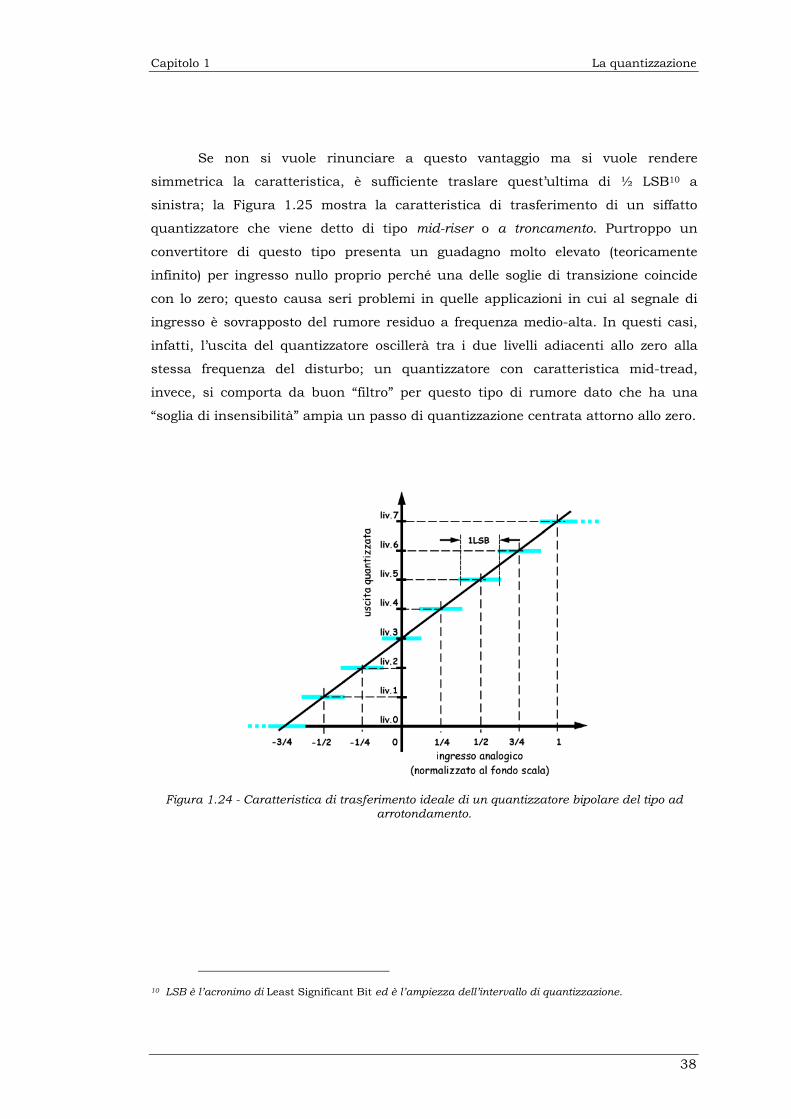
uscita è riportata nella successiva Figura 1.24.
Osserviamo che la caratteristica di Figura 1.24 è asimmetrica rispetto
all’asse delle ordinate; questo è dovuto al fatto che il numero di livelli di
quantizzazione è pari oltre che alla particolare disposizione dei livelli di transizione
tra un sottointervallo e quello adiacente; questo quantizzatore o, equivalentemente
la sua caratteristica, si dice di tipo mid-tread o ad arrotondamento.
Normalmente il numero di livelli di uscita è una potenza intera del 2 e ciò è
imposto da considerazioni di efficienza nella memorizzazione dei dati in uscita al
codificatore; infatti la codifica e le successive elaborazioni numeriche sono eseguite,
almeno comunemente, con circuiterìa logica digitale e in aritmetica binaria e l’uso
di un numero di livelli di uscita uguale ad una potenza intera del due consente di
sfruttare appieno le capacità di codifica di una assegnata stringa di bit.
Capitolo 1 La quantizzazione
38
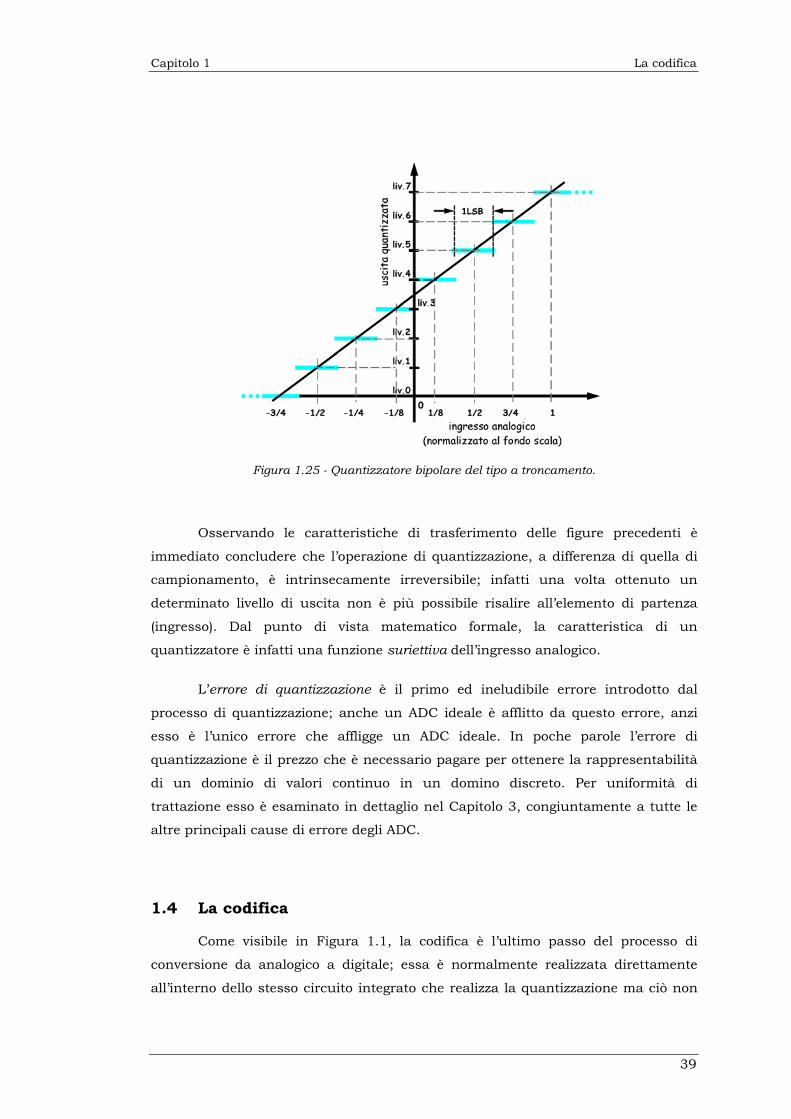
Se non si vuole rinunciare a questo vantaggio ma si vuole rendere
simmetrica la caratteristica, è sufficiente traslare quest’ultima di ½ LSB10 a
sinistra; la Figura 1.25 mostra la caratteristica di trasferimento di un siffatto
quantizzatore che viene detto di tipo mid-riser o a troncamento. Purtroppo un
convertitore di questo tipo presenta un guadagno molto elevato (teoricamente
infinito) per ingresso nullo proprio perché una delle soglie di transizione coincide
con lo zero; questo causa seri problemi in quelle applicazioni in cui al segnale di
ingresso è sovrapposto del rumore residuo a frequenza medio-alta. In questi casi,
infatti, l’uscita del quantizzatore oscillerà tra i due livelli adiacenti allo zero alla
stessa frequenza del disturbo; un quantizzatore con caratteristica mid-tread,
invece, si comporta da buon “filtro” per questo tipo di rumore dato che ha una
“soglia di insensibilità” ampia un passo di quantizzazione centrata attorno allo zero.
Figura 1.24 - Caratteristica di trasferimento ideale di un quantizzatore bipolare del tipo ad
arrotondamento.
10 LSB è l’acronimo di Least Significant Bit ed è l’ampiezza dell’intervallo di quantizzazione.
Capitolo 1 La codifica
39
Figura 1.25 - Quantizzatore bipolare del tipo a troncamento.
Osservando le caratteristiche di trasferimento delle figure precedenti è
immediato concludere che l’operazione di quantizzazione, a differenza di quella di
campionamento, è intrinsecamente irreversibile; infatti una volta ottenuto un
determinato livello di uscita non è più possibile risalire all’elemento di partenza
(ingresso). Dal punto di vista matematico formale, la caratteristica di un
quantizzatore è infatti una funzione suriettiva dell’ingresso analogico.
L’errore di quantizzazione è il primo ed ineludibile errore introdotto dal
processo di quantizzazione; anche un ADC ideale è afflitto da questo errore, anzi
esso è l’unico errore che affligge un ADC ideale. In poche parole l’errore di
quantizzazione è il prezzo che è necessario pagare per ottenere la rappresentabilità
di un dominio di valori continuo in un domino discreto. Per uniformità di
trattazione esso è esaminato in dettaglio nel Capitolo 3, congiuntamente a tutte le
altre principali cause di errore degli ADC.
1.4 La codifica
Come visibile in Figura 1.1, la codifica è l’ultimo passo del processo di
conversione da analogico a digitale; essa è normalmente realizzata direttamente
all’interno dello stesso circuito integrato che realizza la quantizzazione ma ciò non
Capitolo 1 La codifica
40
toglie che sia da intendersi una operazione aggiuntiva. I tipi di codifica realizzabili
sono molte ma le principali sono quella binaria naturale senza offset, quella binaria
naturale con offset e quella binaria in complemento a due; quale di queste sia
applicata dipende dal tipo di ADC (unipolare o bipolare) e, nel caso di ADC bipolare,
dal fatto che si scelga o meno di dare una rappresentazione esplicita del segno
dell’ingresso. Nelle figure che seguono, allo scopo di evidenziare meglio la
dipendenza del codice di uscita dal segno dell’ingresso analogico, sono riportate le
caratteristiche di trasferimento complessive dell’insieme quantizzatore +
codificatore; ovviamente, a rigore, le caratteristiche dovrebbero essere tracciate
come funzioni dell’ingresso del codificatore; se così fosse nelle figure seguenti i
segmenti celeste della caratteristica disegnata si ridurrebbero a dei semplici punti
di ascisse pari ai vari livelli di uscita del quantizzatore.
Sin qui si è implicitamente assunto che l’uscita del quantizzatore sia un
singolo segnale di tensione quantizzato; ciò non è sempre vero. Esistono infatti
convertitori nei quali l’uscita del quantizzatore è già in una forma codificata su più
linee elettriche; un esempio è dato dal convertitore di tipo flash che vedremo nel
seguito. Per evitare fraintendimenti nel seguito si parlerà più propriamente di stati
di uscita del quantizzatore piuttosto che di livelli.
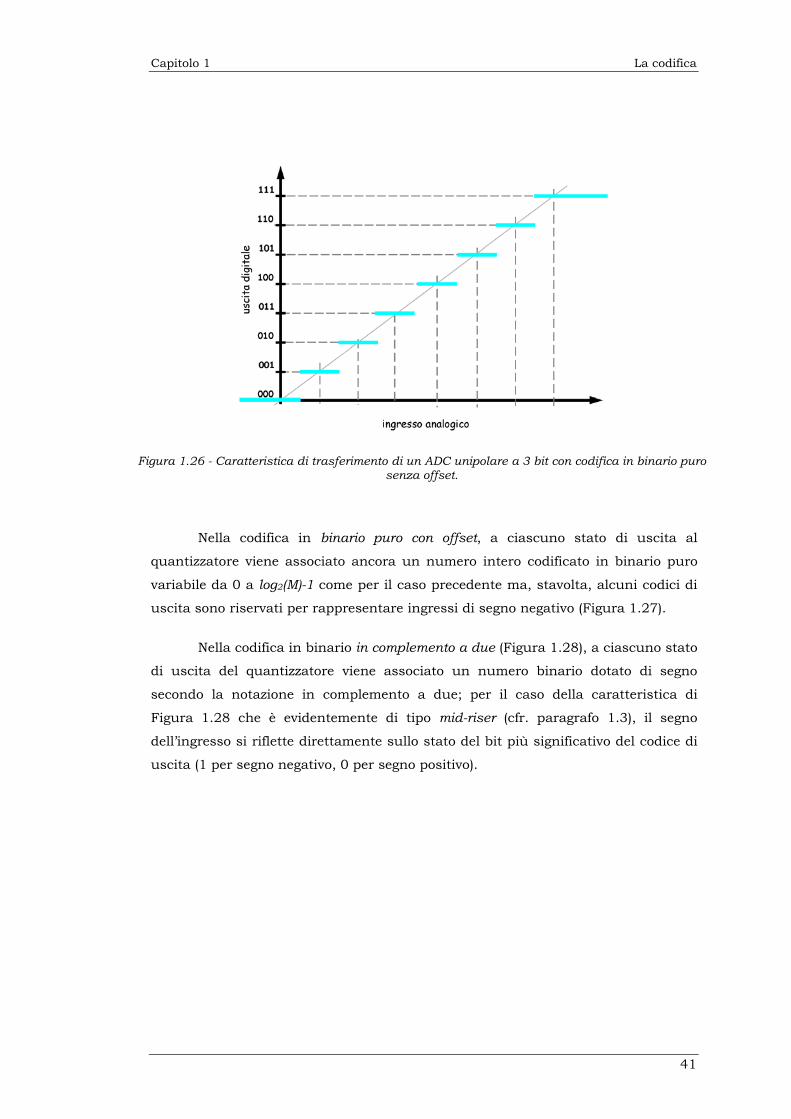
Nella codifica in binario puro senza offset, a ciascuno stato di uscita al
quantizzatore viene associato un numero intero codificato in binario puro variabile
da 0 a log2(M)-1, essendo M il numero complessivo di stati possibili per l’uscita del
codificatore; questo è il tipo di codifica privilegiato per ADC con ingresso unipolare.
Capitolo 1 La codifica
41
Figura 1.26 - Caratteristica di trasferimento di un ADC unipolare a 3 bit con codifica in binario puro
senza offset.
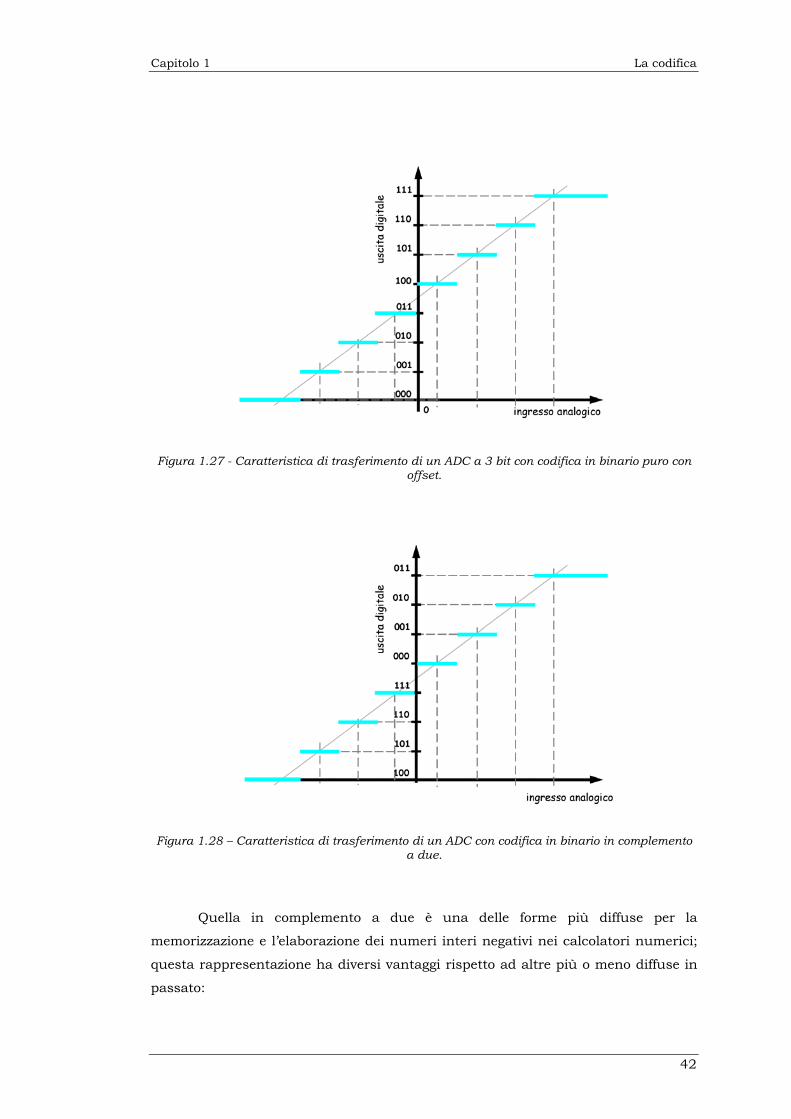
Nella codifica in binario puro con offset, a ciascuno stato di uscita al
quantizzatore viene associato ancora un numero intero codificato in binario puro
variabile da 0 a log2(M)-1 come per il caso precedente ma, stavolta, alcuni codici di
uscita sono riservati per rappresentare ingressi di segno negativo (Figura 1.27).
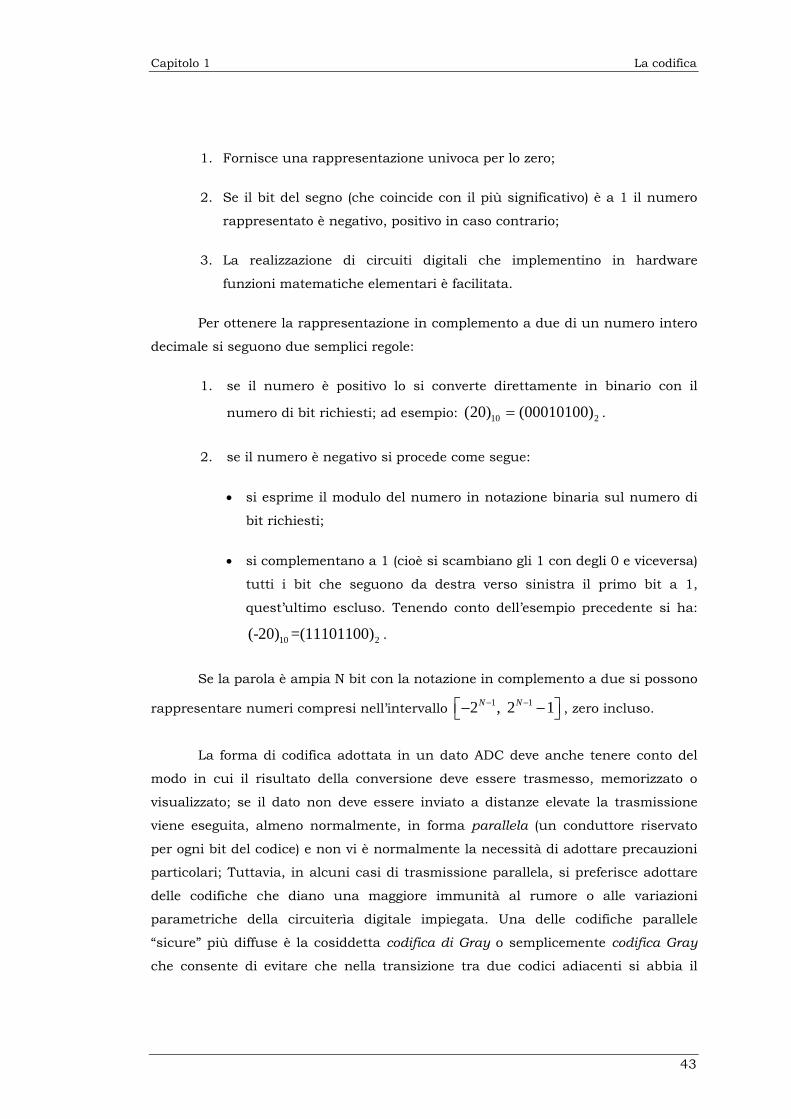
Nella codifica in binario in complemento a due (Figura 1.28), a ciascuno stato
di uscita del quantizzatore viene associato un numero binario dotato di segno
secondo la notazione in complemento a due; per il caso della caratteristica di
Figura 1.28 che è evidentemente di tipo mid-riser (cfr. paragrafo 1.3), il segno
dell’ingresso si riflette direttamente sullo stato del bit più significativo del codice di
uscita (1 per segno negativo, 0 per segno positivo).
Capitolo 1 La codifica
42
Figura 1.27 - Caratteristica di trasferimento di un ADC a 3 bit con codifica in binario puro con
offset.
Figura 1.28 – Caratteristica di trasferimento di un ADC con codifica in binario in complemento
a due.
Quella in complemento a due è una delle forme più diffuse per la
memorizzazione e l’elaborazione dei numeri interi negativi nei calcolatori numerici;
questa rappresentazione ha diversi vantaggi rispetto ad altre più o meno diffuse in
passato:
Capitolo 1 La codifica
43
1. Fornisce una rappresentazione univoca per lo zero;
2. Se il bit del segno (che coincide con il più significativo) è a 1 il numero
rappresentato è negativo, positivo in caso contrario;
3. La realizzazione di circuiti digitali che implementino in hardware
funzioni matematiche elementari è facilitata.
Per ottenere la rappresentazione in complemento a due di un numero intero
decimale si seguono due semplici regole:
1. se il numero è positivo lo si converte direttamente in binario con il
numero di bit richiesti; ad esempio: 10 2(20) (00010100)= .
2. se il numero è negativo si procede come segue:
• si esprime il modulo del numero in notazione binaria sul numero di
bit richiesti;
• si complementano a 1 (cioè si scambiano gli 1 con degli 0 e viceversa)
tutti i bit che seguono da destra verso sinistra il primo bit a 1,
quest’ultimo escluso. Tenendo conto dell’esempio precedente si ha:
10 2(-20) =(11101100) .
Se la parola è ampia N bit con la notazione in complemento a due si possono
rappresentare numeri compresi nell’intervallo 1 12 , 2 1N N− −⎡ ⎤− −⎣ ⎦ , zero incluso.
La forma di codifica adottata in un dato ADC deve anche tenere conto del
modo in cui il risultato della conversione deve essere trasmesso, memorizzato o
visualizzato; se il dato non deve essere inviato a distanze elevate la trasmissione
viene eseguita, almeno normalmente, in forma parallela (un conduttore riservato
per ogni bit del codice) e non vi è normalmente la necessità di adottare precauzioni
particolari; Tuttavia, in alcuni casi di trasmissione parallela, si preferisce adottare
delle codifiche che diano una maggiore immunità al rumore o alle variazioni
parametriche della circuiterìa digitale impiegata. Una delle codifiche parallele
“sicure” più diffuse è la cosiddetta codifica di Gray o semplicemente codifica Gray
che consente di evitare che nella transizione tra due codici adiacenti si abbia il

Capitolo 1 La codifica
44
cambiamento di stato di più di un bit contemporaneamente; la codifica Gray
associata a numeri binari puri a tre bit è ad esempio:
decimale binario Gray
0 000 000
1 001 001
2 010 011
3 011 010
4 100 110
5 101 111
6 110 101
7 111 100
Nel caso di trasmissione seriale (bit del dato numerico trasmessi
sequenzialmente in un fissato ordine sullo stesso conduttore), che si rende
necessaria quando la distanza da coprire è rilevante o quando l’ampiezza della
parola è tale da non consentire l’impiego di trasmissione parallela, potrebbe essere
necessario inserire bit aggiuntivi in testa e/o in coda per stabilire l’adeguato
sincronismo tra trasmettitore o ricevitore (caso della trasmissione asincrona);
commercialmente esistono numerosissimi esempi di convertitori analogico/digitale
con uscita seriale, specialmente per le applicazioni audio ad alta risoluzione o per la
sensoristica industriale intelligente.
Altri tipi di codifica piuttosto diffusi, soprattutto negli ADC destinati
all’impiego in strumentazione di misura portatile o compatta da pannello per quadri
elettrici industriali, sono:
• la codifica BCD (Binary Coded Decimal) che prevede l’uso di 4 bit per la
rappresentazione di ciascun digit decimale del risultato della
conversione
• la codifica a 7 segmenti che prevede l’uso di un codice a 7 bit per ogni
cifra da rappresentare sul display; ogni bit della parola associata ad un
dato digit controlla lo stato (acceso/spento) di un segmento del display
destinato a visualizzarlo.
45
Capitolo 2
Principali architetture degli ADC
Introduzione
Questo capitolo è dedicato all’analisi dettagliata delle principali architetture
realizzative per i convertitori analogico/digitale oggi commercialmente disponibili e
al confronto tra le loro prestazioni. Le architetture che analizzeremo sono le
seguenti:
• ADC a scala;
• ADC ad integrazione a rampa semplice, doppia e multipla;
• ADC ad approssimazioni successive (SAR);
• ADC Flash;
• ADC Pipeline (o subranging);
• ADC Sigma-Delta.
2.1 ADC a scala
Questo tipo di convertitore è senz’altro il più semplice disponibile e, al
contempo, anche quello dalle prestazioni meno avanzate. Come visibile dallo
Capitolo 2 ADC a scala
46
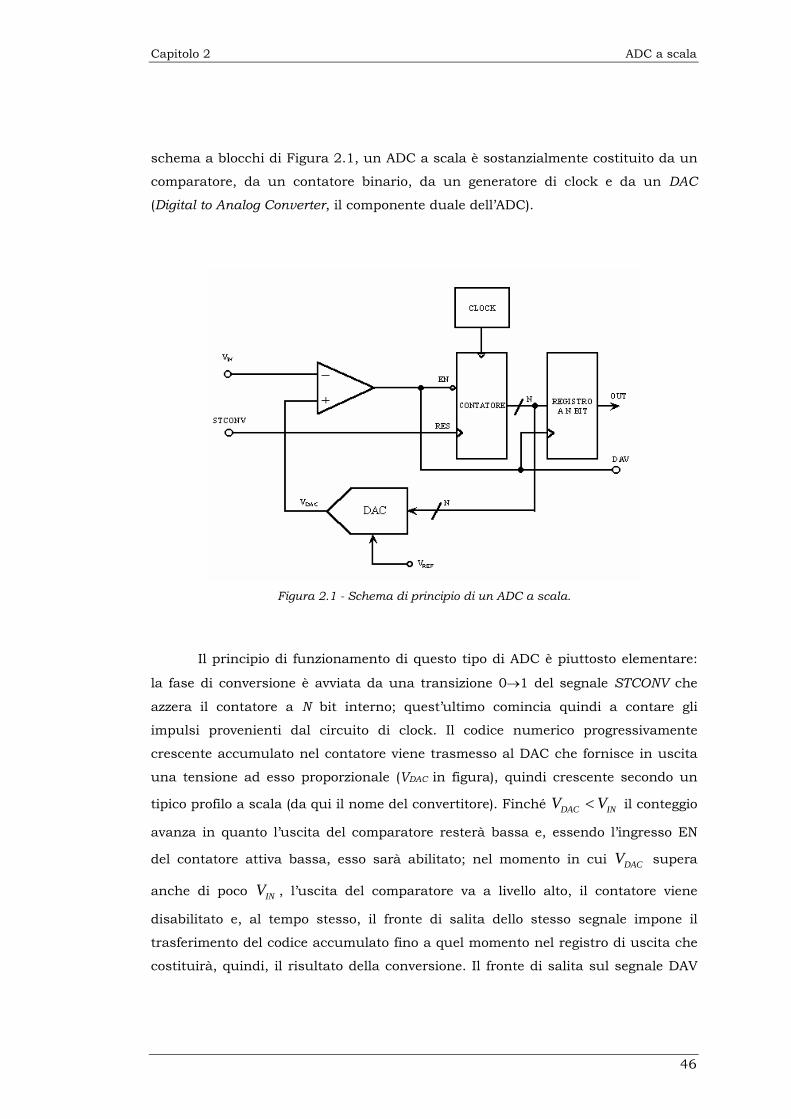
schema a blocchi di Figura 2.1, un ADC a scala è sostanzialmente costituito da un
comparatore, da un contatore binario, da un generatore di clock e da un DAC
(Digital to Analog Converter, il componente duale dell’ADC).
Figura 2.1 - Schema di principio di un ADC a scala.
Il principio di funzionamento di questo tipo di ADC è piuttosto elementare:
la fase di conversione è avviata da una transizione 0→1 del segnale STCONV che
azzera il contatore a N bit interno; quest’ultimo comincia quindi a contare gli
impulsi provenienti dal circuito di clock. Il codice numerico progressivamente
crescente accumulato nel contatore viene trasmesso al DAC che fornisce in uscita
una tensione ad esso proporzionale (VDAC in figura), quindi crescente secondo un
tipico profilo a scala (da qui il nome del convertitore). Finché DAC INV V< il conteggio
avanza in quanto l’uscita del comparatore resterà bassa e, essendo l’ingresso EN
del contatore attiva bassa, esso sarà abilitato; nel momento in cui DACV supera
anche di poco INV , l’uscita del comparatore va a livello alto, il contatore viene
disabilitato e, al tempo stesso, il fronte di salita dello stesso segnale impone il
trasferimento del codice accumulato fino a quel momento nel registro di uscita che
costituirà, quindi, il risultato della conversione. Il fronte di salita sul segnale DAV

Capitolo 2 ADC a scala
47
(Data AValaible) indica alla circuiterìa esterna la fine della conversione e la
disponibilità di un dato valido.
Dalla precedente descrizione risulta evidente quale è il principale svantaggio
di questo tipo di convertitore: il tempo di conversione dipende dal valore di VIN; è
infatti immediato verificare che esso è dato da
( )2 1NININ
CONVDAC CLK REF CLK
VVT
Q f V f
−= =
⋅ ⋅
essendo N il numero di bit o risoluzione del convertitore, VREF e 2 1
REFDAC N
VQ =
−,
rispettivamente, la tensione di riferimento ed il passo di quantizzazione del DAC e
fCLK la frequenza del segnale di clock interno.
Questo svantaggio può essere eliminato modificando leggermente la
struttura interna del convertitore; è sufficiente far si che il contatore sia lasciato
libero di proseguire il conteggio anche quando VDAC > VIN e che il segnale DAV sia
ricavato dal segnale di fine conteggio ottenuto semplicemente inviando tutte le
uscite del contatore all’ingresso di una porta NAND a N ingressi, come nella figura
seguente:
Capitolo 2 ADC a scala
48
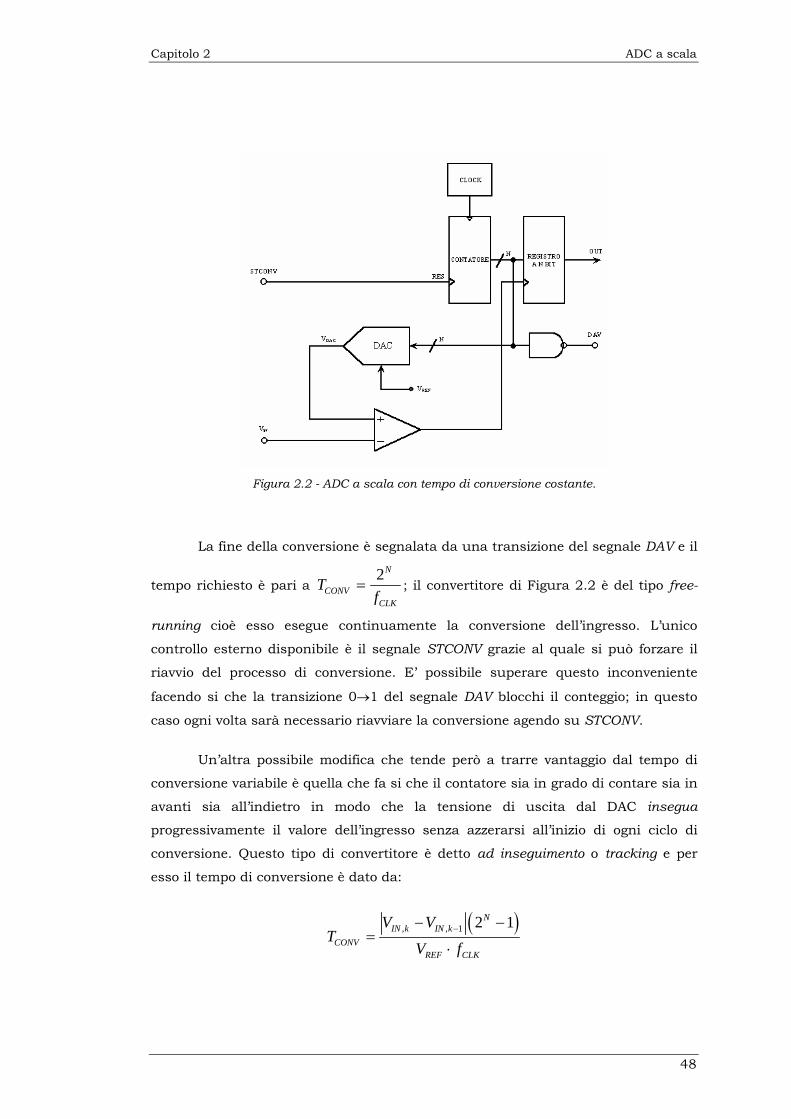
Figura 2.2 - ADC a scala con tempo di conversione costante.
La fine della conversione è segnalata da una transizione del segnale DAV e il
tempo richiesto è pari a 2N
CONVCLK
Tf
= ; il convertitore di Figura 2.2 è del tipo free-
running cioè esso esegue continuamente la conversione dell’ingresso. L’unico
controllo esterno disponibile è il segnale STCONV grazie al quale si può forzare il
riavvio del processo di conversione. E’ possibile superare questo inconveniente
facendo si che la transizione 0→1 del segnale DAV blocchi il conteggio; in questo
caso ogni volta sarà necessario riavviare la conversione agendo su STCONV.
Un’altra possibile modifica che tende però a trarre vantaggio dal tempo di
conversione variabile è quella che fa si che il contatore sia in grado di contare sia in
avanti sia all’indietro in modo che la tensione di uscita dal DAC insegua
progressivamente il valore dell’ingresso senza azzerarsi all’inizio di ogni ciclo di
conversione. Questo tipo di convertitore è detto ad inseguimento o tracking e per
esso il tempo di conversione è dato da:
( ), , 1 2 1NIN k IN k
CONVREF CLK
V VT
V f−− −
=⋅
Capitolo 2 ADC a rampa o ad integrazione
49
dove VIN,k è il valore della tensione di ingresso corrente e VIN,k-1 è il valore
della tensione di ingresso al ciclo di conversione precedente.
2.2 ADC a rampa o ad integrazione
I convertitori a rampa o ad integrazione, come già quelli a scala, sono
convertitori piuttosto semplici ma, ciò nonostante, con alcuni piccoli accorgimenti
essi consentono di ottenere prestazioni di tutto rispetto ad altri tipi di convertitori
ma con costi e consumi molto contenuti, tanto che essi sono stati in passato
ampiamente utilizzati nella strumentazione di misura portatile alimentata a
batteria (come i multimetri palmari) o nella strumentazione digitale da pannello,
ormai ampiamente diffusa in ambito industriale. Molto spesso questi dispositivi
sono disponibili in forma di circuiti integrati monolitici comprendono, oltre alla
circuiterìa di conversione, anche apposite sezioni destinate alla gestione diretta di
display numerici a 7 segmenti a cristalli liquidi o a LED ([9], [11]). L’evoluzione delle
moderne tecnologie elettroniche, con la conseguente produzione economica di
circuiti integrati misti analogici e digitali a larga scala di integrazione, ha fatto sì
che negli ultimi anni questa architettura abbia trovato una temibile concorrente
nell’architettura Sigma/Delta che analizzeremo in uno dei prossimi paragrafi [10].
2.2.1 ADC a singola rampa
E’ questo il tipo più semplice di ADC a rampa; lo schema di principio è
riportato in Figura 2.3.

Capitolo 2 ADC a rampa o ad integrazione
50
Figura 2.3 - Schema di principio di un ADC a rampa semplice.
Il principio di funzionamento è piuttosto semplice: un livello alto al segnale
STCONV causa la scarica completa del condensatore C e l’azzeramento del
contatore; quando STCONV torna basso l’integratore invertente costituito dal primo
amplificatore operazionale, da R e da C inizia ad integrare il segnale di riferimento
che è, per ipotesi, una tensione negativa e stabile. La tensione di uscita
dell’operazionale assumerà quindi un andamento a rampa lineare monotòna
crescente e finché essa non avrà raggiunto la tensione di ingresso VIN l’uscita del
comparatore sarà alta facendo sì che gli impulsi di clock generati dall’apposito
circuito raggiungano tramite la porta AND l’ingresso del contatore; quando VO = VIN
l’uscita del comparatore diviene bassa e la porta AND blocca gli impulsi di clock. Il
fronte di discesa del segnale all’uscita del comparatore trasferisce il contenuto del
contatore nel registro di uscita e segnala anche la fine della conversione e la
disponibilità del dato alla circuiterìa esterna. Il numero n di impulsi contati dal
contatore sarà proporzionale alla tensione VIN; infatti per quanto detto sopra,
possiamo scrivere:
0 0
1 1INT CLKT nT CLK REFREF REF IN
nT VV dt V dt V
RC RC RC= = =∫ ∫
quindi:
CLKIN
REF
RCfn V
V=
Capitolo 2 ADC a rampa o ad integrazione
51
La precedente relazione evidenzia che l’accuratezza del risultato dipende in
modo critico dall’accuratezza e dalla stabilità dei valori della resistenza R e della
capacità C oltre che della tensione di riferimento VREF e della frequenza del clock;
questi ultimi parametri sono però più facilmente controllabili rispetto ai primi
anche se la deriva di fCLK può essere significativa sul lungo termine. Nonostante
esistano tecniche di produzione di resistori e condensatori integrati che
garantiscono sia l’accurata taratura iniziale dei componenti sia basse derive nel
tempo, queste sono spesso troppo costose e la loro applicazione renderebbe troppo
onerosi i dispositivi prodotti. Una soluzione molto più economica a questi problemi
è quella di apportare una modifica sostanziale all’architettura appena analizzata
realizzando gli ADC ad integrazione a doppia rampa o a rampe multiple.
2.2.2 ADC a doppia rampa
In questi dispositivi si svincola il risultato della conversione dalle
inaccuratezze e dalle derive dei componenti R e C scindendo il processo in due fasi
consecutive:
• Nella prima fase il segnale di ingresso VIN viene integrato per un periodo
di durata costante che qui indicheremo con TINT;
• Nella seconda fase all’ingresso dell’integratore si applica un segnale di
riferimento VREF di ampiezza nota e di polarità opposta a quella di VIN in
modo da ottenere alla sua uscita un segnale monotòno decrescente dal
valore raggiunto al termine della prima fase fino a zero; se indichiamo
con TDEINT la durata di questa seconda fase, possiamo quindi scrivere:
0 0
1 1 INT INTT T
IN REF IN INT REF DEINTV dt V dt V T V TRC RC
= ⇔ =∫ ∫
Per ottenere un dato numerico proporzionale a VIN e indipendente da R e da
C è sufficiente abilitare il contatore solo in una delle due fasi; se lo si abilita nella
seconda fase si avrà:
IN INT CLKDEINT INT IN
CLK REF REF
V T fnT T n Vf V V
= = ⇒ =
Capitolo 2 ADC a rampa o ad integrazione
52
Dalla relazione precedente si potrebbe concludere semplicisticamente che la
risoluzione di questo tipo di convertitori può essere aumentata agendo sulla sola
frequenza del segnale di clock; un significativo limite per fCLK è tuttavia imposto
dalla velocità del comparatore; se questo non è sufficientemente veloce, infatti, il
contatore continua a contare gli impulsi di clock per una fase transitoria più o
meno lunga e se fCLK fosse molto elevata il risultato finale della conversione sarebbe
affetto da un errore piuttosto significativo. Fissata fCLK occorrerà dunque stabilire
un compromesso tra velocità di conversione e risoluzione; l’accurata analisi di tutti
i fattori di non idealità in gioco porta a concludere che tutte le migliorìe che
consentono un incremento della risoluzione introducono anche errori aggiuntivi che
vanno a scapito dell’accuratezza del risultato finale.
Il principio sul quale si fonda il funzionamento di questa classe di ADC
consente di ottenere un’ottima immunità al rumore dovuto ad accoppiamenti
induttivi e capacitivi con la rete elettrica di potenza; come abbiamo appena visto,
infatti, nella prima fase della conversione il segnale di ingresso viene integrato per
un periodo di tempo prefissato. Se si fa in modo che questo periodo sia un multiplo
intero del periodo del segnale di rete, è possibile annullare completamente la sua
influenza; ovviamente questo è possibile solo se il segnale da convertire non è
assoggettato a campionamento. Il segnale di rete ha un’ottima stabilità sul lungo
termine, tanto che da esso in alcune applicazioni si ricava un riferimento di
frequenza di elevata qualità, ma esso presenta uno jitter di qualche hertz sul breve
termine e questo limita la reiezione al segnale di rete negli ADC a doppia rampa al
massimo a 40-60 dB.
Purtroppo gli ADC a doppia rampa sono comunque influenzati da un effetto
parassita secondario sempre presente nei condensatori: l’assorbimento del
dielettrico; questo effetto si manifesta con una sorta di indisponibilità del
condensatore ad accumulare o a rilasciare la carica in modo istantaneo, nel senso
che entrambi questi due processi sono sempre soggetti a ritardi più o meno lunghi
dipendenti dal tipo di dielettrico impiegato nella realizzazione del condensatore.
L’effetto viene modellato connettendo in parallelo ad un condensatore ideale C0 un
bipolo RP-CP serie parassita come in figura:

Capitolo 2 ADC a rampa o ad integrazione
53
Figura 2.4 - Modello del condensatore affetto da assorbimento dielettrico.
Condensatori con dielettrico in Teflon, Polistirene o Polipropilene sono meno
soggetti a questo effetto parassita, mentre condensatori con dielettrico in carta,
Mylar e vetro sono più soggetti; i peggiori risultati si ottengono con i comuni
condensatori elettrolitici ([13]).
2.2.3 ADC a rampe multiple
Una tecnica piuttosto diffusa per l’eliminazione delle influenze delle non
idealità nel processo di conversione è quella di eseguire (all’inizio di ogni ciclo o
comunque ad intervalli regolari) una fase di auto-zero. In questa fase l’ingresso della
catena di misura viene disconnesso dalla sorgente del segnale e cortocircuitato al
riferimento e si esegue un normale ciclo di misura sul segnale residuo presente; il
risultato di questa misura sarà poi sottratto a tutte le misure eseguite
successivamente. L’implementazione di questa funzione è agevolata se il contatore è
in grado di contare in avanti e all’indietro; in questo caso infatti la memorizzazione
del residuo potrà essere fatta direttamente in digitale e non in analogico.
Convertitori ad integrazione che implementano questa o altre tecniche di
misura ed eliminazione delle nonidealità della catena di misura sono detti a rampe
multiple; molti produttori di ADC hanno a catalogo diversi dispositivi di questo tipo
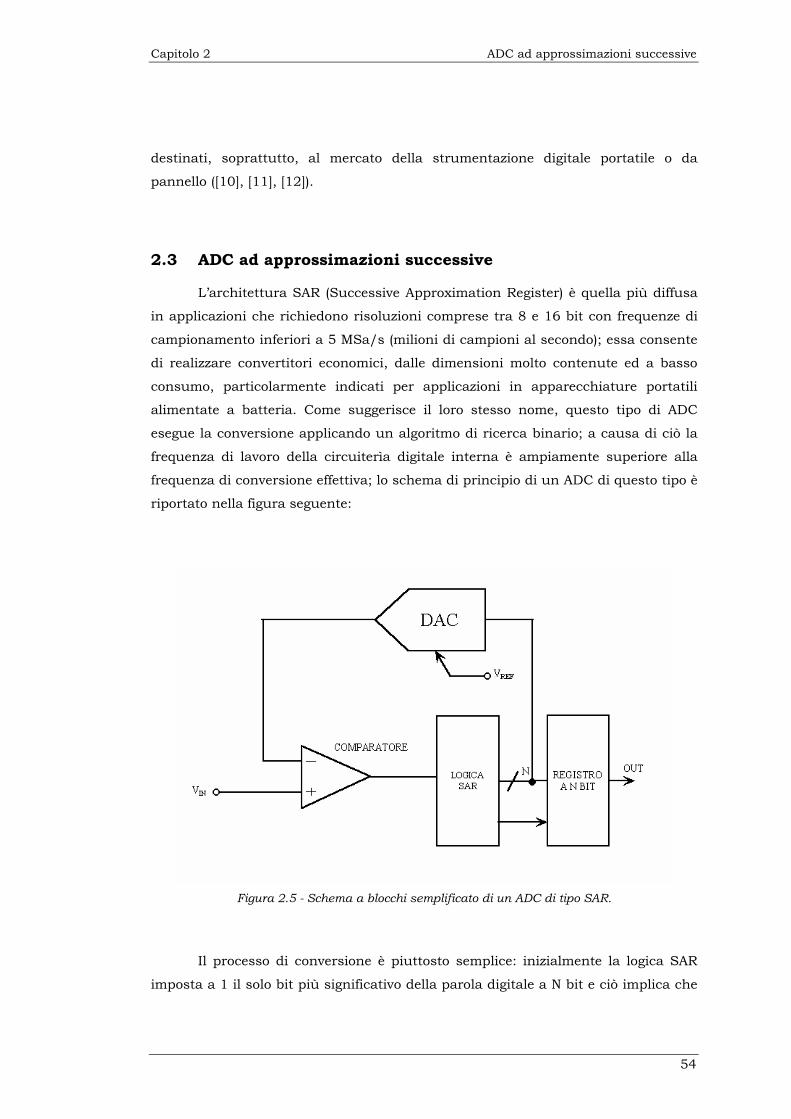
Capitolo 2 ADC ad approssimazioni successive
54
destinati, soprattutto, al mercato della strumentazione digitale portatile o da
pannello ([10], [11], [12]).
2.3 ADC ad approssimazioni successive
L’architettura SAR (Successive Approximation Register) è quella più diffusa
in applicazioni che richiedono risoluzioni comprese tra 8 e 16 bit con frequenze di
campionamento inferiori a 5 MSa/s (milioni di campioni al secondo); essa consente
di realizzare convertitori economici, dalle dimensioni molto contenute ed a basso
consumo, particolarmente indicati per applicazioni in apparecchiature portatili
alimentate a batteria. Come suggerisce il loro stesso nome, questo tipo di ADC
esegue la conversione applicando un algoritmo di ricerca binario; a causa di ciò la
frequenza di lavoro della circuiterìa digitale interna è ampiamente superiore alla
frequenza di conversione effettiva; lo schema di principio di un ADC di questo tipo è
riportato nella figura seguente:
Figura 2.5 - Schema a blocchi semplificato di un ADC di tipo SAR.
Il processo di conversione è piuttosto semplice: inizialmente la logica SAR
imposta a 1 il solo bit più significativo della parola digitale a N bit e ciò implica che
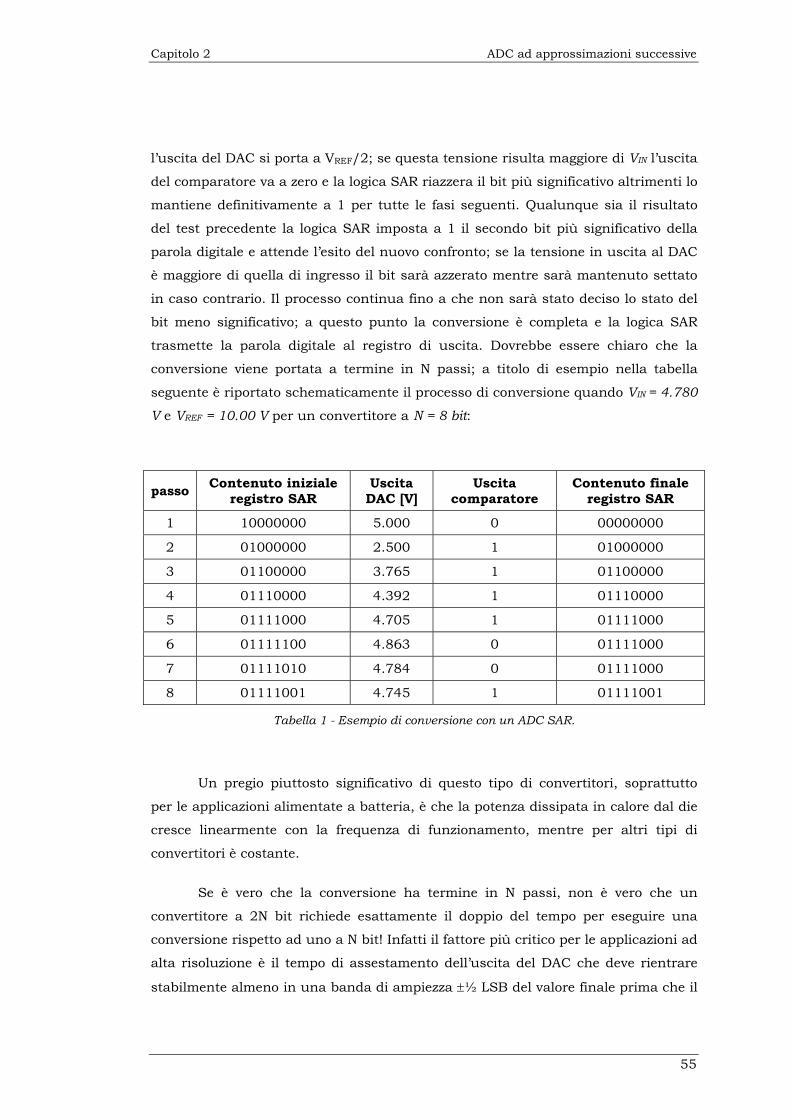
Capitolo 2 ADC ad approssimazioni successive
55
l’uscita del DAC si porta a VREF/2; se questa tensione risulta maggiore di VIN l’uscita
del comparatore va a zero e la logica SAR riazzera il bit più significativo altrimenti lo
mantiene definitivamente a 1 per tutte le fasi seguenti. Qualunque sia il risultato
del test precedente la logica SAR imposta a 1 il secondo bit più significativo della
parola digitale e attende l’esito del nuovo confronto; se la tensione in uscita al DAC
è maggiore di quella di ingresso il bit sarà azzerato mentre sarà mantenuto settato
in caso contrario. Il processo continua fino a che non sarà stato deciso lo stato del
bit meno significativo; a questo punto la conversione è completa e la logica SAR
trasmette la parola digitale al registro di uscita. Dovrebbe essere chiaro che la
conversione viene portata a termine in N passi; a titolo di esempio nella tabella
seguente è riportato schematicamente il processo di conversione quando VIN = 4.780
V e VREF = 10.00 V per un convertitore a N = 8 bit:
passo Contenuto iniziale registro SAR
Uscita DAC [V]
Uscita comparatore
Contenuto finale registro SAR
1 10000000 5.000 0 00000000
2 01000000 2.500 1 01000000
3 01100000 3.765 1 01100000
4 01110000 4.392 1 01110000
5 01111000 4.705 1 01111000
6 01111100 4.863 0 01111000
7 01111010 4.784 0 01111000
8 01111001 4.745 1 01111001
Tabella 1 - Esempio di conversione con un ADC SAR.
Un pregio piuttosto significativo di questo tipo di convertitori, soprattutto
per le applicazioni alimentate a batteria, è che la potenza dissipata in calore dal die
cresce linearmente con la frequenza di funzionamento, mentre per altri tipi di
convertitori è costante.
Se è vero che la conversione ha termine in N passi, non è vero che un
convertitore a 2N bit richiede esattamente il doppio del tempo per eseguire una
conversione rispetto ad uno a N bit! Infatti il fattore più critico per le applicazioni ad
alta risoluzione è il tempo di assestamento dell’uscita del DAC che deve rientrare
stabilmente almeno in una banda di ampiezza ±½ LSB del valore finale prima che il
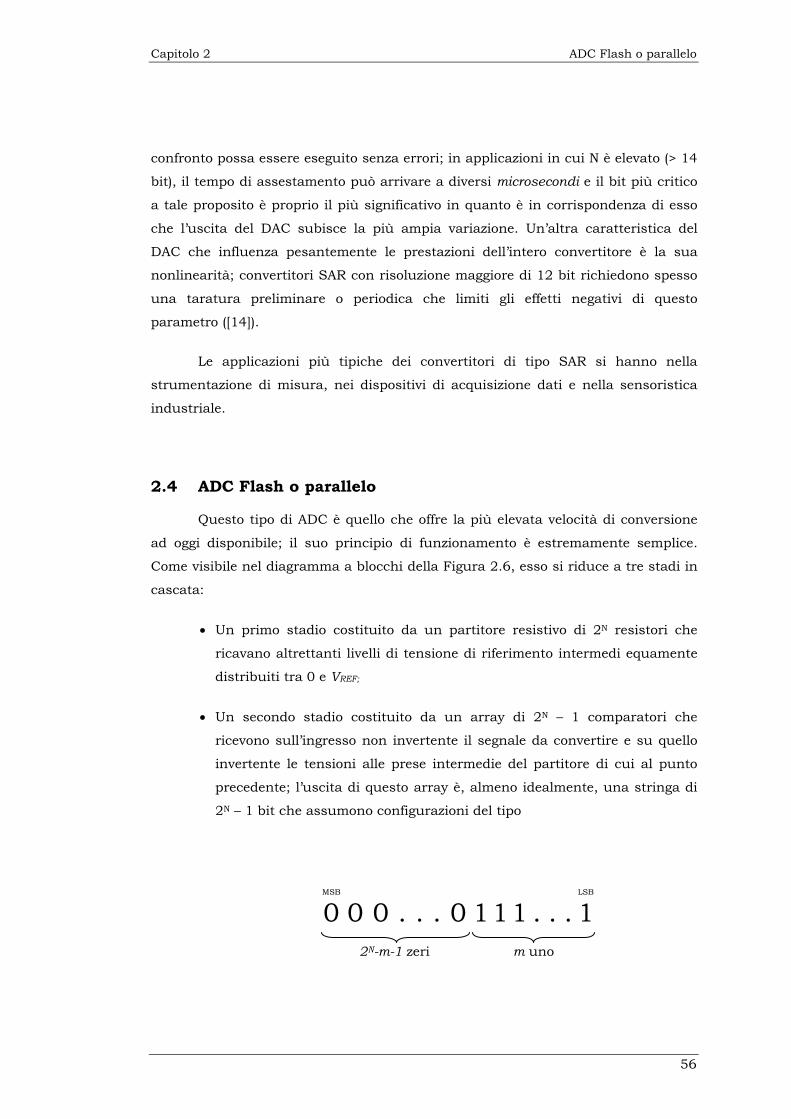
Capitolo 2 ADC Flash o parallelo
56
confronto possa essere eseguito senza errori; in applicazioni in cui N è elevato (> 14
bit), il tempo di assestamento può arrivare a diversi microsecondi e il bit più critico
a tale proposito è proprio il più significativo in quanto è in corrispondenza di esso
che l’uscita del DAC subisce la più ampia variazione. Un’altra caratteristica del
DAC che influenza pesantemente le prestazioni dell’intero convertitore è la sua
nonlinearità; convertitori SAR con risoluzione maggiore di 12 bit richiedono spesso
una taratura preliminare o periodica che limiti gli effetti negativi di questo
parametro ([14]).
Le applicazioni più tipiche dei convertitori di tipo SAR si hanno nella
strumentazione di misura, nei dispositivi di acquisizione dati e nella sensoristica
industriale.
2.4 ADC Flash o parallelo
Questo tipo di ADC è quello che offre la più elevata velocità di conversione
ad oggi disponibile; il suo principio di funzionamento è estremamente semplice.
Come visibile nel diagramma a blocchi della Figura 2.6, esso si riduce a tre stadi in
cascata:
• Un primo stadio costituito da un partitore resistivo di 2N resistori che
ricavano altrettanti livelli di tensione di riferimento intermedi equamente
distribuiti tra 0 e VREF;
• Un secondo stadio costituito da un array di 2N – 1 comparatori che
ricevono sull’ingresso non invertente il segnale da convertire e su quello
invertente le tensioni alle prese intermedie del partitore di cui al punto
precedente; l’uscita di questo array è, almeno idealmente, una stringa di
2N – 1 bit che assumono configurazioni del tipo
MSB LSB
0 0 0 . . . 0 111 . . . 1
2N-m-1 zeri
m uno
Capitolo 2 ADC Flash o parallelo
57
Infatti il partitore resistivo è progettato in modo che a ciascuna presa
intermedia sia disponibile una tensione esattamente pari a quella della
presa precedente aumentata della tensione corrispondente ad un LSB,
quindi, per una data tensione di ingresso, saranno attive (a livello alto)
solo le uscite di quei comparatori per i quali la tensione al pin invertente
è inferiore alla tensione di ingresso.
La configurazione delle uscite dei comparatori ricorda il comportamento
del liquido contenuto nel bulbo di un termometro a mercurio, tant’è che
nella letteratura tecnica ci si riferisce a questa codifica proprio come
thermometer-like.
• Un terzo stadio costituito da una rete di ricodifica digitale di uscita che
associa un numero binario puro a partire dalla configurazione di bit
disponibile all’uscita dell’array di comparatori.
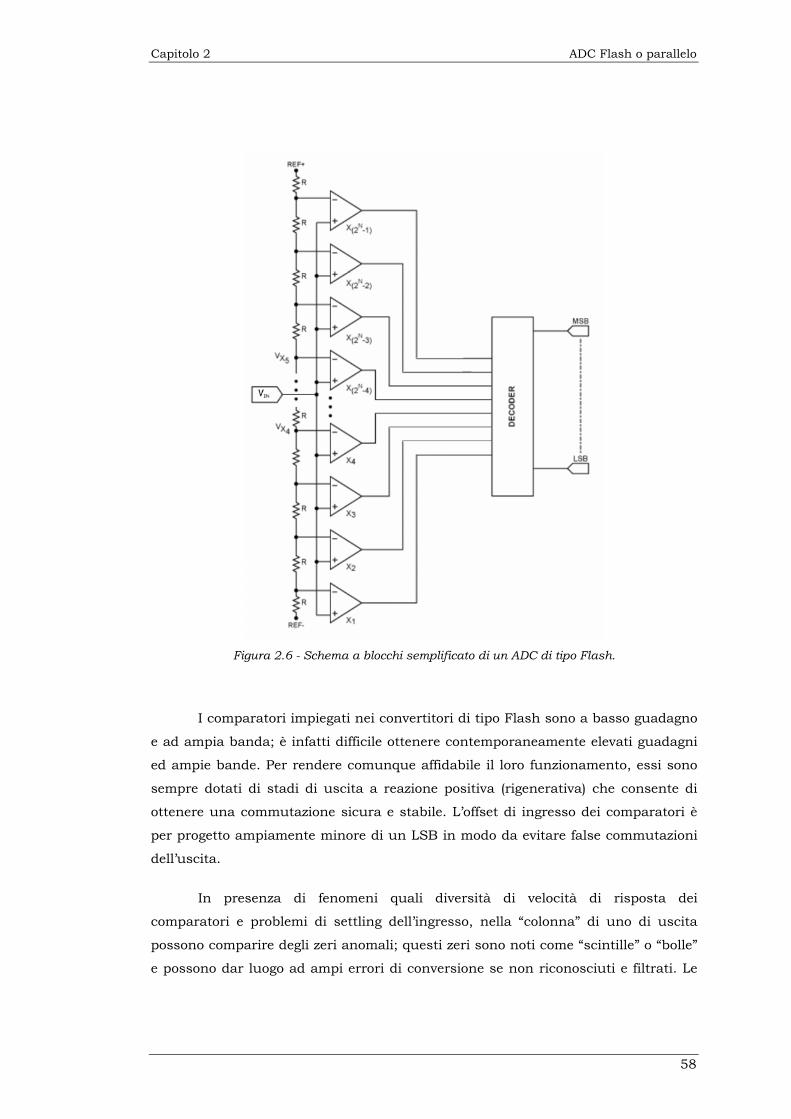
Capitolo 2 ADC Flash o parallelo
58
Figura 2.6 - Schema a blocchi semplificato di un ADC di tipo Flash.
I comparatori impiegati nei convertitori di tipo Flash sono a basso guadagno
e ad ampia banda; è infatti difficile ottenere contemporaneamente elevati guadagni
ed ampie bande. Per rendere comunque affidabile il loro funzionamento, essi sono
sempre dotati di stadi di uscita a reazione positiva (rigenerativa) che consente di
ottenere una commutazione sicura e stabile. L’offset di ingresso dei comparatori è
per progetto ampiamente minore di un LSB in modo da evitare false commutazioni
dell’uscita.
In presenza di fenomeni quali diversità di velocità di risposta dei
comparatori e problemi di settling dell’ingresso, nella “colonna” di uno di uscita
possono comparire degli zeri anomali; questi zeri sono noti come “scintille” o “bolle”
e possono dar luogo ad ampi errori di conversione se non riconosciuti e filtrati. Le

Capitolo 2 ADC di tipo Pipeline o subranging
59
più recenti logiche di ricodifica sono in grado di riconoscere e sopprimere questo
tipo di problemi fornendo in uscita il codice corretto.
Applicazioni tipiche dei convertitori di tipo Flash si hanno nell’ambito della
digitalizzazione di segnali video o nella strumentazione di misura numerica ad
ampia banda quali gli oscilloscopi digitali di tipo Real-Time e DPO (Digital Phosfor
Oscilloscope).
E’ evidente che l’elevato numero di comparatori richiesto limita la
risoluzione di questi convertitori a valori piuttosto modesti (al massimo 8 bit o poco
superiore); altri seri vincoli sono imposti dalla elevata dissipazione di potenza del
die che, esattamente come nel caso dell’area, si raddoppia ad ogni aumento di un
bit della risoluzione. Ovviamente l’aumento della complessità realizzativa comporta
un aumento esponenziale anche del costo ([15]).
2.5 ADC di tipo Pipeline o subranging
Per sopperire alla limitata risoluzione raggiungibile con gli ADC di tipo
Flash, si ricorre ad una architettura ibrida detta Pipeline che consente di ottenere
elevate velocità di conversione (intermedie a quelle ottenibili con gli ADC di tipo
SAR e con gli ADC di tipo Flash) ed elevata risoluzione (12-14 bit). Lo schema a
blocchi semplificato di un ADC Pipeline a N = 12 bit è riportato in Figura 2.7; come
visibile in figura la conversione viene realizzata in due passi:
• In un primo passo si converte il segnale di ingresso in maniera
grossolana impiegando un ADC Flash a bassa risoluzione (6 bit in
figura ma in generale pari a N/2); il risultato di questa prima
conversione viene riconvertito in analogico mediante un apposito DAC e
sottratto alla tensione di ingresso VIN.
• Nel secondo passo la tensione all’uscita del nodo sommatore viene
inviata ad un amplificatore di guadagno opportuno e quindi convertita
in digitale mediante un ulteriore ADC Flash a bassa risoluzione (7 bit in
figura); il bit aggiuntivo rispetto a quelli strettamente necessari per
completare la parola di 12 bit serve a fini di parziale correzione degli
errori introdotti dalla catena di elaborazione analogica; i codici in uscita
ai due ADC Flash sono inviati alla logica di correzione dell’errore e da
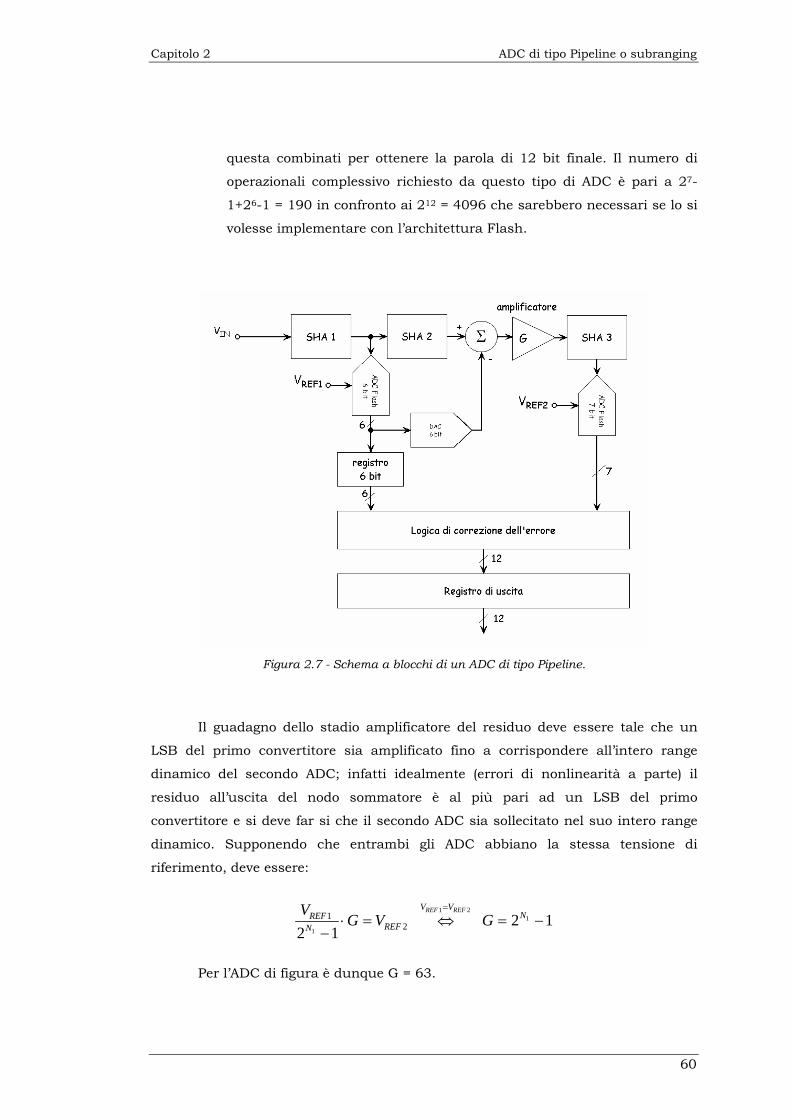
Capitolo 2 ADC di tipo Pipeline o subranging
60
questa combinati per ottenere la parola di 12 bit finale. Il numero di
operazionali complessivo richiesto da questo tipo di ADC è pari a 27-
1+26-1 = 190 in confronto ai 212 = 4096 che sarebbero necessari se lo si
volesse implementare con l’architettura Flash.
Figura 2.7 - Schema a blocchi di un ADC di tipo Pipeline.
Il guadagno dello stadio amplificatore del residuo deve essere tale che un
LSB del primo convertitore sia amplificato fino a corrispondere all’intero range
dinamico del secondo ADC; infatti idealmente (errori di nonlinearità a parte) il
residuo all’uscita del nodo sommatore è al più pari ad un LSB del primo
convertitore e si deve far si che il secondo ADC sia sollecitato nel suo intero range
dinamico. Supponendo che entrambi gli ADC abbiano la stessa tensione di
riferimento, deve essere:
1 21
1
12 2 1
2 1REF REFV V
NREFREFN
VG V G
=
⋅ = ⇔ = −−
Per l’ADC di figura è dunque G = 63.
Capitolo 2 ADC di tipo Sigma-Delta
61
Il funzionamento di un ADC Pipeline ricorda piuttosto da vicino quello di un
convertitore di tipo SAR; a differenza che in quest’ultimo però nella conversione
A/D che avviene in ciascuno dei passi intermedi in un ADC Pipeline è multibit.
Gli ADC di tipo Pipeline in quanto a prestazioni si collocano in posizioni
intermedie tra gli ADC di tipo SAR e quelli di tipo Flash; le principali applicazioni si
hanno nelle comunicazioni, nelle apparecchiature medicali diagnostiche basate su
elaborazione di immagine e nelle apparecchiature radar; principali svantaggi di
questa architettura sono l’elevata complessità realizzativa e l’aumentata
dissipazione di potenza ([16], [17]).
2.6 ADC di tipo Sigma-Delta
I convertitori di tipo Sigma-Delta sono quelli che offrono le più alte
risoluzioni (fino a 24 bit) ad oggi disponibili; tuttavia le bande passanti di questi
dispositivi sono relativamente ridotte: si raggiungono valori massimi dell’ordine del
centinaio di kilohertz per risoluzioni non superiori ai 16 bit, il che relega questi
dispositivi all’uso in applicazioni audio o di controllo di processi industriali.
Il principio di funzionamento e la corrispondente circuiterìa di questi
dispositivi sono piuttosto complessi, certamente ben superiori a quelli degli ADC fin
qui esaminati, tanto è vero che, nonostante essi siano stati sviluppati a metà del
secolo scorso, una loro realizzazione in forma monolitica integrata è stata possibile
ed economicamente conveniente solo negli ultimi due decenni con l’avvento delle
tecnologie elettroniche VLSI (Very Large Scale of Integration). La comprensione del
principio di funzionamento di questi dispositivi richiede conoscenze piuttosto
approfondite di elaborazione numerica dei segnali; nel seguito se ne darà una
descrizione adeguata a questo contesto.
2.6.1 Introduzione
I convertitori A/D fin qui esaminati operano a frequenze di campionamento
pari o di poco superiore a quella dettata dal teorema del campionamento di
Shannon, ossia al doppio della banda passante del segnale da digitalizzare; come
avremo modo di vedere in dettaglio a breve, superando questo vincolo sia i
convertitori di tipo PCM a sovracampionamento sia i convertitori di tipo Sigma-Delta
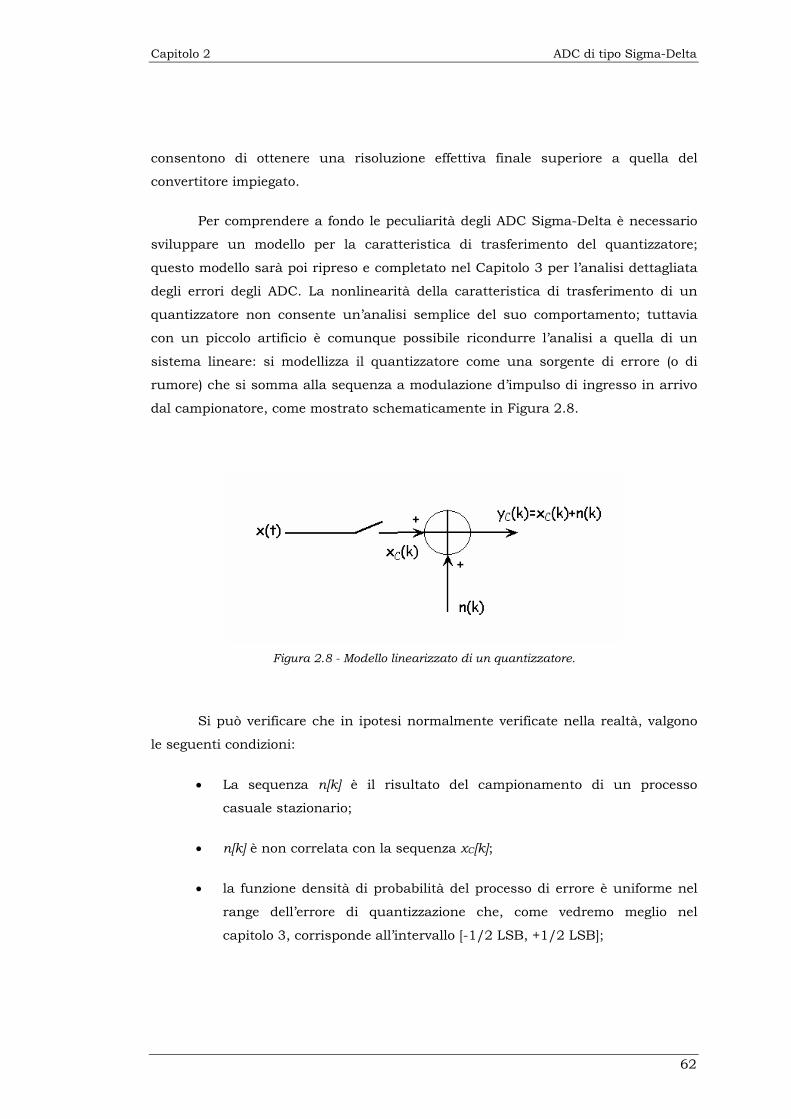
Capitolo 2 ADC di tipo Sigma-Delta
62
consentono di ottenere una risoluzione effettiva finale superiore a quella del
convertitore impiegato.
Per comprendere a fondo le peculiarità degli ADC Sigma-Delta è necessario
sviluppare un modello per la caratteristica di trasferimento del quantizzatore;
questo modello sarà poi ripreso e completato nel Capitolo 3 per l’analisi dettagliata
degli errori degli ADC. La nonlinearità della caratteristica di trasferimento di un
quantizzatore non consente un’analisi semplice del suo comportamento; tuttavia
con un piccolo artificio è comunque possibile ricondurre l’analisi a quella di un
sistema lineare: si modellizza il quantizzatore come una sorgente di errore (o di
rumore) che si somma alla sequenza a modulazione d’impulso di ingresso in arrivo
dal campionatore, come mostrato schematicamente in Figura 2.8.
Figura 2.8 - Modello linearizzato di un quantizzatore.
Si può verificare che in ipotesi normalmente verificate nella realtà, valgono
le seguenti condizioni:
• La sequenza n[k] è il risultato del campionamento di un processo
casuale stazionario;
• n[k] è non correlata con la sequenza xC[k];
• la funzione densità di probabilità del processo di errore è uniforme nel
range dell’errore di quantizzazione che, come vedremo meglio nel
capitolo 3, corrisponde all’intervallo [-1/2 LSB, +1/2 LSB];

Capitolo 2 ADC di tipo Sigma-Delta
63
Si verifica anche che la varianza del rumore di quantizzazione è 2
2
12eQσ = ,
avendo posto 1 2FSR
N
VQ LSB= = ; quindi, se si applica un segnale sinusoidale di
ampiezza tale da sollecitare a piena scala l’ADC, ossia di ampiezza di picco pari a
VFSR/2, il rapporto segnale rumore massimo, quindi anche il range dinamico, dell’
ADC è pari a:
2
22
10 10 1022
132 210 10 10 2 6.02 1.76 [ ]21
12 2
FSR
NxMAX
e FSRN
V
SNR log log log N dBV
σσ
⎛ ⎞⎛ ⎞⎜ ⎟⎜ ⎟⎛ ⎞ ⎛ ⎞⎝ ⎠⎜ ⎟= = = ⋅ = ⋅ +⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎝ ⎠⎛ ⎞⎝ ⎠ ⎜ ⎟⎜ ⎟
⎝ ⎠⎝ ⎠
Dalla precedente possiamo notare che per ogni incremento di una unità nel
numero di bit del quantizzatore si guadagnano 6.02 dB nel rapporto
segnale/rumore massimo. Questa relazione è però ottenuta in condizioni ideali, cioè
trascurando altre cause di non idealità (come rumore di diversa origine, non
linearità, ecc.) sempre presenti nei sistemi reali; portando in conto anche questi
termini aggiuntivi la relazione si modifica come segue:
2
10 210 [ ]x
t
SNR log dBσσ⎛ ⎞
= ⎜ ⎟⎝ ⎠
dove 2tσ è la potenza di rumore totale; uguagliando la precedente all’ultimo termine
dell’espressione del rapporto segnale rumore ideale ed esplicitando rispetto a N si
può ottenere l’espressione del numero di bit effettivi del convertitore:
1.766.02
SNRENOB −=
dove ENOB è l’acronimo per Effective Number Of Bits; questa relazione viene
utilizzata diffusamente nella realtà applicativa per fornire le specifiche operative di
un dato convertitore analogico/digitale.
E’ possibile aumentare il rapporto segnale rumore di un convertitore
“classico” anche senza aumentare il numero di bit; infatti, come vedremo nel

Capitolo 2 ADC di tipo Sigma-Delta
64
dettaglio tra poco, è possibile applicare semplici tecniche di elaborazione numerica
del segnale ad una sequenza ottenuta sovracampionando il segnale analogico di
ingresso, cioè campionandolo a frequenza ben superiore alla frequenza di
campionamento minima dettata dal teorema di Shannon. Per giustificare questo
metodo è sufficiente osservare che la potenza corrispondente all’errore di
quantizzazione è distribuita uniformemente nella banda di frequenze
[ ]/ 2, / 2S Sf f− + , essendo fS proprio la frequenza di campionamento utilizzata; se si
aumenta la frequenza di campionamento lasciando inalterata la risoluzione del
convertitore (N), la stessa potenza di rumore di quantizzazione sarà distribuita su
una banda più ampia e quindi la densità di potenza sarà minore ad ogni frequenza.
Se dopo il campionamento applichiamo un filtro passa basso numerico alla
sequenza in uscita al quantizzatore, possiamo migliorare il rapporto segnale
rumore.
Per poter calcolare un’espressione del rapporto segnale rumore generalizzata
al caso dei convertitori a sovracampionamento è necessario richiamare un teorema
fondamentale della teoria dei segnali ([1]):
se all’ingresso di un filtro lineare e tempo-invariante applichiamo un segnale
descritto come un processo casuale stazionario, all’uscita otterremo ancora un
processo casuale stazionario; se la densità spettrale di potenza del processo di
ingresso è Px(f) e se la funzione di trasferimento del filtro è H(f), la densità
spettrale di potenza del processo di uscita è data da 2( ) ( ) ( )y xP f P f H f= ⋅ .
Grazie a questo risultato, per poter calcolare la potenza associata al rumore
all’uscita della catena di elaborazione sarà sufficiente conoscere la funzione di
trasferimento cui esso è soggetto; val la pena ricordare che, trattandosi di sequenze
tempo discrete, le nostre elaborazioni vanno applicate nel dominio z ([2]).
Applicando il principio di sovrapposizione degli effetti allo schema a blocchi di
Figura 2.8, possiamo facilmente ricavare le funzioni di trasferimento del rumore e
del segnale; esse sono entrambe unitarie in quanto xC[k] ed n[k] non subiscono
alcuna elaborazione particolare.
Qualche cambiamento interviene quando inseriamo nel sistema il filtro
passa basso (numerico) ideale che supponiamo avere banda passante esattamente
pari alla banda utile del segnale; la potenza di rumore all’uscita del filtro passa
basso sarà dunque:

Capitolo 2 ADC di tipo Sigma-Delta
65
22 2 2
0
2( ) ( ) 2B B
en n n e
S SB
BP f H f df dff fσ
σ σ−
= ⋅ = =∫ ∫
Il segnale, per l’ipotesi fatta sul filtro passa basso, non subisce alcuna
alterazione tra ingresso ed uscita, quindi la sua potenza sarà pari a quella del caso
precedente; il rapporto segnale rumore massimo in uscita al filtro sarà dunque:
106.02 1.76 10 [ ]2
SMAX
fSNR N log dB
B⎛ ⎞= ⋅ + + ⎜ ⎟⎝ ⎠
ed è evidente che esso aumenta con fS; se indichiamo con k=2R il rapporto di
sovracampionamento utilizzato, ossia la quantità entro parentesi nella relazione
precedente, possiamo scrivere:
6.02 1.76 3.01 [ ]MAXSNR N R dB= ⋅ + + ⋅
e concludere che ad ogni raddoppio della frequenza di campionamento (quindi ad
ogni aumento di una unità di R), il rapporto segnale rumore aumenta di 3 dB.
La sequenza a valle del filtro passa basso ha (in banda base) ampiezza di
banda pari a quella del segnale di ingresso, per ipotesi molto inferiore alla
frequenza di campionamento impiegata; per questo si può procedere ad una
riduzione della frequenza di campionamento senza timore di causare aliasing. La
riduzione di fS si ottiene decimando la sequenza ossia conservando un campione
ogni M di ingresso; M è detto fattore di downsampling e l’operazione complessiva di
filtraggio e di riduzione della frequenza di campionamento è detta proprio
downsampling.
L’applicazione di questi risultati tout-court al fine di ottenere elevati rapporti
segnale rumore semplicemente agendo sulla frequenza di campionamento non è
conveniente visto che il guadagno ottenuto anche per elevati fattori di
sovracampionamento è piuttosto modesto; infatti utilizzando l’espressione del
numero di bit effettivi vediamo subito che ad ogni raddoppio della frequenza di
campionamento si guadagna appena ½ bit equivalente di risoluzione.
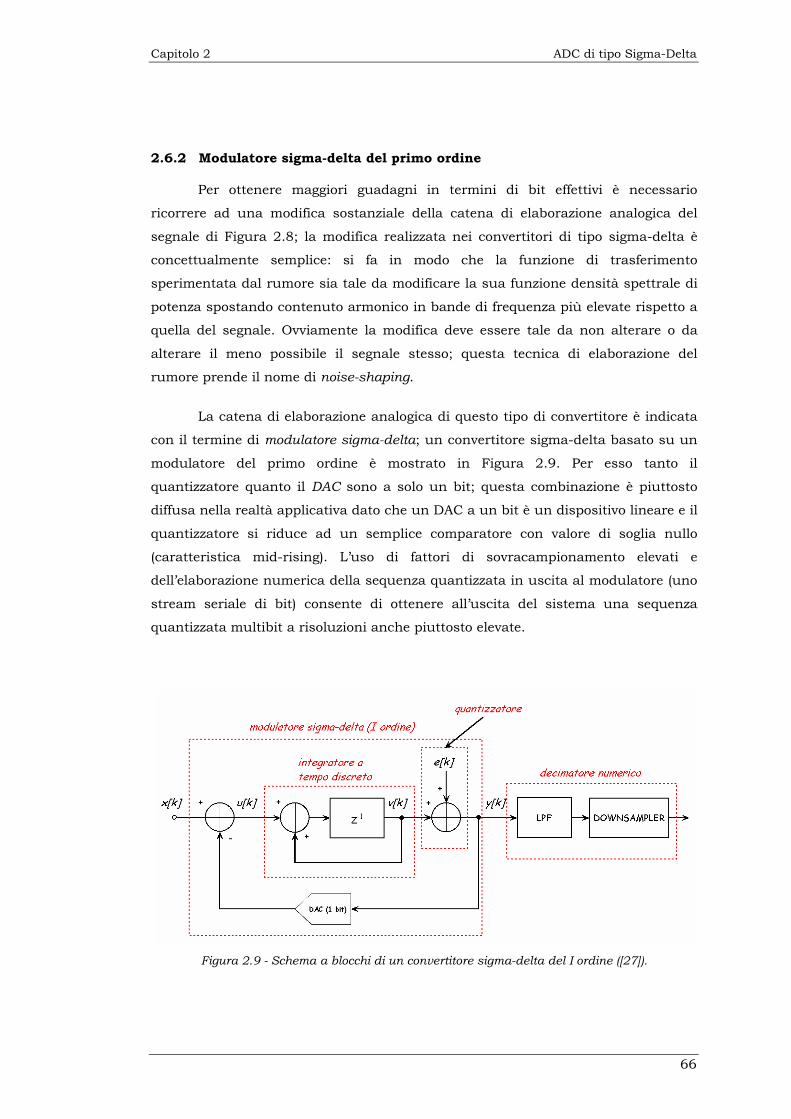
Capitolo 2 ADC di tipo Sigma-Delta
66
2.6.2 Modulatore sigma-delta del primo ordine
Per ottenere maggiori guadagni in termini di bit effettivi è necessario
ricorrere ad una modifica sostanziale della catena di elaborazione analogica del
segnale di Figura 2.8; la modifica realizzata nei convertitori di tipo sigma-delta è
concettualmente semplice: si fa in modo che la funzione di trasferimento
sperimentata dal rumore sia tale da modificare la sua funzione densità spettrale di
potenza spostando contenuto armonico in bande di frequenza più elevate rispetto a
quella del segnale. Ovviamente la modifica deve essere tale da non alterare o da
alterare il meno possibile il segnale stesso; questa tecnica di elaborazione del
rumore prende il nome di noise-shaping.
La catena di elaborazione analogica di questo tipo di convertitore è indicata
con il termine di modulatore sigma-delta; un convertitore sigma-delta basato su un
modulatore del primo ordine è mostrato in Figura 2.9. Per esso tanto il
quantizzatore quanto il DAC sono a solo un bit; questa combinazione è piuttosto
diffusa nella realtà applicativa dato che un DAC a un bit è un dispositivo lineare e il
quantizzatore si riduce ad un semplice comparatore con valore di soglia nullo
(caratteristica mid-rising). L’uso di fattori di sovracampionamento elevati e
dell’elaborazione numerica della sequenza quantizzata in uscita al modulatore (uno
stream seriale di bit) consente di ottenere all’uscita del sistema una sequenza
quantizzata multibit a risoluzioni anche piuttosto elevate.
Figura 2.9 - Schema a blocchi di un convertitore sigma-delta del I ordine ([27]).
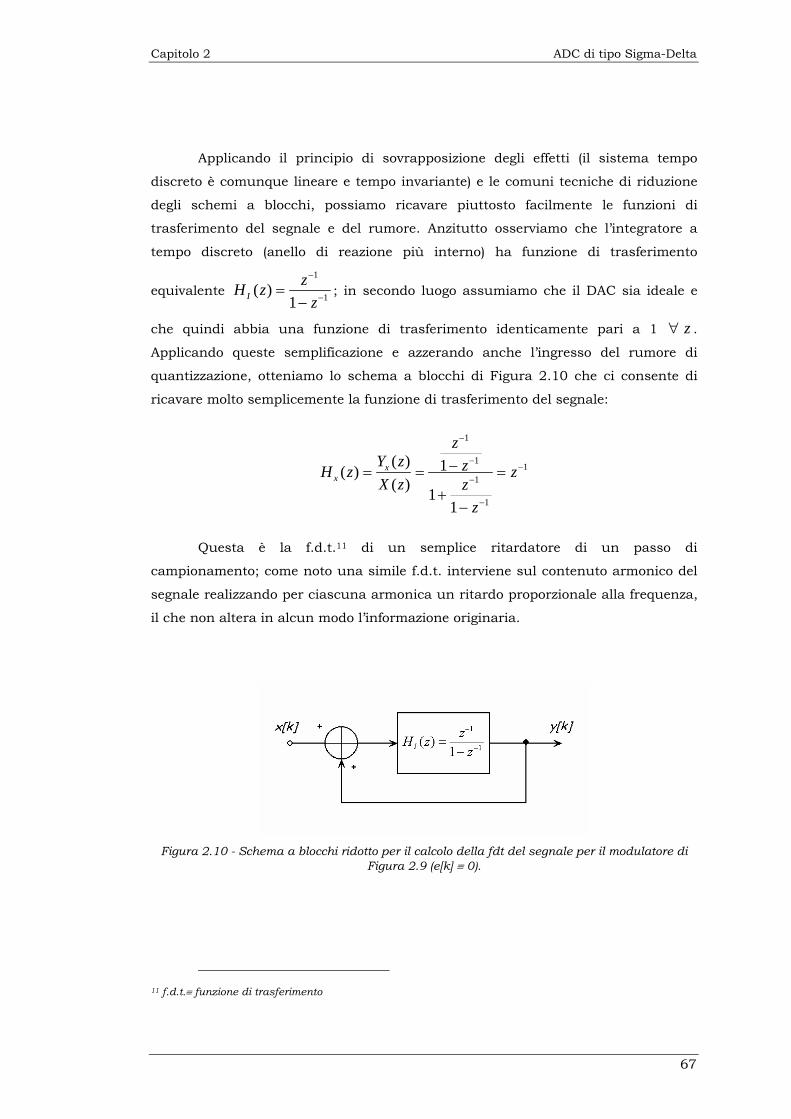
Capitolo 2 ADC di tipo Sigma-Delta
67
Applicando il principio di sovrapposizione degli effetti (il sistema tempo
discreto è comunque lineare e tempo invariante) e le comuni tecniche di riduzione
degli schemi a blocchi, possiamo ricavare piuttosto facilmente le funzioni di
trasferimento del segnale e del rumore. Anzitutto osserviamo che l’integratore a
tempo discreto (anello di reazione più interno) ha funzione di trasferimento
equivalente 1
1( )1I
zH zz
−
−=−
; in secondo luogo assumiamo che il DAC sia ideale e
che quindi abbia una funzione di trasferimento identicamente pari a 1 z∀ .
Applicando queste semplificazione e azzerando anche l’ingresso del rumore di
quantizzazione, otteniamo lo schema a blocchi di Figura 2.10 che ci consente di
ricavare molto semplicemente la funzione di trasferimento del segnale:
1
11
1
1
( ) 1( )( ) 1
1
xx
zY z zH z zX z z
z
−
−−
−
−
−= = =+
−
Questa è la f.d.t.11 di un semplice ritardatore di un passo di
campionamento; come noto una simile f.d.t. interviene sul contenuto armonico del
segnale realizzando per ciascuna armonica un ritardo proporzionale alla frequenza,
il che non altera in alcun modo l’informazione originaria.
Figura 2.10 - Schema a blocchi ridotto per il calcolo della fdt del segnale per il modulatore di
Figura 2.9 (e[k] ≡ 0).
11 f.d.t.≡ funzione di trasferimento
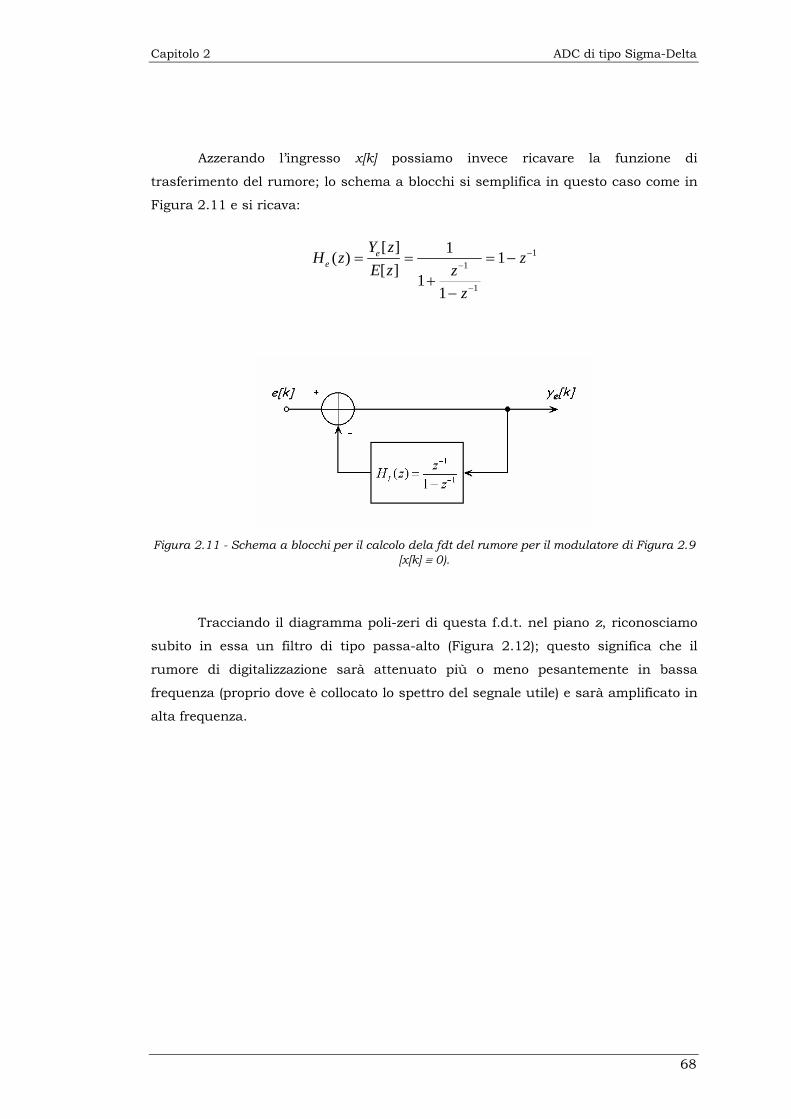
Capitolo 2 ADC di tipo Sigma-Delta
68
Azzerando l’ingresso x[k] possiamo invece ricavare la funzione di
trasferimento del rumore; lo schema a blocchi si semplifica in questo caso come in
Figura 2.11 e si ricava:
11
1
[ ] 1( ) 1[ ] 1
1
ee
Y zH z z
E z zz
−−
−
= = = −+
−
Figura 2.11 - Schema a blocchi per il calcolo dela fdt del rumore per il modulatore di Figura 2.9
[x[k] ≡ 0).
Tracciando il diagramma poli-zeri di questa f.d.t. nel piano z, riconosciamo
subito in essa un filtro di tipo passa-alto (Figura 2.12); questo significa che il
rumore di digitalizzazione sarà attenuato più o meno pesantemente in bassa
frequenza (proprio dove è collocato lo spettro del segnale utile) e sarà amplificato in
alta frequenza.

Capitolo 2 ADC di tipo Sigma-Delta
69
Figura 2.12 - Diagramma poli-zeri della f.d.t. del rumore per il modulatore di Figura 2.9.
Per quanto appena visto, nel dominio della frequenza l’uscita del modulatore
sigma-delta di Figura 2.9 si scrive come:
1 1
( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) (1 ) ( )x e x eY z Y z Y z H z X z H z E z
z X z z E z− −
= + = ⋅ + ⋅
= ⋅ + − ⋅
mentre nel dominio del tempo si ha:
[ ] [ 1] [ ] [ 1]y k x k e k e k= − + − − .
Nella successiva Figura 2.13 sono riportate per confronto i moduli delle
funzioni di trasferimento del rumore per un convertitore PCM a
sovracampionamento e per un convertitore sigma-delta con modulatore del primo
ordine; osserviamo che mentre la prima ha sempre modulo unitario, la seconda ha
un chiaro comportamento passa alto, come già previsto dal relativo diagramma
poli-zeri.
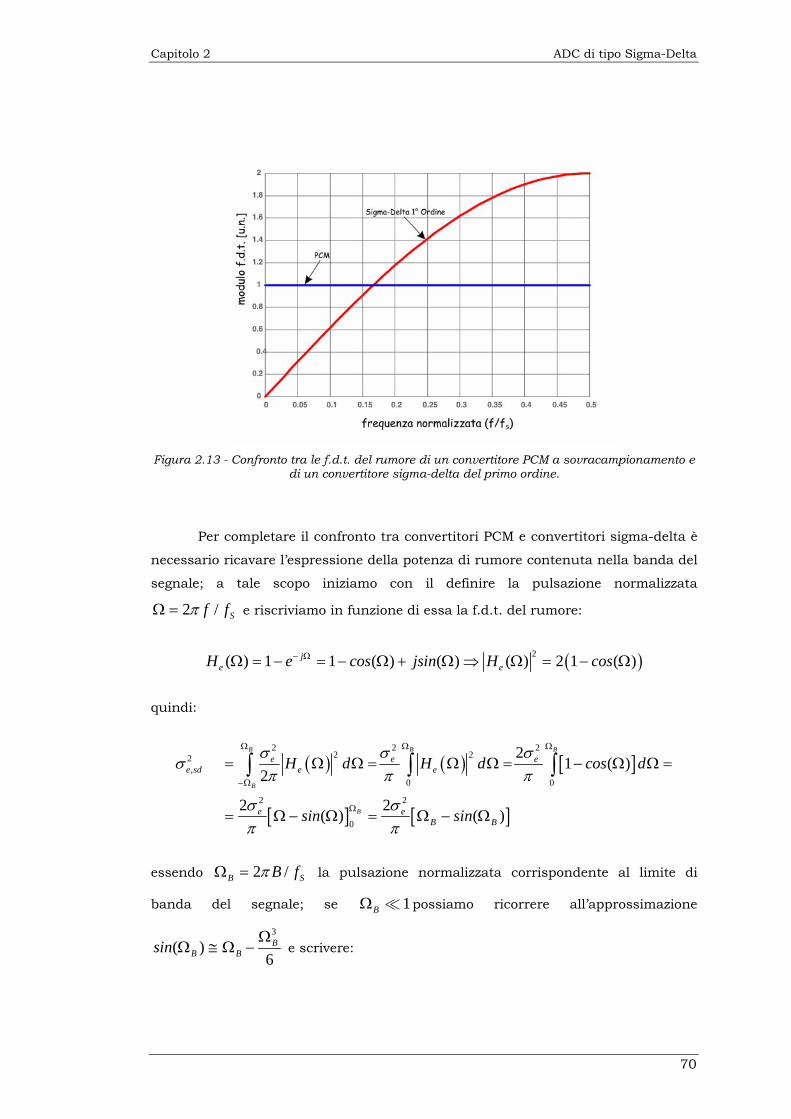
Capitolo 2 ADC di tipo Sigma-Delta
70
Figura 2.13 - Confronto tra le f.d.t. del rumore di un convertitore PCM a sovracampionamento e
di un convertitore sigma-delta del primo ordine.
Per completare il confronto tra convertitori PCM e convertitori sigma-delta è
necessario ricavare l’espressione della potenza di rumore contenuta nella banda del
segnale; a tale scopo iniziamo con il definire la pulsazione normalizzata
2 / Sf fπΩ = e riscriviamo in funzione di essa la f.d.t. del rumore:
( )2( ) 1 1 ( ) ( ) ( ) 2 1 ( )je eH e cos jsin H cos− ΩΩ = − = − Ω + Ω ⇒ Ω = − Ω
quindi:
( ) ( ) [ ]
[ ] [ ]
2 2 22 22
,0 0
2 2
0
21 ( )
2
2 2( ) ( )
B B B
B
B
e e ee sd e e
e eB B
H d H d cos d
sin sin
σ σ σσ
π π π
σ σπ π
Ω Ω Ω
−Ω
Ω
= Ω Ω = Ω Ω = − Ω Ω =
= Ω − Ω = Ω − Ω
∫ ∫ ∫
essendo 2 /B SB fπΩ = la pulsazione normalizzata corrispondente al limite di
banda del segnale; se 1BΩ possiamo ricorrere all’approssimazione
3
( )6
BB Bsin
ΩΩ ≅ Ω − e scrivere:

Capitolo 2 ADC di tipo Sigma-Delta
71
3 32 2 22 3 2,
2 1 226 3 3
e ee sd B e
S S
B Bf f
σ σ πσ π σπ π
⎛ ⎞ ⎛ ⎞= ⋅ Ω = ⋅ = ⋅⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠
Se, come già fatto per il convertitore PCM a sovracampionamento, riteniamo
che il filtro passa basso del decimatore sia ideale e che abbia banda passante B, la
potenza del segnale è inalterata e il rapporto segnale rumore massimo sarà dato da
2 2
10 10 102
2 2
10 102
10 10 303 2
10 10 9.03 [ ]3
xMAX
Se
x
e
BSNR log log logf
log log R dB
σ πσ
σ πσ
⎛ ⎞ ⎛ ⎞⎛ ⎞= − + =⎜ ⎟ ⎜ ⎟⎜ ⎟
⎝ ⎠ ⎝ ⎠⎝ ⎠⎛ ⎞ ⎛ ⎞
= − + ⋅⎜ ⎟ ⎜ ⎟⎝ ⎠⎝ ⎠
avendo reintrodotto esplicitamente il fattore di sovracampionamento k=2R.
Vediamo che stavolta un raddoppio della frequenza di campionamento
comporta un guadagno di ben 9.03 decibel nel rapporto segnale rumore o,
equivalentemente, di 1.5 bit di risoluzione equivalente aggiuntiva.
2.6.3 Modulatori sigma-delta di ordine superiore
Introducendo nel ramo diretto della catena di elaborazione analogica di
Figura 2.9 un ulteriore integratore tempo discreto si ottiene un modulatore sigma-
delta del secondo ordine; lo schema a blocchi del solo modulatore è riportato nella
figura successiva.
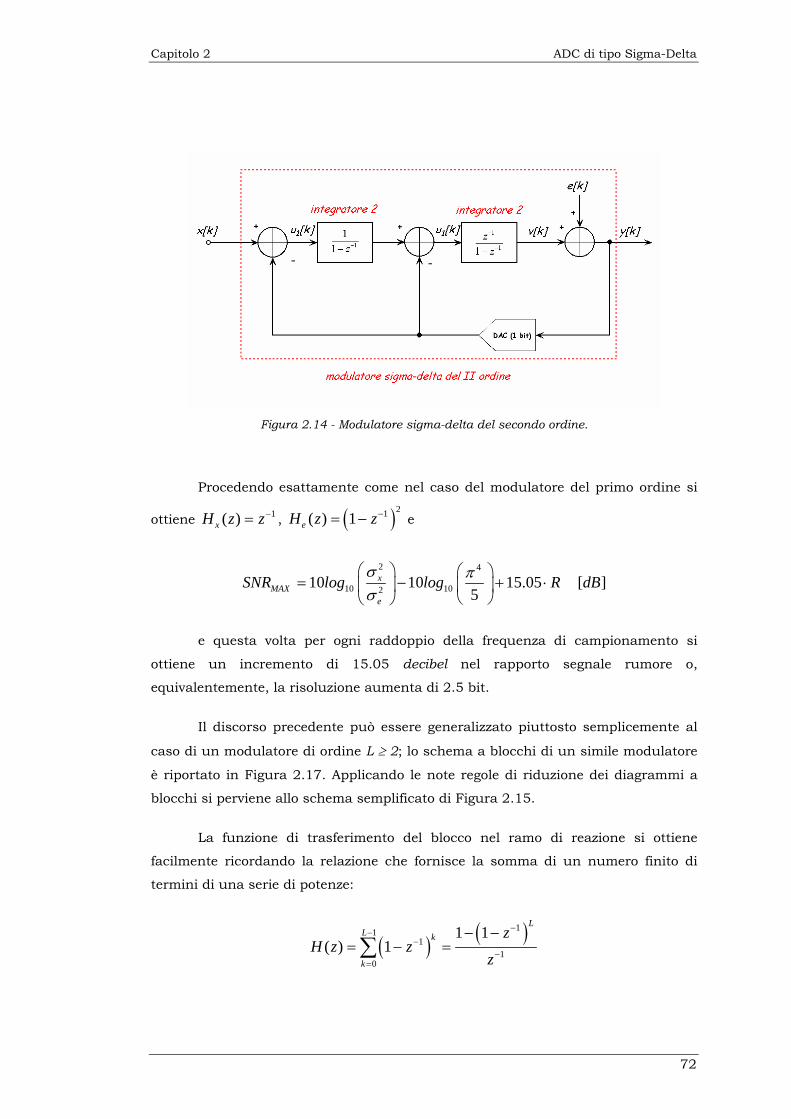
Capitolo 2 ADC di tipo Sigma-Delta
72
Figura 2.14 - Modulatore sigma-delta del secondo ordine.
Procedendo esattamente come nel caso del modulatore del primo ordine si
ottiene 1( )xH z z−= , ( )21( ) 1eH z z−= − e
2 4
10 10210 10 15.05 [ ]5
xMAX
e
SNR log log R dBσ πσ⎛ ⎞ ⎛ ⎞
= − + ⋅⎜ ⎟ ⎜ ⎟⎝ ⎠⎝ ⎠
e questa volta per ogni raddoppio della frequenza di campionamento si
ottiene un incremento di 15.05 decibel nel rapporto segnale rumore o,
equivalentemente, la risoluzione aumenta di 2.5 bit.
Il discorso precedente può essere generalizzato piuttosto semplicemente al
caso di un modulatore di ordine L ≥ 2; lo schema a blocchi di un simile modulatore
è riportato in Figura 2.17. Applicando le note regole di riduzione dei diagrammi a
blocchi si perviene allo schema semplificato di Figura 2.15.
La funzione di trasferimento del blocco nel ramo di reazione si ottiene
facilmente ricordando la relazione che fornisce la somma di un numero finito di
termini di una serie di potenze:
( ) ( )111
10
1 1( ) 1
LL k
k
zH z z
z
−−−
−=
− −= − =∑
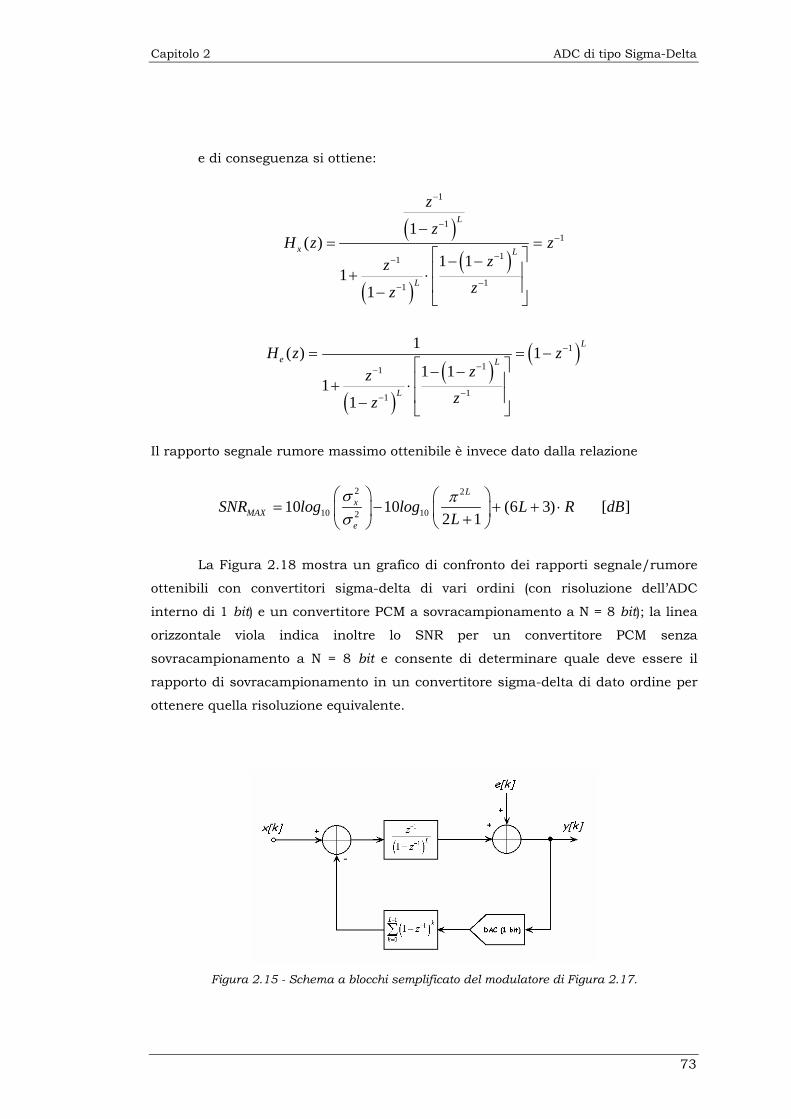
Capitolo 2 ADC di tipo Sigma-Delta
73
e di conseguenza si ottiene:
( )
( )( )
1
11
11
11
1( )
1 11
1
L
x L
L
z
zH z z
zzzz
−
−−
−−
−−
−= =
⎡ ⎤− −⎢ ⎥+ ⋅⎢ ⎥− ⎣ ⎦
( )( )
( )1
11
11
1( ) 11 1
11
L
e L
L
H z zzz
zz
−
−−
−−
= = −⎡ ⎤− −⎢ ⎥+ ⋅⎢ ⎥− ⎣ ⎦
Il rapporto segnale rumore massimo ottenibile è invece dato dalla relazione
2 2
10 10210 10 (6 3) [ ]2 1
Lx
MAXe
SNR log log L R dBL
σ πσ⎛ ⎞ ⎛ ⎞
= − + + ⋅⎜ ⎟ ⎜ ⎟+⎝ ⎠⎝ ⎠
La Figura 2.18 mostra un grafico di confronto dei rapporti segnale/rumore
ottenibili con convertitori sigma-delta di vari ordini (con risoluzione dell’ADC
interno di 1 bit) e un convertitore PCM a sovracampionamento a N = 8 bit); la linea
orizzontale viola indica inoltre lo SNR per un convertitore PCM senza
sovracampionamento a N = 8 bit e consente di determinare quale deve essere il
rapporto di sovracampionamento in un convertitore sigma-delta di dato ordine per
ottenere quella risoluzione equivalente.
Figura 2.15 - Schema a blocchi semplificato del modulatore di Figura 2.17.
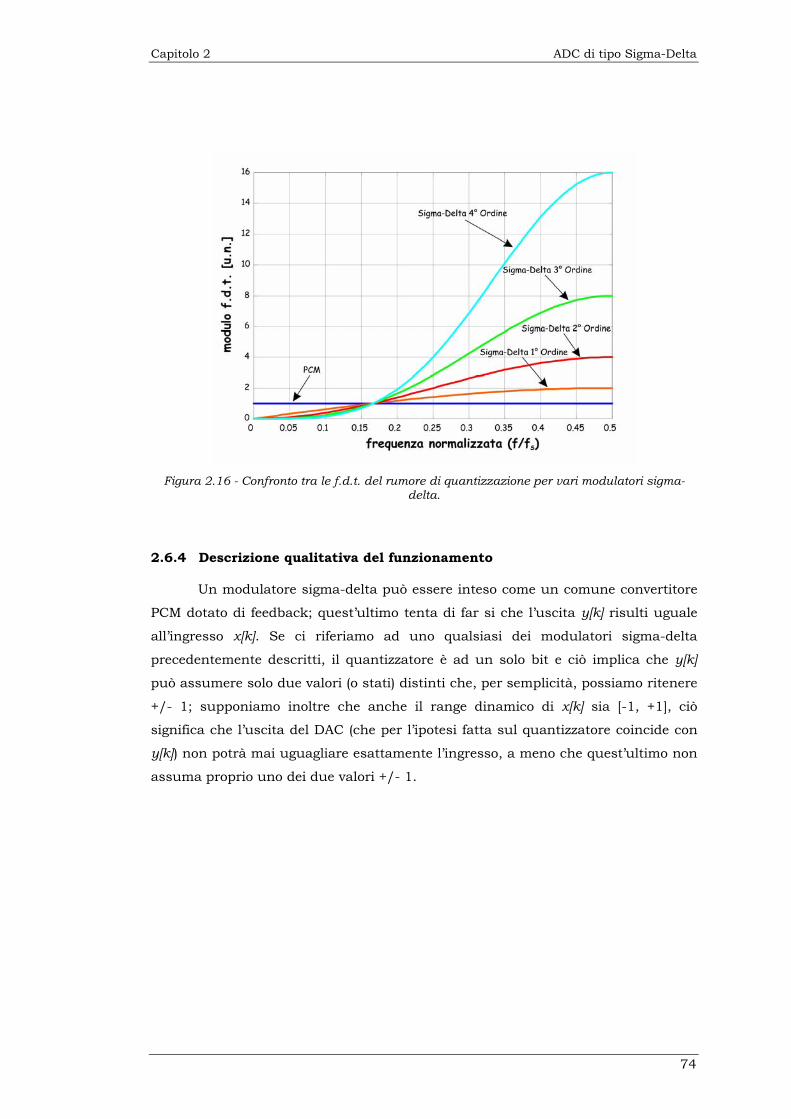
Capitolo 2 ADC di tipo Sigma-Delta
74
Figura 2.16 - Confronto tra le f.d.t. del rumore di quantizzazione per vari modulatori sigma-
delta.
2.6.4 Descrizione qualitativa del funzionamento
Un modulatore sigma-delta può essere inteso come un comune convertitore
PCM dotato di feedback; quest’ultimo tenta di far si che l’uscita y[k] risulti uguale
all’ingresso x[k]. Se ci riferiamo ad uno qualsiasi dei modulatori sigma-delta
precedentemente descritti, il quantizzatore è ad un solo bit e ciò implica che y[k]
può assumere solo due valori (o stati) distinti che, per semplicità, possiamo ritenere
+/- 1; supponiamo inoltre che anche il range dinamico di x[k] sia [-1, +1], ciò
significa che l’uscita del DAC (che per l’ipotesi fatta sul quantizzatore coincide con
y[k]) non potrà mai uguagliare esattamente l’ingresso, a meno che quest’ultimo non
assuma proprio uno dei due valori +/- 1.
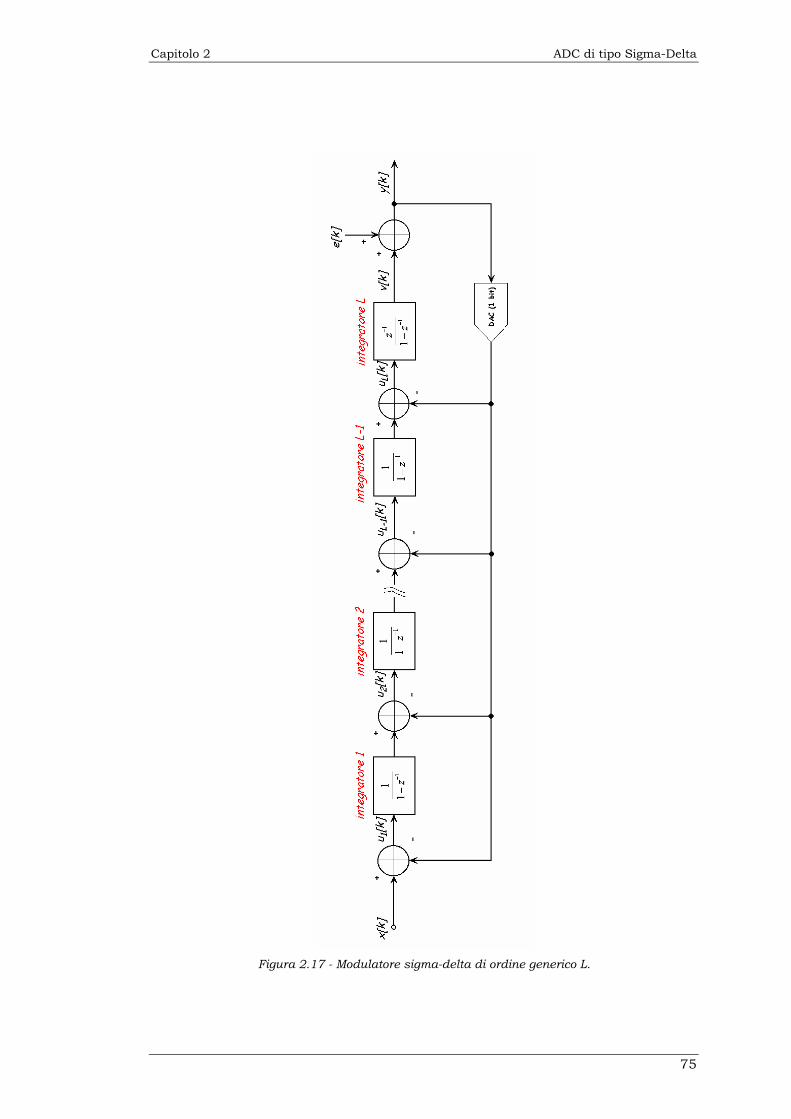
Capitolo 2 ADC di tipo Sigma-Delta
75
Figura 2.17 - Modulatore sigma-delta di ordine generico L.
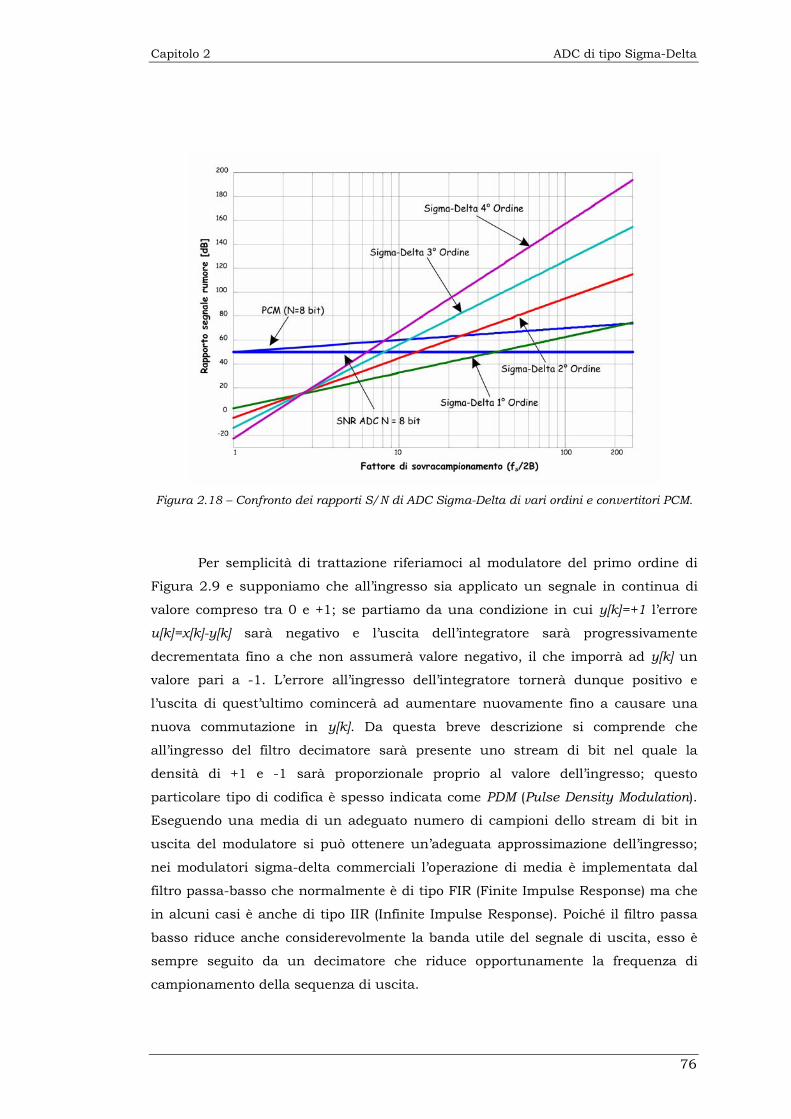
Capitolo 2 ADC di tipo Sigma-Delta
76
Figura 2.18 – Confronto dei rapporti S/N di ADC Sigma-Delta di vari ordini e convertitori PCM.
Per semplicità di trattazione riferiamoci al modulatore del primo ordine di
Figura 2.9 e supponiamo che all’ingresso sia applicato un segnale in continua di
valore compreso tra 0 e +1; se partiamo da una condizione in cui y[k]=+1 l’errore
u[k]=x[k]-y[k] sarà negativo e l’uscita dell’integratore sarà progressivamente
decrementata fino a che non assumerà valore negativo, il che imporrà ad y[k] un
valore pari a -1. L’errore all’ingresso dell’integratore tornerà dunque positivo e
l’uscita di quest’ultimo comincerà ad aumentare nuovamente fino a causare una
nuova commutazione in y[k]. Da questa breve descrizione si comprende che
all’ingresso del filtro decimatore sarà presente uno stream di bit nel quale la
densità di +1 e -1 sarà proporzionale proprio al valore dell’ingresso; questo
particolare tipo di codifica è spesso indicata come PDM (Pulse Density Modulation).
Eseguendo una media di un adeguato numero di campioni dello stream di bit in
uscita del modulatore si può ottenere un’adeguata approssimazione dell’ingresso;
nei modulatori sigma-delta commerciali l’operazione di media è implementata dal
filtro passa-basso che normalmente è di tipo FIR (Finite Impulse Response) ma che
in alcuni casi è anche di tipo IIR (Infinite Impulse Response). Poiché il filtro passa
basso riduce anche considerevolmente la banda utile del segnale di uscita, esso è
sempre seguito da un decimatore che riduce opportunamente la frequenza di
campionamento della sequenza di uscita.
Capitolo 2 ADC di tipo Sigma-Delta
77
2.6.5 Effetti di imperfezioni dell’hardware
Nei paragrafi precedenti sono stati descritti modulatori sigma-delta di ordini
crescenti ma si sono sempre trascurati gli effetti di eventuali imperfezioni
dell’hardware utilizzato nella catena di elaborazione analogica. Le possibili
imperfezioni nei modulatori reali possono essere diverse; cominciamo con il
considerare le seguenti:
• l’integratore nel ramo diretto può avere un guadagno in continua diverso
dall’unità: g0≠1 oltre a un fattore di perdita α<1 che tenga conto di un
suo “difetto di memoria” (vedremo meglio nel seguito a cosa esso è
dovuto);
• il DAC del ramo di reazione del modulatore può avere guadagno gDAC≠1;
Introducendo esplicitamente nella nostra analisi questi tre nuovi fattori, lo
schema a blocchi del modulatore del primo ordine si modifica come nella
successiva Figura 2.19; la funzione di trasferimento dell’integratore è in questo
caso
1
1( )1
INTI
g zH z
zα
−
−=−
e si ricavano facilmente anche le funzioni di trasferimento del segnale e del rumore:
( ) ( )1 1
1 1
1( ) , ( )1 1
INTX
INT DAC INT DAC
g z zH z He zg g z g g z
αα α
− −
− −
−= =
− − + −.

Capitolo 2 ADC di tipo Sigma-Delta
78
Figura 2.19 - Modulatore Sigma-Delta non ideale del primo ordine.
Il fattore di perdita dell’integratore è direttamente correlato al guadagno in
anello aperto A dell’amplificatore operazionale che viene utilizzato nella realtà
applicativa per la sua implementazione con la tecnica delle capacità commutate,
che è la più utilizzata correntemente; si ha in particolare 11A
α− . Si può
verificare che il denominatore di He(z) introduce solo un piccolo ripple nel segnale di
uscita e può essere trascurato senza alterare sensibilmente i risultati; calcolando
con questa semplificazione la potenza del rumore di quantizzazione nella banda
utile di segnale, si ottiene:
,
322 2 2
2
2 1 23e sd e e
S S
B Bf fA
πσ σ ασ⎛ ⎞ ⎛ ⎞
= ⋅ +⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
Vediamo così che se il guadagno A ed il fattore di sovracampionamento sono
significativamente alti il rumore di quantizzazione non subisce eccessivi
peggioramenti a causa della perdita dell’integratore. Osserviamo inoltre che,
affinché il modulatore sia stabile, l’unico polo delle funzioni di trasferimento del
segnale e del rumore deve essere contenuto nel cerchio unitario del piano zeta e
questo richiede che sia 1 1 2INT DACg g α< < + se α è sufficientemente prossimo
all’unità; quest’ultimo non è un vincolo eccessivamente restrittivo e lo si riesce a
soddisfare piuttosto agevolmente.
Capitolo 2 ADC di tipo Sigma-Delta
79
Altre cause di non idealità possono essere dovute al quantizzatore che può
avere un offset ed una nonlinearità non nulli e che può anche introdurre del
rumore aggiuntivo oltre a quello di quantizzazione e[k]; per i comuni valori che tali
parametri assumono nei dispositivi reali, la funzione di noise-shaping del
modulatore attenua sufficientemente gli effetti negativi da essi derivanti. Effetti di
non idealità che sono spesso non trascurabili sono invece quelli dovuti alla
intrinseca struttura di sistema non lineare con retroazione del modulatore; questo è
causa della comparsa di cicli limite all’uscita del modulatore, ossia di toni
sinusoidali puri con frequenza che si dimostra essere funzione del livello
dell’ingresso. I modulatori sigma-delta del primo e del secondo ordine sono quelli
che presentano toni da cicli limite di maggiore ampiezza rispetto ai modulatori di
ordine superiore e ciò ne preclude l’applicazione in dispositivi destinati
all’elaborazione di segnali audio; questo in quanto l’orecchio umano si dimostra un
eccezionale recettore di toni spuri non sovrastati da segnali utili in bande
immediatamente adiacenti. Per questi motivi nella realtà applicativa i modulatori
sigma-delta con quantizzatore a singolo bit disponibili per applicazioni audio sono
di ordine minimo pari a tre.
2.6.6 Modulatori sigma-delta con quantizzatori multibit
Nei paragrafi precedenti si sono trattati solo modulatori sigma-delta con
quantizzatori ad un solo bit; nella realtà applicativa sono tuttavia disponibili anche
modulatori con quantizzatori multibit. Simili modulatori consentono di ottenere
prestazioni superiori a parità di frequenza di campionamento o, equivalentemente,
le stesse prestazioni ma con frequenze di campionamento inferiori. Ovviamente in
un modulatore con quantizzatore multibit anche il DAC deve essere multibit e con
larghezza di parola pari a quella del quantizzatore.
I modulatori con quantizzatori multibit aderiscono più fedelmente al modello
linearizzato semplificato per l’analisi del rumore di quantizzazione e mostrano
minori problemi di toni spuri da cicli limite in uscita; tuttavia essi presentano
anche alcuni svantaggi: ad esempio per essi è richiesto hardware di post-
elaborazione (filtraggio e decimazione) molto più complesso di quello necessario per
i modulatori a singolo bit; infatti in questo caso saranno necessari moltiplicatori
multibit. Inoltre la linearità dei quantizzatori e dei DAC multibit sono meno
facilmente controllabili e questo può causare significativi cali di prestazioni.
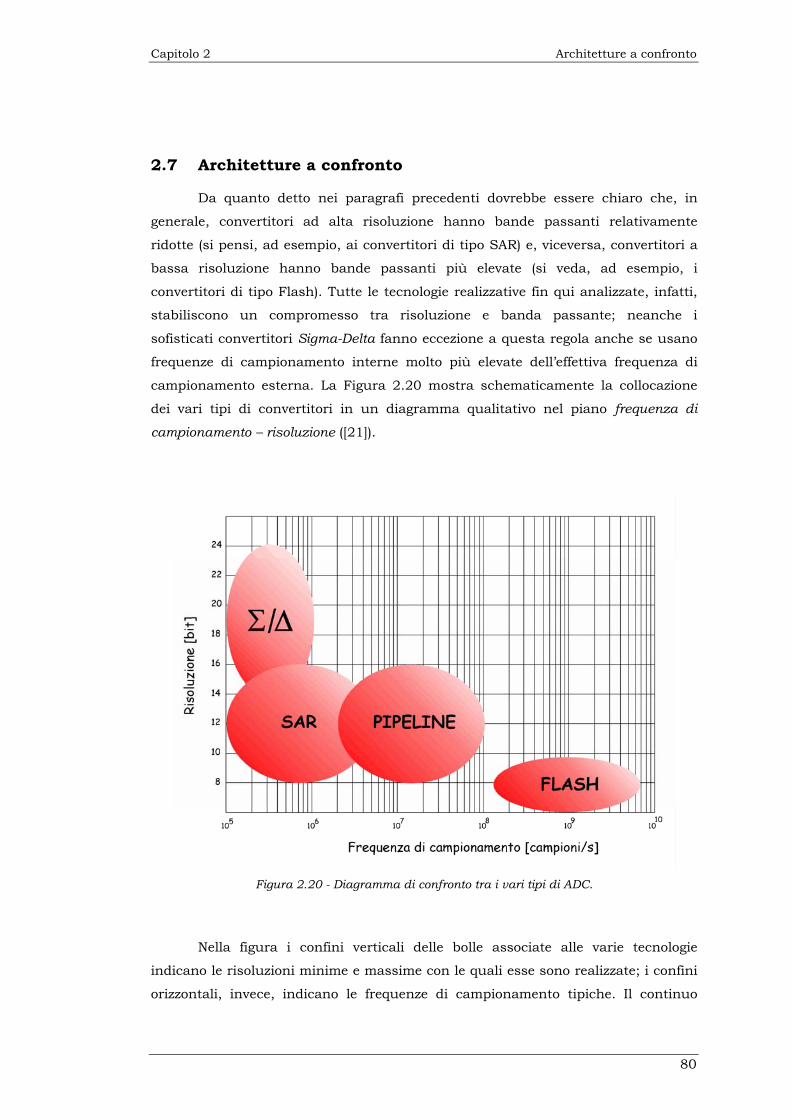
Capitolo 2 Architetture a confronto
80
2.7 Architetture a confronto
Da quanto detto nei paragrafi precedenti dovrebbe essere chiaro che, in
generale, convertitori ad alta risoluzione hanno bande passanti relativamente
ridotte (si pensi, ad esempio, ai convertitori di tipo SAR) e, viceversa, convertitori a
bassa risoluzione hanno bande passanti più elevate (si veda, ad esempio, i
convertitori di tipo Flash). Tutte le tecnologie realizzative fin qui analizzate, infatti,
stabiliscono un compromesso tra risoluzione e banda passante; neanche i
sofisticati convertitori Sigma-Delta fanno eccezione a questa regola anche se usano
frequenze di campionamento interne molto più elevate dell’effettiva frequenza di
campionamento esterna. La Figura 2.20 mostra schematicamente la collocazione
dei vari tipi di convertitori in un diagramma qualitativo nel piano frequenza di
campionamento – risoluzione ([21]).
Figura 2.20 - Diagramma di confronto tra i vari tipi di ADC.
Nella figura i confini verticali delle bolle associate alle varie tecnologie
indicano le risoluzioni minime e massime con le quali esse sono realizzate; i confini
orizzontali, invece, indicano le frequenze di campionamento tipiche. Il continuo

Capitolo 2 Architetture a confronto
81
progredire delle tecnologie realizzative rende però presto imprecisi diagrammi di
questo tipo che devono, dunque, intendersi solo come indicativi.
82
Capitolo 3
Parametri caratteristici degli ADC
Introduzione
Sfogliando un qualsiasi catalogo di un produttore di convertitori
analogico/digitale o un qualsiasi data-sheet di un singolo prodotto, si possono
trovare numerosi termini tecnici, molto spesso dati in forma di acronimi difficili da
interpretare, che ne quantificano le prestazioni e che dovrebbero mettere in grado
un progettista di hardware misto analogico/digitale di scegliere il dispositivo più
adeguato per la propria applicazione. Tuttavia l’uso di termini non standard, come
anche di condizioni di prova non uniformi per l’ottenimento delle prestazioni
specificate, spesso crea notevoli difficoltà nell’interpretazione dei dati messi a
disposizione, come anche nell’esecuzione di un confronto di prestazioni tra
dispositivi di produttori diversi.
Numerosi sono stati e sono tuttora i tentativi a livello internazionale per
uniformare la terminologia e le modalità di test degli ADC; i principali due sono
quelli proposti con i documenti IEEE1057-1994 ([30]) e IEEE1241-2000 ([31])
pubblicati nell’ultimo decennio dallo IEEE (Institute of Electric and Electronic
Engineers), il noto istituto nord-americano che da diversi decenni opera nei più
svariati settori tecnologici quale organismo propositivo di documenti standard che
successivamente sono esaminati dagli Enti Normativi nazionali ed internazionali.
Capitolo 3 La System Accuracy
83
Questi ultimi, spesso, li recepiscono e li adottano nella maggior parte dei casi con
poche o nessuna modifica.
In questo capitolo si darà un’adeguata trattazione dei diversi parametri di
errore caratteristici degli ADC e si cercherà, ove possibile, di indicare le diverse
nomenclature esistenti per un parametro di dato significato; per uniformità di
trattazione i vari parametri sono raggruppati in statici (o in DC) e dinamici (o in AC).
I primi specificano le prestazioni del dispositivo quando il segnale di ingresso ha
frequenza nulla o comunque molto ridotta rispetto alla banda passante utile; i
secondi specificano le prestazioni del dispositivo quando la frequenza del segnale di
ingresso è confrontabile con la banda utile. Fa eccezione a questa classificazione
l’errore di quantizzazione che è il primo ed ineludibile errore introdotto dal processo
di conversione da analogico a digitale; esso sarà quindi trattato separatamente nel
secondo paragrafo di questo capitolo.
3.1 La System Accuracy
Nel ricercare un ADC da impiegare in un sistema di misura è ovviamente di
fondamentale importanza saper valutare l’accuratezza da esso garantita; poiché
questa dipende da numerosi fattori, ciascuno associato ad un determinato
fenomeno o componente del sistema, normalmente la si indica come System
Accuracy. Due sono i metodi più ampiamente diffusi nella realtà applicativa per la
valutazione di questo importante indice di prestazione: il metodo dell’errore
quadratico medio ed il metodo del caso peggiore; il primo considera la radice
quadrata della somma dei quadrati di tutti i vari termini di errore mentre il secondo
considera la somma dei valori assoluti dei singoli termini. Ambedue questi metodi
hanno pregi e difetti propri: il primo garantisce un’ottima stima dell’accuratezza
finale nel caso di contributi di errore tra loro incorrelati (e, comunque, si può
adattare facilmente il metodo al caso di contributi correlati), mentre il secondo
consente di stabilire la massima inaccuratezza del sistema in ogni condizione
operativa e, normalmente, fornisce una sovrastima (in alcuni casi anche eccessiva)
dell’errore finale.
A partire da assegnate specifiche di accuratezza richiesta è possibile
determinare il numero di bit o risoluzione dell’ADC da impiegare; a tale scopo è
sufficiente calcolare il logaritmo in base 2 dell’inverso della risoluzione espressa in
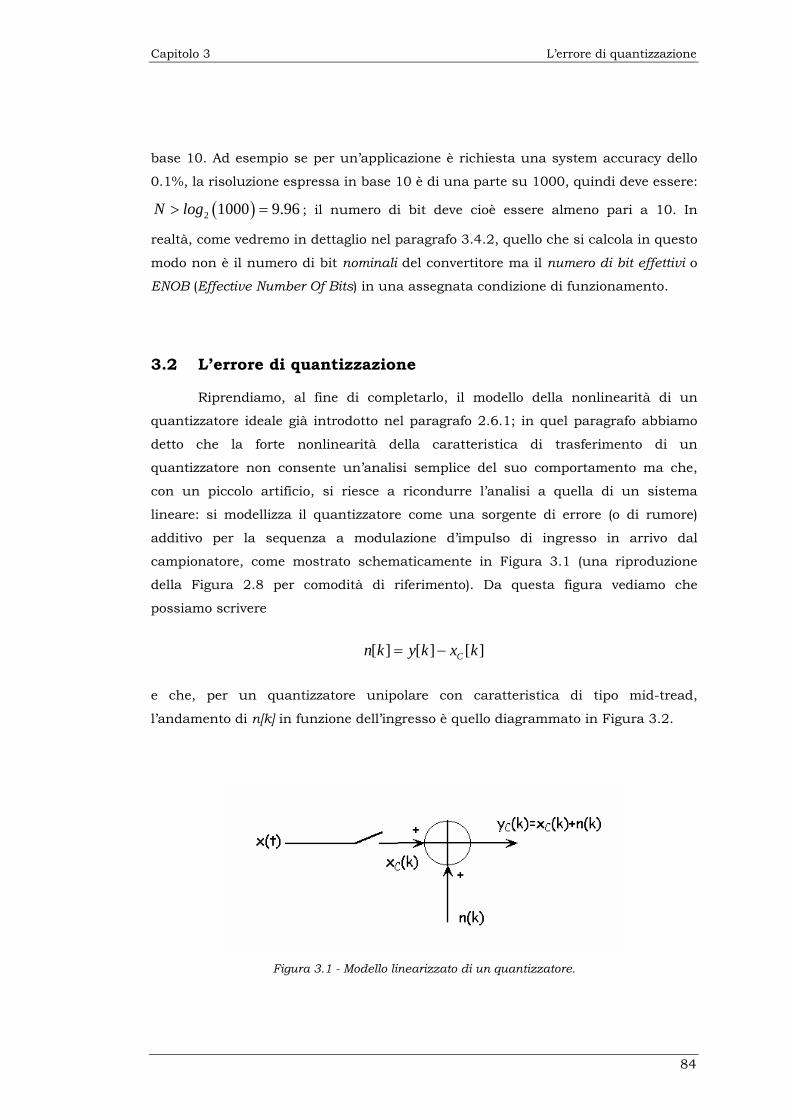
Capitolo 3 L’errore di quantizzazione
84
base 10. Ad esempio se per un’applicazione è richiesta una system accuracy dello
0.1%, la risoluzione espressa in base 10 è di una parte su 1000, quindi deve essere:
( )2 1000 9.96N log> = ; il numero di bit deve cioè essere almeno pari a 10. In
realtà, come vedremo in dettaglio nel paragrafo 3.4.2, quello che si calcola in questo
modo non è il numero di bit nominali del convertitore ma il numero di bit effettivi o
ENOB (Effective Number Of Bits) in una assegnata condizione di funzionamento.
3.2 L’errore di quantizzazione
Riprendiamo, al fine di completarlo, il modello della nonlinearità di un
quantizzatore ideale già introdotto nel paragrafo 2.6.1; in quel paragrafo abbiamo
detto che la forte nonlinearità della caratteristica di trasferimento di un
quantizzatore non consente un’analisi semplice del suo comportamento ma che,
con un piccolo artificio, si riesce a ricondurre l’analisi a quella di un sistema
lineare: si modellizza il quantizzatore come una sorgente di errore (o di rumore)
additivo per la sequenza a modulazione d’impulso di ingresso in arrivo dal
campionatore, come mostrato schematicamente in Figura 3.1 (una riproduzione
della Figura 2.8 per comodità di riferimento). Da questa figura vediamo che
possiamo scrivere
[ ] [ ] [ ]Cn k y k x k= −
e che, per un quantizzatore unipolare con caratteristica di tipo mid-tread,
l’andamento di n[k] in funzione dell’ingresso è quello diagrammato in Figura 3.2.
Figura 3.1 - Modello linearizzato di un quantizzatore.
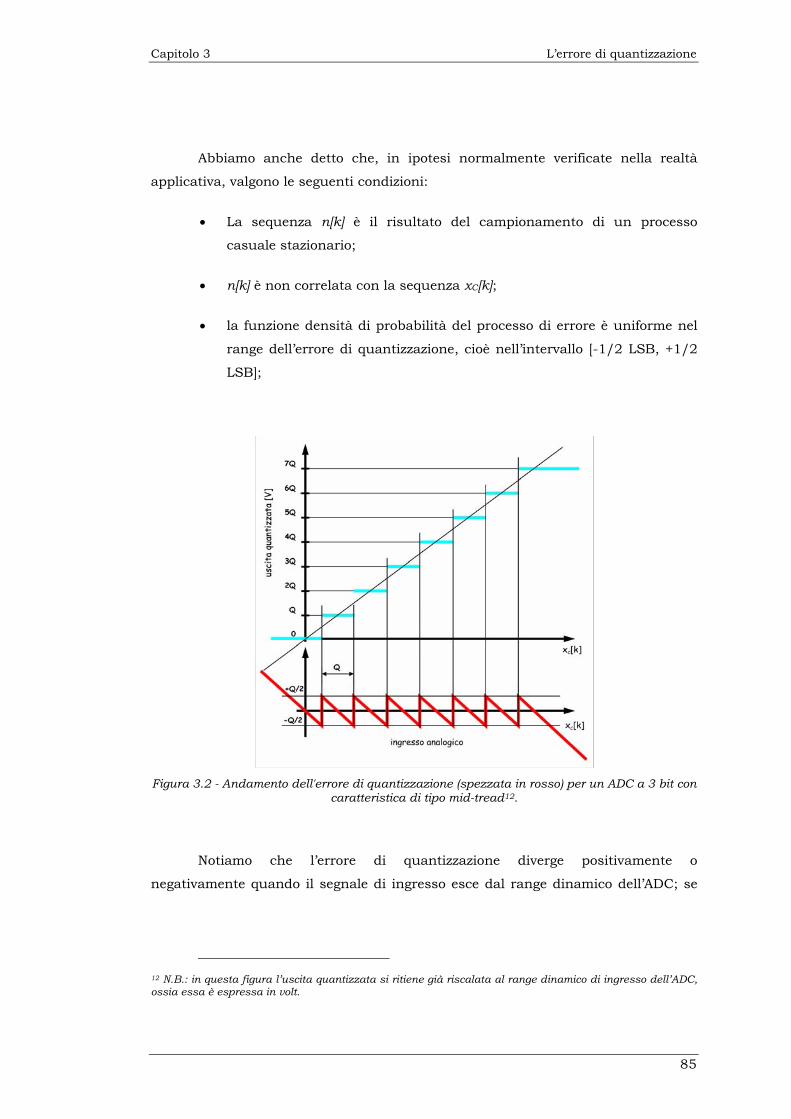
Capitolo 3 L’errore di quantizzazione
85
Abbiamo anche detto che, in ipotesi normalmente verificate nella realtà
applicativa, valgono le seguenti condizioni:
• La sequenza n[k] è il risultato del campionamento di un processo
casuale stazionario;
• n[k] è non correlata con la sequenza xC[k];
• la funzione densità di probabilità del processo di errore è uniforme nel
range dell’errore di quantizzazione, cioè nell’intervallo [-1/2 LSB, +1/2
LSB];
Figura 3.2 - Andamento dell'errore di quantizzazione (spezzata in rosso) per un ADC a 3 bit con
caratteristica di tipo mid-tread12.
Notiamo che l’errore di quantizzazione diverge positivamente o
negativamente quando il segnale di ingresso esce dal range dinamico dell’ADC; se
12 N.B.: in questa figura l’uscita quantizzata si ritiene già riscalata al range dinamico di ingresso dell’ADC, ossia essa è espressa in volt.

Capitolo 3 L’errore di quantizzazione
86
tralasciamo questi segmenti, il calcolo del valore efficace dell’errore di
quantizzazione nσ è immediato (cfr. Figura 3.3):
2 22
0 0
2 3 3 32 3
0
1 12 4
1 1 14 2 3 4 2 3
2 3
Q Q
n
Q
Q Qx dx Qx x dxQ Q
Q Q Q Q Qx x xQ Q
Q
σ⎛ ⎞⎛ ⎞= − = − + =⎜ ⎟⎜ ⎟
⎝ ⎠ ⎝ ⎠
⎡ ⎤ ⎡ ⎤= − + = − + =⎢ ⎥ ⎢ ⎥
⎣ ⎦ ⎣ ⎦
=
∫ ∫
Figura 3.3 – Figura di riferimento per il calcolo del valore efficace dell’errore di quantizzazione.
Nel paragrafo 2.6.1 abbiamo già verificato che, se quello di quantizzazione
fosse l’unico rumore presente nel sistema di conversione, il rapporto segnale
rumore massimo ottenibile da un convertitore a N bit sarebbe:
2
10 210 6.02 1.76 [ ]xMAX
n
SNR log N dBσσ⎛ ⎞
= = ⋅ +⎜ ⎟⎝ ⎠
Nel paragrafo dedicato all’analisi degli errori dinamici vedremo come
modificare questa relazione per tenere conto delle altre fonti di non idealità nei
convertitori reali.
Capitolo 3 Principali parametri statici
87
Nelle ipotesi fatte sulle caratteristiche dell’errore di quantizzazione, si
verifica che nel dominio della frequenza la sua presenza si esplica con la comparsa
di quello che è comunemente indicato come “tappeto di rumore” (noise floor), ossia
di un rumore con densità di potenza uniforme (rumore bianco) e potenza
complessiva pari al valore efficace sopra calcolato. La densità di potenza è uniforme
nel range di frequenza [0, fS/2], essendo fS la frequenza di campionamento utilizzata
dal campionatore; come visto nel paragrafo 2.6 questo risultato viene sfruttato nei
convertitori PCM a sovracampionamento e nei convertitori di tipo Sigma-Delta per
ottenere un aumento della risoluzione eseguendo un filtraggio numerico della
sequenza ottenuta sovracampionando il segnale di ingresso ad una frequenza ben
superiore a quella minima imposta dal teorema del campionamento di Shannon.
E’ bene però tenere sempre presente che questa relazione ha valore
puramente formale dato che, come vedremo meglio tra breve, le cause di non
idealità di un convertitore sono molteplici e tutte contribuiscono ad abbassare il
rapporto segnale rumore effettivo; la precedente ha allora solo il significato di un
limite teorico invalicabile e può servire solo in una prima fase di valutazione della
risoluzione minima che un convertitore deve avere per soddisfare i requisiti di una
data applicazione.
3.3 Principali parametri statici
L’accuratezza di un dato ADC dipende da un numero rilevante di fattori e
tutti devono essere considerati sia per poter eseguire un confronto di prestazioni tra
due o più ADC sia per poter calcolare l’accuratezza totale di conversione (System
Accuracy); la conoscenza di quest’ultima è ad esempio indispensabile per la
valutazione dell’incertezza di misura di uno strumento che contenga l’ADC in
esame. Nella valutazione delle prestazioni di un ADC conviene partire dall’esame dei
suoi parametri statici che, come vedremo dettagliatamente a breve, sono:
nonlinearità differenziale (DNL), nonlinearità integrale (INL), errore di guadagno,
errore di offset, stabilità del riferimento di tensione (importante se integrato
all’interno dello stesso circuito integrato dell’ADC); importanti possono anche
essere gli effetti delle variazioni termiche. Non meno importanti sono anche le
caratteristiche in alternata ma, dato che per esse, nella maggior parte dei casi, non
esiste un modo univoco di specifica, può essere difficile eseguire un confronto tra
più dispositivi partendo proprio da queste.
Capitolo 3 Principali parametri statici
88
Allora, per la selezione di un ADC per una fissata applicazione, conviene
partire selezionando i dispositivi dei vari produttori che soddisfano alle
caratteristiche di base quali tecnologia realizzativa, tensione di alimentazione, range
dinamico, risoluzione teorica, numero di canali, frequenza di campionamento, ecc.; si
passa quindi al confronto delle caratteristiche in continua e si finisce con quello
delle caratteristiche in alternata cercando, se necessario, di riportare queste ultime
alle stesse condizioni di prova. Eventualmente, almeno per quelle applicazioni ove
sia richiesto un errore complessivo molto ridotto e per le quali il costo è
generalmente un fattore non di primaria importanza, può anche essere necessario
eseguire dei test preliminari sui dispositivi stessi.
3.3.1 Nonlinearità differenziale
La nonlinearità differenziale (DNL, Differential Nonlinearity) misura la
distorsione delle ampiezze dei singoli 2N (con N = numero di bit o risoluzione del
convertitore) intervalli in cui è suddiviso il range dinamico di ingresso di un ADC;
tali intervalli in un ADC ideale sono tutti uguali tra loro o, il che è lo stesso, i livelli
di soglia del quantizzatore sono equispaziati nell’intero range dinamico di ingresso;
in Figura 3.4 è ad esempio riportata la caratteristica di I/O statica di un ADC con
caratteristica di tipo mid-tread, ingresso unipolare e codifica in binario puro.
Quando espressa in volt l’ampiezza di questi intervalli è / 2id NREFQ V= , essendo
VREF la tensione di riferimento dell’ADC che coincide, almeno normalmente, proprio
con il range dinamico di quest’ultimo.
Detto ( ) [0, 2 2]Nkt k ∈ − il k-esimo livello di soglia della caratteristica di
trasferimento dell’ADC reale (cfr. Figura 3.6), le ampiezze degli intervalli di
quantizzazione reali sono date da:
1 [ ] [0, 2 3]Nk k kQ t t V k+= − ∈ − 13
e quindi la nonlinearità differenziale del k-esimo passo di quantizzazione è definita
come
13 Questa trattazione non è valida per il solo quantizzatore a N=1 bit che è un semplice comparatore; per esso la nonlinearità si esprime come offset dell’unica soglia di transizione.
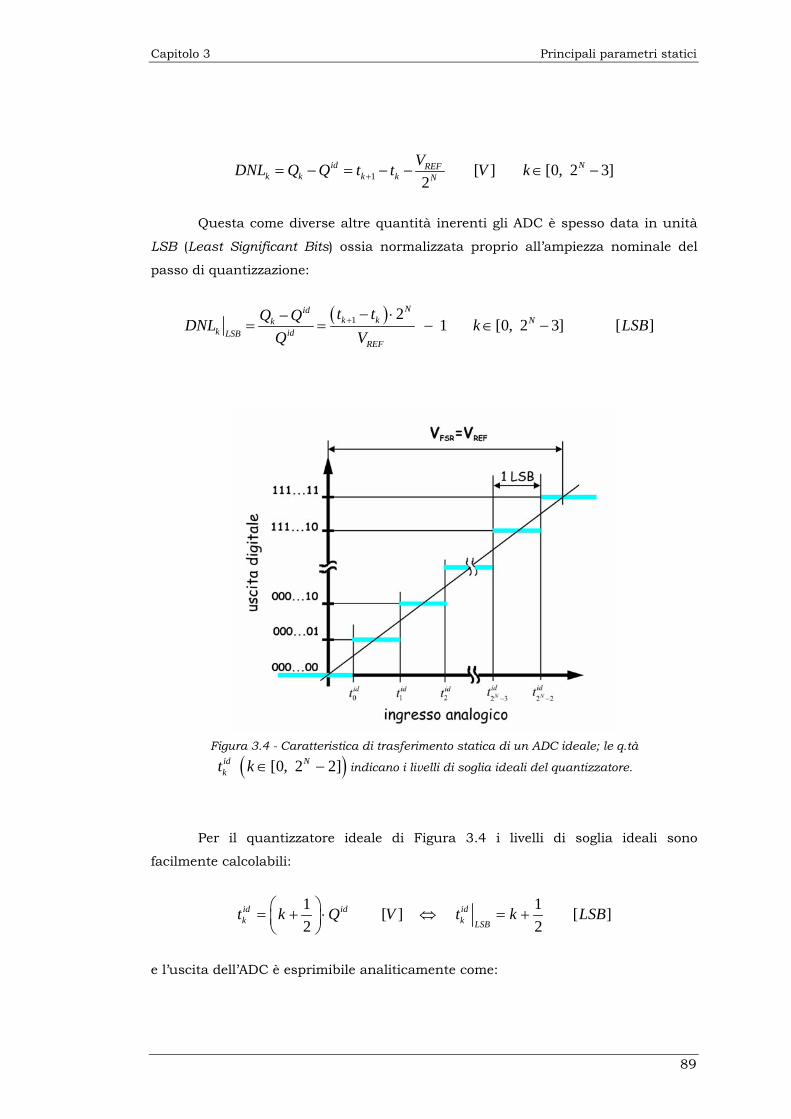
Capitolo 3 Principali parametri statici
89
1 [ ] [0, 2 3]2
id NREFk k k k N
VDNL Q Q t t V k+= − = − − ∈ −
Questa come diverse altre quantità inerenti gli ADC è spesso data in unità
LSB (Least Significant Bits) ossia normalizzata proprio all’ampiezza nominale del
passo di quantizzazione:
( )1 2 1 [0, 2 3] [ ]
Nidk k Nk
k idLSBREF
t tQ QDNL k LSBQ V
+ − ⋅−= = − ∈ −
Figura 3.4 - Caratteristica di trasferimento statica di un ADC ideale; le q.tà
( )[0, 2 2]id Nkt k ∈ − indicano i livelli di soglia ideali del quantizzatore.
Per il quantizzatore ideale di Figura 3.4 i livelli di soglia ideali sono
facilmente calcolabili:
1 1[ ] [ ]2 2
id id idk k LSB
t k Q V t k LSB⎛ ⎞= + ⋅ ⇔ = +⎜ ⎟⎝ ⎠
e l’uscita dell’ADC è esprimibile analiticamente come:
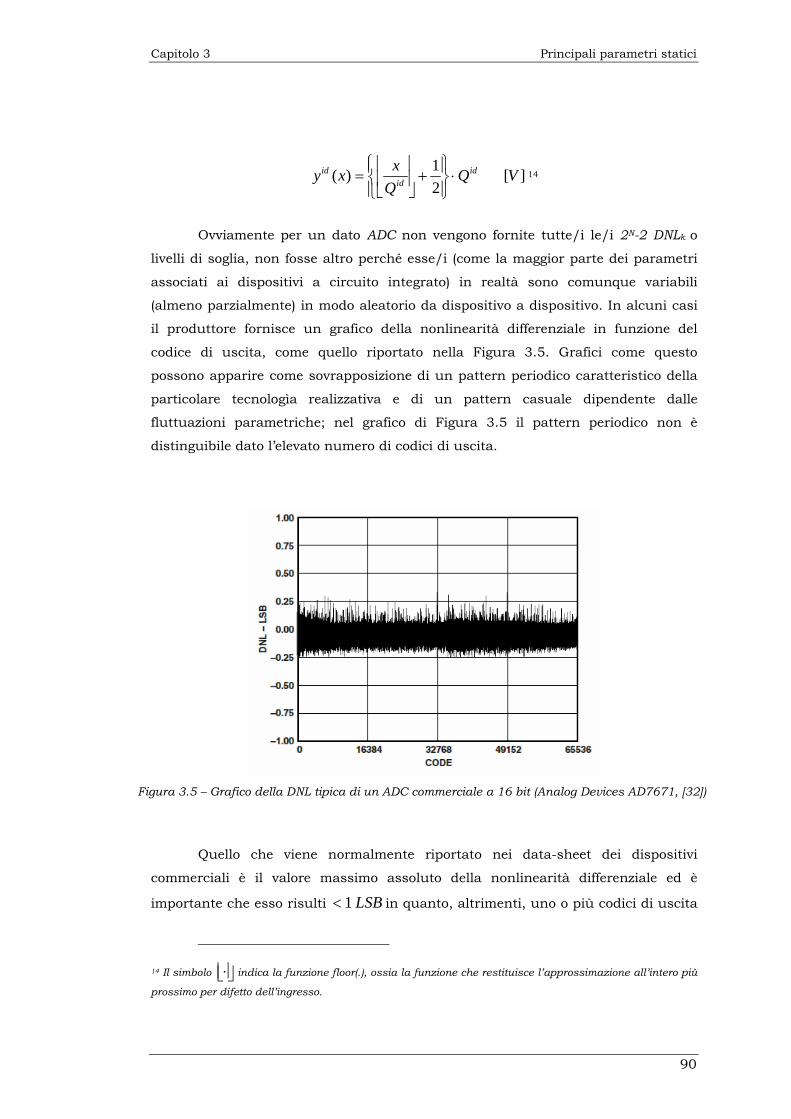
Capitolo 3 Principali parametri statici
90
1( ) [ ]2
id idid
xy x Q VQ
⎧ ⎫⎢ ⎥⎪ ⎪= + ⋅⎨ ⎬⎢ ⎥⎪ ⎪⎣ ⎦⎩ ⎭
14
Ovviamente per un dato ADC non vengono fornite tutte/i le/i 2N-2 DNLk o
livelli di soglia, non fosse altro perché esse/i (come la maggior parte dei parametri
associati ai dispositivi a circuito integrato) in realtà sono comunque variabili
(almeno parzialmente) in modo aleatorio da dispositivo a dispositivo. In alcuni casi
il produttore fornisce un grafico della nonlinearità differenziale in funzione del
codice di uscita, come quello riportato nella Figura 3.5. Grafici come questo
possono apparire come sovrapposizione di un pattern periodico caratteristico della
particolare tecnologìa realizzativa e di un pattern casuale dipendente dalle
fluttuazioni parametriche; nel grafico di Figura 3.5 il pattern periodico non è
distinguibile dato l’elevato numero di codici di uscita.
Figura 3.5 – Grafico della DNL tipica di un ADC commerciale a 16 bit (Analog Devices AD7671, [32])
Quello che viene normalmente riportato nei data-sheet dei dispositivi
commerciali è il valore massimo assoluto della nonlinearità differenziale ed è
importante che esso risulti 1 LSB< in quanto, altrimenti, uno o più codici di uscita
14 Il simbolo ⋅⎢ ⎥⎣ ⎦ indica la funzione floor(.), ossia la funzione che restituisce l’approssimazione all’intero più
prossimo per difetto dell’ingresso.
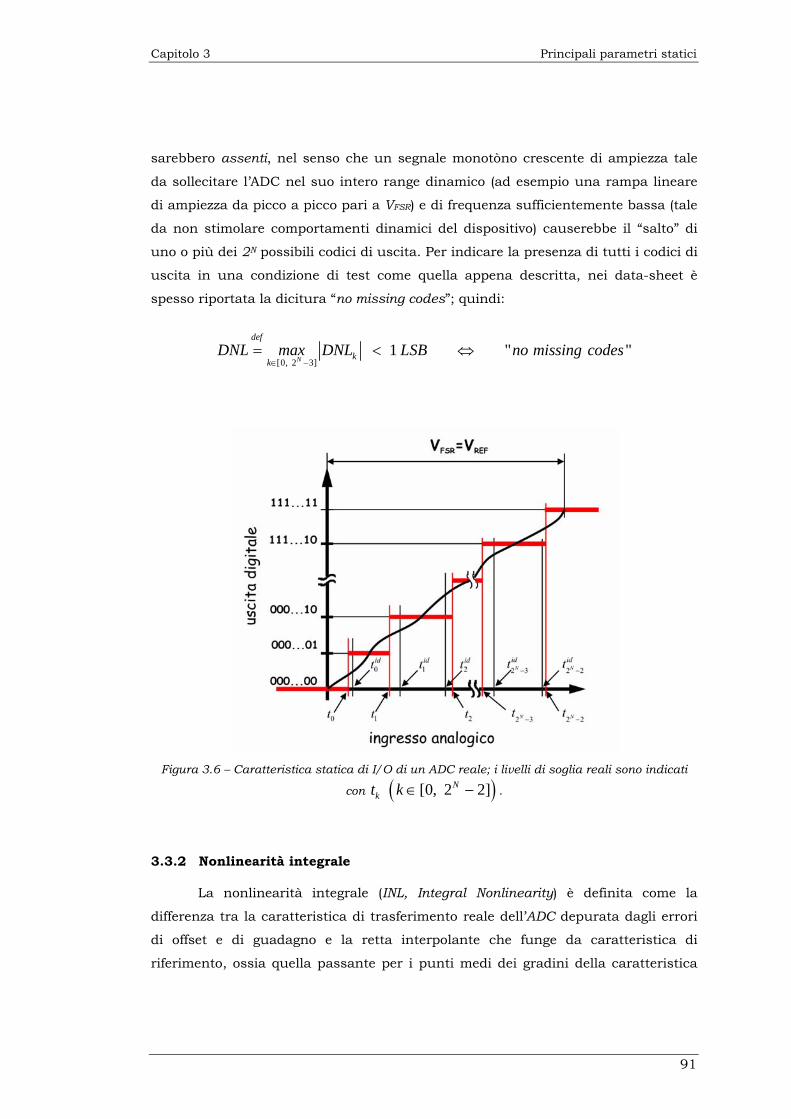
Capitolo 3 Principali parametri statici
91
sarebbero assenti, nel senso che un segnale monotòno crescente di ampiezza tale
da sollecitare l’ADC nel suo intero range dinamico (ad esempio una rampa lineare
di ampiezza da picco a picco pari a VFSR) e di frequenza sufficientemente bassa (tale
da non stimolare comportamenti dinamici del dispositivo) causerebbe il “salto” di
uno o più dei 2N possibili codici di uscita. Per indicare la presenza di tutti i codici di
uscita in una condizione di test come quella appena descritta, nei data-sheet è
spesso riportata la dicitura “no missing codes”; quindi:
[0, 2 3] 1 " "
N
def
kk
DNL max DNL LSB no missing codes∈ −
= < ⇔
Figura 3.6 – Caratteristica statica di I/O di un ADC reale; i livelli di soglia reali sono indicati
con ( )[0, 2 2]Nkt k ∈ − .
3.3.2 Nonlinearità integrale
La nonlinearità integrale (INL, Integral Nonlinearity) è definita come la
differenza tra la caratteristica di trasferimento reale dell’ADC depurata dagli errori
di offset e di guadagno e la retta interpolante che funge da caratteristica di
riferimento, ossia quella passante per i punti medi dei gradini della caratteristica
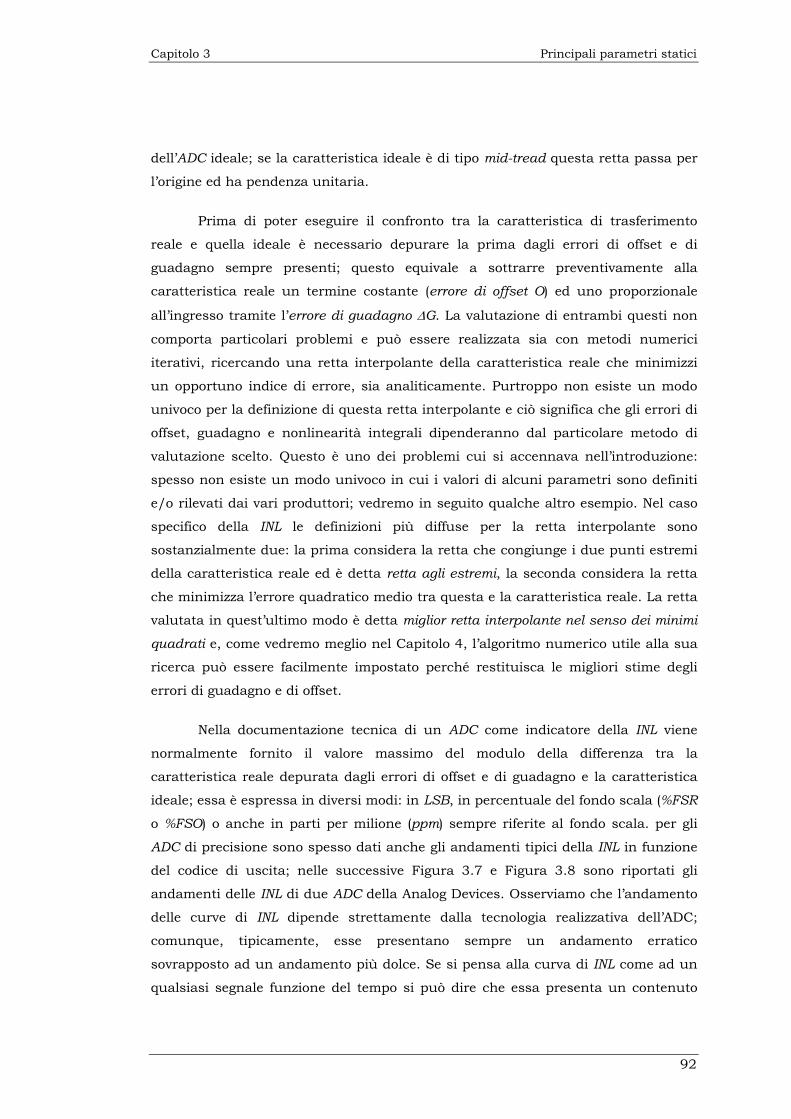
Capitolo 3 Principali parametri statici
92
dell’ADC ideale; se la caratteristica ideale è di tipo mid-tread questa retta passa per
l’origine ed ha pendenza unitaria.
Prima di poter eseguire il confronto tra la caratteristica di trasferimento
reale e quella ideale è necessario depurare la prima dagli errori di offset e di
guadagno sempre presenti; questo equivale a sottrarre preventivamente alla
caratteristica reale un termine costante (errore di offset O) ed uno proporzionale
all’ingresso tramite l’errore di guadagno ∆G. La valutazione di entrambi questi non
comporta particolari problemi e può essere realizzata sia con metodi numerici
iterativi, ricercando una retta interpolante della caratteristica reale che minimizzi
un opportuno indice di errore, sia analiticamente. Purtroppo non esiste un modo
univoco per la definizione di questa retta interpolante e ciò significa che gli errori di
offset, guadagno e nonlinearità integrali dipenderanno dal particolare metodo di
valutazione scelto. Questo è uno dei problemi cui si accennava nell’introduzione:
spesso non esiste un modo univoco in cui i valori di alcuni parametri sono definiti
e/o rilevati dai vari produttori; vedremo in seguito qualche altro esempio. Nel caso
specifico della INL le definizioni più diffuse per la retta interpolante sono
sostanzialmente due: la prima considera la retta che congiunge i due punti estremi
della caratteristica reale ed è detta retta agli estremi, la seconda considera la retta
che minimizza l’errore quadratico medio tra questa e la caratteristica reale. La retta
valutata in quest’ultimo modo è detta miglior retta interpolante nel senso dei minimi
quadrati e, come vedremo meglio nel Capitolo 4, l’algoritmo numerico utile alla sua
ricerca può essere facilmente impostato perché restituisca le migliori stime degli
errori di guadagno e di offset.
Nella documentazione tecnica di un ADC come indicatore della INL viene
normalmente fornito il valore massimo del modulo della differenza tra la
caratteristica reale depurata dagli errori di offset e di guadagno e la caratteristica
ideale; essa è espressa in diversi modi: in LSB, in percentuale del fondo scala (%FSR
o %FSO) o anche in parti per milione (ppm) sempre riferite al fondo scala. per gli
ADC di precisione sono spesso dati anche gli andamenti tipici della INL in funzione
del codice di uscita; nelle successive Figura 3.7 e Figura 3.8 sono riportati gli
andamenti delle INL di due ADC della Analog Devices. Osserviamo che l’andamento
delle curve di INL dipende strettamente dalla tecnologia realizzativa dell’ADC;
comunque, tipicamente, esse presentano sempre un andamento erratico
sovrapposto ad un andamento più dolce. Se si pensa alla curva di INL come ad un
qualsiasi segnale funzione del tempo si può dire che essa presenta un contenuto
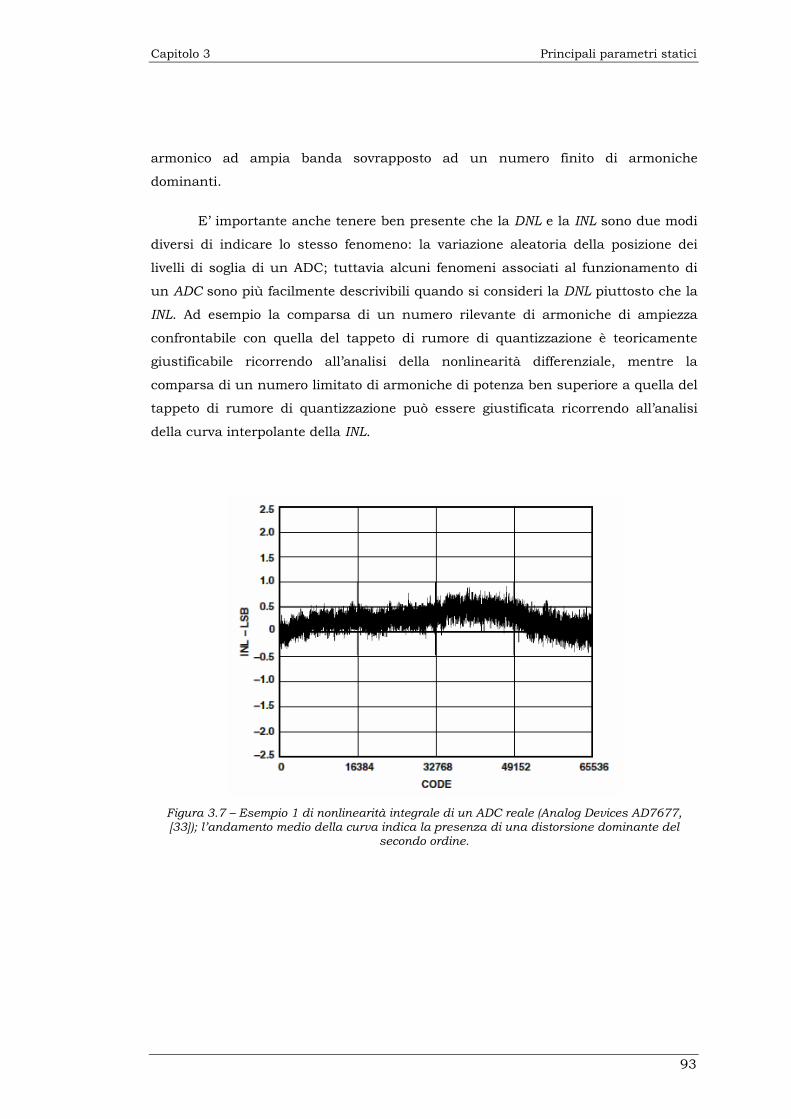
Capitolo 3 Principali parametri statici
93
armonico ad ampia banda sovrapposto ad un numero finito di armoniche
dominanti.
E’ importante anche tenere ben presente che la DNL e la INL sono due modi
diversi di indicare lo stesso fenomeno: la variazione aleatoria della posizione dei
livelli di soglia di un ADC; tuttavia alcuni fenomeni associati al funzionamento di
un ADC sono più facilmente descrivibili quando si consideri la DNL piuttosto che la
INL. Ad esempio la comparsa di un numero rilevante di armoniche di ampiezza
confrontabile con quella del tappeto di rumore di quantizzazione è teoricamente
giustificabile ricorrendo all’analisi della nonlinearità differenziale, mentre la
comparsa di un numero limitato di armoniche di potenza ben superiore a quella del
tappeto di rumore di quantizzazione può essere giustificata ricorrendo all’analisi
della curva interpolante della INL.
Figura 3.7 – Esempio 1 di nonlinearità integrale di un ADC reale (Analog Devices AD7677, [33]); l’andamento medio della curva indica la presenza di una distorsione dominante del
secondo ordine.
Capitolo 3 Principali parametri statici
94
Figura 3.8 - Esempio 2 di nonlinearità integrale di un ADC reale (Analog Devices AD7671, [32]);
l’andamento medio della curva indica la presenza di una distorsione dominante del terzo ordine.
A partire dalla definizione possiamo esprimere piuttosto facilmente la INL in
funzione della DNL; per un fissato ingresso x possiamo infatti scrivere:
( ) ( )0 01( ) ( )2
id idk k id
xinl x t t y x t t QQ
⎧ ⎫⎢ ⎥⎪ ⎪= − − = − − +⎨ ⎬⎢ ⎥⎪ ⎪⎣ ⎦⎩ ⎭
dove è proprio id
xkQ⎢ ⎥
= ⎢ ⎥⎣ ⎦
(per il significato del simbolo ⋅⎢ ⎥⎣ ⎦ cfr. nota 14 a pag. 90);
possiamo quindi scrivere:
( ) ( )0 0
LSB0
1
LSB0 LSB
( ) 1( ) ( )2
= ( ) [ ]
kk n id
id id idLSBn
kid
nn
t t t tinl xinl x k y xQ Q Q
DNL y x LSB
=
−
=
− −⎛ ⎞= = − + = −⎜ ⎟⎝ ⎠
−
∑
∑
La precedente spiega perché in molte pubblicazioni tecniche la INL sia
indicata come l’integrale della DNL.
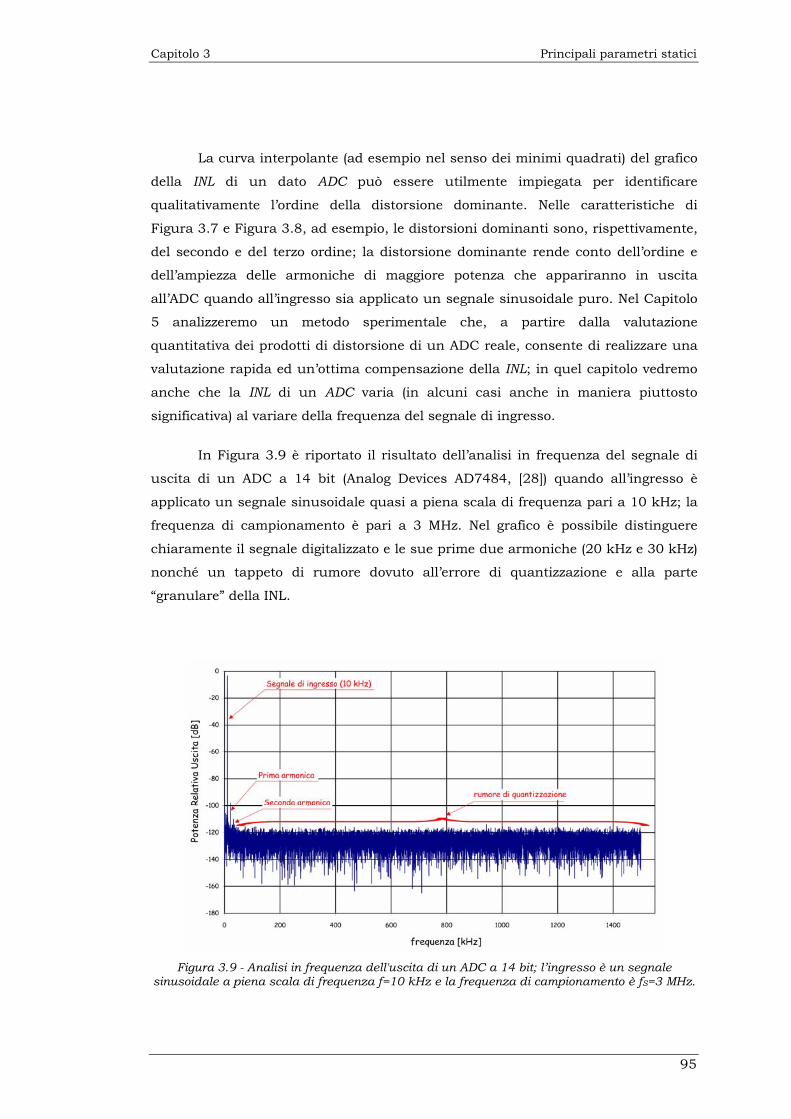
Capitolo 3 Principali parametri statici
95
La curva interpolante (ad esempio nel senso dei minimi quadrati) del grafico
della INL di un dato ADC può essere utilmente impiegata per identificare
qualitativamente l’ordine della distorsione dominante. Nelle caratteristiche di
Figura 3.7 e Figura 3.8, ad esempio, le distorsioni dominanti sono, rispettivamente,
del secondo e del terzo ordine; la distorsione dominante rende conto dell’ordine e
dell’ampiezza delle armoniche di maggiore potenza che appariranno in uscita
all’ADC quando all’ingresso sia applicato un segnale sinusoidale puro. Nel Capitolo
5 analizzeremo un metodo sperimentale che, a partire dalla valutazione
quantitativa dei prodotti di distorsione di un ADC reale, consente di realizzare una
valutazione rapida ed un’ottima compensazione della INL; in quel capitolo vedremo
anche che la INL di un ADC varia (in alcuni casi anche in maniera piuttosto
significativa) al variare della frequenza del segnale di ingresso.
In Figura 3.9 è riportato il risultato dell’analisi in frequenza del segnale di
uscita di un ADC a 14 bit (Analog Devices AD7484, [28]) quando all’ingresso è
applicato un segnale sinusoidale quasi a piena scala di frequenza pari a 10 kHz; la
frequenza di campionamento è pari a 3 MHz. Nel grafico è possibile distinguere
chiaramente il segnale digitalizzato e le sue prime due armoniche (20 kHz e 30 kHz)
nonché un tappeto di rumore dovuto all’errore di quantizzazione e alla parte
“granulare” della INL.
Figura 3.9 - Analisi in frequenza dell'uscita di un ADC a 14 bit; l’ingresso è un segnale
sinusoidale a piena scala di frequenza f=10 kHz e la frequenza di campionamento è fS=3 MHz.
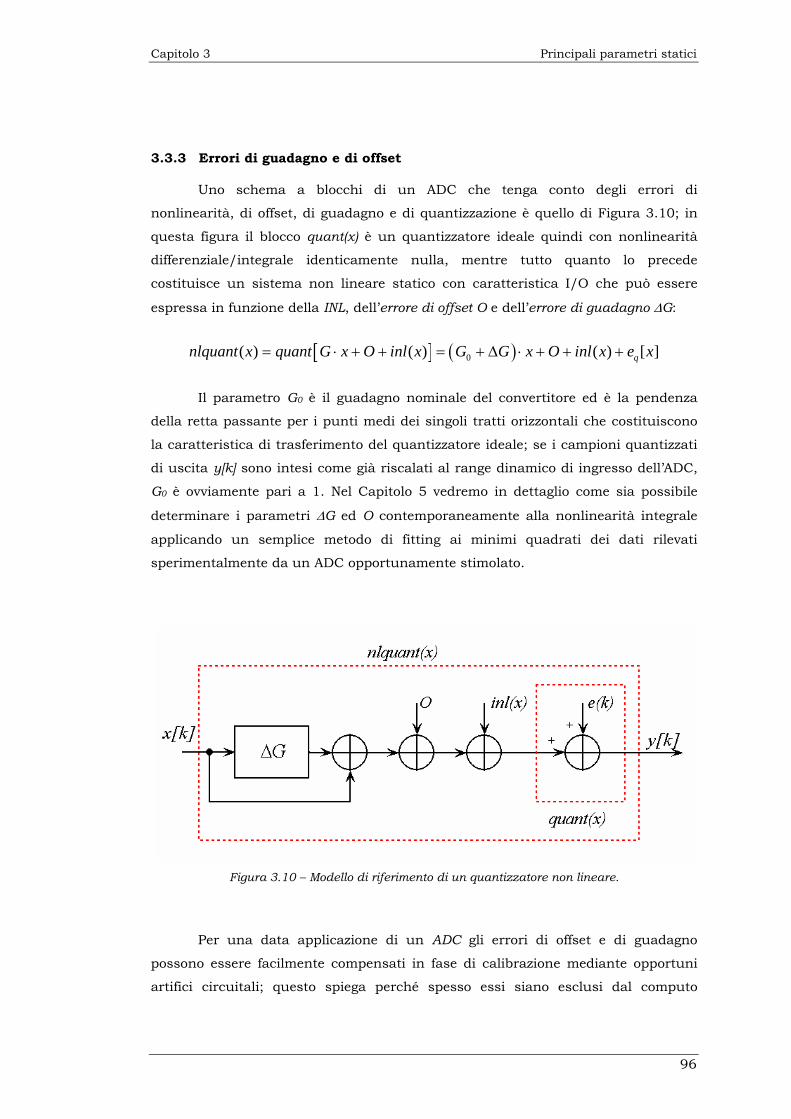
Capitolo 3 Principali parametri statici
96
3.3.3 Errori di guadagno e di offset
Uno schema a blocchi di un ADC che tenga conto degli errori di
nonlinearità, di offset, di guadagno e di quantizzazione è quello di Figura 3.10; in
questa figura il blocco quant(x) è un quantizzatore ideale quindi con nonlinearità
differenziale/integrale identicamente nulla, mentre tutto quanto lo precede
costituisce un sistema non lineare statico con caratteristica I/O che può essere
espressa in funzione della INL, dell’errore di offset O e dell’errore di guadagno ∆G:
[ ] ( )0( ) ( ) ( ) [ ]qnlquant x quant G x O inl x G G x O inl x e x= ⋅ + + = + ∆ ⋅ + + +
Il parametro G0 è il guadagno nominale del convertitore ed è la pendenza
della retta passante per i punti medi dei singoli tratti orizzontali che costituiscono
la caratteristica di trasferimento del quantizzatore ideale; se i campioni quantizzati
di uscita y[k] sono intesi come già riscalati al range dinamico di ingresso dell’ADC,
G0 è ovviamente pari a 1. Nel Capitolo 5 vedremo in dettaglio come sia possibile
determinare i parametri ∆G ed O contemporaneamente alla nonlinearità integrale
applicando un semplice metodo di fitting ai minimi quadrati dei dati rilevati
sperimentalmente da un ADC opportunamente stimolato.
Figura 3.10 – Modello di riferimento di un quantizzatore non lineare.
Per una data applicazione di un ADC gli errori di offset e di guadagno
possono essere facilmente compensati in fase di calibrazione mediante opportuni
artifici circuitali; questo spiega perché spesso essi siano esclusi dal computo
Capitolo 3 Principali parametri statici
97
dell’accuratezza totale di conversione oppure siano sostituiti dai corridondenti errori
di guadagno e di offset residui o non compensati.
Per applicazioni di precisione è importante considerare la dipendenza dalla
temperatura degli errori di guadagno e di offset; spesso sui data-sheet dei
componenti questa dipendenza non è messa adeguatamente in luce a causa
dell’alto costo associato con la sua valutazione. In sistemi di misura nei quali è
richiesta un’elevata accuratezza totale si procede alla compensazione di questi
termini di errore periodicamente o in corrispondenza di elevate variazioni di
temperatura rispetto alla taratura precedente. La compensazione può essere
effettuata in diversi modi; l’approccio più diffuso correntemente è quello dell’uso di
look-up tables ossia di tabelle di conversione compilate in fase di taratura che
forniscono il valore corretto dell’uscita dato il codice restituito dall’ADC. Queste
tabelle sono integrate all’interno dello stesso chip assieme a tutta la circuiterìa
necessaria al loro impiego; la tarabilità on-system (cioè dopo la produzione del
componente) dell’ADC impone la riprogrammabilità della look-up table e questo
implica un significativo aumento dei costi.
3.3.4 Caratteristiche del riferimento di tensione
Dato che le soglie di transizione della caratteristica di trasferimento dell’ADC
dipendono esplicitamente dalla tensione di riferimento è ovvio che l’accuratezza
iniziale e la stabilità nel tempo di questo parametro sono importanti per la prima
realizzazione e per il mantenimento delle specifiche di accuratezza del componente.
I riferimenti di tensione sono spesso esterni all’ADC ma possono anche essere
integrati nello stesso chip; esistono numerosi regolatori di tensione di alta
precisione (noti come generatori di riferimento) commerciali specificamente studiati
per questa applicazione.
Molteplici sono i parametri di un generatore di riferimento che occorre
esaminare per eseguire una accurata selezione del componente più adatto; ecco i
principali:
• INACCURATEZZA INIZIALE. E’ normalmente specificata come massima
deviazione del valore di tensione effettivamente restituito rispetto a
quello nominale ed è espressa in percentuale o in parti per milione del
valore nominale.
Capitolo 3 Principali parametri statici
98
Esistono sistemi di misura per i quali l’accuratezza del riferimento non
costituisce un grosso problema; sono i sistemi ratiometrici per i quali
l’uscita è proporzionale ad una tensione di eccitazione. Esempio tipico
sono i sensori con struttura a Ponte di Wheatstone come i moderni
sensori di pressione a semiconduttore; per la digitalizzazione dell’uscita
di questo tipo di sensori è possibile utilizzare ADC che ricevono la stessa
tensione di riferimento utilizzata per l’eccitazione del ponte di misura.
Per queste applicazioni sono ben più importanti la stabilità a breve
termine e il rumore del riferimento.
Non è detto che un generatore di riferimento con accuratezza iniziale
insufficiente per soddisfare i requisiti di una data applicazione sia da
escludere a priori; esiste infatti sempre la possibilità di usare apposite
reti di precalibrazione e commercialmente sono disponibili molti
generatori di riferimento con reti di calibrazione già integrate. Una
inaccuratezza iniziale di ±5 mV per un riferimento di tensione di 5 V
implica una inaccuratezza di una parte su 1000 e quindi una risoluzione
massima di 10 bit. Un ADC a 16 bit richiederebbe un riferimento di
tensione con inaccuratezza massima iniziale minore di ±7.5 ppm (= ±Q/2
espresso in ppm); se si tiene poi conto che quella del riferimento di
tensione è solo una delle molteplici cause di inaccuratezza di un sistema
di conversione è chiaro che occorre scegliere un riferimento di
inaccuratezza massima ben inferiore a questo limite se si intende
mantenere una risoluzione effettiva di 16 bit.
• DRIFT SUL LUNGO TERMINE (O LONG TERM STABILITY). Le caratteristiche di
tutti i componenti elettronici subiscono alterazioni nel tempo (fenomeno
di aging) soprattutto a causa degli stress termici da essi subiti; per
circuiti analogici di precisione quali sono i generatori di riferimento ciò
comporta una perdita di accuratezza che può risultare eccessiva sul
lungo termine, soprattutto per applicazioni nelle quali si intende
omettere la circuiterìa di calibrazione; in casi del genere sarà importante
selezionare generatori con accuratezza iniziale e con stabilità a lungo
termine adeguate. Questo parametro è normalmente espresso in
/ 1000 ppm h ; ciò a causa del fatto che il suo comportamento è di tipo
random walk e per questo tipo di fenomeni si ha un incremento
Capitolo 3 Principali parametri statici
99
proporzionale alla radice del tempo trascorso. Per ottenere
l’inaccuratezza assoluta di un riferimento a distanza temporale T∆
dall’ultima calibrazione è sufficiente applicare la relazione seguente:
6/ 1000 [ ]
1000 10h REF
ppm h
T VV LTS V
∆∆ = ± ⋅ ⋅
• DRIFT CON LA TEMPERATURA (O TC PER TEMPERATURE COEFFICIENT). La
temperatura è un altro dei principali parametri di influenza sulle
caratteristiche dei componenti elettronici, soprattutto quelli a
semiconduttore. Questo parametro è normalmente dato in parti per
milione/grado celsius (ppm/°C) e per ottenere l’inaccuratezza assoluta
dopo una variazione di temperatura t∆ è sufficiente applicare la
relazione seguente:
6/[ ]
10REF
ppm C C
VV TC t V
° °∆ = ± ⋅ ∆ ⋅
• MASSIMA CORRENTE DI CARICO. E’ la massima corrente erogabile dal
dispositivo; è normalmente limitata a pochi milliampere ma esistono
generatori di riferimento in grado di erogare correnti dell’ordine del
centinaio di milliampere.
• RANGE DELLA TENSIONE DI ALIMENTAZIONE. E’ il campo della tensione di
alimentazione entro il quale il dispositivo opera correttamente; per
questo parametro come per la massima corrente di carico è
indispensabile non superare i limiti massimi pena la distruzione
irreversibile del dispositivo.
• SENSIBILITÀ AL CARICO. E’ la variazione della tensione di uscita in risposta
ad una variazione del carico; è espressa in milliohm o in
microvolt/milliampere. Per le applicazioni tipiche sui questi dispositivi
sono destinati è importante tenere conto della caduta di tensione
aggiuntiva che la corrente di carico causa sui conduttori di
collegamento; alcuni generatori consentono di compensare questo effetto
mediante appositi circuiti di retroazione da connettere direttamente ai
capi del carico.
Capitolo 3 Principali parametri statici
100
• SENSIBILITÀ ALLA TENSIONE DI ALIMENTAZIONE. E’ la variazione subita
dell’uscita in risposta ad una variazione della tensione di alimentazione;
è normalmente espressa in microvolt/volt di ingresso.
• RUMORE. Importante per le applicazioni in sistemi di conversione A/D ad
elevata risoluzione in quanto il rumore sovrapposto al segnale di
tensione di riferimento contribuisce sempre ad incrementare il rumore
totale di sistema, quindi a diminuire la risoluzione effettiva finale.
Questo parametro non è sempre dato e quando è dato è spesso espresso
in modi diversi dai vari produttori; il modo più utile in cui può essere
fornito è in forma di grafico della densità spettrale di rumore (unità
nanovolt/radice di hertz) in funzione della frequenza. Per applicazioni di
precisione è importante verificare che l’ampiezza da picco a picco
massima del rumore sia < ½ LSB; il rumore è però un processo aleatorio
ed è per questo necessario conoscerne le caratteristiche statistiche. In
molti casi la funzione densità di probabilità dell’ampiezza istantanea del
rumore è gaussiana a media nulla e per questo tipo di variabile aleatoria
il valore picco picco può anche essere (teoricamente) infinito; dal punto
di vista statistico, però, valori superiori a 3 volte il valore efficace (=
deviazione standard della variabile aleatoria) sono molto improbabili.
Così se per valore da picco a picco massimo si assume quello pari a 6
volte la varianza, e se la densità di potenza di rumore è costante nella
banda passante del sistema, deve essere:
9/
6 102REF
n NnV Hz Hz
VE f Q−⋅ ⋅ ∆ ⋅ =
• MASSIMA CAPACITÀ AMMESSA IN USCITA. Normalmente i generatori di
riferimento di maggiore precisione contengono dei circuiti retroazionati;
questi possono divenire instabili in presenza di carichi di tipo capacitivo
a causa dell’aumentato sfasamento introdotto nell’anello di reazione.
L’instabilità si manifesta con la comparsa di una oscillazione spuria a
frequenza più o meno alta sovrapposta al segnale di uscita. Nei data-
sheet è normalmente data la massima capacità accettata in uscita
espressa in picofarad o in microfarad.
Capitolo 3 Principali parametri dinamici
101
Per una dettagliata descrizione delle principali architetture circuitali
utilizzate per la realizzazione di riferimenti di tensione si rinvia al rif. [34].
3.4 Principali parametri dinamici
I parametri dinamici di cui ci occuperemo nel seguito sono il rapporto
segnale-rumore + distorsione, il numero di bit effettivi, la distorsione armonica totale,
lo spurious free dynamic range e la Full Power Bandwidth. Nonostante essi non
siano del tutto indipendenti tra loro e dai parametri statici prima analizzati, la loro
conoscenza è fondamentale per la quantificazione delle prestazioni di un dato ADC
soprattutto quando utilizzato in un sistema di misura numerico.
3.4.1 Signal to Noise and Distortion Ratio (SINAD)
Questo parametro è definito come il rapporto tra il valore efficace del segnale
di ingresso ed il valore efficace totale del rumore di quantizzazione e di tutti i
prodotti di distorsione dovuti alle nonidealità del dispositivo; in alcune definizioni
l’armonica a frequenza zero (dovuta all’errore di offset) è esclusa dal computo, in
altre essa è compresa. Normalmente il SINAD diminuisce all’aumentare della
frequenza del segnale in rapporto alla frequenza di campionamento; ciò significa
che, per una fissata frequenza di campionamento, le prestazioni dell’ADC
peggiorano progressivamente all’aumentare della frequenza del segnale. Avremo
modo di verificare questo nel capitolo 5 quando saranno descritti i risultati delle
prove sperimentali su ADC reali.
L’andamento di questo parametro al variare della frequenza del segnale non
è però di semplice determinazione dipendendo fortemente dalla tecnologia
realizzativa dell’ADC; in Figura 3.11 è ad esempio riportato l’andamento del SINAD
per un ADC commerciale a 16 bit (Analog Devices AD7671).
Per quanto appena visto, nella realtà applicativa si fa un’esplicita distinzione
tra rapporto segnale rumore (SNR) e SINAD; il primo è infatti inteso come rapporto
del valore efficace del segnale di ingresso ed il valore efficace del solo rumore di
quantizzazione. Secondo questa definizione lo SNR di un ADC reale non dipende in
alcun modo dalla frequenza del segnale di ingresso; una prima verifica di ciò può
Capitolo 3 Principali parametri dinamici
102
essere fatta osservando l’andamento della curva associata a questo parametro in
Figura 3.11.
3.4.2 Effective Number of Bits (ENOB)
Nel paragrafo dedicato all’analisi dell’errore di quantizzazione si è visto che
un ADC ideale a N bit garantisce un rapporto segnale-rumore massimo pari a
2,
10 210 6.02 1.76 [ ]x MAXMAX
n
SNR log N dBσσ
⎛ ⎞= = ⋅ +⎜ ⎟⎜ ⎟
⎝ ⎠
dove ,x MAXσ è il valore efficace di un segnale sinusoidale a piena scala e nσ è il
valore efficace del rumore di quantizzazione. Tuttavia se, come giusto, si tiene conto
di tutti i restanti contributi di nonidealità dell’ADC si deve riscrivere la precedente
relazione sostituendo al rapporto segnale-rumore massimo ideale il SINAD definito
al paragrafo precedente e al numero di bit nominale N un numero di bit effettivi
ENOB:
6.02 1.76 [ ]SINAD ENOB dB= ⋅ +
quindi:
1.76 [ ]6.02
SINADENOB bit−=
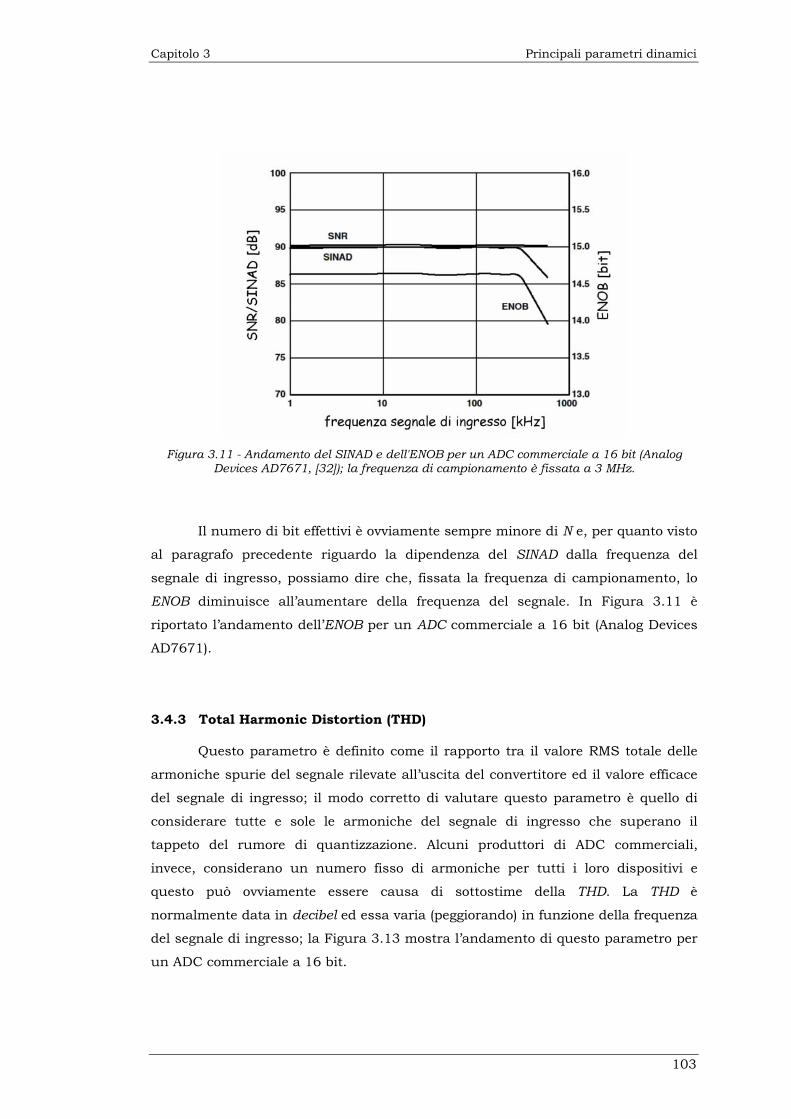
Capitolo 3 Principali parametri dinamici
103
Figura 3.11 - Andamento del SINAD e dell'ENOB per un ADC commerciale a 16 bit (Analog
Devices AD7671, [32]); la frequenza di campionamento è fissata a 3 MHz.
Il numero di bit effettivi è ovviamente sempre minore di N e, per quanto visto
al paragrafo precedente riguardo la dipendenza del SINAD dalla frequenza del
segnale di ingresso, possiamo dire che, fissata la frequenza di campionamento, lo
ENOB diminuisce all’aumentare della frequenza del segnale. In Figura 3.11 è
riportato l’andamento dell’ENOB per un ADC commerciale a 16 bit (Analog Devices
AD7671).
3.4.3 Total Harmonic Distortion (THD)
Questo parametro è definito come il rapporto tra il valore RMS totale delle
armoniche spurie del segnale rilevate all’uscita del convertitore ed il valore efficace
del segnale di ingresso; il modo corretto di valutare questo parametro è quello di
considerare tutte e sole le armoniche del segnale di ingresso che superano il
tappeto del rumore di quantizzazione. Alcuni produttori di ADC commerciali,
invece, considerano un numero fisso di armoniche per tutti i loro dispositivi e
questo può ovviamente essere causa di sottostime della THD. La THD è
normalmente data in decibel ed essa varia (peggiorando) in funzione della frequenza
del segnale di ingresso; la Figura 3.13 mostra l’andamento di questo parametro per
un ADC commerciale a 16 bit.
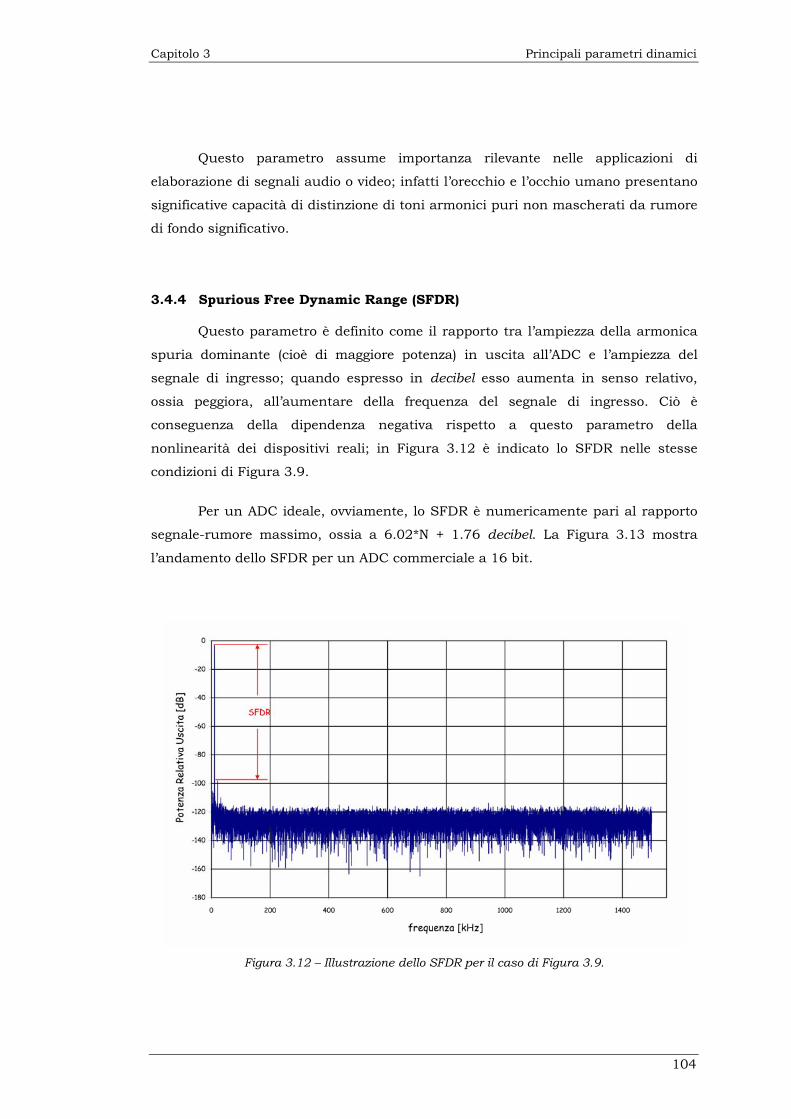
Capitolo 3 Principali parametri dinamici
104
Questo parametro assume importanza rilevante nelle applicazioni di
elaborazione di segnali audio o video; infatti l’orecchio e l’occhio umano presentano
significative capacità di distinzione di toni armonici puri non mascherati da rumore
di fondo significativo.
3.4.4 Spurious Free Dynamic Range (SFDR)
Questo parametro è definito come il rapporto tra l’ampiezza della armonica
spuria dominante (cioè di maggiore potenza) in uscita all’ADC e l’ampiezza del
segnale di ingresso; quando espresso in decibel esso aumenta in senso relativo,
ossia peggiora, all’aumentare della frequenza del segnale di ingresso. Ciò è
conseguenza della dipendenza negativa rispetto a questo parametro della
nonlinearità dei dispositivi reali; in Figura 3.12 è indicato lo SFDR nelle stesse
condizioni di Figura 3.9.
Per un ADC ideale, ovviamente, lo SFDR è numericamente pari al rapporto
segnale-rumore massimo, ossia a 6.02*N + 1.76 decibel. La Figura 3.13 mostra
l’andamento dello SFDR per un ADC commerciale a 16 bit.
Figura 3.12 – Illustrazione dello SFDR per il caso di Figura 3.9.
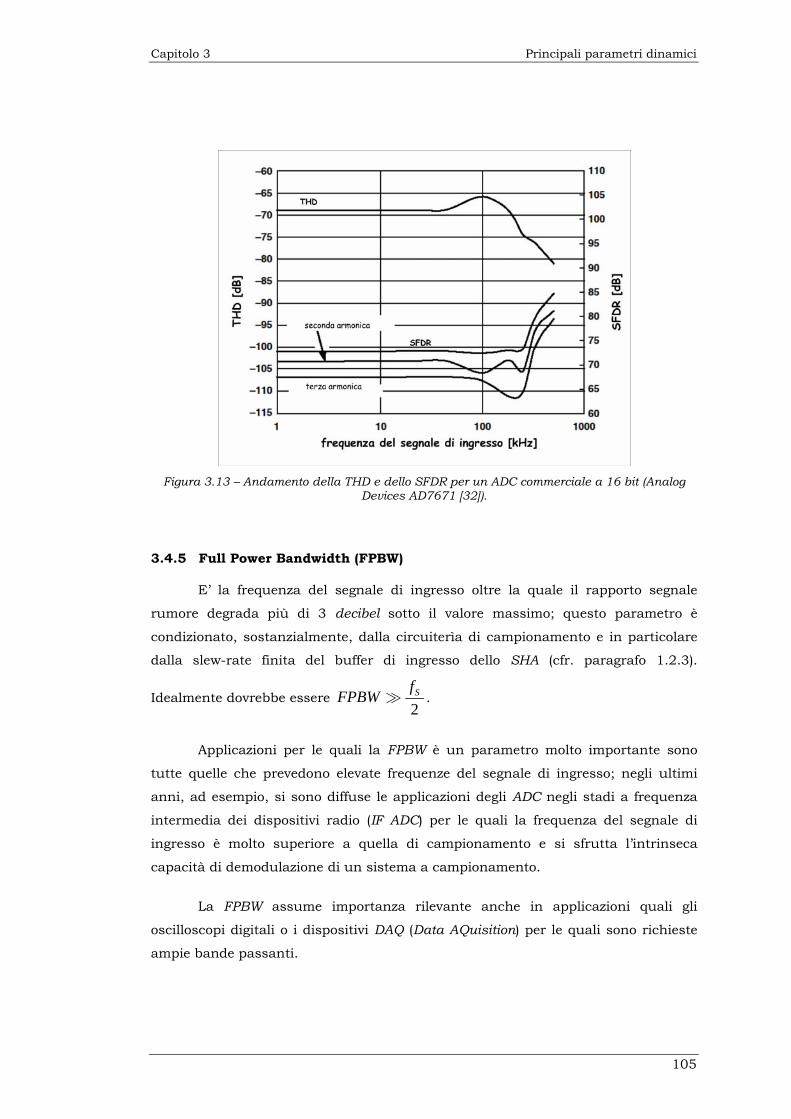
Capitolo 3 Principali parametri dinamici
105
Figura 3.13 – Andamento della THD e dello SFDR per un ADC commerciale a 16 bit (Analog
Devices AD7671 [32]).
3.4.5 Full Power Bandwidth (FPBW)
E’ la frequenza del segnale di ingresso oltre la quale il rapporto segnale
rumore degrada più di 3 decibel sotto il valore massimo; questo parametro è
condizionato, sostanzialmente, dalla circuiterìa di campionamento e in particolare
dalla slew-rate finita del buffer di ingresso dello SHA (cfr. paragrafo 1.2.3).
Idealmente dovrebbe essere 2SfFPBW .
Applicazioni per le quali la FPBW è un parametro molto importante sono
tutte quelle che prevedono elevate frequenze del segnale di ingresso; negli ultimi
anni, ad esempio, si sono diffuse le applicazioni degli ADC negli stadi a frequenza
intermedia dei dispositivi radio (IF ADC) per le quali la frequenza del segnale di
ingresso è molto superiore a quella di campionamento e si sfrutta l’intrinseca
capacità di demodulazione di un sistema a campionamento.
La FPBW assume importanza rilevante anche in applicazioni quali gli
oscilloscopi digitali o i dispositivi DAQ (Data AQuisition) per le quali sono richieste
ampie bande passanti.