Capitol o 07
12
Mario Vultaggio 285 Capitolo 7 Determinazione degli azimut 7.0 – Considerazioni generali In navigazione l’uso della misura di azimut è una operazione molto frequente a bordo delle navi; il controllo della bussola magnetica e della girobussola è una verifica che si effettua due volte al giorno e va trascritta su apposito giornale di bordo. La misura dell’azimut di un astro ( ) m Az con l’appropriata strumentazione di bordo (apparecchio azimutale o grafometro) è confrontata con il corrispondente calcolo analitico ( ) v Az ; la differenza fra questi due valori fornisce la variazione ( ) V . Per la bussola magnetica alla variazione è apportata la declinazione magnetica con la quale si ottiene la deviazione della bussola magnetica per la prora bussola letta al momento della misura: ( ) ( ) ( ) m b b m b m v d V P P d P Az Az V − = + = − = δ δ (7.0) Nel caso della girobussola la variazione fornisce la deviazione della Gyro: ( ) ( ) g b m v P P Az Az V δ = − = (7.1) Il controllo giornaliero della bussola va confrontato con il valore riportato nella tabella delle deviazioni esposta sulla plancia della nave. In presenza di elevate o anomale differenze trovate, deve mettere in attenzione l’ufficiale di bordo, che dopo opportune verifiche sui calcoli effettuati e sulle misure di azimut, sul cattivo funzionamento della bussola e che il campo magnetico di bordo ha subito notevoli variazioni non conforme a quello esistente al momento della stesura delle tabelle di deviazione. 7.1 – La misura di azimut La misura di azimut è effettuata con apparecchio azimutale sistemato sulla bussola normale oppure con grafometro sistemato sulle alette del ponte di comando. Quando si usa la girobussola, l’apparecchio azimutale è sistemato sul una delle due ripetitrice poste sulle alette del
-
Upload
cannizzo45091 -
Category
Documents
-
view
214 -
download
1
description
manual
Transcript of Capitol o 07

Mario Vultaggio
285
Capitolo 7 Determinazione degli azimut
7.0 – Considerazioni generali In navigazione l’uso della misura di azimut è una operazione molto frequente a bordo delle navi; il controllo della bussola magnetica e della girobussola è una verifica che si effettua due volte al giorno e va trascritta su apposito giornale di bordo. La misura dell’azimut di un astro ( )mAz con l’appropriata strumentazione di bordo (apparecchio azimutale o grafometro) è confrontata con il corrispondente calcolo analitico ( )vAz ; la differenza fra questi due valori fornisce la variazione ( )V . Per la bussola magnetica alla variazione è apportata la declinazione magnetica con la quale si ottiene la deviazione della bussola magnetica per la prora bussola letta al momento della misura:
( ) ( )
( ) mb
bmbmv
dVPPdPAzAzV
−=+=−=
δδ
(7.0)
Nel caso della girobussola la variazione fornisce la deviazione della Gyro: ( ) ( )gbmv PPAzAzV δ=−= (7.1) Il controllo giornaliero della bussola va confrontato con il valore riportato nella tabella delle deviazioni esposta sulla plancia della nave. In presenza di elevate o anomale differenze trovate, deve mettere in attenzione l’ufficiale di bordo, che dopo opportune verifiche sui calcoli effettuati e sulle misure di azimut, sul cattivo funzionamento della bussola e che il campo magnetico di bordo ha subito notevoli variazioni non conforme a quello esistente al momento della stesura delle tabelle di deviazione. 7.1 – La misura di azimut La misura di azimut è effettuata con apparecchio azimutale sistemato sulla bussola normale oppure con grafometro sistemato sulle alette del ponte di comando. Quando si usa la girobussola, l’apparecchio azimutale è sistemato sul una delle due ripetitrice poste sulle alette del

Capitolo 7 – Determinazione degli azimut
286
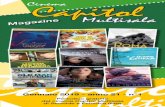
ponte di comando. In entrambi i casi quando si effettua la misura il piano dello strumento deve essere perfettamente orizzontale perché solo in questa situazione la verticale dell’apparecchio appartiene al piano verticale contenente l’astro osservato. Il piano orizzontale della bussola, sul quale è sistemato l’apparecchio azimutale, dovrebbe mantenersi sempre orizzontale, dato che la bussola è dotata di sospensione cardanica; gli attriti ed una eventuale sospensione difettosa potrebbero non mantenere il piano della bussola orizzontale. Durante la misura, con nave in rollio, una pressione anomala sull’apparecchio azimutale da parte dell’operatore in fase di misura, potrebbe anche falsare la misura di azimut. Per valutare quale errore si commette quando il piano della bussola magnetica( o ripetitrice) non è orizzontale, consideriamo la figura 7.1 nella quale si suppone che il piano di misura sia inclinato dell’angolo i.
Figura 7.1 – Variazione della misura di azimut prodotta dal inclinazione
del piano di misura rispetto all’orizzonte
Nella figura 7.1 il piano verticale dell’astro è indicato dalla circonferenza massima ZAD; il piano di misura è rappresentato dalla circonferenza massima Z’AD’; l’astro A ha una altezza sull’orizzonta h; Z’ rappresenta la posizione della verticale dell’osservatore all’instante della misura;ZZ’=i è l’inclinazione della verticale dell’osservatore. A causa dell’inclinazione l’osservatore misura l’azimut HD’ invece del valore esatto HD.

Mario Vultaggio
287
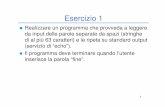
Figura 7.2 – Triangolo sferico associato alla misura di azimut
Dal triangolo sferico di figura 7.2, applicando il teorema delle cotangenti (la formula di Vieta) si ha: ( ) ( ) αcot180sin180coscossincot jjzzi −+−=
αcotsincossinhcoshcot jji +−=
j
jisin
cossinhcoshcotcot +=α
Dalla quale si ricava:
ji
jcossinhcoshcot
sintan+
=α (7.2)
Questa espressione permette di ricavare l’errore in azimut 'DDa =Δ dato che dal triangolo sferico rettangolo DAD’ di figura 7.1 si ricava che: ( ) ( )ah Δ−==− 90cotcotsinh90cos α
sinh
tantan aΔ=α (7.3)
Uguagliando la (7.2) con la (7.3) si ha:
ji
jacossinhcoshcot
sinsinh
tan+
=Δ
e dividendo il secondo membro, numeratore e denominatore per
coshcot i si ha:

Capitolo 7 – Determinazione degli azimut
288
ji
ji
iji
ij
acostanhtan1
sintanhtan
coshcotcossinhcoshcot
coshcotsinhsin
tan+
=+
=Δ
[ ] 1costanhtan1sintanhtantan −+=Δ jijia Che può essere ulteriormente semplificata supponendo °< 45h ed i piccolo, applicando lo sviluppo binomiale: jia sintanh°=°Δ (7.4) Nella quale si è supposto l’inclinazione espressa in gradi. L’errore che si commette dipende principalmente dall’altezza dell’astro per cui per evitare errori di misura occorre usare astri con altezza piccola; per astro sull’orizzonte, l’errore di misura prodotto da inclinazione del piano di misura è nullo. Questo è il motivo per cui si effettua il controllo della bussola misurando l’azimut del Sole al sorgere e al tramonto. 7.2 – L’azimut in funzione del tempo Quando si osserva un astro, si misura al cronometro l’istante di osservazione. Questo valore, dopo opportune trasformazioni, permette di calcolare l’angolo al polo del triangolo di posizione relativo all’istante di osservazione. Note, dal nome dell’astro osservato, le coordinate uranografiche equatoriali e la posizione dell’osservatore, il calcolo dell’angolo azimutale (e quindi dell’azimut) si trova applicando una delle possibili equazioni trigonometriche.

Mario Vultaggio
289
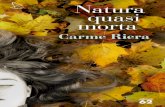
Figura 7.3– Calcolo dell’azimut in funzione del tempo:triangolo di
posizione
Una relazione trigonometrica che esprime l’azimut in funzione del tempo è la relazione di Vieta o dei quattro elementi consecutivi:
ZPccoPcp cotsincossincot += ZPP cotsincossincostan += φφδ PZP cossintancoscotsin φδφ −=
⎥⎦⎤
⎢⎣⎡ −
=P
PZsin
costantancoscot φδφ
[ ]PecPZ cottancostancoscot φδφ −= (7.5) Questa relazione è riportata nelle tavole nautiche edite dall’Istituto Idrografico della marina, note come tavole ABC. Infatti la (7.5) si scompone in due parti:
ecPA costan10 δ= PB cottan10 φ−=
[ ]BACZ +==10
coscot φ (7.6)
E’ importante qui sottolineare che il segno di C definisce il polo a cui occorre riferire l’angolo azimutale; l’angolo al polo definisce l’altro cardine. Nella risoluzione analitica della (7.5) ed in quella con l’uso delle tavole occorre tener presente che la latitudine è sempre positiva qualunque sia l’emisfero di appartenenza dell’osservatore e la declinazione è positiva se omonima alla latitudine:

Capitolo 7 – Determinazione degli azimut
290
( ) ( )( ) ( )( )( ) °<−
°>+−+
90 se B90 se B
eteronimi , se omonimi , se
PP
AA
δφδφ
(7.7)
( )( ) polo al angolodell' cardine angolare, valore,latitudine alla opposto Cardine
polo al angolodell' cardine angolare, valore,latitudine Cardine=⇒−=⇒+
ZCZC
Trovato l’angolo azimutale si passa al calcolo dell’azimut con le ben note relazioni di conversione qui di seguito riportate:
WZSAEZSAWZNAEZNA
zz
zz
180 , 180
360 , ))
))
+°=−°=
−°== (7.8)
7.2.1 – Errori sul calcolo dell’azimut in funzione del tempo L’uso della relazione (7.5) prevede la conoscenza delle coordinate geografiche dell’osservatore all’stante della misura. Di solito nel calcolo dell’azimut con la (7.5) si usano le coordinate del punto stimato. E’ allora importante valutare quale errore si commette nel calcolare l’azimut per mezzo delle coordinate stimate e di un eventuale errore nella misura dell’istante di osservazione. Essendo: ( )tZZ ,,δφ= (7.9) nella quale , occorre ricordare, l’errore in longitudine è all’interno del l’angolo orario calcolato. Per calcolare questo tipo di errore, è sufficiente differenziare la seguente relazione: PZP cossintancoscotsin φδφ −= (7.10) già precedentemente trovata; differenziando si ha:
[ ]
PdPd
dPdZ
dZPZdPP
sinsincoscos
coscostansinsin
sincotcos
2
2
φδδφ
φφφδφ
+
+−−=−
Raggruppando i termini comuni in δφ dddPdZ ,,, si ha:

Mario Vultaggio
291
[ ]
[ ]dPZPPd
dPZ
dZP
cotcossinsincoscos
coscostansinsin
sin
2
2
−++
+−−=−
φδδφ
φφδφ
dP
ZZPZPd
dPZ
dZP
⎥⎦⎤
⎢⎣⎡ +−
++
+⎥⎦⎤
⎢⎣⎡ +
−=−
sinsinsinsincoscos
coscos
coscoscoscossinsin
sinsin
2
2
φδδφ
φδ
δφδφ
(7.11)
Nella quale i differenziali δφ dddPdZ ,,, rappresentano gli errori di calcolo al variare delle variabili presenti nella (7.9). Sostituendo al numeratore del secondo e terzo termine a secondo membro la relazione fondamentale ( )sinh e la corrispondente correlativa ( )Acos , dopo alcuni sviluppi, si ottiene la seguente relazione finale:
[ ][ ]dPhA
dZdAdZ
seccoscos
sintanhcoshsin
δ
φδ
+
−+−= (7.12)
Supposto che le coordinate uranografiche (stella), Sole, pianeta e Luna siano note perché ottenute direttamente dalle effemeridi, gli unici errori che risultano significativi sono quelli introdotti dalla posizione stimata ( )λδφ ddP ≈, . Queste considerazioni permettono di trascurare nella (7.12) l’influenza della declinazione dell’astro osservato: [ ] [ ]dPhAdZdZ seccoscossintanh δφ −= (7.13) La relazione appena trovata fornisce il seguente errore massimo in azimut: hPZ sectanhmax Δ+Δ≤Δ φ (7.14) L’errore in azimut dipende, a parità di errori nel punto stimato, dall’altezza dell’astro osservato. Per un astro osservato all’orizzonte ( )0≈h , l’errore in azimut dipende soltanto dall’errore nell’angolo al polo. Siccome, però, l’incertezza sulla posizione difficilmente è superiore ai 30’, osservando un astro sull’orizzonte, l’errore in azimut difficilmente è superiore a 0,5°. Queste considerazioni portano a suggerire al navigante di non effettuare la lettura al cronometro

Capitolo 7 – Determinazione degli azimut
292
all’istante della misura dell’azimut con astro all’orizzonte o altezza molto bassa dato che il tempo necessario per l’osservatore per spostarsi dal luogo di misura alla sala nautica per la lettura del cronometro non comporta errori significativi nel calcolo dell’azimut dell’astro osservato. 7.3 – L’azimut in funzione dell’altezza osservata Questo calcolo dell’azimut in funzione dell’altezza osservata è usato quando l’osservatore teme un errore eccessivo sulla lettura del cronometro ( )dP ed eventualmente anche sulla posizione stimata ( )λd . In questo caso, dal triangolo di posizione(v. figura 7.4) si può calcolare l’azimut supponendo noti i tre lati ( )zpc ,, .
Figura 7.4– Calcolo dell’azimut in funzione dell’altezza
osservata:triangolo di posizione
Applicando la relazione fondamentale della trigonometria sferica al lato opposto all’angolo Z, si ha: Zcoscoshcossinhsinsin φφδ += (7.15) Alla (7.15) si fa preferire una delle formule del Borda che permette di trovare l’angolo azimutale per mezzo dei tre lati:
( ) ( )( ) SpS
hSSZcossin
sinsin2
tan−
−−=
φ (7.16)

Mario Vultaggio
293
La (7.15), però, può essere usata per studiare l’influenza degli errori di misura ( )φδ ddhd ,, sul calcolo dell’angolo azimutale. Differenziano la (7.15) si ha:
[ ]
[ ] ZdZdhZdZd
sincoshcoscossinhcoscoshsincoscoshsinsinhcoscos
φφφφφφδδ
−−+−=
(7.17)
Nella quale applicando il teorema delle proiezioni e quello dei seni si ottiene:
δφ
δφδφ
φδ d
Zdh
ZAd
ZPdZ
sincoshcoscos
sincoshcoscoscos
sincoshcoscoscos
−+=
Ed applicando ancora il teorema dei seni:
[ ] [ ]
[ ] δφφφφ
decPdhecPAdPdZ
seccosseccoscosseccot
+−+=
(7.18)
La (7.18) fornisce l’incertezza sul calcolo dell’azimut supposto l’esistenza degli errori sui tre lati del triangolo di posizione. Si può, prima di tutto osservare che nella (7.18) compare il termine φsec , per cui l’uso della (7.18) è da evitare con osservatore nelle alte latitudini. Inoltre è presente, sempre nella (7.18) la ecPcos e la Pcot ; per queste due funzioni il metodo non va applicato quando l’astro è prossimo al passaggio al meridiano (massima variazione in azimut). Il metodo è sconsigliato per osservatori con °> 55φ e per angolo al polo compreso: °<<° 45135 P . 7.4 – L’azimut al sorgere e tramonto dell’astro – Amplitudine Nel paragrafo precedente è stato trovato che la condizione ottimale per ridurre l’errore sul calcolo dell’azimut, l’astro osservato si deve trovare basso sull’orizzonte.

Capitolo 7 – Determinazione degli azimut
294
Figura 7.5– Calcolo dell’azimut al sorgere o al tramonto
Dalla figura (7.5), con l’astro all’orizzonte, il triangolo di posizione diventa rettilatero; l’istante del sorgere e del tramonto si ricava considerando nella relazione fondamentale nulla l’altezza:
⎩⎨⎧
=+=
0coscoscossinsinsinh
hPδφδφ
δφ tantancos −=P (7.19) Mentre ponendo h=0 nella (7.15) si ricava il valore dell’azimut al sorgere o tramonto dell’astro:
⎩⎨⎧
=+=
0coscoshcossinhsinsin
hZφφδ
φδ
cossincos =Z (7.20)
Queste due relazioni, che forniscono l’istante del sorgere ed il corrispondente l’azimut, sono particolarmente applicati nel caso in cui l’astro sia il Sole e la Luna. Per quanto riguarda l’azimut la (7.20) per il sorgere e per il tramonto fornisce un valore di Z < 90° per ( )δφ , omonimi e Z>90° per ( )δφ , eteronomi. Spesso la (7.20) è sostituita con la seguente relazione, introducendo l’amplitudine:
φδ
cossinsin =Am (7.21)

Mario Vultaggio
295
E’, comunque, necessario sottolineare che quando si osserva il sorgere o il tramonto del Sole, l’osservatore effettua la misura all’istante in cui il lembo superiore è tangente all’orizzonte. In questa situazione però il centro del Sole si trova sotto l’orizzonte marino (azione combinata della rifrazione e della depressione dell’orizzonte). Ricordando che per una elevazione dell’osservatore sull’orizzonte e=6 m e che per un altezza nulla la rifrazione è circa 36.5’, che il semidiametro del Sole è circa 16,5’, si può ritenere che il centro del Sole è circa 58’ sotto l’orizzonte. Queste considerazioni ci permettono di valutare l’errore in azimut, usando la (7.20) o la (7.21) per mezzo di una relazione differenziale applicata alla (7.15) rispetto ad h e Z: [ ] [ ]dZZdhZ sincoshcoscossinhcoscoshsin0 φφφ −−= ed applicando il teorema delle proiezioni, si ha:
dhZ
dZsintanφ
= (7.22)
valida però soltanto per il valore di Z calcolato con h=0. 7.5 – L’azimut della polare La polare, essendo molto vicina al polo nord (p=89°17’N, 2006), può essere usata per il calcolo di azimut in funzione della latitudine dato che la sua altezza è proprio prossima alla latitudine dell’osservatore. Ovviamente questo calcolo va preso in considerazione per le medie e basse latitudine essendo in questi casi la polare bassa sull’orizzonte. Dal triangolo di posizione, applicando il teorema dei seni si ha:
cosh
sinsinsin pPZ = (7.23)

Capitolo 7 – Determinazione degli azimut
296
Figura 7.6– Calcolo dell’azimut della polare
Essendo xh += φ con tpx cos= La (7.23) si può scrivere:
( )
( ) [ ] 1tancos1secsinsintancos1cos
sinsinsincoscos
sinsincoscos
sinsinsin
−−=−
=
=−
=+
=
φφφφ
φφφ
tptptppt
Pppt
PpptZ
(7.24)
Questa relazione è suscettibile di una ulteriore semplificazione per mezzo dello sviluppo binomiale a secondo membro essendo sicuramente
1tan <φ per latitudini minore di 45°. Per questi casi allora la (7.24) diventa: ( ) ( )[ ]φααφ tancos1sinsinsecsin cotpcotpZ ss +++= (7.25) Questa relazione è usata nelle effemeridi per il calcolo dell’azimut della polare.