Il Questionario Uno strumento di ricerca Prof. Paolo Gambini.
Appunti di matematica generale CTF
Alessandro Gambini
Federica Ferretti
2 dicembre 2015

Indice
1 Concetti di base e insiemi numerici 1
1.1 Insiemi, relazioni e funzioni . . . . . . . . . . . . . . . . . . . . . 1
Simbologia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
Relazioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
Funzioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 Insiemi numerici fondamentali . . . . . . . . . . . . . . . . . . . . 3
Definizione di campo . . . . . . . . . . . . . . . . . . . . . . . . . 5
Densita di Q . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5√2 e irrazionale . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
I numeri reali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.3 Sottoinsiemi della retta reale . . . . . . . . . . . . . . . . . . . . 7
Estremanti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.4 Intervalli . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.5 Il piano cartesiano . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.6 Principio di induzione . . . . . . . . . . . . . . . . . . . . . . . . 9
1.7 Fattoriale e coefficiente binomiale . . . . . . . . . . . . . . . . . . 10
2 Le successioni numeriche 13
2.1 Cos’e una successione . . . . . . . . . . . . . . . . . . . . . . . . 13
2.2 Limite di una successione . . . . . . . . . . . . . . . . . . . . . . 15
La progressione aritmetica . . . . . . . . . . . . . . . . . . . . . . 17
La progressione geometrica . . . . . . . . . . . . . . . . . . . . . 18
Algebra delle successioni convergenti . . . . . . . . . . . . . . . . 19
2.3 Successioni infinitesime e comportamento asintotico . . . . . . . 20
Criterio del rapporto per le successioni . . . . . . . . . . . . . . . 21
2.4 Il numero di Nepero . . . . . . . . . . . . . . . . . . . . . . . . . 21
Altre successioni . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.5 La regola di Cesaro . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3 Le serie numeriche 25
3.1 La serie geometrica . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.2 Serie armonica . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.3 Criteri di convergenza . . . . . . . . . . . . . . . . . . . . . . . . 29
Criterio del confronto . . . . . . . . . . . . . . . . . . . . . . . . 29
i

ii Indice
Criterio del confronto asintotico . . . . . . . . . . . . . . . . . . . 30
Criterio del rapporto . . . . . . . . . . . . . . . . . . . . . . . . . 31
Criterio della radice . . . . . . . . . . . . . . . . . . . . . . . . . 31
Criterio di condensazione . . . . . . . . . . . . . . . . . . . . . . 32
Criterio di Leibniz . . . . . . . . . . . . . . . . . . . . . . . . . . 32
4 Calcolo combinatorio 35
4.1 Permutazioni semplici . . . . . . . . . . . . . . . . . . . . . . . . 35
4.2 Permutazioni con ripetizione . . . . . . . . . . . . . . . . . . . . 36
4.3 Disposizioni semplici . . . . . . . . . . . . . . . . . . . . . . . . . 36
4.4 Disposizioni con ripetizione . . . . . . . . . . . . . . . . . . . . . 37
4.5 Combinazioni semplici . . . . . . . . . . . . . . . . . . . . . . . . 38
4.6 Cenni di calcolo delle probabilita . . . . . . . . . . . . . . . . . . 39
5 Le funzioni continue 43
5.1 Topologia della retta reale . . . . . . . . . . . . . . . . . . . . . . 43
5.2 Trasformazioni del piano e composizione di funzioni . . . . . . . 44
Traslazioni verticali . . . . . . . . . . . . . . . . . . . . . . . . . . 45
Dilatazioni (o contrazioni) verticali . . . . . . . . . . . . . . . . . 45
Riflessioni verticali . . . . . . . . . . . . . . . . . . . . . . . . . . 46
Traslazioni orizzontali . . . . . . . . . . . . . . . . . . . . . . . . 46
Dilatazioni (o contrazioni) orizzontali . . . . . . . . . . . . . . . . 47
Riflessioni orizzontali . . . . . . . . . . . . . . . . . . . . . . . . . 48
|f(x)| e f(|x|) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Il grafico dell’inversa . . . . . . . . . . . . . . . . . . . . . . . . . 49
Funzioni composte . . . . . . . . . . . . . . . . . . . . . . . . . . 50
5.3 Limiti di funzioni . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
5.4 Funzioni continue . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
5.5 Infinitesimi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
5.6 Asintoti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
5.7 Teoremi sulle funzioni continue . . . . . . . . . . . . . . . . . . . 58
6 Il calcolo differenziale 61
6.1 Rapporto incrementale e derivata . . . . . . . . . . . . . . . . . . 61
6.2 Funzioni derivabili . . . . . . . . . . . . . . . . . . . . . . . . . . 63
6.3 Calcolo della derivata . . . . . . . . . . . . . . . . . . . . . . . . 65
Funzioni elementari . . . . . . . . . . . . . . . . . . . . . . . . . . 65
Derivata della funzione inversa . . . . . . . . . . . . . . . . . . . 65
Primitiva . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
Regole di derivazione . . . . . . . . . . . . . . . . . . . . . . . . . 66
6.4 Derivata e monotonıa . . . . . . . . . . . . . . . . . . . . . . . . 67
6.5 Applicazioni del calcolo differenziale . . . . . . . . . . . . . . . . 69
Calcolo di limiti . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
Derivate di ordine superiore . . . . . . . . . . . . . . . . . . . . . 70
Massimi e minimi locali . . . . . . . . . . . . . . . . . . . . . . . 70
Intervalli di concavita . . . . . . . . . . . . . . . . . . . . . . . . 71
Indice iii
6.6 Polinomi di Taylor . . . . . . . . . . . . . . . . . . . . . . . . . . 71
7 L’integrale di Riemann 75
7.1 Calcolo dell’area . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
7.2 Somme di Darboux . . . . . . . . . . . . . . . . . . . . . . . . . . 75
7.3 Integrabilita secondo Riemann . . . . . . . . . . . . . . . . . . . 77
7.4 Proprieta dell’integrale . . . . . . . . . . . . . . . . . . . . . . . . 77
Linearita dell’integrale . . . . . . . . . . . . . . . . . . . . . . . . 77
Additivita dell’integrale . . . . . . . . . . . . . . . . . . . . . . . 78
Disuguaglianza triangolare . . . . . . . . . . . . . . . . . . . . . . 78
Positivita dell’integrale . . . . . . . . . . . . . . . . . . . . . . . . 78
Monotonia dell’integrale . . . . . . . . . . . . . . . . . . . . . . . 78
Media integrale . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
Funzioni integrali . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
7.5 Teorema fondamentale del calcolo integrale . . . . . . . . . . . . 79
7.6 Tecniche di integrazione . . . . . . . . . . . . . . . . . . . . . . . 81
Primitive immediate . . . . . . . . . . . . . . . . . . . . . . . . . 81
Integrazione per parti . . . . . . . . . . . . . . . . . . . . . . . . 82
Integrazione per sostituzione . . . . . . . . . . . . . . . . . . . . 82
Primitive non elementari . . . . . . . . . . . . . . . . . . . . . . . 83
7.7 Integrali Impropri . . . . . . . . . . . . . . . . . . . . . . . . . . 84
8 Equazioni differenziali ordinarie 87
8.1 Problemi di Cauchy . . . . . . . . . . . . . . . . . . . . . . . . . 87
Codominio, dominio e di prolungabilita della soluzione . . . . . . 88
8.2 Equazioni a variabili separabili . . . . . . . . . . . . . . . . . . . 89
8.3 Equazioni differenziali lineari . . . . . . . . . . . . . . . . . . . . 90
9 Funzioni di due variabili reali 91
Limiti e continuita . . . . . . . . . . . . . . . . . . . . . . . . . . 92
9.1 Massimi e minimi locali . . . . . . . . . . . . . . . . . . . . . . . 92
Derivate parziali . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
Matrice Hessiana . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
9.2 Analisi delle curve di livello . . . . . . . . . . . . . . . . . . . . . 95
10 Numeri complessi 99
10.1 Rappresentazione cartesiana . . . . . . . . . . . . . . . . . . . . . 99
10.2 Rappresentazione polare o trigonometrica . . . . . . . . . . . . . 101
Le operazioni in forma polare . . . . . . . . . . . . . . . . . . . . 102
10.3 Le radici n-esime . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
Appendice 105
Tavola degli sviluppi di Maclaurin delle funzioni elementari . . . 105

iv Indice

1 Concetti di base e insiemi
numerici
1.1 Insiemi, relazioni e funzioni
Ricordiamo alcuni concetti e simbolismi fondamentali della teoria degli insiemi
senza soffermarci troppo sui casi generali allo scopo di arrivare velocemente agli
insiemi numerici.
Un insieme viene generalmente indicato con una lettera maiuscola: A =
{1, 3, 5, 7} e un insieme con un numero finito di elementi mentre l’insieme dei
numeri dispari D = {1, 3, 5, 7, . . .} e un insieme con un numero infinito di
elementi.
La cardinalita di un insieme A e il numero degli elementi dell’insieme e si
indica con card(A) o #A. Se il numero di elementi e infinito diciamo semplice-
mente che la cardinalita e infinita senza addentrarci nei diversi tipi di infinito.
Nel caso precedente card(A) = 4. In calcolo combinatorio useremo solo insie-
mi con un numero finito di elementi mentre gli insiemi numerici fondamentali
hanno un numero infinito di elementi. (*)
Simbologia
• a ∈ A significa che l’elemento a appartiene all’insieme A.
• B ⊆ A significa che B e un sottoinsieme di A
• Unione di due insiemi: se A,B ⊆ M allora A ∪ B = {m ∈ M : m ∈A ∨m ∈ B}.
• Intersezione di due insiemi: se A,B ⊆ M allora A ∩ B = {m ∈ M : m ∈A ∧m ∈ B}.
• L’insieme complementare : se A ⊆ M si dice che AC e il complementare
di A su M se AC = {m ∈ M : m /∈ A}. Di conseguenza A ∪ AC = M e
A ∩AC = ∅ (insieme vuoto) .
• Il prodotto cartesiano tra due insiemi si indica A×B = {(a, b) : a ∈ Aeb ∈B}. Il numero di elementi di A×B e il prodotto del numero degli elementi
dei due insiemi.
1

2 Concetti di base e insiemi numerici
Ad esempio seA = {1, 3, 5, 7} eB = {1, 2, 4} alloraA×B = {(1, 1), (1, 2), (1, 4), (3, 1), (3, 2), . . .
con 12 elementi totali.
Relazioni
Una relazione tra gli insiemi A e B si indica con ARB ed e un sottoinsieme del
prodotto cartesiano A×B. Le due relazioni fondamentali che useremo durante
il corso sono la relazione di equivalenza e la relazione d’ordine.
Supponiamo che ∼ sia una relazione tra l’insieme A e se stesso: A ∼ A; una
relazione di equivalenza deve soddisfare le seguenti proprieta:
1. x ∼ x ∀x ∈ A (proprieta riflessiva)
2. se x ∼ y ⇒ y ∼ x ∀x, y ∈ A (proprieta simmetrica)
3. se x ∼ y e y ∼ z ⇒ x ∼ z ∀x, y, z ∈ A (proprieta transitiva).
Il simbolo = rappresenta una relazione di equivalenza.
Supponiamo che ≤ sia una relazione tra l’insieme A e se stesso: A ≤ A; una
relazione d’ordine deve soddisfare le seguenti proprieta:
1. x ≤ x ∀x ∈ A (proprieta riflessiva)
2. se x ≤ y e y ≤ x ⇒ x = y ∀x, y ∈ A (proprieta antisimmetrica)
3. se x ≤ y e y ≤ z ⇒ x ≤ z ∀x, y, z ∈ A (proprieta transitiva).
Il simbolo ≤ rappresenta una relazione d’ordine.
una relazione d’ordine si dice totale se ogni elemento dell’insieme A e
confrontabile con tutti gli altri elementi. (*)
Funzioni
Una funzione e una relazione tra un insieme A ed un insieme B che associa ad
ogni elemento di A un solo elemento di B cioe ∀a ∈ A ∃ ! b ∈ B | f(a) = b.
Generalmente si indica una funzione nel modo seguente:
f : A→ B
dove A rappresenta il dominio della funzione e B il codominio .
L’insieme G = {(a, b) : b = f(a)} e il grafico della funzione.
In generale non e detto che tutti gli elementi diA abbiano una corrispondenza
in B, al massimo si puo asserire che f(A) ⊆ B dove f(A) = {b ∈ B : b =
f(a), a ∈ A}. Tale insieme e l’immagine della funzione f .
Una funzione f di dice suriettiva (su) se l’immagine copre tutto il codominio:
f(A) = B.
Una funzione f si dice iniettiva (1-1) se
∀ a1, a2 ∈ A, a1 = a2 ⇔ f(a1) = f(a2).

1.2. Insiemi numerici fondamentali 3
Una funzione iniettiva e suriettiva si dice biunivoca .
La controimmagine di un insieme C ⊆ B si indica
f−1(C) = {a ∈ A : f(a) ∈ C}.
1.2 Insiemi numerici fondamentali
L’insieme dei numeri naturali si indica con
N = {0, 1, 2, 3, . . .}
ed e l’insieme che si utilizza per contare. E’ possibile costruire un algoritmo in
grado di generare tutti i numeri naturali partendo da 0: anche se non possiamo
elencarli tutti perche sono infiniti esiste un modo per contarne gli elementi.
Questa precisazione e importante perche esistono insiemi di cui non e possibile
nemmeno definire un ordine per contarne gli elementi.
I sottoinsiemi finiti di N si utilizzano nel calcolo combinatorio, mentre N e
il dominio delle funzioni che chiameremo successioni o sequenze numeriche.
I numeri primi sono un sottoinsieme di N con un numero infinito di ele-
menti e costituiscono i mattoni fondamentali dell’aritmetica, infatti ogni numero
si puo scomporre come prodotto di primi. (*)
Se si considera l’operazione di somma sull’insieme dei numeri naturali dati
n, p ∈ N posso dire che n+ p ∈ N e che esiste l’elemento neutro per la somma,
lo zero, infatti n + 0 = 0 + n = n, per ogni n ∈ N. Cio che non e possibile
trovare in N e l’elemento inverso rispetto alla somma, cioe l’opposto: dato n ∈N \ {0} @p ∈ N : p + n = 0. Questa proprieta consentirebbe a N di essere un
gruppo algebrico. Se si aggiungono gli interi negativi all’insieme dei naturali si
ottiene l’insieme dei numeri interi
Z = {0,±1,±2,±3, . . .}
Z con l’operazione di somma, (Z,+), e un gruppo algebrico:
• ∃ l’elemento neutro: 0 + n = n+ 0 = n per ogni n ∈ Z.
• ∃ l’opposto: ∀n ∈ Z ∃ p : p+ n = 0.
• ∀n, p, q ∈ Z vale la proprieta associativa: (n+ p) + q = n+ (p+ q)
Se si aggiunge la proprieta commutativa, cioe che ∀n, p ∈ Z, n+p = p+n
si ha che (Z,+) e un gruppo commutativo o abeliano.
Z pero non e un gruppo se consideriamo come operazione la moltiplicazione:
se escludiamo 1 e -1 non esiste l’inverso (il reciproco) di nessun elemento rispetto
alla moltiplicazione.
N ⊂ Z cioe N e un sottoinsieme stretto di Z perche esistono elementi di Zche non appartengono a N ma entrambi sono insiemi con un numero infinito
di elementi. E’ vero che Z ha piu elementi di Z? Lo stesso si potrebbe dire

4 Concetti di base e insiemi numerici
dei numeri pari P = {n ∈ N : n = 2p, p ∈ N} o quello dei numeri dispari
D = {n ∈ N : n = 2p+ 1, p ∈ N} rispetto ad N.
Se costruiamo una applicazione che associa ad ogni numero naturale il suo
doppio:
0→ 0 1→ 2 2→ 4 3→ 6
4→ 8 5→ 10 · · · n→ 2n(1.1)
otteniamo una corrispondenza biunivoca tra i naturali e i numeri pari (nessun
numero rimane senza corrispondenza): cio significa che siamo di fronte a due
infiniti dello stesso ordine1! La stessa cosa si potrebbe fare con naturali ed
interi; esistono varie forme di infinito, l’infinito e un oggetto poco intuitivo ed
estremamente difficile da trattare. (*)
Si dice che N,Z o l’insieme dei numeri pari sono numerabili, cioe in modo
informale possiamo dire che esiste un modo per contare i loro elementi, e tutti
gli insiemi numerabili hanno lo stesso numero di elementi.
Rimane il problema della moltiplicazione: per ottenere un gruppo algebri-
co con l’operazione di moltiplicazione occorre avere il reciproco di ogni intero.
L’insieme dei numeri razionali
Q =
{n
p, n ∈ Z, p ∈ N \ {0}
}e l’insieme di tutti i numeri che si possono scrivere come frazione. Comprende
anche i numeri interi e contiene il reciproco di ogni suo elemento tranne lo
0. Possiamo pertanto definire un gruppo commutativo con la moltiplicazione
solo se escludiamo l’elemento 0 che non ha inverso e si chiama anche elemento
assorbente della moltiplicazione poiche ∀a ∈ Q, a · 0 = 0 · a = 0.
(Q \ {0}, ·) e un gruppo abeliano2:
1. ∃ l’elemento neutro: 1 · a = a · 1 = a per ogni a ∈ Q.
2. ∃ l’inverso della moltiplicazione (il reciproco): ∀a ∈ Q∗ ∃ b : a · b = 1.
3. ∀a, b, c ∈ Q vale la proprieta associativa: (a · b) · c = a · (b · c)
4. vale la proprieta commutativa: ∀a, b ∈ Q, a · b = b · a
Una frazione si dice ridotta ai minimi termini o irriducibile se numera-
tore e denominatore sono primi tra loro. Se non lo sono la frazione puo essere
ridotta dividendo entrambi per il loro MCD.
Ogni numero decimale finito o periodico si puo scrivere come frazione, ad
esempio, 14 = 0.25 4
3 = 1.3 ma e vero anche il viceversa, tutte le frazioni
danno luogo a numeri decimali finiti o periodici. Il periodo potrebbe essere
molto lungo e guardando un numero in forma decimale non e facile stabilire
1E’ chiaro che se tolgo i numeri pari dall’insieme dei naturali rimangono comunque infiniti
elementi pero la corrispondenza biunivoca ci assicura che siamo di fronte allo stesso tipo di
infinito2Un insieme numerico come Q in cui viene tolto lo 0 si puo indicare anche con Q∗

1.2. Insiemi numerici fondamentali 5
se tale numero e stato generato da una frazione o no, prendiamo il seguente
esempio:
51
94= 0.5 4255319148936170212765957446808510638297872340 42553 191489361702127659574468085106382978723404255319 . . .
Non e quindi facile capire se un numero scritto in forma decimale e periodico
o no, ci sono voluti secoli per dimostrare che π non puo essere scritto come
frazione perche, per quante cifre decimali si possano trovare empiricamente dopo
la virgola anche con l’utilizzo di un calcolatore, l’unico modo per dimostrare che
π non e razionale e una dimostrazione matematica.
Definizione di campo
L’insieme Q con le operazioni di somma e moltiplicazione e una struttura alge-
brica chiamata campo, cioe:
1. (Q,+) e un gruppo commutativo
2. (Q∗, ·) e un gruppo commutativo
3. Vale la proprieta distributiva della moltiplicazione rispetto alla somma:
∀a, b, c ∈ Q a(b+ c) = ab+ ac.
si indica con (Q,+, ·).
Densita di QSe consideriamo due interi a e b e contiamo gli elementi interi compresi tra l’uno
e l’altro otterremo sempre un insieme finito di elementi per quanto distanti siano
i numeri a e b. Se invece consideriamo due numeri razionali a e b, per quanto
vicini possano essere, troveremo sempre un’infinita di razionali compresi tra
l’uno e l’altro. Questa proprieta detta a parole e la proprieta di densita di Q.
Q e un insieme denso perche ∀a, b ∈ Q, a < b, ∃ c ∈ Q : a < c < b. Ad
esempio c =a+ b
2e sicuramente razionale ed e compreso tra a e b.
Z e N non sono insiemi densi, ci sono dei salti per passare da un intero al
suo successivo o al precedente, mentre in Q non ha senso parlare di successivo o
precedente di un numero. Questa proprieta non e sufficiente a dire che l’insieme
Q sia privo di buchi.
Senza addentrarsi in considerazioni topologiche, la cosa importante da non
travisare e la seguente: gli elementi di Z rappresentano punti isolati, tra un
punto e l’altro non c’e nulla, c’e un salto. Questo non avviene in Q ma cio
non significa che Q rappresenti un insieme continuo di valori.
Se pensiamo all’insieme del denaro contante, esso rappresenta un insieme
discreto di valori in quanto esiste una unita fondamentale che e il centesimo di
Euro e che non si puo suddividere. Viceversa se pensiamo alla temperatura di
un’aula, per passare da 20◦C a 21◦C occorre riscaldare l’aula e la temperatu-
ra aumentera da 20◦C a 21◦C toccando tutti i valori intermedi in modo

6 Concetti di base e insiemi numerici
continuo; il mercurio del termometro non si dilata a scatti ! Questa e la pri-
ma differenza tra il concetto di discreto e di continuo, il denaro si conta, la
temperatura si misura. L’insieme Q vive in una via di mezzo tra discreto e
continuo perche contiene un numero infinito di buchi sulla retta reale; si dice
che Q non e completo.
√2 e irrazionale
E’ semplice dimostrare che il numero√
2 non si puo scrivere come frazione e che
quindi non appartiene a Q. Esistono infiniti numeri irrazionali che a loro volta
costituiscono un insieme denso, questo spiega anche che Q non puo rappresentare
un insieme continuo di valori.
Teorema 1.1.√
2 e irrazionale.
Dimostrazione. Supponiamo per assurdo che√
2 sia razionale: in questo caso
possiamo scriverlo come una frazione irriducibile:√
2 = np .
Elevando entrambi i membri al quadrato si ottiene
2 =n2
p2⇔ 2p2 = n2 (1.2)
da cui si deduce che, essendo n, p ∈ Z, n deve essere pari (e uguale a 2p2 che
e necessariamente pari), quindi n si puo scrivere come 2q con q ∈ Z:
2p2 = n2 ⇔ 2p2 = (2q)2 ⇔ 2p2 = 4q2 ⇔ p2 = 2q2 (1.3)
ma dall’ultima uguaglianza si evince che anche p dovrebbe essere pari! Cio
e assurdo perche avevamo posto np come frazione irriducibile!
I numeri reali
I numeri non razionali o irrazionali sono stati scoperti dai greci quali gran-
dezze incommensurabili. Si pensa che furono Pitagora e i pitagorici a fornire
una argomentazione della irrazionalita di√
2 anche se essi stessi stentavano a
riconoscere l’esistenza di tali numeri3. Ovviamente il simbolo√
2 non esisteva,
cosı come non esisteva nessun simbolo per quello che probabilmente e il numero
irrazionale piu famoso, cioe pi greco. Il simbolo π fu introdotto e divenne di
uso comune solo a partire dal diciottesimo secolo.
Questo numero compare ovunque in natura, non solo nello studio della cir-
conferenza. Il fatto che π sia un numero irrazionale, non e facile da dimostrare.
Prima dell’arrivo dei calcolatori elettronici che oggi hanno scoperto milioni di
cifre dopo la virgola, era difficile calcolare le cifre decimali di pi greco poiche non
hanno un periodo e ne regolarita alcuna. L’impossibilita della quadratura del
3Secondo una leggenda Ippaso da Metaponto fu condannato all’annegamento per non essere
stato in grado di confutare la loro esistenza

1.3. Sottoinsiemi della retta reale 7
cerchio, antico problema matematico deriva dal fatto che pi greco e irrazionale,
anzi addirittura trascendente, sottoinsieme degli irrazionali sul quale non ci
dilunghiamo. (*)
L’insieme dei numeri reali comprende tutti i razionali e gli irrazionali e si
indica con la lettera R. Questa non e una definizione rigorosa: la definizione
rigorosa di numero reale va al di la dello scopo di questo corso, basti sapere che
ci sono voluti secoli per definire i numeri reali.
Un’altro concetto importante su cui non ci addentreremo ma che non bi-
sogna assolutamente sottovalutare e che i numeri irrazionali rappresentano la
quasi totalita dei numeri reali. Puo sembrare assurdo ma una delle differenze
fondamentali tra Q ed R e che anche Q come Z e un insieme numerabile (si
puo trovare un algoritmo per contarne gli elementi) mentre R rappresenta un
insieme non numerabile, un infinito di ordine superiore, in cui non e possibile
trovare alcun criterio per contarne gli elementi. La dimostrazione per assurdo di
questo fatto e possibile con il cosiddetto procedimento diagonale di Cantor,
che di per se non e difficile ma va al di la dei nostri obiettivi. (*)
L’insieme R con le operazioni di somma e prodotto e un campo totalmente
ordinato; sono sottoinsiemi di R tutti gli intervalli della retta reale. A differenza
di Q, R e un insieme senza buchi, continuo.
1.3 Sottoinsiemi della retta reale
Estremanti
Un sottoinsieme I di R si dice superiormente limitato se esiste x ∈ R tale
che x ≥ y ∀ y ∈ I. Si dice che x e un maggiorante dell’insieme I.
Allo stesso modo un sottoinsieme I di R si dice inferiormente limitato se
esiste x ∈ R tale che x ≤ y ∀ y ∈ I. Si dice che x e un minorante dell’insieme
A.
Il piu piccolo dei maggioranti di un sottoinsieme A si chiama estremo su-
periore e si indica con sup(I), il piu grande dei minoranti si chiama estremo
inferiore e si indica con inf(I). Se l’estremo superiore appartiene all’insieme
I allora e il massimo; se l’estremo inferiore appartiene all’insieme I allora e il
minimo. In caso contrario non esistono massimo o minimo.
Assioma di completezza: ogni sottoinsieme di R non vuoto e superior-
mente limitato ammette estremo superiore in R. Lo stesso si puo dire per
l’estremo inferiore.
In realta esistono diverse formulazioni dell’assioma di completezza che co-
munque vanno al di la dei nostri scopi.
Se un sottoinsieme I di R non e superiormente limitato si dice che sup(I) =
+∞ mentre se non e inferiormente limitato si dice che inf(I) = −∞.
Ad esempio
• Se I = {x ∈ Q : x2 < 2}, allora 32 , 2, 10 sono maggioranti di I ma
l’estremo superiore e un numero irrazionale:√
2.

8 Concetti di base e insiemi numerici
• Se I = {x ∈ Z : x2 < 2}, allora l’estremo superiore e 1, il piu piccolo intero
minore di√
2 e in questo caso e anche il massimo. L’estremo inferiore
analogamente e −1 che rappresenta anche il minimo.
• Se I = {x ∈ R : x3 ≤ 2}, allora l’estremo superiore e 3√
2, e in questo
caso e anche il massimo perche 3√
2 ∈ R. L’estremo inferiore invece e −∞quindi non esiste il minimo.
1.4 Intervalli
Gli intervalli della retta reale si indicano con le parentesi quadre o tonde:
• l’intervallo [a, b] indica l’insieme {x ∈ R : a ≤ x ≤ b} in cui anche
gli estremi appartengono all’intervallo. Si tratta di un intervallo in cui
sup([a, b]) = max([a, b]) = b e inf([a, b]) = min([a, b]) = a. L’interval-
lo si dice topologicamente chiuso perche contiene la sua frontiera (che
sarebbero i due estremi).
• l’intervallo ]a, b[ o (a, b) indica l’insieme {x ∈ R : a < x < b} in cui gli
estremi non appartengono all’intervallo. Si tratta di un intervallo in cui
max([a, b]) e min([a, b]) non esistono mentre sup([a, b]) = b e inf([a, b]) = a.
L’intervallo si dice topologicamente aperto4.
• alcuni intervalli non sono ne aperti ne chiusi come ad esempio [a, b[ o ]b, a]
o l’unione di intervalli di questo tipo in cui alcuni estremi appartengono
all’intervallo e altri no.
Ogni intervallo aperto e limitato piccolo a piacere si puo mettere in corri-
spondenza biunivoca con la retta reale (illimitata), cioe il segmento e la retta
contengono lo stesso ordine di infinito di punti!!!
Non dimostreremo questo fatto ma geometricamente e molto facile mettere
in corrispondenza biunivoca un oggetto limitato come una semicirconferenza e
un oggetto illimitato come una retta. Osservano la figura si vede come ogni
punto della retta puo essere messo in corrispondenza biunivoca con ogni punto
della circonferenza: cio significa che nei due insiemi i punti sono infiniti ma
hanno lo stesso ordine di infinito!
1.5 Il piano cartesiano
Il piano cartesiano bidimensionale e un sistema di riferimento formato, da 2
rette rette reali tra loro perpendicolari che si intersecano in un punto chiamato
origine. Il piano cartesiano e caratterizzato dalla cosiddetta metrica euclidea
(*) e tutte le funzioni che disegneremo saranno delle curve o un insieme di punti
sul piano cartesiano.
4Un insieme si dice aperto se dato un punto dell’insieme esiste sempre un intorno di quel
punto sufficientemente piccolo in cui tutti gli elementi appartengono all’insieme stesso

1.6. Principio di induzione 9
E’ interessante vedere quali curve rappresentano il grafico di una funzione e
quindi analizzare il grafico di alcune funzioni elementari.
- grafici di funzioni
- valore assoluto, parte intera, parte frazionaria, disuguaglianze
1.6 Principio di induzione
Una volta definito R si potrebbe andare a ritroso e definire tutti gli altri in-
siemi numerici. In matematica N si puo infatti definire anche come insieme
induttivo5 di R.
Tralasciamo pero le definizioni formali e assumiamo che ogni sottoinsie-
me di N∗ ammetta minimo (assioma del buon ordinamento), cio e anche
abbastanza intuitivo. Con questa assunzione possiamo enunciare il seguente
teorema:
Teorema 1.2. Se I ⊆ N∗ e valgono:
• 1 ∈ I
• n ∈ I ⇒ n+ 1 ∈ I
allora I = N
Dimostrazione. Supponiamo per assurdo che esista un elemento di N∗ che non
appartiene ad I:
Teorema 1.3 (Principio di induzione). Se P (n) e una proposizione per n ∈ Ne valgono:
• P (1) e vera
• P (n) ⇒ P (n+ 1)
allora P (n) e vera pero ogni n ∈ N.
Vediamo come il principio di induzione ci permette ad esempio di dimostrare
che la somma dei primi n interi consecutivi vale6:
n∑k=0
k =n(n+ 1)
2(1.4)
dove anziche scrivere 1 + 2 + 3 + · · ·+ (n− 1) + n abbiamo usato il simbolo
di sommatoria (e necessario imparare a giocare con le sommatorie...).
5Abbiamo definito N con lo 0, di solito quando si parla di N come insieme induttivo di Rsi parte da 1, chiamiamo questo insieme N∗
6Questa formula puo essere dimostrata anche in tanti altri modi che non richiedono il
principio di induzione

10 Concetti di base e insiemi numerici
Dimostrazione. La prima cosa da fare e verificare se l’uguaglianza vale per n =
1:
1∑k=0
k =1(1 + 1)
2⇒ 1 = 1
La parte meno intuitiva dell’applicazione del principio di induzione viene
ora: supponiamo che l’uguaglianza 1.4 sia vera (e la tesi che vogliamo dimostra-
re...ora la utilizziamo come ipotesi) e vediamo che cio ci permette di dimostrare
l’uguaglianza per n+ 1. Sostanzialmente la nostra tesi ora diventa:
n+1∑k=0
k =(n+ 1)(n+ 2)
2(1.5)
Partiamo quindi dal membro a sinistra e spezziamo la somma7:
n+1∑k=0
k =
n∑k=0
k + (n+ 1) (1.6)
Lo scopo di questa suddivisione della sommatoria ci permette di evidenziare
la sommatoria fino a n di cui, per ipotesi induttiva, conosciamo l’espressione
equivalente. Infatti ora utilizziamo l’ipotesi induttiva 1.4:
n∑k=0
k + (n+ 1) =n(n+ 1)
2+ (n+ 1) = · · · = (n+ 1)(n+ 2)
2(1.7)
1.7 Fattoriale e coefficiente binomiale
Rimanendo nell’insieme dei numeri naturali definiamo due importanti applica-
zioni:
Definizione 1.4 (Fattoriale).
n! = 1 · 2 · 3 · · · (n− 1) · n0! = 1 (1.8)
n! e il prodotto di tutti i naturali da 1 a n e si puo scrivere anche con il
simbolo di produttoria: n! =∏nk=1 k. Poiche 0! non avrebbe senso con tale
definizione si conviene che 0! = 1. Il fattoriale si puo definire anche in modo
ricorsivo: {0! = 1
n! = n · (n− 1)!(1.9)
7Se ancora non sapete maneggiare bene le sommatorie cio che abbiamo fatto e la seguente
suddivisione:1 + 2 + 3 + · · ·+ n + (n + 1) = (1 + 2 + 3 + ·+ n) + (n + 1)

1.7. Fattoriale e coefficiente binomiale 11
Definizione 1.5 (Coefficiente binomiale).(n
k
)=
n!
k!(n− k)!(1.10)
...

12 Concetti di base e insiemi numerici

2 Le successioni numeriche
2.1 Cos’e una successione
Le successioni sono delle funzioni a valori reali (il codominio e l’insieme dei nu-
meri reali, R) il cui dominio e l’insieme dei numeri naturali, N. Ogni successione
associa quindi uno o piu numeri naturali ad un valore reale; dato che gli elementi
dell’immagine sono una sequenza di numeri il cui pedice rappresenta l’elemento
del dominio, spesso le successioni sono rappresentate come sequenza di numeri.
Solitamente queste funzioni si descrivono con la seguente notazione: (an)n∈N in
cui il pedice n si riferisce al numero naturale a cui an e associato.
(an)n∈N : N→ Rn→ an
Le successioni possono essere definite:
• mediante rappresentazione analitica: quando e possibile determinare l’e-
spressione che permette di determinare l’n-esimo termine della successio-
ne. In questo caso ogni termine e determinato dal valore della funzione f
nell’n-esimo punto; possiamo scrivere an = f(n).
• per elencazione: vengono rappresentati solo le immagini della successione
in sequenza (solitamente i termini sono distanziati tra loro senza alcuna
punteggiatura): a0 a1 a3 a4 . . .
• per ricorrenza: una successione si puo definire per ricorrenza se, una volta
imposte condizioni iniziali, ogni termine si puo calcolare come funzione di
uno o alcuni suoi termini precedenti.
Ad esempio, si puo definire una successione imponendo la condizione ini-
ziale sul primo termine ed esprimendo la funzione che permette di trovare
il valore dell’n+ 1−termine sapendo il valore dell’n−termine.
(an)n∈N =
{a0 = 1;
an+1 = f(an).
Solitamente le successioni le riusciamo a definire mediante una, o al piu due,
rappresentazioni.
13

14 Le successioni numeriche
Guardiamo infatti qualche esempio per vedere come la maggior parte delle
successioni si riescano a rappresentare solo mediante una o due definizioni:
• La successione di Fibonacci E una successione di numeri interi positivi in
cui ciascun termine, a partire dal terzo, si ottiene come somma dei due
termini precedenti 1. Vediamo la sua rappresentazione per ricorrenza:a1 = 1
a2 = 1
an = an−1 + an−2
(2.1)
Possiamo anche rappresentare questa successione per elencazione:
F = 1, 1, 3, 5, 8, 13, 21, 34, 55, ...
Ma nessuno, almeno fin’ora, e riuscito a trovare l’espressione analitica
dell’n-esimo termine della successione di Fibonacci, cioe non si e ancora
riusciti a trovare un’espressione che permetta di trovare l’n-esimo termine
indipendentemente dal valore dei primi due e dei due antecedenti ad esso.
• L’algoritmo di Erone Questo metodo e un procedimento di calcolo che
permette di calcolare la radice quadrata di un numero utilizzando solo
le operazioni fondamentali dell’aritmetica. Esso si basa su considerazioni
geometriche2 e su il metodo delle approssimazioni successive e proprio per
questo, ogni termine lo riusciamo ad esprimere solo conoscendone il prece-
dente ed ancora nessuno ha scoperto l’espressione del termine n-esimo me-
diante rappresentazione analitica. La sua rappresentazione per ricorrenza
e la seguente (nella quale il numero di cui cerchiamo la radice quadrata lo
mettiamo al posto del parametro k):{a1 = 2
an = 12
(an−1 + k
an−1
) (2.2)
Una successione si definisce:
• crescente se an+1 ≥ an∀n ∈ N
• decrescente se an+1 ≤ an∀n ∈ N
• strettamente crescente se an+1 > an∀n ∈ N1La successione prende il nome dal matematico pisano del XII secolo Leonardo Pisano,
detto Fibonacci. Nel 1228 scrisse il Liber Abaci, opera che, oltre ad avere il grande merito di
aver introdotto per la prima volta in Europa le cifre arabe, contiene una parte dedicata alla
”‘matematica divertente”’ contenente problemi che prendono spunto dalla realta. Fra questi
problemi c’e il famoso problema della riproduzione dei conigli, la cui legge matematica che
ne descrive la crescita della popolazione e la successione di Fibonacci. Essa possiede molte
proprieta, una di esse dice che il limite del rapporto per n → ∞ di due termini successivi
tende al numero irrazionale Φ, chiamato anche sezione aurea.2L’algoritmo di Erone prende il nome dal suo inventore (Erone di Alessandria, I◦ sec.
a.C.); si inizia considerando un rettangolo di misura uguale al numero di cui si deve calcolare
la radice quadrata e per approssimazioni successive si arriva ad un quadrato equivalente al
rettangolo iniziale il cui lato e quindi uguale alla radice quadrata cercata.

2.2. Limite di una successione 15
• strettamente decrescente se an+1 < an∀n ∈ N
Il grafico di una successione e rappresentato da un’insieme discreto di punti.
Come abbiamo visto per le altre funzioni, anche le successioni possono essere:
• limitate inferiormente se
inf an = m > −∞ (2.3)
• limitate superiormente se
sup an = M < +∞ (2.4)
• limitate se sono limitate sia inferiormente che superiormente.
2.2 Limite di una successione
La cosa piu interessante per una successione e stabilire cosa succede quando n
diventa molto grande, diciamo per n che tende all’infinito. Questo e il primo
concetto di limite per successione: una successione numerica puo comportarsi
in vari modi per n → ∞, puo avvicinarsi sempre di piu a un valore reale, puo
diventare sempre piu grande (in valore assoluto, quindi anche sempre piu piccola
negativa) o puo oscillare sempre tra diversi valori. Distinguiamo questi casi:
Definizione 2.1. Una successione an si dice convergente se per n → ∞ si
avvicina sempre di piu ad un valore l ∈ R. Si scrive:
limn→∞
an = l (2.5)
che, in termini formali, significa:
∀ε > 0 ∃n ∈ N : ∀n > n, |an − l| < ε. (2.6)
In definitiva significa che, se una successione e convergente allora, comunque
io scelga un intorno di l sull’asse delle ordinate, da un certo valore (n) in poi la
successione an rimane sempre limitata a quell’intorno.
La stessa cosa si puo definire per una successione divergente positivamente o
negativamente; definiamo il limite per le successioni che vanno a +∞, in modo
analogo si definiscono quelle che vanno a −∞.
Definizione 2.2. Una successione an si dice divergente positivamente se
per n → ∞ la successione va a +∞; cioe essa non e limitata superiormen-
te. Analogamente si puo definire una successione divergente negativamente. Si
scrive:
limn→∞
an = +∞ (2.7)
che, in termini formali, significa:
∀M > 0 ∃n ∈ N : ∀n > n, an > M (2.8)

16 Le successioni numeriche
In definitiva significa che, se una successione e divergente positivamente al-
lora, comunque io scelga un un numero M ∈ R sull’asse delle ordinate grande a
piacere, da un certo valore (n) in poi la successione an sara sempre piu grande
di M per ogni n ≥ n.
Una successione ne convergente ne divergente si dice irregolare. Ad esem-
pio la successione an = 1n e convergente al valore 0, la successione an = n e
divergente a +∞ e la successione an = (−1)n e oscillante tra −1 e 1 e quindi e
irregolare.
Definito il limite per le successioni ci sono alcuni teoremi interessanti che
legano la monotonia delle successioni con il loro carattere. Iniziamo con la
permanenza del segno.
Teorema 2.3 (Teorema della permanenza del segno). Sia an una successione
convergente a un limite l > 0 allora ∃n : ∀n > n, an > 0
Il teorema della permanenza del segno ci dice che se una successione converge
a un valore positivo l allora, da un certo valore in poi, n, la successione sara
sempre positiva. Analogamente, se l < 0, da un certo punto in poi la successione
sara sempre negativa.
Teorema 2.4. Sia an : N→ R una successione numerica.
• Se an e monotona crescente e superiormente limitata e sempre convergen-
te.
• Se an e monotona crescente e illimitata e sempre divergente a +∞.
• Se an e monotona decrescente e inferiormente limitata e sempre conver-
gente.
• Se an e monotona decrescente e illimitata e sempre divergente a −∞.
Per dimostrare che una successione ammette limite occorre dimostrare che
e monotona e limitata; questo non ci permette di stabilire il valore del limite
ma solo la sua esistenza. Consideriamo ad esempio l’algoritmo di Erone e uti-
lizziamolo per il calcolo ricorsivo di√
2. Ricordiamo prima l’algoritmo di Erone
definito per ricorsione.
Dimostrazione. a1 = 2
an =1
2
(an−1 +
2
an−1
)(2.9)
Se il limite esistesse, quale sarebbe il suo valore? Se an → l ovviamente
anche an+1 → l per n → ∞; quindi facendo il limite ad ambo i membri della
formula ricorsiva otteniamo la seguente equazione in l:
l =1
2
(l +
2
l
)⇒ · · · ⇒ l =
√2 (2.10)
Rimane pero ancora da dimostrare che il limite esiste. Proviamo la sua
esistenza dimostrando che la successione e monotona e limitata. Per prima

2.2. Limite di una successione 17
cosa dimostriamo (con il principio di induzione) che e limitata dal basso, in
particolare che a2n > 2:
a1 = 2 ⇒ a21 = 4
Ora occorre provare che a2n+1−2 > 0 sfruttando l’ipotesi induttiva (a2n > 2):
a2n+1 − 2 =
(1
2
(an +
2
an
))2
− 2 = · · · = (a2n − 2)2
4a2n> 0
non puo essere nullo perche per ipotesi induttiva a2n > 2. La successione e
quindi limitata dal basso.
Ora vediamo che la successione e monotona decrescente, cioe ∀n ∈ N, an+1 <
an:
an − an+1 = an −1
2
(an +
2
an
)= · · · > 0
La successione e limitata dal basso e monotona. Quindi il limite esiste e
necessariamente e√
2.
Teorema 2.5 (Teorema del confronto). Per dimostrare che una successione e
convergente puo essere utile sapere che tale successione e sempre compresa tra
due successioni convergenti allo stesso limite. Siano an e bn due successioni
tali che limn→∞
an = limn→∞
bn = l, allora se cn e una terza successione tale che
an < cn < bn per ogni n ∈ N,
limn→∞
cn = l
Un ragionamento analogo puo essere fatto per le successioni divergenti: se an e
una successione divergente a +∞ e cn e una successione tale che cn > an per
ogni n ∈ N, allora
limn→∞
cn = +∞
La progressione aritmetica
La progressione aritmetica e una successione definita per ricorrenza ma e pos-
sibile definirla anche come una funzione di n ∈ N. E’ definita in modo tale che
la differenza tra due termini successivi sia costante; se a ∈ R e il valore iniziale
della progressione e d ∈ R e quella che si chiama ragione della progressione
aritmetica, essa si definisce nel modo seguente:{a1 = a
an = an−1 + d(2.11)
Se elenchiamo i primi elementi della progressione ci accorgiamo che essa
possiede una forma analitica:
a1 = a a2 = a+ d a3 = (a+ d) + d = a+ 2d
a4 =(a+ 2d) + d = a+ 3d · · · an = a+ (n− 1)d

18 Le successioni numeriche
E’ chiaramente una successione divergente ma e interessante vedere quanto
vale
n∑k=1
an, ovvero la somma dei primi n elementi della successione:
n∑k=1
ak =
n∑k=1
(a+ (k − 1)d) =
n∑k=1
a+ d
n∑k=1
(k − 1) (2.12)
sfruttando la formula 1.4 della somma dei primi n numeri naturali,
n∑k=1
a+ d
n∑k=1
(k − 1) = na+ dn(n− 1)
2= n
(a+ d
n− 1
2
)=
n
(2a+ (n− 1)d
2
)=n
2(a+ a+ (n− 1)d) =
n
2(a1 + an) (2.13)
Abbiamo cosı ottenuto:
n∑k=1
ak =n
2(a1 + an) (2.14)
Con tale formula possiamo mostrare che la somma dei primi numeri dispari
e sempre un quadrato.
Infatti, ponendo a = 1 e d = 2 come parametri della progressione aritmetica,
otteniamo la sequenza a1 = 1, a2 = 3, a3 = 5, a4 = 7, . . . cioe la sequenza di tutti
i numeri dispari. Calcoliamo la somma dei primi n termini della progressione
(utilizzando la 2.13):
n∑k=1
ak =n
2(a1 + an) =
n
2(1 + (1 + 2(n− 1))) = n2 (2.15)
La progressione geometrica
La progressione geometrica e una successione definita per ricorrenza in modo
tale che il rapporto tra due termini successivi sia costante. Se a ∈ R e il
valore iniziale della progressione e q ∈ R e quella che si chiama ragione della
progressione geometrica, essa si definisce nel modo seguente:{a0 = a
an = q · an−1(2.16)
Se elenchiamo i primi elementi della progressione ci accorgiamo che essa
possiede una forma analitica:
a0 = a a1 = a · q1 a2 = (a · q) · q = a · q2 a3 = a · q3 · · · an = a · qn
A differenza delle progressioni aritmetiche, tali successioni non sono sempre
divergenti; infatti, indipendentemente dal valore iniziale a, il carattere della
progressione dipende strettamente dalla ragione q, si possono presentare diversi
casi:

2.2. Limite di una successione 19
• se |q| < 1, allora limn→∞
an = 0
• se q = 1, allora limn→∞
an = 1
• se q > 1, allora limn→∞
an = +∞
• se q = −1, la successione oscilla sempre tra −1 e 1.
• se q < −1, la successione oscilla in modo illimitato tra −∞ e +∞.
E’ interessante vedere che la somma dei primi n termini della progressione
geometrica (poniamo a = 1 per semplicita) vale esattamente:
n∑k=0
qk =1− qn+1
1− q(2.17)
Tale formula ci sara utile quando dovremo stabilire il carattere della cosid-
detta serie geometrica. Dimostriamola per induzione:
Dimostrazione. Per n = 0 e facilmente verificata: q0 = 1−q11−q , abbiamo 1 ad
entrambi i membri.
Supponiamo ora che l’affermazione 2.17 sia vera e dimostriamo che
n+1∑k=0
qk =1− qn+2
1− q(2.18)
Partendo dal primo membro
n+1∑k=0
qk =
n∑k=0
qk + qn+1 (2.19)
per ipotesi induttiva
n∑k=0
qk + qn+1 =1− qn+1
1− q+ qn+1 =
1− qn+2
1− q(2.20)
che e uguale al secondo membro e quindi l’affermazione e provata.
Algebra delle successioni convergenti
Siano an e bn due successioni convergenti, in particolare limn→∞
an = a ∈ Re limn→∞
bn = b ∈ R. Valgono le seguenti proprieta (che si possono dedurre
facilmente a partire dalla definizione di limite):
• limn→∞
(an + bn) = limn→∞
(an) + limn→∞
(bn) = a+ b
• limn→∞
(an · bn) = limn→∞
(an) · limn→∞
(bn) = a · b
• se bn 6= 0 per ogni n ∈ N, limn→∞
anbn
=limn→∞ anlimn→∞ bn
=a
b

20 Le successioni numeriche
• se c ∈ R, limn→∞
c · an = c · limn→∞
an = c · a
• se c ∈ R, limn→∞
(an)c =(
limn→∞
an
)c= ac
Ovviamente questi calcoli non si possono generalizzare alle successioni di-
vergenti.
2.3 Successioni infinitesime e comportamento asin-
totico
Il calcolo del limite di una successione puo avvenire facilmente attraverso pas-
saggi algebrici che semplificano le forme indeterminate. Le forme indeterminate
che si possono verificare nel passaggio al limite sono le seguenti:
0
0
∞∞
0 · ∞ 1∞ 00 ∞−∞ ∞0 (2.21)
Tali forme sono indeterminate quando si pensa ad esse come comportamento
di una successione cioe quando sono ottenute come limite della successione: la
progressione geometrica an = 1n e una successione costante sempre uguale a
1, non e una forma indeterminata. Lo sarebbe stata se al posto di 1 avessimo
avuto una successione che tende a 1, come ad esempio
(1 +
1
n
)nche vedremo
nella prossima sezione.
Se si riesce a dimostrare che una successione ammette limite o e divergente,
e interessante capire come essa si comporta asintoticamente confrontandola con
alcune successioni piu elementari come ad esempio la successione costituita dalle
potenze di n. Questo si puo fare sia per le successioni divergenti, sia per le
successioni convergenti. Tra quelle convergenti assumono particolare rilevanza
quelle che convergono a 0:
Definizione 2.6. Una successione an si dice infinitesima se limn→∞
an = 0
Esempi:
• limn→∞
1
n= 0, quindi an = 1
n e una successione infinitesima.
• Dato α > 0 an = 1nα e una successione infinitesima.
Il comportamento asintotico di una successione e il comportamento della
successione stessa per valori di n molto grande, ad esempio:
1. La successione an =
√4n4 + n+ 1
n− 1∼ 2n per n molto grande, cioe si com-
porta come un polinomio di primo grado con coefficiente 2 che e divergente
e quindi anche an e divergente.
2. La successione an =
√n+ 2
n∼ 1√
nper n molto grande, cioe si comporta
come una potenza di n di grado − 12 che e infinitesima e quindi convergente
a 0.

2.4. Il numero di Nepero 21
Criterio del rapporto per le successioni
Teorema 2.7. Se una successione an e a termini positivi, allora valgono le
seguenti affermazioni sul rapporto tra termine an e il suo successivo:
• se limn→∞
an+1
an= l < 1 allora la successione e infinitesima.
• se limn→∞
an+1
an= l > 1 allora la successione e divergente.
Nel caso il limite sia esattamente 1 non si puo stabilire il carattere della
successione.
Tale teorema ci permette di stabilire che an =nα
cncon c > 1 e infinitesima
cioe una successione esponenziale va piu velocemente all’infinito di qualsiasi
polinomio. Lo stesso si puo fare per la successione an =cn
n!
2.4 Il numero di Nepero
Una successione che gioca un ruolo di notevole importanza in matematica e la
seguente:
an =
(1 +
1
n
)n(2.22)
Esistono varie dimostrazioni che provano l’esistenza del limite di questa suc-
cessione, una di queste dimostrazioni prova che an e limitata superiormente
dal valore 3 e che e monotona crescente. Tale dimostrazione si puo fare per
induzione utilizzando la disuguaglianza di Bernoulli e la disuguaglianza tra me-
dia geometrica e media aritmetica. Senza pero addentrarci nella dimostrazione
formale, e importante notare che il fatto di sapere che il limite di questa suc-
cessione esista non ci permette di trovarlo facilmente. L’estremo superiore di
tale successione infatti non e 3 ma il numero di Nepero e che viene definito
proprio mediante questa successione:
limn→∞
(1 +
1
n
)n:= e (2.23)
e e un numero importantissimo in matematica, sappiamo che e un numero
irrazionale e che la sua espressione decimale per le prime cifre e e = 2, 718 . . .. E’
la base dei logaritmi naturali e gioca un ruolo chiave nel calcolo infinitesimale.
Il limite sopra citato e un limite notevole e si puo scrivere in forma piu
generale nel modo seguente: data una successione an tale che limn→∞
an = +∞allora vale
limn→∞
(1 +
1
an
)an:= e (2.24)

22 Le successioni numeriche
Consideriamo ad esempio la successione bn =
(1 +
2
n
)nsi puo ricondurre a
2.24 nel modo seguente:
bn =
(1 +
2
n
)n=
[(1 +
1n2
)n2
]2→ e2 (2.25)
per n→∞Utilizzando il limite notevole 2.24 e il criterio del rapporto per le successioni,
si puo provare anche che la successione an =nn
n!e divergente e che quindi nn
va all’infinito molto piu velocemente di n!.
Altre successioni
Anche senza aver definito la costante e possiamo facilmente trovare il limite
della successione an = n√n.
La successione an = n√n puo essere riscritta an = n
1n = e
1n log n per le
proprieta dei logaritmi. A questo punto l’esponente tende a 0 perche i polinomi
vanno all’infinito piu velocemente dei logaritmi e quindi limn→∞
n√n = 1.
Lo stesso ragionamento si poteva effettuare considerando come base un
numero diverso da e.
2.5 La regola di Cesaro
La regola di Cesaro e una sorta di regola di De L’Hospital per le successioni:
Teorema 2.8. Siano an e bn successioni a termini positivi, con bn monotona
crescente e illimitata. Supponiamo inoltre che
limn→+∞
an − an−1bn − bn−1
= l (finito o infinito).
Allora anche
limn→+∞
anbn
= l
Esempio 2.9. Vediamo l’applicazione della regola di Cesaro a una successione
molto importante
an =
∑nk=1
1k
log(1 + n)(2.26)
La successione al denominatore e positiva, monotona e illimitata. Al nume-
ratore invece abbiamo una sommatoria dei reciproci dei numeri interi che non
sapremmo scrivere in nessuna altro modo piu compatto. Non sappiamo se sia o
meno illimitata. Applicando la regola di Cesaro:
limn→+∞
∑nk=1
1k −
∑n−1k=1
1k
log(1 + n)− log(n)= limn→+∞
1n
log(n+1n
)= limn→+∞
1
n log(1 + 1
n
) = limn→+∞
1
log(1 + 1
n
)n = 1

2.5. La regola di Cesaro 23
Questo ci da molte informazioni sulla sommatoria al numeratore: essendo il
denominatore illimitato e considerando il fatto che il limite del rapporto e 1, si-
gnifica che numeratore e denominatore sono asintoticamente equivalenti e quin-
di la somma dei reciproci dei numeri interi tende a +∞. Questo fatto verra
dimostrato in un altro modo nel capitolo relativo alle serie numeriche.

24 Le successioni numeriche

3 Le serie numeriche
Si consideri la successione an : N→ R, e facciamoci alcune domande: ha senso
definire la somma di tutti (gli infiniti) elementi della successione an? Se ane una successione a termini positivi allora la somma di tutti i suoi elementi e
infinita?
La somma di tutti gli infiniti elementi di una successione e una serie nu-
merica e si indica con∞∑n=0
an (3.1)
Le serie sono delle somme di infiniti addendi e il termine generale della
serie e la successione an.
Chiaramente se sommiamo infiniti termini tutti uguali la somma sara infinita
(a meno che questi termini non siano tutti nulli!), ad esempio
∞∑n=0
1 = 1 + 1 + 1 + · · ·+ 1 = +∞
ma se il termine generale della serie diventa sempre piu piccolo la somma e
sempre infinita?
Da questa domanda nasce il Paradosso di Zenone (Achille e la tartaruga):
si tratta di un paradosso proprio perche si suppone che la somma di infiniti
elementi positivi sia necessariamente infinita e invece, in alcuni casi, non lo e!
Cosı come per le successioni, anche per le serie definiamo una serie conver-
gente quando la somma di tutti i termini e finita e divergente se la somma di
tutti i suoi termini e ±∞. Se la serie oscilla e non e ne convergente ne divergente
diciamo che la serie e irregolare.
3.1 La serie geometrica
Se prendiamo una progressione geometrica an = qn (in cui abbiamo posto per
semplicita il termine iniziale a = 1), e sommiamo gli infiniti termini della succes-
sione otteniamo (in alcune situazioni) una somma finita: questa serie si chiama
serie geometrica1
1Una barzelletta sui matematici sulla serie geometrica con ragione q = 12
e la seguente: Un
numero infinito di matematici entra in un bar. Il primo ordina una birra. Il secondo ordina
mezza birra. Il terzo ordina un quarto di birra. Il barista dice: ”siete degli idioti”, e serve
due birre.
25

26 Le serie numeriche
Vediamo in quali casi la serie geometrica e convergente e in quali e diver-
gente utilizzando una formula gia dimostrata per le progressioni geometriche:
la somma dei primi n termini di una progressione geometrica (2.17). Vediamo
come si comporta tale somma quando n tende a +∞:
∞∑n=0
qn = limn→∞
1− qn+1
1− q(3.2)
Abbiamo cosı ridotto lo studio della somma della serie geometrica allo studio
di un limite di una successione numerica che possiamo facilmente confrontare
con una successione geometrica di ragione q. Tale formula esclude il caso q = 1
che puo essere facilmente trattato a parte perche la somma di infiniti ”uno” e
chiaramente infinita. Per tutti gli altri valori di q il limite ottenuto converge
ad un valore finito quando |q| < 1, diverge per q > 1 e oscilla per q ≤ −1.
Riepilogando:
∞∑n=0
qn =
1
1− q, se |q| < 1;
+∞, se q > 1;
e irregolare, se q ≤ −1;
(3.3)
in particolare se q = −1 oscilla in modo limitato tra 0 e 1 mentre se q < −1
oscilla in modo illimitato.
Quando una serie geometrica e convergente abbiamo quindi stabilito anche
quanto vale la somma della serie:1
1− q. Questo fatto e non banale perche
per la maggior parte delle serie convergenti non e possibile stabilire la somma ma
solamente il carattere della serie; vedremo alcuni casi rari in cui si riesce a trovare
la somma di una serie non geometrica ma ci sono molti casi che necessitano di
tecniche molto avanzate per trovare la somma della serie e altri ancora in cui la
somma puo essere trovata solo numericamente.
Alcuni esempi sulle serie geometriche:
∞∑n=0
(1
2
)n=
1
1− 12
= 2
∞∑n=0
(−1
2
)n=
2
3(3.4)
∞∑n=0
3n = +∞∞∑n=0
(−3)n e irregolare. (3.5)
Poiche per le serie geometriche convergenti e possibile stabilire la somma
della serie, un ruolo fondamentale viene giocato dal punto di partenza della
serie che abbiamo sempre posto n = 0 (se ci si limita a stabilire il carattere
della serie e non la somma quale sia il primo termine della serie diventerebbe
irrilevante): cosa succederebbe se la serie partisse da n = 1 o n = k?
∞∑n=0
qn = q0 + q1 + q2 + q3 · · ·∞∑n=1
qn = q1 + q2 + q3 · · · (3.6)

3.2. Serie armonica 27
pertanto∞∑n=1
qn =
∞∑n=0
qn − q0 =1
1− q− 1 =
q
1− q(3.7)
Allo stesso modo:∞∑n=2
qn =
∞∑n=0
qn − (q0 + q1) =1
1− q− (1 + q) =
q2
1− q(3.8)
∞∑n=3
qn =
∞∑n=0
qn − (q0 + q1 + q2) =1
1− q− (1 + q + q2) =
q3
1− q(3.9)
∞∑n=k
qn =
∞∑n=0
qn − (q0 + q1 + q2 + · · ·+ qk−1) (3.10)
sfruttando ancora una volta la somma parziale di una successione geometrica
(2.17) si ottiene la formula:
∞∑n=k
qn =
∞∑n=0
qn−(q0+· · ·+qk−1) =
∞∑n=0
qn−
(k−1∑n=0
qn
)=
1
1− q−1− qk
1− q=
qk
1− q(3.11)
3.2 Serie armonica
Fino a questo momento abbiamo trattato le serie geometriche in cui oltre a
trovare il carattere della serie abbiamo potuto stabilirne la somma. In tutti
i casi di serie convergente il termine generale della serie era una successione
infinitesima: il fatto che la successione sia infinitesima e legato in qualche modo
alla convergenza della serie?
Teorema 3.1. Se
∞∑n=0
an e convergente ⇒ la successione an e infinitesima.
Dimostrazione. Se la serie e convergente allora poniamo che s ∈ R sia la somma
della serie:
∞∑n=0
an = s. Per definizione sappiamo che
∞∑n=0
an = limn→∞
n∑k=0
ak
ma allora anche∞∑n=0
an = limn→∞
n−1∑k=0
ak
Poiche an =
n∑k=0
ak −n−1∑k=0
ak,
limn→∞
an = limn→∞
n∑k=0
ak − limn→∞
n−1∑k=0
ak = s− s = 0

28 Le serie numeriche
E’ vero anche il viceversa? Cioe se an e infinitesima la serie e convergente?
NO! Il controesempio e la cosiddetta serie armonica.
Teorema 3.2. La serie armonica2
∞∑n=1
1
n= 1 +
1
2+
1
3+ · · · = +∞
Dimostrazione. Ci sono diverse dimostrazioni di questo fatto, quella che propon-
go parte da lontano, in particolare dal limite notevole che definisce il numero e,
cosa che apparentemente non c’entra nulla.
Ricordiamo che la successione
(1 +
1
n
)nconverge ad e in modo monotono
crescente, cioe per ogni n ∈ N, (1 +
1
n
)n< e (3.12)
Si tratta di termini positivi quindi possiamo applicare il logaritmo naturale ad
ambo i membri:
ln
((1 +
1
n
)n)< ln(e) ⇔ n ln
(1 +
1
n
)< 1 ⇔
n ln
(n+ 1
n
)< 1 ⇔ n(ln(n+ 1)− ln(n)) < 1 ⇔
ln(n+ 1)− ln(n) <1
n
Adesso sommiamo gli infiniti termini delle due successioni ad ambo i membri
della disuguaglianza e finalmente otteniamo a destra la serie armonica (se una
successione a termini positivi e sempre maggiorata da un’altra allora anche
la somma dei suoi infiniti termini sara maggiorata dalla somma degli infiniti
termini dell’altra):
∞∑n=1
(ln(n+ 1)− ln(n)) <
∞∑n=1
1
n
ma se osserviamo la prima serie ci accorgiamo che i vari termini degli addendi
si elidono a due a due:
∞∑n=1
(ln(n+1)−ln(n)) = limn→∞
((ln(2)−0)+(ln(3)−ln(2))+(ln(4)−ln(3))+· · ·+(ln(n+1)−ln(n)))
Rimane solo il termine ln(n+ 1) per n→∞ quindi
∞∑n=1
(ln(n+ 1)− ln(n)) = limn→∞
ln(n+ 1) = +∞
2La serie armonica parte da n = 1 in quanto altrimenti si annullerebbe il denominatore.
D’altra parte per questo tipo di serie, di cui determineremo solo il carattere e non la somma,
sara irrilevante sapere da dove parte.

3.3. Criteri di convergenza 29
Tornando alla disequazione abbiamo ottenuto che
∞∑n=1
1
n= +∞
quindi per il criterio del confronto la serie armonica e divergente.
Si parla di serie armonica genealizzata quando si tratta la serie
∞∑n=1
1
nαα ∈ R (3.13)
in questo caso (senza dimostrarlo per il momento) la serie e convergente per
α > 1.
Il caso α = 1 e stato appena trattato e poiche α deve essere strettamente
maggiore di 1 per la convergenza, α = 1 diventa un caso limite: per tutti gli α
anche leggermente piu grandi di 1 (ricordate che α e reale e non necessariamente
intero) la serie armonica converge.
∞∑n=1
1
n2<∞
∞∑n=1
1
n54
<∞∞∑n=1
1
n12
=∞
3.3 Criteri di convergenza
La maggior parte dei criteri di convergenza che vedremo riguardano le serie a
termini positivi, anche se in alcuni essi si possono generalizzare ad altre situa-
zioni. Tutti questi criteri permettono di trovare il carattere della serie ma non
ci permettono di trovare la somma della serie. I criteri del confronto e del con-
fronto asintotico permettono di caratterizzare una serie confrontandola con le
serie di cui sappiamo gia il carattere: la serie geometrica e la serie armonica.
Criterio del confronto
Siano an e bn due successioni a termini positivi tale che 0 < an < bn per ogni
n ∈ N. Valgono i fatti seguenti:
1. Se
∞∑n=0
bn e convergente allora
∞∑n=0
an e convergente.
2. Se
∞∑n=0
an e divergente allora
∞∑n=0
bn e divergente.
Ad esempio, la serie
∞∑n=1
sin(n) + 1
n2e convergente perche vale la seguente
disuguaglianza:
∞∑n=1
sin(n) + 1
n2<
∞∑n=1
2
n2(3.14)

30 Le serie numeriche
Dato che la serie armonica con α = 2 e convergente, allora lo e anche la serie
di partenza.
Criterio del confronto asintotico
Siano an e bn due successioni a termini positivi tali che limn→∞
anbn
= l 6= 0.
1.
∞∑n=0
an e convergente se e solo se
∞∑n=0
bn e convergente.
2. Se
∞∑n=0
an e divergente se e solo se
∞∑n=0
bn e divergente.
In questo caso abbiamo una doppia implicazione, osserviamo ad esempio il
comportamento della cosiddetta serie di Mengoli:
∞∑n=1
1
n(n+ 1).
Il termine generale di questa serie si puo confrontare con quello della serie
armonica1
nα, in particolare si osserva che il limite del rapporto tra i due termini
generali delle due serie e un numero reale non nullo solo se α = 2:
limn→∞
1n(n+1)
1n2
= limn→∞
n2
n(n+ 1)= 1 (3.15)
Questo e sufficiente a dire che la serie di Mengoli e convergente in quanto
sappiamo gia che la serie armonica con α = 2 e convergente. Se il limite fosse
stato 0 o +∞ non avremmo potuto dire nulla riguardo alla convergenza delle due
serie; infatti prendendo la serie di Mengoli che ora sappiamo essere convergente
e la serie armonica
∞∑n=1
1
nche sappiamo essere divergente,
limn→∞
1n(n+1)
1n
= limn→∞
n
n(n+ 1)= 0 (3.16)
ma le due serie hanno carattere diverso.
Oltre al fatto che la serie di Mengoli e convergente, essa e una delle rare serie
non geometriche di cui e possibile trovare la somma; si tratta di una cosiddetta
serie telescopica perche si puo scomporre con semplici passaggi algebrici in
questa forma:
∞∑n=1
1
n(n+ 1)=
∞∑n=1
(1
n− 1
n+ 1
)=
∞∑n=1
(1
n− 1
n+ 1
)=
(1− 1
2
)+
(1
2− 1
3
)+
(1
3− 1
4
)+· · ·
(3.17)
tutti i termini si elidono a due a due e la serie si riduce a:
∞∑n=1
(1
n− 1
n+ 1
)= 1− lim
n→∞
1
n+ 1= 1 (3.18)

3.3. Criteri di convergenza 31
Criterio del rapporto
Se dobbiamo analizzare il carattere di una serie che non sia confrontabile ne con
una serie geometrica ne con una serie armonica ci possono essere utili alcuni
criteri di convergenza alternativi. Il criterio del rapporto per le serie e il criterio
della radice sono due criteri che permettono di studiare il carattere di una serie
trovare il limite di una certa successione. I due criteri a volte non risultano pero
efficaci.
Teorema 3.3. Sia
∞∑n=0
an una serie a termini positivi e supponiamo che esista
il limn→∞
an+1
an
1. Se limn→∞
an+1
an= l < 1 allora la serie converge.
2. Se limn→∞
an+1
an= l > 1 o e divergente allora la serie diverge.
3. Se limn→∞
an+1
an= 1 il criterio e inefficace.
Ad esempio se si vuole studiare il carattere della serie
∞∑n=0
en
n!, il criterio del
rapporto ci puo aiutare3:
limn→∞
an+1
an= limn→∞
en+1
(n+1)!en
n!
= limn→∞
en+1n!
(n+ 1)!en= limn→∞
e
n= 0 < 1 (3.19)
Essendo 0 < 1 per il criterio del rapporto la serie di partenza converge.
Criterio della radice
Il criterio della radice e analogo al criterio del rapporto e arriva alle stesse
conclusioni partendo pero dal calcolo di un altro limite.
Teorema 3.4. Sia
∞∑n=0
an una serie a termini positivi e supponiamo che esista
il limn→∞
n√an
1. Se limn→∞
n√an = l < 1 allora la serie converge.
2. Se limn→∞
n√an = l > 1 o e divergente allora la serie diverge.
3. Se limn→∞
n√an = 1 il criterio e inefficace.
3Abbiamo visto nelle successioni che il termine generale e infinitesimo perche n! e un infinito
di ordine superiore rispetto a qualsiasi esponenziale ma questo non e sufficiente a dire che la
serie converge

32 Le serie numeriche
Ad esempio se si vuole studiare il carattere della serie
∞∑n=1
(1− 1
n
)n2
, il
criterio della radice ci puo aiutare4:
limn→∞
n√an = lim
n→∞
n
√(1− 1
n
)n2
= limn→∞
(1− 1
n
)n=
1
e< 1 (3.20)
Essendo 1e < 1 per il criterio della radice la serie converge.
Criterio di condensazione
Precedentemente abbiamo dimostrato che la serie armonica con α = 1 e di-
vergente ma abbiamo anche detto senza dimostrarlo che in generale la serie
armonica converge per α > 1 e che quindi e sufficiente una potenza di n legger-
mente superiore a 1 affinche la serie converga. E’ lecito domandarsi a questo
punto se la serie
∞∑n=2
1
n ln(n)converga o se, piu in generale, la serie
∞∑n=2
1
n lnα(n)
converga. Il ln(n) come sappiamo e un infinito inferiore a qualsiasi potenza di
n ma e sufficiente moltiplicare n per ln(n) al denominatore per ottenere una
serie convergente? Il criterio di condensazione ci puo aiutare a rispondere a tale
domanda.
Teorema 3.5. La serie a termini positivi
∞∑n=0
an e convergente se e solo se la
serie
∞∑n=0
2n a2n e convergente5.
Applichiamo dunque tale criterio alla serie
∞∑n=2
1
n ln(n):
∞∑n=2
2n a2n =
∞∑n=2
2n
2n ln 2n=
∞∑n=2
1
n ln 2(3.21)
che e, a meno di una costante moltiplicativa, la serie armonica con α = 1 e
quindi diverge.
Criterio di Leibniz
L’ultimo criterio di convergenza che vediamo e un criterio relativo alle cosid-
dette serie a termini alterni, l’unico tra quelli proposti che quindi non riguarda
esclusivamente le serie a termini positivi. In realta anche il criterio di Leibniz af-
fronta lo studio del carattere di una serie a termini alterni trattando successioni
monotone a termini positivi.
4In questo caso non abbiamo una serie geometrica perche la variabile n compare sia come
argomento che come esponente; il criterio della radice ci permette di studiare il carattere della
serie studiando un limite notevole5Vale la doppia implicazione quindi se una delle due diverge anche l’altra diverge

3.3. Criteri di convergenza 33
Una serie a termini alterni e una serie del tipo
∞∑n=0
(−1)nan con an successione
a termini positivi.
Teorema 3.6. Sia
∞∑n=0
(−1)nan una serie a termini alterni (an > 0). Se an e
monotona decrescente e infinitesima allora la serie e convergente.
Questo teorema ci permette di dimostrare che se trasformiamo la serie armo-
nica (divergente) in una serie a termini alterni in questo modo,
∞∑n=0
(−1)n1
nessa
diventa convergente. E’ infatti semplice provare che il termine generale an = 1n
e monotono decrescente e infinitesimo.

34 Le serie numeriche

4 Calcolo combinatorio
Il calcolo combinatorio e una branca della matematica che studia i modi per
raggruppare, ordinare e combinare un numero finito di elementi di un insieme.
La prima domanda da farsi quando si raggruppano oggetti e se nel problema che
stiamo considerando bisogna tenere in considerazione oppure no l’ordine
con cui sono disposti gli elementi. Come vedremo questa e la principale distin-
zione tra disposizioni (conta l’ordine) e combinazioni (non conta l’ordine).
Prima di affrontare le disposizioni partiamo dalle permutazioni semplici per poi
generalizzare.
4.1 Permutazioni semplici
Una permutazione semplice di n oggetti distinti e uno dei possibili ordinamenti
degli n oggetti.
Supponiamo di voler determinare quante sigle di 4 lettere distinte (o equi-
valentemente quanti anagrammi anche senza significato) posso formare con
{A,B,C,D}? Si parla in questo caso di permutazioni semplici.
Dobbiamo disporre le 4 lettere in quattro box tenendo presente
che scambiando due lettere cambia l’ordine e quindi la sigla.
Proviamo a partire da un caso piu semplice: se avessimo solo due lettere
avremmo due possibili permutazioni AB,BA. Aggiungendo la C ci troviamo
nella situazione in cui si devono riempire tre box: .
Con la lettera C come primo elemento abbiamo 2 possibilita perche le per-
mutazioni di 2 elementi sono 2: C . Abbiamo sempre 2 possibilita
anche se si mette A o B come primo elemento, quindi in totale avremo 3 · 2 = 6
permutazioni di 3 elementi che indichiamo con P3 = 6. Esse sono:
ABC,ACB,BAC,BCA,CAB,CBA
Aggiungiamo l’ultima lettera e l’ultima casella: con lo stesso ragionamen-
to, ponendo D come primo elemento abbiamo 6 permutazioni degli altri 3
D ma questo si puo fare anche ponendo A,B, o C all’inizio
quindi si hanno P4 = 4 · 3 · 2 = 24 elementi che non stiamo ad elencare.
Il numero di permutazioni di n oggetti e dato dalla formula
Pn = n(n− 1)(n− 2) · · · · · 3 · 2 · 1 = n! (4.1)
35

36 Calcolo combinatorio
4.2 Permutazioni con ripetizione
Determinare il numero di anagrammi anche senza significato di una parola come
TEMPO e facile perche le lettere sono tutte distinte: si tratta di permutazioni di
5 elementi. Ma cosa succede se la parola in questione e MAMMA? Scambiando
le 2 A tra loro si ottiene sempre la stessa parola; lo stesso se scambiamo tra
loro le tre M. Si nota subito che abbiamo molte meno possibilita, ma quante
esattamente? Si tratta di permutazioni con ripetizione, in cui conta l’ordine
ma l’insieme di partenza contiene due o piu gruppi di elementi uguali.
Proviamo a contare i possibili anagrammi della parola CARTA e della pa-
rola MAMMA. Quanti sono rispetto a TEMPO? Quale formula ci permette di
contare le permutazioni con ripetizione?
Gli anagrammi di TEMPO sono 5! = 120. Passiamo ora a CARTA: le
permutazioni ottenute permutando le due “A” sono 2! = 2 ovunque esse si
trovino, dando luogo pertanto alla stessa parola. E’ necessario dunque dividere
il totale delle permutazioni per 2
P(2)5 =
5!
2!=
120
2= 60
P(2)5 indica le permutazioni di 5 elementi di cui uno ripetuto 2 volte.
Nella parola MAMMA anche la “M” e ripetuta 3 volte e comunque vengano
permutate si ottiene sempre la stessa parola, ovunque esse si trovino. Le per-
mutazioni di 3 elementi sono 3! = 6 pertanto questa volta e necessario dividere
per 6 il risultato ottenuto con CARTA:
P(2,3)5 =
5!
2!3!=
5 · 4 · 3 · 22 · (3 · 2)
=5 · 4
2= 10
P(2,3)5 indica le permutazioni di 5 elementi di cui uno ripetuto 2 volte e uno 3
volte.
Gli anagrammi di CARTA sono la meta di quelli di TEMPO e gli anagrammi di
MAMMA sono solo 112 di quelli di TEMPO, talmente pochi che e facile elencarli:
AAMMM, AMAMM, AMMAM, AMMMA, MAAMM, MAMAM, MAMMA,
MMAAM, MMAMA, MMMAA
Generalizziamo:
le permutazioni di n elementi non tutti distinti con p gruppi di elementi
che si ripetono (il primo k1 volte, il secondo k2 volte, e cosı via fino all’ultimo
che si ripete kp volte) sono:
P (k1,k2,...,kp)n =
n!
k1!k2! · · · kp!(4.2)
Osserviamo che k1 + k2 + · · ·+ kp ≤ n.
4.3 Disposizioni semplici
Nel caso in cui l’insieme di partenza abbia n elementi ma gli oggetti da disporre
sono k ≤ n, si parlera di disposizioni di n oggetti. Se k = n (si devono cioe

4.4. Disposizioni con ripetizione 37
disporre tutti gli oggetti dell’insieme) le disposizioni semplici diventano permu-
tazioni semplici che possono essere viste, a questo punto, come caso particolare.
Anche in questo caso cambiando l’ordine cambia la disposizione.
Indicheremo le disposizioni di n elementi di classe k con la lettera Dn,k
dove n indica il numero degli elementi dell’insieme e k il numero di quelli da
disporre. Per quanto detto sopra
Dn,n = Pn = n! (4.3)
Ripartiamo dall’esempio dell’insime con le prime 4 lettere dell’alfabeto: quan-
te sigle di tre lettere distinte si possono formare con {A,B,C,D}? Quante di
due lettere e quante di una?
Cominciamo dalla fine per semplicita: si hanno 4 lettere e bisogna disporle
in una sola casella . Chiaramente abbiamo solo quattro possibilita.
Se abbiamo due caselle da riempire in quanti modi si puo scegliere l’elemen-
to della prima casella? Abbiamo 4 possibilita. Ora, fissato il primo elemento,
x in quanti modi si puo scegliere il secondo? Poiche non si possono ripe-
tere gli elementi, quello che abbiamo scelto al primo non lo possiamo riutilizzare
e quindi abbiamo solo 3 possibilita. 4 modi per il primo e 3 per il secondo fanno
in totale
D4,2 = 4 · 3 = 12 possibili disposizioni.
Con lo stesso ragionamento, con tre caselle da riempire abbiamo 4 possibilita
per il primo, 3 per il secondo e 2 per il terzo e quindi
D4,3 = 4 · 3 · 2 = 24
Generalizzando, Dn,k e il prodotto di tutti i numeri da n a...? Se k = 2
abbiamo 2 fattori, se k = 3 ne abbiamo 3 e cosı via. L’ultimo fattore e n−k+1.
Ad esempio D9,3 = 9 · 8 · 7 (3 fattori) e 7, l’ultimo, e proprio 7 = 9− 3 + 1.
Possiamo scrivere quindi
Dn,k = n(n− 1)(n− 2) · · · (n− k + 1) =n!
(n− k)!(4.4)
L’ultimo passaggio e una scrittura piu compatta, provate a verificare che e la
stessa cosa. Sulle calcolatrici le disposizioni semplici sono indicate col simbolo
nPr o nPk.
4.4 Disposizioni con ripetizione
Il caso delle disposizioni con ripetizione non e del tutto analogo a quello delle
permutazioni. Un tipico esempio e il lancio della moneta T testa, C croce in cui
n = 2 sono i possibili elementi dell’insieme e k e il numero di lanci effettuati. Le
disposizioni con ripetizione ci permettono di calcolare le possibili disposizioni di
T o C in k lanci. Notiamo che in questo caso k puo superare n. Indichiamo
con Drn,k dove r indica appunto che si tratta di disposizioni con ripetizione.

38 Calcolo combinatorio
In quanti modi possono succedersi le facce di una moneta se la lanciamo 1,2
o 3 volte?
Con un lancio abbiamo solo due possibilita T o C: Dr2,1 = 2.
Con due lanci ne abbiamo quattro, due per la prima posizione e due per la
seconda TT, TC,CT,CC: Dr2,2 = 2 · 2 = 22 = 4.
Con tre lanci ne abbiamo otto, due per la prima posizione, due per la seconda,
due per la terza TTT, TTC, TCT, TCC,CTT,CTC,CCT,CCC: Dr2,3 = 2 · 2 ·
2 = 23 = 8 e cosı via.
In generale se n e il numero degli elementi dell’insieme e k il numero di
caselle da riempire, le possibili disposizioni con ripetizione sono:
Drn,k = nk (4.5)
4.5 Combinazioni semplici
Fino ad ora l’ordine di estrazione degli oggetti dall’insieme di partenza ha avuto
una notevole importanza. Ci sono pero casi cui l’ordine non e importante come
ad esempio nelle estrazioni del lotto in cui non importa a che punto venga
estratto un numero ma solo che venga estratto o meno. Si parla quindi di
combinazioni quando l’ordine non conta. Indicheremo le combinazioni con
la lettera Cn,k dove n indica il numero degli elementi dell’insieme e k il numero
di quelli da combinare.
Dato un insieme con 5 elementi {A,B,C,D,E}, in quanti modi se ne pos-
sono estrarre 3 senza reimbussolamento, cioe se un numero gia estratto
non puo venire ri-estratto? Equivalentemente si potrebbe dire: quante sono
le combinazioni semplici di 5 elementi di classe 3?
Se avessimo solo un elemento da estrarre avremmo 5 possibilita: C5,1 = 5
come per le disposizioni D5,1.
Se ne avessimo due le cose cambierebbero perche D5,2 = 20 ma le 20 stringhe
con due elementi si ripetono a due a due visto che ora l’ordine non conta piu:
ad esempio AB = BA, AC = CA e cosı via. Pertanto C5,2 = 10, infatti e
necessario dividere per 2 il numero di disposizioni, C5,2 =D5,2
2 . Perche proprio
per 2? Due sono i modi in cui possiamo permutare due elementi a caso AB,BA.
Per questo motivo scriveremo le combinazioni come
C5,2 =D5,2
P2
A questo punto se estraiamo 3 elementi: le D5,3 = 60 stringhe che avremmo
come disposizioni si ripetono a gruppi di 6. Infatti una terna A,B,C puo essere
permutare in 3! modi, quindi
C5,3 =D5,3
P3= 10
Allo stesso modo C5,4 = 5 e C5,5 = 1. Perche C5,4 = C5,1? Perche estrarre
4 elementi su 5 identifica in modo univoco l’elemento che rimane non estratto e

4.6. Cenni di calcolo delle probabilita 39
quindi e come estrarne solamente 1: gli altri 4 sono univocamente determinati.
Per lo stesso motivo estrarli tutti e come estrarne nessuno, C5,5 = C5,0, e in
generale estrarne k equivale e estrarre i rimanenti n− k.
Generalizzando, dato un insieme con n elementi di cui k ≤ n vengono
estratti, possiamo scrivere
Cn,k =Dn,k
Pk=
n!
(n− k)!k!(4.6)
Quest’ultima scrittura puo essere indicata con(n
k
)=
n!
k!(n− k)!(4.7)
cioe il coefficiente binomiale.
Sulle calcolatrici scientifiche le combinazioni semplici sono indicate con il
simbolo nCr o nCk.
Anche nel caso delle combinazioni e possibile avere delle ripetizioni come ad
esempio nelle estrazioni con reimbussolamento in cui k (numero di estrazioni)
puo superare n (elementi dell’insieme). Il caso e analogo alle combinazioni
semplici, enunciamo qui solo la formula.
Le combinazioni con ripetizione di n elementi di classe k e uguale a
quello delle combinazioni senza ripetizione di n+ k − 1 oggetti di classe k
Crn,k = Cn+k−1,k =
(n+ k − 1
k
)Attenzione! Il caso delle combinazioni con ripetizione non lo tratteremo in
profondita perche puo dare luogo a misconcezioni quando si parla di calcolo delle
probabilita, proviamo a spiegare questo fatto con un esempio. Se consideriamo
il lancio di una moneta due volte e siamo interessati all’ordine in cui sono usciti
T e C abbiamo 4 possibilita: TT, TC,CT,CC (disposizioni con ripetizione). Se
invece l’ordine non ci interessa abbiamo solo 3 possibilita: TT,CT,CC. Qual e
dunque la probabilita che esca una volta testa e una volta croce? La probabilita
come vedremo e definita come rapporto tra casi favorevoli e casi possibili quindi,
se usiamo le disposizioni avremo1
2e se usiamo le combinazioni abbiamo
1
3.
Dov’e l’errore?
La risposta giusta e1
2: il problema delle combinazioni con ripetizione e che
i modi in cui una combinazione puo uscire non sono equiprobabili e questa e
una condizione fondamentale per definire la probabilita come rapporto tra casi
favorevoli e casi possibili!
4.6 Cenni di calcolo delle probabilita
Formalizzare il concetto intuitivo di probabilita di un evento e una cosa tutt’altro
che banale.
Esistono diverse definizioni di probabilita ma quella classica dovuta a Laplace
afferma che la probabilita P (E) di un evento E e il rapporto tra il numero

40 Calcolo combinatorio
dei casi favorevoli all’evento e il numero dei casi possibili, purche questi
siano equiprobabili:
P (E) =# casi favorevoli
# casi possibili(4.8)
Definendo la probabilita come sopra e evidente che P (E) e una quantita
positiva e non puo superare 1 perche il denominatore (casi possibili) e sempre
maggiore del numeratore: 0 ≤ P (E) ≤ 1.
P (E) = 1 e un evento certo, P (E) = 0 e un evento impossibile, 1− P (E) e
la probabilita dell’evento complementare.
Osserviamo che questa definizione, assieme ad altri, presenta il grave incon-
veniente di essere circolare, cioe richiede che i casi possibili abbiano la stessa
probabilita, che e proprio quello che si vuole definire. Non ci vogliamo adden-
trare in questioni del genere e negli esercizi che seguono relativi a estrazioni e
dadi considereremo sempre gli eventi possibili come equiprobabili.
Per tale motivo come dicevamo nella sezione precedente non possiamo usare
le combinazioni con ripetizione perche i modi in cui esse contano gli elementi
non sono equiprobabili.
Supponiamo di avere un’urna con 10 palline numerate da 0 a 9. Se ne estrag-
gono 3 senza reimbussolamento, qual e la probabilita che si verifichi l’evento
1. E=escono tutti numeri dispari?
2. E=esce esattamente un numero dispari?
3. E=esce almeno un numero dispari?
Se in un secondo momento viene concesso il reimbussolamento, qual e la proba-
bilita che si verifichi l’evento
4. E=esce esattamente un numero dispari?
5. E=escono tutti numeri dispari?
6. E=tutti i numeri usciti sono distinti?
7. E=tutti i numeri usciti sono uguali?
1. Si tratta di combinazioni semplici (in quanto non conta l’ordine e non c’e
reimbussolamento): i casi possibili sono quindi C10,3. I numeri dispari
sono solo 5 e se devono uscire 3 dispari i modi possibili sono C5,3. La
probabilita dell’evento e pertanto
P (E) =C5,3
C10,3=
(53
)(103
) =10
120=
1
12
2. Si tratta ancora di combinazioni semplici, stessa cosa per quanto riguarda
i casi possibili. Per i casi favorevoli sappiamo che l’unico numero dispari
lo possiamo scegliere in C5,1 modi mentre i 2 numeri pari in C5,2 modi.
P (E) =C5,1C5,2
C10,3=
(51
)(52
)(103
) =5 · 10
120=
5
12quasi il 50%.

4.6. Cenni di calcolo delle probabilita 41
3. Come nel punto 3 dell’esercizio ?? il modo migliore di procedere per tro-
vare i casi favorevoli e quello di sottrarre alle possibilita totali quelle in
cui non compare neanche un numero dispari:
P (E) =C10,3 − C5,3
C10,3=
(103
)−(53
)(103
) =11
12oltre il 90%.
4. Negli ultimi quattro casi si parla di reimbussolamento e quindi ripetizio-
ne. L’ordine di estrazione non conta ma quando si ha a che fare con delle
ripetizioni e consigliato ragionare in termini di disposizioni. Le possibili
terne di numeri sono Dr10,3 = 103 = 1000 (casi possibili). Proviamo a con-
tare i casi favorevoli: se il numero dispari fosse nella prima posizione avrei
5 possibilita; a questo punto, dei restanti 5 numeri pari 2 vanno disposti
nelle altre posizioni Dr5,2; pero queste tre posizioni posso combinarsi in
C3,2 modi. Si hanno in totale
P (E) =5 ·Dr
5,2 · C3,2
D10,3=
5 · 25 · 31000
=3
8
una probabilita un po’ piu bassa di quella trovata nel caso senza reimbus-
solamento.
5. Se tutti i numeri sono dispari i casi favorevoli sono piu semplici da calco-
lare: si tratta di disposizioni con ripetizione di 5 elementi di classe 3, la
probabilita sara dunque
P (E) =Dr
5,3
Dr10,3
=53
1000=
1
8
6. Se tutti i numeri sono distinti i casi favorevoli sono disposizioni semplici
di 10 elementi di classe 3, D10,3 e la probabilita che si verifichi l’evento e:
P (E) =D10,3
Dr10,3
=10 · 9 · 8
1000=
18
25
7. Infine abbiamo solo 10 casi favorevoli che si verifichi l’evento che escano
numeri tutti uguali, visto che si possono scegliere da un insieme di 10
numeri,
P (E) =10
1000=
1
100

42 Calcolo combinatorio

5 Le funzioni continue
5.1 Topologia della retta reale
La topologia in matematica non e altro che lo studio delle figure e delle loro tra-
sformazioni (senza strappi, incollature o sovrapposizioni). Studiate la topologia
della retta reale significa analizzare i sottoinsiemi della retta reale e formalizzare
concetti fondamentali come continuita, convergenza, limiti, ecc.
Definizione 5.1. Un intorno di un punto x0 e un intervallo della retta reale
centrato del punto x0 di raggio r del tipo
]x0 − r, x0 + r[ (5.1)
Si parla di intorno sinistro se x0 e l’estremo destro dell’intorno, ]x0 − r, x0] e
di intorno destro se x0 e l’estremo sinistro dell’intorno [x0, x0 + r[.
Ad esempio:
• ]1, 3[ e un intorno del punto 2 di raggio 1
• [2, 3[ e un intorno destro del punto 2
• ]1, 2] e un intorno sinistro del punto 2
Definizione 5.2. Un intorno di +∞ e un intervallo illimitato superiormente
del tipo: ]k,+∞[ con k ∈ R. Analogamente un intorno di −∞ e un intervallo
illimitato inferiormente del tipo: ]−∞, k[, k ∈ R.
Definizione 5.3. Un punto x0 si dice interno a un sottoisieme A di R se
esiste almeno un intorno di x0 tutto contenuto in A.
Un punto x0 si dice esterno a un sottoisieme A di R se esiste almeno un
intorno di x0 tutto contenuto in AC (complementare di A).
Un punto x0 si dice di frontiera rispetto ad un insieme A se non e ne
interno ne esterno.
Ad esempio se A =]0, 1] tutti i punti ]0, 1[ sono punti interni, i punti 0 e 1
sono punti di frontiera e l’insieme ]−∞, 0[∪]1,+∞[ e l’insieme dei punti esterni.
Definizione 5.4. Un insieme A si dice aperto se ogni elemento di A e interno
ad A. Dato AC l’insieme complementare di A, l’insieme A si dice chiuso se
AC e aperto.
43

44 Le funzioni continue
Esempi:
• L’insieme A = [0, 1] e chiuso e AC =]−∞, 0[∪]1,+∞[ e aperto (l’insieme
unione di insiemi aperti e aperto).
• L’insieme B =]0, 1[ e aperto e ]0, 1] non e ne aperto ne chiuso.
• L’insieme N e chiuso e NC e aperto.
Con queste nuove definizioni possiamo definire un intorno completo di
un punto x0 come un intervallo aperto contenente x0. Dalla definizione ne
deduciamo che intorni destri e sinistri non sono intorni completi.
Definizione 5.5. Sia A un sottoinsieme della retta reale, x0 si dice punto di
accumulazione per A se ogni intorno di x0 contiene almeno un punto di A
diverso da x0 stesso. L’insieme dei punti di accumulazione si chiama derivato
di A. Un punto e isolato se non e di accumulazione.
Esempi:
• In ]0, 1[ tutti i punti sono punti di accumulazione e lo sono anche 0 e 1 (pur
non appartenendo all’intervallo) in quanto qualunque intorno di essi (cioe
qualsiasi intervallo della retta reale centrato in 0 o 1) contiene almeno un
altro elemento di ]0, 1[.
• Dato A =]0, 1], il Derivato di A e l’insieme [0, 1].
Se invece consideriamo A = {x ∈ R : x =1
n, n ∈ N∗} =
{1,
1
2,
1
3,
1
4, · · ·
}possiamo dire che A e fatto solo di punti isolati, tranne al piu 0 che diventa un
punto di accumulazione (sebbene non appartenga ad A) perche ogni intorno per
quanto piccolo di 0 contiene almeno un elemento di A.
Tutte queste nozioni topologiche ci servono per poter definire i limiti di
funzione e per comprendere il comportamento delle funzioni negli estremi dei
loro domini (cioe nei punti di frontiera e di accumulazione del dominio delle
funzioni).
5.2 Trasformazioni del piano e composizione di
funzioni
Per studiare il comportamento e riuscire a disegnare il grafico di una qualsiasi
funzione, occorre innanzitutto capire il comportamento delle funzioni elemen-
tari e successivamente le loro trasformazioni lineari nel piano cartesiano. Per
trasformazioni lineari intendiamo le traslazioni, le dilatazioni (o contrazioni) e
le riflessioni della funzione sia rispetto alla variabile dipendente che rispetto a
quella indipendente.
In dettaglio, si parla di trasformazioni nella variabile dipendente se ope-
riamo sulla variabile y = f(x) e di trasformazioni nella variabile indipendente
se operiamo sulla x. Nel primo caso si tratta di trasformazioni ”‘verticali”’
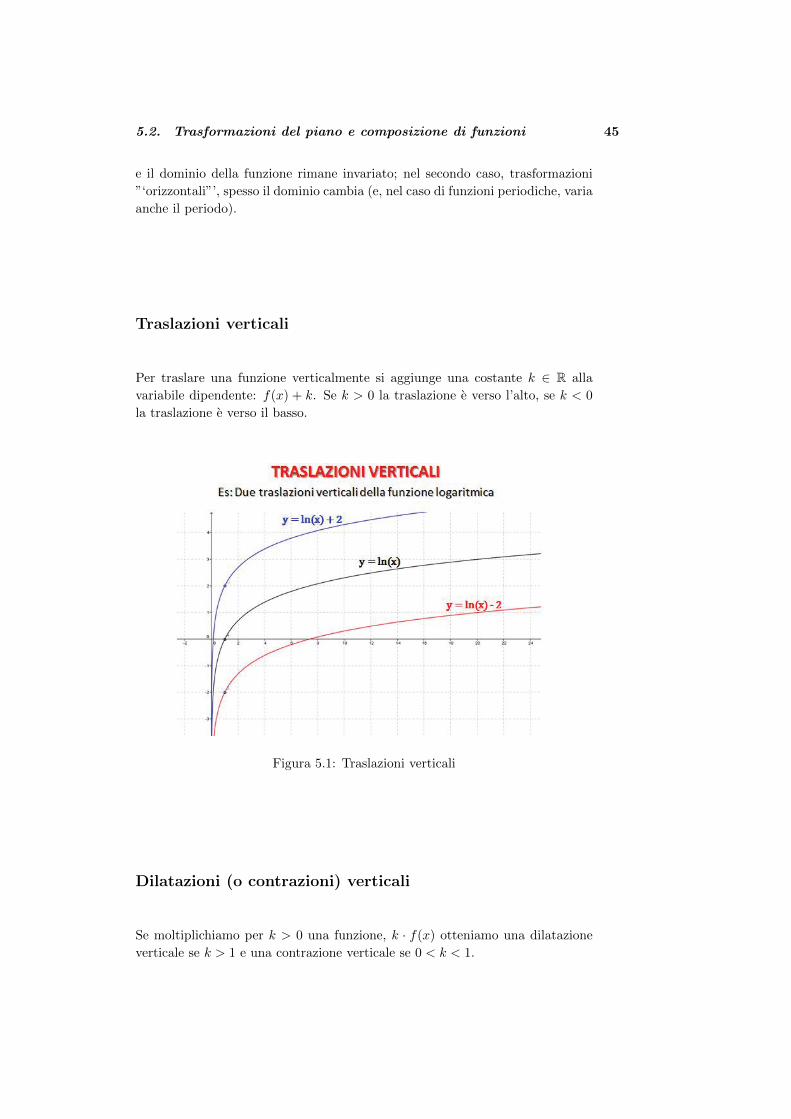
5.2. Trasformazioni del piano e composizione di funzioni 45
e il dominio della funzione rimane invariato; nel secondo caso, trasformazioni
”‘orizzontali”’, spesso il dominio cambia (e, nel caso di funzioni periodiche, varia
anche il periodo).
Traslazioni verticali
Per traslare una funzione verticalmente si aggiunge una costante k ∈ R alla
variabile dipendente: f(x) + k. Se k > 0 la traslazione e verso l’alto, se k < 0
la traslazione e verso il basso.
Figura 5.1: Traslazioni verticali
Dilatazioni (o contrazioni) verticali
Se moltiplichiamo per k > 0 una funzione, k · f(x) otteniamo una dilatazione
verticale se k > 1 e una contrazione verticale se 0 < k < 1.

46 Le funzioni continue
Figura 5.2: Dilatazioni verticali
Riflessioni verticali
Se cambiamo il segno a tutta la funzione, −f(x), otteniamo una riflessione
verticale (rispetto all’asse x).
Traslazioni orizzontali
Per traslare una funzione orizzontalmente si aggiunge una costante k ∈ R alla
variabile indipendente: f(x + k). Se k > 0 la traslazione e verso sinistra, se
k < 0 la traslazione e verso destra.

5.2. Trasformazioni del piano e composizione di funzioni 47
Figura 5.3: Traslazioni orizzontali
Dilatazioni (o contrazioni) orizzontali
Se moltiplichiamo per k > 0 la variabile indipendente di una funzione, f(k · x)
otteniamo una dilatazione orizzontale se 0 < k < 1 e una contrazione orizzontale
se k > 1.
Figura 5.4: Dilatazioni orizzontali
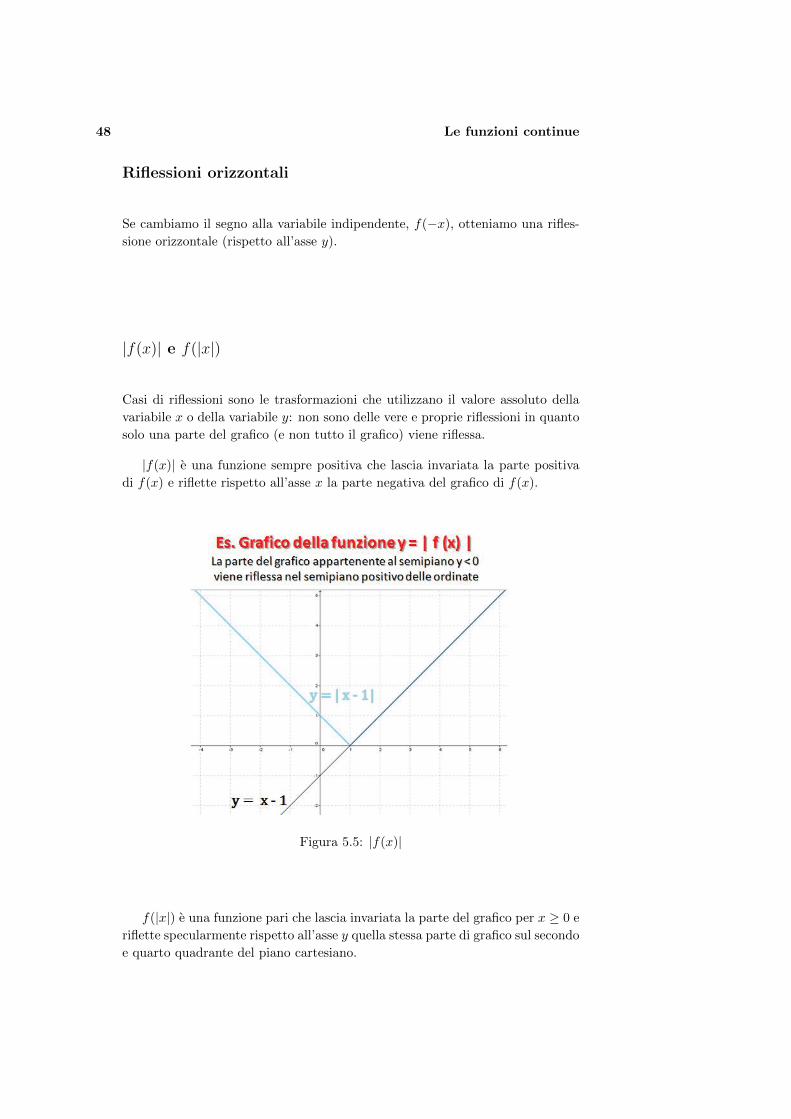
48 Le funzioni continue
Riflessioni orizzontali
Se cambiamo il segno alla variabile indipendente, f(−x), otteniamo una rifles-
sione orizzontale (rispetto all’asse y).
|f(x)| e f(|x|)
Casi di riflessioni sono le trasformazioni che utilizzano il valore assoluto della
variabile x o della variabile y: non sono delle vere e proprie riflessioni in quanto
solo una parte del grafico (e non tutto il grafico) viene riflessa.
|f(x)| e una funzione sempre positiva che lascia invariata la parte positiva
di f(x) e riflette rispetto all’asse x la parte negativa del grafico di f(x).
Figura 5.5: |f(x)|
f(|x|) e una funzione pari che lascia invariata la parte del grafico per x ≥ 0 e
riflette specularmente rispetto all’asse y quella stessa parte di grafico sul secondo
e quarto quadrante del piano cartesiano.

5.2. Trasformazioni del piano e composizione di funzioni 49
Figura 5.6: f(|x|)
Il grafico dell’inversa
Anche il grafico dell’inversa di una funzione puo essere definito tramite una
riflessione. In questo caso la riflessione avviene rispetto alla retta bisettrice del
primo e terzo quadrante che ha equazione y = x.
Figura 5.7: Funzione inversa

50 Le funzioni continue
Funzioni composte
Tutte le trasformazioni del piano sono composizioni di funzioni con funzioni
polinomiali di primo grado (o al piu con la funzione valore assoluto). Ad esempio
se f(x) = ex e g(x) = 2x− 1, componendo le due funzioni, possiamo ottenere:
f(g(x)) = e2x−1 una contrazione e una dilatazione orizzontale;
g(f(x)) = 2ex − 1 una dilatazione e una traslazione verticale.
Si possono evidenziare due fatti importanti: la composizione tra funzioni
non e commutativa (se si cambia l’ordine con il quale componiamo le due
funzioni, cambia la composizione) e comporre una qualsiasi funzione con f(x) =
x lascia sempre invariata la funzione di partenza; infatti, la funzione identita
f(x) = x e l’elemento neutro della composizione tra funzioni. In tutti gli
altri casi non e semplice graficare una funzione composta e per farlo abbiamo
bisogno di tecniche piu sofisticate di calcolo differenziale. E’ possibile pero
definire algebricamente la composizione tra due o piu funzioni. Provate con
alcuni esempi: siano
f(x) = x2 g(x) = sin(x) h(x) = 3
Provate a scrivere analiticamente le seguenti funzioni composte:
f(g(x), g(f(x)), f(h(x)), h(f(x)), g(g(x), f(g(f(x)))
5.3 Limiti di funzioni
Il concetto di limite e fondamentale per descrivere l’andamento di una funzione
quando l’argomento si avvicina a un determinato valore, in generale un punto di
frontiera del dominio che puo essere anche ±∞ (come e stato fatto nel caso delle
succcessioni numeriche). Il concetto di limite e una delle definizioni formali piu
complesse dell’analisi matematica, ma la sua concezione intuitiva e sempre stata
presente nel pensiero matematico, fin dall’antichita1; i limiti hanno un ruolo
cruciale nell’analisi matematica per quanto riguarda concetti come la continuita,
il calcolo differenziale e il calcolo integrale.
Cerchiamo di definire il concetto di limite per x → x0 di una funzione
f(x) con x0 punto di accumulazione del dominio di f , partendo da un esempio
concreto:
1Le prime applicazioni di limite come procedimento infinito sono state per introdurre il
calcolo di aree e volume (ad esempio: il Metodo di esaustione di Eudosso di Cnido, IV sec a.C.
ampiamente utilizzato anche da Archimede di Siracusa, ). Per arrivare alla sua formulazione
definitiva dobbiamo aspettare il XVIII sec., con la nascita del calcolo infinitesimale. Nel
1755 Eulero ne da una definizione abbastanza precisa e sempre nello stesso secolo D’Alambert
pone l’attenzione sulla necessita di porre la teoria del limite alla base del calcolo differenziale,
scoperto indipendentemente da Newton e Leibniz alla fine del XVII sec. Si deve a Cauchy
e, soprattutto alla successiva formalizzazione di Weierstrass, la definzione di limite ancora
adottata ad oggi nell’analisi infinitesimale. Cauchy adotto il concetto di limite di D’Alambert
e ne formulo la seguente definizione: Quando due valori successivi attribuiti a una variabile
si avvicinano indefinitamente a un valore fissato cosı che finiscono con il differire da questo
per una differenza piccola quanto si vuole, questo viene detto il limite di tutti gli altri.

5.3. Limiti di funzioni 51
Esempio 5.6. Sia f(x) =(x− 1)2
x− 1il cui dominio e tutto R tranne che per
x = 1 (formalmente si scrive che il dominio della funzione e R − 1). E’ chiaro
che se x 6= 1 possiamo semplificare la frazione e ottenere f(x) = x − 1 pero
rimane il fatto che la funzione in 1 non e definita e f(1) non esiste. Ha senso
pero vedere quello che succede avvicinandosi arbitrariamente al punto 1, sia
avvicinandosi da sinistra (per valori di x un po’ piu piccoli di 1) che da destra
(per valori di x un po’ piu grandi di 1). Avvicinandoci a 1, sia da destra che da
sinistra, il valore della funzione tende a 0 (cioe man mano che ci avviciniamo,
la funzione assume valori sempre piu prossimi a 0). Questo lo possiamo scrivere
in termini di limite nel modo seguente:
limx→1−
f(x) = 0; limx→1+
f(x) = 0
dove con 1− indichiamo un avvicinamento da sinistra, limite sinistro e con
1+ un avvicinamento da destra, limite destro2.
In questo caso limite destro e limite sinistro sono uguali. In generale, se
limite destro e sinistro sono equivalenti, possiamo dire che esiste il limite per
x→ 1 di f(x), ed e uguale al valore a cui tende la funzione sia da destra che da
sinistra (in questo caso, il limite e = 0).
Esempio 5.7. Consideriamo un secondo esempio, f(x) =|x|x
in cui il dominio
e tutto R tranne il punto 0 (D = R−0). Cerchiamo di capire l’andamento della
funzione per valori di x che si avvicinano a 0. Come osserviamo dal grafico, in
questo caso il limite destro e il limite sinistro non coincidono, infatti:
limx→0−
f(x) = −1 limx→0+
f(x) = 1
quindi in questo caso il limite non esiste.
2Per avere un’idea considerate 1− come 0.99 e 1+ come 1.01 (non e formale asserire cio
ma puo aiutare ad avere l’idea intuitiva di limite destro e sinistro).

52 Le funzioni continue
Figura 5.8: Il limite non esiste.

5.3. Limiti di funzioni 53
Nel primo caso si parla di discontinuita apparente e nel secondo si parla di
discontinuita di salto.
Formalizziamo ora il concetto di limite per x → x0 quando il valore assunto
dalla funzione tende a un valore reale, l ∈ R, cioe
limx→x0
f(x) = l (5.2)
Formalmente: ∀Iε(l), ∃ Iδ(x0) : ∀x ∈ Iδ(x0), f(x) ∈ Iε(l). Il significato e
il seguente: comunque si prenda un intorno di l di raggio ε piccolo a piacere
sulle ordinate, esiste un intorno di x0 di raggio δ sulle ascisse tale che per ogni x
appartenente a questo intorno, f(x) appartiene all’intorno di raggio ε sull’asse
delle ordinate.
E’ chiaro che il calcolo del limiti nel primo esempio e stato fatto rispettando
questa definizione mentre nel secondo non ci saremmo potuti attenere a questa
definizione: infatti, nel secondo caso, la definizione di limite varrebbe solo per
un intorno destro o un intorno sinistro mentre se il limite esiste, essa deve valere
per un intorno completo.
Esempio 5.8. Non si discosta molto dalla definizione precedente, il caso in cui
il limite per x→ x0 va all’infinito. Un esempio puo essere la funzione f(x) =1
x2che non e definita per x = 0. Se ci avviciniamo da sinistra e da destra al valore
0 la funzione diventa sempre piu grande e va verso +∞, in questo caso si parla
di discontinuita di infinito.
In generale
limx→x0
f(x) = +∞ (5.3)
si puo definire formalmente nel modo seguente:
∀IM (+∞), ∃ Iδ(x0) : ∀x ∈ Iδ(x0), f(x) ∈ IM (+∞)
Notiamo che se avessimo scelto nell’esempio la funzione f(x) =1
xavremmo
avuto due risultati differenti per il limite sinistro e destro. Infatti:
limx→0−
1
x= −∞ lim
x→0+
1
x= +∞
in questo caso il limite non esiste. Non e comunque sbagliato dire che la
funzione in valore assoluto in 0 va a ∞.
Possiamo notare che questa definizione riprende la definizione nel caso in cui
il limite a cui tende la funzione e un valore reale; ora, anziche considerare un
intorno di un punto sul codominio, consideriamo un intorno di infinito.
La definizione di limite di funzione per x→ ±∞ riprende la definizione data
per i limiti di successioni; ora che abbiamo formalizzato il concetto di intorno,
la possiamo formulare adottando la nuova terminologia:
limx→+∞
f(x) = l ∈ R (5.4)
che, utilizzando la nozione di intorno di infinito, formalmente significa:

54 Le funzioni continue
∀Iε(l), ∃ IM (+∞) : ∀x ∈ IM (+∞), f(x) ∈ Iε(l)Con ragionamenti analoghi si definiscono i limiti di funzione per x → −∞
oppure per funzioni che tendono a ±∞.
5.4 Funzioni continue
Fino alle serie abbiamo sempre trattato funzioni definite su un sottoinsieme dei
numeri naturali e quindi funzioni che assumono un insieme discreto di valori.
Ora stiamo trattando funzioni definite su un insieme continuo di valori; occor-
re quindi definire esattamente cos’e una funzione continua. Consideriamo una
funzione f(x) e domandiamoci se tale funzione e continua in un punto x0 ap-
partenente al proprio dominio. Il fatto che il limite esista per x→ x0 non e una
condizione sufficiente affinche la funzione sia continua. Ad esempio la funzione
f(x) =x2
xnon e continua in x = 0 mentre lo e in tutti gli altri punti del suo do-
minio. Per essere continua una funzione in x0 non solo il limite deve esistere, ma
deve anche essere uguale al valore della funzione in quel punto. Formalmente:
limx→x0
f(x) = f(x0) (5.5)
cioe la funzione e continua in x0.
Una funzione si dice continua se lo e in ogni punto del proprio dominio3).
Notiamo che una funzione puo essere continua nel proprio dominio anche
se il dominio di definizione e definito come unione di intervalli sconnessi. Ad
esempio la funzione1
x(cosı come tutte le funzioni elementari che conosciamo)
e una funzione continua nel suo dominio di definizione che e (R− 0). Quindi,1
xe una funzione continua sull’unione di due intervalli aperti ]−∞; 0[ U ]0; +∞[
(infatti lo 0 e un punto di accumulazione che non appartiene al dominio, e
ovviamente, non ha senso parlare di continuita di una funzione in un punto in
cui la funzione non e definita).
Esempio 5.9. Un esempio di funzione discontinua e la seguente:
f(x) =
|x|x
se x 6= 0
0 se x = 0
che e chiaramente definita su tutto R ma e discontinua in 0.
3Una definizione informale spesso adottata e: ”‘una funzione e continua se la si puo di-
segnare senza staccare la penna dal foglio”’. Questa non e una definizione corretta per vari
motivi: anzitutto non la si puo generalizzare in dimensioni superiori, inoltre anche per le
curve in una sola variabile, una funzione definita su un dominio connesso puo essere difficile
da disegnare (senza staccare la penna dal foglio, provate a disegnare x sin(1x
)

5.5. Infinitesimi 55
5.5 Infinitesimi
Abbiamo fino parlato di infinitesimi per una successione quando quest’ultima
tende a 0 e abbiamo confrontato gli infinitesimi nei termini generali delle serie
a termini positivi per capire se una serie e convergente o divergente mediante il
confronto con la serie armonica.
Nel caso delle successioni pero non e necessario specificare che una successio-
ne an e infinitesima per n→ +∞ perche per una successione non si puo vedere
altro che il limite per n→ +∞. Nel caso delle funzioni pero occorre specificare
quando una funzione e infinitesima per x→ x0 con x0 punto di accumulazione
per il dominio della funzione stessa. Uno dei casi piu comuni e il caso in cui
x→ 0.
La funzione sinx e infinitesima per x → 0 perche limx→0
sinx = 0; lo stesso
vale ad esempio per le funzioni x2, 1 − cosx, ecc... Mentre la funzione√
1− xe infinitesima per x→ 1.
La cosa interessante e pero capire qual e l’ordine di infinitesimo.
Definizione 5.10. Due funzioni f(x) e g(x) si dicono infinitesime dello
stesso ordine per x→ x0 (con x0 punto di accumulazione del dominio) se
limx→x0
f(x)
g(x)= l 6= 0 (5.6)
con l ∈ R. Le funzioni sono inoltre infinitesimi equivalenti per x→ x0 se
limx→x0
f(x)
g(x)= 1 (5.7)
La definizione di infinitesimo vale anche per x → ±∞ se questo e un punto di
accumulazione per il dominio.
La cosa piu naturale da fare e quella di confrontare gli infinitesimi con le
funzioni polinomiali che sono sempre le piu facili da trattare, ad esempio poiche
limx→0
sinx
x= 1
le funzioni sinx e x sono infinitesimi equivalenti (e quindi dello stesso ordine). In
tal caso si puo scrivere che sinx ∼ x per x→ 0 cioe che sinx si puo approssimare
con x per x→ 0.
Le funzioni 1− cosx e x2 sono dello stesso ordine ma non equivalenti perche
per x→ 0,
limx→0
1− cosx
x2=
1
2
mentre sono equivalenti 1 − cosx ex2
2. In questo caso si puo scrivere che
1− cosx ∼ x2
2per x→ 0.
Un modo alternativo per scrive questo tipo di approssimazioni e quello di
utilizzare i cosiddetti simboli di Landau:

56 Le funzioni continue
Definizione 5.11. Si definisce un ”o piccolo” di (x− x0)k e si scrive o((x−x0)k) un infinitesimo di ordine superiore a k per x → x0, la classe di tutte le
funzioni che tendono a 0 piu velocemente di (x− x0)k per x→ 0.
Utilizzando il simbolo o piccolo si puo scrivere che
sinx = x+ o(x) 1− cosx =x2
2+ o(x2)
A differenza degli infiniti in cui, quando confrontiamo due polinomi quello
che ci interessa e quello con il grado piu alto (le altre potenze sono trascurabili
all’infinito), negli infinitesimi ci interessa quello con grado piu basso in quanto
le potenze piu grandi sono trascurabili: ad esempio se abbiamo un infinitesimo
per x→ 0 della funzione x+ x3, essa si puo approssimare in 0 in questo modo:
x+ x3 ∼ x. 4
Se f(x) e g(x) sono due infinitesimi che non hanno lo stesso ordine per
x → x0 o per x → ±∞ il loro rapporto ci dice qual e l’infinitesimo di ordine
superiore:
se limx→x0
f(x)
g(x)= 0 f(x) ha ordine superiore (5.8)
se limx→x0
f(x)
g(x)=∞ g(x) ha ordine superiore (5.9)
5.6 Asintoti
Un asintoto non e altro che una retta alla quale si avvicina arbitrariamente
una determinata funzione5. In termini matematici possiamo definire asintoti
verticali, orizzontali oppure obliqui.
Definizione 5.12. Una funzione f(x) : I → R possiede un asintoto verticale
per x→ x0 di equazione x = x0 se
limx→x0
f(x) = ±∞ (5.10)
Una funzione possiede un asintoto orizzontale per x→ ±∞ di equazione
y = l se
limx→±∞
f(x) = l ∈ R (5.11)
Nel caso in cui il limite sia per x→ −∞ si parla di asintoto orizzontale sinistro,
per x→ +∞ si parla di asintoto orizzontale destro.
Una funzione puo possedere un numero arbitrario di asintoti verticali, anche
un numero infinito di asintoti verticali come ad esempio la funzione tanx che
possiede infiniti asintoti verticali inπ
2+ kπ con k ∈ Z. La tangente, come una
qualsiasi altra funzione, pero non puo attraversare il proprio asintoto verticale.
4Se x e molto piccolo, vicino a 0, ad esempio x = 0.1 allora x3 = (0.1)3 = 0.001 che e
trascurabile rispetto a 0.1.5In generale, un asintoto puo anche non essere necessariamente una retta ma in questi
appunti tratteremo solo asintoti lineari

5.6. Asintoti 57
Mentre una funzione puo possedere al piu due asintoti orizzontali, uno sini-
stro ed uno destro ma puo attraversare in modo continuo un proprio asintoto
orizzontale, anche infinite volte come ad esempio la funzionesinx
x.
Quando si parla di comportamento asintotico all’infinito di una funzione
non ci riferiamo necessariamente ad un comportamento asintotico lineare, cioe
a una retta. Una funzione puo avvicinarsi per x → ∞ arbitrariamente ad
una qualsiasi curva e possiamo comprendere il suo andamento sostituendo alla
variabile x valori molto grandi (in valore assoluto): ad esempio la funzionex3 + 1
xsi comporta all’infinito come x2 cioe il suo grafico si avvicinera sempre di
piu al grafico di una parabola e non di una retta. In queste note, ci soffermiamo
comunque ad analizzare casi in cui il comportamento all’infinito e quello di una
retta. In questi casi la retta non deve essere necessariamente orizzontale, un
asintoto all’infinito puo anche essere una retta con pendenza non nulla e in tal
caso si parla di asintoto obliquo.
La funzione3x3 − 4x+ 1
7x2 + 1∼ 3
7x per x → ∞ si comporta come una retta di
pendenza3
7; questo vuol dire che se la funzione avra asintoto all’infinito, allora
questo sara un asintoto obliquo. Notiamo inoltre che approssimando la funzione
all’infinito abbiamo gia trovato la pendenza dell’asintoto che, in caso esistesse,
avra equazione y =3
7x+ q con q da determinare.
Attenzione! Il fatto che il comportamento asintotico all’infinito di una fun-
zione e quello di una retta non implica che tale funzione ammetta un asintoto
obliquo. Mentre se osservassimo che il comportamento asintotico non e quello
di una retta, allora potremmo affermare con certezza che la funzione non avra
un asintoto obliquo. Ad esempio, f(x) = x + ln(x) ∼ x, quindi la funzione
potrebbeavere asintoto obliquo. Ma tale funzione non ammette un asintoto obli-
quo, infatti dovremmo tenere conto anche dei termini di grado piu basso (in
questo caso ln(x)) che fanno discostare leggermente la funzione f(x) all’infinito
dal suo comportamento lineare. In generale possiamo definire l’asintoto obliquo
nel modo seguente:
Definizione 5.13. Una funzione f(x) : I → R possiede un asintoto obliquo
per x→ ±∞ se:
• limx→±∞
f(x) = ±∞
• ∃ limx→±∞
f(x)
x= m ∈ R− {0}
• ∃ limx→±∞
(f(x)−mx) = q ∈ R
In tal caso l’asintoto ha equazione y = mx+ q.

58 Le funzioni continue
5.7 Teoremi sulle funzioni continue
Le funzioni continue, quelle che abbiamo definito nella classe C0(A) in cui A
e il loro dominio, rappresentano un insieme di funzioni molto interessante su
cui si basano importantissimi teoremi matematici. L’esistenza degli zeri di una
funzione, cioe delle radici reali quelle per cui f(x0) = 0, sono assicurati per
una funzione continua se sono soddisfatte certe condizione. Lo stesso vale per
i massimi e minimi assoluti. Vediamo nel dettaglio alcuni dei piu importanti
teoremi di analisi matematica.
Teorema 5.14 (Teorema degli zeri o di Bolzano). Sia f : [a, b] → R una
funzione continua su un intervallo chiuso [a, b] per cui i valori agli estremi hanno
segno discorde, f(a)f(b) < 0.
Allora esiste almeno un punto c ∈ [a, b] tale che f(c) = 0, cioe esiste almeno
uno zero della funzione.
Questo non vieta alla funzione di avere piu di uno zero, il teorema di Bolzano
ci assicura solo che almeno uno zero esiste anche se non ci da informazioni
su come determinarlo. Molto spesso in matematica e molto piu importante
determinare l’esistenza di un certo valore che determinarlo, per i calcoli ci sono
gia i computer che li sanno fare molto piu velocemente di noi...
La funzione f(x) = x5 − 3x + 1 e un polinomio di terzo grado non fatto-
rizzabile mediante radici intere o razionali. Non esiste una formula risolutiva
per le equazioni polinomiali di grado superiore al secondo6 ma per il teorema
degli zeri possiamo dire che sicuramente f(x) possiede uno zero in [0, 1] perche
e continua (essendo un polinomio) e f(a)f(b) = 1 · (−1) = −1 cioe agli estremi
il segno di f(x) e discorde.
Se vogliamo avvicinarci alla radice del polinomio possiamo dimezzare l’inter-
vallo e scegliere tra[0, 12]
e[12 , 1]
quello per cui vale ancora il teorema degli zeri
(in questo caso[0, 12]) e continuare questo procedimento iterativo detto metodo
di bisezione o algoritmo dicotomico per approssimare il piu possibile la radice
del polinomio.
Teorema 5.15 (Teorema dei valori intermedi). Sia f : [a, b] → R una funzio-
ne continua su un intervallo chiuso [a, b] e siano f(a) 6= f(b) (per semplicita
pensiamo a f(a) < f(b) ma il teorema vale anche nel caso contrario in modo
analogo).
Allora, per ogni f(a) < y < f(b), esiste almeno un punto x ∈ [a, b] tale che
f(x) = y, cioe la funzione assume tutti i valori compresi tra f(a) e f(b).
Il teorema non ci dice che la funzione assumi tutti e soli ma ci assicura che
se f e continua ogni elemento compreso tra f(a) e f(b) possiede almeno una
controimmagine in [a, b]. L’intervallo [f(a), f(b)] sull’asse delle ordinate e quindi
sicuramente contenuto nell’immagine di f .
6In realta per il terzo e quarto grado esistono ma sono talmente complicate che servirebbe
una pagina solo per scriverle

5.7. Teoremi sulle funzioni continue 59
La funzione f : [0, 1] → R, f(x) = x5 − 3x + 1 assume sicuramente tutti i
valori compresi tra f(1) = −1 e f(0) = 1 nell’immagine.
Il teorema dei valori intermedi e una generalizzazione del teorema di Bolzano
perche ci assicura l’intersezione della funzione, non solo con la retta y = 0 ma
anche con la retta y = y0 per ogni f(a) < y0 < f(b).
Teorema 5.16 (Teorema di Weierstrass). Sia f : [a, b] → R una funzione
continua su un intervallo chiuso [a, b].
Allora esistono sempre massimo e minimo assoluto sull’intervallo [a, b].
Il teorema di Weierstrass e uno dei teoremi piu importanti di analisi e vale in
senso generalizzato anche per funzioni in piu variabili. Esso non ci consente di
trovare massimo e minimo di una funzione, per quello ci vuole anche un po’ di
calcolo differenziale, pero ce ne assicura l’esistenza se l’intervallo di definizione
e chiuso e la funzione e continua.
La funzione f : [0, 2] → R, f(x) = ex − x3 e una funzione continua su [0, 2]
intervallo chiuso. E’ difficile da studiare come funzione, anche utilizzando il
calcolo differenziale, ma il teorema di Weierstrass ci assicura che su [0, 2] essa
possiede sicuramente massimo e minimo assoluti. Tali valori possono essere
assunti anche negli estremi dell’intervallo (non e questo il caso): se una funzione
ad esempio e monotona crescente o decrescente, massimo e minimo assoluto sono
agli estremi dell’intervallo.

60 Le funzioni continue

6 Il calcolo differenziale
Il concetto di derivata e legato storicamente in matematica al concetto di tan-
gente ad una curva. In realta la sua portata e molto piu ampia ed e fondamen-
tale in moltissime situazioni. Il calcolo differenziale nasce con Newton, Leibniz,
Cauchy ed altri matematici famosi nello studio del moto in fisica: ad esempio la
derivata dello spazio percorso (assumendo come variabile il tempo) e la velocita
istantanea, la derivata della velocita e l’accelerazione istantanea. In elettrotec-
nica la derivata di una quantita di carica che attraversa una sezione di filo e la
corrente elettrica, in economia la derivata dell’indice dei prezzi rispetto al tempo
e l’inflazione. E questi sono solo pochi esempi. In matematica la derivata ci
permette di stabilire la pendenza di una determinata curva.
6.1 Rapporto incrementale e derivata
Consideriamo una funzione f : D → R continua e cerchiamo di vederla come
curva del piano cartesiano. Prendiamo in considerazione un punto P di coordi-
nate (x0, f(x0)), x0 ∈ D in cui vogliamo determinare la pendenza della curva.
Per fare questo una possibile strada e cercare la retta tangente in P al grafico
della curva: l’inclinazione della retta tangente individuera la pendenza. At-
tenzione! Non disponiamo per il momento di una buona definizione di retta
tangente se non in casi molto particolari (le coniche). Il nostro primo obiettivo
e quindi quello di cercare di capire che cosa debba intendersi per retta tangente
al grafico di una curva. La tangente e infatti un concetto locale, la definizione
di retta tangente non e quella di una retta che interseca la curva in un solo
punto globalmente. Infatti, ad esempio, la retta tangente alla funzione cos(x)
in x0 = 0 tocca la curva stessa in infiniti altri punti. Quando parliamo di retta
tangente parliamo di una retta che tocca la curva in un unico punto ma solo
riferendoci ad un intorno arbitrariamente piccolo di quel punto. Le rette
tangenti alle coniche del piano cartesiano non possono intersecare le coniche
stesse in altri punti e quindi il discorso fatto puo essere vero globalmente, ma
per una generica curva y = f(x) questo non e vero.
Torniamo quindi alla funzione f(x) e consideriamo un altro punto Q in modo
che la differenza nelle ascisse tra P e Q sia h. Se uniamo P e Q con una retta
otteniamo una secante alla curva. Ricordandoci che il punto P ha coordinate
(x0, f(x0)), allora Q avra coordinate Q(x0 + h, f(x0 + h)). La pendenza della
61

62 Il calcolo differenziale
secante sara :f(x0 + h)− f(x0)
(x0 + h)− x0=f(x0 + h)− f(x0)
h(6.1)
cioe∆y
∆xche e il rapporto tra i cateti di un triangolo rettangolo. Questa espres-
sione si chiama rapporto incrementale e in termini trigonometrici, chiaman-
do α l’angolo compreso tra i due cateti, esso e tanα (definita proprio come il
rapporto tra cateto opposto e cateto adiacente ad un angolo α in un triangolo
rettangolo).
In fisica, se il grafico della funzione f(x) rappresentasse uno spazio percorso
in un determinato tempo, il rapporto incrementale non sarebbe altro che la
velocita media percorsa tra il punto di partenza e il punto di arrivo.
Proviamo ora a tenere fisso il punto P e avvicinare sempre di piu il punto Q
al punto P facendo diventare l’incremento h sempre piu piccolo fino a far quasi
coincidere Q con P (cioe facciamo avvicinare sempre di piu h a 0). Intuitiva-
mente possiamo immaginare che la tangente geometrica al grafico della curva
venga a coincidere con la posizione limite della famiglia di rette secanti. Ana-
liticamente, questo si traduce nel fatto che la retta tangente, se esiste, ha per
coefficiente angolare il limite della famiglia dei coefficienti angolari delle rette
secanti.
Tornando all’esempio relativo alla fisica questo limite non e altro che la
velocita istantanea in corrispondenza del punto P . Possiamo ora formalizzare.
Definizione 6.1 (Derivata). Si dice derivata di una funzione f(x) nel punto
x0 e si indica con f ′(x0), se esiste ed e finito, il seguente limite:
f ′(x0) = limh→0
f(x0 + h)− f(x0)
h(6.2)
Se chiamiamo x = x0 + h e facciamo tendere x a x0 otteniamo la definizione
equivalente:
f ′(x0) = limx→x0
f(x)− f(x0)
x− x0(6.3)
Se una funzione e derivabile per ogni x appartenente al suo dominio di defi-
nizione ha senso parlare genericamente di f ′(x) cioe di una nuova funzione che
rappresenta la derivata di f(x) per ogni scelta di x nel dominio di f .
Per le funzioni di una variabile reale si fa uso molto spesso della notazione
f ′(x) o D(f(x)) ma quando si parla di funzioni in piu variabili occorre specificare
la variabile di derivazione e quindi e piu indicata la seguente notazione:∂f(x)
∂xin cui nel denominatore viene esplicitata la variabile secondo cui si deriva.
Esempio 6.2. La derivata della funzione f(x) = x2 in x0 = 1 vale 2 e in
generale f ′(x) = 2x per ogni x ∈ R:
f ′(1) = limh→0
f(1 + h)− f(1)
h= limh→0
h2 + 2h+ 1− 1
h== lim
h→0
h(h+ 2)
h= 2
f ′(x) = limh→0
f(x+ h)− f(x)
h= limh→0
h2 + 2hx+ x2 − x2
h= limh→0
(h+ 2x) = 2x

6.2. Funzioni derivabili 63
6.2 Funzioni derivabili
Data la definizione di derivata e la sua generalizzazione ad ogni punto del do-
minio della funzione con la costruzione della funzione derivata, occorre capire
ora se una funzione e sempre derivabile e, in particolare, qual e il legame tra
le funzioni continue e le funzioni derivabili in quanto ha poco senso parlare di
pendenza di una curva quando la suddetta curva non e continua in un deter-
minato punto. Questo ragionamento induce a escludere i punti di discontinuita
di una funzione nel calcolo della derivata e ci limiteremo infatti a calcolare la
derivata nei punti in cui la funzione e continua. Inoltre non e detto che nei punti
in cui la funzione e continua allora potremo sicuramente calcolarne la derivata.
Consideriamo alcuni casi particolari.
1. Il grafico della funzione f(x) = |x| e costituito da due semirette che si
incontrano nell’origine, la derivata di f(x) non e altro che la pendenza
delle due semirette ed e quindi costante1 uguale a −1 per x < 0 e costante
uguale a 1 per x > 0. In x = 0 la funzione e continua. Ma qual e la
pendenza in x = 0? Calcoliamola come limite del rapporto incrementale
per h→ 0− e per h→ 0+ (in questo caso si parla di derivata sinistra e
derivata destra):
f ′−(x) = limh→0−
|0 + h| − |0|h
= limh→0−
|h|h
= −1
f ′+(x) = limh→0+
|0 + h| − |0|h
= limh→0+
|h|h
= 1
I due limiti sono diversi, sostanzialmente il limite del rapporto incremen-
tale cambia se ci avviciniamo da sinistra o da destra e quindi la derivata
non esiste! Graficamente si vede questo fatto notando un brusco cambio
di pendenza quando x si avvicina a 0: se derivata destra e sinistra sono
due numeri reali distinti allora graficamente il punto di non derivabilita si
chiama punto angoloso.
2. Studiamo ora il comportamento della funzione f(x) = 3√x quando x = 0.
La funzione e chiaramente continua in quel punto ma se disegniamo la ret-
ta tangente in 0 essa e verticale; non si puo quindi parlare di pendenza in
quanto dovremmo parlare di pendenza infinita. In effetti calcolando la de-
rivata in 0 e proprio quello che succede, il limite del rapporto incrementale
non e finito e quindi la funzione non e derivabile in 0:
f ′(x) = limh→0
3√
0 + h− 3√
0
h= limh→0
13√h2
= +∞
In questo caso si parla di flesso verticale ascendente (discendente se il
limite valesse −∞).
1La derivata di una retta e una funzione costante pari al coefficiente angolare della retta
stessa.

64 Il calcolo differenziale
3. Un ultimo caso e analogo al precedente (la differenza e nel fatto che in
questo caso derivata destra e sinistra oltre ad essere entrambe infinite, sono
infinite con segno discorde), e il caso di f(x) = | 3√x| funzione continua su
tutto R ma che in x = 0 presenta quella che si chiama una cuspide (x0 e
una cuspide quando i limiti del rapporto incrementale destro e sinistro in
x0 sono infiniti di segno opposto):
f ′−(x) = limh→0−
∣∣ 3√
0 + h∣∣− ∣∣ 3√
0∣∣
h= limh→0−
∣∣∣ 3√h∣∣∣
h= −∞
f ′+(x) = limh→0+
∣∣ 3√
0 + h∣∣− ∣∣ 3√
0∣∣
h= limh→0+
∣∣∣ 3√h∣∣∣
h= +∞
I tre casi elencati rappresentano i tipici casi di funzioni continue su tutto il
loro dominio (nei casi specifici il dominio e R) ma con punti di non derivabilita.
Il fatto che in punti in cui la funzione e continua non e derivabile ci dice quindi
che la continuita e una condizione non sufficiente per la derivabilita. E’
vero pero, come avevamo dedotto intuitivamente all’inizio del paragrafo che la
continuita e una condizione necessaria per la derivabilita, e questo lo si puo
dimostrare anche analiticamente:
Dimostrazione. Se f(x) e derivabile in x0, esiste ed e finito il limite
f ′(x0) = limx→x0
f(x)− f(x0)
x− x0
e quindi per x → x0, f(x) ∼ f(x0) + f ′(x0)(x − x0). Se facciamo il limite a
entrambi i membri,
limx→x0
f(x) = limx→x0
(f(x0) + f ′(x0)(x− x0)) ⇒ limx→x0
f(x) = f(x0)
che non e altro la definizione di funzione continua in x0.
Questo fatto ha effetto anche sul dominio della funzione derivata che in gene-
rale e sempre contenuto o al piu uguale al dominio della funzione di partenza: ad
esempio la funzione f(x) = ln(x) come vedremo, ha derivata prima f ′(x) = 1x . Il
dominio della funzione g(x) = 1x sarebbe piu grande del dominio di f(x) = ln(x)
ma il dominio della derivata non puo essere piu grande del dominio della funzio-
ne e quindi saremo costretti a prendere in considerazione per f ′(x) solo i valori
positivi delle x.
Se f : I → R e continua e derivabile con derivata continua2, diciamo che f ∈C1(I).
2In generale non e detto che una funzione derivabile abbia sempre derivata continua ma
non trattiamo questi casi particolari.

6.3. Calcolo della derivata 65
6.3 Calcolo della derivata
Prima di passare all’analisi delle funzioni derivabili calcoliamo le derivate delle
funzioni elementari e della somma, prodotto, quoziente e composizione delle
stesse. Una volta acquisita un po’ di manualita con le tecniche di derivazione
passeremo ad una analisi piu profonda del comportamento delle varie curve
rappresentate dalle funzioni stesse.
Funzioni elementari
Gia con la sola interpretazione geometrica della derivata abbiamo intuito che
la derivata di una funzione costante e nulla e che la derivata di una funzione
lineare e il valore del coefficiente angolare della retta da essa rappresentata e
quindi ha valore costante. Infatti:
Se f(x) = k ∈ R, limh→0
k − kh
= 0.
Se f(x) = mx+ q, limh→0
m(x+ h) + q − (mx+ q)
h= limh→0
mh
h= m
Abbiamo gia visto cosa succede per f(x) = x2, vediamo in generale il
comportamento della derivata di f(x) = xn:
limh→0
(x+ h)n − xn
h= limh→0
xn + nxn−1h+ o(h)− xn
h= nxn−1.
Per calcolare il limite abbiamo usato l’approssimazione (x+h)n ∼ xn+nxn−1h+
o(h) per h → 0 (dal Binomio di Newton) e abbiamo quindi supposto n ∈ N.
Senza perdere di generalita e pero possibile definire la derivata di f(x) = xα
per ogni α ∈ R: f ′(x) = αxα−1.
Una funzione molto speciale e f(x) = ex: la sua peculiarita sta nel fatto che
la sua derivata e uguale a se stessa ed e quindi una sorta di elemento neutro per
l’operazione di derivazione:
limh→0
ex+h − ex
h= limh→0
exeh − 1
h= ex.
Per tutte le altre funzioni rimandiamo alla tabella delle derivate delle funzioni
elementari che si possono facilmente trovare anche sul web, ad esempio: tabella
derivate funzioni elementari
Derivata della funzione inversa
In alcuni casi per determinare la derivata di alcune funzioni inverse delle funzioni
elementari si puo ricorrere alla formula della derivata della funzione inversa:
Teorema 6.3. Sia f(x) :]a, b[→ R strettamente monotona, invertibile e de-
rivabile in x0 ∈]a, b[ con f ′(x0) 6= 0. Allora f−1 e derivabile in y0 = f(x0)
e (f−1
)′(y0) =
1
f ′(x0)(6.4)

66 Il calcolo differenziale
Dimostrazione. Possiamo ottenere la formula scrivendo la definizione di derivata
della funzione inversa partendo dal limite del rapporto incrementale per f−1(y)
e ricordando che x0 = f−1(y0):
limy→y0
f−1(y)− f−1(y0)
y − y0= limx→x0
x− x0f(x)− f(x0)
=1
f ′(x0)
Esempio 6.4. Calcoliamo ad esempio la derivata della funzione x = arctan(y)
(inversa della y = tan(x)) sfruttando la 6.4:
(arctan(y))′
=1
1 + tan2(x)=
1
1 + y2
Allo stesso modo possiamo calcolare le inverse di tutte le funzioni trigono-
metriche e iperboliche e anche la derivata del ln(x) come inversa di ex.
Primitiva
Definizione 6.5. Se f : I → R e una funzione continua e F : I → R e una
funzione continua e derivabile tale che F ′(x) = f(x) si dice che F (x) e una
primitiva di una funzione di f(x).
A differenza della derivata, la primitiva di una funzione non e unica perche
se F ′(x) = f(x) anche (F +k)′(x) = f ′(x) in quanto la derivata di una costante
e nulla. Possiamo dire che la primitiva e unica a meno di una costante additiva.
Con tale definizione possiamo dire ad esempio che ln(x) e una primitiva di 1x o
che ex e una primitiva di ex.
Regole di derivazione
Analizziamo ora le derivate di funzioni che sono la somma, il prodotto, il
quoziente, la composizione delle funzioni elementari3.
• La derivata di una funzione moltiplicata per una costante k reale e uguale
alla costante per la derivata della funzione:
(kf)′ = kf ′ (6.5)
Dimostrazione.
limh→0
k f(x+ h)− k f(x)
h= k lim
h→0
f(x+ h)− f(x)
h= k f ′(x)
La derivata di una somma (o differenza) e la somma (o differenza) delle
derivate:
(f ± g)′ = f ′ ± g′3Per semplicita di scrittura a volte ometteremo la variabile x all’interno della funzione.

6.4. Derivata e monotonıa 67
Dimostrazione.
limh→0
f(x+ h) + g(x+ h)− (f(x) + g(x))
h=
limh→0
f(x+ h)− f(x)
h+ limh→0
g(x+ h)− g(x)
h= f ′(x) + g′(x)
La derivata del prodotto di due funzioni e la somma della derivata della
prima per la seconda non derivata con la derivata della seconda per la
prima non derivata:
(f · g)′ = f ′ · g + f · g′ (6.6)
Dimostrazione.
limh→0
f(x+ h)g(x+ h)− (f(x)g(x))
h=
limh→0
f(x+ h)g(x+ h)− (f(x)g(x)) + f(x+ h)g(x)− f(x+ h)g(x)
h=
limh→0
f(x+ h)g(x+ h)− g(x)
h+ limh→0
g(x)f(x+ h)− f(x)
h=
f(x)g′(x) + f ′(x)g(x)
La derivata del quoziente di due funzioni e la differenza tra la derivata
del numeratore per il denominatore non derivato e la derivata del deno-
minatore per il numeratore non derivato, tutto diviso per il quadrato del
denominatore non derivato:(f
g
)′=f ′ · g − f · g′
(g)2 (6.7)
La derivata della composizione tra due (o piu) funzioni e data dalla
seguente formula detta chain rule:
(f(g(x)))′
= (f ◦ g(x))′
= (f ′ ◦ g(x)) · g′(x) = f ′(g(x)) · g′(x) (6.8)
6.4 Derivata e monotonıa
Come abbiamo gia accennato, la derivata consente di avere a disposizione uno
strumento per analizzare una funzione in profondita: fornendo informazioni
sulla pendenza di una curva in corrispondenza di un determinato valore, come
vedremo la derivata fornisce notevoli informazioni sulla monotonıa della funzione
e sui suoi punti stazionari.

68 Il calcolo differenziale
Un punto c ∈ I si dice stazionario o punto critico per f : I → R se f ′(c) = 0
cioe se la sua pendenza e nulla e quindi la retta tangente in quel punto e una
retta orizzontale. Sono punti stazionari i punti di minino relativo, di massimo
relativo e anche i cosiddetti flessi orizzontali. Un punto stazionario infatti
non e necessariamente un massimo o minimo locale; ad esempio se analizziamo
la funzione f(x) = x3 in x = 0 notiamo che la tangente e orizzontale ma la
funzione non possiede ne massimi ne minimi in quel punto.
Se f e strettamente crescente in un certo intervallo, f ′ ≥ 0 (nota bene
che f ′ e crescente ma non strettamente, infatti essa puo essere anche nulla).
Possiamo analizzare ancora una volta f(x) = x3, strettamente crescente in ogni
punto, anche in 0 ma con derivata che si annulla in x = 0. Analogamente, se f
e strettamente decrescente in un certo intervallo, f ′ ≤ 0.
Nota bene: la monotonıa di una funzione ha una definizione che non ha
nulla a che fare con la derivata! Una funzione puo essere monotona anche se
non e continua ne tanto meno derivabile!
Teorema 6.6 (Teorema di Fermat). Sia f : I → R una funzione derivabile in
x0 ∈ I. Se x0 e un punto di massimo o di minimo locale per la funzione f(x)
allora f ′(x0) = 0.
Come abbiamo visto non e vero il viceversa e un controesempio e la funzione
f(x) = x3 in x = 0 (punto in cui la funzione ha un flesso orizzontale).
Tra i teoremi fondamentali per le funzioni derivabili non possiamo non citare
i teoremi di Rolle e di Lagrange: il teorema di Lagrange puo essere visto come
una generalizzazione del teorema di Rolle.
Teorema 6.7 (Teorema di Rolle). Data una funzione f continua su [a, b] e
derivabile su ]a, b[ con f(a) = f(b) allora
∃ c ∈ ]a, b[ : f ′(c) = 0 (6.9)
In poche parole il teorema ci assicura l’esistenza di almeno un punto con
tangente orizzontale per una funzione derivabile su un intervallo in cui agli
estremi la funzione assume lo stesso valore. Chiaramente questo non e vero per
una funzione non derivabile: ad esempio la funzione f(x) = |x| su [−1, 1] assume
lo stesso valore agli estremi ma non ha punti con tangente orizzontale (il punto
di minimo x = 0 e un punto in cui la funzione non e derivabile).
Teorema 6.8 (Teorema del valore medio di Lagrange). Data una funzione f
continua su [a, b] e derivabile su ]a, b[ allora
∃ c ∈ ]a, b[ : f ′(c) =f(b)− f(a)
b− a(6.10)
In altre parole il teorema ci assicura l’esistenza di almeno un punto in cui
la retta tangente alla curva ha la stessa pendenza della retta che unisce i punti
f(a) e f(b).

6.5. Applicazioni del calcolo differenziale 69
Se i due punti hanno la stessa ordinata la retta in questione e orizzontale e il
teorema di Lagrange si riconduce al Teorema di Rolle che ne diventa quindi un
caso particolare; la dimostrazione del teorema di Lagrange si effettua utilizzando
il teorema di Rolle.
6.5 Applicazioni del calcolo differenziale
Calcolo di limiti
Una delle tante applicazioni del calcolo differenziale e il calcolo di alcuni limiti
che presentano forme indeterminate. Il teorema di De L’Hospital e gli sviluppi
di Taylor (che vedremo successivamente) consentono infatti di risolvere alcuni
casi in cui i limiti presentano forme indeterminate.
Teorema 6.9 (Teorema di De L’Hospital). Ipotesi:
1. siano f e g funzioni derivabili in un intorno I del punto x0,
2. sia g′(x0) 6= 0 su I − {x0},
3. limx→x0
f(x) = limx→x0
g(x) = 0 oppure limx→x0
f(x) = limx→x0
g(x) = ±∞
4. ∃ limx→x0
f ′(x)
g′(x)
Tesi:
1. ∃ limx→x0
f(x)
g(x), 2. lim
x→x0
f(x)
g(x)= limx→x0
f ′(x)
g′(x)
In altre parole se il limite del rapporto tra due funzioni e una forma indetermi-
nata 00 o ±∞±∞ ed esiste il limite del rapporto tra le derivate delle funzioni stesse,
allora questo e uguale al limite del rapporto tra le funzioni di partenza4.
Attenzione a non abusare di questo teorema: puo funzionare soltanto quan-
do si parte da una situazione in cui siamo in presenza di una forma indeterminata
e si puo applicare solo nei casi in cui esiste il limite del rapporto delle derivate.
Esempio 6.10. Alcuni casi in cui non si puo utilizzare il teorema:
• limx→0+
ln(x)
x= −∞.
Non siamo di fronte a una forma indeterminata. Se si utilizzasse erronea-
mente De L’Hospital, otterremmo limx→0+
11x
= 0.
• limx→+∞
x+ sin(x)
x− cos(x)da luogo a una forma indeterminata e si risolve facilmen-
te considerando il comportamento asintotico delle funzioni: il risultato e
1. Non possiamo applicare De L’Hospital, in quanto limx→+∞
1 + cos(x)
1 + sin(x)non
4Vale anche per i limiti con x→∞.

70 Il calcolo differenziale
esiste: questo non significa che il limite di partenza non esiste ma solo che
il teorema e inefficace.
Derivate di ordine superiore
Per una funzione f : I → R e possibile definire anche le cosiddette derivate di
ordine superiore che sono sostanzialmente l’applicazione dell’operatore derivata
piu di una volta. Se lo applichiamo due volte, chiaramente oltre ad avere f
derivabile e necessario che anche f ′ sia derivabile, cioe f due volte derivabile;
si parla dunque di derivata seconda quando si fa la derivata della derivata e si
indica f ′′(x) o∂2f
∂x2.
Equivalentemente si puo parlare di derivata terza, f ′′′(x), quarta e cosı via. In
generale la derivata di ordine n per una funzione n volte derivabile si indica
con f (n)(x) o∂nf
∂xn. Una funzione n volte derivabile su un intervallo I si dice
appartenente a Cn(I); se la funzione e infinite volte derivabile si dice che f ∈C∞(I). Tutti i polinomi, le funzioni esponenziali e logaritmiche e le funzioni
trigonometriche sono infinite volte derivabili nel loro dominio di definizione.
Le derivate di ordine superiore ci consentono un’analisi piu approfondita
dello studio di una funzione e un ruolo molto importante lo gioca la derivata
seconda.
Massimi e minimi locali
Se f : I → R, f ∈ C2(I), sappiamo che essa ha dei punti stazionari x0 ∈ I
se f ′(x0) = 0. Questo pero non e sufficiente per classificare i punti critici;
per farlo abbiamo bisogno di ulteriori informazioni. Infatti, per capire se un
punto stazionario e un massimo o un minimo o un flesso orizzontale possiamo
utilizzare due metodi: il test della derivata prima e il test della derivata seconda
(che consistono negli studi dei segni delle derivate, prime e seconde).
Test della derivata prima
Sia f una funzione derivabile e sia x0 un punto critico per f , cioe f ′(x0) =
0, allora:
• se f ′(x) > 0 per x < x0 e f ′(x) < 0 per x > x0 allora x0 e un punto di
massimo locale e f(x0) un massimo locale;
• se f ′(x) < 0 per x < x0 e f ′(x) > 0 per x > x0 allora x0 e un punto di
minimo locale e f(x0) un minimo locale;
• se f ′(x) ha lo stesso segno in tutto un intorno di x0 allora x0 e un punto
di flesso orizzontale (crescente o decrescente a seconda del segno).
Test della derivata seconda
Sia f una funzione derivabile e sia x0 un punto critico per f , cioe f ′(x0) =
0, allora:
• se f ′′(x0) > 0 allora x0 e un punto di minimo locale;
6.6. Polinomi di Taylor 71
• se f ′′(x0) < 0 allora x0 e un punto di massimo locale.
Se f ′′(x0) = 0 il test e inefficace ed e necessario ricorrere alle derivate di
ordine superiore.
Intervalli di concavita
La derivata seconda di una funzione ci permette anche di definire la concavita
di una funzione (sempre se questa e due volte derivabile). D’altra parte la
concavita e un concetto che esula abbastanza dal calcolo differenziale.
In termini informali una funzione f si dice concava verso l’alto o convessa
su un intervallo I interno al dominio di definizione se dati due punti a e b interni
a I tali che a < b il segmento che congiunge i due punti si trova sempre sopra al
grafico della funzione. Viceversa una funzione si dice concava verso il basso
o semplicemente concava se dati due punti a e b interni a I tali che a < b.
il segmento che congiunge i due punti si trova sempre sotto al grafico della
funzione.
Qualora la funzione sia derivabile, possiamo dire che
• se la funzione e convessa allora la retta tangente in ogni punto interno
all’intervallo si trova sempre sotto al grafico della funzione
• se la funzione e concava allora la retta tangente in ogni punto interno
all’intervallo si trova sempre sopra al grafico della funzione
I punti x0 in cui la funzione cambia concavita sono i punti di flesso della
funzione. Se la funzione e crescente in x0 allora x0 e un flesso ascendente, se
essa e decrescente in in x0 allora x0 e un flesso discendente.
Inoltre, se f : I → R e una funzione due volte derivabile, f ′′(x) ci fornisce
importanti informazioni sulla concavita della funzione stessa e quindi ci permette
di individuarne i punti di flesso (per farlo possiamo utilizzare il test di concavita).
Nota bene: I punti di flesso rappresentano generalmente i punti in cui
la funzione ha massima (o minima) pendenza: essendo punti che annullano la
derivata seconda, i flessi sono dei punti stazionari per la derivata prima e, nel
caso questi punti stazionari per la derivata prima rappresentino dei massimi o
minimi locali, essi sono chiaramente punti di massima o minima pendenza della
funzione.
Test di concavita
• Se f ′′(x) > 0 la funzione e strettamente convessa.
• Se f ′′(x) < 0 la funzione e strettamente concava.
6.6 Polinomi di Taylor
Poiche i polinomi sono le funzioni piu facili da trattare e analizzare, quando
si riesce e molto comodo approssimare funzioni complicate ad essi. Cerchiamo

72 Il calcolo differenziale
quindi un metodo per approssimare una qualsiasi funzione per mezzo di un poli-
nomio in un intorno di un determinato punto. Questo procedimento e gia stato
effettuato nello studio della retta tangente a una funzione in un punto interno
al dominio della stessa: abbiamo gia visto infatti che essa rappresenta il polino-
mio di Taylor di primo grado in quel punto. Per ottenere una approssimazione
migliore della funzione in un punto occorre pero ricorre a polinomi di grado
superiore.
Prendiamo una funzione f ∈ C1(I) e un punto x0 ∈ I: la retta tangente
y = f(x0) + f ′(x0)(x− x0) (6.11)
e il polinomio di Taylor di primo grado della funzione e si puo indicare
T1,x0(f) cioe polinomio di Taylor di grado 1 in x0. La funzione puo essere
quindi approssimata in un intorno di x0:
f(x) = f(x0) + f ′(x0)(x− x0) + o(x− x0) (6.12)
dove come sappiamo o(x−x0) rappresenta dei polinomi che tendono a 0 piu
velocemente di x− x0 per x→ x0. Ne risulta che
f(x)− f(x0)− f ′(x0)(x− x0) = o(x− x0) (6.13)
cioe f(x)− f(x0)− f ′(x0)(x− x0) e un infinitesimo di grado superiore a 1.
Proviamo a vedere se e un infinitesimo di grado 2, dividiamolo per (x − x0)2
e osserviamo che cosa otteniamo (occorre a questo punto aggiungere l’ulteriore
ipotesi che f(x) sia due volte derivabile, infatti):
limx→x0
f(x)− f(x0)− f ′(x0)(x− x0)
(x− x0)2= (H) = lim
x→x0
f ′(x)− f ′(x0)
2(x− x0)=
1
2f ′′(x0)
(6.14)
Se f ′′(x0) 6= 0 i due infinitesimi hanno lo stesso ordine e possiamo scrivere
una migliore approssimazione di f(x) in x0:
f(x) = f(x0) + f ′(x0)(x− x0) +1
2f ′′(x0)(x− x0)2 + o((x− x0)2) (6.15)
Il polinomio di Taylor di secondo grado e quindi:
T2,x0(f) = f(x0) + f ′(x0)(x− x0) +1
2f ′′(x0)(x− x0)2 (6.16)
che rappresenta una parabola che approssima la curva f(x) in un intorno di
x0.
Se la funzione e n volte derivabile si puo andare avanti iterando il ragiona-
mento e trovando il polinomio di Taylor di grado n in x0:

6.6. Polinomi di Taylor 73
Tn,x0(f) = f(x0) + f ′(x0)(x− x0) +1
2f ′′(x0)(x− x0)2 + · · ·+ f (n)(x0)
n!(x− x0)n
(6.17)
=
n∑k=0
f (k)(x0)
k!(x− x0)k (6.18)
dove k indica l’ordine di derivazione ed f (0) rappresenta quindi la funzione
stessa.
Esempio 6.11. Lo sviluppo di Taylor del secondo ordine della funzione f(x) =
ex2
in x0 = 1 e il seguente:
f(1) = e f ′(x) = 2xex2
⇒ f ′(1) = 2e
f ′′(x) = 2ex2
+ 4x2ex2
⇒ f ′′(1) = 6e
T2,1(ex2
) = e+ 2e(x− 1) + 3e(x− 1)2
In generale una funzione si puo scrivere in modo approssimato con il suo
sviluppo di Taylor con resto di Peano:
n∑k=0
f (k)(x0)
k!(x− x0)k + o((x− x0)n) (6.19)
dove o((x− x0)n) e il resto di Peano, un infinitesimo di grado superiore a n.
In particolare, se lo sviluppo vene fatto nel punto x0 = 0 si parla di svi-
luppo di MacLaurin: gli sviluppi di MacLaurin sono molto utili anche nella
risoluzione delle forme indeterminate dei limiti (essi si trovano in quasi tutti i
libri di analisi gli sviluppi di MacLaurin delle funzioni elementari e in Appendice
ne trovate alcuni). Data una funzione f , il suo sviluppo di Mac Laurin si puo
esprimere nel modo seguente:
f(x) =
n∑k=0
f (k)(0)
k!xk + o(xn) (6.20)
Vediamo ad esempio lo sviluppo di ex; essendo tutte le derivate uguali, se le
calcoliamo in 0 viene sempre il valore 1, quindi:
ex =
n∑k=0
xk
k!+ o(xn) (6.21)
Osserviamo ora come possiamo farci aiutare degli sviluppi delle funzioni per
risolvere delle forme indeterminate:
Esempio 6.12.
limx→0
sinx− xx3
= limx→0
x− x3
6 + o(x3)− xx3
= limx→0
−x3
6 + o(x3)
x3= −1
6(6.22)
qui e stato usato lo sviluppo di sinx al terzo ordine.

74 Il calcolo differenziale

7 L’integrale di Riemann
7.1 Calcolo dell’area
Sebbene la teoria dell’integrazione si sia sviluppata soprattutto con Riemann1
alla fine del XIX secolo, essa nasce molti anni prima con gli studi e i lavori di
alcuni dei personaggi piu rilevanti della cultura ellenica come Euclide, Eudosso
di Cnide e Archimede. Nel periodo greco infatti, ci si era gia posti il problema
di calcolo di aree e volumi ed e proprio all’epoca che venne introdotto il metodo
di esaustione che e alla base della teoria dell’intregazione.
La geometria euclidea introdotta nella scuola primaria e secondaria ci ha
insegnato a calcolare le aree delle figure elementari come triangoli, rettango-
li, poligoni, cerchi. La questione pero si complica nel momento in cui si deve
misurare l’area di una curva chiusa piu generale e non regolare. Il problema,
prima ancora del calcolo vero e proprio, e quello di definire cosa si intende per
misura di un’area. Riemann definı con approssimazioni successive il computo
dell’area che sottende una funzione sul piano cartesiano. Successivamente il
concetto venne generalizzato a qualunque curva in qualunque dimensione (ad
esempio per il calcolo dei volumi). In questo capitolo cercheremo di ripercorrere
la definizione di integrale di Riemann e soprattutto vedremo il legame impre-
scindibile tra due teorie apparentemente scorrelate: il calcolo differenziale e il
calcolo integrale che, grazie al lavoro dei piu grandi matematici del XVIII e XIX
secolo, diventano due facce della stessa medaglia.
Un primo approccio di calcolo dell’area compresa tra una curva definita da
una funzione f : [a, b]→ R e l’asse x e quello di approssimare l’area della figura
con tanti rettangoli, con basi via via piu strette, in modo tale da averne una
stima sempre piu precisa.
7.2 Somme di Darboux
Consideriamo con una funzione sempre positiva, limitata (non necessariamente
continua) e definita su un intervallo: f : [a, b] → R e cerchiamo di calcolare
1Georg Friedrich Bernhard Riemann (1826-1866) e un matematico e fisico tedesco.I suoi
studi in geometria ed analisi complessa non hanno solo fatto nascere la teoria dell’integrazione,
ma hanno rivoluzionato gli approcci ad esse. La sua congettura inerente ai numeri primi hanno
rivoluzionato gli approcci rimane uno dei principali problemi su cui lavorano i matematici
dall’epoca ad oggi.
75

76 L’integrale di Riemann
l’area dell parte di piano compresa tra la funzione e l’asse x limitatamente
all’intervallo [a, b] suddividendo l’intervallo in n intervallini uguali di estremi xie xi+1. Chiamiamo x0 = a, xn = b e via via tutti gli altri xi saranno compresi
tra a e b.
Su ogni intervallo [xi, xi+1] la funzione f(x) ammette un estremo inferiore e un
estremo superiore, che chiameremo:
mi = inf[xi,xi+1]
f(x) Mi = sup[xi,xi+1]
f(x) (7.1)
Possiamo approssimare l’area cercata per difetto con la somma dei rettangoli
che hanno come base xi+i−xi e come altezzami, oppure possiamo approssimarla
per eccesso con la somma dei rettangoli che hanno come base xi+i − xi e come
altezza Mi; l’area A cercata sara compresa tra questi due valori trovati:
sn =
n∑i=0
mi(xi+i − xi) ≤ A ≤n∑i=0
Mi(xi+i − xi) = Sn (7.2)
Chiamiamo l’approssimazione per difetto somme inferiori (o somme inferiori di
Darboux) sn e quella per eccesso somme superiori (o somme superiori di Dar-
boux) Sn. Tale area puo essere approssimata meglio se gli intervalli diventano
sempre piu piccoli e facendo quindi tendere n all’infinito. Rendendo piu fine la
partizione dell’intervallo le somme inferiori diventano sempre piu grandi e vi-
ceversa le somme superiori diventano sempre piu piccole, tendendo sempre piu
entrambe all’area reale.
Chiamiamo P l’insieme di tutte le possibili partizioni p dell’intervallo [a, b].
Fra tutte le p, esistera un estremo superiore per le somme inferiori e un estremo
inferiore per le somme superiori:
s = supp∈P
sn S = supp∈P
Sn (7.3)
L’area cercata sara sempre compresa tra s ≤ A ≤ S. Se s = S allora anche
A = s = S e in questo caso si dice la funzione e integrabile secondo Riemann
e si indica
A =
∫ b
a
f =
∫ b
a
f(x)dx (7.4)
Nota bene: l’equivalenza tra calcolo dell’area e il calcolo dell’integrale e
dovuta al fatto di prendere in considerazione funzioni sempre positive. Con la
definizione che abbiamo dato se la funzione fosse stata negativa per alcuni tratti
avremmo trovato un’area negativa. L’integrale di Riemann misura quindi le aree
in senso algebrico cioe considera negative le aree che stanno sotto l’asse x.
Per determinare l’area vera e propria, cioe sommando (e non sottraendo) anche
le aree che si trovano sotto l’asse x, dovremmo ribaltare tutto cio che sta sot-
to l’asse con una simmetria rispetto all’asse x. Per farlo utilizziamo pertanto
la funzione valore assoluto e l’applichiamo alla nostra funzione:|f(x)|. L’area
diventera quindi:
A =
∫ b
a
|f | (7.5)

7.3. Integrabilita secondo Riemann 77
7.3 Integrabilita secondo Riemann
E’ molto raro trovare una funzione che non sia integrabile secondo Riemann,
la maggior parte delle funzioni con cui abbiamo avuto a che fare sono sempre
state funzioni integrabili2. Uno dei pochi esempi noti e il seguente.
Esempio 7.1. Consideriamo la funzione di Dirichlet χ(x). Essa e definita da
χ(x) =
{1 x ∈ Q−1 x ∈ R−Q
(7.6)
E’ una funzione impossibile da rappresentare graficamente. Le somme inferiori
sono sempre uguali a −1 e le somme superiori sono sempre uguali a 1 perche
per quanto sia fine la suddivisione in intervallini, Q e denso in R e quindi al-
l’interno dell’intervallino ci sara sempre sia un numero razionale che un numero
irrazionale.
Se consideriamo un intervallo chiuso e una funzione limitata definita su tale
intervallo ci accorgiamo altresı che la continuita e una condizione sufficiente ma
non necessaria per l’integrabilita.
Teorema 7.2. Sia f : [a, b]→ R allora
1. se f e limitata e continua tranne al piu per un numero finito di punti
allora e integrabile
2. se f e monotona (anche con infinite discontinuita) allora e integrabile.
E’ chiaro che non vale il viceversa, una funzione integrabile non e necessa-
riamente ne continua ne monotona.
7.4 Proprieta dell’integrale
Consideriamo una funzione integrabile f [a, b]→ R sull’intervallo [a, b]. La defi-
nizione di integrale di Riemann per tale funzione si puo estendere con le seguenti
convenzioni: ∫ a
a
f = 0
∫ a
b
f = −∫ b
a
f (7.7)
cioe se integriamo su un insieme di misura nulla otteniamo un’area di misura
nulla e se scambiamo gli estremi di integrazione e andiamo da destra verso
sinistra le aree vengono considerate con segno negativo.
Linearita dell’integrale
Se f e g sono funzioni integrabili definite sull’intervallo [a, b] e k, h sono due
numeri reali allora k ·f+h ·g e ancora una funzione integrabile e vale la seguente
relazione: ∫ b
a
(k · f + h · g) = k
∫ b
a
f + h
∫ b
a
g (7.8)
2D’ora in avanti quando useremo la nozione ”’integrabile”’ sara sottinteso ”’integrabile
secondo Riemann”’.

78 L’integrale di Riemann
Additivita dell’integrale
In questo caso si parla di additivita dell’integrale rispetto al dominio di defini-
zione. Sia data f : I → R. Allora ∀ a, b, c ∈ I con a < c < b, vale:∫ b
a
f =
∫ c
a
f +
∫ b
c
f (7.9)
o equivalentemente, ∫ b
a
f −∫ c
a
f =
∫ b
c
f (7.10)
Disuguaglianza triangolare
Ricordiamo che l’area che sottende il grafico di una funzione f : [a, b] → R e
data da
∫ b
a
|f |. In generale una funzione |f | puo essere integrabile anche se f
non lo e (si pensi alla funzione di Dirichlet), viceversa, se f e integrabile lo e
anche |f |. Ed e proprio per le precedenti considerazioni che vale la seguente
disuguaglianza: ∣∣∣∣∣∫ b
a
f
∣∣∣∣∣ ≤∫ b
a
|f | (7.11)
Positivita dell’integrale
Se f : [a, b] → R e integrabile su [a, b] e f(x) ≥ 0 per ogni x ∈ [a, b] allora∫ b
a
f ≥ 0.
Se invece f , oltre a essere sempre non negativa, e anche una funzione continua
e
∫ b
a
f = 0 allora necessariamente f(x) = 0 ∀x ∈ [a, b].
Monotonia dell’integrale
Siano f, g : [a, b] → R due funzioni integrabili tali che f(x) ≤ g(x) per ogni
x ∈ [a, b] allora vale sempre ∫ b
a
f ≤∫ b
a
g (7.12)
Media integrale
Definizione 7.3. Si definisce media integrale di una funzione f integrabile
sull’intervallo [a, b] il numero
µ =1
b− a
∫ b
a
f(x)dx
Tale numero rappresenta l’altezza del rettangolo di base b − a che ha area
equivalente all’area compresa tra la curva e l’asse x per la funzione f .

7.5. Teorema fondamentale del calcolo integrale 79
Teorema 7.4. Si puo dimostrare che se f : [a, b] → R e continua allora esiste
c ∈ [a, b] tale che
1
b− a
∫ b
a
f(x)dx = f(c) (7.13)
Il teorema ci dice che esiste un punto dell’immagine di f , f(c) corrispondente
ad un punto c ∈ [a, b], per cui l’area del rettangolo di base b− a e altezza f(c)
e uguale all’area sottostante il grafico della funzione.
Dimostrazione. Osserviamo prima di tutto che, per il Teorema di Weierstrass,
una funzione continua definita su un intervallo chiuso ammette sempre massimo
e minimo assoluto. Se m e M sono rispettivamente minimo e massimo di f ,
m ≤ f(x) ≤ M . L’area compresa tra la curva e l’asse x sara quindi compresa
tra
m(b− a) ≤∫ b
a
f ≤M(b− a) ⇒ m ≤ 1
b− a
∫ b
a
f ≤M (7.14)
Poiche, per il teorema dei valori intermedi per le funzioni continue f(x) assume
tutti i valori compresi tra m e M esistera sicuramente un punto c tale che
f ′(c) =1
b− a
∫ b
a
f (7.15)
Funzioni integrali
Supponiamo di avere sempre a che fare con una funzione f integrabile su un
intervallo [a, b] e di integrare tale funzione mantenendo fisso l’estremo a e facendo
variare il secondo estremo t tra a e b. Otteniamo una funzione che calcola l’area
sotto alla curva y = f(x) al variare di t, se chiamiamo F (t) tale funzione essa
puo essere descritta nel modo seguente3:
F (t) =
∫ x
a
f(x)dx (7.16)
7.5 Teorema fondamentale del calcolo integrale
Il calcolo integrale non avrebbe avuto forse una importanza cosı rilevante se non
fosse strettamente collegato alle primitive delle funzioni integrande. Il legame
tra il calcolo integrale e le primitive delle funzioni e stato messo in evidenza con
il cosiddetto teorema fondamentale del calcolo integrale, suddiviso in due parti,
la prima detta anche di Torricelli-Barrow, la seconda detta anche formula di
Newton-Leibniz.
3Non e possibile utilizzare la stessa variabile sia per la funzione integranda che per la
funzione integrale, per questo abbiamo fatto uso di una variabile ausiliaria.

80 L’integrale di Riemann
Teorema 7.5 (Teorema fondamentale del calcolo - prima parte). Sia f(t) :
[a, b]→ R una funzione continua e sia F (x) =
∫ x
a
f(t)dt. Allora:
F (x) e derivabile e F ′(x) = f(x).
Dimostrazione. Per dimostrare questa prima parte si utilizza la definizione di
derivata di F (x) e il teorema della media integrale:
F ′(x) = limh→0
F (x+ h)− F (x)
h= limh→0
∫ x+ha
f(t)dt−∫ xaf(t)dt
h= limh→0
∫ x+hx
f(t)dt
h(7.17)
Per il teorema della media integrale, essendo f continua, esiste sempre un punto
c ∈ [x, x+ h] tale che
f(c) =1
x+ h− x
∫ x+h
x
f(t)dt ⇒∫ x+h
x
f(t)dt = h · f(c) (7.18)
Quando h→ 0, essendo c compreso tra x e x+ h, c→ x,
limh→0
h · f(c)
h= f(x) (7.19)
Teorema 7.6 (Teorema fondamentale del calcolo - seconda parte). Sia f(t) :
[a, b]→ R una funzione continua e sia P (x) una primitiva di f(x). Allora∫ b
a
f(x)dx = P (b)− P (a) (7.20)
Dimostrazione. Definiamo la funzione integrale F (x) =
∫ x
a
f(x)dx e definiamo
D(x) = P (x)−F (x). Se deriviamo la funzione D(x), otteniamo la funzione nulla
perche la derivata di F (x) per la prima parte del teorema vale f(x) mentre la
derivata di P (x) e uguale a f(x) per sua stessa definizione: D′(x) = 0. Pertanto
D(x) = k costante.
Essendo D(x) una funzione costante, D(a) = D(b) = k.
D(b) = D(a) ⇒ P (b)− F (b) = P (a)− F (a) (7.21)
ma F (a) = 0 per come e stata definita, quindi
P (b)− P (a) = F (b) =
∫ b
a
f(x)dt (7.22)
Una conseguenza di tale formula, combinata con le proprieta dell’integrale
definito e la seguente:

7.6. Tecniche di integrazione 81
Corollario 7.7. Date a(x) e b(x) funzioni derivabili,
Se F (x) =
∫ b(x)
a(x)
f(t)dt ⇒ F ′(x) = f(b(x))b′(x)− f(a(x))a′(x) (7.23)
Nel calcolo integrale assume quindi importanza rilevante il calcolo delle pri-
mitive delle funzioni. Purtroppo non esistono regole per trovare le primitive ma
solo tecniche che servono a semplificare i calcoli. Le primitive di alcune funzioni
elementari si possono trovare in fondo ad ogni libro di analisi insieme alla tabella
delle derivate. Per funzioni piu elaborate pero si ricorre ad alcune tecniche di
integrazione che vengono comunque dal calcolo differenziale.
7.6 Tecniche di integrazione
Quando parliamo di tecniche di integrazione in realta ci riferiamo a tecniche
per trovare le primitive, o meglio, si tratta di tecniche volte a semplificare la
ricerca delle primitive. A volte si usa il simbolo di integrale senza estremi di
integrazione per indicare che si sta cercando una primitiva. L’uso di tale simbolo
(integrale indefinito) non ha molto senso matematicamente perche un integrale
non puo essere definito senza estremi di integrazione. Molti libri di testo pero lo
utilizzano per indicare appunto che stiamo cercando una primitiva della funzione
data.
Se F ′(x) = f(x) ⇒ F (x) =
∫f(x)dx+ C (7.24)
con C ∈ R.
Primitive immediate
In alcuni casi, partendo dalla derivata di funzione composte, si possono dedurre
le primitive di alcune funzioni. Quelli che proponiamo sono pochi degli innu-
merevoli casi di derivazione di funzioni composte. Partendo ad esempio dalla
funzione log(f(x)) e derivando si ottiene:
D(log(f(x))) =f ′(x)
f(x)⇒
∫f ′(x)
f(x)dx = log(|f(x)|) + C (7.25)
Tale formula permette di ricavare le primitive della funzione tan(x):
∫tanx dx =
∫sinx
cosxdx = −
∫− sinx
cosx= − log(|cosx|) + C (7.26)
Ecco alcuni altri casi che si possono verificare facilmente calcolando la deri-
vata della primitiva:

82 L’integrale di Riemann
∫fn(x)f ′(x)dx =
fn+1(x)
n+ 1+ C ∀n 6= −1∫
ef(x)f ′(x)dx = ef(x) + C∫cos(f(x))f ′(x)dx = sin(f(x)) + C∫f ′(x)
1 + f2(x)= arctan(f(x)) + C
· · · (7.27)
Integrazione per parti
Dalla formula per il calcolo della derivata del prodotto tra due funzioni si puo
ricavare la formula di integrazione per parti. Sia l’integrazione per parti che
quella per sostituzione non risolvono l’integrale ma lo trasformano (in alcuni
casi) in uno piu semplice.
Teorema 7.8. Siano f, g : [a, b] → R funzioni derivabili su I, allora vale la
seguente relazione:∫ b
a
f ′(x)g(x)dx = [f(x)g(x)]ba −
∫ b
a
f(x)g′(x)dx (7.28)
Dimostrazione. Dalla derivata del prodotto
D(f · g) = f ′g + fg′
integrando ambo i membri sull’intervallo [a, b] si ricava:
[f · g]ba =
∫ b
a
f ′g +
∫ b
a
fg′
da cui segue la tesi.
La formula di integrazione per parti consente di trovare la primitiva di
funzioni come log(x) e arctan(x):
∫log(x)dx =
∫1 · log(x)dx = x log(x)−
∫x · 1
x= x log(x)− x+ C (7.29)
Integrazione per sostituzione
La formula di integrazione per sostituzione si ricava dalla derivata delle funzioni
composte.
Teorema 7.9. Sia f : [a, b] → R una funzione integrabile e g(t) una funzione
derivabile con gli estremi di integrazione a e b che appartengono all’immagine
di g, allora

7.6. Tecniche di integrazione 83
∫ b
a
f(x)dx =
∫ g−1(b)
g−1(a)
f(g(t))g′(t)dt (7.30)
La dimostrazione segue direttamente dalla derivata delle funzioni composte.
Un’integrale che richiede una sostituzione molto speciale e il seguente:∫ 1
−1
√1− x2dx (7.31)
Trattandosi di una semicirconferenza di raggio 1 con centro nell’origine il
risultato dell’integrale deve essereπ
2. E’ difficile pero arrivare a tale risultato
senza effettuare una sostituzione (si potrebbe integrare per parti ma sarebbero
richiesti molti calcoli). La sostituzione non banale e la seguente: x = g(t) = sin t
e in effetti, come puo venire come risultato π2 se non ci sono in ballo funzioni
trigonometriche?
g(t) = sin t g′(t) = cos t g−1(x) = arcsinx g−1(−1) = −π2, g−1(1) =
π
2∫ 1
−1
√1− x2dx =
∫ π2
−π2
√1− sin2 x · cosxdx =
∫ π2
−π2cos2 xdx = · · · = π
2
Primitive non elementari
Come dicevamo trovare una primitiva di una funzione non e facile come deri-
varla: non disponiamo di formule come quelle per la derivata del prodotto, del
quoziente o della composizione di funzioni che ci consentono, di arrivare in gene-
rale a trovare il valore della derivata. Le primitive di molte funzioni non possono
essere nemmeno espresse attraverso funzioni elementari.Un esempio classico e
f(x) = e−x2
la funzione gaussiana. Non riusciremo mai a trovarne una pri-
mitiva in termini di funzioni elementari a meno che non usiamo la definizione
stessa di primitiva come funzione integrale:
F (x) =
∫ x
0
e−t2
dt
Tale primitiva e una primitiva della gaussiana che passa per l’origine.
Questo non significa che la gaussiana non e integrabile, essendo
una funzione continua lo e. Per trovare funzioni non integrabili siamo dovuti
ricorre a definizioni tipo quella di Dirichlet. Il fatto di non riuscire a trovare una
primitiva non significa che la funzione non sia integrabile, d’altra parte anche
molte funzioni discontinue sono integrabili.
Ogni primitiva puo essere espressa come funzione integrale, ad esempio, la
primitiva di f(x) = 2x passante per l’origine e F (x) = x2. Essa puo anche
essere scritta nel modo seguente:
F (x) = x2 =
∫ x
0
2t dt

84 L’integrale di Riemann
7.7 Integrali Impropri
Finora abbiamo considerato l’integrazione di funzioni continue o con disconti-
nuita di salto in qualche punto e abbiamo visto che comunque esse sono in-
tegrabili. Ma cosa succede se una funzione tende all’infinito in un estremo
dell’intervallo di definizione? E’ possibile calcolare l’area di una regione illimi-
tata? E se fosse possibile, l’area e sempre infinita? Si avrebbe lo stesso problema
se l’intervallo di integrazione fosse infinito.
Si parla in questo caso di integrali in senso generalizzato o integrali
impropri. Per capire meglio di cosa si tratta analizziamo la funzione:
1
xα
prima nell’intervallo ]0, 1[ poi nell’intervallo ]1,+∞[
Primo caso: intervallo finito con una discontinuita di infinito.
∫ 1
0
1
xαdx =
[x1−α
1− α
]10
=1
1− α− limx→0
x1−α
1− α
L’integrazione ha senso per α 6= 1, se α = 1,∫ 1
0
1
xdx = [log x]
10
Se α < 1 l’integrale e convergente, mentre in tutti gli altri casi l’integrale e
divergente.
Secondo caso: intervallo infinito.
∫ +∞
1
1
xαdx =
[x1−α
1− α
]+∞1
=1
1− α− limx→+∞
x1−α
1− α
L’integrazione ha senso per α 6= 1, se α = 1,∫ +∞
1
1
xdx = [log x]
+∞1
Se α > 1 l’integrale e convergente, mentre in tutti gli altri casi l’integrale e
divergente. Quest’ultimo caso e analogo al caso della funzione armonica per le
serie numeriche.
Per quanto riguarda una qualsiasi funzione f(x) si puo capire la convergenza
o la divergenza dell’integrale confrontandola con le funzioni armoniche appena
citate. Vediamo un esempio:
Esempio 7.10.
∫ +∞
0
x2√(x2 + 1)3
dx
La funzione integranda non ha problemi di discontinuita ne in x = 0 in cui
vale 0, ne in nessun altro punto della retta reale visto che il denominatore non
si annulla mai. L’unico problema e la convergenza dell’integrale a +∞:
x2√(x2 + 1)3
∼ x2
x3=
1
xper x→ +∞

7.7. Integrali Impropri 85
L’integrale della funzione armonica1
xnon converge verso infinito perche α = 1,
pertanto l’integrale di partenza diverge.

86 L’integrale di Riemann

8 Equazioni differenziali
ordinarie
Si chiamano equazioni differenziali quelle equazioni le cui incognite non sono va-
riabili reali ma funzioni di una o piu variabili. Le equazioni differenziali possono
coinvolgere le derivate di qualsiasi ordine delle funzioni incognite ma , nel caso di
funzioni di una sola variabile indipendente si parla di equazioni differenziali
ordinarie il cui ordine e il grado della derivata piu alta presente nell’equazio-
ne. Per casi di funzioni di piu variabili indipendenti si parla di equazioni alle
derivate parziali che pero non tratteremo in questi appunti. Le sole equazioni
che tratteremo sono solo alcuni tipi di equazioni differenziali del primo ordine
che quindi coinvolgono solo la derivata prima della funzione incognita oltre alla
funzione stessa.
Le derivate sono molto importanti per creare dei modelli matematici di fe-
nomeni che ci circondano e vengono utilizzate in tutti in vari compi: fisica,
chimica, biologia, elettrotecnica, economia, ecc...
La notazione che utilizzeremo per le equazioni differenziali e la seguente: di
solito indichiamo con y(x) la funzione incognita, x la sua variabile e y′(x) la
sua derivata prima. In generale risolveremo alcune equazioni differenziali della
forma
y′ = f(x, y) (8.1)
in cui e stato omessa la dipendenza della funzione y dalla variabile x: si tratta
di una abbreviazione della equazione y′(x) = f(x, y(x)).
In alcuni casi, soprattutto nei sistemi fisici, molte funzioni dipendono dal
tempo, ad esempio y(t) o x(t): in questo caso le derivate si indicano con uno o
piu punto sopra la funzione piuttosto che con un apice ma il succo non cambia:
x(t) = f(t, x(t)) (8.2)
8.1 Problemi di Cauchy
In generale la soluzione di una equazione differenziale non e unica, si pensi alla
semplice equazione y′ = y. Chiaramente y(x) = ex e soluzione di tale equazione
ma se ci pensate anche tutte le funzioni del tipo y(x) = cex sono soluzioni
compresa la soluzione nulla y(x) = 0. Cio e causato chiaramente dal fatto che
87

88 Equazioni differenziali ordinarie
la primitiva di una funzione non e unica se non imponiamo delle condizioni
iniziali; cos’e che quindi rende unica la soluzione di una equazione differenziale?
Se imponiamo la condizione y(0) = 1 l’unica soluzione dell’equazione pre-
cedente e chiaramente y(x) = ex; se imponiamo che y(0) = 0 l’unica soluzione
sara quella nulla. In tal caso si dice che poniamo un Problema di Cauchy
(PC), cioe una equazione differenziale con condizione iniziale.
E’ sufficiente questa condizione per rendere unica la soluzione di una equa-
zione differenziale?
In realta cio non e sufficiente, si prenda ad esempio il problema di Cauchy:{y′ = 3y
23
y(0) = 0(8.3)
in cui una delle soluzioni e sicuramente y(x) = 0 ma anche la funzione y(x) = x3
e soluzione, provate a sostituire la funzione nell’equazione differenziale se non
ci credete!
Come possiamo quindi rendere unica la soluzione del PC? Il teorema che
assicura l’esistenza di una e una sola soluzione del PC e il Teorema di Cauchy-
Lipschitz che non tratteremo ma ne fornire mo solo la seguente versione ridon-
dante:
Teorema 8.1. Consideriamo il Problema Di Cauchy:{y′(x) = f(x, y(x))
y(x0) = y0
Se la funzione (di due variabili) f(x, y) e continua se consideriamo x come
variabile e y come costante e possiede derivata parziale continua rispetto a y,
cioe se derivando rispetto a y (considerando x costante) otteniamo una funzione
continua, allora esiste un’unica soluzione del Problema di Cauchy in un intorno
del punto x0, y0 e quindi un’unica soluzione locale.
In effetti nell’esempio che abbiamo riportato con piu di una soluzione 2√|y|
non aveva derivata continua in (0, 0) e di fatto la soluzione non era unica. Cio
non significa che tutte le equazioni con derivate parziali non continue abbiano
necessariamente infinite soluzione, pero siamo sicuri che se le derivate parziali
sono continue la soluzione e localmente unica.
L’unicita e in ogni caso assicurata in un intorno del PC, perche e difficile
stabilire il dominio della soluzione dell’equazione differenziale e la prolungabilita
della stessa.
Codominio, dominio e di prolungabilita della soluzione
Non analizzeremo nel dettaglio il dominio della soluzione di una equazione dif-
ferenziale ne del prolungamento della stessa l di fuori dell’intorno che contiene
il punto del Problema di Cauchy. In ogni caso cerchiamo di capire con un paio
di esempi come si comportano le soluzioni dei PC:

8.2. Equazioni a variabili separabili 89
{y′(x) = y2
y(0) = 1
non ha problemi di dominio ne per la variabile x, ne per la y pero la so-
luzione e y(x) =1
1− xche e non definita in x = 1, il suo dominio sarebbe
] −∞, 1[∪]1,+∞[: poiche il punto del PC, (0, 1), appartiene al primo dei due
sottointervalli possiamo prolungare la soluzione solo su tutto il primo dei due
sottointervalli e quindi Dom(y) =]−∞, 1[.
Il codominio della soluzione in questo caso si puo evincere dall’equazione
differenziale: notiamo che la soluzione non puo passare per l’asse x (y = 0)
perche se passasse per l’asse x esisterebbe un punto per cui y(x0) = 0. In tale
punto la derivata prima sarebbe nulla (dall’equazione differenziale y2 si annulla
per y = 0) e quindi la soluzione dovrebbe essere costante e uguale a 0 (MA
y(0) = 1) e cio e una contraddizione! Questo sarebbe vero solo se il problema
di Cauchy fosse y(x0) = 0 ma in questo caso l’unica soluzione sarebbe quella
nulla.
Necessariamente la soluzione non passa per 0 e quindi deve trovarsi sempre
sopra o sempre sotto l’asse x, in questo caso si trova sempre sopra perche y(0) =
1 e un punto in cui sta sopra l’asse x. Questo significa che il Cod(y) e un
sottoinsieme di ]0,+∞[ o e esattamente ]0,+∞[.
Il problema di Cauchy {y′ =
y − 1
xy(0) = 1
non avra una soluzione definita per x = 0 (la funzioney − 1
xe discontinua in
x = 0 e non verifica le ipotesi del Teorema 8.1). D’altra parte l’unica soluzione
del problema e y(x) = 1−x che sarebbe definita su tutto R ma se consideriamo
che il codominio di y deve essere un sottoinsieme di ]−∞, 1[ (dopo aver osservato
che y−1 si annulla in 1 e che la soluzione deve passare per (0, 1)) non e possibile
prolungare il dominio della soluzione oltre x = 0 e quindi il dominio massimale
sara ]−∞, 0[.
8.2 Equazioni a variabili separabili
Vediamo ora come risolvere alcuni tipi di equazioni differenziali partendo dai
casi piu semplici in cui si possono separare le variabili, ovvero l’equazione diffe-
renziale e della forma:
y′(x) = a(x) · b(y(x)) (8.4)
in cui, nei valori per cui b(y) 6= 0, si puo scriverey′
b(y)= a(x). Ad esempio
l’equazione y′ = x2(y2 + 1) e a variabili separabili mentre per l’equazione y′ =y + x
y2 − xnon c’e modo di separare le variabili con semplici passaggi algebrici.

90 Equazioni differenziali ordinarie
I problemi di Cauchy a variabili separabili si risolvono, dopo aver separa-
to le variabili, integrando ambo i membri e infine ricavando, se possibile, una
espressione esplicita per la y(x):{y′(x) = a(x) · b(y(x))
y(x0) = y0⇒
∫ y
y0
dt
b(t)=
∫ x
x0
a(s)ds (8.5)
Esempio 8.2.{y′(x) = 2x(1 + y2)
y(0) = 0⇒
∫ y
0
dt
1 + t2=
∫ x
0
2sds
⇒ arctan(y) = x2 ⇒ y = tan(x2)
Non e sempre possibile ricavare esplicitamente una espressione per y(x) ma
l’esistenza e l’unicita della soluzione e assicurata sempre se vengono rispettate
le condizioni del Teorema 8.1.
8.3 Equazioni differenziali lineari
Per equazioni differenziali lineari si intendono le equazioni differenziali lineari
rispetto alla y(x), cioe y(x) deve comparire nell’equazione differenziale come
polinomio al piu di grado 1, sono cioe della forma:
y′(x) = a(x)y(x) + b(x) (8.6)
y′ = x2y+log(x) e lineare non a variabili separabili; y′ = yx+x e sia lineare
che a variabili separabili; y′ = y2ex+ 1 non e ne lineare ne a variabili separabili.
Le equazioni lineari godono di un indiscutibile vantaggio: se a(x) e b(x)
sono funzioni continue su tutto R anche la soluzione dell’equazione differenziale
e definita su tutto R.
La soluzione di un PC lineare e data dalla seguente formula (che non dimostre-
remo in questi appunti):{y′(x) = a(x)y(x) + b(x)
y(x0) = y0⇒ (8.7)
y(x) = e∫ xx0a(t)dt
(y0 +
∫ x
x0
b(t)e−
∫ tx0a(s)ds
dt
)(8.8)
Esempio 8.3. {y′ = 2x
1+x2 y+1
y(0) = 0
Si applica la formula:
y = e∫ x0
2t1+t2
dt(
0 +
∫ x
0
1 · e−∫ t0
2s1+s2
dsdt
)= elog(1+x
2)
(∫ x
0
e− log(1+t2)dt
)=
= (1 + x2)
∫ x
0
1
1 + t2dt = (1 + x2) arctan(x)

9 Funzioni di due variabili
reali
Le funzioni di due variabili reali sono funzioni in cui le variabili indipendenti sono
due anziche una e la variabile dipendente dipende da entrambe: z = f(x, y).
x e y sono le variabili indipendenti mentre z e la variabile dipendente.
Generalizzare alle funzioni in n variabili non e cosı complicato, il passaggio piu
delicato consiste proprio nel passare da una a due variabili.
Le funzioni in piu variabili descrivono tantissimi fenomeni fisici, non solo le
equazioni del moto in tre dimensioni ma anche ad esempio la famosa legge dei
gas in cui la pressione dipende da due variabili, temperatura e volume del gas:
P (T, V ) = kT
V.
Anzitutto il dominio della funzione non e piu un sottoinsieme della retta
reale bensı un sottoinsieme del piano cartesiano R2, ad esempio la funzione
f(x, y) =√y − x2 + ln(x − y) ha come dominio tutti i punti del piano che
stanno al di sotto della retta y = x (esclusa la retta stessa) e nella parte della
parabola y = x2 che contiene il fuoco: in definitiva Dom(f) = {(x, y) ∈ R2 :
y ≥ x2 ∧ y < x}. Si tratta pertanto di un insieme limitato.
Poiche una funzione in due variabili e una superficie definita nello spazio R3
risulta difficile farne un grafico. Cio che possiamo graficare sul piano cartesiano
sono le curve di livello di tale superficie cioe quelle curve che uniscono tutti
i punti alla stessa altezza, cioe tutti i punti che hanno la stessa immagine. Le
curve di livello sono come le isoipse utilizzate in cartografia che uniscono tutti
i punti con la stessa quota o le isobare utilizzate in meteorologia che uniscono
tutti i punti con la stessa pressione.
Una curva di livello e descritta sul piano cartesiano dall’equazione f(x, y) = k
con k costante reale; tale curva non e necessariamente il grafico di una funzione
in una variabile.
Esempio 9.1. Le curve di livello della funzione f(x, y) = x2 + y2 sono tutte le
curve del tipo x2 + y2 = k con k ≥ 0 (altrimenti non esisterebbero) cioe tutte
le circonferenze con centro l’origine e raggio√k. Sono tutte le curve di livello
di un paraboloide tridimensionale.
Nel caso di funzioni di due variabili tratteremo sempre funzioni continue e
infinite volte derivabili e di queste ci limiteremo a cercare massimi e minimi
91

92 Funzioni di due variabili reali
locali. Occorre pero precisare cosa significa per una funzione f(x, y) essere
continua e derivabile.
Limiti e continuita
La continuita in un punto (x0, y0) per una funzione f(x, y) si puo definire allo
stesso modo che per le funzioni in una variabili cioe una funzione e continua in
(x0, y0) se lim(x,y)→(x0,y0)
f(x, y) = f(x0, y0). La cosa piu difficile e pero stabilire
se il limite di tale funzione in quel punto esiste. Mentre per le funzioni in
una variabile potevamo avvicinarci al punto solo in due direzioni possibili, da
sinistra o da destra, in due variabili possiamo avvicinarci da infinite direzioni,
non necessariamente lungo linee rette ma anche lungo altre curve. Se anche
una solo di tale direzioni porta ad un limite diverso da tutti gli altri significa
che il limite non esiste. E’ piu facile quindi dimostrare che un limite non esiste
piuttosto che dimostrare che esiste. Non ci soffermeremo troppo su questo punto
ma giusto per fare un esempio consideriamo la funzione f(x, y) =x2
x2 + y2: se
ci avviciniamo al punto di accumulazione (0, 0) lungo la direzione dell’asse x,
(retta y=0), il limite e 0 perche la funzione e sempre nulla su tale retta. Se invece
ci avviciniamo lungo la direzione della bisettrice y = x, f(x, y) =x2
x2 + x2=
1
2
e quindi anche il limite sara1
2. I due limiti sono diversi e quindi non esiste il
lim(x,y)→(0,0)
x2
x2 + y2.
Soffermiamoci sulle funzioni continue per le quali tra l’altro vale il teorema
di Weierstrass generalizzato: se f : D → R e definita su un insieme D ∈ R2
chiuso e limitato, allora la funzione f(x, y) ammette sempre massimo e minimo
assoluto in D.
9.1 Massimi e minimi locali
La definizione di massimo e minimo locale in due variabili e sostanzialmente
analoga alla definizione in una sola variabile. Se f : A → R e una funzione
continua e derivabile di R2 allora (x0, y0) ∈ A e una punto di minimo locale
se ∀(x, y) ∈ Br(x0, y0) intorno aperto1 di raggio r centrato in (x0, y0), f(x, y) ≥f(x0, y0). Analogamente un punto e di massimo locale ∀(x, y) ∈ Br(x0, y0)
intorno aperto di raggio r centrato in (x0, y0), f(x, y) ≤ f(x0, y0).
Per le funzioni di due o piu variabili si possono pero avere punti che risultano
essere dei massimi se percorriamo la superficie lunga una certa direzione e dei
minimi se la percorriamo lungo un altra direzione. Tali punti si definiscono
punti sella ed hanno la seguente caratteristica: (x0, y0) ∈ A e una punto di
sella se ∀(x, y) ∈ Br(x0, y0) intorno aperto di raggio r centrato in (x0, y0),
1Un intorno di un punto sul piano cartesiano e un disco aperto di raggio r arbitrariamente
piccolo centrato nel punto stesso. Se si parla di un punto in Rn l’intorno sara una sfera piena
senza bordo di dimensione n

9.1. Massimi e minimi locali 93
f(x, y) e sempre sia maggiore che minore di f(x0, y0). Il nome di sella viene
dalla figura della sella di un cavallo che di fatto non e ne un massimo ne un
minimo.
Abbiamo citato i punti sella perche come i massimi e i minimi locale hanno
un piano tangente2 orizzontale.
In tutti i casi, massimi, minimi e punti sella sono considerati punti criti-
ci o stazionari per le funzioni di due variabili. Ma come si individuano e si
classificano i punti critici?
Derivate parziali
Come per le funzioni in una variabile i punti critici hanno a che fare con le
derivate prime della funzione. In questo caso bisogna definire cos’e la derivata
di una funzione visto che abbiamo due variabili. E’ naturale definire le cosiddette
derivate parziali, ovvero le derivate rispetto ad una delle due variabili mentre
consideriamo l’altra una costante. Se f(x, y) e una funzione derivabile in (x0, y0)
si definiscono le derivate parziali rispetto a x e y:
fx(x0, y0) = limh→0
f(x0 + h, y0)− f(x0, y0)
h(9.1)
fy = limh→0
f(x0, y0 + h)− f(x0, y0)
h(9.2)
Si tratta quindi di due derivate parziali e cioe di un vettore di derivate
parziali che viene chiamato gradiente di f e si indica ∇(f) = (fx, fy). Come
per le funzioni di una variabile i punti stazionari sono quelli che annullano il
gradiente.
Esempio 9.2. Consideriamo la funzione f(x, y) = x3 + y3 − 3xy che essendo
un polinomio in due variabili e sicuramente continua e infinite volte derivabile.
∇f = (3x2 − 3y, 3y2 − 3x) = (0, 0) ⇒{x2 − y = 0
y2 − x = 0
Dal sistema impostato si ricavano i punti critici che sono (0, 0) e (1, 1). Ora
pero occorre classificarli...
Per la classificazione dei punti critici ci occorre la derivata seconda della
funzione, anzi LE derivate seconde... Prima di vedere le derivate parziali del
secondo ordine vediamo qual e l’equazione del piano tangente in un qualsiasi
punto della funzione. Analogamente alla retta tangente per le funzioni di una
variabile, il piano tangente di una funzione f(x, y) in (x0, y0) e dato da
z − f(x0, y0) = fx(x0, y0)(x− x0) + fy(x0, y0)(y − y0) (9.3)
2Per le funzioni di due variabili non ha senso parlare di retta tangente ma di piano tangente.

94 Funzioni di due variabili reali
Matrice Hessiana
Analogamente al caso di una variabile le derivate seconde ci forniscono infor-
mazioni utili per la classificazione dei punti critici in due variabili. Le derivate
seconde pero sono 4 perche posso derivare le derivate prima ognuna in due modi,
rispetto a x e rispetto a y, quindi avremo: fxx, fxy, fyx, fyy. Se sono verificate
alcune condizioni il calcolo puo essere piu semplice:
Teorema 9.3 (di Schwarz). Se f(x, y) : A → R e una funzione differenziabile
con derivate seconde miste (fxy e fyx) continue, allora fxy = fyx.
Le derivate seconde possono essere scritte in una tabella quadrata 2×2 detta
matrice come mostrato di seguito:
Hf =
(fxx fxyfyx fyy
)(9.4)
Tale matrice e detta matrice Hessiana di f . Se vale il teorema di Schwarz gli
elementi (1, 2) e (2, 1) sono uguali.
Pur non avendo parlato di algebra lineare definiamo in generale cos’e il
determinante di una matrice 2 × 2 perche ci servira per la classificazione dei
punti critici.
Definizione 9.4. Data una matrice a valori reali A =
(a b
c d
)si definisce
determinante la funzione
det(A) = |A| = ad− bc (9.5)
Nel caso della matrice Hessiana con derivate miste uguali, det(Hf ) = fxxfyy−f2xy.
Teorema 9.5. Sia f : A→ R una funzione di due variabili con derivate seconde
continue e sia (x0, y0) un suo punto stazionario.
• Se det(Hf )(x0, y0) < 0 allora (x0, y0) e un punto sella.
• Se det(Hf )(x0, y0) > 0 e fxx > 0 allora (x0, y0) e un minimo locale.
• Se det(Hf )(x0, y0) > 0 e fxx < 0 allora (x0, y0) e un massimo locale.
In tutti gli altri casi le informazioni non sono sufficienti.
Esempio 9.6. Sia f(x, y) = 2y3 + x3 − 3y2 − 3x. Individuare e classificare i
punti critici.
∇f = (3x2 − 3, 6y2 − 6y) = (0, 0) ⇒{
3x2 − 3 = 0
6y2 − 6y = 0
Si ottengono 4 punti critici: (−1, 0), (−1, 1), (1, 0), (1, 1).
Hf =
(6x 0
0 12y − 6
)

9.2. Analisi delle curve di livello 95
Se la calcoliamo nei punti critici otteniamo:
det(Hf (−1, 0)) = det
(−6 0
0 −6
)= 36 > 0 fxx < 0 ⇒ massimo locale
det(Hf (−1, 1)) = det
(−6 0
0 6
)= −36 < 0 ⇒ sella
det(Hf (1, 0)) = det
(6 0
0 −6
)= −36 < 0 ⇒ sella
det(Hf (1, 1)) = det
(6 0
0 6
)= 36 > 0 fxx > 0 ⇒ minimo locale
9.2 Analisi delle curve di livello
come abbiamo visto in precedenza le curve di livello sono curve del piano car-
tesiano che rappresentano la quota della funzione nello spazio tridimensionale.
Tali curve possono essere studiate sul piano cartesiano grazie alle derivate par-
ziali che ci permettono, non solo di capire quali sono i tratti della curva che
potrebbero essere esplicitati come funzioni ma anche di calcolare la derivata di
tale funzione esplicita (senza nemmeno saperne la sua espressione algebrica!).
Ci viene in auto in questo caso il seguente teorema delle funzioni implicite
(rivisitato e reso piu semplice):
Teorema 9.7 (di Dini). Siano f : A→ R 2 una funzione C1(A) e (x0, y0) ∈ Ae tale che fy(x0, y0) 6= 0. Allora esistono un intorno U di x0, un intorno
V di y0 e una funzione g(x) : U → V C1(U) tale che l’equazione implicita
f(x, y) = f(x0, y0) si puo esplicitare con y = g(x). Inoltre
g′(x) = − fx(x, y
fy(x, y)(9.6)
tenendo presente che ora y diventa funzione di x.
Il Teorema di Dini ci dice che se la derivata parziale rispetto a y non si
annulla nel punto che stiamo analizzando, la curva di livello si puo esplicitare in
un intorno di quel punto e ci fornisce una formula per il calcolo della derivata
senza necessariamente sapere quanto vale tale funzione esplicita. Il discorso
fatto sulla y puo essere fatto sulla x in tal caso troveremmo una funzione x(y).
Vediamo un possibile esempio:
Esempio 9.8. Sia f(x, y) = 3x2 + 2xy + y2. Si consideri la curva di livello 6.
1. Determinare per quali punti del piano xy essa non puo essere espressa
come grafico di una funzione.
2. Calcolare gli estremanti della curva di livello e classificarli.
3. Calcolare la retta tangente alla curva nel punto (1, 1).
4. Determinare y′(1) e y′′(1) nel punto di tangenza.

96 Funzioni di due variabili reali
1. Il teorema di Dini e valido se ∂f∂y 6= 0 e quindi se
2x+ 2y 6= 0 ⇒ y 6= −x
Sostituendo nella curva di livello si ottiene
3x2 − 2x2 + x2 = 6 ⇒ x = ±√
3
quindi i punti in cui la funzione non e esplicitabile sono (√
3,−√
3) e
(−√
3,√
3).
2. Nei punti in cui vale Dini si puo esplicitare y e scrivere la sua derivata
prima sotto forma di equazione differenziale:
y′(x) = −∂f∂x∂f∂y
= −6x+ 2y
2x+ 2y
I punti che annullano il numeratore sono gli estremanti relativi
6x+ 2y = 0 ⇒ y = −3x
Sostituendo nella curva di livello
3x2 − 6x2 + 9x2 = 6 ⇒ x = ±1
quindi i punti in cui la funzione non e esplicitabile sono (1,−3) e (−1, 3).
Calcolando y′′(x) si possono classificare (ricordare che ora y e funzione di
x, y(x)):
y′′(x) = − (6 + 2y′)(2x+ 2y)− (2 + 2y′)(6x+ 2y)
(2x+ 2y)2
Ricordando che negli estremanti y′(x) = 0, possiamo calcolare
y′′(1) = −6(2 + 2(−3))− 2(6 + 2(−3))
(2 + 2(−3))2=
3
2> 0 ⇒ minimo
y′′(−1) = −6(−2 + 2(3))− 2(−6 + 2(3))
(−2 + 2(3))2= −3
2< 0 ⇒ massimo
(Il massimo e il minimo sono anche assoluti perche la curva di livello e un
insieme compatto di R2, la curva e un’ellisse con assi di simmetria obliqui
rispetto agli assi cartesiani, provate a disegnarla.)
3. Abbiamo gia calcolate y′(x) con il Teorema di Dini e il punto (1, 1) verifica
le ipotesi del teorema e appartiene alla curva di livello. Attenzione! Ci
riferiamo al punto (1, 1) e non all’estremante (1,−3) quindi l’espressione
di y′(1) non sara la stessa del punto precedente:
y′(x) = −6x+ 2y
2x+ 2y⇒ y′(1) = −2
La retta tangente ha coefficiente angolare −2, il termine noto si calcola
imponendo il passaggio per (1, 1) e si ottiene y = −2x+ 3

9.2. Analisi delle curve di livello 97
4. y′(1) = −2 gia calcolato. Per trovare y′′(1) riprendiamo la derivata
seconda:
y′′(x) = − (6 + 2y′)(2x+ 2y)− (2 + 2y′)(6x+ 2y)
(2x+ 2y)2
⇒ y′′(1) = − (6 + 2(−2))(2 + 2)− (2 + 2(−2))(6 + 2)
(2 + 2)2= −3
2

98 Funzioni di due variabili reali

10 Numeri complessi
10.1 Rappresentazione cartesiana
Il campo dei numeri complessi C e un’estensione del campo reale in cui ad
esempio e possibile risolvere equazioni del tipo x2 + 1 = 0.
Un numero complesso z ∈ C puo essere scritto in forma cartesiana nel
modo seguente:
z = a+ ib i unita immaginaria tale che i2 = −1
dove a rappresenta la parte reale e b la parte immaginaria del numero
complesso. Si scrive
<(z) = a =(z) = b
La parte reale e immaginaria di un numero z ∈ C sono entrambi numeri
reali.
La forma cartesiana dei numeri complessi e molto comoda perche permette di
operare con essi (cioe eseguire operazioni) utilizzando le usuali proprieta delle
operazioni, con l’avvertenza di ricordare che i2 = −1. L’insieme dei numeri
complessi e infatti un campo: in esso cioe sono definite una operazione di addi-
zione e una di moltiplicazione per le quali valgono proprieta come l’associativita,
la commutativita, l’esistenza dell’elemento neutro... Non si tratta pero di un
campo ordinato: non ha senso chiedersi se un numero complesso e piu grande o
piu piccolo di un altro, non ha senso dunque scrivere z1 < z2.
Un numero complesso z = a + ib puo essere rappresentato su un piano
cartesiano in cui sull’asse delle ascisse poniamo la parte reale a, sulle ordinate
la parte immaginaria b come nell’esempio della figura sopra. Questo piano viene
chiamato piano di Argand-Gauss.
Definizione 10.1. Il modulo di un numero complesso z = a + ib e definito
come
|z| =√a2 + b2
e rappresenta la distanza del punto dall’origine calcolata con l’usuale formula di
geometria analitica ricavata dal Teorema di Pitagora.
Proprieta:
99

100 Numeri complessi
• Se z e un numero reale, ad esempio z = a, il suo modulo non e altro che
il valore assoluto |z| = |a|.
• Il modulo di un numero complesso e sempre un numero reale positivo, ed
e nullo se e solo se z = 0
|z| ∈ R, |z| ≥ 0 ∀z ∈ C e |z| = 0 ⇔ z = 0
• Il modulo del prodotto tra due numeri complessi e il prodotto dei moduli:
|z · w| = |z| · |w| ∀z, w ∈ C
Definizione 10.2. Si chiama complesso coniugato di un numero z = a+ib ∈C il numero z = a − ib, cioe il numero con la stessa parte reale e la parte
immaginaria cambiata di segno.
Alcune proprieta interessanti
La somma di un numero col suo coniugato da come risultato 2 volte la parte
reale:
z + z = 2<(z) ∀z ∈ C
La differenza tra un numero e il suo coniugato da come risultato 2 volte la parte
immaginaria moltiplicata per i:
z − z = 2i=(z) ∀z ∈ C
Il prodotto tra un numero e il suo coniugato da come risultato il quadrato del
modulo:
zz = |z|2 ∀z ∈ C
Il campo C gode anche di unaproprieta che non ha R: ogni polinomio di
grado n ammette sempre n radici complesse eventualmente coinciden-
ti.
Questo fatto e una conseguenza del Teorema fondamentale dell’algebra.
Ogni polinomio non costante a coefficienti complessi ammette sempre una radice
complessa. Un’equazione di secondo grado ha quindi sempre due soluzioni in C.
Si noti che la radice complessa puo avere parte immaginaria nulla ed essere
quindi un numero reale.
Vale inoltre il fatto seguente: se un numero complesso e soluzione di un’e-
quazione a coefficienti reali, allora lo e anche il suo complesso coniugato.
Esempio 10.3. Risolvere in C l’equazione x2 + x+ 1 = 0
Si tratta di un’equazione a coefficienti reali, utilizziamo dunque la formula per
la risoluzione di un’equazione di secondo grado:
x1,2 =−1±
√1− 4
2=−1±
√3 i
2⇒ x1 = −1
2− i√
3
2x2 = −1
2+ i
√3
2
L’equazione ha due soluzioni complesse coniugate.
La ben nota formula risolutiva delle equazioni di secondo grado che abbiamo
utilizzato e valida anche quando l’equazione e a coefficienti complessi, ma il
calcolo effettivo puo essere abbastanza complicato.

10.2. Rappresentazione polare o trigonometrica 101
10.2 Rappresentazione polare o trigonometrica
Ogni punto sul piano cartesiano puo essere rappresentato con le due coordinate
cartesiane x e y che sul piano di Gauss sono parte reale e parte immaginaria
del numero complesso. A volte puo facilitare le cose l’utilizzo di un altro tipo
di coordinate.
• la sua distanza dall’origine,
• l’angolo che forma l’asse x con la semiretta uscente dall’origine passante
per il punto.
Attenzione si parla di angoli orientati e l’orientamento fissato e quello antiora-
rio. Questo angolo e univocamente determinato dal punto di vista geometrico,
ma la sua misura non e univocamente determinata perche possiamo sommare
(o sottrarre) 2π o un suo multiplo intero. Si parla di diverse determinazioni
dell’argomento.
La distanza dall’origine di un numero z = a+ ib non e altro che il modulo
che indichiamo con r (si chiama anche raggio perche identifica tutti i punti
che sono alla stessa distanza dall’origine cioe su una circonferenza di raggio r)
mentre l’argomento e l’angolo α formato dal raggio vettore e definito daα = arg z = arctan b
a a > 0
α = arg z = arctan ba + π a < 0
α = arg z = π2 a = 0, b > 0
α = arg z = −π2 a = 0, b < 0
La distinzione tra a positivi e negativi e dovuta al fatto che la funzione tangente
ha periodo π e quindi, senza questa distinzione, si otterrebbero due numeri con
lo stesso argomento.
Dalla forma polare o trigonometrica e facile tornare a quella cartesiana
mediante le formule: {x = r cosα
y = r sinα
per cui un numero z = a+ ib si puo scrivere nella forma
r(cosα+ i sinα)
oppure z = reiα con eiα = cosα+ i sinα (forma esponenziale).
Esempio 10.4. Trasformare dalla forma cartesiana a quella polare il numero
complesso −7√
3
3+
7
3i
r =
∣∣∣∣∣−7√
3
3+
7
3i
∣∣∣∣∣ =
√49
3+
49
9=
√196
9=
14
3

102 Numeri complessi
arg
(−7√
3
3+
7
3i
)= arctan
(73
− 7√3
3
)+ π = arctan
(−√
3
3
)+ π =(∗) −π
6+ π =
5
6π
⇒ −7√
3
3+
7
3i =
14
3
(cos
(5
6π
)+ i sin
(5
6π
))=
14
3ei
56π
Le operazioni in forma polare
Con numeri complessi in forma trigonometrica e piu facile eseguire le operazioni
di moltiplicazione, divisione ed elevamento a potenza.
Dati due numeri complessi z = reiα e w = seiβ , s 6= 0,
• il prodotto di due numeri complessi ha come modulo il prodotto dei
moduli e come argomento la somma degli argomenti:
z · w = rsei(α+β)
• il rapporto di due numeri complessi ha come modulo il rapporto dei
moduli e come argomento la differenza degli argomenti:
z
w=r
sei(α−β)
• come conseguenza della formula per il prodotto, l’elevamento all’n-
esima potenza e dato da:
zn = rneinα
Esempio 10.5. Dato z = eiπ4 determinare z81
z81 =(1 · eiπ4
)8= 18e2iπ = 1
Da questo esempio si vede che la forma polare e molto pratica quando si deve
elevare un numero ad una potenza alta e che il numero z scelto e una radice
ottava di 1 in campo complesso.
10.3 Le radici n-esime
E’ importante saper determinare le radici n-esime di un numero complesso e
particolare rilevanza hanno in C le radici n-esime dell’unita. Le radice n-esime
di un numero complesso sono sempre n distinte.
Ad esempio,√
1 = ±1,4√
1 = ±1,±i. In questi casi e facile fare una verifica
diretta, ma quali sono, ad esempio, le soluzioni di 3√
1?
Sono i tre numeri complessi: 1, −1
2+
√3
2i, −1
2−√
3
2i.
Provate ad elevare al cubo questi numeri per verificare che il risultato e 1.
Sul piano di Gauss essi sono i vertici di un triangolo equilatero, cosı come le
radici quarte dell’unita sono i vertici di un quadrato. In generale le radici n-
esime dell’unita si dispongono come i vertici di un poligono regolare di n lati
inscritto nella circonferenza unitaria. Come si trovano analiticamente?

10.3. Le radici n-esime 103
Esempio 10.6. Sia z ∈ C un numero tale che z3 = 1, determinare z.
Come sappiamo dal Teorema fondamentale dell’algebra, l’equazione z3 = 1 ha
tre soluzioni complesse. Si tratta quindi di trovare 3 numeri che elevati alla
terza potenza danno 1. Per prima cosa scriviamo il numero in forma polare:
1 = 1 · ei·0
Seguendo il ragionamento inverso dell’elevamento a potenza, dobbiamo trovare
quel numero z il cui modulo elevato alla terza restitusce 1 e il cui argomen-
to moltiplicato per 3 da come risultato 0. Attenzione pero, ricordiamoci il
problema della determinazione dell’argomento. Infatti,{r3 = 1
3α = 0 + 2kπ k ∈ Z⇒
{r = 1
α = 2kπ3 k ∈ Z
(10.1)
Tra tutti gli infiniti numeri (misure di angolo) ce ne sono esattamente 3 comprese
tra 0 e 2π e sono quelli che corrispondo a k = 0, 1, 2. Per k = 3 si ricomincia il
giro e si ritrovano diverse determinazioni degli stessi argomenti.
k 0 1 2
α 0 23π
43π
Le radici terze di 1 sono pertanto
z1 = ei·0 = 1
z2 = ei·23π = −1
2+
√3
2i
z3 = ei·23π = −1
2−√
3
2i
104 Numeri complessi

Appendice
Tavola degli sviluppi di Maclaurin delle funzioni elementari
ex = 1 + x+ x2
2 + x3
6 + . . .+ xn
n! + o(xn)
ax = 1 + x ln(a) + x2
2 ln2(a) + x3
6 ln3(a) + . . .+ xn
n! lnn(a) + o(xn)
sin(x) = x− x3
6 + x5
5! + . . .+ (−1)n(2n+1)!x
2n+1 + o(x2x+2)
cos(x) = 1− x2
2 + x4
4! + . . .+ (−1)n(2n)! x
2n + o(x2n+1)
tan(x) = x+ x3
3 + 215x
5 + 17315x
7 + 622835x
9 + o(x10)
cot(x) = 1x −
x3 −
x3
45 −2x5
945 + o(x6)
sec(x) = 1 + x2
2 + 5x4
24 + 61x6
720 + o(x7)
csc(x) = 1x + x
6 + 7x3
360 + 31x5
15120 + o(x6)
arcsin(x) = x+ 16x
3 + 340x
5 + . . .+ (2n)!4n·(n!)2·(2n+1)x
2n+1 + o(x2n+2)
arccos(x) = π2 − x−
16x
3 − 340x
5 − . . .− (2n)!4n·(n!)2·(2n+1)x
2n+1 + o(x2n+2)
arctan(x) = x− x3
3 + x5
5 + . . .+ (−1)n2n+1 x
2n+1 + o(x2n+2)
11−x = 1 + x+ x2 + x3 + . . .+ xn + o(xn)
ln(1 + x) = x− x2
2 + x3
3 + . . .+ (−1)n+1
n xn + o(xn)
(1 + x)α = 1 + αx+ α(α−1)2 x2 + α(α−1)(α−2)
6 x3 + . . .+
(α
n
)xn + o(xn)
(10.2)

Indice analitico
algoritmo di Erone, 12, 14
asintoto obliquo, 52
asintoto orizzontale, 52
asintoto verticale, 52
assioma di completezza, 7
calcolo delle probabilita, 35
campo, 5
cardinalita, 1
chain rule, 61
codominio, 2
coefficiente binomiale, 10, 35
combinazioni con ripetizione, 35
combinazioni semplici, 34
comportamento asintotico, 18
concavita, 65
controimmagine, 3
criterio del confronto asintotico per le
serie, 26
criterio del confronto per le serie, 25
criterio del rapporto per le serie, 27
criterio del rapporto per le successioni,
19
criterio di condensazione, 28
criterio di Liebniz, 28
curva di livello, 85
cuspide, 58
densita di Q, 5
derivata del prodotto, 61
derivata del quoziente, 61
derivata della composizione, 61
derivata della funzione inversa, 59
derivata seconda, 64
derivate di ordine superiore, 64
derivate parziali, 87
derivato, 40
dilatazioni orizzontali, 43
dilatazioni verticali, 41
disposizioni con ripetizione, 33
disposizioni semplici, 32
dominio, 2
equazioni a variabili separabili, 83
equazioni differenziali lineari, 84
equazioni differenziali ordinarie, 81
estremo inferiore, 7
estremo superiore, 7
fattoriale, 10
flesso orizzontale, 62
flesso verticale, 57
forma polare dei numeri complessi, 95
forma trigonometrica dei numeri com-
plessi, 95
forme indeterminate, 18
funzione, 2
funzione biunivoca, 3
funzione iniettiva, 2
funzione inversa, grafico, 45
funzione suriettiva, 2
funzioni composte, 46
funzioni continue, 49
funzioni di due variabili reali, 85
gradiente, 87
gruppo algebrico, 3
gruppo commutativo, 3
immagine, 2
infinitesimi, 50
insieme, 1
insieme aperto, 39
insieme chiuso, 39
insieme complementare, 1
insieme vuoto, 1
106

Indice analitico 107
insiemi numerabili, 4
integrale di Riemann, 69
integrale, adittivita, 72
integrale, disuguaglianza triangolare, 72
integrale, linearita, 72
integrale, monotonia, 72
integrale, positivita, 72
integrali impropri, 78
integrali in senso generalizzato, 78
integrazione per parti, 76
integrazione per sostituzione, 76
intersezione, 1
intervalli della retta reale, 8
intorno, 39
intorno di +∞, 39
intorno di −∞, 39
limite destro, 47
limite per successioni, 13
limite sinistro, 47
limiti di funzioni, 46
maggiorante, 7
massimo, 7
matrice Hessiana, 88
media integrale, 73
minimo, 7
minorante, 7
modulo di un numero complesso, 93
numeri complessi, 93
numeri interi, 3
numeri irrazionali, 6
numeri naturali, 3
numeri razionali, 4
numeri reali, 6
numero di Nepero, 19
o piccolo, 51
Paradosso di Zenone, 21
parte immaginaria, 93
parte reale, 93
permutazioni con ripetizione, 32
permutazioni semplici, 31
piano cartesiano, 8
piano di Argand-Gauss, 93
polinomi di MacLAurin, 67
polinomi di Taylor, 65
primitive immediate, 75
primitive non elementari, 77
principio di induzione, 9
Problema di Cauchy, 82
prodotto cartesiano, 1
progressione aritmetica, 15
progressione geometrica, 16
punti di flesso, 65
punto angoloso, 57
punto critico, 62
punto di accumulazione, 40
punto di frontiera, 39
punto esterno, 39
punto interno, 39
punto isolato, 40
punto stazionario, 62
radici dell’unita, 96
rapporto incrementale, 56
regole di derivazione, 60
relazione d’ordine, 2
relazione di equivalenza, 2
relazioni, 2
resto di Peano, 67
riflessioni orizzontali, 44
riflessioni verticali, 42
serie a termini alterni, 29
serie armonica, 24
serie geometrica, 21
serie numerica, 21
serie telescopiche, 26
somma di Darboux, 69
sottoinsieme, 1
successione convergente, 13
successione di Fibonacci, 12
successione divergente, 13
successione infinitesima, 18
successioni numeriche, 11
sviluppi di MacLaurin, 67
sviluppi di Taylor, 65
teorema degli zeri, 53
teorema dei valori intermedi, 54

108 Indice analitico
teorema del confronto, 15
teorema del valore medio di Lagrange,
62
teorema della permanenza del segno,
14
teorema delle funzioni implicite, 89
teorema di Bolzano, 53
teorema di De l’Hospital, 63
teorema di Dini, 89
teorema di Rolle, 62
teorema di Weierstrass, 54
teorema fondamentale del calcolo inte-
grale, 74
teorema fondamentale dell’algebra, 94
traformazioni del piano, 40
traslazioni orizzontali, 42
traslazioni verticali, 41
unione, 1