6 Travature Piane con Elementi Elastici: Instabilit`a.pdf · Cominciamo ad esami- narla...
24
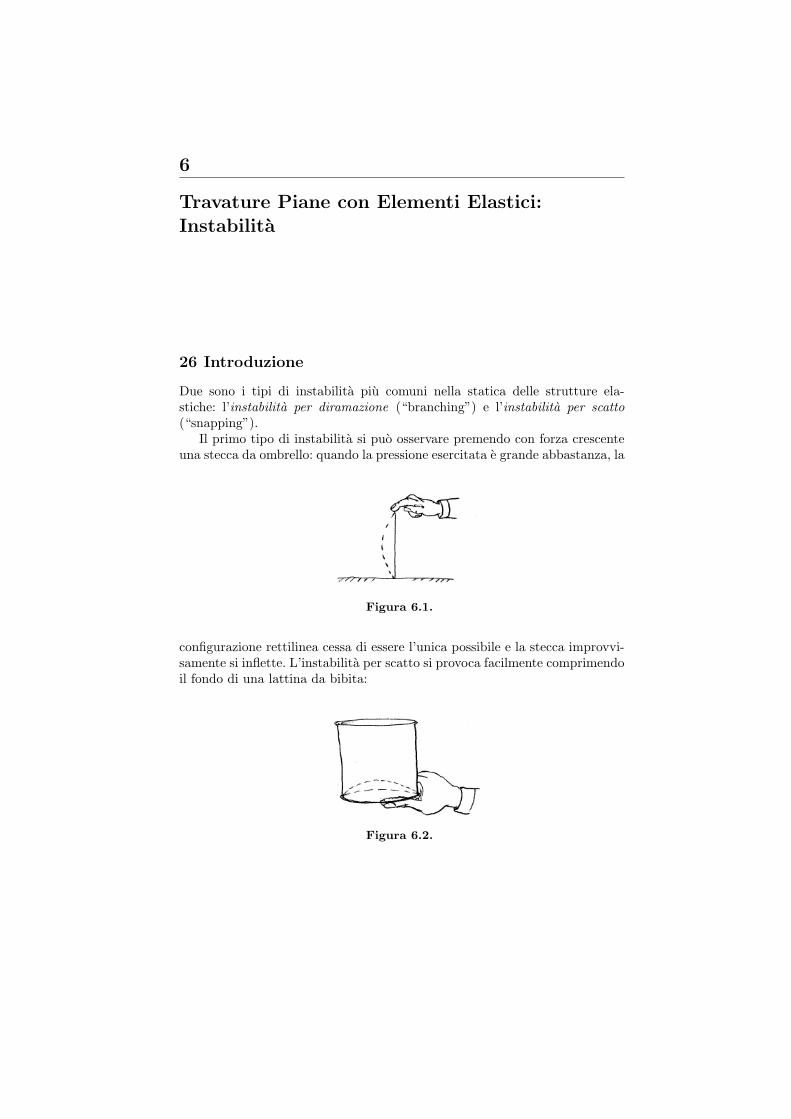
6 Travature Piane con Elementi Elastici: Instabilit` a 26 Introduzione Due sono i tipi di instabilit` a pi` u comuni nella statica delle strutture ela- stiche: l’instabilit`a per diramazione (“branching”) e l’instabilit` a per scatto (“snapping”). Il primo tipo di instabilit` a si pu` o osservare premendo con forza crescente una stecca da ombrello: quando la pressione esercitata ` e grande abbastanza, la Figura 6.1. configurazione rettilinea cessa di essere l’unica possibile e la stecca improvvi- samente si inflette. L’instabilit` a per scatto si provoca facilmente comprimendo il fondo di una lattina da bibita: Figura 6.2.
Transcript of 6 Travature Piane con Elementi Elastici: Instabilit`a.pdf · Cominciamo ad esami- narla...
6
Travature Piane con Elementi Elastici:Instabilita
26 Introduzione
Due sono i tipi di instabilita piu comuni nella statica delle strutture ela-stiche: l’instabilita per diramazione (“branching”) e l’instabilita per scatto(“snapping”).
Il primo tipo di instabilita si puo osservare premendo con forza crescenteuna stecca da ombrello: quando la pressione esercitata e grande abbastanza, la
Figura 6.1.
configurazione rettilinea cessa di essere l’unica possibile e la stecca improvvi-samente si inflette. L’instabilita per scatto si provoca facilmente comprimendoil fondo di una lattina da bibita:
Figura 6.2.

138 6 Travature Piane con Elementi Elastici: Instabilita
in una prima fase il fondo si deforma impercettibilmente, per poi assumereimprovvisamente, quando la pressione raggiunge un valore sufficiente, unaconfigurazione inflessa alquanto distante da quella poco deformata precedente;questa trasformazione repentina e accompagnata da un rumore caratteristico,che ne spiega il nome (snap ≡ schiocco).
Di questi due tipi di instabilita daremo conto qui di seguito tramite lostudio di alcune travature con membrature rigide ed elementi elastici a defor-mabilita concentrata. In questi esempi, la semplicita degli sviluppi matematicipermette di concentrare l’attenzione sugli aspetti qualitativi: la fenomenologiadi base dell’instabilita elastica viene esibita senza far uso di modelli meccanicisofisticati e, quindi, di tecniche matematiche complesse.
27 Instabilita per diramazione: analisi statica
Consideriamo la trave rigida in Fig. 6.3, soggetta al carico di punta
p = −p e3, p = |p|,
assumendo per semplicita che la molla rotazionale abbia risposta lineare:
c(ϕ) = (λϕ)e3 (27.1)
(qui e3 e il terzo versore di una terna ortogonale orientata in senso anitorario;l’angolo ϕ e quello tra l’asta rigida e la verticale, contato positivamente insenso orario).
Figura 6.3.
Osservazione 1. Prima di iniziare lo studio di questa trave sotto carichi dicompressione crescenti, facciamo alcune considerazioni intuitive riguardo al

27 Instabilita per diramazione: analisi statica 139
suo presumibile comportamento sotto carichi di trazione. Sembra plausibileche, per qualunque carico di trazione, perturbazioni anche grandi della confi-gurazione di equilibrio di partenza non inducano la struttura ad allontanarse-ne; e che, cessata la causa perturbante, la struttura riassuma spontaneamentela configurazione di partenza. Cio fa, infatti, una stecca da ombrello tesa (Fig.
Figura 6.4.
6.4), la quale, dopo una perturbazione che la infletta, riassume una configu-razione rettilinea, in marcata contraddizione con il proprio comportamentosotto un carico di compressione abbastanza grande (Fig. 6.5), quando unapiccola perturbazione dello stesso genere viene invece esaltata.
Figura 6.5.
E facile scrivere la condizione per l’equilibrio della trave in una configura-zione di parametro ϕ:
λϕ − pl sinϕ = 0 . (27.2)
Quante e quali soluzioni, oltre alla soluzione di partenza ϕ = 0 , ha questaequazione?
Se la soluzione di partenza fosse l’unica, non ci sarebbe evidentemente al-cun problema a qualificarne la natura: per ϕ = 0 , l’equilibrio non potrebbeche essere stabile. La situazione e pero piu complessa. Cominciamo ad esami-narla restringendo l’attenzione a piccoli scostamenti dalla configurazione dipartenza, per i quali sia lecito confondere il seno con l’angolo: sin ϕ ' ϕ. Conquesta semplificazione, e ponendo
pc :=λ
l, (27.3)
l’equazione di equilibrio (27.2) si puo scrivere nella forma:

140 6 Travature Piane con Elementi Elastici: Instabilita(1 − p
pc
)ϕ = 0. (27.4)
Nel piano (p/pc, ϕ), le soluzioni di questa equazione si rappresentano come inFig. 6.6:
Figura 6.6.
per qualunque valore del parametro di controllo p, c’e la soluzione di equi-librio ϕ = 0, che e l’unica se p 6= pc; per p = pc, qualunque valore di ϕcorrisponde ad una possibile soluzione di equilibrio. Prima di abbandonarel’ipotesi, evidentemente troppo cruda, di piccoli scostamenti, facciamo alcuneosservazioni.
Osservazione 2. E importante rendersi conto di un’ipotesi implicita nellascrittura di (27.2): che il carico sia, come si dice, ‘morto’, e cioe, resti invariatoper modulo, direzione e verso qualunque sia la configurazione assunta dalsistema strutturale cui e applicato. Le situazioni di carico ‘vivo’ compongonouna casistica piuttosto intricata, che non esamineremo nel corso di questanostra trattazione elementare dei problemi di instabilita.
Osservazione 3. Il carico critico pc e tanto minore quanto piu la lunghezzadella trave e grande, a conferma dell’intuizione che una trave snella sia piususcettibile di una tozza a perdere stabilita in compressione (ne le gambe d’untavolo ne i pilastri d’un edificio van fatti troppo sottili!).
Osservazione 4. Se la trave fosse soggetta ad un carico di trazione (p = pe3),l’equazione (27.4) diverrebbe: (
1 +p
pc
)ϕ = 0,
la cui unica soluzione, come anticipato nell’Osservazione 1, e ϕ = 0.
Torniamo adesso ad esaminare l’equazione (27.2), che conviene riscriverenella forma:
sinϕ =pc
pϕ , (27.5)

27 Instabilita per diramazione: analisi statica 141
cercando di metterne in evidenza per via grafica l’insieme delle soluzioni. NellaFig. 6.7, la retta y = ϕ, tangente nell’origine alla sinusoide y = sin ϕ, divide
Figura 6.7.
le rette per l’origine di coefficiente angolare positivo in due famiglie: quelle didi equazione
y =pc
pϕ, p < pc,
e le altre. Tutte le rette della prima famiglia hanno con la curva rappresenta-tiva della funzione seno un’unica intersezione nell’origine; quelle della secondafamiglia, che corrispondono a valori ‘supercritici’ del carico applicato (p > pc),hanno invece, oltre a quella, anche varie altre intersezioni: precisamente, al cre-scere di p, a ϕ = 0 si aggiunge una prima coppia di configurazioni di equilibrio±ϕ1 , con 0 < ϕ < π, simmetricamente poste rispetto all’origine, quindi duecoppie con 2π < ϕ2, ϕ3 < 3π e via continuando, sicche le soluzioni di (27.2)sono in numero di 1, 3, 7, . . . .
Consideriamo, facendo riferimento alla Fig. 6.8, il caso in cui il valore di
Figura 6.8.
p sia tale che la retta che rappresenta la coppia raddrizzante abbia tre inter-sezioni con la sinusoide che rappresenta la coppia instabilizzante. La natura
142 6 Travature Piane con Elementi Elastici: Instabilita
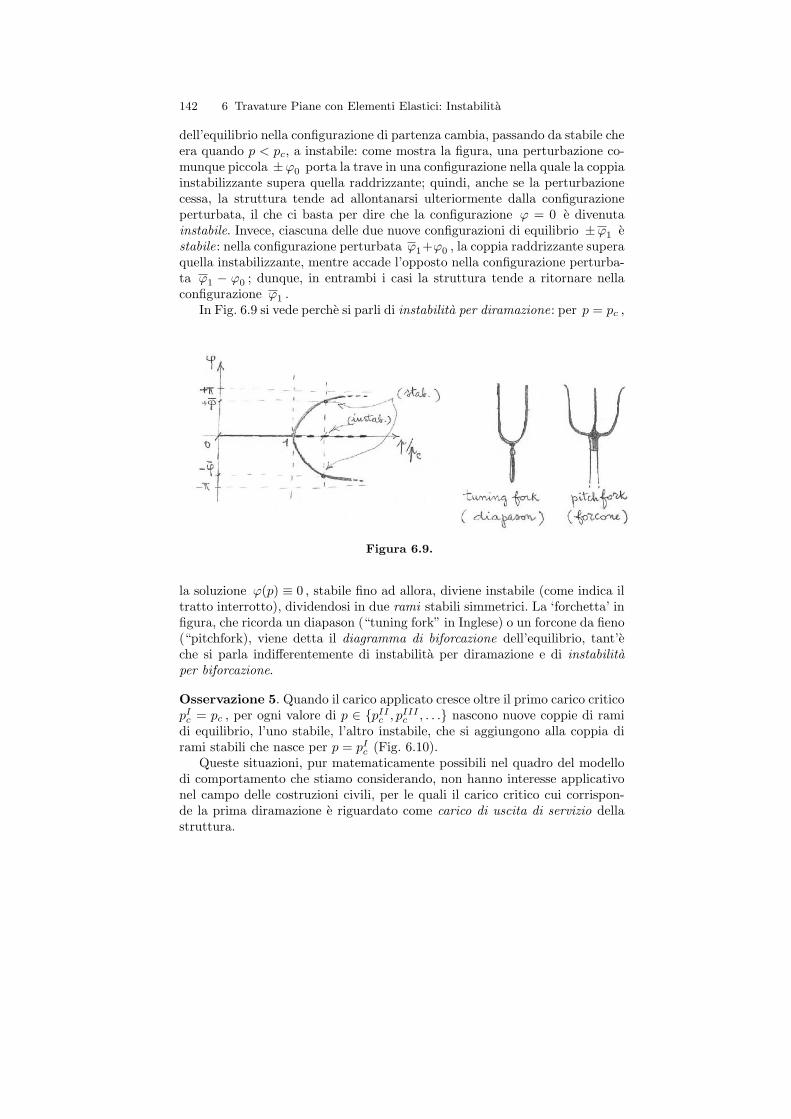
dell’equilibrio nella configurazione di partenza cambia, passando da stabile cheera quando p < pc, a instabile: come mostra la figura, una perturbazione co-munque piccola ±ϕ0 porta la trave in una configurazione nella quale la coppiainstabilizzante supera quella raddrizzante; quindi, anche se la perturbazionecessa, la struttura tende ad allontanarsi ulteriormente dalla configurazioneperturbata, il che ci basta per dire che la configurazione ϕ = 0 e divenutainstabile. Invece, ciascuna delle due nuove configurazioni di equilibrio ±ϕ1 estabile: nella configurazione perturbata ϕ1+ϕ0 , la coppia raddrizzante superaquella instabilizzante, mentre accade l’opposto nella configurazione perturba-ta ϕ1 − ϕ0 ; dunque, in entrambi i casi la struttura tende a ritornare nellaconfigurazione ϕ1 .
In Fig. 6.9 si vede perche si parli di instabilita per diramazione: per p = pc ,
Figura 6.9.
la soluzione ϕ(p) ≡ 0 , stabile fino ad allora, diviene instabile (come indica iltratto interrotto), dividendosi in due rami stabili simmetrici. La ‘forchetta’ infigura, che ricorda un diapason (“tuning fork” in Inglese) o un forcone da fieno(“pitchfork), viene detta il diagramma di biforcazione dell’equilibrio, tant’eche si parla indifferentemente di instabilita per diramazione e di instabilitaper biforcazione.
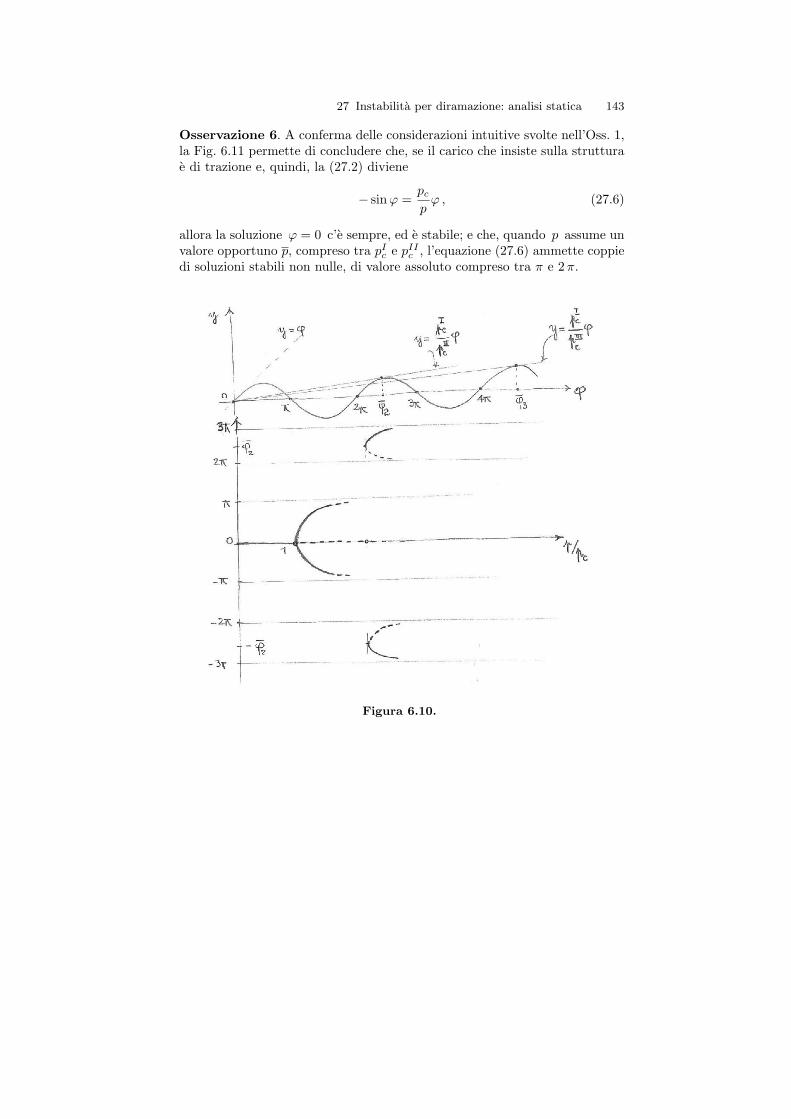
Osservazione 5. Quando il carico applicato cresce oltre il primo carico criticopI
c = pc , per ogni valore di p ∈ {pIIc , pIII
c , . . .} nascono nuove coppie di ramidi equilibrio, l’uno stabile, l’altro instabile, che si aggiungono alla coppia dirami stabili che nasce per p = pI
c (Fig. 6.10).Queste situazioni, pur matematicamente possibili nel quadro del modello
di comportamento che stiamo considerando, non hanno interesse applicativonel campo delle costruzioni civili, per le quali il carico critico cui corrispon-de la prima diramazione e riguardato come carico di uscita di servizio dellastruttura.
27 Instabilita per diramazione: analisi statica 143
Osservazione 6. A conferma delle considerazioni intuitive svolte nell’Oss. 1,la Fig. 6.11 permette di concludere che, se il carico che insiste sulla strutturae di trazione e, quindi, la (27.2) diviene
− sinϕ =pc
pϕ , (27.6)
allora la soluzione ϕ = 0 c’e sempre, ed e stabile; e che, quando p assume unvalore opportuno p, compreso tra pI
c e pIIc , l’equazione (27.6) ammette coppie
di soluzioni stabili non nulle, di valore assoluto compreso tra π e 2 π.
Figura 6.10.

144 6 Travature Piane con Elementi Elastici: Instabilita
Figura 6.11.
28 Instabilita per diramazione: analisi dinamica
La nozione di carico critico per una struttura ‘caricata di punta’ - secondol’analisi statica, quel valore del parametro di carico in corrispondenza del qua-le l’equilibrio di partenza cessa di essere l’unico possibile e perde la qualificadi stabile - viene arricchita e precisata dall’analisi dinamica. Quest’ultima,come qui di seguito vedremo, mostra che e critico quel valore del parametrodi carico per il quale, in presenza di piccole perturbazioni della configura-zione di partenza, si ha una transizione da un regime di piccole oscillazioniattorno alla configurazione imperturbata ad uno di progressivo e irreversibileallontanamento da quella configurazione.
Attribuiamo alla trave di Fig. 6.3 una densita di massa per unita di lun-ghezza ρ, positiva e costante. Per dedurre l’equazione di moto della trave,occorre valutare il momento totale della forza d’inerzia distribuita lungo latrave rispetto alla cerniera al piede. Tale forza distribuita ha l’espressionenewtoniana −(ρ dx)a(x), dove a(x) e l’accelerazione del punto della trave chedista x ∈ [0, l] dalla cerniera; questo punto e individuato dal proprio vettoreposizione rispetto alla cerniera:
x = xe(ϕ), e(ϕ) = sin ϕe1 + cos ϕe2, (28.7)

28 Instabilita per diramazione: analisi dinamica 145
dove e(ϕ) e il versore della trave, nella configurazione che assume quandocompie una rotazione ϕ attorno alla cerniera (Fig 6.12).
Figura 6.12.
Quindi, il momento totale della forza d’inerzia ha l’espressione:∫ l
0
x ×(− ρa(x)
)dx = m(in)e3;
per calcolare m(in), ci resta da trovare l’espressione di a .1 Ora, in un motodi rotazione caratterizzato dall’applicazione t 7→ ϕ(t) , la velocita del punto xall’istante t e il vettore:
v(x, t) =d
dt
(xe(ϕ(t)
)=
(xϕ(t)
)e⊥(ϕ(t)
), e⊥(ϕ) = cos ϕe1 − sinϕe2.
2
(28.8)Quindi, l’accelerazione di x e il vettore:
a(x, t) = v(x, t) =(xϕ(t)
)e⊥(ϕ(t)
)−
(xϕ(t)2
)e (ϕ(t)
)(28.9)
Ne segue che
x ×(− ρa
)= (−ρx2)ϕ e × e⊥ = (ρx2)ϕ e3,
dunque che
m(in) =(1
3ρ l3
)ϕ . (28.10)
L’equazione di moto della trave si ottiene bilanciando la coppia della mol-la (λϕ)e3, il momento rispetto alla cerniera del carico applicato le × p =−(pl sinϕ)e3) e il momento della forza d’inerzia m(in)e3:1 Non c’e’ dubbio che x × a sia un vettore parallelo ad e3, visto che entrambi i
fattori del prodotto vettoriale sono ortogonali a quel versore.2 Un punto sovrapposto segnala una differenziazione rispetto al tempo.

146 6 Travature Piane con Elementi Elastici: Instabilita
λϕ − pl sinϕ +(1
3ρ l3
)ϕ = 0 (28.11)
(si confronti con l’equazione di equilibrio (27.2)). Previa la solita linearizza-zione (sin ϕ ' ϕ), si puo dare a questa equazione la forma:
ϕ + ω2ϕ = 0, ω2 =pc − p13ρ l2
, (28.12)
e considerare i tre tipi di soluzioni generali possibili:
• se ω2 > 0, e cioe, se p < pc,
ϕ(t) = a1 cos ωt + a2 sinωt;
• se ω2 = 0, e cioe, se p = pc,
ϕ(t) = a1 + a2 t;
• se ω2 < 0, e cioe, se p > pc,
ϕ(t) = a1eωt + a2e
−ωt.
Nel secondo e terzo caso, al crescere del tempo la soluzione diverge, comunquepiccola sia la perturbazione iniziale della configurazione verticale di equilibrio,perturbazione che viene specificata assegnando le condizioni iniziali :
ϕ(0) = ϕ0, ϕ(0) = ϕ0 . (28.13)
Tenendo conto di tali condizioni, la soluzione del primo caso (p < pc) descrivemoti oscillatori, di frequenza ω/2π e periodo τ = 2πω−1, la cui ampiezzasoddisfa la condizione
maxt∈[0,τ ]
|ϕ(t)| ≤ (a21 + a2
2)1/2 =
(ϕ0
2 + ω−2ϕ20
)1/2 ;
quindi, a piccole perturbazioni (≡ condizioni iniziali) corrispondono vibrazionidella trave in un piccolo intorno della verticale.
Osservazione. Moltiplicando la (28.12) per ϕ, e integrando il risultato tral’istante iniziale e quello tipico, si trova il teorema di conservazione dell’energiatotale:
E(t) = E(0), E = T + U, (28.14)
dove
T =12ϕ2 (energia cinetica), U =
12ω2ϕ2 (energia potenziale), (28.15)
eE(0) =
12ϕ2
0 +12ω2ϕ0
2. (28.16)

29 Instabilita in presenza di imperfezioni 147
Segue da queste relazioni che
ϕ(t)2 + ω2ϕ(t)2 = ϕ20 + ω2ϕ0
2. (28.17)
Questa condizione di conservazione vale qualunque sia il regime di moto, oscil-latorio o divergente; quando ω2 > 0, e facile dedurne non solo la maggiorazionegia vista per l’ampiezza, ma anche una simile maggiorazione per la velocitaangolare:
maxt∈[0,τ ]
ϕ(t)2 < ϕ20 + ω2ϕ0
2.
29 Instabilita in presenza di imperfezioni
Il modello matematico di instabilita che abbiamo costruito (per diramazionedel percorso di equilibrio, in statica; per transizione da piccole oscillazionia moti divergenti, in dinamica) vale in tanto in quanto le approssimazio-ni fatte nel costruirlo sono giustificate nell’ambito delle applicazioni che sene intendono fare. Questo criterio di convalida vale naturalmente per tutti imodelli. Curiosamente pero, in questo caso particolare, un’approssimazioneche abbiamo accettato senza neppur soffermarci a commentarla - quella chei dati del problema (carichi applicati, geometria, risposta elastica) siano co-nosciuti in modo esatto, senza approssimazione! - costituisce una condizioneindispensabile per il fenomeno di diramazione. Questo fenomeno, quindi, co-me mostreremo per mezzo di un paio di esempi, non e un fatto di natura maun artefatto, dipendente dalla ‘approssimazione di esattezza’, cioe, dall’ap-prossimazione implicita nel supporre di avere un’informazione esatta sui dati.Insomma, il modello di instabilita per diramazione non e un modello ‘robusto’:perturbazioni comunque piccole dei dati ne cancellano l’aspetto caratteristico,dal quale deriva il suo nome.
Figura 6.13.

148 6 Travature Piane con Elementi Elastici: Instabilita
29.1 Imperfezioni di carico
Consideriamo la trave con la quale abbiamo familiarita immaginando che l’in-certezza sulla natura dei carichi si concreti nell’aggiunta di un carico orizzon-tale q = q e1, con |q| comunque piccolo (ad esempio, con |q| = ε pc, ε > 0)(Fig. 6.13). Allora, la condizione di equilibrio (27.2) diviene:
λϕ − pl sinϕ − ql cos ϕ = 0, (29.18)
ovvero, linearizzando,
(λ − pl)ϕ − ql = 0 ⇒ ϕ = ε1
1 − p/pc. (29.19)
Quindi il diagramma di biforcazione di Fig. 6.6 si modifica come si vede in Fig.6.14: le famiglie di iperboli di assi ϕ = 0 e p/pc = 1 tendono a quel diagrammaper ε → 0: una perturbazione di carico ha fatto giustizia della diramazione! Equesto non e un effetto della linearizzazione, la quale, semmai, e responsabiledella conservazione di un altro artefatto, la simmetria speculare delle curvedi carico di equazione (29.19) rispetto alla retta ϕ = p/pc. Ma anche questoartefatto scompare, se si studia l’effetto della perturbazione di carico in baseal modello piu fine riassunto dall’equazione non lineare (29.18), modello chesostituisce la ‘forchetta’ di Fig. 6.9 con le famiglie di curve mostrate in Fig.6.15.
Figura 6.14.
29.2 Imperfezioni di geometria
L’effetto di eventuali incertezze sulla geometria della trave non e dissimile daquello appena visto delle incertezze sul sistema di carico. Si veda l’esempio diFig. 6.16, dove conviene prendere δ = ε l. L’equazione di bilancio diviene:
λϕ − p(l sinϕ + δ cos ϕ) = 0, (29.20)

30 Instabilita di travature a piu parametri 149
Figura 6.15.
e quindi, linearizzando,
(λ − pl)ϕ − pδ = 0 ⇒ ϕ = εp/pc
1 − p/pc. (29.21)
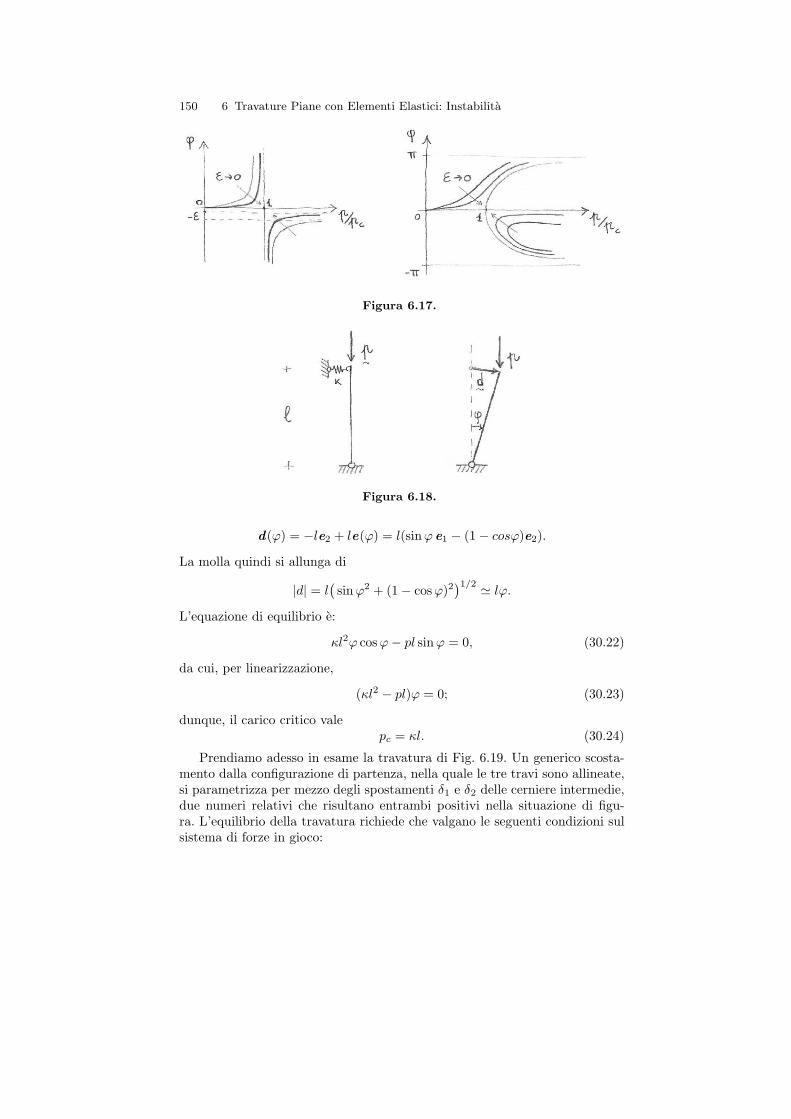
I diagrammi di biforcazione delle Fig. 6.6 e Fig. 6.9 si modificano come si vedein Fig. 6.17: di nuovo, una perturbazione (di geometria, questa volta) ha fattogiustizia della diramazione.
Figura 6.16.
30 Instabilita di travature a piu parametri
30.1 Piu parametri cinematici
Cominciamo a considerare l’eventuale instabilita per diramazione della travein Fig. 6.18. In una configurazione discosta da quella verticale dell’angolo ϕ,l’estremo mobile della molla viene a trovarsi nel punto di vettore posizione
150 6 Travature Piane con Elementi Elastici: Instabilita
Figura 6.17.
Figura 6.18.
d(ϕ) = −le2 + le(ϕ) = l(sinϕ e1 − (1 − cosϕ)e2).
La molla quindi si allunga di
|d| = l(sinϕ2 + (1 − cos ϕ)2
)1/2 ' lϕ.
L’equazione di equilibrio e:
κl2ϕ cos ϕ − pl sinϕ = 0, (30.22)
da cui, per linearizzazione,
(κl2 − pl)ϕ = 0; (30.23)
dunque, il carico critico valepc = κl. (30.24)
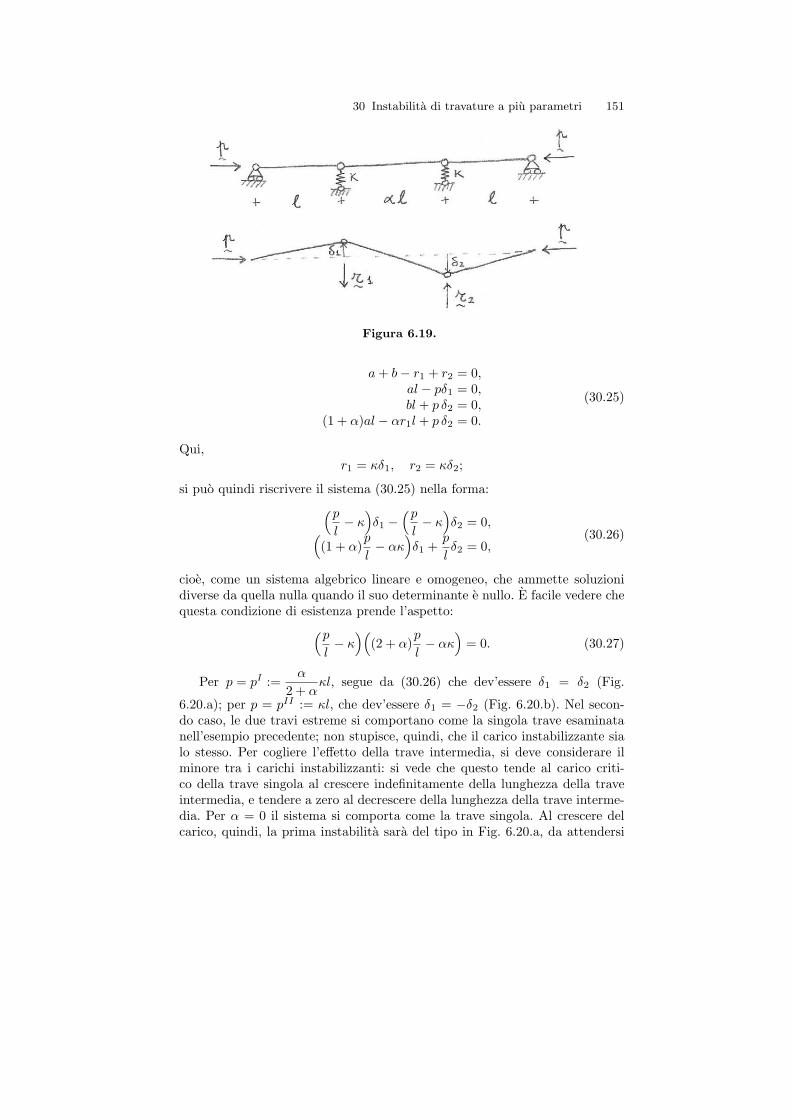
Prendiamo adesso in esame la travatura di Fig. 6.19. Un generico scosta-mento dalla configurazione di partenza, nella quale le tre travi sono allineate,si parametrizza per mezzo degli spostamenti δ1 e δ2 delle cerniere intermedie,due numeri relativi che risultano entrambi positivi nella situazione di figu-ra. L’equilibrio della travatura richiede che valgano le seguenti condizioni sulsistema di forze in gioco:
30 Instabilita di travature a piu parametri 151
Figura 6.19.
a + b − r1 + r2 = 0,al − pδ1 = 0,bl + p δ2 = 0,
(1 + α)al − αr1l + p δ2 = 0.
(30.25)
Qui,r1 = κδ1, r2 = κδ2;
si puo quindi riscrivere il sistema (30.25) nella forma:(p
l− κ
)δ1 −
(p
l− κ
)δ2 = 0,(
(1 + α)p
l− ακ
)δ1 +
p
lδ2 = 0,
(30.26)
cioe, come un sistema algebrico lineare e omogeneo, che ammette soluzionidiverse da quella nulla quando il suo determinante e nullo. E facile vedere chequesta condizione di esistenza prende l’aspetto:(p
l− κ
)((2 + α)
p
l− ακ
)= 0. (30.27)
Per p = pI :=α
2 + ακl, segue da (30.26) che dev’essere δ1 = δ2 (Fig.
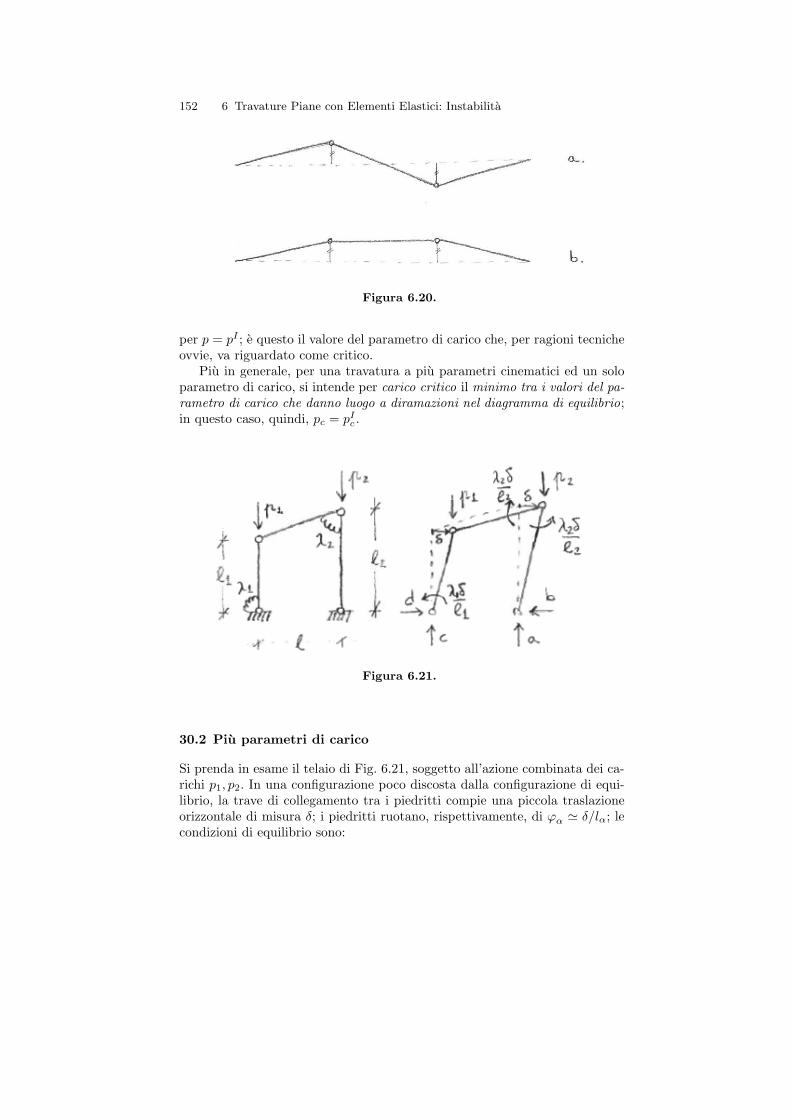
6.20.a); per p = pII := κl, che dev’essere δ1 = −δ2 (Fig. 6.20.b). Nel secon-do caso, le due travi estreme si comportano come la singola trave esaminatanell’esempio precedente; non stupisce, quindi, che il carico instabilizzante sialo stesso. Per cogliere l’effetto della trave intermedia, si deve considerare ilminore tra i carichi instabilizzanti: si vede che questo tende al carico criti-co della trave singola al crescere indefinitamente della lunghezza della traveintermedia, e tendere a zero al decrescere della lunghezza della trave interme-dia. Per α = 0 il sistema si comporta come la trave singola. Al crescere delcarico, quindi, la prima instabilita sara del tipo in Fig. 6.20.a, da attendersi
152 6 Travature Piane con Elementi Elastici: Instabilita
Figura 6.20.
per p = pI ; e questo il valore del parametro di carico che, per ragioni tecnicheovvie, va riguardato come critico.
Piu in generale, per una travatura a piu parametri cinematici ed un soloparametro di carico, si intende per carico critico il minimo tra i valori del pa-rametro di carico che danno luogo a diramazioni nel diagramma di equilibrio;in questo caso, quindi, pc = pI
c .
Figura 6.21.
30.2 Piu parametri di carico
Si prenda in esame il telaio di Fig. 6.21, soggetto all’azione combinata dei ca-richi p1, p2. In una configurazione poco discosta dalla configurazione di equi-librio, la trave di collegamento tra i piedritti compie una piccola traslazioneorizzontale di misura δ; i piedritti ruotano, rispettivamente, di ϕα ' δ/lα; lecondizioni di equilibrio sono:

31 L’instabilita per diramazione come problema agli autovalori 153
a + c − p1 − p2 = 0, b − d = 0 ;
λ2δ
l2− b l2 − aδ = 0,
λ1δ
l1+ d l1 − cδ = 0,
−λ1δ
l1+ p1δ + p2(l + δ) − a l = 0.
(30.28)
Una forma equivalente dell’ultima equazione,
a = p2 + (p1 + p2)δ
l− λ1
δ
l1,
mostra che, coerentemente con la linearizzazione gia parzialmente introdottaapprossimando l’arco ϕαlα con la corda δ,
a ' p2.
Ma allora, dalla prima equazione di equilibrio, segue che
c ' p1
e dalla terza cheb l2 '
(λ2
l2− p2
)δ . (30.29)
D’altra parte, combinando le (30.28)2,3,4, si trova che:
0 =(λ1
l1+
λ2
l2
)δ−b l2
(1− l1
l2
)−(a+c)δ =
(λ1
l1+
λ2
l2
)δ−b l2
(1− l1
l2
)−(p1+p2)δ,
e quindi, vista (30.29),(λ1
l1+
λ2
l2−
(1 − l1
l2
)(λ2
l2− p2
)− (p1 + p2)
)δ ' 0.
Pertanto, il valore critico della combinazione di carichi che insistono sullatravatura e:
pc := p1 +l1l2
p2 =λ1
l1+
l1l2
λ2
l2; (30.30)
e interessante notare che, come conseguenza della procedura di linearizzazione,tale valore non dipende dal parametro geometrico l; e che pc → λ1/l1 perl1/l2 → 0 , mentre pc → λ2/l2 per l1/l2 → ∞.
31 L’instabilita per diramazione come problema agliautovalori
Prendiamo di nuovo in considerazione la trave di Fig. 6.18 e la travatura diFig. 6.19. Nel primo caso, un unico parametro basta a individuare ogni pos-sibile configurazione diversa da quella di partenza; scegliendo δ = lϕ, l’analisilinearizzata fornisce la condizione di equilibrio:

154 6 Travature Piane con Elementi Elastici: Instabilita
(κl − p)δ = 0; (31.31)
richiedendo che questa condizione sia soddisfatta per δ 6= 0, troviamoil valore critico del carico: pc = κl. Nel secondo caso, come sappiamo, oc-corrono due parametri di configurazione indipendenti, δ1 e δ2; la condizio-ne di equilibrio prende l’aspetto del sistema (30.26), che ammette soluzioni(δ1, δ2) 6= (0, 0) se
det(
κl − p −(κl − p)ακl − (1 + α)p −p
)= 0; (31.32)
il valore critico del carico e pari alla minore tra le due radici del polino-mio di secondo grado (30.27), cui corrisponde la famiglia di configurazioniindividuata dalla condizione δ1 = δ2 (Fig. 6.20).
Muovendo da questi esempi, si comprende facilmente che, se le configu-razioni di una travatura con membrature rigide ed elementi elastici a defor-mabilita concentrata sono determinate da una lista δ ≡ (δ1, δ2, . . . , δn) di nparametri reali, le condizioni linearizzate di equilibrio prendono l’aspetto diun sistema algebrico lineare e omogeneo regolato da una matrice A di n righee altrettante colonne:
Aδ = p δ; (31.33)
e che il problema da risolvere consiste nel trovare tutte le coppie (autovalore,autovettore) di A, cioe, tutte le coppie (p, δ), con p reale, che soddisfanol’equazione (31.33). Si trattera, quindi, prima di trovare tutte le radici realidell’equazione polinomiale di grado n
det(A− p1) = 0, 3
poi di determinare, per ciascuna di queste radici, la forma della configurazionecorrispondente;4 avremo cosı completamente risolto il problema agli autovalo-ri per la matrice A, che consiste nel trovare tutte le coppie (p, δ)I , (p, δ)II , . . .che soddisfano (31.33), ordinandole per comodita secondo i valori crescentidel loro primo elemento. Al solito, intenderemo per carico critico della trava-tura corrispondente ad A il piu piccolo tra gli autovalori, e cioe, pc = pI ; seassoggettata a questo carico, la travatura tende ad abbandonare la configura-zione di partenza (divenuta instabile) e ad assumere una configurazione dellafamiglia δI .3 Qui 1 e la matrice identita di ordine n × n. Si noti che la matrice in (31.32) si
puo scrivere nella forma:„
κl − p −(κl − p)ακl − (1 + α)p −p
«
=
„
κl −(κl − p)ακl − (1 + α)p 0
«
− p
„
1 00 1
«
4 La forma, ma non l’ampiezza: per stimare quest’ultima, come ci suggerisco-no gli esempi visti nella Sezione 29, dovremmo compiere un’analisi non linearedell’equilibrio, tenendo conto dell’effetto di eventuali imperfezioni.

32 Verso un modello continuo di instabilita per diramazione 155
Osservazione. Ritornando alla trave di Fig. 6.18, in luogo della condizionedi equilibrio completamente linearizzata (31.31), prendiamo in considerazionela condizione di equilibrio non lineare
r(ϕ) − p sinϕ = 0, r(ϕ) = κδ + o(δ) .
Piu in generale, un problema agli autovalori non lineare di tipo algebrico hal’aspetto:
f (p, δ) = 0, f (p, 0) = 0; (31.34)
in particolare, come nell’esempio appena visto, puo essere che
f (p, δ) = a(δ) − p b(δ);
ancora piu in particolare, il problema puo essere semilineare (se b(δ) = δ), olineare (se a(δ) = Aδ e b(δ) = Bδ, di solito con B = 1); la soluzione di unproblema siffatto consiste nel trovare tutte le coppie (p, ϕ 6= 0) che risolvonol’equazione (31.34) ovvero le sue varianti semilineari e lineari.
32 Verso un modello continuo di instabilita perdiramazione
Prendiamo in esame la travatura a due parametri di configurazione rappre-sentata in Fig. 6.22.
Figura 6.22.
L’equilibrio in una configurazione diversa da quella di partenza e possibilese si trova una soluzione (ϕ,ϕ(1)) non banale del sistema omogeneo:

156 6 Travature Piane con Elementi Elastici: Instabilita
12
pl sin(ϕ + ϕ(1)) = λ(1)ϕ(1),
12
pl(sin(ϕ + ϕ(1)) + sinϕ) = λϕ,
linearizzando il quale si ottiene:
12
pl ϕ +(1
2pl − λ(1)
)ϕ(1) = 0,
(pl − λ)ϕ +12
pl ϕ(1) = 0.
(32.35)
Per l’esistenza di una soluzione non nulla di questo sistema, deve esserne nulloil determinante:
0 =∣∣∣∣ 1
2 pl 12 pl − λ(1)
pl − λ 12 pl
∣∣∣∣ =(1
2pl
)2
− (pl − λ)(1
2pl − λ(1)
);
questa equazione di secondo grado in p ha due radici positive, la piu piccoladelle quali e
pc =λ
l+ 2
λ(1)
l−
√λ2
l2+ 4
λ(1)2
l2. (32.36)
Figura 6.23.
E facile verificare che pc <λ
l(in particolare, se λ = λ(1), pc = (3 −
√5)
λ
l):
la suddivisione in parti della trave in Fig. 6.23(a), per la quale appunto pc =λ
l,
comporta la riduzione del carico critico perche la deformabilita della struttura
33 Instabilita per scatto 157
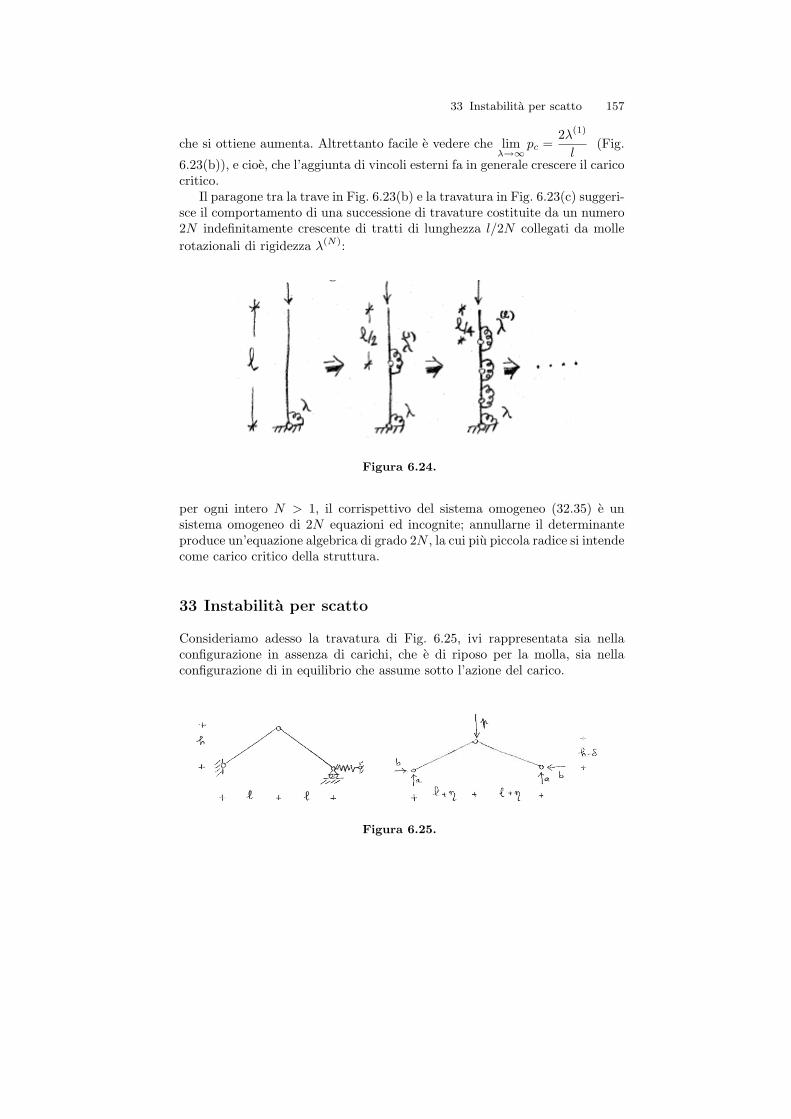
che si ottiene aumenta. Altrettanto facile e vedere che limλ→∞
pc =2λ(1)
l(Fig.
6.23(b)), e cioe, che l’aggiunta di vincoli esterni fa in generale crescere il caricocritico.
Il paragone tra la trave in Fig. 6.23(b) e la travatura in Fig. 6.23(c) suggeri-sce il comportamento di una successione di travature costituite da un numero2N indefinitamente crescente di tratti di lunghezza l/2N collegati da mollerotazionali di rigidezza λ(N):
Figura 6.24.
per ogni intero N > 1, il corrispettivo del sistema omogeneo (32.35) e unsistema omogeneo di 2N equazioni ed incognite; annullarne il determinanteproduce un’equazione algebrica di grado 2N , la cui piu piccola radice si intendecome carico critico della struttura.
33 Instabilita per scatto
Consideriamo adesso la travatura di Fig. 6.25, ivi rappresentata sia nellaconfigurazione in assenza di carichi, che e di riposo per la molla, sia nellaconfigurazione di in equilibrio che assume sotto l’azione del carico.
Figura 6.25.

158 6 Travature Piane con Elementi Elastici: Instabilita
Le condizioni di equilibrio, nella configurazione assunta in presenza delcarico, sono:
2 a = p, a(l + η) − b(h − δ) = 0; (33.37)
la condizione di compatibilita geometrica esatta e:
(l + η)2 + (h − δ)2 = l2 + h2; (33.38)
l’equazione che descrive la risposta elastica lineare della molla e:
b = 2κη. (33.39)
Combinando le prime due equazioni con l’ultima, si trova che
4κη(h − δ) = p(l + η);
poiche dalla (33.38) segue che
l + η =√
l2 + h2 − (h − δ)2,
si ottiene infine:
p = 4κ(h − δ)−l +
√l2 + δ(2h − δ)√
l2 + δ(2h − δ). (33.40)
Da questa relazione si deduce facilmente che p = 0 per δ ∈ {0, h, 2h} ; eche p > 0 tanto per δ ∈ (0, h) che per δ ∈ (h, 2h) ; si veda la Fig. 6.26, dovee rappresentata la funzione
p(ξ) = 4κh(1 − ξ)−α +
√α2 + ξ(2 − ξ)√
α2 + ξ(2 − ξ), α := l/h , ξ := δ/h . (33.41)
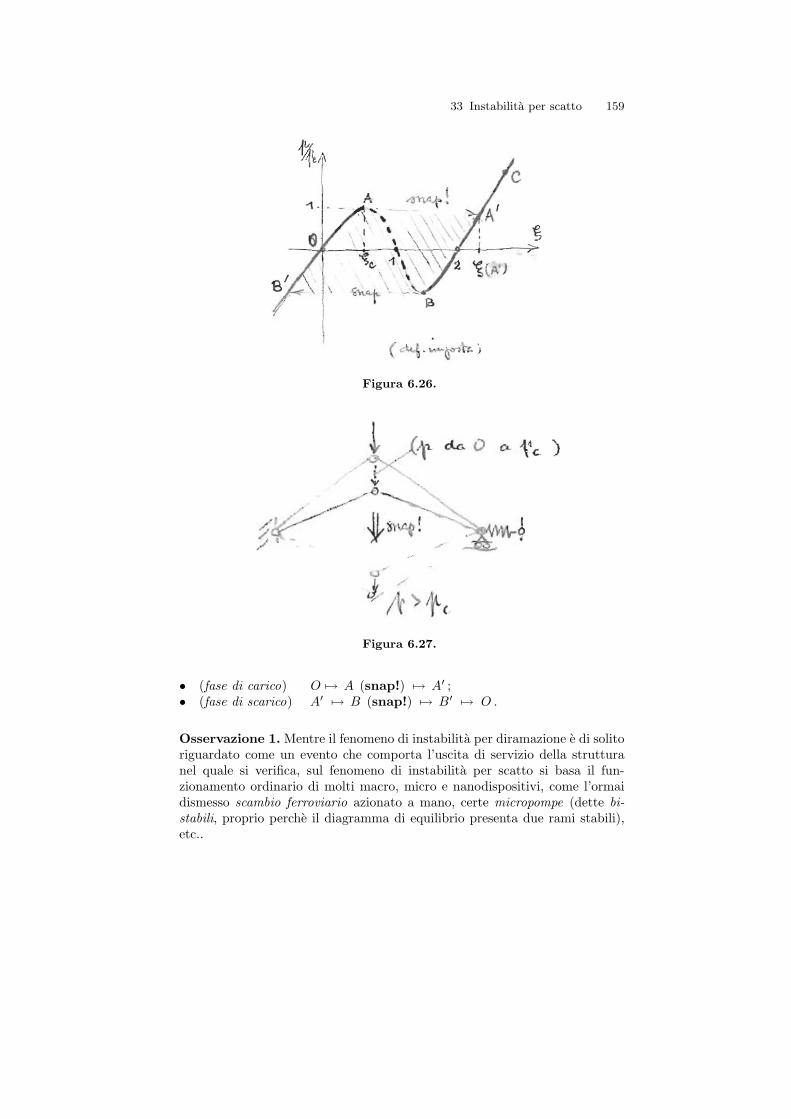
La Fig. 6.27 illustra il comportamento della travatura in un esperimentodi deformazione imposta. Quando ξ = ξc e, quindi, p = pc , un incrementodi deformazione sarebbe possibile solo con un decremento del carico; allora,la travatura si porta con un brusco scatto (“snapping”) nella posizione checorrisponde all’ascissa ξ(A′),donde sono di nuovo possibili incrementi simultanei di carico e deformazione.Nella figura si osserva il fenomeno di instabilita per scatto anche in fase discarico; la porzione da A a B della curva e instabile, mentre i rami OB′A eBA′C sono stabili. Il cammino chiuso
O 7→ A (snap!) 7→ A′ 7→ B (snap!) 7→ B′ 7→ O
si dice ciclo di isteresi. L’area di questo ciclo misura il lavoro che occorrespendere perche il sistema lo compia: anche se non contiene che elementi rigidied elementi elastici, un sistema con comportamento isteretico e dunque sempredissipativo, tanto meno quanto piu piccola e l’area del suo ciclo d’isteresi. Ilgrafico in Fig. 6.28 rappresenta la funzione, inversa della funzione p in (33.41),che descrive un esperimento di carico imposto; un ciclo di carico consiste didue fasi:
33 Instabilita per scatto 159
Figura 6.26.
Figura 6.27.
• (fase di carico) O 7→ A (snap!) 7→ A′ ;• (fase di scarico) A′ 7→ B (snap!) 7→ B′ 7→ O .
Osservazione 1. Mentre il fenomeno di instabilita per diramazione e di solitoriguardato come un evento che comporta l’uscita di servizio della strutturanel quale si verifica, sul fenomeno di instabilita per scatto si basa il fun-zionamento ordinario di molti macro, micro e nanodispositivi, come l’ormaidismesso scambio ferroviario azionato a mano, certe micropompe (dette bi-stabili, proprio perche il diagramma di equilibrio presenta due rami stabili),etc..

160 6 Travature Piane con Elementi Elastici: Instabilita
Figura 6.28.
Osservazione 2. Invece della funzione p, con il cambio di variabile x = ξ − 1e a meno di una costante moltiplicativa, possiamo studiare la funzione
f(x) = −x−α +
√α2 + 1 − x2
√α2 + 1 − x2
.
Poiche f e una funzione dispari (f(x) = −f(−x)), possiamo concludere che,nell’intervallo (−1, +1), f avra massimo e minimo simmetricamente dispostirispetto all’ascissa x = 0, nei punti di ascissa ±x0, con
x20 = 1 −
(α(1 + α2)
)2/3 + α2;
e che f(−x0) = −f(x0) = |f(x0)|. Dunque, nel corrispondente intervallo (0, 2),la funzione p avra anch’essa massimo e minimo di pari modulo.