6 Sistemi Isostatici,Labili,Iperstatici

of 17
-
Upload
pierluigi-merra -
Category
Documents
-
view
217 -
download
0
Transcript of 6 Sistemi Isostatici,Labili,Iperstatici
-
7/25/2019 6 Sistemi Isostatici,Labili,Iperstatici
1/17
2007 Universit degli studi e-Campus - Via Isimbardi 10 - 22060 Novedrate (CO) - C.F. 08549051004Tel: 031/7942500-7942505 Fax: 031/7942501 [email protected]
Pagina 1/17
Corso di Laurea: INGEGNERIA CIVILE EAMBIENTALEInsegnamento: Meccanica delle strutturen Lezione: 6Titolo: Sistemi isostatici, labili, iperstatici
FACOLT DI INGEGNERIA
LEZIONE 6 Sistemi isostatic i, labili , iperstatici.
Nucleotematico
Lez. Contenuto
3 6Bilancio tra gradi di libert e gradi di vincolo: sistemi di traviisostatici, labili, iperstatici.
Nella meccanica delle strutture si studiano le configurazioni diequilibrio dei sistemi strutturali; in questo corso ci si riferisceparticolarmente ai sistemi di travi. Questi sono costituiti da travi traloro in qualche modo connesse ed in qualche modo connesse al suoloo ad altri sistemi ritenuti fissi. Le strutture devono essere collegate al
suolo (o a sistemi fissi) in modo che, pensate come costituite da corpirigidi, non abbiano possibilit di spostamento. Si vedr nel seguito delcorso che in questo caso il soddisfacimento delle condizioni diequilibrio della struttura possibile qualunque sia il carico applicato.Per un sistema piano di travi si descrivono nel seguito le condizioniche i vincoli cui il sistema soggetto devono soddisfare per impediretutte le possibilit di spostamento del sistema steso pensato comeinsieme di aste rigide tra loro connesse.
Sistemi labili, isostatici, iperstatici
La generica configurazione di un sistema piano di travi rigide identificata da un certo numero di parametri indipendenti. Assegnatoun numero ad ognuno di questi parametri la posizione di ogni puntodel sistema (cio la sua configurazione) resta univocamente definita.Ricordando la definizione data nella lezione 5 i parametri necessari esufficienti ad identificare la configurazione del sistema sono detti gradidi libert del sistema.
In assenza di vincoli esterni una trave rigida ha nel piano 3gradi di libert. Conseguentemente in assenza di vincoli esterni edinterni un sistema piano costituito da n travi rigide ha nel piano
n3N = (1)gradi di libert nel senso che la sua generica configurazione univocamente identificata dallassegnazione di 3n parametri reali (treper ognuna delle n travi).
Assegnata una configurazione iniziale C0di un sistema di travirigide chiameremo configurazione spostata del sistema unaqualunque configurazione C1 che si ottiene a partire dallaconfigurazione C0assegnando certi spostamenti ai punti del sistemain modo da rispettare i vincoli interni ed esterni cui il sistema soggetto. chiaro che se il sistema ha N gradi di libert, assegnata laconfigurazione iniziale C0 per definire univocamente unaconfigurazione spostata C1 del sistema necessaria e sufficientelassegnazione di N numeri reali che rappresentano parametri di
mailto:[email protected]:[email protected]:[email protected]:[email protected] -
7/25/2019 6 Sistemi Isostatici,Labili,Iperstatici
2/17
2007 Universit degli studi e-Campus - Via Isimbardi 10 - 22060 Novedrate (CO) - C.F. 08549051004Tel: 031/7942500-7942505 Fax: 031/7942501 [email protected]
Pagina 2/17
Corso di Laurea: INGEGNERIA CIVILE EAMBIENTALEInsegnamento: Meccanica delle strutturen Lezione: 6Titolo: Sistemi isostatici, labili, iperstatici
FACOLT DI INGEGNERIA
spostamento a partire dalla configurazione C0. Questi parametri di
spostamento sono le componenti degli spostamenti dei punti delsistema rispetto ad un riferimento preventivamente fissato o lerotazioni degli elementi del sistema.
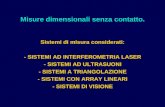
Per definire una configurazione spostata di un sistemacostituito da n travi rigide non soggette a vincoli sono quindi necessariN = 3n parametri, essendo il sistema dotato di N = 3n gradi di libert.Ad esempio la generica configurazione del sistema costituito dalle tretravi rigide difigura 6.1 non collegate tra loro e non soggette a vincoliesterni pu essere, ad esempio, identificata dai 9 parametriindipendenti x1, y1, 1, x2, y2, 2, x3, y3, 3, essendo (xi, yi) le coordinate
di una estremit delle travi e ilinclinazione delle travi rispetto allassex (i = 1, 2, 3).
Figura 6.1.Detta C0la configurazione di figura 6.1a, una configurazione spostataC1del sistema pu essere identificata dai 9 parametri x1, y1, 1,x2, y2, 2, x3, y3, 3, essendo (xi, yi) gli incrementi dellecoordinate (xi, yi) e igli incrementi delle inclinazioni i rispetto allaconfigurazione iniziale C0.
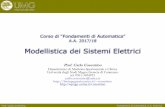
La presenza di vincoli esterni o interni impone restrizioni aquesti spostamenti: in presenza di vincoli la configurazione spostata identificata da meno parametri, essendo alcuni spostamenti impediti.Ad esempio, se nel sistema di figura 6.1 sono presenti una cerniera
esterna allestremo 1 ed una cerniera interna tra le aste 2 e 3, dei 9parametri visti ne sono sufficienti 5 (figura 6.2.)ed in particolare 1,x2, y2, 2, 3, dovendo essere x1= 0, y1= 0, x2= x3e y2=y3. Il sistema cos vincolato ha quindi 5 gradi di libert.
Figura 6.2.
x
y
O x1 x2 x3
y1
y2
y3
1
2
3
1
23
x
y
O x1+x1 x2+x2
y1+ y1 1+ 1
y2+ y2 2+ 2
x3+x3
3+ 3
1
2
3y3+ y3
ConfigurazioneC0 ConfigurazioneC1
21
3
2
1
3
(a)(b)
1+ 1x
y
O x1 x2 x3
y1
y2y3
1
2
3
1
23
x
y
O x2+x2
y2+ y2 2+ 2
x3f
3+ 3
1
2
3y3f
ConfigurazioneC0 ConfigurazioneC1
x1
y1
x3f= x2+ x2+ L2cos(2+2)y3f= y2+ y2+ L2sin(2+2)
1
L1
L2
L3
21
3
2
3
mailto:[email protected]:[email protected]:[email protected]:[email protected] -
7/25/2019 6 Sistemi Isostatici,Labili,Iperstatici
3/17
2007 Universit degli studi e-Campus - Via Isimbardi 10 - 22060 Novedrate (CO) - C.F. 08549051004Tel: 031/7942500-7942505 Fax: 031/7942501 [email protected]
Pagina 3/17
Corso di Laurea: INGEGNERIA CIVILE EAMBIENTALEInsegnamento: Meccanica delle strutturen Lezione: 6Titolo: Sistemi isostatici, labili, iperstatici
FACOLT DI INGEGNERIA
Si osservi che la somma delle molteplicit dei vincoli cui soggetto il
sistema difigura 6.2 pari a 4, due relativamente alla cerniera internae due relativamente alla cerniera esterna.
Si verifica facilmente che la presenza di vincoli riduce il numerodi gradi di libert del sistema in ragione della somma delle molteplicitdei vincoli cui il sistema soggetto. Quindi per impedire al sistemaogni possibile spostamento, cio per rendere nullo il numero dei suoigradi di libert, necessario che questo sia soggetto a vincoli la cuisomma delle molteplicit sia almeno pari al numero di gradi di libertdel sistema pensato non soggetto a vincoli. Si vedr nel seguito chequesta condizione necessaria ma non sufficiente.
Detto N il numero di gradi di libert di un sistema costituito daelementi rigidi pensato non soggetto a vincoli e v la somma dellemolteplicit dei vincoli esterni ed interni cui il sistema soggetto,possono presentarsi le seguenti eventualit.
1. N > v: il sistema vincolato conserva g = N - v gradi di libert equindi pu assumere configurazioni spostate C1 diverse dallaconfigurazione iniziale C0; la molteplicit dei vincoli insufficiente abloccare tutti i possibili spostamenti del sistema; in questo caso ilsistema si dice labile; il numero g = lb= N v di componenti dispostamento o rotazioni non bloccate si dice grado di labilitdel
sistema ed il sistema si dice lbvolte labile.2. N = v: il sistema vincolato non ha gradi di libert e quindi non pu
assumere configurazioni spostate C1diverse dalla configurazioneiniziale C0; la molteplicit dei vincoli strettamente sufficiente abloccare tutti i possibili spostamenti del sistema; in questo caso ilsistema si dice isostatico.
3. N < v: il sistema vincolato non ha gradi di libert e quindi non puassumere configurazioni spostate C1diverse dalla configurazioneiniziale C0; la molteplicit dei vincoli superiore al quantostrettamente necessario a bloccare tutti i possibili spostamenti del
sistema; in questo caso il sistema si dice iperstatico; lulteriorenumero ip = v N di componenti di spostamento o rotazionibloccate rispetto a quanto strettamente necessario si dice grado diiperstaticitdel sistema ed il sistema si dice ipvolte iperstatico.
Esempio 6.1
Si giudichi sulla isostaticit, labilit o iperstacitit del sistema difigura 6.3.
Figura 6.3.
A
B C
x
y
Oz
mailto:[email protected]:[email protected]:[email protected]:[email protected] -
7/25/2019 6 Sistemi Isostatici,Labili,Iperstatici
4/17
2007 Universit degli studi e-Campus - Via Isimbardi 10 - 22060 Novedrate (CO) - C.F. 08549051004Tel: 031/7942500-7942505 Fax: 031/7942501 [email protected]
Pagina 4/17
Corso di Laurea: INGEGNERIA CIVILE EAMBIENTALEInsegnamento: Meccanica delle strutturen Lezione: 6Titolo: Sistemi isostatici, labili, iperstatici
FACOLT DI INGEGNERIA
Il sistema pu essere considerato come costituito dalle dueaste rigide AB e BC e quindi ha, in assenza di vincoli, N = 6 gradi dilibert. Le aste AB ed BC sono connesse nel punto B da un incastrointerno che ha molteplicit di vincolo pari a 3; i vincoli esterni sono lacerniera in A, con molteplicit pari a 2 ed il carrello in C conmolteplicit pari a 1. La somma delle molteplicit dei vincoli quindi
6312v =++= (e.1.1)
Si conclude che il sistema isostatico.Pi brevemente, il sistema pu essere considerato come costituitodallelemento rigido ABC e quindi ha, in assenza di vincoli, di N = 3
gradi di libert. In questo caso non si considerano presenti vincoliinterni mentre i vincoli esterni sono la cerniera in A, con molteplicitpari a 2 ed il carrello in C con molteplicit pari a 1. La somma dellemolteplicit dei vincoli quindi
312v =+= (e.1.2)
Anche con queste considerazioni si conclude che il sistema isostatico.
Esempio 6.2
Si giudichi sulla isostaticit, labilit o iperstacitit del sistema difigura 6.4.
Figura 6.4.
Il sistema pu essere considerato come costituito dalle due
aste rigide AB e BC e quindi ha, in assenza di vincoli, N = 6 gradi dilibert. Le aste AB ed BC sono connesse nel punto B da un incastrointerno che ha molteplicit pari a 3; lunico vincolo esterno lincastroin A, con molteplicit pari a 3. La somma delle molteplicit dei vincoli quindi
633v =+= (e.2.1)
Pi brevemente, il sistema pu essere considerato come costituitodallunico elemento rigido ABC e ha dotato, in assenza di vincoli, di N= 3 gradi di libert. In questo caso non sono presenti vincoli interni,mentre lunico vincolo esterno lincastro in A, con molteplicit pari a3. La somma delle molteplicit dei vincoli quindi
A
B C
x
y
Oz
mailto:[email protected]:[email protected]:[email protected]:[email protected] -
7/25/2019 6 Sistemi Isostatici,Labili,Iperstatici
5/17
2007 Universit degli studi e-Campus - Via Isimbardi 10 - 22060 Novedrate (CO) - C.F. 08549051004Tel: 031/7942500-7942505 Fax: 031/7942501 [email protected]
Pagina 5/17
Corso di Laurea: INGEGNERIA CIVILE EAMBIENTALEInsegnamento: Meccanica delle strutturen Lezione: 6Titolo: Sistemi isostatici, labili, iperstatici
FACOLT DI INGEGNERIA
3v = (e.2.3)
Anche con queste considerazioni si conclude che il sistema isostatico.
Osservazione 1
Questi primi due esempi mostrano come la scelta del sistemarelativamente al quale effettuare il bilancio tra gradi di libert emolteplicit di vincolo non sia univoca. Come in questi esempi tuttaviail numero di gradi di libert del sistema, risultante del bilancio, deveovviamente risultare indipendente dalla scelta effettuata. Di solito piconveniente identificare dapprima gli elementi rigidi che costituisconoil sistema e valutare sulla base di questi il numero di gradi di libert inassenza di vincoli, anzich considerare le singole aste separatamente.
Esempio 6.3
Si giudichi sulla isostaticit, labilit o iperstacitit del sistema difigura 6.5.
Figura 6.5.
Il sistema costituito dallelemento rigido ABC e quindi ha, inassenza di vincoli, N = 3 gradi di libert. I vincoli cui il sistema soggetto sono lincastro scorrevole in A, con molteplicit pari a 2 ed ilcarrello in C con molteplicit pari a 1. La somma delle molteplicit deivincoli quindi
312v =+= (e.3.1)
Si conclude che il sistema isostatico.
Esempio 6.4
Si giudichi sulla isostaticit, labiit o iperstacitit del sistema difigura 6.6.
Figura 6.6.
A B
C
x
y
Oz
A
D
E
B C
x
y
Oz
mailto:[email protected]:[email protected]:[email protected]:[email protected] -
7/25/2019 6 Sistemi Isostatici,Labili,Iperstatici
6/17
2007 Universit degli studi e-Campus - Via Isimbardi 10 - 22060 Novedrate (CO) - C.F. 08549051004Tel: 031/7942500-7942505 Fax: 031/7942501 [email protected]
Pagina 6/17
Corso di Laurea: INGEGNERIA CIVILE EAMBIENTALEInsegnamento: Meccanica delle strutturen Lezione: 6Titolo: Sistemi isostatici, labili, iperstatici
FACOLT DI INGEGNERIA
Il sistema costituito dagli elementi rigidi ABC e CDE quindiha, in assenza di vincoli, N = 6 gradi di libert. I vincoli cui il sistema soggetto sono la cerniera interna in C con molteplicit pari a 2, lacerniera esterna in A, con molteplicit pari a 2 e la cerniera esterna inE, con molteplicit pari a 2. La somma delle molteplicit dei vincoli quindi
6222v =++= (e.4.1)
Si conclude che il sistema isostatico.
Esempio 6.5
Si giudichi sulla isostaticit, labilit o iperstacitit del sistema difigura 6.7.
Figura 6.7.
Il sistema costituito dagli elementi rigidi AB, BCD e DEF,quindi ha, in assenza di vincoli, N = 9 gradi di libert. I vincoli cui ilsistema soggetto sono la cerniera interna in B, con molteplicit paria 2, la cerniera interna in D, con molteplicit pari a 2, la cernieraesterna in A, con molteplicit pari a 2 e la cerniera esterna in F, conmolteplicit pari a 2. La somma delle molteplicit dei vincoli quindi
82222v =+++= (e.5.1)
Si conclude che ha il grado di labilit
189vNlb === (e.5.2)
e si dice che volta labile. In effetti il sistema ha un grado di libert,corrispondente alla possibilit degli spostamenti difigura 6.8.
Figura 6.8.
A
E
F
C
D
B
C0 C1
x
y
Oz
A
E
F
C D
Bx
y
Oz
mailto:[email protected]:[email protected]:[email protected]:[email protected] -
7/25/2019 6 Sistemi Isostatici,Labili,Iperstatici
7/17
2007 Universit degli studi e-Campus - Via Isimbardi 10 - 22060 Novedrate (CO) - C.F. 08549051004Tel: 031/7942500-7942505 Fax: 031/7942501 [email protected]
Pagina 7/17
Corso di Laurea: INGEGNERIA CIVILE EAMBIENTALEInsegnamento: Meccanica delle strutturen Lezione: 6Titolo: Sistemi isostatici, labili, iperstatici
FACOLT DI INGEGNERIA
Con riferimento alla figura 6.8 si osservi che in effetti il sistemaconsiderato ha un solo grado di libert, infatti la configurazionespostata C1 identificata da un solo parametro, ad esempio larotazione dellasta AB in funzione della quale possono esseredeterminati gli spostamenti di tutti i punti delle aste nel passaggio dallaconfigurazione C0 alla configurazione C1. In altre parole, assegnareuna rotazione alla prima asta equivale ad assegnare gli spostamentidi tutti i punti della struttura; equivalentemente non possibileassegnare arbitrariamente due parametri di spostamento alla struttura,cio non possibile assegnare arbitrariamente ad esempio larotazione dellasta AB e la componente orizzontale dellospostamento del punto E e disegnare una configurazione spostatacoerente con entrambi questi due parametri di spostamento senzaviolare le restrizioni imposte dai vincoli o la rigidit delle aste.
Esempio 6.6
Si giudichi sulla isostaticit, labilit o iperstacitit del sistema diFigura 6.9.
Figura 6.9.
Il sistema costituito dagli elementi rigidi ABC e CDE quindiha, in assenza di vincoli, N = 6 gradi di libert. I vincoli cui il sistema soggetto sono il doppio pendolo interno in C, con molteplicit pari a 2,
la cerniera esterna in A, con molteplicit pari a 2 e lincastro in E, conmolteplicit pari a 3. La somma delle molteplicit dei vincoli quindi
7223v =++= (e.6.1)
si conclude che il sistema ha grado di iperstaticit
167Nvip === (e.6.2)
e si dice che 1 volta iperstatico.
Esempio 6.7
Si giudichi sulla isostaticit, labiit o iperstacitit del sistema difigura 6.10.
A
D
E
B
C
x
y
Oz
mailto:[email protected]:[email protected]:[email protected]:[email protected] -
7/25/2019 6 Sistemi Isostatici,Labili,Iperstatici
8/17
2007 Universit degli studi e-Campus - Via Isimbardi 10 - 22060 Novedrate (CO) - C.F. 08549051004Tel: 031/7942500-7942505 Fax: 031/7942501 [email protected]
Pagina 8/17
Corso di Laurea: INGEGNERIA CIVILE EAMBIENTALEInsegnamento: Meccanica delle strutturen Lezione: 6Titolo: Sistemi isostatici, labili, iperstatici
FACOLT DI INGEGNERIA
Figura 6.10.
Il sistema costituito dagli elementi rigidi ABC, CDEF e BDquindi ha, in assenza di vincoli, N = 9 gradi di libert. I vincoli cui il
sistema soggetto sono la cerniera interna in B, con molteplicit paria 2, la cerniera interna in D, con molteplicit pari a 2, la cernierainterna in C, con molteplicit pari a 2, la cerniera esterna in A, conmolteplicit pari a 2 e la cerniera esterna in F, con molteplicit pari a2. La somma delle molteplicit dei vincoli quindi
1022222v =++++= (e.7.1)
si conclude che il sistema ha grado di iperstaticit
1910Nvip === (e.7.2)
e si dice che 1 volta iperstatico.
Si osserva che la struttura pu anche essere pensata costituitadalle sole aste rigide AC e CEF per le quali lasta BD pu considerarsicome un vincolo interno che impedisce gli spostamenti relativi deipunti B e D nella direzione dellasta stessa. In questo caso il sistemain assenza di vincoli ha N = 6 gradi di libert ed i vincoli cui soggettosono la cerniera interna in C, con molteplicit pari a 2, la cernieraesterna in A, con molteplicit pari a 2, la cerniera esterna in F conmolteplicit pari a 2 e lasta BD che impedisce solo la componente dispostamento relativo tra B e D nella direzione dellasta BD e quindi hamolteplicit pari ad 1. In questo caso la somma delle molteplicit dei
vincoli 71222v =+++= (e.7.3)
e quindi ha il grado di iperstaticit
167Nvip === (e.7.4)
Si osserva infine che la simbologia utilizzata in figura 6.10relativamente alle cerniere B e D indica che le cerniere sono dispostein modo da non interrompere la continuit delle aste AC e CE nelsenso che non possono aversi rotazioni relative tra i tratti AB e BE etra i trratti CD e DE.
A
E
F
C
D
Bx
y
Oz
mailto:[email protected]:[email protected]:[email protected]:[email protected] -
7/25/2019 6 Sistemi Isostatici,Labili,Iperstatici
9/17
2007 Universit degli studi e-Campus - Via Isimbardi 10 - 22060 Novedrate (CO) - C.F. 08549051004Tel: 031/7942500-7942505 Fax: 031/7942501 [email protected]
Pagina 9/17
Corso di Laurea: INGEGNERIA CIVILE EAMBIENTALEInsegnamento: Meccanica delle strutturen Lezione: 6Titolo: Sistemi isostatici, labili, iperstatici
FACOLT DI INGEGNERIA
LEZIONE 6 Sessione di studio 1
Giudizio sulla isostaticit, labilit, iperstaticit: esempi
Nella lezione sono stati descritti i criteri generali per la formulazionedel giudizio di isostaticit, labilit, iperstaticit di una struttura. Gliesempi mostrati sono tutti relativi a casi in cui i vincoli esterni sonodisposti in modo che ogni vincolo esterno vincola solo gli spostamentiassoluti di un elemento strutturale mentre i vincoli interni sono dispostiin modo che ogni vincolo interno vincola solo gli spostamenti relativitra due elementi strutturali. Nel seguito, per mezzo di alcuni esempi, simostrano le naturali estensioni di questi concetti ai casi in cui i vincoliesterni ed interni vincolano contemporaneamente pi elementi
strutturali.
Esempio 6.8
Si giudichi sulla isostaticit, labiit o iperstacitit del sistema difigura 6.11.
Figura 6.11.
Si osserva innanzitutto che la cerniera nel punto E collega leestremit di tre aste (ED, EG ed EF, identificate anche come aste 1, 2e 3) ed impone a queste estremit gli stessi spostamenti.Conseguentemente impone le seguenti restrizioni agli spostamenti:
0EE
0EE
y3y1
x3x1
=
=
0EE
0EE
y2y1
x2x1
=
=
(e.8.1)
avendo indicato con E1xE3xe con E1yE3yle componenti secondo gliassi x ed y dello spostamento relativo tra il punto E pensatoappartenente allasta 1 ed il punto E pensato appartenente allasta 3 econ E1xE2xe con E1yE2yle componenti secondo gli assi x ed y dellospostamento relativo tra il punto E pensato appartenente allasta 1 edil punto E pensato appartenente allasta 2. Restano pertanto bloccatidalla cerniera interna in E quattro gradi di libert, quindi la cernierainterna in E, tra gli estremi di 3 aste ha molteplicit di vincolo pari a 4(si ricordi anche che la molteplicit di un vincolo pari al numero diequazioni necessario a caratterizzarlo cinematicamente, comeesposto nella lezione 5). In generale, pu affermarsi che una cerniera
A
D
E
B
C
F
G
H
x
y
Oz
1
2
3
mailto:[email protected]:[email protected]:[email protected]:[email protected] -
7/25/2019 6 Sistemi Isostatici,Labili,Iperstatici
10/17
2007 Universit degli studi e-Campus - Via Isimbardi 10 - 22060 Novedrate (CO) - C.F. 08549051004Tel: 031/7942500-7942505 Fax: 031/7942501 [email protected]
Pagina 10/17
Corso di Laurea: INGEGNERIA CIVILE EAMBIENTALEInsegnamento: Meccanica delle strutturen Lezione: 6Titolo: Sistemi isostatici, labili, iperstatici
FACOLT DI INGEGNERIA
interna che collega n aste di un sistema un vincolo avente
molteplicit
( )1n2 (e.8.2)
Questo risultato pu giustificarsi rapidamente immaginando fissa unadelle aste e pensando che la cerniera blocca due spostamentiindipendenti (le componenti di spostamento in direzione x ed y) perognuna delle altre (n 1) aste collegate.
Tornando al sistema difigura 6.11,si hanno i 4 elementi rigidiABC, CDE, EH ed EG. Pensato in assenza di vincoli il sistema haquindi N = 12 gradi di libert. I vincoli cui il sistema soggetto sono la
cerniera interna in C (collegante due aste), con molteplicit pari a 2, lacerniera interna in E (collegante tre aste), con molteplicit pari a 4, lacerniera esterna in A, con molteplicit pari a 2, il carrello in F conmolteplicit pari a 1 e lincastro in G, con molteplicit pari a 3. Lasomma delle molteplicit dei vincoli quindi
1231242v =++++= (e.8.3)
Si conclude che il sistema isostatico.
Si osserva che la simbologia adottata per il carrello nel punto Fdi figura 6.11 indica che lasta EH continua nel punto F, cio in
corrispondenza del punto F non sono consentite rotazioni relative tra itratti EF ed FH.
Esempio 6.9
Si giudichi sulla isostaticit, labiit o iperstacitit del sistema difigura 6.12.
Figura 6.12.
Il sistema costituito dagli elementi rigidi AB, BC, CD e DA. Inassenza di vincoli ha quindi di N = 12 gradi di libert.Il vincolo in D deve essere considerato sia come cerniera internacollegante le due aste, e quindi con molteplicit pari a 2, che comecarrello esterno e quindi con molteplicit pari a 1. Gli ulteriori vincoli
cui il sistema soggetto sono la cerniera interna in B (collegante dueaste), con molteplicit pari a 2, la cerniera interna in C (collegante dueaste), con molteplicit pari a 2, la cerniera esterna in A che blocca gli
A
C
D
B
x
y
Oz
mailto:[email protected]:[email protected]:[email protected]:[email protected] -
7/25/2019 6 Sistemi Isostatici,Labili,Iperstatici
11/17
2007 Universit degli studi e-Campus - Via Isimbardi 10 - 22060 Novedrate (CO) - C.F. 08549051004Tel: 031/7942500-7942505 Fax: 031/7942501 [email protected]
Pagina 11/17
Corso di Laurea: INGEGNERIA CIVILE EAMBIENTALEInsegnamento: Meccanica delle strutturen Lezione: 6Titolo: Sistemi isostatici, labili, iperstatici
FACOLT DI INGEGNERIA
spostamenti sia dellestremit dellasta AB che dellestremit dellasta
DA e quindi deve essere considerata con molteplicit pari a 4. Lasomma delle molteplicit dei vincoli quindi
( ) ( ) 11222212v =+++++= (e.9.1)
e quindi ha il grado di labilit
11112vNlb === (e.9.2)
cio una volta labile.Equivalentemente, il vincolo in D pu essere considerato sia comecarrello esterno che blocca gi spostamenti verticali assoluti
dellestremo D dellasta AD e dellestremo D dellasta DC e quindi,come vincolo esterno, con molteplicit pari a 2, che come cernierainterna che blocca gi spostamenti relativi orizzontali tra gli estremidelle due aste concorrenti (gli spostamenti relativi verticali sono gistati considerati bloccati dal carrello esterno) e quindi, come ulteriorevincolo interno, con molteplicit pari a 1. Evidentemente anche conqueste considerazioni il sistema risulta 1 volta labile.
In effetti il sistema ha un grado di libert, corrispondente allapossibilit di assumere configurazioni spostate tipo la C1 di figura6.13, identificata da un solo parametro, ad esempio la componenteorizzontale Bxdello spostamento del punto B, in funzione della qualepossono determinarsi gli spostamenti di tutti gli alti punti.
Figura 6.13.
Esempio 6.10
Si giudichi sulla isostaticit, labiit o iperstacitit del sistema difigura 6.14.
Figura 6.14.
C
D
B
x
y
Oz
BB
BxBy
C1C0
A
C
D
B
x
y
Oz
mailto:[email protected]:[email protected]:[email protected]:[email protected] -
7/25/2019 6 Sistemi Isostatici,Labili,Iperstatici
12/17
2007 Universit degli studi e-Campus - Via Isimbardi 10 - 22060 Novedrate (CO) - C.F. 08549051004Tel: 031/7942500-7942505 Fax: 031/7942501 [email protected]
Pagina 12/17
Corso di Laurea: INGEGNERIA CIVILE EAMBIENTALEInsegnamento: Meccanica delle strutturen Lezione: 6Titolo: Sistemi isostatici, labili, iperstatici
FACOLT DI INGEGNERIA
Il sistema costituito dagli elementi rigidi AB, BC, CD, DA e BDquindi dotato, in assenza di vincoli, di N = 15 gradi di libert. Il vincoloin D deve essere considerato sia come cerniera interna collegante letre aste, e quindi con molteplicit pari a 4 che come carrello esterno equindi con molteplicit pari a 1. Gli ulteriori vincoli cui il sistema soggetto sono la cerniera interna in B (collegante tre aste), conmolteplicit pari a 4, la cerniera interna in C (collegante due aste), conmolteplicit pari a 2, la cerniera esterna in A che blocca glispostamenti sia dellestremit dellasta AB che dellestremit dellastaDA e quindi deve essere considerata con molteplicit pari a 4. La
somma delle molteplicit dei vincoli quindi( ) ( ) ( ) 152222214v =++++++= (e.10.1)
Si conclude che il sistema isostatico.
Equivalentemente il vincolo in D pu essere considerato comevincolo esterno che blocca gli spostamenti verticali assolutidellestremo D dellasta AD, dellestremo D dellasta DC e dellestremoD dellasta BD e quindi con molteplicit pari a 3 e come cernierainterna che blocca gi spostamenti relativi orizzontali tra gli estremidelle tre aste concorrenti (gli spostamenti relativi verticali sono gi stati
considerati bloccati dal carrello esterno) e quindi con ulterioremolteplicit pari a 2, essendo concorrenti tre aste. Evidentementeanche con queste considerazioni il sistema risulta isostatico.
Si osserva infine che il sistema difigura 6.14 pu considerarsicome ottenuto da quello difigura 6.12,che stato riconosciuto essereun volta labile, al quale stata aggiunta lulteriore asta BD che, per ilsistema di figura 6.12 pu essere considerata un vincolo interno dimolteplicit unitaria in quanto impedisce gli spostamenti relativi tra ilpunto B ed il punto D nella direzione dellasta BD stessa. Anche conquesto ragionamento si conclude che il sistema isostatico.
mailto:[email protected]:[email protected]:[email protected]:[email protected] -
7/25/2019 6 Sistemi Isostatici,Labili,Iperstatici
13/17
2007 Universit degli studi e-Campus - Via Isimbardi 10 - 22060 Novedrate (CO) - C.F. 08549051004Tel: 031/7942500-7942505 Fax: 031/7942501 [email protected]
Pagina 13/17
Corso di Laurea: INGEGNERIA CIVILE EAMBIENTALEInsegnamento: Meccanica delle strutturen Lezione: 6Titolo: Sistemi isostatici, labili, iperstatici
FACOLT DI INGEGNERIA
LEZIONE 6 Sessione di studio 2
Nella lezione e nella precedente sessione di studio il giudizio sullaisostaticit, labilit o iperstaticit di un sistema di travi formulato sullabase del bilancio tra i gradi di libert del sistema pensato non soggettoa vincoli ed la somma dei gradi di vincolo cui il sistema soggetto. Nelseguito, per mezzo di alcuni esempi si mostra che la condizione diuguaglianza tra gradi di libert e molteplicit dei vincoli costituisce unacondizione necessaria ma non sufficiente a garantire che il sistemanon pu assumere configurazioni spostate. Sussistono infatticonfigurazioni relativamente alle quali, pur essendo soddisfatta lasuddetta condizione, il sistema pu assumere configurazioni spostate.
In questi casi si dice che i vincoli sono mal disposti.
Esempio 6.11
Si giudichi sulla isostaticit, labilit o iperstacitit del sistema difigura 6.15.
Figura 6.15.
Applicando i criteri visiti il sistema dovrebbe essere giudicatoisostatico (N = v = 6). Tuttavia si riconosce che il punto B, pensatoappartenente allasta AB deve spostarsi su una circonferenza dicentro A e raggio AB, mentre il punto B, pensato appartenente allastaBC deve spostarsi su una circonferenza di centro C e raggio CB;evidentemente questi spostamenti non possono avvenire senza che siabbia uno spostamento relativo orizzontale tra gli estremi delle astecollegate dalla cerniera in C (figura 6.16a). Tuttavia, se si limitalindagine agli spostamenti piccoli, gli spostamenti degli estremi delle
aste possono considerarsi sulle tangenti alle effettive traiettorie,pertanto il punto B suscettibile di spostamenti nella direzioneverticale che contemporaneamente tangente alle due circonferenze(figura 6.16b).
Figura 6.16.
Quello descritto un tipico caso di vincoli mal disposti, nelsenso che, pur essendo la somma delle molteplicit dei vincoli pari al
A B Cx
y
Oz
A
B
C
(a)
A
B
C
(b)
x
y
Oz
mailto:[email protected]:[email protected]:[email protected]:[email protected] -
7/25/2019 6 Sistemi Isostatici,Labili,Iperstatici
14/17
2007 Universit degli studi e-Campus - Via Isimbardi 10 - 22060 Novedrate (CO) - C.F. 08549051004Tel: 031/7942500-7942505 Fax: 031/7942501 [email protected]
Pagina 14/17
Corso di Laurea: INGEGNERIA CIVILE EAMBIENTALEInsegnamento: Meccanica delle strutturen Lezione: 6Titolo: Sistemi isostatici, labili, iperstatici
FACOLT DI INGEGNERIA
numero di gradi di libert del sistema pensato non vincolato, detti
vincoli sono disposti in modo che il sistema conserva ancorapossibilit di piccoli spostamenti.Come sar chiarito nelle lezioni successive questa evenienza legataal fatto che i centri di rotazione assoluti (A per lasta AB e C per lastaBC) ed il centro di rotazione relativa tra e due aste (B) giacciono sullastessa retta.
Esempio 6.12
Si giudichi sulla isostaticit, labilit o iperstacitit del sistema difigura 6.17.
Figura 6.17.
Anche in questo caso il bilancio tra gradi di libert e gradi di
vincolo farebbe concludere che la struttura isostatica. Tuttavia,nellambito degli spostamenti piccoli, il punto B dellasta AB devespostarsi ortogonalmente alla congiungente AB (in realt devespostarsi su una circonferenza di centro A e raggio AB) mentre ilpunto B dellasta BC deve spostarsi ortogonalmente alla congiungenteBC (in realt deve spostarsi su una circonferenza di centro C e raggioCB). Siccome la geometria del sistema tale che i segmenti AB e BCgiacciono sulla stessa retta r (figura 6.18) il punto B spostandosiortogonalmente a tale retta soddisfa entrambe le conddizioni richieste(ortogonalit dello spostamento sia ad AB che a BC). In effetti questocaso, esclusa la geometria delle aste, perfettamente analogo a
quello difigura 6.16.
Figura 6.18.
x
y
Oz
A
B
c
r
A
B
cr
x
y
Oz
A
B
c
mailto:[email protected]:[email protected]:[email protected]:[email protected] -
7/25/2019 6 Sistemi Isostatici,Labili,Iperstatici
15/17
2007 Universit degli studi e-Campus - Via Isimbardi 10 - 22060 Novedrate (CO) - C.F. 08549051004Tel: 031/7942500-7942505 Fax: 031/7942501 [email protected]
Pagina 15/17
Corso di Laurea: INGEGNERIA CIVILE EAMBIENTALEInsegnamento: Meccanica delle strutturen Lezione: 6Titolo: Sistemi isostatici, labili, iperstatici
FACOLT DI INGEGNERIA
Esempio 6.13
Si giudichi sulla isostaticit, labilit o iperstacitit del sistema difigura 6.19.
Figura 6.19.
Anche in questo caso il bilancio tra gradi di libert e gradi divincolo farebbe concludere che la struttura isostatica Tuttavia siconsideri che il punto C dellelemento ABC pu solo traslare indirezione verticale per la presenza dellincastro scorrevole. Questospostamento non impedito dallasta DC in quanto il punto C dellastaDC pu ruotare attorno alla cerniera D e quindi, nellambito deglispostamenti piccoli, traslare in direzione verticale (figura 6.20). Comerisulter chiaro nelle lezioni seguenti, anche in questo caso i centri dirotazione assoluti degli elementi ABC e CD ed il loro centro dirotazione relativo sono allineati.
Figura 6.20.
x
y
Oz
AB
CD
x
y
Oz
AB
CD
AB
C
D
mailto:[email protected]:[email protected]:[email protected]:[email protected] -
7/25/2019 6 Sistemi Isostatici,Labili,Iperstatici
16/17
2007 Universit degli studi e-Campus - Via Isimbardi 10 - 22060 Novedrate (CO) - C.F. 08549051004Tel: 031/7942500-7942505 Fax: 031/7942501 [email protected]
Pagina 16/17
Corso di Laurea: INGEGNERIA CIVILE EAMBIENTALEInsegnamento: Meccanica delle strutturen Lezione: 6Titolo: Sistemi isostatici, labili, iperstatici
FACOLT DI INGEGNERIA
LEZIONE 6 Sessione di studio 3
Sistemi isostatici, labili, iperstatici esercizi
Sono proposti nel seguito alcuni esercizi la cui soluzione lasciata allettore.
Esercizio 6.1
Si stabilisca se la struttura di figura 6.21 isostatica, labile oiperstatica.
Figura 6.21.
Esercizio 6.2
Si stabilisca se la struttura di figura 6.22 isostatica, labile oiperstatica.
Figura 6.22.
Esercizio 6.3
Si stabilisca se la struttura di figura 6.23 isostatica, labile oiperstatica. Si valuti come cambia il giudizio eliminando lasta inclinata.
Figura 6.23.
x
y
Oz
x
y
Oz
x
y
Oz
mailto:[email protected]:[email protected]:[email protected]:[email protected] -
7/25/2019 6 Sistemi Isostatici,Labili,Iperstatici
17/17
2007 Universit degli studi e-Campus - Via Isimbardi 10 - 22060 Novedrate (CO) - C.F. 08549051004 Pagina 17/17
Corso di Laurea: INGEGNERIA CIVILE EAMBIENTALEInsegnamento: Meccanica delle strutturen Lezione: 6Titolo: Sistemi isostatici, labili, iperstatici
FACOLT DI INGEGNERIA
Esercizio 6.4
Si stabilisca se la struttura di figura 6.24 isostatica, labile oiperstatica.
Figura 6.24.
Esercizio 6.5
Si introducano vincoli esterni in modo da rendere la struttura difigura 6.25 una volta labile, isostatica ed una volta iperstatica.
Figura 6.25.
x
y
Oz
A
C
B
x
y
Oz
mailto:[email protected]