UNIVERSITA DEGLI STUDI DI BOLOGNA · 2008. 8. 13. · UNIVERSITA DEGLI STUDI DI BOLOGNA FACOLT A DI...
168
UNIVERSIT ` A DEGLI STUDI DI BOLOGNA FACOLT ` A DI SCIENZE MATEMATICHE, FISICHE E NATURALI Dottorato di Ricerca in Fisica: V ciclo Alcuni aspetti di dinamica non lineare con applicazioni in dinamica dei fasci Tesi di Dottorato Relatore: di Massimo Giovannozzi Prof. G. Turchetti Correlatori: Dott. W. Scandale Dott. F. Schmidt Bologna 1993
Transcript of UNIVERSITA DEGLI STUDI DI BOLOGNA · 2008. 8. 13. · UNIVERSITA DEGLI STUDI DI BOLOGNA FACOLT A DI...

UNIVERSITA DEGLI STUDI DI BOLOGNA
FACOLTA DI SCIENZE MATEMATICHE, FISICHE ENATURALI
Dottorato di Ricerca in Fisica: V ciclo
Alcuni aspetti di dinamica non lineare con applicazioni
in dinamica dei fasci
Tesi di Dottorato Relatore:
di Massimo Giovannozzi Prof. G. Turchetti
Correlatori:
Dott. W. Scandale
Dott. F. Schmidt
Bologna 1993


Introduzione
Con la progettazione della nuova generazione di macchine acceleratrici adro-niche quali LHC o SSC, la branca della fisica che si occupa dello studiodella dinamica dei fasci si e dovuta confrontare con tutta una serie di nuovifenomeni. L’uso di magneti superconduttori , necessari per raggiungere en-ergie comprese nell’intervallo 1 − 10 TeV, ha comportato, oltre a notevoliproblemi di carattere tecnologico inerenti al fenomeno stesso della supercon-duttivita, l’introduzione di forti effetti non lineari nella dinamica dei fasciche circolano nella macchina. Questo e causato principalmente dal fatto chela qualita del campo prodotto da un magnete superconduttore e decisamenteinferiore a quella di un magnete convenzionale. In questa situazione la teorialineare sviluppata da Courant e Snyder [1] alla fine degli anni cinquanta, cheaveva rappresentato uno dei capisaldi della fisica degli acceleratori, non epiu sufficiente per interpretare i fenomeni non lineari che si riscontrano nelladinamica delle particelle.Per contro si tenga presente che lo studio dei fenomeni connessi con unadinamica non lineare e da piu di cento anni il punto focale della cosiddet-ta teoria dei sistemi dinamici. Gli strumenti di indagine messi a punto inquesto campo, hanno ormai raggiunto un notevole livello di maturita e sem-bra dunque ovvio adoperare queste tecniche nell’ambito della fisica dei fasciper tentare di gettare luce sui numerosi problemi che si incontrano in fase diprogettazione delle nuove macchine acceleratrici.In questo ambito si inserisce la ricerca presentata in questa dissertazione, incui si sono considerate alcune questioni di dinamica non lineare che, diretta-mente o indirettamente, hanno collegamenti con la fisica degli acceleratori.Detti problemi sono stati affrontati utilizzando alcuni strumenti matematicimutuati dallo studio dei sistemi dinamici.In questa dissertazione ci occuperemo fondamentalmente di tre temi
1. Determinazione del bacino di stabilita per mappe hamiltoniane del pia-no.
2. Riduzione degli effetti non lineari nel moto betatronico di una carica
i

ii INTRODUZIONE
in una macchina acceleratrice circolare.
3. Analisi dei fenomeni di trasporto indotti nei fasci da una lenta varia-zione dei parametri lineari dell’acceleratore.
Nella trattazione del primo e secondo punto si e fatto un uso estensivo dellateoria delle forme normali.Il problema affrontato dalla teoria delle forme normali per i diffeomorfismianalitici si schematizza come segue: siano f1(X), ..., fn(X) con X ∈ Cn, fun-zioni analitiche in un intorno dell’origine che si annullano sull’origine stessa;consideriamo la mappa M definita da
x′i = fi(X) i = 1, .., n
1. Si trovi la forma piu semplice (o forma normale) a cui la mappa prece-dente puo essere ridotta mediante un cambiamento formale di coordi-nate Φ.
2. Si caratterizzi le proprieta di convergenza o divergenza delle serie chedefiniscono la trasformazione di variabili Φ e la forma normale U.
Accanto ai precedenti quesiti di ordine generale si possono considerare anchealtri problemi piu specifici. Ad esempio, supponendo che le condizioni perl’esistenza delle serie formali che definiscono Φ e U siano soddisfatte, si puoconsiderare la possibilita di soluzioni non analitiche o addirittura solamentecontinue [2, 3]; oppure un altro problema estremamente interessante e quellodella relazione tra le orbite della mappa di partenza M e quelle della formanormale U. L’importanza di cio risiede nelle implicazioni fisiche della ques-tione: si tratta di dimostrare che le orbite dei due sistemi sono vicine perun tempo finito ma sufficientemente lungo da poter rendere le forme normaliapplicabili a problemi pratici [4, 5, 6, 7].La teoria delle forme normali e stata sviluppata da Poincare nella sua tesi,per studiare i punti critici dei campi vettoriali in Cn; in particolare Poincaredimostro il seguente teorema: dato un campo vettoriale in Cn
xi = fi(X) i = 1, .., n
dove l’origine e un punto di singolare, allora esiste un cambiamento di varia-bili
xi = Φi(Y ), Φi(0) = 0, i = 1, ..., n
analitico in un intorno dell’origine tale che riduca la mappa alla forma
yi = λiyi i = 1, .., n

INTRODUZIONE iii
dove λi i = 1, .., n sono gli autovalori della matrice ∂fi
∂xj(0) del sistema line-
arizzato purche siano soddisfatti i seguenti requisiti
1) tutti gli autovalori sono distinti
2) esiste una retta nel piano complesso passante per l’origine che lascia tuttigli autovalori dalla stessa parte
3) λi 6= p1λ1 + ....pnλn per una n-nupla arbitraria di interi con∑n
i=1 pi > 1.
Successivamente Dulac [8] generalizzo il risultato di Poincare indebolendo lacondizione 3) e dimostrando l’esistenza di una coniugazione analitica dellamappa con la forma normale
yi = λiyi +∑
ci,p1,..,pnyp1
1 ...ypnn i = 1, .., n
dova la somma e estesa agli esponenti pi che soddisfano ad una relazione dirisonanza λi = p1λ1 + ....pnλn. Il teorema di Poincare-Dulac puo essere rifor-mulato per i diffeomorfismi nel modo seguente [9]: dato un diffeomorfismoanalitico con un punto fisso nell’origine, esiste un cambiamento di variabilianalitico che coniuga la mappa con la forma normale
y′i = λiyi i = 1, .., n
dove λi sono ancora gli autovalori della matrice ∂fi
∂xj(0) purche siano soddis-
fatte le condizioni
1’) tutti gli autovalori sono distinti e non nulli
2’) il modulo degli autovalori e sempre diverso da 1
3’) non e soddisfatta nessuna condizione di risonanza λi = λp1
1 ...λpnn per ogni
n-nupla di interi positivi pi con∑n
i=1 pi > 1.
Tipicamente la dimostrazione di questi teoremi si divide in due passi: primasi deve dimostrare l’esistenza formale della trasformazione Φ, ovvero costrui-re tale trasformazione mediante una serie formale sviluppando ogni funzionesecondo Taylor nell’intorno del punto fisso; poi bisogna provare la conver-genza di tale trasformazione. Questo approccio e rimasto sostanzialmenteinalterato anche nei successivi risultati della teoria delle forme normali. Ladimostrazione della convergenza e basata sul metodo delle serie maggioranti enon si riesce a generalizzare quando la condizione 2) non e verificata. Questo

iv INTRODUZIONE
fatto e in relazione con la presenza dei ben noti piccoli divisori: infatti nel-la costruzione formale della trasformazione Φ compaiono a denominatore lequantita
|λp11 ...λ
pnn − λi| (p1, .., pn) ∈ Nn
n∑i=1
pi > 1
e la condizione 2’) garantisce che tali quantita non possano diventare arbi-trariamente piccole. Purtroppo la condizione 2’) e troppo restrittiva per leapplicazioni ai casi fisicamente interessanti in quanto e sicuramente falsa perpunti fissi di tipo ellittico. In tal caso gli autovalori della mappa linearizzatahanno la forma (eiω1 , ..., eiωn) ed anche se non soddisfano ad alcuna condizionedi risonanza (requisito 3’), i piccoli divisori∣∣ei(p1ω1+...+pnωn) − eiωi
∣∣possono diventare arbitrariamente piccoli quando si considerano n-nuple diinteri con
∑ni=1 pi sufficientemente grande. In questo caso il problema della
convergenza della trasformazione in forma normale rimase aperto fino al 1942quando Siegel [10] dimostro nell’ipotesi che 1’) e 3’) siano verificate la conver-genza della trasformazione normalizzante xi = Φi(Y ), purche gli autovalorisoddisfino ad una condizione diofantina
∣∣ei(p1ω1+...+pnωn) − eiωi∣∣ ≥ Γ−1
∣∣∣∣∣n∑
i=1
pi
∣∣∣∣∣−µ
con Γ e µ opportune costanti. Il fatto rilevante e che nello spazio Cn le n-nuple che soddisfano ad una condizione diofantina costituiscono un insiemedi misura piena e quindi il teorema di Siegel sembrerebbe avere il caratteredi genericita. In seguito il teorema di Siegel fu generalizzato da vari au-tori [11, 12, 13, 14, 15] che indebolirono ulteriormente la condizione sugliautovalori e dimostrarono la convergenza della trasformazione normalizzanteΦ, anche quando i λi soddisfano a delle condizioni di risonanza, purche perola forma normale sia lineare. Piu recentemente Yoccoz [16] ha dimostrato chenel caso particolare di un diffeomorfismo in C la condizione di Brjuno [13]sulle proprieta aritmetiche degli autovalori e necessaria e sufficiente per laconvergenza della trasformazione normalizzante.Purtroppo nel caso di sistemi hamiltoniani (o mappe simplettiche) in C2n,la struttura hamiltoniana della dinamica implica automaticamente che gliautovalori λi i = 1, .., 2n soddisfano le condizioni di risonanza
λpiλ
pi+n = 1 i = 1, .., n p ∈ Z;

INTRODUZIONE v
di conseguenza nel caso hamiltoniano la condizione 3’) risulta genericamenteviolata e la forma normale stessa risulta in generale non lineare [17] e dunquenon e possibile applicare il teorema di Siegel. In questo caso il problemadella convergenza risulta essere estremamente complesso ed e connesso conla questione dell’integrabilita della dinamica ovvero dell’esistenza di integraliprimi del moto analitici indipendenti ed in involuzione tra loro. In questosenso si possono riassumere i risultati ottenuti dicendo che ,nello spazio Hdelle serie di potenze convergenti
H =∑
P∈N2n
hPxp1
1 ....xp2n2n
che rappresentano un sistema hamiltoniano in un intorno di un punto fissoellittico dove si sia introdotta una opportuna topologia, in ogni intorno diun punto arbitrario di H esiste un hamiltoniano analitico, che non ammettenessun integrale primo del moto indipendente dall’hamiltoniano stesso [18].In piu si puo dimostrare che l’insieme dei sistemi hamiltoniani con un puntofisso ellittico, per cui la trasformazione normalizzante converge, forma un in-sieme di prima categoria e dunque il complementare ha misura piena [19, 20].Da questi risultati si desume che la divergenza della trasformazione normal-izzante nel caso hamiltoniano non e il semplice risultato della presenza deipiccoli divisori, ma anche l’effetto della struttura non lineare delle equazionifunzionali che si devono risolvere.La divergenza delle serie utilizzate dalla teoria delle forme normali sembraquindi essere la situazione generica nel caso di punti fissi ellittici. Diverso e ildiscorso per i punti fissi iperbolici, dato che, almeno nel caso bidimensionale,e possibile provare la convergenza di Φ e U [21, 22]. In questa situazione haun particolare interesse l’analisi del dominio di analiticita di Φ. In questa dis-sertazione si e mostrato come sia possibile stimare i poli della trasformazionenormalizzante avvalendosi della tecnica utilizzata da Moser per dimostrarnela convergenza.Uno dei risultati principali di questo lavoro riguarda la determinazione delbacino di stabilita per mappe hamiltoniane del piano. Con il termine bacinodi stabilita si intende la regione dello spazio delle fasi in cui si hanno moticonfinati. Il problema descritto rappresenta uno dei quesiti principali dellateoria dei sistemi dinamici e, a parte casi particolari, una risposta generaleal problema non e nota. Il sistema studiato e rappresentato dalla mappa diHenon [23] (
x′
y′
)= R(ω)
(x
y + x2
),

vi INTRODUZIONE
dove R(ω) e una matrice di rotazione. L’interesse per questa mappa risul-ta nel fatto che nonostante la semplicita ha un carattere di genericita e, inaggiunta, e uno dei piu semplici modelli rappresentanti un sistema non inte-grabile. Da un punto di vista fisico, inoltre, questa mappa e rilevante per lesue connessioni con la fisica degli acceleratori. Si puo infatti mostrare che es-sa rappresenta la mappa di trasferimento di una cella FODO con in aggiuntaun elemento sestupolare. Una cella FODO e la struttura fondamentale diuna macchina acceleratrice. Rappresenta l’elemento periodico della macchi-na. In essa sono compresi gli elementi magnetici lineari che hanno il compitodi mantenere il fascio sull’orbita chiusa, dipoli, e di focalizzarlo, quadrupoli.Il sestupolo e un elemento non lineare la cui funzione puo essere sia quelladi ridurre gli effetti cromatici dovuti ai quadrupoli o di correggere gli errorisestupolari nei magneti. Il risultato principale della nostra analisi e che ilbacino di stabilita della mappa di Henon e dato dall’inviluppo interno dellevarieta invarianti relative al punto fisso iperbolico della mappa di Henon.Le varieta invarianti sono l’analogo della separatrice per un sistema hamilto-niano. Rappresentano l’insieme di punti nello spazio delle fasi che tendono alpunto fisso iperbolico per l’azione generata dalla mappa o dalla sua inversa.Il fatto interessante e che questo risultato vale in generale, indipendente-mente dal valore del parametro ω che compare nell’espressione della mappadi Henon. Il fenomeno delle intersezioni omocliniche ed eterocliniche risultaessere la ragione di questo risultato.La conoscenza delle varieta invarianti e dunque fondamentale per la deter-minazione delle proprieta di stabilita del sistema precedente. Le varieta inquestione possono essere determinate in vari modi: o con metodi numerici,o utilizzando le forme normali iperboliche che permettono di ottenere unarappresentazione delle varieta invarianti tramite uno sviluppo in serie.L’analisi portata a termine non ha pero riguardato solamente la mappa diHenon. Al contrario, partendo da questo sistema, si e tentato di generalizzareil risultato ottenuto al caso di mappe del tipo(
x′
y′
)= R(ω)
(x
y + Pn(x)
),
dove Pn(x) =∑n
j=2 pjxj . Anche in questo caso si e potuto stabilire un risul-
tato analogo al precedente: il bacino di stabilita per una mappa del tipoprecedente e sempre dato dall’inviluppo interno delle varieta invarianti rela-tive ai punti fissi iperbolici di periodo uno o due. La distinzione avviene aseconda della parita di n e del segno del termine di ordine massimo pn.Sempre per mantenere il collegamento con la fisica degli acceleratori, si eproceduto ad analizzare un modello bidimensionale realistico per SPS uti-lizzando il metodo proposto in questa dissertazione, ottenendo un accordo

INTRODUZIONE vii
eccellente con i normali metodi numerici utilizzati per determinare il bacinodi stabilita per un sistema dinamico.Per quanto riguarda il secondo problema trattato in questa dissertazione,questo trae origine direttamente dalle problematiche connesse con la dinami-ca di una particella in una macchina acceleratrice. Anche in questo caso leforme normali si sono dimostrate un valido strumento di indagine per risol-vere problemi di dinamica non lineare. La possibilita di applicare le formenormali alla dinamica in un acceleratore si fonda sull’idea di modellizzare ilmoto trasversale al piano della macchina (o moto betatronico) di una parti-cella nella rete magnetica di un acceleratore circolare mediante una mappasimplettica. Questa idea e dovuta essenzialmente a Dragt [24]: la rete mag-netica di un acceleratore si suddivide, per costruzione, in una successione dimagneti ciascuno dei quali e caratterizzato da un certo tipo di campo mag-netico (campo di dipolo, quadrupolo, sestupolo, ottupolo, etc...) che puoessere pensato con ottima approssimazione, costante all’interno del magnetecon una brusca discontinuita ai suoi estremi. I valori dei campi sono scelti inmodo che esista, per un fissato valore dell’energia, un’orbita chiusa di riferi-mento e la stabilita lineare di tale orbita sia di tipo ellittico [1] dal momentoche l’orbita di riferimento viene percorsa sempre nello stesso verso a velocitavicine a quelle della luce e naturale prendere come parametro per descrivereil moto betatronico la lunghezza d’arco s lungo tale curva. Le equazioni delmoto in un piano trasversale al piano della macchina stessa, sono periodichedi periodo L pari alla lunghezza dell’orbita di riferimento nel parametro sed e possibile avere un formalismo hamiltoniano [25] dal momento che l’ir-raggiamento di un protone (ed in generale delle particelle adroniche) dovutoall’accelerazione ed alla curvatura dell’orbita e trascurabile, almeno per gliattuali progetti. Tuttavia la dipendenza da s non e affatto analitica in quan-to i campi magnetici sono discontinui al bordo di ogni magnete; questo fattorende problematico applicare la teoria perturbativa direttamente sull’hamil-toniano. Se invece consideriamo la mappa di Poincare del sistema, ovverola mappa che descrive il moto su una sezione di riferimento dell’anello dellamacchina, e possibile ottenere una mappa simplettica analitica a due gradidi liberta con un punto fisso ellittico corrispondente all’orbita di riferimento;la stabilita del punto fisso della mappa di Poincare implica la stabilita del-l’orbita di riferimento del sistema iniziale. In effetti in questo caso la mappadi Poincare si puo costruire in modo esplicito per composizione delle mappedi trasferimento di ogni singolo magnete, ovvero le mappe che associano allecoordinate dinamiche di una particella all’ingresso di un magnete le coordi-nate dinamiche della stessa particella all’uscita del magnete. Dal momentoche i campi magnetici sono analitici all’interno del magnete anche la mappadi trasferimento sara analitica e cosı la mappa di Poincare.

viii INTRODUZIONE
Il calcolo della mappa di Poincare puo essere ulteriormente semplificato uti-lizzando la cosiddetta approssimazione di lente sottile per le mappe di trasfer-imento dei singoli magneti: dato che il rapporto tra la lunghezza del magnetee la lunghezza della macchina risulta molto piccolo e possibile considerare illimite verso zero di tale rapporto e contemporaneamente far tendere verso ∞le forze indotte dai campi magnetici in modo da mantenere costante l’impul-so. In tal caso la mappa di trasferimento associata ad un elemento magneticodiventa polinomiale se i campi stessi erano polinomiali. Le mappe di trasfer-imento cosı ottenute sono comunemente utilizzate nei programmi di trackingper integrare direttamente le soluzioni del moto a partire da una fissata con-dizione iniziale; tali programmi risultano tuttavia non sufficienti per dare unaesauriente risposta al problema della stabilita in quanto da una parte nonriescono a raggiungere i tempi dell’ordine di 106 − 108 giri di macchina, checorrispondono ai tipici tempi di permanenza di un fascio nell’acceleratore,dall’altra non permettono un’analisi parametrica degli effetti non lineari.Il calcolo della mappa di Poincare componendo le mappe di trasferimentodei singoli magneti, anche se in linea di principio permetterebbe di avereuna mappa polinomiale che in una sola iterazione descrive un giro completodella macchina, risulta pero impraticabile poiche il numero di magneti rendeil grado della mappa finale estremamente elevato. D’altra parte si verificarapidamente che una mappa di Poincare troncata ad un certo ordine nel suosviluppo di Taylor sull’origine non puo essere usato direttamente per studi-are il moto betatronico, poiche gli effetti di non simpletticita introdotti daltroncamento invaliderebbero i risultati stessi. Ci si trova dunque davantial problema di come estrarre delle informazioni fisicamente corrette per unsistema, di cui e noto lo sviluppo di Taylor attorno ad un punto fisso dellamappa di Poincare fino ad un certo ordine.Per risolvere questa importante questione sono state proposte essenzialmentedue possibili soluzioni: da una parte Dragt [26] propose di rappresentare lamappa di Poincare mediante una trasformazione di Lie associata ad un sis-tema hamiltoniano indipendente dal tempo, dall’altra M. Pusterla e G. Tur-chetti [27] proposero di utilizzare la teoria delle forme normali di Birkhoffper studiare le proprieta della dinamica della mappa. Nonostante il carat-tere divergente delle serie perturbative che entrano in gioco nella teoria delleforme normali, questa soluzione si e rilevata subito la piu promettente siaperche consente un’analisi globale dello spazio delle fasi in un intorno delpunto fisso, in quanto costruisce delle variabili Azione-Angolo approssimatecon un errore che risulta scalare in modo esponenziale rispetto all’inversodella distanza dall’origine, sia perche consente un controllo parametrico sudelle quantita quali il tune e lo smear che hanno particolare importanza incampo acceleratoristico [25, 28, 29]. Il tune (orizzontale o verticale), definito

INTRODUZIONE ix
come il numero di oscillazioni lungo l’asse radiale o verticale che una parti-cella compie mediamente in un giro di macchina in funzione della posizioneiniziale, coincide con l’angolo di rotazione medio nei piani coordinati radialee verticale dell’orbita della particella nello spazio delle fasi. Le forme nor-mali costruiscono esplicitamente il tune in funzione della posizione inizialeattraverso le variabili di Azione approssimate consentendo una precisa local-izzazione nello spazio delle fasi delle risonanze nonlineari: ovvero il luogo deipunti a cui corrispondono due angoli di rotazione ω1 ed ω2 che soddisfano aduna relazione del tipo
k1ω1 + k2ω2 + 2k3π = 0
con k1, k2, k3 ∈ Z. In base ad un teorema di Birkhoff [30], le orbite di unamappa area-preserving nelle vicinanze di una risonanza formano delle strut-ture ad isole per la presenza di punti fissi ellittici ed iperbolici e delle relativeseparatrici. Il meccanismo della diffusione di Arnol’d [31] per i sistemi apiu di due gradi di liberta ed alcuni criteri non completamente rigorosi, maefficaci, hanno messo in evidenza la stretta relazione tra la presenza dellerisonanze non lineari e l’instabilita delle orbite in un intorno dell’origine; perquesto motivo la conoscenza del tune e quindi delle posizioni delle risonanzenon lineari risulta molto utile per lo studio del comportamento delle orbite.In una macchina acceleratrice le risonanze non lineari sono eccitate dai ter-mini non lineari che sono presenti nelle equazioni del moto; a loro volta questitermini sono dovuti ai termini multipolari che sono presenti nel campo mag-netico generato dai vari elementi della macchina. Ancora una volta questieffetti non lineari sono particolarmente rilevanti nel caso di magneti super-conduttori. Risulta dunque in molti casi inevitabile la correzione di questieffetti non voluti. Cio si ottiene inserendo un insieme di magneti correttorinel reticolo magnetico della macchina, con lo scopo di compensare gli effettidovuti agli errori. Si pone dunque il problema di determinare una strategiaper fissare il valore dei correttori noti a priori i valori degli errori. Nel caso incui i correttori siano posti in prossimita delle sorgenti degli errori la soluzionedel problema e banale in quanto bastera fissare i correttori uguali agli errori,ma col segno opposto, affinche si abbia una compensazione esatta. Qualorapero i correttori non siano posti esattamente vicino alle sorgenti di errore onon tutte queste sorgenti siano provviste di correttori, non e piu ovvio comeminimizzare gli effetti non lineari. In questo caso sono stati proposti differ-enti approcci. Il piu in auge e quello proposto da Neuffer [32]. Detto criteriosi fonda sulla cosiddetta regola di Simpson per determinare in maniera ap-prossimata l’integrale di una funzione utilizzando tre punti. Detta regola,ben nota nel campo dell’analisi numerica, risulta essere una regola di inte-grazione esatta per funzioni polinomiali di ordine non maggiore del terzo,

x INTRODUZIONE
mentre in caso diverso fornisce dei risultati approssimati. Da cio risulta im-mediato che l’ambito di applicazione dello schema di Neuffer e relativamenteristretto e circoscritto a casi ben specifici. In questo caso le forme normalipermettono di determinare una procedura generale per correggere gli errorisenza applicare alcuna approssimazione.Ultimamente e stata fatta un’analisi della dipendenza del tune dai parametriche definiscono le componenti multipolari dei campi magnetici, offerta dallateoria delle forme normali. Utilizzando i risultati di questa analisi e statopossibile applicare per la prima volta le forme normali per determinare i val-ori dei correttori da utilizzare in LHC per compensare gli effetti degli errorinei magneti superconduttori [33, 34].Un simile approccio e stato applicato dall’autore sempre per determinare ilvalore dei correttori nel nuovo reticolo magnetico di LHC. In questo casosi sono compensati non solo gli effetti non lineari nel tune come funzionedell’ampiezza, ma si sono anche inclusi quegli effetti cosiddetti cromatici,che dipendono dalle differenze in momento delle varie particelle che compon-gono il fascio. Questo programma ha comportato lo sviluppo di softwareper effettuare, in modo del tutto generale, il processo di compensazione deglierrori. La procedura sviluppata ha permesso di ottenere dei buoni risultati,ampliando notevolmente la regione nello spazio delle fasi in cui il moto delleparticelle e approssimativamente lineare.Inoltre si consideri che in questa dissertazione i risultati relativi all’analisidella dipendenza del tune dalle componenti multipolari sono stati generaliz-zati: una simile analisi e stata compiuta per i cosiddetti parametri di Twiss,quantita introdotte nell’ambito della teoria lineare di Courant e Snyder.Il terzo argomento trattato in questa dissertazione riguarda, come gia accen-nato, i fenomeni di trasporto dovuti a lente variazioni dei parametri linearinelle macchine acceleratrici. Come ben noto la corrente che alimenta i mag-neti di una macchina acceleratrice e sottoposta ad un processo di raddrizza-mento. Questo non puo certamente escludere la presenza di lievi fluttazioninel livello della corrente o la persistenza della componente a 50 Hz e dellesue armoniche principali. Cio implica che anche il campo magnetico prodot-to variera di conseguenza. Questo inevitabile fenomeno produce, dunque, unlento cambiamento del tune lineare della macchina. Il fenomeno di per senon sarebbe preoccupante, il problema sorge quando il moto delle particellee fortemente non lineare. In questo caso l’azione combinata di non linearitae di fluttuazioni nei parametri lineari puo introdurre delle instabilita, che, aloro volta, possono portare alla perdita di parte del fascio in tempi relativa-mente brevi. Un fenomeno di questo genere interessa in maniera particolarele macchine superconduttrici, in cui, come e stato gia sottolineato, il motodelle particelle e fortemente non lineare e, in aggiunta, anche le piu piccole

INTRODUZIONE xi
fluttuazioni nel livello di corrente non vengono smorzate in tempi rapidi.Nell’ambito del progetto LHC e dunque importante giungere a stabilire lespecifiche cui devono rispondere i circuiti di alimentazione dei magneti in mo-do da evitare i fenomeni descritti. Per arrivare a determinare dei criteri prati-ci da applicare in fase di progettazione, al CERN si sono portati a termine,dal 1986 ad oggi, una serie di esperimenti utilizzando SPS [35, 36, 37, 38]. Lafilosofia su cui si fondano questi esperimenti e la seguente: SPS e una macchi-na estremamente lineare a energie attorno ai 120 GeV; in piu sono presentiuna serie di sestupoli che possono essere introdotti in maniera controllata.Esiste, poi, la possibilita di introdurre in maniera artificiale una modulazionenell’alimentazione di alcuni magneti quadrupolari speciali. Cio rende fat-tibile lo studio quantitativo della dipendenza dei fenomeni di trasporto daiparametri della modulazione di corrente introdotta. Le misure effettuate du-rante queste sessioni sperimentali sono poi analizzate utilizzando simulazioninumeriche [38]. Allo stato attuale degli studi l’accordo tra queste simu-lazioni e i dati sperimentali non e troppo incoraggiante. Le ragioni di questodisaccordo non sono del tutto chiare e richiedono ulteriori approfondimen-ti. D’altronde la problematica connessa con questi fenomeni di trasporto erecente e, anche da un punto di vista teorico, le indagini sono ad uno stato al-tamente preliminare (vedi ad esempio [39] per quanto riguarda la trattazionestatistica di un semplice modello unidimensionale). Uno dei pochi risultatidisponibili al proposito permette di affermare che i fenomeni osservati nonpossono essere catalogati sotto l’etichetta di diffusione in senso matemati-co [40]. Con cio si intende che il fenomeno di trasporto non e governato dauna equazione di Fokker-Planck.

xii INTRODUZIONE

Ringraziamenti
L’autore desidera esprimere la sua gratitudine al Prof. G. Turchetti per aversuggerito gli argomenti di studio trattati in questa dissertazione nonche per ilsuo prezioso aiuto e costante incoraggiamento. Un particolare ringraziamentova al Prof. G. Servizi e al Dott. Bazzani per il puntuale e amichevole aiutofornito durante tutto il periodo di ricerca. Si ringraziano anche tutti i colleghidella “Brigata Meccanica” dell’Universita di Bologna per l’amicizia mostratae per le utili discussioni.Durante la preparazione di questa dissertazione l’autore ha passato lunghiperiodi presso il CERN di Ginevra nel gruppo di Fisica degli Acceleratoridella Divisione SL. Oltre a ringraziare tutti i componenti del gruppo perla cordiale ospitalita e per i numerosi aiuti, l’autore vorrebbe esprimere lasua particolare gratitudine ai Dott. J. Gareyte, W. Scandale e F. Schmidtper l’amicizia, la pazienza e l’aiuto fornito che e stato determinante per ilcompletamento di questo studio. Infine desidero esprimere la mia profondagratitudine e riconoscenza a mia Moglie e a tutti coloro che, con il loro affetto,hanno contribuito al sostegno morale e spirituale nei periodi piu difficili diquesto lavoro di ricerca.
xiii

xiv INTRODUZIONE

Indice
Introduzione i
Ringraziamenti xiii
1 Forme Normali Iperboliche nel Piano 31.1 Forme Normali in R2 . . . . . . . . . . . . . . . . . . . . . . . 41.2 Proprieta di convergenza nel caso iperbolico . . . . . . . . . . 141.3 Singolarita della funzione di coniugazione . . . . . . . . . . . . 221.4 Varieta invarianti . . . . . . . . . . . . . . . . . . . . . . . . . 26
2 Analisi di Stabilita per Mappe Simplettiche 352.1 Proprieta della mappa quadratica . . . . . . . . . . . . . . . . 362.2 Relazione tra punti fissi e involuzioni . . . . . . . . . . . . . . 422.3 La mappa di Henon nel dominio complesso . . . . . . . . . . . 472.4 Varieta invarianti e bacino di stabilita . . . . . . . . . . . . . 592.5 Generalizzazione al caso di mappe polinomiali . . . . . . . . . 662.6 Analisi di un caso realistico: il modello di SPS . . . . . . . . . 75
3 Mappe Simplettiche e Forme Normali Applicate allo studiodel Moto Betatronico 793.1 Mappe di trasferimento e moto betatronico . . . . . . . . . . . 803.2 Forme Normali in R4 . . . . . . . . . . . . . . . . . . . . . . . 903.3 Tune shift e leggi di scala . . . . . . . . . . . . . . . . . . . . . 963.4 Strategia di minimizzazione del tune shift . . . . . . . . . . . . 101
4 Correzione del Tune Shift dovuto agli Errori Multipolari inLHC 1054.1 Generalita sui magneti superconduttori . . . . . . . . . . . . . 1084.2 Descrizione del modello studiato . . . . . . . . . . . . . . . . . 1124.3 Risultati della correzione . . . . . . . . . . . . . . . . . . . . . 1164.4 Analisi degli effetti ottupolari . . . . . . . . . . . . . . . . . . 130
xv

INDICE 1
5 Effetti di Trasporto in Macchine Acceleratrici Circolari 1335.1 L’esperimento di diffusione in SPS . . . . . . . . . . . . . . . . 1345.2 Risultati delle simulazioni numeriche . . . . . . . . . . . . . . 139
Bibliografia 145

2 INDICE

Capitolo 1
Forme Normali Iperboliche nelPiano
In questo capitolo si tratta il problema di ridurre a forma normale un dif-feomorfismo analitico del piano in un intorno di un punto fisso. Come giadetto nell’introduzione, indicato con F il suddetto diffeomorfismo, si cercadi determinare una trasformazione di coordinate Φ, tale che la mappa Udefinita dall’equazione:
Φ−1 F Φ = U (1.1)
abbia la forma piu semplice possibile. e chiaro che la forma di U dipendedal tipo di punto fisso che si intende considerare. Nel seguito analizzeremo ilcaso particolare in cui F e un diffeomorfismo che preserva le aree nel piano,ma analoghi risultati possono essere stabiliti anche in casi piu generali (adesempio per mappe che preservano i volumi o per diffeomorfismi analitici diCn.Dopo avere dato la classificazione e alcune proprieta generali dei diversi tipidi forme normali, a seconda che detto punto fisso sia ellittico, parabolico oiperbolico, ci specializzeremo al caso iperbolico trattando il problema dellaconvergenza di Φ considerando differenti approcci per la soluzione dell’e-quazione funzionale (1.1). In connessione con detto problema si presenterauna analisi della struttura delle singolarita di tipo polare di Φ in funzionedel valore dell’integrale primo del moto. In ultimo si dara la definizione divarieta invariante (sempre nel caso di diffeomorfismi del piano nell’intornodi un punto fisso iperbolico), considerando il problema della analiticita dellosviluppo in serie che rappresenta tali varieta.
3

4 CAPITOLO 1. FORME NORMALI IPERBOLICHE
1.1 Forme Normali in R2
In primo luogo considereremo il problema di ridurre a forma normale unamappa lineare simplettica del piano. Si tenga presente che nel seguito usere-mo i termini mappa o diffeomorfismo come sinonimi. Una mappa simpletticalineare L(x) e una trasformazione lineare la cui matrice soddisfa la condizione:
LJLT = J (1.2)
dove J e la matrice simplettica fondamentale definita
J =
(0 1−1 0
). (1.3)
Se consideriamo gli autovalori della matrice L e immediato vedere che sonopossibili solo tre differenti casi:
λ1, λ2 ∈ C λ1 = λ∗2 caso ellitticoλ1, λ2 ∈ R λ1 6= λ2 caso iperbolicoλ1, λ2 ∈ R λ1 = λ2 = 1 caso parabolico (1.4)
A seconda delle diverse situazioni contemplate in (1.4), L sara coniugata contipi differenti di matrici. Si ha infatti la seguente situazione
Caso ellitticoNel caso ellittico una matrice unimodulare e coniugata con una rotazione:
L = TR(ω)T−1 L11 + L22 = 2 cosω, (1.5)
dove
R(ω) =
(cosω sinω− sinω cosω
)T =
(2L12 0
2(cosω − L11) 2 sinω
). (1.6)
Indichiamo con x le coordinate rispetto alle quali la mappa L e una rotazione
x = T−1x, x =
(xpx
). (1.7)
La trasformazione di similitudine T e definita a meno del gruppo di matriciche commutano con R, vale a dire il gruppo abeliano a due parametri delledilatazioni e delle rotazioni: G(µ, ξ) = µI · R(ξ). Tale arbitrarieta puoessere sfruttata per scegliere il segno degli elementi diagonali e il valore deldeterminante di T . Usando la condizione di gauge ξ 6= 0 si perde il vincolo

1.1. FORME NORMALI IN R2 5
T12 = 0. Per questo motivo e consuetudine scegliere ξ = 0 e manteneresolo il grado di liberta in µ. La condizione di gauge usata nella teoria degliacceleratori corrisponde a scegliere anche T unimodulare e T11 > 0, T22 > 0.Cio fissa il segno di ω che deve essere lo stesso di L21. La matrice T diventa
T =
√
L12sinω 0
cosω − L11√L12 sinω
√sinωL12
≡
√β 0
η 1√β
, (1.8)
dove si e definito
β =L12
sinωη = −(L11 − cosω)√
β sinω. (1.9)
Si usa anche la rappresentazione diagonale di L, in particolare quando con-sideriamo le forme normali non lineari. In tal caso le coordinate diventanocomplesse coniugate:
L = V Λ(ω)V −1, V = TK, R(ω) = KΛ(ω)K−1, (1.10)
ove
Λ(ω) =
(eiω 00 e−iω
), K−1 =
(1 −i1 i
), (1.11)
e V e definita come
V =
(L12 L12
eiω − L11 e−iω − L11
). (1.12)
Le coordinate rispetto alle quali Λ e diagonale sono indicate con x e sonocomplesse coniugate:
x = K−1x = V −1x, x =
(zz∗
), z = x− ipx. (1.13)
La mappa che, nei diversi sistemi di coordinate, assume la forma
x′ = Lx, x′ = R(ω)x, z′ = eiωz (1.14)
possiede un invariante dato da
ε = ||T−1x||2 = x2 + p2x = zz∗. (1.15)

6 CAPITOLO 1. FORME NORMALI IPERBOLICHE
Caso parabolicoNel caso parabolico la matrice L, che dipende da due parametri, assume laforma
L = TDT−1 D =
(1 10 1
), (1.16)
ove T e definita a meno di un gruppo a due parametri di matrici commutative
conD, ovvero G(µ, ξ) =
(µ ξ0 µ
). Se scegliamo T unimodulare e con elementi
diagonali positivi, allora possiamo scrivere
T =
(√β 0
η 1√β
)L =
1− η√β β
−η2 1 + η√β
. (1.17)
Caso IperbolicoNel caso iperbolico abbiamo
L = TRH(α)T−1 2 coshα = L11 + L22 (1.18)
dove
RH(α) =
(coshα sinhαsinhα coshα
)T =
(2L12 0
2(coshα− L11) 2 sinhα
). (1.19)
La matrice T e definita a meno del gruppo a due parametri di matrici commu-tative con RH(α), ovvero G(µ, ξ) = µI · RH(ξ). Possiamo sfruttare il gradodi liberta in µ per imporre che U sia unimodulare e con elementi diagonalipositivi. Cio fissa il segno di α imponendogli di coincidere con quello di L12,come nel caso ellittico, e si ottiene
T =
√
L12sinhα
0
coshα− L11√L12 sinhα
√sinhαL12
≡(√
β 0η 1√
β
), (1.20)
dove abbiamo definito
β =L12
sinhαη = −(L11 − coshα)√
β sinhα. (1.21)

1.1. FORME NORMALI IN R2 7
Di conseguenza la matrice L puo essere rappresentata come
L =
coshα− η√β sinhα β sinhα(
1β− η2
)sinhα coshα+ η
√β sinhα
. (1.22)
La rappresentazione diagonale, in questo caso, si ottiene in una base ancorareale. Proprio come in (1.10) si trova
L = V ΛV −1, V = TK, RH(α) = KΛK−1 (1.23)
dove
Λ =
(eα 00 e−α
), K−1 =
(1 11 −1
), (1.24)
e V risulta definita come
V =
(L12 L12
eα − L11 e−α − L11
). (1.25)
Le coordinate in cui Λ e diagonale, indicate ancora con x, sono reali
x = K−1x = V −1x, x =
(xpx
),
x = x+ px
px = x− px.(1.26)
L’invariante per la mappa si scrive, in questo caso, come
ε = ||T−1bfx||2 = x2 − p2x = xpx. (1.27)
Nel semplice caso lineare l’unico punto fisso e l’origine che verra indicato conil termine ellittico, parabolico o iperbolico a seconda degli autovalori λ1,λ2.Nel caso generale in cui si consideri una trasformazione non lineare F, la clas-sificazione precedente si estende considerando gli autovalori dello jacobianoJF di F. Inoltre, sotto queste ipotesi il punto fisso non sara piu necessaria-mente nell’origine del sistema di coordinate. e sempre possibile, pero, conuna semplice traslazione riportarci alla situazione in cui l’origine e un puntofisso. Definiamo, ora, alcuni concetti che saranno utili nel seguito.
Definizione Una mappa F = (F1, F2) si dice in forma normale rispetto algruppo GΛ generato dalla mappa lineare Λ, se commuta con Λ
F Λ = Λ F. (1.28)

8 CAPITOLO 1. FORME NORMALI IPERBOLICHE
Analogamente una variabile dinamica A, definita come funzione scalare, e informa normale se e invariante rispetto a Λ
A Λ = A. (1.29)
Ponendo Λ = Diag (λ1, λ2) e considerando il generico monomio ξn1 ξ
m2 , si ha
che la condizione espressa dalle equazioni (1.28,1.29) si riduce a
λn−δ11 λm−δ2
2 = 1, (1.30)
dove, per tener conto delle differenze dovute al fatto che si consideri unavariabile dinamica o una componente di F, si e definita la quantita δ = (δ1, δ2)come:
δ =
(1, 0) nel caso diF1
(0, 1) nel caso diF2
(0, 0) nel caso diA(1.31)
Dalla condizione (1.30) discende la seguente classificazione:
Forme Normali Ellittiche Non Risonanti.
In questo caso si ha che λ1 = λ∗2 = eiω con ω ∈ R \Q e dunque si deve avereche A puo essere espressa come A = A(ξ1ξ2), mentre per F vale la seguenteproprieta Fi(ξ1, ξ2) = ξiF (ξ1ξ2).
Forme Normali Ellittiche Risonanti.
In questo caso si ha che vale una condizione di risonanza del tipo λ1 = ei2π pq
e dunque nello sviluppo di A saranno presenti monomi del tipo ξn1 ξ
m2 con
n = m + `q con ` un intero generico. Per quanto riguarda F si ha che imonomi costituenti soddisfano alla condizione n = m+ `q ± 1.
Forme Normali Iperboliche.
La condizione da soddisfare e analoga a quella che si ha nel caso ellittico nonrisonante, dove A = A(ξ1ξ2) e Fi(ξ1, ξ2) = ξiF (ξ1ξ2).
e possibile a questo punto studiare in dettaglio il problema della soluzionedell’equazione (1.1). L’idea che sta alla base di questa equazione e quella dicercare un nuovo sistema di coordinate, definito tramite la funzione Φ, taleche la mappa risulti semplificata e dunque la sua dinamica sia di piu facile

1.1. FORME NORMALI IN R2 9
interpretazione che nelle coordinate originali. In questo senso la (1.1) puoessere rappresentata dal seguente diagramma commutativo:
zF−−−−→ z′
Φ
x xΦ
ξ −−−−→U
ξ′(1.32)
e possibile specificare in termini piu precisi cosa si intenda dicendo che U hauna forma semplificata rispetto a F. La condizione che si vuole imporre suU e che sia in forma normale rispetto al gruppo lineare GJF
generato dallojacobiano di F. Si tenga presente che e anche possibile utilizzare tipi diversidi forme normali (scegliendo, ad esempio, un sottogruppo GJ1 di GJF
) cherisultano essere particolarmente utili nel caso ellittico quasi risonante. Nelseguito, pero, faremo sempre riferimento alla prima definizione.In primo luogo introduciamo le seguenti notazioni. Indicheremo con
ξ = (ξ1, ξ2) z = (z1, z2) (1.33)
rispettivamente le nuove e le vecchie coordinate. Per cio che concerne lefunzioni
Φ(ξ) = (Φ1(ξ),Φ2(ξ)) , U(ξ) = (U1(ξ), U2(ξ)) F(z) = (F1(z), F2(z)) ,(1.34)
queste saranno considerate a livello di serie formali. I problemi di convergenzaverranno considerati nel successivo paragrafo a proposito del caso iperbolicoin quanto e noto che non esistono soluzioni analitiche di (1.1) in un intornoaperto dell’origine nel caso ellittico. Utilizzeremo sviluppi sulla base com-pleta dei polinomi omogenei e indicheremo con [Φ]n il termine omogeneo diordine n-esimo dello sviluppo di Taylor della Φ, mentre si usera [Φ]≤N per iltroncamento all’ordine N definito da:
[Φ]≤N (ξ) = ξ +N∑
n=2
[Φ]n(ξ), [U]≤N(ξ) = Λξ +N∑
n=2
[U]n(ξ), (1.35)
dove [U]n(ξ) contiene solamente monomi in forma normale di ordine n. Comegia visto in precedenza nel caso ellittico e conveniente usare coordinate com-plesse, mentre in quello iperbolico le coordinate sono reali. I vettori prece-dentemente definiti avranno dunque un significato diverso a seconda che siconsideri un punto fisso ellittico o iperbolico: nel primo caso si hanno vettoriin C2 in cui la seconda componente e la complessa coniugata della prima,

10 CAPITOLO 1. FORME NORMALI IPERBOLICHE
mentre nel secondo caso si lavora con elementi di R2. Sostituendo in (1.1) itroncamenti all’ordine N , si otterra
F [Φ]≤N = [Φ]≤N [U]≤N + EN , (1.36)
dove EN = O (|ξ|N+1)
rappresenta l’errore dovuto al fatto che risolviamo per-turbativamente l’equazione sostituendo dei troncamenti alle soluzioni vere.Per ottenere delle equazioni che permettano di risolvere iterativamente (1.36)calcolando [Φ]n e [U]n e utile introdurre il seguente operatore:
∆ = Φ Λ− Λ Φ, (1.37)
Si noti che il nucleo di ∆ e costituito esattamente dalle forme normali (rispet-to alla matrice Λ). Introduciamo anche un proiettore
∏che agisce sullo
spazio P dei polinomi omogenei e proietta sullo spazio N dei polinomi informa normale. Analogamente risulta definito (1−∏) che proietta sul com-plemento di N . Con queste convenzioni e facile vedere che la (1.36) puoessere riscritta come
N∑n=2
(∆[Φ]n + [U]n) =∑n≥2
[Q]n −En, (1.38)
dove [Q]n(ξ) sono polinomi omogenei che dipendono solo da [Φ]i e [U]i con1 ≤ i ≤ n− 1 essendo
Q ≡∞∑
n=2
[Q]n(ξ) =
∞∑n=2
[F]n (
ξ +
N∑j=2
[Φ]j(ξ)
)+ (1.39)
N∑n=2
[[Φ]n (Λξ)− [Φ]n
(Λξ +
N∑j=2
[U]j(ξ)
)],
e quindi possono essere considerati come dei termini noti in (1.38). Ci siamodunque ricondotti alla soluzione di un insieme di equazioni lineari in [Φ]n e[U]n che hanno la stessa forma indipendentemente dall’ordine perturbativo.Queste equazioni sono dette equazioni omologiche. La loro soluzione puoessere ottenuta proiettando la (1.38) sul sottospazio dei polinomi omogeneiin forma normale e sul suo complemento. Si ottiene dunque:
[U]n =∏
[Q]n (1.40a)(1−
∏)[Φ]n = ∆−1
(1−
∏)[Q]n, (1.40b)

1.1. FORME NORMALI IN R2 11
per quanto riguarda il resto si ha
[EN ]n = [Q]n n ≥ N + 1. (1.41)
Dalle precedenti equazioni risulta chiaro che rimane una indeterminazionesulla forma di [Φ]n, infatti la componente in forma normale
∏[Φ]n non viene
fissata risolvendo le (1.40). D’altronde questa indeterminazione sui coeffici-enti di Φ si ripercuote necessariamente anche su U e questo potrebbe portarea conseguenze indesiderate quali la perdita di simpletticita per la forma nor-male. e dunque importante stabilire quali sono le condizione che garantisconola conservativita per U. A tal scopo poniamo la seguente definizione.
Definizione Una mappa Φ si dice formalmente simplettica se la matrice jaco-biana (M)i,k = ∂Φi
∂ξke simplettica, nel caso di un troncamento [Φ]≤N , si dice
troncamento simplettico se (MN)i,k =∂[Φi]≤N
∂ξksoddisfa
MNJMTN = J +O (|ξ|N) . (1.42)
Si puo provare il seguente risultato [41].
Teorema Nel caso di forme normali iperboliche o ellittiche non risonanti,U e formalmente simplettica e [U]≤N e un troncamento simplettico indipen-dentemente dalla scelta fatta per Φ.Di piu lo jacobiano di Φ e una formanormale.Dim.La dimostrazione procede per induzione. In primo luogo facciamo vedereche lo jacobiano di una mappa in forma normale e esso stesso una formanormale. Sia U una mappa in forma normale rispetto a Λ = Diag (λ1, λ2) eindichiamo con [U1(ξ), U2(ξ)] = σ(ξ) il suo jacobiano (dove [ ] rappresental’usuale parentesi di Poisson). Si ha che:
[U1 (Λξ) , U2 (Λξ)] = σ (Λξ) = [(ΛU(ξ))1 , (ΛU(ξ))2]= λ1λ2σ(ξ) = σ(ξ)
(1.43)
Dall’equazione funzionale (1.38) si ottiene la seguente relazione che lega glijacobiani
µ(ξ) = [(µ U)(ξ)]σ(ξ), (1.44)
dove si e usato µ = [Φ1,Φ2]. Per quanto detto in precedenza si ha che Ui
possono essere scritte come
U1(ξ) = ξ1u1(ρ), U2(ξ) = ξ2u2(ρ), dove ρ ≡ ξ1ξ2, (1.45)

12 CAPITOLO 1. FORME NORMALI IPERBOLICHE
da cui si deduce che
σ(ρ) = [U1, U2] =d
dρ(ρu1(ρ)u2(ρ)). (1.46)
Espandendo in serie σ(ρ) e µ(ξ)σ(ρ) = 1 + σ2ρ+ . . .+ σ2nρ
n + . . .µ(ξ) = 1 + [µ]1(ξ) + . . .+ [µ]n(ξ) + . . .
(1.47)
e sostituendo in (1.44) si ottiene la seguente relazione
1 + [µ]1(ξ) + [µ]2(ξ) + . . . = (1 + [µ]1 (Λξ) + [µ]2 (Λξ) + . . . ) (1 + σ2ρ+ . . . ) .
Dopo aver decomposto [µ]k(ξ) utilizzando∏
e (1−∏) si ottiene che
∆[µ]1 = 0, ∆[µ]2 = 0, σ2 = 0 =⇒ [µ]1 = 0, [µ]2 = µ2ρ. (1.48)
Procedendo per induzione su n, supponiamo che si abbia σ2k = 0 per k ≤ n−1e che (1−∏) [µ]k = 0 per k ≤ 2n− 1 e dunque
σ = 1 + σ2nρn + . . .
µ = 1 + µ2ρ+ . . .+ µ2(n−1)ρn−1 + [µ]2n + [µ]2n+1 + . . .
. (1.49)
Dopo aver notato che
U1U2 = ρu1(ρ)u2(ρ) =
∫ ρ
0
σ(ρ′)dρ′ = ρ
(1 +
σ2n
n+ 1ρn
), (1.50)
possiamo riscrivere (1.1) ottenendo per l’ordine 2n la seguente espressione
[µ]2n(ξ) =[µ2ρ
(1 +
σ2n
n + 1ρn
)+ . . .+ µ2(n−1)ρ
n−1
(1 +
σ2n
n+ 1ρn
)n−1]
2n
+
[µ]2n(Λξ) + σ2nρn.
e immediato vedere che cio implica
−∆[µ]2n = σ2n =⇒ σ2n = 0, [µ]2n = µ2nρn. (1.51)
Analogamente all’ordine 2n+ 1 si avra
[µ]2n+1(ξ) = [µ]2n+1(Λξ) =⇒ [µ]2n+1(ξ) = 0. (1.52)

1.1. FORME NORMALI IN R2 13
Questo completa la dimostrazione.
Da questo teorema e possibile dedurre ulteriori conseguenze sulla dina-mica della forma normale. La condizione σ = 1 implica che
U1U2 = ρu1(ρ)u2(ρ) = ρ =⇒ u2(ρ) = u−11 (ρ). (1.53)
L’equazione precedente mostra dunque che ρ e un invariante del moto, inquanto si ha che
ρ′ = ξ′1ξ′2 = U1(ξ)U2(ξ) = ρ. (1.54)
Nel caso ellittico, le coordinate sono complesse, in quanto questa e la base incui la parte lineare della mappa risulta diagonale. In conseguenza di questofatto e di (1.54) si ha che
U2 = U∗1 =⇒ u1(ρ) = e−iΩ(ρ). (1.55)
La forma normale risulta dunque integrabile essendo una rotazione di un an-golo dipendente dalla distanza dall’origine. In questo caso le curve invariantisono semplicemente dei cerchi.Per quanto riguarda il caso iperbolico, invece, le coordinate in cui la partelineare e diagonale sono reali. Utilizzando la (1.54) si ottiene
U2 = U−11 =⇒ u1(ρ) = e−Ω(ρ), (1.56)
dove nuovamente Ω(ρ) e una funzione reale di ρ. Anche in questo caso lamappa in forma normale e integrabile, ma le curve invarianti non sono piucerchi, bensı iperboli equilatere.Tornando al problema dell’indeterminazione in Φ possiamo dire che ques-ta puo essere parzialmente risolta imponendo una condizione di simplettic-ita. Nonostante tutto, pero, rimangono sempre dei coefficienti indeterminati.Questo e riconducibile al fatto che se consideriamo un elemento T ∈ N alloraΦ T e T−1 U T sono ancora soluzioni dell’equazione funzionale (1.1). Sinoti l’analogia di questo fatto con quanto discusso a proposito delle trasfor-mazioni lineari. La piu generale trasformazione T puo anche non esseresimplettica (per il teorema dimostrato U sara comunque tale) e si scrivera
T(ξ) =(s(ρ)eG(ρ)ξ1, s(ρ)e
G(ρ)ξ2), s(ρ) =
1
ρ
∫ ρ
0
µ(ρ′)dρ′, (1.57)
dove µ e lo jacobiano di T e G(ρ) e una funzione reale o immaginaria pu-ra a seconda che si considerino forme normali iperboliche o ellittiche non

14 CAPITOLO 1. FORME NORMALI IPERBOLICHE
risonanti. Questo significa che l’ambiguita in Φ e riconducibile ad un gaugenell’angolo di rotazione (ellittico o iperbolico) e ad un fattore di dilatazione,analogamente a quanto visto nel caso lineare. Nel caso in cui T e simplettica,essa commuta con U, e dunque si ha che la nuova forma normale
U = T−1 U T (1.58)
coincide con U. Altrimenti si ha che le due differiscono, ma solo per unfattore di scala, avendosi
ui(ρ) = ui(s2(ρ)ρ). (1.59)
Come ultimo commento, si tenga presente che nel caso ellittico risonante l’ar-bitrarieta nella determinazione della [Φ]≤N e minore rispetto alle situazionitrattate. Infatti si puo provare che la forma normale [U]≤N e un troncamentosimplettico solo se Φ e stata scelta simplettica.
1.2 Proprieta di convergenza nel caso iper-
bolico
Fino ad ora abbiamo trattato l’equazione (1.1) in maniera formale senzapreoccuparci di problemi di convergenza. In effetti si puo mostrare che nelcaso ellittico, non e possibile la convergenza degli sviluppi in serie di Φ e Uin un intorno aperto dell’origine. I problemi sorgono quando si deve invertirel’operatore ∆, in quanto si hanno i cosiddetti piccoli divisori: eikω−1 diventaarbitrariamente piccolo se k e sufficientemente grande, anche se ω ∈ R \ Q.Nel caso iperbolico questa situazione non si presenta, in quanto gli autovalorisono reali e dunque per l’espressione (λn−1 − 1)−1 vale
1
2λn−1≤ 1
λn−1 − 1≤ 1
λ− 1. (1.60)
Uno dei risultati piu importanti risale a Hartman e Grobman [2, 3], che han-no provato il seguente teorema valido per diffeomorfismi.
Teorema Sia f un diffeomorfismo in Rn con un punto fisso iperbolicox. Sia inoltre d f(x) la parte lineare di f .Allora nell’intorno di x e semprepossibile costruire un omeomorfismo h tale che f sia coniugata con la suaparte lineare, ossia tale che valga la seguente relazione
f h = h d f. (1.61)

1.2. PROPRIETA DI CONVERGENZA NEL CASO IPERBOLICO 15
La portata di questo teorema e notevole in quanto permette una classifi-cazione dei diffeomorfismi iperbolici in Rn. D’altronde la coniugazione chelega il diffeomorfismo con la sua parte lineare e solamente continua. Peravere una maggiore regolarita per la funzione di coniugazione e necessariorestringersi a considerare il problema in due dimensioni. In questo caso sipuo provare che esiste una soluzione analitica all’equazione (1.1), come e sta-to fatto da Moser [21].
Teorema Data una mappa simplettica analiticaz′1 = f(z1, z2) = λz1 + . . .z′2 = g(z1, z2) = λ−1z2 + . . .
nell’intorno di un punto fisso iperbolico (dunque λ ∈ R), esiste una trasfor-mazione simplettica analitica
z1 = φ1(ξ1, ξ2)z2 = φ2(ξ1, ξ2)
convergente in un intorno dell’origine, tale che ( 1.2) e posta in forma normaleξ′1 = u(ξ1ξ2)ξ1ξ′2 = u−1(ξ1ξ2)ξ2
con u(ξ1ξ2) convergente in un intorno dell’origine.Non riporteremo la dimostrazione del teorema. Solamente vorremmo ag-giungere come la prova di questo risultato si fondi sull’assunto che la trasfor-mazione (1.2) sia simplettica. Come e stato sottolineato nel precedente para-grafo, per risolvere l’equazione (1.1), non e necessario operare con una Φ sim-plettica. Difatti lo stesso Moser [22] ha fornito una seconda dimostrazione incui si abbandona la richiesta di simpletticita su Φ.Prima di procedere con questa seconda dimostrazione e utile porre la seguentedefinizione.
Definizione Sia G = G(ξ) una funzione il cui sviluppo in serie si legge
G(ξ) =
∞∑n=0
[G]n(ξ), [G]n(ξ) =∑
k+l=n
gk,lξk1ξ
l2, (1.62)
si definisce componente di Fourier di ordine n Gn (ξ) l’espressione
Gn (ξ) =∑
k−l=n
gk,lξk1ξ
l2 (1.63)

16 CAPITOLO 1. FORME NORMALI IPERBOLICHE
Una proprieta interessante di Gn (ξ) e la seguente
G Un = Un Gn , dove U ≡ (u(ξ1, ξ2)), u−1(ξ1, ξ2)). (1.64)
Da questa discende che i Gn sono gli autovettori dell’operatore ∆ definitoin (1.37). L’equazione (1.1) puo essere riscritta utilizzando le componenti diFourier nella seguente maniera
(un − λ)
Φ1
n
=F1(ξ + Φ)
n
(un − λ−1)
Φ2
n
=F2(ξ + Φ)
n
, (1.65)
dove si e usata la convenzione di indicare con gli apici le componenti nonlineari delle funzioni. Per quanto riguarda la Φ, l’unica condizione che siimpone e di avere proiezione nulla sullo spazio delle forme normali, ovvero∏
Φ = 0 che, usando lo sviluppo in componenti di Fourier, diventa
Φ11 = ξ1, Φ2−1 = ξ2. (1.66)
Utilizzando la (1.66) e la (1.65) otteniamo le seguenti relazioni(u− λ) ξ1 =
F1(ξ + Φ)
1
(u−1 − λ−1) ξ2 =F2(ξ + Φ)
−1
, (1.67)
In primo luogo mostriamo che si possono maggiorare (un−λ)−1 e (un−λ−1)−1
con c1−cs
, dove c e una costante e s e la piu piccola maggiorante di u−1−λ−1,
indicata come s = u−1 − λ−1. Supposto che n 6= ±1 e considerando la prima(in quanto la seconda si tratta analogamente) si ha per n ≤ 0
(un − λ)−1 = −λ−1(1− λ−1u−|n|)−1 (1.68)
≺ λ−1∞∑
k=0
(u−|n|λ−1)k
≺ 1
1− u−1
≺ c
1− cs

1.2. PROPRIETA DI CONVERGENZA NEL CASO IPERBOLICO 17
dove c ≥ 11−λ−1 . Se invece vale n ≥ 1 si ottiene
(un − λ)−1 = u−n(1− λu−n)−1 (1.69)
= u−n
∞∑k=0
(u−nλ)k
≺ u−n∞∑
k=0
(u−1λ1n )nk
≺ 1
1− λ1nu−1
≺ c
1− cs.
Osserviamo ora che la parte non lineare della mappa F verifica la seguenterelazione
F1(ξ), F2(ξ) ≺ c1(ξ1 + ξ2)2
1− c1(ξ1 + ξ2)= G(ξ1, ξ2). (1.70)
A questo punto la dimostrazione della convergenza e piuttosto semplice. Seconsideriamo, infatti
Φ1 − ξ1 =∑n 6=1
Φ1n , Φ2 − ξ2 =∑n 6=−1
Φ2n (1.71)
e immediato vedere che vale la seguente maggiorazione
Φ1 − ξ1, Φ2 − ξ2 ≺ c
1− csG(Φ1,Φ2). (1.72)
Un simile risultato vale anche per ξ2s. Se ora poniamo ξ1 = ξ2 e introduciamola serie
W (ξ1) =1
ξ1(Φ1 − ξ1 + Φ2 − ξ2) + s, (1.73)
otteniamo, sfruttando la (1.72), la stima
ξ1W ≺ c21− c1W
G(ξ1(W + 1), ξ1(W + 1)) (1.74)
da cui discende che
W ≺ c21− c1W
4cξ1(1 +W )2
1− 2cξ1(1 +W )≺ c3ξ1(1 +W )2
1− c1W − 2cξ1(1 +W ), (1.75)

18 CAPITOLO 1. FORME NORMALI IPERBOLICHE
dove c2 e c3 sono opportune costanti. La natura stessa della relazione (1.75)implica la convergenza di W , e questa a sua volta quella di Φ1, Φ2 e u.Rimane dunque provata l’esistenza di un disco di convergenza. La strutturaparticolare del problema, legata al carattere iperbolico del punto fisso, per-mette di rafforzare ulteriormente il risultato precedente [42], dimostrando lapossibilita di costruire un prolungamento analitico per le soluzioni del pro-blema di coniugazione al di fuori del cerchio di convergenza di Moser. Valeinfatti il seguente risultato
Teorema Siano Φ, U, F rispettivamente la funzione normalizzante, laforma normale e la mappa avente un punto fisso iperbolico nell’origine.Sia poi D0 il disco di convergenza delle serie introdotte. Se definiamo latrasformazione
Φm : D−m 7−→ R2, m ∈ Z
tale che
Φm = F−m Φ Um, Dm = Um(D0),
allora e possibile definire un prolungamento analitico di Φ
Φ =
∞⋃m=−∞
Φm
che risulta analitico in D =⋃∞
m=−∞Dm.Dim.In primo luogo mostriamo che il prolungamento analitico e ben definito. echiaro che
Dm
⋂Dn 6= ∅ ∀m,n ∈ Z.
Dunque sull’intersezione si deve mostrare che Φn e Φm coincidono indipen-dentemente dal valore di n,m. A tal scopo basta mostrare che Φ−m coincidecon Φ0, ma questo e banalmente vero in quanto
Φ−m = Fm Φ U−m
= Φ Um Φ−1 Φ U−m = Φ, (1.76)
dove si e fatto uso dell’equazione di coniugazione. Le serie che definisconole Φ−m coincideranno con Φ e convergeranno dunque in D0. Si tratta oradi provare che in realta convergono anche in D−m \ D0. Consideriamo oraun quadrato di lato 2X inscritto in D0. Utilizzando la proprieta secondo

1.2. PROPRIETA DI CONVERGENZA NEL CASO IPERBOLICO 19
cui se uno sviluppo di Taylor di una funzione di due variabili complesseΦ(z1, z2) converge per z1 = z1,0, z2 = z2,0 allora converge assolutamente per|z1| ≤ z1,0, |z2| ≤ z2,0 e indicando con D0c il prodotto diretto dei due dischi|z1| ≤ X, |z2| ≤ X, si ha che Φ0 converge in D0c. Questo a sua volta implicache non vi sono singolarita neppure in Dmc = Um(D0c) per Φ−m. Con-siderando ora Dm′c il prodotto diretto dei dischi piu grandi che si adattano aDmc si ha la convergenza di Φm in Dm′c e dunque il risultato rimane provato.
Si tratta ora di risolvere l’equazione funzionale (1.65). A tale scopo e van-taggioso utilizzare un approccio di tipo Newton, risolvendo iterativamentele equazioni per Φn e u usando approssimazioni razionali, piuttosto chel’usuale metodo perturbativo. In questo modo risulta anche piu trasparentela struttura delle singolarita per la funzione di coniugazione. e dunque possi-bile dimostrare il seguente teorema, adattamento di un simile risultato validonel caso ellittico non risonante [29].
Teorema Consideriamo le successioni Λn e Φ1,n, Φ2,ndefinite dalle equa-zioni
(U1,n − eα)ξ1 =F1(ξ + Φn−1)
1
eΛnξ1 = U1,n +O (|ξ|)
Φ1,nk =
F1(ξ + Φn−1)
k
ekΛn − eα
Φ2,nk =
F2(ξ + Φn−1)
k
ekΛn − e−α
(1.77)
inizializzate con Λ0 = α e Φ1,n = 0,Φ2,n = 0; queste coincidono con lesoluzioni perturbative all’ordine n, ossia vale
Φi,n ≡∑
k
Φi,nk = Φi +O (|ξ|n+1), U1,n = U1 +O (|ξ|n+1
), (1.78)
in piu si ha
Λn = Λ +O (|ξ|) (1.79)
Dim.In primo luogo sottolineiamo che in questa dimostrazione utilizzeremo la

20 CAPITOLO 1. FORME NORMALI IPERBOLICHE
seguente rappresentazione per la forma normale U
U(ξ) ≡ (U1(ξ), U2(ξ)) =(eΛ(ξ1ξ2)ξ1, e
−Λ(ξ1ξ2)ξ2),
dove si e usata
Λ(ξ1ξ2) = α +
∞∑j=1
Λ2j (ξ1ξ2)j .
In questo caso, inoltre, l’autovalore λ verra espresso come eα. La prova pro-cede per induzione. L’enunciato e sicuramente vero per n = 0, 1. Suppostoche sia valido per un generico valore n, mostriamo che vale anche per n+ 1.In primo luogo notiamo che F1,2 = O (|ξ|)2. considerando ora l’equazioneche definisce un, si ha che
U1,n+1 = eαxi1 +∏
F1(Φn) (1.80)
= eαξ1 +∏
F1(Φ +O (|ξ|n+1))
= eαξ1 +∏
F1(Φ) +O (|ξ|n+2)
= U1 +O (ξ|n+2)
Procediamo ora a dimostrare la tesi per la funzione normalizzante. Con-siderando le equazioni che definiscono la successione Φi,n e l’ipotesi induttiva,si ottiene che all’ordine n+ 1 valgono le relazioni
∑k 6=1
(ekΛn+1 − eα
) Φ1,n+1 = (1−∏) F1(Φ1,n,Φ2,n)∑k 6=1
(ekΛn+1 − e−α
) Φ2,n+1 = (1−∏) F2(Φ1,n,Φ2,n)
(1.81)
D’altronde, utilizzando le proprieta delle componenti di Fourier si ottiene che∑k 6=1
(ekΛn+1 − eα
) Φ1,n+1 = (1.82)(1−
∏)(Φ1,n+1
(eΛn+1ξ1, e
−Λn+1ξ2)− eαΦ1,n+1(ξ1, ξ2)
)∑k 6=−1
(ekΛn+1 − e−α
) Φ2,n+1 = (1.83)(1−
∏)(Φ2,n+1
(eΛn+1ξ1, e
−Λn+1ξ2)− eαΦ2,n+1(ξ1, ξ2)
)

1.2. PROPRIETA DI CONVERGENZA NEL CASO IPERBOLICO 21
A questo punto uguagliando i membri di sinistra delle precedenti relazioni edaggiungendo la quantita (1−∏)Φi,n+1(e
αξ1, e−αξ2) si ricava l’espressione
∆Φ1,n+1 =(1−
∏)F1 (Φ1,n,Φ2,n)+ (1.84)(
1−∏)(
Φ1,n+1
(eαξ1, e
−αξ2)− Φ1,n+1
(eΛn+1ξ1, e
−Λn+1ξ2))
∆Φ2,n+1 =(1−
∏)F2 (Φ1,n,Φ2,n)+ (1.85)(
1−∏)(
Φ2,n+1
(eαξ1, e
−αξ2)− Φ2,n+1
(eΛn+1ξ1, e
−Λn+1ξ2))
Osservando poi che valgono le seguenti relazioni (ottenute utilizzando diret-tamente le equazioni (1.77)
Φi,n+1 = Φi,n +O (|ξ|n) =⇒ Φi,n+1 = [Φi]≤n +O (|ξ|n)
e che e±Λn+1ξ1 = e±αξ1 +O (|ξ|3), otteniamo infine
∆Φ1,n+1 =(1−
∏)F1 (Φ1,Φ2)+ (1.86)(
1−∏)(
Φ1
(eαξ1, e
−αξ2)− Φ1
(eΛξ1, e
−Λξ2))
+O (|ξ|n+2)
∆Φ2,n+1 =(1−
∏)F2 (Φ1,Φ2)+ (1.87)(
1−∏)(
Φ2
(eαξ1, e
−αξ2)− Φ2
(eΛξ1, e
−Λξ2))
+O (|ξ|n+2),
ma questo significa che le Φi,n+1 soddisfano all’equazione omologica all’ordinen + 2, coincidendo con la soluzione perturbativa fino a tale ordine. Rimanedunque dimostrato l’asserto.
Come ultima considerazione, il teorema di Moser puo essere generalizzatoal caso in cui la mappa F abbia una dipendenza da un parametro. In questasituazione si dimostra che le forme normali dipendono in maniera uniformeda questo parametro. Si prova [43] infatti il seguente risultato
Teorema Sia
Fε : U ⊂ C2 7−→ C2 (1.88)

22 CAPITOLO 1. FORME NORMALI IPERBOLICHE
un diffeomorfismo simplettico che dipende analiticamente dal parametro εnell’intorno di ε = 0 e avente la forma
Fε(ξ) = Λξ + εαf(ξ) + εα+1g(ξ, ε), (1.89)
dove f(0) = g(0, ε) = 0, Df(0) = Dg(0, ε) = 0 e λ = 1 + aεα +O(εα+1) cona e α costanti positive. Sotto queste condizioni e possibile determinare unε0 e un r0, indipendente da ε, in modo che per 0 ≤ ε ≤ ε0 la funzione nor-malizzante Φε e la forma normale Uε siano analitiche in un disco di raggio r0.
1.3 Singolarita della funzione di coniugazione
Come visto nel paragrafo precedente, nel caso iperbolico le serie che definis-cono la funzione normalizzante e la forma normale sono convergenti in unintorno dell’origine. Questo significa che si avranno delle singolarita chelimitano il dominio di analiticita delle funzioni considerate. Lo studio diqueste singolarita puo essere portato a termine in modo diretto considerandole equazioni (1.77). Prima di entrare in dettaglio vorremmo pero sottolin-eare il tipo di relazione che si ha tra lo sviluppo in componenti di Fourier el’usuale sviluppo sulla base costituita dai polinomi omogenei. Supponiamodi indicare con
Ψ(ξ1, ξ2) =∞∑
n=1
[Ψ]n(ξ1, ξ2) =∞∑
n=1
n∑j=0
Ψn,jξj1ξ
n−j2 . (1.90)
In questo caso se utilizziamo coordinate polari del tipoξ1 =
√ρeθ
ξ2 =√ρe−θ
allora la relazione tra lo sviluppo (1.90) e le componenti di Fourier di Ψ edata da
Ψk = ekθρ|k|2 Ak(ρ) dove Ak(ρ) =
∞∑n=0
ρnΨ|k|+2n,n+ k+|k|2. (1.91)
Il motivo per cui si sono introdotte coordinate di questo tipo e che risultanoadattate alla particolare dinamica studiata. In questo caso, contrariamentealle usuali coordinate polari, θ rappresenta un angolo di rotazione iperbo-lica. La dipendenza dall’invariante del moto ρ risulta dunque in evidenza.Per quanto visto nel precedente paragrafo, la funzione normalizzante puo

1.3. SINGOLARITA DELLA FUNZIONE DI CONIUGAZIONE 23
essere approssimata tramite funzioni razionali il cui denominatore e dato daD(ρ) = ek[Λ]≤n(ρ) − eα, dove e[Λ]≤n(ρ) rappresenta la forma normale U e kl’ordine della componente di Fourier di Φik. Per evitare confusioni nelseguito, sottolineiamo che avendo rappresentato U ≡ (eΛ(ξ1ξ2)ξ1, e
−Λ(ξ1ξ2)ξ2)
con Λ(ξ1ξ2) = α∑∞
j=1 Λ2j(ξ1ξ2)j , il termine Λ2j corrisponde ad un ordine per-
turbativo 2j + 1. Le singolarita di queste approssimazioni razionali sarannopercio date dalle soluzioni di
ek[Λ]≤n(ρ) − eα = 0. (1.92)
Osservazione che le due componenti di Φ hanno le stesse singolarita, solovengono scambiati i ruoli tra componenti di Fourier di ordine positivo enegativo. L’equazione (1.92) puo essere riscritta nella seguente maniera
[Λ]≤n (ρ) =α
k+
2πmi
km ∈ Z, (1.93)
dove si e tenuto conto della periodicita dell’esponenziale introducendo il ter-mine immaginario. Ovviamente soluzioni reali di (1.93) si avranno solo nelcaso m = 0. Una prima stima della posizione dei poli si ottiene considerandol’ordine perturbativo piu basso. In questo caso si ha che
Λ2ρ =
(1− k
k
)α +
2πmi
k=⇒ ρ =
(1− k
k
)α
Λ2
+2πmi
Λ2k. (1.94)
Dunque i poli giacciono su rette nel piano complesso. Queste rette verticalisono comprese nella striscia
−1
2≤ Λ2=ρ ≤ 1
2
Incrementando il valore di n, le soluzioni di (1.93) possono essere calcolatesolo con metodi numerici. Osserviamo un fatto rilevante. La posizione dellesingolarita calcolate tramite la (1.93) dipende chiaramente sia da n che dallacomponente di Fourier k considerata, ma questa relazione e di tipo diver-so nei due casi. Infatti le soluzioni dipenderanno in maniera regolare da k,quindi, a partire da un certo ordine k, le singolarita si sposteranno di pocoper ulteriori incrementi di k. Il comportamento in funzione dell’ordine per-turbativo considerato, invece, non e determinabile in maniera elementare.Illustreremo i fatti descritti utilizzando un esempio specifico. Consideriamouna mappa F del tipo
ξ′1 = λ[ξ1 − ν
2(ξ1 + ξ2)
2]ξ′2 = λ−1
[ξ2 + ν
2(ξ1 + ξ2)
2]

24 CAPITOLO 1. FORME NORMALI IPERBOLICHE
dove λ, ν sono due parametri aventi la seguente espressione
λ = 1 + sin2 ω
2+ 2 sin
ω
2
√1 + sin2 ω
2, ν =
cos2 ω2√
1 + sin2 ω2
, ω ∈ [0, π]
La ragione di questa scelta diverra chiara nel prossimo capitolo.e immediato vedere che l’origine e un punto fisso iperbolico per ogni valoredi ω. Sotto queste condizioni possiamo risolvere l’equazione funzionale (1.1).All’ordine piu basso si avra la seguente espressione per i coefficienti dellosviluppo di [Φ]2
Φ1,j = −λν2
(2
j
)1
λ2(j−1) − λ
Φ2,j = −λ−1 ν
2
(2
j
)1
λ2(j−1) − λ−1
Analogamente si puo determinare in maniera esplicita Λ2, ottenendo
Λ2 = −ν2
2
(2λ−1
1− λ−1+
1λ−1
λ2 − λ−1− 2λ
1− λ− λ
λ2 − λ
). (1.95)
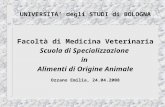
Come si diceva i valori dei ρ possono essere determinati solo numerica-mente. Lavorando sulla mappa precedente, fissando il valore del parametroω/2π = 0.255, si sono calcolati i coefficienti della funzione Λ e di Φ e quindisi sono determinate le soluzioni della (1.93) per differenti valori di n e k. Percompletezza si e fatto variare anche il parametro m. In tutti i risultati chesaranno presentati nel seguito, ci si riferisce a −10 ≤ m ≤ 10.Dal calcolo delle serie, si nota che Λ2j < 0 per ogni valore di j. Questosignifica che si avranno sempre soluzioni reali, anche nel caso in cui n siapari. Inoltre e immediato vedere che, mentre per le componenti di Fouriercon k > 0 la distanza delle singolarita dall’origine cresce con k, nel caso dicomponenti di ordine negativo, si ha il comportamento opposto. I risultatiottenuti sono riportati nella figura 1.1. Nei due grafici nella parte superioredella figura 1.1 si sono rappresentate le soluzioni di (1.93) nel piano comp-lesso di ρ fissando il valore di k = 3 e facendo variare n. Si vede chiaramentecome incrementando n da 5 a 10, si abbia una variazione della distanza min-ima delle singolarita dall’origine. Si e anche verificato, analizzando il cason = 15, che esista una sorta di cerchio limite cui le singolarita tendono. Sipuo notare anche che si hanno sempre delle soluzioni reali come detto inprecedenza. Nella parte inferiore della medesima figura sono mostrati duegrafici in cui si e considerata una componente di Fourier negativa k = −3. e

1.3. SINGOLARITA DELLA FUNZIONE DI CONIUGAZIONE 25
Figura 1.1: Posizioni delle singolarita della funzione normalizzante per dif-ferenti valori di n. Nelle figure in alto si ha k = 3 e l’ordine perturbativo erispettivamente 11 (parte sinistra) e 21 (parte destra). Nella parte inferioresi e mostrata la stessa situazione relativa a k = −3.

26 CAPITOLO 1. FORME NORMALI IPERBOLICHE
immediato vedere che in questo caso le soluzioni dell’equazione (1.93) sonospostate all’esterno rispetto al caso considerato in precedenza.Per quanto riguarda la dipendenza da k, i risultati sono invece mostrati infigura 1.2. In questo caso si e fissato n = 5 e si e fatto variare k, ponendolouguale a 5 (parte sinistra) e 15 (parte destra). Nella parte inferiore sonopoi mostrati i grafici relativi agli stessi valori di k, ma col segno cambiato.Quanto affermato in precedenza e manifesto in questi grafici: la dipendenzada k delle singolarita e veramente debole. In piu mentre le soluzioni si allon-tanano dall’origine all’aumentare di k nella parte superiore di figura 1.2, nellaparte inferiore accade il fenomeno opposto, proprio a causa del segno dellecomponenti di Fourier. L’addensarsi dei punti in dipendenza dell’aumentodel valore di k, ricordiamo che i vari punti corrispondono ai differenti valoridi m, e una ovvia conseguenza di (1.93). Per concludere vorremmo far notareil grado di precisione che si puo raggiungere nella stima della posizione deipoli per la funzione di coniugazione utilizzando l’ordine piu basso. Semprenel caso in cui ω/2π = 0.255 si ha che
α ≈ 1.18904 Λ2 ≈ −0.25862.
Dunque la posizione del polo dovrebbe essere stimata da ρ ≈ 2.29 consideran-do k = 2. Dai grafici, al contrario, si desume un valore ρ ≈ 0.75. Non edunque ipotizzabile l’uso di questa approssimazione per stimare il raggio diconvergenza di Φ. D’altronde, anche dovendo ricorrere ad ordini piu elevatiper avere delle stime affidabili del dominio di convergenza di Φ, il meto-do presentato e sicuramente piu efficiente di altri. Infatti se consideriamol’usuale criterio di Hadamard per stimare ρ
ρ =
[lim supj→+∞
|Φj |1j
]−1
.
e necessario spingersi fino a valori di j = 200 per ottenere risultati in accordocon quelli presentati.Per quanto riguarda il valore del residuo corrispondente alle singolarita dicui si e parlato, questo puo essere determinato utilizzando la (1.91) e risultaessere dato approssimativamente da
Res[Φk] ≈ ekθρAk(ρ). (1.96)
1.4 Varieta invarianti
Nei paragrafi precedenti abbiamo mostrato come, nel caso di un punto fissoiperbolico, la dinamica di una mappa non lineare sia analiticamente coniu-gata con quella di una forma normale integrabile: gli integrali del moto per

1.4. VARIETA INVARIANTI 27
Figura 1.2: Posizioni delle singolarita della funzione normalizzante per dif-ferenti valori di k. L’ordine perturbativo e stato fissato a 11 in tutte lesituazioni mostrate. Nelle figure in alto si ha k = 5 (parte sinistra), k = 15(parte destra). Nella parte inferiore si sono considerate componenti negativecon k = −5 e k = −15.

28 CAPITOLO 1. FORME NORMALI IPERBOLICHE
quest’ultima sono varieta non compatte (iperboli) nelle variabili normali. Unruolo particolare hanno gli assi coordinati ξ1 = 0 e ξ2 = 0. Infatti la dinamicadiventa puramente lineare essendo
ξ′1 = λξ1, ξ′2 = λ−1ξ2 (1.97)
si ha quindi un moto espansivo nel primo caso e contrattivo nel secondo.Dunque lungo l’asse ξ2 si ha che iterando tramite la mappa inversa ci siapprossima all’origine (che e il punto fisso iperbolico), mentre nel secondocio avviene usando la mappa diretta. Questo fatto e generale nell’intorno dipunti fissi iperbolici. Nel caso lineare, infatti, se A ∈ GL (Rn) dove GL (Rn)e il gruppo delle applicazioni lineari in Rn aventi l’origine come punto fissoiperbolico, si puo mostrare che esistono Es, Eu ⊆ Rn tali che Rn = Es⊕Eu elimn→∞A−n(x) = 0 ∀x ∈ Eu, mentre limn→∞An(x) = 0 ∀x ∈ Es. Anchenel caso generale di un diffeomorfismo non lineare e possibile definire degliinsiemi analoghi a Es, Eu, anche se, come risulta ovvio, non saranno piu sem-plici spazi lineari. A tal scopo si pone la seguente definizione.
Definizione Dato un diffeomorfismo F di Rn con un punto fisso iperbolico psi definiscono varieta stabile e varieta instabile di p gli insiemi
Ws(p) =x ∈ Rn| lim
n→∞Fn(x) = p
Wu(p) =
x ∈ Rn| lim
n→−∞Fn(x) = p
Una proprieta che risulta immediata dalle definizioni precedenti, e l’invarian-za di Wu,s(p) sotto l’azione di F. Inoltre e facile vedere che vi e una dualitache lega le varieta di F e F−1, infatti Ws(p) relativa a F coincide con Wu(p)relativa a F−1 (F e F−1 hanno il medesimo punto fisso p con la medesima sta-bilta). Per questo motivo tutti i risultati verranno enunciati solo per Ws(p)essendo questi banalmente estendibili anche a Wu(p).Altre importanti conseguenze meno evidenti delle definizioni sono raggrup-pate nel seguente teorema.
Teorema Sia F un diffeomorfismo con un punto fisso iperbolico p. Siainoltre A = dF(p) la sua parte lineare e Es, Eu la decomposizione di Rn
indotta da A. Allora indichiamo con Dβ un disco di raggio β sufficientementepiccolo e sia
Wsβ(p) = x ∈ Dβ |Fn(x) ∈ Dβ, ∀n ≥ 0
la cosiddetta varieta stabile locale. Sotto queste ipotesi si ha che

1.4. VARIETA INVARIANTI 29
i)
Ws(p) =⋃n≥0
F−n(Ws
β(p)).
ii) Esiste una ϕs : Es 7−→ Rn con la stessa regolarita di F con la proprietaϕs (Es) = Ws(p). Dunque Ws(p) e una varieta immersa in Rn. In piuvale la relazione dim (Ws(p)) = dim (Es).
iii) Lo spazio tangente a Ws(p) in p coincide con Es.
Se consideriamo il caso bidimensionale, dal teorema precedente si ha cheWu,s(p) sono varieta unidimensionali (curve) di R2; inoltre lo spazio tangentenel punto iperbolico coincide con le direzioni generate dagli autovettori del-la parte lineare della mappa. Per quel che concerne la costruzione di dettiinsiemi, si hanno essenzialmente due approcci differenti. Il primo si fondasulla prima proprieta enunciata nel precedente teorema. La varieta comple-ta puo essere costruita a partire da una sua parte espandendola utilizzandoF−1. Il problema si sposta ora sul modo di determinare Ws
β(p). Per la terzaproprieta gli autovettori della parte lineare di F sono tangenti alla varietanel punto iperbolico. Dunque se β e sufficientemente piccolo, essi possonoessere identificati con Ws
β(p). In linea di principio si potrebbero considerareapprossimazioni di ordine superiore che possono essere ottenute utilizzandole forme normali. Nelle coordinate normali le varieta invarianti sono rappre-sentate dagli assi. Se ora costruiamo la controimmagine di questi tramitela Φ otteniamo l’espressione voluta per Ws
β(p). e opportuno sottolineareche in realta lavorando con un troncamento della funzione normalizzante, siavra un’espressione approssimata per la varieta locale. D’altronde l’errorecommesso decresce esponenzialmente con il numero n di iterazioni di F equindi il risultato non dipende in maniera critica dall’ordine usato per ap-prossimare le varieta locale. Il secondo metodo, invece, determina le funzioniϕs,u attraverso il suo sviluppo in serie. Ancora una volta la teoria delle formenormali fornisce la soluzione a questo problema. Infatti, come gia detto, lafunzione normalizzante trasforma le varieta di U in quelle della mappa dipartenza. Questo significa che ϕs,u sono date da
ϕu(ξ) = Φ (exp(ξ − ξ0), 0) , per Re ξ < Re ξ0 + log rϕs(ξ) = Φ (0, exp(ξ′0 − ξ)) , per Re ξ > Re ξ′0 − log r
dove r e il raggio del disco di convergenza di Φ. Da questo fatto parrebbeche, essendo Φ convergente in un disco, le equazioni precedenti forniscanosolo una parte della varieta, e precisamente Ws,u
r (p). In realta quanto detto

30 CAPITOLO 1. FORME NORMALI IPERBOLICHE
a proposito delle proprieta di convergenza di Φ e delle sue singolarita, sug-gerisce che sia possibile estenderle indefinitamente lungo gli assi coordinati.Utilizzando l’equazione funzionale (1.1) e immediato verificare che
F(ϕu(ξ)) = ϕu(ξ + log λ)F−1(ϕs(ξ)) = ϕs(ξ + log λ)
(1.98)
Se dunque F e una funzione intera, la (1.98) permette di estendere ϕs,u(ξ)al di la del dominio di definizione iniziale, in definitiva deve essere intera.Risolto il problema di costruire le varieta invarianti, analizziamo la strut-tura dell’intersezione di Wu,s(p). Chiaramente Ws(p)
⋂Wu(p) e sempre nonvuoto, essendo p in comune alle due varieta. Introduciamo ora una nuovadefinizione.
Definizione Sia x ∈ Ws(p)⋂Wu(q), se p 6= q allora x si dice punto eterocli-
nico, altrimenti e detto punto omoclinico.In questo paragrafo considereremo solo punti omoclinici, ma la discussioneche faremo puo essere generalizzata al caso eteroclinico.A causa dell’invarianza di Wu,s(p) si ha che se q e un punto omoclinico, alloraanche Fn(q) e un punto omoclinico per ogni n intero. Dunque si ha che lacardinalita diWs(p)
⋂Wu(p) e uno o infinito. Non sono possibili valori inter-medi. Se in piu richiediamo che q sia un punto trasversalmente omoclinico (ilche significa che Ws(p) e Wu(p) non sono tangenti in q), allora, essendo F undiffeomorfismo, tutta l’orbita di q sara costituita da punti trasversalmenteomoclinici. In questo caso si ha l’insorgere di tutta una serie di fenomeniestremamente interessanti. In presenza di punti trasversalmente omoclinicisi producono delle oscillazioni di una varieta attorno all’altra; le cosiddetteoscillazioni omocliniche. Il risultato finale e che una varieta tende ad approssi-mare globalmente l’altra. Specializzandoci al caso di F simplettica, abbiamoche le aree sono conservate dalla dinamica della mappa. Se consideriamodunque la regione di piano racchiusa dalle due varieta tra due intersezionisuccessive Fn(q) e Fn+1(q), questa si deve mantenere costante. D’altronde,poiche si ha limn→+∞Fn(x) = p, la distanza tra due intersezioni succes-sive decresce, e la velocita e asintoticamente esponenziale. Questo imponeche l’ampiezza delle oscillazioni cresca in proporzione in modo da mantenerel’area costante. Questo fenomeno e chiaramente mostrato nella figura 1.3.Utilizzando il metodo analitico descritto abbiamo determinato ϕu,s(ξ) per lamappa (1.3) con ω/2π = 0.24. Sono chiaramente visibili alcune delle inter-sezioni omocliniche e i fenomeni descritti in precedenza.Le intersezioni tra le due varieta possono essere classificate e raggruppate incategorie differenti. Nel complesso il risultato di questo fenomeno e l’insor-genza di una zona caotica nello spazio delle fasi. In questa regione non esiste

1.4. VARIETA INVARIANTI 31
-2.0 2.0
-2.0
2.0
Figura 1.3: Varieta invarianti per la mappa quadratica.
un integrale primo del moto analitico. e infatti dimostrato che la dinamicadi F ristretta alle varieta invarianti e coniugata con uno shift di Bernoul-li [44], un sistema dinamico che e considerato il prototipo di comportamentocaotico. Da quanto detto risulta cruciale poter determinare se in un sistemadinamico si verificano le condizioni per l’insorgenza di intersezioni trasver-salmente omocliniche. Nel caso hamiltoniano Melnikov [45]) ha dimostratoun teorema in cui si danno delle condizioni per l’esistenza di punti trasver-salmente omoclinici.
Teorema Sia dato il sistema hamiltoniano del tipo
H(x, p; t) = H0(x, p) + εH1(x, p; t) (1.99)
con H0,H1 funzioni analitiche di x, p e periodiche in t con periodo uno. Inpiu si supponga che l’origine sia un punto fisso iperbolico per H0. Le varietainvarianti di H1 sono vicine ordine ε a quelle del problema imperturbato e

32 CAPITOLO 1. FORME NORMALI IPERBOLICHE
avranno intersezioni trasversalmente omocliniche se la funzione
M(t0) =
∫ +∞
−∞
[∂H0
∂x
∂H1
∂p− ∂H0
∂p
∂H1
∂x
](x0(t− t0), p0(t− t0))dt, (1.100)
ha zeri semplici. In (1.100) si e indicato con x0(t− t0), p0(t− t0) l’equazionedella separatrice di H0.Dim.In primo luogo consideriamo xs(t, t0; ε), x
u(t, t0; ε), le espressioni delle varietainvarianti per H. In questo caso si ha che
xs(t, t0; ε) = x0(t, t0) + εxs1(t, t0; ε) +O (ε2) per t ∈ [t0,∞)
xu(t, t0; ε) = x0(t, t0) + εxu1(t, t0; ε) +O (ε2) per t ∈ (−∞, t0]
,
(1.101)
e le analoghe relazioni per ps, pu. Introducendo la notazione
x ≡(xp
), fi ≡
(∂Hi
∂x∂Hi
∂p
), con i = 0, 1 QH ≡
(∂2H0
∂x2∂2H0
∂x∂p∂2H0
∂x∂p∂2H0
∂p2
),
le equazioni di hamilton scritte nella forma x′ = f0 + εf1 forniscono al primoordine in ε il seguente risultato
dxs,u1
dt= QH(x0)x
s,u1 + f1(x0). (1.102)
Definiamo ora la distanza tra le due varieta stabile e instabile. Per far cioconsidereremo la proiezione di xu−xs lungo la direzione perpendicolare allatangente alla varieta del problema imperturbato
d(t, t0) ≡ f0 × (xu − xs) = (1.103)
εf0 × (xu1 − xs
1) +O (ε2) = ε (∆u −∆s) +O (ε2) .Partendo dalla relazione precedente e possibile derivare una equazione dif-ferenziale per ∆s,∆u. Differenziando rispetto a t si ottiene
d∆u,s
dt= Tr (QH(x0)) f0(x0)× xu,s
1 + f0(x0)× f1(x0), (1.104)
dove si e fatto uso dell’identita
Au× v − u× Av = Tr (A) (u× v) (1.105)

1.4. VARIETA INVARIANTI 33
valida per generici vettori di R2. Se ora integriamo la (1.104) tra t0 e +∞nel caso di ∆s si ottiene
−∆s(t0, t0) =
∫ +∞
t0
f0 × f1dt (1.106)
tenendo conto che ∆s(+∞, t0) = 0 in quanto f0(x0(+∞)) = 0 e che, in piuvale Tr (QH(x0)) = 0. Analogamente per ∆u integrato tra −∞ e t0 si ha
∆u(t0, t0) =
∫ t0
−∞f0 × f1dt. (1.107)
In definitiva si ha che
d(t0, t0) =
∫ +∞
−∞f0 × f1dt = M(t0). (1.108)
Quindi all’ordine ε M(t0) e la distanza tra le due varieta. Uno zero semplicedi M(t0) implica dunque una intersezione trasversa.
Ancora una volta sottolineiamo che, come nel caso del teorema di con-vergenza delle forme normali iperboliche, non esiste un analogo di questirisultati in dimensioni superiori. Per quanto riguarda il teorema di Mel-nikov, ne daremo una applicazione nel prossimo capitolo, dove tratteremodiffusamente della mappa quadratica, per mostrare la non integrabilita diquesto modello.

34 CAPITOLO 1. FORME NORMALI IPERBOLICHE

Capitolo 2
Analisi di Stabilita per MappeSimplettiche
In questo capitolo si affronta uno dei problemi centrali di questa dissertazione:la caratterizzazione dell’insieme dello spazio delle fasi in cui si hanno moticonfinati nel caso di un sistema hamiltoniano ad un grado e mezzo di liberta.Piu precisamente, prenderemo in considerazione una classe di sistemi hamil-toniani aventi un punto fisso ellittico nell’origine e derivabili da una funzioneH = H(q, p; t) del tipo
H(x, p; t) =p2
2+ ω2x
2
2+G(x)
+∞∑n=−∞
δ(t− nT ), (2.1)
dove G(x) =∑∞
k=3 gkxk. Detti sistemi sono di particolare rilevanza fisica in
quanto, con una opportuna scelta della forma della parte non lineare G(x),possono rappresentare la dinamica di una particella carica in un elementomagnetico di una macchina acceleratrice. L’analisi di (2.1), pur riferendosiad un caso semplificato rispetto a quello reale, puo essere quindi di notevolerilevanza nello studio del problema di stabilita dei fasci in un acceleratorecircolare. La regione dello spazio delle fasi in cui il moto e confinato, indicataanche come bacino di stabilita o, utilizzando un termine preso a prestito dallafisica degli acceleratori apertura dinamica, puo essere facilmente analizzatoutilizzando semplici strumenti numerici. Con questo approccio puramentecomputazionale, peraltro, e estremamente complicato giungere alla deter-minazione dei fenomeni che determinano la topologia di questo insieme. Ilmetodo che proponiamo sfrutta i concetti introdotti nel precedente capito-lo (forme normali iperboliche e varieta invarianti) e permette di avere unamigliore comprensione delle cause che determinano la stabilita o meno di unaregione dello spazio delle fasi.
35

36 CAPITOLO 2. ANALISI DI STABILITA
2.1 Proprieta della mappa quadratica
Partendo dalla (2.1) possiamo determinare immediatamente le equazioni delmoto
x = p
p = −ω2x− G(x)∑+∞
n=−∞ δ(t− nT )(2.2)
che possono essere integrate banalmente a causa della presenza della funzioneδ periodica. Otterremo dunque una mappa del tipo(
x′
y′
)=
(cosωT − sinωTsinωT cosωT
)(x
y + g(x)ω
), (2.3)
dove si e posto y = pω
e g(x) = −G′(x).Consideriamo il semplice caso un cui
G(x) = −ωx3
3
.
Ponendo T = 1, la sezione di Poincare (2.3) diventa dunque
H2(ω) :
(x′
y′
)=
(cosω sinω− sinω cosω
)(x
y + x2
). (2.4)
La mappa (2.4) e anche nota come mappa di Henon [23] in quanto introdotta eanalizzata numericamente da Henon nel 1969. Il motivo che spinge a studiarequesta mappa, e dovuto non solo alla sua semplicita e alla facilita ad esserestudiata numericamente, ma soprattutto al fatto che presenta una dinamicaestremamente ricca, presentando allo stesso tempo sia regimi regolari checaotici. e dunque un modello che ben si presta a fungere da prototipo persistemi non integrabili piu complessi. Per dimostrare la non integrabilita,come gia accennato nel capitolo precedente, si sfrutta il teorema di Melnikov.Riscalando le variabili
x = ωx, p = ωp (2.5)
l’hamiltoniana che corrisponde alla mappa di Henon diventa
H(x, p;ω) =p2 + x2
2− x
3ωδp(t− ω). (2.6)
Dove si e indicato con δp(t − ω) la funzione δ periodica. Il fatto che nellimite ω → 0 l’hamiltoniana precedente puo essere vista come un integratoresimplettico di
H0(x, p) =p2 + x2
2− x
3ω

2.1. PROPRIETA DELLA MAPPA QUADRATICA 37
suggerisce di decomporre H nel modo seguente
H = H0 +H1, H0 =p2 + x2
2− x
3, H1 =
x
3
1− ωδp(t− ω)
ω. (2.7)
Osserviamo che la distribuzione χ(t, ω) = 1−ωδp(t−ω)ω
e limitata anche perω → 0 se integrata su una funzione di prova. Visto poi che il punto fissoiperbolico di H0 si trova in x = 1, p = 0 puo essere conveniente definire nuovevariabili y = 1 − x, py = −p da cui risulta che l’equazione della separatricediventa
y =3
2
1
cosh t2
, py = −3
2
sinh t2
cosh t2
, per −∞ < t < +∞ (2.8)
La funzione di Melnikov sara data in questo caso da
M(t0) =1
ω
∫ +∞
−∞y2(t)py(t)[1− δP (t + t0 − ω)]dt =
9
4
+∞∑−∞
sinh 12(nω − t0)
cosh7 12(nω − t0)
M(t0) puo essere sviluppata in serie di Fourier ottenendo
M(t0) =9
4
+∞∑−∞
Bn sin2πn
ωt0 (2.9)
dove i coefficienti Bn hanno la seguente espressione
Bn = 2
∫ +∞
−∞
sinh t2
cosh7 t2
sin2πn
ωtd t =
2π8
45
1
sinh 2π2nω
(2πn
ω
)2[1 +
(2πn
ω
)2][
1 + 4
(2πn
ω
)2]
Dunque M(t0) e una funzione sinusoidale e quindi ha degli zeri semplici, cosache garantisce l’esistenza di intersezioni omocliniche trasverse e, a sua volta,la non integrabilita.Un altro fatto interessante che depone a favore di questo modello e che, no-nostante la forma speciale, questa mappa e generica. Si puo infatti provareil risultato seguente.
Teorema Considerata una generica mappa simplettica del piano del tipo(x′
y′
)=
(cosω sinω− sinω cosω
)(x+ f(x, y)y + g(x, y)
). (2.10)

38 CAPITOLO 2. ANALISI DI STABILITA
in cui f(x, y) e g(x, y) sono polinomi omogenei di secondo grado, del tipo
f(x, y) =2∑
k=0
fkxky2−k, g(x, y) =
2∑k=0
gkxky2−k. (2.11)
Sotto queste ipotesi e sempre possibile trovare un nuovo sistema di coordi-nate in cui la (2.10) abbia l’espressione (2.4).
Dim.Il risultato si dimostra facilmente riscrivendo la (2.10) utilizzando coordinatecomplesse. In questo caso una generica mappa quadratica si scrive
w′ = eiω(w +a
2w2 + bww∗ +
c
2w∗2) (2.12)
dove si e usato w = x − ip e w∗ = x + ip e le costanti a, b, c sono arbitrarinumeri complessi legati ai coefficienti fk, gk. Imponendo la condizione disimpletticita si ottiene una relazione tra i coefficienti della parte quadraticadella (2.12)
∂(w′, w′∗)∂(w,w∗)
= 1 =
1 + (a+ b∗)w + (a∗ + b)w∗ + (ab∗ − bc∗)w2 + (aa∗ − cc∗)ww∗ +
(a∗b− b∗c)w∗2
Risolvendo si ottengono le relazioni che legano i diversi parametri
b = −a∗ c =a
a
∗2(2.13)
e quindi la (2.10) puo essere riscritta, tenendo conto di (2.13), nella forma
w′ = eiω
[w +
1
2a(aw + a∗w∗)2
]. (2.14)
Introducendo nuove coordinate riscalate w = z2ia
si ottiene l’espressione finale
z′ = eiω
[z +
i
4(z + z∗)2
](2.15)
che coincide esattamente con la (2.10), previo passaggio a coordinate reali.

2.1. PROPRIETA DELLA MAPPA QUADRATICA 39
La mappa di Henon sara l’oggetto principale del nostro studio. Per esserepiu precisi considereremo la famiglia di mappe (2.4) ottenute considerando ladipendenza dal parametro ω. Nel seguito utilizzeremo una forma modificataper la matrice di rotazione che compare nell’espressione (2.4), cambiandoω → −ω. In conclusione l’oggetto del nostro studio sara il seguente
H2(ω) :
(x′
y′
)= R(ω)
(x
y + x2
)(2.16)
con
R(ω) =
(cosω − sinωsinω cosω
)(2.17)
In primo luogo notiamo che se operiamo la trasformazione y → −y, la mappasi trasforma in accordo con H2(ω) → H2(−ω). Da cio risulta che e sufficienteconsiderare ω ∈ [0, π], in quanto il caso ω ∈ [π, 2π] si riconduce al precedentesemplicemente riflettendo y. In piu i due casi limite ω = 0 e ω = π possonoessere studiati esplicitamente. Nel primo caso si ha che R(ω) = Id e dunquela mappa si riduce a
x′ = x
y′ = y + x2(2.18)
La ricorrenza precedente puo essere agevolmente risolta, fornendo la soluzionexn = x0
yn = y0 + nx20
(2.19)
da cui risulta immediato che per ogni condizione iniziale diversa dall’originevale rn =
√x2
n + y2n → +∞. Cio implica che il bacino di stabilita e nullo.
Nel secondo caso si ha invece che R2(π) = Id da cui risulta che H2(π) hal’espressione
x′ = −x
y′ = −y − x2(2.20)
Anche in questo caso e possibile scrivere in forma esplicita la soluzione dellaricorrenza che risulta essere
xn = (−1)nx0
yn = (−1)ny0 − 1−(−1)n
2x2
0
(2.21)

40 CAPITOLO 2. ANALISI DI STABILITA
Dunque per qualsiasi condizione iniziale si ha che rn e limitato, implicandoche l’intero spazio costituisce il bacino di stabilita. Si noti infine come ilcomportamento per ω = π sia legato al tipo di nonlinearita e non sia dunqueuna proprieta generica. Qualora, infatti, il termine quadratico fosse statosostituito con uno di ordine dispari x2n+1, questo avrebbe prodotto una in-stabilita simile a quella che si ha per ω = 0.Per raggiungere una migliore comprensione della dinamica della mappa diHenon e utile considerare la possibilita di fattorizzare H2(ω) nel prodotto didue trasformazioni piu semplici. Si puo infatti mostrare che vale la relazione
H2(ω) = I1(ω) I2 (2.22)
con I1(ω) e I2 definite da
I1(ω) :
(x′
y′
)=
(cosω sinωsinω − cosω
)(xy
), (2.23)
I2 :
(x′
y′
)=
(1 00 −1
)(xy
)+
(0x2
). (2.24)
Tutte e due le trasformazioni sono caratterizzate del fatto di essere involu-zioni: il loro quadrato coincide con l’identita, come e facile verificare. Laprima e una mappa lineare e rappresenta una riflessione attorno alla rettadi equazione y = x tan ω
2, mentre la seconda e una trasformazione non li-
neare e rappresenta uno spostamento verticale. Nel seguito risultera ancheimportante considerare gli insiemi
F ix (Ii) =(x, y) ∈ R2| Ii(x, y) = (x, y)
(2.25)
che sono i luoghi dei punti fissi delle due trasformazioni. Per quanto riguardaI1(ω), e ovvio che F ix (I1) coincide con la retta indicata. Nel caso di I2,invece, i punti fissi si trovano su di una parabola di equazione y = −x2
2.
Una prima conseguenza di questa fattorizzazione in involuzioni consiste nelfatto che la mappa inversa e essa stessa polinomiale, essendo data da
H−12 (ω) = I2 I1(ω).
Dunque H2(ω) e una mappa di Cremona. Una ulteriore conseguenza dellafattorizzazione (2.22) riguarda la simmetria delle orbite diH2(ω): queste sonoinfatti simmetriche rispetto alla retta y = x tan ω
2. Vale infatti la relazione
H2(ω) I1 = I1 H−12 (ω)

2.1. PROPRIETA DELLA MAPPA QUADRATICA 41
e quindi il risultato discende dalle proprieta di I1(ω). Per questo motivo laretta suddetta verra indicata nel seguito come retta di simmetria H2(ω).Nel paragrafo seguente discuteremo le conseguenze della fattorizzazione (2.22)sui punti fissi della mappa quadratica dando alcuni risultati generali, nel frat-tempo basti dire che la mappa di Henon ha due punti fissi, l’origine (ellittico)e
xi = −2 tanω
2, yi = −2 tan2 ω
2. (2.26)
Questo punto e iperbolico come si puo verificare considerando la matricejacobiana di H2(ω) in un intorno di (xi, yi)
LH2(ω) =
(cosω + 2 sinω tan ω
2− sinω
sinω − 2 cosω tan ω2
cosω
). (2.27)
La traccia vale infatti 2(cosω + sinω tan ω
2
)ed e sempre maggiore di due
garantendo la realta degli autovalori la cui espressione sara
λ1 = 1 + 2 sin2 ω
2+ 2 sin
ω
2
√1 + sin2 ω
2, λ2 = λ−1
1 . (2.28)
Se ora introduciamo nuove coordinate definite dalla seguente trasformazione(xy
)=
(−2 tan ω2−2 tan2 ω2
)+ (2.29)(
cos ω2
cos ω2
2 sin ω2−√
1 + sin2 ω2
2 sin ω2
+√
1 + sin2 ω2
)(XY
),
dove la matrice rappresenta la matrice degli autovettori di LH2(ω), si ottieneuna nuova mappa quadratica che ha ora un punto fisso iperbolico nell’origine.Questa mappa ha la seguente espressione(
X ′
Y ′
)=
(λ 00 λ−1
)(X − ν
2[X + Y ]2
Y + ν2[X + Y ]2
). (2.30)
Come si puo vedere questa e esattamente la mappa introdotta nel precedentecapitolo e utilizzata per determinare lo sviluppo in serie delle varieta inva-rianti.Come ultimo commento sulle proprieta generali di questo modello, vorrem-mo accennare alle sue connessioni con la fisica degli acceleratori. Premessoche nel prossimo capitolo si affrontera in maggior dettaglio il problema dellemappe di trasferimento per elementi magnetici, si puo anticipare che la map-pa di Henon rappresenta la mappa di trasferimento per una cella FODO

42 CAPITOLO 2. ANALISI DI STABILITA
bidimensionale con una non linearita di tipo sestupolare considerata nell’ap-prossimazione di kick.Una cella FODO e la struttura fondamentale nel reticolo magnetico di unacceleratore di particelle. e costituita, nella sua versione elementare, da e-lementi magnetici (dipoli e quadrupoli) che provvedono a fornire non solola forza necessaria per mantenere le particelle sull’orbita di riferimento, maanche il focheggiamento richiesto per controllare la divergenza del fascio. Ilsestupolo, elemento non lineare, viene introdotto per correggere gli effetticromatici introdotti dagli elementi lineari (quadrupoli). Nel nostro model-lo questo elemento e considerato di lunghezza nulla e approssimato con uneffetto impulsivo, rappresentato dalla funzione δ che compare nell’hamilto-niana (2.1). Come vedremo nel prossimo capitolo questa approssimazionee largamente usata, permettendo di ottenere delle mappa che, benche nonsiano esatte, sono per contro esattamente simplettiche.
2.2 Relazione tra punti fissi e involuzioni
In questo paragrafo presentiamo una serie di risultati generali valevoli permappe che possono essere decomposte nel prodotto di involuzioni [46, 47, 48].Questo tipo di trasformazioni ha delle proprieta peculiari. Ad esempio epossibile mostrare che una involuzione possiede sempre almeno un puntofisso. In particolare nel caso bidimensionale il luogo dei punti fissi di unainvoluzione e una curva analitica. Questo fatto si ripercuote sulla mappa cheviene fattorizzata imponendo dei vincoli sui punti fissi. Il primo risultato chesi puo enunciare in tal senso e il seguente.
Teorema Sia F una mappa di Rn tale che F = I1 I2 con I21 = I2
2 = Id,allora se x ∈ Rn e soluzione di
I1(x) = x
I2 (Fn(x)) = Fn(x)(2.31)
vale F2n+1(x) = x. Nel caso che x sia soluzione diI1(x) = x
I1 (Fn(x)) = Fn(x)(2.32)
o di I2(x) = x
I2 (Fn(x)) = Fn(x)(2.33)

2.2. RELAZIONE TRA PUNTI FISSI E INVOLUZIONI 43
risulta F2n(x) = x.
Dim.Daremo la dimostrazione della prima affermazione, in quanto la seconda siprova analogamente. In primo luogo notiamo che dalla fattorizzazione (2.22)discende che
I1 Fm = I2 Fm−1, Fm I2 = Fm−1 I1; (2.34)
utilizzando queste proprieta e (2.26) si ottiene che
F2n+1(x) = Fn+1 Fn(x) = Fn+1 I2 Fn(x) (2.35)
= Fn I1 Fn(x) = Fn I2 Fn−1(x)
= I1(x)
L’ultimo passaggio si e ottenuto applicando ripetutamente le (2.34). Rimanedunque dimostrato l’asserto.
Consideriamo ora un caso meno generale introducendo delle ipotesi piurestrittive sulla forma delle due trasformazioni in cui si decompone la mappaF. Sia I1 una involuzione lineare di R2. e possibile descrivere la formagenerale di una tale trasformazione. La condizione I2
1 = Id impone chedet (I1) = ±1. Nel caso in cui il determinante sia positivo le uniche matriciche siano involuzioni sono multipli dell’identita
I1 = ±Id. (2.36)
Nel secondo caso la soluzione dipende da due parametri liberi
I1 :
(x′
y′
)=
(α β
1−α2
β−α)(
xy
)(2.37)
La trasformazione (2.37) rappresenta una riflessione rispetto alla retta diequazione
y =1− α
βx (2.38)

44 CAPITOLO 2. ANALISI DI STABILITA
che e ovviamente il luogo dei punti fissi.Per quanto concerne I2 sia una involuzione non lineare del tipo
I2 :
(x′
y′
)=
(1 00 −1
)(x
y + Pn(x)
)(2.39)
con Pn(x) =∑n
j=1 pjxj. Il luogo dei punti fissi della trasformazione (2.39) e
costituito dalla curva
y = −Pn(x)
2. (2.40)
Con queste premesse si possono rafforzare i risultati precedenti relativi aipunti fissi di F = I1 I2.
Teorema Sia F una mappa di R2 decomposta in involuzioni del tipoprecedente. Condizione necessaria e sufficiente affinche x sia un punto fissodi F e che valga
I1(x) = x
I2 (x) = x(2.41)
Dim.Per quanto abbiamo gia dimostrato in precedenza rimane da provare che sex e un punto fisso allora appartiene all’intersezione di F ix (I1) e F ix (I2).La condizione che x deve soddisfare per essere un punto fisso si scrive
(α− 1)x− βy − bPn(x) = 0
1− α2
βx+ (α− 1)y + αPn(x) = 0
(2.42)
Sostituendo la prima equazione nella seconda si ottieney =
α− 1
βx− Pn(x)
α− 1
βx = −1
2Pn(x)
(2.43)
e immediato notare che la (2.43) e equivalente a richiedere che x appartengaa F ix (I1)
⋂F ix (I2) come affermato nella tesi.
Un risultato analogo vale anche per i punti fissi di F2.

2.2. RELAZIONE TRA PUNTI FISSI E INVOLUZIONI 45
Teorema Sia F una mappa di R2 decomposta in involuzioni del tipoprecedente. Condizione necessaria e sufficiente affinche x sia un punto fissodi F2 e che valga la seguente relazione
I2(x) = x
I2 (F(x)) = F(x)(2.44)
Dim.Da quanto abbiamo gia dimostrato risulta che anche le soluzioni di (2.32)per n = 1 sono, in linea di principio, punti fissi di F2. Mostriamo, quindiche se x soddisfa
I1(x) = x
I1 (F(x)) = F(x)(2.45)
allora x e un punto fisso di F e dunque soluzione banale di F2(x) = x.Scrivendo esplicitamente le equazioni si ottiene
y =1− α
βx
1 + α− 2α2
βx+ αPn(x) =
(1− α)(2α− 1)
βx− (1− α)Pn(x)
(2.46)
ed e immediato verificare che la seconda equazione si riduce a 1−αβx = −Pn(x)
2
e dunque F(x) = x. Questo significa che solo le soluzioni di (2.33) per n = 1,sono punti fissi non banali di F2.Rimane ora da dimostrare che viceversa un punto fisso di F2 verifica la(2.44). Questo e immediato scrivendo l’equazione F2(x) = (x) nella formaequivalente F(x) = F−1(x). Risulta dunque
αx− βy − βPn(x) = αx+ βy
1− α2
βx+ αy + αPn(x) = −1 − α2
βx+ αy − αPn(αx+ βy)
(2.47)
da cui si ottieney = −1
2Pn(x)
1− α2
βx+
α
2Pn(x) = −1
2Pn(αx− β
2Pn(x))
(2.48)

46 CAPITOLO 2. ANALISI DI STABILITA
e immediato vedere che la (2.48) coincide esattamente con l’equazione che siottiene dalla (2.44).
Dopo avere analizzato il problema dell’esistenza di punti fissi e di come siapossibile determinarli, passiamo a considerare lo studio della loro stabilita.A tal scopo considereremo una forma meno generale per la trasformazioneI1. Ritorneremo infatti a utilizzare l’involuzione in cui si decompone la map-pa di Henon. Questo permette di avere un punto fisso ellittico nell’originein maniera automatica. Con queste premesse e possibile provare il seguenterisultato
Teorema Data una mappa F fattorizzata in involuzioni I1(ω), I2 del tipoconsiderato in precedenza, allora se il grado di F e pari oppure dispari, mapn e negativo, i punti fissi esterni sono sempre iperbolici.
Dim.Per provare il risultato utilizzeremo il concetto di indice di una curva Sia Cuna curva chiusa che non passi per nessun punto fisso della mappa, in questecondizioni l’indice di C, IndC, e definito come il numero di volte che il vettore
v(x) = F(x)− x x ∈ C,
ruota attorno all’origine mentre il punto x percorre C. L’indice e dunqueuna funzione a valori interi (il segno indica il verso di rotazione). Alcuneproprieta sono immediate. Ad esempio IndC e continuo rispetto a C e ha unadipendenza regolare dagli eventuali parametri che entrano nell’espressione diF. Nel caso la curva prescelta racchiuda un solo punto fisso, il valore del-l’indice sara −1,+1,+1 a seconda che il punto fisso sia iperbolico, ellitticoo iperbolico con inversione. Nel caso si abbiano piu punti fissi all’interno diC, l’indice si comporta in maniera additiva essendo dato dalla somma degliindici dei vari punti fissi. L’ultima proprieta che considereremo e la seguente:l’indice di una orbita chiusa di F vale +1. Detto cio possiamo precedere conla dimostrazione. Supponiamo che il grado di F sia pari. In questo casodovrebbe essere chiaro dalla discussione sulle proprieta dei punti fissi che es-istera un valore ω tale che se ω > ω si hanno solo due punti fissi: l’origineed un secondo punto appartenente al ramo esterno della curva y = −Pn(x)
2.
Consideriamo ora una curva chiusa C tale da racchiudere tutti i punti fissiche si hanno per i valori del parametro ω nell’intervallo [0, ω]. Per quantodetto IndC non dipenderdal valore di ω. Se ω = 0 si ha che la dinamica einstabile e dunque non possono esistere curve chiuse. Questo significa cheIndC 6= +1. Questo significa che il punto fisso diverso dall’origine che si ha nel

2.3. LA MAPPA DI HENON NEL DOMINIO COMPLESSO 47
caso ω ≥ omega non puo essere altro che iperbolico in quanto deve continua-re a valere che IndC 6= +1 e, in piu non esistono mappe continue con indicedue (quindi e escluso che possa essere ellittico o iperbolico con inversione).In aggiunta si puo dire che la stabilita di detto punto fisso non cambia anchese ω ∈ [0, π] e quindi rimane dimostrata la prima parte dell’asserto. Nelsecondo caso si procede analogamente. L’unica differenza consiste nel fattoche, la diversa simmetria di F ix(I2) comporta che per ω > ω si avranno tresoluzioni invece di due. A parte cio e possibile dimostrare che i due puntifissi distinti dall’origine sono iperbolici e che la loro stabilita non cambia intutto l’intervallo di variazione di ω.
2.3 La mappa di Henon nel dominio comp-
lesso
In questo paragrafo illustriamo un primo approccio al problema della deter-minazione del bacino di stabilita per la mappa di Henon [49]. Considereremoquesta mappa nel dominio complesso in modo da poter utilizzare le tecnichesviluppate nell’ambito della teoria delle funzioni analitiche in una variabilecomplessa. L’idea e di correlare le caratteristiche del bacino di stabilita conle proprieta dello sviluppo in frazione continua della frequenza ω della partelineare della mappa. Detto approccio e stato applicato per la prima volta daBuric, Percival e Vivaldi [50, 51, 52] nello studio della funzione critica permappe quali la Standard Map e Semi standard Map.Prima di esporre il risultato, passeremo in rassegna alcuni aspetti prelimi-nari di teoria dei numeri. Indichiamo con [a0, a1, . . . ] lo sviluppo in frazionecontinua di un numero ν ∈ R\Q. I coefficienti ai possono essere determinatiricorsivamente secondo lo schema
aj =
[1
νj
], νj =
1
νj−1
, per j ≥ 1, (2.49)
dove [ ] denota la funzione parte intera, mentre la frazionaria. L’inizia-lizzazione delle due successioni avviene ponendo ν0 = ν − [ν] e a0 = [ν]. Leapprossimazioni successive pk
qka ν ottenute troncando ad un ordine finito lo

48 CAPITOLO 2. ANALISI DI STABILITA
sviluppo
pk
qk= a0 +
1
a1 +1
a2 +1
. . . +1
ak
(2.50)
sono date da pk = akpk−1 + pk−2
pk = akpk−1 + pk−2
(2.51)
per tutti i k ≥ 0, dove le due successioni sono inizializzate con i seguenti valoriq−2 = p−1 = 1, q−1 = p−2 = 0. Gli approssimanti verificano la proprieta
1
qk(qk + qk+1)< (−1)k
(ν − pk
qk
)<
1
qkqk+1, (2.52)
e dunque a seconda che k sia pari o dispari, pk/qk approssima ν da destra oda sinistra. Nel seguito sara utilizzato un secondo tipo di sviluppo in frazionecontinua. Se consideriamo ν un irrazionale, possiamo definire le successioni
bk = 〈θ−1k−1〉, θk = ‖θ−1
k−1‖ per k ≥ 1, (2.53)
dove si e indicato con 〈 〉 e ‖ ‖ rispettivamente l’intero piu vicino e la distanzadall’intero piu vicino. In questo caso i valori iniziali per bk e θk sono b0 = 〈ν〉e θ0 = ‖ν‖. e immediato vedere che θk ∈ (0, 1/2) ∀k e dunque bk ≥ 2 ∀k.Tra i due diversi sviluppi in frazione continua esiste un legame mediato dallasuccessione βk =
∏ki=0 θi, con β−1 = 1.
Si puo mostrare che esiste una funzione monotona crescente m : N 7−→ N taleche
βk = (−1)m(k)(qm(k) − pm(k)
). (2.54)
Poniamo ora la seguente definizione.
Definizione Sia B una applicazione
B : R \Q 7−→ R+⋃∞

2.3. LA MAPPA DI HENON NEL DOMINIO COMPLESSO 49
pari, Z-periodica e finita per tutti i ν aventi uno sviluppo in frazione continuache soddisfi la condizione di Brjuno
+∞∑k=0
log qk+1
qk< +∞. (2.55)
In questo caso si pone
B(ν) = −+∞∑k=0
βk−1 log θk. (2.56)
dove βk, θk rappresentano lo sviluppo modificato in frazione continua di ν. Lafunzione B(ν) e detta funzione di Brjuno. Se consideriamo il caso particolarein cui ν ∈ R \Q
⋂(0, 1/2] allora B(ν) soddisfa l’equazione funzionale
B(ν) = − log ν + νB(ν−1). (2.57)
L’importanza della funzione di Brjuno e della condizione (2.55) e dovuta allasua connessione con il problema della linearizzazione di un diffeomorfismoolomorfo nell’intorno di un punto fisso. Sia f un tale diffeomorfismo con unpunto fisso in z = 0 e sia λ = f ′(0). Indicando con f = λz +
∑+∞n=2 fnz
n Sidice che f e linearizzabile se esiste una funzione Φ che risolva l’equazione
f Φ = Φ Rλ (2.58)
con Rλ : z 7−→ λz. L’equazione precedente e l’equivalente della (1.1) nelcaso complesso. Il problema dell’esistenza formale di Φ e facilmente risoltoin quanto basta che sia λn − 1 6= 0 per ogni n. In tal caso i coefficientiΦn dello sviluppo Φ =
∑+∞n=0 Φnz
n possono essere determinati dalla (2.58)uguagliando i termini simili. Si ottiene, quindi che Φ1 = 1 e
Φn = (λn − λ)−1
n∑j=2
fj
∑m1+...+mj=n
Φm1 . . .Φmj, n ≥ 2. (2.59)
Per quanto riguarda il problema della convergenza di Φ, bisogna distingueredue casi a seconda del modulo di λ. Nel caso banale |λ| 6= 1, Poincare haprovato la convergenza di Φ. Se invece vale |λ| = 1 ⇒ λ = e2πiν anchese ν ∈ R \ Q la serie (2.59) potrebbe essere divergente a causa dei piccolidivisori: λn − λ pur essendo sempre diverso da zero, potrebbe essere co-munque arbitrariamente piccolo. e proprio per controllare i piccoli divisoriche si richiede che ν soddisfi ad una condizione diofantina. Qualora si ab-bia la convergenza, all’interno del disco di convergenza, detto anche disco

50 CAPITOLO 2. ANALISI DI STABILITA
di Siegel, la dinamica generata da f e coniugata con una rotazione di fre-quenza 2πν. Recentemente [16] Yoccoz ha provato un teorema fondamentale.
Teorema La condizione di Brjuno (2.55) e necessaria e sufficiente perl’esistenza di una soluzione analitica di (refeq31.10) nel caso che λ = e2πiν .In piu, se si richiede che f sia univalente, allora detto τS il raggio del discodi Siegel, vale la relazione
| log τ−1S −B(ν)| ≤ C, (2.60)
dove C e una costante universale.
Chiaramente questo fatto suggerisce che per una mappa generica valga la re-lazione τS = C(ν)e−B(ν). Detta ipotesi e stata verificata numericamente [53],fornendo delle ottime stime per il disco di Siegel.Per studiare la mappa di Henon utilizzando le tecniche descritte in prece-denza, bisogna in primo luogo riscriverla in una forma differente. e possibile,infatti, eliminare completamente la dipendenza dalla coordinata y, ottenendoun’equazione nella sola x
xn+1 − 2 cos 2πνxn + xn−1 = [xn]2 sin 2πν (2.61)
dove si e posto ω = 2πν. Introducendo l’operatore
δ2νxn = xn+1 − 2 cos 2πνxn + xn−1, (2.62)
e possibile riscrivere la (2.61) come
δ2νxn = [xn]2 sin 2πν. (2.63)
Si tenga anche presente che da ora in avanti le coordinate (xn, yn) sono con-siderate come appartenenti a C2. La mappa con cui vogliamo coniugare la(2.63) ha la forma
zn+1 = e2πiνzn, con zn = Keiθn , (2.64)
Gli invarianti sono dei cerchi: K misura la distanza dal punto ellitticodel’invariante, mentre θ ∈ R/Z e una coordinata che parametrizza il cerchio.Per risolvere la (2.58) si porra
xn = Φ(zn) =⇒ δ2νΦ(z) = Φ(e2πiνz)− 2 cos 2πνΦ(z) + Φ(e−2πiνz), (2.65)
e dunque l’equazione (2.63) diventera
δ2νΦ(z) = [Φ(z)]2 sin 2πν. (2.66)

2.3. LA MAPPA DI HENON NEL DOMINIO COMPLESSO 51
Il problema che stiamo tentando di risolvere consiste nel trovare un discodi Siegel immerso in C2 che sia compatibile con la dinamica della mappadi Henon in C2. Come gia indicato in precedenza e immediato trovare l’e-spressione dei coefficienti che definiscono lo sviluppo in serie della funzionedi coniugazione Φ. Uguagliando le potenze nella (2.66) si ottiene
Φn =sin 2πν
(D1 −Dn)
n−1∑l−1
ΦlΦn−l, n ≥ 2. (2.67)
La successione dei Dn = 4 sin2 2πν rappresenta i piccoli divisori. Come efacile vedere il coefficiente Φ1 rimane indeterminato e percio puo essere postouguale a uno, riscalando opportunamente tutti gli altri coefficienti. A questopunto il raggio di convergenza di Φ si puo calcolare utilizzando, ad esempio,la formula di Hadamard
K(ν) =
[lim supn→+∞
|Φn| 1n]−1
. (2.68)
Sottolineiamo il fatto che K(ν) limita il raggio dei cerchi invarianti coniugaticon la dinamica della mappa di Henon. Possiamo ora enunciare il risultatoprincipale.
Teorema Una condizione sufficiente per l’esistenza di un cerchio invarian-te e la condizione di Brjuno (2.55). In piu vale la seguente disuguaglianza
logK(ν) ≥ − log 2(1 +√
2)− 8
+∞∑k=0
log qk+1
qk. (2.69)
Dim.La dimostrazione usa il metodo delle serie maggioranti secondo la tecnicasviluppata da Siegel e Brjuno. Dalla (2.68) si ha
− logK(ν) ≤ supn≥1
1
nlog |Φn| , (2.70)
e dunque per dimostrare l’enunciato basta dimostrare che vale
1
nlog |Φn| ≤ C + 8
+∞∑k=0
log qk+1
qk, (2.71)
dove C = log 2(1 +√
2). Poniamo ora
εn := | sin(π(n+ 1)ν) sin(π(n− 1)ν)| ∀n ≥ 1 (2.72)

52 CAPITOLO 2. ANALISI DI STABILITA
Se ‖ . ‖ indica la distanza dell’intero piu vicino, ‖y‖ := minp∈Z |y+ p|, poichevale che 2x ≤ sin(πx) ≤ πx per ogni x ∈ [0, 1/2], si ha immediatamente
1 ≥ εn ≥ 4‖(n+ 1)ν‖‖(n− 1)ν‖ ≥ 4[min(‖(n+ 1)ν‖ , ‖(n− 1)ν‖)]2 .(2.73)
Introduciamo ora le seguenti successioni
σ1 = 1 , σn =n−1∑l=1
σlσn−l , n ≥ 2 , (2.74)
e
δ1 = 1 , δn =1
εnmax
1≤j≤n−1δjδn−j , n ≥ 2 , (2.75)
che verranno utilizzate per determinare una serie maggiorante per la funzionedi coniugazione Φ . Con queste definizioni si puo provare il seguente
Lemma.1 I coefficienti Φn dello sviluppo in serie della funzione di co-niugazione verificano la disuguaglianza
|Φn| ≤ σnδn ∀n ≥ 1 , (2.76)
Dim.Dalle definizioni (2.67), (2.74) e (2.75) si ha che Φ1 = 1 = δ1σ1 in aggiunta,per induzione, poiche D1 −Dn = −4εn,
|Φn| =∣∣∣∣∣sin(2πν)
4εn
n−1∑l=1
ΦlΦn−l
∣∣∣∣∣ ≤ 1
εn
n−1∑l=1
σlσn−lδlδn−l (2.77)
≤(
1
εnmax
1≤l≤n−1δlδn−l
)(n−1∑l=1
σlσn−l
)
= σnδn.
Questo completa la dimostrazione del lemma.
Utilizzando il lemma precedente,per dimostrare il teorema basta provare che
1
nlog σn +
1
nlog δn ≤ log 2(1 +
√2) + 8
+∞∑k=0
log qk+1
qk(2.78)

2.3. LA MAPPA DI HENON NEL DOMINIO COMPLESSO 53
Il contributo di σn non e altro che il termine costante: questa successionetiene conto della crescita di |Φn| dipendente dalla ricorrenza senza tenereconto dei piccoli divisori cioe ponendo Dn = 1 in (2.67) . Al contrario lasuccessione δn estrae dalla serie i contributi dei piccoli divisori. Utilizzandola definizione di σn e ponendo f(z) =
∑+∞n=1 σnz
n si ricava che f verifical’equazione funzionale
f(z) = z + (f(z))2 (2.79)
che puo essere facilmente risolta fornendo il risultato
f(z) =1−√1− 4z
2. (2.80)
Quindi f converge per |z| < 1/4 e utilizzando le stime alla Cauchy si ha che
σn ≤ 4n max|z|≤1/4
|f(z)| ≤ 1 +√
2
24n . (2.81)
Consideriamo ora la successione δn . Nella (2.75) il massimo e raggiunto peruna decomposizione
δn =1
εn
δjnδn−jn , dove 1 ≤ jn ≤ n− 1 . (2.82)
Decomponendo δjn , δn−jn nella stessa maniera e procedendo nello stessomodo si ottiene alla fine del processo una decomposizione ben definita
δn =
l(n)∏k=1
ε−1ik, dove εi1 = εn , 1 ≤ i2 ≤ . . . ≤ il(n) ≤ n− 1 , (2.83)
Lemma 2.
l(n) = 2n− 1 .
Dim.e immediato provare il lemma per induzione.
Consideriamo ora la funzione Ω : N \ 1 → R+ definita come segue: perogni m ≥ 2
Ω(m) := min1≤j≤m−1
‖jν‖2 .

54 CAPITOLO 2. ANALISI DI STABILITA
Chiaramente Ω e non crescente e visto che ν ∈ R \ Q, vale la relazionelimm→+∞ Ω(m) = 0. In piu per la legge della migliore approssimazione deinumeri irrazionali partendo dalle frazioni parziali, se 1 ≤ q ≤ qk, (p, q) 6=(pk, qk) e k ≥ 1, dove pk/qk e una frazione parziale di ν, |qν−p| > |qkν−pk|.In piu se (p, q) 6= (pk−1, qk−1), |qν − p| > |qk−1ν − pk−1|. Dunque Ω e unafunzione costante a tratti tale che Ω(qk−1 + 1) = Ω(q) = Ω(qk) > Ω(qk + 1)per ogni qk−1 + 1 ≤ q ≤ qk, e in definitiva si ottiene
Ω(qk) = min1≤j≤qk−1
(minp∈Z
|jν + p|)2 ≥ |qk−1ν − pk−1|2 ≥ 1
4q2k
. (2.84)
L’idea principale del metodo proposto da Brjuno e di contare i termini nelladecomposizione (2.83) di δn che sono minori di 4Ω(m) per un fissato m ≥ 2(il fattore 4 e dovuto alla (2.73)).
Lemma 3. Sia Nm(n) := card k = 1, . . . , l(n) nella(2.83) | εik <4Ω(m+ 1) . Allora
Nm(n) = 0 se n < m
Nm(n) ≤ 2[
nm
]− 1 se n ≥ m(2.85)
dove [ ] denota la parte intera
Dim.Per la (2.83), se n < m, allora m ≥ ik + 1 per ogni k = 1, . . . , l(n). Quindidalla (2.73) abbiamo che
εik = | sin(π(ik + 1)ν) sin(π(ik − 1)ν)| ≥ 4‖(ik + 1)ν‖‖(ik − 1)ν‖ ≥ 4Ω(m+ 1)
in quanto Ω e non crescente. Dunque Nm(n) = 0.Se n = m, per ogni k = 2, . . . , l(n), allora ik ≤ n − 1 = m − 1, e dunqueutilizzando lo stesso argomento possiamo affermare che
εik ≥ 4Ω(m+ 1) .
L’unica possibilita rimasta e che εi1 = εn < 4Ω(m+ 1), quindi Nm(m) ≤ 1.Procediamo ora per induzione su n. Sia n > m: sono possibili due casi
Caso 1: εn ≥ 4Ω(m+ 1). Allora per la (2.82) e l’ipotesi induttiva, vale
Nm(n) = Njn(m) +Nn−jn(m) ≤ 2
[jnm
]+ 2
[n− jnm
]− 2 ≤ 2
[ nm
]− 2
(2.86)

2.3. LA MAPPA DI HENON NEL DOMINIO COMPLESSO 55
in quanto [x] + [y] ≤ [x+ y] .
Caso 2: εn < 4Ω(m+ 1). In questo caso
Nm(n) = 1 +Njn(m) +Nn−jn(m) ≤ 1 + 2[ nm
]− 2 = 2
[ nm
]− 1 . (2.87)
Questo completa la dimostrazione del lemma.
A questo punto e possibile completare la dimostrazione del teorema.Definiamo la successione di insiemi di indici
I(0) : = k = 1, . . . , l(n) nella (2.83) | 4Ω(q1) ≤ εik < 1
I(m) : = k = 1, . . . , l(n) nella (2.83) | 4Ω(qm+1) ≤ εik < 4Ω(qm)(2.88)
La successione (qk)+∞k=1 rappresenta la successione dei denominatori delle fra-
zioni parziali di ν. Chiaramente ∪+∞m=0I(m) =]0, 1] ; per il Lemma 3 se m ≥
1
card I(m) ≤ Nqm−1(n) ≤ 2[n
qm − 1]− 1 (2.89)
e
card I(0) ≤ 2n− 1 (2.90)
Dunque utilizzando la (2.83) e la (2.84) si avra
1
nlog δn =
l(n)∑k=1
1
nlog ε−1
ik≤
+∞∑m=0
1
ncard I(m) log
1
4Ω(qm+1)(2.91)
≤ 4log q1q0
+ 4
+∞∑m=1
1
qm − 1log qm+1 ≤ 8
+∞∑m=0
1
qmlog qm+1
In definitiva si ottiene
supn≥1
1
nlog Φn ≤ sup
n≥1
(1
nlog σn +
1
nlog δn
)≤ (2.92)
≤ log1 +
√2
2+ log 4 + 8
+∞∑k=0
log qk+1
qk
che completa la dimostrazione. Il teorema e percio dimostrato.

56 CAPITOLO 2. ANALISI DI STABILITA
Il risultato precedente si presta ad alcuni commenti.In primo luogo, poiche e noto che qn ≥ 2(n−1)/2, dato un arbitrario ε > 0 sescegliamo
m(ε) :=
[2 log2
1 + 2ε
ε
](2.93)
si ha
1
qm − 1≤ 1 + ε
qm(2.94)
per tutti gli interi che soddisfano m ≥ m(ε). Quindi si puo migliorare lastima del teorema ottenendo
1
nlog δn ≤ 4 log q1 + 4
m(ε)−1∑m=1
1
qm − 1log qm+1 + 4(1 + ε)
+∞∑m=m(ε)
1
qmlog qm+1.
In secondo luogo si puo mostrare, adattando un argomento usato da Yoccoz,che qualora la condizione di Brjuno non sia soddisfatta la serie maggioranteutilizzata nella dimostrazione del teorema precedente diverge. Definendo
βk := σkδk , (2.95)
allora (βk)k∈N e monotona non crescente, in piu per ogni k ≥ 1 e s ≥ 1 vale
βks−1 ≥ βks−1 , (2.96)
come si puo vedere facilmente per induzione.Sia ora ν ∈ R \ Q tale che B(ν) = +∞. Se pk/qk sono le corrispondentifrazioni parziali, allora A = qk | qk+1 ≥ (qk + 1)2 deve essere infinito e sedenotiamo con q′0 < q′1 < . . . < q′n i suoi elementi si ha che
+∞∑k=0
1
q′klog
1
εq′k
= +∞ . (2.97)
Poniamo ora nk = [q′k+1/(q′k + 1)]. Utilizzando la definizione dei βk si ha che
βq′k+1≥ 1
εq′k+1
βnk(q′k+1)−1 ≥ 1
εq′k+1
βnk
q′k, (2.98)
e dunque
1
q′k+1
log βq′k+1≥ 1
q′k+1
log1
εq′k+1
+ αk1
q′kβq′k ≥ (2.99)
≥+∞∏k=0
(1
q′0log βq′0 +
k+1∑j=1
1
q′jlog
1
εq′j
)

2.3. LA MAPPA DI HENON NEL DOMINIO COMPLESSO 57
dove si e fatto uso di αk = nkq′k/q
′k+1. Poiche
∏+∞k=0 αk < +∞, otteniamo che
lim supn→+∞
1
nlog βn = +∞ (2.100)
nell’ipotesi che la condizione di Brjuno sia violata.Infine sottolineiamo che il metodo presentato non e ristretto alla mappaquadratica. Infatti se consideriamo una mappa polinomiale del tipo(
x′
y′
)(cos 2πν − sin 2πνsin 2πν cos 2πν
)(x
y + Pn(x)
)(2.101)
dove
Pj(x) =
j∑l=2
plxl , (2.102)
non e difficile provare che anche in questo caso la condizione di Brjuno e unacondizione sufficiente per l’esistenza di un cerchio invariante e che vale laseguente disuguaglianza
logK(ν) ≥ − log21
4− 8
+∞∑k=0
log qk+1
qk(2.103)
(purche si abbia |pl| ≤ 1 per ogni l ≥ 2, come si puo sempre ottenere permezzo di un semplice scaling.In questo caso la funzione di coniugazione si legge
Φ1 = 1 , Φn =sin 2πν
(D1 −Dn)
n∑l=2
kl
∑k1+...+kl=n
Φk1 . . .Φkl, n ≥ 2 , (2.104)
dove si e posto kl = 0 per ogni l ≥ j + 1 .
Veniamo ora a discutere la relazione tra K(ν) e il bacino di stabilitaper la mappa di Henon in R2. La mappa quadratica considerata in C2 hadelle curve invarianti diffeomorfe a cerchi in un disco di raggio K(ν). Al difuori di questo dominio non si hanno curve chiuse. Quindi il disco di Siegelrappresenta realmente il bacino di stabilita inteso come sottoinsieme di C2.Le curve invarianti che riempiono la regione stabile sono intrinsecamente com-plesse e dunque non sono direttamente collegate con le corrispondenti curvedel sistema considerato in R2. D’altro canto la dinamica reale rappresentauna sezione di quella complessa, e dunque sarebbe ragionevole supporre un

58 CAPITOLO 2. ANALISI DI STABILITA
Figura 2.1: Grafico della funzione K(ν) per la mappa di Henon complessa.
Figura 2.2: Grafico del bacino di stabilita per la mappa di Henon reale.

2.4. VARIETA INVARIANTI E BACINO DI STABILITA 59
qualche legame traK(ν) e il bacino di stabilita per la mappa di Henon usuale.Per confrontare le due situazioni abbiamo mostrato nella parte superiore difigura 2.2 il raggio di convergenza di Φ in funzione di ν, calcolato utilizzandola (2.68), mentre nella parte inferiore e mostrato l’andamento del raggiodel bacino di stabilita per la mappa di Henon in funzione di ν. Da unconfronto dei due grafici e immediato rilevare le differenze. In particolarerisulta marcatamente diverso l’andamento delle due funzioni per ν → 0.Per contro si ha un comportamento simile nell’intorno di ν = 1/3 dove inentrambe i casi la regione di stabilita tende a zero e nell’intorno di ν = 1/2dove si ha stabilita in tutto lo spazio. Il comportamento generale per 1/4 ≤ν ≤ 1/2 risulta poi somigliante nei due casi.Per ottenere un accordo migliore bisogna sfruttare un metodo diverso.
2.4 Varieta invarianti e bacino di stabilita
Nel precedente paragrafo si e discusso un metodo per determinare il bacinodi stabilita della mappa di Henon sfruttando le proprieta del punto ellittico.Partendo dall’origine si tenta, muovendosi all’esterno, di determinare il rag-gio massimo della regione in cui si hanno curve chiuse. Il procedimento cheillustreremo ora si basa sul punto fisso iperbolico della mappa e, partendodall’esterno, nella zone in cui si hanno moti non confinati, tenta di approssi-mare il bordo dell’apertura dinamica. In primo luogo facciamo vedere chenel limite ν → 0 il bacino di stabilita e determinato esattamente del puntofisso iperbolico.Consideriamo il modello hamiltoniano che corrisponde alla mappa di Henon.Nel limite considerato detta hamiltoniana puo essere vista come un integra-tore simplettico dell’hamiltoniana cubica
K(y, py) =p2
y + y2
2− y3
3. (2.105)
dove le nuove coordinate sono legate alle vecchie tramite le relazioni
x = ωy p = ωpy (2.106)
Il nuovo sistema definito dalla (2.105) e banalmente integrabile, essendo adun grado di liberta. Come ben noto le sue soluzioni possono essere ottenuteper mezzo delle funzioni ellittiche. La dinamica e chiara: si ha una separatriceall’interno della quale il moto e limitato e lo spazio delle fasi e foliato in curveinvarianti diffeomorfe a cerchi. All’esterno, invece, si hanno curve aperte. Ilbordo del bacino di stabilita rimane quindi identificato con la separatrice

60 CAPITOLO 2. ANALISI DI STABILITA
che puo essere determinata facilmente. Il punto fisso instabile di (2.105) hacoordinate y = 1, py = 0, l’equazione della separatrice si legge
3(p2y + y2)− 2y3 = 1, =⇒ 3ω(p2 + x2)− 2x3 = ω3. (2.107)
Si tenga presente che, qualora ω sia differente da zero, K non rappresentapiu un modello approssimato per la mappa di Henon. Questo e dovuto alfatto che i due sistemi sono intrinsecamente differenti, essendo integrabile ilprimo, non integrabile il secondo (vedi la dimostrazione utilizzando il teore-ma di Melnikov). Solo nel limite le due dinamiche sono coniugate. Per unvalore generico della frequenza si puo, comunque, generalizzare il risultatoprecedente. Poiche l’analogo della separatrice per un sistema integrabile edato dalle varieta invarianti nel caso non integrabile, affermiamo che vale ilseguente risultato [54, 55, 56].Il bacino di Stabilita della mappa di Henon e dato dall’inviluppo interno dellevarieta invarianti relative al punto fisso iperbolico xi.Il risultato non e stato dimostrato, ma e supportato dall’evidenza numerica.In primo luogo abbiamo analizzato il bacino della mappa (2.16) per due valoriparticolari della frequenza ω/2π = 0.255 e ω/2π = 0.420. Nel primo caso ladinamica della mappa e fortemente dominata dalla risonanza 1/4. Si hannoquattro isole stabili di notevoli dimensioni che circondano un’area, anch’essastabile, attorno all’origine. Il bacino di stabilita risulta dunque essere un in-sieme disconnesso. In figura 2.3 e presentato il risultato. La regione in grigiorappresenta il bacino di stabilita. Essa e calcolata numericamente applicandola mappa (2.16) ad un certo numero di condizioni iniziali x0, verificando seHn
2 (x0) ≥ r dove r e un raggio di controllo prefissato. In caso negativo x0 econsiderato stabile. Il numero di iterazioni usate e dell’ordine di 5×103. Perquanto riguarda le varieta invarianti, queste sono costruite numericamentesecondo quanto descritto nel primo capitolo. Un certo numero di condizioniiniziali sono scelte su di un piccolo segmento collineare con l’autovettore diLH2 relativo all’autovalore maggiore di uno. Applicando la mappa un nu-mero sufficiente di volte si genera la varieta instabile, mentre quella stabilepuo essere costruita semplicemente sfruttando la trasformazione I1 eWu(xi),in quanto vale
I1 (Wu(xi)) = Ws(xi). (2.108)
Si vede chiaramente che le varieta descrivono perfettamente il bordo del ba-cino di stabilita perfino nei minimi dettagli delle isole secondarie.
In figura 2.4 presentiamo il grafico relativo al secondo valore di ω. Inquesto caso siamo nella regione vicino alla risonanza 1/3 che e instabile perla mappa quadratica. Anche nel secondo caso si ha che l’apertura dinamica

2.4. VARIETA INVARIANTI E BACINO DI STABILITA 61
-2. 2.
-2.
2.
Figura 2.3: Varieta invarianti e bacino di stabilita per la mappa di Henon(ω/2π = 0.255).

62 CAPITOLO 2. ANALISI DI STABILITA
-7. 7.
-7.
7.
Figura 2.4: Varieta invarianti e bacino di stabilita per la mappa di Henon(ω/2π = 0.42).

2.4. VARIETA INVARIANTI E BACINO DI STABILITA 63
e riprodotta perfettamente dall’inviluppo delle varieta invarianti. Dunquecon la conoscenza del punto fisso iperbolico e possibile ricostruire la com-plessa struttura di isole che caratterizza il bordo del bacino di stabilita. Laspiegazione di questo fatto risiede nella presenza di intersezione eteroclinichetra varieta invarianti relative a punti fissi instabili di diverso periodo. Perogni valore di ω una particolare risonanza domina il moto e determina latopologia della regione stabile dello spazio delle fasi. Grazie alle intersezionitra varieta differenti si ha che il punto fisso iperbolico e connesso con gliinsiemi invarianti che determinano in maniera diretta l’apertura dinamica.Partendo dalla varieta piu esterna e dunque possibile raggiungere il bordodel bacino di stabilita. Per mostrare questo meccanismo si sono costruite levarieta invarianti relative a punti fissi instabili di Hn
2 e si sono confrontatecon quelle di H2(ω). Per dare una idea del processo dinamico di intersezione,si e considerata una successione nk e in corrispondenza si e definita
Wuk (p) =
nk⋃j=1
Fj (Wuβ (p)
).
Si e poi disegnato
Wuk (p) \Wu
k−1(p) =
nk⋃j=nk−1
Fj (Wuβ (p)
)Nella figura 2.5 abbiamo mostrato le varieta invarianti relative ai punti fissidi H4
2 assieme a quelle di H2. Il valore di ω e nuovamente 0.255 e, a causadella risonanza 1/4 le varieta di H4
2 costituiscono il limite della dinamicastabile. Come si vede al crescere di nk, Wu(xi) tendono ad approssimarele varieta interne. Cio e mostrato dalla diminuzione di punti nella regioneesterna. La velocita di questo processo non e uniforme, ma varia con nk
(vedi figura 2.7). e importante sottolineare un fatto. La distribuzione di con-dizioni iniziali utilizzata per generare Wu(xi), che e scelta uniforme, cambiacol tempo. Approssimativamente si ha una diminuzione esponenziale. Acausa di questo fenomeno due identiche distribuzioni iniziali daranno originea punti finali leggermente differenti. Cio causa il persistere di punti isolatinella regione esterna. Una situazione analoga e poi mostrata in figura 2.6. Inquesto caso la frequenza lineare vale ω/2π = 0.22 e la risonanza dominante ela 1/5. Dunque in questo caso si sono considerate le varieta di H5
2 . Ancorauna volta le intersezioni eterocliniche sono chiaramente visibili. In ultimomostriamo in figura 2.7 l’andamento della distanza dall’origine per un puntoche si muove sugli insiemi Wu,s(xi). In ascissa e riportato il valore del tempodi calcolo impiegato su un CRAY X/MP per calcolare i punti della varieta

64 CAPITOLO 2. ANALISI DI STABILITA
-3.0 3.0
-3.0
3.0
-3.0 3.0
-3.0
3.0
-3.0 3.0
-3.0
3.0
-3.0 3.0
-3.0
3.0
Figura 2.5: Esempio di intersezioni eterocliniche per la mappa di Henon(ω/2π = .0255).

2.4. VARIETA INVARIANTI E BACINO DI STABILITA 65
-3.0 3.0
-3.0
3.0
-3.0 3.0
-3.0
3.0
-3.0 3.0
-3.0
3.0
-3.0 3.0
-3.0
3.0
Figura 2.6: Esempio di intersezioni eterocliniche per la mappa di Henon(ω/2π = 0.22).

66 CAPITOLO 2. ANALISI DI STABILITA
, mentre in ordinata si ha la distanza minima di questi ultimi dall’origine.Si e considerata la distanza minima per evitare problemi dovuti alle oscil-lazioni omocliniche. In entrambi i grafici risulta chiaro come questa distanzaraggiunga un limite ben definito. In piu le curve sono chiaramente divisein tre parti distinte. Si ha un primo tratto in cui la variazione della dis-tanza e quasi trascurabile. Questo corrisponde al moto vicino al punto fissoiperbolico dove il periodo diverge. Successivamente la distanza diminuisce,ma questa diminuzione dipende dal valore di ω. In questa situazione si hal’unione delle varieta relative a punti fissi di periodo diverso. Come e ovvionel caso ω = 0.05 il processo e rapido essendo il sistema quasi integrabile edunque le oscillazioni eterocliniche trascurabili. Nel caso ω = 0.255, invece,la zona caotica dovuta alle intersezioni della varieta di H2 e H4
2 ha dimen-sione macroscopica e dunque un certo numero di iterazioni sono richiesteprima che Wu,s(xi) raggiunga il bordo del bacino di stabilita. Infine nellaterza regione si ha il raggiungimento dell’apertura dinamica.Fino ad ora si e mostrata la validita della nostra congettura esplorando solo
un numero limitato di valori delle frequenze. ω. Da ultimo mostreremo l’an-damento complessivo del bacino di stabilita in funzione di ω, confrontandolocon il minimo di Wu(xi). Il risultato e mostrato in figura 2.8. La curva con-tinua rappresenta il raggio del disco inscritto nel bacino di stabilita calcolatonumericamente. Si e dunque considerato solo la parte connessa escludendole eventuali isole stabili che circondano l’origine. I punti rappresentano in-vece la distanza minima dall’origine della varieta invariante Wu(xi). Come sivede l’accordo e perfetto in tutto l’intervallo di variazione di ω confermandoulteriormente quanto ipotizzato all’inizio del paragrafo.
2.5 Generalizzazione al caso di mappe poli-
nomiali
Nel tentativo di generalizzare il risultato precedente al caso di mappe poli-nomiali del tipo
Hn(ω) :
(x′
y′
)= R(ω)
(x
y + Pn(x)
), (2.109)
con Pn(x) =∑n
k=0 pnxn,considereremo ora una mappa differente da quella
quadratica. Studieremo dunque un mappa con nonlinearita cubica
H3(ω) :
(x′
y′
)= R(ω)
(x
y + βx2 + αx3
)(2.110)

2.5. GENERALIZZAZIONE AL CASO DI MAPPE POLINOMIALI 67
Figura 2.7: Minima distanza dall’origine delle varieta invarianti per differentivalori della frequenza lineare: ω = 0.05 in A e ω = 0.255 in B.

68 CAPITOLO 2. ANALISI DI STABILITA
Figura 2.8: Confronto tra il bacino di stabilita calcolato numericamente eutilizzando le varieta invarianti.
derivabile da una hamiltoniana in cui si sia posto G(x) = −ω (β3x3 + α
4x4).
e facile vedere che β puo essere sempre posto uguale a uno riscalando oppor-tunamente le variabili. Il caso in cui β = 1 e α e un parametro generico e giastato trattato [56]. Considereremo dunque la situazione semplificata in cuiβ = 0. Cio ha il vantaggio di poter trattatare in modo analitico la mappasenza nulla togliere alla generalita dei risultati. La mappa che considereremoavra dunque la seguente espressione
H3(ω) :
(x′
y′
)= R(ω)
(x
y + αx3
), α ∈ R. (2.111)
In primo luogo osserviamo che α puo sempre essere posto uguale a ±1 aseconda del segno. Infatti se consideriamo nuove coordinate definite tramitele
X = ±√|α| Y = ±
√|α|,

2.5. GENERALIZZAZIONE AL CASO DI MAPPE POLINOMIALI 69
allora la mappa (2.111) si leggera(X ′
Y ′
)= R(ω)
(X
Y + sgn(α)X3
). (2.112)
Dunque da ora in avanti supporremo che α = ±1.Anche in questo caso considereremo ω ∈ [0, π], in quanto se ω ∈ [π, 2π] allorapossiamo semplicemente cambiare il segno del coefficiente del termine cubico.Si ha percio solo uno scambio tra le due mappe cubiche fondamentali. Perquanto riguarda i casi limite, se ω = 0, allora la (2.111) si riduce a
x′ = x
y′ = y + αx3(2.113)
che ha come soluzione la xn = x0
yn = y0 + nαx30
(2.114)
e quindi si ha instabilita, ogni punto dello spazio delle fasi tende all’infinitoper iterazione della mappa.Ancora una volte se ω = π, risulta che R2(π) = Id da cui H3(π) hal’espressione
x′ = −x
y′ = −y − x3(2.115)
In questo caso la soluzione exn = (−1)nx0
yn = (−1)ny0 − (−1)nnαx30
(2.116)
e come conseguenza si ha instabilita anche in questo caso. Per quanto riguar-da la fattorizzazione in involuzioni, anche in questo caso la mappa (2.111) sidecompone nel prodotto di due trasformazioni I1(ω), I2. La prima coincidecon quella gia definita per la mappa di Henon, mentre la seconda ha la forma
I2 :
(x′
y′
)=
(1 00 −1
)(xy
)+
(0αx3
). (2.117)

70 CAPITOLO 2. ANALISI DI STABILITA
Per quanto riguarda i punti fissi, in questo caso si hanno due situazionidifferenti a seconda del segno di α se α ≥ 0 allora nessuna soluzione reale
se α < 0 allora x1,2 =
(±√
2 tan ω2
|α| ,±√
2 tan3 ω2
|α|
)(2.118)
Per quanto riguarda la loro stabilita e immediato verificare che la tracciadella parte lineare di H3 vale
Tr(LH3(ω)) = 2
(5 tan2 ω
2+ 1
tan2 ω2
+ 1
)e quindi i due punti fissi sono iperbolici per ogni valore della frequenza lineare.A questo punto risulta chiaro che non e possibile generalizzare banalmentei risultati ottenuti per la mappa di Henon al caso di quella cubica. Infattiper α ≥ 0 non vi sono punti fissi instabili. e necessario passare ai punti fissiiperbolici di periodo superiore. Le soluzioni di
H23 (x) = (x) (2.119)
si possono determinare facilmente. Per quanto detto sulle relazioni tra puntifissi ed involuzioni dovrebbe risultare chiaro che non esistono soluzioni realidi (2.119) per α ≤ 0. Nel secondo caso, invece, si hanno sempre due soluzionireali
x1,2 =
(±√
2
α tan ω2
,∓√
2
α tan3 ω2
). (2.120)
dove vale H3(x1) = x2 e viceversa. Anche in questo caso la loro stabilita edeterminata facilmente e i due punti fissi risultano essere di tipo iperbolicoindipendentemente dal valore della frequenza lineare.La strategia per la determinazione del bacino di stabilita di H3 sara dunquela seguente: nel caso in cui α ≤ 0 si utilizzeranno i punti fissi iperbolici e levarieta che emanano da essi. Se α > 0 si utilizzeranno,invece, i punti fissi diperiodo due e le relative varieta. Nella figura 2.9 sono presentati i risultati nelcaso in cui il coefficiente del termine cubico sia negativo. Come per la mappaquadratica, si ha una sorprendente ricostruzione dell’apertura dinamica daparte dell’inviluppo delle varieta invarianti. Le strutture fini sono riprodottein tutti i loro dettagli. Ancora una volta cio e dovuto alle intersezioni ete-rocliniche tra le diverse varieta relative a punti fissi di periodo differente.Si sottolinea anche che, avendosi due punti fissi iperbolici distinti, si hanno

2.5. GENERALIZZAZIONE AL CASO DI MAPPE POLINOMIALI 71
-2.0 2.0
-2.0
2.0
Figura 2.9: Varieta invarianti e bacino di stabilita per la mappa cubica(ω/2π = 0.34, α = −1).

72 CAPITOLO 2. ANALISI DI STABILITA
Figura 2.10: Bacino di stabilita per la mappa cubica (α = −1) determinatocon i due metodi.
intersezioni eterocliniche tra le relative varieta. L’andamento del bacino distabilita in dipendenza dalla frequenza lineare e riportato nella figura 2.10.In questo caso α = −1. La curva continua rappresenta il raggio del discoinscritto nel bacino di stabilita, raggio calcolato numericamente iterando lamappa, mentre i punti forniscono la distanza minima delle varieta dall’orig-ine. Ancora una volta l’apertura dinamica e ben riprodotta dall’inviluppo diWu,s(p).Infine consideriamo il caso α = 1. A titolo di esempio mostriamo l’aperturadinamica per un valore di ω = 0.255. In figura 2.11 abbiamo presentato ilconfronto tra il bacino di stabilita e le varieta di H2
3 . Anche se in questocaso sono stati utilizzati punti fissi instabili di periodo due, si ha un perfet-to accordo tra il metodo proposto e l’usuale approccio numerico. A questopunto dovrebbe essere chiaro come generalizzare il risultato ottenuto per lemappe considerate al caso generale di mappe polinomiali del tipo (2.109).A proposito dei punti fissi, si e provato che se il grado della mappa e pari,oppure dispari con coefficiente pn negativo, allora si ha sempre almeno un

2.5. GENERALIZZAZIONE AL CASO DI MAPPE POLINOMIALI 73
-1.5 1.5
-1.5
1.5
Figura 2.11: Varieta invarianti dei punti fissi di periodo due e bacino distabilita per la mappa cubica(ω/2π = 0.255, α = 1).

74 CAPITOLO 2. ANALISI DI STABILITA
punto fisso iperbolico esterno. In questi casi si potranno dunque usare levarieta relative a detti punti instabili. Nel caso, invece, il grado sia disparie pn positivo, allora bisogna considerare i punti fissi di H2
n , in quanto nonsi ha la garanzia dell’esistenza dei punti iperbolici di periodo uno in tuttol’intervallo di variazione di ω. Utilizzando poi le varieta connesse sarebbepossibile ricostruire il bacino di stabilita.
Si potrebbe sollevare il problema se, nel caso in cui l’ordine della map-pa sia dispari ed il coefficiente di ordine massimo positivo, si abbia semprealmeno un punto fisso iperbolico di periodo due per poter costruire le vari-eta. La risposta a tale quesito e affermativa. Vale infatti il seguente risultato.
Teorema Consideriamo una mappa del tipo
H2n+1(ω) :
(xy
)= R(ω)
(x
y + P2n+1(x)
)ω ∈ [0, π], (2.121)
dove P2n+1(x) =∑2n+1
j=2 pjxj . Allora se vale p2n+1 > 0 la mappa H2n+1(ω) ha
sempre almeno due punti fissi di periodo due.
Dim.Per quanto dimostrato in precedenza, affinche x sia un punto fisso diH2
2n+1(ω),e necessario che sia soluzione di
I2(x) = x
I2 (H2n+1(x)) = H2n+1(x)(2.122)
Si puo vedere facilmente che la (2.122) e equivalente alla condizione
2x sinω + cosωP2n+1
(x cosω − sinω
2P2n+1(x)
)= 0. (2.123)
Il problema e che anche i punti fissi di H2n+1(ω) sono soluzioni di (2.122) chesoddisfano la relazione
2 tanω
2x+ Pn(x) = 0. (2.124)
Per eliminare le soluzioni banali considereremo
F(x) =2x sinω + cosωP2n+1
(x cosω − sinω
2P2n+1(x)
)2 tan ω
2x+ Pn(x)
. (2.125)

2.6. ANALISI DI UN CASO REALISTICO: IL MODELLO DI SPS 75
In questo modo le soluzioni di F(x) = 0 sono solamente i punti fissi di periododue di H2n+1(ω). e immediato osservare che F(0) = sinω/ tan ω
2e dunque
e sempre positiva per ogni ω ∈ [0, 2π]. In piu se x → ±∞ l’andamento diF(x) e dato da
F(x) ≈ −p2n+22n+1
(sinω
2
)x(2n+1)2
[1 +O( 1
x)]
p2n+1x2n+1[1 +O( 1
x)]
≈ −p2n+12n+1
(sinω
2
)x2n2n+1
[1 +O
(1
x
)].
Cio significa che a seconda del segno di p2n+1 il limite di F(x) per x→ ±∞sara differente. In particolare se p2n+1 > 0, F(x) → −∞ e quindi ammettealmeno due soluzioni reali. Il teorema e dunque dimostrato.
In aggiunta si puo affermare che esiste sempre almeno un punto fissoinstabile, in quanto, se cio non fosse vero si avrebbero almeno due punti fissistabili. Dunque l’indice di Poincare di detta mappa sarebbe uguale a due,ma questo non e possibile per alcuna mappa continua.
2.6 Analisi di un caso realistico: il modello
di SPS
Per concludere questo capitolo presentiamo l’analisi di un modello realisticodi macchina acceleratrice circolare compiuta utilizzando le tecniche descrittein precedenza. Il modello scelto rappresenta una versione bidimensionale delSuperProtonSynchrotron del CERN.La struttura di questa macchina e relativamente semplice. Ha una simme-tria di ordine sei, con celle FODO lunghe circa 108 metri. L’avanzamentodi fase e prossimo a 90 gradi. In aggiunta agli elementi lineari, si ha unaserie di sestupoli e ottupoli. I primi hanno due possibili funzioni: correzionedegli effetti cromatici prodotti dai quadrupoli (cinque famiglie indipendentidi elementi) e estrazione lenta del fascio (otto sestupoli). Gli ottupoli hannoinvece il compito principale di ridurre le instabilita nella macchina. In untipico esperimento dedicato agli studi di dinamica non lineare per LHC, laconfigurazione utilizzata per SPS prevede l’uso di tutti i sestupoli. In partico-lare quelli normalmente utilizzati per l’estrazione del fascio vengono eccitaticon correnti molto intense, in modo da generare in maniera controllata fortinon linearita nella macchina. In questi esperimenti gli ottupoli non vengonoutilizzati. Sotto queste ipotesi la mappa di trasferimento di SPS puo essere

76 CAPITOLO 2. ANALISI DI STABILITA
approssimata in maniera ragionevole dalla composizione delle otto mapperelative ai sestupoli di estrazione. I sestupoli cromatici essendo molto piudeboli possono essere trascurati. La mappa di trasferimento si potra scriverecome
x′ = M(x) = M1 . . .M8(x), (2.126)
dove Mj e la mappa di trasferimento del j-esimo sestupolo di estrazione.Queste mappe sono state determinate utilizzando il programma SIXTRACK.La mappa complessiva M e stata trasformata in coordinate normalizzate,ottenendo come forma finale
y′ = M(y) = R(ω) N(y), (2.127)
in cui R(ω) rappresenta una matrice di rotazione, mentre N la parte nonlineare della mappa. Il valore di ω/2π e stato posto uguale a 0.636, un valoretipico per gli esperimenti di dinamica non lineare su SPS.Per applicare le tecniche descritte in precedenza, e necessario conoscere lecoordinate dei punti fissi instabili. Essendo la mappa M(x) di grado pari(28), bisognera conoscere i punti fissi iperbolici di periodo uno. A tal scoposi e utilizzato un programma chiamato GIOTTO [57]. GIOTTO permette lavisualizzazione dello spazio delle fasi per sistemi dinamici rappresentati damappe e, nel contempo, ha la possibilita di determinare i punti fissi ellitticie iperbolici di periodo arbitrario, utilizzando un metodo di bisezione [58].Un esempio delle possibilita di questo programma e mostrato in figura 2.12dove si sono rappresentate le orbite di M(x). Si vedono chiaramente le isolerelative alla risonanza 1/5 tipiche del valore di ω scelto. I punti fissi instabilisono stati calcolati con l’ausilio di GIOTTO. Per costruire le varieta invariantisi e scelto il punto fisso piu esterno. Questa decisione non influisce sui risul-tati, in quanto tutte le varieta sono connesse. In figura 2.13 si sono riportatii risultati. La regione in grigio rappresenta il bacino di stabilita calcolatonumericamente. La struttura dell’apertura dinamica coincide perfettamentecon l’inviluppo interno delle varieta invarianti. Si ritrova dunque il risultatoottenuto nei casi studiati nei precedenti paragrafi.

2.6. ANALISI DI UN CASO REALISTICO: IL MODELLO DI SPS 77
-15.0 15.0
-15.0
15.0
Figura 2.12: Spazio delle fasi relativo al modello bidimensionale di SPS.

78 CAPITOLO 2. ANALISI DI STABILITA
-15.0 15.0
-15.0
15.0
Figura 2.13: Varieta invarianti e bacino di stabilita per il modello di SPS.

Capitolo 3
Mappe Simplettiche e FormeNormali Applicate allo studiodel Moto Betatronico
In questo capitolo si tratta del problema di modellizzare il moto betatro-nico in un acceleratore circolare di particelle utilizzando il formalismo delleMappe Simplettiche. Lo scopo ultimo e di studiare la dinamica in un ac-celeratore analizzando una mappa simplettica opportuna tramite l’uso delleForme Normali. L’uso di una dinamica discreta e particolarmente adattoalla descrizione del moto in una macchina acceleratrice, in quanto i campimagnetici risultano essere delle funzioni discontinue a tratti della coordina-ta curvilinea associata all’orbita di riferimento. Infatti, per costruzione, unacceleratore e costituito da una successione di elementi magnetici distinticui sono interposte sezioni vuote, e, con buona approssimazione, e possibiletrascurare gli effetti di bordo dovuti alle dimensioni finite dei magneti stessi.Dopo avere mostrato come si possono costruire mappe di trasferimento peri diversi elementi magnetici e come si connetta questa descrizione locale conla dinamica su di un giro, si introduce il concetto di Forma Normale perun diffeomorfismo in quattro dimensioni nell’intorno di un punto fisso sta-bile (ellittico) discutendone brevemente le proprieta. Utilizzando le formenormali e possibile estrarre parecchie informazioni relative alla dinamica nonlineare; in particolare ci soffermeremo sul concetto di tune shift discutendoneil significato fisico e la dipendenza funzionale dai vari termini multipolari pre-senti nello sviluppo del campo magnetico. Detta analisi verra generalizzataal caso in cui si ha una dipendenza parametrica dal momento delle particellenelle equazioni del moto. Utilizzando questo risultato e la teoria lineare diCourant-Snyder si mostrera come e possibile determinare la dipendenza deiparametri di Twiss dai termini multipolari nel campo magnetico sempre nel
79

80 CAPITOLO 3. MAPPE SIMPLETTICHE E FORME NORMALI
caso in cui si abbia una dipendenza dal momento cinetico delle particelle.Infine verra descritta la procedura che permette di minimizzare il tune shiftdovuto agli effetti non lineari connessi con i coefficienti multipolari nellosviluppo del campo magnetico.
3.1 Mappe di trasferimento e moto betatron-
ico
Consideriamo un reticolo magnetico di E elementi M1, . . . ,ME. Indichi-amo con x, y rispettivamente gli assi orizzontale e verticale perpendicolariall’orbita, e con s la coordinata curvilinea lungo l’orbita. Trascurando l’ac-coppiamento con il moto longitudinale, analizziamo il moto trasversale inuno spazio di fase a quattro dimensioni R4, i cui punti sono indicati con
x =
xpx
ypy
, px =dx
ds, py =
dy
ds. (3.1)
Chiamato ρ(s) il raggio di curvatura, scriviamo lo sviluppo multipolare delcampo magnetico come
By(x, y; s) + iBx(x, y; s) = B1 − B1ρ(s)
M∑n=1
[kn+1(s) + i jn+1(s)](x+ iy)n
n!.
(3.2)
Il campo di dipolo B1 e parallelo all’asse y ed e dato da B1 = pc/(ρe) per unvalore p dell’impulso; kn e jn sono rispettivamente i gradienti di multipolonormale e antisimmetrico (noti fino all’ordine M).L’equazione del moto per una particella carica e [59]
d2x
ds2+
(1
ρ(s)2+ k2(s)
)x = <
[M∑
n=2
kn+1(s) + ijn+1(s)
n!(x+ iy)n
]
d2y
ds2− k2(s)y = −=
[M∑
n=2
kn+1(s) + ijn+1(s)
n!(x+ iy)n
] .
(3.3)
I gradienti multipolari sono funzioni discontinue dato che gli effetti al bordosono trascurabili. Descriviamo percio i gradienti tramite funzioni costanti a

3.1. MAPPE DI TRASFERIMENTO E MOTO BETATRONICO 81
tratti, introducendo la mappa di trasferimento Mj su ciascun elemento ma-gnetico. L’elemento magnetico Mj ricopre l’arco [sj−1, sj] con j = 1, . . . , E,ove s0 = 0 e sE = 2πR e la lunghezza totale dell’anello (vedi la figura 3.1).La mappa di trasferimento Mj per l’elemento magnetico Mj trasforma le
sE-1
ME-1
s1 M
2
s2
M3
s=0
M1
Figura 3.1: Schema di una macchina acceleratrice con inclusi gli elementimagnetici.
coordinate nello spazio delle fasi a s = sj−1 nelle coordinate a s = sj secondo
x(sj) = Mj(x(sj−1)). (3.4)
La mappa su un giro F(0), detta mappa di Poincare alla sezione s = 0, edata da
F(0) = ME · · · M2 M1. (3.5)
Se si cambia la sezione di Poincare da s = 0 a s = sk la mappa su di un giroF(sk) diventa
F(sk) = Mk Mk−1 . . . M1 ME . . . Mk+2 Mk+1. (3.6)

82 CAPITOLO 3. MAPPE SIMPLETTICHE E FORME NORMALI
Le mappe di trasferimento tra due sezioni adiacenti s = sk e s = sk−1 sonocorrelate da
F(sk) = Mk F(sk−1) M−1k . (3.7)
La relazione (3.7) resta invariata quando iteriamo, cioe quando sostituiamoF(sk−1) e F(sk) con Fn(sk−1) e Fn(sk).Consideriamo ora una particella di condizione iniziale x(0) ≡ x0 assegnata as = 0 e sia xnE+k ≡ x(snE+k) il punto dell’orbita a s = sk dopo n rivoluzionicomplete. L’orbita e calcolabile come segue, in accordo con il cosiddettoalgoritmo di tracking:
xnE+k = Mk(xnE+k−1). (3.8)
Le orbite, a una sezione fissata, sono date dalla successione xnE+k∞n=0 perun k fissato; si ottengono iterando la mappa su un giro F(sk)
x(n+1)E+k = F(sk;xnE+k). (3.9)
Osserviamo che il calcolo dell’orbita per mezzo dell’algoritmo di tracking puoessere spinto fino alla precisione di macchina. Il problema e dovuto al fattoche non e possibile memorizzare la mappa su un giro esatta dato che essa con-siste in un polinomio di grado mE se una qualunque mappa di trasferimentoe di grado m. Si possono d’altronde facilmente calcolare dei troncamenti ditale polinomio, ma questi non possono essere usati per il calcolo delle orbite,essendo non simplettici. Per ciascuna mappa di trasferimento Mk, separiamoi contributi lineari da quelli non lineari
Mk = Lk (1 + Nk), (3.10)
ed effettuiamo la stessa separazione per la mappa su un giro F(sk)
F(sk) = L(sk) (1 + N(sk)), (3.11)
ove L(x) = Lx e L, N sono definiti secondo
L(sk) = LkLk−1 . . .L1LE . . .Lk+1
N(sk) = Nk Nk−1 . . . N1NE . . .Nk+1(3.12)
D’ora in avanti faremo riferimento alla sezione s = 0 per la mappa su un giroe la indicheremo con F chiamando L la sua parte lineare, a meno che non sifaccia esplicito riferimento a una sezione diversa.Nel caso di elementi lineari il calcolo della mappa di trasferimento non pre-senta alcun problema. A titolo di esempio ci soffermeremo su magneti di tre

3.1. MAPPE DI TRASFERIMENTO E MOTO BETATRONICO 83
diversi tipi: di deriva, di dipolo rettangolare e di quadrupolo (focalizzatore edefocalizzatore). Dette mappe si ottengono risolvendo l’equazione (3.3) doveρ(s) e k1(s) assumono valori costanti sul corrispondente arco, di lunghezza`, (sj−1, sj). In questo caso i gradienti multipolari di ordine piu elevato siannullano.Per quanto riguarda la deriva, questa elemento non e altro che una sezionerettilinea vuota (ρ = ∞, k1 = 0) di lunghezza `. La corrispondente mappalineare Ldrift e data da
Lderiva =
1 ` 0 0;
0 1 0 0;
0 0 1 `;
0 0 0 1
. (3.13)
Nel caso si consideri un dipolo rettangolare, il campo dipolare assume unvalore costante e ρ < ∞, k1 = 0. La corrispondente mappa lineare Ldip. edata da
Ldip. =
1 ρ sin`
ρ0 0
0 1 0 0
0 0 cos`
ρρ sin
`
ρ
0 0 −ρ sin`
ρcos
`
ρ
, (3.14)
dove con ` si e indicata la lunghezza dell’elemento.Infine il quadrupolo focalizzatore e una sezione rettilinea di lunghezza ` conun campo costante quadrupolare ρ = ∞, k1 > 0 e la corrispondente mappa

84 CAPITOLO 3. MAPPE SIMPLETTICHE E FORME NORMALI
lineare Lquad. e data da
Lquad. =
cos(√k1`)
1√k1
sin(√k1`) 0 0
−√k1 sin(√k1`) cos(
√k1`) 0
0 0 ch(√k1`)
1√k1
sh(√k1`)
0 0√k1sh(
√k1`) ch(
√k1`)
.
(3.15)
La matrice di quadrupolo defocalizzatore, corrispondente al caso k1 < 0, edata dalla medesima espressione (3.15) ove si scambiano tra loro i blocchidiagonali 2× 2 superiore e inferiore. Le espressioni per altri tipi di elementilineari, come dipoli curvi o quadrupoli, possono essere facilmente ricavate oreperite in letteratura.La possibilita di determinare in modo esplicito l’espressione delle mappe ditrasferimento per elementi lineari e equivalente al fatto che l’equazione (3.3)e risolubile in questa situazione. La soluzione generale puo essere scritta nellaseguente maniera
x(s) =
√εxβx(s) sin(ψx(s) + δx)
y(s) =√εyβy(s) sin(ψy(s) + δy),
(3.16)
dove εx, εy, δx, δy sono costanti, βx(s) e βy(s) sono funzioni periodiche diperiodo 2π e
ψx(s) =
∫ s
0
dσ
βx(σ)ψy(s) =
∫ s
0
dσ
βy(σ). (3.17)
Ne segue che, ponendo w = (√εx sin δx,
√εx cos δx,
√εy siny,
√εy cos δy), si
puo riscrivere la (3.16) come
x(s) = T(s)R(s)w, (3.18)

3.1. MAPPE DI TRASFERIMENTO E MOTO BETATRONICO 85
dove T(s) e periodica con periodo 2πR:
T(s) =
√βx(s) 0 0 0
γx 1/√βx(s) 0 0
0 0√βy(s) 0
0 0 γy 1/√βy(s)
(3.19)
e R(s) e la somma diretta di due matrici di rotazione
R =
cosψx(s) sinψx(s) 0 0− sinψx(s) cosψx(s) 0 0
0 0 cosψy(s) sinψy(s)0 0 − sinψy(s) cosψy(s)
. (3.20)
Le costanti γx, γy sono date da γx = βx(s)/[2√βx(s)] e γy = βy(s)/[2
√βy(s)].
Valutando (3.18) a s = 0 si ha x(0) = T(0)w e la si puo quindi riscriverenella forma
x(s) = T(s)R(s)T(0)−1x(0). (3.21)
La mappa su un giro lineare L(s) si ottiene da (3.21) confrontando x(s) ex(s+ 2πR) e sfruttando la periodicita di T(s)
x(s+ 2πR) = L(s)x(s) L(s) = T(s)RT−1(s). (3.22)
Indichiamo con R la matrice di rotazione su un giro (3.20). La matrice L(s)e nota come matrice di Twiss ed e data esplicitamente da
L(s) =
Lx 0
0 Ly
(3.23)
dove le matrici Lx,y sono date da
Lx =
cos(2πνx) + αx sin(2πνx) βx sin(2πνx)
−γx sin(2πνx) cos(2πνx)− αx sin(2πνx)
, (3.24)

86 CAPITOLO 3. MAPPE SIMPLETTICHE E FORME NORMALI
Ly =
cos(2πνy) + αy sin(2πνy) βy sin(2πνy)
−γy sin(2πνy) cos(2πνy)− αy sin(2πνy)
. (3.25)
Partendo dalle matrici di trasferimento dei singoli elementi e possibile cal-colare L(s) in qualunque punto del reticolo: la mappa lineare su un giro as = 0 e
L = LELE−1 · · ·L2L1 = T(0)RT(0)−1, (3.26)
mentre la matrice L(s) in qualunque altro punto sk e data dalla ricorrenza
L(sk) = LkL(sk−1)L−1k ) (3.27)
e si ha L(sk) = T(sk)RT−1(sk) dove
T(sk) = LkT(sk−1) k = 1, . . . , E − 1. (3.28)
I risultati ottenuti nel caso lineare sono compresi nella teoria di Courant-Snyder [1]. I punti salienti possono essere riassunti come segue:
i) Per ogni mappa lineare su di un giro L(sk) esiste una trasformazionelineare T(sk) che la riconduce al prodotto diretto di due rotazioni,rispettivamente di 2πνx e 2πνy.
ii) La matrice di rotazione e invariante, ovvero e indipendente da sk.
iii) La trasformazione T(sk) dipende da sk e non e univocamente determi-nata. In effetti la classe di equivalenza di queste trasformazioni e datadal gruppo G delle matrici che commutano con le matrici R che sonola composizione diretta di due rotazioni piane.
iv) Il cambiamento di coordinate
x = T−1(sk)x (3.29)
riconduce la mappa al prodotto diretto di rotazioni. Possiamo dareuna rappresentazione grafica di quanto detto per mezzo del seguentediagramma commutativo.
x(s)L−−−−→ x(s+ 2πR)
T(s)
x xT(s)
x(s) −−−−→R
x(s+ 2πR)
(3.30)

3.1. MAPPE DI TRASFERIMENTO E MOTO BETATRONICO 87
v) Gli invarianti della mappa sono i raggi delle orbite nelle nuove coordi-nate
εx = x2 + p2x εy = y2 + p2
y. (3.31)
Il significato geometrico di questo cambiamento di coordinate e evi-dente: si parte da una mappa lineare simplettica, che conserva le areenei piani di coordinate (x, px), (y, py). Le proiezioni dell’orbita in questipiani sono ellissi, e noi scegliamo un nuovo sistema di coordinate in cuile orbite sono date da cerchi con la stessa area. Tali aree sono esat-tamente i due integrali primi del moto indipendenti (o invarianti diCourant-Snyder).
La teoria di Courant-Snyder esaurisce la trattazione dell’equazione del motonel caso lineare.Nel caso in cui si introducano dei termini non lineari nell’equazione del moto,la soluzione non e piu ottenibile in forma chiusa. e comunque sempre possi-bile scrivere delle espressioni approssimate per detta soluzione. Se scriviamol’equazione differenziale per Mj, mappa di trasferimento per un elementonon lineare, come
dx
ds= K(s)x + f(x, y; s), (3.32)
dove x ≡ (x, px, y, py), allora la corrispondente equazione integrale si legge
x(s) = L(s)x(sj−1) +
∫ s
sj−1
L(s)L−1(t)f(x(t), y(t); t)dt sj−1 ≤ s ≤ sj
(3.33)
dove x(sj−1) e la condizione iniziale e L(s) e la matrice fondamentale per ilsistema lineare e soddisfa
dL(s)
ds= K(s)L(s) L(sj−1) = I. (3.34)
Una soluzione di (3.33) si ottiene iterando l’equazione integrale e risulta datada una serie nella condizione iniziale x(sj−1), con coefficienti dipendenti dallospessore ` = sj − sj−1 di Mj. Nel caso di un elemento uniforme, in cui Ke f non dipendono da s e L(s) = eK(s−sj−1), e in effetti possibile calcolarequesti coefficienti esattamente. Il teorema di Cauchy-Kowaleska assicural’analiticita della soluzione e di conseguenza la convergenza della serie per||x(sj−1)|| e ` sufficientemente piccoli. Le approssimazioni ottenute con unnumero finito di iterazioni sono mappe polinomiali nel punto iniziale x(sj−1)

88 CAPITOLO 3. MAPPE SIMPLETTICHE E FORME NORMALI
e verificano le condizioni di simpletticita solo a livello perturbativo. Inoltre,incrementando ||x(sj−1)|| ed `, si incontrano problemi di convergenza. Perrisolvere questi inconvenienti si usa, generalmente, un altro metodo, moltopiu semplice e che fornisce mappe simplettiche. Questa approssimazione chee detta approssimazione delle lenti sottili per la sua analogia con l’ottica,consiste nel sostituire f in (3.32) con una delle due espressioni seguenti
i) f`δ(s− sj−1).
ii) f`[
12δ(s− sj−1) + 1
2δ(s− sj)
].
Il risultato e una mappa simplettica, in ambedue i casi, poiche risultaessere il flusso da sj−1 a sj di un campo vettoriale hamiltoniano nel caso siabbia
f(x(s, y, s) =
0
fx(x, y, s)0
fy(x, y, s)
(3.35)
Il risultato dell’integrazione di (3.32) nel primo caso e
x(sj) = L(sj) [x(sj−1) + `f(x(sj−1), y(sj−1), sj−1)] , (3.36)
Questa approssimazione corrisponde ad integrare il membro destro di (3.33)tramite la regola dei rettangoli. Questo permette di dare una stima dell’errorecommesso. Vale infatti
x(sj) = xkick(sj) + e, e = O(`2). (3.37)
Se consideriamo la seconda approssimazione, invece, si ha
x(sj) =
[x +
`
2f(x, y, s)
] L(sj)
[x(sj−1) +
`
2f(x(sj−1), y(sj−1), sj−1)
].
(3.38)
La (3.38) puo essere riscritta nella seguente maniera
x(sj) = L(sj)
[x(sj−1) +
`
2f(x(sj−1), y(sj−1), sj−1)
]`
2f(x, y, s), (3.39)
da cui risulta che la seconda scelta corrisponde a risolvere l’equazione in-tegrale (3.33) utilizzando la regola dei trapezi. In questo caso la stimadell’errore varra
x(sj) = xkick(sj) + e, e = O(`3). (3.40)

3.1. MAPPE DI TRASFERIMENTO E MOTO BETATRONICO 89
Sostituendo f(x, y; s) con∑m−1
k=0 f(x, y; s)(`/m)δ(s − sj−1 − k`/m), ossia u-sando m > 1 forze impulsive piuttosto che una sola la precisione puo esseremigliorata. Il risultato si puo scrivere come composizione di m mappe simi-li a (3.36) sugli intervalli [sj−1, sj−1 + `/m], . . . , [sj`/m, sj]. Introducendo igradienti integrati
Kn =
∫ sn
sn−1
kn(s) ds Jn =
∫ sn
sn−1
jn(s) ds, (3.41)
l’approssimazione di singolo kick a un multipolo si puo scrivere
x
px
y
py
s=sj
=
x
px + ReM−1∑n=2
Kn + Jn
n!(x+ iy)n
y
py − ImM−1∑n=2
Kn + Jn
n!(x+ iy)n
s=sj−1
(3.42)
Torniamo ora al problema di determinare la mappa di trasferimento su ungiro di una macchina acceleratrice. Questa sara in generale esprimibile comeuna somma di termini del tipo
F =∑n≥1
[F]n, (3.43)
dove indichiamo con [ ]n la componente omogenea di ordine n. La partelineare [F]1 era stata in precedenza indicata con L. In generale la rappresen-tazione esatta di F e impossibile poiche si tratta di un polinomio il cui gradoe il prodotto dei gradi delle mappe di trasferimento sugli elementi individu-ali del reticolo. Il solo calcolo esatto (a meno di errori di arrotondamentodi macchina) di F puo essere effettuato per mezzo del tracking. Possiamoagevolmente calcolare un troncamento polinomiale [F]≤N di F, dove
[F]≤N =
N∑n=1
[F]n, (3.44)
componendo e troncando all’ordine N i singoli elementi Mk in accordo conl’algoritmo
Fk = [Mk Fk−1]≤N F0 = I, FE = [F]≤N . (3.45)

90 CAPITOLO 3. MAPPE SIMPLETTICHE E FORME NORMALI
Osserviamo che la mappa troncata [F]≤N e simplettica solo fino all’ordineN . Cio significa che le sue parentesi di Poisson verificano le relazioni canoni-che solo fino ai termini di ordine ||x||N . Di conseguenza, dopo n iterazioni,la deviazione dalla simpletticita sara dell’ordine di n||x0||N . Le deviazionidalla struttura hamiltoniana si manifestano come perdita della proprieta diconservazione delle aree nei piani di fase (x, px) e (y, py), cioe con un compor-tamento contrattivo o espansivo della mappa. Ammettendo un errore nonsuperiore a 10−4, potremmo usare una mappa troncata capace di seguire or-bite limitate per un milione di rivoluzioni se ||x0|| = 1/10, e solo per pocherivoluzioni se ||x0|| = 1/2.
3.2 Forme Normali in R4
Come e stato sottolineato, non e possibile calcolare esattamente la mappa ditrasferimento completa di un acceleratore. Lo studio della dinamica di unfascio utilizzando mappe di trasferimento troncate e altresı precluso a causadella non simpletticita di quest’ultime. Per dovere di completezza bisognaricordare il fatto che recentemente ci sono stati parecchi studi dedicati alproblema di rendere simplettica una mappa troncata [26, 60, 61]. Il principiosu cui si basano queste tecniche e quello di aggiungere un resto alla mappain modo da renderla simplettica. Il processo contiene comunque un elevatogrado di arbitrarieta e non e quindi assicurato che la mappa risultante debbaavere un comportamento dinamico equivalente a quello della mappa troncatadi partenza. Addirittura si e proposto di iterare la mappa troncata, senzacurarsi della mancanza di simpletticita, allo scopo di determinare l’aperturadinamica di un acceleratore [62, 63]. Da un punto di vista computazionale,questa procedura permetterebbe un risparmio di tempo di calcolo notevolerispetto ai normali programmi che eseguono un tracking simplettico e, nelcaso di macchine quali LHC o SSC, la prospettiva e sicuramente allettante.D’altronde il fondamento di queste nuove proposte sembra essere abbastan-za inconsistente.e quindi imperativo utilizzare una tecnica che permetta diestrarre informazioni fisicamente corrette a partire da mappe troncate. An-cora una volta lo strumento che si e rivelato piu utile e costituito dalle FormeNormali. In questo caso, diversamente da quanto fatto nel primo capitolo,considereremo problemi in uno spazio delle fasi quadridimensionale. Moltedefinizioni date in precedenza si possono estendere facilmente a questa nuovasituazione. I vari operatori ∆,
∏non subiscono alcun cambiamento. Cio che
cambia e la classificazione dei punti fissi. In quattro dimensioni, i vincolisugli autovalori di una matrice imposti dalle condizioni di simpletticita sonotali che se λ e un autovalore, allora anche λ−1, λ∗ e λ−1∗ sono autovalori

3.2. FORME NORMALI IN R4 91
della medesima matrice. Dunque in generale gli autovalori sono raggruppatiin quadruple. Cio implica, ad esempio, l’esistenza di punti fissi che sonostabili in un piano di fase e instabili lungo un altro. In piu si possono avererisonanze anche nel caso iperbolico (cosa che era esclusa in due dimensioni).Per questi motivi riporteremo la classificazione delle forme normali in quat-tro dimensioni descrivendo la struttura dei monomi in forma normale sia nelcaso di mappe che di variabili dinamiche.
i) Forme normali ellittiche non risonanti. In questo caso λ1 = e−iω1 e λ2 =e−iω2 con ω ≡ (ω1, ω2, 2π) razionalmente indipendenti, ossia
k · ω = 0 =⇒ k = 0 k ∈ Z3 (3.46)
Di conseguenza tutti i monomi che danno contributi ad A hanno n1 =m1, n2 = m2, cioe
A = A(z1z∗1 , z2z
∗2), (3.47)
mentre F1 = z1B1(z1z∗1 , z2z
∗2) e cosı via. Se in piu richiediamo che F sia
simplettica, imponendo le condizioni di conservazione delle parentesi diPoisson, si puo mostrare che
F =
e−iΩ1(z1z∗1 ,z2z∗2 )z1eiΩ1(z1z∗1 ,z2z∗2 )z∗1e−iΩ2(z1z∗1 ,z2z∗2 )z2eiΩ2(z1z∗1 ,z2z∗2 )z∗2
(3.48)
ii) Forme normali ellittiche risonanti.
Se ci sono vettori interi k ∈ Z3 ortogonali a ω, allora diciamo che lefrequenze sono risonanti e distinguiamo
a) Risonanze del primo ordine
ω · k = 0 k = `k0 k ∈ Z3, (3.49)
dove k0 = (q, 0,−p) o k0 = (0, q,−p). In questo caso k generaun sottospazio di Z3 e corrisponde a ω1
2πo ω2
2πuguale al numero
razionale p/q. I monomi della forma normale sono
n1 = m1 + δ1 + `q n2 = m2 + δ2 ω1 = 2πp
q(3.50)
n1 = m1 + δ1 n2 = m2 + δ2 + `q ω2 = 2πp
q. (3.51)

92 CAPITOLO 3. MAPPE SIMPLETTICHE E FORME NORMALI
b) Risonanze del secondo ordine. Abbiamo
ω · k = 0 k = `1k(1)0 + `2k
(2)0 (3.52)
dove k(1)0 e k
(2)0 sono vettori razionalmente indipendenti di Z3. La
forma normale in questo caso e data da tutti i monomi tali chen1 = m1 + `1k
(1)01 + `2k
(2)01 + δ1
n2 = m2 + `1k(1)02 + `2k
(2)02 + δ2.
(3.53)
iii) Forme normali iperboliche non risonanti. In questo caso λ1 = e−α1 eλ2 = e−α2 dove α1 e α2 sono razionalmente indipendenti. I monomidella forma normale hanno n1 = m1 + δ1, n2 = m2 + δ2
iv) Forme normali iperboliche risonanti. Abbiamo
λ1 = e−α1 , λ2 = e−α2 k ·α = 0 per k = `k0 k ∈ Z2 (3.54)
dove k0 e il piu piccolo vettore intero ortogonale ad α. In questo casoi monomi sono dati da
n1 = m1 + `k01 + δ1, n2 = m1 + `k02 + δ2 (3.55)
v) Autovalori complessi o misti. Se abbiamo un punto fisso iperbolico-ellittico, ovvero λ1 = e−iω e λ2 = e−α o autovalori complessi λ1 =e−α−iω, λ2 = e−α+iω, allora la forma normale ha la struttura nonrisonante n1 = m1 + δ1, n2 = m2 + δ2.
Nel seguito ci occuperemo principalmente di forme normali non risonantinel caso ellittico che risulta essere rilevante per l’applicazione alla stabilitadei fasci negli acceleratori circolari di particelle.La ragione di cio e facilmentecomprensibile, in quanto con le mappe di trasferimento si schematizza il motobetatronico intorno all’orbita chiusa dell’acceleratore la quale e una soluzionestabile delle equazioni del moto. Dunque l’origine sara un punto fisso ellitticoper la mappa di trasferimento su un giro.Ancora una volta il punto di partenza per la nostra analisi e l’equazionefunzionale
F Φ = Φ U. (3.56)
In analogia con quanto visto nel caso bidimensionale, l’equazione (3.56) nonpossiede soluzioni analitiche in un intorno aperto dell’origine. Ad ogni modoe sempre possibile risolvere la (3.56) utilizzando serie formali. Sfruttando le

3.2. FORME NORMALI IN R4 93
notazioni gia introdotte in precedenza e indicando con eiωz ≡ (eiω1z1, eiω2z2)
, l’equazione precedente puo essere riscritta come
[Φ1]n(eiωξ, e−iωξ∗
)− eiω1 [Φ1]n + [U1]n = (3.57)[F1
(ξ + Φ, ξ∗ + Φ
∗)]n−[[Φ1]≤n
(eiωξ + U, e−iωξ∗ + U∗
)]n
(3.58)
[Φ2]n(eiωξ, e−iωξ∗
)− eiω2 [Φ2]n + [U2]n =[F2
(ξ + Φ, ξ∗ + Φ
∗)]n−[[Φ2]≤n
(eiωξ + U, e−iωξ∗ + U∗
)]n
Decomponendo la (3.59) nelle componenti in forma normale si ottengono leequazioni omologiche
(1−∏) [Φ1]n = ∆−1 (1−∏) [Q1]n
(1−∏) [Φ2]n = ∆−1 (1−∏) [Q2]n(3.59)
e ∏[U1]n =
∏[Q1]n∏
[U2]n =∏
[Q2]n. (3.60)
Per costruzione l’operatore ∆−1 e ben definito essendo applicato ad un e-lemento nel complemento ortogonale del nucleo di ∆ e puo essere scrittoesplicitamente. Nel caso di forme normali non risonanti, si ha per esempio
∆−1ξ1l1ξ1
∗l2ξ2l3ξ2∗l4 =(
ei(l1−l2)ω1+(l3−l4)ω2 − eiω1)−1
ξ1l1ξ1
∗l2ξ2l3ξ2∗l4 prima componente
∆−1ξ1l1ξ1
∗l2ξ2l3ξ2
∗l4 =(ei(l1−l2)ω1+(l3−l4)ω2 − eiω2
)−1ξ1
l1ξ1∗l2ξ2
l3ξ2∗l4 seconda componente
Come si e visto nel caso bidimensionale le equazioni (3.59) non determinanocompletamente la Φ, ma rimane arbitraria la componente in forma normale

94 CAPITOLO 3. MAPPE SIMPLETTICHE E FORME NORMALI
che puo essere scelta a piacere. Ancora una volta si pone la questione del-la relazione tra la simpletticita di Φ e di U. In questo caso il problema ecruciale, in quanto uno degli scopi principali dell’uso delle forme normali eproprio quello di rendere simplettica una mappa troncata per poter simularecorrettamente la dinamica in una macchina acceleratrice. Nel caso non riso-nante, comunque, e sempre possibile rappresentare la forma normale nellaseguente forma
[U1]N(ξ, ξ∗) = [exp (iΩ1(ξξ∗))]≤N−1
[U2]N(ξ, ξ∗) = [exp (iΩ2(ξξ∗))]≤N−1
(3.61)
senza imporre condizioni addizionali su Φ. Le funzioni Ωi sono polinomi realidi ordine N−1 che dipendono solo dal prodotto di ξ1ξ
∗1 e ξ2ξ
∗2 . Detti polinomi
possono essere determinati facilmente a partire dalle equazioni precedenti.Vale infatti
iξ1[Ω1|]n−1 = [|U1]n − ξ1 [exp i[|Ω1]≤n−1]n−1
iξ2[Ω2|]n−1 = [|U2]n − ξ2 [exp i[|Ω2]≤n−1]n−1
(3.62)
La forma normale e dunque integrabile e la sua dinamica si puo determinareimmediatamente, in quanto vale
(ξ exp (iΩ(ξξ∗)))n = (ξ exp (inΩ(ξξ∗))) . (3.63)
A seguito delle precedenti relazioni discende che e possibile derivare unahamiltoniana che interpola la dinamica generata da (3.63) e quindi quella diU. Detta hamiltoniana verifica le condizioni date da
∂
∂ρiH(ρ1, ρ2) = ωi +
∑j≥1
[Ωi]j(ρ1, ρ2), per i = 1, 2. (3.64)
Nella formula precedente abbiamo indicato con ρi il prodotto ξiξ∗i . Nel caso
non risonante il problema e dunque risolto. Per quanto riguarda, invece ilcaso risonante, e necessario imporre le condizioni di simpletticita sotto formadi
Φ1,Φ∗1 = 1 Φ2,Φ
∗2 = 1
Φ1,Φ2 = 0 Φ1,Φ∗2 = 0
. (3.65)

3.2. FORME NORMALI IN R4 95
Le (3.65) rappresentano un sistema sovradeterminato e dunque non solubile.e pero possibile dimostrare che esiste sempre una soluzione perturbativa chesoddisfa (3.56) all’ordine n− 1 e la (3.65) all’ordine n− 2. Il problema dellacostruzione di una hamiltoniana interpolante e risolubile anche in questa si-tuazione.Prima di completare la discussione, vorremmo sottolineare alcuni fatti. Inprimo luogo e importante osservare che la soluzione dell’equazione (3.56)puo essere ottenuta anche con altre tecniche. In [64, 65] si e usata unafunzione generatrice, mentre un secondo metodo sfrutta le trasformazioni diLie [66, 67, 68]. I vantaggi di questi approcci rispetto al metodo direttopresentato, consistono nel fatto che la trasformazione Φ risulta essere auto-maticamente simplettica e dunque anche U e tale. D’altronde in entrambei casi ci si trova a manipolare equazioni implicite oppure operatori di Lie,mentre il metodo descritto richiede semplicemente l’uso dell’algebra dei poli-nomi [69] (composizione e prodotto di polinomi in quattro variabili) che efacilmente implementabile in un codice numerico.Per ora si e descritto un formalismo che permette di trattare il moto trasver-so di un fascio in una macchina acceleratrice nel caso in cui le particellesiano considerate come un insieme perfettamente monocromatico. Questanon e pero la situazione reale. e inevitabile che le particelle abbiano energieleggermente differenti e dunque anche le equazioni del moto che si sono in-trodotte in precedenza devono tenere conto di queste variazioni. In questocaso si hanno due possibilita: si possono considerare le equazioni completenei tre gradi di liberta (considerando dunque l’energia con la sua variabileconiugata), oppure considerare le equazioni nei due gradi di liberta trasver-si introducendo il momento come un parametro. In pratica si verrebbe aconsiderare uno spazio delle fasi esteso R5 in cui la quinta dimensione e unparametro. Cio significa che la nostra mappa di trasferimento sara ora unafunzione in cinque variabili
F(z; δ) =∑
n
[F(δ)]n =∑n,m
[F]n,mδm, (3.66)
dove con δ si e indicato la variazione percentuale del momento
δ =p− p0
p
In questo caso e ancora possibile utilizzare le forme normali. I coefficientidei polinomi che rappresentano gli sviluppi di Φ e U saranno ora funzionidel momento, ma le ricorrenze trovate in precedenza rimangono valide sen-za modifiche e permettono di determinare anche i coefficienti relativi alladipendenza di Φ da δ.

96 CAPITOLO 3. MAPPE SIMPLETTICHE E FORME NORMALI
3.3 Tune shift e leggi di scala
Dall’analisi compiuta utilizzando le forme normali risulta che, almeno nelcaso semplice in cui le frequenze non soddisfano una condizione di risonanza,la dinamica non lineare e rappresentata da rotazioni di angoli che dipendonodalla distanza dall’origine ρ1 e ρ2. Quindi la frequenza di rotazione variada punto a punto nello spazio delle fasi ed e differente da quella che si hanell’origine (che coincide con la frequenza del sistema linearizzato). Questavariazione della frequenza e un fenomeno indotto dai termini non lineari nelleequazioni del moto ed e estremamente importante in quanto puo indurre fortiinstabilita nella dinamica del sistema considerato. In una macchina accel-eratrice, ad esempio, se le frequenze ω1 o ω2 soddisfano a delle condizionidi risonanza si ha l’insorgenza di instabilita che possono anche portare al-la perdita completa del fascio (per inciso in alcuni casi questo fenomeno esfruttato volutamente per estrarre il fascio dalla macchina). A causa dellavariazione della frequenza con la distanza dall’origine dello spazio delle fasisi potrebbe avere che, nonostante le frequenze lineari siano non risonanti, siverifichi una condizione di risonanza non lineare. Un secondo effetto prodot-to dai termini non lineari e la deformazione delle orbite. Chiaramente nelcaso di un sistema lineare le orbite nell’intorno di un punto fisso ellitticosono cerchi (nelle coordinate normalizzate). Introducendo delle non linearitale orbite vengono deformate, anche se rimangono diffeomorfe a cerchi in unintorno sufficientemente piccolo dell’origine.Questi due effetti, variazione della frequenza e deformazione delle orbite, sonoestremamente importanti in fisica degli acceleratori in quanto sono correlaticon il comportamento non lineare della macchina e dunque possono essereconsiderati degli indicatori di instabilita. Risulta dunque abbastanza nat-urale che, in fase di progettazione si tenti di determinare i parametri dellamacchina in modo da minimizzare queste quantita. In questo contesto l’ap-proccio con le forme normali si dimostra particolarmente potente e utile.Nel seguito considereremo unicamente il problema della minimizzazione deltune shift (tale e il termine che indica la variazione della frequenza conl’ampiezza) senza considerare la minimizzazione dello smear (deformazionedelle orbite). Il primo problema che si presenta e quello di definire un meto-do di calcolo per il tune shift. Essenzialmente tre sono i possibili approcci.Prima di discuterli poniamo
zn = F F . . .F︸ ︷︷ ︸n
(z, z∗) , (3.67)
inoltre indicheremo con νx, νy il tune shift nei due piani di fase. Con questaconvenzione si ha:

3.3. TUNE SHIFT E LEGGI DI SCALA 97
i) Avanzamento di Fase MedioIl tune e definito da
νx(z, N) = 1N
∑Nj=1
(φj1 − φj−1
1
)νy(z, N) = 1
N
∑Nj=1
(φj2 − φj−1
2
), (3.68)
dove φji indica la fase di zji . L’errore che si commette e proporzionalea 1/N .
ii) Trasformata di FourierIn questo caso indichiamo con wl i coefficienti dello sviluppo di Fourierdell’orbita
wl =1
sqrtN
N∑j=1
zij exp
(2iπ
jl
N
), con i = 1, 2 (3.69)
Il massimo coefficiente si otterra in corrispondenza di ji. il tune sarauguale a ji/N . In questo caso l’errore decresce piu lentamente 1/
√N
che utilizzando il metodo dell’avanzamento di fase medio, ma la co-noscenza dei coefficienti di Fourier fornisce delle informazioni estrema-mente utili per quanto riguarda le risonanze e lo smear.
iii) Forme Normali
In questo caso il tune shift e ottenuto direttamente come
νx = 12π
(ω1 +
∑i≥1 [Ω1]i (ρ1, ρ2)
)νy = 1
2π
(ω2 +
∑i≥1 [Ω2]i (ρ1, ρ2)
) (3.70)
In principio sembrerebbe dunque che all’ordine i il tune shift dipendada 2i+2 coefficienti reali. In realta il carattere hamiltoniano del sistemapermette di ridurre il numero di coefficienti indipendenti, che risultanoessere solo i + 2. In piu e possibile definire una funzione H tale chevalga la relazione
[Ωi]n =∂[H ]n∂ρi
con i = 1, 2 (3.71)
Per quanto riguarda l’errore che si commette si tenga presente chequesto dipende dall’ordine a cui si arresta lo sviluppo in serie chedefinisce Ω. D’altronde a causa del carattere asintotico delle serie che siusano nella teoria delle forme normali, l’errore non decresce indefinita-mente aumentando l’ordine. Al contrario esiste un ordine ottimale per

98 CAPITOLO 3. MAPPE SIMPLETTICHE E FORME NORMALI
cui l’errore ha un minimo, superato il quale si ha un peggioramento inquanto si comincia a sentire l’effetto della divergenza delle serie. Inoltreil grado di approssimazione tende a peggiorare aumentando l’ampiezza.Infine si consideri che l’equazione (3.70) permette di calcolare il tuneshift come funzione delle coordinate normali. Per comparare il risultatocon gli altri metodi e indispensabile trasformare le variabili ritornandoalle coordinate di partenza. Poiche vale
z = Φ (ξ) = ξ +O (|ξ|2) (3.72)
si ha che i tre metodi non sono esattamente equivalenti. I primi due,infatti, proiettano il tune sulle z, mentre le forme normali usano le ξ ecome si vede dalla (3.72) solo vicino all’origine si ha che i due sistemidi coordinate sono vicini.
Come detto all’inizio il tune shift e generato dai contributi non lineari delladinamica i quali a loro volta originano dai termini non lineari dello sviluppo inmultipoli del campo magnetico. Dunque il tune shift sara legato ai coefficientiKn, Jn e la conoscenza delle leggi di scala e importante per definire unaprocedura di minimizzazione. Sottolineiamo che le dipendenze in questionepossono essere determinate includendo o meno il momento delle particellecome parametro [29, 33].
Per brevita abbiamo riportato il risultato senza dimostrazione. Preci-siamo solamente che nella tabella 3.1 con il termine ordine della mappa siintende il grado rispetto alle coordinate ξ. Questo dunque e diverso dall’or-dine del tune shift essendo questo riferito agli invarianti.Vorremmo ora mostrare come si possa utilizzare la tabella precedente perdeterminare la dipendenza dei parametri di Twiss dai gradienti multipolari.Qualora si consideri la dipendenza dal momento, si ha che anche la partelineare della mappa viene a dipendere dai gradienti degli elementi nonlineari,come si vede dalla prima colonna della tabella 3.1. Questa dipendenza siriflettera anche sulle funzioni γx,y, βx,y, αx,y introdotte in precedenza a pro-posito della soluzione dell’equazione del moto nel caso lineare. In aggiuntasi e introdotta una nuova funzione α definita da
γx,yβx,y − α2x,y = 1.

3.3. TUNE SHIFT E LEGGI DI SCALA 99
Ordine della mappa
Ordine 1 2 3 4nel momento
0 K2 K3 (K3)2, K4 (K3)
3, K3K4
K4
K3 (K3)2, K4
1 K2, K3 (K3)2, K4 (K3)
3, K3K4 · · ·K5
K2, K3 K3, K4, (K3)2
2 (K3)2, K4 (K3)
3, K3K4 · · · · · ·K5
Tabella 3.1: Dipendenza della mappa di trasferimento dai gradientimultipolari.
Utilizzando l’equazione (3.25) si possono determinare le relazioni che leganoi tre parametri di Twiss con gli elementi della matrice di trasferimento
βx =L1,2
sin 2πνx
γx = − L2,1
sin 2πνx
αx =L2,2 − L1,1
2 sin 2πνx
βy =L3,4
sin 2πνy
γy = − L4,2
sin 2πνy
αy =L4,4 − L3,3
2 sin 2πνy
.
(3.73)
La dipendenza daiKn e da δ dei parametri di Twiss e dovuta al tune shift νx,y
e alla matrice di trasferimento. Da queste considerazioni discende che tutte etre le funzioni avranno lo stesso tipo di dipendenza dai gradienti multipolari.Considereremo dunque il problema per la funzione βx. Introduciamo glisviluppi in serie
βx =∑n≥0
βnδn νx =
∑n≥0
νnδn L1,2 =
∑n≥0
εnδn. (3.74)
I coefficienti degli sviluppi in serie precedenti dipenderanno a loro volta daigradienti Kn. Prima di calcolare esplicitamente le dipendenze di βx, vediamoquale relazione intercorre tra lo sviluppo della funzione sin 2πνx e quello del

100 CAPITOLO 3. MAPPE SIMPLETTICHE E FORME NORMALI
tune. Se indichiamo con
sin 2πνx =∑n≥0
ϕnδn (3.75)
allora si avra la seguente relazione tra i ϕn e i νn
ϕn =∑j≥0
(−1)j(2π)2j+1
(2j + 1)!
∑l1+···l2j+1=n
νl1 · · · νl2j+1(3.76)
per i primi termini si ha dunque che
ϕ0 =∑
j≥0
(−1)j(2π)2j+1
(2j + 1)!ν2j+1
0 = sin 2πν0
ϕ1 =∑
j≥0
(−1)j(2π)2j+1
(2j)!ν2j
0 = 2πν1 cos 2πν0.
(3.77)
Utilizzando questi risultati possiamo riscrivere la relazione che definisce βx
come (∑n≥0
βnδn
)(∑j≥0
ϕjδj
)=∑p≥0
εpδp. (3.78)
Dunque per un ordine generico varra la seguente relazione
βp =
[εp −
p−1∑n=0
βnϕp−n
]. (3.79)
Da cio utilizzando la (3.77) si ha per i primi ordini della funzione βx
β0 =ε0
sin 2πν0
β1 =1
sin 2πν0[ε1 − 2πβ0ν1 cos 2πν0] .
(3.80)
A questo punto e facile determinare la dipendenza dai Kn dei βn. Per quantoriportato nella tabella 3.1 si ha che ν0, ε0 dipendono solo dagli elementi lineari.Questo comporta che anche β0 dipendera solo daK0, K1. Per quanto riguardaβ1, invece, dipendera linearmente dai sestupoli a causa dei termini ν1, ε1. Ilragionamento puo essere ripetuto anche per gli ordini superiori fornendo ladipendenza completa di βx dai gradienti Kn.

3.4. STRATEGIA DI MINIMIZZAZIONE DEL TUNE SHIFT 101
3.4 Strategia di minimizzazione del tune shift
Come e stato detto e possibile calcolare il tune shift numericamente con unprogramma di tracking. Il problema della sua minimizzazione puo esseredunque risolta in maniera puramente numerica [70, 71]: si scelgono alcunipunti dello spazio delle fasi e si calcola il tune shift corrispondente. A questopunto si variano i parametri liberi e si ricalcola il tune shift per verificarese questo e aumentato o meno. Procedendo in questa maniera e possibilerisolvere il problema. Chiaramente questo approccio richiede un notevoletempo di calcolo e in piu non si ha la garanzia che il minimo trovato sia unminimo assoluto.Utilizzando le forme normali ci troviamo nella condizione di poter calcolareil tune shift in maniera efficiente. In piu la sua dipendenza funzionale daicoefficienti dello sviluppo in multipoli del campo magnetico risulta nota.Minimizzare detta funzione puo essere dunque fatto in maniera analiticao semi-analitica. Per delineare una procedura di minimizzazione bisognainnanzitutto definire una opportuna funzione scalare di νx, νy. La scelta piuovvia e la seguente
τ2i(ρ1, ρ2) =1
2
([δνx(ρ1, ρ2)]
2i + [δνy(ρ1, ρ2)]
2i
), (3.81)
dove con [δνx,y]i si e indicato [Ω1,2]i. La funzione τ2i rappresenta il tuneshift medio all’ordine i ottenuto a partire dai valori nei due piani di fase. Seper il momento ci limitiamo a considerare il caso ideale in cui non si ha ladipendenza dal momento, detta funzione dipende solamente dagli invariantidel moto e dai coefficienti Kn, Jn. Quest’ultima e anche l’unica dipenden-za rilevante per le nostre esigenze. e dunque opportuno definire una secondafunzione che non dipenda piu da ρ1, ρ2. Questo si ottiene integrando τ rispet-to agli invarianti tenendone costante la somma. Posto dunque ρ1 + ρ2 = R,definiamo
χi =1
Ri
(1
R
∫ R
0
τ2i(R − ρ1, ρ1)dρ1
) 12
. (3.82)
e possibile scrivere la forma esplicita di questa funzione in termini dei coef-ficienti che entrano nello sviluppo del tune shift. Si ottiene ad esempio per iprimi due ordini le seguenti espressioni
χ1 =1
2π
√1
3
(2(h2,2)
2 + (h2,1)2 + 2(h2,0)
2 + h2,2h2,1 + h2,1h2,0
) 12

102 CAPITOLO 3. MAPPE SIMPLETTICHE E FORME NORMALI
χ2 =1
2π
√1
30(27h2
3,3 + 5h23,2 + 5h2
3,1 + 27h23,0+
9h3,3h3,2 + 9h3,1h3,0 + 6h3,2h3,1 + 3h3,3h3,1 + 3h3,2h3,0)12 .
Anche nel caso generale e possibile determinare l’espressione di χj. In basea quanto e stato detto se indichiamo con
[H(ρ1, ρ2)]i =i∑
j=0
hi,jρj1ρ
i−j2 ,
allora avremo
χ2j = R2j−1
j∑i=0
j∑l=0
hj,ihj,l
∫ R
0
[ilρi+l−2
1 (R− ρ1)2j−i−l + (j − i)(j − l)ρi+l
1 (1 + ρ1)2j−i−l−2
]dρ1.
Il valore dell’integrale puo essere determinato facilmente. Indicando con Idetto valore, si avra
I = il
2j−i−l∑p=0
(2j − i− l
p
)1
2j − i− p+
(j − i)(j − l)
j−i−l−2∑q=0
(j − i− l − 2
q
)1
2j − l − q
Avendo definito le funzioni opportune per operare la minimizzazione del tuneshift, siamo pronti per descrivere il procedimento da applicare. Una primapossibilita consiste nell’operare sul tune shift ordine per ordine. Fissato undeterminato ordine i si puo tentare di annullare esattamente i coefficienti checostituiscono lo sviluppo di [Ω1,2]i sfruttando, ovviamente, la dipendenza diquesti dai coefficienti Kn, Jn. Se questo non fosse possibile, allora si utilizzala funzione χi e si procede alla sua minimizzazione. Se al termine si hannoancora un certo numero di parametri liberi si puo passare all’ordine i + 1ripetendo il procedimento precedente fino a quando non si sono fissati tuttii parametri liberi a disposizione.Un secondo procedimento, invece si basa sulla minimizzazione della seguentefunzione
χ =n∑
i=1
χiRi (3.83)

3.4. STRATEGIA DI MINIMIZZAZIONE DEL TUNE SHIFT 103
che altro non e se non il tune shift medio calcolato fino all’ordine n. Inquesto caso invece di minimizzare ordine per ordine, si riducono gli effettinon lineari fino ad un prefissato termine. Cio comporta una dipendenzadel procedimento di minimizzazione dal valore della somma degli invarianti,contrariamente con quanto si aveva applicando una minimizzazione ordineper ordine. e dunque necessario fissare a priori un punto dello spazio dellefasi in cui si vuole minimizzare la χ (tipicamente una determinata frazionedell’apertura dinamica).Quanto descritto si ripete con lievi modifiche nel caso in cui si consideri ladipendenza del tune shift dal momento. In questo caso si avra che χi dipendedal momento e potremo dunque svilupparla in serie secondo
χi(δ) =∑m≥0
χi,mδm (3.84)
dove χi,0 = χi(0). Di conseguenza la procedura di minimizzazione procedenello stesso modo: si possono minimizzare le χi,m per determinati valori di ie m, oppure la funzione
χ =∑
i,m≥0
χi,mRiδm. (3.85)
Veniamo ora al problema del software utilizzato per eseguire la proceduradi minimizzazione. Gli elementi richiesti sono: un programma per calcolarela mappa di trasferimento di un acceleratore partendo dalla sua struttura.Uno strumento in cui siano implementate le forme normali in modo da pot-er estrarre le informazioni rilevanti quali il tune shift dalla mappa e, infine,il programma che operi la minimizzazione vera e propria del tune shift. Iprogrammi citati sono facilmente disponibili. Il problema chiave, pero e ilseguente. Calcolare il tune shift come funzione degli invarianti (o delle co-ordinate) non e sufficiente per il processo di minimizzazione. Infatti il tipodi dipendenza dai coefficienti multipolari Kn e nota (vedi tabella 3.1, ma icoefficienti di questa dipendenza non sono noti esplicitamente (almeno nonlo sono in forma elementare). Per determinarli il procedimento utilizzato inpassato [33] e stato di iterare il processo di generazione del tune shift at-traverso le forme normali assegnando ai parametri liberi dei valori arbitrari.Essendo nota la relazione funzionale che lega il tune ai Kn e possibile cal-colare i coefficienti. Il metodo e ovviamente tutt’altro che ottimizzato. Iltempo di calcolo richiesto e non indifferente. La cosa migliore e di riusci-re a calcolare lo sviluppo di Taylor del tune shift rispetto ai gradienti deicorrettori in maniera automatica. Questo e ora possibile ed ha permessonon solo di velocizzare il processo di minimizzazione, ma ha potuto anche

104 CAPITOLO 3. MAPPE SIMPLETTICHE E FORME NORMALI
renderlo altamente automatizzato. Utilizzando il programma di trackingSIXTRACK e possibile calcolare la mappa di trasferimento di LHC, ad esem-pio. Internamente questo processo si avvale della libreria DA di M. Berz [72].Questa e essenzialmente uno strumento per manipolare in maniera ottimiz-zata polinomi. Una delle possibilita di questo strumento e la capacita dideterminare lo sviluppo di Taylor di una funzione. e stato dunque possibileintrodurre l’opzione di calcolare lo sviluppo di Taylor della mappa rispettoa dei parametri addizionali quali ad esempio i gradienti Kn. A questo puntoutilizzando la libreria LIELIB sviluppata da E. Forest, si calcola il tune shiftutilizzando un approccio basato sugli operatori di Lie. Il risultato finale e laconoscenza del tune della macchina come funzione, non solo degli invariantinon lineari, ma soprattutto dei parametri addizionali desiderati. Un pro-gramma scritto dall’autore compie poi la minimizzazione vera e propria deltune in maniera estremamente semplice e rapida.Nel prossimo capitolo mostreremo come sia possibile applicare le tecnichedescritte in un caso realistico: la minimizzazione degli errori multipolari inLHC.

Capitolo 4
Correzione del Tune Shiftdovuto agli Errori Multipolariin LHC
Il modello standard rappresenta uno dei capisaldi della fisica moderna. Lasua conferma sperimentale ha avuto luogo nei primi anni ottanta, quando estato possibile identificare la particella Z0 tra i prodotti di decadimento dellecollisioni tra protoni e antiprotoni in SPS. La costruzione di LEP ha poipermesso di verificare in dettaglio le previsione fatte dalla teoria utilizzandocome sonde elettroni e antielettroni. L’energia che queste particelle sono ingrado di raggiungere e dell’ordine dei 50 GeV per fascio. Con l’avvio dellafase due di LEP sara possibile spingersi fino a 100 GeV. Nel frattempo aFermilab, utilizzando protoni e le corrispondenti antiparticelle, si lavora adenergie dell’ordine di 800 GeV che corrispondono, pero, a solo un centinaio diGeV a livello di quarks e gluoni. e ormai quasi universalmente riconosciutoche il prossimo obiettivo della fisica delle interazioni fondamentali e quellodi sondare la regione di energie dell’ordine del TeV. Si aprono dunque duepossibilita distinte: orientarsi verso una macchina a elettroni la cui energia siaggiri attorno a uno o due GeV, oppure considerare una macchina a protonicapace di raggiungere energie comprese tra gli 8 e i 20 TeV.La prima ipotesi e estremamente ardua da realizzare allo stato attuale delleconoscenze. A causa dell’enorme quantita di energia dissipata sotto formadi radiazione di sincrotrone, non e concepibile progettare una macchina cir-colare con tali prestazioni. Lo sviluppo di un collider lineare, d’altronde, eben lungi dall’essere realizzabile in tempi brevi, nonostante i risultati incor-aggianti ottenuti a Stanford con SLC. Rimane dunque la seconda alternativa:una macchina circolare a protoni. L’elevata energia non e comunque l’unicorequisito richiesto a questa macchina. Deve infatti avere anche una elevata
105

106 CAPITOLO 4. CORREZIONE DEL TUNE SHIFT
luminosita. La luminosita e definita come il numero di possibili collisioniche si hanno nell’unita di tempo. Poiche le sezioni d’urto dei processi rile-vanti decadono come E−2, per poter compiere osservazioni ad alta energiae necessario incrementare di conseguenza la luminosita di una macchina. equindi chiaro che, a causa della bassa efficienza del processo di produzionedegli antiprotoni, bisognera progettare una macchina che acceleri due fascidi protoni. Queste sono le caratteristiche di base del Large Hadron Colliderche e in avanzata fase di progettazione al CERN: un acceleratore circolaread alta energia (7.7 TeV) e con elevata luminosita.I due obiettivi rappresentano una vera e propria sfida scientifica e tecno-logica. Il raggiungimento di una elevata luminosita quale quella richiesta,dell’ordine di 1034 cm−2s−1, rappresenta un risultato certamente non banale.Per definizione si ha che
L =N2kfγ
4πσxσy(4.1)
dove N e il numero di particelle per bunch, k il numero di bunches, f lafrequenza di rivoluzione mentre σx,y rappresentano le dimensioni trasversedel fascio nel punto di collisione misurate in termini delle varianze delledistribuzioni spaziali supposte gaussiane. I limiti imposti all’aumento ar-bitrario di L sono dovuti in primo luogo alle interazioni elettromagnetichetra un fascio e le particelle dell’altro. Questa azione e fortemente non linearee provoca un comportamento stocastico del fascio qualora la densita di par-ticelle per bunch superi precisi valori critici che sono stati determinati daglistudi compiuti sugli attuali colliders di protoni e antiprotoni al CERN e alFermi Laboratory. Altri fattori limitano il valore della corrente circolante edi conseguenza la luminosita. Come esempio si puo citare l’interazione tra ilfascio e la camera a vuoto in cui si muove. Essendo quest’ultima conduttricesi ha una corrente indotta dal fascio che a sua volta esercita un’azione sulleparticelle. Si ha dunque un complesso fenomeno di feedback che puo generareinstabilita nel fascio.Per quanto riguarda il raggiungimento dell’energia di interesse, essendo lacirconferenza di questa macchina fissata ab initio dalle dimensioni del pre-esistente magnetico dipolare necessario per mantenere i protoni sull’orbitaprevista risulta essere predeterminato e dell’ordine di 10 T. Inoltre i duefasci che circolano nella macchina hanno la medesima carica, e quindi si im-pone l’uso di due canali magnetici separati in cui il campo dipolare abbiasegno opposto. Per soddisfare questi requisiti si e costretti ad avvalersi dimagneti superconduttori del tipo due-in-uno: all’interno dello stesso criosta-to, utilizzato per raggiungere le temperature tipiche che rendono possibilela superconduttivita, si trovano due magneti separati in cui circolano i due

107
fasci di particelle.Il problema maggiore dovuto all’impiego di questi magneti e dovuto al fatto
Figura 4.1: Sezione di un magnete di LHC del tipo due-in-uno.
che il campo generato ha rilevanti componenti multipolari. Risulta dunquenecessario prevedere una strategia che minimizzi gli effetti di questi errorisulla dinamica delle particelle. Generalmente vengono usati a tale scopo uninsieme di magneti (detti correttori) che producono un campo non linearesimile a quello dovuto agli errori multipolari. I correttori, poi, possono es-sere posizionati o all’interno dei magneti che rappresentano la sorgente dierrori, oppure nell’immediata vicinanza.La prima soluzione permette di correggere in maniera estremamente localiz-zata gli errori. I valori che i correttori devono assumere sono poi legati inmaniera banale agli errori da correggere. Si hanno pero notevoli problemicostruttivi dovuti alla necessita di alloggiare questi magneti speciali all’in-terno di altri.La seconda possibilita, scelta per LHC, fornisce delle correzioni quasi localie ha il vantaggio di minori complicazioni costruttive. Rimane comunque ilproblema di determinare i valori dei correttori atti a compensare gli effettidegli errori.In questo capitolo mostreremo, appunto, come l’approccio con le forme nor-mali possa essere proficuamente usato per calcolare, in maniera efficiente, ivalori dei gradienti dei vari correttori richiesti per ridurre l’influenza deglierrori sul tune shift in LHC [73, 74].

108 CAPITOLO 4. CORREZIONE DEL TUNE SHIFT
4.1 Generalita sui magneti superconduttori
Come e stato detto l’uso di magneti superconduttori e stato imposto dal-la necessita di raggiungere energie estremamente elevate. Pur comportan-do delle difficolta tecniche notevoli, nondimeno l’uso di questi magneti haanche permesso il raggiungimento di notevoli risparmi energetici e questofatto e certamente positivo in un momento in cui la coscienza ambientalistasta accrescendo sempre piu la sua pressione sull’opinione pubblica. Infatti
Figura 4.2: Andamento del costo di un magnete in funzione del campo ma-gnetico prodotto.
con l’utilizzazione di magneti superconduttori la potenza dissipata e dovutaprincipalmente al sistema criogenico necessario per raffreddare i magneti. Siarriva cosı al risultato paradossale che la potenza richiesta per LHC saracomparabile con quella utilizzata attualmente per le operazioni di SPS chepure opera ad un’energia venti volte inferiore e con una luminosita diecimilavolte piu piccola.Per quanto riguarda i problemi prodotti da questi magneti, considereremo

4.1. GENERALITA SUI MAGNETI SUPERCONDUTTORI 109
in primo luogo quelli connessi al mantenimento delle proprieta di supercon-duttivita. Questo stato dipende in maniera cruciale da tre parametri T,B, ~Jche rappresentano la temperatura, il campo magnetico e la densita di cor-rente. Superando certi valori critici i materiali compiono la transizione cheli riporta nel loro stato di conduttori normali. Molteplici sono i motivi chepossono originare detta transizione. In primo luogo le particelle che inci-dono sui magneti depositano la loro energia provocando un surriscaldamentoe dunque una transizione. e quindi necessario un efficiente sistema di colli-matori [75, 76, 77] per l’assorbimento delle particelle prima che raggiunganoi magneti. Anche la radiazione di sincrotrone rappresenta un pericolo per imagneti che devono essere opportunamente protetti con schermi.Le elevate forze in gioco (dell’ordine di 400 t per metro) possono poi causaremovimenti delle strutture che costituiscono i magneti provocando nuova-mente una transizione a causa del calore prodotto dalla frizione dei vari com-ponenti. Una conseguenza di questo meccanismo e il cosiddetto fenomenodel training: il magnete raggiunge gradualmente il campo massimo passandoattraverso diversi processi di transizione allo stato di conduttore normale.Cio e dovuto al movimento dei vari conduttori a seguito delle intense forzeelettromagnetiche. Le diverse parti raggiungono delle situazioni di equilibrioin tempi diversi. Ogni volta che cessano i movimenti il magnete torna super-conduttore e incrementa il campo prodotto. e ovviamente molto importanteche questo meccanismo si verifichi una volta sola e non ogni volta la correntee incrementata.Passando a considerare il problema della qualita del campo prodotto daimagneti superconduttori, illustreremo la situazione considerando dei magnetistandard, non del tipo due in uno [78, 79]. Da un punto di vista concettualequesto approccio e piu che sufficiente per illustrare i fenomeni. Definito unsistema di coordinate cilindrico (z, r, θ), e noto che il potenziale vettore gene-rato da una corrente I parallela all’asse z e posta a una distanza a dall’origineha solo componente lungo z e vale
Az(r, θ) = −µ0I
2πlnR
a, (4.2)
dove R = [a2 + r2 − 2ar cos(φ− θ)] e la distanza del punto P dalla corrente.Se ipotizziamo che r < a, utilizzando lo sviluppo del logaritmo, otterremoper il potenziale vettore e le componenti del campo magnetico le seguentiespressioni
Az(r, θ) =µ0I
2π
+∞∑n=1
1
n
(ra
)n
cos[n(φ− θ)], (4.3)

110 CAPITOLO 4. CORREZIONE DEL TUNE SHIFT
Bθ = −∂Az
∂r= −µ0I
2πa
+∞∑n=1
1
n
(ra
)n−1
cos[n(φ− θ)]
Br = −1
r
∂Az
∂θ= −µ0I
2πa
+∞∑n=1
1
n
(ra
)n−1
sin[n(φ − θ)]
. (4.4)
Chiaramente Bz = 0, quindi anche nel seguito tralasceremo tale compo-nente del campo magnetico. Se ora consideriamo invece una distribuzione dicorrente angolare del tipo
I(φ) = I0 cosφ, (4.5)
ripetendo quanto fatto in precedenza otteniamo per il campo magnetico laseguente espressione
Bθ = −µ0I
2πa
1
m
(ra
)m−1
cos[m(φ− θ)]
Br = −µ0I
2πa
1
m
(ra
)m−1
sin[m(φ− θ)]
. (4.6)
L’equazione precedente esprime il campo di un multipolo puro di ordine 2m.Piu precisamente si dice multipolo normale. Se si considera I(φ) = I0 sin φallora si ha il cosiddetto multipolo skew. In un magnete superconduttorenon si riesce a riprodurre una distribuzione di corrente uguale a quella (4.5),ma si usano delle approssimazioni ottenute considerando degli strati di cor-rente. La qualita di una tale approssimazione si puo quantificare utilizzandol’espansione generale in multipoli
Bθ = Brif
∑+∞n=1
(r
r0
)n−1
(bn cosnθ − an sinnθ)
Br = Brif
∑+∞n=1
(r
r0
)n−1
(−an cosnθ + bn sinnθ)
(4.7)
dove Brif e il campo di riferimento (nel caso di un dipolo e il campo dipolare)e r0 e tipicamente una frazione dell’apertura del magnete (nel caso di LHCr0 = 10 mm). Dunque in principio i vari coefficienti an, bn dovrebbero esserepiccoli per avere una buon qualita di campo. Per inciso la relazione tra losviluppo (4.7) e l’analogo utilizzato nel capitolo precedente e facile da ricavaree risulta
kn =(n− 1)!
rn−10
bn, jn =(n− 1)!
rn−10
an (4.8)

4.1. GENERALITA SUI MAGNETI SUPERCONDUTTORI 111
Dall’analisi delle simmetrie dei campi multipolari puri segue che nel caso diapprossimazioni reali a queste distribuzioni non tutti i termini nello sviluppo(4.7) sono presenti: ad esempio nel caso di un magnete a simmetria dipolare siavranno solo termini dispari normali. Se consideriamo ora il campo prodottoda un guscio di corrente compreso tra i raggi a1, a2 e di apertura angolare2φl, si ricava che il termine n–esimo dello sviluppo in multipoli vale
bn = (a2 − a1)1
n
(ra
)n−1
sinnφl. (4.9)
Dunque i coefficienti bn sono in generale diversi da zero. Se pero si scegliel’angolo φl opportunamente, e possibile annullare b3. Cio nonostante il pri-mo termine non nullo, b5, risultera inaccettabilmente grande. e possibileridurre anche questo utilizzando un secondo guscio di corrente adattato alprimo e con una diversa apertura.angolare. Questo nuovo parametro liberopotra essere usato per annullare anche b5. Un ulteriore accorgimento con-siste nell’interporre una lamina non conduttrice tra i due gusci permettendola riduzione anche di b7 e b9.Ovviamente, qualora il valore dell’angolo φl non sia esattamente uguale aquello teorico, i termini b3, b5 non saranno annullati esattamente. Tipica-mente per avere b3 ≤ 1 × 10−4 si devono avere tolleranze costruttive del-l’ordine di 10 µm cosa difficilmente raggiungibile in pratica per magneti chehanno lunghezze superiori a 10m. Le forze magnetiche tra i vari conduttoriche contribuiscono a generare i gusci di corrente non migliorano la situazione.In aggiunta ai fenomeni di tipo geometrico dovuti all’approssimazione delladistribuzione ideale (4.5),i termini bn, an hanno origine anche dalle corren-ti persistenti. Quando il campo magnetico prodotto non e particolarmenteintenso, cosa che avviene all’iniezione del fascio nella macchina, le corren-ti persistenti giocano un ruolo chiave nella produzione di errori multipolari.Queste sono infatti responsabili della generazione di multipoli il cui camposi oppone alla crescita del campo magnetico. Nel caso specifico dei dipoliancora una volta si ha che i termini prodotti sono di ordine dispari, in piu b3risulta essere di gran lunga dominante sui rimanenti coefficienti.Il fenomeno delle correnti persistenti non e certamente caratteristico dei ma-teriali superconduttori. Tutte le volte che si ha una variazione di corrente sigenera un campo elettromagnetico che si oppone a questa variazione. Nelcaso di conduttori normali, pero, queste correnti hanno un decadimentoesponenziale. La decrescita e quindi molto rapida. Nel caso dei materialisuperconduttori a causa della resistivita uguale a zero, queste correnti nondecadono in tempi brevi. La dipendenza temporale e all’incirca logaritmicae la ragione ha i suoi fondamenti nelle proprieta intrinseche dei supercondut-tori e in fenomeni quantistici quali il flux creep.

112 CAPITOLO 4. CORREZIONE DEL TUNE SHIFT
Per ridurre al massimo gli effetti prodotti dalle correnti persistenti si utiliz-zano per la fabbricazione dei cavi superconduttori complesse tecniche costrut-tive,quali l’immersione dei filamenti superconduttori in matrici di rame scarsa-mente conduttrici ed altri ancora.
4.2 Descrizione del modello studiato
Il fatto che LHC deve essere costruito nel tunnel di LEP, in cui si ha adisposizione uno spazio limitato, implica che la sua struttura deve seguireda vicino quella di LEP. LHC e una macchina con simmetria di ordine otto.e costituito da otto archi uniti tramite otto sezioni diritte. gli otto archisono divisi in pari e dispari. Il fascio nel percorrere la circonferenza dellamacchina passa dalla parte interna a quella esterna per otto volte, in mododa non avere differenze di percorso tra i due fasci. Le inserzioni, suddivisein dispari e pari a causa delle lievi differenze tra i due tipi, hanno una lungasezione rettilinea centrata sul punto di incrocio dei fasci. Le quattro inserzionipari sono intercambiabili per funzione e sono concepite per accogliere gliesperimenti, mentre per quanto riguarda quelle dispari ve ne sono due confunzioni ben definite. L’inserzione numero tre, non molto differente da quellesperimentali, e concepita con lo scopo di assorbire le particelle con elevataampiezza prima che possano essere perdute nei magneti superconduttori.In questa regione si trova il sistema di collimatori deputati a raccoglierele particelle. Per quanto riguarda l’inserzione numero cinque, questa deveassolvere allo scopo di smorzare il fascio in caso di situazioni di emergenza. Loschema generale delle inserzioni prevede, partendo dal punto di intersezione,un tripletto di quadrupoli, quindi il dipolo con la funzione di separare i fascie nuovamente un tripletto di quadrupoli. Tra le inserzioni e gli archi sitrovano i soppressori di dispersione.che sono costituiti da quattro quadrupoliintercalati con tre dipoli dello stesso tipo di quelli usati nella cella FODOdella macchina. Vi e, poi, un ulteriore dipolo lungo ≈ 9 m.Per quanto riguarda gli archi, questi sono costituiti da 24 celle regolari. Laloro struttura e mostrata in figura 4.4. La cella e stata modificata rispetto aquanto previsto nella precedente versione [80]. Questi cambiamenti sono statiapportati in s eguito ai test sul comportamento dei dipoli prodotti, i qualihanno dimostrato una notevole difficolta a raggiungere il campo richiesto di10T. Per ovviare a questo problema si e dunque provveduto ad allungare idipoli in modo da poter diminuire il campo magnetico richiesto senza variaresensibilmente l’energia della macchina. In definitiva si hanno sei dipoli percella (MB nella figura) lunghi ≈ 13 m. Il campo massimo previsto e di9.5 T ed ogni dipolo produce una curvatura di 4.8 mrad. All’estremita di

4.2. DESCRIZIONE DEL MODELLO STUDIATO 113
Figura 4.3: Struttura generale di LHC.
Figura 4.4: Struttura della semi-cella FODO di LHC.

114 CAPITOLO 4. CORREZIONE DEL TUNE SHIFT
ogni dipolo si trovano i magneti correttori (S e D in figura). Si tratta disestupoli e decapoli con il compito di correggere gli errori prodotti dai dipoli.In corrispondenza dei quadrupoli principali (MQD e MQF) si hanno deipiccoli quadrupoli per regolare l’avanzamento di fase della macchina (QTDFe QTDD) con incluso anche un correttore ottupolare e una coppia di monitors(BPV e BPH). Infine si hanno dei correttori sestupolari e dipolari (SBV e
Figura 4.5: Funzioni ottiche lineari di una cella FODO.
SBH). Le funzioni ottiche lineari βx, βy di una cella FODO sono mostratein figura 4.5. Per il calcolo dei valori dei correttori, descritto nel prossimoparagrafo, si sono considerati solo gli errori sistematici normali nei dipoli.I quadrupoli, ulteriori sorgenti di termini multipolari, sono stati consideratisenza errori. Gli errori utilizzati nei calcoli sono mostrati nella tabella 4.2.
Dalla tabella 4.2 risultano alcune notevoli regolarita. I termini multipolaridi ordine pari hanno un doppio segno. Questo significa che a seconda del tipodi arco, pari o dispari, l’errore ha segno positivo o negativo. e questa unasimmetria che deriva dalla struttura due-in- uno dei magneti. Proprio acausa di questa proprieta si e deciso di considerare, nel contesto del calcolodei correttori, l’errore ottupolare uguale a zero in quanto questo cambio disegni produce una autocompensazione globale di b4 come e stato osservatoin studi precedenti. La consistenza di questa ipotesi e stata verificata e verradiscussa nel seguito. Anche gli errori dipolari e quadrupolari non sono stati

4.2. DESCRIZIONE DEL MODELLO STUDIATO 115
Ordine Iniezione Campo medio CollisioneB = 0.58T B = 2.5T B = 9.5T
n bn bn bn
1 5.00 5.00 5.00
2 ±1.15 ±1.13 ±0.85
3 −2.19 −0.071 2.61
4 ±0.11 ±0.11 ±0.07
5 0.34 0.04 0.04
6 ±0.001 ±0.001 ±0.002
7 0.035 0.02 0.02
8 ±0.002 ±0.002 ±0.002
9 0.007 0.005 0.005
Tabella 4.1: Errori multipolari nei dipoli espressi di LHC in unita di 10−4 eriferiti a r0 = 10 mm.

116 CAPITOLO 4. CORREZIONE DEL TUNE SHIFT
considerati. In definitiva ci si e concentrati sull’effetto di b3, b5 controllandol’influenza di b7, b9 sui risultati ottenuti.
4.3 Risultati della correzione
Prima di cominciare la descrizione dei risultati ottenuti, vorremmo fare al-cune precisazioni. Per quanto concerne il numero di correttori indipendenti, eovvio che in linea di principio si puo arrivare ad avere sei sestupoli nella cellapiu due sestupoli cromatici. Nel caso dei decapoli si hanno solo i correttoriall’estremita dei dipoli e quindi si possono sfruttare al piu sei decapoli.Avere degli elementi indipendenti significa alimentarli con circuiti indipen-denti il che implica costi addizionali non indifferenti. Quindi la minimiz-zazione del tune shift deve essere attuata anche considerando il problemadi sfruttare il numero minimo di elementi correttori possibile. Per questomotivo si sono sempre considerati indipendenti solo gli elementi appartenen-ti ad una semi-cella. Questo significa avere cinque sestupoli indipendentie tre decapoli. Dopo avere controllato l’influenza del numero di elementisulla qualita delle correzioni, si e giunti alla conclusione che ridurre ulterior-mente il numero di elementi disponibili non avrebbe peggiorato le correzionie, per contro, permetteva un notevole risparmio di circuiti d’alimentazione.In definitiva i calcoli dettagliati si sono effettuati considerando la situazionein cui si hanno tre sestupoli indipendenti (due sestupoli cromatici e uno nellacella) piu un solo decapolo.Per quanto concerne il tipo di funzioni minimizzate, si e deciso di lavoraresu due tipi di componenti del tune shift, ossia le componenti che dipendonosolamente dall’ampiezza e quelle puramente dipendenti dalla deviazione delmomento. Questo significa che si sono considerate funzioni del tipo χi,0 o χ0,i.La tecnica di minimizzazione usata e stata quella ordine per ordine. Si tengapresente che, come si puo dedurre dalla tabella 3.1, i contributi di sestupolie decapoli (siano essi errori o correttori) entrano nel tune shift ad ordinidifferenti. Questo significa che e possibile introdurre la sola componente se-stupolare dell’errore (b3) e correggerla utilizzando i correttori corrispondenti.Introducendo i valori calcolati in questo modo per i sestupoli e aggiungendogli errori decapolari, si determinano le intensita dei correttori decapolari.Indipendentemente dal tipo di correzione considerata, effetti di ampiezza odi momento, bisogna sempre annullare la cromaticita lineare. Questa rap-presenta il contributo al tune shift di ordine zero negli invarianti e linearein δ (deviazione del momento delle particelle). Come si vede nella tabel-la 3.1, questo contributo del tune shift dipende linearmente dai sestupoli edai quadrupoli (che sono la sorgente principale di questo effetto). In generale,

4.3. RISULTATI DELLA CORREZIONE 117
quindi, si puo affermare che la condizione di annullamento della cromaticitalineare impone una relazione tra gli n correttori sestupolari, del tipo
ξx + a1K3,1 + . . . a5K3,n = 0ξy + a1K3,1 + . . . a5K3,n = 0
, (4.10)
dove con ξx,y si e indicata la cromaticita naturale della macchina. Per correg-gere questo effetto si utilizzano i due sestupoli laterali a fianco dei quadrupoli.Questo per avere una correzione localizzata vicino alla sorgente dell’errore.Questo significa che il valore dei sestupoli cromatici rimane determinatosecondo la relazione
K3,D = α0 + α1K3,1 + . . . α1K3,n
K3,F = α0 + α1K3,1 + . . . α1K3,n. (4.11)
dove con K3,D, K3,F si sono indicati i sestupoli vicini ai quadrupoli focaliz-zanti e defocalizzanti rispettivamente. Chiaramente nel membro destro della(4.11) compaiono gli n− 2 sestupoli rimanenti.Cio significa che nel nostro schema si ha un solo sestupolo libero a causa dellanecessita di imporre la condizione (4.10). Non resta altro che utilizzarlo perminimizzare o χ1,0 o χ0,1, in quanto abbiamo troppi coefficienti del tune (trenel caso della dipendenza dall’ampiezza e due per la dipendenza da δ) perchesi possa annullarli tutti contemporaneamente.In figura 4.6 sono riportati i grafici con il tune shift orizzontale e verticale
in funzione dell’ampiezza prima e dopo le correzioni operate utilizzando leforme normali. In questo caso si sono introdotti solo gli errori di tipo ses-tupolare. Si sono considerate tre situazioni differenti. In un primo caso sie corretto solo la cromaticita lineare della macchina, trascurando completa-mente gli effetti non lineari. Si sono dunque sfruttati solamente i sestupolicromatici, mentre i rimanenti correttori sono stati posti uguali a zero. Nellealtre due situazioni analizzate si sono minimizzati anche gli effetti non linearifino al primo ordine nel tune shift utilizzando tutti i correttori sestupolaria disposizione. In un caso si e lavorato con χ1,0, mentre nel secondo χ0,1.Le curve continue rappresentano il tune shift calcolato utilizzando le formenormali, mentre i punti sono ottenuti attraverso delle simulazioni numerichedefinendo il tune shift come avanzamento di fase medio. Nelle simulazioni sie utilizzato un numero di iterazioni pari a circa 2× 103, sufficiente cioe, peravere una precisione dell’ordine di 5 × 10−3. Come si vede l’accordo tra lecurve teoriche e i punti ottenuti con le simulazioni e piu che buono in tut-to l’intervallo di ampiezze. I valori dei correttori sestupolari permettono diridurre il tune shift nella macchina dovuto agli errori. Si potrebbe obbiettareche il guadagno e marginale, visto che si ha un miglioramento in un piano

118 CAPITOLO 4. CORREZIONE DEL TUNE SHIFT
Figura 4.6: Correzione dell’errore b3 in condizione di bassa energia utilizzandoi correttori sestupolari.

4.3. RISULTATI DELLA CORREZIONE 119
di fase e un leggero peggioramento nell’altro. Questo fatto ha pero una spie-gazione ben precisa. Gli errori sono stati posti in tutti i dipoli della macchina,anche in quelli che si trovano nei soppressori di dispersione. In questa zonanon si hanno dei magneti correttori. Risulta dunque che i correttori postinelle celle FODO di LHC devono servire a minimizzare anche quegli effettiche sono prodotti in regioni lontane dell’acceleratore. Viene cosı a cadere ilconcetto di correzione locale: il correttore ha lo scopo di curare gli errori nelleimmediate vicinanze. Se questo concetto risulta falso, allora il metodo perdela sua efficacia. Per verificare questa spiegazione si sono trascurati gli errorinel dipolo corto che si trova nelle inserzioni, e si e osservato come cambiano ivalori dei correttori in conseguenza di questo cambiamento. In figura 4.7 si eriportato il risultato ottenuto per un errore sestupolare piu grande di quelloprecedente, pari a b3 = −3.80× 10−4. Come in precedenza le curve continuerappresentano i risultati teorici delle correzioni, mentre i punti sono ottenuticon simulazioni numeriche con gli stessi parametri indicati in precedenza.e immediato notare come la correzione sia migliore nel caso in cui si sonotrascurati gli errori nei dipoli corti. Questo e imputabile principalmente alfatto che le correzioni diventano sempre piu locali. Cio e confermato anchedai valori dei correttori sestupolari nella cella FODO che tendono a converg-ere al valore −b3, come si avrebbe con uno schema perfettamente locale dicorrezione.Nei grafici precedenti si sono sempre mostrati i valori del tune shift in fun-zione dell’ampiezza. Per quanto riguarda la dipendenza da δ, si ha che glierrori sestupolari non introducono degli effetti rilevanti. Risulta infatti cheper δ = ±2.0× 10−3 sia ha un tune shift minore o uguale a 4× 10−4 e quindidetta variazione e ben al di sotto delle tolleranze richieste. La situazionedescritta si e presentata in tutti gli schemi di correzione riguardanti gli er-rori sestupolari. Per motivi di brevita non si e dunque ritenuto opportunopresentare i grafici relativi.Avendo determinato i valori dei correttori sestupolari, e possibile introdurrenella macchina gli errori decapolari e procedere alla loro correzione. Anchein questa situazione non si ha un numero sufficiente di parametri liberi perannullare completamente il tune shift, bisogna dunque procedere a minimiz-zare le funzioni χ2,0, χ0,2. La minimizzazione e alquanto semplice in questocaso, poiche il secondo ordine del tune shift dipende linearmente da K5, siaper quanto riguarda la dipendenza dall’ampiezza, che quella dal momen-to. Nel primo caso, per essere precisi, si ha che il gradiente decapolareentra nell’espressione del tune shift come termine di interferenza con i ses-tupoli. Essendo pero il valore di tutti i sestupoli gia fissato, in definitiva siha una dipendenza lineare dai decapoli. Questo fatto risulta avere notevoliconseguenze, in quanto il valore dei correttori decapolari necessari per min-

120 CAPITOLO 4. CORREZIONE DEL TUNE SHIFT
Figura 4.7: Confronto tra due differenti schemi di correzioni ottenuti inclu-dendo (curva continua) o meno (curva tratteggiata) gli errori sestupolari neldipolo corto dei soppressori di dispersione.

4.3. RISULTATI DELLA CORREZIONE 121
imizzare χ2,0 dipende in maniera sensibile dal contenuto sestupolare dellamacchina. In figura 4.8 sono riportati i grafici del tune shift in funzione del-l’ampiezza relativi alle correzioni con decapoli nel caso di bassa energia. Lediverse situazioni rappresentate dalle curve si riferiscono ai seguenti casi
i) Effetto degli errori decapolari sulle correzioni sestupolari, senza intro-durre alcun correttore.
ii) Correzioni degli effetti in ampiezza.
iii) Correzioni degli effetti di momento.
Gli ultimi due casi sono stati considerati per le due possibili configurazioni disestupoli correttori (minimizzazioni di χ1,0 o di χ0,1). Nella prima situazionesi vede come l’accordo tra curve teoriche e dati numerici non sia buono comein precedenza. Questo e dovuto al fatto che l’errore b5 non corretto intro-duce dei termini di ordine elevato che sono visibili nel tracking, ma non conle forme normali a causa dell’ordine finito di approssimazione. Incremen-tando ragionevolmente l’ordine utilizzato, per non incorrere in problemi didivergenza delle serie implicate, la discrepanza viene risolta. Detto disaccor-do si risolve anche introducendo i correttori: in questo caso i due modi dideterminare il tune shift danno risultati concordi. Si osserva anche come ledifferenze nei possibili tipi di correzioni con decapoli siano per lo piu ricon-ducibili alle differenze tra gli schemi sestupolari su cui si basano. e infineimportante osservare come, dopo la correzione, la curva che rappresenta iltune shift coincide con ottima approssimazione con quella relativa al casoin cui si hanno solo sestupoli (errori e correttori) in LHC. Questo significache la correzione con i decapoli e efficiente e permette di annullare quasicompletamente il contenuto decapolare. Si noti come questo sia differentecon quanto visto per i sestupoli, dove le correzioni non erano completamenteottimizzate a causa degli effetti non locali. Per i decapoli detti effetti sonomolto meno importanti, in quanto, come e stato detto in precedenza, si tentadi correggere un effetto che e lineare in K5. Per i sestupoli, invece, il ter-mine che si dove minimizzare dipende da K2
3 . Questo spiega il perche se lecorrezioni sono solo quasi locali i sestupoli ne risentono in maniera maggioredei decapoli.Per concludere l’analisi della correzione degli errori decapolari, si mostra in
figura 4.9 l’effetto sul tune shift come funzione di δ. Si distingue chiaramenteil notevole contributo in δ3 tipico dei decapoli. Questo effetto puo comunqueessere ridotto notevolmente con la procedura utilizzata. Cio anche se, con unsolo decapolo indipendente, non e possibile annullare completamente il tuneshift.

122 CAPITOLO 4. CORREZIONE DEL TUNE SHIFT
Figura 4.8: Correzione dell’errore b5 utilizzando i correttori decapolari nellasituazione di bassa energia.

4.3. RISULTATI DELLA CORREZIONE 123
Figura 4.9: Correzione dell’errore b5 utilizzando i correttori decapolari nellasituazione di bassa energia.

124 CAPITOLO 4. CORREZIONE DEL TUNE SHIFT
Correttore Gradiente Integrato Gradiente Integrato(Minimizzazione χi,0) (Minimizzazione χ0,i)
Sestupolo Cromatico −0.744× 10−1 −0.805× 10−1
(Defocusing)
Sestupolo Cromatico 0.132× 10−1 0.901× 10−2
(Focusing)
Sestupolo di Cella (S) −0.283× 10−1 0.302× 10−1
Decapolo di Cella (D) −4.06× 102 −4.05× 102
(Minimizzazione di χ2,0 )
Decapolo di Cella (D) −3.77× 102 −3.770× 102
(Minimizzazione di χ0,2 )
Tabella 4.2: Gradienti dei correttori sestupolari e decapolari utilizzati percompensare gli errori all’iniezione.
Infine i valori dei correttori calcolati utilizzando le forme normali nella situ-azione descritta sono riportati in tabella 4.3.
Per calcolare gli schemi di correzione precedenti si sono trascurati glieffetti indotti da errori di ordine superiore quali ad esempio b7 e b9. Uncontrollo e stato fatto per verificare la loro influenza sul tune shift corretto.Per quanto mostrato nella tabella 3.1 i gradienti legati a b7, b9, non han-no alcuna influenza su χi,0, χ0,i i = 1, 2. L’unica possibilita per introdurredegli effetti agli ordini piu bassi nel tune shift e considerare contributi chedipendono sia dall’ampiezza che dal momento. In questo caso si vede che b7contribuisce a χ1,4, χ2,3, mentre b9 a χ1,6, χ2,5. Per verificare l’effetto di questierrori si e dunque determinato il tune shift per particelle aventi una devia-zione dal momento nominale diversa da zero. In particolare si e consideratoδ = ±1.25× 10−3 essendo questo il valore tipico per LHC.

4.3. RISULTATI DELLA CORREZIONE 125
Anche il valore dell’errore e stato fatto variare in un intervallo compreso trazero ed il valore presentato nella tabella 4.2. I risultati sono riportati in figu-ra 4.10 per quanto riguarda b7. Si tenga presente che in questa situazione iltune shift e stato calcolato in maniera puramente numerica, e le linee contin-ue hanno l’unico significato di unire i punti ottenuti con i tracking. Come sivede l’influenza e notevole soprattutto a grandi ampiezze dove l’introduzionedi questi errori induce instabilita (le oscillazioni sono dovute a condizioni ini-ziali instabili). Dunque e probabile che l’influenza di questi errori trascuratisi manifesti soprattutto nel determinare l’apertura dinamica su tempi lunghi.Per valori fino a circa 8 mm sembra non essere rilevante la presenza di b7, b9.In questa regione caso dominano i termini dovuti ai sestupoli e decapoli, checontribuiscono a χ1,3, χ3,2, che, peraltro, non sembrano produrre un effettodrammatico, in quanto il tune shift a 8 mm e dell’ordine di 2× 10−3. Nellasituazione di campo magnetico intermedio, corrispondente a circa 2.5T, glierrori sono praticamente trascurabili. Il loro effetto e stato controllato nu-mericamente e dai risultati ottenuti non si e ritenuto opportuno procederead una correzione degli effetti prodotti da questi termini.Incrementando il valore del campo magnetico fino al suo massimo si ha unanuova situazione per quanto riguarda gli errori. Il valore di b3 cambia seg-no in quanto le correnti persistenti, che costituivano la sorgente principaledell’errore sestupolare a bassa energia, cedono il posto agli errori dovuti alleimperfezioni geometriche dei magneti. Si noti infatti il cambio di segno carat-teristico di questo cambiamento. Questo fatto introduce dei mutamenti nelcomportamento della macchina. La cromaticita lineare risulta cambiata cosıcome il segno del termine quadratico del tune shift. Per quanto riguardab5, il suo valore e notevolmente diminuito rispetto alla situazione a bassaenergia. Questa diminuzione e semplicemente dovuta all’aumento di energia.Nonostante queste differenze, utilizzando le forme normali e possibile anchein questo caso correggere in maniera opportune gli effetti degli errori sul tuneshift.Nel nostro studio e stata analizzata anche un’ultima situazione relativa lacaso di alta energia. Prima di passare nella fase di collisione dei due fasci,l’ottica della macchina viene cambiata. La nuova configurazione ha il com-pito di raggiungere la massima luminosita possibile diminuendo la sezionetrasversa del fascio nel punto di collisione. Questo si ottiene diminuendo ilvalore della funzione β in tale punto. Detta diminuzione avviene agendo suiuna serie di quadrupoli speciali. In questa configurazione il comportamentodella macchina cambia completamente. La cromaticita naturale, dovuta alcontributo dei quadrupoli nelle inserzioni, aumenta di circa tre volte. Saran-no dunque richiesti sestupoli cromatici con un campo estremamente intenso, iquali, a loro volta, oltre a correggere la cromaticita lineare produrranno forti

126 CAPITOLO 4. CORREZIONE DEL TUNE SHIFT
Figura 4.10: Effetto degli errori b7 sullo schema di correzione determinato inprecedenza in condizioni di bassa energia.

4.3. RISULTATI DELLA CORREZIONE 127
effetti non lineari. La struttura ottica della macchina, poi, non e certamenteottimizzata per la correzione di tali effetti. I correttori sestupolari sono in-fatti localizzati nella cella FODO della macchina e dunque non si trovanoposizionati in vicinanza dell’errore da correggere. Di conseguenza l’eventualetentativo di correzione e destinato a dare risultati peggiori di quelli ottenutii precedenza. Per tale motivo in questo caso ci siamo semplicemente limi-tati a tentare di utilizzare i correttori sestupolari per correggere il tune shiftcome funzione dell’ampiezza. I risultati sono riportati in figura 4.11 in cuiappare manifestamente come le correzioni non siano particolarmente efficaci.In questa situazione si potrebbe avere un miglioramento utilizzando un nu-mero maggiore di sestupoli cromatici.indipendenti, disposti in modo tale dacancellare vicendevolmente i diversi contributi. e opportuno sottolineare ilfatto che, nonostante il tune sifht non sia corretto al livello delle situazioniprecedenti, nondimeno in collisione la regione fisica occupata dal fascio e es-tremamente ridotta rispetto ai casi precedenti e quindi si dovrebbe avere unacompensazione con la scarsa efficacia delle correzioni ottenute. Prima di pas-sare a descrivere il comportamento dei valori numerici dei correttori calcolatiutilizzando le forme normali, vorremmo descrivere brevemente alcune altresituazioni che si sono analizzate, ma di cui non riporteremo i dati per ragionidi spazio. Per quanto concerne l’errore sestupolare si ha che la differenza trai valori di b3 a bassa ed alta energia e fissata per un magnete. Utilizzandoopportuni accorgimenti costruttivi e pero possibile variare a piacere il valorea bassa energia. Nel nostro caso il valore relativamente basso riportato nellatabella 4.2 prevede gia l’uso di detti accorgimenti. Per motivi di risparmiopotrebbe essere utile abbandonare queste correzioni aumentando il valore dib3 all’iniezione, ma diminuendolo ad alta energia. Per simulare questa nuovasituazione abbiamo considerato un valore estremamente elevato a bassa en-ergia, pari a b3 = −3.80 da cui risulta un valore ad alta energia b3 = 1.00. Ilrisultato delle correzioni non e cambiato di molto. Anche in questa situazionee possibile calcolare dei correttori che permettano di ridurre gli effetti nonlineari entro termini accettabili.Come si e accennato in principio, uno degli scopi di questa analisi era anchela determinazione del numero minimo di correttori necessari per avere unariduzione sufficiente degli effetti non lineari sul tune shift. In questo con-testo si sono considerati anche altri schemi ottenuti utilizzando un numeroinferiore di elementi.
Schema A In questo schema si sono considerati solo i due sestupoli cro-matici e l’unico decapolo indipendente.
Schema B In questo schema si sono utilizzati unicamente i due sestupolicromatici e, invece di considerare un unico decapolo indipendente, si

128 CAPITOLO 4. CORREZIONE DEL TUNE SHIFT
Figura 4.11: Correzione con sestupoli dell’errore b3 in collisione con β∗
minima.

4.4. ANALISI DEGLI EFFETTI OTTUPOLARI 129
sono considerati due decapoli indipendenti ai lati dei quadrupoli (unasorta di decapoli cromatici). In questo caso dunque i correttori vicinoai dipoli si sono completamente trascurati.
In ambedue i casi gli effetti di momento sono stati corretti senza incon-trare difficolta, mentre per quanto riguarda la dipendenza dall’ampiezza nonsempre si e riusciti ad ottenere risultati soddisfacenti. Come conseguenza sie deciso di mantenere il numero di correttori utilizzati fino ad ora.Riguardo ai valori dei correttori presentati si possono notare i seguenti fatti
i) Il valore del correttore sestupolare centrale (posto ad una estremita deidipoli) utilizzato per correggere il tune shift in funzione dell’ampiezza,risulta essere circa uguale al valore dell’integrale dell’errore sestupolarecorrispondente, KC
3 = KE3 . Le differenze sono dovute al fatto che gli
errori sono stati posti in tutti i dipoli della macchina, dunque anchenei soppressori di dispersione dove, al contrario, non ci sono corret-tori. Cio significa che non siamo nella situazione di avere correzioniveramente locali e a conferma di cio si osserva che il valore di KC
3 eovunque maggiore dell’errore dovendo tenere conto anche dei contributiche provengono dal resto della macchina.
ii) Le differenze tra i valori che i sestupoli cromatici assumono nelle variesituazioni sono legate alle variazioni dei correttori centrali a causa dellarelazione lineare imposta dall’annullamento della cromaticita (4.11).
iii) Anche per i decapoli vale la regola che il gradiente del correttore tendeall’integrale dell’errore. In questo caso, pero, il contributo decapolareal tune shift che si vuole ridurre ha una natura differente a secondache si consideri la dipendenza da δ o dall’ampiezza. Nel primo caso,infatti, il tune shift ha una dipendenza lineare da K5. I valori deisestupoli determinati in precedenza entrano nel termine costante dellarelazione. La dipendenza dai sestupoli risulta quindi debole in questocaso. Nella seconda situazione, invece, il termine che contribuisce altune shift rappresenta l’interferenza tra sestupoli e decapoli, come sivede dalla tabella 3.1. In questo caso si ha una forte dipendenza daivalori dai sestupoli che sono stati determinati in precedenza.
4.4 Analisi degli effetti ottupolari
In precedenza si e affermato che l’errore ottupolare si autocompensa lungo lamacchina a causa del cambio di segno negli archi pari e dispari. Per studiare

130 CAPITOLO 4. CORREZIONE DEL TUNE SHIFT
questo fatto si e proceduto nel seguente modo. In primo luogo, considerandosolamente l’errore sestupolare nei dipoli, si sono fissati i valori dei sestupolilaterali SBV, SBH in modo da annullare la cromaticita lineare. I correttorisestupolari vicino ai dipoli sono stati posti uguali a zero. Utilizzando ilprogramma di tracking SIXTRACK si e calcolato il tune shift in funzionedell’ampiezza nelle seguenti quattro situazioni
i) Solo errore sestupolare.
ii) Errore sestupolare e ottupolare con alternanza di segno.
iii) Errore sestupolare e ottupolare senza alternanza di segno (b4 < 0).
iv) Errore sestupolare e ottupolare senza alternanza di segno (b4 > 0).
I risultati sono riportati in figura 4.12 per una versione di LHC leggermentedifferente da quella considerata in precedenza. Anche gli errori utilizzati sonodifferenti, essendo uguali a
b3 = −3.0 b4 = 0.05,
dove i valori riportati si riferiscono sempre a r0 = 10 mm e sono espressi inunita di 10−4. Le curve in questo caso rappresentano semplicemente l’inter-polazione dei punti ottenuti tramite le simulazioni numeriche. Il risultatoe chiaro. L’alternanza dei segni produce realmente una autocompensazionedell’effetto degli ottupoli. La curva ottenuta in questo caso coincide infatticon quella ottenuta senza errore ottupolare fino ad ampiezze elevate. Perquanto riguarda i rimanenti casi, si ha che per piccole ampiezze le curve rel-ative a valori positivi e negativi di b4 sono esattamente simmetriche rispettoa quella relativa al caso b4 = 0. Un tentativo per spiegare questi fatti puoessere fatto rifacendoci alla dipendenza dei vari ordini del tune shift dai co-efficienti b3, b4.Quanto mostrato nella tabella 3.1 puo essere sintetizzato nella seguentemaniera. Se consideriamo un termine del tipo
n∏l=1
(Kml)pl (4.12)
contribuisce all’ordine i del tune shift pari a
i =1
2
[n∑
l=1
pl(ml − 2)
]. (4.13)

4.4. ANALISI DEGLI EFFETTI OTTUPOLARI 131
Figura 4.12: Tune orizzontale e verticale per differenti valori degli erroriottupolari.

132 CAPITOLO 4. CORREZIONE DEL TUNE SHIFT
Qualora il valore di i calcolato utilizzando l’espressione precedente non sia in-tero, significa che il termine considerato non da contributo a tale ordine. Nelcaso si abbiano solo sestupoli e ottupoli, allora i termini ammessi all’ordinei-esimo sono del tipo K2j
3 Ki−j4 0 ≤ j ≤ i. Tra tutti i termini chiaramente
i dominanti saranno quelli con j = 0 e j = i − 1 in base ai valori di b3, b4.Essenzialmente rimarranno solo il termine sestupolare puro e un termine diinterferenza lineare nell’ottupolo. Questo spiega in primo luogo perche ilcambio di segno provoca una autocompensazione quasi perfetta dell’erroreottupolare: il termine lineare si annulla e dunque ad ogni ordine rimane soloil contributo del sestupolo piu piccole correzioni dovute ai termini trascurati.Anche le rimanenti curve possono essere interpretate nella stessa maniera.Nel caso in cui il valore di b4 e costante si ha che il tune e dato da
νx,y ≈ ν3x,y +K4νx,y, (4.14)
dove ν3x,y rappresenta il tune shift dovuto al solo contributo del sestupolo,
mentre νx,y indica la somma di tutti i termini del tipo K2(i−1)3 K4. Il segno di
K4 spiega dunque le differenze delle due curve relative a K4 > 0 e K4 < 0.Come ultimo commento vorremmo sottolineare come piccole deviazioni dallalegge che prevede l’alternanza di segno nei differenti archi, produce notevolivariazioni del tune shift in quanto l’effetto degli ottupoli e approssimativa-mente lineare a tutti gli ordini. Cio implica che nella situazione reale in cui imagneti sono prodotti da ditte differenti e quindi con errori necessariamentediversi, difficilmente si potra fare affidamento su questa autocompensazionenaturale. Dunque sembra necessario prevedere anche dei correttori ottupolarinello schema della macchina.

Capitolo 5
Effetti di Trasporto inMacchine AcceleratriciCircolari
Come e stato descritto in dettaglio nel capitolo precedente l’uso dei magnetisuperconduttori nelle macchine acceleratrici porta a una serie di fenomeninon lineari che possono generare delle instabilita nel fascio. L’uso di magneticorrettori e un accorgimento che mira ad ampliare la regione nello spaziodelle fasi in cui il moto e approssimativamente lineare. Cosı facendo si vuoleevitare il possibile attraversamento di risonanze dovuto al tune shift. L’effet-to negativo delle non linearita non si manifesta d’altronde solo nelle gener-azione del tune shift, ma anche in una serie di fenomeni di trasporto cui i fascipossono andare soggetti in particolari condizioni. Consideriamo ad esempiole piccole fluttuazioni che si hanno nella corrente che alimenta i magneti.Queste variazioni sono praticamente inevitabili e sono dovute ai processi diraddrizzamento. L’effetto combinato di queste fluttuazioni e delle compo-nenti non lineari della dinamica possono produrre fenomeni di trasporto, percui particelle che si trovano in una regione stabile si spostano lentamente ver-so l’esterno fino a raggiungere regioni in cui vengono definitivamente perse.Dunque questo significa che si generano una serie di deboli instabilita il cuieffetto si fa sentire sul lungo periodo. Risulta dunque estremamente impor-tante per il funzionamento di una macchina superconduttrice quale LHC lacorretta progettazione del sistema di alimentazione dei magneti, in modo daridurre al massimo le fluttuazioni di corrente.Per arrivare a definire le specifiche cui dovranno soddisfare le alimentazioniin LHC, si e intrapreso un programma di esperimenti su SPS volti a misuraregli effetti sul moto delle particelle di forti non linearita introdotte in manieracontrollata, in concomitanza con fluttuazioni nella corrente che alimenta i
133

134 CAPITOLO 5. EFFETTI DI TRASPORTO
magneti, anche queste prodotte artificialmente. In questo capitolo intendia-mo descrivere gli esperimenti che sono stati fatti assieme ai dati ricavati. Inpiu presenteremo i risultati ottenuti con simulazioni numeriche che dovreb-bero servire per interpretare i dati sperimentali ed estrapolare i risultati nelcaso di LHC.
5.1 L’esperimento di diffusione in SPS
Come e stato detto nell’introduzione la macchina su cui vengono effettuati gliesperimenti di dinamica non lineare e SPS. Le ragioni di questa scelta sonomolteplici. In primo luogo questo acceleratore e ben conosciuto a causa dellungo periodo di operazioni e ha il pregio di essere una macchina estrema-mente lineare. Lavorando ad una energia compresa tra 100 e 250 GeV glieffetti di carica spaziale sono trascurabili, mentre gli effetti di saturazionedei magneti non sono ancora importanti. L’energia tipicamente usata negliesperimenti di diffusione e pari a 120 GeV, un valore che permette di averel’intensita massima per i campi non lineari. L’uso di fasci di bassa intensita,dell’ordine di 1012 protoni, permette una minimizzazione di effetti collettiviquali le interazioni elettromagnetiche tra il fascio e la camera a vuoto.Queste particolari condizioni sperimentali permettono di controllare in ma-niera accurata gli effetti non lineari presenti in SPS. Dunque le non linearitadominanti sono quelle introdotte artificialmente usando gli otto sestupoli che,in condizione di operazione normale, servono per l’estrazione lenta del fascio.La polarita di questi campi e scelta in modo da minimizzare gli effetti dovutialla risonanza 1/3 che, come noto, e proprio eccitata dai sestupoli. La cor-rente di alimentazione di questi magneti e fissata a 140A che corrisponde adun valore del gradiente sestupolare pari a
B′′`/Bρ = 0.28m−2
Il secondo ingrediente fondamentale di questi esperimenti e la fluttuazionenell’alimentazione dei magneti. In primo luogo una serie di filtri capacitivivengono impiegati per ridurre il piu possibile l’influenza della frequenza 50 Hze delle sue armoniche e subarmoniche. In secondo luogo una modulazione ar-tificiale viene introdotta nell’alimentazione di un quadrupolo speciale che hail compito di simulare la lenta variazione dei parametri lineari della macchina.La modulazione introdotta e di tipo sinusoidale con la possibilita di variarea piacere sia l’ampiezza che la frequenza e anche di introdurre piu frequen-ze simultaneamente. Le frequenze tipiche che vengono utilizzate in questogenere di esperimento sono 9, 40, 180 Hz.Con l’esperienza acquisita durante la serie di esperimenti condotti, ci si e resi

5.1. L’ESPERIMENTO DI DIFFUSIONE IN SPS 135
conto che, per il successo delle misure, e necessario che sia l’orbita chiusache l’accoppiamento lineare siano corretti al meglio. Infatti qualora l’orbitachiusa non sia stata corretta opportunamente, le distorsioni possono intro-durre effetti non lineari spurii. Un residuo accoppiamento lineare puo poiessere estremamente dannoso per quanto concerne la stabilita del fascio e ilrisultato delle misure.Un ulteriore fenomeno che deve essere controllato per la buona riuscita del-l’esperimento e la cromaticita lineare e non lineare della macchina. A causadella differente energia delle varie particelle che compongono il fascio la lorodinamica sara differente. In particolare cio produrra una distribuzione deivalori assunti dal tune. Dal momento che l’esperimento stesso prevede l’in-troduzione artificiale di una modulazione per generare un allargamento nellospettro di frequenze coperto dal tune, se lo spettro naturale non e sufficien-temente stretto si ha che l’effetto introdotto artificialmente e completamentecoperto da altre cause. Per risolvere questo problema si e dovuto trovare unmodo di minimizzare gli effetti cromatici in SPS. Nella macchina sono pre-viste a tale scopo un massimo di cinque famiglie indipendenti di sestupoli.Utilizzando le forme normali e la procedura che e stata descritta nel prece-dente capitolo, si e provveduto a calcolare i valori dei sestupoli correttoriin modo da ridurre la dipendenza del tune dalla variazione percentuale delmomento. In figura 5.1 sono presentati i risultati della correzione. Comesi vede usando solamente quattro famiglie indipendenti di sestupoli e pos-sibile ridurre drasticamente la componente quadratica nel tune. Si tengapresente che in SPS si ha ∆p/p ≈ ±1.3× 10−3 e quindi dai grafici si desumeche, senza le correzioni, la distribuzione del tune avrebbe una larghezza∆Qh ≈ 6.0 × 10−3 ben maggiore di quella che viene introdotta artificial-mente con la modulazione.Le misure vere e proprie richiedono la manipolazione del fascio in variemaniere. Per determinare la dipendenza dei fenomeni di trasporto dall’am-piezza nello spazio delle fasi, bisogna deflettere il fascio in modo da spostarneil centro nel punto prescelto. Questo viene fatto con un kicker, elemento ditipo elettrostatico, utilizzato normalmente per l’estrazione veloce del fascio.Generalmente viene impressa al fascio una deflessione in senso orizzontale,mentre la posizione verticale viene lasciata invariata. La misurazione del-la velocita di diffusione avviene con l’ausilio di una serie di collimatori e dirivelatori che permettono di evidenziare le particelle che vengono perse inquanto assorbite dai collimatori stessi. In una prima fase in cui il fascio sitrova in una situazione stabile, evidenziata dalla mancanza di grosse perditee da una vita media dell’ordine di decine di ore, i collimatori orizzontale everticale vengono avvicinati al fascio stesso fino a quando non si osservanodelle perdite di intensita pari a circa 1, 2% dell’intensita totale; in questo

136 CAPITOLO 5. EFFETTI DI TRASPORTO
Figura 5.1: Dipendenza del tune dal momento delle particelle. Le due curvesono calcolate utilizzando le forme normali. La curva B si riferisce alla si-tuazione prima delle correzioni, mentre quella A riporta l’effetto delle cor-rezioni. In questo caso si sono utilizzate solo quattro famiglie indipendentidi sestupoli.
modo si definisce meglio il bordo del fascio eliminando l’alone di particellecon elevata ampiezza. In un secondo tempo i collimatori vengono ritratti aduna certa distanza, tipicamente ci si porta ad un paio di millimetri all’ester-no della posizione precedente e le perdite cessano completamente. A questopunto avviene la misura del tempo necessario alle particelle par riempire lospazio che e stato ripulito dai collimatori. Questo tempo si identifica conl’intervallo temporale necessario per osservare nuovamente una diminuzionedi intensita. Effettuata la misurazione i collimatori vengono di nuovo inser-iti all’interno del fascio, fino a raggiungere la posizione iniziale, in modo dapoter stabilire se le perdite sono avvenute in direzione verticale o orizzon-tale. Questo ultimo fatto e importante per capire se nella macchina vi sonofenomeni dovuti ad accoppiamenti residui (quali ad esempio deflessione inorizzontale e diffusione in verticale).Nel 1991 un esperimento di questo tipo ha permesso di ottenere una seriedi misure complete relative alla dipendenza dei fenomeni di trasporto dal-l’ampiezza della modulazione introdotta [38]. In questo caso si e utilizzata

5.1. L’ESPERIMENTO DI DIFFUSIONE IN SPS 137
una frequenza di 9 Hz e si sono considerati tre valori differenti per l’ampiezzadi modulazione. I risultati sperimentali sono presentati in tabella 5.1. Come
Ampiezza della modulazione 1.10× 10−3 1.65× 10−3 2.20× 10−3
(∆Q)
Tempo di diffusione 6.7 3.1 0.7(min)
Tabella 5.1: Valori del tempo di diffusione in funzione dell’ampiezza dellamodulazione. La frequenza usata e 9 Hz. L’ampiezza cui si riferiscono lemisure e 14.3 mm.
si vede si ha una forte dipendenza dall’ampiezza della modulazione: un rad-doppio di ampiezza produce una diminuzione di un fattore dieci del tempodi diffusione. Nel caso dell’ampiezza di modulazione minore, l’andamentodell’intensita del fascio in funzione del tempo e mostrato in figura 5.2. Laprima parte della curva si riferisce alla situazione in cui i collimatori sonostati ritratti dopo aver ripulito il fascio. In questa circostanza non si hannoperdite e dunque l’intensita rimane costante. Quando le particelle hanno
Figura 5.2: Dipendenza dell’intensita del fascio dal tempo dopo la ritrazionedei collimatori.

138 CAPITOLO 5. EFFETTI DI TRASPORTO
riempito lo spazio vuoto racchiuso dai collimatori e cominciano ad incideresu di essi, le prime perdite iniziano a verificarsi. Da questo momento in poiil tasso di diminuzione dell’intensita del fascio e costante come si vede nellaseconda parte della curva.Un secondo effetto che e stato rilevato durante l’esperimento riguarda l’in-fluenza di piu frequenze. In questo caso si e notato che la diminuzione dellastabilita del fascio e drammatica come si puo osservare in figura 5.3. Utiliz-zando una sola frequenza di modulazione, 9 Hz, con l’ampiezza intermedia,si ha che la vita media del fascio passa da un valore praticamente infinito aτ = 7 ore. Se a questo punto si introducono simultaneamente due frequenze9, 180 Hz con una ampiezza pari a ∆Q = 0.8× 10−3, in modo che la sommadelle ampiezze sia simile a quella che si aveva nella situazione con una solamodulazione, la vita media raggiunge un valore τ = 2 ore. La spiegazione diquesta situazione puo essere data in termini di risonanze prodotte dalle duefrequenze. Un ruolo fondamentale gioca la differenza tra le due frequenze,cioe la possibilita di distinguere tra una frequenza veloce ed una lenta. Ciosara illustrato piu in dettaglio nel prossimo paragrafo in cui si illustrerannoi risultati numerici ottenuti dalle simulazioni dell’esperimento descritto.
Figura 5.3: Effetto di due frequenze sulla stabilita del fascio. Si noti comespegnendo la modulazione la vita media del fascio diventi praticamenteinfinita (le perdite si annullano).

5.2. RISULTATI DELLE SIMULAZIONI NUMERICHE 139
5.2 Risultati delle simulazioni numeriche
Per cercare di interpretare i dati sperimentali ottenuti si sono fatte dellesimulazioni numeriche per tentare di riprodurre il comportamento di SPS. Ilmodello usato consisteva nella macchina completa, senza alcuna ipotesi sem-plificativa. L’orbita chiusa misurata durante l’esperimento e stata introdottaper completezza. Le quantita fisiche che si sono analizzate sono state essen-zialmente due: l’apertura dinamica e il bordo tra la regione dei moti regolarie caotici. Il concetto di apertura dinamica e collegato con la posizione nellospazio delle fasi in cui si ha la prima perdita di particelle. Nel programma disimulazione questo si verifica quando si ha una condizione di overflow. Piudelicata e la situazione riguardante il bordo della regione regolare. Come eben noto, una caratteristica del moto regolare consiste nel fatto che la distan-za tra due condizioni iniziali arbitrariamente vicine aumenta linearmente neltempo. Al contrario in una regione caotica l’aumento e di tipo esponenziale.Gli esponenti di Lyapunov permettono di rilevare se la regione dello spaziodelle fasi e caotica o regolare e sono definiti nella seguente maniera: suppo-nendo che x0 e x0 + δ siano due condizioni iniziali vicine, indichiamo cond(x0, t) la distanza tra le due traiettorie al tempo t. La rapidita esponenzialecon cui due traiettorie vicine divergono puo essere misurata da
σ(x0) = limt→∞
lim →0
1
tlog
d(x0, t)
d(x0, 0). (5.1)
Il limite precedente esiste sempre ed e finito. Ovviamente nel caso di orbiteregolari si avra che σ(x0) = 0. I coefficienti di Lyapunov sono legati allaquantita σ(x0) definita in precedenza.In campo acceleratoristico la conoscenza di quantita correlate con gli espo-nenti di Lyapunov puo dare utili informazioni circa il tipo di dinamica che siha in una regione dello spazio delle fasi. L’idea e che questi esponenti pos-sano essere degli indicatori sensibili della posizione dell’apertura dinamica.In SIXTRACK e implementato un metodo per la determinazione di quello chepotrebbe essere chiamato uno pseudo– esponente di Lyapunov. Infatti, stantela difficolta a calcolare numericamente il limite richiesto dalla definizione(5.1), si considerano due condizioni iniziali differenti con distanza dell’ordinedi 10−6 e si determina l’evoluzione della distanza angolare. Se l’andamen-to temporale di questa distanza e approssimativamente lineare significa chele condizioni iniziali sono in una regione regolare, altrimenti si considera laregione caotica. Ovviamente il test non e conclusivo, in quanto l’evoluzionee seguita solo per un tempo finito, cio nonostante la quantita introdotta ecomunque significativa.Il numero massimo di giri simulato e stato pari a 2.6 × 107 corrispondente

140 CAPITOLO 5. EFFETTI DI TRASPORTO
a un periodo di rivoluzione in SPS di circa 10 minuti. Come prima cosa sie determinata la dipendenza del bordo della regione caotica e dell’aperturadinamica sia in funzione dell’ampiezza di modulazione, che della frequenza.Nel primo caso i risultati sono riportati in figura 5.4. Sia l’apertura dinamica
Figura 5.4: Dipendenza dell’apertura dinamica (curva tratteggiata) e delbordo della regione caotica (curva continua) dall’ampiezza della modulazione.La frequenza in questo caso vale 9 Hz.
(curva tratteggiata) che il bordo della regione caotica (curva continua) sonorappresentati in tre situazioni differenti relative a tre valori possibili del mo-mento delle particelle.(δp/p = ±1.0× 10−3 e δp/p = 0). Come si vede il casorelativo a δp/p < 0 e differente dagli altri due. L’apertura dinamica mostratasi riferisce al caso in cui si hanno perdite in tempi inferiori a 20 secondi. Dairisultati e possibile affermare che sia l’apertura dinamica che la regione cao-tica si tendono verso l’origine all’aumentare dell’ampiezza della modulazione.Questa tendenza e sicuramente piu marcata per la prima quantita, dove siha una chiara e costante diminuzione. Questo fatto non deve stupire, inquanto all’aumentare dell’ampiezza della modulazione, aumenta l’intervallodi frequenze coperto dal tune e dunque la probabilita di attraversare unarisonanza spiega la riduzione della zona stabile e della maggior caoticita.Per quanto riguarda la dipendenza dalla frequenza di modulazione, i risul-tati in figura 5.5 mostrano quanto ottenuto. Nella parte a.) si vede come

5.2. RISULTATI DELLE SIMULAZIONI NUMERICHE 141
Figura 5.5: Dipendenza dell’apertura dinamica (curva tratteggiata) e delbordo della regione caotica (curva continua) dalla frequenza di modulazione.L’ampiezza usata e 1.65 × 10−3. Nella parte a.) e stata considerata unasola frequenza di modulazione, mentre in b.) e stata aggiunta una secondafrequenza corrispondente a 50 Hz.

142 CAPITOLO 5. EFFETTI DI TRASPORTO
l’apertura dinamica sia praticamente indipendente dalla frequenza della mo-dulazione. Questo effetto e stato gia osservato in [37]. In quella situazione,infatti, si notava che l’apertura dinamica e effettivamente differente a se-conda della frequenza di modulazione, ma per apprezzare questa differenzabisogna arrivare ad un numero di giri estremamente elevato, ben piu elevatodi quanto e stato fatto in questa situazione. In questo caso, infatti, l’aperturadinamica e riferita ad un tempo dell’ordine dei 20s, corrispondente a circa9× 105 giri in SPS. Per distinguere le differenze tra frequenze dell’ordine dei9 Hz e 180 Hz, bisogna spingersi fino a circa 107 giri.Per quanto riguarda, invece, la curva relativa al bordo tra la regione regolaree quella caotica, si ha una chiara tendenza a raggiungere l’apertura dinamicaall’aumentare della frequenza di modulazione. In particolare e interessantenotare come le frequenze basse aumentino la regione caotica. Questo puoessere compreso in termini di sovrapposizione di risonanze, utilizzando il cri-terio di Chirikov [81]. Prima di passare a considerare la parte b.) dellafigura 5.5 vorremmo considerare la tabella 5.2. In essa sono riportati i valoriottenuti tramite le simulazioni numeriche dell’apertura dinamica considerataper un numero crescente di giri. I due valori presentati per ogni ampiezza dimodulazione e intervallo temporale si riferiscono all’intervallo ottenuto con-siderando i tre valori del momento gia citati. Come mostrato in tabella 5.1 aduna ampiezza di 14.3 mm occorrono circa 6.7 min per raggiungere il collima-tore nel caso dell’ampiezza di modulazione piu piccola. Considerando questotempo uguale al tempo necessario perche la particella venga persa, abbiamoche i dati mostrati in tabella 5.2 non sono in buon accordo con i risultati sper-imentali. Il punto e che il fenomeno di trasporto indotto dalla modulazione etroppo debole nelle simulazioni numeriche rispetto a quanto osservato negliesperimenti. Per tentare di migliorare l’accordo si e introdotta una secon-da frequenza di modulazione uguale a 50 Hz. L’idea e che, per quanto gliaccorgimenti sperimentali possano aver ridotto questa componente naturalenella corrente di alimentazione, pure una piccola influenza e inevitabile. In-fatti nonostante l’ampiezza scelta per questa seconda modulazione sia statasolo di 2.5 × 10−4 dunque almeno cinque volte piu piccola rispetto al val-ore minimo della modulazione principale, cionondimeno gli effetti sono stativistosi. Ritornando a considerare la parte b.) della figura 5.5 dove si sonoconsiderate le stesse modulazione che nella parte a.) aggiungendo pero an-che la frequenza di 50 Hz, si nota immediatamente l’effetto di questa secondafrequenza. Addirittura anche la curva che rappresenta l’apertura dinamicasembra dipendere maggiormente dalla frequenza di modulazione. Per quantoriguarda il bordo della regione in cui si hanno moti regolari, si ha nuovamenteche le frequenze piu basse creano una zona caotica di dimensioni maggiori.Globalmente questa secondo tipo di curva e molto piu vicino all’origine in

5.2. RISULTATI DELLE SIMULAZIONI NUMERICHE 143
Ampiezza della modulazione 1.10× 10−3 1.65× 10−3 2.20× 10−3
(∆Q)
Instabilitaentro 20s 19− 23 18− 23 18− 22
Instabilitatra 20s e 2min. 17− 19 17− 19 17− 19
Instabilitatra 2min. e 10min. − 17− 19 15− 19
Tabella 5.2: Valori dell’apertura dinamica (in mm) per differenti intervalli ditempo e per varie ampiezze di modulazione.
questa situazione che in quella con una sola frequenza. In questa secondafigura si sono anche visualizzati i risultati sperimentali. Come si vede il pun-to sperimentale, corrispondente ad una frequenza di 9 Hz ed una ampiezzadi 14.3 mm, non coincide con quello ottenuto con le simulazioni in cui si hache l’ampiezza di 18 mm e instabile su intervalli di tempi dell’ordine dei dieciminuti.Ancora una volta, nonostante l’introduzione di una seconda frequenza dimodulazione abbia permesso di migliorare l’accordo tra dati sperimentali enumerici, l’effetto di trasporto e sottostimato nelle simulazioni numeriche.Da ultimo vorremmo mostrare i dati relativi all’analisi di Fourier delle orbitenel caso in cui si abbia una sola o due frequenze di modulazione. Questi datisono riportati nella figura 5.6. Nella parte a.) si ha una sola frequenza dimodulazione, mentre nella parte b.) si ha in aggiunta anche la componente a50 Hz. L’introduzione della seconda modulazione produce una nuova serie dipicchi attorno a quelli esistenti in precedenza. In piu, analizzando la regioneracchiusa dai cerchi, si nota come la seconda distribuzione sia notevolmentepiu larga della prima. Questo spiega la maggior caoticita dovuta all’aggiuntadella seconda frequenza.

144 CAPITOLO 5. EFFETTI DI TRASPORTO
Figura 5.6: Analisi di Fourier di un orbita di SPS ottenuta con delle simu-lazioni numeriche. Nella parte a.) si ha una sola frequenza di modulazione9 Hz con ampiezza 1.65 × 10−3. Nella parte b.) invece si ha in aggiuntaanche una seconda modulazione di frequenza pari a 50 Hz e con ampiezza2.5× 10−4.

Bibliografia
[1] E. Courant, H. Snyder: “Theory of the Alternating–GradientSynchrotron” – Annals of Physics 3 1, (1958).
[2] P. Hartman: “A lemma in the theory of structural stability of differentialequations” – Proc. Amer. Math. Soc. 11 610, (1960).
[3] D. M. Grobman: “Homeomorphisms of systems of differentialequations” – Dokl. Akad. Nauk. 128 880, (1959).
[4] N. N. Nekhoroshev: “An exponential estimate of the time of stabilityof nearly-integrable Hamiltonian systems” – Russ. Math. Surveys 32 1,(1977).
[5] L. Galgani, A. Giorgilli:“Rigorous estimates for the series expansions ofHamiltonian perturbation theory, Cel. Mech. 17 95, (1985).
[6] P. Lochak: “Stabilite en temps exponentielles des systemes hamil-toniens proches des systemes integrables: resonances et orbites fermes”– preprint Ecole Normale Superieur Paris, (1990).
[7] A. Bazzani, S. Marmi, G. Turchetti: “Nekhoroshev estimates forisochronous nonresonant symplectic maps” – Cel. Mech. 47 333, (1990).
[8] H. Dulac: “Recherches sur le points singuliers des equationsdifferentielles” – J. Ecole Polytechnique 9 1, (1904).
[9] V. I. Arnol’d: “Geometrical methods in the theory of ordinarydifferential equations” – Springer–Verlag, (1983).
[10] C. Siegel: “Iteration of analytic functions” – Ann. of Math. 43 607,(1942).
[11] V. A. Pliss: “On the reduction of an analytic system of differentialequations to a linear form” – Differential Equations 1 111, (1965).
145

146 BIBLIOGRAFIA
[12] H. Russmann: “Uber die iteration analytischer funktionen” – J. Math.Mech. 17 523, (1967).
[13] A. D. Brjuno: “The analytical forms of differential equations; part I” –Trans Mosk. Math. Soc. 25 131, (1971).
[14] A. D. Brjuno: “The analytical forms of differential equations; part II”– Trans Mosk. Math. Soc. 26 199, (1972).
[15] A. D. Brjuno: “Local methods in nonlinear differential equations” –Springer-Verlag, (1989).
[16] J. C. Yoccoz: “Theoreme de Siegel, polynomes quadratiques et nombresde Brjuno” – Asterisque, (1990).
[17] G. D. Birkhoff: “Surface transformations and their dynamicalapplications” – Acta Math. 43 1, (1920).
[18] C. Siegel: “On the integrals of canonical systems” – Ann. of Math. 42806, (1941).
[19] C. Siegel: “Uber die existenz einer normalform analytischer hamilton-sher differentialgleichungen in der nahe einer gleichgewichtslosung” –Math. Ann. 128 144, (1952).
[20] J. Moser: “Nonexistence of integrals for canonical systems of differentialequations” – Comm. Pure Appl. Math. 8 409, (1955).
[21] J. Moser: “The analytic invariants of an area–preserving mapping nearan hyperbolic fixed point ” – Comm. Pure Appl. Math. 11 257, (1956).
[22] J. Moser, C. L. Siegel: “Lectures in celestial mechanics” – Springer-Verlag, (1971).
[23] M. Henon: “Numerical study of quadratic area– preserving mappings”– Quarterly of Appl. Math. 27 291, (1969).
[24] A. J. Dragt: “Nonlinear Dynamics and the beam-beam interaction” –AIP Conf. Proc. 57 143, (1979).
[25] A. Bazzani, A. Pisent, G. Turchetti: “Normal forms for hamiltonianmaps and future applications to accelerators” – CERN Report SPS–AMF 87–38, (1987).
[26] A. J. Dragt, J. M. Finn: “Lie series and invariant functions for analyticsymplectic maps”– J. Math. Phys. 17 2215, (1976).

BIBLIOGRAFIA 147
[27] M. Pusterla, G. Servizi, G. Turchetti: “Non–linear beam–beam effectsin present and future storage rings and generalized Birkhoff method onconservative mappings” – IEEE Trans. Nucl. Sc. 30 4 2642, (1983).
[28] A. Bazzani, P. Mazzanti, G. Servizi, G. Turchetti: “Normal forms forHamiltonian maps and nonlinear effects in a particle accelerator Il NuovoCimento 102 B 51, (1988).
[29] A. Bazzani, G. Servizi, E. Todesco and G. Turchetti: “Normal formsfor symplectic maps and non–linear theory of betatronic motion” –sottomesso come pubblicazione della serie CERN YELLOW REPORT.
[30] G. D. Birkhoff: “Dynamical systems” – Amer. Math. Soc. 8 295, (1927).
[31] V. I. Arnol’d: “Instability of dynamical systems with several degrees offreedom” – Soviet Math. Dokl. 5 581, (1964).
[32] D. Neuffer: “Lumped correction of systematic multipoles in largesynchrotrons” – Part. Acc. 23 21, (1988).
[33] W. Scandale, F. Schmidt, E. Todesco: “Compensation of the tune shiftin the LHC, using the normal form techniques ” – Part. Acc. 35, 53,(1991)
[34] E. Todesco: “Forme normali risonanti per mappe polinomiali e cor-rezioni multipolari per LHC” – Tesi di Laurea Universita degli Studi diBologna, (1990).
[35] L. Evans, J. Gareyte, A. Hilaire, W. Scandale, L. Vos: “ The non–linear dynamic aperture experiment in the SPS” – Proceedings dellaConferenza EPAC - Roma, (1988).
[36] J. Gareyte, A. Hilaire, F. Schmidt: “Dynamic aperture and long–termstability in the presence of strong sextupoles in the CERN SPS” –Prooceedings della Conferenza PAC - Chicago, (1989).
[37] D. Brandt, E. Brouzet, A. Faugier, J. Gareyte, W. Herr, A. Hilaire, W.Scandale, F. Schmidt, A. Verdier: “Influence of the power supply rippleon the dynamic aperture of the SPS in the presence of strong non–linearfields” – Proceedings della Conferenza EPAC - Nizza, (1990).
[38] X. Altuna et Al: “The 1991 dynamic experiment at the CERN SPS” –AIP Conf. Proc. 255, (1991).

148 BIBLIOGRAFIA
[39] M. Giovannozzi, S. Tzenov: “Statistical description of nonlinear particlemotion in cyclic accelerators” – CERN Report 92–23, (1992).
[40] A. Gerasimov: “The applicability of diffusion phenomenology to particlelosses in hadron colliders” – CERN Report SL–AP 92–30, (1992).
[41] G. Turchetti: “Perturbative methods for hamiltonian maps” – in Meth-ods and applications of nonlinear dynamics, ed. W. A. Saenz, WorldScientific, (1988).
[42] O. De Almeida, R. Douady, G. L. Da Silva Ritter: “Analytical determi-nation of unstable periodic orbits in area–preserving maps” – PhysicaD 29 181, (1987).
[43] E. Fontich, C. Simo: “The splitting of separatrices for analyticdiffeomorfisms” – Ergod. Th. & Dynam. Sys. 10 295, (1990).
[44] U. Kirchgraber, D. Stoffer: “Chaotic behaviour in simple dynamicalsystems” – SIAM Review 32 424, (1990).
[45] V. K. Melnikov: “On the stability of the center for time–periodicperturbations” – Trans. Moskow Math. Soc. 12, (1963).
[46] R. De Vogeleare: “On the Structure of Symmetric Periodic Solutionsof Conservative Systems with Applications” – in Contributions to thetheory of nonlinear oscillations, Vol 4 53, (1958).
[47] J. M. Finn: “Integrals of canonical transformations and normal formsfor mirror machines hamiltonian ” – Tesi di dottorato Universita delMaryland, (1974)
[48] M. Giovannozzi: “Analisi di stabilita per mappe hamiltoniane polino-miali e loro applicazioni alla fisica degli acceleratori” – Tesi di LaureaUniversita degli Studi di Bologna, (1989).
[49] M. Giovannozzi, S. Marmi: “Existence of complex invariant circlesin the quadratic area–preserving map” – Rendiconti di Matematica 9457,(1990).
[50] N. Buric, I. C. Percival, F. Vivaldi: “Critical function and modularsmoothing” – Nonlinearity 3 21, (1990).
[51] N. Buric, I. C. Percival: “Modular smoothing and finite perturbationtheory” – Nonlinearity 4 981, (1990).

BIBLIOGRAFIA 149
[52] N. Buric, J. Cartwright, I. C. Percival, O. Piro: “On modular smoothingand scaling functions for mode locking” – Phys. Lett. A 163 63, (1992).
[53] S. Marmi: “Critical Functions for Complex Analytic Maps” – J. Phys.A: Math. Gen. , (1990).
[54] M. Giovannozzi: “Analysis of the stability domain for the Henon map”,CERN Report SL–AP 92–23, (1992) sottomesso per la pubblicazionesu Phys. Lett. A.
[55] A. Bazzani, M. Giovannozzi, E. Todesco, G. Turchetti: “Computation ofthe Dynamic Aperture of a One Dimensional Model of a Sextupole Non-linearity, using Analytical Tools” – Proceedings della conferenza EPAC- Berlino, (1992).
[56] M. Giovannozzi: “Invariant manifolds and stability domain: some re-sults for 1D maps” – Proceedings del Workshop Stability of ParticleMotion in Storage Rings, Brookhaven National Laboratory, Ottobre(1992).
[57] T. Bountis, G. Servizi, G. Turchetti, M. N. Vrahatis: “A Procedure toCompute the Fixed Points and Visualize the Orbits of a 2D Map” –CERN Report SL–AP 93-06, (1993).
[58] M. N. Vrahatis: “CHABIS: A mathematical software package for lo-cating and evaluating roots of systems of nonlinear equations” – ACMTrans. Math. Software 14 330, (1988).
[59] R. D. Ruth: “Single particle dynamics and nonlinear resonances incircular accelerators” – Proceedings del Congresso Nonlinear Dynam-ics Aspects of Particle Accelerators, Lecture Notes in Physics 247 37,Springer-Verlag, (1985)
[60] J. Irwin: “A multi–kick factorization algorithm for nonlinear maps”–SSC Report 228, (1989).
[61] R. Kleiss, F. Schmidt, F. Zimmermann: “Experience with a simpleMethod to ‘simplectify’ Differential–Algebra Maps”– CERN ReportSL–AP 92–31, (1992).
[62] R. Kleiss, F. Schmidt, Y. Yan, F. Zimmermann: “On the Feasibili-ty of Tracking with Differential–Algebra Maps in Long–Term Stabili-ty Studies for Large Hadron Colliders”– CERN Report SL–AP 92–02,(1992).

150 BIBLIOGRAFIA
[63] R. Kleiss, F. Schmidt, F. Zimmermann: “The Use of Truncated TaylorMaps in Dynamic Aperture Studies”– CERN Report SL–AP 92–21,sottomesso a Part. Acc. (1992).
[64] A. Bazzani, G. Turchetti: “Normal forms for symplectic maps” – Pro-ceedings del Workshop Nonlinear Dynamics and stochastic processes II,eds. Livi-Vulpiani, World Scientific, (1988).
[65] A. Bazzani: “Normal forms for symplectic maps in R2n ” – Cel. Mech.42 107, (1988).
[66] A. Giorgilli, – Computer Physics Comm. 16 331, (1979).
[67] M. Berz, E. Forest – LBL Accelerator & Fusion Reasearch Divisioninternal report 25609 UC–414, (1988).
[68] M. Berz, E. Forest, J. Irwin: “Normal forms methods for complicatedperiodic systems: a complete solution using differential algebra and lieoperators” – Part. Acc. 24 91, (1989).
[69] A. Bazzani, G. Turchetti: “Polyn: a program for algorithmicmanipulation of polynomials” – CERN Report SL–AP 91–13, (1991).
[70] F. Galluccio and W. Scandale: “Compensation of the LHC lattice in thepresence of systematic multipolar errors in the dipoles” – CERN ReportSPS–AMS 89–51, (1989).
[71] F. Galluccio: “Compensation of systematic multipolar errors in the LHCfrom the operational point of view” – CERN Report SL–AP 90–12,(1990).
[72] M. Berz: “Differential–Algebraic description of beam dynamics to veryhigh orders” – Part. Acc. 24, (1989).
[73] M. Giovannozzi, F. Schmidt: “General Normal Forms Procedure toCorrect Tune–Shift and Non–Linear Chromaticity”– in preparazione.
[74] M. Giovannozzi: “LHC Correction Scheme”– Talk presentato al Work-shop Stability of Particle Motion in Storage Rings, Brookhaven NationalLaboratory, Ottobre (1992).
[75] The LHC Study Group: “Design study of the large hadron collider(LHC)” – CERN 91–3 115, (1991).

BIBLIOGRAFIA 151
[76] P. J. Bryant: “Some advantages of inclined collimators”– CERN ReportSL–AP 92–24, (1992).
[77] P. J. Bryant, E. Klein: “The design of betatron and momentumcollimation systems”– CERN Report SL–AP 92–40, (1992).
[78] P. Schmuser: “Superconducting magnets for particle accelerators” –Rep. Prog. Phys. 54 683, (1990).
[79] P. Schmuser: “Magnetic measurements of the superconducting HERAmagnets and analysis of systematic errors” – DESY Report, HERA–P92–01, (1992).
[80] W. Scandale: “The lattice of the LHC: Version 1 ” – CERN ReportSL–AP 91–03, (1991).
[81] V. B. Chirikov: “A universal instability of many–dimensional oscillatorsystems” – Phys. Rep. 52 265, (19 79).