Universit a degli studi di Trento Corso di Meccanica ...siboni/dispenseFMR/punti.pdf · complanari...
171
Universit`a degli studi di Trento Corso di Meccanica razionale Nozioni introduttive Punto materiale Sistemi di punti materiali liberi Dispense per il corso di Meccanica Razionale di Stefano Siboni 1. Calcolo vettoriale in R 3 In questo paragrafo verranno richiamate le nozioni fondamentali riguardanti i vettori di R 3 e la relativa algebra vettoriale. Non ci si preoccuper` a del rigore formale delle definizioni e notazioni ma essenzialmente degli aspetti operativi del calcolo vettoriale che hanno inte- resse nelle applicazioni alla meccanica razionale. 1.1 Vettori di R 3 Il modo pi` u elementare di introdurre i vettori di R 3 fa uso del concetto di segmento orientato nello spazio fisico E 3 . Per segmento orientato di estremi A e B di pu` o intendere il segmento di retta che congiunge i punti A e B, compreso il caso limite di punti A e B coincidenti, per il quale il segmento si identifica con il punto stesso. Due sono gli orientamenti possibili del segmento: da A verso B o viceversa, da B verso A. Il segmento orientato da A verso B viene indicato con la notazione B - A. Per A 6= B, la retta di appartenenza del segmento B - A ` e determinata univocamente e si dice retta di giacitura o retta d’azione del segmento orientato. I punti A e B si dicono rispettivamente primo estremo,o punto di applicazione,e secondo estremo, o estremit` a, del segmento orientato. La geometria razionale definisce inoltre: (i) la nozione di segmenti paralleli, tramite il parallelismo delle rispettive rette d’azione; (ii) il concetto di lunghezza di un segmento, mediante appropriati criteri di confronto con un arbitrario segmento di riferimento, di estremi distinti, assunto come unit` a di misura; (iii) il carattere concorde o discorde dell’orientamento di due segmenti paralleli. Nell’insieme dei segmenti orientati si introduce la relazione che vede equivalenti tutti i segmenti fra loro paralleli, che abbiano la stessa lunghezza rispetto ad un segmento campione assegnato e che siano concordemente orientati l’uno rispetto all’altro. Si tratta di una evidente relazione di equivalenza, che definisce una partizione in classi di equivalenza dell’insieme dei segmenti orientati. L’insieme dei vettori di R 3 ` e l’insieme delle classi di equivalenza dei segmenti orientati secondo tale relazione. La stessa denominazione si estende a qualsiasi insieme che possa porsi in corrispondenza biunivoca con l’insieme precedente, semprech´ e detta corrispondenza preservi le operazioni vettoriali Stefano Siboni 1
Transcript of Universit a degli studi di Trento Corso di Meccanica ...siboni/dispenseFMR/punti.pdf · complanari...
Universita degli studi di Trento Corso di Meccanica razionale
Nozioni introduttivePunto materialeSistemi di punti materiali liberiDispense per il corso di Meccanica Razionale
di Stefano Siboni
1. Calcolo vettoriale in R3
In questo paragrafo verranno richiamate le nozioni fondamentali riguardanti i vettori di R3
e la relativa algebra vettoriale. Non ci si preoccupera del rigore formale delle definizioni enotazioni ma essenzialmente degli aspetti operativi del calcolo vettoriale che hanno inte-resse nelle applicazioni alla meccanica razionale.
1.1 Vettori di R3
Il modo piu elementare di introdurre i vettori di R3 fa uso del concetto di segmentoorientato nello spazio fisico E3. Per segmento orientato di estremi A e B di puo intendereil segmento di retta che congiunge i punti A e B, compreso il caso limite di punti Ae B coincidenti, per il quale il segmento si identifica con il punto stesso. Due sono gliorientamenti possibili del segmento: da A verso B o viceversa, da B verso A. Il segmentoorientato da A verso B viene indicato con la notazione
B −A .
Per A 6= B, la retta di appartenenza del segmento B − A e determinata univocamente esi dice retta di giacitura o retta d’azione del segmento orientato. I punti A e B sidicono rispettivamente primo estremo, o punto di applicazione, e secondo estremo,o estremita, del segmento orientato. La geometria razionale definisce inoltre:
(i) la nozione di segmenti paralleli, tramite il parallelismo delle rispettive rette d’azione;
(ii) il concetto di lunghezza di un segmento, mediante appropriati criteri di confrontocon un arbitrario segmento di riferimento, di estremi distinti, assunto come unita dimisura;
(iii) il carattere concorde o discorde dell’orientamento di due segmenti paralleli.
Nell’insieme dei segmenti orientati si introduce la relazione che vede equivalenti tuttii segmenti fra loro paralleli, che abbiano la stessa lunghezza rispetto ad un segmentocampione assegnato e che siano concordemente orientati l’uno rispetto all’altro. Si tratta diuna evidente relazione di equivalenza, che definisce una partizione in classi di equivalenzadell’insieme dei segmenti orientati. L’insieme dei vettori di R3 e l’insieme delleclassi di equivalenza dei segmenti orientati secondo tale relazione. La stessadenominazione si estende a qualsiasi insieme che possa porsi in corrispondenza biunivocacon l’insieme precedente, sempreche detta corrispondenza preservi le operazioni vettoriali
Stefano Siboni 1
Universita degli studi di Trento Corso di Meccanica razionale
che verranno introdotte nel seguito. Il generico vettore di R3 si indichera con una letterasoprassegnata da una freccia
~v ∈ R3 .
In un certo senso, i vettori di R3 possono essere riguardati come segmenti orientati per iquali si prescinda dalla scelta del punto di applicazione, che puo quindi identificarsi con unpunto prefissato a piacere O: il segmento orientato A−O, che ha in O il proprio punto diapplicazione, costituisce un particolare elemento rappresentativo della classe di equivalenzacorrispondente al vettore ~v
~v = [A−O] .
1.1.1 Modulo di un vettoreIl modulo di un vettore ~v = [A − O] si definisce come la lunghezza di un suo qualsiasisegmento orientato rappresentativo, rispetto ad un preassegnato segmento campione. Ilmodulo del vettore ~v e indipendente dalla rappresentazione prescelta in termini di segmentiorientati e viene indicato con
|~v|ovvero con |A−O|, che denota anche la lunghezza del segmento orientato A−O.
1.1.2 Vettori unitari, o versoriUn vettore si dice unitario, o semplicemente versore, se il suo modulo e uguale a 1:
~v versore ⇐⇒ |~v| = 1 .
I versori vengono identificati con un accento circonflesso in luogo della semplice freccia
|v| = 1 .
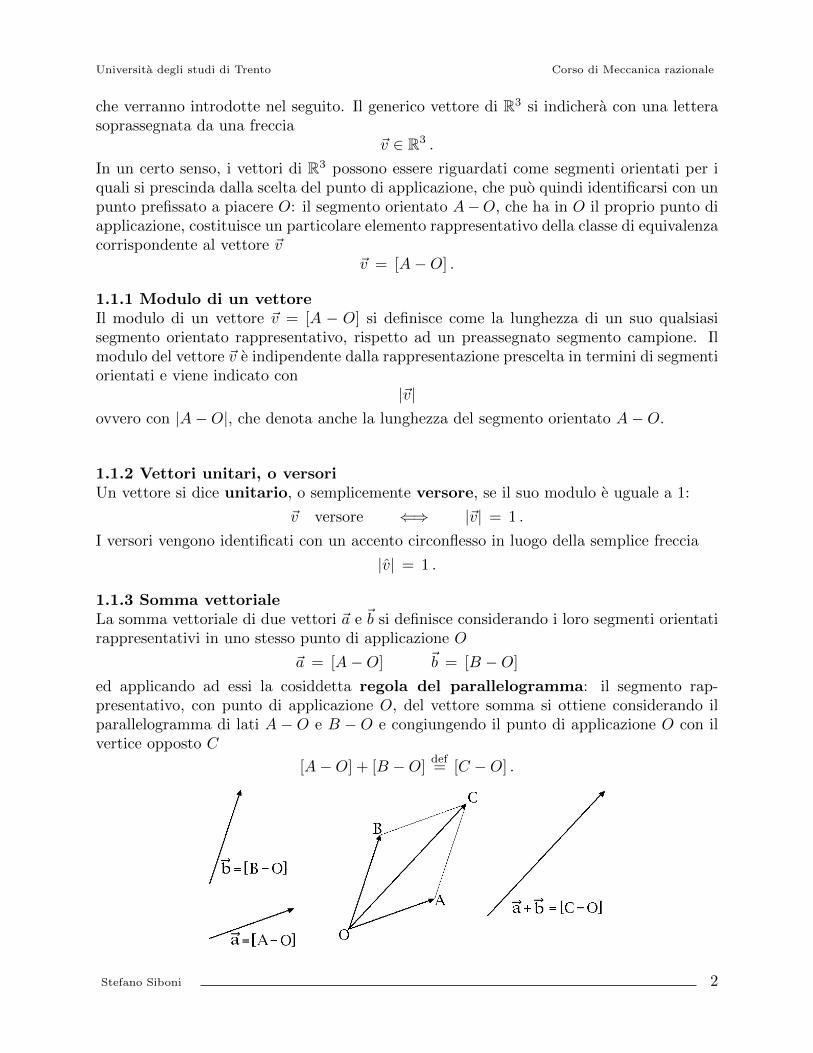
1.1.3 Somma vettorialeLa somma vettoriale di due vettori ~a e ~b si definisce considerando i loro segmenti orientatirappresentativi in uno stesso punto di applicazione O
~a = [A−O] ~b = [B −O]
ed applicando ad essi la cosiddetta regola del parallelogramma: il segmento rap-presentativo, con punto di applicazione O, del vettore somma si ottiene considerando ilparallelogramma di lati A − O e B − O e congiungendo il punto di applicazione O con ilvertice opposto C
[A−O] + [B −O]def= [C −O] .
Stefano Siboni 2

Universita degli studi di Trento Corso di Meccanica razionale
E facile verificare che il vettore somma non dipende dal particolare punto di applicazioneO prescelto, come la buona posizione della definizione richiede. La somma vettoriale vieneindicata con lo stesso simbolo — “+” — che designa la somma fra numeri reali. La sommavettoriale gode chiaramente delle proprieta commutativa ed associativa. Esiste l’elementoneutro della somma vettoriale, costituito dal vettore di modulo nullo [O−O], usualmenteindicato con 0 e denominato vettore nullo
~a+ 0 = 0 + ~a = ~v ∀~a ∈ R3 .
Il vettore nullo e l’unico vettore di R3 di modulo nullo. Ogni vettore ~a = [A−O] ammetteun opposto additivo, i cui segmenti rappresentativi coincidono in tutto e per tutto conquelli di ~a salvo che per l’orientamento. L’opposto di ~a ∈ R3 viene indicato con −~a, sicche
~a+ (−~a) = (−~a) + ~a = 0 ∀~a ∈ R3 .
La differenza fra due vettori viene definita in modo indiretto, come somma fra il primovettore e l’opposto del secondo
~a−~b def= ~a+ (−~b) .
1.1.4 Prodotto di un vettore per uno scalareIl prodotto di uno scalare α ∈ R per un vettore ~a = [A−O] ∈ R3, e il vettore:
nullo se α = 0 o ~a = 0;
il cui segmento rappresentativo ha la stessa retta d’azione di A−O, lo stesso verso diA−O e modulo
α|A−O| ,qualora sia α > 0;
il cui segmento rappresentativo ha la stessa retta d’azione di A − O, verso oppostorispetto ad A−O e modulo
|α||A−O| ,per α < 0.
Stefano Siboni 3

Universita degli studi di Trento Corso di Meccanica razionale
E evidente dalla definizione che l’opposto additivo di un vettore coincide con il suo prodottoper lo scalare −1
(−1)~a = −~a ∀~a ∈ R3 .
1.1.5 Relazione con la definizione generale di spazio vettorialeL’insieme R3, munito delle operazioni di somma e di prodotto per uno scalare e un casoparticolare di spazio vettoriale sul campo dei numeri reali. Posto infatti V = R3, leoperazioni introdotte sono applicazioni del tipo
(~a,~b) ∈ V× V −−−−−−−−−→ ~a+~b ∈ V
(α,~a) ∈ R× V −−−−−−−−−→ α~a ∈ V
per le quali:
V,+ e un gruppo commutativo — o abeliano;
vale la proprieta pseudoassociativa del prodotto
α(β~v) = (αβ)~v ∀α, β ∈ R , ∀~v ∈ V
e verificata la proprieta pseudodistributiva del prodotto rispetto alla somma
(α+ β)~v = α~v + β~v ∀α, β ∈ R , ∀~v ∈ V
vale la proprieta distributiva del prodotto per uno scalare rispetto alla somma vetto-riale
α(~u+ ~v) = α~u + α~v ∀α ∈ R , ∀ ~u,~v ∈ V
e soddisfatta la legge dell’identita
1~v = ~v ∀~v ∈ V
essendo 1 l’unita del campo reale — elemento neutro del prodotto fra numeri reali.
Le proprieta sopraelencate individuano l’insieme V, munito delle operazioni di somma fravettori e di prodotto fra uno scalare ed un vettore, come spazio vettoriale sul camporeale. A R3 e quindi possibile applicare tutti i teoremi formali relativi agli spazi vettorialireali.
1.1.6 Sistemi di vettori linearmente dipendenti/indipendentiSi chiama combinazione lineare dei vettori ~v1, . . . , ~vn ∈ R3, di coefficienti scalari c1, . . .,cn ∈ R, l’espressione
c1~v1 + . . .+ cn~vn =
n∑i=1
ci~vi .
Stefano Siboni 4

Universita degli studi di Trento Corso di Meccanica razionale
Un sistema di vettori ~v1, . . . , ~vn ∈ R3 si dice linearmente indipendente se una suacombinazione lineare arbitraria si annulla soltanto se si annullano tutti i relativi coefficientiscalari
n∑i=1
ci~vi = 0 ⇐⇒ ci = 0 ∀ i = 1, . . . , n .
In caso contrario, qualora cioe sia possibile annullare la combinazione lineare dei vettoriscegliendo coefficienti scalari non tutti nulli, si parla di sistema linearmente dipendente.In base alla definizione di somma e prodotto per uno scalare, e immediato verificare che:
(i) un vettore ~v1 ∈ R3 e linearmente indipendente se e soltanto se non nullo
c1~v1 = 0 ⇒ c1 = 0 ⇐⇒ ~v1 6= 0 ;
(ii) due vettori ~v1, ~v2 ∈ R3 risultano linearmente indipendenti se e soltanto se sono rap-presentabili mediante segmenti orientati non paralleli;
(iii) tre vettori ~v1, ~v2, ~v3 ∈ R3 sono linearmente indipendenti se e soltanto se ammettonouna rappresentazione mediante segmenti orientati con lo stesso punto di applicazionenon complanari — disponendosi dunque secondo gli spigoli di un parallelepipedoproprio, di volume strettamente positivo.
Due vettori sono linearmente dipendenti se i segmenti orientati che li rappresentano risul-tano paralleli. Una terna di vettori e invece linearmente dipendente qualora risultinocomplanari i loro segmenti rappresentativi in un comune punto di applicazione. Esempi disistemi di 1, 2, 3 vettori linearmente dipendenti sono illustrati nella figura seguente.
Un sistema di vettori linearmente indipendenti si definisce massimo se qualsiasi sistema divettori ottenuto da quello aggiungendo un vettore ulteriore risulta linearmente dipendente.Un sistema di vettori linearmente indipendente massimo si dice anche, piu semplicemente,una base di R3. Tutte le basi di R3 hanno lo stesso numero — tre — di elementi
~v1 ~v2 ~v3 .
Stefano Siboni 5

Universita degli studi di Trento Corso di Meccanica razionale
Tale numero e noto come la dimensione dello spazio: R3 costituisce percio uno spaziovettoriale di dimensione tre. Qualsiasi vettore ~v di R3 si esprime, e in un solo modo, comecombinazione lineare dei vettori di una base comunque assegnata
~v = c1~v1 + c2~v2 + c3~v3 .
I coefficienti c1, c2, c3 di questa combinazione lineare dipendono unicamente dalla sceltadella base assegnata e ad essi ci si riferisce come le componenti del vettore ~v rispetto allabase ~v1, ~v2, ~v3.
1.1.7 Prodotto scalare, o internoIl prodotto scalare o interno di due vettori ~a e ~b di R3 e il numero reale dato dal prodottodei moduli dei vettori e del coseno dell’angolo α ∈ [0, π], intendendosi con α il piu piccoloangolo compreso fra i segmenti orientati che rappresentano i due vettori in un comunepunto di applicazione O arbitrario
Il prodotto scalare dei vettori ~a e ~b si indica con ~a ·~b — da leggersi ~a scalare ~b — ed equindi dato dall’espressione
~a ·~b = |~a| |~b| cosα ,
risultando indipendente dalla scelta del punto di applicazione O. Qualora uno deglioperandi risulti nullo, l’angolo α non e definito univocamente ma il prodotto scalare assumecomunque valore zero a prescindere dalla scelta — arbitraria — di α.
Il prodotto scalare permette di riesprimere, in modo del tutto equivalente, il modulo di ungenerico vettore di R3. Si ha infatti l’ovvia identita
|~a| = (~a · ~a)1/2 = (~a2)1/2 ∀~a ∈ R3
che identifica il modulo di un vettore con la radice quadrata aritmetica del suo prodottoscalare con se stesso — altrimenti noto come quadrato, ~a2, del vettore.
Due vettori sono detti ortogonali se il loro prodotto scalare e nullo
~a , ~b ortogonali ⇐⇒ ~a ·~b = 0
e evidente dalla definizione che il vettore nullo risulta ortogonale ad ogni altro, e che lanozione di ortogonalita dei vettori equivale a quella di perpendicolarita dei corrispondentisegmenti orientati. Vettori non nulli e fra loro ortogonali costituiscono sempre un sistemalinearmente indipendente. Una base ortogonale di R3 e composta da tre vettori nonnulli due a due ortogonali. Se i vettori ortogonali sono di modulo unitario, si parla di baseortonormale, i cui elementi vengono di solito indicati con la notazione seguente
e1 e2 e3
Stefano Siboni 6

Universita degli studi di Trento Corso di Meccanica razionale
e soddisfano la condizione di ortonormalizzazione
ei · ej = δij ∀ i, j = 1, 2, 3
nella quale δij e il cosiddetto simbolo di Kronecker di indici i, j
δijdef=
1 se i = j0 se i 6= j
∀ i, j = 1, 2, 3 .
Le componenti di un generico vettore ~v ∈ R3 rispetto ad una base ortonormale e1, e2, e3
si denotano con v1, v2, v3; esse sono anche date dai prodotti scalari di ~v con i rispettiviversori di base. Sussiste percio la relazione generale
~v =3∑i=1
viei =3∑i=1
(~v · ei)ei ∀~v ∈ R3 .
Le basi ortonormali e1, e2, e3 di R3 si distinguono in destre e sinistre o, rispettivamente,sinistrorse e destrorse.(1) Nelle basi destre i versori sono ordinati e mutuamente orien-tati secondo la regola della mano destra, o convenzione sinistrorsa: se si immaginadi serrare a pugno la mano destra e di drizzarne poi il pollice, disponendo la mano cosıconfigurata in modo che il pollice indichi direzione e verso del versore e3, allora il senso diavvolgimento delle dita restanti specifica il senso della rotazione che porterebbe il versoree1 a sovrapporsi ad e2 spazzando l’angolo retto compreso fra i due. Nelle basi sinistre, odestrorse, vale la condizione opposta.
E facile convincersi che da una base ortonormale destra si puo generare una base ortonor-male sinistra, o viceversa, invertendo un numero dispari di versori — un unico versore,oppure tutti e tre i versori della base ortonormale.
1.1.8 Prodotto vettoriale, o esternoIl prodotto vettoriale, o esterno, di due vettori ~a e ~b di R3 e un vettore di
modulo uguale a |~a| |~b| sinα, essendo α il piu piccolo angolo compreso fra i segmentiorientati rappresentativi dei vettori ed applicati in un punto comune;
(1)In alcuni testi le terne destre sono anche dette destrorse e quelle sinistre sinistrorse
Stefano Siboni 7

Universita degli studi di Trento Corso di Meccanica razionale
direzione ortogonale al piano di giacitura dei segmenti orientati che rappresentato ivettori;
verso determinato dalla regola della mano destra, in modo che rispetto ai vettori ~a e~b il prodotto vettoriale sia orientato secondo la convenzione sinistrorsa.
Qualora i vettori ~a e ~b risultino linearmente dipendenti, i loro segmenti rappresentativi inun comune punto di applicazione sono paralleli e l’angolo α vale 0 o π; sebbene il piano digiacitura dei segmenti orientati non sia univocamente definito, l’annullarsi di sinα implicacomunque l’annullarsi del prodotto vettoriale.
Il prodotto vettoriale di ~a e ~b si indica con il simbolo ~a ∧ ~b e si legge ~a vettore ~b. Ilmodulo del prodotto vettoriale si identifica con l’area del parallelogramma i cui lati sianoi segmenti rappresentativi dei vettori rispetto ad un comune punto di applicazione — lostesso parallelogramma che si considera nella definizione della somma vettoriale.
1.1.9 Proprieta delle operazioni sui vettoriSi e gia precisato che la somma di vettori in R3 costituisce un gruppo commutativo: inparticolare, quindi, e associativa
~a+ (~b+ ~c) = (~a+~b) + ~c ∀~a,~b,~c ∈ R3
e commutativa~a+~b = ~b+ ~a ∀~a,~b ∈ R3 .
La proprieta pseudoassociativa del prodotto per uno scalare e quelle distributiva e pseu-dodistributiva dello stesso prodotto rispetto alla somma sono state messe in evidenzaassieme alla struttura generale di spazio vettoriale di R3.Per il prodotto scalare e vettoriale valgono, rispetto alla somma ed al prodotto per unoscalare, le stesse proprieta formali che ci si aspetta debbano ricorrere per operazioni chehanno nome di prodotto e di somma. Si hanno soltanto alcune, importanti, eccezioni:
(i) il prodotto vettoriale non e associativo, per cui in generale risulta
~a ∧ (~b ∧ ~c) 6= (~a ∧~b) ∧ ~c
per vettori ~a,~b,~c ∈ R3 generici;
Stefano Siboni 8

Universita degli studi di Trento Corso di Meccanica razionale
(ii) il prodotto vettoriale non risulta commutativo, ma bensı anticommutativo oantisimmetrico
~a ∧~b = −~b ∧ ~a ∀~a,~b ∈ R3 ;
(iii) parlare di associativita del prodotto scalare non ha ovviamente alcun significato, giacceil prodotto scalare non genera un risultato vettoriale
~a ·~b · ~c non e definita
1.1.10 Algebra vettoriale rispetto ad una base ortonormaleRispetto ad una base ortonormale e1, e2, e3 le operazioni vettoriali fondamentali possonoessere eseguite agevolmente per componenti. Cosı e il caso della somma di due vettori,che si ricava sommando ordinatamente le componenti corrispondenti
~a =3∑i=1
aiei ~b =3∑i=1
biei =⇒ ~a+~b =3∑i=1
(ai + bi)ei ,
una relazione, si badi bene, indipendente dalla condizione di ortonormalita della base evalida per basi qualsivoglia. Al fine di esprimere in forma semplice il prodotto scalare, laproprieta di ortonormalita della base e invece indispensabile. Per gli stessi vettori ~a e ~b siha infatti
~a ·~b =
3∑i=1
aiei ·3∑j=1
bj ej =
3∑i=1
3∑j=1
aibj ei · ej =
3∑i=1
3∑j=1
aibj δij =
3∑i=1
aibi
e il prodotto scalare e dato dalla somma dei prodotti delle componenti corrispondenti.Per il prodotto vettoriale e altresı importante che la base ortonormale sia destra
~a ∧~b =3∑i=1
aiei ∧3∑j=1
bj ej =3∑i=1
3∑j=1
aibj ei ∧ ej =
∣∣∣∣∣∣e1 e2 e3
a1 a2 a3
b1 b2 b3
∣∣∣∣∣∣poiche in caso contrario il determinante simbolico dell’espressione finale deve essere cam-biato di segno.
1.2 Vettori spostamento in E3
In molte applicazioni alla meccanica razionale ha interesse considerare vettori sposta-mento in E3, vettori di R3 dei quali si specifica anche il punto di applicazione e che de-scrivono lo spostamento da una posizione A ad una posizione B. Un vettore spostamentoviene quindi specificato completamente assegnandone entrambi gli estremi e precisandoneil verso, fra i due disponibili. Per un vettore di estremi A e B, orientato da A verso B, siusa la notazione
B −A
Stefano Siboni 9

Universita degli studi di Trento Corso di Meccanica razionale
nella quale il segno meno funge semplicemente da separatore fra gli estremi e non ha valoredi operatore. Questa notazione e molto vantaggiosa per la manipolazione algebrica dellesomme vettoriali, in quanto dalla definizione segue immediatamente che
B −A + C −B = C −A
−(B −A) = A−B.
I risultati delle espressioni precedenti sono gli stessi che si otterrebbero, trattando for-malmente i simboli degli estremi come numeri reali e riguardando i segni + e − comeusuali operatori algebrici di somma e sottrazione — avendo cura, naturalmente, di scriverel’espressione finale in una forma geometricamente interpretabile, con il segno − interpostofra due estremi.
E opportuno precisare che una trattazione rigorosa dei vettori spostamento in E3 richiede-rebbe una buona esposizione della teoria degli spazi affini euclidei, che fornisce una de-scrizione formale dei concetti di spazio dei punti, spazio vettoriale associato e siste-ma di vettori spostamento. Tali aspetti vanno pero al di la degli scopi del corso e nonverranno esaminati in queste note.
1.3 Identita vettoriali notevoliNell’algebra vettoriale rivestono grande importanza alcune identita vettoriali notevoli, chesono largamente impiegate nei calcoli pratici e nella prova di alcuni teoremi. Si riportanonel seguito, senza dimostrazione, quelle piu rilevanti.
1.3.1 Identita del prodotto misto
Si dice prodotto misto di tre vettori ~a,~b,~c, nell’ordine, l’espressione
~a ∧~b · ~c
nella quale si sottintende, ne potrebbe essere altrimenti, che il prodotto vettore debba essereeseguito prima del prodotto scalare. Il prodotto misto e suscettibile di una notevole inter-pretazione geometrica, che lo rende utile nel calcolo del volume dei poliedri. Assumendoper semplicita tre vettori non nulli, rappresentati da segmenti orientati con comune puntodi applicazione O, il prodotto ~a∧~b definisce un vettore ortogonale al piano individuato da~a e ~b, il cui modulo coincide con l’area del parallelogramma O~a~b di lati ~a e ~b. Il successivoprodotto scalare con ~c comporta che tale area sia moltiplicata per la proiezione di ~c lungola normale allo stesso parallelogramma: la proiezione rappresenta l’altezza relativa ad O~a~bdel parallelepipedo(1) di vertice O e spigoli ~a, ~b, ~c: il prodotto misto rappresenta percio ilvolume del parallelepipedo di vertice O i cui spigoli siano individuati dai vettori ~a, ~b, ~c,con segno positivo o negativo secondo che l’angolo α compreso fra i vettori ~a ∧~b e ~c siaminore o maggiore di π/2 radianti.
(1)in generale non rettangolo
Stefano Siboni 10

Universita degli studi di Trento Corso di Meccanica razionale
La discussione precedente e illustrata nella figura che segue
Si osservi, in particolare, che l’annullarsi del prodotto misto corrisponde al caso in cui itre segmenti orientati rappresentativi dei vettori ~a, ~b e ~c siano perfettamente complanari,condizione questa equivalente alla lineare dipendenza del sistema ~a,~b,~c. Pertanto con-
dizione necessaria e sufficiente perche i vettori ~a, ~b, ~c siano linearmente indipendenti e cheil loro prodotto misto risulti diverso da zero.
L’identita fondamentale del prodotto misto stabilisce che il valore — scalare — del prodottomisto non cambia se si scambiano fra loro prodotto scalare e vettore
~a ·~b ∧ ~c = ~a ∧~b · ~c ∀~a,~b,~c ∈ R3 .
E questo un caso particolare di una proprieta un poco piu generale, nota come proprietadi circolarita del prodotto misto, secondo la quale il valore del prodotto rimane invariatopermutando circolarmente gli operandi
~a −−−−−−→ ~b
~b −−−−−−→ ~c
~c −−−−−−→ ~a
in modo che~a ·~b ∧ ~c = ~b · ~c ∧ ~a = ~c · ~a ∧~b .
1.3.2 Prodotto misto come determinanteIl prodotto misto di tre vettori ~a,~b,~c si puo rappresentare sotto forma di determinante dellecomponenti degli operandi rispetto ad una base ortonormale destra e1, e2, e3. Se infatti
~a =3∑i=1
ai ei ~b =3∑i=1
bi ei ~c =3∑i=1
ci ei
sono le espressioni dei vettori ~a,~b,~c rispetto alla base assegnata, si ha
~a ·~b ∧ ~c =
∣∣∣∣∣∣a1 a2 a3
b1 b2 b3c1 c2 c3
∣∣∣∣∣∣ .Stefano Siboni 11

Universita degli studi di Trento Corso di Meccanica razionale
1.3.3 Identita del doppio prodotto vettorialeIl doppio prodotto vettoriale di tre vettori ~a,~b,~c si puo esprimere per mezzo dell’identitaseguente
~a ∧ (~b ∧ ~c) = (~a · ~c)~b− (~a ·~b)~c ∀~a,~b,~c ∈ R3 .
2. Terne di riferimento nello spazioIn questa sezione si introduce il concetto di terna di riferimento nello spazio e si affronta ilproblema della ubicazione di una terna di riferimento rispetto ad un’altra — cambiamentodella terna di riferimento. Questi argomenti verranno affrontati da un punto di vista pu-ramente geometrico, rimandando per il momento la questione dell’eventuale moto relativodelle terne considerate.
2.1 Terne di riferimento cartesiane nello spazioSi consideri un punto O dello spazio e una base e1, e2, e3 di R3. Qualsiasi punto P dellospazio e individuato, rispetto ad O, per mezzo del vettore di R3
P −O
che rispetto alla base assegnata e1, e2, e3 potra rappresentarsi per componenti mediante lacombinazione lineare
P −O =3∑i=1
xiei x1, x2, x3 ∈ R .
L’insieme composto dal punto O e dalla base e1, e2, e3 di R3 si dice terna di riferimentocartesiana dello spazio. Il punto O ne costituisce l’origine, mentre e1, e2, e3 e la baseassociata alla terna di riferimento. Il vettore P − O che individua la posizione di ungenerico punto P dello spazio rispetto all’origine O si chiama vettore posizione delpunto P , e le sue componenti x1, x2, x3 rispetto alla base associata sono dette coordinatecartesiane del punto P rispetto alla terna di riferimento. La terna di riferimento vieneindicata con Oe1e2e3, ovvero come Ox1x2x3.
Le rette passanti per l’origine O e la cui direzione e individuata da ciascuno dei vettoridi base sono note come assi della terna di riferimento, indicati con Oxi o Oei, per i =
Stefano Siboni 12

Universita degli studi di Trento Corso di Meccanica razionale
1, 2, 3. Nel caso che la base associata sia ortonormale, si parla di terna di riferimentocartesiana ortogonale. Una terna di riferimento ortogonale puo essere destra o sinistrasecondo che la base ortonormale associata sia del tipo corrispondente. Nel seguito siassumera sempre, salvo sia diversamente specificato, che le terne di riferimento cartesianeutilizzate siano ortogonali destre.Dato un generico vettore ~v — il cui significato fisico potrebbe essere qualsiasi, non neces-sariamente quello di un vettore posizione — si dicono componenti di ~v rispetto alla ternaOe1e2e3 le componenti di ~v rispetto alla base associata e1e2e3.
2.2 Cambiamento della terna di riferimentoSi considerino due terne di riferimento cartesiane ortogonali:
Ωξ1ξ2ξ3, con base associata e′1, e′2, e′3
e Ox1x2x3, di versori e1, e2, e3.
Dato un arbitrario punto P , si indichino con ξ1, ξ2, ξ3 le coordinate di P rispetto alla ternadi origine Ω, e con x1, x2, x3 le coordinate dello stesso punto rispetto alla seconda ternaOx1x2x3
P − Ω =3∑i=1
ξie′i P −O =
3∑j=1
xj ej (2.1)
mentre le coordinate dell’origine O relative al primo riferimento sono ξo1 , ξo2 , ξo3
O − Ω =
3∑i=1
ξoi e′i (2.2)
Si vuole stabilire la relazione fra le coordinate ξi e le coordinate xi del generico punto P .
A questo scopo si osserva preliminarmente che i vettori posizione P −Ω e P −O sono legatifra loro dall’ovvia relazione di somma
P − Ω = O − Ω + P −O . (2.3)
Stefano Siboni 13

Universita degli studi di Trento Corso di Meccanica razionale
La prima delle (2.1) e la (2.2) sono gia espresse nella base e′1e′2e′3, per cui e sufficiente
riscrivere il vettore P − O come combinazione lineare degli stessi versori. Poiche la basee′1, e
′2, e′3 e ortonormale, vale la scomposizione
ej =3∑i=1
ej · e′i e′i ∀ j = 1, 2, 3 ,
che sostituita nella seconda delle equazioni (2.1), e scambiando le sommatorie, porge
P −O =3∑j=1
xj
3∑i=1
ej · e′i e′i =3∑i=1
[ 3∑j=1
ej · e′i xj]e′i =
3∑i=1
[ 3∑j=1
e′i · ej xj]e′i .
Conviene introdurre la matrice A di elementi
Aijdef= e′i · ej ∀ i, j = 1, 2, 3 (2.4)
in modo che risulta
P −O =3∑i=1
[ 3∑j=1
Aij xj
]e′i
e l’equazione (2.3) diventa
3∑i=1
ξie′i =
3∑i=1
ξoi e′i +
3∑i=1
[ 3∑j=1
Aij xj
]e′i =
3∑i=1
[ξoi +
3∑j=1
Aij xj
]e′i
riducendosi pertanto al sistema di equazioni lineari
ξi = ξoi +
3∑j=1
Aij xj ∀ i = 1, 2, 3
che puo peraltro essere scritto nella forma matriciale equivalente ξ1ξ2ξ3
=
ξo1ξo2ξo3
+A
x1
x2
x3
. (2.5)
L’equazione (2.5) costituisce la relazione cercata: essa consente di ricavare le coordinateξi del punto P note che siano le coordinate xi dello stesso punto. Gli elementi (2.4) dellamatrice A si interpretano geometricamente come coseni di angoli, precisamente Aij e ilcoseno dell’angolo ϕij compreso fra i versori e′i ed ej
Aij = e′i · ej = cosϕij ∀ i, j = 1, 2, 3
Stefano Siboni 14

Universita degli studi di Trento Corso di Meccanica razionale
ovvero dell’angolo compreso fra la direzione dell’asse Ωξ′i e quella dell’asse Oxj . Gli angoliϕij sono atti a specificare la direzione degli assi della terna Ox1x2x3 rispetto alla ternaΩξ1ξ2ξ3. Per questo motivo gli elementi di matrice Aij sono noti come coseni direttori(1)
e la matrice A si dice, corrispondentemente, matrice dei coseni direttori della secondaterna rispetto alla prima.
La matrice A dei coseni direttori e una matrice 3× 3, ma i suoi 9 elementi non risultantotutti indipendenti. Si tratta infatti di una matrice ortogonale: la matrice e sempreinvertibile e la sua inversa A−1 coincide con la trasposta AT della matrice stessa. Perconvincersi di questo e sufficiente considerare il prodotto scalare delle espressioni di ei edej in termini dei versori di base e′1e
′2e′3
ei =3∑a=1
ei · e′a e′a =3∑a=1
Aai e′a ej =
3∑b=1
ej · e′b e′b =3∑b=1
Abj e′b
e fare uso della condizione di ortonormalita delle basi associate alle due terne di riferimento
δij = ei · ej =3∑a=1
Aai e′a ·
3∑b=1
Abj e′b =
3∑a=1
3∑b=1
AaiAbjδab =3∑a=1
AaiAaj ,
notando che la matrice trasposta di A soddisfa, per definizione, l’ovvia condizione
(AT )ia = Aai
cosicche
δij =3∑a=1
(AT )iaAaj = (ATA)ij ∀ i, j = 1, 2, 3 (2.6)
e quindiATA = I .
In modo analogo — basta scambiare i versori con apice e quelli senza apice nel calcoloprecedente — si prova che
AAT = I
e si conclude pertanto che A−1 = AT , come affermato. Dalla proprieta di ortogonalita,segue immediatamente che la matrice dei coseni direttori deve avere determinante di valoreassoluto unitario
[detA]2 = detA detA = det(AT ) detA = det(ATA) = det I = 1 ,
a ulteriore riprova della invertibilita della matrice. Ma la condizione di ortogonalita poneben altre restrizioni agli elementi della matrice: la matrice dei coseni direttori dipendeda tre parametri liberi. Una giustificazione euristica si puo avere notando che le (2.6)
(1)ossia coseni di direzione
Stefano Siboni 15

Universita degli studi di Trento Corso di Meccanica razionale
forniscono 6 relazioni fra i 9 elementi della matrice. Una dimostrazione rigorosa dell’assertorichiederebbe l’uso del teorema di Dini delle funzioni implicite e non verra qui discussa.
2.3 Esempio notevoleUn caso particolare di notevole interesse e quello di due terne Oξ1ξ2ξ3 e Ox1x2x3 di ugualeorigine O e con gli assi coordinati Oξ3 e Ox3 coincidenti, attorno ai quali la seconda ternae ruotata rispetto alla prima di un angolo θ, orientato secondo la regola della mano destra
La matrice dei coseni direttori vale
A(θ) =
e′1 · e1 e′1 · e2 e′1 · e3
e′2 · e1 e′2 · e2 e′2 · e3
e′3 · e1 e′3 · e2 e′3 · e3
=
cos θ − sin θ 0sin θ cos θ 0
0 0 1
e di essa e possibile verificare direttamente l’ortogonalita
A(θ)T =
cos θ sin θ 0− sin θ cos θ 0
0 0 1
=
cos(−θ) − sin(−θ) 0sin(−θ) cos(−θ) 0
0 0 1
= A(−θ)
essendo chiaramente A(−θ) = A(θ)−1 — l’inversa della rotazione di un angolo θ attornoall’asse Oe3 corrisponde alla rotazione di un angolo opposto −θ attorno allo stesso asse.
3. Vettori applicatiSi e gia visto come in taluni casi sia importante specificare anche il punto di applicazionedi un vettore di R3; cio rende necessari la definizione e lo studio dei cosiddetti vettori ap-plicati, per i quali e stata sviluppata una teoria molto potente ed elegante, di grandissimautilita in meccanica.
3.1 Definizioni fondamentaliSi introducono preliminarmente i concetti basilari di vettore applicato e di sistema divettori applicati, con le relative nozioni di risultante e momento risultante rispetto ad unpolo assegnato (o centro di riduzione).
Stefano Siboni 16

Universita degli studi di Trento Corso di Meccanica razionale
3.1.1 Vettore applicato
Per vettore applicato si intende una coppia ordinata
(P,~v)
costituita da un punto P dell’usuale spazio fisico E3 e da un vettore di R3. Il punto Pe detto punto di applicazione del vettore applicato. Per ~v 6= 0, la retta parallela a ~vpassante per P si dice retta d’azione del vettore applicato.
3.1.2 Sistema di vettori applicati
Si definisce sistema di vettori applicati l’insieme
S = (Pi, ~vi) : i = 1, . . . , n
costituito dagli n vettori applicati (Pi, ~vi), i = 1, . . . , n.
3.1.3 Risultante di un sistema di vettori applicati
Si denomina risultante di un sistema S di vettori applicati, e lo si indica con il simbolo ~R,la somma dei vettori relativi:
~R =n∑i=1
~vi .
3.1.4 Momento (polare) di un vettore applicato
Si dice momento (polare) di un vettore applicato (P,~v) rispetto ad un punto O il vettore
(P −O) ∧ ~v .
Il punto O si dice polo o centro di riduzione del momento.
3.1.5 Momento risultante (polare) di un sistema di vettori applicati
Per momento risultante (o polare) in O di un sistema S di vettori applicati si intende lasomma dei momenti dei singoli vettori applicati calcolati rispetto al punto O, detto poloo centro di riduzione:
~MO =
n∑i=1
(Pi −O) ∧ ~vi .
Il momento risultante dipende in generale dalla scelta del polo O, che quindi deve esserespecificato. La notazione — ~MO — ribadisce questa dipendenza.
Stefano Siboni 17

Universita degli studi di Trento Corso di Meccanica razionale
3.2 Cambiamento del polo nel momento risultanteQualsiasi cambiamento nella scelta del polo comporta una variazione del momento risul-tante di un sistema di vettori applicati. Se il polo O viene sostituito con un secondo poloA, si ha la relazione
~MA =n∑i=1
(Pi −A) ∧ ~vi =n∑i=1
(Pi −O + O −A) ∧ ~vi =
=
n∑i=1
[(Pi −O) ∧ ~vi + (O −A) ∧ ~vi
]= ~MO + (O −A) ∧ ~R
per cui la trasformazione del momento risultante avviene secondo la formula generale
~MA = ~MO + (O −A) ∧ ~R . (3.1)
Nel calcolo precedente si e fatto uso del cosiddetto teorema di Varignon
n∑i=1
(O −A) ∧ ~vi = (O −A) ∧n∑i=1
~vi
che esprime la proprieta distributiva del prodotto vettore rispetto alla somma vettoriale.
3.2.1 Sistemi di vettori applicati con risultante nulloNel caso particolare che il sistema di vettori applicati abbia risultante nullo, la relazione(3.1) implica che si abbia
~MA = ~MO + (O −A) ∧ 0 = ~MO ∀A,O ∈ E3
per cui il momento risultante di un sistema di vettori applicati con risultante nullo eindipendente dalla scelta del polo, del quale dunque non e richiesta la specifica.
3.2.2 CoppiaUn caso particolare di notevole interesse e quello della coppia, sistema costituito da duevettori applicati di risultante nullo e dunque sempre esprimibile nella forma
(P1,−~v) , (P2, ~v)
per punti P1, P2 ∈ E3 comunque assegnati ed un qualsiasi vettore ~v ∈ R3. Il momentorisultante della coppia e indipendente dal polo prescelto e si riduce a
~M coppia = (P2 − P1) ∧ ~v .
Stefano Siboni 18

Universita degli studi di Trento Corso di Meccanica razionale
3.3 Momento assialeNello studio dei vettori applicati ha interesse considerare il momento risultante rispetto adun asse, noto come momento assiale del sistema.
3.3.1 Momento assiale di un sistema di vettori applicati rispetto ad una rettaorientata a
Il momento assiale Ma di un sistema di vettori applicati S rispetto ad una retta orientataa, individuata da un suo punto O e da un versore tangente n, si definisce per mezzodell’espressione
Ma = n · ~MO = n ·n∑i=1
(Pi −O) ∧ ~vi
interpretabile come la componente lungo l’asse del momento risultante calcolato rispettoad un polo preso sullo stesso asse. La definizione dipende unicamente dalla retta orientataa e non dalla scelta del polo O ∈ a. Per convincersene basta applicare la formula (3.1) perun qualsiasi altro punto A ∈ a
n · ~MA = n · [ ~MO + (O −A) ∧ ~R] = n · ~MO + n · (O −A) ∧ ~R
e notare che l’ultimo termine a secondo membro e identicamente nullo
n · (O −A) ∧ ~R = n ∧ (O −A) · ~R = 0 · ~R = 0
in quanto O −A risulta parallelo a n ∀O,A ∈ a. Percio
n · ~MA = n · ~MO ∀A,O ∈ a
come affermato.
3.4 Asse centralePer un sistema di vettori applicati con risultante non nullo si introduce il concetto diasse centrale. Rispetto ad un qualsiasi punto dell’asse centrale il momento risultante hala proprieta di essere parallelo al risultante del sistema.
3.4.1 Asse centrale di un sistema di vettori applicati con risultante non nulloPer un sistema S di vettori applicati con risultante ~R non nullo l’asse centrale a vienedefinito come il luogo dei punti A ∈ E3 rispetto ai quali il momento risultante ~MA delsistema e un vettore parallelo al risultante ~R
a = A ∈ E3 : ~MA ‖ ~R . (3.2)
Il teorema seguente assicura esistenza ed unicita dell’asse centrale per un qualsiasi sistemadi vettori applicati, purche di risultante diverso da zero.
Stefano Siboni 19

Universita degli studi di Trento Corso di Meccanica razionale
3.4.2 Teorema dell’asse centrale
Per un sistema di vettori applicati con risultante ~R non nullo l’asse centrale definito da(3.2) e una retta parallela a ~R rappresentabile parametricamente nella forma
A ∈ E3 : A−O =1
|~R|2~R ∧ ~MO + α ~R , α ∈ R
dove O ∈ E3 e un qualsiasi punto assegnato e ~MO indica il momento risultante del sistemarispetto al polo O. Il momento risultante e assume lo stesso valore in ogni punto A dell’assecentrale.
Dimostrazione
Scelto un punto O a piacere ed indicato con ~MO il momento risultante in O del sistemadi vettori applicati, con risultante ~R 6= 0, i punti A dell’insieme (3.2) sono individuati dauna relazione del tipo
~MO + (O −A) ∧ ~R = λ ~R (3.3)
per un qualche scalare λ ∈ R. L’equazione deve essere risolta nel vettore incognito A−O,in modo da consentire l’individuazione dei punti A ∈ a. A questo scopo non e possibileprocedere direttamente ad isolare il vettore A − O, in quanto il prodotto vettoriale nonammette inversi. Si deve dunque ricorrere ad un trucco che consenta di ricavare la soluzionein modo indiretto. Si moltiplicano vettorialmente a sinistra ambo i membri dell’equazione(3.3) per il vettore ~R e si applica la proprieta distributiva per ottenere la relazione
~R ∧ ~MO + ~R ∧ [(O −A) ∧ ~R] = ~R ∧ (λ~R) = 0
nella quale il coefficiente incognito λ non compare piu, con conseguente semplificazionedel problema. A primo membro si fa uso dell’identita del doppio prodotto vettoriale e siriesprime la relazione precedente nella forma
~R ∧ ~MO + (O −A)|~R|2 − ~R [~R · (O −A)] = 0
dalla quale si deduce, dato che ~R 6= 0 per ipotesi,
A−O =1
|~R|2~R ∧ ~MO +
~R · (A−O)
|~R|2~R . (3.4)
La (3.4) non puo considerarsi esprimere la soluzione del problema, in quanto l’incognitaA − O compare anche a secondo membro. Appare tuttavia evidente che il vettore A − Odeve comunque scriversi nella forma
A−O =1
|~R|2~R ∧ ~MO + α~R (3.5)
Stefano Siboni 20

Universita degli studi di Trento Corso di Meccanica razionale
per una scelta opportuna dello scalare α ∈ R. In effetti e facile verificare che i punti Aindividuati dalla (3.5) costituiscono punti dell’insieme a per qualsiasi valore dello scalareα. Si ha infatti che, per A−O dato da (3.5), vale
~MA = ~MO + (O −A) ∧ ~R = ~MO + ~R ∧ (A−O) =
= ~MO + ~R ∧[
1
|~R|2~R ∧ ~MO + α~R
]= ~MO +
1
|~R|2~R ∧ (~R ∧ ~MO) =
= ~MO +1
|~R|2[~R(~R · ~MO)− ~MO |~R|2
]=
~R · ~MO
|~R|2~R
per cui il momento risultante ~MA e della forma richiesta λ~R a patto di assumere
λ =~R · ~MO
|~R|2.
I punti richiesti sono percio individuati dalla formula (3.5) per α arbitrario
A−O =1
|~R|2~R ∧ ~MO + α~R , ∀α ∈ R .
E facile convincersi che i punti cosı ottenuti sono quelli di una retta parallela al risultante~R. Basta osservare che per localizzare i punti A ∈ a e sufficiente muovere dalla posizioneO di un vettore fisso
1
|~R|2~R ∧ ~MO
e quindi di un arbitrario vettore α~R ovviamente parallelo a ~R, oltre che ortogonale alprecedente. L’insieme a viene cosı individuato come una retta parallela ad ~R, secondoquanto illustrato nella figura seguente
L’essere il momento risultante indipendente dalla scelta del polo lungo l’asse centrale segueimmediatamente dalla formula di trasformazione (3.1)
~MB = ~MA + (A−B) ∧ ~R = ~MA ∀A,B ∈ a ,
Stefano Siboni 21

Universita degli studi di Trento Corso di Meccanica razionale
in quanto per qualsiasi A,B ∈ a il vettore A−B e parallelo ad a e dunque ad ~R.
3.5 Sistemi di vettori applicati paralleliUn sistema di vettori applicati paralleli e costituito da vettori di uguale direzione. Essopuo quindi scriversi nella forma
(Pi, fin) , i = 1, . . . , n
dove n e un versore assegnato e gli fi, i = 1, . . . , n sono scalari opportuni che specificanomodulo e verso dei vettori applicati. Il risultante del sistema ha la stessa direzione di n
~R =n∑i=1
fin =( n∑i=1
fi
)n (3.6)
mentre il momento risultante rispetto ad un polo arbitrario O e ortogonale al versore
~MO =n∑i=1
(Pi −O) ∧ fin =n∑i=1
fi(Pi −O) ∧ n =
[ n∑i=1
fi(Pi −O)
]∧ n . (3.7)
3.5.1 Centro di un sistema di vettori applicati paralleli con risultante non nulloLa condizione che il risultante ~R sia diverso da zero equivale a richiede che si abbia
n∑i=1
fi 6= 0 . (3.8)
In tale caso e definito un asse centrale a del sistema, costituito da tutti i punti di E3
rispetto ai quali il momento risultante e parallelo ad ~R. Si ha pertanto
A ∈ a ⇐⇒ ~MA ‖ n .
D’altra parte, per ogni punto A ∈ E3 si e gia stabilito con la relazione (3.7) che il momentorisultante e un vettore ortogonale ad n, per cui deve aversi altresı
~MA ⊥ n
e poiche il solo vettore contemporaneamente parallelo ed ortogonale ad un vettore n nonnullo e il vettore zero, si conclude che
A ∈ a ⇐⇒ ~MA = 0 .
Per un sistema di vettori applicati paralleli l’asse centrale, se definito, e il luogo dei puntirispetto ai quali si annulla il momento risultante del sistema.
Stefano Siboni 22

Universita degli studi di Trento Corso di Meccanica razionale
Assegnato a piacere un punto O, i punti A dell’asse centrale si potranno dunque caratter-izzare per mezzo della relazione vettoriale
0 = ~MA = ~MO + (O −A) ∧ ~R
che sostituendo le espressioni (3.6) e (3.7) diventa
0 =n∑i=1
fi(Pi −O) ∧ n− (A−O) ∧n∑i=1
fin
ed equivale a [1n∑i=1
fi
n∑i=1
fi(Pi −O)− (A−O)
]∧ n = 0
dove si e fatto uso della condizione (3.8). L’equazione ottenuta implica che il vettore entroparentesi quadre sia parallelo ad n e che pertanto l’equazione parametrica dell’asse centraledebba assumere la forma
A−O =1n∑i=1
fi
n∑i=1
fi(Pi −O) + α n ∀α ∈ R (3.9)
in cui il primo vettore a secondo membro e indipendente da n. L’asse centrale si identificaallora con la retta di direzione n passante per il punto C individuato dal vettore posizione
C −O =1n∑i=1
fi
n∑i=1
fi(Pi −O) . (3.10)
Se ora si immagina di modificare il sistema di vettori applicati sostituendo il versore n conun nuovo versore n′, senza modificare i coefficienti fi ne i punti di applicazione Pi,e evidente dalla parametrizzazione (3.9) che l’asse centrale cambiera corrispondentementela propria direzione ma continuera a passare per il punto C. Al variare del versoren, l’asse centrale andra a descrivere un fascio di rette passanti per il punto C che perquesto motivo viene chiamato centro del sistema di vettori applicati paralleli (di risultantenon nullo).
Stefano Siboni 23

Universita degli studi di Trento Corso di Meccanica razionale
3.5.2 Il sistema delle forze peso. BaricentroUn caso di particolare interesse e quello delle forze peso applicate ad un corpo compostoda un numero finito di punti materiali (Pi,mi), i = 1, . . . , n, essendo Pi la posizione edmi la massa inerziale dell’i-esimo punto. Indicato con ~g = gn il vettore accelerazionegravitazionale, il sistema delle forze peso si scrive
(Pi,mi~g) , i = 1, . . . , n
e si riconosce immediatamente essere un sistema di vettori applicati paralleli di direzionen e coefficienti proporzionali alle masse
fi = mig ∀ i = 1, . . . , n .
Il risultante del sistema e chiaramente diverso da zero, dovendosi identificare con il pesototale del sistema
n∑i=1
fi =n∑i=1
mi g 6= 0 .
L’espressione (3.10) del centro diventa allora
C −O =1
n∑i=1
mi g
n∑i=1
mi g(Pi −O) =1
n∑i=1
mi
n∑i=1
mi (Pi −O) (3.11)
ed appare dipendere unicamente dalle posizioni dei punti e dalle rispettive masse, in quantoil comune fattore g si semplifica. Il centro del sistema delle forze peso e detto baricentrodel sistema di punti materiali e viene usualmente indicato con il simbolo G. Si puo in-terpretare, formalmente, come una sorta di media ponderata delle posizioni Pi dei punti,assumendo come pesi i valori delle masse mi. Per questa ragione il baricentro e anche notocome centro di massa del sistema.
Vale la pena di sottolineare che nel caso delle forze peso, l’operazione di variare a piacereil versore n che specifica la direzione dei vettori e facilmente interpretabile dal punto divista fisico. Si puo infatti immaginare di sottoporre il sistema ad una rototraslazionearbitraria: in una terna di riferimento di quiete del sistema cio equivale a modificare apiacere la direzione ed il verso dell’accelerazione gravitazionale ~g e dunque del versore n,senza tuttavia alterare i valori delle masse.
3.6 Sistemi equivalenti di vettori applicatiNello studio dei sistemi rigidi ha particolare rilevanza il concetto di equivalenza di duesistemi di vettori applicati. Si dimostra infatti che le equazioni del moto e le condizionidi equilibrio di un sistema rigido non cambiano se al sistema di forze che effettivamenteagisce sul sistema si sostituisce un qualsiasi altro sistema di forze applicate equivalente alprimo.
Stefano Siboni 24

Universita degli studi di Trento Corso di Meccanica razionale
3.6.1 Definizione. Sistemi equivalenti di vettori applicatiDue sistemi di vettori applicati
S1 = (Pi, ~vi) , Pi ∈ E3 , ~vi ∈ R3 , i = 1, . . . , nS2 = (Qj , ~wj) , Qj ∈ E3 , ~wj ∈ R3 , j = 1, . . . , `
si dicono equivalenti se hanno lo stesso risultante e, relativamente ad un polo comune O,lo stesso momento risultante
~R(S1) = ~R(S2) ~MO(S1) = ~MO(S2) .
Dalla relazione (3.1) e immediato verificare che, causa l’identita dei risultanti, i momentirisultanti sono uguali rispetto ad un polo O se e soltanto se lo sono rispetto ad un qualsiasialtro punto: per il confronto il polo O puo dunque essere scelto a piacere.
3.6.2 Teorema di riduzioneQualsiasi sistema S di vettori applicati e sempre equivalente ad un sistema costituito alpiu da un vettore applicato e da una coppia.
DimostrazioneSiano ~R ed ~MO rispettivamente il risultante ed il momento risultante in O del sistema S.Si consideri il sistema costituito dal vettore applicato (O, ~R) e dalla coppia
(O,
(P −O) ∧ ~MO
|P −O|2)
,(P,− (P −O) ∧ ~MO
|P −O|2)
(3.12)
dove P e un qualsiasi punto distinto da O tale che il vettore P −O sia ortogonale ad ~MO
(P −O) · ~MO = 0 .
E allora facile verificare che il nuovo sistema di vettori applicati e equivalente all’S as-segnato. Il risultante si identifica infatti con quello del solo vettore applicato (O, ~R), in
quanto la coppia non offre alcun contributo; al momento in O e invece (O, ~R) a non porgerecontributo alcuno, per cui dalla coppia si ricava
(O −O) ∧ (P −O) ∧ ~MO
|P −O|2+ (P −O) ∧
[− (P −O) ∧ ~MO
|P −O|2
]=
= (P −O) ∧[ ~MO ∧ (P −O)
|P −O|2
]=
~MO|P −O|2 − (P −O)(P −O) · ~MO
|P −O|2= ~MO
grazie alla ortogonalita di P −O e ~M0.
Il teorema di riduzione puo essere enunciato in una forma piu forte facendo uso del concettodi invariante scalare.
Stefano Siboni 25

Universita degli studi di Trento Corso di Meccanica razionale
3.6.3 Invariante scalareL’invariante scalare di un sistema S di vettori applicati e definito dall’espressione
I = ~R · ~MO ,
in qui O ∈ E3 un polo assegnato a piacere. Benche possa non apparire evidente, ladefinizione non dipende dalla scelta del polo O. Vale infatti, per la (3.1),
~R · ~MA = ~R · [(O −A) ∧ ~R+ ~MO] = ~R · (O −A) ∧ ~R+ ~R · ~MO = ~R · ~MO ∀A ∈ E3
in quanto i vettori ~R e (O − A) ∧ ~R sono sempre ortogonali fra loro. Cio giustifica ladenominazione adottata: I e un invariante in quanto indipendente dalla scelta del poloO, mentre e evidente che si tratta di uno scalare.
3.6.4 Forma forte del teorema di riduzioneUn sistema S di vettori applicati e equivalente ad un sistema costituito o da un solo vettoreapplicato o da una sola coppia se e soltanto se il suo invariante scalare si annulla.
Il teorema individua un semplice criterio per stabilire se sia possibile ottenere un sistemaequivalente ad S che non sia genericamente costituito da un vettore applicato e da unacoppia, come prevede il teorema di riduzione, ma o soltanto da un vettore applicato,senza coppia, o soltanto da una coppia, senza ulteriore vettore applicato.
DimostrazioneE chiaro dalla definizione che se due sistemi di vettori applicati sono equivalenti, alloradevono avere lo stesso invariante scalare. Se S e equivalente ad un solo vettore applicato(O, ~R) si ha
I = ~R · ~MO = ~R · 0 = 0
e il risultato non cambia se si ammette l’equivalenza con una sola coppia di momento ~M— indipendente, come noto, dal polo —
I = ~R · ~MO = 0 · ~M = 0 .
La necessita della condizione I = 0 e cosı stabilita. Viceversa, si assuma I = 0 per S.Possono allora darsi due casi:
(i) se il risultante ~R e nullo, allora il sistema e equivalente ad un’unica coppia di momento~MO, che puo determinarsi ad esempio nella forma (3.12);
(ii) se viceversa vale ~R 6= 0, e definito l’asse centrale a del sistema ed in un generico puntoA di questo deve aversi
~MA = λ ~R
per λ ∈ R opportuno. Di conseguenza risulta
0 = I = ~R · ~MA = ~R · λ~R = λ|~R|2
Stefano Siboni 26

Universita degli studi di Trento Corso di Meccanica razionale
in modo che λ = 0. Percio~MA = 0
ed il sistema di vettori applicati e equivalente all’unico vettore applicato
(A, ~R) .
Resta inteso che qualora si abbia ~R = 0 e ~MO = 0, il sistema di vettori applicati si puosempre intendere equivalente ad un vettore applicato nullo, del tipo (O, 0).
3.7 Sistemi continui di vettori applicatiIn alcuni casi di interesse fisico si rende necessario considerare sistemi di vettori applicatiche agiscono su un insieme continuo di punti: si esamineranno i casi di una curva regolaree di una superficie regolare.
3.7.1 Vettori applicati lungo una curva regolareUna curva regolare γ viene rappresentata per mezzo di una parametrizzazione del tipo
P = ϕ(ξ) , ξ ∈ [ξ1, ξ2]
di classe C1 e con derivata prima non nulla nel proprio intervallo di definizione
ϕ′(ξ) 6= 0 ∀ ξ ∈ [ξ1, ξ2] .
Una distribuzione continua di vettori applicati lungo la curva γ e descritta da unadensita per unita di lunghezza
ξ ∈ [ξ1, ξ2] −−−−−−−−→ ~f(ξ) ∈ R3 , ,
in modo che su un tratto ϕ(u), u ∈ [ξ + δξ], [ξ + δξ] ⊆ [ξ1, ξ2], di curva il risultante deivettori applicati sia dato dall’integrale vettoriale
ξ+δξ∫ξ
~f(u) |ϕ′(u)| du
ovvero, per δξ = dξ infinitesimo,
~f(ξ) ds(ξ) = ~f(ξ) |ϕ(ξ)| dξ .
Il risultante del sistema continuo di vettori applicati si scrive
~R =
ξ2∫ξ1
~f(ξ) |ϕ′(ξ)| dξ
Stefano Siboni 27

Universita degli studi di Trento Corso di Meccanica razionale
mentre il momento risultante in O ∈ E3 vale
~MO =
ξ2∫ξ1
[ϕ(ξ)−O] ∧ ~f(ξ) |ϕ′(ξ)| dξ
3.7.2 Vettori applicati lungo una superficie regolareSi rappresenta una superficie regolare S mediante una parametrizzazione della forma
P = ϕ(u, v) , (u, v) ∈ D ⊆ R2
dove D u un qualsiasi dominio aperto o chiuso di R2. La parametrizzazione si assumeregolare, dunque di classe C1 in D e verificante la condizione
∂ϕ
∂u(u, v) ∧ ∂ϕ
∂v(u, v) 6= 0 ∀ (u, v) ∈ D
che assicura essere definiti in ogni punto ϕ(u, v) della superficie un versore normale n(u, v)ed un elemento d’area dA(u, v) strettamente positivo
n(u, v) =
∂ϕ
∂u(u, v) ∧ ∂ϕ
∂v(u, v)∣∣∣∣∂ϕ∂u (u, v) ∧ ∂ϕ
∂v(u, v)
∣∣∣∣ dA(u, v) =
∣∣∣∣∂ϕ∂u (u, v) ∧ ∂ϕ∂v
(u, v)
∣∣∣∣ dudv .La densita di vettori applicati per unita di area e un campo vettoriale definito sull’interasuperficie
(u, v) ∈ D −−−−−−−−→ ~f(u, v) ∈ R3 .
I contributi dell’elemento infinitesimo d’area dA(u, v) al risultante ed al momento risultantein O del sistema di vettori applicati ad S si scrivono
~f(u, v) dA(u, v) [ϕ(u, v)−O] ∧ ~f(u, v) dA(u, v) .
Il risultante del sistema vale percio
~R =
∫D
~f(u, v)
∣∣∣∣∂ϕ∂u (u, v) ∧ ∂ϕ∂v
(u, v)
∣∣∣∣ dudvmentre il momento risultante in O e dato dalla formula
~MO =
∫D
[ϕ(u, v)−O] ∧ ~f(u, v)
∣∣∣∣∂ϕ∂u (u, v) ∧ ∂ϕ∂v
(u, v)
∣∣∣∣ dudv
Stefano Siboni 28

Universita degli studi di Trento Corso di Meccanica razionale
4. Cinematica del puntoPer moto di un punto si intende una qualsiasi applicazione P (t) di un intervallo di tempoI ⊆ R a valori nello spazio dei punti
P : t ∈ I −−−−−−−−−→ P (t) ∈ R3 .
L’applicazione specifica ad ogni istante t nell’intervallo I la posizione P (t) occupata dalpunto. Poiche la posizione di P viene sempre determinata relativamente ad una ternadi riferimento cartesiana ortogonale destra Ox1x2x3, il moto di P (t) risultera specificatoassegnando le corrispondenti coordinate x1, x2, x3 quali funzioni del tempo t ∈ I
P (t)−O =
3∑i=1
xi(t) ei .
La traiettoria del moto e definita come l’immagine di P (t) e si interpreta fisicamentecome la collezione di tutte le posizioni occupate dal punto nell’intervallo di tempo I
P (I) = P (t) ∈ R3 : t ∈ I .
Si dice regolare un moto P (t) di classe C2 nel proprio intervallo di definizione I. Datidue istanti t1, t2 ∈ I, t1 < t2,la velocita media del moto nell’intervallo di tempo[t1, t2] viene definita come il vettore
~v(t1, t2)def=
1
t2 − t1[P (t2)− P (t1)] =
P (t2)− P (t1)
t2 − t1.
Se definito, il limite per ∆t → 0 della velocita media del moto nell’intervallo di tempo[t, t + ∆t] ⊆ I si denomina velocita istantanea del moto all’istante t ∈ I e coincide,beninteso, con la derivata prima in t del moto P (t)
P (t) = lim∆t→0
~v(t, t+ ∆t) = lim∆t→0
P (t+ ∆t)− P (t)
∆t.
La velocita istantanea P (t) e tangente alla traiettoria del moto nella posizione P (t), perogni t ∈ I. Per un moto regolare, la velocita istantanea e una funzione definita e C1
nell’intero intervallo I a valori vettoriali in R3
P : t ∈ I −−−−−−−−−→ P (t) ∈ R3 .
L’accelerazione media del moto nell’intervallo [t1, t2] ⊆ I viene definita per mezzodella relazione
~a(t1, t2) =1
t2 − t1[P (t2)− P (t1)] =
P (t2)− P (t1)
t2 − t1.
Stefano Siboni 29

Universita degli studi di Trento Corso di Meccanica razionale
L’eventuale limite per ∆t → 0 dell’accelerazione media nell’intervallo [t, t + ∆t] ⊆ I co-stituisce l’accelerazione istantanea del moto all’istante t ∈ I e si identifica con laderivata seconda in t del moto P (t)
P (t) = lim∆t→0
~a(t, t+ ∆t) = lim∆t→0
P (t+ ∆t)− P (t)
∆t.
La richiesta di regolarita del moto risponde pertanto all’esigenza di assicurarel’esistenza e la continuita di velocita ed accelerazione istantanee nell’interointervallo di definizione I del moto. Per moti non regolari puo verificarsi, ad esempio,che la velocita istantanea sia una funzione discontinua e l’accelerazione non risulti definita;e quanto accade in presenza di forze impulsive o d’urto, che pero non verranno trattatein queste note.
5. Moti relativiSi considerino due terne di riferimento cartesiane ortogonali destre:
una terna Ωξ1ξ2ξ3, denominata terna fissa, di origine Ω e base associata e′1, e′2, e′3;
un riferimento Ox1x2x3, indicato come terna mobile, di origine O e base ortonormaleassociata e1, e2, e3, in moto arbitrario rispetto alla terna fissa.
Il moto della terna mobile rispetto a quella fissa viene specificato assegnando la posizionedell’origine O ed il valore dei versori e1, e2, e3 quali funzioni del tempo t su un convenienteintervallo I ⊆ R.
O : t ∈ I −−−−−−−−−→ O(t) ∈ R3
ei : t ∈ I −−−−−−−−−→ ei(t) ∈ R3 i = 1, 2, 3
Il requisito di regolarita portera inoltre ad assumere tali funzioni di classe C2 nell’intervalloI di definizione
O(t) ∈ C2(I,R3) ei(t) ∈ C2(I,R3) , i = 1, 2, 3 .
Dal punto di vista cinematico i due sistemi di riferimento sono totalmente equivalenti e ladistinzione fra terna fissa e terna mobile deve intendersi puramente convenzionale. Per ungenerico punto P si indicano con ξ1, ξ2, ξ3 le coordinate relative alla terna fissa Ωξ1ξ2ξ3,mentre x1, x2, x3 sono quelle relative al riferimento mobile Ox1x2x3
P − Ω =
3∑i=1
ξi e′i P −O =
3∑i=1
xi ei .
L’insieme dei punti dello spazio riguardati come fissi rispetto alla terna di riferimento fissaΩξ1ξ2ξ3 costituisce lo spazio fisso o assoluto. I punti dello spazio fisso sono caratterizzati,tutti e soltanto, da valori costanti delle coordinate relative a Ωξ1ξ2ξ3
P − Ω =
3∑i=1
ξi e′i , ξi = costante ∀ i = 1, 2, 3 .
Stefano Siboni 30

Universita degli studi di Trento Corso di Meccanica razionale
Per contro, lo spazio solidale alle terna mobile, o semplicemente spazio solidalee costituito dai punti dello spazio considerati in quiete rispetto alla terna di riferimentomobile e dunque caratterizzati da valori costanti delle coordinate x1, x2, x3 relative a taleterna
P −O =3∑i=1
xiei , xi = costante ∀ i = 1, 2, 3 .
Il moto dello spazio solidale relativamente alla terna fissa viene chiamato moto di trasci-namento della terna mobile rispetto a quella assoluta. Il moto di trascinamento ecompletamente definito assegnando le funzioni O(t), e1(t), e2(t), e3(t) in un intervallo I, inmodo che per un generico punto P ∈ R3 il moto di trascinamento si esprime nella forma
P (t)− Ω = O(t)− Ω +3∑i=1
xiei(t) , xi = costante ∀ i = 1, 2, 3 .
Equivalentemente, il moto di trascinamento puo essere specificato assegnando rispetto allaterna assoluta le coordinate ξo1(t), ξo2(t), ξo3(t) dell’origine O e la matrice A(t) dei cosenidirettori della terna mobile in funzione del tempo. In tal caso la relazione matriciale ξ1(t)
ξ2(t)ξ3(t)
=
ξo1(t)ξo2(t)ξo3(t)
+ A(t)
x1
x2
x3
, xi = costante ∀ i = 1, 2, 3 , ∀ t ∈ I
esprime le coordinate assolute ξ1, ξ2, ξ3 di un generico punto P dello spazio solidale infunzione del tempo e delle coordinate costanti x1, x2, x3 relative alla terna mobile.
5.1 Teorema dei moti relativiIl teorema dei moti relativi esprime la relazione generale di composizione delle velocita fraterne di riferimento in moto relativo arbitrario. Indicati al solito con Ωξ1ξ2ξ3, con baseassociata e′1, e
′2, e′3, la terna di riferimento assoluta e con Ox1x2x3 il sistema di riferimento
mobile, di base associata e1, e2, e3, le coordinate assolute ξ1, ξ2, ξ3 e quelle relative x1, x2, x3
di un generico punto P sono fra loro legate dall’equazione fondamentale
P − Ω = O − Ω +3∑i=1
xiei ,
nella quale O, x1, x2, x3 e e1, e2, e3 devono intendersi come funzioni assegnate del tempo,C2 in un intervallo I ⊆ R. Una derivazione rispetto al tempo porge quindi
P = O +
3∑i=1
xideidt
+3∑i=1
xiei . (5.1)
La derivata P si identifica con la velocita istantanea del punto P quale appare nel sistemadi riferimento assoluto Ωξ1ξ2ξ3 e viene percio indicata come velocita assoluta di P
~vA = P (5.2)
Stefano Siboni 31

Universita degli studi di Trento Corso di Meccanica razionale
Analogamente, l’ultimo termine a secondo membro della (5.1) puo intendersi ottenutoderivando le sole coordinate di P rispetto alla terna mobile e riguardando come costantitanto l’origine O quanto i versori e1, e2, e3; si tratta percio della velocita istantanea di Pquale appare ad un osservatore solidale alla terna mobile, grandezza nota come velocitarelativa alla terna mobile
~vR =3∑i=1
xiei . (5.3)
All’opposto, il termine residuo nella (5.1)
~vT = O +3∑i=1
xideidt
(5.4)
puo pensarsi ottenuto lasciando variare l’origine e i versori della terna mobile ma riguar-dando come costanti le relative coordinate x1, x2, x3. A tale risultato si perviene quindiconsiderando il punto P come solidale alla terna mobile, in modo che risulti xi = 0,i = 1, 2, 3. Per questo motivo la velocita ~vT e nota come velocita di trascinamento erappresenta la velocita di un punto ideale che all’istante t occupa la stessa posizione diP , ma che si muove di moto solidale alla terna mobile. Per tramite della relazione (5.1) edelle definizioni (5.2), (5.3), (5.4) si perviene cosı al teorema dei moti relativi
Per un qualsiasi moto di trascinamento della terna mobile ed un qualsivoglia moto diP , la velocita assoluta di P coincide con la somma della velocita relativa e di quella ditrascinamento
~vA = ~vR + ~vT . (5.5)
Il risultato e anche noto, per ovvie ragioni, come teorema di composizione delle velocita.
5.2 Teorema di CoriolisIl teorema di Coriolis rappresenta la relazione generale di composizione delle accelerazioniper terne in moto relativo arbitrario. E sufficiente derivare una seconda volta, rispetto altempo, l’equazione di composizione delle velocita (5.1) per ottenere
P = O +
3∑i=1
xid2eidt2
+3∑i=1
xideidt
+3∑i=1
xideidt
+3∑i=1
xiei =
= O +3∑i=1
xid2eidt2
+ 23∑i=1
xideidt
+3∑i=1
xiei .
(5.6)
In modo analogo a quanto gia osservato a proposito delle velocita (5.2), (5.3), (5.4), laderivata seconda P rappresenta l’accelerazione istantanea del punto P quale appare nelsistema di riferimento fisso, e viene percio denominata accelerazione assoluta del punto
~aA = P . (5.7)
Stefano Siboni 32

Universita degli studi di Trento Corso di Meccanica razionale
L’accelerazione relativa alla terna mobile
~aR =3∑i=1
xiei (5.8)
viene determinata derivando le sole coordinate x1, x2, x3 del punto e mantenendo costantiorigine O e versori di base e1, e2, e3: e l’accelerazione istantanea calcolata dall’osservatoresolidale con la terna mobile, il che ne giustifica la denominazione. Considerando costantile coordinate x1, x2, x3 si ricava invece l’accelerazione di trascinamento
~aT = O +3∑i=1
xid2eidt2
(5.9)
interpretabile come l’accelerazione di un punto fittizio che all’istante t occupa la stessaposizione di P , muovendosi pero solidalmente alla terna mobile — e dunque “trascinato”da questa nel proprio moto di trascinamento rispetto al riferimento fisso. L’equazione(5.6) mostra allora che, diversamente da quanto accade per la composizione delle velocita,l’accelerazione assoluta ~aA non coincide con la semplice somma di accelerazione relativa~aR e di trascinamento ~aT . Si rende infatti necessaria l’introduzione di un ulteriore termine
~aC = 23∑i=1
xideidt
(5.10)
nota come accelerazione complementare o di Coriolis. Il teorema di composizionedelle accelerazioni, o teorema di Coriolis, assume allora la forma seguente.
Per un qualsiasi moto di trascinamento della terna mobile ed un qualsivoglia moto diP , l’accelerazione assoluta di P coincide con la somma delle accelerazioni relativa, ditrascinamento e di Coriolis
~aA = ~aR + ~aT + ~aC .
5.3 Teorema di PoissonNello studio dei moti relativi e, come si vedra piu oltre, nell’analisi dei moti rigidi, risultaestremamente utile riesprimere le derivate prime rispetto al tempo dei versori associati allaterna mobile in termini del cosiddetto vettore velocita angolare istantanea, per mezzo delleformule di Poisson. Il teorema di Poisson stabilisce che
Per una terna mobile Oe1e2e3 in moto regolare arbitrario rispetto ad un riferimento as-soluto, ad ogni istante t ∈ I dell’intervallo di definizione del moto esiste unico un vettore~ω ∈ R3 tale da soddisfare le tre relazioni
deidt
= ~ω ∧ ei i = 1, 2, 3 . (5.11)
Tale vettore, che in generale dipende dall’istante t ∈ I considerato, e detto vettore ve-locita angolare istantanea di trascinamento della terna mobile rispetto a quella assolutae puo esprimersi per mezzo della seguente espressione
~ω =1
2
3∑i=1
ei ∧deidt
. (5.12)
Stefano Siboni 33

Universita degli studi di Trento Corso di Meccanica razionale
Le corrispondenti equazioni (5.11) sono note come formule di Poisson e sono di gran-dissima utilita pratica e teorica.
Per dimostrare il teorema puo essere conveniente mostrare in primo luogo che se un vettore~ω che soddisfi le (5.11) effettivamente esiste, esso deve essere dato dall’espressione (5.12),il che peraltro ne attesta l’unicita. L’esistenza della velocita angolare istantanea viene poiprovata dimostrando che il vettore ~ω definito da (5.12) verifica le formule di Poisson (5.11).Moltiplicando vettorialmente a sinistra per ei il primo ed il secondo membro della (5.11)si ha infatti
ei ∧deidt
= ei ∧ (~ω ∧ ei) = ~ω(ei · ei)− ei(~ω · ei) = ~ω − (~ω · ei)ei
in modo che e sufficiente sommare le relazioni precedenti in i = 1, 2, 3 per ricavare
3∑i=1
ei ∧deidt
=
3∑i=1
~ω −3∑i=1
(~ω · ei)ei = 3 ~ω − ~ω = 2 ~ω
e quindi l’espressione esplicita (5.12) di ~ω
~ω =1
2
3∑i=1
ei ∧deidt
che garantisce l’unicita della velocita angolare istantanea, qualora definita. Dalla relazionetrovata si ricava quindi, per ogni j = 1, 2, 3 prefissato, l’equazione
~ω ∧ ej =1
2
( 3∑i=1
ei ∧deidt
)∧ ej =
1
2
3∑i=1
(ei ∧
deidt
)∧ ej
che una doppia permutazione di operandi nei due prodotti vettoriali consente di scriverenella forma equivalente
~ω ∧ ej =1
2
3∑i=1
ej ∧(deidt∧ ei
)e l’applicazione della solita identita del doppio prodotto vettoriale riduce a
~ω ∧ ej =1
2
3∑i=1
[deidt
(ei · ej)− ei(ej ·
deidt
)]=
1
2
3∑i=1
[deidtδij − ei
(ej ·
deidt
)]. (5.13)
In virtu dell’identita:
0 =d
dtδij =
d
dt(ei · ej) = ei ·
dejdt
+deidt· ej ,
Stefano Siboni 34
Universita degli studi di Trento Corso di Meccanica razionale
la (5.13) diventa infine
~ω ∧ ej =1
2
3∑i=1
[deidtδij + ei
(ei ·
dejdt
)]=
=1
2
3∑i=1
deidtδij +
1
2
3∑i=1
(ei ·
dejdt
)ei =
1
2
dejdt
+1
2
dejdt
=dejdt
a completamento della dimostrazione.
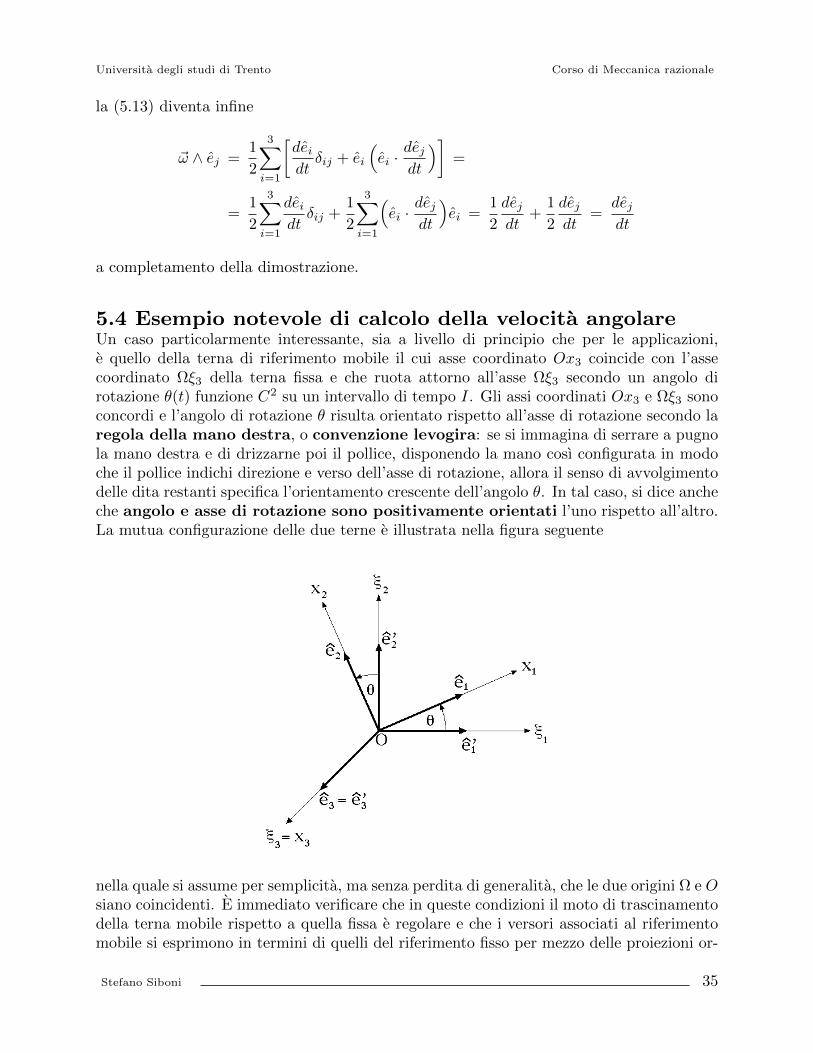
5.4 Esempio notevole di calcolo della velocita angolareUn caso particolarmente interessante, sia a livello di principio che per le applicazioni,e quello della terna di riferimento mobile il cui asse coordinato Ox3 coincide con l’assecoordinato Ωξ3 della terna fissa e che ruota attorno all’asse Ωξ3 secondo un angolo dirotazione θ(t) funzione C2 su un intervallo di tempo I. Gli assi coordinati Ox3 e Ωξ3 sonoconcordi e l’angolo di rotazione θ risulta orientato rispetto all’asse di rotazione secondo laregola della mano destra, o convenzione levogira: se si immagina di serrare a pugnola mano destra e di drizzarne poi il pollice, disponendo la mano cosı configurata in modoche il pollice indichi direzione e verso dell’asse di rotazione, allora il senso di avvolgimentodelle dita restanti specifica l’orientamento crescente dell’angolo θ. In tal caso, si dice ancheche angolo e asse di rotazione sono positivamente orientati l’uno rispetto all’altro.La mutua configurazione delle due terne e illustrata nella figura seguente
nella quale si assume per semplicita, ma senza perdita di generalita, che le due origini Ω e Osiano coincidenti. E immediato verificare che in queste condizioni il moto di trascinamentodella terna mobile rispetto a quella fissa e regolare e che i versori associati al riferimentomobile si esprimono in termini di quelli del riferimento fisso per mezzo delle proiezioni or-
Stefano Siboni 35

Universita degli studi di Trento Corso di Meccanica razionale
togonali
e1 =3∑i=1
e1 · e′i e′i = e1 · e′1 e′1 + e1 · e′2 e′2 + e1 · e′3 e′3
e2 =3∑i=1
e2 · e′i e′i = e2 · e′1 e′1 + e2 · e′2 e′2 + e2 · e′3 e′3
e3 =3∑i=1
e3 · e′i e′i = e3 · e′1 e′1 + e3 · e′2 e′2 + e3 · e′3 e′3
che la disposizione relativa delle due basi ortonormali, con e3 = e′3 ed entrambi i versorie1, e2 complanari a e′1, e
′2, consente di scrivere esplicitamente nella forma
e1 = cos θ e′1 + sin θ e′2
e2 = − sin θ e′1 + cos θ e′2
e3 = e′3 .
La determinazione del vettore velocita angolare istantanea per mezzo dell’equazione (5.12)richiede il calcolo preventivo delle derivate prime in t dei versori associati alla terna mobile,facilmente ottenibili con il teorema di derivazione delle funzioni composte
de1
dt= − sin θ θ e′1 + cos θ θ e′2
de2
dt= − cos θ θ e′1 − sin θ θ e′2
de3
dt= 0 .
Si ha pertanto
~ω =1
2
3∑i=1
ei ∧deidt
=1
2
[e1 ∧
de1
dt+ e2 ∧
de2
dt
]e basta calcolare esplicitamente i prodotti vettoriali per ottenere
~ω =1
2
∣∣∣∣∣∣e′1 e′2 e′3
cos θ sin θ 0− sin θ cos θ 0
∣∣∣∣∣∣ θ +1
2
∣∣∣∣∣∣e′1 e′2 e′3− sin θ cos θ 0− cos θ − sin θ 0
∣∣∣∣∣∣ θ =1
2θ e′3 +
1
2θ e′3 = θ e′3 .
Si intende che nel calcolo precedente l’aver assunto l’asse fisso coincidente con un comuneasse coordinato delle due terne, fissa e mobile, costituisce soltanto una ipotesi di comodo,diretta puramente a semplificare i calcoli, mentre il risultato deve considerarsi del tuttogenerale. Si conclude dunque che
nel moto di rotazione della terna mobile attorno ad un asse fisso, secondo un angolo dirotazione θ(t) positivamente orientato rispetto all’asse, il vettore velocita angolare istanta-nea ~ω(t) si determina moltiplicando la derivata prima in t dell’angolo di rotazione θ per ilversore associato all’asse
~ω(t) =d
dt(angolo di rotazione) versore associato all’asse di rotazione
Stefano Siboni 36

Universita degli studi di Trento Corso di Meccanica razionale
Qualora la convenzione levogira, o sinistrorsa, non fosse rispettata e ci si attenesse in suavece alla regola della mano sinistra, l’espressione precedente conserverebbe la propria va-lidita salvo che per l’introduzione di un cambiamento di segno. Il cambiamentodi convenzione equivale infatti ad invertire l’orientamento dell’asse di rotazione e quindi asostituire il versore associato con il suo opposto, ovvero ad invertire il senso degli angoli dirotazione θ crescenti, con conseguente sostituzione di −θ a θ. Si osservi infine che il calcolosuesposto, sebbene ottenuto per un caso molto particolare di moto di trascinamento, con-sente di interpretare il vettore velocita angolare istantanea come angolo spazzato nell’unitadi tempo da un moto rotatorio attorno ad un asse dato e quindi fornisce una ragionevolegiustificazione della particolare denominazione che ad ~ω e riservata.
5.5 Velocita angolare istantanea e moti relativiLe formule di Poisson (5.11) possono essere utilizzate per riscrivere le espressioni della ve-locita di trascinamento, dell’accelerazione di trascinamento e dell’accelerazione di Coriolisin una forma piu conveniente per le applicazioni ed i calcoli teorici. Per quanto riguardala velocita di trascinamento si ha infatti
~vT = O +3∑i=1
xideidt
= O +3∑i=1
xi ~ω ∧ ei = O + ~ω ∧3∑i=1
xi ei = O + ~ω ∧ (P −O) (5.14)
mentre una relazione analoga vale per l’accelerazione di trascinamento
~aT = O +
3∑i=1
xid2eidt2
= O +
3∑i=1
xid
dt(~ω ∧ ei) =
= O +
3∑i=1
xid~ω
dt∧ ei +
3∑i=1
xi ~ω ∧deidt
=
= O +d~ω
dt∧
3∑i=1
xi ei +3∑i=1
xi ~ω ∧ (~ω ∧ ei) =
= O +d~ω
dt∧
3∑i=1
xi ei + ~ω ∧[~ω ∧
3∑i=1
xi ei
]=
= O +d~ω
dt∧ (P −O) + ~ω ∧ [~ω ∧ (P −O)]
Stefano Siboni 37

Universita degli studi di Trento Corso di Meccanica razionale
in cui si e sfruttata l’indipendenza del vettore velocita angolare di trascinamento ~ω dall’in-dice di somma i. Quanto all’accelerazione di Coriolis, si ricava immediatamente l’equazione
~aC = 2
3∑i=1
xideidt
= 23∑i=1
xi ~ω ∧ ei = 2 ~ω ∧3∑i=1
xi ei = 2 ~ω ∧ ~vR .
5.6 Derivata assoluta e relativa di un vettore variabileSi consideri una funzione derivabile di un intervallo di tempo I a valori vettoriali in R3
~u : t ∈ I −−−−−−−−−→ ~u(t) ∈ R3 .
Una funzione di tal genere si dice vettore variabile nel tempo, e sara espressa percomponenti rispetto alla base e′1e
′2e′3 della terna di riferimento assoluta Ωξ1ξ2ξ3
~u(t) =
3∑i=1
u′i(t) e′i t ∈ I
con u′1(t), u′2(t), u′3(t) funzioni derivabili nell’intervallo I. La derivata in t del vettorevariabile nel tempo si definisce derivata assoluta di ~u all’istante assegnato ed e ottenutaderivando le corrispondenti componenti di ~u relative a Ωξ1ξ2ξ3
dA~u
dt(t) =
3∑i=1
du′idt
(t) e′i . (5.15)
Fisicamente, la derivata assoluta si interpreta percio come la derivata della funzione vet-toriale determinata secondo il punto di vista dell’osservatore solidale alla terna assoluta,il che ne giustifica la denominazione. Si supponga di introdurre una terna di riferimentomobile Ox1x2x3, di base associata e1e2e3. Rispetto alla nuova terna la funzione ~u si scrive
~u(t) =3∑i=1
ui(t) ei(t)
per cui la derivata assoluta (5.15) diventa
dA~u
dt(t) =
3∑i=1
duidt
(t) ei(t) +
3∑i=1
ui(t)deidt
(t)
ed in termini della velocita angolare istantanea ~ω di trascinamento della terna mobilerispetto alla terna fissa diventa
dA~u
dt(t) =
3∑i=1
duidt
(t) ei(t) +
3∑i=1
ui(t) ~ω(t) ∧ ei(t) =
=3∑i=1
duidt
(t) ei(t) + ~ω(t) ∧ ~u(t) .
Stefano Siboni 38

Universita degli studi di Trento Corso di Meccanica razionale
La sommatoria a secondo membro nella precedente relazione viene formalmente ottenutaderivando in t le sole componenti di ~u rispetto alla terna mobile. Si tratta percio delladerivata in t di ~u quale appare all’osservatore solidale con la terna mobile e viene perquesto definita derivata relativa alla terna mobile del vettore variabile
dR~u
dt(t)
def=
3∑i=1
duidt
(t) ei(t) .
Derivata assoluta e relativa, ad uno stesso istante assegnato t ∈ I, sono quindi legate dallarelazione
dA~u
dt=
dR~u
dt+ ~ω ∧ ~u .
6. Equazione del moto del punto materiale libero6.1 Corpi puntiformi e primo principio della dinamicaSi definisce puntiforme un qualsiasi corpo la cui estensione nello spazio possa esseretrascurata agli effetti dei processi fisici che si e interessati a descrivere e nei quali il corpostesso sia coinvolto. In relazione ai processi esaminati uno stesso corpo puo essere trattatoconvenientemente come puntiforme o meno. Cosı la Terra, ad esempio, che nell’interazionegravitazionale con i corpi posti presso la sua superficie non puo certo essere trattata comeun oggetto puntiforme, si descrive perfettamente come corpo puntiforme nel processo diinterazione con il Sole o la Luna, a causa delle distanze di interazione coinvolte, che sonoconsiderevolmente maggiori delle dimensioni caratteristiche (diametro) di questi corpi ce-lesti.
Il primo principio della dinamica assicura l’esistenza di almeno un sistema di riferi-mento nel quale vale il principio d’inerzia:
un corpo puntiforme posto a grande distanza da tutti gli altri corpi dell’universo, e dunquenella ragionevole impossibilita di interagire con essi, in modo che nessuna sollecitazionedeve ritenersi applicata al corpo in esame, permane indefinitamente nel suo stato di quieteoppure, se in moto, si muove di moto rettilineo ed uniforme.
Un sistema di riferimento di questo tipo si dice inerziale o galileiano. Si ricorda che ilprimo principio non va inteso come una semplice definizione — peraltro assai meno operati-va di quanto possa sembrare a prima vista — di terna inerziale. L’aspetto di principio dellaprima legge della dinamica e proprio rappresentato dall’enunciato di esistenza di almenouna terna di riferimento inerziale, dalla quale e poi possibile dedurre una infinita di altreterne galileiane secondo l’unico requisito che esse siano in moto traslatorio rettilineo eduniforme rispetto a quella — principio di relativia galileiana. Giova ricordare ancorache la definizione di un sistema di riferimento non si riduce a specificare le sole procedureoperative per la determinazione delle coordinate dei punti dello spazio rispetto ad unsistema di assi — “regoli” e procedure per la misura delle lunghezze — ma richiede anchel’individuazione delle metodologie operative di misura degli intervalli di tempo — “orologi”e procedure di sincronizzazione degli stessi.
Stefano Siboni 39

Universita degli studi di Trento Corso di Meccanica razionale
6.2 Secondo principio della dinamica. Punto materialeIn un sistema di riferimento inerziale i corpi puntiformi sottostanno al secondo principiodella dinamica. Questo prevede che se un sistema di forze di risultante ~F e applicato adun corpo puntiforme P , esiste allora una relazione di proporzionalita fra ~F e l’accelerazioneistantanea P subita dal corpo allo stesso istante, secondo una costante di proporzionalitastrettamente positiva e caratteristica del corpo considerato. Detta massa inerziale delcorpo puntiforme P tale costante di proporzionalita, ed indicato con m il suo valore, ilsecondo principio della dinamica assume la forma:
mP = ~F
relazione che deve intendersi verificata ad ogni istante t. A questo livello di approssi-mazione, dunque, il corpo puntiforme deve considerarsi completamente caratterizzato dallasua posizione P nello spazio e della sua massa inerziale m > 0. Si definisce percio puntomateriale la coppia ordinata:
(m,P )
che individua il corpo puntiforme di massa m nella posizione P ∈ R3.
6.3 Estensione del secondo principio a terne non inerzialiA rigore, il secondo principio e applicabile solo nei sistemi di riferimento inerziali. Una suaestensione a sistemi di riferimento qualsivoglia si ottiene pero molto facilmente facendouso del teorema di Coriolis. A questo scopo e sufficiente considerare il riferimento dellaboratorio come una terna mobile rispetto ad una terna fissa, o assoluta, inerziale — lacui esistenza e assicurata dal primo principio. Si ha allora che l’accelerazione di P nellaterna assoluta inerziale, ~aA, e l’accelerazione dello stesso punto relativa alla terna mobile,~aR, sono legate fra loro dalla relazione:
~aA = ~aR + ~aT + ~aC (6.1)
in cui ~aT e ~aC sono rispettivamente l’accelerazione di trascinamento e quella di Coriolisdel punto P allo stesso istante. L’accelerazione assoluta, proprio perche riferita ad unaterna inerziale, soddisfa alla seconda legge della dinamica:
m~aA = ~F
che sostituendo il secondo membro della (6.1) diventa:
m~aR +m~aT +m~aC = ~F
ed isolando a primo membro il termine di accelerazione relativa, si riduce a:
m~aR = ~F −m~aT −m~aC .
Si conclude allora che anche nella terna mobile, non inerziale, e permesso scrivere for-malmente il secondo principio della dinamica, ma a condizione che nel computo delle sol-lecitazioni applicate al punto materiale non vengano considerate soltanto le forze reali ~F ,
Stefano Siboni 40

Universita degli studi di Trento Corso di Meccanica razionale
imputabili alla effettiva interazione del punto materiale con altri punti o corpi dell’universo,ma anche gli ulteriori contributi:
~FT = −m~aT e ~FC = −m~aC
che viceversa non e possibile attribuire ad alcuna effettiva interazione e risultano semplice-mente legati alla scelta della terna di riferimento. I vettori ~FT e ~FC sono noti rispettiva-mente come forza di trascinamento e forza di Coriolis. Tali forze, nel loro complesso,si indicano come forze fittizie o d’inerzia. Si ricorda che le forze reali possono risultareda un contatto diretto o da un’azione a distanza: in questo secondo caso esse vengono diregola descritte mediante l’introduzione di appropriati campi di interazione (gravitazionale,elettromagnetico).
6.4 Forma matematica delle forze applicateNello studio dei sistemi meccanici si postula che le forze reali ~F agenti su un punto materialeal tempo t nella posizione P e con velocita istantanea P possano essere soltanto funzioniesplicite del tempo t, della posizione P e della velocita istantanea P . Non esistono sistemimeccanici di un qualche interesse per i quali si renda necessario assumere che le forze realiabbiano forma piu complessa. In particolare, non v’e necessita di richiedere che:
(i) le forze applicate possano dipendere da derivate di ordine superiore al primo del motoP (t), quali l’accelerazione istantanea P o sue derivate successive in t;
(ii) le forze applicate possano dipendere da posizione o velocita istantanea del punto ma-teriale ad un istante diverso da quello t in cui esse agiscono.
Di conseguenza, le forze reali agenti sul punto materiale si scrivono sempre nella forma:
~F = ~F (t, P, P ) ∀ (t, P, P ) ∈ R× R3 × R3 .
E facile convincersi che tutte le principali forze agenti nei sistemi meccanici ricadono nellatipologia precedente. E questo il caso delle forze costanti e della forza peso m~g, nellaquale l’accelerazione gravitazionale ~g risulta approssimativamente costante in prossimitadella superficie terrestre e in generale dipendente dalla posizione — ~g(P ). Un altro esempiodi forze dipendenti dalla posizione e quello delle forze elastiche, che verranno introdottein seguito. Dipendenti dalla velocita instantanea sono invece le resistenze viscose e leresistenze idrauliche, di cui si dara la definizione in una sezione successiva. Sebbenenon trattate in queste note, della forma prescritta sono pure le forze elettromagnetiche,che si esprimono per mezzo della legge di Lorentz
q ~E(t, P ) + qP ∧ ~B(t, P )
in termini della carica elettrica q del punto materiale, del campo elettrico ~E e del campo diinduzione magnetica ~B, questi ultimi in generale dipendenti dal tempo e dalla posizione.Anche le forze fittizie agenti in una terna di riferimento non inerziale ricadono nella stessatipologia, come e immediato verificare. Cosı ad esempio, in termini delle coordinate
Stefano Siboni 41

Universita degli studi di Trento Corso di Meccanica razionale
x1, x2, x3 del punto P rispetto alla terna del laboratorio, di origine O, la forza di trasci-namento ~FT si esprime come:
~FT = −m~aT = −mO −m3∑i=1
xid2eidt2
e facendo uso delle formule di Poisson diventa:
~FT = −mO −m3∑i=1
xid
dt(~ω ∧ ei)
per cui eseguendo la derivata in t si ottiene:
~FT = −mO −m3∑i=1
xi
(d~ω
dt∧ ei + ~ω ∧ dei
dt
)e con una seconda sostituzione delle formule di Poisson si perviene al risultato:
~FT = −mO −m3∑i=1
xi
[d~ω
dt∧ ei + ~ω ∧ (~ω ∧ ei)
].
L’essere la velocita angolare istantanea di trascinamento, ~ω, indipendente dall’indice iconsente di riesprimere le somme nella forma:
~FT = −mO −m d~ω
dt∧
3∑i=1
xiei −m~ω ∧(~ω ∧
3∑i=1
xiei
)e ricordata l’espressione del vettore posizione di P nella terna del laboratorio:
P −O =3∑i=1
xiei
si conclude che:
~FT = −mO −m d~ω
dt∧ (P −O)−m~ω ∧ [~ω ∧ (P −O)] .
In questa relazione i vettori O e ~ω sono funzioni preassegnate del tempo, connesse al motodi trascinamento della terna mobile — del laboratorio — rispetto alla terna fissa inerziale.La forza di trascinamento e dunque una funzione nota di tempo e posizione:
~FT = ~FT (t, P )
come affermato. In modo analogo si verifica la forma funzionale della forza di Coriolis,per la quale vale infatti:
~FC = −m~aC = −m 23∑i=1
xideidt
= −m 23∑i=1
xi~ω ∧ ei = −2m~ω ∧3∑i=1
xiei
Stefano Siboni 42

Universita degli studi di Trento Corso di Meccanica razionale
e basta ricordare la definizione della velocita P relativa alla terna del laboratorio perconcludere che:
~FC = −2m~ω ∧ P = ~FC(t, P ) .
Giova sottolineare che nell’ambito della meccanica classica esiste un’unica eccezione allaregola generale che vuole le forze di interesse fisico sempre esprimibili nella forma ~F (t, P, P ).L’eccezione riguarda l’elettrodinamica classica, e precisamente il problema dell’emissione diradiazione elettromagnetica da parte di una carica puntiforme. La teoria elettromagneticaclassica prevede che una particella carica in moto accelerato debba emettere energia sottoforma di onde elettromagnetiche, emissione che avviene a spese dell’energia cinetica dellaparticella. Questa perdita di energia cinetica viene imputata all’azione sulla particella diuna sollecitazione nota come forza di Lorentz-Abraham-Dirac, che in unita SI risultaespressa come
~FLAD =2
3
kq2
c3...
P
in termini della costante di Coulomb k, della carica elettrica q della particella, della velocitadella luce nel vuoto c e della derivata terza della posizione
...
P . Quest’ultima coincide,evidentemente, con la derivata prima dell’accelerazione istantanea ed e talora indicata conil termine inglese jerk — letteralmente, “movimento brusco”, o “sobbalzo”. L’equazionedi LAD comporta non pochi problemi dal punto di vista matematico e soprattutto fisico, edeve ritenersi fondamentalmente scorretta in termini di principio. Per la sua particolaritanon verra trattata in queste note.
6.5 Equazioni del moto per il punto liberoLa seconda legge della dinamica consente di scrivere l’equazione del moto del punto mate-riale libero nella forma:
mP = ~F (t, P, P ) (6.2)
dove per brevita si conviene di indicare con ~F (t, P, P ) il risultante di tutte le sollecitazioniapplicate al punto materiale, comprese le eventuali forze d’inerzia. L’equazione ottenutae:
(i) un’equazione differenziale, poiche l’incognita e costituita dalla funzione P (t), defi-nita su un conveniente intervallo I di t, e compare nell’equazione per tramite di alcunesue derivate allo stesso istante t;
(ii) un’equazione differenziale del secondo ordine, in quanto la derivata di ordine mas-simo della funzione incognita P (t) che compare nell’equazione e proprio la derivataseconda. In generale, l’ordine di una equazione differenziale coincide con l’ordinemassimo delle derivate che vi compaiono;
(iii) un’equazione differenziale riconducibile alla forma normale, dal momento che e suf-ficiente dividere membro a membro la (6.2) per la massa m per esplicitare la derivataseconda in funzione del tempo t, della funzione incognita P (t) e dell’unica derivata diordine inferiore P (t):
P =1
m~F (t, P, P ) .
Stefano Siboni 43

Universita degli studi di Trento Corso di Meccanica razionale
Per una qualsiasi equazione differenziale di qualsivoglia ordine, la riduzione alla formanormale consiste nel ricavare la derivata di ordine massimo in funzione della variabileindipendente, della funzione incognita e delle sue derivate di ordine inferiore a quellomassimo — che definisce, peraltro, l’ordine dell’equazione. Si osservi che la riducibilitadi una equazione differenziale alla forma normale non costituisce un fatto ovvio e, ingenerale, puo non essere consentita. Un caso molto semplice e offerto dall’equazionedifferenziale:
x2 = x
che, sebbene del primo ordine, non puo essere ricondotta alla forma normale per viadella non invertibilita della funzione quadratica:
|x| =√x ⇐⇒ x = ±
√x
che lascia irrisolta l’ambiguita di segno a secondo membro e non consente dunque diesprimere x come funzione di x.
L’equazione differenziale puo sempre essere ricondotta alla forma normale del primoordine mediante l’introduzione di una variabile ausiliaria, da riguardarsi come ulteriorefunzione incognita:
~V = P
per cui le equazioni del moto diventano:
dP
dt= ~V
d~V
dt=
1
m~F (t, P, ~V )
(6.3)
del primo ordine nelle incognite (P, ~V ). Si intende che la semplificazione del problema,con la sua riduzione al primo ordine, e soltanto apparente: si paga infatti il prezzo diraddoppiare il numero delle funzioni incognite, dalle 3 coordinate di P alle 6 componentidi (P, ~V ), e delle corrispondenti equazioni scalari — da 3 a 6. Va osservato che il numero
di equazioni scalari — 6 — coincide con quello delle variabili dipendenti (P, ~V ). Perqualsiasi equazione differenziale, la riduzione del problema al primo ordine e semprepossibile mediante l’introduzione di appropriate variabili ausiliarie, le derivatedi ordine inferiore a quello massimo. L’aspetto non banale del problema e quello dellariduzione alla forma normale, non quello della riduzione al primo ordine.
Si e cosı condotti a considerare il problema generale della esistenza ed unicitadelle soluzioni per un sistema di equazioni differenziali del primo ordine informa normale, problema che trovera applicazione non soltanto nello studio dinamicodel punto materiale libero, ma anche del punto materiale vincolato e piu genericamente ditutti i sistemi olonomi.
Stefano Siboni 44

Universita degli studi di Trento Corso di Meccanica razionale
7. Equazioni differenziali del primo ordine informa normale
In questo paragrafo si esaminano le nozioni fondamentali relative alle equazioni differenzialidel primo ordine in forma normale, il problema a valori iniziali o di Cauchy, la questionedell’esistenza ed unicita della corrispondente soluzione, il concetto di soluzione massimaleo completa.
7.1 Equazione differenziale del primo ordine in formanormale
Si definisce equazione differenziale del primo ordine in forma normale l’equazione:
x = f(t, x) (7.1)
nella quale:
t e una variabile scalare, nota come variabile indipendente dell’equazione differen-ziale. Essa ha di regola, ma non necessariamente, il significato fisico di un tempo;
x indica un vettore di Rn di componenti x1, x2, . . . , xn
x = (x1, x2, . . . , xn) ∈ Rn
che si dicono variabili dipendenti dell’equazione differenziale. x e dunque il vettoredelle variabili dipendenti;
f costituisce una funzione di un dominio aperto Ω ⊆ R× Rn a valori in Rn
f : (t, x) ∈ Ω −−−−−−−−−→ f(t, x) ∈ Rn
e di componenti f1, f2, . . . , fn
f(t, x) =(f1(t, x), f2(t, x) . . . , fn(t, x)
)il cui numero coincide percio con quello delle variabili dipendenti.
L’equazione differenziale (7.1) deve quindi intendersi equivalente al sistema di equazionidifferenziali scalari:
x1 = f1(t, x1, x2, . . . , xn)x2 = f2(t, x1, x2, . . . , xn). . . . . . . . . . . . . . . . . . . . . . . .xn = fn(t, x1, x2, . . . , xn)
(7.2)
costituito da n equazioni scalari nelle n variabili dipendenti x1, x2, . . . , xn. Per questomotivo ci si riferisce abitualmente alla (7.1) o (7.2) come equazione differenziale osistema di equazioni differenziali del primo ordine in forma normale, intendendo nelprimo caso che l’equazione sia rappresentata con notazione vettoriale e nel secondo casoche essa sia espressa in forma scalare.L’insieme Ω di definizione della f , e quindi del secondo membro dell’equazione differenziale,si identifica con un generico aperto di R × Rn soltanto per una maggiore generalita della
Stefano Siboni 45

Universita degli studi di Trento Corso di Meccanica razionale
definizione di (7.1); capita sovente infatti che l’equazione differenziale non sia definita perogni scelta di t ∈ R e di x ∈ Rn, ma soltanto per valori di (t, x) ricompresi in un appropriatodominio aperto.Qualora la funzione f a secondo membro non dipenda esplicitamente da t si dice chel’equazione differenziale e autonoma; si parla, viceversa, di equazione differenziale nonautonoma in caso contrario.
Per soluzione dell’equazione differenziale (7.1) si intende una funzione ϕ tale che:
ϕ e una funzione della variabile indipendente t in un intervallo I ed a valori in Rn
ϕ : t ∈ I −−−−−−−−−→ ϕ(t) ∈ Rn ;
ϕ risulta derivabile in tutto l’intervallo di definizione I
∃ ϕ′(t)def=dϕ
dt(t) ∀ t ∈ I ;
per ogni t ∈ I la coppia (t, ϕ(t)) appartiene al dominio di definizione del secondomembro f dell’equazione
(t, ϕ(t)) ∈ Ω ∀ t ∈ I ;
sostituendo nell’equazione (7.1) ϕ in luogo di x, il primo ed il secondo membrodell’equazione(1) coincidono per ogni t ∈ I
ϕ′(t) = f(t, ϕ(t)) ∀ t ∈ I .
Si osservi che la seconda e la terza delle precedenti condizioni costituiscono la necessariapremessa perche possa verificarsi la quarta, e risultano del tutto ovvie. L’unica condizioneche merita un commento e la prima: le soluzioni di una equazione differenziale sonosempre definite su un intervallo. Cio conformemente all’idea fisica che la variabileindipendente t e un tempo e che il vettore delle variabili dipendenti x deve fornire ladescrizione matematica della evoluzione del sistema in un intervallo di tempo — peresempio, il moto di un punto o di un sistema di punti. Il grafico di una soluzione ϕ,sull’intervallo I, dell’equazione differenziale e noto come curva integrale della soluzione,e costituisce un sottoinsieme di Ω
(t, ϕ(t)) : t ∈ I ⊂ Ω ⊆ R× Rn .
Si definisce invece orbita della soluzione l’immagine di questa, ossia la collezione dei valoriassunti dalla variabile dipendente x
ϕ(t) : t ∈ I ⊆ Rn .
(1)che diventano funzioni note della variabile indipendente t
Stefano Siboni 46

Universita degli studi di Trento Corso di Meccanica razionale
7.2 Problema di CauchyNello studio delle equazioni differenziali e di fondamentale importanza individuare le con-dizioni che assicurano l’esistenza e l’unicita, nel senso che si precisera nel seguito, dellarelativa soluzione. In generale, una equazione differenziale del primo ordine in forma nor-male ammette una infinita di soluzioni distinte, per cui al fine di specificare una solasoluzione fra le moltre consentite si rende necessario affiancare all’equazione differenzialeuna condizione supplementare opportuna. Una delle scelte piu comuni e utili nelle appli-cazioni alla meccanica e data dalle cosiddette condizioni, o valori, iniziali.Il problema di Cauchy, o problema a valori iniziali, e ottenuto associando all’equa-zione differenziale (7.1) una condizione iniziale (t0, x0) ∈ Ω: x = f(t, x)
x(t0) = x0 .(7.3)
Il vettore x0 e chiamato valore iniziale della variabile dipendente x all’istante inizialet0. Una funzione ϕ si dice soluzione del problema di Cauchy (7.3) se:
ϕ e soluzione dell’equazione differenziale, su un intervallo I;
l’istante iniziale t0 appartiene all’intervallo I;
il valore della soluzione all’istante t0 coincide con il valore iniziale x0
ϕ(t0) = x0 .
7.3 Teorema di esistenza (o di Peano)Il teorema di Peano costituisce il fondamentale teorema di esistenza delle soluzioni per ilproblema di Cauchy. L’enunciato e il seguente.
Si consideri l’equazione differenziale in forma normale del primo ordine (7.1) e sia lafunzione f : Ω−−→Rn continua nel proprio dominio aperto Ω. Allora per ogni condizioneiniziale (t0, x0) ∈ Ω esiste almeno una soluzione del corrispondente problema di Cauchy(7.3), definita su un intervallo I contenente t0 al proprio interno.
Il teorema assicura che per ogni scelta delle condizioni iniziali sia sempre consentito deter-minare almeno una soluzione del relativo problema di Cauchy, ma non garantisce in alcunmodo l’unicita di tale soluzione: e possibile che esistano soluzioni dello stesso problema diCauchy definite sullo stesso intervallo I ed ivi distinte.A titolo di esempio si consideri il problema di Cauchy in forma normale del primo ordine
x = 2√|x|
x(0) = 0(t, x) ∈ R× R
in cui il secondo membro dell’equazione differenziale e funzione continua di R2. Per ogniδ > 0 fissato si verifica facilmente che l’applicazione
ϕδ(t) =
(t− δ)2 per t > δ
0 se t ≤ δcostituisce una soluzione del problema di Cauchy. Tuttavia, per ogni diverso valore dellacostante δ si perviene ad una soluzione distinta dello stesso problema a valori iniziali,
Stefano Siboni 47

Universita degli studi di Trento Corso di Meccanica razionale
come illustra la figura seguente.
Il problema di Cauchy qui considerato ammette una infinita non numerabile di soluzionidistinte.
7.4 Teorema di unicitaUna soluzione ϕ del problema di Cauchy (7.3) e sempre definita su un intervallo I. Perciola soluzione di un problema a valori iniziali non puo mai risultare unica in senso stretto,dal momento che e sempre possibile considerare una restrizione di ϕ ad un intervallostrettamente incluso in I e contenente l’istante iniziale. L’unicita deve essere intesa in unsenso diverso. Date due soluzioni ϕ e ψ dello stesso problema di Cauchy con condizioneiniziale (t0, x0), rispettivamente definite sugli intervalli I e J , l’intersezione I ∩ J risultacertamente un intervallo non vuoto, dovendo comprendere almeno l’istante iniziale t0 —eventualmente identificandosi con il solo istante t0: nell’intervallo I ∩J e quindi consentitoconfrontare le due soluzioni. Si parlera di unicita della soluzione di (7.3) qualora duequalsivoglia soluzioni coincidano punto per punto nell’intersezione dei rispettivi intervallidi definizione
ϕ(t) = ψ(t) ∀ t ∈ I ∩ J . (7.4)
Una condizione sufficiente per l’unicita della soluzione del problema di Cauchy si determinaassumendo minime proprieta di regolarita, piu forti della semplice continuita, per il secondomembro dell’equazione differenziale. Il teorema di unicita recita quanto segue.
Sia data l’equazione differenziale del primo ordine in forma normale (7.1) e sia la funzione
Stefano Siboni 48

Universita degli studi di Trento Corso di Meccanica razionale
f : Ω−−→Rn di classe C1 nel dominio aperto Ω. Allora per ogni condizione iniziale(t0, x0) ∈ Ω esiste unica la soluzione del relativo problema di Cauchy, l’unicita essendointesa nel senso precisato sopra.
L’unicita della soluzione del problema di Cauchy, per qualsivoglia scelta della condizioneiniziale, e percio assicurata qualora il secondo membro f dell’equazione differenziale am-metta continue in Ω tutte le derivate parziali prime
∂f
∂t,
∂f
∂x1, . . . . . . ,
∂f
∂xn.
Si sottolinea che il teorema classico di unicita prescrive per il secondo membro f unacondizione piu debole, nota come condizione di Lipschitz locale in x e uniformein t su Ω. L’appartenenza di f alla classe C1 in Ω implica la condizione di Lipschitz erisulta quindi meno generale, offrendo tuttavia il grande vantaggio di una maggiore sem-plicita d’uso. Nella quasi totalita delle applicazioni e la proprieta C1, e non la condizionelipschitziana, ad essere riconosciuta ed utilizzata per assicurare esistenza ed unicita dellesoluzioni del problema di Cauchy.
7.5 Prolungamenti, soluzioni prolungabili, soluzionimassimali
Nelle ipotesi del teorema di unicita, se ϕ e ψ sono due soluzioni del problema di Cauchycon dato iniziale (t0, x0) ∈ Ω nei rispettivi intervalli I e J , l’applicazione definita da
ζ(t) =
ϕ(t) se t ∈ I
ψ(t) se t ∈ J
costituisce una evidente soluzione dello stesso problema di Cauchy nell’intervallo unioneI ∪J . La definizione e ben posta in quanto ϕ(t) = ψ(t) ∀ t ∈ I ∩J . In particolare, qualorasi abbia J ⊂ I, la soluzione ψ coincide puntualmente con la ϕ in tutto l’intervallo J , edunque si identifica con la restrizione a J di ϕ. La soluzione ψ si dice prolungabile,mentre ϕ e chiamata prolungamento di ψ nell’intervallo I.
Stefano Siboni 49
Universita degli studi di Trento Corso di Meccanica razionale
Una soluzione che non ammetta prolungamenti viene detta soluzione massimale o com-pleta del problema di Cauchy. Anche per le soluzioni massimali, e nelle stesse ipotesi delrisultato precedente, vale un teorema di esistenza ed unicita.
7.6 Teorema di esistenza ed unicita delle soluzionimassimali
Sia consideri l’equazione differenziale in forma normale del primo ordine (7.1), con f :Ω−−→Rn di classe C1 nel proprio dominio aperto Ω. Per ogni condizione iniziale (t0, x0) ∈Ω esiste allora unica la soluzione massimale del relativo problema di Cauchy (7.3), definitasu un intervallo aperto.
La soluzione massimale e determinata univocamente dalla condizione iniziale (t0, x0) ∈ Ω.L’intervallo — aperto — di definizione della soluzione viene indicato con
J(t0, x0) ⊆ R
e per la corrispondente soluzione si fa uso della notazione
t ∈ J(t0, x0) −−−−−−−−−→ x(t, t0, x0) ∈ Rn .
x(t, t0, x0) rappresenta percio il valore all’istante t ∈ J(t0, x0) della soluzione associata aldato iniziale (t0, x0).
7.7 Osservazione. Teorema di prolungabilita delle soluzionimassimali
E importante sottolineare come la soluzione massimale x(t, t0, x0) non risulti necessaria-mente definita sull’intera retta reale, ma soltanto su un intervallo aperto di R
J(t0) ⊂ R .
Questa circostanza potrebbe apparire sorprendente. La soluzione massimale viene de-terminata considerando tutte le soluzioni del problema di Cauchy assegnato e costruen-done il prolungamento all’intervallo unione di tutti gli intervalli di definizione delle singolesoluzioni. Sarebbe quindi utile comprendere quali ostruzioni possano essere di ostacoloalla individuazione di una soluzione massimale definita a tutti i tempi. Il teoremadi prolungabilita delle soluzioni massimali risponde precisamente a questa esigenza.Esso stabilisce che le soluzioni massimali definite su intervalli superiormente — o inferior-mente — limitati devono presentare alcuni andamenti caratteristici e generali, in prossimitadell’estremo superiore — o inferiore, rispettivamente — del loro dominio.
Si consideri l’equazione differenziale x = f(t, x), con f : Ω−−−−→Rn di classe C1 in Ω,aperto di Rn. Sia x(t) la soluzione massimale di un problema di Cauchy, definita su unintervallo I superiormente limitato, con sup I = β. Sia (ti)i∈N una successione di istantiti ∈ I convergente a β — da sinistra —
limi→∞
ti = β .
Stefano Siboni 50

Universita degli studi di Trento Corso di Meccanica razionale
Deve allora ricorrere una delle seguenti circostanze:
(i) esiste una sottosuccessione (tin)n∈N di (ti)i∈N tale che
limn→∞
x(tin) = y ∈ Rn
ed il punto (β, y) appartiene alla frontiera ∂Ω del dominio Ω;
(ii) esiste una sottosuccessione (tin)n∈N di (ti)i∈N tale che
limn→∞
|x(tin)| = +∞ .
Il teorema si interpreta facilmente dal punto di vista geometrico. [x(ti)]i∈N e una suc-cessione di Rn, e puo risultare limitata o non limitata. Se limitata, per il teorema diBolzano-Weierstrass essa deve ammettere una sottosuccessione (tin)n∈N convergente ad unvettore y ∈ Rn, in modo che
limn→∞
(tin , x(tin)) = (β, y) .
In tal caso il punto limite (β, y) si colloca sulla frontiera ∂Ω: la possibilita di prolungareulteriormente la soluzione e preclusa dal raggiungimento della frontiera deldominio Ω. Il prolungamento della soluzione a t = β e oltre comporterebbe una curvaintegrale estesa al di fuori di Ω, laddove l’equazione differenziale non risulta definita.
Nel caso la successione [x(ti)]i∈N sia non limitata, e certamente dato estrarre da essa unasottosuccessione il cui modulo tende all’infinito: la soluzione esplode, in modulo, all’infinitoin un intervallo di tempo limitato(1). Naturalmente il dominio Ω dovra risultare di forma
(1)Si osservi che non necessariamente esiste il limite per t→β− della soluzione in quanto tale. L’asserto
riguarda una appropriata sottosuccessione di istanti temporali.
Stefano Siboni 51

Universita degli studi di Trento Corso di Meccanica razionale
appropriata, in modo che anche la curva integrale della soluzione sia a propria volta nonlimitata. La figura seguente fornisce una possibile illustrazione di questa circostanza.
8. Applicazione alla dinamica del punto liberoAll’equazione differenziale del moto di un punto materiale libero, (6.3), deve associarsi ilproblema di Cauchy
dP
dt= ~V
d~V
dt=
1
m~F (t, P, ~V )
P (t0) = P0
~V (t0) = ~V0
con la condizione iniziale (t0, P0, ~V0) ∈ R×R6. Il secondo membro dell’equazione differen-ziale ha componenti (
~V ,1
m~F (t, P, ~V )
)e risulta di classe C1 se e soltanto se la funzione forza ~F (t, P, ~V ) e di pari regolarita neldominio R×R6. Le prime tre componenti non influiscono sulla regolarita dell’equazione dif-ferenziale, dal momento che si identificano con quelle del vettore ~V e sono quindi polinomidi primo grado delle variabili (t, P, ~V ) — di classe C∞ per via delle derivate parziali:
∂vi∂t
= 0∂vi∂xj
= 0∂vi∂vj
= δij ∀ i, j = 1, 2, 3 .
In tale ipotesi, per ogni scelta della condizione iniziale (t0, P0, ~V0) esiste unica la soluzionemassimale su un appropriato intervallo aperto I
t ∈ I −−−−−−−−−→ (P (t), ~V (t))
ed e quindi individuato univocamente il moto P (t), t ∈ I, del punto materiale. L’evoluzio-ne del sistema e completamente e univocamente determinata dalla posizione
Stefano Siboni 52

Universita degli studi di Trento Corso di Meccanica razionale
e velocita iniziali, tanto nel passato (t ∈ I, t ≤ t0) quanto nel futuro (t ∈ I, t ≥t0). In questo senso l’equazione differenziale del moto fornisce quella che si dice unadescrizione deterministica della dinamica del punto materiale libero. E questo unaspetto particolare del generale determinismo della meccanica classica: come si vedranel seguito, la dinamica di tutti i sistemi meccanici e determinata in modo univoco dallacondizione iniziale.
9. Esempi notevoli di moti liberiPochissimi sono i casi di equazioni del moto per le quali sia disponibile la soluzione delproblema di Cauchy. In generale ci si deve limitare ad approssimazioni numeriche disoluzioni massimali la cui esistenza ed unicita sono assicurate a priori dalla condizione diregolarita dell’equazione differenziale. Si esaminano alcuni esempi notevoli di problemi avalori iniziali esattamente risolvibili.
9.1 Grave soggetto a resistenza viscosaLe forze di resistenza viscosa ed idraulica — altrimenti note come attriti interni —descrivono la resistenza opposta da un mezzo fluido ad un corpo che si muova in seno adesso. La forza dipende dal tipo di fluido attraversato, dalla velocita e, sebbene il corpovenga schematizzato come un punto materiale, anche dalle dimensioni e dalla forma delcorpo stesso. Per velocita sufficientemente piccole, in relazione al tipo di fluido(1), la forzae proporzionale alla velocita istantanea ed avversa a questa, secondo l’equazione
−βP
in cui β e una costante reale positiva, nota come costante di frizione. Si parla, in questocaso, di resistenza viscosa del mezzo. Se le velocita in gioco sono piu elevate la resistenzadel mezzo manifesta una intensita proporzionale al quadrato della velocita istantanea e siesprime per mezzo dell’equazione
−λAk |P | P
dove:
λ e una costante positiva che dipende dal tipo di fluido — essenzialmente dalla suadensita e viscosita — nonche dallo stato della superficie del corpo in moto;
A indica la cosiddetta area investita del corpo, vale a dire l’area della sezione mas-sima del corpo secondo un piano ortogonale alla direzione di moto P /|P |. In defini-tiva, il parametro tiene conto della estensione del corpo ortogonalmente alla propriadirezione di moto;
k e un fattore positivo adimensionale che tiene conto della forma geometrica del corpo— fattore di forma. Valori piccoli del parametro k individuano corpi di forma affu-solata secondo la direzione del moto, che a parita di ogni altra condizione incontranoscarsa resistenza al moto da parte del mezzo. Per contro, grandi valori di k sono
(1)ad esempio, per l’aria a temperatura e pressione standard si tratta di velocita non superiori ai 2 ms−1
Stefano Siboni 53

Universita degli studi di Trento Corso di Meccanica razionale
caratteristici di forme poco “aerodinamiche”, che non favoriscono la penetrazione delmezzo da parte del corpo in movimento.
In questa circostanza la forza esercitata sul corpo prende il nome di resistenza idraulicadel mezzo. In molti casi di interesse pratico, laddove il corpo sia soggetto a forze attiveche inducano un rapido incremento della velocita, e dato trascurare la fase di moto a bassavelocita e quindi trattare la resistenza del mezzo come se operasse interamente in regimeidraulico.
Cio premesso, si consideri un punto materiale P , di massa m, sottoposto alla forza pesom~g e ad una forza di resistenza viscosa −βP . L’equazione differenziale del moto siscrive
mP = m~g − βP
ed il problema di Cauchy che individua univocamente il moto assume la formamP = m~g − βPP (t0) = P0
P (t0) = ~V0
con dato iniziale (t0, P0, ~V0) ∈ R×R6. L’equazione del moto si riesprime immediatamente
come una equazione differenziale del primo ordine nella sola velocita istantanea ~V = P
md~V
dt= m~g − β~V
per cui e possibile procedere preventivamente alla soluzione del problema di Cauchy in ~Vmd~V
dt= m~g − β~V
~V (t0) = ~V0
(9.1)
e provvedere quindi alla determinazione della legge oraria mediante integrazione in t
P (t) = P (t0) +
∫ t
t0
~V (τ) dτ .
Il problema (9.1) riguarda una equazione differenziale del primo ordine lineare, non omo-genea e a coefficienti costanti. Il metodo piu rapido per determinarne la soluzione e quellodel fattore integrante. Basta porre l’equazione nella forma
d~V
dt+β
m~V = ~g
e moltiplicarla membro a membro per il fattore exp(βt/m)
eβt/md~V
dt+β
meβt/m~V = eβt/m~g
Stefano Siboni 54

Universita degli studi di Trento Corso di Meccanica razionale
in modo che il primo membro si riduce ad una derivata
d
dt
(eβt/m~V
)= eβt/m~g
che e possibile rimuovere con una integrazione in t
eβt/m ~V (t)− eβt0/m ~V (t0) = eβt/mm
β~g − eβt0/mm
β~g .
Tenuto conto del dato iniziale, l’espressione della velocita e quindi
~V (t) =m
β~g + e−β(t−t0)/m
(~V0 −
m
β~g)
∀ t ∈ R
e per t→ +∞ tende al limite finito
limt→+∞
~V (t) =m
β~g = ~V∞
che costituisce la cosiddetta velocita di regime del sistema, parallela e concorde conl’accelerazione gravitazionale ~g. Data la convergenza esponenziale a ~V∞, la velocita diregime puo ritenersi raggiunta dopo un breve intervallo di tempo, trascorso il quale il motodel grave e con buona approssimazione un moto rettilino uniforme diretto verticalmenteverso il basso. E cio a prescindere dal valore della velocita iniziale ~V0 ∈ R3.
9.2 Caduta di un grave soggetto a resistenza idraulicaUn punto materiale P di massa m e soggetto al proprio peso m~g e ad una forza di resistenzaidraulica, la quale per definizione si oppone alla velocita istantanea ed ha intensita pro-porzionale al modulo quadrato di questa, secondo la relazione
−β|P | P
con β costante positiva. L’equazione del moto diventa percio
mP = m~g − β|P | P .
Stefano Siboni 55

Universita degli studi di Trento Corso di Meccanica razionale
Il secondo membro dell’equazione differenziale e di classe C1 in (t, P, ~V ) ∈ R× R6, quindisoddisfa i requisiti di validita del teorema di esistenza e unicita delle soluzioni massimali peril problema di Cauchy. Si tratta, tuttavia, di una equazione differenziale non lineare lacui soluzione non puo essere ottenuta esplicitamente per ogni scelta delle condizioni iniziali.Al fine di ricevare la soluzione in forma chiusa dell’equazione ci si limita a considerare ilcaso molto particolare della partenza da fermo del punto materiale, ossia il caso in cui lavelocita iniziale sia nulla
mP = m~g − β|P | PP (0) = P0
P (0) = 0 .
(9.2)
Introdotta una terna di riferimento cartesiana ortogonale Oe1e2e3, con l’asse Oe3 direttoverticalmente verso il basso, l’accelerazione gravitazionale si scrive nella forma ~g = ge3, cong > 0. L’intuizione fisica suggerisce allora di ricercare la soluzione massimale del problemadi Cauchy nella forma di un moto lungo la direzione verticale Oe3
~V (t) = v(t) e3
P (t)−O = (P0 −O) · e1 e1 + (P0 −O) · e2 e2 +[(P0 −O) · e3 +
∫ t
0
v(τ) dτ]e3
(9.3)
essendo v(t) la soluzione massimale del problema unidimensionalev = g − β
m|v| v
v(0) = 0 ,(9.4)
che si verifichera essere definita per ogni t ∈ R. Poiche la soluzione (9.3)-(9.4) soddisfacertamente le condizioni iniziali e l’equazione differenziale, per il teorema di unicita essacostituisce la soluzione del problema di Cauchy (9.2). La soluzione v(t) e una funzioneC1 in tutto il suo intervallo di definizione e all’istante iniziale t = 0 la sua derivata primaassume segno positivo
v(0) = g − β
m|v(0)| v(0) = g > 0 .
Data la continuita di v, la derivata deve mantere segno positivo in un conveniente intorno dit = 0, nel quale v(t) risultera percio funzione monotona crescente del tempo. La condizioneiniziale v(0) = 0 assicura pertanto che in un intervallo di tempo del tipo [0, ε], con ε > 0,la velocita e positiva e crescente. Si afferma che v(t) mantiene il segno positivo per ognit > 0 su cui la soluzione e definita. Se per assurdo esistesse un istante positivo in cuil’accelerazione v(t) diventasse negativa, per il teorema di Bolzano dovrebbe essere definitoaltresı un istante t? > 0 per il quale si abbia v(t?) = 0, con v(t) > 0 ∀ t ∈ [0, t?). Inquell’istante la velocita dovrebbe risultare positiva e soddisfare l’equazione del moto
0 = v(t?) = g − β
m|v(t?)| v(t?) = g − β
mv(t?)2
Stefano Siboni 56
Universita degli studi di Trento Corso di Meccanica razionale
assumendo percio il valore
v(t?) =
√mg
β
def= v∞ > 0 .
Si arriverebbe allora a concludere che il problema di Cauchyv = g − β
m|v| v
v(t?) = v∞ ,(9.5)
dovrebbe ammettere la soluzione v(t) e la soluzione v∞ costante a tutti tempi, soluzionicertamente distinte all’istante t = 0:
v(0) = 0 < v∞ .
Tale circostanza contraddice il teorema di unicita, che certamente e applicabile al problema(9.5) essendo il secondo membro dell’equazione differenziale di classe C1 in (t, v) ∈ R2.Se ne deduce pertanto che la derivata v(t) della soluzione non puo annullarsi per alcunvalore positivo di t in cui sia definita e che, di conseguenza, positiva si mantiene anche v(t)nello stesso intervallo. Limitandosi a considerare la parte nel futuro della soluzione v(t),e possibile omettere il valore assoluto nel secondo membro dell’equazione differenziale edil problema di Cauchy (9.4) assume la forma piu semplice v = g − β
mv2
v(0) = 0 ,(9.6)
che puo risolversi direttamente con il metodo di separazione delle variabili
v(t)∫0
1
g − β
mv2dv =
t∫0
dt . (9.7)
L’integrando a primo membro si riesprime in termini della velocita caratteristica v∞
1
g − β
mv2
=1
g
1
1− β
mgv2
=1
g
1
1− v2
v2∞
ed ammette la seguente decomposizione in fratti semplici
1
g − β
mv2
=1
2g
[1
1− v
v∞
+1
1 +v
v∞
]
Stefano Siboni 57

Universita degli studi di Trento Corso di Meccanica razionale
per cui l’equazione risolvente (9.7) diventa
v(t)∫0
[1
1− v
v∞
+1
1 +v
v∞
]1
v∞dv =
2g
v∞t
e integrato esplicitamente il primo membro, porge[− ln
(1− v
v∞
)+ ln
(1 +
v
v∞
)]v(t)
0
=2g
v∞t .
Non rimane che risolvere in v(t) per ottenere la soluzione cercata
v(t) = v∞
[1− 2
1 + e2gt/v∞
]∀ t ≥ 0
la quale, crescendo, tende esponenzialmente alla velocita caratteristica
v(t) −−−−−−−−−→t→+∞
v∞ ,
senza tuttavia mai raggiungerla a tempi finiti. La velocita del grave in caduta si approssimaasintoticamente alla velocita v∞, che assume dunque il significato fisico di una vera epropria velocita limite per il moto. Essendo la convergenza esponenziale, ci si convinceimmediatamente che decorso un intervallo di tempo t >∼ v∞/2g la velocita del grave puoconsiderarsi, di fatto, indistinguibile dal valore asintotico costante v∞ e il moto risultabene approssimabile come rettilineo ed uniforme.
In modo analogo si verifica che la soluzione v(t) e prolungabile indefinitamente nel passato,su tutto l’intervallo (−∞, 0) dei tempi, ed ivi monotona crescente.
9.3 Punto soggetto ad una forza elastica.Oscillatore armonico semplice
Si dice elastica una forza del tipo−k(P −O) (9.8)
applicata al punto P . Il punto fisso O si dice centro della forza elastica, mentre k e unacostante positiva nota come costante elastica della forza. Se il punto materiale di massam e sottoposto alla forza (9.8), le equazioni del moto risultano
mP = −k(P −O) (9.9)
e rispetto ad una terna di riferimento cartesiana ortogonale Ox1x2x3 equivalgono al sistemadi equazioni scalari
mxi = −kxi ∀ i = 1, 2, 3 .
Stefano Siboni 58

Universita degli studi di Trento Corso di Meccanica razionale
Dette equazioni condividono la medesima struttura e ognuna di esse dipende unicamenteda una sola coordinata xi: il moto del sistema e quindi dato dalla composizione di motiunidimensionali indipedenti secondo gli assi della terna di riferimento, ciascun moto essendodescritto da un’equazione differenziale scalare della forma
x+k
mx = 0 . (9.10)
Posto, come d’uso, k/m = ω2, con ω > 0, l’equazione del moto unidimensionale diventa
x+ ω2x = 0 (9.11)
e si riconosce essere una equazione differenziale lineare omogenea a coefficienti costanti, lacui soluzione generale si scrive come
x(t) = c1 cos(ωt) + c2 sin(ωt) (9.12)
in termini delle costanti reali arbitrarie c1 e c2. Qualora necessario, dette costanti possonodeterminarsi univocamente assegnando le condizioni iniziali. Per c1 = c2 = 0 il moto delsistema si riduce alla quiete nella configurazione di equilibrio x = 0. Nel caso si abbia(c1, c2) 6= (0, 0), la soluzione (9.12) si puo porre nella forma equivalente
x(t) =√c21 + c22
[c1√c21 + c22
cos(ωt) +c2√c21 + c22
sin(ωt)
](9.13)
dove i coefficienti costanti entro parentesi quadre sono compresi fra −1 e +1
−1 ≤ c1√c21 + c22
,c2√c21 + c22
≤ +1
e hanno somma dei quadrati unitaria[c1√c21 + c22
]2
+
[c2√c21 + c22
]2
=c21
c21 + c22+
c22c21 + c22
= 1
potendosi cosı identificare con seno e coseno di uno stesso angolo φcosφ = +
c1√c21 + c22
sinφ = − c2√c21 + c22
che e peraltro individuato univocamente nell’intervallo [0, 2π). La soluzione generale (9.13)si riduce percio alla funzione sinusoidale
x(t) =√c21 + c22
[cos(ωt) cosφ− sin(ωt) sinφ
]= A cos(ωt+ φ) (9.14)
Stefano Siboni 59

Universita degli studi di Trento Corso di Meccanica razionale
nella quale compaiono le costanti Adef=√c21 + c22 > 0 e φ ∈ [0, 2π) in luogo delle c1, c2
iniziali. Per A = 0 si recupera anche il caso particolare di c1 = c2 = 0, percio la (9.14)deve intendersi completamente equivalente alla (9.12). Una semplice interpretazione fisicadella (9.14) si puo dare nei termini seguenti. Si consideri un punto materiale Q vincolato amuoversi lungo una circonferenza fissa di centro O e raggio A, con velocita angolare scalarecostante ω — per cui Q si muove di moto circolare uniforme. Si tracci poi il diametroMN della circonferenza, in modo che all’istante t = 0 l’angolo NOQ sia uguale a φ, e siidentifichi P con la proiezione ortogonale di Q sul diametro. E allora immediato verificareche la legge oraria di P coincide con la (9.14). Il moto del punto P si identifica conquello della proiezione ortogonale, lungo un diametro, di un punto in motocircolare uniforme. Un moto oscillatorio di questo tipo si dice armonico semplice.
La costante A e detta ampiezza del moto armonico semplice, mentre φ ne costituisce lafase. La velocita angolare scalare ω del moto circolare uniforme associato si dice pul-sazione del moto armonico semplice. Per qualsiasi valore di ampiezza e fase, i motiarmonici semplici sono periodici con periodo T e frequenza ν pari quelli del corrispondentemoto circolare uniforme
T =2π
ων =
ω
2π.
Tutte le soluzioni dell’equazione (9.11) si possono interpretare dunque come moti armonicisemplici. Viceversa, qualsiasi moto armonico semplice si descrive per mezzo di una leggeoraria (9.14), che e chiaramente una soluzione dell’equazione (9.11)
d2
dt2[A cos(ωt+ φ)
]= −ω2A cos(ωt+ φ) ∀ t ∈ R ,
la quale percio si dice equazione differenziale caratteristica del moto armonicosemplice di pulsazione ω. Il sistema descritto dall’equazione (9.10), costituito da unpunto materiale di massa m in moto lungo l’asse Ox e soggetto ad una forza elastica dicentro O e costante k, e noto come oscillatore armonico semplice unidimensionaledi pulsazione ω e, per quanto detto, tutti i suoi moti sono armonici semplici. La soluzionegenerale del problema (9.9) consiste in una composizione di moti armonici semplici, diuguale pulsazione, uno per ciascun asse coordinato.
Stefano Siboni 60

Universita degli studi di Trento Corso di Meccanica razionale
9.4 Moto armonico semplice con smorzamento viscosoe forzante sinusoidale
Lungo l’asse Ox = Oe1 di una terna di riferimento inerziale si consideri un punto materialeP , di massa m, soggetto a:
una forza elastica di centro O e costante k > 0
−k(P −O) = −kxe1 ,
una forza di resistenza viscosa con costante di frizione β > 0
−βP = −βx e1 ,
una forza sinusoidale di ampiezza F , pulsazione Ω e fase α
F cos(Ωt+ α) e1 .
L’equazione del moto del sistema risulta allora
mx = −kx− βx+ F cos(Ωt+ α)
e posto β/m = h e k/m = ω2 assume la forma equivalente
x+ hx+ ω2x =F
mcos(Ωt+ α) (9.15)
nella quale si riconosce una equazione differenziale lineare a coefficienti costanti non omo-genea. E noto dalla teoria delle equazioni differenziali lineari che la soluzione generale della(9.15) si ottiene sommando ad una soluzione particolare della stessa equazione la soluzionegenerale dell’omogenea associata
x+ hx+ ω2x = 0 . (9.16)
9.4.1 Soluzione generale dell’equazione omogeneaLa soluzione generale dell’omogenea associata e data da una combinazione lineare arbitrariadi due soluzioni linearmente indipendenti, la cui scelta dipende dalle radici dell’equazionecaratteristica
λ2 + hλ+ ω2 = 0 (9.17)
ottenuta imponendo che eλt sia soluzione dell’equazione. Si devono distinguere tre casi:
(i) per ∆ = h2 − 4ω2 > 0 le radici dell’equazione caratteristica sono reali e di segnonegativo
λ1 =−h+
√h2 − 4ω2
2< 0 λ2 =
−h−√h2 − 4ω2
2< 0
Stefano Siboni 61

Universita degli studi di Trento Corso di Meccanica razionale
per cui la soluzione generale dell’equazione omogenea si scrive
x(t) = c1eλ1t + c2e
λ2t
e indipendentemente dalla scelta delle costanti arbitrarie c1 e c2 converge a zero pert→ +∞, unitamente alla sua derivata prima
limt→+∞
x(t) = 0 limt→+∞
x(t) = 0 .
Il moto descritto dalla soluzione generale dell’omogenea tende quindi asintoticamenteallo stato di quiete nell’origine x = 0;
(ii) se ∆ = h2 − 4ω2 = 0, le radici dell’equazione caratteristica sono reali e coincidenti
λ1 = λ2 = −h2
per cui due soluzioni linearmente indipendenti dell’equazione omogenea sono date da
e−ht/2
e la corrispondente soluzione generale diventa
x(t) = (c1 + c2t) e−h
2 t
e mantiene comunque il comportamento asintotico gia riscontrato nel caso precedente;
(iii) qualora si abbia infine ∆ = h2− 4ω2 < 0, le radici di (9.17) sono complesse coniugate
λ1 =−h+ i
√4ω2 − h2
2= a+ ib λ2 =
−h− i√
4ω2 − h2
2= a− ib
con parti reale ed immaginaria
a = −h2
b =1
2
√4ω2 − h2 .
Due soluzioni reali e linearmente indipendenti dell’equazione omogenea si scrivono
eat cos(bt) eat sin(bt)
in modo che la soluzione generale assuma la forma
x(t) = eat[c1 cos(bt) + c2 sin(bt)]
e puo anche esprimersi come
x(t) = Ae−ht/2 cos(bt+ β)
Stefano Siboni 62

Universita degli studi di Trento Corso di Meccanica razionale
con A > 0 e β ∈ [0, 2π). Anche in questa circostanza, posizione e velocita istantaneatendono asintoticamente a zero per t→ +∞, ma la soluzione ha ora un andamento ditipo oscillatorio. Gli istanti di arresto del moto sono infatti determinati dall’equazione
x(t) = Ae−ht/2[−h
2cos(bt+ β)− b sin(bt+ β)
]= 0
che equivale ah
2bcos(bt+ β) + sin(bt+ β) = 0
e, non potendo ammettere soluzioni per le quali si abbia cos(bt+ β), si riduce a
h
2b+ tg(bt+ β) = 0 . (9.18)
Poiche la tangente trigonometrica e una funzione invertibile in (−π/2, π/2), di im-magine R e periodo π, le soluzioni in t dell’equazione (9.18) sono sempre definite espaziate di π
t = tndef=
1
b
[−β − arctg
( h2b
)+ nπ
]∀n ∈ Z .
In effetti il moto del punto puo interpretarsi come un moto armonico semplice di pul-sazione b e fase β, la cui ampiezza non sia costante ma esponenzialmente descrescentenel tempo
A −−−−−−−−−→ Ae−ht/2
secondo quanto illustrato nella figura seguente
In tutti i casi, la soluzione dell’equazione omogenea associata tende asintoticamente azero per t→ +∞ e poiche la convergenza esponenziale e relativamente rapida la soluzionegenerale dell’omogenea viene denominata parte transiente, o semplicemente transiente,del moto del sistema. A determinare le caratteristiche del moto per tempi lunghi e lasoluzione particolare dell’equazione non omogenea.
Stefano Siboni 63

Universita degli studi di Trento Corso di Meccanica razionale
9.4.2 Soluzione particolare dell’equazione non omogeneaLa teoria delle equazioni differenziali lineari a coefficienti costanti dimostra che una solu-zione particolare della (9.15) puo sempre ricercarsi come funzione sinusoidale
x(t) = A cos(Ωt+ ϕ) (9.19)
con A > 0 e ϕ ∈ R costanti da determinare. Il calcolo delle costanti incognite puo essereeseguito in vari modi. Un metodo abbastanza diretto fa uso del formalismo complesso,lo stesso impiegato in elettromagnetismo per lo studio dei circuiti in corrente alternata.Si conviene di riscrivere l’equazione del moto, con la corrispondente soluzione particolare(9.19), nella forma( d2
dt2+ h
d
dt+ ω2
)[A cos(Ωt+ ϕ)] =
F
mcos(Ωt+ α) (9.20)
in cui si e posto ( d2
dt2+ h
d
dt+ ω2
)x(t)
def= x(t) + hx(t) + ω2x(t) .
Derivando membro a membro rispetto a t e moltiplicando per −1/Ω, si ottiene alloraanaloga relazione con i seni al posto dei coseni( d2
dt2+ h
d
dt+ ω2
)[A sin(Ωt+ ϕ)] =
F
msin(Ωt+ α)
che e poi sufficiente moltiplicare per l’unita immaginaria i e sommare a (9.20) per ricondursialla forma complessa ( d2
dt2+ h
d
dt+ ω2
)[AeiΩt+iϕ
]=
F
meiΩt+iα
nella quale si e fatto uso dell’identita di Eulero
eiz = cos z + i sin z ∀ z ∈ C .
Eseguite le derivate in t, l’equazione complessa diventa
A[−Ω2 + iΩh+ ω2
]eiΩteiϕ =
F
meiΩteiα
e da essa si deduce la relazione
Aeiϕ =F
m
1
ω2 − Ω2 + ihΩeiα =
=F
m
ω2 − Ω2 − ihΩ
(ω2 − Ω2)2 + h2Ω2eiα =
=F
m
1√(ω2 − Ω2)2 + h2Ω2
ω2 − Ω2 − ihΩ√(ω2 − Ω2)2 + h2Ω2
eiα .
Stefano Siboni 64

Universita degli studi di Trento Corso di Meccanica razionale
In modo analogo a quanto gia visto per l’oscillatore armonico semplice, conviene introdurreuna fase φ definita univocamente in [0, 2π) dalle equazioni
cosφ = +ω2 − Ω2√
(ω2 − Ω2)2 + h2Ω2
sinφ = − hΩ√(ω2 − Ω2)2 + h2Ω2
per cui l’equazione precedente diventa
Aeiϕ =F
m
1√(ω2 − Ω2)2 + h2Ω2
(cosφ+ i sinφ) eiα =
=F
m
1√(ω2 − Ω2)2 + h2Ω2
eiφ eiα =
=F
m
1√(ω2 − Ω2)2 + h2Ω2
ei(φ+α)
e confrontando moduli e fasi dei due membri si perviene al risultato richiesto
A =F
m
1√(ω2 − Ω2)2 + h2Ω2
ϕ = φ+ α
(9.21)
dove la fase ϕ si intende ovviamente definita a meno di multipi interi di 2π.
9.4.3 Soluzione generale dell’equazione non omogeneaLa soluzione del problema (9.15) e quindi esprimibile nella forma
x(t) = xo(t) +A cos(Ωt+ ϕ)
con la soluzione generale xo(t) dell’omogenea associata che tende a zero per t→ +∞ e rap-presenta quindi la parte transiente del moto, mentre la soluzione particolare A cos(Ωt+ϕ)sopravvive inalterata nel tempo e costituisce la cosiddetta parte di regime o stazionariadella soluzione x(t). Giova sottolineare che la dipendenza dalle costanti arbitrarie c1 e c2 ecompletamente contenuta nella soluzione generale xo(t) dell’omogenea, per cui la memo-ria delle condizioni iniziali si perde rapidamente con l’approssimarsi a zero deltransiente: su tempi abbastanza lunghi, in modo che il transiente divenga trascurabile, ilmoto del sistema e descritto dalla soluzione di regime, indipendentemente dalle condizioniiniziali assegnate.
9.4.4 RisonanzaNel caso che la pulsazione Ω della forzante F cos(Ωt + α)e1 possa essere modulata a pia-cere, ha interesse chiedersi per quale — o quali — valori di Ω l’ampiezza A del moto diregime risulta massima. In queste condizioni si puo pensare che il sistema manifesti la
Stefano Siboni 65

Universita degli studi di Trento Corso di Meccanica razionale
massima efficienza nell’assorbire energia meccanica dalla forzante e riesca a raggiungere ilmoto stazionario piu vigoroso possibile. In tal caso di dice il sistema e in condizioni dirisonanza e la pulsazione Ω che realizza tale condizione si dice pulsazione di risonanzadel sistema. Dall’espressione (9.21) di A appare evidente che l’ampiezza di oscillazione, aregime, e massima se e soltanto se minimo risulta il polinomio in Ω2 a denominatore
P(Ω2)def= (Ω2 − ω2)2 + h2Ω2 Ω2 ≥ 0
che risulta di secondo grado nel proprio argomento e va considerato limitatamente ai valorinon negativi dello stesso — Ω e un numero reale. L’unico punto critico del polinomio eindividuato da
dPdΩ2
(Ω2) = 2Ω2 − 2ω2 + h2 = 0 ⇐⇒ Ω2 = ω2 − h2
2
per cui:
(i) se ω2 − h2
2> 0 la pulsazione di risonanza vale
ΩR =
√ω2 − h2
2;
(i) se ω2 − h2
2≤ 0 l’ampiezza del moto stazionario e massima per Ω = 0, non si ha
risonanza in senso proprio e la pulsazione di risonanza non risulta definita.
Si osservi che generalmente il coefficiente di frizione della forza viscosa e piccolo, per cuirisulta h ω. Di conseguenza la pulsazione di risonanza risulta sempre definita ed assumel’espressione approssimata
ΩR =
√ω2 − h2
2= ω
√1− h2
2ω2' ω
(1− h2
4ω2
)potendosi peraltro, in moltissimi casi, identificare con la stessa pulsazione ω dell’oscillatorearmonico semplice — senza resistenza viscosa.
Stefano Siboni 66
Universita degli studi di Trento Corso di Meccanica razionale
10. Statica del punto materiale liberoLa statica e tradizionalmente quella parte della meccanica che si occupa della definizione,caratterizzazione e determinazione dell’equilibrio dei sistemi. Il problema dell’equilibrioper il punto materiale libero puo essere usato come prototipo per introdurre le definizionifondamentali di quiete ed equilibrio, che verranno poi estese al punto vincolato, ai sistemidi punti materiali liberi, ai sistemi rigidi ed infine a quelli olonomi.
10.1 Quiete di un punto materiale liberoSi consideri un punto materiale P ed una posizione P0 nello spazio. Si definisce quiete inP0 del punto P il moto che vede il punto costantemente nella posizione P0 a tutti i tempi:
P (t) = P0 ∀ t ∈ R .
La quiete in P0 e un moto particolare del sistema, per il quale la posizione P0 delpunto non varia nel tempo. La quiete viene utilizzata per definire gli equilibri del sistema.
10.2 Equilibrio di un punto materiale liberoUna posizione P0 si dice di equilibro per il sistema, o semplicemente un equilibrio, se laquiete in P0 e un moto del sistema, soluzione cioe delle equazioni differenziali del moto.
L’equilibrio e una posizione del sistema e non un particolare moto. Questa osservazionesottolinea in modo netto la distinzione fra quiete ed equilibrio.
10.3 Caratterizzazione degli equilibriLa posizione P0 viene caratterizzata come equilibrio del sistema imponendo che la quietein P0 sia soluzione delle equazioni del moto (6.2). Essendo P (t) = P0 e P (t) = 0 ∀ t ∈ R,la condizione necessaria e sufficiente affinche P0 sia equilibrio del sistema e dunque che siabbia
0 = ~F (t, P0, 0) ∀ t ∈ R .
10.4 Comportamento del sistema in una posizione diequilibrio
Collocare il punto materiale in una posizione di equilibrio P0 non significa specificarnecompletamente le condizioni iniziali: queste infatti richiedono l’assegnazione ad un istanteiniziale t0 ∈ R tanto della posizione P (t0) quanto della velocita iniziale P (t0), mentrel’equilibrio individua soltanto la posizione P (t0) = P0.Qualora si assuma P (t0) = P0 e P (t0) = 0, imponendo quindi che il punto parta da unaposizione di equilibrio con velocita nulla, il moto del sistema e la quiete in P0. Questorisultato, fisicamente molto ragionevole, si stabilisce rigorosamente notando che la quieteP (t) = P0 e la soluzione in tutto l’intervallo reale del problema di Cauchy
P =1
m~F (t, P, P )
P (t0) = P0
P (t0) = 0
(10.1)
Stefano Siboni 67

Universita degli studi di Trento Corso di Meccanica razionale
in quanto 0 = ~F (t, P0, 0) ∀ t ∈ R per definizione di equilibrio in P0, mentre P (t0) = P (t) =P0 e P (t0) = P (t) = 0 ∀ t ∈ R. La soluzione e ovviamente massimale in quanto definita intutto R — piu completa di cosı non potrebbe essere. Il teorema di unicita della soluzionemassimale assicura che la quiete in P0 costituisce l’unica soluzione del problema diCauchy considerato.(1) Si sottolinea che questo risultato, sebbene suggerito dall’intuizionefisica, si fonda in modo essenziale sul teorema di unicita: qualora infatti la funzione diforza ~F (t, P, P ) non fosse di regolarita sufficiente ad assicurare l’applicabilita del teorema,la quiete in P0 potrebbe non essere la sola soluzione del problema di Cauchy (10.1) e quindipotrebbe aversi che il punto materiale, benche collocato con velocita nulla in una posizionedi equilibrio, si allontani da questa al trascorrere del tempo. E chiaro, tuttavia, che in talicircostanze ricorrerebbero ben altri problemi che un semplice comportamento “bizzarro”e fisicamente poco intuitivo degli equilibri: verrebbe meno l’unicita della soluzione per ilproblema a valori iniziali, e con essa, la possibilita di utilizzare l’equazione differenzialedel moto per una descrizione deterministica del sistema. Le equazioni del moto (6.2)perderebbero qualsiasi valore predittivo e diventerebbero, di fatto, del tutto inservibili.
11. Punto materiale vincolatoIl punto materiale si dice vincolato quando e sottoposto a restrizioni sulle sue possibilitadi moto. Tali restrizioni sono note come vincoli. In generale, i vincoli imposti ad un puntomateriale sono espressi da una o piu relazioni della forma
f(t, P, P ) ≥ 0 (11.1)
e si intendono rispettati da tutti e soli i moti P (t), su un intervallo I di tempo, per i qualirisulta
f(t, P (t), P (t)) ≥ 0 ∀ t ∈ I .I vincoli sono variamente classificabili, secondo diversi criteri. Si distinguono cosı:
(i) vincoli unilaterali e bilaterali, i primi espressi da disequazioni come la (11.1), isecondi descritti da equazioni
f(t, P, P ) = 0 .
Quest’ultima denominazione si giustifica con il fatto che un vincolo bilaterale si puosempre intendere come equivalente ad una coppia di vincoli unilaterali
f(t, P, P ) = 0 ⇐⇒
f(t, P, P ) ≥ 0
−f(t, P, P ) ≥ 0;
(ii) vincoli dipendenti ed indipendenti dal tempo, secondo che nella relazione (11.1) iltempo t compaia esplicitamente o meno. La forma generale di un vincolo indipendentedal tempo sara dunque
f(P, P ) ≥ 0 ;
(1)Resta inteso che qualora la velocita iniziale P (t0) sia diversa da zero, il moto del sistema sara tutt’altro
che la quiete in P0.
Stefano Siboni 68

Universita degli studi di Trento Corso di Meccanica razionale
(iii) vincoli olonomi e anolonomi, a seconda che nella relazione (11.1) si abbia o menouna dipendenza esplicita dalla velocita istantanea P . Per un generico vincolo olonomosi avra pertanto
f(t, P ) ≥ 0 .
Si osservi che, di fatto, il vincolo olonomo si riduce ad una restrizione sulle posizioniP che il punto materiale ha la possibilita di assumere; l’insieme delle posizioni ac-cessibili puo altresı dipendere dal tempo. Storicamente, la denominazione di vincoloolonomo venne introdotta da H. Hertz alla fine dell’Ottocento, modellandola su unaparola greca il cui significato letterale e “di sola legge”, con allusione al fatto chel’espressione matematica del vincolo coinvolge soltanto le coordinate del punto, oltreche il tempo. Quanto al termine anolonomo, il suo significato letterale e quello di“non olonomo”, ma piu specificamente esso sottolinea la presenza di termini in Pnell’espressione del vincolo.
Le classificazioni precedenti sono indipendenti l’una dall’altra, per cui e dato di considerarlein tutte le loro — otto — possibili combinazioni.
Un punto materiale vincolato a rimanere su una superficie fissa costituisce un sistema avincoli olonomi, bilaterali e indipendenti dal tempo: l’espressione del vincolo si identificainfatti con l’equazione cartesiana della superficie, non dipende esplicitamente dal tempoperche la superficie si e supposta fissa e contiene soltanto le coordinate del punto. Cosı adesempio, se la superficie vincolare fosse una sfera di raggio R e con centro nell’origine O,il vincolo sarebbe espresso da
x21 + x2
2 + x23 = R2 .
Nel caso la superficie sferica fosse di centro fissato O e raggio variabile nel tempo secondouna legge R(t) preassegnata, il vincolo sarebbe definito da
x21 + x2
2 + x23 = R(t)2 ,
rimarrebbe percio olonomo e bilaterale, ma acquisirebbe una dipendenza dal tempo. Ilvincolo diventa unilaterale qualora al punto sia consentito di accedere anche all’internodella boccia sferica di raggio R(t) e centro O, oltre che alla superficie che ne costituisce lafrontiera:
x21 + x2
2 + x23 ≤ R(t)2 .
Quanto ai vincoli anolonomi, l’esempio piu importante e costituito dal vincolo di purorotolamento, noto anche come vincolo di rotolamento senza strisciamento di unsistema rigido su una superficie preassegnata. Di esso si parlera con qualche dettaglio nelseguito.
11.1 Postulato delle reazioni vincolariNello studio dinamico del punto materiale vincolato non e possibile fare riferimento soltantoal secondo principio della dinamica e pretendere di scrivere l’equazione del moto nella forma
mP = ~F (t, P, P ) . (11.2)
Stefano Siboni 69
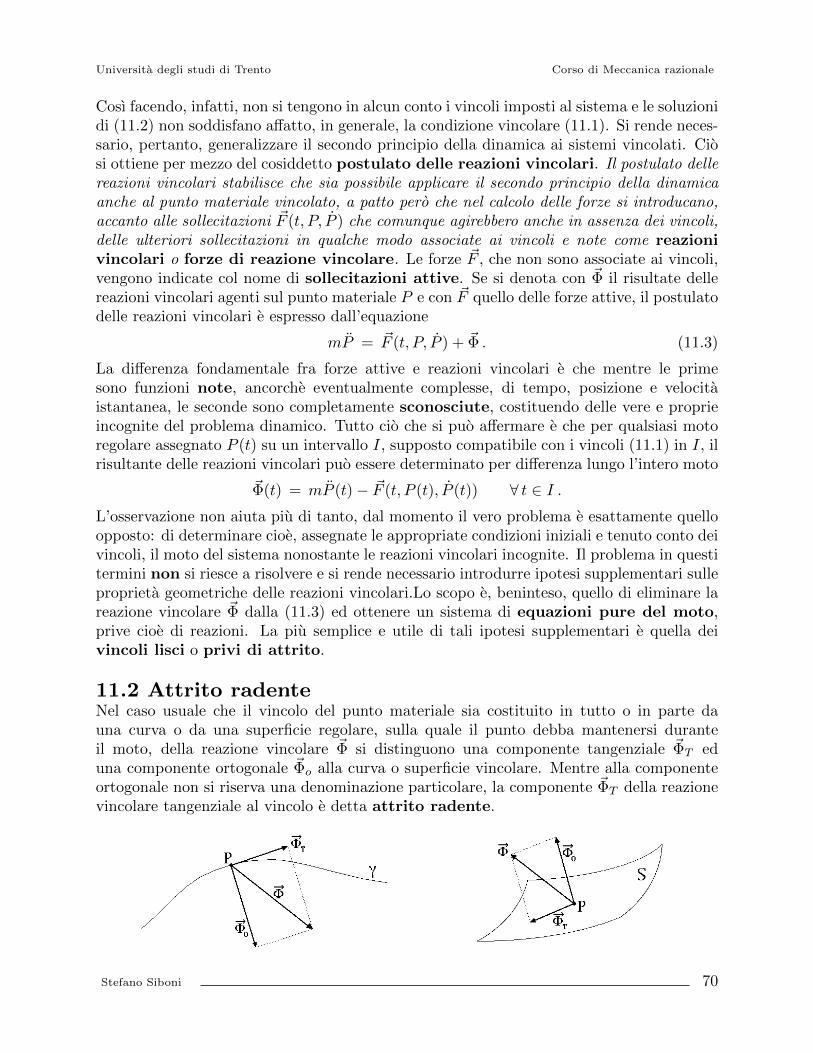
Universita degli studi di Trento Corso di Meccanica razionale
Cosı facendo, infatti, non si tengono in alcun conto i vincoli imposti al sistema e le soluzionidi (11.2) non soddisfano affatto, in generale, la condizione vincolare (11.1). Si rende neces-sario, pertanto, generalizzare il secondo principio della dinamica ai sistemi vincolati. Ciosi ottiene per mezzo del cosiddetto postulato delle reazioni vincolari. Il postulato dellereazioni vincolari stabilisce che sia possibile applicare il secondo principio della dinamicaanche al punto materiale vincolato, a patto pero che nel calcolo delle forze si introducano,accanto alle sollecitazioni ~F (t, P, P ) che comunque agirebbero anche in assenza dei vincoli,delle ulteriori sollecitazioni in qualche modo associate ai vincoli e note come reazionivincolari o forze di reazione vincolare. Le forze ~F , che non sono associate ai vincoli,vengono indicate col nome di sollecitazioni attive. Se si denota con ~Φ il risultate dellereazioni vincolari agenti sul punto materiale P e con ~F quello delle forze attive, il postulatodelle reazioni vincolari e espresso dall’equazione
mP = ~F (t, P, P ) + ~Φ . (11.3)
La differenza fondamentale fra forze attive e reazioni vincolari e che mentre le primesono funzioni note, ancorche eventualmente complesse, di tempo, posizione e velocitaistantanea, le seconde sono completamente sconosciute, costituendo delle vere e proprieincognite del problema dinamico. Tutto cio che si puo affermare e che per qualsiasi motoregolare assegnato P (t) su un intervallo I, supposto compatibile con i vincoli (11.1) in I, ilrisultante delle reazioni vincolari puo essere determinato per differenza lungo l’intero moto
~Φ(t) = mP (t)− ~F (t, P (t), P (t)) ∀ t ∈ I .L’osservazione non aiuta piu di tanto, dal momento il vero problema e esattamente quelloopposto: di determinare cioe, assegnate le appropriate condizioni iniziali e tenuto conto deivincoli, il moto del sistema nonostante le reazioni vincolari incognite. Il problema in questitermini non si riesce a risolvere e si rende necessario introdurre ipotesi supplementari sulleproprieta geometriche delle reazioni vincolari.Lo scopo e, beninteso, quello di eliminare lareazione vincolare ~Φ dalla (11.3) ed ottenere un sistema di equazioni pure del moto,prive cioe di reazioni. La piu semplice e utile di tali ipotesi supplementari e quella deivincoli lisci o privi di attrito.
11.2 Attrito radenteNel caso usuale che il vincolo del punto materiale sia costituito in tutto o in parte dauna curva o da una superficie regolare, sulla quale il punto debba mantenersi duranteil moto, della reazione vincolare ~Φ si distinguono una componente tangenziale ~ΦT eduna componente ortogonale ~Φo alla curva o superficie vincolare. Mentre alla componenteortogonale non si riserva una denominazione particolare, la componente ~ΦT della reazionevincolare tangenziale al vincolo e detta attrito radente.
Stefano Siboni 70
Universita degli studi di Trento Corso di Meccanica razionale
La condizione che di solito si introduce per ricavare le equazioni pure del moto per il puntovincolato riguarda precisamente le forze di attrito radente.
11.3 Vincoli lisciSi consideri un punto materile vincolato a restare su una curva o una superficie regolare.
Il vincolo si dice liscio se esso e in grado di esercitare sul punto materiale tutte e sole lereazioni vincolari ortogonali al vincolo nella posizione occupata dal punto.
Si osservi che il vincolo liscio non risulta semplicemente privo di attrito radente edunque incapace di sviluppare componenti tangenziali non nulle di reazione vincolare: sirichiede infatti che esso sia in grado di esercitare sul punto qualsiasi reazione vincolareortogonale al vincolo. E evidente che l’ipotesi del vincolo liscio costituisce sempre unaapprossimazione nei sistemi meccanici reali, e cio per due ordini di motivi:
(i) gli attriti radenti non sono mai completamente nulli, sebbene in particolari sistemie/o nelle appropriate condizioni essi possano avere intensita trascurabile rispetto allealtre sollecitazioni applicate e possano quindi essere ignorati, almeno in prima ap-prossimazione;
(ii) le forze di reazione vincolare ortogonali ai vincoli non possono, in realta, avere inten-sita arbitraria. Non si deve dimenticare infatti che i vincoli sono sempre ottenuti permezzo di appropriati dispositivi meccanici, quali guide o sostegni, che al passaggiodel punto materiale P risentono di una sollecitazione opposta alla reazione vincolare,nota come cimento dinamico. I dispositivi meccanici che realizzano i vincoli de-vono essere progettati e costruiti in modo da poter sopportare i cimenti prodotti dalpunto materiale in condizioni normali di funzionamento. Se l’intensita delle reazionivincolari, e dunque dei cimenti, eccede i limiti costruttivi e di progetto stabiliti, ildispositivo meccanico che realizza il vincolo puo andare incontro a deformazione o arottura e perdere cosı la capacita di assolvere alla propria funzione.
La condizione dei vincoli lisci verra quindi sı utilizzata per ricavare le equazioni pure delmoto del sistema, ma con riserva di escludere poi quelle soluzioni che si accom-pagnino a reazioni vincolari — o cimenti — di intensita eccessiva.
Si procede ora ad esaminare i casi piu notevoli di punto materiale vincolato: quello dellacurva fissa e liscia e quello della superficie fissa e liscia.
12. Dinamica del punto materiale vincolato aduna curva fissa e liscia
Si consideri un punto materiale P , di massa m, vincolato a restare su una curva γ fissae liscia. Con cio si vuole intendere che la curva γ non e soggetta, nel tempo, ad alcunospostamento o deformazione, e che gli attriti radenti sono costantemente e identicamentenulli. Lo scopo e quello di scrivere le equazioni pure del moto del sistema, specificarele condizioni iniziali che assicurano l’esistenza di un moto univocamente determinato nel
Stefano Siboni 71

Universita degli studi di Trento Corso di Meccanica razionale
passato e nel futuro, e di calcolare infine, a posteriori, le reazioni vincolari applicate al puntomateriale lungo il suo moto — nonche i rispettivi cimenti dinamici agenti sul vincolo.A questo proposito, tuttavia, si rende necessario introdurre opportune ipotesi di regolaritasulla parametrizzazione della curva: ci si limitera, infatti, a considerare soltanto curvebiregolari di R3.
12.1 Curve regolariUna curva regolare γ di R3 e individuata da una parametrizzazione del tipo
P (ξ) , ξ ∈ [a, b] (12.1)
in cui [a, b] indica un qualsiasi intervallo reale — che per fissare le idee si assumera chiuso— mentre P (ξ) e di classe C1 in [a, b] e la sua derivata risulta sempre diversa da zero nellostesso intervallo di definizione
P ′(ξ) 6= 0 ∀ ξ ∈ [a, b] .
Regolare e quindi la curva in ogni punto della quale esiste non nulla la derivata prima dellaparametrizzazione, funzione continua nel proprio intervallo di definizione. La proprieta diregolarita permette di definire:
(i) il vettore non nullo P ′(ξ) come vettore tangente alla curva nella posizione P (ξ);
(ii) lo spazio vettoriale tangente alla curva nello stesso punto come il sottospaziovettoriale unidimensionale dei vettori linearmente dipendenti dal vettore tangente
TP (ξ)(γ)def= ~v ∈ R3 : ~v = αP ′(ξ) , α ∈ R ;
(iii) la retta tangente alla curva, sempre in P (ξ), quale luogo dei punti il cui vettoreposizione rispetto a P (ξ) appartiene allo spazio tangente alla curva nello stesso punto
rP (ξ)
(γ)def= P ∈ R3 : P − P (ξ) = αP ′(ξ) , α ∈ R .
Queste definizioni appaiono ragionevoli, dal punto di vista geometrico, grazie al significatodella derivata P ′(ξ). Il rapporto incrementale
P (ξ + ∆ξ)− P (ξ)
∆ξ
Stefano Siboni 72
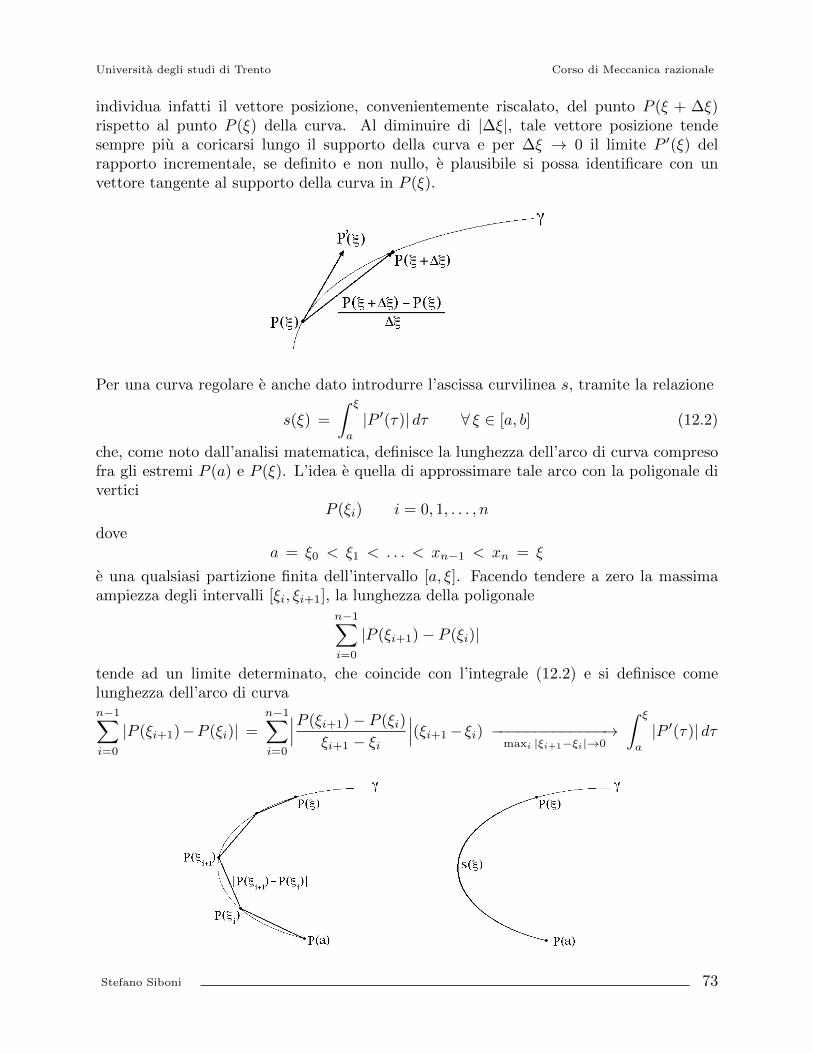
Universita degli studi di Trento Corso di Meccanica razionale
individua infatti il vettore posizione, convenientemente riscalato, del punto P (ξ + ∆ξ)rispetto al punto P (ξ) della curva. Al diminuire di |∆ξ|, tale vettore posizione tendesempre piu a coricarsi lungo il supporto della curva e per ∆ξ → 0 il limite P ′(ξ) delrapporto incrementale, se definito e non nullo, e plausibile si possa identificare con unvettore tangente al supporto della curva in P (ξ).
Per una curva regolare e anche dato introdurre l’ascissa curvilinea s, tramite la relazione
s(ξ) =
∫ ξ
a
|P ′(τ)| dτ ∀ ξ ∈ [a, b] (12.2)
che, come noto dall’analisi matematica, definisce la lunghezza dell’arco di curva compresofra gli estremi P (a) e P (ξ). L’idea e quella di approssimare tale arco con la poligonale divertici
P (ξi) i = 0, 1, . . . , n
dovea = ξ0 < ξ1 < . . . < xn−1 < xn = ξ
e una qualsiasi partizione finita dell’intervallo [a, ξ]. Facendo tendere a zero la massimaampiezza degli intervalli [ξi, ξi+1], la lunghezza della poligonale
n−1∑i=0
|P (ξi+1)− P (ξi)|
tende ad un limite determinato, che coincide con l’integrale (12.2) e si definisce comelunghezza dell’arco di curvan−1∑i=0
|P (ξi+1)−P (ξi)| =
n−1∑i=0
∣∣∣P (ξi+1)− P (ξi)
ξi+1 − ξi
∣∣∣(ξi+1− ξi) −−−−−−−−−−−−−→maxi |ξi+1−ξi|→0
∫ ξ
a
|P ′(τ)| dτ
Stefano Siboni 73

Universita degli studi di Trento Corso di Meccanica razionale
Poiche l’applicazione ξ ∈ [a, b]−−→|P ′(ξ)| e continua in [a, b] quale composizione di fun-zioni continue, l’ascissa curvilinea s risulta una funzione di classe C1 nello stesso intervallo,con derivata
ds
dξ(ξ) = |P ′(ξ)|
definita e strettamente positiva ∀ ξ ∈ [a, b] in virtu della condizione di regolarita — P ′(ξ) 6=0. L’ascissa curvilinea si riconosce percio essere una funzione monotona crescente delparametro ξ in [a, b], invertibile nello stesso intervallo. La sua inversa ξ(s) costituisce asua volta una funzione crescente e C1 nell’intervallo [s(a), s(b)], con derivata
dξ
ds(s) =
1
ds
dξ(ξ(s))
=1
|P ′(ξ(s))|∀ s ∈ [s(a), s(b)] ,
come e immediato desumere dal teorema di derivazione della funzione inversa. Si rendecosı possibile sostituire l’ascissa curvilinea s al parametro ξ nella (12.1) e parametrizzarela curva nella forma
P (s)def= P [ξ(s)] ∀ s ∈ [s(a), s(b)] .
La derivata della nuova parametrizzazione non risulta soltanto diversa da zero — la curvarimane ovviamente regolare — ma si identifica con un vettore di modulo unitario
dP
ds(s) =
d
dsP [ξ(s)] =
dP
dξ[ξ(s)]
dξ
ds(s) = P ′[ξ(s)]
1
|P ′[ξ(s)]|
noto come versore tangente alla curva nella posizione P (s). Il versore tangente allacurva in P (s) viene indicato con τ(s). Nella successiva discussione si assumera sempre chela curva sia regolare e che la relativa parametrizzazione venga espressa in termini di unaascissa curvilinea s.
12.2 Curve biregolari. Triedro principaleSi dice biregolare una curva regolare di classe C2, la cui parametrizzazione in terminidell’ascissa curvilinea s abbia derivata seconda non nulla in tutto l’intervallo di definizione.Indicato con [a, b] l’intervallo di s nel quale e definita la parametrizzazione P (s) della curva,la condizione di biregolarita si traduce nel richiedere P (s) di classe C2 in [a, b] e
P ′(s) 6= 0 P ′′(s) 6= 0 ∀ s ∈ [a, b] .
Il versore tangente τ(s) e una funzione C1 di s e la sua derivata si scrive
dτ
ds(s) =
d
ds
dP
ds(s) =
d2P
ds2(s) 6= 0 .
Trattandosi di vettore non nullo per effetto della condizione di biregolarita, tale derivatapuo sempre porsi nella forma
dτ
ds(s) =
∣∣∣d2P
ds2(s)∣∣∣ ∣∣∣d2P
ds2(s)∣∣∣−1 d2P
ds2(s) ,
Stefano Siboni 74
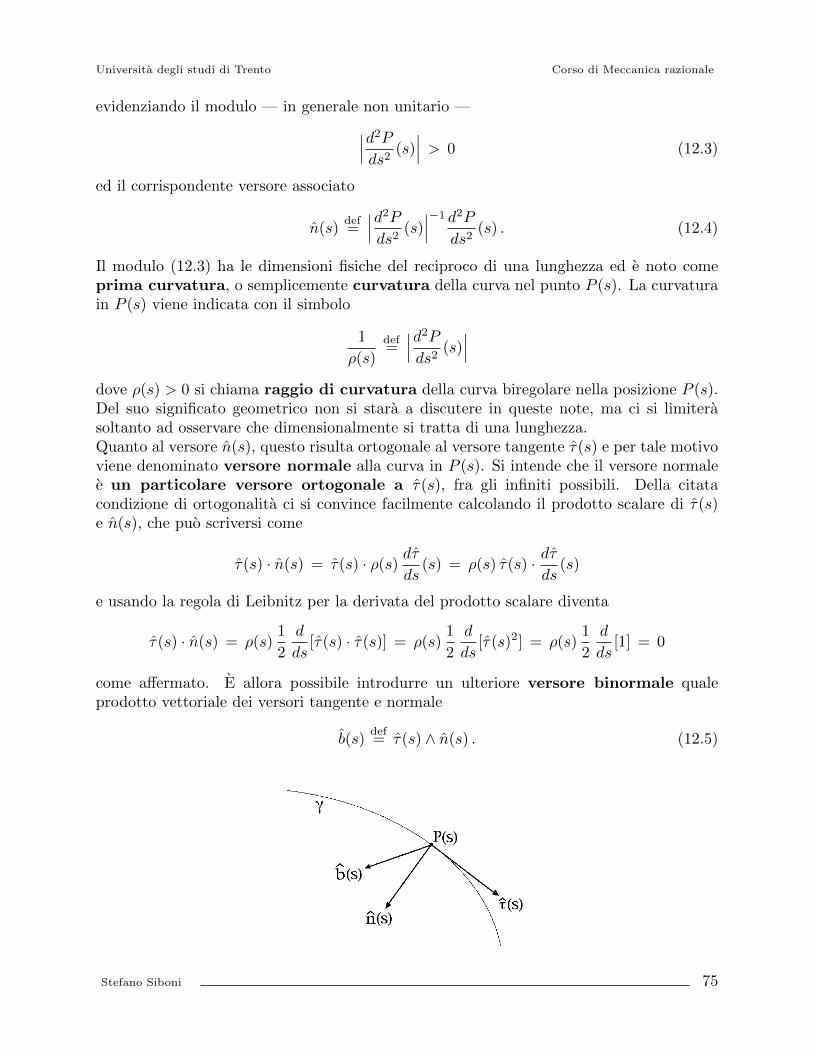
Universita degli studi di Trento Corso di Meccanica razionale
evidenziando il modulo — in generale non unitario —∣∣∣d2P
ds2(s)∣∣∣ > 0 (12.3)
ed il corrispondente versore associato
n(s)def=∣∣∣d2P
ds2(s)∣∣∣−1 d2P
ds2(s) . (12.4)
Il modulo (12.3) ha le dimensioni fisiche del reciproco di una lunghezza ed e noto comeprima curvatura, o semplicemente curvatura della curva nel punto P (s). La curvaturain P (s) viene indicata con il simbolo
1
ρ(s)
def=∣∣∣d2P
ds2(s)∣∣∣
dove ρ(s) > 0 si chiama raggio di curvatura della curva biregolare nella posizione P (s).Del suo significato geometrico non si stara a discutere in queste note, ma ci si limiterasoltanto ad osservare che dimensionalmente si tratta di una lunghezza.Quanto al versore n(s), questo risulta ortogonale al versore tangente τ(s) e per tale motivoviene denominato versore normale alla curva in P (s). Si intende che il versore normalee un particolare versore ortogonale a τ(s), fra gli infiniti possibili. Della citatacondizione di ortogonalita ci si convince facilmente calcolando il prodotto scalare di τ(s)e n(s), che puo scriversi come
τ(s) · n(s) = τ(s) · ρ(s)dτ
ds(s) = ρ(s) τ(s) · dτ
ds(s)
e usando la regola di Leibnitz per la derivata del prodotto scalare diventa
τ(s) · n(s) = ρ(s)1
2
d
ds[τ(s) · τ(s)] = ρ(s)
1
2
d
ds[τ(s)2] = ρ(s)
1
2
d
ds[1] = 0
come affermato. E allora possibile introdurre un ulteriore versore binormale qualeprodotto vettoriale dei versori tangente e normale
b(s)def= τ(s) ∧ n(s) . (12.5)
Stefano Siboni 75

Universita degli studi di Trento Corso di Meccanica razionale
I versori tangente, normale e binormale alla curva in P (s) definiscono una base ortonormaledestra di R3
τ(s) n(s) b(s)
usualmente indicata come triedro principale o triedro di Frenet della curva in P (s).Superfluo osservare che i versori del triedro principale sono funzione dall’ascissa curvilineae dipendono pertanto dal punto P (s) considerato.
12.3 Equazioni pure del moto e problema di CauchyDeterminare il moto del punto materiale vincolato a restare sulla curva biregolare γ diparametrizzazione P (s), s ∈ [a, b], significa poter specificare ad ogni istante t di un inter-vallo di tempo I il valore dell’ascissa curvilinea s. Essendo interessati esclusivamente amoti regolari, si dovra richiedere che tale funzione s(t) sia di classe C2 nell’intervallo I, inmodo che per il teorema di derivazione delle funzioni composte anche il moto del sistemaabbia la regolarita prescritta
P (t) = P [s(t)] t ∈ I .
Il problema dinamico viene percio ricondotto alla determinazione della cosiddetta leggeoraria s(t), che specifica la lunghezza percorsa dal punto mobile lungo la curva in funzionedel tempo. L’equazione del moto del sistema viene scritta facendo uso del postulato dellereazioni vincolari
mP = ~F (t, P, P ) + ~Φ (12.6)
e richiede il calcolo della velocita e dell’accelerazione istantanee di P in termini di s, s es. Ricordando che P (t) = P [s(t)], si ha in effetti
P (t) =dP
ds[s(t)] s(t) = s(t) τ [s(t)] (12.7)
mentre per l’accelerazione istantanea risulta
P (t) =d
dt
[s(t) τ [s(t)]
]= s(t) τ [s(t)] + s(t)
dτ [s(t)]
dt=
= s(t) τ [s(t)] + s(t)2 dτ
ds[s(t)] = s(t) τ [s(t)] +
s(t)2
ρ[s(t)]n[s(t)] . (12.8)
La velocita istantanea e proporzionale al versore tantente τ e consta pertanto di un unicotermine tangenziale alla curva nella posizione considerata; lo scalare s e noto come velocitascalare istantanea e si identifica con il modulo con segno della velocita — vettoriale —istantanea. Quanto all’accelerazione istantanea, essa risulta dalla somma di un terminetangente alla traiettoria del moto nella posizione occupata dal punto allo stesso istante
~aτ = s τ
detta accelerazione tangenziale, e di un termine diretto secondo la normale
~an =s2
ρn
Stefano Siboni 76

Universita degli studi di Trento Corso di Meccanica razionale
noto come accelerazione centripeta. Si osservi che la componente dell’accelerazioneistantanea lungo il versore binormale si presenta costantemente nulla. Sostituendo in(12.6) le espressioni (12.7) e (12.8), l’equazione del moto assume percio la forma
ms τ +ms2
ρn = ~F [t, P (s), s τ ] + ~Φ . (12.9)
Per rimuovere la reazione vincolare ~Φ e sufficiente applicare l’ipotesi dei vincoli ideali eproiettare l’equazione precedente lungo la direzione tangente nella posizione occupata dalpunto all’istante t. Essendo le reazioni vincolari esplicabili in un punto della curva tutte esole quelle ortogonali alla curva nello stesso punto, si ha comunque
~Φ · τ = 0
e la proiezione lungo τ dell’equazione (12.9) si riduce all’equazione pura
ms = ~F [t, P (s), s τ ] · τ (12.10)
mentre le proiezioni secondo n e b porgono
ms2
ρ(s)= ~F [t, P (s), s τ ] · n+ ~Φ · n
0 = ~F [t, P (s), s τ ] · b+ ~Φ · b .(12.11)
Poiche il secondo membro si identifica con una funzione nota delle variabili t, s ed s,l’equazione pura (12.10) e una equazione differenziale scalare del secondo ordine nellavariabile dipendente s
ms = ~F [t, P (s), s τ(s)] · τ(s)
e puo immediatamente scriversi in forma normale
s =1
m~F [t, P (s), s τ(s)] · τ(s)
def= f(t, s, s)
ovvero come equivalente sistema di due equazioni del primo ordines = v
v = f(t, s, v)(12.12)
con il solito trucco di definire la derivata prima s come variabile ausiliaria. L’ascissacurvilinea puo assumere valori nell’intero intervallo [a, b], mentre per la velocita scalarev = s la meccanica classica non prevede limitazioni di principio, cosicche qualsiasi v ∈R e ammissibile. Supponendo la forza ~F definita a tutti i tempi, il secondo membrodell’equazione (12.12) sara quindi definito nel dominio chiuso di R3
(t, s, v) ∈ R× [a, b]× R
Stefano Siboni 77

Universita degli studi di Trento Corso di Meccanica razionale
di cui tuttavia si considerera soltanto l’interno
Ω = (t, s, v) ∈ R× (a, b)× R
richiedendosi, al solito, che l’equazione differenziale sia definita su un dominio aperto(1).Se la funzione a secondo membro in (12.12)
f : (t, s, s) ∈ Ω −−−−−−−−−→ f(t, s, s) = ~F [t, P (s), s τ(s)] · τ(s) ∈ R
risulta di classe C1 nel proprio dominio Ω e allora applicabile il teorema di esistenza eunicita e il problema di Cauchy
s = v
v = f(t, s, v)
s(t0) = s0
v(t0) = v0
(12.13)
ammette una ed una sola soluzione massimale per ogni scelta della condizione iniziale(t0, s0, v0) ∈ Ω. Come nel caso del punto materiale libero, la descrizione meccanica del siste-ma e ancora rigorosamente deterministica. Vale la pena di sottolineare che assegnares(t0) = s0 equivale a individuare la posizione iniziale del punto sulla curva γ
P (t0) = P [s(t0)] = P (s0)
mentre la coppia (s(t0), v(t0)) = (s0, v0) specifica la velocita iniziale
P (t0) = s(t0) τ [s(t0)] = v(t0) τ(s0) = v0 τ(s0)
per cui, ancora una volta, e la specifica della posizione e della velocita iniziali del punto adeterminarne completamente il moto, nel futuro come nel passato.
12.4 Calcolo di reazioni vincolari e cimentiUna volta determinata la soluzione (s(t), v(t)), t ∈ I, del problema di Cauchy (12.13),
e possibile procedere al calcolo della reazione vincolare ~Φ lungo il moto considerato. Leequazioni (12.11) porgono infatti
~Φ · n =ms2
ρ(s)− ~F [t, P (s), s τ(s)] · n(s)
~Φ · b = −~F [t, P (s), s τ(s)] · b(s)
e sostituendo a s la soluzione s(t) forniscono le componenti normale e binormale dellareazione vincolare ad ogni istante t dell’intervallo I in cui il moto e definito. Di conseguenza
~Φ(t) = ~Φ · n n+ ~Φ · b b =
=
[ms2
ρ(s)− ~F [t, P (s), s τ(s)] · n(s)
]n(s)− ~F [t, P (s), s τ(s)] · b(s) b(s)
∣∣∣∣s=s(t)
(1)Il dominio Ω di definizione dell’equazione si assume aperto per evitare problemi “tecnici”, quali la definizio-
ne delle derivate nei punti di frontiera o la corretta, ma piu complessa, formulazione del teorema di esistenza e
unicita nel caso di dominı non aperti.
Stefano Siboni 78

Universita degli studi di Trento Corso di Meccanica razionale
per ogni t ∈ I. A fronte della forza di reazione vincolare ~Φ che la curva esercita sul puntoP , una reazione opposta −~Φ viene applicata dallo stesso punto P sulla curva γ. Talereazione si dice cimento dinamico, e ad ogni istante t ∈ I e ovviamente calcolabile permezzo della formula
−~Φ(t) =
−[ms2
ρ(s)+ ~F [t, P (s), s τ(s)] · n(s)
]n(s) + ~F [t, P (s), s τ(s)] · b(s) b(s)
∣∣∣∣s=s(t)
lungo il moto di legge oraria s(t). Il dispositivo meccanico che realizza il vincolo — guida,rotaia, o quant’altro — deve quindi essere in grado di sopportare i cimenti dinamici cheil punto P esercita su di esso al proprio passaggio. Si pensi ad esempio ad un veicoloferroviario vincolato a muoversi su un binario: in condizioni normali di moto e fondamentaledeterminare i cimenti che il binario deve essere in grado di sopportare al passaggio delveicolo, in modo da scongiurare deformazioni troppo ampie delle rotaie, vibrazioni eccessivee deragliamenti. Di qui l’importanza di calcolare i cimenti dinamici del sistema in normalicondizioni di lavoro — ossia per le soluzioni di interesse pratico delle equazioni del moto— in sede di progettazione e di costruzione del dispositivo.
13. Dinamica del punto materiale vincolato aduna superficie fissa e liscia
Sia P un punto materiale di massa m vincolato a rimanere su una superficie fissa e liscia S.Cio significa che la superficie S non e sottoposta ad alcuno moto nel tempo e che gli attritiradenti su di essa sono costantemente e identicamente nulli. Ci si propone di determinarele equazioni pure del moto del sistema, di individuare le condizioni iniziali che assicuranoesistenza ed unicita del moto corrispondente, e di calcolare infine le reazioni vincolariapplicate al punto materiale lungo il moto. Il problema puo essere risolto facilmenteimponendo una opportuna condizione di regolarita della superficie.
13.1 Superfici regolariPer superficie regolare di R3 si intende il sottoinsieme S di R3 parametrizzato da un’appli-cazione del tipo
(u, v) ∈ D −−−−−−−−−→ P (u, v) ∈ R3
definita e di classe C1 su un qualsiasi dominio D di R2, nonche ivi soddisfacente la con-dizione
∂P
∂u(u, v) ∧ ∂P
∂v(u, v) 6= 0 ∀ (u, v) ∈ D . (13.1)
Detta condizione merita qualche commento, che ne chiarisca il significato geometrico. Aquesto scopo, si fissi un punto (u0, v0) ∈ D e si considerino le applicazioni
ϕ : v ∈ (u, v) ∈ D : u = u0 −−−−−−−−−→ P (u0, v)
ψ : u ∈ (u, v) ∈ D : v = v0 −−−−−−−−−→ P (u, v0) .
Stefano Siboni 79

Universita degli studi di Trento Corso di Meccanica razionale
Esse descrivono due curve ubicate sulla superficie S, la prima caratterizzata da un valorecostante u0 del parametro u, la seconda corrispondente a v = v0; dalle ovvie relazioni
dϕ
dv(v) =
∂P
∂v(u0, v) ∀ v ∈ (u, v) ∈ D : u = u0
dψ
du(u) =
∂P
∂u(u, v0) ∀u ∈ (u, v) ∈ D : v = v0
si conclude immediatamente che le curve sono di classe C1 nei rispettivi dominı, mentrela (13.1) ne assicura altresı la regolarita
∂P
∂u(u, v0) 6= 0
∂P
∂v(u0, v) 6= 0 .
In particolare, per (u, v) = (u0, v0) le derivate parziali prime della parametrizzazione
∂P
∂u(u0, v0)
∂P
∂v(u0, v0)
devono intendersi rispettivamente tangenti alle curve v = v0 e u = u0 nella pozioneP (u0, v0) e la condizione di regolarita (13.1) stabilisce che tali derivate non possano esserelinearmente dipendenti. Cio consente di definire:
(i) lo spazio vettoriale tangente alla superficie S nel punto P (u0, v0) come il sot-tospazio vettoriale bidimensionale generato dalle derivate parziali prime
TP (u0,v0)(S)def=~w ∈ R3 : ~w = α
∂P
∂u(u0, v0) + β
∂P
∂v(u0, v0) , α, β ∈ R
;
(ii) il versore normale alla superficie nel punto P (u0, v0) per mezzo della relazione
n(u0, v0)def=
1∣∣∣∂P∂u
(u0, v0) ∧ ∂P∂v
(u0, v0)∣∣∣∂P
∂u(u0, v0) ∧ ∂P
∂v(u0, v0) ,
e cosı denominato in quanto ortogonale allo spazio tangente;
(iii) il piano tangente alla superficie in P (u0, v0) quale luogo dei punti il cui vettoreposizione rispetto a P (u0, v0) appartiene allo spazio tangente alla superficie nello stessopunto
πP (u0,v0)(S)def=P ∈ R3 : P −P (u0, v0) = α
∂P
∂u(u0, v0)+β
∂P
∂v(u0, v0) , α, β ∈ R
;
(iv) la retta normale alla superficie in P (u0, v0) come luogo dei punti il cui vettoreposizione relativamente a P (u0, v0) risulta proporzionale al versore normale ad S nellostesso punto
rP (u0,v0)
(S)def=P ∈ R3 : P − P (u0, v0) = αn(u0, v0) , α ∈ R
.
Stefano Siboni 80
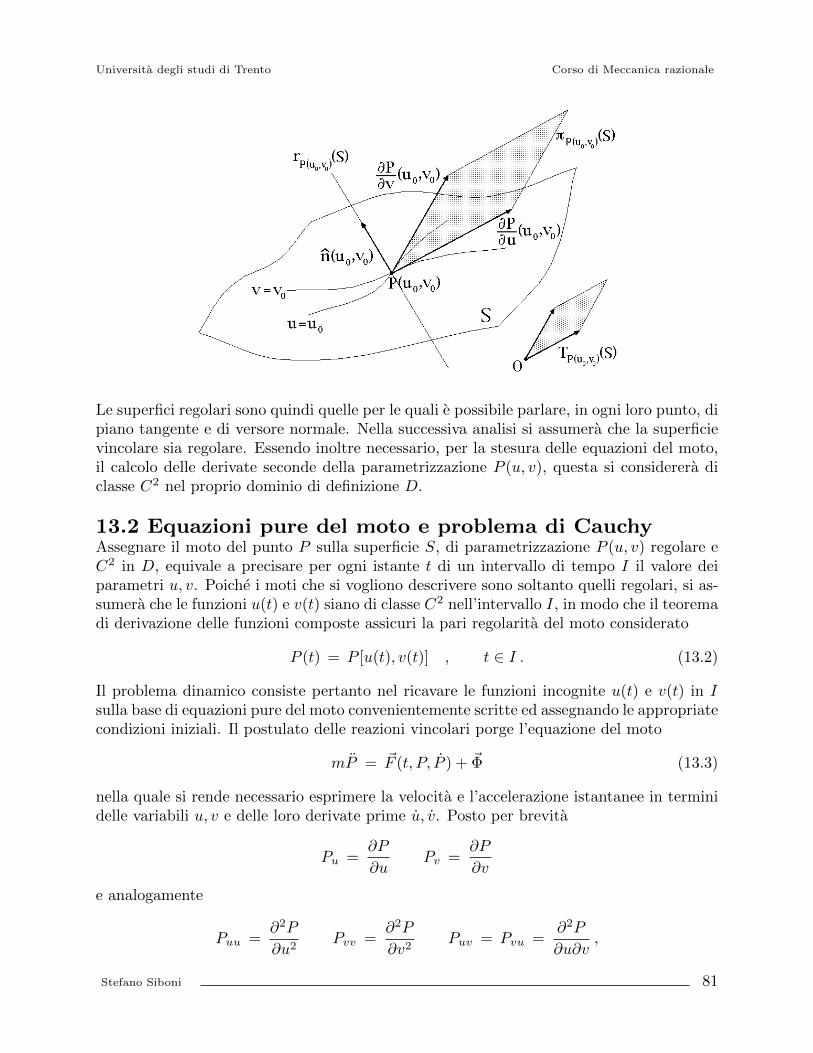
Universita degli studi di Trento Corso di Meccanica razionale
Le superfici regolari sono quindi quelle per le quali e possibile parlare, in ogni loro punto, dipiano tangente e di versore normale. Nella successiva analisi si assumera che la superficievincolare sia regolare. Essendo inoltre necessario, per la stesura delle equazioni del moto,il calcolo delle derivate seconde della parametrizzazione P (u, v), questa si considerera diclasse C2 nel proprio dominio di definizione D.
13.2 Equazioni pure del moto e problema di CauchyAssegnare il moto del punto P sulla superficie S, di parametrizzazione P (u, v) regolare eC2 in D, equivale a precisare per ogni istante t di un intervallo di tempo I il valore deiparametri u, v. Poiche i moti che si vogliono descrivere sono soltanto quelli regolari, si as-sumera che le funzioni u(t) e v(t) siano di classe C2 nell’intervallo I, in modo che il teoremadi derivazione delle funzioni composte assicuri la pari regolarita del moto considerato
P (t) = P [u(t), v(t)] , t ∈ I . (13.2)
Il problema dinamico consiste pertanto nel ricavare le funzioni incognite u(t) e v(t) in Isulla base di equazioni pure del moto convenientemente scritte ed assegnando le appropriatecondizioni iniziali. Il postulato delle reazioni vincolari porge l’equazione del moto
mP = ~F (t, P, P ) + ~Φ (13.3)
nella quale si rende necessario esprimere la velocita e l’accelerazione istantanee in terminidelle variabili u, v e delle loro derivate prime u, v. Posto per brevita
Pu =∂P
∂uPv =
∂P
∂v
e analogamente
Puu =∂2P
∂u2Pvv =
∂2P
∂v2Puv = Pvu =
∂2P
∂u∂v,
Stefano Siboni 81

Universita degli studi di Trento Corso di Meccanica razionale
basta derivare successivamente due volte in t la (13.2) per ottenere le espressioni
P = Puu+ Pv v
P = Puu+ Pv v + Puuu2 + Pvv v
2 + 2Puvuv
che sostituite nella (13.3) la riducono a
m[Puu+ Pv v + Puuu2 + Pvv v
2 + 2Puvuv] = ~F [t, P (u, v), Puu+ Pv v] + ~Φ .
Si tratta evidentemente di una equazione della forma
Puu+ Pv v = ~F(t, u, v, u, v) +1
m~Φ , (13.4)
con~F(t, u, v, u, v)
def=
1
m~F [t, P (u, v), Puu+ Pv v]− Puuu2 − Pvv v2 − 2Puvuv
funzione nota del tempo, delle variabili dipendenti u, v e delle loro derivate prime u, v.Causa l’ipotesi di vincolo liscio, nella posizione P (u, v) la superficie vincolare puo esercitare
sul punto materiale tutte e sole le reazioni vincolari ~Φ ortogonali alla superficie nellaposizione occupata, e dunque soddisfacenti la duplice condizione
Pu · ~Φ = 0 Pv · ~Φ = 0 .
Alle equazioni pure del moto si perviene dunque proiettando l’equazione (13.4) lungoi vettori tangenti e linearmente indipendenti Pu e Pv, nella posizione P (u, v) del puntomateriale Pu · Pu u+ Pu · Pv v = Pu · ~F(t, u, v, u, v)
Pv · Pu u+ Pv · Pv v = Pv · ~F(t, u, v, u, v) .(13.5)
Si tratta di un sistema di due equazioni scalari del secondo ordine nelle variabili dipendentiu e v, che e possibile porre nella forma matriciale equivalente Pu · Pu Pu · Pv
Pv · Pu Pv · Pv
u
v
=
Pu · ~F(t, u, v, u, v)
Pv · ~F(t, u, v, u, v)
.
La matrice quadrata a primo membro e certamente invertibile in quanto
det
Pu · Pu Pu · Pv
Pv · Pu Pv · Pv
= Pu · Pu Pv · Pv − (Pu · Pv)2 =
= |Pu|2|Pv|2 − |Pu · Pv|2 > 0
per via della diseguaglianza di Cauchy-Schwarz
|Pu · Pv| ≤ |Pu| |Pv|
Stefano Siboni 82

Universita degli studi di Trento Corso di Meccanica razionale
nella quale il segno di equaglianza vale se e soltanto se i vettori Pu e Pv sono linearmentedipendenti, una circostanza espressamente esclusa dalla definizione di superficie regolarequalunque sia (u, v) ∈ D. Si ha pertanto u
v
=
Pu · Pu Pu · Pv
Pv · Pu Pv · Pv
−1Pu · ~F(t, u, v, u, v)
Pv · ~F(t, u, v, u, v)
sicche il sistema delle equazioni pure del moto e sempre riconducibile alla forma normale.L’equivalente sistema del primo ordine si scrive
u = αv = β α
β
=
Pu · Pu Pu · Pv
Pv · Pu Pv · Pv
−1Pu · ~F(t, u, v, α, β)
Pv · ~F(t, u, v, α, β)
(13.6)
e deve intendersi propriamente definito per
(t, u, v, α, β) ∈ Ωdef= R× int(D)× R2
non essendo classicamente previste limitazioni ai valori delle variabili α, β che individuanola velocita del punto mobile. Se la funzione ~F(t, u, v, α, β) e di classe C1 in Ω, al sistemasi applica il teorema di esistenza ed unicita e per ogni condizione iniziale
u(t0) = u0
v(t0) = v0
α(t0) = α0
β(t0) = β0
, (t0, u0, v0, α0, β0) ∈ Ω ,
esiste unica la soluzione massimale del corrispondente problema di Cauchy. Il moto delsistema e dunque determinato completamente e univocamente dalla condizione iniziale. Siosservi che, come gia verificato nel caso del punto su curva fissa e liscia, fissare la condizioneiniziale (t0, u0, v0, α0, β0) equivale ad assegnare posizione e velocita iniziali del punto
P (t0) = P [u(t0), v(t0)] = P (u0, v0)
P (t0) = α(t0)Pu[u(t0), v(t0)] + β(t0)Pv[u(t0), v(t0)] =
= α0 Pu(u0, v0) + β0 Pv(u0, v0) .
Una volta individuata la soluzione massimale (u(t), v(t)), t ∈ I, del problema a valoriiniziali e possibile usare il postulato delle reazioni vincolari per ricavare la reazione vincolarelungo il moto P (t) = P [u(t), v(t)]
~Φ(t) = mP (t)− ~F [t, P (t), P (t)] ∀ t ∈ I
ed il relativo cimento dinamico esercitato dal punto mobile sulla superficie vincolare
−~Φ(t) = ~F [t, P (t), P (t)]−mP (t) ∀ t ∈ I .
Stefano Siboni 83

Universita degli studi di Trento Corso di Meccanica razionale
14. Statica del punto materiale vincolato aduna curva fissa e liscia
La strategia adottata nella sezione 12, per determinare l’equazione pura del moto di unpunto materiale vincolato a rimanere su una curva fissa e liscia, puo essere inquadrata inun ambito piu generale. Si e gia evidenziato che i moti di P compatibili con il vincolo sonotutti e soli quelli della forma
P (t) = P [s(t)] ∀t ∈ I , (14.1)
in cui la funzione s(t) deve soddisfare soltanto condizioni molto generali, dirette adassicurare esistenza e regolarita del moto nell’intervallo I:
l’immagine di s(t) deve essere inclusa nell’intervallo [a, b] di definizione della parame-trizzazione P (s) della curva vincolare, in modo che la composizione (14.1) abbia si-gnificato ∀ t ∈ I;
s(t) deve assumersi C2 in I, al pari della parametrizzazione biregolare P (s).
Un moto cosiffatto, che soddisfa i vincoli ad ogni istante in cui e definito, si dice motopossibile del sistema. Per un simile moto il postulato delle reazioni vincolari consentedi calcolare, istante per istante, l’andamento nel tempo della reazione vincolare agentesul punto P . Tali reazioni vincolari, tuttavia, non sono in generale compatibilicon l’assunto del vincolo liscio, potendo presentare componenti non nulle tangen-ziali alla curva vincolare. Imporre che le reazioni vincolari siano del tipo previsto peril vincolo liscio, ovvero tutte e sole quelle ortogonali alla curva, significa introdurre unacondizione supplementare e quindi selezionare fra tutti i moti possibili alcunimoti particolari. Questi moti sono individuati da tutte e soltanto le funzioni s(t) chesiano soluzioni dell’equazione pura del moto (12.10) e sono detti moti naturali delsistema. Le soluzioni dell’equazione pura (12.10) caratterizzano percio tutti e soli i motinaturali del sistema, selezionandoli fra quelli possibili, ben piu numerosi. In altri termini,si puo affermare che mentre i moti possibili sono cinematicamente possibili, per il fattodi rispettare i vincoli ad ogni istante, i moti naturali vanno intesi come dinamicamentepossibili, nel senso che non soltanto essi obbediscono istante per istante ai vincoli imposti,ma in piu si accompagnano a reazioni vincolari del tipo corretto, che i vincoli del sistemasono effettivamente in grado di esercitare.
Il concetto di moto naturale viene ora applicato alla definizione formale di equilibrio nelcaso del punto vincolato.
14.1 Definizione di equilibrioCome gia nel caso del punto materiale libero, la definizione di equilibrio viene data facendoriferimento alla nozione di quiete. La quiete in una posizione assegnata P0 e definita semprecome il moto che vede il sistema mantenersi costantemente nella posizione P0 a tutti i tempi
P (t) = P0 ∀ t ∈ R .
Si definisce allora l’equilibrio nel modo seguente.
Stefano Siboni 84
Universita degli studi di Trento Corso di Meccanica razionale
La posizione P0 si dice di equilibrio per il sistema, o semplicemente un equilibrio, se laquiete in P0 e un moto naturale del sistema.
Nella caso specifico del punto vincolato alla curva fissa e liscia, la definizione di equilibrioin P0 implica che:
(i) la posizione P0 appartenga alla curva vincolare, dal momento che l’essere P (t) = P0
∀ t ∈ R un moto naturale presuppone che esso sia anche un moto possibile, ossiacompatibile con il vincolo a tutti i tempi. Uno stato di quiete in P0 sulla curva fissacostituisce un moto possibile, evidentemente, se e soltanto se P0 e ubicato sulla curva;
(ii) la reazione che occorre applicare al punto materiale per mantenerlo indefinitamentein quiete nella posizione P0 deve essere di quelle effettivamente esplicabili dal vincolo,cioe ortogonale alla curva vincolare in P0.
14.2 Caratterizzazione degli equilibriPer la quiete in P0 la reazione vincolare agente sul punto materiale si ricava, al solito, dalpostulato delle reazioni vincolari
~Φ(t) = mP (t)− ~F [t, P (t), P (t)] = −~F (t, P0, 0) ∀ t ∈ R ,
per il fatto che P (t) = 0 e P (t) = 0 ∀ t ∈ R. Perche si abbia equilibrio in P0 sulla curvaliscia si dovra richiedere che detta reazione vincolare sia ortogonale alla curva in P0. Diconseguenza, omesso l’irrilevante segno negativo, si avra che:
condizione necessaria e sufficiente affinche P0 sia una posizione di equilibrio e che il risul-tante delle forze attive, ad ogni istante t, nella configurazione P0 e con velocita istantaneanulla, risulti ortogonale alla curva vincolare in P0.
Il tentativo di collocare il punto in quiete nella posizione P0 ha successo perche la forzaattiva, calcolata in (t, P0, 0), e diretta ortogonalmente alla curva in P0 e puo quindi esserebilanciata da una reazione vincolare opposta che il vincolo liscio e in grado di esercitare.Si osservi che non necessariamente la forza attiva in (t, P0, 0) deve essere nulla a tutti itempi, come nel caso del punto libero, ne si richiede che essa debba mantenersi costantein t: detta forza puo variare, a condizione pero di conservarsi ortogonale alla curva nellaposizione P0. Posto P0 = P (s0), la condizione di equilibrio puo scriversi nella forma
~F [t, P (s0), 0] · τ(s0) = 0 ∀ t ∈ R (14.2)
a ulteriore conferma che l’individuazione di P0 come posizione di equilibrio richiede la solaconoscenza delle forze attive, e non delle reazioni vincolari.E anche evidente che la stessa condizione individua la funzione s(t) = s0 ∀ t ∈ R comesoluzione statica dell’equazione pura del moto
ms = ~F [t, P (s), s τ(s)] · τ(s) .
Per la soluzione statica si ha infatti s(t) = 0, s(t) = 0 ∀ t ∈ R e sostituendo si ottiene
0 = ~F [t, P (s0), 0 τ(s0)] · τ(s0) ∀ t ∈ R
Stefano Siboni 85
Universita degli studi di Trento Corso di Meccanica razionale
che coincide chiaramente con la condizione (14.2). Pertanto, P (s0) e posizione di equi-librio se e soltanto se s(t) = s0 ∀ t ∈ R e soluzione statica delle equazioni puredel moto. La validita dell’asserto e evidente a priori, in quanto l’essere s(t) = s0 ∀ t ∈ Rsoluzione dell’equazione pura del moto equivale ad individuare in P (t) = P (s0) ∀ t ∈ Run moto naturale del sistema, che al tempo stesso rappresenta anche uno stato di quiete:P (s0) e percio un equilibrio. Si osservi che l’identificazione vale per una curva fissa e ingenerale non puo estendersi al caso di una curva in moto preassegnato.
15. Statica del punto materiale vincolato aduna superficie fissa e liscia
In analogia con caso precedente, i moti possibili del sistema sono tutti e soli quelli cherispettano i vincoli ad ogni istante del loro intervallo I di definizione, per i quali quindi ilpunto materiale si mantiene sulla superficie vincolare S. Detti moti si rappresenterannopercio nella forma
P (t) = P [u(t), v(t)] ∀ t ∈ I (15.1)
dove la funzione (u(t), v(t)) deve soddisfare soltanto alcuni requisiti minimi molto generali:
(i) essere di classe C2 in I, al pari della parametrizzazione regolare P (u, v), in modo daassicurare uguale regolarita al moto corrispondente;
(ii) avere immagine nel dominio D della parametrizzazione P (u, v) della superficie rego-lare, al fine di rendere la composizione (15.1) ben definita.
Le reazioni vincolari corrispondenti ad un moto possibile qualsiasi si calcolano per mezzodel postulato delle reazioni vincolari, ma non sono in generale compatibili con l’ipotesi dellasuperficie liscia. Fra tutti i moti possibili questa condizione seleziona i soli moti naturalidel sistema, che si identificano con le soluzioni delle equazioni pure del moto (13.5).
Il concetto di equilibrio viene ora introdotto allo stesso modo gia visto per il punto sucurva fissa e liscia.
15.1 Definizione di equilibrioPer quiete in una posizione P0 del sistema si intendera quel particolare moto che vedeil sistema collocato nella posizione P0 a tutti i tempi. Si definira P0 come posizione diequilibrio, o equilibrio tout court, se la quiete in P0 costituisce un moto naturale delsistema. Cio significa che:
(i) la posizione P0 deve appartenere alla superficie S, perche la quiete in P0 deve essere,prima di tutto, un moto possibile e quindi soddisfare il vincolo;
(ii) la reazione vincolare che si rende necessaria per bloccare il punto materiale nellaposizione P0 a tutti i tempi deve risultare del tipo esplicabile dal vincolo liscio, ossiaortogonale alla superficie S nella posizione P0.
Stefano Siboni 86

Universita degli studi di Trento Corso di Meccanica razionale
15.2 Caratterizzazione degli equilibriLe reazioni vincolari applicate al punto materiale in quiete nella posizione P0 si calcolanosempre per mezzo del postulato delle reazioni vincolari
~Φ(t) = −~F (t, P0, 0) ∀ t ∈ R
e per un vincolo liscio dovranno risultare normali alla superficie S nella posizione P0.
Condizione necessaria e sufficiente affinche P0 sia un equilibrio e che il risultante delleforze attive, ad ogni istante t, nella posizione P0 e per velocita istantanea nulla, risultinormale alla superficie vincolare in P0.
Posto P0 = P (u0, v0), con (u0, v0) ∈ D opportuno, la condizione di equilibrio si formulacome
~F [t, P (u0, v0), 0] · ∂P∂u
(u0, v0) = 0
~F [t, P (u0, v0), 0] · ∂P∂v
(u0, v0) = 0∀ t ∈ R .
E evidente che la configurazione P (u0, v0) costituisce un equilibrio per il sistema se esoltanto se la funzione
(u(t), v(t)) = (u0, v0) ∀ t ∈ R
rappresenta una soluzione statica delle equazioni pure del moto (13.5).
16. Vincoli con attritoLa descrizione della dinamica e della statica del punto materiale vincolato e stata condotta,nelle sezioni precedenti, assumendo la curva e la superficie vincolare perfettamente liscie,ovvero incapaci di esplicare forze di attrito radente. Nei sistemi vincolati reali, tuttavia,solo in particolari casi e possibile trascurare le forze di attrito ed ottenere quindi unadescrizione sufficientemente accurata del comportamento del sistema prescindendo dagliattriti. Di regola si rende necessario modellare l’azione delle forze di attrito agenti sulsistema. Lo studio del problema viene affrontato sperimentalmente e conduce ad unacaratterizzazione delle forze di attrito soddisfacente per la maggior parte delle applicazioni.L’esperienza insegna che le caratteristiche delle forze di attrito radente sono molto diversein condizioni statiche e in condizioni dinamiche, secondo che cioe il punto materia-le abbia velocita nulla oppure diversa da zero rispetto al vincolo, curva o superficie chesia, nella posizione di contatto con quest’ultimo. Si stabiliscono cosı due diverse leggiempiriche, note come legge di Coulomb-Morin dell’attrito radente statico e leggedi Coulomb-Morin dell’attrito radente dinamico.
16.1 Legge dell’attrito radente staticoLa legge di Coulomb-Morin dell’attrito radente statico puo essere enunciata in varie forme.Qui si preferisce presentarla come una caratterizzazione delle forze di reazione vincolare chela curva o superficie vincolare puo esercitare sul punto materiale, in analogia con quanto
Stefano Siboni 87

Universita degli studi di Trento Corso di Meccanica razionale
gia fatto per il caso di vincolo liscio. Si supponga allora il punto materiale posto, convelocita nulla, in una posizione P della curva o superficie vincolare. La reazione vincolareagente sul punto materiale consistera di una componente tangente al vincolo, ~ΦT , e di unacomponente ortogonale allo stesso, ~Φo.
La reazione vincolare ~Φ = ~ΦT +~Φo e esplicabile dal vincolo se e soltanto se vale la relazione
|~ΦT | ≤ µs |~Φo| (16.1)
in cui µs e un coefficiente che dipende dalla natura del contatto fra il punto materiale edil vincolo nella posizione considerata.
Il parametro µs e una grandezza adimensionale nota come coefficiente di attrito raden-te statico, che l’esperienza insegna assumere valori di regola compresi fra 0 e 1. Un modoper intendere la (16.1) consiste nel ragionare a ~Φo fissato: per ~Φo 6= 0 la relazione non
determina univocamente il valore dell’attrito radente statico ~ΦT , ma impone soltantoun limite superiore alla sua intensita, che non puo eccedere µs|~Φo|. Se µs e prossimo a 1
l’intensita massima delle forze di attrito risulta, a parita di |~Φo|, relativamente elevata; aldiminuire di µs, detta intensita massima si riduce in proporzione. Per µs = 0 la condizionedi Coulomb-Morin diventa
|~ΦT | ≤ 0 ⇐⇒ ~ΦT = 0
ed equivale quindi alla condizione di vincolo liscio, ovvero all’assenza di attrito radente.Valori piccoli di µs sono quindi caratteristici di regioni di contatto ben pulite,levigate e/o lubrificate, cui si accompagnano attriti di modesta intensita. Viceversa,valori elevati del coefficiente di attrito statico possono accompagnarsi a forzedi attrito radente statico di grande intensita, caratteristiche di zone di con-tatto rugose, poco pulite e/o mal lubrificate. Si osservi che il coefficiente di attritoradente statico µs, essendo legato allo stato del contatto fra il punto materiale ed il vincolo,potrebbe dipendere dalla posizione del punto.
Della relazione (16.1) si puo dare anche una interpretazione geometrica notevole. Nel casodi punto vincolato ad una superficie con attrito la reazione vincolare esplicabile in unaposizione P assegnata deve essere contenuta entro la falda interna del cono circolare divertice P , asse ortogonale alla superficie in P e semiapertura α = arctgµs, poiche l’angoloϕ fra ~Φ e componente ortogonale ~Φo della reazione vincolare soddisfa
tgϕ =|~ΦT ||~Φo|
≤ µs|~Φo||~Φo|
= µs = tgα
Stefano Siboni 88
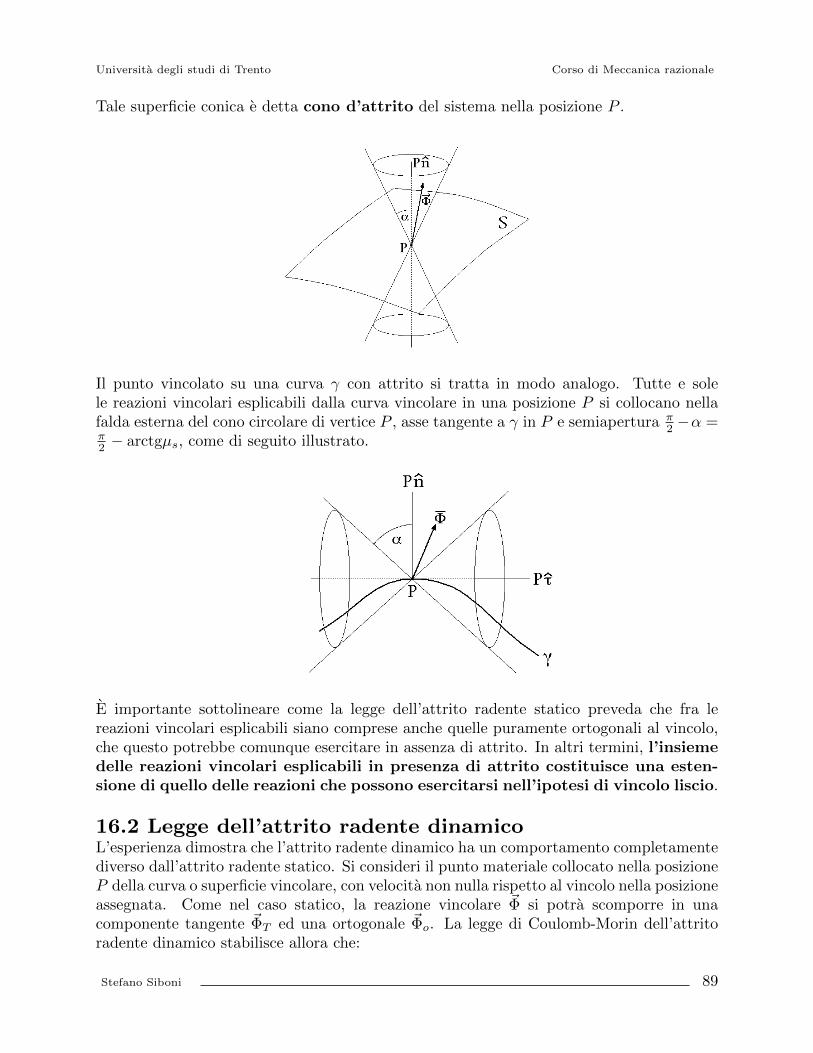
Universita degli studi di Trento Corso di Meccanica razionale
Tale superficie conica e detta cono d’attrito del sistema nella posizione P .
Il punto vincolato su una curva γ con attrito si tratta in modo analogo. Tutte e solele reazioni vincolari esplicabili dalla curva vincolare in una posizione P si collocano nellafalda esterna del cono circolare di vertice P , asse tangente a γ in P e semiapertura π
2 −α =π2 − arctgµs, come di seguito illustrato.
E importante sottolineare come la legge dell’attrito radente statico preveda che fra lereazioni vincolari esplicabili siano comprese anche quelle puramente ortogonali al vincolo,che questo potrebbe comunque esercitare in assenza di attrito. In altri termini, l’insiemedelle reazioni vincolari esplicabili in presenza di attrito costituisce una esten-sione di quello delle reazioni che possono esercitarsi nell’ipotesi di vincolo liscio.
16.2 Legge dell’attrito radente dinamicoL’esperienza dimostra che l’attrito radente dinamico ha un comportamento completamentediverso dall’attrito radente statico. Si consideri il punto materiale collocato nella posizioneP della curva o superficie vincolare, con velocita non nulla rispetto al vincolo nella posizioneassegnata. Come nel caso statico, la reazione vincolare ~Φ si potra scomporre in unacomponente tangente ~ΦT ed una ortogonale ~Φo. La legge di Coulomb-Morin dell’attritoradente dinamico stabilisce allora che:
Stefano Siboni 89

Universita degli studi di Trento Corso di Meccanica razionale
la forza di attrito radente agente sul punto materiale, collocato nella posizione P e in motorelativo alla curva o superficie vincolare con velocita relativa P 6= 0, e data dalla relazione
~ΦT = −µd|~Φo|P
|P |
nella quale µd indica un coefficiente che dipende dalla natura del contatto fra il puntomateriale ed il vincolo nella posizione data.
Il parametro µd e un coefficiente adimensionale noto come coefficiente di attrito radentedinamico, ed esprimendo il “grado di scorrevolezza” del contatto fra punto materiale evincolo nella posizione considerata, puo dipendere da questa. E pero sempre indipen-dente, con buona approssimazione, dalla velocita relativa P . Argomenti di compatibilitadelle leggi di attrito radente statico e dinamico impongono che debba aversi, per un datocontatto,
µd ≤ µsma l’esperienza insegna che, di regola, vale
µd µs .
A parita di ogni altra condizione gli attriti radenti dinamici sono meno intensidi quelli statici.Mentre la legge dell’attrito statico non fornisce il valore esplicito della forza di attrito,ponendo soltanto un limite superiore al modulo di questa, la legge dell’attrito radentedinamico determina univocamente la forza di attrito, che risulta avversa alla ve-locita e di intensita proporzionale al modulo di ~Φo.
16.3 Osservazione. Verifica che µd ≤ µsSi consideri un punto materiale di massa m posto nella posizione P su una retta Oe1 concoefficienti di attrito statico e dinamico µs e µd rispettivamente. Il punto sia soggetto aduna reazione vincolare ortogonale ~Φo e ad una forza attiva diretta secondo e1 del tipo
~F = [µs|~Φo|+ ε] e1
con ε costante positiva. Poiche |~F | > µs|~Φo|, il vincolo non e in grado di esplicare unaforza di attrito radente statico sufficiente a mantenere il punto in quiete nella posizione
Stefano Siboni 90

Universita degli studi di Trento Corso di Meccanica razionale
assegnata. Il punto si mettera quindi in movimento, accelerando ed acquistando unavelocita concorde con e1. All’attrito statico si sostituisce quello dinamico
−µd|~Φo|P
|P |= −µd|~Φo| e1
e la forza agente sul punto, oltre all’ortogonale ~Φo, risulta data da
~F − µd|~Φo|P
|P |= [(µs − µd)|~Φo|+ ε] e1 .
Dovendo questa comportare, comunque, una accelerazione parallela e concorde con il ver-sore e1, dovra aversi
(µs − µd)|~Φo|+ ε ≥ 0
ossiaµs − µd ≥ −
ε
|~Φo|,
relazione che sussiste per ogni scelta della costante positiva ε. Pertanto
µs − µd ≥ 0 .
16.4 Caratterizzazione dell’equilibrioLa definizione di equilibrio per un punto materiale vincolato a restare su una curva o suuna superficie fissa, in presenza di attrito, e la stessa gia considerata nel caso dei vincolilisci. La posizione P0 del sistema si dice un equilibrio se e soltanto se la quiete in P0
costituisce un moto naturale del sistema, accompagnandosi quindi a reazioni vincolari ef-fettivamente esplicabili dal vincolo, secondo quanto previsto dalla legge di Coulomb-Morindell’attrito radente statico (16.1). Il risultate ~F (t, P, P ) delle forze attive si scomporra
nella posizione P0 in una componente ~FT (t, P, P ) tangente al vincolo ed una componente~Fo(t, P, P ) ortogonale allo stesso. La reazione vincolare che occorre e basta a mantereil punto materiale in quiete nella posizione P0 a tutti i tempi e quindi determinabile, alsolito, mediante il postulato delle reazioni vincolari
0 = ~FT (t, P0, 0) + ~Fo(t, P0, 0) + ~Φ ⇐⇒ ~Φ = −~FT (t, P0, 0)− ~Fo(t, P0, 0) ∀ t ∈ R
dal che si deducono le espressioni per le componenti tangente e ortogonale della reazionevincolare
~ΦT = −~FT (t, P0, 0) ~Φo = −~Fo(t, P0, 0) ∀ t ∈ R .
La quiete in P0 sara allora un moto naturale del sistema se e soltanto se la reazione vincolaresoddisfa alla legge di Coulomb-Morin dell’attrito radente statico a tutti i tempi
| − ~FT (t, P0, 0)| ≤ µs| − ~Fo(t, P0, 0)| ∀ t ∈ R
Stefano Siboni 91

Universita degli studi di Trento Corso di Meccanica razionale
ossia|~FT (t, P0, 0)| ≤ µs|~Fo(t, P0, 0)| ∀ t ∈ R , (16.2)
dove µs e il coefficiente di attrito radente statico del vincolo nella posizione P0. Larelazione (16.2) fornisce la condizione necessaria e sufficiente affinche P0 siaposizione di equilibrio del sistema. Essa equivale a richiedere che la forza attiva~F (t, P0, 0) appartenga al cono d’attrito nella posizione P0.Poiche, come gia osservato, le reazioni vincolari ortogonali al vincolo sono comunque com-patibili con la legge di Coulomb dell’attrito radente statico, e chiaro che le posizioni ri-conosciute come di equilibrio assumendo il vincolo liscio sono anche posizioni di equilibriodel sistema con attrito. Per contro, in presenza di attrito, una generica posizione di equili-brio del sistema sara resa possibile da una componente tangenziale non nulla della reazionevincolare. Esisteranno quindi, in generale, posizioni di equilibrio definite grazie agli attritiradenti e che non possono essere individuate assumendo il vincolo liscio.
16.5 Esempio notevoleUn esempio notevole di applicazione della condizione di equilibrio per il punto vincolato inpresenza di attrito e quello di un punto materiale pesante vincolato scorrere su una curvapiana γ, grafico di una funzione assegnata e avente coefficiente di attrito statico µs.La curva γ sia il grafico della funzione f , derivabile nell’intervallo aperto (a, b). Laparametrizzazione della curva si scrivera percio
P −O = x e1 + f(x) e2 x ∈ (a, b)
con il versore e2 diretto verticalmente verso l’alto, in modo che la forza peso applicata alpunto materiale vale −mg e2. E ben noto dall’analisi matematica che la retta tangente algrafico della funzione f in un generico punto P (x, f(x)) forma con la direzione positivadell’asse orizzontale Ox un angolo α ∈ (−π/2, π/2) la cui tangente coincide con il valoredella derivata prima f ′(x).
Se il punto viene collocato in quiete nella posizione P (x, f(x)), la reazione vincolare ~Φdeve equilibrare costantemente la forza peso
~Φ = −m~g = mg e2 ,
Stefano Siboni 92

Universita degli studi di Trento Corso di Meccanica razionale
con componente tangente alla curva γ
~ΦT = mg e2 · τ τ = mg sinα τ
e componente normale — quella binormale e ovviamente nulla —
~Φo = mg e2 · n n = mg cosα n .
La condizione (16.2) perche si abbia equilibrio nella posizione P (x, f(x)) considerata e cherisulti
|mg sinα τ | ≤ µs|mg cosα n| ∀ t ∈ R
ossia, data la mancanza di una esplicita dipendenza dal tempo delle forze attive,
| sinα| ≤ µs| cosα|
e quindi, ricordando che α ∈ (−π/2, π/2)∣∣tgα∣∣ ≤ µs .
Basta sostituire l’equazione tgα = f ′(x) per ricavare infine la condizione necessaria esufficiente per l’equilibrio nella posizione di ascissa x della curva γ
|f ′(x)| ≤ µs . (16.3)
L’interpretazione del risultato e immediata: le posizioni di equilibrio sono quelle per lequali la pendenza della curva, in valore assoluto, non eccede il coefficiente di attrito radentestatico — nella posizione considerata. Si osservi che nel caso di curva liscia, con µs = 0, leconfigurazioni di equilibrio soddisfano tutte e sole la condizione |f ′(x)| ≤ 0 e si identificanopertanto con i punti critici della funzione f , ovvero con gli zeri della sua derivata prima.
16.5.1 Caso particolare del piano inclinatoNella fattispecie la curva γ, che rappresenta la direzione di massima pendenza di un pianoinclinato, si puo intendere come il grafico della funzione f(x) = kx + q, con pendenzak = tgα ed intercetta q costanti assegnate. La condizione di equilibrio (16.3) si riducepercio a
|k| ≤ µs
ed e indipendente dal valore dell’ascissa x. Se la l’angolo di inclinazione α del pianoinclinato non eccede, in valore assoluto, l’angolo limite
arctgµs
tutte le configurazioni del sistema sono di equilibrio. In caso contrario non sussistonoequilibri.
Stefano Siboni 93

Universita degli studi di Trento Corso di Meccanica razionale
17. Dinamica del punto materiale vincolatoa una curva o superficie fissa con attrito
Lo studio del moto del punto vincolato in presenza di attrito dinamico costituisce un pro-blema relativamente complesso dal punto di vista matematico, ma puo essere impostatofacilmente. Si introdurra il problema analizzato un esempio notevole per il quale, cir-costanza piuttosto insolita, e anche disponibile una soluzione analitica esplicita. Si ricav-eranno quindi le equazioni pure del moto per un punto materiale vincolato a una curvaregolare fissa e ad una superficie regolare fissa.
17.1 Moto lungo un piano inclinato con attritoCi si limitera ad illustrare un semplice esempio, il cui unico scopo e quello di chiarireulteriormente il significato della legge di Coulomb-Morin nel caso dinamico. Si consideracosı il problema del moto di un punto pesante lungo la direzione di massima pendenzadi un piano inclinato scabro, nel caso particolare che le posizioni di equilibrio non sianodefinite — tgα > µs — e la velocita iniziale risulti nulla o comunque diretta verso il basso.Conviene introdurre una terna di riferimento Oe1e2e3 = Oxyz con l’origine O nella rettadi massima pendenza, il versore e1 diretto secondo la stessa retta e verso il basso, ed ilversore e2 ortogonale e diretto verso l’alto.
Nella terna di riferimento Oxyz, il postulato delle reazioni vincolari porge l’equazione delmoto
m(x e1 + y e2) = mg sinα e1 −mg cosα e2 + Φ1e1 + Φ2e2
in cui Φ2e2 e la componente ortogonale della reazione vincolare, mentre Φ1e1 rappresental’attrito radente dinamico, espresso dalla legge di Coulomb-Morin
Φ1e1 = −µdx
|x||Φ2| e1 . (17.1)
Le equazioni del moto proiettate lungo gli assi Ox e Oy si scrivono alloramx = mg sinα+ Φ1
my = −mg cosα+ Φ2
e poiche lungo qualsiasi moto possibile deve aversi costantemente y = 0 — in virtu delvincolo — dalla seconda equazione si deduce che
Φ2 = mg cosα > 0
Stefano Siboni 94

Universita degli studi di Trento Corso di Meccanica razionale
e di conseguenza la (17.1) conduce a
Φ1 = −µdx
|x|mg cosα .
Per la scelta del valore iniziale della velocita ci si aspetta che lungo il moto si abbia x ≥ 0.L’equazione pura del moto assume pertanto la forma:
mx = mg sinα− µdmg cosα
e da essa si deduce che quello del punto materiale lungo il piano inclinato e un motouniformemente accelerato, di accelerazione
g(sinα− µd cosα)
leggermente inferiore rispetto a quella determinabile in assenza di attrito — g sinα.
17.2 Punto su una curva fissa con attritoSi vuole determinare l’equazione pura del moto di un punto materiale vincolato a restaresu una curva fissa con attrito radente. La curva abbia parametrizzazione P (s), regolare e
di classe C2 nell’ascissa curvilinea s ∈ (a, b). Al solito, si indichi con ~F il risultante delle
forze attive applicate al punto e con ~Φ la corrispondente reazione vincolare. Siano inoltreµs e µd i coefficienti di attrito radente statico e dinamico, rispettivamente. Il postulatodelle reazioni vincolari porge
mP = ~F + ~Φ
e per una curva regolare di classe C2 puo riesprimersi nella forma equivalente
ms τ +mdτ
dss2 = ~F + ~Φ
per mezzo del versore τ tangente alla curva, in modo che risulta
~Φ = ms τ +mdτ
dss2 − ~F .
La componente della reazione vincolare tangente alla curva si scrive allora
~Φ · τ τ =(ms τ · τ +m
dτ
ds· τ s2 − ~F · τ
)τ = (ms− ~F · τ) τ (17.2)
mentre la componente ortogonale della stessa reazione vale
~Φ− ~Φ · τ τ = ms τ +mdτ
dss2 − ~F − (ms− ~F · τ) τ = ms2 dτ
ds+ ~F · τ τ − ~F .
Stefano Siboni 95

Universita degli studi di Trento Corso di Meccanica razionale
In condizioni dinamiche, quando la velocita P = sτ del punto e non nulla, l’attrito radentesegue la legge di Coulomb-Morin dell’attrito radente dinamico
~Φ · τ τ = −µd∣∣~Φ− ~Φ · τ τ ∣∣ P
|P |= −µd
∣∣∣ms2 dτ
ds+ ~F · τ τ − ~F
∣∣∣ s τ|s τ |per cui
~Φ · τ = −µd∣∣∣ms2 dτ
ds+ ~F · τ τ − ~F
∣∣∣ s|s|e dal confronto con la (17.2) si deduce l’equazione pura
ms− ~F · τ = −µd∣∣∣ms2 dτ
ds+ ~F · τ τ − ~F
∣∣∣ s|s|ossia
ms = ~F · τ − µd∣∣∣ms2 dτ
ds+ ~F · τ τ − ~F
∣∣∣ s|s| per s 6= 0 . (17.3)
L’equazione pura del moto cosı ottenuta e immediatamente riducibile alla forma normaledel secondo ordine nella variabile dipendente s — basta dividere membro a membro per lamassa m del punto materiale — in quanto le forze attive sono funzioni assegnate di t, P (s)e P = s τ(s). Per s = 0 il secondo membro della (17.3) non risulta definito perche l’attritoradente dinamico deve essere sostituito da quello statico, di cui e determinato soltanto ilmodulo massimo. Se ad un certo istante t0 la velocita scalare s si annulla, da quell’istantein poi il punto materiale si manterra in quiete nella posizione raggiunta P0 = P (s0) se esoltanto se e soddisfatta la legge di Coulomb-Morin dell’attrito radente statico∣∣−~F (t, P0, 0) · τ
∣∣ ≤ µs∣∣~F (t, P0, 0) · τ τ − ~F (t, P0, 0)
∣∣ ∀ t ≥ t0 . (17.4)
In caso contrario il punto deve tornare a muoversi a partire dalla condizione iniziale (s, s) =(s0, 0). Questa circostanza obbliga a prolungare il secondo membro della (17.3) anche ins = 0; purtroppo un simile prolungamento non puo essere ottenuto in modo continuo, pervia del fattore
s
|s|=
+1 per s > 0
−1 per s < 0
che presenta una discontinuita proprio in s = 0. Il teorema di esistenza ed unicita dellesoluzioni massimali per il problema di Cauchy non e dunque applicabile, il secondo membrodell’equazione del moto non risultando di classe C1. Nondimeno, a tutti gli effetti praticiil fattore critico s/|s| puo essere sostituito dalla funzione C∞
tanh( sδ
)∀ s ∈ R ,
Stefano Siboni 96

Universita degli studi di Trento Corso di Meccanica razionale
con δ costante positiva abbastanza piccola. Per δ ∼ 0 le due funzioni presentano pratica-mente lo stesso andamento salvo che in un piccolo intorno di s = 0, dove tanh(s/δ) nonha alcuna discontinuita ed appare anzi estremamente regolare:
L’equazione pura del moto “regolarizzata” diventa pertanto
ms = ~F · τ − µd∣∣∣ms2 dτ
ds+ ~F · τ τ − ~F
∣∣∣ tanh( sδ
). (17.5)
17.3 Punto su una superficie fissa con attritoLe equazioni pure del moto di un punto materiale vincolato a restare su una superficiefissa con attrito radente si ricavano in maniera del tutto analoga a quanto gia visto per ilcaso della curva fissa. Indicata con ϕ(u, v), (u, v) ∈ D = int(D) ⊆ R2 la parametrizzazioneregolare C2 della superficie, il versore normale a questa nel punto ϕ(u, v) e definito da
n(u, v) =ϕu(u, v) ∧ ϕv(u, v)
|ϕu(u, v) ∧ ϕv(u, v)|,
dove si sono indicate al solito con ϕu e ϕv le derivate parziali prime della parametrizzazionerispetto alle variabili u e v. La base di partenza e sempre costituita dal postulato dellereazioni vincolari
mP = ~F + ~Φ
che porge per la reazione vincolare applicata al punto l’espressione
~Φ = mP − ~F .
Per la componente normale della reazione vincolare si ha quindi
~Φ · n = mP · n− ~F · n (17.6)
e la componente tangenziale della stessa reazione, l’attrito radente, diventa
~Φ− ~Φ · n n = mP − ~F − (mP · n− ~F · n)n = mP −mP · n n− ~F + ~F · n n . (17.7)
Stefano Siboni 97

Universita degli studi di Trento Corso di Meccanica razionale
Per P 6= 0 la componente tangenziale della reazione vincolare deve sottostare alla legge diCoulomb-Morin dell’attrito radente dinamico
~Φ− ~Φ · n n = −µd |~Φ · n|P
|P |
che sostituendo le espressioni (17.6) e (17.7) fornisce l’equazione pura del moto
mP −mP · n n− ~F + ~F · n n = −µd∣∣mP · n− ~F · n
∣∣ P|P |
, P 6= 0 . (17.8)
L’equazione ottenuta e equivalente ad un sistema di due equazioni scalari del secondoordine riducibile alla forma normale. Per convincersene si moltiplica scalarmente la (17.8)per ϕu e ϕv, ricordando che
n · ϕu = 0 n · ϕv = 0 .
Si ottengono cosı le equazioni scalari
mP · ϕu = ~F · ϕu − µd∣∣mP · n− ~F · n
∣∣ P · ϕu|P |
mP · ϕv = ~F · ϕv − µd∣∣mP · n− ~F · n
∣∣ P · ϕv|P |
(17.9)
dove la velocita e l’accelerazione istantanea del punto P sono date da
P = ϕu u+ ϕv v P = ϕu u+ ϕv v +dϕudt
u+dϕvdt
v
e soddisfano le relazioni utili:
P · ϕu = ϕu · ϕu u+ ϕv · ϕu v
P · ϕv = ϕu · ϕv u+ ϕv · ϕv v
|P |2 = P · P = ϕu · ϕu u2 + ϕv · ϕv v2 + 2ϕu · ϕv uv
P · n =dϕudt· n u+
dϕvdt· n v
P · ϕu = ϕu · ϕu u+ ϕv · ϕu v +dϕudt· ϕu u+
dϕvdt· ϕu v
P · ϕv = ϕu · ϕv u+ ϕv · ϕv v +dϕudt· ϕv u+
dϕvdt· ϕv v .
Stefano Siboni 98

Universita degli studi di Trento Corso di Meccanica razionale
Sostituendo queste relazioni, le equazioni (17.9) diventano
m
[ϕu · ϕu u+ ϕv · ϕu v +
dϕudt· ϕu u+
dϕvdt· ϕu v
]=
= ~F · ϕu − µd∣∣∣∣mdϕu
dt· n u+m
dϕvdt· n v − ~F · n
∣∣∣∣ ϕu · ϕu u+ ϕv · ϕu v(ϕu · ϕu u2 + ϕv · ϕv v2 + 2ϕu · ϕv uv)1/2
m
[ϕu · ϕv u+ ϕv · ϕv v +
dϕudt· ϕv u+
dϕvdt· ϕv v
]=
= ~F · ϕv − µd∣∣∣∣mdϕu
dt· n u+m
dϕvdt· n v − ~F · n
∣∣∣∣ ϕu · ϕv u+ ϕv · ϕv v(ϕu · ϕu u2 + ϕv · ϕv v2 + 2ϕu · ϕv uv)1/2
e possono riesprimersi nella forma matriciale seguente
m
ϕ2u ϕv · ϕu
ϕu · ϕv ϕ2v
u
v
+m
dϕudt· ϕu
dϕvdt· ϕu
dϕudt· ϕv
dϕvdt· ϕv
u
v
= (17.10)
=
~F · ϕu
~F · ϕv
− µd∣∣∣∣mdϕu
dt· n u+m
dϕvdt· n v − ~F · n
∣∣∣∣(ϕu · ϕu u2 + ϕv · ϕv v2 + 2ϕu · ϕv uv)1/2
ϕ2u ϕv · ϕu
ϕu · ϕv ϕ2v
u
v
dove il secondo membro e definito per (u, v) 6= (0, 0) e la matrice simmetrica ϕ2
u ϕv · ϕu
ϕu · ϕv ϕ2v
risulta sempre definita positiva — e dunque invertibile — in virtu dell’ipotesi di regolaritadella superficie. Il sistema e cosı banalmente esprimibile in forma normale. Per (u, v) =(0, 0) l’attrito radente dinamico va sostituito con quello statico, di cui e pero definito ilsolo modulo massimo. Se lungo il moto esiste un istante t0 in corrispondenza del quale(u, v) = (0, 0), da quell’istante in poi il punto materiale si mantiene in quiete nella posizioneraggiunta P0 = ϕ(u0, v0) se e soltanto se risulta soddisfatta la legge di Coulomb-Morindell’attrito radente statico
| − ~F (t, P0, 0) + ~F (t, P0, 0) · n n| ≤ µs| − ~F (t, P0, 0) · n| ∀ t ≥ t0 .
In caso contrario il punto materiale deve tornare a muoversi, soggetto all’attrito dinamico,a partire dalla condizione iniziale
(u, v, u, v) = (u0, v0, u, v) ,
per cui si rende necessario prolungare i secondi membri delle (17.10) anche in (u, v) = (0, 0).Come nel caso della curva fissa, questo prolungamento non puo essere continuo. E tuttavia
Stefano Siboni 99

Universita degli studi di Trento Corso di Meccanica razionale
possibile “regolarizzare” le componenti dell’attrito radente dinamico a secondo membromediante l’introduzione di un fattore
tanh(|P |/δ) = tanh[(ϕu · ϕu u2 + ϕv · ϕv v2 + 2ϕu · ϕv uv)1/2/δ]
che per δ > 0 sufficientemente piccolo non cambia la fisica del sistema, ma rende peroapplicabile il teorema di esistenza ed unicita della soluzione per il problema di Cauchygrazie alla regolarita della funzione
tanh(|P |/δ)|P |
=tanh[(ϕu · ϕu u2 + ϕv · ϕv v2 + 2ϕu · ϕv uv)1/2/δ]
(ϕu · ϕu u2 + ϕv · ϕv v2 + 2ϕu · ϕv uv)1/2,
di classe C∞ in (u, v) ∈ R2. In definitiva, l’equazione pura del moto regolarizzata si puoscrivere
m
ϕ2u ϕv · ϕu
ϕu · ϕv ϕ2v
u
v
+m
dϕudt· ϕu
dϕvdt· ϕu
dϕudt· ϕv
dϕvdt· ϕv
u
v
=
=
~F · ϕu
~F · ϕv
− µd∣∣∣∣mdϕudt· n u+m
dϕvdt· n v − ~F · n
∣∣∣∣ ϕ2
u ϕv · ϕu
ϕu · ϕv ϕ2v
u
v
·· tanh[(ϕu · ϕu u2 + ϕv · ϕv v2 + 2ϕu · ϕv uv)1/2/δ]
(ϕu · ϕu u2 + ϕv · ϕv v2 + 2ϕu · ϕv uv)1/2
ed e sempre esprimibile in forma normale.
18. Osservazioni sulla dinamica e statica relativeLa descrizione statica e dinamica del punto materiale libero o vincolato hanno carattererelativo, in quanto:
(i) la scelta della terna di riferimento puo determinare, qualora la terna non abbia naturainerziale, l’insorgere di forze fittizie o d’inerzia delle quali occorre tenere conto nelloscrivere le equazioni del moto;
(ii) lo stato di quiete del sistema in una data posizione e relativo alla terna di riferi-mento adottata. Tali risultano, conseguentemente, anche le posizioni di equilibrio,che vengono definite facendo riferimento allo stato di quiete. Si deve percio parlare diequilibrio relativo al riferimento prescelto.
La dinamica e la statica del punto nei sistemi di riferimento non inerziali vengono quinditrattate allo stesso modo, sia nel caso libero che nel caso vincolato, includendo anche leforze di trascinamento e di Coriolis nel computo delle forze attive applicate al punto.
E importante rilevare che nella caratterizzazione degli equilibri relativi le eventuali forzedi Coriolis possono essere ignorate: si tratta infatti di forze proporzionali alla velocita
Stefano Siboni 100

Universita degli studi di Trento Corso di Meccanica razionale
secondo la relazione −m~ω ∧ P e si annullano a velocita istantanea nulla, una circostanzache certamente ricorre nell’analisi degli stati di quiete.
Quanto alla forza di trascinamento, e evidente che essa deve essere tenuta nel debitoconto nello studio dell’equilibrio relativo. Particolarmente interessante e la forma specificaassunta dalla forza di trascinamento nel caso di una terna mobile la cui origine risulti inquiete rispetto ad una terna inerziale e il cui moto di trascinamento sia rotatorio uniforme— cioe con velocita angolare di trascinamento costante. L’espressione generale della forzadi trascinamento e
~FT = −m[O +
3∑i=1
xid2eidt2
].
Nella fattispecie vale
O = 0 edeidt
= ~ω ∧ ei
con ~ω costante, per cui
~FT = −m3∑i=1
xid
dt(~ω ∧ ei) = −m
3∑i=1
xi ~ω ∧deidt
=
= −m3∑i=1
xi ~ω ∧ (~ω ∧ ei) = −m~ω ∧ [~ω ∧ (P −O)] =
= −m[(P −O) · ~ω ~ω − |~ω|2(P −O)
]=
= m|~ω|2[P −O − (P −O) · ~ω
|~ω|~ω
|~ω|
]= m|ω|2(P − P ?) ,
in cui si e indicata con P ? la proiezione ortogonale della posizione P del punto sull’asse dirotazione O~ω.
La forza di trascinamento risulta direttamente proporzionale alla massa del punto, alquadrato della velocita angolare di trascinamento e alla distanza del punto dall’asse dirotazione. E inoltre diretta secondo il segmento distanza fra il punto P e l’asse di ro-tazione, e dall’asse verso l’esterno. Cio giustifica la denominazione di forza centrifugacon la quale la forza di trascinamento e nota in questa circostanza particolare.
Stefano Siboni 101

Universita degli studi di Trento Corso di Meccanica razionale
19. Lavoro ed energiaNello studio della dinamica del punto materiale, e dei sistemi in generale, rivestono grandeimportanza i concetti di energia cinetica, potenziale, energia potenziale ed energia mecca-nica. Tali concetti verranno illustrati preliminarmente nel caso del punto materiale libero,per poi procedere alla analoga discussione per il punto vincolato a curva e superficie fissaliscia. L’analisi condurra a due ordini di problemi: la caratterizzazione dei campi di forzeposizionali e conservativi, con l’individuazione degli esempi piu importanti e notevoli dicampi cosiffatti, e l’introduzione del concetto generale di integrale primo, di cui, nelleappropriate condizioni, l’energia meccanica costituisce un esempio particolare.
19.1 Teorema dell’energia cineticaDall’equazione del moto di un punto materiale libero P , di massa m,
mP = ~F (t, P, P ) (19.1)
moltiplicando scalarmente membro a membro per la velocita istantanea P si deduce l’equa-zione scalare
mP · P = ~F (t, P, P ) · P
nella quale il primo membro puo riscriversi nella forma equivalente
mP · P =m
2(P · P + P · P ) =
m
2
d
dt(P · P ) =
d
dt
(m2P 2)
e conduce percio alla relazione
d
dt
(m2P 2)
= ~F (t, P, P ) · P .
La grandezza
T =m
2P 2 (19.2)
e nota come energia cinetica del punto materiale P di massa m, mentre il prodottoscalare
π = ~F (t, P, P ) · P (19.3)
viene indicato come la potenza della forza ~F . Il teorema dell’energia cinetica informa differenziale stabilisce cosı che lungo un qualsiasi moto di un punto materialelibero la derivata in t dell’energia cinetica coincide con la potenza di tutte le forze agentisul punto
dT
dt= π .
Con una espressione un po’ arcaica, l’energia cinetica (19.2) e anche conosciuta comeforza viva(1), per cui il teorema dell’energia cinetica viene anche indicato come teorema
(1)Si intende che l’energia cinetica e uno scalare e della forza, grandezza vettoriale, non ha che il nome.
Stefano Siboni 102

Universita degli studi di Trento Corso di Meccanica razionale
delle forze vive. Dato un qualsiasi moto P (t) del sistema, definito su un intervallo ditempo [t1, t2] e soluzione dell’equazione (19.1), il teorema dell’energia cinetica in formadifferenziale si puo integrare nel tempo lungo il moto, porgendo la relazione∫ t2
t1
dT
dtdt =
∫ t2
t1
~F [t, P (t), P (t)] · P (t) dt
nella quale il primo membro si riduce alla variazione di energia cinetica fra l’istante inizialet1 e quello finale t2 ∫ t2
t1
dT
dtdt =
m
2P (t2)2 − m
2P (t1)2 = T2 − T1
mentre il secondo membro rappresenta l’integrale della potenza nel tempo lungo il motoassegnato ∫ t2
t1
π dt =
∫ t2
t1
~F [t, P (t), P (t)] · P (t) dt .
Ne risulta il teorema dell’energia cinetica in forma integrale
T2 − T1 =
∫ t2
t1
~F [t, P (t), P (t)] · P (t) dt (19.4)
secondo il quale lungo qualsiasi moto del sistema la variazione di energia cinetica fral’istante iniziale e quello finale si identifica con l’integrale sui tempi della potenza di tuttele forze applicate.
19.2 Campi di forze posizionaliIl teorema dell’energia cinetica (19.4) assume una forma particolarmente interessante nel
caso che la sollecitazione ~F sia posizionale. Una sollecitazione ~F si dice posizionale sedipende unicamente dalla posizione P del punto su cui si esercita
~F = ~F (P ) .
Nel caso del punto materiale P sia libero, si dovra richiedere che la funzione ~F (P ) siadefinita ∀P ∈ R3. Piu in generale, la forza posizionale sara definita su un certo dominioaperto D = int(D) ⊆ R3 di R3 e si prefigurera come un campo vettoriale su D —campo di forze sul dominio spaziale D:
~F : P ∈ D −−−−−−−−−→ ~F (P ) ∈ R3 .
Per la consueta esigenza di assicurare esistenza ed unicita delle soluzioni massimali delleequazioni del moto, per qualsivoglia scelta delle condizioni iniziali, si richiedera che il campodi forze posizionali ~F (P ) sia una funzione di classe C1 nel proprio dominio di definizione
Stefano Siboni 103
Universita degli studi di Trento Corso di Meccanica razionale
D. Nell’ipotesi che le forze agenti sul punto materiale siano posizionali, l’integrale lungoil moto P (t) della potenza si scrive∫ t2
t1
~F [t, P (t), P (t)] · P (t) dt =
∫ t2
t1
~F [P (t)] · P (t) dt . (19.5)
D’altra parte, se si indica con P (s) la parametrizzazione della traiettoria del moto in terminidella relativa ascissa curvilinea s, il moto P (t) si rappresenta nella forma intrinseca
P (t) = P [s(t)] ∀ t ∈ [t1, t2]
e l’integrale in (19.5) e ricondotto alla forma equivalente∫ t2
t1
~F [P (t)] · P (t) dt =
∫ t2
t1
~F [P [s(t)]] · dPds
[s(t)] s(t) dt
che con il cambiamento di variabile t→ s indotto dalla legge oraria s = s(t) si riduce a∫ t2
t1
~F [P [s(t)]] · dPds
[s(t)] s(t) dt =
∫ s2
s1
~F [P (s)] · dPds
(s) ds , (19.6)
essendo s1 ed s2 i valori dell’ascissa curvilinea all’istante iniziale e finale rispettivamente
s1 = s(t1) s2 = s(t2) .
L’espressione ottenuta non reca piu alcuna traccia della legge oraria s(t), madipende unicamente dalla traiettoria P (s). L’integrale della potenza lungo il motonon dipende quindi dal moto in quanto tale ma soltanto dalla sua traiettoria γ, qualunquesia la legge oraria s(t) con la quale detta traiettoria venga percorsa. L’integrale finale
in (19.6) e noto come integrale del lavoro del campo di forze posizionali ~F (P ) e puoidentificarsi con l’integrale curvilineo ∫
γ
~F (P ) · dP
calcolato sulla traiettoria γ. La forma differenziale che compare nell’integrale viene detta,in meccanica, lavoro elementare del campo di forze ~F e si puo scrivere nella formaesplicita
δL = ~F (P ) · dP = F1(x1, x2, x3) dx1 + F2(x1, x2, x3) dx2 + F3(x1, x2, x3) dx3
in termini delle componenti cartesiane F1, F2, F3 del campo ~F e delle coordinate x1, x2, x3
del generico punto P rispetto ad una stessa terna di riferimento cartesiana ortogonaledestra.
Stefano Siboni 104

Universita degli studi di Trento Corso di Meccanica razionale
19.3 Campi di forze posizionali e conservativeSi dice posizionale e conservativo nel dominio D ⊆ R3 un campo di forze posizionali ~Fche possa esprimersi come gradiente di una funzione scalare U definita sullo stesso dominio
~F (P ) =∂U
∂P(P ) ∀P ∈ D
e nota come potenziale o funzione potenziale del campo ~F . Del tutto equivalentemente,le componenti cartesiane F1, F2, F3 del campo posizionale e conservativo si identificano conle corrispondenti derivate parziali di U rispetto alle coordinate cartesiane x1, x2, x3 di P
F1(x1, x2, x3) =∂U
∂x1(x1, x2, x3)
F2(x1, x2, x3) =∂U
∂x2(x1, x2, x3)
F3(x1, x2, x3) =∂U
∂x3(x1, x2, x3) .
Per un campo posizionale e conservativo, l’integrale del lavoro si semplifica ulteriormente.Vale infatti:∫
γ
~F (P ) · dP =
∫ s2
s1
~F [P (s)] · dPds
(s) ds =
∫ s2
s1
∂U
∂P[P (s)] · dP
ds(s) ds
e poiche per il teorema di derivazione delle funzioni composte deve aversi
∂U
∂P[P (s)] · dP
ds(s) =
3∑i=1
∂U
∂xi[P (s)]
dxids
(s) =d
dsU [P (s)] ,
si conclude che∫γ
~F (P ) · dP =
∫ s2
s1
d
dsU [P (s)] ds = U [P (s2)]− U [P (s1)] .
L’integrale del lavoro di un campo posizionale conservativo dipende unica-mente dagli estremi della traiettoria di integrazione γ, ed assume percio lo stessovalore per qualsiasi traiettoria regolare di uguali estremi. Tale valore si identifica con lavariazione della funzione potenziale U fra l’estremo iniziale P (s1) e l’estremo finale P (s2)della traiettoria.La stessa proprieta puo rileggersi dicendo che il lavoro elementare e un differenzialeesatto, identificandosi con il differenziale della funzione potenziale
δL = ~F (P ) · dP =∂U
∂P(P ) · dP = dU(P ) .
Stefano Siboni 105

Universita degli studi di Trento Corso di Meccanica razionale
19.4 Teorema di conservazione dell’energia meccanicaNel caso che le forze agenti sul punto materiale P siano posizionali e conservative, il teoremadell’energia cinetica in forma differenziale si riduce a
dT
dt= ~F (P ) · P =
∂U
∂P(P ) · P =
dU
dt
in modo che lungo qualsiasi moto del sistema deve aversi
d
dt(T − U) = 0
e dunque mantenersi costante la funzione
H = T − U =m
2P 2 − U(P ) . (19.7)
L’opposto −U della funzione potenziale e noto in meccanica come energia potenziale delsistema. La funzione H in (19.7) si interpreta allora come la somma dell’energia cinetica edell’energia potenziale del punto e viene denominata energia meccanica del sistema. Sidice che per il punto materiale libero, soggetto esclusivamente a sollecitazioniposizionali e conservative, l’energia meccanica e un integrale primo, ovvero unacostante del moto, o ancora una grandezza conservata. Questo risultato costituisceil cosiddetto teorema di conservazione dell’energia meccanica.
19.5 Esempi di forze posizionali e conservativeLe sollecitazioni posizionali che si incontrano piu frequentemente nelle applicazioni hannonatura conservativa: si tratta delle forze costanti, di cui le forze peso sono l’esempio piurilevante, delle forze elastiche e delle forze centrifughe. L’esistenza del potenziale puo essereverificata direttamente mostrando come il lavoro elementare possa scriversi nella forma diun differenziale esatto. A questo scopo conviene introdurre le coordinate x1, x2, x3 delpunto P rispetto alla terna assegnata Ox1x2x3 ed esprimere il lavoro elementare come
δL = ~F (P ) · dP = ~F (x) · d~x .
19.5.1 Forza costante (forza peso)
Il lavoro elementare di una forza costante ~F e dato dalla relazione
δL = ~F · d~x = d(~F · ~x)
e si identifica percio con il differenziale della funzione scalare
UF = ~F · ~x = ~F · (P −O)
che costituisce il potenziale della forza costante. Nel caso particolare della forza pesosi ha ~F = m~g ed il corrispondente potenziale gravitazionale Ug si riduce a
Ug = m~g · ~x = m~g · (P −O) ,
Stefano Siboni 106

Universita degli studi di Trento Corso di Meccanica razionale
essendo ~g il vettore di accelerazione gravitazionale. Si osservi che una funzione poten-ziale del tutto equivalente si ottiene aggiungendo alla precedente una costante arbitraria.L’introduzione di una siffatta costante additiva non altera infatti il gradiente del poten-ziale, ne conseguentemente le componenti del campo di forze. In generale, il potenziale diun campo di forze posizionali e conservative e definito a meno di una costanteadditiva arbitraria.
19.5.2 Forza elasticaIl campo di forze elastiche, il cui centro si identifichi con l’origine O della terna di riferi-mento, e dato dalla relazione
~F = −k~x
in cui k > 0 e la costante elastica della sollecitazione. Per il lavoro elementare vale allora
δL = ~F · d~x = −k~x · d~x = −k2
(~x · d~x+ d~x · ~x) = −k2d(~x · ~x)
in modo che la sollecitazione si riconosce essere posizionale e conservativa, con potenzialeelastico
Uel = −k2~x2 .
19.5.3 Forza centrifugaIn un sistema di riferimento rotante con velocita angolare costante ~ω rispetto ad una ternainerziale, il campo delle forze centrifughe e dato dalla seguente espressione
~F = m|~ω|2[~x−
(~x · ~ω|~ω|
) ~ω
|~ω|
].
Il lavoro elementare del campo diventa percio
δL = m|~ω|2[~x−
( ~ω|~ω|· ~x) ~ω
|~ω|
]· d~x = m|~ω|2
[~x · d~x−
( ~ω|~ω|· ~x) ~ω
|~ω|· d~x
]e, data la costanza del versore ~ω/|~ω|, assume la forma equivalente
δL = m|~ω|2[~x · d~x−
( ~ω|~ω|· ~x)d( ~ω|~ω|· ~x)]
= m|~ω|2[d(~x2
2
)− d[1
2
( ~ω|~ω|· ~x)2]]
dalla quale si deduce che il campo delle forze centrifughe e posizionale e conservativo, conpotenziale
Ucf =m|~ω|2
2
[~x2 −
( ~ω|~ω|· ~x)2].
Giova osservare che l’espressione entro parentesi quadre
~x2 −( ~ω|~ω|· ~x)2
Stefano Siboni 107

Universita degli studi di Trento Corso di Meccanica razionale
rappresenta il quadrato della distanza del punto P dall’asse di rotazione O~ω.
19.6 Campi di forze irrotazionaliUn campo di forze ~F su un dominio D di R3 si dice rotore del campo il campo vettorialein D definito da
∇∧ ~F =
∣∣∣∣∣∣∣∣∣e1 e2 e3
∂
∂x1
∂
∂x2
∂
∂x3
F1 F2 F3
∣∣∣∣∣∣∣∣∣ =
=(∂F3
∂x2− ∂F2
∂x3
)e1 +
(∂F1
∂x3− ∂F3
∂x1
)e2 +
(∂F2
∂x1− ∂F1
∂x2
)e3 .
Il campo ~F si definisce irrotazionale se il suo rotore risulta identicamente nullo neldominio D
∇∧ ~F (~x) = 0 ~x ∈ D .
19.7 Irrotazionalita dei campi conservativiSotto condizioni molto generali, l’irrotazionalita di un campo posizionale e condizionenecessaria per l’esistenza del potenziale. Vale infatti il teorema seguente.
Un campo posizionale conservativo e di classe C1 in un dominio D ⊆ R3 e irrotazionalenello stesso dominio.
Per la dimostrazione e sufficiente osservare che provare l’irrotazionalita equivale a verificare,per qualsiasi scelta del punto ~x ∈ D, l’annullarsi delle derivate incrociate
∂Fi∂xj
(~x)− ∂Fj∂xi
(~x) ∀ i, j = 1, 2, 3
non banalmente nulle, ed identificabili a meno del segno con le componenti del rotore, soloper i 6= j. Si ha in effetti, ricordando la definizione di campo conservativo e l’espressionedella componente Fi del campo in termini del potenziale U ,
∂Fi∂xj
(~x) =∂
∂xj
( ∂U∂xi
)(~x) =
∂2U
∂xj∂xi(~x)
e siccome l’essere ~F C1 in D implica che U debba risultare C2 sullo stesso dominio, illemma di Schwarz consente di commutare l’ordine delle derivate parziali in xi e xj e diconcludere che
∂Fi∂xj
(~x) =∂2U
∂xi∂xj(~x) =
∂
∂xi
( ∂U∂xj
)(~x) =
∂Fj∂xi
(~x) ∀ i, j = 1, 2, 3 , ∀ ~x ∈ D ,
come richiesto. Si noti che nel ricavare il risultato si e fatto uso in modo essenzialedell’ipotesi di regolarita, l’appartenenza di ~F alla classe C1 nel proprio dominio di definizio-ne D. In caso contrario, infatti, il potenziale U non risulta di classe C2 in D e l’inversionedell’ordine delle derivate parziali nelle derivate seconde miste non e in generale consentita.
Stefano Siboni 108
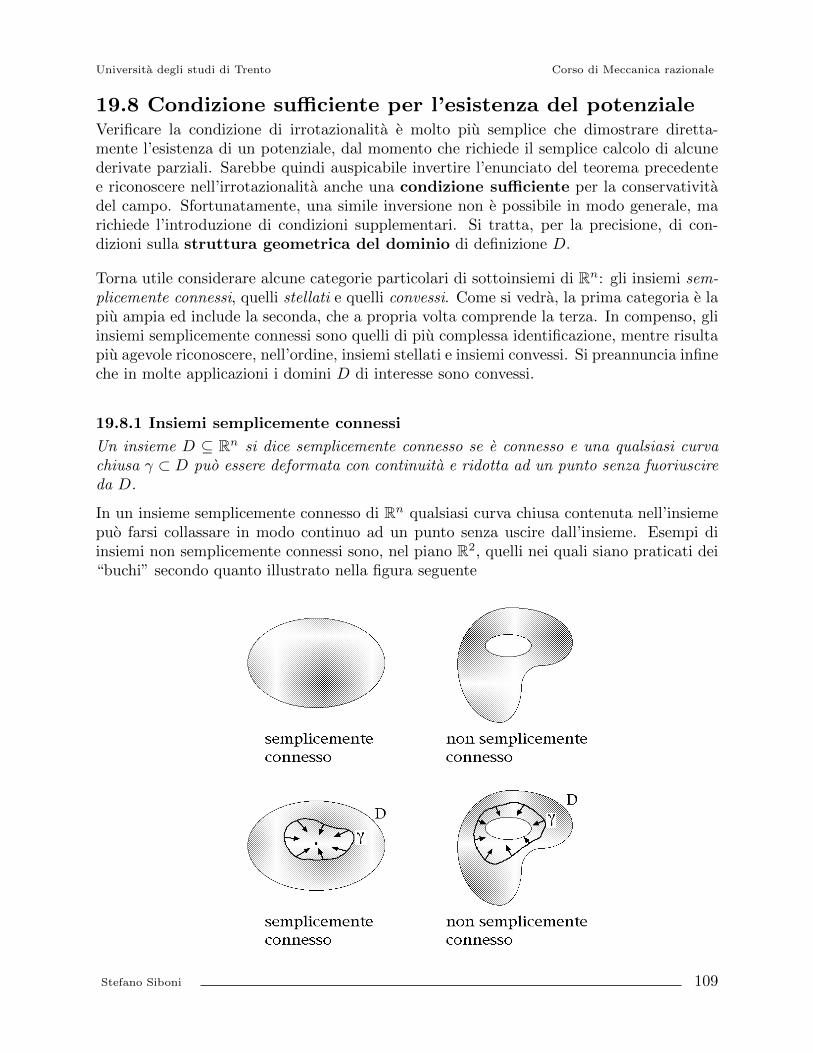
Universita degli studi di Trento Corso di Meccanica razionale
19.8 Condizione sufficiente per l’esistenza del potenzialeVerificare la condizione di irrotazionalita e molto piu semplice che dimostrare diretta-mente l’esistenza di un potenziale, dal momento che richiede il semplice calcolo di alcunederivate parziali. Sarebbe quindi auspicabile invertire l’enunciato del teorema precedentee riconoscere nell’irrotazionalita anche una condizione sufficiente per la conservativitadel campo. Sfortunatamente, una simile inversione non e possibile in modo generale, marichiede l’introduzione di condizioni supplementari. Si tratta, per la precisione, di con-dizioni sulla struttura geometrica del dominio di definizione D.
Torna utile considerare alcune categorie particolari di sottoinsiemi di Rn: gli insiemi sem-plicemente connessi, quelli stellati e quelli convessi. Come si vedra, la prima categoria e lapiu ampia ed include la seconda, che a propria volta comprende la terza. In compenso, gliinsiemi semplicemente connessi sono quelli di piu complessa identificazione, mentre risultapiu agevole riconoscere, nell’ordine, insiemi stellati e insiemi convessi. Si preannuncia infineche in molte applicazioni i domini D di interesse sono convessi.
19.8.1 Insiemi semplicemente connessi
Un insieme D ⊆ Rn si dice semplicemente connesso se e connesso e una qualsiasi curvachiusa γ ⊂ D puo essere deformata con continuita e ridotta ad un punto senza fuoriuscireda D.
In un insieme semplicemente connesso di Rn qualsiasi curva chiusa contenuta nell’insiemepuo farsi collassare in modo continuo ad un punto senza uscire dall’insieme. Esempi diinsiemi non semplicemente connessi sono, nel piano R2, quelli nei quali siano praticati dei“buchi” secondo quanto illustrato nella figura seguente
Stefano Siboni 109
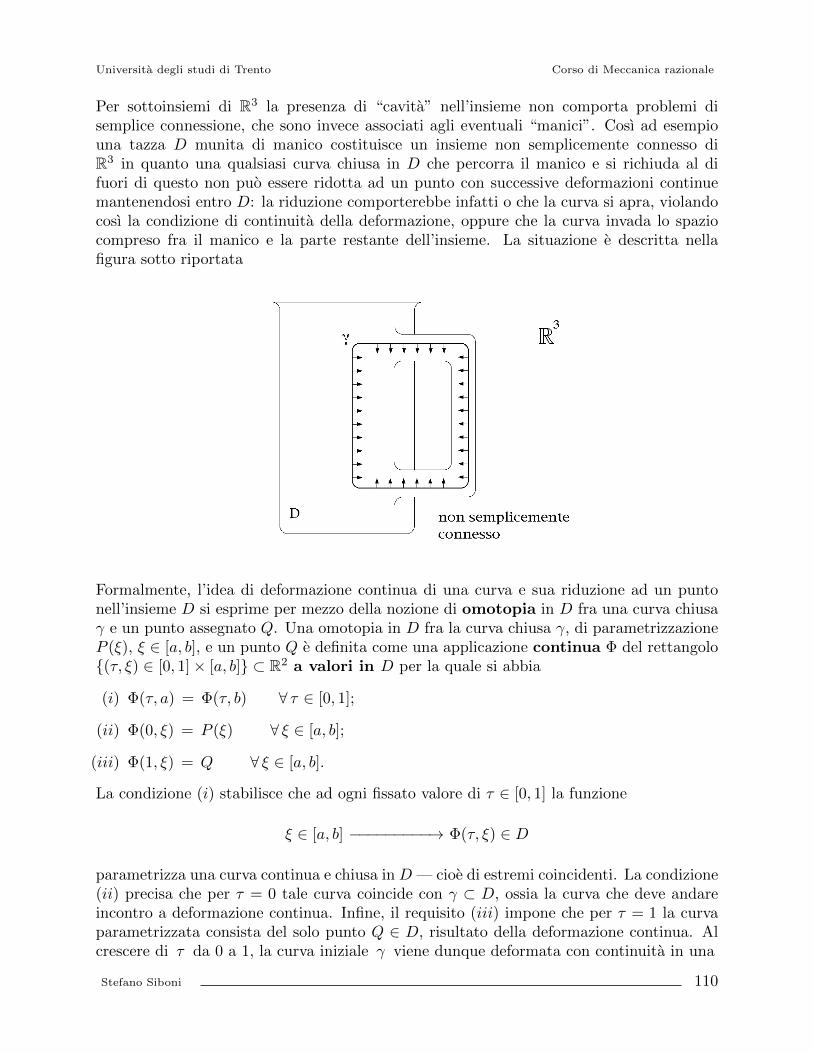
Universita degli studi di Trento Corso di Meccanica razionale
Per sottoinsiemi di R3 la presenza di “cavita” nell’insieme non comporta problemi disemplice connessione, che sono invece associati agli eventuali “manici”. Cosı ad esempiouna tazza D munita di manico costituisce un insieme non semplicemente connesso diR3 in quanto una qualsiasi curva chiusa in D che percorra il manico e si richiuda al difuori di questo non puo essere ridotta ad un punto con successive deformazioni continuemantenendosi entro D: la riduzione comporterebbe infatti o che la curva si apra, violandocosı la condizione di continuita della deformazione, oppure che la curva invada lo spaziocompreso fra il manico e la parte restante dell’insieme. La situazione e descritta nellafigura sotto riportata
Formalmente, l’idea di deformazione continua di una curva e sua riduzione ad un puntonell’insieme D si esprime per mezzo della nozione di omotopia in D fra una curva chiusaγ e un punto assegnato Q. Una omotopia in D fra la curva chiusa γ, di parametrizzazioneP (ξ), ξ ∈ [a, b], e un punto Q e definita come una applicazione continua Φ del rettangolo(τ, ξ) ∈ [0, 1]× [a, b] ⊂ R2 a valori in D per la quale si abbia
(i) Φ(τ, a) = Φ(τ, b) ∀ τ ∈ [0, 1];
(ii) Φ(0, ξ) = P (ξ) ∀ ξ ∈ [a, b];
(iii) Φ(1, ξ) = Q ∀ ξ ∈ [a, b].
La condizione (i) stabilisce che ad ogni fissato valore di τ ∈ [0, 1] la funzione
ξ ∈ [a, b] −−−−−−−−−→ Φ(τ, ξ) ∈ D
parametrizza una curva continua e chiusa in D — cioe di estremi coincidenti. La condizione(ii) precisa che per τ = 0 tale curva coincide con γ ⊂ D, ossia la curva che deve andareincontro a deformazione continua. Infine, il requisito (iii) impone che per τ = 1 la curvaparametrizzata consista del solo punto Q ∈ D, risultato della deformazione continua. Alcrescere di τ da 0 a 1, la curva iniziale γ viene dunque deformata con continuita in una
Stefano Siboni 110
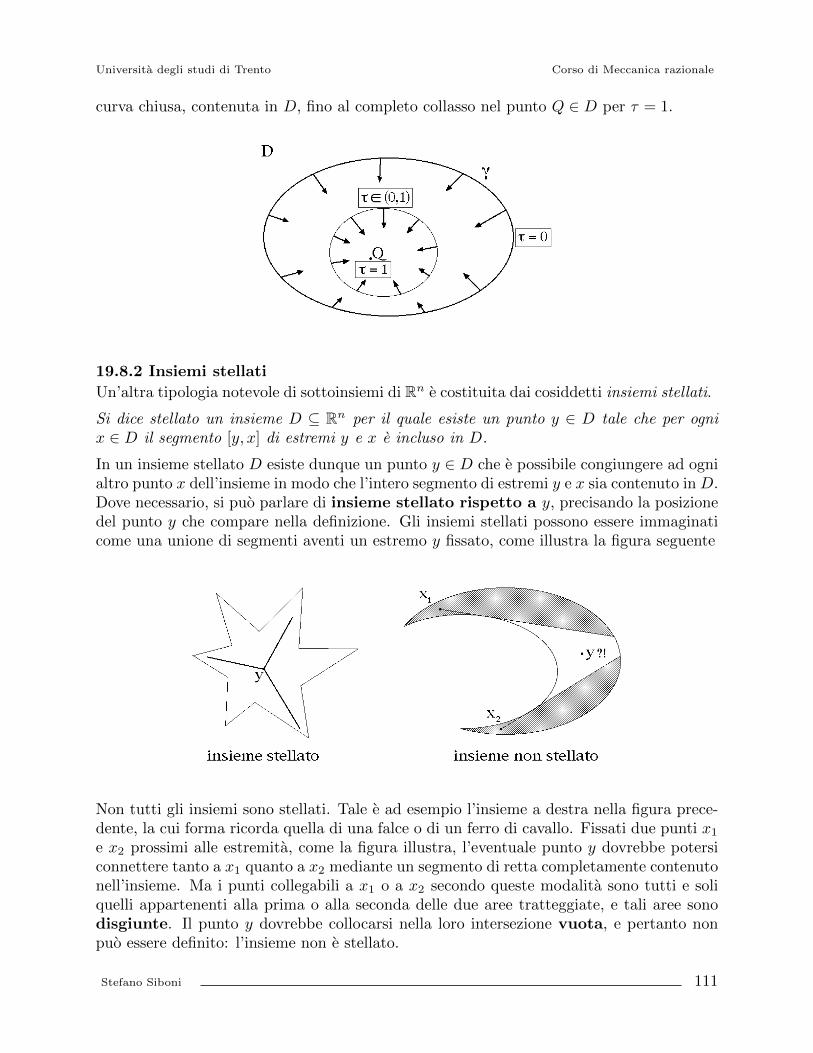
Universita degli studi di Trento Corso di Meccanica razionale
curva chiusa, contenuta in D, fino al completo collasso nel punto Q ∈ D per τ = 1.
19.8.2 Insiemi stellati
Un’altra tipologia notevole di sottoinsiemi di Rn e costituita dai cosiddetti insiemi stellati.
Si dice stellato un insieme D ⊆ Rn per il quale esiste un punto y ∈ D tale che per ognix ∈ D il segmento [y, x] di estremi y e x e incluso in D.
In un insieme stellato D esiste dunque un punto y ∈ D che e possibile congiungere ad ognialtro punto x dell’insieme in modo che l’intero segmento di estremi y e x sia contenuto in D.Dove necessario, si puo parlare di insieme stellato rispetto a y, precisando la posizionedel punto y che compare nella definizione. Gli insiemi stellati possono essere immaginaticome una unione di segmenti aventi un estremo y fissato, come illustra la figura seguente
Non tutti gli insiemi sono stellati. Tale e ad esempio l’insieme a destra nella figura prece-dente, la cui forma ricorda quella di una falce o di un ferro di cavallo. Fissati due punti x1
e x2 prossimi alle estremita, come la figura illustra, l’eventuale punto y dovrebbe potersiconnettere tanto a x1 quanto a x2 mediante un segmento di retta completamente contenutonell’insieme. Ma i punti collegabili a x1 o a x2 secondo queste modalita sono tutti e soliquelli appartenenti alla prima o alla seconda delle due aree tratteggiate, e tali aree sonodisgiunte. Il punto y dovrebbe collocarsi nella loro intersezione vuota, e pertanto nonpuo essere definito: l’insieme non e stellato.
Stefano Siboni 111

Universita degli studi di Trento Corso di Meccanica razionale
Una proprieta notevole afferma che
ogni insieme stellato e semplicemente connesso
per cui gli insiemi semplicemente connessi costituiscono una famiglia piu ampia di quellistellati. Della veridicita di questa affermazione ci si convince immediatamente notando cheper una qualsiasi curva chiusa γ in D, insieme stellato rispetto a y, tutti i segmenti di rettache congiungono y con un qualsivoglia punto di γ sono necessariamente e completamentecontenuti in D. Un’ovvia omotopia fra γ e y in D e allora data dall’espressione
Φ(τ, ξ) = (1− τ)P (ξ) + τy ∀ (τ, ξ) ∈ [0, 1]× [a, b]
essendo P (ξ), ξ ∈ [a, b], la parametrizzazione di γ. E facile verificare che tutte le proprietaformali dell’omotopia sono soddisfatte, come pure interpretare il significato geometricodella funzione Φ: questa, infatti, descrive il collasso della curva γ al punto y lungo isegmenti, tutti inclusi in D, che congiungono con y ogni singolo punto di γ.
Per contro, esistono insiemi semplicemente connessi che non sono stellati, l’insieme a ferrodi cavallo considerato in precedenza ne e un esempio.
La famiglia degli insiemi stellati e strettamente inclusa in quella degli insiemi semplice-mente connessi.
19.8.3 Insiemi convessi
Un’ultima classe di sottoinsiemi di Rn che si incontra molto frequentemente nello studiodei campi posizionali e quella degli insiemi convessi.
Si definisce convesso un insieme D ⊆ Rn tale che per ogni x, y ∈ D il segmento [x, y] diestremi x e y e incluso in D.
Stefano Siboni 112
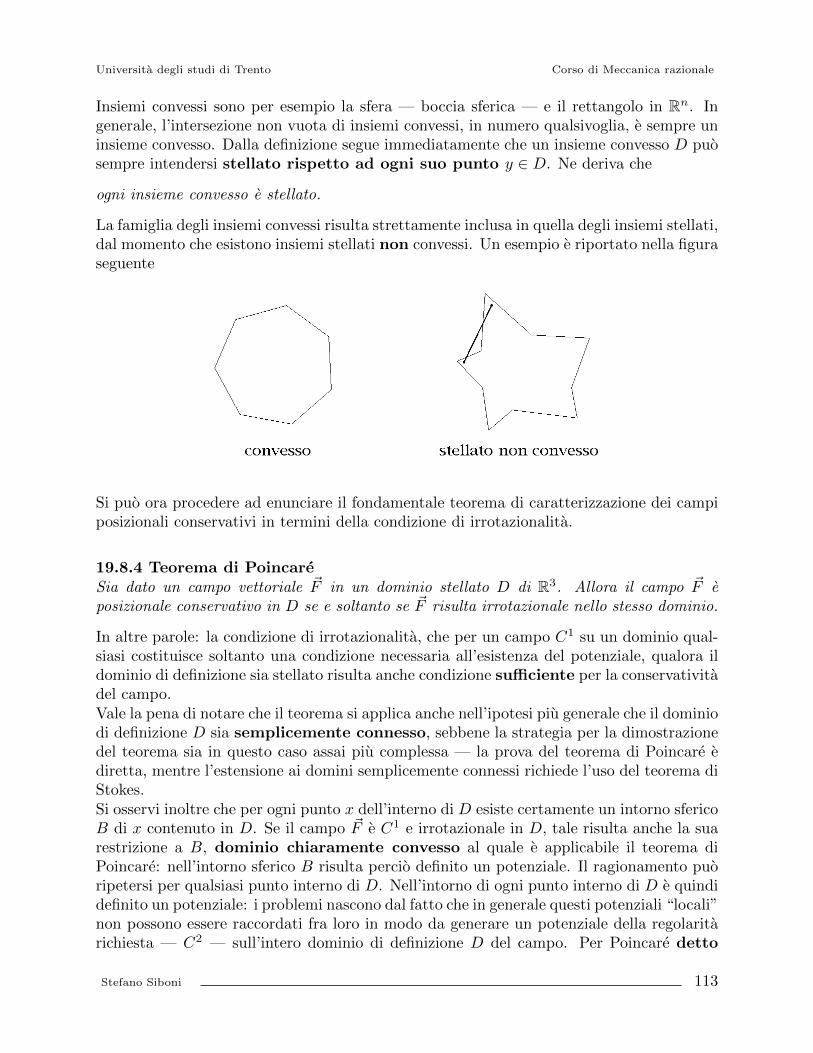
Universita degli studi di Trento Corso di Meccanica razionale
Insiemi convessi sono per esempio la sfera — boccia sferica — e il rettangolo in Rn. Ingenerale, l’intersezione non vuota di insiemi convessi, in numero qualsivoglia, e sempre uninsieme convesso. Dalla definizione segue immediatamente che un insieme convesso D puosempre intendersi stellato rispetto ad ogni suo punto y ∈ D. Ne deriva che
ogni insieme convesso e stellato.
La famiglia degli insiemi convessi risulta strettamente inclusa in quella degli insiemi stellati,dal momento che esistono insiemi stellati non convessi. Un esempio e riportato nella figuraseguente
Si puo ora procedere ad enunciare il fondamentale teorema di caratterizzazione dei campiposizionali conservativi in termini della condizione di irrotazionalita.
19.8.4 Teorema di PoincareSia dato un campo vettoriale ~F in un dominio stellato D di R3. Allora il campo ~F eposizionale conservativo in D se e soltanto se ~F risulta irrotazionale nello stesso dominio.
In altre parole: la condizione di irrotazionalita, che per un campo C1 su un dominio qual-siasi costituisce soltanto una condizione necessaria all’esistenza del potenziale, qualora ildominio di definizione sia stellato risulta anche condizione sufficiente per la conservativitadel campo.Vale la pena di notare che il teorema si applica anche nell’ipotesi piu generale che il dominiodi definizione D sia semplicemente connesso, sebbene la strategia per la dimostrazionedel teorema sia in questo caso assai piu complessa — la prova del teorema di Poincare ediretta, mentre l’estensione ai domini semplicemente connessi richiede l’uso del teorema diStokes.Si osservi inoltre che per ogni punto x dell’interno di D esiste certamente un intorno sfericoB di x contenuto in D. Se il campo ~F e C1 e irrotazionale in D, tale risulta anche la suarestrizione a B, dominio chiaramente convesso al quale e applicabile il teorema diPoincare: nell’intorno sferico B risulta percio definito un potenziale. Il ragionamento puoripetersi per qualsiasi punto interno di D. Nell’intorno di ogni punto interno di D e quindidefinito un potenziale: i problemi nascono dal fatto che in generale questi potenziali “locali”non possono essere raccordati fra loro in modo da generare un potenziale della regolaritarichiesta — C2 — sull’intero dominio di definizione D del campo. Per Poincare detto
Stefano Siboni 113

Universita degli studi di Trento Corso di Meccanica razionale
raccordo e certamente possibile nel caso di domini D stellati o semplicementeconnessi.
19.8.5 Estensione a campi vettoriali di RnNelle applicazioni ai sistemi olonomi, secondo il formalismo lagrangiano, torna molto utileestendere i risultati precedenti a campi vettoriali di dimensione arbitraria n ∈ N.
In un dominio aperto D di Rn si consideri il campo vettoriale
F : x ∈ D −−−−−−−−−→ F (x) ∈ Rn
di componentiF (x) = (F1(x), F2(x), . . . , Fn(x))
e di classe C1 sullo stesso dominio.Il campo vettoriale si dice conservativo o, piu genericamente, esatto, se esiste una fun-zione scalare di D
U : x ∈ D −−−−−−−−−→ U(x) ∈ R
il cui gradiente coincide con F in D
F (x) =∂U
∂x(x) ∀x ∈ D
ossia
Fi(x) =∂U
∂xi(x) ∀x ∈ D .
La funzione U e nota come potenziale di F nel dominio D.Il campo F si chiama irrotazionale, o chiuso, se sono soddisfatte le relazioni
∂Fi∂xj
(x)− ∂Fj∂xi
(x) = 0 ∀ i, j = 1, . . . , n , ∀x ∈ D .
Si dice che in un campo chiuso le derivate incrociate delle componenti del camporispetto alle coordinate risultano identicamente nulle.
Si ha allora la seguente estensione della condizione necessaria di conservativita o esattezzadel campo:
un campo vettoriale F , di classe C1 ed esatto in un dominio D di Rn, risulta chiuso nellostesso dominio.
I concetti di curva chiusa, segmento, omotopia, insieme semplicemente connesso, stellatoe convesso, si estendono immediatamente a spazi vettoriali Rn di dimensione n arbitraria.E cosı dato di stabilire il seguente teorema di Poincare in forma generale:
un campo vettoriale F , chiuso e di classe C1 su un dominio stellato D di Rn risulta iviesatto.
Stefano Siboni 114

Universita degli studi di Trento Corso di Meccanica razionale
Il teorema afferma che per i campi vettoriali C1 in un dominio stellato D la condizione dichiusura in D e necessaria e sufficiente per l’esattezza nello stesso dominio — e dunqueper l’esistenza del potenziale in D.
19.9 Esempio di campo irrotazionale C1 non conservativoCome precisato in precedenza, se il dominio di definizione D del campo di forze nonrisulta semplicemente connesso, la proprieta di irrotazionalita e condizione necessaria ma ingenerale non sufficiente per l’esistenza di un potenziale. Questo concetto e bene illustratodal seguente esempio. Nel piano (x, y) ∈ R privato dell’origine (0, 0) si considera ilcampo di forze a due componenti
Fx(x, y) =y
x2 + y2Fy(x, y) = − x
x2 + y2∀ (x, y) ∈ R2 \ (0, 0) .
Il campo e chiaramente di classe C1 — risulta addirittura C∞ — ma il suo dominio didefinizione D = R2\(0, 0) non risulta semplicemente connesso — per convincersene,basta considerare una qualsiasi curva chiusa che circonda l’origine (0, 0) ed osservare chenon c’e modo di far collassare tale curva su un punto del dominio D senza attraversarel’origine stessa, che non e punto dell’insieme. L’irrotazionalita si verifica immediatamente,in quanto
∂Fx∂y
(x, y) =x2 − y2
(x2 + y2)2
∂Fy∂x
(x, y) =x2 − y2
(x2 + y2)2∀ (x, y) ∈ R2 \ (0, 0)
per cui∂Fx∂y
(x, y)− ∂Fy∂x
(x, y) = 0 ∀ (x, y) ∈ R2 \ (0, 0) .
Il campo, tuttavia, non e conservativo. Considerata infatti la circonferenza γ di raggioR e centro (0, 0), parametrizzabile come
x(θ) = R cos θ y(θ) = R sin θ θ ∈ [0, 2π] ,
l’integrale del lavoro si dimostra essere diverso da zero:∫γ
(Fxdx+ Fydy) =
∫γ
y dx− x dyx2 + y2
=
=
2π∫0
R sin θ(−R sin θ)−R cos θ R cos θ
R2cos2θ +R2sin2θdθ = −
2π∫0
dθ = −2π 6= 0 .
Tale risultato esclude la natura conservativa del campo in quanto, se esistesse un potenzialeU , dovrebbe aversi ∫
γ
(Fxdx+ Fydy) = 0
lungo un qualunque arco chiuso γ del dominio D.
Stefano Siboni 115

Universita degli studi di Trento Corso di Meccanica razionale
Si osservi che sebbene non conservativo in D il campo di forze deve comunque esserelocalmente conservativo, nel senso che un potenziale deve essere definito nell’intornodi ogni punto (x, y) del dominio D: tale intorno infatti e un disco aperto e costituiscecertamente un dominio semplicemente connesso — addirittura connesso — su cui il teoremadi Poincare assicura l’esistenza di un potenziale locale. Il problema deriva dal fattoche detti potenziali locali non possono essere raccordati fra loro in modo dadefinire un potenziale globale, della prescritta regolarita, in tutto D.In effetti, dall’integrazione diretta del sistema di equazioni differenziali alle derivate parziali
∂U
∂x(x, y) =
y
x2 + y2
∂U
∂y(x, y) = − x
x2 + y2
si ricaverebbero le soluzioni formali
U(x, y) = arctg(xy
)∀ y 6= 0
eU(x, y) = −arctg
(yx
)∀x 6= 0 .
Almeno una di queste funzioni costituisce un potenziale per il campo in un intorno suf-ficientemente piccolo di un qualsiasi punto (xo, yo) ∈ D. Nessuna di esse, tuttavia,definisce un potenziale sull’intero dominio D, dal momento che la prima funzionerisulta discontinua lungo l’asse delle ascisse, mentre la seconda e discontinua lungo l’assedelle ordinate. La prima funzione deve essere usata quando (xo, yo) giace sull’asse delle or-dinate, mentre la seconda entra necessariamente in gioco quando (xo, yo) si colloca sull’assedelle ascisse.
19.10 Esempio di calcolo del potenzialePer illustrare la strategia generale di calcolo del potenziale, si consideri il campo piano
Fx(x, y) = 1 + y2 Fy(x, y) = 2xy + 2y
in (x, y) ∈ R2 — dominio convesso. Per il teorema di Poincare l’esistenza del potenzialeequivale alla irrotazionalita del campo, che e immediato verificare
∂Fx∂y
(x, y)− ∂Fy∂x
(x, y) = 2y − 2y = 0 ∀ (x, y) ∈ R2 .
E percio definita una funzione scalare U(x, y) in R2 tale che
∂U
∂x(x, y) = 1 + y2 ∂U
∂y(x, y) = 2xy + 2y ∀ (x, y) ∈ R2 .
Poiche la derivata parziale in x non e che una derivata ordinaria in x ad y fissato, lasoluzione generale della prima equazione differenziale si scrive nella forma
U(x, y) = x+ y2x+ f(y)
Stefano Siboni 116

Universita degli studi di Trento Corso di Meccanica razionale
essendo f(y) una funzione arbitraria di y — ossia una arbitraria costante additivarispetto alla sola variabile x. In modo analogo, la soluzione generale della seconda equazio-ne vale
U(x, y) = xy2 + y2 + g(x)
in termini di una funzione arbitraria g(x) della variabile x. Confrontando le due espressioni,che devono coincidere, si conclude che il potenziale e dato dall’espressione generale
U(x, y) = x+ xy2 + y2 + c ∀ (x, y) ∈ R2
definita, come sempre, a meno di una costante additiva c arbitraria. Va sottolineatal’importanza di avere accertato preliminarmente l’esistenza del potenziale, attraverso lasemplice verifica della irrotazionalita: in tal modo si va a ricercare un potenziale la cuiesistenza e certa a priori.
19.11 Punto su curva fissa e lisciaL’equazione pura del moto per un punto materiale vincolato a restare su una curva bire-golare fissa e liscia e data da
ms = ~F [t, P (s), s τ(s)] · τ(s)
e nell’ipotesi che le sollecitazioni attive siano puramente posizionali si riduce a
ms = ~F [P (s)] · τ(s) .
Basta percio moltiplicare membro a membro per s l’equazione precedente per ottenere
ms s = ~F [P (s)] · τ(s) s
ossiad
dt
(ms2
2
)= ~F [P (s)] · τ(s) s , (19.8)
che e la forma particolare assunta dal teorema dell’energia cinetica, in quanto
T =mP 2
2=
m
2
(dPdss)2
=m
2(sτ)2 =
ms2
2.
Nell’ipotesi che la curva sia biregolare e il campo di forze posizionali ~F (P ) almeno continuo,e evidente che la funzione di s a secondo membro in (19.8)
s ∈ (a, b) −−−−−−−−−→ ~F [P (s)] · τ(s) ∈ R
risulta continua nell’intervallo (a, b) di definizione della parametrizzazione P (s) ed ammettepercio una primitiva U(s)
U(s) =
∫~F [P (s)] · τ(s) ds .
Stefano Siboni 117

Universita degli studi di Trento Corso di Meccanica razionale
La (19.8) diventa cosıd
dt
(ms2
2
)=
dU
ds(s) s =
dU
dt
e da essa si deduce la conservazione, lungo qualsiasi moto naturale del sistema, dell’energiameccanica
H(s, s) =ms2
2− U(s) (s, s) ∈ (a, b)× R .
Nel caso di forze posizionali, il moto di un punto vincolato a restare su una curva fissa eliscia risulta sempre conservativo per l’energia.
Si osservi che l’essere l’energia meccanica un integrale primo del sistema non presuppone lanatura posizionale e conservativa del campo di forze ~F (P ): tale campo viene consideratolimitatamente al supporto della curva vincolare, proiettato tangenzialmente in ogni puntodi questa e riespresso in termini dell’ascissa curvilinea s. A causa del carattere essenzial-mente unidimensionale del problema, l’esistenza del potenziale U(s) e automaticamente
assicurata dalla natura posizionale di ~F (P ).Nell’ipotesi che il campo di forze sia esso stesso posizionale e conservativo, e che dunquepossa associarsi ad un potenziale
~F (P ) =∂U∂P
(P ) ,
si stabilisce una relazione molto semplice fra il potenziale U del campo di forze e quelloU(s) per il moto lungo la curva vincolare
U(s) =
∫~F [P (s)] · τ(s) ds =
∫∂U∂P
[P (s)] · dPds
(s) ds =
∫dU [P (s)]
dsds
in modo che risulta
U(s) = U [P (s)] + costante ∀ s ∈ (a, b) .
Nel caso che ~F (P ) sia un campo posizionale e conservativo di potenziale U , il campo di forzelungo la curva vincolare ha potenziale dato dalla composizione di U con la parametrizzazioneP (s) della curva.
Inutile sottolineare che il risultato ottenuto appare del tutto ragionevole dal punto di vistafisico.
19.12 Punto su superficie fissa e lisciaI moti naturali di un punto materiale vincolato a restare sulla superficie fissa e liscia diparametrizzazione P (u, v), (u, v) ∈ D ⊆ R2, sono individuati tutti e soltanto dalle soluzionidelle equazioni pure del moto mP · Pu = ~F (t, P, P ) · Pu
mP · Pv = ~F (t, P, P ) · Pv
Stefano Siboni 118

Universita degli studi di Trento Corso di Meccanica razionale
che nell’ipotesi di sollecitazioni attive ~F puramente posizionali si riducono amP · Pu = ~F [P (u, v)] · Pu(u, v) = Qu(u, v)
mP · Pv = ~F [P (u, v)] · Pv(u, v) = Qv(u, v)
dove Qu(u, v) e Qv(u, v) sono le componenti della forza attiva tangenti alla superficie nellaposizione P (u, v)
Qu(u, v)def= ~F [P (u, v)] · ∂P
∂u(u, v) Qv(u, v)
def= ~F [P (u, v)] · ∂P
∂v(u, v) ∀ (u, v) ∈ D .
Qualora il campo di forze Qu, Qv ammetta un potenziale U(u, v) in D, sicche si abbia
Qu(u, v) =∂U
∂u(u, v) Qv(u, v) =
∂U
∂v(u, v) ∀ (u, v) ∈ D , (19.9)
e immediato convincersi che vale il teorema di conservazione dell’energia meccanica. Leequazioni pure del moto si scrivono infatti
mP · Pu =∂U
∂u(u, v)
mP · Pv =∂U
∂v(u, v)
e sommate membro a membro l’una all’altra dopo aver moltiplicato la prima per u e laseconda per v porgono
mP · (uPu + vPv) =∂U
∂u(u, v)u+
∂U
∂v(u, v)v
da cui si deduce
mP · P =dU [P (u, v)]
dt
ed infined
dt
(m2P 2)
=dU [P (u, v)]
dt.
Se il potenziale (19.9) e definito, vale il teorema di conservazione dell’energia mec-canica
H(u, v, u, v) =mP 2
2− U(u, v) (u, v, u, v) ∈ D × R2 .
Tuttavia, per questo problema bidimensionale l’esistenza di un potenziale chesoddisfi la (19.9) non e assicurata a priori, diversamente dal caso unidimensionaledella curva liscia. Il campo di forze (Qu, Qv), se C1 in D, deve infatti soddisfare lanecessaria condizione di “irrotazionalita”
∂Qu∂v
(u, v)− ∂Qv∂u
(u, v) = 0 ∀ (u, v) ∈ D ,
Stefano Siboni 119

Universita degli studi di Trento Corso di Meccanica razionale
che e pure sufficiente per la conservativita del campo nell’ipotesi di dominio D semplice-mente connesso. La natura puramente posizionale del campo di forze ~F (P ) non basta,da sola, a garantire l’esistenza del potenziale U(u, v) per lo studio del moto vincolato allasuperficie liscia.Per contro, qualora il campo ~F (P ) abbia natura posizionale e conservativa
~F (P ) =∂U∂P
(P ) ,
con potenziale U , il potenziale U(u, v) e certamente definito
Qu(u, v) =∂U∂P
[P (u, v)] · ∂P∂u
(u, v) =∂U [P (u, v)]
∂u
Qv(u, v) =∂U∂P
[P (u, v)] · ∂P∂v
(u, v) =∂U [P (u, v)]
∂v
∀ (u, v) ∈ D
e si identifica con la composizione di U e della parametrizzazione P (u, v) della superficie
U(u, v) = U [P (u, v)] ∀ (u, v) ∈ D ,
analogamente a quanto gia verificato nel caso della curva fissa e priva di attrito.
20. Integrali primiL’energia meccanica per un punto materiale libero o vincolato soggetto esclusivamente asollecitazioni posizionali e conservative costituisce un esempio particolare, seppur notevole,di integrale primo. La nozione di integrale primo puo essere introdotta per qualsiasiequazione differenziale, anche se di regola ha interesse considerare il solo caso dei sistemidi equazioni del primo ordine in forma normale.
20.1 Definizione di integrale primoSia dato il sistema di equazioni differenziali in forma normale del primo ordine (7.1) x =f(t, x) di variabile indipendente t ∈ R e variabili dipendenti x = (x1, . . . , xn) ∈ Rn, conf : Ω → Rn e Ω aperto non vuoto di R× Rn. In tal caso
una funzione V di Ω a valori reali
V : Ω −−−−−−−−−→ R
si dice un integrale primo dell’equazione differenziale (7.1) se per ogni soluzione x(t) di(7.1) in un intervallo I, la funzione
φ : t ∈ I −−−−−−−−−→ V [t, x(t)] ∈ R
e costante nel proprio intervallo di definizione I.
Stefano Siboni 120

Universita degli studi di Trento Corso di Meccanica razionale
In altri termini, un integrale primo dell’equazione differenziale e una funzione scalare,definita nello stesso dominio di definizione dell’equazione, che assume valore costantelungo qualsiasi soluzione dell’equazione stessa. Naturalmente, il valore costante as-sunto da φ dipende dalla soluzione prescelta, potendo variare con questa. Cruciale, nelladefinizione, e l’arbitrarieta della soluzione x(t). In luogo della denominazione di inte-grale primo si incontrano, nella pratica, anche altre espressioni sostanzialmente equivalenti,anche se forse meno precise, quali costante del moto o quantita conservata.
Il riconoscimento degli integrali primi sulla base della precedente definizione richiede laconoscenza di tutte le soluzioni dell’equazione differenziale. Se non fosse possibile pro-cedere in altro modo a tale riconoscimento, il concetto di integrale primo risulterebbe didubbia utilita, potendosi applicare soltanto ad equazioni differenziali delle quali fosse notol’intero insieme di tutte le possibili soluzioni. Ed in effetti tale circostanza sarebbe deltutto eccezionale, dal momento che le sole equazioni differenziali di tipo generale per lequali sia consentito di scrivere esplicitamente tutte le soluzioni sono quelle lineari a co-efficienti costanti, che comunque costituiscono una tipologia estremamente particolare diequazioni. E in realta possibile individuare gli eventuali integrali primi di una equazionedifferenziale in forma normale del primo ordine per mezzo di un appropriato teorema dicaratterizzazione che non richiede la conoscenza di alcuna soluzione, e che fornisce una con-dizione necessaria e sufficiente affinche una funzione V assegnata, purche convenientementeregolare in Ω, sia un integrale primo.
20.2 Teorema di caratterizzazione degli integrali primiSia data l’equazione differenziale (7.1) con f continua. Sia inoltre V : Ω → R di classeC1 in Ω. Sono allora equivalenti le proposizioni seguenti:
(i) V e un integrale primo di (7.1)
(ii) V = 0 in Ω, essendo V : Ω→ R definita da
V (t, x) =∂V
∂t(t, x) +
n∑i=1
∂V
∂xi(t, x) fi(t, x) (20.1)
la cosiddetta derivata di V lungo le soluzioni dell’equazione (7.1), e (f1, . . . , fn) lecomponenti di f .
Dimostrazione che da (i) segue (ii)Per ogni scelta della condizione iniziale (t0, x0) ∈ Ω l’essere f continua in Ω, e la con-seguente applicabilita del teorema di esistenza, assicurano che esiste almeno una soluzionex(t), su un intervallo I contenente t0, che soddisfa la condizione iniziale
x(t0) = x0 .
Dalla definizione di integrale primo segue allora che sostituendo a x in V tale soluzionex(t), la funzione di t
φ(t) = V [t, x(t)] t ∈ I
Stefano Siboni 121

Universita degli studi di Trento Corso di Meccanica razionale
e costante nel proprio intervallo di definizione I. Identicamente nulla e dunque la derivataprima di φ in I, che per la differenziabilita di V puo calcolarsi tramite il teorema diderivazione delle funzioni composte
0 =dφ
dt(t) =
∂V
∂t(t, x(t)) +
n∑i=1
∂V
∂xi(t, x(t)) xi(t) ∀ t ∈ I
e per l’essere x(t) soluzione delle equazioni (7.1) si riscrive nella forma equivalente
0 =dφ
dt(t) =
∂V
∂t(t, x(t)) +
n∑i=1
∂V
∂xi(t, x(t)) fi[t, x(t)] ∀ t ∈ I
avendosi xi(t) = fi[t, x(t)] ∀ t ∈ I e ∀ i = 1, . . . , n. E allora sufficiente considerarel’espressione precedente per t = t0 ∈ I e richiamare la definizione (20.1) di V per ot-tenere
0 =∂V
∂t(t0, x0) +
n∑i=1
∂V
∂xi(t0, x0) fi(t0, x0) = V (t0, x0)
e data l’arbitrarieta di (t0, x0 ∈ Ω concludere che V = 0 in Ω, come affermato.
Prova che da (ii) segue (i)Vicerversa, si supponga che V = 0 identicamente in Ω. Data allora una qualsiasi soluzionex(t) di (7.1) in un intervallo I, deve aversi
φ(t) = V [t, x(t)] ∀ t ∈ I
derivabile in I, con derivata
dφ
dt(t) =
∂V
∂t(t, x(t)) +
n∑i=1
∂V
∂xi(t, x(t)) xi(t) =
=∂V
∂t(t, x(t)) +
n∑i=1
∂V
∂xi(t, x(t)) fi[t, x(t)] = V [t, x(t)] ∀ t ∈ I .
Ma poichee, per definizione di soluzione deve aversi (t, x(t)) ∈ Ω ∀ t ∈ I, si conclude che
dφ
dt(t) = V [t, x(t)] = 0 ∀ t ∈ I
e dunque φ(t) = V (t, x(t)) si mantiene costante lungo l’intero intervallo di definizione t ∈ I.L’arbitrarieta della soluzione x(t) consente di concludere che V e costante lungo tutte lesoluzioni di (7.1), per cui V risulta un integrale primo. La dimostrazione e completa.
Stefano Siboni 122

Universita degli studi di Trento Corso di Meccanica razionale
Giova osservare che la condizione V = 0 e relativamente agevole da controllare, richiedendosoltanto il calcolo delle derivate parziali prime di V e qualche manipolazione algebrica. Unavolta accertato che V sia un integrale primo, questo puo fornire informazioni qualitative osemiquantitative sull’andamento delle soluzioni incognite di (7.1).
E anche importante puntualizzare ulteriormente che la derivata di V lungo le soluzionidell’equazione differenziale e funzione di entrambe le variabili (t, x) ∈ Ω, ad onta dellanotazione che suggerirebbe di intendere V come una derivata di V rispetto al tempo t:una simile operazione sarebbe peraltro del tutto priva di significato, considerato che V ein realta funzione degli argomenti indipendenti t e x. In un generico punto (t0, x0) ∈ Ωla derivata V si puo definire considerando una soluzione — non necessariamente unica— x(t) del problema di Cauchy di condizione iniziale (t0, x0), sostituendo tale soluzionealla variabile dipendente x in V (t, x) e derivando la funzione di t cosı ottenuta, per poiconsiderare il risultato all’istante iniziale t = t0
V (t0, x0)def=
d
dtV [t, x(t)]
∣∣∣∣t=t0
.
Ci si convince immediatamente che questa definizione coincide con la (20.1).
20.3 Esempio notevole di applicazione del teorema dicaratterizzazione
Come illustrazione del precedente teorema di caratterizzazione, si vuole verificare formal-mente che l’energia meccanica costituisce un integrale primo per l’equazione del moto diun punto materiale libero soggetto a sollecitazioni posizionali e conservative. In tal caso,l’equazione del moto e data da
mP =∂U
∂P(P )
e si scrive nella forma normale equivalente del primo ordine P = ~V
~V =1
m
∂U
∂P(P ) .
(20.2)
Volendosi accertare se l’energia meccanica del sistema(1)
H(t, P, ~V ) =m
2~V 2 − U(P ) (t, P, ~V ) ∈ R× R6
sia un integrale primo per l’equazione differenziale che ne governa il moto, il teorema dicaratterizzazione conduce a considerare la derivata di H lungo le soluzioni delle equazioni(20.2)
H =∂H
∂t+∂H
∂P· P +
∂H
∂~V· ~V
(1)l’energia meccanica, al pari dell’equazione del moto, non dipende esplicitamente dal tempo per cui la
variabile t potrebbe essere completamente ignorata nella discussione
Stefano Siboni 123

Universita degli studi di Trento Corso di Meccanica razionale
ossia, sostituendo i secondi membri delle (20.2),
H(t, P, ~V ) =∂H
∂t+∂H
∂P· ~V +
∂H
∂~V· 1
m
∂U
∂P(P ) . (20.3)
Basta infine calcolare esplicitamente le derivate parziali prime dell’energia meccanica
∂H
∂t= 0
∂H
∂P= −∂U
∂P(P )
∂H
∂~V= m~V
e sostituirle in (20.3) per ottenere il risultato richiesto
H(t, P, ~V ) =(−∂U∂P
(P ))· ~V +m~V · 1
m
∂U
∂P(P ) = 0 ∀ (t, P, ~V ) ∈ R× R6 .
L’identico annullarsi della derivata H lungo le soluzioni dell’equazione del moto consentedi concludere che l’energia meccanica H e effettivamente un integrale primo del sistema,come gia stabilito in precedenza per via diretta.
20.4 Ulteriore esempio di applicazione del teorema dicaratterizzazione
Si consideri il sistema di equazioni differenziali del primo ordine in forma normale: p = −2x− p2
x = p+ 2px(p, x) ∈ R2
e si voglia stabilire se la funzione scalare
H(p, x) =p2
2+ x2 + p2x (p, x) ∈ R2
costituisca o meno un integrale primo per tale equazione. Poiche H e una funzione C1 nelproprio dominio R2 — risulta addirittura C∞ — basta calcolare la derivata di H lungo lesoluzioni dell’equazione differenziale:
H =∂H
∂pp+
∂H
∂xx =
∂H
∂p(−2x− p2) +
∂H
∂x(p+ 2px) =
= (p+ 2px)(−2x− p2) + (2x+ p2)(p+ 2px) = 0 ∀ (p, x) ∈ R2 .
Essendo H = 0 identicamente in R2, si conclude che H individua effettivamente un inte-grale primo del sistema.
Stefano Siboni 124

Universita degli studi di Trento Corso di Meccanica razionale
21. Sistemi di punti materiali liberiPer sistema di punti materiali liberi si intende un insieme S costituito da un numerofinito N di punti materiali
S = (Pi,mi) , i = 1, . . . , N
dove Pi ∈ R3 ed mi > 0 indicano rispettivamente la posizione e la massa del puntomateriale i-esimo. Si prenderanno in esame soltanto sistemi costituiti da punti materialidi massa costante, per cui le masse inerziali mi si assumeranno indipendenti dal tempo.Data l’assenza di vincoli, ciascun punto Pi potra assumere a priori qualsiasi posizione nellospazio tridimensionale, e saranno consentite anche sovrapposizioni di due o piu punti nellastessa posizione di R3.
Si dice configurazione del sistema la collezione delle posizioni occupate da tutti i puntidi S simultaneamente ad un dato istante. Di regola la configurazione del sistema vieneindicata con il simbolo P , che va pertanto inteso come un vettore di R3N
P = (P1, . . . , PN ) ∈ R3N .
Un generico moto del sistema S sara allora definito come una qualsiasi funzione che adogni istante t di un intervallo di tempo I ⊆ R faccia corrispondere una configurazione —la configurazione assunta dal sistema a quell’istante
P : t ∈ I −−−−−−−−−→ P (t) ∈ R3N ;
assegnare il moto di S equivale percio a specificare, su uno stesso intervallo di tempo I, ilmoto di tutti i punti del sistema
Pi : t ∈ I −−−−−−−−−→ Pi(t) ∈ R3 ∀ i = 1, . . . , N .
Si parlera di moto regolare nel caso che il moto P (t) risulti di classe C2 nel propriointervallo di definizione I, in modo che ad ogni istante siano definite e continue la velocitae l’accelerazione istantanee di ogni singolo punto del sistema.
Viene definito atto di moto del sistema S, ad un istante assegnato t, la collezione dellevelocita istantanee di tutti i punti di S all’istante t. Usualmente indicato con P , l’atto dimoto e un vettore arbitrario di R3N
P = (P1, . . . , PN ) ∈ R3N .
Stefano Siboni 125

Universita degli studi di Trento Corso di Meccanica razionale
22. Equazioni del moto di un sistema di puntimateriali liberi
Le equazioni differenziali del moto di un sistema di punti materiali si ricavano dalsecondo principio della dinamica e si scrivono
miPi = ~Fi ∀ i = 1, . . . , N
in termini del risultante ~Fi delle forze attive applicate al punto i-esimo del sistema. Inanalogia a quanto gia visto per il punto materiale libero, in meccanica si assume sempreche le forze attive agenti su un generico punto del sistema S possano essere funzioni notedel tempo t, della configurazione P — ovvero della posizione di tutti i punti del sistemaall’istante considerato — e dell’atto di moto P — vale a dire delle velocita istantanee ditutti i punti allo stesso istante. Ne segue che le equazioni del moto costituiscono un sistemadi equazioni differenziali del secondo ordine in forma normale
Pi =1
mi
~Fi(t, P, P ) ∀ i = 1, . . . , N (22.1)
nella variabile dipendente P ∈ RN . Introducendo le velocita istantanee come variabiliausiliarie, detto sistema si riduce ad un sistema del primo ordine costituito da un numerodoppio di equazioni in un numero doppio di variabili dipendenti
Pi = ~Vi
~V i =1
mi
~Fi(t, P, ~V )∀ i = 1, . . . , N . (22.2)
Il sistema conta complessivamente 6N equazioni scalari e 6N variabili dipendenti — lecomponenti cartesiane di (P, ~V ), di cui le prime 3N sono le coordinate cartesiane degli Npunti e le ultime 3N le componenti cartesiane delle rispettive velocita istantanee, rispettoalla stessa terna di riferimento. Data l’assenza di vincoli e il carattere classico della de-scrizione adottata, il vettore (P, ~V ) assume valori arbitrari in R3N ×R3N ed il dominio didefinizione dell’equazione differenziale (22.2) deve identificarsi con
Ω = (t, P, ~V ) ∈ R× R6N = R× R6N .
Il problema di Cauchy associato all’equazione (22.2) si otterra introducendo la con-dizione iniziale
P (t0) = P0~V (t0) = ~V0
per una scelta arbitraria di (t0, P0, ~V0) ∈ R×R6N . Nell’ipotesi che i secondi membri delle(22.2) siano sufficientemente regolari — ad esempio di classe C1 in Ω — sara applicabileil teorema di esistenza ed unicita della soluzione massimale del problema di Cauchy, e perogni scelta della condizione iniziale (t0, P0, ~V0) ∈ Ω esistera unica la soluzione massimalecorrispondente
(P, ~V ) = (P (t), ~V (t)) ∀ t ∈ I .
Stefano Siboni 126
Universita degli studi di Trento Corso di Meccanica razionale
Si osservi che la condizione di regolarita sui secondi membri della (22.2) si riduce, in effetti,
ad una condizione sulle forze attive ~Fi, dal momento che le funzioni ~Vi sono polinomidi primo grado delle variabili (t, P, ~V ) e costituiscono pertanto delle funzioni di classeC∞: gli eventuali problemi di regolarita possono provenire soltanto dalle funzioni di forza~Fi(t, P, ~V ), che si dovranno assumere di classe C1 in Ω per ogni i = 1, . . . , N . In questecondizioni, il moto del sistema sara quindi determinato completamente ed univocamente,nel futuro come nel passato, dall’assegnazione delle condizioni iniziali. In questo sensopersiste, anche per i sistemi di punti materiali liberi, la descrizione deterministica giacaratteristica del punto materiale libero e vincolato.
23. Statica di un sistema di punti materiali liberiData una configurazione arbitraria P0 ∈ R3N di un sistema S di punti materiali liberi, sidefinisce la quiete in P0 del sistema il moto che vede S mantenersi costantemente nellaconfigurazione P0 a tutti i tempi
P (t) = P0 ∀ t ∈ R .
La configurazione P0 si dira allora una configurazione di equilibrio, o una posizionedi equilibrio, o ancora, semplicemente, un equilibrio del sistema se la quiete in P0
costituisce un moto del sistema, ossia una soluzione delle equazioni del moto (22.2) o(22.1). Poiche alla quiete in P0 corrispondono valori costantemente nulli di atto di moto eaccelerazioni istantanee a tutti i tempi, la condizione necessaria e sufficiente per l’equilibrioin P0 si riduce a
0 = ~Fi(t, P0, 0) ∀ t ∈ R ∀ i = 1, . . . , N . (23.1)
L’equilibrio in P0 ricorre pertanto se e soltanto se le forze agenti su ogni singolo puntomateriale del sistema, calcolate nella configurazione data, all’istante generico t ∈ R e conatto di moto nullo, si mantengono costantemente nulle a tutti i tempi.Si ricorda, come gia sottolineato per il punto materiale libero e vincolato, che se all’istanteiniziale il sistema viene collocato in una configurazione di equilibrio e con atto di moto nullo,il sistema permane indefinitamente in quiete in quella configurazione, come e immediatoverificare facendo uso del teorema di esistenza ed unicita.Si intende che la condizione iniziale puo sempre assegnarsi in modo che la configurazioneiniziale sia un equilibrio e l’atto di moto iniziale sia diverso da quello nullo: in tal caso ilmoto del sistema sara comunque determinato in modo univoco dalla condizione iniziale,ma non si ridurra alla quiete nella configurazione di equilibrio.
24. Equazioni cardinali della dinamicaPer un sistema S di N punti materiali liberi (Pi,mi), si introducono le grandezze dinamichefondamentali di massa, quantita di moto, momento angolare ed energia cinetica, nonchela nozione di baricentro o centro di massa.
Stefano Siboni 127

Universita degli studi di Trento Corso di Meccanica razionale
24.1 Massa del sistemaLa massa del sistema viene definita come la somma delle masse inerziali di tutti i punticostituenti
m =N∑i=1
mi
e rappresenta una grandezza costante nel tempo e indipendente dalla scelta del sistema diriferimento — ovvero, come si dice, un invariante.
24.2 Baricentro o centro di massaIl baricentro, o centro di massa, G del sistema e determinato da una media pesata deivettori posizione dei punti Pi considerati ad uno stesso istante, assumendo come pesi ivalori delle masse inerziali degli stessi punti. Se Ω e l’origine della terna di riferimento dellaboratorio, il vettore posizione del baricentro rispetto a tale riferimento e dato da
G− Ω =1
N∑i=1
mi
N∑i=1
mi(Pi − Ω) =1
m
N∑i=1
mi(Pi − Ω) .
E immediato verificare che la definizione precedente individua il baricentro G del sistemacome punto, indipendentemente dalla scelta dell’origine Ω. Vale la pena di sottolineareche il baricentro del sistema non costituisce un punto materiale, essendo definito in modopuramente formale — cioe da una relazione matematica.
24.3 Quantita di motoLa quantita di moto, o impulso, del sistema si definisce come la somma delle quantita dimoto miPi, allo stesso istante, di tutti i punti componenti
~Q =N∑i=1
miPi .
La quantita di moto dipende dall’atto di moto del sistema ed e quindi una grandezzarelativa al sistema di riferimento considerato. Puo riesprimersi in termini della velocitadel baricentro G, per mezzo dell’ovvia relazione
~Q =N∑i=1
mid
dt(Pi − Ω) =
d
dt
[ N∑i=1
mi(Pi − Ω)
]=
d
dt
[m(G− Ω)
]= mG .
Stefano Siboni 128
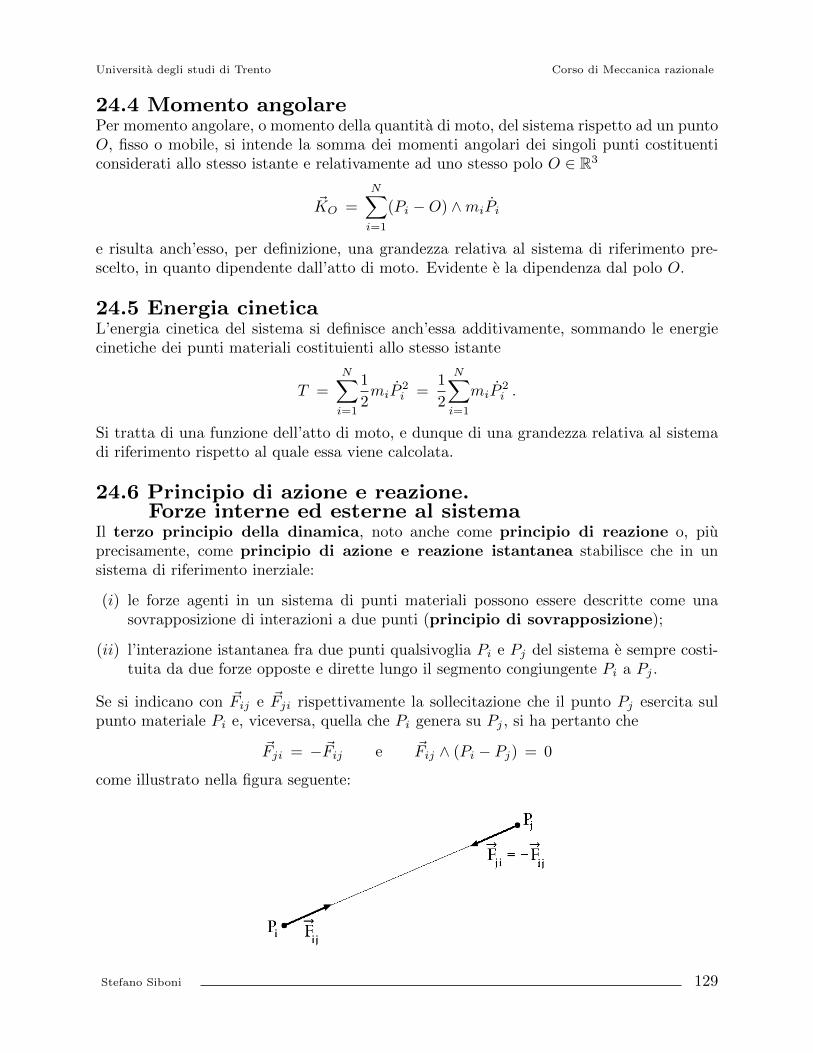
Universita degli studi di Trento Corso di Meccanica razionale
24.4 Momento angolarePer momento angolare, o momento della quantita di moto, del sistema rispetto ad un puntoO, fisso o mobile, si intende la somma dei momenti angolari dei singoli punti costituenticonsiderati allo stesso istante e relativamente ad uno stesso polo O ∈ R3
~KO =
N∑i=1
(Pi −O) ∧miPi
e risulta anch’esso, per definizione, una grandezza relativa al sistema di riferimento pre-scelto, in quanto dipendente dall’atto di moto. Evidente e la dipendenza dal polo O.
24.5 Energia cineticaL’energia cinetica del sistema si definisce anch’essa additivamente, sommando le energiecinetiche dei punti materiali costituienti allo stesso istante
T =N∑i=1
1
2miP
2i =
1
2
N∑i=1
miP2i .
Si tratta di una funzione dell’atto di moto, e dunque di una grandezza relativa al sistemadi riferimento rispetto al quale essa viene calcolata.
24.6 Principio di azione e reazione.Forze interne ed esterne al sistema
Il terzo principio della dinamica, noto anche come principio di reazione o, piuprecisamente, come principio di azione e reazione istantanea stabilisce che in unsistema di riferimento inerziale:
(i) le forze agenti in un sistema di punti materiali possono essere descritte come unasovrapposizione di interazioni a due punti (principio di sovrapposizione);
(ii) l’interazione istantanea fra due punti qualsivoglia Pi e Pj del sistema e sempre costi-tuita da due forze opposte e dirette lungo il segmento congiungente Pi a Pj .
Se si indicano con ~Fij e ~Fji rispettivamente la sollecitazione che il punto Pj esercita sulpunto materiale Pi e, viceversa, quella che Pi genera su Pj , si ha pertanto che
~Fji = −~Fij e ~Fij ∧ (Pi − Pj) = 0
come illustrato nella figura seguente:
Stefano Siboni 129

Universita degli studi di Trento Corso di Meccanica razionale
Per un sistema S di punti materiali che interagisca con punti materiali non appartenentiad S il principio di sovrapposizione consente di distinguere forze interne ed esterne alsistema:
• sono interne al sistema le forze che derivano dall’interazione fra punti del sistema;
• si dicono esterne al sistema le sollecitazioni dovute all’interazione dei punti del siste-ma con punti non appartenenti al sistema.
Si ricorda che il secondo principio della dinamica e stato formalmente esteso anche alleterne di riferimento non inerziali tramite l’introduzione delle forze fittizie, o d’inerzia.Appare evidente che queste ultime non soddisfano il principio di azione e reazione. Lacircostanza non deve sorprendere, dal momento che le forze d’inerzia non descrivono unareale interazione fra punti materiali, ma sono solo il frutto di una scelta particolare delsistema di riferimento. Le conseguenze fondamentali del terzo principio, le equazioni cardi-nali della dinamica, rimangono tuttavia valide anche nei sistemi di riferimento non inerzialia patto di considerare le forze d’inerzia come forze esterne al sistema materiale.
24.7 Equazione cardinale della quantita di motoL’equazione cardinale della quantita di moto, altrimenti nota come prima equazione cardi-nale della dinamica, esprime la derivata rispetto al tempo della quantita di moto lungo unmoto arbitrario del sistema. Se infatti P (t) e un qualsiasi moto del sistema, soluzione delleequazioni del moto (22.1) su un intervallo I, la derivata rispetto al tempo della quantitadi moto si scrive
d~Q
dt=
d
dt
[ N∑i=1
miPi
]=
N∑i=1
miPi
e sostituendo i prodotti miPi con i rispettivi risultanti delle forze ~Fi, diventa
d~Q
dt=
N∑i=1
~Fi .
Se ora si separano le singole ~Fi nella somma di un termine ~F(i)i relativo alle forze interne
e di un ulteriore contributo ~F(e)i identificabile con le forze esterne al sistema, l’equazione
precedente assume la forma
d~Q
dt=
N∑i=1
~F(i)i +
N∑i=1
~F(e)i
e in essa il risultante delle forze interne risulta identicamente nullo in quanto somma diforze due a due opposte per il principio di azione e reazione
~R(i) =
N∑i=1
~F(i)i =
N∑′
i,j=1
~F(i)ij =
N∑′
j,i=1
~F(i)ji = −
N∑′
i,j=1
~F(i)ij = −~R(i) = 0 , (24.1)
Stefano Siboni 130

Universita degli studi di Trento Corso di Meccanica razionale
dove l’apice indica che la sommatoria e estesa a tutti i valori degli indici i e j per i qualii 6= j. A secondo membro sopravvive soltanto il risultante delle forze esterne
~R(e) =N∑i=1
~F(e)i
e l’equazione cardinale della quantita di moto si formula percio come
d~Q
dt= ~R(e) (24.2)
mentre una espressione totalmente equivalente si ottiene sostituendo l’identita ~Q = mG
mG = ~R(e) . (24.3)
Si osservi che, al pari delle singole forze attive ~Fi, il risultante delle forze esterne ~R(e) efunzione nota di tempo, configurazione e atto di moto
~R(e) = ~R(e)(t, P, P ) .
Se ne conclude che l’equazione cardinale (24.3) non puo, in generale, essere consideratauna sorta di equazione del moto per il baricentro G, dal momento che il risultante delle forzeesterne potrebbe conservare una dipendenza esplicita dalla configurazione e dall’attodi moto del sistema, e non risultare una semplice funzione di t, G e G.
24.8 Equazione cardinale del momento angolareL’equazione cardinale del momento angolare, o seconda equazione cardinale della dinamica,concerne la derivata rispetto al tempo del momento angolare del sistema lungo un arbitrariomoto di questo. Scelto un polo O in moto regolare arbitrario rispetto al riferimento dellaboratorio e considerata una qualsiasi soluzione P (t) delle equazioni del moto (22.1), ilmomento angolare in O ha derivata
d ~KO
dt=
d
dt
[ N∑i=1
(Pi −O) ∧mPi]
=
N∑i=1
(Pi − O) ∧miPi +
N∑i=1
(Pi −O) ∧miPi
per cui, facendo uso delle equazioni del moto (22.1), e rimossi i prodotti Pi ∧ Pi, talederivata si riduce all’espressione
d ~KO
dt= −O ∧
N∑i=1
miPi +
N∑i=1
(Pi −O) ∧ ~Fi
che la definizione di quantita di moto consente di porre nella forma
d ~KO
dt= −O ∧mG+
N∑i=1
(Pi −O) ∧ ~Fi .
Stefano Siboni 131

Universita degli studi di Trento Corso di Meccanica razionale
Nella sommatoria residua a secondo membro conviene poi separare i termini relativi alleforze interne e quelli associati alle forze esterne, per ottenere
d ~KO
dt= −O ∧mG+
N∑i=1
(Pi −O) ∧ ~F (i)i +
N∑i=1
(Pi −O) ∧ ~F (e)i . (24.4)
Il momento risultante in O delle forze interne risulta identicamente nullo in virtu delprincipio di azione e reazione
~M(i)O =
N∑i=1
(Pi −O) ∧ ~F (i)i = 0 .
Per convincersene e sufficiente osservare che l’interazione fra i generici punti Pi e Pj del
sistema da al momento risultante ~M(i)O il contributo
(Pi −O) ∧ ~F (i)ij + (Pj −O) ∧ ~F (i)
ji = (Pi −O) ∧ ~F (i)ij − (Pj −O) ∧ ~F (i)
ij = (Pi − Pj) ∧ ~F (i)ij
che e dunque nullo per via del gia osservato parallelismo fra ~F(i)ij e il vettore posizione
Pi − Pj . Formalmente il risultato si deduce dalla relazione seguente
~M(i)O =
N∑i=1
(Pi −O) ∧ ~F (i)i =
N∑′
i,j=1
(Pi −O) ∧ ~F (i)ij =
=1
2
N∑′
i,j=1
(Pi −O) ∧ ~F (i)ij +
1
2
N∑′
j,i=1
(Pj −O) ∧ ~F (i)ji =
=1
2
N∑′
i,j=1
[(Pi −O) ∧ ~F (i)
ij + (Pj −O) ∧ ~F (i)ji
]=
=1
2
N∑′
i,j=1
(Pi − Pj) ∧ ~F (i)ij = 0 ,
in cui, come gia nella prova della prima equazione cardinale, gli apici stanno ad indicareche la somma doppia in i e j e limitata ai soli valori i 6= j. Nell’equazione cardinale delmomento angolare (24.4) compare allora il solo momento risultante in O delle forze esterne
~M(e)O =
N∑i=1
(Pi −O) ∧ ~F (e)i
sicche risultad ~KO
dt= −O ∧mG+ ~M
(e)O , (24.5)
che costituisce la forma generale della seconda equazione cardinale della dinamica.
Stefano Siboni 132

Universita degli studi di Trento Corso di Meccanica razionale
24.9 Casi particolari della seconda equazione cardinaleL’equazione cardinale del momento angolare (24.5) si riduce alla forma semplificata
d ~KO
dt= ~M
(e)O
qualora ricorra una delle seguenti condizioni particolari:
(i) il polo O e fisso. In tal caso si ha O = 0 a tutti i tempi ed il termine −O ∧mG nellaforma generale dell’equazione cardinale (24.5) si annulla identicamente;
(ii) il polo O coincide con il baricentro G del sistema. Nella fattispecie, si ha infatti
−O ∧mG = −G ∧mG = 0 ;
(iii) il polo O non coincide con il baricentro G, ma pur tuttavia le velocita istantanee diO e G risultano costantemente parallele fra loro. Una circostanza di questo generericorre per esempio nel caso di un disco circolare omogeneo vincolato a rotolare suuna retta r, qualora si assuma come polo il punto di contatto O fra il disco e la rettaassegnata. In tal caso, infatti, e evidente che il baricentro G del disco coincide con ilsuo centro geometrico e che durante il moto i punti O e G si muovono l’uno lungo laretta r e l’altro lungo una retta parallela ad r, per cui O e G risultano costantementeparalleli fra loro e
−O ∧mG = 0 .
24.10 Teorema dell’energia cineticaIl teorema dell’energia cinetica non costituisce, a stretto rigore, una equazione cardinaledella dinamica, anche se a volte la si presenta impropriamente come tale. Considerata,al solito, una qualsiasi soluzione P (t) delle equazioni del moto, si calcola la derivata in tdell’energia cinetica e si ottiene
dT
dt=
d
dt
[1
2
N∑i=1
miP2i
]=
N∑i=1
Pi ·miPi
per cui, facendo ricorso alle equazioni del moto, l’espressione diventa
dT
dt=
N∑i=1
Pi · ~Fi . (24.6)
Stefano Siboni 133

Universita degli studi di Trento Corso di Meccanica razionale
La grandezza a secondo membro nella (24.6) e la somma delle potenze delle forze agenti sututti i singoli punti materiali del sistema, allo stesso istante, e viene percio definita comela potenza del sistema di forze agenti sul sistema S di punti materiali, usualmenteindicata con π. Come gia fatto in precedenza, e sempre possibile separare i risultanti ~Fiin un componente relativo alle forze interne ed uno corrispondente alle forze esterne; intal modo la potenza π si scrivera come somma di una potenza delle forze interne, π(i) e diuna potenza delle forze esterne π(e), secondo le ovvie definizioni
π(i) =N∑i=1
Pi · ~F (i)i π(e) =
N∑i=1
Pi · ~F (e)i .
Il teorema dell’energia cinetica assume pertanto la forma generale:
dT
dt= π(i) + π(e) . (24.7)
Si sarebbe tentati di affermare, sulla base del terzo principio della dinamica, che la potenzadelle forze interne sia identicamente nulla e dunque ignorabile nel secondo membro della(24.7). Tale asserto e falso e cio costituisce il motivo per cui, di regola, il teoremadell’energia cinetica non viene considerato una equazione cardinale in senso proprio, purcondividendo la struttura matematica generale delle equazioni cardinali propriamentedette. Per una coppia Pi-Pj di punti materiali mutuamente interagenti del sistema, il
primo soggetto alla forza ~Fij , il secondo sottoposto alla sollecitazione ~Fji = −~Fij , il con-tributo alla potenza delle forze interne risulta infatti
Pi · ~Fij + Pj · ~Fji = Pi · ~Fij − Pj · ~Fij = (Pi − Pj) · ~Fij =d
dt(Pi − Pj) · ~Fij
e l’essere il vettore ~Fij parallelo al vettore posizione Pi − Pj non consente di concluderealcunche circa il valore del prodotto scalare finale, che dunque puo assumere segno positivo,negativo o nullo. La potenza π(i) risulta percio dalla somma di termini — a due corpi — ilcui segno e completamente indefinito, e risulta essa stessa di segno indeterminato. In casimolto speciali la potenza π(i) puo risultare identicamente nulla.
24.11 Osservazione. E identicamente π(i) = 0lungo i moti rigidi del sistema
E facile verificare che la potenza delle forze interne risulta identicamente nulla lungo glieventuali moti rigidi del sistema, sempreche questi siano definiti. Per moto rigido siintende un moto del sistema lungo il quale le distanze fra i punti si mantengono costanti.Ovviamente, non e affatto detto che il sistema delle equazioni del moto ammetta soluzionicorrispondenti a moti rigidi, i quali quindi non necessariamente sono definiti come motinaturali. Ad ogni buon conto, se il moto del sistema e rigido in un intervallo di tempo I,per una qualsiasi coppia di punti Pi e Pj del sistema vale
(Pi − Pj)2 = |Pi − Pj |2 = costante ∀ t ∈ I
Stefano Siboni 134

Universita degli studi di Trento Corso di Meccanica razionale
e quindi, derivando in t;
(Pi − Pj) ·d
dt(Pi − Pj) = 0 .
Ne deriva che il vettore d(Pi − Pj)/dt e ortogonale a Pi − Pj e dunque, per il principio di
azione e reazione, anche a ~Fij . In definitiva
d
dt(Pi − Pj) · ~Fij = 0
e basta dunque sommare su tutte le possibili coppie di punti del sistema per ottenere ilrisultato richiesto, π(i) = 0.
24.12 Principio di indifferenza materialeSebbene non consenta di dimostrare il generale annullarsi della potenza π(i) delle forzeinterne, il terzo principio della dinamica conduce al notevole risultato che tale potenza euna grandezza assoluta, indipendente cioe dalla scelta del sistema di riferimento. Questofatto e in un certo senso sorprendente, dal momento che la potenza viene determinatafacendo uso dell’atto di moto del sistema, e dunque ci si aspetta che debba costituire unagrandezza relativa alla terna di riferimento prescelta. Per convincersi di quanto affermato,si consideri di abbandonare la terna di riferimento del laboratorio e di introdurne unaseconda, in moto arbitrario rispetto alla prima. Se Pi e la velocita del punto Pi rispettoalla terna del laboratorio e P ?i la corrispondente velocita dello stesso punto, allo stessoistante, relativa alla terna mobile, le due velocita sono legate l’una all’altra per tramite delteorema dei moti relativi — equazione (5.5) —
Pi = P ?i + O + ~ω ∧ (Pi −O)
dove O e ~ω sono, rispettivamente, la velocita dell’origine O e la velocita angolare istantaneadi trascinamento della terna mobile allo stesso istante, e
O + ~ω ∧ (Pi −O)
individua la velocita di trascinamento di Pi — equazione (5.14). I vettori O e ~ω sonocompletamente arbitrari e dipendono unicamente dalla scelta della terna di riferimentomobile. La potenza delle forze interne, calcolata rispetto alla terna del laboratorio, siscrive percio
π(i) =
N∑i=1
Pi · ~F (i)i =
N∑i=1
[P ?i + O + ~ω ∧ (Pi −O)] · ~F (i)i =
=
N∑i=1
P ?i · ~F(i)i +
N∑i=1
O · ~F (i)i +
N∑i=1
~ω ∧ (Pi −O) · ~F (i)i
Stefano Siboni 135

Universita degli studi di Trento Corso di Meccanica razionale
ed e sufficiente scambiare fra loro il prodotto scalare e vettore nel prodotto misto perottenere
π(i) = π(i)∗ + O ·N∑i=1
~F(i)i + ~ω ·
N∑i=1
(Pi −O) ∧ ~F (i)i =
= π(i)∗ + O · ~R(i) + ~ω · ~M (i)O ,
essendo π(i)∗, ~R(i) e ~M(i)O rispettivamente la potenza, il risultante ed il momento risultante
in O delle forze interne rispetto alla terna mobile. Poiche infine il principio di azione ereazione impone che siano nulli il risultante ed il momento risultante delle forze interne, siconclude che
π(i) = π(i)∗ ,
come affermato. E questo il cosiddetto principio di indifferenza materiale. Nel casoqui considerato dei sistemi di punti materiali liberi lo si dimostra come teorema. Qualora siabbia a che fare con sistemi continui, l’asserto non puo essere dimostrato e viene assuntocome postulato, costituendo una sorta di estensione del principio di azione e reazione aisistemi continui — il principio equivale ad assumere che anche in un sistema continuo ilrisultante ed il momento risultante delle forze interne siano comunque uguali a zero.
24.13 Sistemi isolatiUn caso particolare e costituito dai cosiddetti sistemi isolati, i cui punti non sono soggettiad alcuna sollecitazione esterna: tutte le forze applicate si riducono pertanto a sollecitazioniinterne
~F(e)i = 0 ∀ i = 1, . . . , N
e hanno quindi nulli il risultante e il momento risultante rispetto ad un polo O arbitrario
~R = ~R(e) =
N∑i=1
~F(e)i = 0 ~M = ~M (e) =
N∑i=1
(Pi −O) ∧ ~F (e)i = 0 ,
come pure nulla e la potenza delle forze esterne
π(e) =N∑i=1
Pi · ~F (e)i = 0 .
Le equazioni cardinali della dinamica diventano cosı
d~Q
dt= 0 ⇐⇒ mG = 0
d ~KO
dt= −O ∧mG
dT
dt= π(i) .
(24.8)
Stefano Siboni 136
Universita degli studi di Trento Corso di Meccanica razionale
La prima di queste equazioni stabilisce che lungo qualsiasi moto del sistema la quantitadi moto ~Q si mantiene costante: cio significa, per definizione, che ~Q = mG e un integraleprimo delle equazioni del moto. Ne segue, in particolare, che durante qualsiasi moto delsistema si mantiene costante la velocita del baricentro G, il quale dunque si muove di motorettilineo ed uniforme.
In modo analogo, qualora il polo O sia fisso la seconda delle (24.8) implica la conservazionedel momento angolare in O del sistema, che costituisce quindi un ulteriore integrale primodelle equazioni del moto. Alla stessa conclusione si perviene qualora si assuma come poloil baricentro G del sistema. In tal caso e certamente −O ∧mG = 0, sebbene possa aversi,in generale, G 6= 0.
Giova notare, infine, che il teorema dell’energia cinetica — la terza delle equazioni (24.8)— non implica affatto la conservazione dell’energia cinetica: nulla infatti puo dirsi circail segno della potenza π(i) delle forze interne, che non necessariamente risulta nulla. Nelcaso che tutti i moti del sistema siano rigidi — e questo il caso dei sistemi rigidi, sistemidi punti vincolati a muoversi esclusivamente di moto rigido — allora la potenza π(i) eidenticamente nulla e l’energia cinetica costituisce un integrale primo del sistema.
24.14 Equazioni del moto ed equazioni cardinaliDa quanto detto sopra risulta chiaramente che le equazioni cardinali della dinamica sonostate ricavate assumendo che il moto P (t) sia soluzione delle equazioni del moto del sistema.Le equazioni cardinali della dinamica costituiscono pertanto una condizionenecessaria perche P (t) sia un moto del sistema: se P (t) e soluzione delle equazioni delmoto, allora e anche soluzione delle equazioni cardinali. Il viceversa e in generale falso:una soluzione delle equazioni cardinali della dinamica non rappresenta necessariamente unmoto del sistema. Ci si convince facilmente della veridicita di questa affermazione notandoche le equazioni cardinali della dinamica costituiscono un sistema di 6 equazioni scalari— 7 qualora si ricomprenda anche il teorema dell’energia cinetica — mentre le equazionidifferenziali del moto del sistema corrispondono a 3N equazioni scalari del secondo ordinenella variabile dipendente P ∈ R3N . Appare che evidente che non appena il numero di punticostituenti il sistema sia sufficientemente grande — N ≥ 3 — il numero delle equazionidel moto eccede decisamente quello, fisso, delle equazioni cardinali. In altre parole, ognimoto naturale P (t) del sistema deve sottostare ad un numero di condizioni differenzialinettamente superiore rispetto a quello richiesto per le soluzioni delle equazioni cardinali,per cui l’insieme delle soluzioni delle equazioni cardinali e molto piu ampio di quello dellesoluzioni delle equazioni del moto. In questo senso le equazioni cardinali della dinamicaforniscono soltanto una informazione parziale sulla dinamica del sistema, non potendosi inalcun modo intendere come equivalenti alle relative equazioni del moto.
La sola importante eccezione a questo risultato generale e rappresentata daisistemi rigidi: per questi infatti si verifichera che le equazioni cardinali della dinamica siidentificano con le equazioni del moto, purche convenientemente riscritte e a condizionedi introdurre le appropriate ipotesi supplementari, dove necessario.
Stefano Siboni 137

Universita degli studi di Trento Corso di Meccanica razionale
25. Equazioni cardinali della staticaSi e gia precisato che la configurazione P0 costituisce un equilibrio per il sistema di puntimateriali liberi se e soltanto se la quiete in P0, vale a dire la funzione costante P (t) = P0,∀ t ∈ R, risulta soluzione delle equazioni del moto (22.1). Allora, in virtu della particolarerelazione che intercorre fra equazioni del moto ed equazioni cardinali, la quiete in P0
deve costituire una soluzione anche delle corrispondenti equazioni cardinali della dinamica.Per uno stato di quiete e evidente che l’atto di moto si mantiene costantemente nullo eche di conseguenza la quantita di moto ed il momento angolare in O del sistema sonoidenticamente nulli a tutti i tempi
~Q =N∑i=1
miPi =N∑i=1
0 = 0 ~KO =N∑i=1
(Pi −O) ∧miPi =N∑i=1
0 = 0 ∀ t ∈ R
come pure la velocita del baricentro
G =1
m
N∑i=1
miPi = 0 ∀ t ∈ R .
La prima e la seconda equazione cardinale(1) della dinamica diventano percio
0 = ~R(e)(t, P0, 0) ∀ t ∈ R (25.1)
0 = ~M(e)O (t, P0, 0) ∀ t ∈ R (25.2)
e prendono il nome, rispettivamente, di prima e seconda equazione cardinale dellastatica del sistema. Essendo la forma particolare assunta dalle equazioni cardinali delladinamica, le equazioni cardinali della statica costituiscono soltanto una condizione neces-saria affinche la quiete in P0 rappresenti un moto naturale del sistema, e dunque unacondizione necessaria perche P0 sia un equilibrio. Le due equazioni statiche (25.1) e(25.2) non sono sufficienti per l’equilibrio. Si puo avere riprova della necessita dellecondizioni (25.1) e (25.2) per l’equilibrio in P0, ma della non sufficienza, notando che leequazioni di equilibrio (23.1)
~Fi(t, P0, 0) = 0 ∀ t ∈ R , ∀ i = 1, . . . , N,
se sommate direttamente membro a membro conducono alla (25.1)
0 =N∑i=1
~Fi(t, P0, 0) =N∑i=1
~F(e)i (t, P0, 0) = ~R(e)(t, P0, 0) ∀ t ∈ R
(1)In condizioni statiche il teorema dell’energia cinetica si riduce all’identita banale 0=0, che ovviamente non
e di alcun interesse.
Stefano Siboni 138

Universita degli studi di Trento Corso di Meccanica razionale
e se sommate dopo essere state moltiplicate vettorialmente a sinistra ciascuna per Pi −Odanno luogo alla (25.2)
0 =N∑i=1
(Pi −O)∧ ~Fi(t, P0, 0) =N∑i=1
(Pi −O)∧ ~F (e)i (t, P0, 0) = ~M (e)(t, P0, 0) ∀ t ∈ R .
E altresı evidente che l’annullarsi delle sommatorie ~R(e)(t, P0, 0) e ~M (e)(t, P0, 0) non implica
affatto quello delle ~Fi(t, P0, 0) per ogni i = 1, . . . , N , ossia l’equilibrio in P0.
26. Teoremi di KonigDalla precedente discussione delle equazioni cardinali appare evidente che la determi-nazione del baricentro, del momento angolare e dell’energia cinetica di un sistema di puntimateriali riveste grande importanza nello studio della dinamica dei sistemi. Risultanopercio di grande interesse risultati che consentano di semplificare il calcolo di tali grandezze,senza dover ricorrere alla diretta applicazione della definizione. Lasciato da parte il proble-ma dei baricentri, che verra ampiamente sviluppato in una sezione successiva, si esaminanoi teoremi di Konig per l’energia cinetica ed il momento angolare. L’enunciato di questiteoremi richiede il concetto di moto di un sistema attorno ad un punto assegnatoO, il quale potrebbe identificarsi con il baricentro dello stesso sistema. D’altra parte perdefinire il moto attorno ad un punto, o al baricentro, si rende necessario introdurre lanozione di moto traslatorio — di trascinamento, nella fattispecie.
26.1 Moti traslatoriSi consideri una terna di riferimento Ox1x2x3 in moto rispetto alla terna assoluta Ωξ1ξ2ξ3in un intervallo di tempo I. Il moto di trascinamento della terna Ox1x2x3 rispetto aΩξ1ξ2ξ3 si dice traslatorio se, quale che sia il moto dell’origine O, risulta verificata unadelle seguenti condizioni equivalenti:
(1) durante il moto gli assi Ox1, Ox2, Ox3 mantengono inalterata la loro orientazionerispetto alla terna Ωξ1ξ2ξ3. Siccome tale orientazione e specificata dai coseni direttori,richiedere che l’orientazione degli assi si mantenga costante nel tempo equivale adassumere che la matrice dei coseni direttori sia funzione costante del tempo;
(2) durante il moto i versori e1, e2, e3 associati alla terna mobile sono costanti
ei(t) = costante ∀ t ∈ I , ∀ i = 1, 2, 3 ;
(3) le derivate prime in t dei versori e1, e2, e3 sono costantemente nulle nell’intervallo I
deidt
(t) = 0 ∀ t ∈ I , ∀ i = 1, 2, 3 ;
(4) il vettore velocita angolare istantanea di trascinamento ~ω della terna mobile rispettoa quella fissa risulta costantemente nullo nell’intervallo I
~ω(t) = 0 ∀ t ∈ I .
Stefano Siboni 139

Universita degli studi di Trento Corso di Meccanica razionale
L’equivalenza delle condizioni (1) e (2) e evidente per la definizione stessa di base associataalla terna mobile. Equivalenti sono anche le condizioni (2) e (3) in virtu del fatto che lefunzioni ei(t), i = 1, 2, 3 sono definite su un intervallo, lo stesso in cui e definito il moto.L’equivalenza fra (3) e (4) segue infine dalla formula di Poisson
0 =deidt
(t) = ~ω(t) ∧ ei(t) ∀ t ∈ I , ∀ i = 1, 2, 3
notando che ~ω ∧ ei = 0 ∀ i = 1, 2, 3 se e soltanto se ~ω = 0. Una terna di riferimento inmoto traslatorio e caratterizzata dalla notevole proprieta che la velocita di trascinamentodi tutti i punti ad essa solidali e la stessa, identificabile ad esempio con quella dell’origineO
~vT = O + ~ω ∧ (P −O) = O .
Questo comune valore della velocita di trascinamento e denominato velocita della ternamobile; la definizione ha significato nel solo caso delle terne in moto traslatorio,poiche in ogni altra circostanza la velocita di trascinamento dipende dal punto dello spaziosolidale.
26.2 Moto di un sistema attorno ad un punto,terne baricentrali
Dato un sistema di punti materiali S ed un punto mobile O in moto arbitrario rispetto aduna terna assoluta, si dice moto di S attorno ad O il moto del sistema S quale appare inuna qualsiasi terna mobile di origine O in moto traslatorio rispetto al riferimento assoluto.Si osservi che la terna di riferimento in moto traslatorio non e determinata univocamente,dal momento che l’orientamento degli assi puo essere assegnato a piacere. Nel caso cheil punto O si identifichi con il baricentro G del sistema S, la terna di origine G in mototraslatorio viene detta terna baricentrale ed il moto del sistema rispetto ad essa si dicemoto attorno al baricentro.Se per un generico punto Pi del sistema S si indicano con Pi e ~vi rispettivamente la velocitaassoluta e quella del moto attorno ad O, il teorema dei moti relativi porge la relazione
Pi = O + ~vi (26.1)
che e cruciale nella dimostrazione dei teoremi di Konig.
26.3 Teorema di Konig per l’energia cineticaIl teorema di Konig stabilisce una semplice relazione fra l’energia cinetica di un sistema dipunti materiali e quella calcolata relativamente al moto attorno ad un punto O. L’energiacinetica rispetto al riferimento assoluto si riesprime per mezzo (26.1) nella forma
T =1
2
N∑i=1
miP2i =
1
2
N∑i=1
mi(O + ~vi)2 =
=1
2
N∑i=1
miO2 +
1
2
N∑i=1
mi~v2i +
N∑i=1
mi~vi · O .
(26.2)
Stefano Siboni 140

Universita degli studi di Trento Corso di Meccanica razionale
Nel primo termine e possibile evidenziare la massa totale del sistema
1
2
N∑i=1
miO2 =
1
2mO2
mentre il secondo si identifica con l’energia cinetica relativa alla terna mobile, energia checompete al sistema in virtu del suo moto attorno ad O
1
2
N∑i=1
mi~v2i = T ′ .
Il terzo termine a secondo membro nella (26.2) equivale infine a
N∑i=1
mi~vi · O = ~Q′ · O
dove ~Q′ indica la quantita di moto del sistema per il moto attorno al punto O. L’espressionedell’energia cinetica nella terna assoluta diventa allora
T =m
2O2 + T ′ + ~Q′ · O ,
relazione che costituisce la forma generale del teorema di Konig per l’energia cinetica.Un caso particolare di grande interesse e quello del moto attorno al baricentro, quandol’origine O coincide con G. Nella fattispecie l’energia cinetica T ′ e quella del moto attornoal baricentro, relativa quindi alla terna baricentrale, mentre la quantita di moto ~Q′ risultaidenticamente nulla
~Q′ =
N∑i=1
mi~vi =
N∑i=1
mi(Pi − G) =
N∑i=1
miPi −N∑i=1
miG = mG−mG = 0
per cui il teorema di Konig assume la forma semplificata
T =m
2G2 + T ′ (26.3)
che e quella piu comunemente utilizzata nelle applicazioni. L’energia cinetica riferita allaterna assoluta consiste della somma di due termini, uno dei quali e l’energia cinetica relativaalla terna baricentrale e l’altro puo considerarsi ottenuto immaginando l’intera massa delsistema concentrata nel baricentro G dello stesso.
26.4 Teorema di Konig per il momento angolareConviene considerare il teorema di Konig per il momento angolare nel caso particolare dellaterna baricentrale, che e quello piu semplice — e piu utile nelle applicazioni. Il teoremaassume la forma
~KO = (G−O) ∧mG+ ~K ′G
Stefano Siboni 141

Universita degli studi di Trento Corso di Meccanica razionale
in cui:
~KO e il momento angolare del sistema rispetto alla terna assoluta, calcolato relativa-mente ad un polo O — fisso o mobile;
(G−O)∧mG e il momento angolare in O di un punto fittizio in cui si pensi concentratal’intera massa m del sistema e la cui posizione e velocita coincidano con quelle delbaricentro;
~K ′G indica il momento angolare in G del sistema in una terna di riferimento baricen-trale.
La struttura dell’equazione e analoga a quella della (26.3) per l’energia cinetica. Analogae anche la dimostrazione. Si ha infatti
~KO =N∑i=1
(Pi −O) ∧miPi =N∑i=1
(Pi −O) ∧mi(G+ ~vi) =
=N∑i=1
mi(Pi −O) ∧ G+N∑i=1
(Pi −O) ∧mi~vi =
= m(G−O) ∧ G+N∑i=1
(Pi −G) ∧mi~vi +N∑i=1
(G−O) ∧mi~vi =
= (G−O) ∧mG+ ~K ′G + (G−O) ∧N∑i=1
mi~vi =
= (G−O) ∧mG+ ~K ′G + (G−O) ∧ ~Q′ = (G−O) ∧mG+ ~K ′G .
27. Proprieta del baricentroNello studio della dinamica dei sistemi un ruolo di particolare importanza svolge la deter-minazione del baricentro. Di grande interesse sono percio tutti i metodi che consentanodi semplificare il calcolo del baricentro, evitando l’applicazione diretta della definizione.Questi sono basati su alcune proprieta notevoli, che vanno sotto il nome di:
proprieta distributiva;
proprieta dell’inviluppo convesso;
proprieta legate agli elementi di simmetria.
27.1 Proprieta distributivaDato un sistema S = (Pi,mi), i = 1, . . . , N di punti materiali, si dice che due sottoinsiemiA e B di S definiscono partizione di S se A ∪ B = S e A ∩ B = ∅: il sistema S e datodall’unione disgiunta dei sottosistemi A e B. Il baricentro del sistema si calcola per mezzo
Stefano Siboni 142

Universita degli studi di Trento Corso di Meccanica razionale
della definizione
G−O =1
N∑i=1
mi
N∑i=1
mi(Pi −O) =1∑
Pi∈A∪Bmi
∑Pi∈A∪B
mi(Pi −O)
e assume la forma equivalente
G−O =1∑
Pi∈Ami +
∑Pi∈B
mi
[∑Pi∈A
mi(Pi −O) +∑Pi∈B
mi(Pi −O)
]=
=1
mA +mB
[mA
1
mA
∑Pi∈A
mi(Pi −O) +mB1
mB
∑Pi∈B
mi(Pi −O)
]nella quale:
mA =∑Pi∈A
e la massa del sottosistema A;
mB =∑Pi∈B
rappresenta la massa della parte sistema B;
il baricentro GA del sottosistema A e dato dalla relazione
GA −O =1
mA
∑Pi∈A
mi(Pi −O) ;
il baricentro GB della parte B del sistema si esprime per mezzo della definizione
GB −O =1
mB
∑Pi∈B
mi(Pi −O) .
Si conclude pertanto che
G−O =mA(GA −O) +mB(GB −O)
mA +mB.
Questa relazione stabilisce che il baricentro G del sistema si identifica con il baricentro diun sistema fittizio costituito da due soli punti materiali, coincidenti con i baricentri GA eGB delle parti costituenti A e B, e nei quali si assumano concentrate le intere masse mA
e mB di dette parti.
Stefano Siboni 143
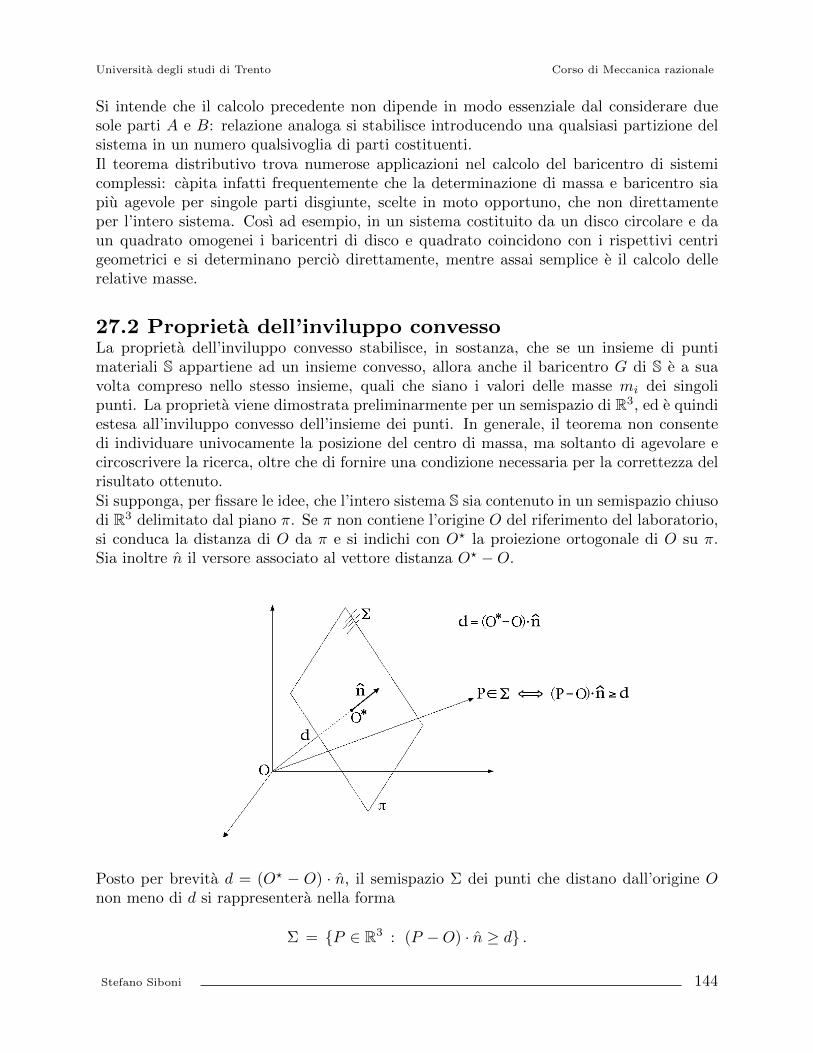
Universita degli studi di Trento Corso di Meccanica razionale
Si intende che il calcolo precedente non dipende in modo essenziale dal considerare duesole parti A e B: relazione analoga si stabilisce introducendo una qualsiasi partizione delsistema in un numero qualsivoglia di parti costituenti.Il teorema distributivo trova numerose applicazioni nel calcolo del baricentro di sistemicomplessi: capita infatti frequentemente che la determinazione di massa e baricentro siapiu agevole per singole parti disgiunte, scelte in moto opportuno, che non direttamenteper l’intero sistema. Cosı ad esempio, in un sistema costituito da un disco circolare e daun quadrato omogenei i baricentri di disco e quadrato coincidono con i rispettivi centrigeometrici e si determinano percio direttamente, mentre assai semplice e il calcolo dellerelative masse.
27.2 Proprieta dell’inviluppo convessoLa proprieta dell’inviluppo convesso stabilisce, in sostanza, che se un insieme di puntimateriali S appartiene ad un insieme convesso, allora anche il baricentro G di S e a suavolta compreso nello stesso insieme, quali che siano i valori delle masse mi dei singolipunti. La proprieta viene dimostrata preliminarmente per un semispazio di R3, ed e quindiestesa all’inviluppo convesso dell’insieme dei punti. In generale, il teorema non consentedi individuare univocamente la posizione del centro di massa, ma soltanto di agevolare ecircoscrivere la ricerca, oltre che di fornire una condizione necessaria per la correttezza delrisultato ottenuto.Si supponga, per fissare le idee, che l’intero sistema S sia contenuto in un semispazio chiusodi R3 delimitato dal piano π. Se π non contiene l’origine O del riferimento del laboratorio,si conduca la distanza di O da π e si indichi con O? la proiezione ortogonale di O su π.Sia inoltre n il versore associato al vettore distanza O? −O.
Posto per brevita d = (O? − O) · n, il semispazio Σ dei punti che distano dall’origine Onon meno di d si rappresentera nella forma
Σ = P ∈ R3 : (P −O) · n ≥ d .
Stefano Siboni 144

Universita degli studi di Trento Corso di Meccanica razionale
Se l’intero sistema S di punti materiali e ubicato in Σ, dovra aversi
(Pi −O) · n ≥ d ∀ i = 1, . . . , N
e per la positivita delle masse inerziali ciascuna delle precedenti relazioni rimarra inalterataa seguito di una moltiplicazione membro a membro per le rispettive masse
mi(Pi −O) · n ≥ mid ∀ i = 1, . . . , N .
Una somma sull’indice i = 1, . . . , N porge allora
N∑i=1
mi(Pi −O) · n ≥N∑i=1
mid
ed e poi sufficiente dividere per la massa del sistema S per ottenere
1
m
N∑i=1
mi(Pi −O) · n ≥ d
e concludere che anche il baricentro G di S si colloca nello stesso semispazio Σ
(G−O) · n ≥ d .
Se S e incluso in un semispazio Σ, allora il baricentro G di S appartiene allostesso semispazio. Poiche la costruzione precedente puo ripetersi per qualsiasi semispaziochiuso Σ che includa interamente S, si conclude che il baricentro G deve appartenere allaintersezione di tutti i semispazi che contengono completamente S
G ∈⋂
semispazi Σ : S ⊆ Σ
Σdef= conv(S)
e cio a prescindere dal valore delle masse mi dei singoli punti materiali costituenti. L’in-tersezione conv(S) di tutti i semispazi contenenti S dipende unicamente dalle posizioni deipunti Pi ed e nota come inviluppo convesso di S. In quanto intersezione di insiemi chiusi,si tratta certamente di un insieme chiuso. conv(S) costituisce inoltre un insieme convesso,essendo ottenuto dall’intersezione di insiemi convessi — ogni semispazio e convesso inR3. Si puo verificare che l’inviluppo convesso di un insieme rappresenta il piu piccoloinsieme chiuso e convesso che include l’insieme assegnato, il che giustifica la denominazioneadottata.(1)
Il baricentro di un sistema di punti materiali S e sempre contenuto nell’inviluppo convessoconv(S) di S, indipendentmente dalle masse inerziali dei punti.
(1)In molti testi di matematica l’inviluppo convesso di un insieme S e definito come il piu piccolo insieme
convesso che contiene S; in cal caso conv(S) puo non essere chiuso. Se pero S e chiuso, e possibile provare che
le due definizioni coincidono.
Stefano Siboni 145

Universita degli studi di Trento Corso di Meccanica razionale
Alcuni casi notevoli meritano di essere sottolineati.
• Qualora i punti del sistema S si collochino tutti in un comune piano π — si parlera in talcaso di sistema piano di punti materiali — e evidente che il baricentro deve identificarsicon un punto opportuno di quello stesso piano. Nella determinazione di conv(S) e infattisempre possibile considerare entrambi i semispazi chiusi delimitati dal piano π, cosiccheconv risulta certamente incluso nella intersezione π di tali semispazi
conv(S) ⊆ π .
Il baricentro di un sistema piano di punti materiali appartiene sempre al piano di giacituradello stesso sistema.
• In modo analogo, se tutti i punti Pi di S sono allineati lungo una retta s, l’inviluppoconvesso di S deve ubicarsi nella intersezione di tutti i piani contenenti r, dovendo perciorisultare sottoinsieme della stessa retta r
conv(S) ⊆ r ,
per cui il baricentro di un sistema di punti allineati lungo una retta r si colloca sempresulla stessa retta.
• L’inviluppo convesso di un sistema di due punti materiali (P1,m1) e (P2,m2), con P1 6= P2
e costituito dal segmento P1 − P2, ottenibile intersecando la retta P1 − P2 con:
− il semispazio contenente P1 e delimitato dal piano ortogonale a r passante per P2;
− il semispazio contenente P2 e delimitato dal piano ortogonale a r passante per P1.
• L’inviluppo convesso di un sistema di tre punti materiali distinti e non allineati P1, P2, P3
si identifica con il triangolo di uguali vertici P1, P2, P3. Per convincersene e sufficienteintersecare il piano di giacitura π dei tre punti con il semispazio contenente gli stessi puntie la cui frontiera sia il piano ortogonale a π passante per P1, P2, ripetendo poi l’operazione
Stefano Siboni 146

Universita degli studi di Trento Corso di Meccanica razionale
con gli analoghi semispazi costruiti su P2, P3 e P3, P1 rispettivamente.
• Piu interessante e il caso di un sistema costituito da quattro punti materiali (Pi,mi),i = 1, 2, 3, 4. Nella fattispecie l’inviluppo convesso non e in generale il quadrilatero divertici P1, P2, P3, P4, che non necessariamente risulta convesso. Nell’ipotesi che i punti nonsiano allineati, l’inviluppo convesso dell’insieme puo anche identificarsi con un triangolo icui vertici siano punti convenienti dello stesso insieme.
27.3 Proprieta legate alle simmetrieQueste proprieta sono connesse alla presenza di particolari elementi di simmetria nelsistema di punti materiali. Si tratta di centro, assi e piani di simmetria, nonche di pianidiametrali coniugati alla direzione di una retta assegnata. Questi elementi di simmetriasono gia noti dalla geometria elementare, ma nella localizzazione dei baricentri si rendenecessario tenere conto di un elemento nuovo: la massa inerziale associata ad ogni singolopunto.
27.3.1 Centro di simmetria
La nozione geometrica di simmetria rispetto ad un centro C e quella ben nota dalla ge-ometria elementare, per cui due punti P e P ? sono simmetrici rispetto a C se il segmentoP − P ? passa per C e i segmenti P −C e C − P ? hanno eguale lunghezza. Nel caso di unsistema di punti materiali, tuttavia, e necessario tenere conto anche delle rispettive masse.Si dice allora che un sistema S di punti materiali ha nel punto C un centro di simmetria se
Stefano Siboni 147

Universita degli studi di Trento Corso di Meccanica razionale
per ogni punto P del sistema, di massa m, il punto simmetrico P ? di P rispetto al centroC appartiene a sua volta al sistema e con lo stesso valore m della massa. Tutti ipunti del sistema appaiono quindi organizzati secondo coppie di punti simmetrici di egualemassa, salvo gli eventuali punti che occupino la posizione C.
Si ha allora che
il centro di simmetria C coincide con il baricentro G del sistema.
Il risultato segue immediatamente applicando la proprieta distributiva, che consente disostituire ad ogni coppia di punti simmetrici P e P ? di eguale massa m, un’unico puntoC di massa 2m. Si perviene cosı ad un sistema di punti materiali tutti coincidenti in C, ilcui baricentro si identifica con C stesso.
27.3.2 Asse di simmetriaData una retta r ed un punto P non appartenente ad r, si dice che P ? e il punto simmetricodi P rispetto all’asse r se P ? si ottiene da P congiungendo questo con la sua proiezioneortogonale Q su r e prolungando il segmento PQ oltre Q di un segmento QP ? di lunghezzapari a |P − Q|. Si dira allora che un sistema S di punti materiali ammette un asse disimmetria r se per ogni punto P di S:
− P giace sull’asse di simmetria;
− oppure anche il punto P ? simmetrico di P rispetto all’asse r appartiene al sistema ei due punti hanno la stessa massa.
I punti del sistema sono quindi organizzati per coppie di punti simmetrici di eguale massa,eccettuati al piu gli eventuali punti del sistema collocati sullo stesso asse r. Resta intesoche il comune valore della massa, per una coppia di punti simmetrici, puo cambiare da unacoppia all’altra.
Stefano Siboni 148

Universita degli studi di Trento Corso di Meccanica razionale
E allora evidente che il baricentro G appartiene all’asse di simmetria.Basta anche in questo caso fare ricorso al teorema distributivo e sostituire ad ogni coppiadi punti simmetrici P e P ? di massa m il corrispondente baricentro Q di massa 2m. Dalladefinizione di asse di simmetria segue immediatamente che Q appartiene all’asse, in modoche la determinazione del baricentro G viene ricondotta all’esame di un sistema di puntimateriali collotati lungo r. Di conseguenza G ∈ r, come affermato.
27.3.3 Asse di simmetria di ordine n (n intero positivo ≥ 2)Un sistema si dice ammettere un asse di simmetria a di ordine (intero) n ≥ 2 se qualsi-asi rotazione di un angolo 2π/n attorno all’asse a lascia invariato il sistema, per quantoriguarda sia la collocazione dei suoi punti che le relative masse. Per individuare l’asse disimmetria di ordine n non e dunque sufficiente verificare che la rotazione di 2π/n radiantiattorno ad esso assicuri la completa sovrapposizione geometrica del sistema con se stesso,ma occorre anche accertare che i punti portati a sovrapporsi siano di uguale massa. Ilconcetto e illustrato nella figura seguente, dove il sistema ammette l’asse coordinato Ozcome asse di simmetria di ordine 3 (asse ternario), in quanto tutti i punti sovrapponibiliper rotazioni successive di 2π/3 radianti attorno all’asse Oz presentano la stessa massa:
L’asse Oz non e invece definito come asse di simmetria ternario nel caso seguente:
Stefano Siboni 149
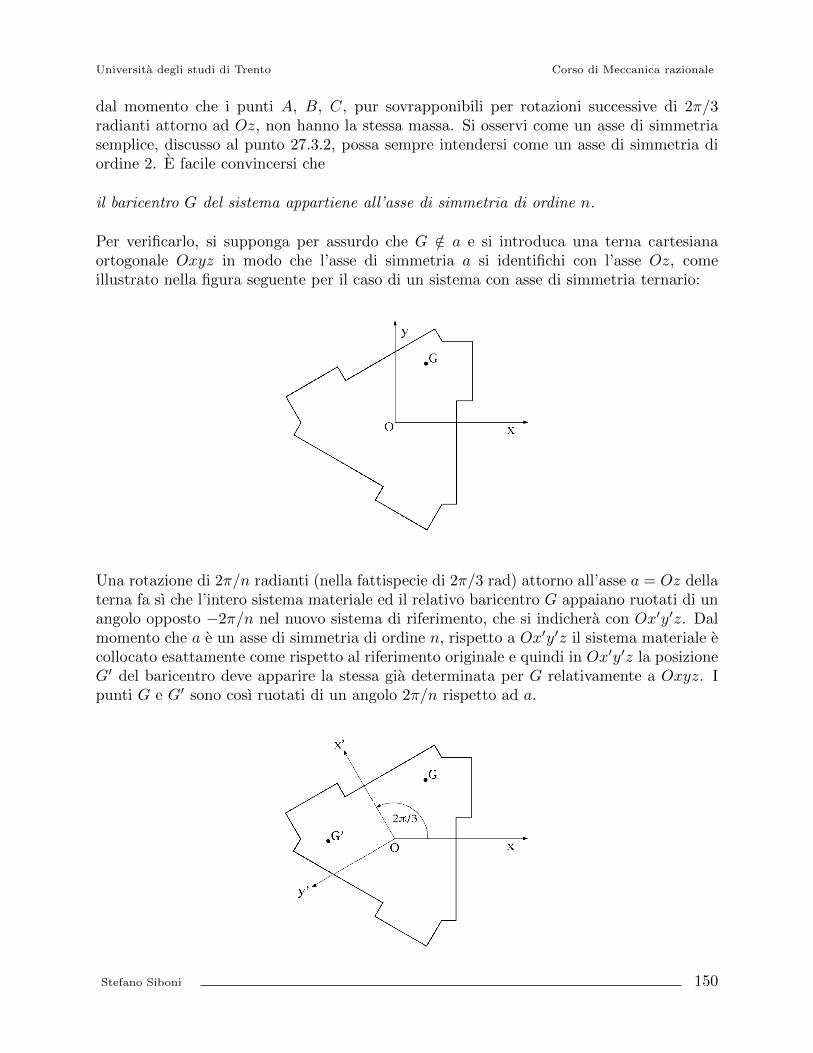
Universita degli studi di Trento Corso di Meccanica razionale
dal momento che i punti A, B, C, pur sovrapponibili per rotazioni successive di 2π/3radianti attorno ad Oz, non hanno la stessa massa. Si osservi come un asse di simmetriasemplice, discusso al punto 27.3.2, possa sempre intendersi come un asse di simmetria diordine 2. E facile convincersi che
il baricentro G del sistema appartiene all’asse di simmetria di ordine n.
Per verificarlo, si supponga per assurdo che G /∈ a e si introduca una terna cartesianaortogonale Oxyz in modo che l’asse di simmetria a si identifichi con l’asse Oz, comeillustrato nella figura seguente per il caso di un sistema con asse di simmetria ternario:
Una rotazione di 2π/n radianti (nella fattispecie di 2π/3 rad) attorno all’asse a = Oz dellaterna fa sı che l’intero sistema materiale ed il relativo baricentro G appaiano ruotati di unangolo opposto −2π/n nel nuovo sistema di riferimento, che si indichera con Ox′y′z. Dalmomento che a e un asse di simmetria di ordine n, rispetto a Ox′y′z il sistema materiale ecollocato esattamente come rispetto al riferimento originale e quindi in Ox′y′z la posizioneG′ del baricentro deve apparire la stessa gia determinata per G relativamente a Oxyz. Ipunti G e G′ sono cosı ruotati di un angolo 2π/n rispetto ad a.
Stefano Siboni 150

Universita degli studi di Trento Corso di Meccanica razionale
Ma allora l’essere 0 < 2π/n < 2π implica che G 6= G′, in evidente contraddizione conl’unicita del baricentro di un sistema materiale. Ne segue che deve aversi necessariamenteG ∈ a, come affermato.
27.3.4 Piano di simmetria
Il piano di simmetria per un sistema S di punti materiali si definisce in modo analogo aquanto visto per l’asse di simmetria. Dato un piano π, due punti P e P ? non appartenentiad esso si dicono simmetrici rispetto a π se il segmento PP ? e ortogonale a π e da questobisecato — il piano interseca il segmento nel suo punto medio. Il piano π si dice disimmetria per il sistema di punti materiali se per ogni punto P di S:
− P appartiene al piano π;
− oppure il punto P ?, simmetrico di P rispetto a π, e a propria volta un punto delsistema e con la stessa massa di P .
In tal caso il baricentro del sistema giace nel piano di simmetria.
Si tratta ancora una volta di ricorrere al teorema distributivo per sostituire ad ogni cop-pia P − P ? di punti simmetrici, di massa m, un unico punto materiale Q di massa 2m,necessariamente ubicato nel punto medio del segmento P −P ? e quindi appartenente a π.Si e cosı ricondotti ad un sistema piano di punti materiali, il cui piano di giacitura π deveanche contenere il relativo baricentro G.
27.3.5 Piano diametrale coniugato alla direzione di una retta
Il risultato precedente, relativo ai piani di simmetria, e suscettibile di una utile generaliz-zazione. Dato un piano π ed una retta r a questo non parallela, per ogni punto P che nongiaccia su π si definisce il corrispondente punto coniugato P ? conducendo da P la rettaparallela ad r fino ad intersecare π in un punto Q e prolungando il segmento P −Q oltre Qin modo che il segmento Q−P ? abbia la stessa lunghezza |P −Q|. Si dice allora che per unsistema S di punti materiali π e un piano diametrale coniugato alla direazione della rettar se per ogni punto materiale P ∈ S che non giace nel piano π il relativo punto coniugato
Stefano Siboni 151
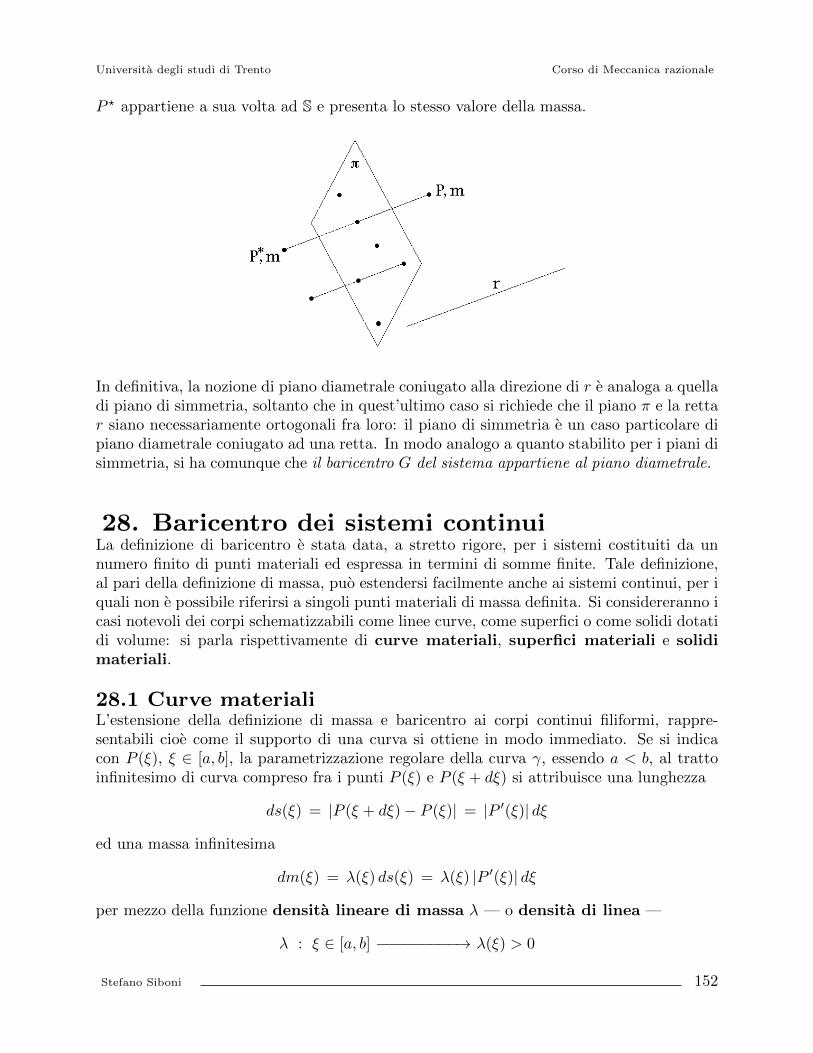
Universita degli studi di Trento Corso di Meccanica razionale
P ? appartiene a sua volta ad S e presenta lo stesso valore della massa.
In definitiva, la nozione di piano diametrale coniugato alla direzione di r e analoga a quelladi piano di simmetria, soltanto che in quest’ultimo caso si richiede che il piano π e la rettar siano necessariamente ortogonali fra loro: il piano di simmetria e un caso particolare dipiano diametrale coniugato ad una retta. In modo analogo a quanto stabilito per i piani disimmetria, si ha comunque che il baricentro G del sistema appartiene al piano diametrale.
28. Baricentro dei sistemi continuiLa definizione di baricentro e stata data, a stretto rigore, per i sistemi costituiti da unnumero finito di punti materiali ed espressa in termini di somme finite. Tale definizione,al pari della definizione di massa, puo estendersi facilmente anche ai sistemi continui, per iquali non e possibile riferirsi a singoli punti materiali di massa definita. Si considereranno icasi notevoli dei corpi schematizzabili come linee curve, come superfici o come solidi dotatidi volume: si parla rispettivamente di curve materiali, superfici materiali e solidimateriali.
28.1 Curve materialiL’estensione della definizione di massa e baricentro ai corpi continui filiformi, rappre-sentabili cioe come il supporto di una curva si ottiene in modo immediato. Se si indicacon P (ξ), ξ ∈ [a, b], la parametrizzazione regolare della curva γ, essendo a < b, al trattoinfinitesimo di curva compreso fra i punti P (ξ) e P (ξ + dξ) si attribuisce una lunghezza
ds(ξ) = |P (ξ + dξ)− P (ξ)| = |P ′(ξ)| dξ
ed una massa infinitesima
dm(ξ) = λ(ξ) ds(ξ) = λ(ξ) |P ′(ξ)| dξ
per mezzo della funzione densita lineare di massa λ — o densita di linea —
λ : ξ ∈ [a, b] −−−−−−−−−→ λ(ξ) > 0
Stefano Siboni 152

Universita degli studi di Trento Corso di Meccanica razionale
che in ogni punto della curva e definita formalmente come la massa per unita di lunghezzanell’intorno di quel punto
λ(ξ) =dm
ds(ξ) .
La curva γ munita di questa funzione densita dilinea λ si dice curva materiale, in analogia aquanto avviene per il punto materiale, che e com-pletamente specificato per mezzo della sua po-sizione geometrica e della sua massa inerziale.Nella fattispecie, la parametrizzazione P (ξ) spe-cifica la forma geometrica della curva e la sua collocazione nello spazio, mentre la densita λprecisa la distribuzione della massa lungo il suo supporto. La massa della curva materialesi ottiene integrando l’elemento infinitesimo dm lungo l’intero intervallo di definizione dellaparametrizzazione
m =
∫γ
dm =
∫ b
a
λ(ξ) ds(ξ) =
∫ b
a
λ(ξ) |P ′(ξ)| dξ
e in modo del tutto analogo si definisce la posizione del baricentro rispetto ad una qualcheorigine O
G−O =1
m
∫γ
(P −O) dm =1
m
∫ b
a
[P (ξ)−O]λ(ξ) |P ′(ξ)| dξ .
Una curva materiale si dice omogenea se e caratterizzata da un valore costante delladensita lineare λ, lo stesso in ogni punto. In tal caso e immediato verificare che la posizionedel baricentro e indipendente dal valore della densita e diventa una caratteristica puramentegeometrica del sistema
G−O =1∫ b
a
|P ′(ξ)| dξ
∫ b
a
[P (ξ)−O] |P ′(ξ)| dξ .
28.2 Superfici materialiIn modo analogo, i corpi a struttura laminare vengono rappresentati per mezzo delle su-perfici materiali. Si rappresenta la superficie regolare S per mezzo della parametrizzazione
P : (u, v) ∈ D −−−−−−−−−→ P (u, v) ∈ R3
definita su un dominio D di R2. L’idea e quella di definire l’area infinitesima della porzionedi superficie compresa fra le quattro curve
P (u, v) : (u, v) ∈ D , u = u0 P (u, v) : (u, v) ∈ D , u = u0 + du
P (u, v) : (u, v) ∈ D , v = v0 P (u, v) : (u, v) ∈ D , v = v0 + dv ,
Stefano Siboni 153
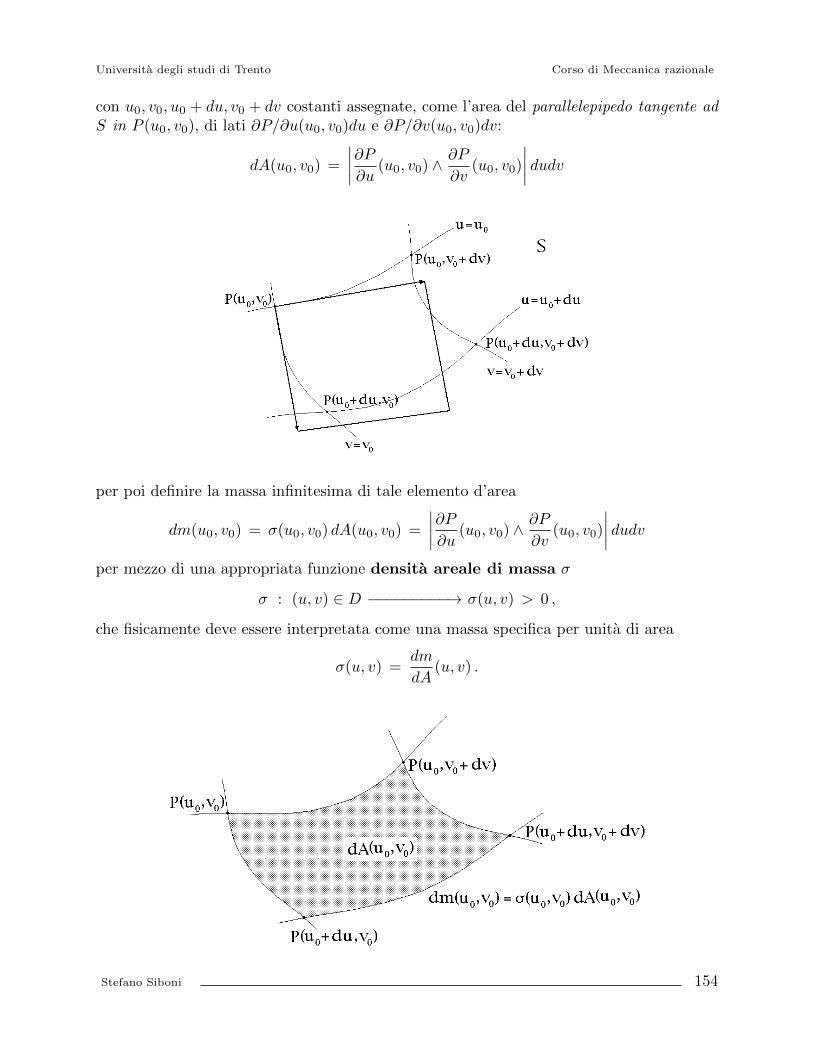
Universita degli studi di Trento Corso di Meccanica razionale
con u0, v0, u0 + du, v0 + dv costanti assegnate, come l’area del parallelepipedo tangente adS in P (u0, v0), di lati ∂P/∂u(u0, v0)du e ∂P/∂v(u0, v0)dv:
dA(u0, v0) =
∣∣∣∣∂P∂u (u0, v0) ∧ ∂P∂v
(u0, v0)
∣∣∣∣ dudv
per poi definire la massa infinitesima di tale elemento d’area
dm(u0, v0) = σ(u0, v0) dA(u0, v0) =
∣∣∣∣∂P∂u (u0, v0) ∧ ∂P∂v
(u0, v0)
∣∣∣∣ dudvper mezzo di una appropriata funzione densita areale di massa σ
σ : (u, v) ∈ D −−−−−−−−−→ σ(u, v) > 0 ,
che fisicamente deve essere interpretata come una massa specifica per unita di area
σ(u, v) =dm
dA(u, v) .
Stefano Siboni 154

Universita degli studi di Trento Corso di Meccanica razionale
Una superficie regolare in ogni punto della quale sia definita la corrispondente densita arealedi massa σ, o massa specifica per unita di superficie, e nota come superficie materiale.La massa della superficie materiale si determina integrando l’elemento infinitesimo di massadm sull’intero dominio di definizione della parametrizzazione regolare P (u, v)
m =
∫S
dm =
∫S
σ dA =
∫D
σ(u, v)
∣∣∣∣∂P∂u (u, v) ∧ ∂P∂v
(u, v)
∣∣∣∣ dudvmentre il vettore posizione del baricentro viene definito per mezzo dell’integrale
G−O =1
m
∫S
(P −O) dm =1
m
∫D
[P (u, v)−O]σ(u, v)
∣∣∣∣∂P∂u (u, v) ∧ ∂P∂v
(u, v)
∣∣∣∣ dudv .La superficie materiale si dice omogenea quando la densita areale di massa σ e costante.Per superfici materiali omogenee la posizione del baricentro non dipende dalla densita
G−O =1∫
D
∣∣∣∣∂P∂u (u, v) ∧ ∂P∂v
(u, v)
∣∣∣∣ dudv∫D
[P (u, v)−O]
∣∣∣∣∂P∂u (u, v) ∧ ∂P∂v
(u, v)
∣∣∣∣ dudve costituisce percio una caratteristica puramente geometrica del sistema.
28.3 Solidi materialiUn solido materiale Ω e individuato per mezzo di una parametrizzazione regolare in trevariabili
P : (u, v, w) ∈ D −−−−−−−−−→ P (u, v, w) ∈ R3
definita in un appropriato dominio D di R3 ed ivi di classe C1, con la condizione supple-mentare
∂P
∂u· ∂P∂v∧ ∂P∂w6= 0
in D. La condizione precedente — cosiddetta di locale invertibilita della parametrizzazione— permette di esprimere il volume della porzione infinitesima di solido posta a ridosso delpunto P (u, v, w) e compresa fra le superfici
P (u, v, w) : (u, v, w) ∈ D , u = u0 P (u, v, w) : (u, v, w) ∈ D , u = u0 + duP (u, v, w) : (u, v, w) ∈ D , v = v0 P (u, v, w) : (u, v, w) ∈ D , v = v0 + dvP (u, v, w) : (u, v, w) ∈ D , w = w0 P (u, v, w) : (u, v, w) ∈ D , w = w0 + dw
nella forma
dV (u0, v0, w0) =
∣∣∣∣∂P∂u · ∂P∂v ∧ ∂P∂w∣∣∣∣(u0, v0, w0) dudvdw
e di definire il corrispondente elemento infinitesimo di massa dm(u0, v0, w0) per mezzodella relazione
dm(u0, v0, w0) = ρ(u0, v0, w0) dV (u0, v0, w0)
Stefano Siboni 155

Universita degli studi di Trento Corso di Meccanica razionale
dove compare una opportuna funzione densita volumica di massa ρ
ρ : (u, v, w) ∈ D −−−−−−−−−→ ρ(u, v, w) > 0
che ha il significato fisico di una massa specifica per unita di volume del solido. Per lamassa del solido continuo si ha pertanto
m =
∫Ω
dm =
∫Ω
ρ dV =
∫D
ρ(u, v, w)
∣∣∣∣∂P∂u · ∂P∂v ∧ ∂P∂w∣∣∣∣(u, v, w) dudvdw
e l’espressione che definisce il baricentro diventa
G−O =1
m
∫D
(P −O) dm =
=1
m
∫D
[P (u, v, w)−O] ρ(u, v, w)
∣∣∣∣∂P∂u · ∂P∂v ∧ ∂P∂w∣∣∣∣(u, v, w) dudvdw .
Per i solidi omogenei la densita volumica di massa ρ e costante su tutto il sistema e laposizione del baricentro dipende unicamente dalla struttura geometrica del corpo
G−O =
∫D
[P (u, v, w)−O]
∣∣∣∣∂P∂u · ∂P∂v ∧ ∂P∂w∣∣∣∣(u, v, w) dudvdw∫
D
∣∣∣∣∂P∂u · ∂P∂v ∧ ∂P∂w∣∣∣∣(u, v, w) dudvdw
.
28.4 Estensione delle proprieta del baricentro ai sistemicontinui
Formalmente il passaggio dai sistemi di punti materiali discreti ai sistemi continui — curve esuperfici materiali o solidi continui — si realizza sostituendo alle masse i rispettivi elementiinfinitesimi di massa e alle somme i corrispondenti integrali — curvilinei, di superficie, o divolume. Poiche gli integrali soddisfano fondamentalmente le stesse proprieta delle sommefinite, quali la linearita e l’additivita sul dominio di integrazione, e facile verificare chele proprieta del baricentro gia stabilite per i sistemi discreti rimangono sostanzialmenteinalterate nel caso dei corpi continui. In particolare:
• la proprieta distributiva rimane valida, ma sono tollerate intersezioni non vuote frai sottosistemi componenti, a patto che su tali intersezioni risultino nulli i relativicontributi all’integrale della massa e all’integrale del baricentro;
• la proprieta dell’inviluppo convesso e ancora soddisfatta, sebbene l’individuazionedell’inviluppo convesso di un insieme infinito — e non numerabile — di punti possacomportare maggiori difficolta che non nel caso finito, laddove il risultato si identificanecessariamente con un poligono o con un poliedro;
• tutte le proprieta legate alle simmetrie conservano la loro validita. Inoltre, nel ri-conoscimento degli eventuali elementi di simmetria ci si puo limitare a confrontare i
Stefano Siboni 156
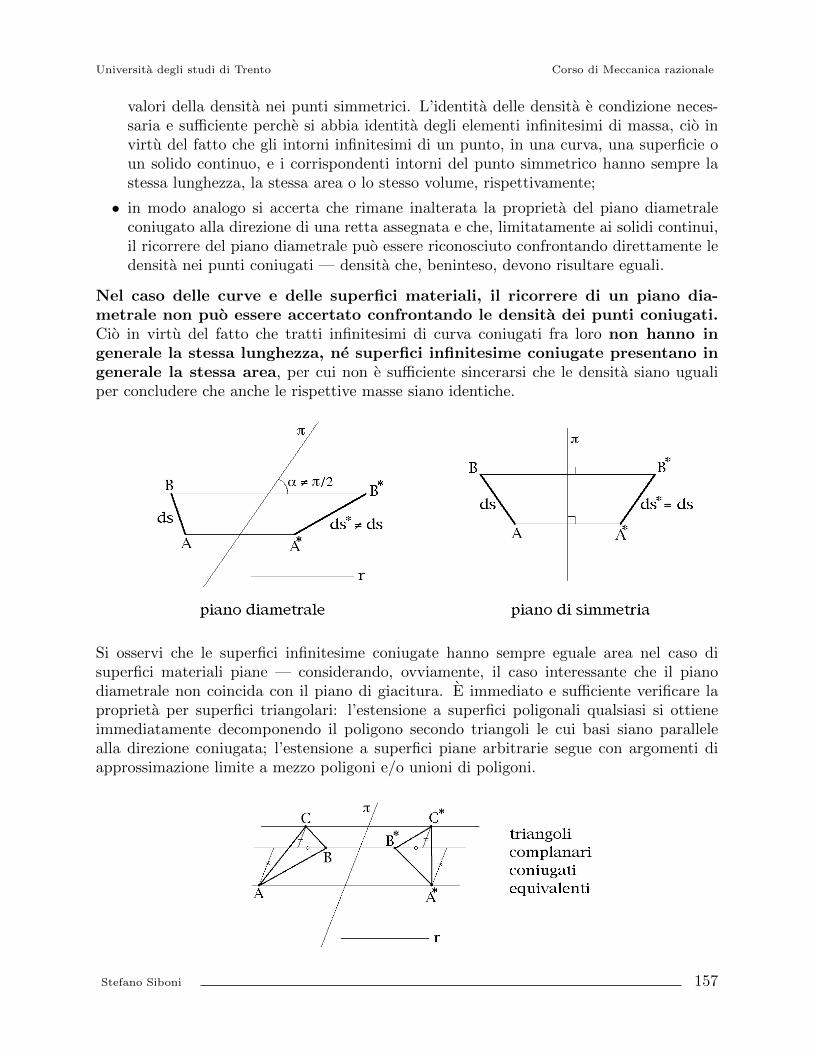
Universita degli studi di Trento Corso di Meccanica razionale
valori della densita nei punti simmetrici. L’identita delle densita e condizione neces-saria e sufficiente perche si abbia identita degli elementi infinitesimi di massa, cio invirtu del fatto che gli intorni infinitesimi di un punto, in una curva, una superficie oun solido continuo, e i corrispondenti intorni del punto simmetrico hanno sempre lastessa lunghezza, la stessa area o lo stesso volume, rispettivamente;
• in modo analogo si accerta che rimane inalterata la proprieta del piano diametraleconiugato alla direzione di una retta assegnata e che, limitatamente ai solidi continui,il ricorrere del piano diametrale puo essere riconosciuto confrontando direttamente ledensita nei punti coniugati — densita che, beninteso, devono risultare eguali.
Nel caso delle curve e delle superfici materiali, il ricorrere di un piano dia-metrale non puo essere accertato confrontando le densita dei punti coniugati.Cio in virtu del fatto che tratti infinitesimi di curva coniugati fra loro non hanno ingenerale la stessa lunghezza, ne superfici infinitesime coniugate presentano ingenerale la stessa area, per cui non e sufficiente sincerarsi che le densita siano ugualiper concludere che anche le rispettive masse siano identiche.
Si osservi che le superfici infinitesime coniugate hanno sempre eguale area nel caso disuperfici materiali piane — considerando, ovviamente, il caso interessante che il pianodiametrale non coincida con il piano di giacitura. E immediato e sufficiente verificare laproprieta per superfici triangolari: l’estensione a superfici poligonali qualsiasi si ottieneimmediatamente decomponendo il poligono secondo triangoli le cui basi siano parallelealla direzione coniugata; l’estensione a superfici piane arbitrarie segue con argomenti diapprossimazione limite a mezzo poligoni e/o unioni di poligoni.
Stefano Siboni 157
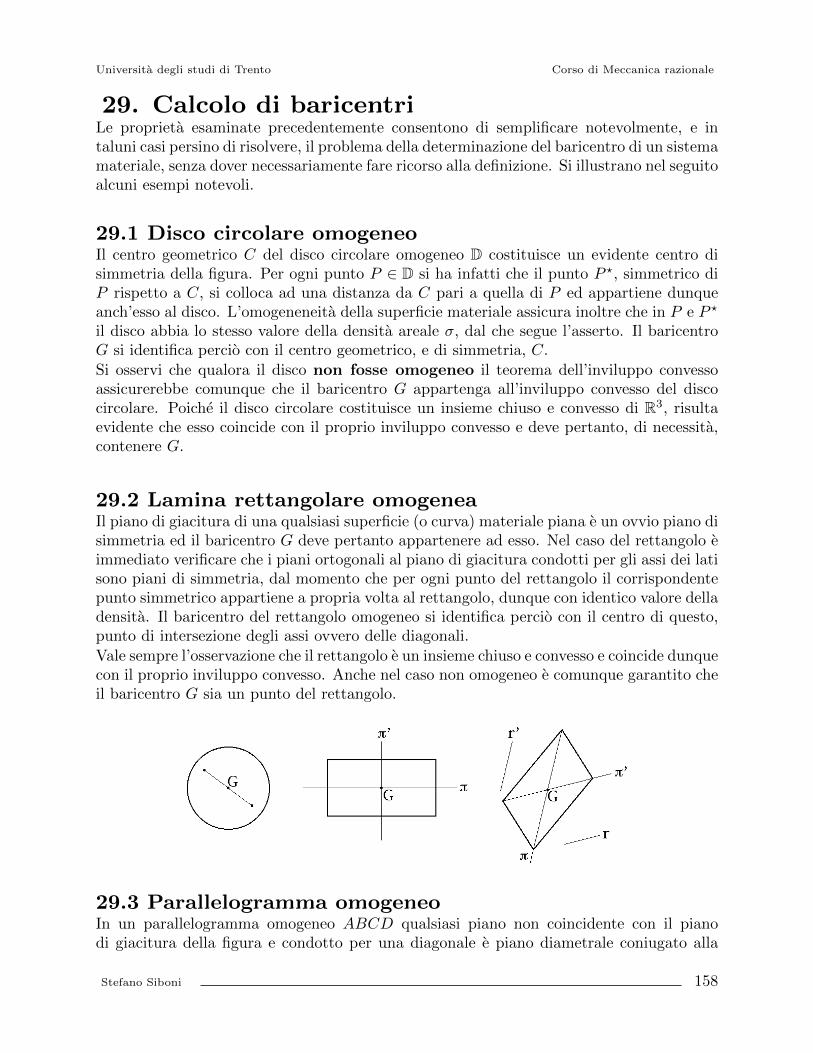
Universita degli studi di Trento Corso di Meccanica razionale
29. Calcolo di baricentriLe proprieta esaminate precedentemente consentono di semplificare notevolmente, e intaluni casi persino di risolvere, il problema della determinazione del baricentro di un sistemamateriale, senza dover necessariamente fare ricorso alla definizione. Si illustrano nel seguitoalcuni esempi notevoli.
29.1 Disco circolare omogeneoIl centro geometrico C del disco circolare omogeneo D costituisce un evidente centro disimmetria della figura. Per ogni punto P ∈ D si ha infatti che il punto P ?, simmetrico diP rispetto a C, si colloca ad una distanza da C pari a quella di P ed appartiene dunqueanch’esso al disco. L’omogeneneita della superficie materiale assicura inoltre che in P e P ?
il disco abbia lo stesso valore della densita areale σ, dal che segue l’asserto. Il baricentroG si identifica percio con il centro geometrico, e di simmetria, C.Si osservi che qualora il disco non fosse omogeneo il teorema dell’inviluppo convessoassicurerebbe comunque che il baricentro G appartenga all’inviluppo convesso del discocircolare. Poiche il disco circolare costituisce un insieme chiuso e convesso di R3, risultaevidente che esso coincide con il proprio inviluppo convesso e deve pertanto, di necessita,contenere G.
29.2 Lamina rettangolare omogeneaIl piano di giacitura di una qualsiasi superficie (o curva) materiale piana e un ovvio piano disimmetria ed il baricentro G deve pertanto appartenere ad esso. Nel caso del rettangolo eimmediato verificare che i piani ortogonali al piano di giacitura condotti per gli assi dei latisono piani di simmetria, dal momento che per ogni punto del rettangolo il corrispondentepunto simmetrico appartiene a propria volta al rettangolo, dunque con identico valore delladensita. Il baricentro del rettangolo omogeneo si identifica percio con il centro di questo,punto di intersezione degli assi ovvero delle diagonali.Vale sempre l’osservazione che il rettangolo e un insieme chiuso e convesso e coincide dunquecon il proprio inviluppo convesso. Anche nel caso non omogeneo e comunque garantito cheil baricentro G sia un punto del rettangolo.
29.3 Parallelogramma omogeneoIn un parallelogramma omogeneo ABCD qualsiasi piano non coincidente con il pianodi giacitura della figura e condotto per una diagonale e piano diametrale coniugato alla
Stefano Siboni 158

Universita degli studi di Trento Corso di Meccanica razionale
direzione dell’altra diagonale. Il centro del parallelogramma, punto di intersezione dellediagonali, e dunque posto all’intersezione dei due piani diametrali ovvi e del piano digiacitura, identificandosi pertanto con il baricentro G del sistema. Trattandosi di sistemapiano, i piani diametrali — diversi da quello di giacitura della figura, che e ovvio pianodi simmetria — possono essere ricercati confrontando direttamente i valori della densitaareale σ nei punti coniugati P e P ?: basta quindi osservare che il coniugato di un puntodel parallelogramma e ancora punto della figura. Il centro del parallelogramma omogeneocoincide dunque con il baricentro del sistema.Il baricentro di un parallelogramma non omogeneo cade comunque nel parallelogramma,che costituisce un sottoinsieme chiuso e convesso di R3.
29.4 Lamina triangolare omogeneaPer una lamina triangolare omogenea ABC, qualsiasi piano π non coincidente con il pianodi giacitura e passante per la mediana condotta da un vertice costituisce un piano diame-trale coniugato alla direzione del lato opposto al vertice considerato. Se infatti si congiungeil vertice A con il punto medio M del lato opposto BC e si considera un qualsiasi punto Pdel triangolo, e evidente al triangolo appartiene anche il punto P ? coniugato a P rispettoad un qualsiasi piano π passante per la mediana AM e distinto dal piano di giacitura, sec-ondo la direzione del lato BC. Il risultato segue immediatamente dal teorema di Talete.Trattandosi di superficie materiale piana, il riconoscimento di π come piano diametrale co-niugato puo ottenersi confrontando direttamente le densita della superficie nei punticoniugati. Nella fattispecie la densita e costante e quindi la simultanea appartenenza altriangolo di entrambi i punti coniugati consente di concludere che π e piano diametrale. Ilbaricentro G deve quindi collocarsi nella intersezione del piano diametrale π con il pianodi giacitura, ossia nella mediana al triangolo condotta dal vertice A. Poiche il precedenteragionamento puo ripetersi per ogni vertice, si deduce che il baricentro deve giacere simul-taneamente su tutte le tre mediane. E ben noto dalla geometria razionale che il punto diintersezione di un triangolo qualunque esiste sempre unico e viene denominato — non acaso — baricentro del triangolo. Ne segue che il baricentro G della lamina triangolareomogenea coincide con il baricentro in senso geometrico del triangolo ABC.
Si sottolinea che per una superficie triangolare non omogenea il baricentro G non eesterno al triangolo stesso, come conseguenza della proprieta di inviluppo convesso.
Stefano Siboni 159

Universita degli studi di Trento Corso di Meccanica razionale
29.5 Asta rettilinea non omogeneaSi consideri un’asta rettilinea non omogenea, disposta lungo l’asse Ox di una terna diriferimento cartesiana ortogonale Oxyz. La parametrizzazione dell’asta e data da
P (x) = x e1 x ∈ [a, b]
mentre la densita lineare di massa sara una funzione λ(x) della sola ascissa x
λ(x) > 0 ∀x ∈ [a, b] .
Notando che l’ascissa curvilinea del segmento coincide con l’ascissa — ds = dx — a massadel sistema si ricava per mezzo dell’integrale
m =
∫ b
a
λ(x) dx
e la posizione del baricentro e individuata da
G−O =1
m
∫ b
a
xλ(x) dx e1
risultando comunque ubicata nel segmento [a, b] dell’asse Ox.
29.6 Lamina rettangolare non omogeneaNel piano coordinato Oxy di una terna di riferimento cartesiana ortogonale si consideri ilrettangolo di lati a e b:
(x, y) ∈ R2 , x ∈ [0, a] , y ∈ [0, b]
e la cui densita areale sia espressa dalla funzione non negativa σ(x, y). Essendo dx dyl’elemento infinitesimo di area della superficie, la massa del sistema si scrive
m =
∫ a
0
∫ b
0
σ(x, y) dxdy .
Trattandosi di figura piana, il piano coordinato Oxy e un ovvio piano di simmetria, percui la quota zG del baricentro G deve necessariamente annullarsi. Le coordinate residuexG e yG si determinano infine per mezzo delle relazioni
xG =1
m
∫ a
0
∫ b
0
xσ(x, y) dxdy yG =1
m
∫ a
0
∫ b
0
y σ(x, y) dxdy .
Stefano Siboni 160

Universita degli studi di Trento Corso di Meccanica razionale
29.7 SemicirconferenzaNel piano coordinato Oxy di una terna di riferimento cartesiana ortogonale si consideri lasemicirconferenza di centro O e raggio R, ubicata nel primo e nel secondo quadrante. Laparametrizzazione della curva puo scriversi nella forma
P (ξ)−O = R cos ξ e1 +R sin ξ e2 ξ ∈ [0, π]
e la densita lineare di massa dovra essere assegnata come arbitraria funzione non negativaλ(ξ) del parametro ξ. L’elemento infinitesimo di lunghezza vale
ds = |P ′(ξ)| dξ = | −R sin ξ e1 +R cos ξ e2| dξ = Rdξ
e quello di massa corrspondentedm = λ(ξ)Rdξ
per cui la massa totale della curva diventa
m =
∫ π
0
λ(ξ)Rdξ .
Il vettore posizione del baricentro e infine definito dall’espressione
G−O =1
m
∫ π
0
[R cos ξ e1 +R sin ξ e2]λ(ξ)Rdξ =
= R1∫ π
0
λ(ξ) dξ
∫ π
0
[cos ξ e1 + sin ξ e2]λ(ξ) dξ .
Nel caso che la semicirconferenza sia omogenea la densita costante puo essere ignoratanella determinazione del baricentro e l’espressione precedente diventa
G−O =R
π
∫ π
0
(cos ξ e1 + sin ξ e2) dξ =2
πR e2 .
Si osservi che l’annullarsi dell’ascissa di G poteva prevedersi riconoscendo che l’asse coor-dinato Oy e un evidente asse di simmetria del sistema.
Stefano Siboni 161

Universita degli studi di Trento Corso di Meccanica razionale
29.8 Disco circolare non omogeneoNel piano Oxy di una terna cartesiana ortogonale si considera un disco circolare nonomogeneo, di centro O e raggio R. Conviene parametrizzare la superficie materiale incoordinate polari
P (ρ, φ)−O = x e1 + y e2 = ρ cosφ e1 + ρ sinφ e2 (ρ, φ) ∈ [0, R]× [0, 2π] (29.1)
esprimendo la densita areale di massa in funzione delle stesse coordinate
σ = σ(ρ, φ) (ρ, φ) ∈ [0, R]× [0, 2π] .
Le derivate prime della parametrizzazione sono date da
∂P
∂ρ(ρ, φ) = cosφ e1 + sinφ e2
∂P
∂φ(ρ, φ) = −ρ sinφ e1 + ρ cosφ e2
ed il loro prodotto vettore vale
∂P
∂ρ∧ ∂P∂φ
=
∣∣∣∣∣∣e1 e2 e3
cosφ sinφ 0−ρ sinφ ρ cosφ 0
∣∣∣∣∣∣ = ρ e3
per cui l’elemento infinitesimo d’area risulta
dA =
∣∣∣∣∂P∂ρ ∧ ∂P∂φ∣∣∣∣ dρdφ = ρ dρdφ
e quello di massa si riduce adm = σ(ρ, φ) ρ dρdφ .
Da notare che il vettore normale alla superficie e ovunque diretto secondo e3 salvo chenell’origine, dove per ρ = 0 la parametrizzazione non risulta regolare ed il versore normale
Stefano Siboni 162

Universita degli studi di Trento Corso di Meccanica razionale
non appare definito. La massa del sistema si ricava integrando l’elemento infinitesimo dimassa sull’intera superficie
m =
∫[0,R]×[0,2π]
σ(ρ, φ) ρ dρdφ
mentre il baricentro e individuato da
G−O =1
m
∫[0,R]×[0,2π]
ρ [cosφ e1 + sinφ e2]σ(ρ, φ) ρ dρdφ .
29.9 Semidisco circolare non omogeneoLo studio del semidisco circolare e analogo a quello condotto nella sezione precedente peril cerchio completo. La parametrizzazione da utilizzare e la stessa indicata in (29.1), salvoche l’anomalia φ va ora considerata nel solo intervallo [0, π].
Si ha cosı la seguente espressione per la massa della superficie materiale
m =
∫[0,R]×[0,π]
σ(ρ, φ) ρ dρdφ
e il vettore posizione del baricentro G risulta dall’integrale doppio
G−O =1
m
∫[0,R]×[0,π]
ρ [cosφ e1 + sinφ e2]σ(ρ, φ) ρ dρdφ .
Nel caso il semidisco sia omogeneo, la densita σ puo essere ignorata ed il vettore posizionedel baricentro si riduce a
G−O =1∫
[0,R]×[0,π]
ρ dρdφ
∫[0,R]×[0,π]
ρ [cosφ e1 + sinφ e2] ρ dρdφ =
=1
πR2
2
R3
3
∫ π
0
[cosφ e1 + sinφ e2] dφ =4
3πe2 .
Vale la pena di sottolineare che l’annullarsi dell’ascissa di G era prevedibile in base adargomenti di simmetria — la retta Oy e asse di simmetria del sistema omogeneo.
Stefano Siboni 163

Universita degli studi di Trento Corso di Meccanica razionale
29.10 Lamina triangolare non omogeneaLe espressioni per la massa ed il baricentro di una lamina triangolare non omogenea, didensita assegnata, possono essere scritte in modo relativamente semplice introducendo unopportuno sistema di coordinate (u, v), che si costruisce nel modo seguente. Indicata conABC la lamina triangolare in esame, di vertici non allineati A, B, C e privata del suocontorno, se ne consideri un generico punto P . La retta congiungente P con il vertice Cindividua uno ed un solo punto Q sul lato opposto AB.
Dal momento che il punto P viene a trovarsi sul segmento CQ, il vettore posizione di Ppotra allora scriversi nella forma
P −O = v(C −O) + (1− v)(Q−O) v ∈ (0, 1) (29.2)
per un opportuno valore del parametro v nell’intervallo aperto (0, 1). In modo analogo, ilvettore posizione del punto Q, che appartiene al segmento AB, si esprime per mezzo dellarelazione
Q−O = (1− u)(A−O) + u(B −O) u ∈ (0, 1) (29.3)
nella quale il parametro u e individuato univocamente nell’intervallo (0, 1). La sostituzionedella (29.3) in (29.2) porge allora la parametrizzazione cercata della lamina triangolare,escluso il perimetro di questa,
ϕ(u, v) = (1− u)(1− v)(A−O) + u(1− v)(B −O) + v(C −O) (u, v) ∈ (0, 1)2.
Stefano Siboni 164

Universita degli studi di Trento Corso di Meccanica razionale
La parametrizzazione e chiaramente invertibile e regolare in (u, v) ∈ (0, 1)2, come risultaimmediato verificare calcolando le derivate parziali prime
∂ϕ
∂u(u, v) = −(1− v)(A−O) + (1− v)(B −O) = (1− v)(B −A)
∂ϕ
∂v(u, v) = −(1− u)(A−O)− u(B −O) + C −O = C −A+ u(A−B)
ed il relativo prodotto vettoriale
∂ϕ
∂u(u, v) ∧ ∂ϕ
∂v(u, v) = (1− v)(B −A) ∧ [C −A+ u(A−B)] = (1− v)(B −A) ∧ (C −A)
che ∀ (u, v) ∈ (0, 1)2 risulta non nullo e di direzione costante — ortogonale al piano ABC,dal momento che i tre punti sono per ipotesi non allineati. L’elemento infinitesimo di areavale allora
dA =
∣∣∣∣∂ϕ∂u (u, v) ∧ ∂ϕ∂v
(u, v)
∣∣∣∣ dudv = |(B −A) ∧ (C −A)|(1− v) dudv =
= 2 area(ABC) (1− v) dudv
per cui la massa della lamina risulta
m =
∫(0,1)2
σ(u, v)2 area(ABC) (1− v) dudv = 2 area(ABC)
∫(0,1)2
σ(u, v) (1− v) dudv .
Giova osservare che per σ(u, v) = σ0 costante — lamina omogenea — si ha
m = 2 area(ABC)σ0
∫(0,1)2
(1− v) dudv = 2 area(ABC)σ0
1∫0
du
1∫0
(1− v) dv =
= 2 area(ABC)σ0 · 1 ·[v − v2
2
]1
0
= area(ABC)σ0
come richiesto dalla definizione di densita areale. Per il baricentro del sistema si avra infinel’espressione
G−O =1
m
∫(0,1)2
[(1− u)(1− v)(A−O)+u(1− v)(B −O) + v(C −O)]·
· σ(u, v) 2 area(ABC)(1− v) dudv
che semplificando i fattori costanti si riduce a
G−O =
∫(0,1)2
[(1− u)(1− v)(A−O) + u(1− v)(B −O) + v(C −O)]σ(u, v)(1− v) dudv
∫(0,1)2
σ(u, v) (1− v) dudv
.
Stefano Siboni 165
Universita degli studi di Trento Corso di Meccanica razionale
Indice degli argomenti
1. Calcolo vettoriale in R3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.1 Vettori di R3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.1.1 Modulo di un vettore . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.1.2 Vettori unitari, o versori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.1.3 Somma vettoriale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.1.4 Prodotto di un vettore per uno scalare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.1.5 Relazione con la definizione generale di spazio vettoriale . . . . . . . . . . . . . . . . . . . . . . . 41.1.6 Sistemi di vettori linearmente dipendenti/indipendenti . . . . . . . . . . . . . . . . . . . . . . . . . 41.1.7 Prodotto scalare, o interno . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.1.8 Prodotto vettoriale, o esterno . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.1.9 Proprieta delle operazioni sui vettori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.1.10 Algebra vettoriale rispetto ad una base ortonormale . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.2 Vettori applicati . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.3 Identita vettoriali notevoli . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101.3.1 Identita del prodotto misto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101.3.2 Prodotto misto come determinante . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111.3.3 Identita del doppio prodotto vettoriale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2. Terne di riferimento nello spazio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122.1 Terne di riferimento cartesiane nello spazio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122.2 Cambiamento della terna di riferimento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.3 Esempio notevole . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3. Vettori applicati . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163.1 Definizioni fondamentali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163.1.1 Vettore applicato . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173.1.2 Sistema di vettori applicati . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173.1.3 Risultante di un sistema di vettori applicati . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173.1.4 Momento (polare) di un vettore applicato . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173.1.5 Momento (polare) di un sistema di vettori applicati . . . . . . . . . . . . . . . . . . . . . . . . . . . 173.2 Cambiamento del polo nel momento risultante . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183.2.1 Sistemi di vettori applicati con risultante nullo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183.2.2 Coppia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183.3 Momento assiale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.3.1 Momento assiale di un sistema di vettori applicati rispetto ad una retta
orientata a . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.4 Asse centrale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.4.1 Asse centrale di un sistema di vettori applicati con risultante non nullo . . . . . . . . 193.4.2 Teorema dell’asse centrale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203.5 Sistemi di vettori applicati paralleli . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
Stefano Siboni i

Universita degli studi di Trento Corso di Meccanica razionale
3.5.1 Centro di un sistema di vettori applicati paralleli con risultante non nullo . . . . . . 223.5.2 Il sistema delle forze peso. Baricentro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243.6 Sistemi equivalenti di vettori applicati . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243.6.1 Definizione. Sistemi equivalenti di vettori applicati . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253.6.2 Teorema di riduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253.6.3 Invariante scalare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263.6.4 Forma forte del teorema di riduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263.7 Sistemi continui di vettori applicati . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 273.7.1 Vettori applicati lungo una curva regolare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 273.7.2 Vettori applicati lungo una superficie regolare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4. Cinematica del punto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
5. Moti relativi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 305.1 Teorema dei moti relativi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 315.2 Teorema di Coriolis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 325.3 Teorema di Poisson . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 335.4 Esempio notevole di calcolo della velocita angolare . . . . . . . . . . . . . . . . . . . . . . . . . . . . 355.5 Velocita angolare istantanea e moti relativi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 375.6 Derivata assoluta e relativa di un vettore variabile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
6. Equazione del moto del punto materiale libero . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 396.1 Corpi puntiformi e primo principio della dinamica . . . . . . . . . . . . . . . . . . . . . . . . . . . . 396.2 Secondo principio della dinamica. Punto materiale . . . . . . . . . . . . . . . . . . . . . . . . . . . . 406.3 Estensione del secondo principio a terne non inerziali . . . . . . . . . . . . . . . . . . . . . . . . . 406.4 Forma matematica delle forze applicate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 416.5 Equazioni del moto per il punto libero . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
7. Equazioni differenziali del primo ordine in forma normale . . . . . . . . . . . . . . . . . . . . . . 457.1 Equazione differenziale del primo ordine in forma normale . . . . . . . . . . . . . . . . . . . . . 457.2 Problema di Cauchy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 477.3 Teorema di esistenza (o di Peano) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 477.4 Teorema di unicita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 487.5 Prolungamenti, soluzioni prolungabili, soluzioni massimali . . . . . . . . . . . . . . . . . . . . . 497.6 Teorema di esistenza ed unicita delle soluzioni massimali . . . . . . . . . . . . . . . . . . . . . . 507.7 Osservazione. Teorema di prolungabilita delle soluzioni massimali . . . . . . . . . . . . . . 50
8. Applicazione alla dinamica del punto materiale libero . . . . . . . . . . . . . . . . . . . . . . . . . . 52
9. Esempi notevoli di moti liberi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 539.1 Grave soggetto a resistenza viscosa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 539.2 Caduta di un grave soggetto a resistenza idraulica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 559.3 Punto soggetto ad una forza elastica. Oscillatore armonico semplice . . . . . . . . . . . 589.4 Moto armonico semplice con smorzamento viscoso e forzante sinusoidale . . . . . . . 61
Stefano Siboni ii
Universita degli studi di Trento Corso di Meccanica razionale
9.4.1 Soluzione generale dell’equazione omogenea . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 619.4.2 Soluzione particolare dell’equazione omogenea . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 649.4.3 Soluzione generale dell’equazione non omogenea . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 659.4.4 Risonanza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
10. Statica del punto libero . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6710.1 Quiete di un punto materiale libero . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6710.2 Equilibrio di un punto materiale libero . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6710.3 Caratterizzazione degli equilibri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6710.4 Comportamento del sistema in una posizione di equilibrio . . . . . . . . . . . . . . . . . . . . . 67
11. Punto materiale vincolato . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6811.1 Postulato delle reazioni vincolari . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6911.2 Attrito radente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7011.3 Vincoli lisci . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
12. Dinamica del punto materiale vincolato ad una curva fissa e liscia . . . . . . . . . . . . . 7112.1 Curve regolari . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7212.2 Curve biregolari. Triedro principale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7412.3 Equazioni pure del moto e problema di Cauchy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7612.4 Calcolo di reazioni vincolari e cimenti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
13. Dinamica del punto materiale vincolato ad una superficie fissa e liscia . . . . . . . . . . 7913.1 Superfici regolari . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7913.2 Equazioni pure del moto e problema di Cauchy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
14. Statica del punto materiale vincolato ad una curva fissa e liscia . . . . . . . . . . . . . . . . 8414.1 Definizione di equilibrio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8414.2 Caratterizzazione degli equilibri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
15. Statica del punto materiale vincolato ad una superficie fissa e liscia . . . . . . . . . . . . 8615.1 Definizione di equilibrio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8615.2 Caratterizzazione degli equilibri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
16. Vincoli con attrito . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8716.1 Legge dell’attrito radente statico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8716.2 Legge dell’attrito radente dinamico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8916.3 Osservazione. Verifica che µd ≤ µs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9016.4 Caratterizzazione dell’equilibrio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9116.5 Esempio notevole . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9216.5.1 Caso particolare del piano inclinato . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
17. Dinamica del punto materiale vincolato a una curva o superficie con attrito . . . . 9417.1 Moto lungo un piano inclinato con attrito . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
Stefano Siboni iii
Universita degli studi di Trento Corso di Meccanica razionale
17.2 Punto su una curva fissa con attrito . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9517.3 Punto su una superficie fissa con attrito . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
18. Osservazioni sulla dinamica e statica relative . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
19. Lavoro ed energia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10219.1 Teorema dell’energia cinetica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10219.2 Campi di forze posizionali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10319.3 Campi di forze posizionali e conservative . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10519.4 Teorema di conservazione dell’energia meccanica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10619.5 Esempi di forze posizionali e conservative . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10619.5.1 Forza costante (forza peso) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10619.5.2 Forza elastica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10719.5.3 Forza centrifuga . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10719.6 Campi di forze irrotazionali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10819.7 Irrotazionalita dei campi corservativi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10819.8 Condizione sufficiente per l’esistenza del potenziale . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10919.8.1 Insiemi semplicemente connessi. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10919.8.2 Insiemi stellati . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11119.8.3 Insiemi convessi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11219.8.4 Teorema di Poincare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11319.8.5 Estensione a campi vettoriali di Rn . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11419.9 Esempio di campo irrotazionale C1 non conservativo . . . . . . . . . . . . . . . . . . . . . . . . . . 11519.10 Esempio di calcolo del potenziale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11619.11 Punto su curva fissa e liscia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11719.12 Punto su superficie fissa e liscia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
20. Integrali primi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12020.1 Definizione di integrale primo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12020.2 Teorema di caratterizzazione degli integrali primi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12120.3 Esempio notevole di applicazione del teorema di caratterizzazione . . . . . . . . . . . . . . 12320.4 Ulteriore esempio di applicazione del teorema di caratterizzazione . . . . . . . . . . . . . . 124
21. Sistemi di punti materiali liberi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
22. Equazioni del moto per un sistema di punti materiali liberi . . . . . . . . . . . . . . . . . . . . 126
23. Statica di un sistema di punti materiali liberi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
24. Equazioni cardinali della dinamica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12724.1 Massa del sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12824.2 Baricentro o centro di massa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12824.3 Quantita di moto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12824.4 Momento angolare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
Stefano Siboni iv
Universita degli studi di Trento Corso di Meccanica razionale
24.5 Energia cinetica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12924.6 Principio di azione e reazione. Forze interne ed esterne al sistema . . . . . . . . . . . . . 12924.7 Equazione cardinale della quantita di moto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13024.8 Equazione cardinale del momento angolare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13124.9 Casi particolari della seconda equazione cardinale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13324.10 Teorema dell’energia cinetica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13324.11 Osservazione. π(i) = 0 identicamente lungo i moti rigidi del sistema . . . . . . . . . . . . 13424.12 Principio di indifferenza materiale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13524.13 Sistemi isolati . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13624.14 Equazioni del moto ed equazioni cardinali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
25. Equazioni cardinali della statica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
26. Teoremi di Konig . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13926.1 Moti traslatori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13926.2 Moto di un sistema attorno ad un punto, terne baricentrali . . . . . . . . . . . . . . . . . . . . 14026.3 Teorema di Konig per l’energia cinetica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14026.4 Teorema di Konig per il momento angolare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141
27. Proprieta del baricentro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14227.1 Proprieta distributiva . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14227.2 Proprieta dell’inviluppo convesso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14427.3 Proprieta legate alle simmetrie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14727.3.1 Centro di simmetria . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14727.3.2 Asse di simmetria . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14827.3.3 Asse di simmetria di ordine n (n intero positivo ≥ 2 ) . . . . . . . . . . . . . . . . . . . . . . . . . 14927.3.4 Piano di simmetria. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15127.3.5 Piano diametrale coniugato alla direzione di una retta . . . . . . . . . . . . . . . . . . . . . . . . . 151
28. Baricentro dei sistemi continui . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15228.1 Curve materiali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15228.2 Superfici materiali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15328.3 Solidi materiali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15528.4 Estensione delle proprieta del baricentro ai sistemi continui . . . . . . . . . . . . . . . . . . . . 156
29. Calcolo di baricentri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15829.1 Disco circolare omogeneo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15829.2 Lamina rettangolare omogenea . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15829.3 Parallelogramma omogeneo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15829.4 Lamina triangolare omogenea . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15929.5 Asta rettilinea non omogenea . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16029.6 Lamina rettangolare non omogenea . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16029.7 Semicirconferenza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16129.8 Disco circolare non omogeneo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162
Stefano Siboni v
Universita degli studi di Trento Corso di Meccanica razionale
29.9 Semidisco circolare non omogeneo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16329.10 Lamina triangolare non omogenea . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164
Stefano Siboni vi

![01a Forze.ppt [modalità compatibilità] - architettobotta.it · Forze complanari concorrenti. Sistemadi2forze–Grafica(REGOLADELPARALLELOGRAMMA). Graficamentela risultante siricavacomesegue:](https://static.fdocumenti.com/doc/165x107/5c6acc9d09d3f2a1458b5627/01a-forzeppt-modalita-compatibilita-forze-complanari-concorrenti-sistemadi2forzegraficaregoladelparallelogramma.jpg)