Un P di matematica -...
12
Un Pò di matematica
Transcript of Un P di matematica -...
Un Pò di matematica
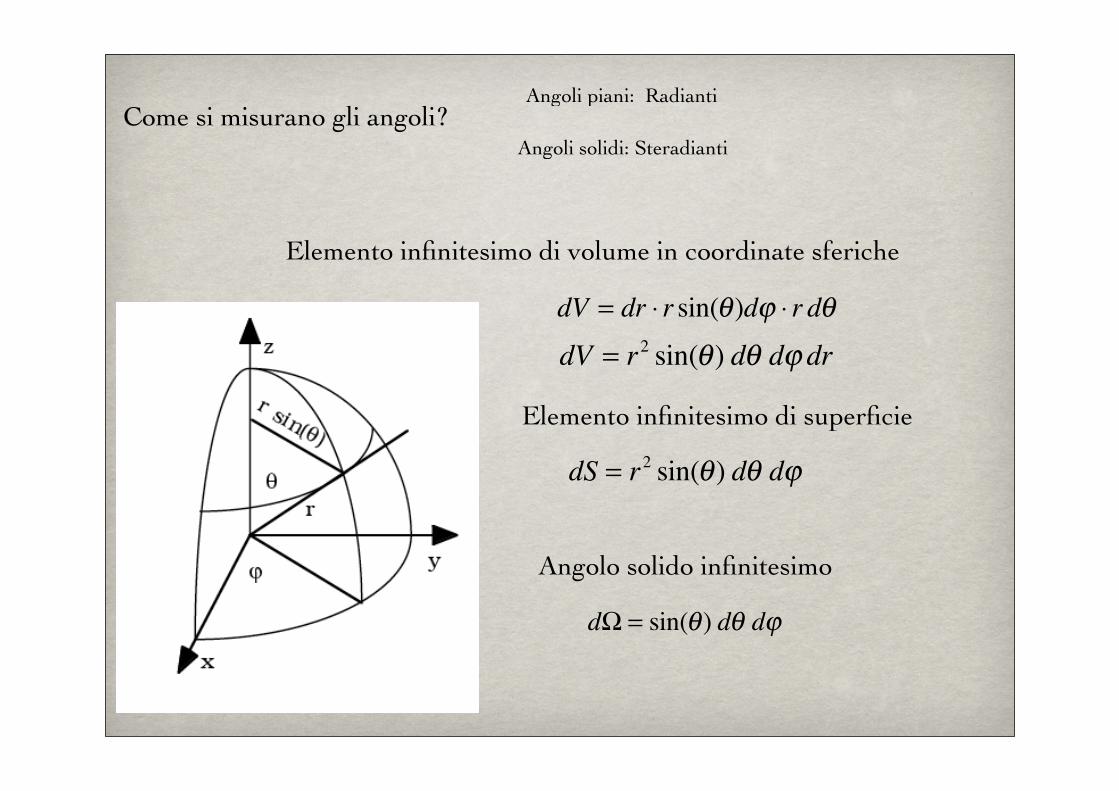
Elemento infinitesimo di volume in coordinate sferiche
dV = dr ⋅ r sin(θ)dϕ ⋅ r dθ
Come si misurano gli angoli?Angoli piani: Radianti
Angoli solidi: Steradianti
Elemento infinitesimo di superficie
Angolo solido infinitesimo
dV = r2 sin(θ) dθ dϕ dr
dS = r2 sin(θ) dθ dϕ
dΩ = sin(θ) dθ dϕ

Cosa è un vettore?Non una qualunque terna di numeri può essere una grandezza vettoriale
Prodotto scalare
Prodotto vettoriale
Somma
A =B +C
s =B ⋅C
A =B ×C
Alcuni casi notevoli
A ×A = 0
A ⋅A ×B( ) = 0
A ⋅B ×C( ) = A ×
B( ) ⋅ C
A ×
B ×C( ) = B A ⋅ C( ) − C A ⋅ B( )
Risultato è un vettore
Risultato è un vettore
Risultato è uno scalare

Integrale
A = ρ r( )V∫ dv
Due integrali particolari:
Flusso:
Circolazione:
Φ =E ⋅ n
S∫ ds
La superficie S può essere chiusa oppure aperta
Normale alla superficieCampo vettoriale
A =E ⋅dl
Γ∫
Linea chiusa
Campo vettoriale
Elemento di linea
Elemento di superficie

f (r0 + Δr
) f (r0 ) +
∇ ⋅ f r( )( )r = r0 ⋅ Δr
Come sono connessi i valori di una funzione in due punti vicini tra loro?
Gradiente
f (r0 + Δr
) f (r0 ) + df (r )dx
⎛⎝⎜
⎞⎠⎟ r = r0
Δx +df (r )dy
⎛⎝⎜
⎞⎠⎟ r = r0
Δy +df (r )dz
⎛⎝⎜
⎞⎠⎟ r = r0
Δz
Ha la struttura di un prodotto scalare
∇ =
ddx, ddy, ddz
⎛⎝⎜
⎞⎠⎟
Nabla
Il risultato è una grandezza vettoriale
Opera su di una funzione scalare

L’operatore differenziale nabla può essere applicato anche ad una grandezza vettoriale
Si definiscono in questo modo due operazioni
Divergenza
Rotore
∇ ⋅A =
ddx, ddy, ddz
⎛⎝⎜
⎞⎠⎟⋅A =
ddxAx +
ddyAy +
ddzAz
Il risultato è una grandezza scalare
Il risultato è una grandezza vettoriale
∇ ×A =
ddx, ddy, ddz
⎛⎝⎜
⎞⎠⎟×A =
ddxAy −
ddyAx
⎛⎝⎜
⎞⎠⎟i + .....

A ⋅ s = s ⋅
A
∇ ⋅ s ≠ s ⋅
∇invece
Spesso nabla si comporta come una normale grandezza vettoriale
Spesso, ma non sempre
∇ ⋅A ≠A ⋅∇
∇ ×A ≠A ×∇
ugualmente:

Derivate seconde dei campi
Se il campo è un campo scalare:
Se il campo è un campo vettoriale:
∇ ⋅∇Τ( )
∇ ×
∇Τ( )
Divergenza di un gradiente
Rotore di un gradiente
∇ ×
∇ ×A( )
∇ ⋅∇ ×A( )
∇∇ ⋅A( )
Rotore di un rotore
Divergenza di un rotore
Gradiente di una divergenza

∇ ⋅∇ ×A( ) = 0
∇ ×
∇Τ( ) = 0
Valgono le:
Si può mostrare che valgono pure le inverse
Se allora
∇ ×A = 0
A =∇T
∇ ⋅A = 0
A =∇ ×B
∇Φ ×
∇Ψ ≠ 0Notare tuttavia, ad esempio, che:

Divergenza di un gradiente
Rotore di un rotore
∇ ⋅∇Τ( )
∇ ×
∇ ×A( )
∇ ⋅∇Τ( ) = d 2
dx2T +
d 2
dy2T +
d 2
dz2T = ∇2T Associa ad uno scalare una
seconda grandezza scalare
Può essere applicata anche ad una grandezza vettoriale
∇2 A = ∇2Ax ,∇
2Ay ,∇2Az( )
∇ ×
∇ ×A( ) = ∇ ⋅
∇ ⋅A( ) − ∇2 A

Tre teoremi
1) Dato un campo scalare ‘s’, la differenza tra i valori assunti
dal campo in due punti qualsiasi può essere espressa
come:
s(β) − s(α ) =∇s( )
Γ
α→β
∫ ⋅dl
2) Teorema di Gauss
3) Teorema di Stokes
A ⋅ n ds
S∫ =
∇ ⋅A dv
V∫
A ⋅dl
Γ∫ =
∇ ×A( ) ⋅ n ds
S∫
Convenzione della regola della mano destra

Simmetria dei corpi e proprietà fisiche in punti correlati
Assumiamo che tutte le proprietà fisiche,
sia dei corpi che dello spazio che li
circonda, riflettano le proprietà di
simmetria del complesso di oggetti materiali che forma il
sistema.










![Pitagora - icgallico.gov.it · Capitolo1 Pitagora CopiaromanadelIsec.a.C.dioriginalegrecoconservatanei MuseiCapitolinidiRoma Pitagora[2] (Samo, tra il 580 e il 570 – Metaponto,](https://static.fdocumenti.com/doc/165x107/5c66dc2309d3f252168cfa43/pitagora-capitolo1-pitagora-copiaromanadelisecacdioriginalegrecoconservatanei.jpg)