TesiFusioneImmagini_01
48
Fusione di immagini TC-RM-SPET nella radioterapia dei tumori cerebrali: validazione ed implementazione clinica di un algoritmo basato sulla misura di entropia Universit` a degli Studi di Milano Scuola di Specializzazione in Fisica Sanitaria Marco DOMINIETTO Cod PACS: 95.75 M Anno Accademico 2003-2004
-
Upload
giorgia-giulianelli -
Category
Documents
-
view
118 -
download
0
description
Uploaded from Google Docs
Transcript of TesiFusioneImmagini_01

Fusione di immagini TC-RM-SPET nella
radioterapia dei tumori cerebrali: validazione
ed implementazione clinica di un algoritmo
basato sulla misura di entropia
Universita degli Studi di Milano
Scuola di Specializzazione in Fisica Sanitaria
Marco DOMINIETTO
Cod PACS: 95.75 M
Anno Accademico 2003-2004

La mia vita ha sensonella misura in cui
e utile agli altri.
Bob Marley
1

Indice
1 Introduzione 4
2 Considerazioni teoriche 62.1 Trasformazioni geometriche . . . . . . . . . . . . . . . . . . . . . . 6
2.1.1 Trasformazioni rigide . . . . . . . . . . . . . . . . . . . . . . 62.1.2 Trasformazioni non rigide . . . . . . . . . . . . . . . . . . . 7
2.2 Metodi di registrazione . . . . . . . . . . . . . . . . . . . . . . . . . 82.2.1 Punti fiduciali . . . . . . . . . . . . . . . . . . . . . . . . . . 82.2.2 Cross correlation e Local correlation . . . . . . . . . . . . . 102.2.3 Entropy based . . . . . . . . . . . . . . . . . . . . . . . . . 10
3 Materiali e metodi 133.1 Fantocci . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133.2 Pazienti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153.3 Tecniche diagnostiche . . . . . . . . . . . . . . . . . . . . . . . . . 153.4 Validazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.4.1 Definizione del gold standard . . . . . . . . . . . . . . . . . 193.4.2 Definizione degli estimatori . . . . . . . . . . . . . . . . . . 223.4.3 Fantocci . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253.4.4 Pazienti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263.4.5 Definizione dei valori limiti . . . . . . . . . . . . . . . . . . 27
4 Risultati 294.1 Accuratezza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.1.1 Fantocci . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 294.1.2 Pazienti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
4.2 Robustezza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 314.3 Tempo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
5 Discussione 385.1 Gold standard . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 385.2 Accuratezza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 395.3 Robustezza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
5.3.1 Fantocci . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 395.3.2 Pazienti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
5.4 Tempo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
6 Conclusioni 42
2

7 Ringraziamenti 43
Bibliografia 44
3

Capitolo 1
Introduzione
Lo scopo di questa tesi e la valutazione di un sistema automatico di co-registrazionedi immagini intra e multimodali basato su misure di correlazione e di entropia peril contornamento dei volumi di interesse nel trattamento radioterapico dei gliomiad alto grado.Questo lavoro e stato svolto presso il Servizio di Fisica Sanitaria in collaborazionecon il Servizio di Medicina Nucleare, con il Reparto di Radioterapia e con il Ser-vizio di Radiodiagnostica dell’Ospedale Maggiore della Carita di Novara.In radioterapia l’acquisizione di immagini anatomiche in modo non invasivo e par-te centrale della procedura di trattamento. Sulla base di queste immagini vengonoinfatti definiti i volumi tumorali da irradiare e gli organi a rischio da preservare.Le informazioni ottenute mediante modalita diagnostiche differenti sono di natu-ra complementare. Mentre le immagini di risonanza magnetica (RM) descrivonoin modo molto accurato i tessuti molli, quelle di tomografia computerizzata (TC)danno una rappresentazione ottimale dei tessuti ossei. Gli esami medico nuclea-ri come la tomografia ad emissione di singolo fotone (SPET) o la tomografia ademissione di positroni (PET) forniscono informazioni sulla biologia e sull’attivitametabolica dei tessuti in esame.La possibilita di integrare tutte queste informazioni in un’unica rappresentazionepermette un notevole miglioramento nella comprensione dello stato e dell’evolu-zione della malattia. In particolare, con riferimento al trattamento radioterapico,il poter disporre contemporaneamente di immagini anatomiche (TC e RM) e fun-zionali (SPET o PET) offre notevoli vantaggi nel delineamento del tumore, nelladiscriminazione tra necrosi e persistenza di malattia e nella valutazione della ri-sposta alla terapia. Per questi motivi i sistemi di co-registrazione di immaginimultimodali possono diventare uno strumento molto utile nella routine clinica.In questo lavoro si discutera dell’applicazione di questa metodica ai tumori deldistretto encefalico dove, da tempo, e in atto presso la nostra istituzione un pro-tocollo di studio per l’ottimizzazione del trattamento radioterapico dei gliomi adalto grado. Tale studio si avvale della fusione di immagini multimodali CT, MR,SPET con metodo interattivo.Il motivo dell’interesse per questo tipo di localizzazione risiede in due ragioniprincipali: la prima attiene alla conformazione della scatola cranica che per de-finizione puo essere assimilata ad un corpo rigido e quindi puo essere facilmenteimmobilizzata rendendo appropriati i metodi di co-registrazione che si basano sutrasformazioni rigide. La seconda attiene a considerazioni cliniche. I gliomi ad alto
4

grado hanno la caratteristica di essere neoplasie fortemente localizzate e quindi, inlinea di principio, particolarmente adatte per un trattamento locoregionale qualequello radioterapico. Purtroppo sono anche forme altamente aggressive e radiore-sistenti che conducono ad un’aspettativa di vita ancora tutt’oggi molto breve.La delineazione del volume bersaglio rimane materia di dibattito e non vi sonolinee guida condivise su cosa e quanto trattare. La moderna radioterapia del restoevolve verso tecniche di sempre maggiore focalizzazione consentendo un aumentodella dose. Anche se gli studi di dose escalation riportati in letteratura mostranorisultati controversi, e lecito aspettarsi un miglior controllo locale di malattia conl’aumento della dose. Il punto cruciale diventa allora cosa e soprattutto dove ir-radiare. Questi rimangono problemi aperti alla cui soluzione la co-registrazione diimmagini morfologiche e funzionali puo fornire un contributo molto utile in termi-ni di comprensione della malattia e di miglioramento della strategia terapeutica.Per diventare una tecnica appropriata ed efficace i metodi di coregistrazione auto-matica devono risultare accurati e robusti con livelli di errore compatibili con quellidelle attuali procedure radioterapiche speciali quali la stereotassi e l’IMRT (In-tensity Modulated Radiation Therapy). Questa verifica sara condotta nel presentelavoro di tesi.
5

Capitolo 2
Considerazioni teoriche
2.1 Trasformazioni geometriche
Viene definita registrazione la trasformazione geometrica biunivoche allinea i puntidi un oggetto riferiti ad uno spazio con i corrispettivi punti dello stesso o di unaltro oggetto rappresentati in un altro spazio [1]. Come oggetti si considererannoimmagini digitali (TC, RM, SPET o PET) e come spazi gli spazi individuati dalsistema di coordinate di acquisizione.Se si applica la trasformazione Γ al punto x nello spazio X otterremo il punto y
nello spazio Y.
y = Γ(x) (2.1)
Se il punto y nello spazio Y corrisponde a x nello spazio X la registrazione ecorretta. Ogni valore di Γ(x)-y diverso da zero e detto errore di registrazione .I possibili tipi di trasformazioni possono essere classificati in molti modi [1].Solitamente vengono suddivise in rigide e non rigide.
2.1.1 Trasformazioni rigide
Le trasformazioni rigide conservano le distanze, gli angoli, la rettilineita dellelinee e la planarita delle superfici degli oggetti considerati. Sono identificate dadue componenti: la traslazione T e la rotazione R. T e definita da un vettoretridimensionale la cui componenti indicano la traslazione lungo i tre assi cartesiani.R e una matrice che puo essere definita mediante il metodo di Cailey-Klein, deiquaternioni e delle matrici ortogonali. In questo lavoro e stato utilizzato questoultimo metodo che descriveremo brevemente.Considerando una trasformazione Γ tale che:
x’ = Rx + T (2.2)
dove R e una matrice ortogonale 1, quindi R−1=Rt.Questo tipo di matrici include sia le rotazioni proprie che quelle improprie . Men-tre le prime descrivono solo le rotazioni fisicamente compatibili con l’oggetto inesame, le seconde descrivono tutti i tipi geometricamente possibili di rotazioni.
1se R ortogonale ↔ RtR=RR
t=I
6

Clinicamente queste non possono essere accettate in quanto ammetterebbero peresempio anche la riflessione mutando la parte destra con la sinistra di un’imma-gine diagnostica. Per eliminare questo problema occorre imporre det(R)=+1.Le rotazioni proprie possono essere parametrizzate in termini di angoli di rota-zione θx, θy, θz attorno ai rispettivi assi. Questi angoli sono denominati angoli diEulero. Si definiscono quindi tre matrici Rz, Ry e Rx che determinano rispettiva-mente la rotazione attorno a z, x, y. La rotazione complessiva nello spazio e datadal prodotto delle tre matrici.
R = RzRyRx =
cos θz −sin θz 0sin θz cos θz 0
0 0 1
cos θy 0 sin θy
0 1 0− sin θy 0 cos θy
1 0 00 cos θx − sin θx
0 sin θx cos θx
=
cos θy cos θz − cos θx sin θz + sin θx sin θy cos θz ...
cos θy sin θz cos θx cos θz + sin θx sin θy sin θz ...
− siny sin θx cos θy ...
... sin θx sin θz + cos θx sin θy cos θz
... − sin θx cos θz + cos θx sin θy sin θz
... cos θx cos θy
)
(2.3)
Il metodo di Cailey-Klein e dei quaternioni permettono una parametrizzazionesimile dei parametri della rotazione [2].
2.1.2 Trasformazioni non rigide
Le trasformazioni non rigide rivestono un importante ruolo nelle applicazioni alleparti anatomiche deformabili come il distretto toracico. Si dividono in:
Trasformazioni di scala
Le trasformazioni di scala sono equivalenti a quelle rigide eccetto per un fattoredi scala S
x’ = SRx + T (2.4)
dove S=diag( sx, sy,sz) e una matrice diagonale i cui elementi definiscono i fattoridi scala per le tre coordinate. Se questi sono identici nelle tre direzioni il fattoredi scala e definito isotropo e la trasformazione e detta simile.
x’ = sRx + T (2.5)
dove s e uno scalare 2. Tali trasformazioni preservano la linearita delle linee egli angoli.
2se s> 1 si avra una dilatazione dell’immagine. Se s< 1si avra una contrazione dell’immagine
7

Figura 2.1: Tipi di trasformazioni nel caso di immagini 2-dimensionali
Trasformazioni affini
Le trasformazioni affini rappresentano un ampliamento delle trasformazioni discala sopra descritte.
x’ = Ax + T (2.6)
dove non ci sono restrizioni sugli elementi aij della matrice A. Le trasformazioniaffini preservano la linearita delle linee e la planarita delle superfici ma non gliangoli. Altri tipi di trasformazioni non rigide sono le trasformazioni proiettive,quelle curve e quelle prospettive [1] [3].
2.2 Metodi di registrazione
Molti metodi possono essere usati per la registrazione. I metodi basati sulle im-magini [1] [4] sono suddivisi in estrinseci e intrinseci. I primi si basano su reperiposizionati sul paziente e visibili a tutte le metodiche considerate. I secondi sulcontenuto informativo delle sole immagini. La registrazione puo anche essere ba-sata su una serie di punti fiduciali, sulla segmentazione delle strutture e sul valoredi grigio dei pixel. Nel prossimo capitolo tratteremo nel dettaglio quattro tipi dialgoritmi basati sui punti fiduciali, sulle misure di intensita dei singoli voxel e sullemisure di entropia.
2.2.1 Punti fiduciali
Il processo di registrazione mediante punti fiduciali e basato sull’individuazionedi punti di repere. Questi possono essere applicati (marker esterni o interni) alpaziente oppure possono essere reperi anatomici visibili in entrambi i data set. Inogni caso, il posizionamento del punto non coincidera quasi mai con quello reale.Quest’indeterminazione nel posizionamento del punto e denominata FLE (fiducial
8

Figura 2.2: Esempio di fusione TC-RM nelle viste transassiali, sagittali e coronali.
localization error).Questo errore puo essere valutato. Per i marker esterni il FLE decresce conl’aumentare delle dimensioni del marker. Il punto di repere deve coincidere con lecoordinate del centroide del marker.La differenza tra il punto trasformato Γ(x) e il corrispettivo punto y e definitacome FRE (fiducial registration error)
FREi = Γ(xi) − yi (2.7)
dove xi e yi sono i corrispettivi punti fiduciali rispettivamente nello spazio X eY. Possiamo inoltre definire FRE2 come la media pesata FRE2
i
FRE2 =1
N
N∑
i=1
w2
i FRE2
i (2.8)
dove N e il numero di punti fiduciali usati e wi e il fattore di peso che coincidecon l’inverso di FLE :
Wi =1
FLE2
i
(2.9)
Se la trasformazione da determinare e rigida, la (2.8) puo essere scritta come:
FRE2 =1
N
N∑
i=1
1
FLE2i
(Rxi + T − yi)2 (2.10)
9

Lo scopo e trovare la trasformazione che minimizzi questa equazione. [5] [6] [7]. Lasua minimizzazione costituisce la soluzione del problema di Procruste 3 ampiamentedescritto in letteratura [5].
2.2.2 Cross correlation e Local correlation
I metodi di correlazione sono basati sul confronto dell’intensita di coppie di voxelnei due set di immagini.Se i valori di intensita nei due set sono correlati linearmente esiste una corrispon-denza lineare tra i valori di intensita dei voxel delle due immagini. Il coefficientedi correlazione CC e il migliore candidato per fornire una misura di similarita [8].Per due set di immagini A e B, il coefficiente di correlazione e definito come:
CC =
∑
i(A(i) − A) (B′(i) − B′)[
∑
i(A(i) − A)2∑
i(B′(i) − B′)
] 1
2
∀i ∈ A ∩ B′ (2.11)
dove i e il numero di pixel (i=1.....N ), A e B′ sono rispettivamente i valori medidei voxel nell’immagine A e in quella trasformata B. La soluzione del problemaconsiste nel trovare la trasformazione che massimizza CC.Sia l’algoritmo di cross che di local correlation sfruttano il coefficiente di corre-lazione CC. Mentre il primo applica il calcolo all’immagine globale, il secondosuddivide l’immagine in un determinato numero di subset su cui esegue il calcolobasandosi sempre sull’ipotesi che per immagini multimodali dello stesso oggetto ladistribuzione relativa dei grigi sia localmente invariante. In teoria la suddivisionein subset dovrebbe fornire risultati piu accurati a scapito della potenza di calcolorichiesta.Nel caso di algoritmi che sfruttino il coefficiente di correlazione e importante os-servare che le due immagini devono possedere le stesse dimensioni e circa lo stessocontenuto informativo. Questo e dovuto al fatto che viene sfruttata la corrispon-denza pixel a pixel dei due set di immagini. Tale metodo risulta quindi ottimaleper la co-registrazione intramodalita (TC-TC, RM-RM, SPET-SPET) come nelcaso di studi retrospettivi. Per gli studi tra modalita diverse e necessario chela struttura dell’immagine sia molto simile: si ottengono buoni risultati con co-registrazioni TC-RM o SPET-PET, ma non con co-registrazioni TC-SPET, TC-PET, RM-SPET o RM PET.
2.2.3 Entropy based
Questi metodi sfruttano due concetti fondamentali della teoria dell’informazione:la mutual information e l’entropia.Consideriamo due variabili casuali A e B, con distribuzione marginale di proba-bilita pA(a) e pB(b) e con distribuzione congiunta di probabilita pAB(a, b). A e Bsono statisticamente indipendenti se:
pAB(a, b) = pA(a) · pB(b) (2.12)
3Le tecniche procrustiane consentono di evitare molti problemi legati alla linearizzazione disistemi di equazioni lineari e non mediante il ricorso a procedure iterative. Questo comporta unnotevole risparmio di tempo e minori complessita di calcolo.
10

mentre sono totalmente dipendenti se sono legate da una trasformazione Γ taleche
pA(a) = pB(Γ(a)) = pAB(a,Γ(a)) con b = Γ(a) (2.13)
Si definisce mutual information I(A,B):
I(A,B) =∑
a,b
pAB(a, b) · logpAB(a, b)
pA(a) · pB(b)(2.14)
e rappresenta la misura del grado di dipendenza di A e B per mezzo della misuradi Kullback-Leibler [9] [10]. Tale misura rappresenta la distanza tra la distribuzio-ne congiunta di probabilita pAB e la distribuzione associata nel caso di completaindipendenza pA(a)·pB(b). Per quanto riguarda l’entropia ci sono molte definizioniin letteratura in base al campo nel quale tale concetto e applicato. In questo lavo-ro abbiamo considerato la definizione di Shannon che definisce l’entropia l’H(A)associata alla variabile A come:
H(A) =∑
a
pA(a) · log1
pA(a)= −
∑
a
pA(a) · log pA(a) (2.15)
dove H(A) misura il grado di incertezza di A.Date due variabili casuali che nel nostro caso sono i due set di immagini, possiamoinoltre definire:
H(A,B) = −∑
a,b
pAB(a, b) · log pAB(a, b) (2.16)
H(A|B) = −∑
a,b
pAB(a, b) · log pA|B(a|b) (2.17)
dove H(A,B) e l’entropia congiunta di A e B e la grandezza H(A|B) misural’incertezza su A che si ha dalla conoscenza di B.
La mutual information I(A,B) e l’entropia H sono legate dalla seguente rela-zione
I(A,B) = H(A) + H(B) − H(A,B) (2.18)
= H(A) − H(A|B) (2.19)
= H(B) − H(B|A) (2.20)
Dall’ultima equazione osserviamo che I(A,B) rappresenta la riduzione di incertezzadella variabile casuale B dovuta alla conoscenza della variabile A. Equivalentemen-te si puo anche affermare che I(A,B) rappresenta la quantita di informazione di Bcontenuta in A.4
Consideriamo i valori di intensita a e b, di un coppia di voxel corrispettivi nelledue immagini A e B. Le intensita a e b sono legati dalla trasformazione geometricaΓ. Lo scopo di tale metodo e trovare la trasformazione Γ che massimizzi la mutual
4Proprieta fondamentali di I(A,B):
11

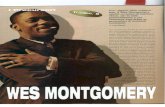
Figura 2.3: Istogrammi congiunti di probabilita TC-RM. A sinistra prima di effettuare
la co-registrazione I=0.46. A destra dopo la co-registrazione I=0.89.
information I(A,B). In questa condizione le due immagini saranno correttamenteallineate.
Positivita I(A,B) ≥ 0Indipendenza I(A,B) = 0 ⇐⇒ pAB(a, b) = pA(a) · pB(b)
Simmetria I(A,B) = I(B,A)Self information I(A,B) = H(A)
Boundedness I(A,B) ≤ H(A,B)≤ min(H(A),H(B))≤ H(A)+H(B)
12

Capitolo 3
Materiali e metodi
3.1 Fantocci
Sono stati usati tre fantocci antropomorfi: Alderson Rando, il fantoccio di Hoffmane un particolare fantoccio realizzato in casa chiamato Remedios. Tutti e tre sonostati preparati in modo tale da essere visibili alla TC, RM, e SPET.
Alderson Rando
Alderson Rando e un comune fantoccio dedicato per la CT in radiologia e radiote-rapia. Esso e composto da un intero scheletro [11] umano immerso in una specialeresina che simula i tessuti molli del corpo. La densita della resina varia in fun-zione degli organi principali in modo da avere una rappresentazione dell’anatomiaumana. Esso e inoltre suddiviso in fette dello spessore di 4 cm e ha una serie difori per l’alloggiamento di reperi o dosimetri.Per questo lavoro e stato usato solo il capo. Per individuare il contorno alla SPETil fantoccio e stata avvolto con una cannula di diametro 3 mm, riempita con unasoluzione di 99mTc (concentrazione 2.2 MBq/ml) e Gadodiamide (concentrazione0.5 mmol/l). Sono inoltre stati posizionati internamente quattro capillari riem-piti con 99mTc (concentrazione 61 MBq/ml) e Gadodiamide (concentrazione 0.5mmol/l) utilizzati come reperi intracranici.
Hoffman
Il fantoccio di Hoffman e composto da un cilindro (diametro 20.8cm, altezza17.5cm) al cui interno sono alloggiati degli inserti in plexiglass opportunamen-te sagomati e forati sulla base dei lobi cerebrali. Questo fantoccio e dedicato allevalutazioni di perfusione cerebrale in SPET e PET ma risulta comunque visibileanche alla TC e alla RM.Tale fantoccio e stato riempito con una soluzione di 99mTc (concentrazione 2.2MBq/ml) e Gadodiamide (concentrazione 0.5 mmol/l).
Remedios
Remedios e un particolare fantoccio ideato appositamente per questo lavoro. E’un teschio umano lobotomizzato che consente un libero accesso alla cavita cranica.Per simulare i lobi cerebrali e stato riempito con uno speciale materiale chiamato
13

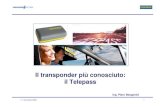
Figura 3.1: Fantoccio di Hoffman. Nella seconda figura e rappresentato un inserto in
plexiglass
Dido . Esso e composto da: NaCl 7%, acqua 46%, farina di frumento bianca 46%,cremortartaro 0.3%, olio di vaselina 0.7% miscelati e riscaldati a circa 80◦C fino aquando la soluzione passa dallo stato liquido a quello solido. Una volta raffreddatoe stato modellato per assumere la forma dei lobi che sono stati posti all’internodella cavita cranica.All’interno del lobo parietale sinistro e stata inoltre posizionata una sfera di dia-metro di 1.7 cm per simulare un tumore cerebrale. Tale sfera e stata riempita conuna soluzione di 99mTc (concentrazione 8.2 MBq/ml) and Gadodiamide (concen-trazione 0.5 mmol/l).Analogamente per individuare il contorno alla SPET il fantoccio e stato avvoltocon una cannula di diametro 3 mm, riempita con una soluzione di 99mTc (concen-trazione 2.2 MBq/ml) e Gadodiamide (concentrazione 0.5 mmol/l).
Figura 3.2: Fantoccio di Remedios. Si osservano la cannula che avvolge la teca cranica
per individuare il contorno alla SPET.
14

3.2 Pazienti
Per questo studio sono stati candidati dieci pazienti (4 donne e 6 uomini, eta media51.4 anni) affetti da glioblastoma multiforme. Ognuno di essi e stato sottopostoad intervento chirurgico per la resezione della massa neoplastica e successivamentecandidato a trattamento radioterapico. Il protocollo di studio prevede l’esecuzionedegli esami TC, RM e SPET per la definizione del volume da trattare (PTV)in seguito all’esito dell’intervento chirurgico e per l’individuazione degli organi arischio (OAR).
3.3 Tecniche diagnostiche
TC
Gli esami TC sono stati eseguiti con un scanner Prospeed plus GE. Per l’immobi-lizzazione dei pazienti sono state usate le stesse maschere termoplastiche persona-lizzate per il trattamento radioterapico. I parametri TC usati sono stati: spessoredella fetta 3mm, campo di vista (FOV) 30 cm, tensione del tubo 120 KV, corrente130mA, dimensione della matrice 512x512 pixel, dimensione del pixel 0.049 cm.
RM
Gli esami RM sono stati eseguiti con un scanner Signa Contour GE 0.5 T. Le ac-quisizioni sono state eseguite con la bobina per l’encefalo standard dopo la sommi-nistrazione del mezzo di contrasto (Gd-DTPA 15 ml). I parametri RM usati sonostati: sequenza fast-spin-echo pesata T1 assiale, spessore della fetta 3mm,campodi vista (FOV) 30 cm, dimensione della matrice 256x256 pixel, dimensione delpixel 1.17 mm. In questo caso non e stata utilizzata la maschera termoplasticaper l’immobilizzazione del paziente. Cio e dovuto al fatto che essa non era com-patibile con le dimensioni della bobina per l’encefalo ed in assenza di quest’ultimale immagini erano troppo rumorose. Per impedire eventuali movimenti in fase diacquisizione, si e quindi scelto di immobilizzare il capo del paziente con una fasciadi velcro e di correggere via software eventuali errori sistematici di set-up.
SPET
Gli esami SPET sono stati eseguiti con una gamma-camera Varicam GE. Le ac-quisizioni sono state eseguite 10 min dopo la somministrazione di 99mTc-MIBI(740 MBq). Per l’immobilizzazione dei pazienti sono state usate le stesse masche-re termoplastiche personalizzate per il trattamento radioterapico. I parametri diacquisizione e ricostruzione usati sono stati: spessore della fetta 4.41 mm, campodi vista (FOV) 30 cm, dimensione della matrice 128x128 pixel, dimensione delpixel 2.34mm.
I parametri utilizzati per le tre metodiche sono riassunti nella tabella sottostante.
15

modalita px py pz dimensione della matrice FOV
CT 0.049 0.049 0.3 512x512 25MR 0.117 0.117 0.3 256x256 30
SPET 0.234 0.234 0.441 128x128 30
Tabella 3.1: Parametri di acquisizione. I parametri px, py e pz rappresentano ledimensioni in cm del pixel nelle tre direzioni. Il FOV (field of view) e espresso in cm.
Workstation
Tutti gli esami eseguiti sono stati trasferiti via rete alla workstation Syntegra(Pinnacle, ver. 1.2b, sistema operativo Unix Sun Solaris). Essa consente la fusio-ne manuale ed implementa i seguenti algoritmi per la fusione automatica: crosscorrelation, local correlation e mutual information. Permette inoltre la fusionemediante l’utilizzo di punti fiduciali e l’allineamento interattivo.Questa versione del software permette solo le trasformazioni rigide.Le macchine TC, MR, SPET e la workstation sono connesse ad un Dicom serverper il trasferimento dell’immagini via rete.Il sistema permette la co-registrazione di due data-set alla volta. Il primario(generalmente il set di immagini piu risoluto) viene selezionato come riferimentoprincipale e il sistema calcola la trasformazione da applicare al secondario per so-vrapporsi al primo.Durante il processo di co-registrazione le immagini possono essere visualizzate percui e possibile valutare anche visivamente le trasformazioni applicate. E’ inoltrepossibile la visualizzazione in varie modalita: transassiale, coronale, sagittale, 3D,3D con diversi piani di taglio con opportuni strumenti grafici che consentono lavalutazione visiva dell’allineamento delle immagini.
16

Figura 3.3: Fusione TC-SPET per il fantoccio Remedios. Sono ben visibili i contorni della
teca cranica e la sfera posizionata per simulare la lesione all’esame TC (prima colonna),
all’esame SPET (seconda colonna) e loro fusione (terza colonna)
17

Figura 3.4: Fusione TC-RM. Si osserva come sono diversi i contenuti informativi della
TC (prima colonna) e della RM (seconda colonna).
18

3.4 Validazione
Lo scopo della validazione e valutare quantitativamente il successo della core-gistrazione. A tale scopo molti autori suggeriscono la valutazione dei seguentiparametri: fattibilita, accuratezza, riproducibilita e stabilita del sistema, richie-sta di risorse, complessita dell’algoritmo e implementazione clinica [1]. In questolavoro sono stati valutati tutti questi parametri con particolare riferimento allavalutazione dell’accuratezza, della robustezza e del tempo impiegato del sistemaper la co-registrazione. Si puo affermare che questi tre parametri raggruppanotutte le caratteristiche del sistema.L’accuratezza e definita come l’errore di registrazione nella soluzione determinatadall’algoritmo. In un caso ideale l’accuratezza e massima se l’errore di registrazio-ne e nullo, caso che si verifica quando la congruenza tra il set di dati principale equello secondario e completa. In realta questa condizione assoluta non e facilmen-te verificabile. Pertanto l’accuratezza degli algoritmi viene valutata in relazione airisultati di registrazioni basate su metodi di riferimento, definiti come gold stan-dard. La robustezza viene invece definita come la capacita di convergere semprealla medesima soluzione partendo da differenti condizioni iniziali.Per la valutazione dell’accuratezza e stata eseguita una co-registrazione automa-tica per ogni tipo di algoritmo e la matrice di rototraslazione ottenuta e stataconfrontata con il gold standard.Per la valutazione della robustezza sono state eseguite una serie di coregistrazioniautomatiche al variare delle condizioni iniziali perturbando la posizione di parten-za dei due data set. Tali perturbazioni, applicate al data set secondario, riflettonole tipiche differenze di posizionamento che si possono riscontrare clinicamente. Irisultati ottenuti sono stati confrontati con il gold standard. Alcuni autori [12]preferiscono fare il confronto con la prima fusione ottenuta senza perturbazione.In questo modo non puo pero essere valutato un possibile errore sistematico.
3.4.1 Definizione del gold standard
In letteratura i metodi per definire un gold standard [12][13][16] sono molti maalcuni di difficile realizzazione. I metodi suggeriti sono: simulazioni al computer1, fantocci, studi su reperti autoptici e su pazienti.Le simulazioni al computer consistono nel creare due set di immagini digitali dicui si conoscono con esattezza le posizioni reciproche e le possibili perturbazioniin modo da valutare la bonta delle fusioni. Sono molto semplici ed efficaci marichiedono un grosso impegno nella creazione delle immagini. Gli studi su fantoc-ci sono altrettanto efficaci e presentano a volte difficolta nella loro preparazioneper gli esami medico-nucleari. Gli studi su reperti autoptici incontrano grossedifficolta tecnico organizzative. Quelli sui pazienti sono i piu complicati ma sonoindispensabili per valutare la metodica dal punto di vista clinico.In questo lavoro si e scelto di usare alcuni fantocci e di verificare poi i dati ottenutisu un campione omogeneo di dieci pazienti.Ogni singolo studio e consistito nella fusione dei tre data set: CT, MR e SPET.
1una proposta di simulazione del distretto cerebrale e stata proposta da Collins et al [18] sulsito www.bic.mni.mcgill.ca/brainweb/
19

Ciascuno di essi e stato esaminato congiuntamente da due fisici e due radiotera-pisti. La co-registrazione e stata eseguita manualmente usando punti di repereinterni visibili nelle tre metodiche:
- le ossa craniche delimitate dalla cannula e i capillari entrambi riempiti conla soluzione di 99mTc e Gadodiamide per gli studi sui fantocci;
- le ossa craniche, l’ipofisi, i forami dei nervi cranici, le ghiandole salivari, leparotidi, i globi oculari, le ghiandole lacrimali, i plessi coroidei e la mucosanasale per gli studi sui pazienti.
Quando tutti e quattro gli operatori si dichiaravano d’accordo sulla trasformazioneottenuta attraverso un’ispezione visiva, questa veniva definita come gold standardper quello studio.
Figura 3.5: Fantoccio Alderson Rando, fusione TC-SPET. Si osserva come la cannula,
usata come repere sia esattamente sovrapposta.
Figura 3.6: Fantoccio Alderson Rando, fusione TC-SPET. Qui i reperi sono i capillari,
molto ben visibili, inseriti all’intero del fantoccio e la cannula esterna.
20

Figura 3.7: Fantoccio di Hoffman. Si vede una perfetta sovrapposizione tra la TC (prima
riga) e la SPET (seconda riga)
21

Figura 3.8: Studi sui pazienti, fusione TC-SPET. Si osservano i seguenti reperi anatomici:
plessi coroidei, muscoli oculari, parotidi e contorno della teca cranica. Si apprezza molto
bene la regione della lesione captante alla SPET.
Figura 3.9: Studi sui pazienti, fusione TC-RM. Si osservano i seguenti reperi anatomici:
mucosa nasale, forame magnum, ventricoli e contorno della teca cranica. Si apprezza
molto bene anche qui la lesione dove la RM permette di distinguere tra la parte solida e
l’edema circostante.
3.4.2 Definizione degli estimatori
La misura del successo di una co-registrazione deve essere valutata in modo quan-titativo. Molti studi [16] [17] riportano diversi tipi estimatori (geometrici o stati-stici) con lo scopo di valutare l’allineamento tra i due set di immagini. Uno deipiu comuni e il Target Registration Error (TRE) che e definito come
TRE = T(p) − q (3.1)
dove p e un punto nella prima immagine, T e la trasformazione ad essa applicatae q lo stesso punto nella seconda immagine.Questo tipo di valutazione misura di fatto la distanza geometrica tra i due punti.Ha pero due difetti: il primo e che dipende fortemente dalla loro localizzazione.Trattandosi di rototraslazioni se la scelta viene fatta nel centro dell’immagine ilTRE sara minimo, se invece viene fatta alla periferia si osservera un incrementonotevole. Il secondo e che rappresenta una somma degli errori dovuti alla traslazio-ne e alla rotazione contemporaneamente, non permettendo una loro suddivisione.Altre misure proposte in letteratura sono la distanza tra linee e tra superfici
22

[16, 17]. Queste ultime possono essere molto utili in particolari condizioni clinichedove risulta necessaria la delineazione di organi o tessuti, o nel caso di segmen-tazione automatica dell’immagine. Matematicamente questo tipo di misure sonoconcettualmente diverse dal TRE.E’ risultato quindi necessario sviluppare un nuova classe estimatori che abbia leseguenti caratteristiche:
- valuti separatamente gli errori dovuti alla traslazione da quelli dovuti allarotazione
- valuti gli errori nelle tre direzioni degli assi cartesiani
- sia indipendente dalla posizione e quindi costante su tutto il FOV dell’im-magine
- sia semplice e di facile interpretazione
Descriveremo ora mediante un caso concreto gli estimatori da noi sviluppati.Consideriamo un caso di co-registrazione tra due data-set: CT e SPET. Essendol’esame CT piu risoluto dell’esame SPET lo scegliamo come primario.Il sistema visualizza per ogni trasformazione la matrice di rototraslazione RT chesara la matrice da applicare allo studio SPET per la co-registrazione con lo studioTC. La prima riga della matrice rappresenta i parametri della traslazione lungo itre assi, la seconda quelli della rotazione.
RT =
(
tx ty tzθx θy θz
)
(3.2)
Con la stessa notazione del capitolo due possiamo scrivere
x’ = RT(x) = R(x) + T (3.3)
Se si considera la matrice RTgs associata al gold standard e quella di unaqualunque altra trasformazione RTt possiamo definire la matrice errore ME
ME = RTgs −RTt =
(
Etx Ety EtzEθx Eθy Eθz
)
(3.4)
dove la prima riga rappresenta gli errori sulla traslazione lungo i tre assi x, y e z ela seconda quelli sulla rotazione attorno agli stessi. La situazione e rappresentatanella figura 3.8 dove, per semplicita, consideriamo i due set di immagini comesemplici parallelepipedi. Se i due parallelepipedi fossero sovrapposti la matriceerrore ME sarebbe nulla; nella pratica questo e molto improbabile ed e necessarioprocedere ad una valutazione quantitativa dell’errore.
Per questo scopo sono stati definiti due estimatori, uno per la traslazione euno per la rotazione2. Questi hanno lo scopo di raggruppare i sei parametri del-la matrice ME per quantificare in modo immediato la bonta della trasformazione.
2Questo e possibile perche la traslazione e rigida, se cosı non fosse i due problemi non sarebberoseparabili.
23

Figura 3.10: Esempio di errore di co-registrazione tra due set di immagini. Se questo
fosse nullo i due sarebbero sovrapposti.
E’ stato pertanto definito l’estimatore di traslazione TE come:
TE =√
Et2x + Et2y + Et2z (3.5)
Esso rappresenta la distanze tra i due sistemi di riferimento della figura prece-dente: se fosse nullo i due sistemi avrebbero l’origine coincidente. L’estimatore dirotazione RE e stato invece definito come:
RE = −→n · −→n ′ =‖ −→n ‖ · ‖ −→n ′ ‖ cos θ = nxn′x + nyn
′y + nzn
′z (3.6)
RE rappresenta il prodotto interno tra due vettori normalizzati −→n ed −→n ′ nei duesistemi Σ e Σ′. θ e l’angolo tra i due vettori. Dalla geometria sappiamo che:
- se RE = 1 i vettori sono paralleli, con lo stesso verso e l’errore e uguale azero =⇒ i due data set sono perfettamente allineati;
- se RE = 0 i due vettori sono ortogonali e l’errore di rotazione e massimo=⇒ i due data set sono completamente disallineati;
- se RE = -1 i vettori sono paralleli ma di verso opposto =⇒ i due data setsono capovolti.
Per riassumere si considera la co-registrazione corretta se vengono soddisfatte leseguenti condizioni:
TE −→ 0 e RE −→ 1 (3.7)
Questi due estimatori posseggono tutte le caratteristiche sopra citate. In questomodo e possibile descrivere mediante due semplici scalari la bonta della registra-zione. In particolare RE e indipendente dalla posizione in cui vengono scelti i due
24

vettori −→n ed −→n ′ in quanto dipende dall’angolo Θ che e costante.Definiamo ora un terzo estimatore che combina i due precedenti. Consideriamo idue estimatori TE ed RE. Dalla definizione di RE (3.6) possiamo ricavare l’angoloθ tra i due vettori −→n ed −→n ′:
θ = cos−1RE
‖ −→n ‖ · ‖ −→n ′ ‖(3.8)
Possiamo definire quindi uno spazio bidimensionale (spazio degli estimatori) econsiderare un vettore in coordinate polari individuato da TE e θ:
Figura 3.11: Rappresentazione degli estimatori TE e θ in coordinate polari nello spazio
degli estimatori.
Definiamo ora l’estimatore globale A come l’area della parte di circonferenzaindividuata da TE e θ:
A =
∫
dadb =
∫ TE
0
rdr
∫ θ
0
dθ =TE2
2· θ (3.9)
Si osserva che tale area aumentera all’aumentare dell’estimatore TE e θ come elogico aspettarsi. Possiamo concludere che A da una rappresentazione dell’erroreglobale molto sintetica (in modo simile al TRE) ma ha il pregio di non dipenderedalla posizione in cui vengono scelti i punti dei vettori −→n e−→n ′.
Il calcolo di TE, RE e A a partire dalle matrici di rototraslazione e stato fattomediante un programma apposito scritto in ambiente C++ e Matlab.
3.4.3 Fantocci
Per le misure di accuratezza si sono valutati i valori di TE e RE al variare dell’al-goritmo usato.La robustezza e stata valutata perturbando le posizioni iniziale via software:
- traslazione: 1, 3, 6, 8 cm lungo l’asse x
- traslazione: 1, 3, 6, 8 cm lungo l’asse y
25

- traslazione: 1, 3, 6, 8 cm lungo l’asse z
- traslazione: 1, 3, 6, 8 cm lungo gli assi x,y,z
- rotazione: 1, 3, 5, 10, 15 gradi attorno all’asse x
- rotazione: 1, 3, 5, 10, 15 gradi attorno all’asse y
- rotazione: 1, 3, 5, 10, 15 gradi attorno all’asse z
- rotazione: 1, 3, 5, 10, 15 gradi attorno agli assi x,y,z
- traslazione: 1, 3, 6, 8 cm lungo gli assi x,y,z; rotazione: 1, 3, 5, 10 gradiattorno agli assi x,y,z
La scelta delle perturbazioni e stata fatta in modo sistematico cercando di ripro-durre le possibili differenze di setup che si hanno nei casi clinici. La scelta deglialgoritmi usati per la co-registrazione automatica dipende dal contenuto informa-tivo dei due data set. Quando questo e completamente differente l’uso di algoritmibasati sul confronto pixel a pixel non risulta possibile. Gli algoritmi usati sonopertanto:
- mutual information per la co-registrazione CT-SPET
- mutual information, cross correlation and local correlation per la coregistra-zione CT-MR
I valori di TE e RE risultano quindi essere in funzione della perturbazione edell’algoritmo utilizzato.
3.4.4 Pazienti
In modo analogo agli studi sui fantocci per le misure di accuratezza si sono valutatii valori di TE e RE al variare dell’algoritmo usato.La robustezza e stata valutata perturbando le posizioni iniziale via software:
- traslazione: 1, 3, 6 cm lungo l’asse x
- traslazione: 1, 3, 6 cm lungo gli assi x,y,z
- rotazione: 1, 3, 5, 10, 15 gradi attorno all’asse z
- rotazione: 1, 3, 5, 10, 15 gradi attorno agli assi x,y,z
- traslazione: 1, 3, 5 cm lungo gli assi x,y,z; rotazione: 1, 3, 5 gradi attornoagli assi x,y,z
La scelta delle perturbazioni applicate non e stata fatta in modo sistematico comenel caso dei fantocci. Sono state scelte le perturbazioni che piu comunemente sipresentano come differenze di setup nel corso degli esami clinici. Gli algoritmiusati sono gli stessi utilizzati per i fantocci.I valori di TE e RE trovati sono in funzione delle perturbazioni e degli algoritmiusati.Per ogni tipo di perturbazione e per un dato algoritmo e stato calcolato il valoremedio e la deviazione standard sulla popolazione dei dieci pazienti.
26

3.4.5 Definizione dei valori limiti
Nel capitolo precedente sono stati definiti i due estimatori TE e RE che permet-tono di quantificare la bonta della sovrapposizione. Ora e necessario definirne ilimiti entro i quali consideriamo clinicamente corretta la co-registrazione.In accordo con la maggior parte dei dati della letteratura consideriamo come limitele dimensioni del voxel meno risoluto. Questo limite dipende fortemente dal di-stretto anatomico considerato. Siccome stiamo considerando il distretto cerebralee lo scopo della fusione e la valutazione dei volumi da irradiare, assumiamo che ladimensione di un voxel sia clinicamente accettabile.Considerando le dimensioni del voxel (px, py, pz), per la traslazione occorre chesiano verificate tutte le seguenti condizioni
- Etx < px
- Ety < py
- Etz < pz
- TE < TEmax
dove TEmax, in accordo con la definizione di TE e
TEmax =√
(px)2 + (py)2 + (pz)2 (3.10)
In pratica viene richiesto che ogni errore di traslazione Et lungo un asse sia minoredella corrispettiva dimensione del voxel lungo quell’asse e che il valore di TE siaminore della diagonale del voxel. I valori di TEmax calcolati sono:
- 0.55 cm per co-registrazioni CT-SPET
- 0.34 cm per co-registrazioni CT-MR
Le condizioni sulla rotazioni sono leggermente piu complicate. La rotazione causauna errore che dipende dalla distanza dal punto di rotazione.Ne consegue che tale errore sara maggiore alla periferia dell’immagine rispetto alcentro.A causa di cio consideriamo come periferia il raggio della teca cranica r definitoin base all’uomo standard [11] e come centro il baricentro del volume della tecacranica. Per piccoli angoli possiamo valutare l’errore m dovuto alla rotazione Θtra i due vettori (il primo nel data set originale ed il secondo in quello ruotato):
m = r sinΘ (3.11)
Considerando il massimo valore di m accettato come la diagonale del pixel menorisoluto3, possiamo ricavare il massimo angolo Θ ammesso
Θ = sin−1(m
r
)
= sin−1
(
√
(px)2 + (py)2 + (pz)2
r
)
(3.12)
3questa e una condizione molto restrittiva nell’intorno del centro dell’immagine: se l’erroreche si accetta e dell’ordine del voxel in periferia, al centro dell’immagine sara molto inferiore
27

Figura 3.12: L’errore dipende dalla distanza del punto di rotazione: m = rsinθ aumenta
verso la periferia dell’immagine.
quindi, dalla definizione di RE
REmin = −→n · −→n ′ =‖ −→n ‖ · ‖ −→n ′ ‖ cos Θ (3.13)
dove REmin e il valore di RE che origina un errore m alla periferia dell’immagine.La condizione per una corretta co-registrazione sono dunque che RE>REmin. Ivalori calcolati sono:
- 0.9969 per co-registrazioni CT-SPET
- 0.9988 per co-registrazioni CT-MR
Per determinare il valore massimo di A entro il quale considereremo correttala co-registrazione consideriamo i valori limite TEmax ed REmin appena definiti.Dalla (3.8) otteniamo:
Amax =TE2
max
2· Θmax (3.14)
dove Θmax si ricava dalla (3.6):
Θmax = cos−1REmin
‖ −→n ‖ · ‖ −→n ′ ‖(3.15)
I valori di Amax calcolati sono:
- 0.0128 cm2 per co-registrazioni CT-SPET
- 0.0029 cm2per co-registrazioni CT-MR
28

Capitolo 4
Risultati
4.1 Accuratezza
4.1.1 Fantocci
Negli studi sui fantocci, per ogni registrazione sono state determinate le matricidi rototraslazione e sono state confrontate con il gold standard. Sono stati quindicalcolati i valori di TE, RE e A. I dati ottenuti sono in funzione della perturbazioneal variare dell’algoritmo usato. I risultati ottenuti sono riportati nelle seguentitabelle.
fusione algoritmo Etx px Ety py Etz pz
CT-SPET MU 0.19 0.23 0.52 0.23 0.54 0.44CT-MR LC 0.10 0.12 0.01 0.12 0.07 0.30CT-MR CC 0.07 0.12 0.84 0.12 0.47 0.30CT-MR MU 0.01 0.12 0.09 0.12 0.08 0.30
fusione algoritmo TE TEmax RE REmin
CT-SPET MU 0.77 0.55 0.9976 0.9984CT-MR LC 0.16 0.34 0.9996 0.9994CT-MR CC 0.97 0.34 0.9990 0.9994CT-MR MU 0.22 0.34 0.9999 0.9994
Tabella 4.1: Valori di accuratezza per il fantoccio Remedios. Etx, Ety, Etz sono gli erroridi traslazione, px,py,pz le dimensioni dei voxel, TE e RE i parametri stimati, TEmax eREmin i valori limite di tali parametri. MU=mutual information, LC=local correlationCC=cross correlation.
29

fusione algoritmo Etx px Ety py Etz pz
CT-SPET MU 0.19 0.23 0.30 0.23 0.06 0.44CT-MR LC 0.01 0.12 0.06 0.12 0.02 0.30CT-MR CC 0.07 0.12 0.04 0.12 0.41 0.30CT-MR MU 0.01 0.12 0.09 0.12 0.04 0.30
fusione algoritmo TE TEmax RE REmin
CT-SPET MU 0.39 0.55 0.9981 0.9984CT-MR LC 0.07 0.34 0.9999 0.9994CT-MR CC 0.41 0.34 0.9999 0.9994CT-MR MU 0.10 0.34 0.9999 0.9994
Tabella 4.2: Valori di accuratezza per il fantoccio Alderson Rando. MU=mutualinformation, LC=local correlation CC=cross correlation.
fusione algoritmo Etx px Ety py Etz pz
CT-SPET MU 0.10 0.23 0.33 0.23 0.25 0.44CT-MR LC 0.18 0.12 0.09 0.12 0.10 0.30CT-MR CC 0.25 0.12 0.10 0.12 0.21 0.30CT-MR MU 0.15 0.12 0.10 0.12 0.10 0.30
fusione algoritmo TE TEmax RE REmin
CT-SPET MU 0.43 0.55 0.9991 0.9984CT-MR LC 0.22 0.34 0.9998 0.9994CT-MR CC 0.34 0.34 0.9997 0.9994CT-MR MU 0.21 0.34 0.9992 0.9994
Tabella 4.3: Valori di accuratezza per il fantoccio di Hoffmann. MU=mutual information,LC=local correlation CC=cross correlation.
4.1.2 Pazienti
Negli studi sui pazienti sono stati calcolati per ogni paziente i valori di TE, RE eA. Nel grafico seguente riportiamo il numero di casi che soddisfano o meno i valorilimite. Tali dati sono in funzione del tipo di fusione e di algoritmo usato.
30

Figura 4.1: Studi sui pazienti. Accuratezza. MU=mutual information, LC=local
correlation, CC=cross correlation.
4.2 Robustezza
I valori di robustezza sono stati determinati sia per i fantocci che per i pazienti.Per ogni registrazione sono state determinate le matrici di rototraslazione e sonostate confrontate con il gold standard. Sono stati quindi calcolati i valori di TE,RE e A.I dati ottenuti sono in funzione della perturbazione al variare dell’algoritmo usato.Per non appesantire il testo non si riportano i grafici di TE e RE.Nella tabelle seguenti riportiamo solo i massimi valori delle perturbazioni tali percui i valori di TE e RE soddisfano i limiti.I valori del fantoccio Alderson Rando e di Hoffman sono sovrapponibili.
perturbazione CT-SPET MU CT-MR LC CT-MR CC CT-MR MU
Traslazione x [cm] 3 3 1 6Traslazione y [cm] 6 3 1 6Traslazione z [cm] 3 1 1 3
Traslazione xyz [cm] 3 6 1 3Rotazione x [◦] 15 10 1 15Rotazione y [◦] 15 10 1 15Rotazione z [◦] 15 1 1 15
Rotazione xyz [◦] 10 5 10 10Rototraslazione xyz [cm.- ◦] 1-1 1-1 1-1 1-1
Tabella 4.4: Studio sul fantoccio Remedios. Valori massimi delle perturbazioni tali percui entrambi i valori TE ed RE sono al di sotto dei valori limite. MU=mutual information,LC=local correlation, CC=cross correlation.
31

perturbazione CT-SPET MU CT-MR LC CT-MR CC CT-MR MU
Traslazione x [cm] 3 3 1 3Traslazione xyz [cm] 3 1 1 3
Rotazione z [◦] 3 15 1 15Rotazione xyz [◦] 15 1 1 5
Rototraslazione xyz [cm.- ◦] 3-1 1-1 1-1 1-1
Tabella 4.5: Studi sui pazienti. Valori massimi delle perturbazioni tali per cui i valoridi TE ed RE sono al di sotto dei valori limite. MU=mutual information, LC=localcorrelation, CC=cross correlation.
I grafici dell’andamento dell’estimatore A in funzione della perturbazione perogni algoritmo sono riportati nelle pagine seguenti.
32

4.3 Tempo
Per ogni registrazione automatica e stato valutato il tempo impiegato dal sistemaper raggiungere la soluzione. Non sono stati osservati degli andamenti significatividel tempo impiegato in funzione della perturbazione applicata. Per ogni algoritmosono stati quindi considerati i valori medi.
fusione algoritmo fantocci pazienti
t σt t σt
CT-SPET MU 17.7 14.8 34.1 19.3CT-MR LC 14.8 6.6 24.4 15.3CT-MR CC 10.9 6.5 15.6 9.0CT-MR MU 53.8 15.8 69.2 34.6
Tabella 4.6: Valori medi e deviazione standard del tempo impiegato per la co-registrazione automatica in funzione del tipo di algoritmo usato. MU=mutual information,LC=local correlation CC=cross correlation.
Analogamente si e valutato il tempo impiegato dai quattro operatori (due fisicie due radioterapisti). Il tempo medio t impiegato per ogni singola co-registrazionee stato 614 s (σ = 60s) per gli studi sui fantocci e stato 852 s (σ = 94s) per glistudi sui pazienti.
33

Figura 4.2: Misure di riproducibilita sui fantocci. Valori dell’estimatore A (in cm2) al
variare delle perturbazioni applicate per il fantoccio Remedios. Nei grafici della rototra-
slazione le perturbazioni lungo i tre assi corrispondono a: punto 1: 1cm, 1◦; punto 2: 3cm,
3◦; punto 3: 6cm, 5◦; punto 4: 8cm, 10◦.
34

Figura 4.3: Misure di riproducibilita sui fantocci. Valori dell’estimatore A (in cm2) al
variare delle perturbazioni applicate per il fantoccio Alderson Rando. Nei grafici della
rototraslazione le perturbazioni lungo i tre assi corrispondono a: punto 1: 1cm, 1◦; punto
2: 3cm, 3◦; punto 3: 6cm, 5◦; punto 4: 8cm, 10◦.
35

Figura 4.4: Misure di riproducibilita sui fantocci. Valori dell’estimatore A (in cm2)
al variare delle perturbazioni applicate per il fantoccio di Hoffman. Nei grafici della
rototraslazione le perturbazioni lungo i tre assi corrispondono a: punto 1: 1cm, 1◦; punto
2: 3cm, 3◦; punto 3: 6cm, 5◦; punto 4: 8cm, 10◦.
36

Figura 4.5: Misure di riproducibilita sui pazienti. Valori medi dell’estimatore A (in cm2)
al variare delle perturbazioni applicate. Nel grafici della rototraslazione le perturbazioni
lungo i tre assi corrispondono a: punto 1: 1cm, 1◦; punto 2: 3cm, 3◦; punto 3: 5cm, 5◦.
37

Capitolo 5
Discussione
5.1 Gold standard
La scelta del gold standard e fondamentale per la valutazione degli errori. Comedescritto in precedenza vi sono diversi metodi per la sua determinazione [12][16].Il metodo utilizzato e basato direttamente sul sistema visivo umano ed e statoutilizzato come gold standard per la validazione dei metodi automatici in una in-numerevole serie di lavori [22][23][24][25][26][27][28]. La maggior critica a questometodo e data dalla dipendenza dell’operatore, ma in piu studi e stato dimostratocome questa dipendenza, in presenza di un’interfaccia software adeguata e di im-magini con ampio contenuto informativo, sia del tutto trascurabile. Pfluger [29]ha quantificato la variazioni dipendenti dall’operatore nel matching interattivodimostrando che globalmente sono inferiori a 2mm. In questo studio la dipenden-za dall’operatore e stata ulteriormente ridotta coinvolgendo nella co-registrazionequattro diversi operatori esperti.Tuttavia non dobbiamo dimenticare che il gold standard viene definito sulla ba-se di una procedura che non e priva di errori, ma che semplicemente e nota perl’elevata accuratezza. L’accuratezza dello stesso sistema visivo umano e stata sot-toposta a validazione per registrazioni di immagini RM-PET e CT-RM [30][31]. Irisultati ottenuti indicano come al sistema visivo umano sia attribuibile un’accu-ratezza inferiore a 2mm per la registrazione TC-RM e 4mm per la co-registrazioneRM-PET, in pratica valori dell’ordine del voxel delle metodiche meno definite.Nella determinazione del gold standard ci siamo avvalsi di una procedura mistain cui si e utilizzata sia l’ispezione visiva, sia la determinazione quantitativa del-l’errore attraverso l’analisi della distanza tra reperi anatomici intrinseci. Nellanostra procedura un errore globale medio inferiore a 2mm nelle tre direzioni estato ritenuto accettabile per il gold standard nella co-registrazione CT-SPET.Per come abbiamo definito gli stimatori, questo equivale a TE di 0.346cm e REdi 0.9998 (corrispondenti a circa 2.8◦ di rotazione). Questi livelli di accuratezzasono assolutamente appropriati per l’impiego clinico in radioterapia e appaionoadeguati per la validazione dei metodi automatici considerati.Indubbiamente i metodi basati su marker impiantati direttamente nell’osso o fra-me stereotassici consentono errori inferiori, ma sono difficilmente utilizzabili nellaroutine clinica per l’invasivita; inoltre non e facile individuare reperi puntiformiben visibili in tutte le modalita. Per il frame stereotassico vi e anche il problema
38

delle distorsioni spaziali in RM e degli artefatti di ricostruzione nelle metodicheche utilizzano la retroproiezione filtrata.
5.2 Accuratezza
I valori determinati nei tre fantocci mostrano un livello di accuratezza inferioreal voxel per tutti gli algoritmi. In particolare sia per la fusione CT-SPET cheCT-MR i valori dell’algoritmo mutual information sono sempre inferiori ai valorilimite. Gli algoritmi local correlation e cross correlation mostrano in alcuni casi unvalore di poco superiore al limite. Non vi sono comunque valori sistematicamentemaggiori in una direzione particolare; questo permette di affermare che nessunodi questi tre algoritmi e soggetto a errori sistematici.Si osserva inoltre un buon accordo tra i tre fantocci nonostante il loro contenutoinformativo sia completamente diverso. Questo a conferma del fatto che l’algo-ritmo mutual information tratta bene immagini nettamente diverse come TC eSPET.Anche visivamente si osserva un ottimo allineamento dei due set di immagini comesi puo osservare dalle figure 3.2 e 3.3. In esse sono rappresentate rispettivamenteuna fusione TC-SPET per il fantoccio Remedios e Alderson Rando. Per il primo siosserva molto bene la sovrapposizione della cannula visibile nelle due metodiche.Nel secondo si osserva la corretta sovrapposizione dei capillari inseriti nei fori delfantoccio.
5.3 Robustezza
5.3.1 Fantocci
Dalla tabella 4.4 si vede che l’algoritmo mutual information consente delle per-turbazioni maggiori entro le quali tutti i valori degli estimatori sono soddisfano ailimiti. Se si confrontano i dati delle perturbazioni di traslazione rispetto a quelledi rotazione, osserviamo che queste ultime influiscono molto meno sull’errore diregistrazione. In altre parole gli algoritmi sono molto meno sensibili alle perturba-zioni di rotazione. Questo stesso risultato e evidente dall’osservazione dei graficidell’estimatore A. Questo e un risultato inaspettato in quanto la rotazione e piudifficile da trattare a causa della quasi simmetria sferica del capo che, in terminipratici, si traduce in molti massimi locali nell’intorno del massimo assoluto. An-che visivamente risulta piu difficile valutare un eventuale rotazione mentre unatraslazione puo essere individuata molto piu facilmente.I valori degli estimatori ottenuti per i tre fantocci mostrano andamenti simili.Questo permette di affermare che la forma dell’immagine non influenza il compor-tamento di questi tipi di algoritmi. Non sarebbe cosı se si usassero metodi basatisulla segmentazione.
5.3.2 Pazienti
Le perturbazioni non sono state applicate in modo sistematico come nel caso deifantocci; sono state applicate solo quelle che maggiormente si riscontrano nellapratica clinica. I dati ottenuti hanno confermato quelli determinati per i fantocci
39

Qui occorre pero fare delle precisazioni ulteriori. Le perturbazioni in questo casoriflettono quello che si verifica nella situazione clinica e sono connesse con il posi-zionamento del paziente. La differenza di posizionamento tra le varie metodichecoincide con la perturbazione applicata. Il poter disporre di un algoritmo chepermetta di ottenere tutti i valori degli estimatori al di sotto dei valori limite pergrandi perturbazioni significa avere delle condizioni meno restrittive nell’immobi-lizzazione del paziente.L’immobilizzazione resta comunque un punto critico del processo di fusione. Essoha sia lo scopo di ottenere un setup identico in ogni modalita che garantire l’im-mobilita del capo in fase di acquisizione.Questi risultati dimostrano che, nella pratica clinica, e necessario usare un sistemadi immobilizzazione che garantisca degli errori di setup inferiori ai valori delle per-turbazioni di tabella 4.4 e 4.5. A tale scopo possono essere indicati vari sistemi diposizionamento e immobilizzazione comunemente usati in radioterapia. Da questolavoro si e dedotto che il sistema piu accurato e riproducibile e rappresentato dallemaschere termoplastiche. L’unico inconveniente e dovuto alle ridotte dimensionidella bobina della risonanza magnetica che sovente non riesce a contenerle. Inquesti casi e sufficiente fissare il capo del paziente con una fascia di velcro, possi-bilmente elastico. Mentre questi sistemi impediscono una rotazione intorno ai treassi cartesiani del capo del paziente, un eventuale errore di traslazione e dovutoal non corretto posizionamento da parte dell’operatore.Osserviamo ancora che nel caso in cui i due set di immagini siano macroscopica-mente disallineati a causa di errori casuali e sufficiente allinearli grossolanamentein modo manuale prima di iniziare il processo di fusione. L’immobilizzazione assu-me tuttavia un valore molto importante nei distretti non rigidi come ad esempio ilcollo. In questo caso una differente estensione del collo stesso, conseguenza di unadifferente posizione del capo, modifica l’anatomia in modo consistente: i rappor-ti anatomici tra vasi, muscoli, vertebre e ghiandole saranno modificati rendendoimpossibile una fusione automatica rigida. Questo problema puo essere risolto inparte solo mediante algoritmi di fusione non rigida. Nel caso questa metodica nonabbia come fine la valutazione dei volumi radioterapici da irradiare, l’uso di ma-schere termoplastiche non e agevole dal punto di vista organizzativo ed economico.In questi casi puo essere sufficiente l’uso di un poggiatesta rigido, che garantiscala stessa estensione del collo, e di una fascia di velcro elastico per fissare il capoed impedirne una rotazione lungo l’asse z.
5.4 Tempo
Il tempo impiegato per una co-registrazione e un parametro fondamentale nel-l’implementazione clinica. Da esso dipende infatti la possibilita o meno di poterestendere questa metodica alla routine ospedaliera.I tempi per la fusione completamente manuale sono stati stimati essere dell’or-dine dei 600-800s. I tempi impiegati con il sistema automatico sono risultatisensibilmente inferiori di almeno un ordine di grandezza.
Occorre notare che il tempo impiegato dal sistema dipende dalla potenza dicalcolo del computer e dalla memoria a disposizione. Tali valori sono quindi da
40

riferirsi alla workstation in questione e possono essere notevolmente differenti suun’altra. Risultano comunque molto inferiori al tempo impiegato dall’operatore esono perfettamente compatibili con l’implementazione clinicaIl tempo impiegato dall’operatore per la fusione manuale dipende dalla sua pre-parazione ed esperienza. Risulta ovvia una conoscenza approfondita dal punto divista anatomico della zona da sovrapporre. In questo lavoro non si sono riscontratenotevole differenze di tempo impiegato tra i quattro operatori.
41

Capitolo 6
Conclusioni
L’introduzione di un sistema automatico di fusione d’immagini nella pratica clinicarichiede necessariamente un processo preliminare di validazione al fine di determi-nare il suo grado di affidabilita.La metodica risulta valida e garantisce valori sovrapponibili al gold standard perrotazioni e traslazioni considerevoli tra i due set di immagini. In alcuni casi,nei quali gli algoritmi convergono in un punto estremale locale, risulta comunquenecessario l’intervento dell’operatore per ottimizzare manualmente il processo difusione.Il controllo di qualita basato sull’ispezione visiva rimane comunque necessario nel-la pratica clinica. Il grande vantaggio di questi sistemi e il breve tempo impiegato(dell’ordine del minuto) per convergere ad una soluzione accettabile. Bisognainoltre ricordare che i sistemi basati su metodi interattivi manuali, per quantoaccurati, sono molto dispendiosi per quanto riguarda il fattore tempo e questo hacostituito il principale limite alla loro introduzione nella routine clinica. Infat-ti il sistema visivo umano appare molto abile nel rilevare un’incongruenza nellasovrapposizione di due immagini, ma non altrettanto nel ricercare una soluzionenella loro coregistrazione.Il grado di immobilizzazione del paziente dipende dal fine per cui e usata la fusio-ne: piu e alto il grado di precisione richiesto, piu rigido dovra essere il sistema diimmobilizzazione.L’impiego di algoritmi basati su misure di entropia come la mutual informationpermette di eseguire coregistrazioni svincolandosi dal contenuto informativo delleimmagini. Questo risulta indispensabile nella fusione di immagini anatomiche conimmagini funzionali.
42

Capitolo 7
Ringraziamenti
Alla fine di questi quattro anni lunghi e difficili mi sembra doveroso ringraziareun bel po di persone.Il mio gruppo 18/b, tutti compresi, dal 1994 ad oggi, per avermi insegnato chenulla e impossibile: Sr Teresa, Rosanna, Giuseppe, Francesco, Enrico, Beppe,Pietrina, Mario x 2, Donatello, Antonio, Sr Raffa, Sr Anna Maria, Sr Felicita,P. Gerry, Sr Luciana, Francesca, Alberto, Fabry, Fede, Paola, Elisa, Fiammetta,Eusita, Guido, Klaudiana, Claudio, Felice, Massimo, Andrea, Cristina, Antonio,Silvia David, Davide, Benj, Giorgio, Stefania, Giuseppe....I tanti amici incontrati lungo la strada: Rosa, Cora (zio fa), Gianlu, Pier, Piero,Dino, Lory, il buon Negro, Mario, Curi, Puglish, Jolanta, Ire & Andrea, Giulia,Rosa, Michele & Michela, Stefania, Fabry, Chris & Adry figli, Simo & Miriam efigli, Olga, Enrico, Rosa, Daniela, Marco, Eva, Barbara, Rossana con ognuno deiquali si condivde un pezzo di vita.I miei genitori un po per tutto, i miei nonni che, a parte la nonna, per ora non hoancora conosciuto ma che da lassu penso mi abbiano tenuto una mano sulla testapiu di una volta.La Fondazione Tera: Gaudenzio, prof. Amaldi, Elena non solo per il sostegnoeconomico.I compagni di sventura, cioe di avventura: l’Ale, la Claudia, Francesco, la Gio, laLaura, Michele e la Sara (chissa perche mettono l’articolo dietro al nome !)Martina e Nicolo per avermi fatto scoprire le meraviglie del mondo subacqueoTutti coloro che purtroppo non sono piu qui ma che ci camminano a fianco.La mitica Y che un giorno a Dalmine ha detto basta !Tutti i pazienti incontrati e Remedios per essere esistita.La Fisica Sanitaria di Novara: Tiziana, Dott. Brambilla, Elio, Gian, Ele 1 e2, Chiara grande e piccola, Barbara e Roberta; la Radioterapia e la MedicinaNucleare: Massimo, Lucia, Andrea, prof. Krengli, Giuse, Debora, Cesare, Patrizia,Irene, prof. Inglese, Lucia, Gianmauro, Piero, Edgardo, Elena, Enrico, Giancarlo,Daniele.Stefi per tutta la gioia e la serenita che mi dona e per aver sopportato le miecontinue lamentele sul sistema.La mia magnifica moto (ma quanto e bella!) per aver sopportato tutte le miesfuriate di questi ultimi anni, la MTB e gli sci che tanto lontano mi hanno portato.Me stesso e me medesimo che tanta compagnia mi hanno tenuto in questi anni.Dio per la vita e per aver creato la Montagna e il Mare.
43

Bibliografia
[1] J.B.A. Maintz and M.A. ViergeverA survey of medical image registrationMed Image Anal, vol 2, pp 1-36, 1998
[2] B.K.P. Horn et al.,Closed-form solution of absolute orientation using unit quaternionsJ Opt Soc Amer A, vol 4, pp 629-642, 1987
[3] J.M. Fitzpatrick et al.Handbook of Medical Imaging, Volume 2: Medical Image Processing and Ana-lysis, chapter 8SPIE, Belligham, WA, 2000
[4] van den Elsen et al.Medical image matching - a review with classificationIEEE Engineering in medicine and biology, vol 12(1), pp 26-39, 1993
[5] B. F. Green et al.The orthogonal approximation of an oblique structure in factor analysisPsycometrika, vol 17, pp 429-440, 1952
[6] C. Goddal et al.Procustes methods in the statistical analysis of shapeJ R Statist Soc B, vol 53, pp 285-339, 1991
[7] F. L. Bookstein et al.Morphometric tools for landmark data:geometry and biologyCambridge University Press, 1991
[8] P. A. ViolaAlignment bay maximization of mutual informationP.h.D thesys, 1995
[9] F. Maes et al.Mutual image registration by maximization of mutual informationIEEE Trans Med Imaging, vol 16, n 2, 1997
[10] I. Vajda., Theory of statistical inference and informationIEEE transcription on medical imaging, vol 16, n 2, 1997Dordrecht The Nederlands: Kluwer, 1989
44

[11] Report ICRPRecommendations of the International Commission on Radiologicla Protec-tion (adopted 1977)ICRP publications, report 26, 1977
[12] A.L.Grosu et al.Validation of a method for automatic image fusion (BrainLab System) of CTdata and C11-Methionine-PET data for stereotactic radiotherapy using Linac:first clinical experienceInt J Rad Onc Biol Phys, vol 56, n 5, pp 1450-1463, 2003
[13] T Makela et al.A review of cardiac image registration methodsIEEE Trans Med Imaging, vol 21, n 9, 2002
[14] Biermat W.2000 World Health Organization, classification of tumors of the nervous sy-stemPol J Pathol, vol 51, pp 107-114, 2000
[15] A. Del Sole. et al.Anatomical and biochemical investigation of brain tumoursEur J Nuc Med, vol 28, n 10, pp 1851-1872, 2001
[16] J.M. Fitzpatrick et al.Handbook of Medical Imaging, Volume 2: Medical Image Processing and Ana-lysis, chapter 6SPIE press, Belligham, WA, 2000
[17] C.R.Maurer et al.Regitration of 3D images using weighted geometrical featuresIEEE Trans Med Imaging, vol 15, pp 836-849, 1997
[18] D.L.Collins et al.Design and construction of a realistic digital brain phantomIEEE Trans Med Imaging, vol 17, pp 463-468, 1998
[19] J.P.W.Pluin et al.Mutual information based registration of medical images: a surveyIEEE Trans Med Imaging, vol 22, pp 986-1004, 2003
[20] W.M. Wells III et al.Multi-modal volume registration by maximization of mutual information,Medical Image Analysis, vol 1(1), pp 35-51, 1996
[21] Baldari S. Investigation of brain tumors with 99mTc-MIBI spetQuat J Nuc Med, vol 46, n 4, 2002
[22] Woods R.P. et al Intersubject validation of linear and nonlinear modelsJ Comput Assist Tomogr, vol 22, pp 153-165, 1998
45

[23] Collins D.L. et al Automatic 3D intersubject registration of MR volumetricdata in standardized Talairach spaceJ Comput Assist Tomogr, vol 18, pp 192-205, 1994
[24] Kooy H.M. et al, Image fusion for stereotactic radiotherapy and radiosurgerytreatment planningInt J Radiat Oncol Biol Phys, vol 28, pp 1229-1234, 1994
[25] Van den Elsen P.A. et al Automatic registration of CT and MR grain imagesusing correlation of geometrical featuresIEEE Trans Med Imaging, vol 14, pp 384-396, 1995
[26] Maintz J.B.A. et al. Evaluztion of ridge seeking operators for multimodalitymedical imaging matchingIEEE Trans Pattern Anal Mach Intell, vol 18, pp 353-365, 1996
[27] Thompson P. et al A surface-based technique or warping three-dimensionalimages of the brainIEEE Trans Med Imaging, vol 15, pp 402-417, 1996
[28] Studholme C. et al. Automated 3D registration of MR and PET brain imagemulti-resolution optimisation of voxel similarity measuresMed Phys, vol 15, pp 402-417, 1997
[29] Pfluger T et al. Quantitative comparison of automatic and interactive methodsfor MRI and SPECT image registration of the brain based on 3-Dimensionalcalculation of error J Nucl Med 2000, vol 41, pp 1823-1829.
[30] Wong J. C. H. et al. Evaluation of the limits of visual detection of imagemisregistration in a brain fluorine ?18 fluorodeoxyglucose PET-MRI studyEur J Nucl Med, vol 24, pp 642-650, 1997
[31] Fitzpatrick J M et al Visual assessment of the accuracy of retrospective re-gistration of MR and CT images of the brain IEEE Trans Med Imaging, vol17, pp 571-585, 1998
46

Indice analitico
accuratezza, 19angoli di Eulero, 7
coefficiente di cross correlazione, 10cross correlation, 10
Dido, 14
entropia, 11entropia congiunta, 11errore di registrazione, 6estimatore di rotazione, RE, 24estimatore di traslazione, TE, 24estimatori, 22
fantoccio Alderson Rando, 13fantoccio di Hoffman, 13fantoccio Remedios, 13fiducial localization error, FLE, 9fiducial registration error, FRE, 9
local correlation, 10
matrice errore, 23matrice errore, ME, 23matrici ortogonali, 6mutual information, 11
problema di Procruste, 10punti fiduciali, 8
registrazione, 6robustezza, 19rotazioni improprie, 6rotazioni proprie, 6
spazio degli estimatori, 25
Target Registration Error, TRE, 22trasformazioni affini, 8trasformazioni di scala, 7Trasformazioni non rigide, 7trasformazioni rigide, 6trasformazioni simili, 7
47