Tesi_Aimone
69
Politecnico di Torino Master Thesis Ultra Wide Band Variable Gain IF Amplifier for V-band Transceivers Author: Alessandro Aimone TU Supervisors: Prof. Dr.- Ing. Georg Boeck Ing. Andrea Malignaggi PoliTo Supervisors: Prof. Giovanni Ghione Prof. Fabrizio Bonani A thesis submitted in fulfillment of the requirements for the degree of Science in Micro- and Nanotechnologies for ICT September 2012
description
UWB driver design
Transcript of Tesi_Aimone

Politecnico di Torino
Master Thesis
Ultra Wide Band Variable Gain IFAmplifier for V-band Transceivers
Author:
Alessandro Aimone
TU Supervisors:
Prof. Dr.- Ing. Georg Boeck
Ing. Andrea Malignaggi
PoliTo Supervisors:
Prof. Giovanni Ghione
Prof. Fabrizio Bonani
A thesis submitted in fulfillment of the requirements
for the degree of Science in Micro- and Nanotechnologies for ICT
September 2012

i

Declaration of Authorship
I, Alessandro Aimone, declare that this thesis titled, ’Ultra Wide Band Variable
Gain IF Amplifier for V-band Transceivers’ and the work presented in it are my own. I
confirm that:
This work was done wholly or mainly while in candidature for a research degree
at this University.
Where I have consulted the published work of others, this is always clearly at-
tributed.
Where I have quoted from the work of others, the source is always given. With
the exception of such quotations, this thesis is entirely my own work.
I have acknowledged all main sources of help.
Where the thesis is based on work done by myself jointly with others, I have made
clear exactly what was done by others and what I have contributed myself.
Signed:
Date:
ii

i

Project Overview
This masther thesis is the result of a 6 months project carried out in the Microwave
department of TU Berlin, under the supervision of Professor Georg Boeck. The aim
of the work is to study and design a wideband Variable Gain Amplifie within the
framework of WioNet project (No.10033322): Wireless Communication and Networks
(WN), financially supported by the Federal Ministry of Education and Research of
Germany (BMBF). The part of the WioNet project that is carried on in the Profes-
sor Boeck group, consists in the design of an entire 60 GHz transceiver, which the
VGA will be part of. The project started in the middle of 2010 and the transceiver
is expected to be completed and fully functional during the course of 2013. The first
printed version of the variable gain amplifier is expected to be measured in the month
of September 2012, while an optimized version should be obtained at the end of the year.

Acknowledgements
I would like to acknowledge my Politecnico supervisors for helping me improving this
work. In the same way, I am grateful to Professor Boeck for giving me the opportunity
of working in his group.
Grazie soprattutto ad Andrea: nonostante il nostro ben diverso approccio alla vita, ti
ringrazio per la continua disponibilita e l’infinito numero di ore passate ad assistermi.
Senza di te questo lavoro non sarebbe che una montagna di dubbi.
Grazie alla mia famiglia.
Grazie nonna Sarina: i tuoi piatti accompagnati da lunghe discussioni, piene di saggezza,
mi hanno aiutato ad affrontare diversi momenti difficili e sono sicuro che ancora lo
faranno. Grazie nonno Piero per il tuo affetto, silenzioso ma costante.
Grazie nonna Anna: in ogni momento mi infondi coraggio dimostrandomi che ogni giorno
e buono per partire, buttandosi in una nuova avventura senza aver mai paura.
Grazie zii, cugini e fratello: anche se non spesso vicini, l’affetto che mi lega ad ognuno
di voi mi sostiene continuamente.
Thanks to those, among my fellow students, who helped me face the never-lasting classes.
Stefano: grazie per la disponibilita e le sagge discussioni nelle piccole camere del Berlioz,
nonche nei luminosi spazi del Rolex.
Adrien & Benjamin: ensemble jusqu’a la fin. Merci pour toutes les betises qu’on s’est
raconte. Merci pour m’avoir supporte (tous les team-work !) et merci pour pas souligner
que je fais plans des fautes quand j’ecris dans cette horrible langue (oui, maintenant
aussi!).
Grazie anche ad Emanuele: e grazie a te se il mio master si e concluso 7mila volte meglio
di come e iniziato!
Merci Benoıt I : toutes les choses qu’on a fait ensemble ont vraiment change ma experience
a Grenoble. Merci a toi et a tous tes fous amis pour les grillades et les soirees passees
ensemble. Vous avez ete super avec moi !
Grazie a Valeria e a Chiara: in coppia per forza. Persi un po’ per la distanza o altre
stupidaggini, cosı come abbiamo iniziato, spero si finisca presto da Busters in un freddo
inverno torinese, a scambiarsi sveglie e calzini come regali!
Merci Benoıt II : je serais pas tombe amoureux de Copenhague si c’etait pas pour toi.
C’est vrai, c’est vrai, je tombe amoureux un peu facilement ! Mais je t’assure : t’as
ete un ami exceptionnel et si je remercie, c’est pas seulement pour tous tes bieres et
cocktails, que je ”goutais” seulement quand meme!
v

vi
Thanks to my first-aid group in Lausanne.
Jenny! I cannot write what I think about you, because this is an official work! I therefore
have to get sentimental and tell you that with you I had the best connection ever. The
days spent talking of everything as well as those spent judging your food and your lack
of hygiene will be forever in my heart.
E Valeria! Grazie per le incredibili stupidaggini nonche i discorsi piu seri. Ma soprattutto
grazie per la tua bonta. Non so come altro dirlo: sei la persona piu buona e generosa
che io abbia mai conosciuto e spero un giorno di riuscire a diventare un po’ piu come te.
Grazie a Cinzia. Splendida Cinzia con un’infinita pazienza nei miei confronti. Grazie
per il sostegno in terra straniera. Sei il mio pilastro nonche la mia piu cara amica.
Prometto: saro carino al telefono! Tu sopportami ancora un po’ e ti dedico la tesi del
dottorato!
Un grande, immenso grazie e per Giuliana: non posso immaginare come sarebbero stati
gli ultimi anni senza di te. Grazie per l’immenso affetto dimostrato, mai dovuto, ma
sempre presente. Grazie per il supporto, tu solo sai quante volte mi hai sentito lamen-
tarmi. Grazie per l’ospitalita, non dimentichero mai la vecchia via Beaulard (letta come
si scrive, perche altrimenti non capiscono) e la nuova, ridente, via Duino. Grazie per
tutte le milioni di occasioni in cui mi sei stata vicino: le mie infinite malattie (il diabete
e ancora lı!) e i mille test; i miei amori vecchi, ma sempre sofferti; le mie noiosissime
spiegazioni sulle onde e i loro amici, e le mille altre che, se scrivessi, renderebbero i
ringraziamenti piu lunghi della tesi.
Il piu importante ringraziamento e per mio padre: Claudio, la dedica di questo intero
lavoro (la trovi qualche pagina piu avanti!) non e abbastanza per ringraziarti. Non solo
il vile denaro, che pur mi ha permesso di fare tutte le cose che ho fatto fino ad oggi, e
cio di cui ti sono grato. Grazie per le lezioni di piano, grazie per Lilli, grazie per avermi
tirato fuori da tutti i casini in cui sono un mastro a ficcarmi. Grazie a te e a mia madre.
Grazie per avermi fatto e per avermi reso la persona che sono oggi: ogni mio interesse,
nonche ogni aspetto della mia personalita, e dovuto a voi.

Contents
Declaration of Authorship ii
Project Overview iii
Acknowledgements iv
List of Figures vii
1 Introduction 1
1.1 Transceiver architecture . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.1.1 Variable Gain Amplifiers . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2 Technology . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.3 Methods and Equipment . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2 Design Specifications 6
2.1 Bandwidth . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.1.1 Feedback Amplifiers . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2 Variable Gain . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.3 Impedance Matching . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.4 Linearity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.5 Stability . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.6 Group Delay . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3 Amplifier Design 24
3.1 VGA Architecture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.1.1 Fixed Gain Stages . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.1.2 Variable Gain Stages . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.1.3 Active Feedback . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.1.4 Output Buffer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.1.5 Additional Components . . . . . . . . . . . . . . . . . . . . . . . . 33
3.2 Layout . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3.3 Circuit Simulations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
3.3.1 Statistical Simulations . . . . . . . . . . . . . . . . . . . . . . . . . 42
3.3.2 Post layout simulations . . . . . . . . . . . . . . . . . . . . . . . . 44
vii

Contents viii
4 Conclusions and Outlook 46
A Circuit Layout 49
Bibliography 50

i

List of Figures
1.1 Transceiver simplified schematic . . . . . . . . . . . . . . . . . . . . . . . . 2
2.1 Miller capacitance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.2 Feedback . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.3 Active Feedback Block Scheme . . . . . . . . . . . . . . . . . . . . . . . . 12
2.4 Resistive degenerated amplifier . . . . . . . . . . . . . . . . . . . . . . . . 14
2.5 Different impedance configurations: (a) receiver and (b) transmitter chain 16
2.6 Amplifier signal swings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.7 Third order intercept point . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.8 two-ports network . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.9 Stability regions in the ΓL plane . . . . . . . . . . . . . . . . . . . . . . . 22
3.1 Chosen VGA topology . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.2 Fixed gain amplifier topology . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.3 Variable gain amplifier schematic . . . . . . . . . . . . . . . . . . . . . . . 28
3.4 PMOS I-V characteristic curves . . . . . . . . . . . . . . . . . . . . . . . . 29
3.5 Feedback block schematic . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.6 Active feedback effect . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.7 Buffer topology . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.8 Current mirror schematic . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
3.9 DC Block (a) schematic and (b) Bode plot . . . . . . . . . . . . . . . . . . 34
3.10 Layout of the active area . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
3.11 VGA AC response . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3.12 Controlling voltage gain dependency . . . . . . . . . . . . . . . . . . . . . 39
3.13 P1dB . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.14 Input third-order intercept point . . . . . . . . . . . . . . . . . . . . . . . 40
3.15 Edwards stability factors . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
3.16 VGA CMRR at different gain levels . . . . . . . . . . . . . . . . . . . . . 41
3.17 Noise Figure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
3.18 Monte Carlo simulation of VGA gain . . . . . . . . . . . . . . . . . . . . . 43
3.19 Monte Carlo simulation of VGA bandwidth . . . . . . . . . . . . . . . . . 44
3.20 Monte Carlo simulation of VGA CMRR . . . . . . . . . . . . . . . . . . . 44
A.1 Whole circuit layout . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
ix

i

A mio padre. . .
x

i

Chapter 1
Introduction
The importance of high speed communications is becoming greater and greater as mobile
devices get more powerful. Multimedia applications get involving larger and larger data
amount to be exchanged during the last years. Wireless communications offer a much
greater mobility with respect to cabled ones. However, the second ones still offer a much
greater data rate.
When data rate in the gigabit range is required, high frequency signals have to be
used. When looking at unlicensed frequency bands, the one around 60 GHz is a good
candidate for high speed communications. 60 GHz signals suffer indeed from a large free-
space attenuation due to the peak in the oxigen absorption spectrum and this makes this
frequency particularly suitable for high-speed short-range, i.e. indoor, communications:
no more than few meters should divide the trasmitter from the receiver in order to
correctly receive the sent signal. Furthermore, very high attenuation has been proved
for 60 GHz signals when passing through common materials walls, which would make
this technology communications limited to one room only.
IEEE Std 802.15.3c standard classifies 60 GHz communications as ones for WPAN (Wire-
less Personal Area Newtorks) use. This standard divides the whole band, from 57 GHz
to 66 GHz, into four channels, whose carrier frequencies are separated by 2.16 GHz.
This would allow data rate larger than 2 Gbit/s, depending on the modulation scheme.
Efforts have been made in last years in order to design a working 60 GHz transceiver and
some papers giving an overview of the different blocks design can be found in literature
[1] - [6]. Considering the use that has to be done of them, integrated, low-power and
cheap systems are needed.
Even if a lot of interest is put in these systems, 60 GHz circuits design keeps being very
challenging: because of the mm-wavelength, mismatch effects have a very strong impact
1

Chapter 1. Introduction 2
on the signal. Large care must be put when considering parasitics and other unwanted
effect, such as the skin one. Moreover, following the RF approach with distributed
parameters, a whole set of phenomena, like the inductive behaviour of every trasmission
line, should be kept in mind.
1.1 Transceiver architecture
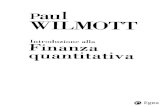
The transceiver is being designed with a superheterodyne topology (Figure 1.1). This
topology has been chosen because, even if more complex, more power consuming and
more area demanding in comparison to the homodyne one, its use avoids issues such as
self-mixing and DC offsets. In addition, the design of an intermediate frequency phase
locked loop (PLL) is easier with respect to the one of a 60 GHz PLL.
Figure 1.1: Transceiver simplified schematic
The incoming signal at the antenna of the receiver is pre-amplified by a low-noise am-
plifier whose aim is to bring the signal to a wider amplitude, in order to be able to
distinguish it from the collected noise. The signal gets then shifted to an intermediate
frequency (IF) by a first mixer. The mixer receives a reference signal from the PLL at
the frequency of about 40 GHz. The downconversion will then bring the signal at a
center frequency of about 20 GHz. This signal is amplified by the IF-Buffer just before
passing through another mixer. This second downconversion is made with a reference
signal that, before reaching the mixer, goes through a frequency divider. Both the IF
and this reference signal are at about 20 GHz and the information is therefore brought in
baseband. Just before the analog-to-digital converter a variable gain amplifier is placed.
Concerning the transmitter chain, the incoming signal from the DAC gets amplified by

Chapter 1. Introduction 3
the variable gain amplifier of an extent that depends on the power that has to be trans-
mitted. Two following upconversions, with the same frequency values as the receiver
branch, bring the signal up to 60 GHz where, thanks to a power amplifier, it is fed to
the antenna and finally radiated. The digital to analog conversion is to be made with
the Analog Devices AD9739, while the chosen ADC is EV10AQ190, produced by e2v
Semiconductors. Both are high speed converters, with differential low impedance inter-
facing connections toward the transceiver circuitry.
A monolithic integration of the system starts after the antenna and ends with the VGA.
At the antenna a power of −40 dBm is expected. The transmitted power level should
reach the maximum value of 10 dBm.
Even if some 60 GHz transceivers can already be found in the literature, several of them
omit the baseband part from the integrated solution [4] - [5]; some complete solutions,
including the baseband circuitry, can already be found [6].
1.1.1 Variable Gain Amplifiers
As introduced, this work focuses on the design of the variable gain amplifier that is put
just at the edge of the chip, before the digital converters. This VGA has expressely
been designed in order to work within the transceiver framework and therefore all its
specifications are determined by the global system required performance.
US Federal Communications Commission (FCC) defines as Ultra Wide-Band (UWB) a
signal whose bandwidth is broader than 500 MHz or than 20% of its center frequency.
Because of standard requirements, i.e. channel width of 2 GHz, the amplifier can be
classified as a UWB one.
Because of its application, the VGA has to be designed in order to handle signal span-
ning from MHz to GHz range frequencies. The fact that the amplifier is working both
at low and at RF regions, constitute one of the most challenging aspects of this design.
In fact, during the development of this work, some techniques typically when dealing
with high RF were not suitable because of the lower frequencies signals, e.g. impedance
matching techniques (Section (2.3)). On the other hand, obtaining high gain at GHz
frequency is much more complicated than for signals in the MHz range. As a bright
side, at frequencies of few GHz, high RF annoying effects, such as coupling and strong
parasitics effects, are much more soften and do not require the same amount of care that

Chapter 1. Introduction 4
a 60 GHz designer is used to take.
1.2 Technology
The chosen technology is always a compromise between performances and costs. 60
GHz systems are not easy to be realized because of the very high working frequencies.
Some technologies, such as III/V ones, are the best candidates for high frequency system
because of the high speed transistors and excellent RF performances and have been often
used in the mm-wavelength tranceivers found in literature [1], [4], [7].
Because of their high cost though, CMOS technology is still the more desiderable and
several high frequency transceivers have been designed using this technology [3], [2], [6].
In fact, CMOS is the cheapest available technology and with the scaling of its transistors
dimensions, its transistor have in the last years reached speed high enough to make them
suitable for RF designers, still with some difficulties to be solved such as the lowering
of the breakdown voltage which because a critical issue when designing power stages.
If willing to monolithically integrate the transceiver analog part with the digital one,
CMOS offer the additional advantage of a simplified integration.
The technology chosen for the transceiver project is the TSMC 90nm CMOS one. TSMC
offers low cost but reliable technology. The circuit model implemented for simulations is
based on BSIM4, which addresses the MOSFET physical effects into sub-100nm regime.
TSMC provides a slightly modified MOSFET model, in order to better fit their transis-
tors behaviour.
This technology offers 9 metal layers, the last of which being thicker than the other and
therefore called Ultra Thick Metal (UTM). This layer allows designer to decrease the
parasitic resistance when lines are longer. Moreover, since this layer is the furthest from
the substrate, the parasitic capacitance to the bulk is as well minimized. Low resistance
and low capacitance make this layer the best candidate to realize inductors with.
1.3 Methods and Equipment
To design the ampilfier, Cadence Virtuoso has been used for both the schematic and
the layout steps. All the simulations have been performed with the integrated simulator
GoldenGate. The chip has been designed to be measured with the HP8510C newtwork

Chapter 1. Introduction 5
analyzer for what concerns the gain and the bandwidth. Linearity measurements are
to be done with the HP83650L sine generator and the Rohde&Schwarz FSU spectrum
analyzer.


Chapter 2
Design Specifications
Before starting with the amplifier design, goals have to be defined: the VGA spec-
ifications have been derived by the transceiver ones starting from the whole system
requirements. Several compromises have to be considered when designing any electronic
circuit: hints of theory required in order to understand where they come from will be
given.
During the work, some parameters have been considered as more important than others.
Linearity, bandwidth and gain range have been thought as primary goals and checked at
every design modification. On the other hand, other parameters have been less focused
on during the preliminary steps because, according to the VGA function, less impor-
tant. Once completed the VGA architecture, their values have been though simulated
and checked to be in an acceptable range for the system requirements.
Considering the input required at the stage following the VGA, i.e. the ADC when
speaking of the receiver chain, and according to the signal that the VGA will receive
from its previous stage, the needed gain range has been calculated. The mixer will feed
the amplifier a signal which is expected to vary from 15 mVp to 70 mVp while the signal
that must be put in input at the ADC should be of 125 mVp constant amplitude in
order to exploit its whole available input swing, that is to say the whole range of voltage
values that can be coded in a different discrete digital sequence. This requires the VGA
to be able to vary its gain from 5 to 18.5 dB. In the transmitter, a variable gain could be
used in order to irradiate different power levels. Typically, this is not made, as eventual
amplitude modulation is obtained thanks to other blocks. However, an adjustable gain
level could be exploited in order to compensate for the variations of the gains of the
following VGA blocks, in the different transmitters. The needed variable range for this
purpose is much smaller than the one required for the receiver chain.
6

Chapter 2. Design Specifications 7
The required bandwidth has been directly obtained by the IEEE standard instructions:
the communication channel exploits signals from 10 MHz to 2.16 GHz to carry the
information and therefore the VGA is needed to have bandwidth of more than 2 GHz.
Since the requirements for the VGA in the receiver chain are more strict and more
challenging to be satisfied, the design goals have been derived for this component. The
same amplifier in the transmitter chain will in fact be used, with the due modifications
that will be in the course this work highlighted.
Table 2.1 resumes the entire set of design goals for the receiver VGA.
Parameter Value
Gain [dB] 5 - 18.5
Bandwidth [GHz] > 2
OP1dB [dBm] −5
OIP3 [dBm] 5
Table 2.1: Receiver VGA design goals
Parameters such as the power consumption and the chip area were not part of the prior-
to-design specification: these values have been though minimized as much as possible.
The same way, the noise factor was not considered as a primary parameter to design
according with, because of some simple considerations: when in the trasmitter, the VGA
will receive by the DAC a wide signal with a good signal-to-noise ratio; on the other
hand, considering the receiver, the position of the VGA in the chain, as last element,
explains its non-critical role in the noise generation. In fact, when cascading several two-
port stages, the overall noise factor can be calculated thanks to Friis formula (Formula
2.1) which shows how the main contribute to the noise factor Ftot is due to the first
elements of the chain, as the other contributes are divided by the previous stages gain
G.
Ftot = F1 +F2 − 1
G1+F3 − 1
G1G2+ ...+
Fn − 1
G1G2...Gn−1(2.1)

Chapter 2. Design Specifications 8
Consequence of the Friis formula is the presence of a low-noise amplifier straight after
the antenna, in typical receivers architectures.
According to the system specifications, the VGAs are required to have both differential
inputs and outputs. The use of a differential architecture, instead than a single-ended
one, leads to several advantages: common mode noise is rejected and even-order har-
monics are suppressed. Moreover the signal swing is doubled for a given supply voltage.
Before starting to work on the design, literature has been scanned in order to analyse
the state-of-the-art adopted solutions that have been exploited to acheive performance
comparable or better than the goal-specified ones.
2.1 Bandwidth
As introduced in the previous chapter, the amplifier is required to have a large band-
width. This aspect has been one of the most challenging problems while designing the
VGA: in addition to the high-frequency problems already introduced, the lower limit of
the passband is required to be at least of 10 MHz which makes several of the RF-design
techniques unusable and complicates the design some more.
The communication channel is 2 GHz wide and therefore this value is the smallest
required value for the amplifier to be implemented in the transceiver. A deeper con-
sideration will make it clear how a 3 dB-bandwidth at the upper limit of the channel
is not advisable as a wide section of the functional signal will be attenuated and phase
distorted (Section 2.6). Therefore the amplifier has been designed to have a gain which
is as flat as possible in the entire range of frequencies it works at.
As well known from the theory, the gain of a common source amplifying stage is pro-
portional to the resistance seen at the output node (Formula 2.2). This node happens
to be the critical one in terms of bandwidth: the dominant pole frequency in the Bode
plot is function of this output resistance as well (Formula 2.3).
G = gm ·Rout (2.2)
fp =1
2πRoutC(2.3)
This inverse dependancy gives rise to a compromise that is well known to any amplifier
designer: higher the gain, lower the bandwidth.

Chapter 2. Design Specifications 9
At the output node, significative capacitance is seen as to the load capacitance, typically
a transistor gate, several parasitic capacitors are added. The total capacitance, together
with the high resistance seen at the same node generates a pole that is indeed located
around the GHz frequencies.
Techniques exist in order to reduce the parasitic capacitances: cascoding transistors will
avoid the Miller effect to amplify the differential pair capacitances. In addition, the use
of smaller transistors, both in the stage and for the next-stage differential pair, i.e. the
load, will push the pole toward higher frequencies.
For a given technology, working on capacitances cannot though solve the problem beyond
a certain extent: transistor sizes are chosen according to several other parameters and a
cascode solution could be ineffective due to the increased resistance seen at transistors
drains which will again lower the pole frequency.
Considering the output resistance, some optimization can be done as well: lowering this
resistance will in fact push the pole frequency to higher values, but a compensation for
the lower gain of the stage has to be found. Working on both resistances and capacitances
can lead to performant 2 GHz band simple amplifiers with still interesting gain levels
[16]. When willing to push the amplifiers performance, a very common approach consists
in cascading several amplifier stages: the gain, in dB, of the total network is in fact the
sum of the single stages ones. Thus the single stages can have a lower gain: if this is
acheived via a lower load resistance, a wider bandwith can be obtained.
Cherry-Hooper amplifiers exploit a different topology in order to lower the resistance
seen at the output node and to push the pole toward high frequencies [17]. Several
amplifiers in literature exploit modified versions of the Cherry-Hooper topology as a
base which to start from for high speed systems [13], [14], [23].
In this work, both the capacitive and the resistive load have been optimized, in order to
push the pole generated between the several stages as far as possible. Details of the used
solution will be presented in Chapter 3. Working on the pole frequency in this manner
is though not sufficient to reach bandwidths much broader than the required ones. In
fact, literature presents promising topologies that exploit other techniques in order to
acheive bandiwidths up to several GHz [8] - [15].
One of the techniques that have been used to extend the bandwidth consists in a multi-
stage amplifier that exploits a capacitive feedback in order to compensate the capacitance
responsable for the generation of the dominant pole [8]. With the capacitive neutral-
izazion configuration, the Miller effect is exploited to vary the capacitance seen at the
input of an amplifier that will be placed as load of another stage (Figure 2.1). In fact, if a
capacitive impedance Cp is connected in parallel to an amplifying stage, the capacitance
seen at the input of the stage is varied from its original value (Figure 2.1).

Chapter 2. Design Specifications 10
Figure 2.1: Miller capacitance
The resulting capacitance at the input node can be calculated and shown to be linked
to the gain of the amplifier A with a linear relation (Formula 2.4).
Cin,tot = Cin + (1−A) · Cp (2.4)
If the amplifier is a non-inverting one, the total capacitance at the input node Cin,tot is
then reduced and if the gain of the stage is large enough, a negative capacitive value,
that can be exploited to compensate the one seen at the previous stage output, can be
obtained.
As a drawback, because of the same effect, the capacitance at the output node is ampli-
fied. It is though possible to compensate Cout,tot thanks to a similar capacitive feedback
on the following stage. Also, this technique can be used to reduce the capacitive load at
the most critical node, at the cost of increasing it on another one, which, because of the
design could not give rise to a critcal pole. Since the negative capacitance rises at the
amplifier input node, this kind of feedback can be used to extend the bandwidth only
when using a cascade architecture.
Another way to reduce the capacitive load at the output node exploits the use of induc-
tors in order to compensate for the node reactance at the working frequency. Historically,
the use of inductive loads to generate a peak in the region close to the bandwidth edge,
extending it of a certain amount, has been studied and implemented [9], [10]. The cre-
ation of a parallel resonant circuit associated with the capacitance seen at the output
neutralizes it and results in a bandwidth broading. Inductive peaking techniques re-
quires careful design in order to extend the bandwidth without generating an high peak
close to the bandwidth edge and ruin the gain flatness.
In integrated technology, inductors become very expensive in terms of area consumption.
Moreover they are the most difficult components to be designed because of the strong

Chapter 2. Design Specifications 11
parasitics effects. In order to overcome inductors area drawbacks, the use of active in-
ductance elements has been proposed: some active load topologies are shown to act as
an inductive load in the high frequency region [11], [12].
2.1.1 Feedback Amplifiers
A very common solution that has been proposed in the past is the use of a feedback
chain. In a feedback amplifier part of the output signal is taken and fed at the input.
If the two signals are combined when in phase opposition, the feedback is said to be
negative. Because of this feedback, the amplitude of the signal entering the amplifier
is reduced. When creating this loop, the overall gain becomes dependent on both the
original amplifier gain, A0, and the feedback factor β, which depends on the feedback
topology (Formula 2.5).
Aloop =A(jω)
1 + βA(jω)(2.5)
Inserting in (2.5) the gain expression of an amplifier whose frequency behaviour is of
a high-pass filter characterized by a single pole, it is easily shown that the closed-loop
amplifier will show a lower gain (Formula 2.6), but a different cut-off frequency fcut
(Formula 2.7).
Aloop,DC =A0
(1 +A0β)(2.6)
fcut = f0,cut · (1 +A0β) (2.7)
The bandwidth can then be broadened at the cost of a reduced gain (Figure 2.2). Since
both the quantities vary of the same amount (1 +A0β), the Gain-Bandwidth product is
kept constant. This kind of feedback can be implemented thanks to a resistor networks
in a very easy way. With this implementation, the β factor will vary in a range from 0 to
1. A resistive feedback will though present some drawbacks. First of all, if a very wide
band is required, the amplifier stage has to be designed with a very high gain, since its
reduction is of a significative amount when compared to the extent of the consequent
bandwidth broadening. In addition, this kind of feedback will couple the DC operating
point at the input with the one at the output, which could be a problem according to
the amplifier topology. The use of a DC block is not suitable to solve this problem, as

Chapter 2. Design Specifications 12
Figure 2.2: Feedback
this will give rise to undesired high-pass active filters, resulting in a cut of the lower
limit of the bandwidth.
On the other hand, the use of an active feedback solves the problems of the resistive one
(Figure 2.3).
Figure 2.3: Active Feedback Block Scheme
This kind of feedback has been used in literature in the last years, with interesting results
[13], [14] , [15]. The way an active feedback works differs from the one of a resistive one.
Several ways to implement it exist, the simplest one being a common source transistor.
When the ouput signal is fed to the gate of the feedback transistor, its drain will follow
it with a reverse polarity, therefore creating a signal exploitable for a negative feedback.
However, this is a simplified view and it should be considered that this is true only for
low frequency signals. In fact, high frequency signals will accumulate a certain phase
delay while going through the feedback block and will not be therefore fed back in total

Chapter 2. Design Specifications 13
phase opposition. This frequency dependance of the active feedback network can be
exploited to extend the bandwidth. More details will be given in Chapter 3.
The use of an active feedback lets the designer solve the DC coupling problems rising
with a resistive network, since the input and the output of a common source amplifier
are DC decoupled.
2.2 Variable Gain
In the past years several approaches have been reported in literature in order to acheive
variable gain stages. The different techniques present advantages and drawbacks and
not all of them can be used together with a given bandwidth extension method.
A simple mathematical derivation can be made in order to understand on what is pos-
sible to work when willing to vary the amplifier gain. As already said, the DC gain
of an amplifier stage is proportional to both the output resistance and the transisor
transconductance (Formula 2.8).
G = gm ·Rout (2.8)
The transconductance gm is not a constant but depends on several parameters, both
technology, i.e. gate capacitance and carriers mobility, and design dependant ones, it
is to say the transistor dimensions. It is clear that once the design is chosen and the
circuit realized, no one of those parameters can be varied and therefore none of them
can be exploited in order to obtain a variable gain.
gm shows a dependency on the current that is flowing in the transistor channel at the
biasing point. This dependency is not fixed and changes according to the transistor
working region: when the voltage on a transistor gate reaches values around the threshold
one, the channel begins to be created and the transistor works in weak inversion (W.I.)
regime. In this regime, the gate voltage is still not high enough to attract a large amount
of inversion carriers at the interface, but depletion of the majority carriers around the
oxide surface is already acheived. As the gate voltage is increased the channel is fully
created and the transistor is said to be in strong inversion (S.I.). When the transistor
moves from one regime to the other, its transconductance dependency on the current
varies: an exact mathematical fit for this transition is not given, but a linear to square
root link with ID is shown when going from weak inversion toward strong inversion.

Chapter 2. Design Specifications 14
Inserting in (2.8) the transconductance expressions for both regimes, new expressions
for the gain are obtained (Formulas 2.9 - 2.10).
G =ID
n · UT·Rout (W.I.) (2.9)
G =
√2β · IDn
·Rout (S.I.) (2.10)
Formulas show all the parameters that can be exploited to vary the gain: the bias current
ID as well as the output resistance Rout. Moreover when varying the gate biasing voltage
the gain dependancy on the biasing current will change from one expression to the other.
Examples of gain variation by gate biasing voltage can be found in literature [16]. A more
common approach consist though on working on the output resistance. More than one
way to vary the load impedance exist, however resistors in integrated technologies are
usually implemented with active elements, i.e. MOSFETs, because of smaller process
tolerances and the lower area requirements they exhibit with respect to their passive
counterpart. Using a MOSFET as a variable resistor has though a major drawback:
non-linearities are introduced. In fact, the I-V characteristic of a MOSFET is non-linear
and can be linearized to emulate a variable but Ohmic behaviour only when in triode
region.
Other techniques to obtain variable gain stages exist. For example, adding a degenera-
tion resistance will affect the gain level as well (Figure 2.4).
Figure 2.4: Resistive degenerated amplifier
Indeed, when a degeneration resistance is added, the gain expression becomes:

Chapter 2. Design Specifications 15
G =gm ·Rout
1 + gm ·Rdeg(2.11)
Degeneration resistances are usually implemented because of the increased stage linearity
and because of the stabilization the gain, due to the weaker dependency on the transistors
transconductance. If Rdeg is implemented as a variable resistor, the gain can be varied
as well. It should be noticed that with this technique the gain can be only reduced
from the value the stage would have withouth Rdeg. Therefore this solution should be
implemented on high gain stages that could give rise to problems in terms of bandwidth.
Variable feedback networks can be used as well. As stated in the previous paragraph,
feedback nets extend the bandwidth at the cost of a reduced gain: connecting a feedback
will indeed vary the output resistance, changing it from the open loop value. As a
drawback, a variable feedback network will result in a variable bandwidth according to
the gain level. Since a constant badnwidth for all the gain levels is usually preferrable,
this tecnhinque is usually discarded.
A last solution that has been investigated consists in the employ of several fixed gain
stages that can be included or excluded in the amplifier chain by switches, driven by a
digital controller. Examples can be found in literature, where this architecture has been
exploited in order to make the gain vary in discrete steps and not in a continuous way
[7], [18]. In [18] the use of coarse and fine gain stages has been implemented in order to
obtain a gain range from 0 to 45 dB with a 3dB step.
The digital controller can be used not only to include or exclude amplifier stages, but as
well to select the number of passive resistors that can be connected at one node, avoiding
the use of variable resistances. When using this technique, the introduction of the mosfet
due non-linearities will be avoided and a very linear amplifier can be obtained.
2.3 Impedance Matching
As stated in the previous chapter, two VGA types will be needed. One of them will be
placed in the receiver chain, while the second one in the trasmitter one. According to the
VGA position, the amplifier will see different impedances at its inputs and outputs and
therefore the two of them could require additional hardware to be properly interfaced
(Figure 2.5). The chosen ADC has a low input impedance, i.e. 50 Ω. On the other side,
considering the transmitter, the upconverter will offer high impedance at its inputs.
Speaking of the VGA inputs, the same issue occurs: as the output impedances of the

Chapter 2. Design Specifications 16
previous stages changes from high to low in the two chains, the input impedance of the
amplifier has to be matched.
(a)
(b)
Figure 2.5: Different impedance configurations: (a) receiver and (b) transmitter chain
Although all these considerations have been taken in account while designing the am-
plifier, for measurements purposes both the input and the output impedances have to
be matched at 50 Ω.
Radio frequency designers are very used to impedance matching problems, as they be-
come more and more critical while going toward higher frequencies. Typical approaches
to match impedances include LC networks, where impedance resonances are exploited
to match at a particular frequency. As already stated, inductors can become a trouble-
some component to be used in integrated technology: in fact, in addition to parasitics
problems, low frequency resonating inductors become prohibitive in terms of area re-
quirements and therefore not feasible. Furthermore, resonating circuits are used to
match impedances at specific frequencies and are not easily exploitable for broadband
matching.
To match over a 2 GHz span at relative low frequencies, resistive feedbacks can be used:
when connecting resistors to the VGA terminals the seen impedance is changed and
matching can be acheived. The feedback resistor values will anyway affect as well the
amplifier performance and all those effects should be considered when matching with
this technique.
Buffer stages are one of the possible and most exploited solutions. This is to say that
an additional stage, able to properly load the wanted impedance, is put at the interface
with the circuit, preventing an unproper loading and avoiding interference with the

Chapter 2. Design Specifications 17
desired operation. Voltage buffers are ideally required to have unity gain at all the
passband frequencies and very high linearity. Common Drain (CD) configurations are
usually chosen as buffer stages when in the need to match to low impedances. This is
thanks to the fact that the impedance seen through the transistor source is much lower
than the one seen through the drain. CD topologies present though some drawbacks:
while consuming a large amount of current, the signal gets attenuated if loaded on a
low resistance, i.e. 50 Ω,. This is because the voltage gain of a CD stage has an upper
limit at 1, that is to say that ideally a CD topology can adapt the impedance without
affecting the signal amplitude. This ideal limit is more approached the more the load
resistance RL is high (Formula 2.12).
Av =gmRL
gmRL + 1(2.12)
In case of a 50 Ω load resistance the common drain will then attenuate. Since the larger
the attenuation of the buffer, the bigger the needed signal swing at the previous stage
output, this issue has to be carefully handled while designing.
The adopted soluton will be shown in the Chapter 3 where the VGA schematic will be
discussed in detail.
2.4 Linearity
Linearity is one of the most important aspect of an amplifier: if the signal in the passband
gets amplified but too much distorted, it could be of no use as no more processable.
Furthermore VGA linearity will affect the whole system performance.
Starting from the maximum expected power at the antenna, the requirements in terms
of linearity for the several blocks have been calculated. Still, since the amplifier is at the
end of the receiver chain, its estimated properties depend on the ones of the different
preceding stages. These stages designs have not yet been finalized and therefore an
accurate estimation is difficult. This explains why the required linearity properties have
been obtained starting from the digital converters side.
Regarding linearity, two parameters are usually exploited to quantify the amplifier per-
formance: the large-signal 1 dB compression point (P1dB) and the small-signal third-
order intercept point (IP3).
P1dB is directly related to the signal compression and usually starts becoming an issue
when large signal swings are to be handled.

Chapter 2. Design Specifications 18
A 250 mVpp single-ended signal swing is the largest signal that can be correctly processed
by the ADC, without saturating it. As anticipied in Section 2.3, if a buffer stage, such
as CD, is exploited to adapt the impedance, it must be taken in account that, due to its
attenuation, an even larger signal has to be handled. Speaking of the transmitter, the
DAC will feed at the amplifier inputs a wide signal that should not cause compression
distortion. However, the used DAC has a programmable output current. In order to
grant the proper working, the amplifier should at least be able to process the signal
coming from the converter with the smallest available amplitude, i.e. 150 mVp on the
single signal.
In order to assure proper working, large care has to be put when choosing the working
points, i.e. bias currents and transistor dimensions, since it is around their value that
the signal will swing, both at the inputs and at the outputs (Figure 2.6).
Figure 2.6: Amplifier signal swings
The compression of the gain concerns the input of every amplifier stage: for the transistor
not to turn off, the threshold voltage must be granted at its gate. Therefore, considering
the topology of Figure 2.6, VB,in > Vth. The threshold voltage should be assured not
only while in bias condition, but also when the signal is applied, that is to say when
Vgs 6= VB,in. In particular, when the signal gets its minimal value the transistor has to
be checked not to go in subthreshold regime: the condition to be assured is therefore
Vmin,in > Vth. On the other hand, if Vgs becomes too high when reaching its maximum,
the transisor could offer such a small channel resistance not to grant its self channel
saturation anymore.
Similar considerations can be made at the output node, where the critical situation is
reached when Vds assumes its minimal value Vmin,out that has to be larger than the

Chapter 2. Design Specifications 19
transistor saturation voltage Vds,sat not to bring the transistor in the triode regime.
When considering more complex topologies, with biasing structures and active loads,
the issue becomes more problematic as each component requires a part of the total
voltage headroom in order to properly function. In designs where the supply voltage is
low, cascoding becomes an unexploitable technique: when handling large signals, non-
linearity effects appear and the gain gets compressed.
P1dB simulations have been made to check the proper amplifier working.
Careful transistor dimensioning and bias point choice let the designer handle pretty
ample signals, up to a certain amplitude. When willing to overcome the described
limitations, less common amplifier topologies can be exploited: in literature other ar-
chitectures, known as push-pull amplifiers, have been proposed and seem to be able
to handle almost rail to rail signals. An interesting study on the topic, enlighting the
advantages and the drawbacks, has been developed in the last year [19].
Linearity issues do not rise only from compression, but as well from small signal distor-
tion. In fact, amplifiers are linear elements just in first approximation. It is possible
to model the amplifier non-linearities with a polynomial expansion. Exploiting the
equivalence of (2.15), it is easy to show with few mathematical steps that, if a signal
x(t) = X1cos(2πf1t) is fed to an amplifier whose polynomial characteristic shows cubic
terms (Formula 2.13), signals at three times the input frequency will be seen at the stage
output.
y = k0 + k1x+ k3x3 + ... (2.13)
−→ y(t) = k0 + k1 ·X1cos(2πf1t) + k3 ·X31cos
3(2πf1t) (2.14)
with cos3(x) =3
4cos(x) +
1
4cos(3x) (2.15)
As these components grow with the cube of the input signal amplitude, increasing the
input power will degrade the ratio between the first order and the third order sig-
nals power. In addition to third harmonics generation, if a multi-tone signal x(t) =
X1cos(2πf1t) +X2cos(2πf2t) is fed to the amplifier, intermodulation products rise and
signals at frequencies that are sum or difference of f1 and f2 can be observed. If the
amplifier shows poor linearity, the wanted signal could be too distorted at the work
point because of the other frequency components.
Input IP3 (IIP3) measures the signal power that has to be fed in input in order to
obtain an output power of equal magnitude for both first and third order signals. As at

Chapter 2. Design Specifications 20
high input power the output of the amplifier will eventually saturate, the IIP3 is ob-
tained via an extrapolation and is therefore a theoretical parameter (Figure 2.7). Even
though theorethical, it can be used to succesfully quantify linearity VGA performance.
Not only third order harmonics gets generated due to the non-linearities, but second
Figure 2.7: Third order intercept point
and higher order ones as well. Third order harmonics constitute anyway the main issue
because of the techniques that exist and are commonly used to suppress the even-order
harmonics, such as differential designs.
Concerning amplifiers, it is possible to demonstrate that the IP3 has a link with the
compression point: the first one is 10 dBm higher that the P1dB. Starting from the ADC
requirements, the needed input IP3 values for the VGA in the different gain configura-
tions has been obtained. A value larger than -13 dBm has to be achevied when in high
gain setting, while 0 dBm is the minimum that has to be obtained when in low gain
level.
When small-signal linearity requirements are not met, techniques to boost it exist: in-
creasing the transistors gate bias and lowering the gain, as well as using larger flowing
currents, are commonly exploited tricks.
2.5 Stability
Stability is a big issue for any amplifier design. When dealing with feedback amplifiers,
both resistive and active, phase and gain margin are usually considered in order to assure

Chapter 2. Design Specifications 21
that the amplifying block will not start to oscillate because of the feedback network.
When speaking of RF-VGAs, greater care should be put during design and when carrying
on simulations to guarantee stability at all the gain levels. In fact, going toward radio
frequencies, other effects such as strong signal cross-coupling could lead the circuit to
the instability.
The understanding of stability issues involve not trivial theory and calculations that are
not to be presented in this work. Some hints are anyway to be given in order to catch
how the stability has been tested for the VGA.
Figure 2.8: two-ports network
Considering a two-ports with both load and source connected to a passive network
(Figure 2.8), the circuit is granted not to oscillate, therefore to be stable, if the signal
reflected at the two ports meet the conditions of formula (2.16), that is to say that the
reflected power will not be larger than the incident one at the same port.
|Γin| < 1 and |Γout| < 1 (2.16)
This condition is equivalent to state that the admittance of either port remains positive
for any arbitrary passive termination on the other port. In this case one speak of
unconditional stability. If there are specific terminations at one port that can brake the
condition, one speaks of conditional stability. Unconditional stability is advisable when
designing any circuit because of the larger margin of safety that it grants, as well as for
the easier techniques that exist to check it.
It is possible to map on the complex plane, for example in the ΓL one, the values for
which |Γin| = 1, that is to say the limit condition for the circuit to be stable. Similarly,
it is possible to map on the ΓS plane the values for which |Γout| = 1. This mapping will
lead to the trace of circles that will divide the regions of instability from the others. If
|S11| < 1 the stability regions lie outside these circles and therefore, in order to assure
unconditional stability, these circles should lie entirely outside the Smith chart (Figure
2.9).

Chapter 2. Design Specifications 22
Figure 2.9: Stability regions in the ΓL plane
Calculations of stability circles center and radius are difficult and prone to errors. Be-
cause of the not trivial theory beneath the understanding of stability issues, a practical
and simple way to check whether the stage is unconditionally stable consists in the use
of S-matrix-derived parameters. Both Rollett and Edwards proposed two different pa-
rameters that can be used, whose derivation can be made for all the linear two-ports
networks [20],[21].
In this work, Edwards µ parameter is preferred with respect to Rollett k one as the first
one has a direct geometrical meaning, measuring how far from the instability circles the
center of the Smith chart is. Therefore a two-ports with larger µ parameter will be more
stable than one with a smaller µ. Edwards identifies two parameters, µ and µ′: the first
one defines the minimum distance between the center of the unit Smith chart and the
unstable region in the ΓL plane, while the second one refers to the ΓS plane. Therefore,
µ > 1 and µ′ > 1 will assure that no impedance seen at both the two-ports terminations
will make it oscillate, that is to say that the circuit is unconditionally stable.
2.6 Group Delay
Signal phase distortion is another amplifier property that should be taken in account.
The origin of this distortion is due to a dependency of the transit time of a signal within
a block on its frequency.
Phase distortion shows up when going closer to zeros or poles in the Bode plot. In fact,

Chapter 2. Design Specifications 23
the zero/pole frequencies can be defined as those frequency values for which the phase
of the gain changes of 45. Therefore, a broader bandwidth will usually lower the phase
distortion in a given range of frequencies. For example, when a 3 dB bandwidth of 2
Ghz is obtained, signals at the edge of the band will experience a large phase distortion.
If the bandwidth is increased up to several GHz, the phase distortion for the 2 GHz
signal will be reduced. This emphasizes the need of a VGA with flat gain characteristics
as broad as possible.
Equalizers exist in order to reduce the phase distortion. Therefore phase distortion is
acceptable in amplifier stages in a certain range, as long as it does not get so large not
to be recoverable anymore by following stages.

Chapter 3
Amplifier Design
3.1 VGA Architecture
In the previous chapter the goals have been established and a review on the existing
literature has been presented.
Designing the VGA requires as first steps the choice of the topology and therefore
the selection of literature solutions that best acheive the aim, considering both the
advantages and the limitations of each of them. Among the reasons that led to the
final topology, one that deserve to be mentioned is the design semplicity: solutions
can be found in literature that exploit several techniques together in order to acheive
good performances [15]. This approach could though result in an over-complicated
design because of the several effects that have to be studied, first singularly and then
all together, in order to fully understand the overall working. Moreover as the design
becomes more complex, the number of parameters that has to be optimized before the
chip production quickly increases.
Before the choice of the final achitechture, several solutions have been investigated.
Because of the large output swing needed, in a first time a push-pull amplifier, like
the one proposed by Keehr in [19], has been designed and simulated. Due to the non-
standard achitecture problems rised: the chosen topology has been proved to be too
sensible to load variations. In addition, push-pull amplifiers with variable gain cannot
be found in literature and their implementation is not trivial. Therefore, a more classical
topology with cascaded amplifying blocks has been selected.
Concerning the bandwidth extension techniques, inductive peaking was discarded in the
first steps as it did not look as appealing as other technique, mostly due to the mentioned
drawbacks (Section 2.1).
24

Chapter 3. Amplifier Design 25
Cascoded stages were then designed and simulated. Eventually, their use has been
discarded: Miller capacitance amplification becomes in fact more critical when the gain
of the stage is high. Since low-gain wide-band stages were to be designed, no large
benefit was obtained when cascoding. The large signal handling requirements became
then the reason which casoding implementation was avoided for.
As next trial, capacitive feedback networks to obtain negative capacitance compensation,
as proposed in [8], were used. Because of the use of inverting stages, one single-ended
signal was fed to the other branch. Thanks to this cross-feedback technique, a bandwidth
broadening was successfully simulated. The use of this kind of feedback in integrated
circuits requires though a very precise tuning of a small capacitors (≈ fF ) in order
to obtain the desired effects. Even more important than that, stability simulations
were performed and it was shown that the circuit was not unconditionally stable. Even
though a possible solution to these problems is proposed in literature [15], the use of the
capacitve feedback was discarded in favor of other more appealing and reliable topologies.
The chosen final achitecture is shown in Figure 3.1.
Figure 3.1: Chosen VGA topology
The whole VGA is composed by 8 amplifying cascaded stages plus an output buffer.
The number of stages has been chosen during the final steps of the design in order to
satisfy the gain requirements without exceeding in the required DC current. In fact,
cascading the same identical topology will allow wider gain range and higher reacheable
gain levels, but at cost of larger area and power consumption.
Two variable attenuation stages at the beginning of the chain are used to lower the
amplitude of too large incoming signals. Following variable and fixed gain stages are used
in order to bring the signal to the desired output amplitude. Two active feedback blocks
are exploited to let high frequency signals to be in the passband. An active feedback
has been chosen after some trials with a resistive one: the drawbacks of the resistive
feedback have been proved not to be easily solveable (Section (2.1.1)). Moreover, the

Chapter 3. Amplifier Design 26
active implementation seems to be capable of larger bandwidth broadening with respect
to the consequent gain loss, with respect to the passive counterpart.
The need of fixed gain stages beneath the feedback chains, rises from the active feedback
working principle and will be justified in Section (3.1.3).
Last, the buffer stage, as well as the 50 Ω resistors at the input, are used to lower
the impedance seen from the VGA terminations. Adapting the impedances with this
amplifier topology offers the major advantage of a versatile architecture: adding or
removing the border stages will vary the terminations impedances from low to high,
without affecting the core of the amplifier. In fact, if the output impedance is required
to be high, the removal of the output stage will improve the VGA gain performance
of a small amount (Section (2.3)). At the amplifier inputs, when removing the input
resistances, the seen impedance will become much higher and no change in the VGA
performance can be observed. This adaptibility lets the amplifier to be designed just
once in order for its performance to be tested, avoiding the need of the different designs
for the transmitter and the receiver chains.
3.1.1 Fixed Gain Stages
Fixed gain stages consist in a differential pair, with a common biasing tansistor and a
resistive load (Figure 3.2).
Figure 3.2: Fixed gain amplifier topology

Chapter 3. Amplifier Design 27
A resistive load, in these stages as well as in the variable gain ones, has been preferred
with respect to an active one. The choice is due to the linearity issues active loads could
introduce if their saturation voltage is not granted: because of the required output swing,
which increases while moving through the amplifier elements, this kind of load has been
simulated not to be the best candidate. On the other hand, when little currents are
handled, the output node can reach much higher values if not too high resistors are used
as load. In fact, the resistive voltage drop V = R · I can be appreciably smaller than the
VDD − Vds,sat limit imposed by active loads. Thanks to the resistive load, the high DC
output voltage of each block has been exploited to bias the following stage, avoiding the
use of intermediate DC blocks.
The fixed gain amplifiers have been designed with a gain of about 7 dB and, thanks to
a low resistive load of 220 Ω and small transistors, i.e. small capacitances, a high cutoff
frequency at the output node is simulated (Section (2.1)): 1dB-bandwith of 3 GHz is
obtained when the fixed-gain amplifier is loaded with an identical stage.
The power consumption of these stages is of about 2.5 mW, due to a bias current of
about 1.05 mA on each transistor of the differential pair. Little variations from this
value are shown, depending on the stage position: minor modifications have been done
in the different fixed gain stages in order to adjust the biasing voltages at the different
nodes at the optimal value.
3.1.2 Variable Gain Stages
As presented in the previous chapter, several techniques to vary the gain exist (Section
(2.2)). The chosen one consists in varying the load resistance: most of the other discussed
techniques, such as working point variations or variable feedback networks, have been
discarded because of their major drawback of varying the amplifier performace according
to the gain set level. In fact, because of the strict bounds due to the large-signal handling,
the DC working points of the different blocks should be changed with great care in order
to assure satisfying linearity in all the configurations. Varying the gain with a variable
feedback network will have a great impact on the amplifier bandwidth for the reasons
that have been previously explained.
Constant VGA performance at each gain level are advisable in most the situations and
a variable load can lead to good behaviour in these terms, when well designed.
Digitally controlled amplifiers have been as well excluded because of the additional area
required by the controller as well as the resistors array, if implemented. Moreover the
design would have become more complex because of the digital parts.

Chapter 3. Amplifier Design 28
Figure 3.3: Variable gain amplifier schematic
The variable gain stages have been designed starting from the fixed gain ones, adding
a PMOS in parallel to the load resistor (Figure 3.3). Because of the high voltage value
at the output node, this transistor will never reach the saturation: when its Vsg is lower
than the threshold value, the current coming from the biasing transistor will entirely
flow in the resistor, giving rise to a potential drop at its nodes, as well as at the PMOS
ones, which has be designed to be always lower than 100 mV. When a larger Vsg is put
on the PMOS, current can flow through it, reducing the amout of current that flows in
the resistor, thus further decreasing the value of the PMOS Vsd. The PMOS is therefore
always working in triode region, i.e. far from the saturation regime. In this region the
active element acts, in first approximation, as an Ohmic component, showing a linear
resistive behaviour.
In order to use the PMOS as a resistor, it has to be assured that it will not reach the
saturation even when the signal is applied, i.e. Vsd < Vsd,sat even when the output node
reaches its lower value. In fact, this condition is not fully satisfying as, just approaching
the saturation regime, the I-V characteristic of the transistor becomes non-linear (Figure
3.4).
Appreciable linearity can be observed when the PMOS Vsd is lower than a certain value.
This value is not constant, but varies according to the voltage applied on the transisor
gate. When higher Vsg is applied, the output resistance of the stage is lowered, therefore
lower gain is expected. In this configuration, the source-drain voltage that can be applied
at the PMOS terminals and assure a linear behaviour is wider, reaching values larger

Chapter 3. Amplifier Design 29
Figure 3.4: PMOS I-V characteristic curves
than 200 mV. Lower linearity is expected for high gain configurations where the limits
in terms of output swing become stricter. It is therefore clear that, with this kind of
architecture, variable-gain stages are unable to handle very large signals. This justiffies
the presence of the attenuation stages that have been put at the beginning of the whole
amplifier chain: handling small signals will preserve the signal from be distorted. On
the other hand, the stages that will handle the largest signals, i.e. the last ones, are
fixed-gain ones.
This variable resistors technique has been exploited in all the four VGA stages. Though,
because of different design parameters, i.e. PMOS sizes and resistors value, the first two
VGA of the chain can vary their gain in a range from 2 to −13 dB, while the other two
from 0.5 to 6.8 dB. The first two amplifiers are thus exploited as attenuation stages,
while the other two are used as gain stages.
In fact, using larger PMOS will increase the maximal conductance value that it can offer,
therefore letting the tunable gain range of the single stage become wider toward smaller
values. The upper limit of the gain is instead not linked to these transistors dimensions,
but only to the resistors values. The final dimensioning of the different PMOS has been
made considering these effects, as well as the parasitic capacitance that a wider PMOS
would have introduced and its consequences on the overall bandwidth.
The biasing current flowing in each transistor of the differential pair is close to 500 µA
for the attenuation stages and to 3 mA for the gain stages. In fact, the difference in the
gain levels mostly rises from the difference in the bias current. The power consumption

Chapter 3. Amplifier Design 30
of the attenuator blocks is then simulated to be 1.2 mW. The gain stages consume 7.8
mW.
3.1.3 Active Feedback
The feedback working principle has been already explained in the previous chapter, but
will be here covered in larger details.
Figure 3.5: Feedback block schematic
In order to decouple the DC a simple common source configuration has been used (Figure
3.5): the stage is designed in order to use the output resistance of the stage whom it
is connected at as its load. This stage is not a gain one, though, as explained, the
performance of the whole loop will be affected by the feedback gain (Section (2.1.1)).
In order to obtain a low gain, these stages have been designed with small transistors
dimensions and low biasing current. Moreover, to lower the gain some more, these stage
have been resistively degenerated. In fact, the resistive degeneration let the transistor
to be designed with larger dimensions, without increasing the gain. Larger transistors
and resistive degeneration have been preferred because of the smaller impact of process
fluctuations on larger structures.
To better understand how the feedback works, Figure (3.6) shows the Bode plot of the
stage at whose output the feeback output is attached.
When the feedback is connected, the signal at the variable gain stage output node gets
combined. This is why the gain of this stage, which by itself could vary from 0.5 to 6.8

Chapter 3. Amplifier Design 31
Figure 3.6: Active feedback effect
dB, is here shown to be significantly lower at low frequencies.
The plot shows a peak at high frequencies. In fact, at GHz frequencies signals experi-
ence a certain delay while travelling through the feedback loop. Because of this delay,
the combined signal is not anymore combined in total phase opposition and, as result,
signals are not completely subtracted, but a portion of them starts to be summed. With
the designed feedback network, signals at 8 GHz are combined in phase and they get
completely summed: the peak in the plot is observed. This peak will vary its amplitude
as well as its frequency according to several parameters. The peak frequency can be
slightly shifted by designing various feedback stages or connecting them over a different
number of fixed-gain amplifiers. The peak height is instead function of the amplitude
of the signals that gets combined, that is to say, it depends on the gain levels of all the
stages forming the loop, as well as on the gain of its preceeding stage. This explains
why fixed-gain stages have been used in the loop, instead of variable-gain ones: in fact,
using variable-gain stages would have led to a variable peak amplitude, resulting in a
variable bandwidth according to the gain level in the whole VGA.
This high peak compensates the lowering of the gain due to the frequency behaviour of
the other stages of the amplifier chain and, when the two effects are well balanced, it is
possible to acheive a flat bandwidth up to several GHz.
As well as the peak amplitude, the different gain levels affect the gain at low frequencies.
Transistor dimensions as well as the bias current values have been chosen in order to
optimize the overall frequency behaviour.

Chapter 3. Amplifier Design 32
Since no high gain is needed for the feedback stage, the current can be kept at a low
value: 300 µA is flowing in each transistor.
It is here reminded that feedbacks, especially when positive, have to be handled very
carefully concerning the stability aspects: in order to assure unconditional stability,
simulations have been made and results will be presented in next section.
3.1.4 Output Buffer
The output buffer has been designed with the same topology of a fixed gain stage (Figure
3.7).
Figure 3.7: Buffer topology
This stage has been included in the taped out system because of measurement purposes:
it will be removed in the transmitter amplifier, but however left in the receiver one.
First versions of the circuit implemented a common-drain buffer. Due to the large at-
tenuation values rising from this topology, another solution has been chosen: a common-
source stage with small resistive load and high current is used to drive the low output
impedance and obtain the desired output swing at its nodes. The cost of this impedance
transformation is an attenuation of about 1.5 dB over the whole bandwidth, which is a
better value compared to the one simulated with the common-drain.

Chapter 3. Amplifier Design 33
Because of the very large signal swing at the buffer input, i.e. about 150 mVp, care was
put while designing this stage not to bring the differential pair in subthreshold regime
and not to cause the signal to be distorted. 250 mVpp output swing has been obtained
with no significant distortion, but this stage keeps being the limiting one if larger signals
are to be handled.
Since this stage is the power one, larger power consumption was expected while designing
it: indeed to obtain such a large voltage swing on a small resitor, large current values
are required. The final version of the buffer requires 8.6 mA for each of the signal chains
to work properly and therefore consumes in total about 21 mW.
3.1.5 Additional Components
Additional blocks have been designed in order to assure the circuit to work properly.
Standard current mirrors to bias every block were required and have been implemented.
Resistively loaded NMOS mirrors have been designed (Figure 3.8).
Figure 3.8: Current mirror schematic
Thanks to different transistors ratios the desired current value has been mirrored in the
different blocks of the amplifier. While designing the biasing structures, care has been
put in obtaining the as low as possible saturation voltage for these transistors. In fact, a
lower VDS,sat for these components will let the output nodes reach lower voltage values,
without ending in linearity problems.
Impedance matching at the amplifier input is obtained thanks to two passive resistors
linked toward ground. As they are placed between the DC block and the signal generator,
no DC current will flow into them and therefore no DC power will be dissipated. Thanks

Chapter 3. Amplifier Design 34
to this simple matching technique the proper signal swing at the input will be obtained
when the measurement system, with an output impedance of 50 Ω, will be connected.
A more interesting stage that was required in order to correctly bias the amplifying
stages, is the DC block. DC blocks, even if very widely used and well known, can
become critical to be designed in integrated technology, when low frequencies signals
are required to be in the passband. This is because of the cut-off frequency of a high
pass filter, which is inversionally proportional to both the resistor and the capacitor used
to implement it (Formula 3.1).
fcut =1
2π ·RC(3.1)
In this work this frequency is required to be lower than 10 MHz, not to cut part of the
signal containing the information. To obtain such a low cut-off frequency, either very
large R or very large capacitance values are required. As big capacitors are extremely
area consuming, at first the system was thought not to implement any DC block, except
for external ones. Not to use DC biasing structures led to several difficulties and, in
order to solve them, an interesting solution has been found in literature, where the use
of off transistors as resistors in the MΩ range is proposed [14]. This solution has been
eventually used in this work and two DC blocks, one at the beginning of the ampilfier
chain, one before the output buffer, have been implemented (Figure 3.9).
(a) (b)
Figure 3.9: DC Block (a) schematic and (b) Bode plot
Thanks to the very high resistance transistors offer when their channel is completely
open, the cut-off frequency is simulated to be as low as 1 KHz. The used capacitors
area is (22x22)µm2 which results in a 1 pF capacitance. This means that the transistors
offer a resistance of about 205 MΩ.
As already explained, having a cut-off frequency far from the band the system should

Chapter 3. Amplifier Design 35
work in, is indeed an advantage: phase distortion for low frequency signals will be
reduced (Section (2.6)). In fact, almost no phase distortion for signals at the beginning
of the passband, i.e. 10 MHz, have been obtained.
Because of such large resistors, no DC current at all is required to flow thorough the
transistors, in order not to cause a votlage drop. Leaking currents can then constitute a
problem if precise voltage levels are required for biasing purposes. The major advantage
of this DC block topology is that such big R values, let the capacitor to be very small
compared to the one that would have been required if Ohmic resistor were used. Taking
into account the losses that a too small capacitance value would have introduced, the
final value has been chosen as the best compromise.
3.2 Layout
Guidelines for a properly structured layout are well known: minimization of area and
parasitics are usually the goals. In this particular work the layout has been organized
in order to minimize the amplifier area. After the first placing, it has been observed
how the contact pads require for themselves a much larger area than the amplifier does.
The free space has been therefore filled with several RF grounds on critical lines, this to
assure a good ground for the signal at the operating frequency.
Regarding the parasitics, the good rules to avoid a too large impact on the performances
have been followed: signal lines have been designed as short as possible and crossing with
other metals lines has been avoided, in order to reduce parasitic capacitances.
Layout has been organized in order to be totally symmetrical. This is to minimize
mismatching effects that would affect performances such as CMRR and even-harmonic
distortion. Dummy transistor are already implemented in TSMC cells and have been
exploited to acheive higher simmetry. No common centroid configuration has been im-
plemented: the interdigitatation of the differential pairs fingers, one with each other,
would have led to a better device matching, but TSMC technology does not allow the
designer to go down to such a deep level of customization. Moreover, the layout would
have become much more complicated.
Multi-fingers transistors were used because of the several advantages they lead to.
Firstly, more compact structures and more controllable aspect-ratios can be obtained.
Furthermore, their use let the designer minimize the parasitic resistances that would
have a much larger impact if a unique short-and-wide gate had to be used. Multi-fingers
transistors can be therefore thought as more lumped components and when modelling

Chapter 3. Amplifier Design 36
the charge along the channel with a uniform charge distribution a smaller error is made.
Last, a more compact transistor would suffer in a minor extent of spatial fluctuations of
the process parameters during fabrication.
The layout has been made symmetrical with respect to the horizontal axis in order to
obtain identical paths for the two signals composing the differential one (Figure 3.10. As
introduced, efforts have been made in order to obtain a total symmetrical configuration
and this has been completely acheived (Figure 3.10). The complete layout, including
routing and pads, is shown in Appendix A.
Figure 3.10: Layout of the active area
VDD routing, when talking about long lines, has been made on the ultra thick metal
in order to minimize the line resistance while the ground grid has been realized on M8
and brought down to M1, a more resistive layer, just when crossing with signal lines
was unavoidable. Exploiting M1 for the ground while keeping the signals on a high level
minimized the capacitance between the two.
TSMC technology has very strict requirements when speaking of minimum local densities
for the metal layers: fillers have been placed all over the circuit and as much as possible
their influence on the VGA performances, i.e. losses due to induced eddy currents, has
been minimized.
The total chip dimensions, accounting for the pads is (500x870)µm2 while, excluding
the pads and the RF grounds, the amplifier dimensions measure only (104x560)µm2.
3.3 Circuit Simulations
The simulated VGA parameters are hereby reported. Layout-related parasitic effects
such as the ones due to the lines resistance and coupling have not been taken in account
while performing these simualtions. The gain-bandwidth simulations, as well as the

Chapter 3. Amplifier Design 37
compression point ones, have been performed on the single-ended signal, for the sake
of semplicity. Intercept point and stability have been simulated exploiting two-port
networks and therefore refer to the whole differential architecture.
The gain versus frequency curves of the amplifier have been simulated (Figure 3.11). To
better understand these curves, it has to be reminded that, when willing to vary the
gain, an external control voltage will act on the different stages loads. This will result
not only in a change in the gain level, but in their frequency behaviour as well (Section
(2.1)).
In fact, when the VGA is set to the highest acheivable gain configuration, i.e. the PMOS
channel is totally open, the resistance value seen at the nodes between the stages, is
the maximum. The frequency of the poles in between the different stages is lowered
and the gain for the GHz signals decreses as well. This extra loss in the gain should
be compensated by the feedback action, whose peaking amplitude is though always
constant (Section (3.1.3)). When the gain of the amplifier is set to lower values, the
high frequency attenuation becomes smaller and the feedback action could be more
than what is required to compensate this loss. Therefore, a compromise rises between
the extension of the bandwidth for high gain settings and the curves flatness for the
other setups. The feedback has been designed and optimized taking into account this
issue: satisfying bandwidth is obtained for all the required gain levels without a large
peaking at its edges.
The achievable gain range with the proposed VGA architecture is simulated to vary
from +23 dB to −10 dB, obtained changing the control voltage on the PMOS gates
from +800 mV to −800 mV. Slightly lower and higher values of gain can be obtained,
but a saturation phenomena on both sides is observed. Since the amplifier has been
specifically designed to work in the transceiver, its performance have been tested in the
values range that were interesting from the system point of view, i.e. the values defined
in Table (2.1). Gain-Bandwidth simulations, as well as all the following ones, have been
therefore performed just in this range.
The curves of Figure 3.11 are obtained varying VC from 270 mV to 600 mV with a 110
mV step, but it is here reminded that with this kind of architecture the gain can be varied
in a continuous manner. Speaking of the bandwidth and according to the simulation,
the active feedback provides a 3dB-bandwith much larger than the requested one of 2
GHz. In fact, for all the gain levels required for the transceiver, a 1dB-bandwidth larger
than 5 GHz has been simulated. As explained and expected, the higher level gain is the
one with the lower bandwidth.
To obtain the desired gain level, it should be inspected how it varies according to the
control voltage. The performed simulations show how an almost linear-in-dB depen-
dancy is obtained (Figure 3.12). The link between these two quantites comes from the

Chapter 3. Amplifier Design 38
Figure 3.11: VGA AC response
chosen architecture. If it is true that the gain is directly proportional to the output
resistance, it should be reminded not to confuse Rout with the channel resistance of the
PMOS, as, in addiction to the channel resistance of the differential pair transistors, the
resistive load is in parallel with it. Moreover the resistance offered by the PMOS does
not have a linear link with the control voltage as well.
In fact, linear-in-dB carachteristic is sometimes considered a design goal and solutions
have been proposed in order to acheive it: linear-to-exponential voltage converter are
usually implemented [11]. However the exponential function generator design can be
quite complex and, since for the proposed VGA the linear dependancy on VC is not a
main issue, it has not here been studied.
To check VGA linearity properties, P1dB and IIP3 simulations have been performed.
As explained, compression of the gain for this VGA rises from the large signal handling
at the last amplifier and at the output buffer (Section (2.4)). To ensure that the VGA
is able to handle the required signals, i.e. not compressing the gain when in operating
conditions, signals of the expected amplitude have been fed to the amplifier with the
corresponding gain setting in the first steps of the design. After matching both the
input and the output to the desired impedances, power gain was simulated and P1dB
values have been obtained for both the high and the low gain setups (Figure 3.13). For
high gain setup, the P1dB is simulated to be −22.3 dBm which, considering the 50 Ω
impedance at the input node, corresponds to a signal of amplitude of about 24 mVp.
In this configuration the amplifier is required to be able to treat 15 mVp signals, this

Chapter 3. Amplifier Design 39
Figure 3.12: Controlling voltage gain dependency
Figure 3.13: P1dB

Chapter 3. Amplifier Design 40
Figure 3.14: Input third-order intercept point
is to say less than −26 dBm on 50 Ω. The amplifier is therefore proved to be able to
correctly handle the signal. Similarly, at the low gain stage, the P1dB is estimated to be
−9.5 dBm which again shows the VGA to have no working problems in terms of gain
compression.
Considering small-signal linearity tests, third-order intercept point has been simulated
for the different control voltage values (Figure 3.14). Small signal distortion has been
shown to be in an acceptable range for the system requirements for the different gain
levels.
According to what was expected, larger distortion appears when the VGA is set in high
gain configuration. A value of −8.6 dBm in the worst case seems to be acceptable when
compared to the literature: works who propose a similar kind of architecture report no
IIP3 [13], [14], [15] making a direct comparison therefore impossible. IIP3 values in
the range of the simulated ones can though be found in some different topology amplifier
works [14].
Regarding the amplifier stability, µ and µ′ factors have been simulated, up to the tran-
sistor transition frequency, i.e. the frequency after which the transistor itself attenuates
the signal applied at its input. They are shown to be greater than 1 in this whole range
(Figure 3.15), meaning that the VGA is expected to be unconditionally stable at all the
frequencies (Section (2.5)). Simulations up to the transistor transition frequency are
usually performed, in order to be sure that local harmonics oscillations do not make the
whole circuit unstable. The positive feedback is therefore proven not to cause instability
problems. This is thought to be because of the large attenuation that all the stages
involved in the loop show at frequencies of several GHz.

Chapter 3. Amplifier Design 41
Figure 3.15: Edwards stability factors
Common more rejection ratio (CMRR) has been also simulated applying the same signal
on both the amplifier inputs (Figure 3.16). High values are obtained because as the
Figure 3.16: VGA CMRR at different gain levels
simulation takes into account no mismatch effect between the two single-ended branches
and the two signal paths are identical. CMRR simulations when some mismatch effect
is considered will be presented in Section 3.3.1.
Noise figure has been simulated to be varying from 40 dB to 23 dB (Figure 3.17). These
values are acceptable as comparable to the literature reported ones [14], [15]. Particular

Chapter 3. Amplifier Design 42
technique to boost the noise figure exist, but non of them has been implemented, nor is
though to be in the future, for the previously described reasons (Chapter (2)).
Figure 3.17: Noise Figure
3.3.1 Statistical Simulations
As last step, the design has been checked to be resistant to fabrication parameters fluc-
tuations. TSMC foundry statistical data has been fed to the simulator and Monte Carlo
simulations have been performed. Exploiting repeated random sampling, these simu-
lations let the designer know how the performance of the circuit will be distributed.
Assuming gaussian distributions for the process variables, gaussian distribution, cen-
tered at a certain mean value, are expected for the different VGA properties as well.
Excluding the mean of the distribution, the most intuitive information is obtained thanks
to the width of these curves. In fact, the width of a gaussian will give a feeling on to
which extent a given quantity of the printed circuit could differ from the expected value
obtained via non-statistical simulations. A quantification of this is given by the standard
deviation σ.
Both the variations due to global process parameters, as well as the local fluctuations
model have been taken into account. While the first one results in different VGAs
performance for chips produced on different wafers in different moments, the second
one takes into account the mismatch between the several components lying on the same
chip. This kind of fluctuations can lead to significative degradation of performance
when affecting the differential pair transistors, especially speaking of those quantities

Chapter 3. Amplifier Design 43
Figure 3.18: Monte Carlo simulation of VGA gain
that are directly linked to the simmetry of the two single-ended paths, i.e. common
mode rejection ratio and even-order harmonics suppression.
Monte Carlo simulation has been carried out for the gain of the amplifier, when in
high level configuration (Figure 3.18). The number of simulated samples is 3000 and
the working frequency is set to 2 GHz (Figure 3.18). Excluding the outliers, a narrow
enough Gaussian distribution around the mean value. The simulated gain standard de-
viation σG value is 2.4 dB. Considering that the amplifier has an adjustable gain, a few
dB fluctuation around the desired value does not represent an issue.
The frequency behaviour of the amplifier, again in the high gain setting, has been sim-
ulated as well (Figure 3.19). It is proven that, on the average, the different fluctuations
will not affect of a significative amount the amplifier bandwidth, which keeps being much
larger than the required 2 GHz.
Monte Carlo simulation of the CMRR for high gain value at a frequency of 2 GHz has
been carried out (Figure 3.20). In agreement to what previously introduced, mismatch
effects have a much larger impact on the common mode rejection ratio. In fact, for the
produced samples, the expected value of the CMRR is 67 dB and almost none of them
is expected to reach the value of 90 dB that has been instead previously simulated.
Furthermore, it is shown a much larger expected variation around the mean value, since
the standard deviation σcmrr is simulated to be 7.47 dB.

Chapter 3. Amplifier Design 44
Figure 3.19: Monte Carlo simulation of VGA bandwidth
Figure 3.20: Monte Carlo simulation of VGA CMRR
3.3.2 Post layout simulations
After the layout completion, parasitic extraction has been performed. No simulation
with the whole parasitics network has been made: a more analitical approach has been
preferred in order to obtain a larger understanding of the circuit. The biggest parasitics
elements have been individuated in the layout and added by hand in the schematic.

Chapter 3. Amplifier Design 45
Thanks to simulations that took into accout the single parasitic, its effect has been
investigated and better understood.
A big role has been found for the parasitic resistance in the VDD line for the last stage,
i.e. the output buffer. Even if the VDD routing has been made in the ultra-thick metal
to lower its line resistance, due to the large amount of current flowing through this line,
even a small resistive value affected of a significant amount the VGA performances.
After the identification of the problem, the lines have been redesigned and the effect of
the parasitic resistance has been checked not to constitute an issue anymore.
The layout has therefore been finalized in this way and sent to be printed.

Chapter 4
Conclusions and Outlook
In this work, the design steps of a variable gain amplifier have been illustrated. After
a short introduction on high-speed transceivers, the VGA design goals have been given.
An overview on the encountered issues, as well as on the literature solutions, have been
presented in Chapter 2. Next, the chosen amplifier architecture has been described
and the working principle of the active feedback has been explained. Thanks to the
aid of numerical simulations, the amplifier has been optmized in order to obtain the
best acheivable performance, which are reported, together with some layout hints, in
Chapter 3. The VGA has been proven to be able to properly work when inserted in
the transceiver system, which it was designed for. Moreover, the amplifier has been
shown able to reach a wider gain range and different applications for it could be thought
of, even if additional simulations would be needed in order to assure the proper VGA
working.
The system-required simulated VGA main specifications and properties are resumed in
Table 4.1.
All the design goals have been achieved and, although the amplifier is yet to be measured,
a VGA whose performance are comparable to the state of the art has been simulated.
This work aim was the design of a first version of a VGA and large space for further
improvement is present.
When speaking of the gain and the bandwidth, it has been shown that the feedback
action is not always sufficient to flatten the bandwidth when the gain is set to high
level. To improve this point, work on the poles between the stages should be carried on.
Future amplifiers could exploit the Cherry-Hooper architecture as a base which to start
from, in order to acheive higher gain levels with satisfying bandwidth. Even choosing
this topology, the dependency of the bandwidth on the gain level will not disappear: to
46

Chapter 4. Conclusions and Outlook 47
Parameter Low Gain Mode High Gain Mode
Gain [dB] 5 18.5
1dB Bandwidth [GHz] 6.5 5
3dB Bandwidth [GHz] 7.6 6.3
P1dB [dBm] −9.5 −22.3
Input IP3 [dBm] 6 −8.6
CMRR@109 Hz [dB] 77 90
Power Consumption [mW] 51 * 50 *
Area [mm2] 0.43 ** -
*including the output buffer**with pads
Table 4.1: VGA specifications
obtain a constant bandwidth at every gain level, the variable load resistors cannot be
exploited anymore, as they have been shown to affect the frequency behaviour of the
amplifier.
Controlling the signal delay on the feedback chain is thought to be able to lead to slightly
broader bandwidth.
When looking at different techniques to vary the gain, between the presented ones the
most promising seems to be the digitally controlled amplifier. In fact, with these topolo-
gies and their proper design, the link between the gain and the bandwidth can be
loosened. Another aspect that makes this topology appealing is the limited linearity
performances that have been simulated when exploting active elements as variable re-
sistors. Digitally controlled amplifiers have been shown to be able to reach very good
small-signal linearity properties [18].
Considering large-signal linearity, the VGA can handle with no issues the signals which
it has been studied for. During the design phases this has been though the biggest

Chapter 4. Conclusions and Outlook 48
problem, as the large signal handling puts strict bounds on several parameters such as
the transistor dimensions and the flowing currents, linking them all. In particular, the
design of the output buffer required some efforts not to compress the signal and it still
remains the VGA bottleneck. In addition, the large power consumption of this stage,
makes this block most-likely to be redesigned in future works.
Because of the short available time, the VGA performances have not been measured. The
VGA is though expected to be fully functioning after the production. Indeed because
of mismatch and parasitics, its performance, i.e. gain and bandwidth, are expected to
be less performant than the simulated ones. Monte Carlo simulations have been indeed
carried out to have a stronger feeling on how the produced chip could differ from the
simulated one and the results are satisfying.
The amplifier power consumption has been lowered thanks to an optimization procedure
during the desing. Including the output buffer, the whole amplifier consumes 50 mW,
whose 21 mW are to be attributed to this last stage. Similar works report values in the
same range, not specifying if including the matching stages [13], [15]. An outstanding
low power value is reported by Wang [14], though none of these works include IP3
simulations nor measurements, which is expected to worsen when reducing the DC
current.


Appendix A
Circuit Layout
Figure A.1: Whole circuit layout
49


Bibliography
[1] B. Floyd, S. Reynolds, et. al., ”A silicon 60 GHz receiver and transmitter chipset for
broadband communications”, IEEE ISSCC Dig. Tech. Papers, 2006, pp. 184-185.
[2] T. Mitomo, R. Fujimoto, et. al., ”A 60-GHz CMOS Receiver Front-End With Fre-
quency Synthesizer”, IEEE Journal of Solid-State Circuits, Vol. 43, No. 4, 2008.
[3] M. Tanomura, Y. Hamada, et. al., ”TX and RX Front-Ends for 60 GHz Band in
90nm Standard Bulk CMOS”, IEEE International Solid-State Circuits Conference,
2008.
[4] Sten E. Gunnarsson, Camilla Kaernfelt, et. al., ”Highly Integrated 60 GHz Trasmitter
and Receiver MMICs in a GaAs pHEMT Technology”, IEEE Journal of Solid-State
Circuits, Vol. 40, No. 11, 2005.
[5] A. Tomkins, R.A. Aroca, et. al., ”A Zero-IF 60 GHz Transceiver in 65nm CMOS
with ¿ 3.5 Gb/s Links”, IEEE Custom Integrated Circuits Conference, 2008.
[6] Cristian Marcu, Debopriyo Chowdhury, et. al., ”A 90 nm CMOS Low-Power 60
GHz Transceiver With Integrated Baseband Circuitry”, IEEE Journal od Solid-State
Circuits, Vol. 44, No. 12, 2009.
[7] Thangarasu B. Kumar, Kaixue Ma, et. al., ”A DC to 4 GHz Fully Differential Wide-
band digitally controlled Variable Gain Amplifier”, Proceedings of Asia-Pacific Mi-
crowave Conference, 2010.
[8] Filip Tavernier, and Michiel Steyaert, ”A Low Power, Area Efficient Limiting Am-
plifier in 90nm CMOS”, IEEE , 2009.
[9] Chia-Hsin Wu, Chang-Shun Liu, and Shen-Iuan Liu, ”A 2GHz CMOS Variable-Gain
Amplifier with 50dB Linear-in-Magnitude Controlled Gain Range for 10GBase-LX4
Ethernet”, IEEE International Solid-State Circuits Conference, Recent trends in
combinatorics (Matrahaza, 1995), 2004.
[10] Bendong Sun, Fei Yuan, and Ajoy Opal, ”Inductive Peaking in Wideband CMOS
Current Amplifiers”, ISCAS, 2004
50

Bibliography 51
[11] Hui Dong Lee, Kyung Ai Lee, and Songcheol Hong, ”A Wideband CMOS Vari-
able Gain Amplifier With an Exponential Gain Control”, IEEE Transactions on Mi-
crowave Theory and Techniques, Vol. 55, No. 6, 2007, pp. 1363-1373.
[12] J.K. Kwon, K.D. Kim, et. al., ”Wideband high dynamic range CMOS variable gain
amplifier for low voltage and low power wireless applications”, Electronics Letters,
Vol. 39, No. 10, 2003.
[13] Justin Abbott, Calvin Plett, and John W. M. Rogers, ”A 15GHz, 1.8V, Variable-
Gain, Modifier Cherry-Hooper Amplifier”, IEEE Custom Integrated Circuits Con-
ference, 2005.
[14] Yanjie Wang, Bager Afshar, et. al., ”A 2.5mW Inductorless Wideband VGA with
Dual Feedback DC-Offset Correction in 90nm CMOS Technology”, IEEE Radio Fre-
quency Integrated Circuits Symposium, 2008.
[15] XI Qin, Xingli Huang, et. al., ”A 0-35dB Wideband Variable Gain Amplifier in
0.13um CMOS”, IEEE International Symposium on Radio-Frequency Integration
Technology, 2011.
[16] You Zheng and Carlos E. Saavedra, ”A Variable Gain Amplifier Using a Very-High
Speed OTA”, Microwave and Optical Technology Letters, Vol. 52, No. 5, 2010, pp.
1112-1116.
[17] E. Cherry, and D. Hooper, ”The design of wide-band transistor feedback amplifiers”,
Electrical Engineers, Proceedings od the Institution of, Vol. 110, No. 2, 1963, pp.
375-389.
[18] T. Hui Teo, M. Annamalai Arasu, et. al., ”A 90nm CMOS Variable-Gain Amplifier
and RSSI Design for Wide-band Wireless Network Application”, IEEE , 2006.
[19] Edward A. Keehr, and Ali Hajimiri, ”A Wide-Swing Low-Noise Transconductance
Amplifier and the Enabling of Large-Signal Handling Direct-Conversion Receivers”,
IEEE Transactions on Circuits and Systems, Vol. 59, No.1, pp. 30-43, 2012
[20] J. M. Rollett, ”Stability and Power-Gain Invariants of Linear Twoports”, IRE
Transactions on Circuit Theory, 1962.
[21] Marion Lee Edwards, and Jeffrey H. Sinsky, ”A New Criterion for Linear 2-Port
Stability Using a Single Geometrically Derived Parameter”, IEEE Transactions on
Microwave Theory and Techniques, Vol. 40, No.12, pp. 2303-2311, 1992.
[22] Adel S. Sedra, and Kenneth C. Smith, ”Circuiti per la Microelettronica”, Edizioni
Ingegneria 2000, pp. xxxx, 1996.

Bibliography 52
[23] C. Holdenried, M. Lynch, and J.Haslett, ”Modified CMOS Cherry-Hooper amplifiers
with source follower feedback in 0.35 um technology”, Solid-State Circuits Conference,
2003.


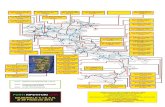





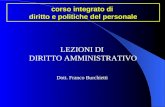







![[Free Scores.com] Antonio Lauro El Negrito 4136 (1)](https://static.fdocumenti.com/doc/165x107/53f8f9f3dab5cad23a8b486b/free-scorescom-antonio-lauro-el-negrito-4136-1.jpg)