
Tesi di Laurea - tesi.cab.unipd.ittesi.cab.unipd.it/26566/2/presentazione.pdf · Presentazione...
30
SISTEMA DI GUIDA E NAVIGAZIONE COMBINATO OTTICO BCI DEL ROBOT “OPTICHAIR II” IN AUSILIO AI PORTATORI DI SLA AVANZATA. Università degli Studi di Padova Facoltà di Ingegneria Corso di Laurea in Ingegneria Elettrica Tesi di Laurea Relatore: Prof. Emanuele Menegatti Laureando: Marco Gottardo Anno Accademico 2009/2010 10 Dicembre 2010
Transcript of Tesi di Laurea - tesi.cab.unipd.ittesi.cab.unipd.it/26566/2/presentazione.pdf · Presentazione...

SISTEMA DI GUIDA E NAVIGAZIONE COMBINATO
OTTICO BCI DEL ROBOT “OPTICHAIR II” IN AUSILIO
AI PORTATORI DI SLA AVANZATA.
Università degli Studi di Padova
Facoltà di Ingegneria
Corso di Laurea in Ingegneria Elettrica
Tesi di Laurea
Relatore: Prof. Emanuele Menegatti
Laureando: Marco Gottardo
Anno Accademico 2009/2010
10 Dicembre 2010

10 Dicembre 2010 Marco Gottardo 2
Università degli studi di Padova
Tesi di Laurea SISTEMA DI GUIDA E NAVIGAZIONE COMBINATO OTTICO BCI DEL ROBOT “OPTICHAIR II”
IN AUSILIO AI PORTATORI DI SLA AVANZATA.
• Sviluppare uno chassy, un’elettronica, e un
software per Optichair II piu’ efficiente rispetto
alla versione precedente.
• Sviluppare tre tipi di comando utilizzabili dal
malato di SLA.
• Comparare l’efficacia dei tre tipi di comando.
• Assegnare ruoli specifici ai tipi di comando in
funzione dell’affidabilita’
Obiettivi della Tesi
10 Dicembre 2010 Marco Gottardo 3
Università degli studi di Padova
Tesi di Laurea SISTEMA DI GUIDA E NAVIGAZIONE COMBINATO OTTICO BCI DEL ROBOT “OPTICHAIR II”
IN AUSILIO AI PORTATORI DI SLA AVANZATA.
SLA
Sclerosi Laterale Amiotrofica
Sindrome di Lou Gehrig
Malattia degenerativa
progressiva del sistema
nervoso
Premessa
10 Dicembre 2010 Marco Gottardo 4
Università degli studi di Padova
Tesi di Laurea SISTEMA DI GUIDA E NAVIGAZIONE COMBINATO OTTICO BCI DEL ROBOT “OPTICHAIR II”
IN AUSILIO AI PORTATORI DI SLA AVANZATA.
Colpisce selettivamente i
motoneuroni.
Il paziente perde progressivamente
mobilità mantenendo lucidità di
intelletto.
premessa
10 Dicembre 2010 Marco Gottardo 5
Università degli studi di Padova
Tesi di Laurea SISTEMA DI GUIDA E NAVIGAZIONE COMBINATO OTTICO BCI DEL ROBOT “OPTICHAIR II”
IN AUSILIO AI PORTATORI DI SLA AVANZATA.
Sfruttare le capacità intellettive
inalterate del soggetto per
governare un ausilio robotico
Obiettivi della tesi
10 Dicembre 2010 Marco Gottardo 6
Università degli studi di Padova
Tesi di Laurea SISTEMA DI GUIDA E NAVIGAZIONE COMBINATO OTTICO BCI DEL ROBOT “OPTICHAIR II”
IN AUSILIO AI PORTATORI DI SLA AVANZATA.
E stato costruito inizialmente un Robot
denominato Optichair sulla struttura
di base di una carrozzella per disabili
standard di misura per bambino
Obiettivi della tesi

10 Dicembre 2010 Marco Gottardo 7
Università degli studi di Padova
Tesi di Laurea SISTEMA DI GUIDA E NAVIGAZIONE COMBINATO OTTICO BCI DEL ROBOT “OPTICHAIR II”
IN AUSILIO AI PORTATORI DI SLA AVANZATA.
Optichair I°
2008-2009
Presentazione ufficiale al
meeting
istruzione/imprese
3 Aprile 2009
Primo prototipo

10 Dicembre 2010 Marco Gottardo 8
Università degli studi di Padova
Tesi di Laurea SISTEMA DI GUIDA E NAVIGAZIONE COMBINATO OTTICO BCI DEL ROBOT “OPTICHAIR II”
IN AUSILIO AI PORTATORI DI SLA AVANZATA.
• Problemi meccanici, trazione inadeguata sia dal
punto di vista della trasmissione del moto che dal
punto di vista della motorizzazione elettrica.
• Scarsa potenza di calcolo.
• Apparati sensoriali insufficienti.
• Autonomia limitata (batteria 18 Ah insufficiente).
Limiti del primo prototipo

10 Dicembre 2010 Marco Gottardo 9
Università degli studi di Padova
Tesi di Laurea SISTEMA DI GUIDA E NAVIGAZIONE COMBINATO OTTICO BCI DEL ROBOT “OPTICHAIR II”
IN AUSILIO AI PORTATORI DI SLA AVANZATA.
• Guida ottica molto funzionale
• Connettività internet ottimale
• Posizionamento globale GPS ottimale
• Sistemi di override e telecontrollo operativi
• Sistemi multimediali e sintesi di voce operativi
• Telecamere di visione presenti
• Ausilio alla ricarica fotovoltaico presente
Pregi del primo prototipo
10 Dicembre 2010 Marco Gottardo 10
Università degli studi di Padova
Tesi di Laurea SISTEMA DI GUIDA E NAVIGAZIONE COMBINATO OTTICO BCI DEL ROBOT “OPTICHAIR II”
IN AUSILIO AI PORTATORI DI SLA AVANZATA.
Sulla base delle esperienze, hardware,
software e meccaniche acquisite nella
costruzione di Optichair I, nel
settembre 2009 entra in fase
progettuale Optichair II°.
Sviluppo del secondo prototipo
10 Dicembre 2010 Marco Gottardo 11
Università degli studi di Padova
Tesi di Laurea SISTEMA DI GUIDA E NAVIGAZIONE COMBINATO OTTICO BCI DEL ROBOT “OPTICHAIR II”
IN AUSILIO AI PORTATORI DI SLA AVANZATA.
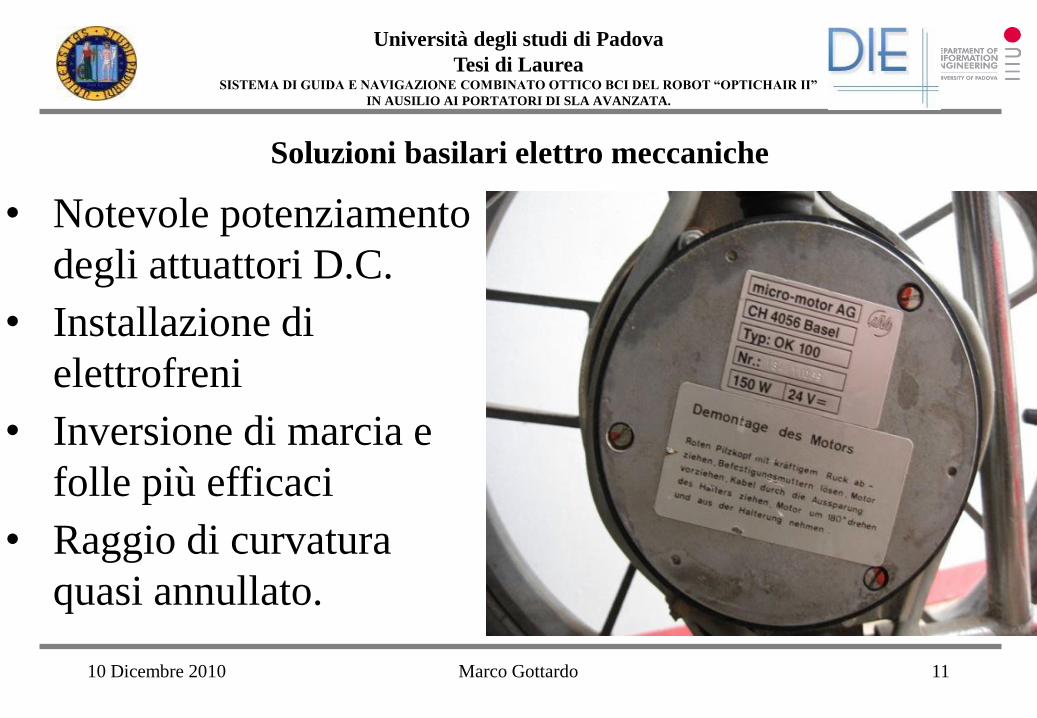
• Notevole potenziamento
degli attuattori D.C.
• Installazione di
elettrofreni
• Inversione di marcia e
folle più efficaci
• Raggio di curvatura
quasi annullato.
Soluzioni basilari elettro meccaniche

10 Dicembre 2010 Marco Gottardo 12
Università degli studi di Padova
Tesi di Laurea SISTEMA DI GUIDA E NAVIGAZIONE COMBINATO OTTICO BCI DEL ROBOT “OPTICHAIR II”
IN AUSILIO AI PORTATORI DI SLA AVANZATA.
Le capacità di calcolo di
Optichair II sono
notevolmente migliorate
grazie all’impiego del
processore di nuova
generazione VIA C7™.
Migliora l’elaborazione degli
algoritmi Open-cv
Soluzioni informatiche applicate
10 Dicembre 2010 Marco Gottardo 13
Università degli studi di Padova
Tesi di Laurea SISTEMA DI GUIDA E NAVIGAZIONE COMBINATO OTTICO BCI DEL ROBOT “OPTICHAIR II”
IN AUSILIO AI PORTATORI DI SLA AVANZATA.
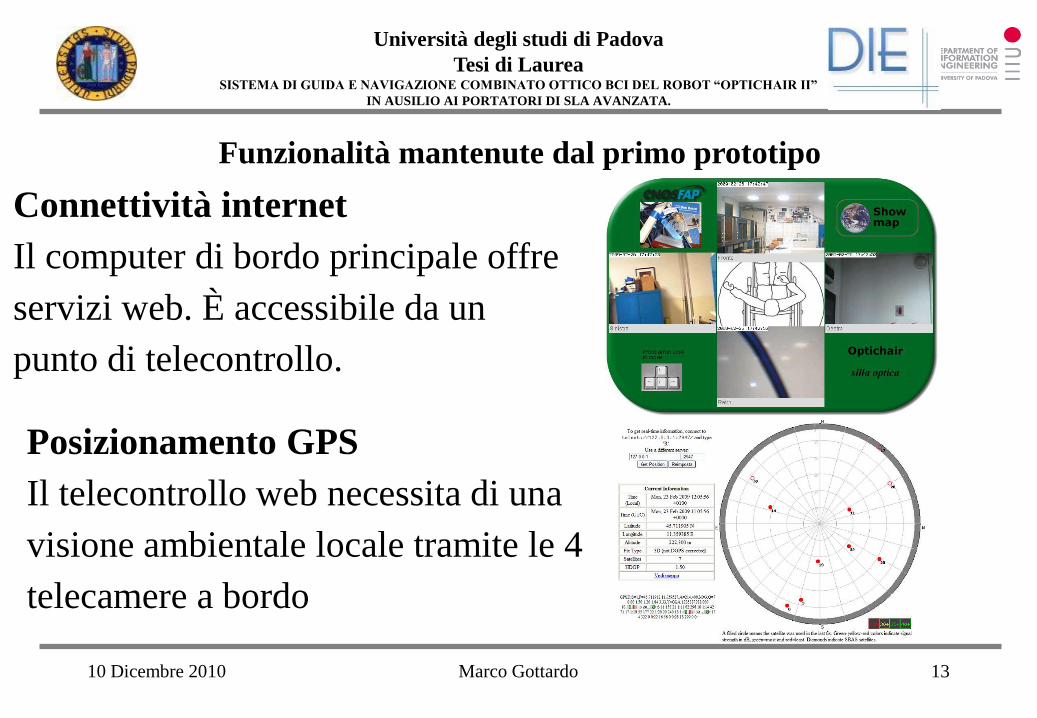
Connettività internet
Il computer di bordo principale offre
servizi web. È accessibile da un
punto di telecontrollo.
Funzionalità mantenute dal primo prototipo
Posizionamento GPS
Il telecontrollo web necessita di una
visione ambientale locale tramite le 4
telecamere a bordo

10 Dicembre 2010 Marco Gottardo 14
Università degli studi di Padova
Tesi di Laurea SISTEMA DI GUIDA E NAVIGAZIONE COMBINATO OTTICO BCI DEL ROBOT “OPTICHAIR II”
IN AUSILIO AI PORTATORI DI SLA AVANZATA.
• Metodo BCI (brain Computer Interface)
• Metodo open-cv (algoritmi di computer vision)
• Metodo IR-Reflex (riflessione infrarossi)
Scopo principale della tesi
Progettazione, sviluppo, analisi di tre diversi metodi di guida sperimentale del robot

10 Dicembre 2010 Marco Gottardo 15
Università degli studi di Padova
Tesi di Laurea SISTEMA DI GUIDA E NAVIGAZIONE COMBINATO OTTICO BCI DEL ROBOT “OPTICHAIR II”
IN AUSILIO AI PORTATORI DI SLA AVANZATA.
Metodo BCI (brain Computer Interface)
Analisi dei 3 metodi
Sonde BCI Classificatore
neuroscan sysamp. a 32 canali
Blinker Progettato e costruito dal laureando

10 Dicembre 2010 Marco Gottardo 16
Università degli studi di Padova
Tesi di Laurea SISTEMA DI GUIDA E NAVIGAZIONE COMBINATO OTTICO BCI DEL ROBOT “OPTICHAIR II”
IN AUSILIO AI PORTATORI DI SLA AVANZATA.
Schema elettrico
Blinker
sensore

10 Dicembre 2010 Marco Gottardo 17
Università degli studi di Padova
Tesi di Laurea SISTEMA DI GUIDA E NAVIGAZIONE COMBINATO OTTICO BCI DEL ROBOT “OPTICHAIR II”
IN AUSILIO AI PORTATORI DI SLA AVANZATA.
Soggetto n.1 (Marianna) Learning: 6 sessioni Testing: 8 sessioni (le prime 4 con il classificatore n.2, le ultime 4 con il classificatore n.3) Tab. 1: parametri BCI (8 sessioni di test) BCI-skill 1 healthy subject (mean±std) Classification accuracy (performance %) 74.3 9.5 Transfer bit rate (bit/min) 7.38 5.11 Percentage of sessions successfully completed (%) 75 Training Number of Stimuli (TNS) 175 Performance trend (%/session) 2.57 Weakness index (%) 0.0 0.0 Robustness index (%) 88.8 21.0
Soggetto n.1 (Marianna) Learning: 6 sessioni Testing: 8 sessioni (le prime 4 con il classificatore n.2, le ultime 4 con il classificatore n.3)
Tab. 1: parametri BCI (8 sessioni di test)
BCI-skill 1 healthy subject (mean±std)
Classification accuracy (performance %) 74.39.5
Transfer bit rate (bit/min) 7.385.11 Percentage of sessions successfully completed (%) 75 Training Number of Stimuli (TNS) 175 Performance trend (%/session) 2.57
Weakness index (%) 0.00.0
Robustness index (%) 88.821.0
10 Dicembre 2010 Marco Gottardo 18
Università degli studi di Padova
Tesi di Laurea SISTEMA DI GUIDA E NAVIGAZIONE COMBINATO OTTICO BCI DEL ROBOT “OPTICHAIR II”
IN AUSILIO AI PORTATORI DI SLA AVANZATA.
Soggetto n.1 (Marianna) Learning: 6 sessioni Testing: 8 sessioni (le prime 4 con il classificatore n.2, le ultime 4 con il classificatore n.3) Tab. 1: parametri BCI (8 sessioni di test) BCI-skill 1 healthy subject (mean±std) Classification accuracy (performance %) 74.3 9.5 Transfer bit rate (bit/min) 7.38 5.11 Percentage of sessions successfully completed (%) 75 Training Number of Stimuli (TNS) 175 Performance trend (%/session) 2.57 Weakness index (%) 0.0 0.0 Robustness index (%) 88.8 21.0
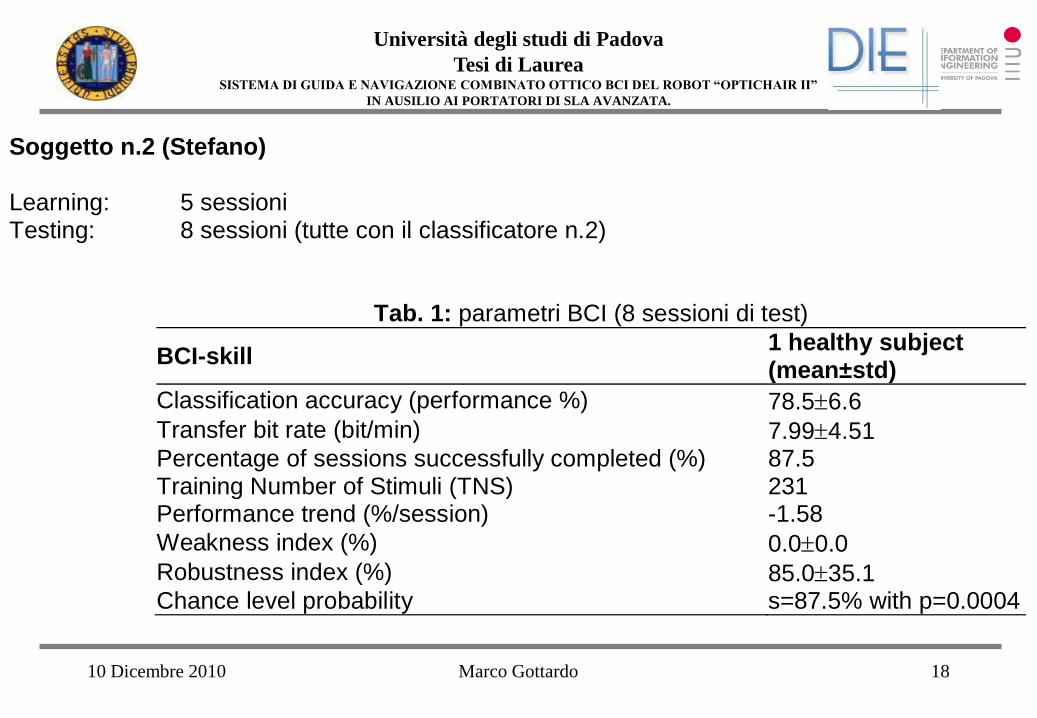
Soggetto n.2 (Stefano) Learning: 5 sessioni Testing: 8 sessioni (tutte con il classificatore n.2)
Tab. 1: parametri BCI (8 sessioni di test)
BCI-skill 1 healthy subject (mean±std)
Classification accuracy (performance %) 78.56.6
Transfer bit rate (bit/min) 7.994.51 Percentage of sessions successfully completed (%) 87.5 Training Number of Stimuli (TNS) 231 Performance trend (%/session) -1.58
Weakness index (%) 0.00.0
Robustness index (%) 85.035.1 Chance level probability s=87.5% with p=0.0004

10 Dicembre 2010 Marco Gottardo 19
Università degli studi di Padova
Tesi di Laurea SISTEMA DI GUIDA E NAVIGAZIONE COMBINATO OTTICO BCI DEL ROBOT “OPTICHAIR II”
IN AUSILIO AI PORTATORI DI SLA AVANZATA.
Metodo open-cv (algoritmi di computer vision)
Analisi dei 3 metodi
Acquisita una immagine con la webcam si esegue:
• Erosione
• Espansione (unione in blob)
• Calcolo del centriode

10 Dicembre 2010 Marco Gottardo 20
Università degli studi di Padova
Tesi di Laurea SISTEMA DI GUIDA E NAVIGAZIONE COMBINATO OTTICO BCI DEL ROBOT “OPTICHAIR II”
IN AUSILIO AI PORTATORI DI SLA AVANZATA.
Occhiali costruiti dal laureando per applicare le Open-CV
10 Dicembre 2010 Marco Gottardo 21
Università degli studi di Padova
Tesi di Laurea SISTEMA DI GUIDA E NAVIGAZIONE COMBINATO OTTICO BCI DEL ROBOT “OPTICHAIR II”
IN AUSILIO AI PORTATORI DI SLA AVANZATA.
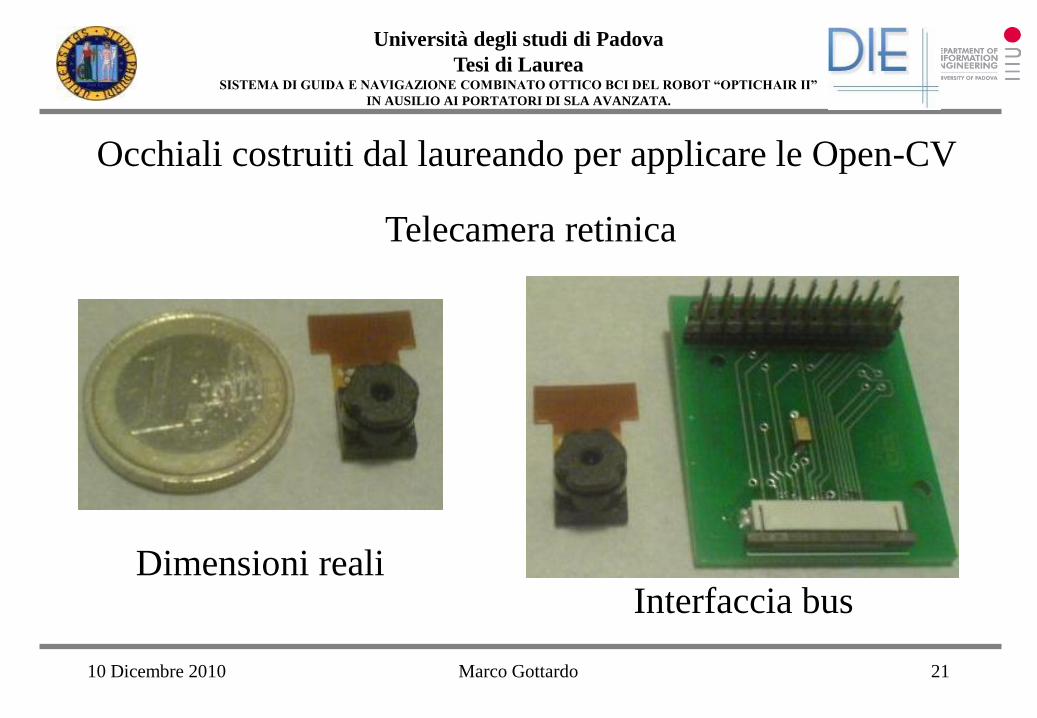
Occhiali costruiti dal laureando per applicare le Open-CV
Telecamera retinica
Dimensioni reali Interfaccia bus
10 Dicembre 2010 Marco Gottardo 22
Università degli studi di Padova
Tesi di Laurea SISTEMA DI GUIDA E NAVIGAZIONE COMBINATO OTTICO BCI DEL ROBOT “OPTICHAIR II”
IN AUSILIO AI PORTATORI DI SLA AVANZATA.
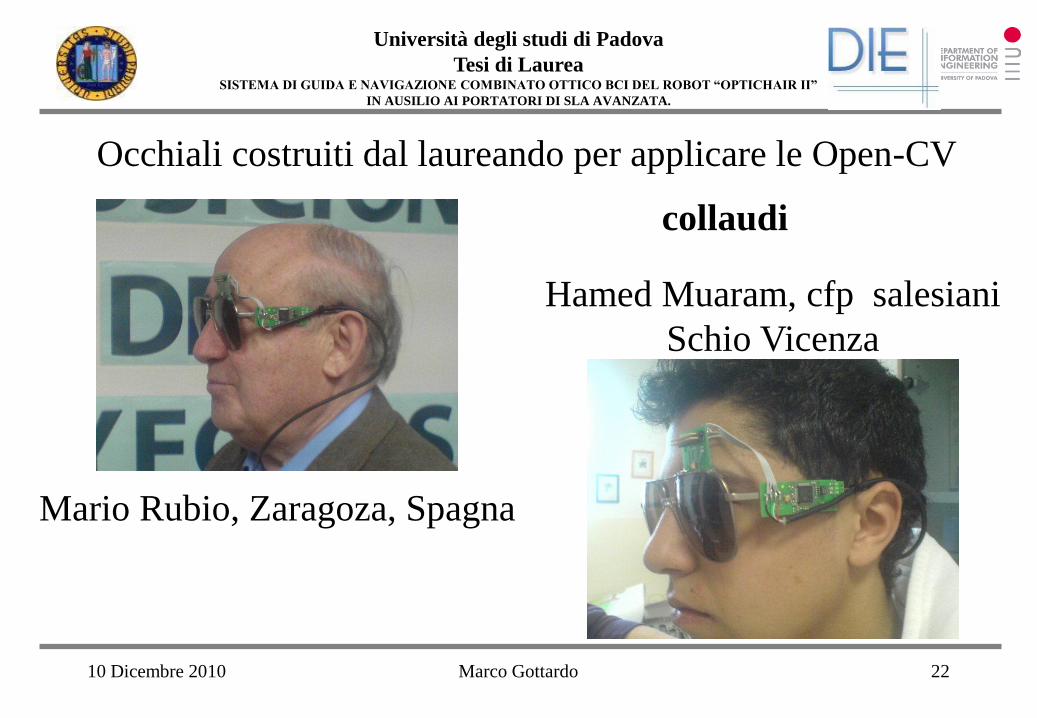
Occhiali costruiti dal laureando per applicare le Open-CV
Mario Rubio, Zaragoza, Spagna
Hamed Muaram, cfp salesiani
Schio Vicenza
collaudi

10 Dicembre 2010 Marco Gottardo 23
Università degli studi di Padova
Tesi di Laurea SISTEMA DI GUIDA E NAVIGAZIONE COMBINATO OTTICO BCI DEL ROBOT “OPTICHAIR II”
IN AUSILIO AI PORTATORI DI SLA AVANZATA.
Metodo Open-CV (rilevamento pupilla)
Analisi dei 3 metodi
detect centro detect avanti detect indietro detect sinistra detect destra
10 Dicembre 2010 Marco Gottardo 24
Università degli studi di Padova
Tesi di Laurea SISTEMA DI GUIDA E NAVIGAZIONE COMBINATO OTTICO BCI DEL ROBOT “OPTICHAIR II”
IN AUSILIO AI PORTATORI DI SLA AVANZATA.
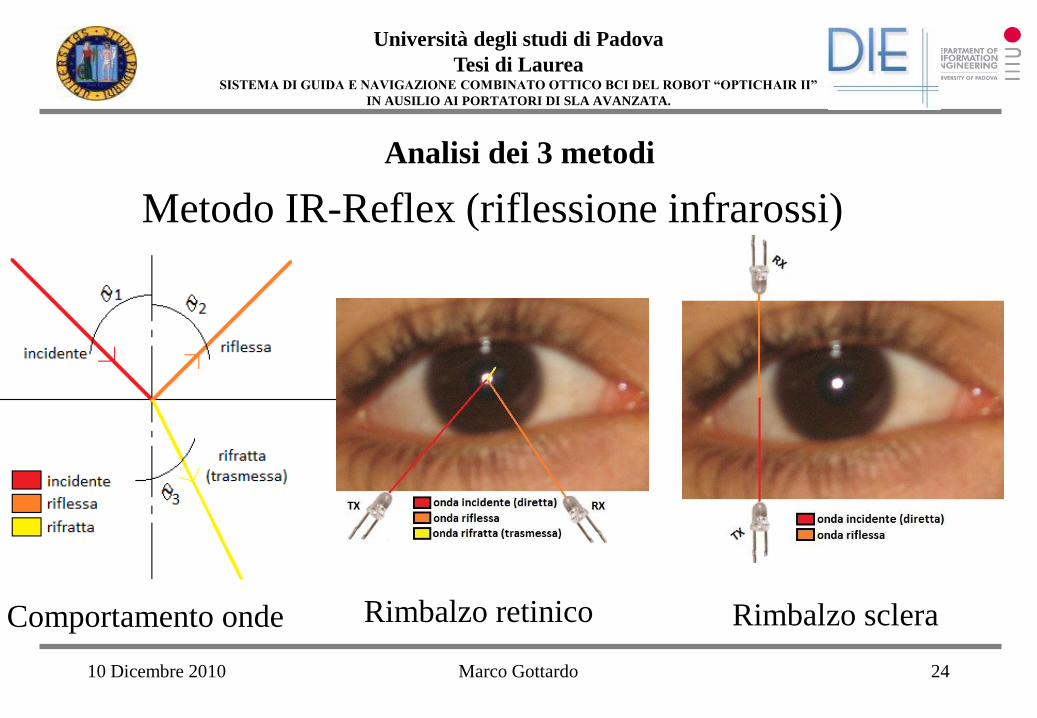
Metodo IR-Reflex (riflessione infrarossi)
Analisi dei 3 metodi
Comportamento onde Rimbalzo retinico Rimbalzo sclera
10 Dicembre 2010 Marco Gottardo 25
Università degli studi di Padova
Tesi di Laurea SISTEMA DI GUIDA E NAVIGAZIONE COMBINATO OTTICO BCI DEL ROBOT “OPTICHAIR II”
IN AUSILIO AI PORTATORI DI SLA AVANZATA.
Analisi dei 3 metodi
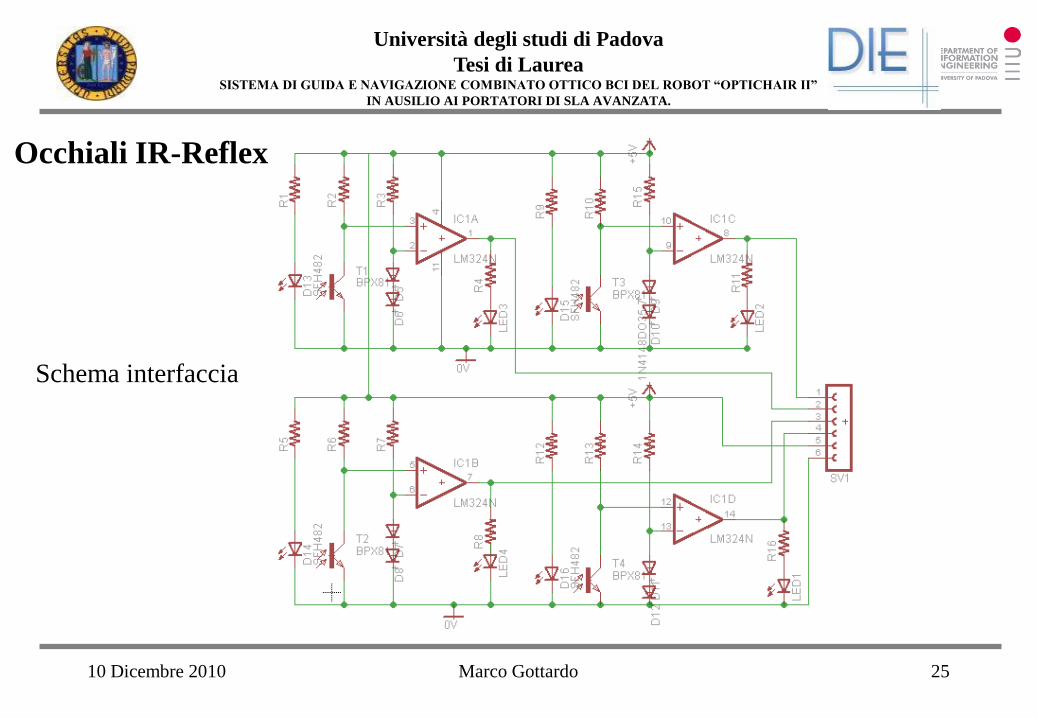
Schema interfaccia
Occhiali IR-Reflex
10 Dicembre 2010 Marco Gottardo 26
Università degli studi di Padova
Tesi di Laurea SISTEMA DI GUIDA E NAVIGAZIONE COMBINATO OTTICO BCI DEL ROBOT “OPTICHAIR II”
IN AUSILIO AI PORTATORI DI SLA AVANZATA.
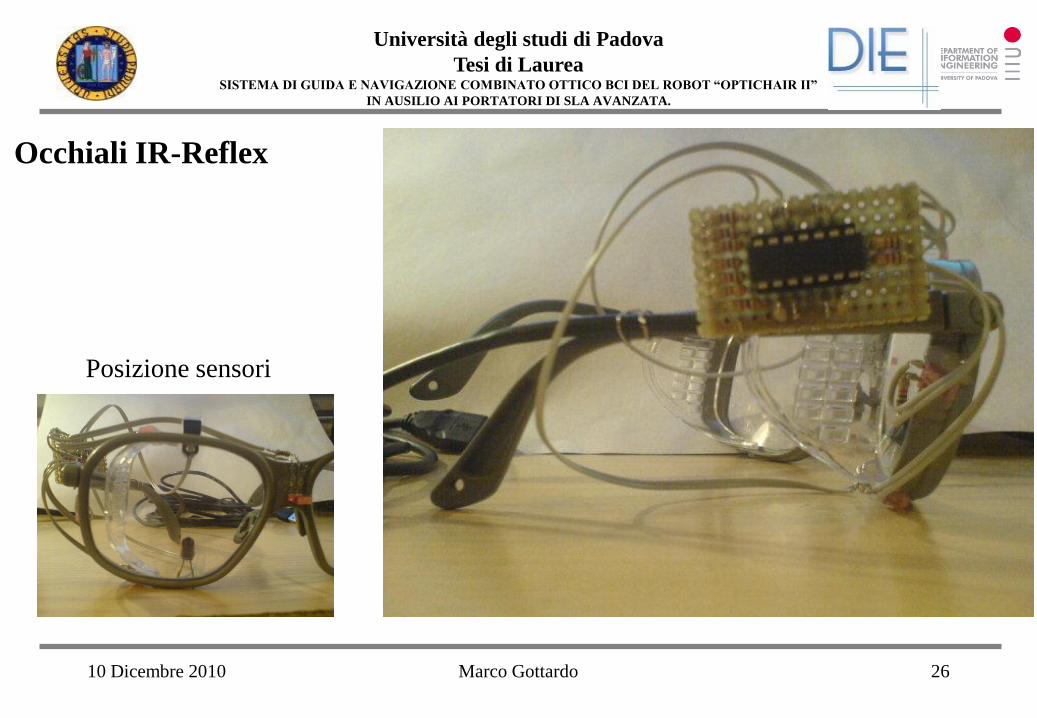
Posizione sensori
Occhiali IR-Reflex

10 Dicembre 2010 Marco Gottardo 27
Università degli studi di Padova
Tesi di Laurea SISTEMA DI GUIDA E NAVIGAZIONE COMBINATO OTTICO BCI DEL ROBOT “OPTICHAIR II”
IN AUSILIO AI PORTATORI DI SLA AVANZATA.
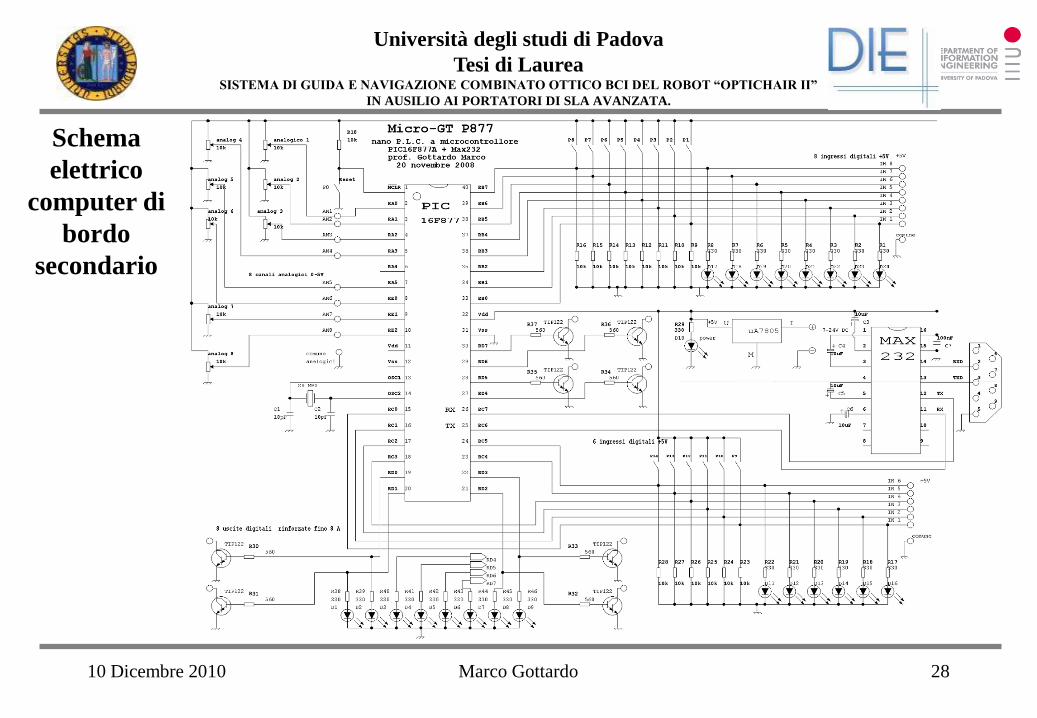
Generazione dei segnali di comando
A prescindere dal tipo di guida scelto tra i tre disponibili viene generata una
matrice di comando i cui 4 bit sono inviati al computer di bordo secondario
progettato e costruito dal laureando. La programmazione firmware è in
linguaggio C ed impedisce la generazione di segnali conflittuanti o
distruttivi per lo stadio di potenza dell’inverter
10 Dicembre 2010 Marco Gottardo 28
Università degli studi di Padova
Tesi di Laurea SISTEMA DI GUIDA E NAVIGAZIONE COMBINATO OTTICO BCI DEL ROBOT “OPTICHAIR II”
IN AUSILIO AI PORTATORI DI SLA AVANZATA.
Schema
elettrico
computer di
bordo
secondario
10 Dicembre 2010 Marco Gottardo 29
Università degli studi di Padova
Tesi di Laurea SISTEMA DI GUIDA E NAVIGAZIONE COMBINATO OTTICO BCI DEL ROBOT “OPTICHAIR II”
IN AUSILIO AI PORTATORI DI SLA AVANZATA.
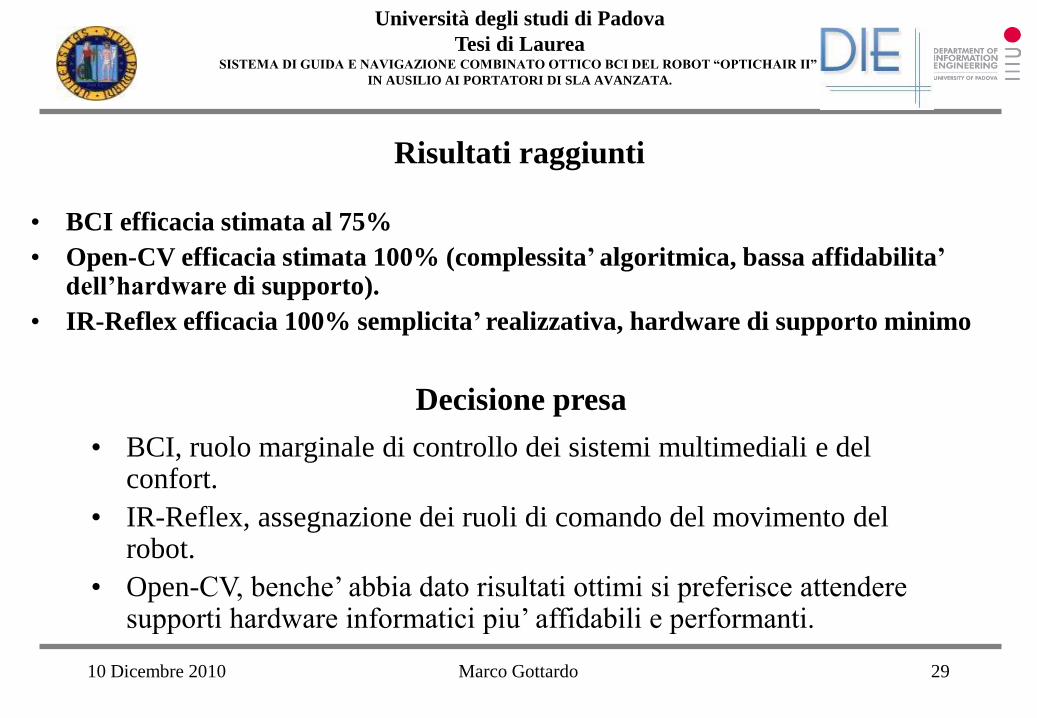
• BCI efficacia stimata al 75%
• Open-CV efficacia stimata 100% (complessita’ algoritmica, bassa affidabilita’ dell’hardware di supporto).
• IR-Reflex efficacia 100% semplicita’ realizzativa, hardware di supporto minimo
Risultati raggiunti
• BCI, ruolo marginale di controllo dei sistemi multimediali e del confort.
• IR-Reflex, assegnazione dei ruoli di comando del movimento del robot.
• Open-CV, benche’ abbia dato risultati ottimi si preferisce attendere supporti hardware informatici piu’ affidabili e performanti.
Decisione presa
10 Dicembre 2010 Marco Gottardo 30
Università degli studi di Padova
Tesi di Laurea SISTEMA DI GUIDA E NAVIGAZIONE COMBINATO OTTICO BCI DEL ROBOT “OPTICHAIR II”
IN AUSILIO AI PORTATORI DI SLA AVANZATA.
Dedicata A:
Mio padre Danilo, uomo di straordinaria forza di volonta’ e solidissimi principi morali
Con il miglior augurio di buona salute e una meritata serena vecchiaia.
In memoria di:
Daniele Gonzo, allievo del cfp dei Salesiani di Schio Vicenza, mancato all’effetto dei sui genitori, insegnati e compagni di scuola. Un sentito rigraziamento per aver messo a disposizione la sua carrozzina utilizzata per lo sviluppo del robot Optichair I.












![IMPOSTAZIONE GENERALE DI UN PROTOTIPO DI …-Tesi_Laurea_Ingegneria_Modena]01... · 1.2 LO SVILUPPO SINERGICO DI STILE E TECNOLOGIA IN UN PROTOTIPO ... ambiente CAD. A questo punto,](https://static.fdocumenti.com/doc/165x107/5c66f80c09d3f252168d23f9/impostazione-generale-di-un-prototipo-di-tesilaureaingegneriamodena01.jpg)




