TEORIA STRUTTURALE DELLE TRAVI - UniNa STiDuE: l ...unina.stidue.net/Politecnico di...
56
TEORIA STRUTTURALE DELLE TRAVI SCOPO: ridurre un problema intrinsecamente tridimensionale ad un problema monodimensionale, senza perdere in accuratezza dei risultati Per trave si intende quel solido che ottengo dalla traslazione rigida di una figura piana (la sezione) che si mantiene ortogonale alla traiettoria del suo baricentro ( asse geometrico) Lo sviluppo in lunghezza e gli eventuali raggi di curvatura devono essere più di d ll i di i li d ll i grandi della massima dimensione lineare della sezione
Transcript of TEORIA STRUTTURALE DELLE TRAVI - UniNa STiDuE: l ...unina.stidue.net/Politecnico di...
TEORIA STRUTTURALE DELLE TRAVI
SCOPO: ridurre un problema intrinsecamente tridimensionale ad un problema monodimensionale, senza perdere in accuratezza dei risultati
Per trave si intende quel solido che ottengo dalla traslazione rigida di una figura piana (la sezione) che si mantiene ortogonale alla traiettoria del suo baricentro (assegeometrico)
Lo sviluppo in lunghezza e gli eventuali raggi di curvatura devono essere più di d ll i di i li d ll igrandi della massima dimensione lineare della sezione

Trave piana con asse geometrico rettilineo (asse x) e sezione costante (Teoria secondo Timoshenko)
Ipotesi 1:• si assume uno stato piano di sforzi nel piano x-y, essendo x l’asse della trave;
z
x
yxσ⎧ ⎫
⎪ ⎪⎨ ⎬0
xy
στ
⎪ ⎪= ⎨ ⎬⎪ ⎪⎩ ⎭

Ipotesi 2:• sezioni inizialmente rette si mantengono tali durante il processo deformativo.
xu(x)
yv(x)v(x)
ϕ(x)
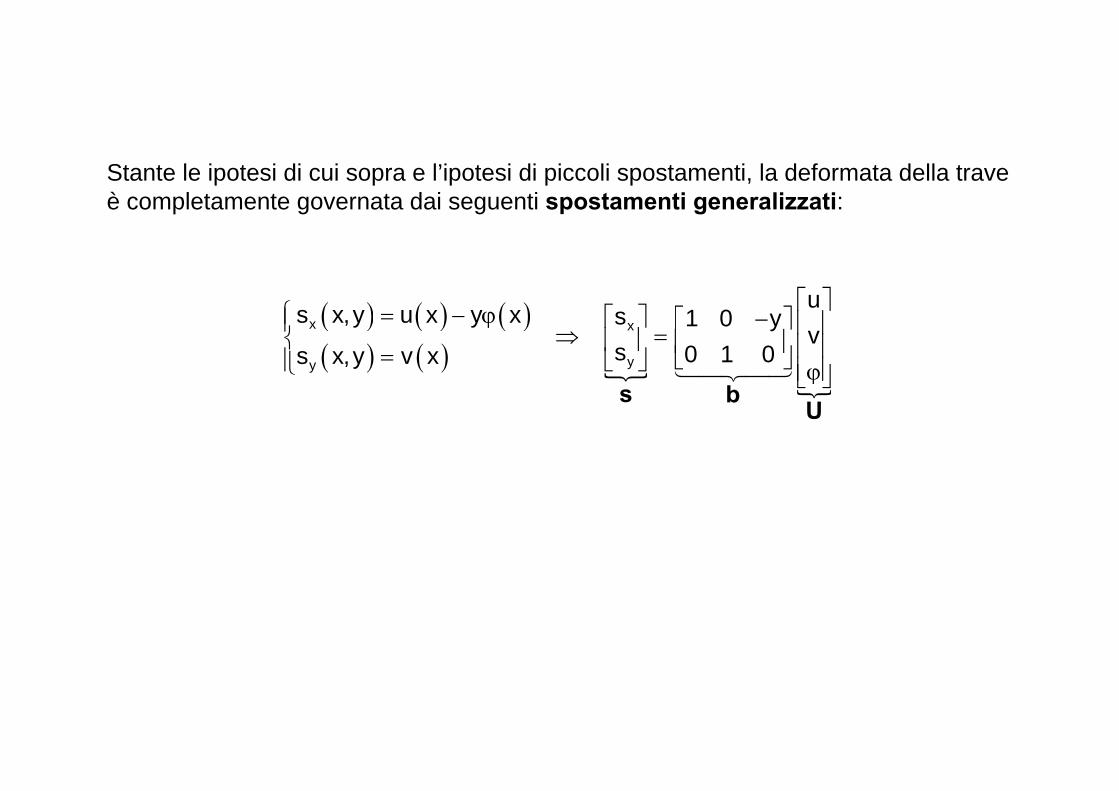
Stante le ipotesi di cui sopra e l’ipotesi di piccoli spostamenti, la deformata della trave è completamente governata dai seguenti spostamenti generalizzati:
( ) ( ) ( ) ⎡ ⎤⎧ ⎡ ⎤ ⎡ ⎤u( ) ( ) ( )
( ) ( )
⎡ ⎤⎧ = − ϕ ⎡ ⎤ −⎡ ⎤⎪ ⎢ ⎥⇒ =⎨ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥= ⎣ ⎦⎪ ⎣ ⎦⎩ ⎢ ⎥ϕ⎣ ⎦s b
x x
yy
us x,y u x y x s 1 0 y v
s 0 1 0s x,y v xs b U

Dalle equazioni di congruenza ricavo le deformazioni
⎧ε = − ϕ ≡ η+ χ η⎡ ⎤ε⎡ ⎤⎪ ⎡ ⎤ ⎢ ⎥
⎨ ⎢ ⎥x x x
x
u, y , y1 0 y
0 t⎡ ⎤⎪ ⎡ ⎤ ⎢ ⎥ε = ⇒ =⎨ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥γ ⎣ ⎦⎣ ⎦⎪ ⎢ ⎥χγ = −ϕ + ≡ ⎣ ⎦⎩ ε n q
xy
xyxy x
y0 t
0 1 0v, t
q
Dove q sono le deformazioni generalizzate così definite:Dove q sono le deformazioni generalizzate così definite:
η =⎧⎪ = −ϕ +⎨⎪
x
x
u,t v,⎨⎪χ = −ϕ⎩
x
x,
Queste equazioni sono chiamate equazioni di congruenza generalizzate.
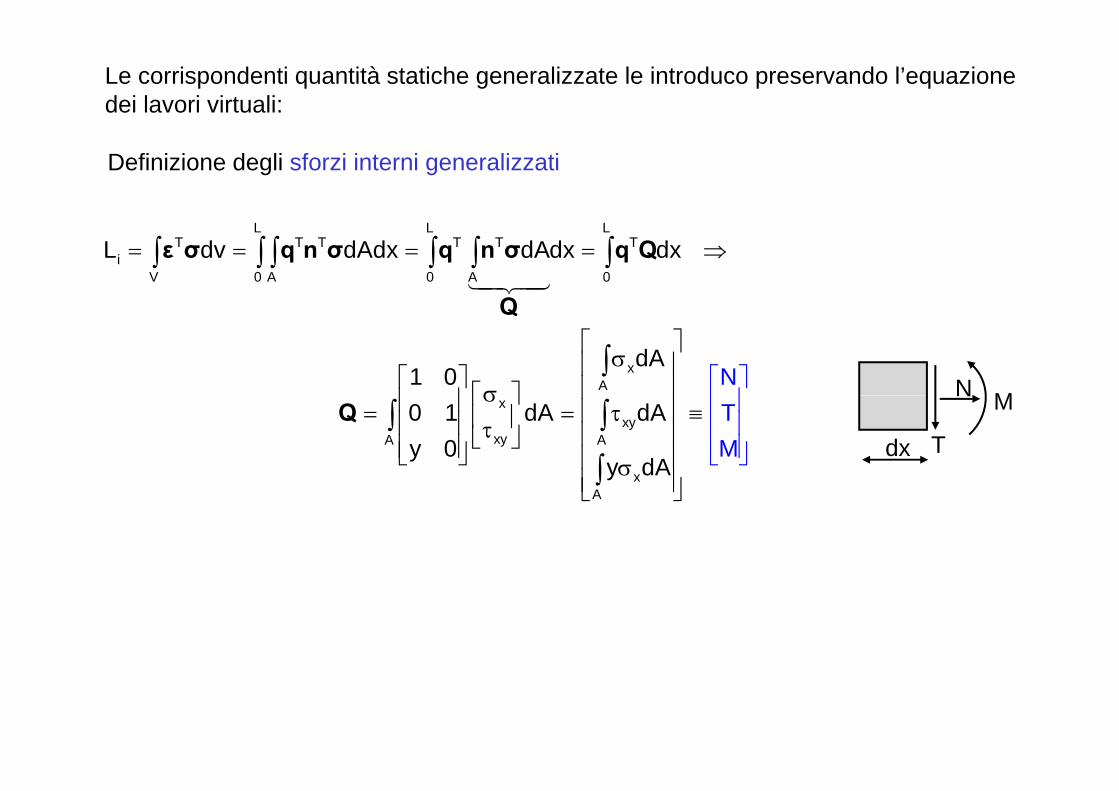
Le corrispondenti quantità statiche generalizzate le introduco preservando l’equazione dei lavori virtuali:
Definizione degli sforzi interni generalizzati
L L LT T T T T T
iV 0 A 0 A 0
L dv dAdx dAdx dx = = = = ⇒∫ ∫ ∫ ∫ ∫ ∫ε σ q n σ q n σ q Q
Q
xA
dA1 0 N
⎡ ⎤σ⎢ ⎥⎡ ⎤ ⎢ ⎥σ⎡ ⎤⎢ ⎥
⎡ ⎤⎢ ⎥
∫
Q
N Mxxy
xyA A
x
0 1 dA dAy 0
TM
y dA
⎢ ⎥σ⎡ ⎤⎢ ⎥ ⎢ ⎥= = τ ≡⎢ ⎥⎢ ⎥ τ ⎢ ⎥⎣ ⎦⎢ ⎥⎣ ⎦ ⎢ ⎥
⎢ ⎥⎢ ⎥⎢ ⎥⎣σ
⎢⎣ ⎦⎦
⎥
∫ ∫
∫
QT
N M
dx
A⎢⎣ ⎦⎥∫

Definizione delle forze esterne generalizzate:
L L LT T T T T T
eL dv dAdx dAdx dx = = = = ⇒∫ ∫ ∫ ∫ ∫ ∫s F U b F U b F U PV 0 A 0 A 0
F dA⎡ ⎤⎢ ⎥∫
Pp
m
xA
xy
yA A
F dA1 0
F0 1 dA F dA
Fy
npm0
⎢ ⎥⎡ ⎤ ⎢ ⎥⎡ ⎤⎢ ⎥ ⎢ ⎥= = ≡⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦⎢ ⎥⎣ ⎦ ⎢ ⎥
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
∫
∫ ∫Pn
xA
yyF
m0dA
⎢ ⎥−⎣ ⎦ ⎢ ⎥−⎢ ⎥⎣ ⎦
⎢ ⎥⎣ ⎦∫ dx
NB. Formulare una teoria strutturale vuol dire sostituire le variabili cinematiche(spostamenti e deformazioni) e statiche (forze e sforzi) che governano il continuogenerico con opportune quantità dette generalizzate che forniscono informazionimedie dei valori locali in una regione della struttura (la sezione della trave).

Le equazioni di equilibrio possono essere ottenute per ragionamento diretto imponendol’equilibrio di un concio infinitesimo di trave.
pm
N
p
n
M M+dM
N+dN
T
N
dx T+dT
N+dN
dx
XdN n 0dx
d
R 0 -N+N+dN+ndx=0
R 0 T T dT d 0 T 0
+ == → →
ydR 0 T-T-dT-pdx=0
dxM 0 M+Tdx+mdx-pdx -M-
p 0dx
dM TdM=0 2
m 0dx
+ == → →
−= → −→ =2
0dx
≈
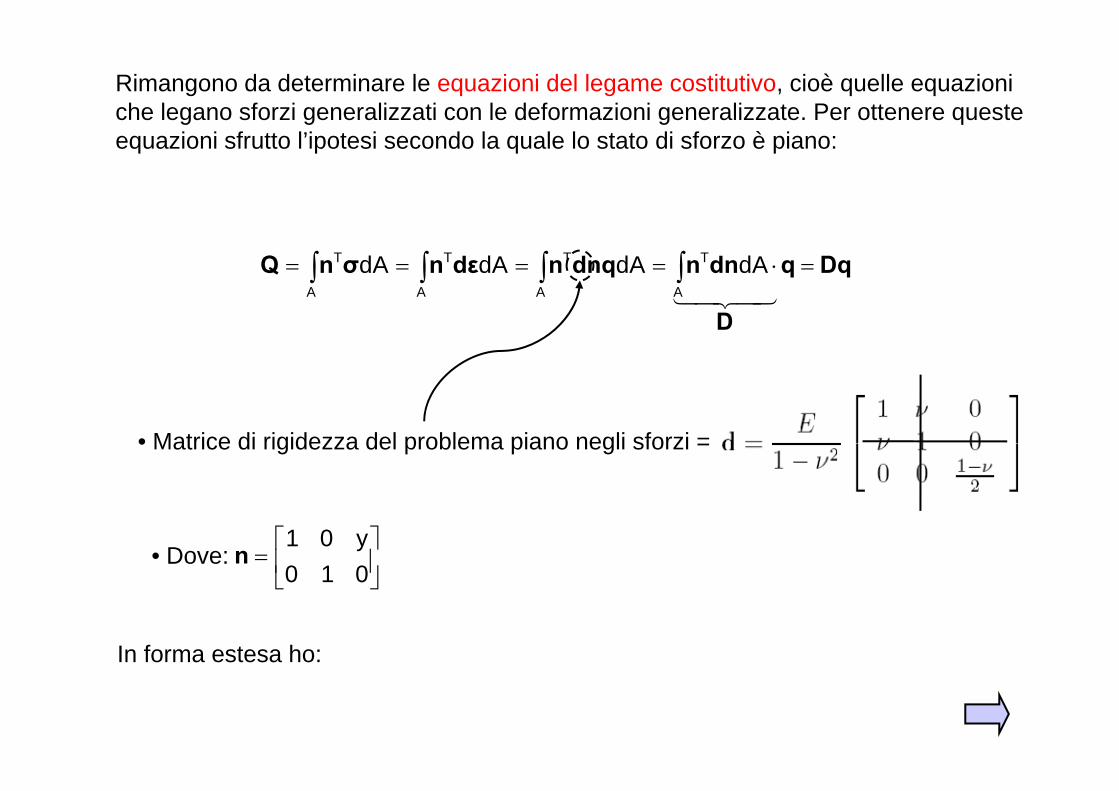
Rimangono da determinare le equazioni del legame costitutivo, cioè quelle equazioni che legano sforzi generalizzati con le deformazioni generalizzate. Per ottenere queste equazioni sfrutto l’ipotesi secondo la quale lo stato di sforzo è piano:
T T T T
A A A A
dA dA dA dA= = = = ⋅ =∫ ∫ ∫ ∫Q n σ n dε n dnq n dn q Dq
D
• Matrice di rigidezza del problema piano negli sforzi =
1 0 y0 1 0⎡ ⎤
= ⎢ ⎥⎣ ⎦
n• Dove:0 1 0⎣ ⎦
In forma estesa ho:
2
2
E 01 0 1E 0 1 0 y 1 0 y⎡ ⎤
⎡ ⎤ ⎢ ⎥− ν⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥⎢ ⎥∫ ∫2
A A
2
0 1 0 y 1 0 y10 1 dA 0 G dA0 1 0 0 1 00 Gy 0 yE 01
⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥− ν⎢ ⎥= = =⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎣ ⎦ ⎣ ⎦⎣ ⎦⎢ ⎥ ⎢ ⎥⎣ ⎦⎢ ⎥− ν⎣ ⎦
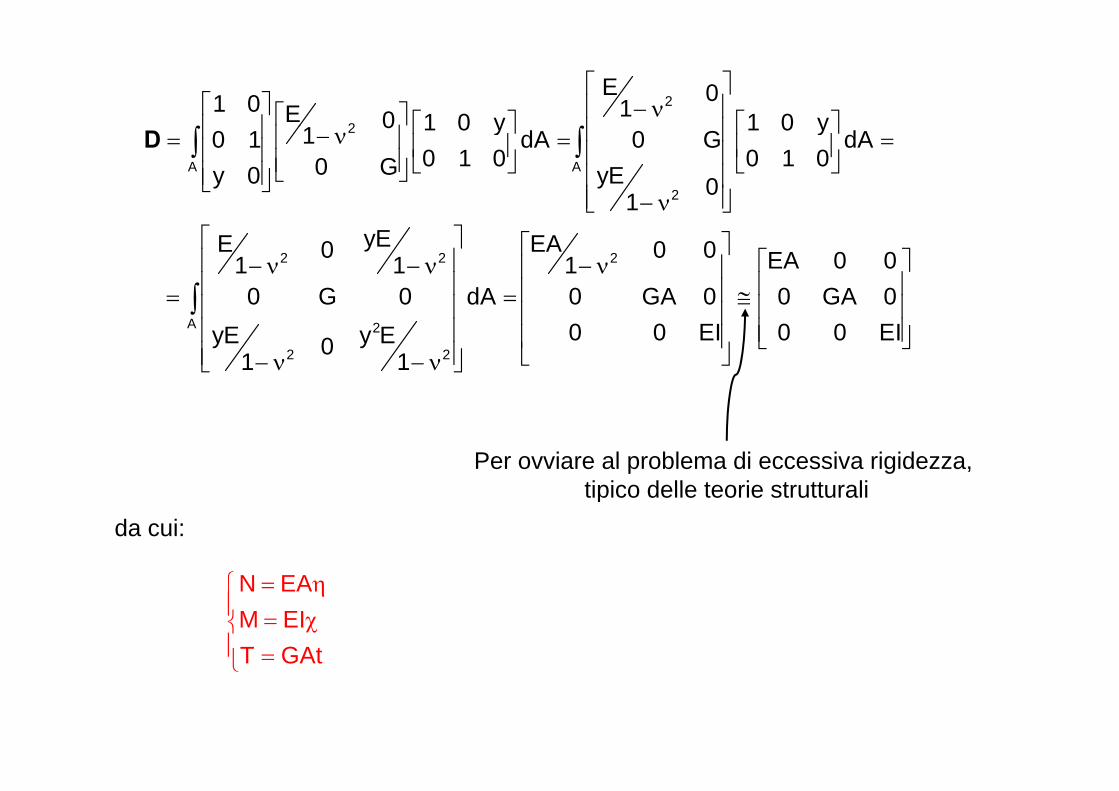
∫ ∫D
2 2 2yEE EA0 0 0 EA 0 01 1 1
0 G 0 dA 0 GA 0 0 GA 0
⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎡ ⎤− ν − ν − ν⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥= = ≅⎢ ⎥ ⎢ ⎥⎢ ⎥∫
A 2
2 20 0 EI 0 0 EIyE y E01 1
⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎣ ⎦⎢ ⎥ ⎣ ⎦− ν − ν⎣ ⎦
∫
Per ovviare al problema di eccessiva rigidezza, tipico delle teorie strutturali
da cui:tipico delle teorie strutturali
N EA⎧N EAM EIT GAt
= η⎧⎪ = χ⎨⎪ =⎩⎩
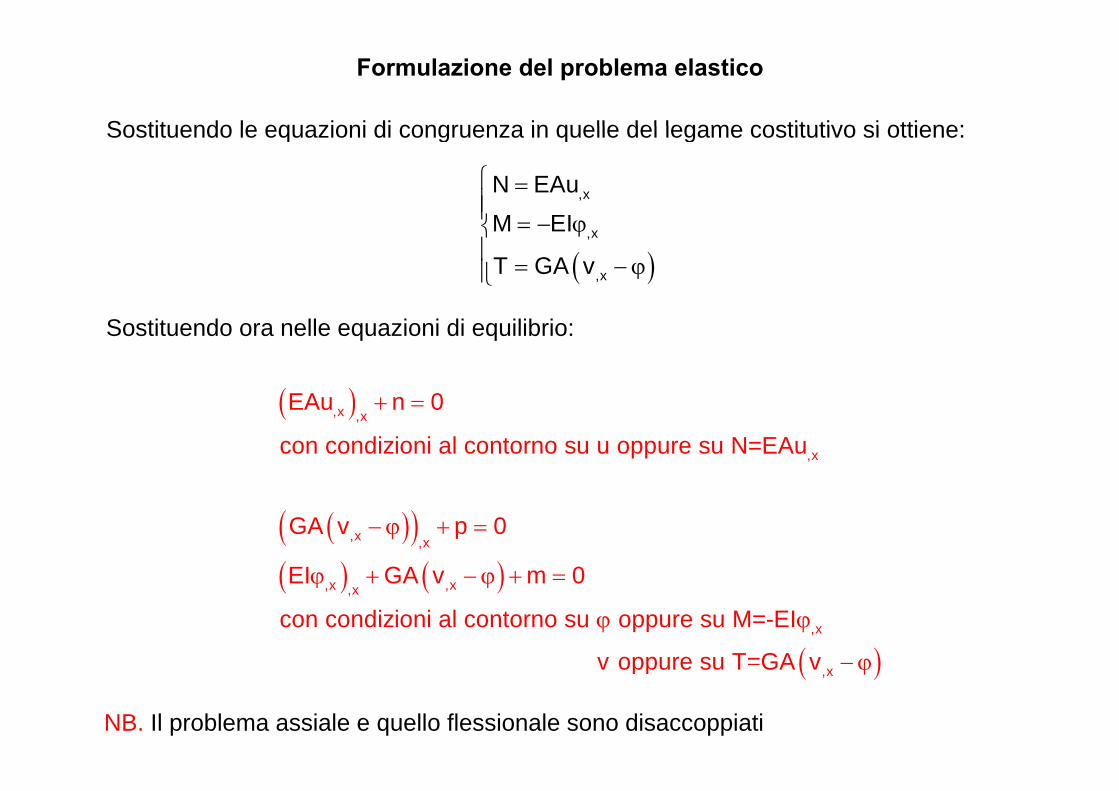
Formulazione del problema elastico
Sostituendo le equazioni di congruenza in quelle del legame costitutivo si ottiene:Sostituendo le equazioni di congruenza in quelle del legame costitutivo si ottiene:
,xN EAuM EI
⎧ =⎪⎪⎨
( ),x
,x
M EI
T GA v
⎪ = − ϕ⎨⎪
= − ϕ⎪⎩
Sostituendo ora nelle equazioni di equilibrio:
( )EA 0( ),x ,x
,x
EAu n 0
con condizioni al contorno su u oppure su N=EAu
+ =
( )( )( ) ( )
,x ,xGA v p 0
EI GA v m 0
− ϕ + =
ϕ + ϕ + =( ) ( ),x ,x,x
,x
EI GA v m 0
con condizioni al contorno su oppure su M=-EI
v oppure su
ϕ + − ϕ + =
ϕ ϕ
( )T=GA v − ϕ v oppure su ( ),xT GA v ϕ
NB. Il problema assiale e quello flessionale sono disaccoppiati


Trave piana con asse geometrico rettilineo (x1) e sezione costante (Teoria secondo Eulero-Bernoulli)
Quella finora vista è la teoria della trave di Timoshenko; nel caso di travi snelle (rapporto lunghezza altezza maggiore di 5) è possibile formulare la seguente ipotesi aggiuntiva:
Ipotesi 3:• le sezioni inizialmente rette non solo si mantengono piane durante il processo deformativo (Ipotesi 2) ma anche ortogonali all’asse della travedeformativo (Ipotesi 2), ma anche ortogonali all asse della trave.

xu(x) x
y v(x)y v(x)
( )
ϕ(x)
∼v,x(x)
Ne consegue che:
( ) ( )x xx v, x t v, 0 ϕ ≈ ⇒ = −ϕ + ≈ ⇒
• Ciò equivale quindi a trascurare le deformazioni taglianti• Gli spostamenti generalizzati indipendenti sono: u, v

Vediamo come cambiano le equazioni finora scritte:
Equazioni di congruenza generalizzate
xx
x
u,t v,
u,
v
ηη =⎧⎪ = −ϕ + →⎨⎪
=⎧⎨χ⎩
xxxv,
,⎪χ = −ϕ⎩χ = −⎩
Equazioni di equilibrio
dNdN ⎧⎧ dN n 0dN n 0dxdT dTp 0 p 0
dx⎧⎧ + = ⎪⎪⎪⎪
⎪ ⎪ ⎫+ = → + =⎨
+ =
⎨ ⎪ 2
2
p 0 p 0dx dx dM dMT m 0 T 0dx dx
d M p 0dx
+ = → + =⎨+ =
⎨ ⎪⎪⎪ ⎪ →⎬⎪ ⎪ ⎪− − = − =⎪ ⎪ ⎪⎭⎩ ⎩dx dx ⎪⎭⎩ ⎩

Equazioni del legame costitutivo
N EAM EI
N EA==
η⎧⎨
η⎧⎪ = χ →⎨M EI T GAt
M EI⎨ == χ →⎨
⎪ χ= ⎩
⎩
NB. Il taglio non può più quindi essere calcolato attraverso il legame costitutivo, ma solo attraverso l’equilibrio:
dMTdx
=

Formulazione del problema elastico
Sostituendo le equazioni di congruenza in quelle del legame costitutivo si ottieneSostituendo le equazioni di congruenza in quelle del legame costitutivo si ottiene
xN EAu=⎧⎪⎨
,x
,xxM EIv⎪⎨ = −⎪⎩
Sostituendo ora nelle equazioni di equilibrio:
( ),x ,x
x,
EAu n 0
con condizioni al contorno su u oppure su N=EAu
+ =
( ),xx ,xx
,
EIv p 0 − + =
,x ,xx
,x
con condizioni al contorno su v oppure su M=-EIv
v oppure su T= =M ( ),xx ,x- EIv
(EQUAZIONE DELLA LINEA ELASTICA AL QUARTO ORDINE)

Per evitare di dover integrare un’equazione del quarto ordine, si preferisce usare la versione al secondo ordine, che ottengo dalle equazioni di congruenza e del legame costitutivo.
,xx
,x
M EIv con condizioni al contorno solo cinematiche su v e su v= −
(EQUAZIONE DELLA LINEA ELASTICA AL SECONDO ORDINE)
L’equilibrio viene imposto direttamente scrivendo l’espressione del momento M daL equilibrio viene imposto direttamente scrivendo l espressione del momento M da sostituire nell’equazione sopra (vedi esempi successivi).
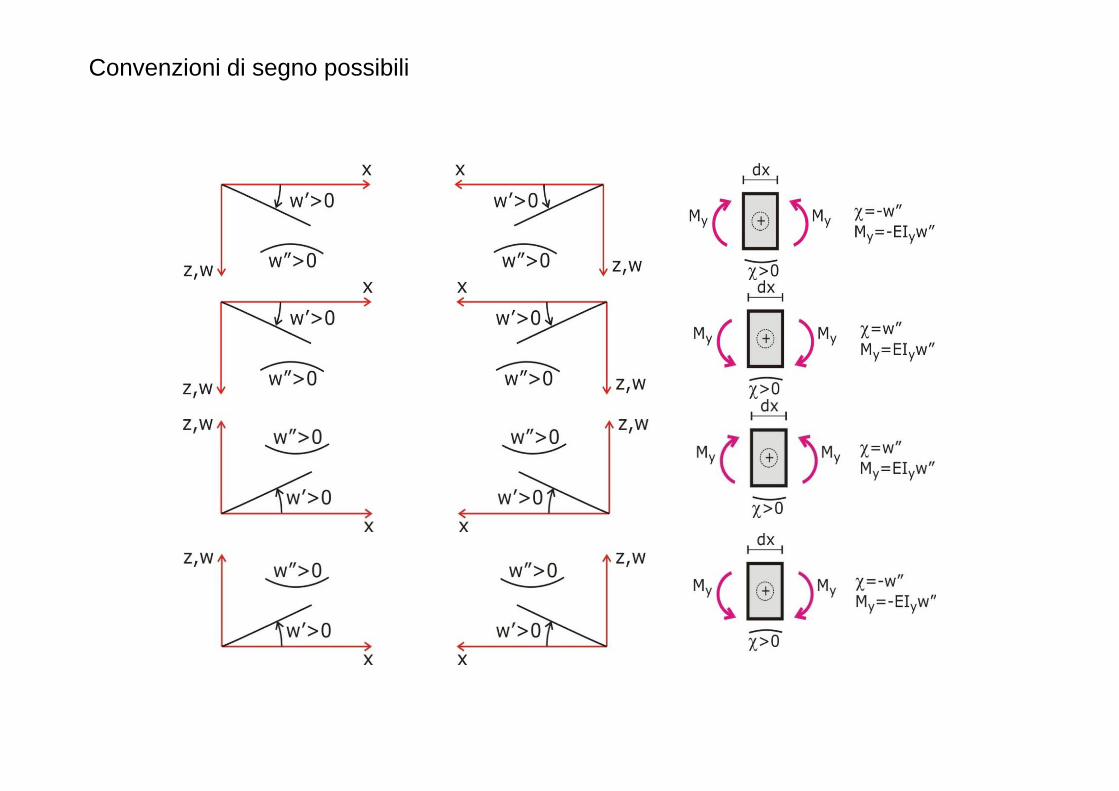
Convenzioni di segno possibili

Applicazione 1
0
3
=
= −
A
A
HpV
i equ
ilibrio
3
6= −B
pV
Equ
azio
n
21
1 6 2= −
pxpT(x )
3=p pM(x ) x x
6 2
1 1 16 6= −M(x ) x x

3′′ p pEIv x x
Applicazione 1
E i d ll li l ti
⎧
1 16 6= −EIv x xEquazione della linea elastica
1
1
0 0 0
= ⇒ =⎧⎨ = ⇒ =⎩
x vx vCondizioni al contorno
4 21 1
124 12
⎡ ⎛ ⎞′ = − +⎜ ⎟⎢ ⎝ ⎠p pv x x A
EI( )1
10 0⎧ = ⇒ =⎪⎪x B
EI37⎧ =⎪A p1 1
5 31 1 1
24 121
120 36
⎜ ⎟⎢ ⎝ ⎠⎢⎢ ⎛ ⎞= − + +⎢ ⎜ ⎟
⎝ ⎠⎣
EIp pv x x Ax B
EI
( )4
11 7 0
360
⎪⎪⎨ ⎛ ⎞⎪ = ⇒ = − + +⎜ ⎟⎪ ⎝ ⎠⎩
EIpx A B
EI
3600
=⎪⎨⎪ =⎩
A p
B
1 7⎛ ⎞ 1 7⎛ ⎞5 3 31 1 1
1 7120 36 360⎛ ⎞= − +⎜ ⎟⎝ ⎠
p pv x x p xEI
4 2 31 1
1 724 12 360⎛ ⎞′ = − +⎜ ⎟⎝ ⎠
p pv x x pEI

Applicazione 1
370 0 α′= ⇒ = = =px v v1
3
1
0 0 360
1 0 45
α
β
= ⇒ = = =
′= ⇒ = = − =
x v vEI
px v vEI45 EI
44
1 1 10 0 519 0 00652′ = ⇒ = ⇒ = =* * pv (x ) x . v(x ) . fEI

Applicazione 2
vv
0=AHWilib
rio
= −
=
A
B
WV
WV
Equa
zion
i equ
E
W1 =
=
WT(x )
WM(x ) x1 1=M(x ) x

Applicazione 2
1
1
0 0 0
η= ⇒ =⎧⎨ ′= ⇒ = =⎩
x vx v v1′′ = −
WEIv x Condizioni al contorno
( )110
⎧= ⇒ =⎪x Bη ⎧
⎪B EI21
3
12
1
⎡ ⎛ ⎞′ = − +⎜ ⎟⎢ ⎝ ⎠⎢⎢ ⎛ ⎞
Wv x AEI
W
( )1
2
1
0
1 06
⇒⎪⎪⎪ ⎛ ⎞⎪ = ⇒ = − + +⎨ ⎜ ⎟
⎝ ⎠⎪
x BEI
Wx A EIEI
η
η 2
3 η
η⎪ =⎪⎪ = −⎨⎪
B EIEIW
31 1
16
⎢ ⎛ ⎞= − + +⎢ ⎜ ⎟⎝ ⎠⎣
Wv x Ax BEI
11 0
2
⎝ ⎠⎪⎪ ⎛ ⎞⎪ = ⇒ = − +⎜ ⎟⎪ ⎝ ⎠⎩
Wx AEI
3 2η
⎪⎪ = −⎪⎩
EIA
32 313 2η ⎛ ⎞
= − +⎜ ⎟x
v x132 3 3= − +⎜ ⎟
⎝ ⎠v x
( )2 23 η ( )2 213
32η′ = −v x

Applicazione 2
1 3
3 η=
EIT(x )
3 η=
EIM(x ) x1 13=M(x ) x
31
30 2ηη α′= ⇒ = = − =x v v
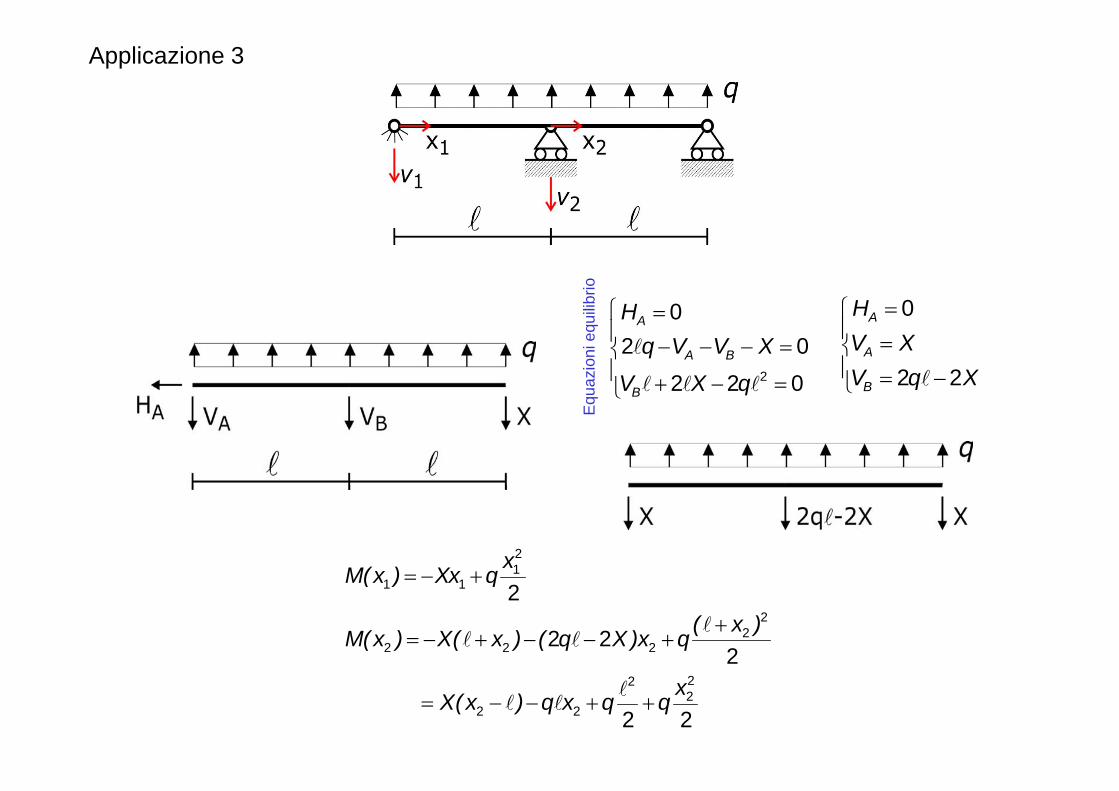
Applicazione 3
0⎧Hibrio
0⎧H
2
02 0
2 2 0
⎧ =⎪
− − − =⎨⎪ + − =⎩
A
A B
B
Hq V V X
V X quazi
oni e
quili 0
2 2
=⎧⎪ =⎨⎪ = −⎩
A
A
B
HV XV q X⎩ B
Eq
21= +
xM(x ) Xx q1 1
22
2 2 2
2
2 22
= − +
+= − + − − +
M(x ) Xx q
( x )M(x ) X( x ) ( q X )x q
222
2 2 2 2
= − − + +x
X(x ) q x q q

Applicazione 3
21
1 1 2′′ = −
xEIv Xx q
1 1
1 1
0 00
0 0
= =⎧⎪ = =⎪⎪⎨
v (x )v (x )
( )Condizioni al222
2 22 2′′ = − + − −
xEIv ( X q ) (q X )x q
2 2
2 2
1 1 2 2
0 00
0
⎪ = =⎨⎪ = =⎪′ ′⎪ = = =⎩
v (x )v (x )v (x ) v (x )
Condizioni al contorno
1 1 2 2⎩ ( ) ( )
2 31 1
1
3 4
12 6
1
⎡ ⎛ ⎞′ = − +⎢ ⎜ ⎟
⎝ ⎠⎢⎢ ⎛ ⎞⎢
x xv X q A
EI
x x 3
01
=⎧⎪⎪ =
B
A q1 11 1
16 24
⎛ ⎞⎢ = − + +⎜ ⎟⎢ ⎝ ⎠⎣
x xv X q Ax B
EI
2 321⎡ ⎛ ⎞
4800
⎪ = −⎪⎪ =⎨⎪ =⎪
A q
DC2 32
2 22 2
2 3 422 2 2
12 2 6
1
⎡ ⎛ ⎞′ = − + − − +⎢ ⎜ ⎟
⎝ ⎠⎢⎢ ⎛ ⎞⎢ + + +⎜ ⎟
x xv ( X q )x (q X ) q C
EI
x x xv ( X q ) (q X ) q Cx D
038
=⎪⎪ =⎪⎩
C
X q
2 22 2 6 24⎢ = − + − − + +⎜ ⎟⎢ ⎝ ⎠⎣v ( X q ) (q X ) q Cx D
EI

33 2 11 1 3⎡ ⎛ ⎞
′⎢ ⎜ ⎟x
Applicazione 3
3 2 11 1
43 3 1
1 1 1
48 16 6
1 1 148 16 24
′ = − + −⎢ ⎜ ⎟⎝ ⎠⎢
⎢ ⎛ ⎞⎢ = − + −⎜ ⎟⎢
v q q x qEI
xv q x q x q
EI1 1 148 16 24⎜ ⎟⎢ ⎝ ⎠⎣q q q
EI
32 2 2
2 2 21 1 5
8 16 6⎡ ⎛ ⎞′ = − + −⎢ ⎜ ⎟
⎝ ⎠⎢
xv q x q x q
EI4
2 2 3 22 2 2
8 16 6
1 1 516 48 24
⎝ ⎠⎢⎢ ⎛ ⎞⎢ = − + −⎜ ⎟⎢ ⎝ ⎠⎣
EI
xv q x q x q
EI 31⎡ q⎝ ⎠⎣1 1 1
1 1 1
10 0 48
0 0
α⎡
′= ⇒ = = − =⎢⎢
′= ⇒ = =⎢⎣
qx v vEI
x v v
2 2 23
2 2 2
0 0 01 0
48β
′= ⇒ = =⎡⎢⎢ ′= ⇒ = = =⎢⎣
x v vqx v vEI48⎢⎣ EI
4
1 1 1 1 10 0 422 0 0054⎡′ = ⇒ = ⇒ = − =⎢
⎢
* * qv x . v (x ) . fEI
4
2 2 2 2 20 0 578 0 0054⎢⎢ ′ = ⇒ = ⇒ = − =⎢⎣
* * qv x . v (x ) . fEI

Effetto anelastico: Carico termico
Carico termico costante
Riscaldamento uniforme dell’asta con incremento di
temperatura ΔT
TT Tε = αΔ η=
Deformazione termica di ogni fibraAllungamento termico di ogni fibra
T Tdu dx Tdx= ε = αΔ
⎧( ) ( )( )
ex T
e T x,x
x T x,EA u, n 0
N EAN EA u,
u, + cN n
.c.0
N n 0
⎧ = η⎧ = −η⎪ ⎪η + η = → →⎨ ⎨
+ =⎪⎪⎩
=
+ =
−η +⎩
,xN n 0⎩ + =
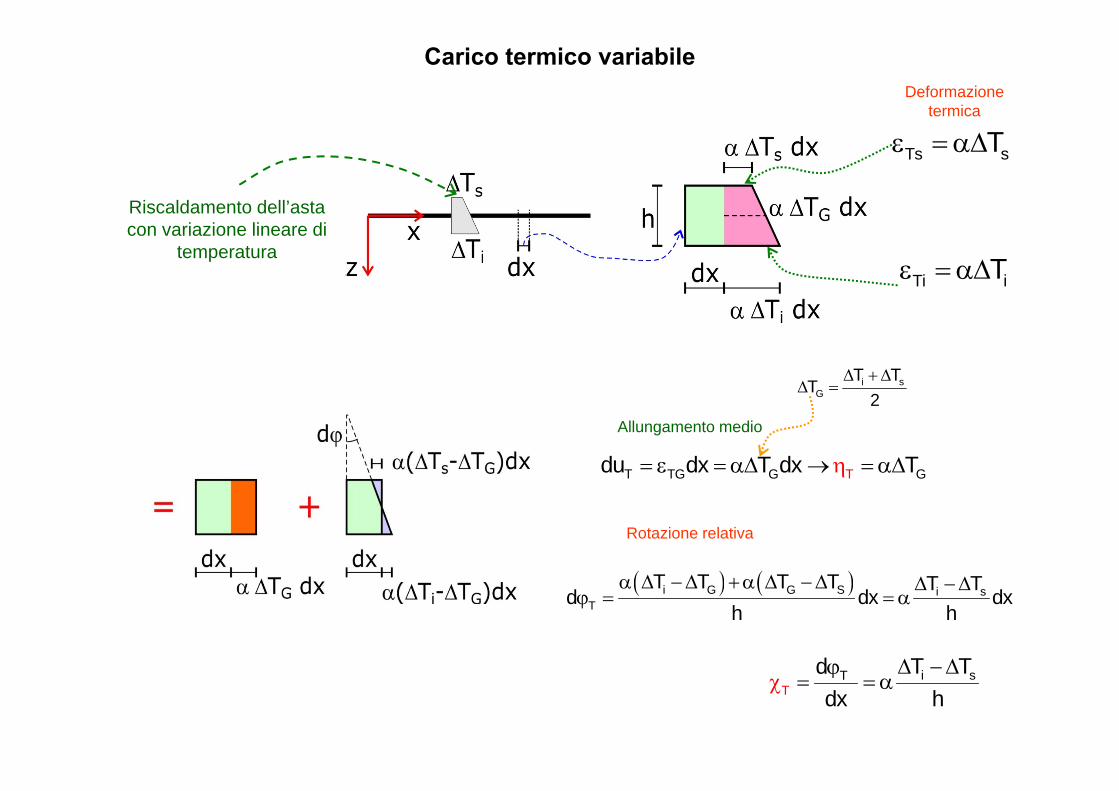
Carico termico variabile Deformazione
termica
Riscaldamento dell’asta
Ts sTε = αΔ
con variazione lineare di temperatura
Ti iTε = αΔ
i sG
T TT
2Δ +Δ
Δ =
T T G GTGdu dx T dx Tη= ε = αΔ → =αΔ
Allungamento medio
G 2
( ) ( )T T T TΔ Δ Δ Δ
Rotazione relativa
( ) ( )i G G S i sT
T T T T T Td dx dx
h hα Δ −Δ +α Δ −Δ Δ −Δ
ϕ = = α
T Td Δ Δϕ sT
iT T Tddx h
Δ −Δϕ= = αχ

Carico termico variabile
⎧ ( )exx T
e TT
xx
xx
M EIM EI v, Mv, + c.
,.
vc
EI= χ⎧
→ = − +χ →⎨χ + χ = −⎩= − − χ
(EQUAZIONE DELLA LINEA ELASTICA AL SECONDO ORDINE)
L’equilibrio viene sempre imposto direttamente scrivendo l’espressione del momento M da sostituire nell’equazione sopra (vedi esempi successivi).

Applicazione 5
BH 0V V 0
=⎧⎪ +⎨
BH 0V V
=⎧⎪⎨eq
uilib
rio
A B
B A A
V V 0W W V 0
+ =⎨⎪ − − =⎩
B A
B A A
V VW W V
= −⎨⎪ = +⎩
Equ
azio
ni
A A AM(x) W V V x= + −
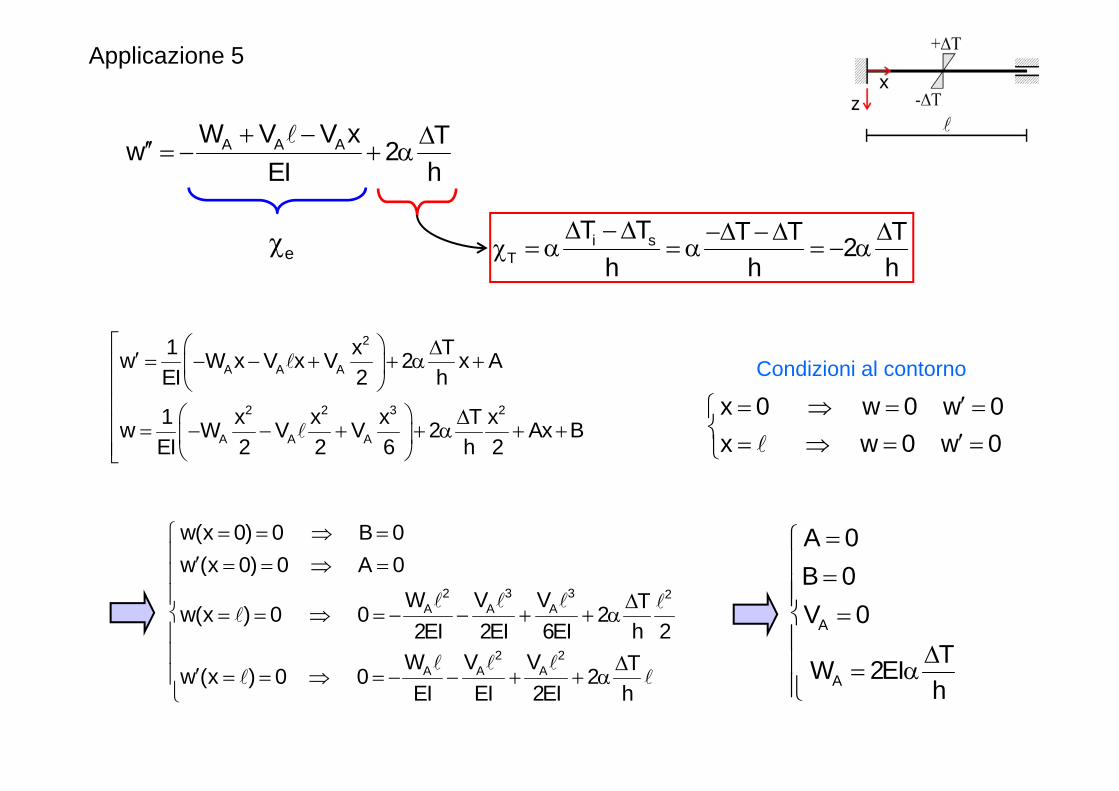
W V V TΔ
Applicazione 5
A A AW V V x Tw 2EI h
+ − Δ′′ = − + α
i sT
T T T T T2h h h
Δ −Δ −Δ −Δ Δχ = α = α = − αeχ
⎧
Condizioni al contorno2
A A A1 x Tw W x V x V 2 x AEI 2 h
⎡ ⎛ ⎞ Δ′ = − − + + α +⎢ ⎜ ⎟⎝ ⎠⎢
⎢ x 0 w 0 w 0x w 0 w 0
′= ⇒ = =⎧⎨ ′= ⇒ = =⎩
2 2 3 2
A A A1 x x x T xw W V V 2 Ax BEI 2 2 6 h 2
⎢ ⎛ ⎞ Δ⎢ = − − + + α + +⎜ ⎟⎢ ⎝ ⎠⎣
w(x 0) 0 B 0w (x 0) 0 A 0
= = ⇒ =⎧⎪ ′ = = ⇒ =⎪
A 0B 0=⎧
⎪⎪2 3 3 2
A A A
2 2
( )W V V Tw(x ) 0 0 22EI 2EI 6EI h 2
W V V T
⎪⎪ Δ⎨ = = ⇒ = − − + + α⎪⎪ Δ⎪
A
B 0V 0
TW 2EI
=⎪⎪=⎨
⎪ Δ⎪A A AW V V Tw (x ) 0 0 2EI EI 2EI h
Δ′⎪ = = ⇒ = − − + + α⎩
AW 2EIh
⎪ = α⎪⎩

Applicazione 5
w (x) 0w(x) 0′ =⎡
⎢ =⎣La struttura non si deforma!!
( )⎣

Vincoli elastici
I cedimenti dei vincoli dipendono dall’intensità della reazione che devono fornire
Esempio:Esempio:• Vincolo di fondazione che grava sul terreno. Il
terreno si deforma in funzione della spinta della fondazione.
• Appoggio di un elemento su un altro elementoAppoggio di un elemento su un altro elemento strutturale.
Ipotesi:legame elastico-lineare tra il cedimento η e la reazione Rlegame elastico lineare tra il cedimento η e la reazione R
Rη= k è la costante di rigidezza elastica
kη=
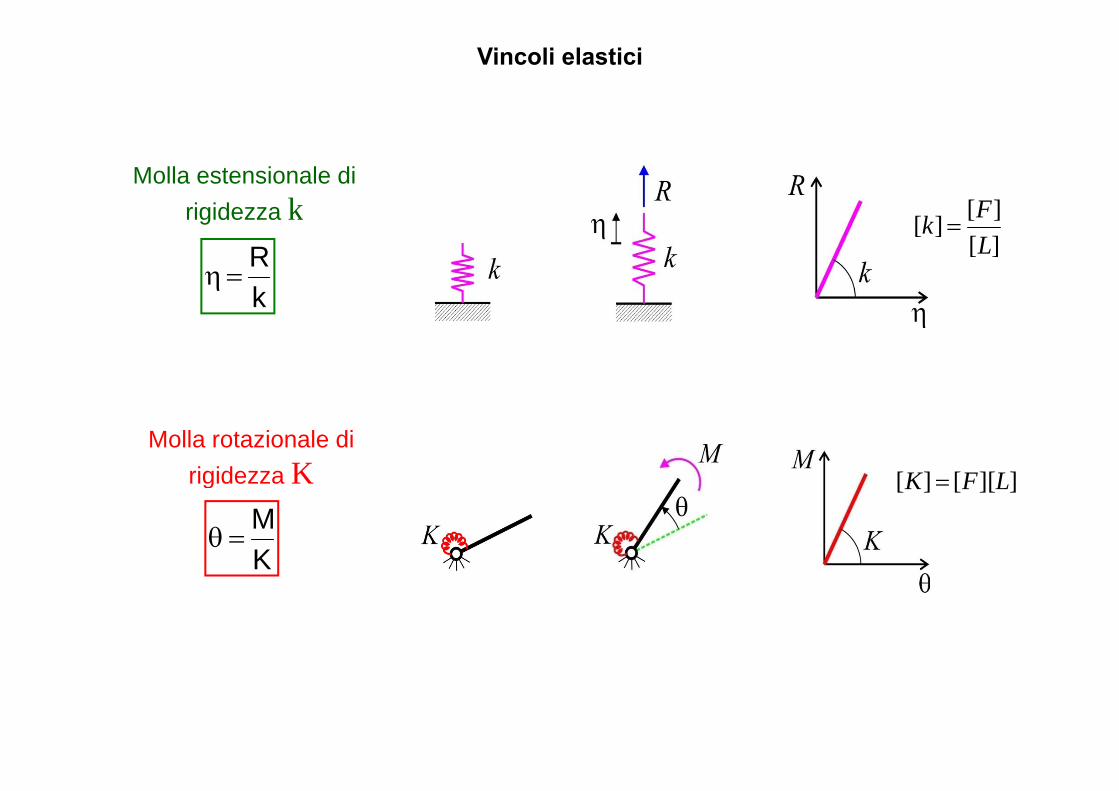
Vincoli elastici
Molla estensionale di rigidezza k ][Fkrigidezza k
Rk
η=][][][
LFk =
k
Molla rotazionale di rigidezza K ]][[][ LFK =g
MK
θ =
]][[][ LFK =
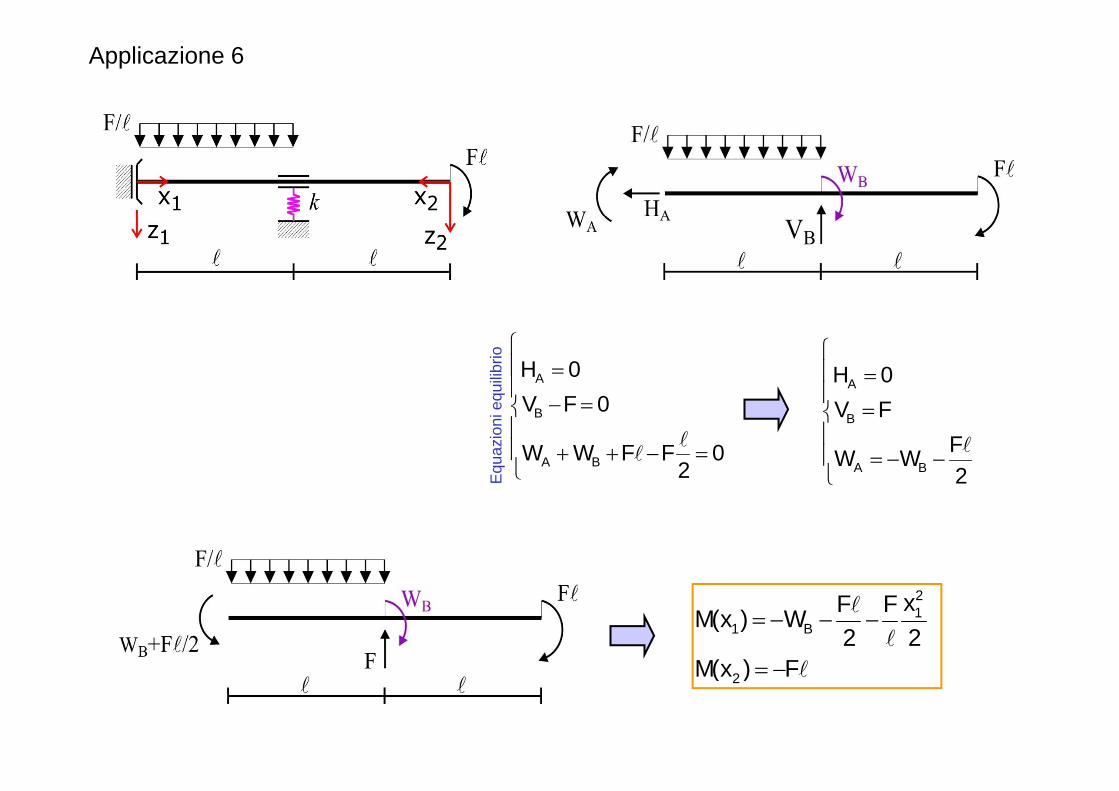
Applicazione 6
AH 0V F 0
⎧⎪ =⎪⎨
AH 0⎧⎪ =⎪qu
ilibrio
B
A B
V F 0
W W F F 02
⎪− =⎨
⎪⎪ + + − =⎩
B
A B
V FFW W2
⎪=⎨
⎪⎪ = − −⎩E
quaz
ioni
eq
21
1 BxF FM(x ) W
2 2M(x ) F
= − − −
2M(x ) F = −
3x1 F F⎡ ⎛ ⎞
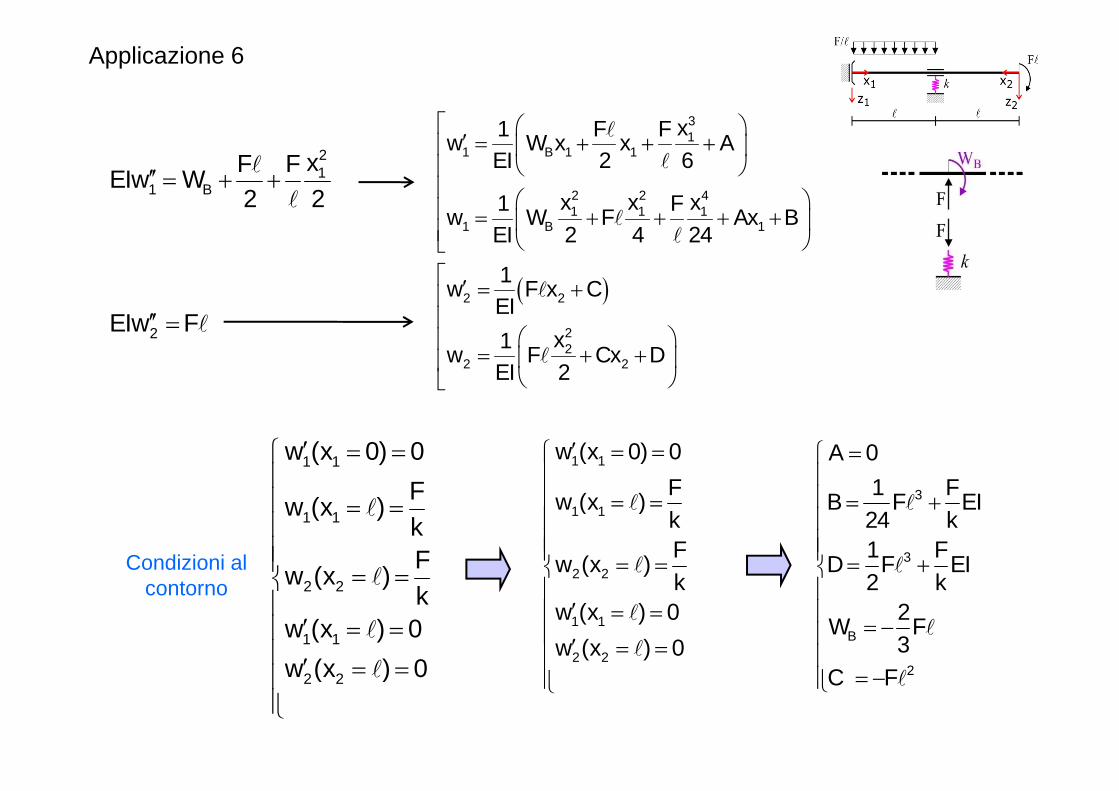
Applicazione 6
21
1 BxF FEIw W
2 2′′ = + +
11 B 1 1
2 2 41 1 1
x1 F Fw W x x AEI 2 6
x x x1 Fw W F Ax B
⎡ ⎛ ⎞′ = + + +⎢ ⎜ ⎟
⎝ ⎠⎢⎢ ⎛ ⎞⎢ + + + +⎜ ⎟1 B 1w W F Ax B
EI 2 4 24⎢ = + + + +⎜ ⎟⎢ ⎝ ⎠⎣
( )2 21w F x CEI
⎡ ′ = +⎢⎢
2EIw F′′ = 22
2 2
EIx1w F Cx D
EI 2
⎢⎢
⎛ ⎞⎢= + +⎜ ⎟⎢
⎝ ⎠⎣
1 1w (x 0) 0F
′ = =⎧⎪
1 1w (x 0) 0 A 0F 1 F
′ = = =⎧ ⎧⎪ ⎪⎪ ⎪
Condizioni al
1 1Fw (x )kFw (x )
⎪⎪ = =⎪⎪⎪ = =⎨
31 1
32 2
F 1 Fw (x ) B F EIk 24 kF 1 Fw (x ) D F EIk 2 k
⎪⎪ ⎪= = = +⎪ ⎪⎪ ⎪⎪ ⎪= = ⇒ = +⎨ ⎨
contorno 2 2
1 1
w (x )k
w (x ) 0w (x ) 0
= =⎨⎪
′ = =⎪⎪ ′⎪
2 2
1 1B
2 2
( )k 2 k
w (x ) 0 2W F3w (x ) 0
⎨ ⎨⎪ ⎪
′ = =⎪ ⎪ = −⎪ ⎪′ = =⎪ ⎪2 2w (x ) 0′ = =⎪
⎪⎩
2C F⎪ ⎪
= −⎪ ⎪⎩⎩
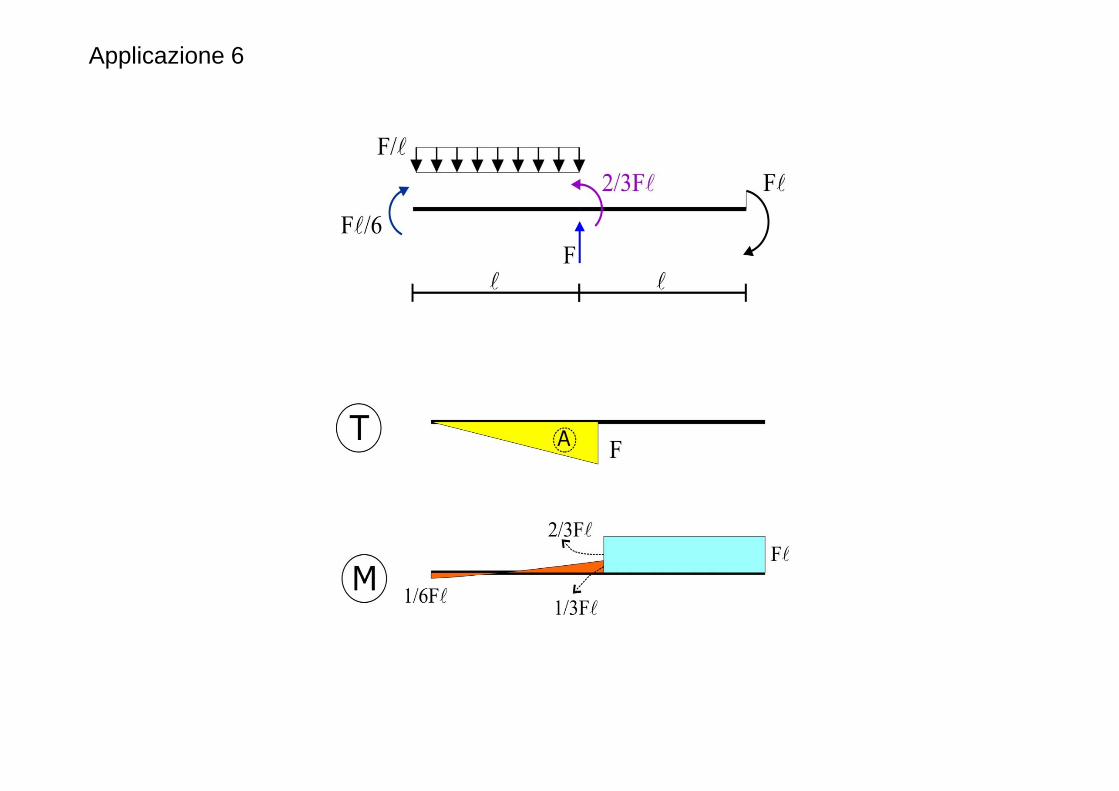
Applicazione 6

31x1 F 1w F x
⎡ ⎛ ⎞′ +⎢ ⎜ ⎟
31x1 F 1w F x
⎡ ⎛ ⎞′⎢ ⎜ ⎟
Applicazione 6
11 1
42 31
1 1
w F xEI 6 6
x1 F 1 1 Fw F x F EIEI 24 12 24 k
′ = + −⎢ ⎜ ⎟⎝ ⎠⎢
⎢ ⎛ ⎞⎢ = − + +⎜ ⎟⎢ ⎝ ⎠⎣3
EIk ≡
1 1
42 31
1 1
w F xEI 6 6
x1 F 1 25w F x FEI 24 12 24
= −⎢ ⎜ ⎟⎝ ⎠⎢
⎢ ⎛ ⎞⎢ = − +⎜ ⎟⎢ ⎝ ⎠⎣EI 24 12 24 k⎢ ⎝ ⎠⎣
( )22 2
1w F x F⎡ ′ = −⎢
EI 24 12 24⎢ ⎝ ⎠⎣
( )22 2
1w F x F⎡ ′ = −⎢( )2 2
22 32
2 2
w F x FEI
x1 1 Fw F F x F EIEI 2 2 k
⎢⎢
⎛ ⎞⎢= − + +⎜ ⎟⎢
⎝ ⎠⎣
( )2 2
22 32
2 2
w F x FEI
x1 3w F F x FEI 2 2
⎢⎢
⎛ ⎞⎢= − +⎜ ⎟⎢
⎝ ⎠⎣⎣ ⎣
3
1 1 1
3
25 Fx 0 w w 024 EIF
⎡′= ⇒ = =⎢
⎢⎢
3 2
2 2 2
3
3 F Fx 0 w =f w2 EI EIF
⎡′= ⇒ = = − = −α⎢
⎢⎢3
1 1 1Fx w w 0EI
⎢ ′= ⇒ = =⎢⎣
3
2 2 2Fx w w 0EI
⎢ ′= ⇒ = =⎢⎣
Principio dei Lavori Virtuali per sistemi di trave
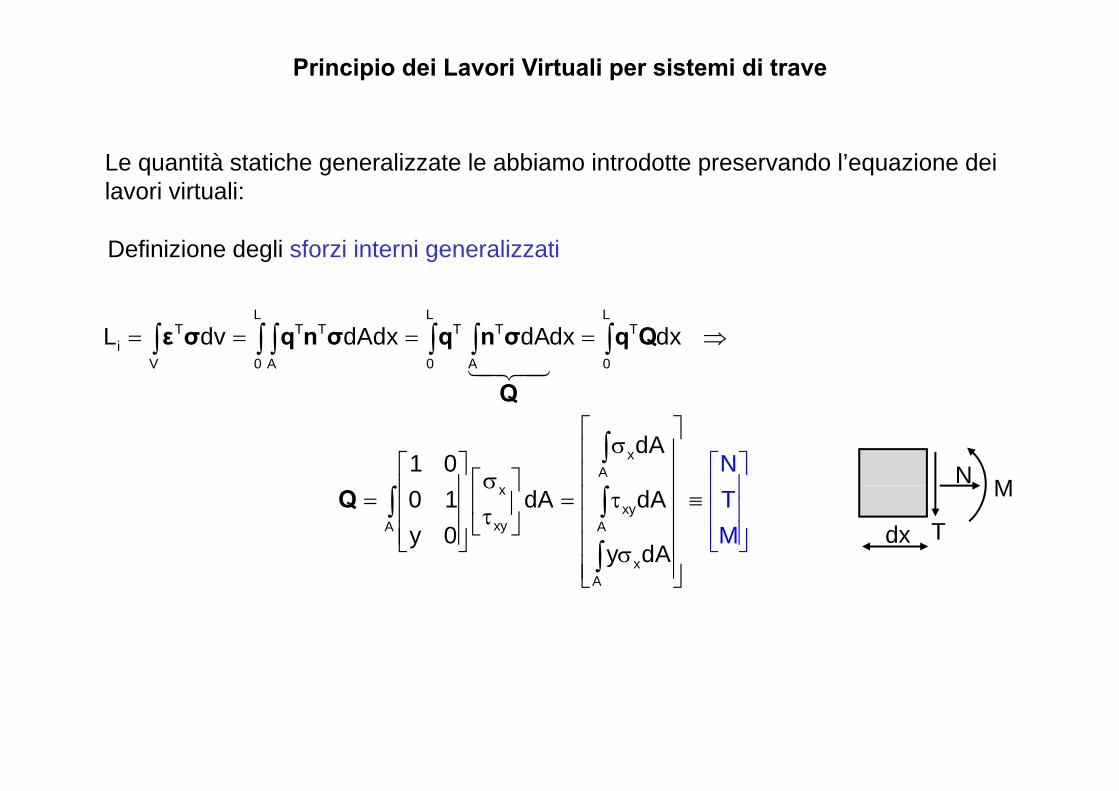
Le quantità statiche generalizzate le abbiamo introdotte preservando l’equazione dei lavori virtuali:
Definizione degli sforzi interni generalizzati
L L LT T T T T T
iV 0 A 0 A 0
L dv dAdx dAdx dx = = = = ⇒∫ ∫ ∫ ∫ ∫ ∫ε σ q n σ q n σ q Q
Q
xA
dA1 0 N
⎡ ⎤σ⎢ ⎥⎡ ⎤ ⎢ ⎥σ⎡ ⎤⎢ ⎥ ⎢ ⎥
⎡ ⎤⎢ ⎥
∫
Q
N Mxxy
xyA A
x
0 1 dA dAy 0
TM
y dA
⎢ ⎥σ⎡ ⎤⎢ ⎥ ⎢ ⎥= = τ ≡⎢ ⎥⎢ ⎥ τ ⎢ ⎥⎣ ⎦⎢ ⎥⎣ ⎦ ⎢ ⎥
⎢ ⎥⎢ ⎥⎢ ⎥⎣σ
⎢⎣ ⎦⎦
⎥
∫ ∫
∫
QT
M
dx
A⎢⎣ ⎦⎥

Definizione delle forze esterne generalizzate:
L L LT T T T T T
eL dv dAdx dAdx dx = = = = ⇒∫ ∫ ∫ ∫ ∫ ∫s F U b F U b F U PV 0 A 0 A 0
F dA⎡ ⎤⎢ ⎥∫
Pp
m
xA
xy
yA A
F dA1 0
F0 1 dA F dA
Fy
npm0
⎢ ⎥⎡ ⎤ ⎢ ⎥⎡ ⎤⎢ ⎥ ⎢ ⎥= = ≡⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦⎢ ⎥⎣ ⎦ ⎢ ⎥
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
∫
∫ ∫Pn
xA
yyF
m0dA
⎢ ⎥−⎣ ⎦ ⎢ ⎥−⎢ ⎥⎣ ⎦
⎢ ⎥⎣ ⎦∫ dx

A questo punto il principio dei lavori virtuali, visto per il continuo, continua a valere, in entrambe le sue due versioni:
Versione 1: Dato un insieme di forze esterne (n,p,m) e sforzi interni generalizzati (N,T,M) in equilibrio e dato un insieme di spostamenti (u,v,ϕ) e deformazioni
li t ( t ) ti l h
L LT T T
c cdx dx+ =∑∫ ∫U P W F q Q
generalizzate (η,t,χ) congruenti, vale che:
0 0∑∫ ∫
In forma più estesa ho:Lavoro di eventuali carichi concentrati
p
( ) ( )L L
Tnu pv m dx N Tt M dx+ + ϕ + = η+ + χ∑∫ ∫W F( ) ( )c c0 0
nu pv m dx N Tt M dx + + ϕ + = η+ + χ∑∫ ∫W F

Versione 2: Imporre l’uguaglianza tra lavoro esterno e lavoro interno per ogni cinematica congruente, equivale ad imporre l’equilibrio:
L LT T T T T Tdx dx , , congruente+ = ∀∑∫ ∫U P W F q Q U q Wc c c
0 0
dx dx , , congruente+ ∀∑∫ ∫U P W F q Q U q W
In forma più estesa ho:In forma più estesa ho:
( ) ( )L L
T T
ud N Tt M d t t
η⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥∑∫ ∫W F W( ) ( )T T
c c c0 0
nu pv m dx N Tt M dx v , t , congruente⎢ ⎥ ⎢ ⎥+ + ϕ + = η+ + χ ∀ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ϕ χ⎣ ⎦ ⎣ ⎦
∑∫ ∫W F W
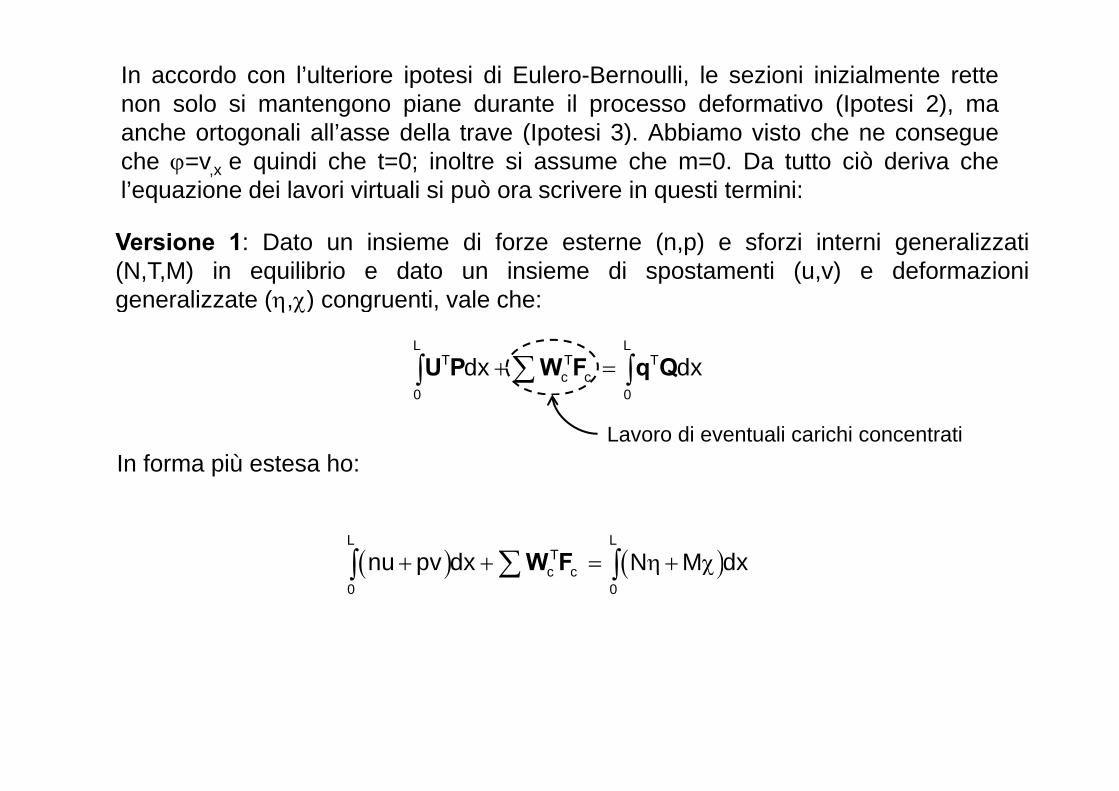
In accordo con l’ulteriore ipotesi di Eulero-Bernoulli, le sezioni inizialmente rettenon solo si mantengono piane durante il processo deformativo (Ipotesi 2), ma
h t li ll’ d ll t (I t i 3) Abbi i t hanche ortogonali all’asse della trave (Ipotesi 3). Abbiamo visto che ne consegueche ϕ=v,x e quindi che t=0; inoltre si assume che m=0. Da tutto ciò deriva chel’equazione dei lavori virtuali si può ora scrivere in questi termini:
Versione 1: Dato un insieme di forze esterne (n,p) e sforzi interni generalizzati(N,T,M) in equilibrio e dato un insieme di spostamenti (u,v) e deformazionigeneralizzate (η,χ) congruenti, vale che:
L LT T T
c c0 0
dx dx+ =∑∫ ∫U P W F q Q
generalizzate (η,χ) congruenti, vale che:
0 0
In forma più estesa ho:Lavoro di eventuali carichi concentrati
( ) ( )L L
Tc cnu pv dx N M dx + + = η+ χ∑∫ ∫W F( ) ( )c c
0 0
η χ∑∫ ∫
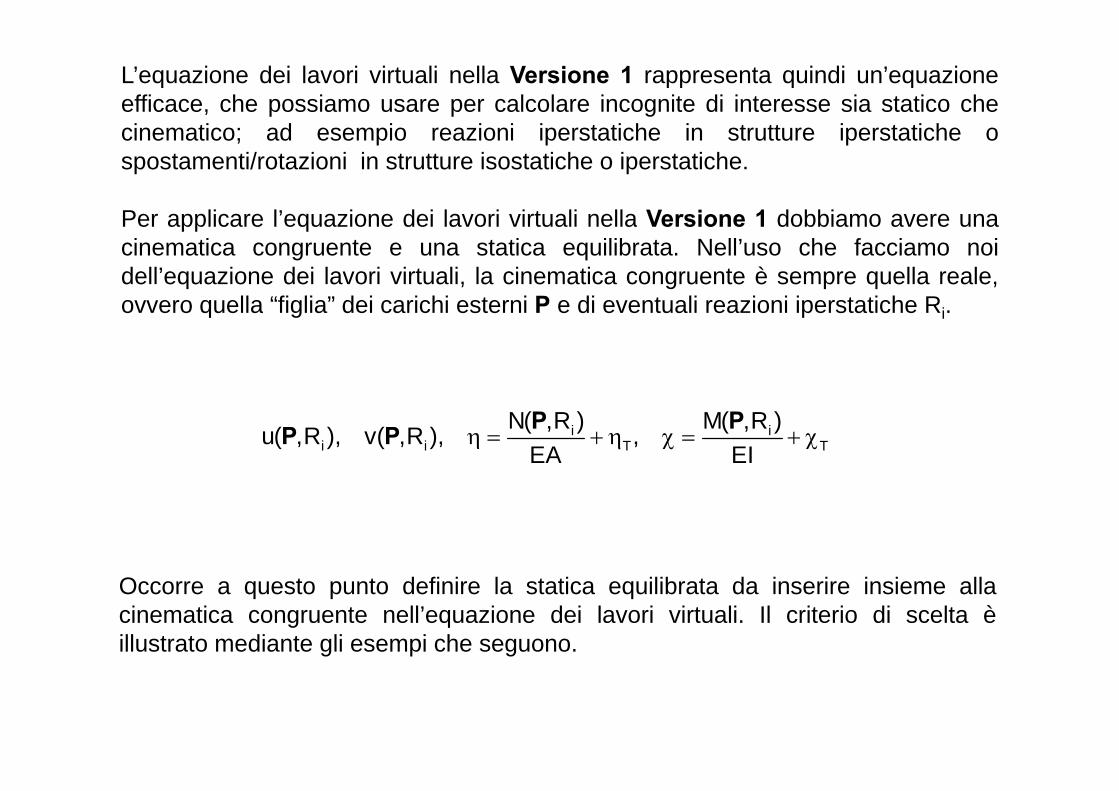
L’equazione dei lavori virtuali nella Versione 1 rappresenta quindi un’equazioneefficace, che possiamo usare per calcolare incognite di interesse sia statico chei ti d i i i i t ti h i t tt i t ti hcinematico; ad esempio reazioni iperstatiche in strutture iperstatiche o
spostamenti/rotazioni in strutture isostatiche o iperstatiche.
Per applicare l’equazione dei lavori virtuali nella Versione 1 dobbiamo avere unaPer applicare l equazione dei lavori virtuali nella Versione 1 dobbiamo avere unacinematica congruente e una statica equilibrata. Nell’uso che facciamo noidell’equazione dei lavori virtuali, la cinematica congruente è sempre quella reale,ovvero quella “figlia” dei carichi esterni P e di eventuali reazioni iperstatiche Rovvero quella figlia dei carichi esterni P e di eventuali reazioni iperstatiche Ri.
η = + η χ = + χi ii i T T
N( ,R ) M( ,R )u( ,R ), v( ,R ), , EA EIP PP P
Occorre a questo punto definire la statica equilibrata da inserire insieme allacinematica congruente nell’equazione dei lavori virtuali. Il criterio di scelta èillustrato mediante gli esempi che seguono.

I caso: soluzione di strutture iperstatiche
vv
• Calcolo le azioni interne reali in funzioni dei carichi esterni e delle reazioniiperstatiche, da cui ricavo il valore delle deformazioni generalizzate reali:
0=
= −
A
A
HWVeq
uilib
rio=
A
BWV
Equ
azio
ni e
1
1
N(x ) 0 N= =0W EAT(x )
⎧=⎪ ⎧η⎪ ⎪⎪ ⎪= →⎨ ⎨1
1
1 1
T(x ) M W= xW EI EIM(x ) x
→⎨ ⎨⎪ ⎪χ =
⎪⎪ ⎩=⎪⎩

• Come statica equilibrata, scelgo quella statica fittizia, che calcolo con equazionidi equilibrio, caricando la struttura resa isostatica con l’iperstatica di valore unitario:
AH 0=rio1 1A
1V
1V
= −
azio
ni e
quilib
1 1
1
BV =
Equa
1
1 1
N(x ) 0 1M(x ) x
′ =⎧⎪⇒ ⎨ ′ =⎪⎩

• scrivo l’equazione dei lavori virtuali:
( ) ( )Tc c
0 0
nu pv dx N M dx + + = η+ χ∑∫ ∫W F
( ) ( ) ( ) ( )
0 0
T T1 1 N M0u 0v dx 0 1 0 N M dx⎛ ⎞⎛ ⎞ ⎛ ⎞′ ′+ + −η + + = + η + + χ⎜ ⎟⎜ ⎟ ⎜ ⎟∫ ∫( ) ( ) ( ) ( ) T T
0 0
0u 0v dx 0 1 0 N M dxEA EI
0 1 W
+ + η + + + η + + χ⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠⎝ ⎠
⎛ ⎞η ⎛ ⎞ ⎛ ⎞
∫ ∫
1 10
0 1 W0 0 x x 0 dxEA EI
⎛ ⎞η ⎛ ⎞ ⎛ ⎞− = + + +⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠⎝ ⎠
∫
3 31
o
x1 W 1 WEI 3 EI 3
η− = ⋅ ⋅ = ⋅ ⋅
2
3 EIW η= −

1 3
3 η=
EIT(x )
1 13
3 η=
EIM(x ) x

II caso: calcolo di spostamenti in strutture isostatiche (esempio: rotazione β in A)
• Calcolo le azioni interne reali in funzioni dei carichi esterni da cui ricavo il valoredelle deformazioni generalizzate reali:
0=AHpui
librio
3
6
= −
= −
A
B
pV
pV
Equa
zion
i equ
6E

1N(x ) 0=
21
1pxpT(x ) = −
p p
1T(x )6 2
31 1 1
p pM(x ) x x6 6
= −
N= =0⎧η⎪
31 1
= =0EA M 1 p p= x xEI EI 6 6
η⎪⎪⇒ ⎨ ⎛ ⎞⎪χ = −⎜ ⎟⎪ ⎝ ⎠⎩ EI EI 6 6⎪ ⎝ ⎠⎩

• Come statica equilibrata, scelgo quella statica fittizia, che calcolo con equazionidi equilibrio, caricando la struttura con una forza unitaria applicata incorrispondenza dello spostamento da calcolare e nella direzione dello stesso:
11
01
=AH
Vuilib
rio1 1
1
=
= −
A
B
V
VEq
uazi
oni e
q
11E
1N(x ) 01
′ =⎧⎪⎨
1 1
1M(x ) x⎪⇒ ⎨ ′ =⎪⎩
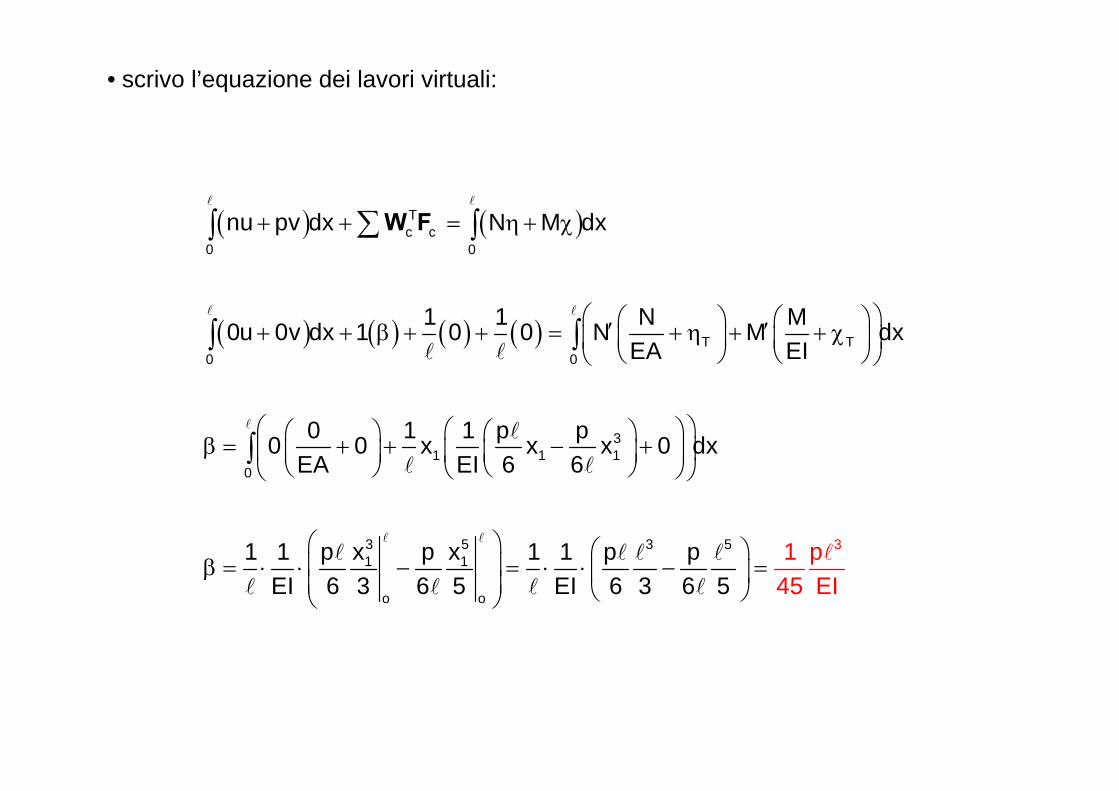
• scrivo l’equazione dei lavori virtuali:
( ) ( )Td N M d∑∫ ∫W F( ) ( )Tc c
0 0
nu pv dx N M dx + + = η+ χ
⎛ ⎞⎛ ⎞ ⎛ ⎞
∑∫ ∫W F
( ) ( ) ( ) ( ) T T0 0
1 1 N M0u 0v dx 1 0 0 N M dxEA EI
⎛ ⎞⎛ ⎞ ⎛ ⎞′ ′+ + β + + = + η + + χ⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠⎝ ⎠
∫ ∫
31 1 1
0
0 1 1 p p0 0 x x x 0 dxEA EI 6 6
⎛ ⎞⎛ ⎞⎛ ⎞ ⎛ ⎞β = + + − +⎜ ⎟⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠⎝ ⎠⎝ ⎠
∫
3 51 1x x1 1 p p 1 1 p⎛ ⎞
⎜ ⎟β = ⋅ ⋅ − = ⋅ ⋅⎜ ⎟
3 5 3p 1 p⎛ ⎞− =⎜ ⎟
o oEI 6 3 6 5 EI 6⎜ ⎟β⎜ ⎟⎝ ⎠ 3 6 5 45 EI⎜ ⎟
⎝ ⎠

370 0 α′= ⇒ = = =px v v1
3
1
0 0 360
1 0 45
α
β
= ⇒ = = =
′= ⇒ = = − =
x v vEI
px v vEI45 EI
44
1 1 10 0 519 0 00652′ = ⇒ = ⇒ = =* * pv (x ) x . v(x ) . fEI





![slide della lezione · Timoshenko . problema elastico-lineare della trave — ð[s] confronto "analitico" legami costitutivi — - equilibrio 0 compatibilità . problema elastico-lineare](https://static.fdocumenti.com/doc/165x107/60646fd7791daa53422bbc97/slide-della-lezione-timoshenko-problema-elastico-lineare-della-trave-a-s.jpg)