TEMI RISOLTI DI MECCANICA RAZIONALE -...
46
TEMI RISOLTI DI MECCANICA RAZIONALE
Transcript of TEMI RISOLTI DI MECCANICA RAZIONALE -...
TEMI RISOLTI
DI MECCANICA RAZIONALE
1
PROVA SCRITTA DI MECCANICA RAZIONALE
Corsi Meccanici I e II - Corso Aerospaziali, 30/6/1999
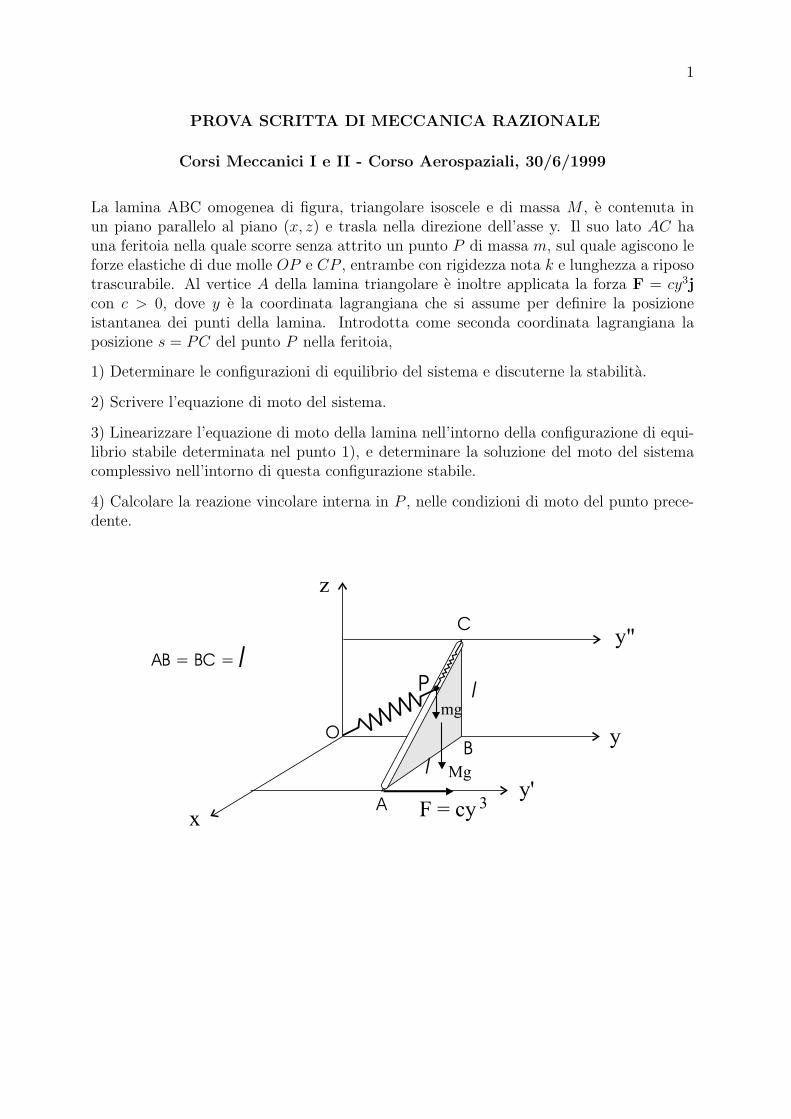
La lamina ABC omogenea di figura, triangolare isoscele e di massa M , e contenuta inun piano parallelo al piano (x, z) e trasla nella direzione dell’asse y. Il suo lato AC hauna feritoia nella quale scorre senza attrito un punto P di massa m, sul quale agiscono leforze elastiche di due molle OP e CP , entrambe con rigidezza nota k e lunghezza a riposotrascurabile. Al vertice A della lamina triangolare e inoltre applicata la forza F = cy3jcon c > 0, dove y e la coordinata lagrangiana che si assume per definire la posizioneistantanea dei punti della lamina. Introdotta come seconda coordinata lagrangiana laposizione s = PC del punto P nella feritoia,
1) Determinare le configurazioni di equilibrio del sistema e discuterne la stabilita.
2) Scrivere l’equazione di moto del sistema.
3) Linearizzare l’equazione di moto della lamina nell’intorno della configurazione di equi-librio stabile determinata nel punto 1), e determinare la soluzione del moto del sistemacomplessivo nell’intorno di questa configurazione stabile.
4) Calcolare la reazione vincolare interna in P , nelle condizioni di moto del punto prece-dente.
x
y
z
O
l
l
lP
A
B
C
F = cy 3y'
y"
Mg
mg
AB = BC =

2
SOLUZIONE
1) Le forze attive sono tutte conservative, e il potenziale complessivo vale:
U(y, s) =c
4y4 −mgzP − k
2s2 − k
2OP
2+ cost =
=c
4y4 +
√2
2(mg + k`)s− ks2 − k
2y2 + cost.
Annullando le sue derivate prime, che sono:
U ′y = cy3 − ky, U ′
s =
√2
2(mg + k`)− 2ks,
si trovano queste tre configurazioni di equilibrio qe = ye, se:
q(1)e = 0, se, q(2,3)
e = ±√
k
c, se con se =
√2
4
(` +
mg
k
).
Poiche le derivate seconde valgono:
U”ss = −2k < 0; U”ys = 0; U”yy = 3cy2 − k,
la matrice Hessiana ha autovalori negativi λ1 = −k, λ2 = −2k se calcolata per q = q(1)e ,
ed ha autovalori di segno opposto λ1,2 = ±2k se calcolata per q = q(2,3)e .
Dunque q(1)e e stabile e q(2)
e , q(3)e sono instabili.
2) L’energia cinetica del sistema vale:
T =1
2My2 +
1
2mv2
P =1
2(M + m)y2 +
1
2ms2
e scrivendo le equazioni di Lagrange
d
dt
(∂T
∂qi
)− ∂T
∂qi
=∂U
∂qi
, q1 = y, q2 = s
si ricavano le seguenti equazioni del moto:
(M + m)y + ky = cy3
2ms + 4ks =√
2(mg + k`).
3) Nell’intorno di q(1)e il potenziale si approssima come segue:
U ' 1
2U”ss(s− se)
2 +1
2U”yy(0, se)y
2 = −k
2[2(s− se)
2 + y2]
mentre l’energia cinetica non e da approssimare. Usando l’espressione approssimata di Ula prima delle due equazioni del moto si linearizza nella forma seguente:
(M + m)y + ky = 0

3
mentre la seconda equazione del moto e gia lineare. La soluzione delle equazioni lineariz-zate (che sono disaccoppiate) e :
y(t) = A sin(σyt + ϕ1); s(t) = se + B sin(σst + ϕ2)
dove le pulsazioni proprie dei due oscillatori valgono:
σy =
√k
M + m; σs =
√2k
m
e A,B, ϕ1, ϕ2 sono costanti di integrazione.
4) Introduciamo la base ortonormale mobile (~λ, ~µ,~j) in cui ~λ ha la direzione di (A − C)e ~µ quella normale ad (A− C), contenuta nel piano della lamina:
~λ =
√2
2(~i− ~k); ~µ =
√2
2(~i + ~k).
In assenza di attriti, la reazione interna in P si puo scrivere come
~ΦP = Φµ~µ + Φy~j
e si ricava applicando il teorema della quantita di moto:
−ks~λ−mg~k − k(s~λ + y~j + `~k) + Φµ~µ + Φy~j = m(s~λ + y~j).
Si esprime il versore dell’asse z nella base (~λ, ~µ,~j):
~k =
√2
2(~µ− ~λ)
e si uguagliando le componenti delle forze agenti nelle direzioni ~µ e ~j. Si ricava:
Φµ =
√2
2(mg + k`);
Φy(t) = my + ky =(k −mσ2
y
)· A sin(σyt + ϕ1).
(Se invece si uguagliano le componenti nella direzione ~λ, si ottiene la seconda equazionedel moto gia ricavata al punto 2).
4
PROVA SCRITTA DI MECCANICA RAZIONALE - 14/7/1999
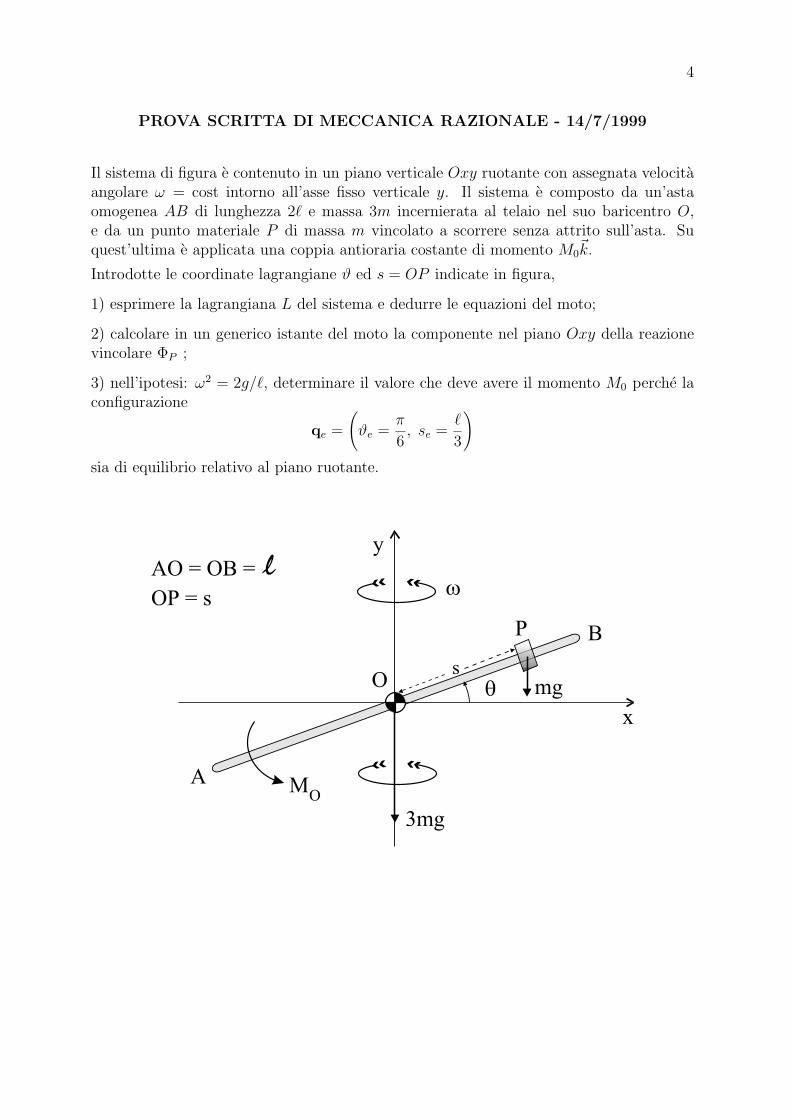
Il sistema di figura e contenuto in un piano verticale Oxy ruotante con assegnata velocitaangolare ω = cost intorno all’asse fisso verticale y. Il sistema e composto da un’astaomogenea AB di lunghezza 2` e massa 3m incernierata al telaio nel suo baricentro O,e da un punto materiale P di massa m vincolato a scorrere senza attrito sull’asta. Suquest’ultima e applicata una coppia antioraria costante di momento M0
~k.
Introdotte le coordinate lagrangiane ϑ ed s = OP indicate in figura,
1) esprimere la lagrangiana L del sistema e dedurre le equazioni del moto;
2) calcolare in un generico istante del moto la componente nel piano Oxy della reazionevincolare ΦP ;
3) nell’ipotesi: ω2 = 2g/`, determinare il valore che deve avere il momento M0 perche laconfigurazione
qe =
(ϑe =
π
6, se =
`
3
)
sia di equilibrio relativo al piano ruotante.
3mg
mg
x
y
w
sq
O
B
AO
M
P
AO = OB =
OP = s
l

5
SOLUZIONE
1) L’energia cinetica T e il potenziale U delle forze agenti possono essere calcolate as-sumendo come sistema di riferimento sia un osservatore inerziale, sia un osservatore mo-bile, ruotante con velocita ω con il piano Oxy.
• Nel riferimento inerziale, la velocita angolare Ω dell’asta e la velocita di P valgono:
~Ω = ϑ~k + ω~j, ~vP = s~λ + sϑ~µ− sω cos ϑ~k
dove ~λ e il versore di (B −O) e ~µ e il versore di ~k ∧ (B −O).
L’energia cinetica dell’asta vale:
T asta =1
2~Ω× ~KO =
1
2(IOzϑ
2 + IOyω2) =
1
2m`2(ϑ2 + ω2 cos2 ϑ);
quella del punto P vale
T P =1
2m(s2 + s2ϑ2 + s2ω2 cos2 ϑ)
e quella dell’intero sistema e
T = T asta + T P =1
2m
[s2 + (s2 + `2)ϑ2 + cos2 ϑ(`2 + s2)ω2
].
Il potenziale del peso e della coppia hanno per somma:
U = −mgyP +∫
M0dϑ = −mgs sin ϑ + M0ϑ + cost.
• Rispetto all’osservatore ruotante con il piano Oxy, l’energia cinetica si riduce a
T r =1
2IOzϑ
2 +1
2m(s2 + s2ϑ2) =
1
2m
[s2 + (s2 + `2)ϑ2
],
mentre al potenziale U gia calcolato si deve aggiungere quello delle forze centrifughe.Indicando con IOy = m`2 cos2 ϑ il momento d’inerzia dell’asta rispetto all’asse di rotazione,e con r = s cos ϑ la distanza di P da questo asse, il potenziale delle forze centrifughe vale:
U c =1
2ω2IOy +
∫mrω2dr =
1
2mω2(`2 + s2) cos2 ϑ
e quindi nel sistema di riferimento ruotante il potenziale complessivo e
U r = −mgs sin ϑ + M0ϑ +1
2mω2(`2 + s2) cos2 ϑ + cost.
In ogni caso, si ricava la lagrangiana
L = T + U = T r + U r
che, introdotta nelle equazioni di Lagrange
d
dt
(∂L
∂qi
)=
∂L
∂qi
con q1 = ϑ, q2 = s,

6
fornisce:
(s2 + `2)ϑ + 2ssϑ = M0/m− gs cos ϑ− ω2(`2 + s2) sin ϑ cos ϑs = sϑ2 + sω2 cos2 ϑ− g sin ϑ.
2) In assenza di attriti la reazione vincolare in P e normale all’asta: ~ΦP = ΦPµ~µ + ΦPz~k.
Il teorema della quantita di moto per il punto P si scrive:
ΦPµ~µ + ΦPz~k −mg~j = m~aP =
= m[s~λ + 2sϑ~µ + sϑ~µ− sϑ2~λ− ω2s cos ϑ~i + 2ω(s sin ϑϑ− s cos ϑ)~k
]
e moltiplicando scalarmente per ~µ si ottiene:
ΦPµ = m(g cos ϑ + 2sϑ + sϑ + sω2 sin ϑ cos ϑ).
(Se si uguagliano le componenti nella direzione ~λ si ottiene la seconda equazione di moto;
se si uguagliano quelle nella direzione ~k si ricava la componente ΦPz della reazione in Pche e normale al piano ruotante, ed equilibra le forze apparenti di Coriolis).
3) Le derivate parziali di U r valgono:
∂U r
∂ϑ= −mgs cos ϑ + M0 −mω2(`2 + s2) sin ϑ cos ϑ
∂U r
∂s= −mg sin ϑ + mω2s cos2 ϑ.
Se ϑe = π/6, se = `/3 e un punto di stazionarieta di U r, esse devono soddisfare:
−mg`
3
√3
2+ M0 −mω2
(`2 +
`2
9
) √3
4= 0
−mg
2+ mω2 · `
3· 3
4= 0.
Per ω2 = 2g/` la seconda e automaticamente soddisfatta, e dalla prima si ricava:
M0 =13
18
√3mg`.
7
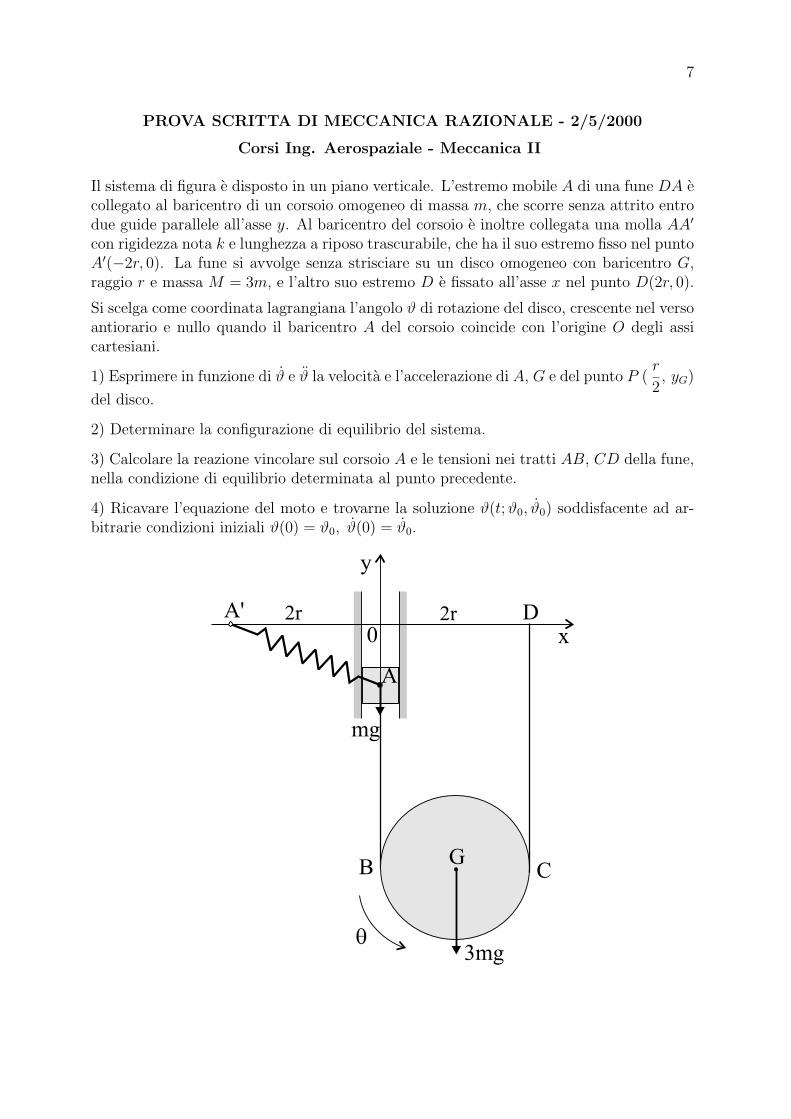
PROVA SCRITTA DI MECCANICA RAZIONALE - 2/5/2000
Corsi Ing. Aerospaziale - Meccanica II
Il sistema di figura e disposto in un piano verticale. L’estremo mobile A di una fune DA ecollegato al baricentro di un corsoio omogeneo di massa m, che scorre senza attrito entrodue guide parallele all’asse y. Al baricentro del corsoio e inoltre collegata una molla AA′
con rigidezza nota k e lunghezza a riposo trascurabile, che ha il suo estremo fisso nel puntoA′(−2r, 0). La fune si avvolge senza strisciare su un disco omogeneo con baricentro G,raggio r e massa M = 3m, e l’altro suo estremo D e fissato all’asse x nel punto D(2r, 0).
Si scelga come coordinata lagrangiana l’angolo ϑ di rotazione del disco, crescente nel versoantiorario e nullo quando il baricentro A del corsoio coincide con l’origine O degli assicartesiani.
1) Esprimere in funzione di ϑ e ϑ la velocita e l’accelerazione di A, G e del punto P (r
2, yG)
del disco.
2) Determinare la configurazione di equilibrio del sistema.
3) Calcolare la reazione vincolare sul corsoio A e le tensioni nei tratti AB, CD della fune,nella condizione di equilibrio determinata al punto precedente.
4) Ricavare l’equazione del moto e trovarne la soluzione ϑ(t; ϑ0, ϑ0) soddisfacente ad ar-bitrarie condizioni iniziali ϑ(0) = ϑ0, ϑ(0) = ϑ0.
x
y
0
G
A
mg
3mgq
B C
A' 2r 2r D

8
SOLUZIONE
1) Ricordando che C, centro delle velocita del disco, ha velocita nulla e accelerazione~aC = −rϑ2~i, si ricava:
~vA = yA~j = ~vB = −2rϑ~j ; ~aA = yA
~j = −2rϑ~j~vG = ~vC + ϑ~k ∧ (G− C) = −rϑ~j ; ~aG = ~aC − rϑ~j + rϑ2~i = −rϑ~j
~vP = ~vC + ϑ~k ∧ (P − C) = −3r
2ϑ~j ; ~aP = ~aC − 3r
2ϑ~j +
3r
2ϑ2~i = −3r
2ϑ~j +
r
2ϑ2~i.
2-4) Anche se non espressamente richiesto, la soluzione dei punti 2, 3 e 4 puo esserericercata applicando separatamente al corsoio e al disco le equazioni della Statica e iteoremi della quantita di moto e del momento angolare.
• Le forze attive e reattive applicate al corsoio sono:
. la forza peso: −mg~j ;
. la tensione: ~TA = −TA~j del tratto AB della fune ;
. il sistema di reazioni vincolari della guida verticale, che in assenza di attrito si riduceal risultante ~Rv = Rv~i applicato in A, piu il momento risultante ~M v
A = M vA~k ;
. la forza elastica prodotta dalla molla la quale, tenuto conto che yA = −2rϑ, vale:~Fel = −k(A− A′) = −2kr~i + 2krϑ~j.
Il teorema della quantita di moto per il corsoio, proiettato sugli assi x e y, fornisce:
Rv = 2kr (1)
−TA + 2krϑ−mg = myA = −2mrϑ ⇒ TA = 2krϑ−mg + 2mrϑ (2)
e dal teorema del momento assiale delle quantita di moto si ricava:
M vA = 0. (3)
• Le forze attive e reattive agenti sul disco (tutte verticali) sono:
. la forza peso: −3mg~j ;
. la tensione: ~TB = −~TA = TA~j = (2krϑ−mg + 2mrϑ)~j del tratto AB della fune ;
. la tensione ~TC = TC~j, ancora incognita, del tratto CD della fune.
Dal teorema della quantita di moto proiettato nella direzione dell’asse y si ricava:
TB − 3mg + TC = 3maG = −3mrϑ ⇒ TC = 4mg − 2krϑ− 5mrϑ. (4)
Il teorema del momento assiale delle quantita di moto rispetto al centro delle velocita Cdel disco si scrive:
−2rTB + 3mgr = IC ϑ =3
2· 3mr2ϑ
e sostituendo il valore noto di TB si ottiene l’equazione del moto:
17
2mrϑ + 4krϑ = 5mg. (5)
Se in questa equazione del moto si sopprime l’accelerazione angolare, si ricava la configu-razione di equilibrio:
ϑe =5mg
4kr.

9
In tale configurazione di equilibrio, i moduli TAB e TCD delle tensioni della fune nei suoidue tratti verticali valgono, per le (2) e (4):
TAB = TA = 2krϑe −mg =3
2mg , TCD = TC = 4mg − 2krϑe =
3
2mg ≡ TA.
L’equazione del moto (5) e lineare, e si puo riscrivere nella forma:
ϑ + σ2(ϑ− ϑe) = 0, σ = 2
√2k
17m.
Il suo integrale generale eϑ(t) = ϑe + A sin(σt + ϕ)
con:
A =√
(ϑ0 − ϑe)2 + (ϑ0/σ)2, tgϕ =σ(ϑ0 − ϑe)
ϑ0
.
Osservazione 1
La configurazione di equilibrio ϑe e l’equazione del moto (5) possono anche essere ricavatecalcolando il potenziale delle forze attive:
U(ϑ) = −3mgyG −mgyA − k
2AA′2 = 5mgrϑ− 2kr2(1 + ϑ2) + cost
e l’energia cinetica del sistema materiale:
T (ϑ) =1
2my2
A +1
2· 3mv2
G +1
2IGϑ2 =
17
4mr2ϑ2.
In tal caso, annullando la derivata del potenziale si ottiene:
dU
dϑ= 5mgr − 4kr2ϑ = 0 ⇒ ϑe =
5mg
4kr,
e scrivendo il teorema delle forze vive o una equazione di Lagrange si ottiene subito la(5).
Osservazione 2
Il vincolo di rotolamento senza strisciamento del disco sul tratto CD della fune (che e un
vincolo doppio) richiederebbe di considerare una reazione vincolare ~ΦC = ΦCx~i + ΦCy
~j,applicata al centro delle velocita C del disco.Ma la sua componente verticale non e altro che la tensione del tratto CD della fune:ΦCy ≡ TC ; e la sua componente orizzontale e nulla in ogni istante del moto, perche tuttele altre forze applicate al disco sono verticali, e sussiste l’integrale primo scalare dellequantita di moto: ~Q×~i = cost = 0.
10
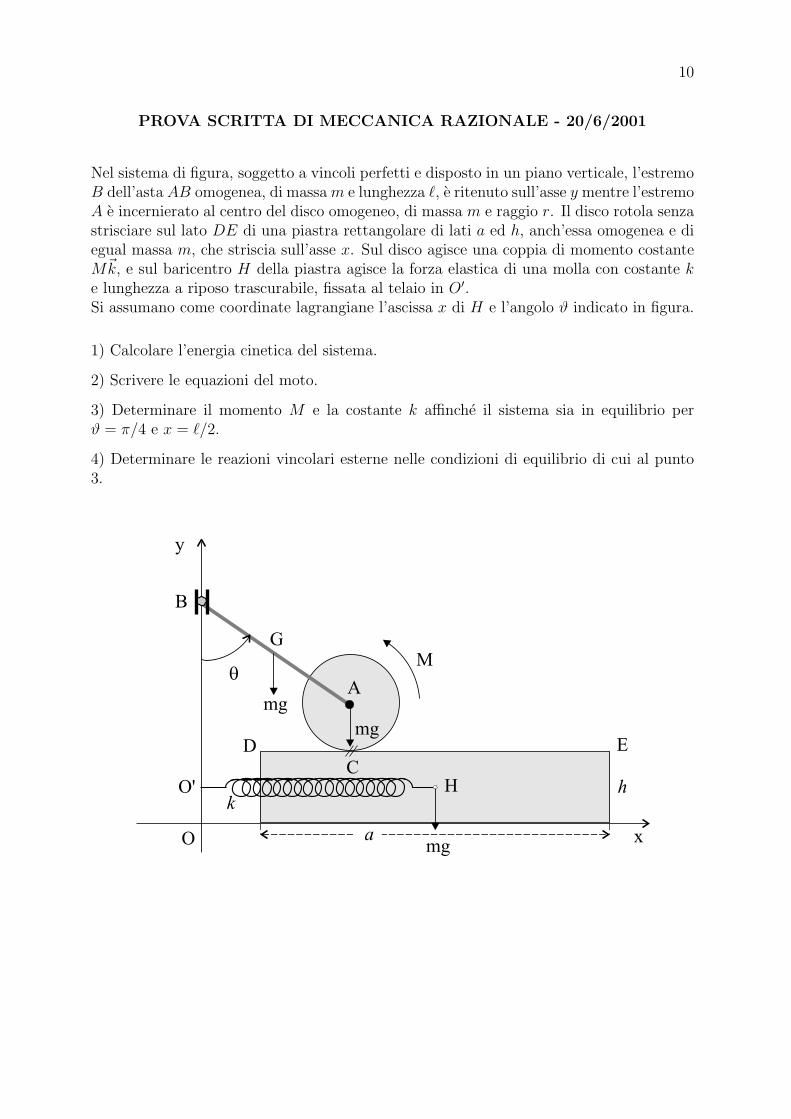
PROVA SCRITTA DI MECCANICA RAZIONALE - 20/6/2001
Nel sistema di figura, soggetto a vincoli perfetti e disposto in un piano verticale, l’estremoB dell’asta AB omogenea, di massa m e lunghezza `, e ritenuto sull’asse y mentre l’estremoA e incernierato al centro del disco omogeneo, di massa m e raggio r. Il disco rotola senzastrisciare sul lato DE di una piastra rettangolare di lati a ed h, anch’essa omogenea e diegual massa m, che striscia sull’asse x. Sul disco agisce una coppia di momento costanteM~k, e sul baricentro H della piastra agisce la forza elastica di una molla con costante ke lunghezza a riposo trascurabile, fissata al telaio in O′.Si assumano come coordinate lagrangiane l’ascissa x di H e l’angolo ϑ indicato in figura.
1) Calcolare l’energia cinetica del sistema.
2) Scrivere le equazioni del moto.
3) Determinare il momento M e la costante k affinche il sistema sia in equilibrio perϑ = π/4 e x = `/2.
4) Determinare le reazioni vincolari esterne nelle condizioni di equilibrio di cui al punto3.
M
B
G
mg
q
y
O'
O mg
hH
D E
C
A
mg
k
xa

11
SOLUZIONE
Relazioni cinematiche (si indica con ϕ la velocita angolare del disco):
~vA = ` cos ϑϑ~i = ~vC − rϕ~i = x~i− rϕ~i ; ϕ =x− ` cos ϑϑ
r.
1) L’energia cinetica del sistema vale:
T =1
2mv2
G +1
2IGϑ2 +
1
2mv2
A +1
2IAϕ2 +
1
2mx2
=1
2
(m`2
3+
3
2m`2 cos2 ϑ
)ϑ2 +
3
4mx2 − 1
2m` cos ϑxϑ.
2) Il potenziale della coppia di forze con momento M vale:
U coppia =∫
Mdϕ =M
r
(∫dx−
∫` cos ϑdϑ
)=
M
r(x− ` sin ϑ) + cost.
Il potenziale complessivo delle forze agenti sul sistema e percio:
U(x, ϑ) = −k
2x2 −mg
`
2cos ϑ +
M
r(x− ` sin ϑ) + cost
ed ha derivate prime:
U ′x ' Qx = −kx +
M
r, U ′
ϑ ' Qϑ = mg`
2sin ϑ− M`
rcos ϑ.
Per scrivere le equazioni di Lagrange, si calcolano le seguenti derivate dell’energia cinetica:
∂T
∂x= 0
∂T
∂x=
3
2mx− m`
2cos ϑϑ
d
dt
(∂T
∂x
)=
3
2mx− m`
2cos ϑϑ +
m`
2sin ϑϑ2
∂T
∂ϑ= −3
2m`2 cos ϑ sin ϑϑ2 +
m`
2sin ϑxϑ
∂T
∂ϑ=
(m`2
3+
3
2m`2 cos2 ϑ
)ϑ− m`
2cos ϑx
d
dt
(∂T
∂ϑ
)=
(m`2
3+
3
2m`2 cos2 ϑ
)ϑ− m`
2cos ϑx− 3m`2 cos ϑ sin ϑϑ2 +
m`
2sin ϑxϑ
con le quali si ricavano le equazioni del moto:

12
3
2mx−m
`
2cos ϑϑ + m
`
2sin ϑϑ2 + kx− M
r= 0
m`2(
1
3+
3
2cos2 ϑ
)ϑ− m`
2cos ϑx− 3
2m`2 sin ϑ cos ϑϑ2 −mg
`
2sin ϑ +
M`
rcos ϑ = 0.
3) Si annullano le derivate prime della funzione potenziale U(x, ϑ) e si impone: x = xe =`/2 ; ϑ = ϑe = π/4. Si ottiene il sistema:
−k`
2+
M
r= 0
mg
2− M
r= 0
nelle incognite M e k, che ha come unica soluzione
M =mgr
2; k =
mg
`.
4) In presenza di vincoli perfetti, le reazioni esterne da determinare sono:
. ~ΦB = ΦB~i, normale alla guida y ;
. le reazioni del telaio x sulla piastra, che si riducono al risultante ~Rv = Rv~j applicato
sulla retta passante per H, piu una coppia di momento M vH~k (oppure: al solo risultante ~Rv
applicato sull’asse centrale del sistema di reazioni, la cui distanza dalla retta baricentricavale b = M v
H/Rv).
Per determinare le tre incognite di reazione si possono applicare le equazioni cardinalidella statica al sistema complessivo. Queste si scrivono come segue:
• equazione di risultante lungo l’asse x:
ΦB − kxe ≡ ΦB − mg
`
`
2= 0 ⇒ ΦB =
mg
2
• equazione di risultante lungo l’asse y:
−3mg + Rv = 0 ⇒ Rv = 3mg
• equazione di momento rispetto al baricentro H della piastra:
−ΦB
(` cos ϑe + r +
h
2
)+ mg
(xe − `
2sin ϑe
)+ mg(xe − ` sin ϑe) + M + M v
H = 0.
Sostituendo xe = `/2, ϑe = π/4 ed M = mgr/2 si ottiene:
M vH = mg
[`(√
2− 1) +h
4
].
13
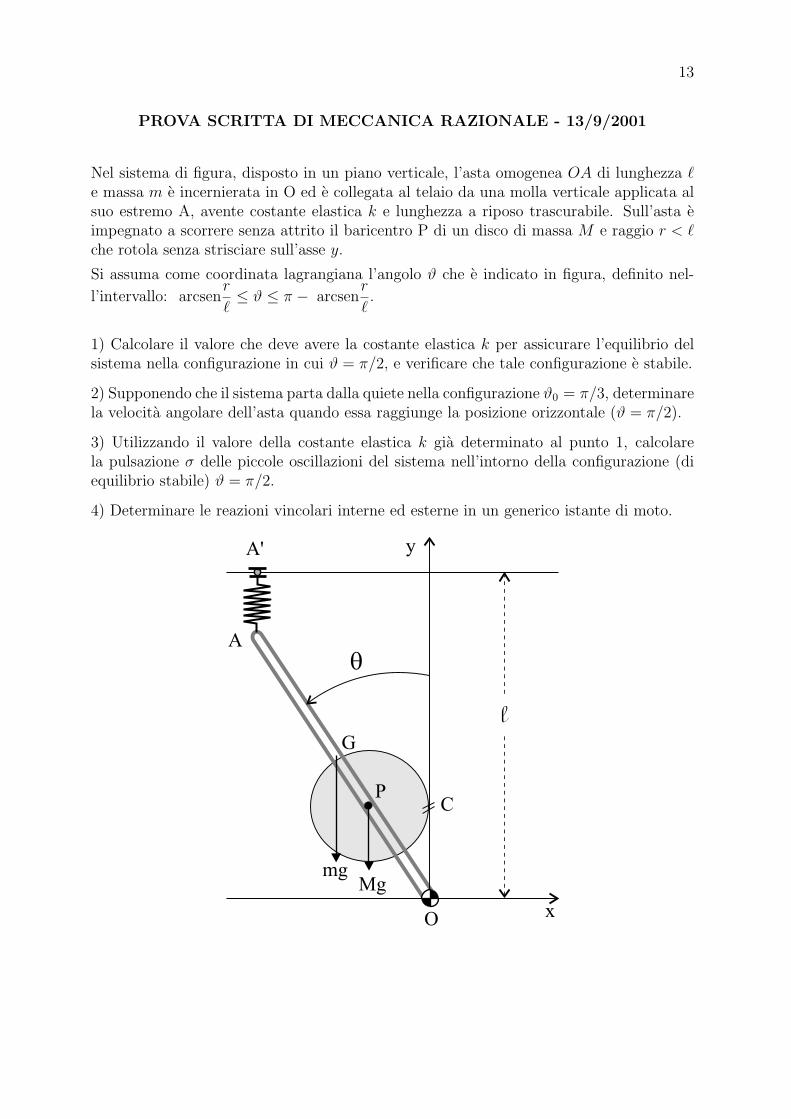
PROVA SCRITTA DI MECCANICA RAZIONALE - 13/9/2001
Nel sistema di figura, disposto in un piano verticale, l’asta omogenea OA di lunghezza `e massa m e incernierata in O ed e collegata al telaio da una molla verticale applicata alsuo estremo A, avente costante elastica k e lunghezza a riposo trascurabile. Sull’asta eimpegnato a scorrere senza attrito il baricentro P di un disco di massa M e raggio r < `che rotola senza strisciare sull’asse y.
Si assuma come coordinata lagrangiana l’angolo ϑ che e indicato in figura, definito nel-
l’intervallo: arcsenr
`≤ ϑ ≤ π − arcsen
r
`.
1) Calcolare il valore che deve avere la costante elastica k per assicurare l’equilibrio delsistema nella configurazione in cui ϑ = π/2, e verificare che tale configurazione e stabile.
2) Supponendo che il sistema parta dalla quiete nella configurazione ϑ0 = π/3, determinarela velocita angolare dell’asta quando essa raggiunge la posizione orizzontale (ϑ = π/2).
3) Utilizzando il valore della costante elastica k gia determinato al punto 1, calcolarela pulsazione σ delle piccole oscillazioni del sistema nell’intorno della configurazione (diequilibrio stabile) ϑ = π/2.
4) Determinare le reazioni vincolari interne ed esterne in un generico istante di moto.
yA'
A
q
O
P
G
mgMg
x
l
C

14
SOLUZIONE
Relazioni geometriche e cinematiche (si indica con ϕ la velocita angolare del disco):
yP = rctgϑ; yP = − r
sin2 ϑϑ = −rϕ; ϕ =
ϑ
sin2 ϑ
1) Le forze attive sono conservative ed hanno potenziale:
U(ϑ) = −mgyG −MgyP − k
2AA′2 = −mg
`
2cos ϑ−Mgrctgϑ− k
2`2(1− cos ϑ)2 + cost.
La derivata prima di U vale
U ′(ϑ) = mg`
2sin ϑ +
Mgr
sin2 ϑ− k`2 sin ϑ(1− cos ϑ)
e imponendo che essa si annulli per ϑ = π/2 si ricava:
k =g
`
(m
2+
Mr
`
).
La derivata seconda del potenziale e
U”(ϑ) = mg`
2cos ϑ− 2Mgr cos ϑ
sin3 ϑ− k`2[cos ϑ(1− cos ϑ) + sin2 ϑ]
e calcolata nella configurazione di equilibrio ϑe = π/2 vale: U”(π/2) = −k`2 < 0. Dunquel’energia potenziale V (ϑ) = −U(ϑ) ha un minimo per ϑe = π/2, e l’equilibrio e stabile.
2) Poiche il sistema e conservativo, si puo scrivere l’integrale primo dell’energia: T1−U1 =E ≡ T0 − U0, dove T1 e U1 sono l’energia cinetica e il potenziale calcolati per ϑ = π/2,mentre T0, U0 sono i loro valori nell’istante iniziale del moto. L’energia cinetica e laseguente:
T (ϑ, ϑ) =1
2IOϑ2 +
1
2· 3
2Mr2ϕ2 =
1
2
(m`2
3+
3Mr2
2 sin4 ϑ
)ϑ2.
Per ϑ0 = π/3 e nulla, e per ϑ = π/2 vale:
T1 =1
2
(m`2
3+
3Mr2
2
)ϑ2
1.
Il potenziale, calcolato nelle due configurazioni, vale
U0 = −mg`
4−√
3
3Mgr − k`2
8; U1 = −1
2k`2.
Dunque l’integrale primo dell’energia si scrive:
1
2
(m`2
3+
3Mr2
2
)ϑ2
1 =mg`
4+
√3
3Mgr − 3k`2
8
e da esso si ricava:
ϑ1 =
√√√√3mg` + 4√
3Mgr − 9k`2/2
2m`2 + 9Mr2.

15
Questa soluzione e reale se 2g(3m + 4√
3Mr/`) ≥ 9k`. La condizione e verificata, peresempio, se il valore di k e quello determinato al punto 1.
3) Approssimiamo l’energia cinetica e il potenziale nell’intorno della configurazione diequilibrio stabile ϑe = π/2:
T ' T1 =1
2
(m`2
3+
3Mr2
2
)ϑ2 ; U ' −k`2
2(ϑ− π/2)2.
Si ricava che le piccole vibrazioni del sistema attorno a ϑe = π/2 sono descritte dall’equa-zione linearizzata: ϑ + σ2(ϑ− π/2) = 0 con
σ2 =k`2
m`2/3 + 3Mr2/2.
Sostituendo il valore di k ricavato al punto 1 si ottiene:
σ =
√3g(m` + 2Mr)
2m`2 + 9Mr2.
4) In assenza di attriti, la reazione vincolare interna e normale all’asta e si puo scrivere:~ΦP = ΦP~n dove ~n e il versore di (A − O) ∧ ~k ; le reazioni esterne sono: ~ΦC = ΦCx
~i +
ΦCy~j ; ~ΦO = ΦOx
~i + ΦOy~j. Tenendo conto che la forza elastica vale ~F = k`(1− cos ϑ)~j, le
cinque incognite si possono determinare scrivendo:
• una equazione di momento rispetto ad O per le forze agenti sull’asta, la quale fornisce:
ΦP =`
rsin ϑ
[1
2mg sin ϑ + k` sin ϑ(cos ϑ− 1)− m`
3ϑ
];
• due equazioni di risultante per le forze agenti sul disco:
ΦCx = ΦP cos ϑΦCy = −Mg − ΦP sin ϑ = MyP = −Mrϕ
da cui
ΦCy = Mg + ΦP sin ϑ− Mr
sin2 ϑ(ϑ− 2 · ctgϑ · ϑ2);
• due equazioni di risultante per le forze agenti sull’asta, che forniscono:
ΦOx = mxG − ΦP cos ϑΦOy = mg − k`(1− cos ϑ)− ΦP sin ϑ + myG.

16
PROVA SCRITTA DI MECCANICA RAZIONALE - 7/9/2001
Nel sistema di figura, disposto in un piano verticale, una sbarretta rigida di massa M elunghezza ` e appoggiata senza attrito sugli estremi A,B di una guida semicircolare diraggio r < `/4, sulla quale e impegnato a scorrere senza attrito un anello P di massa
m e dimensioni trascurabili. Sulla sbarretta agisce la forza costante ~F = F~i ed il suobaricentro G e collegato all’anello P da una molla con costante elastica k = mg/r elunghezza a riposo trascurabile.
Si assumano come coordinate lagrangiane l’ascissa x = xG del baricentro della sbarrettae l’angolo ϑ indicato in figura.
1) Calcolare il valore che devono avere la forza F e la coordinata ϑ perche il sistema siain equilibrio quando xG = xB.
2) Studiare la stabilita della configurazione di equilibrio determinata nel punto precedente.
3) Scrivere le equazioni del moto del sistema e linearizzarle nell’intorno della configurazionedi equilibrio sopra definita.
4) Determinare le reazioni vincolari interne ed esterne in un generico istante di moto.
y
x
P
G
mg
Mg
q
A B
OF
OP = r
q = ( , x )q G

17
SOLUZIONE
1) Il potenziale delle forze attive, tutte conservative, vale
U(ϑ, x) =∫
Fdx−mgyP − k
2PG
2= Fx + mgr cos ϑ− k
2(r2 + x2 − 2rx sin ϑ) + cost
ed ha derivate prime:
U ′ϑ = −mgr sin ϑ + krx cos ϑ
U ′x = F − kx + kr sin ϑ.
Annullando le derivate prime e imponendo x = xe = r si ha il sistema
F − kr + kr sin ϑe = 0−mg sin ϑe + kr cos ϑe = 0
nelle due incognite ϑe ed F , la cui (unica) soluzione accettabile e
tgϑe =kr
mg= 1 ⇒ ϑe =
π
4
F = kr(1− sin ϑe) = mg
(1−
√2
2
).
2) Le derivate seconde di U(ϑ, x) sono:
U”ϑϑ = −mgr cos ϑ− krx sin ϑU”xx = −k < 0U”ϑx = kr cos ϑ.
Nel punto di equilibrio ϑe = π/4, xe = r il determinante della matrice Hessiana vale:
detH =√
2mgkr − 1
2k2r2 =
(√2− 1
2
)m2g2 > 0.
Poiche e positivo, e la derivata seconda U”xx e negativa, si deduce (test delle derivateseconde) che il potenziale ha un massimo nel punto di equilibrio. Dunque vi e un minimodell’energia potenziale V = −U , e l’equilibrio e stabile.
3) L’energia cinetica del sistema vale
T =1
2Mx2 +
1
2mr2ϑ2.
Usandola insieme con le derivate prime del potenziale, si ricavano le seguenti equazioni diLagrange:
Mx = F − kx + kr sin ϑmr2ϑ = −mgr sin ϑ + krx cos ϑ.
Osservazione. Se si calcola la forza elastica applicata in G, che vale:
~Fel,G = −k(G− P ) = −k(x− r sin ϑ)~i− kr cos ϑ~j,

18
la prima equazione si ricava anche scrivendo il Teorema della quantita di moto per lasbarretta, moltiplicato scalarmente per il versore dell’asse x; la seconda si ricava scrivendoper il punto P una equazione di momento rispetto al punto fisso O.
Per scrivere le equazioni linearizzate nell’intorno di π/4, r basta approssimare il poten-ziale nella forma:
U ' U∗ = −k
2(x− r)2 −
√2
2mgr(ϑ− π/4)2 +
√2
2kr(x− r)(ϑ− π/4)
e usare la funzione Lagrangiana approssimata L∗ = T + U∗. Si ricavano le seguentiequazioni linearizzate del moto:
Mx = −k(x− r) +
√2
2kr(ϑ− π/4)
mr2ϑ = −√
2mgr(ϑ− π/4) +
√2
2kr(x− r).
4) In assenza di attriti, e indicando con ~n il versore di (P − O), le reazioni vincolari siesprimono come segue:
~ΦA = ΦA~j, ~ΦB = ΦB
~j (esterne), ~ΦP = ΦP~n (interna).
Le reazioni esterne si possono determinare scrivendo per la sbarretta un’equazione dimomento rispetto al suo baricentro G, e il teorema della quantita di moto lungo l’asse y:
−ΦA(r + x) + ΦB(r − x) = 0ΦA + ΦB −Mg − kr cos ϑ = 0
da cui si ricava:
ΦA =r − x
2r· g(M + m cos ϑ); ΦB =
r + x
2r· g(M + m cos ϑ).
Per ricavare ΦP e utile scrivere, per il punto P , il teorema della quantita di moto nelladirezione radiale. Se ~τ e il versore tangente in P alla semicirconferenza, la forza peso e laforza elastica applicata in P si possono anche scrivere:
−mg~j = −mg(sin ϑ~τ + cos ϑ~n), ~Fel,P = kx cos ϑ~τ + k(r − x sin ϑ)~n.
Il teorema della quantita di moto di P , proiettato nella direzione ~n, fornisce
k(r − x sin ϑ)−mg cos ϑ + ΦP = m~aP × ~n = mrϑ2
e da esso si ricava:ΦP = k(x sin ϑ− r) + mg cos ϑ + mrϑ2.
19
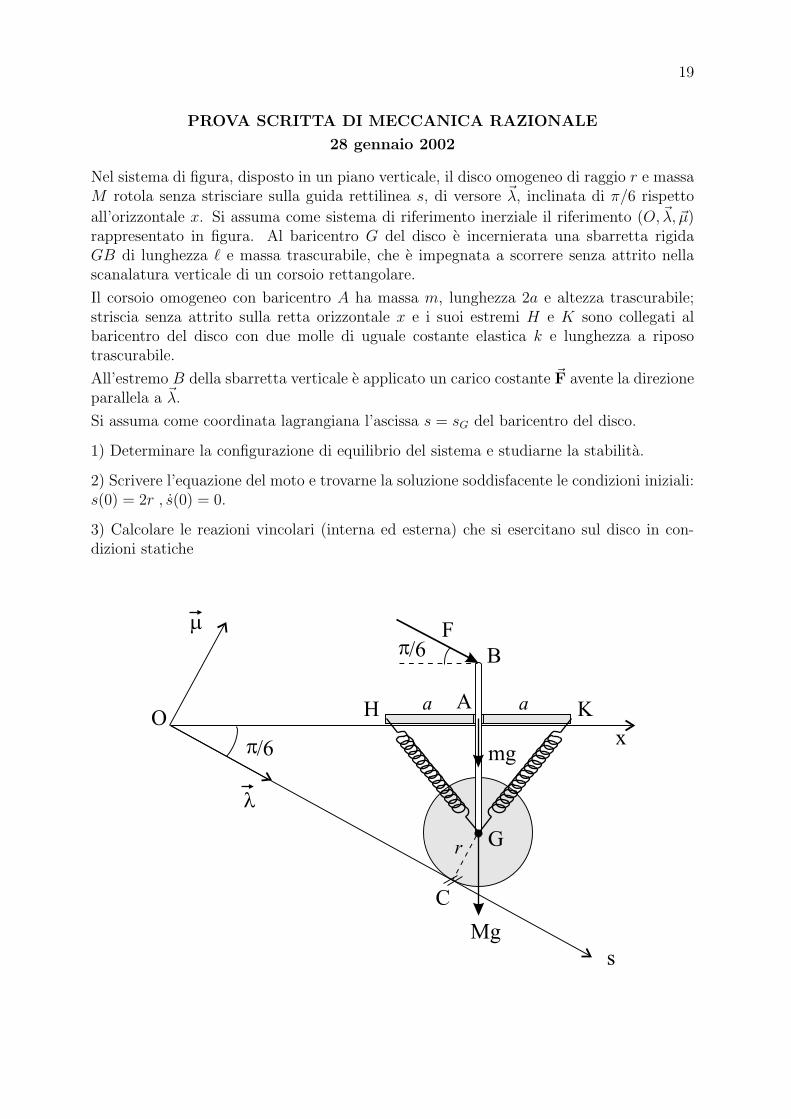
PROVA SCRITTA DI MECCANICA RAZIONALE
28 gennaio 2002
Nel sistema di figura, disposto in un piano verticale, il disco omogeneo di raggio r e massaM rotola senza strisciare sulla guida rettilinea s, di versore ~λ, inclinata di π/6 rispetto
all’orizzontale x. Si assuma come sistema di riferimento inerziale il riferimento (O,~λ, ~µ)rappresentato in figura. Al baricentro G del disco e incernierata una sbarretta rigidaGB di lunghezza ` e massa trascurabile, che e impegnata a scorrere senza attrito nellascanalatura verticale di un corsoio rettangolare.
Il corsoio omogeneo con baricentro A ha massa m, lunghezza 2a e altezza trascurabile;striscia senza attrito sulla retta orizzontale x e i suoi estremi H e K sono collegati albaricentro del disco con due molle di uguale costante elastica k e lunghezza a riposotrascurabile.
All’estremo B della sbarretta verticale e applicato un carico costante ~F avente la direzioneparallela a ~λ.
Si assuma come coordinata lagrangiana l’ascissa s = sG del baricentro del disco.
1) Determinare la configurazione di equilibrio del sistema e studiarne la stabilita.
2) Scrivere l’equazione del moto e trovarne la soluzione soddisfacente le condizioni iniziali:s(0) = 2r , s(0) = 0.
3) Calcolare le reazioni vincolari (interna ed esterna) che si esercitano sul disco in con-dizioni statiche
x
Mg
C
G
H K
B
A
F
s
p/6
p/6
a a
r
mg
O
l
m

20
SOLUZIONE
Relazioni geometriche e cinematiche (ϑ e l’angolo di rotazione del disco, crescente nelverso antiorario):
~λ =
√3
2~i− 1
2~j; ~µ =
1
2~i +
√3
2~j ; ~G = s~λ + r~µ =
1
2(√
3s + r)~i +1
2(√
3r − s)~j
xA = xB = xG =1
2(√
3s + r); yB = yG + ` =1
2(√
3r − s) + `
~vA =
√3
2s~i; ~vG = s~λ = −rϑ ~λ ; GH
2= GK
2= a2 +
1
4(√
3r − s)2
1) Il potenziale delle forze attive (tutte conservative) vale:
U(s) = −MgyG +
√3F
2xB − F
2yB − 2 · k
2GH
2=
(Mg
2+ F
)s− k
4(√
3r − s)2 + cost.
Se si annulla la sua derivata prima:
dU
ds=
Mg
2+ F +
k
2(√
3r − s) = 0
si ricava la configurazione di equilibrio:
se =√
3r +Mg + 2F
k
che e sempre stabile perche la derivata seconda di U(s) e negativa: U”(s) = −k/2 < 0 edunque l’energia potenziale V (s) = −U(s) del sistema ha un minimo per s = se.
2) Calcolata l’energia cinetica del sistema, che vale:
T =1
2IC ϑ2 +
1
2mv2
A =3
4
(M +
m
2
)s2,
se si applica il Teorema delle forze vive o si scrive una equazione di Lagrange si ricava:
3
2
(M +
m
2
)s +
k
2s =
√3
2kr +
Mg
2+ F ≡ k
2se
che si puo riscrivere:
s + ω2(s− se) = 0, ω2 =2k
3(2M + m).
Il suo integrale generale e: s(t) = se + A sin(ωt + ϕ) con A, ϕ costanti che si determinanoimponendo le condizioni iniziali:
s(0) = 2r = se + A sin ϕs(0) = 0 = ωA cos ϕ. ⇒ A = 2r − se; ϕ = π/2.
Si ottiene dunque:s(t) = se + (2r − se) cos(ωt).
3) Le reazioni vincolari che si esercitano sul disco sono ~ΦC e ~ΦG. Indichiamo con ΦCλ, ΦCµ
e ΦGλ, ΦGµ le loro componenti incognite nella direzione della coppia di versori (~λ, ~µ); con

21
ΦCx, ΦCy e ΦGx, ΦGy quelle nella direzione degli assi (x, y), ruotati di π/6 rispetto al
sistema di riferimento (O,~λ, ~µ).
• In assenza di attrito le reazioni prodotte dall’asse x sul corsoio HK sono verticali:dunque in condizioni statiche l’equazione di risultante per le componenti orizzontali delleforze esterne agenti sul sistema complessivo fornisce
ΦCx +
√3
2F = 0 ΦCx = −
√3
2F. (1)
• Le forze elastiche applicate al baricentro G del disco valgono:
−k(G−H) = −ka~i− k
2(√
3r − s)~j; −k(G−K) = ka~i− k
2(√
3r − s)~j
e la loro risultante ha componente nulla nella direzione dell’asse x. Dalle equazioni car-dinali della Statica per il disco isolato si ricava:
ΦCx + ΦGx = 0 ⇒ ΦGx =
√3
2F (2)
rΦCλ = 0 ⇒ ΦCλ = 0. (3)
• Sulla sbarretta agiscono: ~F , −~ΦG e le reazioni prodotte dal suo scorrimento nellascanalatura del corsoio HK. Queste ultime si riducono ad un risultante ~Rv = Rv~iapplicato sul loro asse centrale, e non sono richieste. L’equazione di risultante per lecomponenti verticali delle forze agenti sulla sbarretta isolata fornisce:
−ΦGy − F
2= 0 ⇒ ΦGy = −F
2. (4)
Dalle (1) e (3) si ricava subito:
ΦCµ = 2ΦCx = −√
3 F ; ΦCy =
√3
2ΦCµ = −3
2F.
In conclusione si ottiene
~ΦC = −F
2(√
3~i + 3~j) = −√
3 F ~µ ; ~ΦG =F
2(√
3~i−~j) = F ~λ.
Al posto della (4) si puo anche usare la rimanente equazione di risultante (lungo l’asse y)delle forze agenti sul disco isolato. Da essa, con la sostituzione di se , si ricava ancora:
ΦGy = Mg − ΦCy + k(√
3r − se) = −F
2.

22
PROVA SCRITTA DI MECCANICA RAZIONALE
28 aprile 2003
Il sistema di figura e disposto in un piano verticale. Una trave a T, omogenea e con massacomplessiva m, e costituita da due bracci di uguale lunghezza ` e spessore trascurabile.Il suo braccio verticale e impegnato a scorrere senza attrito lungo l’asse y, ed e sostenutoda una forza costante nota ~F = F~. Sul suo braccio orizzontale rotola senza strisciare undisco omogeneo di massa M e raggio r = `/4, il cui baricentro A e collegato all’origineO del sistema di riferimento inerziale O(x, y) da una molla con costante elastica nota k elunghezza a riposo trascurabile.Si assumano come coordinate lagrangiane: l’ascissa x del baricentro A del disco e l’ordinatay del baricentro G della trave.
1. Determinare la configurazione di equilibrio del sistema e studiarne la stabilita.
2. Ricavare le equazioni del moto e scrivere la loro soluzione soddisfacente ad arbitrariecondizioni iniziali.
3. Calcolare tutte le reazioni vincolari esterne ed interne in un generico istante di motodel sistema.
A
O
G
y
Mg
mg
C
AC = = /4r l
A Gx yq = ,
x
F

23
Soluzione
1. Il baricentro G della trave a T si trova sull’asse y, a una distanza d = `/4 dal suo braccioorizzontale. Se x, y sono le due coordinate lagrangiane e ϑ e l’angolo di rotazione del disco,crescente in verso antiorario, si hanno le seguaenti relazioni geometico-cinenatiche:
A = O + x~ı + (y + r + `/4)~ = O + x~ı + (y + `/2)~ ⇒ AO2
= x2 + (y + `/2)2
~vA = x~ı + y~ ≡ ~vC + ϑ~k ∧ (A− C) = y~− rϑ~ı ⇒ ϑ = −x/r
~aA = x~ı + y~.
Il potenziale delle forze attive vale
U(x, y) = −mgyG −MgyA + FyG − k
2AO
2+ cost
= [F − (M + m)g ] y − k
2(x2 + y2 + `y) + cost.
Il suo punto di stazionarieta si trova annullandone le derivate prime:
∂U
∂x= −kx = 0
∂U
∂y= F − (M + m)g − ky − k`/2 = 0
e fornisce la seguente configurazione di equilibrio:
qe = xe, ye; xe = 0, ye = − `
2+
F − (M + m)g
k.
Le derivate seconde del potenziale valgono:
∂2U
∂x2=
∂2U
∂y2= −k,
∂2U
∂x∂y= 0.
La matrice Hessiana ha un autovalore doppio, negativo: λ1,2 = −k, per cui il punto distazionarieta e un massimo e la configurazione di equilibrio trovata e stabile.
2. Determinata l’energia cinetica del sistema, che vale
T (x, y) =1
2mv2
G +1
2Mv2
A +1
2IAϑ2 =
1
2(M + m)y2 +
3
4Mx2,
si ricavano le seguenti equazioni di Lagrange
3
2Mx = −kx
(M + m)y = F − (M + m)g − ky − k`/2
che, posto:
σ2x =
2k
3Mσ2
y =k
M + m,

24
si possono riscriverex + σ2
xx = 0; y + σ2y(y − ye) = 0.
Queste sono le equazioni differenziali del moto di due oscillatori lineari disaccoppiati, lacui soluzione e
x(t) = A sin(σxt + ϕx), y(t) = ye + B sin(σyt + ϕy)
in cui le costanti A,B, ϕx, ϕy sono definite dalle rispettive condizioni iniziali (x0, x0),(y0, y0) , e precisamente:
A =
√√√√x20 +
x20
σ2x
, B =
√√√√(y0 − ye)2 +y2
0
σ2y
ϕx = arctan(
σxx0
x0
); ϕy = arctan
[σy(y0 − ye)
y0
].
3. Indichiamo con ~ΦC = ΦCx~ı + ΦCy~ la reazione vincolare interna in C agente sul disco,
e con ~Rv = Rv~ı, M vG la risultante e il momento risultante delle reazioni della coppia
prismatica agenti sull’elemento verticale della trave.
Il Teorema del momento angolare rispetto al baricentro A del disco isolato fornisce:
rΦCx = IAϑ ⇒ ΦCx =Mr
2ϑ = −M
2x(t).
La reazione interna agente sulla trave vale ~ΦtraveC = −~ΦC . Per il Teorema della quantita
di moto applicato alle forze agenti sulla trave isolata si ha:
Rv − ΦCx = 0 ⇒ Rv = −M
2x(t)
F − mg − ΦCy = my ⇒ ΦCy = F −m[g + y(t)].
Infine, una equazione di momento rispetto al baricentro G della trave isolata forniscel’ultima incognita di reazione:
M vG +
`
4ΦCx − xΦCy = 0 ⇒ M v
G =M`
8x(t) + F −m [g + y(t)] x(t).
Le equazioni di moto richieste al punto 2 possono anche essere ricavate applicando ilTeorema della quantita di moto al sistema complessivo:
Rv~ı + F~− (M + m)g~− k[x~ı + (y + `/2)~ ] = m~aG + M~aA = (M + m)y~ + Mx~ı
che e equivalente alle due equazioni scalari
Rv − kx = Mx
F − (M + m)g − k(y + `/2) = (M + m)y.
La seconda e l’equazione differenziale soddisfatta dalla coordinata y, e sostituendo Rv
nella prima si ottiene l’equazione differenziale per la coordinata x.
25
PROVA SCRITTA DI MECCANICA RAZIONALE
3 settembre 2003
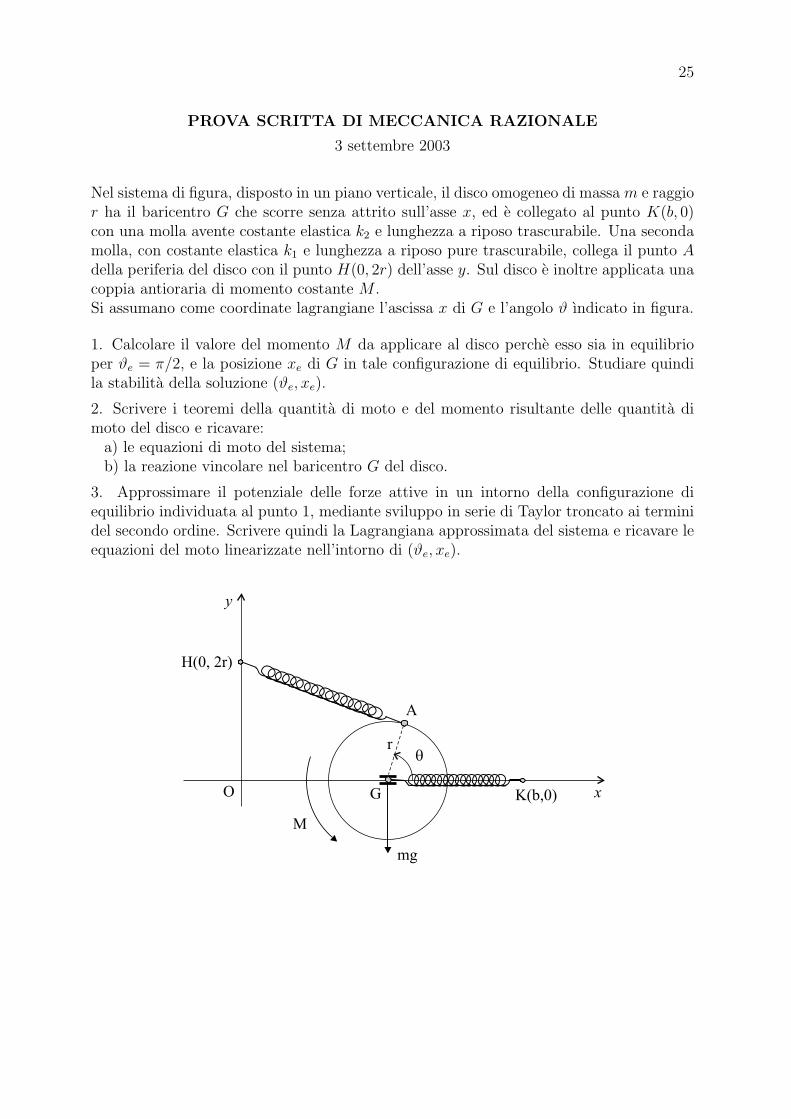
Nel sistema di figura, disposto in un piano verticale, il disco omogeneo di massa m e raggior ha il baricentro G che scorre senza attrito sull’asse x, ed e collegato al punto K(b, 0)con una molla avente costante elastica k2 e lunghezza a riposo trascurabile. Una secondamolla, con costante elastica k1 e lunghezza a riposo pure trascurabile, collega il punto Adella periferia del disco con il punto H(0, 2r) dell’asse y. Sul disco e inoltre applicata unacoppia antioraria di momento costante M .Si assumano come coordinate lagrangiane l’ascissa x di G e l’angolo ϑ ındicato in figura.
1. Calcolare il valore del momento M da applicare al disco perche esso sia in equilibrioper ϑe = π/2, e la posizione xe di G in tale configurazione di equilibrio. Studiare quindila stabilita della soluzione (ϑe, xe).
2. Scrivere i teoremi della quantita di moto e del momento risultante delle quantita dimoto del disco e ricavare:
a) le equazioni di moto del sistema;b) la reazione vincolare nel baricentro G del disco.
3. Approssimare il potenziale delle forze attive in un intorno della configurazione diequilibrio individuata al punto 1, mediante sviluppo in serie di Taylor troncato ai terminidel secondo ordine. Scrivere quindi la Lagrangiana approssimata del sistema e ricavare leequazioni del moto linearizzate nell’intorno di (ϑe, xe).
K(b,0) x
M
mg
A
H(0, 2r)
O
y
q
G
r

26
Soluzione
1. Il potenziale delle forze applicate e la funzione
U(ϑ, x) = −mgyG − k1
2AH
2 − k2
2GK
2+ Mϑ
= −k1
2
[(x + r cos ϑ)2 + (2r − r sin ϑ)2
]− k2
2(b− x)2 + Mϑ + cost
ed ha derivate parziali
U ′ϑ = k1r(x sin ϑ + 2r cos ϑ) + M, U ′
x = −k1(x + r cos ϑ) + k2(b− x).
Posto ϑ = π/2 ed uguagliando a zero le due derivate parziali, si ottiene il sistema
rk1x + M = 0
−k1x + k2(b− x) = 0
nelle incognite M, x che fornisce la soluzione:
M = −rk1xe = − rbk1k2
k1 + k2
, xe =k2b
k1 + k2
.
Le derivate seconde del potenziale sono
U”xx = −(k1 + k2), U”ϑϑ = k1r(x cos ϑ− 2r sin ϑ), U”ϑx = k1r sin ϑ
e nella configurazione di equilibrio valgono
U”xx,e = −(k1 + k2), U”ϑϑ,e = −2k1r2, U”ϑx,e = k1r.
Poiche il determinante della matrice Hessiana e positivo:
U”xx,eU”ϑϑ,e − [U”ϑx,e]2 = k2
1r2 + 2k1k2r
2
e inoltre U”ϑϑ,e < 0, U”xx,e < 0, la funzione potenziale ha un massimo per (ϑe, xe). Se nededuce che l’energia potenziale V (ϑ) = −U(ϑ) ha un minimo e l’equilibrio e stabile.
2. Il teorema della quantita di moto fornisce le due equazioni scalari:
k2(b− x)− k1(x + r cos ϑ)) = mx
−mg + k1r(2− sin ϑ) + ΦG = myG = 0.
Il teorema del momento risultante delle quantita di moto rispetto al baricentro G fornisce:
k1(x + r cos ϑ)r sin ϑ + k1r(2− sin ϑ)r cos ϑ + M = IGϑ.
La prima e la terza sono le equazioni pure del moto:
mx = −(k1 + k2)x− k1r cos ϑ + k2b
mr2
2ϑ = M + rk1(x sin ϑ + 2r cos ϑ)

27
e dalla seconda si ricava la reazione vincolare ~ΦG = ΦG~ :
ΦG = mg − k1r(2− sin ϑ).
3. L’energia cinetica del disco vale
T (ϑ, x) =1
2mv2
G +1
2IGϑ2 =
1
2m
(x2 +
r2
2ϑ2
).
L’approssimazione del secondo ordine della funzione potenziale, nell’intorno di (ϑe, xe), ela seguente:
U(ϑ, x) ' 1
2U”ϑϑ,e(ϑ− ϑe)
2 +1
2U”xx,e(x− xe)
2 + U”ϑx,e(ϑ− ϑe)(x− xe) + cost
= −k1r2(ϑ− π/2)2 − k1 + k2
2(x− xe)
2 + k1r(ϑ− π/2)(x− xe) + cost.
Sommamdo questa espressione approssimata alla energia cinetica gia calcolata (che eanch’essa del secondo ordine rispetto a una piccola perturbazione della soluzione di equili-brio), si ottiene l’espressione approssimata delle funzione Lagrangiana, valida in un intornodi (π/2, xe):
L(ϑ, x, ϑ, x) = T (ϑ, x) + U(ϑ, x) '1
2m
(x2 +
r2
2ϑ2
)− k1r
2(ϑ− π/2)2 − k1 + k2
2(x− xe)
2 + k1r(ϑ− π/2)(x− xe) + c
da cui le seguenti equazioni del moto, linearizzate nell’intorno della configurazione diequilibrio (π/2, xe):
mr2
2ϑ + 2k1r
2(ϑ− π/2)− k1r(x− xe) = 0
mx− k1r(ϑ− π/2) + (k1 + k2)(x− xe) = 0.
con xe che e stato ricavato al punto 1.
28
PROVA SCRITTA DI MECCANICA RAZIONALE
2 febbraio 2004
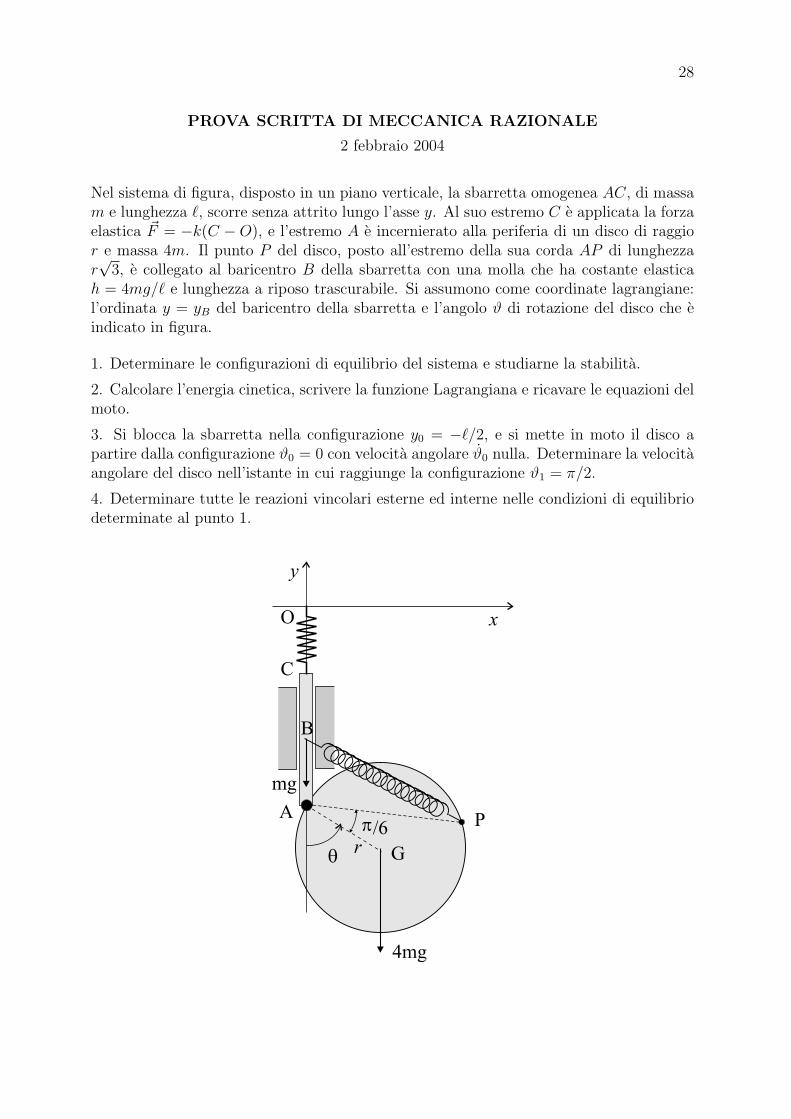
Nel sistema di figura, disposto in un piano verticale, la sbarretta omogenea AC, di massam e lunghezza `, scorre senza attrito lungo l’asse y. Al suo estremo C e applicata la forzaelastica ~F = −k(C − O), e l’estremo A e incernierato alla periferia di un disco di raggior e massa 4m. Il punto P del disco, posto all’estremo della sua corda AP di lunghezzar√
3, e collegato al baricentro B della sbarretta con una molla che ha costante elasticah = 4mg/` e lunghezza a riposo trascurabile. Si assumono come coordinate lagrangiane:l’ordinata y = yB del baricentro della sbarretta e l’angolo ϑ di rotazione del disco che eindicato in figura.
1. Determinare le configurazioni di equilibrio del sistema e studiarne la stabilita.
2. Calcolare l’energia cinetica, scrivere la funzione Lagrangiana e ricavare le equazioni delmoto.
3. Si blocca la sbarretta nella configurazione y0 = −`/2, e si mette in moto il disco apartire dalla configurazione ϑ0 = 0 con velocita angolare ϑ0 nulla. Determinare la velocitaangolare del disco nell’istante in cui raggiunge la configurazione ϑ1 = π/2.
4. Determinare tutte le reazioni vincolari esterne ed interne nelle condizioni di equilibriodeterminate al punto 1.
O
C
B
A
q
p P
G
mg
4mg
/6
x
y
r

29
Soluzione
1. Tenendo conto che nel triangolo isoscele AGP gli angoli alla base hanno ampiezza π/6,applichiamo il teorema di Carnot al triangolo ABP per ricavare
BP2
=`2
4+ 3r2 −
√3r` cos[π − (ϑ + π/6)] =
√3r` cos(ϑ + π/6) + cost
=
√3
2r`(√
3 cos ϑ− sin ϑ) + cost.
Inoltre:xG = r sin ϑ; yG = y − `/2− r cos ϑ.
Il potenziale delle forze attive e percio
U(y, ϑ) = −mgyB − 4mgyG − k
2OC
2 − h
2BP
2
= −mgy − 4mg(y − r cos ϑ)− k
2
(y +
`
2
)2
− h
2
√3
2r`(√
3 cos ϑ− sin ϑ) + cost
= −5mgy − k
2
(y +
`
2
)2
+ mgr(cos ϑ +√
3 sin ϑ) + cost.
Per ricavare le configurazioni di equilibrio annulliamo le derivate parziali:
U ′y = −5mg − k(y + `/2) = 0
U ′ϑ = mgr(
√3 cos ϑ− sin ϑ) = 0.
Il sistema e soddisfatto per
ye = −(
`
2+
5mg
k
); ϑ(1)
e = arctan(√
3) =π
3, ϑ(2)
e =4π
3
per cui sono sempre possibili le due configurazioni di equilibrio
q(1)e = ye, π/3 ; q(2)
e = ye, 4π/3.Per studiarne la stabilita calcoliamo le derivate seconde:
U”yy = −k < 0 ; U”ϑϑ = −mgr(√
3 sin ϑ + cos ϑ) ; U”yϑ = 0.
Poiche U”ϑϑ e negativa per ϑ = π/3 e positiva per ϑ = 4π/3, si deduce che il determinantedella matrice Hessiana e:• positivo nella configurazione q(1)
e , la quale risulta stabile;• negativo nella configurazione q(2)
e , che e percio instabile.
2. L’energia cinetica del sistema vale
T =1
2mv2
B +1
2· 4mv2
G +1
2IGϑ2 =
1
2my2 +
1
2· 4m(r2ϑ2 + 2r sin ϑyϑ) +
1
2
4mr2
2ϑ2
=5
2my2 + +4mryϑ + 3mr2ϑ2.

30
Ricavata la funzione Lagrangiana L = T + U con T ed U sopra calcolate, si ottengono leseguenti equazioni del moto:
5y + 4rϑ + 5g + k(y + `/2)/m = 0
4y + 6rϑ + g(sin ϑ−√
3 cos ϑ) = 0.
3. Poiche il sistema e conservativo, applichiamo l’integrale primo dell’energia: T0 − U0 =T1 − U1 tra l’istante iniziale t0 = 0 in cui
y0 = −`/2, y0 = 0, ϑ0 = 0, ϑ0 = 0 ⇒ T0 = 0, U0 = mg(
5
2` + r
)
e l’istante finale t1 in cui
y1 = −`/2, y1 = 0, ϑ1 = π/2 ⇒ T1 = 3mr2ϑ21, U1 = mg
(5
2` +
√3r
)
e otteniamo:
ϑ1 =
√(√
3− 1)g
3r.
4. Indichiamo con ~ΦA = ΦAx~ı+ΦAy~ la reazione vincolare interna nella cerniera A, agente
sul disco, e con ~Rv = Rv~ı, M v la risultante e il momento risultante (rispetto a B) dellereazioni del telaio y sulla sbarretta. Dalle le equazioni cardinali della Statica, applicateall’intero sistema e alla sbarretta isolata, si ricava:
Rv = 0 , M v = (`/2)ΦAx.
L’equazione di risultante per il disco isolato fornisce:
ΦAx + h(B − P )×~ı = 0; ΦAy − 4mg + h(B − P )× ~ = 0.
Il vettore (B−P ) e funzione della sola coordinata ϑ. In condizioni generiche di moto vale
(B − P ) = −r√
3 sin(ϑ + π/6)~ı + [`/2 + r√
3 cos(ϑ + π/6)]~
e nelle configurazioni di equilibrio, in cui la corda AP e parallela all’asse x, si riducerispettivamente a
(B − P ) = −√
3r~ı + (`/2)~ per ϑ(1)e = π/3
(B − P ) =√
3r~ı + (`/2)~ per ϑ(2)e = 4π/3.
Quindi le componenti della reazione vincolare interna in condizioni statiche valgono:
ΦAx =
4√
3mgr/` nella configurazione q(1)e
−4√
3mgr/` nella configurazione q(2)e ;
ΦAy = 2mg.

31
PROVA SCRITTA DI MECCANICA RAZIONALE
13 febbraio 2004
Nel sistema di figura, disposto in un piano verticale, il disco di massa m e raggio r rotolasenza strisciare sull’asse y e il suo baricentro A e incernierato a un estremo della sbarrettaomogenea AB di lunghezza ` e ugual massa m. L’estremo B e incernierato a una secondasbarretta omogenea BD di massa 2m e lunghezza 2`, che ruota attorno al suo baricentrofisso E ed e sollecitata da una coppia esterna di momento costante M0. Si assuma comecoordinata lagrangiana l’angolo ϑ indicato in figura, e che sia: yA 6= 0 se ϑ 6= 0.
1. Determinare le configurazioni di equilibrio del sistema e studiarne la stabilita,
2. Calcolare l’energia cinetica e ricavare l’equazione del moto.
3. Determinare tutte le reazioni vincolari esterne ed interne nelle condizioni di equilibrioindividuate al punto 1.
C
A
B
O
M
mgmg
2mg
q
x
y
G
D
E( ,0)r
rAB =BD = 2 l
l

32
Soluzione
1. Il potenziale delle forze applicate vale
U(ϑ) = −mgyA −mgyG −Mϑ + cost = −7
2mg` sin ϑ + Mϑ + cost.
Le configurazioni di equilibrio sono i suoi punti di stazionarieta, che si ricavano annullandola derivata prima:
U ′(ϑ) = −7
2mg` cos ϑ + M = 0.
Si ricavano le due soluzioni di equilibrio
ϑ(1)e = arccos
(2M
7mg`
), ϑ(2)
e = −ϑ(1)e ,
reali se 2M ≤ 7mg`. Per studiare la stabilita calcoliamo il segno della derivata secondaU”(ϑ) = 7
2mg` sin ϑ nelle due configurazioni di equilibrio. Se e soddisfatta la condizione
per la loro esistenza, essa vale
U”(ϑ(1)e ) =
7
2mg`
√√√√1−(
2M
7mg`
)2
> 0 ; U”(ϑ(2)e ) = −7
2mg`
√√√√1−(
2M
7mg`
)2
< 0.
Poiche l’equilibrio e stabile nei punti di minimo della energia potenziale V (ϑ) = −U(ϑ),si deduce che la configurazione ϑ(1)
e e instabile e ϑ(2)e e stabile.
2. L’energia cinetica del sistema vale
T (ϑ, ϑ) =1
2IEϑ2 +
1
2ICϕ2 +
1
2mv2
G +1
2IGψ2
dove ϕ e la velocita angolare del disco e ψ quella della sbarretta AB. Quest’ultima euguale e contraria a ϑ, e quella del disco si ricava sfruttando la condizione di rotolamentosenza strisciamento:
yA = 2` sin ϑ, vA = yA = 2` cos ϑϑ = rϕ ⇒ ϕ =2`
rcos ϑϑ.
Inoltre:
xG = r +`
2cos ϑ, xG = − `
2sin ϑϑ
yG =3`
2sin ϑ, yG =
3`
2cos ϑϑ
da cui: v2G = (`2/4)(1 + 8 cos2 ϑ)ϑ2. Si ricava pertanto:
T (ϑ, ϑ) =1
2
8m`2
12ϑ2 +
1
2
3mr2
2
4`2
r2· cos2 ϑϑ2 +
1
2· m`2
4(1 + 8 cos2 ϑ)ϑ2 +
1
2· m`2
12ϑ2
=1
2m`2(1 + 8 cos2 ϑ)ϑ2

33
da cui la Lagrangiana del sistema
L(ϑ, ϑ) = T (ϑ, ϑ) + U(ϑ) =1
2m`2(1 + 8 cos2 ϑ)ϑ2 − 7
2mg` sin ϑ + Mϑ + cost.
Da essa si ricava l’equazione del moto:
m`2(1 + 8 cos2 ϑ)ϑ− 8m`2 sin ϑ cos ϑϑ2 +7
2mg` cos ϑ−M = 0.
3. Il sistema e soggetto a quattro vincoli doppi: indichiamo le reazioni esterne con ~ΦC =ΦCx~ı + ΦCy~, ~ΦE = ΦEx~ı + ΦEy~; quella interna nella cerniera A, e agente sul disco, con~ΦA = ΦAx~ı + ΦAy~; quella interna e agente sull’asta BD con ~ΦB = ΦBx~ı + ΦBy~. Le ottoincognite di reazione si possono determinare applicando le seguenti equazioni cardinalidella Statica:• al disco isolato:
ΦCx + ΦAx = 0
ΦCy + ΦAy −mg = 0
−rΦCy = 0
• all’asta BD isolata:
ΦBx + ΦEx = 0
ΦBy + ΦEy − 2mg = 0
• al sistema complessivo:
ΦCx + ΦEx = 0
ΦCy + ΦEy − 4mg = 0
• e alle due aste isolate, con un’equazione di momento rispetto alla cerniera E:
M − mg`
2cos ϑ + 2` sin ϑΦAx = 0
Da quest’ultima si ricava
ΦAx = ∓ 3M
7`
√√√√1−(
2M
7mg`
)2
e dalle precedenti:
ΦAy = mg
ΦCx = −ΦAx ; ΦCy = 0
ΦEx = ΦAx ; ΦEy = 4mg
ΦBx = −ΦAx ; ΦBy = −2mg.

34
PROVA SCRITTA DI MECCANICA RAZIONALE
8 luglio 2004
Nel sistema in figura, che e disposto in un piano verticale, la sbarretta rigida AB dilunghezza ` e massa m e incernierata, ad un terzo della sua lunghezza, nell’origine delsistema di riferimento inerziale O(x, y). Ad essa sono applicate: una coppia di momentocostante M, e una molla con costante elastica k e lunghezza a riposo trascurabile, checollega l’estremo A ad un punto materiale P di massa mP scorrevole senza attrito sull’assex. Al punto P e applicata una forza costante ~F = F~ı.
1. Determinare la posizione di equilibrio xe del punto P e il valore che deve avere ilmomento M della coppia, perche la sbarretta si trovi in equilibrio per ϑe = π.
2. Determinare la condizione che deve essere soddisfatta dalla forza F per assicurare lastabilita della configurazione di equilibrio (ϑe, xe) determinata al punto precedente.
3. Scrivere le equazioni del moto del sistema.
4. Calcolare tutte le reazioni vincolari in un generico istante di moto.
O
P
P
x
y
mg
q
G
m g
A
B M
F
AB =OB = /3
ll

35
Soluzione
1. Calcolati il quadrato della elongazione della molla e la quota del baricentro G:
(AP )2 = x2 +4
9`2 − 4
3`x cos ϑ ; yG = OG sin ϑ =
`
6sin ϑ,
il potenziale delle forze attive risulta:
U(ϑ, x) = −mg`
6sin ϑ− k
2
(x2 +
4
9`2 − 4
3`x cos ϑ
)+ Mϑ + Fx + cost
ed ha derivate parziali:
U ′ϑ(ϑ, x) = −mg`
6cos ϑ− 2k`
3x sin ϑ + M
U ′x(ϑ, x) = −kx +
2k`
3cos ϑ + F.
Annullandole entrambe e ponendo ϑ = ϑe = π si ricava subito:
M = −mg`
6; xe =
F
k− 2`
3.
2. Le derivate seconde del potenziale, calcolate nella configurazione di equilibrio qe =(−π, xe), valgono:
U”ϑϑ(qe) =mg`
6sin ϑe − 2k`
3xe cos ϑe =
2k`
3
(F
k− 2`
3
)
U”xx(qe) = −k < 0
U”ϑx(qe) =2k`
3sin ϑe = 0
per cui U”ϑϑ(qe) e U”xx(qe) = −k coincidono con gli autovalori della matrice Hessiana.Affinche entrambi gli autovalori siano negativi (condizione affiche U(ϑ, x) abbia un mas-simo in qe), occorre che F < 2k`/3. Se e soddisfatta questa condizione, l’energia potenzialeV = −U ha un minimo, e qe e stabile.
3. L’energia cinetica del sistema vale
T (ϑ, x) =1
2IOϑ2 +
1
2mP v2
P =1
2
m`2
9ϑ2 +
1
2mP x2
e usandola per scrivere le equazioni di Lagrange si ottengono le seguenti equazioni delmoto:
ϑ +3g
2`cos ϑ +
6k
`x sin ϑ =
9M
m`2
mP x + kx− 2
3k` cos ϑ = F.
4. La reazione ~ΦP = ΦP~ della guida x sul punto P si ricava con una equazione dirisultante:
−mP g − k(P − A)× ~ + ΦP = 0 =⇒ ΦP = mP g − kyA = mP g − 2k`
3sin ϑ

36
oppure applicando al sistema complessivo il teorema del momento delle quantita di motorispetto ad O
M + ΦP x− mg`
6cos ϑ−mP gx = IOϑ
che fornisce l’espressione equivalente:
ΦP =1
x
(m`2
9ϑ +
mg`
6cos ϑ + mP g −M
)
dove ϑ(t) e x(t) sono soluzioni delle precedenti equazioni del moto.Le due componenti della reazione di cerniera si ottengono applicando il teorema dellaquantita di moto alla sbarretta isolata:
ΦOx + k(P − A)×~ı = mxG = −m`
6(sin ϑϑ + cos ϑϑ2)
ΦOy − mg − kyA = myG =m`
6(cos ϑϑ− sin ϑϑ2)
da cui si ricava
ΦOx = k
(2`
3cos ϑ− x
)− m`
6(sin ϑϑ + cos ϑϑ2)
ΦOy = mg +2k`
3sin ϑ +
m`
6(cos ϑϑ− sin ϑϑ2).
37
PROVA SCRITTA DI MECCANICA RAZIONALE
2 settembre 2004
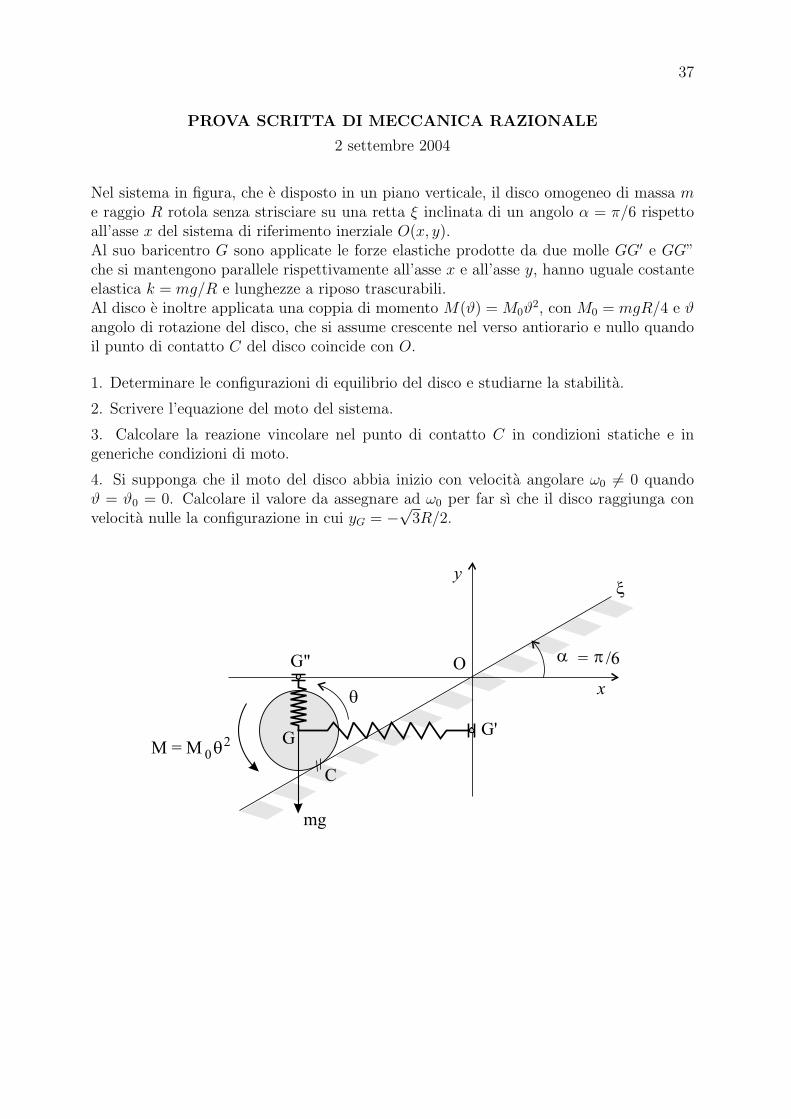
Nel sistema in figura, che e disposto in un piano verticale, il disco omogeneo di massa me raggio R rotola senza strisciare su una retta ξ inclinata di un angolo α = π/6 rispettoall’asse x del sistema di riferimento inerziale O(x, y).Al suo baricentro G sono applicate le forze elastiche prodotte da due molle GG′ e GG”che si mantengono parallele rispettivamente all’asse x e all’asse y, hanno uguale costanteelastica k = mg/R e lunghezze a riposo trascurabili.Al disco e inoltre applicata una coppia di momento M(ϑ) = M0ϑ
2, con M0 = mgR/4 e ϑangolo di rotazione del disco, che si assume crescente nel verso antiorario e nullo quandoil punto di contatto C del disco coincide con O.
1. Determinare le configurazioni di equilibrio del disco e studiarne la stabilita.
2. Scrivere l’equazione del moto del sistema.
3. Calcolare la reazione vincolare nel punto di contatto C in condizioni statiche e ingeneriche condizioni di moto.
4. Si supponga che il moto del disco abbia inizio con velocita angolare ω0 6= 0 quandoϑ = ϑ0 = 0. Calcolare il valore da assegnare ad ω0 per far sı che il disco raggiunga convelocita nulle la configurazione in cui yG = −√3R/2.
O a = /6
x
x
G'
G"
G
C
mg
M = M 02q
q
y
p

38
Soluzione
1) Dalla geometria del sistema si ricava
xG = ξC cos α−R sin α = −R
2(√
3ϑ + 1); yG = ξC sin α + R cos α =R
2(√
3− ϑ)
~vG = xG~ı + yG~ = −Rϑ
2(√
3~ı + ~) = −Rϑ~λ ≡ ξG~λ
dove ~λ e il versore dell’asse ξ.Il potenziale delle forze applicate e pertanto
U(ϑ) = −mgyG − k
2(x2
G + y2G) +
∫M(ϑ)dϑ =
mgR
2(ϑ3/6− ϑ2 + ϑ) + cost
e la sua derivata prima vale
U ′(ϑ) =mgR
2(ϑ2/2− 2ϑ + 1).
I suoi zeri forniscono i seguenti due punti di stazionarieta:
ϑ(1)e = 2 +
√2; ϑ(2)
e = 2−√
2
che definiscono altrettante soluzioni di equilibrio. Per valutarne la stabilita ricaviamo laderivata seconda U”(ϑ) = mgR
2(ϑ− 2) che nelle configurazioni di equilibrio vale
U”(ϑ(1)e ) =
√2
2mgR > 0; U”(ϑ(2)
e ) = −√
2
2mgR < 0.
Dunque l’energia potenziale V (ϑ) = −U(ϑ) ha un massimo nella configurazione ϑ(1)e che
e instabile, e ha un minimo per ϑ(2)e che e stabile.
2) L’energia cinetica del disco vale
T (ϑ, ϑ) =1
2IC ϑ2 =
3
4mR2ϑ2.
Se la si usa per scrivere l’equazione di Lagrange
d
dt
(∂T
∂ϑ
)− ∂T
∂ϑ=
dU
dϑ
si ricava l’equazione del moto:
3Rϑ− g
(ϑ2
2− 2ϑ + 1
)= 0.
3) Per ricavare la reazione vincolare ~ΦC = ΦCx~ı + ΦCy~ si puo applicare il teorema dellaquantita di moto del disco. Ricavate le espressioni delle forze elastiche:
−k(G−G′) = −kxG~ı =kR
2(√
3ϑ + 1)~ı; −k(G−G”) = −kyG~ =kR
2(ϑ−
√3)~,

39
risulta:
ΦCx +kR
2(√
3ϑ + 1) = mxG = −√
3mR
2ϑ
ΦCy +kR
2(ϑ−
√3)−mg = myG = −mR
2ϑ
dalle quali si ottiene
ΦCx = −√
3mR
2ϑ− mg
2(√
3ϑ + 1); ΦCy = mg − mR
2ϑ +
mg
2(√
3− ϑ).
Sostituendo l’accelerazione angolare ϑ fornita dall’equazione del moto si ha infine:
ΦCx[ϑ(t)] = −√
3mg
6
(ϑ2
2+ ϑ + 1 +
√3
); ΦCy[ϑ(t)] =
mg
6
(5 + 3
√3− ϑ− ϑ2
2
).
Una delle due precedenti equazioni puo essere sostituita dalla equazione di momentorispetto al baricentro del disco:
rΦCλ + M0ϑ2 = (mR2/2)ϑ
dove ΦCλ =√
3ΦCx/2 + ΦCy/2 e la componente di ~ΦC nella direzione della retta ξ.In condizioni statiche (ϑ = 0) le componenti della reazione vincolare si riducono a
ΦCx = −mg
2(√
3ϑ(1,2)e + 1) = −
√3mg
6(6 +
√3± 3
√2)
ΦCy = mg +mg
2(√
3− ϑ(1,2)e ) =
mg
2(√
3∓√
2).
4) Nell’istante iniziale del moto, in cui ϑ = 0 e ϑ = ω0, si ha
T0 =3
4mR2ω2
0 ; U0 = cost.
Nella configurazione in cui yG = −√3R/2 la coordinata lagrangiana ϑ vale:
ϑ1 =√
3− 2yG
R= 2
√3.
In essa il potenziale assume il valore:
U1 = U(ϑ1) = 3mgR(√
3− 2) + cost,
e se si vuole che questa configurazione venga raggiunta con velocita nulle (ϑ = 0), appli-cando l’integrale primo dell’energia T0−U0 = T1−U1 si ricava che deve essere soddisfattal’uguaglianza:
3
4mR2ω2
0 = −3mgR(√
3− 2).
Risolvendo rispetto ad ω0 si ottiene:
ω0 = +2
√g
R(2−
√3).

40
PROVA SCRITTA DI MECCANICA RAZIONALE
24 gennaio 2005
Il sistema materiale indicato in figura e disposto in un piano orizzontale. Il disco diraggio r e massa m rotola senza strisciare su una circonferenza fissa di raggio 2r. Al suobaricentro A e incernierata una sbarretta rigida AB di massa 2m e lunghezza ` = 3r, ilcui estremo B e impegnato a scorrere senza attrito sull’asse x ed e sollecitato da una forzacostante ~F = −F~ı con F > 0. Il centro A del disco e collegato all’asse x da una mollaAA′ che si mantiene parallela all’asse y, ha costante elastica nota k e lunghezza a riposotrascurabile.
1. Determinare le configurazioni di equilibrio del sistema comprese nell’intervallo
−π/2 < ϑ < π/2
e studiarne la loro stabilita.
2. Calcolare l’energia cinetica del sistema e scrivere l’equazione di Lagrange.
3. Linearizzare l’equazione del moto nell’intorno della configurazione di equilibrio stabilein cui si trova il sistema nell’ipotesi: F = kr.
4. Calcolare le reazioni vincolari esterne in una generica condizione di moto.
A
BF
x
A’
C2r
r
G
qO
y
AB = 3r

41
Soluzione
1) Il potenziale delle forze attive, tutte conservative, espresso in funzione della coordinatalagrangiana ϑ, vale:
U(ϑ) = −k
2(AA′)2 − FxB = −9
2kr2 sin2 ϑ− 6Fr cos ϑ + cost
ed ha derivata primaU ′(ϑ) = 3r sin ϑ(2F − 3kr cos ϑ).
Per cercare le configurazioni di equilibrio determiniamo i punti di stazionarieta di U(ϑ),che devono soddisfare: U ′(ϑ) = 0. Si ricavano tre soluzioni comprese nell’intervallo−π/2 < ϑe < π/2:
ϑ(1)e = 0 sempre valida
ϑ(2)e = arccos
(2F
3kr
); ϑ(3)
e = −ϑ(2)e reali se F ≤ 3
2kr.
Per studiare la loro stabilita ricaviamo i massimi e minimi di U(ϑ) calcolando la derivataseconda
U”(ϑ) = 3r cos ϑ(2F − 3kr cos ϑ) + 9kr2 sin2 ϑ.
Nei punti di stazionarieta essa vale:
U”(0) = 3r(2F − 3kr)
< 0 se F < 3kr/2 ⇒ massimo di U> 0 se F > 3kr/2 ⇒ minimo di U
U”(ϑ(3,4)e ) = 9kr2 sin2 ϑ(3,4)
e > 0 ⇒ minimi di U.
Tenuto conto che l’energia potenziale del sistema e V (ϑ) = −U(ϑ) ed ha un minimo inogni configurazione stabile, se ne deduce che
• la configurazione ϑ(1)e = 0 e stabile se F < 3kr/2 e instabile se F > 3kr/2;
• ϑ(2,3)e , quando esistono, sono instabili.
2) L’energia cinetica del sistema vale
T (ϑ, ϑ) =1
2mv2
A +1
2IAϕ2 +
1
22mv2
G +1
2IGϑ2
dove ϕ e la velocita angolare del disco. Indicando con ϑ∗ l’angolo compreso tra l’asse x eil vettore (A− O), che ha modulo uguale a ϑ ma e crescente nel verso orario, la velocitadel baricentro A del disco vale
~vA = rϕ~τ = ϑ∗(−~k) ∧ (A−O) = −3rϑ~τ ,
dove ~τ = sin ϑ~ı+cos ϑ~ e il versore di ~k∧ (A−O). Da questa si deduce anche: ϕ = −3ϑ.Inoltre, la velocita del baricentro della sbarretta vale
~vG = xG~ı + yG~ =d
dt
(9
2r cos ϑ~ı− 3
2r sin ϑ~
)= −3r
2(3 sin ϑ~ı + cos ϑ~)ϑ

42
da cui
v2G =
9r2
4(1 + 8 sin2 ϑ)ϑ2.
Sostituendo nella espressione dell’energia cinetica si ottiene:
T (ϑ, ϑ) =1
2mr2
[15 +
9
2(1 + 8 sin2 ϑ)
]ϑ2 ≡ 1
2a(ϑ)ϑ2.
Se la si usa per scrivere l’equazione di Lagrange si ricava l’equazione del moto:
mr2[15 +
9
2(1 + 8 sin2 ϑ)
]ϑ + 36mr2 sin ϑ cos ϑϑ2 − 3r sin ϑ(2F − 3kr cos ϑ) = 0.
3) Nell’ipotesi F = kr l’unica configurazione di equilibrio stabile e ϑ(1)e = 0. In un suo
intorno il potenziale e l’energia cinetica si approssimano con
U ' 1
2U”(0)ϑ2 =
1
2(−3kr2)ϑ2; T ' 1
2a(0)ϑ2 =
39
4mr2ϑ2
e da queste espressioni si ricava l’equazione linearizzata
ϑ + σ2ϑ = 0 con σ =
√√√√−U”(0)
a(0)=
√2k
13m.
4) Le reazioni vincolari da determinare sono ~ΦB = ΦB~ e ~ΦC = ΦCτ~τ + ΦCρ~ρ dove~ρ = cos ϑ~ı− sin ϑ~ e il versore di (A−O).
La componente tangenziale di φC si calcola subito con un’equazione di momento rispettoal baricentro A del disco isolato:
−rΦCτ = IAϕ =mr2
2(−3ϑ) =⇒ ΦCτ =
3
2mrϑ.
Le altre due incognite si possono ricavare scrivendo il teorema della quantita di moto perl’intero sistema:
−F~ı + 3kr sin ϑ~ + ΦB~ + ΦCτ (sin ϑ~ı + cos ϑ~) + ΦCρ(cos ϑ~ı− sin ϑ~) = m~aA + 2m~aG
dove
~aA = −3r(ϑ~τ + ϑ2~ρ ) = −3r(cos ϑϑ2 + sin ϑϑ)~ı + 3r(sin ϑϑ2 − cos ϑϑ)~
~aG = xG~ı + yG~ = −9r
2(cos ϑϑ2 + sin ϑϑ)~ı +
3r
2(sin ϑϑ2 − cos ϑϑ)~.
Uguagliando le componenti lungo gli assi x, y e sostituendo ΦCτ ,~aA,~aG si ricava
−F +3
2mr sin ϑϑ + ΦCρ cos ϑ = −12mr(cos ϑϑ2 + sin ϑϑ)
ΦB + 3kr sin ϑ +3
2mr cos ϑϑ− ΦCρ sin ϑ = 6mr(sin ϑϑ2 − cos ϑϑ)
da cui
ΦCρ =1
cos ϑ
[F − 3
2mr sin ϑϑ− 12mr(cos ϑϑ2 + sin ϑϑ)
]
ΦB = 3r sin ϑ(2mϑ2 − k)− 15
2mr cos ϑϑ + ΦCρ sin ϑ.

43
COMPITO DI MECCANICA RAZIONALE
14 febbraio 2005
In un piano verticale (O, x, y) un disco omogeneo di massa m e raggio r e incernieratosenza attrito nel suo baricentro fisso O . In una scanalatura diametrale scorre senza attritol’asta omogenea AB di lunghezza ` ed egual massa m . All’asta e applicata una coppiaM antioraria e costante.Assunte come coordinate lagrangiane l’ascissa s del baricentro G sull’asta ( (G−O) = s~λ ,
con ~λ versore di (B − A) ) e l’angolo ϑ di rotazione dell’asta ,
(1) determinare le posizioni d’equilibrio del sistema, studiandone la stabilita;
(2) calcolare l’energia cinetica e scrivere le equazioni differenziali del moto del sistema;
(3) calcolare la reazione vincolare della cerniera in O sia in condizioni statiche che di-namiche;
(4) abbandonato il sistema nella posizione s0 = 0 e ϑ0 = π/2 con velocita iniziali nulle(moto incipiente) si calcoli l’accelerazione iniziale del baricentro G dell’asta e la corrispon-
dente reazione ~ΦO in tale istante.
A
B
G
mg
mgq
s
s
r
O x
yAB =OG =
l
M

44
Soluzione
(1) Il potenziale delle forze applicate vale
U(ϑ, s) = −mgyG + Mϑ + cost = mgs cos ϑ + Mϑ + cost
e le sue derivate prime sono
∂U
∂ϑ= −mgs sin ϑ + M
∂U
∂s= mg cos ϑ.
Poiche le posizioni di equilibrio sono i punti di stazionarieta di U(ϑ, s), imponiamo chequeste derivate siano nulle e determiniamo le soluzioni del sistema che ne risulta. Siricavano le due posizioni di equilibrio:
ϑ(1)
e =π
2, s(1)
e =M
mg
ϑ(2)
e = −π
2, s(2)
e = −M
mg
e per studiarne la stabilita calcoliamo le derivate seconde del potenziale
U”ϑϑ = −mgs cos ϑ, U”ss = 0, U”sϑ = −mg sin ϑ.
Nelle posizioni di equilibrio queste valgono
U”ϑϑ = U”ss = 0, U”sϑ = ∓mg
e quindi il determinante della matrice Hessiana vale
detH = U”ϑϑU”ss − (U”sϑ)2 = −m2g2 < 0.
Poiche e negativo, il potenziale non ha ne un massimo ne un minimo nelle due posizionidi equilibrio, che quindi risultano entrambe instabili.
(2) L’atto di moto della sbarretta e la composizione del suo moto relativo alla scanalatura
e di quello di trascinamento con il disco. Pertanto, se indichiamo con ~λ il versore di(G−O) e con ~µ il versore della direzione ~k ∧ (G−O) normale alla sbarretta, la velocitadel suo baricentro e
~vG = s~λ + sϑ~µ da cui : v2G = s2 + s2ϑ2.
Si ha percio l’energia cinetica:
T (s, ϑ, s) =1
2IOϑ2 +
1
2mv2
G +1
2· IGϑ2 =
1
2m
(r2
2+
`2
12+ s2
)ϑ2 +
1
2ms2
e la sua conoscenza permette di scrivere le equazioni di Lagrange
d
dt
(∂T
∂ϑ
)− ∂T
∂ϑ=
∂U
∂ϑ,
d
dt
(∂T
∂s
)− ∂T
∂s=
∂U
∂s

45
da cui si ottengono le seguenti equazioni del moto:
m
(r2
2+
`2
12+ s2
)ϑ + 2mssϑ + mgs sin ϑ−M = 0
s− sϑ2 − g cos ϑ = 0.
3) Per determinare la reazione vincolare ~ΦO = ΦOx~ı + ΦOy~ e sufficiente scrivere l’equa-zione di risultante per l’intero sistema (teorema della quantita di moto):
−2mg~ + ΦOx~ı + ΦOy~ = m~aG = m(xG~ı + yG~ )
dove
xG =d
dt(s sin ϑ + s cos ϑϑ) = sin ϑs + s cos ϑϑ− s sin ϑϑ2 + 2 cos ϑsϑ
yG =d
dt(−s cos ϑ + s sin ϑϑ) = − cos ϑs + s sin ϑϑ + s cos ϑϑ2 + 2 sin ϑsϑ.
Moltiplicando scalarmente per i versori degli assi x, y si ricavano le due componenti dellareazione vincolare della cerniera, che in condizioni dinamiche valgono:
ΦOx = mxG , ΦOy = 2mg + myG
e in condizioni statiche (in cui ~aG = 0) si riducono a
ΦstatOx = 0 , Φstat
Oy = 2mg.
(4) Nell’atto di moto incipiente in cui s0 = ϑ0 = s0 = 0 e ϑ0 = π/2, dalla secondaequazione del moto si deduce che s(0) = s0 = 0. Sostituendo insieme con i dati inizialiassegnati nelle espressioni di xG, yG prima calcolate, si ricava:
xG(0) = s0 = 0
xG(0) = s0ϑ0 = 0
e quindi l’accelerazione iniziale del baricentro dell’asta e nulla. Nello stesso istante inizialela reazione vincolare della cerniera vale:
ΦOx(0) = 0, ΦOy(0) = 2mg =⇒ ~Φ0(0) = 2mg~.