Lezioni meccanica razionale

of 229
-
Upload
danilo-infantino -
Category
Documents
-
view
409 -
download
24
description
meccanica
Transcript of Lezioni meccanica razionale
-
Franco Cardin
SISTEMI DINAMICI MECCANICI
Introduzione alla Meccanica Razionale
per il corso di Fisica Matematica - 2 parte
Laurea triennale in Matematica 2013/14
J.L.Lagrange, Mecanique Analytique
Hamiltons variation principle can be shown to correspond to Fermats Principle for a wave propagation in configuration space (q-space), and the Hamilton-Jacobi equation expresses Huygens Principle for this wave propagation. Unfortunately this powerful and momentous conception of Hamilton is deprived, in most modern reproductions, of its beautiful raiment as a superfluous accessory, in favour of a more colourless representation of the analytical correspondence.
E. Schroedinger, Quantization as a problem of eigenvalues, II
E. Schrodinger, Quantization as a problem of eigenvalues, II
-
Avvertenza per il Lettore
Queste dispense sono solo una traccia per un corso di Meccanica, non certo un trattatodi Meccanica.
I manuali di Meccanica sono altri: il lettore che, magari, sappassionasse e desiderasseapprofondire la materia e` invitato a rivolgersi, esplorare le pagine dei bellissimi trattatidi Levi Civita - Amaldi, di Whittaker, di Wintner, di Arnold, e poi ancora i piu` recentivolumi di Benenti, Cercignani, DellAntonio, Fasano - Marmi, Gallavotti, ecc.
Queste note sono invece semplicemente un modo di raccontare alcuni, pochi, capitolidella Meccanica Classica, modo legato intimamente alla maturazione di tali argomenti,usufruendo dellesperienza dellinsegnamento e della conseguente risposta degli studenti,via via nel tempo.
Franco Cardin Padova, 29 maggio 2014
2
-
Indice
1 Sistemi Meccanici Vincolati 7
1.1 Fondamenti della Meccanica . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.1.1 Spazi Inerziali, Riferimenti Inerziali, Tempo Assoluto . . . . . . . . . 8
1.1.2 Punti materiali e masse . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.1.3 Spazio delle Configurazioni e Spazio degli Atti di Moto per un sistemadi punti materiali liberi . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.1.4 Forze . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.1.5 Vincoli e loro descrizione geometrica . . . . . . . . . . . . . . . . . . 10
1.1.6 Vincoli e loro descrizione dinamica . . . . . . . . . . . . . . . . . . . 14
1.1.7 Moti Dinamicamente Possibili . . . . . . . . . . . . . . . . . . . . . 15
1.2 Quiete ed Equilibrio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.3 Vincoli privi dattrito . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
1.4 Un sistema meccanico la cui dinamica e` retta dallequazione differenzialex = f(x), con x R1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171.4.1 Diagramma di Fase per x = f(x) . . . . . . . . . . . . . . . . . . . . 24
1.5 Metodo di Lagrange per la determinazione delle Reazioni Vincolari . . . . 27
1.6 Il modello di Coulomb dellattrito . . . . . . . . . . . . . . . . . . . . . . . 30
1.7 Vincoli Lisci o Ideali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
1.8 Cinematica e dinamica elementare dei sistemi particellari . . . . . . . . . . 33
1.8.1 Equazioni Cardinali . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
1.8.2 Cinematica dei sistemi particellari rigidi . . . . . . . . . . . . . . . . 36
1.9 Teorema di Conservazione dellEnergia . . . . . . . . . . . . . . . . . . . . . 40
1.10 La restrizione di un sistema di forze conservativo e` conservativa . . . . . . 41
1.11 Sistemi continui (di infinite particelle) a finiti gradi di liberta` . . . . . . . . 42
1.12 Appendice: Il Principio di Gauss . . . . . . . . . . . . . . . . . . . . . . . 45
2 Il Problema dei Due Corpi e la Meccanica Celeste 49
2.1 Premessa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
2.2 Moti Piani . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
2.3 Moti Centrali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
3
-
2.4 Formule di Binet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
2.5 Sulle Coniche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
2.6 Kepler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
2.7 Newton . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
2.8 Massa Ridotta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
2.9 Soluzione del Problema Ridotto ad un Corpo, il Problema di Kepler . . . . 61
2.10 Lequazione di Kepler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
2.11 Il Vettore di Runge-Lenz per il Problema di Kepler Spaziale . . . . . . . . . 67
2.12 Circonferenza di Hamilton delle velocita` nel Problema di Kepler piano . . . 67
2.13 Teorema di Bohlin (nella versione di Faure-Arnold): Equivalenza orbitaledei potenziali elastico e Kepleriano . . . . . . . . . . . . . . . . . . . . . . . 68
2.14 Sulle soluzioni esatte del Problema a Tre Corpi ed N Corpi . . . . . . . . . 70
3 Teoria della Stabilita` 75
3.1 Lyapunov Stabilita` . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
3.2 Stabilita` Asintotica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
3.3 Teorema di Lagrange-Dirichlet . . . . . . . . . . . . . . . . . . . . . . . . . 81
3.4 Stabilizzazione Giroscopica . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
3.5 Equazioni Differenziali Lineari (richiamo) . . . . . . . . . . . . . . . . . . . 86
3.6 Linearizzazione attorno ad Equilibri Stabili . . . . . . . . . . . . . . . . . . 87
3.7 Primo Metodo di Lyapunov . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
3.8 Stabilita` per Sistemi Dinamici infinito-dimensionali . . . . . . . . . . . . . . 90
3.9 La Teoria di Floquet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
4 Meccanica di Lagrange 93
4.1 Dinamica dei Sistemi Olonomi Lisci: Equazioni di Lagrange . . . . . . . . . 93
4.2 Sugli Integrali Primi delle Equazioni di Lagrange . . . . . . . . . . . . . . . 99
4.3 Teoria di Routh . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
4.4 Teoria di Nother . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
5 Piccole Oscillazioni nei Sistemi Lagrangiani 107
6 Il Pendolo di Foucault: Appunti per lo studio del problema linearizzato111
7 Meccanica Elementare del Corpo Rigido 117
7.1 Il Corpo Rigido e` un sistema vincolato a vincoli olonomi . . . . . . . . . . . 117
7.2 Il Corpo Rigido e` un sistema vincolato a vincoli lisci . . . . . . . . . . . . . 118
7.3 Dinamica del Corpo Rigido . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
7.4 Equazioni di Euler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
4
-
8 Calcolo delle Variazioni 129
8.1 Principio Variazionale di Hamilton . . . . . . . . . . . . . . . . . . . . . . . 129
8.2 Minimo nel Calcolo delle Variazioni: il Principio della Minima Azione . . . 132
8.3 Sinossi di Teoria Variazionale in H1 . . . . . . . . . . . . . . . . . . . . . . 137
8.4 Minimo Forte e Minimo Debole . . . . . . . . . . . . . . . . . . . . . . . . . 139
8.5 Moti spontanei e geodetiche su varieta` . . . . . . . . . . . . . . . . . . . . . 140
8.6 Metrica di Jacobi. Formulazione non variazionale del Principio di Maupertuis144
8.7 Riduzione Isoenergetica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146
8.8 Problema di Plateau dellarea minima (o delle bolle di sapone). . . . . . . . 147
8.9 Problema inverso nel Calcolo delle Variazioni: Teorema di Volterra-Vainberg 149
9 Meccanica di Hamilton 155
9.1 Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155
9.2 Fibrato cotangente o spazio delle fasi . . . . . . . . . . . . . . . . . . . . . . 156
9.3 Trasformazione di Legendre . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
9.4 Globalizzazione della trasformazione di Legendre . . . . . . . . . . . . . . . 158
9.4.1 Appendice: Diffeomorfismi globali di Rn in se` . . . . . . . . . . . . . 1599.5 Equazioni di Hamilton . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 160
9.6 Principio Var. di Hamilton-Helmholtz . . . . . . . . . . . . . . . . . . . . . 161
9.6.1 Interpretazione delle Equazioni di Hamilton come opportune equa-zioni di Lagrange . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162
9.6.2 Cenno sul problema delle Lagrangiane equivalenti . . . . . . . . . . . 163
9.7 Coniugazione di Campi Vettoriali . . . . . . . . . . . . . . . . . . . . . . . 164
9.8 Trasformazioni Canoniche . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165
9.9 Condizione di Lie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 170
9.9.1 La Condizione di Lie e` N & S caratterizzante le Trasformazioni Ca-noniche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173
9.10 Metodo dintegrazione di Hamilton-Jacobi . . . . . . . . . . . . . . . . . . . 174
9.10.1 Metodo dintegrazione di H-J: Hamiltoniana con n1 variabili cicliche1769.10.2 Metodo dintegrazione di H-J: Hamiltoniana separabile . . . . . . . . 177
9.10.3 Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 178
10 Algebra dei Campi Vettoriali 183
10.1 Morfismi dAlgebra, Parentesi di Lie e di Poisson . . . . . . . . . . . . . . . 183
10.2 Algebra di Lie e Trasformazioni Canoniche . . . . . . . . . . . . . . . . . . . 185
10.3 Significato dinamico delle parentesi di Lie . . . . . . . . . . . . . . . . . . . 187
10.4 Formula di Lie-Trotter-Chernov . . . . . . . . . . . . . . . . . . . . . . . . . 190
10.5 Derivata di Lie di Campi Vettoriali . . . . . . . . . . . . . . . . . . . . . . . 190
10.6 Cenni sulla Teoria delle Perturbazioni dei Sistemi Hamiltoniani . . . . . . . 192
10.6.1 Sistemi Hamiltoniani integrabili . . . . . . . . . . . . . . . . . . . . 192
10.6.2 Perturbazioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193
5
-
10.6.3 Frequenze Diofantee: Convergenza del primo passo perturbativo . . 194
11 Cenno sullanalisi qualitativa dello spazio delle fasi 19911.1 Teoremi del Trasporto e di Liouville . . . . . . . . . . . . . . . . . . . . . . 19911.2 Teorema del Ritorno di Poincare . . . . . . . . . . . . . . . . . . . . . . . . 202
12 Metodo di Newton e Sistemi Dinamici 20512.1 Metodo di Newton . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20512.2 Equazioni alle differenze finite, campo vettoriale di Newton e stabilita` asin-
totica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20712.3 Coniugazione del campo vettoriale di Newton . . . . . . . . . . . . . . . . . 20912.4 Un (altro) teorema di inversione globale . . . . . . . . . . . . . . . . . . . . 209
13 Vettori Applicati, Velocita` Angolare, Cinematica Relativa 21113.1 Vettori Applicati . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211
13.1.1 Asse Centrale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21213.1.2 Centro di un sistema di vettori applicati paralleli a con R 6= 0 . . . . 213
13.2 Richiami sulle trasformazioni lineari . . . . . . . . . . . . . . . . . . . . . . 21513.3 Cinematica rigida . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 216
13.3.1 Velocita` angolare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21613.4 Cinematica relativa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 221
14 Derivata di determinante 225
15 Test 22715.1 Alcune domande su argomenti interessanti la prima prova parziale di Fisica
Matematica 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22715.2 Alcune domande su argomenti interessanti la seconda prova parziale di Fisica
Matematica 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 228
6
-
Capitolo 1
Sistemi Meccanici Vincolati
Vi sono anzitutto le difficolta` che si incontrano quando
si vogliano definire le nozioni fondamentali.
Che cose` la massa? E risponde Newton il
prodotto del volume per la densita`.
Sarebbe meglio replicano Thomson e Tait dire
che la densita` e` il quoziente della massa per il volume.
Che cose` la forza? E risponde Lagrange una
causa che produce il movimento o che tende a produrlo.
E affermera` invece Kirchhoff il
prodotto della massa per laccelerazione. Ma allora
perche non dire che la massa e` il quoziente della
forza per laccelerazione? Queste difficolta`
sono inestricabili.
Henri Poincare, Le idee di Hertz sulla Meccanica, 1897. 1
1.1 Fondamenti della Meccanica
Introduciamo una elenco di oggetti matematici necessari per lo studio della Meccanica deiSistemi Vincolati. La presentazione di tale elenco, almeno per i primi punti, e` di tipo
1Il pessimismo che traspare dalle parole di Poincare sulledificazione rigorosa dei fondamenti della Mec-canica Classica e` decisamente superato: le costruzioni di Mach e Painleve sui principi della Meccanica sonostate in tempi relativamente recenti riprese rigorosamente in unopera poderosa e originale a cui il lettoreinteressato ai fondamenti dovra` rivolgersi naturalmente non da principiante, ma dopo essersi addentratonel corpo vasto della meccanica:
Aldo Bressan, Metodo di assiomatizzazione in senso stretto della meccanica classica. Applicazione diesso ad alcuni problemi di assiomatizzazione non ancora completamente risolti, Rendiconti del SeminarioMatematico, Universita` di Padova, 32 (1962):55-212.
7
-
gerarchico, nel senso che ogni oggetto via via introdotto ha un carattere piu` generale edindipendente dal successivo. Non cureremo la costruzione completa dei fondamenti, bensrichiameremo rapidamente quei concetti utili per entrare concretamente nel cuore dellostudio dei problemi dinamici meccanici.
1.1.1 Spazi Inerziali, Riferimenti Inerziali, Tempo Assoluto
Nellambito della Meccanica Classica consideriamo uno Spazio Inerziale . Questo e` mo-dellato matematicamente da uno spazio affine 3-dimensionale, del quale scegliamo un puntoO (origine) e tre vettori ortonormali ad O applicati: lo spazio vettoriale generato sara` dettoRiferimento Inerziale R associato: denoteremo con vettori di R3 i punti geometrici rap-presentati in tale riferimento. Mentre il ruolo operativo di tali spazi inerziali emergera` trabreve nella costruzione della dinamica e dei moti dinamicamente possibili2 la loro esistenzae` un fatto assiomatico. Piu` precisamente, si postula lesistenza di uno spazio cinematicoinerziale. A volte, cio` e` detto Prima Legge della Meccanica Classica. Ogni altro spazioinerziale trasla uniformemente rispetto a questo.Ancora in tale ambito classico, lInsieme degli Istanti, che ha la struttura di uno spazioaffine 1-dimensionale, viene rappresentato, una volta scelto lorigine e lunita` di misura,dallo spazio vettoriale R1, indipendentemente (tempo assoluto) dalla scelta di e delriferimento inerziale.
1.1.2 Punti materiali e masse
Nel nostro modello in costruzione luniverso contenga solamente n punti materialiM1, ...,Mi,...,Mn, di massa rispettivamente m1, ...,mn e mi > 0. Lo schema di punto materiale, qualemodello di particella adimensionale senza struttura interna, e il concetto di massa, sonoritenuti di tipo primitivo, senza necessita` quindi di ulteriori specificazioni.
1.1.3 Spazio delle Configurazioni e Spazio degli Atti di Moto per unsistema di punti materiali liberi
Nel riferimento inerziale scelto le configurazioni possibili per il nostri sistema di puntimateriali M1, ...,Mi, ...,Mn, attualmente non vincolato, sono tutti e soli i vettori di R3n escriveremo
(OP1, ..., OPi, ..., OPn) R3 ... R3 = R3n.Lo spazio R3n R3n formato dalle configurazioni e corrispondenti velocita` consentite alnostro sistema M1, ...,Mi, ...,Mn,
(OP1, ..., OPi, ..., OPn; v1, ...vj , ...vn) R3n R3n,2vedremo che in essi, e solo relativamente ad essi, i moti dinamicamente possibili sono caratterizzati
dalla legge di Newton nella versione del punto 7.
8
-
e` detto spazio degli atti di moto 3.
1.1.4 Forze
Relativamente alla scelte sopra operate sul sistema in studio, sono assegnate delle leggiforza mediante delle funzioni che rappresentano per ogni i = 1, ..., n la risultante delleazioni delle restanti n 1 particelle sulla particella Mi. In tutta generalita`, tali forzepotranno dipendere dalle configurazioni di tutte le particelle, dalle loro velocita`, e daltempo,
Fi : R3n R3n R R3
(..., OPj , ...,vk, ..., t) 7 Fi(..., OPj , ...,vk, ..., t).Il significato operativo di tali azioni sara` precisato tra breve, nella definizione di motidinamicamente possibili.
Esempio 1. Per n = 2, le due particelle (punti materiali) M1,M2 siano mutuamenteinteragenti mediante forze elastiche attrattive lineari (p.e. e` tesa una molla tra loro), in talcaso, per qualche costante strutturale h > 0,
Fi : R6 R6 R R3, i = 1, 2
(OP1, OP2,v1,v2, t) 7 F1(OP1, OP2,v1,v2, t) := h(OP2 OP1) = hP1P2 R3
(OP1, OP2,v1,v2, t) 7 F2(OP1, OP2,v1,v2, t) := h(OP1 OP2) = hP2P1 R3
Si noti che tale assegnazione di legge forza non dipende ne` dalle velocita` ne` dal tempo, intal caso diremo che il sistema di forze (F1,F2) e`, appunto, posizionale.
Esempio 2. Sia n = 1, supponiamo di voler schematizzare con una legge forza lazione diresistenza che un mezzo (es., un liquido) agisce sulla particella in studio M ; tale forza e`(dallesperienza) tanto piu` intensa tanto piu` e` intensa la velocita`, inoltre si oppone al moto;schematizziamo tutto cio` cos`: per qualche costante strutturale k > 0
F : R3 R3 R R3
(OP,v, t) 7 F(OP,v, t) := kvQuesto e` evidentemente una assegnazione di legge forza non posizionale.
3Detto anche spazio delle fasi, sebbene tale nome, a rigore, sia attribuito da molti autori al solo ambientedella Meccanica Hamiltoniana.
9
-
1.1.5 Vincoli e loro descrizione geometrica
Supponiamo ora di introdurre mediante dei meccanismi ideali delle restrizioni alle confi-gurazioni fin qui ammissibili per il nostro sistema. Diremo che il nostro sistema di puntimateriali e` vincolato in maniera olonoma se, per ogni t R, le configurazioni possibili aquellistante, sono rappresentate da una sottovarieta` N -dimensionale St R3n, N < 3n.Diremo che il nostro sistema e` vincolato in maniera anolonoma se le restrizioni coinvolgonoanche le velocita`, asserendo che, per ogni t R, le configurazioni e velocita` possibili sonodate da una sottovarieta`At dello spazio degli atti di moto del sistema libero, At R3nR3n.Ci occuperemo del seguito fondamentalmente di vincoli olonomi.
Allo stato attuale, iniziale, di costruzione della teoria non ci preoccuperemo della defi-nizione rigorosa della nozione di sottovarieta` e piu` in generale di varieta`; tentereremo diintrodurla in modo operativo e cureremo in modo rigoroso solamente il suo aspetto locale.Supponiamo che il nostro sistema di n particelle, che in assenza di vincoli avrebbe a dispo-sizione tutto R3n quale spazio di configurazione, sia appunto vincolato in un sottoinsiemedi R3n. Tale sottoinsieme sia dato dagli zeri di qualche funzione f abbastanza regolare,almeno di classe C1 per poter applicare il teorema della funzione implicita che qui sottorichiamiamo a nostro uso, ma anche di piu` (C3) per i nostri scopi legati alla meccanica.Daremo inizialmente, per tentativo di chiarezza, un esempio di vincolo indipendente daltempo. Dunque, sia data
f : R3n Rk
(OP1, ...., OPn) 7(f(OP1, ...., OPn)
)=1,...,k
e affermiamo di aver realizzato un meccanismo che vincola il sistema in
S = f1(0) ={
(OP1, ...., OPn) : f(OP1, ...., OPn) = 0} R3n,
f1(OP1, ...., OPn) = 0....
f(OP1, ...., OPn) = 0....
fk(OP1, ...., OPn) = 0
In tutta generalita`, se f non e` lineare, linsieme S non ha proprieta` algebriche interessan-ti, in altre parole, non e` un sottospazio vettoriale di R3n : tale fatto genera una primagrande difficolta`4: il problema della descrizione geometrica, della parametrizzazione ditale insieme S. Il teorema della funzione implicita (detto t. del Dini) ci aiutera`, almeno
localmente. Useremo la seguente notazione OPi = (x(i)1 , x
(i)2 , x
(i)3 ) = (x
(i) )=1,2,3.
4sono difficolta` legate a vari aspetti di non-linearita` che spesso incontreremo nello studio dei sistemidinamici.
10
-
(Una versione del) Teorema della Funzione Implicita: Sia data una funzione f di classeC1 come sopra, k < 3n,
f : R3n Rk
OP 7 f(OP )Siai) OP = (OP 1, ...., OP i, ..., OPn) un punto di R3n appartenente aS = f1(0): f(OP ) = 0;ii) valga la seguente ipotesi algebrica:il rango del differenziale di f valutato in OP sia massimo 5, cioe` k,
rk df(OP ) = k, in dettaglio : rk
f1
x(1)1
... f1x
(n)3
.... ... ...
.... fx
(i)
...
.... ... ...fk
x(1)1
... fkx
(n)3
(OP ) = k.
Esiste allora un intorno aperto U in R3nk ed una mappa C1 su di esso definita, e a valoriin R3n, scriveremo N := 3n k,
U RN R3n
q = (q1, ..., qh, ..., qN ) 7 OP (q)tale che(1) f(OP (q)) = 0 q U , (2) OP (U) e` un insieme aperto di S nella sua topologiaindotta, OP OP (U), e OP () stabilisce un omeomorfismo di U nellimmagine OP (U) S.
Osservazione 1. Tale teorema ci dice che possiamo utilizzare le variabili q come parametridescriventi localmente S, infatti per (1) siamo sicuri OP = OP (q) S, inoltre, per (2),con tale mappa descriviamo localmente ma completamente S perche OP (U) e` un insiemeaperto di S, nella sua topologia indotta. Tali variabili q U RN si dicono coordinateLagrangiane (locali) per S.Osservazione 2. La mappa inversa dellomeomorfismo sopra descritto,
S OP (U) 3 OP 7 q = q(OP ) U RN ,
si dice carta locale per S: descrive un pezzo delloggetto non lineare S con un pezzo dellospazio vettoriale RN , proprio come le carte geografiche.
5si richiama che al differenziale di f valutato in un punto, che e` una mappa lineare, resta associata unamatrice di k righe e 3n colonne.
11
-
Osservazione 3. Unattenta ispezione della dimostrazione (e di enunciati non necessaria-mente legati allapplicazione in meccanica) del teorema del Dini mostra che le coordinate
Lagrangiane q1, ..., qN , N = 3n k, sono selezionabili tra le 3n variabili x(1)1 , ...., x(n)3complementari rispetto alle k colonne rispetto alle quali leggiamo il rango massimo nellamatrice del differenziale sopra introdotta. Consideriamo il seguente esempio: Superficiesferica di raggio R > 0.Sia n = 1, k = 1 e sia f data:
f : R3 R(x1, x2, x3) 7 f(x1, x2, x3) = (x1)2 + (x2)2 + (x3)2 R2
S = f1(0) ={
(x1, x2, x3) : (x1)2 + (x2)
2 + (x3)2 R2 = 0
}Consideriamo per esempio il punto OP = (x1, x2, x3) = (0, 0, R), il polo nord di S.
rk df(OP ) = rk(fx1
fx2
fx3
) OP
=(2x1 2x2 2x3
) OP
=(0 0 2R
)= 1 = k.
Le variabili q1, q2 sono identificabili con x1, x2, la mappa OP e` data da (N = 3 1 = 2)
U := {x2 + y2 < R2} 3 (q1, q2) 7 OP (q1, q2) =
x1 = q1x2 = q2x3 =
R2 (q1)2 (q2)2
Dunque, la mappa stabilisce lomeomorfsmo tra la calotta boreale (senza equatore) e ildisco aperto di R2 di raggio R. Se ora consideriamo, per esempio, il polo sud OP =(0, 0,R), allora la nuova mappa e` data da
U := {x2 + y2 < R2} 3 (q1, q2) 7 OP (q1, q2) =
x1 = q1x2 = q2x3 =
R2 (q1)2 (q2)2
Osservazione 4. (Non ci si curi di approfondire i concetti qui di seguito velocemente accen-nati, almeno strettamente in relazione a questo primo corso di Fisica Matematica) DiremoSottovarieta` Differenziale di R3n un sottoinsieme S di R3n, con la topologia indotta, cheammetta un ricoprimento aperto {U}I , (U) = U, S = IU, tale che su ogni U siadefinita una mappa carta locale come sopra, a valori in opportuni aperti di uno stesso RN ,ed inoltre tale che relativamente agli aperti per cui U U 6= esista un diffeomorfismolocale6 q = q(q) e linverso q = q(q) rappresentante il cambio di coordinate dalle qalle q, con qualche altra precisazione topologica su cui ora non entriamo in merito (Hau-sdorff, paracompattezza). Linsieme di tali carte locali si chiama, chiaramente, Atlante. Il
6per esempio, sulla sfera prima descritta, q potrebbero essere due coordinate cartesiane nel disco aperto diraggio R privato del segmento-raggio dei punti dallorigine (0, 0) al punto (0, R), mentre q delle coordinatepolari, angolo e raggio r, (, r) appartenenti al rettangolo aperto ]0, 2pi[]0, R[.
12
-
numero N e` detto Dimensione di S. Benche non ogni sottovarieta` si descriva globalmentecome zeri di funzione, localmente questo e` sempre possibile.
Osservazione 5. Spazi Tangenti ad una varieta` vincolare S. Formalmente, pensando allesottovarieta` immerse in R3n, lo spazio tangente in OP a S,
TOPS
e` la varieta` affine immersa in R3n che contiene OP , che ha la stessa dimensione di S, e cheapprossima al primo ordine S. (Primo esempio semplice a cui pensare: curva differenzialee retta tangente in un suo punto.) Definizione alternativa equivalente: e` linsieme delleclassi di equivalenza delle locali curve differenziali ] , [3 7 OP () S a valori in Se transitanti per = 0 per il punto OP , ove la relazione di equivalenza e`:
OP () OP () se e solo se ddOP (0) =
d
dOP (0)
La varieta` vincolare S sia localmente descritta come zeri di una funzione f : in tal caso,le curve sopra descritte, tra le quali abbiamo definito la relazione dequivalenza , hannola proprieta`
f(OP ()) = 0 ] , [,differenziando rispetto a e valutando in = 0, denotando con il simbolo (e` un uso anticoin meccanica)
P :=d
dOP (0) = ... =
d
dOP (0)
il vettore velocita` caratterizzante la classe, osserviamo che
0 =d
d[f(OP ())]|=0 = df(OP (0))P
Dunque:
TOPS = ker [df(OP )] (ker : nucleo) () La varieta` vincolare S sia localmente descritta con una mappa dimmersione vincolareU 3 q 7 OP (q) R3n : in tal caso costruiremo linsieme delle curve componendo lamappa dimmersione OP () con tutte le arbitrarie curve differenziali 7 q() a valori inU e transitanti per il medesimo q per cui OP = OP (q),
P =d
d[OP (q())]|=0 = dOP (q) d
dq(0),
ove i vettori ddq(0) percorrono tutto RN . Dunque:
TOPS = im [dOP (q)] (im : immagine) ()
13
-
Osservazione 6. Spostamenti Virtuali. A volte il vincolo e` rappresentato da una varieta`mobile, dipendente dal tempo. Si pensi per esempio ad una particella (n = 1) vincolatasopra una superficie sferica con raggio pulsante R(t) = 2 + sin t. Ad ogni t R, talevarieta` sara` descritta dagli zeri di una funzione che ora dipendera` dal tempo:
f : R3n R Rk
(OP1, ...., OPn, t) 7(f(OP1, ...., OPn, t)
)=1,...,k
St ={OP R3n : f(OP, t) = 0
}Si ripercorrono, parametricamente per ogni t fissato, le costruzioni di prima: in sostanza,per t fissato, si congela temporalmente la varieta` mobile e si costruiscono, per esempio,gli spazi tangenti TOPSt, naturalmente se OP St; e` uso classico in meccanica chiamarespostamenti virtuali i vettori P degli spazi TOPSt .
1.1.6 Vincoli e loro descrizione dinamica
Il modo, lazione, con cui il vincolo fa sentire la sua presenza sulle particelle, vincolandolesu di se, e` rappresentato da forze, che chiameremo Reazioni Vincolari. Tale affermazione avolte e` chiamata nei manuali classici, come il Levi Civita-Amaldi, Postulato delle ReazioniVincolari. Accanto dunque alla descrizione geometrica del vincolo, dovremo dichiararela classe OP,v,t delle reazioni vincolari esplicabili da tale vincolo. Dunque il vincolo e`completamente descritto quando accanto alla sua definizione geometrica (p.e., sottovarieta`di R3n) si dichiara anche linsieme OP,v,t, che rappresenta, per ogni (OP,v) atto di motoconsentito geometricamente dal vincolo al tempo t , linsieme delle reazioni vincolari, oforze vincolari, che a quel dato istante e in quel dato atto di moto il vincolo puo` esplicareper mantenere il sistema, appunto, vincolato su di se`. Si noti che a differenza delle leggiforza, per le reazioni vincolari non ce` una legge costitutiva, una funzione, che ad ogni(OP,v) ad un dato istante t associa un ben preciso vettore = (1...,i, ...,n) R3n;la situazione nuova e` la seguente: ad ogni (OP,v), ad un dato istante t, si associa un benpreciso insieme di vettori reazioni vincolari esplicabili, OP,v,t.Per esempio, per n = 1, nel caso olonomo indipendente dal tempo, il vincolo sia datogeometricamente da una superficie 2-dim S in R3; diciamo ora che tale vincolo sia privodi attrito, cioe` il vincolo sia in grado di esplicare tutte e sole le reazioni vincolari concomponente tangenziale a S nulla: pertanto, per ogni configurazione geometricamenteconsentita OP S, linsieme OP,v,t = OP e` rappresentato da tutti e soli i vettori cheappartengono alla retta passante per OP e ortogonale a S. Rappresentano casi di forteinteresse fisico la classe dei vincoli privi dattrito, la classe dei vincoli con attrito nel modellodi Coulomb e la classe dei vincoli lisci (o ideali), che, come vedremo tra breve, contienepropriamente la classe dei vincoli privi d attrito.
14
-
1.1.7 Moti Dinamicamente Possibili
Nel sistema di riferimento inerziale scelto, in cui abbiamo costruito gli oggetti descriventiil sistema materiale vincolato, ed in ogni altro sistema di riferimento inerziale (lo studio diquestultimo aspetto necessita di un accurato sviluppo della cinematica relativa), vale laseguente costruzione dei moti dinamicamente possibili. Questo e` in sostanza il contenutodella Seconda Legge della Meccanica Classica.
Diremo che la curva due volte differenziabile
R I 3 t 7 OP (t) = (OP1(t), ..., OPi(t), ..., OPn(t)) R3n
e` un moto dinamicamente possibile se, per ogni istante t in cui il moto e` definito,i) il vincolo e` capace di esplicare delle reazioni vincolari
t 7 (...,i(t), ...) OP (t), ddtOP (t),t
tali che valgano, t I,
mid2
dt2OPi(t) = Fi(..., OPj(t), ...,
d
dtOPk(t), ..., t) + i(t), i = 1, ..., n
ii) il moto soddisfa geometricamente al vincolo: (..., OPi(t), ...) St R3n, t I.Notiamo che a questo stadio di generalita` le incognite del nostro problema dinamico sonodate sia dal moto, sia dalle reazioni vincolari lungo quel moto: le equazioni dinamichesopra scritte non sono dunque necessariamente interpretabili come equazioni differenziali enon sono quindi, in prima misura, trattabili direttamente con i metodi usuali dellanalisi.Un caso in cui la legge fondamentale della meccanica sopra introdotta e` subito interpretabilecome equazione differenziale e` il caso dellassenza di vincolo: S = R3n, OP,v,t = {0}. Intal caso i moti dinamicamente possibili sono dati da tutte e sole le soluzioni della seguenteequazione differenziale del secondo ordine in R3n, eventualmente dipendente dal tempo (sele forze lo sono)
mid2
dt2OPi(t) = Fi(..., OPj(t), ...,
d
dtOPk(t), ..., t)
Molto spesso i teoremi sulle equazioni differenziali che si trovano nei manuali di analisimatematica sono per equ. diff. nel formato del primo ordine, eventualmente dipendentidal tempo. Questo non e` un grave problema perche rapidamente traduciamo le nostre eq.diff. del secondo ordine (nello spazio delle configurazioni) in eq. diff. del primo ordine(nello spazio degli atti di moto), basta opportunamente raddoppiare le incognite, cos:
z :=
...OPj...vi...
R6n, Z(z, t) :=
...vj...
1mi
Fi(OP,v, t)
...
, Z : R6n R R6n
15
-
Pertanto il problema fondamentale della ricerca dei moti dinamicamente possibili (solo peril momento ristretto al caso di assenza di vincolo) diventa: determinare curve R I 3 t 7z(t) R6n per cui, t I,
z(t) = Z(z(t), t) ()La funzione Z(z, t) si chiama campo vettoriale; pensiamo al caso, per semplicita`, indipen-dente dal tempo, z 7 Z(z), essa va cos interpretata geometricamente:in ogni punto z dello spazio7 (pensiamolo pure affine) attacchiamo il vettore Z(z), e inquesta selva di frecce le curve risolventi sono quelle curve differenziabili le cui velocita`sono, punto per punto z(t) ove transitano, esattamente le frecce-vettori assegnate Z(z(t)).
Un teorema fondamentale di Cauchy, riportato qui sotto, ci dice sostanzialmente che un podi regolarita` analitica per Z permette di affermare lesistenza di una ed ununica soluzionelocale di () che transita ad un dato istante prefissato t0 per il punto(=posizione+velocita`)z0. Quando questo teorema funziona in meccanica, si parla spesso di determinismoclassico.
(Una versione del) Teorema di esistenza e unicita` locale per i problemi di Cauchydelle equazioni differenziali ordinarie : Sia il campo vettoriale dipendente dal tempoZ,
Z : U( R6n) I( R) R6n, z0 U = U, t0 I = I
continuo e, uniformemente in t I, Lipschitziano in z,
|Z(z1, t) Z(z2, t)| L|z1 z2|, z1, z2 U, per qualche L > 0.
Allora esiste un sottointervallo aperto I I contenente t0 su cui e` definita una ed ununicacurva I 3 t 7 z(t) U soddisfacente lequazione differenziale () e transitante per il datoiniziale z(t0) = z0.
Osservazione importante: Vedremo che tale schema deterministico, consistente nella teoriaelementare delle equazioni differenziali, sara` utilizzabile anche in una importante classe disistemi vincolati: i sistemi olonomi lisci.
1.2 Quiete ed Equilibrio
Un moto si dice di quiete se e` costante:
t 7 OPi(t) OP i .
Diremo che una configurazione consentita dai vincoli
(OP i )i=1,...,n = (..., OPi , ...) St
7in questo caso, spazio degli atti di moto o spazio delle fasi.
16
-
e` di equilibrio per il nostro sistema meccanico se il moto di quiete in tale configurazione e`dinamicamente possibile; piu` in dettaglio, (OP i )i=1,...,n e` di equilibrio se il vincolo e` capacedi esplicare delle reazioni vincolari t 7 (...,i(t), ...) OP ,0,t tali che, per ogni t,
0 = Fi(..., OPj , ...,0, ..., t) + i(t), (..., OP
i , ...) St.
Si noti con attenzione che mentre lequilibrio e` una configurazione, la quiete e` un moto.E pure importante la seguente osservazione: Il fatto che una certa configurazione siadequilibrio non implica necessariamente che il moto conseguente al porre il sistema inquella configurazione con atto di moto nullo sia la quiete. Esempio. Una particella dimassa m soggetta alla forza F(OP ) = 3
OP u u e` vincolata senza attrito su di un
asse X parallelo al versore u e contenente lorigine. E facile mostrare (farlo) che i motidinamicamente possibili sono dati da tutte e sole le soluzioni di
mx = 3x,
ove x e` lascissa sullasse X; x = 0 e` configurazione dequilibrio, ed il Problema di Cauchyx(0) = 0, x(0) = 0 e` soddisfatto, oltre da x(t) 0, da altre infinite soluzioni (trovarle, emeditare sulla Lipschitzianita` assente).
1.3 Vincoli privi dattrito
E di importanza cruciale la ricerca e la definizione di modelli di vincolo, che da un latosiano fisicamente interessanti, utili, dallaltro porgano una descrizione dei moti dinamica-mente possibili trattabile matematicamente, riuscendo, tra laltro, a scindere la difficolta`della determinazione del moto (teoria delle equazioni differenziali, problema di Cauchyed eventuale determinismo-unicita`) da quella della determinazione delle reazioni vincolari.Consideriamo a tal scopo i sistemi cosiddetti privi dattrito, gia` precedentemente accennati.Per fissare le idee, consideriamo una particella vincolata su una varieta` S 1-dimensionale(curva) o 2-dimensionale (superficie). Diciamo che tale vincolo e` privo di attrito, se nonsono ammissibili componenti tangenziali di reazione vincolare al piano tangente locale allaconfigurazione: pertanto, nel caso 1-dimensionale per ogni configurazione geometricamenteconsentita OP S, linsieme OP e` rappresentato da tutti e soli i vettori che appartengonoal piano ortogonale alla retta tangente a S in OP ; nel caso 2-dimensionale per ogni confi-gurazione geometricamente consentita OP S, linsieme OP e` rappresentato da tutti esoli i vettori che appartengono alla retta ortogonale al piano tangente locale a S in OP .
1.4 Un sistema meccanico la cui dinamica e` retta dallequa-zione differenziale x = f(x), con x R1
(Attenzione: allinterno di questo lungo esempio e` introdotta la nozione di Integrale Primo.)
17
-
Studiamo in dettaglio il sistema dinamico composto da una particella P di massa m > 0,che e` soggetta alla (legge) forza posizionale, indipendente dal tempo, data da:
F : R3 R3, OP 7 F(OP ).La forza F = (F1, F2, F3) non sia necessariamente conservativa, cioe` lassociata 1-formadifferenziale Lavoro L in R3, i cui coefficienti sono dati proprio dalle componenti dellafunzione F,
L : R3 (R3), OP 7 L(OP ) = F(OP ) OP, OP R3
non sia necessariamente chiusa (qui, in R3, la condizione di chiusura si scrive: rot F = 0), edunque, visto che lambiente R3 e` semplicemente connesso, non sia necessariamente esatta(ma su tali aspetti si insistera` altrove).Introduciamo il vincolo geometrico olonomo 1-dimensionale (una guida), di cui unagenerica immersione vincolare, regolare (almeno C2), sia data da:
R 3 7 OP () R3.A questa generica parametrizzazione della curva chiederemo, oltre alla regolarita`, che nonammetta punti tali che dOPd (
) = 0, cio` e` un fatto puramente tecnico. La particellaora e` vincolata su tale guida: preliminarmente, studieremo in dettaglio la geometria dellacurva, mediante il
Triedro di Frenet: Rettifichiamo la curva, cioe` misuriamone la lunghezza, il che e`equivalente allintroduzione del parametro (lunghezza) darco s = s():
s() :=
0
dOPd
()R3d, ove
WR3
:=W 21 +W
22 +W
23 .
Lipotesi che dOPd 6= 0 mostra che ds()d =dOPd ()R3 > 0 e dunque la mappa 7
s() e` un diffeomorfismo di R in R. E cos ben definita linversa s 7 (s), e con essariparametrizziamo la curva col parametro darco s:
R 3 s 7 OP (s) := OP ((s)) R3.
Notiamo subito che la funzione vettoriale tangente dOPds (s) ha identicamente norma euclideaunitaria: dOP
ds(s)R3
=dOPd
()=(s)
d
ds(s)R3 1.
Tale derivata la chiameremo versore (=vettore unitario) tangente:
t(s) :=dOP
ds(s).
18
-
Studiamo la derivata di t. Indichiamo con n, laddove e` definito (||dtds(s)|| 6= 0), il seguenteversore:
n(s) :=dtds(s)
||dtds(s)||.
Per esempio, per una retta t e` costante, dunque n non e` (ovunque) definito. Anzi,questesempio ci suggerisce di definire come curvatura k della curva in s la quantita` scalare:
k(s) :=
dtds(s) .
Introduciamo pure la definizione
(s) :=1
k(s).
Si noti che i versori t e n sono tra loro ortogonali, infatti (t t 1):
0 =d
ds(t(s) t(s)) = 2 t(s) n(s)
(s).
Teorema. Per ogni s tale che k(s) 6= 0,i) il versore n(s) punta verso il centro del locale cerchio osculatore di cuiii) (s) ne e` il raggio.
Prova. Mentre la retta tangente in s e` lapprossimazione di primo ordine (lineare in s)alla curva, il cerchio osculatore in s e`, per definizione, lapprossimazione di secondo ordine(quadratica in s) alla curva in un punto s. Infatti, sia (non e` restrittivo) s = 0, alloralocalmente
OP (s) = OP (0) + t(0) s+1
2!
dt
ds(0) s2 +O(s3) = OP (0) + t(0) s+ 1
2!
n(0)
(0)s2 +O(s3)
Notiamo che, al secondo ordine in s (cioe` a meno di O(s3)), la curva e` descritta nel piano pipassante per il punto OP (0) e generato dai vettori t(0) e n(0). In tale piano consideriamoil cerchio che passa per OP (0), ha raggio (0), e centro in OC = OP (0) + (0)n(0). (Siabbozzi in un disegno un piano cartesiano in cui il versore x e` n(0) e il versore y e` t(0)).Scriviamo lequazione parametrica di tale cerchio nel parametro lunghezza darco s:
OQ(s) = OP (0) + (0) sins
(0)t(0) + (0)
(1 cos s
(0)
)n(0).
Calcoliamo derivate prime e seconde di OQ(s) in s = 0:
d
dsOQ(s)
s=0
=[
coss
(0)t(0) + sin
s
(0)n(0)
]s=0
= t(0),
19
-
d2
ds2OQ(s)
s=0
=[ 1
(0)sin
s
(0)t(0) +
1
(0)cos
s
(0)n(0)
]s=0
=n(0)
(0).
Dunque, effettivamente tale cerchio cos` costruito approssima la curva, localmente in s = 0,al secondo ordine.
Definiamo infine il versore binormale
b(s) := t(s) n(s).
Infine: in ogni punto OP (s) della curva, con curvatura non nulla, resta definito il triedro
ortonormale levogiro(t(s),n(s),b(s)
), detto triedro di Frenet.
Sia ora t 7 s(t) un moto geometrico, cinematico, non necessariamente dinamicamentepossibile, per P . Determiniamo le associate grandezze cinematiche: velocita` ed accele-razione.
v(t) =d
dt
[OP (s(t))
]= t(s(t)) s(t),
a(t) =d2
dt2
[OP (s(t))
]=
d
dt
[t(s(t)) s(t)
]=
d
dst(s(t)) s2(t) + t(s(t)) s(t),
a(t) = t(s(t)) s(t) +n(s(t))
(s(t))s2(t).
(Si veda pure: G. De Marco, Analisi Due/1, cap. 3, Par. 9 e 10, oppure G. De Marco,Analisi Due (seconda edizione) alla fine del cap. 3.)
Riprendiamo ora la descrizione del nostro sistema dinamico. Sia t 7 s(t) un genericaevoluzione di P sulla guida. Supponiamo che la particella sia vincolata senza attrito sullaguida: cio` e` equivalente a dire che la classe delle reazioni vincolari esplicabili, quando lattodi moto vale (
OP (s(t)),d
dt
[OP (s(t))
]),
e` data da tutti e soli i vettori del piano di origine OP (s), e generato da(n(s),b(s)
); in
altre parole, le possibili reazioni vincolari non hanno componente tangente al vincolo.
Ora possiamo dire che un moto t 7 s(t), e dunque t 7 OP (s(t)), e` dinamicamente possibilese e solo se il vincolo e` capace di esplicare una reazione vincolare t 7 (t) con t 0tale che, per ogni tempo t in cui e` definito il moto, valga:
md2
dt2
[OP (s(t))
]= F
(OP(s(t)
))+ (t),
20
-
proiettando sul triedro mobile di Frenet, risulta:
ms(t) = F(OP(s(t)
)) t(s(t)),m s
2
% = F n + n,0 = F b + b.
Notiamo due fatti fondamentali.Primo, il problema della determinazione del moto e della reazione vincolare si disac-
coppia: la prima equazione, la t-componente (indipendente da ), e` interpretabile comeequazione differenziale, da cui determiniamo t 7 s(t), mentre dalle altre due determine-remo successivamente = n n + b b. La possibilita` sistematica della rimozione delproblema vincolare risultera` chiara per una classe di sistemi generalizzanti quello appenaanalizzato: i sistemi a vincoli lisci, olonomi e bilaterali (varieta` senza bordo).
Secondo, questa equazione differenziale e` di tipo cosiddetto integrabile, cioe` i problemidi Cauchy
()s(t) = f(s(t)),s(0) = s0,s(0) = s0,
ove la funzione f e` ben definita mediante m, F(), OP () e le sue derivate:
f(s) :=1
mF(OP(s)) t(s),
si risolvono a meno del calcolo di primitive di integrali e di inversioni di funzioni. Questaproprieta`, goduta dai sistemi differenziali lineari, e` rarissima nel caso non lineare, comeappunto quello che stiamo trattando. Qui nel seguito realizzeremo questo programma.Nelle ipotesi di regolarita` scelte per F e per la curva-guida (C2), segue che f e` C1, inparticolare Lipschitziana, dunque il teorema di esistenza ed unicita` per i problemi di Cauchyvale: () ammette una ed un unica soluzione locale (nel tempo, per t in un intervalloaperto contenente lo zero). Mostriamo che () ammette il seguente integrale primo, di tipoenergia
R2 3 (s, s) 7 E(s, s) := 12s2
ss0
f() d R,
infatti lungo le soluzioni s(t) di s = f(s) la funzione E(s, s)s(t)
e` costante:
d
dtE(s(t), s(t)) = s s f(s) s = [s f(s)]s = 0.[
Digressione-richiamo sugli integrali primi: data lequazione differenziale
x = X(x), X : Rm Rm
21
-
la funzione scalare Rm 3 x 7 (x) R e` un suo integrale primo se lungo ogni sua soluzionet 7 x(t) la funzione composta t 7 (x(t)) e` costante (naturalmente, la costante varia dasoluzione a soluzione). Utilizzazione geometrica degli integrali primi: abbassamento delladimensionalita` del problema. Infatti, se si conosce lintegrale primo , e si vuol indagaresulla regione di Rm invasa dallorbita soluzione del problema di Cauchy
x = X(x), x(0) = x0,
possiamo senzaltro restringerci alla regione (m 1)dimensionale 1((x0)) Rm; ineffetti, lungo lorbita x = x(t, x0), x(0, x0) = x0, si ha che per ogni t: (x(t, x0)) = (x0),cioe` lorbita sta sul luogo 1((x0)). Se si conosce un altro integrale primo, diciamo(x), allora si e` sicuri che lorbita sta su 1((x0))
1((x0)), un sottoinsieme ora
(m 2)dimensionale (almeno genericamente, certe condizioni di rango devono esseresoddisfatte, vedi sotto). Infine: la conoscenza di m 1 integrali primi per x = X(x),
1(x), ..., (x), ..., m1(x),
funzionalmente indipendenti, cioe`:
rk
1x1
(x) ... 1xm (x)
... ... ...m1x1
(x) ... m1xm (x)
xm1=1 1 ((x0))
= max = m 1,
ci permette geometricamente di determinare il luogo 1dimensionale sostegno della curvasoluzione del suddetto problema di Cauchy.
]Si tratta ora di mostrare lequivalenza del problema () con il seguente problema
()12 s
2 ss0 f() d = 12 s20,s(0) = s0,s(0) = s0.
Questultimo infatti coinvolge la derivata prima della funzione incognita s(t), in realta`,invece di un abbassamento dimensionale abbiamo realizzato un abbassamento dellordinedi differenziazione della primitiva equazione differenziale che coinvolge la derivata seconda.Le due procedure sono equivalenti: nel seguente senso, ogni equazione differenziale di ordinek,
(#) dk
dtkx = X( d
k1dtk1x,
dk2dtk2x, ..., x)
22
-
si puo` ridurre al primo ordine aumentando opportunamente le variabili e dunque la dimen-sionalita`:
(##)
x0 = x1,x1 = x2,x2 = x3,.... .......
xk2 = xk1xk1 = X(xk1, xk2, ..., x1, x0)
Se x in (#) e` in Rm, ora la nuova incognita (x0, x1, ..., xk1) Rkm.
Torniamo al problema dellequivalenza. Il fatto che () implica () e` banale, un popiu` delicato e` il viceversa. Si noti che in () la derivata dordine massimo, la prima,non compare esplicitata rispetto al resto, cioe` quellequazione differenziale non e` in formanormale, questo creera` qualche (superabile) complicazione.
Per fissare le idee, sia s0 6= 0. Supponiamo dunque che t 7 s(t) risolva (). Sia t1il primo istante darresto per tale moto, cioe` s(t) 6= 0 t [0, t1) e s(t1) = 0. Derivandorispetto al tempo la ()1 otteniamo[
s(t) f(s(t))]s(t) = 0,che per t [0, t1), dunque s(t) 6= 0, implica la ()1. Cosa accade per t t1? Per t = t1puo` capitare una delle due seguenti situazioni:
1) s1 = s(t1) e` dequilibrio: f(s1) = 0,2) s1 = s(t1) non e` dequilibrio: f(s1) 6= 0.
Il primo caso non puo` accadere per t1 finito: infatti se cos fosse il sistema arrivato l convelocita` nulla dovrebbe ivi restarci per sempre, per il teorema di esistenza e unicita`, perogni t, nel futuro e nel passato di t1. Dunque sarebbe proprio il teorema di unicita` adessere violato perche avremmo trovato due soluzioni al problema di Cauchy
s(t) = f(s(t)),s(t1) = s1,s(t1) = 0,
assurdo, abbiamo supposto f regolare (Lipschitziana). Questa considerazione e` generale:non e` possibile raggiungere un equilibrio, in tempi finiti, con velocita` nulla.Resta quindi la seconda possibilita`, s1 non e` dequilibrio, e in un intorno forato di t1si ha che f(s(t)) 6= 0, dunque t1 e` un istante darresto. Per quanto riguarda il nostroproblema dellequivalenza, in tale intorno forato, dalla
[s(t) f(s(t))]s(t) = 0 otteniamo
s(t) = f(s(t)), e, per continuita`, questultima e` soddisfatta pure in t = t1. Per tempimaggiori di t1 si itera questo procedimento di studio. Lequivalenza di () con () e` cos`dimostrata.
23
-
Piu` precisamente, t1 e` un istante di inversione del moto, infatti (Taylor):
s(t) = s(t1) +12!f(s1)(t t1)2 +O(|t t1|3),
s(t) = f(s1)(t t1) +O(|t t1|2),lultima di queste relazioni mostra chiaramente che la velocita` s(t) cambia segno in t1.Procediamo quindi con il problema (). Dato che abbiamo supposto che s0 6= 0, in un
intorno destro di t = 0, [0, t1), la () si scrive:
s(t) = sign(s0)
s20 + 2 ss0f() d
(=: (s)
)s(0) = s0.
Si risolve per separazione di variabili. Dato che in [0, t1) si ha che s(t)) 6= 0, scriviamos(t)
(s(t)) = 1, e integriamo membro a membro tra 0 e t: t0
s(t)(s(t))
dt = t.
Sempre in [0, t1) sicuramente il moto soluzione t 7 s(t) e` un diffeomorfismo con limmagine,usiamolo per operare un cambio di variabile dintegrazione s
s0
1
(s)ds = t.
Indichiamo con G(s) la primitiva del primo membro: linversione di G(s) = t e` esattamentela soluzione cercata t 7 s(t).
1.4.1 Diagramma di Fase per x = f(x)
Le anti-immagini, le fibre, della funzione
R2 3 (x, x) 7 E(x, x) := 12x2
xaf() d R, (a : fissato)
rappresentano il sostegno delle curve soluzione dei problemi di Cauchy per lequazionex = f(x):
E1(e) = {(x, x) : E(x, x) = e}.Studiamone la geometria globalmente. il grafico di E1(e) in R2 e` simmetrico rispetto allasse x: in effetti, E e` funzione pari inx.
24
-
Il teorema della funzione implicita ci assicura che E1(e) e` regolare (una varieta` 1-dimensionale in R2) se il rango
rk(Ex
Ex
) E1(e) =
(f(x) x) E1(e) = max = 1.
Studiamo gli eventuali punti singolari, questi sono i punti (x, x) che annullano i dueelementi della matrice: f(x) = 0, x = 0. Dunque questi punti sono esattamente leconfigurazioni dequilibrio per x = f(x), assieme a x = 0, dato che stiamo leggendo lanostra equazione nello spazio degli atti di moto o delle fasi. Tali punti singolari sono tuttie soli sullasse x. Possono esistere rami di E1(e) con punti (x, x), x 6= 0, nei quali la tangente sia verticale,parallela allasse x? No, le locali funzioni x 7 x(x) i cui grafici sono in {(x, x) R2 :x > 0} e {(x, x) R2 : x < 0}, e definite negli intervalli aperti (x1, x2) tra consecutivi puntidi intersezione con lasse x, (x1, 0), (x2, 0) sono differenziabili, quindi la fenomenologiasopra descritta non puo` accadere. Sui rami di E1(e) possiamo agevolmente stabilire il verso di percorrenza: questo sara`inequivocabilmente stabilito dal locale segno di x: per esempio, se E1(e) e` una curvachiusa (naturalmente, simmetrica rispetto allasse x) allora essa e` percorsa in senso orario. Proseguendo con lesempio di E1(e) curva chiusa, se essa e` regolare allora necessaria-mente interseca lasse x due volte e con tangente, diciamo in (x1, 0) e (x2, 0), verticale, cioe`parallela allasse delle x. Curve E1(e) che intersecano lasse x in x con angoli diversi dapi/2 sono necessariamente ivi singolari, e danno luogo a rami intersecantesi in x: esempio,le separatrici del pendolo in x(= ) = pi. Ancora con lesempio di E1(e) curva chiusa. Il moto e` periodico, e il periodo si calcola(verificarlo):
T = 2
x2x1
dx2(e+
xa f()d
) .E interessante notare la relazione Periodo-Energia: Sia A(e) larea racchiusa dalla curvachiusa E1(e), essa vale
A(e) = 2
x2x1
x(x; e)dx = 2
x2x1
2(e+
xaf()d
)dx,
dove x 7 x(x; e) e` lesplicitazione nel semipiano x > 0 di E(x, x) = e; si osserva che:
T =dA
de(e).
25
-
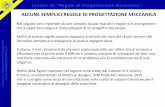
Grafico della funzione Energia Totale per il Pendolo
26
-
Altri esempi a questo stadio facilmente risolubili. Consideriamo una particella vincolatasenza attrito su di un piano pi e una legge forza F(OP,v) (eventualmente lineare: in talcaso infatti le soluzioni sono rappresentabili mediante funzioni elementari). Introdotto unriferimento (O, x1, x2, x3) con (O, x1, x2) coincidente con pi, con un procedimento analogo alprecedente (ora si proietta lequazione fondamentale della Meccanica sui tre assi xi) si notaancora il disaccoppiamento della determinazione del moto dalla reazione vincolare. Talemoto sara` governato da un equazione differenziale del secondo ordine nel piano, fornentet 7 (x1(t), x2(t)).Prima di procedere ulteriormente, estendiamo la nozione di lavoro virtuale al caso di n par-ticelle. Sia F = (F1, ...,Fn) R3n un insieme di vettori applicati in OP = (OP1, ..., OPn),configurazione ammissibile ad un vincolo (eventuamente dipendente dal tempo) St R3n, t R. Si consideri lo spazio tangente a St per t fissato (vincolo congelato). In-dichiamo con P = (P1, ..., Pn) TOPSt il generico vettore tangente locale. Alloradiremo lavoro virtuale della distribuzione di forze F in OP la forma lineare, o 1-forma,elemento del duale T OPSt di TOPSt, che essa individua:
LF :=ni=1
Fi Pi ( : prodotto scalare in R3).
1.5 Metodo di Lagrange per la determinazione delle Rea-zioni Vincolari
Consideriamo un sistema di n particelle vincolate senza attrito in maniera olonoma su diuna varieta` S definita mediante zeri di k funzioni regolari (differenziabili con continuita` ungiusto numero di volte):
f(OPi) = 0, = 1, ..., k f : R3n Rk.Supponiamo che siano funzionalmente indipendenti su S:
rango(df)|S = k.Dire che il vincolo e` privo dattrito significa equivalentemente che, per ogni configurazioneprefissata OP del nostro vincolo olonomo (indipendente dal tempo) S, le n-uple di reazionivincolari esplicabili = (1, ...,n) sono tutte e sole quelle che fanno lavoro nullo perogni spostamente virtuale (vettore tangente) P = (P1, ..., Pn) consentito dal vincolo:
df(OP )P = 0 dL := P =ni=1
i Pi = 0.
Dunque, il nucleo dellapplicazione lineare differenziale df(OP ) : R3n Rk e` contenutonel nucleo dellapplicazione lineare 1-forma lavoro delle reazioni vincolari dL : R3n R.
27
-
Usando il classico teorema di omomorfismo (per spazi vettoriali) (vedi: De Marco, AnalisiDue/1, p.331) concludiamo che esiste una mappa lineare : Rk R tale che
dL = df(OP ), o, equivalentemente : i =k
=1
OPif(OP )
dL
R3n R
df(OP )
Rk
Le componenti di = (1, ..., k) sono i ben noti Moltiplicatori di Lagrange. Infine, i motidinamicamente possibili consistono nelle soluzioni del sistema algebrico-differenziale mi
d2
dt2OPi(t) = Fi(OPj(t),
ddtOPl(t), t) +
k=1 (t)OPif(OPj(t)),
f(OPj(t)) = 0
nelle incognite t 7 (OPi(t), (t)).
Esercizio (importante). Verificare che il sistema algebrico-differenziale sopra scritto porgein modo univoco le e dunque le reazioni vincolari. (Suggerimento: derivare due volterispetto al tempo le f composte con le soluzioni, con lespressione cos` ottenuta eliminarele accelerazioni dalle equazioni dinamiche, quindi, usando lindipendenza funzionale dellef, esplicitare le rispetto allatto di moto).
Soluzione: Sia f(OP ) = 0, = 1, ..., k 3n, (OP ) R3n. Un moto t 7 OPi(t),t I e` dinamicamente possibile se e solo se f(OP (t)) = 0 t I e vale:
mid2
dt2OPi(t) = Fi(OP (t),
d
dtOP (t), t) +
k=1
(t)OPif(OP (t)) (1)
Le incognite del problema sono sia i moti che i moltiplicatori cioe` t 7 (OPi(t), (t)).Deriviamo rispetto al tempo f(OP (t)) = 0 e otteniamo:
ni=1
OPif(OP ) d
dtOPi(t) = 0
28
-
Derivando di nuovo si ottiene:k,i
2OPkOPif d
dtOPk(t),
d
dtOPi(t)
+i
OPif d2
dt2OPi(t) = 0. (2)
Ora dividiamo (1) per mi ottenendo:
d2
dt2OPi(t) =
Fimi
(OP (t),d
dtOP (t), t) +
k=1
(t)OPimi
f(OP (t)),
da cui si ha:
i
OPif(OP )d2
dt2OPi =
i
FimiOPif(OP )+
k=1
(i
OPif(OP ) OPif(OP )mi
)
(3)
Definiamo
, :=i
1
miOPif(OP ) OPif(OP )
e confrontiamo (2) e (3) ottenendo:
k,i
2OPkOPif d
dtOPk(t),
d
dtOPi(t)
=i
FimiOPif(OP ) +
k=1
, (4)
Osserviamo che , e` non degenere, cio` discende dal fatto che il rango di df e` massimocioe`: rango(df)|f=0 = k, questo implica che la forma quadratica associata a , e` definitapositiva, infatti:
k,=1
, =i
(
OPifmi
OPifmi
)= |v|2R3n .
dove v =(
OP1f
m1, ...,
OPnf
mn
). Poiche si ha v = 0 ()=1,...,k = 0
ne segue che e` una forma quadratica definita positiva. Quindi det , 6= 0 e dalla (4)possiamo infine esplicitare:
= (OP, OP , t).
29
-
1.6 Il modello di Coulomb dellattrito
Consideriamo una particella vincolata su una varieta` 1-dimensionale (curva) o 2-dimensionale(superficie). Vogliamo definire la classe OP,v,t delle reazioni vincolari nel caso che il vincolosia con attrito. Scriveremo
= T + N ,
ove T e` la componente vettoriale di sul piano tangente al vincolo, la cosiddetta forzadattrito, e N e` la componente vettoriale ortogonale al piano tangente. v 6= 0: in tal casodiremo che il vincolo esplica tutte e sole le reazioni vincolari tali che
T = v|v|fd|N |,
ove 0 fd e` detto coefficiente di attrito dinamico e i moti dinamicamente possibili sonocaratterizzati da
ma(t) = F(OP (t),v(t), t) + (t).
v(t) = 0, primo caso: se accade che, detto fs il coefficiente di attrito statico, 0 fd fs, e in un opportuno intorno destro I di t
,
0 = F(OP (t),0, t) + , |T | fs|N |,il sistema restera ivi in quiete; diremo che la configurazione OP (t) e` dequilibrio se ilsuddetto intervallo I e` superiormente illimitato.
v(t) = 0, secondo caso: se accade che la precedente disuaglianza non sia soddisfatta,allora, per t in un opportuno intorno destro di t e fino ad un successivo istante darresto,il sistema evolve e vale la precedente descrizione per v 6= 0.
Si noti pero` che nellultimo caso la reazione vincolare non e` definita per v(t) = 0, piu`precisamente, ce` una discontinuita` della forza dattrito in t. Il sistema evolve comunquenella direzione della forza attiva tangenziale, infatti, si ha
v(t) = a(t)(t t) + o(t t),(ove o(t t) significa o piccolo di (t t)) ma anche
v(t) = aT (t)(t t) + o(t t),
dato che v e` tangente al vincolo. Ora consideriamo lequazione dinamica (per v(t) 6= 0),proiettiamola sul vincolo, e valutiamo il seguente limite
limt(t)+
maT (t) = limt(t)+
(FT (OP (t),v(t), t) aT (t)(t t) + o(t t)
|aT (t)(t t) + o(t t)|fd|N (t)|),
otteniamo cheversaT (t
) = versFT (OP (t),0, t).
30
-
(Questultimo risultato e` detto talvolta teorema del moto incipiente, per esempio, nel LeviCivita-Amaldi). Infine:
v(t)||FT (OP (t),0, t)(t t) + o(t t).Alcune osservazioni. Notiamo che linsieme delle reazioni esplicabili dipende dallatto
di moto (configurazione e velocita`) della particella. Consideriamo per esempio il caso delvincolo di superficie: in situazione di quiete le reazioni vincolari possibili appartengonoalla chiusura del cono a due falde di semi-apertura arctan(fs), in situazione dinamica lereazioni vincolari possibili appartengono alla superficie conica a due falde di semi-aperturaarctan(fd) e con la forza dattrito che si oppone al moto. (Compiere lanaloga analisi per ilvincolo 1-dimensionale). Si noti che il modello di Coulomb dellattrito non consiste in unamera definizione della classe delle reazioni vincolari sviluppabili: pure la seconda legge dellameccanica ne risulta modificata. I coefficienti dattrito sono di determinazione empirico-sperimentale e sono costitutivi del nostro sistema vincolato; la relazione fd fs esprime ilfatto (euristico, ma fisicamente attendibile) che, a parita` di forza attiva F, la forza dattritopuo` essere maggiore (in intensita`) nelle situazioni statiche rispetto a situazioni dinamiche,in altre parole, e` piu` difficile mettere in moto un sistema con attrito che mantenere il motostesso.
Esercizi.1) Su un piano inclinato pi rispetto alla verticale di un angolo e` vincolata con attrito
una particella di massa m. Oltre la gravita`, agisce sulla particella una forza elastica dicostante h > 0 di centro un punto fisso O sul piano pi. Detto fs il coefficiente di attritostatico, determinare tutte le configurazioni dequilibrio.
2) Su di un asse orizzontale X e` vincolata con attrito una particella di massa m. Oltrealla gravita`, agisce sulla particella una forza elastica di costante h > 0 di centro un puntofisso O sullasse X. Detti fd fs i coefficienti di attrito, i) determinare tutte le configura-zioni dequilibrio, ii) studiare la dinamica di tale sistema, in particolare, determinare dopoquanto tempo il sistema si arresta se latto di moto iniziale consiste di una configurazionidi non equilibrio e di velocita` nulla, iii) dimostrare che O e` una configurazione dequilibrioLyapunov stabile, iv) confrontare questo sistema dinamico con quello che si ottiene daquestultimo supponendo privo dattrito lasse X, fd = fs = 0, e supponendo agisca, oltrela gravita` e la forza elastica, una forza di resistenza di mezzo di tipo viscoso Fv = kv,ove k > 0 e v e` la velocita`.
1.7 Vincoli Lisci o Ideali
(Definizione di) Vincolo Liscio. Un vincolo si dice liscio se riesce ad esplicare tutte esole le reazioni vincolari che fanno lavoro virtuale nullo per ogni spostamento virtuale:
L(v) = 0, per ogni P virtuale.
31
-
Come accennato precedentemente nel punto 6, mostriamo che effettivamente la classedei vincoli lisci contiene propriamente la classe dei vincoli privi di attrito. Consideriamo undisco materiale di raggio R vincolato senza attrito a stare in un piano pi, ed a ruotare senzastrisciare su di un asse x (retta) di tale piano. Dal punto di vista geometrico tale vincolo sipropone come vincolo anolonomo: infatti il puro rotolamento significa che (lunica) velocita`consentita dal vincolo al punto materiale P del disco che localmente transita per il puntogeometrico C di contatto con la retta x e` la velocita` nulla. Un conto geometrico-cinematicomolto semplice mostra che tale vincolo anolonomo (vP = 0) e` equivalente ad una famiglia1-parametrica di vincoli olonomi (fare, xG = R + x
0G, ove G e` il baricentro del disco,
e` un angolo tra un raggio del disco e una retta del piano pi, e x0G scandisce la suddettafamiglia 1-parametrica). Veniamo alla parte dinamica del vincolo. Le reazioni vincolari chemantengono il disco nel piano fanno senzaltro lavoro virtuale nullo (assenza di attrito). Ilpuro rotolamento si esplica, volta per volta, sui punti materiali P che localmente transitanoper il punto geometrico C di contatto con la retta x. Evidentemente il vincolo esplichera`, intutta generalita`, una componente T parallela a x non nulla: in caso contrario (T = 0)ci dovremo aspettare slittamento, come un pneumatico sul ghiaccio. Ma la classe deglispostamenti virtuali P (che coincidono con i possibili, dato che sono indipendenti daltempo) per i suddetti punti materiali P coincide con lo spazio banale nullo {0}. Dunque:L(v) = P 0, che mostra che il vincolo e` liscio, nonostante una componente dattritonon necessariamente nulla.
Consideriamo ora il fondamentale teorema caratterizzante i moti dinamicamente pos-sibili nel caso liscio mediante una condizione variazionale; questo e` classicamente notocomePrincipio di DAlembert. Sia dato un sistema particellare vincolato St soggetto ad ungenerale sistema di leggi-forza come sopra considerato. Allora [t0, t1] 3 t 7 OP (t) St e`dinamicamente possibile se e soltanto se per ogni t [t0, t1] e per ogni vettore appartenenteal piano tangente (spostamento virtuale) P = (P1, ..., Pn) TOP (t)St vale la seguentecondizione variazionale:
ni=1
[mid2
dt2OPi(t) Fi(OP1(t), ..., d
dtOPn(t), t)] Pi = 0.
Osservazione importante. Tale teorema, quando utilizzato per la determinazione degliequilibri, e dunque dei moti ivi di quiete, si dicePrincipio dei Lavori Virtuali: La configurazione OP , compatibile col vincolo, e` de-quilibrio se e solo se
ni=1
Fi(OP1 , ..., OP
n , 0...., 0, t) Pi = 0, P TOP St.
32
-
Dimostrazione (del Principio di DAlembert). Supponiamo che [t0, t1] 3 t 7 OP (t) Stsia dinamicamente possibile, allora il vincolo esplica delle reazioni vincolari tali che
mid2
dt2OPi(t) = Fi(OP1(t), ...,
d
dtOPn(t), t) + i(t)
conni=1
i(t) Pi = 0, P TOP (t)St,
dato che il vincolo e` liscio; dunque, vale la condizione variazionale.Viceversa, la curva [t0, t1] 3 t 7 OP (t) St sia compatibile col vincolo e per essa valga
la condizione variazionale. Definiamo le seguenti funzioni del tempo
i(t) := mid2
dt2OPi(t) Fi(OP1(t), ..., d
dtOPn(t), t).
La condizione variazionale ci dice che per ogni istante t [t0, t1] valeni=1
i(t) Pi = 0, P TOP (t)St.
Dato che tale vincolo esplica tutte e sole le reazioni vincolari soddisfacenti an
i=1 i Pi =0, in particolare esplichera` pure le i(t), e cio` e` quanto ci basta per dire che il moto e`dinamicamente possibile.
Si noti che uno degli aspetti operativi piu` importanti di tale teorema e` che i motidin. poss. si caratterizzano senza introdurre (e calcolarle) le reazioni vincolari. Questoconsentira`, nel caso liscio olonomo bilaterale (eventualmente dipendente dal tempo), lacostruzione della dinamica mediante le equazioni di Lagrange.
1.8 Cinematica e dinamica elementare dei sistemi particel-lari
Sia dato un sistema di riferimento inerziale (O, ei), i = 1, 2, 3 e consideriamo un sistemadi punti materiali (sistema particellare) S = {(OPi,mi)}, i = 1, . . . , n, ove mi > 0 e` lamassa del punto Pi e OPi il raggio vettore dallorigine. Cominciamo introducendo alcunedefinizioni elementari. Il baricentro di S e` il vettore
OG :=
imiOPiimi
=
imiOPim
.
Una conseguenza immediata della definizione di baricentro e` che
mvG = mdOG
dt=i
mivi = P
33
-
ove P indica la quantita` di moto di S. Definito il baricentro G, ha senso introdurre ilsistema (non inerziale) (G, ei), detto sistema del baricentro, con origine coincidente conG ed assi sempre paralleli a quelli di (O, ei), per cui si ha (formula di composizione dellevelocita`)
() = 0, v() = vG, vi = v()i + v
(r)i = vG + v
(r)i .
Si dimostrano facilmente le seguenti relazionii
miGPi =i
mi(OPi OG) = mOGmOG = 0
da cui, derivando rispetto a t,
0 =d
dt
i
miGPi =i
miv(r)i = P
(r).
Inoltre si ha per lenergia cinetica
2T =i
miv2i =
i
mi(v(r)i + vG)
2 =i
miv(r)2
i +mv2G + 2vG P (r),
da cui segue il Teorema di Konig
TS =1
2mv2G + T
(r).
Sia A un punto (fisso o mobile) nel riferimento inerziale; il momento angolare o momentodella quantita` di moto di S rispetto al polo A e`
MA =i
APi mivi
Usando la formula di variazione del momento di un sistema di vettori applicati al variaredel polo si ha subito
MA = AG P +MGed essendo inoltre
MG =i
GPi mivi =i
GPi mi(v(r)i + vG) =i
GPi miv(r)i = M (r)G
si ha lanalogo del Teorema di Konig per il momento angolare
MA = AG P +M (r)G
34
-
1.8.1 Equazioni Cardinali
Sia S un sistema di n punti materiali di masse mi, i = 1, . . . , n. Suddividiamo le forzeagenti sull i-esimo punto del sistema in due classi: le forze interne F inti , ovvero dovuteallazione degli altri punti del sistema sul punto i-esimo, per le quali possiamo dare larappresentazione
F inti =nj=1
fij , fii = 0, i = 1, . . . , n,
ove fij R3 indica la forza agente su i dovuta allazione di j; e le forze esterne F exti chedescrivono leffetto sul punto i di corpi non appartenenti al sistema S. Questa distinzionetra forze esterne e interne e` complementare a quella di uso frequente tra forze attive e forzevincolari; la sua utilita` sta nel fatto che per le forze interne si fa lipotesi, importantissimaper gli sviluppi che vogliamo trarre, che esse siano un sistema equilibrato di forze (si vedail Capitolo sui Vettori Applicati):
Rint = 0, N intO = 0.
Da tale ipotesi si ricavano le equazioni cardinali per il sistema particellare S, ovvero unsistema di 3 piu` 3 equazioni differenziali scalari che sono necessariamente soddisfatte lungoi moti OPi(t) dinamicamente possibili per il sistema ovvero soddisfacenti a
miOPi = Fexti + F
inti , i = 1, . . . , n.
Sommando sullindice di particella i troviamo infatti che necessariamente
maG =
ni=1
miOPi = Rext +Rint = Rext (Prima Equazione Cardinale)
Sia ora OA(t) la traiettoria del polo A rispetto al sistema inerziale di origine O usato perdescrivere il moto di S, di modo che si ha immediatamente che
OPi = OA+APi, e vi = vA +d
dt(APi).
Indichiamo con
MA =ni=1
miAPi vi
il momento della quantita` di moto rispetto al polo A; la sua derivata lungo un motodinamicamente possibile vale
MA =
ni=1
mi(vi vA) vi +ni=1
miAPi ai =
= vA P +ni=1
APi (F exti + F inti ) =
= vA P +N extA +N intA = vA P +N extA
35
-
MA = vA P +N extA (Seconda Equazione Cardinale)Osservazione. Le equazioni cardinali costituiscono un sistema di 6 equazioni che de-
vono essere necessariamente soddisfatte lungo il moto. E chiaro intuitivamente che, se ilsistema S ha piu` di 6 gradi di liberta`, le equazioni cardinali non possono essere sufficienti adeterminare completamente il moto del sistema. Infatti, esse sono sufficienti a determinaresolo il moto del baricentro G, attraverso la prima equazione cardinale, e levoluzione delmomento della quantita` di moto MA. Per una particolare classe di sistemi, i corpi rigidiprivi di ulteriori vincoli, le equazioni cardinali risultano essere esattamente equivalenti alsistema delle equazioni descrivente i moti dinamicamente possibili.
1.8.2 Cinematica dei sistemi particellari rigidi
Sia ora S sistema rigido e denotiamo con la velocita` angolare assoluta di S. Mostriamopreliminarmente che:
Proposizione 1.8.1 Se S e` rigido, allora G e` solidale a S, ovverovG = vi + PiG, i = 1, . . . , n.
Infatti, fissato j {1, . . . , n},
mvG =i
mivi =i
mi(vj + PjPi) = mvj + i
miPjPi,
ed essendo PjPi = GPi GPj , si ha
mvG = mvj + i
mi(GPi GPj) = m(vj + PjG).
Ne segue che il sistema S = S {(OG, 0)} e` ancora un sistema rigido e in (G, ei) ilmoto di S ha un punto fisso G. Inoltre, da () = 0, usando la formula di composizionedelle velocita` angolari nei moti rigidi si ha che
= () + (r) = (r).
Per un generico sistema rigido con un punto fisso A, il momento angolare e lenergia cineticaammettono lespressione seguente (si usa la formula del doppio prodotto vettore)
MA =i
APi mivi =i
miAPi ( APi) =
=i
mi(AP2i (APi )APi) =
i
mi(AP2i IAPi APi) = IA
36
-
ove a b M(n) indica la matrice prodotto tensore dei due vettori a, b Rn
(a b)u := a(b u) u Rn
eIA =
i
mi(APiIAPi APi) M(n)
e` il tensore dinerzia del sistema (rigido) di punti materiali. Si tratta di un oggetto chedipende dalla sola geometria della distribuzione delle masse del sistema rigido.
Prima di studiare le proprieta` del tensore dinerzia, ricaviamo lespressione dellenergiacinetica per un generico sistema rigido con un punto fisso
2TS =i
miv2i =
i
mi( APi)2 =i
mi APii APii =
=i
mi APi ( APi) = i
miAPi ( APi) = IA.
Nel caso particolare di G punto fisso nel sistema del baricentro e (r) velocita` angolare delsistema rispetto al riferimento del baricentro, otteniamo lanalogo delle formule di Konigper un sistema rigido
TS =1
2mv2G +
1
2 IG, (1)
MA = AG P + IG. (2)
Proprieta` del tensore dinerzia
1) IA e` operatore simmetrico (e quindi diagonalizzabile). Rispetto alla base (O, ei) siha infatti
(IA)ij = ei IAej =k
mk(AP2k ei ej APk eiAPk ej) = (IA)ji
2) Sia = ||u, ove u= vers . Allora
T =1
2 IA =
2
2u IAu =
2
2Iu (3)
oveIu := u IAu =
i
mi(u APi)2 =i
mid2i 0
e` il momento dinerzia del sistema rispetto alla retta per A e parallela al versore u.Esso coincide con la somma delle masse per le distanze al quadrato dei punti Pi dallaretta per A. Come si vede subito, Iu non varia se si considera un altro punto A
sulla
37
-
retta definita da (A, u). Dalla (3) si deduce che IA, simmetrico e` definito positivoovvero
IA 0, IA = 0 = ||u = 0,tranne che nel caso in cui esista u tale che Iu = 0. In tal caso i punti di S sonodisposti tutti lungo una retta parallela a u e S e` solido degenere (asta).
3) Formula di variazione del momento dinerzia (Teorema di HuygensSteiner). Con-sideriamo le rette parallele al versore u per i punti A e G, baricentro di S; non e`restrittivo supporre che sia d = |AG| la distanza tra le rette. Allora (vedi figura)
AAAAAK
A
Pi.
G
d
I(A)u =i
mi(u APi)2 =i
mi[(u AG) + (u GPi)]2 =
=i
mi[(u AG)2 + (u GPi)2 + 2(u AG) (u GPi)],
da cuiI(A)u = md
2 + I(G)u
Esercizio. Mostrare che la relazione precedente e` un caso particolare della formula
IO = IG +mOGOG.
4) Momenti principali dinerzia. Supponiamo per semplicita` A coincidente con loriginedel riferimento inerziale, per cui OPi = (xi, yi, zi). I termini sulla diagonale di IOsono detti momenti principali dinerzia. Si ha ad esempio per e3
(IO)33 = e3 IOe3 = I(O)e3 =i
mi(OPi e3)2 =
=i
mi(OP2i (OPi e3)2) =
i
mi(x2i + y
2i + z
2i z2i )
=i
mi(x2i + y
2i ).
38
-
I termini extradiagonali sono detti momenti deviatori
(IO)23 = e2 IOe3 =i
mi(yizi)
5) Solidi piani (lamine). Sia e3 perpendicolare al piano che contiene il sistema. Allorazi = 0 per ogni i = 1, . . . n e
I1 =i
mi(x2i + y
2i + 0 x2i ) =
i
miy2i , I2 =
i
mix2i
e si haI
(O)3 = I
(O)2 + I
(O)1 .
39
-
1.9 Teorema di Conservazione dellEnergia
Consideriamo un sistema vincolato di n particelle di masso mi > 0, i = 1, ..., n con vin-colo liscio S R3n, indipendente dal tempo (fisso), bilaterale (senza bordo), e soggettoad un sistema di forze (interne e/o esterne) di tipo conservativo di Energia PotenzialeU(OP1, ..., OPn), quindi: Fi(OP1, ..., OPn) = gradOPiU(OP1, ..., OPn). Allora lEnergiaTotale:
E : R6n R
E(OP1, ..., OPn, OP 1, ..., OPn) :=1
2
ni=1
mi|OP i|2 + U(OP1, ..., OPn)
e` costante lungo i moti dinamicamente possibili.
Prova. I moti dinamicamente possibili per tale sistema sono tutte e sole le curve t 7 OP (t)tali che il vincolo e` capace di esplicare reazioni vincolari t 7 i(t), i = 1, ..., n per cui, perogni i = 1, ..., n
miOP i(t) = Fi(OP1, ..., OPn) + i(t),
ed il vincolo e` geometricamente soddisfatto: OP i(t) S. Lungo tali curved
dtE(OP1(t), ..., OPn(t), OP 1(t), ..., OPn(t)
)=
=
ni=1
miOP i(t) OP i(t) +ni=1
gradOPiU(OP1(t), ..., OPn(t)) OP i(t) =
=ni=1
i(t) OP i(t).
Dobbiamo considerare ora due fatti: primo, il vincolo e` liscio bilaterale, dunque puo`sviluppare tutte e sole le reazioni vincolari che fanno lavoro virtuale identicamente nullo
L =
ni=1
i Pi = 0,
per ogni spostamento virtuale (Pi)i=1,...,n TOPS; secondo, il vincolo e` fisso, dunque ivettori velocita` lungo i moti sono spostamenti virtuali (affermazione che non e` vera nelcaso di vincolo mobile, dipendente dal tempo), pertanto:
d
dtE(OP1(t), ..., OPn(t), OP 1(t), ..., OPn(t)
)= ... =
ni=1
i(t) OP i(t) = 0.
40
-
1.10 La restrizione di un sistema di forze conservativo e`conservativa
Consideriamo un sistema di n particelle libere, soggette ad un sistema conservativo di forze;cioe`, esiste una funzione energia potenziale
U : R3n R, (OP1, ..., OPn) 7 U(OP )
tale che la forza esercitata sulla particella iesima dovuta alla presenza di tutte le altrenelle configurazioni OP1, ... e` data da
Fi : R3 ... R3 R3, Fi(OP ) := gradOPiU(OP1, ..., OPi, ..., OPn)
In altri termini, linsieme delle n funzioni 3-vettori forze Fi si puo` interpretare come lin-sieme delle componenti di una forma differenziale esatta (la forma lavoro LF ) in R3n dicui U e` la primitiva:
LF =ni=1
Fi(OP1, ..., OPn) dOPi =
= ni=1
gradOPiU(OP1, ..., OPi, ..., OPn) dOPi = dU
Supponiamo ora di vincolare il nostro sistema in maniera olonoma, cioe` mediante un vincolosulle configurazioni S R3n, dimS = N < 3n di cui RN 3 q = (qh)h=1,...,N 7 OP =OP (q) R3n sia la generica immersione/rappresentazione locale del vincolo. Ha dunquegeometricamente senso definire la forma differenziale lavoro ristretta alla varieta` vincolareS; tale operazione e` ben definita per ogni forma differenziale: (i) le componenti si valutano
non piu` in generici OP di R3n ma solo sui punti appartenenti a S, cioe` su OP (q) con qarbitrario nel suo dominio di definizione (un aperto di RN ) e (ii) tale forma ristretta nonla si valuta piu` su generici vettori di R3n bens sui soli vettori tangenti ad S nei puntiOP (q) ove si sono valutate le componenti della forma. Ricordando che i vettori tangentisi ottengono come immagine del differenziale dellimmersione vincolare, possiamo scriverela nuona forma differenziale ristretta:
LF |S =ni=1
Fi(OP (q)) Nh=1
OP i(q)
qhdqh ()
Ricordiamo che LF e` esatta,
LF |S = ni=1
gradOPiU(OP1, ..., OPi, ..., OPn)OP=OP (q)
Nh=1
OP i(q)
qhdqh
41
-
ricordando il teorema di differenziazione delle funzioni composte
LF |S = Nh=1
qh[U OP ](q) dqh = dU ,
doveU : RN R, q 7 U(q) := U(OP (q))
Abbiamo ottenuto il seguente risultato: in generale, la restrizione di una forma esatta e`esatta, e la sua primitiva e` la restrizione della originale primitiva. Nel nostro caso (dellameccanica): la restrizione di una forma lavoro conservativa e` conservativa e la energiapotenziale del sistema ristretto e` data dallenergia potenziale originale composta con larappresentazione vincolare.
Ritorniamo sulla () e nel caso non necessariamente conservativo (Fi = Fi(OP, OP )):
LF |S =ni=1
Fi
(OP (q),
Nk=1
OP (q)
qkqk)Nh=1
OP i(q)
qhdqh ()
riorganizzando le sommatorie (possiamo scambiarle come meglio crediamo):
LF |S =Nh=1
[ ni=1
Fi
(OP (q),
Nk=1
OP (q)
qkqk) OP i(q)
qh
]dqh =
Nh=1
Qh(q, q)dqh
le Qh(q, q) =[...]
sono dette le Componenti Lagrangiane della Sollecitazione; solo nel
caso di forze posizionali (Fi = Fi(OP )) sono interpretabili come componenti di formedifferenziali nel senso standard dellAnalisi e della Geometria.
1.11 Sistemi continui (di infinite particelle) a finiti gradi diliberta`
Per semplicita`, nel caso olonomo, ci siamo limitati in questi appunti a sistemi materiali din particelle. Se per ogni t la varieta` vincolare St e` senza bordo (non ci sono configura-zioni di confine), allora, localmente, possiamo rappresentare tale varieta` mediante delleimmersioni locali
RN R 3 (qh, t) 7 OPi(qh, t) St R3n.Molto spesso in meccanica finito-dimensionale dobbiamo trattare con sistemi compostida infinite particelle vincolate tra loro in maniera tale che il sistema risultante e` a finitigradi di liberta`; basti pensare, per esempio, ai sistemi articolati di corpi rigidi. Da unpunto di vista non solo formale e` estremamente utile pensare anche per questi sistemi a
42
-
delle rappresentazioni vincolari mediante delle immersioni locali analoghe alle precedenti.Il punto qualitativamente diverso consiste nel fatto che ora, invece dellindice discreto diparticella i 1, ..., n, avremo un indice continuo y = (y1, ..., yd) C Rd, ove d vale1, 2, oppure 3, in relazione al fatto che il nostro corpo materiale di infinite particelle siarispettivamente 1- , 2- , oppure 3-dimensionale. Dunque:
Rd RN R 3 (y, qh, t) 7 OP (y, qh, t) R3
rappresenta la configurazione assunta dalla particella y C, quando, al tempo t, i para-metri lagrangiani valgono q RN . Esempio: corpo rigido. Si consideri una terna solidale alrigido e sia C linsieme dei punti di R3 rappresentanti il rigido; in questo caso N = 6: treparametri per il baricentro (oppure, se vogliamo, lorigine della terna), tre altri parametriper la rotazione (cioe` tre parametri descriventi localmente SO(3), per esempio gli angolidi Euler).
Unapplicazione di tali rappresentazioni. Supponiamo esista un campo di forze ta-le che se poniamo una particella di massa m in OP questa sia soggetta alla forza f =mgradR3U(OP ), ove R3 3 OP 7 U(OP ) R e` una densita` per unita` di massa di energiapotenziale. Si consideri ora un sistema di infinite particelle come sopra, con vincoli indipen-denti dal tempo. Dimostriamo che il lavoro (virtuale, possibile) di tale campo di forze sulsistema e` (ancora) conservativo e calcoliamo l energia potenziale lagrangiana U(qh) il cuigradiente in RN (col segno meno) esprime le componenti lagrangiane della sollecitazione(vedi p.e. (3.38) di AMR). Scriviamo dunque il lavoro di tali forze sul sistema e sia (y)la densita` di massa in C.
L = yC (y)gradR3U(OP (y, q)) gradRNOP (y, q)qdy,= yC (y)3l=1 xlU(OP (y, q))Nh=1 qhxl(y, q)qhdy,= Nh=1 qh [yC (y)U(OP (y, q))dy]qh.
Lenergia potenziale e` pertanto data da
U(q) =yC
(y)U(OP (y, q))dy.
Esercizio. La terna cartesiana Oxyz ruota uniformemente rispetto agli spazi inerziali convelocita` angolare di trascinamento = z. Una lamina materiale C omogenea di massam e` vincolata senza attrito sul piano Oxz. Laccelerazione di gravita` e` g = g z, cioe` lassez si dice verticale ascendente. Determinare lenergia potenziale lagrangiana U(q) dovutaalla forza gravitazionale e a quella centrifuga.
Il generico punto materiale della lamina e` indicato con y = (X,Z) C, mentre lagenerica configurazione assunta dalla lamina e` caratterizzata dai parametri Lagrangiani
43
-
q = (x, z, ) R2S1 dove G = (x, z) e` la posizione del baricentro e e` l angolo formatocon una direzione invariante del sistema, infine : C R+ e` la densita` (superficiale) dimassa della lamina.
Gravita`:Fg = mg = OP (mg OP )Allora per unita` di massa si ha:U(OP ) = g OPL(F ) = mg dP = d(mg OP )Quindi:
Ug(q) =yC
(y)U(OP (y, q)) dy = yC
(y)g OP (y, q) dy =
= gyC
(y) OP (y, q) dy
Ora usando la definizione di baricentro e il fatto cheyC (y)dy = m si ha:
Ug(q) = mg OG(q) = mgz
Centrifuga:Per unita` di massa si ha:U(OP ) = 22 |P P |2,dove P e` il punto proiezione ortogonale di P sullasse di rotazione z. Quindi:
Ucentr(q) =yC
(y)U(OP (y, q)) dy =
yC
(y)
(
2
2
) P P (y, q)2 dy ==
2
2
yC
(y)P P (y, q)2 dy = 2
2Iz(q)
Per il teorema di Huygens-Steiner si ha:
2
2Iz(q) =
2
2
(mx2 + Iz()
)=
2
2
(mx2 + nT () IG n()
)Dove n() e` il versore dellasse z, parallelo a z e passante per il baricentro della lamina,rappresentato nella base (G;X,Y, Z) solidale alla lamina in cui si costruisce la matricedinerzia IG.
44
-
1.12 Appendice: Il Principio di Gauss
Si consideri un sistema di n particelle soggette al vincolo olonomo , localmente descrittoda
=loc. {OP R3n : f(OP ) = 0}, dove f : U R3n Rk, rk df
= k. (4)
Il luogo e` pertanto una varieta` N = 3n k dimensionale, dato che considereremo senzarestrizioni buona regolarita` per f Cr, r 1. Il nucleo del differenziale di f in un punto8
x = OP = (OP1, OP2, ..., OPn)
risolvente f(OP ) = 0 rappresenta i vettori del locale piano tangente Tx, gli spostamentivirtuali P :
df(OP )P = 0 (5)
Consideriamo una generica curva : I R3n a valori in e (0) = OP ; dunque:
f((t)) 0. (6)
Derivando rispetto al parametro devoluzione e valutando in t = 0 otteniamo esattamentela relazione ( 5) caratterizzante le velocita` cinematicamente compatibili col vincolo :
df(OP )(0) = 0 (7)
Derivando due volte e valutando in t = 0 otteniamo:
d2f(OP )(0), (0)+ df(OP )(0) = 0. (8)
Da un punto di vista un po piu` formale possiamo richiamare il seguente fatto: se da un latogli elementi del fibrato tangente T sono del tipo ((0); (0)) risolventi ( 7), gli elementidel secondo fibrato tangente T 2 sono del tipo ((0); (0), (0)), naturalmente al variarearbitrario di curve a valori in , dunque risolventi le relazioni ( 7) e ( 8). Consideriamola mappa di proiezione
2,1 : T2 T, (9)
(x; v, a) 7 (x; v), dove df(x)v = 0 e d2f(x)v, v+ df(x)a = 0 (10)Si definiscono i vettori di T 2 verticali rispetto a 2,1 tutti e soli del tipo (x; 0, a), cioe`
df(x)a = 0, (11)
e dal punto di vista cinematico rappresentano, per un assegnato atto di moto (x; v) diT, le variazioni possibili in accelerazione compatibili col vincolo a partire da (x; v). In
8Scriveremo: x = OP, v = OP , a = OP .
45
-
altri termini: se un vettore di T 2 e` dato da (x; v, a), allora ogni altro vettore di T 2,compatibile con un prefissato atto di moto (x; v) T, si ottiene sommando (solo sullefibre vettoriali, sopra lo stesso punto x) a (x; v, a) tutti e soli i vettori verticali (x; 0, a)con df(x)a = 0, ottenendo cos`: (x; v, a+ a).
Naturalmente alla stessa conclusione giungiamo se, invece di rappresentazioni implicite(f = 0) del vincolo, lavoriamo con immersioni vincolari del tipo (N = 3n k):
OP : V RN R3n(q1, ..., qN ) = q 7 OP (q). (12)
v = dOP (q)q, a = d2OP (q)q, q+ dOP (q)q. (13)Le variazioni di accelerazione a, per fissato atto di moto, dunque per q = 0, si ottengonoper
a = dOP (q)q (14)
per arbitrari q. Questultima relazione e` la stessa caratterizzante gli spostamenti virtuali
P = dOP (q)q, (15)
per arbitrari q.
E` nodo cruciale nel Principio di Gauss il fatto che la relazione caratterizzante i vettoriverticali ( 14) sia esattamente la relazione caratterizzante gli spostamenti virtuali ( 15).
Assegnate delle generiche funzioni-forza F (OP, OP ), consideriamo la funzione di Gauss:
G : T 2 R(q; q, q) 7 G(q; q, q) := ni=1 mi OP iFi22mi , (16)
ove sintende OP = d2OP (q)q, q+ dOP (q)q e F = F(OP (q), dOP (q)q
).
Principio di Gauss: Un moto compatibile col vincolo olonomo e liscio , dunque del tipo
OP (t) = OP (q(t)), I 3 t 7 q(t) RN , (17)
e` dinamicamente possibile se e solo se, per ogni istante in cui e` definito, la funzione diGauss ivi valutata e` minima per ogni variazione verticale dellaccelerazione, ovvero:
vG := dG(q(t); q(t), q(t)
)(q(t); 0, q
)= 0, q,
2vG :=d2G
(q(t); q(t), q(t)
)(q(t); 0, q
),(q(t); 0, q
)> 0, q 6= 0.
(18)
46
-
Osservazione. Si noti il significato della funzione di Gauss: per ogni configurazione OP ,distribuzione di velocita` OP , e distribuzione di accelerazioni OP , consentite dal vincolo, Gmisura la somma su tutte le particelle della norma quadrato delle deviazioni di miOP i daFi, quantita` questultima candidata ad essere la reazione vincolare, a quellistante lungoquel moto, sulla particella i-esima. La distribuzione dinamicamente possibile di accelera-zioni e` appunto, nel caso dei vincoli lisci, quella in corrispondenza della deviazione minima,a parita` datto di moto (OP (t), OP (t)).
Prova. CalcoliamovG = dG
(q(t); q(t), q(t)
)(q(t); 0, q
)=
=ni=1
(miOP i(t) Fi(OP (t), OP (t))
) dOP i(q(t))q,
e pe