Sviluppo di layer applicativo per fault injection in un ... · Corso di Laurea in Ingegneria...
32
Scuola Politecnica e delle Scienze di Base Corso di Laurea in Ingegneria Informatica Elaborato finale in Misure per l'Automazione e la Produzione Industriale Sviluppo di layer applicativo per fault injection in un wheel speed sensor emulator Anno Accademico 2013-2014 Candidato: Francesco Di Lillo matr. N46001380
Transcript of Sviluppo di layer applicativo per fault injection in un ... · Corso di Laurea in Ingegneria...

Scuola Politecnica e delle Scienze di BaseCorso di Laurea in Ingegneria Informatica
Elaborato finale in Misure per l'Automazione e la Produzione Industriale
Sviluppo di layer applicativo per fault injection in un wheel speed sensor emulator
Anno Accademico 2013-2014
Candidato:
Francesco Di Lillo
matr. N46001380

Vorrei ringraziare Vittorio per avermi seguito nello sviluppo di questo lavoro con estrema disponibilità e pazienza. Dedico questo traguardo a Chiara, Fabio e tutte le persone che mi hanno sostenuto ed incentivato durante questi anni, ma sopratutto ai miei genitori ed amia sorella Marcella per essere stati una guida costante nel mio percorso e per avermi impartito insegnamenti che nessun tipo di università avrebbe potuto trasferirmi.

Indice
Introduzione .......................................................................................................................................... 4Capitolo 1: Struttura dell'emulatore ...................................................................................................... 5
1.1 Protocollo di Comunicazione ..................................................................................................... 71.2 Interfaccia Grafica ...................................................................................................................... 9
Capitolo 2: Firmware .......................................................................................................................... 112.1 ISR TIMER0 ............................................................................................................................ 11
2.1.1 Prescaler e Risoluzione ...................................................................................................... 132.1.2 Maschere di Open e di Short ............................................................................................. 13
Capitolo 3: Ottimizzazioni ................................................................................................................. 163.1 Scelta dei fattori correttivi ........................................................................................................ 16
Capitolo 4: Risultati sperimentali ...................................................................................................... 194.1 KMI22 Philips – VDA .............................................................................................................. 20
4.1.2 Funzionamento in condizioni ideali .................................................................................. 214.1.3 Funzionamento in condizioni di fault ................................................................................ 22
4.2 INFINEON TLE4942 ............................................................................................................... 264.3 AIS1200PS .............................................................................................................................. 29
Conclusioni ......................................................................................................................................... 31Bibliografia ......................................................................................................................................... 32
Introduzione
La necessità di velocizzare la prototipazione dei sistemi di testing ha portato
l'azienda STMicroelectronics a realizzare un emulatore di wheel speed sensor in
grado di poter riprodurre i segnali elettrici dei sensori posti in corrispondenza delle
ruote di automobili e motoveicoli. L'emulazione delle situazioni di fault, in cui il
comportamento dei sensori non coincide con quello atteso, costituisce un sensibile
miglioramento delle prestazioni dell'emulatore. Da questa esigenza è partito il
progetto che ha avuto come obiettivo quello di sviluppare un layer applicativo che
consentisse l'emulazione della fault injection ; il lavoro si è articolato in diverse
parti : l'analisi dell'emulatore precedentemente realizzato (firmware ed interfaccia
grafica), modifica della board su cui è stata implementata la precedente versione
del progetto e fase di debug e caratterizzazione.
Per lo sviluppo del layer applicativo sono stati utilizzati : l'IDE Atmel Studio nella
sua versione 6.1 per la modifica, la compilazione ed il debug del firmware e
LabVIEW (Laboratory Virtual Instrumentation Engineering Workbench) per la
realizzazione dell'apposita VI adibita alla fault injection.
4

Capitolo 1: Struttura dell'emulatore
Per la realizzazione dell'emulatore è stato utilizzato il microcontrollore ad 8 bit
ATMEGA328p, realizzato dalla casa produttrice Atmel, montato su di una board
realizzata dalla STMicroeletronics.
Rispetto all'emulatore pre-esistente, è stata richiesta la possibilità di simulare due
differenti tipologie di guasto : OPEN e SHORT TO GROUND. Per spiegarne il
funzionamento, occorre una breve premessa riguardante i sensori emulati. Tutti i
sensori presenti nell'emulatore codificano le informazioni sotto forma di impulsi di
corrente che possono assumere unicamente tre valori : 7, 14, 28 mA da ciò risultano
anomale le condizioni di OPEN (uscita del sensore pari a 0 mA) e di SHORT
(uscita saturata a 35 mA). Per realizzare la prima tipologia di fault è stato
necessario interrompere il percorso della corrente Is, mostrata nell'Illustrazione 1,
così da emulare una condizione di perdita del segnale, dovuta, ad esempio, ad una
disconnessione del sensore (temporanea o permanente).
A tale scopo, sono stati inseriti in serie al percorso dei mosfet (Q2 – Q5, in
Illustrazione 1) i quali, pilotati opportunamente mediante i pin D10, D11, D12, D13
del micro consentono l'emulazione del fault desiderato interrompendo/ripristinando
il passaggio di corrente in base ad una particolare tempistica definibile dall'utente.
Riguardo al fault SHORT TO GROUND non è stato neccessario apportare
modifiche hardware alla scheda poiché esso si realizza alzando tutti i pin relativi
alle PORTB e PORTD, ciò ha come risultato il portare a VUSB le tensioni V021,
V031, V022, V032, V023, V033, V024 e V034 indicate nell'illustrazione 1. In questo
modo, considerato a titolo di esempio il circuito con R55 e R10 (il risultato ed i
calcoli sono i medesimi in tutte e quattro gli schemi circuitali) si vuole determinare
l'uscita del sensore IS : le resistenze R55 , R10 e R9 sono in parallelo tra loro e la
resistenza equivalente risultante è :
5

Il potenziale del nodo 3 (adiacente all'amplificatore) puo' essere calcolato
utilizzando un partitore di tensione.
Da cui, per il corto circuito virtuale, si è determinato anche il potenziale del nodo 2.
La corrente I2 equivale a :
Utilizzando I2 si determina il potenziale del nodo C da cui poi è possibile giungere a
IS :
Il risultato finale è la saturazione dell'uscita del sensore a 35 mA, valore non
previsto nel normale funzionamento del sensore di wheel-speed.
6

1.1 Protocollo di Comunicazione
Nel progetto pre-esistente, l'utente puo' selezionare il tipo di sensore ed il pattern di
segnale da emulare utilizzando l'interfaccia grafica, la quale, nativamente,
implementa un protocollo di comunicazione seriale tra il computer ed il
7
Illustrazione 1
microcontrollore sulla board. Il protocollo di comunicazione dell'emulatore è stato
quindi modificato per permettere il trasferimento delle informazioni relative al fault
(tipologia, ritardo rispetto ad un trigger definito e durata) di cui effettuare una
simulazione.
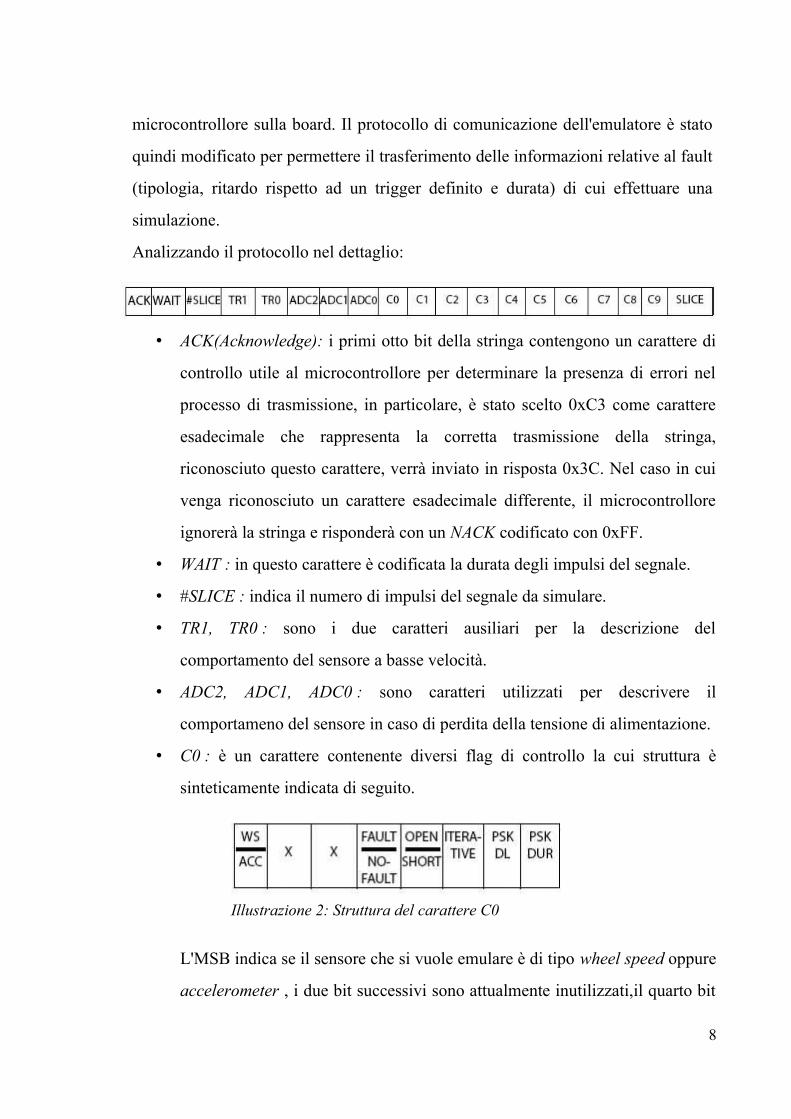
Analizzando il protocollo nel dettaglio:
• ACK(Acknowledge): i primi otto bit della stringa contengono un carattere di
controllo utile al microcontrollore per determinare la presenza di errori nel
processo di trasmissione, in particolare, è stato scelto 0xC3 come carattere
esadecimale che rappresenta la corretta trasmissione della stringa,
riconosciuto questo carattere, verrà inviato in risposta 0x3C. Nel caso in cui
venga riconosciuto un carattere esadecimale differente, il microcontrollore
ignorerà la stringa e risponderà con un NACK codificato con 0xFF.
• WAIT : in questo carattere è codificata la durata degli impulsi del segnale.
• #SLICE : indica il numero di impulsi del segnale da simulare.
• TR1, TR0 : sono i due caratteri ausiliari per la descrizione del
comportamento del sensore a basse velocità.
• ADC2, ADC1, ADC0 : sono caratteri utilizzati per descrivere il
comportameno del sensore in caso di perdita della tensione di alimentazione.
• C0 : è un carattere contenente diversi flag di controllo la cui struttura è
sinteticamente indicata di seguito.
L'MSB indica se il sensore che si vuole emulare è di tipo wheel speed oppure
accelerometer , i due bit successivi sono attualmente inutilizzati,il quarto bit
8
Illustrazione 2: Struttura del carattere C0

abilita o disabilita i fault nell'emulazione, con il terzo bit invece si specifica
la tipologia di guasto che si è interessati ad emulare : OPEN che simula
l'interruzione di segnale e SHORT che simula la condizione di sensore in
corto a massa. Il secondo bit abilita l'iterazione dei fault o alternativamente la
modalità single-shot. I bit PSK_DUR e PSK_DL definiscono invece la
risoluzione temporale desiderata dall'utente rispettivamente sulla durata del
guasto e sul ritardo rispetto al trigger.
• C1 : contiene al suo interno la durata del tempo di delay, ovvero
dell'intervallo di tempo, a partire dal trigger, in seguito al quale si desidera
che avvenga la simulazione di guasto.
• C2 : codifica la durata del guasto, parametro che, insieme al precedente, è a
totale discrezione dell'utente.
• C3, C4, .. , C9 : al momento inutilizzati e destinati a scopi futuri.
• SLICES : è contenuta la sequenza degli stati dei pin, definiscono il pattern di
modulazione del sensore.
1.2 Interfaccia Grafica
A partire dalla precedente implementazione dell'emulatore ed utilizzando
l'ambiente LabView è stata aggiunta la funzione di emulazione dei guasti.
Visualizzando il front panel è stata aggiunta sulla destra una sottosezione chiamata
Fault Manager in cui è stato inserito tutto l'occorrente per poter settare
adeguatamente i parametri relativi ai guasti. Partendo dall'alto e muovendosi verso
il basso, vi sono due slider (Fault Delay e Fault Duration) tramite cui vengono
selezionati i tempi di delay del fault rispetto al trigger e la durata effettiva del
guasto, successivamente vi è Faults ON/OFF tramite cui impostare o meno
l'abilitazione della simulazione di guasto: è importante notare che nel caso in cui
Faults ON/OFF non sia impostato su ON, l'emulatore è stato impostato in modo da
9

ignorare tutti i settaggi relativi ai faults, operando in condizioni di assenza di guasti.
Inoltre, tramite uno switch è possibile selezionare la tipologia di fault di interesse
(sia esso short o open) ed agendo su Faults iteration è possibile rendere iterativo il
presentarsi di malfunzionamenti così da poter simulare, ad esempio, situazioni di
guasti intermittenti.
Quindi, una volta selezionata la porta seriale a cui è connessa la board, scelto il
sensore da voler simulare ed impostati i parametri dei guasti, sarà sufficiente
utilizzare il bottone TRANSMIT per inviare i dati al microcontrollore che
provvederà poi ad elaborarli, l'accensione di un LED verde sull'interfaccia
indicherà la corretta riuscita della trasmissione. Non è stato però possibile inserire
la possibilità di simulare i guasti per l'accelerometro per le motivazioni spiegate nel
Capitolo 4 per cui, selezionandolo, la GUI nasconderà automaticamente le
impostazioni relative ai faults.
10

Capitolo 2: Firmware
Il firmware è strutturato secondo una logica di interrupt dove, al verificarsi di un
particolare evento la CPU sospende l'esecuzione del programma corrente per
servire l'interruzione mediante la chiamata della subroutine che esegue il compito
richiesto dall'interrupt., terminato il quale il processore riprende l'esecuzione delle
operazioni che stava precedentemente elaborando. Per la modifica del precedente
firmware sono state utilizzate librerie standard (messe a disposizione da AVR) oltre
che le librerie sviluppate in precedenza a cui sono state applicate alcune
ottimizzazioni per rendere più performante l'emulatore.
Le librerie custom sono state raggruppate in base alle funzionalità che inglobano:
1. UARTFunctions.h: contiene le primitive e le funzioni necessarie per
permettere la comunicazione tra il microcontrollore ed il pc.
2. DynamicStringFunctions.h: contiene la definzione di tipo e le funzioni
necessarie per poter utilizzare il tipo strutturato non predefinito “String”,
composto da una parte statica di lunghezza fissa più una parte dinamica a
lunghezza variabile.
3. TIMERFunctions.h: racchiude tutta la logica per la gestione dei tre timer
disponibili all'interno dell'ATMEGA328p, inglobando in funzioni tutti i
passaggi per settare i valori all'interno dei registri dei timer.
4. ADCFunctions.h: contiene le procedure per il funzionamento del
convertitore Analog-to-Digital
2.1 ISR TIMER0
L'interrupt del TIMER0 viene invocata non appena il contenuto del registro di
conteggio coincide con il valore memorizzato nel registro di arrivo, poiché il timer
in questione ha il compito di contare sia il tempo di delay che il tempo di durata11

effettiva del guasto, l'interruzione presenta un duplice comportamento descritto
dalla seguente illustrazione nell'ipotesi che fault_delay<650μs e quindi il TIMER0
parta con un prescaler di 64:
12
Illustrazione 3: Diagramma di flusso interrupt Timer0

2.1.1 Prescaler e Risoluzione
Mediante l'interfaccia grafica, l'utente potrà selezionare valori di delay e di durata
del fault che vanno, rispettivamente, da 30 a 2600μs per il primo slider e da 10 a
2600μs per il secondo. Risulta di fondamentale importanza notare che, poiché il
TIMER0 possiede unicamente registri ad 8bit, occorre selezionare il prescaler in
maniera adeguata per poter simulare guasti di delay e durata desiderata, inoltre i
due tempi in esame non devono essere necessariamente di uguale estensione e ciò
porta all'inserimento di istruzioni per il cambiamento del prescaler tra il conteggio
del delay e della duration, come è possibile osservare dall'illustrazione 2.
Senza l'impostazione di un prescaler, con il TIMER0 sarebbe possibile contare fino
a:
Un intervallo temporale estremamente piccolo. L'ATMega328p mette a
disposizione la possibilità di impostare il prescaler a valori quali 8, 64, 256, 1024 in
base alle esigenze derivanti dalla particolare applicazione. Utilizzando la relazione
precedentemente applicata:
Utilizzando questi due valori di prescaler, il timer potrà quindi contare l'intervallo
di tempo richiesto, in particolare, nel caso in cui il valore desiderato (sia esso per la
durata o il delay) sia inferiore al 650μs, il prescaler del TIMER0 verrà impostato
durante l'esecuzione del programma a 64, altrimenti a 256.
13

2.1.2 Maschere di Open e di Short
I faults vengono generati andando a definire ed applicare delle particolari bit mask
che condizionano i livelli logici dei pin del microcontrollore producendo, a livello
fisico, gli effetti descritti nel Capitolo 1. Considerato il fault di tipo OPEN, ad esso
è associato un'opportuna maschera (OPEN_mask) che ha come valore predefinito
0x3C che, una volta terminato il tempo di delay, viene modificato in 0x00 per tutta
la durata del fault ottenendo l'effetto desiderato per poi re-impostare la maschera al
valore predefinito. Il valore di partenza è stato calcolato determinando i pin
connessi alle gate dei mosfet presenti nell'Illustrazione 1, si ha infatti che è la porta
B a controllare i pin digitali che vanno da 8 a 13 e, poiché in condizioni di regolare
funzionamento dell'emulatore i pin D10, D11, D12 e D13 devono essere in ogni
caso alti – altrimenti non si avrebbe passaggio di corrente – osservando la struttura
del registro PORTB:
Considerata l'esecuzione di un fault di tipo OPEN nel caso iterativo, si ha un
andamento della maschera di questo tipo:
14
Illustrazione 4: Registro PORTB

Più immediato è il discorso nel caso del fault di tipo SHORT TO GROUND
poiché, in questo caso, l'obiettivo è alzare tutti i pin digitali (da D0 a D13). Per
realizzare questa tipologia di fault si ricorre quindi ad una maschera differente
(SHORT_mask) dal valore predefinito posto a 0x00 che, una volta terminato il
conteggio del tempo di delay, viene passato a 0xFF per tutta la durata del fault, e,
poiché la maschera contribuisce tramite un OR al risultato finale sui registri
PORTB (che pilota i pin D8 a D13) e PORTD (pin da D0 a D7) si ottiene la
saturazione dell'uscita dei sensori a 35 mA.
15

Capitolo 3: Ottimizzazioni
Utilizzare funzioni con un numero eccessivo di controlli e di istruzioni rallentava
più del consentito l'esecuzione dell'emulatore e quindi per eliminare alcune
assegnazioni dalle routine di interrupt dei timer, utilizzando il datasheet
dell'ATMEGA328p, sono stati impostati tutti in CLEAR TIMER ON
COMPARE MATCH (CTC) MODE in cui, al contrario dell'esecuzione in
modalità normale, porta automaticamente a zero il contatore una volta che il valore
di conteggio (contenuto nel registro TCNTx) coincide con il valore contenuto nel
registro OCRxA. Così facendo sono state eliminate tutte le operazioni software di
azzeramento del registro di conteggio dalle interrupt ottenendo un aumento della
velocità complessiva di esecuzione oltre all'alleggerimento delle routine. Il ridotto
tempo di esecuzione della routine di interrupt ha reso necessaria la ricalibrazione
dello scheduler interno.
3.1 Scelta dei fattori correttivi
Effettuando differenti misurazioni con l'oscilloscopio è stato determinato l'errore
medio nel calcolo dei tempi di delay e di durata dei faults sia nel caso di prescaler
impostato a 64 o 256. Sono emersi i seguenti risultati: selezionando un prescaler
pari a 64, il valore misurato del tempo di delay si discostava in media dal valore
ideale di 9μs mentre quello del tempo di durata di appena 3μs, con questi dati sono
stati calcolati i fattori correttivi utilizzando la seguente relazione:
16
Determinando così, al lancio del timer0, la necessità di sottrarre una costante pari a
4 al tempo di delay (nel caso di prescaler impostato a 64) e di sottrarre 1 alla durata
del fault. Le medesime misurazioni sono state effettuate selezionando il prescaler a
256, evidenziando uno scostamento del tempo di delay di 12μs rispetto all'idealità
ed un errore di 9μs nel tempo di durata, applicando la stessa relazione
precedentemente definita sono stati determinati i due fattori correttivi (stavolta
coincidenti): al lancio del timer andrà sottratto 1 ad entrambi i tempi.
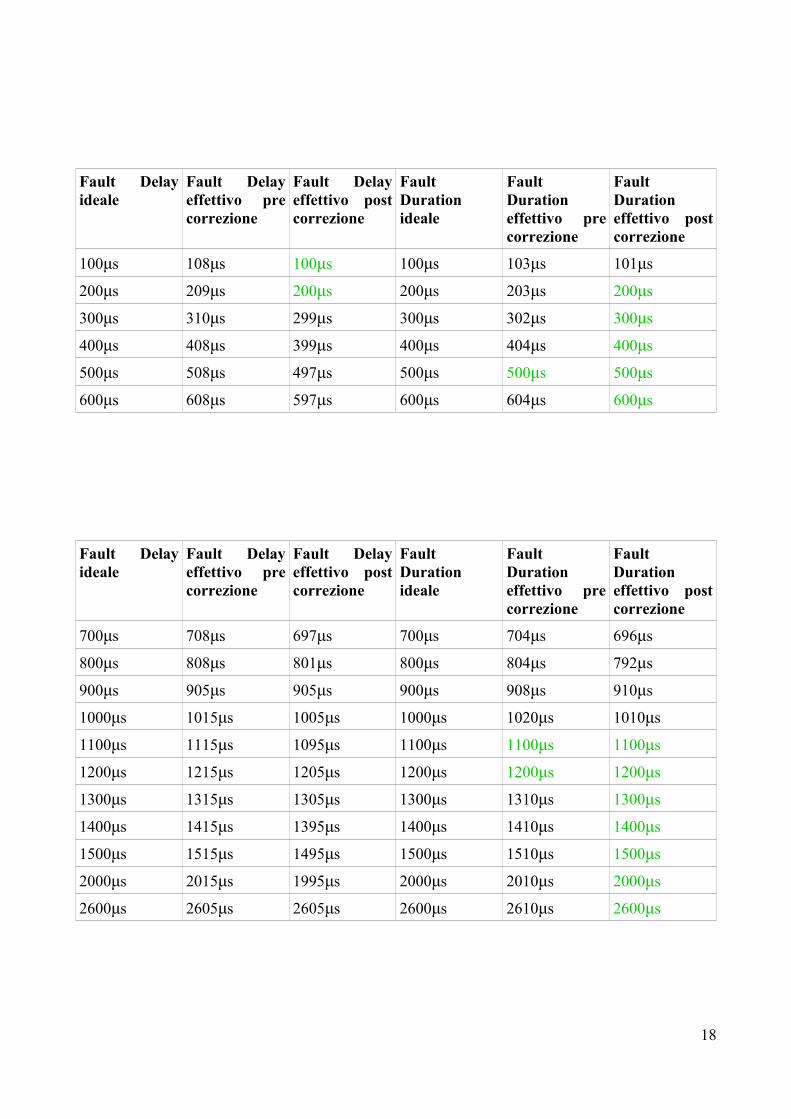
Inseriti i fattori di correzione all'interno del codice sono state effettuate nuovamente
le misurazioni oggetto del test evidenziando un notevole miglioramento rispetto
alla situazione iniziale. Alla pagina seguente sono riportate le tabelle contenti le
misurazioni effettuate: nella prima tabella il prescaler a cui era impostato il timer è
pari a 64, nella seconda a 256.
17
Fault Delayideale
Fault Delayeffettivo precorrezione
Fault Delayeffettivo postcorrezione
FaultDurationideale
FaultDurationeffettivo precorrezione
FaultDurationeffettivo postcorrezione
100μs 108μs 100μs 100μs 103μs 101μs
200μs 209μs 200μs 200μs 203μs 200μs
300μs 310μs 299μs 300μs 302μs 300μs
400μs 408μs 399μs 400μs 404μs 400μs
500μs 508μs 497μs 500μs 500μs 500μs
600μs 608μs 597μs 600μs 604μs 600μs
Fault Delayideale
Fault Delayeffettivo precorrezione
Fault Delayeffettivo postcorrezione
FaultDurationideale
FaultDurationeffettivo precorrezione
FaultDurationeffettivo postcorrezione
700μs 708μs 697μs 700μs 704μs 696μs
800μs 808μs 801μs 800μs 804μs 792μs
900μs 905μs 905μs 900μs 908μs 910μs
1000μs 1015μs 1005μs 1000μs 1020μs 1010μs
1100μs 1115μs 1095μs 1100μs 1100μs 1100μs
1200μs 1215μs 1205μs 1200μs 1200μs 1200μs
1300μs 1315μs 1305μs 1300μs 1310μs 1300μs
1400μs 1415μs 1395μs 1400μs 1410μs 1400μs
1500μs 1515μs 1495μs 1500μs 1510μs 1500μs
2000μs 2015μs 1995μs 2000μs 2010μs 2000μs
2600μs 2605μs 2605μs 2600μs 2610μs 2600μs
18

Capitolo 4: Risultati sperimentali
La parte finale del lavoro ha riguardato la caratterizzazione delle performances
dell'emulatore in termini di fault injection.
Il primo canale mostra sull'oscilloscopio la corrente dei sensori, misurata tramite
una sonda di corrente, il secondo canale è mostrato a video collegando una sonda di
tensione al pin D2 ed evidenzia gli impulsi di inizio frame, il terzo canale mostra
gli impulsi relativi alla trasmissione dei dati da parte dei sensori mentre il quarto ed
ultimo canale permette di vedere l'effetto dei fault di tipo OPEN.
Per mostrare l'effetto dei fault sui sensori, occorrerà fornire le informazioni
necessarie alla comprensione del loro funzionamento in condizioni di normali.
19
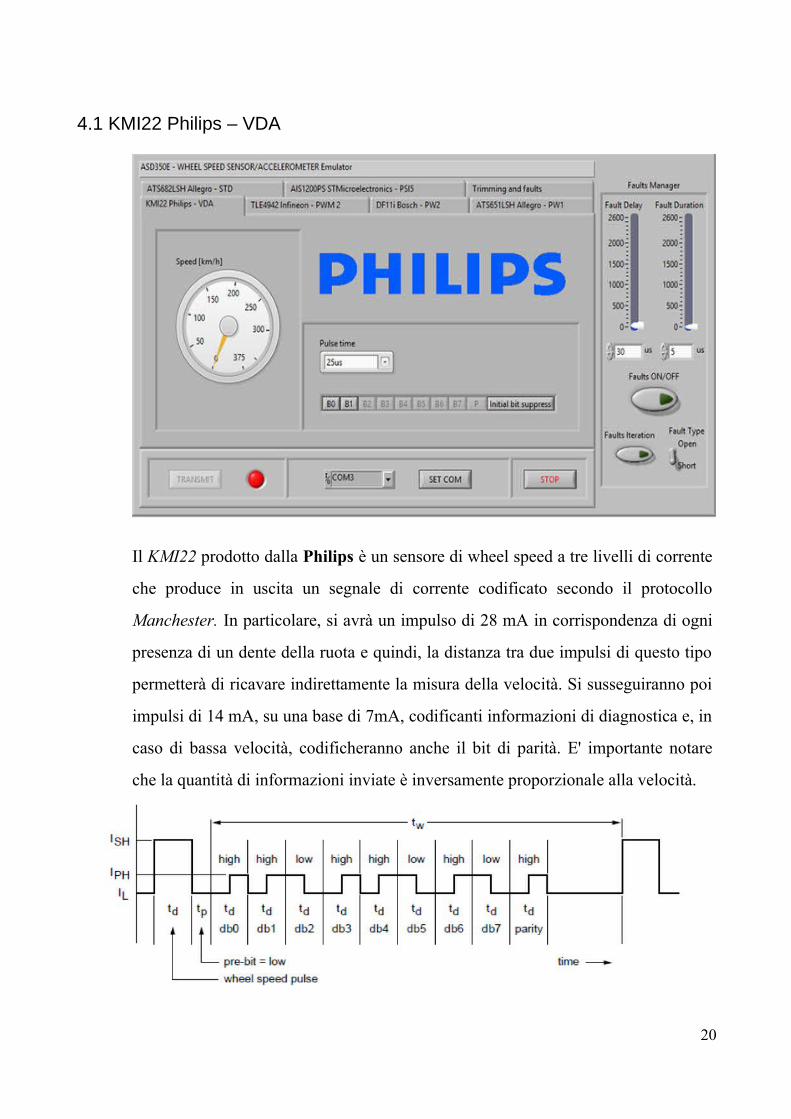
4.1 KMI22 Philips – VDA
Il KMI22 prodotto dalla Philips è un sensore di wheel speed a tre livelli di corrente
che produce in uscita un segnale di corrente codificato secondo il protocollo
Manchester. In particolare, si avrà un impulso di 28 mA in corrispondenza di ogni
presenza di un dente della ruota e quindi, la distanza tra due impulsi di questo tipo
permetterà di ricavare indirettamente la misura della velocità. Si susseguiranno poi
impulsi di 14 mA, su una base di 7mA, codificanti informazioni di diagnostica e, in
caso di bassa velocità, codificheranno anche il bit di parità. E' importante notare
che la quantità di informazioni inviate è inversamente proporzionale alla velocità.
20
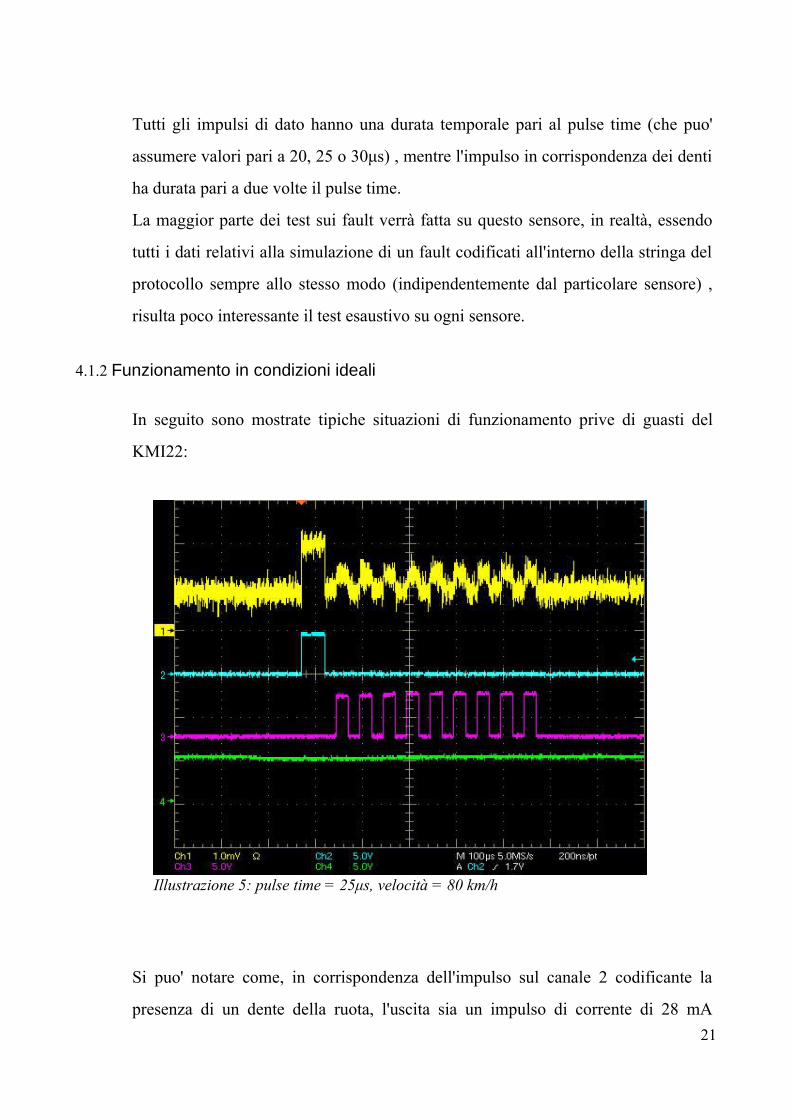
Tutti gli impulsi di dato hanno una durata temporale pari al pulse time (che puo'
assumere valori pari a 20, 25 o 30μs) , mentre l'impulso in corrispondenza dei denti
ha durata pari a due volte il pulse time.
La maggior parte dei test sui fault verrà fatta su questo sensore, in realtà, essendo
tutti i dati relativi alla simulazione di un fault codificati all'interno della stringa del
protocollo sempre allo stesso modo (indipendentemente dal particolare sensore) ,
risulta poco interessante il test esaustivo su ogni sensore.
4.1.2 Funzionamento in condizioni ideali
In seguito sono mostrate tipiche situazioni di funzionamento prive di guasti del
KMI22:
Si puo' notare come, in corrispondenza dell'impulso sul canale 2 codificante la
presenza di un dente della ruota, l'uscita sia un impulso di corrente di 28 mA
21
Illustrazione 5: pulse time = 25μs, velocità = 80 km/h
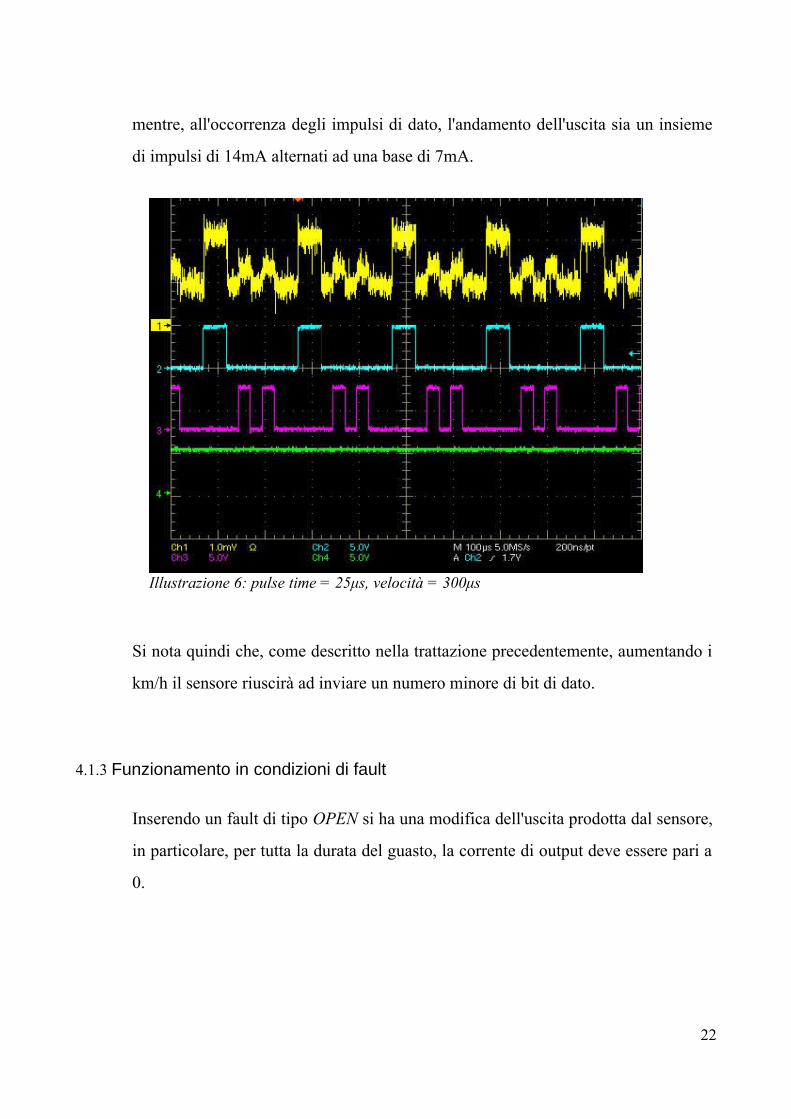
mentre, all'occorrenza degli impulsi di dato, l'andamento dell'uscita sia un insieme
di impulsi di 14mA alternati ad una base di 7mA.
Si nota quindi che, come descritto nella trattazione precedentemente, aumentando i
km/h il sensore riuscirà ad inviare un numero minore di bit di dato.
4.1.3 Funzionamento in condizioni di fault
Inserendo un fault di tipo OPEN si ha una modifica dell'uscita prodotta dal sensore,
in particolare, per tutta la durata del guasto, la corrente di output deve essere pari a
0.
22
Illustrazione 6: pulse time = 25μs, velocità = 300μs

Nell'Illustrazione 6 è mostrato il caso di un fault con delay pari a 100μs e durata
pari a 80μs, è importante notare che il calcolo del delay non parte dal primo fronte
alto del segnale bensì dall'inizio della frame, ovvero un pulse time (25μs) prima.
Per quanto riguarda la misura della durata del fault, in questa particolare
simulazione, il guasto risulta durare 2μs in più, ma ciò è dovuto alla bassa
risoluzione del timer calcolabile mediante la semplice relazione:
Ricordando che in questo caso il prescaler associato alla duration è pari a 64 poiché
la durata impostata è minore di 650μs.
23
Illustrazione 7: fault delay = 100μs, fault duration = 80μs

Un'ulteriore simulazione è quella realizzabile aumentando la velocità a 270 km/h ed
impostando il delay del fault a 400μs e la durata dei fault a 700μs (utilizzando
quindi un prescaler impostato a 256). Con questi dati, l'uscita sulll'oscilloscopio è:
24
Illustrazione 8: Misura della durata del guasto

Si ha che ad alte velocità gli speed pulse sono molto ravvicinati e dal primo fronte
d'onda vengono calcolati i 400μs di delay.
Riducendo a 100μs il delay e la velocità ed impostando la duration a 50μs,
simulando dei fault di tipo OPEN iterativamente si ottiene il seguente risultato:
In questa situazione non è avvenuto il corretto tracciamento della forma d'onda
mentre è però corretta l'uscita del sensore: la corrente deve essere 0 mA in
corrispondenza dei fault.
I guasti di tipologia SHORT producono la saturazione dell'uscita a 35 mA, di
seguito è riportata una simulazione del loro funzionamento con velocità a 67 km/h,
delay a 30μs e durata a 300μs.
25
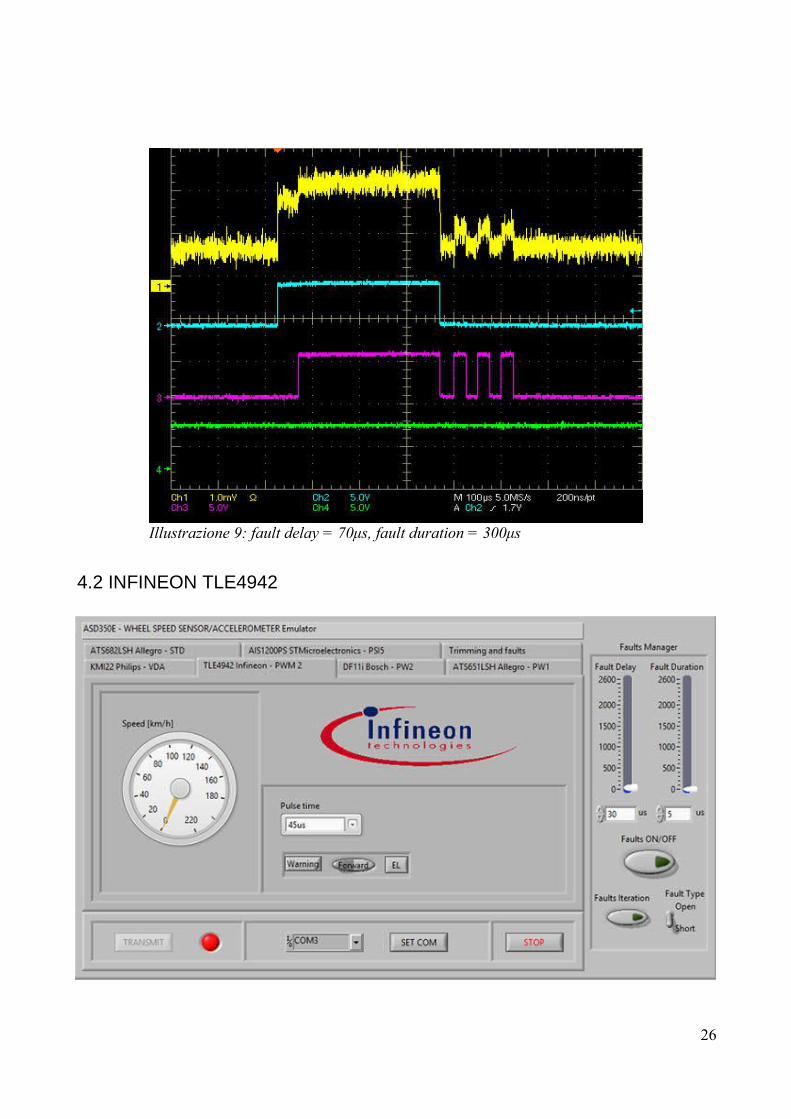
4.2 INFINEON TLE4942
26
Illustrazione 9: fault delay = 70μs, fault duration = 300μs

L'INFINEON TLE4942 è un sensore a due livelli di corrente in cui la distanza
temporale tra due fronti di salita degli impulsi fornisce una misura indiretta della
velocità mentre eventuali informazioni sono trasmesse mediante la lunghezza degli
impulsi alti, di durata temporale multipla del pulse time.
Un segnale di warning è codificato con un impulso di durata temporale pari ad un
pulse time, la marcia in avanti è tradotta in un impulso di durata temporale pari a
due pulse time, mentre la marcia indietro con quattro pulse time.
4.2.1 Funzionamento in condizione di fault
Oltre che sul KMI22, le condizioni di fault sono state testate anche sul sensore
Infineon, di seguito sono riportati i risultati di alcune simulazioni.
27
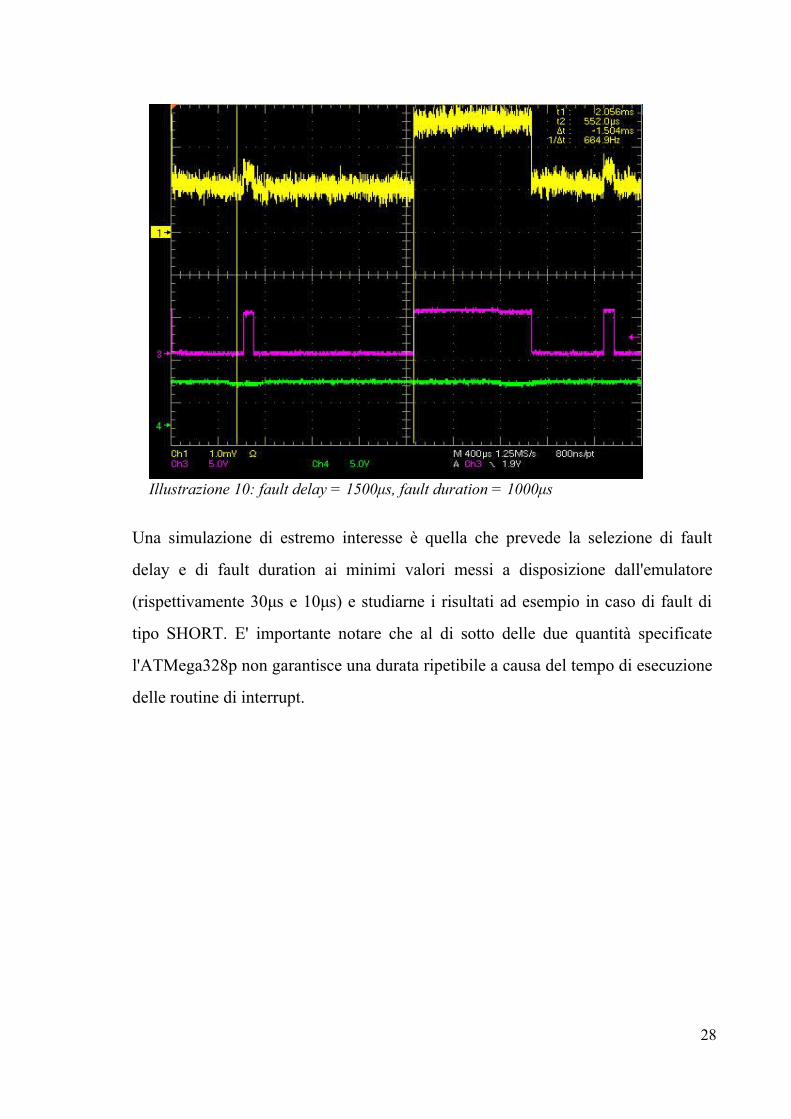
Una simulazione di estremo interesse è quella che prevede la selezione di fault
delay e di fault duration ai minimi valori messi a disposizione dall'emulatore
(rispettivamente 30μs e 10μs) e studiarne i risultati ad esempio in caso di fault di
tipo SHORT. E' importante notare che al di sotto delle due quantità specificate
l'ATMega328p non garantisce una durata ripetibile a causa del tempo di esecuzione
delle routine di interrupt.
28
Illustrazione 10: fault delay = 1500μs, fault duration = 1000μs

Si puo' notare che nonostante le condizioni limite, il funzionamento dell'emulatore
è prossimo all'idealità.
4.3 AIS1200PS
E' necessario trattare a parte l'accelerometro AIS1200PS sviluppato dalla
STMicroeletronics poiché, al contrario degli altri sensori, richiede la produzione di
impulsi della durata di 4μs obbligando quindi ad una riduzione all'essenziale delle
operazioni necessarie alla gestione dell'interruzione del timer2 che ne descrive il
comportamento. Il pattern caratteristico prodotto dal sensore ha un periodo di
500μs dove solo nei primi 104μs si hanno delle transizioni che definiscono il valore
di 13 bit:
• S0 ed S1 sono start bit.
• In D0 – D9 è codificato il valore dell'accelerazione.
• L'ultimo bit è di parità.
Per i restanti 396μs la corrente in uscita rimane costante a 7 mA.
29
Illustrazione 11: fault delay = 30μs, fault duration = 10μs

Tutti i tentativi di inserire la possibilità di fault injection su questo tipo di sensore
hanno portato a ripercussioni negative sul funzionamento in modalità priva di fault:
essendo il timing particolarmente critico per questo sensore infatti, qualsiasi tipo di
emulazione dei fault comportava una complessità computazionale non sostenibile
per il micro. Si è dunque deciso di disabilitare la modalità di emulazione dei fault
per l'accelerometro.
30

Conclusioni
Il lavoro svolto per la costruzione di un modulo di fault-injection da aggiungere
all'emulatore ASD350E pre-esistente, ha portato all'affrontare un gran numero di
problematiche relative allo studio ed alla comprensione di un progetto sviluppato
da terzi oltre alle difficoltà di sviluppo vere e proprie del plug-in,
Dopo aver approfondito la conoscenza sul funzionamento e sulle potenzialità del
microcontrollore montato sulla board utilizzata, al candidato è stato chiesto di
sviluppare la parte firmware del componente utilizzando l'IDE Atmel Studio e la
GUI ricorrendo al software LabView in modo tale da permettere al plug-in di essere
perfettamente compatibile con gli output della versione precedente dell'interfaccia
grafica dell'emulatore.
Nella fase finale di test bench sono emerse le potenzialità del modulo e la validità
delle simulazioni di guasto effettuabili utilizzandolo, sebbene non sia stato
possibile renderlo utilizzabile nel caso dell'accelerometro dove i risultati ottenuti
non hanno corrisposto le aspettative.
Durante lo sviluppo del modulo sono state fornite direttive riguardo a modifiche
dell'emulatore pre-esistente per gli sviluppi futuri di nuove tipologie di sensori e
plug-in.
31

Bibliografia
[1] Roberto Galizia, “Sviluppo ed ottimizzazione firmware e software di un emulatore
di accelerometer e wheel speed sensor per applicazioni airbag ed ESP”, Napoli
2013.
[2] Atmel ATMEGA328p, DATASHEET
[3] Infineon Technologies TLE4942 DATASHEET
[4] Philips KMI22 VDA3level, DATASHEET
[5] STMicroelectronics AIS1200PS PSI5, DATASHEET
32