Sistemi robotici e meccatronici per la riabilitazione...principali sono l’ictus, i traumi cranici,...
20
1 Università di Pisa Facoltà di Medicina e Chirurgia Corso di Laurea in Terapia Occupazionale Anno Accademico 2009/2010 Corso di “Bioingegneria applicata alle protesi” Sistemi robotici e meccatronici per la riabilitazione Stefano Mazzoleni ARTS Lab, Advanced Robotics Technology & Systems Laboratory, Scuola Superiore Sant'Anna, Pisa [email protected] Sommario Questo capitolo presenta le motivazioni e i presupposti neurofisiologici che sono alla base dello sviluppo di sistemi meccatronici e robotici per la riabilitazione, illustra il principio di funzionamento e le principali caratteristiche tecniche di alcuni sistemi che sono stati sviluppati negli ultimi anni e analizza i risultati che sono stati ottenuti nella pratica clinica. Nella parte conclusiva del capitolo vengono presentate le notevoli potenzialità per un ulteriore sviluppo di tali macchine grazie al contributo della ricerca nel settore della bioingegneria, con particolare riferimento all’utilizzo integrato di macchine robotiche riabilitative, di sistemi meccatronici indossabili per l’analisi del movimento, e la valutazione funzionale e di tecniche avanzate di brain imaging sia per analizzare i meccanismi di recupero motorio e cognitivo a seguito di un danno neurologico, sia per la valutazione degli effetti della terapia riabilitativa, in particolare quella robotica. Introduzione Nelle società industrializzate esistono diversi fattori che concorrono a determinare una sempre maggiore necessità di prestazioni riabilitative, a completamento e supporto degli interventi medici di tipo chirurgico e farmacologico. I principali di essi sono la crescente longevità della popolazione, l’esigenza di ridurre i tempi di degenza ospedaliera, l’introduzione di terapie che permettono di trattare patologie progressive altamente invalidanti, l’incremento di incidenza di disabilità gravi e moderate derivante dall’aumento di attività a rischio di incidenti e traumi, l’utilizzo di tecniche avanzate di rianimazione. La necessità di una terapia riabilitativa appropriata ha una sempre maggiore rilevanza in molte patologie motorie di origine neurologica: in questo caso si parla più specificamente di neuroriabilitazione.
Transcript of Sistemi robotici e meccatronici per la riabilitazione...principali sono l’ictus, i traumi cranici,...
1
Università di Pisa Facoltà di Medicina e Chirurgia
Corso di Laurea in Terapia Occupazionale Anno Accademico 2009/2010
Corso di “Bioingegneria applicata alle protesi”
Sistemi robotici e meccatronici per la riabilitazione
Stefano Mazzoleni
ARTS Lab, Advanced Robotics Technology & Systems Laboratory, Scuola Superiore Sant'Anna, Pisa
Sommario
Questo capitolo presenta le motivazioni e i presupposti neurofisiologici che sono alla base dello
sviluppo di sistemi meccatronici e robotici per la riabilitazione, illustra il principio di
funzionamento e le principali caratteristiche tecniche di alcuni sistemi che sono stati sviluppati negli
ultimi anni e analizza i risultati che sono stati ottenuti nella pratica clinica. Nella parte conclusiva
del capitolo vengono presentate le notevoli potenzialità per un ulteriore sviluppo di tali macchine
grazie al contributo della ricerca nel settore della bioingegneria, con particolare riferimento
all’utilizzo integrato di macchine robotiche riabilitative, di sistemi meccatronici indossabili per
l’analisi del movimento, e la valutazione funzionale e di tecniche avanzate di brain imaging sia per
analizzare i meccanismi di recupero motorio e cognitivo a seguito di un danno neurologico, sia per
la valutazione degli effetti della terapia riabilitativa, in particolare quella robotica.
Introduzione
Nelle società industrializzate esistono diversi fattori che concorrono a determinare una sempre
maggiore necessità di prestazioni riabilitative, a completamento e supporto degli interventi medici
di tipo chirurgico e farmacologico. I principali di essi sono la crescente longevità della popolazione,
l’esigenza di ridurre i tempi di degenza ospedaliera, l’introduzione di terapie che permettono di
trattare patologie progressive altamente invalidanti, l’incremento di incidenza di disabilità gravi e
moderate derivante dall’aumento di attività a rischio di incidenti e traumi, l’utilizzo di tecniche
avanzate di rianimazione.
La necessità di una terapia riabilitativa appropriata ha una sempre maggiore rilevanza in molte
patologie motorie di origine neurologica: in questo caso si parla più specificamente di
neuroriabilitazione.

2
Milioni di persone nel mondo soffrono di disordini motori legati a problemi neurologici, tra i quali i
principali sono l’ictus, i traumi cranici, le lesioni del midollo spinale, la sclerosi multipla e il morbo
di Parkinson.
Ogni anno si verificano in Italia circa 196.000 casi di ictus1: in circa il 20% di questi casi si
verifica il decesso entro il primo mese successivo all’evento e il 30% dei sopravvissuti rimane
affetto da disabilità gravi. Di questi 196.000, l’80% sono primi episodi, mentre il 20% sono recidive.
L’ictus cerebrale rappresenta la terza causa di morte nei paesi industrializzati, dopo le malattie
cardiovascolari ed i tumori e la prima causa di disabilità con un rilevante impatto individuale,
familiare e sociosanitario [1]-[3]. L’incidenza dell’ictus aumenta progressivamente con l’età
raggiungendo il valore massimo negli ultra ottantacinquenni. Il 75% degli ictus colpisce i soggetti
di oltre 65 anni. Il tasso di prevalenza di ictus nella popolazione anziana (età 65-84 anni) italiana è
pari al 6,5%, ed è leggermente più alto negli uomini (7,4%) rispetto alle donne (5,9%). In
particolare negli ultraottantenni l’incidenza di ictus raggiunge il 24,2% con una prevalenza maschile
(28,2%) rispetto a quella femminile (21,8%). L’ictus colpisce, sia pure in misura minore, anche
persone giovani, circa 27.000 persone in età produttiva (<65 anni) ogni anno [4]. Negli USA, la
stima del costo delle cure di ospedalizzazione a causa di ictus per il 2009 è di $68,9 miliardi [5].
In molti casi le metodiche riabilitative motorie tradizionali consistono nella manipolazione
dell'arto paretico da parte del terapista. Solitamente il trattamento viene pianificato valutando ex
ante le abilità residue del soggetto e può durare diverse ore al giorno, divenendo così molto spesso
un esercizio lungo e faticoso sia per il paziente che per il terapista. Inoltre, il percorso terapeutico
può prolungarsi anche per alcuni mesi, nel corso dei quali il paziente deve recarsi quotidianamente
presso la struttura clinica e affrontare seri disagi per sè e per i propri familiari.
Peraltro, per molti disordini motori non è ancora sufficientemente chiaro quali siano i trattamenti
terapeutici e i protocolli clinici che risultino oggettivamente più efficaci per il migliore recupero
della funzionalità motoria; ciò deriva anche dal fatto che le abilità residue del paziente vengono
spesso valutate mediante metodi in larga misura soggettivi, il che rende difficile monitorare
adeguatamente gli effetti del trattamento riabilitativo sul paziente. La natura di tali trattamenti, che
devono essere somministrati dai terapisti su un paziente alla volta, e la mancanza di metodologie e
di strumenti che consentano di confrontare le diverse terapie riabilitative e la loro reale efficacia
fanno sì che le spese associate alle prestazioni riabilitative siano tipicamente molto elevate; il
rapporto tra il numero di risorse umane qualificate da impiegare per l’erogazione del servizio
riabilitativo e il numero di pazienti trattati è infatti sempre molto vicino o superiore all’unità. Inoltre
1 Questi dati derivano dalla estrapolazione fatta sulla popolazione italiana nel 2001.
3
risultano di difficile definizione le strategie di valutazione e di miglioramento del rapporto
costo/beneficio relativo agli specifici programmi riabilitativi.
L’impiego di macchine robotiche per la neuroriabilitazione si ispira a evidenze in ambito
neurofisiologico che dimostrano come, a partire dal livello cellulare, le connessioni sinaptiche
subiscano continue modifiche, in risposta a eventi fisiologici, stimoli ambientali (processi di
apprendimento e memorizzazione) e danni al Sistema Nervoso Centrale (SNC)2.
La topologia della corteccia motoria e sensoriale non è fissa, ma flessibile e si adatta in base
all’apprendimento e all’esperienza [6]. Questa caratteristica della corteccia motoria ha importanti
conseguenze per la riabilitazione: ci sono aree della corteccia cerebrale che hanno la capacità di
adattare le loro funzioni ai cambiamenti avvenuti, l’addestramento intensivo di un’area corticale
può avvenire alle spese di aree circostanti e possono verificarsi rapidi cambiamenti dell’attività
corticale. Grazie alle tecniche di brain imaging, come la risonanza magnetica funzionale (fMRI,
functional Magnetic Resonance Imaging) e la tomografia ad emissione di positroni (PET, Positron
emission tomography), alla stimolazione magnetica transcranica (TMS, Transcranial magnetic
stimulation) associata ai potenziali motori evocati (MEP, Motor Evoked Potentials) e alla
stimolazione elettrica sono state osservati cambiamenti nell’eccitabilità e nella topologia del SNC.
Attraverso l’impiego di queste tecniche è possibile identificare le regioni che hanno subito un danno
e applicare una terapia specifica.
I fattori che influenzano l’apprendimento sensorimotorio sono di tipo fisico (feedback sensoriali
come la vista, l’udito e la propriocezione), di tipo psicologico (piacere/dolore, motivazione, spinte
emotive e desiderio) e di tipo cognitivo (decision making, pianificazione, ragionamento,
concentrazione e attenzione, linguaggio e comprensione, esperienze pregresse).
L’apprendimento sensorimotorio può essere facilitato mediante la ripetizione di movimenti
finalizzati ad un obiettivo specifico (goal-oriented), il rafforzamento dei muscoli e l’aumento
dell’intervallo del movimento (ROM, Range of Movement), la modulazione della spasticità,
un’aumentata richiesta di focalizzazione dell’attenzione sul movimento e l’incremento degli stimoli
sensoriali.
Negli ultimi anni alcuni gruppi di ricerca hanno studiato e sviluppato sistemi meccatronici e
robotici per la riabilitazione, in grado di permettere al paziente di effettuare movimenti ripetitivi e
2 I termini neuroplasticità o plasticità neurale sono usati per indicare una sequenza di cambiamenti nelle risposte chimiche (interazione del neurotrasmettitore con il recettore), elettriche (depressione o potenziamento a lungo termine) e molecolari (attivazione dei fattori di trascrizione e della sintesi proteica), che conducono alla riorganizzazione delle connessioni nelle aree cerebrali e, conseguentemente, a cambiamenti cognitivi e comportamentali stabili.
4
goal-oriented, che consentono di effettuare un addestramento sicuro ed intensivo3 che può essere
effettuato in associazione ad altri tipi di trattamento, appropriato a ciascun livello di abilità motorie
residue, potenzialmente in grado di migliorare in maniera significativa gli esiti della terapia
riabilitativa, di permetterne una valutazione oggettiva e di migliorare la pianificazione e l’utilizzo
delle risorse sanitarie.
Nella fase riabilitativa assistita dal robot, il ruolo del paziente è assolutamente centrale: il robot
accompagna, ed eventualmente completa, il movimento eseguito dal paziente in base alle sue
capacità motorie residue (strategia di controllo denominata “assisted-as-needed”) e consente di
ricevere molteplici input sensorimotori e cognitivi, ovvero stimoli propriocettivi, stimoli visivi,
spinte motivazionali4.
Il paziente affetto da problemi motori può svolgere la terapia di riabilitazione con l’ausilio di una
“macchina riabilitativa” 5 . Mediante opportuni sensori, la macchina è in grado di misurare le
variabili dinamiche di interesse clinico durante l’esecuzione di movimenti attivi e passivi da parte
del paziente e di permettere così una valutazione quantitativa degli specifici meccanismi fisiologici,
dei recuperi spontanei e dell’abilità funzionale. Tale valutazione risulta molto più accurata di quanto
non sia possibile con i metodi tradizionali. Inoltre, la macchina può consentire al terapista di
programmare e di fare eseguire al paziente una vasta gamma di sequenze di movimenti utili per la
riabilitazione dell’arto.
L’applicazione di macchine nella riabilitazione soffre ancora di alcune limitazioni tecniche e
funzionali; il suo reale vantaggio in campo clinico è stato dimostrato solo parzialmente. Vi sono
tuttavia solidi argomenti che incoraggiano la ricerca a sviluppare nuovi sistemi per la riabilitazione
che traggano diretto vantaggio dal progresso scientifico e tecnologico nel campo della robotica e
della meccatronica.
Il potenziale clinico di queste macchine è tuttavia evidentemente notevole in quanto esse possono,
da un lato, coadiuvare il terapista nel somministrare la terapia motoria ritenuta più adeguata per
3 Durante ogni singola seduta riabilitativa con i sistemi robotici è possibile effettuare un numero estremamente elevato di movimenti: la ripetizione di movimenti è un fattore che può facilitare il recupero di funzioni motorie. 4 Il paziente si sente gratificato dall’impiego di sistemi tecnologicamente avanzati per la riabilitazione. Inoltre le spinte motivazionali sono fortemente stimolate dall’impiego di interfacce software che consentono al paziente di ricevere informazioni (feedback) sui movimenti eseguiti e collegabili al recupero di funzionalità essenziali per la propria vita quotidiana. 5 Una “macchina riabilitativa” è un sistema robotico o meccatronico in grado di coadiuvare il terapista nella somministrazione di trattamenti riabilitativi programmabili e personalizzabili. E’ costituita da una struttura meccanica articolata in cui sono presenti 1) attuatori (cioè i motori), 2) sorgenti di energia, 3) sensori di tipo propriocettivo, che forniscono informazioni sullo stato della macchina, e/o di tipo esterocettivo, che forniscono informazioni sull’interazione della macchina con l’ambiente di lavoro, 4) un microcontrollore, dedicato all’elaborazione dei segnali provenienti dai sensori e alla generazione dei comandi di controllo motorio e 5) una interfaccia uomo-macchina (software), dedicata all’immissione dei comandi da parte dell’utente, alla registrazione dei dati e alla presentazione di informazioni di feedback.

5
ogni singolo paziente con la precisione e la ripetibilità caratteristiche dei sistemi robotici e,
dall’altro, permettere di acquisire informazioni quantitative sui movimenti effettuati dal paziente
stesso, attraverso le registrazioni di variabili fisiche associate al movimento, eseguite durante la
terapia. Tali informazioni possono risultare utili sia per la valutazione delle funzionalità motorie del
paziente, sia per acquisire nuove conoscenze di base sul movimento e sui meccanismi di recupero
della funzionalità motoria. Tali macchine possono inoltre permettere al paziente di svolgere sedute
riabilitative in modo semi-autonomo, in linea di principio anche dalla propria abitazione6, con un
notevole vantaggio in termini di migliore qualità di vita e riduzione della spese. L’innovazione
tecnologica nella robotica e nella meccatronica ha permesso di sviluppare dispositivi per
riabilitazione con un notevole impatto potenziale.
Nell’ampio ventaglio delle applicazioni tecnologiche sviluppate nell’ambito della robotica
biomedica, certamente un ruolo di particolare importanza è rappresentato dai sistemi per la
riabilitazione di pazienti che, a seguito di un trauma o di una patologia, abbiano una ridotta capacità
motoria.
Sistemi robotici per la riabilitazione dell’arto superiore
L’Organizzazione Mondiale della Sanità stima che, ogni anno, 15 milioni di persone in tutto il
mondo sono colpite da un ictus e 5 milioni di queste vivono con una disabilità permanente [7].
La maggior parte dei pazienti post-ictus è in grado di recuperare una deambulazione indipendente,
ma molti di loro non riescono a riprendere l'uso funzionale degli arti superiori, anche dopo un
prolungato trattamento riabilitativo: queste limitazioni funzionali sono responsabili di una notevole
riduzione della qualità della vita [8]. Un anno dopo l'evento acuto, i pazienti vengono di norma
considerati cronici e le terapie riabilitative vengono spesso sospese. Recenti studi hanno dimostrato
che i miglioramenti nelle capacità motorie indotti dalle terapie riabilitative, somministrate da 6 a 12
mesi dopo l’evento acuto, possono verificarsi anche in soggetti con danno cronico agli arti superiori
[9]-[10].
In realtà, approcci recenti che coinvolgono un addestramento ripetitivo degli arti superiori con
attività orientate a compiti specifici (task-oriented) hanno fornito una evidenza scientifica di
ulteriori miglioramenti in pazienti emiparetici oltre un anno dopo l'ictus.
In particolare, la Constraint-Induced Movement Therapy (CIMT), sulla base di una intensa pratica
funzionalmente orientata ai compiti degli arti superiori paretici, ottenuta con una limitazione
6 La tele-riabilitazione si basa sull’integrazione di sistemi tecnologicamente avanzati (come i robot per la riabilitazione) e di infrastrutture per le telecomunicazioni (ad es. connessioni via cavo, fibre ottiche, reti wireless e sistemi satellitari): ha lo scopo di permettere lo svolgimento di trattamenti riabilitativi a casa o presso una struttura sanitaria differente dall’ospedale, con la supervisione e il monitoraggio da parte dei medici e dei terapisti in remoto.

6
all’utilizzo dell’arto superiore sano, sembra essere efficace nel ridurre le disabilità di lungo termine
[11]-[12]. La motivazione per l'uso di questo tipo di trattamento è legata all’evidenza che l’ictus e le
altre lesioni neurologiche causano una parziale distruzione del tessuto corticale e danno luogo ad
una generazione di programmi motori non corretti, attraverso il coinvolgimento di aree
sensomotorie. Ciò nonostante, la CIMT richiede un livello significativo di funzione motoria e non è
applicabile ai casi di pazienti con debolezza o spasticità grave a seguito di danno neurologico.
Interventi terapeutici per gli arti superiori ad alta intensità e orientati a compiti costituiti da
movimenti attivi altamente ripetitivi hanno portato a notevoli miglioramenti della riorganizzazione
corticale e della funzione motoria in persone disabili, più di un anno dopo l'ictus [13]-[14].
Purtroppo, i metodi tradizionali per la riabilitazione post-ictus mostrano alcuni inconvenienti: essi
richiedono un’intensa interazione manuale da parte di fisioterapisti e i trattamenti devono essere
forniti su base giornaliera per diverse settimane, rendendo particolarmente difficile e costosa la
somministrazione di un trattamento intensivo per ciascun paziente. Per evitare questi inconvenienti,
sono stati recentemente sviluppati diversi dispositivi robotici per la riabilitazione, in grado di fornire
ai pazienti con danno motorio lieve, moderato e grave una terapia motoria sicura e di intensiva.
Inoltre, l’addestramento con il supporto del robot può essere estremamente preciso, intenso e
prolungato. I sistemi robotici consentono anche di misurare i progressi del paziente in modo
oggettivo, aumentare l'efficacia del trattamento e ridurre i costi associati al sistema sanitario.
Diverse recensioni hanno dimostrato che i trattamenti sensorimotori assistiti da robot e i
movimenti ripetitivi goal-oriented possono migliorare la forza muscolare e la coordinazione
motoria in pazienti con danni neurologici [15]-[16], anche se gli studi mostrano un impatto limitato
sulle abilità da parte dei pazienti nelle attività di vita quotidiana (ADL, Activities of Daily Living).
Tra questi, solo tre studi hanno coinvolto più di 30 soggetti, e solo due hanno riguardato prove
sperimentali con misure pre- e post-trattamento con gruppo sperimentale e gruppo di controllo. Solo
in uno studio la terapia robotica è stata fornita a pazienti in fase subacuta [17].
Tra i sistemi robotici più avanzati e con un numero crescente di dati sperimentali c’è il “MIT-
Manus” (InMotion2, Interactive Motion Technologies. Inc., Cambridge, MA, USA), progettato
presso il Massachusetts Institute of Technology (MIT) da Neville Hogan e Hermano Igo Krebs e
brevettato nel 1995 [18]. La sperimentazione clinica con il “MIT-Manus” è iniziata nel 1994 al
Burke Rehabilitation Hospital, White Plains, NY, USA e in dieci anni molti ospedali in tutto il
mondo hanno adottato questo sistema robotico per la terapia riabilitativa dell’arto superiore nei
pazienti con danni neurologici. Il primo esemplare in Europa di questo sistema robotico è stato
acquistato dalla Scuola Superiore Sant’Anna di Pisa nel 1995 e si trova attualmente presso l’Unità
di Riabilitazione Neurologica del Centro di Riabilitazione Multispecialistico di riferimento
7
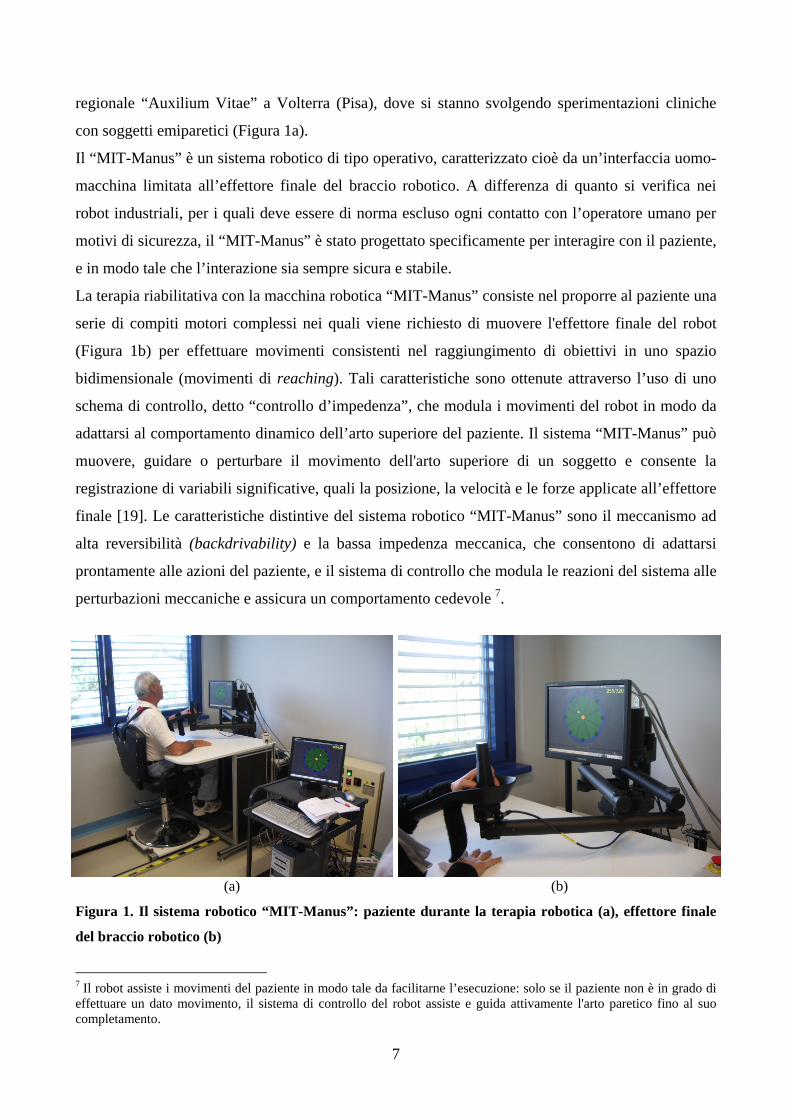
regionale “Auxilium Vitae” a Volterra (Pisa), dove si stanno svolgendo sperimentazioni cliniche
con soggetti emiparetici (Figura 1a).
Il “MIT-Manus” è un sistema robotico di tipo operativo, caratterizzato cioè da un’interfaccia uomo-
macchina limitata all’effettore finale del braccio robotico. A differenza di quanto si verifica nei
robot industriali, per i quali deve essere di norma escluso ogni contatto con l’operatore umano per
motivi di sicurezza, il “MIT-Manus” è stato progettato specificamente per interagire con il paziente,
e in modo tale che l’interazione sia sempre sicura e stabile.
La terapia riabilitativa con la macchina robotica “MIT-Manus” consiste nel proporre al paziente una
serie di compiti motori complessi nei quali viene richiesto di muovere l'effettore finale del robot
(Figura 1b) per effettuare movimenti consistenti nel raggiungimento di obiettivi in uno spazio
bidimensionale (movimenti di reaching). Tali caratteristiche sono ottenute attraverso l’uso di uno
schema di controllo, detto “controllo d’impedenza”, che modula i movimenti del robot in modo da
adattarsi al comportamento dinamico dell’arto superiore del paziente. Il sistema “MIT-Manus” può
muovere, guidare o perturbare il movimento dell'arto superiore di un soggetto e consente la
registrazione di variabili significative, quali la posizione, la velocità e le forze applicate all’effettore
finale [19]. Le caratteristiche distintive del sistema robotico “MIT-Manus” sono il meccanismo ad
alta reversibilità (backdrivability) e la bassa impedenza meccanica, che consentono di adattarsi
prontamente alle azioni del paziente, e il sistema di controllo che modula le reazioni del sistema alle
perturbazioni meccaniche e assicura un comportamento cedevole 7.
(a) (b)
Figura 1. Il sistema robotico “MIT-Manus”: paziente durante la terapia robotica (a), effettore finale
del braccio robotico (b)
7 Il robot assiste i movimenti del paziente in modo tale da facilitarne l’esecuzione: solo se il paziente non è in grado di effettuare un dato movimento, il sistema di controllo del robot assiste e guida attivamente l'arto paretico fino al suo completamento.
8
La macchina è stata infatti progettata in modo da avere una bassa impedenza intrinseca, una bassa
inerzia isotropica (1±0.33 kg, anisotropia massima 2:1), un basso attrito isotropico (0.84±0.28 N,
anisotropia massima 2:1) ed è in grado di produrre un determinato range di forze (0-45 N) e di
impedenze (0-2 N/mm).
Le variabili fisiche acquisite mediante il sistema “MIT-Manus” consentono di calcolare parametri
biomeccanici specifici che possono essere utilizzati per la caratterizzazione delle prestazioni
motorie del paziente, insieme ai parametri calcolati a partire dai segnali elettroencefalografici
(EEG) per la valutazione dell’attivazione delle aree motorie prima e dopo il trattamento (Figura 2)
[20].
Le varie esperienze cliniche svolte con l’utilizzo del sistema robotico “MIT-Manus” sono state
descritte ed analizzate in numerosi articoli. In uno studio sono stati presentati i risultati ottenuti con
96 pazienti, di cui 40 nel gruppo di controllo e 56 nel gruppo sperimentale. Il gruppo sperimentale
ha evidenziato in questo caso un miglioramento rispetto al gruppo di controllo, in base ai risultati
della valutazione funzionale eseguita mediante differenti scale di valutazione, tra cui Motor Status
Score per spalla e gomito (MSS-SE), Motor Power Scale (MP) e scala di Ashworth modificata
(MAS) [21].
Anche i risultati della sperimentazione clinica, eseguita presso il Centro “Auxilium Vitae” in
collaborazione con la Scuola Superiore Sant’Anna, confermano il significativo miglioramento del
danno motorio (1), l’incremento dei valori MSS-SE sia per l’articolazione della spalla, sia per
quella del gomito, 2) la diminuzione dei valori MAS per l’articolazione della spalla, 3) nessun
incremento dei valori MAS per l’articolazione di gomito e 4) l’incremento dei valori ROM per
l’articolazione della spalla: si tratta di dati statisticamente significativi, rilevati prima e dopo il
trattamento su soggetti emiparetici cronici, della durata di 6 settimane, con 3 sessioni per settimana
di 45 minuti di terapia ciascuna. Anche il follow-up a tre mesi ha messo in evidenza un’ulteriore
riduzione del danno motorio grazie ad un incremento del ROM all’articolazione della spalla.
I risultati hanno dimostrato che i miglioramenti delle capacità motorie dopo un danno neurologico
possono continuare anche un anno dopo l’evento acuto [22].
Dall’analisi dei questionari distribuiti ai pazienti al termine degli esperimenti, allo scopo di rilevare
l’accettabilità della terapia robotica, è emersa una sostanziale accettabilità della stessa, che
comunque non deve essere considerata come sostitutiva rispetto ai trattamenti tradizionali e al ruolo
del terapista. La sperimentazione clinica con soggetti emiparetici in fase subacuta, attualmente in
corso, ha lo scopo di valutare gli effetti della terapia robotica dopo poche settimane dall’evento
acuto e di identificare parametri prognostici del recupero motorio da fornire ai medici al fine di
identificare precocemente i trattamenti riabilitativi più adatti per ciascun paziente.

9
Figura 2. Un soggetto durante la terapia robotica con il
sistema “MIT-Manus” e registrazione dei segnali EEG
per la valutazione funzionale
Presso la Scuola Superiore Sant’Anna di Pisa è stato progettato e realizzato il sistema “MEMOS”
(MEchatronic system for MOtor recovery after Stroke), mostrato in Figura 3. Si tratta di un
dispositivo meccatronico per la riabilitazione di pazienti post-ictus, che è in fase di validazione
clinica presso la Fondazione Salvatore Maugeri a Veruno (Novara) e che ha già mostrato ottimi
risultati [23], [24].
Il “MEMOS” permette di effettuare movimenti di reaching attraverso l’utilizzo di un semplice
sistema di guide che permettono di raggiungere uno spazio di lavoro di dimensioni 70 cm x 70 cm.
Prima dell’inizio della seduta di terapia, il piano di lavoro può essere opportunamente inclinato in
funzione delle esigenze del terapista mediante una regolazione manuale. A una maggiore semplicità
dal punto di vista della struttura meccanica rispetto al sistema “MIT-Manus”, il “MEMOS” unisce
anche la flessibilità di un sistema che può essere usato per la riabilitazione a livello domestico,
supportato in tempo reale dal controllo in remoto via internet da parte di medici e fisioterapisti.
Sistemi robotici per la riabilitazione degli arti inferiori
L'obiettivo della riabilitazione in pazienti paraplegici consiste nel raggiungere la massima
autonomia nelle ADL. Nel corso degli ultimi decenni, la riabilitazione della locomozione in soggetti
con lesione del midollo spinale (SCI, Spinal Cord Injured) è stata ampiamente sviluppata e testata
[25]-[28].
Attualmente la locomozione in tali soggetti viene eseguita mediante l’utilizzo di carrozzine standard,
senza alcuna relazione con il recupero motorio degli arti inferiori per la funzione del cammino.

10
Una crescente evidenza basata su studi neurofisiologici ha dimostrato la possibilità di attivare
schemi locomotori in animali con lesione midollare mediante l’utilizzo di sistemi per l’allevio del
peso (Body Weight Support, BWS) e di un treadmill (tappeto rotante) [29]. Studi simili sono stati
poi eseguiti su soggetti umani utilizzando una imbracatura e percentuali variabili di allevio del peso
sul treadmill.
Figura 3. Il sistema “MEMOS”: una macchina
riabilitativa di tipo operativo per l’arto superiore
Per attivare la funzione locomotoria mediante l'utilizzo di tali sistemi, è spesso necessario aiutare
la progressione degli arti inferiori sul treadmill attraverso uno sforzo manuale di due o più terapisti.
Pertanto, la durata dell’addestramento è di solito limitata dalla fatica dei terapisti e ciò comporta
una brevità maggiore delle sessioni rispetto al tempo necessario al fine di ottenere un ottimo
risultato riabilitativo.
Al fine di agevolare questo tipo di riabilitazione e di assicurare la ripetibilità dei movimenti per la
locomozione è stato sviluppato il sistema “Lokomat” (Hocoma AG, Volketswil, Svizzera), una
ortesi robotica bilaterale utilizzata, in congiunzione con un sistema di allevio del peso e con un
treadmill, per controllare i movimenti degli arti inferiori del paziente nel piano sagittale (Figura 4)
[30], [31].
I giunti del sistema “Lokomat” che si trovano in corrispondenza delle articolazioni dell’anca e del
ginocchio sono azionati da motori lineari, che sono integrati in una struttura esoscheletrica. Un
sistema passivo a molle finalizzate al sollevamento della pianta del piede induce una dorsiflessione
della caviglia durante la fase di volo. Gli arti inferiori del paziente, che vengono fissati
all'esoscheletro mediante un sistema di fasce e alloggiamenti regolabili, sono mobilizzati secondo
una strategia di controllo con traiettorie predefinite per l’anca e il ginocchio, che permette

11
un’interazione sicura tra paziente e macchina [32], [33].
Fino ad oggi, sono stati pubblicati diversi studi sull’utilizzo del sistema “Lokomat” in soggetti
affetti da malattie neurologiche [34]-[40]. Recenti studi sperimentali hanno evidenziato l'attivazione
di differenti schemi elettromiografici (EMG) in soggetti sani e con lesione midollare durante
l’addestramento con il treadmill e assistito dal robot. In soggetti sani, l'attività muscolare negli arti
inferiori è stata registrata durante la deambulazione su treadmill e assistita dal robot per studiare le
differenze di attivazione EMG nelle due condizioni sperimentali [37]. Il confronto dell’attività
EMG tra soggetti SCI e soggetti sani mostra che anche nel caso di un midollo spinale con lesione
completa, l'adattamento a diverse velocità di locomozione è ancora presente [38].
Figura 4. Il sistema robotico “Lokomat”
per la riabilitazione degli arti inferiori
Uno studio sperimentale attualmente in corso in collaborazione tra Scuola Superiore Sant’Anna,
U.O. Neuroriabilitazione e Sezione Dipartimentale per le Mielolesioni presso l’Azienda
Universitario Ospedaliera Pisana è finalizzato a valutare i cambiamenti di attivazione muscolare
dopo un periodo di riabilitazione con il sistema “Lokomat” in soggetti con lesione midollare
incompleta. Allo stato attuale delle conoscenze l’utilizzo di tale dispositivo risulta ancora empirico:
infatti la scelta dei parametri (entità dell’allevio, velocità, forza guida e durata) non è ancora inserita
in linee guida specifiche e gli schemi di attivazione muscolare del cammino robot-assistito non sono,
12
per il momento, definiti.
Lo studio prevede la registrazione EMG tramite elettrodi di superficie di quattro muscoli per
ciascun arto (retto femorale, bicipite femorale, tibiale anteriore, gastrocnemio mediale) in soggetti
sani e soggetti con lesione midollare incompleta durante l’addestramento con il sistema robotico
“Lokomat”, a tre diverse velocità (1.0, 1.6 e 2.4 Km/h), a differenti percentuali di allevio del peso
corporeo (30% e 60%) e in due diverse modalità: (1) “passiva” in cui il soggetto non contribuisce al
movimento degli arti inferiori che vengono mobilizzati dalle ortesi robotiche, e 2) “attiva” in cui il
soggetto accompagna il movimento degli arti inferiori in base alle proprie capacità motorie residue.
I soggetti con lesione midollare seguono, successivamente alla registrazione sopra descritta (pre-
training), un programma di allenamento con il sistema “Lokomat” della durata variabile di 4-8
settimane, al termine del quale viene eseguita una nuova registrazione (post-training). Inoltre è
previsto un programma di follow-up con ulteriori registrazioni a 3 e 6 mesi dal trattamento [43].
I risultati ottenuti finora su un campione limitato di pazienti con lesione midollare, che hanno
effettuato una terapia motoria con il sistema robotico Lokomat, hanno evidenziato un
miglioramento della funzionalità locomotoria, dovuto ad un migliore reclutamento muscolare degli
arti inferiori nella condizione “attiva”: tale valutazione è stata effettuata sulla base dell’analisi dei
segnali EMG registrati prima e dopo il trattamento e con l’utilizzo di scale di valutazione specifiche
(10-Meter Walk Test, 6-Minute Walk Test, Timed Up & Go Test).
Sistemi meccatronici per l’analisi del movimento e la valutazione funzionale
Il progetto “Alladin”, finanziato dalla Commissione Europea nell’ambito del 6° Programma Quadro
(IST-2002-507424) ha permesso di realizzare una piattaforma meccatronica per la valutazione
funzionale del trattamento riabilitativo mediante misure isometriche di forza/coppia durante
l’esecuzione di compiti ADL, in soggetti colpiti da ictus8. La piattaforma (Figura 5) è stata validata
in tre centri clinici europei:
• Algemeen Ziekenhuis Maria Middelares-Sint Jozef (Gent, Belgio),
• Szent János Hospital (Budapest, Ungheria),
• Adelaide & Meath Hospital (Tallaght, Irlanda).
In questi centri è stata effettuata la sperimentazione clinica con 270 soggetti, di cui 150 emiparetici
e 120 sani come gruppo di controllo: i risultati hanno permesso di identificare 6 parametri relativi al
recupero motorio di pazienti post-ictus, che possono essere utilizzati per effettuare una valutazione
funzionale dopo un breve tempo dall’evento acuto, in modo da indirizzare prontamente le scelte dei
8 http://www.alladin-ehealth.org/

13
medici sui trattamenti riabilitativi più opportuni per ciascun paziente [44]-[47].
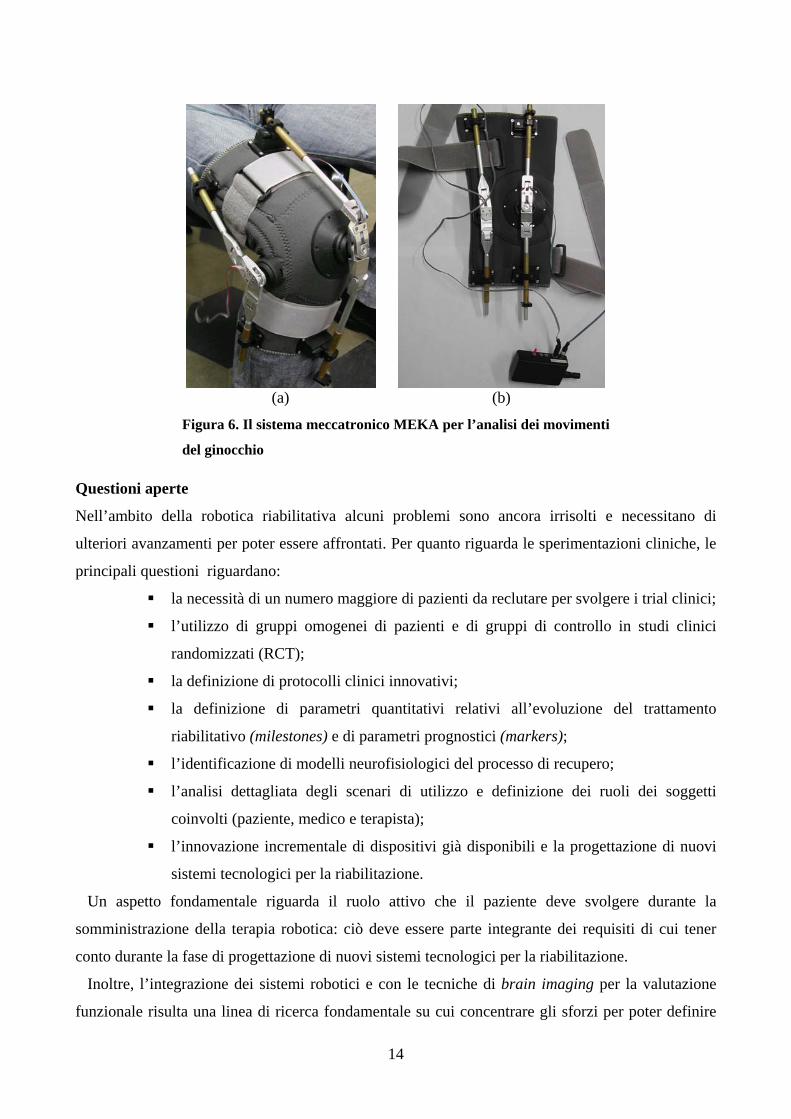
Negli ultimi anni sono stati sviluppati anche vari sistemi meccatronici indossabili per l’analisi del
movimento. Il sistema MEKA, progettato e sviluppato attraverso una collaborazione tra il
laboratorio ARTS della Scuola Superiore Sant’Anna di Pisa e la società Humanware s.r.l., è un
dispositivo meccatronico che effettua il monitoraggio real-time degli angoli di flesso-estensione e
varo-valgo del ginocchio (analisi dinamica del ginocchio), durante il cammino ed altre ADL. I dati
ottenuti, una volta registrati, possono essere visualizzati in formato numerico e grafico.
Il sistema è composto da tre unità di base:
1. un dispositivo meccatronico modulare per il rilevamento dei valori relativi agli angoli di flesso-
estensione e varo-valgo dell’articolazione di ginocchio, tramite l’utilizzo di sensori ad effetto Hall
(Figura 6a).
2. un sistema wireless per l’acquisizione e il trasferimento su PC dei dati cinematici (Figura 6b)
3. un software per l’elaborazione e la visualizzazione dei dati.
Uno dei vantaggi principali relativi all’utilizzo di questo sistema consiste nel miglior rapporto
prezzo/prestazioni, se confrontato con altri dispositivi simili finalizzati all’analisi dinamica.
I risultati delle sperimentazioni effettuate con il dispositivo meccatronico hanno permesso di
evidenziare strategie locomotorie differenti a seconda dell’età e della difficoltà del compito
richiesto [48]-[49].
Figura 5. Il sistema meccatronico ALLADIN per la valutazione funzionale di soggetti con danni neurologici
14
Questioni aperte
Nell’ambito della robotica riabilitativa alcuni problemi sono ancora irrisolti e necessitano di
ulteriori avanzamenti per poter essere affrontati. Per quanto riguarda le sperimentazioni cliniche, le
principali questioni riguardano:
la necessità di un numero maggiore di pazienti da reclutare per svolgere i trial clinici;
l’utilizzo di gruppi omogenei di pazienti e di gruppi di controllo in studi clinici
randomizzati (RCT);
la definizione di protocolli clinici innovativi;
la definizione di parametri quantitativi relativi all’evoluzione del trattamento
riabilitativo (milestones) e di parametri prognostici (markers);
l’identificazione di modelli neurofisiologici del processo di recupero;
l’analisi dettagliata degli scenari di utilizzo e definizione dei ruoli dei soggetti
coinvolti (paziente, medico e terapista);
l’innovazione incrementale di dispositivi già disponibili e la progettazione di nuovi
sistemi tecnologici per la riabilitazione.
Un aspetto fondamentale riguarda il ruolo attivo che il paziente deve svolgere durante la
somministrazione della terapia robotica: ciò deve essere parte integrante dei requisiti di cui tener
conto durante la fase di progettazione di nuovi sistemi tecnologici per la riabilitazione.
Inoltre, l’integrazione dei sistemi robotici e con le tecniche di brain imaging per la valutazione
funzionale risulta una linea di ricerca fondamentale su cui concentrare gli sforzi per poter definire
(a) (b)
Figura 6. Il sistema meccatronico MEKA per l’analisi dei movimenti
del ginocchio

15
approcci terapeutici mirati e adattati alle specifiche necessità di ciascun paziente e al grado di
recupero raggiunto.
Conclusioni e sviluppi futuri
I sistemi robotici e meccatronici per la riabilitazione presentati nei paragrafi precedenti sono sempre
più diffusi negli ospedali e nei centri di riabilitazione. Tali sistemi sono utilizzati per somministrare
trattamenti intensivi e prolungati finalizzati al recupero funzionale in soggetti con danno
neurologico, con un potenziale miglioramento del rapporto costo/efficacia e al fine di valutarne gli
effetti in modo quantitativo.
Tali sistemi devono essere progettati sulla base delle sempre maggiori conoscenze in ambito
neurofisiologico, con l’obiettivo di migliorare la funzione motoria mediante esercizi stimolanti e in
grado di promuovere la motivazione dei pazienti. Inoltre devono essere facili da usare e, nel caso di
sistemi meccatronici indossabili, facili da indossare e togliere.
L’uso integrato di sistemi robotici per la riabilitazione, di sistemi meccatronici per l’analisi del
movimento e per la valutazione funzionale e di tecniche avanzate di brain imaging, permette di
analizzare i meccanismi di recupero motorio di ciascun paziente e di proporre trattamenti
riabilitativi personalizzati, con una ottimizzazione dei tempi e delle risorse sanitarie (Figura 7)
Inoltre, lo sviluppo di sistemi robotici a basso costo e di infrastrutture di reti di telecomunicazione
affidabili e robuste permette di poter validare protocolli innovativi per la teleriabilitazione, con
notevoli vantaggi:
(i) la possibilità, per il paziente, di poter continuare i trattamenti riabilitativi a casa o presso la
residenza assistenziale (o il centro di riabilitazione);
(ii) la possibilità per il sistema sanitario di ridurre i costi associati alla degenza e alla
riabilitazione in ospedale.
La fattibilità e l’efficacia di un tale approccio sono state già dimostrate da alcuni progetti di ricerca
in ambito nazionale ed europeo: alcune esperienze in questo ambito sono attualmente in corso, ad
esempio il progetto di ricerca sulla teleriabilitazione in ambito neurologico, cardiologico e
respiratorio9 che si sta svolgendo mediante una collaborazione tra Scuola Superiore Sant’Anna e il
Centro di Riabilitazione “Auxilium Vitae”.
In conclusione, la sinergia tra clinici, terapisti e ingegneri nell’ambito della riabilitazione, che ha
già evidenziato risultati clinici e scientifici di grande interesse e beneficio per i pazienti, deve essere
ulteriormente rafforzata attraverso progetti di ricerca e programmi specifici a livello locale e
9 Progetto di ricerca integrato finanziato dalla Regione Toscana (“Tecnologie Innovative a supporto del Percorso riabilitativo”) e dalla Fondazione Cassa di Risparmio di Volterra (2009-2011).

16
nazionale, in quanto risulta essenziale per lo sviluppo di sistemi tecnologici sicuri ed efficaci, per
una robotica al servizio dell’uomo e orientata a migliorare la qualità della vita dei soggetti disabili.
Figura 7. Robotica per la neuro-riabilitazione: uno scenario integrato
Bibliografia
[1] V. L. Feigin, C. M. Lawes, D. A. Bennett, and C. S. Anderson, “Stroke epidemiology: a
review of population-based studies of incidence, prevalence, and case-fatality in the late 20th
century”, Lancet Neurol, vol. 2, pp. 43-53, 2003.
[2] C. J. L. Murray, A. D. Lopez, “Global mortality, disability and the contribution of risk factors.
Global burden of the disease study”, Lancet, vol. 349, pp. 1436-1442, 1997.
[3] C. Marini, M. Baldassarre, T. Russo, F. De Santis, S. Sacco, I. Ciancarelli, A. Carolei,
“Burden of first-ever ischemic stroke in the oldest old: evidence from a population-based study“,
Neurology, vol. 62, pp. 77-81, 2004.
[4] SPREAD, Stroke Prevention and Educational Awareness Diffusion, in “Ictus cerebrale: linee
guida italiane di prevenzione e trattamento”, V Edizione”, Milano, ed. Catel , 2007.
[5] Heart Disease and Stroke Statistics 2009 Update: A Report From the American Heart
Association Statistics Committee and Stroke Statistics Subcommittee. Available at:
http://circ.ahajournals.org/cgi/reprint/119/2/e21.pdf
[6] J. P. Donoghue, G. Hess, J. N. Sanes, “Motor cortical substrates and mechanisms for learning”
17
In Acquisition of Motor Behavior in Vertebrates, ed. JR Bloedel, TJ Ebner, SP Wise, pp. 363–86.
Cambridge, MA: MIT Press, 1996.
[7] World Health Organization, The atlas of Heart Disease and Stroke. Available at:
http://www.who.int/cardiovascular_diseases/resources/atlas/en/
[8] D. S. Nichols-Larsen, P. C. Clark, A. Zeringue, A. Greenspan, S. Blanton, “Factors
influencing stroke survivors' quality of life during sub-acute recovery”, Stroke 2005;36: 1480-84.
[9] P. W. Duncan, L. B. Goldstein, D. Matchar, G. W. Divine, J. Feussner, “Measurement of
motor recovery after stroke”, Stroke 1992;23:1084-89.
[10] H. T. Hendricks, J. Van Limbeek, A. C. Geurts, M. J. Zwarts, “Motor recovery after stroke: a
systematic review of the literature”, Arch Phys Med Rehabil 2002; 83:1629-37.
[11] W. L. Miltner, H. Bauder, M. Sommer, C. Dettmers, E. Taub, “Effects of constraint induced
movement therapy on patients with chronic motor deficits after stroke” Stroke 1999;30:586-92.
[12] S. L. Wolf, C. J. Winstein, J. P. Miller et al. ”Effect of constraint-induced movement therapy
on upper extremity function 3 to 9 months after stroke: the EXCITE randomized clinical trial”, J
Am Med Assoc 2006; 296(17): 2095-2104.
[13] S. E. Fasoli, H .I. Krebs, J. Stein, W .R. Frontera, N. Hogan, “Effects of robotic therapy on
motor impairment and recovery in chronic stroke”, Arch Phys Med Rehabil 2003;84:477-82.
[14] P. W. Duncan, R. Zorowitz, B. Bates et al., “Management of adult stroke rehabilitation care: a
clinical practice guideline”, Stroke 2005;36:e100-43.
[15] G. Kwakkel, B. J. Kollen, H. I. Krebs, “Effects of Robot-Assisted Therapy on Upper Limb
Recovery After Stroke: A Systematic Review”, Neurorehabilitation and Neural Repair
2008;22(2):111-121.
[16] J. Mehrholz, T. Platz, J. Kugler, M. Pohl, “Electromechanical and robot-assisted arm training
for improving arm function and activities of daily living after stroke”, Cochrane Database of
Systematic Reviews 2008, 4, CD006876.
[17] G. B. Prange, M. J. Jannink, C. G. Groothuis-Oudshoorn, H. J. Hermens, M. .J Ijzerman,
“Systematic review of the effect of robot-aided therapy on recovery of the hemiparetic arm after
stroke”, J Rehabil Res Dev. 2006;43(2):171-84.
[18] N. Hogan, H. I. Krebs, A. Sharon & J. Charnnarong, “Interactive Robotic Therapist,” U.S.
Patent Number 5,466,213 MIT, 1995.
[19] H. I. Krebs, N. Hogan, M. L. Aisen, B. T. Volpe, “Robot-Aided Neurorehabilitation”, IEEE
Trans. Rehabilitation Engineeering, vol. 6, pp. 75-87, March 1998.
[20] S. Mazzoleni, G. Stampacchia, E. Cattin, E. Bradaschia, M. Tolaini, B. Rossi, M. C. Carrozza,
“Effects of a robot-mediated locomotor training on EMG activation in healthy and SCI subjects,” in
18
Proc. 11th IEEE International Conference on Rehabilitation Robotics, 2009, Kyoto, Japan, pp. 378-
382.
[21] B.T. Volpe, H. I. Krebs, N. Hogan, L. Edelstein, C. M. Diels, M. Aisen, “A Novel Approach
to Stroke Rehabilitation: Robot Aided Sensorymotor Stimulation”, Neurology, 54:1938-1944, 2000.
[22] F. Posteraro, S. Mazzoleni, S. Aliboni, B. Cesqui, A. Battaglia, P. Dario, S. Micera, “A
comparison of two robot-mediated therapies for paretic upper limb of chronic patients following a
neurological injury”, Journal of Rehabilitation Medicine, 2009, 41(12): 976-80.
[23] S. Micera M. C. Carrozza , E. Guglielmelli, G. Cappiello , F. Zaccone, C. Freschi, R.
Colombo, A. Mazzone, C. Delconte, F. Pisano, G. Minuco, P. Dario, “A simple robotic system for
neurorehabilitation”, Autonomous Robots, vol. 19, pp. 1-11, 2005.
[24] R. Colombo, F. Pisano, S. Micera, A. Mazzone, C. Delconte, M. C. Carrozza, P. Dario, G.
Minuco, “Assessing mechanisms of recovery during robot-aided neurorehabilitation of the upper
limb”, Neurorehabil Neural Repair, vol. 22, no. 1, pp. 50-63, 2008.
[25] G. Scivoletto, V. Di Donna, “Prediction of walking recovery after spinal cord injury,” Brain
Res Bull, vol. 78, n. 1, pp.43-51, 2009.
[26] H. Barbeau, S. Nadeau, C. Garmeau, “Physical determinants, emerging concepts, and training
approaches in gait of individuals with spinal cord injury,” J Neurotrauma, vol. 23, pp.571-85, 2006.
[27] H. Barbeau, M. Ladouceur, K. E. Norman, A. Pepin, “Walking after spinal cord injury:
Evaluation, treatment, and functional recovery,” Arch Phys Med Rehabil., vol. 80, pp. 225–235,
1999.
[28] H. Barbeau, S. Rossignol, “Enhancement of locomotor recovery following spinal cord injury,”
Current Opinion Neurol, vol. 7, pp. 517-524, 1994.
[29] H. Barbeau, Rossignol, “Recovery of locomotion after chronic spinalization in the adult spinal
cat”, Brain Res, vol. 412, pp. 84-95, 1987.
[30] G. Colombo, M. Joerg, R. Schreier, V. Dietz, “Treadmill training of paraplegic patients using
a robotic orthosis”, J Rehabil Res Dev, vol. 37, pp. 693-700, 2000.
[31] G. Colombo, M. Wirz, V. Dietz, “Driven gait orthosis for improvement of locomotor training
in paraplegic patients”, Spinal Cord, vol. 39, pp. 252-255, 2001.
[32] R. Riener, L. Lünenburger, S. Jezernik, M. Anderschitz, G. Colombo, “Patient-cooperative
strategies for robot-aided treadmill training: first experimental results”, IEEE Trans Neural Syst
Rehabil Eng, vol. 13, pp. 380-394, 2005.
[33] R. Riener, L. Lünenburger, G. Colombo, “Human-centered robotics applied to gait training
and assessment”, J Rehab Res Dev, vol. 43, pp. 679-694, 2006.
[34] G. Colombo, M. Joerg, R. Schreier, V. Dietz, “Treadmill training of paraplegic patients using
19
a robotic orthosis,” J Rehab Res Dev, vol. 37, pp. 693-700, 2000.
[35] S. Jezernik, R. Schärer, G. Colombo, M. Morari, “Adaptive robotic rehabilitation of
locomotion: A clinical study in spinally injured individuals,” Spinal Cord, vol. 41, no. 12, pp. 657–
666, Dec. 2003.
[36] L. Lünenburger, G. Colombo, R. Riener, V. Dietz, ”Clinical assessments performed during
robotic rehabilitation by the gait training robot Lokomat”, in Proc. 9th International Conference on
Rehabilitation Robotics, Chicago, USA, 2005, pp. 4888-4490.
[37] J. M. Hidler, A. E. Wall, “Alterations in muscle activation patterns during robotic-assisted
walking”, Clinical Biomechanics, vol. 20, pp. 184-193, 2005.
[38] L. Lünenburger, M. Bolliger, D. Czell, R. Müller, V. Dietz, “Modulation of locomotor activity
in complete spinal cord injury”, Exp Brain Res, vol. 174, pp. 638-646, 2006.
[39] J. Hidler, D. Nichols, M. Pelliccio, K. Brady, D. D. Campbell, J. H. Kahn, T. G. Hornby,
“Multicenter randomized clinical trial evaluating the effectiveness of the Lokomat in subacute
stroke,” Neurorehabil Neural Repair, vol. 23, pp.5-13, 2009.
[40] T. G. Hornby, D. D. Campbell, J. H. Kahn, T. Demott, J. L. Moore, H. R. Roth, “Enhanced
gait-related improvements after therapist- versus robotic-assisted locomotor training in subjects
with chronic stroke: a randomized controlled study,” Stroke, vol.39, pp. 1786-92, 2008.
[41] J. F. Israel, D. D. Campbell, J. H. Kahn, T. G. Hornby, “Metabolic costs and muscle activity
patterns during robotic- and therapist-assisted treadmill walking in individuals with incomplete
spinal cord injury,” Phys Ther, vol.86, pp.1466-78, 2006.
[42] M. Wirz, D. H. Zemon, R. Rupp, A. Scheel, G. Colombo, V. Dietz, T. G. Hornby,
“Effectiveness of automated locomotor training in patients with chronic incomplete spinal cord
injury: a multicenter trial,” Arch Phys Med Rehabil, vol.86, pp.672-80, 2005.
[43] S. Mazzoleni, G. Stampacchia, E. Cattin, O. Lefevbre, C. Riggio, M. Troncone, E. Bradaschia,
M. Tolaini, B. Rossi, M. C. Carrozza, “Effects of a robot-mediated locomotor training in healthy
and spinal cord injured subjects”, in Proc. The 1st National Conference on Bioengineering, Pisa,
Italy, 2008, pp.245-246.
[44] S. Mazzoleni, J. V. Vaerenbergh, A. Toth, M. Munih, E. Guglielmelli, P. Dario, “ALLADIN:
a novel mechatronic platform for assessing post-stroke functional recovery”, in Proc. 9th IEEE
International Conference on Rehabilitation Robotics, 2005, Chicago, IL, USA, pp. 156-159.
[45] S. Mazzoleni, S. Micera, F. Romagnolo, P. Dario, E. Guglielmelli, “An ergonomic
dynamometric foot platform for functional assessment in rehabilitation”, in Proc. 1st IEEE/RAS-
EMBS International Conference on Biomedical Robotics and Biomechatronics, 2006, Pisa, Italy, pp.
619-624.
20
[46] S. Mazzoleni, J. Van Vaerenbergh, A. Toth, M. Munih, E. Guglielmelli, P. Dario, “The
ALLADIN diagnostic device: an innovative platform for assessing post-stroke functional recovery”,
in Rehabilitation Robotics, ARS Scientific book, I-Tech Education and Publishing, Vienna, Austria,
2007, pp. 535-554
[47] S. Mazzoleni, A. Toth, M. Munih,, J. Van Vaerenbergh, G. Cavallo, S. Micera, P. Dario, E.
Guglielmelli, “Whole-body isometric force/torque measurements for functional assessment in
neuro-rehabilitation: platform design, development and verification,” J Neuroeng Rehabil. 2009 Oct
30;6:38.
[48] S. Micera, S. Mazzoleni, E. Guglielmelli, P. Dario, “Assessment of gait in elderly people
using mechatronic devices: preliminary results”, Gait & Posture, 2003, vol. 18, Supplement 1, pp.
S22.
[49] S. Micera, J. Carpaneto, A. Scoglio, F. Zaccone, C. Freschi, E. Guglielmelli, P. Dario, “On the
analysis of knee biomechanics using a wearable biomechatronic device”, in Proc. International
Conference on Intelligent Robots and Systems, 2004, Sendai, Japan, vol. 2, pp. 1674 – 1679.