Sintesi e validazione di strategie di controllo cilindro per cilindro del titolo della miscela per...
20
Facoltà di Ingegneria Corso di Studi in Ingegneria dell’Automazione Sintesi e validazione di strategie di controllo cilindro per cilindro del titolo della miscela per motori GDI, mediante strumenti di cosimulazione Anno accademico 2007/2008 Relatore Ch.mo Prof. Mario di Bernardo Correlatore Ch.mo Prof. Alessandro di Gaeta Ch.ma Prof.ssa Stefania Santini Candidato Dario Di Maio Matr. 322/28
-
Upload
dariodimaio -
Category
Automotive
-
view
1.133 -
download
0
Transcript of Sintesi e validazione di strategie di controllo cilindro per cilindro del titolo della miscela per...

Facoltà di IngegneriaCorso di Studi in Ingegneria dell’Automazione
Sintesi e validazione di strategie di controllo cilindro per cilindro del titolo della miscela per
motori GDI, mediante strumenti di cosimulazione
Anno accademico 2007/2008
Relatore
Ch.mo Prof. Mario di Bernardo
Correlatore
Ch.mo Prof. Alessandro di Gaeta
Ch.ma Prof.ssa Stefania Santini
Candidato
Dario Di Maio
Matr. 322/28

Struttura della presentazione
- Introduzione al controllo del titolo della miscela
- Descrizione dell’impianto da controllare
- Stato dell’arte ed obiettivi del lavoro di tesi
- Controllo “Sliding Mode Adattativo” del titolo della miscela
- Implementazione in cosimulazione
- Analisi delle prestazioni a ciclo chiuso
- Conclusioni

Introduzione al controllo del titolo della miscela
Il corretto funzionamento dei motori a benzina prevede la combustione di una miscela aria/combustibile chimicamente bilanciata (o stechiometrica).
In queste condizioni i prodotti di scarto della combustione sono solo acqua ed anidride carbonica.
In realtà, allo scarico sono presenti altre specie chimiche tra cui: monossido di carbonio, ossidi di azoto ed idrocarburi incombusti. Ciò perché la combustione non avviene mai in modo ideale.
Queste specie chimiche sono tossiche per gli organismi viventi, per questo motivo sono regolamentate dalle normative Euro II, Euro III, Euro IV, …
3

Introduzione al controllo del titolo della miscela/2
Per ridurre la presenza di queste specie inquinanti, le moderne automobili sono dotate di convertitori catalitici, in cui avvengono reazioni di ossidazione e riduzione.
OSSIDAZIONE
RIDUZIONE
Il catalizzatore, grazie alla presenza di materiali nobili quali palladio, iridio e platino, riduce l’energia di attivazione di queste reazioni. Portandola da 600°C a 300-400°C.
La natura delle reazioni chimiche interne al catalizzatore, rende la finestra di funzionamento molto stretta e centrata sulla condizione di miscela stechiometrica.
4

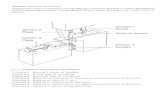
Descrizione dell’impianto da controllare
Gli ingressi al motore sono rappresentati dalla portata d’aria e di benzina, la prima è un disturbo in quanto gestita autonomamente dal guidatore mentre la seconda è la variabile di controllo. L’uscita è il rapporto aria/benzina in camera di combustione, il quale può essere letto solo al collettore di scarico, attraverso un sensore di ossigeno (sonda lambda) che ne effettua una misura indiretta.
5

Descrizione dell’impianto da controllare/2
6

Descrizione dell’impianto da controllare/3
I parametri del modello variano fortemente al variare delle condizioni operative del motore
Efficienza Volumetrica
Ritardo
Miscelazione
7

Stato dell’arte ed obiettivi del lavoro di tesiSchema a blocchi di una classica soluzione per il controllo del titolo della miscela
8

Stato dell’arte ed obiettivi del lavoro di tesi/2
Controllo PI con parametri
schedulati
Controllo model-based
Compensazione transitori in retroazione
Stima accurata della portata d’aria
INDUSTRIA AUTOMOTIVE
RICERCA AUTOMOTIVE
Prestazioni elevate anche nei transitori, senza richiedere informazioni sui parametri modello.
Calibrazione semplice
Prestazioni in transitorio scarse
Controllo Sliding Mode Adattativo
Validazione della legge di controllo in cosimulazione 9

Controllo Sliding Mode AdattativoL’azione di controllo compenserà gli errori sulla stima dell’aria, le compensazioni saranno memorizzate in una tabella adattativa
Il controllo è in Feedforward adattativo, questa struttura rende l’azione di controllo indipendente dal punto motore, quindi non è richiesta una schedulazione ai fini della stabilità, come normalmente accade per le strutture di controllo Feedforward + Feedback.
10

Controllo Sliding Mode Adattativo/2
11
Superficie di sliding
Modello lato “scarico” a meno
del ritardoPortata d’aria al
cilindro
Portata di combustibile iniettata
< 0 → 0
SISTEMA
CONTROLLO
STABILITA’

Validazione in cosimulazione
Il controllore grazie alla tabella adattativa identifica l’efficienza volumetrica del motore, portando il motore a regime in diversi punti di funzionamento si ottiene:
12

Controllo dei transitori
Analizziamo la portata al collettore di aspirazione e quella stimata dall’azione di FF
In blu è rappresentata la portata effettiva al collettore di aspirazione, in verde la portata stimata con la Speed-Density.
La variazione di portata non viene predetta correttamente, ciò perché il segnale di pressione prima di essere utilizzato deve essere filtrato, per estrarne il valore medio.
Supponiamo che in figura sia rappresentato il risultato di una identificazione parametrica, la prima considerazione sarebbe: “Al modello con effettuiamo l’identificazione manca uno zero”.
La Speed-Density non è altro che l’equazione algebrica di uscita, calcolata misurando direttamente lo stato (pressione al collettore di aspirazione), quindi aggiungere uno zero corrisponde ad aggiungere alla Speed-Density la propria derivata.
13

Controllo dei transitori/2Partendo dalla stima dell’aria si ricava algebricamente la portata di benzina, quindi lo schema di controllo risulta essere:
14

Validazione in cosimulazione
Il contributo legato alla derivata della pressione al collettore di aspirazione, permette di ridurre i picchi che si verificano durante le brusche aperture e chiusure della valvola a farfalla.
Nella figura al lato si nota come i valori di massimo e minimo tendano a ridursi per stabilizzarsi all’interno di una fascia di valori, in questo caso del 3%.
I guadagni giungono a regime, presentando un’oscillazione tipica del controllo sliding mode.
Rapporto Aria/Benzina normalizzato
15

Motore numerico: cosimulazione
La cosimulazione, prevede la collaborazione tra due software specializzati in ambiti diversi, in particolare la fluidodinamica interna al motore (modello alle derivate parziali) è simulata con WAVE, mentre con Simulink è realizzata l’architettura di controllo.
In particolare, in Simulink è realizzata una ECU strutturata in Task su base angolo, ognuno con un diverso compito nel controllo del motore. Nel lavoro di tesi è stato sviluppato il Task relativo al controllo A/F.
Questa scelta permette di simulare la fluidodinamica del motore con modelli 1D, rendendo i risultati estremamente realistici ed introducendo nella sintesi i problemi tipici che si incontrerebbero nello sviluppo di un controllore su un motore al banco.
16

Motore numerico: cosimulazione/2
Al lato sono mostrate alcune misurazioni effettuate sul motore numerico a seguito di un gradino sulla valvola a farfalla.
I grafici sono ottenuti con velocità di rotazione fissa a 1500 giri/min, con controllo A/F attivo.
17

Analisi delle prestazioni a ciclo chiusoLe prestazioni del controllore sono state valutate secondo un “Test Standart”, per brevità sono mostrati solo due risultati, rispettivamente alla velocità più bassa (1500 giri/min) e più alta (5200 giri/min).
Apertura/Chiusura della valvola a farfalla
Rapporto Aria/Benzina Rapp. Stechiometrico normalizzato
18

Analisi delle prestazioni a ciclo chiuso/2
Per valutare meglio le prestazioni del controllore, effettuiamo un confronto con un P.P. con Gain Scheduling e Smith Predictor, sviluppato in [1]. Il confronto è rappresentato con dei grafici che mostrano l’area sottesa oltre la soglia del 3%.
19
APERTURA VALVOLA A FARFALLA
CHIUSURA VALVOLA A FARFALLA

Conclusioni
La soluzione di controllo proposta presenta i seguenti vantaggi:
20
Per brevità non sono mostrate le prove di robustezza, effettuate arretrando la sonda lambda. La percentuale di degrado delle prestazioni varia in base alle condizioni operative del motore, presentando un degrado medio inferiore al 10% in 15 prove su 20.
ROBUSTEZZA DELLE PRESTAZIONI
CALIBRAZIONE SEMPLICELa struttura in feedforward adattativo e l’utilizzo di due contributi indipendenti, rende la calibrazione semplice e può essere effettuata senza utilizzare i parametri del modello identificato.
PRESTAZIONI ELEVATELa compensazione dei transitori in FF adattativo, svincola il controllore dal ritardo sulla misura del rapporto A/F, incrementando le prestazioni ai bassi regimi, dove il ritardo assume i valori maggiori.