Servo Motor SL16 位置制御コヺペムヺソ SL16 速度制御コ-ペム...
8
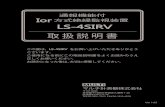
SL16-C03 1 SL16 位置制御 SL16 速度制御- SLシリーズサーボモータ Servo Motor SL16 ●仕様 エンコーダ機能 内蔵 Φ16×L48mm ACサーボモータ ① この大きさで簡易レゾルバ内蔵 ② 超小型ACサーボドライバ(単3乾電池大) ③ シリアル通信による運転条件、パターン設定可 SL16 Nꝏ 項目 位置制御 (列入力) 速度制御 (指令電圧入力) 1 型式 SL16-P01 (D軸) SL16G□□-P01 (軸/) SL16-S01 (D軸軸) SL16G□□-S01 (軸/) 3 定格出力 5 4 電 源 入 力 電圧 DC24 10% (電源入力はDC12に対応していす。特性はお問い合せください。) 5 定格入力電流 0.4 A 6 最大入力電流 2.0 A 7 瞬時最大 0.015 N 8 定格 0.003 N 9 定格回転速度 16700 / 10 回転速度範囲 ~26000 / 11 回転速度設定方法 入力列周波数 (50H 6000 /) ①内 ②外 ③外制御電圧(0~5) 14 入力信号 列、回転方向、 1/2方式切替、励磁 転/停止、外速度指令電圧、 速度指令外/内切替、入力 15 出力信号 回転、位置決完了、 回転、、出力 16 保護機能 17 対応 1/19 1/84 電流、電圧、不足電圧、熱、異常 13 電気的停止位置精度 3.6 ― 2 瞬時最大出力 10 12 分解能 500 / ― 暫定仕様
Transcript of Servo Motor SL16 位置制御コヺペムヺソ SL16 速度制御コ-ペム...

SL16-CT_03 1
SL16 位置制御サーボモータ SL16 速度制御サ-ボモータ
SLシリーズサーボモータ Servo Motor SL16カタログ
●仕様
エンコーダ機能 内蔵
Φ16×L48mm
ACサーボモータ
① この大きさで簡易レゾルバ内蔵
② 超小型ACサーボドライバ(単3乾電池大)
③ シリアル通信による運転条件、パターン設定可
SL16
No 項目 位置制御 (パルス列入力) 速度制御 (指令電圧入力)
1 型式 SL16-P01 (Dカット軸モータ)
SL16G□□-P01 (ギヤ軸モータ/ギヤヘッド)
SL16-S01 (Dカット軸軸モータ)
SL16G□□-S01 (ギヤ軸モータ/ギヤヘッド)
3 定格出力 5 W
4 電
源
入
力
電圧 DC24 V±10% (電源入力はDC12Vにも対応しています。特性はお問い合わせください。)
5 定格入力電流 0.4 A
6 最大入力電流 2.0 A
7 瞬時最大トルク 0.015 N・m
8 定格トルク 0.003 N・m
9 定格回転速度 16700 r/min
10 回転速度範囲 ~26000 r/min
11 回転速度設定方法 入力パルス列周波数 (50kHz 6000 r/min) ①内部ボリューム ②外部ボリューム
③外部制御電圧(0~5V)
14 入力信号 パルス列、回転方向、
1パルス/2パルス方式切替、励磁
運転/停止、外部速度指令電圧、
速度指令外部/内部切替、オプション入力
15 出力信号 回転パルス、位置決め完了、アラーム 回転パルス、アラーム、オプション出力
16 保護機能
17 対応ギヤヘッド 1/19 1/84
過電流、過電圧、不足電圧、過熱、センサ異常
13 電気的停止位置精度 ±3.6° ―
2 瞬時最大出力 10 W
12 分解能 500 p/r ―
暫定仕様

SL16-CT_03 2
●一般仕様
No 項目 規格
1 使用温度・湿度範囲 0~+40℃、85%RH以下(結露のないこと)
2 保存温度・湿度範囲 -10~+70℃、85%RH以下(結露のないこと)
3 使用環境 引火性・腐食性ガス・粉塵のないこと。
注1) 使用温度、保存温度共に急激な温度変化は避けてください。外部、内部に結露を生じ錆の原因となったり、
内部回路の絶縁不良や誤動作の原因となります。
注2) 本製品を機器内に組み込んだ場合は、各温度、湿度は機器内本製品周辺の値が適用されます。
機器外の条件ではありません。
No 項目 規格 条件
1 絶縁抵抗 DC500Vメガにて
10MΩ以上 入出力(CN1)端子一括対ケース間
2 耐電圧 AC500V、50Hz、
1分間印加して絶縁破壊せぬこと
上記規格は常温・常湿においての規格値となります。
上記特性は、DC24V電源・モータ単体での運転領域です。
ギヤヘッドと組み合せてご使用の場合は、ギヤヘッド許容トルク以下で
ご使用ください
運転条件により放熱が必要です。
定格内でも、周囲条件、運転条件によっては、強制空冷や放熱板を
取り付けるなどの冷却を考慮していただく場合があります。
モータ側面温度65℃以下でご使用ください。
●モータ代表特性と運転領域
●ギヤヘッド仕様
モータの出力トルクはギヤヘッドの許容トルクに制限されます。
No 型式 減速比 定格ト許容ルク 効率
1 1/19 1/19.22 0.294Nm 66%
2 1/84 1/84.29 0.392Nm 53%
回転
速度
[r/
min
]
トルク [N・m]
0.010 0.0150 0.005
24000
連続運転領域
瞬時運転領域
20000
8000
4000
28000
16000
12000

SL16-CT_03 3
ピン
番号
入出
力 信号名 説明 備考
1 +24V 電源(+12~24V)入力
2 GND 電源(GND)入力
3 入力 CCW/DIR
1パルス方式:回転方向
H:CCW
L:CW
2パルス方式:CCWパルス
回転方向の項 参照
4 入力 SV-ON
励磁
H:無励磁(軸フリー)
L:励磁
モータを励磁状態にする信号です。
無励磁状態でパルスを送ってもモータは動作しません。
外部からモータ軸を回すときに使用します。
無励磁状態では偏差カウンタはリセットされ
励磁開始時の位置を初期値として読み込みます。
5 入力 AN-OPT-IN オプションアナログ入力 0~5V (5V以上は入力しないでください)
6 入力 CW/PLS 1パルス方式:パルス
2パルス方式:CWパルス 回転方向の項 参照
7 出力 PLS-OUT 回転パルス 15P/R
停止時はL出力
8 出力 ALM
アラーム
アラーム時はアラーム種別パルス
正常時はL
保護機能(アラーム)の項 参照
9 TXP シリアル通信 端子
10 TXN シリアル通信 端子
11 SWD プログラム書込み用です 使用禁止
12 SWC プログラム書込み用です 使用禁止
13 入力 2/1
2パルス方式/1パルス方式切替
H:1パルス方式
L:2パルス方式
電源投入時に設定
14 出力 INPOS 位置決め完了 編差カウンタが、±5以下のとき L出力
● 位置制御 パルス列入力 CN 1 コネクタ説明表
内部ボリュームでゲインの調整ができます。
ゲインを大きくすると、位置決め精度は向上しますが
振動、ハンチングが大きくなります。負荷の状態により設定が可能です。
●位置制御ゲイン調整
●位置制御 回転方向 回転速度 分解能500P/R 入力パルス信号 周波数50kHz に対して、
回転速度は6000r/minとなります。
回転方向を切り替えるとき、次のパルス出力まで
10msec程度のインターバル時間をとって下さい。
パルスは、立下りでカウントされます。
2パルス方式 1パルス方式
信号
回転方向 CW CCW CW CCW
2/1 L
CW/PLS パルス L パルス パルス
CCW/DIR L パルス L オープンまたはH
オープンまたはH
CCW/DIR
CW/PLS
モータ動作CW
CCW
CW
CCW
1パルス方式2パルス方式
2/1

SL16-CT_03 4
● 速度制御 指令電圧入力 CN 1 コネクタ説明表
ピン
番号
入出
力 信号名 説明 備考
1 +24V 電源(+12~24V)入力
2 GND 電源(GND)入力
3 入力 CW/CCW
回転方向切替
H:CCW
L:CW
速度制御タイミングチャート参照
CWは 出力軸から見て右回り
4 入力 RUN/STOP
運転/停止
H:停止
L:運転
速度制御タイミングチャート参照
5 入力 AN-SPD 外部速度指令電圧 0~5V (5V以上は入力しないでください)
回転速度設定方法の項 参照
6 入力 EXT/INT
速度指令外部/内部切替
H:内部ボリューム
L:外部ボリューム/外部電圧
速度制御タイミングチャート参照
7 出力 PLSOUT 回転パルス 15P/R
停止時はL出力
1回転15パルスを出力しますが
回転速度により等間隔にならないことがあります
8 出力 ALM
アラーム
アラーム時はアラーム種別パルス
正常時はL
保護機能(アラーム)の項 参照
9 TXP シリアル通信 端子
10 TXN シリアル通信 端子
11 SWD プログラム書込み用です 使用禁止
12 SWC プログラム書込み用です 使用禁止
13 入力 OPT-IN オプション入力
14 出力 OPT-OUT オプション出力

SL16-CT_03 5
●速度制御 タイミングチャート
●速度制御 回転速度設定方法 外部ボリューム(別売)による速度設定
AN-SPD に可変抵抗(外部ボリューム)を接続してください。
24Vを利用する時は30KΩの抵抗を追加してください。
ボリューム角度 ⇒最大角度
ボリューム角度 — 回転速度
外部速度指令電圧による速度設定
AN-SPD にDC 0~5Vを接続してください。
外部直流電圧[V]
電圧 — 回転速度
入力信号の切り替え後、別の入力信号を切り替えるときは、
10msec程度のインターバル時間をとって下さい。
52
AN-SPD
GND
CN10~5V
+24V1
52
AN-SPD
GND
24V
30KΩ
10KΩ
1
23
CN1
外部ボリューム
停止
RUN/STOP
CW/CCW
2速切替 回転方向切替
CW
CCW
H
L
L
L
H
H
RUN
CW
速度設定内部VR
速度設定外部電圧
INTEXTEXT/INT
CCW
STOP
回転
速度
[r/m
in]
8000
24000
20000
4000
1 2 3 4 50
16000
12000
28000
回転
速度
[r/m
in]
8000
24000
20000
4000
1 2 3 4 50
16000
12000
28000

SL16-CT_03 6
●出力回路
◆ 7、8、14 番ピン
◇入力
H:2.3V以上またはオープン
L:0.5V以下(GNDにショート)
●入力回路
◆ 3、4、6、13 番ピン
◇外部制御機器の出力がオープンコレクタ出力のとき
◇スイッチ接続のとき
◆ 5 番ピン
コネクタNo コネクタ型名 嵌合コネクタ メーカ 備考
CN1 SM14B-ZPDSS-TF ZPDR-14V-S JST ---
● 使用コネクタ
1
2
1 3
1 4
◇アナログ入力
10KΩ1000pF
20KΩ
10KΩ
注)10mA以下
例 24V時2.2K~5KΩ
(注)
24V
4.7KΩ
+5V
10KΩ
4.7KΩ
+5V
10KΩ
GND 2
ドライバ
GND 2
ドライバ
AN-IN 5
GND 2
ドライバ
ドライバ
GND 2

SL16-CT_03 7
1 2 . 5
Φ4
Φ8
3 - M 2 深 さ 3P C D 1 2
15
6 0
1 4
6.5
2 . 5
1 8 . 5
2
R 1
V R
Φ 2
モ ー タ コ ネ ク タ
コ ネ ク タ
1ギ ヤ ヘ ッ ド1 / 8 4 ( 1 / 1 9 L = 1 8 . 2 )
5 0 2
1 . 5
4 8 . 5
8
3.5
2 1 . 8
3.5
Φ4
Φ8
Φ16
2
3 . 5
1 0 . 5
Φ16
5 0 モ ー タ ケ ー ブ ル
4 8 . 5
Φ16
5 0 モ ー タ ケ ー ブ ル
4 - M 2深 さ3
P C D 1 2
●外形図
ドライバ : 質量 4 g
ドライバケーブル
丸軸モータ
ギヤヘッド(1/84)付モータ

SL16-CT_03 8
2017/01/13版
適用
万一の事故や故障に対する装置の安全設計、および事前の実機による評価確認を実施してください。
また、本製品の故障や誤動作により人命や人体に危険がおよぶような用途に対しては、実機により十分な安全性確認のうえ、
お客様の責任で適用してください。
本製品は、特に高い品質と信頼性が要求される原子力、航空宇宙、医療機器、安全装置等の特定用途向けに
設計、製造されたものではありません。
保証期間及び保証の範囲
保証期間は、納入後12ヶ月です。
保証期間内に発生した故障のうち、弊社の設計・製造上の責任によるものは、無償で修理もしくは代品を納入いたします。
なお、原則として修理は弊社工場への引取修理とさせていただきます。
保証の範囲は納入品のみとし、納入品の故障等による二次的な損害については除外します。
●保護機能 (アラーム)
異常時にCN1「ALM」端子からアラーム種別パルスを出力します。アラーム信号は正常時、L信号を出力します。
アラーム アラーム条件 パルス数 アラーム信号出力
非アラーム - -
過負荷 過大な負荷が連続した場合 1
過電圧 電源電圧が連続して30V以上になった場合 2
不足電圧 電源電圧が連続して20V以下になった場合 3
過熱 温度検出素子が異常を検出した場合 4
センサ異常 回転センサの異常を検出した場合 5
アラーム出力時は、モータは自動停止しますので、原因を取り除いて電源再投入してください。
過熱アラーム出力時は、適正な冷却または負荷の低減等、モータの冷却処置をおこなった上、ご使用ください。
予告なく内容を変更する場合があります。
性能数値は代表値です。保証値ではありません
〒330-0071 埼玉県さいたま市浦和区上木崎2-5-15
TEL 048-749-1811 FAX 048-749-1845
E-mail : info@micro-sv.com http://www.micro-sv.com