Robotics 2015 05 Dynamics - polito.it · Basilio Bona -DAUIN -PoliTo ROBOTICS 01PEEQW -2014/2015 3....
45
ROBOTICS 01PEEQW Basilio Bona DAUIN – Politecnico di Torino
Transcript of Robotics 2015 05 Dynamics - polito.it · Basilio Bona -DAUIN -PoliTo ROBOTICS 01PEEQW -2014/2015 3....

ROBOTICS
01PEEQW
Basilio Bona
DAUIN – Politecnico di Torino

Dynamics

Dynamics – 1
� Dynamics studies the relations between the task space
forces/torques and the joint forces/torques in non-static
equilibrium, i.e., when the robot moves
� The dynamic model equation can be obtained applying two main
approaches
� Lagrange equations based on energy functions
� Newton-Euler equations based on the equilibrium of the vector forces
� The first approach is conceptually simpler and will be adopted here
� The second approach is more efficient for implementation of
recursive computer algorithms; only a brief review of this approach
will be presented here
Basilio Bona - DAUIN - PoliTo 3ROBOTICS 01PEEQW - 2014/2015
Dynamics – 2
� The dynamic equations of the robot can be obtained adopting the
Lagrange approach
� The derived state-space differential equations represent the robot
dynamical model
� Why state equations are necessary?
� Used for control design
� Used for robot simulation
� Used to implement model identification or parameter estimation
algorithms
Basilio Bona - DAUIN - PoliTo 4ROBOTICS 01PEEQW - 2014/2015

Newton-Euler approach – 1
Basilio Bona - DAUIN - PoliTo 5ROBOTICS 01PEEQW - 2014/2015

Newton-Euler approach – 2
Basilio Bona - DAUIN - PoliTo 6ROBOTICS 01PEEQW - 2014/2015

Newton-Euler approach – 3
Basilio Bona - DAUIN - PoliTo 7ROBOTICS 01PEEQW - 2014/2015

Newton-Euler approach – 4
Basilio Bona - DAUIN - PoliTo 8ROBOTICS 01PEEQW - 2014/2015
ib
ic
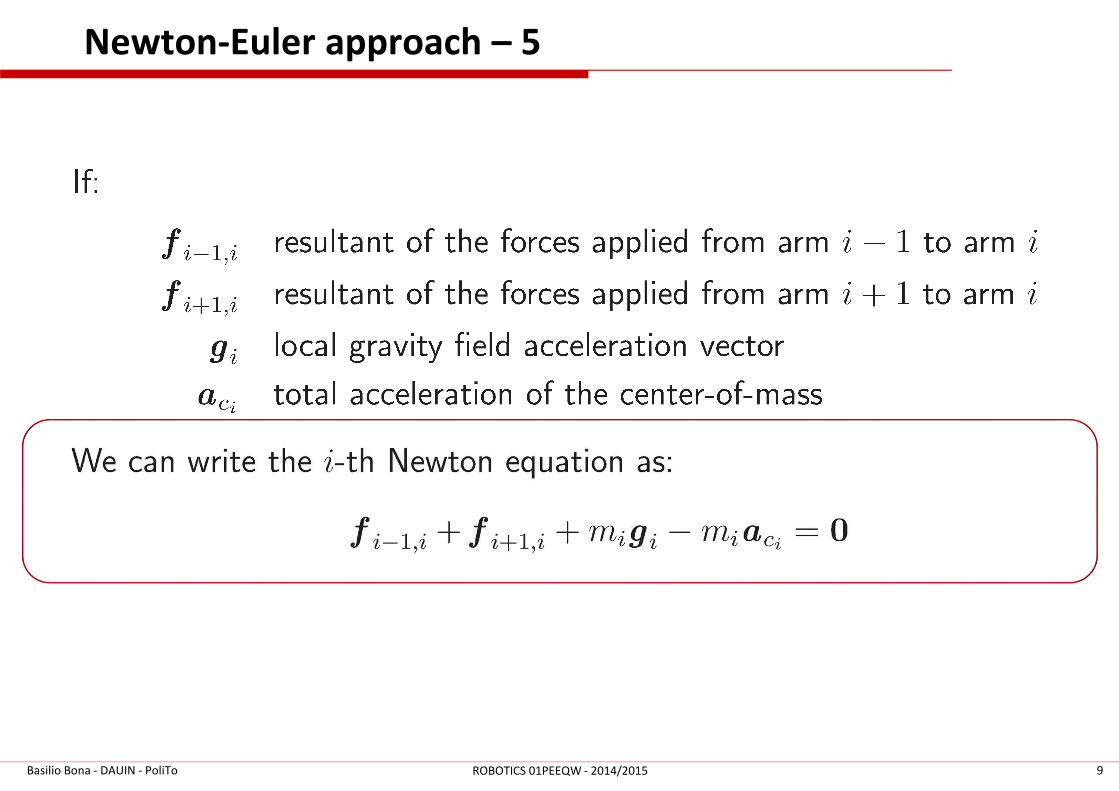
Newton-Euler approach – 5
Basilio Bona - DAUIN - PoliTo 9ROBOTICS 01PEEQW - 2014/2015
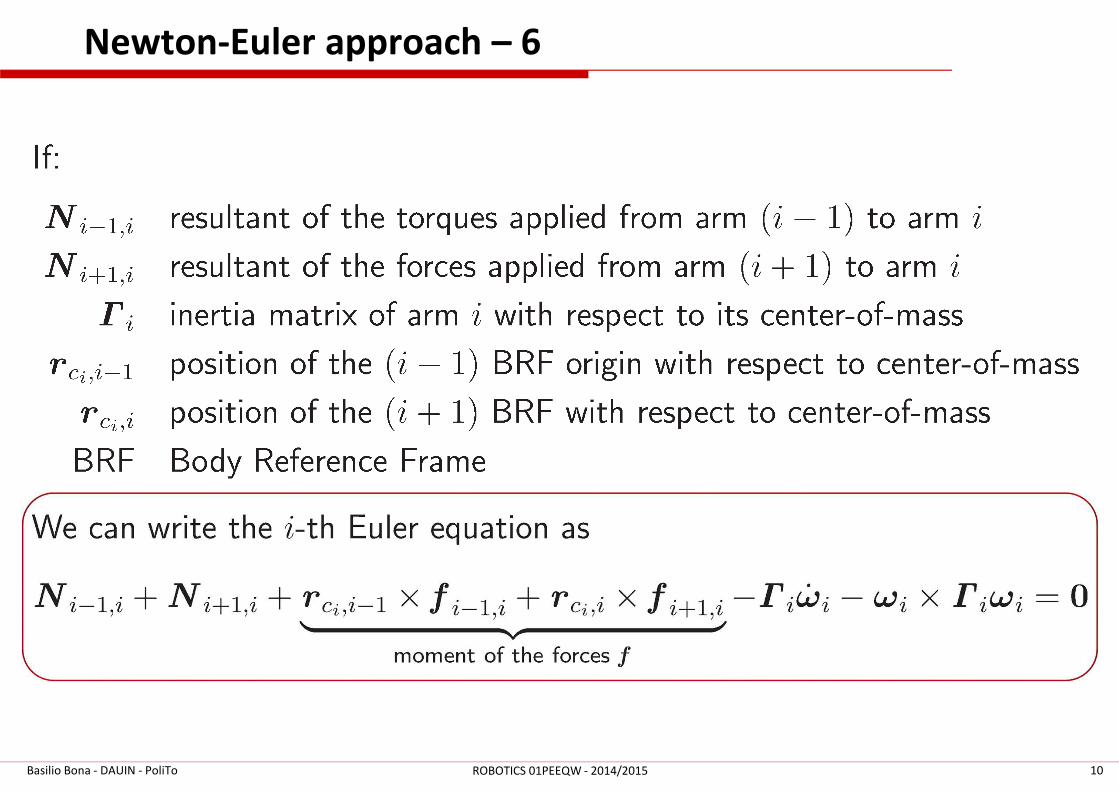
Newton-Euler approach – 6
Basilio Bona - DAUIN - PoliTo 10ROBOTICS 01PEEQW - 2014/2015

Newton-Euler approach – 7
Basilio Bona - DAUIN - PoliTo 11ROBOTICS 01PEEQW - 2014/2015

Lagrange equations – 1
Basilio Bona - DAUIN - PoliTo 12ROBOTICS 01PEEQW - 2014/2015

Lagrange equations – 2
Basilio Bona - DAUIN - PoliTo 13ROBOTICS 01PEEQW - 2014/2015

Lagrange equations – 3
Basilio Bona - DAUIN - PoliTo 14ROBOTICS 01PEEQW - 2014/2015

Lagrange equations – 4
Basilio Bona - DAUIN - PoliTo 15ROBOTICS 01PEEQW - 2014/2015

Kinetic Energy – 1
Basilio Bona - DAUIN - PoliTo 16ROBOTICS 01PEEQW - 2014/2015
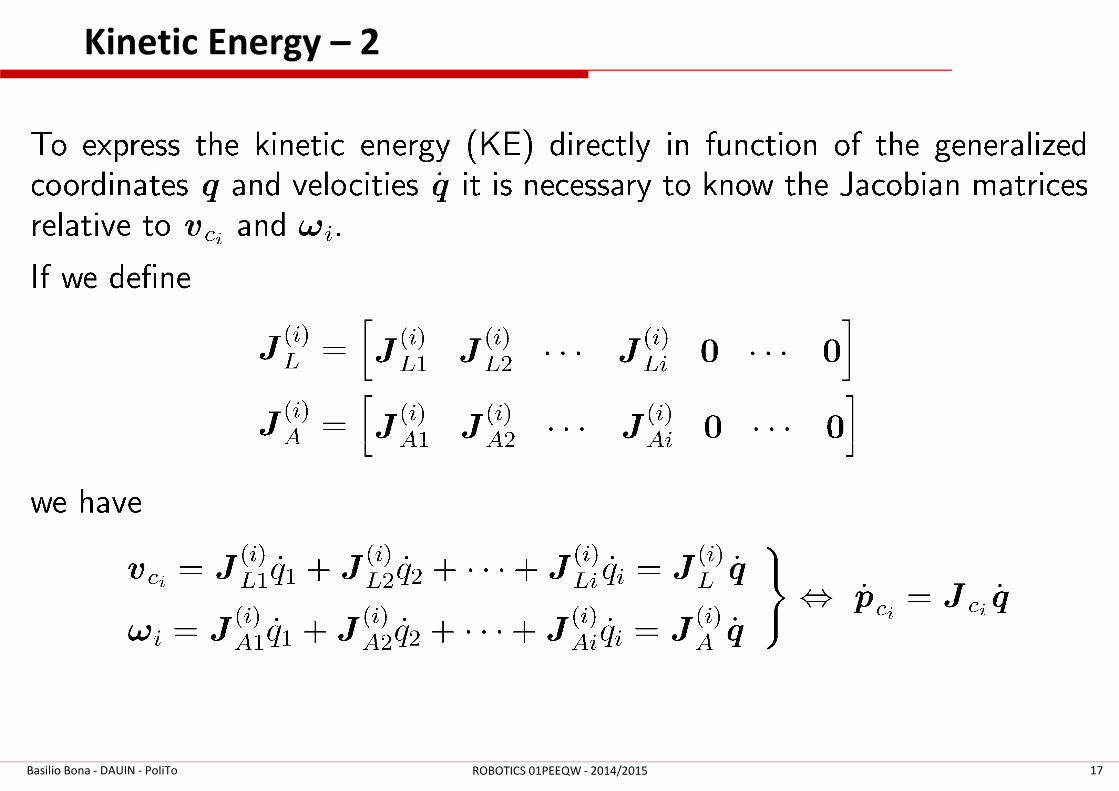
Kinetic Energy – 2
Basilio Bona - DAUIN - PoliTo 17ROBOTICS 01PEEQW - 2014/2015

Kinetic Energy – 3
Basilio Bona - DAUIN - PoliTo 18ROBOTICS 01PEEQW - 2014/2015
First form for the Kinetic Energy

Kinetic Energy – 1
Basilio Bona - DAUIN - PoliTo 19ROBOTICS 01PEEQW - 2014/2015
Second form for the Kinetic Energy

Potential Energy – 1
Basilio Bona - DAUIN - PoliTo 20ROBOTICS 01PEEQW - 2014/2015

Potential Energy – 2
Basilio Bona - DAUIN - PoliTo 21ROBOTICS 01PEEQW - 2014/2015

Potential Energy – 3
Basilio Bona - DAUIN - PoliTo 22ROBOTICS 01PEEQW - 2014/2015

Generalized forces – 1
Basilio Bona - DAUIN - PoliTo 23ROBOTICS 01PEEQW - 2014/2015

Generalized forces – 2
Basilio Bona - DAUIN - PoliTo 24ROBOTICS 01PEEQW - 2014/2015

Generalized forces – 3
Basilio Bona - DAUIN - PoliTo 25ROBOTICS 01PEEQW - 2014/2015

Final equations – 1
Basilio Bona - DAUIN - PoliTo 26ROBOTICS 01PEEQW - 2014/2015

Final equations – 2
Basilio Bona - DAUIN - PoliTo 27ROBOTICS 01PEEQW - 2014/2015

Final equations – 3
Basilio Bona - DAUIN - PoliTo 28ROBOTICS 01PEEQW - 2014/2015

Physical interpretation – 1
Basilio Bona - DAUIN - PoliTo 29ROBOTICS 01PEEQW - 2014/2015
21 43 5

Physical interpretation – 2
Basilio Bona - DAUIN - PoliTo 30ROBOTICS 01PEEQW - 2014/2015
1
2
3
4
5

Properties of the Lagrange Equations – 1
Basilio Bona - DAUIN - PoliTo 31ROBOTICS 01PEEQW - 2014/2015

Properties of the Lagrange Equations – 2
Basilio Bona - DAUIN - PoliTo 32ROBOTICS 01PEEQW - 2014/2015
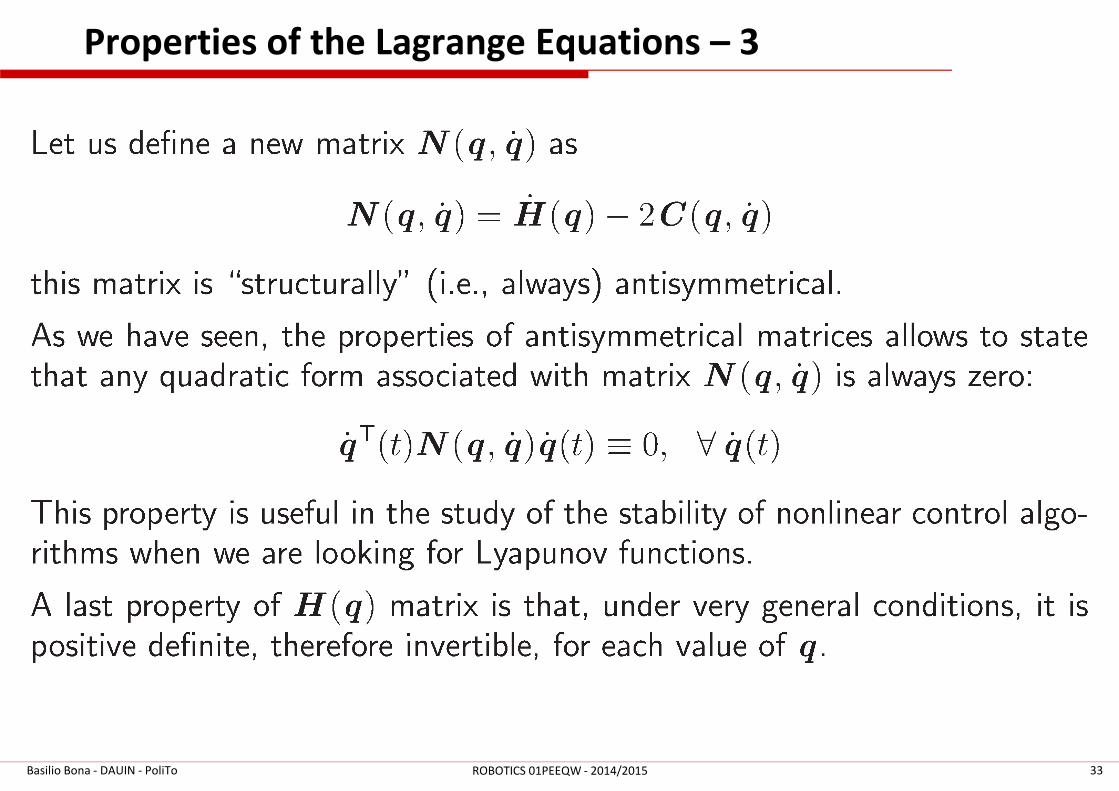
Properties of the Lagrange Equations – 3
Basilio Bona - DAUIN - PoliTo 33ROBOTICS 01PEEQW - 2014/2015

Dynamic calibration – 1
Basilio Bona - DAUIN - PoliTo 34ROBOTICS 01PEEQW - 2014/2015
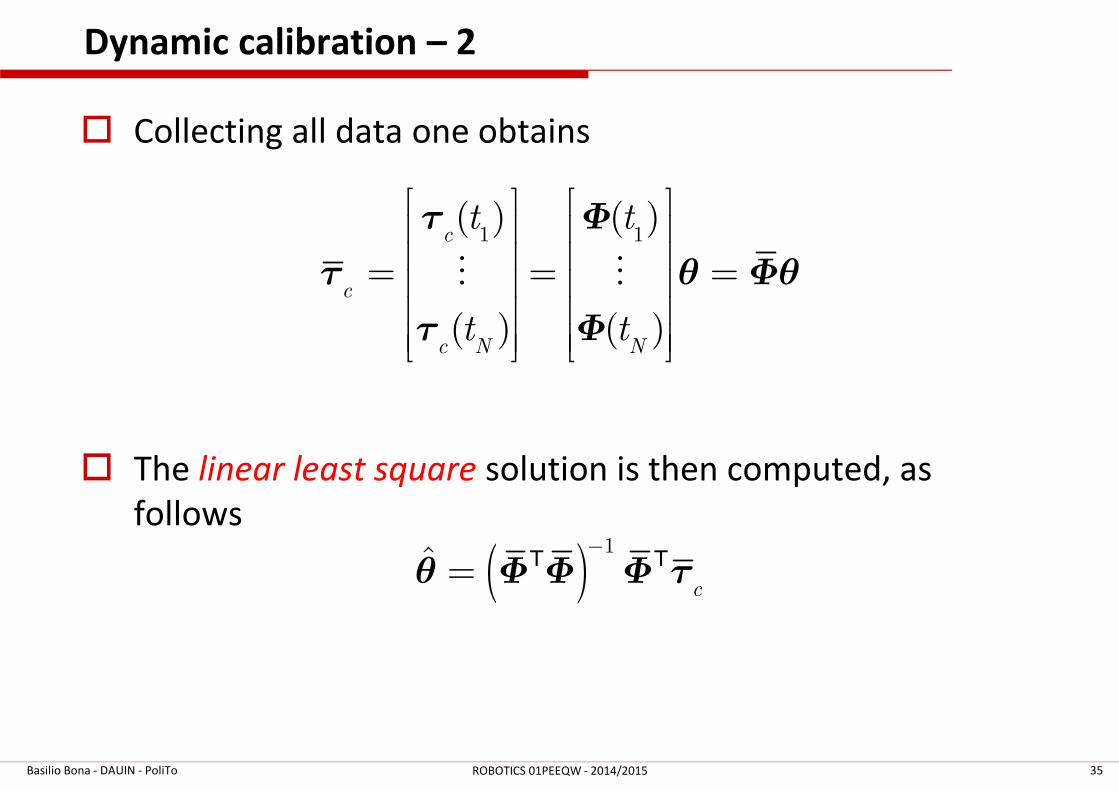
Dynamic calibration – 2
� Collecting all data one obtains
Basilio Bona - DAUIN - PoliTo 35ROBOTICS 01PEEQW - 2014/2015
1 1( ) ( )
( ) ( )
c
c
c N N
t t
t t
= = =
τ Φ
τ θ Φθ
τ Φ
⋮ ⋮
� The linear least square solution is then computed, as
follows
( )1
ˆc
−
=θ Φ Φ Φ τT T

State equations – 1
Basilio Bona - DAUIN - PoliTo 36ROBOTICS 01PEEQW - 2014/2015

State equations – 2
Basilio Bona - DAUIN - PoliTo 37ROBOTICS 01PEEQW - 2014/2015

Direct and inverse dynamics
Basilio Bona - DAUIN - PoliTo 38ROBOTICS 01PEEQW - 2014/2015

Numerical recursive algorithms – 1
Basilio Bona - DAUIN - PoliTo 39ROBOTICS 01PEEQW - 2014/2015

Numerical recursive algorithms – 2
Basilio Bona - DAUIN - PoliTo 40ROBOTICS 01PEEQW - 2014/2015
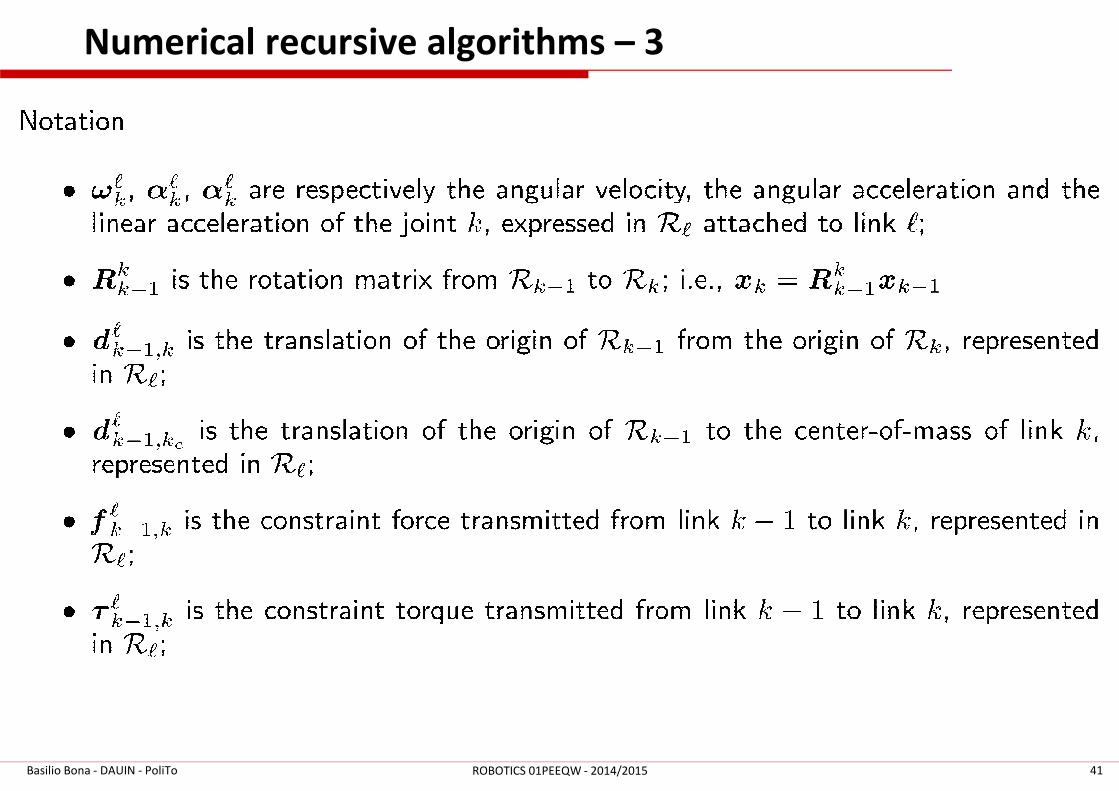
Numerical recursive algorithms – 3
Basilio Bona - DAUIN - PoliTo 41ROBOTICS 01PEEQW - 2014/2015

Numerical recursive algorithms – 4
Basilio Bona - DAUIN - PoliTo 42ROBOTICS 01PEEQW - 2014/2015

Numerical recursive algorithms – 5
Basilio Bona - DAUIN - PoliTo 43ROBOTICS 01PEEQW - 2014/2015

Numerical recursive algorithms – 6
Basilio Bona - DAUIN - PoliTo 44ROBOTICS 01PEEQW - 2014/2015

Conclusions
� Dynamics equations are essential for modeling and control purposes
� Modeling is easier to understand adopting the Lagrange energy
function
� Computer program are more efficient if they implement recursive
Newton-Euler approach
� Nonlinear state equations have this form
Basilio Bona - DAUIN - PoliTo 45ROBOTICS 01PEEQW - 2014/2015
NonlinearitiesProducts, squares, trigonometric functions
herehere here