ROBOTICS Manualedell'operatore IRC5conFlexPendant · 2019. 2. 26. ·...
316
ROBOTICS Manuale dell'operatore IRC5 con FlexPendant
Transcript of ROBOTICS Manualedell'operatore IRC5conFlexPendant · 2019. 2. 26. ·...

ROBOTICS
Manuale dell'operatoreIRC5 con FlexPendant

Trace back information:Workspace R18-2 version a9Checked in 2018-10-09Skribenta version 5.3.008

Manuale dell'operatoreIRC5 con FlexPendant
RobotWare 6.08
ID documento: 3HAC050941-007Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.Le specifiche sono soggette a modifiche senza preavviso.

Le informazioni contenute nel presente manuale sono soggette a modifiche senzapreavviso e non devono essere considerate vincolanti per ABB. ABB non si assumealcuna responsabilità per eventuali errori nel presente manuale.Salvo quanto espressamente indicato nel presente manuale, ABB non concedealcuna altra garanzia in relazione al Prodotto in merito a eventuali perdite, danni apersone o beni, idoneità per uno scopo specifico o altro.In nessun caso ABB potrà essere ritenuta responsabile per eventuali danni accidentalio consequenziali dovuti all'utilizzo del presente manuale e dei prodotti in esso descritti.Né questo Manuale, né alcuna sua parte possono essere riprodotti o ricopiati senzail consenso scritto da parte di ABB.Conservare per consultazioni successive.Delle copie supplementari di questo Manuale possono essere ottenute da ABB.
Traduzione delle istruzioni originali.
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.Le specifiche sono soggette a modifiche senza preavviso.
ABB AB, RoboticsRobotics and MotionSe-721 68 Västerås
Svezia

Sommario9Panoramica di questo Manuale ........................................................................................................
12Documentazione del prodotto ..........................................................................................................
151 Sicurezza151.1 Contenuto del capitolo .......................................................................................161.2 Standard applicabili ...........................................................................................181.3 Interventi di sicurezza ........................................................................................181.3.1 Arresto del sistema ..................................................................................191.3.2 Estinzione degli incendi ............................................................................201.3.3 Assicurarsi che l'alimentazione di rete sia spenta! .........................................211.3.4 I robot in movimento sono potenzialmente letali! ...........................................221.3.5 Ripristino dagli arresti di emergenza ...........................................................231.3.6 Abilitazione del dispositivo e della funzionalità hold-to-run ..............................241.4 Utilizzo del modo sicuro .....................................................................................241.4.1 Manipolazione della FlexPendant ...............................................................261.4.2 Strumenti di sicurezza ..............................................................................271.4.3 Informazioni sulla modalità automatica ........................................................291.4.4 Informazioni sulla modalità manuale ...........................................................321.5 Terminologia della sicurezza ...............................................................................321.5.1 Segnali di sicurezza nel Manuale ...............................................................341.5.2 Arresto di protezione e arresto di emergenza ...............................................
352 Presentazione di IRC5352.1 Contenuto del capitolo .......................................................................................362.2 Controller IRC5 .................................................................................................372.3 FlexPendant .....................................................................................................432.4 T10 .................................................................................................................452.5 RobotStudio Online ...........................................................................................472.6 RobotStudio .....................................................................................................482.7 Quando utilizzare i dispositivi di spostamento diversi ...............................................512.8 Pulsanti e porte sul controller ..............................................................................
533 Navigazione e manipolazione della FlexPendant533.1 Contenuto del capitolo .......................................................................................543.2 Il Main menu ....................................................................................................543.2.1 HotEdit menu .........................................................................................563.2.2 Esplora FlexPendant ................................................................................573.2.3 Input e output, I/O ...................................................................................583.2.4 Movimento manuale ................................................................................603.2.5 Finestra Produzione ...............................................................................613.2.6 Dati programma .....................................................................................633.2.7 Editor di programma ...............................................................................653.2.8 Backup e ripristino .................................................................................663.2.9 Calibratura ............................................................................................683.2.10 Pannello di comando ..............................................................................703.2.11 Registro eventi .......................................................................................723.2.12 Informazioni di sistema ...........................................................................743.2.13 Riavvia ..................................................................................................753.2.14 Fine sessione ........................................................................................763.3 Finestra Operatore ............................................................................................773.4 Barra di stato ....................................................................................................783.5 QuickSet, impostazione rapida ............................................................................783.5.1 Menu di impostazione rapida .....................................................................803.5.2 Menu di impostazione rapida, Unità meccanica ............................................863.5.3 Menu di impostazione rapida, Incremento ...................................................873.5.4 Menu di impostazione rapida, Modalità di esecuzione ...................................
Manuale dell'operatore - IRC5 con FlexPendant 53HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
Sommario

883.5.5 Menu di impostazione rapida, Modalità per passi .........................................893.5.6 Menu di impostazione rapida, Velocità ........................................................903.5.7 Menu di impostazione rapida, Task ............................................................913.6 Procedure di base .............................................................................................913.6.1 Utilizzo della tastiera software ...................................................................933.6.2 Messaggi sulla FlexPendant ......................................................................943.6.3 Scorrimento e zoom .................................................................................953.6.4 Filtro dei dati ..........................................................................................983.6.5 Applicazioni di processo ...........................................................................993.6.6 Autorizzazione dell'accesso per RobotStudio ...............................................
1003.6.7 Inizio e termine di sessione (log-in e log-off). ................................................1023.7 Modifica delle impostazioni della FlexPendant ........................................................1023.7.1 Impostazioni di sistema ............................................................................1023.7.1.1 Impostazione di percorsi predefiniti .................................................
1043.7.1.2 Definire una vista da mostrare al cambio o all’avvio della modalità
operativa ....................................................................................1063.7.1.3 Modifica dell'immagine di sfondo ....................................................1073.7.1.4 Definire il livello di visibilità per le funzioni protette UAS. .....................1083.7.1.5 Definizione di una vista di test aggiuntiva ........................................1093.7.1.6 Definire la regola di programmazione della posizione .........................1113.7.1.7 Definizione dei task selezionabili nel pannello dei task .......................1123.7.1.8 Gestione della visualizzazione del nome del controller e del sistema .....1133.7.2 Impostazioni di base ................................................................................1133.7.2.1 Modifica di luminosità e contrasto ...................................................1143.7.2.2 Adattamento della FlexPendant per utenti mancini .............................1163.7.2.3 Impostazioni controller .................................................................1183.7.2.4 Configurazione degli I/O più comuni ................................................1193.7.2.5 Modifica della lingua ....................................................................1203.7.2.6 Modifica dei tasti programmabili .....................................................1223.7.2.7 Calibratura dello schermo tattile .....................................................
1254 Movimento manuale1254.1 Introduzione al spostamento ...............................................................................1274.2 Sistemi di coordinate per lo spostamento ..............................................................1334.3 Direzioni joystick ...............................................................................................1344.4 Limitazioni al spostamento ..................................................................................1354.5 Spostamento coordinato .....................................................................................1364.6 Impostazioni di base per il spostamento ................................................................1364.6.1 Selezionare l’unità meccanica per lo spostamento ........................................1384.6.2 Selezione della modalità di movimento ........................................................1394.6.3 Selezione dell'utensile, dell'oggetto di lavoro e del carico utile .........................1404.6.4 Impostazione dell'orientamento dell'utensile .................................................1414.6.5 Spostamento asse per asse ......................................................................1434.6.6 Selezionare il sistema di coordinate ............................................................1444.6.7 Blocco del joystick in direzioni specifiche ....................................................1464.6.8 Movimento incrementale per il posizionamento preciso ..................................1484.6.9 Lettura della posizione esatta ....................................................................1504.6.10 Allineamento degli utensili ........................................................................
1515 Programmazione e test1515.1 Prima di iniziare la programmazione .....................................................................1525.2 Utilizzo di programmi RAPID ...............................................................................1545.3 Concetto della programmazione ...........................................................................1545.3.1 Gestione dei programmi ...........................................................................1575.3.2 Gestione dei moduli .................................................................................1615.3.3 Gestione delle routine ..............................................................................1665.3.4 Gestione delle istruzioni ...........................................................................1715.3.5 Esempio: Aggiunta di istruzioni di movimento ...............................................1735.3.6 A proposito dei puntatori di programma e movimento ....................................
6 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
Sommario

1745.4 Tipi di dati ........................................................................................................1745.4.1 Visualizzazione dei dati in specifici task, moduli o routine ...............................1755.4.2 Creazione di nuove istanze di dati ..............................................................1775.4.3 Modifica delle istanze di dati ......................................................................1815.5 Utensili ............................................................................................................1815.5.1 Che cosa è un utensile? ...........................................................................1835.5.2 Che cosa è il punto centrale dell'utensile? ...................................................1845.5.3 Creazione di un utensile ...........................................................................1875.5.4 Definizione del sistema di riferimento utensile ..............................................1925.5.5 Modifica dei dati dell'utensile .....................................................................1955.5.6 Modifica della dichiarazione dell'utensile .....................................................1965.5.7 Eliminazione di un utensile ........................................................................1975.5.8 Configurazione di utensili fissi ...................................................................1995.6 Oggetti di lavoro ...............................................................................................1995.6.1 Che cosa è un oggetto di lavoro? ...............................................................2005.6.2 Creazione di un oggetto di lavoro ...............................................................2015.6.3 Definizione del sistema di coordinate dell'oggetto di lavoro .............................2055.6.4 Modifica dei dati dell'oggetto di lavoro .........................................................2065.6.5 Modifica della dichiarazione dell'oggetto di lavoro .........................................2075.6.6 Eliminazione di un oggetto di lavoro ...........................................................2085.7 Carichi utili .......................................................................................................2085.7.1 Creazione di un carico utile .......................................................................2105.7.2 Modifica dei dati del carico utile .................................................................2125.7.3 Modifica della dichiarazione del carico utile ..................................................2135.7.4 Eliminazione di un carico utile ...................................................................2145.8 Verifica ............................................................................................................2145.8.1 Informazioni sulla modalità automatica ........................................................2165.8.2 Informazioni sulla modalità manuale ...........................................................2195.8.3 Utilizzo della funzione Hold-to-run ..............................................................2205.8.4 Esecuzione del programma da un'istruzione specifica ....................................2215.8.5 Esecuzione di una routine specifica ............................................................2225.8.6 Esecuzione un'istruzione alla volta .............................................................2255.9 Routine di servizio .............................................................................................2255.9.1 Esecuzione di una routine di servizio ..........................................................2295.9.2 Routine di servizio per l'arresto della batteria ...............................................2305.9.3 Calibration Pendulum, CalPendulum routine di servizio ..................................2315.9.4 Service Information System, ServiceInfo routine di servizio .............................2325.9.5 LoadIdentify, routine di servizio di identificazione del carico ............................2425.9.6 Servizio online controllo freni ....................................................................
2496 In funzione2496.1 Procedure di base .............................................................................................2496.1.1 Avvio dei programmi ................................................................................2526.1.2 Interruzione dei programmi .......................................................................2536.1.3 Utilizzo di programmi multitasking ..............................................................2556.1.4 Utilizzo della supervisione del movimento e non dell’esecuzione del movimento ..2596.1.5 Impiego dell’opzione hot plug ....................................................................2626.2 Risoluzione dei problemi ed eliminazione degli errori ...............................................2626.2.1 Procedura generale per la risoluzione dei problemi ........................................2636.2.2 Ritorno del robot sul percorso ...................................................................2656.2.3 Esecuzione di programmi RAPID con unità meccanica non calibrata ................2666.3 Modalità operative .............................................................................................2666.3.1 Modalità operativa corrente .......................................................................2686.3.2 Passaggio dalla modalità manuale a quella automatica ..................................2706.3.3 Passaggio dalla modalità automatica a quella manuale ..................................2716.3.4 Passaggio alla modalità manuale a velocità massima .....................................2726.4 Modifica delle posizioni ......................................................................................2726.4.1 Modifica e regolazione delle posizioni .........................................................2736.4.2 Modifica di posizioni tramite l'Editor di programma o la finestra Produzione. ....
Manuale dell'operatore - IRC5 con FlexPendant 73HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
Sommario

2776.4.3 Posizioni di regolazione con HotEdit ...........................................................2816.4.4 Lavoro con spostamenti ed offset ...............................................................2836.4.5 Spostamento del robot in una posizione programmata ...................................
2857 Gestione di Input e output, I/O2857.1 Visualizzazione degli elenchi dei segnali ................................................................2867.2 Simulazione e modifica del valore dei segnali .........................................................2897.3 Visualizzazione di un gruppo di segnali .................................................................2907.4 Segnali di sicurezza ...........................................................................................2907.4.1 Segnali di I/O di sicurezza .........................................................................
2938 Gestione del registro degli eventi2938.1 Accesso al registro degli eventi ...........................................................................2948.2 Eliminazione delle voci del registro .......................................................................2958.3 Salvataggio delle voci del registro ........................................................................
2979 Backup e ripristino2979.1 Backup del sistema ...........................................................................................2999.2 Note importanti per l'esecuzione dei backup ...........................................................3019.3 Ripristino del sistema .........................................................................................
30510 calibratura30510.1 Verifica della necessità di calibrare il robot .............................................................30610.2 Aggiornamento del contagiri ................................................................................
309Index
8 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
Sommario

Panoramica di questo ManualeInformazioni sul manuale
Questo manuale contiene le istruzioni per l'utilizzo quotidiano dei sistemi roboticibasati su IRC5 mediante una FlexPendant.
UtilizzoQuesto manuale deve essere utilizzato durante il funzionamento.Alcune azioni più avanzate e non utilizzate nelle operazioni di routine sono descrittein Operating manual - IRC5 Integrator's guide.
Chi deve leggere il manuale?Il presente manuale è destinato a:
• operatori• tecnici di prodotto• tecnici dell'assistenza• programmatori di robot
Come leggere il manuale operativoIl manuale operativo è organizzato nei seguenti capitoli.
ContenutoTitoloCapitolo
Istruzioni di sicurezza e avvertenze.Sicurezza1
Descrizioni della IRC5.Presentazione di IRC52
Descrizioni dell'interfaccia utente e delle proceduredi base della FlexPendant.
Navigazione e gestione delFlexPendant
3
Procedure per il spostamento.Movimento manuale4
Procedure per la programmazione e test, compresedescrizioni di alcuni concetti di programmazione.
Programmazione e test5
Procedure per il funzionamento in produzione.In funzione6
Procedure per la gestione dell'I/O.Gestione di Input e output,I/O
7
Procedure per il registro degli eventi.Gestione del registro deglieventi
8
Procedure per il backup e il ripristino dei sistemi.Backup e ripristino9
Procedure per la calibratura del sistema robotico.calibratura10
PrerequisitiIl lettore deve:
• Apprendere i concetti descritti in Manuale dell'operatore - Guida introduttiva- IRC5 e RobotStudio.
• conoscere il funzionamento del robot.
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 93HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
Panoramica di questo Manuale

Riferimenti
3HAC047136-007Manuale del prodotto - IRC5IRC5 con computer principale DSQC1000.
3HAC047137-007Manuale del prodotto - IRC5 Panel Mounted ControllerIRC5 con computer principale DSQC1000.
3HAC047138-007Manuale del prodotto - IRC5 CompactIRC5 con computer principale DSQC1000.
3HAC027097-007Manuale dell'operatore - Guida introduttiva - IRC5 e RobotStudio
3HAC032104-007Manuale dell'operatore - RobotStudio
3HAC050944-007Manuale dell'operatore - Service Information System
3HAC020738-007Manuale dell'operatore - Risoluzione dei problemi IRC5
3HAC050940--001Operating manual - IRC5 Integrator's guide
3HAC050943-007Manuale dell'operatore - IRC5 con T10
3HAC16578-7Manuale dell'operatore - Calibration Pendulum
3HAC050948-007Manuale tecnico di riferimento - Parametri di sistema
3HAC050947-007Manuale tecnico di riferimento - RAPID Overview
3HAC050917-007Manuale tecnico di riferimento - Istruzioni RAPID, Funzioni e Tipi didati
3HAC050946--001Technical reference manual manual - RAPID kernel
3HAC051016--001Application manual - Additional axes and stand alone controller
3HAC050798--001Application manual - Controller software IRC5
3HAC050961-007Manuale dell'applicazione - MultiMove
Nota
I numeri della documentazione elencati per la documentazione del software sonovalidi per RobotWare 6. I documenti equivalenti sono validi per RobotWare 5.
Revisioni
DescrizioneRevisione
Rilasciato con RobotWare 6.0.-
Rilasciato con RobotWare 6.02.• Aggiunte informazioni relative al limite di tempo nel paragrafo Passag-
gio alla modalità manuale a velocità massima a pagina 271.• Aggiunte informazioni su Verifica schema di carico nel paragrafoLoa-
dIdentify, routine di servizio di identificazione del carico a pagina 232.• Aggiornato il paragrafo Impostazioni controller a pagina 116.
A
Rilasciato con RobotWare 6.03.• Aggiornato il paragrafo Modalità passo a pagina 88.• Aggiornato il paragrafo Illustrazione del Pannello di comando a pagi-
na 69.• Aggiornato il paragrafo Informazioni di sistema a pagina 72.• Aggiunta di una nota di avvertimento relativa ai dati di carico nelle
sezioni Prima di iniziare la programmazione a pagina 151, Utensili apagina181,Carichi utili a pagina208 eRoutine di servizio a pagina225.
B
Continua nella pagina successiva10 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
Panoramica di questo ManualeContinua

DescrizioneRevisione
Rilasciato con RobotWare 6.04.• Aggiornato il paragrafo Menu di impostazione rapida, Incremento a
pagina 86.• Aggiornato il paragrafo Ripristino del sistema a pagina 301.• Aggiornato il paragrafo LoadIdentify, routine di servizio di identificazio-
ne del carico a pagina 232.
C
Rilasciato con RobotWare 6.05.• Aggiunto il nuovo paragrafo Gestione della visualizzazione del nome
del controller e del sistema a pagina 112.• Aggiunto il nuovo paragrafoServizio online controllo freni a pagina242.• Aggiornato il paragrafo Definire una vista da mostrare al cambio o
all’avvio della modalità operativa a pagina 104.• Aggiornate descrizioni degli arresti nella sezione Arresto di protezione
e arresto di emergenza a pagina 34.• Rimossa l’informazione relativa al limite di tempo nella sezione Pas-
saggio alla modalità manuale a velocità massima a pagina 271.
D
Rilasciato con RobotWare 6.06.• Aggiornato il paragrafo Servizio online controllo freni a pagina 242.• Aggiornato il paragrafo Backup e ripristino a pagina 297.• Aggiornato il paragrafoEsempio di esecuzione all'indietro a pagina223.• Aggiornato il paragrafo Impostazioni controller a pagina 116.
E
Rilasciato con RobotWare 6.07.• Sezione sicurezza ristrutturata• È stata aggiornata l’immagine di sfondo della schermata di base di
FlexPendant.• Aggiornato il paragrafo Quando è possibile il backup? a pagina 299• Aggiornato il paragrafo LoadIdentify per robot a 4 assi a pagina 240• Aggiornato il paragrafo Simulazione e modifica del valore dei segnali
a pagina 286.
F
Rilasciato con RobotWare 6.08.• Aggiornato il paragrafo Impostazioni controller a pagina 116.• Aggiornato il paragrafo Modifica delle impostazioni di supervisione di
movimento a pagina 256.• Aggiornato il paragrafo Modifica dei tasti programmabili a pagina 120.• Aggiunte informazioni ed esempio di codice alla sezione Controllo
freni per sistemi MultiMove a pagina 243.
G
Manuale dell'operatore - IRC5 con FlexPendant 113HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
Panoramica di questo ManualeContinua

Documentazione del prodottoCategorie per la documentazione utente di ABB Robotics
La documentazione utente di ABB Robotics è suddivisa in varie categorie. Questoelenco si basa sul tipo di informazioni contenute nei documenti, a prescindere dalfatto che i prodotti siano di serie oppure opzionali.Tutti i documenti si trovano nel myABB Business Portal, www.myportal.abb.com.
Manuali dei prodottiI manipolatori, i controller, i DressPack/SpotPack e la maggior parte dell'hardwarevengono consegnati insieme a un Manuale del prodotto contenente in genere:
• Informazioni di sicurezza.• Installazione e commissioning (descrizioni dell’installazione meccanica o
delle connessioni elettriche).• Manutenzione (descrizione di tutte le procedure di manutenzione preventiva
richiesta, compresi gli intervalli di sostituzione e la durata attesa dei varipezzi).
• Riparazione (descrizioni di tutte le procedure di riparazione consigliate, conindicazione delle parti di ricambio).
• Calibratura.• Dismissione• Informazioni di riferimento (norme di sicurezza, conversioni delle unità di
misura, giunti a vite, elenchi di utensili).• Elenco dei pezzi di ricambio con dati corrispondenti (oppure riferimenti agli
elenchi separati dei pezzi di ricambio).• Riferimenti agli schemi elettrici.
Manuali tecnici di riferimentoI manuali tecnici di riferimento descrivono le informazioni rilevanti per i prodottirobotici, per esempio la lubrificazione, il linguaggio RAPID e i parametri di sistema.
Manuali delle applicazioniLe applicazioni specifiche (ad esempio opzioni software o hardware) vengonodescritte nei Manuali delle applicazioni. Un manuale dell’applicazione puòdescrivere una o diverse applicazioni.Generalmente, in questi manuali vengono fornite informazioni su:
• Scopo dell'applicazione (che cosa fa e quando è utile).• Dotazioni incluse (ad esempio cavi, schede di I/O, istruzioni RAPID, parametri
di sistema, software).• Modo di installazione dei materiali inclusi o richiesti.• Modalità di utilizzo dell'applicazione.• Esempi di utilizzo dell'applicazione.
Continua nella pagina successiva12 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
Documentazione del prodotto

Manuali operativiI manuali d’istruzione descrivono la gestione diretta dei prodotti. I manuali sonoindicati per coloro che sono direttamente coinvolti con il funzionamento del prodotto,per gli operatori della cella di produzione e per gli addetti alla risoluzione deiproblemi.
Manuale dell'operatore - IRC5 con FlexPendant 133HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
Documentazione del prodottoContinua

Questa pagina è stata intenzionalmente lasciata bianca

1 Sicurezza1.1 Contenuto del capitolo
Introduzione alla sicurezzaIn questo capitolo vengono descritti i principi e le procedure di sicurezza dautilizzare per il funzionamento di un robot o di un sistema robotico.Non vengono affrontati gli argomenti riguardanti la progettazione dei criteri disicurezza e le modalità di installazione delle apparecchiature correlate allasicurezza. Tali argomenti sono trattati nei manuali dei prodotti forniti con il robot.
Nota
L’integratore è responsabile per la sicurezza dell’applicazione finale.
Manuale dell'operatore - IRC5 con FlexPendant 153HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
1 Sicurezza1.1 Contenuto del capitolo

1.2 Standard applicabili
Nota
Gli standard elencati sono validi al momento del rilascio di questo documento.Gli standard eliminati o sostituiti vengono rimossi dall’elenco quando necessario.
Norme, EN ISOIl prodotto è progettato in conformità con i seguenti requisiti:
DescrizioneNorma
Safety of machinery - General principles for design - Risk as-sessment and risk reduction
EN ISO 12100:2010
Safety of machinery, safety related parts of control systems -Part 1: General principles for design
EN ISO 13849-1:2015
Safety of machinery - Emergency stop - Principles for designEN ISO 13850:2015
Robots for industrial environments - Safety requirements -Part1 Robot
EN ISO 10218-1:2011
Robots and robotic devices -- Coordinate systems and motionnomenclatures
ISO 9787:2013
Manipulating industrial robots, performance criteria, and relatedtest methods
ISO 9283:1998
Classification of air cleanlinessEN ISO 14644-1:2015 i
Ergonomics of the thermal environment - Part 1EN ISO 13732-1:2008
EMC, Generic emissionEN 61000-6-4:2007 +A1:2011IEC 61000-6-4:2006 +A1:2010(opzione 129-1)
EMC, Generic immunityEN 61000-6-2:2005IEC 61000-6-2:2005
Arc welding equipment - Part 1: Welding power sourcesEN IEC 60974-1:2012 ii
Arc welding equipment - Part 10: EMC requirementsEN IEC 60974-10:2014 ii
Safety of machinery - Electrical equipment of machines - Part1 General requirements
EN IEC 60204-1:2006
Degrees of protection provided by enclosures (IP code)IEC 60529:1989 + A2:2013i Soltanto robot con la classe di protezione Clean Room.ii Valido soltanto per robot per saldatura ad arco. Sostituisce EN IEC 61000-6-4 per robot per saldatura
ad arco.
Norme europee
DescrizioneNorma
Safety of machinery - Ergonomic design principles - Part 1:Terminology and general principles
EN 614-1:2006 + A1:2009
Safety of machinery - Two-hand control devices - Functionalaspects - Principles for design
EN 574:1996 + A1:2008
Continua nella pagina successiva16 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
1 Sicurezza1.2 Standard applicabili

Altre norme
DescrizioneNorma
Safety requirements for industrial robots and robot systemsANSI/RIA R15.06
Safety standard for robots and robotic equipmentANSI/UL 1740
Industrial robots and robot Systems - General safety require-ments
CAN/CSA Z 434-14
Manuale dell'operatore - IRC5 con FlexPendant 173HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
1 Sicurezza1.2 Standard applicabili
Continua

1.3 Interventi di sicurezza
1.3.1 Arresto del sistema
PanoramicaPremere immediatamente uno dei pulsanti di arresto di emergenza se:
• È presente personale nell'area di lavoro del robot mentre questo è in funzione.• Il robot causa danni a personale o apparecchiature meccaniche.
Pulsante arresto d’emergenza controllerIl pulsante di arresto di emergenza del controller si trova sul lato anterioredell’armadietto. Tuttavia la sua posizione può variare in base alla configurazionedell’impianto.FlexPendant dispone anche di un pulsante di arresto d’emergenza.
Altri dispositivi di arresto di emergenzaIl progettista dell'impianto potrebbe avere collocato altri dispositivi di arresto diemergenza in punti convenienti. Consultare la documentazione dell'impianto perverificare la loro posizione.
18 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
1 Sicurezza1.3.1 Arresto del sistema

1.3.2 Estinzione degli incendi
PrecauzioniIn caso d’incendio assicurarsi di mettere in salvo se stessi e i propri colleghi primadi iniziare con le operazioni di spegnimento. In caso di infortunati, assicurarsi chequesti vengano assistiti per primi.
Estintore da utilizzarePer estinguere incendi in apparecchiature elettriche quali il robot o il controllerutilizzare sempre estintori ad anidride carbonica. Non utilizzare acqua o schiuma.
Manuale dell'operatore - IRC5 con FlexPendant 193HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
1 Sicurezza1.3.2 Estinzione degli incendi

1.3.3 Assicurarsi che l'alimentazione di rete sia spenta!
DescrizioneLavorare con l'alta tensione è potenzialmente letale. Le persone soggette all'altatensione possono soffrire di arresto cardiaco, ustioni o altre gravi lesioni. Perevitare tali pericoli, non proseguire il lavoro prima di aver eliminato il pericolo comeè descritto di seguito.
Nota
Disattivare tutti gli interruttori principali in un sistema MultiMove.
20 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
1 Sicurezza1.3.3 Assicurarsi che l'alimentazione di rete sia spenta!

1.3.4 I robot in movimento sono potenzialmente letali!
DescrizioneUn robot in movimento costituisce una macchina potenzialmente letale.Durante la corsa, il robot può eseguire dei movimenti imprevisti e a volte irrazionali.Inoltre, tutti i movimenti vengono effettuati con notevole forza e possono feriregravemente il personale e/o danneggiare le attrezzature che si trovano entro laportata operativa del robot.
Movimentazione sicura
NotaAzione
Apparecchiatura di arresto di emergenza,ad esempio cancelli, tappeti sensibili, bar-riere fotoelettriche e così via.
Prima di tentare di far funzionare il robot,verificare che tutte le apparecchiature diarresto di emergenza siano correttamenteinstallate e connesse.
1
Il modo di utilizzare la funzione Hold-to-Run è descritto nel paragrafo Modo di uti-lizzo della funzioneHold-to-Run nelManua-le dell'operatore - IRC5 con FlexPendant.
In genere, la funzione Hold-to-run è attivasoltanto in modalità piena velocità manua-le. Per incrementare la sicurezza, è purepossibile attivare la funzione Hold-to-runper la modalità velocità ridotta manuale,mediante un parametro di sistema.
2
La funzione Hold-to-run viene utilizzatanella modalità manuale, non in quella auto-matica.
Prima di premere il pulsante di avvio, assi-curarsi che non sia presente personalenella portata operativa del robot.
3
Manuale dell'operatore - IRC5 con FlexPendant 213HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
1 Sicurezza1.3.4 I robot in movimento sono potenzialmente letali!

1.3.5 Ripristino dagli arresti di emergenza
PanoramicaIl ripristino da un arresto di emergenza è una procedura semplice ma importante.Tale procedura assicura che il sistema robotico non venga riportato in produzionein presenza di una condizione di pericolo.
Reinizializzazione del blocco dei pulsanti di arresto di emergenzaTutti i dispositivi di arresto di emergenza disponibili come pulsanti sono dotati diuna funzionalità di blocco che deve essere rilasciata per rimuovere la condizionedi arresto di emergenza del dispositivo.In molti casi ciò viene ottenuto ruotando il pulsante nella direzione indicata, ma visono anche dispositivi nei quali è necessario sollevare il pulsante per rilasciare ilblocco.
Reinizializzazione dei dispositivi di arresto di emergenza automaticoTutti i dispositivi di arresto di emergenza automatico sono dotati di qualche tipodi funzione di blocco che deve essere rilasciata. Per verificare la configurazionedel sistema robotico consultare la documentazione dell’impianto o della cella.
Ripristino dagli arresti di emergenza
Azione
Accertarsi che non esista più la situazione di pericolo che ha determinato la condizionedi arresto di emergenza.
1
Individuare e reinizializzare il dispositivo o i dispositivi che hanno causato la condizionedi arresto di emergenza.
2
Per ripristinare una condizione di arresto di emergenza premere il pulsante MOTORSON, motori inseriti.
3
22 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
1 Sicurezza1.3.5 Ripristino dagli arresti di emergenza

1.3.6 Abilitazione del dispositivo e della funzionalità hold-to-run
Dispositivo di abilitazione a tre posizioniIl dispositivo di abilitazione a tre posizioni è un pulsante a pressione costanteazionato manualmente che, quando viene attivato continuamente in una solaposizione, rende possibili funzioni potenzialmente pericolose, senza però iniziarle.In qualsiasi altra posizione consente l'arresto sicuro delle funzioni pericolose.Il dispositivo di abilitazione a tre posizioni è di un tipo specifico in quanto, peressere attivato, il pulsante deve essere premuto solo a metà. Nelle posizionicompletamente premuta e completamente rilasciata, il funzionamento del robot èimpossibile.
Nota
Il dispositivo di abilitazione a tre posizioni è un pulsante situato sul Teach Pendantche, quando viene premuto a metà corsa, commuta il sistema nello stato MOTORSON. Quando il dispositivo di abilitazione viene rilasciato o premuto a fondo, ilmanipolatore viene portato nello stato MOTORS OFF.Per garantire l’utilizzo sicuro del Teach Pendant, è necessario implementare ciòche segue:
• Il dispositivo di attivazione non deve essere reso inoperante in alcun modo.• Durante la programmazione e il collaudo, il dispositivo di attivazione deve
essere rilasciato non appena non è più necessario che il robot si muova.• Il personale che accede allo spazio operativo del robot deve sempre portare
con sé il Teach Pendant. Questo allo scopo di impedire che terzi possanoassumere il controllo del robot a sua insaputa.
Funzione Hold-to-runLa funzione Hold-to-run consente il movimento quando un pulsante collegato allafunzione viene azionato manualmente e arresta immediatamente qualsiasimovimento quando viene rilasciato. La funzione Hold-to-run può essere utilizzatasolo in modalità manuale.Il modo di eseguire la funzione Hold-to-Run per l'IRC5 è illustrato nel Manualedell'operatore - IRC5 con FlexPendant.
Manuale dell'operatore - IRC5 con FlexPendant 233HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
1 Sicurezza1.3.6 Abilitazione del dispositivo e della funzionalità hold-to-run

1.4 Utilizzo del modo sicuro
1.4.1 Manipolazione della FlexPendant
Manipolazione della FlexPendantLa FlexPendant è un terminale palmare di alta qualità, dotato di un’elettronicaall'avanguardia, estremamente sensibile. Per evitare malfunzionamenti o danniderivanti da un utilizzo improprio, durante il funzionamento seguire queste istruzioni.La FlexPendant può essere utilizzata solo per gli scopi menzionati in questoManuale. La FlexPendant è stata sviluppata, prodotta, collaudata e documentatasecondo le norme di sicurezza in vigore. Se vengono seguite le istruzioni relativealla sicurezza e all'impiego descritte in questo Manuale, in condizioni normali ilprodotto non causerà alcuna lesione personale o danno a macchinari eapparecchiature.Il FlexPendant è sviluppato, prodotto, testato e documentato in base alle normedi sicurezza applicabili.
Gestione e pulizia• Maneggiare con cura. Non lasciar cadere, tirare o sottoporre a urti violenti
la FlexPendant. Tali azioni possono provocare rotture o guasti.• Se la FlexPendant dovesse subire un qualche urto, verificare sempre che le
funzioni di sicurezza (dispositivo di attivazione a tre posizioni e arrestod'emergenza) siano operative e non abbiano subito danni.
• Quando il dispositivo non viene utilizzato, appenderlo al supporto a paretefornito per riporlo e proteggerlo così da cadute accidentali.
• Utilizzare e riporre sempre la FlexPendant in modo che il cavo non si trasformiin una causa di incespicamento.
• Non utilizzare mai oggetti affilati (come cacciavite o penna) per operare conlo schermo tattile, altrimenti questo potrebbe venire danneggiato. Utilizzareinvece un dito o una stilo.
• Pulire lo schermo tattile regolarmente. Polvere e particelle possonodepositarsi sullo schermo tattile e causarne il malfunzionamento.
• Non pulire mai la FlexPendant con solventi, detergenti aggressivi o spugneruvide. Utilizzare un panno morbido inumidito con un po' d'acqua o un blandodetergente.Vedere il manuale del prodotto del controller robot, sezione Pulizia diFlexPendant.
• Chiudere il coperchietto protettivo della porta USB quando a essa non ècollegato alcun dispositivo. La porta può guastarsi o fornire un funzionamentoanomalo se esposta alla sporcizia o alla polvere.
ATTENZIONE
Una FlexPendant scollegata deve essere riposta in modo tale che non siapossibile sbagliarsi e pensare che sia collegata al controller.
Continua nella pagina successiva24 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
1 Sicurezza1.4.1 Manipolazione della FlexPendant

Cablaggio e alimentazione• Spegnere l'alimentazione prima di aprire l'area di ingresso dei cavi della
FlexPendant. Diversamente, i componenti potrebbero venire distrutti o sipotrebbero verificare segnali indefiniti.
• Accertarsi che nessuno transiti sul cavo per evitare che il dispositivo cadaa terra.
• Fare attenzione a non comprimere e quindi danneggiare il cavo con qualsiasioggetto.
• Non adagiare il cavo su spigoli vivi in quanto ciò può danneggiare la guainadel cavo.
Collegamenti utente per FlexPendantQualsiasi mezzo di collegamento del FlexPendant ad eccezione del cavo fornitoin dotazione e del relativo connettore standard, non deve rendere inattivo il pulsantedi arresto di emergenza.Se viene utilizzato un cavo di collegamento personalizzato provare sempre ilpulsante di arresto di emergenza per accertarne il funzionamento.
SmaltimentoPer lo smaltimento dei componenti elettronici, osservare le norme nazionali vigenti.Quando si sostituiscono i componenti, smaltire correttamente quelli usati.
Uso improprio prevedibile del dispositivo di attivazione a tre posizioniUso improprio prevedibile significa lo spostamento non consentito del dispositivodi attivazione a tre posizioni nella posizione di attivazione. L’uso improprioprevedibile del dispositivo di attivazione deve essere limitato.Quando si rilascia e si preme di nuovo il dispositivo di attivazione a tre posizioni,prima di premerlo nuovamente assicurarsi di attendere che il sistema passi nellostato Motors off altrimenti verrà visualizzato un messaggio di errore.
Manuale dell'operatore - IRC5 con FlexPendant 253HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
1 Sicurezza1.4.1 Manipolazione della FlexPendant
Continua

1.4.2 Strumenti di sicurezza
Meccanismi di protezioneIl sistema robotico può essere attrezzato con un'ampia gamma di protezioni qualiinterblocchi sportello, barriere fotoelettriche di sicurezza, tappeti di sicurezza ealtro. Il più comune è l'interblocco sportello della cella del robot che arrestatemporaneamente il robot se viene aperto.
IRC5Il controller IRC5 è dotato di tre meccanismi di protezione separati, arresto protettoin modalità generale (GS), arresto protetto in modalità automatica (AS) e arrestoprotetto superiore (SS).
sono...Le protezioni collegate al...
sempre attive indipendentemente dalla modalitàoperativa.
meccanismo GS
attive solo quando il sistema è in modalità automa-tica.
meccanismo AS
sempre attive indipendentemente dalla modalitàoperativa.
meccanismo SS
Consultare la documentazione dell'impianto o della cella per vedere in che modoè configurato il sistema robotico e la posizione e il funzionamento dei meccanismidi protezione.
Supervisione della sicurezzaI meccanismi di arresto di emergenza e di protezione vengono supervisionati inmodo che qualsiasi guasto sia rilevato dal controller e il robot venga fermato finchéil problema non è risolto.
Funzioni di arresto incorporateLe funzionalità hardware e software sono costantemente monitorate dal controller.Se vengono rilevati problemi o errori, il robot viene arrestato finché il problemanon è stato risolto.
allora...Se il guasto è...
viene impartito un semplice arresto del programma(SYSSTOP).
semplice e può essere risolto facilmen-te
viene impartito un SYSHALT che determina un ar-resto di protezione.
non grave e può essere risolto
viene impartito un SYSFAIL che determina un arre-sto di emergenza. Per ritornare al normale funzio-namento è necessario riavviare il controller.
grave, ad esempio riguarda l'hardwarerotto
Limitazione del range di lavoro del robotIl range di lavoro del robot può essere limitato per mezzo di arresti meccanici, difunzioni software o di una combinazione di entrambi.Consultare la documentazione dell’impianto o della cella per vedere come è statoconfigurato il robot.
26 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
1 Sicurezza1.4.2 Strumenti di sicurezza

1.4.3 Informazioni sulla modalità automatica
Che cosa è la modalità automatica?In modalità automatica, la funzione di sicurezza del dispositivo di attivazione a treposizioni è bypassata in modo che il manipolatore possa muoversi senza interventoumano.
AVVERTENZA
Prima di selezionare la modalità automatica, qualsiasi funzione di protezionesospesa deve essere ripristinata a una funzionalità completa.
Task normalmente eseguiti in modalità automaticaI task elencati di seguito vengono, in genere, eseguiti in modalità automatica.
• Avvio e arresto dei processi.• Caricamento, avvio e arresto di programmi RAPID.• Movimento del manipolatore per riportarlo sul relativo percorso quando si
ritorna allo stato operativo dopo un arresto di emergenza.• Backup del sistema.• Ripristino dei backup.• Pulizia degli utensili.• Preparazione o sostituzione degli oggetti di lavoro.• Esecuzione di altri task orientati al processo.
Limitazioni in modalità automaticaIn modalità automatica non è possibile lo spostamento manuale. È possibile chevi siano altri task specifici che non devono essere eseguiti in questa modalità.Consultare la documentazione specifica dell’impianto o del sistema per verificarequali compiti specifici non devono essere eseguiti in modalità automatica.
Meccanismi di protezione attiviPer IRC5 entrambi i meccanismi di arresto in modalità generale (GS), arresto inmodalità automatica (AS) e arresto superiore (SS), sono attivi durante ilfunzionamento in modalità automatica.
Gestione delle interferenze di processoLe interferenze di processo potrebbero interessare non solo una cella dimanipolatore specifica ma anche un'intera catena di sistemi anche se l'origine delproblema è in una specifica cella.Durante tali interferenze è necessario prestare la massima attenzione in quantotale catena di eventi potrebbe creare funzionamenti pericolosi che non sono visibiliquando si aziona la singola cella del manipolatore. Tutti gli interventi dimanutenzione devono essere effettuati da personale provvisto di una buonaconoscenza dell'intera linea di produzione, non del solo manipolatore difettoso.
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 273HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
1 Sicurezza1.4.3 Informazioni sulla modalità automatica

Esempi di interferenze di processoI componenti di prelievo di un manipolatore in un trasportatore potrebbero veniretolti dalla produzione a causa di un malfunzionamento meccanico, mentre iltrasportatore deve rimanere attivo per continuare la produzione nel resto dellalinea. Questo significa, ovviamente, che il personale deve prestare particolareattenzione quando prepara il manipolatore nelle vicinanze del trasportatore infunzione.Un manipolatore di saldatura richiede manutenzione. La rimozione del manipolatoredi saldatura dalla produzione significa che, per evitare pericoli per il personale, ènecessario rimuovere anche un banco di lavoro e un manipolatore per lamovimentazione dei materiali.
28 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
1 Sicurezza1.4.3 Informazioni sulla modalità automaticaContinua

1.4.4 Informazioni sulla modalità manuale
Che cosa è la modalità manuale?In modalità manuale, il movimento del manipolatore avviene in base al comandomanuale. Per attivare i motori del manipolatore, ovvero per abilitare il movimento,è necessario premere il dispositivo di attivazione a tre posizioni.La modalità manuale viene utilizzata per la programmazione e la verifica deiprogrammi.Vi sono due modalità manuali:
• Modalità manuale a velocità ridotta, in genere chiamata modalità manuale.• Modalità manuale a velocità massima (non disponibile in USA o Canada).
Che cos'è la modalità manuale a velocità ridotta?Nella modalità manuale a velocità ridotta, il movimento è limitato a 250 mm/s. Èinoltre prevista una limitazione sulla velocità massima consentita per ciascun asse.Queste limitazioni degli assi dipendono dal robot e non possono essere modificate.Per attivare i motori del manipolatore, è necessario premere il dispositivo diattivazione a tre posizioni.
AVVERTENZA
Ove possibile, la modalità manuale di funzionamento va utilizzata mentre tuttele persone sono all'esterno dello spazio protetto.
Che cosa è la modalità manuale a velocità massima?In modalità manuale a piena velocità, il manipolatore può spostarsi in base allavelocità programmata, ma soltanto sotto comando manuale.La modalità manuale a velocità massima viene utilizzata solo per la verifica deiprogrammi.Nella modalità manuale a velocità massima, il limite di velocità iniziale è di massimo250 mm/s. Ciò si ottiene limitando la velocità al 3% della velocità programmata.Mediante il controllo manuale, la velocità può essere aumentata fino al 100%.Per attivare i motori del manipolatore è necessario premere il dispositivo diattivazione a tre posizioni, mentre per avviare l’esecuzione del programma ènecessario premere il pulsante Hold-to-run.
AVVERTENZA
Ove possibile, la modalità manuale di funzionamento va utilizzata mentre tuttele persone sono all'esterno dello spazio protetto.
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 293HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
1 Sicurezza1.4.4 Informazioni sulla modalità manuale

Notare che la modalità manuale a velocità massima è opzionale e, pertanto, nonè disponibile in tutti i robot.
Nota
In conformità alla norma aggiornata, ISO 10218-1:2011Robots and robotic devices– Safety requirements for industrial robots – Part 1 Robots, alla modalità manualea velocità massima sono apportati gli adattamenti riportati di seguito.
• Attuazione del ripristino della velocità di 250 mm/s ogni volta che ildispositivo di attivazione a tre posizioni viene reinizializzato, sistemando ilselettore nella posizione centrale di abilitazione, una volta che è statorilasciato o pienamente compresso.
• La modifica dei programmi RAPID e lo spostamento manuale delmanipolatore sono disattivati.
Meccanismi di protezione bypassatiI meccanismi di arresto protetto (AS) in modalità automatica vengono tutti evitatidurante la modalità manuale.
Dispositivo di attivazione a tre posizioniInmodalità manuale i motori del manipolatore vengono attivati tramite il dispositivodi attivazione a tre posizioni su FlexPendant In tal modo, il manipolatore puòmuoversi solo fino a quando il dispositivo viene mantenuto premuto.Per eseguire un programma in modalità manuale a velocità massima è necessario,per ragioni di sicurezza, tenere premuto sia il dispositivo di attivazione a treposizioni sia il pulsante Avvia. La funzione Hold-to-run vale anche quando si eseguela verifica dell’esecuzione di un programma in modalità manuale a velocità massima.Il dispositivo di attivazione a tre posizioni è progettato in modo che per attivare imotori del manipolatore è necessario premere per metà corsa il relativo pulsante.Nelle posizioni completamente rilasciato e completamente premuto il manipolatorenon si muove.
La funzione Hold-to-runLa funzione Hold-to-run consente un'esecuzione passo passo o normale di unprogramma in modalità manuale a piena velocità. Da notare che lo spostamentonon richiede la funzione Hold-to-run, indipendentemente dalla modalità operativa.La funzione Hold-to-run può anche essere attivata per la modalità manuale avelocità ridotta.
Task eseguiti di norma nella modalità manuale a velocità ridottaI task elencati di seguito vengono eseguiti, di norma, nella modalità manuale avelocità ridotta.
• Spostamento manuale del manipolatore per riportarlo sul relativo percorsoquando si ritorna allo stato operativo dopo un arresto di emergenza
• Correzione del valore dei segnali di I/O dopo condizioni di errore• Creazione e modifica di programmi RAPID
Continua nella pagina successiva30 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
1 Sicurezza1.4.4 Informazioni sulla modalità manualeContinua

• Avvio, avanzamento/indietreggiamento passo passo e arresto dell'esecuzionedel programma, ad esempio durante la verifica di un programma
• Regolazione delle posizioni programmate
Task eseguiti di norma nella modalità manuale a velocità massimaIn conformità alla norma, ISO 10218-1:2011, le attività elencate di seguito nonpossono essere eseguite in modalità manuale a velocità massima:
• Avvio e arresto dell'esecuzione del programma per la verifica finale deiprogrammi
• esecuzione del programma passo passo• impostazione della velocità (0–100%)• Impostazione del puntatore di programma (su Main, Routine, Cursor, routine
di servizio, ecc.)Le attività seguenti non possono essere eseguite in modalità manuale a pienavelocità:
• Modifica dei valori dei parametri di sistema• Modifica dei dati di sistema
Manuale dell'operatore - IRC5 con FlexPendant 313HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
1 Sicurezza1.4.4 Informazioni sulla modalità manuale
Continua

1.5 Terminologia della sicurezza
1.5.1 Segnali di sicurezza nel Manuale
Introduzione ai segnali di sicurezzaQuesta sezione illustra tutti i segnali di sicurezza impiegati nel manuale utente.Ogni segnale è composto da:
• Un'illustrazione che specifica il livello di pericolo (PERICOLO,AVVERTIMENTO o ATTENZIONE) ed il tipo di pericolo.
• una breve descrizione di ciò che potrebbe accadere se il pericolo non vieneeliminato.
• Un'istruzione sul modo di eleminare il pericolo per semplificare l'effettuazionedel lavoro in questione.
Livelli di pericoloNella tabella seguente vengono definiti i simboli utilizzati nel manuale per indicareil livello di pericolosità.
SignificatoDesignazioneSimbolo
Avverte che un incidente insorgerà se non si osser-vano le istruzioni, provocando lesioni gravi o addirit-tura fatali e/o gravi danni al prodotto. Si riferisce asituazioni di pericolo quali, ad esempio, contatto conunità elettriche ad alta tensione, rischio di esplosioneo di incendio, rischio di emissione di gas venefici,rischio di schiacciamento, impatto o caduta da altez-ze elevate e così via.
PERICOLO
Avvisa che un incidente potrà insorgere se le istru-zioni non verranno osservate, e che potrebbe provo-care lesioni gravi, o forsanco fatali, e/o danni impor-tanti al prodotto. Si applica ad avvertimenti attinentia pericoli quali, ad esempio, contatto con unità elet-triche sotto alta tensione, esplosione o rischio d'in-cendio, rischi provocati da gas venefici, rischi dischiacciamento, di impatto, di caduta dall'alto, etc.
AVVERTENZA
Avvisa di pericoli derivanti dall'elettricità, che potreb-bero provocare al personale lesioni gravi o addiritturafatali.
SCARICHE ELET-TRICHE
Avvisa che un incidente insorgerà se le istruzioninon verranno osservate, provocando lesioni al per-sonale e/o danni al prodotto. Si applica pure ad av-vertimenti di rischi che comprendono ustioni, lesionioculari, ferite all'epiderme, danni all'udito, schiaccia-menti o scivolamenti, capovolgimenti, impatti, cadutedall'alto, etc. Si applica inoltre ad avvertimenti cheincludono esigenze di funzionamento al momentodell'installazione e della rimozione di apparati, laddo-ve sussista un rischio di danneggiamento al prodottoo di una sospensione della sua operatività.
ATTENZIONE
Continua nella pagina successiva32 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
1 Sicurezza1.5.1 Segnali di sicurezza nel Manuale

SignificatoDesignazioneSimbolo
Avvisa in merito a pericoli elettrostatici, che potreb-bero provocare gravi danni al prodotto.
SCARICAELETTRO-STATICA (ESD)
Descrive importanti fatti e condizioni.NOTA
Descrive dove trovare informazioni aggiuntive o ilmodo di condurre un'operazione in un modo piùsemplice.
SUGGERIMENTO
Manuale dell'operatore - IRC5 con FlexPendant 333HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
1 Sicurezza1.5.1 Segnali di sicurezza nel Manuale
Continua

1.5.2 Arresto di protezione e arresto di emergenza
PanoramicaGli arresti di protezione e di emergenza sono descritti nel manuale del prodottoper il controller.
34 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
1 Sicurezza1.5.2 Arresto di protezione e arresto di emergenza

2 Presentazione di IRC52.1 Contenuto del capitolo
PanoramicaQuesto capitolo presenta una panoramica di FlexPendant, del controller IRC5 e diRobotStudio.Un sistema robotico di base è normalmente composto da controller robot,FlexPendant, RobotStudio e uno o più manipolatori o altre unità meccaniche.Possono essere pure presenti attrezzature di processo e opzioni softwareaggiuntive.Il presente manuale descrive un robot di base senza opzioni. Tuttavia, in alcunipunti, nel manuale viene fornita una panoramica delle modalità di utilizzo oapplicazione delle opzioni. La maggior parte delle opzioni è descritta in dettaglionel rispettivo manuale dell'applicazione.
Manuale dell'operatore - IRC5 con FlexPendant 353HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
2 Presentazione di IRC52.1 Contenuto del capitolo

2.2 Controller IRC5
Controller IRC5Il controller IRC5 contiene tutte le funzioni necessarie per muovere e controllareil robot.Il controller IRC5 standard consiste in un Single Cabinet. Il controller è disponibileanche in una versione compatta, IRC5 Compact, e può essere integrato anche inun armadietto esterno Panel Mounted Controller.Quando si aziona più di un robot con un controller (opzione MultiMove), ènecessario aggiungere un modulo di azionamento supplementare per ciascunrobot aggiuntivo. Tuttavia, viene utilizzato un unico modulo di controllo
Informazioni correlateManuale del prodotto - IRC5, IRC5 del modello M2004.Manuale del prodotto - IRC5, IRC5 del modello 14.Manuale del prodotto - IRC5 Panel Mounted Controller, IRC5 del modello M2004.Manuale del prodotto - IRC5 Panel Mounted Controller, IRC5 del modello 14.Manuale del prodotto - IRC5 Compact, IRC5 del modello M2004.Manuale del prodotto - IRC5 Compact, IRC5 del modello 14.Manuale dell'applicazione - MultiMove.
36 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
2 Presentazione di IRC52.2 Controller IRC5

2.3 FlexPendant
Introduzione alla FlexPendantFlexPendant è un’unità operatore portatile che viene utilizzata per svolgere diverseoperazioni del robot: esecuzione dei programmi, avanzamento lento delmanipolatore, modifica dei programmi ecc.L’unità FlexPendant è stata progettata per il funzionamento continuo in ambientiindustriali gravosi. Lo schermo tattile è facile da pulire ed è resistente all'acqua,all'olio e agli spruzzi accidentali di saldature.FlexPendant si compone di un hardware e un software e quindi è un computercompleto a tutti gli effetti. È collegato al controller del robot per mezzo di un cavoe di un connettore integrati.Il pulsante hot plug permette di scollegare FlexPendant in modalità manuale e dicontinuare le operazioni senza questa unità.
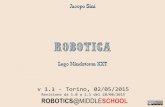
Componenti principaliQueste sono le parti principali della FlexPendant.
xx1400001636
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 373HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
2 Presentazione di IRC52.3 FlexPendant

ConnettoreA
Touch screenB
Pulsante di arresto di emergenzaC
JoystickD
Porta USBE
Dispositivo di abilitazione a tre posizioniF
Pennino stiloG
Pulsante di azzeramentoH
JoystickUtilizzare il joystick per spostare il manipolatore. Questo metodo viene chiamatospostamento del robot. Sono disponibili diverse impostazioni per controllare ilmodo in cui il joystick sposterà il manipolatore.
Porta USBPer leggere o memorizzare i file, collegare una memoria USB alla porta USB. Lamemoria USB viene visualizzata come unità /USB:Rimovibile nelle finestre didialogo e su Esplora FlexPendant.
Nota
Chiudere il coperchietto protettivo della porta USB quando non in uso.
Pennino stiloIl pennino stilo fornito con la FlexPendant è situato sulla parte posteriore. Tirarela levetta per rilasciare il pennino.Quando si utilizza la FlexPendant, usare il pennino stilo per picchiettare sulloschermo tattile. Non utilizzare cacciaviti o altri oggetti affilati.
Pulsante di azzeramentoSe FlexPendant si blocca durante le operazioni, premere il pulsante reset perriavviarlo.Il pulsante di azzeramento azzera la FlexPendant, non il sistema nel controller.
Continua nella pagina successiva38 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
2 Presentazione di IRC52.3 FlexPendantContinua

Pulsanti hardwareSulla FlexPendant sono presenti dei pulsanti hardware dedicati. È possibileassegnare le proprie funzioni a quattro dei pulsanti.
xx0900000023
Tasti programmabili 1 - 4. La definizione delle relative funzioni è descritta nelparagrafo Tasti programmabili, .
A - D
Seleziona l'unità meccanica.E
Commuta la modalità di movimento, via riorientamento o lineare.F
Commuta la modalità di movimento, assi 1-3 o assi 4-6.G
Commuta gli incrementi.H
Pulsante Passo INDIETRO. Premendo il pulsante, viene eseguita un'istruzioneall'indietro.
J
Pulsante AVVIA. Avvia l'esecuzione del programma.K
Pulsante Passo AVANTI. Premendo il pulsante, viene eseguita un'istruzione inavanti.
L
Pulsante STOP. Arresta l'esecuzione di un programma.M
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 393HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
2 Presentazione di IRC52.3 FlexPendant
Continua

Come sostenere la FlexPendantFlexPendant viene normalmente comandato tenendo l’unità in mano. Le personeche usano la mano destra utilizzano la sinistra per sostenere il dispositivo e ladestra per eseguire operazioni sullo schermo tattile. I mancini, tuttavia, possonoruotare facilmente il display di 180 gradi ed utilizzare la mano destra per sostenereil dispositivo.
en0400000913
Continua nella pagina successiva40 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
2 Presentazione di IRC52.3 FlexPendantContinua

Elementi del touch screenLa figura mostra gli elementi principali dello schermo tattile di FlexPendant.
xx1400001446
Menù principaleA
Finestra OperatoreB
Barra di statoC
Pulsante ChiudiD
Barra delle applicazioniE
Menu di impostazione rapidaF
Menù principaleDal menù principale possono selezionare gli elementi seguenti:
• HotEdit• Input e output• Movimento manuale• Finestra Produzione• Editor di programma• Dati programma• Backup e ripristino• Calibratura• Pannello di comando• Registro eventi
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 413HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
2 Presentazione di IRC52.3 FlexPendant
Continua

• Esploratore FlexPendant• Informazioni di sistema• ecc.
Questo è descritto in dettaglio nella sezione Il Main menu a pagina 54.
Finestra OperatoreNella finestra operatore vengono visualizzati i messaggi dei programmi del robot.Questo succede in genere quando il programma ha bisogno di determinate risposteda parte dell’operatore per poter continuare. Queste funzionalità sono descrittenel paragrafo Finestra Operatore a pagina 76.
Barra di statoLa barra di stato visualizza informazioni importanti sullo stato del sistema, qualila modalità operativa, lo stato motors on/off, lo stato del programma ecc. Questoviene descritto nella sezione Barra di stato a pagina 77.
Pulsante ChiudiScegliendo il pulsante Chiudi è possibile chiudere la vista o l'applicazione attiva.
Barra delle applicazioniDal menù principale è possibile aprire più viste, ma è possibile lavorare solamentesu una di queste alla volta. La barra delle applicazioni visualizza tutte le viste aperteed è utilizzata per passare da una vista all'altra.
Menu di impostazione rapidaIl menu di impostazione rapida contiene le impostazioni per l'esecuzione delprogramma. Questo viene descritto nella sezione Menu di impostazione rapida apagina 78.
42 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
2 Presentazione di IRC52.3 FlexPendantContinua

2.4 T10
IntroduzioneIl T10 è un dispositivo di spostamento utilizzato per spostare manipolatori e unitàmeccaniche in modo intuitivo puntando il dispositivo nella direzione di movimento.Quando si utilizza una FlexPendant per lo spostamento, viene selezionato unsistema di coordinate predefinito, come coordinate universali o coordinate utensile,e il manipolatore si sposta nella direzione desiderata lungo il sistema di coordinateselezionato.L'uso del T10 per lo spostamento è piuttosto simile, ma invece di selezionare unsistema di coordinate, la direzione viene mostrata nello spazio con il dispositivostesso. Ad esempio, quando si esegue lo spostamento in verticale, il T10 vienemantenuto in direzione verticale, quando si esegue lo spostamento in orizzontale,il T10 viene mantenuto in direzione orizzontale, ecc. Ciò si ottiene grazie all'unitàdi misurazione di inerzia integrata, costituita da accelerometri e giroscopi chemisurano il movimento del dispositivo nello spazio.Il joystick viene utilizzato per regolare la velocità di spostamento e la direzionepositiva o negativa. Il movimento avanti e indietro del joystick corrispondedirettamente al movimento del manipolatore il che rappresenta il metodo piùintuitivo. Il movimento a destra e sinistra del joystick viene utilizzato per ilriorientamento.Per ulteriori informazioni sul T10, vedere Manuale dell'operatore - IRC5 con T10.
PrerequisitiL'opzione RobotWare 976-1 T10 Support è necessaria per eseguire il T10 con ilcontroller del robot IRC5.
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 433HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
2 Presentazione di IRC52.4 T10

Panoramica
xx1400002068
DisplayA
JoystickB
Pulsante di arresto di emergenzaC
Dispositivo di abilitazione a tre posizioniD
44 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
2 Presentazione di IRC52.4 T10Continua

2.5 RobotStudio Online
Introduzione a RobotStudio OnlineRobotStudio Online è una suite di applicazioni Windows Store da eseguire suitablet Windows 10. Offre la funzionalità per il commissioning dei sistemi roboticiin officina.
Nota
Alcune funzionalità richiedono l'uso di un dispositivo di sicurezza come ildispositivo di spostamento T10 o il dispositivo di sicurezza a tre posizioni JSHD4.Per ulteriori informazioni sul T10, vedereManuale dell'operatore - IRC5 con T10.
È possibile eseguire queste applicazioni su un tablet che comunica con il controllerdel robot in modalità wireless. Per abilitare determinate funzionalità, come l'accessoalla modalità manuale e l'attivazione dell'alimentazione ai motori delle unitàmeccaniche, è necessario un dispositivo di sicurezza collegato al robot che utilizzala stessa spina usata, in alternativa, per collegare la FlexPendant.Le seguenti app RobotStudio Online sono disponibili nel Windows Store diMicrosoft:
Nota
Per eseguire le applicazioni, è necessario disporre di Windows 8.1.
DescrizioneApp RobotStudio Online
Manage è uno strumento per gestire i control-ler IRC5 su una rete.
xx1400002047
Calibrate è uno strumento per la calibraturae la definizione dei sistemi di riferimento coni controller IRC5.
xx1400002049
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 453HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
2 Presentazione di IRC52.5 RobotStudio Online

DescrizioneApp RobotStudio Online
Jog è uno strumento per il posizionamentomanuale (movimento o spostamento) con icontroller IRC5.
xx1400002048
Tune è uno strumento per la modifica in offi-cina dei programmi RAPID con i controllerIRC5.
xx1400002050
Operate è uno strumento utilizzato nellaproduzione per visualizzare il codice program-ma.
xx1400002511
YuMi è uno strumento di programmazionedel nuovo braccio doppio e del robot collabo-rativo YuMi, IRB 14000, di ABB.
xx1500000832
Si tratta di un utile strumento che consenteagli utenti di accorciare la curva di apprendi-mento della programmazione del robot trami-te procedure guidate e grafiche.
46 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
2 Presentazione di IRC52.5 RobotStudio OnlineContinua

2.6 RobotStudio
Panoramica di RobotStudioRobotStudio è un utensile tecnico per la configurazione e la programmazione dirobot ABB, sia di tipo reale per applicazioni sul campo che di tipo virtuale per PC.Per raggiungere la vera programmazione fuori linea, RobotStudio utilizza ABBVirtualRobot™ Technology.RobotStudio ha adottato l’interfaccia utente Microsoft Office Fluent. L’IU OfficeFluent viene utilizzata anche in Microsoft Office. Come in Office, le caratteristichedi RobotStudio sono progettate con una prospettiva orientata al flusso di lavoro.Gli add-in di RobotStudio permettono di ampliare e personalizzare questo strumentoin modo da renderlo più consono alle vostre esigenze specifiche. Gli add-in vengonosviluppati con RobotStudio SDK. SDK permette inoltre di sviluppareSmartComponent personalizzati che superano di gran lunga le funzionalità offertedai componenti di base di RobotStudio.Per ulteriori informazioni vedere Manuale dell'operatore - RobotStudio.
RobotStudio per controller realiRobotStudio consente, ad esempio, le seguenti operazioni se connesso a uncontroller reale:
• Installazione e modifica dei sistemi sui controller RobotWare 6 medianteInstallation Manager.
• Programmazione e modifica basate sul testo, tramite l'Editor RAPID.• Gestione file per il controller.• Amministrazione del Sistema di autorizzazione utente (User Authorization
System, UAS).• Configurazione dei parametri di sistema.
Manuale dell'operatore - IRC5 con FlexPendant 473HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
2 Presentazione di IRC52.6 RobotStudio

2.7 Quando utilizzare i dispositivi di spostamento diversi
PanoramicaPer l'utilizzo e la gestione del robot, è possibile utilizzare una delle seguenti opzioni:
• FlexPendant: Ottimizzata per la gestione dei movimenti del robot e il normalefunzionamento
• RobotStudio: Ottimizzato per la configurazione, la programmazione e altreattività non legate al funzionamento quotidiano.
• T10: Indicato per lo spostamento dei robot in maniera intuitiva attraverso laselezione delle direzioni di movimento desiderate.
• App RobotStudio Online: Ottimizzate per lo spostamento, la gestione, l'utilizzodi telai, metodi di calibratura e programmi RAPID disponibili nel controllerdel robot.
Avvio, riavvio e arresto del controller
Utilizzare...Per...
L'interruttore di alimentazione sul pannello anteriore delcontroller.
Avviare il controller
La FlexPendant, RobotStudio, le App RobotStudio Online ol'interruttore di alimentazione sul pannello anteriore delcontroller.
Riavviamento del controller
L'interruttore di alimentazione sul pannello anteriore delcontroller o la FlexPendant, scegliere Riavvia, quindiAvanzate.
Arrestare il controller
La FlexPendant.Spegnere il computer principa-le
Esecuzione e controllo di programmi del robot
Utilizzare...Per...
La FlexPendant o T10 .Muovere manualmente il robot
La FlexPendant, RobotStudio o le App RobotStudio Online.Avviare o arrestare un pro-gramma del robot
La FlexPendant, RobotStudio o le App RobotStudio Online.Avvio e arresto dei task inbackground.
Comunicazione con il controller
Utilizzare...Per...
La FlexPendant o le App RobotStudio Onli-ne.
Confermare eventi
RobotStudio, la FlexPendant o le App Robo-tStudio Online.
Visualizzare e salvare i registri eventi delcontroller
RobotStudio, la FlexPendant o le App Robo-tStudio Online.
Eseguire il backup del software del controllersu file sul PC o su un server
La FlexPendant o le App RobotStudio Onli-ne.
Eseguire il backup del software del controllersu file sul controller
Continua nella pagina successiva48 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
2 Presentazione di IRC52.7 Quando utilizzare i dispositivi di spostamento diversi

Utilizzare...Per...
RobotStudio, la FlexPendant o le App Robo-tStudio Online.
Trasferire file tra i controller e le unità di rete
Programmazione di un robot
Utilizzare...Per...
RobotStudio per creare la struttura del programma e lamaggior parte del codice sorgente e la FlexPendant permemorizzare le posizioni del robot e apportare i ritocchi fi-nali al programma.
Creare o modificare program-mi del robot in modo flessibi-le. È adatto per programmicomplessi con molta logica,segnali di I/O o istruzioni diazione
Durante la programmazione, RobotStudio fornisce i seguentivantaggi:
• Un editor di testo ottimizzato per il codice RAPID, contesto automatico e suggerimenti relativi a istruzionie parametri.
• Controllo dei programmi con indicazione degli erroridi programmazione.
• Accesso approfondito alla modifica di configurazionee I/O.
La FlexPendant.Creare o modificare un pro-gramma del robot in modosupportato. Adatto per pro-grammi che contengono prin-cipalmente istruzioni di movi-mento
Durante la programmazione, FlexPendant fornisce i seguentivantaggi:
• Elenchi di selezione delle istruzioni• Controllo e debug del programma durante la scrittura• Possibilità di creare posizioni del robot durante la
programmazione
La FlexPendant o T10 con una combinazione di App Robo-tStudio Online adeguate.
Aggiungere o modificare posi-zioni del robot
La FlexPendant o T10 con una combinazione di App Robo-tStudio Online adeguate.
Modificare posizioni del robot
Configurazione dei parametri di sistema del robot
Utilizzare...Per...
RobotStudio, la FlexPendant o le App Robo-tStudio Online.
Modificare i parametri di sistema del sistemain esecuzione
RobotStudio, la FlexPendant o le App Robo-tStudio Online.
Salvare i parametri di sistema del robot comefile di configurazione
RobotStudio, la FlexPendant o le App Robo-tStudio Online.
Caricare i parametri di sistema dai file di con-figurazione sul sistema in esecuzione
RobotStudio, la FlexPendant o le App Robo-tStudio Online.
Caricamento dei dati di calibratura
Creazione, modifica e installazione di sistemi
Utilizzare...Per...
RobotStudio con RobotWare e una Chiave di Robot-Ware valida per sistemi basati su RobotWare 5.
Creare o modificare un sistema
RobotStudio con RobotWare e un file di licenza persistemi basati su RobotWare 6.
RobotStudioInstallare un sistema su un control-ler
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 493HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
2 Presentazione di IRC52.7 Quando utilizzare i dispositivi di spostamento diversi
Continua

Utilizzare...Per...
La FlexPendant.Installare un sistema su un control-ler da una memoria USB
Calibrazione
Utilizzare...Per...
La FlexPendant o le App RobotStudio Onli-ne.
Calibrare il sistema di riferimento di base ecosì via.
La FlexPendant o le App RobotStudio Onli-ne.
Calibrare utensili, oggetti di lavoro e così via.
Informazioni correlateLa tabella che segue specifica i manuali da consultare, durante l'esecuzione dellediverse attività a cui si fa riferimento:
Numero di documentoPer ulteriori informazioni, vedere ilmanuale...
Utilizzo consigliato...
3HAC050941-007Manuale dell'operatore - IRC5 conFlexPendant
FlexPendant
3HAC032104-007Manuale dell'operatore - RobotStu-dio
RobotStudio
3HAC050943-007Manuale dell'operatore - IRC5 conT10
T10
50 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
2 Presentazione di IRC52.7 Quando utilizzare i dispositivi di spostamento diversiContinua

2.8 Pulsanti e porte sul controller
Pulsanti e porte sul controllerQuesti sono i pulsanti e le porte di un controller IRC5. Alcuni pulsanti e portepossono rappresentare opzioni, per cui possono non essere disponibili sulcontroller. I pulsanti e le porte sembrano gli stessi, ma la loro posizione può differirea seconda del modello di controller (IRC5 Standard, IRC5 Compact, oppure IRC5Panel Mounted Controller) e dal fatto che sia presente un pannello dell’operatoreesterno.
xx0600002782
Interruttore di reteA
Arresto di emergenzaB
Motori inseritiC
Interruttore di modalitàD
LED della catena di sicurezza (opzione)E
Porta di servizio per PC (opzione)G
Contatore tempo di utilizzo (opzione)H
Presa di servizio 115/230V, 200 W (opzione)J
Hot plug pulsante (opzione)K
Connettore per FlexPendant o T10L
Informazioni correlateManuale del prodotto - IRC5, IRC5 del modello 14.
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 513HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
2 Presentazione di IRC52.8 Pulsanti e porte sul controller

Manuale del prodotto - IRC5 Panel Mounted Controller, IRC5 del modello 14.Manuale del prodotto - IRC5 Compact, IRC5 del modello 14.Manuale dell'operatore - Risoluzione dei problemi IRC5.
52 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
2 Presentazione di IRC52.8 Pulsanti e porte sul controllerContinua

3 Navigazione e manipolazione della FlexPendant3.1 Contenuto del capitolo
Introduzione a questo capitoloQuesto capitolo aiuta a lavorare in maniera efficiente con la FlexPendant. Glielementi importanti per la navigazione, illustrati in Elementi del touch screen apagina 41 vengono descritti qui.Tutte le visualizzazioni del Main menu, elemento principale della navigazione,vengono descritti con una panoramica, e con riferimenti a maggiori dettagli aproposito delle loro funzioni.Inoltre, questo capitolo offre informazioni sulle procedure di base, quali il modo diimmettere testi o numeri tramite la tastiera software, come far scorrere o ingrandirelo schermo tattile grafico, e come utilizzare la funzione di filtro. Vengono inoltreillustrati i processi di accesso e sconnessione.
Gestione e risoluzione dei problemi di FlexPendantIl modo di manipolare e pulire la FlexPendant viene descritto in Manipolazionedella FlexPendant a pagina 24.La risoluzione dei problemi di FlexPendant è descritta in Manualedell'operatore - Risoluzione dei problemi IRC5.
Opzioni del materiale e del softwareDa notare che questo manuale copre soltanto le visualizzazioni di un sistemaRobotWare di base. I processi applicativi quali la saldatura ad arco, la distribuzioneo le plastiche vengono citati nel menù principale, ma non sono descritti in questomanuale. Tutte le opzioni vengono descritte nel loro rispettivo manuale applicativo.
Manuale dell'operatore - IRC5 con FlexPendant 533HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.1 Contenuto del capitolo

3.2 Il Main menu
3.2.1 HotEdit menu
HotEditHotEdit viene utilizzato per regolare finemente le posizioni programmate. Esso èdisponibile per tutte le modalità operative, anche durante l'esecuzione delprogramma. È possibile regolare sia le coordinate che l'orientamento.È possibile utilizzare HotEdit solo per posizioni denominate di tipo robtarget (vederele limitazioni qui di seguito).Le funzioni disponibili in HotEdit possono essere limitate dal sistema diautorizzazione degli utenti, UAS.
Illustrazione della visualizzazione HotEdit
en0500001542
Funzioni disponibili in HotEdit
Elenca tutte le posizioni con nome in una vista struttura. Sele-zionare una o più posizioni da regolare finemente, picchiettandola freccia. Da notare che, se una posizione viene utilizzata indiversi luoghi del programma, ogni modifica apportata all’offsetprenderà effetto ovunque utilizzata.
Target programmati
Elenca tutte le posizioni selezionate e il relativo offset corrente.Per rimuovere una posizione dalla selezione, picchiettarla equindi picchiettare il bidone dei rifiuti.
Destinazioni selezionate
Continua nella pagina successiva54 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.2.1 HotEdit menu

Memorizza e carica le selezioni delle posizioni da regolare fi-nemente. Se il sistema utilizza UAS, questo può essere l'unicomodo per selezionare le posizioni per HotEdit.
File
Utilizzata per applicare o rigettare nuovi valori di offset alla lineadi base, che mantiene i valori delle posizioni correntementevisibili come quelli originali. Una volta soddisfatti della sessioneHotEdit e, se si desiderano memorizzare i nuovi valori offsetcome valori della posizione originale, li si applicano alla lineadi base. I vecchi valori di linea di base per queste posizionisono così eliminati, e non possono essere ripristinati.
Linea base
Visualizza le impostazioni per la regolazione fine: Sistema dicoordinate, modalità di regolazione e incremento di regolazione.Effettuare le proprie scelte e quindi utilizzare le icone “più” e“meno” per specificare la regolazione degli obbiettivi selezio-nati.
Destinazioni regolazione
Selezionare Applica per far sì che le impostazioni Affina ob-biettivi entrino in vigore. Da notare che questa operazione noncambia i valori originali delle posizioni della linea di base.
Applica
ATTENZIONE
HotEdit offers advanced functionality, which has to be handled carefully. Beaware that new offset values will be used immediately by a running programonce the Apply button has been tapped.Prima di iniziare ad utilizzare la funzionalità HotEdit, si consiglia vivamente dileggere le limitazioni e procedure Posizioni di regolazione con HotEdit apagina 277, where HotEdit, ove viene illustrato in dettaglio anche il concetto dilinea di base.
Informazioni correlateVedere la sezione Modifica e regolazione delle posizioni a pagina 272 per unapanoramica generale sul modo di modificare le posizioni programmate.Le posizioni possono anche essere modificate tramite il spostamento del robotnella nuova posizione, vedere la sezione Modifica di posizioni tramite l'Editor diprogramma o la finestra Produzione. a pagina 273.Per informazioni dettagliate a proposito di HotEdit, vedere Posizioni di regolazionecon HotEdit a pagina 277.Manuale tecnico di riferimento - Istruzioni RAPID, Funzioni e Tipi di dati.Manuale tecnico di riferimento - Parametri di sistema, paragrafoArgomentoController - TipoModPos Settings.
Manuale dell'operatore - IRC5 con FlexPendant 553HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.2.1 HotEdit menu
Continua

3.2.2 Esplora FlexPendant
Esplora FlexPendantEsplora FlexPendant è un file manager, simile a Esplora risorse, tramite il quale èpossibile visualizzare il file system nel controller. È anche possibile rinominare,eliminare o spostare file o cartelle.
Illustrazione di Esplora FlexPendantL'illustrazione descrive Esplora FlexPendant.
en0400001130
Vista semplice Selezionare la funzione per nascondere il tipo nella finestra deifile.
A
Vista dettagliata Selezionare la funzione di visualizzazione del tipo nella finestradei file.
B
Percorso Visualizza i percorsi della cartella.C
Menu. Selezionare la funzione di visualizzazione del menu delle funzioni per lagestione dei file.
D
Nuova cartella. Selezionare la creazione di una nuova cartella nella cartellapresente.
E
Per spostarsi al livello superiore. Selezionare per passare alla cartella di livellosuperiore.
F
Aggiorna. Selezionare per l’aggiornamento dei file e delle cartelle.G
56 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.2.2 Esplora FlexPendant

3.2.3 Input e output, I/O
Input e outputInput e output, I/O, sono segnali utilizzati nel sistema robotico. I segnali vengonoconfigurati tramite parametri di sistema.
La visualizzazione della vista di ingressi e uscite diNella seguente figura è illustrato il menu Input e output.
en0400000770
Che cosa è un segnale?Un segnale I/O è la rappresentazione software logica di:
• Ingressi o uscite che si trovano su un dispositivo di I/O di rete industrialeconnesso a una rete industriale nell’ambito del sistema robotico (segnaleeffettivo di I/O).
• Un segnale di I/O senza rappresentazione su un qualsiasi dispositivo di I/Odella rete industriale (segnale virtuale di I/O).
Specificando un segnale I/O, viene creata una rappresentazione logica del segnaleI/O reale o virtuale. La configurazione del segnale I/O definisce i parametri disistema specifici per il segnale I/O che controllerà la funzionalità del segnale stesso.
Manuale dell'operatore - IRC5 con FlexPendant 573HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.2.3 Input e output, I/O

3.2.4 Movimento manuale
PanoramicaLe funzioni di spostamento sono disponibili nella finestra Spostamento. Quelleutilizzate più comunemente sono disponibili anche nel menu di impostazionerapida.
Menu SpostamentoNella figura sono illustrate le funzioni principali disponibili nel menu Spostamento:
en0400000654
FunzioneProprietà/pulsante
Per la selezione dell'unità meccanica attiva per lo spostamento,vedere il paragrafo Selezionare l’unità meccanica per lo sposta-mento a pagina 136.
Unità meccanica
Absolute Accuracy: Off è l'impostazione predefinita. Se il robotè provvisto dell'opzione Absolute Accuracy, allora viene visualiz-zata l’indicazione Absolute Accuracy: On.
Precisione assoluta
Seleziona la modalità di movimento, vedere la sezione Selezionedella modalità di movimento a pagina 138.
Modalità dimovimento
Selezionare il sistema di coordinate, come descritto nel paragrafoSelezionare il sistema di coordinate a pagina 143.
Sistema di coordinate
Seleziona l'utensile, vedere la sezione Selezione dell'utensile,dell'oggetto di lavoro e del carico utile a pagina 139.
Utensile
Seleziona l'oggetto di lavoro, vedere la sezione Selezionedell'utensile, dell'oggetto di lavoro e del carico utile a pagina 139.
Oggetto di lavoro
Continua nella pagina successiva58 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.2.4 Movimento manuale

FunzioneProprietà/pulsante
Seleziona il carico utile, vedere la sezione Selezione dell'utensile,dell'oggetto di lavoro e del carico utile a pagina 139.
Carico utile
Seleziona le direzioni di blocco del joystick, vedere la sezioneBlocco del joystick in direzioni specifiche a pagina 144.
Blocco joystick
Seleziona gli incrementi di movimento, vedere la sezioneMovimen-to incrementale per il posizionamento preciso a pagina 146.
Incremento
Visualizza ciascuna posizione d’asse, in relazione al sistema dicoordinate selezionato: questa funzione viene descritta nel para-grafo Lettura della posizione esatta a pagina 148.
Posizione
Se i valori della posizione vengono visualizzati in rosso, i contagiridevono essere aggiornati. Vedere il paragrafo Aggiornamento delcontagiri a pagina 306.
Seleziona il formato della posizione, vedere la sezione Letturadella posizione esatta a pagina 148.
Formato posizione
Visualizza le direzioni correnti del joystick, a seconda della moda-lità di movimento. Vedere la sezione Selezione della modalità dimovimento a pagina 138.
Direzioni joystick
Allinea l'utensile corrente a un sistema di coordinate. Vedere lasezione Allineamento degli utensili a pagina 150.
Allinea
Sposta il robot in una posizione/destinazione selezionata. Vederela sezione Spostamento del robot in una posizione programmataa pagina 283.
Vai a
Attiva un'unità meccanica.Attiva
Manuale dell'operatore - IRC5 con FlexPendant 593HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.2.4 Movimento manuale
Continua

3.2.5 Finestra Produzione
PanoramicaLa Finestra di produzione viene utilizzata per visualizzare il codice del programmain esecuzione.
Illustrazione della finestra di ProduzioneQuesto paragrafo illustra la finestra Produzione.
en0400000955
Caricare un nuovo programma.Carica pro-gramma
Spostare il puntatore di programma sulla routine Main.PP verso main
Il Menu Debug è disponibile solo in modalità manuale. Modifica della po-sizione, vedereModifica di posizioni tramite l'Editor di programma o la fi-nestra Produzione. a pagina 273. Visualizza il puntatore di movimentoeVisualizza il puntatore di programma, vedereA proposito dei puntatoridi programma emovimento a pagina173. Modifica del programma, vede-reEditor di programma a pagina 63.
Nota
L'icona della modalità passo passo visiva indica che la modalità Passopasso all'interno non è selezionata. Ciò significa che se la modalità sele-zionata è Passo passo e esci, In soluzione unica o Mossa successiva èvisualizzata l'icona della modalità passo passo visiva.
Debug
60 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.2.5 Finestra Produzione

3.2.6 Dati programma
PanoramicaLa vista Dati del programma contiene funzioni per la visualizzazione e l'utilizzodei tipi e delle istanze di dati. È possibile aprire più di una finestra Dati delprogramma, che può risultare utile quando si lavora con molte istanze o tipi didati.
Illustrazione della vista Dati del programmaQuesto paragrafo illustra la vista Dati del programma.
en0400000659
Per il cambiamento dello scopo dei tipi di dati nell'elenco, vedere il para-grafoVisualizzazione dei dati in specifici task, moduli o routine a pagina174.
Cambia scopo
Mostra tutte le istanze del tipo di dati selezionato.Mostra dati
Mostra tutti i tipi di dati o solo quelli utilizzati.Visualizza
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 613HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.2.6 Dati programma

Illustrazione di un esempio di istanze di tipi di datiIn questa sezione è illustrato un elenco di istanze per un tipo di dati.
en0500001571
Per il filtraggio delle istanze, vedere Filtro dei dati a pagina 95.Filtro
Per la creazione di una nuova istanza del tipo di dati selezionato, ve-dere Creazione di nuove istanze di dati a pagina 175.
Nuova
Per la modifica delle istanze selezionate, vedere Modifica delleistanze di dati a pagina 177.
Modifica
Aggiorna l'elenco delle istanze.Aggiorna
Ritorna al menu Dati del programma.Visualizza tipi didati
62 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.2.6 Dati programmaContinua

3.2.7 Editor di programma
PanoramicaL'Editor di programma è il contesto in cui vengono creati o modificati i programmi.È possibile aprire più di una finestra dell'Editor di programma, che può risultareutile quando ad esempio si lavora con l’opzione Multitasking installata.Il pulsante dell'Editor di programma nella barra dei task visualizza il nome deltask.
Illustrazione dell'Editor di programmaIn questo paragrafo viene illustrata la vista Editor di programma.
en0400001143
Menu per le operazioni sul programma, vedere Gestione deiprogrammi a pagina 154.
Task e programmi
Elenca tutti i moduli, vedere Gestione dei moduli a pagina 157.Moduli
Elenca tutte le routine, vedereGestione delle routine a pagina161.Routine
Apre il menu Istruzioni, vedere Gestione delle istruzioni a pagi-na 166.
Aggiungi istruzione
Apre il menu Modifica, vedere Gestione delle istruzioni a pagi-na 166.
Modifica
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 633HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.2.7 Editor di programma

Per le funzioni per lo spostamento del puntatore di programma,routine di servizio, ecc., vedere Esecuzione di una routine diservizio a pagina 225, e A proposito dei puntatori di programmae movimento a pagina 173..
Debug
Funzioni per la ricerca di routine e la visualizzazione di dati disistema
• Routine di ricerca: cerca tutte le routine in tutti i moduli(a eccezione delle routine nascoste).
• Visualizzare i dati di sistema: visualizza tutti i task.
Vedere Modifica di posizioni tramite l'Editor di programma o lafinestra Produzione. a pagina 273.
Modifica della posizione
Nasconde le dichiarazioni per facilitare la lettura del codice pro-gramma.
Nascondi dichiarazioni
Attivare automaticamente l’unità meccanica per lo spostamentoSe la funzione Multitasking è installata con più di un’unica unità meccanica e piùdi un unico task di movimento, la commutazione fra le finestre dell’Editor diprogramma non influisce sulla selezione dell’unità meccanica per lo spostamento.Questo significa che, in caso di un’azione di spostamento, si muoverà l’unitàmeccanica utilizzata per ultima, non quindi necessariamente quella utilizzatanell’Editor di programma attivo.Questa impostazione potrà essere modificata mediante parametri di sistema deltipo Automatically Switch Jog Unit nell’argomento Man-machine Communication.Eseguire questa impostazione per attivare automaticamente l’unità meccanicautilizzata per ultima in unEditor di programma, mentre si commuta a quella finestra.Questo significa che, durante lo spostamento, si muove l’unità meccanica utilizzataper ultima nell’Editor di programma attivo. Da notare che, se si commuta tra Editordi programmi nello stesso task, non avviene alcun cambiamento.Le unità meccaniche vengono manualmente attivate per lo spostamento nellafinestra di movimento o nel menu di impostazione rapida Quickset; vedereSelezionare l’unità meccanica per lo spostamento a pagina 136.
64 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.2.7 Editor di programmaContinua

3.2.8 Backup e ripristino
Informazioni sui backupIl menu Backup e ripristino viene utilizzato per eseguire le operazioni di backupe ripristino dei sistemi. Vedere il paragrafo Backup e ripristino a pagina 297.
Illustrazione di Backup e ripristinoDi seguito è illustrato il menu Backup e ripristino.
xx0300000440
Vedere Backup del sistema a pagina 297.Backup dell'attuale siste-ma
Vedere Ripristino del sistema a pagina 301.Ripristino del sistema
Manuale dell'operatore - IRC5 con FlexPendant 653HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.2.8 Backup e ripristino

3.2.9 Calibratura
Informazioni sulla calibraturaIl menu Calibratura viene utilizzato per calibrare le unità meccaniche del sistemarobotico. La calibratura può essere eseguita mediante l’opzione CalibrationPendulum. Vedere Manuale dell'operatore - Calibration Pendulum.
Illustrazione del menu CalibraturaQuesta illustrazione mostra il menuCalibratura. Nella colonna Stato sono elencatetutte le unità meccaniche assieme al loro stato di calibratura.
en0400001146
Continua nella pagina successiva66 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.2.9 Calibratura

Opzioni del menu CalibraturaQuesta illustrazione mostra le opzioni del menu Calibratura dopo la selezione diun'unità meccanica.
en0400000771
Manuale dell'operatore - IRC5 con FlexPendant 673HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.2.9 Calibratura
Continua

3.2.10 Pannello di comando
Pannello di comandoIl pannello di controllo contiene funzioni per la personalizzazione del sistemarobotico e della FlexPendant.
Continua nella pagina successiva68 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.2.10 Pannello di comando

Illustrazione del Pannello di comando
en0400000914
Impostazioni per personalizzare la luminosità del display. VedereModifica di luminosità e contrasto a pagina 113.
Aspetto
Impostazioni per la supervisione del movimento e le impostazionidi esecuzione. Vedere Utilizzo della supervisione del movimentoe non dell’esecuzione del movimento a pagina 255.
Supervision
Nota
Quando si modifica il livello di rilevamento della collisione, è ne-cessario portare i motori in stato Off per attivare le modifiche.
Impostazioni per la configurazione dell'elenco Segnali di I/O piùcomuni. VedereConfigurazione degli I/O più comuni a pagina118.
I/O
Impostazioni per la lingua corrente del controller del robot. VedereModifica della lingua a pagina 119.
Lingua
Impostazioni per i quattro tasti programmabili sulla FlexPendant.Vedere Modifica dei tasti programmabili a pagina 120.
TastiProg
Impostazioni per configurare la rete, la data e l’ora del controllerdel robot, e il suo ID. Vedere Impostazioni controller a pagina116.
Impostazioni controller
Impostazioni di ricalibratura per il touch screen. Vedere Calibra-tura dello schermo tattile a pagina 122.
Schermo tattile
Configurazione delle viste per il cambio di modalità operativa elo User Authorization System (UAS). Vedere Definire una vistada mostrare al cambio o all’avvio della modalità operativa a pagi-na 104.
FlexPendant
Configurazione dei parametri di sistema.Configurazione
Manuale dell'operatore - IRC5 con FlexPendant 693HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.2.10 Pannello di comando
Continua

3.2.11 Registro eventi
Il Registro eventiI sistemi robotizzati sono spesso operati senza la presenza del personale in loco.La funzione di archiviazione dati, il log, permette di salvare le informazioni suglieventi passati in modo da averli a disposizione per l’eventuale risoluzione deiproblemi.L'apertura di un registro degli eventi è descritta nel paragrafo Accesso al registrodegli eventi a pagina 293.
Illustrazione del Registro eventiNella tabella di seguito sono riassunte brevemente tutte le azioni che è possibileeseguire con il registro degli eventi.
xx0300000447
DescrizioneFunzione
Selezionare il messaggio. La struttura dei messaggiviene descritta in Un messaggio del registro deglieventi a pagina 71.
Visualizzazione di un messaggio
Vedere Scorrimento e zoom a pagina 94.Far scorrere o ingrandire un mes-saggio
VedereEliminazione delle voci del registro a pagina294.Eliminare il registro
VedereSalvataggio delle voci del registro a pagina295.Memorizzare il registro
Vedere Accesso al registro degli eventi a pagina 293.Chiudere il registro
Continua nella pagina successiva70 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.2.11 Registro eventi

Un messaggio del registro degli eventiCiascuna voce del registro degli eventi è composta da un messaggio che descrivein dettaglio l'evento e spesso contiene indicazioni su come risolvere il problema.
en0300000454
Numero dell'evento. Tutti gli errori sono indicati tramite numeri.A
Titolo dell'evento. Spiega brevemente ciò che è accaduto.B
Indicatore dell'ora dell'evento. Specifica il momento esatto in cui si è verificatol'evento.
C
Descrizione. Una breve descrizione dell'evento. Ha la funzione di facilitare lacomprensione delle cause e delle implicazioni dell'evento.
D
Conseguenze. Una breve descrizione di qualsiasi conseguenza per il sistema,passaggio a un'altra modalità operativa, arresto di emergenza, causatodall'evento. Ha la funzione di facilitare la comprensione delle cause e delle im-plicazioni dell'evento.
E
Probabili cause. Un elenco delle probabili cause, elencate in ordine di probabi-lità.
F
Azioni consigliate. Un elenco delle azioni correttive consigliate, basate sulle"Probabili cause" specificate in precedenza. Queste possono variare da "Sosti-tuire xx..." a "Eseguire il programma di verifica xx...", ovvero azioni volte a isolareil problema come anche a risolverlo.
G
Pulsante Conferma o OK.H
Informazioni correlate sui registriI messaggi del registro eventi e ulteriori informazioni sul registro eventi sonodescritti in Manuale dell'operatore - Risoluzione dei problemi IRC5.
Manuale dell'operatore - IRC5 con FlexPendant 713HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.2.11 Registro eventi
Continua

3.2.12 Informazioni di sistema
Sulle Informazioni di sistemaLe informazioni di sistema visualizzano informazioni a proposito del controller edel sistema caricato. Qui si possono trovare la versione RobotWare e le opzioniattualmente utilizzate, le chiavi valide per i moduli di comando e di azionamento,le connessioni alla rete ecc.
Illustrazione della vista Informazioni di sistema
en0400000968
Proprietà del controllerSono qui contenute informazioni sul controller e sulla rete. Quando vengonoespanse le Proprietà del controller, sono visibili i seguenti elementi:
Porta di servizio e proprietà della rete locale LAN.Connessioni di rete
Elenco dei sistemi installati.Sistemi installati
Proprietà del sistemaContiene informazioni riguardanti il sistema attualmente utilizzato. Quando vengonoespanse le Proprietà del sistema, sono visibili i seguenti elementi:
Nome e chiave del Control Module.Control Module
Tutte le opzioni e le lingue di RobotWare installate.Opzioni
Elenco di tutti i Drive Modules.Moduli di azionamento
Nome e chiave del Drive Module x.Modulo di azionamento X
Opzioni Drive Module x, con il tipo di robot ecc.Opzioni
Continua nella pagina successiva72 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.2.12 Informazioni di sistema

Qualsiasi opzione RobotWare e opzione delle applicazioni diprocesso.
Opzioni aggiuntive
Dispositivi hardwareContiene informazioni riguardanti i vari tipi di hardware connessi. Quando vengonoespansi i Dispositivi hardware, sono visibili i seguenti elementi:
Nome e chiave del Control Module.Controller
Contiene informazioni riguardanti il computer principale.Sistema di computer
Contiene informazioni riguardanti l'unità di alimentazione.Sistema di alimentazione
Fornisce informazioni su hardware e software della scheda delpannello.
Scheda pannello
Contiene informazioni riguardanti il computer dell’asse, l’unitàdi trasmissione e la scheda del contattore.
Modulo di azionamento X
Elenca di dati dei robot o degli assi esterni connessi al controller.Unità meccaniche
Risorse softwareContiene informazioni riguardanti il RAPID. Quando vengono espanse le Risorsesoftware, sono visibili i seguenti elementi:
Contiene informazioni su tempo in attività e memoria del siste-ma.
Sistema
Software utilizzato dal controller.RAPID
Memoria attribuita ai programmi RAPID.Memoria RAPID
Mostra il carico dei programmi in esecuzione.Prestazioni del RAPID.
Contiene informazioni sul Remote Service Embedded.Comunicazione
Manuale dell'operatore - IRC5 con FlexPendant 733HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.2.12 Informazioni di sistema
Continua

3.2.13 Riavvia
RiavviaNormalmente un sistema in funzione non ha la necessità di essere riavviato.Selezionare il menu ABB e poi Riavvia per riavviare il sistema.
en0500001557
74 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.2.13 Riavvia

3.2.14 Fine sessione
Il menu Fine sessione (Log Off)In questo paragrafo viene descritto il menu Fine sessione (Log Off). Ulterioriinformazioni su questo menu sono descritte in Inizio e termine di sessione (log-ine log-off). a pagina 100 (Log Off e Log In).Fine sessione è disponibile nel menu ABB.
en0400000947
Manuale dell'operatore - IRC5 con FlexPendant 753HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.2.14 Fine sessione

3.3 Finestra Operatore
Finestra OperatoreNella finestra Operatore vengono visualizzati i messaggi del programma. In unsistema Multitasking installato, i messaggi di tutti i task sono visualizzati nellamedesima finestra Operatore. Se un messaggio richiede l'intervento allora verràvisualizzata una finestra separata per il relativo task.La finestra Operatore viene aperta scegliendo l'icona sulla destra del logo ABBnella barra di stato. L'illustrazione mostra un esempio della finestra Operatore.
en0400000975
Cancella tutti i messaggiCancella
Cancella tutti i messaggiNon visualizzare registri
Nascondi nomi taskNon visualizzare nome task
76 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.3 Finestra Operatore

3.4 Barra di stato
Illustrazione della barra di statoLa barra di stato visualizza informazioni sullo stato corrente, quali la modalitàoperativa, il sistema e l'unità meccanica attiva.
en0300000490
Finestra OperatoreA
Modalità operativaB
Nome sistema (e nome del controller)C
Stato controllerD
Stato programmaE
Unità meccaniche. L'unità selezionata e qualsiasi unità coordinata con quella selezio-nata viene contrassegnata con un bordo. Le unità attive sono visualizzate a colori,mentre quelle disattivate sono grigie.
F
Manuale dell'operatore - IRC5 con FlexPendant 773HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.4 Barra di stato

3.5 QuickSet, impostazione rapida
3.5.1 Menu di impostazione rapida
Menu di impostazione rapidaIl menu di impostazione rapida fornisce un metodo rapido per modificare tra lealtre cose le proprietà di spostamento senza ricorrere alla vista Spostamento.Ciascun pulsante del menu mostra il valore o l’impostazione della proprietàattualmente selezionato.In modalità manuale, il pulsante del menu Quickset di impostazione rapida mostral’unità meccanica attualmente selezionata, la modalità di spostamento e ladimensione dell’incremento.
Illustrazione del menu di impostazione rapidaQuesta sezione descrive i pulsanti nel menu di impostazione rapida.
en0300000471
Per l’unità meccanica, vedere il paragrafo Menu di impostazione rapida, Unitàmeccanica a pagina 80
A
Per l’incremento, vedere il paragrafo Menu di impostazione rapida, Incrementoa pagina 86
B
Per la modalità di esecuzione, vedere il paragrafo Menu di impostazione rapida,Modalità di esecuzione a pagina 87
C
Per la modalità passo a passo, vedere il paragrafoMenu di impostazione rapida,Modalità per passi a pagina 88
D
Continua nella pagina successiva78 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.5.1 Menu di impostazione rapida

Per la velocità, vedere il paragrafo Menu di impostazione rapida, Velocità a pa-gina 89
E
Per i task, vedere il paragrafo Menu di impostazione rapida, Task a pagina 90F
Manuale dell'operatore - IRC5 con FlexPendant 793HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.5.1 Menu di impostazione rapida
Continua

3.5.2 Menu di impostazione rapida, Unità meccanica
Illustrazione del Pulsante unità meccanicaNel menu di impostazione rapida, scegliereUnità meccanica e selezionare quindiun'unità meccanica.
en0300000539
Pulsante del menu Unità meccanicaA
Unità meccanica: è evidenziata un'unità selezionata Vedere Selezionare l’unitàmeccanica per lo spostamento a pagina 136.
B
Impostazioni per la modalità di spostamento (modalità di spostamento per gliassi 1-3 attualmente selezionata), mentre ulteriori impostazioni vengono descrittein Illustrazione delle impostazioni della modalità di movimento a pagina 81.
C
Impostazioni dell’utensile (utensile 0 attialmente selezionato); ulteriori imposta-zioni vengono descritte in Illustrazione Impostazioni utensile a pagina 82.
D
Impostazioni dell’oggetto di lavoro (oggetto di lavoro 0 attialmente selezionato);ulteriori impostazioni vengono descritte in Illustrazione delle impostazionidell'oggetto di lavoro a pagina 83.
E
Impostazioni del sistema di coordinate (coordinate universali attualmente sele-zionate); ulteriori impostazioni vengono descritte in Illustrazione delle imposta-zioni del sistema di coordinate a pagina 84.
F
Disattivazione del coordinamento; ulteriori impostazioni vengono descritte inDisattivazione della coordinazione a pagina 85.
G
Mostra i dettagli; ulteriori impostazioni vengono descritte in L’illustrazioneMostrai dettagli a pagina 85.
H
Nota
Il Menu dell’unità meccanica è disponibile solo in modalità manuale.
Continua nella pagina successiva80 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.5.2 Menu di impostazione rapida, Unità meccanica

Illustrazione delle impostazioni della modalità di movimentoSe si desidera visualizzare o modificare una qualsiasi funzionalità della modalitàdi movimento, selezionare il pulsante Impostazioni della Modalità di movimento.Queste impostazioni sono pure disponibili nella finestra dello spostamento, vedereSelezione della modalità di movimento a pagina 138.
en0300000540
Selezione delle impostazioni della modalità di movimento:• Asse 1-3• Asse 4-6• Lineare• Riorienta
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 813HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.5.2 Menu di impostazione rapida, Unità meccanica
Continua

Illustrazione Impostazioni utensileSe si desidera visualizzare o modificare gli utensili disponibili, selezionare ilpulsante Impostazioni dell'Utensile. Queste impostazioni sono pure disponibilinella finestra dello spostamento, vedere Selezione dell'utensile, dell'oggetto dilavoro e del carico utile a pagina 139.
en0400000988
Continua nella pagina successiva82 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.5.2 Menu di impostazione rapida, Unità meccanicaContinua

Illustrazione delle impostazioni dell'oggetto di lavoroSe si desidera visualizzare o modificare gli oggetti di lavoro disponibili, selezionareil pulsante Impostazioni dell'Oggetto di lavoro. Queste impostazioni sono puredisponibili nella finestra dello spostamento, vedere Selezione dell'utensile,dell'oggetto di lavoro e del carico utile a pagina 139.
en0400000989
Selezionare un oggetto di lavoro da utilizzare.
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 833HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.5.2 Menu di impostazione rapida, Unità meccanica
Continua

Illustrazione delle impostazioni del sistema di coordinatePer visualizzare o modificare la funzionalità del sistema di coordinate, selezionareil pulsante delle impostazioni del Sistema di coordinate. Queste impostazioni sonopure disponibili nella finestra dello spostamento, vedere Selezionare il sistema dicoordinate a pagina 143.
en0300000541
Selezionare un’impostazione del sistema di coordinate:• Sistema di coordinate universali• Sistema di coordinate di base• Sistema di coordinate utensile• Sistema di coordinate dell'oggetto di lavoro
Continua nella pagina successiva84 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.5.2 Menu di impostazione rapida, Unità meccanicaContinua

L’illustrazione Mostra i dettagliSelezionareMostra dettagli per visualizzare le impostazioni disponibili per un'unitàmeccanica.
en0500002354
Ridefinisce le impostazioni della velocità del spostamento (100% attualmenteselezionato)
A
Impostazioni del sistema di coordinateB
Impostazioni della modalità di spostamentoC
Spegnere o accendere l’incremento utenteD
Spegnere o accendere la supervisione allo spostamentoE
Se le impostazioni non sono disponibili, vengono visualizzate barrate.È possibile modificare la modalità di movimento e le impostazioni delle coordinateselezionando il pulsante opportuno.Selezionare Nascondi i dettagli per far ritorno alla visualizzazione di base.
Disattivazione della coordinazionePer cambiare velocemente tra uno spostamento coordinato e non coordinato,utilizzare il pulsante di disattivazione del coordinamento.Tale pulsante scompare automaticamente quando si modifica un qualcosa cheinfluisce sul coordinamento, ad esempio l’oggetto di lavoro o il sistema di coordinatedell’unità meccanica coordinata.Per riattivare il pulsante, l'utente deve impostare di nuovo la coordinazionemanualmente.Per informazioni sulla coordinazione tra robot MultiMove, vedere Manualedell'applicazione - MultiMove.
Manuale dell'operatore - IRC5 con FlexPendant 853HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.5.2 Menu di impostazione rapida, Unità meccanica
Continua

3.5.3 Menu di impostazione rapida, Incremento
Impostazioni degli incrementiLe impostazioni d’incremento sono pure disponibili nella finestra di spostamento.Per ulteriori dettagli, vedereMovimento incrementale per il posizionamento precisoa pagina 146.
Illustrazione dell’incremento
en0300000542
Nessun incrementoNessuno
Piccoli movimentiRidotto
Movimento medioMedio
Movimenti estesiAmpio
Movimenti definiti dall’utenteUtente
Visualizza/nasconde i valori degli incrementiMostra/Nascondi valori
Definisce l’unità per gli angoli.Unità dell’angolo
Nota
Il menu Incrementi è disponibile solo in modalità manuale.
86 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.5.3 Menu di impostazione rapida, Incremento

3.5.4 Menu di impostazione rapida, Modalità di esecuzione
Modalità di esecuzioneL'impostazione della modalità di esecuzione definisce se il programma deve essereeseguito una volta e quindi interrotto o eseguito in modo continuo.Per informazioni sulla modalità di esecuzione in:
• Per il Multitasking, vedere Application manual - Controller software IRC5,sezione Multitasking.
• MultiMove, vedere Manuale dell'applicazione - MultiMove, paragrafoInterfaccia utente, specifica per MultiMove.
Illustrazione della modalità esecuzione
en0300000472
Esegue un unico ciclo, per poi arrestare l’esecuzione.Ciclo singolo
Esecuzione continua.Continuo
Manuale dell'operatore - IRC5 con FlexPendant 873HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.5.4 Menu di impostazione rapida, Modalità di esecuzione

3.5.5 Menu di impostazione rapida, Modalità per passi
Modalità passoL'impostazione della modalità di avanzamento definisce il modo di funzionamentodell'esecuzione del programma. Per ulteriori dettagli, vedere Esecuzioneun'istruzione alla volta a pagina 222
Illustrazione della modalità passo a passo
en0300000543
Entra nelle routine chiamate e le esegue un'istruzione alla volta.Entra
Esegue il resto della routine corrente e quindi si interrompe alla successivaistruzione nella routine dalla quale è stata chiamata quella corrente. Nonè possibile utilizzare la routine Main.
Esci
Le routine chiamate vengono eseguite in un solo passo.Procedi
Passa alla successiva istruzione di movimento. Si arresta prima e dopo leistruzioni di movimento che consentono, ad esempio, la modifica delleposizioni.
Movimentosuccessivo
Nota
Se si selezionano le modalità Step Out/Step Over/Next Move, viene visualizzata
anche un’icona a freccia ( ) nel menu QuickSet a indicare che lamodalità selezionata non è una modalità di avanzamento Step Into.
88 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.5.5 Menu di impostazione rapida, Modalità per passi

3.5.6 Menu di impostazione rapida, Velocità
Pulsante VelocitàLe impostazioni di velocità valgono per la modalità operativa corrente. Tuttavia,se si riduce la velocità in modalità automatica, l'impostazione vale anchenell'eventuale passaggio alla modalità manuale.
Illustrazione: VelocitàSelezionare il pulsante Velocità per visualizzare o modificare le impostazioni dellavelocità. La velocità di esecuzione corrente, in relazione a quella massima, vienevisualizzata sopra la pulsantiera.
en0300000470
Riduci velocità di esecuzione in passi del 1%-1%
Aumenta velocità di esecuzione in passi del 1%+1%
Riduci velocità di esecuzione in passi del 5%-5%
Aumenta velocità di esecuzione in passi del 5%+5%
Impostare la velocità a 0%0%
Esegui a un quarto della velocità (25%)25%
Esegui a metà della velocità (50%)50%
Esegui a velocità massima (100%)100%
Manuale dell'operatore - IRC5 con FlexPendant 893HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.5.6 Menu di impostazione rapida, Velocità

3.5.7 Menu di impostazione rapida, Task
Pulsante dei TaskSe è stata installata l'opzione Multitasking, allora è possibile che vi sia più di untask. Altrimenti, vi sarà un solo task.Per impostazione predefinita, è possibile attivare/disattivare solo i task Normalidal menu Quickset. Tuttavia, dal Pannello di controllo è possibile modificare leimpostazioni in modo da poter attivare/disattivare Tutti i task.I task attivati possono essere avviati ed arrestati mediante i pulsantiAvvio eArrestodella FlexPendant.Le impostazioni dei task sono validi soltanto per la modalità operativa manuale.
Informazioni correlateApplication manual - Controller software IRC5, sezione Multitasking.Il modo di avviare e arrestare programmi multitasking viene descritto nel paragrafoUtilizzo di programmi multitasking a pagina 253.TrustLevel per task impostati con i parametri di sistema, vedere sezione Task inManuale tecnico di riferimento - Parametri di sistema.Si potrà definire se devono essere visualizzati tutti i task, o soltanto i task normali.Vedere la sezione Definizione dei task selezionabili nel pannello dei task apagina 111.
90 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.5.7 Menu di impostazione rapida, Task

3.6 Procedure di base
3.6.1 Utilizzo della tastiera software
Tastiera softwareLa tastiera software viene utilizzata spesso per azionare il sistema, ad esempio,per immettere nomi di file o valori di parametri.La tastiera software funziona come una tastiera normale mediante la quale èpossibile posizionare il punto di inserimento, digitare e correggere gli errori.Selezionare lettere, numeri e caratteri speciali per immettere il testo o i valori.
Illustrazione della tastiera softwareQuesta illustrazione mostra la tastiera software sulla FlexPendant.
en0300000491
Uso dei caratteri internazionaliÈ possibile utilizzare tutti i caratteri occidentali, anche nei nomi utente e nellepassword. Per accedere ai caratteri internazionali, scegliere il pulsante Int’l sullatastiera software.
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 913HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.6.1 Utilizzo della tastiera software

Modifica del punto di inserimentoSelezionare i tasti freccia per cambiare il punto di inserimento, ad esempio quandosi correggono errori di digitazione.
then tap...If you need to move...
xx0300000492
indietro
xx0300000493
avanti
Annullamento1 Selezionare il tasto Backspace (in alto a destra) per eliminare i caratteri a
sinistra del punto di inserimento.
xx0300000494
92 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.6.1 Utilizzo della tastiera softwareContinua

3.6.2 Messaggi sulla FlexPendant
Panoramica dei messaggiLa FlexPendant visualizza messaggi dal sistema. Questi possono essere messaggidi stato, di errore, di programma o richieste di intervento all'utente. Alcuni richiedonointerventi e altri forniscono semplicemente informazioni.
Messaggi del registro eventiI messaggi del registro eventi sono messaggi generati dal sistema RobotWarerelativamente allo stato, eventi o errori del sistema.Le modalità di lavoro con i messaggi del registro eventi sono descritte nella sezioneGestione del registro degli eventi a pagina293. Tutti i messaggi sono inoltre descrittiin Manuale dell'operatore - Risoluzione dei problemi IRC5.
Messaggi di sistemaAlcuni messaggi vengono inviati dal sistema e non dal registro degli eventi. Essipossono provenire da altre applicazioni, come ad esempio RobotStudio.Per essere in grado di cambiare configurazioni e impostazioni nel sistema, a partireda RobotStudio, l'utente deve richiedere l'accesso in scrittura. Questo genera unmessaggio sulla FlexPendant nel quale l'operatore può autorizzare o negarel'accesso. In qualsiasi momento l'operatore può decidere di ritirare l'accesso inscrittura.La procedura per richiedere l'accesso e utilizzare RobotStudio è descritta inManualedell'operatore - RobotStudio.
Messaggi di programmaI programmi RAPID possono inviare messaggi alla finestra operatore, vedere lasezione Finestra Operatore a pagina 76.La modalità per generare i messaggi del programma è descritta inManuale tecnicodi riferimento - Istruzioni RAPID, Funzioni e Tipi di dati.
Manuale dell'operatore - IRC5 con FlexPendant 933HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.6.2 Messaggi sulla FlexPendant

3.6.3 Scorrimento e zoom
PanoramicaÈ possibile che l'intero contenuto dello schermo non sia interamente visibile. Pervisualizzarne l’intero contenuto, è possibile:
• Scorrere verso l'alto o verso il basso (e a volte verso sinistra o destra)• Eseguire lo zoom avanti o indietro (disponibile solo nell'Editor di programma).
en0400000685
Zoom avanti (testo più grande)A
Scorrimento verso l'alto (dell'altezza di una pagina)B
Scorrimento verso l'alto (dell'altezza di una riga)C
Scorrimento verso sinistraD
Scorrimento verso destraE
Zoom indietro (testo più piccolo)F
Scorrimento verso il basso (dell'altezza di una pagina)G
Scorrimento verso il basso (dell'altezza di una riga)H
94 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.6.3 Scorrimento e zoom

3.6.4 Filtro dei dati
Filtro dei datiIn diversi menu FlexPendant si potrà utilizzare il filtraggio. Questo potrà rivelarsiutile quando si guardano presenze di tipi di dati, ad esempio, e ve ne sianoparecchie disponibili, per cui sarebbe possibile trascurarne alcune. Filtrando lepresenze che inizino con uno specifico carettere, ad esempio, il loro numero potràvenire ridotto di molto.A seconda del tipo di dati, si possono filtrare i dati sia in ordine alfabetico, sia inordine numerico.
Illustrazione del filtroLa funzione di filtro è attivata finché il filtro attivo non venga rimosso (ad esempioscegliendo il comando Reset).
en0500001539
Nota
Quando si filtrano segnali di I/O, è disponibile un numero di opzioni maggioreche per molti altri tipi di dati. Ad esempio,
• si possono filtrare dati in base al Nome o alla Categoria.• Una funzionalità di filtraggio può essere visualizzata automaticamente se il
numero di segnali visualizzati eccede un valore predefinito. VedereSpiegazione della visualizzazione automatica del filtro a pagina 97.
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 953HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.6.4 Filtro dei dati

en1200000669
Figure 3.1:
Visualizza il filtro corrente. Questo è visualizzato anche nella partesuperiore dell'elenco di elementi.
Filtro attivo
Cancella il testo all'interno del riquadro di testo Filtro attivo.Cancella
Rimuove la stringa di filtroReset
A seconda del tipo di dati, possono essere disponibili uno o più me-todi per filtrare i dati, ad esempio, numerico, alfabetico, ecc.
123 / ABC
Applica il filtro.Filtro
Apre e chiude il menu Filtro attivo.
en1100000506
Continua nella pagina successiva96 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.6.4 Filtro dei datiContinua

Spiegazione della visualizzazione automatica del filtroSe il numero di dati supera un numero predefinito è possibile impostare lavisualizzazione automatica del filtro dei segnali di I/O.
en0600002643
Azione
Selezionare Cambia per effettuare le modifiche quando viene visualizzata la fi-nestra di dialogo di filtro.
1.
Immettere un nuovo numero che definisca il limite superiore per il non utilizzodel filtro. Quindi scegliere Fatto.
2.
Selezionare Virtuali per selezionare gli elementi dell'elenco: tutti i segnali, osolo i virtuali, o solo i non virtuali.
3.
Manuale dell'operatore - IRC5 con FlexPendant 973HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.6.4 Filtro dei dati
Continua

3.6.5 Applicazioni di processo
Applicazioni di processoLe applicazioni di processo personalizzate vengono avviate dal menu ABB.Ciascuna applicazione è elencata come voce di menu insieme alle viste dellaFlexPendant.
Avvio di un'applicazione di processoUtilizzare questa procedura per avviare un’applicazione di processo.
Azione
Selezionare il pulsante ABB per visualizzare il menu ABB.Le applicazioni di processo vengono elencate nel menu.
1
Selezionare il nome dell'applicazione di processo da avviare.2
Passaggio da un'applicazione di processo avviata a un'altraPer ciascuna applicazione avviata è disponibile un pulsante rapido nella barra delleapplicazioni, analogamente alle viste della FlexPendant. Selezionare i pulsanti perpassare tra le applicazioni avviate e le viste.
en0400000768
In questo caso le viste e le applicazioni di processo in esecuzione sono:
Vista Esplora FlexPendantA
Vista Editor di programmaB
RobotWare Arc, un'applicazione di processoC
Vista Pannello di comandoD
98 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.6.5 Applicazioni di processo

3.6.6 Autorizzazione dell'accesso per RobotStudio
Informazioni sull'accesso in scrittura sul controllerIl controller accetta solo un utente alla volta provvisto di accesso in scrittura. Gliutenti di RobotStudio possono richiedere l'accesso in scrittura sul sistema. Se ilsistema è in esecuzione in modalità manuale, la richiesta viene accettata o rifiutatasulla FlexPendant.
Autorizzazione dell'accesso per RobotStudioQuesta procedura descrive come autorizzare l'accesso per RobotStudio.
AzioneQuando un utente in RobotStudio richiede l'accesso, viene visualizzato un messaggiosulla FlexPendant. Decidere se autorizzare o rifiutare l'accesso.
1
Se si desidera autorizzare l'accesso, scegliereAutorizza. L'utente mantiene l'accessoin scrittura finché non si disconnette o finché non gli viene rifiutato l'accesso.Se si desidera negare l'accesso, selezionare Rifiuta.
Se, dopo avere autorizzato l'accesso, si desidera revocarlo, selezionare Rifiuta.2
Nota
In caso di sistema collegato a T10, gli utenti di RobotStudio possono richiederel'accesso in scrittura premendo due volte il dispositivo di abilitazione edeffettuando la connessione come client locale.
Manuale dell'operatore - IRC5 con FlexPendant 993HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.6.6 Autorizzazione dell'accesso per RobotStudio

3.6.7 Inizio e termine di sessione (log-in e log-off).
Procedura di disconnessioneUtilizzare questa procedura per sconnettersi dal sistema.
Azione
Sul menu ABB, selezionare Disconnessione.1
Premere Sì per confermare.2
Procedura di accessoUtilizzare questa procedura per accedere ad una sessione al controller, utilizzandol’User Authorization System, UAS. UAS può limitare le funzioni disponibili per gliutenti.Dopo lo scollegamento, viene visualizzata automaticamente la finestra Accesso.
en0400000947
InformazioniAzione
Se si seleziona Utente prestabilito, lapassword non è necessaria, e l'accessoavviene automaticamente.
Selezionare il menu Utente e sceglierequindi l'utente.Se gli utenti sono più di sette, il menu vienesostituito da un pulsante.
1
Se l'utente scelto è provvisto di una pas-sword è necessario utilizzare la tastierasoftware per immetterla. SelezionareABC... per visualizzare la tastiera software.
2
Immettere la password e convalidare OK.
Selezionare Inizio sessione.3
Continua nella pagina successiva100 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.6.7 Inizio e termine di sessione (log-in e log-off).

Gestione degli utenti e dei livelli di autorizzazioneUlteriori informazioni su come aggiungere gli utenti o impostare l’autorizzazionein Manuale dell'operatore - RobotStudio.La modifica delle viste o delle funzioni che sono nascoste a determinati utenti èdescritta in Definire una vista da mostrare al cambio o all’avvio della modalitàoperativa a pagina 104.
Manuale dell'operatore - IRC5 con FlexPendant 1013HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.6.7 Inizio e termine di sessione (log-in e log-off).
Continua

3.7 Modifica delle impostazioni della FlexPendant
3.7.1 Impostazioni di sistema
3.7.1.1 Impostazione di percorsi predefiniti
Introduzione ai percorsi prestabilitiSi possono impostare singoli percorsi prestabiliti per certe azioni, tramite laFlexPendant.Si possono impostare i seguenti percorsi prestabiliti:
• Memorizzazione e caricamento di programmi RAPID.• Memorizzazione e caricamento di moduli RAPID.• Salvaguardia e memorizzazione dei file di configurazione.
Questa funzione è disponibile se l'utente collegato, dispone delle opportuneautorizzazioni. L'autorizzazione utente è gestita tramite RobotStudio. VedereManuale dell'operatore - RobotStudio.
Impostazione di percorsi prestabilitiUtilizzare questa procedura per impostare un percorso prestabilito.
Azione
Nel menu ABB, scegliere Pannello di comando e quindi FlexPendant.1
Selezionare Percorso predefinito del file system.
en0500002361
2
Selezionare il menu Tipo file da cui operare la scelta del tipo di percorso prestabilito:• Programmi RAPID• Moduli RAPID• File di configurazione
3
Digitare il percorso predefinito o scegliere Sfoglia per cercare la posizione desiderata.4
Se necessario, è possibile rimuovere un qualsiasi percorso immesso precedentementeselezionando Cancella.
5
Continua nella pagina successiva102 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.7.1.1 Impostazione di percorsi predefiniti

Azione
Premere OK.6
Manuale dell'operatore - IRC5 con FlexPendant 1033HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.7.1.1 Impostazione di percorsi predefiniti
Continua

3.7.1.2 Definire una vista da mostrare al cambio o all’avvio della modalità operativa
Visualizza al cambiamento della modalità operativa o all’avvioQuesta funzione può essere impiegata, ad esempio, se si desidera unavisualizzazione differente da quella della finestra Produzione, quando si commutaal modo Automatico.
Visualizza al cambiamento della modalità operativaUtilizzare questa procedura per configurare la FlexPendant affinché mostriautomaticamente una vista specificata durante un cambiamento della modalitàoperativa o un avvio.
Azione
Nel menu ABB, scegliere Pannello di controllo e quindi scegliere FlexPendant.1
Scegliere Visualizza su Evento di sistema.2La finestra Visualizza su Evento di sistema viene visualizzata.
en0400001152
Scegliere l’elenco Evento di sistema e selezionare un tipo di evento di sistema.3I tipi disponibili sono i seguenti:
• Passaggio in modalità automatica: Selezionare questa opzione per definire lavista FlexPendant quando si passa alla modalità automatica.
• Passaggio in modalità manuale: Selezionare questa opzione per definire lavista FlexPendant quando si passa alla modalità manuale.
• Passaggio in modalità manuale a velocità massima: Selezionare questa op-zione per definire la vista FlexPendant quando si passa alla modalità manualea velocità massima.
• Avvio di FlexPendant: Selezionare questa opzione per definire la vista quandoFlexPendant viene avviato.
Nel campo Vista selezionata, toccare ... e selezionare un’applicazione desiderata davisualizzare durante l’evento di sistema selezionato.
4
Premere OK.5Le modifiche vengono salvate.
Continua nella pagina successiva104 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.7.1.2 Definire una vista da mostrare al cambio o all’avvio della modalità operativa

Nota
Il pulsanteCancella vista rimuoverà la visualizzazione correntemente selezionata,se non si desidera che una vista data venga mostrata automaticamente.
Manuale dell'operatore - IRC5 con FlexPendant 1053HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.7.1.2 Definire una vista da mostrare al cambio o all’avvio della modalità operativa
Continua

3.7.1.3 Modifica dell'immagine di sfondo
Immagini di sfondoÈ possibile cambiare l'immagine di sfondo sulla FlexPendant. È possibile utilizzarequalsiasi file immagine presente sul disco rigido del controller, che può essereuna fotografia o un'illustrazione.Per ottenere risultati migliori, utilizzare un'immagine conforme alle seguentiindicazioni:
• 640 per 390 pixel (larghezza, altezza)• Formato gif
Modifica dell'immagine di sfondoQuesta procedura descrive come cambiare l'immagine di sfondo sulla FlexPendant.
Azione
Nel menu ABB, scegliere Pannello di comando.1
Selezionare FlexPendant, e quindi Immagine di sfondo.
en0500001547
2
Selezionare Sfoglia per individuare un'altra immagine sul disco rigido del controller.3
Selezionare Predefinita per ripristinare l'immagine di sfondo originale.4
Premere OK.5
106 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.7.1.3 Modifica dell'immagine di sfondo

3.7.1.4 Definire il livello di visibilità per le funzioni protette UAS.
Introduzione ai livelli di visibilitàQuesta sezione descrive la modalità di definizione del livello di visibilità per lefunzioni protette dal sistema di autorizzazione utenti, UAS. Le funzioni protettepossono essere nascoste o visualizzate ma non sono accessibili. Tutte le altreoperazioni di amministrazione del sistema di autorizzazione degli utenti vengonosvolte mediante RobotStudio. Vedere Manuale dell'operatore - RobotStudio.
Definire il livello di visibilità per le funzioni protette UAS.
Azione
Nel menu ABB, scegliere Pannello di comando e quindi scegliere FlexPendant.1
Selezionare Sistema di autorizzazione utenti (UAS).
en0400001153
2
Selezionare il livello di visibilità per le funzioni protette del sistema di autorizzazionedegli utenti, UAS:
• Nascondi le funzioni non accessibili OPPURE• Visualizza messaggio quando si accede a funzioni protette.
3
Scegliere OK.4
Manuale dell'operatore - IRC5 con FlexPendant 1073HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.7.1.4 Definire il livello di visibilità per le funzioni protette UAS.

3.7.1.5 Definizione di una vista di test aggiuntiva
PanoramicaSe il sistema dispone di un’interfaccia operatore personalizzata, ovvero di una opiù applicazioni sviluppate mediante il FlexPendant SDK, è possibile abilitarel’utente ad avviare l’esecuzione di programmi in modo manuale, a partire da taleapplicazione. Se non dovesse essere disponibile una tale applicazione, comunque,la schermata per l’aggiunta di altre viste di test si presenterà come nell’illustrazionequi di seguito.
Definizione di una vista di test aggiuntivaLa procedura seguente descrive come definire una vista di test aggiuntiva.
Azione
Nel menu ABB, scegliere Pannello di comando e quindi FlexPendant.1
Selezionare Vista di test aggiuntiva.La schermata visualizzata potrà apparire così:
en0600003110
2
In genere, soltanto nell’Editor di programma e nella finestra Produzione potrannoapparire viste di test. Nel caso ci fossero più viste aggiuntive da selezionare, esseappariranno nell’elenco. Spuntare una o più applicazioni da utilizzare come viste ditest aggiuntive.
3
Scegliere OK.4
108 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.7.1.5 Definizione di una vista di test aggiuntiva

3.7.1.6 Definire la regola di programmazione della posizione
Introduzione alla denominazione delle posizioniLe posizioni del robot nel programma RAPID possono rappresentare variabilidenominate o no (utilizzando il carattere “jolly”, l’asterisco (*)). Il programmatorepotrà selezionare la regola di denominazione che la FlexPendant potrà utilizzarequando saranno programmate nuove istruzioni di spostamento.
Definizione della regola di programmazione della posizioneQuesta procedura illustra come definire una regola di denominazione per le nuoveposizioni dei robot.
Azione
Nel menu ABB, scegliere Pannello di comando e quindi FlexPendant.1
Selezionare Regola di programmazione delle posizioni.
en0500002415
2
Selezionare la regola di programmazione della posizione preferita.3
Premere OK.4
Regole di programmazione delle posizioniQuesta sezione offre una descrizione dettagliata delle opzioni disponibili per laprogrammazione delle posizioni del robot, a cui ci si riferisce come ai targets.Questo significa la posizione alla quale l’unità meccanica è programmata per lospostamento.I nuovi target possono essere denominati secondo uno di questi principi:
• Nuova posizione creata; regola di denominazione * o sequenziale.• Posizione successiva sequenziale selezionata già esistente.• Nessuna nuova posizione creata; regola di denominazione *
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 1093HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.7.1.6 Definire la regola di programmazione della posizione

Nuova posizione creata; regola di denominazione * o sequenzialeSi tratta della regola prestabilita. Quando viene programmata un'istruzione Move,viene creata automaticamente una nuova destinazione. Se è stato già denominatol’ultimo target, vale a dire non utilizzando un “*”, il nuovo target verrà denominatoin sequenza con il precedente.Ad esempio: MoveJ p10 sarà seguito da MoveJ p20, a meno che questo targetnon esista già, in seno al programma. In quest'ultimo caso verrà invece utilizzatoMoveJ p30 (o il numero libero successivo).
Posizione successiva selezionata già esistenteQuando viene programmata un'istruzione Move, non viene creata una nuovadestinazione. Sarà invece selezionato il successivo target nella sequanza creatain precedenza. Il primissimo target, comunque, sarà un “*”, dato che non esisteancora nessuna sequenza. Non appena il primo target sarà stato definito, questaregola verrà applicata.Ad esempio: Sono state predefinite certe destinazioni; da p10 a p50. In tal caso,MoveJ p10 sarà seguito da MoveJ p20. L'istruzione successiva utilizzerà ladestinazione p30, e così via finché non verrà raggiunta p50. Poiché non sono statedefinite ulteriori destinazioni, p50 verrà utilizzata pure per le destinazioni successive.
Nuova posizione non creata; regola di denominazione *Quando viene programmata un'istruzione Move, non viene creata una nuovadestinazione. Verrà invece sempre utilizzato un "*". Questo può essere sostituitoda una destinazione reale in una fase successiva.Ad esempio: MoveJ p10 verrà seguito da MoveJ *.
110 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.7.1.6 Definire la regola di programmazione della posizioneContinua

3.7.1.7 Definizione dei task selezionabili nel pannello dei task
Pannello dei taskIl pannello dei task si trova nel menu d’impostazione rapida. Vedere la sezioneMenu di impostazione rapida, Task a pagina 90.
Suggerimento
Per semplificare il debug dei task in background è possibile rendere visibili tuttii task (inclusi quelli in background) nel pannello dei task della FlexPendant.Quindi, in modalità manuale, tutti i task selezionati nel pannello dei task (inclusiquelli in background) si arresteranno una volta premuto il pulsante di arresto.
Definizione dei task da mostrareQuesta procedura illustra come impostare task selezionabili, nel pannello dei taskdel menu d’impostazione rapida.
Azione
Nel menu ABB, scegliere Pannello di comando e quindi scegliere FlexPendant.1
Selezionare Impostazioni del pannello dei task.2
Selezionare Solo task normali oppure Tutti i task.3Quando è selezionata l'opzione Tutti i task, tutti i task selezionati nel pannello dei task(inclusi quelli in background) si arresteranno una volta premuto il pulsante di arresto.I task in background selezionati verranno trattati come se il valore del parametro disistema Trustlevel fosse definito come NoSafety.
Premere OK.4
Manuale dell'operatore - IRC5 con FlexPendant 1113HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.7.1.7 Definizione dei task selezionabili nel pannello dei task

3.7.1.8 Gestione della visualizzazione del nome del controller e del sistema
PanoramicaÈ possibile gestire la visualizzazione del nome del controller e del sistemautilizzando questa funzione.
Nome del controller e del sistemaUtilizzare la procedura seguente per gestire la visualizzazione del nome delcontroller e del sistema nella barra di stato.
Azione
Nel menu ABB, scegliere Pannello di controllo e quindi scegliere FlexPendant.1Viene visualizzata la finestra Proprietà di configurazione FlexPendant.
Navigare e toccare Nome del controller e del sistema.2La finestra Nome del controller e del sistema viene visualizzata.
xx1700000330
Selezionare l’opzione di denominazione del controller e del sistema secondo i proprirequisiti.
3
Le opzioni disponibili e le loro descrizioni sono le seguenti:• Solo nome del controller. (Predefinito): Visualizza solo il nome del controller
nella barra di stato. Questa è l’opzione predefinita.• Solo nome del sistema: Visualizza solo il nome del sistema nella barra di stato.• Nome del controller e del sistema: Visualizza sia il nome del controller sia
quello del sistema nella barra di stato.
Premere OK.4Le modifiche vengono applicate e visualizzate nella barra di stato.
Selezionare Chiudi.5
112 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.7.1.8 Gestione della visualizzazione del nome del controller e del sistema

3.7.2 Impostazioni di base
3.7.2.1 Modifica di luminosità e contrasto
Opzioni di aspettoQuesto paragrafo descrive il menuAspetto, in cui è possibile regolare la luminositàe il contrasto dello schermo. Il contrasto può essere regolato soltanto sullaFlexPendant che non dispone di una porta USB.
Modifica di luminosità e contrastoQuesta procedura descrive come cambiare la luminosità e il contrasto delloschermo.
Azione
Nel menu ABB, scegliere Pannello di comando.1
Selezionare Aspetto.2
Selezionare il pulsante Più o Meno appropriato per regolare i livelli. Selezionare Pre-definito per ritornare ai valori predefiniti.L'impostazione della luminosità e del contrasto cambia durante la regolazione dei li-velli in modo da fornire una visione immediata degli effetti sulla visibilità.
3
Selezionare OK per utilizzare i nuovi livelli di luminosità e contrasto.4
Nota
Se si modificano la luminosità o il contrasto dai livelli predefiniti, alcune schermatepotrebbero apparire a striscie. Non si tratta comunque di un sintomo di schermodifettoso. Richiamare allora le impostazioni predefinite per evitare l'aspetto astrisce.
Manuale dell'operatore - IRC5 con FlexPendant 1133HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.7.2.1 Modifica di luminosità e contrasto

3.7.2.2 Adattamento della FlexPendant per utenti mancini
PanoramicaIl dispositivo funziona in genere mentre è la mano sinistra che lo mantiene. Unmancino, in genere, preferirà utilizzare la mano sinistra per lavorare con lo schermotattile. Potrà allora ruotare lo schermo a 180 gradi e utilizzare la sua mano destraper mantenere il dispositivo. La FlexPendant è predisposta alla consegna peressere utilizzata dalla mano destra, ma potrà essere in seguito adattata per leesigenze dei mancini.
FiguraLa FlexPendant mentre funziona da un persona destra, in cima, e da un mancino,sul fondo. Da notare soprattutto la posizione del pulsante di emergenza quandolo schermo è ruotato di 180 gradi.
en0400000913
Rotazione dello schermo della FlexPendantUtilizzare questa procedura per adattare la FlexPendant all’impiego da parte di unutente mancino.
Azione
Selezionare il menu ABB, quindi Pannello di comando.1
Selezionare Aspetto.2
Continua nella pagina successiva114 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.7.2.2 Adattamento della FlexPendant per utenti mancini

Azione
Selezionare Rotazione a destra.
en0400000915
3
Ruotare FlexPendant e suo spostamento nell’altra mano.4
Su che cosa influisce quest’azione?L’adattamento della FlexPendant per un utente mancino influirà sulle seguentiimpostazioni.
InformazioniEffettoImpostazione
Le illustrazioni delle direzionidi movimento nel menu dimovimento vengono regolateautomaticamente.
Le direzioni del joystick ven-gono regolate automaticamen-te.
Direzioni di spostamento
Vedere i pulsanti A-G nella fi-gura Pulsanti hardware a pa-gina 39.
I pulsanti Avvio, Arresto,Avanti e Indietro non cambia-no di posto nel caso dei pul-santi programmabili.
Pulsanti hardware e tasti pro-grammabili
Posizionato differentemente,in basso invece che in alto.
Nessun effetto.Arresto di emergenza
Nessun effettoDispositivo di attivazione a treposizioni
Manuale dell'operatore - IRC5 con FlexPendant 1153HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.7.2.2 Adattamento della FlexPendant per utenti mancini
Continua

3.7.2.3 Impostazioni controller
Impostazioni data e oraUsare la procedura di seguito illustrata per configurare data e ora.
AzioneFase
Nei menu ABB, toccare Pannello di controllo.1
Toccare Impostazioni Controller.Viene visualizzata la finestra impostazioni Data e ora.
2
Nel paragrafo Impostazioni, selezionareOra rete o Ora manuale.3SelezionareOra rete per configurare il controller del robot per la sincronizzazione automa-tica dell'ora tramite protocollo NTP di un server dell'ora. Il server dell'ora è identificatotramite il suo indirizzo IP o nome DNS. Selezionare Ora manuale se non si ha un serverdell'ora raggiungibile dal controller.
Selezionare il fuso orario richiesto nella sezioneFuso orario.4
Nella sezione Data e Ora, toccare il pulsante + (Più) o - (Meno) e configurare la data e l'ora.5
Premere OK.6Le impostazioni selezionate vengono salvate.
Nota
La data e l'ora vengono visualizzate in base allo standard ISO che prevede perla data il formato anno-mese-giorno e per l'ora il formato ora:minuti (formato 24ore).
Impostazioni di reteSeguire la seguente procedura per configurare la rete.
AzioneFase
Nei menu ABB, toccare Pannello di controllo.1
Toccare Impostazioni Controller.2
Navigare fino alla parte inferiore del menù, toccare Impostazioni e selezionare Rete.Si apre la finestra Pannello di controllo - Impostazioni controller - Rete.
3
Configurare le impostazioni di rete in base ai requisiti del sistema.4
Premere OK.5Le impostazioni selezionate vengono salvate.
Impostazioni identitàSeguire la seguente procedura per configurare l’identità del controller.
AzioneFase
Nei menu ABB, toccare Pannello di controllo.1
Toccare Impostazioni Controller.2
Navigare fino alla parte inferiore del menù, toccare Impostazioni e selezionare Identità.Si apre la finestra Pannello di controllo - Impostazioni controller - Identità.
3
Modificare il nome del controller nel campo Nome controller in base alle esigenze del si-stema.
4
Continua nella pagina successiva116 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.7.2.3 Impostazioni controller

AzioneFase
Premere OK.5Il nome del controller viene memorizzato.
Manuale dell'operatore - IRC5 con FlexPendant 1173HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.7.2.3 Impostazioni controller
Continua

3.7.2.4 Configurazione degli I/O più comuni
Segnali di I/O più comuniSegnali di I/O più comuni Viene utilizzata nell'Editor di programmi per visualizzareun elenco dei segnali di I/O utilizzati più comunemente nel sistema robotico. Datoche vi possono essere molti segnali, può risultare utile l'impiego di questa selezione.Il contenuto dell'elenco può essere ordinato manualmente. Per impostazionepredefinita, i segnali sono ordinati seguendo l'ordine con cui sono stati creati.I segnali di I/O più comuni possono anche essere configurati mediante i parametridi sistema nell'argomento Man-machine Communication. Tuttavia, l'ordinamentodell'elenco può essere eseguito solo mediante la funzione disponibile nel Pannellodi comando.
Configurazione degli I/O più comuniUtilizzare questa procedura per configurare l'elenco Segnali di I/O più comuni.
Azione
Nel menu ABB, scegliere Pannello di comando.1
Selezionare I/O.Viene visualizzato un elenco di tutti i segnali di I/O definiti nel sistema con caselle dicontrollo.
2
Selezionare i nomi dei segnali da selezionare per l'elenco Segnali di I/O più comuni.3Selezionare Tutti o Nessuno per selezionare tutti i segnali o nessun segnale.Selezionare Nome o Tipo per ordinare in base al nome o al tipo di segnale.
Selezionare Anteprima per visualizzare l'elenco dei segnali e regolare il criterio diordinamento.
4
Selezionare un segnale da selezionare, quindi scegliere le frecce per spostare il se-gnale verso l'alto o verso il basso nell'elenco e riorganizzare l'ordinamento.Selezionare APPLICA per salvare il criterio di ordinamento.Selezionare Modifica per ritornare all'elenco di tutti i segnali.
Selezionare APPLICA per salvare le impostazioni.5
118 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.7.2.4 Configurazione degli I/O più comuni

3.7.2.5 Modifica della lingua
LingueLa FlexPendant viene installata con, e supporta, 20 lingue diverse. Per impostazionepredefinita, la lingua corrente è l'inglese.È molto semplice passare da una delle lingue installate all'altra. Per maggioriinformazioni, vedere Modifica della lingua a pagina 119.
Nota
Quando si commuta ad un’altra lingua, tutti i pulsanti, menu e dialoghiutilizzeranno la nuova lingua. Istruzioni RAPID, variabili, parametri di sistema esegnali di I/O non vengono interessati dalla modifica.
Modifica della linguaUtilizzare questa procedura per cambiare la lingua della FlexPendant.
Azione
Nel menu ABB, scegliere Pannello di comando.1
Selezionare Lingua.Viene visualizzato un elenco di tutte le lingue installate.
2
Selezionare la lingua desiderata.3
Selezionare OK. Viene visualizzata una finestra di dialogo. Selezionare Sì per prose-guire e riavviare la FlexPendant.La lingua corrente viene sostituita da quella selezionata.
4
Manuale dell'operatore - IRC5 con FlexPendant 1193HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.7.2.5 Modifica della lingua

3.7.2.6 Modifica dei tasti programmabili
PanoramicaI pulsanti programmabili sono quattro pulsanti fisici, sulla FlexPendant, che possonoessere utilizzati per specifiche funzioni dedicate stabilite dall'utente. VederePulsantihardware a pagina 39.I tasti possono essere programmati per semplificare la programmazione o la verificadei programmi. Possono anche essere utilizzati per attivare menu sulla FlexPendant.
Modifica dei tasti programmabiliUtilizzare questa procedura per impostare i pulsanti programmabili:
Azione
Nel menu ABB, scegliere Pannello di comando.1
Selezionare TastiProg.
en0400001154
2
Selezionare il tasto da programmare, Tasto 1-4, nell'elenco di selezione, parte supe-riore.
3
Selezionare il menu Tipo per selezionare il tipo di azione:• Nessuno• Input• Output• Sistema
4
Se è stato selezionato il Tipo Input.• Selezionare uno degli input digitali dall'elenco.• Selezionare il menu Consenti in auto per selezionare se la funzione è consen-
tita anche nella modalità operativa automatica.
Nota
Un ingresso non può essere impostato con un pulsante programmabile: il suo valorepuò essere solo pulsato. L’impulso sarà il valore invertito dell’ingresso.
5
Continua nella pagina successiva120 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.7.2.6 Modifica dei tasti programmabili

Azione
Se è stato selezionato il Tipo Output.• Selezionare uno degli output digitali dall'elenco• Selezionare il menu Tasto premuto per definire come deve comportarsi il se-
gnale quando il tasto viene premuto.• Selezionare il menu Consenti in auto per selezionare se la funzione è consentita
anche nella modalità operativa automaticaFunzioni Tasto premuto:
• Commuta - commuta il valore del segnale da 0 a 1 o viceversa• Imposta a 1 - predispone il segnale a 1• Imposta a 0 - predispone il segnale a 0• Premi/Rilascia - imposta il valore del segnale a 1 quando si preme il tasto (da
notare che un segnale invertito sarà impostato a 0)• Impulso - il valore del segnale viene emesso via impulso una sola volta
6
Se è stato selezionato il Tipo Sistema.• Selezionare il menu Tasto premuto per selezionare Sposta PP in main• Selezionare il menu Consenti in auto per selezionare se la funzione è consen-
tita anche nella modalità operativa automatica
7
Configurare gli altri tasti come descritto nei passi precedenti, dal 3 al 7.8
Selezionare OK per salvare le impostazioni.9
Manuale dell'operatore - IRC5 con FlexPendant 1213HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.7.2.6 Modifica dei tasti programmabili
Continua

3.7.2.7 Calibratura dello schermo tattile
RicalibraturaQuesti paragrafo descrive come ricalibrare lo schermo tattile. Il touch screen ècalibrato alla consegna e normalmente non è necessario ricalibrarlo. A secondadel modello di FlexPendant, l’aspetto dei simboli può variare, ma la funzione ècomunque sempre la stessa.
en0400000974
Calibratura dello schermo tattileUtilizzare questa procedura per calibrare lo schermo tattile.
InformazioniAzione
Nel menu ABB, scegliere Pannello di comando.1
Selezionare Touch Screen.2
Selezionare Ricalibra.Lo schermo verrà disattivato per alcuni secondi.Sullo schermo verrà visualizzata una serie di simbo-li, uno dopo l’altro.
3
ATTENZIONE
Non utilizzare oggetti aguzzi, inquanto si potrebbe danneggiarela superficie dello schermo.
Selezionare il centro di ciascun simbolo con unoggetto a punta.
4
La ricalibratura è completata.5
Continua nella pagina successiva122 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.7.2.7 Calibratura dello schermo tattile

A proposito della funzione di calibratura del toccoLa funzione di calibratura del tocco attende, per ciascun punto di calibratura, unacoppia di coordinate di tocco, o che il tocco stesso venga rilasciato. Verrà alloracalcolata la media delle coordinate raccolte, ed il simbolo si sposterà alla posizionesuccessiva.Il controllore del tocco spedisce nuove coordinate alla CPU solo quando talicoordinate stanno cambiando. Se si tocca il simbolo molto accuratamente, medianteuno stiletto, le coordinate di tocco non cambiano. Allora il controllore di tocco inviasolo una coordinata, e la funzione di calibratura di tocco aspetta indefinitamenteulteriori coordinate.Il modo migliore per evitare questo problema è quello di picchiettare sul simboloper un solo secondo, e poi rilasciare il contatto.
Manuale dell'operatore - IRC5 con FlexPendant 1233HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
3 Navigazione e manipolazione della FlexPendant3.7.2.7 Calibratura dello schermo tattile
Continua

Questa pagina è stata intenzionalmente lasciata bianca

4 Movimento manuale4.1 Introduzione al spostamento
Che cosa è il spostamento?Con “spostamento” si intende l'operazione di posizionamento manuale omovimentazione di robot o assi esterni.
Quando è possibile il spostamento?È possibile effettuare lo spostamento in modalità manuale, ma non durantel'esecuzione dei programmi.
Movimento manuale del robotQuesta procedura descrive le fasi principali per lo spostamento del robot.
InformazioniAzione
La modalità manuale è descritta nel para-grafo Informazioni sulla modalità manualea pagina 29.
È possibile muovere manualmente il robotnelle seguenti condizioni:
• Il sistema è stato avviato come de-scritto in questo manuale.
• Non è in esecuzione alcuna opera-zione programmata.
• Il sistema è in modalità manuale.• Il dispositivo di attivazione a tre po-
sizioni è premuto e il sistema è nellostato di Motori accesi.
1
L'avvio nella modalità manuale è descrittonel paragrafo Avvio dei programmi a pagi-na 249.Il passaggio alla modalità manuale è de-scritto nel paragrafo Passaggio dalla mo-dalità automatica a quella manuale a pagi-na 270.
La differenza tra i vari tipi di spostamentoè descritta nel paragrafo Introduzione alspostamento a pagina 125.
Determinare in quale modo si desidera ef-fettuare il spostamento.
2
Il modo di selezionare il sistema di coordi-nate viene illustrato nel paragrafo Selezio-nare il sistema di coordinate a pagina 143.
Il spostamento del robot asse per asse èdescritto nel paragrafo Spostamento asseper asse a pagina 141.
Seleziona un'unità meccanica. Gli assipossono essere spostati in diversi modi.
3
Il range di lavoro del robot è definito daiparametri di sistema. Vedere la Manualetecnico di riferimento - Parametri di siste-ma.
Definire il range di lavoro per il robot o irobot e per qualsiasi altra apparecchiaturaoperante nella cella del robot.
4
La FlexPendant e le relative varie parti esezioni sono descritte nel paragrafo Flex-Pendant a pagina 37.
Muovere manualmente il manipolatoremediante il joystick sulla FlexPendant.
5
Il joystick e la procedura per mappare lerelative direzioni, sono descritti nel paragra-fo Selezione della modalità di movimentoa pagina 138.La procedura per impedire che venganoprovocati movimenti del manipolatore indeterminate direzioni durante il spostamen-to è descritta nel paragrafo Blocco deljoystick in direzioni specifiche a pagina144.La modalità di spostamento può esseresoggetta a limitazioni, vedere la sezioneLimitazioni al spostamento a pagina 134.
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 1253HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
4 Movimento manuale4.1 Introduzione al spostamento

InformazioniAzione
Il spostamento di più manipolatori è descrit-to nel paragrafo Spostamento coordinatoa pagina 135.
In alcuni casi, è possibile muovere manual-mente più di un manipolatore alla volta.Questa possibilità richiede l’opzioneMulti-Move.
6
Informazioni sulle modalità di movimento e i robotLa modalità di movimento e/o il sistema di coordinate selezionati determinano ilmodo in cui viene mosso il robot.Nella modalità di movimento lineare, il punto centrale dell’utensile si muove lungolinee rette nello spazio con un criterio di “movimento dal punto A al punto B”. Ilpunto centrale dell’utensile si muove nella direzione degli assi del sistema dicoordinate selezionato.La modalità asse per asse muove il robot di un asse alla volta. Ciò rende piùdifficoltoso prevedere in che modo si sposta il punto centrale dell'utensile.
Informazioni sulle modalità di movimento e gli assi aggiuntiviGli assi aggiuntivi possono essere mossi manualmente solo asse per asse. Unasse aggiuntivo può essere progettato per qualche tipo di movimento lineare oper il movimento rotatorio (angolare). Il movimento lineare viene utilizzato neitrasportatori, il movimento rotatorio in molti tipi di manipolatori di pezzi di lavoro.Gli assi aggiuntivi non vengono influenzati dal sistema di coordinate selezionato.
Informazioni sui sistemi di coordinateIl posizionamento di un perno su un foro tramite una pinza può essere eseguito inmodo molto semplice nel sistema di coordinate utensile, se una delle coordinatein tale sistema è parallela al foro. L'esecuzione dello stesso task nel sistema dicoordinate di base potrebbe richiedere il spostamento in tutte le coordinate x, y ez, rendendo più difficile garantire la precisione.La selezione dei sistemi di coordinate più appropriati per il spostamento puòsemplificare le operazioni, ma non esistono tuttavia risposte semplici e univochesu quale sistema scegliere.Un determinato sistema di coordinate consentirà di muovere il punto centraledell'utensile verso la posizione di destinazione con un minor numero di movimentidel joystick rispetto a un altro.La scelta sarà guidata anche dalla valutazione di condizioni come le limitazioni dispazio, gli ostacoli o la dimensione fisica di un oggetto di lavoro o di un utensile.Per ulteriori informazioni sui sistemi di coordinate, vedere la sezione Sistemi dicoordinate per lo spostamento a pagina 127.
126 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
4 Movimento manuale4.1 Introduzione al spostamentoContinua

4.2 Sistemi di coordinate per lo spostamento
Sistemi di coordinateUn sistema di coordinate definisce il piano o spazio tramite gli assi da un puntofisso chiamato origine. Le destinazioni e le posizioni del robot vengono individuatetramite misurazioni lungo gli assi dei sistemi di coordinate.Un robot utilizza vari sistemi di coordinate, ciascun adeguato a tipi specifici dispostamento o di programmazione.
• Il sistema di coordinate di base è situato alla base del robot. È il sistema piùsemplice per spostare il robot da una posizione a un'altra.
• Il sistema di dell'oggetto di lavoro è relativo al pezzo di lavoro ed è spessoil migliore per la programmazione del robot.
• Il sistema di coordinate utensile definisce la posizione dell'utensile utilizzatodal robot quando raggiunge le destinazioni programmate.
• Il sistema di coordinate universale che definisce la cella del robot. Tutti glialtri sistemi di coordinate sono direttamente o indirettamente legati al sistemadi coordinate universale. È utile per il spostamento, i movimenti generali eper gestire stazioni e celle con più robot o robot spostati tramite assi esterni.
• Il sistema di coordinate utente è utile per rappresentare l'attrezzatura chesostiene altri sistemi di coordinate, come gli oggetti di lavoro.
Impostazioni prestabiliteSe si modifica il sistema di coordinate nelle proprietà di spostamento, tale sistemaverrà automaticamente riazzerato alle impostazioni prestabilite dopo un riavvio.
Modalità linearePer ciascuna unità meccanica, il sistema utilizzerà come prestabilito il sistema dicoordinate di base per la modalità di movimento lineare.
Modalità di riorientamentoPer ciascuna unità meccanica, il sistema utilizzerà come prestabilito il sistema dicoordinate utensile per la modalità di movimento di riorientamento.
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 1273HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
4 Movimento manuale4.2 Sistemi di coordinate per lo spostamento

Illustrazione degli assi e delle direzioni del joystickGli assi di un manipolatore generico a sei assi si possono spostare manualmente,tramite il joystick. Per determinare l'orientamento fisico degli assi aggiuntiviconsultare la documentazione dell'impianto o della cella.L’illustrazione mostra i modelli di movimento per ciascun asse del manipolatore.
xx0300000520
Continua nella pagina successiva128 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
4 Movimento manuale4.2 Sistemi di coordinate per lo spostamentoContinua

Sistema di coordinate di base
xx0300000495
Il sistema di coordinate di base ha il suo punto zero alla base del robot, checonsente di prevedere i movimenti per i robot fissi. Di conseguenza è utile per lospostamento manuale di un robot da una posizione a un'altra. Per laprogrammazione di un robot, spesso sono più utili altri sistemi di coordinate, comeil sistema di coordinate dell'oggetto di lavoro. Per ulteriori informazioni, vedereSistema di coordinate dell'oggetto di lavoro a pagina 130.Quando si staziona davanti al robot e si esegue il spostamento nel sistema dicoordinate di base, in un sistema robotico configurato normalmente, lo spostamentodel joystick verso l'operatore consentirà sempre di muovere il robot lungo l'asseX, mentre lo spostamento del joystick verso i lati consentirà di muoverlo lungol'asse Y. La rotazione del joystick consentirà di muovere il robot lungo l'asse Z.
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 1293HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
4 Movimento manuale4.2 Sistemi di coordinate per lo spostamento
Continua

Sistema di coordinate dell'oggetto di lavoro
xx0600002738
Sistema di coordinate universaliA
Sistema di coordinate dell'oggetto di lavoro 1B
Sistema di coordinate dell'oggetto di lavoro 2C
Il sistema di coordinate dell'oggetto di lavoro corrisponde al pezzo di lavoro.Definisce la posizione del pezzo di lavoro in relazione al sistema di coordinateuniversali o a qualsiasi altro sistema di coordinate.Un sistema di coordinate dell'oggetto di lavoro deve essere definito in due sistemidi riferimento, il sistema di riferimento utente (relativo al sistema di riferimentouniversale) e il sistema di riferimento oggetto (relativo al sistema di riferimentoutente).Un robot può avere più sistemi di coordinate dell'oggetto di lavoro, perrappresentare differenti pezzi di lavoro o varie copie dello stesso pezzo di lavoroin posizioni diverse.Nei sistemi di coordinate dell'oggetto di lavoro è possibile creare destinazioni epercorsi durante la programmazione del robot. Ciò fornisce numerosi vantaggi:
• Quando si riposiziona il pezzo di lavoro nella stazione è sufficiente cambiarela posizione del sistema di coordinate dell'oggetto di lavoro e tutti i percorsivengono aggiornati in una sola operazione.
• Consente di spostare i pezzi di lavoro tramite assi esterni o trasportatori, inquanto è possibile spostare l'intero oggetto di lavoro con i relativi percorsi.
Esempi di utilizzoAd esempio, si stanno determinando le posizioni di alcuni buchi da forare lungo ilbordo dell'oggetto di lavoro.Si sta creando una saldatura tra due pareti in una scatola.
Continua nella pagina successiva130 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
4 Movimento manuale4.2 Sistemi di coordinate per lo spostamentoContinua

Sistema di coordinate utensile
en0300000497
Il sistema di coordinate utensile ha la sua posizione zero nel punto centraledell'utensile. Come risultato definisce la posizione e l'orientamento dell'utensile.Il sistema di coordinate utensile è spesso abbreviato in TCPF ((Tool Center PointFrame) e il relativo centro in TCP (Tool Center Point).Si tratta del TCP che il robot sposta sulle posizioni programmate durantel'esecuzione dei programmi. Questo significa che se si cambia l'utensile, e il sistemadi coordinate utensile, verranno modificati anche i movimenti del robot in modoche il nuovo TCP raggiunga la destinazione.Tutti i robot hanno un sistema di coordinate utensile predefinito, chiamato tool0,situato sul polso del robot. Da tool0 è quindi possibile definire uno o più nuovisistemi di coordinate utensile.Quando si muove manualmente un robot, il sistema di coordinate utensile è utilequando non si desidera cambiare l'orientamento dell'utensile durante il movimento,ad esempio durante il movimento di una sega senza che questa venga piegata.
Esempi di utilizzoUtilizzare un sistema di coordinate utensile quando è necessario programmare oregolare le operazioni per la filettatura, foratura, fresatura o segatura.
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 1313HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
4 Movimento manuale4.2 Sistemi di coordinate per lo spostamento
Continua

Sistema di coordinate universali
en0300000496
Sistema di coordinate di base per il robot 1A
Sistema di coordinate universaliB
Sistema di coordinate di base per il robot 2C
Il sistema di coordinate universali ha il suo punto zero in una posizione fissa nellacella o nella stazione. Ciò lo rende utile per la manipolazione di più robot o di robotspostati tramite assi esterni.Per impostazione predefinita il sistema di coordinate universali coincide con ilsistema di coordinate di base.
Esempi di utilizzoAd esempio, supponiamo di avere due robot, uno montato a pavimento e uno asoffitto. Il sistema di coordinate di base del robot a soffitto sarebbe capovolto.Se si muove manualmente il robot a soffitto nel sistema di coordinate di base, saràpiuttosto difficile prevedere i movimenti. Selezionare invece il sistema di coordinateuniversali condiviso.
132 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
4 Movimento manuale4.2 Sistemi di coordinate per lo spostamentoContinua

4.3 Direzioni joystick
Introduzione alle direzioni del joystickL'area Direzioni joystick mostra la corrispondenza tra gli assi del joystick e gliassi del sistema di coordinate selezionato.
ATTENZIONE
La funzione delle proprietà Direzioni non è quella di mostrare la direzione in cuisi muoverà l'unità meccanica. Provare sempre a eseguire il spostamento conpiccoli spostamenti del joystick in modo da apprendere le effettive direzionidell'unità meccanica.
Direzioni joystickIl significato delle direzioni del joystick dipende dalla modalità di movimento cheè stata selezionata.
DescrizioneIllustrazione del joystickModalità di movi-mento
La modalità lineare è descritta nelparagrafo Impostazionedell'orientamento dell'utensile apagina 140.
en0400001131
Lineare
La modalità Asse 1-3 è descrittanel paragrafo Spostamento asseper asse a pagina 141.
en0300000536
Assi 1, 2 e 3(impostazione prede-finita per i robot)
La modalità Asse 4-6 è descrittanel paragrafo Spostamento asseper asse a pagina 141.
en0300000537
Assi 4, 5 e 6
La modalità riorienta è descrittanel paragrafo Impostazionedell'orientamento dell'utensile apagina 140.
en0400001131
Riorienta
Manuale dell'operatore - IRC5 con FlexPendant 1333HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
4 Movimento manuale4.3 Direzioni joystick

4.4 Limitazioni al spostamento
Spostamento di assi aggiuntiviGli assi addizionali possono essere spostati lentamente soltanto asse per asse.VedereApplication manual - Additional axes and stand alone controller.
Spostamento di unità meccaniche non calibrateSe l'unità meccanica non è calibrata verrà visualizzato il testo Unità non calibratanell'area Posizione della finestra Spostamento.Un'unità meccanica non calibrata può essere mossa manualmente solo asse perasse. Il relativo range di lavoro non verrà verificato.Quando il robot non è calibrato, il movimento incrementale è ristretto a un solopasso per ogni deflessione del joystick. Un robot calibrato esegue 10 passi/secondoper ogni deflessione del joystick.
ATTENZIONE
Le unità meccaniche il cui range di lavoro non è controllato dal sistema roboticopossono essere spostate in posizioni pericolose. Per evitare pericoli perl'attrezzatura o per il personale è necessario utilizzare e configurare gli arrestimeccanici.
Spostamento degli assi in modalità indipendenteNon è possibile muovere lentamente gli assi in modalità indipendente. Per lospostamento è necessario riportare gli assi in modalità normale. Per ulterioriinformazioni, vedere Application manual - Controller software IRC5.
Spostamento mediante le zone universaliSe è stata installata l'opzioneWorld Zones, le zone definite limiteranno il movimentomentre si attua lo spostamento lento. Per ulteriori informazioni, vedereApplicationmanual - Controller software IRC5.
Spostamento con carichi degli assi non impostatiSe su uno degli assi del robot è montata dell'attrezzatura, allora è necessarioimpostare i carichi degli assi. Diversamente, durante il spostamento si possonoverificare errori di sovraccarico.L'impostazione dei carichi degli assi è descritta nel manuale del prodotto fornitocon il robot.
Spostamento con pesi dell'utensile o del carico utile non impostatiSe il peso degli utensili o dei carichi utili non è impostato, allora durante ilspostamento si potrebbero verificare errori di sovraccarico. I carichi di assiaggiuntivi controllati da software specifico (modelli dinamici) possono essereimpostati solamente nella programmazione.
134 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
4 Movimento manuale4.4 Limitazioni al spostamento

4.5 Spostamento coordinato
CoordinamentoUn robot coordinato a un oggetto di lavoro seguirà i movimenti di tale oggetto.
Spostamento coordinatoSe l'unità meccanica che muove l'oggetto di lavoro viene spostata manualmente,qualsiasi robot che è coordinato con l'oggetto di lavoro verrà mosso in modo daconservare la posizione relativa all'oggetto di lavoro.
Impostazione del coordinamento
InformazioniAzione
Vedere Selezionare l’unità meccanica perlo spostamento a pagina 136.
Selezionare il robot che deve essere coor-dinato con un'altra unità meccanica.
1
VedereSelezionare il sistema di coordinatea pagina 143.
ImpostareSistemadi coordinate su Ogget-to di lavoro.
2
VedereSelezione dell'utensile, dell'oggettodi lavoro e del carico utile a pagina 139.
Impostare Oggetto di lavoro sull'oggettodi lavoro mosso dall'altra unità meccanica.
3
Qualsiasi spostamento che viene eseguitomentre questa unità meccanica è selezio-nata interesserà anche il robot con il qualeessa è coordinata.
Selezionare l'unità meccanica che muovel'oggetto di lavoro.
4
Coordinamento di robotIl coordinamento di robot, in modo che lo spostamento manuale di uno determiniquello di un altro, richiede l'opzione MultiMove. Vedere Manualedell'applicazione - MultiMove.
Manuale dell'operatore - IRC5 con FlexPendant 1353HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
4 Movimento manuale4.5 Spostamento coordinato

4.6 Impostazioni di base per il spostamento
4.6.1 Selezionare l’unità meccanica per lo spostamento
Proprietà di spostamentoSe il sistema presenta più di un robot, ovvero robot o assi aggiuntivi, è necessarioselezionare l’unità meccanica da spostare quando si utilizza il joystick.Vi sono tre modi di selezionare l’unità meccanica:
• Utilizzare il pulsante Selezione dell’unità meccanica.• Utilizzo della finestra Spostamento nel menu ABB.• Per l'utilizzo del menu Impostazione rapida per l'Unità meccanica, vedere
Menu di impostazione rapida, Unità meccanica a pagina 80.Tutte le modifiche eseguite alle proprietà di spostamento hanno effetto solosull'unità meccanica selezionata.Tutte le proprietà di spostamento vengono salvate e ripristinate quando si ritornaa muovere manualmente l'unità meccanica.
Identificazione delle unità meccanicheCiascuna unità meccanica che può essere mossa manualmente è rappresentatanell'elenco delle unità meccaniche. Il nome dell'unità è definito nella configurazionedel sistema. Ciascun unità è dotata anche di un simbolo che viene utilizzato nellabarra di stato, vedere la sezione Barra di stato a pagina 77.In modalità manuale, il pulsante del menu Impostazione rapida visualizza l’unitàmeccanica che è stata selezionata.Consultare la documentazione dell'impianto o della cella per vedere quali unitàmeccaniche sono disponibili nel sistema robotico.
Selezione dell’unità meccanica mediante un pulsante fisicoPremere il pulsante Selezione dell’unità meccanica per cambiare di unità. Unasingola pressione sul pulsante fa passare all’unità meccanica successiva, comenelle fasi di un ciclo.
xx0900000051
Selezione dell’unità meccanica nella finestra SpostamentoUtilizzare questa procedura nella finestra Spostamento per selezionare un’unitàmeccanica da spostare.
Azione
Nel menu ABB, scegliere Spostamento.1
Continua nella pagina successiva136 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
4 Movimento manuale4.6.1 Selezionare l’unità meccanica per lo spostamento

Azione
Selezionare Unità meccanica.
en0400000653
2
Selezionare l'unità meccanica da muovere manualmente, quindi scegliere OK.L'unità meccanica selezionata viene utilizzata fino a quando ne viene scelta un'altra osi chiude la finestra Movimento.
3
Esempi di utilizzoIl sistema robotico può essere composto da più di un singolo robot. È possibileche siano presenti anche altre unità meccaniche, come manipolatori di pezzi dilavoro o assi aggiuntivi montati sul robot, che possono essere mosse manualmente.
Informazioni correlateSe il sistema utilizza Multitasking, presenta più di un task di movimento ed utilizzapiù di un’unità meccanica, allora l’unità meccanica selezionata può esserecommutata automaticamente tra le finestre degli Editor di programmi. Vedere ilparagrafo Editor di programma a pagina 63.Le unità meccaniche possono essere attivate o disattivate mediante la funzioneAttiva nella finestraMovimento.
Manuale dell'operatore - IRC5 con FlexPendant 1373HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
4 Movimento manuale4.6.1 Selezionare l’unità meccanica per lo spostamento
Continua

4.6.2 Selezione della modalità di movimento
Modalità di movimentoVi sono tre modi di selezionare la modalità di movimento:
1 Utilizzando il pulsante Cambiamento della modalità di movimento.2 Utilizzo della finestra Spostamento nel menu ABB.3 Per l'utilizzo del menu Impostazione rapida per l'Unità meccanica, vedere
Menu di impostazione rapida, Unità meccanica a pagina 80.
Selezione della modalità di movimento per mezzo del pulsante di cambiamentoPremere il pulsante Cambiamento della modalità di movimentoriorientamento/lineare per commutare la modalità di movimento.
xx0900000052
Selezione della modalità di movimento nella finestra SpostamentoUtilizzare questa procedura per selezionare la modalità di movimento nella finestraSpostamento.
InformazioniAzione
Nel menu ABB, scegliere Spostamento.1
Selezionare Modalità di movimento.2
Il significato delle direzioni del joystick èillustrato in Direzione joystick dopo avereeseguito la selezione.
Selezionare la modalità desiderata e quindiOK.
3
Informazioni correlateDirezioni joystick a pagina 133.
138 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
4 Movimento manuale4.6.2 Selezione della modalità di movimento

4.6.3 Selezione dell'utensile, dell'oggetto di lavoro e del carico utile
PanoramicaÈ sempre importante scegliere l'utensile, l'oggetto di lavoro o il carico utile adatto.Ciò è assolutamente vitale quando si crea un programma tramite spostamentosulle posizioni di destinazione.Non procedere in tal senso può molto probabilmente determinare errori disovraccarico e/o un posizionamento non corretto quando si esegue il spostamentoo quando si esegue il programma in produzione.
Selezione dell'utensile, dell'oggetto di lavoro e del carico utile
Azione
Nel menu ABB, scegliere Spostamento per visualizzare le proprietà di spostamento.1
Selezionare Utensile, Oggetto di lavoro o Carico utile per visualizzare l'elenco degliutensili, oggetti di lavoro o carichi utili disponibili.
2
Selezionare l'utensile, l'oggetto di lavoro o il carico utile seguito da OK.3
Manuale dell'operatore - IRC5 con FlexPendant 1393HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
4 Movimento manuale4.6.3 Selezione dell'utensile, dell'oggetto di lavoro e del carico utile

4.6.4 Impostazione dell'orientamento dell'utensile
Esempi di utilizzoGli utensili per saldatura ad arco, smerigliatura ed erogazione devono essereorientati con un angolo particolare rispetto al pezzo di lavoro per garantire il risultatomigliore. È anche necessario configurare l'angolo per la foratura, fresatura osegatura.Nella maggior parte dei casi l'orientamento viene impostato quando è stato mossomanualmente il punto centrale dell'utensile su una posizione specifica come ilpunto di partenza di un'operazione. Dopo avere impostato l'orientamentodell'utensile si continua il spostamento lineare per completare il percorso el'operazione prevista.
Definizione dell'orientamento dell'utensileL'orientamento dell'utensileè relativo al sistema di coordinate selezionato. Tuttavia,dal punto di vista dell'utente non è percettibile.
Impostazione dell'orientamento dell'utensile
Azione
Nel menu ABB, scegliere Spostamento.1
Toccare Modalità di movimento, quindi scegliere Riorienta seguito da OK.2
Se non è già stato selezionato, selezionare l'utensile adeguato seguendo la proceduradescritta in Selezione dell'utensile, dell'oggetto di lavoro e del carico utile a pagina139.
3
Premere e tenere premuto il dispositivo di attivazione a tre posizioni per attivare imotori dell’unità meccanica.
4
Muovere il joystick e l’orientamento dell’utensile cambia.
Suggerimento
Utilizzare il menu Impostazione rapida per selezionare la modalità di spostamentopiù veloce.
140 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
4 Movimento manuale4.6.4 Impostazione dell'orientamento dell'utensile

4.6.5 Spostamento asse per asse
Spostamento asse per asseVi sono tre modi di selezionare gli assi per lo spostamento
• Utilizzo del pulsante Cambiamento della modalità di movimento per ungruppo di assi.
• Utilizzo della finestra Spostamento nel menu ABB.• Per l'utilizzo del menu Impostazione rapida per l'Unità meccanica, vedere
Menu di impostazione rapida, Unità meccanica a pagina 80.In modalità manuale, il pulsante del menu Impostazione rapida visualizza il gruppodi assi che è stato selezionato.Come utilizzare il joystick quando viene visualizzato il movimento asse per assenella zona Direzioni del joystick. Vedere pure Illustrazione degli assi e delledirezioni del joystick a pagina 128.
Esempi di utilizzoUtilizzare il spostamento asse per asse se è necessario:
• Allontanare l'unità meccanica lontano da una posizione pericolosa.• Allontanare gli assi di un robot da singolarità.• Posizionare gli assi per una calibratura fine.
Selezione di un gruppo di assi per mezzo del pulsante di cambiamentoPremere il pulsante Cambiamento della modalità di movimento per un gruppodi assi per commutare la modalità di movimento.
xx0900000053
Selezione di un gruppo di assi nella finestra SpostamentoUtilizzare questa procedura per selezionare un gruppo di assi nella finestraSpostamento.
Azione
Nel menu ABB, scegliere Spostamento.1
Selezionare Modalità di movimento.2
Selezionare il gruppo di assi 1-3 o 4-6 e quindi selezionare OK.3
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 1413HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
4 Movimento manuale4.6.5 Spostamento asse per asse

ATTENZIONE
Questa procedura avrà effetto sull'orientamento di qualsiasi utensile montato.Se l'orientamento risultante è importante, al termine eseguire la proceduradescritta in Impostazione dell'orientamento dell'utensile a pagina 140 una voltaterminato.
142 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
4 Movimento manuale4.6.5 Spostamento asse per asseContinua

4.6.6 Selezionare il sistema di coordinate
Sistemi di coordinate per lo spostamentoIl sistema di coordinamento più adatto allo spostamento dipende da molti fattori.Vedere i paragrafiSistemi di coordinate per lo spostamento a pagina127, per ulterioriinformazioni.Sono due i modi di selezionare un sistema di coordinate:
• Utilizzo della finestra Spostamento nel menu ABB.• Per l'utilizzo del menu Impostazione rapida per l'Unità meccanica, vedere
Menu di impostazione rapida, Unità meccanica a pagina 80.
PrerequisitiSelezionare la modalità di movimento adatta per lo spostamento desiderato.
Utensili fissi nel sistema di coordinate utensileSe il sistema robotico utilizza utensili fissi, per muovere manualmente in coordinateutensile è necessario selezionare l'utensile e l'oggetto di lavoro adatti (azionatodal robot).Il sistema di coordinate utensile è definito dalla posizione e dall'orientamentodell'utensile fisso ed è fisso nello spazio. Per eseguire le operazioni desiderateviene mosso l'oggetto di lavoro. In tal modo le posizioni possono essere espressenel sistema di coordinate utensile.
Selezione del sistema di coordinateUtilizzare questa procedura per selezionare un sistema di coordinate nella finestraSpostamento.
Azione
Nel menu ABB, scegliere Spostamento.1
Selezionare Sistema di coordinate.2
Selezionare un sistema di coordinate.3
Premere OK.4
Manuale dell'operatore - IRC5 con FlexPendant 1433HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
4 Movimento manuale4.6.6 Selezionare il sistema di coordinate

4.6.7 Blocco del joystick in direzioni specifiche
PanoramicaIl joystick può essere bloccato in direzioni specifiche per impedire il movimento diuno o più assi.Questo può essere utile, ad esempio, durante la regolazione precisa delle posizionio quando si programmano operazioni che devono essere eseguite solo nelladirezione di uno specifico asse del sistema di coordinate.Notare che gli assi bloccati dipendono dalla modalità di movimento attualmenteselezionata.
Quali assi vengono bloccati?Questa sezione descrive come visualizzare quali direzioni del joystick vengonobloccate.
Azione
Nel menu ABB, scegliere Spostamento per visualizzare le proprietà di spostamento.1
Selezionare Blocco joystick per verificare le proprietà del joystick o per verificare leproprietà dell'area Direzioni joystick sul lato destro della finestra.
2
Per gli assi bloccati viene visualizzato un simbolo di lucchetto.
Blocco del joystick in direzioni specificheQuesta sezione descrive come bloccare il joystick in direzioni specifiche.
Azione
Nel menu ABB, scegliere Spostamento.1
Selezionare Blocco joystick.
en0300000488
2
Continua nella pagina successiva144 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
4 Movimento manuale4.6.7 Blocco del joystick in direzioni specifiche

Azione
Selezionare l'asse o gli assi del joystick da bloccare.3A ogni scelta l'impostazione dell'asse commuta tra bloccato e sbloccato.
Selezionare OK per bloccare.4
Sblocco di tutti gli assiQuesta sezione descrive come sbloccare tutti gli assi dal blocco delle direzioni deljoystick.
Azione
Nel menu ABB, scegliere Spostamento.1
Selezionare Blocco joystick.2
Selezionare Nessuno, quindi OK.3
Manuale dell'operatore - IRC5 con FlexPendant 1453HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
4 Movimento manuale4.6.7 Blocco del joystick in direzioni specifiche
Continua

4.6.8 Movimento incrementale per il posizionamento preciso
Movimento incrementaleUtilizzare il movimento incrementale per muovere manualmente il robot di piccolipassi, rendendo possibile un posizionamento molto preciso.Questo significa che ogni volta che il joystick viene spostato, il robot si sposta diun passo (incremento). Se il joystick viene spostato per uno o più secondi, verràeseguita una sequenza di passi, alla velocità di 10 al secondo, che dipende dalladurata dello spostamento.La modalità predefinita è senza incremento, quindi quando il joystick viene spostatoil robot si muove in modo continuo.Vi sono tre modi di selezionare la quantità di incremento:
• Utilizzando il pulsante Cambiamento degli incrementi.• Utilizzando la finestra Spostamento nel menu ABB.• Utilizzando il menu Impostazione rapida per gli Incrementi, vedere Menu
di impostazione rapida, Incremento a pagina 86.Per utilizzare il pulsante di cambiamento, si deve per prima cosa selezionare unaquantità d’incremento nella finestraSpostamento o nel menu Impostazione rapida.
Selezione degli incrementi tramite il pulsante di cambiamentoPremere il pulsante Cambiamento incrementi per commutare la quantità diincremento; si può commutare tra "nessun incremento" e la quantità di incrementoselezionata in precedenza nella finestra Spostamento.
xx0900000054
Selezione degli incrementi nella finestra SpostamentoUtilizzare questa procedura per selezionare la quantità di movimento incrementaletramite la finestra Spostamento.
Azione
Nel menu ABB, scegliere Spostamento.1
Continua nella pagina successiva146 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
4 Movimento manuale4.6.8 Movimento incrementale per il posizionamento preciso

Azione
Selezionare Incremento.
en0400000971
2
Selezionare la modalità di incremento desiderata, la cui descrizione è fornita nel para-grafo Dimensioni del movimento incrementale a pagina 147.
3
Scegliere OK.4
Dimensioni del movimento incrementaleSelezionare tra incrementi piccoli, medi o grandi. È anche possibile definiredimensioni specifiche del movimento incrementale.
AngolareDistanzaIncremento
0.005°0,05 mmRidotto
0.02°1 mmMedio
0.2°5 mmAmpio
Utente
Manuale dell'operatore - IRC5 con FlexPendant 1473HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
4 Movimento manuale4.6.8 Movimento incrementale per il posizionamento preciso
Continua

4.6.9 Lettura della posizione esatta
Sulle posizioni e i contagiriLa posizione esatta del robot viene determinata utilizzando la posizione dei resovere dei contatori che conteggiano il numero dei giri di resolver. Tali contatori sichiamano contagiri.Se il robot è stato correttamente calibrato, la posizione corrente viene calcolataautomaticamente all’avvio.
ATTENZIONE
Se le posizioni vengono visualizzate con un testo rosso, significa che i valoriprovenienti dai contagiri sono andati perduti e che al loro posto vengonovisualizzati i valori memorizzati sull’SMB. Fare attenzione durante lo spostamentodel robot, nel caso che i valori fossero visualizzati con caratteri rossi. Osservareil robot da vicino, e NON utilizzare i valori visualizzati! Se l’unità meccanica nonfosse calibrata, la posizione effettiva può rivelarsi molto differente dai valori diposizionamento memorizzati dall’SMB. Si devono aggiornare i contagiri primadi poter avviare un programma. VedereAggiornamento del contagiri a pagina306.
Nota
Se non viene visualizzata alcuna posizione, ciò significa che l’unità meccanicanon è calibrata. Al posto dei valori, compare il messaggio Unità meccanicaselezionata non calibrata.
Nota
Quando si aggiornano i contagiri, la funzione o l'istruzione RAPID in corso vieneinterrotta e il percorso viene cancellato.
Modalità di visualizzazione delle posizioni del robotLe posizioni sono sempre visualizzate come:
• il punto nello spazio, espresso in coordinate del punto centrale dell'utensilex, y e z.
• La rotazione angolare del punto centrale dell'utensile, espressa in angoli diEulero, o come quaternione.
Modalità di visualizzazione delle posizioni degli assi aggiuntiviQuando si sposta un asse aggiuntivo, viene visualizzata solo la relativa posizione.Le posizioni dell'asse lineare sono visualizzate in millimetri espresse come distanzadalla posizione di calibratura.Le posizioni dell'asse rotante sono visualizzate in gradi espresse come angolodalla posizione di calibratura.
Continua nella pagina successiva148 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
4 Movimento manuale4.6.9 Lettura della posizione esatta

Lettura della posizione esattaQuesta procedura descrive la lettura della posizione esatta.
Azione
Nel menu ABB, scegliere Spostamento.1
La posizione viene visualizzata nelle proprietà dell'area Posizione sul lato destrodella finestra.
2
Vedere l'illustrazione in Movimento manuale a pagina 58.
Formato posizioneLa posizione può essere visualizzata in formati diversi. Selezionare Formato dellaposizione per modificare le impostazioni.La Posizione può essere visualizzata in relazione ai seguenti sistemi di riferimento:
• Universale• Base• Oggetto di lavoro
Il Formato di orientamento può essere impostato a:• Quaternione• Angoli di Eulero
Il Formato dell’angolo di posizione può essere impostato a:• Angoli
L’Unità dell’angolo di presentazione può essere impostata come:• Gradi• Radianti
Manuale dell'operatore - IRC5 con FlexPendant 1493HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
4 Movimento manuale4.6.9 Lettura della posizione esatta
Continua

4.6.10 Allineamento degli utensili
PanoramicaUn utensile può essere allineato con un altro sistema di coordinate.Quando si allinea un utensile, il relativo asse z viene allineato sull’asse più vicinodel sistema di coordinate selezionato. Di conseguenza è consigliabile per primacosa muovere manualmente l’utensile vicino alle coordinate desiderate.Tenere presente che i dati dell’utensile non vengono modificati.
Allineamento di unità meccanicheQuesta procedura descrive come allineare utensili.
Azione
Nel menu ABB, scegliere Spostamento.1
Assicurasi che sia attivo l'utensile corretto, quindi scegliere Allinea....
en0500001548
2
Selezionare un sistema di coordinate sul quale allineare l'utensile selezionato.3
Premere e tenere premuto il dispositivo di attivazione a tre posizioni quindi toccare ilpulsante Avvia allineamento per avviare l’allineamento dell’utensile.
4
Al termine scegliere Chiudi.5
150 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
4 Movimento manuale4.6.10 Allineamento degli utensili

5 Programmazione e test5.1 Prima di iniziare la programmazione
Strumenti di programmazionePer la programmazione è possibile utilizzare la FlexPendant e RobotStudio. LaFlexPendant è migliore per la modifica dei programmi, quali le posizioni e i percorsi,mentre RobotStudio è da preferire per una programmazione maggiormentecomplessa.La modalità di programmazione mediante RobotStudio è descritta in Manualedell'operatore - RobotStudio.
Definizione di utensili, carichi utili e oggetti di lavoroDefinire utensili, carichi utili e oggetti di lavoro prima di iniziare la programmazione.È sempre possibile creare altri oggetti anche in un secondo tempo, ma èconsigliabile definire preventivamente quelli di base.
AVVERTENZA
È importante definire sempre il carico effettivo dell'utensile e, se utilizzato, ilcarico utile del robot (ad esempio una parte afferrata). Definizioni non correttedei dati di carico possono sovraccaricare la struttura meccanica del robot.Se si specificano dati di carico inesatti, si possono verificare le conseguenzedescritte di seguito.
• Non verrà sfruttata la capacità massima del robot• Precisione del percorso preclusa; ciಠinclude un rischio di velocità
eccessiva• Rischio di sovraccarico della struttura meccanica
Il controller esegue il monitoraggio continuo del carico e scrive un registro eventise il carico è superiore al previsto. Questo registro eventi viene salvato eregistrato nella memoria del controller.
Definizione dei sistemi di coordinateAssicurarsi che i sistemi di coordinate di base e universali siano stati configuraticorrettamente durante l'installazione del sistema robotico. Assicurarsi inoltre chegli assi aggiuntivi siano stati configurati.Prima di iniziare la programmazione, definire anche i sistemi di coordinate utensilee dell’oggetto di lavoro. Via via che vengono aggiunti altri oggetti è anche necessariodefinire i corrispondenti sistemi di coordinate.
Suggerimento
Per ulteriori dettagli sul linguaggio e sulla struttura di RAPID, vedere Manualetecnico di riferimento - RAPID Overview e Manuale tecnico diriferimento - Istruzioni RAPID, Funzioni e Tipi di dati.
Manuale dell'operatore - IRC5 con FlexPendant 1513HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.1 Prima di iniziare la programmazione

5.2 Utilizzo di programmi RAPID
Utilizzo del programma RAPIDQuesta procedura descrive le fasi principali necessarie per la creazione, salvataggio,modifica e debug di programmi RAPID.Notare che sono disponibili maggiori informazioni rispetto a quanto segnalato nellaprocedura.
InformazioniAzione
La creazione di un programma RAPID èdescritta nel paragrafo Gestione dei pro-grammi a pagina 154.
Iniziare creando un programma RAPID.1
Procedere come descritto nel paragrafoGestione delle istruzioni a pagina 166.
Modificare il programma.2
La procedura per visualizzare, aggiungereo eliminare un modulo è descritta nel para-grafo Gestione dei moduli a pagina 157.
Per semplificare la programmazione emantenere una visione complessiva delprogramma, è possibile suddividerlo in piùmoduli.
3
La procedura per aggiungere o eliminareuna routine è descritta nel paragrafo Ge-stione delle routine a pagina 161.
Per semplificare ulteriormente la program-mazione, è possibile suddividere il moduloin più routine.
4
Leggere anche le sezioni seguenti:• Creazione di un utensile a pagi-
na 184.• Creazione di un oggetto di lavoro a
pagina 200.• Creazione di un carico utile a pagi-
na 208.
Durante la programmazione è possibilelavorare con:
• Utensili• Oggetti di lavoro• Carichi utili
5
I gestori degli errori sono descritti nei ma-nuali di RAPID.
Per gestire potenziali errori che si possonoverificare durante l'esecuzione, è possibilecreare un gestore errori.
6
Procedere come descritto nel paragrafoVerifica a pagina 214.
Dopo il completamento del programmaRAPID, sarà necessario verificarlo primadi metterlo in produzione.
7
La modifica delle posizioni durante l'esecu-zione del programma è descritta nel para-grafo HotEdit menu a pagina 54.
Dopo avere verificato l'esecuzione delprogramma RAPID, potrebbe essere neces-sario modificarlo. È possibile modificare oregolare le posizioni programmate, le posi-zioni del TCP o i percorsi.
8
La modifica delle posizioni in modalitàmanuale è descritta nel paragrafoModificadi posizioni tramite l'Editor di programmao la finestra Produzione. a pagina 273.
I programmi che non sono più necessaripossono essere rimossi.
9
Esecuzione del programmaQuesta procedura specifica come utilizzare un programma RAPID esistente.
InformazioniAzione
Vedere il paragrafo Avvio dei programmia pagina 249.
Caricare un programma esistente.1
Continua nella pagina successiva152 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.2 Utilizzo di programmi RAPID

InformazioniAzione
Vedere il paragrafo Menu di impostazionerapida, Modalità di esecuzione a pagina87.
Quando si avvia l'esecuzione di programmi,è possibile scegliere tra l'esecuzione delprogramma una volta o continua.
2
Vedere la sezione Avvio dei programmi apagina249 eUtilizzo di programmi multita-sking a pagina 253.
Dopo il caricamento del programma, èpossibile avviarne l'esecuzione.
3
Procedere come descritto nel paragrafoInterruzione dei programmi a pagina 252.
Terminata l'esecuzione del programma,questo può essere arrestato.
4
Manuale dell'operatore - IRC5 con FlexPendant 1533HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.2 Utilizzo di programmi RAPID
Continua

5.3 Concetto della programmazione
5.3.1 Gestione dei programmi
PanoramicaQuesta sezione descrive come svolgere la normale gestione dei programmidelrobot. Sono descritte le seguenti operazioni:
• creazione di un nuovo programma• caricamento di un programma esistente• salvataggio di un programma• ridenominazione di un programma• eliminare un programma
Ciascun task deve contenere un solo programma. Da notare che le seguentiprocedure descrivono un sistema a singolo task, ovvero un sistema in cui èdisponibile un solo task.La creazione di un nuovo programma quando non ve ne sono disponibili è descrittanel paragrafo Creazione di un programma a pagina 154.
Informazioni sui file di programmaQuando si salva un programma sul disco rigido del controller, per impostazionepredefinita viene salvato nella directory HOME della cartella di sistema se non èspecificato diversamente. La procedura per impostare un altro percorso predefinitoè descritta nel paragrafo Impostazione di percorsi predefiniti a pagina 102.Il programma viene salvato sotto forma di cartella, con il nome del programma eil file di programma effettivo di tipo pgf.Quando si carica un programma si apre la cartella di programma e si seleziona ilfile pgf.Per rinominare un programma si rinomina la cartella di programma e il file diprogramma.Quando si salva un programma caricato che è già stato salvato su disco, non sideve aprire la cartella di programma esistente. Invece, è necessario salvare dinuovo la cartella di programma e sovrascrivere la versione precedente o rinominareil programma.
Creazione di un programmaQuesta sezione descrive come creare un nuovo programma.
Azione
Nel menu ABB, scegliere Editor di programma.1
Selezionare Task e programmi.2
Continua nella pagina successiva154 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.3.1 Gestione dei programmi

Azione
Selezionare File, quindi Nuovo programma.Se è presente un programma caricato, viene visualizzata una finestra di dialogo diavvertimento.
• Selezionare Salva per salvare il programma caricato.• Selezionare Non salvare per chiudere il programma caricato senza salvarlo,
ovvero, eliminandolo dalla memoria.• Selezionare Annulla per lasciare il programma caricato.
3
Proseguire aggiungendo istruzioni, routine o moduli.Viene creato un nuovo programma.
4
Caricamento di un programma esistenteQuesta sezione descrive come caricare un programma esistente.
Azione
Nel menu ABB, scegliere Editor di programma.1
Selezionare Task e programmi.2
Selezionare File, quindi Carica programma.3Se è presente un programma caricato, viene visualizzata una finestra di dialogo diavvertimento.
• Selezionare Salva per salvare il programma caricato.• Selezionare Non salvare per chiudere il programma caricato senza salvarlo,
ovvero, eliminandolo dalla memoria.• Selezionare Annulla per lasciare il programma caricato.
Utilizzare lo strumento di ricerca dei file per individuare il file di programma da caricare(tipo di file pgf). Quindi scegliere OK.Il programma viene caricato e viene visualizzato il relativo codice.
en0400000699
4
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 1553HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.3.1 Gestione dei programmi
Continua

Salvataggio di un programmaQuesta sezione descrive come salvare un programma caricato sul disco rigido delcontroller.Un programma caricato viene salvato automaticamente nella memoria diprogramma, tuttavia il salvataggio sul disco rigido del controller offre unaprecauzione supplementare.
Azione
Nel menu ABB, scegliere Editor di programma.1
Selezionare Task e programmi.2
Selezionare File e selezionare Salva programma con nome....3
Utilizzare il nome di programma suggerito o scegliere ... per aprire la tastiera softwaree immettere un nuovo nome. Quindi scegliere OK.
4
Ridenominazione di un programma caricatoQuesta sezione descrive come rinominare un programma caricato.
Azione
Nel menu ABB, scegliere Editor di programma.1
Selezionare Task e programmi.2
Selezionare File e selezionare Rinomina programma.Viene visualizzata una tastiera software.
3
Utilizzare la tastiera software per immettere il nuovo nome del programma. Quindiscegliere OK.
4
Cancellazione di un programmaQuesta sezione descrive come eliminare un programma.
Azione
Nel menu ABB, scegliere Editor di programma.1
Selezionare Task e programmi.2
Selezionare File e selezionare Elimina programma.Viene visualizzata una finestra di dialogo di conferma.
3
Selezionare OK per eliminare, o Annulla per conservare intatto il programma.4
156 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.3.1 Gestione dei programmiContinua

5.3.2 Gestione dei moduli
PanoramicaQuesta sezione descrive come gestire i moduli di programma svolgendo questeoperazioni:
• creazione di un nuovo modulo• caricamento di un modulo esistente• salvataggio di un modulo• ridenominazione di un modulo• eliminazione di un modulo
Creazione di un nuovo moduloQuesta sezione descrive come creare un nuovo modulo.
Azione
Nel menu ABB, scegliere Editor di programma.1
Selezionare Moduli.2
Selezionare File, quindi Nuovo modulo.
en0400000688
3
Selezionare ABC... e utilizzare la tastiera software per immettere il nome del nuovomodulo. Selezionare OK per chiudere la tastiera software.
4
Selezionare il tipo di modulo da creare:• Programma• Sistema
Quindi scegliere OK.
5
La procedura per passare tra tipi di moduli diversi è descritta nel paragrafo Modificadel tipo di modulo a pagina 159.
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 1573HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.3.2 Gestione dei moduli

Caricamento di un modulo esistenteQuesta sezione descrive come caricare un modulo esistente.
Azione
Nel menu ABB, scegliere Editor di programma.1
Selezionare Moduli.2
Selezionare File, quindi Carica modulo.
en0400000689
Individuare il modulo da caricare. Vedere la sezione Esplora FlexPendant a pagina56.La procedura per impostare un percorso predefinito è descritta nel paragrafo Imposta-zione di percorsi predefiniti a pagina 102.
3
Selezionare OK per caricare il modulo selezionato.Il modulo viene caricato.
4
Salvataggio di un moduloQuesta sezione descrive come salvare un modulo.
Azione
Nel menu ABB, scegliere Editor di programma.1
Selezionare Moduli e poi il modulo da caricare.2
Continua nella pagina successiva158 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.3.2 Gestione dei moduliContinua

Azione
Selezionare File, quindi Salva modulo con nome....
en0400000690
3
Selezionare il nome file suggerito e utilizzare la tastiera software per immettere il nomedel modulo. Quindi scegliere OK.
4
Utilizzare lo strumento di ricerca dei file per individuare la posizione in cui salvare ilmodulo. Vedere la sezione Esplora FlexPendant a pagina56. La posizione predefinitaè sul disco del controller, tuttavia è possibile impostare una diversa posizione prede-finita come descritto nel paragrafo Impostazione di percorsi predefiniti a pagina 102.
5
Quindi scegliere OK.Il modulo viene salvato.
Salvataggio di un moduloQuesta sezione descrive come rinominare un modulo.
Azione
Nel menu ABB, scegliere Editor di programma.1
Selezionare Moduli.2
Selezionare File, quindi Rinomina modulo....Viene visualizzata la tastiera software.
3
Utilizzare la tastiera software per immettere il nome del modulo. Quindi scegliere OK.4
Modifica del tipo di moduloQuesta sezione descrive come cambiare il tipo di modulo.
Azione
Nel menu ABB, scegliere Editor di programma.1
Selezionare Moduli e selezionare il modulo da cambiare.2
Selezionare File, quindi Cambia dichiarazione....3
Selezionare Tipo e selezionare il tipo di modulo.4
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 1593HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.3.2 Gestione dei moduli
Continua

Azione
Scegliere OK.5
Eliminazione di un moduloQuesta sezione descrive come eliminare un modulo dalla memoria. Se il moduloè stato salvato su disco, in tale posizione non verrà cancellato.
Azione
Nel menu ABB, scegliere Editor di programma.1
Selezionare Moduli e poi il modulo da eliminare.2
Selezionare File, quindi Elimina modulo....Viene visualizzata una finestra di dialogo.
3
Selezionare OK per eliminare il modulo senza salvarlo.4Se si desidera salvare prima il modulo, scegliere Annulla e salvare il modulo.Il salvataggio del modulo è descritto nel paragrafo Salvataggio di un modulo a pagi-na 158.
160 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.3.2 Gestione dei moduliContinua

5.3.3 Gestione delle routine
PanoramicaQuesta sezione descrive come gestire le routine di programma svolgendo questeoperazioni:
• creazione di una nuova routine• creazione di una copia di una routine• modifica della dichiarazione di una routine• eliminazione di una routine
Creazione di una nuova routineQuesta sezione descrive come creare una nuova routine, impostare la dichiarazionee aggiungerla a un modulo.
Azione
Nel menu ABB, scegliere Editor di programma.1
Selezionare Routine.2
Selezionare File, quindi Nuova routine.Una nuova routine viene creata e visualizzata con i valori di dichiarazione predefiniti.
en0400000692
3
Selezionare ABC... e utilizzare la tastiera software per immettere il nome della nuovaroutine. Quindi scegliere OK.
4
Selezionare il tipo di routine.• Procedura: utilizzata per una normale routine senza valore di ritorno.• Funzione: utilizzata per una normale routine con valore di ritorno.• Trap: utilizzata per una routine di interrupt.
5
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 1613HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.3.3 Gestione delle routine

AzioneÈ necessario utilizzare parametri?6In caso affermativo, scegliere ... e procedere come descritto nel paragrafoDefinizionedei parametri nella routine a pagina 162.In caso negativo, procedere al passo successivo.
Selezionare il modulo a cui aggiungere la routine.7
Se la routine deve essere locale, scegliere la casella di controllo per selezionare Di-chiarazione locale.
8
Una routine locale può essere utilizzata solo nel modulo selezionato.
Scegliere OK.9
Definizione dei parametri nella routineQuesta sezione descrive come definire i parametri in una routine.
Azione
Nella dichiarazione della routine, scegliere ... per definire i parametri.Viene visualizzato un elenco dei parametri definiti.
en0400000693
1
Continua nella pagina successiva162 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.3.3 Gestione delle routineContinua

Azione
Se non vengono mostrati parametri, scegliere Aggiungi per aggiungere un nuovoparametro.
• Aggiungi parametro facoltativo consente di aggiungere un parametro opzionale.• Aggiungi parametro comune facoltativo consente di aggiungere un parametro
che è reciprocamente opzionale in confronto di un altro parametro.Ulteriori informazioni sui parametri di routine sono disponibili nei manuali di riferimentodi RAPID.
en0400000695
2
Utilizzare la tastiera software per immettere il nuovo nome del parametro quindi sce-gliere OK.Il nuovo parametro viene visualizzato nell'elenco.
en0400000696
3
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 1633HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.3.3 Gestione delle routine
Continua

Azione
Selezionare per selezionare un parametro. Per modificare i valori, modificare il valore.4
Selezionare OK per ritornare alla dichiarazione della routine.5
Creazione di una copia di una routineQuesta sezione descrive come creare una copia di una routine.
Azione
Nel menu ABB, scegliere Editor di programma.1
Selezionare Routine.2
Selezionare la routine per evidenziarla.3
Selezionare File, quindi Routine di copia.Viene visualizzata la nuova routine. Il nome della nuova routine viene impostatouguale a quello dell'originale con l'aggiunta del suffisso Copia.
4
Eseguire eventuali modifiche alle dichiarazioni della nuova copia della routine. Quindiscegliere OK.
5
L'esecuzione di tutte le dichiarazioni è descritta nel paragrafo Creazione di una nuovaroutine a pagina 161.
Modifica della dichiarazione di una routineQuesta sezione descrive come cambiare la dichiarazione di una routine.
Azione
Nel menu ABB, scegliere Editor di programma.1
Selezionare Routine.2
Selezionare la routine per evidenziarla.3
Selezionare File, quindi Cambia dichiarazione.4
Modificare eventuali valori della dichiarazione della routine. Quindi scegliere OK.5Le impostazioni della dichiarazione sono descritti nel paragrafo Creazione di unanuova routine a pagina 161.
Spostamento di una routineQuesta sezione descrive come spostare una routine in un altro modulo.
Azione
Nel menu ABB, scegliere Editor di programma.1
Selezionare Routine.2
Selezionare la routine per evidenziarla.3
Selezionare File, quindi Sposta Routine...4
Selezionare il task e il modulo. Quindi scegliere OK.5
Eliminazione di una routineQuesta sezione descrive come eliminare una routine dalla memoria.
Azione
Nel menu ABB, scegliere Editor di programma.1
Selezionare Routine.2
Continua nella pagina successiva164 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.3.3 Gestione delle routineContinua

Azione
Selezionare la routine per evidenziarla.3
Selezionare File, quindi Cancella Routine...Viene visualizzata una finestra di dialogo.
4
Selezionare:• OK per eliminare la routine senza salvare eventuali modifiche.• Annulla per annullare le modifiche senza eliminare la routine.
5
Manuale dell'operatore - IRC5 con FlexPendant 1653HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.3.3 Gestione delle routine
Continua

5.3.4 Gestione delle istruzioni
IstruzioniUn programma RAPID è composto da istruzioni. Ad esempio, un'istruzione puòspostare il robot, impostare un segnale di I/O o scrivere un messaggio all'operatore.È disponibile un buon numero di istruzioni, che sono elencate in Manuale tecnicodi riferimento - Istruzioni RAPID, Funzioni e Tipi di dati. La procedura di base perl'aggiunta di istruzioni è, in ogni caso, identica.
Annullamento e ripristinoQuando si modificano i programmi nell'Editor di programma, è possibile annullaree ripristinare fino a un massimo di tre passi. Questa funzione è disponibile nelmenu Modifica.
Aggiunta di istruzioniQuesta sezione descrive come aggiungere istruzioni.
Azione
Nel menu ABB, scegliere Editor di programma.1
Evidenziare l'istruzione sotto la quale aggiungere una nuova istruzione.2
Selezionare Aggiungi istruzione.Viene visualizzata una categoria di istruzioni.
en0400000697
Sono disponibili numerose istruzioni divise in varie categorie. La categoria predefinitaè Comune, nella quale sono elencate le istruzioni più comuni.È possibile creare tre elenchi personalizzati, utilizzando i parametri di sistema del tipoMost Common Instruction nell'argomento Man-machine Communication. I parametridi sistema sono descritti nel Manuale tecnico di riferimento - Parametri di sistema.
3
Continua nella pagina successiva166 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.3.4 Gestione delle istruzioni

Azione
Selezionare Comune per visualizzare un elenco delle categorie disponibili.4Per passare alla categoria successiva o precedente è anche possibile scegliere Pre-cedente/Successivo nella parte inferiore dell'elenco delle istruzioni.
Selezionare l'istruzione da aggiungere.L'istruzione viene aggiunta nel codice.
5
Modifica degli argomenti delle istruzioniQuesta sezione descrive come modificare gli argomenti delle istruzioni.
Azione
Selezionare l'istruzione da modificare.
en0400000699
1
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 1673HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.3.4 Gestione delle istruzioni
Continua

Azione
Selezionare Modifica.
en0400000701
2
Selezionare Cambia selezione.A seconda del tipo di istruzione, il tipo di dati degli argomenti può variare. Utilizzarela tastiera software per cambiare i valori stringa o proseguire con i passi successiviper altri tipi di dati o istruzioni con più argomenti.
en0400000702
3
Continua nella pagina successiva168 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.3.4 Gestione delle istruzioniContinua

Azione
Selezionare l'argomento da modificare.Viene visualizzato un certo numero di opzioni.
en0400000703
4
Toccare una istanza di dati esistente per selezionarla, quindi toccare OK per comple-tare, oppure toccare Espressione .
5
Suggerimento
Scegliendo due volte in rapida successione un'istruzione viene eseguitaautomaticamente l'opzione Cambia selezione. Scegliendo due volte in rapidasuccessione un argomento di istruzione viene eseguito automaticamente l'editordi argomenti.
Copia e incolla di istruzioni o argomentiQuesta sezione descrive come incollare istruzioni o argomenti.
Azione
Selezionare per selezionare l’argomento o l’istruzione che si vogliono copiare.1Per scegliere più di una riga: selezionare la prima riga, selezionare Scegli intervallonel menu Modifica e quindi selezionare l’ultima riga.
Selezionare Modifica e quindi Copia.2
Posizionare il cursore sull'istruzione precedente al punto in cui incollare l'istruzioneo l'argomento, o scegliere l'argomento o l'istruzione da cambiare seguito da Incolla.
3
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 1693HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.3.4 Gestione delle istruzioni
Continua

Taglio di un'istruzioneQuesta sezione descrive come tagliare un'istruzione.
Azione
Selezionare per selezionare l’istruzione che si vuole eliminare.1Per scegliere più di una riga: selezionare la prima riga, selezionare Scegli intervallonel menu Modifica e quindi selezionare l’ultima riga.
Selezionare Modifica e quindi Taglia.2
Modifica della modalità di movimento per un'istruzione di movimentoQuesta sezione descrive come cambiare la modalità di movimento per un'istruzionedi movimento.
Azione
Selezionare l'istruzione di movimento da cambiare, quindi scegliere Modifica.1
Selezionare Cambia in MoveJ o Cambia in MoveL.La modifica viene eseguita.
2
Commento delle righe di istruzioniLe righe di istruzioni possono essere impostate come commenti, ovvero ignoratenell'esecuzione del programma. Il comando per commentare o annullare i commentisi trova nel menu Modifica dell'Editor di programma.
170 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.3.4 Gestione delle istruzioniContinua

5.3.5 Esempio: Aggiunta di istruzioni di movimento
PanoramicaIn questo esempio verrà creato un semplice programma che fa muovere il robotin un quadrato. Per completare questo programma sono necessarie quattroistruzioni di movimento.
A
C
B
en0400000801
Primo puntoA
Dati sulla velocità di movimento del robot v50 = velocità 50 mm/sB
Zona z50 = (50 mm)C
Aggiunta di istruzioni di movimentoQuesta sezione descrive come aggiungere le istruzioni di movimento.
InformazioniAzione
Suggerimento: per muovere manualmentein un quadrato utilizzare solo i movimentidel joystick sinistra-destra/alto-basso.
Muovere manualmente il robot fino al primopunto.
1
Nell'Editor di programma, scegliereAggiun-gi istruzione.
2
Selezionare MoveL per inserire un'istruzio-ne MoveL.
3
Ripetere per le quattro posizioni successi-ve del quadrato.
4
Per la prima e l'ultima istruzione, seleziona-re z50 nell'istruzione, scegliere Modifica equindi Cambia selezione in Fine. Selezio-nare OK.
5
RisultatoIl codice di programma dovrebbe risultare come il seguente:
Proc main()
MoveL *, v50, fine, tool0;
MoveL *, v50, z50, tool0;
MoveL *, v50, z50, tool0;
MoveL *, v50, z50, tool0;
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 1713HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.3.5 Esempio: Aggiunta di istruzioni di movimento

MoveL *, v50, fine, tool0;
End Proc;
172 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.3.5 Esempio: Aggiunta di istruzioni di movimentoContinua

5.3.6 A proposito dei puntatori di programma e movimento
Il puntatore di programmaIl puntatore di programma (PP) indica l’istruzione mediante la quale il programmainizierà quando si preme uno qualsiasi dei pulsanti Avvio, Avanti o Indietro dellaFlexPendant.L’esecuzione del programma continua dall’istruzione in cui si trova il puntatore diprogramma. In ogni caso, se si muove il cursore ad un’altra istruzione quando siarresta il programma stesso, si può spostare il puntatore di programma allaposizione del cursore (oppure si potrà spostare il cursore verso il puntatore diprogramma), e l’esecuzione può essere riavviata a partire da questo punto.Il puntatore di programma viene mostrato come una freccia gialla a sinistra delcodice del programma nell’Editor di programma e nella Finestra di produzione.
Il puntatore di movimentoIl puntatore di movimento (MP) indica l’istruzione attualmente eseguita dal robot.Tale istruzione si trova in genere ad una o più istruzioni dopo il puntatore diprogramma, dato che il sistema esegue e calcola il percorso del robot piùvelocemente di quanto non si muova il robot stesso.Il puntatore di movimento viene mostrato come una miniatura di robot a sinistradel codice del programma nell’Editor di programma e nella Finestra di produzione.
Il cursoreIl cursore può indicare un’istruzione completa, o uno qualsiasi dei suoi argomenti.Il cursore viene mostrato come un’evidenziazione blu del codice del programmanell’Editor del programma.
Editor di programmaSe si commuta tra l’Editor di programma ed un’altra vista, e poi si ritorna indietro,l’Editor di programma mostrerà la stessa parte del codice a condizione che ilpuntatore del programma non sia stato spostato. Se il puntatore del programmaè stato spostato, l'Editor di programmamostra il codice alla posizione del puntatoredel programma.Lo stesso comportamento si applica alla Finestra di produzione.
Informazioni correlateFinestra Produzione a pagina 60.Editor di programma a pagina 63.Esecuzione un'istruzione alla volta a pagina 222.Avvio dei programmi a pagina 249.
Manuale dell'operatore - IRC5 con FlexPendant 1733HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.3.6 A proposito dei puntatori di programma e movimento

5.4 Tipi di dati
5.4.1 Visualizzazione dei dati in specifici task, moduli o routine
PanoramicaÈ possibile visualizzare una varietà dei tipi di dati selezionando uno scopo specifico.
Visualizzazione dei dati in specifici task, moduli o routineQuesta sezione descrive come visualizzare istanze di dati in specifici moduli oroutine.
Azione
Nel menu ABB, scegliere Dati di programma.1
Selezionare Cambia scopo.Viene visualizzata la seguente schermata:
en0400000661
2
Selezionare lo scopo richiesto selezionando:• Solo dati incorporati: mostra tutti i tipi di dati utilizzati dallo specifico sistema• Esecuzione corrente: mostra tutti i tipi di dati utilizzati nella corrente esecuzione• Task: mostra tutti i tipi di dati utilizzati da uno specifico task• Modulo: mostra tutti i tipi di dati utilizzati da uno specifico modulo• Routine: mostra tutti i tipi di dati utilizzati da una specifica routine
3
Selezionare OK per confermare la scelta.4
Selezionare toccando due volte per selezionare un tipo di dati e visualizzare le relativeistanze.
5
174 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.4.1 Visualizzazione dei dati in specifici task, moduli o routine

5.4.2 Creazione di nuove istanze di dati
Creazione di nuove istanze di datiQuesta sezione descrive come creare nuoveistanze di tipi di dati.
Azione
Nel menu ABB, scegliere Dati di programma.Viene visualizzato un elenco di tutti i tipi di dati disponibili.
1
Selezionare il tipo di istanza di dati da creare, ovvero bool quindi scegliere Mostradati.Viene visualizzato un elenco di tutte le istanze del tipo di dati.
2
Scegliere Nuovo.
en0400000663
3
Per definire il nome dell'istanza di dati, selezionare ... sulla destra di Nome.Nome4
Selezionare il menuScopo per impostare l'accessibilità dell'istanza di dati. Selezionare:• Global: raggiungibile da tutti i task• Local: raggiungibile all'interno del modulo• Task: raggiungibile all'interno del task
5
Selezionare il menu Tipo memoria per selezionare il tipo di memoria utilizzata perl'istanza di dati. Selezionare:
• Persistente se l'istanza di dati è persistente• Variabile se l'istanza di dati è variabile• Costante se l'istanza di dati è costante
6
Selezionare il menu Modulo per selezionare il modulo.7
Selezionare il menu Routine per selezionare una routine.8
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 1753HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.4.2 Creazione di nuove istanze di dati

Azione
Se si desidera creare un array di istanze di dati, scegliere il menu Dimensione e sele-zionare il numero di dimensioni nell'array, 1-3.
• 1• 2• 3• Nessuno
Quindi scegliere ... per impostare le Dimensioni degli assi dell'array.
9
Scegliere OK.10
176 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.4.2 Creazione di nuove istanze di datiContinua

5.4.3 Modifica delle istanze di dati
PanoramicaQuesto paragrafo descrive il modo di visualizzare presenze di dati nella finestraDati di programma. Illustra pure come modificare, eliminare, modificare ladichiarazione, copiare e definire una presenza di dati.Per i tipi di dati tooldata, wobjdata e loaddata vedere pure le sezioni Utensilia pagina 181, Oggetti di lavoro a pagina 199 oppure Carichi utili a pagina 208.
Visualizzazione di istanze di datiQuesta sezione descrive come visualizzare tutte le istanze disponibili di un tipo didati.
Azione
Nel menu ABB, scegliere Dati di programma.1
Selezionare il tipo di dati dell'istanza da visualizzare, quindi scegliere Mostra dati.2
Selezionare i dati da modificare, quindi scegliere Modifica.
en0400000671
3
A seconda di quel che si desidera fare, scegliere uno dei seguenti elementi di menu:• Selezionare Elimina per rimuovere l'istanza di dati.• Selezionare Cambia dichiarazione per cambiare la dichiarazione dell'istanza
di dati.• Selezionare Cambia valore per modificare il valore dell'istanza di dati.• Selezionare Copia per copiare l'istanza di dati.• Selezionare Definisci per definire l’istanza (disponibile solo per tooldata,
wobjdata e loaddata).• SelezionareModifica della posizione per modificare una posizione (disponibile
soltanto per robtarget e jointtarget).Proseguire come descritto nelle rispettive sezioni qui di seguito.
4
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 1773HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.4.3 Modifica delle istanze di dati

Modifica del valore di un’istanza di dati.In questa sezione viene descritto come modificare il valore di un'istanza di dati.
InformazioniAzione
Selezionare Cambia valore per aprirel'istanza.
1
Il metodo per modificare un valore dipendedal tipo di dati e dai valori possibili, adesempio, testo, numeri, valori predefiniti,ecc.
Selezionare il valore per aprire una tastierao un elenco di scelte.
2
Selezionare o immettere un nuovo valore.3
Scegliere OK.4
Nota
Se il valore di una variabile persistente viene modificato quando un programmaè in esecuzione, l’Editor di programma visualizzerà sempre il vecchio valorefino all’arresto del programma. La schermata dei Dati del programma visualizzatuttavia il valore attuale delle variabili persistenti. Per ulteriori informazioni, vedereDichiarazione persistentein Manuale tecnico di riferimento - RAPID Overview.
Eliminazione di un’istanza di datiQuesta sezione descrive come eliminare un’istanza di dati.
Nota
Una istanza di dati può essere di tipo utensile, oggetto di lavoro, carico utile oaltro.
Azione
Selezionare Elimina nel menu per l'istanza di dati da eliminare, come descritto nelparagrafo Visualizzazione di istanze di dati a pagina 177.Viene visualizzata una finestra di dialogo.
1
Selezionare Sì per confermare l'eliminazione dell'istanza di dati.2
ATTENZIONE
Non è possibile recuperare un utensile, un oggetto di lavoro o un carico utileeliminato e i relativi dati verranno perduti. Eventuali programmi nei quali vienefatto riferimento all'utensile, all'oggetto di lavoro o al carico utile devono esseremodificati in modo appropriato altrimenti non verranno eseguiti correttamente.Se si elimina un utensile non è possibile continuare il programma dalla posizionecorrente.
Continua nella pagina successiva178 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.4.3 Modifica delle istanze di datiContinua

Modifica della dichiarazione di un’istanza di dati.Questa sezione descrive come modificare la dichiarazione di un’istanza di dati.
Azione
Selezionare Cambia dichiarazione nel menu per l'istanza di dati da modificare, comedescritto nel paragrafo Visualizzazione di istanze di dati a pagina 177.
en0400000672
1
Selezionare i valori dell'istanza di dati da modificare:• Nome: Selezionare ... per visualizzare la tastiera software e modificare il nome.• Scopo• Tipo memoria• Modulo• Routine
2
Copia di un’istanza di datiQuesta sezione descrive come copiare un’istanza di dati.
Azione
Selezionare Copia nel menu per l'istanza di dati da copiare, come descritto nel para-grafo Visualizzazione di istanze di dati a pagina 177.Viene creata una copia dell'istanza di dati.La copia contiene gli stessi valori dell'originale, ma il nome è diverso.
1
Definizione di un’istanza di datiLa definizione del sistema di riferimento utensile o del sistema di riferimentodell'oggetto di lavoro è descritto nelle sezioniDefinizione del sistema di riferimentoutensile a pagina187 e Definizione del sistema di coordinate dell'oggetto di lavoroa pagina 201.
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 1793HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.4.3 Modifica delle istanze di dati
Continua

Modifica della posizione di un’istanza di datiSoltanto istanze di tipi di dati robtarget e jointtarget possono utilizzare lafunzione Modifica della posizione. Nell'operazione verranno utilizzati l’oggetto dilavoro e lo strumento attualmente attivi.Ulteriori informazioni sulla modifica delle posizioni sono illustrate in Modifica eregolazione delle posizioni a pagina 272.
Nota
Assicurarsi che siano selezionati i correnti oggetto di lavoro e utensili, allorchési modificano posizioni nella finestra dei Dati del programma. Questo non vieneverificato automaticamente dal sistema.
180 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.4.3 Modifica delle istanze di datiContinua

5.5 Utensili
5.5.1 Che cosa è un utensile?
UtensileUn utensile è un oggetto che può essere montato direttamente o indirettamentesul disco rotante del robot o collocato in una posizione fissa all'interno del rangedi lavoro del robot.Un attacco (jig) non è un utensile.Tutti gli utensili devono essere definiti con un punto centrale dell'utensile (TCP,Tool Center Point).Per ottenere un posizionamento preciso del TCP, ciascun utensile che può essereutilizzato dal robot deve essere misurato e i relativi dati devono essere memorizzati.
AVVERTENZA
È importante definire sempre il carico effettivo dell'utensile e, se utilizzato, ilcarico utile del robot (ad esempio una parte afferrata). Definizioni non correttedei dati di carico possono sovraccaricare la struttura meccanica del robot.Se si specificano dati di carico inesatti, si possono verificare le conseguenzedescritte di seguito.
• Non verrà sfruttata la capacità massima del robot• Precisione del percorso preclusa; ciಠinclude un rischio di velocità
eccessiva• Rischio di sovraccarico della struttura meccanica
Il controller esegue il monitoraggio continuo del carico e scrive un registro eventise il carico è superiore al previsto. Questo registro eventi viene salvato eregistrato nella memoria del controller.
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 1813HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.5.1 Che cosa è un utensile?

Figura
en0400000803
Lato utensileA
Lato robotB
182 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.5.1 Che cosa è un utensile?Continua

5.5.2 Che cosa è il punto centrale dell'utensile?
FiguraL'illustrazione mostra che il punto centrale dell'utensile (TCP) è il punto intorno alquale viene definito l'orientamento dell'utensile/polso del manipolatore.
xx0300000604
DescrizioneIl punto centrale dell'utensile (TCP) è il punto in relazione al quale viene definitotutto il posizionamento del robot. In genere il TCP viene definito relativamente auna posizione sul disco rotante del manipolatore.Il TCP verrà mosso manualmente o spostato sulla posizione di destinazioneprogrammata. Il punto centrale dell'utensile costituisce anche l'origine del sistemadi coordinate utensile.Il sistema robotico è in grado di gestire varie definizioni di TCP, ma solo una allavolta può essere attiva.Esistono due tipi fondamentali di TCP: mobile o fisso.
TCP mobileLa grande maggioranza di tutte le applicazioni interagisce con TCP mobili, ovverocon TCP che si muovono nello spazio insieme con il manipolatore.Ad esempio, un tipico TCP mobile può essere definito in relazione all’ugello di uncannello per saldatura ad arco, al centro di un cannello per saldatura a punti oall'estremità di un utensile di selezione.
TCP fissoIn alcune applicazioni viene utilizzato un TCP fisso, ad esempio, quando vieneutilizzata una testa per saldatura a punti fissa. In questi casi, il TCP può esseredefinito in relazione all'apparecchiatura fissa invece che al manipolatore mobile.
Manuale dell'operatore - IRC5 con FlexPendant 1833HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.5.2 Che cosa è il punto centrale dell'utensile?

5.5.3 Creazione di un utensile
Che cosa accade quando viene creato un utensile?Quando si crea un nuovo utensile, viene creata una variabile di tipo di datitooldata. Il nome della variabile costituirà il nome dell'utensile. Per maggioriinformazioni sui tipi di dati, vedereManuale tecnico di riferimento - Istruzioni RAPID,Funzioni e Tipi di dati.Il nuovo utensile ha valori predefiniti per massa, sistema di riferimento, etc., chedevono essere definiti prima del suo utilizzo.
Come creare un utensileIl punto centrale dell'utensile predefinito (tool0) è il centro della flangia di montaggiodel robot e condivide l'orientamento della base del robot.Tramite la creazione di un utensile è possibile definire un altro punto centraledell'utensile. Per ulteriori informazioni sugli utensili ed sui punti centrali degliutensili, vedereChe cosa è un utensile? a pagina181 eChe cosa è il punto centraledell'utensile? a pagina 183.
A
en0400000779
TCP (Tool Center Point), per tool0A
Azione
Nel menu ABB, scegliere Spostamento.1
Selezionare Utensile per visualizzare l'elenco degli utensili disponibili.2
Continua nella pagina successiva184 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.5.3 Creazione di un utensile

Azione
Selezionare Nuovo per creare un nuovo utensile.
en0300000544
Immettere valori per ciascun campo, vedere la tabella di seguito.
3
Scegliere OK.4
Impostazioni della dichiarazione dell'utensile
Recommendationallora...If you want to change...Agli utensili viene automatica-mente assegnato il nometool seguito da un numeroprogressivo, ad esempiotool10 o tool21.Si consiglia la modifica delnome con uno più descrittivo,come testa, pinza o saldatore.
Nota
Se si cambia il nome di unutensile al quale è già statofatto riferimento in un pro-gramma, è necessario cambia-re anche tutte le relative oc-correnze.
scegliere ... pulsante accantoa Nome
il nome dell'utensile
Per essere disponibili in tuttii moduli nel programma gliutensili devono sempre esse-re globali.
selezionare lo scopo preferitodal menu
lo scopo
Le variabili utensile devonosempre essere persistenti.
-il tipo di memoria
selezionare dal menu il modu-lo nel quale deve essere di-chiarato l'utensile
il modulo
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 1853HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.5.3 Creazione di un utensile
Continua

Recommendationallora...If you want to change...
scegliere ... pulsante accantoa Dimensione
la dimensione degli assi dellamatrice dati
Nota
L'utensile creato non è utile finché non sono stati definiti i dati dell'utensile(coordinate del TCP, orientamento, peso, ecc.). Vedere Modifica dei datidell'utensile a pagina192 e LoadIdentify, routine di servizio di identificazione delcarico a pagina 232 per apprendere ulteriori dettagli sul come fare.
186 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.5.3 Creazione di un utensileContinua

5.5.4 Definizione del sistema di riferimento utensile
Operazioni preliminariPer definire il sistema di riferimento utensile, è necessario innanzitutto un puntodi riferimento nel sistema di coordinate universali. Se è necessario impostarel'orientamento del punto centrale dell'utensile è necessario fissare delle prolungheall'utensile.È pure necessario decidere quale metodo utilizzare per la definizione del sistemadi riferimento dell’utensile.
Metodi disponibiliSono tre i diversi metodi da poter utilizzare per la definizione del sistema diriferimento dell’utensile. Tutti e tre i metodi richiedono la definizione delle coordinatecartesiane del punto centrale dell'utensile. Quel che differisce tra loro è il modo incui si definisce l'orientamento.
...then selectIf you want to...
TCP (orientamento predefinito)impostare l'orientamento come identicoa quello della piastra di montaggio del robot
TCP&Zimpostare l'orientamento nell'asse Z
TCP&Z,Ximpostare l'orientamento negli assi X e Z
Come selezionare un metodoQuesta procedura descrive come selezionare il metodo da utilizzare per ladefinizione del sistema di riferimento dell’utensile.
Azione
Nel menu ABB, scegliere Spostamento.1
Selezionare Utensile per visualizzare l'elenco degli utensili disponibili.2
Selezionare l’utensile che si desidera definire.3
Nel menu Modifica, selezionare Definisci4
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 1873HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.5.4 Definizione del sistema di riferimento utensile

Azione
Nel riquadro di dialogo che appare, selezionare il metodo da utilizzare.
en0600003147
5
Selezionare il numero dei punti d’approccio da utilizzare. In genere, 4 punti sonosufficienti. Se si sceglie un numero maggiore di punti, per ottenere un risultato piùaccurato, si deve ugualmente prestare attenzione quando li si definiscono.
6
Vedere Come procedere con la definizione del sistema di riferimento dell’utensile apagina189 per informazioni sul modo di raccolta delle posizioni, e sul processo di de-finizione del sistema di riferimento dell’utensile.
7
Continua nella pagina successiva188 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.5.4 Definizione del sistema di riferimento utensileContinua

Come procedere con la definizione del sistema di riferimento dell’utensileQuesta procedura descrive come definire il TCP (Tool Center Point) in coordinatecartesiane.
en0400000906
InformazioniAzione
Utilizzare piccoli incrementi per posizionareaccuratamente la punta dello strumento ilpiù vicino possibile al punto di riferimento.
Muovere manualmente il robot in una posi-zione appropriata, A, per il primo punto diapproccio.
1
SelezionareModifica posizione per defini-re il punto.
2
Per ottenere migliori risultati allontanaremanualmente dal punto universale fisso.La semplice modifica dell'orientamentonon fornirà un buon risultato.
Ripetere la fase 1 e 2 per ciascun punto diapproccio da definire, posizioni B, C e D.
3
Seguire le istruzioni in Come definire ipunti dell’elongatore a pagina 190.
Se il metodo utilizzato è TCP & Z oTCP & Z, anche l'orientamento X deve es-sere definito.
4
Se, per qualche ragione, si desidera rieffet-tuare la procedura di calibratura descrittanel passo 1-4, scegliere Posizioni e quindiAzzera tutto.
5
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 1893HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.5.4 Definizione del sistema di riferimento utensile
Continua

InformazioniAzione
Quando tutti i punti sono definiti, li si pos-sono memorizzare in un file, il che consen-te di riutilizzarli in seguito. Nel menu Posi-zioni, scegliere Salva.
6
Per ulteriori informazioni, vedere Il risultatocalcolato è sufficientemente buono? a pa-gina 190
Selezionare OK. Verrà allora visualizzatala finestra di dialogo Risultati dei calcoli,che richiede di cancellare o confermare ilrisultato prima che quest’ultimo venga tra-scritto sul controller.
7
Come definire i punti dell’elongatoreQuesta procedura descrive come definire l’orientamento del sistema di riferimento,specificando la direzione degli assi "z" e/o "x". È necessario far questo solo sel’orientamento dell’utensile deve differire da quello della base del robot. Il sistemadi coordinate dell’utensile assomiglia all'origine al sistema di coordinate di tool0,come illustrato in Misurazione del punto centrale dell'utensile a pagina 193.
Azione
Senza cambiare l'orientamento dell'utensile, muovere manualmente il robot in modoche il punto universale fisso diventi un punto sull'asse positivo desiderato del sistemadi coordinate utensile ruotato.
1
Selezionare Modifica posizione per definire il punto.2
Ripetere la fase 1 e 2 per il secondo asse, se anch'esso va definito.3
Il risultato calcolato è sufficientemente buono?La finestra di dialogo Risultato del calcolo visualizza il risultato del calcolo delladefinizione del sistema di riferimento dell’utensile. Si deve confermare di accettareil risultato prima che esso prenda effetto nel controller. L’alternativa è quella diridefinire il sistema di riferimento, al fine di ottenere un risultato migliore. Il risultatoErrore medio rappresenta la distanza media dei punti di approccio dal TCP (ToolCenter Point) calcolato. Errore massimo rappresenta l'errore massimo fra tutti ipunti di approccio.È difficle dire esattamente quale sia il risultato accettabile. Tutto dipende infattidall’utensile, tipo di robot, etc., che si stanno utilizzando. In genere, un errore mediodi pochi decimi di millimetro è da considerare come un buon risultato. Se ilposizionamento è stato realizzato con una precisione ragionevole, il risultato saràcorretto.Dato che il robot viene utilizzato come una macchina di misurazione, il risultatodipende pure dal punto dello spazio lavorativo del robot in cui è stato effettuato ilposizionamento. Variazioni dell’effettivo TCP fino ad un paio di millimetri (per grandirobot) si possono trovare tra le definizioni in diverse parti dello spazio lavorativo.La ripetibilità di tutte le successive calibrazioni TCP verrà incrementata, se esseverranno effettuate vicino alle precedenti. Da notare che il risultato rappresenta ilTCP ottimale per il robot in quello spazio lavorativo, prendendo in considerazionetutte le discrepanze del robot nella configurazione a disposizione.
Continua nella pagina successiva190 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.5.4 Definizione del sistema di riferimento utensileContinua

Suggerimento
Un modo commune per verificare che il sistema di riferimento sia statocorrettamente definito, è quello di eseguire un test di riorientamento quando èpronta la definizione. Selezionare il modo del movimento di riorientamento e ilsistema di coordinate dell'utensile, e far muovere il robot. Verificare che la puntadell’utensile permanga molto vicina al punto di riferimento selezionato, duranteil movimento del robot.
Manuale dell'operatore - IRC5 con FlexPendant 1913HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.5.4 Definizione del sistema di riferimento utensile
Continua

5.5.5 Modifica dei dati dell'utensile
Dati dell'utensileUtilizzare le impostazioni del valore per definire la posizione del punto centraledell'utensile e le proprietà fisiche come il peso e il baricentro.Ciò può anche essere ottenuto automaticamente tramite la routine di servizioLoadIdentify. Vedere le sezioni Esecuzione di una routine di servizio a pagina 225o LoadIdentify, routine di servizio di identificazione del carico a pagina 232.
Visualizzazione dei dati dell'utensileQuesta sezione descrive come visualizzare i dati dell'utensile.
Azione
Nel menu ABB, scegliere Spostamento.1
Selezionare Utensile per visualizzare l'elenco degli utensili disponibili.2
Selezionare l'utensile da modificare e scegliere Modifica.Viene visualizzato un menu.
3
• Cambia dichiarazione• Cambia valore• Elimina• Definisci
Nel menu, scegliere Cambia valore.Vengono visualizzati i dati che definiscono l'utensile. Il testo verde indica che il valorepuò essere modificato.
4
Proseguire con la modifica dei dati come è descritto di seguito.5
Continua nella pagina successiva192 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.5.5 Modifica dei dati dell'utensile

Misurazione del punto centrale dell'utensileIl modo più semplice per definire il punto centrale dell'utensile, TCP (Tool CenterPoint), è in genere di utilizzare il metodo predefinito descritto in Definizione delsistema di riferimento utensile a pagina 187. Se si utilizza questo metodo, non ènecessario scrivere valori per il sistema di riferimento in quanto vengono fornitiautomaticamente.Se le misurazioni dell'utensile sono già disponibili o se per qualche ragione sidesidera effettuarle manualmente, i valori possono essere immessi nei datidell'utensile.
en0400000881
Asse X per tool0X
Asse Y per tool0Y
Asse Z per tool0Z
Asse X per l'utensile da definireX
Asse Y per l'utensile da definireY
Asse Z per l'utensile da definireZ
Azione
Misurare la distanza dal centro della flangia di montaggio del robot al punto centraledell'utensile sull'asse X di tool0.
1
Misurare la distanza dal centro della flangia di montaggio del robot al punto centraledell'utensile sull'asse Y di tool0.
2
Misurare la distanza dal centro della flangia di montaggio del robot al punto centraledell'utensile sull'asse Z di tool0.
3
Modifica della definizione dell'utensile
UnitàIstanzaAzione
[mm]tframe.trans.xImmettere le coordinate cartesiane della posi-zione del punto centrale dell'utensile.
1tframe.trans.y
tframe.trans.z
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 1933HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.5.5 Modifica dei dati dell'utensile
Continua

UnitàIstanzaAzione
Nessunotframe.rot.q1Se necessario, immettere l'orientamento delsistema di riferimento utensile.
2tframe.rot.q2
tframe.rot.q3
tframe.rot.q4
[kg]tload.massImmettere il peso dell'utensile.3
[mm]tload.cog.xSe necessario, immettere il baricentrodell'utensile.
4tload.cog.y
tload.cog.z
Nessunotload.aom.q1Se necessario, immettere dell'orientamentodell'asse del momento
5tload.aom.q2
tload.aom.q3
tload.aom.q4
[kgm 2 ]tload.ix
tload.iy
Se necessario, immettere il momento di inerziadell'utensile.
6
tload.iz
Selezionare OK per utilizzare i nuovi valori oAnnulla per lasciare invariata la definizione.
7
194 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.5.5 Modifica dei dati dell'utensileContinua

5.5.6 Modifica della dichiarazione dell'utensile
Dichiarazione dell'utensileUtilizzare la dichiarazione per modificare l'utilizzo della variabile dell'utensile neimoduli di programma.
Visualizzazione della dichiarazione dell'utensile
Azione
Nel menu ABB, scegliere Spostamento.1
Selezionare Utensile per visualizzare l'elenco degli utensili disponibili.2
Selezionare l'utensile da modificare e scegliere Modifica.Viene visualizzato un menu.
• Cambia dichiarazione• Cambia valore• Elimina• Definisci
3
Nel menu, scegliere Cambia dichiarazione.Viene visualizzata la dichiarazione dell'utensile.
4
Modificare la dichiarazione dell'oggetto di lavoro come descritto nel paragrafo Crea-zione di un utensile a pagina 184.
5
Nota
Se si cambia il nome di un utensile al quale è già stato fatto riferimento in unprogramma, è necessario cambiare anche tutte le relative occorrenze.
Manuale dell'operatore - IRC5 con FlexPendant 1953HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.5.6 Modifica della dichiarazione dell'utensile

5.5.7 Eliminazione di un utensile
Eliminazione di un utensilePer maggiori informazioni sull'eliminazione di un utensile, vedere Eliminazione diun’istanza di dati a pagina 178.
196 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.5.7 Eliminazione di un utensile

5.5.8 Configurazione di utensili fissi
Utensili fissiGli utensili fissi vengono utilizzati, ad esempio, in applicazioni che comprendonograndi macchine come frese, presse e punzonatrici. È possibile utilizzare gli utensilifissi per eseguire qualsiasi operazione che sarebbe difficile o non convenientesvolgere tramite l'utensile sul robot.Grazie agli utensili fissi, il robot tiene l'oggetto di lavoro.
Creazione di un utensile fissoQuesta sezione descrive come creare un utensile fisso.
Azione
Nel menu ABB, scegliere Spostamento.1
Selezionare Utensile per visualizzare l'elenco degli utensili disponibili.2
Selezionare l'utensile da modificare e scegliere Modifica.Viene visualizzato un menu.
3
Nel menu, scegliere Cambia valore.Vengono visualizzati i dati che definiscono l'utensile.
4
Selezionare l'istanza robhold.5
Selezionare FALSE per impostare l'utensile dato come fisso.6
Selezionare OK per utilizzare la nuova configurazione o Annulla per lasciare invariatol'utensile.
7
Creazione di un oggetto di lavoro tenuto dal robotQuesta sezione descrive come creare un oggetto di lavoro tenuto dal robot.
Azione
Nella finestra Spostamento, scegliere Oggetto di lavoro per visualizzare l'elenco deglioggetti di lavoro disponibili.
1
Selezionare l'oggetto di lavoro da modificare e scegliere Modifica.Viene visualizzato un menu.
2
Nel menu, scegliere Cambia valore.Vengono visualizzati i dati che definiscono l'oggetto di lavoro.
3
Selezionare l'istanza robhold.4
Selezionare TRUE per indicare che l'oggetto di lavoro è tenuto dal robot.5
Selezionare OK per utilizzare la nuova configurazione o Annulla per lasciare invariatol'oggetto di lavoro.
6
Differenze nei riferimenti al sistema di coordinateQuesta sezione descrive le differenze nei riferimenti ai sistemi di coordinate.
...ma ora fa riferimento a......normalmente fa riferimentoa...
Il...
sistema di coordinate utente(nessuna modifica)
sistema di coordinate utentesistema di coordinate dell'og-getto di lavoro
piastra di montaggio del robotsistema di coordinate univer-sali
sistema di coordinate utente
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 1973HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.5.8 Configurazione di utensili fissi

...ma ora fa riferimento a......normalmente fa riferimentoa...
Il...
sistema di coordinate univer-sali
piastra di montaggio del robotsistema di coordinate utensile
Configurazione del sistema di coordinate utensilePer configurare un utensile vengono utilizzati gli stessi metodi di misurazioneadottati con gli utensili montati sul robot.In questo caso, il punto di riferimento universale deve essere associato al robot.Definire e utilizzare un utensile con le misurazioni del punto di riferimento quandosi creano punti di approccio. Se è necessario configurare l'orientamento ènecessario anche fissare delle prolunghe all'utensile fisso.Per ridurre al minimo gli errori quando si calcola il sistema di coordinate utensileè opportuno immettere manualmente la definizione del punto di riferimento.È possibile immettere manualmente la definizione dell'utensile fisso.
en0400000990
198 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.5.8 Configurazione di utensili fissiContinua

5.6 Oggetti di lavoro
5.6.1 Che cosa è un oggetto di lavoro?
Figura
Z
X
Y
Z
X
Y
Z
X
Y
en0400000819
DescrizioneUn oggetto di lavoro è un sistema di coordinate al quale sono associate proprietàspecifiche. Viene utilizzato principalmente per semplificare la programmazionequando si modificano i programmi in seguito a spostamenti di specifici task,processi di oggetti ecc.Un sistema di coordinate dell'oggetto di lavoro deve essere definito in due sistemidi riferimento, il sistema di riferimento utente (relativo al sistema di riferimentouniversale) e il sistema di riferimento oggetto (relativo al sistema di riferimentoutente).Gli oggetti di lavoro vengono spesso creati per semplificare il spostamento lungole superfici degli oggetti. È possibile che siano stati creati vari oggetti di lavoro equindi è necessario scegliere quello da utilizzare per il spostamento.Quando si lavora con pinze, i carichi utili sono importanti. Per posizionare emanipolare un oggetto con la massima precisione è necessario tenere conto delrelativo peso. È necessario scegliere quale utilizzare per il spostamento.
Manuale dell'operatore - IRC5 con FlexPendant 1993HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.6.1 Che cosa è un oggetto di lavoro?

5.6.2 Creazione di un oggetto di lavoro
Che cosa accade quando viene creato un oggetto di lavoro?Viene creata una variabile di tipo wobjdata. Il nome della variabile costituirà ilnome dell'oggetto di lavoro. Per maggiori informazioni sui tipi di dati, vedereManuale tecnico di riferimento - Istruzioni RAPID, Funzioni e Tipi di dati.Vedere il paragrafo dettagliato Che cosa è un oggetto di lavoro? a pagina 199.
Creazione di un oggetto di lavoroIl sistema di coordinate dell'oggetto di lavoro ora è identico al sistema di coordinateuniversali. Per definire la posizione e l'orientamento del sistema di coordinatedell'oggetto di lavoro, vedere Modifica della dichiarazione dell'oggetto di lavoro apagina 206.
Azione
Nel menu ABB, scegliere Spostamento.1
SelezionareOggetto di lavoro per visualizzare l'elenco degli oggetti di lavoro disponi-bili.
2
Selezionare Nuovo... per creare un nuovo oggetto di lavoro.3
Scegliere OK.4
Impostazioni della dichiarazione dell'oggetto di lavoro
Recommendationallora...If you want to change...Agli oggetti di lavoro vieneautomaticamente assegnatoil nome wobj seguito da unnumero progressivo, adesempio wobj10, wobj27.Tali nomi possono esserecambiati con altri più descritti-vi.Se si cambia il nome di unoggetto di lavoro al quale ègià stato fatto riferimento inun programma, è necessariocambiare anche tutte le relati-ve occorrenze.
scegliere il ... pulsante accan-to a esso
il nome dell'oggetto di lavoro
Per essere disponibili in tuttii moduli nel programma glioggetti di lavoro devonosempre essere globali.
selezionare lo scopo dellascelta nel menu
lo scopo
Le variabili oggetto di lavorodevono sempre essere persi-stenti.
-il tipo di memoria
selezionare dal menu il modu-lo nel quale deve essere di-chiarato l'oggetto di lavoro
il modulo
200 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.6.2 Creazione di un oggetto di lavoro

5.6.3 Definizione del sistema di coordinate dell'oggetto di lavoro
PanoramicaDefinire un oggetto di lavoro significa utilizzare il robot per evidenziare la suaposizione. Si attua ciò definendo tre posizioni, due sull’asse delle x, ed una sull’assedelle y.Quando si definisce un oggetto di lavoro è possibile utilizzare sia il sistema diriferimento utente, sia il sistema di riferimento oggetto, o entrambi i sistemi. Ilsistema di riferimento utente e il sistema di riferimento oggetto in genere concidono.Se così non fosse, il sistema di riferimento oggetto viene spostato dal sistema diriferimento utente.
Come selezionare un metodoQuesta procedura descrive il modo di selezionare un metodo per definire sia ilsistema di riferimento utente, sia il sistema di riferimento oggetto, sia entrambi.Notare che questo è valido solo per un oggetto di lavoro creato dall'utente, nonper l'oggetto di lavoro predefinito, wobj0. La definizione di un oggetto di lavoropuò anche essere compiuta a partire dalla finestra dei dati del programma.
Azione
Nel menu ABB, scegliere Spostamento.1
SelezionareOggetto di lavoro per visualizzare l'elenco degli oggetti di lavoro disponi-bili.
2
Selezionare l'oggetto di lavoro da definire, quindi scegliere Modifica.3
Nel menu, selezionare Definisci....4
Selezionare il metodo da Metodo utente o dal menu Metodo oggetto. Vedere Defini-zione del sistema di riferimento utente a pagina 202 e Definizione del sistema di riferi-mento oggetto a pagina 203.
en0400000893
5
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 2013HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.6.3 Definizione del sistema di coordinate dell'oggetto di lavoro

Definizione del sistema di riferimento utenteQuesta sezione descrive come definire il sistema di riferimento utente.
en0400000887
L'asse x passerà attraverso i punti X1-X2 e l'asse y attraverso Y1.
InformazioniAzione
Nel menu a comparsa Metodo utente,scegliere 3 punti.
1
Per una definizione più precisa è preferibileun’ampia distanza tra X1 e X2.
Premere il dispositivo di attivazione a treposizioni e muovere manualmente il robotsul primo punto (X1, X2 o Y1) da definire.
2
Selezionare il punto nell'elenco.3
SelezionareModifica posizione per defini-re il punto.
4
Ripetere i passi da 2 a 4 per i punti rima-nenti.
5
Continua nella pagina successiva202 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.6.3 Definizione del sistema di coordinate dell'oggetto di lavoroContinua

Definizione del sistema di riferimento oggettoQuesto paragrafo descrive come definire il sistema di riferimento oggetto, se lo sivuole spostare da quello di riferimento utente.
en0400000899
L'asse x passerà attraverso i punti X1-X2 e l'asse y attraverso Y1.
Azione
Nel menu a comparsa Metodo oggetto, scegliere 3 punti.1
Vedere i passi da 2 a 4 nella descrizione Definizione del sistema di riferimento utentea pagina 202.
2
Salvataggio delle posizioni definiteIn genere, le posizioni definite vengono utilizzate unicamente come posizionitemporanee dal controller per calcolare la posizione dell'oggetto di lavoro, quindivengono ignorate. Le posizioni, tuttavia, possono anche essere salvate in unmodulo di programma per essere utilizzate in seguito o per fini di analisi.Durante il salvataggio delle posizioni, viene creato un nuovo modulo di programmain cui le posizioni vengono memorizzate con nomi predefiniti assegnati dalcontroller. I nomi delle posizioni possono essere modificati in un secondo momento,ma durante il caricamento delle posizioni si consiglia di utilizzare i nomi predefiniti.
Nota
Vengono salvate unicamente le posizioni (robtarget). Per modificare le posizionidefinite, ricordarsi di annotare l'utensile che è stato utilizzato.
Azione
Una volta che la definizione del riferimento dell'oggetto di lavoro è stata completatae che tutte le posizioni sono state modificate, scegliere OK.
1
Nella finestra di dialogo Memorizzare i punti modificati, scegliere Sì.2
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 2033HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.6.3 Definizione del sistema di coordinate dell'oggetto di lavoro
Continua

Azione
Scegliere ABC per modificare il nome del modulo di programma, scegliere OK peraccettare il nome.
3
I nomi delle posizioni e del modulo vengono visualizzati nella finestra di dialogo Salva,scegliere OK.
4
Caricamento delle posizioni definiteA volte, è sconsigliabile o impossibile utilizzare il robot per definire le posizioni. Inquesti casi, le posizioni possono essere definite o calcolate altrove e caricate nellafinestra di dialogo Definizione sistema di riferimento oggetto di lavoro.È possibile caricare le posizioni da qualsiasi modulo di programma; si consiglia,tuttavia, di utilizzare il modulo dalla finestra di dialogo Memorizzare i puntimodificati con nomi di posizione predefiniti assegnati dal controller.
ATTENZIONE
Prima di caricare qualsiasi posizione, assicurarsi che siano attivati l'oggetto dilavoro e l'utensile corretti nella finestra di dialogo Definizione sistema diriferimento oggetto di lavoro.
Azione
Nella finestra di dialogoDefinizione sistema di riferimento oggetto di lavoro, sceglierePosizioni e Carica.
1
Selezionare un modulo contenente punti di calibratura validi, scegliere OK.2
Se il controller trova tute le posizioni o eventuali posizioni predefinite all'interno delmodulo, le posizioni vengono caricate automaticamente nel punto oggetto o utentecorretto.
3
Nella finestra di dialogo Carica, scegliere OK.
In caso di posizioni mancanti o se alcune posizioni non possiedono nomi corretti, ilcontroller non sarà in grado di caricare le posizioni automaticamente; a questo puntoall'utente viene chiesto di effettuare l'abbinamento delle posizioni manualmente.
4
Scegliere ciascun punto nell'elenco per assegnare le posizioni manualmentedall’elenco a tendina. Premere OK.
Se necessario, utilizzare Modifica della posizione per definire eventuali punti rima-nenti che non sono stati caricati.
5
204 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.6.3 Definizione del sistema di coordinate dell'oggetto di lavoroContinua

5.6.4 Modifica dei dati dell'oggetto di lavoro
PanoramicaUtilizzare la definizione dei dati dell'oggetto di lavoro per impostare la posizionee rotazione del sistema di coordinate utente e dell'oggetto di lavoro.
Come spostare i dati dell’oggetto di lavoro
Azione
Nel menu ABB, scegliere Spostamento.1
SelezionareOggetto di lavoro per visualizzare l'elenco degli oggetti di lavoro disponi-bili.
2
Selezionare l'oggetto di lavoro da modificare e scegliere Modifica.3
Selezionare Cambia valore.Vengono visualizzati i dati che definiscono l'oggetto di lavoro.
4
Come impostare manualmente i valori del sistema di riferimento utente ed oggetto.Il modo più semplice per impostare la posizione dei sistemi di riferimento utentee dell'oggetto di lavoro è di utilizzare il metodo descritto in Definizione del sistemadi coordinate dell'oggetto di lavoro a pagina201. Si possono comunque modificarei valori manualmente, utilizzando la guida sottostante.
UnitàIstanzaValori
mmoframe.trans.xLe coordinate cartesiane della posizione del sistema diriferimento oggetto oframe.trans.y
oframe.trans.z
-oframe.rot.q1L’orientamento del sistema di riferimento oggettooframe.rot.q2
oframe.rot.q3
oframe.rot.q4
mmuframe.trans.xLe coordinate cartesiane della posizione del sistema diriferimento utente uframe.trans.y
uframe.trans.z
-uframe.rot.q1L’orientamento del sistema di riferimento utenteuframe.rot.q2
uframe.rot.q3
uframe.rot.q4
Nota
La modifica dei dati dell’oggetto di lavoro può essere compiuta anche dallafinestra dei Dati del programma.
Manuale dell'operatore - IRC5 con FlexPendant 2053HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.6.4 Modifica dei dati dell'oggetto di lavoro

5.6.5 Modifica della dichiarazione dell'oggetto di lavoro
PanoramicaUtilizzare la dichiarazione per modificare l'utilizzo della variabile dell'oggetto dilavoro nei moduli di programma.
Visualizzazione della dichiarazione dell'oggetto di lavoro
Azione
Nel menu ABB, scegliere Spostamento.1
SelezionareOggetto di lavoro per visualizzare l'elenco degli oggetti di lavoro disponi-bili.
2
Selezionare l'oggetto di lavoro da modificare e scegliere Modifica.3
Nel menu, scegliere Cambia dichiarazione.4
Viene visualizzata la dichiarazione dell'oggetto di lavoro.5
Modificare la dichiarazione dell'oggetto di lavoro come descritto nel paragrafo Crea-zione di un oggetto di lavoro a pagina 200.
6
Nota
Se si cambia il nome di un oggetto di lavoro al quale è già stato fatto riferimentoin un programma, è necessario cambiare anche tutte le relative occorrenze.
206 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.6.5 Modifica della dichiarazione dell'oggetto di lavoro

5.6.6 Eliminazione di un oggetto di lavoro
Eliminazione di un oggetto di lavoroPer maggiori informazioni sull'eliminazione di un oggetto di lavoro, vedereEliminazione di un’istanza di dati a pagina 178.
Manuale dell'operatore - IRC5 con FlexPendant 2073HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.6.6 Eliminazione di un oggetto di lavoro

5.7 Carichi utili
5.7.1 Creazione di un carico utile
Che cosa accade quando viene creato un carico utile?Viene creata una variabile di tipo loaddata. Il nome della variabile costituirà ilnome del carico utile. Per maggiori informazioni sui tipi di dati, vedere Manualetecnico di riferimento - Istruzioni RAPID, Funzioni e Tipi di dati.
Aggiunta di un nuovo carico utile e impostazione della dichiarazione datiIl sistema di coordinate del carico utile sarà impostato sulla posizione, compresol'orientamento, del sistema di coordinate universali.
Azione
Nel menu ABB, scegliere Spostamento.1
Selezionare Carico utile oppure Carico totale per visualizzare l'elenco dei carichiutili disponibili.
Nota
Carico totale viene visualizzato soltanto quando il valore di ModalPayLoadModeviene impostato a 0 e nel caso che le unità meccaniche siano dei robot TCP. VedereImpostazione del valore di ModalPayLoadMode a pagina 209.
2
Selezionare Nuovo per creare un nuovo carico utile per inserire i dati. Vedere Impo-stazioni della dichiarazione del carico utile a pagina 209.
3
Scegliere OK.4
AVVERTENZA
È importante definire sempre il carico effettivo dell'utensile e, se utilizzato, ilcarico utile del robot (ad esempio una parte afferrata). Definizioni non correttedei dati di carico possono sovraccaricare la struttura meccanica del robot.Se si specificano dati di carico inesatti, si possono verificare le conseguenzedescritte di seguito.
• Non verrà sfruttata la capacità massima del robot• Precisione del percorso preclusa; ciಠinclude un rischio di velocità
eccessiva• Rischio di sovraccarico della struttura meccanica
Il controller esegue il monitoraggio continuo del carico e scrive un registro eventise il carico è superiore al previsto. Questo registro eventi viene salvato eregistrato nella memoria del controller.
Continua nella pagina successiva208 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.7.1 Creazione di un carico utile

Impostazioni della dichiarazione del carico utile
Recommendation...then...If you want to change...Ai carichi utili viene automati-camente assegnato il nomeload seguito da un numeroprogressivo, ad esempioload10, load31.Tali nomi possono esserecambiati con altri più descritti-vi.Se si cambia il nome di uncarico utile al quale è già sta-to fatto riferimento in un pro-gramma, è necessario cambia-re anche il nome di tutte lerelative occorrenze.
scegliere il ... pulsante accan-to a esso
il nome del carico utile
Per essere disponibili in tuttii moduli nel programma i cari-chi utili devono sempre esse-re globali.
selezionare lo scopo dellascelta nel menu
lo scopo
Le variabili carico utile devo-no sempre essere persistenti.
-il tipo di memoria
-selezionare dal menu il modu-lo nel quale deve essere di-chiarato il carico utile
il modulo
Impostazione del valore di ModalPayLoadModeQuesta procedura descrive il modo di modificare il valore di ModalPayLoadMode:
1 Nel menu ABB, selezionare Pannello di comando e quindi Configurazione.2 Selezionare Controller.3 Selezionare il tipo System Misc e quindi confermare la scelta.4 Selezionare ModalPayLoadMode e quindi Modifica.5 Selezionare due volte il parametro Valore ed impostarlo a 0.6 Fare clic su OK.7 Selezionare Sì alla domanda Le modifiche non avranno effetto fintantoché
il controller non venga riavviato "a caldo". Si desidera riavviarlo ora?.
Manuale dell'operatore - IRC5 con FlexPendant 2093HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.7.1 Creazione di un carico utile
Continua

5.7.2 Modifica dei dati del carico utile
PanoramicaUtilizzare i dati del carico utile per impostare le proprietà fisiche del carico utilecome il peso e il baricentro.Ciò può anche essere ottenuto automaticamente, tramite la routine di servizioLoadIdentify. Vedere le sezioni Esecuzione di una routine di servizio a pagina 225o LoadIdentify, routine di servizio di identificazione del carico a pagina 232.
Visualizzazione della definizione del carico utile
Azione
Nel menu ABB, scegliere Spostamento.1
Selezionare Carico utile per visualizzare l'elenco dei carichi utili disponibili.2
Selezionare il carico utile da modificare e scegliere Modifica.3
Selezionare Cambia valore.Vengono visualizzati i dati che definiscono il carico utile.
4
Modifica dei dati del carico utileQuesta procedura descrive come immettere manualmente i dati del carico utile.Ciò può anche essere ottenuto automaticamente eseguendo la routine di servizioLoadIdentify. L'esecuzione di una routine di servizio è descritta nel paragrafoEsecuzione di una routine di servizio a pagina 225.
UnitàIstanzaAzione
[kg]load.massImmettere il peso del carico utile.1
[mm]load.cog.xImmettere il baricentro del carico utile.2load.cog.y
load.cog.z
load.aom.q1Immettere dell'orientamento dell'asse del momento.3load.aom.q2
load.aom.q3
load.aom.q3
[kgm 2 ]ix
iy
Immettere il momento di inerzia del carico utile.4
iz
--Selezionare OK per utilizzare i nuovi valori o An-nulla per lasciare invariati i dati.
5
Continua nella pagina successiva210 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.7.2 Modifica dei dati del carico utile

Utilizzo del parametro PayLoadsInWristCoords
Utilizzando il parametro PayLoadsInWristCoords, i loaddata per carichi utilipossono essere specificati in relazione al polso invece che del TCP attivo odell’oggetto di lavoro. Ciò può essere utile se diversi utensili o TCP o oggetti dilavoro (quando l’utensile è fisso) vengono utilizzati per un carico utile. In tal casoè necessaria solo un’identificazione di carico invece che una per ciascun utensileo TCP o oggetto di lavoro. Per cui è possibile utilizzare gli stessi loaddata del caricoutile per ciascun robhold o utensile fisso attivo. Ciò consente di risparmiare tempo(ad esempio, durante il commissioning).Per ulteriori informazioni su PayLoadsInWristCoords, vedere Manuale tecnicodi riferimento - Parametri di sistema e Manuale tecnico di riferimento - IstruzioniRAPID, Funzioni e Tipi di dati.
Manuale dell'operatore - IRC5 con FlexPendant 2113HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.7.2 Modifica dei dati del carico utile
Continua

5.7.3 Modifica della dichiarazione del carico utile
PanoramicaUtilizzare la dichiarazione per modificare l'utilizzo della variabile del carico utilenei moduli di programma.
Visualizzazione della dichiarazione del carico utile
Azione
Nel menu ABB, scegliere Spostamento.1
Selezionare Carico utile per visualizzare l'elenco dei carichi utili disponibili.2
Selezionare il carico utile da modificare e scegliere Modifica.3
Nel menu, scegliere Cambia dichiarazione.4
Viene visualizzata la dichiarazione del carico utile. Vedere Creazione di un carico utilea pagina 208.
5
Nota
Se si cambia il nome di un carico utile al quale è già stato fatto riferimento in unprogramma, è necessario cambiare anche il nome di tutte le relative occorrenze.
212 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.7.3 Modifica della dichiarazione del carico utile

5.7.4 Eliminazione di un carico utile
Eliminazione di un carico utilePer maggiori informazioni sull'eliminazione di un carico utile, vedere Eliminazionedi un’istanza di dati a pagina 178.
Manuale dell'operatore - IRC5 con FlexPendant 2133HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.7.4 Eliminazione di un carico utile

5.8 Verifica
5.8.1 Informazioni sulla modalità automatica
Che cosa è la modalità automatica?In modalità automatica, la funzione di sicurezza del dispositivo di attivazione a treposizioni è bypassata in modo che il manipolatore possa muoversi senza interventoumano.
AVVERTENZA
Prima di selezionare la modalità automatica, qualsiasi funzione di protezionesospesa deve essere ripristinata a una funzionalità completa.
Task normalmente eseguiti in modalità automaticaI task elencati di seguito vengono, in genere, eseguiti in modalità automatica.
• Avvio e arresto dei processi.• Caricamento, avvio e arresto di programmi RAPID.• Movimento del manipolatore per riportarlo sul relativo percorso quando si
ritorna allo stato operativo dopo un arresto di emergenza.• Backup del sistema.• Ripristino dei backup.• Pulizia degli utensili.• Preparazione o sostituzione degli oggetti di lavoro.• Esecuzione di altri task orientati al processo.
Limitazioni in modalità automaticaIn modalità automatica non è possibile lo spostamento manuale. È possibile chevi siano altri task specifici che non devono essere eseguiti in questa modalità.Consultare la documentazione specifica dell’impianto o del sistema per verificarequali compiti specifici non devono essere eseguiti in modalità automatica.
Meccanismi di protezione attiviPer IRC5 entrambi i meccanismi di arresto in modalità generale (GS), arresto inmodalità automatica (AS) e arresto superiore (SS), sono attivi durante ilfunzionamento in modalità automatica.
Gestione delle interferenze di processoLe interferenze di processo potrebbero interessare non solo una cella dimanipolatore specifica ma anche un'intera catena di sistemi anche se l'origine delproblema è in una specifica cella.Durante tali interferenze è necessario prestare la massima attenzione in quantotale catena di eventi potrebbe creare funzionamenti pericolosi che non sono visibiliquando si aziona la singola cella del manipolatore. Tutti gli interventi di
Continua nella pagina successiva214 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.8.1 Informazioni sulla modalità automatica

manutenzione devono essere effettuati da personale provvisto di una buonaconoscenza dell'intera linea di produzione, non del solo manipolatore difettoso.
Esempi di interferenze di processoI componenti di prelievo di un manipolatore in un trasportatore potrebbero veniretolti dalla produzione a causa di un malfunzionamento meccanico, mentre iltrasportatore deve rimanere attivo per continuare la produzione nel resto dellalinea. Questo significa, ovviamente, che il personale deve prestare particolareattenzione quando prepara il manipolatore nelle vicinanze del trasportatore infunzione.Un manipolatore di saldatura richiede manutenzione. La rimozione del manipolatoredi saldatura dalla produzione significa che, per evitare pericoli per il personale, ènecessario rimuovere anche un banco di lavoro e un manipolatore per lamovimentazione dei materiali.
Manuale dell'operatore - IRC5 con FlexPendant 2153HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.8.1 Informazioni sulla modalità automatica
Continua

5.8.2 Informazioni sulla modalità manuale
Che cosa è la modalità manuale?In modalità manuale, il movimento del manipolatore avviene in base al comandomanuale. Per attivare i motori del manipolatore, ovvero per abilitare il movimento,è necessario premere il dispositivo di attivazione a tre posizioni.La modalità manuale viene utilizzata per la programmazione e la verifica deiprogrammi.Vi sono due modalità manuali:
• Modalità manuale a velocità ridotta, in genere chiamata modalità manuale.• Modalità manuale a velocità massima (non disponibile in USA o Canada).
Che cos'è la modalità manuale a velocità ridotta?Nella modalità manuale a velocità ridotta, il movimento è limitato a 250 mm/s. Èinoltre prevista una limitazione sulla velocità massima consentita per ciascun asse.Queste limitazioni degli assi dipendono dal robot e non possono essere modificate.Per attivare i motori del manipolatore, è necessario premere il dispositivo diattivazione a tre posizioni.
AVVERTENZA
Ove possibile, la modalità manuale di funzionamento va utilizzata mentre tuttele persone sono all'esterno dello spazio protetto.
Che cosa è la modalità manuale a velocità massima?In modalità manuale a piena velocità, il manipolatore può spostarsi in base allavelocità programmata, ma soltanto sotto comando manuale.La modalità manuale a velocità massima viene utilizzata solo per la verifica deiprogrammi.Nella modalità manuale a velocità massima, il limite di velocità iniziale è di massimo250 mm/s. Ciò si ottiene limitando la velocità al 3% della velocità programmata.Mediante il controllo manuale, la velocità può essere aumentata fino al 100%.Per attivare i motori del manipolatore è necessario premere il dispositivo diattivazione a tre posizioni, mentre per avviare l’esecuzione del programma ènecessario premere il pulsante Hold-to-run.
AVVERTENZA
Ove possibile, la modalità manuale di funzionamento va utilizzata mentre tuttele persone sono all'esterno dello spazio protetto.
Continua nella pagina successiva216 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.8.2 Informazioni sulla modalità manuale

Notare che la modalità manuale a velocità massima è opzionale e, pertanto, nonè disponibile in tutti i robot.
Nota
In conformità alla norma aggiornata, ISO 10218-1:2011Robots and robotic devices– Safety requirements for industrial robots – Part 1 Robots, alla modalità manualea velocità massima sono apportati gli adattamenti riportati di seguito.
• Attuazione del ripristino della velocità di 250 mm/s ogni volta che ildispositivo di attivazione a tre posizioni viene reinizializzato, sistemando ilselettore nella posizione centrale di abilitazione, una volta che è statorilasciato o pienamente compresso.
• La modifica dei programmi RAPID e lo spostamento manuale delmanipolatore sono disattivati.
Meccanismi di protezione bypassatiI meccanismi di arresto protetto (AS) in modalità automatica vengono tutti evitatidurante la modalità manuale.
Dispositivo di attivazione a tre posizioniInmodalità manuale i motori del manipolatore vengono attivati tramite il dispositivodi attivazione a tre posizioni su FlexPendant In tal modo, il manipolatore puòmuoversi solo fino a quando il dispositivo viene mantenuto premuto.Per eseguire un programma in modalità manuale a velocità massima è necessario,per ragioni di sicurezza, tenere premuto sia il dispositivo di attivazione a treposizioni sia il pulsante Avvia. La funzione Hold-to-run vale anche quando si eseguela verifica dell’esecuzione di un programma in modalità manuale a velocità massima.Il dispositivo di attivazione a tre posizioni è progettato in modo che per attivare imotori del manipolatore è necessario premere per metà corsa il relativo pulsante.Nelle posizioni completamente rilasciato e completamente premuto il manipolatorenon si muove.
La funzione Hold-to-runLa funzione Hold-to-run consente un'esecuzione passo passo o normale di unprogramma in modalità manuale a piena velocità. Da notare che lo spostamentonon richiede la funzione Hold-to-run, indipendentemente dalla modalità operativa.La funzione Hold-to-run può anche essere attivata per la modalità manuale avelocità ridotta.
Task eseguiti di norma nella modalità manuale a velocità ridottaI task elencati di seguito vengono eseguiti, di norma, nella modalità manuale avelocità ridotta.
• Spostamento manuale del manipolatore per riportarlo sul relativo percorsoquando si ritorna allo stato operativo dopo un arresto di emergenza
• Correzione del valore dei segnali di I/O dopo condizioni di errore• Creazione e modifica di programmi RAPID
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 2173HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.8.2 Informazioni sulla modalità manuale
Continua

• Avvio, avanzamento/indietreggiamento passo passo e arresto dell'esecuzionedel programma, ad esempio durante la verifica di un programma
• Regolazione delle posizioni programmate
Task eseguiti di norma nella modalità manuale a velocità massimaIn conformità alla norma, ISO 10218-1:2011, le attività elencate di seguito nonpossono essere eseguite in modalità manuale a velocità massima:
• Avvio e arresto dell'esecuzione del programma per la verifica finale deiprogrammi
• esecuzione del programma passo passo• impostazione della velocità (0–100%)• Impostazione del puntatore di programma (su Main, Routine, Cursor, routine
di servizio, ecc.)Le attività seguenti non possono essere eseguite in modalità manuale a pienavelocità:
• Modifica dei valori dei parametri di sistema• Modifica dei dati di sistema
218 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.8.2 Informazioni sulla modalità manualeContinua

5.8.3 Utilizzo della funzione Hold-to-run
Quando utilizzare la funzione Hold-to-runLa funzione Hold-to-run viene utilizzata per eseguire i programmi completamenteo un’istruzione alla volta in modalità manuale a velocità massima, in combinazionecon il dispositivo di attivazione a tre posizioni.Per eseguire un programma in modalità manuale a velocità massima è necessario,per ragioni di sicurezza, mantenere premuto sia il dispositivo di attivazione a treposizioni sia il pulsante Avvia. Questa funzione di tipo Hold-to-run vale anchequando si esegue la verifica dell’esecuzione di un programma in modalità manualea velocità massima. Quando i pulsanti Avvia, Avanti e Indietro vengono utilizzatiin questo modo, ovvero vengono mantenuti premuti, vengono indicati come pulsantiHold-to-run. Alcune versioni della FlexPendant possono anche essere dotate dipulsanti Hold-to-run separati.
FunzioneModalità operativa
Normalmente, Hold-to-run non ha alcun effetto nella moda-lità manuale a velocità ridotta.
Modalità manuale a velocitàridotta
Tuttavia, è possibile attivare la modalità manuale a velocitàridotta modificando un parametro di sistema.
La pressione di Hold-to-run E del dispositivo di attivazionea tre posizioni attiva l’esecuzione di un programma. Puòessere un’esecuzione in modo continuo o passo-paso.
Modalità manuale a velocitàmassima
Rilasciando Hold-to-run in questa modalità viene arrestatoimmediatamente il movimento del manipolatore e l'esecuzio-ne del programma. Quando lo si preme di nuovo, l'esecuzio-ne viene ripresa dalla stessa posizione.
Hold-to-run non viene utilizzata in modalità automatica.Modalità automatica
Utilizzo della funzione Hold-to-runQueste istruzioni descrivono come utilizzare la funzione Hold-to-run in modalitàmanuale a velocità massima.
Azione
Premere il dispositivo di attivazione a tre posizioni sulla FlexPendant.1
Selezionare la modalità di esecuzione premendo e tenendo premuto:• Avvia (esecuzione continua del programma)• Avanti (esecuzione del programma un'istruzione alla volta in avanti)• Indietro (esecuzione del programma un'istruzione alla volta all'indietro)
2
Se è stato premuto il pulsante Avvia allora l'esecuzione del programma continua finoa quando tale pulsante viene tenuto premuto.
3
Se è stato premuto Avanti o Indietro, il programma viene eseguito un'istruzione allavolta rilasciando e premendo di nuovo alternativamente il pulsante Avanti/Indietro.Notare che il pulsante deve essere premuto e tenuto premuto fino all'esecuzionedell'istruzione. Se il pulsante viene rilasciato, l'esecuzione del programma si arrestaimmediatamente.
Se il dispositivo di attivazione a tre posizioni viene rilasciato, in modo intenzionale oaccidentale, per attivare l’esecuzione è necessario ripetere la procedura completa.
4
Manuale dell'operatore - IRC5 con FlexPendant 2193HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.8.3 Utilizzo della funzione Hold-to-run

5.8.4 Esecuzione del programma da un'istruzione specifica
PanoramicaAll’avvio di un programma, l’esecuzione inizia dal puntatore di programma. Periniziare da un’altra istruzione, spostare il puntatore di programma verso il cursore.
AVVERTENZA
Quando si avvia l’esecuzione, il robot si sposterà verso la prima posizioneprogrammata nel programma. Assicurarsi che il robot con TCP non incorra nelrischio di incontare ostacoli!
Esecuzione del programma da un'istruzione specifica
Azione
Nel menu ABB, scegliere Editor di programma.1
Selezionare il passo di programma dal quale iniziare, quindi scegliere Debug e sele-zionare PP in cursore.
2
PERICOLO
Assicurarsi che non vi sia personale nell'area di lavoro del robot.Prima di azionare il robot, osservare le informazioni sulla sicurezza fornite nel para-grafo I robot in movimento sono potenzialmente letali! a pagina 21.
3
Premere il pulsante Avvio sul set di pulsanti hardware della FlexPendant (vedere Enella seguente illustrazione).
en0300000587
4
220 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.8.4 Esecuzione del programma da un'istruzione specifica

5.8.5 Esecuzione di una routine specifica
PanoramicaAll’avvio di un programma, l’esecuzione inizia dal puntatore di programma. Periniziare da un’altra routine, spostare il puntatore di programma verso la routine inquestione.
PrerequisitiPer poter eseguire una routine specifica, il modulo con la routine dev’essere caricatoed il controller trovarsi in modo manuale, all’arresto.
Esecuzione di una routine specificaQuesta procedura descrive il modo di eseguire una specifica routine, spostandosu di essa il puntatore di programma.
Azione
Nel menu ABB, scegliere Editor di programma.1
Selezionare Debug e poi Sposta PP nella routine per posizionare il puntatore di pro-gramma all'inizio della routine.
2
Premere il pulsante Avvio sulla FlexPendant.3
Informazioni correlateL'esecuzione di una routine di servizio è descritta nel paragrafo Esecuzione di unaroutine di servizio a pagina225. Lo stesso metodo può comunque essere utilizzatoper eseguire una qualsiasi routine nello scopo del task. Per ulteriori informazioni,vedere Esecuzione di una routine di servizio a pagina 225.
Manuale dell'operatore - IRC5 con FlexPendant 2213HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.8.5 Esecuzione di una routine specifica

5.8.6 Esecuzione un'istruzione alla volta
PanoramicaIn tutte le modalità operative, è possibile eseguire il programma passo per passoin avanti e all'indietro.L'indietreggiamento è limitato; per ulteriori informazioni, vedereManuale tecnicodi riferimento - RAPID Overview.
Selezione della modalità passoQuesta sezione descrive come selezionare la modalità passo. L'esecuzioneun'istruzione alla volta può essere eseguita in tre modalità: Ingresso, Salta eIstruzione di movimento.
InformazioniAzione
Azione descritta in Menu di impostazionerapida, Modalità per passi a pagina 88.
Selezionare la modalità passo mediante ilmenu di impostazione rapida.
1
Esecuzione un'istruzione alla voltaQuesta sezione descrive come eseguire un'istruzione alla volta in avanti eall'indietro.
premere...Per eseguire un'istruzione alla volta...
Pulsante Avanti sulla FlexPendantavanti
Pulsante Indietro sulla FlexPendantindietro
Limitazioni dell'esecuzione all'indietroPer l'esecuzione all'indietro vi sono alcune limitazioni:
• Quando si esegue un'istruzione alla volta all'indietro attraverso un'istruzioneMoveC, l'esecuzione non si interrompe nel punto circolare.
• Non è possibile tornare indietro un'istruzione alla volta da un'istruzione IF,FOR, WHILE e TEST.
• Non è possibile eseguire un'istruzione alla volta all'indietro fuori da unaroutine dopo averne raggiunto l'inizio.
• Vi sono istruzioni che influiscono sul movimento e non possono essereeseguite all'indietro (ad esempio, ActUnit, ConfL e PDispOn). Se si tental'esecuzione all'indietro, una finestra di avviso segnala che l'operazione nonè possibile.
Comportamento dell'esecuzione all'indietroQuando si esegue un'istruzione alla volta in avanti nel codice del programma, unpuntatore di programma indica la successiva istruzione da eseguire e un puntatoredi movimento indica l'istruzione di movimento che il robot sta eseguendo.Quando si esegue un'istruzione alla volta all'indietro nel codice del programma, ilpuntatore di programma indica l'istruzione precedente alla posizione del puntatoredi movimento. Quando il puntatore di programma indica un'istruzione di movimentoe il puntatore di movimento ne indica un'altra, il successivo movimento all'indietro
Continua nella pagina successiva222 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.8.6 Esecuzione un'istruzione alla volta

si sposterà sulla destinazione indicata dal puntatore di programma, utilizzando iltipo di movimento e la velocità indicati dal puntatore di movimento.
Esempio di esecuzione all'indietroIl presente esempio illustra il comportamento quando il sistema torna indietro inbase alle istruzioni di movimento. Il puntatore del programma e di movimentopermettono di tracciare in quale fase si trova l’esecuzione RAPIDA e dove si trovail robot.MoveL, MoveJ, e MoveC sono le istruzioni di movimento in RAPID, vedereManualetecnico di riferimento - Istruzioni RAPID, Funzioni e Tipi di dati.
en0400001204
Puntatore di programmaA
Puntatore di movimentoB
Evidenziazione del robtarget verso il quale si sta muovendo il robot o che è giàstato raggiunto.
C
allora...Quando...
Il puntatore di movimento indicherà p50 ed il puntatore del program-ma la prossima istruzione di movimento (MoveL p60).
Avanzamento fino aquando il robot è inp50
Il robot rimarrà fermo ma il puntatore del programma torneràall’istruzione precedente (MoveC p30, p40). In questo modo il si-stema indica che è stato pressato Indietro , cioè l’istruzione chesarà eseguita la prossima volta.
Se si preme una solavolta il pulsante Indie-tro
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 2233HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.8.6 Esecuzione un'istruzione alla volta
Continua

allora...Quando...
Il robot si muoverà linearmente fino a p40 ad una velocità di v300.se si preme di nuovoil pulsante Indietro L’obiettivo per questo movimento (p40) è preso dall’istruzione MoveC.
Il tipo di movimento (lineare) e la velocità sono prese dall’istruzionesotto (MoveL p50).Il puntatore di movimento indicherà p40 e il puntatore del programmasi sposterà fino a MoveL p20.
Il robot eseguirà un movimento circolare da p30 a p20 con una velo-cità pari a v1000.
se si preme di nuovoil pulsante Indietro
L’obiettivo p20 è preso dall’istruzione MoveL p20. Il tipo di movimen-to (circolare), il punto circolare (p30) e la velocità sono presedall’istruzione MoveC.Il puntatore di movimento indicherà p40 e il puntatore del programmasi sposterà fino a MoveL p10.
Il robot si muoverà linearmente fino a p10 con una velocità pari av1000.
se si preme di nuovoil pulsante Indietro
Il puntatore di movimento indicherà p10 e il puntatore del programmasi sposterà fino a MoveJ p10.
Il robot rimarrà fermo ma il puntatore del programma andràall’istruzione successiva (MoveL p20).
se si preme una voltail pulsante Avanti
Il robot si muoverà fino a p20 a una velocità pari a v1000.se si preme di nuovoil pulsante Avanti
224 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.8.6 Esecuzione un'istruzione alla voltaContinua

5.9 Routine di servizio
5.9.1 Esecuzione di una routine di servizio
Routine di servizioLe routine di servizio eseguono un certo numero di servizi comuni. Le routine diservizio disponibili dipendono dalla configurazione del sistema e dalle opzionidisponibili. Per ulteriori informazioni, fare riferimento alla documentazionedell'impianto o della cella.
PrerequisitiLe routine di servizio possono essere eseguite in modalità manuale a velocitàridotta o in modalità manuale a velocità massima.Il programma deve essere arrestato e deve essere presente un puntatore diprogramma.Non è possibile richiamare una routine in modalità sincronizzata.Se la routine di servizio contiene parti che devono essere eseguite in modalitàautomatica, il puntatore di programma non deve essere spostato manualmenteprima di avviare la routine di servizio. Il puntatore di programma deve trovarsi nelpunto in cui il flusso del programma è stato arrestato.
AVVERTENZA
Se viene avviata una routine di servizio nel mezzo di una istruzione di movimentoarrestato (ovvero, prima che venga raggiunta la posizione finale), il movimentoverrà ripreso all'avvio dell'esecuzione della routine di servizio.
ATTENZIONE
Notare che dopo l'avvio dell'esecuzione di una routine di servizio, l'interruzionepotrebbe non far ripartire il sistema dalla situazione precedente in quanto laroutine potrebbe avere spostato il braccio del robot.
Esecuzione di una routine di servizioQuesto paragrafo descrive come eseguire una routine di servizio, o un’altra routinenello scopo del task, per mezzo del comando Richiamo routine.
Azione
Nel menu ABB, scegliere Editor di programma.1
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 2253HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.9.1 Esecuzione di una routine di servizio

Azione
Nel menu Debug, scegliere Richiamo routine.
en0400000884
2
La finestra di dialogo Richiamo di una routine di servizio elenca tutte le routine diservizio predefinite disponibili.
3
Lo stesso dialogo può comunque essere utilizzato per eseguire una qualsiasi routinenello scopo del task. Selezionare Tutte le routine sul menu Visualizza, per vederetutte le routine disponibili.
en0400000885
Continua nella pagina successiva226 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.9.1 Esecuzione di una routine di servizioContinua

Azione
Selezionare una routine di servizio e quindi selezionare Vai a.4Verrà allora visualizzato l’Editor di programma con il puntatore di programma spostatoall’inizio della routine selezionata.
Premere il pulsante Avvio sulla FlexPendant, e seguire le istruzioni visualizzate sullaFlexPendant stessa.
5
Una volta eseguita la routine, il task viene arrestato ed il puntatore di programma ritornaal punto in cui si trovava prima dell’inizio della routine di servizio.
ATTENZIONE
Premere Cancella richiamo routine se si desidera interrompere la routine primache abbia terminato l’esecuzione. Prima di poter ripristinare il normale flusso delprogramma, comunque, si deve verificare la posizione corretta del robot. Se laroutine interrotta lo ha fatto spostare, si dovranno intraprendere le azioninecessarie per riportare il robot alla sua posizione. Per maggiori dettagli, vedereRitorno del robot sul percorso a pagina 263.
AVVERTENZA
Non si deve eseguire una routine d'assistenza nel mezzo di uno spostamento odi una saldatura.Se si eseguisse una routine d'assistenza nel mezzo di uno spostamento, imovimenti non terminati saranno completati prima dell'esecuzione della routinerichiamata. Questo potrebbe provocare un movimento indesiderato.Se possibile, procedere al completamento del movimento interrotto prima dirichiamare la routine di servizio. Altrimenti, memorizzare l'attuale movimentoaggiungendo StorePath e RestoPath nella routine di servizio. Il movimentoverrà allora completato una volta terminata la routine di servizio e dopo il riavviodel programma.Non sarà cimunque possibile memorizzare più di un singolo movimento interrottoogni volta che lo desidera, se la routine d'assistenza verrà chiamata da un gestored'errori con StorePath e RestoPath.
LimitazioniAccanto alle routine di servizio, Richiamo routine si applica a tutte le routine cherispondono ai seguenti criteri:
• Si deve trattare di una procedura con un elenco di parametri vuoto. Il chevuol dire che non deve trattarsi né di una funzione, né di una routine trap.
• Deve trovarsi nello scopo del task, non localmente. Se la procedura è localead un modulo, lo scopo è limitato a tal modulo, e la procedura non è visibiledal livello del task.
• Si deve trovare in un modulo caricato, non installato. (Verificare il parametrodi sistema Installed nel tipo Automatic Loading of Modules nell’argomentoController.)
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 2273HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.9.1 Esecuzione di una routine di servizio
Continua

Informazioni correlateRoutine di servizio per l'arresto della batteria a pagina 229.LoadIdentify, routine di servizio di identificazione del carico a pagina 232.Service Information System, ServiceInfo routine di servizio a pagina 231.Calibration Pendulum, CalPendulum routine di servizio a pagina 230.Per maggiori informazioni a proposito di StorePath e RestoPath, vedereManualetecnico di riferimento – RAPID: Istruzioni, Funzioni e Tipi di dati.
228 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.9.1 Esecuzione di una routine di servizioContinua

5.9.2 Routine di servizio per l'arresto della batteria
Quando utilizzare questa routine di servizioPer le unità SMB con contatto della batteria a 2 poli, è possibile arrestare la batteriadi riserva della scheda di misurazione seriale per risparmiare l'energia durante iltrasporto o l'immagazzinaggio. Si tratta della routine di servizio Bat_shutdown.Per le unità SMB con contatto a 3 poli, questa funzione non va utilizzata in quantol'assorbimento è talmente basso da non essere necessario.
Bat_shutdownLa funzione viene reimpostata quando il sistema viene nuovamente alimentato. Icontagiri andranno perduti e dovranno essere aggiornati anche se i valori dicalibratura saranno conservati.Il consumo, nel caso di spegnimenti normali, è di circa 1 mA. Quando si utilizza lamodalità di riposo, il consumo viene ridotto a 0,3 mA. Quando la batteria èpraticamente scarica, ovvero a meno di 3 Ah, viene emesso un allarme sullaFlexPendant, e la batteria deve essere sostituita.
Suggerimento
Prima di avviare la routine di servizio Bat_shutdown, spostare il robot alla suaposizione di calibratura. Con ciò, sarà più facile il ripristino dalla modalità riposo.
Informazioni correlateL'avvio di una routine di servizio è descritta nel paragrafo Esecuzione di una routinedi servizio a pagina 225.L'aggiornamento dei contagiri è descritto nel paragrafoAggiornamento del contagiria pagina 306.
Manuale dell'operatore - IRC5 con FlexPendant 2293HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.9.2 Routine di servizio per l'arresto della batteria

5.9.3 Calibration Pendulum, CalPendulum routine di servizio
Quando utilizzare questa routine di servizioCalPendulum è una routine di servizio utilizzata con il Calibration Pendulum, ilmetodo standard per la calibratura dei robot di ABB. Questo è il metodo più accuratoper il tipo di calibratura standard ed è anche quello consigliato per ottenere leprestazioni appropriate.
CalPendulumIl dispositivo di calibratura per il Calibration Pendulum viene consegnato come kitcompleto, comprensivo del manualeManuale dell'operatore - Calibration Pendulum.
Informazioni correlateEsecuzione di una routine di servizio a pagina 225.Il Calibration Pendulum è descritto estesamente nel manuale Manualedell'operatore - Calibration Pendulum. Informazioni specifiche su ciascun robotsono descritte nel relativo manuale del prodotto del robot stesso.
230 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.9.3 Calibration Pendulum, CalPendulum routine di servizio

5.9.4 Service Information System, ServiceInfo routine di servizio
Quando utilizzare questa routine di servizioServiceInfo è una routine di servizio basata sul Service Information System, SIS,una funzione software che semplifica la manutenzione del sistema robotico. Questafunzione consente infatti di controllare il tempo e la modalità operativa del robote avvisa l'operatore quando è necessario eseguire la manutenzione.
ServiceInfoPer programmare la manutenzione bisogna impostare i parametri di sistema deltipo SIS Parameters. Tutti i parametri di sistema sono descritti in Manuale tecnicodi riferimento - Parametri di sistema. Per ulteriori dettagli su SIS vedere Manualedell'operatore - Service Information System.
Funzioni controllateSono disponibili i seguenti contatori:
• Contatore tempo di calendario• Contatore tempo di funzionamento• Contatore tempo di funzionamento del riduttore
I contatori vengono azzerati al termine della manutenzione.Lo stato del contatore viene visualizzato dopo l'esecuzione della routine ServiceInfoper la manutenzione. Lo stato "OK" indica che il contatore non ha superato il limitedell'intervallo di manutenzione.
Informazioni correlateEsecuzione di una routine di servizio a pagina 225.Manuale dell'operatore - Service Information System.I parametri di sistema per SIS sono descritti in Manuale tecnico diriferimento - Parametri di sistema, capitolo Motion.
Manuale dell'operatore - IRC5 con FlexPendant 2313HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.9.4 Service Information System, ServiceInfo routine di servizio

5.9.5 LoadIdentify, routine di servizio di identificazione del carico
Quando utilizzare questa routine di servizioLa routine di servizio LoadIdentify viene utilizzata per identificare automaticamentei dati dei carichi montati sul robot. È anche possibile immettere i dati manualmente,ma ciò richiede informazioni che sono difficili da calcolare.Per eseguire LoadIdentify, vi sono alcuni elementi da considerare. Tali elementisono descritti nelle pagine seguenti. Sono anche presenti informazioni sullagestione degli errori e sulle limitazioni descritti in questo capitolo.
AVVERTENZA
È importante definire sempre il carico effettivo dell'utensile e, se utilizzato, ilcarico utile del robot (ad esempio una parte afferrata). Definizioni non correttedei dati di carico possono sovraccaricare la struttura meccanica del robot.Se si specificano dati di carico inesatti, si possono verificare le conseguenzedescritte di seguito.
• Non verrà sfruttata la capacità massima del robot• Precisione del percorso preclusa; ciಠinclude un rischio di velocità
eccessiva• Rischio di sovraccarico della struttura meccanica
Il controller esegue il monitoraggio continuo del carico e scrive un registro eventise il carico è superiore al previsto. Questo registro eventi viene salvato eregistrato nella memoria del controller.
LoadIdentifyLoadIdentify può identificare il carico dell'utensile e il carico utile. I dati che possonoessere identificati sono massa, baricentro e momenti di inerzia.
en0500001535
Carico del braccio superioreA
Carico dell'utensileB
Carico utileC
Prima di eseguire l'identificazione del carico, assicurarsi che i dati di caricodell'utensile siano definiti correttamente ed in anticipo, ad esempio, tramitel'esecuzione di LoadIdentify per l'utensile in questione.
Continua nella pagina successiva232 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.9.5 LoadIdentify, routine di servizio di identificazione del carico

Per identificare la massa di B e C, l’asse 3 deve eseguire alcuni movimenti. Questosignifica che per identificare la massa, il carico del braccio superiore A deve esserepreventivamente noto e definito correttamente.Per migliorare la precisione se si monta il carico del braccio superiore A, immetterela massa nota di B e C e selezionare il metodomassa nota durante l’identificazione.
Angoli di configurazionePer eseguire l'identificazione il robot sposta il carico dopo uno specifico schemae calcola i dati. Gli assi che vengono spostati sono 3, 5 e 6. Nella posizione diidentificazione, il movimento dell'asse 3 è circa 3 gradi e per l'asse 5 è circa 30gradi. Per l'asse 6 il movimento viene eseguito intorno a due punti di configurazione.Il valore ottimale per l'angolo di configurazione è +90 gradi o -90 gradi.
A
B
C
30° 30°
30°
30°
en0500001537
Configurazione 1 (posizione iniziale)A
Angolo di configurazioneB
Configurazione 2C
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 2333HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.9.5 LoadIdentify, routine di servizio di identificazione del carico
Continua

LoadIdentify con carichi del braccio montatiIl modo migliore per eseguire l'identificazione del carico è utilizzare un robot senzacarichi del braccio montati. Se ciò non è possibile, è comunque possibile ottenereun buon livello di precisione. Considerare, ad esempio, il robot nella figura diseguito, sul quale è montata un'attrezzatura per la saldatura ad arco.
en0500001536
Cavo 1A
Carico 1B
Cavo 2C
Carico 2D
Se si desidera utilizzare l'identificazione del carico per trovare i dati del carico 2,la cosa più importante da ricordare è di assicurarsi che il carico del bracciosuperiore sia definito correttamente, in particolare la relativa massa e il baricentrolungo il braccio del robot. Il carico del braccio comprende tutto ciò che è montatosul robot, fatta eccezione per il carico dell'utensile e il carico utile. Nella figuraprecedente, cavo 1, cavo 2 e carico 1 sono compresi nel carico del braccio; ènecessario calcolare il peso totale e il baricentro.Quando si esegue l'identificazione del carico, cavo 2 deve essere scollegato,altrimenti aggiungerebbe una forza aggiuntiva su carico 2. Quando si identificacarico 2 con tale forza presente, il risultato potrebbe variare notevolmente rispettoal carico corretto. Idealmente, cavo 2 deve essere scollegato da carico 2 e fissatosul braccio superiore. Se questo non è possibile, il cavo può anche esserescollegato da carico 1 e fissato sul braccio superiore in modo tale che la forzarisultante su carico 2 sia ridotta al minimo.
Prerequisiti per i carichi dell'utensilePrima di eseguire la routine di servizio LoadIdentify per un carico utensile,assicurarsi che:
• l'utensile sia selezionato nel menu Spostamento• l'utensile sia montato correttamente• l'asse 6 sia quasi orizzontale
Continua nella pagina successiva234 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.9.5 LoadIdentify, routine di servizio di identificazione del caricoContinua

• Il carico del braccio superiore è definito, nel caso sia necessario identificarela massa dell'utensile.
• gli assi 3, 5 e 6 non siano vicini ai corrispondenti limiti della portata di lavoro• la velocità sia impostata su 100%• Il sistema si trovi in modalità manuale.
Notare che non è possibile utilizzare LoadIdentify per tool0.
Prerequisiti per i carichi utiliPrima di eseguire la routine di servizio LoadIdentify per un carico utile, assicurarsiche:
• l'utensile e il carico di lavoro siano montati correttamente• l'asse 6 sia quasi orizzontale• il carico utensile sia noto (eseguire prima LoadIdentify per l'utensile)• Il carico del braccio superiore è definito, nel caso sia necessario identificare
la massa del carico utile.• quando si utilizza un TCP in movimento, l'utensile deve essere calibrato
(TCP)• quando si utilizza un TCP fisso, il corrispondente oggetto di lavoro deve
essere calibrato (sistema di riferimento utente e sistema di riferimentooggetto)
• gli assi 3, 5 e 6 non siano vicini ai corrispondenti limiti della portata di lavoro• la velocità sia impostata su 100%• Il sistema si trovi in modalità manuale.
Notare che non è possibile utilizzare LoadIdentify per load0.
LoadIdentify in esecuzionePer avviare la routine di servizio per l'identificazione del carico è necessario chevi sia un programma attivo in modalità manuale e che l'utensile e il carico utile daidentificare siano definiti e attivi nella finestra Spostamento.
Suggerimento
Eseguire sempre l’identificazione del carico a motori freddi (nessunriscaldamento).
InformazioniAzione
L'avvio di routine di sevizioè descritto nel paragrafoEsecuzione di una routine diservizio a pagina 225.
Avviare LoadIdentify dall’Editor di programma. Premereil dispositivo di attivazione a tre posizioni e poi il pulsanteAvvia sulla FlexPendant.
1
SelezionareAnnulla e quindiAnnulla chiamata routineper chiudere la routine diservizio senza perdere ilpuntatore di programma.
Selezionare OK per confermare che il percorso correnteverrà cancellato e che il puntatore di programma verràperso.
2
Selezionare Utensile o Carico utile.3
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 2353HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.9.5 LoadIdentify, routine di servizio di identificazione del carico
Continua

InformazioniAzione
In caso contrario, rilasciareil dispositivo di attivazione atre posizioni e selezionarel’utensile/carico utile correttonel menuMovimentomanua-le. Quindi ritornare a LoadI-dentify, premere il dispositi-vo di attivazione a tre posizio-ni e poi Avvia. ToccareRipro-va e confermare la correttez-za del nuovo utensile/caricoutile.
SelezionareOK per confermare che l'utensile e/o il caricoutile nel menu Spostamento siano attivi e montati corret-tamente.
4
Vedere punto 4.Quando si identificano carichi utensile, verificare chel'utensile sia attivo.
5
Quando si identificano carichi utili, verificare che l'uten-sile del carico utile sia attivo e calibrato.
Vedere punto 4.Quando si identificano carichi utili con TCP fisso, verifi-care che l'oggetto di lavoro corretto sia attivo e, preferi-bilmente, calibrato. Se tutto è corretto, scegliere OK perconfermare.
6
Selezionare il metodo di identificazione. Se è stato sele-zionato il metodo in cui viene assunto che la massa ènota, ricordare che deve essere stata definita corretta-mente la massa dell'utensile/carico utile da utilizzare.Selezionare OK per confermare.
7
Selezionare l'angolo di configurazione. Il valore ottimaleè +90 o -90 gradi. Se questo non è possibile, scegliereAltro e impostare l'angolo. Il valore minimo è +30 o -30gradi.
8
Gli assi da 1 a 3 non devonoessere a più di 10 gradi dallaposizione proposta.
Se il robot non è in una posizione corretta per l'identifica-zione, verrà richiesto di muovere manualmente uno opiù assi approssimativamente in una posizione specifica-ta. Effettuata l'operazione, scegliere OK per confermare.
9
Se non è ancora in una posizione corretta per l'identifica-zione del carico, il robot si muoverà lentamente nellaposizione corretta. Premere Sposta per avviare il movi-mento.
Questo è utile per garantireche il robot non colpiscanulla durante l'identificazio-ne. Tuttavia, questa operazio-ne richiederà parecchio tem-po.
Nota
Se l’identificazione del caricoè programmata per essereeseguita nella modalità ma-nuale a velocità massima,prima che possa essere av-viata la misurazione effettivaè richiesta una prova rallen-tata.
Prima di procedere all'identificazione del carico, il robotpuò eseguire lentamente i movimenti necessari (provarallentata). Scegliere Sì se si desidera una prova rallen-tata e No per procedere all'identificazione.
10
Continua nella pagina successiva236 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.9.5 LoadIdentify, routine di servizio di identificazione del caricoContinua

InformazioniAzione
La configurazione per l'identificazione del carico è cosìcompletata. Per avviare il movimento, passare in moda-lità automatica e Motori inseriti. Quindi premere Spostaper avviare i movimenti di identificazione del carico.
11
Terminata l’identificazione, ritornare in modalità manuale,premere il dispositivo di attivazione a tre posizioni e ilpulsante Avvia. Toccare OK per confermare.
12
Vedere Verifica schema dicarico a pagina 237.
Il risultato dell'identificazione del carico è ora visualizzatosulla FlexPendant.Per i robot che supportano la funzionalitàVerifica schemadi carico, è previsto un messaggio che indica se il caricoè stato o non è stato ed un pulsante Analizza per visua-lizzare ulteriori informazioni.
13
Toccare Sì per aggiornare il carico utile o l'utensile sele-zionato con i parametri di identificazione.
14
Toccare No per uscire da LoadIdentify senza salvare iparametri.
Verifica schema di caricoNel caso di robot che supportano la funzionalità Verifica schema di carico, lacombinazione carico totale, utensile e carico del braccio verrà valutata rispettoallo schema di carico. Le valutazioni del peso totale di movimentazione nonchédella distanza del baricentro sullo schema di carico nelle direzioni Z e L verrannofornite per le configurazioni sia con il polso rivolto verso l’alto sia con il polso rivoltoverso il basso.È previsto un messaggio che indica se il carico è stato o non è stato ed un pulsanteAnalizza per visualizzare ulteriori informazioni.
• Carico approvato• Carico non approvato• Carico approvato solo con il polso rivolto verso il basso
Esecuzione di LoadIdentify con ModalPayLoadMode disattivataQuando il parametro di sistema ModalPayLoadMode è disattivato, impostato a 0,LoadIdentify identificherà il carico dell'utensile e il carico totale. Non è più possibiledefinire il carico utile.Quando ModalPayLoadMode è disattivato, è possibile utilizzare l’argomento \TLoadnelle istruzioni di movimento. L’argomento \TLoad descrive il carico totale utilizzatonel movimento. Il carico totale è la somma del carito utensile più carico utile portatodall'utensile stesso. Se si utilizza l’argomento \TLoad allora il loaddata nell’attualetooldata non viene tenuto in considerazione. Per ulteriori informazioni sulleistruzioni di movimento ModalPayLoadMode vedere la sezione MoveL in Manualetecnico di riferimento - Istruzioni RAPID, Funzioni e Tipi di dati.
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 2373HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.9.5 LoadIdentify, routine di servizio di identificazione del carico
Continua

Per avviare la routine di servizio per l'identificazione del carico è necessario chevi sia un programma attivo in modalità manuale e che l'utensile e il carico utile daidentificare siano definiti e attivi nella finestra Spostamento.
Suggerimento
Eseguire sempre l’identificazione del carico a motori freddi (nessunriscaldamento).
InformazioniAzione
L'avvio di routine di sevizioè descritto nel paragrafoEsecuzione di una routine diservizio a pagina 225.
Avviare LoadIdentify dall’Editor di programma. Premereil dispositivo di attivazione a tre posizioni e poi il pulsanteAvvia sulla FlexPendant.
1
SelezionareAnnulla e quindiAnnulla chiamata routineper chiudere la routine diservizio senza perdere ilpuntatore di programma.
Selezionare OK per confermare che il percorso correnteverrà cancellato e che il puntatore di programma verràperso.
2
La selezione di aggiornamen-to del carico dell'utensile odel carico totale viene com-piuta ad uno stadio ulteriore.
SelezionareOK per proseguire con il processo LoadIden-tify.
3
In caso contrario, rilasciareil dispositivo di attivazione atre posizioni e selezionarel’utensile/carico utile correttonel menuMovimentomanua-le. Quindi ritornare a LoadI-dentify, premere il dispositi-vo di attivazione a tre posizio-ni e poi Avvia. ToccareRipro-va e confermare la correttez-za del nuovo utensile/caricoutile.
Selezionare OK per confermare che il carico idoneodell'utensile e/o il carico totale siano attivi nel menuSpostamento e che il carico dell'utensile e il carico totalesiano montati correttamente.
4
Vedere punto 4.Quando si identificano carichi utensile, verificare chel'utensile sia attivo.
5
Selezionare il metodo di identificazione. Se è stato sele-zionato il metodo in cui viene assunto che la massa ènota, ricordare che deve essere stata definita corretta-mente la massa del carico dell'utensile/carico utile dautilizzare. Selezionare OK per confermare.
6
Selezionare l'angolo di configurazione. Il valore ottimaleè +90 o -90 gradi. Se questo non è possibile, scegliereAltro e impostare l'angolo. Il valore minimo è +30 o -30gradi.
7
Gli assi da 1 a 3 non devonoessere a più di 10 gradi dallaposizione proposta.
Se il robot non è in una posizione corretta per l’identifi-cazione, viene richiesto di muovere manualmente unoo più assi approssimativamente in una posizione speci-ficata. Effettuata l’operazione, toccare OK per conferma-re.
8
Se non è ancora in una posizione corretta per l'identifica-zione del carico, il robot si muoverà lentamente nellaposizione corretta. Premere Sposta per avviare il movi-mento.
Continua nella pagina successiva238 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.9.5 LoadIdentify, routine di servizio di identificazione del caricoContinua

InformazioniAzione
Questo è utile per garantireche il robot non colpiscanulla durante l'identificazio-ne. Tuttavia, questa operazio-ne richiederà parecchio tem-po.
Nota
Se l’identificazione del caricoè programmata per essereeseguita nella modalità ma-nuale a velocità massima,prima che possa essere av-viata la misurazione effettivaè richiesta una prova rallen-tata.
Prima di procedere all'identificazione del carico, il robotpuò eseguire lentamente i movimenti necessari (provarallentata). Scegliere Sì se si desidera una prova rallen-tata e No per procedere all'identificazione.
9
La configurazione per l'identificazione del carico è cosìcompletata. Per avviare il movimento, passare in moda-lità automatica e Motori inseriti. Quindi premere Spostaper avviare i movimenti di identificazione del carico.
10
Terminata l’identificazione, ritornare in modalità manuale,premere il dispositivo di attivazione a tre posizioni e ilpulsante Avvia. Toccare OK per confermare.
11
Il risultato dell'identificazione del carico è ora visualizzatosulla FlexPendant. Selezionare Utensile se si desideral'aggiornamento dell'utensile selezionato, selezionareLoaddata se si desidera aggiornare il carico totale, oppu-re selezionare No se si desidera abbandonare senza at-tuare una salvaguardia.
12
Se si sono selezionati i Loaddata, è possibile aggiornareil carico totale verso una variabile persistente loaddata,esistente o nuova.
13
Gestione degli erroriSe il dispositivo di attivazione a tre posizioni viene rilasciato durante l’identificazionedel carico (prima dell’avvio del movimento), è sempre possibile riavviare la routinepremendo di nuovo il dispositivo di attivazione a tre posizioni seguito dal pulsanteAvvia.Se si verifica un errore durante i movimenti di identificazione del carico, la routinedeve essere riavviata dall’inizio. Ciò avviene automaticamente premendo Avviadopo la conferma dell’errore. Per interrompere e uscire dalla procedura diidentificazione del carico, toccare Annulla chiamata routine nel menu Debugdell’Editor di programma.
Limitazioni per LoadIdentifyTramite LoadIdentify è possibile identificare solo carichi utensile e carichi utili. Perquesto motivo, i dati di carico del braccio non possono essere identificati.Se i movimenti di identificazione del carico venissero interrotti da un qualsiasi tipodi arresto (interruzione del programma, arresto di emergenza, ecc.), l'identificazionedel carico deve essere riavviata dall'inizio. Confermare l'errore e premere il pulsanteAvvio per un riavvio automatico del sistema.
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 2393HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.9.5 LoadIdentify, routine di servizio di identificazione del carico
Continua

Se il robot viene arrestato su un percorso tramite un'interruzione di programma eviene eseguita l'identificazione del carico sul punto di arresto, il percorso verràazzerato. Questo significa che non verrà eseguito alcun movimento di ripresa perritornare sul percorso.L'identificazione del carico termina con un'istruzione EXIT. Questo significa che ilpuntatore di programma viene perso e deve essere impostato su main prima diavviare l'esecuzione di qualsiasi programma.
Suggerimento
L'utensile e/o i dati del carico utile possono essere impostati manualmente nelcaso che il carico sa ridotto (10% o meno del carico massimo) o simmetrico,come ad esempio nel caso che il carico sia distribuito simmetricamente attornoall'asse 6.
Suggerimento
Se la massa dell'utensile o il carico utile sono sconosciuti, la routine di servizioLoadIdentify è in grado in taluni casi di identificare una massa di 0 kg. Se il caricoè estremamente piccolo in confronto al carico massimo per il robot, una massadi 0 kg può essere adeguata. In caso contrario, per identificare la massa provaread eseguire la procedura indicata di seguito.
• Controllare che i carichi del braccio siano definiti correttamente e ripeterel'identificazione.
• Trovare il peso del carico con una modalità alternativa ed eseguirel'identificazione del carico con la massa conosciuta al fine di rimuovere ladipendenza sui carichi del braccio.
LoadIdentify per robot a 4 assiQuando si eseguire LoadIdentify su un robot con 4 e non 6 assi, ci sono alcunedifferenze. La presente descrizione delle differenze del tipo di robot presume chesiano simili a IRB 260, IRB 460, IRB 660, IRB 760, o IRB 910SC.Le differenze principali sono:
• Gli assi utilizzati sono:- 1 (o 2 per alcuni modelli di robot)- 3 (per tutti i modelli di robot)- 6 (o 4 per alcuni modelli di robot)
• Dato che viene utilizzato il primo asse (asse 1 o 2), i movimenti risultantipossono essere estesi.
• Non tutti i parametri di carico possono essere identificati.Il primo asse (asse 1 o 2) si muoverà di circa ±23 gradi dalla sua posizione attuale.Pertanto, il carico potrà muoversi per una grande distanza durante l’identificazione.Gli assi 3 e 6 (o 4) si muoveranno come nel caso del robot a 6 assi. L’angolo diconfigurazione per l’asse 6 (o 4) funziona esattamente come per i robot a 6 assi.
Continua nella pagina successiva240 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.9.5 LoadIdentify, routine di servizio di identificazione del caricoContinua

Dato che non sono presenti 6 assi, un robot a 4 assi non potrà identificare tutti iparametri del carico. I parametri seguenti non possono essere identificati:
• Ix - L’inerzia attorno all’asse delle x.• Iy - L’inerzia attorno all’asse delle y.• mz - La coordinata z per il centro della massa.
In ogni caso, per questo tipo di robot, i parametri summenzionati presenterannoun effetto trascurabile sulle prestazioni di movimento. Vedere l’illustrazionesottostante per la definizione del sistema di coordinate del carico.
xx0900000021
Suggerimento
È possibile che la procedura di identificazione non riesca a stimare il baricentrose la coppia misurata sia troppo variabile. In questo caso dovrebbe esserepossibile ottenere buoni risultati ripetendo la routine LoadIdentify, preferibilmentecon un’altra posizione dell’ultimo asse.
Informazioni correlateÈ pure possibile includere LoadIdentify in un programma mediante le istruzioniRAPID. Vedere LoadID inManuale tecnico di riferimento - Istruzioni RAPID, Funzionie Tipi di dati.L'immissione manuale di dati è descritta nel paragrafoModifica dei dati dell'utensilea pagina 192 e Modifica dei dati del carico utile a pagina 210.Il manuale del prodotto per il robot contiene informazioni sulle modalità e leposizioni di montaggio dei carichi.L'identificazione del carico per i posizionatori viene effettuata per mezzo dellaroutine di servizio ManLoadIdentify, vedere Manuale del prodotto - IRBP /D2009.La procedura per definire i parametri di sistema dei carichi del braccio è descrittain Manuale tecnico di riferimento - Parametri di sistema.
Manuale dell'operatore - IRC5 con FlexPendant 2413HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.9.5 LoadIdentify, routine di servizio di identificazione del carico
Continua

5.9.6 Servizio online controllo freni
PanoramicaLa BrakeCheck routine di servizio viene utilizzata per verificare se i freni meccanicifunzionano correttamente.La BrakeCheck routine di servizio fa parte dell’installazione RobotWare se ilcontroller non dispone di SafeMove o dell’opzione EPS.
Nota
Se il controller dispone dell’opzione SafeMove or EPS, l’installazione RobotWareinclude la routine di servizio Cyclic Brake Check. Per maggiori dettagli vedereManuale dell'applicazione - Sicurezza funzionale e SafeMove2.
Durante la routine di servizio in corso BrakeCheck i freni vengono testati insuccessione per 10-15 secondi.
Condizioni per eseguire la routine di servizio BrakeCheck.A seguito sono indicate le condizioni per seguire la routine di servizio BrakeCheck:
• Il robot e tutti gli assi aggiuntivi devono essere spostati in una posizionesicura e calma (lontana dal personale e dalle attrezzature), prima di potereffettuare una verifica dei freni. In genere, il robot si sposta soltanto di alcunicentimetri durante la verifica dei freni.
• Spostare il robot ad un punto d’arresto prima di effettuare una verifica deifreni.
• Il controllo dei freni può essere eseguito solo a livello normale (non dal livellotrappola, gestione errori, routine evento o livello percorso memoria).
Esclusione dei singoli assi dal controllo dei freniPer il controllo dei freni è possibile escludere i singoli assi. Per fare ciò impostareil valore del parametro sistema Deactivate Cyclic Brake Check for axis
in On. Per maggiori dettagli vedere Configurazione dei parametri di sistema apagina 248.
Esecuzione del controllo freniQuesti sono i due modi per attivare la routine di servizio BrakeCheck:
• Aprire la BrakeCheck routine di servizio da FlexPendant. Il controller dovràessere in modalità manuale.
• Aprire la procedura BrakeCheck dal programma RAPID.
AVVERTENZA
Quando il controllo freni è attivo, non modificare la velocità da FlexPendant enon utilizzare le istruzioni VelSet, AccSet, SpeedRefresh, o altre istruzioniche modificano il movimento in TRAPS o le routine eventi.
Continua nella pagina successiva242 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.9.6 Servizio online controllo freni

Nota
La funzione RAPID IsBrakeCheckActive può essere utilizzata per controllarese BrakeCheck è attivo.
Interruzione del controllo freniNon è consigliabile, ma è possibile arrestare l'esecuzione di una verifica dei freni.Se la verifica dei freni è interrotta, tale azione viene ripristinata quando l'esecuzionedel programma viene riavviata. La verifica dei freni può essere ripristinata fino a3 volte.
Manutenzione dei freniManutenzione freni è una funzione della funzionalità verifica dei freni.La routine BrakeCheck rileva automaticamente se la manutenzione dei frenimeccanici è necessaria e attiva la funzionalità Manutenzione freni durantel’esecuzione. Manutenzione freni applica il freno e ruota cinque volte i radiantidell’albero del motore 1, muovendo il braccio del robot per meno di 1 gradi.Appositi registri eventi indicano se la manutenzione dei freni è necessaria e se èstata effettuata.Per maggiori informazioni, vedere il parametro Brake Maintenance, tipo GeneralRapid, argomento Controller, in Manuale tecnico di riferimento - Parametri disistema.
Registri degli eventiQuando viene eseguito BrakeCheck, vengono mostrati i seguenti log di eventi:
TitoloRegistro eventi
Verifica dei freni eseguita10272
Verifica dei freni avviata10273
Se vi è un problema con uno o più freni meccanici, verrà mostrato un log di eventoche descrive quale unità meccanica e quale asse presentano freni non funzionanti:
TitoloRegistro eventi
Avvertimento prestazione dei freni37234
Errore prestazione dei freni37235
Controllo freni per sistemi MultiMove
Nota
Assicurarsi che tutte le unità meccaniche siano in piedi prima di ordinareBrakeCheck.
Uno dei compiti di movimento attiva la routine BrakeCheck per eseguire il controllodi tutte le unità meccaniche in tutti i compiti.
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 2433HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.9.6 Servizio online controllo freni
Continua

Il controllo del freno non deve essere eseguito se i task sono in modalitàsincronizzata (movimento coordinato). È necessario sincronizzare tutti i task dimovimento con le istruzioni WaitSyncTask prima e dopo il controllo effettivo delfreno. Se si esegue un’istruzione di movimento durante l’esecuzione di unBrakeCheck, verrà visualizzato un errore (41888) e l’esecuzione verrà fermata. Èinoltre vietato utilizzare l’istruzione ExitCycle durante un BrakeCheck attivo.La funzione RAPID IsBrakeCheckActive può essere utilizzata per controllarese c’è un BrakeCheck in corso.È possibile attivare solo un BrakeCheck alla volta. Ciò può essere controllato dallaroutine di servizio e se più di un task o client RAPID cercano di eseguire la routine,verrà attivato un errore (41886).
Esempio di programmaT_ROB1
PERS tasks task_list{2} := [ ["T_ROB1"], ["T_ROB2"] ];
VAR syncident sync1;
VAR syncident sync2;
...
IF PLC_di1_DO_CBC = 1 THEN
WaitSyncTask sync1, task_list;
BrakeCheck;
WaitSyncTask sync2, task_list;
ENDIF
T_ROB2
PERS tasks task_list{2} := [ ["T_ROB1"], ["T_ROB2"] ];
VAR syncident sync1;
VAR syncident sync2;
...
IF PLC_di1_DO_CBC = 1 THEN
WaitSyncTask sync1, task_list;
! Wait for T_ROB1 to be ready with BrakeCheck
WaitSyncTask sync2, task_list;
ENDIF
Verifica dei freni sugli assi aggiuntiviPer poter eseguire la verifica dei freni sugli assi aggiuntivi, è necessario calcolareil parametro Max Static Arm Torque (nella voce Motion e nel tipo Brake) per l’asseaggiuntivo e inserirlo nella configurazione. La verifica dei freni utilizza questo valoredurante la verifica dei freni a livello dell’errore.Il parametro deve indicare la coppia statica massima di cui hanno bisogno i freniper resistere nei casi in cui l'asse aggiuntivo si trova a livelli di gravità massima.Per il calcolo utilizzare la seguente formula:
Max Static Arm Torque = (M*L*g)/n
Continua nella pagina successiva244 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.9.6 Servizio online controllo freniContinua

Lunghezza rispetto alla massa (L)
1L
23
M * g
xx1600001289
Massa (M) * Costante di gravità (g)
Trasmissione (n)
Motore (1)
Riduttore (2)
Braccio (3)
Per calcolare il parametro di un asse che non presenta gravità, ad esempio unbinario, è possibile utilizzare la formula seguente:
Max Static Arm Torque = Tbrake min/1.35
Tbrake min per le unità motrici di ABB si trova nelle specifiche dei prodotti perl'unità motrice specifica, vedere Dati tecnici del prodotto - Gruppi motore e gruppiriduttore.Per ulteriori informazioni sul parametroMax Static Arm Torque, vedere l’argomentoMotion, tipo Brake in Manuale tecnico di riferimento - Parametri di sistema.
Nota
È necessario inserire il valore calcolato in [Nm] e calcolarlo al lato motore.
Descrizione dell’impostazione I/O
Configurazione del segnaleÈ possibile configurare i segnali digitali di uscita che riflettono lo stato dei frenimeccanici in un modulo aperto RAPID. I segnali digitali di uscita che possonoessere configurati per ciascun modulo di azionamento sono OK, WARNING, ERROR,e ACT (verifica dei freni attiva).La configurazione del segnale deve essere eseguita nel modulo RAPIDBC_config_IO.sys, vedere Descrizione dell’impostazione I/O a pagina 245.Il file BC_config_IO.sys si trova nella directory hd0a\<activesystem>\PRODUCTS\RobotWare_6.0x.xxxx\utility/BrakeCheck e deve esserecopiato nella directory HOME per attivare il sistema.
Nota
Ricordarsi di aggiornare la configurazione I/O con i segnali digitali di uscita.
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 2453HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.9.6 Servizio online controllo freni
Continua

In un sistema MultiMove è necessario definire un segnale digitale di uscita OK,WARNING, ERROR e ACT per ciascun modulo di azionamento.
Nota
Se i segnali devono conservare i loro valori in seguito a un’interruzione dialimentazione, le impostazioni di tale interruzione nei parametri del sistemadevono essere anch’essi aggiornati, vedere Descrizione dell’impostazione I/O apagina 245.
Descrizione del modulo BC_config_IOMODULE BC_config_IO(SYSMODULE,NOVIEW)
PROC BC_config_IO_proc(VAR string user_io_names{*,*})
!TPWrite "BC_config_IO_proc";
! Define your own signals. The signal
! names must be signals defined in EIO.cfg
! If 1 drive module
user_io_names{1, 1}:="BCACT1";
user_io_names{1, 2}:="BCOK1";
user_io_names{1, 3}:="BCWAR1";
user_io_names{1, 4}:="BCERR1";
! If 2 drive modules
!user_io_names{2, 1}:="BCACT2";
!user_io_names{2, 2}:="BCOK2";
!user_io_names{2, 3}:="BCWAR2";
!user_io_names{2, 4}:="BCERR2";
! If 3 drive modules
!user_io_names{3, 1}:="BCACT3";
!user_io_names{3, 2}:="BCOK3";
!user_io_names{3, 3}:="BCWAR3";
!user_io_names{3, 4}:="BCERR3";
! If 4 drive modules
!user_io_names{4, 1}:="BCACT4";
!user_io_names{4, 2}:="BCOK4";
!user_io_names{4, 3}:="BCWAR4";
!user_io_names{4, 4}:="BCERR4";
ENDPROC
ENDMODULE
Descrizione del file EIO.cfgEIO:CFG_1.0:6:1::
...
#
EIO_SIGNAL:
-Name "BCACT1" -SignalType "DO"
Continua nella pagina successiva246 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.9.6 Servizio online controllo freniContinua

-Name "BCOK1" -SignalType "DO"
-Name "BCWAR1" -SignalType "DO"
-Name "BCERR1" -SignalType "DO"
Descrizione del segnale di verifica dei freni
IntroduzioneDescrizione dei diversi stati dei segnali per la verifica dei freni nella routineBrakeCheck. I nomi dei segnali sono conformi a Descrizione dell’impostazioneI/O a pagina 245.
Sequenza di timing per i segnali della verifica dei freniDescrizione di quali segnali siano impostati a tempi diversi durante l’esecuzionedi BrakeCheck.
Inizio della verifica dei freniI seguenti segnali sono impostati all’inizio dell’esecuzione di BrakeCheck.
Impostato aSegnale
0BCOK
1BCACT
0BCERR
0BCWAR
Fine della verifica dei freniI seguenti segnali sono impostati al termine dell’esecuzione di BrakeCheck.
BrakeCheck test ER-RORImpostato a
BrakeCheck testWARNINGImpostato a
BrakeCheck test OKImpostato a
Segnale
001BCOK
100BCERR
010BCWAR
000BCACT
Puntatore di programma spostato su Main dopo l’interruzione della verifica dei freniQuando il puntatore di programma è spostato su Main dopo l’interruzionedell’esecuzione di BrakeCheck, vengono impostati i seguenti segnali.
Impostato aSegnale
0BCOK
0BCACT
Durante il primo test di verifica dei freni
Stato del segnaleSegnale
0BCOK
0BCERR
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 2473HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.9.6 Servizio online controllo freni
Continua

Stato del segnaleSegnale
0BCWAR
1BCACT
Test di verifica dei freni interrotto; il puntatore di programma si trova tuttora nella routine BrakeCheck
Stato del segnaleSegnale
0BCOK
0BCERR
0BCWAR
1BCACT
Test di verifica dei freni interrotto; il puntatore di programma è stato spostato dalla routine BrakeCheck
Stato del segnaleSegnale
0BCOK
0BCERR
0BCWAR
0BCACT
Configurazione dei parametri di sistema
Informazioni sui parametri di sistemaLa configurazione dei parametri di sistema richiesti per un sistema roboticodev’essere effettuata prima di eseguire la verifica dei freni.
Nota
È importante riavviare il controller IRC5 dopo aver modificato i parametri disistema.
Type Mechanical UnitTutte le unità meccaniche per gli assi aggiuntivi da controllare devono disporredei parametri Activate at Start Up e Deactivation Forbidden impostati su On. (Tuttele unità meccaniche controllate devono sempre essere attive).
Type ArmSe un asse deve essere escluso dalla verifica dei freni, impostare il parametroDeactivate Cyclic Brake Check for axis su On.
Type BrakeSe il controllo dei freni viene eseguito per un asse addizionale, è necessario definirela coppia frenante minima di sicurezza. Durante il test viene aggiunto un marginedi errore pari al 5%. Il parametro utilizzato è Max Static Arm Torque che vienedefinito sul lato motore . In caso di coppia frenante superiore viene impostato unlimite di allarme (in base al freno).
248 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
5 Programmazione e test5.9.6 Servizio online controllo freniContinua

6 In funzione6.1 Procedure di base
6.1.1 Avvio dei programmi
Avvio dei programmiUtilizzare questa procedura per avviare un programma per la prima volta ocontinuare l'esecuzione di un programma che è stato arrestato.Se nel sistema robotico è installata l'opzioneMultitasking, vedere anche la sezioneUtilizzo di programmi multitasking a pagina 253.
InformazioniAzione
Verificare che siano state effettuate tuttele preparazioni necessarie sul robot e nellacella del robot e che non vi siano ostacolinell’ambito dell'area di lavoro del robot.
1
Assicurarsi che non vi sia personale nellacella del robot.
2
xx0600002782
Selezionare una modalità operativa sulcontroller, mediante il commutatore dimodalità.
3
C: Pulsante Motors OnD: Interruttore di modalità
Premere il pulsante Motors On sul control-ler per attivare il robot.
4
Il caricamento dei programmi è descrittonel paragrafo Gestione dei programmi apagina 154.
Il programma è caricato?In caso affermativo, procedere al passosuccessivo.
5
In caso negativo, caricare un programma.
Vedere Menu di impostazione rapida, Mo-dalità di esecuzione a pagina 87 e Menudi impostazione rapida, Velocità a pagi-na 89.
Se necessario, selezionare modalità diesecuzione e velocità tramite il menu Impo-stazioni rapide.
6
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 2493HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
6 In funzione6.1.1 Avvio dei programmi

InformazioniAzione
Il pulsante è illustrato nella sezionePulsan-ti hardware a pagina 39.
In modalità AUTO:1 Premere il pulsante Avvio sulla
FlexPendant per iniziare il program-ma.
In modalità MANUAL:1 Selezionare la modalità di avviamen-
to.2 Premere e tenere premuto il disposi-
tivo di attivazione a tre posizioni.3 Premere il pulsante Avvio sulla
FlexPendant per iniziare il program-ma.
7
Il modo di selezionare una modalità di av-vio viene illustrato nel paragrafo Utilizzodella funzione Hold-to-run a pagina 219.
Il ritorno del robot sul percorso è descrittonel paragrafo Ritorno del robot sul percor-so a pagina 263.
È visualizzata la finestra di dialogo Richie-sta di ripresa?In caso affermativo, riportare il robot sulpercorso utilizzando un metodo adeguato.
8
In caso negativo, proseguire.
Questa finestra di dialogo viene visualizza-ta soltanto se sono definiti i parametri disistema di tipo Warning at start. VedereManuale tecnico di riferimento - Parametridi sistema.
Se viene visualizzata la finestra di dialogoIl cursore non coincide con il PP, selezio-nare PP o Cursore per selezionare il puntoda cui il programma deve iniziare. Premerequindi di nuovo il pulsante Avvio.
9
Continuazione dell'esecuzione dopo che il programma è stato modificatoÈ sempre possibile continuare un programma anche se è stato modificato.In modalità automatica, potrebbe venire visualizzata una finestra di dialogo diavvertimento per evitare il riavvio del programma nel caso le conseguenze nonsiano chiare.
then tap...If you...
SìSi è certi che le modifiche eseguite non sono in conflitto con la posizio-ne corrente del robot e che il programma può continuare senza pericoloper l'attrezzatura o per il personale?
NoVi sono dubbi sulle conseguenze che potrebbero derivare dalle modi-fiche e si desidera indagare ulteriormente sull’argomento.
Riavvio dall'inizioÈ possibile riavviare un programma a partire dalla finestra Produzione o dall'Editor di programma.PP verso Main, dalla finestra Produzione, azzererà il puntatore di programmaall’ingresso di produzione in tutti i task normali, inclusi i task disattivati nel pannellodi selezione dei task.PP verso Main dall’Editor di programma azzererà il puntatore di programmaall’ingresso di produzione soltanto nel task specificato, anche se il task in questionefosse stato disattivato nel pannello di selezione dei task.Utilizzare questa procedura per riavviare un programma dalla finestra Produzione.
Azione
Nel menu ABB, scegliere Finestra Produzione.1
Selezionare Sposta PP in Main.2
Avviare il programma premendo il pulsante Avvio sulla FlexPendant.3
Continua nella pagina successiva250 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
6 In funzione6.1.1 Avvio dei programmiContinua

Utilizzare questa procedura per riavviare un programma dall’Editor di programma.
Azione
Nel menu ABB, scegliere Editor di programma.1
Selezionare Debug.2
Selezionare Sposta PP in Main.3
Avviare il programma premendo il pulsante Avvio sulla FlexPendant.4
LimitazioniÈ possibile eseguire un solo programma alla volta, a meno che il sistema non siadotato dell'opzione Multitasking, In questo caso, si possono eseguirecontemporaneamente diversi programmi. Vedere il modo di selezionare i task inMenu di impostazione rapida, Task a pagina 90.Se il sistema robotico rileva degli errori nel codice durante l'esecuzione delprogramma, verrà interrotto e l'errore viene registrato nel registro degli eventi.
Manuale dell'operatore - IRC5 con FlexPendant 2513HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
6 In funzione6.1.1 Avvio dei programmi
Continua

6.1.2 Interruzione dei programmi
Interruzione dei programmiSe nel sistema robotico è installata l'opzioneMultitasking, vedere anche la sezioneUtilizzo di programmi multitasking a pagina 253.
Azione
Verificare che l'operazione in corso sia in una condizione che è possibile interrompere.1
Assicurarsi che l'interruzione del programma possa avvenire in tutta sicurezza.2
Premere il pulsante Stop sul gruppo di pulsanti hardware del dispositivo di spostamen-to.
3
PERICOLO
Non utilizzare il pulsante Stop in caso di emergenza. Utilizzare il pulsante diarresto di emergenza.L'interruzione di un programma tramite il pulsante Stop non significa che ilmovimento del robot si arresti immediatamente.
Interruzione dell'esecuzione quando si utilizza Hold-to-run o l'esecuzione passo passoQuando si utilizza Hold-to-run o l'esecuzione passo passo, è possibile interromperel'esecuzione in base alle condizioni descritte di seguito.
InformazioniAzioneMode
La funzione Hold-to-run è de-scritta nel paragrafo FlexPen-dant a pagina 37.
Rilasciare il pulsante AvvioFunzionamento tramite Hold-to-run
I pulsanti STOP e Avanti so-no descritti nel paragrafoFlexPendant a pagina 37.
Il robot si fermerà dopo avereeseguito ciascuna istruzione.Eseguire l'istruzione successi-va premendo di nuovo il pul-sante Avanti.
Modalità passo passo
Se si preme il pulsante STOPdurante l'esecuzione diun'istruzione di movimento, ilrobot verrà arrestato senzacompletare il movimento.
252 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
6 In funzione6.1.2 Interruzione dei programmi

6.1.3 Utilizzo di programmi multitasking
PanoramicaIn un sistema con l’opzione Multitasking, è possibile avere uno o più programmiche vengono eseguiti parallelamente, ad esempio, in una cella MultiMove con piùdi un robot, ciascuno dei quali ha il proprio task e programma (multitasking).Per informazioni generali a proposito del trattamento dei programmi, vedereGestione dei programmi a pagina 154. Multitasking è descritto in Applicationmanual - Controller software IRC5.
Configurazione manuale dei taskPer essere eseguiti secondo le aspettative i task devono essere configurati.Normalmente, tutti i task sono configurati alla consegna. La configurazione deitask viene eseguita tramite la definizione dei parametri di sistema del tipo diController. Vedere la sezioneManuale tecnico di riferimento - Parametri di sistemaper informazioni sui parametri.Per configurare i task manualmente sono necessarie informazioni dettagliate. Atal scopo leggere la documentazione dell'impianto o della cella.
Modalità di esecuzione dei taskI task possono essere definiti come Normal, Static, o Semistatic. Static e i taskSemistatic vengono avviati automaticamente, non appena un programma vienecaricato in quei dati task.I task Normal vengono avviati quando si preme il pulsanteAvvio della FlexPendante vengono arrestati quando si preme il pulsante Stop.Per poter fare un passo, avviare o arrestare un task statico o semistatico:selezionare su Impostazioni pannello task Tutti i task e attivare il task per mezzodel menuQuickset. VedereApplicationmanual - Controller software IRC5, sezioneMultitasking.I concetti di Static, Semistatic e Normal vengono descritti in Manuale tecnico diriferimento - Parametri di sistema, tipo Tasks.
Caricamento, esecuzione e interruzione di programmi multitaskingQuesta sezione descrive come caricare, eseguire e interrompere programmimultitasking.
Azione
Assicurarsi che sia configurato più di un singolo task. Questo viene attuato per mezzodei parametri del sistema, vedereManuale tecnico di riferimento - Parametri di sistema.
1
Caricare i programmi nel rispettivo task utilizzando l'Editor di programma o la finestraProduzione, come descritto nel paragrafo Caricamento di un programma esistente apagina 155.
2
Se è necessario disattivare uno o più task, accedere al menu di impostazione rapida.Vedere la sezione Menu di impostazione rapida, Task a pagina 90.La deselezione dei task può essere eseguita solo in modalità manuale. Quando sipassa alla modalità automatica, verrà visualizzata una finestra di avviso per segnalareche non tutti i task sono selezionati per l'esecuzione.
3
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 2533HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
6 In funzione6.1.3 Utilizzo di programmi multitasking

Azione
Avviare l'esecuzione del programma premendo il pulsante Avvio. Vengono avviatitutti i task attivi.
4
Interrompere l'esecuzione del programma premendo il pulsante Stop. Tutti i task attivivengono allora interrotti.
5
Caricamento di un programma su un taskQuesta sezione descrive come caricare un programma su un task in un sistemamultitasking. Si presuppone che i task siano stati configurati.
Caricamento di un programma dalla finestra Produzione
Azione
Nel menu ABB, scegliere Finestra Produzione.1.
Selezionare il task nel quale caricare un programma.2.
Selezionare Elimina programma....3.Se si desidera aprire un programma situato in un'altra cartella, individuare e aprirequella desiderata. Vedere la descrizione in Esplora FlexPendant a pagina 56.Viene visualizzata la finestra di dialogo per la selezione dei file.
Selezionare il programma da caricare seguito da OK.4.
Caricamento di un programma dall'Editor di programma
Azione
Nel menu ABB, scegliere Editor di programma.1.
Selezionare Task e programmi.2.
Selezionare il task nel quale caricare un programma.3.
Nel menu File, scegliere Carica programma.4.Se si desidera aprire un programma situato in un'altra cartella, individuare e aprirequella desiderata. Vedere la descrizione in Esplora FlexPendant a pagina 56.Viene visualizzata la finestra di dialogo per la selezione dei file.
Selezionare il programma da caricare seguito da OK.5.
Selezionare Chiudi per chiudere l'Editor di programma.6.
Visualizzazione di programmi multitaskingNella finestra Produzione è presente una scheda per ciascun task. Per commutaretra i vari task, scegliere la scheda desiderata.Per modificare svariati task in parallelo, aprire unEditor di programma per ciascunodi quelli desiderati. Per modificare i task statici e semistatici, vedere Applicationmanual - Controller software IRC5, sezione Multitasking.
254 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
6 In funzione6.1.3 Utilizzo di programmi multitaskingContinua

6.1.4 Utilizzo della supervisione delmovimento e non dell’esecuzione delmovimento
Supervisione del movimentoIl software del controller dispone di una funzionalità tendente alla riduzione delleforze di impatto di collisioni sul robot. Questa assistenza protegge il robot el’attrezzatura esterna da gravi danni in caso di una collisione.La supervisione del movimento durante l’esecuzione del programma è sempreattiva, per predisposizione, indipendentemente dalle opzioni installate nel controller.Quando viene rilevata una collisione, il robot si arresta immediatamente, e alleviale forze residue in gioco spostandosi per una breve distanza in direzione oppostalungo il suo percorso. L’esecuzione del programma si arresta con un messaggiodi errore. Il robot permane nello stato Motori inseriti, in modo che l’esecuzione delprogramma possa essere ripristinata dopo la ricezione del messaggio d’errore.È presente inoltre un’opzione software, chiamataCollision Detection, che presentacaratteristiche supplementari, quali la supervisione durante il movimento. Pertrovare se il proprio sistema disponga di questa opzione installata, scegliereInformazioni sistema nel menu ABB. Espandere il nodo Proprietà del sistema escegliere Opzioni sotto Control Module.
Funzioni della versione di base di RobotWareDescrizione delle funzioni nella versione base di RobotWare:
• Supervisione del percorso in modalità automatica e manuale, a piena velocità,utilizzata per prevenire danni meccanici dovuto al fatto che il robot incorrain un ostacolo durante l’esecuzione del programma.
• Viene utilizzata Esecuzione senza movimento per eseguire un programmasenza movimento del robot.
Funzioni presenti nella Collision DetectionUn sistema RobotWare dotato di Collision Detection presenta una funzionalitàaggiuntiva:
• Supervisione del percorso in modalità manuale, e la possibilità di regolarela supervisione in tutti i modi.
• Viene utilizzata la Jog Supervision per prevenire danni meccanici al robotdurante il spostamento.
• L’istruzione RAPID MotionSup viene impiegata per attivare/disattivare ilrilevamento delle collisioni e regolare la sensibilità durante l’esecuzione delprogramma.
Nota
La supervisione del movimento deve essere impostata separatamente per ciascuntask.
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 2553HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
6 In funzione6.1.4 Utilizzo della supervisione del movimento e non dell’esecuzione del movimento

Modifica delle impostazioni di supervisione di movimentoQuesta sezione descrive come modificare le impostazioni per la supervisione delmovimento.
InformazioniAzione
Nel menu ABB toccare il Pannello di controllo e poiSupervisione.
1
In presenza di più di un task, ènecessario impostare i valoridesiderati separatamente perciascun task.
Selezionare l’elenco Task e quindi selezionare untask.
2
Suggerimento
La sensibilità può essere regola-ta tra 0 e 300. Nel caso essa siainferiore a 80, comunque, il robotpotrebbe arrestarsi a causa dellaresistenza interna.
Selezionare OFF/ON per rimuovere o attivare la su-pervisione percorso.Selezionare il pulsante 123... per aprire la tastieranumerica e inserire un valore per regolare la sensibi-lità della supervisione percorso.
Nota
Se l'opzioneCollision Detection non fosse installata,• l'impostazione di sensibilità non avrebbe alcun
effetto.• la supervisione del percorso influisce soltanto
sul robot in modalità piena velocità, automaticae manuale.
3
Nota
Si può modificare la sensibilitàdella Supervisione del percorso.Per ulteriori informazioni, vedereImpostazione della sensibilitàdella supervisione del movimen-to a pagina 257.
Suggerimento
La sensibilità può essere regola-ta tra 0 e 300. Nel caso essa siainferiore a 80, comunque, il robotpotrebbe arrestarsi a causa dellaresistenza interna.
Selezionare OFF/ON per rimuovere o attivare la su-pervisione jog (avanzamento lento).Selezionare il pulsante 123... per aprire la tastieranumerica e inserire un valore per regolare la sensibi-lità della supervisione jog.
Nota
Se l'opzioneCollision Detection non fosse installata,queste impostazioni non avrebbero alcun effetto.
4
Nota
Si può modificare la sensibilitàdella Supervisione del percorso.Per ulteriori informazioni, vedereImpostazione della sensibilitàdella supervisione del movimen-to a pagina 257.
VedereEsecuzione senzamovi-mento a pagina257 per informa-zioni su questa funzione.
Nell’ambito delle Impostazioni d’esecuzione, sceglie-re OFF/ON per attivare/disattivare l’esecuzione dinon movimento. Si tratta di una funzione separata,non di una parte della supervisione del movimento.
5
Continua nella pagina successiva256 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
6 In funzione6.1.4 Utilizzo della supervisione del movimento e non dell’esecuzione del movimentoContinua

Impostazione della sensibilità della supervisione del movimentoUtilizzare la procedura seguente per impostare la sensibilità della Supervisionedel percorso e Supervisione dello spostamento manuale.
InformazioniAzione
Nel menu ABB, scegliere Pannello di comando,quindi scegliereConfigurazione.
1
Selezionare Argomenti e selezionare Movimento.2
Selezionare il tipo Supervisione del movimento econfermare la scelta.
3
Ad esempio: rob1Selezionare un elemento dall'elenco e scegliereModifica.
4
Il valore massimo che può essereimpostato è 500.
Selezionare Livello di rilevamento delle collisioni sulpercorso, toccare due volte e impostare un valore.
5
Fare clic su OK.6
Il valore massimo che può essereimpostato è 500.
Selezionare Livello di rilevamento delle collisionidurante il movimento manuale, toccare due volte eimpostare un valore.
7
Fare clic su OK.8
Esecuzione senza movimentoL’esecuzione senza movimento permette di eseguire il programma RAPID senzail movimento del robot. Tutte le altre funzioni operano normalmente: durate ciclocorrente, I/O, calcolo velocità TCP ecc.L’esecuzione senza movimento può essere impiegata per il debugging diprogrammi, o la valutazione della durata del ciclo. Essa rappresenta inoltre unasoluzione, nel caso sia ad esempio necessaria la misurazione del consumo di collao vernice durante un ciclo.Quando l'esecuzione senza movimento è attivata, può essere eseguita in:
• modo manuale• modalità manuale a velocità massima• modalità automatica
Le durate di ciclo verranno simulate conformemente alla modalità selezionata.
Nota
L’esecuzione senza movimento può essere attivata unicamente quando il sistemasi trova in stato Motori disinseriti.
ATTENZIONE
Dopo un riavvio l'esecuzione senza movimento viene annullata. Se si intendeeseguire il programma in modalità senza movimento, non riavviarlo senza aververificato lo stato di Esecuzione senza movimento. L'avvio non corretto delprogramma potrebbe causare gravi lesioni o la morte, o danneggiare il robot oaltre attrezzature.
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 2573HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
6 In funzione6.1.4 Utilizzo della supervisione del movimento e non dell’esecuzione del movimento
Continua

Informazioni correlatePer ulteriori informazioni su Collision Detection, vedere Applicationmanual - Controller software IRC5.
258 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
6 In funzione6.1.4 Utilizzo della supervisione del movimento e non dell’esecuzione del movimentoContinua

6.1.5 Impiego dell’opzione hot plug
Opzione Hot plugL’opzione hot plug rende possibile:
• Scollegare il dispositivo di spostamento da un sistema in modalità automatica,quindi azionare il sistema senza un dispositivo di spostamento collegato.
• Collegare e azionare temporaneamente un dispositivo di spostamento senzainterrompere l'applicazione in esecuzione sul sistema.
AVVERTENZA
La pressione del pulsante hot plug disattiva il pulsante di arresto di emergenzasulla FlexPendant. Premere il pulsante hot plug solo per collegare o scollegarela FlexPendant.
AVVERTENZA
Una FlexPendant scollegata deve sempre essere conservata separatamente dalcontroller IRC5.
Connettere e disconnettere la FlexPendant mediante il pulsante hot plugNella procedura seguente viene descritto come collegare o scollegare laFlexPendant su un sistema in modalità automatica mediante l'opzione pulsantehot plug.
Nota
Non passare in modalità manuale o manuale a velocità massima mentre il sistemaè in esecuzione senza la FlexPendant. Quando si passa in modalità automaticala FlexPendant deve essere collegata altrimenti non è possibile confermare ilcambio di modalità.
InformazioniAzione
Assicurarsi che il sistema sia in modalitàautomatica.
1
Una spia rossa all'interno del pulsante neindica l'attivazione.
Premere e mantener premuto il pulsantehot plug.
2
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 2593HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
6 In funzione6.1.5 Impiego dell’opzione hot plug

InformazioniAzione
xx0600002784
Tenere premuto il pulsante hot plug e, alcontempo, commutare il tappo a ponticellocon il connettore della FlexPendant.
3
A: Pulsante Hot plugB: Connettore della FlexPendant
xx0600002796
Tappo ponticello
Assicurarsi che il pulsante non sia bloccatonella posizione di attivazione perché questodisattiva il pulsante di arresto di emergenzadella FlexPendant.
Rilasciare il pulsante hot plug.4
Nota
Quando la FlexPendant è scollegata, il tappo ponticello deve essere collegatoin posizione.
Nota
Se il pulsante hot plug viene rilasciato mentre il tappo ponticello o la FlexPendantè collegata, i movimenti del robot verranno arrestati in quanto le catene di arrestodi emergenza sono aperte.
Limitazioni per i messaggi sulla FlexPendantQuando si utilizza l'opzione pulsante hot plug, i messaggi sulla FlexPendant sonosoggetti alle seguenti limitazioni:
Messaggi dell'operatoreAlcune applicazioni possono richiedere input all'operatore mediante la FlexPendant,ad esempio, quelle che utilizzano le istruzioni RAPID TPReadNum, UIMsgBox, etc.).Se l'applicazione comprende un tale messaggio dell'operatore, l'esecuzione delprogramma rimarrà in attesa. Dopo il collegamento della FlexPendant, pervisualizzare e rispondere a questi messaggi è necessario arrestare e avviarel'esecuzione del programma. Essi non vengono visualizzati automaticamentecollegando semplicemente la FlexPendant.
Continua nella pagina successiva260 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
6 In funzione6.1.5 Impiego dell’opzione hot plugContinua

Se possibile, evitare di utilizzare questi tipi di istruzioni nella programmazione disistemi che utilizzano l'opzione pulsante hot plug.
Messaggi del registro eventiQuando si collega la FlexPendant è anche possibile visualizzare i messaggi diregistro per il periodo di scollegamento in quanto vengono memorizzati sulcontroller.
Manuale dell'operatore - IRC5 con FlexPendant 2613HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
6 In funzione6.1.5 Impiego dell’opzione hot plug
Continua

6.2 Risoluzione dei problemi ed eliminazione degli errori
6.2.1 Procedura generale per la risoluzione dei problemi
Tipi di guastiI guasti che si verificano nel sistema robotico possono essere di due categorie:
• Guasti rilevati dal sistema di diagnostica integrata. Questi guasti sono descrittinella sezioneMessaggi registro eventi inManuale dell'operatore - Risoluzionedei problemi IRC5.
• Guasti NON rilevati dal sistema di diagnostica integrata. Tali guasti sonodescritti nella sezione Altri tipi di guasti in Manualedell'operatore - Risoluzione dei problemi IRC5.
Guasti che causano messaggi di errore sulla FlexPendantIl sistema di controllo è dotato di un software di diagnostica che semplifica leprocedure di risoluzione dei problemi e riduce i tempi di inattività. Tutti gli erroririlevati dal sistema di diagnosi vengono visualizzati su FlexPendant con messaggidi testo chiari ed un codice.Tutti i messaggi di sistema e di errore vengono registrati in un registro comunenel quale vengono salvati gli ultimi 150 messaggi. È possibile accedere al registrodalla barra di stato sulla FlexPendant.Per semplificare la risoluzione dei problemi è importanti attenersi a determinatiprincipi di base. Questi sono indicati nei principi di risoluzione dei problemi inManuale dell'operatore - Risoluzione dei problemi IRC5.
Guasti che NON causano messaggi di errore sulla FlexPendantQuesti guasti non vengono rilevati dal sistema di diagnostica ma vengono gestitiin altri modi. Il metodo di osservazione del sintomo del guasto influiscenotevolmente sul tipo di guasto. Istruzioni in merito sono fornite nella sezione Altritipi di guasti in Manuale dell'operatore - Risoluzione dei problemi IRC5.Le anomalie che NON attivano messaggi di errore in FlexPendant possono essererisolte seguendo i passi 3 e 4 della procedura sopraindicata.
Altre azioni possibiliAlcuni errori possono richiedere l’esecuzione di una routine di servizio. Vedere lasezione Routine di servizio a pagina 225.
262 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
6 In funzione6.2.1 Procedura generale per la risoluzione dei problemi

6.2.2 Ritorno del robot sul percorso
Informazioni sui percorsi e le regioni di ritornoDurante l'esecuzione di un programma, il robot o l'asse aggiuntivo viene consideratosul percorso, vale a dire che segue la sequenza di posizioni desiderata.Se si interrompe il programma, il robot è ancora sul percorso, a meno che non nevenga modificata la posizione. In tal caso viene considerato fuori dal percorso.Tuttavia, se il robot viene arrestato da un arresto di emergenza o di sicurezza,potrebbe trovarsi fuori dal percorso.Se il robot arrestato si trova entro la regione di ritorno del percorso si può riavviareil programma, ed il robot farà ritorno al percorso e continuerà l’esecuzione delprogramma.Notare che non vi è modo di prevedere il movimento di ritorno esatto del robot.
Suggerimento
La regione di ritorno del percorso viene impostata tramite i parametri di sistema.Vedere il Manuale tecnico di riferimento - Parametri di sistema, tipo Path ReturnRegion.
Ritorno sul percorsoSe si disattiva l’alimentazione dei motori del robot, spesso la conseguenza che nederiverà sarà una deviazione dal percorso programmato. Ciò può accadere dopoun arresto di emergenza o di sicurezza incontrollato. La distanza di slittamentoconsentita viene configurata con i parametri di sistema e può variare a secondadella modalità operativa.Se il robot non è entro la distanza minima consentita, è possibile scegliere dilasciare che il robot ritorni sul percorso programmato o che prosegua al successivopunto programmato nel percorso. Dopodiché l'esecuzione del programma continuaautomaticamente alla velocità programmata.Per altre informazioni, vedereManuale tecnico di riferimento - Parametri di sistema,paragrafo Argomento Controller - Tipo Path Return Region.
Azione
Assicurarsi che non vi siano ostacoli che bloccano la strada e che i carichi utili o glioggetti di lavoro siano posizionati correttamente.
1
Se necessario, passare il sistema in modalità automatica e premere il pulsante Motoriinseriti sul controller, per attivare i motori del robot.
2
Premere il pulsante Avvia sulla FlexPendant per continuare il programma dal puntoin cui era stato interrotto.Si verifica una delle due seguenti situazioni:
• Il robot o l'asse ritorna lentamente sul percorso e il programma continua.• Verrà visualizzato il riquadro di dialogo Richiesta di ripresa
3
Se viene visualizzato il riquadro di dialogo Richiesta di ripresa, selezionare l'azioneappropriata.
4
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 2633HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
6 In funzione6.2.2 Ritorno del robot sul percorso

Selezione dell'azione
then tap...If you...
Sìsi desidera ritornare sul percorso e continua-re il programma
Nosi desidera ritornare sulla successiva posizio-ne di destinazione e continuare il programma
Annullanon si desidera continuare il programma
264 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
6 In funzione6.2.2 Ritorno del robot sul percorsoContinua

6.2.3 Esecuzione di programmi RAPID con unità meccanica non calibrata
Quand’è che questo si rivela utile?Se una testa assistita è danneggiata o non calibrata, si può considerare l’esecuzionedi una routine di servizio. Per poter eseguire la routine di servizio (o un qualsiasicodice RAPID), malgrado un asse aggiuntivo non calibrato, si devono seguire ipassi di questa descrizione.
Come avviare il programma
Azione
Impostare il parametro di servizio Active at Start Up (nel tipo Mechanical Unit, argo-mento Motion) a No.
1
Impostare il parametro di servizio Disconnect at Deactivate (nel tipo MeasurementChannel, argomento Motion) a Yes.
Se uno qualsiasi dei valori dei parametri di sistema fosse cambiato, riavviare il control-ler.
2
Disattivare l’unità meccanica non calibrata.3
Spostare il puntatore di programma a Main (altrimenti, l’unità meccanica verrebbe at-tivata automaticamente).
4
Eseguire la routine di servizio o l’altro codice RAPID.5
Manuale dell'operatore - IRC5 con FlexPendant 2653HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
6 In funzione6.2.3 Esecuzione di programmi RAPID con unità meccanica non calibrata

6.3 Modalità operative
6.3.1 Modalità operativa corrente
PanoramicaVerificare la posizione dell'interruttore di modalità del controller o la barra di statodella FlexPendant.I cambiamenti di modalità operativa vengono anche registrati nel registro eventi.
Interruttore di modalitàL'interruttore di modalità deve essere nella posizione illustrata.
xx0300000466
Interruttore di modalità a due posizioniA
Interruttore di modalità a tre posizioniB
Modalità automaticaC
Modalità manuale a velocità ridottaD
Modalità manuale a velocità massimaE
InformazioniAzione
vedere Passaggio dalla modalità manualea quella automatica a pagina 268.
Passaggio dalla modalità manuale a quellaautomatica
1
vedere Passaggio dalla modalità automati-ca a quella manuale a pagina 270.
Passaggio dalla modalità automatica aquella manuale
2
Visualizzazione della modalità presente nella FlexPendantNella FlexPendant, è possibile visualizzare la modalità operativa presente nellabarra di stato. Di seguito è mostrato un esempio della barra di stato.
en0300000490
Finestra OperatoreA
Continua nella pagina successiva266 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
6 In funzione6.3.1 Modalità operativa corrente

Modalità operativaB
Sistema attivoC
Stato controllerD
Stato programmaE
Unità meccaniche, quella attiva è evidenziataF
Informazioni correlateInformazioni sulla modalità automatica a pagina 27Informazioni sulla modalità manuale a pagina 29
Manuale dell'operatore - IRC5 con FlexPendant 2673HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
6 In funzione6.3.1 Modalità operativa corrente
Continua

6.3.2 Passaggio dalla modalità manuale a quella automatica
Quando impostare il sistema in modalità automatica?Passare il sistema in modalità automatica quando si ha un'applicazione di processoo un programma RAPID pronto per essere eseguito in produzione.
PERICOLO
Quando viene impostato in modalità automatica, il robot potrebbe muoversisenza preavviso.Prima di cambiare modalità operativa, assicurarsi che non vi sia personale nellospazio protetto.
Passaggio dalla modalità manuale a quella automatica
InformazioniAzione
xx0300000467
Impostare l'interruttore di modalità nella posizioneautomatica.Viene visualizzata una finestra di dialogo di modificadella modalità.
1
Il fatto che questi valori sianoda riazzerare o no viene definitodai parametri di sistema nel tipoRiazzeramento automatico dellacondizione nell’argomentoController.
Nel caso siano state modificate impostazioni di messaa punto, una finestra di dialogo informerà dei cambia-menti avvenuti e dell'eventuale necessità di riazzeraretali valori. Selezionare Riconoscimento.
2
Selezionare OK per chiudere la finestra di dialogo.3Se si riporta l'interruttore alla modalità manuale, la fi-nestra di dialogo verrà chiusa automaticamente.
L'avvio dei programmi è descrit-to nel paragrafo Avvio dei pro-grammi a pagina 249.
Il sistema ha cambiato modalità senza errori?In caso affermativo, riprendere o avviare l'applicazionedi processo o il programma RAPID.In caso negativo, arrestare e risolvere il problema.
4
Nota
Se il sistema specifico utilizza un pannello dell'operatore distribuito, controlli eindicatori potrebbero essere in una posizione diversa da quella descritta in questomanuale. Per ulteriori informazioni consultare la documentazione dell'impiantoo della cella.Tuttavia, l'aspetto e il funzionamento di controlli e indicatori è sempre lo stesso.
Continua nella pagina successiva268 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
6 In funzione6.3.2 Passaggio dalla modalità manuale a quella automatica

Quando è possibile iniziare a utilizzare il sistema robotico?Finché è visualizzata la finestra di dialogo per il cambio di modalità, non è possibileavviare programmi e i motori del robot non possono essere attivati né manualmente,né in modalità remota.
EccezioniIn modalità automatica è possibile avviare un programma RAPID e accendere imotori in modalità remota. Questo significa che il sistema non entrerà mai in unostato di attesa sicuro e il robot potrebbe muoversi in qualsiasi momento.Per verificare la configurazione del sistema consultare la documentazionedell'impianto o della cella.
Informazioni correlateUn certo numero di condizioni può essere impostato o azzerato quando si commutain modalità automatica; vedereManuale tecnico di riferimento - Parametri di sistema,paragrafi Azzeramento automatico delle condizioni e Impostazioni della modalitàd'esecuzione.
Manuale dell'operatore - IRC5 con FlexPendant 2693HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
6 In funzione6.3.2 Passaggio dalla modalità manuale a quella automatica
Continua

6.3.3 Passaggio dalla modalità automatica a quella manuale
Passaggio dalla modalità automatica a quella manuale
InformazioniAzione
xx0300000468
Impostare l'interruttore di modalità nellaposizione manuale.
1
La gestione degli errori viene illustrata inManuale dell'operatore - Risoluzione deiproblemi IRC5.
Il sistema ha cambiato modalità senza er-rori?In caso affermativo, la procedura è comple-tata.
2
In caso negativo, provare a individuarel'errore.
Nota
Se il sistema specifico utilizza un pannello dell'operatore, controlli e indicatoripotrebbero essere in una posizione diversa da quella descritta in questo manuale.Per ulteriori informazioni consultare la documentazione dell'impianto o dellacella.Tuttavia, l'aspetto e il funzionamento di controlli e indicatori è sempre lo stesso.
270 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
6 In funzione6.3.3 Passaggio dalla modalità automatica a quella manuale

6.3.4 Passaggio alla modalità manuale a velocità massima
Quando utilizzare la modalità manuale a velocità massima?Utilizzare la modalità manuale a velocità massima quando il programma deveessere verificato a velocità massima.La modalità manuale a velocità massima consente di eseguire il programma avelocità massima conservando l'accesso a tutte le funzioni di debug disponibilidell'Editor di programma.
PERICOLO
La verifica a velocità massima è pericolosa.Assicurarsi che non vi sia personale nello spazio protetto all'avvio del programma.
Passaggio alla modalità manuale a velocità massima
InformazioniAzione
Impostare l'interruttore di modalità nellaposizione manuale a velocità massima.
1
La gestione degli errori viene illustrata inManuale dell'operatore - Risoluzione deiproblemi IRC5.
Il sistema ha cambiato modalità senza er-rori?In caso affermativo, la procedura è comple-tata.
2
In caso negativo, provare a individuarel'errore.
Nota
Quando si passa alla modalità manuale a velocità massima, vengono disabilitatetutte le funzioni tranne Start, Stop e Step.
Avviso della FlexPendantQuando si cambia modalità, viene visualizzata una finestra di dialogo sullaFlexPendant che avverte che si sta cambiando modalità. Toccare OK per chiuderela finestra di dialogo.Se si torna indietro alla modalità precedente, la finestra di dialogo vieneautomaticamente chiusa e non avviene alcun cambio di modalità.
Manuale dell'operatore - IRC5 con FlexPendant 2713HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
6 In funzione6.3.4 Passaggio alla modalità manuale a velocità massima

6.4 Modifica delle posizioni
6.4.1 Modifica e regolazione delle posizioni
PanoramicaLe posizioni sono istanze del tipo di dati robtarget o jointtarget. Vedere Manualetecnico di riferimento - Istruzioni RAPID, Funzioni e Tipi di dati.Le posizioni possono essere regolate mediante la funzione HotEdit, nella qualevengono immessi i valori di offset utilizzando una tastiera software. Il valore dioffset viene utilizzato insieme al valore della posizione originale. Vedere Posizionidi regolazione con HotEdit a pagina 277. Il menu HotEdit è descritto nel paragrafoHotEdit menu a pagina 54.È anche possibile modificare le posizioni utilizzando la funzioneModifica posizioninell'Editor di programma, o la finestra Produzione, per cui è possibile spostaremanualmente il robot nella nuova posizione. Il valore di una posizione modificatasovrascrive quello originale. Vedere Modifica di posizioni tramite l'Editor diprogramma o la finestra Produzione. a pagina 273.
ATTENZIONE
La modifica delle posizioni programmate potrebbe alterare in modo significativolo schema di movimento del robot.Assicurarsi sempre che le modifiche siano sicure per l'apparecchiatura e per ilpersonale.
Posizioni negli arraySe una posizione viene dichiarata come facente parte di un array, la proceduraper la modifica o la regolazione può lggermente differire, secondo come l’array èindicizzato nell’istruzione di spostamento.
LimitazioniDa notare che i jointtargets possono essere modificati solo mediante il metodoModifica posizioni nell'Editor di programma e la finestra Produzione, vale a direnon tramite HotEdit.
Nota
La modalità di modifica delle posizioni può essere soggetta a limitazioni delsistema. Tali limitazioni possono essere applicabili alla distanza utilizzando iparametri di sistema (argomentoController, tipoModPos Settings) e alle posizioniche è possibile modificare mediante UAS.
272 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
6 In funzione6.4.1 Modifica e regolazione delle posizioni

6.4.2 Modifica di posizioni tramite l'Editor di programma o la finestra Produzione.
PanoramicaQuando si modificano posizioni portando manualmente il robot nella nuovaposizione è possibile eseguire il programma un'istruzione dopo l'altra per fino allaposizione da modificare o muovere manualmente nella nuova posizione e cambiareil corrispondente argomento di posizione dell'istruzione.Il consiglio è di eseguire il programma - un'istruzione dopo l'altra - fino allaposizione. Se tuttavia si dispone di una buona conoscenza del programma delrobot e la nuova posizione è nota, il metodo più veloce è quello dello spostamento.
Nota
Non utilizzare questo metodo per cambiare i valori di orientamento.
PrerequisitiPer modificare le posizioni utilizzando l'Editor dei programmi o la finestraProduzione:
• il sistema deve trovarsi in modalità manuale;• la posizione d'obbiettivo deve disporre di un valore iniziale. Ad esempio:
CONST robtarget
p10:=[[515.00,0.00,712.00],[0.707107,0,0.707107,0],[0,0,0,0],
[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]]; CONST jointtarget
jpos10:=[[-0,-0,0,-0,-0,-0],
[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]];
Nota
Per modificare le posizioni nella finestra Produzione, si deve aver avviato ilprogramma, per cui è impostato il puntatore di movimento.
Applicazione delle posizioni modificateI valori della posizione modificata verranno normalmente utilizzati quando si riavviail programma. Se il robot non potesse utilizzare i valori direttamente, all’avvio, verràvisualizzata un’avvertenza. Dopo di che, la posizione modificata verrà utilizzata lavolta successiva che tale posizione verrà utilizzata nel programma.
Modifica delle posizioniQuesta procedura descrive come modificare le posizioni tramite l'esecuzione diun'istruzione dopo l'altra o lo spostamento. Si potrà utilizzare l’Editor di programmao la finestra Produzione: la funzionalità è la stessa.
InformazioniAzione
Nel menu ABB, scegliere Editor di program-ma.
1
Interrompere il programma se è in esecuzione.2
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 2733HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
6 In funzione6.4.2 Modifica di posizioni tramite l'Editor di programma o la finestra Produzione.

InformazioniAzione
Quando si esegue un'istruzione dopol'altra, se l'istruzione o la chiamata diprocedura ha più di un argomento diposizione, continuare in modo da rag-giungere ciascun argomento.
Si desidera eseguire il programma un'istruzio-ne dopo l'altra fino alla posizione o procederecon il spostamento?Nel primo caso, eseguire un'istruzione dopol'altra fino alla posizione da modificare. Assicu-rarsi che sia selezionato l'argomento corretto.
3
Se si sceglie lo spostamento, utilizzare la vistaSpostamento per assicurarsi che siano sele-zionati lo stesso oggetto di lavoro e lo stessoutensile utilizzati nell'istruzione.
Muovere manualmente nella nuova posizione.4
Quando si utilizza il metodo del spostamento,scegliere per selezionare l'argomento di posi-zione da modificare.
5
Quando si modifica una posizione inun array indicizzato da una variabile,si deve selezionare l’elemento dell’ar-ray da modificare, prima di eseguire lamodifica.
Nell’Editor di programma, selezionareModificaposizione.Nella finestra Produzione, scegliere Debug equindi Modifica della posizione.Viene visualizzata una finestra di dialogo diconferma.
6
Se si spunta la casella di controlloNonmostrare più questo dialogo nel dialo-go di conferma, non si riceveranno piùdialoghi di conferma in occasione dellamodifica di posizioni.
Nota
Valido solo per l’Editor di programmacorrente.
Selezionare Modifica per utilizzare la nuovaposizione o Annulla per conservare quellaoriginale.
7
Ripetere le fasi da 3 a 7 per ciascun argomentoposizione da modificare.
8
LimitazioniIl pulsante Modifica posizione nell'Editor di programma è disattivato finché nonsi seleziona un argomento di posizione (che sia modificabile).Il pulsante Modifica posizione nella finestra Produzione è disattivato fino a cheil puntatore di movimento non sia impostato e una posizione non sia stataselezionata. Per poter impostare il puntatore di movimento, il programma dev’essereavviato e quindi arrestato.È possibile limitare il movimento massimo o la modifica dell'orientamento tramitei parametri di sistema (argomento Controller, tipo ModPos Settings) nel progettodel sistema. A tal scopo leggere la documentazione dell'impianto o della cella.Se i parametri di sistema sono configurati per utilizzare limiti assoluti per lemodifiche di posizione, allora le posizioni originali possono essere solamenteripristinate o modificate mediante il menu Linea base in HotEdit. Il concetto di lineabase è descritto nel paragrafo Posizioni di regolazione con HotEdit a pagina 277.Se una posizione denominata viene modificata, ciò interesserà anche tutte le altreistruzioni che la utilizzano.
Continua nella pagina successiva274 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
6 In funzione6.4.2 Modifica di posizioni tramite l'Editor di programma o la finestra Produzione.Continua

Nella finestra Produzione, i punti del circolo non possono essere modificati inmodalità sincronizzata. Vedere Manuale dell'applicazione - MultiMove.
Differenze tra l’Editor di programma e la finestra ProduzioneLa procedura per la modifica di posizioni è la stessa nell’Editor di programma enella finestra Produzione. Ci cono comunque delle differenze nel modo di selezionedelle posizioni.Inoltre, se il sistema utilizza MultiMove, i risultati provenienti dall’Editor diprogramma e dalla finestra Produzione saranno diversi. Vedere Manualedell'applicazione - MultiMove.
Selezioni dell’Editor di programmaPer selezionare una posizione da modificare nell’Editor di programma, selezionarela posizione desiderata.
Selezioni tramite la finestra ProduzionePer selezionare una posizione da modificare nella finestra Produzione, si devefar avanzare il programma verso la posizione desiderata.
Nota
Se il programma è stato eseguito a partire da un’altra finestra, e quindi si ècommutato di nuovo alla finestra Produzione, la posizione selezionata saràcambiata alla posizione in cui si trova attualmente il puntatore di movimento.Assicurarsi che sia stata selezionata la posizione corretta, prima di effettuare lamodifica!
Informazioni correlatePer una panoramica sulla modifica delle posizioni, vedere Modifica e regolazionedelle posizioni a pagina 272.HotEdit e linea base sono descritti in Posizioni di regolazione con HotEdit apagina 277.Il menu HotEdit è descritto anche in HotEdit menu a pagina 54.La modifica delle posizioni nella finestra dei Dati del programma è descritta inModifica delle istanze di dati a pagina 177.Manuale tecnico di riferimento - Istruzioni RAPID, Funzioni e Tipi di dati.Manuale tecnico di riferimento - Parametri di sistema.Manuale dell'applicazione - MultiMove
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 2753HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
6 In funzione6.4.2 Modifica di posizioni tramite l'Editor di programma o la finestra Produzione.
Continua

Esempi del percorso pianificatoGli esempi seguenti indicano come si influisce sul percorso pianificato quando simodificano posizioni.
Movimento lineareNell’esempio A, il robot viene arrestato sul percorso, prima di raggiungere laposizione P10. Il movimento del robot viene arrestato sulla nuova posizione (P10x)e la posizione P10 viene modificata.Nell’esempio B, il robot viene arrestato sul percorso, alla posizione P10. Ilmovimento del robot viene arrestato sulla nuova posizione (P10x) e la posizioneP10 viene modificata.
xx0800000175
In entrambi gli esempi, quando si riavvia il programma, il robot continua dalla nuovaP10 (che ora corrisponde alla P10x), direttamente verso la P20, senza far ritornoal percorso pianificato in precedenza (tramite la vecchia P10).
Movimento circolareIn questo esempio, il robot viene arrestato sul percorso, alla posizione P20 (puntodel circolo), e quindi spostato alla nuova posizione P20x. La posizione P20 vienemodificata.
xx0800000176
In sistemi a robot singolo oppure sistemi MultiMove in modalità non sincronizzata:Quando si riavvia il programma, il robot continua dalla nuova P20 (che oracorrisponde alla P20x), direttamente verso la P30, senza far ritorno al percorsopianificato in precedenza (tramite la vecchia P20). Il nuovo percorso pianificatodalla P20 (P20x) alla P30 viene calcolato utilizzando queste due posizioni e laposizione P10.In modalità sincronizzataMultiMove: Quando si riavvia il programma, il robot ritornaalla vecchia P20, ed utilizza il percorso precedentemente pianificato verso P30.Nel ciclo seguente, si utilizza solo la nuova P20 (P20x).
276 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
6 In funzione6.4.2 Modifica di posizioni tramite l'Editor di programma o la finestra Produzione.Continua

6.4.3 Posizioni di regolazione con HotEdit
PanoramicaHotEdit viene utilizzato per regolare finemente le posizioni programmate. Esso èdisponibile per tutte le modalità operative, anche durante l'esecuzione delprogramma. È possibile regolare sia le coordinate che l'orientamento.È possibile utilizzare HotEdit solo per posizioni denominate di tipo robtarget (vederele limitazioni qui di seguito).Le funzioni disponibili in HotEdit possono essere limitate dal sistema diautorizzazione degli utenti, UAS.Il menu HotEdit è descritto nel paragrafo HotEdit menu a pagina 54.
Applicazione delle posizioni regolateI valori di regolazione vengono utilizzati direttamente da un programma in fased’esecuzione, quando si sceglie Applica. Se la regolazione ha luogo vicino al PPo MP, potrebbe essere difficile prevedere quando avrà effetto la modifica alprogramma. È importante conoscere la posizione del robot nel programma primadi cambiare qualsiasi valore offset durante l'esecuzione del programma stesso.Tuttavia, i valori di offset modificati non vengono memorizzati nella linea base finoa quando non si utilizza il comando Assegna.
Come regolare le posizioniQuesto è il modo in cui si regolano le posizioni programmate, utilizzando HotEdit:
Azione
Nella finestra Destinazioni programmate, selezionare le posizioni da regolare e ag-giungerle alle Destinazioni selezionate mediante la freccia.
1
Selezionare Destinazioni da regolare e selezionare il modo di regolazione (lineare,via riorientamento o tramite gli assi esterni), e quindi il sistema di coordinate (utensileod oggetto di lavoro).
2
Selezionare + e – per specificare la regolazione esatta delle posizioni nelle direzionix, y e z. Selezionare Incremento per definire la dimensione regolabile di questi pulsanti.
3
Per attivare i nuovi valori, scegliere APPLICA. L’offset verrà utilizzato direttamente seil programma è in fase d’esecuzione.
4
Se si è soddisfatti del risultato, e si desidera che le posizioni regolate facciano partedella linea base, scegliere Linea base e quindi Assegna la selezione.
5
Se, ad ogni modo, le destinazioni selezionate richiedessero una regolazione ulteriore,si potrà scegliere Linea base e quindi Ripristina la selezione e ricominciare tuttodaccapo, oppure si potrà semplicemente continuare nelle regolazione, fino ad ottenereun risultato soddisfacente.
6
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 2773HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
6 In funzione6.4.3 Posizioni di regolazione con HotEdit

Utilizzo delle selezioniUna selezione delle posizioni da regolare più tardi potrà essere memorizzatanell’unità di memoria di massa del controller. Se il sistema utilizza UAS, questopuò essere l'unico modo per selezionare le posizioni per la regolazione.I comandi per lavorare con le selezioni si trovano nel menu File:
Assicurarsi che la finestra Destinazioni selezionate non mostri altroche le posizioni da memorizzare. Selezionare File e selezionare Salvaselezione con nome. Immettere il nome, ed opzionalmente una de-scrizione del file, quindi scegliere OK.
Salva selezione connome
Selezionare File e selezionare Apri selezione. Quindi scegliere laselezione da utilizzare e scegliere OK.
Apri selezione
Azzerare lo spazioDestinazioni selezionate scegliendo File e Eliminaselezione.
Azzera selezione
Concetto di linea baseUna linea base può essere definita come un riferimento rispetto al quale vengonomisurate le modifiche future. Il concetto di linea base rende possibile annullarequalsiasi regolazione compiuta e ritornare ai valori di posizione memorizzatinell'ultima linea base. Per far ciò, si utilizza un comando Ripristina.Quando viene eseguito un comando Assegna, la linea base viene aggiornata coni nuovi valori di offset e i valori precedenti non esistono più nella memoria diprogramma.Utilizzare il menu della linea base per appicare o annullare la regolazione.
• Ripristina la selezione scarterà tutte le regolazioni delle posizionicorrentemente selezionate, e le sostituirà con i valori della linea base piùrecente, il che significa che i loro valori offset saranno 0,0.
• Ripristina l’intero programma scarterà TUTTE le posizioni di regolazione,facendo ritorno a quelle programmate, a partire dall’ultimo comandoAssegna.Questo può comprendere più sessioni HotEdit per lo stesso task. Se il sistemautilizza Absolute Limit ModPos, verrà cancellato anche qualsiasi comandoModifica di posizione dall’Editor di programma.
• Assegna selezione applicherà l’offset delle posizioni correntementeselezionate alla linea base.
• Assegna l’intero programma applicherà TUTTE le regolazioni alle posizioniprogrammate. Questo può comprendere più sessioni HotEdit per lo stessotask. Se il sistema utilizza Absolute Limit ModPos, esso comprende anchela Modifica della posizione eseguita nell'Editor di programma.
Criteri target della linea baseTutti i target che soddisfano i seguenti criteri fanno parte della linea base:
• Il tipo di dati deve essere robtarget o jointtarget• Non deve essere dichiarato a livello locale in una routine• Non deve essere dichiarato in un array di target.
Continua nella pagina successiva278 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
6 In funzione6.4.3 Posizioni di regolazione con HotEditContinua

Illustrazione del concetto di linea baseIl concetto di linea base è illustrato nella figura seguente nella quale un punto vienespostato, ripristinato e assegnato. Iniziando dalla linea base originale (A),presumiamo di spostare due volte il punto (B). Se non si è soddisfatti deicambiamenti, si può eseguire un comando di ripristino (C). Se invece si continuaa spostare il punto, e se si esegue un comando Assegna (B+D), si sarà creata unanuova linea base (E), e non sarà più possibile far ritorno alla linea base di partenza.Se si muove il punto ancora una volta e quindi si attua un ripristino, il punto verràrispostato alla linea base più recente (E).
xx0600002620
Linea base originaleA
Spostamento del punto selezionatoB
RipristinaC
AssegnaD
Nuova linea baseE
Ripristina selezione o Ripristina l’intero programmaIl seguente esempio mostra la differenza tra Ripristina selezione e Ripristinal’intero programma a quello d’origine. Lo stesso concetto si applica a Assegnala selezione e Assegna l’intero programma.
Azione
I robtargets p10 e p30 vengono aggiunti alle Destinazioni selezionate e regolati unasola volta.
1.
p10 viene rimosso dalle Destinazioni selezionate2.
p30 viene regolato di nuovo.3.• Ripristina la selezione imposta la posizione correntemente selezionata, p30,
al suo valore nella linea base più recente. Non si influisce su p10, per cui essoè sempre regolato.
• Ripristina l’intero programma imposta tutte le posizioni regolate, vale a direp10 e p30, ai loro valori di linea base.
4.
HotEdit per assi esterniGli assi esterni possono essere regolati mediante HotEdit, se essi sono attivati inalmeno uno degli obbiettivi robtarget selezionati. Solo gli assi con valori attivivengono regolati.
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 2793HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
6 In funzione6.4.3 Posizioni di regolazione con HotEdit
Continua

LimitazioniLa regolazione di HotEdit è possibile soltanto per i robtarget (designati (vale a direp10, p20) (* i robtarget non sono visibili nella vista ad arborescenza.)Se un robtarget è dichiarato come un array, deve essere indicizzato mediante unnumero che può essere modificato in HotEdit.È possibile eseguire la regolazione HotEdit solo su target che fanno parte dellalinea base. I target che NON fanno parte della linea base non saranno visualizzatinella vista struttura di HotEdit, in quanto non possono essere selezionati per laregolazione. Ad esempio, questo significa che un target dichiarato a livello localein una routine non verrà visualizzato.La regolazione HotEdit è possibile solo per i robtargets. (I Jointtargets possonoessere regolati soltanto utilizzando il comando Modifica posizione nell’Editor diprogramma.) Se il sistema utilizza Absolute limit ModPos, questi jointtargets fannocomunque parte della linea base, e su di loro avrà influenza il fatto di utilizzare icomandi Ripristina l’intero programma e Assegna l’intero programma.
Nota
Per altre informazioni su Absolute Limit ModPos, vedere Manuale tecnico diriferimento - Parametri di sistema, paragrafo ArgomentoController - TipoModPosSettings.
Utilizzo di UAS in HotEditÈ possibile utilizzare il sistema di autorizzazione degli utenti (UAS) per limitare lafunzionalità HotEdit e consentire all'utente di modificare solo posizionipreselezionate. Le posizioni vengono caricate scegliendo File, quindi Apriselezione. Le posizioni selezionate potranno quindi essere regolate nel modoabituale.
Informazioni correlateManuale tecnico di riferimento - Parametri di sistema.
280 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
6 In funzione6.4.3 Posizioni di regolazione con HotEditContinua

6.4.4 Lavoro con spostamenti ed offset
A proposito degli spostamentiIn alcuni casi, è necessario eseguire lo stesso percorso in varie posizioni sullostesso oggetto o su più pezzi di lavoro situati uno accanto all'altro. Per evitare ognivolta la riprogrammazione di tutte le posizioni è possibile definire un sistema dicoordinate di spostamento.Questo sistema di coordinate può anche essere utilizzato in combinazione con lericerche, per compensare le differenze nelle posizioni delle singole parti.Il sistema di coordinate di spostamento viene definito in base al sistema dicoordinate oggetto.Il sistema di coordinate di spostamento viene descritto nel paragrafo Sistemi dicoordinate per lo spostamento a pagina 127.
Selezione del metodo di spostamentoA seconda di come, quando e quanto spesso si vogliono utilizzare gli spostamenti,il miglior metodo può differire.
Spostamento di un oggetto di lavoroLo spostamento di un oggetto di lavoro è adatto quando non è necessario trasferireo spostare l’oggetto di lavoro molto spesso.Vedere il paragrafo dettagliato Definizione del sistema di coordinate dell'oggettodi lavoro a pagina 201.
Spostamento di un oggetto di lavoroUn oggetto di lavoro consiste in un sistema di riferimento utente e oggetto. Sipossono spostare uno od entrambi questi sistemi di riferimento. Se si spostanoentrambi questi sistemi di riferimento, allora è l’intero oggetto di lavoro ad esserespostato. Può essere utile spostare il sistema di riferimento oggetto da quelloutente, ad esempio quando si utilizza un solo fissaggio per diversi oggetti di lavoro.Si può allora mantenere il sistema di riferimento utente e spostare quello oggettoper gli oggetti di lavoro.Vedere la procedura Come definire il sistema di riferimento oggetto nel paragrafoDefinizione del sistema di coordinate dell'oggetto di lavoro a pagina 201.
Spostamento e rotazione di un oggetto di lavoroSi può volere spostare e ruotare il sistema di riferimento oggetto da quello utente,se lo spostamento non è solo per gli assi x, y e z.Per uno spostamento lungo gli assi x, y e z, si può utilizzare lo stesso metodo dicui sopra. Per ruotare l’oggetto di lavoro, seguire la procedura indicata nel paragrafoModifica dei dati dell'oggetto di lavoro a pagina 205.
A proposito degli offsetTalvolta risulta più semplice definire una posizione come un offset da una posizionedata. Se, ad esempio, si conoscono le dimensioni esatte di un oggetto di lavoro,sarà sufficiente spostarsi su una sola posizione.
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 2813HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
6 In funzione6.4.4 Lavoro con spostamenti ed offset

L’offset è programmato con la distanza di spostamento nella direzione x, y e z, inrelazione all’oggetto di lavoro. Ad esempio:
MoveL Offs(p10, 100, 50, 0), v50...
Definire l’offset per la posizione con le seguenti espressioni:1 Posizione originale / punto di partenza2 Spostamento in direzione x3 Spostamento in direzione y4 Spostamento in direzione z
EsempiQuesto esempio illustra le istruzioni di spostamento per trasferire il robot su unquadrato (in senso orario), con inizio a p10, con uno spostamento di 100 mm lungole x e y.
MoveL p10, v50...
MoveL Offs(p10, 100, 0, 0), v50...
MoveL Offs(p10, 100, 100, 0), v50...
MoveL Offs(p10, 0, 100, 0), v50...
MoveL p10, v50...
Come creare offset di posizioneQuesta procedura dettaglia come modificare una posizione per farla diventare unaposizione offset.
InformazioniAzione
Nell’Editor di programma, picchiettare perselezionare l’argomento di posizione damodificare.
1
SelezionareModifica quindiCambia sele-zione.
2
Selezionare Funzioni e quindi Offs.3
Si può utilizzare il filtro per restringere idati disponibili. Si può pure cambiare il tipodi dati dei dati disponibili.
Selezionare ciascuna espressione, <EXP>,e quindi selezionare alcuni dei dati o fun-zioni disponibili.
4
Si può anche selezionare Modifica per ac-cedere ad ulteriori funzioni. SelezionareTutto per aprire la tastiera software e mo-dificare tutte le espressioni allo stessotempo, oppure selezionareSolo seleziona-to per apportare le modifiche una alla volta,tramite la tastiera software.
Selezionare OK per memorizzare le modi-fiche.
5
Informazioni correlateUn certo numero di funzioni RAPID potrebbero rivelarsi utili. Vedere Manualetecnico di riferimento - Istruzioni RAPID, Funzioni e Tipi di dati, e Manuale tecnicodi riferimento - RAPID Overview.
282 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
6 In funzione6.4.4 Lavoro con spostamenti ed offsetContinua

6.4.5 Spostamento del robot in una posizione programmata
PosizioniUn programma del robot contiene in genere posizioni programmate. Il robot puòspostarsi automaticamente in una posizione programmata mediante una funzionedel menu Spostamento.Il robot si sposterà alla velocità di 250 mm/s.
PERICOLO
Quando si sposta automaticamente, il braccio del robot potrebbe muoversi senzapreavviso. Assicurarsi che non vi siano persone nello spazio protetto e che nonsiano presenti oggetti sul percorso tra la posizione corrente e quella programmata.
Spostamento del robot in una posizione programmataQuesta procedura descrive come spostare un robot automaticamente su unaposizione programmata.
InformazioniAzione
Nel menu ABB, scegliere Spostamento.1
Assicurasi che l'unità meccanica sia selezionata quindiscegliere Vai a....
2
Se vi sono molte posizioniprogrammate è possibile uti-lizzare un filtro per restringe-re le posizioni visibili. Vederela sezione Filtro dei dati apagina 95.
Selezionare per selezionare una posizione programmata.3
Premere e tenere premuto il dispositivo di attivazione atre posizioni, quindi toccare il pulsante Vai a.Il robot si sposta direttamente dalla posizione correntea quella programmata. Assicurarsi che non vi siano og-getti sul percorso.
4
Manuale dell'operatore - IRC5 con FlexPendant 2833HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
6 In funzione6.4.5 Spostamento del robot in una posizione programmata

Questa pagina è stata intenzionalmente lasciata bianca

7 Gestione di Input e output, I/O7.1 Visualizzazione degli elenchi dei segnali
PanoramicaLe proprietà dei segnali di I/O vengono utilizzate per visualizzare i segnali di inpute output e i relativi valori. I segnali vengono configurati tramite parametri di sistema,.
Come visualizzare gli elenchi dei segnaliQuesta sezione descrive come visualizzare un elenco dei segnali.
Azione
Nel menu ABB scegliere Input e output.Viene visualizzato l'elenco Segnali di I/O più comuni.
en0400000770
1
Selezionare Visualizza per cambiare la selezione dei segnali nell'elenco.2
Suggerimento
Selezionare il menu Selezione del profilo se si desidera la visualizzazione delleetichette dei segnali nell’elenco.
Informazioni correlateSimulazione e modifica del valore dei segnali a pagina 286.Filtro dei dati a pagina 95.Configurazione degli I/O più comuni a pagina 118.
Manuale dell'operatore - IRC5 con FlexPendant 2853HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
7 Gestione di Input e output, I/O7.1 Visualizzazione degli elenchi dei segnali

7.2 Simulazione e modifica del valore dei segnali
Simulazione e modifica del valore dei segnaliÈ possibile cambiare un segnale in un segnale simulato. Anche il valore del segnalepuò essere modificato.Seguire la procedura seguente per simulare un segnale o modificare il suo valore:
Azione
Nel menù ABB, selezionare Input e output.Viene visualizzato un elenco dei segnali più comuni. Vedere la sezioneConfigurazionedegli I/O più comuni a pagina 118.
1
Selezionare Visualizza e poi un filtro segnale.L’elenco segnale sarà aggiornato.
2
xx1700002252
Nota
Selezionare Tutti i segnali per visualizzare tutti i segnali.
Selezionare un segnale.3
Selezionare Simula per modificare il segnale in un segnale simulato.Selezionare Rimuovi simulazione per rimuovere la simulazione dal segnale.
4
Nota
Quando si elimina la simulazione dal segnale, il suo valore tornerà allo stesso livellodi quello che aveva prima della simulazione. Anche i collegamenti incrociati sarannoaggiornati di conseguenza.
Per un segnale digitale, selezionare 0 o 1 per modificare il valore di un segnale.5Per segnali analogici e gruppi, scegliere 123... per cambiare il valore del segnale.Viene visualizzata la tastiera software numerica. Immettere un nuovo valore e scegliereOK.
Nota
Se esiste un collegamento incrociato tra due segnali, modificando il valore di uno simodifica automaticamente anche quello dell’altro collegato in modo incrociato.
Continua nella pagina successiva286 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
7 Gestione di Input e output, I/O7.2 Simulazione e modifica del valore dei segnali

Per ulteriori informazioni sulla modifica delle proprietà del segnale vedere la sezionepannello di controllo Configurazione degli I/O più comuni a pagina 118.
Gestone dei dispositivi I/OI dispositivi I/O possono essere gestiti dalla pagina Dispositivi I/O.
xx1700002253
Dalla pagina Dispositivi I/O è possibile eseguire le seguenti azioni:
UscitaAzione
Attivazione o disattivazione del dispositivo I/O selezionato.Attivazione/Disattivazione
Visualizza i segnali assegnati al dispositivo I/O selezionato.Segnali
Visualizza i valori bit d’ingresso e uscita del dispositivo selezio-nato.
Azioni - Valori bit
Visualizza il MAC ID del dispositivo selezionato.
Nota
Azione - Identificazione è disponibile solo per il tipo di reteEtherNet IP.
Azioni - Identificazione
Permette di configurare il dispositivo I/O locale selezionato.
Nota
Azioni - Configurazione e disponibile solo per il tipo di reteEtherNet IP.
Azioni - Configurazione
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 2873HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
7 Gestione di Input e output, I/O7.2 Simulazione e modifica del valore dei segnali
Continua

UscitaAzione
Permette di aggiornare il firmware.
Nota
Azioni - Firmware e disponibile solo per il tipo di rete EtherNetIP.
Azioni - Firmware
Aggiornamento firmwareÈ possibile aggiornare il firmware del dispositivo I/O EtherNet IP. Seguire laprocedura seguente per aggiornare il firmware.
DescrizioneAzione
Sarà visualizzata la Finestra & Input e Output.Selezionare > Inputs eOutputs.
1
Sarà visualizzata la finestra Dispositivi I/O che mostratutti i dispositivi I/O disponibili.
Selezionare Visualizza >Dispositivi I/O.
2
Nota
L’opzione di aggiornamento firmware è disponibile soloper il tipo di rete EtherNet IP.
Selezionare EtherNet IPdel dispositivo I/O.
3
Sarà visualizzata la finestra Firmware dispositivo con idettagli del firmware.
xx1800000120
Selezionare Azioni >Firmware.
4
Il firmware per il dispositivo I/O EtherNet IP selezionatoverrà aggiornato.
Seleziona Aggiorna.5
288 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
7 Gestione di Input e output, I/O7.2 Simulazione e modifica del valore dei segnaliContinua

7.3 Visualizzazione di un gruppo di segnali
Visualizzazione di un gruppo di segnaliQuesta sezione descrive come visualizzare un gruppo di segnali.
Azione
Nel menu ABB, scegliere I/O.Viene visualizzato un elenco dei segnali più comuni. Vedere la sezioneConfigurazionedegli I/O più comuni a pagina 118.
1
Nel menu Visualizza, scegliere Gruppi.2
Selezionare il nome del gruppo di segnali nell'elenco, quindi scegliere Proprietà. Op-pure scegliere due volte il nome del gruppo di segnali.Vengono visualizzate le proprietà del gruppo di segnali.
3
Manuale dell'operatore - IRC5 con FlexPendant 2893HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
7 Gestione di Input e output, I/O7.3 Visualizzazione di un gruppo di segnali

7.4 Segnali di sicurezza
7.4.1 Segnali di I/O di sicurezza
Informazioni generaliNella forma base e standard del controller, certi segnali di I/O sono riservati aspecifiche funzioni di sicurezza. Essi sono elencati di seguito con una brevedescrizione di ciascuno.Tutti i segnali possono essere visualizzati nel menu I/O sulla FlexPendant.
Segnali di I/O di sicurezzaNell'elenco di seguito sono descritti i segnali di I/O di sicurezza utilizzati dal sistemastandard.
Da - ACondizione del valo-re bit
DescrizioneNome del segna-le
Dalla scheda del pannel-lo al computer principale
1 = Catena chiusaArresto di emergenza,catena 1
ES1
Dalla scheda del pannel-lo al computer principale
1 = Catena chiusaArresto di emergenza,catena 2
ES2
Dalla scheda del pannel-lo al computer principale
1 = Arresto soft attiva-to
Arresto di emergenzasoft
SOFTESI
Dalla scheda del pannel-lo al computer principale
1 = AttivatoDispositivo di attivazio-ne 1&1, catena 2
EN1
Dalla scheda del pannel-lo al computer principale
1 = AttivatoDispositivo di attivazio-ne 1&2, catena 2
EN2
Dalla scheda del pannel-lo al computer principale
1 = Selezione automa-tica
Selettore modalitàoperativa, catena 1
AUTO1
Dalla scheda del pannel-lo al computer principale
1 = Selezione automa-tica
Selettore modalitàoperativa, catena 2
AUTO2
Dalla scheda del pannel-lo al computer principale
1 = MAN selezionatoSelettore modalitàoperativa, catena 1
MAN1
Dalla scheda del pannel-lo al computer principale
1 = Velocità massimamanuale selezionata
Selettore modalitàoperativa, catena 1
MANFS1
Dalla scheda del pannel-lo al computer principale
1 = MAN selezionatoSelettore modalitàoperativa, catena 2
MAN2
Dalla scheda del pannel-lo al computer principale
1 = Velocità massimamanuale selezionata
Selettore modalitàoperativa, catena 2
MANFS2
Dalla scheda del pannel-lo al computer principale
1 = Errore, 0 = OKSovraccarico, DOutente
USERDOOVLD
Dalla scheda del pannel-lo al computer principale
1 = Pulsante premutoPulsante Motori inseritiMONPB
Dalla scheda del pannel-lo al computer principale
1 = Catena chiusaArresto automatico,catena 1
AS1
Dalla scheda del pannel-lo al computer principale
1 = Catena chiusaArresto automatico,catena 2
AS2
Dalla scheda del pannel-lo al computer principale
1 = Arresto soft attiva-to
Arresto automatico softSOFTASI
Continua nella pagina successiva290 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
7 Gestione di Input e output, I/O7.4.1 Segnali di I/O di sicurezza

Da - ACondizione del valo-re bit
DescrizioneNome del segna-le
Dalla scheda del pannel-lo al computer principale
1 = Catena chiusaArresto generale, cate-na 1
GS1
Dalla scheda del pannel-lo al computer principale
1 = Catena chiusaArresto generale, cate-na 2
GS2
Dalla scheda del pannel-lo al computer principale
1 = Arresto soft attiva-to
Arresto generale softSOFTGSI
Dalla scheda del pannel-lo al computer principale
1 = Catena chiusaArresto superiore, cate-na 1
SS1
Dalla scheda del pannel-lo al computer principale
1 = Catena chiusaArresto superiore, cate-na 2
SS2
Dalla scheda del pannel-lo al computer principale
1 = Arresto soft attiva-to
Arresto superiore softSOFTSSI
Dalla scheda del pannel-lo al computer principale
1 = Catena chiusaTutti gli interruttori nel-la catena di funziona-mento 1 chiusi
CH1
Dalla scheda del pannel-lo al computer principale
1 = Catena chiusaTutti gli interruttori nel-la catena di funziona-mento 2 chiusi
CH2
Dalla scheda del pannel-lo al computer principale
1 = Attiva, 0 = Interru-zione catena 1
Attiva da computerprincipale (read back)
ENABLE1
Dalla scheda del pannel-lo al computer principale
1 = Attiva, 0 = Interru-zione catena 2
Attiva da computer as-se 1
ENABLE2_1
Dalla scheda del pannel-lo al computer principale
1 = Attiva, 0 = Interru-zione catena 2
Attiva da computer as-se 2
ENABLE2_2
Dalla scheda del pannel-lo al computer principale
1 = Attiva, 0 = Interru-zione catena 2
Attiva da computer as-se 3
ENABLE2_3
Dalla scheda del pannel-lo al computer principale
1 = Attiva, 0 = Interru-zione catena 2
Attiva da computer as-se 4
ENABLE2_4
Dalla scheda del pannel-lo al computer principale
1 = Errore, 0 = OKSovraccarico, pannello24 V
PANEL24OVLD
Dalla scheda del pannel-lo al computer principale
1 = Errore, 0 = OKSovraccarico, modulidi azionamento
DRVOVLD
Dal computer degli assial computer principale
1 = Catena 1 chiusaRead back della catena1 dopo finecorsa
DRV1LIM1
Dal computer degli assial computer principale
1 = Catena 2 chiusaRead back della catena2 dopo finecorsa
DRV1LIM2
Dal computer degli assial computer principale
1 = K1 chiusoRead back del contatto-re K1, catena 1
DRV1K1
Dal computer degli assial computer principale
1 = K2 chiusoRead back del contatto-re K2, catena 2
DRV1K2
Dal computer degli assial computer principale
1 = Contattori chiusiContattori esterni chiu-si
DRV1EXTCONT
Dal computer degli assial computer principale
CommutatoÈ stata rilevata una ca-duta nella catena diazionamento 1
DRV1TEST1
Dal computer degli assial computer principale
CommutatoÈ stata rilevata una ca-duta nella catena diazionamento 2
DRV1TEST2
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 2913HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
7 Gestione di Input e output, I/O7.4.1 Segnali di I/O di sicurezza
Continua

Da - ACondizione del valo-re bit
DescrizioneNome del segna-le
Dal computer principalealla scheda del pannello
1 = Arresto di emer-genza soft impostato
Arresto di emergenzasoft
SOFTESO
Dal computer principalealla scheda del pannello
1 = Arresto di emer-genza automatico softimpostato
Arresto automatico softSOFTASO
Dal computer principalealla scheda del pannello
1 = Arresto generalesoft impostato
Arresto generale softSOFTGSO
Dal computer principalealla scheda del pannello
1 = Arresto superioredi emergenza soft im-postato
Arresto superiore softSOFTSSO
Dal computer principalealla scheda del pannello
1 = Lampada accesaLampada Motori inseritiMOTLMP
Dal computer principalealla scheda del pannello
1 = Avvia testTest di Enable1TESTEN1
Dal computer principaleal computer degli assi 1
1 = Chiudi catena 1Segnale al circuito diinterbloccaggio
DRV1CHAIN1
Dal computer principaleal computer degli assi 1
1 = Chiudi catena 2Segnale al circuito diinterbloccaggio
DRV1CHAIN2
Dal computer principaleal computer degli assi 1
1 = Rilascio del frenoSegnale alla bobina dirilascio del freno
DRV1BRAKE
292 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
7 Gestione di Input e output, I/O7.4.1 Segnali di I/O di sicurezzaContinua

8 Gestione del registro degli eventi8.1 Accesso al registro degli eventi
Registro eventiAprire il registro eventi per:
• visualizzare tutte le voci presenti.• esaminare in dettaglio voci specifiche.• gestire le voci del registro, ad esempio salvandole o eliminandole.
Il registro può essere stampato utilizzando RobotStudio.
Apertura e chiusura del registro eventiQuesta sezione descrive come aprire il registro eventi.
Azione
Selezionare la barra di stato.Viene visualizzata la finestra di stato.
1
Selezionare Registro eventi.Viene visualizzato l'elenco del registro eventi.
2
Se il contenuto del registro supera la dimensione di una singola schermata, è possibilefarlo scorrere.
3
Selezionare una voce di registro per visualizzare il messaggio dell'evento.4
Selezionare di nuovo la barra di stato per chiudere il registro.5
Informazioni correlateManuale dell'operatore - RobotStudio.
Manuale dell'operatore - IRC5 con FlexPendant 2933HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
8 Gestione del registro degli eventi8.1 Accesso al registro degli eventi

8.2 Eliminazione delle voci del registro
Perché eliminare le voci del registro?Il contenuto dei registri può essere eliminato per aumentare lo spazio disponibile.Spesso l'eliminazione delle voci del registro è un buon metodo per ricostruire iguasti in quanto è possibile rimuovere le voci più vecchie e non significative chenon sono correlate al problema da risolvere.
Eliminazione di tutte le voci del registro
Azione
Selezionare la barra di stato, quindi la scheda Registro eventi per aprire il registroeventi.
1
Nel menu Visualizza, scegliere Comune.2
Selezionare Elimina, quindi Elimina tutti i registri.Viene visualizzata una finestra di dialogo di conferma.
3
Selezionare Sì per eliminare o No per conservare intatto il registro.4
Eliminazione delle voci del registro relative a una specifica categoria
Azione
Selezionare la barra di stato, quindi la scheda Registro eventi per aprire il registroeventi.
1
Nel menu Visualizza, scegliere la categoria desiderata.2
Selezionare Elimina, quindi Elimina registro.Viene visualizzata una finestra di dialogo di conferma.
3
Selezionare Sì per eliminare o No per conservare intatto il registro.4
294 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
8 Gestione del registro degli eventi8.2 Eliminazione delle voci del registro

8.3 Salvataggio delle voci del registro
Perché salvare le voci del registro?È consigliabile salvare le voci del registro quando:
• è necessario cancellare il registro ma si desidera conservare le voci correntiper visualizzarle in seguito.
• si desidera inviare le voci del registro al supporto per risolvere un problema.• si desidera conservare le voci del registro per riferimento futuro.
Nota
Il registro può conservare fino a 20 voci per categoria e fino a 1000 vocinell'elenco degli eventi. Quando il tampone è esaurito, le voci più vecchie vengonosovrascritte e quindi vanno perdute. Non vi è alcuna possibilità di ricuperare talivoci del registro.
Salvataggio di tutte le voci del registroQuesta sezione descrive come salvare tutte le voci del registro.
Azione
Selezionare la barra di stato per aprire il registro degli eventi.1
Selezionare Salva tutti i registri con nome.Viene visualizzata la finestra di dialogo per la selezione dei file.
2
Se si desidera salvare il registro in un'altra cartella, individuare e aprire quella deside-rata.
3
Nella casella Nome file, digitare un nome per il file.4
Selezionare Salva.5
Manuale dell'operatore - IRC5 con FlexPendant 2953HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
8 Gestione del registro degli eventi8.3 Salvataggio delle voci del registro

Questa pagina è stata intenzionalmente lasciata bianca

9 Backup e ripristino9.1 Backup del sistema
Quando è necessario?ABB consiglia di eseguire un backup:
• prima di installare una nuova versione di RobotWare.• prima di eseguire modifiche di rilievo a istruzioni e/o parametri per consentire
il ritorno all'impostazione precedente.• dopo avere eseguito modifiche di rilievo alle istruzioni e/o parametri e avere
verificato la correttezza delle nuove impostazioni, al fine di conservarle.
Backup del sistemaQuesta sezione descrive come eseguire il backup del sistema.
Azione
Selezionare il menu ABB, quindi scegliere Backup e Ripristino.1
Selezionare Backup sistema corrente.Si apre la finestra Sistema backup di corrente.Se è stato definito un percorso come indicato nella sezione Impostazione di percorsipredefiniti a pagina 102, questo sarà visualizzato.
xx0300000441
2
Nota
• Per impostazione predefinita, viene creato il nome Cartella di backup il qualepuò essere rinominato dall'utente.
• Durante la ridenominazione, accertarsi che il nome non inizi con uno spazio.• Se il nome della cartella inizia con uno spazio, viene visualizzata una finestra
di dialogo di avvertimento.
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 2973HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
9 Backup e ripristino9.1 Backup del sistema

Azione
Toccare Avanzato....3Si apre la finestra Impostazioni controller.
Nota
Seguire questo passo per creare una copia di sicurezza come file .zip. Se non neces-sario, andare all’ultimo passo.
xx1700001302
Selezionare il riquadro Backup nel file archivio.4
Premere OK.5Il percorso di backup visualizzato è quello corretto?6SÌ: Selezionare Backup per eseguire il backup sulla directory selezionata. Vienecreato un file di backup denominato in base alla data corrente.NO: Selezionare ... sulla destra del percorso di backup e selezionare la directory.Quindi scegliere Backup. Viene creata una cartella di backup denominata in base alladata corrente.
298 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
9 Backup e ripristino9.1 Backup del sistemaContinua

9.2 Note importanti per l'esecuzione dei backup
Informazioni generaliQuando si creano i backup, o si ripristinano backup creati in precedenza, vi sonoparecchie cose da tenere presenti. Alcune di queste sono indicate di seguito.
BACKUP directoryIl sistema crea automaticamente una directory di backup locale predefinita, dinome BACKUP. Si consiglia di utilizzare questa directory per il salvataggio deibackup. Nel corso dei successivi backup, tali backup non vengono copiati nelladirectory HOME.Non modificare mai il nome della directory BACKUP.Inoltre, non rinominare mai il nome del file di salvaguardia in BACKUP, poiché ciòinterferirebbe con questa directory.È possibile creare in qualsiasi posizione della rete un percorso predefinito in cuiverrà memorizzato il backup. Vedere Impostazione di percorsi predefiniti apagina 102.
Quando è possibile il backup?Un backup di sistema può essere eseguito durante l’esecuzione del programma,con alcune limitazioni:
• Le operazioni di avvio del programma, caricamento del programma,caricamento di moduli, chiusura del programma e cancellazione del modulonon possono essere eseguite mentre il backup è in corso. Tuttavia, è possibileutilizzare le istruzioni RAPID Load e StartLoad.
• Non eseguire operazioni di backup mentre si eseguono movimenti critici osensibili, perché la precisione e l'esecuzione del movimento potrebberoesserne alterate. Utilizzare l'input di sistema Disable Backup per assicurarsiche non venga richiesto nessun backup durante il passaggio in aree critiche.
Il segnale d’ingresso del sistema può essere impostato da RAPID per tutte le partidel codice che sono critiche in termini di interferenze, oppure eliminarel’impostazione. Per ulteriori informazioni vedere Manuale tecnico diriferimento - Parametri di sistema.
Nota
L’esecuzione di un backup durante la produzione potrebbe interferiresull’esecuzione di RAPID.
Che cosa accade durante il backup?Oltre all'ovvia creazione di un backup, durante l'operazione si verificano alcunialtri eventi. Ad esempio, i task in background continuano la loro esecuzione.
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 2993HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
9 Backup e ripristino9.2 Note importanti per l'esecuzione dei backup

Moduli duplicati?Il comando di backup non comprende alcuna operazione di salvataggio. Questoimplica che nel backup possono esistere due revisioni dello stesso modulo, unodalla memoria di programma salvata nella directory Rapid\Task\Progmod\ e unodalla directory HOME copiata nella directory principale del backup. Un ripristinodeterminato da un backup ripristinerà entrambe le revisioni del modulo, in modoche lo stato resti invariato.
Grande quantità di datiUn numero eccessivo di file nella directory HOME può determinare una directorydi backup molto grande. Sarà quindi possibile eliminare senza problemi i file nonnecessari dalla directory principale.
Anomalie durante il backupSe si verifica un guasto durante il backup, ad esempio un errore di disco pieno oun'interruzione dell'alimentazione, l'intera struttura del backup viene eliminata.
300 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
9 Backup e ripristino9.2 Note importanti per l'esecuzione dei backupContinua

9.3 Ripristino del sistema
Quando è necessario?ABB consiglia di eseguire un ripristino da backup:
• se si sospetta che il file di programma sia danneggiato.• se una qualsiasi modifica eseguita alle impostazioni delle istruzioni e/o dei
parametri non è riuscita correttamente e si desidera ritornare a quelleprecedenti.
Durante il ripristino, tutti i parametri di sistema vengono sostituiti e vengono caricatitutti i moduli dalla directory di backup.Durante il riavvio, la directory principale viene ricopiata nella directory HOME delnuovo sistema.
Ripristino del sistemaQuesta sezione descrive come ripristinare il sistema.
Azione
Nel menu ABB, toccare Backup e Ripristino.1
Selezionare Ripristino sistema.2Sarà visualizzata la pagina Ripristina sistema.
xx0300000442
Nota
Se è stato definito un percorso, come descritto nella sezione Impostazione di percorsipredefiniti a pagina102, il percorso sarà visualizzato nel percorso dellaCartella backup.
Continua nella pagina successivaManuale dell'operatore - IRC5 con FlexPendant 3013HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
9 Backup e ripristino9.3 Ripristino del sistema

Azione
Per selezionare il percorso della cartella backup o selezionare il TAR formato filebackup, toccare ....
3
Si apre la finestra Seleziona cartella.
xx1700001303
Selezionare la cartella backup o il file backup che è nel formato TAR.4
Premere OK.5La paginaRipristina sistema sarà visualizzata ancora una volta con la cartella backupo i dettagli del percorso file selezionati.Se si desidera sostituire il controller attuale e le impostazioni di sicurezza con il con-troller di backup e le impostazioni di sicurezza selezionati, fare clic su Advanced...,selezionare le caselle di controllo Controller Settings e Safety Settings e fare clic suOK.
xx1600001082
Continua nella pagina successiva302 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
9 Backup e ripristino9.3 Ripristino del sistemaContinua

Azione
Toccare Ripristina.6Viene visualizzata la seguente schermata:
xx1400002325
Selezionare Sì.7Viene effettuata l’azione di ripristino e il sistema viene riavviato.
Nota
Se il backup ed il sistema attuale non corrispondono, sarà visualizzato seguentemessaggio di errore.
xx1400002326
Manuale dell'operatore - IRC5 con FlexPendant 3033HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
9 Backup e ripristino9.3 Ripristino del sistema
Continua

Questa pagina è stata intenzionalmente lasciata bianca

10 calibratura10.1 Verifica della necessità di calibrare il robot
Verifica dello stato di calibratura del robotQuesta sezione descrive come verificare lo stato di calibratura del robot.
Azione
Nel menu ABB, scegliere Calibratura.1
Nell'elenco di unità meccaniche, verificare lo stato della calibratura.2
Tipo di calibratura necessaria
allora...Se lo stato della calibratura è...
il robot deve essere calibrato da un tecnicoqualificato dell'assistenza.
Non calibrata
è necessario aggiornare i contagiri.Necessario aggiornamento del contagiriL'aggiornamento dei contagiri è descritto nelmanuale del prodotto per il robot.
non è necessaria alcuna calibratura.Calibrata
PERICOLO
Non tentare di eseguire la procedura di calibratura fine senza l'addestramentoe gli strumenti appropriati. Ciò potrebbe determinare un posizionamento erratoche potrebbe causare lesioni e danni materiali.
Manuale dell'operatore - IRC5 con FlexPendant 3053HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
10 calibratura10.1 Verifica della necessità di calibrare il robot

10.2 Aggiornamento del contagiri
PanoramicaIn questo paragrafo viene descritto come eseguire una calibratura grossolana diciascun asse del robot, vale a dire l'aggiornamento del valore del contagiri perciascun asse, utilizzando la FlexPendant. Informazioni dettagliate sui contagiri esul relativo aggiornamento, con posizioni di calibratura e scale, sono disponibilinel corrispondente manuale del prodotto del robot. Vedere anche il manualeManuale dell'operatore - Calibration Pendulum per informazioni a proposito dellacalibratura.Per i robot che utilizzano l'opzione Absolute Accuracy, è necessario caricare primadi tutto il file dei dati di calibratura absacc.cfg.
Memorizzazione delle impostazioni dei contagiriQuesta procedura descrive la seconda fase di aggiornamento dei contagiri, ovverola memorizzazione delle impostazioni dei contagiri.
Azione
Nel menu ABB, scegliere Calibratura.1Vengono visualizzate tutte le unità meccaniche collegate al sistema, insieme al relativostato di calibratura.
Scegliere l'unità meccanica desiderata.2Viene visualizzata una schermata: scegliere Contagiri.
en0400000771
Continua nella pagina successiva306 Manuale dell'operatore - IRC5 con FlexPendant
3HAC050941-007 Revisione: G©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
10 calibratura10.2 Aggiornamento del contagiri

Azione
Selezionare Aggiorna contagiri.Viene visualizzata una finestra di dialogo che segnala come l'aggiornamento deicontagiri potrebbe modificare le posizioni programmate del robot:
• Scegliere Sì per aggiornare i contagiri.• Scegliere No per annullare l'aggiornamento dei contagiri.
Scegliendo Sì viene visualizzata la finestra di selezione dell'asse.
3
Nota
Quando si aggiornano i contagiri, la funzione o l'istruzione RAPID in corso viene inter-rotta e il percorso viene cancellato.
Per selezionare l'asse di cui si desidera aggiornare il contagiri:• Selezionare la casella sulla sinistra.• Scegliere Seleziona tutto per aggiornare tutti gli assi.
Quindi, scegliere Aggiorna.
4
Viene visualizzata una finestra di dialogo in cui si avverte che non è possibile annullarel'operazione di aggiornamento:
• Scegliere Aggiorna per procedere all'aggiornamento dei contagiri.• Scegliere Annulla per annullare l'aggiornamento dei contagiri.
Scegliendo Aggiorna vengono aggiornati i contagiri selezionati e il segno di spuntaviene eliminato dall'elenco degli assi.
5
ATTENZIONE
If a revolution counter is incorrectly updated, it will cause incorrect manipulator posi-tioning, which in turn may cause damage or injury!Verificare attentamente la posizione di calibrazione dopo ogni aggiornamento.
6
A seconda del metodo di calibratura da utilizzare, vedere la sezione Verifica dellaposizione di calibratura in entrambi i manuali. Ulteriori informazioni sulla calibraturasono disponibili anche nel manuale del prodotto per il robot.
Informazioni correlateManuale dell'operatore - Calibration Pendulum
Manuale dell'operatore - IRC5 con FlexPendant 3073HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
10 calibratura10.2 Aggiornamento del contagiri
Continua

Questa pagina è stata intenzionalmente lasciata bianca

IndexAABB menu, 41accesso, 100accesso in scrittura
autorizzazione, 99messaggio, 93rifiuto, 99
alle istruzionicommenti, 170
annullaistruzioni, 166
App RobotStudio OlineCalibrate, 45Jog, 46
App RobotStudio Online, 45Manage, 45Operate, 46Tune, 46
armadietti, 36array
modifica le posizioni, 180arresti di emergenza
ripristino, 22arresto della batteria
routine di servizio, 229assi
illustrazione, 128
Bbackup
directory, 299importante, 299menu, 65percorso predefinito del file, 102sistema, 297
barra delle applicazioni, 41barra di stato, 41, 77
Ccalibratura
CalPendulum, 230LoadIdentify, 232schermo tattile, 122stato, 305
calibrazione, 50CalPendulum
routine di servizio, 230caratteri
immissione, 91internazionali, 91
caratteri internazionali, 91carichi
identificazione, 232carichi utili
creazione, 208dichiarazioni, 209eliminazione, 213identificazione, 232modifica, 210modifica delle dichiarazioni, 212selezione, 139visualizzazione delle definizioni, 210
Carico totale, 208connettore, 37
contagiriaggiornamento, 306arresto della batteria, 229impostazione, 306informazioni, 148
contatore del tempo di calendario, 231contatore del tempo di funzionamento, 231controller
armadietto singolo, 36porte, 51pulsanti, 51
controller IRC5, 36coordinate dell'oggetto di lavoro
selezione, 143coordinate di base
impostazioni prestabilite, 127selezione, 143
coordinate universaliselezione, 143
coordinate utensileimpostazioni prestabilite, 127selezione, 143
cursoreinformazioni, 173
Ddata e ora, 116dati del programma
menu, 61dati di programma
modifica, 177destinazioni
movimento, 283regolazione, 272, 277
directory di programma, 154direzioni del joystick
blocco, 144illustrazione, 128
direzioni joystickinformazioni, 133
disconnessione, 100display, 44dispositivo di abilitazione, 23, 38, 44dispositivo di abilitazione a tre posizioni, 23, 38, 44dispositivo di attivazione, 37
uso, 30, 217utilizzo, 219
dispositivo di attivazione a tre posizioniuso, 30, 217
Eesecuzione all'indietro
informazioni, 222limitazioni, 222
esecuzione passo passo, 222Esplora FlexPendant, 56espressioni
off, 281posizioni, 281
Ffieldbus, 57file
programmi, 154filtro
file, 95informazioni, 95
Manuale dell'operatore - IRC5 con FlexPendant 3093HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
Index

programmi, 95tipi di dati, 95
finestra Operatore, 41, 76FlexPendant, 41
collegamento in funzione, 259come sostenere, 40componenti principali, 37Hot plug, 259impugnatura, 114mancino, 40pulizia, 24pulsante arresto d’emergenza, 18pulsanti hardware, 39rotazione, 115scollegamento, 259tappo ponticello, 259
FlexPendant o T10connettore, 51
Hhold-to-run, 23, 252
utilizzando, 30, 217utilizzo, 219
HotEdit, 54, 273utilizzo, 277
Hot plug, 259
II/O
cambiamento dei valori, 286informazioni, 57menu, 57più comuni, 118simulazione, 286visualizzazione di gruppi, 289
I/O, input e output, 285I/O più comuni
configurazione, 118impostazione rapida
incrementi, 86modalità di movimento, 81modalità esecuzione, 87modalità passo a passo, 88modalità velocità, 89oggetti di lavoro, 83sistemi di coordinate, 84task, 90unità meccanica, 80utensili, 82
impostazioni di rete, 116impostazioni di visualizzazione
configurazione, 104viste di test aggiuntive, 108
impostazioni prestabiliteimpostazioni prestabilite, 127
interruttore di retecontroller, 51
IsBrakeCheckActive, 243istanza di dati, 61istanze
tipi di dati, 175istruzioni
annulla, ripristina, 166copia di argomenti, 169copia e incolla, 169esecuzione all'indietro, 222esecuzione da una specifica, 220
gestione, 166modifica degli argomenti, 167modifica della modalità di movimento, 170taglio, 170
Jjoystick, 37, 44
direzioni di blocco, 144mediante, 38
Llinea base
criteri target, 278linea di base
concetto, 278livelli di pericolo, 32LoadIdentify
routine di servizio, 232
Mmancino, 114ManLoadIdentify
routine di servizio, 241menu di calibratura, 66menu di impostazione rapida, 41messaggi di errore, 93modalità automatica
limitazioni, 27, 214passaggio a, 268
modalità di movimentoimpostazione rapida, 81selezione, 81, 138
modalità di movimento lineare, 133modalità di movimento riorientata, 133modalità esecuzione
impostazione, 87impostazione rapida, 87
modalità manualeinformazioni, 29, 216limitazioni, 29, 216passaggio a, 270
modalità manuale a velocità massimainformazioni, 29, 216passaggio a, 271
modalità per passiimpostazione, 88impostazione rapida, 88
modalità riorientamentoimpostazioni prestabilite, 127
modalità velocitàimpostazione, 89impostazione rapida, 89
modifica delle posizioniarrays, 180presenze di dati, 177
modifica posizioni, 273panoramica, 272
ModPos, 273Absolute Limit ModPos, 272
modulicaricamento, 158creazione, 157eliminazione, 160gestione, 157ridenominazione, 159salvataggio, 158
movimento incrementale
310 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
Index

definizione, 146impostazione della dimensione, 146impostazione rapida, 86impostazioni della dimensione, 86impostazioni dimensione, 147
Nnorme
ANSI, 17CAN, 17EN, 16EN IEC, 16EN ISO, 16
Ooffset
creazione, 282descrizione, 281informazioni, 281
oggetti di lavorocreazione, 200definizione del sistema di coordinate, 201dichiarazioni, 200eliminazione, 207impostazione rapida, 83modifica dei dati dell'oggetto di lavoro, 205modifica delle dichiarazioni, 206selezione, 83, 139spostamenti, 201
opzionicalibratura Levelmeter, 66contatore tempo di utilizzo, 51IRC5 Compact, 36IRC5 Panel Mounted Controller, 36LED della catena di sicurezza, 51MultiMove, 135pendolo di calibratura, 66porta di servizio, 51presa di servizio, 51pulsante hot plug, 51pulsante Hot plug, 259
orientamento dell'utensileimpostazione, 140
orientamento dell'utensile, definizione, 140orientamento dell’utensile, 190
Ppanoramica
controller IRC5, 36Panoramica
FlexPendant, 37RobotStudio, 47
parametri di sistema, 49passo
avanti, 39indietro, 39
pennino stilomediante, 38posizione, 38
percorsi predefinitiimpostazione, 102
percorsoritorno, 263
porta di servizio, 51porta USB
FlexPendant, 38porte
controller, 51posizioni
destinazioni, 272esatte, 149HotEdit, 273informazioni, 148lettura, 149modifica, 272–273offset, 281regolazione, 54, 272, 277regolazione fine, 273regole di denominazione, 109
programmazione di un robot, 49programmi
arresto, 252avvio, 249caricamento, 155creazione, 154esecuzione passo passo, 222gestione, 154informazioni sui file, 154multitasking, 253percorso predefinito del file, 102ridenominazione..., 156salvataggio, 156
programmi multitaskingcaricamento, esecuzione e interruzione, 253informazioni, 253visualizzazione, 254
puliziaFlexPendant, 24
pulsante arresto d’emergenza, 18pulsante Avanti, 39pulsante Chiudi, 41pulsante d'esecuzione, 39pulsante di arresto, 39pulsante di arresto di emergenza, 44
FlexPendant, 38pulsante di avvio, 39pulsante di avvio dell'esecuzione del programma, 39pulsante di azzeramento
mediante, 38posizione, 38
pulsante hold-to-run, 37pulsante indietro, 39pulsanti
controller, 51pulsanti di selezione, 39Pulsanti hardware, 39pulsanti programmabili
modifica, 120Puntatore di movimento, MP
informazioni, 173puntatore di movimento, PM, 223puntatore di programma, PP, 223Puntatore di programma, PP
informazioni, 173punti dell’elongatore
definisci, 190punti d’approccio, 188punto centrale dell'utensile
informazioni, 184misurazione, 193risultati del calcolo, 190
punto centrale dell'utensile TCP, 184punto centrale dell’utensile
Manuale dell'operatore - IRC5 con FlexPendant 3113HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
Index

definizione, 190variazioni dello spazio lavorativo, 190
punto di inserimento, modifica, 92
RRAPID, 152regione di ritorno del percorso, 263registro eventi
menu, 70messaggio, 71
regolazioneposizioni, 277regolazione, 272
regolazione fineHotEdit, 273target, 273
resolverinformazioni, 148
riavviomenu, 74
ripristinaistruzioni, 166
ripristinomenu, 65percorso del file predefinito, 102sistema, 301
risoluzione dei problemi, 262risultati del calcolo, 190RobotStudio Oline Apps
YuMi, 46RobotWare opzione, 43routine
copia, 164creazione, 161definizione dei parametri, 162eliminazione, 164esecuzione di routine di servizio, 225esecuzione di una specifica, 221gestione, 161modifica delle dichiarazioni, 164
routine di servizio, 265bat_shutdown, 229CalPendulum, 230esecuzione, 225LoadIdentify, 232ManLoadIdentify, 241ServiceInfo, 231
SSchermo
schermo tattile di, 41schermo tattile
luminosità, 113rotazione della, 115
scorrimento, 94segnali
cambiamento dei valori, 286sicurezza, 32simulazione, 286visualizzazione, 285
segnali di I/O di sicurezzasegnali di sicurezza, 290
segnali di sicurezzanel Manuale, 32
sfondomodifica, 106
sicurezza
robot in movimento, 21segnali, 32segnali nel Manuale, 32simboli, 32
simbolisicurezza, 32
SIS, Service Information Systemcontatori, 231routine di servizio, 231
sistemabackup, 297ripristino, 301
sistema di riferimento dell’utensiletest di riorientamento, 191
sistema di riferimento utensiledefinizione, 187metodi, 187
sistemi di coordinateimpostazione rapida, 84impostazioni prestabilite, 127panoramica, 127selezione, 84, 143
SMBarresto della batteria, 229
spostamentiinformazioni, 281oggetto di lavoro, 201
spostamentoassi aggiuntivi, 134assi in modalità indipendente, 134coordinati, 135informazioni, 125limitazioni, 134sistemi di coordinate, 143unità meccaniche non calibrate, 134World Zone, 134
Spostamentospostamento, 283
spostamento, menu, 58standard, 16standard sulla sicurezza, 16standard sul prodotto, 16
Ttappo ponticello, 259target
modifica, 272–273regolazione, 54regolazione fine, 273regole di denominazione, 109
taskavvio e interruzione, 253caricamento di un programma, 254configurazione, 253debug, 111normale, statico, semistatico, 253pannello dei task, 90, 111
tastiera software, 91tasti programmabili
modifica, 120tipi di dati, 175
creazione di nuovi, 175menu, 61modifica, 177visualizzazione, 174
Tool Center Pointdefinire, 189
312 Manuale dell'operatore - IRC5 con FlexPendant3HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
Index

touch screencalibratura, 122immagine di sfondo, 106
UUAS
configurazione delle viste, 107unità meccanica
impostazione rapida, 80selezione, 80, 136
unità meccanica non calibrata, 265unità meccaniche
attivare automaticamente, 64utensile
impostazione rapida, 82utensile, panoramica degli utensili di controllo, 48utensili
allineamento, 150
configurazione del sistema di coordinateutensile, 198creazione, 184creazione di fissi, 197eliminazione, 196fisso, 197identificazione dei carichi, 232modifica dei dati dell'utensile, 192modifica delle definizioni, 193modifica delle dichiarazioni, 195selezione, 82, 139
utensili di controllo, panoramica, 48
Vvisualizzazione di messaggi nei programmi, 76
Zzoom, 94
Manuale dell'operatore - IRC5 con FlexPendant 3133HAC050941-007 Revisione: G
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.
Index



ABB AB, RoboticsRobotics and MotionS-721 68 VÄSTERÅS, SwedenTelephone +46 (0) 21 344 400
ABB AS, RoboticsRobotics and MotionNordlysvegen 7, N-4340 BRYNE, NorwayBox 265, N-4349 BRYNE, NorwayTelephone: +47 22 87 2000
ABB Engineering (Shanghai) Ltd.Robotics and MotionNo. 4528 Kangxin HighwayPuDong DistrictSHANGHAI 201319, ChinaTelephone: +86 21 6105 6666
ABB Inc.Robotics and Motion1250 Brown RoadAuburn Hills, MI 48326USATelephone: +1 248 391 9000
abb.com/robotics
3HAC050941-007,Rev
G,it
©Copyright 2018 ABB All rights reserved - Tutti i diritti riservati.Le specifiche sono soggette a modifiche senza preavviso.