Progettazione funzionale di sistemi...
57
MECHATRONICS AND MECHANICAL DYNAMICS LABS UNIVERSITÀ DEGLI STUDI DI BERGAMO Progettazione funzionale di sistemi meccatronci Introduzione al modulo
Transcript of Progettazione funzionale di sistemi...

MECHATRONICS AND MECHANICAL DYNAMICS LABS
UNIVERSITÀ DEGLI STUDI DI BERGAMO
Progettazione funzionale di sistemi meccatronci
Introduzione al modulo

UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
Introduzione• Quali sono le aperture che si possono scorgere dal punto di vista
“Funzionale” ricorrendo alla meccatronica?
• Estensione del concetto “trasformazione del moto” visto nel primo semestre
• Applicazioni industriali
• Quali sono gli strumenti disponibili e come possiamo utilizzarli
• Esempi applicativi

UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
Programma• Introduzione
• Introduzione alla progettazione funzionale di sistemi meccatronici in ambito industriale. La generazione del moto distribuita
• Tipologie di macchinari in relazione alla produzione richiesta
• Trasmissioni• trasmissioni caratteristiche poste a valle degli attuatori: trasmissioni a vite,
cinghia, cremagliera. Considerazioni cinematiche e dinamiche.
• Modellazione di un sistema generatore di moto• modello dinamico di un sistema di azionamento completo ad 1 gdl. Effetti
dell'attuatore e della trasmissione sulle prestazioni complessive
• Controllo del moto distribuito• introduzione ai bus di campo per applicazioni industriali• profili e standardizzazioni per il controllo del moto
• Esempi applicativi

UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
Meccatronica e Produzione• In questa parte del corso faremo riferimento a sistemi meccatornici
dedicati a linee di produzioni ad elevata cadenza produttiva• Basso impatto di manodopera
• Situazione di vantaggio per i paesi occidentali• Molte persone non hanno più impiego diretto nel settore industriale• Sono impiegati in settore di servizio• Sono necessari impianti ad elevata automazione ed a elevata cadenza
produttiva
• Si pensi a questo proposito• Industrie alimentari• Produzione di apparecchiature elettroniche o elettrodomestici• Prodotti dedicati direttamente all'utente finale

UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
Meccatronica e Produzione• Industria automobilistica
• Produzione di 1 milione di autovetture, su un impianto con due turni, vita media di 15 anni
• Deve essere prodotta un auto ogni 3 minuti circa• VW Golf è prodotta ad una cadenza 0.3 minuti
• Nel settore alimentare• Un milione di confezione ogni 24 ore• 14 pezzi al secondo (50000 pezzi/ora)
• Come possiamo pensare di inserire in questo contesto la progettazione meccatroncia?• Gli elementi chiave sono:
• Flessibilità operativa• Flessibilità progettuale• Elevata cadenza operativa e ripetibilità

UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
Meccatronica e Produzione• A livello industriale, elemento chiave per ottenere questi risultati
• Azionamenti elettrici controllati, destinati a:• Muovere• Lavorare• Confezionare• Inscatolare• Immagazzinare• Ecc..
• Piccole parti lasciate ancora oggi agli attuatori pneumatici• Modesto rendimento• Impossibilità di un controllo efficace in posizione
• Attorno ad essi due elementi fondamentali• Sistema meccanico per la trasformazione del moto• Sistema di controllo distribuito
• Nuovo concept per la progettazione e la modularità delle macchine

UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
Progettazione Meccatronica• Il sistema meccatronico nel suo insieme NON deve replicare gli stessi
movimenti o la stessa sequenza utilizzata per la realizzazione manuale del prodotto
• La macchina automatica deve essere in grado di eseguire anche più funzioni in parallelo• Ovvero un sistema che opera con più di due mani in parallelo• La precisione del movimento di ogni singola mano è garantito dagli
attuatori controllati
• Il coordinamento delle mani è garantito da• Un sistema di controllo della macchina e del sotto-sistema
• Evoluzione degli stati della macchina• Controllo del movimento di ogni singolo attuatore
• Sensori disposti a bordo macchina per la determinazione dello stato delle parti operative della macchina
• Alcuni di questi sensori possono essere direttamente integrati nei sistemi di azionamento

UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
Progettazione Meccatronica• Le caratteristiche
• Generazione del moto distribuita (più attuatori distribuiti sulla macchina)• Sistema di controllo (eventualmente distribuito)
• Sono in contrapposizione alla tradizionale soluzione “meccanica”• Una sola sorgente di moto
• Un solo motore (asincrono) in ingresso alla macchina per convertire energia elettrica in meccanica
– In passato ruota ad acqua• Alberi di trasmissione per il trasferimento del moto• Camme e meccanismi per la realizzazione delle funzioni richieste (un
meccanismo per ogni funzione)• Soluzione rigida• Consente elevatissima cadenza produttiva• Elevata affidabilità

UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
Sistemi di azionamento• Caratteristiche specifiche dei sistemi di azionamento
• Affrontate in Meccanica degli Azionamenti
• Qui introduciamo solamente i concetti base• Attuatore elettrico per la conversione di energia elettrica in meccanica• Alimentatore di potenza per il trasferimento modulato di energia verso
l'attuatore
• Saranno affrontati più in dettaglio quegli aspetti che consentono• Progettazione funzionale• Impostazione della logica di funzionamento della macchina
• Avanzamento degli stati macchina• Coordinamento di più assi• Pilotaggio in posizione degli assi (in contrapposizione alla generazione
del moto ottenuta con le camme)

UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
Tipi di produzione• Industrie di processo
• Il prodotto in uscita è caratterizzato da una specifico materiale (o composizione chimica)
• NON è fissata la forma• Chimiche, processi meccanici di base, alimentari, ecc..• Il tempo caratteristico è ALTO
• Industrie manifatturiere• Il prodotto in uscita è caratterizzato da uno specifico materiale e da una
specifica forma• Tutti i prodotti destinati ad un utente finale sono processati da questo tipo di
industria• Nel settore delle bevande, si pensi alla confezione
• Il tempo caratteristico è BASSO

UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
Tipi di produzione• Più difficile il controllo del processo in industrie manifatturiere
• Situazione dovuta all'elevata velocità con cui evolvono gli stati ed i movimenti• Il tempo caratteristico nelle industrie manifatturiere è più BASSO rispetto a
quello delle industrie di processo• Nelle industrie di processo i parametri (temperature, portate, ecc..)
cambiano lentamente (anche in decine di minuti)• Nell'industria manifatturiera i movimenti necessari ad eseguire le funzioni
prescritte avvengono in frazioni di secondo

UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
Tipi di produzione
Tecnologia di produzione
Di processo Manifatturiera
Ind. Chimica (ossidazione, polimerizzazione)
Ind. Biologica (fermentazione)
Processi termiciEssicatura
Vaporizzazionecristallizzazione
Formatura di baseFormatura
SeparazioneJOINING
Rivestimento Cambiamento delle proprietà
superficiali
DIN 8580

UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
Tipi di Produzione• JOINING rappresenta un interessante aspetto delle funzioni che
possono essere elaborate da un sistema automatico
• DIN 8593 definisce le seguenti attività per joining• Assemblaggio• Riempimento• Montaggio forzato• Collegamento per mezzo di formazione di base• Collegamento per saldatura o brasatura• Collegamento per incollaggio

UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
Produzione continua• Il materiale “principale” ha un movimento continuo, generalmente
progressivo(spostamento monotono crescente), durante le fasi di elaborazione• Trafilatura di fili metallici• Produzione di lamiere• Processo di estrusione di materiali termoplastici o metallici• Fabbricazione della carta
• Il materiale non subisce accelerazioni o decelerazioni• Velocità costante (ad eccezione dei transitori di avvio)• Elevata qualità della produzione• Elevata produttività (dipende esclusivamente dalla velocità di
avanzamento del materiale)

UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
Produzione continua• Al termine della produzione sono spesso previsti dei sistemi per la
separazione del prodotto in parti• L'operazione di taglio richieste deve essere eseguita senza interrompere il
movimento del materiale• Sistemi di taglio al volo
• In questo tipo di macchine le movimentazioni sono sincronizzate con la velocità di avanzamento del prodotto principale• Sincronizzazione e fasatura dei sistemi generatori di moto• Sistemi di avvolgimento, eventualmente con controllo del tiro• Sistemi per il taglio al volo
UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
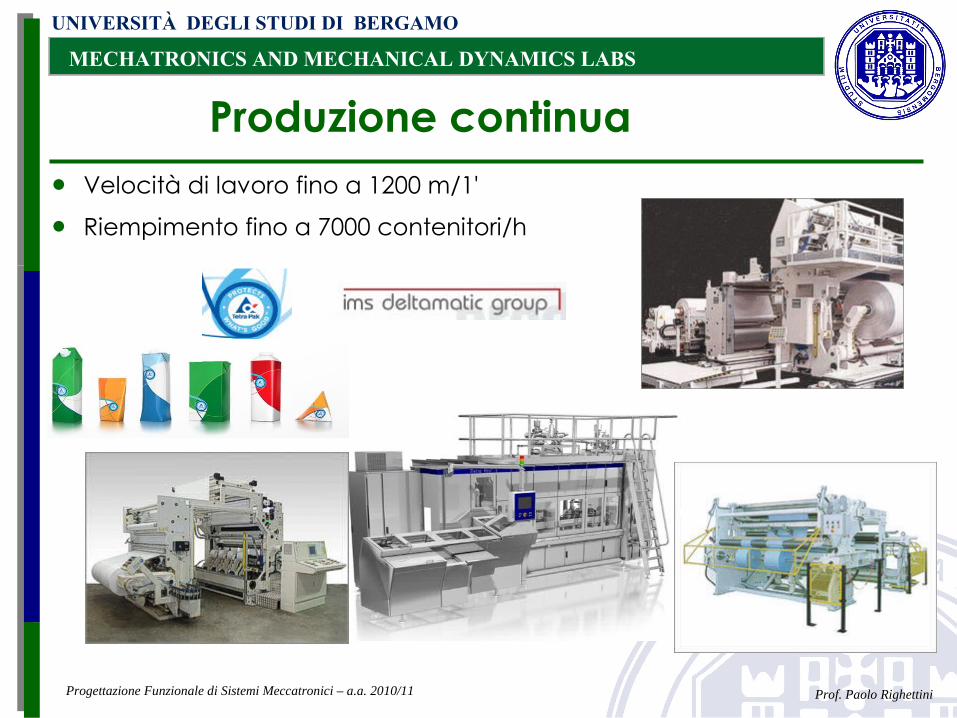
Produzione continua• Velocità di lavoro fino a 1200 m/1'
• Riempimento fino a 7000 contenitori/h
UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
Produzione intermittente• Le operazioni necessarie alla realizzazione del prodotto finale sono
suddivise in sotto operazioni elementari eseguite in parallelo• Le operazioni elementari sono eseguite in posizione prestabilite, dette
stazioni di lavoro• Il prodotto, affinché subisca tutte le lavorazioni necessarie per renderlo
completo, deve attraversare tutte le stazioni di lavoro• Se sono presenti n stazioni di lavoro, sono lavorati contemporaneamente n
prodotti• Durante l'esecuzione delle operazioni elementari nelle stazioni il prodotto è
fermo• Tutte le operazioni elementari terminano nello stesso istante,
successivamente tutti i sotto-prodotti sono portati nella stazione successiva che li compete
• Le attività in ogni singola stazione dipendono dal prodotto stesso

UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
Produzione intermittente• Tutte le stazioni DEVONO avere lo stesso tempo di ciclo
• La divisione in sotto-attività è un'attività complessa• La produttività della linea risulta• Il tempo di ciclo T dipende dal tempo di effettivo di lavoro e dal tempo
dedicato al trasferimento del prodotto
• Due problematiche generali• Determinazione dei sistema di trasporto del pezzo• Realizzazione delle stazioni di lavoro
• In questa categoria di macchine ricadono• Linee di assemblaggio• linee transfer di lavorazione
P= 1T[Pz /s ]
T=T lT m

UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
Produzione intermittente

UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
Generazione del moto distribuita• La generazione del moto è distribuita
nell'impianto o macchina
• Elementi caratteristici di questo tipo di impianti• Attuatore per introdurre forze/coppie nell'impianto• Trasmissione a valle dell'attuatore• Alimentatore di potenza a monte dell'attuatore
• Sistema di controllo della macchina o di una parte della macchine
• Canale di comunicazione fra l'alimentatore di potenza ed il sistema di controllo• Soluzione classica: analogica• Digitale basata su bus di campo

UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
Generazione del moto distribuita • I sistemi di azionamento sono i principali
attori in un impianto
• Permettono di introdurre l'energia necessaria a compiere attività di assemblaggio, movimentazione
• In impianti complessi più sistemi di azionamento devono essere fra loro coordinati • Impianti di montaggio• Macchine automatiche• Robot

UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
Generazione del moto distribuitaRequisiti necessari
• Chiusura degli anelli di posizione del singolo motore
• Coordinamento di più assi secondo uno specifico profilo di moto• Affidato ad un sistema centralizzato• Sistema di controllo (master)

UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
Generazione del moto distribuita• Nelle versioni più semplici permettono di
regolare il flusso di energia dalla sorgente verso il motore (PWM)
• Nelle soluzioni digitali oggi disponibili• Controllo della corrente• Controllo della velocità del motore• Controllo della posizione del motore• Possibilità di retroazione da sensori ausiliari
• Una parte delle funzioni del sistema di controllo può essere integrata nell'azionamento assieme all'alimentatore
UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
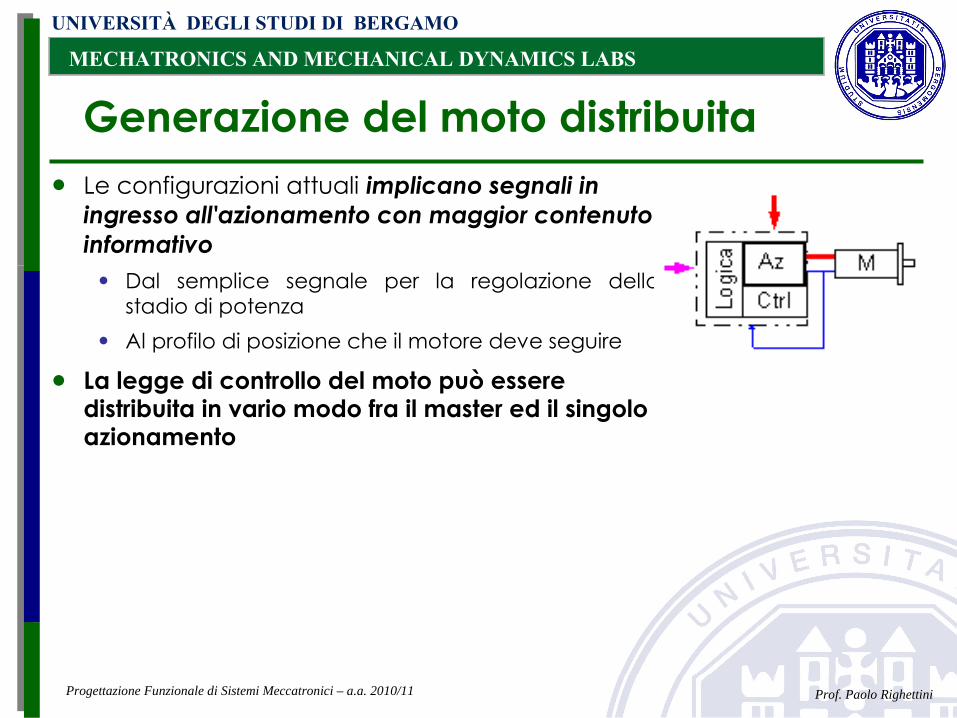
Generazione del moto distribuita• Le configurazioni attuali implicano segnali in
ingresso all'azionamento con maggior contenuto informativo• Dal semplice segnale per la regolazione dello
stadio di potenza• Al profilo di posizione che il motore deve seguire
• La legge di controllo del moto può essere distribuita in vario modo fra il master ed il singolo azionamento
UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
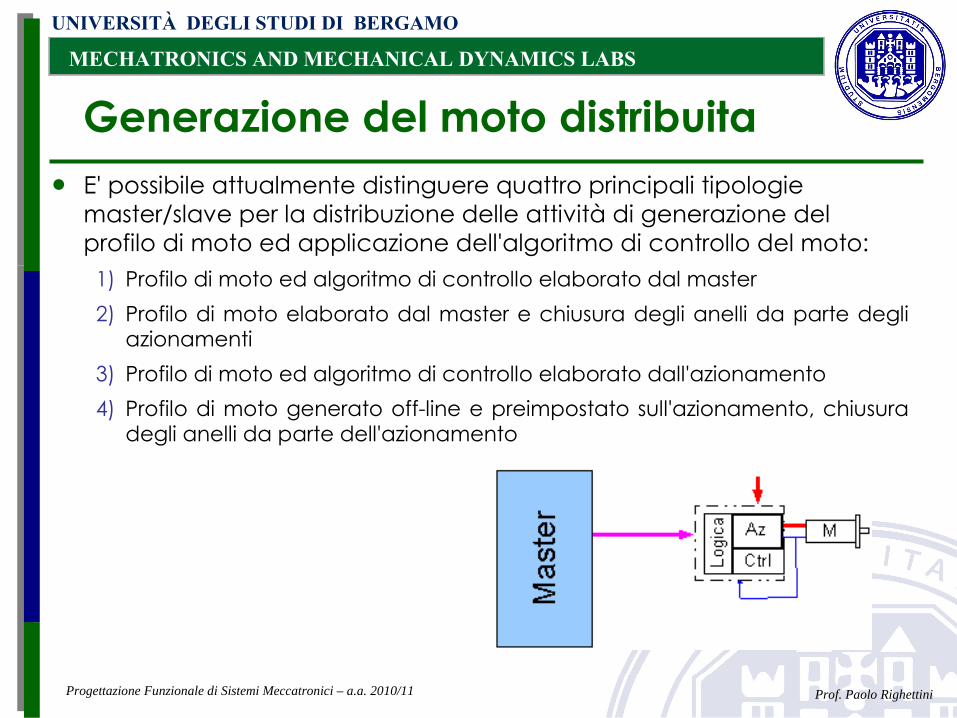
Generazione del moto distribuita• E' possibile attualmente distinguere quattro principali tipologie
master/slave per la distribuzione delle attività di generazione del profilo di moto ed applicazione dell'algoritmo di controllo del moto:
1) Profilo di moto ed algoritmo di controllo elaborato dal master2) Profilo di moto elaborato dal master e chiusura degli anelli da parte degli
azionamenti3) Profilo di moto ed algoritmo di controllo elaborato dall'azionamento4) Profilo di moto generato off-line e preimpostato sull'azionamento, chiusura
degli anelli da parte dell'azionamento

UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
Generazione del moto distribuitaLa possibile distribuzione della legge di controllo fra master e singolo
azionamento porta a due considerazioni immediate
• E' necessario disporre di un sistema digitale di comunicazione fra master ed azionamento per poter far fronte al maggior contenuto informativi richiesto in ingresso dall'azionamento
• E' possibile spostare alcune funzionalità dal master all'azionamento con una riduzioni dei costi• Prestazioni del sistema di controllo nel suo complesso• Costo HW• Costo del cablaggio

UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
Generazione del moto distribuita

UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
Generazione del moto distribuita

UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
Hardware abstraction layer• virtualizza tutti i dispositivi che effettivamente interagiranno con
l'impianto produttivo
• La virtualizzazione permette lo sviluppo di applicazioni che interagiscono con i dispositivi virtualizzati e non con quelli fisici, indipendentemente dal tipo di canale di comunicazione
• la stessa applicazione, potrà essere eseguita anche prescindendo dal tipo di bus di campo utilizzato o dal numero di reti utilizzato
• questa soluzione permette facilmente di passare da azionamenti con comando punto-punto ad azionamenti che richiedono la generazione del profilo di moto
• analogamente per quanto riguarda il passaggio da Can ad Ethernet
• In fase di aggiornamento Hardware o di nuovo indirizzamento delle periferiche sul bus di campo sarà necessario la riconfigurazione dell'hardware abstraction layer
• L'hw abstraction layer deve inoltre contenere il master della rete

UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
Interfacce verso il bus di campo o I/O standard
• operano fra l'hardware abstraction layer ed i driver di accesso alle periferiche connesse al sistema master di controllo
• per queste interfacce si devono definire dei metodi operativi stadanrd verso l'HW astratto e devono interagire per mezzo dei comandi tipici verso i driver di comunicazione con le periferiche
• se tutte le periferiche industriali sono comandate via Bus di campo è necessario solo uno di questi moduli
• nel caso più generale è necessaria una interfaccia per ogni canale di comunicazione hardware che si intende installare sull'hardware del sistema di controllo.
UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
Azionamenti virtualizzati• Ogni azionamenti virtualizzato deve rispondere ad una serie di comandi/eventi
tipici dell'ambiente del motion control• ricerca dello zero
• passaggio dallo stato di riposo ad uno attivo
• emergenze, errore di inseguimento ammesso
• esecuzione di traiettorie punto-punto
• esecuzione di traiettorie interpolate, ecc..
• Ognuna di queste azioni sarà opportunamente tradotta in funzione dello specifico azionamento utilizzato
• un'adeguata impostazione di questo tipo di entità permette di gestire tutte le possibili configurazioni di sistema master/slave a livello di motion control (si veda documento sul motion control e bus di campo)
• Gli azionamenti virtualizzati devono essere opportunamente configurati in fase di inizializzazione dell'applicazione
• A parte la fase di inizializzazione, gli azionamenti virtualizzati avranno tutti la stessa interfaccia verso l'applicazione vera e propria indipendentemente dalla tipologia del sistema di azionamento/master utilizzata.

UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
Segnali I/O dal campo analogici e digitali virtualizzati
• I segnali dal campo o verso il campo virtualizzati rappresentano delle collezioni di entità che descrivono la loro controparte presente a livello di impianto
• E' necessario prevedere una collezione per ogni tipo di segnale in ingresso e per ogni tipo di segnale di uscita
• L'applicazione interagirà con il dispositivo virtualizzato, mentre la parte di hardware abstraction layer e le interfacce verso l'effettiva parte hardware incanaleranno opportunamente le informazioni del programma verso il dispositivo fisico e viceversa.

UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
Programma di Controllo

UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
Programma di Controllo• Cinematica inversa.
• Permette di convertire le coordinate utente (nello spazio di lavoro del sistema di manipolazione) nelle coordinate dei sistemi di azionamento
• dipende dalla configurazione cinematica del robot, dai rapporti di trasmissione e dalla risoluzione dei trasduttori di misura
• taratura cinematica del sistema al fine di migliorare la precisione di posizionamento
• Cinematica Diretta• Permette di convertire le posizioni determinate dal sistema di azionamento
nella posizione della pinza di lavoro• utilizzato per indagare la posizione raggiunta dalla pinza in fase di manovra
da parte dell'operatore al fini di limitare urti con parti fisse della macchina• utilizzato per visualizzare su sinottico la posizione attuale del manipolatore.
• Gestione Processo• Gestisce stati del processo• Parametri per le stesse tipologie di applicazione

MECHATRONICS AND MECHANICAL DYNAMICS LABS
UNIVERSITÀ DEGLI STUDI DI BERGAMO
Trasmissioni

UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
Trasmissioni a valle dell'attuatore• Trasmissioni con rapporto di trasmissione costante
• Trasmissioni da rotativo a lineare• Trasmissione da rotativo a rotativo
• Trasmissioni con rapporto di trasmissione variabile• Spesso l'elemento movente NON esegue una rotazione
completa• Sistemi articolati• Settori di camme

UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
Trasmissioni lineari• La trasformazione del moto rotatorio dei motori in moto lineare, può
essere ottenuta con:• Vite a ricircolo di sfere• Sistemi a cinghia dentata• Pignone e cremagliera
• Concettualmente realizzano la stessa trasformazione del moto
• Le differenze riguardano• Precisione• Massima velocità• Impatto inerziale• Massima corsa realizzabile

UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
Trasmissioni lineari
Viti a ricircolo
Pignone e cremagliera
Cinghie dentate
Corsa limitata illimitata limitataVelocità [m/s]
2 5 10
Forza elevata elevata bassaAccuratezza pos.
0.01/0.001 mm
0.1 mm 0.1/0.01 mm
rigidezza elevata elevata bassacosto alto medio basso

UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
Trasmissioni a cinghia dentata• Le cinghie dentate garantiscono il sincronismo fra il movimento
comandata dal motore e lo spostamento del carico
• La taglia della cinghia dipende dalla forza/potenza da trasmettere
• Materiali esterni• Gomma (neoprene)• Plastica (poliuretano )
• Materiali interni per irrigidimento longitudinale• Devono essere flessibili, ad elevata rigidezza• Funi in acciaio• Fibre di vetro• Materiali tessili speciali (kevlar)

UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
Trasmissioni a cinghia dentata• Le configurazioni principali sono 3
• Cinghia chiusa, con motore a terra
• Configurazione ad omega, motore fisso
• Configurazione ad omega, motore mobile
• Il rapporto di trasmissione dipende dal passo e dal numero di denti della ruota motrice [mm/rad]
UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
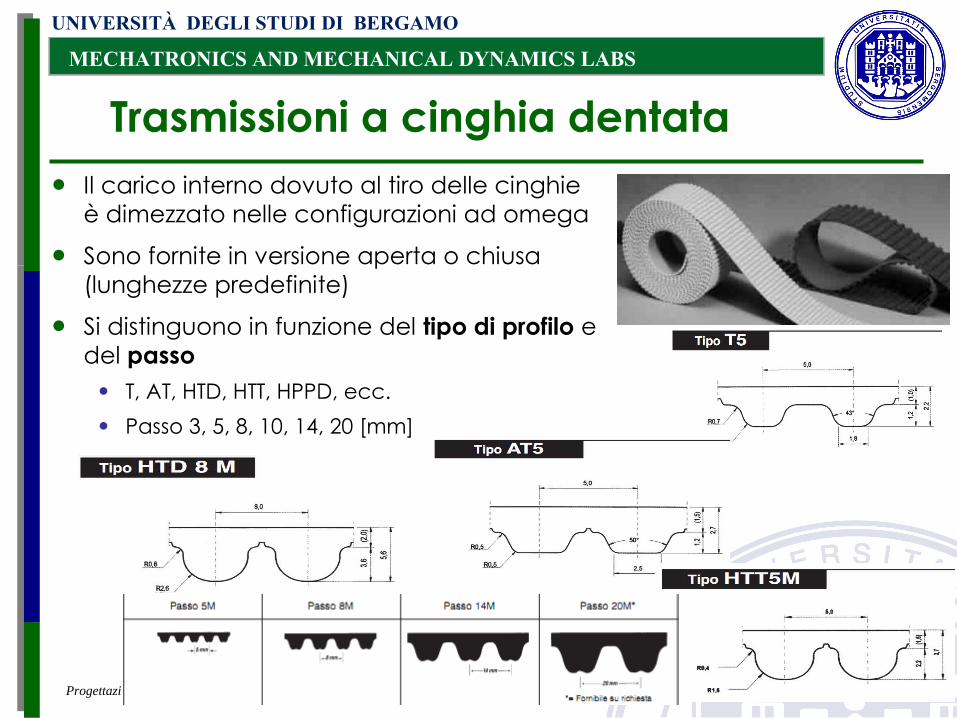
Trasmissioni a cinghia dentata• Il carico interno dovuto al tiro delle cinghie
è dimezzato nelle configurazioni ad omega
• Sono fornite in versione aperta o chiusa (lunghezze predefinite)
• Si distinguono in funzione del tipo di profilo e del passo• T, AT, HTD, HTT, HPPD, ecc.• Passo 3, 5, 8, 10, 14, 20 [mm]

UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
Trasmissioni a cinghia dentata• Dimensionamento in funzione del numero di giri e della potenza
trasmessa

UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
Trasmissione a cinghia dentata• I tipi di puleggia ed il numero di denti è standardizzato
• Si trovano pulegge in:• Ghisa• Alluminio (le uniche utilizzabili per movimenti intermittenti
• Le pulegge possono avere dei risalti per guidare la cinghia
• Sono disponibile delle barre dentate da cui ricavare pulegge di forma conveniente

UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
Trasmissione a cinghia dentata• La rigidezza della trasmissione a cinghia dipende da:
• Passo e sistema di irrigidimento longitudinale• Larghezza della cinghia• Lunghezza della trasmissione
• I dati caratteristici della rigidezza della sola cinghia possono essere acquisiti dal costruttore della cinghia o dal catalogo tecnico
• Può essere rappresentata come una rigidezza torsionale equivalente vista sulla puleggia in ingresso alla trasmissione

UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
Trasmissione a cinghia dentata• Rigidezza equivalente all'albero in ingresso

UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
Trasmissione a cinghia dentata• Vantaggi
• Basso costo• Bassa inerzia• Elementi standardizzati di facile impiego• Alta velocità di funzionamento (fino a 10 m/s)
• Contro• Media precisione di posizionamento (0.1 mm)
• In funzione dello stato di tensione delle cinghie• Bassa forza trasmissibile• Bassa rigidezza
• Può essere incrementata sovradimensionando la cinghia• Necessario sistema per la messa in tensione della cinghia
• Modellazione dinamica• È necessario introdurre l'effetto della rigidezza della trasmissione

UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
Viti a ricircolo di sfere• Trovano ampia applicazione in sostituzione
all'accoppiamento vite/madrevite
• L'attrito radente fra i due elementi della coppia cinematica è sostituito dall'attrito volvente di sfere interposte fra i due elementi della coppia cinematica
• Le sfere devono essere riportate all'ingresso per avere continuità di esercizio• Ricircolo interno• Ricircolo esterno
• Queste configurazioni variano da costruttore a costruttore
UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
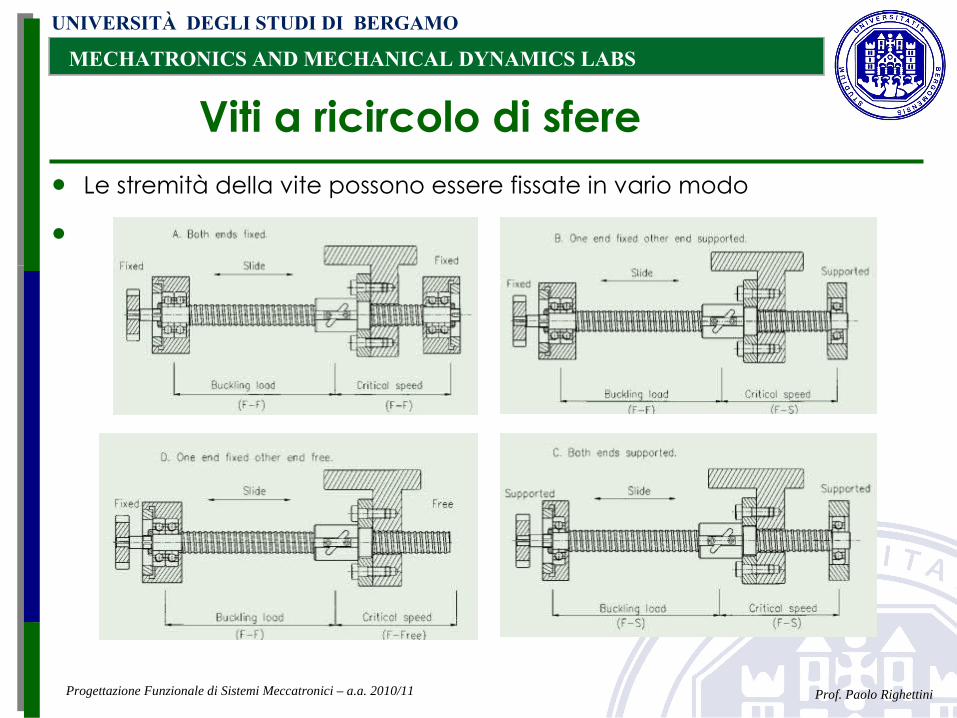
Viti a ricircolo di sfere• Le stremità della vite possono essere fissate in vario modo
•

UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
Viti a ricircolo di sfere• Le estremità della vite possono essere richieste secondo alcune
specifiche forme per il montaggio di • Cuscinetti• Sistemi di calettamento• Organi terminali di lavoro

UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
Viti a ricircolo di sfere• Sono caratterizzate da:
• Passo della vite• Numero di principi• Diametro della vite• Lunghezza della vite
• Si distinguono due principali tipo di viti• Viti rullate• Viti rettificate
• Le maggiori precisioni, silenziosità e vita si ottengono con le viti rettificate, a scapito del costo• Deviazione del passo, rugosità superficiale, tolleranza geometrica, gioco
UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
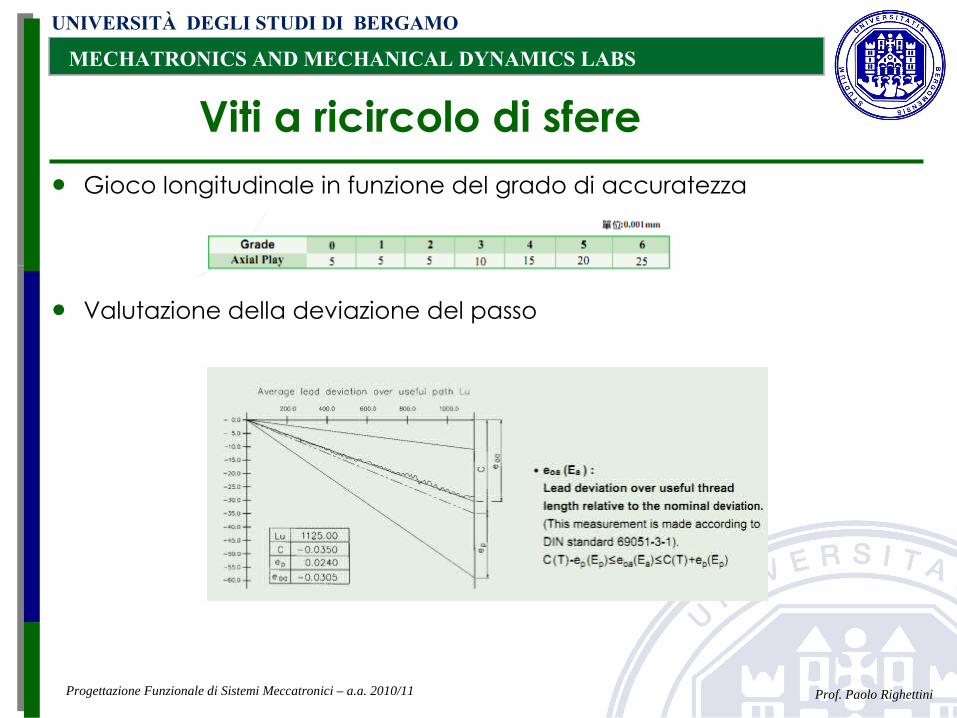
Viti a ricircolo di sfere• Gioco longitudinale in funzione del grado di accuratezza
• Valutazione della deviazione del passo

UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
Viti a ricircolo di sfere• Precarico delle chiocciole per la riduzione dei giochi
• Di forma: sede delle sfere• Di forza, utilizzando due chiocciole avvicinate od allontanate

UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
Viti a ricircolo di sfere• Due configurazioni principali
• Vite rotante• In questa configurazione il moto di rotazione viene imposto alla vite• La chiocciola non ruota e quindi trasla
• Chiocciola rotante• La chiocciola è dotata di cuscinetti che ne consentono la rotazione rispetto
al telaio• È dotata di una flangia per calettare la trasmissione interposta fra motore e
chiocciola (ruota dentata o cinghia dentata)
UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
e• La rigidezza dipende da:
• Tipo di chiocciola e numero delle sfere in presa• Dimetro della vite, lunghezza della vite• Rigidezza degli organi di collegamento fra motore ed elemento movente
della coppia cinematica• Cuscinetti che scaricano a terra le forze motrici trasmesse dalla vite
• Dal punto di vista meccanico, possiamo valutare la rigidezza dovuta alla vite• Rigidezza torsionale, funzione della distanza della chiocciola da punto di
ingresso del moto o dal telaio• Rigidezza assiale (generalmente trascurabile)
UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
Rigidezza torsionale vite• La rigidezza torsionale può essere espressa per mezzo di un
solo parametro rappresentate il rapporto fra il momento trasmesso dalla vite fra due sezioni e la loro conseguente rotazione relativa
• G modulo di elasticità tangenziale, Jp momento d'inerzia polare della sezione della vite, l distanza fra le sezioni prese in considerazione
• Da queste relazioni si ottiene

UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
Rigidezza torsionale vite

UNIVERSITÀ DEGLI STUDI DI BERGAMO MECHATRONICS AND MECHANICAL DYNAMICS LABS
Progettazione Funzionale di Sistemi Meccatronici – a.a. 2010/11 Prof. Paolo Righettini
Rigidezza torsionale vite• La rigidezza torsionale aumenta all'aumentare del
diametro
• All'aumentare del diametro aumenta anche l'inerzia delle vite e quindi il carico dinamico complessivo
• In serie alla rigidezza torsionale qui vista, deve essere presa in considerazione la rigidezza degli elementi posti in serie sulla trasmissione• Organi o sistemi di calettamento (giunti)• cuscinetti
• L'influenza del carico dinamico e della rigidezza devono essere valutati caso per caso, anche in relazione al posizionamento dei sensori• Located vs co-located