Problemi Inversi Malposti - dm.unibo.itmontelau/html/Problemi Inversi Malposti.pdf · Problemi...
25
Serena Papi Esercitazione laboratorio -Matematica computazionale 2008/2009 1 Problemi Inversi Malposti Consideriamo il sistema lineare A x = b (1) dove la matrice A è nxn, ma è molto mal condizionata. Il problema (1) viene detto problema inverso mal posto. Pertanto la soluzione del sistema (1) è estremamente sensibile a perturbazioni, anche relativamente piccole, sul termine noto b. Consideriamone la versione con termine noto perturbato ε ε = b b ; avremo allora che il sistema da risolvere è ε ε b Ax = . Approccio SVD alla Soluzione Poiché siamo in presenza anche di rumore occorre filtrare la soluzione. Sia A una matrice nxn si definisce SingularValueDecomposition di A A = UΣV T dove U T U = V T V = I n Σ = diag(σ 1 , …, σ n ) con σ 1 ≥ σ 2 … σ n ≥ 0 Tutti i valori singolari decadono gradualmente e l’indice di condizionamento di A cond(A)= σ 1 / σ n
Transcript of Problemi Inversi Malposti - dm.unibo.itmontelau/html/Problemi Inversi Malposti.pdf · Problemi...

Serena Papi Esercitazione laboratorio -Matematica computazionale 2008/2009 1
Problemi Inversi Malposti
Consideriamo il sistema lineare
A x = b
(1)
dove la matrice A è nxn, ma è molto mal condizionata. Il problema (1) viene
detto problema inverso mal posto. Pertanto la soluzione del sistema (1) è
estremamente sensibile a perturbazioni, anche relativamente piccole, sul termine
noto b.
Consideriamone la versione con termine noto perturbato εε += bb ; avremo
allora che il sistema da risolvere è
εε bAx = .
Approccio SVD alla Soluzione Poiché siamo in presenza anche di rumore occorre filtrare la soluzione. Sia A una matrice nxn si definisce SingularValueDecomposition di A
A = UΣVT dove UTU = VTV = In Σ = diag(σ1, …, σn) con
σ1 ≥ σ2 … σn ≥ 0 Tutti i valori singolari decadono gradualmente e l’indice di condizionamento di A
cond(A)= σ1/ σn

Serena Papi Esercitazione laboratorio -Matematica computazionale 2008/2009 2
è molto elevato perché la matrice A è molto mal condizionata. L’immediata soluzione che ne deriva è
xε = A-1 bε = i
N
i i
T
i vbu
∑=1 σ
ε =
=A-1 b + A-1 ε = i
N
i i
T
i vbu
∑=1 σ
+ i
N
i i
T
i vu
∑=1 σ
ε = x + i
N
i i
T
i vu
∑=1 σ
ε
ed è completamente dominata dall’inversione della componente di rumore A-1ε. Vediamo un esempio su un segnale monodimensionale per capire la mal
posizione del problema.
Si consideri il seguente segnale lungo n=512: >> x=load( 'segnale_box.dat' ); >> figure >> plot(x);
0 100 200 300 400 500 6000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Si consideri ora una matrice A 512x512 che applicata al segnale ne produce una versione distorta

Serena Papi Esercitazione laboratorio -Matematica computazionale 2008/2009 3
>> load -mat 'matrice_conv_mono.dat' >> b=A*x'; >> figure >> plot(b);
0 100 200 300 400 500 6000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
>> be=addnoiseG(b,0,0.00001); >> figure >> plot(be);
0 100 200 300 400 500 600-0.2
0
0.2
0.4
0.6
0.8
1
1.2
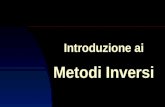
La matrice A di distorsione è una matrice di Toeplitz molto sparsa generata da una stringa di valori che rappresentano il campionamento di una gaussiana sul suo supporto
Serena Papi Esercitazione laboratorio -Matematica computazionale 2008/2009 4
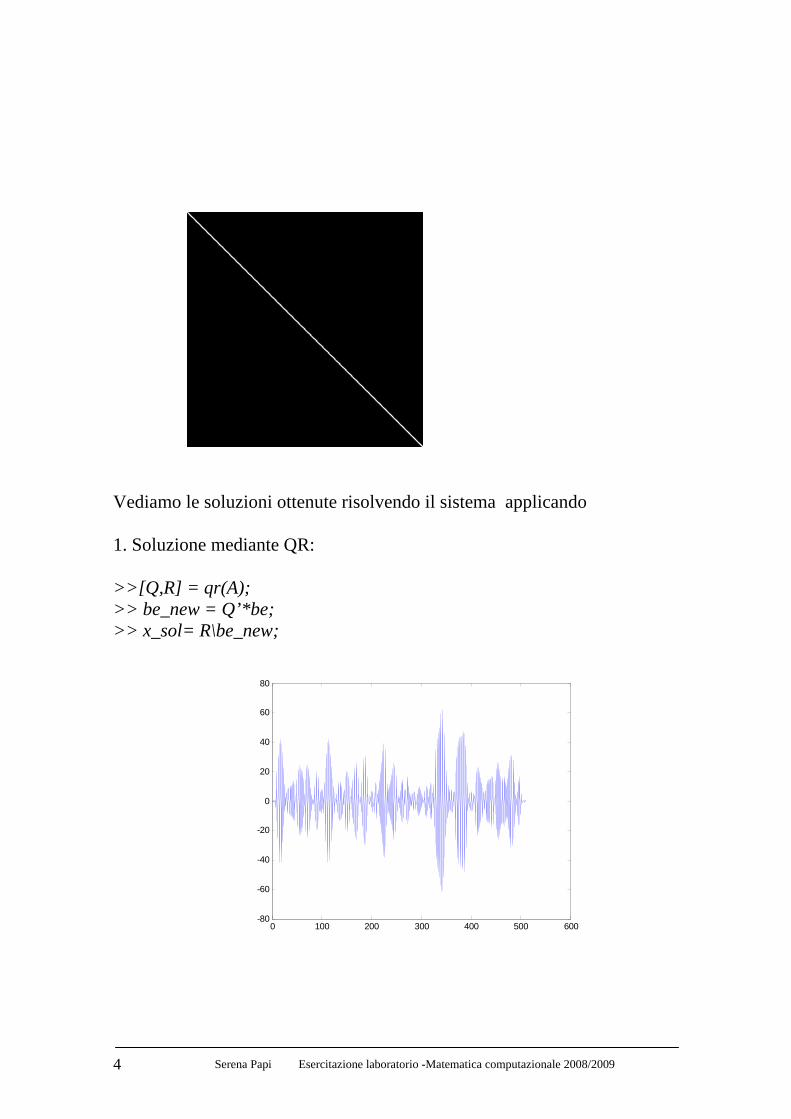
Vediamo le soluzioni ottenute risolvendo il sistema applicando 1. Soluzione mediante QR: >>[Q,R] = qr(A); >> be_new = Q’*be; >> x_sol= R\be_new;
0 100 200 300 400 500 600-80
-60
-40
-20
0
20
40
60
80
Serena Papi Esercitazione laboratorio -Matematica computazionale 2008/2009 5
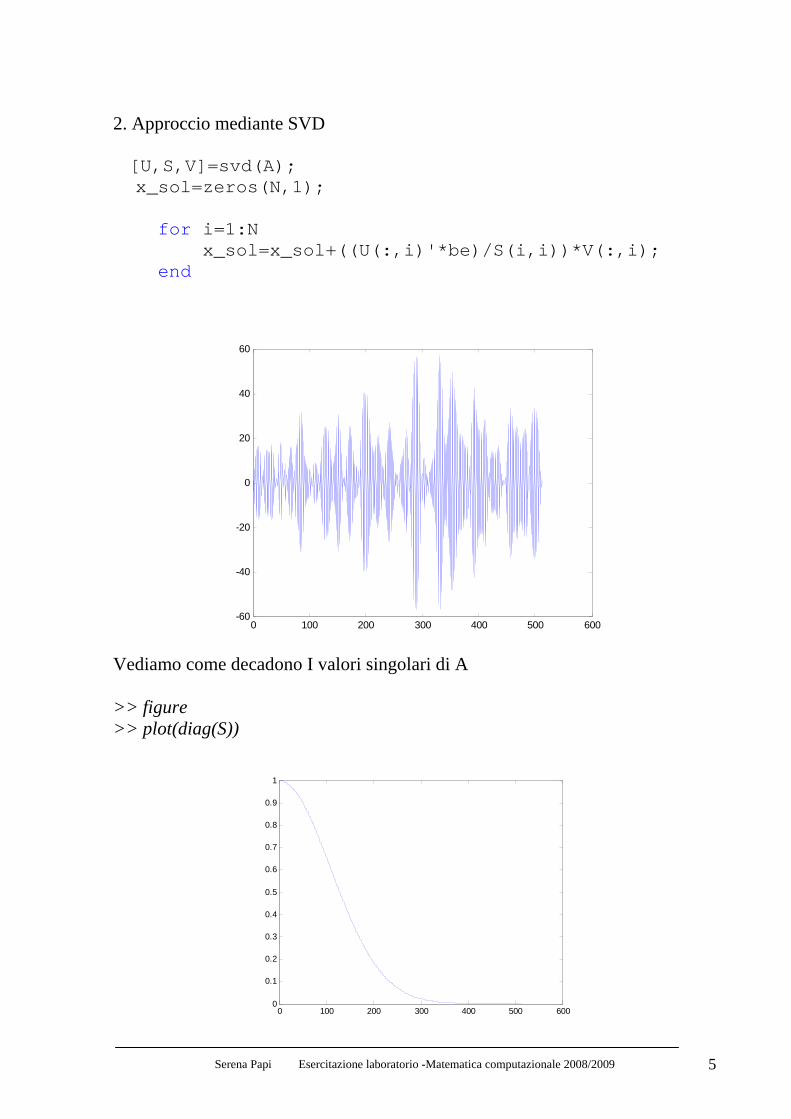
2. Approccio mediante SVD [U,S,V]=svd(A); x_sol=zeros(N,1); for i=1:N x_sol=x_sol+((U(:,i)'*be)/S(i,i))*V(:,i); end
0 100 200 300 400 500 600-60
-40
-20
0
20
40
60
Vediamo come decadono I valori singolari di A >> figure >> plot(diag(S))
0 100 200 300 400 500 6000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1

Serena Papi Esercitazione laboratorio -Matematica computazionale 2008/2009 6
Metodi di Regolarizzazione 1. Approccio TSVD alla Soluzione TSVD: Un semplice approccio per ridurre il rumore in ricostruzione è quello di
scartare tutte le componenti della SVD che sono dominate dal rumore.
Questo porta al soluzione mediante TSVD:
xk = .,1
Nkvbu
i
k
i i
Ti <∑
= σ
Nonostante la sua semplicità questo metodo può lavorare abbastanza bene se si
riesce a determinare il giusto parametro k di troncamento.
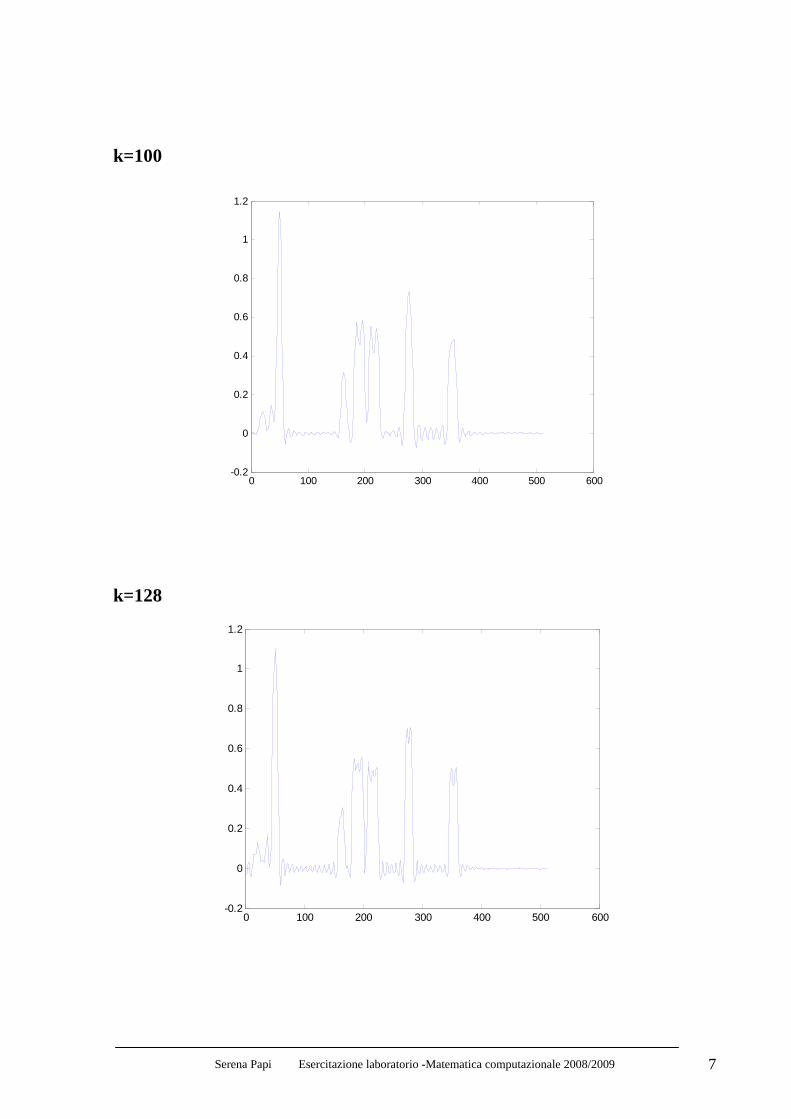
Tornando all’esempio la soluzione che si ottiene è
x_sol=zeros(N,1); %inserire k il numero dei valori singolari da considerare k=128; for i=1:k x_sol=x_sol+((U(:,i)'*ye)/S(i,i))*V(:,i); end figure plot(x_sol)
Serena Papi Esercitazione laboratorio -Matematica computazionale 2008/2009 7
k=100
0 100 200 300 400 500 600-0.2
0
0.2
0.4
0.6
0.8
1
1.2
k=128
0 100 200 300 400 500 600-0.2
0
0.2
0.4
0.6
0.8
1
1.2

Serena Papi Esercitazione laboratorio -Matematica computazionale 2008/2009 8
k=180
0 100 200 300 400 500 600-0.2
0
0.2
0.4
0.6
0.8
1
1.2
K=250
0 100 200 300 400 500 600-0.2
0
0.2
0.4
0.6
0.8
1
1.2

Serena Papi Esercitazione laboratorio -Matematica computazionale 2008/2009 9
2.Metodi di filtraggio spettrale La TSVD è un esempio di una classe generale di metodi, noti come metodi di
filtraggio spettrale, in cui la soluzione è
xfilt = i
N
i i
Ti
i vbu
∑=1 σ
φ ,
con filtri φi;
Tali filtri sono scelti in modo tale che φi∼1 per i grandi valori singolari e φi∼0
per i valori singolari piccoli.
Infatti nella TSVD si ha:
+====
Nki
ki
i
i
,...,10
,...,11
φφ
Dove il parametro k è noto come parametro di troncamento e determina il
numero di componenti della SVD da mantenere nella soluzione regolarizzata.
Regolarizzazione di Tikhonov
In questo metodo si definisce il fattore di filtro come
Nii
i
i ,...,122
2
=+
=λσ
σφ
con λ>0 parametro di regolarizzazione.
Serena Papi Esercitazione laboratorio -Matematica computazionale 2008/2009 10
Quando
• σi >>λ si ha φi∼1
• σi =<λ si ha φi∼σi2/λ2
Il parametro λ nel metodo di Tikhonov e il parametro k nella TSVD agiscono
allo stesso modo ovvero controllano le componenti della SVD da filtrare.
Determinazione del parametro di filtraggio
Prendiamo in considerazione 3 importati criteri di determinazione del parametro
• Il principio di discrepanza
• Il metodo della cross-validation
• Il criterio della L-curva.
Si consideri la norma della soluzione filtrata
2
1
2
2 ∑=
=
N
i i
Ti
ifilt
bux
σφ ,
e la norma del residuo
( )2
1
2
2)1(∑
=
−=−N
i
Tiifilt buAxb φ .
Nel metodo TSVD si ha
• La norma della soluzione è una funzione di k monotonicamente nondecrescente
• La norma del residuo è invece monotonicamente
noncrescente. Nel metodo di Tikhonov al contrario si ha
• La norma della soluzione è una funzione di λ monotonicamente noncrescente

Serena Papi Esercitazione laboratorio -Matematica computazionale 2008/2009 11
• La norma del residuo è invece monotonicamente nondecrescente.
Principio di Discrepanza
Tale principio richiede una buona stima della deviazione standard δ del rumore.
L’idea che sta alla base di tale principio è quella di scegliere il parametro di
regolarizzazione in modo che la norma del residuo sia approssimativamente pari
alla deviazione standard del rumore:
δτ=−2
2filtAxb
con τ>1 valore reale.
Data la SVD e i filtri UTb il costo di G(k) è di 2N moltiplicazioni e 2N addizioni
per ogni calcolo del residuo.
Il principio di discrepanza è convergente anche quando il rumore tende a zero
pero’ richiede informazioni che spesso non sono disponibili.
Tornando al nostro esempio il risultato che si ottiene applicando la
regolarizazione di Tikhonov in cui il parametro di regolarizzazione è
determinato mediante il principio della discrepanza è mostrato di seguito:

Serena Papi Esercitazione laboratorio -Matematica computazionale 2008/2009 12
0 100 200 300 400 500 600-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Il codice per la risoluzione è “approssimazione.m”

Serena Papi Esercitazione laboratorio -Matematica computazionale 2008/2009 13
Applicazioni:
Image Restoration
X B immagine originale immagine blurred
(distorta) n x n n x n
Il modello di distorsione è un modello lineare
Ax = b Per poterlo rappresentare occorre procedere ad una vettorizzazione delle
immagini.
La vettorizzazione per colonne delle matrici-immagini X e B nei vettori x e b (di
dimensione n2 x 1) può essere facilmente realizzata in Matlab:
x = X(:);
X = reshape(x,n,n);
PSF

Serena Papi Esercitazione laboratorio -Matematica computazionale 2008/2009 14
Modello Lineare: Esiste una matrice A di dimensioni N x N (N=n2) tale che
b = Ax, dove
A è la matrice discretizzazione della PSF (spesso identificata come matrice di blurring o distorsione)
B e X sono le matrici relative alle immagini b e x le loro vettorizzazioni.
Perciò dobbiamo risolvere un problema inverso, ovvero determinare x, noti b e A
Ax = b
Il problema dell’image restoration (deblurring) consiste nel risolvere questo sistema. La difficoltà è dovuta a differenti motivi:
• la matrice A è di grandi dimensioni • la matrice A è molto mal condizionata
• la matrice A potrebbe essere un modello di blurring non esatto

Serena Papi Esercitazione laboratorio -Matematica computazionale 2008/2009 15
La funzione di distorsione (Point Spread
Function) Le immagini distorte nascono dai processi meccanici e fisici di acquisizione.
Un esempio tipico sono le immagini sfuocate prodotte da limitazioni del
sistema ottico oppure immagini mosse dovute ad un movimento dell’oggetto
ripreso.
La matrice A rappresenta il blurring che applicato all’immagine originale x
ne ha prodotto la versione distorta b.
Si vuole dare una caratterizzazione della matrice A di blurring.
Sorgente Puntuale Sorgente di dispersione puntuale
La PSF solitamente è locale: questo significa che la zona con elementi non
nulli è piccola.
E’ possibile quindi memorizzare e salvare in maniera sparsa.

Serena Papi Esercitazione laboratorio -Matematica computazionale 2008/2009 16
Modelli di PSF Horizontal motion blur Vertical motion blur
Out of focus Atmospheric turbulence blur

Serena Papi Esercitazione laboratorio -Matematica computazionale 2008/2009 17
• Horizontal motion blur e Vertical motion blur
• Out of focus
• Atmospheric turbulence blur

Serena Papi Esercitazione laboratorio -Matematica computazionale 2008/2009 18
IN MATLAB: I = imread('peppers.png');
I = I(60+[1:256],222+[1:256],:); % crop the image
figure; imshow(I);
LEN = 31; THETA = 11;
PSF = fspecial('motion',LEN,THETA); % create PSF
Blurred = imfilter(I,PSF,'circular','conv');
figure; imshow(Blurred);

Serena Papi Esercitazione laboratorio -Matematica computazionale 2008/2009 19
Il problema dei bordi La linea gialla delimita i bordi dell’immagine blurred B.
La PSF va oltre i bordi dell’immagine, e questo causa nell’immagine B una
perdita dell’informazione dell’immagine originale.
Osservando la figura si puo’ notare che, se si considera un pixel bij di bordo
nell’immagine blurred questo è ottenuto come somma pesata del pixel xij e di
quelli del suo intorno, alcuni dei quali possono esere fuori dal campo di vista.
Un buon modello di image deblurring deve tener conto del problema ai bordi
altrimenti la ricostruzione potrà contenere alcuni artefatti spiacevoli sui bordi.
La tecnica più usata per trattare con la mancanza di informazione è quella di
imporre alcune condizioni ai bordi.
Questo significa che definiamo delle condizioni per determinare Xext a partire da
X.
1. zero boundary conditions
Si assume che l’immagine esatta sia nera (zero) fuori dai bordi.
Xext =
000
0X0
000
0 = sottomatrice nulla

Serena Papi Esercitazione laboratorio -Matematica computazionale 2008/2009 20
Tale scelta è buona quando l’immagine esatta è per lo più nulla ai bordi come spesso accade per le immagini astronomiche. Sfortunatamente questa scelta ha un brutto effetto su quelle immagini che invece non sono nulle vicino ai bordi. Infatti spesso appaiono alcuni artefatti neri ai bordi oppure degli anelli ai bordi causati dalla grossa differenza tra i valori dentro e fuori dal bordo.
Le due condizioni ai bordi che seguono impongono un modello più realistico sul comportamento delle immagini ai bordi facendo uso solo delle informazioni disponibili, ovvero delle informazioni dell’ immagine vicino al bordo.

Serena Papi Esercitazione laboratorio -Matematica computazionale 2008/2009 21
2. periodic boundary conditions
L’immagine si ripete, come se fosse un segnale periodico, in
tutte le direzioni.
Xext =
XXX
X XX
XXX
Si ottiene il seguente effetto:

Serena Papi Esercitazione laboratorio -Matematica computazionale 2008/2009 22
3. reflexive boundary condition
L’immagine fuori dalla scena è l’immagine specchiata dell’immagine interna.
Xext =
xudx
lrlr
xudx
XXX
X XX
XXX
dove, utilizzando la sintassi del matlab, Xx=fliplr(X); X ud=flipud(X); Xx=fliplr(X ud);

Serena Papi Esercitazione laboratorio -Matematica computazionale 2008/2009
23
Il rumore Oltre alla distorsione le immagini osservate solo solitamente presentano anche il rumore. Il rumore dipende da differenti sorgenti e può essere lineare, nonlineare, moltiplicativo o additivo. Solitamente si considera un modello di rumore additivo di tipo gaussiano che caratterizza i sistemi di conversione analogico-digitale. La funzione Matlab che realizza il rumore gaussiano è ‘randn’ E = 0.01*randn(n,n); E è una matrice n x n che contiene gli elementi di rumore gaussiano con media 0 e standard deviation 0.01. Perciò il modello finale risulta:
Bnoisy = Bext + E
Il corrispondente modello di deblurring ora diviene B = (A0 + ABC)X + E Nell’image processing toolbox vi è la funzione imnoise che data un’immagine gli applica rumore permettendo di scegliere il tipo di rumore e la quantità: Bnoisy =imnoise(B, type, parameters); Bnoisy =imnoise(B, ‘gaussian’, mean, variance);
Serena Papi Esercitazione laboratorio -Matematica computazionale 2008/2009
24
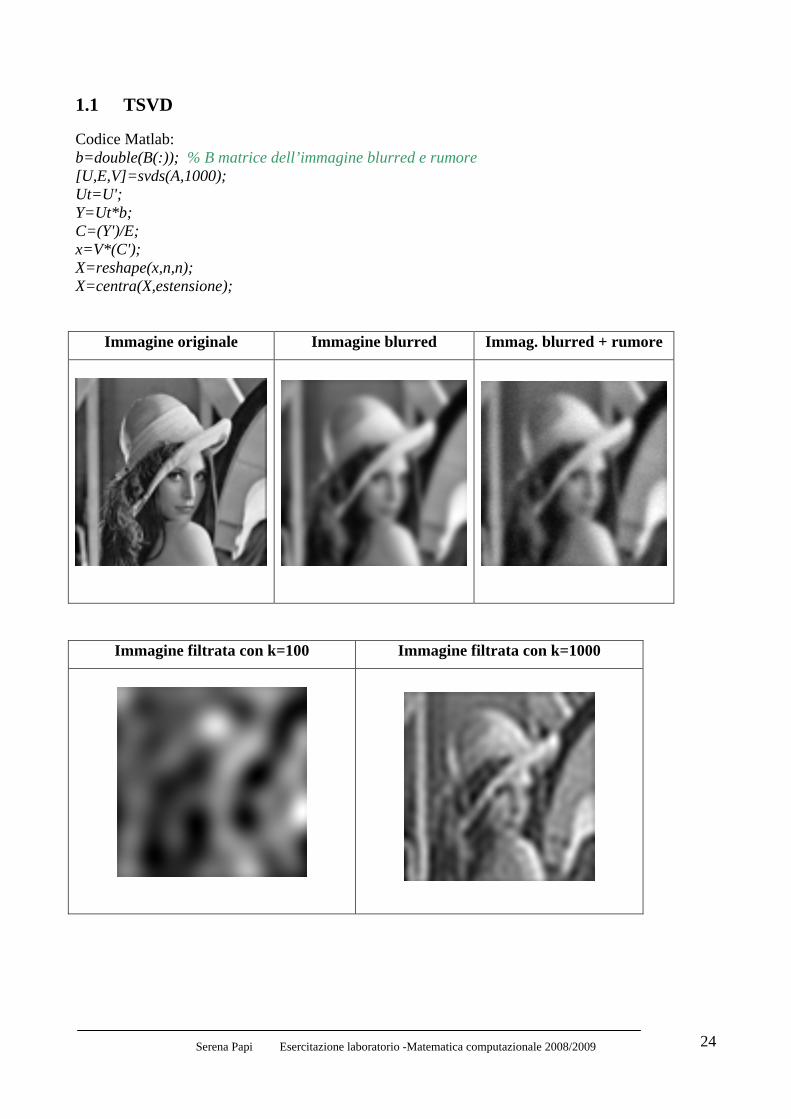
1.1 TSVD
Codice Matlab: b=double(B(:)); % B matrice dell’immagine blurred e rumore [U,E,V]=svds(A,1000); Ut=U'; Y=Ut*b; C=(Y')/E; x=V*(C'); X=reshape(x,n,n); X=centra(X,estensione);
Immagine originale Immagine blurred Immag. blurred + rumore
Immagine filtrata con k=100 Immagine filtrata con k=1000

Serena Papi Esercitazione laboratorio -Matematica computazionale 2008/2009
25
Il bordo nero è dovuto alla zero boundary condition. Sotto viene mostrato lo stesso esempio ma considerando la reflexive boundary condition: