NOTE SUL PRINCIPIO DI FUNZIONAMENTO DEGLI … del... · quale quella degli encoder ottici a...
15
NOTE SUL PRINCIPIO DI FUNZIONAMENTO DEGLI ENCODER OTTICI INCREMENTALI Mariolino De Cecco 12 dicembre 2006 Indice 1 PRINCIPIO DI FUNZIONAMENTO 2 1.1 Riconoscimento del verso di rotazione ............. 4 1.2 Compensazione degli ingressi di disturbo ............ 5 1.3 Aumento della risoluzione mediante maschera fissa ...... 6 1.4 Aumento della risoluzione mediante elaborazione digitale . . . 8 1.5 Stima della velocit` a mediante encoder incrementale ...... 12 1.6 Considerazioni di montaggio ................... 15 1
Transcript of NOTE SUL PRINCIPIO DI FUNZIONAMENTO DEGLI … del... · quale quella degli encoder ottici a...

NOTE SUL PRINCIPIO DI FUNZIONAMENTO
DEGLI ENCODER OTTICI INCREMENTALI
Mariolino De Cecco
12 dicembre 2006
Indice
1 PRINCIPIO DI FUNZIONAMENTO 21.1 Riconoscimento del verso di rotazione . . . . . . . . . . . . . 41.2 Compensazione degli ingressi di disturbo . . . . . . . . . . . . 51.3 Aumento della risoluzione mediante maschera fissa . . . . . . 61.4 Aumento della risoluzione mediante elaborazione digitale . . . 81.5 Stima della velocita mediante encoder incrementale . . . . . . 121.6 Considerazioni di montaggio . . . . . . . . . . . . . . . . . . . 15
1

1 PRINCIPIO DI FUNZIONAMENTO
Gli encoder ottici sono trasduttori di spostamento relativo sia lineare cheangolare. Hanno un largo impiego che va dalle macchine utensili ai robotindustriali. La caratteristica che li distingue e la quantizzazione del campodi lavoro e la conseguente uscita digitale. Grazie a tale proprieta, nel casodi unita di acquisizione od elaborazione digitale, non e necessario interporreconvertitori A/D ma e possibile interfacciare direttamente lo strumento al-l’unita di governo. Un ulteriore vantaggio e legato alla codifica digitale cheassicura una minore sensibilita ai disturbi interferenti in fase di trasmissionedel segnale. Da contro la risoluzione risulta limitata.
Una trattazione completa delle possibili realizzazioni richiederebbe la de-scrizione di varie tipologie di encoder (a contatti striscianti, ottici a diffrazione,a riflessione, laser, magnetici, elettromagnetici, etc.), tuttavia in questabreve nota si e presa a riferimento una categoria molto diffusa di strumentiquale quella degli encoder ottici a trasmissione incrementali.
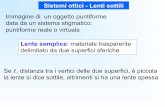
Il principio su cui si basano gli encoder ottici incrementali e la trasmis-sione di energia luminosa tra una sorgente luminosa (diodo emettitore) edun fotosensore di ricezione (fotodiodo o fototransistor), funzione del mo-to relativo tra la coppia sorgente-ricevitore ed un corpo interposto, det-to maschera, caratterizzato da settori opachi accanto a settori trasparenti(Figura 1). Il segnale raccolto dai fotosensori viene fornito in ingresso adun circuito comparatore che presenta in uscita un segnale logico alto, se ilsegnale del fotosensore e maggiore della soglia Vr, basso nel caso opposto.Le transizioni del segnale digitale in uscita dal comparatore possono esserecontate da un opportuno circuito logico (contatore) che fornisce un numerodigitale proporzionale alle transizioni chiaro-scuro della maschera e quin-di allo spostamento relativo tra la coppia sorgente-ricevitore e la mascherastessa.
Il valore in uscita viene ricavato per via incrementale rispetto ad una po-sizione di riferimento interno (il canale di zero) od esterno (un interruttoremeccanico). Tale accorgimento e alla base di quanto si verifica nella maggio-ranza dei robot industriali allorquando, nella fase di accensione, eseguonoun ciclo di movimentazione dei bracci in sequenza, allo scopo di azzerareuno ad uno gli encoder di cui dispongono.
L’uscita del fotosensore in base al moto relativo e una funzione periodicadi forma variabile tra una armonica pura ed una funzione a dente di sega convalore minimo maggiore di zero. Il massimo corrisponde all’allineamentocon il settore trasparente, il minimo con quello opaco. Cio e dovuto alfatto che generalmente la maschera, in corrispondenza del settore opaco, nonimpedisce a tutta l’energia luminosa di raggiungere il fotosensore a causa diriflessioni interne allo strumento, ne di annullare il bias del fotosensore odella elettronica di condizionamento.
Nella realizzazione pratica lo schema di principio mostrato in figura
2

(a) (b)
(c) (d)
Figura 1: (a): principio di funzionamento e schema dell’elettronica diprossimita; (b): disco codificato per encoder ottico incrementale di tiporotativo; (c, d): come appare lo strumento nella versione rotazionale elineare.
1 e soggetto ad alcune modifiche. Infatti tale schema, se direttamenteimplementato, evidenzierebbe i seguenti limiti:
1. non e possibile riconoscere il verso di rotazione;
2. il sistema e sensibile ad ingressi di disturbo quali temperatura, in-vecchiamento, dose totale di radiazioni, assestamenti meccanici chemodificano l’allineamento, etc. Pertanto l’operazione di sogliatura,che e sensibile al valore medio dell’uscita del fotosensore (figura 2),puo generare impulsi di duty-cycle molto diversi dalla condizione ide-ale tali da far perdere i conteggi per velocita di rotazione elevate ofar scomparire addirittura le transizioni. Per duty-cycle si intende il
3

Figura 2: In alto il segnale del fotodiodo (schematizzato da una funzione adente di sega) e la soglia di comparazione; in basso i due risultati dell’op-erazione di sogliatura. Si nota la sensibilita al livello medio del segnale delfotodiodo.
rapporto percentuale tra l’intervallo in cui l’onda ha valore alto ed ilperiodo della stessa;
3. la luce emessa deve essere estremamente collimata per aumentare larisoluzione. Se il fascio emesso dalla sorgente interessa piu di unafenditura si potrebbe non rilevare variazione di potenza luminosa in-cidente;
4. la risoluzione e pari a 12 ciclo delle fenditure fotoincise sulla maschera,
dove per ciclo si intende la sequenza fenditura chiara - fenditura scura;
5. il segnale e digitale e quindi non puo essere semplicemente derivatoper stimare la velocita.
Di seguito vengono analizzate le soluzioni adottate in riferimento adognuno dei punti sopraelencati.
1.1 Riconoscimento del verso di rotazione
Per riconoscere il verso di rotazione vengono poste due coppie sorgente-ricevitore sfasate di /4 ovvero 90◦, comunemente identificate come canaleA e canale B. Con , lunghezza d’onda, si definisce la larghezza della coppiafenditura chiara e scura, anche corrispondente a 360◦ del segnale periodico.Rilevando la fase tra i due canali si riconosce il verso del moto. In figura 3
4

vengono mostrate le sequenze di uscita delle due coppie in caso di moto inverso positivo e negativo: se il canale B risulta essere in ritardo il moto epositivo, viceversa se in anticipo.
(a) (b)
Figura 3: (a, b): disposizione ed uscita di due coppie sorgente-ricevitoreposte a λ/4 (piu un multiplo di λ, non influente).
1.2 Compensazione degli ingressi di disturbo
Per ovviare alla variazione di sensibilita dei fotoricevitori e di potenza emessadalle sorgenti luminose, dovute potenzialmente a vari fattori quali temper-atura, polvere e deposizioni accumulate all’interno dello strumento, invecchi-amento, dose di radiazioni subita, etc., e quindi del livello medio del segnale(figura 2) e possibile porre due coppie di sensori ad una distanza spaziale diλ/2, piu un numero intero di cicli, non influente, necessario ad accomodaregli ingombri dei componenti. In tal modo si ottengono segnali opposti inbase al principio di compensazione degli ingressi in opposizione. Operandola differenza tra i due segnali vengono compensati gli effetti interferenti dimodo comune, dove per modo comune si definisce l’effetto che affligge inmodo analogo due componenti del sistema.
Allo scopo di evidenziare il principio di compensazione modelliamo ledue uscite mediante due sinusoidi SA(x) e SA(x) funzioni del moto relativox :
SA(x) = A · sin(x) + MA
SA(x) = −A · sin(x) + MA
Da cui, calcolando la differenza:
SA(x)− SA(x) = A · sin(x) + MA + A · sin(x)−MA
5

In considerazione del fatto che sia le sorgenti che i fotosensori apparten-gono allo stesso lotto di produzione, e quindi verosimilmente hanno subito lostesso invecchiamento e sono stati sottoposti alle medesime condizioni am-bientali, avranno segnali comparabili in termini di ampiezza e valor medio,per cui:
SA(x)− SA(x) ∼= 2A · sin(x)
Dall’equazione appena ricavata si evincono due considerazioni:
1. il valor medio e circa pari a zero per cui, impiegando una soglia apotenziale nullo, si ottiene una funzione con duty-cycle pari al 50%anche al variare delle condizioni operative;
2. raddoppiando l’ampiezza del segnale analogico e garantita una mag-giore robustezza nei confronti degli ingressi di disturbo non di modocomune.
(a) (b)
Figura 4: (a, b): disposizione ed uscita di due coppie di fotodiodi posti aλ/2 (piu un multiplo di λ).
1.3 Aumento della risoluzione mediante maschera fissa
Il terzo limite e rappresentato dalla dimensione del raggio emesso dalla sor-gente luminosa in rapporto alla dimensione delle fenditure. Per aumentarela risoluzione si potrebbe pensare di diminuire la dimensione delle fenditurea piacimento. Tuttavia, quando la dimensione delle fenditure e inferiore allalarghezza della superficie di raccolta del fotosensore, si verifica un inconve-niente. Infatti se l’energia luminosa viene raccolta da piu fenditure, tantomaggiore sara il loro numero, tanto minore sara la variazione di energiarilevata dal fotosensore (figura 5).
6

Una soluzione che puo essere adottata e la riduzione della superficie deglielementi sensibili. Tale soluzione viene effettivamente praticata nel caso dirisoluzioni non inferiori a circa 0.1 mm accoppiando i fotosensori con sorgentilaser. Tuttavia, per risoluzioni minori, una ulteriore riduzione della superfi-cie di raccolta provocherebbe una diminuzione del segnale e quindi del rap-porto segnale rumore, prima della operazione di sogliatura. Tale condizione,se la parte di rumore non di modo comune diviene importante od addiritturacomparabile con il segnale utile, potrebbe risultare pericolosa a causa dellanon perfetta compensazione mediante ingressi in opposizione vista nel prece-dente paragrafo. Per ovviare a tale inconveniente si inserisce tra mascheramobile e fotosensore una maschera fissa (figura 6). Quando le due mascheresono allineate si ha passaggio di luce, quando sono sfasate di λ/2 non siha passaggio di luce sul ricevitore, purche tutti i raggi dell’emettitore sianoparalleli o la distanza tra le maschere sia nulla.
In questo modo si ottiene il duplice vantaggio di spostare il requisitodi accurato posizionamento dai fotosensori alle fenditure e di aumentarel’energia luminosa raccolta, impiegando anche fotoricevitori a superficie rel-ativamente ampia. Il primo vantaggio risulta particolarmente significativo sesi considera che i componenti sono collocati su vetronite, nel caso di circuitistampati, o su silicio, nel caso di circuiti integrati. In questo modo sarebbedifficile garantirne la precisione ed a maggior ragione la stabilita ad esem-pio in funzione della temperatura. Ricavando invece entrambe le maschere,sia quella mobile che quella fissa, su supporto in vetro mediante fotoinci-sione, e possibile garantire un’ottima stabilita ed accuratezze dell’ordine delmicrometro.
Mettendo assieme gli accorgimenti visti nei tre paragrafi precedenti siperviene ad uno schema piu vicino alla realizzazione commerciale dello stru-mento (figura ).
A causa della non perfetta collimazione dei raggi luminosi provenientidalla sorgente, la distanza tra maschera mobile e maschera fissa dovrebbeessere minima per avere la massima efficienza. A causa delle condizioni ambi-entali, in particolare della temperatura, delle condizioni di carico trasmessodal giunto di accoppiamento alla struttura meccanica (vedere §1.6), si gen-era una variazione della distanza tra le due maschere che vincola la minimadistanza di sicurezza (per condizioni standard dell’ordine di 0.1 mm). Taledistanza, assieme alla non perfetta collimazione del fascio luminoso (rag-gi non perfettamente paralleli), provoca una evidente differenza tra segnalianalogici reali ed ipotizzati (rif. figura 1a).
1.4 Aumento della risoluzione mediante elaborazione digi-tale
Una tecnica utilizzabile per incrementare la risoluzione impiega le uscitedelle coppie di sensori sfasate di /4. I due segnali vengono elaborati da un
7

Figura 5: Schemi di principio e segnali dei fotosensori al variare dellarisoluzione.
circuito digitale che ne calcola l’OR-esclusivo (siglato XOR) in modo che lasua uscita sia alta quando solo uno dei due ingressi e al valore logico alto.L’uscita viene successivamente ritardata, ad esempio mediante una rete RC,e fornita in ingresso ad un secondo OR-esclusivo (figura 7). Il risultato edi aver aumentato di quattro volte il numero di transizioni basso-alto in unperiodo spaziale pari a . Il numero di transizioni basso-alto e il parametrosignificativo per quei i contatori che rispondono ad uno dei cambiamenti distato e non ad entrambi.
Per incrementare ulteriormente la risoluzione e necessario ricorrere ai cir-cuiti interpolatori che impiegano direttamente i segnali analogici provenientidai fotoricevitori.
Alcune delle prime versioni di circuiti interpolatori erano basate su retidi resistenze determinanti differenti livelli di comparazione cui sottoporre ilsegnale analogico in modo da imporre transizioni di livello ad ogni variazionepari alla soglia di risoluzione.
8

(a) (b)
Figura 6: Disposizione della maschera di fronte al fotodiodo.
(a) (b)
Figura 7: (a): schema di assemblaggio dei quattro fotosensori che generanoi due segnali in quadratura; (b): segnali analogici corrispondenti.
Moderne tecniche di interpolazione impiegano invece sistemi come quellischematizzati in figura . I segnali analogici, nel caso di risoluzioni grossolane,assomigliano a segnali triangolari come quelli schematizzati nelle figure prece-denti. Nel caso di risoluzioni fini divengono pressoche sinusoidali. In questoultimo caso i segnali dei canali A e B in quadratura tra loro (sfasati di 90◦)vengono impiegati per ottenere direttamente l’angolo tramite operazione diarco-tangente od arco-cotangente a seconda che il livello del segnale A siamaggiore o minore di quello B (quando l’inversa dell’operatore tangente evicina alla singolarita si impiega la cotangente e viceversa).
Tali tecniche di incremento della risoluzione funzionano bene purchesiano rispettate le seguenti condizioni:
• l’ampiezza dei due canali sia bilanciata;
• sia presente un basso valor medio residuo dalla operazione di compen-sazione (discusso nel §1.2);
9

Figura 8: Tecnica di elaborazione digitale del segnale di due fotodiodi sfasatidi /4 per moltiplicare di 4 volte la risoluzione.
• lo sfasamento tra i canali sia di 90◦;
• la distorsione del segnale sia bassa, ovvero il segnale sia composto dauna armonica pura (in condizioni di velocita costante).
Per tali motivi si pre-elaborano i due segnali in modo da compensaredeviazioni di ampiezza, fase e valor medio. Tali operazioni sono effet-tuate a livello digitale e quindi precedute da una operazione di conversioneanalogico/digitale.
Figura 9: Schema logico di un sistema di interpolazione per l’incrementodella risoluzione.
Nella realizzazione pratica la compensazione sara certamente non priva diincertezze; inoltre l’ipotesi di bassa distorsione potrebbe avere una validitamolto limitata ed essere di difficile correzione. Ne consegue che, mentrela risoluzione dell’encoder puo essere incrementata anche di tre ordini digrandezza, l’accuratezza dello strumento molto difficilmente potra essereinferiore ad un decimo del passo della griglia.
10

A questo punto ci si potrebbe chiedere quale sia la ragione del largoimpiego di tali sistemi interpolatori. Essa deriva soprattutto da esigenze ditipo controllistico infatti, dal punto di vista di un sistema di controllo, puorisultare piu conveniente avere uno strumento con elevata risoluzione e bassaaccuratezza. Per chiarire tale concetto si faccia riferimento ad esempio adun robot che mantiene un carico nella postura indicata in figura .
(a) (b)
Figura 10: Fenomeno del digital jitter. (a): foto di un manipolatore chesorregge un carico; (b): segnale encoder di spalla (asse di rotazione indicatonella foto) in funzione dello spostamento verticale del carico.
Se la coppia applicata al giunto risulta appena inferiore a quella nec-essaria per tenerlo in equilibrio contro la gravita, il braccio si piegheralentamente, mentre la scheda di controllo assi non rilevera alcun moto fi-no a che la rotazione non avra superato la soglia della risoluzione dell’en-coder. A questo punto la scheda, tramite il segnale di controreazione, farain modo di riportare il braccio sul valore di riferimento, ma non avra lacapacita di stabilire l’esatta quantita di corrente da fornire per rimanere inequilibrio essendo l’encoder sprovvisto di riferimenti tra una tacca e l’al-tra. La forza stabilita sara quindi di poco inferiore o di poco superiore aquella necessaria ed il ciclo si ripetera dando vita all’instaurarsi di piccoleoscillazioni, fenomeno denominato digital jitter. Esso si manifesta ancheper altri sistemi in retroazione basati su sensori di tipo digitale, e puo es-sere ridotto incrementando la risoluzione mediante l’impiego dei sistemi diinterpolazione.
1.5 Stima della velocita mediante encoder incrementale
I segnali degli encoder incrementali sono di natura digitale per cui non epossibile applicare direttamente l’operazione di derivazione per ottenere lavelocita dal segnale di spostamento. Per analizzare le problematiche e gliaccorgimenti da attuare per la stima di velocita tramite encoder incrementalicon canali in quadratura, si supponga di voler misurare un moto relativodescritto dalla seguente legge:
x(t) = 1 − cos(2πt/20)
11

nel periodo di tempo 0-10 secondi e di avere a disposizione un encoderdi lunghezza d’onda 0.2 (per le unita di misura si fa riferimento alla con-venzione mks). In figura ... sono riportati lo spostamento ed i segnali en-coder corrispondenti; in figura 9 sono rappresentati lo spostamento relativoe la ricostruzione ottenibile da encoder. Appare evidente come sia impossi-bile applicare direttamente l’operazione di derivata per stimare la velocitarelativa.
(a) (b)
Figura 11: Spostamento relativo (a) misurato tramite encoder a due canaliin quadratura (b).
Una metodo utilizzabile per poter stimare la velocita e quello che con-sidera i fronti di discesa e salita dei due canali, basandosi sul fatto che sonodistanziati di una quantita pari a /4 (riferimento alla figura 10a):
v
(t(i + 1) + t(i)
2
)=
r
4 · (t(i + 1)− t(i))
L’assegnazione temporale del campione puo essere fatta all’istante t(i+1)+t(i)2 ,
media dei due istanti di transizione considerati. Dalla formula sopra ripor-tata si desume che per stimare la velocita, e del resto anche lo spostamento,non e necessario acquisire il segnale nel suo andamento completo nel tempo,essendo sufficiente registrare le sue transizioni. Pertanto, dal punto di vistadell’impiego di sistemi di acquisizione del segnale, non e necessario utiliz-zare convertitori A/D, ma e sufficiente impiegare contatori digitali sia percontare i fronti di salita e discesa allo scopo di stimare lo spostamento, siaper registrare gli istanti di transizione e quindi desumere la velocita.
Mediante la relazione appena introdotta, si ottiene una buona accuratez-za solo nel caso in cui le condizioni siano ideali, ovvero:
• la fase tra i canali sia esattamente 90◦;
• il duty-cycle di entrambi sia 50%.
Tale situazione difficilmente si verifica nella realta. Le motivazioni sonoessenzialmente due:
12

(a) (b)
Figura 12: Spostamento relativo originario e ricostruito tramite encoder (a)zoom sui segnali encoder (b).
(a) (b)
Figura 13: (a): segnali encoder considerando tutte le transizioni in sequenza;(b): segnali encoder considerando le transizioni corrispondenti.
• il non perfetto allineamento tra maschera fissa e maschera mobile(dovrebbero essere centrate assialmente e giacere su piani paralleli);
• la non perfetta compensazione degli ingressi di disturbo (riferimento §1.2).
Il risultato della stima di velocita mediante il metodo che considera tuttele transizioni in sequenza e illustrato in figura 11, sia nel caso ideale (90◦
sfasamento e 50% duty-cycle per entrambi i canali, figura 11a), che nel casoin cui la fase sia 88◦, il valor medio del canale A analogico sia pari a 0.02 V(2% dell’ampiezza), il valor medio del canale B analogico sia pari a -0.02 V(-2% dell’ampiezza).
Dalla figura 11b risulta evidente come piccoli scostamenti dalle condizioniideali provochino evidenti deviazioni da una stima corretta di velocita, ad-dirittura introducendo oscillazioni non reali. Si consideri inoltre che, per
13

(a) (b)
Figura 14: (a): velocita stimata considerando tutte le transizioni in sequenzanel caso ideale: 90◦ sfasamento e 50% duty-cycle per entrambi i canali; (b):velocita stimata nel caso in cui la fase e pari a 88◦, il valor medio del canaleA analogico sia pari a 0.02 V (2% dell’ampiezza), il valor medio del canaleB analogico sia pari a -0.02 V (-2% dell’ampiezza).
encoder ad alta risoluzione, le deviazioni prese ad esempio nella figura 11non sono affatto conservative.
Per ovviare al problema della sensibilita nei confronti delle condizioni diallineamento e compensazione che risultano tanto piu critiche quanto mag-giore e la risoluzione dell’encoder, e sufficiente considerare le transizioni cor-rispondenti (riferimento figura 10b): salita-salita canale A, discesa-discesacanale A, salita-salita canale B e discesa-discesa canale B. In tale manierasi perviene al seguente algoritmo di stima della velocita:
vAup
(tAup(i + 1) + tAup(i)
2
)=
r
4 · (tAup(i + 1)− tAup(i))
In figura 12 risulta evidente il miglioramento nella stima della velocita ot-tenuto mediante l’accorgimento di considerare le transizioni corrispondenti.Tale compensazione risulta stabile anche per grosse deviazioni (figura 12b)in quanto, sebbene la fase ed il duty-cycle devino dalle condizioni ideali, letransizioni corrispondenti rimangono coerenti.
1.6 Considerazioni di montaggio
Come descritto nei precedenti paragrafi l’allineamento e la distanza tramaschera mobile e maschera fissa risultano di fondamentale importanza peril corretto funzionamento dello strumento. Pertanto, particolare cura deveessere prestata nell’operazione di assemblaggio dello strumento con la strut-tura a cui va applicato. Nel caso di encoder angolare il principio da adottaree quello di vincolare l’albero motore, o comunque l’organo di cui si vuol sti-
14

(a) (b)
Figura 15: (a): velocita stimata considerando le transizioni corrispondentinel caso in cui la fase e pari a 88◦, il valor medio del canale A analogico siapari a 0.02 V (2% dell’ampiezza), il valor medio del canale B analogico siapari a -0.02 V (-2% dell’ampiezza), corrisponde al caso della figura 11b; (b):caso in cui la fase e pari a 60◦, il valor medio del canale A analogico e paria 0.2 V (20% dell’ampiezza), il valor medio del canale B analogico e pari a-0.3 V (-30% dell’ampiezza).
mare il moto angolare, all’encoder mediante un sistema che trasmetta ilmoto angolare (la coppia ma non la flessione).
In figura 13 sono riportati alcuni sistemi di vincolo per encoder otticiangolari sia nella configurazione classica che ad albero cavo. Per quantoriguarda gli encoder lineari essi sono generalmente composti da una rigaottica, solitamente fissa, e da un cursore composto da emettitore e ricevi-tore con relativa maschera; le soluzioni di vincolo variano a seconda dellaconfigurazione.
Figura 16: (a): encoder ad albero cavo con aletta di fissaggio che vinco-la la rotazione della carcassa ma ne lascia parzialmente libera la flessione;(b,c): giunti flessibili per il collegamento dell’alberino di encoder angolari almotore.
NOTE: Considerazioni pratiche sulla tecnologia attuale (vedi Doebelin)in termini di risoluzione
Diagnostica?????
15