
Modulo 1.2 Il sistema di acquisizione dati e controllo ... · 2) segnale continuo o analogico,...
73
Modulo 1.2 Il sistema di acquisizione dati e controllo industriale Prof. Ing. Cesare Saccani Prof. Ing. Augusto Bianchini Dott. Ing. Marco Pellegrini Department of Industrial Engineering (DIN) - University of Bologna Viale del Risorgimento 2, 40136, Bologna – Italy Corso di Strumentazione e Automazione Industriale
Transcript of Modulo 1.2 Il sistema di acquisizione dati e controllo ... · 2) segnale continuo o analogico,...

Modulo 1.2
Il sistema di acquisizione dati e controllo
industriale
Prof. Ing. Cesare Saccani
Prof. Ing. Augusto Bianchini
Dott. Ing. Marco Pellegrini
Department of Industrial Engineering (DIN) - University of Bologna
Viale del Risorgimento 2, 40136, Bologna – Italy
Corso di Strumentazione e Automazione Industriale

Automazione industriale
2
Impianto
T1
T2
T3
T4
4-20 mA
0-10 V
mV
0-5 V (digitale)
I/V0-10 V
A/D0-5 V (dig)
A/D0-5 V (dig)
Amp.0-10 V
A/D0-5 V (dig)
Profibus0-5 V (dig)
PCDAQ
Board
Attuatore
Trasduttore Std elettrico Condizionamento segnale Comunicazione e acquisizione dati
Strumento di misura
Campo/processo Sala controllo /DCS
0-5 V
(dig)
DCS: Distributed Control System
DAQ: Data Acquisition
4-20 mA
0-10 V
0-5 V (digitale)
2P + PID
Sistema di acquisizione dati e controllo: generalità
Agenda
Il sistema di controllo industriale
La conversione del segnale
Il condizionamento del segnale
3
4
Cos’è un sistema di acquisizione dati e controllo
Le informazioni o i dati generati da un sistema di misura richiedono uno o
più livelli di condizionamento per essere presentati all’osservatore
esterno sotto forma di indicazione o registrazione.
Pertanto, il compito primario di un sistema di acquisizione dati è quello di
ottenere, in una forma consona e appropriata, dal sistema di misura le
informazioni relative alle grandezze fisiche che descrivono il
comportamento del processo oggetto del sistema.
I dati provenienti dal sistema di misura vengono opportunamente
codificati e memorizzati, per essere poi rielaborati.
5
FENOMENO
FISICO
(Ad esempio la temperatura)
Il fenomeno fisico è una grandezza caratteristica del processo oggetto del
sistema di misura.
Cos’è un sistema di acquisizione dati e controllo
6
FENOMENO
FISICO
(Ad esempio una termocoppia)
ELEMENTO
SENSIBILE
PRIMARIO
L’elemento sensibile primario, che riceve energia dall’ambiente, produce
un segnale in uscita che è dipendente dal valore della grandezza fisica
misurata.
Un buon elemento sensibile deve ridurre al minimo l’inevitabile effetto
intrusivo e di disturbo dell’ambiente perché lo strumento interagisce
energeticamente con il fenomeno che misura.
Cos’è un sistema di acquisizione dati e controllo
7
(Ad esempio conversione analogico-digitale)
ELEMENTO
SENSIBILE
PRIMARIO
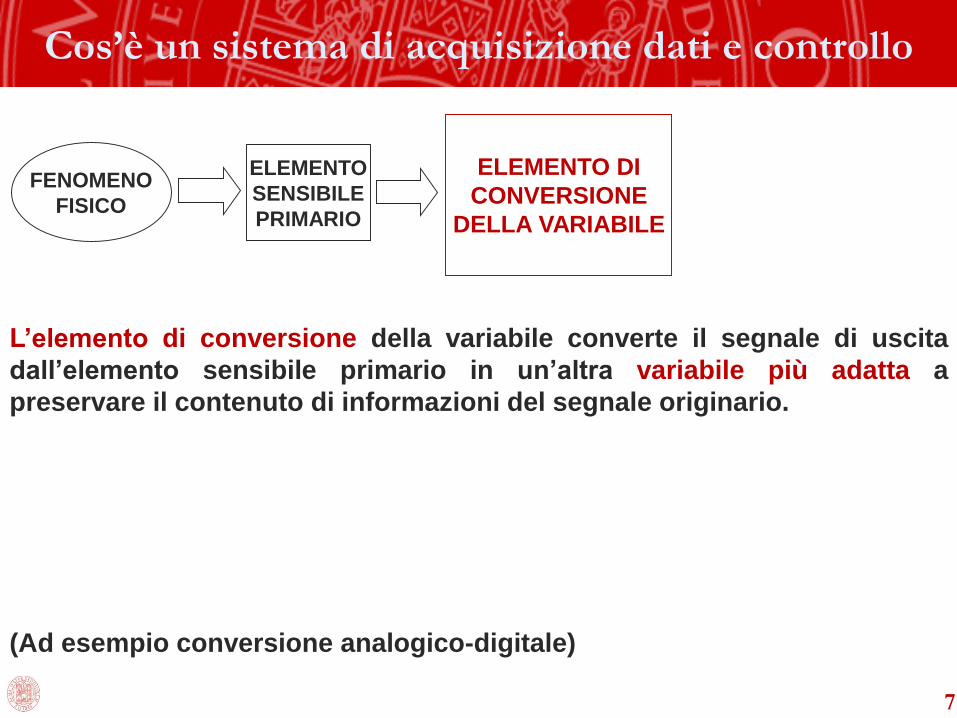
L’elemento di conversione della variabile converte il segnale di uscita
dall’elemento sensibile primario in un’altra variabile più adatta a
preservare il contenuto di informazioni del segnale originario.
ELEMENTO DI
CONVERSIONE
DELLA VARIABILE
FENOMENO
FISICO
Cos’è un sistema di acquisizione dati e controllo
8
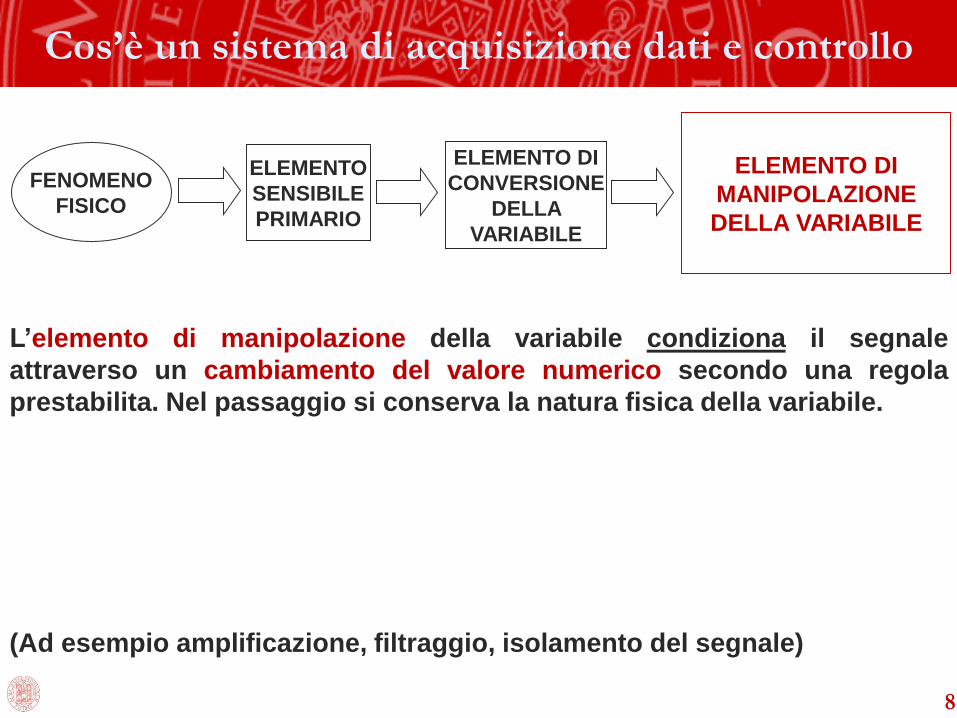
(Ad esempio amplificazione, filtraggio, isolamento del segnale)
ELEMENTO
SENSIBILE
PRIMARIO
L’elemento di manipolazione della variabile condiziona il segnale
attraverso un cambiamento del valore numerico secondo una regola
prestabilita. Nel passaggio si conserva la natura fisica della variabile.
ELEMENTO DI
CONVERSIONE
DELLA
VARIABILE
FENOMENO
FISICO
ELEMENTO DI
MANIPOLAZIONE
DELLA VARIABILE
Cos’è un sistema di acquisizione dati e controllo
9
ELEMENTO
SENSIBILE
PRIMARIO
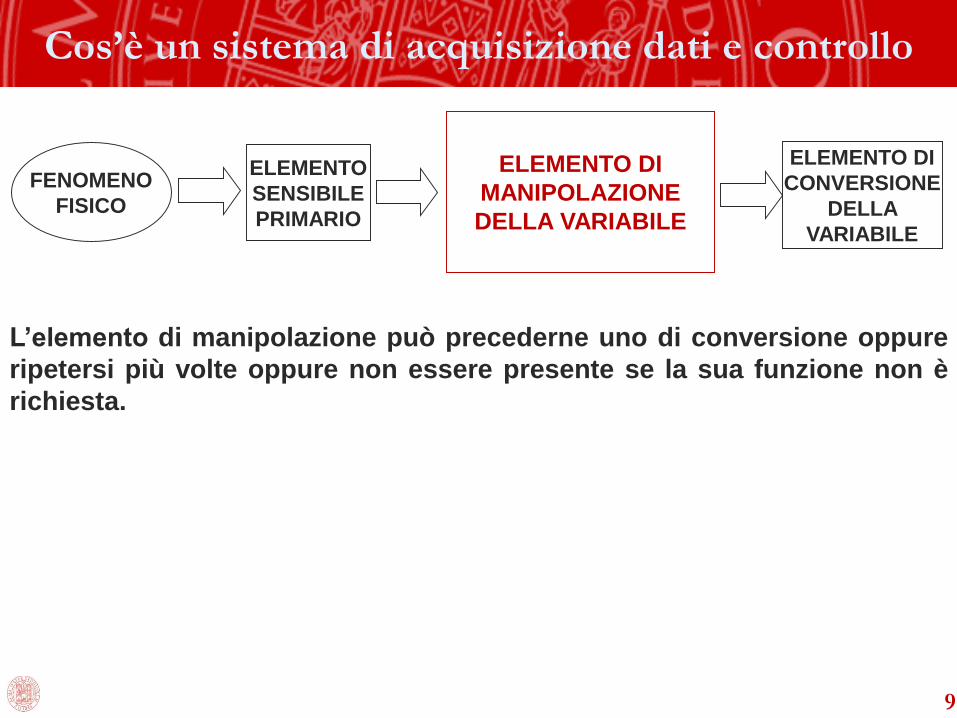
L’elemento di manipolazione può precederne uno di conversione oppure
ripetersi più volte oppure non essere presente se la sua funzione non è
richiesta.
ELEMENTO DI
CONVERSIONE
DELLA
VARIABILE
FENOMENO
FISICO
ELEMENTO DI
MANIPOLAZIONE
DELLA VARIABILE
Cos’è un sistema di acquisizione dati e controllo
10
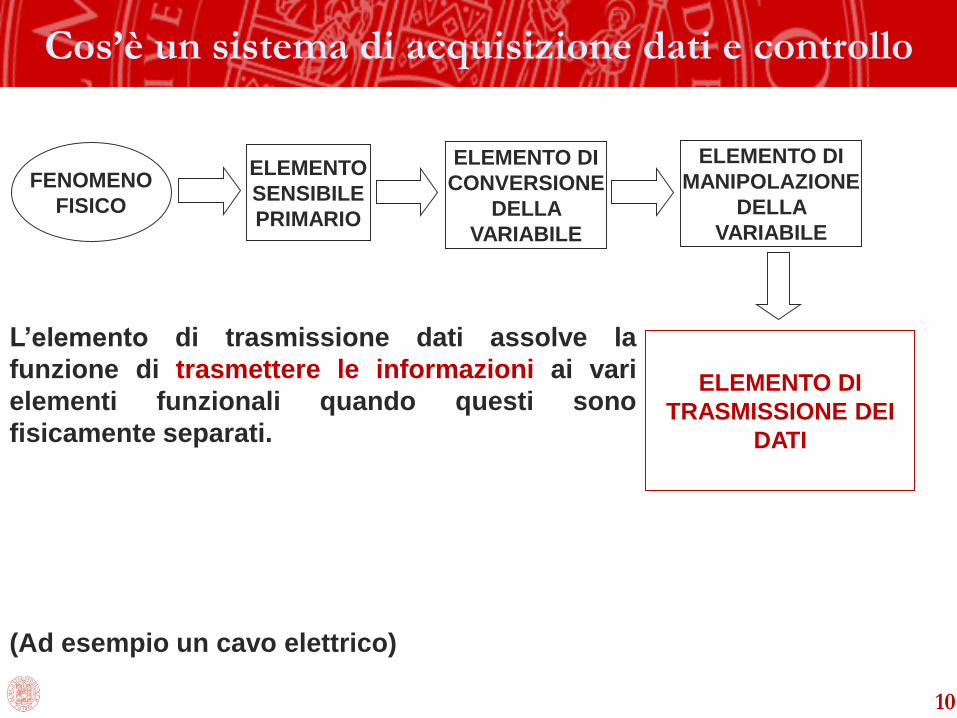
(Ad esempio un cavo elettrico)
ELEMENTO
SENSIBILE
PRIMARIO
ELEMENTO DI
CONVERSIONE
DELLA
VARIABILE
FENOMENO
FISICO
ELEMENTO DI
MANIPOLAZIONE
DELLA
VARIABILE
ELEMENTO DI
TRASMISSIONE DEI
DATI
L’elemento di trasmissione dati assolve la
funzione di trasmettere le informazioni ai vari
elementi funzionali quando questi sono
fisicamente separati.
Cos’è un sistema di acquisizione dati e controllo

11
(Ad esempio rappresentazione grafica su display)
ELEMENTO
SENSIBILE
PRIMARIO
ELEMENTO DI
CONVERSIONE
DELLA
VARIABILE
FENOMENO
FISICO
ELEMENTO DI
MANIPOLAZIONE
DELLA
VARIABILE
ELEMENTO DI
TRASMISSION
E DEI DATI
L’elemento di elaborazione dei dati comunica con l’osservatore
traducendo l’informazione in una forma facilmente comprensibile. Si
compone di un sistema di indicazione e di un sistema di registrazione.
ELEMENTO DI
ELABORAZIONE DEI
DATI
Cos’è un sistema di acquisizione dati e controllo
12
La fase di elaborazione dei dati può presentare diversi gradi di
complessità: nella situazione più semplice l’elaborazione può consistere
unicamente nella documentazione dell’evoluzione del fenomeno, ad
esempio attraverso la visualizzazione su di un display della variazione di
una certa grandezza nel tempo.
Cos’è un sistema di acquisizione dati e controllo

13
Esempio 1: termometro a pressione (tubo di Bourdon)
Cos’è un sistema di acquisizione dati e controllo
V=V0(1+ α ΔT)
V: volume finale
V0: volume iniziale alla temperatura T0
ΔT: differenza tra temperatura finale T e iniziale T0
α: coefficiente di dilatazione cubica

14
Esempio 2: indicatore di pressione (a pistone)
Cos’è un sistema di acquisizione dati e controllo
F=pA=kx
F: forza
p: pressione
A: superficie pistone
k: costante elastica della molla
x: spostamento
15
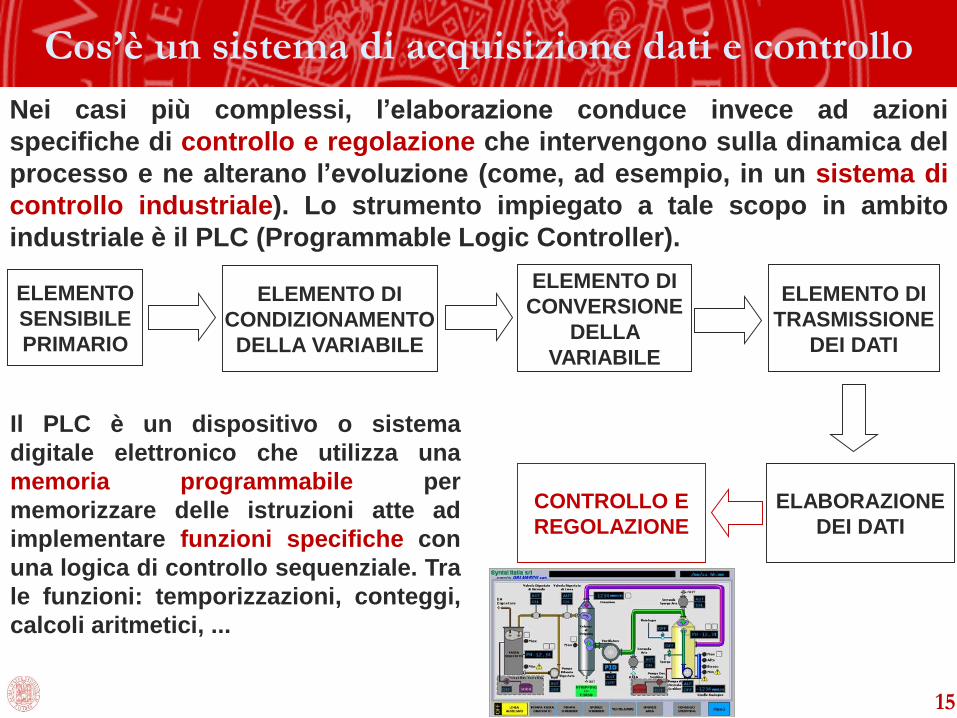
Nei casi più complessi, l’elaborazione conduce invece ad azioni
specifiche di controllo e regolazione che intervengono sulla dinamica del
processo e ne alterano l’evoluzione (come, ad esempio, in un sistema di
controllo industriale). Lo strumento impiegato a tale scopo in ambito
industriale è il PLC (Programmable Logic Controller).
ELEMENTO
SENSIBILE
PRIMARIO
ELEMENTO DI
CONVERSIONE
DELLA
VARIABILE
ELEMENTO DI
CONDIZIONAMENTO
DELLA VARIABILE
ELEMENTO DI
TRASMISSIONE
DEI DATI
ELABORAZIONE
DEI DATI
CONTROLLO E
REGOLAZIONE
Cos’è un sistema di acquisizione dati e controllo
Il PLC è un dispositivo o sistema
digitale elettronico che utilizza una
memoria programmabile per
memorizzare delle istruzioni atte ad
implementare funzioni specifiche con
una logica di controllo sequenziale. Tra
le funzioni: temporizzazioni, conteggi,
calcoli aritmetici, ...
16
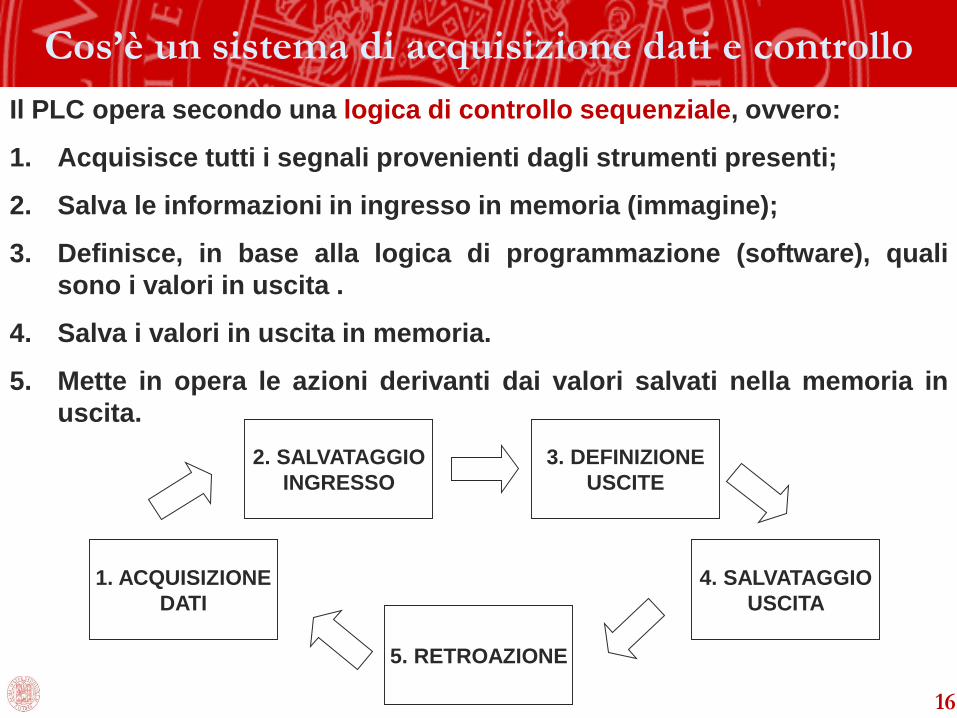
Il PLC opera secondo una logica di controllo sequenziale, ovvero:
1. Acquisisce tutti i segnali provenienti dagli strumenti presenti;
2. Salva le informazioni in ingresso in memoria (immagine);
3. Definisce, in base alla logica di programmazione (software), quali
sono i valori in uscita .
4. Salva i valori in uscita in memoria.
5. Mette in opera le azioni derivanti dai valori salvati nella memoria in
uscita.
1. ACQUISIZIONE
DATI
Cos’è un sistema di acquisizione dati e controllo
2. SALVATAGGIO
INGRESSO
3. DEFINIZIONE
USCITE
4. SALVATAGGIO
USCITA
5. RETROAZIONE

17
In base ai dati rilevati dal sistema di controllo e regolazione ed alle
logiche di regolazione prestabilite, il regolatore elabora un segnale (sotto
forma di tensione, corrente, pressione, …) da applicare all’attuatore.
ELEMENTO
SENSIBILE
PRIMARIO
ELEMENTO DI
CONVERSIONE
DELLA
VARIABILE
ELEMENTO DI
CONDIZIONAMENTO
DELLA VARIABILE
ELEMENTO DI
TRASMISSIONE
DEI DATI
ELABORAZIONE
DEI DATI
CONTROLLO E
REGOLAZIONEATTUATORE
Cos’è un sistema di acquisizione dati e controllo
Un tipico esempio di attuatore è la valvola,
ad esempio una valvola di regolazione, con
attuatore elettrico o pneumatico, impiegata
per modulare la portata di un fluido
attraverso una tubazione o regolare la
temperatura in ingresso ad una utenza.
Agenda
La conversione del segnale
Sistema di acquisizione dati e controllo: generalità
Il sistema di controllo industriale
Il sistema di controllo industriale
18
19
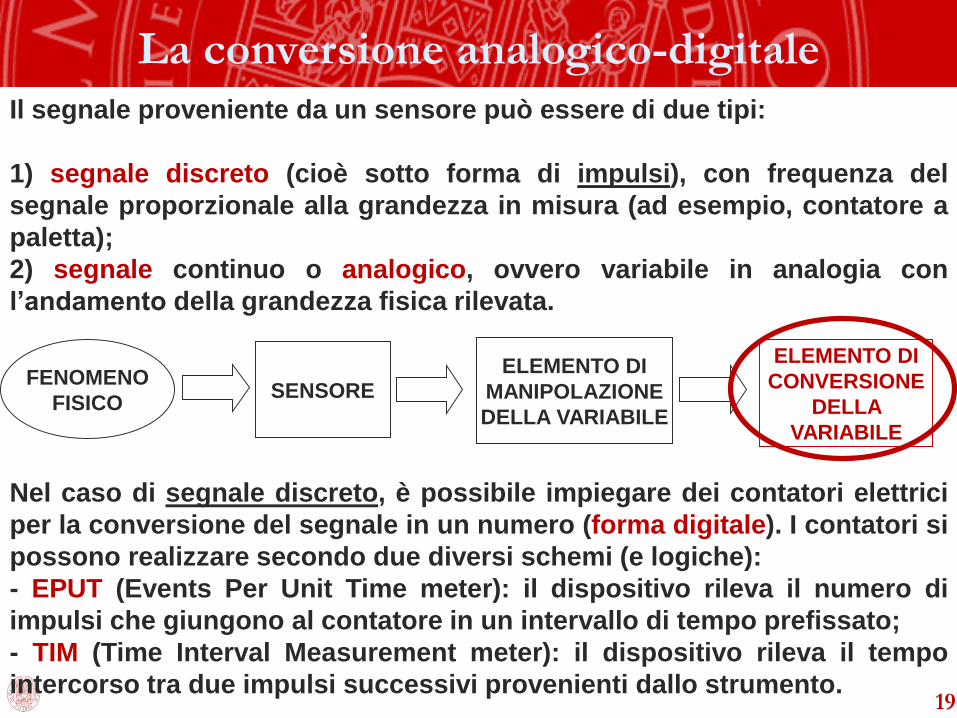
Il segnale proveniente da un sensore può essere di due tipi:
1) segnale discreto (cioè sotto forma di impulsi), con frequenza del
segnale proporzionale alla grandezza in misura (ad esempio, contatore a
paletta);
2) segnale continuo o analogico, ovvero variabile in analogia con
l’andamento della grandezza fisica rilevata.
Nel caso di segnale discreto, è possibile impiegare dei contatori elettrici
per la conversione del segnale in un numero (forma digitale). I contatori si
possono realizzare secondo due diversi schemi (e logiche):
- EPUT (Events Per Unit Time meter): il dispositivo rileva il numero di
impulsi che giungono al contatore in un intervallo di tempo prefissato;
- TIM (Time Interval Measurement meter): il dispositivo rileva il tempo
intercorso tra due impulsi successivi provenienti dallo strumento.
La conversione analogico-digitale
SENSOREFENOMENO
FISICO
ELEMENTO DI
CONVERSIONE
DELLA
VARIABILE
ELEMENTO DI
MANIPOLAZIONE
DELLA VARIABILE
20
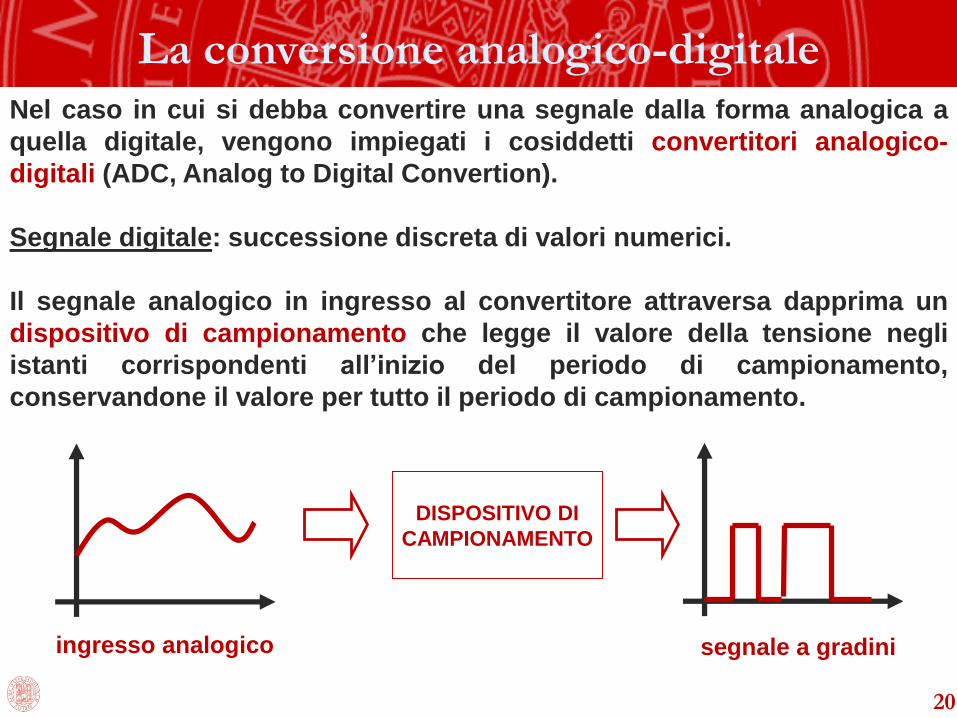
Nel caso in cui si debba convertire una segnale dalla forma analogica a
quella digitale, vengono impiegati i cosiddetti convertitori analogico-
digitali (ADC, Analog to Digital Convertion).
Segnale digitale: successione discreta di valori numerici.
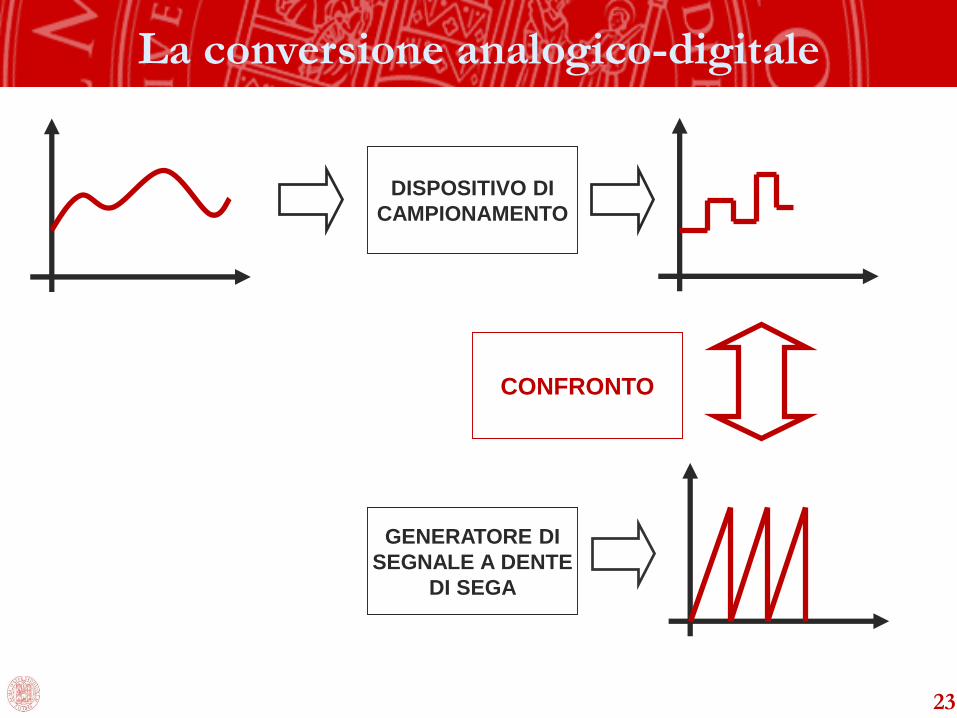
Il segnale analogico in ingresso al convertitore attraversa dapprima un
dispositivo di campionamento che legge il valore della tensione negli
istanti corrispondenti all’inizio del periodo di campionamento,
conservandone il valore per tutto il periodo di campionamento.
La conversione analogico-digitale
ingresso analogico
DISPOSITIVO DI
CAMPIONAMENTO
segnale a gradini
21
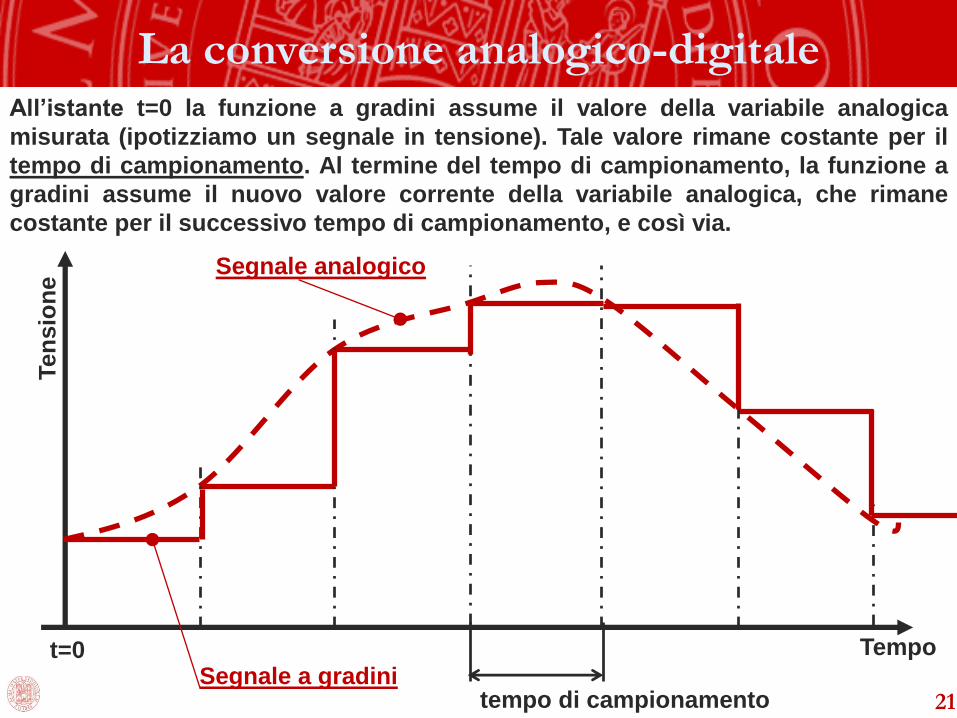
All’istante t=0 la funzione a gradini assume il valore della variabile analogica
misurata (ipotizziamo un segnale in tensione). Tale valore rimane costante per il
tempo di campionamento. Al termine del tempo di campionamento, la funzione a
gradini assume il nuovo valore corrente della variabile analogica, che rimane
costante per il successivo tempo di campionamento, e così via.
La conversione analogico-digitale
Segnale analogico
Segnale a gradinitempo di campionamento
Tempo
Ten
sio
ne
t=0
22
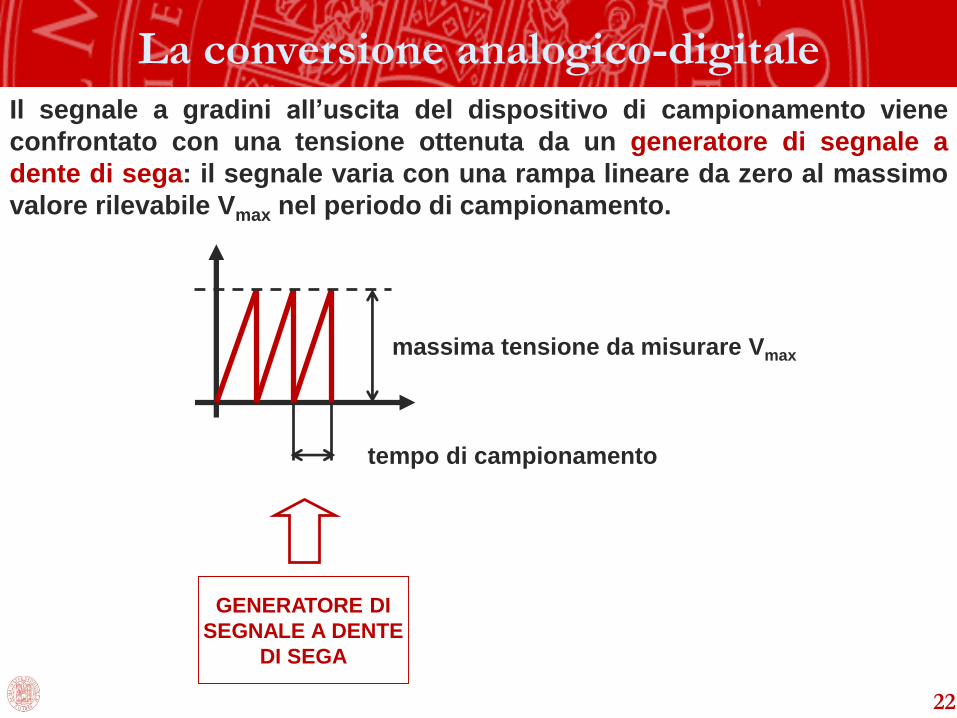
Il segnale a gradini all’uscita del dispositivo di campionamento viene
confrontato con una tensione ottenuta da un generatore di segnale a
dente di sega: il segnale varia con una rampa lineare da zero al massimo
valore rilevabile Vmax nel periodo di campionamento.
La conversione analogico-digitale
GENERATORE DI
SEGNALE A DENTE
DI SEGA
massima tensione da misurare Vmax
tempo di campionamento
23
La conversione analogico-digitale
DISPOSITIVO DI
CAMPIONAMENTO
GENERATORE DI
SEGNALE A DENTE
DI SEGA
CONFRONTO

24
La conversione analogico-digitale
Segnale dente di segaSegnale analogico
Segnale a gradinitempo di campionamento
Tempo
Ten
sio
ne
In figura sono mostrati segnale analogico, segnale a gradini e segnale a dente di
sega sovrapposti: nel periodo che intercorre tra un campionamento e l’altro, il
valore costante attribuito alla funzione a gradino viene confrontata con il segnale
a dente di sega.
25
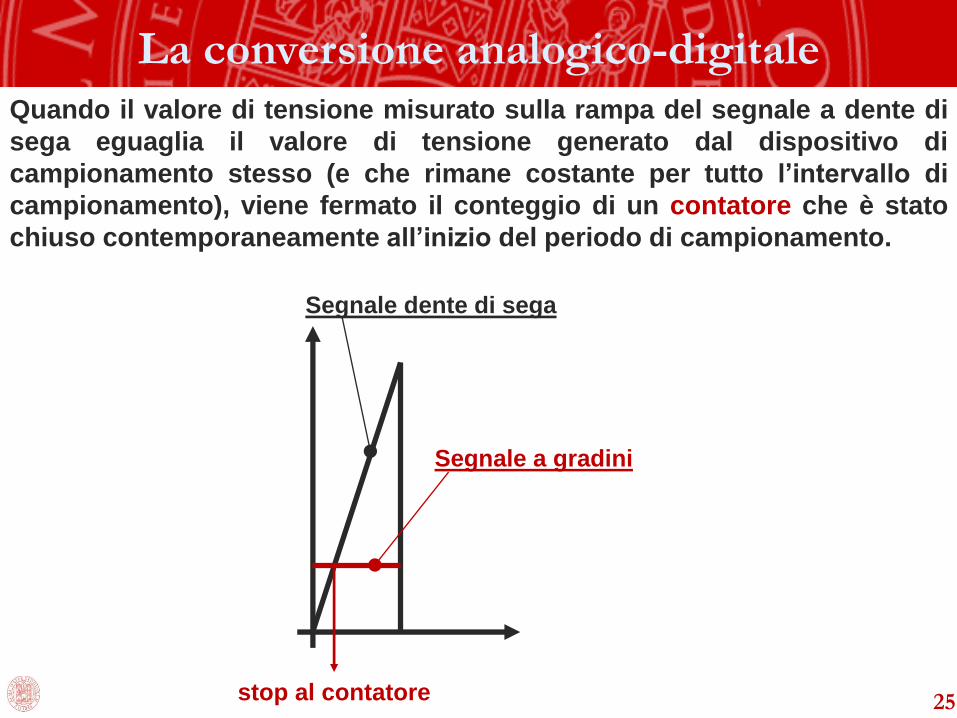
Quando il valore di tensione misurato sulla rampa del segnale a dente di
sega eguaglia il valore di tensione generato dal dispositivo di
campionamento stesso (e che rimane costante per tutto l’intervallo di
campionamento), viene fermato il conteggio di un contatore che è stato
chiuso contemporaneamente all’inizio del periodo di campionamento.
La conversione analogico-digitale
stop al contatore
Segnale dente di sega
Segnale a gradini

26
La conversione analogico-digitale
DISPOSITIVO DI
CAMPIONAMENTO+
GENERATORE DI
SEGNALE A DENTE DI
SEGA
-
STOP CONTATORE
GENERATORE DI
IMPULSI
TEMPORIZZATO
STOP
START
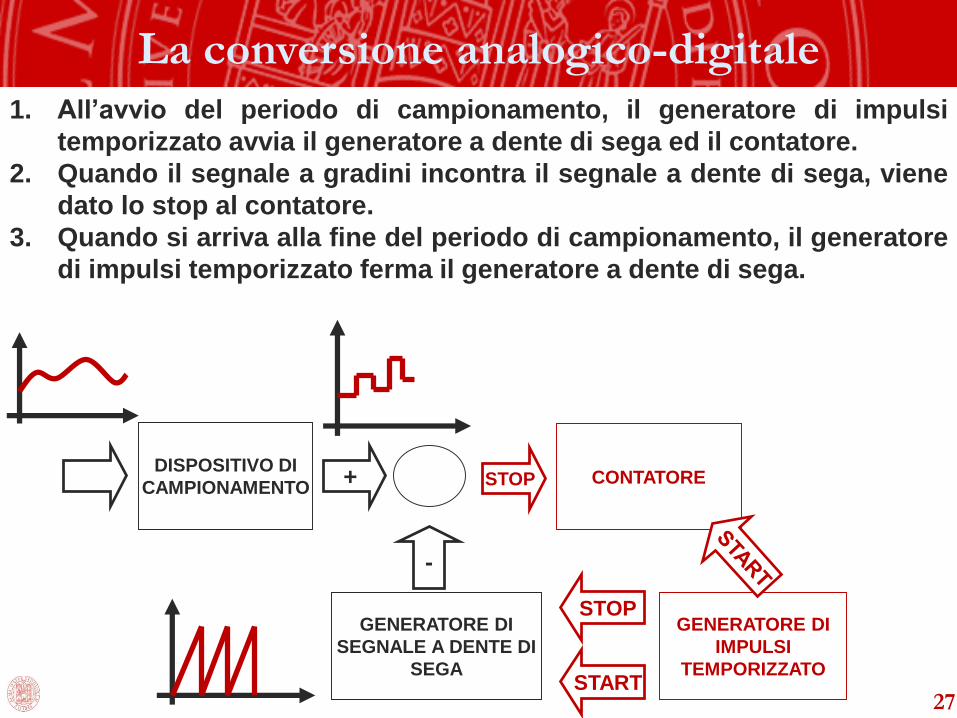
Pertanto sono altresì presenti:
- un generatore di impulsi temporizzato, che comanda accensione e
spegnimento del generatore a dente di sega, e che aziona l’accensione di
un contatore;
- un contatore, che misura il tempo che intercorre tra la generazione del
segnale a dente di sega e il momento in cui l’impulso prodotto dal
dispositivo di campionamento eguaglia la funzione a dente di sega.
27
La conversione analogico-digitale
DISPOSITIVO DI
CAMPIONAMENTO+
GENERATORE DI
SEGNALE A DENTE DI
SEGA
-
STOP CONTATORE
GENERATORE DI
IMPULSI
TEMPORIZZATO
STOP
START
1. All’avvio del periodo di campionamento, il generatore di impulsi
temporizzato avvia il generatore a dente di sega ed il contatore.
2. Quando il segnale a gradini incontra il segnale a dente di sega, viene
dato lo stop al contatore.
3. Quando si arriva alla fine del periodo di campionamento, il generatore
di impulsi temporizzato ferma il generatore a dente di sega.
28
La conversione analogico-digitale
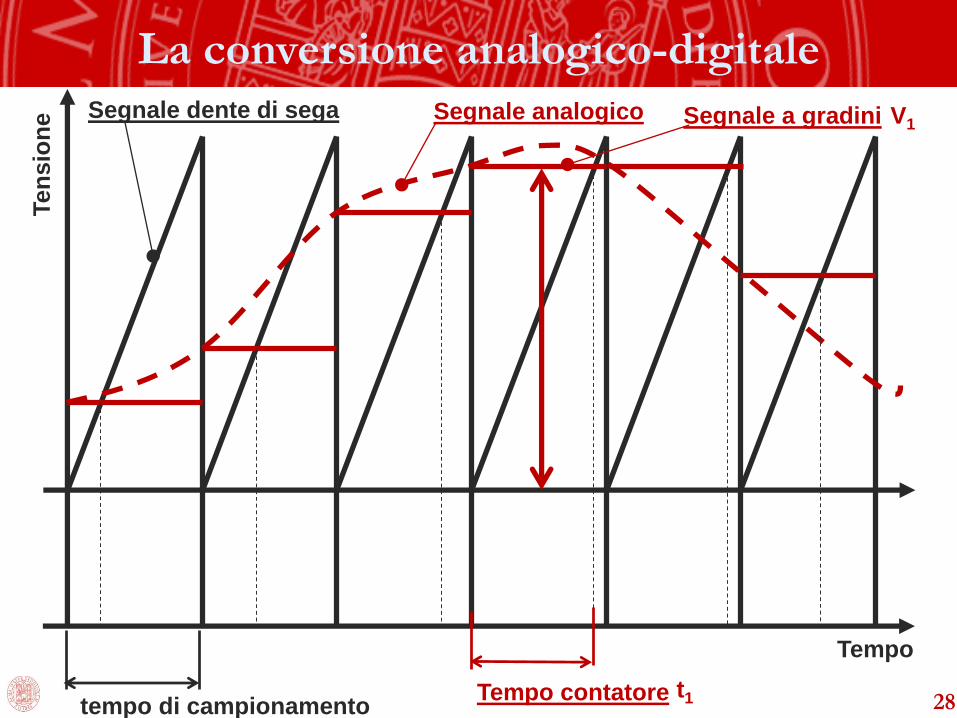
t1
V1Segnale dente di sega Segnale analogico Segnale a gradini
tempo di campionamento
Tempo
Ten
sio
ne
Tempo contatore
29
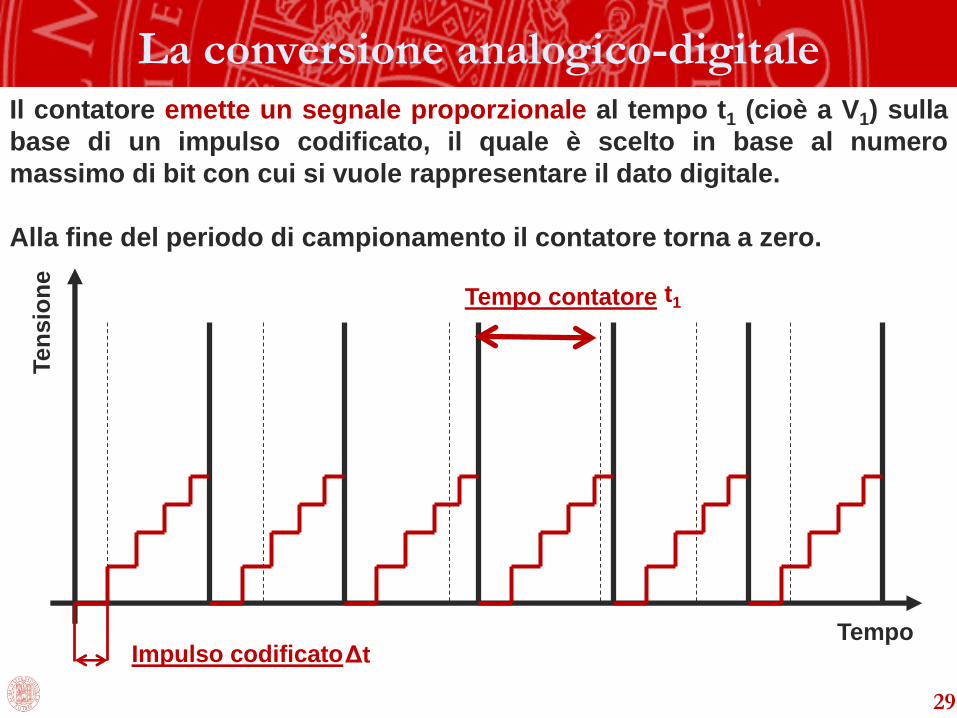
Il contatore emette un segnale proporzionale al tempo t1 (cioè a V1) sulla
base di un impulso codificato, il quale è scelto in base al numero
massimo di bit con cui si vuole rappresentare il dato digitale.
Alla fine del periodo di campionamento il contatore torna a zero.
La conversione analogico-digitale
Impulso codificatoΔt
t1Tempo contatore
Tempo
Ten
sio
ne
30
La conversione analogico-digitale
DISPOSITIVO DI
CAMPIONAMENTO+
GENERATORE DI
SEGNALE A DENTE DI
SEGA
-
STOP CONTATORE
GENERATORE DI
IMPULSI
TEMPORIZZATO
STOP
START
IMP
UL
SI
Segnale digitale
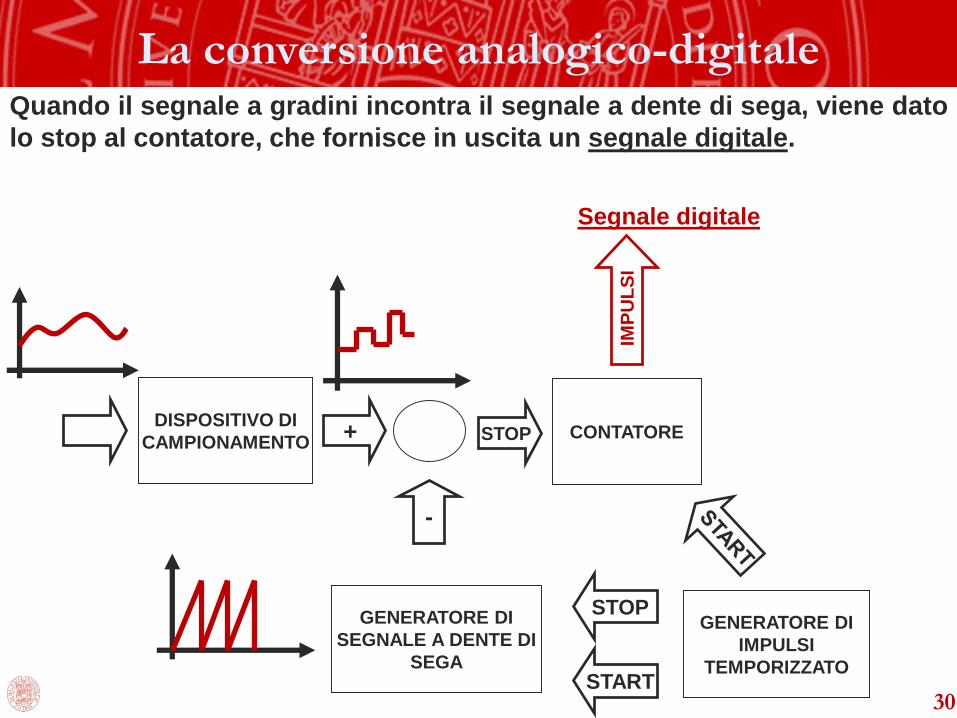
Quando il segnale a gradini incontra il segnale a dente di sega, viene dato
lo stop al contatore, che fornisce in uscita un segnale digitale.
31
Nota bene: base binaria e numero di bit
Solitamente il segnale analogico viene convertito in un segnale digitale
rappresentato da un numero binario (scelta naturale per applicazioni con
calcolatori elettronici).
2692 = 28 + 23 + 22 + 20
2692 = 1000011012
In questo caso il numero binario è formato da 9 bit. Pertanto, il bit
rappresenta l’informazione 0/1 espressa in codice binario.
La conversione analogico-digitale

32
Agenda
La conversione del segnale
Il condizionamento del segnale
Il sistema di controllo industriale
Sistema di acquisizione dati e controllo: generalità
33
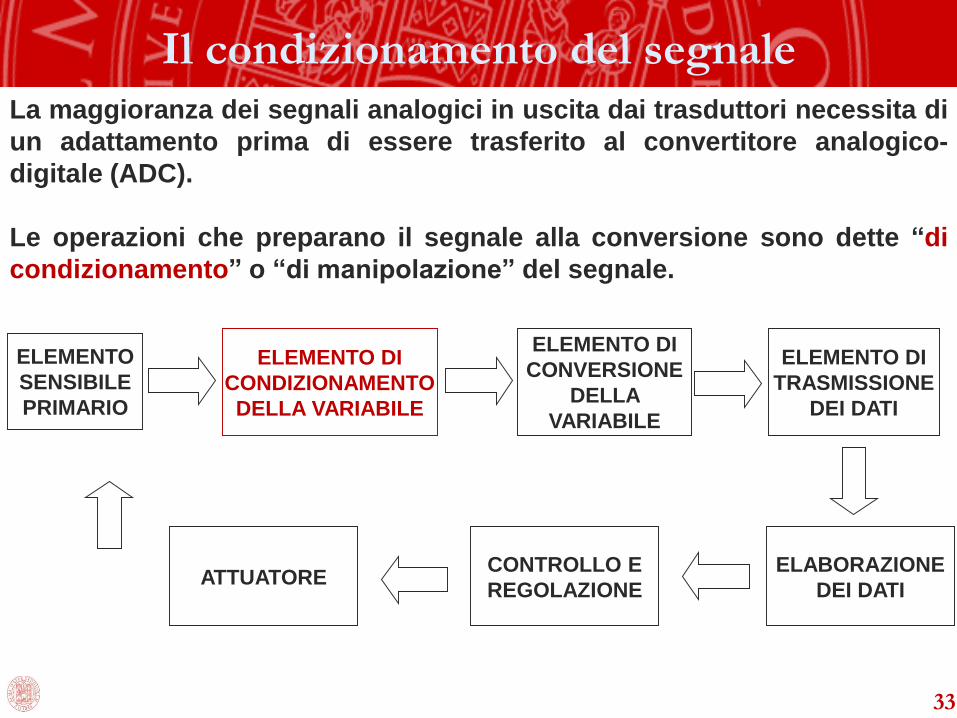
La maggioranza dei segnali analogici in uscita dai trasduttori necessita di
un adattamento prima di essere trasferito al convertitore analogico-
digitale (ADC).
Le operazioni che preparano il segnale alla conversione sono dette “di
condizionamento” o “di manipolazione” del segnale.
Il condizionamento del segnale
ELEMENTO
SENSIBILE
PRIMARIO
ELEMENTO DI
CONVERSIONE
DELLA
VARIABILE
ELEMENTO DI
CONDIZIONAMENTO
DELLA VARIABILE
ELEMENTO DI
TRASMISSIONE
DEI DATI
ELABORAZIONE
DEI DATI
CONTROLLO E
REGOLAZIONEATTUATORE
34
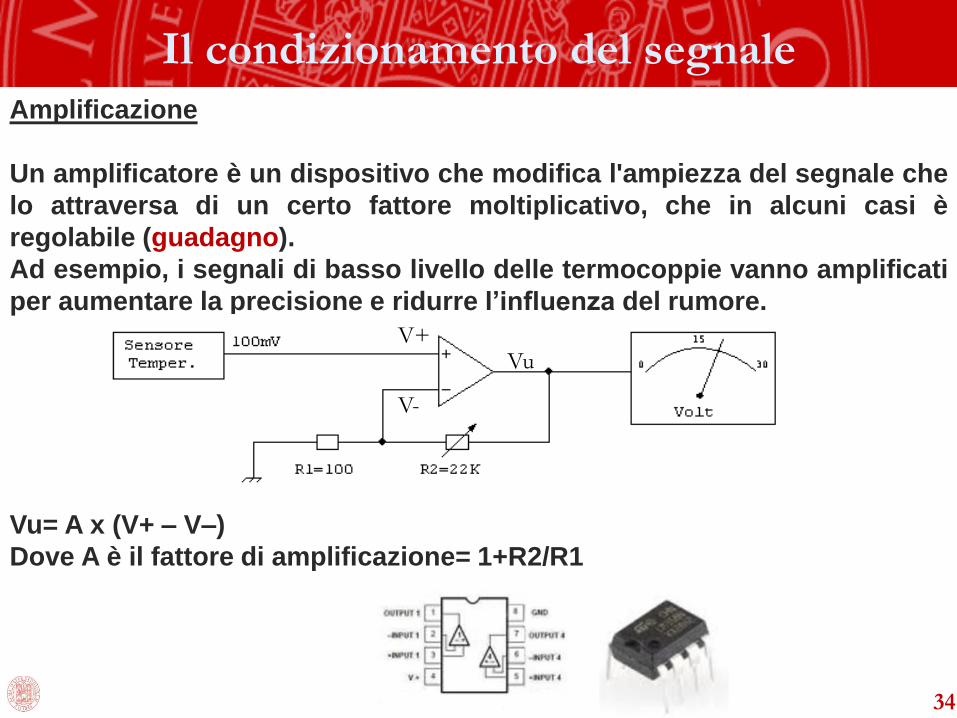
Amplificazione
Un amplificatore è un dispositivo che modifica l'ampiezza del segnale che
lo attraversa di un certo fattore moltiplicativo, che in alcuni casi è
regolabile (guadagno).
Ad esempio, i segnali di basso livello delle termocoppie vanno amplificati
per aumentare la precisione e ridurre l’influenza del rumore.
Vu= A x (V+ – V–)
Dove A è il fattore di amplificazione= 1+R2/R1
Il condizionamento del segnale
V+
V-
Vu
35
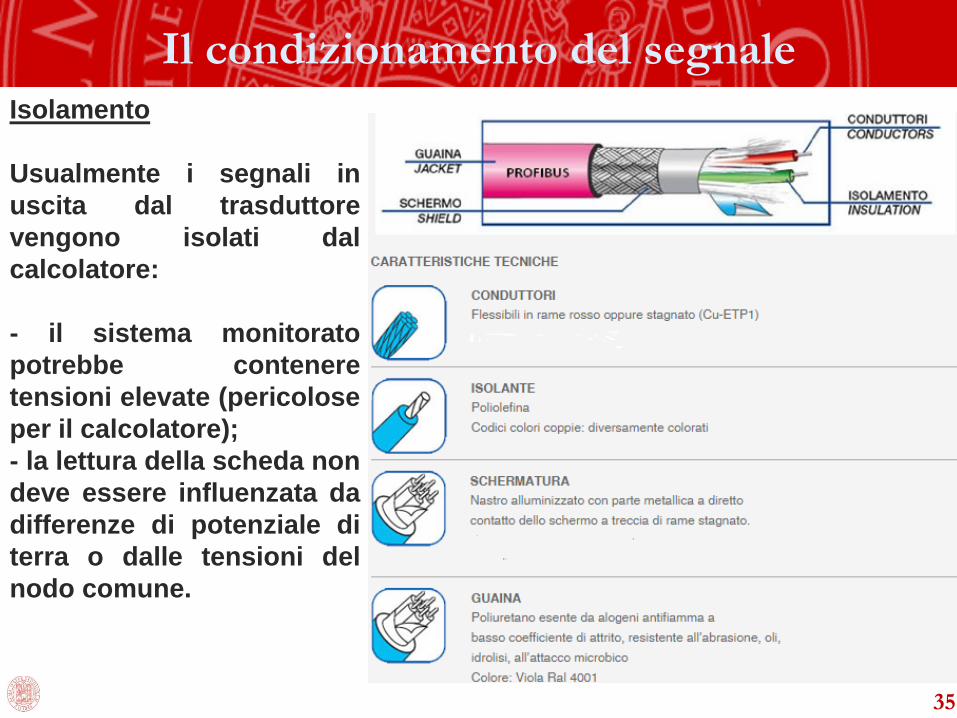
Isolamento
Usualmente i segnali in
uscita dal trasduttore
vengono isolati dal
calcolatore:
- il sistema monitorato
potrebbe contenere
tensioni elevate (pericolose
per il calcolatore);
- la lettura della scheda non
deve essere influenzata da
differenze di potenziale di
terra o dalle tensioni del
nodo comune.
Il condizionamento del segnale
36
Multiplexing
E’ una tecnica comunemente usata per misurare molti segnali con una
singola apparecchiatura di misura.
Il dispositivo campiona un canale, quindi passa al successivo, lo
campiona e passa al seguente, e così via. Poiché lo stesso dispositivo
campiona molti canali invece di uno solo, l’effettiva velocità di
campionamento per ciascun canale è inversamente proporzionale al
numero dei canali campionati.
Il condizionamento del segnale
37
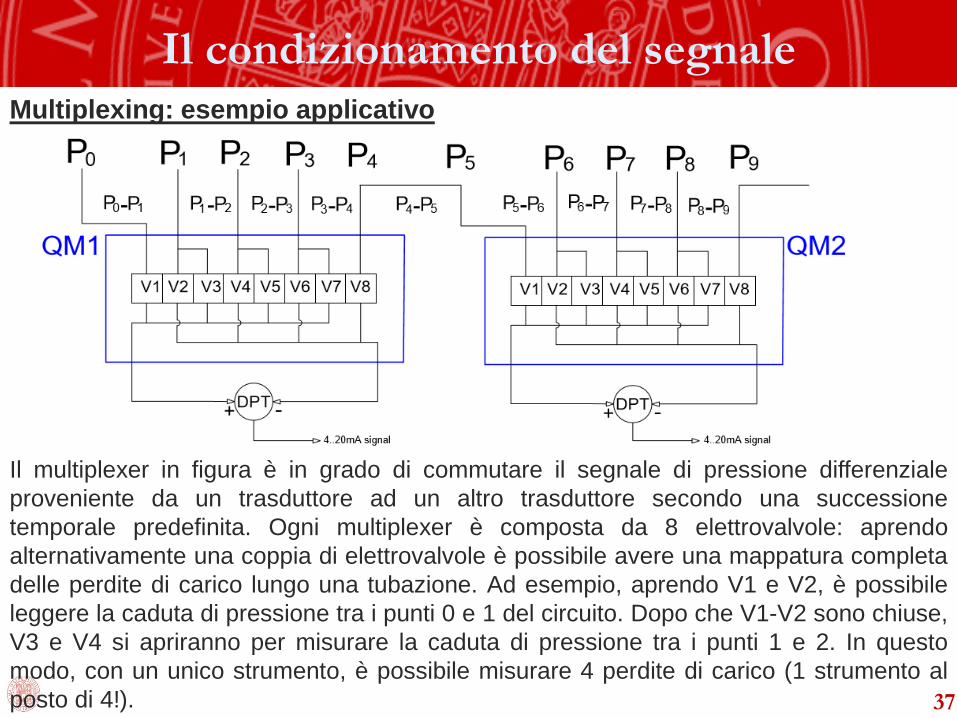
Multiplexing: esempio applicativo
Il condizionamento del segnale
Il multiplexer in figura è in grado di commutare il segnale di pressione differenziale
proveniente da un trasduttore ad un altro trasduttore secondo una successione
temporale predefinita. Ogni multiplexer è composta da 8 elettrovalvole: aprendo
alternativamente una coppia di elettrovalvole è possibile avere una mappatura completa
delle perdite di carico lungo una tubazione. Ad esempio, aprendo V1 e V2, è possibile
leggere la caduta di pressione tra i punti 0 e 1 del circuito. Dopo che V1-V2 sono chiuse,
V3 e V4 si apriranno per misurare la caduta di pressione tra i punti 1 e 2. In questo
modo, con un unico strumento, è possibile misurare 4 perdite di carico (1 strumento al
posto di 4!).
38
Filtraggio
Il filtro rimuove i segnali non desiderati dal segnale che si intende
misurare. Nei segnali di tipo continuo, il filtro viene impiegato per
attenuare la frequenza più alta del segnale che può ridurre l’accuratezza
della misura. Ad esempio, molti moduli di condizionamento presentano
un filtro passa basso da 4 Hz a 10 kHz per eliminare il rumore prima che il
segnale sia digitalizzato. I segnali alternati (ad esempio, una vibrazione)
spesso richiedono un tipo diverso di filtro (anti-aliasing). Esso ha una
altissima velocità di cut-off, così da rimuovere quasi completamente tutte
le frequenze del segnale che siano più alte dell’ampiezza di banda
(bandwidth) d’ingresso della scheda.
Il condizionamento del segnale

39
Linearizzazione
Molti trasduttori, come le termocoppie, non hanno risposta lineare alle
variazioni del fenomeno misurato. Pertanto, può essere necessario
intervenire sul segnale in uscita per linearizzarlo.
Il condizionamento del segnale
40
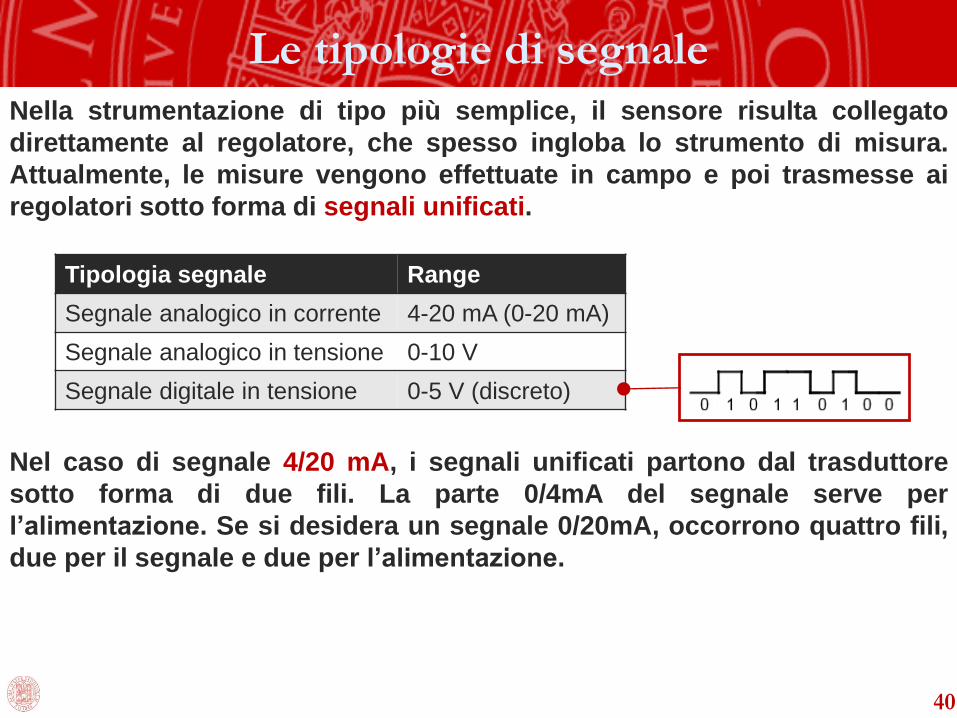
Le tipologie di segnale
Nella strumentazione di tipo più semplice, il sensore risulta collegato
direttamente al regolatore, che spesso ingloba lo strumento di misura.
Attualmente, le misure vengono effettuate in campo e poi trasmesse ai
regolatori sotto forma di segnali unificati.
Nel caso di segnale 4/20 mA, i segnali unificati partono dal trasduttore
sotto forma di due fili. La parte 0/4mA del segnale serve per
l’alimentazione. Se si desidera un segnale 0/20mA, occorrono quattro fili,
due per il segnale e due per l’alimentazione.
Tipologia segnale Range
Segnale analogico in corrente 4-20 mA (0-20 mA)
Segnale analogico in tensione 0-10 V
Segnale digitale in tensione 0-5 V (discreto)
41
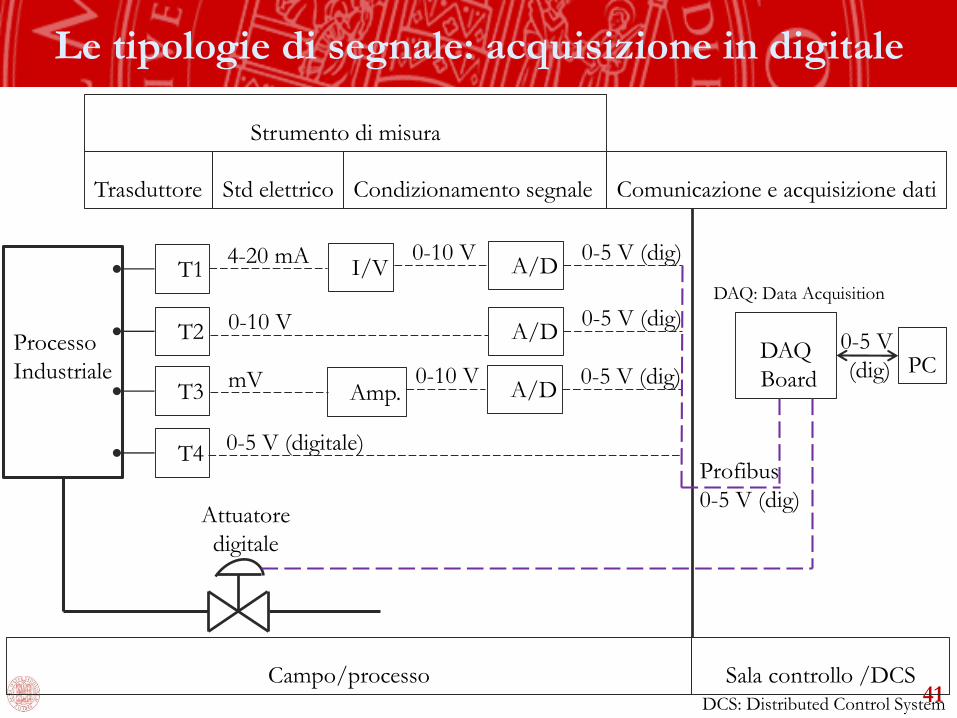
Processo
Industriale
T1
T2
T3
T4
4-20 mA
0-10 V
mV
0-5 V (digitale)
I/V0-10 V
A/D0-5 V (dig)
A/D0-5 V (dig)
Amp.0-10 V
A/D0-5 V (dig)
Profibus
0-5 V (dig)
PCDAQ
Board
Attuatore
digitale
Trasduttore Std elettrico Condizionamento segnale Comunicazione e acquisizione dati
Strumento di misura
Campo/processo Sala controllo /DCS
0-5 V
(dig)
DCS: Distributed Control System
DAQ: Data Acquisition
Le tipologie di segnale: acquisizione in digitale
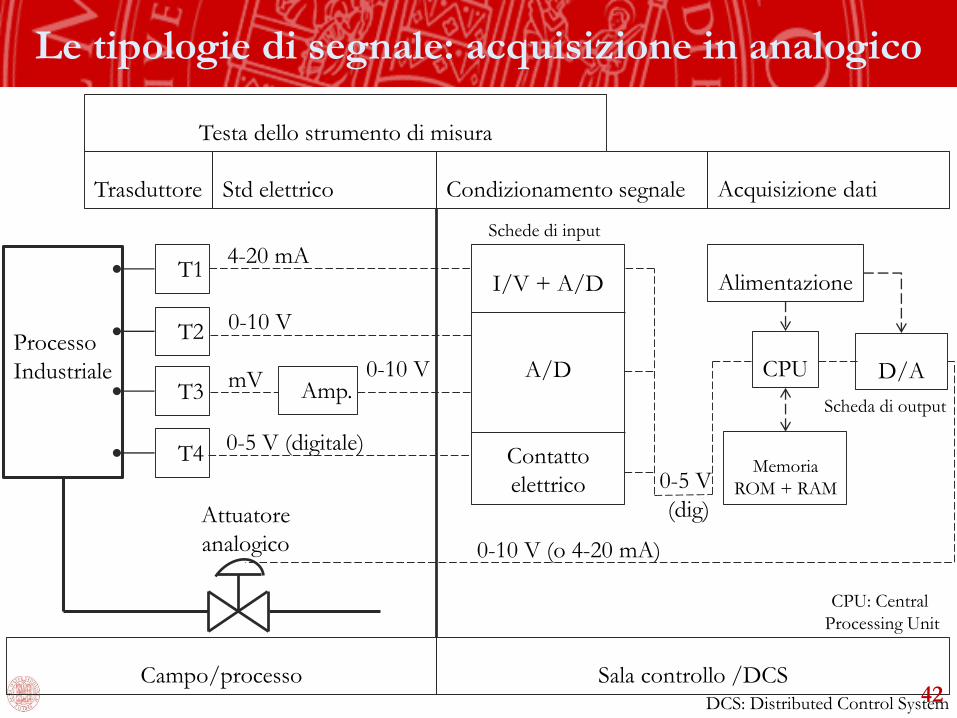
Processo
Industriale
T1
T2
T3
T4
4-20 mA
0-10 V
mV
0-5 V (digitale)
Amp.0-10 V CPU
I/V + A/D
A/D
Contatto
elettrico
Attuatore
analogico
Trasduttore Std elettrico Condizionamento segnale Acquisizione dati
Testa dello strumento di misura
Campo/processo Sala controllo /DCS
0-5 V
(dig)
DCS: Distributed Control System
Schede di input
CPU: Central
Processing Unit
Memoria
ROM + RAM
Alimentazione
D/A
Scheda di output
0-10 V (o 4-20 mA)
42
Le tipologie di segnale: acquisizione in analogico
43
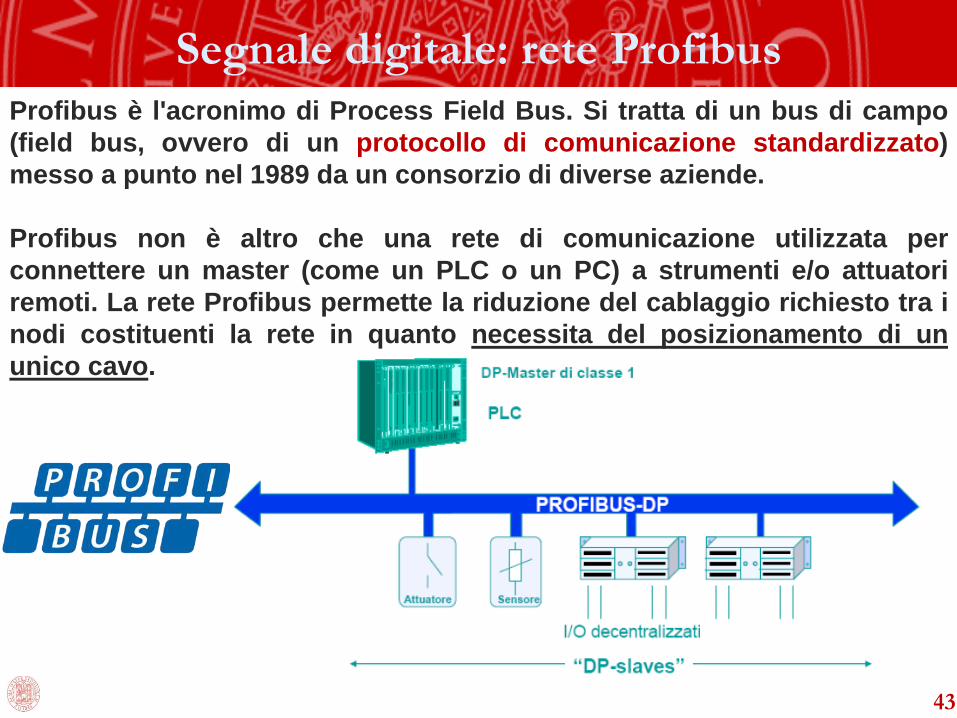
Segnale digitale: rete Profibus
Profibus è l'acronimo di Process Field Bus. Si tratta di un bus di campo
(field bus, ovvero di un protocollo di comunicazione standardizzato)
messo a punto nel 1989 da un consorzio di diverse aziende.
Profibus non è altro che una rete di comunicazione utilizzata per
connettere un master (come un PLC o un PC) a strumenti e/o attuatori
remoti. La rete Profibus permette la riduzione del cablaggio richiesto tra i
nodi costituenti la rete in quanto necessita del posizionamento di un
unico cavo.
44
Segnale digitale: rete Profibus
Vantaggi della comunicazione digitale rispetto a quella analogica:
1- più informazioni sullo stesso cavo: il doppino analogico è in grado di
trasferire solo il segnale della variabile misurata, mentre con la
comunicazione digitale possono essere trasferite più informazioni;
2- comunicazione bidirezionale: attraverso la comunicazione digitale si
possono ricevere informazioni e anche inviarne dal master allo slave;
3- riduzione del rumore elettrico: essendo il segnale discretizzato e non
continuo è possibile ridurre l’impatto del rumore elettrico andando a
confrontare i livelli di tensione sui due cavi;
4- un solo doppino: nella comunicazione analogica è necessario stendere
un doppino elettrico per ogni strumento, mentre nella digitale (Profibus)
con un solo doppino si riescono a mettere in comunicazione fino a 137
slave;
45
Segnale digitale: rete Profibus
Vantaggi della comunicazione digitale rispetto a quella analogica:
5- maggiore isolamento: dovendo stendere un solo doppino è possibile
prevedere un isolamento maggiore in termini di rumore elettrico e agenti
atmosferici;
6- minori ingombri: la minor quantità di cavi incide anche sugli ingombri
soprattutto in sala comando dove convergono tutti i cavi;
7- minore manutenzione: a causa della minore numerosità e maggiore
robustezza, azioni di manutenzioni sono molto meno frequenti e anche
molto più facili da effettuare;

46
Segnale digitale: rete Profibus
La funzione più importante del Profibus è quella di permettere uno
scambio ciclico di messaggi tra i dispositivi di campo e l'unità centrale di
controllo. Il sistema include stazioni attive e passive. In totale possono
essere indirizzate 127 stazioni, delle quali solo 32 attive.
Stazione attiva: controllano
l’accesso al bus di campo. Il
passaggio da una stazione attiva
all’altra viene gestita con il
passaggio del «token», cioè del
permesso per l’accesso al bus.
Stazione passiva: sono neutrali e
trasmettono dati solo quando
interrogati da una stazione attiva.
47
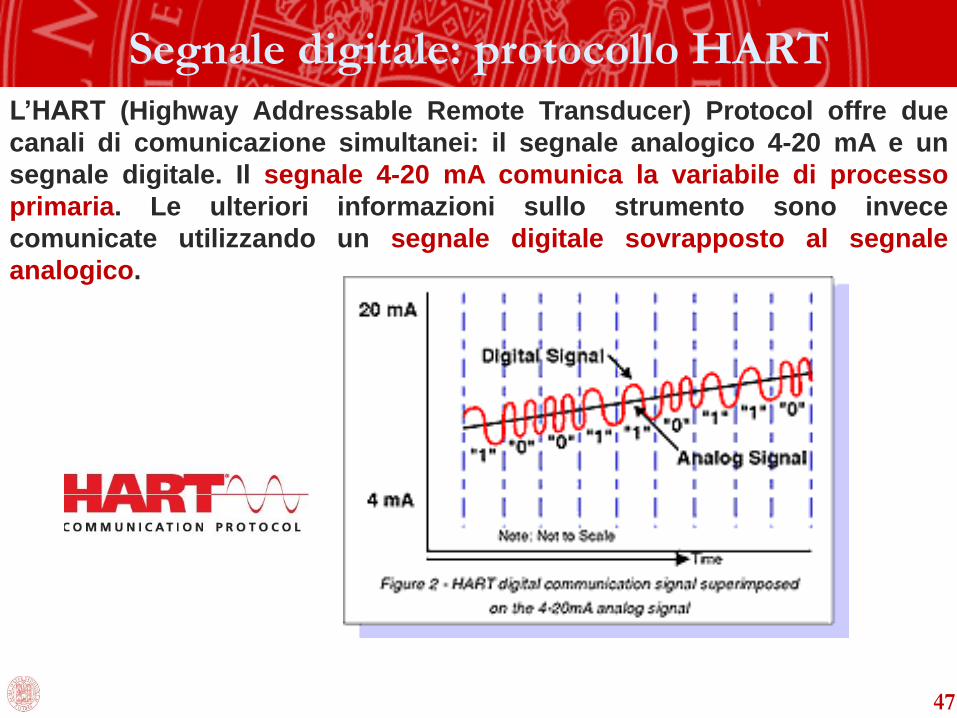
Segnale digitale: protocollo HART
L’HART (Highway Addressable Remote Transducer) Protocol offre due
canali di comunicazione simultanei: il segnale analogico 4-20 mA e un
segnale digitale. Il segnale 4-20 mA comunica la variabile di processo
primaria. Le ulteriori informazioni sullo strumento sono invece
comunicate utilizzando un segnale digitale sovrapposto al segnale
analogico.

48
Segnale digitale: protocollo HART
Il segnale digitale contiene informazioni dal dispositivo compreso lo stato
del dispositivo, la diagnostica, ulteriori variabili misurate o calcolate,
ecc...
Insieme i due canali di comunicazione offrono una soluzione di
comunicazione di campo completa, poco costosa e molto robusta che è
facile da utilizzare e configurare.
49
Agenda
Il sistema di controllo industriale
La conversione del segnale
Il condizionamento del segnale
Sistema di acquisizione dati e controllo: generalità
50
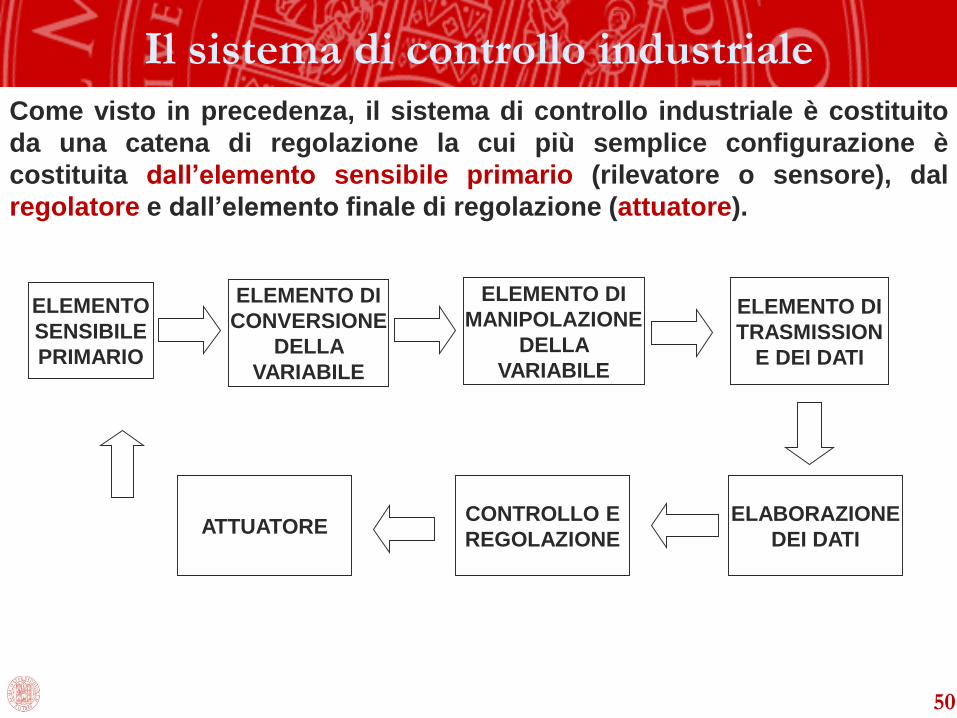
Come visto in precedenza, il sistema di controllo industriale è costituito
da una catena di regolazione la cui più semplice configurazione è
costituita dall’elemento sensibile primario (rilevatore o sensore), dal
regolatore e dall’elemento finale di regolazione (attuatore).
ELEMENTO
SENSIBILE
PRIMARIO
ELEMENTO DI
CONVERSIONE
DELLA
VARIABILE
ELEMENTO DI
MANIPOLAZIONE
DELLA
VARIABILE
ELEMENTO DI
TRASMISSION
E DEI DATI
ELABORAZIONE
DEI DATI
CONTROLLO E
REGOLAZIONEATTUATORE
Il sistema di controllo industriale
51
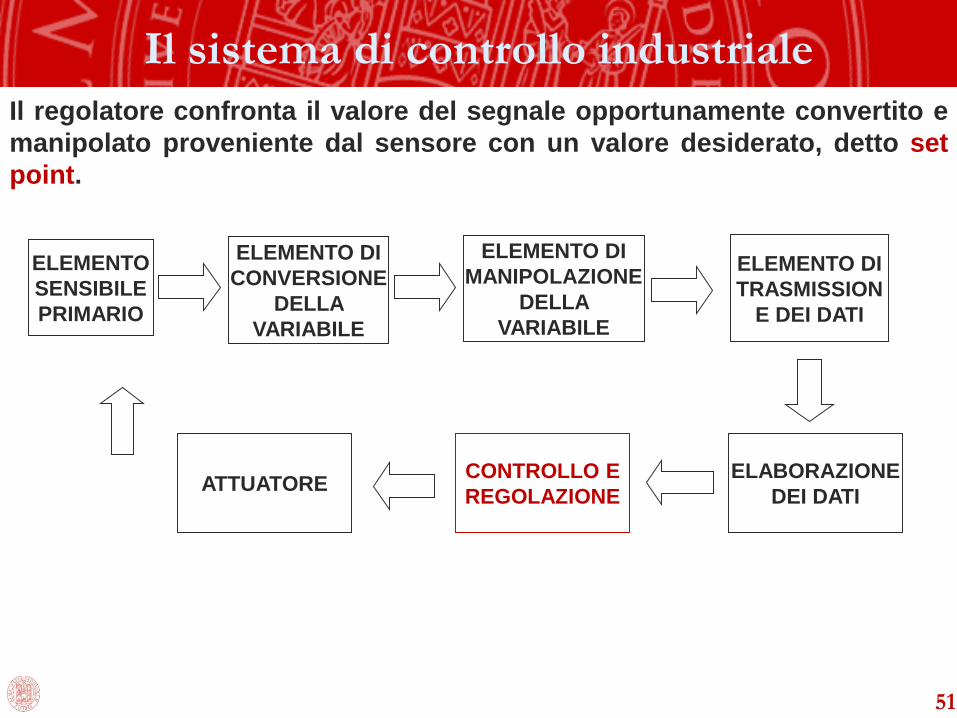
Il regolatore confronta il valore del segnale opportunamente convertito e
manipolato proveniente dal sensore con un valore desiderato, detto set
point.
ELEMENTO
SENSIBILE
PRIMARIO
ELEMENTO DI
CONVERSIONE
DELLA
VARIABILE
ELEMENTO DI
MANIPOLAZIONE
DELLA
VARIABILE
ELEMENTO DI
TRASMISSION
E DEI DATI
ELABORAZIONE
DEI DATI
CONTROLLO E
REGOLAZIONEATTUATORE
Il sistema di controllo industriale

52
In base al risultato del confronto ed alle logiche di regolazione
prestabilite, il regolatore elabora un segnale (sotto forma di tensione,
corrente, pressione, …) da applicare all’attuatore.
ELEMENTO
SENSIBILE
PRIMARIO
ELEMENTO DI
CONVERSIONE
DELLA
VARIABILE
ELEMENTO DI
MANIPOLAZIONE
DELLA
VARIABILE
ELEMENTO DI
TRASMISSION
E DEI DATI
ELABORAZIONE
DEI DATI
CONTROLLO E
REGOLAZIONEATTUATORE
Il sistema di controllo industriale
53
E’ possibile riconoscere alcune funzioni principali di un regolatore di tipo
industriale:
- funzione di controllo (regolazione e autotaratura);
- interfaccia verso il processo;
- interfaccia verso l’operatore;
- allarmi.
Ulteriori funzioni ausiliarie (come la funzione di programmazione,
autodiagnosi, back-up) sono presenti in prodotti di classe più elevata.
Il sistema di controllo industriale
54
Nel controllore logico programmabile (PLC, Programmable Logic
Controller) lo schema di controllo è definito tramite un programma
memorizzato.
Esso non è altro che un elaboratore di tipo industriale concepito per
risolvere problemi di controllo ed automazione. Le principali
caratteristiche sono:
- affidabilità;
- espandibilità;
- semplicità di programmazione;
- semplicità di integrazione con dispositivi commerciali differenti.
Il controllore logico programmabile
55
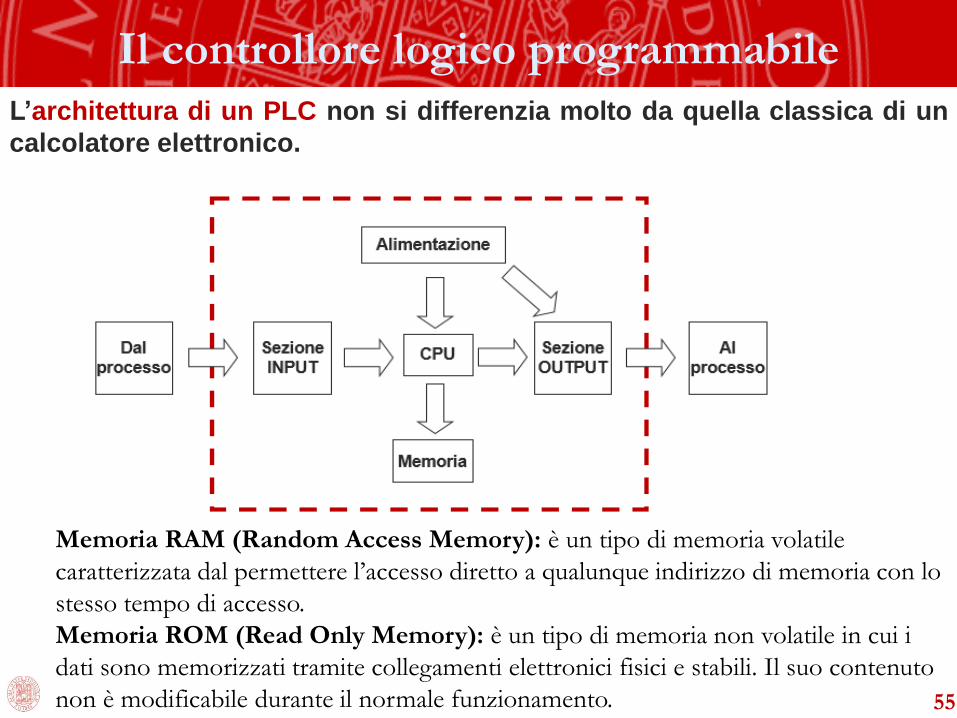
L’architettura di un PLC non si differenzia molto da quella classica di un
calcolatore elettronico.
Il controllore logico programmabile
Memoria RAM (Random Access Memory): è un tipo di memoria volatile
caratterizzata dal permettere l’accesso diretto a qualunque indirizzo di memoria con lo
stesso tempo di accesso.
Memoria ROM (Read Only Memory): è un tipo di memoria non volatile in cui i
dati sono memorizzati tramite collegamenti elettronici fisici e stabili. Il suo contenuto
non è modificabile durante il normale funzionamento.
56
Il PLC opera eseguendo due diversi tipi di operazioni
1) operazioni automatiche: sono gestite da programmi che fanno capo al
sistema operativo, non sono gestibili o accessibili dall’utente, si avviano e
terminano in modo automatico (ad esempio, a seguito di riavvii o
ripristini);
2) operazioni programmabili: sono le operazioni connesse al
funzionamento a regime e dipendono dalla programmazione stabilita
dall’utente;
Il controllore logico programmabile
57
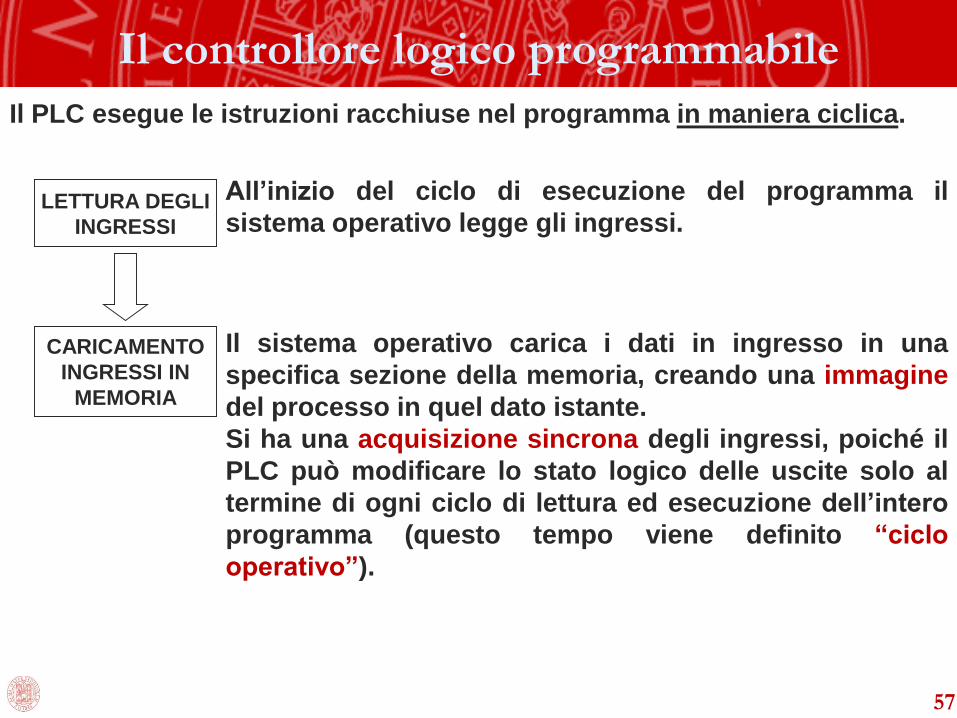
Il PLC esegue le istruzioni racchiuse nel programma in maniera ciclica.
LETTURA DEGLI
INGRESSI
All’inizio del ciclo di esecuzione del programma il
sistema operativo legge gli ingressi.
CARICAMENTO
INGRESSI IN
MEMORIA
Il sistema operativo carica i dati in ingresso in una
specifica sezione della memoria, creando una immagine
del processo in quel dato istante.
Si ha una acquisizione sincrona degli ingressi, poiché il
PLC può modificare lo stato logico delle uscite solo al
termine di ogni ciclo di lettura ed esecuzione dell’intero
programma (questo tempo viene definito “ciclo
operativo”).
Il controllore logico programmabile
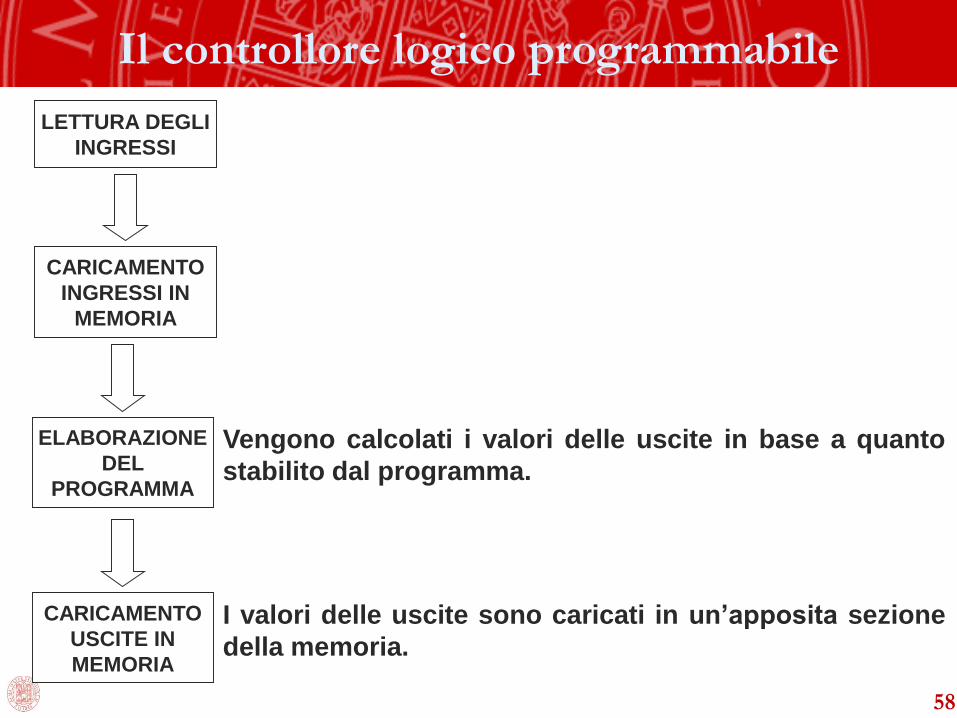
58
LETTURA DEGLI
INGRESSI
CARICAMENTO
INGRESSI IN
MEMORIA
Vengono calcolati i valori delle uscite in base a quanto
stabilito dal programma.
ELABORAZIONE
DEL
PROGRAMMA
I valori delle uscite sono caricati in un’apposita sezione
della memoria.
CARICAMENTO
USCITE IN
MEMORIA
Il controllore logico programmabile
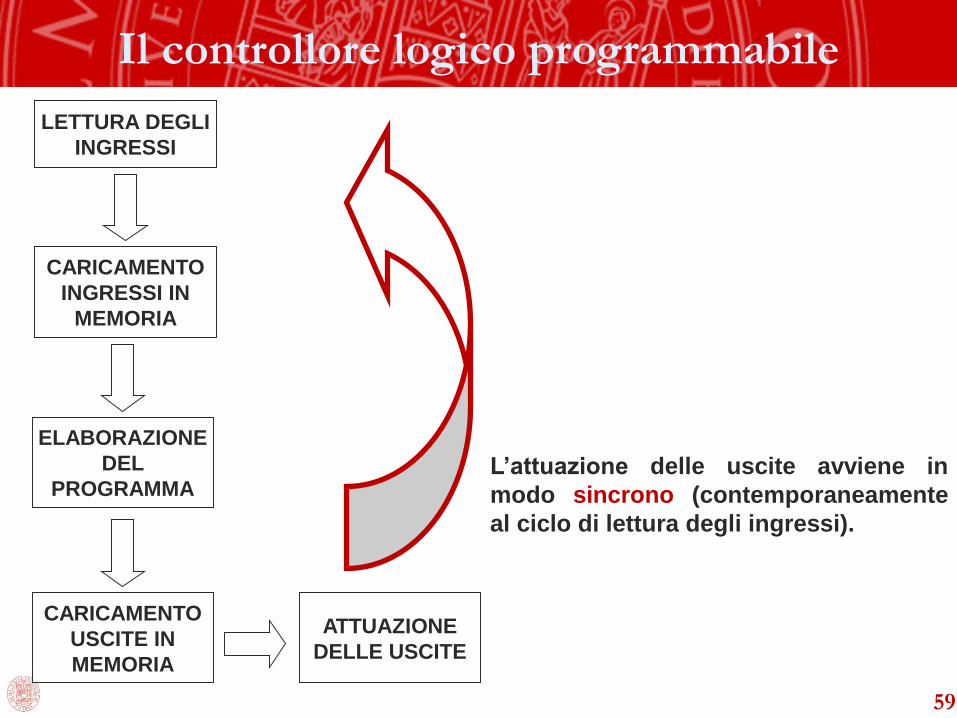
59
LETTURA DEGLI
INGRESSI
CARICAMENTO
INGRESSI IN
MEMORIA
ELABORAZIONE
DEL
PROGRAMMA
CARICAMENTO
USCITE IN
MEMORIA
ATTUAZIONE
DELLE USCITE
L’attuazione delle uscite avviene in
modo sincrono (contemporaneamente
al ciclo di lettura degli ingressi).
Il controllore logico programmabile
60
La maggior parte dei PLC sono in grado eseguire, oltre che funzioni
logiche, anche funzioni di calcolo e regolazione.
Per questo motivo la definizione PLC sta perdendo significato nell’uso
della “L” (Logic) a vantaggio della definizione PC (Programmable
Controller); tuttavia, al fine di evitare confusioni con la sigla PC intesa
come Personal Computer, resiste a tutt’oggi la denominazione originaria.
Una ulteriore implementazione del PLC si è avuta con l’inserimento delle
subroutine, ovvero un blocco funzionale che realizza una funzione logica
e che può essere richiamato ovunque serva nel programma, e della
istruzione di salto, che consente l’attivazione o meno di alcune funzioni
del programma solo in determinate condizioni.
Il controllore logico programmabile
61
L’evoluzione del linguaggio ha incrementato il numero di istruzioni
gravanti sul PLC, portando ad un sovraccarico del processore.
Per questo motivo, spesso sono presenti CPU specializzate in
determinate attività (logica, regolazione, comunicazione, …).
L’utente può così “costruire” l’architettura del proprio PLC risolvendo al
meglio le problematiche di controllo senza impattare eccessivamente sui
costi complessivi. Difatti, usualmente il costo del PLC è più condizionato
dal numero di I/O piuttosto che dal numero dei CPU.
Il controllore logico programmabile

62
LETTURA DEGLI
INGRESSI
CARICAMENTO
INGRESSI IN
MEMORIA
ELABORAZIONE DEL
PROGRAMMA
CARICAMENTO
USCITE IN
MEMORIA
ATTUAZIONE
DELLE USCITE
Il PLC svolge le attività programmabili in sequenza ed in
modo ciclico.
Il ciclo richiede un certo tempo, che dipende da:
- numero e tipo di istruzioni presenti nel programma,
complessità della struttura software;
- capacità di elaborazione della/e CPU e dei circuiti ad
essa/e collegate (in particolare, influiscono sulla rapidità
del ciclo la frequenza di clock del processore, il tipo di
architettura hardware, le modalità interne di gestione).
Il controllore logico programmabile
63
LETTURA DEGLI
INGRESSI
CARICAMENTO
INGRESSI IN
MEMORIA
ELABORAZIONE DEL
PROGRAMMA
CARICAMENTO
USCITE IN
MEMORIA
ATTUAZIONE
DELLE USCITE
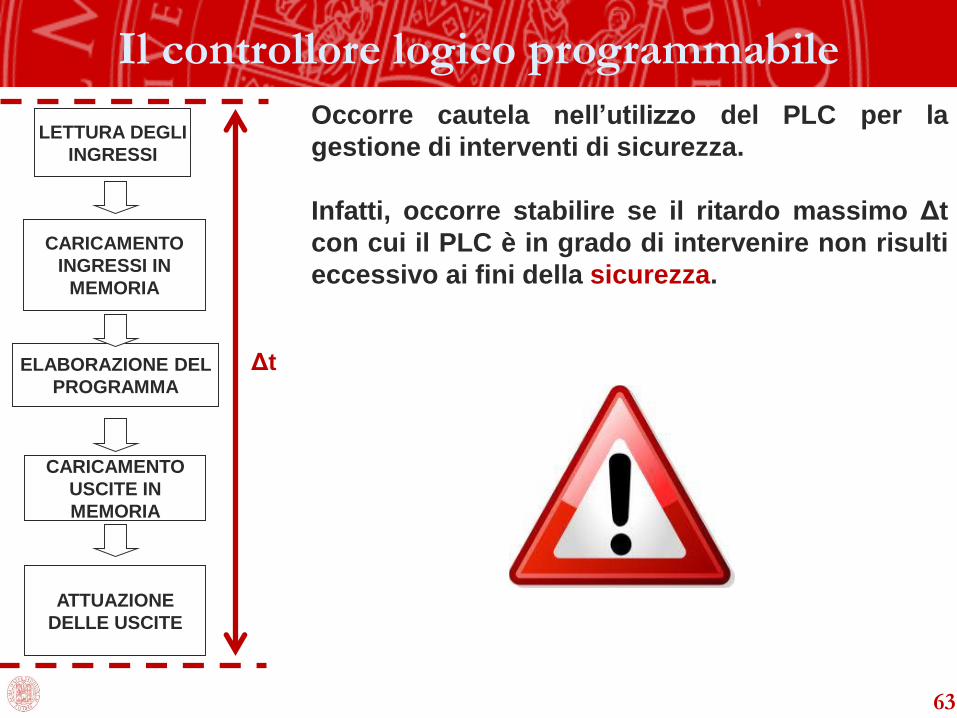
Occorre cautela nell’utilizzo del PLC per la
gestione di interventi di sicurezza.
Infatti, occorre stabilire se il ritardo massimo Δt
con cui il PLC è in grado di intervenire non risulti
eccessivo ai fini della sicurezza.
Δt
Il controllore logico programmabile

64
Esempio: funzione di sicurezza
Si prenda in considerazione il PLC a controllo di una macchina
punzonatrice. Supponiamo sia presente un sensore il cui scopo è quello
di fermare la macchina qualora l’operatore si avvicini con la mano
all’utensile.
Se il segnale proveniente dal sensore venisse acquisito all’interno del
normale ciclo di acquisizione dati, e quindi il PLC intervenisse solo al
termine del ciclo, sicuramente sarebbe troppo tardi per l’incolumità
dell’operatore.
Ecco perché alcune funzioni, come quelle di sicurezza, vanno gestite con
logiche differenti da quelle tipiche del PLC.
Il controllore logico programmabile
65
LETTURA DEGLI
INGRESSI
CARICAMENTO
INGRESSI IN
MEMORIA
ELABORAZIONE DEL
PROGRAMMA
CARICAMENTO
USCITE IN
MEMORIA
ATTUAZIONE
DELLE USCITE
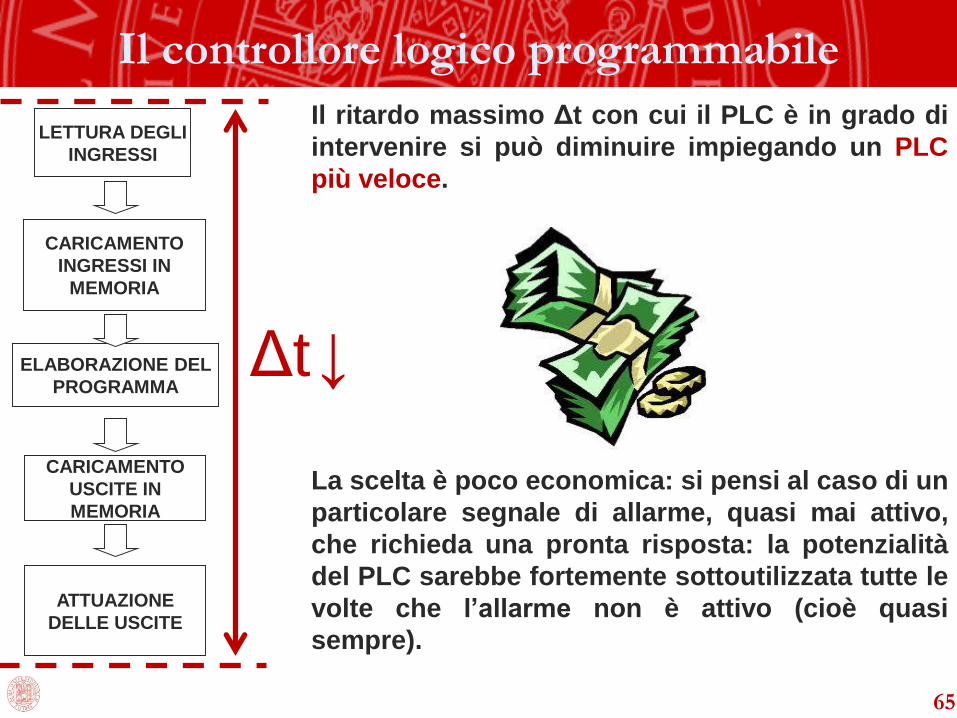
Il ritardo massimo Δt con cui il PLC è in grado di
intervenire si può diminuire impiegando un PLC
più veloce.
Δt↓
La scelta è poco economica: si pensi al caso di un
particolare segnale di allarme, quasi mai attivo,
che richieda una pronta risposta: la potenzialità
del PLC sarebbe fortemente sottoutilizzata tutte le
volte che l’allarme non è attivo (cioè quasi
sempre).
Il controllore logico programmabile

66
LETTURA DEGLI
INGRESSI
CARICAMENTO
INGRESSI IN
MEMORIA
ELABORAZIONE DEL
PROGRAMMA
CARICAMENTO
USCITE IN
MEMORIA
ATTUAZIONE
DELLE USCITE
Per ovviare a questo problema sono previste
esplicite istruzioni di input e output per mezzo
delle quali è possibile leggere il valore attuale in
ingresso senza riferirsi a quello campionato ad
inizio ciclo e attuare immediatamente l’uscita
desiderata senza dover aspettare la fine del ciclo
stesso.
Esempio:
Δt ciclo = 50 ms vs Δt allarme = 10 ms
Il programma legge l’ingresso riferito all’allarme
almeno 5 volte nello stesso ciclo.
Δt ↓
Il controllore logico programmabile

67
LETTURA DEGLI
INGRESSI
CARICAMENTO
INGRESSI IN
MEMORIA
ELABORAZIONE DEL
PROGRAMMA
CARICAMENTO
USCITE IN
MEMORIA
ATTUAZIONE
DELLE USCITE
Tuttavia l’uso di esplicite funzioni di input e
output non consente la gestione di segnali che
richiedono una risposta immediata, poiché il
programma di controllo dovrebbe dedicarsi
esclusivamente a tale attività.
Per questo motivo il PLC prevede una serie di
istruzione dette “interrupt”, in grado di
interrompere il flusso di elaborazioni conseguente
ad una precisa richiesta esterna o interna al
dispositivo.
Δt ↓
Il controllore logico programmabile
68
In corrispondenza di un interrupt il microprocessore interrompe la
normale elaborazione, terminando l’istruzione corrente.
I dati elaborati in precedenza al comando di interrupt vengono indirizzati
ed allocati in un apposita area di memoria.
Il microprocessore gestisce l’interrupt (risolve l’emergenza agendo come
da programma).
Risolta l’emergenza, il microprocessore riprende l’attività là dove era stata
interrotta.
Il controllore logico programmabile

69
LETTURA DEGLI
INGRESSI
CARICAMENTO
INGRESSI IN
MEMORIA
ELABORAZIONE DEL
PROGRAMMA
CARICAMENTO
USCITE IN
MEMORIA
ATTUAZIONE
DELLE USCITE
Perché l’immagine in memoria?
Se gli ingressi non venissero campionati ad inizio ciclo
ma letti al momento dell’utilizzo (rete asincrona), la
correttezza del controllo potrebbe dipendere dall’ordine
con cui vengono eseguite le istruzioni del programma.
Difatti, in tempi diversi dall’avviamento del ciclo di
istruzioni, uno stesso ingresso potrebbe assumere
valori differenti. Questo fatto renderebbe piuttosto
complicata l’attività di programmazione, rendendo
altresì molto difficile modificare correttamente il
programma.
Il controllore logico programmabile
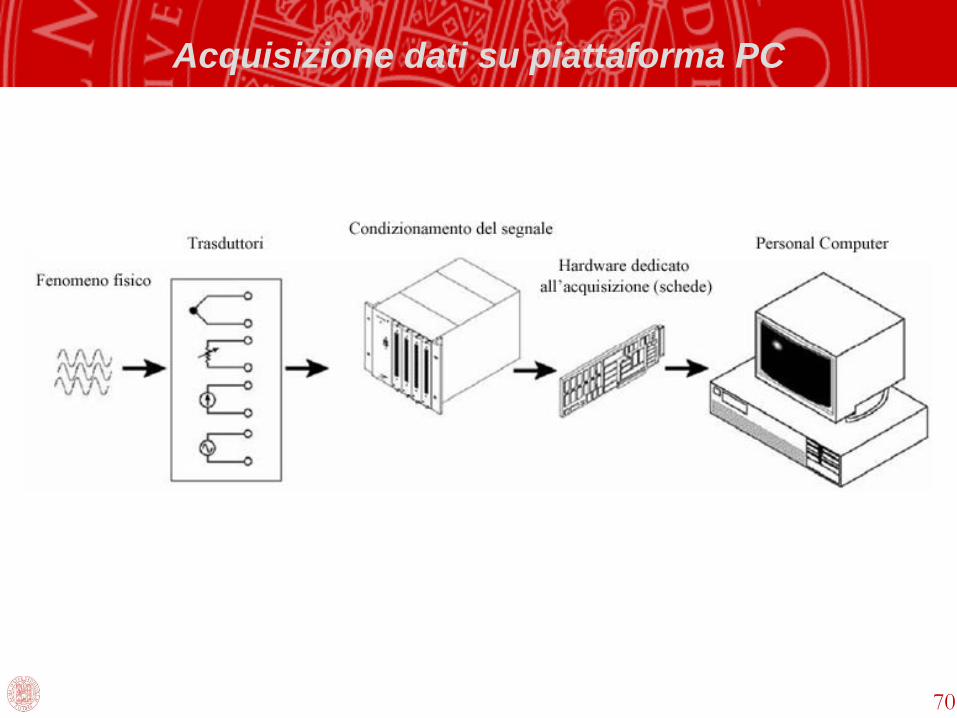
Acquisizione dati su piattaforma PC
70
Acquisizione dati su piattaforma PC
71
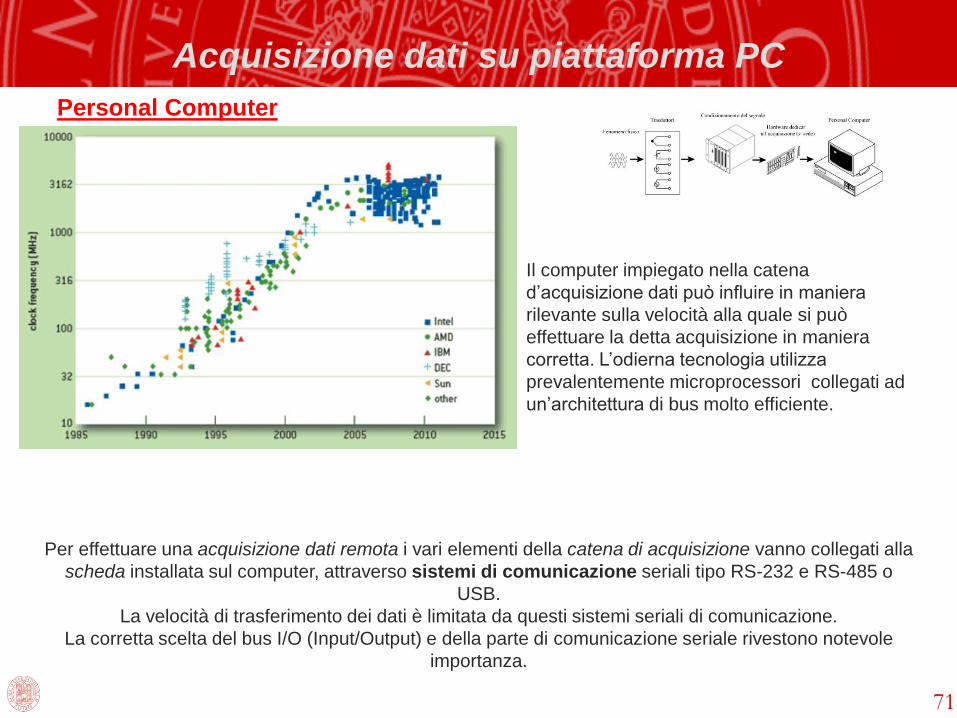
Personal Computer
Il computer impiegato nella catena
d’acquisizione dati può influire in maniera
rilevante sulla velocità alla quale si può
effettuare la detta acquisizione in maniera
corretta. L’odierna tecnologia utilizza
prevalentemente microprocessori collegati ad
un’architettura di bus molto efficiente.
Per effettuare una acquisizione dati remota i vari elementi della catena di acquisizione vanno collegati alla
scheda installata sul computer, attraverso sistemi di comunicazione seriali tipo RS-232 e RS-485 o
USB.
La velocità di trasferimento dei dati è limitata da questi sistemi seriali di comunicazione.
La corretta scelta del bus I/O (Input/Output) e della parte di comunicazione seriale rivestono notevole
importanza.
Acquisizione dati su piattaforma PC
72
Personal Computer
Un personal computer non può permettersi di avere differenti circuiti per le
comunicazioni tra le varie periferiche. La soluzione migliore è l’impiego di un bus.
Il bus è un set comune di fili che connette tra loro tutte le periferiche del computer e tutti
i chips.
Alcuni di questi fili sono utilizzati per trasmettere dati e altri trasmettono un numero
(“l’indirizzo”) che identifica una periferica particolare o una ubicazione nella memoria.
Il computer controlla i segnali portati da questi fili e risponde quando ritrova il numero -
indirizzo corrispondente. Quindi trasferisce i dati sugli altri conduttori.
Nel 1984 l’IBM introduceva sul mercato il suo PC, modello A. La CPU, la memoria ed il
bus di input/output viaggiavano tutti alla stessa velocità, con un clock di 8 MHz e questo
bus di input/output è noto come ISA (Industry Standard Architecture). L’ISA era una
interfaccia a 16-bit, che poteva trasferire solo due byte alla volta, viaggiando a soli 8
MHz.
A fine anni ‘90 sono state sviluppate schede EISA (Extended Industry Standard
Architecture), capaci di trasferire dati a 32 bit (quattro byte per operazione).
I bus I/O

Acquisizione dati su piattaforma PC
73
Personal Computer
Successivamente è diventato uno standard il bus PCI (Peripheral Component
Interconnect) sviluppato da Intel. Il bus PCI è un ambiente a 32 bit. Questo bus
viaggia a 33 MHz e può trasferire 132 MBytes/s.
Attualmente lo standard più usato più diffuso è l’USB (Universal Serial Bus),
che ha avuto l’evoluzione riportata in tabella.
I bus I/O


















