Modulo 1.1 Introduzione e richiami - diem.ing.unibo.it · È buona norma inoltre identificare i...
84
Corso di Strumentazione e Automazione Industriale Modulo 1.1 Introduzione e richiami Prof. Ing. Cesare Saccani Prof. Ing. Augusto Bianchini Ing. Marco Pellegrini Ing. Alessandro Guzzini Department of Industrial Engineering (DIN) - University of Bologna
Transcript of Modulo 1.1 Introduzione e richiami - diem.ing.unibo.it · È buona norma inoltre identificare i...

Corso di Strumentazione e Automazione Industriale
Modulo 1.1
Introduzione e richiami
Prof. Ing. Cesare Saccani
Prof. Ing. Augusto Bianchini
Ing. Marco Pellegrini
Ing. Alessandro Guzzini
Department of Industrial Engineering (DIN) - University of Bologna
Automazione degli impianti: codice pneumatico
Agenda
2
Da Process Flow Diagram (PFD) a Piping &
Instrumentation Design (P&ID) al Quadro Elettrico (QE)
Schemi di regolazione
Esercitazione: regolazione selettiva
La catena di misura
Automazione degli impianti: codice elettrico

Process Flow Diagram (PFD)
La rappresentazione schematica di un impianto e dei processi che vi avvengono è realizzata nel diagramma
o schema di processo dell’impianto (Process Flow Diagram – PFD). All’interno del PFD sono riportati i
componenti principali necessari al funzionamento, le linee di collegamento fra questi, le potenze termiche
scambiate (se presenti) ed le informazioni di processo (portate, temperature e pressioni) delle varie linee.
Per la realizzazione del PFD è buona norma utilizzare diagrammi termodinamici che consentono non solo di
rappresentare il processo fisico ma anche di dimensionare i componenti.
Da PFD a P&ID a QE
PFD e diagramma termodinamico impianto frigorifero
1→2: il fluido viene compresso dallo stato di vapore saturo secco allo stato
di vapore surriscaldato.
2→3: il vapore viene raffreddato fino a condensare.
3→4: il liquido saturo umido, raccolto in un recipiente, subisce una
laminazione fino alla pressione di evaporazione (si ottiene un fluido bifase).
4→1: il fluido, acquistando calore dall’ambiente da raffreddare, evapora.
PFD
Diagramma
termodinamico
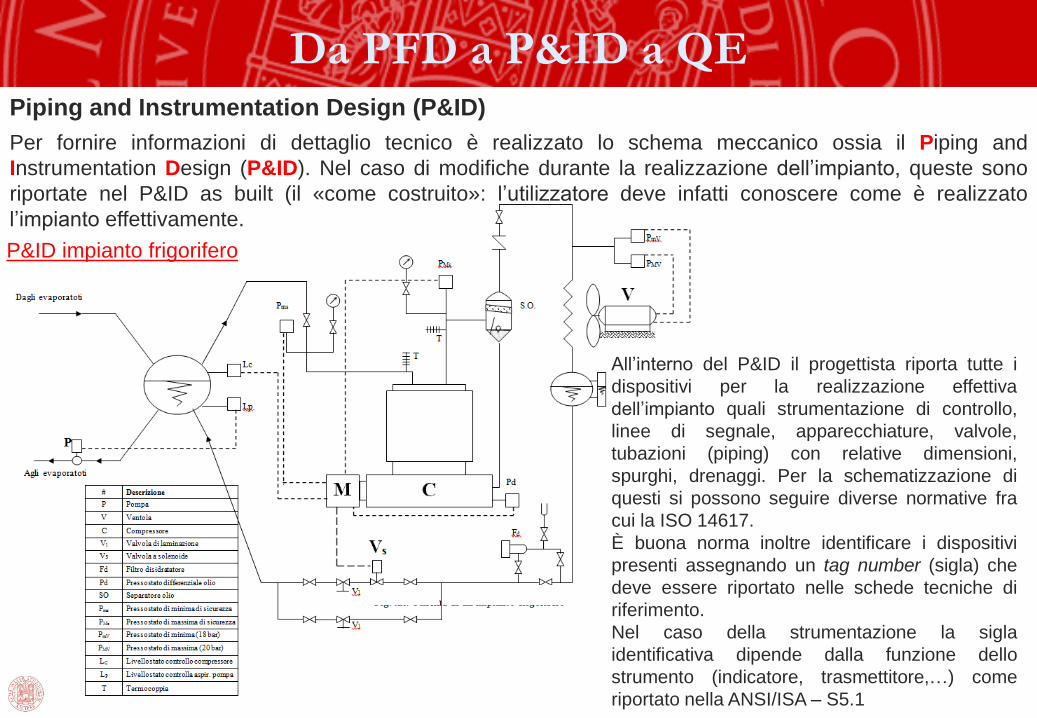
Piping and Instrumentation Design (P&ID)
Per fornire informazioni di dettaglio tecnico è realizzato lo schema meccanico ossia il Piping and
Instrumentation Design (P&ID). Nel caso di modifiche durante la realizzazione dell’impianto, queste sono
riportate nel P&ID as built (il «come costruito»: l’utilizzatore deve infatti conoscere come è realizzato
l’impianto effettivamente.
Da PFD a P&ID a QE
All’interno del P&ID il progettista riporta tutte i
dispositivi per la realizzazione effettiva
dell’impianto quali strumentazione di controllo,
linee di segnale, apparecchiature, valvole,
tubazioni (piping) con relative dimensioni,
spurghi, drenaggi. Per la schematizzazione di
questi si possono seguire diverse normative fra
cui la ISO 14617.
È buona norma inoltre identificare i dispositivi
presenti assegnando un tag number (sigla) che
deve essere riportato nelle schede tecniche di
riferimento.
Nel caso della strumentazione la sigla
identificativa dipende dalla funzione dello
strumento (indicatore, trasmettitore,…) come
riportato nella ANSI/ISA – S5.1
P&ID impianto frigorifero
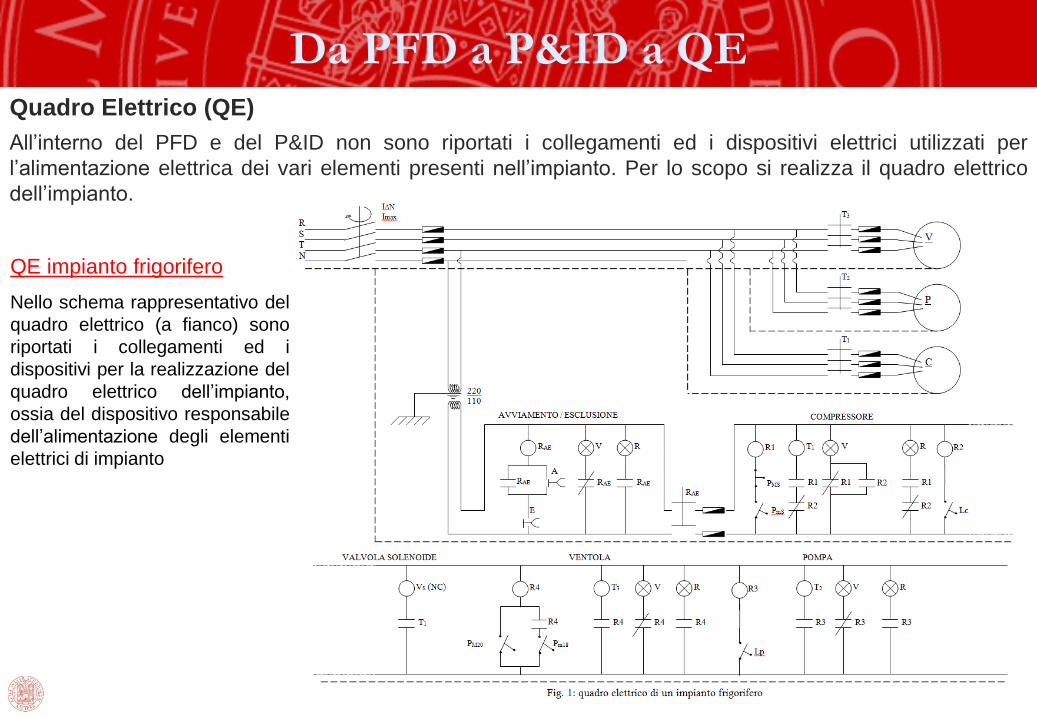
Da PFD a P&ID a QEQuadro Elettrico (QE)
All’interno del PFD e del P&ID non sono riportati i collegamenti ed i dispositivi elettrici utilizzati per
l’alimentazione elettrica dei vari elementi presenti nell’impianto. Per lo scopo si realizza il quadro elettrico
dell’impianto.
QE impianto frigorifero
Nello schema rappresentativo del
quadro elettrico (a fianco) sono
riportati i collegamenti ed i
dispositivi per la realizzazione del
quadro elettrico dell’impianto,
ossia del dispositivo responsabile
dell’alimentazione degli elementi
elettrici di impianto
Automazione degli impianti: codice pneumatico
Agenda
6
Schemi di regolazione
Esercitazione: regolazione selettiva
La catena di misura
Automazione degli impianti: codice elettrico
Da Process Flow Diagram (PFD) a Piping &
Instrumentation Design (P&ID) al Quadro Elettrico (QE)

Automazione degli impianti: architettura di un sistema di misura e controllo
Il controllo e l’automazione di un impianto può essere schematizzato nello schema seguente
dove sono presenti gli elementi principali. L’elemento di misura E deve estrarre la minima
potenza possibile dal sistema per non alterarlo e pertanto, E non potrà comandare direttamente
un attuatore (il quale necessita di potenze maggiori).
Risulta dunque necessario introdurre un regolatore R che si interfaccia tra l’elemento sensibile e
l’attuatore. Per fornite potenza all’attuatore, R viene alimentato da un segnale di potenza.
E
Segnale di
potenza
7
I codici di trasmissione del segnale dal regolatore
all’attuatore possono essere suddivisi in:
1)Codice pneumatico
2)Codice elettrico analogico
3)Codice elettrico digitale
Automazione degli impianti: codice pneumatico
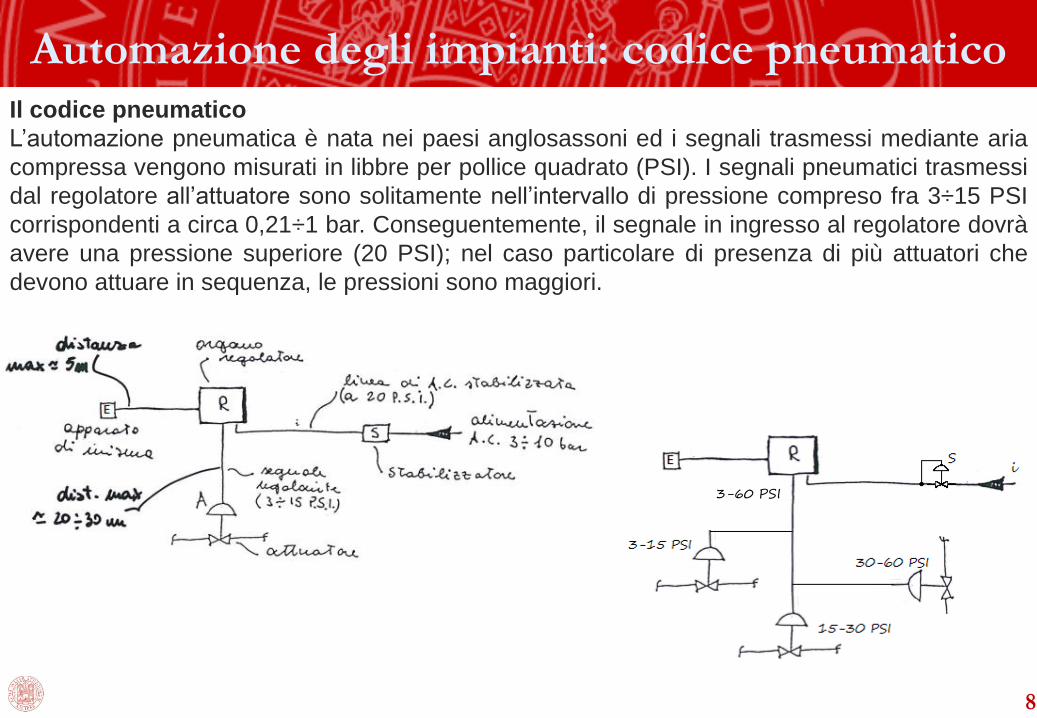
Il codice pneumatico
L’automazione pneumatica è nata nei paesi anglosassoni ed i segnali trasmessi mediante aria
compressa vengono misurati in libbre per pollice quadrato (PSI). I segnali pneumatici trasmessi
dal regolatore all’attuatore sono solitamente nell’intervallo di pressione compreso fra 3÷15 PSI
corrispondenti a circa 0,21÷1 bar. Conseguentemente, il segnale in ingresso al regolatore dovrà
avere una pressione superiore (20 PSI); nel caso particolare di presenza di più attuatori che
devono attuare in sequenza, le pressioni sono maggiori.
3-60 PSI
8
Automazione degli impianti: codice pneumatico
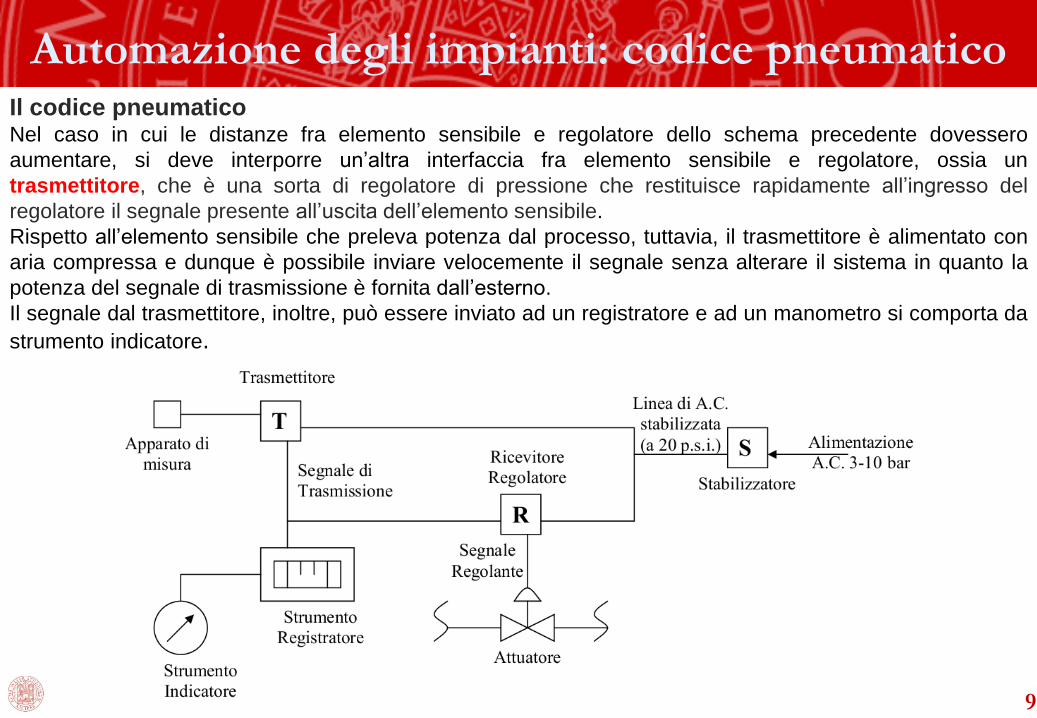
Il codice pneumaticoNel caso in cui le distanze fra elemento sensibile e regolatore dello schema precedente dovessero
aumentare, si deve interporre un’altra interfaccia fra elemento sensibile e regolatore, ossia un
trasmettitore, che è una sorta di regolatore di pressione che restituisce rapidamente all’ingresso del
regolatore il segnale presente all’uscita dell’elemento sensibile.
Rispetto all’elemento sensibile che preleva potenza dal processo, tuttavia, il trasmettitore è alimentato con
aria compressa e dunque è possibile inviare velocemente il segnale senza alterare il sistema in quanto la
potenza del segnale di trasmissione è fornita dall’esterno.
Il segnale dal trasmettitore, inoltre, può essere inviato ad un registratore e ad un manometro si comporta da
strumento indicatore.
9
Automazione degli impianti: codice pneumatico
Il diametro di una tubazione: diametro nominale e pollici
La dimensione delle valvole attuate presenti sull’impianto dipende dalle esigenze di processo. A
tal proposito un’informazione molto importante per la definizione della valvola è la dimensione
dell’otturatore, che solitamente viene espresso in termini di diametro nominale o in pollici.
In idraulica il diametro nominale (simbolo DN) è un valore convenzionale, espresso in mm, con
cui vengono individuati componenti idraulici quali tubazioni, flange, valvole; inoltre, a seconda
del materiale, viene dimensionato in funzione del diametro interno od esterno.
Se il componente idraulico è dimensionato in funzione del suo diametro interno standardizzato
si fa riferimento alla serie DN/ID (standard dimensionali basati sui diametri interni). Se invece è
dimensionato in funzione del suo diametro esterno standardizzato viene riferito alla
serie DN/OD. Il costruttore deve indicare se il DN si riferisce alla serie DN/ID o DN/OD.
In generale per le tubazioni vale la seguente convenzione:
• ghisa sferoidale: DN/ID
• gres: DN/ID
• fibrocemento: DN/ID
• plastiche (PVC, PEAD): DN/OD
• acciaio: DN/ID
Attenzione: il pollice cui si fa riferimento in idraulica non è lo stesso utilizzato in altri settori e
non vale 2,54 cm.
10
Automazione degli impianti: codice pneumatico
11
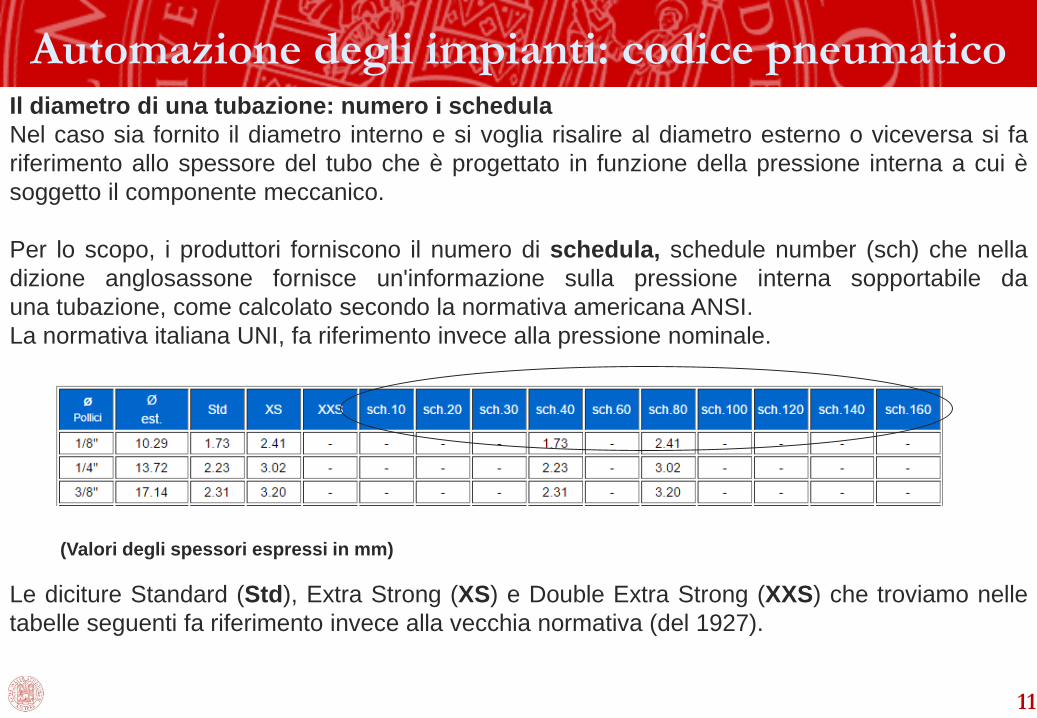
Il diametro di una tubazione: numero i schedula
Nel caso sia fornito il diametro interno e si voglia risalire al diametro esterno o viceversa si fa
riferimento allo spessore del tubo che è progettato in funzione della pressione interna a cui è
soggetto il componente meccanico.
Per lo scopo, i produttori forniscono il numero di schedula, schedule number (sch) che nella
dizione anglosassone fornisce un'informazione sulla pressione interna sopportabile da
una tubazione, come calcolato secondo la normativa americana ANSI.
La normativa italiana UNI, fa riferimento invece alla pressione nominale.
Le diciture Standard (Std), Extra Strong (XS) e Double Extra Strong (XXS) che troviamo nelle
tabelle seguenti fa riferimento invece alla vecchia normativa (del 1927).
(Valori degli spessori espressi in mm)
Automazione degli impianti: codice pneumatico
12
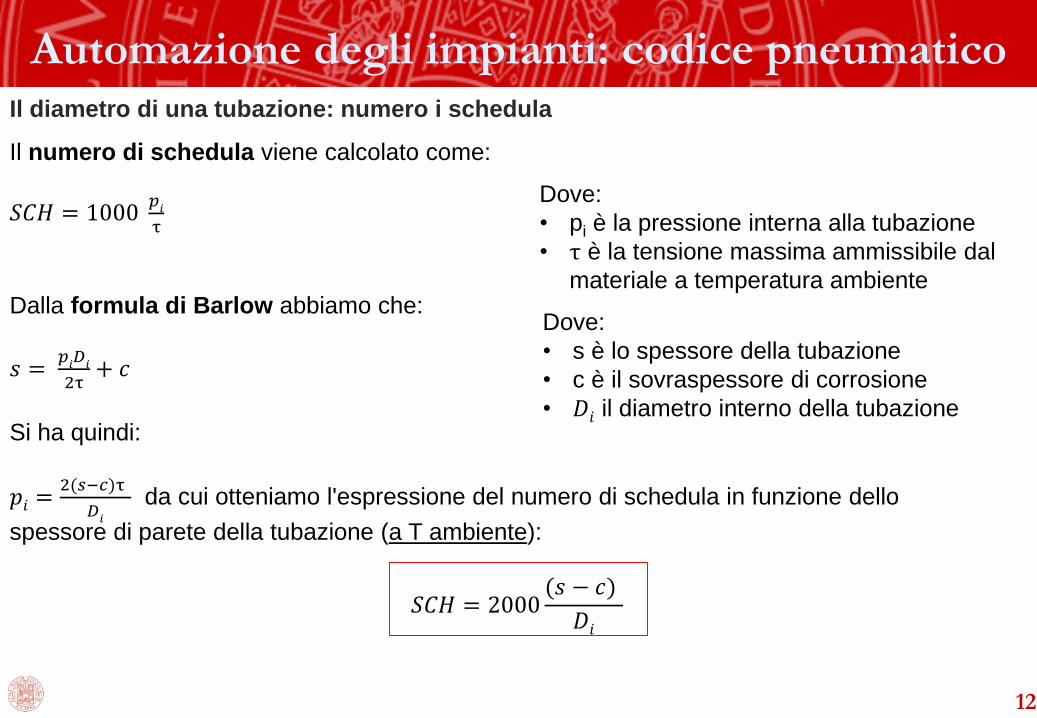
Il diametro di una tubazione: numero i schedula
Il numero di schedula viene calcolato come:
𝑆𝐶𝐻 = 1000𝑝𝑖
τ
Dalla formula di Barlow abbiamo che:
𝑠 =𝑝𝑖𝐷𝑖
2τ+ 𝑐
Si ha quindi:
𝑝𝑖 =2(𝑠−𝑐)τ
𝐷𝑖
da cui otteniamo l'espressione del numero di schedula in funzione dello
spessore di parete della tubazione (a T ambiente):
𝑆𝐶𝐻 = 2000(𝑠 − 𝑐)
𝐷𝑖
Dove:
• pi è la pressione interna alla tubazione
• τ è la tensione massima ammissibile dal
materiale a temperatura ambiente
Dove:
• s è lo spessore della tubazione
• c è il sovraspessore di corrosione
• 𝐷𝑖 il diametro interno della tubazione
Automazione degli impianti: codice pneumatico
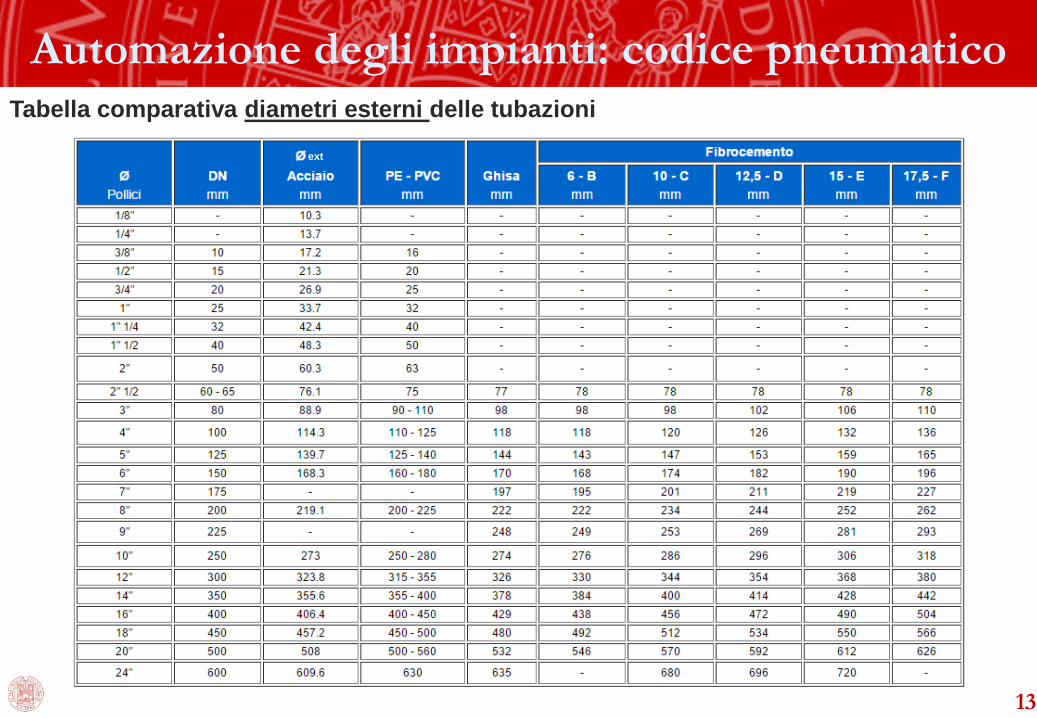
Tabella comparativa diametri esterni delle tubazioni
13
ext
Automazione degli impianti: codice pneumatico
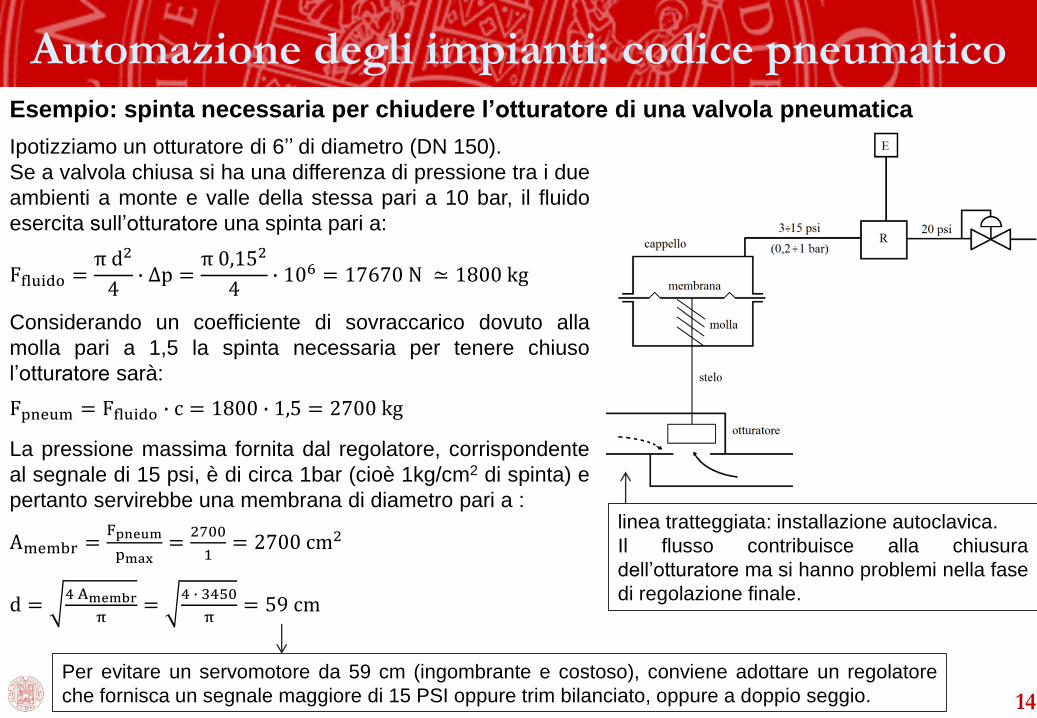
Esempio: spinta necessaria per chiudere l’otturatore di una valvola pneumatica
Ipotizziamo un otturatore di 6’’ di diametro (DN 150).
Se a valvola chiusa si ha una differenza di pressione tra i due
ambienti a monte e valle della stessa pari a 10 bar, il fluido
esercita sull’otturatore una spinta pari a:
Ffluido =π d2
4∙ ∆p =
π 0,152
4∙ 106 = 17670 N ≃ 1800 kg
Considerando un coefficiente di sovraccarico dovuto alla
molla pari a 1,5 la spinta necessaria per tenere chiuso
l’otturatore sarà:
Fpneum = Ffluido ∙ c = 1800 ∙ 1,5 = 2700 kg
La pressione massima fornita dal regolatore, corrispondente
al segnale di 15 psi, è di circa 1bar (cioè 1kg/cm2 di spinta) e
pertanto servirebbe una membrana di diametro pari a :
Amembr =Fpneum
pmax=
2700
1= 2700 cm2
d =4 Amembr
π=
4 ∙ 3450
π= 59 cm
linea tratteggiata: installazione autoclavica.
Il flusso contribuisce alla chiusura
dell’otturatore ma si hanno problemi nella fase
di regolazione finale.
Per evitare un servomotore da 59 cm (ingombrante e costoso), conviene adottare un regolatore
che fornisca un segnale maggiore di 15 PSI oppure trim bilanciato, oppure a doppio seggio. 14
Automazione degli impianti: codice pneumatico
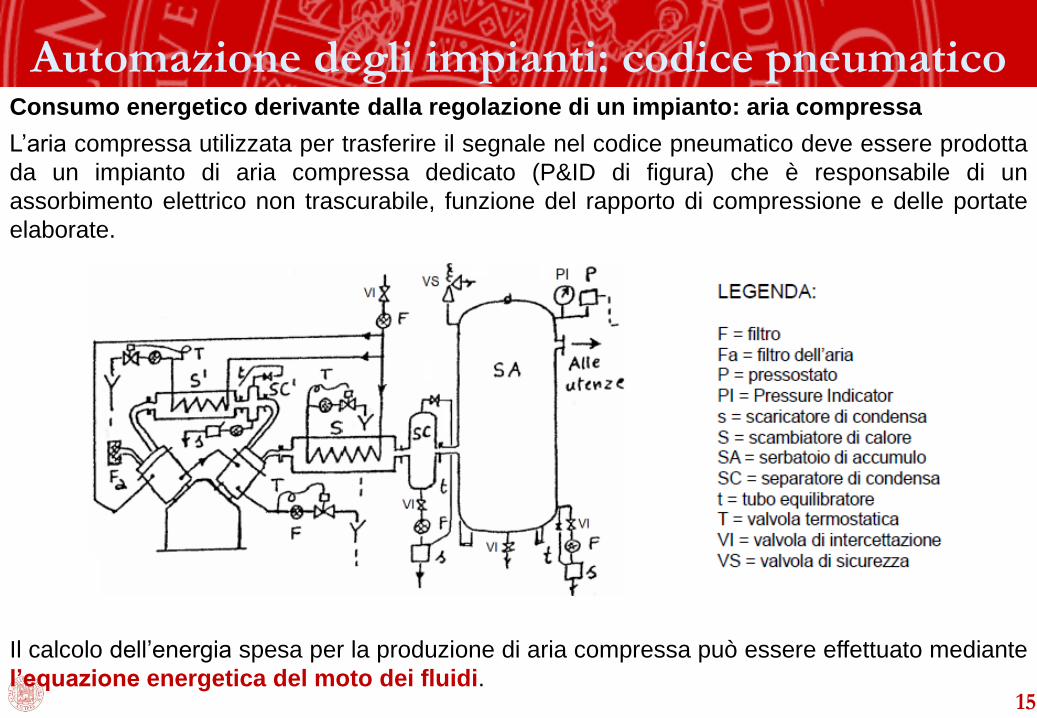
Consumo energetico derivante dalla regolazione di un impianto: aria compressa
L’aria compressa utilizzata per trasferire il segnale nel codice pneumatico deve essere prodotta
da un impianto di aria compressa dedicato (P&ID di figura) che è responsabile di un
assorbimento elettrico non trascurabile, funzione del rapporto di compressione e delle portate
elaborate.
15
Il calcolo dell’energia spesa per la produzione di aria compressa può essere effettuato mediante
l’equazione energetica del moto dei fluidi.
Automazione degli impianti: codice pneumatico
Automazione degli impianti: codice pneumatico
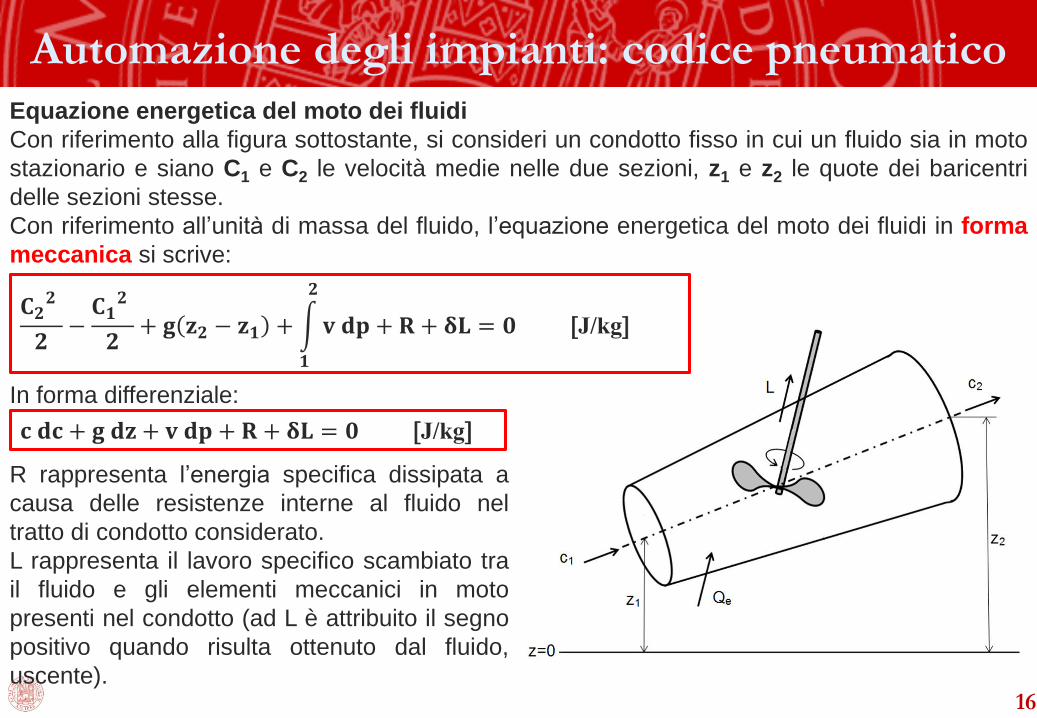
Equazione energetica del moto dei fluidi
Con riferimento alla figura sottostante, si consideri un condotto fisso in cui un fluido sia in moto
stazionario e siano C1 e C2 le velocità medie nelle due sezioni, z1 e z2 le quote dei baricentri
delle sezioni stesse.
Con riferimento all’unità di massa del fluido, l’equazione energetica del moto dei fluidi in forma
meccanica si scrive:
In forma differenziale:
R rappresenta l’energia specifica dissipata a
causa delle resistenze interne al fluido nel
tratto di condotto considerato.
L rappresenta il lavoro specifico scambiato tra
il fluido e gli elementi meccanici in moto
presenti nel condotto (ad L è attribuito il segno
positivo quando risulta ottenuto dal fluido,
uscente).
𝐂𝟐𝟐
𝟐−𝐂𝟏
𝟐
𝟐+ 𝐠 𝐳𝟐 − 𝐳𝟏 +න
𝟏
𝟐
𝐯 𝐝𝐩 + 𝐑 + 𝛅𝐋 = 𝟎 [J/kg]
𝐜 𝐝𝐜 + 𝐠 𝐝𝐳 + 𝐯 𝐝𝐩 + 𝐑 + 𝛅𝐋 = 𝟎 [J/kg]
16
Automazione degli impianti: codice pneumatico
Nell’equazione energetica del moto dei fluidi in forma meccanica sono presenti più termini:
𝐂𝟐𝟐
𝟐−𝐂𝟏
𝟐
𝟐+ 𝐠 𝐳𝟐 − 𝐳𝟏 +න
𝟏
𝟐
𝐯(𝐩) 𝐝𝐩 + 𝐑 + 𝛅𝐋 = 𝟎 [J/kg]
17
In particolare, oltre alle perdite di carico ed al lavoro sono presenti:
• Termine energia cinetica 𝑐2/2;
• Termine energia potenziale gz;
Il termine integrale si sviluppa in maniera differente in funzione della comprimibilità o meno del fluido; infatti
vale:
• Fluido incomprimibile: v = cost
න
𝟏
𝟐
𝐯(𝐩) 𝐝𝐩 = v(𝑝2 − 𝑝1)
• Fluido comprimibile: v = v(p), ossia il volume specifico del fluido è funzione della pressione secondo
una legge che dipende dalla trasformazione eseguita; in particolare si può avere:
• Trasformazione isoterma: 𝑝𝑣 = 𝑐𝑜𝑠𝑡;• Trasformazione isoentropica: 𝑝𝑣𝑘 = 𝑐𝑜𝑠𝑡;• Trasformazione politropica: 𝑝𝑣𝑛 = 𝑐𝑜𝑠𝑡.
Dove k ( = cp/cv) e n sono rispettivamente gli indici della trasformazione isoentropica e politropica. Nel
caso di fluido comprimibile, l’integrale andrà risolto in funzione della trasformazione eseguita
Automazione degli impianti: codice pneumaticoEsempio: sviluppo dell’integrale nel caso di trasformazione isoentropica
Nel caso di trasformazione isoentropica, se si considera un generico stato del fluido all’interno della
trasformazione a partire dallo stato iniziale 0 si può scrivere:
𝑝𝑣𝑘 = 𝑝0𝑣0𝑘 → 𝑣𝑘 =
𝑝0𝑝𝑣0𝑘 → 𝑣 =
𝑝0𝑝
1𝑘
𝑣0
Il termine integrale dunque diventa:
න
𝟏
𝟐
𝐯(𝐩) 𝐝𝐩 = 𝒗𝟎න
𝟏
𝟐𝑝0𝑝
1𝑘
𝐝𝐩 = 𝒗𝟎𝒑𝟎
𝟏𝒌න
𝟏
𝟐1
𝑝
1𝑘
𝐝𝐩 =p0
1k
𝜌0
p1−
1k
1 −1k p1
p2
Dove 𝜌0 = 1/𝑣0 è la densità del fluido nelle condizioni iniziali [kg/m^3]. Per il calcolo del termine, dunque,
occorre conoscere la densità del fluido a inizio trasformazione.
18
Automazione degli impianti: codice pneumaticoEsempio: calcolo della densità dell’aria in condizioni ambientali
Si consideri la trasformazione per la produzione di aria compressa.
La densità dell’aria in aspirazione al compressore (Tamb, pamb) è dovuta alla presenza principalmente di due
gas: azoto (77% in mol) e ossigeno (23% in mol). Nella realtà nell’aria ambiente sono presenti anche altri
gas la cui presenza, date la limitata quantità, viene trascurata per il calcolo.
Il peso molecolare di una mole di aria μa può essere calcolato come:
𝜇𝑎 = 𝑤02𝜇02 + 𝑤𝑁2𝜇𝑁2 = 0,23 × 32 + 0,77 × 28 = 28,92 𝑘𝑔/𝑘𝑚𝑜𝑙
Dove μO2 e μN2 sono rispettivamente la massa molare della molecola di ossigeno e di azoto mentre w è la
concentrazione molare.
Dalla legge dei gas ideali deriva inoltre che:
𝑝𝑣 = 𝑛𝑅0𝑇 = RT → 𝜌 =𝑝
𝑅𝑇
Dove R0 è la costante universale dei gas pari a 8,314 kJ/(K x mol) e n è il numero di molecole presenti. R
può essere ricavato da R0 dalla seguente:
𝑅 =𝑅0𝜇→ 𝑅𝑎 =
𝑅0𝜇𝑎
=8314
28,92= 287,5
𝐽
𝑘𝑔𝐾
Sostituendo nell’espressione precedente ed identificando come pressione e temperatura quelle ambiente (1
bar e 25 °C) si ha:
𝜌 =𝑝
𝑅𝑇=
1 × 101325
287,5 × (25 + 273,15)= 1,18 𝑘𝑔/𝑚3
19
Automazione degli impianti: codice pneumatico
Dalla forma meccanica alla forma termica:
definizione di entalpia) h = u + p v → dh = du + p dv + v dp1° principio termodinamica) δq = du + p dv
𝐝𝐡 = 𝛅𝐪 + 𝐯 𝐝𝐩 (𝟏)
Inoltre:
𝐪 = 𝐐𝐞 + 𝐑 (𝟐)
Mentre Qe rappresenta l’energia termica specifica, scambiata dal sistema solo con l’esterno
(irraggiamento, convezione ,…), q rappresenta l’energia termica specifica totale ricevuta o
ceduta dall’intero sistema, ovvero data dalla somma algebrica del calore scambiato con
l’esterno Qe e dalle dissipazioni in calore R dovute alle trasformazioni interne.
Dalla (1) e dalla (2) si ottiene l’espressione: 𝐯 𝐝𝐩 = 𝐝𝐡 − 𝛅𝐐𝐞 − 𝐑.
Introducendo tale relazione nell’equazione energetica del moto dei fluidi in forma meccanica, si
ottiene la forma termica di tale equazione.
c dc + g dz + v dp + R + δL = 0 → 𝐜 𝐝𝐜 + 𝐠 𝐝𝐳 + 𝐝𝐡 = 𝛅𝐐𝐞 − 𝛅𝐋 [J/kg]
20

Automazione degli impianti: codice pneumaticoConsumo energetico derivante dalla regolazione di un impianto: presenza di valvole
Si supponga di dover regolare la portata d’acqua all’interno di un circuito idraulico, per esempio
in un impianto di pompaggio. Per il controllo della portata si decide di utilizzare una valvola
regolatrice che apre o chiude in funzione dello scostamento fra valore desiderato e valore
misurato per esempio da un diaframma.
La presenza in linea di una valvola utilizzata comporta una perdita di carico Δp in [Pa], ossia
una perdita di potenza P [W] e dunque un consumo di energia E [Wh]. Occorre ricordare che la
perdita di carico, sebbene inferiore rispetto alle condizioni di valvola in regolazione, è presente
anche nel caso di valvola completamente aperta!
21
Qualunque elemento che determina una caduta di pressione, dunque, è responsabile di un
consumo energetico. Si rende quindi necessario calcolare le perdite di carico provocate.
∆p
G, [kg/s]
𝑷 =𝑮 × ∆𝒑
𝜼𝒆𝒍
Nell’espressione ηel è il rendimento elettrico
della pompa.
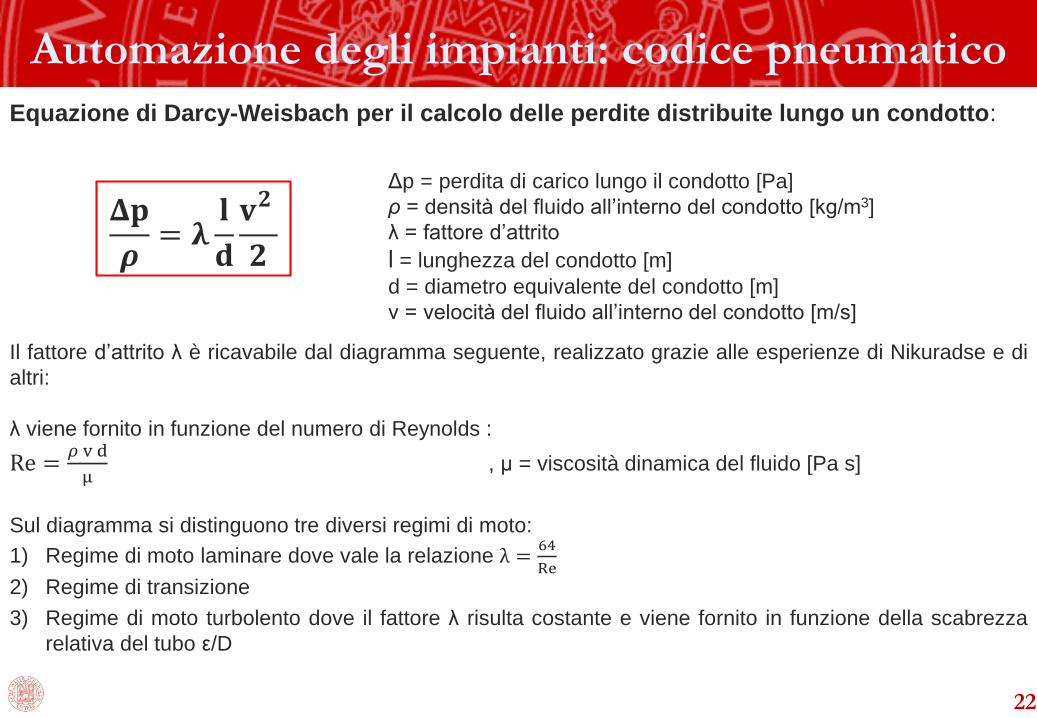
Equazione di Darcy-Weisbach per il calcolo delle perdite distribuite lungo un condotto:
Δp = perdita di carico lungo il condotto [Pa]
ρ = densità del fluido all’interno del condotto [kg/m3]
λ = fattore d’attrito
l = lunghezza del condotto [m]
d = diametro equivalente del condotto [m]
v = velocità del fluido all’interno del condotto [m/s]
𝚫𝐩
𝝆= 𝛌
𝐥
𝐝
𝐯𝟐
𝟐
Il fattore d’attrito λ è ricavabile dal diagramma seguente, realizzato grazie alle esperienze di Nikuradse e di
altri:
λ viene fornito in funzione del numero di Reynolds :
Re =𝜌 v d
μ, μ = viscosità dinamica del fluido [Pa s]
Sul diagramma si distinguono tre diversi regimi di moto:
1) Regime di moto laminare dove vale la relazione λ =64
Re
2) Regime di transizione
3) Regime di moto turbolento dove il fattore λ risulta costante e viene fornito in funzione della scabrezza
relativa del tubo ε/D
22
Automazione degli impianti: codice pneumatico
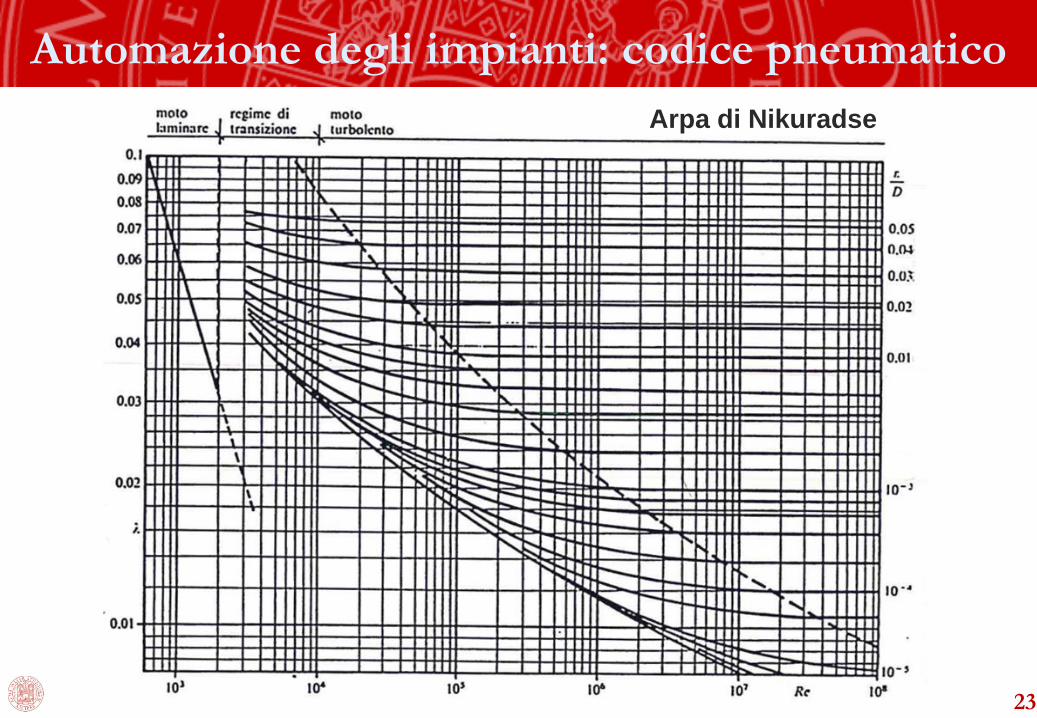
Arpa di Nikuradse
23
Automazione degli impianti: codice pneumatico
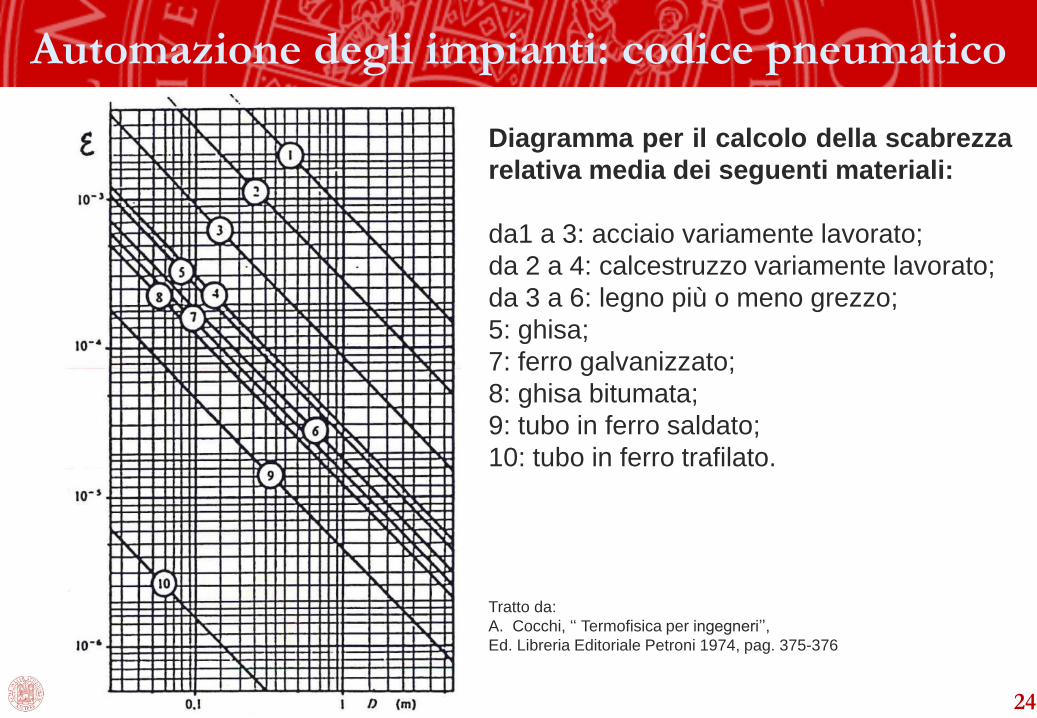
Diagramma per il calcolo della scabrezza
relativa media dei seguenti materiali:
da1 a 3: acciaio variamente lavorato;
da 2 a 4: calcestruzzo variamente lavorato;
da 3 a 6: legno più o meno grezzo;
5: ghisa;
7: ferro galvanizzato;
8: ghisa bitumata;
9: tubo in ferro saldato;
10: tubo in ferro trafilato.
Tratto da:
A. Cocchi, ‘‘ Termofisica per ingegneri’’,
Ed. Libreria Editoriale Petroni 1974, pag. 375-376
24
Automazione degli impianti: codice pneumatico
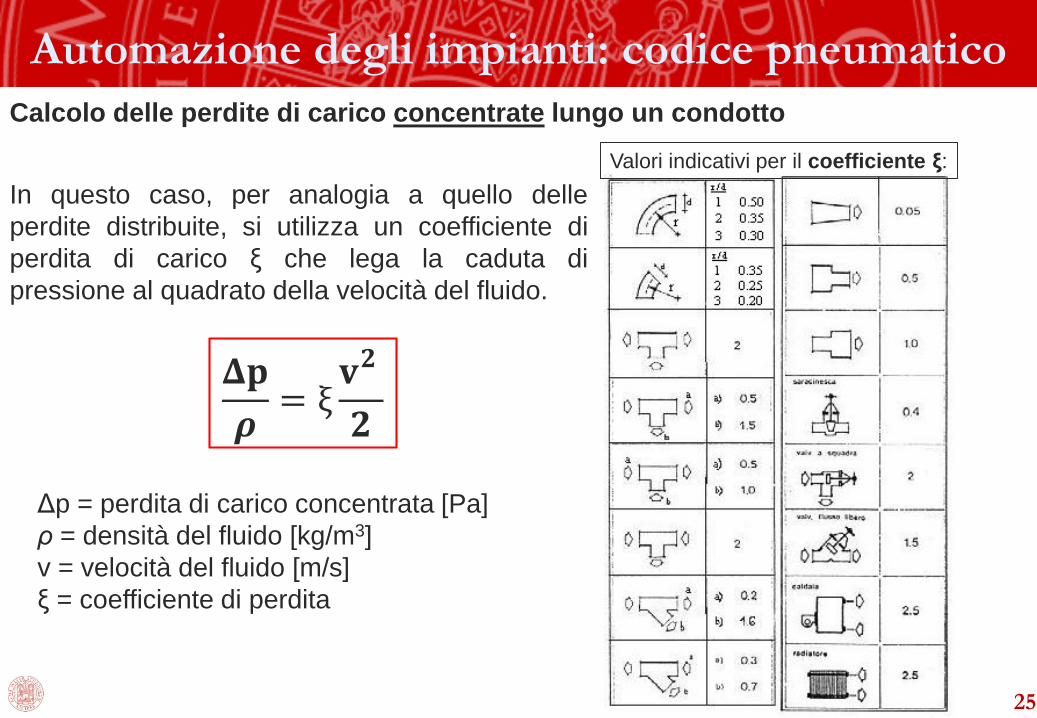
Calcolo delle perdite di carico concentrate lungo un condotto
Δp = perdita di carico concentrata [Pa]
ρ = densità del fluido [kg/m3]
v = velocità del fluido [m/s]
ξ = coefficiente di perdita
𝚫𝐩
𝝆= ξ
𝐯𝟐
𝟐
Valori indicativi per il coefficiente ξ:
In questo caso, per analogia a quello delle
perdite distribuite, si utilizza un coefficiente di
perdita di carico ξ che lega la caduta di
pressione al quadrato della velocità del fluido.
25
Automazione degli impianti: codice pneumatico

Δp = perdita di carico concentrata [Pa]
ρ = densità del fluido [kg/m3]
v = velocità del fluido [m/s]
ξ = coefficiente di perdita
λ = fattore d’attrito
leq = lunghezza equivalente dell’accidentalità [m]
d = diametro equivalente [m]
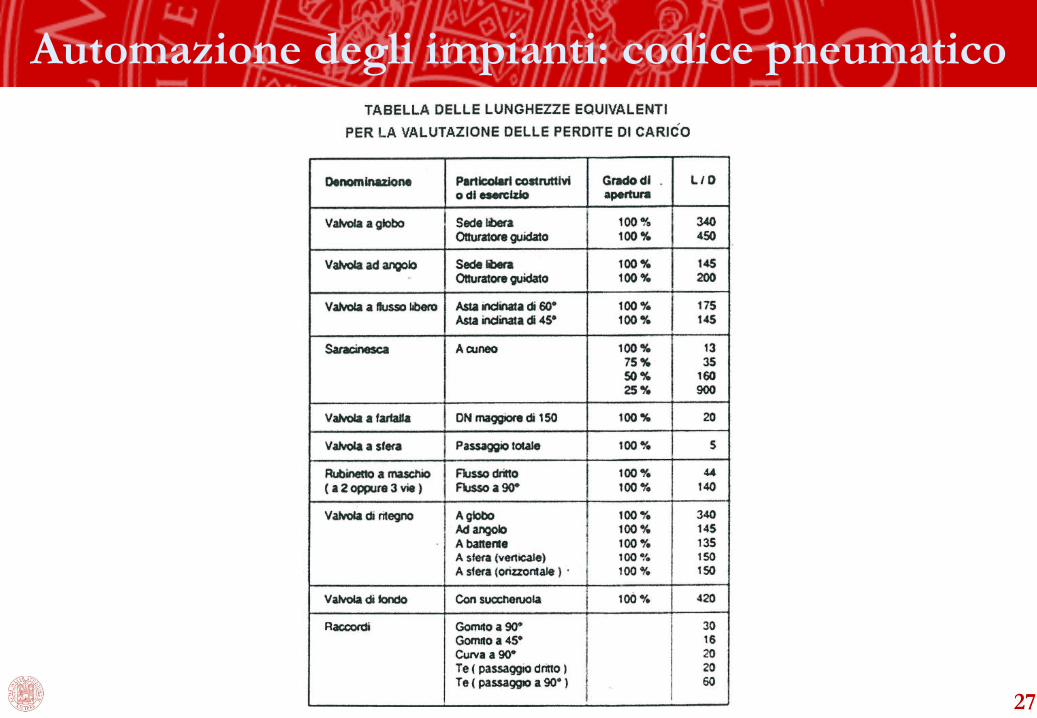
Lunghezza equivalente
In alternativa al coefficiente di perdita ξ, si può associare ad ogni accidentalità una
lunghezza di condotto equivalente.
𝚫𝐩
𝝆= ξ
𝐯𝟐
𝟐
𝚫𝐩
𝝆= 𝛌
𝐥𝐞𝐪𝐝
𝐯𝟐
𝟐oppure
ξ = 𝛌𝐥𝐞𝐪𝐝
Dove ξ è proporzionale a λ ed alla lunghezza del condotto, espressa in numero di diametri.
26
Automazione degli impianti: codice pneumatico
27
Automazione degli impianti: codice pneumatico

Automazione degli impianti: codice pneumatico
Agenda
28
Da PFD a P&ID a QE
Schemi di regolazione
Esercitazione: regolazione selettiva
La catena di misura
Automazione degli impianti: codice elettrico
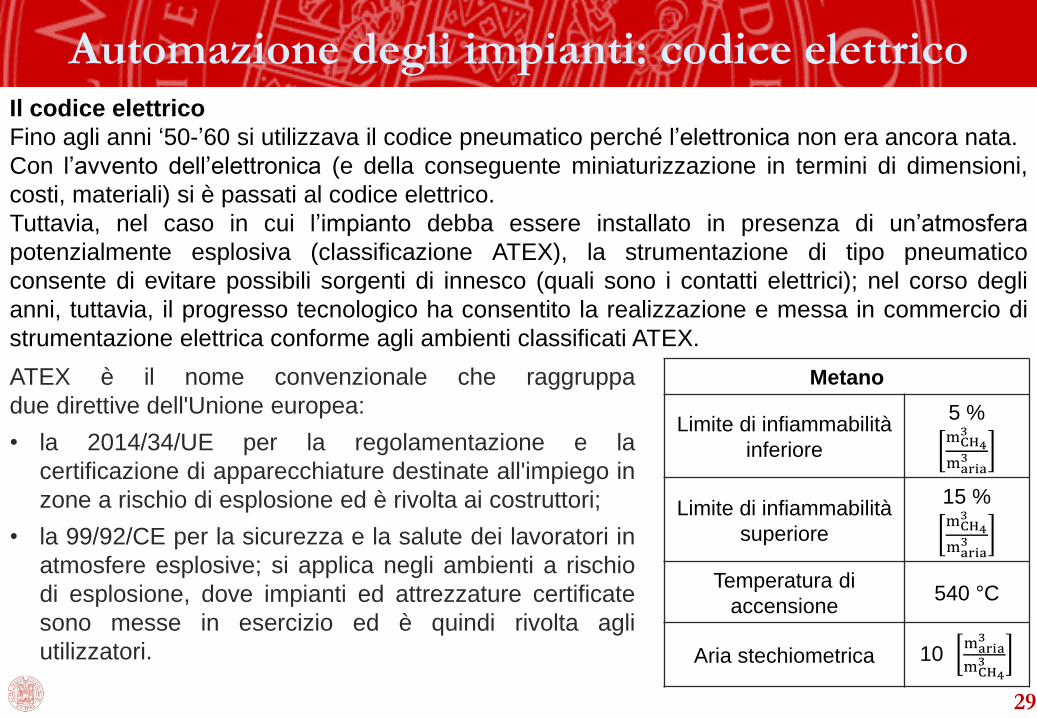
Il codice elettrico
Fino agli anni ‘50-’60 si utilizzava il codice pneumatico perché l’elettronica non era ancora nata.
Con l’avvento dell’elettronica (e della conseguente miniaturizzazione in termini di dimensioni,
costi, materiali) si è passati al codice elettrico.
Tuttavia, nel caso in cui l’impianto debba essere installato in presenza di un’atmosfera
potenzialmente esplosiva (classificazione ATEX), la strumentazione di tipo pneumatico
consente di evitare possibili sorgenti di innesco (quali sono i contatti elettrici); nel corso degli
anni, tuttavia, il progresso tecnologico ha consentito la realizzazione e messa in commercio di
strumentazione elettrica conforme agli ambienti classificati ATEX.
Automazione degli impianti: codice elettrico
Metano
Limite di infiammabilità
inferiore
5 %mCH43
maria3
Limite di infiammabilità
superiore
15 %mCH43
maria3
Temperatura di
accensione540 °C
Aria stechiometrica 10 maria3
mCH43
ATEX è il nome convenzionale che raggruppa
due direttive dell'Unione europea:
• la 2014/34/UE per la regolamentazione e la
certificazione di apparecchiature destinate all'impiego in
zone a rischio di esplosione ed è rivolta ai costruttori;
• la 99/92/CE per la sicurezza e la salute dei lavoratori in
atmosfere esplosive; si applica negli ambienti a rischio
di esplosione, dove impianti ed attrezzature certificate
sono messe in esercizio ed è quindi rivolta agli
utilizzatori.
29

Il codice elettrico analogico
Con la comunicazione mediante codice elettrico, all’uscita dei regolatori si utilizza un codice in
corrente o un codice in tensione: nel caso di codice in tensione l’intervallo di segnali che arriva
all’attuatore è 0-10 V, mentre nel caso di codice in corrente è 4-20 mA.
• Comunicazione in tensione: 0 - 10V
Quando la natura del segnale proveniente dallo strumento
di misura è in tensione, il regolatore utilizza un codice
elettrico in tensione, per evitare di introdurre errori a seguito
di passaggi di conversione.
È importante osservare che nel caso di comunicazione in
tensione si induce un errore sistematico (ineliminabile
perché è l’architettura del sistema che lo impone) variabile
ΔV. La caduta di tensione lungo i cavi è variabile perché
dipende dalla corrente che circola.
Questa, a sua volta è funzione della differenza di tensione
ai capi del circuito che è funzione del segnale ricevuto al
regolatore dall’elemento sensibile.
30
Automazione degli impianti: codice elettrico
𝟎 ± ∆𝑽𝟏𝟎 ± ∆𝑽′
R
0-10 V
Doppino
Il codice elettrico analogico
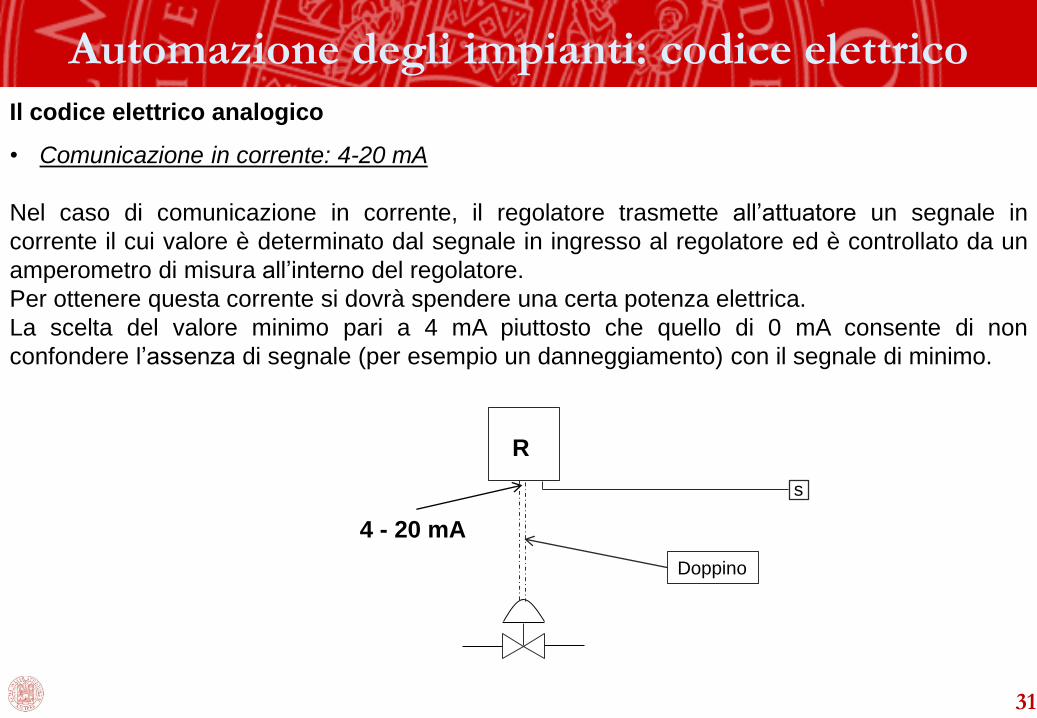
• Comunicazione in corrente: 4-20 mA
Nel caso di comunicazione in corrente, il regolatore trasmette all’attuatore un segnale in
corrente il cui valore è determinato dal segnale in ingresso al regolatore ed è controllato da un
amperometro di misura all’interno del regolatore.
Per ottenere questa corrente si dovrà spendere una certa potenza elettrica.
La scelta del valore minimo pari a 4 mA piuttosto che quello di 0 mA consente di non
confondere l’assenza di segnale (per esempio un danneggiamento) con il segnale di minimo.
31
R
Doppino
s
4 - 20 mA
Automazione degli impianti: codice elettrico
Il codice elettrico digitale.
A differenza del codice elettrico analogico, in cui il segnale assume un qualsiasi valore
all’interno dell’intervallo definito (in corrente o in tensione), il segnale digitale è un segnale in
tensione discreto che assume due valore, per esempio 0V e 5V.
La strumentazione analogica deve avere un convertitore A/D per le comunicazioni con un PLC o
un PC. Viceversa un PC o un PLC per comunicare con un attuatore analogico deve disporre di
un convertitore D/A.
I convertitori A/D e D/A sono caratterizzati da due parametri:
• Numero di campionamenti nell’unità di tempo. Definisce ogni quanto tempo vado a
campionare il segnale.
• Numero di bit. Rappresenta in quanti intervalli si va a suddividere il campo di variazione
massima della variabile.
Andando a campionare un segnale analogico si ottiene un segnale digitale caratterizzato da un
unico valore per ogni intervallo di campionamento.
Più frequentemente vado a campionare l’onda analogica, tanto maggiore è il numero di bit
utilizzato e tanto migliore sarà l’approssimazione dell’onda analogica con un’onda quadra.
32
Automazione degli impianti: codice elettrico

Il codice elettrico digitale
La scelta della comunicazione digitale rispetto alla comunicazione analogica comporta alcuni
vantaggi fra cui:
• Non è influenzata dal rumore elettrico che nel caso analogico obbliga l’utilizzo di cavi armati
con conseguente aumento dei costi.
• Si può comunicare più di un’informazione dal singolo strumento; nel caso analogico è
necessario utilizzare un doppino diverso per ogni informazione ricevuta e inviata dallo
strumento alla sala comandi. In questo caso si ha una riduzione dei costi di cablatura.
• Un singolo doppino può trasferire più di un’informazione da più di uno strumento fra cui
anche lo stato dello strumento derivante da diagnostica.
• È una comunicazione bidirezionale. Posso ricevere informazioni dallo strumento, ma posso
anche inviare comandi allo strumento. Questa proprietà è di fondamentale importanza
laddove l’impianto si trovi in ambienti difficilmente raggiungibili o ad elevato rischio per
l’operatore.
Nonostante questi indubbi vantaggi, la comunicazione analogica è ancora molto utilizzata a
causa del costo maggiore degli strumenti digitali rispetto agli strumenti analogici.
33
Automazione degli impianti: codice elettrico
Automazione degli impianti: codice pneumatico
Agenda
34
Da PFD a P&ID a QE
Schemi di regolazione
Esercitazione: regolazione selettiva
La catena di misura
Automazione degli impianti: codice elettrico

Catena di misura
La catena di misura
35
Ci si avvale di un fenomeno
naturale per leggere una variabile
cercando di perturbare il meno
possibile il mezzo
È necessario trasdurre la variabile in
una variabile che possa essere
misurata e manipolata
È necessario condizionare il
segnale acquisito:
1)Cambio scala
2)Conversione del codice
(1) (2) (3) (4) (5)

Catena di misuraEsempio di catena di misura: si supponga di volere misurare la temperatura in un mezzo e per lo scopo si
decida di utilizzare un termometro a mercurio. Si descrivono sotto gli elementi presenti riportati nella slide
precedente:
1. Il mezzo: è il sistema in cui inseriamo l’elemento sensibile e del quale vogliamo misurare la temperatura;
2. Elemento sensibile primario: è un oggetto selezionato dall’uomo perché ha certe caratteristiche tuttavia
non è quasi mai di per sé sufficiente a determinare la misura;
3. Elemento di conversione della variabile: è il trasduttore. Nel caso del termometro a mercurio si
trasduce una variazione di temperatura in una variazione di volume secondo la legge V = V0 x (1+αT),
dove V0 è il volume nelle condizioni di riferimento e α è il coefficiente di dilatazione che è necessario
conoscere; infatti, se la legge di trasferimento non è chiara la catena di misura non ha alcun senso;
4. Elemento di manipolazione della variabile: nel caso proposto il termometro a mercurio trasduce una
variazione di volume che sarebbe illeggibile nel caso in cui questa fosse contenuta in un serbatoio. Per
evitare questa condizione, si inserisce il mercurio all’interno di un volume che ne amplifica le dilatazioni
o contrazioni assiali in caso di variazione di temperatura (amplificazione dei dati);
5. Elemento di trasmissione dei dati: la variazione di volume del mercurio potrebbe essere collegato ad un
segnale elettrico o fisico che comporta lo spostamento di una lancetta e dunque la trasmissione dei dati.
Nel caso di codice pneumatico, la variazione di temperatura determina lo spostamento di una paletta
che apre o chiude un orifizio alimentato con aria compressa;
6. Elemento di presentazione dei dati: nel caso del termometro a mercurio è la scala graduata che
consente di leggere il valore.
La catena di misura
36
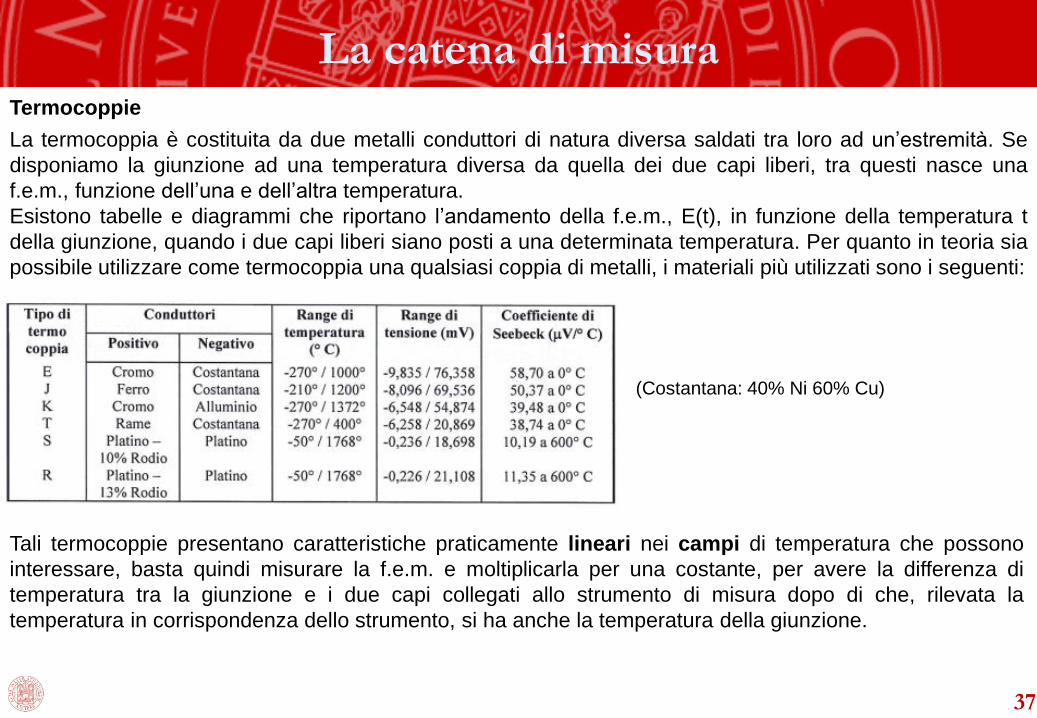
Tali termocoppie presentano caratteristiche praticamente lineari nei campi di temperatura che possono
interessare, basta quindi misurare la f.e.m. e moltiplicarla per una costante, per avere la differenza di
temperatura tra la giunzione e i due capi collegati allo strumento di misura dopo di che, rilevata la
temperatura in corrispondenza dello strumento, si ha anche la temperatura della giunzione.
Termocoppie
La termocoppia è costituita da due metalli conduttori di natura diversa saldati tra loro ad un’estremità. Se
disponiamo la giunzione ad una temperatura diversa da quella dei due capi liberi, tra questi nasce una
f.e.m., funzione dell’una e dell’altra temperatura.
Esistono tabelle e diagrammi che riportano l’andamento della f.e.m., E(t), in funzione della temperatura t
della giunzione, quando i due capi liberi siano posti a una determinata temperatura. Per quanto in teoria sia
possibile utilizzare come termocoppia una qualsiasi coppia di metalli, i materiali più utilizzati sono i seguenti:
(Costantana: 40% Ni 60% Cu)
37
La catena di misura
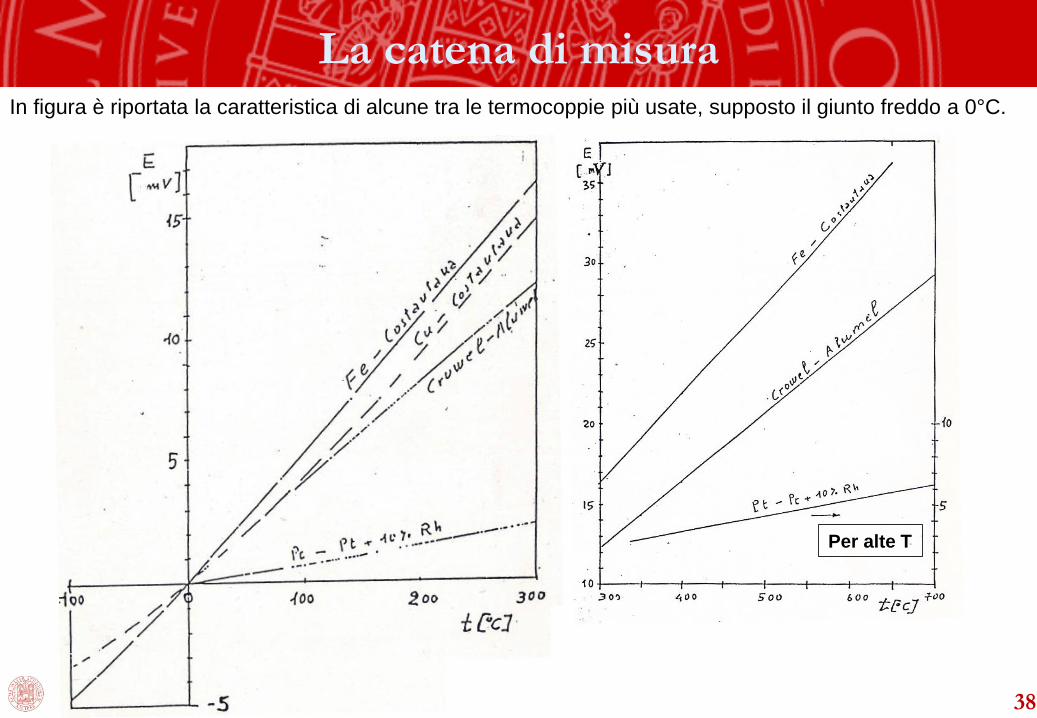
In figura è riportata la caratteristica di alcune tra le termocoppie più usate, supposto il giunto freddo a 0°C.
Per alte T
38
La catena di misura
Ponti di misura per termocoppieQuando il punto di misura è lontano dallo strumento, non conviene prolungare le termocoppie fino allo
strumento stesso. Conviene invece utilizzare cavi di compensazione, cioè cavi realizzati con materiali
«poveri» con caratteristiche simili a quelle delle termocoppie cui sono collegati.
Per quanto riguarda la misura della f.e.m. con un normale millivoltmetro, ci troviamo al solito nella
situazione di commettere un errore. Lo strumento infatti ha un equipaggio mobile i cui spostamenti sono
proporzionali alla corrente i che passa nel circuito interno e questa vale:
i =E
R + r
Lo strumento misura una d.d.p: V = Ri =ER
R+re quindi non consente l’esatto rilievo di E a meno che
R
R+r≃ 1,
vale a dire a meno che non si abbia una r piccolissima, il che contrasta con l’esigenza di impiegare
conduttori molto sottili allo scopo di miniaturizzare la termocoppia (più la sezione del conduttore è grande,
minore è la sua resistenza elettrica 𝑟 = 𝜌𝑙
𝑠, dove 𝜌 rappresenta la resistività elettrica, tuttavia l’elemento di
misura risulta sempre perturbativo rispetto all’ambiente di misura)
E = f.e.m. data dalla termocoppia
r = resistenza della termocoppia
R = resistenza interna dello strumento
39
La catena di misura
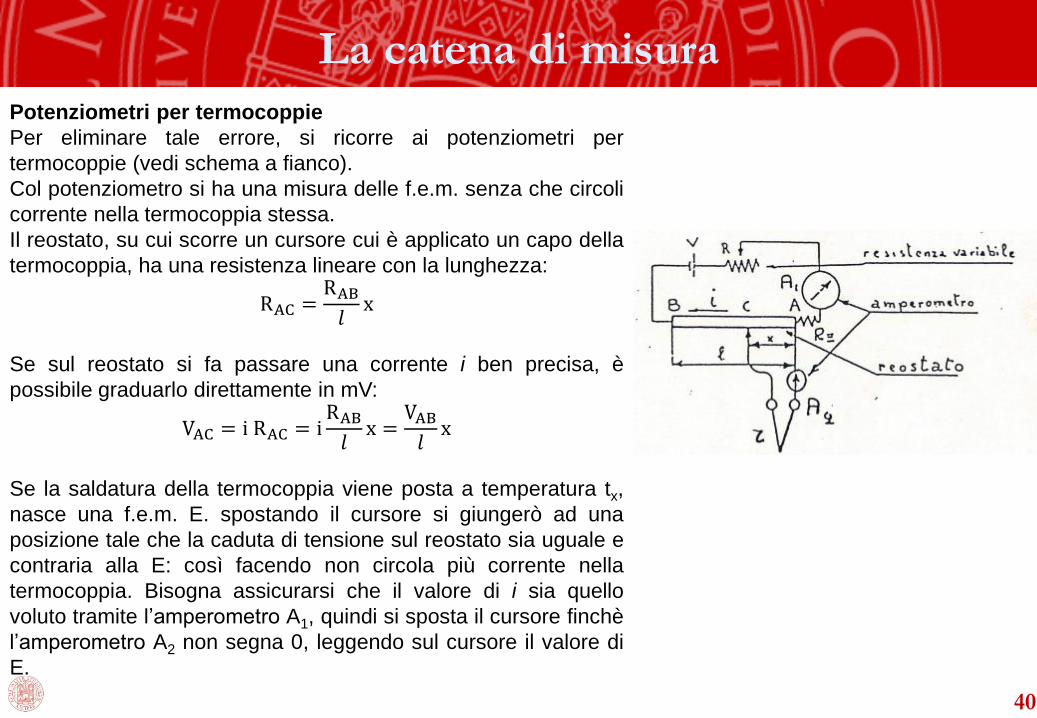
Potenziometri per termocoppie
Per eliminare tale errore, si ricorre ai potenziometri per
termocoppie (vedi schema a fianco).
Col potenziometro si ha una misura delle f.e.m. senza che circoli
corrente nella termocoppia stessa.
Il reostato, su cui scorre un cursore cui è applicato un capo della
termocoppia, ha una resistenza lineare con la lunghezza:
RAC =RAB𝑙
x
Se sul reostato si fa passare una corrente i ben precisa, è
possibile graduarlo direttamente in mV:
VAC = i RAC = iRAB𝑙
x =VAB𝑙x
Se la saldatura della termocoppia viene posta a temperatura tx,
nasce una f.e.m. E. spostando il cursore si giungerò ad una
posizione tale che la caduta di tensione sul reostato sia uguale e
contraria alla E: così facendo non circola più corrente nella
termocoppia. Bisogna assicurarsi che il valore di i sia quello
voluto tramite l’amperometro A1, quindi si sposta il cursore finchè
l’amperometro A2 non segna 0, leggendo sul cursore il valore di
E.
40
La catena di misura
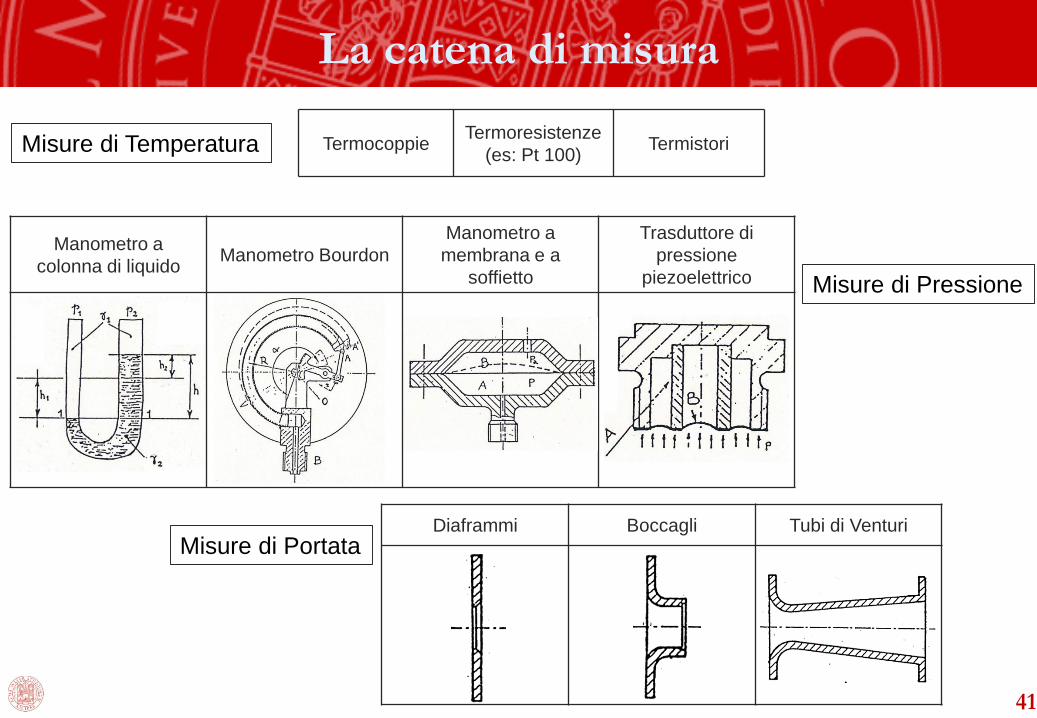
Manometro a
colonna di liquidoManometro Bourdon
Manometro a
membrana e a
soffietto
Trasduttore di
pressione
piezoelettrico
Misure di Temperatura
Diaframmi Boccagli Tubi di Venturi
Misure di Portata
Misure di Pressione
TermocoppieTermoresistenze
(es: Pt 100)Termistori
41
La catena di misura

Esercitazione: perdite di carico dovute all’attraversamento di un diaframma
∆p = ξ 𝜌v2
2= ξ 𝜌
G2
2 A2𝜌2= ξ
G2
2 A2𝜌[Pa]
Definendo Τ1 𝜉2 pari ad 𝛼2 si ottiene:
G = ∆p2 A2𝜌
ξ= A α 2 𝜌 ∆p [kg/s]
Dati: diametro del tubo: D = 1 m
densità dell’acqua: ρ = 1000 kg/m3
velocità dell’acqua: v = 2 m/s
Ipotesi: Si sceglie un diaframma tale da generare una perdita di carico
localizzata Δp = 100 mmH20 = 981 Pa
Energia persa (equazione di Bernoulli per un fluido incomprimibile)
c dc + g dz + v dp + R + L = 0 [J/kg]
R = න
1
2
v dp = v ∆p =∆p
𝜌=
981
1000≃ 1 J/kg
G = 𝜌 v A = 𝜌 vπ D2
4= 1000 ∙ 2 ∙
π 1 2
4= 1571 kg/s
P = R ∙ G = 1 ∙ 1571 = 1571 W
42
La catena di misura
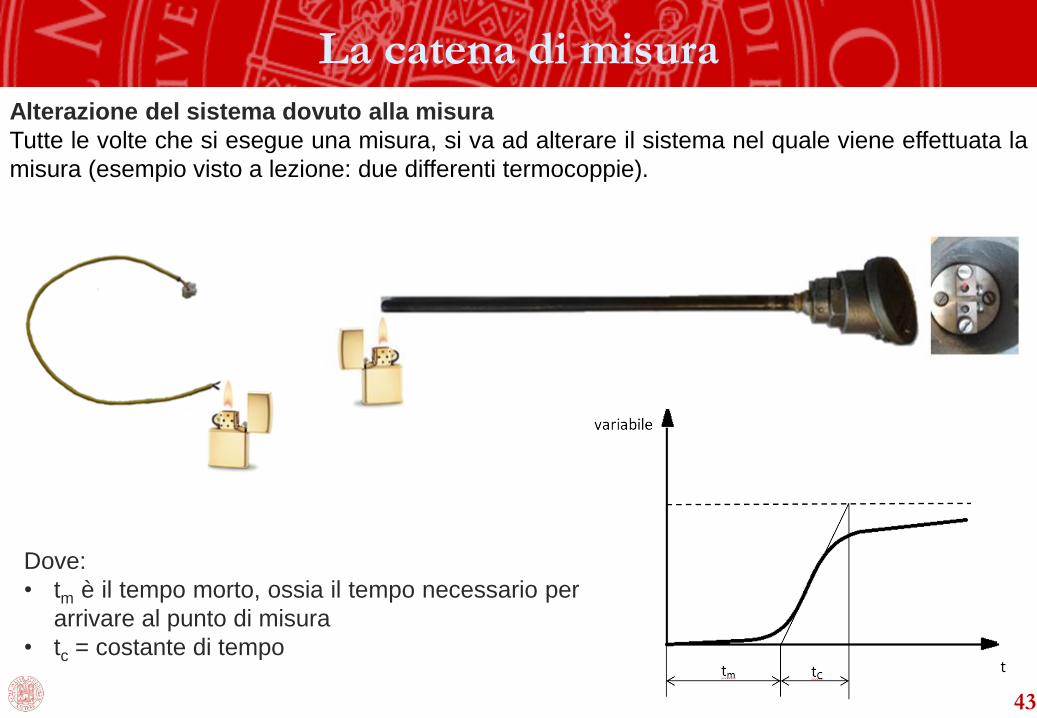
Dove:
• tm è il tempo morto, ossia il tempo necessario per
arrivare al punto di misura
• tc = costante di tempo
Alterazione del sistema dovuto alla misura
Tutte le volte che si esegue una misura, si va ad alterare il sistema nel quale viene effettuata la
misura (esempio visto a lezione: due differenti termocoppie).
43
La catena di misura
Automazione degli impianti: codice pneumatico
Agenda
44
Da PFD a P&ID a QE
Schemi di regolazione
Esercitazione: regolazione selettiva
La catena di misura
Automazione degli impianti: codice elettrico
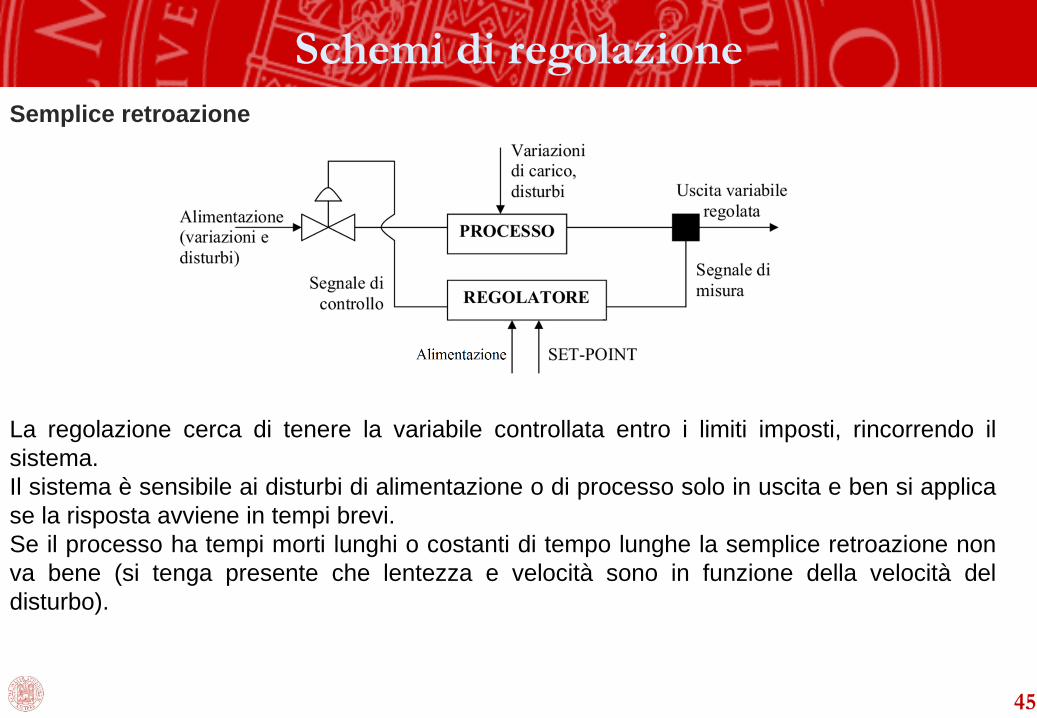
Semplice retroazione
La regolazione cerca di tenere la variabile controllata entro i limiti imposti, rincorrendo il
sistema.
Il sistema è sensibile ai disturbi di alimentazione o di processo solo in uscita e ben si applica
se la risposta avviene in tempi brevi.
Se il processo ha tempi morti lunghi o costanti di tempo lunghe la semplice retroazione non
va bene (si tenga presente che lentezza e velocità sono in funzione della velocità del
disturbo).
Schemi di regolazione
45
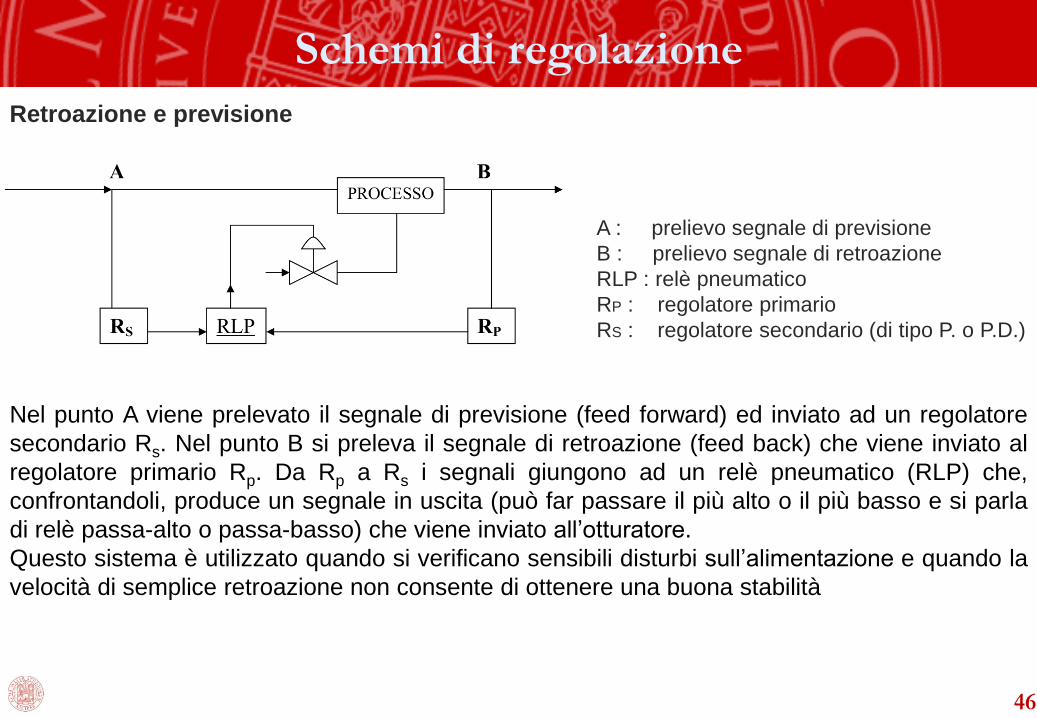
Retroazione e previsione
Nel punto A viene prelevato il segnale di previsione (feed forward) ed inviato ad un regolatore
secondario Rs. Nel punto B si preleva il segnale di retroazione (feed back) che viene inviato al
regolatore primario Rp. Da Rp a Rs i segnali giungono ad un relè pneumatico (RLP) che,
confrontandoli, produce un segnale in uscita (può far passare il più alto o il più basso e si parla
di relè passa-alto o passa-basso) che viene inviato all’otturatore.
Questo sistema è utilizzato quando si verificano sensibili disturbi sull’alimentazione e quando la
velocità di semplice retroazione non consente di ottenere una buona stabilità
A : prelievo segnale di previsione
B : prelievo segnale di retroazione
RLP : relè pneumatico
RP : regolatore primario
RS : regolatore secondario (di tipo P. o P.D.)
Schemi di regolazione
46
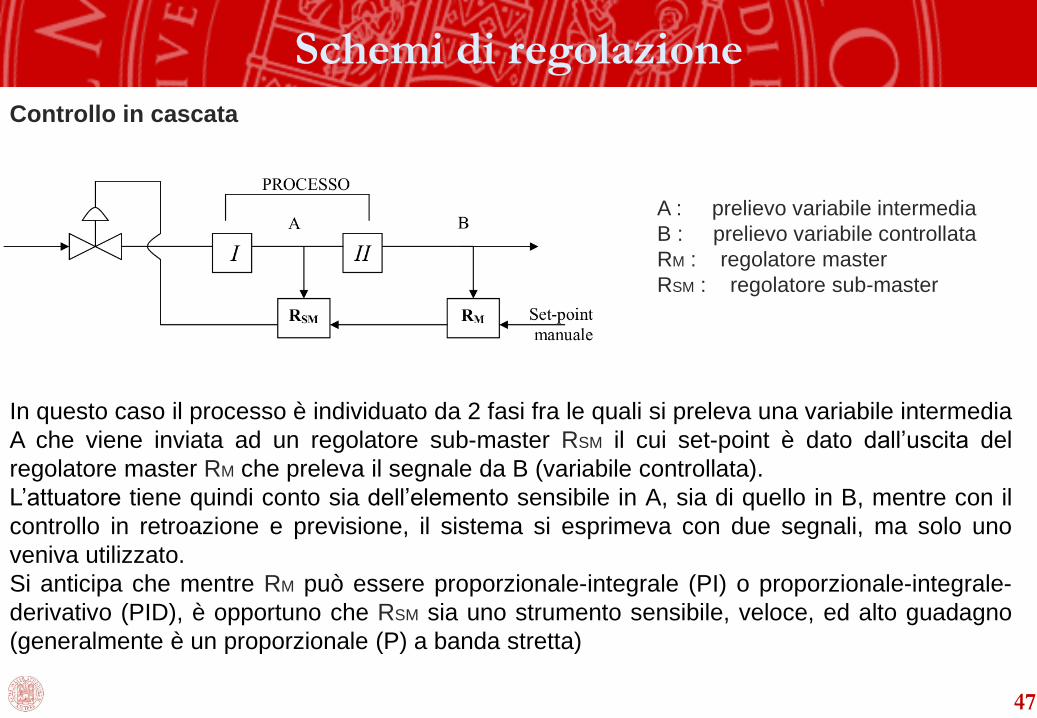
Controllo in cascata
In questo caso il processo è individuato da 2 fasi fra le quali si preleva una variabile intermedia
A che viene inviata ad un regolatore sub-master RSM il cui set-point è dato dall’uscita del
regolatore master RM che preleva il segnale da B (variabile controllata).
L’attuatore tiene quindi conto sia dell’elemento sensibile in A, sia di quello in B, mentre con il
controllo in retroazione e previsione, il sistema si esprimeva con due segnali, ma solo uno
veniva utilizzato.
Si anticipa che mentre RM può essere proporzionale-integrale (PI) o proporzionale-integrale-
derivativo (PID), è opportuno che RSM sia uno strumento sensibile, veloce, ed alto guadagno
(generalmente è un proporzionale (P) a banda stretta)
A : prelievo variabile intermedia
B : prelievo variabile controllata
RM : regolatore master
RSM : regolatore sub-master
Schemi di regolazione
47
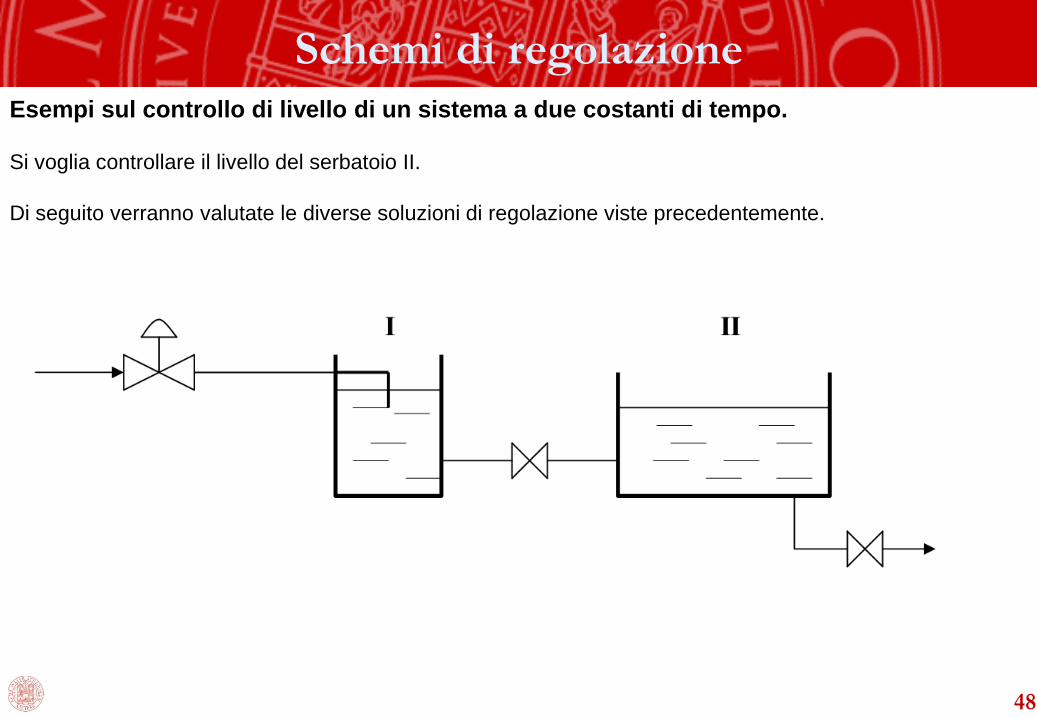
Esempi sul controllo di livello di un sistema a due costanti di tempo.
Si voglia controllare il livello del serbatoio II.
Di seguito verranno valutate le diverse soluzioni di regolazione viste precedentemente.
Schemi di regolazione
48
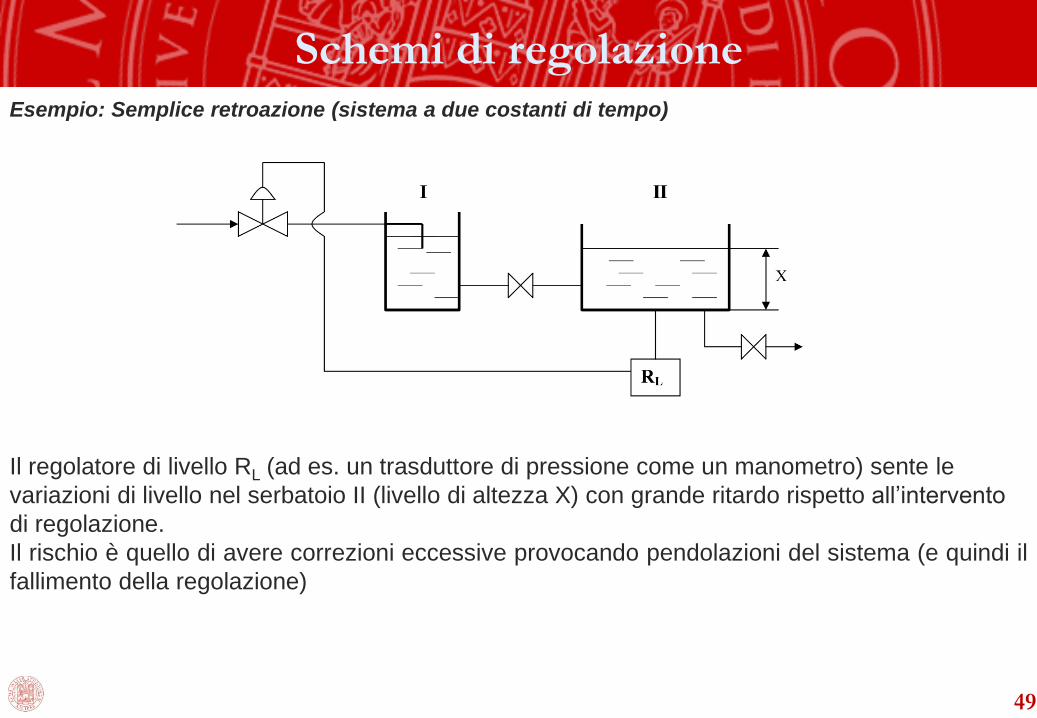
Il regolatore di livello RL (ad es. un trasduttore di pressione come un manometro) sente le
variazioni di livello nel serbatoio II (livello di altezza X) con grande ritardo rispetto all’intervento
di regolazione.
Il rischio è quello di avere correzioni eccessive provocando pendolazioni del sistema (e quindi il
fallimento della regolazione)
Esempio: Semplice retroazione (sistema a due costanti di tempo)
Schemi di regolazione
49
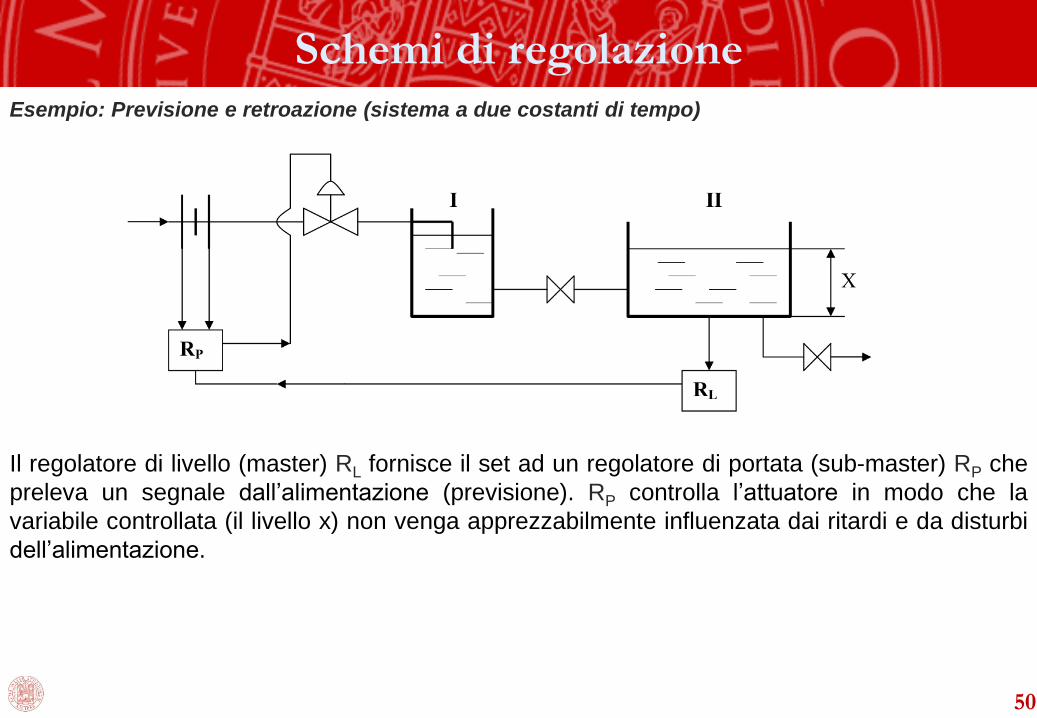
Il regolatore di livello (master) RL fornisce il set ad un regolatore di portata (sub-master) RP che
preleva un segnale dall’alimentazione (previsione). RP controlla l’attuatore in modo che la
variabile controllata (il livello x) non venga apprezzabilmente influenzata dai ritardi e da disturbi
dell’alimentazione.
Esempio: Previsione e retroazione (sistema a due costanti di tempo)
Schemi di regolazione
50
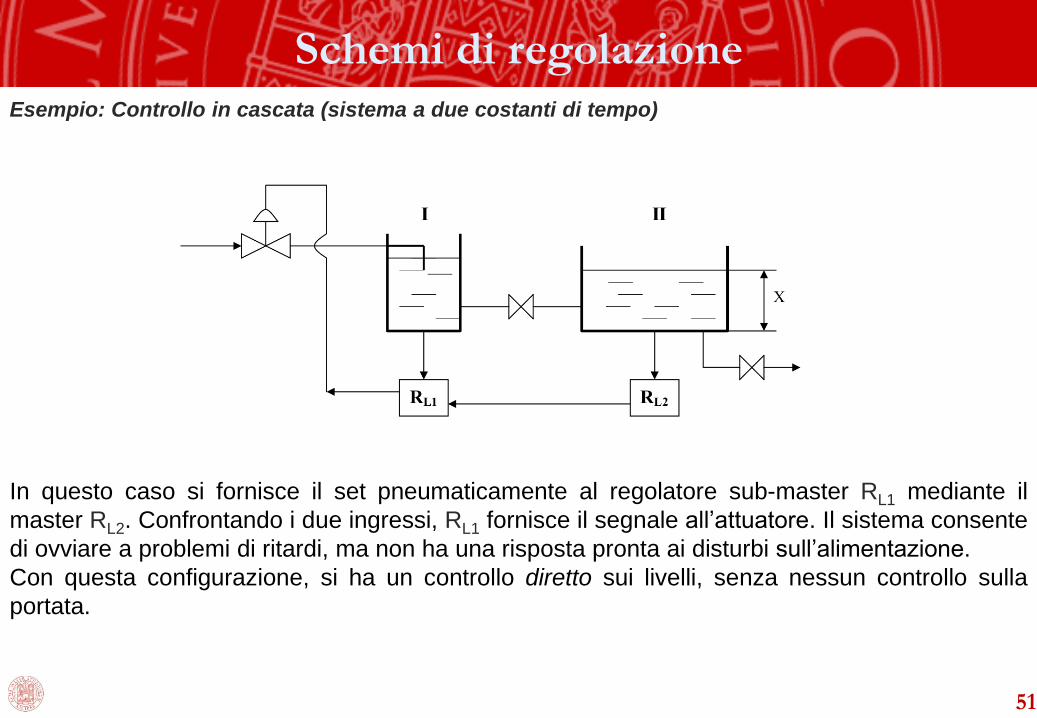
In questo caso si fornisce il set pneumaticamente al regolatore sub-master RL1 mediante il
master RL2. Confrontando i due ingressi, RL1 fornisce il segnale all’attuatore. Il sistema consente
di ovviare a problemi di ritardi, ma non ha una risposta pronta ai disturbi sull’alimentazione.
Con questa configurazione, si ha un controllo diretto sui livelli, senza nessun controllo sulla
portata.
Esempio: Controllo in cascata (sistema a due costanti di tempo)
Schemi di regolazione
51
Automazione degli impianti: codice pneumatico
Agenda
52
Da PFD a P&ID a QE
Schemi di regolazione
Esercitazione: regolazione selettiva
La catena di misura
Automazione degli impianti: codice elettrico
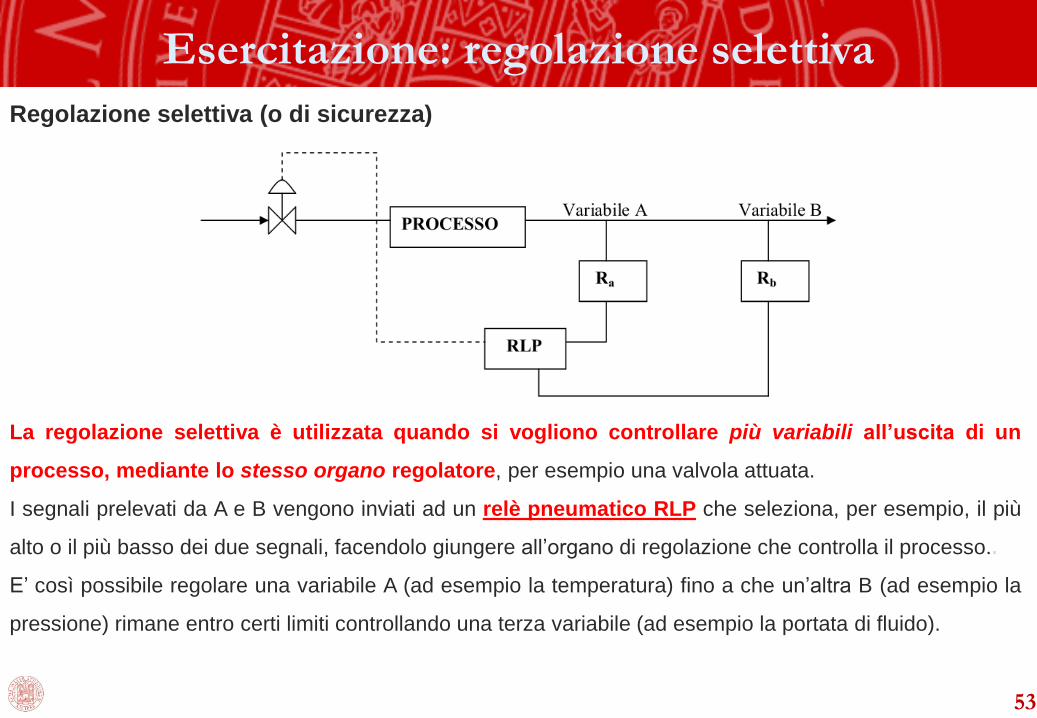
Regolazione selettiva (o di sicurezza)
La regolazione selettiva è utilizzata quando si vogliono controllare più variabili all’uscita di un
processo, mediante lo stesso organo regolatore, per esempio una valvola attuata.
I segnali prelevati da A e B vengono inviati ad un relè pneumatico RLP che seleziona, per esempio, il più
alto o il più basso dei due segnali, facendolo giungere all’organo di regolazione che controlla il processo..
E’ così possibile regolare una variabile A (ad esempio la temperatura) fino a che un’altra B (ad esempio la
pressione) rimane entro certi limiti controllando una terza variabile (ad esempio la portata di fluido).
Esercitazione: regolazione selettiva
53

Esempio di regolazione selettiva: regolazione della pressione di mandata di una pompa
con controllo di sicurezza (anti cavitazione) all’aspirazione
Pompa
Segnale in pressione
(dall’impianto)
PT1
Segnale in pressione
3-15 psi
Acqua
Aria compressa
20 psi
RP1
Valvola
Regolazione NC
Segnale in pressione
(dall’impianto)
Segnale in pressione
3-15 psi
Aria compressa
20 psi
RP2RLP
(PB)
PT2
54
Segnale
15-3 psiSegnale in pressione
3-15 psi
Azione diretta Azione inversa
Esercitazione: regolazione selettiva
• RP: regolatore pneumatico
• RLP (PB): relè pneumatico (passo basso)
• PT: trasmettitore pneumatico
• NC: valvola normalmente chiusa
Problema della cavitazione
Scelta della condizioni normali della valvola di regolazione VR
Le condizioni normali di una valvola (Normalmente aperta = NA; Normalmente chiusa = NC)
sono le condizioni della valvola quando non vi insiste nessun segnale.
La scelta relativa alle condizioni normali di una valvola all’interno di un impianto è legata,
solitamente, a considerazioni di sicurezza.
In questo esempio, volendo regolare evitando la cavitazione, la valvola sarà una NC.
Infatti in caso di perdita di alimentazione del segnale in pressione all’attuatore, la valvola si
chiude intercettando la mandata della pompa. Dunque, in assenza del segnale dai due
trasduttori pneumatici, ossia in una condizione in cui non si hanno informazioni su come
l’impianto stia evolvendo, si intercetta la mandata per evitare cavitazione e dunque la rottura
della pompa.
Se si fosse scelto una valvola NA, in caso di assenza di segnale pneumatico e dunque perdita
del controllo alla mandata della pompa, la valvola aprirebbe completamente aumentando la
portata elaborata. Questa scelta potrebbe essere determinata dalla volontà di alimentare in ogni
caso l’utenza. In realtà questa scelta non è corretta tecnicamente: in caso del verificarsi di
cavitazione, infatti, la pompa elabora una portata inferiore rispetto a quella nominale che si
vorrebbe garantire aprendo completamente la valvola.
Conseguentemente la regolazione dell’impianto fallirebbe con l’installazione di una valvola NA.
55
Esercitazione: regolazione selettiva
Breve descrizione del funzionamento in caso di aumento della portata richiesta
L’aumento della richiesta di portata è responsabile di:
• Riduzione della pressione misurata da PT2. Il segnale pneumatico inviato a RP2 richiede
l’apertura della valvola VR per inseguire la richiesta da parte dell’utenza.
• Riduzione della pressione misurata da PT1. Il segnale pneumatico inviato a RP1 richiede
la chiusura della valvola VR per evitare fenomeni di cavitazione.
Le due richieste all’aumento della portata richiedono un’azione diversa da parte del sistema di
regolazione ed in ultima analisi da parte della valvola (apertura o chiusura). Per poter regolare
correttamente l’impianto, dunque, la regolazione deve essere in grado di identificare l’azione
prioritaria in funzione delle condizioni di funzionamento attuali dell’impianto.
In particolare, l’obiettivo del sistema di regolazione è quello di soddisfare le richieste da parte
delle utenze preservando la pompa da eventuali fenomeni di cavitazione e dunque da rotture.
Esercitazione: regolazione selettiva

La cavitazione è un fenomeno che provoca il danneggiamento di dispositivi idraulici
quali pompe e valvole ed è provocata dall’implosione di bolle di vapore e gas che si
formano nella sezione di ingresso dove la pressione del fluido è inferiore alla
tensione di vapore, Tv, calcolata alla temperatura del fluido.
L’implosione delle bolle avviene nella sezione della pala dove la pressione ritorna
ad essere superiore alla tensione di vapore, provocando il danneggiamento con
conseguente erosione meccanica in breve tempo; tale fenomeno è accompagnato
da un caratteristico «rumore metallico» e da un notevole calo delle prestazioni. Per
garantire l’assenza del fenomeno occorre che la pressione del fluido in ingresso alla
pompa sia maggiore della tensione di vapore alla temperatura di lavoro.
Con riferimento alla figura a fianco, scrivendo l’equazione energetica del moto dei fluidi
tra la sezione di ingresso nella girante e quella rappresentata dal pelo libero, si ha:
C2 − Ca2
2+ g z − za + Rc + Ra +
p − pa𝜌
= 0J
kg
Dove Rc rappresenta le perdite subite dal fluido nel condotto di aspirazione (imputabili
quindi all’impianto), mentre Ra rappresenta le perdite interne alla pompa che il fluido
subisce tra la sezione di ingresso nella pompa e quella di ingresso nella girante.
Posto h = z – za e trascurando Ca si ottiene:
C2
2+ g h + Rc + Ra +
p − pa𝜌
= 0
57
Esercitazione: regolazione selettiva
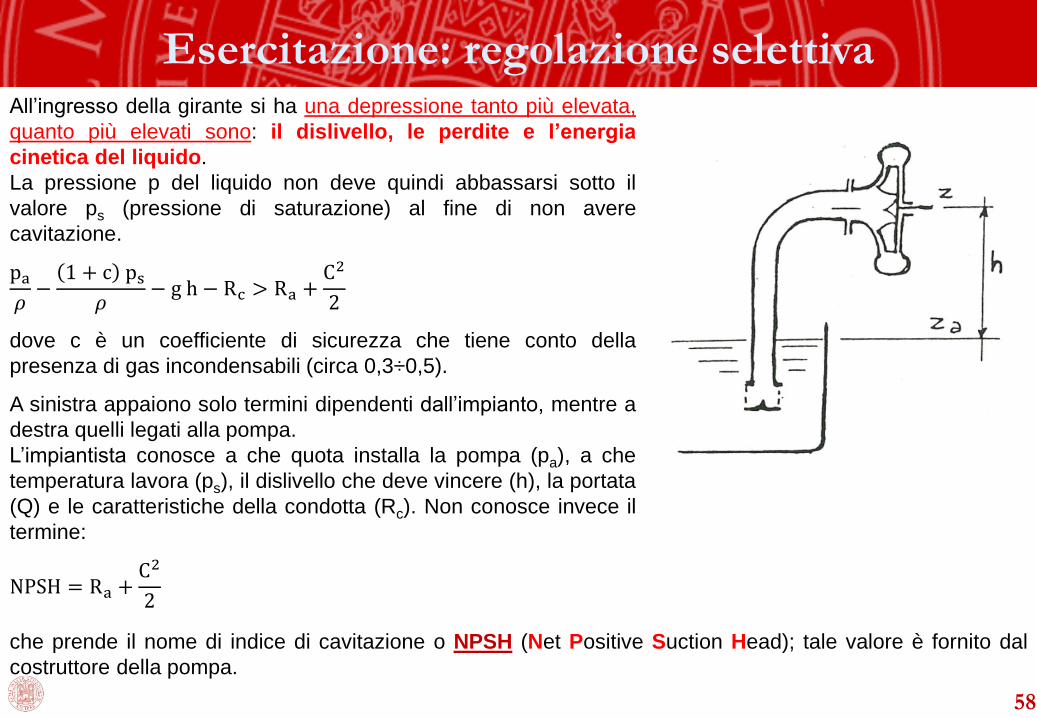
All’ingresso della girante si ha una depressione tanto più elevata,
quanto più elevati sono: il dislivello, le perdite e l’energia
cinetica del liquido.
La pressione p del liquido non deve quindi abbassarsi sotto il
valore ps (pressione di saturazione) al fine di non avere
cavitazione.
pa𝜌−
1 + c ps𝜌
− g h − Rc > Ra +C2
2
dove c è un coefficiente di sicurezza che tiene conto della
presenza di gas incondensabili (circa 0,3÷0,5).
A sinistra appaiono solo termini dipendenti dall’impianto, mentre a
destra quelli legati alla pompa.
L’impiantista conosce a che quota installa la pompa (pa), a che
temperatura lavora (ps), il dislivello che deve vincere (h), la portata
(Q) e le caratteristiche della condotta (Rc). Non conosce invece il
termine:
NPSH = Ra +C2
2
che prende il nome di indice di cavitazione o NPSH (Net Positive Suction Head); tale valore è fornito dal
costruttore della pompa.
58
Esercitazione: regolazione selettiva
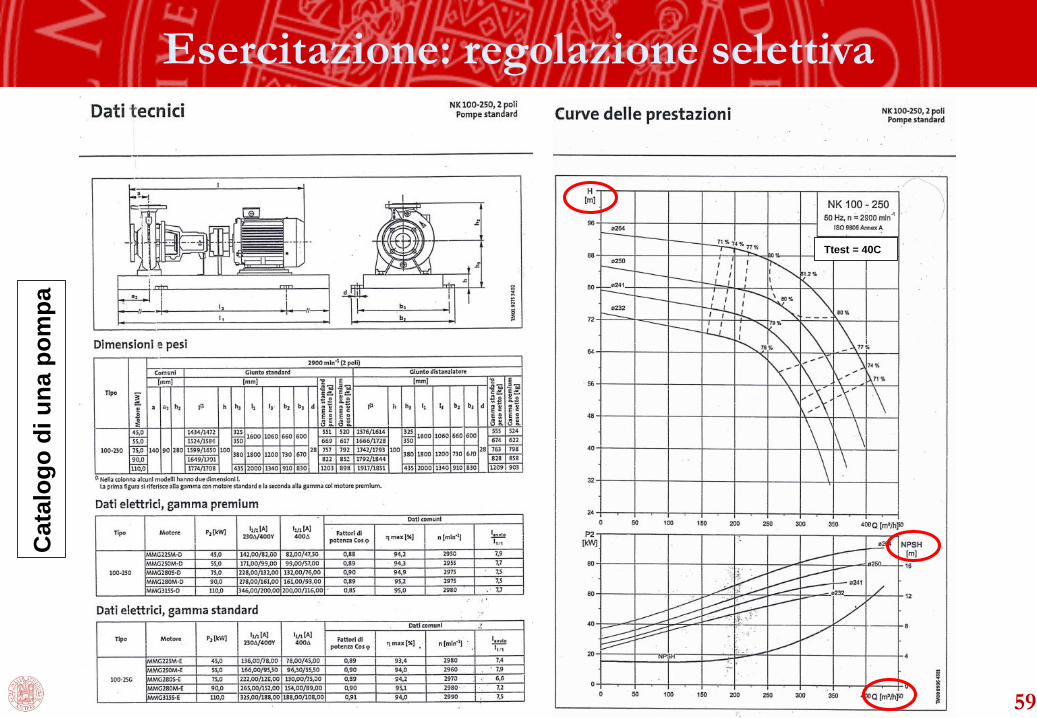
Cata
log
o d
i u
na
po
mp
a
59
Ttest = 40C
Esercitazione: regolazione selettiva

NPSH:
Trascurando la pressione di saturazione e le perdite
nel condotto si ha:
pa
𝜌 g− h > NPSH [m]
Per esempio:
1) Q = 100 m3/h NPSH ≃ 3 m
Posso installare la pompa a non più di 7 metri
d’altezza dal pelo libero del bacino da cui sto
pescando. Infatti:
h <pa𝜌 g
− NPSH =101300
1000 ∙ 9,81− 3 ≃ 7 m
2) Q = 380 m3/h NPSH ≃ 10 m
La pompa va installata allo stesso livello del pelo
libero (in realtà, servono ulteriori 1÷1,5 m di battente
per tutelarsi dalla cavitazione. La pompa andrebbe
quindi installata sotto battente).
3) Q = 410 m3/h NPSH ≃ 12 m
La pompa va installata almeno 2 metri sotto il
battente.
60
Esercitazione: regolazione selettiva
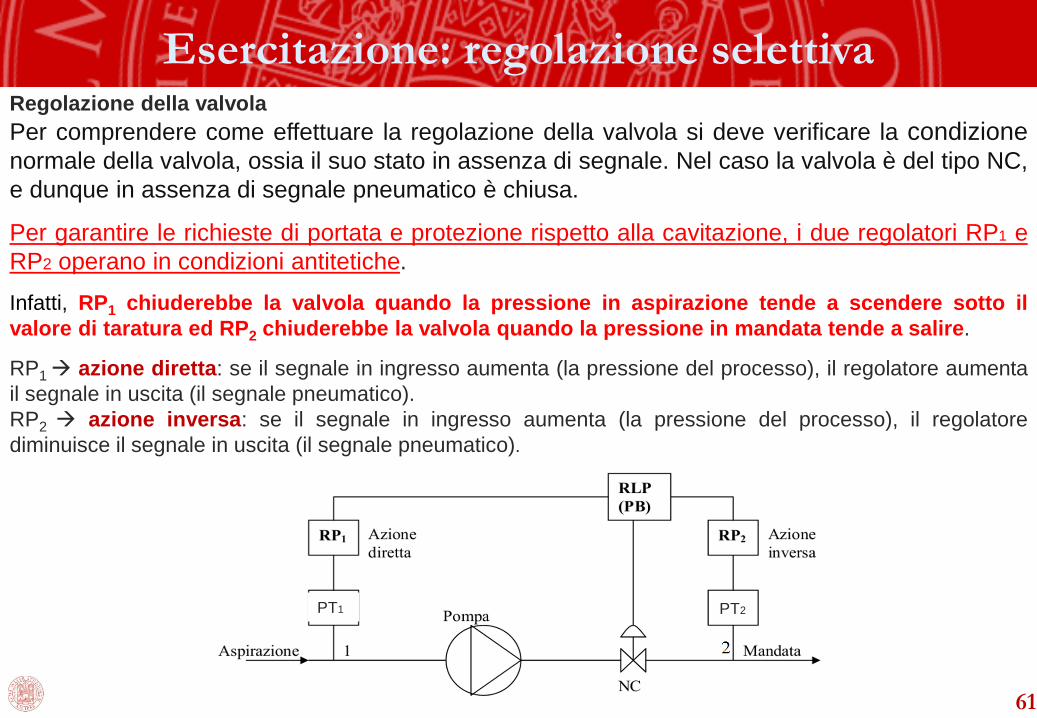
Regolazione della valvola
Per comprendere come effettuare la regolazione della valvola si deve verificare la condizionenormale della valvola, ossia il suo stato in assenza di segnale. Nel caso la valvola è del tipo NC,
e dunque in assenza di segnale pneumatico è chiusa.
Per garantire le richieste di portata e protezione rispetto alla cavitazione, i due regolatori RP1 e
RP2 operano in condizioni antitetiche.
Infatti, RP1 chiuderebbe la valvola quando la pressione in aspirazione tende a scendere sotto il
valore di taratura ed RP2 chiuderebbe la valvola quando la pressione in mandata tende a salire.
RP1 azione diretta: se il segnale in ingresso aumenta (la pressione del processo), il regolatore aumenta
il segnale in uscita (il segnale pneumatico).
RP2 azione inversa: se il segnale in ingresso aumenta (la pressione del processo), il regolatore
diminuisce il segnale in uscita (il segnale pneumatico).
PT1 PT2
61
Esercitazione: regolazione selettiva
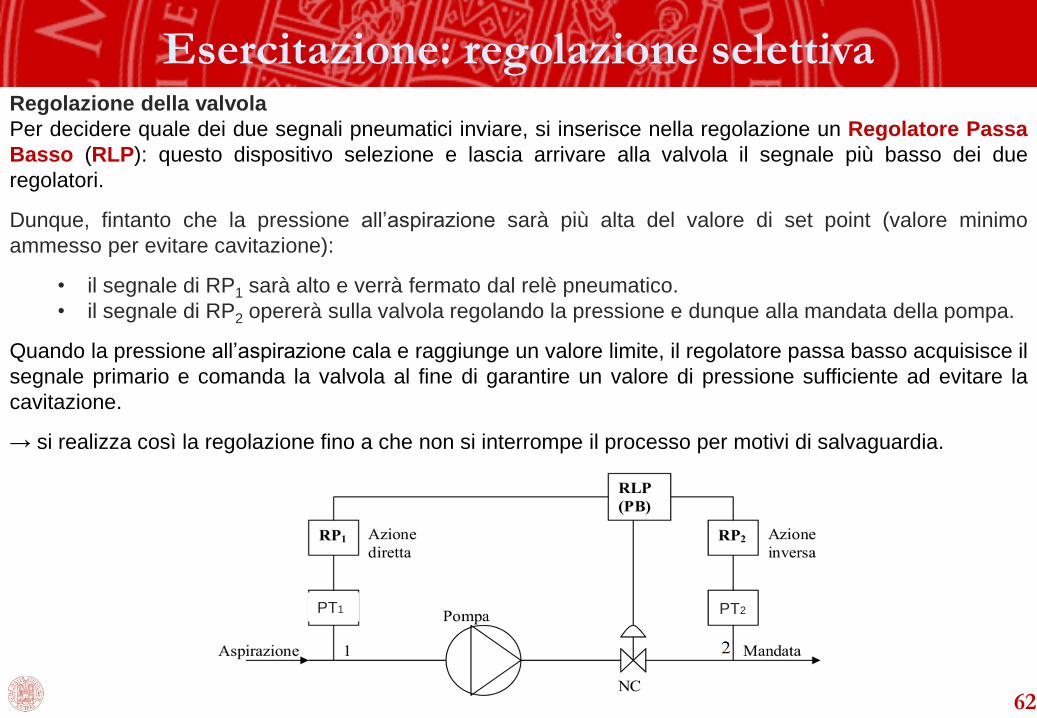
Regolazione della valvola
Per decidere quale dei due segnali pneumatici inviare, si inserisce nella regolazione un Regolatore Passa
Basso (RLP): questo dispositivo selezione e lascia arrivare alla valvola il segnale più basso dei due
regolatori.
Dunque, fintanto che la pressione all’aspirazione sarà più alta del valore di set point (valore minimo
ammesso per evitare cavitazione):
• il segnale di RP1 sarà alto e verrà fermato dal relè pneumatico.
• il segnale di RP2 opererà sulla valvola regolando la pressione e dunque alla mandata della pompa.
Quando la pressione all’aspirazione cala e raggiunge un valore limite, il regolatore passa basso acquisisce il
segnale primario e comanda la valvola al fine di garantire un valore di pressione sufficiente ad evitare la
cavitazione.
→ si realizza così la regolazione fino a che non si interrompe il processo per motivi di salvaguardia.
PT1 PT2
62
Esercitazione: regolazione selettiva
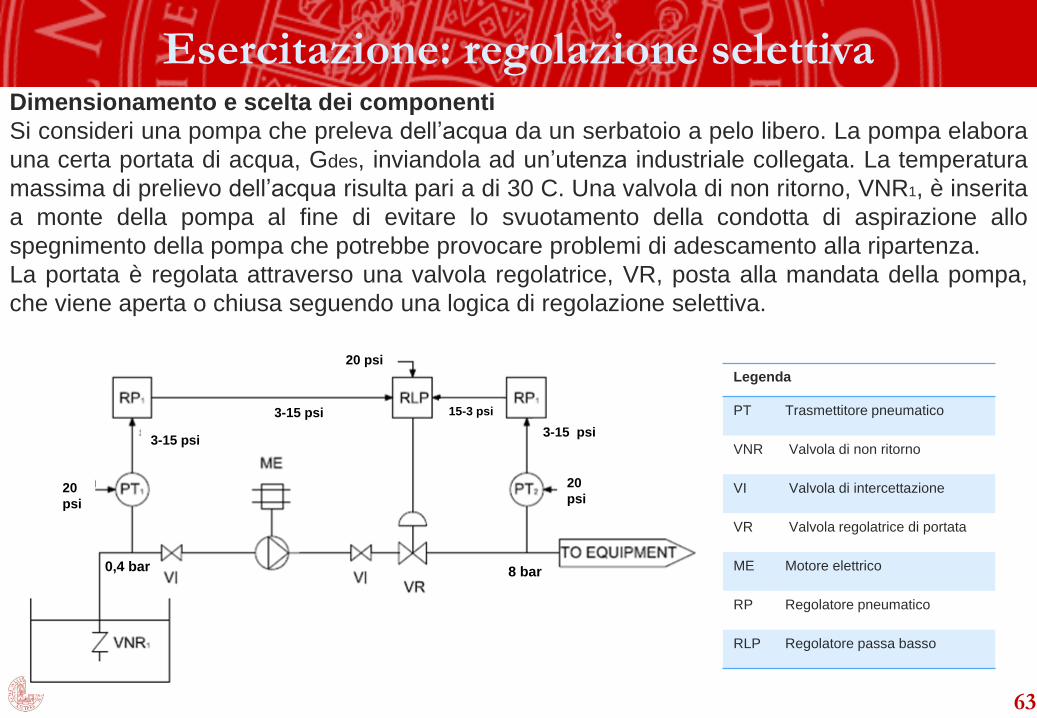
Dimensionamento e scelta dei componenti
Si consideri una pompa che preleva dell’acqua da un serbatoio a pelo libero. La pompa elabora
una certa portata di acqua, Gdes, inviandola ad un’utenza industriale collegata. La temperatura
massima di prelievo dell’acqua risulta pari a di 30 C. Una valvola di non ritorno, VNR1, è inserita
a monte della pompa al fine di evitare lo svuotamento della condotta di aspirazione allo
spegnimento della pompa che potrebbe provocare problemi di adescamento alla ripartenza.
La portata è regolata attraverso una valvola regolatrice, VR, posta alla mandata della pompa,
che viene aperta o chiusa seguendo una logica di regolazione selettiva.
Legenda
PT Trasmettitore pneumatico
VNR Valvola di non ritorno
VI Valvola di intercettazione
VR Valvola regolatrice di portata
ME Motore elettrico
RP Regolatore pneumatico
RLP Regolatore passa basso
63
20
psi
20 psi
20
psi
3-15 psi
3-15 psi3-15 psi
15-3 psi
8 bar0,4 bar
Esercitazione: regolazione selettiva
Dimensionamento della pompaIl dimensionamento e dunque la scelta della pompa deriva da diverse considerazioni che devono tenere
conto delle seguenti informazioni di processo:
1. Tipologia scelta: pompa centrifuga;
2. Portata richiesta dall’utenza: 80 m3/h. La portata richiesta dall’utenza dipende dalle esigenze
specifiche dell’utenza allacciata. Sebbene il suo valore nominale possa essere calcolato mediante
bilanci di massa e di energia al sistema, è opportuno identificare la presenza di eventuali condizioni di
fuori progetto che richiedono portate maggiori rispetto a quelle nominali.
3. Prevalenza: 8 bar
• La prevalenza dipende dalla caratteristica del circuito. A seguito del calcolo delle perdite di carico
complessive del circuito percorso dalla portata di progetto, è possibile individuare la prevalenza
della pompa richiesta; infatti la relazione che lega la prevalenza della pompa con le perdite di
carico è la seguente: ∆𝑝𝑝𝑜𝑚𝑝𝑎= 𝜑∆𝑝𝑐𝑖𝑟𝑐𝑢𝑖𝑡𝑜, dove 𝜑 è un fattore di sicurezza che tiene conto delle
approssimazioni effettuate nel calcolo della perdita di carico complessiva.
4. Fluido elaborato: acqua. In funzione della tipologia di fluido elaborato dipendo i materiali utilizzati per le
parti in contatto con il fluido, che dunque possono richiedere specifiche caratteristiche.
64
Esercitazione: regolazione selettiva

Dimensionamento pompa: scelta pompa
65
Si vuole lavorare in un
punto a massimo
rendimento
La pompa scelta è una pompa
centrifuga Grundfos caratterizzata da:
• Portata: 80 m3/h;
• Prevalenza: 8 bar;
• NPSH: 3 m;
• Potenza elettrica assorbita: 25 kW
Esercitazione: regolazione selettiva
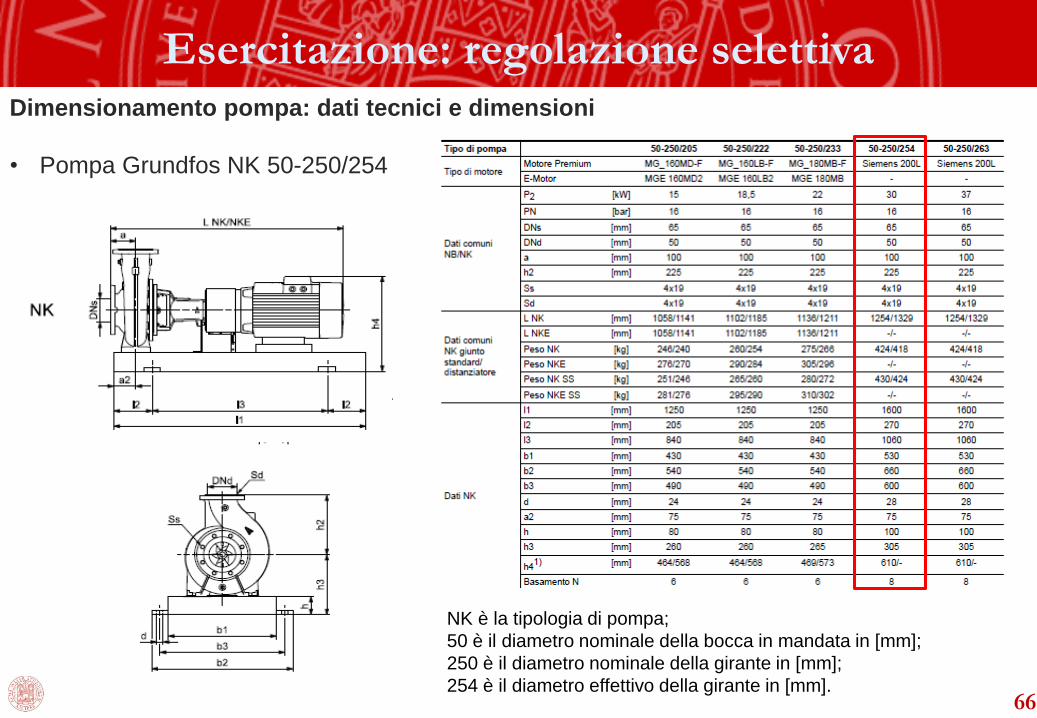
Dimensionamento pompa: dati tecnici e dimensioni
• Pompa Grundfos NK 50-250/254
66
NK è la tipologia di pompa;
50 è il diametro nominale della bocca in mandata in [mm];
250 è il diametro nominale della girante in [mm];
254 è il diametro effettivo della girante in [mm].
Esercitazione: regolazione selettiva
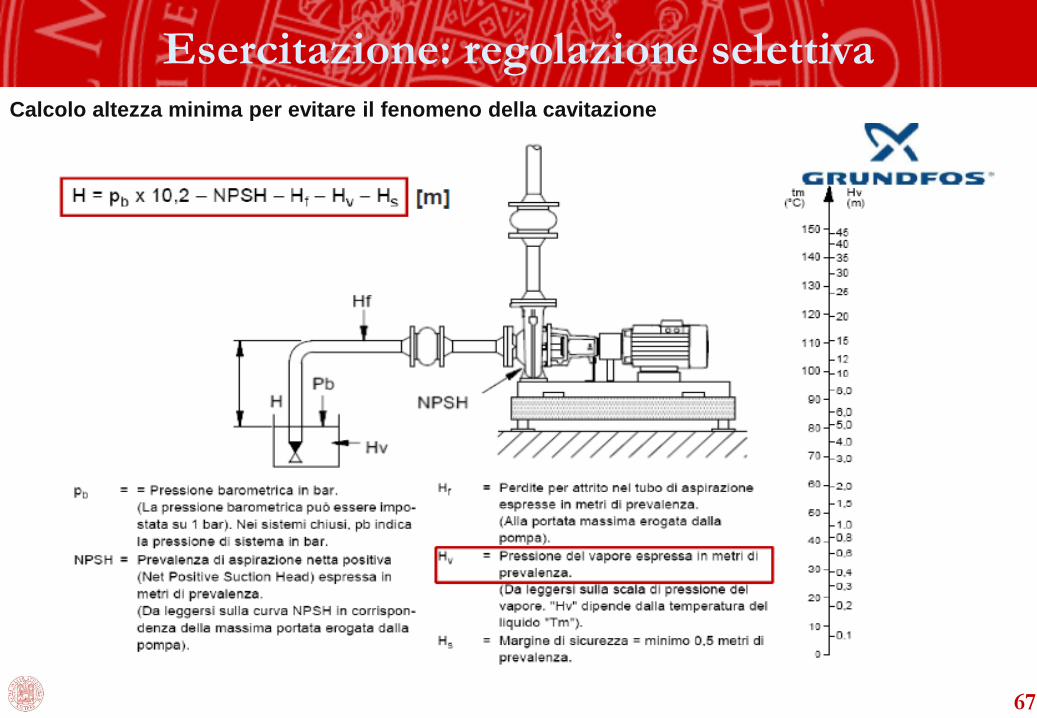
Calcolo altezza minima per evitare il fenomeno della cavitazione
67
Esercitazione: regolazione selettiva
Per evitare fenomeni di cavitazione occorre verificare che l’altezza di installazione della pompa eviti il
raggiungimento della tensione di vapora in ingresso alla pompa.
Per la verifica, si suppongano validi i seguenti valori:
• pb: 1 bar (pressione barometrico che è presente sul serbatoio aperto).
• Hf: 0,5 m (valore calcolato attraverso la somma di perdite distribuite e concentrate alla portata nominale
nel tubo di aspirazione)
• HV (T=30°C): 0,4 m (da manuale)
• NPSH= 3,0 m (valore fornito dal costruttore)
• HS: 0,5 m (margine di sicurezza)
Inserendo i valori numerici nell’equazione fornita dal costruttore della pompa si ottiene:
𝐻 = 𝑝𝑏 × 10,2 − 𝑁𝑃𝑆𝐻 − 𝐻𝑓 − 𝐻𝑉 − 𝐻𝑆 = 1 × 10,2 − 3,0 − 0,5 − 0,4 − 0,5 = 5,8 𝑚
Dunque, per non avere fenomeni di cavitazione occorre installare la pompa ad un’altezza massima di 5,8 m
sopra il battente. Questa valutazione è valida in condizione di design, ossia portata uguale a quella di
progetto. Nel momento in cui si effettua una regolazione della portata si potrebbero verificare tuttavia
fenomeni di cavitazione e dunque la regolazione selettiva risulta necessaria.
Calcolo altezza minima per evitare il fenomeno della cavitazione
68
Esercitazione: regolazione selettiva

Dimensionamento e scelta della valvola di regolazione VR
69
Esercitazione: regolazione selettiva
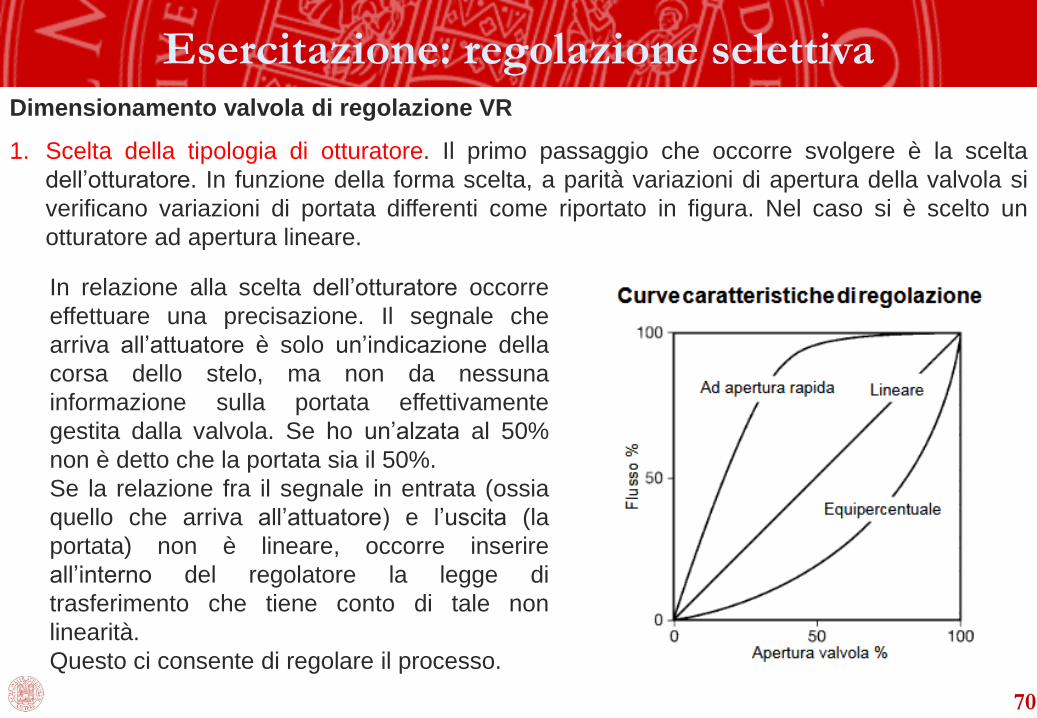
Dimensionamento valvola di regolazione VR
1. Scelta della tipologia di otturatore. Il primo passaggio che occorre svolgere è la scelta
dell’otturatore. In funzione della forma scelta, a parità variazioni di apertura della valvola si
verificano variazioni di portata differenti come riportato in figura. Nel caso si è scelto un
otturatore ad apertura lineare.
70
Esercitazione: regolazione selettiva
In relazione alla scelta dell’otturatore occorre
effettuare una precisazione. Il segnale che
arriva all’attuatore è solo un’indicazione della
corsa dello stelo, ma non da nessuna
informazione sulla portata effettivamente
gestita dalla valvola. Se ho un’alzata al 50%
non è detto che la portata sia il 50%.
Se la relazione fra il segnale in entrata (ossia
quello che arriva all’attuatore) e l’uscita (la
portata) non è lineare, occorre inserire
all’interno del regolatore la legge di
trasferimento che tiene conto di tale non
linearità.
Questo ci consente di regolare il processo.

Dimensionamento valvola di regolazione VR
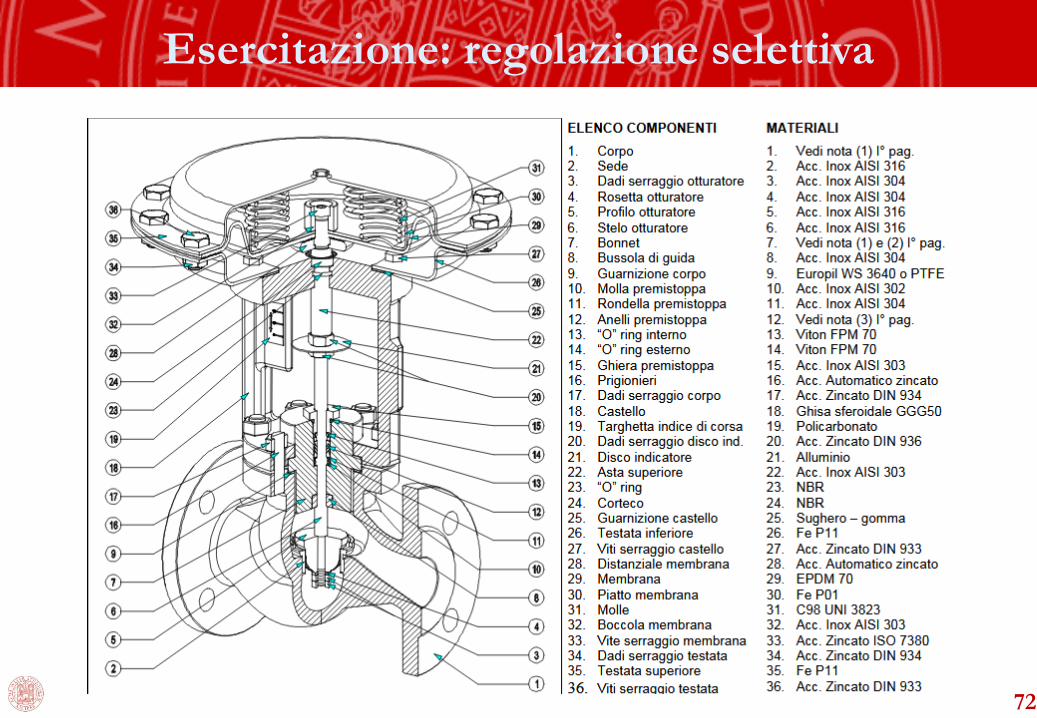
La valvola di regolazione scelta è prodotta da Conflow ed è il modello 2000 AR serie Uniworld
Caratteristiche tecniche:
• Tipologia di attuatore: a diaframma;
• Segnale di azionamento: 3 – 15 psi, 6 – 18 psi, 6 – 30 psi;
• Profilo otturatore: otturatore ad apertura lineare;
• Massima pressione dell’aria applicabile: 35 psi;
• Temperatura ambiente operativa: da -20 a +70 C;
• Cassa attuatore: Fe P11;
• Membrana: EPDM 70 (Gomma sintetica);
• Castello: Ghisa sferoidale EN-GJS500-7;
• Connessioni pneumatiche: ISO 7 Rp – 1/8’’
71
Esercitazione: regolazione selettiva
72
Esercitazione: regolazione selettiva

Dimensionamento valvola di regolazione VR
2. Scelta del corpo valvola: Calcolo del CvPer calcolare il CV occorre stimare la perdita di carico ammissibile sulla valvola. Solitamente, con la
valvola completamente aperta, si assume che la perdita di carico sia circa il 50% della caduta di carico
totale dell’impianto (stimata in 8 bar, valvola compresa): in questa maniera è possibile, da un lato,
consentire una regolazione efficace e, dall’altro, limitare le perdite di carico (costi di pompaggio).
Dalla relazione si ha:
𝐶𝑉 = 1,17 × 𝑄 ×𝑑
∆𝑝
0,5
= 1,17 × 80 ×1
4
0,5
= 46,8
73
Si sceglie la valvola con Cv
immediatamente superiore
Esercitazione: regolazione selettiva
Valvola scelta
74
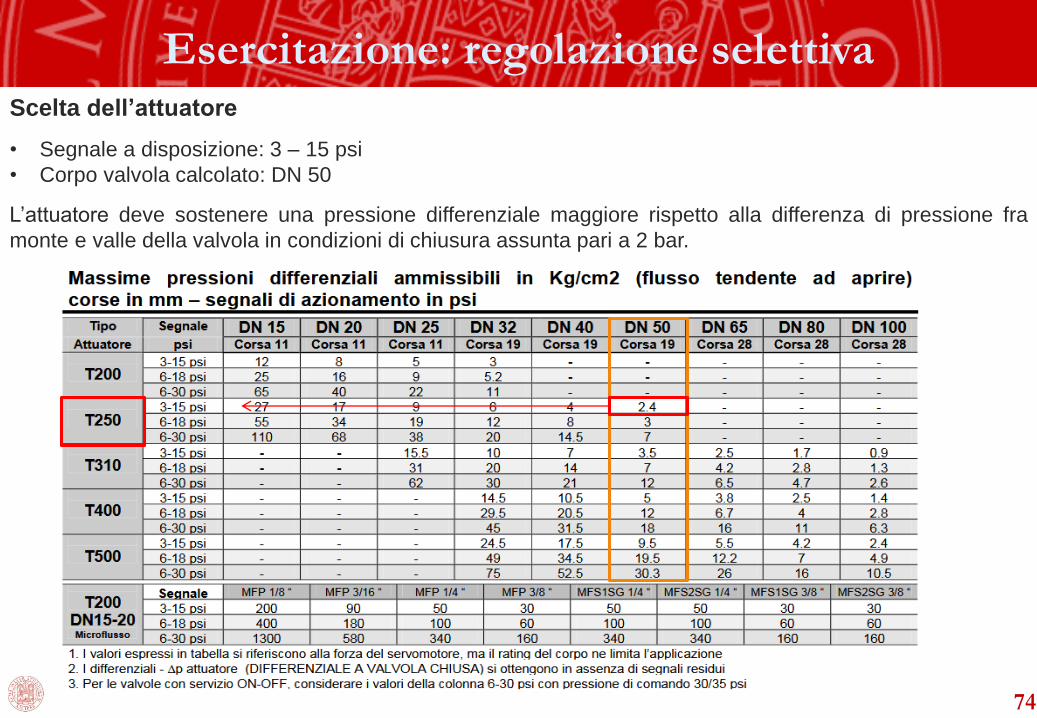
Scelta dell’attuatore
• Segnale a disposizione: 3 – 15 psi
• Corpo valvola calcolato: DN 50
L’attuatore deve sostenere una pressione differenziale maggiore rispetto alla differenza di pressione fra
monte e valle della valvola in condizioni di chiusura assunta pari a 2 bar.
Esercitazione: regolazione selettiva
75
Esercitazione: regolazione selettiva
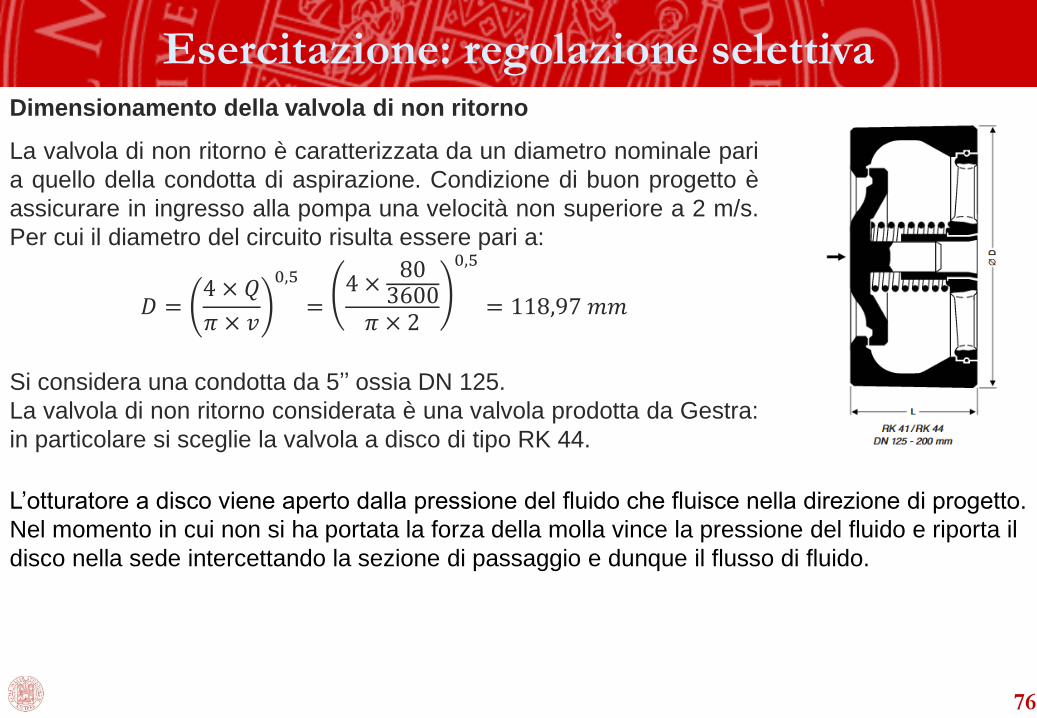
Dimensionamento della valvola di non ritorno
La valvola di non ritorno è caratterizzata da un diametro nominale pari
a quello della condotta di aspirazione. Condizione di buon progetto è
assicurare in ingresso alla pompa una velocità non superiore a 2 m/s.
Per cui il diametro del circuito risulta essere pari a:
𝐷 =4 × 𝑄
𝜋 × 𝑣
0,5
=4 ×
803600
𝜋 × 2
0,5
= 118,97 𝑚𝑚
Si considera una condotta da 5’’ ossia DN 125.
La valvola di non ritorno considerata è una valvola prodotta da Gestra:
in particolare si sceglie la valvola a disco di tipo RK 44.
76
L’otturatore a disco viene aperto dalla pressione del fluido che fluisce nella direzione di progetto.
Nel momento in cui non si ha portata la forza della molla vince la pressione del fluido e riporta il
disco nella sede intercettando la sezione di passaggio e dunque il flusso di fluido.
Esercitazione: regolazione selettiva
Dimensionamento della valvola di non ritorno
77
Esercitazione: regolazione selettiva
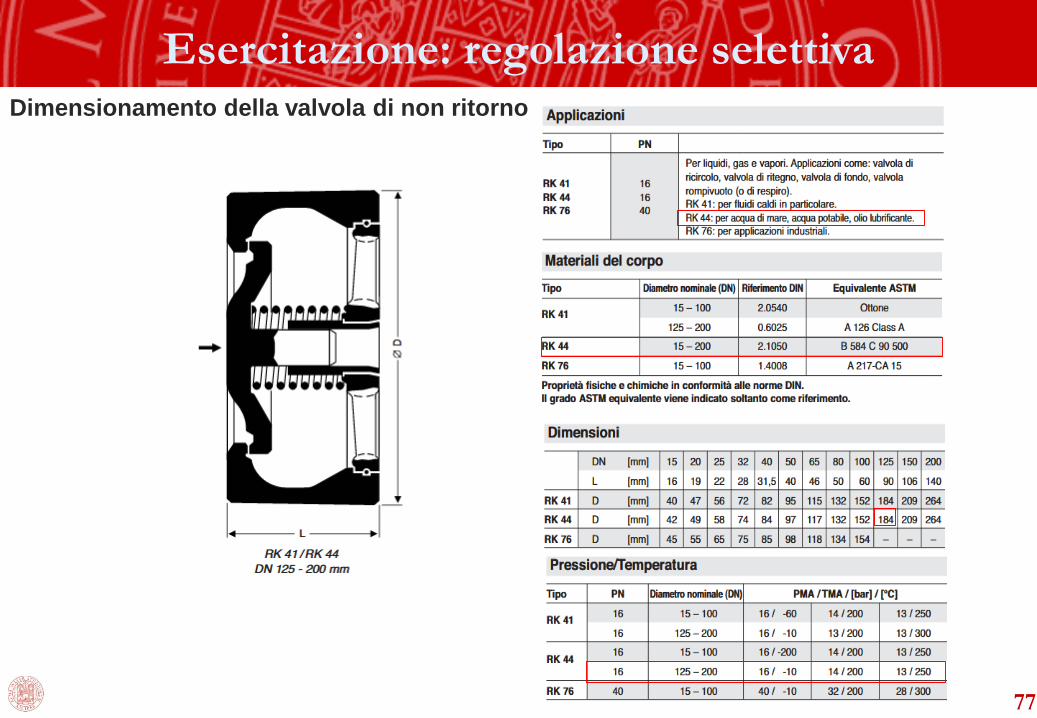
Dimensionamento della valvola di non ritorno
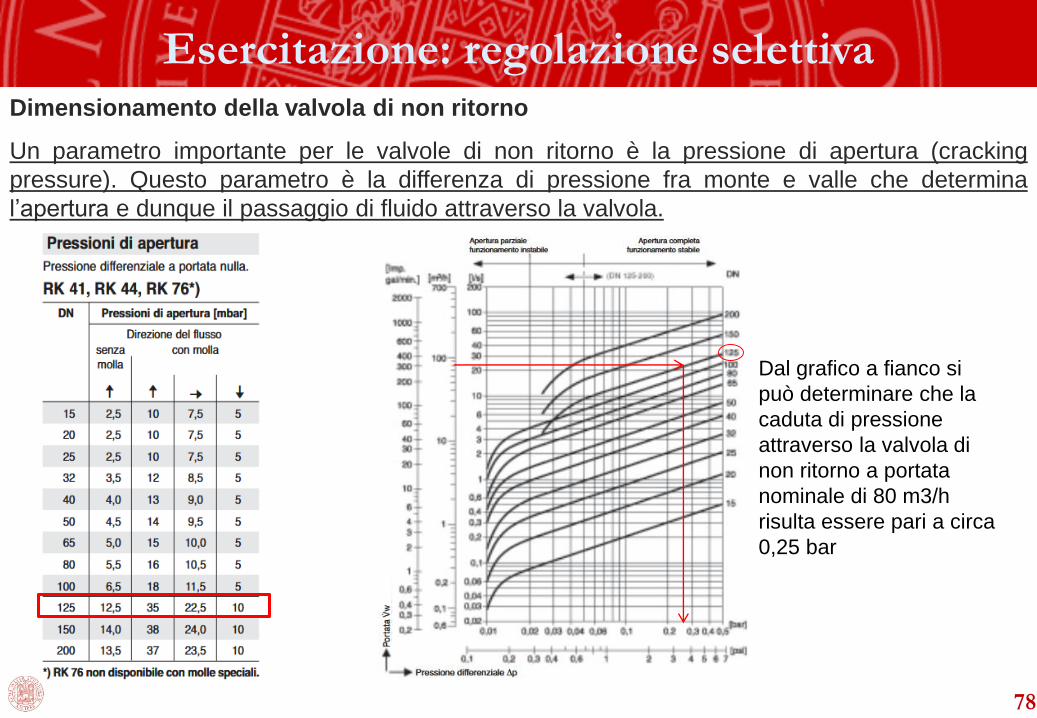
Un parametro importante per le valvole di non ritorno è la pressione di apertura (cracking
pressure). Questo parametro è la differenza di pressione fra monte e valle che determina
l’apertura e dunque il passaggio di fluido attraverso la valvola.
78
Dal grafico a fianco si
può determinare che la
caduta di pressione
attraverso la valvola di
non ritorno a portata
nominale di 80 m3/h
risulta essere pari a circa
0,25 bar
Esercitazione: regolazione selettiva
Scelta dei trasmettitori penumatici e dei regolatori
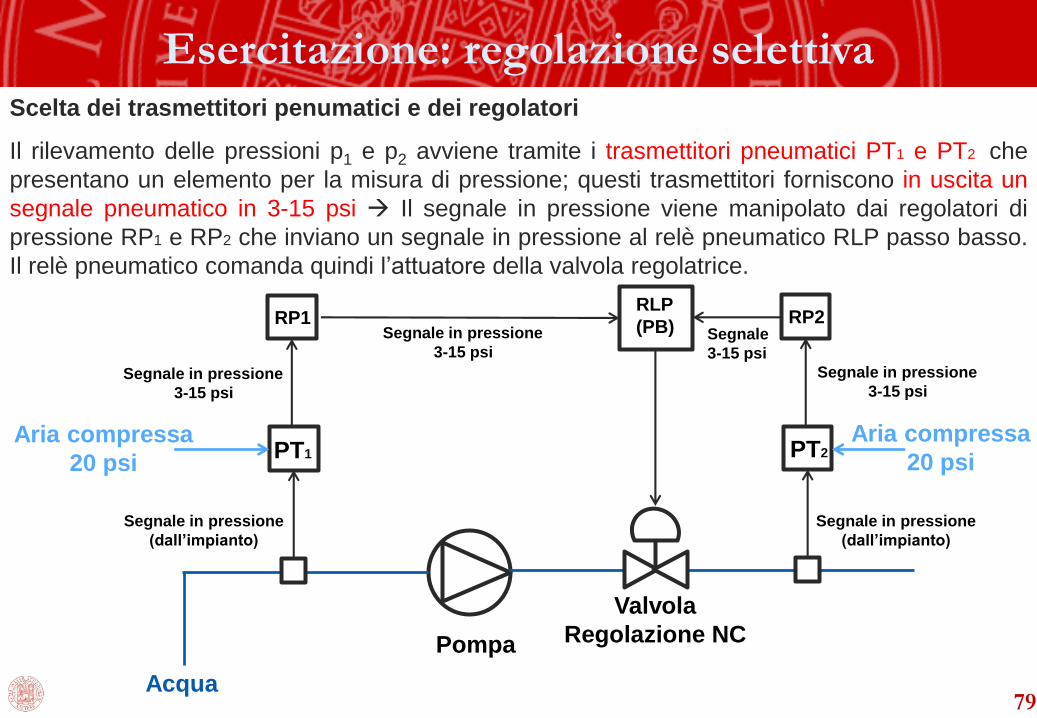
Il rilevamento delle pressioni p1 e p2 avviene tramite i trasmettitori pneumatici PT1 e PT2 che
presentano un elemento per la misura di pressione; questi trasmettitori forniscono in uscita un
segnale pneumatico in 3-15 psi Il segnale in pressione viene manipolato dai regolatori di
pressione RP1 e RP2 che inviano un segnale in pressione al relè pneumatico RLP passo basso.
Il relè pneumatico comanda quindi l’attuatore della valvola regolatrice.
Pompa
Segnale in pressione
(dall’impianto)
PT1
Segnale in pressione
3-15 psi
Acqua
Aria compressa
20 psi
RP1
Valvola
Regolazione NC
Segnale in pressione
(dall’impianto)
Segnale in pressione
3-15 psi
Aria compressa
20 psi
RP2RLP
(PB)
PT2
79
Segnale in pressione
3-15 psiSegnale
3-15 psi
Esercitazione: regolazione selettiva

Trasmettitore pneumatico (PT): serie 200
80
Esercitazione: regolazione selettiva
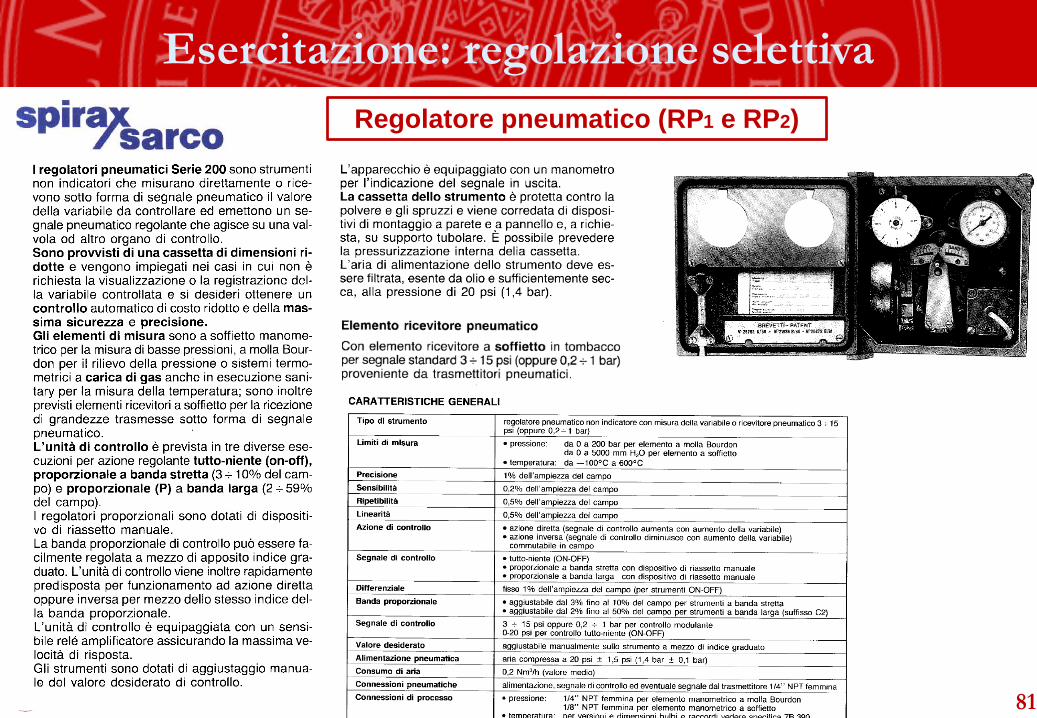
Regolatore pneumatico (RP1 e RP2)
81
Esercitazione: regolazione selettiva
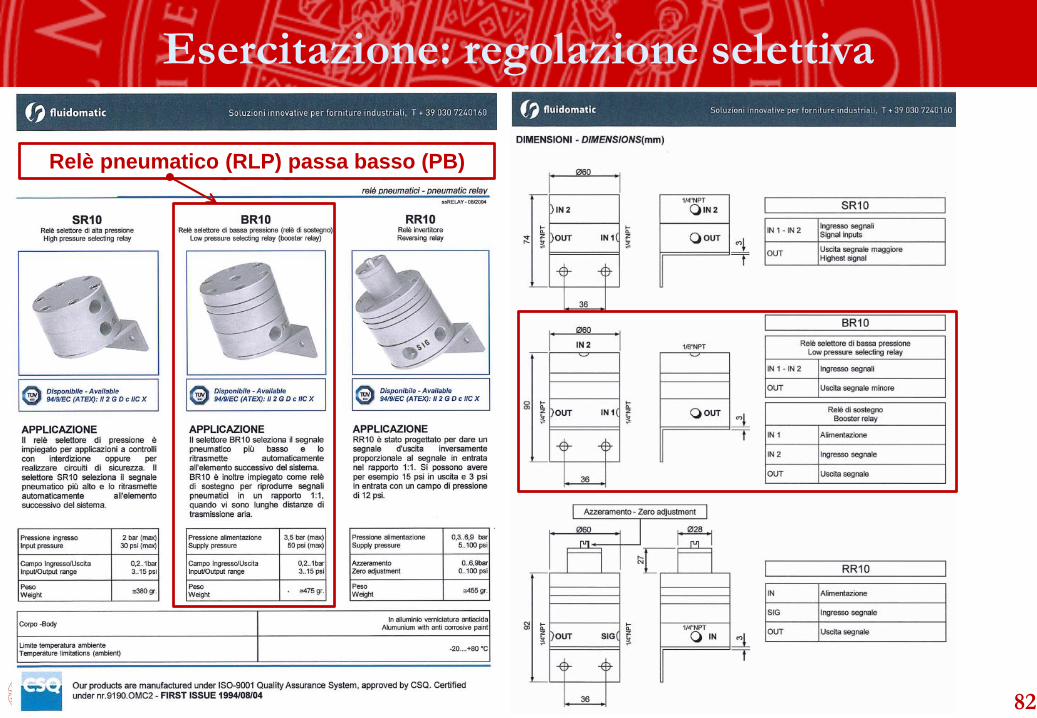
Relè pneumatico (RLP) passa basso (PB)
82
Esercitazione: regolazione selettiva
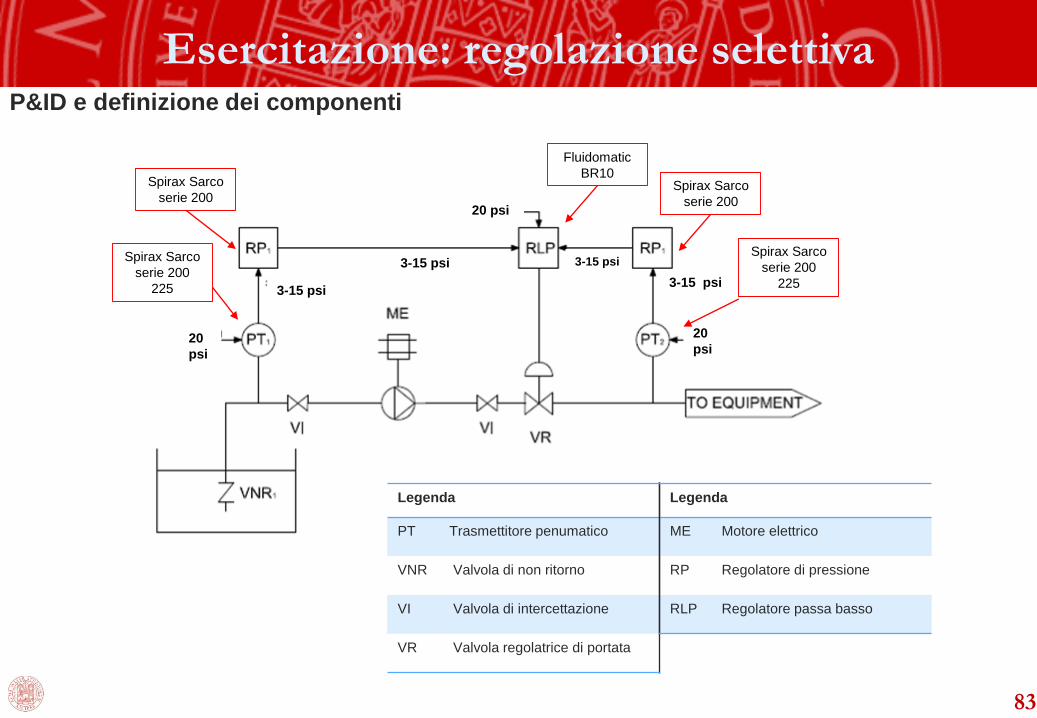
83
P&ID e definizione dei componenti
Legenda
PT Trasmettitore penumatico
VNR Valvola di non ritorno
VI Valvola di intercettazione
VR Valvola regolatrice di portata
Legenda
ME Motore elettrico
RP Regolatore di pressione
RLP Regolatore passa basso
20
psi
20 psi
20
psi
3-15 psi
3-15 psi3-15 psi
3-15 psi
Fluidomatic
BR10Spirax Sarco
serie 200
Spirax Sarco
serie 200
Spirax Sarco
serie 200
225
Spirax Sarco
serie 200
225
Esercitazione: regolazione selettiva

Corso di Strumentazione e Automazione Industriale
Modulo 1.1
Introduzione e richiami
Prof. Ing. Cesare Saccani
Prof. Ing. Augusto Bianchini
Ing. Marco Pellegrini
Ing. Alessandro Guzzini
Department of Industrial Engineering (DIN) - University of Bologna