MOBILE MAPPING SYSTEM PER IL CATASTO DELLE … siligato mms.pdf · Nel presente lavoro si propone...
10
MOBILE MAPPING SYSTEM PER IL CATASTO DELLE STRADE Dott. Ing. Giuseppe Siligato Università degli Studi Catania Dottorato in Ingegneria delle Infrastrutture Viarie Ciclo XIX Dipartimento Ingegneria Civile Ambientale Tutor: Prof. Giuseppe Mussumeci KEY WORDS: catasto strade, GPS, geometria stradale, caratteristiche geometriche, MMS, fotogrammetria digitale ABSTRACT: Nel presente lavoro si propone l’utilizzo di un prototipo di veicolo, capace di acquisire e catalogare alcune delle informazioni necessarie alla realizzazione del Catasto Strade, quali segnaletica orizzontale e verticale, cartellonistica, sezione trasversale, stato della pavimentazione, geometria d’asse ed accessi laterali. Il veicolo è equipaggiato con due sensori di acquisizione video ed un ricevitore GPS. La video camera anteriore è orientata lungo la direzione di marcia e consente di acquisire le informazione relative alla segnaletica verticale, alla sezione trasversale e la presenza di accessi; quella posteriore è orientata ortogonalmente alla pavimentazione stradale e consente invece l’estrazione delle informazioni relative allo stato della pavimentazione e l’affettiva traiettoria percorsa dal veicolo. Le sequenze video vengono eseguite in maniera da ottenere frame sincroni al rate di acquisizione del sensore GPS, ciò consente la georeferenziazione delle informazioni estratte dai frame. La metodologia permette inoltre la conoscenza puntuale della distanza veicolo segnaletica di riferimento, ciò consente di ottenere una nuova semina di punti coincidente con la segnaletica orizzontale, rendendo di fatto più agevoli le operazioni di estrazione della geometria stradale. Una particolare attenzione è stata rivolta ai fattori che possono influenzare la qualità e quantità delle soluzioni posizionali della semina di punti. In particolare sono state esplorate le correlazioni esistenti tra tipologia, durata e lunghezza del segmento di inizializzazione e qualità della soluzione posizionale. 1. INTRODUZIONE Il rilevamento delle caratteristiche geometriche delle infrastrutture stradali è di grande attualità ed ha attivato numerosi ricercatori nella definizione e sperimentazione sul campo di metodologie innovative. Obiettivi primari della ricerca sono il raggiungimento di un’elevata precisione (ad esempio il Catasto delle strade richiede, in Italia, ±0.10 m sulle dimensioni della carreggiata) e contemporaneamente l’alta produttività. Riguardo a quest’ultimo aspetto non appare superfluo precisare che una provincia italiana di medie dimensioni, quale è quella di Catania, gestisce (e quindi ha l’obbligo di “catastare”) oltre 3000 Km di strade. L’approccio dunque non può che essere basato su riprese della sede stradale mediante video o foto- camere installate su veicolo in movimento e trattamento delle stesse con tecniche fotogrammetriche, ove possibile, georeferenziate mediante GPS/INS per una restituzione fotogrammetrica “diretta”. L’impiego della strumentazione GPS in modalità cinematica risulta particolarmente adatto al rilievo stradale, in particolare assume grande rilevanza la tecnica GPS differenziale con misure di fase; utilizzando detta tecnica in modalità cinematica si ottiene, infatti, un notevole beneficio di precisione e rapidità permettendo il rilievo di una semina di punti rappresentativi della traiettoria percorsa dal veicolo. Sebbene la tecnica GPS differenziale basata su misura di fase sia già da tempo utilizzata nelle applicazioni cinematiche, una piena operatività implica comunque la risoluzione di alcune problematiche legate all’impiego della coppia di ricevitori. La determinazione dell’ambiguità iniziale nel metodo differenziale cinematico GPS consiste nella soluzione, epoca per epoca, delle equazioni di osservazione tra due ricevitori (master rover) dopo aver determinato le ambiguità iniziali e mantenendo il contatto con i satelliti; è facilmente intuibile il decadimento della qualità posizionale rispetto al metodo statico, dove è possibile calcolare le coordinate di un punto risolvendo ai minimi quadrati un sistema di equazioni caratterizzato da una notevole ridondanza; nel posizionamento cinematico, ad ogni perdita di contatto con i satelliti è necessario determinare nuovamente l’ambiguità iniziale non appena questo si ripristina; inoltre poiché uno dei punti è in movimento, questa operazione si basa sulle sole osservabili disponibili al momento. In queste condizioni viene generalmente utilizzato l’algoritmo OTF che si basa sulla misura delle pseudo-distanze generando coordinate approssimate che comunque permettono di determinare l’ambiguità iniziale. La lunghezza della base di inizializzazione risulta di fondamentale importanza difatti con il suo incremento si ha una progressiva perdita di correlazione spaziale degli errori di misura GPS ed il conseguente decadimento delle modellazioni basate sul concetto di base singola. Vi è inoltre da considerare la configurazione geometrica dei satelliti, in genere si fa riferimento al GDOP che tiene conto sia degli s.q.m. relativi alle coordinate geocentriche sia s.q.m. dell’errore imputabile all’orologio del ricevitore; valori elevati corrispondono a intersezioni nello spazio con basi piccole rispetto alla distanza satellite ricevitore originando soluzioni non ottimali che ovviamente si ripercuotono sulla qualità finale del dato posizionale. Le interferenze generate dalla riflessione del segnale sorgente su superfici prossime al ricevitore e lacune GPS imputabili a parziale oscuramento del sensore, o alla presenza di ostacoli al
Transcript of MOBILE MAPPING SYSTEM PER IL CATASTO DELLE … siligato mms.pdf · Nel presente lavoro si propone...

MOBILE MAPPING SYSTEM PER IL CATASTO DELLE STRADE
Dott. Ing. Giuseppe Siligato
Università degli Studi Catania Dottorato in Ingegneria delle Infrastrutture Viarie Ciclo XIX
Dipartimento Ingegneria Civile Ambientale
Tutor: Prof. Giuseppe Mussumeci
KEY WORDS: catasto strade, GPS, geometria stradale, caratteristiche geometriche, MMS, fotogrammetria digitale
ABSTRACT:
Nel presente lavoro si propone l’utilizzo di un prototipo di veicolo, capace di acquisire e catalogare alcune delle informazioni
necessarie alla realizzazione del Catasto Strade, quali segnaletica orizzontale e verticale, cartellonistica, sezione trasversale, stato
della pavimentazione, geometria d’asse ed accessi laterali.
Il veicolo è equipaggiato con due sensori di acquisizione video ed un ricevitore GPS. La video camera anteriore è orientata lungo la
direzione di marcia e consente di acquisire le informazione relative alla segnaletica verticale, alla sezione trasversale e la presenza di
accessi; quella posteriore è orientata ortogonalmente alla pavimentazione stradale e consente invece l’estrazione delle informazioni
relative allo stato della pavimentazione e l’affettiva traiettoria percorsa dal veicolo.
Le sequenze video vengono eseguite in maniera da ottenere frame sincroni al rate di acquisizione del sensore GPS, ciò consente la
georeferenziazione delle informazioni estratte dai frame.
La metodologia permette inoltre la conoscenza puntuale della distanza veicolo segnaletica di riferimento, ciò consente di ottenere
una nuova semina di punti coincidente con la segnaletica orizzontale, rendendo di fatto più agevoli le operazioni di estrazione della
geometria stradale.
Una particolare attenzione è stata rivolta ai fattori che possono influenzare la qualità e quantità delle soluzioni posizionali della
semina di punti. In particolare sono state esplorate le correlazioni esistenti tra tipologia, durata e lunghezza del segmento di
inizializzazione e qualità della soluzione posizionale.
1. INTRODUZIONE
Il rilevamento delle caratteristiche geometriche delle
infrastrutture stradali è di grande attualità ed ha attivato
numerosi ricercatori nella definizione e sperimentazione sul
campo di metodologie innovative. Obiettivi primari della
ricerca sono il raggiungimento di un’elevata precisione (ad
esempio il Catasto delle strade richiede, in Italia, ±0.10 m sulle
dimensioni della carreggiata) e contemporaneamente l’alta
produttività.
Riguardo a quest’ultimo aspetto non appare superfluo precisare
che una provincia italiana di medie dimensioni, quale è quella
di Catania, gestisce (e quindi ha l’obbligo di “catastare”) oltre
3000 Km di strade. L’approccio dunque non può che essere
basato su riprese della sede stradale mediante video o foto-
camere installate su veicolo in movimento e trattamento delle
stesse con tecniche fotogrammetriche, ove possibile,
georeferenziate mediante GPS/INS per una restituzione
fotogrammetrica “diretta”.
L’impiego della strumentazione GPS in modalità cinematica
risulta particolarmente adatto al rilievo stradale, in particolare
assume grande rilevanza la tecnica GPS differenziale con
misure di fase; utilizzando detta tecnica in modalità cinematica
si ottiene, infatti, un notevole beneficio di precisione e rapidità
permettendo il rilievo di una semina di punti rappresentativi
della traiettoria percorsa dal veicolo.
Sebbene la tecnica GPS differenziale basata su misura di fase
sia già da tempo utilizzata nelle applicazioni cinematiche, una
piena operatività implica comunque la risoluzione di alcune
problematiche legate all’impiego della coppia di ricevitori.
La determinazione dell’ambiguità iniziale nel metodo
differenziale cinematico GPS consiste nella soluzione, epoca
per epoca, delle equazioni di osservazione tra due ricevitori
(master rover) dopo aver determinato le ambiguità iniziali e
mantenendo il contatto con i satelliti; è facilmente intuibile il
decadimento della qualità posizionale rispetto al metodo statico,
dove è possibile calcolare le coordinate di un punto risolvendo
ai minimi quadrati un sistema di equazioni caratterizzato da una
notevole ridondanza; nel posizionamento cinematico, ad ogni
perdita di contatto con i satelliti è necessario determinare
nuovamente l’ambiguità iniziale non appena questo si ripristina;
inoltre poiché uno dei punti è in movimento, questa operazione
si basa sulle sole osservabili disponibili al momento. In queste
condizioni viene generalmente utilizzato l’algoritmo OTF che si
basa sulla misura delle pseudo-distanze generando coordinate
approssimate che comunque permettono di determinare
l’ambiguità iniziale.
La lunghezza della base di inizializzazione risulta di
fondamentale importanza difatti con il suo incremento si ha una
progressiva perdita di correlazione spaziale degli errori di
misura GPS ed il conseguente decadimento delle modellazioni
basate sul concetto di base singola.
Vi è inoltre da considerare la configurazione geometrica dei
satelliti, in genere si fa riferimento al GDOP che tiene conto sia
degli s.q.m. relativi alle coordinate geocentriche sia s.q.m.
dell’errore imputabile all’orologio del ricevitore; valori elevati
corrispondono a intersezioni nello spazio con basi piccole
rispetto alla distanza satellite ricevitore originando soluzioni
non ottimali che ovviamente si ripercuotono sulla qualità finale
del dato posizionale.
Le interferenze generate dalla riflessione del segnale sorgente su
superfici prossime al ricevitore e lacune GPS imputabili a
parziale oscuramento del sensore, o alla presenza di ostacoli al

di sopra di 15°-20° di elevazione possono disturbare o
interrompere la ricezione generando ulteriori cycle slip.
Nell’ambito dell’attività svolta, è stata messa a punto una
metodologia di acquisizione basata su un veicolo rilevatore
equipaggiato da due video camere, la prima orientata lungo la
direzione di marcia mentre la seconda disposta ortogonalmente
alla pavimentazione stradale; entrambi i sensori vengono gestiti
da un software appositamente realizzato con il quale è anche
possibile sincronizzare il tempo di acquisizione di ogni sensore
con un impulso esterno. Nel caso in esame l’intero sistema
viene sincronizzato al “rate” di campionamento del sensore
GPS alloggiato sul veicolo in movimento, ciò consente di fatto
l’estrazione dei singoli “frame” dalle sequenze video sincroni al
“rate” di acquisizione del sensore GPS.
Dalle due diverse sequenze di “frame” georeferenziate è
possibile estrarre informazioni relative alla tipologia e
dimensione della sezione trasversale dell’infrastruttura lo stato
di degrado della pavimentazione stradale, l’effettiva traiettoria
percorsa dal veicolo che transita sull’infrastruttura la presenza
di accessi e cartelloni. Dai “frame” estratti della camera
posteriore è possibile determinare in ogni istante la posizione
della mezzeria del veicolo rispetto alla segnaletica orizzontale,
ove presente, condizione che consente di generare una nuova
semina di punti denominata “semina ausiliaria” che meglio
approssima la reale geometria dell’infrastruttura.
2. VALUTAZIONE DELLE SOLUZIONI
POSIZIONALI
2.1 Qualità delle soluzione posizionali
L’utilizzo cinematico dei sensori GPS finalizzato alla
ricostruzione della traiettoria percorsa dal veicolo è fortemente
influenzato da numerosi fattori, tra cui sono di fondamentale
importanza l’inizializzazione del segmento cinematico, il
numero e la disposizione geometrica della costellazione
osservabile, la presenza di ostacoli e/o mascheramenti.
A seguito di operazioni di osservazione e controllo protratte nel
tempo (sitting) si sono validati e materializzati due capisaldi
nel seguito denominati [DICA] ed [SS114]; questi sono stati
scelti in maniera tale che SS114 si possa considerare come
punto “vicino” (gran parte del tracciato si sviluppa nelle sue
vicinanze), mentre DICA risulta più distante e può quindi essere
considerato come punto “lontano”.
Nello svolgimento delle prove sono stati utilizzati
contemporaneamente tre sensori: due di riferimento collocati sui
capisaldi, il terzo alloggiato sul veicolo in movimento sul
tracciato di prova.
La possibilità di utilizzare i dati provenienti da due diversi
ricevitori master, consente di associare ad ogni singolo punto
acquisito in modalità cinematica due distinte soluzioni
posizionali, una relativa al “punto vicino” ed una associata al
“punto lontano” , ciò di fatto consente di effettuare un controllo
sulla qualità della soluzione posizionale.
Individuata la base di riferimento, la soluzione posizionale
associata al generico punto non è univoca, ma più in generale
vengono determinate un insieme di soluzioni che costituiscono
il cosiddetto “dominio delle soluzioni” dal quale viene estratta
la soluzione più probabile in relazione alla tipologia di rilievo
ed all’affidabilità ricercata; in pratica questo si traduce
nell’adottare uno unico “criterio di reiezione” per l’intero
rilievo.
Al fine di evidenziare la forte dipendenza della soluzione dalla
distanza tra ricevitori sono stati fissati due differenti criteri di
reiezione: il primo, molto selettivo, capace di assicurare una
maggiore affidabilità a discapito del numero di soluzioni
validate, associato al “punto vicino” [SS114], mentre il secondo
più blando, permette di restituire una maggiore porzione di
traiettoria viene invece associato al “punto lontano” [DICA].
Figura 1. Soluzione associate al riferimento SS114
Figura 2. Soluzione associate al riferimento DICA
Figura 3 . Variazioni nel numero delle soluzioni in relazione al
criterio di reiezione adottato
Nello successivo grafo si evidenziano le zone caratterizzate da
un doppia soluzione:
Soluzioni posizionali
1753
2678
0
500
1000
1500
2000
2500
3000
DICA
SS114

Figura 4. Tracciato Test
Al fine di quantificare per ogni punto della catena cinematica
lo scarto tra la soluzione associata al “punto lontano” e quella
del “punto vicino” si definisce il vettore differenza di posizione
come il valore assoluto delle differenza della soluzione
posizionale del punto lontano e quella del punto vicino; (VDP =
[Slont- Svic]).
Di seguito si riportano dei grafici dove si evidenzia la
variabilità del vettore differenza di posizione (nel prosieguo
indicato con VDP) al mutare delle condizioni che hanno
originato le diverse soluzioni, lunghezza e modalità del
segmento di inizializzazione; l’intero vettore differenza è
indicato dalla curva in blu denominata [diff. 3d], mentre la
componente planimetrica è indicata dalla curva magenta
denominata [diff. 2d], la porzione di segmento contenuta tra la
curva [diff. 3d] e [diff. 2d] è dunque rappresentativa della
componente altimetrica del VDP.
Figura 5 . Zona 1
Figura 6 . Zona 2
Figura 7 . Zona 3
Figura 8 . Zona 4

Figura 9 . Zona 5
Figura 10 . Zona 6
Figura 11 . Zona 7
Nel primo tratto la prolungata inizializzazione statica consente
di fissare l’ambiguità in maniera molto efficace, come
evidenziato dalla ridotta entità del VDP.
Nella zona 2 l’entità del VDP è paragonabile a quella della
zona 1 per il tratto iniziale; successivamente, al crescere della
distanza rover - master, il VDP cresce. La zona 3 è invece
caratterizzata da una inizializzazione OTF, ovvero il veicolo
non ha arrestato la marcia in presenza di ostruzioni e la
risoluzione dell’ambiguità viene tentata in fase di post
processamento utilizzando solo l’intervallo di dati validi,
condizione che origina ambiguità palesemente differenti per il
“punto vicino” e per il “punto lontano”, come evidenziato dal
VDP .
La zona 4 è caratterizzata da una inizializzazione statica e da
baseline pressoché costanti; per tutto l’intervallo il VDP si
mantiene quasi immutato.
Nella zona 5 valgono le considerazioni fatte per la zona 3,
mentre nella zona 6 l’intervallo delle soluzioni è molto più
elevato rispetto al caso delle inizializzazione cinematiche
precedentemente analizzate; ciò consente all’algoritmo OTF un
fissaggio delle ambiguità molto più robusto. Infatti escluso il
primo tratto, generato da valori di primo tentativo, l’entità del
VDP si mantiene abbondantemente sotto il metro e ciò è anche
dovuto alla progressiva riduzione delle baselines.
Nella zona 7 sebbene la dimensione delle baselines sia ridotta
l’intervallo di soluzione è molto esiguo e ciò non consente un
fissaggio accurato dell’ambiguità di ciclo.
Dai grafici sopra riportati si deduce che in generale
l’inizializzazione statica è più affidabile rispetto a quella OTF,
inoltre la dimensione della baseline è di fondamentale influenza
nella qualità della soluzione visto che generalmente a basi corte
corrispondono differenze posizionali minime.
Vista la modalità di correzione differenziale “post_processing”,
nell’algoritmo OTF assume particolare rilevanza l’entità e la
qualità dell’intervallo nel quale il ricevitore ha osservato un
sufficiente numero di satelliti con una geometria soddisfacente.
L’algoritmo di risoluzione è in grado di utilizzare e trattare le
osservabili immediatamente successive alle carenze; quindi,
maggiore è l’intervallo di dati valido, maggiori sono le
possibilità di arrivare ad un corretto fissaggio dell’ambiguità di
fase.
La determinazione di una nuova ambiguità è necessaria ogni
qualvolta si ha una carenza nella ricezione della costellazione
GPS, difatti ad ogni perdita il valore dell’ambiguità muta; nel
caso dei grafici 3 e 5 l’intervallo temporale di ricezione di
segnali “soddisfacenti” è stato troppo esiguo per fissare un
valore di ambiguità sufficientemente valido, al contrario nel
grafico 6 l’intervallo di tempo è stato sufficiente, come
evidenziato dall’entità del VDP. Questo risulta superiore nel
tratto iniziale, dove l’algoritmo di filtraggio non ha potuto
analizzare i dati cronologicamente precedenti alla perdita di
segnale e si è basato su sole soluzioni di codice.
Condizione comune a tutti i grafici è la differenza di precisione
tra componente piana e tridimensionale nelle soluzioni, in
particolari condizioni tale differenza può anche essere di un
ordine di grandezza. La differente affidabilità tra la componente
planimetrica e altimetrica della soluzione è tipica delle
metodologie di rilievo satellitari, difatti tutte queste sono
riconducibili ad uno schema di rilievo per intersezioni in avanti
multiple, schema di rilievo in origine mal condizionato, inoltre
la differenza è tanto più spiccata quanto più scadente è il
fissaggio dell’ambiguità.
L’utilizzo della doppia base di riferimento ha consentito di
quantificare l’entità del vettore differenze senza però dare un
riscontro oggettivo dell’effettiva bontà delle soluzioni
posizionali, vista la selettività adottata per il “punto vicino” e
la minore entità delle baselines di risoluzione si può solo
ipotizzare che questa sia la soluzione più affidabile.
2.2 Riscontro oggettivo delle qualità posizionali
Al fine di ottenere un riscontro oggettivo del dato posizionale è
stata individuata una apposita area test, caratterizzata da una
copertura satellitare completa ed un flusso veicolare ridotto,
condizioni che di fatto hanno consentito lo svolgimento delle
diverse campagne di rilievo e controllo in totale sicurezza.

Verificata l’assenza di disturbi localizzati, è stato possibile
individuare una serie di capisaldi all’interno dell’area test,
costituendo una rete primaria locale successivamente inquadrata
nel sistema nazionale. Grazie alla rete è stato possibile eseguire
il rilievo di dettaglio dell’intera area e, in particolare, di tutti gli
elementi appartenenti alla piattaforma stradale (banchine,
marciapiedi e l’intera segnaletica orizzontale).
La completa assenza di ostacoli ed ostruzione nell’area test ha
consentito di restituire l’intera catena cinematica con una sola
inizializzazione statica, determinando le componenti nel sistema
di riferimento WGS84. I risultati di tutte le prove condotte sono
state riferite ad un apposito sistema cartesiano polare, tale da
esprimere posizioni tridimensionali o altre grandezze, quali
baselines, residui, spostamenti, in un sistema che pur essendo
cartesiano è locale ed aderente al terreno e che quindi
minimizza le deformazioni delle rappresentazioni cartografiche,
ed inoltre permette di scindere anche se in maniera rigorosa la
componente altimetrica da quella planimetrica.
Figura 12 . Area Test e rilievo di dettaglio
I sensori di riferimento sono stati collocati in maniera tale che la
distanza massima dal punto “lontano” sia prossima ai 6 Km
mentre quella dal punto “vicino” sia inferiore a 3 Km; il criterio
di reiezione adottato, unico per entrambi, tende ad accettare
solo le soluzioni caratterizzate da una ottima qualità ed
affidabilità.
Nelle differenti esperienze condotte l’incremento del segmento
di inizializzazione [3004.7 - 5745.6 m] a parità delle altre
condizioni di rilievo (tempo di inizializzazione, modalità di
osservazione ecc ecc.), ha comportato solo un decremento nella
qualità intrinseca della soluzione posizionale, mantenendo
invariato il numero dei punti traiettoria restituiti.
Esperienze condotte in finestre orarie differenti hanno
evidenziato una dipendenza della qualità posizionale dalla
configurazione satellitare, difatti la perdita di visibilità di un
solo satellite ha comportato un incremento del VDP.
Figura 13 . Visibilità satellitare
Figura 14 . Variazione GDOP
comparata
0,000
0,050
0,100
0,150
0,200
0,250
0,300
0,350
2
13
24
35
46
57
68
79
90
10
1
11
2
12
3
13
4
14
5
15
6
16
7
17
8
18
9
20
0
21
1
22
2
23
3
24
4
25
5
26
6
27
7
28
8
29
9
31
0
32
1
33
2
34
3
35
4
36
5
37
6
ID_POINT
[m] dif_2d
diff_3d
Figura 15 . VDP relativo ad una finestra oraria con 6 satelliti
tracciati

comparata
0,000
0,050
0,100
0,150
0,200
0,250
0,300
0,350
1 9 17 25 33 41 49 57 65 73 81 89 97 105
113
121
129
137
145
153
161
169
177
185
193
201
209
217
225
233
241
ID_POINT
[m] dif_2d
diff_3d
Figura 16 . VDP relativo ad una finestra oraria con 5 satelliti
tracciati
Nel caso di una tradizionale campagna di rilievo non è possibile
ricreare le condizione “ideali” dell’esperienza è quindi lecito
attendersi un decadimento sia nel numero di punti validati che
nella qualità intrinseca della soluzione stessa.
3. PROPOSTA METODOLOGICA PER IL
RILIEVO SU BASE ASSOLUTA
3.1 Il Laboratorio Mobile D.I.C.A.
Presso il Dipartimento di Ingegneria Civile ed Ambientale
dell’Università degli Studi di Catania è in un studio la
realizzazione di un laboratorio mobile per il rilievo delle strade.
Il veicolo in dotazione al Dipartimento è un FIAT Ducato
opportunamente modificato ed arredato per accogliere
strumentazione e personale tecnico nell’esecuzione di rilievi ad
alta produttività. Il veicolo è omologato per il trasporto di 3
tecnici oltre all’autista ed è dotato di 3 postazioni PC collegate
da LAN, l’intero sistema è alimentato da un inverter 12/220 V e
da un gruppo elettrogeno, il che assicura una buona autonomia.
Da un punto di vista operativo si possono distinguere le
seguenti sezioni:
1) Sistema di acquisizione:
• sensore Trimble 4000 SSI con rate di acquisizione
minima pari ad 1sec ed output PPS su porta dedicata;
• odometro ottico con giroscopio inerziale di sensibilità
56.2 mV/°/s per la velocità angolare, 25 mV/Km/h per
la velocità longitudinale, 460 pulses/m per lo
spostamento;
• accelerometri triassiali con sensibilità di 1000 mV/g
intervallo di frequenza 0 – 150 Hz, precisione 30 µg;
• videocamera digitale b/n BASLER A 101f con focale
da 8 mm, dimensione media del pixel 6.7 µm,
dimensione dell’immagine 1300 x 1300 (nel
prosieguo indicata come CCD)
• videocamera digitale con sensore CMOS risoluzione
1288 x 1032, frequenza di acquisizione 16 Mhz – 9.3
fps (nel prosieguo denominata CMOS)
2) Sistema di sincronizzazione delle soluzioni posizionali e
della sensoristica “on board”, basato sul “PPS Event” del
sensore GPS, e scheda di acquisizione dati PCI6220
National Instruments;
3) Sistema di archiviazione ed elaborazione dati, mediante
apposito software sviluppato in C++ dotato di GUI ed
operante in ambiente Windows;
Figura 17 . Il laboratorio mobile D.I.C.A
Allo stato attuale il laboratorio è equipaggiato con due sensori
di acquisizione video, il primo denominato CCD è collocato
nella parte anteriore del veicolo all’interno del vano guida, su
una apposita staffa posta in asse con l’antenna GPS, mentre il
secondo, denominato CMOS ,sempre in asse con l’antenna
GPS, è invece collocato nella parte posteriore del veicolo su un
supporto posto alla stessa altezza dell’antenna, con un
orientamento pressoché ortogonale alla pavimentazione
stradale, l’unità inerziale, costituita da un odometro ottico
integrato ad una bussola giroscopica, è collocata sul pianale
inferiore del veicolo e fuoriesce da esso grazie ad una apposita
botola.
Figura 18 . Collocazione spaziale dei sensori di acquisizione
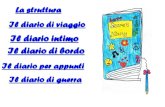
3.2 Misura della sezione stradale
L’utilizzo della metodologia del reticolo virtuale consente, nota
la focale del sensore video e la distanza di restituzione, di
individuare il piano di raddrizzamento e più propriamente la sua
traccia sul piano di rotolamento della pavimentazione stradale.
Figura 19 . Tracce dei piani di acquisizione

La materializzazione del reticolo sul piano di raddrizzamento
consente di risolvere la proiettività tra i due piani, rendendo
difatti possibile il calcolo dei parametri necessari alla
trasformazione omografica dei frame estratti dalla sequenza
video.
Di seguito si riporta una esempio degli elementi individuati sul
piano di raddrizzamento e le corrispondenti misure ottenute
Figura 20 . Elementi sul piano di raddrizzamento
La trasformazione in condizioni ideali è una trasformazione
corretta, gli scarti registrati sono da imputare principalmente
alle reali condizioni di prova quali: approssimazione
nell’orientamento spaziale del sensore e nella misura
dell’elevazione dal piano di rotolamento, nella dimensione
fisica del pixel e nella difficoltà nell’individuare e delimitare
tutti e soli gli elementi appartenenti al piano di raddrizzamento,
condizione molto vincolante come evidenziato dalla misura del
segmento 7-8 elemento non appartenente alla traccia del piano
di raddrizzamento sul quello di rotolamento.
Elementi rilevati Misure reali
1-2 0,14 0,15
2-3 3,15 3,12
3-4 0,13 0,12
4-5 3,15 3.12
5-6 0,15 0,15
6-7 0,38 0,40
7-8 3,65 3,80
Tabella 1. Elementi della sezione stradale
3.3 Il Rilievo della Geometria dell’Asse
Il laboratorio mobile è dotato di un solo sensore GPS e questo
consente di considerare l’intero veicolo alla stregua di un punto
materiale coincidente con il centro di fase dell’antenna. Non
possono quindi essere prese in esame le rotazioni del mezzo
rispetto al sistema di riferimento solidale al veicolo [body-
frame] e la traiettoria viene quindi individuata per mezzo di una
serie di vettori orientati nello spazio, le cui componenti
rappresentano le tre traslazioni del punto materiale (veicolo) nel
sistema di riferimento globale.
La semina di punti acquisita descrive l’effettiva traiettoria
percorsa dal veicolo, che risulta in generale ben diversa dalla
geometria stradale, visto che il mezzo percorre l’infrastruttura
stradale nella propria corsia in posizione eccentrica rispetto
all’asse, ad una distanza dalla mezzeria in ogni istante variabile
perchè influenzata dalla condotta di guida del conducente e
dalla presenza di eventuali ostacoli.
Al fine di quantificare tali spostamenti si è pensato di utilizzare
la segnaletica orizzontale come elemento rappresentativo della
geometria stradale, definendo gli offset di traiettoria, ovvero lo
scostamento della traiettoria rispetto alla geometria
materializzata dalla segnaletica orizzontale.
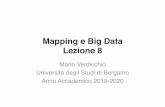
Il sensore di acquisizione video collocato nella parte posteriore
del veicolo (CMOS) è alloggiato su un supporto a sbalzo con un
orientamento tale da consentire l’acquisizione di frame
pressoché ortogonali al piano di rotolamento. In ogni frame
sono contenute le informazioni relative alla segnaletica
orizzontale ed allo stato della pavimentazione stradale.
Dalla intera sequenza video vengono isolati i frame sincroni al
rate del sensore GPS, originando immagini che descrivono in
ogni istante lo scostamento esistente tra la segnaletica
orizzontale e l’asse di simmetria del furgone.
Affinché le informazioni contenute nei frame possano essere
estratte è necessario trasformare questi in immagini
metricamente valide e correlarne la posizione al sistema di
riferimento veicolo.
Grazie ad una serie di target rifrangenti impressionati sui frame
di calibrazione, determinate le coordinate in entrambi i sistemi
di riferimento è possibile correlare le coordinate immagine al
sistema di riferimento veicolo, originando la matrice di
passaggio tra i due sistemi di riferimento.
Figura 21 . Frame di calibrazione
Nota la matrice di trasformazione è possibile applicarla
all’intera sequenza, in maniera da ricampionare tutti i frame
acquisiti per generare fotopiani metricamente validi, al fine di
estrarre le informazioni in esse contenute.
L’elaborazione delle immagini acquisite deve essere
sufficientemente robusta rispetto alle variazioni di luminosità e
contrasto della scena. Situazioni come ombre e scarsa visibilità
(foschia, pioggia) devono essere previste; inoltre il sistema deve
poter affrontare cambi repentini delle condizioni di luminosità
come, ad esempio, il passaggio tra zone soleggiate e zone in
ombra, ingresso e uscita da gallerie, illuminazione frontale, ecc.

Figura 22 . Offset di traiettoria
Dall’intera sequenza video vengono estratte le informazione
relative all’offset di traiettoria ed allo stato della
pavimentazione stradale, grandezze che vengono associate al
frame di origine in un file di testo.
Nota la sequenza degli offset e l’elemento rispetto al quale
questo è stato misurato è possibile eseguire a posteriori una
composizione vettoriale tra il punto GPS ed il corrispondente
offset di traiettoria, dando così origine ad una nuova sequenza
di punti denominata ”semina ausiliaria” rappresentativa della
segnaletica orizzontale che si presta in maniera più appropriata
alla georeferenziazione delle informazioni e alla determinazione
della geometria stradale.
Lo scostamento tra i punti traiettoria e i punti ausiliari risulta
minimo lungo i rettifili e le curve ampie, al contrario per piccoli
raggi di curvatura lo scostamento aumenta, ciò è dovuto
principalmente alla ipotesi iniziale di considerare l’intero
veicolo come un punto materiale, condizione che permette di
eseguire la composizione vettoriale basandosi solo sul vettore
individuato dalla successione dei punti semina.
Figura 23 . Costituzione della semina ausiliaria
Per mitigare gli scostamenti è comunque possibile ridurre la
velocità di percorrenza del veicolo in maniera da ottenere una
interdistanza ridotta tra i punti semina e rendere ancora
accettabile il risultato della composizione vettoriale.
Di seguito, si riporta una prova eseguita all’interno dell’area
test dove la geometria stradale è stata preventivamente
determina con metodologie topografiche tradizionali, in
particolare si propone un esempio dove si transita a cavallo
della mezzeria, questo permette di effettuare un immediato
riscontro della bontà della metodologia, e si registra un valore
massimo dello scostamento prossimo ai 15 cm in
corrispondenza della curva circolare di raggio 36m.
Figura 24 . Punti ausiliari
Figura 25 . Geometria del tratto
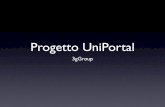
3.4 La restituzione della Geometria dell’Asse
La composizione vettoriale tra la semina GPS originaria e gli
offset di traiettoria consente di dare origine ad un nuovo
insieme di punti denominato “semina ausiliaria”, questa è
coincidente con la segnaletica orizzontale di mezzeria o di
corsia in relazione alle condizioni di ripresa adottate.
Di seguito viene riportata una esperienza relativa al transito del
veicolo a cavallo della linea di mezzeria, dall’analisi delle
curvature è immediato notare come la semina originaria sia
fortemente influenzata dalla condotta di guida del conducente;
al contrario le curvature relativa alla semina ausiliaria variano
con continuità.
Figura 26 . Diagramma delle curvature della semina originaria

Figura 27 . Diagramma delle curvature della semina ausiliaria
Da un analisi più attenta delle curvature della semina ausiliaria
è possibile individuare l’elemento a curvatura costante ed i
tratti di raccordo tra rettifilo e curva, elementi di raccordo
caratterizzati da curvatura variabile necessari per consentire il
passaggio tra elementi con raggi di curvatura differenti come la
successione rettifilo curva rettifilo.
4. CONCLUSIONI E PROSPETTIVE DI RICERCA
La metodologia proposta consente di rilevare con continuità
molte delle informazioni e grandezze necessarie alla
realizzazione del Catasto delle Strade.
Le diverse prove condotte nell’area test hanno fornito risultati
molto confortanti, si è riusciti ad acquisire con continuità la
segnaletica orizzontale, verticale e la presenza di accessi laterali
ed di individuare lo stato della pavimentazione stessa.
Particolarmente interessante si è dimostrata la possibilità di
utilizzare la “semina ausiliaria” per l’estrazione della geometria
stradale, consentendo di lavorare sulla una nuova semina di
punti che non tiene conto dalla condotta di guida del
conducente e che meglio approssima la reale geometria
dell’infrastruttura.
Un uso a regime della metodologia proposta si scontra con i
limiti del sistema di posizionamento satellitare adottato,
fortemente influenzato dalle inizializzazione dei segmenti
cinematici e dalla possibilità di perdita o oscuramento parziale
delle costellazione satellitare.
I limiti legati all’utilizzo del sistema di posizionamento
satellitare potrebbero essere superati con l’introduzione di più
stazioni di riferimento, in grado di garantire la copertura
dell’intero tracciato. In tal caso ad ogni ricevitore competerebbe
una propria area di influenza, e, volta per volta, verrà utilizzato
il ricevitore più vicino al rover come riferimento per il
posizionamento differenziale. Occorre far rilevare che
l’incremento del numero di ricevitori risulta oneroso dal punto
di vista logistico ed inoltre il fatto di dover adoperare in
maniera indipendente l’uno dall’altro ne rende certamente meno
agevole l’utilizzazione, è quindi necessario puntare ad una
architettura di rete, abbandonando quello che è il concetto della
stazione isolata e la modellizzazione degli errori di osservazione
legati alla concetto della singola base.
Si potrebbe migliorare il sistema mediante l’aggiunta al sistema
di una seconda antenna allineata lungo l’asse di simmetria del
veicolo, questa consentirebbe di abbandonare in maniera
definitiva tutte le semplificazioni legate al fatto di considerare
l’intero veicolo come un punto materiale e consentirebbe di
fatto di assimilarlo ad un vettore orientato nello spazio
consentendo un più preciso orientamento dei diversi sensori “on
bord” e la possibilità grazie alla potenzialità NRTK di eseguire
un controllo immediato sulla qualità delle soluzioni posizionali.
La vulnerabilità del sistema ad oscuramenti ed ostruzioni potrà
essere presto superata vista la prossima implementazione dei
dati provenienti della sensoristica inerziale al sistema di
navigazione.
Bibliografia
• A;A;V;V; (1998), Telerilevamento e analisi del
territorio – Ottenere informazioni sulla copertura delle
terre con classificazione semi automatica di immagini
da satellite, Quaderno realizzato a cura del Settore
Sistemi territoriali del CSI- Piemonte;
• Baker-Benefied, S; 2000; “Extra dimension:
Professor-Patented Mapping Device Combined Old,
New”; The Florida Times-Union;
Website:http//www;jacksonville;com/tu-
online/stories/071200/bus_3519070;html
• Benning, W; and T; Aussems; 1998; “Mobile
Mapping by a car Driven Survey (CDSS)”;
Procedings of the Symposium on Geodesy for
Geotechnical and Structural Engineering; H; Kahmen,
E; Bruckl & T; Wunderlich, eds; International
Association of Geodesy (IAG); April 20-22, 1998;
Eisenstadt,Auatria;
• Berg, R;, ferguson, J;(2000), “a pratical Evaluation of
Airbone laser mapping for Highway Engineering
Surveyes”,ION GPS 2000 Proceedings, September
2000, Sal Lake City, Usa
• Bezoari G;, Gallivone M;,Sellini A; (1993); Tecniche
fotogrammetrico - informatiche avanzate per il
rilevamento e la restituzione di monumenti; Boll;
SIFET, n°; 1 Milano
• Bezoari G;, Monti C;, Sellini A; (1993)
Fotogrammetria per l’Architettura; Liguori Ed;,
Napoli;
• Bezoari G;, Mpnti C;, Sellini A; (1993)
Fotogrammetria per l’Architettura; Liguori Ed;,
Napoli;
• Blaho, G; and C; Toth; 1995; “Field Experiences with
a Fully Digital Mobile Stereo Image Acquisition
System”; Proceedings of 1995 Mobile Mapping
Symposium; May 24-26, 1995; Columus, OH; Pp; 97-
104;
• Brown, A; 1998; “High Accuracy Targeting Using a
GPS-Aided Inertial Measurement Unit”; Proceedings
of the 54th Annual Meeting; Institute of Navigation
(ION); June, 1998; Denver, CO;
• Casella, V;, Spalla, A; (2000), “dati laser a scansione
da piattaforma aerea a supporto della pianificazione
urbana”, Bollettino Sifet, 2/2000, 43-51
• Castagnoli A;, Marchetti M;, Volpe F; (2001),
“Sperimentazione di tecniche satellitari ad alta
risoluzione geometrica e/o spettrale per
l’aggiornamento di cartografia della CTR della
regione Emilia – Romagna”, Atti della 5° Conferenza
Nazionale Asita – Rimini 2001
• Chen, X;, Kusanagi, M;, 2001, Automatic
Recognition and Location of Road Signs from
Terrestrial Color Imagery, in Proceeding of The 3rd
ISPRS Workshop on Dynamic and Multi-
Dimensional GIS & The 10th Annual Conference of
CPGIS on Geoinformatics, May 23-25, Bangkok,
Thailand
• Coetesee, J;, A; Brown,and J; Bossler; 1994; “GIS
data Collection Using the GPSVan Supported by a
GPS/Inertial mapping System”; Proceedings of GPS-
94; Institute of Navigation (ION);Septeber 20-23,
1994; Salt Lake City, UT;

• Colombo L;,Sellini A; (1993); Strumenti e
applicazione della fotogrammetria digitale; Boll;
SIFET n° 4 Milano
• D;P;R; n; 495 del 16;12;1992
• D;P;R; n; 610 del 16;09;1996
• Decreto legislativo n; 285 del 20;04;1992 (Nuovo
Codice della Strada)
• Decreto legislativo n; 360 del 10;09;1993
• DM dell’1;06;2001 (Suppl; Ord; Alla GU n; 5 del
7;01;2002)
• El-Hakim, S;F;, P; Boulanger, F; Blais, and J;A
Beraldin; 1997; “A System for Indoor 3-D Mapping
and Virtual Environments”; Proceedings of SPIE Vol;
3174 – Video metrics V; The International Society for
Optical Engineering (SPIE); San Diego, CA; July
1997; pp;21-35;
• Ellum, C; M;, and El-Sheimy, N;, 2002, Land-based
Integrated Systems For Mapping And GIS
Applications, Survey Review, 36, 283: 323-338
• Ellum, C;M; and N; El; Sheimy; 2001; “A mobile
Mappings System for the Survey Community”;
Proceedings of The 3rd International Symposium on
Mobile Mapping Technology (MMS 2001); Cairo,
Egypt; January 3-5, 2001;
• El-Sheimy, N; 1999; “Mobile Multi-sensor Systems:
The New Trend in Mapping and GIS Applications”;
Geodesy Beyond 2000: The Challenges of first
Decade; International Association of Geodesy
Symposia Volume 120; Springer-Vergag Berlin; Pp
319-32a;
• El-Sheimy, N; and K;-P ;Schwarz; 1999;”navigation
urban areas by VISAT – A Mobile Mapping System
Integrating GPS/INS/Digital Cameras for GIS
Applications”; Institute of Navigation (ION); Vol; 45;
No; 4; pp; 275-285;
• Feng, W;, 2002, Close-range Photogrammetry,
Wuhan University Publishing House
• Goad, C;C; 1991; “The Ohio State University
Mapping System: The Positioning Component”;
Proceeding of the 47th Annual Meeting; The Institute
of Navigation (ION); June 10 – 12; Williamsburg;
VA; Pp; 121-124;
• Goldfarb; J;M 1985; “Exposure Station Control for
Aereotriangulation with and INS-Difference GPS”;
Proceedings of Inertial Technology for Surveying and
Geodesy; September 16-20; pp 777-789;
• Graefe, G;, WCaspary, H Heister; J; Klemm and M;
Sever; 2001 “The road Data Acquisition System
MoSES – Determination and Accurancy of Trajectory
Data Gained with the Applanix POS/LV”; Proceeding
of The 3rd International Symposium on Mobile
Mapping Technology (MMS 2001); Cairo, Egypt;
January 3-5, 2001
• He, G;, G; Orvets, R; Hammersley; 1996; “Capturing
Urban Infrastructure data using Mobile Mapping
System”; Proceeding of the 52nd Annual Meeting; The
Institute of Navigation (ION); June 19-21, 1996;
Cambridge, MA; Pp; 667-674;
• He, X;, Chen, Y;, 1998, Design of Minimax Robust
Kalman Filter for an Integrated GPS/INS System,
ACAT Geodaetica et Cartographica Sinica, 27(2):
177-184;
• Hock, C;, W; Caspary, H; Heister, J; Klemm, and H;
Sterneberg; 1995; „Architetture and Design of the
Kinematic Survey System KiSS“; Proceedings of the
3rd International Workshop on High precision
Navigation, Stuttgart, germany; April, 1995; pp; 569-
576;
• http://toposys.com ;
• http://www.optech.on.ca ;
• Istituto Geografico Militare Italiano http//:
www.igmi.org;
• Kaplan, E; D;, 1996, Understanding GPS Principles
and Application, Artech House, Inc;
• Krauss K; (1982) Photogrammetrie Voll; I e II,
D;Ummler Verlag, Bonn;
• L; (1978); Fotogrammetria; CLUP, MILANO;
• Lachapelle, G; Pugliano, G; (2002), posizionamento
GPS Network RTK: il metodo Multiref, Bollettino
SIFET, 3/2002, 5-15;
• Lambda Tech; 2001; “Welcome to Lambda
International”; Website: www.lambdatech.com;
• Leick A; (1994) “GPS satellite surveying” John Wiley
& Sons, Inc
• Li, D; S; – D; Zhong, S; – X; He, and H; Zheng;
1999; “A mobile Mapping System Based on Gps, Gis
and Multi Sensor”; Proceedings International
Workshop on Mobile Mapping Technology;
Bangkok, Thailand; April 21-23, 1999; pp; 1-3 – 1-3-
5;
• Li, D;, et al, 2000, Vehicle Navigation System Design
and Implementation Based on Integration of GPS and
GIS, Journal of Wuhan Technical University of
Surveying and mapping, 25(2): 95-98
• Li, R; 1997; “mobile Mapping: An Emerging
Technology for Spatial Data Asquisition”; Photogram
metric Engineering and Remote Sensing (PE&RS);
Vol 63; No; 9; pp; 1085-1092;
• Manzoni, G; Mussumeci, G; “Il progetto di un veicolo
GNSS/INS per rilievi cinematici di strade e
monitoraggi ambientali”; Atti Conferenza Nondo GIS
24-26 Maggio 2000 Roma;
• Mussumeci, G; (2000), “DGPS cinematico integrato
con video riprese per il collaudo della segnaletica
orizzontale e la restituzione della linea d’asse”; 26-28
Ottobre, 2000, X convegno S.I.I.V;
• Mussumeci, G; Condorelli, A; Parente, C; Santamaria
R; (2002), “Trasformazioni di datum per la
rappresentazione di tracciati stradali acquisiti con
rilievi GPS” VI Conferenza ASITA;
• Mussumeci, G; Condorelli, V; Colombrita, F; (2000),
“Potenzialità di impiego del GPS per il rilevamento
geometrico e l’accatastamento delle intersezioni
stradali”; 26-28 Ottobre, 2000, X convegno S.I.I.V;
• Mussumeci, G; Condorelli, V; Siligato, G;(2003), “A
high productivity procedure for road section
surveying based on the rectification of images taken
from a moving vehicle”; 6th Conference on optical 3-
d measurement techniques ETH Hönggerberg Zurich,
Switzerland, 2003;