Metodo degli elementi finiti per l’approssimazione...
116
UNIVERSIT ` A DEGLI STUDI DI MILANO Facolt`a di Scienze Matematiche, Fisiche e Naturali Corso di Laurea in Matematica Metodo degli elementi finiti per l’approssimazione numerica del problema delle correnti parassite Relatore: Dott.ssa Ana M. Alonso Rodriguez Correlatore: Prof. Luca Pavarino Tesi di Laurea di: Gloria Faccanoni Matricola N.561907 Anno Accademico 2001-2002
Transcript of Metodo degli elementi finiti per l’approssimazione...

UNIVERSITA DEGLI STUDI DI MILANO
Facolta di Scienze Matematiche, Fisiche e Naturali
Corso di Laurea in Matematica
Metodo degli elementi finiti
per l’approssimazione numerica
del problema delle correnti
parassite
Relatore: Dott.ssa Ana M. Alonso Rodriguez
Correlatore: Prof. Luca Pavarino
Tesi di Laurea di:
Gloria Faccanoni
Matricola N.561907
Anno Accademico 2001-2002


Indice
Introduzione 5
1 Background fisico 9
1.1 Equazioni di Maxwell . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.1.1 Relazioni costitutive . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.1.2 Regime sinusoidale . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.2 Correnti parassite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.2.1 Freni e forni elettromagnetici . . . . . . . . . . . . . . . . . . . . . 15
1.2.2 Approssimazione a “bassa frequenza” . . . . . . . . . . . . . . . . . 16
2 Correnti parassite in regime armonico 19
2.1 Formulazione del problema . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.2 Cenni di base . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.3 Esistenza e unicita della soluzione . . . . . . . . . . . . . . . . . . . . . . . 22
2.4 Formulazione variazionale del problema in H . . . . . . . . . . . . . . . . . 25
3 Approssimazione numerica 31
3.1 Metodo di Galerkin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.2 Formulazione debole bidominio . . . . . . . . . . . . . . . . . . . . . . . . 33
3.3 Elementi finiti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
3.3.1 Triangolazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
3.3.2 Sottospazio di funzioni polinomiali a tratti . . . . . . . . . . . . . . 37
3.3.3 Elementi finiti di Lagrange . . . . . . . . . . . . . . . . . . . . . . . 38
3.3.4 Elementi finiti di Nedelec . . . . . . . . . . . . . . . . . . . . . . . . 40
3.4 Iterazione per sottodomini . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
4 Risultati numerici 49
4.1 Passaggio del dato nell’interfaccia Γ . . . . . . . . . . . . . . . . . . . . . . 50
4.1.1 Passaggio del dato Dirichlet da ΩI a ΩC . . . . . . . . . . . . . . . 51
4.1.2 Passaggio del dato Neumann da ΩC a ΩI . . . . . . . . . . . . . . . 51
4.2 Risultati numerici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
4.2.1 Gradi di liberta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
3

4.2.2 Dato iniziale in Γ reale . . . . . . . . . . . . . . . . . . . . . . . . . 56
4.2.3 Dato iniziale in Γ complesso . . . . . . . . . . . . . . . . . . . . . . 63
4.3 Considerazioni conclusive . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
I Documentazione 71
I.1 NC,h := elementi finiti lineari di Nedelec . . . . . . . . . . . . . . . . . . . . 72
I.1.1 Costruzione di una base sul cubo di riferimento . . . . . . . . . . . 74
I.1.2 Generalizzazione della base ad un cubo K qualsiasi . . . . . . . . . 77
I.1.3 Costruzione della mesh . . . . . . . . . . . . . . . . . . . . . . . . . 77
I.1.4 Costruzione della matrice di stiffness A globale . . . . . . . . . . . . 81
I.1.5 Costruzione della matrice di massa M globale . . . . . . . . . . . . 83
I.1.6 Costruzione del vettore termine noto TN globale . . . . . . . . . . . 85
I.2 VI,h := elementi finiti lineari di Lagrange . . . . . . . . . . . . . . . . . . . 89
I.2.1 Costruzione di una base sul cubo di riferimento . . . . . . . . . . . 89
I.2.2 Generalizzazione della base ad un cubo K qualsiasi . . . . . . . . . 91
I.2.3 Costruzione della mesh . . . . . . . . . . . . . . . . . . . . . . . . . 91
I.2.4 Costruzione della matrice di stiffness A globale . . . . . . . . . . . . 93
I.2.5 Costruzione del vettore termine noto TN globale . . . . . . . . . . . 95
I.3 Passaggio del dato nell’interfaccia Γ . . . . . . . . . . . . . . . . . . . . . . 99
I.3.1 Passaggio del dato Neumann da ΩC a ΩI . . . . . . . . . . . . . . . 100
I.3.2 Passaggio del dato Dirichlet da ΩI a ΩC . . . . . . . . . . . . . . . 109
I.4 Implementazione della procedura iterativa . . . . . . . . . . . . . . . . . . 111
Bibliografia 115
4

Introduzione
Obiettivo della tesi e lo studio di un algoritmo, basato sul metodo degli elementi
finiti, per l’approssimazione numerica delle correnti parassite indotte dal passaggio di
flusso magnetico attraverso un materiale conduttore immerso in un dominio isolante. Le
correnti parassite sono indotte in un corpo conduttore da un variazione del campo ma-
gnetico. In altre parole, compaiono in tutti i congegni elettromagnetici che sono soggetti
a variazioni temporali dei campi (in particolare quando i campi sono in regime sinusoida-
le) e pertanto hanno un’ampio spettro d’applicazione. Talvolta le correnti parassite sono
utili come nel caso dei forni o dei freni elettromagnetici, ma in altri casi la loro presen-
za e dannosa e sono totalmente indesiderate come nel nucleo dei trasformatori. Il buon
funzionamento di molte apparecchiature elettromagnetiche dipende dalla circolazione delle
correnti parassite nella zona conduttiva e questo e il motivo per il quale esse sono state
oggetto di numerose ricerche.
Talvolta, come nel caso di fili elettrici, e sufficiente un’analisi 2D per il calcolo delle cor-
renti parassite. Ma, nel caso generale, la maggior parte dei problemi ingegneristici concreti
non e riconducibile ad un problema 2D ed e necessaria un’analisi del problema completo
tridimensionale. Esistono ampie ricerche allo scopo di sviluppare tecniche numeriche per
la soluzione del problema 3D. La maggior parte delle formulazioni propone l’impiego del
metodo degli elementi finiti. Lo scopo di questo lavoro di tesi e lo studio di un metodo,
basato su un’iterazione per sottodomini che combina elementi finiti nodali con elementi
finiti di spigolo, per il calcolo delle correnti parassite generate in un conduttore da una
sorgente in regime armonico. Noi consideriamo un problema magnetico ai valori al bordo,
in cui si assume che la componente tangenziale H×n del campo magnetico sparisce su ∂Ω.
Il lavoro e organizzato come segue.
Nel primo capitolo viene introdotto il problema delle correnti parassite modellandolo
sulle equazioni di Maxwell, assumendo che tutti i campi siano armonici e che si possa tra-
scurare il termine coinvolgente la corrente di spostamento nella Legge di Maxwell-Ampere.
Viene quindi presentata una motivazione di tale modello e si perviene alle seguenti equazioni
rotE = −iωµH
rotH = σE+Je(1)
5

nelle quali la densita di corrente Je, la conducibilita σ , la permeabilita magnetica µ e la
frequenza angolare ω sono assegnate, mentre si vogliono determinare il campo magnetico
H e il campo elettrico E.
Nel secondo capitolo si considera un dominio Ω limitato composto da un conduttore
ΩC non omogeneo ed anisotropo immerso in un isolante perfetto ΩI. Si determinano le
condizioni necessarie cui deve soddisfare il dato Je per garantire l’esistenza di una soluzione.
Si completa poi il sistema (1) con ulteriori condizioni sul campo elettrico nell’isolante per
garantire l’unicita della soluzione. Stabilito il sistema di equazioni che modellizzano il
problema, questo si puo riformulare esprimendo il campo elettrico E nei termini del campo
magnetico H o viceversa. In questo lavoro si considera la formulazione coinvolgente solo il
campo magnetico la cui formulazione variazionale e
cercare H ∈VJe,I := v ∈ H0(rot;Ω) | rotvI = Je,I in ΩI
tale che ∀ v ∈V := v ∈ H0(rot;Ω) | rotvI = 0 in ΩI
∫
ΩiωµH ·v+
∫
ΩC
σ−1 rotHC · rotvC =
∫
ΩC
σ−1Je,C · rotvC
(2)
dove H0(rot;Ω) e l’insieme delle funzioni vettoriali (reali o complesse) di [L2(Ω)]3 aventi
il rotore (distribuzionale) appartenente a [L2(Ω)]3 e con componente tangenziale nulla sul
bordo ∂Ω. Il secondo capitolo si conclude con la dimostrazione di esistenza e unicita della
soluzione di questo problema.
Nel terzo capitolo si studia l’approssimazione numerica del problema (2) usando il
metodo degli elementi finiti. Imponendo l’ipotesi di semplice connessione dell’isolante e
possibile introdurre un potenziale scalare magnetico. Infatti in questo caso le funzioni di
V ristrette ad ΩI sono gradienti di funzioni di H10,∂Ω(ΩI) :=
φ ∈ H1(ΩI) |φ|∂Ω = 0
. Se
indichiamo con gli indici I e C la restrizione di una funzione rispettivamente a ΩI e ΩC,
assumendo di conoscere He ∈ H0(rot;Ω) tale che rotHe,I = Je,I, e chiamando Z = H−He,
6

il problema (2) si puo riformulare nel seguente modo.
cercare (ZC,ψI) ∈W := (vC,φI) ∈ H(rot;ΩC)×H10,∂Ω(ΩI) |
vC ×nC +∇φI ×nI = 0 su Γ
tale che ∀ (vC,ϕI) ∈W
∫
ΩC
[iωµCZC ·vC +σ−1 rotZC · rotvC
]+∫
ΩI
[iωµI∇ψI ·∇ϕI] =
=
∫
ΩC
[σ−1(Je,C −rotHe,C) · rotvC − iωµCHe,C ·vC
]−∫
ΩI
[iωµIHe,I ·∇ϕ I]
(3)
Con questa formulazione del problema e naturale usare elementi finiti nodali di La-
grange per l’approssimazione del potenziale scalare ψI ∈ H10 (ΩI) nell’isolante ed elementi
finiti di spigolo di Nedelec per l’approssimazione del campo magnetico HC ∈ H(rot;ΩC)
nel conduttore. Dopo l’introduzione di queste due famiglie di elementi finiti siamo ora in
condizione di definire uno spazio di elementi finiti Wh ⊂W e di formulare l’approssimazione
di Galerkin di (3). La difficolta principale nella costruzione di una base di Wh e il dover im-
porre l’incollamento delle componenti tangenziali sull’interfaccia. Puo essere conveniente
considerare allora una formulazione bidominio del problema e risolvere il problema accop-
piato tramite un’iterazione per sottodomini. La procedura iterativa che proponiamo si basa
sulla formulazione forte del problema (3)
rot(σ−1 rotHC)+ iωµCHC = rot(σ−1Je,C) in ΩC
HC ×nC = −∇ψI ×nI −He,I ×nI su Γdiv(µI∇ψI) = −div(µIHe,I) in ΩI
µI∇ψI ·nI = −µCHC ·nC −µIHe,I ·nI su ΓψI = 0 su ∂ΩI \Γ
(4)
che suggerisce la seguente procedura
Dato λ 0 ∈ ϒΓ (spazio della traccia di H(rot;ΩC) su Γ), per ogni k ≥ 0 calcolare HkC
soluzione di
rot(σ−1 rotHkC)+ iωµCHk
C = rot(σ−1Je,C) in ΩC
HkC ×nC = −λ k −He,I ×nI su Γ ,
(5)
7

quindi calcolare ψkI soluzione di
div(µI∇ψkI ) = −div(µIHe,I) in ΩI
µI∇ψkI ·nI = −µCHk
C ·nC −µIHe,I ·nI su Γψk
I = 0 su ∂ΩI \Γ
(6)
Infine porre
λ k+1 = (1−ϑ)λ k +ϑ (∇ψkI ×nI) su Γ , (7)
dove ϑ > 0 e un parametro d’accelerazione.
Il capitolo si conclude con la formulazione dell’analogo discreto di questo processo iterativo.
Nel quarto capitolo sono riportati alcuni risultati di una serie di prove numeriche che
intendono verificare le proprieta di convergenza di questa iterazione per sottodomini. Sono
state effettuate in una geometria semplificata e con coefficienti costanti. Per le prove nu-
meriche effettuate il processo iterativo risulta essere convergente con velocita indipendente
dalla dimensione della griglia di calcolo e dalla posizione dell’interfaccia.
Infine nell’appendice vengono presentati gli aspetti implementativi degli elementi finiti
di Nedelec e di Lagrange e commentati i programmi MATLABTM scritti per realizzare le
prove numeriche presentate nel quarto capitolo.
8

1Background fisico
S copo di questo capitolo e quello di richiamare i concetti di base relativi alle equazioni
che governano l’elettromagnetismo e formulare un modello per il problema delle correnti
parassite. Per una piu ampia trattazione si vedano ad esempio (7), (8), (10), (12), (14),
(15).
Contenuto
1.1 Equazioni di Maxwell
1.1.1 Relazioni costitutive
1.1.2 Regime sinusoidale
1.2 Correnti parassite
1.2.1 Freni e forni elettromagnetici
1.2.2 Approssimazione a “bassa frequenza”
Sezione 1.1
Equazioni di Maxwell ed equazione di continuita
Il campo elettromagnetico viene descritto mediante i seguenti campi vettoriali
dipendenti dalla posizione x e dal tempo t:
? D = D(x, t) induzione elettrica [C/m2]
? E = E(x, t) campo elettrico [V/m]
9

Cap.1 Background fisico
? B = B(x, t) induzione magnetica [Wb/m2]
? H = H(x, t) campo magnetico [A/m]
Richiamiamo le quattro equazioni che governano l’elettromagnetismo:
? il teorema di Gauss dell’elettrostatica per una distribuzione continua di cariche
elettriche con densita ρ puo scriversi nella seguente forma differenziale:
divD = ρ; (1.1)
? il teorema di Gauss per la magnetostatica:
divB = 0; (1.2)
? il teorema di Ampere per una distribuzione continua di correnti di densita J:
rotH =∂D∂ t
+J; (1.3)
? la legge dell’induzione elettromagnetica di Faraday:
rotE = −∂B∂ t
. (1.4)
Esse si possono riunire nel seguente sistema di equazioni differenziali:
rotH =∂D∂ t
+J (1.5)
rotE = −∂B∂ t
(1.6)
divD = ρ (1.7)
divB = 0 (1.8)
dove
? J = J(x, t) rappresenta la densita di corrente, [A/m2]
? e ρ = ρ(x, t) la densita di carica elettrica. [C/m3]
10

§ 1.1 Equazioni di Maxwell
Osserviamo che il termine∂D∂ t
, aggiunto da Maxwell, rende del tutto simmetriche le rela-
zioni tra campo elettrico e campo magnetico: infatti, cosı come le variazioni temporali del
campo elettrico inducono un campo di induzione magnetica in base alla relazione
rotH =∂D∂ t
(nell’ipotesi, ovviamente, che J = 0), allo stesso modo, in base alla prima equazione di
Maxwell, le variazioni temporali del campo di induzione magnetica inducono un campo
elettrico secondo la relazione
rotE = −∂B∂ t
.
Le equazioni di Maxwell sono insufficienti per studiare il campo elettromagnetico, anche
nei problemi in cui le densita di carica e di corrente sono grandezze impresse (cioe note a
priori). In effetti, per determinare il campo e necessario associare alle equazioni di Maxwell
ulteriori equazioni dipendenti dalla natura del mezzo. Tuttavia le sole equazioni di Max-
well, grazie alla loro assoluta generalita, permettono di dedurre ulteriori relazioni che —
opportunamente interpretate — rappresentano leggi altrettanto generali come, ad esempio,
quella di conservazione della carica.
La legge di conservazione della carica si puo dedurre dalle equazioni di Maxwell
considerando la divergenza della (1.5) ed eliminando D mediante la (1.7):
divrotH =∂∂ t
(divD)+divJ. (1.9)
Si ottiene la cosiddetta equazione di continuita che esprime, in forma differenziale, la
condizione di conservazione della carica
divJ+∂ρ∂ t
= 0. (1.10)
Poiche essa e conseguenza delle equazioni di Maxwell, tali equazioni non ammetterebbero
soluzione se si cercasse di determinare il campo prodotto da densita di carica e corrente
assegnate arbitrariamente, in contrasto con l’equazione di continuita. Osserviamo che, in
condizioni stazionarie, la (1.10) diviene divJ = 0 ossia il vettore densita di corrente J e
solenoidale in tutto lo spazio.
11

Cap.1 Background fisico
1.1. Relazioni costitutive
E doveroso osservare che nelle equazioni di Maxwell non compaiono, in modo esplicito,
le proprieta del mezzo in cui ci si trova. D’altro canto sotto l’azione del campo il mezzo si
polarizza e — se e conduttore — viene attraversato da correnti di conduzione. Questi effetti
influenzano il campo e devono essere tenuti in conto attraverso ulteriori equazioni, dette
relazioni costitutive. Poiche i meccanismi microscopici che determinano la polarizzazione e
la conduzione dei materiali sono molteplici, la forma delle relazioni costitutive non e unica
e deve essere dedotta caso per caso. Nel caso particolare del vuoto, che non si polarizza
ne conduce, le equazioni costitutive non riflettono alcun fenomeno fisico e dipendono solo
dalla scelta del sistema di unita di misura. Nel sistema MKSA si ha:
D = ε0E B = µ0H
dove µ0 = 4π ·10−7 H/m, ε0 ≈ 1/(36π) ·10−9 F/m. Si ha:
1√ε0µ0= c ≈ 3 ·108m/s (velocita della luce) .
Quando i campi sono “sufficientemente deboli” e quando le loro variazioni spaziali e tempo-
rali sono “sufficientemente lente”, le proprieta del mezzo sono rappresentate dai parametri
σ conducibilita [S/m], ε permeabilita elettrica e µ permeabilita magnetica. Questi pa-
rametri legano tra loro E, D, B, H e la densita totale di corrente J tramite le seguenti
relazioni:
J = σE , (1.11)
D = εE , (1.12)
B = µH . (1.13)
Un mezzo anisotropo e tale quando ε , µ e/o σ sono dei tensori, per cui il campo E non e
parallelo al campo D oppure il campo B non e parallelo ad H oppure J non e parallela ad E.
Esempio tipico sono le ferriti. Un mezzo non lineare si ha invece quando D e una funzione
non lineare dell’ampiezza di E, quando B e una funzione non lineare di H e/o quando J e
una funzione non lineare di E. Un esempio di mezzo non lineare e dato da un materiale
ferromagnetico in cui il modulo di B e legato al modulo di H tramite la curva di isteresi, che
e tipicamente una curva non lineare. Un mezzo non omogeneo e tale quando i parametri del
12

§ 1.1 Equazioni di Maxwell
mezzo sono funzione della posizione: si ha cioe ε = ε(x), µ = µ(x) e/o σ = σ(x). Esempi
di mezzi non omogenei sono i circuiti stampati nei quali il campo elettrico che si genera si
trova in parte in aria (dove ε = ε0) ed in parte nel materiale isolante (dove ε 6= ε0). Infine
un mezzo per il quale i parametri σ , ε e µ sono delle costanti di valore noto si dice mezzo
lineare, omogeneo ed isotropo.
Osserviamo che la (1.11) e la ben nota legge di Ohm: i corpi conduttori (metalli, ...)
sono quelli in cui esistono delle cariche elettriche libere (non legate agli atomi) e poiche la
densita di corrente dovuta a questo tipo di cariche e funzione della loro velocita, si ha una
relazione funzionale tra il vettore densita di corrente J ed il campo elettrico E che, in via
del tutto generale, e del tipo: J = f (E). Laddove, come molto spesso accade, tali proprieta
di conduzione non dipendono dalla direzione del campo elettrico che muove i portatori
nel conduttore, si dice che il mezzo e conduttivamente isotropo (oltre che lineare). Se il
mezzo e isolante si pone invece σ=0 per cui J = 0. I generatori sono dei mezzi in cui la
densita di corrente (indicata con Je, e per esterna) e fissata indipendentemente dal campo
elettrico. Possiamo supporre σ = 0 in questi mezzi e scrivere la cosiddetta Legge di Ohm
generalizzata:
J = σE+Je . (1.14)
Si noti che l’equazione costitutiva che collega la corrente di conduzione al campo (1.11) e
richiesta solo quando J e una densita di corrente di conduzione incognita. Essa invece non
deve essere considerata se J e una corrente impressa, dato che in questo caso J interviene
nelle equazioni di Maxwell come una funzione nota, che ricopre il ruolo di “sorgente” del
campo.
Le equazioni di Maxwell e le relazioni costitutive sono sufficienti per affrontare lo
studio del campo in una regione in cui il mezzo e continuo. Nel caso che porzioni diverse
dello spazio siano riempite con materiali diversi, il problema viene trattato risolvendo
le (1.5)-(1.6) all’interno di ciascun materiale e imponendo ai campi, sulle superfici di
separazione fra materiali diversi, le condizioni di raccordo:
E1 ×n1 + E2 ×n2 = 0
ε1E1 ·n1 + ε2E2 ·n2 = 0
µ−1
1 B1 ×n1 + µ−12 B2 ×n2 = 0
B1 ·n1 + B2 ·n2 = 0(1.15)
con gli indici 1, 2 a indicare i due diversi materiali.
13

Cap.1 Background fisico
1.1. Regime sinusoidale
Generalmente si lavora con sorgenti di corrente alternata. In questi casi
Je(x, t) = ℜ[Je(x)exp(iωt)] (1.16)
dove ω 6= 0 e una frequenza angolare assegnata e le equazioni di Maxwell possono essere
espresse, senza perdere di generalita, con riferimento a campi la cui variazione temporale
e di tipo sinusoidale:
E(x, t) = E(x)exp(iωt)
H(x, t) = H(x)exp(iωt)
dove E(x) ed H(x) sono campi vettoriali tridimensionali a valori complessi. In tal caso le
(1.5)-(1.6) diventano rotE = −iωµH
rotH = iωεE+Je +σE(1.17)
Nella teoria dei campi in regime armonico queste equazioni sono comunemente dette “equa-
zioni di Maxwell”, anche se, in realta, esse derivano sia dalle equazioni di Maxwell che dalle
relazioni costitutive.
Sezione 1.2
Correnti parassite
Supponiamo che, internamente a un materiale conduttore, sia presente un campo di
induzione magnetica B variabile nel tempo (o per variazione dell’induzione stessa, o per
spostamento del conduttore). In tal caso si ha una variazione del flusso del campo magne-
tico Φ(B) ad esso concatenato e, secondo la legge di Faraday-Neumann, si genera una forze
elettromotrice fi (detta forza elettromotrice indotta) data da:
fi = −dΦ(B)
dt. (1.18)
E opportuno sottolineare il segno negativo che compare a secondo membro che esprime
la cosiddetta legge di Lenz: la forza elettromotrice indotta ha verso tale da generare una
corrente indotta il cui flusso magnetico tende ad opporsi a qualsiasi cambiamento del
flusso magnetico originale. Tali correnti indotte sono dette eddy current (o correnti di
14

§ 1.2 Correnti parassite
Foucault), sono anche chiamate parassite perche causano una perdita di energia per effetto
Joule. Se poi il conduttore e metallico il campo elettrico indotto da origine a correnti
concatenate alle linee di B che possono essere molto intense dato che la resistivita del
metallo e piccola. Se il materiale, oltre ad essere conduttore, e anche ferromagnetico, alle
perdite dovute alle correnti parassite vanno sommate quelle dovute all’isteresi magnetica.
Per evitare quindi notevoli dissipazioni di energia nei nuclei magnetici sottoposti a campi
d’induzione magnetica variabili si puo ricorrere alla cosiddetta laminatura: laminare la
massa del conduttore in fogli paralleli alle linee di B e separarli con strati di vernice isolante,
di modo che le correnti debbano attraversare tali strati. Concretamente si realizza il nucleo
con sottilissimi fili, reciprocamente isolati da vernici o fogli di sostanze isolanti.
1.2. Freni e forni elettromagnetici
Le correnti parassite si generano in qualsiasi massa metallica che ruoti o si sposti co-
munque entro un campo magnetico. Per la legge di Lenz, queste correnti hanno l’effetto di
frenare il movimento che le induce (attrito elettromagnetico) e l’energia corrispondente a
questa azione frenante si traduce integralmente in calore in seno alla massa, la quale pertan-
to si riscalda. Tale azione frenante viene direttamente utilizzata nella costruzione dei freni
elettromagnetici. Questi vengono realizzati prevalentemente in forma di un disco metallico
che si muove nel traferro di un elettromagnete (o eventualmente di un magnete perma-
nente). In questo modo, lungo i raggi del disco che tagliano le linee di forza del campo si
inducono tante forze elettromotrici che fanno circolare nella massa del disco delle correnti.
Su ogni filetto di corrente agisce cosı una forza elettromagnetica diretta in verso opposto
al moto. L’effetto risultante di tutte queste forze viene a costituire l’azione frenante che
si contrappone alla rotazione del disco. Un esempio di utilizzo e il freno elettromagnetico
impiegato in molte metropolitane: elettromagneti posti sotto una vettura in vicinanza delle
rotaie vengono accesi e il fatto genera correnti parassite nelle rotaie esercitando un’azione
frenate sulle ruote del treno in arrivo e causandone la frenata. Lo stesso accorgimento e
applicato per smorzare le oscillazioni, ad esempio in alcuni modelli di bilance.
Il fenomeno del riscaldamento, se da un lato e fonte di gravi problemi in quanto puo
causare notevoli perdite di energia, puo d’altra parte essere sfruttato per diverse applicazio-
ni come nei forni ad induzione in cui si fondono metalli sottoponendoli a campi magnetici
variabili. Questo calore viene utilizzato per elevare la temperatura dei corpi. Si fa variare
15

Cap.1 Background fisico
il flusso d’induzione nel conduttore immobile ponendolo all’interno di un campo magnetico
alternato prodotto, per esempio, da un solenoide. Se il corpo ha la forma di un cilindro
con l’asse parallelo a quello del solenoide, le correnti indotte circolano secondo le sue se-
zioni normali e, per la legge di Lenz, si oppongono alle variazioni dell’induzione magnetica
all’interno del cilindro.
Il dispositivo presenta i seguenti vantaggi:
• il calore viene sviluppato nel corpo stesso che si vuole riscaldare: cio riduce le perdite
termiche e permette di raggiungere temperature molto alte senza riscaldare troppo
gli involucri interposti;
• il corpo da riscaldare puo essere un mediocre conduttore, puo trovarsi ridotto in
pezzetti od anche in polvere, e puo essere mantenuto al sicuro dalle cause d’alterazione
chimica, specialmente d’ossidazione.
Finche la frequenza e abbastanza bassa da implicare che la profondita di penetrazione
sia superiore al raggio del cilindro, si dimostra che la potenza P dissipata per effetto
Joule aumenta rapidamente con la frequenza. Alle frequenze elevate, invece, la corrente
resta localizzata in una pellicola superficiale e P e proporzionale alla superficie (effetto
pelle). Esiste quindi la possibilita di produrre riscaldamenti in superficie od in profondita,
variando la frequenza secondo le dimensioni del campione. Un forno ad alta frequenza e
formato da un generatore di corrente ad oscillazioni smorzate, il cui circuito oscillante e
accoppiato al circuito di riscaldamento. La frequenza varia, secondo i casi, da 20 a 106 Hz;
la potenza sviluppata raggiunge talvolta i 106 W. Le installazioni di riscaldamento ad alta
frequenza, benche assai costose, sono usate per fusioni ed i trattamenti termici dei metalli
e delle leghe di alta qualita.
Noi vogliamo studiare questo fenomeno quando l’effetto pelle e trascurabile. In tal
caso allora si deve lavorare con frequenza “basse” benche, come vedremo tra poco, questo
termine sia molto relativo.
1.2. Approssimazione a “bassa frequenza”
Introduciamo ora una semplificazione, spesso descritta come “approssimazione a bas-
sa frequenza”, che consiste nel trascurare il termine della corrente di spostamento iωD in
(1.17). Riscrivendo (1.17) nella forma rotH = iωεE+σE+Je, si vede che questo termine e
16

§ 1.2 Correnti parassite
trascurabile nel conduttore quando il rapporto εω/σ puo essere considerato piccolo. Nell’iso-
lante, dove σ = 0, si puo immaginare che questa corrente di spostamento sia stata aggiunta
alla corrente impressa Je, e l’approssimazione e giustificata se il rapporto ||iωD||/||Je|| e pic-
colo (essendo || · || una norma opportuna). In molti casi, la corrente indotta J = σE e dello
stesso ordine di grandezza della corrente impressa Je, e il campo elettrico e dello stesso
ordine di grandezza internamente ed esternamente al conduttore. Se e cosı, il rapporto
fra iωD e Je e anch’esso dell’ordine di grandezza di εω/σ. La grandezza del rapporto εω/σ
e dunque spesso un buon indicatore della validita dell’approssimazione a bassa frequen-
za. Ad esempio, nel caso di riscaldamento indotto alle frequenza industriali, ω = 100π ,
la grandezza di σ circa 5× 106, e ε = ε0∼= 1
36π ×109 , da cui il rapporto εω/σ vale circa
5×10−16, e si puo dunque trascurare il termine εω/σ. Molto piu in alto nello spettro, nelle
simulazioni relative ad alcune pratiche mediche come l’ipotermia, dove le frequenze sono
nell’ordine 10÷50 MHz, la conducibilita del tessuto nell’ordine 0.1÷1 e con ε ∼ 10÷90ε0,
si ha di nuovo un rapporto εω/σ inferiore a 0.3, e l’approssimazione a bassa frequenza puo
essere ancora accettabile, a seconda dell’uso che se ne vuole fare.
Formalmente parlando il modello per il problema delle correnti parassite si ottiene
trascurando le correnti di spostamento nelle equazioni (1.17):
rotE = −iωµH
rotH = σE+Je(1.19)
Questo modello costituisce un’approssimazione ampiamente usata in elettrotecnica e la si
considera valida in generale quando la frequenza ω e sufficientemente bassa affinche la
lunghezza d’onda corrispondente sia grande rispetto alle dimensioni del sistema. Per una
trattazione piu approfondita si puo vedere l’articolo di Ammari et al (5) che fornisce le
condizioni sotto le quali l’approssimazione delle equazioni di Maxwell con il modello delle
correnti parassite e accettabile.
17


2Correnti parassite in regime armonico
I n questo capitolo ci proponiamo di analizzare il modello delle correnti parassite in regime
armonico in un dominio limitato contenente conduttori ed isolanti. Come abbiamo visto
questo modello puo essere ottenuto dalle equazioni di Maxwell assumendo che tutti i campi
siano armonici e che si possa trascurare il termine coinvolgente la corrente di spostamento
nella Legge di Maxwell-Ampere (1.3).
Contenuto
2.1 Formulazione del problema
2.2 Cenni di base
2.3 Esistenza e unicita della soluzione
2.4 Formulazione variazionale del problema in H
Sezione 2.1
Formulazione del problema
Consideriamo un dominio Ω⊂R3 aperto, connesso e con bordo ∂Ω. La normale uscente
da ∂Ω sara indicata con n. Assumiamo che Ω sia diviso in due parti, Ω = ΩC∪ΩI, dove ΩC
(un conduttore non omogeneo non isotropo) ed ΩI (un isolante perfetto) sono sottoinsiemi
aperti disgiunti, tali che ΩC ⊂ Ω. Supponiamo che Ω, ΩC ed ΩI siano poliedri di Lipschitz.
Supponiamo inoltre che ΩI sia connesso e denotiamo con Γ := ∂ΩI ∩∂ΩC l’interfaccia tra
i due sottodomini; osserviamo che ∂ΩC = Γ e ∂ΩI = ∂Ω∪Γ. Inoltre, indichiamo con Γ j,
j = 1, . . . , pΓ, le componenti connesse di Γ.
19

Cap.2 Correnti parassite in regime armonico
Come visto nel capitolo introduttivo, nel caso generale di un mezzo non omogeneo ed
anisotropo la permeabilita magnetica µ(x) e la conducibilita σ(x) sono matrici reali 3×3
simmetriche con coefficienti in L∞(Ω). Assumiamo inoltre che µ(x) sia uniformemente
definita positiva in Ω (cioe esiste una costante c1 > 0 tale che u∗µ(x)u ≥ c1|u|2 per quasi
ogni x ∈ Ω e per ogni u ∈ C3). La conducibilita σ(x) sia uniformemente definita positiva nel
conduttore ed e uguale a zero nell’isolante (pertanto anche σ−1 e uniformemente definita
positiva nel conduttore).Sezione 2.2
Cenni di base
Questa sezione e dedicata al richiamo di alcuni risultati preliminari di analisi funzionale
che sono necessari per formulare e risolvere il problema (una piu completa trattazione si
puo trovare in (13)).
Indichiamo con D(Ω) lo spazio delle funzioni C∞C (Ω) cioe lo spazio delle funzioni
infinitamente derivabili ed a supporto compatto in Ω e con D ′(Ω) il suo duale.
Per ogni s ≥ 0 indichiamo con Hs(Ω) lo spazio di Sobolev delle funzioni (reali o com-
plesse) di L2(Ω) aventi tutte le derivate (distribuzionali) fino all’ordine s appartenenti a
L2(Ω)
Hs :=
ψ ∈ D′(Ω) | ∂ αψ ∈ L2(Ω) , |α| ≤ s
munito della norma
||ψ||s,Ω :=
(
∑|α|≤s
||∂ αψ||2L2(Ω)
)1/2
.
Per convenzione L2(Ω) = H0(Ω).
H1/2(∂Ω) e lo spazio della traccia di H1(Ω) su ∂Ω e H−1/2(∂Ω) e il suo duale.
Indichiamo con −1/2 < ·, · >1/2 il prodotto di dualita tra H−1/2(∂Ω) e H1/2(∂Ω). Se
non c’e ambiguita porremo < ·, · > : = −1/2 < ·, · >1/2.
Indichiamo con H(div;Ω) l’insieme delle funzioni vettoriali (reali o complesse) di
[L2(Ω)]3 aventi la divergenza (distribuzionale) appartenente a L2(Ω) e definiamo la norma
|| · || H(div;Ω) come segue:
||u||H(div;Ω) :=(||u||2L2(Ω) + ||divu||2L2(Ω)
)1/2.
20

§ 2.2 Cenni di base
Se u ∈ H(div;Ω) allora (u ·n)|∂Ω ∈ H−1/2(∂Ω) e vale la seguente formula di Green:
∀u ∈ H(div;Ω) e ∀ϕ ∈ H1(Ω)
∫
Ω[u ·∇ϕ +divuϕ] =< u ·n,ϕ > (2.1)
Indichiamo con H(rot;Ω) l’insieme delle funzioni vettoriali (reali o complesse) di
[L2(Ω)]3 aventi il rotore (distribuzionale) appartenente a [L2(Ω)]3 e definiamo la norma
|| · ||H(rot;Ω) come segue:
||u||H(rot;Ω) :=(||u||2L2(Ω) + ||rotu||2L2(Ω)
)1/2.
Se u ∈ H(rot;Ω) allora (u×n)|∂Ω ∈[H−1/2(∂Ω)
]3e vale la seguente formula di Green:
∀u ∈ H(rot;Ω) e ∀v ∈ [H1(Ω)]3
∫
Ω[u · rotv−rotu ·v] =< u×n,v > . (2.2)
E da segnalare che lo spazio della traccia di (u×n)|∂Ω con u ∈ H(rot;Ω) e un sottoin-
sieme proprio di[H−1/2(∂Ω)
]3. Infatti sia H3/2(∂Ω) lo spazio della traccia di H2(Ω) su
∂Ω e H−3/2(∂Ω) il suo duale. Data λ ∈ [H−1/2(∂Ω)]3 con (λ ·n)|∂Ω = 0, si puo definire la
distribuzione divτ λ ∈ H−3/2(∂Ω) divergenza tangenziale del campo vettoriale λ come
−3/2 < divτλ ,ψ >3/2:= −−1/2 < λ ,∇ψ∗|∂Ω >1/2 ∀ψ ∈ H3/2(∂Ω)
dove ψ∗ e un’estensione di ψ in H2. Osserviamo che ∇ψ∗ ∈[H1(Ω)
]3e (∇ψ∗)|∂Ω ∈
[H1/2(∂Ω)
]3.
Siccome (λ ·n)|∂Ω = 0 allora < λ ,∇ψ∗|∂Ω > dipende solo dalla componente tangenziale
di ∇ψ∗|∂Ω.
D’altra parte se u ∈ H(rot;Ω) allora rotu ∈ H(div;Ω), (rotu ·n)|∂Ω ∈ H−1/2(∂Ω) e si
verifica che
< rotu ·n,ψ >(2.1)=
∫
Ωrotu ·∇ψ∗ (2.2)
= − < u×n,∇ψ∗ > .
Pertanto se u ∈ H(rot;Ω)
divτ(u×n) = rotu ·n ∈ H−1/2(∂Ω) . (2.3)
21

Cap.2 Correnti parassite in regime armonico
Questo mostra che lo spazio delle tracce tangenziali di funzioni H(rot;Ω) e un sottospazio
proprio di [H−1/2(∂Ω)]3 che chiameremo ϒ∂Ω. Per una caratterizzazione intrinseca dello
spazio ϒ∂Ω vedere (3), (9), (11).
La formula di Green (2.2) si puo estendere nel seguente modo (vedi (9))
∫
Ω[u · rotv−rotu ·v] =<< u×n,n×v×n >> ∀u,v ∈ H(rot;Ω) (2.4)
dove << ·, · >> e il prodotto di dualita tra ϒ∂Ω e ϒ′∂Ω.
Useremo anche i seguenti spazi: H10 (Ω) sottospazio di H1(Ω) costituito dalle funzioni
ψ tali che ψ|∂Ω = 0 e H0(rot;Ω) sottospazio di H(rot;Ω) costituito dalle funzioni v sod-
disfacenti (v×n)|∂Ω = 0. Infine se Σ e un sottoinsieme di ∂Ω indichiamo con H10,Σ(Ω) il
sottospazio di H1(Ω) costituito dalle funzioni ψ tali che ψ|Σ = 0.
Sezione 2.3
Esistenza e unicita della soluzione
Richiamiamo il sistema che costituisce il modello matematico per il problema delle
correnti parassite: rotH = σE+Je
rotE = −iωµH(2.5)
Immaginiamo poi di avere uno schermo magnetico:
H×n = 0 su ∂Ω. (2.6)
Con queste condizioni non e detto che esista soluzione. Vale infatti la seguente
Proposizione 2.1 (Vincoli per l’esistenza)
Condizione necessaria per l’esistenza di una soluzione di (2.5) e che la densita di corrente
Je soddisfi le seguenti condizioni:
divJe,I = 0 in ΩI (2.7)
Je,I ·n = 0 su ∂Ω (2.8)
< Je,I ·nI,1 >Γ j = 0 ∀ j = 1, . . . , pΓ −1. (2.9)
22

§ 2.3 Esistenza e unicita della soluzione
Dimostrazione.
• La condizione (2.7) deve essere ovviamente verificata: poiche σ|ΩI= 0, dalla prima
delle (2.5) segue divrotHI = divJe,I in ΩI quindi divJe,I = 0 in ΩI.
• La (2.8) segue dalla prima delle (2.5) in ΩI e dalla (2.3):
Je,I ·n = rotH ·n = divτ(H×n) su ∂Ω.
Infine la condizione di bordo (2.6) implica Je,I ·n = 0 su ∂Ω.
• Infine per dimostrare la (2.9) si consideri la funzione ausiliaria z j ∈ H1(ΩI) tale che
−4z j = 0 in ΩI,
z j = δ jk in Γk,
z j = 0 su ∂Ω.
(2.10)
e sia u = rotv. Allora
< u ·n,1 >Γ j = < u ·n,z j >∂ΩI=
=∫
ΩI
[divuz j +u ·∇z j] =
=∫
ΩI
rotv ·∇z j =
=
∫
ΩI
v · rot∇z j− << v×n,n×∇z j ×n >> = 0
poiche, essendo z j costante su ogni componente connessa di Γ, (n×∇z j ×n)|∂Ω = 0.
Inoltre da Je = rotH segue la (2.9).
Osserviamo che la condizione (2.7) e la condizione (2.9) sono necessarie perche una
funzione sia un rotore. La condizione (2.8) invece e legata al valore di H×n sul bordo.
Inoltre il campo elettrico EI , soluzione delle equazioni (2.5)-(2.6), non e unico (dove ab-
biamo indicato con EI := E|ΩIe analogamente sara fatto nel seguito per ogni altra funzione
vettoriale), infatti possiamo sempre aggiungere alla EI della soluzione una funzione u tale
cherotu = 0 in ΩI
u×n = 0 su ∂ΩI
23

Cap.2 Correnti parassite in regime armonico
(ad esempio u = ∇ϕ con ϕ ∈ H10 (ΩI)).
Osserviamo che nel problema “full Maxwell” (1.17) ci sono delle condizioni su EI che
non sono presenti nel modello a bassa frequenza. Si ha infatti il seguente risultato
Proposizione 2.2
Se (H,E) sono soluzioni di (1.17) con la condizione H× n = 0 su ∂Ω e se Je soddisfa
(2.7)-(2.8)-(2.9) allora il campo elettrico EI deve soddisfare le tre seguenti condizioni
div(εEI) = 0 in ΩI, (2.11)
εEI ·n = 0 su ∂Ω, (2.12)
< (εE)|ΩI·n,1 >Γ j= 0 ∀ j = 1, . . . , pΓ −1. (2.13)
Dimostrazione.
• La prima condizione segue immediatamente dalla seconda delle (1.17) quando vale
(2.7).
• La seconda condizione segue dalla seconda delle (1.17) in ΩI
rotHI = iωεEI +Je,I
dalla (2.8) e dalla (2.3). Infatti la condizione al contorno H×n = 0 su ∂Ω implica
(rotH ·n)|∂Ω = divτ(H×n)|∂Ω = 0 su ∂Ω.
• Per l’ultima condizione si consideri ancora la funzione ausiliaria (2.10). Allora
< (εE)|ΩI·n,1 >Γ j = < (εE)|ΩI
·n,z j >∂ΩI=
=∫
ΩI[div(εE)|ΩI
z j +(εE)|ΩI·∇z j] =
∫ΩI
(εE)|ΩI·∇z j =
per la seconda delle (1.17)
= (iω)−1 ∫ΩI
(rotHI −Je,I) ·∇z j =
= (iω)−1[∫
ΩI[H · rot∇z j −Je,I ·∇z j]− << H×n,n×∇z j ×n >>
]=
= −(iω)−1[∫
ΩIJe,I ·∇z j
]=
= −(iω)−1[< Je,I ·nI,z j >∂ΩI
−∫
ΩIdivJe,I z j
]= 0 .
24

§ 2.4 Formulazione variazionale del problema in H
Completando (2.5)-(2.6) con queste condizioni si ha il sistema
rotH−σE = Je in ΩrotE+ iωµH = 0 in Ωdiv(εE)|ΩI
= 0 in ΩI
εE ·n = 0 su ∂ΩH×n = 0 su ∂Ω< (εE)|ΩI
·n,1 >Γ j= 0 ∀ j = 1, . . . , pΓ −1 .
(2.14)
E stato dimostrato in (1) che il sistema (2.14) con le ipotesi (2.7)-(2.9) ammette una
ed una sola soluzione.
Sezione 2.4
Formulazione variazionale del problema in H
In generale il problema delle correnti parassite e riformulabile esprimendo il campo
magnetico H nei termini del campo elettrico E o viceversa. Queste due formulazioni sono
equivalenti ma conducono a schemi numerici diversi. Noi presentiamo una formulazione
coinvolgente solo il campo magnetico H. Definiamo quindi i seguenti spazi di Hilbert di
funzioni vettoriali a valori complessi:
VJe,I := v ∈ H0(rot;Ω) | rotvI = Je,I in ΩI , (2.15)
e
V := v ∈ H0(rot;Ω) | rotvI = 0 in ΩI . (2.16)
Al fine di ottenere una formulazione debole procediamo formalmente, moltiplichiamo la
seconda delle (2.5) per una funzione test v ∈V ed integriamola su tutto il dominio Ω:∫
ΩiωµH ·v+
∫
ΩrotE ·v = 0 . (2.17)
Utilizzando la formula di Green (2.2), si trova∫
ΩiωµH ·v+
∫
ΩE · rotv = 0 . (2.18)
Con tale scelta di spazi rotv = 0 in ΩI, quindi rimane∫
ΩiωµH ·v+
∫
ΩC
EC · rotvC = 0 , (2.19)
25

Cap.2 Correnti parassite in regime armonico
avendo indicato con l’indice C la restrizione della funzione a ΩC. Sapendo che σ e una
matrice simmetrica uniformemente definita positiva in ΩC, otteniamo
EC = σ−1(rotHC −Je,C)
da cui ∫
ΩiωµH ·v+
∫
ΩC
σ−1 rotHC · rotvC =∫
ΩC
σ−1Je,C · rotvC . (2.20)
Pertanto se H e soluzione di (2.5)-(2.6) allora
H ∈VJe,I e ∀ v ∈V
∫
ΩiωµH ·v+
∫
ΩC
σ−1 rotHC · rotvC =
∫
ΩC
σ−1Je,C · rotvC .(2.21)
Per dimostrare l’esistenza e l’unicita della soluzione del problema (2.21) vogliamo avvalerci
del Lemma di Lax-Milgram nel caso complesso. Richiamiamo prima alcune definizioni:
una forma A (·, ·) : V ×V → C si dice
• sesquilineare se per ogni w,w1,w2,v,v1,v2 ∈V e per ogni c1,c2 ∈ C
A (c1w1 + c2w2,v) = c1A (w1,v)+ c2A (w2,v) ;
A (w,c1v1 + c2v2) = c1A (w,v1)+ c2A (w,v2) ;
• continua se per ogni v,w ∈V
∃ γ > 0 : |A (w,v)| ≤ γ||w||V ||v||V ;
• coerciva se per ogni v ∈V
∃ α > 0 : |A (v,v)| ≥ α||v||2V .
Il lemma di Lax-Milgram nel caso complesso e il seguente (vedi (17) e (18))
26

§ 2.4 Formulazione variazionale del problema in H
Teorema 2.3 (Lemma di Lax-Milgram)
Sia V uno spazio di Hilbert complesso, dotato di norma || · ||V , A (·, ·) : V ×V → C una
forma sesquilineare continua e coerciva ed F : V → C un funzionale lineare continuo, cioe
F ∈ V ′ dove V ′ indica lo spazio duale di V . Allora esiste una ed una sola u ∈ V soluzione
del problema
cercare u ∈V : A (u,v) = F(v) ∀v ∈V (2.22)
e
||u||V ≤ 1α||F||V ′. (2.23)
Siamo ora in grado di dimostrare il seguente risultato:
Teorema 2.4 (Esistenza ed unicita della soluzione)
Il problema (2.21) ammette una ed una sola soluzione.
Dimostrazione. Definiamo in H(rot;Ω)×H(rot;Ω) la forma sesquilineare A (·, ·)
A (w,v) :=∫
ΩC
σ−1 rotwC · rotvC + iω∫
Ωµ w ·v . (2.24)
Definiamo inoltre su V il funzionale lineare
LC(vC) :=∫
ΩC
σ−1Je,C · rotvC . (2.25)
Allora il problema (2.21) diventa:
cercare H ∈VJe,I tale che ∀ v ∈V
A (H,v) = LC(vC) .(2.26)
Come conseguenza dei vincoli (2.7)–(2.8) (vedi (3) e (13)), esiste He,I ∈ H(rot;ΩI) tale che
rotHe,I = Je,I in ΩI
He,I ×n = 0 su ∂ΩI \Γ(2.27)
Sia He,C ∈ H(rot;ΩC) tale che
He,C ×nC +He,I ×nI = 0 su Γ . (2.28)
Indichiamo con H∗ ∈ H0(rot;Ω) il campo vettoriale definito da
H∗ :=
He,I in ΩI
He,C in ΩC .(2.29)
27

Cap.2 Correnti parassite in regime armonico
Sia Z := H−H∗, allora Z ∈V e, grazie al lemma di Lax-Milgram, il problema
cercare Z ∈V tale che ∀ v ∈V
A (Z,v) = L(v) (2.30)
dove A (·, ·) e stata definita in (2.24) mentre
L(v) := −A (H∗,v)+ LC(vC) (2.31)
ha un’unica soluzione. Effettivamente osserviamo che la forma sesquilineare A (·, ·) e
continua
|A (u,v)| ≤∣∣∣∣∫
Ωiωµu ·v
∣∣∣∣+∣∣∣∣∫
ΩC
σ−1 rotu · rotv
∣∣∣∣≤
≤ |ω| ||µ||∞ ||u||L2(Ω) ||v||L2(Ω) +
+ ||σ−1||L∞(ΩC) ||rotu||L2(ΩC) ||rotv||L2(ΩC) ≤≤ max|ω| ||µ||∞, ||σ−1||L∞(ΩC)(||u||L2(Ω) ||v||L2(Ω) +
+ ||rotu||L2(Ω) ||rotv||L2(Ω) ) ≤≤ γ (||u||2L2(Ω) + ||rotu||2L2(Ω) )
1/2 (||v||2L2(Ω) + ||rotv||2L2(Ω) )1/2 =
= γ ||u||H(rot,Ω) ||v||H(rot,Ω)
(2.32)
coerciva in V (usando l’ipotesi di uniforme positivita della matrice µ in Ω e della matrice
σ−1 in ΩC)
|A (v,v)|2 =
∣∣∣∣∫
Ωiωµv ·v+
∫
ΩC
σ−1 rotv · rotv
∣∣∣∣2
=
= ω2[∫
Ωµv ·v
]2
+
[∫
Ωσ−1 rotv · rotv
]2
≥
≥ ω2 c1||v||4L2(Ω) + c2||rotv||4L2(ΩC) =
= ω2 c1||v||4L2(Ω) + c2||rotv||4L2(Ω) ≥≥ minω2c1 , c2(||v||4L2(Ω) + ||rotv||4L2(Ω)) ≥≥ α||v||4
H(rot,Ω)
(2.33)
28

§ 2.4 Formulazione variazionale del problema in H
e il funzionale lineare L(v) e continuo:
|L(v)| = |−A (H∗,v)+ LC(vC)| ≤ |A (H∗,v)| + |LC(vC)| ≤
≤ γ||H∗||H(rot,Ω)||v||H(rot,Ω) +
∣∣∣∣∫
ΩC
σ−1Je,C · rotv
∣∣∣∣ ≤
≤ γ||H∗||H(rot,Ω)||v||H(rot,Ω) + ||σ−1||L∞(ΩC) ||Je,C||L2(ΩC) ||rotv||L2(ΩC) ≤≤ C1||v||H(rot,Ω) + C2||rotv||L2(ΩC) ≤C||v||H(rot,Ω)
(2.34)
quindi la soluzione di (2.21) esiste ed e unica.
Una volta calcolato H, dalla prima delle (2.14) otteniamo il campo elettrico nel
conduttore:
EC = σ−1 (rotHC −Je,C).
Ricordando la condizione di incollamento lungo l’interfaccia EI ×nI + EC ×nC = 0 su Γ j,
j = 1, . . . , pΓ, il campo elettrico nell’isolante e soluzione del sistema
rotEI = −iωµIHI in ΩI
div(εEI) = 0 in ΩI
(εE)|ΩI·n = 0 su ∂Ω
EI ×nI = −σ−1(rotHC −Je,C
)×nC su Γ
< (εE)|ΩI·n,1 >Γ j= 0 su Γ j , j = 1, . . . , pΓ −1.
E stato dimostrato in (1) che tale sistema ammette una ed una sola soluzione.
29


3Approssimazione numerica
S i vuole approssimare la soluzione di (2.30) usando il metodo degli elementi finiti.
Contenuto
3.1 Metodo di Galerkin
3.2 Formulazione debole bidominio
3.3 Elementi finiti
3.3.1 Triangolazione
3.3.2 Sottospazio di funzioni polinomiali a tratti
3.3.3 Elementi finiti di Lagrange
3.3.4 Elementi finiti di Nedelec
3.4 Iterazione per sottodomini
L’idea generale dei metodi di tipo Galerkin (di cui il metodo degli elementi finiti e un
caso particolare) e la seguente.
Sezione 3.1
Metodo di Galerkin
Se consideriamo la formulazione debole di un generico problema posto su un dominio
Ω ⊂ R3:
cercare u ∈V : ∀ v ∈V
a(u,v) = F(v)(3.1)
31

Cap.3 Approssimazione numerica
essendo V un opportuno spazio di Hilbert, a(·, ·) una forma sesquilineare da V ×V in C
continua con costante γ e coerciva con costante α e F(·) un funzionale lineare da V in
C continuo, il metodo di Galerkin per l’approssimazione numerica di (3.1) consiste nel
cercare una soluzione approssimata uh ∈ Vh, essendo Vh una famiglia di spazi dipendente
da un parametro positivo h, tali che Vh ⊂ V , dimVh = N < ∞ e per ogni v ∈V
infvh∈Vh
||v− vh|| −→ 0h→0
. (3.2)
Il problema approssimato assume allora la forma:
cercare uh ∈Vh : ∀ vh ∈Vh
a(uh,vh) = F(vh)(3.3)
Indicando con ϕihNi=1 una base di Vh, e sufficiente che la (3.3) sia verificata per ogni
funzione della base, in quanto tutte le funzioni dello spazio Vh sono una combinazione
lineare delle ϕih. Pertanto il problema diventa:
cercare uh ∈Vh : ∀ i = 1, ...,N
a(uh,ϕih) = F(ϕih)(3.4)
Naturalmente, avendosi uh ∈Vh, sara possibile esprimere uh come combinazione lineare delle
funzioni di base ovvero
∃uh = (u jh)1≤ j≤N : uh(x) =N
∑j=1
u jhϕ jh(x)
dove uh e un vettore con i coefficienti
u jhN
i= j incogniti. Le equazioni (3.4) diventano
allora:cercare uh ∈ CN : ∀ i = 1, ...,N
a
(N
∑j=1
u jhϕ jh , ϕih
)= F(ϕih) .
Per la linearita di a(·, ·) e equivalente a:
cercare u ∈ CN : ∀ i = 1, ...,NN
∑j=1
u jha(ϕ jh,ϕih) = F(ϕih) .(3.5)
Indicando conA ≡
(ai j)
1≤i, j≤N con ai j = a(ϕ jh,ϕih)
b ≡ (bih)1≤i≤N con bih = F(ϕih)
uh ≡(u jh)
1≤ j≤N
32

§ 3.2 Formulazione debole bidominio
il problema (3.5) e equivalente a:
cercare uh ∈ CN soluzione del sistema lineare
Auh = b(3.6)
la cui soluzione esiste ed e unica poiche u∗hAuh = a(uh,uh)> 0 per ogni uh 6= 0 per la coercivita
di a(·, ·). Altrimenti e sufficiente osservare che il sistema (3.6) e equivalente al problema
(3.3) e che il lemma di Lax-Milgram, che vale per ogni spazio di Hilbert V , in particolare
vale anche per il sottospazio chiuso Vh che risulta di Hilbert rispetto alla stessa norma di
V .
Inoltre la soluzione uh del problema di Galerkin converge alla soluzione del problema
debole (3.1) quando h tende a zero. Vale infatti il seguente risultato
Lemma 1 (di Cea)
Se u e soluzione di (3.1) e uh e soluzione di (3.3), segue che
||u−uh||V ≤ γα
infvh∈Vh
||u− vh||V .
Dalla (3.2) segue che uh converge a u quando h → 0.
Sezione 3.2
Formulazione debole bidominio
Per applicare il metodo di Galerkin si tratta adesso di costruire una famiglia di
sottospazi di dimensione finita Vh ⊂ V che approssima lo spazio V dove e definito il
problema (2.30).
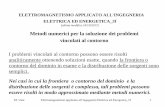
Per semplicita di trattazione consideriamo domini Ω in cui l’isolante ΩI e semplicemente
connesso (vedi figura 3.1). E ben noto (vedi ad esempio (19)) che in tal caso una forma
differenziale vI (definita su ΩI) irrotazionale e il gradiente di un potenziale ψI.
Se vI ×n = 0 su ∂Ω, possiamo scegliere ψI = 0 su ∂Ω. Pertanto se v ∈ V , possiamo
decomporla come v|ΩC= vC e v|ΩI
= ∇ψI tali che
vC ∈ H(rot;ΩC) ,
ψI ∈ H10,∂Ω(ΩI) :=
ξ ∈ H1(ΩI) |ξ|∂Ω = 0
.
(3.7)
33

Cap.3 Approssimazione numerica
Figura 3.1: Dominio computazionale
Inoltre, per ogni z ∈ H(rot;Ω), zC ×nC + zI ×nI = 0 in Γ: infatti per ogni w ∈ [H10 (Ω)]3
∫
Ωrotz ·w =
∫
Ωz · rotw =
∫
ΩC
zC · rotwC +∫
ΩI
zI · rotwI =
=∫
ΩC
rotzC ·wC +∫
ΩI
rotzI ·wI+ < zC ×nC,wC > + < zI ×nI ,wI >=
=
∫
Ωrotz ·w+ < zC ×nC,w > + < zI ×nI ,w > .
Pertanto zC ×nC + zI ×nI = 0 in Γ.
Siccome V ⊂ H(rot;Ω) introduciamo lo spazio
W :=
(vC,φI) ∈ H(rot;ΩC)×H10,∂Ω(ΩI) vC ×nC +∇φI ×nI = 0 su Γ
dotato della norma naturale
||(vC,φI)||W =(||vC||2H(rot;ΩC) + ||φI||2H1(ΩI)
)1/2.
La formulazione debole di (2.30) puo essere riscritta nel seguente modo:
cercare (ZC,ψI) ∈W tale che ∀ (vC,ϕI) ∈W
∫
ΩC
[iωµCZC ·vC +σ−1 rotZC · rotvC
]+
∫
ΩI
[iωµI∇ψI ·∇ϕI] =
=∫
ΩC
[σ−1(Je,C −rotHe,C) · rotvC − iωµCHe,C ·vC
]−∫
ΩI
[iωµIHe,I ·∇ϕ I]
(3.8)
34

§ 3.2 Formulazione debole bidominio
In altre parole se definiamo in W ×W la forma sesquilineare B(·, ·)
B((wC,ψI),(vC,ϕI)) := AC(wC,vC)+BI(ψI,ϕI) , (3.9)
dove
AC(wC,vC) :=∫
ΩC
(σ−1 rotwC · rotvC + iωµCwC ·vC) (3.10)
e
BI(ψI,ϕI) := iω∫
ΩI
µI∇ψI ·∇ϕ I , (3.11)
il problema (3.8) si scrive
cercare (ZC,ψI) ∈W tale che ∀ (vC,ϕI) ∈W
AC(ZC,vC)+BI(ψI,ϕI) = LC(vC)+LI(ϕI)(3.12)
dove
LC(vC) :=∫
ΩC
[σ−1(Je,C −rotHe,C) · rotvC − iωµCHe,C ·vC
]
LI(ϕI) := −∫
ΩI
[iωµIHe,I ·∇ϕ I]
La soluzione del problema (3.8) esiste ed e unica poiche (3.8) e equivalente al problema
(2.30). Tuttavia e possibile dimostrarlo direttamente utilizzando nuovamente il lemma di
Lax-Milgram. La dimostrazione e analoga a quella fatta per il problema (2.30) eccetto
per quanto riguarda la coercivita della forma sesquilineare B(·, ·) per la quale si deve
considerare il seguente risultato
Proposizione 3.1 (Disuguaglianza di Poincare)
Sia Ω un insieme limitato e connesso di Rn e Σ un sottoinsieme (non vuoto) Lipschitziano
del bordo ∂Ω. Allora esiste una costante CΩ > 0 tale che:
||v||L2(Ω) ≤CΩ||∇v||L2(Ω) ∀v ∈ H10,Σ(Ω). (3.13)
35

Cap.3 Approssimazione numerica
Infatti si ha
|B((vC,ψI),(vc,ψI))|2 =
=
∣∣∣∣∫
ΩC
σ−1 rotvC · rotvC +∫
ΩC
iωµCvC ·vC +∫
ΩI
iωµI∇ψI ·∇ψ I
∣∣∣∣2
=
=
[∫
ΩC
σ−1 rotvC · rotvC
]2
+ω2[∫
ΩC
µCvC ·vC +∫
ΩI
µI∇ψI ·∇ψ I
]2
≥
≥[∫
ΩC
σ−1 rotvC · rotvC
]2
+ω2[∫
ΩC
µCvC ·vC
]2
+ω2[∫
ΩI
µI∇ψI ·∇ψ I
]2
≥
≥ α ||vC||4H(rot,ΩC) + ω2 c ||∇ψI||4L2(ΩI)≥
(3.13)≥ α ||vC||4H(rot,ΩC) + ω2 c
C4ΩI
+1||ψI||4H1(ΩI)
≥
≥ α ||(vC,ψI)||4W .
(3.14)
Pertanto, poiche la forma sesquilineare B(·, ·) e continua e coerciva in W e il funzionale
lineare L ((vC,ϕI)) := LC(vC) + LI(ϕI) e continuo in W , per il lemma di Lax-Milgram
esiste una ed una sola soluzione.
Sezione 3.3
Elementi finiti
Vista la natura eterogenea del problema e necessario usare spazi diversi per approssi-
mare la soluzione nei due sottodomini ΩC ed ΩI. Usiamo gli elementi finiti di Lagrange per
approssimare lo spazio H10,∂Ω(ΩI) :=
ψ ∈ H1(ΩI) |ψ|∂Ω = 0
e gli elementi finiti di Nedelec
per approssimare lo spazio H(rot,ΩC). Possiamo costruire queste famiglie per tetraedri
o cubi e, poiche il controllo degli elementi della mesh e piu agevole per i cubi, si e deciso
di lavorare con questi ultimi. Presentiamo quindi le proprieta dell’approssimazione degli
elementi finiti sottolineando tre aspetti base di questo metodo: l’esistenza di una trian-
golazione del dominio Ω, la costruzione di un sottospazio finito-dimensionale di funzioni
polinomiali a tratti e l’esistenza di una base costituita da funzioni aventi supporto piccolo.
Quindi introduciamo un operatore di interpolazione e stimiamo l’errore di interpolazione.
3.3. Triangolazione
Sia Ω ⊂ R3 un dominio poligonale, cioe Ω e un sottoinsieme aperto limitato connesso
tale che Ω e l’unione di un numero finito di poliedri.
36

§ 3.3 Elementi finiti
Qui consideriamo una decomposizione finita
Ω =⋃
K∈Th
K, (3.15)
dove:
• ogni K e un poliedro conK 6= 0;
•
K1 ∩
K2 = 0 per ogni K1, K2 ∈ Th distinti;
• se f = K1∩K2 6= 0 (K1 e K2 elementi distinti di Th) allora f e un vertice, lato o faccia
comune a K1 e K2;
• diam(K) ≤ h per ogni k ∈ Th.
Th e detta triangolazione di Ω.
Assumeremo inoltre che ogni elemento K di Th si possa ottenere come K = FK(K),
dove K e un poliedro di riferimento ed FK una trasformazione affine invertibile, cioe
FK(x) := BK x + bk con BK matrice invertibile. Se consideriamo come poliedro di
riferimento K il cubo unitario [0,1]3 e la matrice BK e diagonale, allora ogni K = FK(K) ∈Th e un parallelepipedo di facce parallele agli assi cartesiani.
3.3. Sottospazio di funzioni polinomiali a tratti
Un secondo aspetto fondamentale del metodo degli elementi finiti consiste nel deter-
minare uno spazio di dimensione finita Xh costituito da funzioni polinomiali a tratti che
fornisce una buona approssimazione dello spazio X che stiamo considerando. Chiamando
PK :=
vh|K |vh ∈ Xh
,
questo deve essere uno spazio di funzioni polinomiali. Sia Ql l’insieme dei polinomi in x
a coefficienti reali di grado minore o uguale a l separatamente in tutte le variabili e Ql,m,n
l’insieme dei polinomi in x a coefficienti reali di grado minore o uguale a l in x1, a m in x2
e a n in x3.
Negli elementi finiti di Lagrange PK = Ql mentre in quelli di Nedelec PK = Ql−1,l,l ×Ql,l−1,l ×Ql,l,l−1 =: Gl . Ci limitiamo al caso l = 1.
37

Cap.3 Approssimazione numerica
3.3. Elementi finiti di Lagrange (su parallelepipedi, di grado 1)
Lo spazio degli elementi finiti di Lagrange e dato da
Vh :=
ψh ∈C0(Ω) | ψh|K FK ∈ Q1 ∀K ∈ Th
Osserviamo che, siccome BK e diagonale e Q1 e invariante per questo tipo di trasformazione,
lo spazio Vh si puo scrivere equivalentemente come
Vh :=
ψh ∈C0(Ω) | ψh|K ∈ Q1 ∀K ∈ Th
Osserviamo che Vh ⊂ H1(Ω). Questo e conseguenza del seguente risultato:
Proposizione 3.2
Una funzione v : Ω → R appartiene ad H1(Ω) se e solo se
a. v|K ∈ H1(K) per ogni K ∈ Th;
b. per ogni faccia comune f = K1 ∩K2, K1, K2 ∈ Th, la traccia su f di v|K1e v|K2
e la
stessa.
Dimostrazione. Se vale a., possiamo definire le funzioni w j ∈ L2(Ω), j = 1,2,3, come
w j|K := D j(v|K) ∀K ∈ Th
indicando con D j :=∂
∂x j.
Per provare che v ∈ H1(Ω) e sufficiente provare che w j = D jv. Usando la formula di
Green, per ogni ψ ∈ D(Ω) possiamo scrivere
D ′(Ω) < w j,ψ >D(Ω)=
∫
Ωw jψ = ∑
K
∫
Kw jψ = −∑
K
∫
K(v|K)D jψ +∑
K
∫
∂K(v|K)ψn j ,
dove n j := (nK) j e la componente j-esima della normale uscente da K.
Poiche ψ|∂Ω = 0 e nK1 = −nK2 =: n sulla faccia comune f = K1 ∩K2, allora se vale b. si
ottiene
D ′(Ω) < w j,ψ >D(Ω)=
∫
Ωw jψ = −
∫
ΩvD jψ +∑
f
∫
f(v|K1
− v|K2)ψn j = −
∫
ΩvD jψ ,
cioe w j = D jv nel senso delle distribuzioni.
38

§ 3.3 Elementi finiti
Viceversa, se v ∈ H1(Ω), ovviamente vale a. Inoltre, definendo w j := D jv ∈ L2(Ω) e
procedendo come sopra si trova
∑f
∫
f(v|K1
− v|K2)ψn j = 0 ∀ψ ∈ D(Ω) , j = 1,2,3,
cioe la b. e soddisfatta.
E ora necessario costruire una base dello spazio Vh in modo che le funzioni di base
siano facilmente descrivibili ed abbiano un supporto piccolo. Per questo e importante
determinare quali sono i gradi di liberta cioe i parametri che determinano univocamente
su ogni elemento K una funzione di Q1.
Nel cubo di riferimento K = [0,1]3 osserviamo che se q ∈ Q1 ed e uguale a zero negli
otto vertici di K allora q e identicamente nulla. Lo stesso argomento e valido per ogni
parallelepipedo K ∈ Th di facce parallele agli assi. Pertanto i gradi di liberta sono i valori
di ψh nei vertici della mesh che denotiamo a jnh,Lj=0. Osserviamo inoltre che questa scelta
dei gradi di liberta garantisce che le funzioni ψh sono continue perche i gradi di liberta in
ogni faccia identificano univocamente la restrizione di ψh in questa faccia.
Pertanto le funzioni della base sono le funzioni ϕ j,h che ristrette ad ogni elemento sono
un polinomio di Q1 e che soddisfano
ϕi,h(a j) = δi j ∀i, j = 0 . . .nh,L.
L’identificazione dei gradi di liberta e delle funzioni di base porta facilmente alla defi-
nizione di un operatore di interpolazione, cioe un operatore ΠL : C0(Ω) → Vh tale che per
ogni v ∈C0(Ω)
ΠL(v) :=nh,L
∑i=1
v(ai)ϕi,h .
Vale la seguente stima dell’errore d’interpolazione:
Teorema 3.3
Per ogni ψ ∈ H2(Ω) esiste una costante c > 0, indipendente da h, tale che
||ψ −ΠLψ||1,Ω ≤ ch |ψ|2,Ω.
Osserviamo che H2(Ω) ⊂C0(Ω), pertanto ΠLψ e ben definito per ogni ψ ∈ H2(Ω).
39

Cap.3 Approssimazione numerica
3.3. Elementi finiti di Nedelec (su parallelepipedi, di grado 1)
Lo spazio degli elementi finiti di Nedelec e dato da
Nh :=
vh ∈ H(rot;Ω) | vh|K ∈ G1 ∀K ∈ Th
Il seguente risultato ci indica quali condizioni devono soddisfare le funzioni vh nel-
l’interfaccia f tra due elementi K1, K2 della triangolazione Th affinche appartengano
a Nh:
Proposizione 3.4
Sia v : Ω → R3 una funzione tale che
a. v|K ∈ [H1(K)]3 per ogni K ∈ Th
b. per ogni faccia comune f = K1 ∩K2, K1, K2 ∈ Th, le tracce su f delle componenti
tangenziali v×n|K1e v×n|K2
coincidono
allora v appartiene ad H(rot;Ω). Viceversa se v appartiene ad H(rot;Ω) e la a. e
soddisfatta, allora vale la b.
Dimostrazione. Consideriamo la funzione w ∈ [L2(Ω)]3 cosı definita:
w|K := rot(v|K) ∀K ∈ Th
Verifichiamo che la distribuzione rotv coincide con w. Per ogni u ∈ [C∞C (Ω)]3 si ha
D ′(Ω) < rotv,u >D(Ω)=∫
Ωv · rotu = ∑
K
∫
K(v|K) · rotu =
poiche u|∂Ω = 0 e nK1 = −nK2 =: n sulla faccia comune f = K1 ∩K2, allora
= ∑K
∫
Krot(v|K) ·u+∑
f
∫
f(v×n|K1
−v×n|K2) ·u =
=∫
Ωw ·u = D ′(Ω) < w,u >D(Ω) ,
cioe rotv = w ∈ [L2(Ω)]3 .
Viceversa, se v ∈ H(rot;Ω) abbiamo w = rotv ∈ [L2(Ω)]3. Poiche v|K ∈ [H1(K)]3, la
traccia su f e ben definita e si ottiene
∑f
∫
f(v×n|K1
−v×n|K2) ·u = 0 ∀u ∈ [C∞
C (Ω)]3 , j = 1,2,3
cioe vale la b.
40

§ 3.3 Elementi finiti
Si tratta ora di determinare i gradi di liberta che ci permettono di individuare univo-
camente le funzioni di Nh e costruirne una base. In ogni parallelepipedo K il numero di
gradi di liberta deve coincidere con la dimensione di G1 che e dodici e devono essere tali
che se sono tutti nulli allora la funzione e nulla (unisolvenza). Inoltre, per la proposizione
precedente, devono essere tali da determinare le componenti tangenziali sulle facce dei pa-
rallelepipedi della mesh. In Nedelec (16) si dimostra che, se einh,Ni=1 e l’insieme degli spigoli
della mesh, i momenti
mi(v) :=∫
ei
v · tds i = 1, . . . ,nh,N
dove t e il vettore tangente lungo ei, soddisfano queste due condizioni. Infatti ogni v ∈ Nh
si puo scrivere come
v =
a1 +b1y+ c1z+d1yz
a2 +b2x+ c2z+d2xz
a3 +b3x+ c3y+d3xy
con a j, b j , c j, d j ∈ R , j = 1,2,3. Su una faccia f , ad esempio z = 0, la restrizione di v ad
f e
v| f =
a1 +b1y
a2 +b2x
a3 +b3x+ c3y+d3xy
e la componente tangenziale di v e
v| f ×n =
a2 +b2 x
−a1 −b1 y
0
.
Pertanto la condizione di azzeramento dei quattro momenti corrispondenti ai quattro spigoli
della faccia implica a1 = a2 = b1 = b2 = 0 ossia la conformita. Procedendo in maniera
analoga sulle altre facce si ha che v = 0 cioe si ha unisolvenza.
Pertanto una base di Nh e costituita dalle funzioni wi,h che, ristrette ad ogni elemento
K, sono un polinomio di G1 e soddisfano
∫
e j
wi,h · tds = δi j .
L’identificazione dei gradi di liberta e delle funzioni di base porta alla definizione di
un operatore di interpolazione, cioe un operatore ΠN : [H2(Ω)]3 → Nh tale che per ogni
41

Cap.3 Approssimazione numerica
v ∈ [H2(Ω)]3
ΠN(v) :=nh,N
∑i=1
mi(v)wi,h
e vale la seguente stima dell’errore d’interpolazione:
Teorema 3.5
Per ogni v ∈ [H2(Ω)]3 esiste una costante c > 0, indipendente da h, tale che
||v−ΠN(v)||[L2(K)]3 ≤ ch|v|[H2(K)]3
||rot(v−ΠN(v))||[L2(K)]3 ≤ ch|v|[H2(K)]3
Nel seguito indicheremo con VI,h lo spazio degli elementi finiti di Lagrange introdotti
nella sezione precedente relativi al dominio ΩI e con NC,h lo spazio degli elementi finiti
di Nedelec relativi al dominio ΩC. E pertanto naturale formulare il problema discreto
dell’approssimazione di Galerkin corrispondente a (3.8) nello spazio
Wh := (vC,h,φI,h) ∈ NC,h ×VI,h |vC,h×nC +∇φI,h×nI = 0 su Γ
(vedi (2) e (6)) e si ottiene il seguente problema discreto
cercare (ZC,h,ψI,h) ∈Wh tale che ∀ (vC,h,ϕI,h) ∈Wh
∫
ΩC
[iωµCZC,h ·vC,h +σ−1 rotZC,h · rotvC,h
]+
∫
ΩI
[iωµI∇ψI,h ·∇ϕ I,h
]=
=∫
ΩC
[σ−1(Je,C −rotHe,C) · rotvC,h − iωµCHe,C ·vC,h
]−∫
ΩI
[iωµIHe,I ·∇ϕ I,h
].
(3.16)
Sezione 3.4
Iterazione per sottodomini
Per risolvere il problema accoppiato discreto proponiamo un metodo iterativo per sot-
todomini di tipo Dirichlet-Neumann che, risolvendo una successione di problemi in NC,h e
VI,h, a convergenza da la soluzione del problema accoppiato.
42

§ 3.4 Iterazione per sottodomini
Per capire meglio questo processo iterativo e utile scrivere (3.8) in forma forte:
rot(σ−1 rotHC)+ iωµCHC = rot(σ−1Je,C) in ΩC (3.17)
HC ×nC = −∇ψI ×nI −He,I ×nI su Γ (3.18)
div(µI∇ψI) = −div(µIHe,I) in ΩI (3.19)
µI∇ψI ·nI = −µCHC ·nC −µIHe,I ·nI su Γ (3.20)
ψI = 0 su ∂ΩI \Γ (3.21)
Effettivamente da (3.8) seguono (3.17)-(3.21). Infatti
poiche la (3.8) vale per ogni (vC,ϕI) ∈ W , in particolare vale per ogni coppia (vC,ϕI)
in cui vC ∈ H0(rot,ΩC) e ϕI = 0 in ΩI e la (3.8) diviene
∫
ΩC
[iωµCZC ·vC +σ−1 rotZC · rotvC] =
=
∫
ΩC
[σ−1(Je,C −rotHe,C) · rotvC + iωµCHe,C ·vC] .
(3.22)
Ricordando che HC = ZC +He,C
∫
ΩC
[iωµCHC ·vC +σ−1 rotHC · rotvC] =
=∫
ΩC
[σ−1Je,C · rotvC] .
(3.23)
In particolare questa uguaglianza e vera per ogni vC ∈ [D(ΩC)]3 ed osservando che
D ′(ΩC) < rotu,v >D(ΩC) =
∫
ΩC
u · rotv si ha
D ′(ΩC) < iωµCHC +rot(σ−1 rotHC),vC >D(ΩC) =
= D ′(ΩC) < rot(σ−1Je,C),vC >D(ΩC)
(3.24)
che e la (3.17) in senso distribuzionale.
Analogamente poiche la (3.8) vale per ogni (vC,ϕI) ∈ W , in particolare vale per ogni
coppia (vC,ϕI) in cui vC = 0 in ΩC e ϕI ∈ H10 (ΩI) e la (3.8) diviene
∫
ΩI
[iωµI∇ψI ·∇ϕ I] = −∫
ΩI
[iωµIHe,I ·∇ϕ I] (3.25)
43

Cap.3 Approssimazione numerica
che, in senso distribuzionale, si puo scrivere come
D ′(ΩI) < iω div(µI∇ψI),ϕI >D(ΩI) = D ′(ΩI) < iω div(µIHe,I),ϕI >D(ΩI) (3.26)
cioe la (3.19).
La (3.18) e la (3.21) sono contenute nella definizione di W .
Resta da provare la (3.20).
Assumiamo che rot(σ−1Je,C) ∈ [L2(ΩC)]3 e che div(µIHe,I) ∈ L2(ΩI). Per semplicita
riscriviamo la (3.8) come A+B = C +D dove
A :=∫
ΩC
[iωµCZC ·vC +σ−1 rotZC · rotvC],
B :=∫
ΩI
[iωµI∇ψI ·∇ϕ I],
C :=∫
ΩC
[σ−1(Je,C −rotHe,C) · rotvC − iωµCHe,C ·vC],
D := −∫
ΩI
[iωµIHe,I ·∇ϕ I],
e studiamo separatamente ciascun termine.
Per la (2.4)
A =∫
ΩC
iωµCZC ·vC +∫
ΩC
rot(σ−1 rotZC) ·vC+
+ << σ−1 rotZC ×nC,n×vC ×n >>Γ .
Analogamente
C =∫
ΩC
rot(σ−1(Je,C −rotHe,C)) ·vC −∫
ΩC
iωµCHe,C ·vC]+
+ << σ−1(Je,C −rotHe,C)×nC,n×vC ×n >>Γ .
Quindi poiche vale la (3.17) si ottiene
A−C =<< σ−1(rotHC −Je,C) ·nC,n×vC ×n >>Γ .
Per la (2.1)
B = −∫
ΩI
iω div(µI∇ψI)ϕ I+ < iωµI∇ψI ·nI,ϕI >∂ΩI.
44

§ 3.4 Iterazione per sottodomini
Poiche ϕI = 0 su ∂Ω si ottiene
B = −∫
ΩI
iω div(µI∇ψI)ϕ I+ < iωµI∇ψI ·nI,ϕI >Γ .
Analogamente
D =
∫
ΩI
[iω div(µIHe,I)ϕ I]− < iωµIHe,I ·nI,ϕI >Γ .
Quindi poiche vale la (3.19) si ottiene
D−B = − < iωµI(He,I +∇ψI) ·nI,ϕI >Γ .
In conclusione l’uguaglianza A−C = D−B si riduce a
<< σ−1(rotHC −Je,C) ·nC,n×vC ×n >>Γ= − < iωµI(He,I +∇ψI) ·nI,ϕI >Γ
che vale per ogni (vC,ϕI) ∈ W . In particolare n×vC ×n = n×∇ϕI ×n in Γ pertanto
iωµI(He,I +∇ψI) ·nI = divτ [σ−1(rotHC −Je,C)×nC] =
= rot[σ−1(rotHC −Je,C)] ·nC =
= −iωµCHC ·nC
da cui µI∇ψI ·nI = −µCHC ·nC −µIHe,I ·nI che e la (3.20).
Osserviamo che le condizioni che abbiamo ottenuto per l’incollamento del campo nel-
l’interfaccia (3.18) e (3.20) sono proprio le condizioni di raccordo illustrate in (1.15).
La formulazione forte (3.17)-(3.21) suggerisce la seguente procedura di tipo Dirichlet-
Neumann:
dato λ 0 ∈ ϒΓ (spazio della traccia di H(rot;ΩC) su Γ), per ogni k ≥ 0 calcolare HkC
soluzione di
rot(σ−1 rotHk
C)+ iωµCHkC = rot(σ−1Je,C) in ΩC
HkC ×nC = −λ k −He,I ×nI su Γ ,
(3.27)
45

Cap.3 Approssimazione numerica
quindi calcolare ψkI soluzione di
div(µI∇ψkI ) = −div(µIHe,I) in ΩI
µI∇ψkI ·nI = −µCHk
C ·nC −µIHe,I ·nI su Γψk
I = 0 su ∂ΩI \Γ
(3.28)
infine porre
λ k+1 = (1−ϑ)λ k +ϑ (∇ψkI ×nI) su Γ , (3.29)
dove ϑ > 0 e un parametro d’accelerazione.
Osserviamo che se la successione λ k e convergente, al limite si ha la soluzione di (3.17)-
(3.21). Effettivamente se λ k → λ , chiamiamo HC la corrispondente soluzione di (3.27) e ψI
quella di (3.28); dalla (3.29) abbiamo λ = ∇ψI ×nI quindi
HC ×nC = −∇ψI ×nI −He,I ×nI .
Pertanto (HC, ψI) sono soluzione di (3.17)-(3.21).
Nel discreto l’algoritmo risulta:
dato λ 0h ∈ NΓ,h (spazio discreto della traccia di NC,h su Γ), per ogni k ≥ 0 calcolare
HkC,h ∈ NC,h tale che per ogni vC,h ∈ N0
C,h := NC,h ∩ H0(rot;ΩC)
∫
ΩC
[σ−1 rotHk
C,h · rotvC,h + iωµCHkC,h ·vC,h
]=∫
ΩC
σ−1Je,C · rotvC,h
HkC,h×nC = −λ k
h −He,I,h ×nI
(3.30)
quindi calcolare ψkI,h ∈VI,h tale che per ogni ϕI,h ∈V 0
I,h := VI,h ∩H10,∂Ω(ΩI)
∫
ΩI
µI∇ψkI,h ·∇ϕ I,h = −
∫
ΩI
µIHe,I,h ·∇ϕ I,h−∫
ΓµCHk
C,h ·nC ϕ I,h (3.31)
infine porre
λ k+1h = (1−ϑ)λ k
h +ϑ (∇ψkI,h ×nI) su Γ . (3.32)
Osserviamo che He,I,h e un’opportuna approssimazione di He,I nello spazio discreto VI,h;
non e infatti possibile considerare He,I poiche non si potrebbe soddisfare la seconda delle
(3.30); in particolare osserviamo che i gradienti delle funzioni ψI,h di VI,h sono funzioni di
46

§ 3.4 Iterazione per sottodomini
H(rot;ΩI) e localmente elementi di G1, pertanto ∇VI,h ⊂ NI,h := Nh(ΩI). Se si costruiscono
mesh in Γ coincidenti nei due sottodomini, ∇ψkI,h ×nI e un dato Dirichlet ammissibile per
il problema (3.30).
Due validi test d’arresto sono i seguenti: il primo considera l’errore assoluto fra due
iterate successive mentre il secondo l’errore relativo
||∇ψk+1I,h −∇ψk
I,h||2L2(ΩI)+ ||Hk+1
C,h −HkC,h||2H(rot;ΩC)
≤ toll ;
||∇ψk+1I,h −∇ψk
I,h||2L2(ΩI)
||∇ψk+1I,h ||2
L2(ΩI)
+||Hk+1
C,h −HkC,h||2H(rot;ΩC)
||Hk+1C,h ||2H(rot;ΩC)
≤ toll .
(3.33)
Infatti se Hk+1C,h = Hk
C,h allora λ k+1h = λ k
h, quindi λ kh = ∇ψk
I,h ×nI e pertanto
HkC,h×nC = −∇ψk
I,h ×nI −µIHe,I,h ×nI.
47


4Risultati numerici
I n questo capitolo proponiamo alcuni esperimenti numerici per verificare la convergenza
del metodo iterativo e la sua robustezza.
Contenuto
4.1 Passaggio del dato nell’interfaccia Γ
4.1.1 Passaggio del dato Dirichlet da ΩI a ΩC
4.1.2 Passaggio del dato Neumann da ΩC a ΩI
4.2 Risultati numerici
4.2.1 Gradi di liberta
4.2.2 Dato iniziale in Γ reale
4.2.3 Dato iniziale in Γ complesso
4.3 Considerazioni conclusive
Consideriamo un problema modello con parametri µ e σ scalari e costanti (un mezzo
omogeneo, lineare ed isotropo).
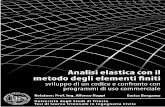
Il dominio computazionale e il parallelepipedo Ω = (0,1) × (0,2) × (0,1), che sara
decomposto nei due sottospazi ΩC = (0,1) × (0,yΓ) × (0,1) ed ΩI = (0,1)×(yΓ,2)×(0,1)
(vedi figura 4.1). L’interfaccia e il quadrato Γ = (x,yΓ,z) |x,z ∈ (0,1).La mesh e uniforme e ogni elemento della griglia e un cubo di lato h.
In questa situazione ∂ΩC∩∂Ω 6= /0. Pertanto in (4.8) bisogna aggiungere una condizione
su ∂ΩC ∩∂Ω; in concreto
HC ×nC = 0 su ∂ΩC ∩∂Ω.
49

Cap.4 Risultati numerici
Figura 4.1: Dominio computazionale e alcune posizioni dell’interfaccia Γ
Definendo un parametro k := ωσ µ la procedura di iterazione per sottodomini in questa
geometria diviene:
dato λ 0h ∈ NΓ,h (spazio discreto della traccia di NC,h su Γ), per ogni k ≥ 0 calcolare
HkC,h ∈ N0
C,h :=
uC,h ∈ NC,h |(uC,h×nC)|(∂ΩC\Γ) = 0
tale che per ogni vC,h ∈ N0C,h =
NC,h ∩ H0(rot;ΩC)
∫
ΩC
[rotHk
C,h · rotvC,h + i k HkC,h ·vC,h
]=∫
ΩC
Je,C · rotvC,h
HkC,h ×nC = −λ k
h −He,I,h×nI
(4.1)
quindi calcolare ϕkI,h ∈VI,h tale che per ogni ψI,h ∈V 0
I,h = VI,h ∩H10,∂Ω(ΩI)
∫
ΩI
µI∇ϕkI,h ·∇ψ I,h = −
∫
ΩI
µIHe,I ·∇ψ I,h −∫
ΓµCHk
C,h ·nC ψ I,h (4.2)
infine porre
λ k+1 = (1−ϑ)λ k +ϑ (∇ϕkI ×nI) su Γ. (4.3)
Sezione 4.1
Passaggio del dato nell’interfaccia Γ
Per semplicita in questa sezione indicheremo con wkNnk=1 le funzioni base dello spazio
di Nedelec e con ψ jNlj=1 le funzioni base dello spazio di Lagrange (vedere l’appendice per
i dettagli).
50

§ 4.2 Risultati numerici
4.1. Passaggio del dato Dirichlet da ΩI a ΩC
Ad ogni iterazione in ΩC si risolve un problema di tipo Dirichlet
∫
ΩC
[rotHk
C,h · rotvC,h + ikHkC,h ·vC,h
]= 0 ∀vC,h ∈ N0
C,h
HkC,h ×nC = −λ k
h
(4.4)
Osserviamo che le funzioni ψI,h di VI,h sono localmente elementi di Q1. I loro gradienti sono
funzioni di H(rot;ΩI) e localmente elementi di G1, pertanto ∇VI,h ⊂NI,h := Nh(ΩI). Siccome
le mesh dei due sottodomini coincidono in Γ, ∇ψkI,h ×nI e un dato Dirichlet ammissibile
per il problema (4.4).
4.1. Passaggio del dato Neumann da ΩC a ΩI
Abbiamo visto nel capitolo precedente che, noto HC,h ∈ NC,h soluzione di (4.4), si cerca
ϕI,h ∈ VI,h tale che per ogni ψI,h ∈ VI,h
∫
ΩI
µ∇ϕI ·∇ψ j = −∫
ΓµHC,h ·nCψ j. (4.5)
Poiche HC,h = ∑Nnk HC,kwk (omettiamo il pedice h per non appesantire la notazione), avremo
∫
ΓµHC,h ·nCψ j =
Nn
∑k
HC,k
∫
Γµwk ·nCψ j. (4.6)
Ponendo∫
Γµwk ·nCψ j = S jk, il problema (4.5) risulta equivalente al sistema lineare
ALu = bL ,
dove
(AL)i j :=∫
ΩI
µ∇ψ j∇ψ i ,
(bL) j := (S ∗HC) j .
Sezione 4.2
Risultati numerici
Questa sezione e dedicata all’analisi dei dati ottenuti nelle prove numeriche effettuate.
Tali risultati illustrano l’efficacia della procedura di iterazione per sottodomini presentata
51

Cap.4 Risultati numerici
nel capitolo precedente. Ci limitiamo a considerare il problema con dati Je,C e He,I uguali
a zero e verificheremo che partendo da un dato λ 0 6= 0 la successione (HkC,ψk
I )k converge
a zero. Questo equivale a studiare il decadimento dell’errore nel processo iterativo giacche,
scrivendo la differenza tra le soluzioni del problema forte (3.17)-(3.21) e l’iterazione k-esima
(3.27)-(3.28) e chiamando
ΞkC = HC −Hk
C ,
ξ kI = ψI −ψk
I ,(4.7)
l’errore nell’iterazione k-esima, questo soddisfa
rot(σ−1 rotΞkC)+ iωµCΞk
C = 0 in ΩC
ΞkC ×nC = −∇ψI ×nI +λ k su Γ
ΞkC ×nC = 0 su ∂ΩC \Γ
(4.8)
−div(µI∇ξ kI ) = 0 in ΩI
µI∇ξ kI ·nI = −µCΞk
C ·nC su Γξ k
I = 0 su ∂ΩI \Γ
(4.9)
Ponendo χk := ∇ψI ×nI −λ k e ricordando che
λ k+1 = (1−ϑ)λ k +ϑ (∇ψkI ×nI) su Γ , (4.10)
segue che
χk+1 = ∇ψI ×nI − (1−ϑ)λ k −ϑ (∇ψkI ×nI) =
= (1−ϑ)χk +ϑ(∇ξ kI ×nI) su Γ .
Mostreremo che partendo da un dato iniziale (reale o complesso) diverso da zero nel-
l’interfaccia, l’algoritmo converge alla soluzione nulla in poche iterazioni. In particolare
vedremo che la velocita di convergenza non dipende dalla dimensione h della griglia di
calcolo, mostreremo che esiste un valore ottimale del parametro di rilassamento ϑ indipen-
dente da h e dai parametri del problema e infine che l’algoritmo e piuttosto robusto sia
rispetto alla posizione dell’interfaccia sia rispetto ai parametri ω, σ e µ.
Non e infine da sottovalutare lo sforzo computazionale richiesto per risolvere i sistemi
lineari: vedremo infatti che le dimensione delle matrici in gioco raggiungono dimensioni
elevate.
52

§ 4.2 Risultati numerici
4.2. Gradi di liberta
Indichiamo con nc il numero di cubetti in cui viene decomposto il dominio Ω lungo
l’asse delle x, con pc il numero di cubetti in cui viene decomposto il dominio Ω lungo l’asse
delle z e con mcN ed mcL il numero di cubetti in cui vengono decomposti rispettivamente
i due sottodomini ΩC ed ΩI lungo l’asse delle y.
Il numero totale di spigoli in ΩC e
DOFC := nc(mcN +1)(pc+1)+(nc+1)mcN (pc+1)+(nc+1)(mcN +1) pc
e il numero di gradi di liberta nel conduttore e pari a DOFC meno il numero di spigoli con
dato Dirichlet.
Il numero totale di vertici in ΩI e
DOFI := (nc+1)(mcL +1)(pc+1)
e il numero di gradi di liberta nell’isolante e pari a DOFI meno il numero di vertici con
dato Dirichlet.
Poiche la mesh e uniforme e ogni elemento della griglia e un cubo di lato h, si ha:
nc =1h
pc =1h
mcN =yΓh
mcL =(2− yΓ)
h
Di conseguenza:
DOFC =(1+h)(3yΓ +2h+ yΓ h)
h3
DOFI =(1+h)2 (2− yΓ +h)
h3
La tabella 4.1 contiene l’espressione, in funzione della dimensione h della mesh, dei
gradi di liberta di Nedelec e di Lagrange per le tre configurazioni del dominio con le quali
abbiamo effettuato le prove numeriche.
In figura 4.2 sono rappresentate le mesh per (a) h=1/4 (b) h=1/8 (c) h=1/16.
53

Cap.4 Risultati numerici
yΓ = 1/2 yΓ = 1 yΓ = 3/2
DOF in ΩC(1+h)(3+5h)
2h3
3 (1+h)2
h3
(1+h)(9+7h)
2h3
DOF in ΩI(1+h)2 (3+2h)
2h3
(1+h)3
h3
(1+h)2 (1+2h)
2h3
Tabella 4.1: DOF in funzione di h per alcune posizioni dell’interfaccia.
(a) h=1/4 (b) h=1/8
(c) h=1/16
Figura 4.2: Mesh cubica
54

§ 4.2 Risultati numerici
La tabella 4.2 contiene il numero di gradi di liberta di Nedelec e il numero di gradi di
liberta di Lagrange per le tre posizioni dell’interfaccia con le quali abbiamo effettuato le
prove numeriche.
h yΓ = 1/2 yΓ = 1 yΓ = 3/2
1/4 170 / 175 300 / 125 430 / 75
1/6 483 / 490 882 / 343 1281 / 196
1/8 1044 / 1053 1944 / 729 2844 / 405
1/10 1925 / 1936 3630 / 1331 5335 / 726
1/12 3198 / 3211 6084 / 2197 8970 / 1183
1/14 4935 / 4950 9450 / 3375 13965 / 1800
1/16 7208 / 7225 13872 / 4913 20536 / 2601
1/18 10089 / 10108 19494 / 6859 28899 / 3610
Tabella 4.2: DOF in ΩC / ΩI .
55

Cap.4 Risultati numerici
4.2. Dato iniziale in Γ reale
Assegnamo come dato iniziale sull’interfaccia:
λ 0 := (ΞC ×nC)|Γ =
ez sin(x y)
ex (y + z)
cos(x z)
e studiamo la convergenza della soluzione a 0.
Questo dato iniziale e lo stesso che e stato usato in (4) per testare un algoritmo simile
relativo alla formulazione del problema nei termini del campo elettrico E.
4.2.2.1 Indipendenza da h e ϑ ottimale
Consideriamo un problema in cui ω σ µ = 1 e toll = 10−10.
Nella tabella 4.3 abbiamo riportato il numero di iterazioni necessario per abbattere l’errore
||ΞkC||2H(rot;ΩC)
+ ||∇ξ kI ||2L2(ΩI)
a meno di toll per differenti valori del coefficiente di rilas-
samento ϑ e per varie dimensioni della mesh h. Si osserva che il numero di iterazioni e
indipendente da h e che il valore di ϑ ottimale, cioe il valore del parametro di rilassamento
che rende piu veloce la convergenza, e ϑ = 1 indipendentemente da h.
HHHHHHHHh
ϑ0.50 0.75 1.00 1.25 1.50
1/4 23 13 8 10 19
1/6 23 13 8 10 19
1/8 22 13 9 10 19
1/10 23 13 9 10 19
1/12 22 13 8 11 20
1/14 22 13 8 11 20
1/16 22 13 8 11 20
1/18 22 13 8 11 20
Tabella 4.3: Numero di iterazioni con ω σ µ = 1, toll= 10−10 e yΓ = 1.
56

§ 4.2 Risultati numerici
In figura 4.3 e rappresentato il numero di iterazioni necessario per abbattere l’errore a
meno di 10−10 per differenti valori di h e del parametro di rilassamento ϑ per il problema
con parametri ω = σ = µ = 1.
0.5 1 1.55
10
15
20
25
yΓ = 1
Parametro di rilassamento ϑ
Num
ero
di it
eraz
ioni
h=1/4 h=1/6 h=1/8 h=1/10h=1/12h=1/14h=1/16h=1/18
Figura 4.3: ϑ ottimale e yΓ = 1
4.2.2.2 Robustezza rispetto alla posizione yΓ dell’interfaccia Γ
Nelle tabelle (4.4)-(4.5) abbiamo riportato di nuovo il numero di iterazioni necessario
per abbattere l’errore a meno di toll per differenti valori del coefficiente di rilassamento ϑe per varie dimensioni della mesh h. Ogni tabella corrisponde a una differente posizione
dell’interfaccia yΓ. Si osserva che anche in questo caso il numero di iterazioni e indipendente
da h e il valore di ϑ ottimale e sempre ϑ = 1 indipendentemente da h.
57

Cap.4 Risultati numerici
HHHHHHHHh
ϑ0.50 0.75 1.00 1.25 1.50
1/4 22 13 8 10 18
1/6 22 12 8 10 18
1/8 21 13 8 10 18
1/10 22 13 8 10 19
1/12 22 13 8 10 19
1/14 22 12 8 10 19
1/16 21 12 8 10 19
1/18 21 12 8 10 19
Tabella 4.4: Numero di iterazioni con ω σ µ = 1, toll= 10−10 e yΓ = 1/2.
HHHHHHHHh
ϑ0.50 0.75 1.00 1.25 1.50
1/4 23 13 8 10 19
1/6 23 13 8 11 20
1/8 23 13 9 11 20
1/10 23 14 9 11 20
1/12 23 13 9 11 20
1/14 23 13 8 11 20
1/16 22 13 8 11 20
1/18 22 13 8 11 20
Tabella 4.5: Numero di iterazioni con ω σ µ = 1, toll= 10−10 e yΓ = 3/2.
58

§ 4.2 Risultati numerici
0.5 1 1.58
10
12
14
16
18
20
22
yΓ = 1/2
Parametro di rilassamento ϑ
Num
ero
di it
eraz
ioni
h=1/4 h=1/6 h=1/8 h=1/10h=1/12h=1/14h=1/16h=1/18
0.5 1 1.55
10
15
20
25
yΓ = 3/2
Parametro di rilassamento ϑ
Num
ero
di it
eraz
ioni
h=1/4 h=1/6 h=1/8 h=1/10h=1/12h=1/14h=1/16h=1/18
Figura 4.4: ϑ ottimale, yΓ = 1/2 e yΓ = 3/2
4.2.2.3 Stime dell’errore per diversi valori di h
Nelle figure 4.5-4.6-4.7 sono rappresentati in scala logaritmica i decadimenti degli errori
(per il problema con ω = σ = µ = 1 e ϑ ottimale) ad ogni passo iterativo per differenti
valori di h e della posizione dell’interfaccia. Si osserva che anche in questo caso la velocita di
convergenza non risente ne della dimensione h della mesh ne delle variazioni della posizione
dell’interfaccia.
59

Cap.4 Risultati numerici
100
101
10−15
10−10
10−5
100
105
Errore con yΓ=1
Numero di iterazioni
Err
ore
h=1/4 h=1/6 h=1/8 h=1/10h=1/12h=1/14h=1/16
Figura 4.5: Decadimento dell’errore globale e yΓ = 1
100
101
10−15
10−10
10−5
100
105
Errore con yΓ=1/2
Numero di iterazioni
Err
ore
h=1/4 h=1/6 h=1/8 h=1/10h=1/12h=1/14h=1/16
Figura 4.6: Decadimento dell’errore globale e yΓ = 1/2
60

§ 4.2 Risultati numerici
100
101
10−15
10−10
10−5
100
105
Errore con yΓ=3/2
Numero di iterazioni
Err
ore
h=1/4 h=1/6 h=1/8 h=1/10h=1/12h=1/14h=1/16
Figura 4.7: Decadimento dell’errore globale e yΓ = 3/2
4.2.2.4 Robustezza rispetto ai parametri ω, σ e µ
Consideriamo θ ottimale (cioe θ = 1) e poniamo k := ω σ µ. Nella tabella 4.6 abbiamo
riportato il numero di iterazioni necessario ad abbattere l’errore a meno di toll = 10−10 per
differenti valori di h e del prodotto k dei parametri ω, σ , µ.
@@
@@
h
k10−1 1 10 102
1/4 10 8 5 4
1/6 11 8 5 4
1/8 12 9 5 4
1/10 14 9 5 4
1/12 14 8 5 4
1/14 15 8 5 4
1/16 15 8 5 3
1/18 14 8 5 4
Tabella 4.6: Numero di iterazioni con θ = 1, toll=10−10 e yΓ = 1.
61

Cap.4 Risultati numerici
Anche in questo caso la posizione dell’interfaccia Γ e ininfluente come si vede dalle
tabelle 4.7-4.8.
@@
@@
h
k10−1 1 10 102
1/4 10 8 5 4
1/6 11 8 5 4
1/8 12 8 5 3
1/10 13 8 5 3
1/12 14 8 5 3
1/14 14 8 5 3
1/16 14 8 5 3
1/18 14 8 5 3
Tabella 4.7: Numero di iterazioni con θ = 1, toll=10−10 e yΓ = 1/2 .
@@
@@
h
k10−1 1 10 102
1/4 10 8 5 4
1/6 11 8 5 4
1/8 12 8 5 4
1/10 14 9 5 4
1/12 15 9 5 4
1/14 15 8 5 4
1/16 15 8 5 4
1/18 14 8 5 4
Tabella 4.8: Numero di iterazioni con θ = 1, toll=10−10 e yΓ = 3/2.
62

§ 4.2 Risultati numerici
4.2. Dato iniziale in Γ complesso
Riportiamo di seguito i risultati degli esperimenti precedenti considerando questa volta
un dato iniziale complesso:
λ 0 := (ΞC ×nC)|Γ =
ez + i sin(x y)
y z + i ex
i cos(x z)
e studiamo di nuovo la convergenza della soluzione a 0.
Questo dato iniziale e lo stesso che e stato usato in (4) per testare un algoritmo simile
relativo alla formulazione del problema nei termini del campo elettrico E.
Vedremo che i risultati sono analoghi ai precedenti.
4.2.3.1 Indipendenza da h e ϑ ottimale
HHHHHHHHh
ϑ0.50 0.75 1.00 1.25 1.50
1/4 22 13 8 11 20
1/6 22 13 8 11 20
1/8 22 13 8 11 21
1/10 22 13 9 11 21
1/12 22 13 8 11 21
1/14 22 13 8 11 21
1/16 22 13 8 11 21
1/18 22 13 8 11 21
Tabella 4.9: Numero di iterazioni con ω σ µ = 1, toll= 10−10 e yΓ = 1.
63

Cap.4 Risultati numerici
0.5 1 1.58
10
12
14
16
18
20
22
yΓ = 1
Parametro di rilassamento ϑ
Num
ero
di it
eraz
ioni
h=1/4 h=1/6 h=1/8 h=1/10h=1/12h=1/14h=1/16h=1/18
Figura 4.8: ϑ ottimale e yΓ = 1
4.2.3.2 Robustezza rispetto alla posizione yΓ dell’interfaccia Γ
HHHHHHHHh
ϑ0.50 0.75 1.00 1.25 1.50
1/4 22 13 8 11 20
1/6 22 13 8 11 20
1/8 22 13 8 11 21
1/10 22 13 8 11 21
1/12 22 13 8 11 21
1/14 22 13 8 11 21
1/16 22 13 8 11 21
1/18 22 13 8 11 21
Tabella 4.10: Numero di iterazioni con ω σ µ = 1, toll= 10−10 e yΓ = 1/2.
64

§ 4.2 Risultati numerici
HHHHHHHHh
ϑ0.50 0.75 1.00 1.25 1.50
1/4 22 13 8 11 20
1/6 22 13 8 11 20
1/8 22 13 8 11 21
1/10 22 13 9 11 21
1/12 22 13 9 11 21
1/14 22 13 8 11 21
1/16 22 13 8 11 21
1/18 23 13 8 11 21
Tabella 4.11: Numero di iterazioni con ω σ µ = 1, toll= 10−10 e yΓ = 3/2.
0.5 1 1.58
10
12
14
16
18
20
22
yΓ = 1/2
Parametro di rilassamento ϑ
Num
ero
di it
eraz
ioni
h=1/4 h=1/6 h=1/8 h=1/10h=1/12h=1/14h=1/16h=1/18
0.5 1 1.55
10
15
20
25
yΓ = 3/2
Parametro di rilassamento ϑ
Num
ero
di it
eraz
ioni
h=1/4 h=1/6 h=1/8 h=1/10h=1/12h=1/14h=1/16h=1/18
Figura 4.9: ϑ ottimale, yΓ = 1/2 e yΓ = 3/2
65

Cap.4 Risultati numerici
4.2.3.3 Stime dell’errore per diversi valori di h
Nelle figure 4.10-4.11-4.12 sono rappresentati in scala logaritmica i decadimenti degli
errori ad ogni passo iterativo per differenti valori di h e della posizione dell’interfaccia (la
componente complessa dell’errore e trascurabile).
100
101
10−15
10−10
10−5
100
105
Errore con yΓ=1
Numero di iterazioni
Err
ore
h=1/4 h=1/6 h=1/8 h=1/10h=1/12h=1/14h=1/16
Figura 4.10: Decadimento dell’errore globale e yΓ = 1
100
101
10−15
10−10
10−5
100
105
Errore con yΓ=1/2
Numero di iterazioni
Err
ore
h=1/4 h=1/6 h=1/8 h=1/10h=1/12h=1/14h=1/16
Figura 4.11: Decadimento dell’errore globale e yΓ = 1/2
66

§ 4.2 Risultati numerici
100
101
10−15
10−10
10−5
100
105
Errore con yΓ=3/2
Numero di iterazioni
Err
ore
h=1/4 h=1/6 h=1/8 h=1/10h=1/12h=1/14h=1/16
Figura 4.12: Decadimento dell’errore globale e yΓ = 3/2
4.2.3.4 Robustezza rispetto ai parametri ω, σ e µ
@@
@@
h
k10−1 1 10 102
1/4 10 8 5 4
1/6 11 8 5 4
1/8 12 8 5 4
1/10 13 9 5 4
1/12 14 8 5 3
1/14 14 8 5 3
1/16 14 8 5 3
1/18 14 8 5 3
Tabella 4.12: Numero di iterazioni con θ = 1, toll=10−10 e yΓ = 1.
67

Cap.4 Risultati numerici
@@
@@
h
k10−1 1 10 102
1/4 10 8 5 4
1/6 11 8 5 4
1/8 12 8 5 4
1/10 13 8 5 4
1/12 14 8 5 3
1/14 14 8 5 3
1/16 14 8 5 3
1/18 14 8 5 3
Tabella 4.13: Numero di iterazioni con θ = 1, toll=10−10 e yΓ = 1/2
@@
@@
h
k10−1 1 10 102
1/4 10 8 5 4
1/6 11 8 5 4
1/8 12 8 5 4
1/10 13 9 5 4
1/12 14 9 5 4
1/14 15 8 5 3
1/16 14 8 5 3
1/18 15 8 5 3
Tabella 4.14: Numero di iterazioni con θ = 1, toll=10−10 e yΓ = 3/2.
68

§ 4.3 Considerazioni conclusive
Sezione 4.3
Considerazioni conclusive
Possiamo pertanto concludere che l’algoritmo d’iterazione per sottodomini che abbiamo
proposto per risolvere un problema modello in una geometria semplificata e con coefficienti
costanti e efficiente. Ci siamo limitati a considerare il problema con dati Je,C e He,I uguali
a zero e abbiamo verificato che partendo da un dato iniziale (reale o complesso) λ 0 6=0 nell’interfaccia, l’algoritmo converge alla soluzione nulla in poche iterazioni. Questo
equivale a studiare il decadimento dell’errore nella norma || · ||W
||ΞkC||2H(rot;ΩC)
+ ||∇ξ kI ||2L2(ΩI)
≤ toll .
Si e cercato di testare la velocita di convergenza in funzione dalla dimensione h della
griglia di calcolo e i risultati mostrano che non risente di tale parametro.
Inoltre, in questa geometria particolare, il parametro di rilassamento ottimale risulta
essere ϑ = 1 per le tre posizioni dell’interfaccia che sono state considerate.
Si e poi voluto verificare l’efficienza per diversi problemi e si e visto che il metodo
e efficiente in tutti i casi considerati ma il numero di iterazioni cresce al diminuire di
k = ω σ µ.
69


IDocumentazione
I n questa appendice illustriamo in maniera dettagliata gli aspetti implementativi del me-
todo di iterazione per sottodomini limitandoci al caso di elementi finiti lineari. Inizialmente
si costruiscono la griglia di calcolo e le relative strutture dei dati, si assemblano i contributi
di ciascun elemento finito al sistema lineare e si predispongono i sistemi lineari da risolvere
in ogni sottodominio, quindi si appronta il passaggio dei dati da un sottodominio all’altro
ed infine si implementa il processo iterativo vero e proprio.
Contenuto
I.1 NC,h := elementi finiti lineari di Nedelec
I.1.1 Costruzione di una base sul cubo di riferimento
I.1.2 Generalizzazione della base ad un cubo K qualsiasi
I.1.3 Costruzione della mesh
I.1.4 Costruzione della matrice di stiffness A globale
I.1.5 Costruzione della matrice di massa M globale
I.1.6 Costruzione del vettore termine noto TN globale
I.2 VI,h := elementi finiti lineari di Lagrange
I.2.1 Costruzione di una base sul cubo di riferimento
I.2.2 Generalizzazione della base ad un cubo K qualsiasi
I.2.3 Costruzione della mesh
I.2.4 Costruzione della matrice di stiffness A globale
I.2.5 Costruzione del vettore termine noto TN globale
71

Cap.I Documentazione
I.3 Passaggio del dato nell’interfaccia Γ
I.3.1 Passaggio del dato Neumann da ΩC a ΩI
I.3.2 Passaggio del dato Dirichlet da ΩI a ΩC
I.4 Implementazione della procedura iterativa
Consideriamo come dominio
Figura I.1: Dominio computazionale e alcune
posizioni dell’interfaccia Γ
computazionale il parallelepipe-
do Ω = (0,1)×(0,2)×(0,1), che
sara decomposto nei due sotto-
spazi ΩC = (0,1)×(0,yΓ)×(0,1)
ed ΩI = (0,1) × (yΓ,2) × (0,1)
(vedi figura I.1). L’interfaccia e
il quadrato Γ = (x,yΓ,z) |x,z ∈(0,1). La mesh e uniforme e
ogni elemento della griglia e un
cubo di lato h.
Indichiamo con nc il numero di cubetti in cui viene decomposto il dominio Ω lungo
l’asse delle x, con pc il numero di cubetti in cui viene decomposto il dominio Ω lungo l’asse
delle z e con mcN ed mcL il numero di cubetti in cui vengono decomposti rispettivamente
i due sottodomini ΩC ed ΩI lungo l’asse delle y.
Sezione I.1
NC,h := elementi finiti lineari di Nedelec
Per k = 1 abbiamo l’elemento finito (C,P,A ) definito da:
• P = v = [v1;v2;v3] |v1 ∈ Q0,1,1; v2 ∈ Q1,0,1; v3 ∈ Q1,1,0 cioe
v =
a1 +b1y+ c1z+d1yz
a2 +b2x+ c2z+d2xz
a3 +b3x+ c3y+d3xy
;
• i momenti sono∫
a v · t ds dove a e uno spigolo di C.
72

§ I.1 NC,h := elementi finiti lineari di Nedelec
Abbiamo un grado di liberta per ogni spigolo.
Nella tabella I.1 sono indicati il numero totale di gradi di liberta per diversi valori di h
e posizioni dell’interfaccia quando il dominio computazionale e il parallelepipedo ΩC =
(0,1)× (0,yΓ)× (0,1) (vedi figura I.2).
HHHHHHHHyΓ
h−1
4 6 8 10 12 14 16 18
12
170 483 1044 1925 3198 4935 7208 10089
1 300 882 1944 3630 6084 9450 13872 19494
32
430 1281 2844 5335 8970 13965 20536 28899
Tabella I.1: Numero di gradi di liberta
CO
ND
UT
TO
RE
00.2
0.4
0.6
0.8
1
z 0.2
0.4
0.6
0.8
1
y
0.2
0.4
0.6
0.8
1
x
Figura I.2: ΩC
73

Cap.I Documentazione
I.1. Costruzione di una base sul cubo di riferimento
Nella pratica le funzioni di base ϕi si ottengono trasformando le funzioni di base ϕi
costruite una volta per tutte su un dominio di riferimento. Questo modo di procedere
(definire la base su un elemento di riferimento e poi trasformare le funzioni di base su uno
specifico elemento) e di fondamentale importanza quando si considerano problemi in piu
dimensioni come nel nostro caso. Il cubo di riferimento e C := x∈R3 |0≤ xi ≤ 1; i = 1,2,3.Numeriamo i suoi spigoli in ordine lessicografico indicando con 0, 1 o 2 lo spigolo diretto
come l’asse delle x, delle y o delle z rispettivamente, seguito dal vertice di partenza (vedi
tabella I.1.1 e figura I.1.1).
SPIGOLO COORDINATE
1 (0;0,0,0)
2 (0;0,1,0)
3 (0;0,0,1)
4 (0;0,1,1)
5 (1;0,0,0)
6 (1;0,0,1)
7 (1;1,0,0)
8 (1;1,0,1)
9 (2;0,0,0)
10 (2;1,0,0)
11 (2;0,1,0)
12 (2;1,1,0)
Figura I.3: Coordinate locali in ΩC e cubo di riferimento C
Indichiamo con ϕ i12i=1 le funzioni base su questo cubetto di riferimento. Tali funzioni
ϕ i sono tali che:
• ϕ i ∈ P ,
• ϕ i =
1 sullo spigolo i-esimo di C ,
0 sugli altri 11 spigoli di C .
74

§ I.1 NC,h := elementi finiti lineari di Nedelec
Teorema I.1
Le 12 funzioni base ϕ i sono:
ϕ1 :=
(1− y)(1− z)
0
0
, ϕ2 :=
y(1− z)
0
0
,
ϕ3 :=
(1− y)z
0
0
, ϕ4 :=
yz
0
0
,
ϕ5 :=
0
(1− x)(1− z)
0
, ϕ6 :=
0
(1− x)z
0
,
ϕ7 :=
0
x(1− z)
0
, ϕ8 :=
0
xz
0
,
ϕ9 :=
0
0
(1− x)(1− y)
, ϕ10 :=
0
0
x(1− y)
,
ϕ11 :=
0
0
(1− x)y
, ϕ12 :=
0
0
xy
.
Dimostrazione. E evidente che ϕ i ∈ P. Non resta che verificare che
ϕ i =
1 sullo spigolo i-esimo di C,
0 sugli altri 11 spigoli di C.
Verifichiamolo per la funzione ϕ1 (le altre sono analoghe):
75

Cap.I Documentazione
• Spigolo 1
∫ 1
0[(1− y)(1− z),0,0] ·
1
0
0
ds =
=∫ 1
0(1− y)(1− z)ds =
(lungo lo spigolo 1: y=z=0)
=
∫ 1
01ds = 1
• Spigoli 2, 3, 4
∫ 1
0[(1− y)(1− z),0,0] ·
1
0
0
ds =
=
∫ 1
0(1− y)(1− z)ds =
(lungo lo spigolo 2: y=1 e z=0)
(lungo lo spigolo 3: y=0 e z=1)
(lungo lo spigolo 4: y=z=1)
=
∫ 1
00ds = 0
• Spigoli 5, 6, 7, 8
∫ 1
0[(1− y)(1− z),0,0] ·
0
1
0
ds =
=∫ 1
00ds = 0
• Spigoli 9, 10, 11,12
∫ 1
0[(1− y)(1− z),0,0] ·
0
0
1
ds =
=∫ 1
00ds = 0
76

§ I.1 NC,h := elementi finiti lineari di Nedelec
I.1. Generalizzazione della base ad un cubo K qualsiasi
Indichiamo con x un punto di K e con x un punto di C (cubo di riferimento). L’affinita
che manda C in K e un’omotetia di entita h seguita da una traslazione di entita b
x = hx+b .
Allora
ϕ i(x) =1h
ϕ i(x) =1h
ϕ i
(1h
(x−b)
). (I.1)
Effettivamente ∫
aϕ i(x) · t = h
∫
aϕ i(hx+b) · t =
∫
aϕ i(x) · t .
I.1. Costruzione della mesh
Consideriamo una mesh strutturata costituita da un parallelepipedo avente lunghezza
nc cubetti, larghezza mc cubetti e altezza pc cubetti. Numeriamo i cubetti in ordine lessi-
cografico e analogamente numeriamo globalmente gli spigoli. Questa struttura e riassunta
nella matrice Z ∈ Mat(R;numeroCubi×12) dove alla riga i-esima sono contenuti gli spigoli
del cubo i-esimo. La function seguente costruisce la matrice Z:
File I.1: meshN
1 function [ Z]=meshN(nc ,mc, pc , ns ,ms , ps )
2 % I l v e t t o r e v e ’ l a prima r i ga d e l l a matr ice Z
3 v=zeros ( 1 , 1 2 ) ; %
4 v (1)=1; %
5 v(2)=v(1)+nc ; %
6 v(3)=v(2)+nc∗mc; %
7 v(4)=v(3)+nc ; %
8 v(5)= ns+1; %
9 v(6)=v(5)+( nc+1)∗mc; %
10 v(7)=v(5)+1; %
11 v(8)=v(6)+1; %
12 v(9)= ns+ms+1; %
13 v(10)=v(9)+1; %
77

Cap.I Documentazione
14 v(11)=v(10)+nc ; %
15 v(12)=v(11)+1; %
16 % La matr ice A cont i ene l e co lonne 1−4 d i Z
17 AV=[v (1 ) , v ( 2 ) , v ( 3 ) , v ( 4 ) ] ; %
18 Aa=AV; %
19 for i =1:( nc∗mc−1)
20 Aa=[Aa ;AV + i ] ;
21 end %
22 A=Aa ; %
23 i f pc>1
24 for i =1:( pc−1)
25 A=[A;Aa + ( nc∗mc+nc )∗ i ] ;
26 end
27 end
28 % La matr ice B cont i ene l e co lonne 5−8 d i Z
29 % La matr ice C cont i ene l e co lonne 9−12 d i Z
30 BV=[v (5 ) , v ( 6 ) , v ( 7 ) , v ( 8 ) ] ; %
31 CaV=[v (9 ) , v (10) , v (11) , v ( 1 2 ) ] ; %
32 Ba=BV;
33 Da=CaV;
34 for i =1:( nc−1)
35 Ba=[Ba ;BV+i ] ;
36 Da=[Da ;CaV+i ] ;
37 end
38 B=Ba ;
39 i f mc∗pc>1
40 for i =1:( pc∗mc−1)
41 B=[B;Ba + ( nc+1)∗ i ] ;
42 end
43 end
44 Ca=Da ;
45 i f mc∗pc>1
46 for i =1:(mc−1)
47 Ca=[Ca ;Da + ( nc+1)∗ i ] ;
48 end
78

§ I.1 NC,h := elementi finiti lineari di Nedelec
49 end
50 C=Ca ;
51 i f pc>1
52 for i =1:( pc−1)
53 C=[C;Ca+((( nc+1)∗mc+nc+1)∗ i ) ] ;
54 end
55 end
56 % Assemblaggio
57 Z=[A,B,C ] ;
E utile inoltre avere una matrice coor contenente il tipo e le coordinate del vertice iniziale
di ogni spigolo. La matrice coor ∈ Mat(R;numeroSpigoli×5) e tale che alla riga i-esima si
trova il tipo dello spigolo i-esimo seguito dalle coordinate del punto iniziale come in tabella
I.1.1. La function seguente costruisce la matrice coor:
File I.2: coordinateN
58 function [ coor ]= coordinateN (h , nc ,mc, pc , ns ,ms , ps )
59 % Colonna T:
60 % 0 = sp i g o l o lungo x
61 % 1 = sp i g o l o lungo y
62 % 2 = sp i g o l o lungo z
63 T=[zeros ( ns , 1 ) ; ones (ms , 1 ) ; 2 ∗ ones ( ps , 1 ) ] ;
64 % Colonna X: coord inata x d e l l ’ o r i g i n e d e l l o s p i g o l o
65 X1= [ ] ; %
66 X2= [ ] ; %
67 for i =1:((mc+1)∗(pc+1))
68 X1=[X1 ; [ 0 : ( nc−1)] ’∗h ] ;
69 end
70 for i =1:(mc∗( pc+1)+(mc+1)∗pc )
71 X2=[X2 ; [ 0 : nc ] ’∗ h ] ;
72 end X=[X1 ;X2 ] ;
73 % Colonna Y: coord inata y d e l l ’ o r i g i n e d e l l o s p i g o l o
74 Y1 = [ ] ; %
75 Y1p= [ ] ; %
76 Y2 = [ ] ; %
77 Y2p= [ ] ; %
79

Cap.I Documentazione
78 Y3 = [ ] ; %
79 Y3p= [ ] ; %
80 for i =0:mc
81 Y1p=[Y1p ; ones ( nc , 1 )∗ i ∗h ] ;
82 end
83 for i =1:pc+1
84 Y1=[Y1 ;Y1p ] ;
85 end
86 for i =0:mc−1
87 Y2p=[Y2p ; ones ( nc+1 ,1)∗ i ∗h ] ;
88 end
89 for i =1:( pc+1)
90 Y2=[Y2 ;Y2p ] ;
91 end
92 for i =0:mc
93 Y3p=[Y3p ; ones ( nc+1 ,1)∗ i ∗h ] ;
94 end
95 for i =1:pc
96 Y3=[Y3 ;Y3p ] ;
97 end
98 Y=[Y1 ;Y2 ;Y3 ] ;
99 % Colonna Z : coord inata z d e l l ’ o r i g i n e d e l l o s p i g o l o
100 Z1 = [ ] ;
101 Z2 = [ ] ;
102 Z3 = [ ] ;
103 for i =0:pc
104 Z1=[Z1 ; ones ( nc ∗(mc+1) ,1)∗ i ∗h ] ;
105 end
106 for i =0:pc
107 Z2=[Z2 ; ones ( ( nc+1)∗mc,1 )∗ i ∗h ] ;
108 end
109 for i =0:pc−1
110 Z3=[Z3 ; ones ( ( nc+1)∗(mc+1) ,1)∗ i ∗h ] ;
111 end
112 Z=[Z1 ; Z2 ; Z3 ] ;
80

§ I.1 NC,h := elementi finiti lineari di Nedelec
113 coor =[T,X,Y,Z ] ;
I.1. Costruzione della matrice di stiffness A globale
La matrice di stiffness globale A e definita da:
A = (ai j)1≤i, j≤N ,
ai j =∫
Ωrotϕ i · rotϕ j = ∑
K∈Th
∫
Krotϕ i · rotϕ j .
Pertanto la matrice di stiffness A globale si costruisce sommando i contributi di ogni cubetto
K della triangolazione. Tali contributi sono raccolti nelle matrici di stiffness AK elementari
∈ Mat(R;12) cosı definite:
aKi j =
∫
Krotϕ i · rotϕ j ∀ i, j = 1, ...,12
Poiche ϕ i(x) =1h
ϕ i(F−1(x)), e sufficiente calcolare AC (cioe la matrice elementare di stiff-
ness sul cubetto di riferimento) e poi passare alla generica AK . Gli elementi aCi j di AC sono
definiti da:
aCi j =
∫
Crot ϕ i · rot ϕ j ∀ i, j = 1, ...,12
Sviluppando i conti si ottengono i seguenti vettori:
rot ϕ1 :=
0
−(1− y)
(1− z)
, rot ϕ2 :=
0
−y
−(1− z)
,
rot ϕ3 :=
0
(1− y)
z
, rot ϕ4 :=
0
y
−z
,
rot ϕ5 :=
(1− x)
0
−(1− z)
, rot ϕ6 :=
−(1− x)
0
−z
,
rot ϕ7 :=
x
0
(1− z)
, rot ϕ8 :=
−x
0
z
,
81

Cap.I Documentazione
rot ϕ9 :=
−(1− x)
(1− y)
0
, rot ϕ10 :=
−x
−(1− y)
0
,
rot ϕ11 :=
(1− x)
y
0
, rot ϕ12 :=
x
−y
0
.
e la matrice di stiffness elementare sull’elemento C di riferimento e:
AC =16
4 −1 −1 −2 −2 −1 2 1 −2 2 −1 1
−1 4 −2 −1 2 1 −2 −1 −1 1 −2 2
−1 −2 4 −1 −1 −2 1 2 2 −2 1 −1
−2 −1 −1 4 1 2 −1 −2 1 −1 2 −2
−2 2 −1 1 4 −1 −1 −2 −2 −1 2 1
−1 1 −2 2 −1 4 −2 −1 2 1 −2 −1
2 −2 1 −1 −1 −2 4 −1 −1 −2 1 2
1 −1 2 −2 −2 −1 −1 4 1 2 −1 −2
−2 −1 2 1 −2 2 −1 1 4 −1 −1 −2
2 1 −2 −1 −1 1 −2 2 −1 4 −2 −1
−1 −2 1 2 2 −2 1 −1 −1 −2 4 −1
1 2 −1 −2 1 −1 2 −2 −2 −1 −1 4
Poiche ϕ(x) =1h
ϕ(x) risulta rotϕ(x) =1h2 rot ϕ(x). Pertanto
∫
Krotϕ i(x) · rotϕ j(x) = h3
∫
Crot
(1h
ϕ i(x)
)· rot
(1h
ϕ j(x)
)=
= h3∫
C
1h2 rot(ϕ i(x)) · 1
h2 rot(
ϕ j(x))
=1h
∫
Crot ϕ i · rot ϕ j .
(I.2)
In conclusione la matrice di stiffness elementare sul generico cubetto K e:
AK =1h
AC
Osservazione 1. Poiche la nostra mesh e fortemente strutturata, la matrice di stiffness
elementare AK e la stessa per ogni cubetto K.
82

§ I.1 NC,h := elementi finiti lineari di Nedelec
I.1. Costruzione della matrice di massa M globale
La matrice di massa globale M e definita da:
M = (mi j)1≤i, j≤N
mi j =∫
Ωϕ i ·ϕ j = ∑
K∈Th
∫
Kϕ i ·ϕ j
Pertanto la matrice di massa M globale si costruisce sommando i contributi di ogni cubetto
K della triangolazione. Tali contributi sono raccolti nelle matrici di massa MK elementari
∈ Mat(R;12) cosı definite:
mKi j =
∫
Kϕ i ·ϕ j ∀ i, j = 1, ...,12
Poiche ϕ i(x) = 1h ϕ i(F
−1(x)), e sufficiente calcolare MC (cioe la matrice elementare di massa
sul cubetto di riferimento) e poi passare alla generica MK . Gli elementi mCi j di MC sono
definiti da:
mCi j =
∫
Cϕ i · ϕ j ∀ i, j = 1, ...,12
e la matrice di massa elementare sull’elemento C di riferimento e:
MC =1
36
4 2 2 1 0 0 0 0 0 0 0 0
2 4 1 2 0 0 0 0 0 0 0 0
2 1 4 2 0 0 0 0 0 0 0 0
1 2 2 4 0 0 0 0 0 0 0 0
0 0 0 0 4 2 2 1 0 0 0 0
0 0 0 0 2 4 1 2 0 0 0 0
0 0 0 0 2 1 4 2 0 0 0 0
0 0 0 0 1 2 2 4 0 0 0 0
0 0 0 0 0 0 0 0 4 2 2 1
0 0 0 0 0 0 0 0 2 4 1 2
0 0 0 0 0 0 0 0 2 1 4 2
0 0 0 0 0 0 0 0 1 2 2 4
Poiche ϕ(x) =1h
ϕ(x)∫
Kϕ i ·ϕ j = h
∫
Cϕ i · ϕ j .
In conclusione la matrice di massa elementare sul generico cubetto K e:
MK = hMC .
83

Cap.I Documentazione
Osservazione 2. Anche in questo caso, poiche la nostra mesh e fortemente strutturata,
la matrice di massa elementare MK e la stessa per ogni cubetto K.
La seguente function genera le matrici di stiffness e massa globali assemblando le matrici
di stiffness e massa elementari:
File I.3: NStiffMassa
114 function [AN,MN]= NSti f fMassa (Z , h , numSpigoli , numCubi)
115 As t i f=sparse ( numSpigoli , numSpigoli ) ;
116 Mmassa=sparse ( numSpigoli , numSpigoli ) ;
117 % Matr ice d i s t i f f n e s s e lementare con cubi u n i t a r i :
118 Asti fElem = (1/6)∗[4 ,−1 ,−1 ,−2 ,−2 ,−1 , 2 , 1 ,−2 , 2 ,−1 , 1 ; . . .
119 −1, 4 ,−2 ,−1 , 2 , 1 ,−2,−1,−1, 1 ,−2 , 2 ; . . .
120 −1,−2, 4 ,−1,−1,−2, 1 , 2 , 2 ,−2 , 1 , − 1 ; . . .
121 −2,−1,−1, 4 , 1 , 2 ,−1 ,−2 , 1 ,−1 , 2 , − 2 ; . . .
122 −2, 2 ,−1 , 1 , 4,−1,−1,−2,−2,−1, 2 , 1 ; . . .
123 −1, 1 ,−2 , 2 ,−1 , 4 ,−2 ,−1 , 2 , 1 , −2 , −1; . . .
124 2 ,−2 , 1 ,−1,−1,−2, 4 ,−1,−1,−2, 1 , 2 ; . . .
125 1 ,−1 , 2 ,−2,−2,−1,−1, 4 , 1 , 2 , −1 , −2; . . .
126 −2,−1, 2 , 1 ,−2 , 2 ,−1 , 1 , 4 ,−1 ,−1 ,−2;. . .
127 2 , 1 ,−2,−1,−1, 1 ,−2 , 2 ,−1 , 4 , −2 , −1; . . .
128 −1,−2, 1 , 2 , 2 ,−2 , 1 ,−1,−1,−2, 4 , − 1 ; . . .
129 1 , 2 ,−1 ,−2 , 1 ,−1 , 2 ,−2,−2,−1,−1, 4 ] ;
130 % Matr ice d i massa e lementare con cubi u n i t a r i :
131 MmassaElem = (1/36)∗ [ 4 , 2 , 2 , 1 , 0 , 0 , 0 , 0 , 0 , 0 , 0 , 0 ; . . .
132 2 , 4 , 1 , 2 , 0 , 0 , 0 , 0 , 0 , 0 , 0 , 0 ; . . .
133 2 , 1 , 4 , 2 , 0 , 0 , 0 , 0 , 0 , 0 , 0 , 0 ; . . .
134 1 , 2 , 2 , 4 , 0 , 0 , 0 , 0 , 0 , 0 , 0 , 0 ; . . .
135 0 , 0 , 0 , 0 , 4 , 2 , 2 , 1 , 0 , 0 , 0 , 0 ; . . .
136 0 , 0 , 0 , 0 , 2 , 4 , 1 , 2 , 0 , 0 , 0 , 0 ; . . .
137 0 , 0 , 0 , 0 , 2 , 1 , 4 , 2 , 0 , 0 , 0 , 0 ; . . .
138 0 , 0 , 0 , 0 , 1 , 2 , 2 , 4 , 0 , 0 , 0 , 0 ; . . .
139 0 , 0 , 0 , 0 , 0 , 0 , 0 , 0 , 4 , 2 , 2 , 1 ; . . .
140 0 , 0 , 0 , 0 , 0 , 0 , 0 , 0 , 2 , 4 , 1 , 2 ; . . .
141 0 , 0 , 0 , 0 , 0 , 0 , 0 , 0 , 2 , 1 , 4 , 2 ; . . .
142 0 , 0 , 0 , 0 , 0 , 0 , 0 , 0 , 1 , 2 , 2 , 4 ] ;
84

§ I.1 NC,h := elementi finiti lineari di Nedelec
143 % Assemblaggio d e l l e componenti g l o b a l i
144 for k=1:numCubi
145 for j =1:12
146 As t i f (Z(k , : ) , Z(k , j ))= As t i f (Z(k , : ) , Z(k , j ) ) + . . .
147 Asti fElem ( : , j )/h ;
148 Mmassa(Z(k , : ) , Z(k , j ))=Mmassa(Z(k , : ) , Z(k , j ) ) + . . .
149 MmassaElem ( : , j )∗h ;
150 end
151 end
152 AN=Ast i f ;
153 MN=Mmassa ;
I.1. Costruzione del vettore termine noto TN globale
Anche se nel caso di cui ci siamo occupati l’equazione e omogenea, per verificare la
corretta implementazione del metodo sono state effettuate delle prove fissando un termine
noto f in modo da poter approssimare numericamente la soluzione di un problema di cui
si conosce la soluzione esplicita. Il calcolo del vettore corrispondente e fatto nel seguente
modo.
Il vettore termine noto globale TN e definito da:
TN = (TNi)1≤i≤N N = numeroSpigoli
T Ni = F(ϕ i) =
∫
Ωf ·ϕ i = ∑
K∈Th
∫
Kf ·ϕ i
Pertanto anche il vettore termine noto TN globale si costruisce sommando i contributi di
ogni cubetto K della triangolazione. Tali contributi sono raccolti nei vettori termine noto
TNK elementari ∈ Mat(R;12×1) cosı definiti:
T NKi =
∫
Kf ·ϕ i ∀ i = 1, ...,12
Osservazione 3. Per il calcolo del termine noto conviene ricondursi al cubetto di
riferimento C con un cambio di variabili:
T NKi =
∫
Kf(x) ·ϕ i(x)dx = h2
∫
Cf(Bx+b) ·ϕ i(Bx+b)dx = h
∫
Cf(Bx+b) · ϕ i(x)dx
85

Cap.I Documentazione
Poiche in generale non sono integrali immediati, la costruzione di TNK passa attra-
verso un’approssimazione con formule di quadratura. Le function seguenti si occupano di
calcolare TNK al variare di K utilizzando come formula di quadratura la formula di Gauss:
File I.4: TNned
154 % h = la to cubo
155 % f1 , f2 , f 3 = s t r i n gh e con tenen t i i l termine noto
156 function [ TNned]=TNned(h , f1 , f2 , f3 , coor , Z , numSpigoli , numCubi)
157 TN=zeros ( numSpigoli , 1 ) ; % ve t t o r e termine noto g l oba l e
158 % Assemblaggio
159 for k=1:numCubi
160 % b = vet t o r e colonna con l a coord inata de l
161 % ve r t i c e de l cubetto k−esimo
162 b=[ coor (Z(k , 1 ) , 2 ) ; coor (Z(k , 1 ) , 3 ) ; coor (Z(k , 1 ) , 4 ) ] ;
163 % Vettore termine noto e lementare :
164 % var ia da cubetto a cubetto
165 TNelem=tnelemN ( f1 , f2 , f3 , b , h ) ;
166 TN(Z(k , : ) )=TN(Z(k , : ) )+TNelem ( : ) ;
167 end TNned=TN;
169 % f1 , f2 , f 3 = componenti d i f in formato s t r i n g a
170 % b = vet t o r e colonna con l e coord inate de l v e r t i c e
171 % di un cubetto
172 function [ TNelem]=tnelemN ( f1 , f2 , f3 , b , h)
173 % Str inghe con i t e rm in i non n u l l i d e l l e p h i i d i base
174 phi1=’(1-y)*(1-z)’ ;
175 phi2=’y*(1-z)’ ;
176 phi3=’(1-y)*z’ ;
177 phi4=’y*z’ ;
178 phi5=’(1-x)*(1-z)’ ;
179 phi6=’(1-x)*z’ ;
180 phi7=’x*(1-z)’ ;
181 phi8=’x*z’ ;
182 phi9=’(1-x)*(1-y)’ ;
183 phi10=’x*(1-y)’ ;
86

§ I.1 NC,h := elementi finiti lineari di Nedelec
184 phi11=’(1-x)*y’ ;
185 phi12=’x*y’ ;
186 TNelem=zeros ( 1 2 , 1 ) ;
187 TNelem(1)= in tegra l eN ( f1 , phi1 , b , h ) ;
188 TNelem(2)= in tegra l eN ( f1 , phi2 , b , h ) ;
189 TNelem(3)= in tegra l eN ( f1 , phi3 , b , h ) ;
190 TNelem(4)= in tegra l eN ( f1 , phi4 , b , h ) ;
191 TNelem(5)= in tegra l eN ( f2 , phi5 , b , h ) ;
192 TNelem(6)= in tegra l eN ( f2 , phi6 , b , h ) ;
193 TNelem(7)= in tegra l eN ( f2 , phi7 , b , h ) ;
194 TNelem(8)= in tegra l eN ( f2 , phi8 , b , h ) ;
195 TNelem(9)= in tegra l eN ( f3 , phi9 , b , h ) ;
196 TNelem(10)= in tegra l eN ( f3 , phi10 , b , h ) ;
197 TNelem(11)= in tegra l eN ( f3 , phi11 , b , h ) ;
198 TNelem(12)= in tegra l eN ( f3 , phi12 , b , h ) ;
200 function [ i n t e g r a l e ]= in tegra l eN ( f f , pph , b , h)
201 % L ’ i n t e g r a l e su C di r i f e r im en t o d i f f ( hx+b) con
202 % pph(x ) s i o t t i e n e sommando 8 c on t r i b u t i o t t enu t i
203 % valutando i l prodotto n e g l i 8 nodi
204 % [ eta ( i ) , e ta ( j ) , e ta ( l ) ] con i , j , l =1,2
205 f=i n l i n e ( f f , ’x’ ,’y’ , ’z’ ) ;
206 phi=i n l i n e (pph , ’x’ , ’y’ ,’z’ ) ;
207 eta =[.5− sqrt (3)/6 , .5+ sqrt ( 3 ) / 6 ] ;
208 i n t e =0;
209 % I nodi p in cu i va lu tar e phi s i ottengono con tu t t e l e
210 % p o s s i b i l i permutazioni d i eta (1) ed eta (2)
211 % I nodi FP in cu i va lu tar e f s i ottengono
212 % con l ’ a f f i n i t a hp+b
213 for i =1:2
214 for j =1:2
215 for l =1:2
216 p = [ eta ( i ) ; e ta ( j ) ; e ta ( l ) ] ;
217 FP = (h∗p)+b ;
218 i n t e = in t e +( f (FP(1 ) ,FP(2 ) ,FP ( 3 ) ) . . .
87

Cap.I Documentazione
219 ∗phi (p (1 ) , p ( 2 ) , p ( 3 ) ) ) ;
220 end
221 end
222 end
223 % La sommatoria va d i v i s a per 8 e
224 % mo l t i p l i c a t a per hˆ2
225 i n t e g r a l e=hˆ2∗ i n t e /8 ;
Quando, come nel nostro caso, ci sono delle condizioni Dirichlet non omogenee sul bordo
(λ 6= 0), queste si impongono nel seguente modo. Sia M e la matrice del problema, λ il
vettore contenente il dato Dirichlet e gli indici I e Γ indichino rispettivamente nodi interni
o di interfaccia. Allora l’equazione (4.4) implica a livello algebrico
MIIxI +MIΓλ = f ,
cioe
MIIxI = f−MIΓλ .
88

§ I.2 VI,h := elementi finiti lineari di Lagrange
Sezione I.2
VI,h := elementi finiti lineari di Lagrange
Per l = 1 abbiamo l’elemento finito (C,P,Σ) dove i gradi di liberta Σ = a j8j=1 sono gli
otto vertici del cubo di riferimento C e P = Q1 cioe l’insieme dei polinomi del tipo
v = a0 +a1x+a2y+a3z+a4xy+a5xz+a6yz+a7xyz
Abbiamo un grado di liberta per ciascuno degli otto vertici.
Nella tabella I.2 sono indicati il numero totale di gradi di liberta per diversi valori di
h e posizioni dell’interfaccia quando il dominio computazionale e il parallelepipedo ΩI =
(0,1)× (yΓ,2)× (0,1) (vedi figura I.4).
HHHHHHHHyΓ
h−1
4 6 8 10 12 14 16 18
12
175 490 1053 1936 3211 4950 7225 10108
1 125 343 729 1331 2197 3375 4913 6859
32
75 196 405 726 1183 1800 2601 3610
Tabella I.2: Numero di gradi di liberta
I.2. Costruzione di una base sul cubo di riferimento
Il cubo di riferimento e C := x ∈ R3 |0 ≤ xi ≤ 1; i = 1,2,3. Numeriamo localmente i
suoi vertici in ordine lessicografico (vedi tabella I.2.1 e figura I.2.1).
Indichiamo con ϕi8i=1 le funzioni base su questo cubetto di riferimento. Tali funzioni
ϕi sono tali che:
• ϕi ∈ P
89

Cap.I Documentazione
Figura I.4: ΩI
VERTICE COORDINATE
1 (0,0,0)
2 (1,0,0)
3 (0,1,0)
4 (1,1,0)
5 (0,0,1)
6 (1,0,1)
7 (0,1,1)
8 (1,1,1)
Figura I.5: Coordinate locali in ΩI e cubo di riferimento C
• ϕi =
1 nel vertice i-esimo di C
0 negli altri 7 vertici di C
Le 8 funzioni base ϕi sono:
ϕ1 := (1− x)(1− y)(1− z), ϕ2 := x(1− y)(1− z),
ϕ3 := (1− x)y(1− z), ϕ4 := xy(1− z),
ϕ5 := (1− x)(1− y)z, ϕ6 := x(1− y)z,
ϕ7 := (1− x)yz, ϕ8 := xyz.
I.2. Generalizzazione della base ad un cubo K qualsiasi
90

§ I.2 VI,h := elementi finiti lineari di Lagrange
Indichiamo con x un punto di K e con x un punto di C (cubo di riferimento). L’affinita
che manda C in K e un’omotetia di entita h seguita da una traslazione di entita b:
x = hx+b
Allora
ϕ(x) = ϕ(
1h(x−b)
)(I.3)
I.2. Costruzione della mesh
Consideriamo una mesh strutturata costituita da un parallelepipedo avente lunghezza
nc cubetti, larghezza mc cubetti e altezza pc cubetti. Numeriamo i cubetti in ordine lessi-
cografico e analogamente numeriamo globalmente gli spigoli. Questa struttura e riassunta
nella matrice ZL ∈ Mat(R;numeroCubi×8) dove alla riga i-esima sono contenuti i vertici
del cubo i-esimo. La function seguente costruisce la matrice ZL:
File I.5: meshL
226 function [ ZL]=meshL( nc ,mc , pc )
227 v = zeros ( 1 , 8 ) ;
228 v(1)= 1 ;
229 v(2)= v(1)+1;
230 v(3)= v(2)+nc ;
231 v(4)= v(3)+1;
232 v(5)= v(1)+( nc+1)∗(mc+1);
233 v(6)= v(5)+1;
234 v(7)= v(6)+nc ;
235 v(8)= v(7)+1;
236 Za = [ v ] ;
237 Zb = Za ;
238 for i =1:( nc−1)
239 Zb=[Zb ; Za+i ] ;
240 end
241 Zc=Zb ;
242 for i =1:(mc−1)
243 Zc=[Zc ; Zb+(nc+1)∗ i ] ;
244 end
91

Cap.I Documentazione
245 ZL=Zc ;
246 for i =1:( pc−1)
247 ZL=[ZL ; Zc+(nc+1)∗(mc+1)∗ i ] ;
248 end
E utile inoltre avere una matrice coorL contenente le coordinate di ogni vertice. La
matrice coorL ∈ Mat(R;numeroVertici× 4) e tale che alla riga i-esima si trova il numero
del vertice i-esimo seguito dalle coordinate come in tabella I.2.1. La function seguente
costruisce la matrice coorL:
File I.6: coorL
249 function [ coorL ]= coord inateL (h , nc ,mc , pc , yg )
250 % Colonna X: coord inata x de l v e r t i c e a l l a r i ga i−esima
251 X= [ ] ;
252 for i =1:(mc+1)∗(pc+1)
253 X=[X ; [ 0 : nc ] ’∗h ] ;
254 end
255 % Colonna Y: coord inata y de l v e r t i c e a l l a r i ga i−esima
256 v=ones ( nc +1 ,1) ;
257 Y1= [ ] ;
258 for i =0:mc
259 Y1=[Y1 ; v∗ i ∗h ] ;
260 end
261 Y=Y1 ;
262 for i =1:pc
263 Y=[Y;Y1 ] ;
264 end
265 % Colonna Z : coord inata z de l v e r t i c e a l l a r i ga i−esima
266 v=ones ( ( nc+1)∗(mc+1) ,1) ;
267 Z= [ ] ;
268 for i =0:pc
269 Z=[Z ; v∗ i ∗h ] ;
270 end
271 % Le Y sono t r a s l a t e d i 1 perch e mi trovo su l cubo t r a s l a t o
272 coorL=[X,Y+yg ,Z ] ;
92

§ I.2 VI,h := elementi finiti lineari di Lagrange
I.2. Costruzione della matrice di stiffness A globale
La matrice di stiffness globale A e definita da:
A = (ai j)1≤i, j≤N
ai j =
∫
Ω∇ϕi ·∇ϕ j = ∑
K∈Th
∫
K∇ϕi ·∇ϕ j
Pertanto la matrice di stiffness A globale si costruisce sommando i contributi di ogni cubetto
K della triangolazione. Tali contributi sono raccolti nelle matrici di stiffness AK elementari
∈ Mat(R;8) cosı definite:
aKi j =
∫
K∇ϕi ·∇ϕ j ∀ i, j = 1, ...,8
Poiche ϕi(x) = ϕi (x), e sufficiente calcolare AC (cioe la matrice elementare di stiffness sul
cubetto di riferimento) e poi passare alla generica AK . Gli elementi aCi j di AC sono definiti
da:
aCi j =
∫
C∇ϕi ·∇ϕ j ∀ i, j = 1, ...,8
Sviluppando i conti si ottengono i seguenti vettori:
∇ϕ1 :=
−(1− y)(1− z)
−(1− x)(1− z)
−(1− x)(1− y)
, ∇ϕ2 :=
(1− y)(1− z)
−x(1− z)
−x(1− y)
,
∇ϕ3 :=
−y(1− z)
(1− x)(1− z)
−(1− x)y
, ∇ϕ4 :=
y(1− z)
x(1− z)
−xy
,
∇ϕ5 :=
−(1− y)z
−(1− x)z
(1− x)(1− y)
, ∇ϕ6 :=
(1− y)z
−xz
x(1− y)
,
∇ϕ7 :=
−yz
(1− x)z
(1− x)y
, ∇ϕ8 :=
yz
xz
xy
,
93

Cap.I Documentazione
e la matrice di stiffness elementare sull’elemento C di riferimento e:
AC =1
12
4 0 0 −1 0 −1 −1 −1
0 4 −1 0 −1 0 −1 −1
0 −1 4 0 −1 −1 0 −1
−1 0 0 4 −1 −1 −1 0
0 −1 −1 −1 4 0 0 −1
−1 0 −1 −1 0 4 −1 0
−1 −1 0 −1 0 −1 4 0
−1 −1 −1 0 −1 0 0 4
Poiche ϕ(x) = ϕ(x) risulta ∇ϕ(x) =1h
∇ϕ(x). Pertanto
∫
K∇ϕi(x) ·∇ϕ j(x) = h3
∫
C∇(
1h
ϕi(x)
)·∇(
1h
ϕ j(x)
)= h
∫
C∇ϕi ·∇ϕ j
In conclusione la matrice di stiffness elementare sul generico cubetto K e:
AK = hAC
Osservazione 4. Poiche la nostra mesh e fortemente strutturata, la matrice di stiffness
elementare AK e la stessa per ogni cubetto K.
La seguente function genera la matrice si stiffness globale assemblando le matrici di
stiffness elementari:
File I.7: LStiff
273 function [AL]= L S t i f f (ZL , h , numVertici , numCubi)
274 A=sparse ( numVertici , numVertici ) ;
275 % Matr ice d i s t i f f n e s s e lementare con cubi u n i t a r i :
276 AElem = (1/12 )∗ [ 4 , 0 , 0 , −1, 0 , −1, −1, − 1 ; . . .
277 0 , 4 , −1, 0 , −1, 0 , −1, − 1 ; . . .
278 0 , −1, 4 , 0 , −1, −1, 0 , − 1 ; . . .
279 −1, 0 , 0 , 4 , −1, −1, −1, 0 ; . . .
280 0 , −1, −1, −1, 4 , 0 , 0 , − 1 ; . . .
281 −1, 0 , −1, −1, 0 , 4 , −1, 0 ; . . .
282 −1, −1, 0 , −1, 0 , −1, 4 , 0 ; . . .
94

§ I.2 VI,h := elementi finiti lineari di Lagrange
283 −1, −1, −1, 0 , −1, 0 , 0 , 4 ] ;
284 % Assemblaggio d e l l e componenti g l o b a l i
285 for k=1:numCubi
286 for j =1:8
287 A(ZL(k , : ) , ZL(k , j ))=A(ZL(k , : ) , ZL(k , j ))+AElem ( : , j )∗h ;
288 end
289 end
290 AL=A;
I.2. Costruzione del vettore termine noto TN globale
Come nel caso degli elementi finiti di Nedelec, anche se l’equazione di cui ci siamo
occupati e omogenea, per verificare la corretta implementazione del metodo sono state
effettuate delle prove fissando un termine noto f in modo da poter approssimare numeri-
camente la soluzione di un problema di cui si conosce la soluzione esplicita. Il calcolo del
vettore corrispondente e fatto nel seguente modo.
Il vettore termine noto globale TN e definito da:
TN = (T Ni)1≤i≤N N = numeroVertici
T Ni = F(ϕi) =∫
Ωf ϕi = ∑
K∈Th
∫
Kf ϕi
Pertanto anche il vettore termine noto TN globale si costruisce sommando i contributi di
ogni cubetto K della triangolazione. Tali contributi sono raccolti nei vettori termine noto
TNK elementari ∈ Mat(R;12×1) cosı definiti:
T NKi =
∫
Kf ϕi ∀ i = 1, ...,8
Osservazione 5. Per il calcolo del termine noto conviene ricondursi al cubetto di
riferimento C con un cambio di variabili:
T NKi =
∫
Kf (x)ϕi(x)dx =
= h3∫
Cf (hx+b)ϕi(hx+b)dx =
= h3∫
Cf (hx+b)ϕi(x)dx
95

Cap.I Documentazione
Poiche in generale non sono integrali immediati, la costruzione di TNK passa attra-
verso un’approssimazione con formule di quadratura. Le function seguenti si occupano di
calcolare TNK al variare di K utilizzando come formula di quadratura la formula di Gauss:
File I.8: TNlag
291 % h = la to cubo
292 % f = s t r i n g a contenente l ’ e s p r e s s i o n e de l termine noto
293 function [ TNlag]=TNlag (h , f , ZL , coorL , numCubi , numVertici )
294 TN=zeros ( numVertici , 1 ) ;
295 % Assemblaggio
296 for k=1:numCubi
297 % b = vet t o r e colonna con l a coord inata de l
298 % primo v e r t i c e de l cubetto k
299 b = [ coorL (ZL(k , 1 ) , 1 ) ; coorL (ZL(k , 1 ) , 2 ) ; coorL (ZL(k , 1 ) , 3 ) ] ;
300 % Vettore termine noto e lementare : var i a
301 % da cubetto a cubetto
302 TNelemL = tnelemL ( f , b , h ) ;
303 TN(ZL(k , : ) ) = TN(ZL(k , : ) )+TNelemL ( : ) ;
304 end
306 % f = s t r i n g a
307 % b = vet t o r e colonna con l e coord inate de l
308 % primo v e r t i c e d i un cubetto
309 function [ TNelem ] = tnelemL ( f , b , h)
310 phi = zeros ( 8 , 1 ) ;
311 % Vettore d i s t r i n gh e contenente i
312 % termin i non n u l l i d e l l e p h i i d i base
313 phi1=’(1-x)*(1-y)*(1-z)’ ;
314 phi2=’(1-x)*y*(1-z)’ ;
315 phi3=’(1-x)*(1-y)*z’ ;
316 phi4=’(1-x)*y*z’ ;
317 phi5=’x*(1-y)*(1-z)’ ;
318 phi6=’x*y*(1-z)’ ;
319 phi7=’x*(1-y)*z’ ;
320 phi8=’x*y*z’ ;
96

§ I.2 VI,h := elementi finiti lineari di Lagrange
321 TNelem=zeros ( 8 , 1 ) ;
322 % TNelem s i o t t i e n e integrando f con
323 % phi1 , phi2 , phi3 , phi4 . . .
324 TNelem(1)= in t eg r a l eL ( f , phi1 , b , h ) ;
325 TNelem(2)= in t eg r a l eL ( f , phi2 , b , h ) ;
326 TNelem(3)= in t eg r a l eL ( f , phi3 , b , h ) ;
327 TNelem(4)= in t eg r a l eL ( f , phi4 , b , h ) ;
328 TNelem(5)= in t eg r a l eL ( f , phi5 , b , h ) ;
329 TNelem(6)= in t eg r a l eL ( f , phi6 , b , h ) ;
330 TNelem(7)= in t eg r a l eL ( f , phi7 , b , h ) ;
331 TNelem(8)= in t eg r a l eL ( f , phi8 , b , h ) ;
333 function [ i n t e g r a l e ]= in t eg r a l eL ( f f , pph , b , h)
334 % L ’ i n t e g r a l e su C di r i f e r im en t o d i f f ( hx+b)
335 % con pph(x ) s i o t t i e n e sommando 8 c on t r i b u t i o t t enu t i
336 % valutando i l prodotto n e g l i 8 nodi
337 % [ eta ( i ) , e ta ( j ) , e ta ( l ) ] con i , j , l =1,2
338 f=i n l i n e ( f f , ’x’ ,’y’ , ’z’ ) ;
339 phi=i n l i n e (pph , ’x’ , ’y’ ,’z’ ) ;
340 eta =[.5− sqrt (3)/6 , .5+ sqrt ( 3 ) / 6 ] ;
341 i n t e =0;
342 % I nodi p in cu i va lu tar e phi s i ottengono con tu t t e l e
343 % p o s s i b i l i permutazioni d i eta (1) ed eta (2)
344 % I nodi FP in cu i va lu tar e f s i ottengono
345 % con l ’ a f f i n i t a hp+b
346 for i =1:2
347 for j =1:2
348 for l =1:2
349 p=[ eta ( i ) ; e ta ( j ) ; e ta ( l ) ] ;
350 FP=(h∗p)+b ;
351 i n t e=in t e+f (FP(1 ) ,FP(2 ) ,FP(3 ) )∗ phi (p (1 ) , p ( 2 ) , p ( 3 ) ) ;
352 end
353 end
354 end
355 % La sommatoria va d i v i s a per 8 e
97

Cap.I Documentazione
356 % mo l t i p l i c a t a per hˆ3
357 i n t e g r a l e=hˆ3∗ i n t e /8 ;
A differenza di quanto accade per gli elementi finiti di Nedelec, in questo caso si ha un
dato Neumann sull’interfaccia Γ, pertanto il passaggio del dato attraverso l’interfaccia non
e cosı immediato come illustrato nell’altra situazione. Come viene incorporato questo dato
costituisce l’argomento della prossima sezione.
98

§ I.3 Passaggio del dato nell’interfaccia Γ
Sezione I.3
Passaggio del dato nell’interfaccia Γ
Per semplicita in questa sezione indicheremo con wkNnk=1 le funzioni base dello spazio
di Nedelec e con ψ jNlj=1 le funzioni base dello spazio di Lagrange:
• Le 8 funzioni base di Lagrange ψi sul cubo di riferimento C (figura I.2.1) sono:
ψ1 := (1− x)(1− y)(1− z), ψ2 := x(1− y)(1− z),
ψ3 := (1− x)y(1− z), ψ4 := xy(1− z),
ψ5 := (1− x)(1− y)z, ψ6 := x(1− y)z,
ψ7 := (1− x)yz, ψ8 := xyz.
• Le 12 funzioni base di Nedelec wi sul cubo di riferimento C (figura I.1.1) sono:
w1 :=
(1− y)(1− z)
0
0
, w2 :=
y(1− z)
0
0
,
w3 :=
(1− y)z
0
0
, w4 :=
yz
0
0
,
w5 :=
0
(1− x)(1− z)
0
, w6 :=
0
(1− x)z
0
,
w7 :=
0
x(1− z)
0
, w8 :=
0
xz
0
,
w9 :=
0
0
(1− x)(1− y)
, w10 :=
0
0
x(1− y)
,
w11 :=
0
0
(1− x)y
, w12 :=
0
0
xy
.
99

Cap.I Documentazione
I.3. Passaggio del dato Neumann da ΩC a ΩI
Noto HC, si tratta di risolvere il problema
−div(µI∇ϕI) = 0 in ΩI (I.4)
µI∇ϕI ·nI + µCHC ·nC = 0 su Γ (I.5)
ϕI = 0 su ∂ΩI \Γ (I.6)
In forma debole l’equazione (I.4) diventa:
0 =
∫
ΩI
div(µI∇ϕI)ψ j = −∫
ΩI
µI∇ϕI∇ψ j +
∫
∂ΩI
µ∇ϕI ·nIψ j =
usando (I.5) e (I.6)
= −∫
ΩI
µI∇ϕI∇ψ j −∫
ΓµHC ·nCψ j
Pertanto, noto HC, si tratta di risolvere:
∫
ΩI
µ∇ϕI ·∇ψ j = −∫
ΓµHC ·nCψ j. (I.7)
Poiche HC = ∑Nnk HC,kwk, avremo:
∫
ΓµHC ·nCψ j =
Nn
∑k
HC,k
∫
Γµwk ·nCψ j. (I.8)
Poniamo ∫
Γµwk ·nCψ j = S jk .
Osservando che le funzioni wk hanno un’unica componente non nulla che compare nella
direzione dello spigolo che supporta il grado di liberta ed osservando che nC = (0,1,0),
segue che
wk ·nC =
0 se lo spigolo k-esimo e di tipo 0 o 2
oppure e di tipo 1 ma non termina in Γ6= 0 se lo spigolo k-esimo e di tipo 1 e termina in Γ
quindi S jk puo essere 6= 0 solo se j e un nodo di interfaccia e se k e uno spigolo di tipo 1
che termina in Γ . Risulta pertanto fondamentale classificare gli spigoli in base alla loro
direzione e alla loro posizione rispetto all’interfaccia.
100

§ I.3 Passaggio del dato nell’interfaccia Γ
Figura I.6: Relazione fra spigoli di Nedelec e vertici di Lagrange in Γ
I.3.1.1 Relazioni fra vertici e spigoli in Γ
Numeriamo globalmente i nodi di Γ in ordine lessicografico. Estraiamo quindi dalla
numerazione globale di Lagrange i vertici di interfaccia e dalla numerazione globale di
Nedelec gli spigoli che terminano in questi nodi. Per fare questo utilizziamo le due seguenti
function:
File I.9: vbcL
358 % vbcL( i )=1 se i l v e r t i c e i−esimo e d i bordo
359 % vbcL( i )=9 se i l v e r t i c e i−esimo e d i i n t e r f a c c i a
360 % vbcL( i )=0 se i l v e r t i c e i−esimo e in te rno
361 function vbcL=vbcL( coorL , numVertici )
362 for i =1: numVertici
363 x i=coorL ( i , 1 ) ;
364 y i=coorL ( i , 2 ) ;
365 z i=coorL ( i , 3 ) ;
366 i f abs ( yg−y i )<eps
367 vbcL( i )=9;
368 end
369 i f abs(2− y i )<eps
370 vbcL ( i )=1;
371 end
372 i f abs ( x i )<eps
101

Cap.I Documentazione
373 vbcL ( i )=1;
374 end
375 i f abs(1− x i )<eps
376 vbcL ( i )=1;
377 end
378 i f abs ( z i )<eps
379 vbcL ( i )=1;
380 end
381 i f abs(1− z i )<eps
382 vbcL ( i )=1;
383 end
384 end
File I.10: vbc
385 % vbcN( i )=1 se l o s p i g o l o i−esimo e d i bordo
386 % vbcN( i )=9 se l o s p i g o l o i−esimo e d i i n t e r f a c c i a
387 % vbcN( i )=7 se l o s p i g o l o i−esimo termina s u l l ’ i n t e r f a c c i a
388 % ( e dunque e anche in te rno )
389 % vbcN( i )=0 se l o s p i g o l o i−esimo e in te rno
390 function vbcN=vbc ( coor , numSpigoli , h )
391 vbcN=zeros ( numSpigoli , 1 ) ;
392 for i =1: numSpigoli
393 t i p o i=coor ( i , 1 ) ;
394 x i=coor ( i , 2 ) ;
395 y i=coor ( i , 3 ) ;
396 z i=coor ( i , 4 ) ;
397 i f t i p o i==0
398 i f abs ( yg−y i )<eps
399 vbcN( i )=9;
400 end
401 i f abs ( y i )<eps
402 vbcN( i )=1;
403 end
404 i f abs ( z i )<eps
405 vbcN( i )=1;
102

§ I.3 Passaggio del dato nell’interfaccia Γ
406 end
407 i f abs(1− z i )<eps
408 vbcN( i )=1;
409 end
410 end
411 i f t i p o i==1
412 i f abs ( yg−yi−h)<eps
413 vbcN( i )=7;
414 end
415 i f abs(1− x i )<eps
416 vbcN( i )=1;
417 end
418 i f abs ( x i )<eps
419 vbcN( i )=1;
420 end
421 i f abs ( z i )<eps
422 vbcN( i )=1;
423 end
424 i f abs(1− z i )<eps
425 vbcN( i )=1;
426 end
427 end
428 i f t i p o i==2
429 i f abs ( yg−y i )<eps
430 vbcN( i )=9;
431 end
432 i f abs ( y i )<eps
433 vbcN( i )=1;
434 end
435 i f abs ( x i )<eps
436 vbcN( i )=1;
437 end
438 i f abs(1− x i )<eps
439 vbcN( i )=1;
440 end
103

Cap.I Documentazione
441 end
442 end
I due seguenti vettori contengono gli indici nelle numerazioni globali di Lagrange e di
Nedelec dei vertici/spigoli in base alla loro posizione:
443 vbcN = vbc ( coorN , numSpigoli , h ) ;
444 vNintern i = find (vbcN==0 | vbcN==7) ’;
445 vNgamma = find (vbcN==9) ’;
446 vNfineingamma = find (vbcN==7) ’;
448 vbcL = vbcL ( coorL , numVertici ) ;
449 vL in te rn i = find ( vbcL==0) ’;
450 vLgamma = find ( vbcL==9) ’;
I due vettori vNfineingamma e vLgamma sono tali che se i e il nodo i-esimo nella
numerazione globale dell’interfaccia, vNfineingamma(i) e il numero associato allo spigolo,
che termina su questo vertice, nella numerazione globale di Nedelec; inoltre tale spigolo —
grazie alle mesh poste in ΩI e in ΩC — termina sul vertice che nella numerazione globale
di Lagrange ha numero vLgamma(i).
Ora ai vertici di Γ associamo una mesh di quadrati sempre in ordine lessicografico:
File I.11: meshG
451 function [ZG]=meshG(h)
452 nq=(1/h)−2; % numero quadrat i in ogni d i r .
453 v=zeros ( 1 , 4 ) ;
454 v (1)=1;
455 v (2)=2;
456 v(3)=v(1)+nq+1;
457 v(4)=v(3)+1;
458 Za=[v ] ;
459 Zb=Za ;
460 for i =1:(nq−1)
461 Zb=[Zb ; Za+i ] ;
462 end
463 Zc=Zb ;
464 for i =1:(nq−1)
104

§ I.3 Passaggio del dato nell’interfaccia Γ
465 Zc=[Zc ; Zb+(nq+1)∗ i ] ;
466 end
467 ZG=Zc ;
Figura I.7: Numerazione semi-globale in Γ
Ricordando la definizione di S jk =∫
Γ µwk · nCψ j, consideriamo solo i vertici di Γe gli spigoli di tipo 1 che terminano in Γ. Definiamo una matrice S globale come
S = (Sil)1≤i,l≤(nc−1)(pc−1) dove:
Sil :=∫
Γwl ·nCψi. (I.9)
Avremo
Sil = ∑Q∈Γ
∫
Qwl ·nCψi. (I.10)
Pertanto la matrice globale S si costruisce sommando i contributi di ogni quadrato Q della
triangolazione. Tali contributi sono raccolti nelle matrici SQ elementari ∈ Mat(R,4) cosı
definite:
SQil :=
∫
Qwl ·nCψi ∀ i, l = 1, ...,4 (I.11)
E sufficiente calcolare SQ (cioe la matrice elementare sul quadrato di riferimento) e poi
passare alla generica SQ.
I.3.1.2 Costruzione di una base sul quadrato di riferimento Q
Il quadrato di riferimento e Q := x ∈ R3|x2 = 1 e 0 ≤ xi ≤ 1; i = 1,3. Numeriamo
localmente i suoi vertici in ordine lessicografico (vedi tabella I.3.1.2 e figura I.3.1.2).
105

Cap.I Documentazione
Indichiamo con wi4i=1 le funzioni base di Nedelec e con ψi4
i=1 le funzioni base di
Lagrange su questo quadrato di riferimento. Allora avremo:
w1 =
0
(1− x)(1− z)
0
, ψ1 = (1− x)(1− z),
w2 =
0
x(1− z)
0
, ψ2 = x(1− z),
w3 =
0
(1− x)z
0
, ψ3 = (1− x)z,
w4 =
0
xz
0
, ψ4 = xz.
(I.12)
Definendo in maniera naturale
SQil :=
∫
Qwl ·nCψi, (I.13)
VERTICE COORDINATE
1 (0,1,0)
2 (1,1,0)
3 (0,1,1)
4 (1,1,1)
Figura I.8: Coordinate locali in Γ e quadrato Q di riferimento
106

§ I.3 Passaggio del dato nell’interfaccia Γ
ed osservando che w j ·nC = (w j)2 = ψ j, la matrice elementare su Q e
SQelem =
136
4 2 2 1
2 4 1 2
2 1 4 2
1 2 2 4
I.3.1.3 Generalizzazione della base ad un quadrato Q qualsiasi
Indichiamo con x un punto di Q e con x un punto di Q (quadrato di riferimento).
L’affinita che manda Q in Q e un’omotetia di entita h seguita da una traslazione di entita
b:
x = hx+b
Allora ricordando la (I.1) e la (I.3) si ottiene:
wl(x) :=1h
wl
(1h
(x−b)
)=
1h
wl(x)
ψi(x) = ψi(x)
(I.14)
Figura I.9: Quadrato Q generico
I.3.1.4 Assemblaggio
In conclusione:
SQil :=
∫
Qwl ·nCψi = h2
∫
Qwl(x) ·nC(x)ψi(x) =
∫
Q(wl)2 ψi =
= h2∫
Q(wl(hx+b))2 ψi(x)dx = h
∫
Q(wl(x))2 ψi(x)dx = hSQ
il
107

Cap.I Documentazione
e la matrice elementare sul generico quadrato Q e:
SQ = hSQ (I.15)
Osservazione 6. Poiche la nostra mesh e fortemente strutturata, la matrice
elementare SQ e la stessa per ogni quadrato Q.
La seguente function genera la matrice S assemblando le matrici elementari:
File I.12: GStiff
468 function SG=GSt i f f (ZG, h ) ;
469 numQuadrati=((1/h)−2)ˆ2;
470 numVerticiG=((1/h)−1)ˆ2;
471 SG=sparse ( numVerticiG , numVerticiG ) ;
472 % Matr ice d i s t i f f n e s s e lementare con quadrat i u n i t a r i :
473 SGElem = (1/36 )∗ [ 4 , 2 , 2 , 1 ; . . .
474 2 , 4 , 1 , 2 ; . . .
475 2 , 1 , 4 , 2 ; . . .
476 1 , 2 , 2 , 4 ] ;
477 % Assemblaggio d e l l e componenti g l o b a l i
478 for k=1:numQuadrati
479 for j =1:4
480 SG(ZG(k , : ) ,ZG(k , j ))=SG(ZG(k , : ) ,ZG(k , j ))+SGElem ( : , j )∗h ;
481 end
482 end
I.3.1.5 Passaggio del dato
Torniamo al problema iniziale:
risolvere
∫
ΩI
µI∇ϕI ·∇ψ j = (bL) j (I.16)
dove il termine noto bL e dato da
(bL) j := −∫
ΓµHC ·nCψ j = −∑
k
Hck
∫
Γµwk ·nCψ j. (I.17)
108

§ I.3 Passaggio del dato nell’interfaccia Γ
Il problema (I.16) risulta equivalente al sistema lineare
ALu = bL ,
dove
(AL)i j :=∫
ΩI
µ∇ψ j∇ψ i ,
(bL) j := (S ∗HC) j .
483 bL=zeros ( length ( vbcL ) , 1 ) ;
484 bL(vLgamma)=SG∗HCfineingamma ’ ;
485 bLint=bL( vLinterniEgamma ) ;
I.3. Passaggio del dato Dirichlet da ΩI a ΩC
Per aggiornare il dato Dirichlet sull’interfaccia Γ nel sottodominio ΩC, dobbiamo cal-
colare i momenti sugli spigoli di interfaccia di ∇ϕI. Osserviamo che se a e lo spigolo che va
dall’i-esimo nodo Pi al j-esimo nodo Pj della mesh di ΩC, allora
∫
a∇ϕI · τ = ϕI(Pj)−ϕI(Pi) .
Pertanto a livello implementativo abbiamo
File I.13: CalcoloEstremi
486 for i =1: length (vNgamma)
487 aux ( i )=ph i I ( e s t r emi ( i ,2))− ph i I ( e s t r emi ( i , 1 ) ) ;
488 end
491 function e s t r emi=Calco loEstremi ( coorN , coorL , vNgamma, nc )
492 for i =1: length (vNgamma)
493 c=coorN (vNgamma( i ) , : ) ;
494 cc=c ( 2 : 4 ) ;
495 for j =1: length ( coorL )
496 i f coorL ( j ,:)== cc
497 e s t r emi ( i ,1)= j ;
498 end
499 end
109

Cap.I Documentazione
500 i f c(1)==0
501 e s t r emi ( i ,2)= es t r emi ( i ,1)+1;
502 e l s e i f c(1)==2
503 e s t r emi ( i ,2)= es t r emi ( i ,1)+ nc+1;
504 end
505 end
110

§ I.4 Implementazione della procedura iterativa
Sezione I.4
Implementazione della procedura iterativa
Lo script seguente costruisce la mesh, le matrici di stiffness e di massa nel conduttore e
la matrice di stiffness nell’isolante. Costruisce anche la matrice S che permette di passare il
dato Neumann dal conduttore all’isolante ed inizializza il dato Dirichlet λ . In altre parole
costruisce tutte le componenti che non dipendono dall’iterazione
506 % main1
507 clc
508 clear ;
509 h = input (’Inserisci il valore di h: ’ ) ; %
510 yg = input ( ’Inserisci lacoordinata y della interfaccia: ’ ) ;
511 nc=1/h ; % nc = numero cubi lungo as s e x
512 mcN=(yg )/( h ) ; % mcN = numero cubi lungo as s e y
513 % ne l conduttore
514 mcL=(2−yg )/( h ) ; % mcL = numero cubi lungo as s e y
515 % ne l l ’ i s o l a n t e
516 pc=1/h ; % pc = numero cubi lungo as s e z
517 numCubiN=nc∗mcN∗pc ; % tot . cubi ne l conduttore
518 numCubiL=nc∗mcL∗pc ; % tot . cubi n e l l ’ i s o l a n t e
519 ns=nc ∗(mcN+1)∗(pc+1); % tot . s p i g o l i lungo x
520 ms=(nc+1)∗mcN∗( pc+1); % tot . s p i g o l i lungo y
521 ps=(nc+1)∗(mcN+1)∗pc ; % tot . s p i g o l i lungo z
522 numSpigoli=ns+ms+ps ; % tot . s p i g o l i
523 numVertici=(nc+1)∗(mcL+1)∗(pc+1); % tot . v e r t i c i
525 % NEDELEC = CONDUTTORE
526 coorN=coordinateN (h , nc ,mcN, pc , ns ,ms , ps ) ;
527 ZN=meshN( nc ,mcN, pc , ns ,ms , ps ) ;
528 [AN,MN]=NSti f fMassa (ZN, h , numSpigoli , numCubiN) ;
529 vbcN=vbc ( coorN , numSpigoli , h ) ;
530 vNintern i=find (vbcN==0 | vbcN==7) ’;
531 vNgamma=find (vbcN==9) ’;
532 vNfineingamma=find (vbcN==7) ’;
111

Cap.I Documentazione
533 coorNgamma=coorN (vNgamma , : ) ;
535 % LAGRANGE = ISOLANTE
536 coorL=coord inateL (h , nc ,mcL, pc , yg ) ;
537 ZL=meshL( nc ,mcL, pc ) ;
538 AL=L S t i f f (ZL , h , numVertici , numCubiL ) ;
539 vbcL=vbcL ( coorL , numVertici ) ;
540 vL in te rn i=find ( vbcL==0) ’; vLgamma=find ( vbcL==9) ’;
541 vLinterniEgamma=find ( vbcL==0 | vbcL==9) ’;
542 ALinterniEgamma=AL( vLinterniEgamma , vLinterniEgamma ) ;
544 % INTERFACCIA
545 % Da C a I
546 ZG=meshG(h ) ;
547 SG=GSt i f f (ZG, h ) ;
548 bL=zeros ( length ( vbcL ) , 1 ) ;
549 % Da I a C
550 e s t r emi=Calco loEstremi ( coorN , coorL , vNgamma, nc ) ;
552 uu1=input (’Inserisci una stringa con la prima componente...
553 della funzione iniziale: ’ ) ; %
554 uu2=input (’Inserisci una stringa con la seconda...
555 componente della funzione iniziale: ’ ) ; %
556 uu3=input (’Inserisci una stringa con la terza componente...
557 della funzione iniziale: ’ ) ; %
558 u1=i n l i n e (uu1 , ’x’ ,’y’ , ’z’ ) ;
559 u2=i n l i n e (uu2 , ’x’ ,’y’ , ’z’ ) ;
560 u3=i n l i n e (uu3 , ’x’ ,’y’ , ’z’ ) ;
562 lambdaNew=ones ( s ize (vNgamma ’ ) ) ; % dato D i r i c h l e t i n i z i a l e
564 for i =1: s ize ( lambdaNew , 1 )
565 t i p o i=coorN ( i , 1 ) ;
566 x i=coorNgamma( i , 2 ) ;
567 y i=coorNgamma( i , 3 ) ;
112

§ I.4 Implementazione della procedura iterativa
568 z i=coorNgamma( i , 4 ) ;
569 lambdaNew ( i )= in t eg r a l eD iL in ea ( t i p o i , xi , yi , z i , h , u1 , u2 , u3 ) ;
570 end
Lo script seguente implementa la procedura iterativa: partendo dal dato Dirichlet ini-
ziale λ calcolato in precedenza, ad ogni passo iterativo risolve il problema nel conduttore,
aggiorna il dato Neumann, risolve il problema nell’isolante, calcola il dato Dirichlet ed
infine aggiorna il dato nell’interfaccia.
571 % main3
572 t o l l=input ( ’Inserisci la tolleranza sullo errore: ’ ) ;
573 theta=input (’Inserisci theta coefficiente di rilassamento:’ ) ;
574 omega=input (’Inserisci la frequenza omega: ’ ) ;
575 mu=input ( ’Inserisci la permeabilita magnetica mu: ’ ) ;
576 i n v s i g=input (’Inserisci sigma^(-1) dove sigma e la...
577 conducibilita elettrica: ’ ) ;
578 nmax=input ( ’Inserisci il numero massimo di
579 iterazioni: ’ ) ;
581 AMNinterni=i n v s i g ∗AN( vNintern i , vNintern i ) + . . .
582 i ∗omega∗mu∗MN( vNintern i , vNintern i ) ;
583 AMNinterniEgamma=in v s i g ∗AN( vNintern i , vNgamma ) + . . .
584 i ∗omega∗mu∗MN( vNintern i , vNgamma ) ;
586 % INIZIALIZZAZIONI
587 e r r =1;
588 e r rAs so lu to =1;
589 numIteraz =0;
591 HC=zeros (1 , numSpigoli ) ;
592 HCnew=zeros (1 , numSpigoli ) ;
593 ph i I=zeros (1 , numVertici ) ;
594 phiInew=zeros (1 , numVertici ) ;
595 r i e p i l o g o = [ ] ;
597 while ( er rAsso luto >t o l l & numIteraz<nmax)
113

Cap.I Documentazione
598 numIteraz=numIteraz +1;
599 % Riso lu z ione ne l Conduttore
600 HinternaC=AMNinterni\(−AMNinterniEgamma∗lambdaNew ) ;
601 HC( vNintern i )=HinternaC ;
602 HC(vNgamma)=lambdaNew ;
603 HCfineingamma=HC( vNfineingamma ) ;
604 % Aggiornamento de l dato Neumann
605 bL(vLgamma)=SG∗HCfineingamma ’ ;
606 bLint=bL( vLinterniEgamma ) ;
607 % Riso lu z ione n e l l ’ i s o l a n t e
608 phiInterniEgamma=ALinterniEgamma\bLint ;
609 ph i I ( vLinterniEgamma)=phiInterniEgamma ;
610 lambdaOld=lambdaNew ;
611 % Calco lo de l dato D i r i c h l e t
612 for i =1: length (vNgamma)
613 aux ( i )=ph i I ( e s t r emi ( i ,2))− ph i I ( e s t r emi ( i , 1 ) ) ;
614 end
615 % Aggiornamento de l dato d i i n t e r f a c c i a
616 lambdaNew=(1−theta )∗ lambdaOld+theta ∗aux ’ ;
617 HCold=HCnew;
618 HCnew=HC;
619 ph i I o l d=phiInew ;
620 phiInew=ph i I ;
621 n1=(HCnew−HCold )∗ (AN)∗ (HCnew−HCold ) ’ ;
622 n2=(HCnew−HCold )∗ (MN)∗ (HCnew−HCold ) ’ ;
623 n4=(phiInew−ph i I o l d )∗AL∗( phiInew−ph i I o l d ) ’ ;
624 e r rAs so lu to=(n1+n2)+(n4 ) ;
625 r i e p i l o g o =[ r i e p i l o g o ; er rAsso luto , e r r ] ;
626 end
627 r i e p i l o g o
628 numIteraz
114

Bibliografia
[1] Ana Alonso Rodriguez, Paolo Fernandes, e Alberto Valli. Weak and strong formu-
lations for the time-harmonic eddy-current problem in general domains. UTM 603,
Dipartimento di Matematica, Universita degli studi di Trento, 2001.
[2] Ana Alonso Rodriguez, Paolo Fernandes, e Alberto Valli. The time-harmonic eddy-
current problem in general domains: solvability via scalar potentials, volume 28 di
Lecture Notes in Computational Science and Engineering. Springer-Verlag, 2003.
[3] Ana Alonso Rodriguez e Alberto Valli. Some remarks on the characterization of the
space of tangential traces of H(rot;Ω) and the construction of an extension operator.
Manuscripta Math., 89(2):159–178, 1996.
[4] Ana Alonso Rodriguez e Alberto Valli. Domain decomposition methods for time-
harmonic Maxwell equations: numerical results, volume 23 di Lecture Notes in
Computational Science and Engineering. Springer-Verlag, Berlin, 2002.
[5] H. Ammari, A. Buffa, e J.-C. Nedelec. A justification of eddy currents model for the
Maxwell equations. SIAM J. Appl. Math., 60(5):1805–1823 (electronic), 2000.
[6] Alfredo Bermundez, Rodolfo Rodriguez, e Pilar Salgado. A finite element method
with Lagrange multipliers for low-frequency harmonic Maxwell equations. 2002.
[7] Alain Bossavit. Electromagnetisme, en vue de la modelisation, volume 14 di Ma-
thematiques & Applications [Mathematics & Applications]. Springer-Verlag, Paris,
1993.
[8] Alain Bossavit. Computational electromagnetism. Electromagnetism. Academic Press
Inc., San Diego, CA, 1998. Variational formulations, complementarity, edge elements.
[9] A. Buffa e P. Ciarlet, Jr. On traces for functional spaces related to Maxwell’s equations.
I. An integration by parts formula in Lipschitz polyhedra. Math. Methods Appl. Sci.,
24(1):9–30, 2001.
[10] Piero Caldirola, Marcello Fontanesi, e Elio Sindoni. Elettromagnetismo, volume II.
Masson Italia Editori, 1981.

[11] Michel Cessenat. Mathematical methods in electromagnetism, volume 41 di Series on
Advances in Mathematics for Applied Sciences. World Scientific Publishing Co. Inc.,
River Edge, NJ, 1996. Linear theory and applications.
[12] Giuseppe Conciauro. Introduzione alle onde elettromagnetiche. Serie di Elettronica.
McGraw-Hill, 1993.
[13] V. Girault e P.-A. Raviart. Finite Element Methods for Navier-Stokes Equations.
Theory and algorithms. Springer-Verlag, Berlin, 1986.
[14] Mazzoldi, Nigro, e Voci. Fisica II. EdiSES, seconda edizione, 2000.
[15] Corrado Mencuccini e Vittorio Silvestrini. Fisica II. Liguori Editore, second edizione,
Novembre 1995.
[16] Jean-Claude Nedelec. Mixed finite elements in R3. Numer. Math., (35):315–341, 1980.
[17] Alfio Quarteroni. Modellistica Numerica per Problemi Differenziali. Springer-Verlag,
Milano, 2000.
[18] Alfio Quarteroni e Alberto Valli. Numerical approximation of partial differential equa-
tions, volume 23 di Springer Series in Computational Mathematics. Springer-Verlag,
Berlin, 1994.
[19] Walter Rudin. Real and complex analysis. McGraw-Hill Book Co., New York, third
edizione, 1987.