Il Metodo degli Elementi Finiti - costruzionedimacchine.com · Il Metodo degli Elementi Finiti. 2...
55
1 Il Metodo degli Elementi Finiti
Transcript of Il Metodo degli Elementi Finiti - costruzionedimacchine.com · Il Metodo degli Elementi Finiti. 2...
1
Il Metodo degli Elementi Finiti

2
Elemento piano triangolarea tre nodia tre nodi
In alcune strutture la divisione in porzioni elementari, facilmente schematizzabili, discende immediatamente dal disegno e dalla tecnologia utilizzata per la costruzione
Elemento piano triangolare a tre nodi
costruzione.
In questi casi si può
Molto spesso, invece, particolarmente nei componenti meccanici, la struttura è un continuo tridimensionale, che non presenta una preferenziale suddivisione in elementi.
Le caratteristiche di rigidezza dei vari elementi sono facilmente ricavabili dai modelli strutturali degli elementi (barre assiali, travi)
immaginare comunque di dividere la struttura in un numero finito di elementi, ognuno dei quali sarà caratterizzato da un certo numero di punti nodali nei quali definire le grandezze cinematiche e dinamiche.

3
In alcune strutture la divisione in porzioni elementari, facilmente schematizzabili, discende immediatamente dal disegno e dalla tecnologia utilizzata per la costruzione
Elemento piano triangolare a tre nodi
costruzione.
Le caratteristiche di rigidezza dei vari elementi sono facilmente ricavabili dai modelli strutturali degli elementi (barre assiali, travi)
In questi casi si può
Molto spesso, invece, particolarmente nei componenti meccanici, la struttura è un continuo tridimensionale, che non presenta una preferenziale suddivisione in elementi.
immaginare comunque di dividere la struttura in un numero finito di elementi, ognuno dei quali sarà caratterizzato da un certo numero di punti nodali nei quali definire le grandezze cinematiche e dinamiche.
Elemento piano triangolare a tre nodi
In alcune strutture la divisione in porzioni elementari, facilmente schematizzabili, discende immediatamente dal disegno e dalla tecnologia utilizzata per la costruzione
Tutte le quantità cinematiche e dinamiche della struttura sono definite unicamente nei punti nodali.
La struttura è schematizzata quindi
costruzione.
Le caratteristiche di rigidezza dei vari elementi sono facilmente ricavabili dai modelli strutturali degli elementi (barre assiali, travi)
come un reticolo di elementi solidila cui rigidezza dipende dalle caratteristiche elastiche del materiale e dalla cinematica dei singoli elementi.

4
Elemento piano triangolare a tre nodi
Modello solido 2D
Stato piano di tensione
In molti casi, pur essendo l’oggetto da studiare un solido continuo, la schematizzazione del comportamento strutturale può essere fatta con un modello continuo 2D, con un sufficiente grado di approssimazione.
Stato piano di deformazione
Modello solido 2D
s
Spessore unitario o spessore effettivo
Stato piano di tensione: s << L, H
L
H
Elemento piano triangolare a tre nodi
Modello solido 2D
Stato piano di tensione
In molti casi, pur essendo l’oggetto da studiare un solido continuo, la schematizzazione del comportamento strutturale può essere fatta con un modello continuo 2D, con un sufficiente grado di approssimazione.
Stato piano di deformazione
Modello solido 2D
Spessore unitario
Stato piano di deformazione:s >> L, H
L
H
s
5
Elemento piano triangolare a tre nodi
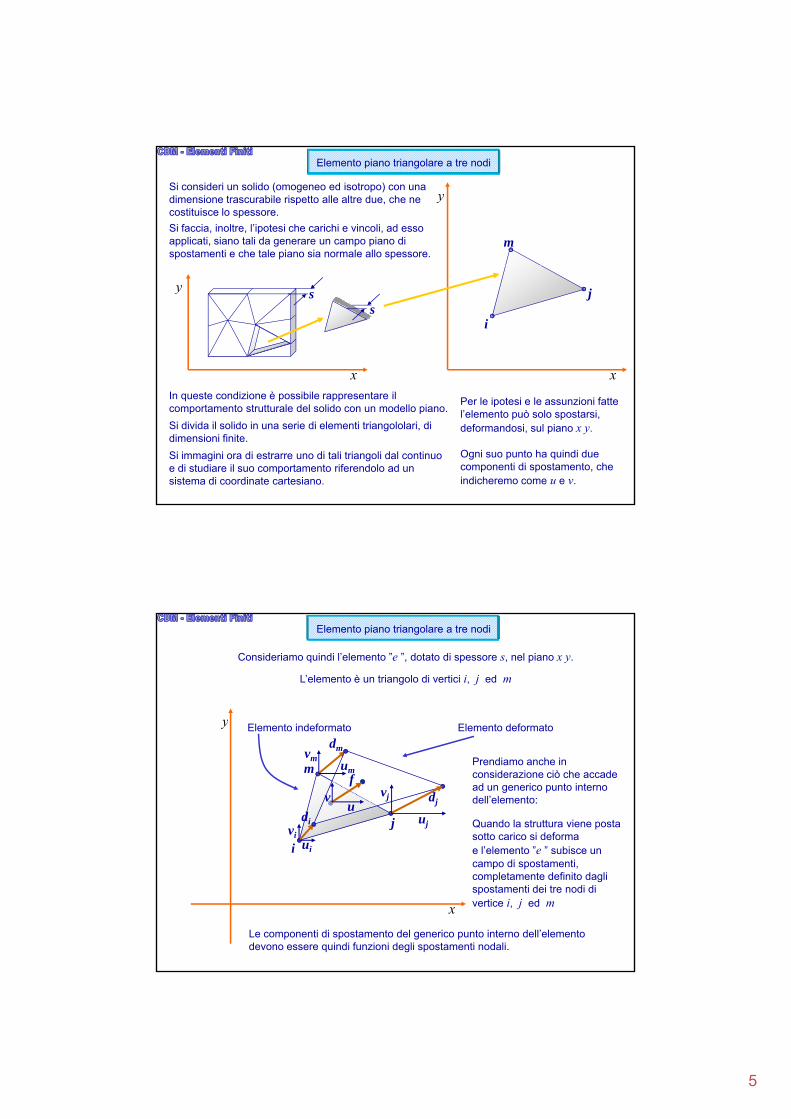
Si consideri un solido (omogeneo ed isotropo) con una dimensione trascurabile rispetto alle altre due, che ne costituisce lo spessore.
Si faccia, inoltre, l’ipotesi che carichi e vincoli, ad esso applicati, siano tali da generare un campo piano di spostamenti e che tale piano sia normale allo spessore.
y
m
ss
x
i
j
x
y
In queste condizione è possibile rappresentare il comportamento strutturale del solido con un modello piano.
Si divida il solido in una serie di elementi triangololari, di dimensioni finite.
Si immagini ora di estrarre uno di tali triangoli dal continuo e di studiare il suo comportamento riferendolo ad un sistema di coordinate cartesiano.
Ogni suo punto ha quindi due componenti di spostamento, che indicheremo come u e v.
Per le ipotesi e le assunzioni fatte l’elemento può solo spostarsi, deformandosi, sul piano x y.
Elemento piano triangolare a tre nodi
y Elemento indeformato Elemento deformato
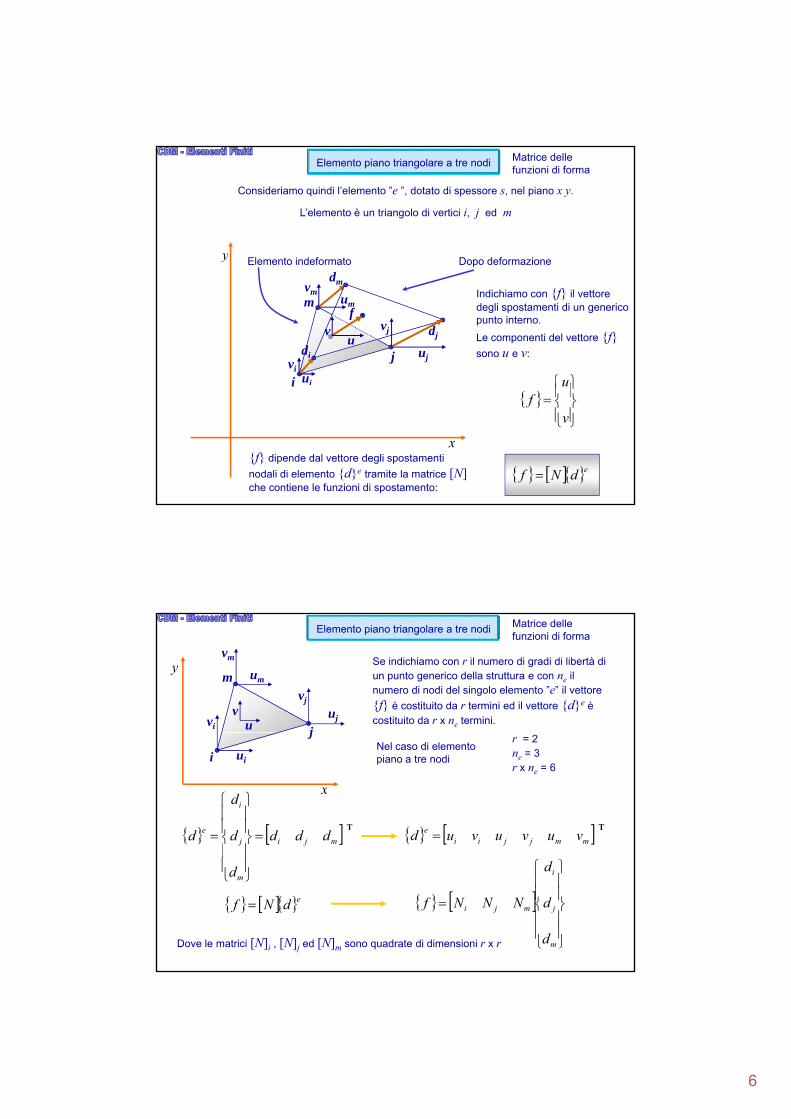
Consideriamo quindi l’elemento ”e ”, dotato di spessore s, nel piano x y.
L’elemento è un triangolo di vertici i, j ed m
i
j
mf
di
dj
dm
vu
Prendiamo anche in considerazione ciò che accade ad un generico punto interno dell’elemento:
Quando la struttura viene posta sotto carico si deforma e l’elemento ”e ” subisce unui
vi
uj
vj
um
vm
x
i e l elemento e subisce un campo di spostamenti, completamente definito dagli spostamenti dei tre nodi di vertice i, j ed m
Le componenti di spostamento del generico punto interno dell’elemento devono essere quindi funzioni degli spostamenti nodali.
6
Elemento piano triangolare a tre nodi
y Elemento indeformato
Consideriamo quindi l’elemento ”e ”, dotato di spessore s, nel piano x y.
L’elemento è un triangolo di vertici i, j ed m
Dopo deformazione
Matrice delle funzioni di forma
i
j
m
di
ui
vi
dj
uj
vj
dm
um
vm
vu
p
u
Indichiamo con {f} il vettore degli spostamenti di un generico punto interno.
f
Le componenti del vettore {f}sono u e v:
x
i
v
uf
edNf {f} dipende dal vettore degli spostamenti
nodali di elemento {d}e tramite la matrice [N]che contiene le funzioni di spostamento:
Elemento piano triangolare a tre nodi
y
j
m
viuj
vj
um
vm
vu
Se indichiamo con r il numero di gradi di libertà di un punto generico della struttura e con ne il numero di nodi del singolo elemento ”e” il vettore
{f} è costituito da r termini ed il vettore {d}e è costituito da r x ne termini.
Matrice delle funzioni di forma
x
i
j
ui
T
mjij
i
e dddd
d
d
Nel caso di elemento piano a tre nodi
r = 2 ne = 3 r x ne = 6
T
mmjjiie vuvuvud
md
edNf
m
j
i
mji
d
d
d
NNNf
Dove le matrici [N]i , [N]j ed [N]m sono quadrate di dimensioni r x r

7
Elemento piano triangolare a tre nodi
Le matrici [N]i , [N]j ed [N]m possono essere viste come il prodotto di una funzione per la matrice identità: mji NINININ
10
01IDove la matrice identità vale:
Matrice delle funzioni di forma
10
e N’i , N’j ed N’m sono funzioni arbitrarie, note con il nome di funzioni di spostamento , le quali legano il campo degli spostamenti interni all’elemento al vettore degli spostamenti nodali.
Le funzioni di spostamento rappresentano quindi uno dei punti cruciali del metodo agli elementi finiti, perché influenzano fortemente il livello di approssimazione della soluzione.
Da esse dipende, dunque, la forma del campo di spostamenti all’interno dell’elemento: infatti sono anche note con il nome di funzioni di forma.
Le funzioni di spostamento pur essendo arbitrarie, devono tuttavia essere scelte in base ad alcuni criteri:
1) devono essere in grado di rappresentare correttamente i moti rigidi: in tali casi non devono generare deformazioni nell’elemento;
2) devono essere in grado di riprodurre la condizioni di campo uniforme di deformazione all’interno dell’elemento;
3) le deformazioni in corrispondenza della separazione tra gli elementi devono essere finite.
Elemento piano triangolare a tre nodi
y
Le funzioni N’i , N’j ed N’m dipendono dalle coordinate nodali dell’elemento
Elemento “e“ - nodi i j m coordinatenodo
Matrice delle funzioni di forma
i
m
j
jy
my
ii yxi
jj yxj
mm yxm
j
Le coordinate nodali devono essere note per poter calcolare il vettore degli spostamentii
xix
mxjx
iy
jyil vettore degli spostamenti.
8
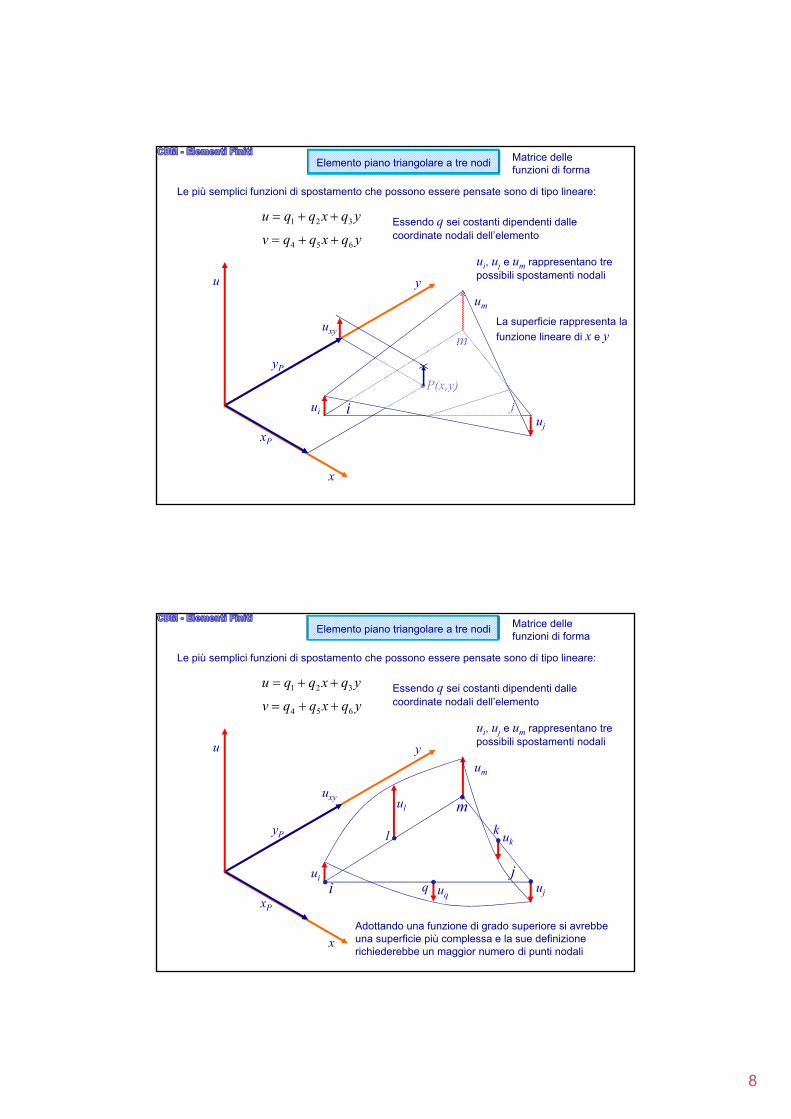
Elemento piano triangolare a tre nodi Matrice delle funzioni di forma
ui, uj e um rappresentano tre
Le più semplici funzioni di spostamento che possono essere pensate sono di tipo lineare:
yqxqqu 321
yqxqqv 654 Essendo q sei costanti dipendenti dalle coordinate nodali dell’elemento
P(x y)
y
m
u
um
uxy
yP
La superficie rappresenta la
funzione lineare di x e y
i, j m pppossibili spostamenti nodali
P(x,y)
x
i juiuj
xP
Elemento piano triangolare a tre nodi Matrice delle funzioni di forma
ui, uj e um rappresentano tre
Le più semplici funzioni di spostamento che possono essere pensate sono di tipo lineare:
yqxqqu 321
yqxqqv 654 Essendo q sei costanti dipendenti dalle coordinate nodali dell’elemento
y
m
u
um
uxy
yP
i, j m pppossibili spostamenti nodali
ul
ukkl
x
ijui
uj
xP
Adottando una funzione di grado superiore si avrebbe una superficie più complessa e la sue definizione richiederebbe un maggior numero di punti nodali
uqq
9
Elemento piano triangolare a tre nodi
Le più semplici funzioni di spostamento che possono essere pensate sono di tipo lineare:
yqxqqu 321
yqxqqv 654 Essendo q sei costanti dipendenti dalle coordinate nodali dell’elemento
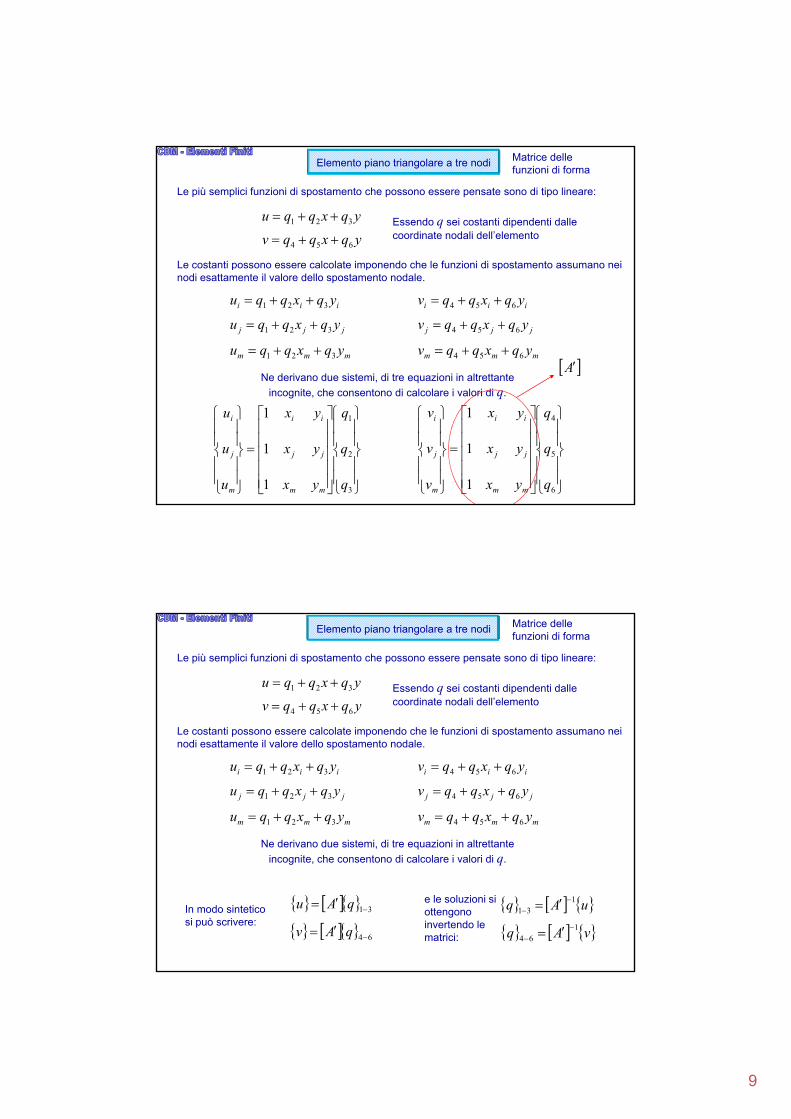
Le costanti possono essere calcolate imponendo che le funzioni di spostamento assumano nei
Matrice delle funzioni di forma
iii yqxqqu 321 iii yqxqqv 654
jjj yqxqqu 321
mmm yqxqqu 321
jjj yqxqqv 654
mmm yqxqqv 654
Le costanti possono essere calcolate imponendo che le funzioni di spostamento assumano nei nodi esattamente il valore dello spostamento nodale.
Ne derivano due sistemi, di tre equazioni in altrettante A
3
2
1
1
1
1
q
q
q
yx
yx
yx
u
u
u
mm
jj
ii
m
j
i
incognite, che consentono di calcolare i valori di q.
6
5
4
1
1
1
q
q
q
yx
yx
yx
v
v
v
mm
jj
ii
m
j
i
Elemento piano triangolare a tre nodi
Le più semplici funzioni di spostamento che possono essere pensate sono di tipo lineare:
yqxqqu 321
yqxqqv 654 Essendo q sei costanti dipendenti dalle coordinate nodali dell’elemento
Le costanti possono essere calcolate imponendo che le funzioni di spostamento assumano nei
Matrice delle funzioni di forma
iii yqxqqu 321 iii yqxqqv 654
jjj yqxqqu 321
mmm yqxqqu 321
jjj yqxqqv 654
mmm yqxqqv 654
Le costanti possono essere calcolate imponendo che le funzioni di spostamento assumano nei nodi esattamente il valore dello spostamento nodale.
Ne derivano due sistemi, di tre equazioni in altrettante
31 qAu uAq 131
incognite, che consentono di calcolare i valori di q.
In modo sintetico si può scrivere: 64 qAv vAq 1
64
e le soluzioni si ottengono invertendo le matrici:
10
Elemento piano triangolare a tre nodi
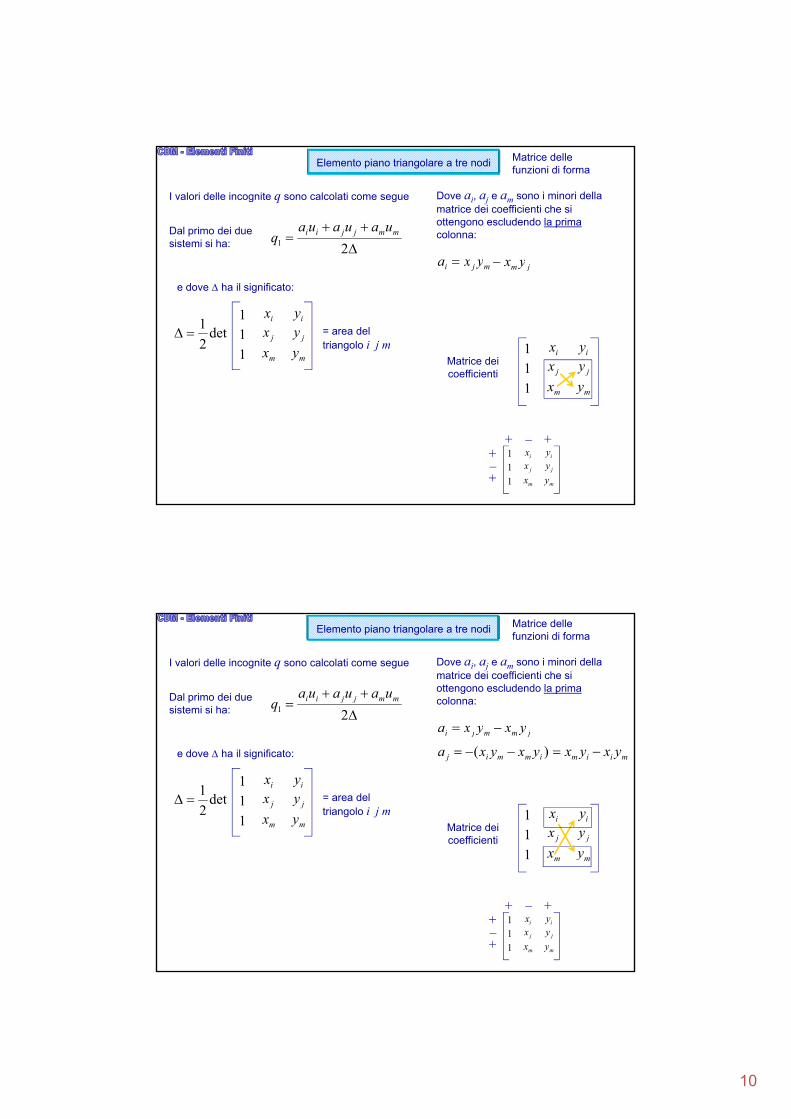
21
mmjjii uauauaq
mji yxa
I valori delle incognite q sono calcolati come segue
Dal primo dei due sistemi si ha:
Dove ai, aj e am sono i minori della matrice dei coefficienti che si ottengono escludendo la primacolonna:
Matrice delle funzioni di forma
jm yxmji y
Matrice dei coefficienti
iyix1
jyjx1yx1
det2
1
iyix1
jyjx1
mymx1
= area del triangolo i j m
e dove ha il significato:
jm yx
mymx1
iyix1
jyjx1
mymx1
+ +–++
–
Elemento piano triangolare a tre nodi
21
mmjjii uauauaq
jmmji yxyxa
I valori delle incognite q sono calcolati come segue
Dal primo dei due sistemi si ha:
Dove ai, aj e am sono i minori della matrice dei coefficienti che si ottengono escludendo la primacolonna:
Matrice delle funzioni di forma
jmmji yy
Matrice dei coefficienti
iyix1
jyjx1yx1
)( immij yxyxa miim yxyx
det2
1
iyix1
jyjx1
mymx1
= area del triangolo i j m
e dove ha il significato:
mymx1
iyix1
jyjx1
mymx1
+ +–++
–

11
Elemento piano triangolare a tre nodi
21
mmjjii uauauaq
jmmji yxyxa
I valori delle incognite q sono calcolati come segue
Dal primo dei due sistemi si ha:
Dove ai, aj e am sono i minori della matrice dei coefficienti che si ottengono escludendo la primacolonna:
Matrice delle funzioni di forma
jmmji yy
Matrice dei coefficienti
iyix1
jyjx1yx1
)( immij yxyxa miim yxyx
ijjim yxyxa
det2
1
iyix1
jyjx1
mymx1
= area del triangolo i j m
e dove ha il significato:
mymx1
iyix1
jyjx1
mymx1
+ +–++
–
Elemento piano triangolare a tre nodi
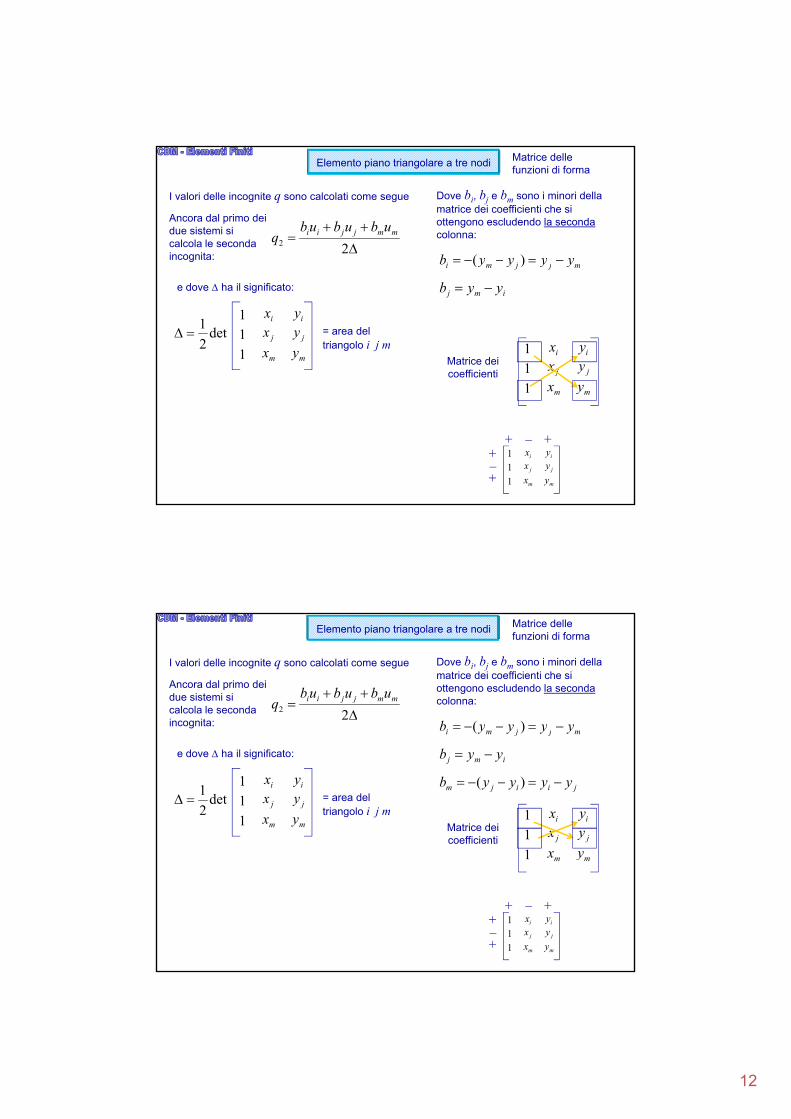
22
mmjjii ubububq
mjjmi yyyyb )(
I valori delle incognite q sono calcolati come segue
Ancora dal primo dei due sistemi si calcola le seconda incognita:
Dove bi, bj e bm sono i minori della matrice dei coefficienti che si ottengono escludendo la secondacolonna:
Matrice delle funzioni di forma
mjjmi yyyy )(
Matrice dei coefficienti
iyix1
jyjx1yx1
det2
1
iyix1
jyjx1
mymx1
= area del triangolo i j m
e dove ha il significato:
mymx1
iyix1
jyjx1
mymx1
+ +–++
–
12
Elemento piano triangolare a tre nodi
22
mmjjii ubububq
mjjmi yyyyb )(
I valori delle incognite q sono calcolati come segue
Ancora dal primo dei due sistemi si calcola le seconda incognita:
Dove bi, bj e bm sono i minori della matrice dei coefficienti che si ottengono escludendo la secondacolonna:
Matrice delle funzioni di forma
mjjmi yyyy )(
Matrice dei coefficienti
iyix1
jyjx1yx1
det2
1
iyix1
jyjx1
mymx1
= area del triangolo i j m
e dove ha il significato:imj yyb
mymx1
iyix1
jyjx1
mymx1
+ +–++
–
Elemento piano triangolare a tre nodi
22
mmjjii ubububq
mjjmi yyyyb )(
I valori delle incognite q sono calcolati come segue
Ancora dal primo dei due sistemi si calcola le seconda incognita:
Dove bi, bj e bm sono i minori della matrice dei coefficienti che si ottengono escludendo la secondacolonna:
Matrice delle funzioni di forma
mjjmi yyyy )(
Matrice dei coefficienti
iyix1
jyjx1yx1
det2
1
iyix1
jyjx1
mymx1
= area del triangolo i j m
e dove ha il significato:imj yyb
jiijm yyyyb )(
mymx1
iyix1
jyjx1
mymx1
+ +–++
–

13
Elemento piano triangolare a tre nodi
23
mmjjii ucucucq
jmi xxc
I valori delle incognite q sono calcolati come segue
e la terza incognita:
Dove ci, cj e cm sono i minori della matrice dei coefficienti che si ottengono escludendo la terzacolonna:
Matrice delle funzioni di forma
jmi
Matrice dei coefficienti
iyix1
jyjx1yx1
det2
1
iyix1
jyjx1
mymx1
= area del triangolo i j m
e dove ha il significato:miimj xxxxc )(
ijm xxc
mymx1
iyix1
jyjx1
mymx1
+ +–++
–
Elemento piano triangolare a tre nodi
24
mmjjii vavavaq
Gli altri tre valori delle incognite q si ottengono semplicemente introducendo nelle relazioni
precedenti le componenti di spostamento v in luogo di u
jmmji yxyxa
iij yxyxa
Matrice delle funzioni di forma
25mmjjii vbvbvb
q
26mmjjii vcvcvc
q
miimj yxyxa
ijjim yxyxa
mji yyb
imj yyb
jim yyb
avendo ai, aj , am , bi, bj , bm , ci, cj e cmgli stessi valori calcolati prima in funzione delle coordinate nodali dell’elemento e riportati qui per riepilogo.
j
jmi xxc
mij xxc
ijm xxc

14
Elemento piano triangolare a tre nodi
A questo punto sono calcolabili le componenti del vettore {f} di spostamento dei
punti interni all’elemento, u e v , in funzione delle coordinate x e y.
mmmmjjjjiiii uycxbauycxbauycxbau
)()()(2
1
1
Matrice delle funzioni di forma
mmmmjjjjiiii vycxbavycxbavycxbav
)()()(2
1
j
i
i
u
v
u
u
j
i
mji d
d
NNNf
Le due relazioni precedenti possono essere scritte in forma matriciale come segue:
ed in modo più compatto:
m
m
j
j
mji
v
u
vNININI
vf
m
jmji
d
dNNNf
edNf
Elemento piano triangolare a tre nodi
A questo punto sono calcolabili le componenti del vettore {f} di spostamento dei
punti interni all’elemento, u e v , in funzione delle coordinate x e y.
mmmmjjjjiiii uycxbauycxbauycxbau
)()()(2
1
1
Matrice delle funzioni di forma
emji dNININI
v
u
Le funzioni e N’i , N’j ed N’m assumono
dunque, in questo caso, le espressioni:
)(1
ycxbaN per k=i j m
mmmmjjjjiiii vycxbavycxbavycxbav
)()()(2
1
)(2
ycxbaN kkkk
per k=i,j,m
)()(2 jmijmijmmj xxyyyxyxyx
Anche la quantità 2 , che è il determinante della matrice dei coefficienti, dipende solo dalle coordinate nodali dell’elemento:
15
Elemento piano triangolare a tre nodi
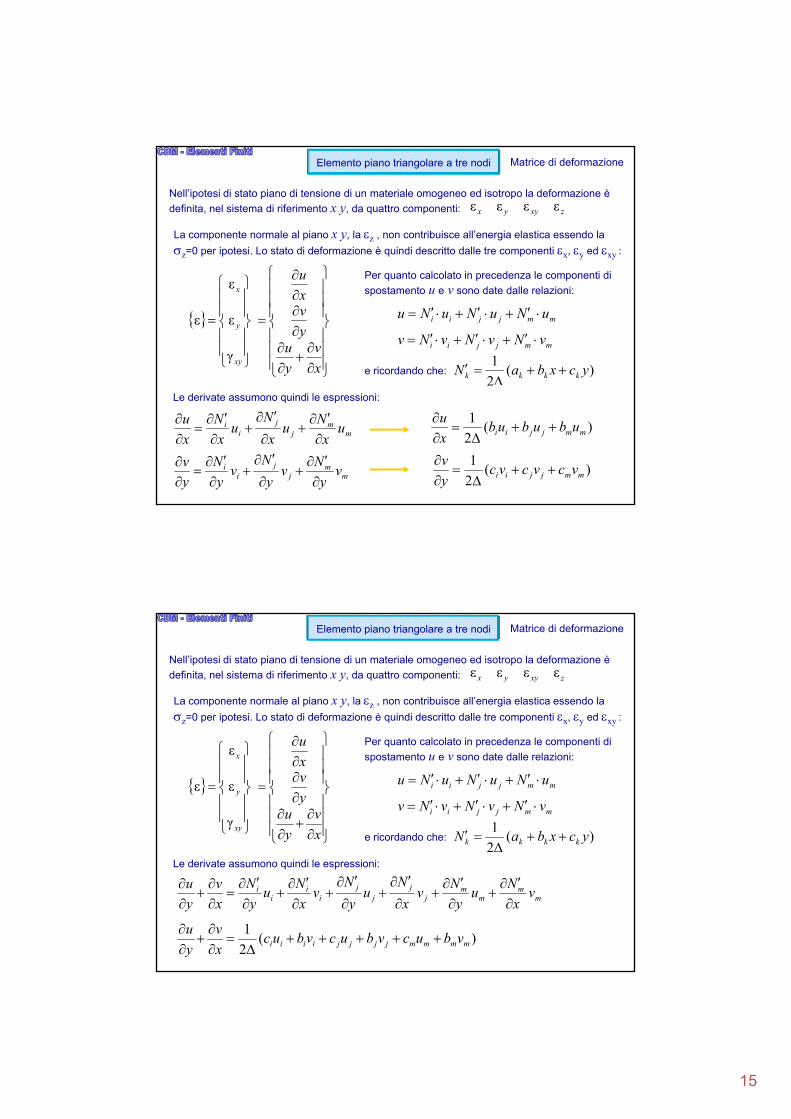
Nell’ipotesi di stato piano di tensione di un materiale omogeneo ed isotropo la deformazione è
definita, nel sistema di riferimento x y, da quattro componenti: zxyyx εεεε
La componente normale al piano x y, la z , non contribuisce all’energia elastica essendo la
z=0 per ipotesi. Lo stato di deformazione è quindi descritto dalle tre componenti x, y ed xy :
Matrice di deformazione
xy
y
x
γ
ε
ε
ε
x
v
y
uy
vx
u
mmjjii uNuNuNu
mmjjii vNvNvNv
Per quanto calcolato in precedenza le componenti di
spostamento u e v sono date dalle relazioni:
)(2
1ycxbaN kkkk
e ricordando che:
mm
jj
ii u
x
Nu
x
Nu
x
N
x
u
mm
jj
ii v
y
Nv
y
Nv
y
N
y
v
Le derivate assumono quindi le espressioni:
)(2
1mmjjii ububub
x
u
)(2
1mmjjii vcvcvc
y
v
Elemento piano triangolare a tre nodi
Nell’ipotesi di stato piano di tensione di un materiale omogeneo ed isotropo la deformazione è
definita, nel sistema di riferimento x y, da quattro componenti: zxyyx εεεε
La componente normale al piano x y, la z , non contribuisce all’energia elastica essendo la
z=0 per ipotesi. Lo stato di deformazione è quindi descritto dalle tre componenti x, y ed xy :
Matrice di deformazione
xy
y
x
γ
ε
ε
ε
x
v
y
uy
vx
u
mmjjii uNuNuNu
mmjjii vNvNvNv
Per quanto calcolato in precedenza le componenti di
spostamento u e v sono date dalle relazioni:
)(2
1ycxbaN kkkk
e ricordando che:
Le derivate assumono quindi le espressioni:
mm
mm
jj
jj
ii
ii v
x
Nu
y
Nv
x
Nu
y
Nv
x
Nu
y
N
x
v
y
u
)(2
1mmmmjjjjiiii vbucvbucvbuc
x
v
y
u

16
Elemento piano triangolare a tre nodi
È possibile ora esprimere in forma matriciale il legame tra le componenti della deformazione e gli spostamenti nodali:
xε
mji bbb
0
0
0
0
0
0
1 e
In forma compatta si ha:
Matrice di deformazione
xy
y
γ
εε
mm
m
jj
j
ii
i
bc
c
bc
c
bc
c 0002 ed edBε
La matrice di deformazione [B] ha dimensioni r x (r x ne), nel caso in esame 3x6, e può essere divisa in tre sottomatrici 3x2 del tipo:
La matrice [B] è composta da termini che contengono le derivate spaziali delle funzioni di forma. Essa può quindi essere
derivata dalla matrice [N] .
kk
k
k
k
bc
c
b
B 0
0
2
1per k=i,j,m
Nel caso dell’elemento piano a tre nodi i
termini della matrice [B] sono delle costanti,
infatti non contengono le variabili x o y .In questo caso dunque lo stato di deformazione è costante in tutto l’elemento, che risulta poco adatto a rappresentare i gradienti di deformazione.
Elemento piano triangolare a tre nodi
La deformazione appena calcolata, in funzione degli spostamenti nodali è quella totale.
Per calcolare correttamente lo stato di tensione, è necessario sottrarre alla deformazione totale eventuali deformazioni iniziali, quali ad esempio, le dilatazioni termiche:
1
Matrice di deformazione
0
0
0
0
γ
ε
ε
ε
x
y
x
0
1
1
Tα valida nel caso di stato piano di tensione
oppure:
0
1
1
Tα)ν1(ε0valida nel caso di stato piano di deformazione

17
Elemento piano triangolare a tre nodi
Lo stato di tensione in un punto dell’elemento è descritto dal vettore { }, anch’esso composto da r termini (in questo caso 3).
In condizioni di comportamento elastico del materiale, tale vettore può essere espresso come :
La matrice [D] ha dimensioni r x r (in questo caso 3x3),
Matrice di elasticità
00 σεεσ D mentre il vettore {0 } rappresenta un eventuale stato di tensione preesistente nel materiale prima dell’applicazione del carico come, ad esempio, una tensione residua.
y
x
σ
σ
σIl vettore { } è definito dalle componenti:
Il legame con le deformazioni in campo elastico è definito dalla legge di Hooke scritta per lo stato piano di tensione:
)νσ(σ1
ε yxx E
xyτ
E
)νσ(σ1
ε xyy E
EG xyxy
xy
ν)1(2τ
τγ
Elemento piano triangolare a tre nodi
La matrice [D] si ottiene dalle equazioni di Hooke,
ricavando le in funzione delle :
)νσ(σ1
ε yxx E
1
0ν1
E Stato piano di
Matrice di elasticità
)νσ(σ1
ε xyy E
EG xyxy
xy
ν)1(2τ
τγ
2
ν-100
01νν1
ED
2
Stato piano di tensione
Nel caso di stato piano di deformazione la matrice [D] si ottiene tenendo conto che z =0
1 )( 0)σσν(σ1
ε yxzz E)σσν(σ yxz
)σσν(σ1
ε zyxx E
)σσν(σ1
ε zxyy E
dalla legge di Hooke si ha:
yxx E
σν-1
νσ
ν-1ε
2
xyy E
σν-1
νσ
ν-1ε
2

18
yxx E
σν-1
νσ
ν-1ε
2
νν-1 2
Elemento piano triangolare a tre nodi
yxx
Eσ
ν-1
νε
ν-1σ
2
E νEν
Matrice di elasticità
xyy E
σν-1
νσ
ν1ε
yyyy
Eσ
ν-1
νε
ν-1
E
ν-1
νσε
ν-1 22
xyy
Eε
ν-1
νε
ν)2(1ν)(1
ν)-1(σIsolando la y si ottiene:
yxx
Eε
ν-1
νε
ν)2(1ν)(1
ν)-1(σA questo punto si ottiene anche
l’espressione della x :
xyy
Eε
ν1
νε
ν)2(1ν)(1
ν)-1(σ
yxx
Eε
ν-1
νε
ν)2(1ν)(1
ν)-1(σ
Elemento piano triangolare a tre nodi
Ed infine, esprimendo il legame tra ed in
forma matriciale, si ottiene la matrice [D] :
Matrice di elasticità
yy ν-1ν)2(1ν)(1
2ν-100
01ν-1
ν
0ν-1
ν1
ν)2ν)(1(1
ν)-E(1D Stato piano di
deformazione
ν)-2(1
00
Nonostante che la componente dello stato tensionale z sia diversa da zero, nel caso di
deformazione piana, non compie alcun lavoro, essendo nulla la z e, pertanto, essa non
viene presa in considerazione: la matrice [D] rimane una 3x3.

19
Elemento piano triangolare a tre nodi Matrice di rigidezza
k
ke
k
V
UF
Indichiamo con il vettore {F}e le forze esterne che agiscono sull’elemento e che sono applicate direttamente sui nodi:
per k=i,j,m
XIndichiamo, inoltre, con il vettore {p} i carichi distribuiti per unità di volume, come le azioni inerziali:
Y
Xp
L’equilibrio globale dell’elemento richiede che le forze esterne siano staticamente equivalenti
alle tensioni { } agenti sul contorno dell’elemento.
Per trovare la condizione di equilibrio traPer trovare la condizione di equilibrio tra le forze esterne e le reazioni interne, dovute allo stato tensionale, si ricorre al principio dei lavori virtuali,
imponendo un campo di spostamenti virtuali il lavoro compiuto dalle forze esterne deve eguagliare quello compiuto dalle forze interne
ieLL
Elemento piano triangolare a tre nodi Matrice di rigidezza
ieLL e
d *Il vettore rappresenta il campo di spostamenti virtuali.
Lo spostamento interno virtuale e la deformazione conseguente al campo di spostamenti virtuali sono date dai vettori: e**
edNf ** TT
*T
* Ndfe
spostamenti virtuali sono date dai vettori: edB **ε
Il lavoro virtuale compiuto dalle forze esterne vale:
V
eedVpfFd
T*T
*eL
V
eedVpNFd T
T*
Il lavoro virtuale compiuto dalle tensioni interne vale:
dVV
σε TiL
Uguagliando i lavori si ottiene:
dVddVpNFdV
e
V
eeσB T
T*T
T*
dVdV
eσB T
T*
20
Elemento piano triangolare a tre nodi Matrice di rigidezza
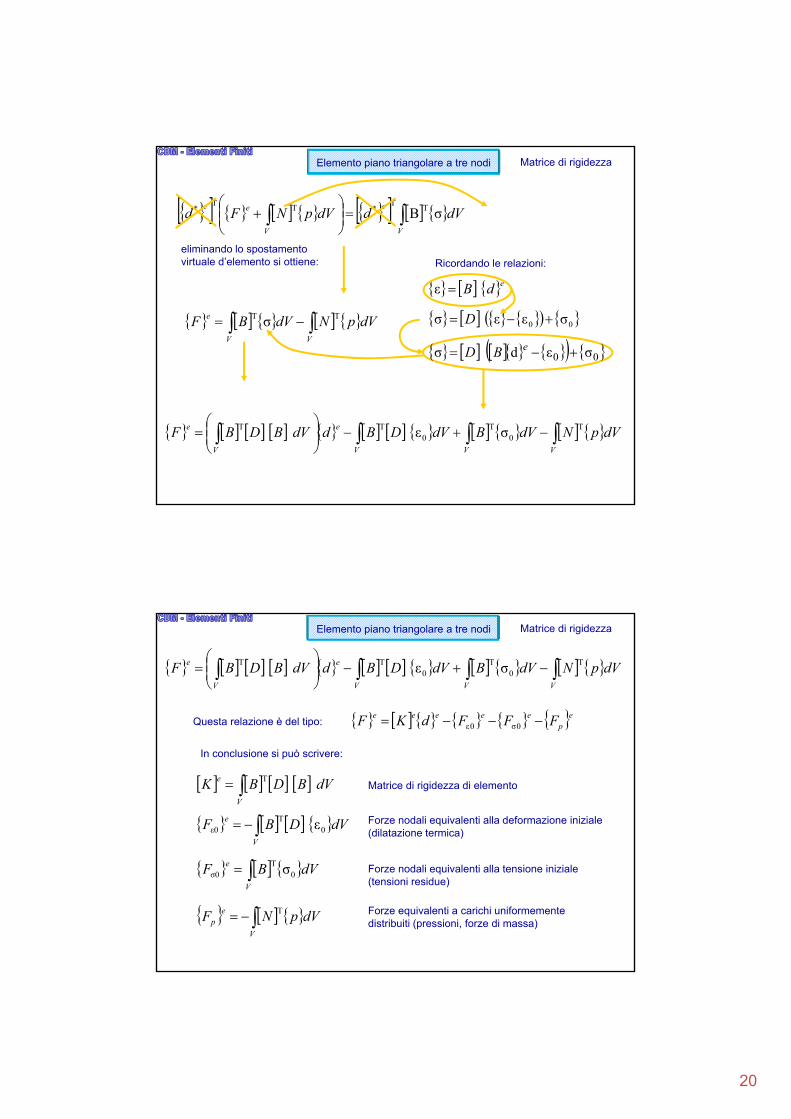
eliminando lo spostamento virtuale d’elemento si ottiene:
dVddVpNFdV
e
V
eeσB T
T*T
T*
Ricordando le relazioni:
dVpNdVBFVV
e TT σ 00 σεεσ D
edBε
Ricordando le relazioni:
00 σεdσ eBD
VVV
e
V
e dVpNdVBdVDBddVBDBF T0
T0
TT σε
Elemento piano triangolare a tre nodi Matrice di rigidezza
VVV
e
V
e dVpNdVBdVDBddVBDBF T0
T0
TT σε
ep
eeeee FFFdKF 0σ0εQuesta relazione è del tipo:
In conclusione si può scrivere:
V
e dVBDBK T
V
e dVDBF 0T
ε0 ε
Matrice di rigidezza di elemento
Forze nodali equivalenti alla deformazione iniziale (dilatazione termica)
V
e dVBF 0T
σ0 σ
V
ep dVpNF T
Forze nodali equivalenti alla tensione iniziale (tensioni residue)
Forze equivalenti a carichi uniformemente distribuiti (pressioni, forze di massa)
21
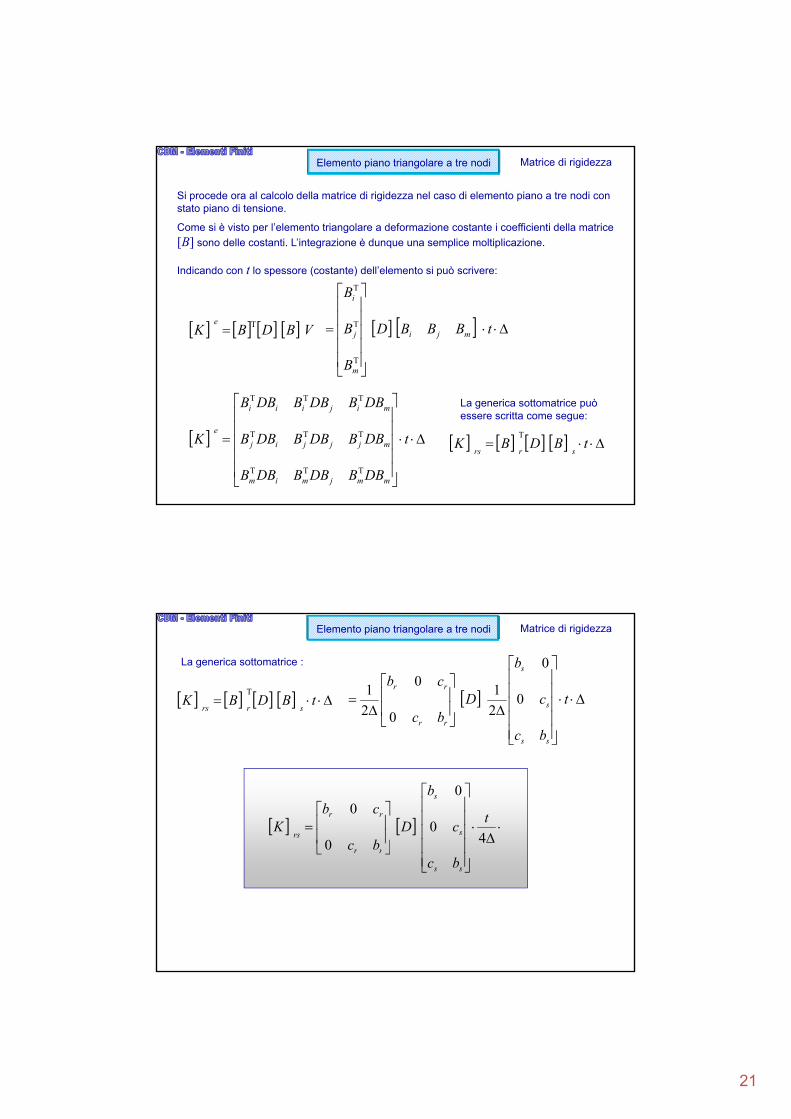
Elemento piano triangolare a tre nodi Matrice di rigidezza
Si procede ora al calcolo della matrice di rigidezza nel caso di elemento piano a tre nodi con stato piano di tensione.
Come si è visto per l’elemento triangolare a deformazione costante i coefficienti della matrice
[B] sono delle costanti. L’integrazione è dunque una semplice moltiplicazione.
VBDBKe T
Indicando con t lo spessore (costante) dell’elemento si può scrivere:
tBBBD
B
B
B
mji
m
j
i
T
T
T
t
DBBDBBDBB
DBBDBBDBB
DBBDBBDBB
K
mmjmim
mjjjij
mijiii
e
TTT
TTT
TTT La generica sottomatrice può essere scritta come segue:
tBDBKsrrs
T
La generica sottomatrice :
tBDBKsrrs
T
Elemento piano triangolare a tre nodi Matrice di rigidezza
t
b
c
b
Dbc
cb
s
s
rr
rr
0
0
2
1
0
0
2
1
bc ss
40
0
0
0t
c
b
Dbc
cbK s
s
rr
rr
rs
bc ss
rr
22
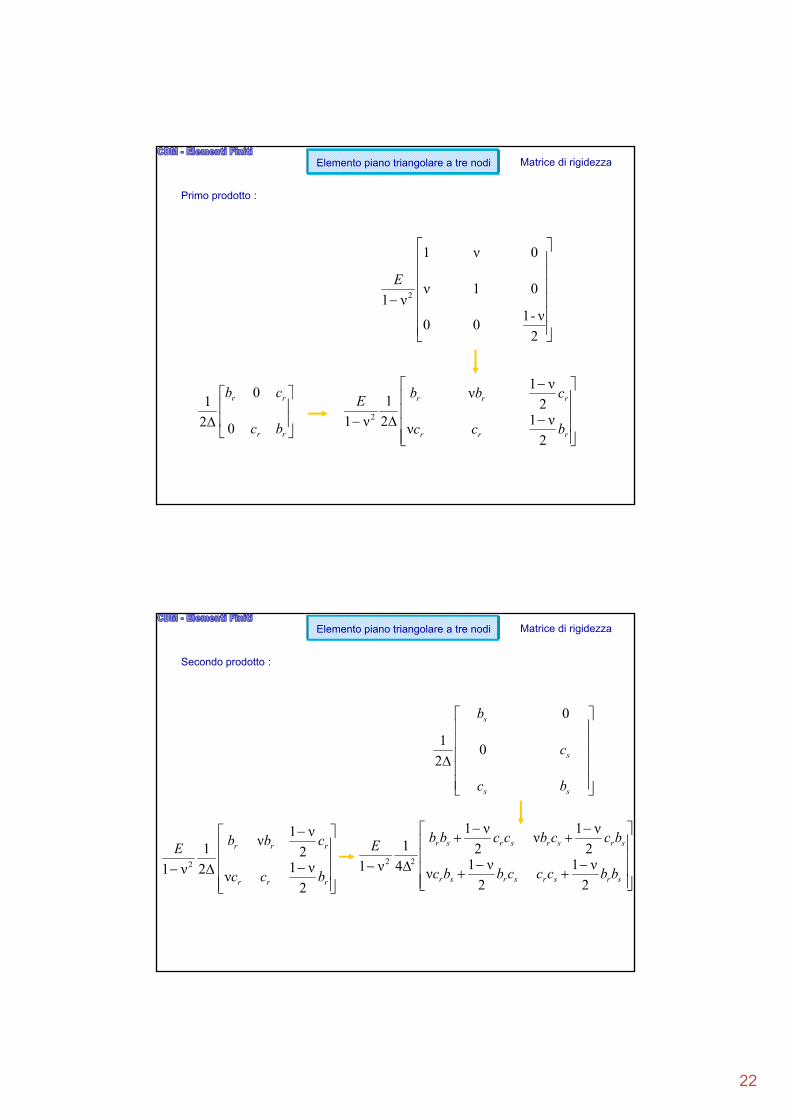
0ν1
Primo prodotto :
Elemento piano triangolare a tre nodi Matrice di rigidezza
2
ν-100
01νν1 2
E
ν1
rr
rr
bc
cb
0
0
2
1
rrr
rrr
bcc
cbbE
2
ν1ν
2
ν1ν
2
1
ν1 2
sb 0
Secondo prodotto :
Elemento piano triangolare a tre nodi Matrice di rigidezza
rrr cbbE 2
ν1ν
1
ss
s
bc
c02
1
srsrsrsr bccbccbbE 2
ν1ν
2
ν11
rrr bcc
E
2
ν1ν
22
1
ν1 2
srsrsrsr bbcccbbc
2
ν1
2
ν1ν
224ν1 22

23
bccbccbbν1
νν1
Elemento piano triangolare a tre nodi Matrice di rigidezza
La generica sottomatrice rs
K
t
bbcccbbc
bccbccbbE
K
srsrsrsr
srsrsrsr
rs
2
ν1
2
ν1ν
2ν
24
1
ν1 22
bccbccbbν1
νν1
srsrsrsr
srsrsrsr
rs
bbcccbbc
bccbccbbtE
K
2
ν1
2
ν1ν
2ν
24ν1 2
Elemento piano triangolare a tre nodi Matrice di rigidezza
La matrice completa 11
La generica sottomatrice rs
K
ji
jmjjji
imijii
e
KKK
KKK
KKK
K
La matrice completa
srsrsrsr
srsrsrsr
rs
bbcccbbc
bccbccbbtE
K
2
ν1
2
ν1ν
2
ν1ν
2
ν1
4ν1 2
mmmjmi KKK

24
Elemento piano triangolare a tre nodi Matrice di rigidezza
La matrice completa
jijiji
iiiiii
eKKK
KKK
tEK
41 2
mimimimijijijijiiiiiiiii
bbcccbbcbbcccbbcbbcccbbc
bccbccbbbccbccbbbccbccbb
ν1ν1ν
ν1ν1ν
ν1ν1ν
2
ν1ν
2
ν1
2
ν1ν
2
ν1
2
ν1ν
2
ν1
mimimi
jjj
KKK
4ν1 2
mmmmmmmmjmjmjmjmimimimim
mmmmmmmmjmjmjmjmimimimim
mjmjmjmjjjjjjijjjijijiij
mijmjmjmjjjjjjjjjijijijij
mimimimijijijijiiiiiiiii
bbcccbbcbbcccbbcbbcccbbc
bccbccbbbccbccbbbccbccbb
bbcccbbcbbcccbbcbbccbjcbc
bccbccbbbccbccbbbccbccbb
bbcccbbcbbcccbbcbbcccbbc
2
ν1
2
ν1ν
2
ν1
2
ν1ν
2
ν1
2
ν1ν
2
ν1ν
2
ν1
2
ν1ν
2
ν1
2
ν1ν
2
ν12
ν1
2
ν1ν
2
ν1
2
ν1ν
2
ν1
2
ν1ν
2
ν1ν
2
ν1
2
ν1ν
2
ν1
2
ν1ν
2
ν122
ν22
ν22
ν
Elemento piano triangolare a tre nodi
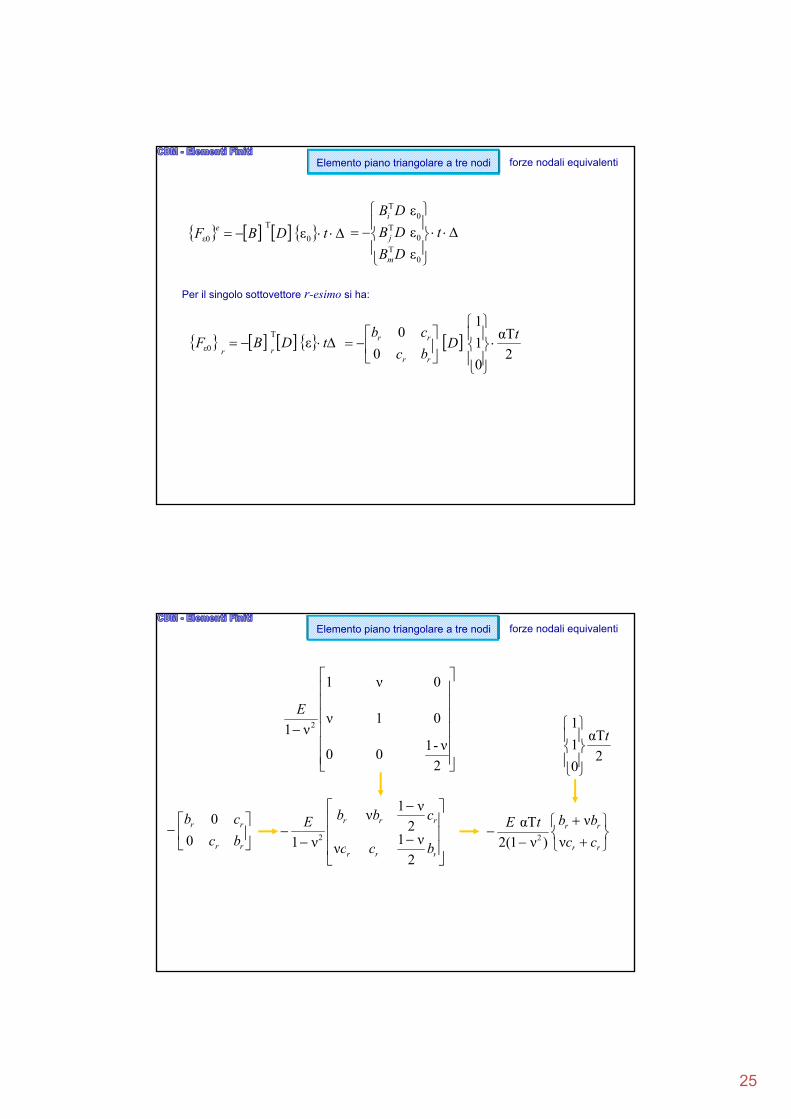
A questo punto devono essere valutate anche le forze nodali equivalenti
V
e dVDBF 0T
ε0 ε
Forze nodali equivalenti alla deformazione iniziale (dilatazione termica)
forze nodali equivalenti
V
e dVBF 0T
σ0 σ
V
ep dVpNF T
Forze nodali equivalenti alla tensione iniziale (tensioni residue)
Forze equivalenti a carichi uniformemente distribuiti (pressioni, forze di massa)
25
Elemento piano triangolare a tre nodi
tDBF e0
T
ε0 ε
forze nodali equivalenti
t
DB
DB
DB
m
j
i
0T
0T
0T
ε
ε
ε
tDbc
cb
rr
rr αT
0
1
1
0
0
2
1
Per il singolo sottovettore r-esimo si ha:
tDBFrr
εT
ε0 2
αT
0
1
1
0
0 tD
bc
cb
rr
rr
01ν
0ν1
ν1 2
E
Elemento piano triangolare a tre nodi forze nodali equivalenti
T1
t
rr
rr
bc
cb
0
0
2
ν-100
ν1
rrr
bcc
cbbEν1
ν
2
ν1ν
ν1 2
2
αT
0
1t
rr
rr
cc
bbtEν
ν
)ν1(2
αT2
rrr bcc
2ν

26
rr
rr
cc
bbtEν
ν
)ν1(2
αT2
Il sottovettore r-esimo ha dunque l’espressione:
r
Fε0
Elemento piano triangolare a tre nodi forze nodali equivalenti
jj
ii
ii
e bb
cc
bb
tEF
ν
ν
ν
αT
Il vettore completo che rappresenta le forze equivalenti ad una dilatazione termica dell’elemento, dovuta ad un incremento T della temperatura, può quindi essere scritto come segue:
mm
mm
jj
jj
cc
bb
cct
F
ν
ν
ν)ν1(2
α20ε
Elemento piano triangolare a tre nodi
A questo punto devono essere valutate anche le forze nodali equivalenti
V
e dVDBF 0T
ε0 ε
Forze nodali equivalenti alla deformazione iniziale (dilatazione termica)
forze nodali equivalenti
V
e dVBF 0T
σ0 σ
V
ep dVpNF T
Forze nodali equivalenti alla tensione iniziale (tensioni residue)
Forze equivalenti a carichi uniformemente distribuiti (pressioni, forze di massa)
27
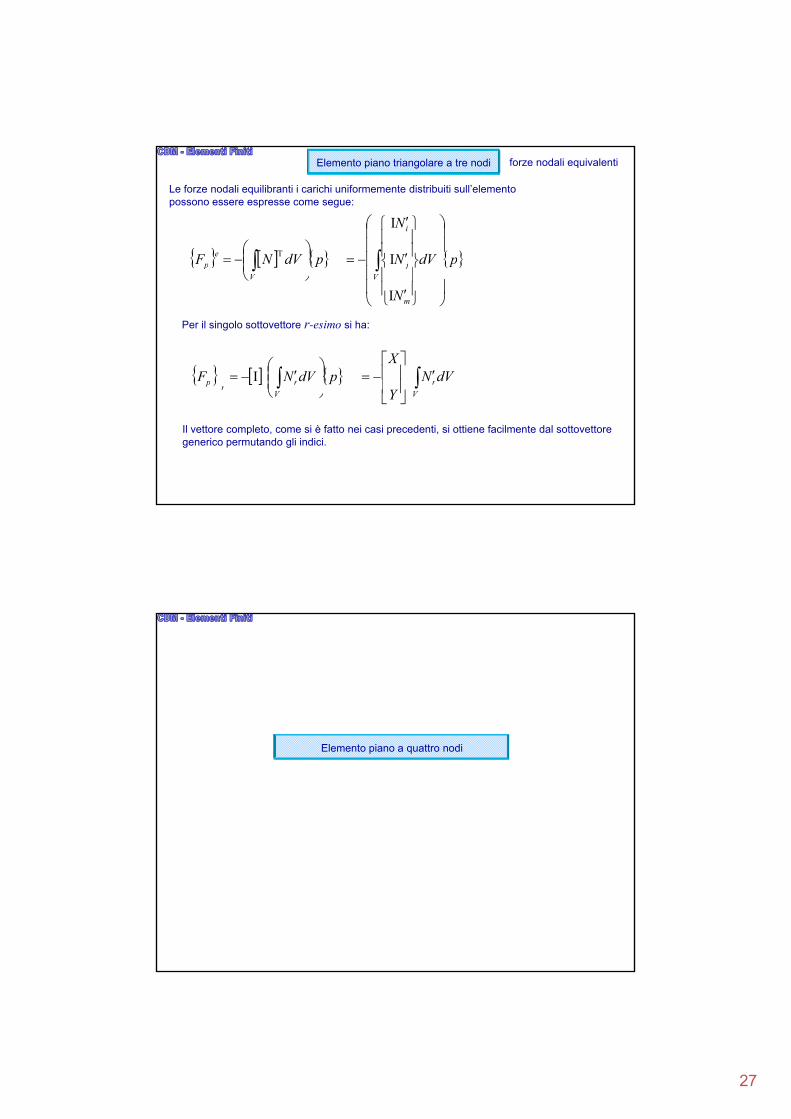
Elemento piano triangolare a tre nodi forze nodali equivalenti
Le forze nodali equilibranti i carichi uniformemente distribuiti sull’elemento possono essere espresse come segue:
pdVNF ep
T pdVN
N
j
i
I
I
pV
p
p
N
V
m
j
I
pdVNF rp
I
Per il singolo sottovettore r-esimo si ha:
rdVNX
V
rp
VY
Il vettore completo, come si è fatto nei casi precedenti, si ottiene facilmente dal sottovettore generico permutando gli indici.
Elemento piano a quattro nodi
28
y
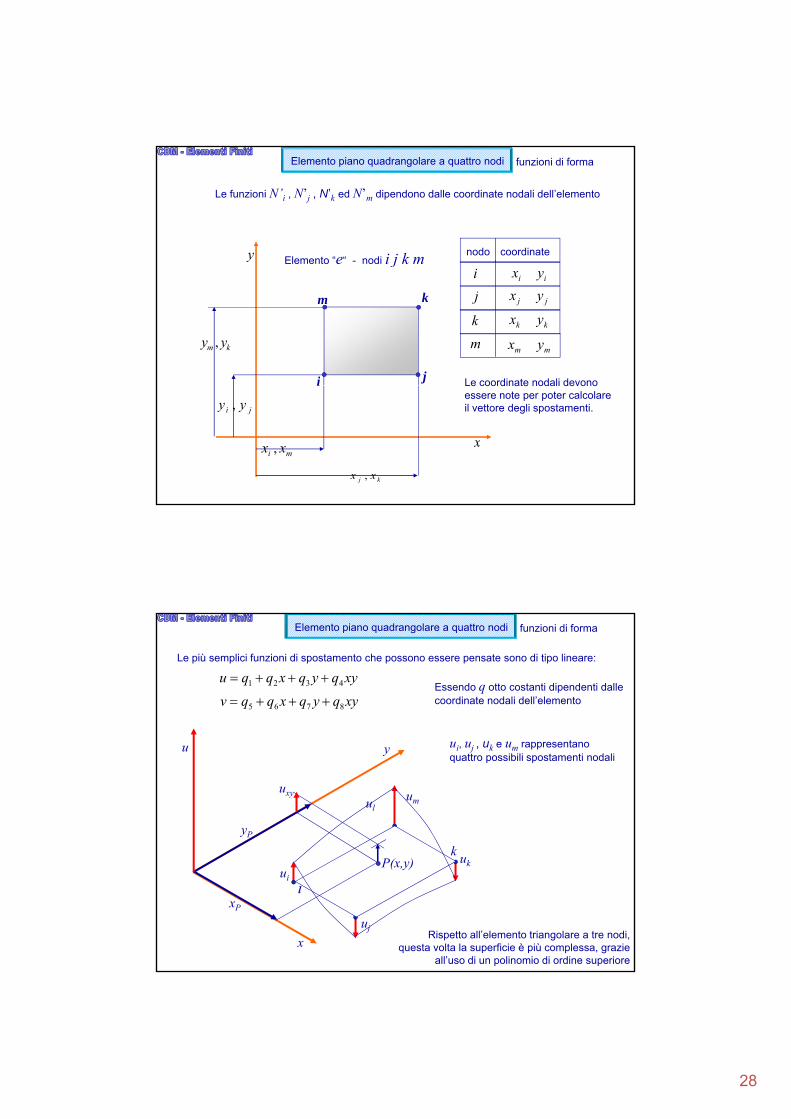
Le funzioni N’i , N’j , N’k ed N’m dipendono dalle coordinate nodali dell’elemento
Elemento “e“ - nodi i j k m coordinatenodo
Elemento piano quadrangolare a quattro nodi funzioni di forma
i
m
j
km yy ,
ii yxi
jj yxj
kk yxk
j
Le coordinate nodali devono
k
mm yxm
i
xmi xx ,
kj xx ,
ji yy ,
Le coordinate nodali devono essere note per poter calcolare il vettore degli spostamenti.
Le più semplici funzioni di spostamento che possono essere pensate sono di tipo lineare:
xyqyqxqqu 4321
xyqyqxqqv 8765 Essendo q otto costanti dipendenti dalle coordinate nodali dell’elemento
Elemento piano quadrangolare a quattro nodi funzioni di forma
yu
yP
ui, uj , uk e um rappresentano quattro possibili spostamenti nodali
ul
m
um
k
uxy
x
jxP
Rispetto all’elemento triangolare a tre nodi, questa volta la superficie è più complessa, grazie
all’uso di un polinomio di ordine superiore
iui
uj
ukk
P(x,y)

29
Elemento piano quadrangolare a quattro nodi funzioni di forma
Le più semplici funzioni di spostamento che possono essere pensate sono di tipo lineare:
xyqyqxqqu 4321
xyqyqxqqv 8765 Essendo q otto costanti dipendenti dalle coordinate nodali dell’elemento
Le costanti possono essere calcolate imponendo che le funzioni di spostamento assumano nei di tt t il l d ll t t d lnodi esattamente il valore dello spostamento nodale.
iiiii yxqyqxqqv 8765
jjjjj yxqyqxqqv 8765
kkkkk yxqyqxqqv 8765
mmmmm yxqyqxqqv 8765
iiiii yxqyqxqqu 4321
jjjjj yxqyqxqqu 4321
mmmmm yxqyqxqqu 4321 kkkkk yxqyqxqqu 4321
Ne derivano due sistemi, di quattro equazioni in altrettante A
4
3
2
1
1
1
1
1
q
q
q
q
yxyx
yxyx
yxyx
yxyx
u
u
u
u
mmmm
kkkk
jjjj
iiii
m
k
j
i
incognite, che consentono di calcolare i valori di q.
8
7
6
5
1
1
1
1
q
q
q
q
yxyx
yxyx
yxyx
yxyx
v
v
v
v
mmmm
kkkk
jjjj
iiii
m
k
j
i
Elemento piano quadrangolare a quattro nodi funzioni di forma
Le più semplici funzioni di spostamento che possono essere pensate sono di tipo lineare:
Le costanti possono essere calcolate imponendo che le funzioni di spostamento assumano nei di tt t il l d ll t t d l
xyqyqxqqu 4321
xyqyqxqqv 8765 Essendo q otto costanti dipendenti dalle coordinate nodali dell’elemento
iiiii yxqyqxqqu 4321
jjjjj yxqyqxqqu 4321
mmmmm yxqyqxqqu 4321
nodi esattamente il valore dello spostamento nodale.
Ne derivano due sistemi, di quattro equazioni in altrettante
iiiii yxqyqxqqv 8765
jjjjj yxqyqxqqv 8765
kkkkk yxqyqxqqv 8765
mmmmm yxqyqxqqv 8765 kkkkk yxqyqxqqu 4321
incognite, che consentono di calcolare i valori di q.
41 qAuIn modo sintetico si può scrivere: 85 qAv
uAq 141
vAq 185
e le soluzioni si ottengono invertendo le matrici:

30
Elemento piano quadrangolare a quattro nodi
Le successive operazioni per il calcolo delle matrici N e B sono del tutto analoghe a quelle viste per l’elemento triangolare.
N è di dimensione 2x8
Essendo le deformazioni interessate dal problema le stesse dell’elemento triangolare,
Matrice di deformazione
allora B risulta essere di dimensione 3x8; la matrice D rimane 3x3.
La differenza fondamentale è che in questo caso, oltre che N (ovviamente), anche B è una funzione di punto, cioè gli elementi di B contengono espressioni in x e y.
Tralasciando i passaggi e supponendo noti (anche se in funzione degli spostamenti nodali) gli otto coefficienti q delle funzioni di forma,
xyqyqxqqu 4321 xyqyqxqqv 8765
xy
y
x
γ
ε
ε
ε
x
v
y
uy
vx
u
yqqxqq
xqq
yqq
xy
y
x
8643
87
42
ε
ε
lineare in y
lineare in x
lineare in x e y
Elemento piano quadrangolare a quattro nodi Considerazioni sulla congruenza tra elementi contigui
31
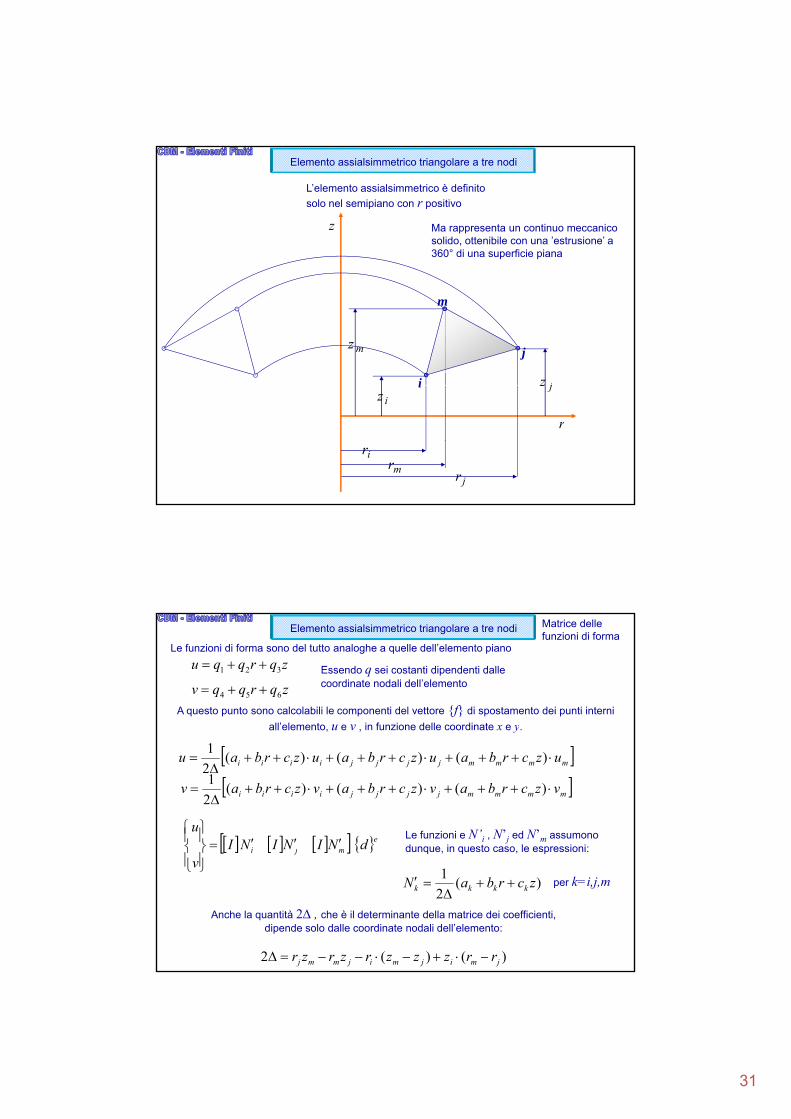
Elemento assialsimmetrico triangolare a tre nodi
z
L’elemento assialsimmetrico è definito
solo nel semipiano con r positivo
Ma rappresenta un continuo meccanico solido, ottenibile con una ’estrusione’ a 360° di una superficie piana
i
m
j
jz
mz
i
r
irmr
jr
izjz
Elemento assialsimmetrico triangolare a tre nodi Matrice delle funzioni di forma
Le funzioni di forma sono del tutto analoghe a quelle dell’elemento piano
zqrqqu 321
zqrqqv 654 Essendo q sei costanti dipendenti dalle coordinate nodali dell’elemento
A questo punto sono calcolabili le componenti del vettore {f} di spostamento dei punti interni
all’elemento, u e v , in funzione delle coordinate x e y.y
mmmmjjjjiiii uzcrbauzcrbauzcrbau
)()()(2
1
mmmmjjjjiiii vzcrbavzcrbavzcrbav
)()()(2
1
emji dNININI
u
Le funzioni e N’i , N’j ed N’m assumono dunque, in questo caso, le espressioni:
per k=i,j,m
mji
v
du que, ques o caso, e esp ess o
)(2
1zcrbaN kkkk
)()(2 jmijmijmmj rrzzzrzrzr
Anche la quantità 2 , che è il determinante della matrice dei coefficienti, dipende solo dalle coordinate nodali dell’elemento:

32
Elemento assialsimmetrico triangolare a tre nodi Matrice di deformazione
Le componenti di deformazione interessate nel problema assialsimmetrico sono 4:
ru
ru
c
r
ε
ε
ε La matrice B pertanto è una 4x6 tale che:
j
i
i
c
r
u
v
u
Bε
ε
rv
zu
zv
rz
z
γ
ε è una 4x6 tale che:
m
m
j
rz
z
v
u
v
γ
ε
jj
ii
ii
zr
zr
zr
zru
1
1 0001
1000
0001
0001
Ricordando l’espressione del campo degli spostamenti in funzione degli spostamenti nodali:
11 ACAderivB
e
mm
mm
jj
jje d
zr
zr
zr
zr
zr
zrdA
v
u 1
1000
0001
1000
0001
1000
0001
La matrice A contiene delle costanti.La matrice B si ottiene derivando la Ф:
Elemento assialsimmetrico triangolare a tre nodi Matrice di deformazione
zr
zr
1000
0001
Derivando la prima riga rispetto a r si ottiene il vettore:
000010
Derivando la terza riga rispetto a z si ottiene il vettore:
100000
Eseguendo le derivate miste e sommando si ottiene:
100100
Dividendo la prima riga per r si ottiene il vettore:
00011 rzr
100100
100000
00011
000010
rzrC
1 ACBLa matrice C, e quindi anche B, è una funzione di punto
In particolare, la deformazione circonferenziale non è costante all’interno dell’elemento assialsimmetrico, neanche in quello triangolare
33
Elemento assialsimmetrico triangolare a tre nodi Matrice di elasticità
)σν(σσ1
ε zyxx E
)σν(σσ1
ε zxyy E
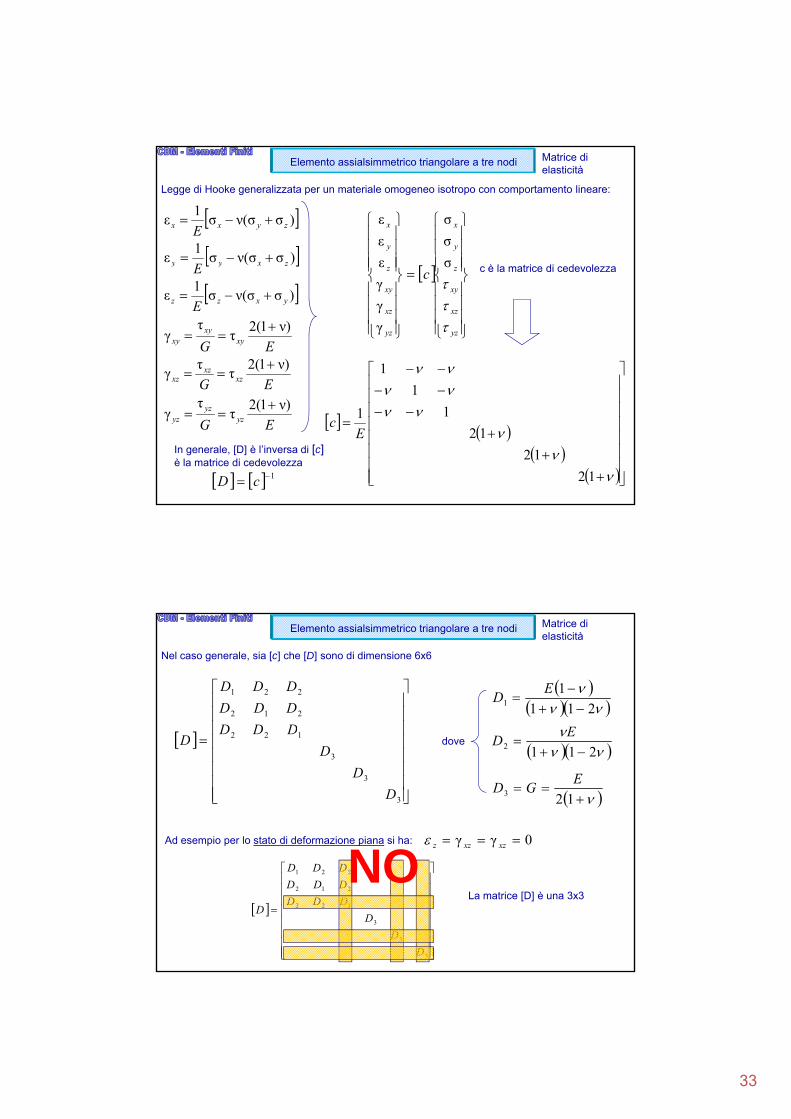
Legge di Hooke generalizzata per un materiale omogeneo isotropo con comportamento lineare:
y
x
y
x
σ
σ
σ
ε
ε
ε
è l t i di d l
EG xyxy
xy
ν)1(2τ
τγ
yy E
)σν(σσ1
ε yxzz E
EG xzxz
xz
ν)1(2τ
τγ
yz
xz
xy
z
yz
xz
xy
zc
σ
γ
γ
γ
ε
1
1
c è la matrice di cedevolezza
EG
EG yzyz
yz
ν)1(2τ
τγ
12
12
12
1
1
1
Ec
In generale, [D] è l’inversa di [c]è la matrice di cedevolezza
1 cD
Elemento assialsimmetrico triangolare a tre nodi Matrice di elasticità
Nel caso generale, sia [c] che [D] sono di dimensione 6x6
122
212
221
DDD
DDD
DDD
211
11
ED
E
3
3
3
122
D
D
D
DDDD dove
2112
ED
123
EGD
Ad esempio per lo stato di deformazione piana si ha: 0γγ xzxzz
NO
3
3
3
122
212
221
D
D
D
DDD
DDD
DDD
DLa matrice [D] è una 3x3
NO
34
Elemento assialsimmetrico triangolare a tre nodi Matrice di elasticità
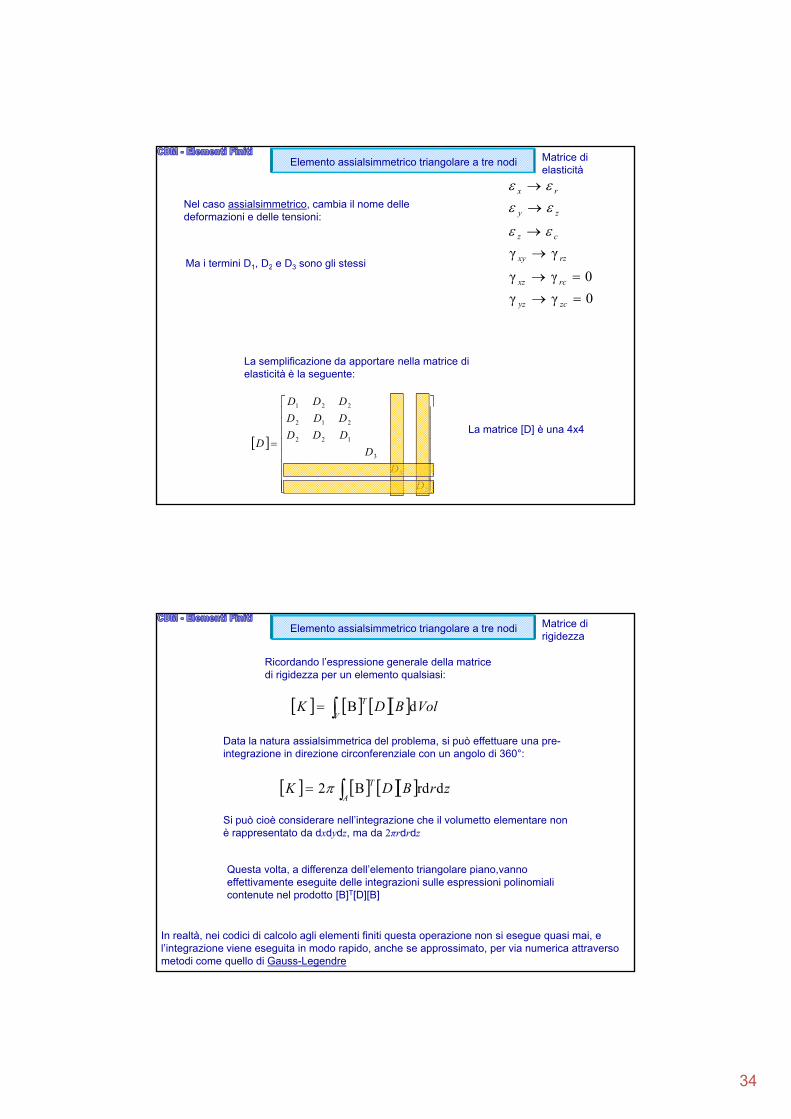
Nel caso assialsimmetrico, cambia il nome delle deformazioni e delle tensioni:
γγ
rzxy
cz
zy
rx
Ma i termini D1, D2 e D3 sono gli stessi
0γγ
0γγ
zcyz
rcxz
La semplificazione da apportare nella matrice di elasticità è la seguente:
Ma i termini D1, D2 e D3 sono gli stessi
3
3
3
122
212
221
D
D
D
DDD
DDD
DDD
DLa matrice [D] è una 4x4
Elemento assialsimmetrico triangolare a tre nodi Matrice di rigidezza
V
T VolBDK dB
Ricordando l’espressione generale della matrice di rigidezza per un elemento qualsiasi:
Data la natura assialsimmetrica del problema, si può effettuare una pre-integrazione in direzione circonferenziale con un angolo di 360°:
zrBDKA
T drdB2
Si può cioè considerare nell’integrazione che il volumetto elementare non è rappresentato da dxdydz, ma da 2πrdrdz
Questa volta, a differenza dell’elemento triangolare piano,vanno effettivamente eseguite delle integrazioni sulle espressioni polinomiali contenute nel prodotto [B]T[D][B]
In realtà, nei codici di calcolo agli elementi finiti questa operazione non si esegue quasi mai, e l’integrazione viene eseguita in modo rapido, anche se approssimato, per via numerica attraverso metodi come quello di Gauss-Legendre
35
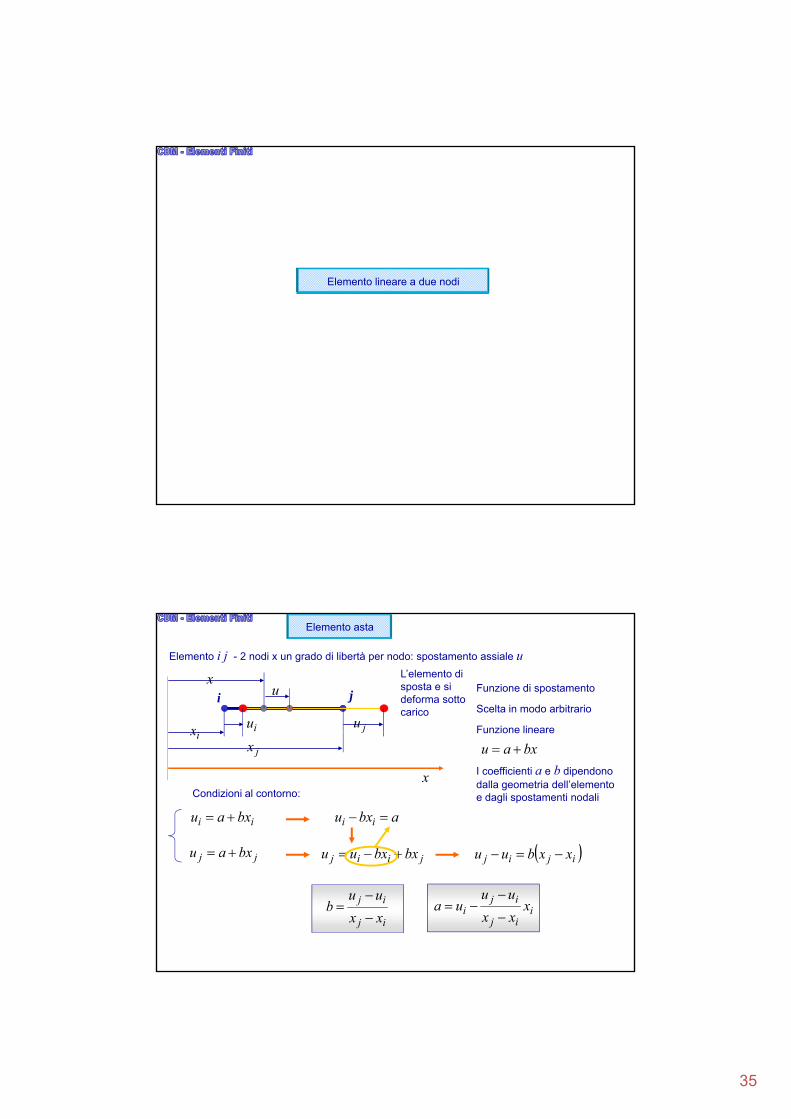
Elemento lineare a due nodi
i j
ix
Elemento asta
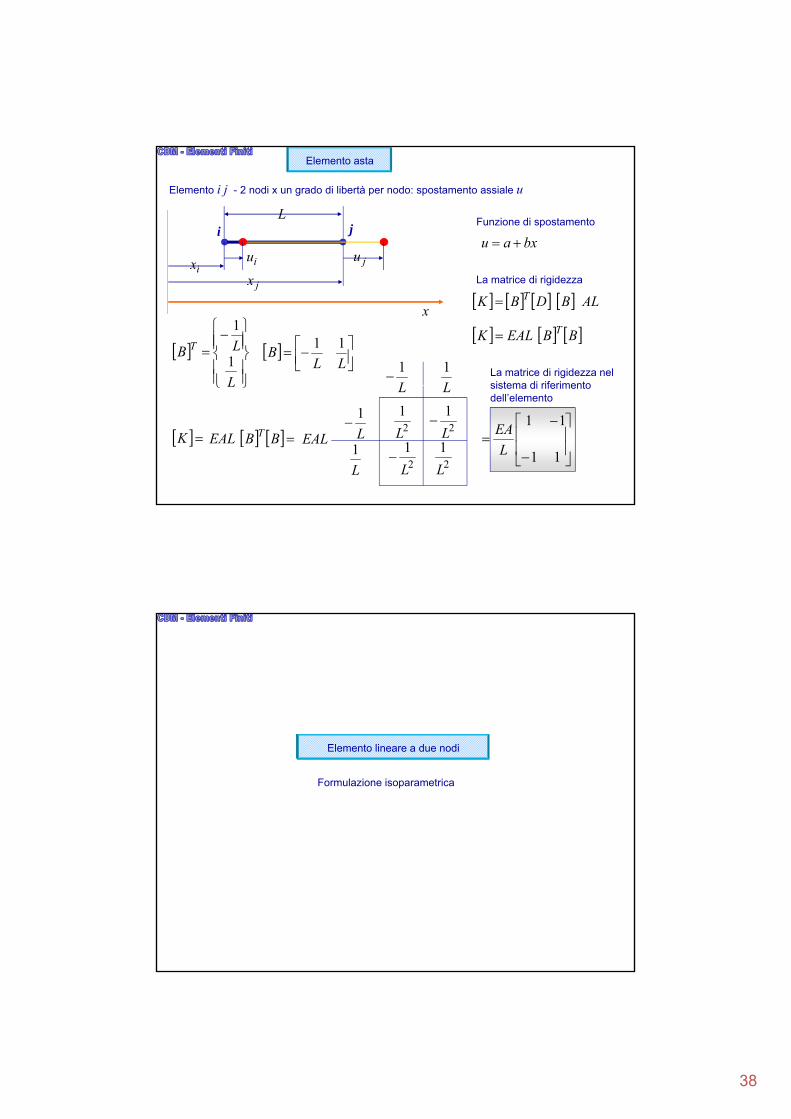
Elemento i j - 2 nodi x un grado di libertà per nodo: spostamento assiale u
juiu
ux
Funzione di spostamento
Scelta in modo arbitrario
Funzione lineare
L’elemento di sposta e si deforma sotto carico
jxix j
x
bxau Funzione lineare
ii bxau
Condizioni al contorno:
bxau
abxu ii
bxbxuu b
I coefficienti a e b dipendono dalla geometria dell’elemento e dagli spostamenti nodali
jj bxau jiij bxbxuu ijij xxbuu
ij
ij
xx
uub
i
ij
iji x
xx
uuua

36
Elemento asta
i j
ix
Elemento i j - 2 nodi x un grado di libertà per nodo: spostamento assiale u
juiu
ux
Funzione di spostamento
bxau
ij uu
bxau xxx
uux
xx
uuuu
ij
iji
ij
iji
jxix j
x
ij
ij
xx
uub
iij
iji x
xx
uuua
conviene ora riscrivere questa relazione in una forma più adatta alla notazione matriciale
iij
jij
iij
ij
ij
ii u
xx
xu
xx
xu
xx
xu
xx
xuu
jij
ii
ij
i uxx
xxu
xx
xxu
1 jjii uNuNu dNu
Elemento asta
Li j
ix
Elemento i j - 2 nodi x un grado di libertà per nodo: spostamento assiale u
juiu
Funzione di spostamento
bxau
ji NNN
xx
Lxx ij
xx
jxix j
x
ij
ii xx
xxN 1
ij
ij xx
xxN
L
xxN i
i 1
L
xxN i
j
37
Elemento asta
Li j
ix
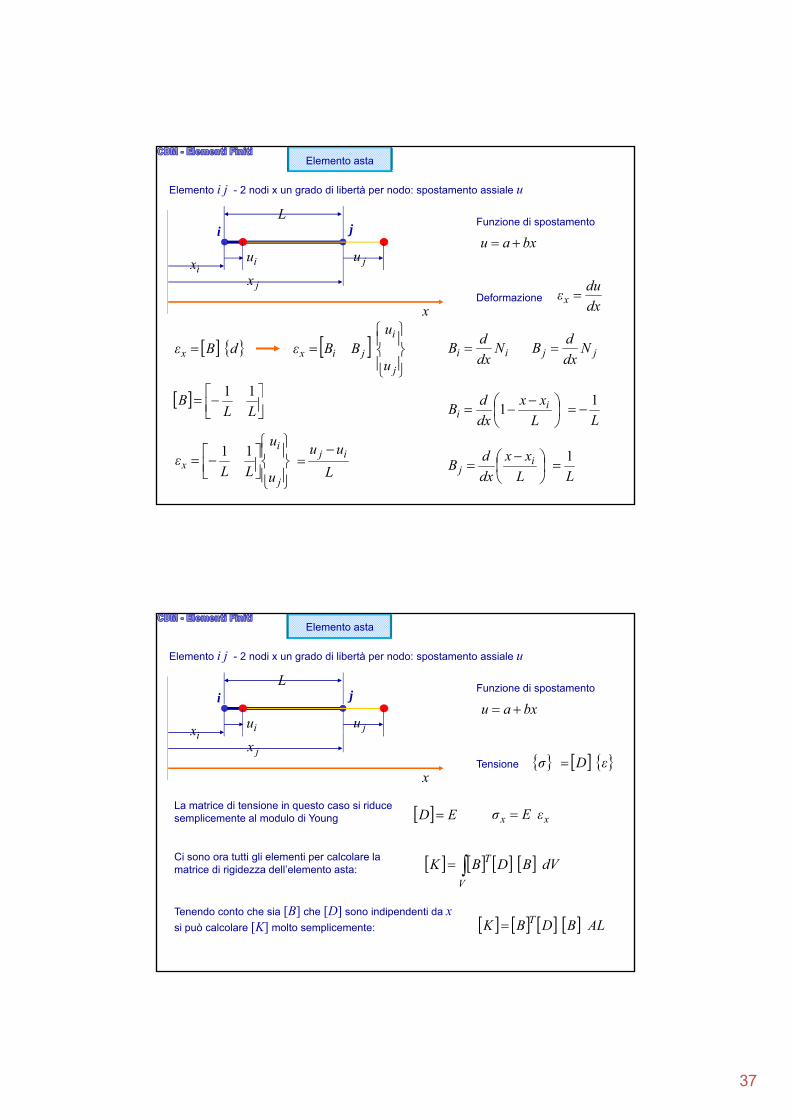
Elemento i j - 2 nodi x un grado di libertà per nodo: spostamento assiale u
juiu
Funzione di spostamento
bxau
dx
duεx Deformazione
dBεx
j
i
jixu
uBBε ii N
dx
dB jj N
dx
dB
jxix j
x
L
xx
dx
dB i
i 1
L
xx
dx
dB i
j
L
1
L
1
LLB
11
j
i
xu
u
LLε
11
L
uu ij
Li j
ix
Elemento i j - 2 nodi x un grado di libertà per nodo: spostamento assiale u
juiu
Funzione di spostamento
bxau
Elemento asta
εDσ Tensionejx
ix j
x
ED La matrice di tensione in questo caso si riduce semplicemente al modulo di Young xx εEσ
Ci sono ora tutti gli elementi per calcolare la matrice di rigidezza dell’elemento asta:
V
T dVBDBK
ALBDBK TTenendo conto che sia [B] che [D] sono indipendenti da xsi può calcolare [K] molto semplicemente:
38
Li j
ix
Elemento i j - 2 nodi x un grado di libertà per nodo: spostamento assiale u
juiu
Funzione di spostamento
bxau
Elemento asta
jxix j
x
La matrice di rigidezza
LL
11
L
LB T
1
1 BBEALK T
ALBDBK T
LLB
11
La matrice di rigidezza nel sistema di riferimentoLL
L
L1
1
L
BBEAL T
22
22
11
11
LL
LL
EAL
11
11
L
EA K
sistema di riferimento dell’elemento
Formulazione isoparametrica
Elemento lineare a due nodi
39
i j
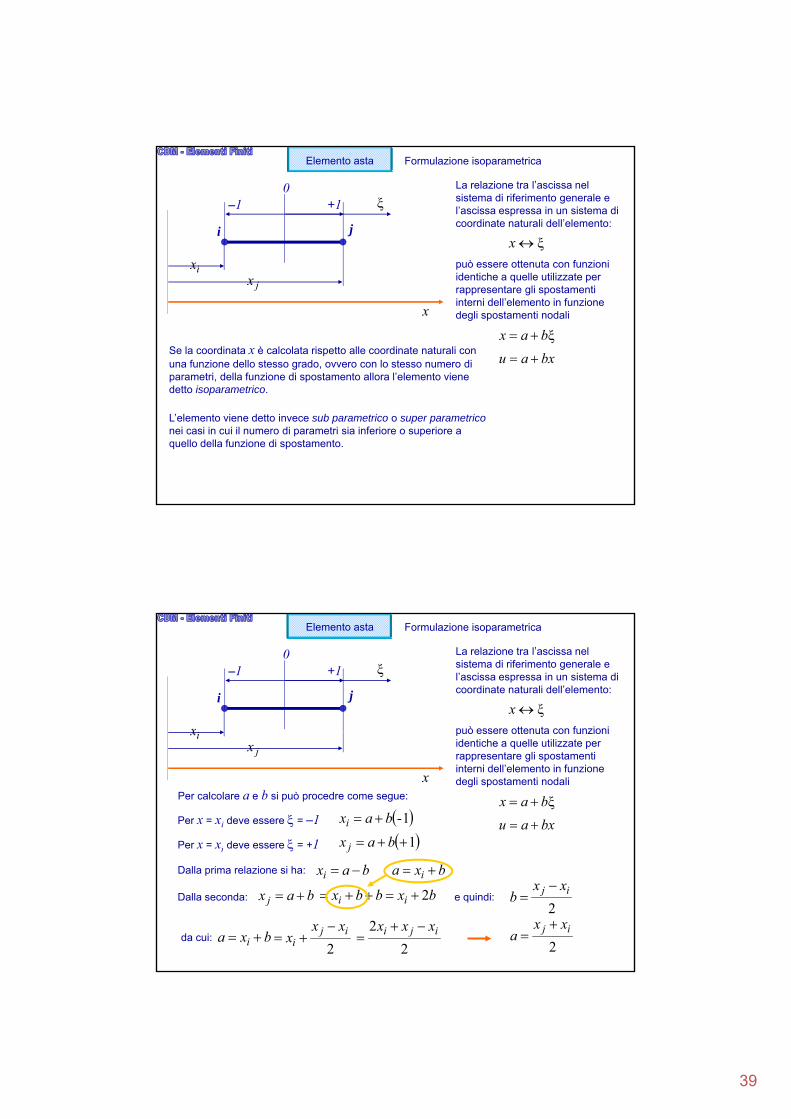
Elemento asta Formulazione isoparametrica
ξ0
+1–1
ξx
ix
La relazione tra l’ascissa nel sistema di riferimento generale e l’ascissa espressa in un sistema di coordinate naturali dell’elemento:
può essere ottenuta con funzioni
x
ixjx
ξbax
può essere ottenuta con funzioni identiche a quelle utilizzate per rappresentare gli spostamenti interni dell’elemento in funzione degli spostamenti nodali
bxau Se la coordinata x è calcolata rispetto alle coordinate naturali con una funzione dello stesso grado, ovvero con lo stesso numero di parametri, della funzione di spostamento allora l’elemento viene d tt i t idetto isoparametrico.
L’elemento viene detto invece sub parametrico o super parametriconei casi in cui il numero di parametri sia inferiore o superiore a quello della funzione di spostamento.
i j
Elemento asta Formulazione isoparametrica
ξ0
+1–1
ξx
ix
La relazione tra l’ascissa nel sistema di riferimento generale e l’ascissa espressa in un sistema di coordinate naturali dell’elemento:
può essere ottenuta con funzioni
x
ixjx
ξbax
può essere ottenuta con funzioni identiche a quelle utilizzate per rappresentare gli spostamenti interni dell’elemento in funzione degli spostamenti nodali
bxau
Per calcolare a e b si può procedre come segue:
Per x = xi deve essere = –1 1-baxi
Per x = xj deve essere = +1 1 bax jj
baxi Dalla prima relazione si ha: bxa i
Dalla seconda: bax j bxbbx ii 22
ij xxb
e quindi:
da cui: bxa i 2
2 iji xxx
2ij
i
xxx
2ij xx
a

40
i j
Elemento asta Formulazione isoparametrica
ξ0
+1–1
ix
ξx
ξbax
bxau
ji xxx2
ξ1
2
ξ1
x
ixjx
2ij xx
b
2
ij xxa
ξfx La funzione può essere ottenuta come segue:
ji 22
ξbax ξ22
ijij xxxx
ξ
2-ξ
222ijij xxxx
2
ξ12
ξ1 ji xxx ji xx
2
ξ1
2
ξ1
i j
Elemento asta Formulazione isoparametrica
ξ0
+1–1
ix L
ξx
ξbax
bxau
ji xxx2
ξ1
2
ξ1
Lxx ij
xfξSi può ricavare anche la funzione inversa
L
xx j 21ξ
2ij xx
b
2
ij xxa
x
ixjx
L ji 22
ξbax b
ax ξ
b
a
b
x
ij
ij
ij xx
xx
xx
x
2
2
2
ij
ij
ij xx
xx
xx
x
2
ij
j
ij
i
xx
xx
xx
xx
ij
jjji
xx
xxxxx
2ξ
ij
j
xx
xx
21
L
xx j 21
Può essere conveniente esprimerla anche in una forma un po’ diversa:

41
i j
Elemento asta Formulazione isoparametrica
ξ0
+1–1
ix L
ξx
ξbax
bxau
ji xxx2
ξ1
2
ξ1
x
ixjx
2ij xx
b
2
ij xxa
Lxx ij
L
ξfx può essere espressa tramite funzioni di forma
L
xx j 21ξ
ji 22
ji xxx2
ξ1
2
ξ1
cNx
j
i
x
xN
j
i
jix
xNN
2
ξ1iN
2
ξ1jN
c è il vettore delle coordinate nodali (nel sistema di riferimento generale)
i j
Elemento asta Formulazione isoparametrica
ξ0
+1–1
ix L
ξx
ξbax
bxau
ji xxx2
ξ1
2
ξ1
x
ixjx
2ij xx
b
2
ij xxa
Lxx ij
L
cNx Con le stesse funzioni di forma viene calcolato
lo spostamento interno u dell’elemento
L
xx j 21ξ
ji 22
ji uu2
ξ1
2
ξ1
dNu
j
i
u
uN
j
i
jiu
uNN
lo spostamento interno u dell elemento
d è il vettore degli spostamenti nodali
42
i j
Elemento asta Formulazione isoparametrica
ξ0
+1–1
ix L
ξx
ξbax
bxau
ji xxx2
ξ1
2
ξ1
x
ixjx
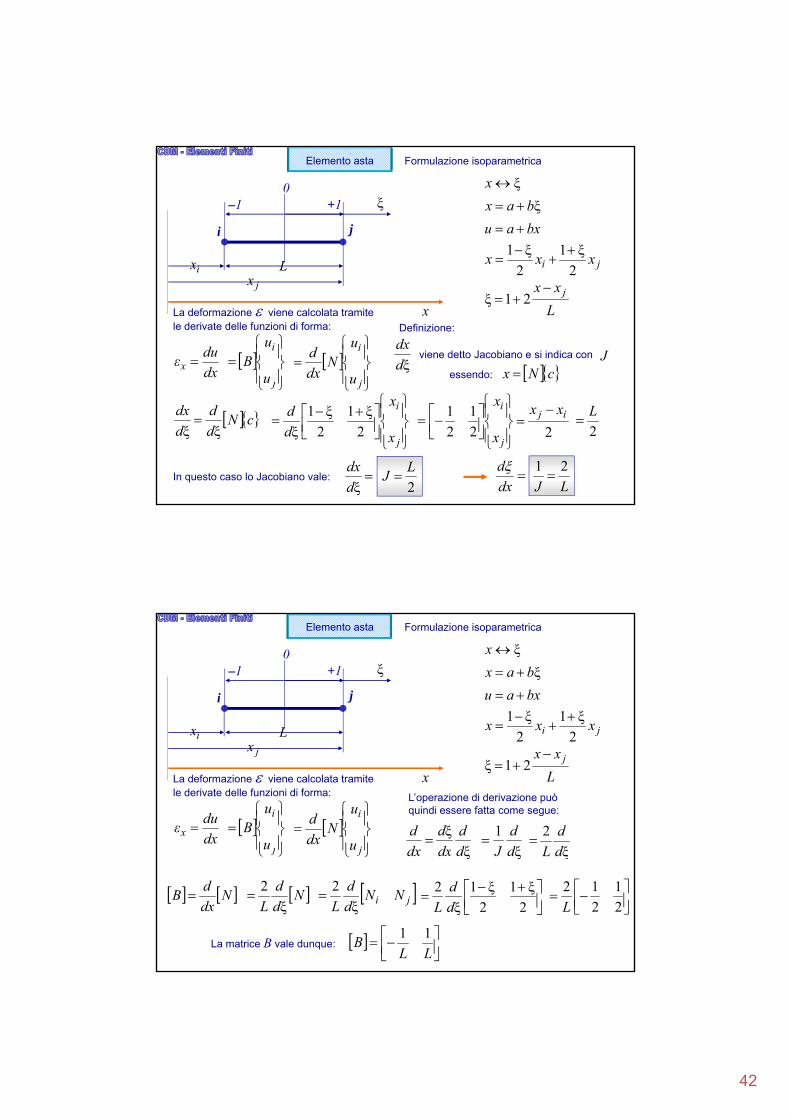
L
La deformazione viene calcolata tramitele derivate delle funzioni di forma:
dx
duεx ξd
dxviene detto Jacobiano e si indica con J
j
i
u
uB
j
i
u
uN
dx
d
L
xx j 21ξ
ji 22
cNx
Definizione:
essendo:
cNd
d
d
dx
ξξ
j
i
x
x
d
d
2
ξ1
2
ξ1
ξ
j
i
x
x
2
1
2
1
2ij xx
2
L
LJ
21In questo caso lo Jacobiano vale:
ξd
dx dx
d
j j
2
LJ
i j
Elemento asta Formulazione isoparametrica
ξ0
+1–1
ix L
ξx
ξbax
bxau
ji xxx2
ξ1
2
ξ1
x
ixjx
L
L
xx j 21ξ
ji 22
La deformazione viene calcolata tramitele derivate delle funzioni di forma:
dx
duεx
j
i
u
uB
ξ
ξ
d
d
dx
d
dx
d
ξ
1
d
d
J
L’operazione di derivazione può quindi essere fatta come segue:
ξ
2
d
d
L
j
i
u
uN
dx
d
j ξddxdx ξdJ ξdL j
Ndx
dB N
d
d
L ξ
2 ji NN
d
d
L ξ
2
2
ξ1
2
ξ1
ξ
2
d
d
L
2
1
2
12
L
LLB
11La matrice B vale dunque:
43
i j
Elemento asta Formulazione isoparametrica
ξ0
+1–1
ix L
ξx
ξbax
bxau
ji xxx2
ξ1
2
ξ1
x
ixjx
L
L
xx j 21ξ
ji 22
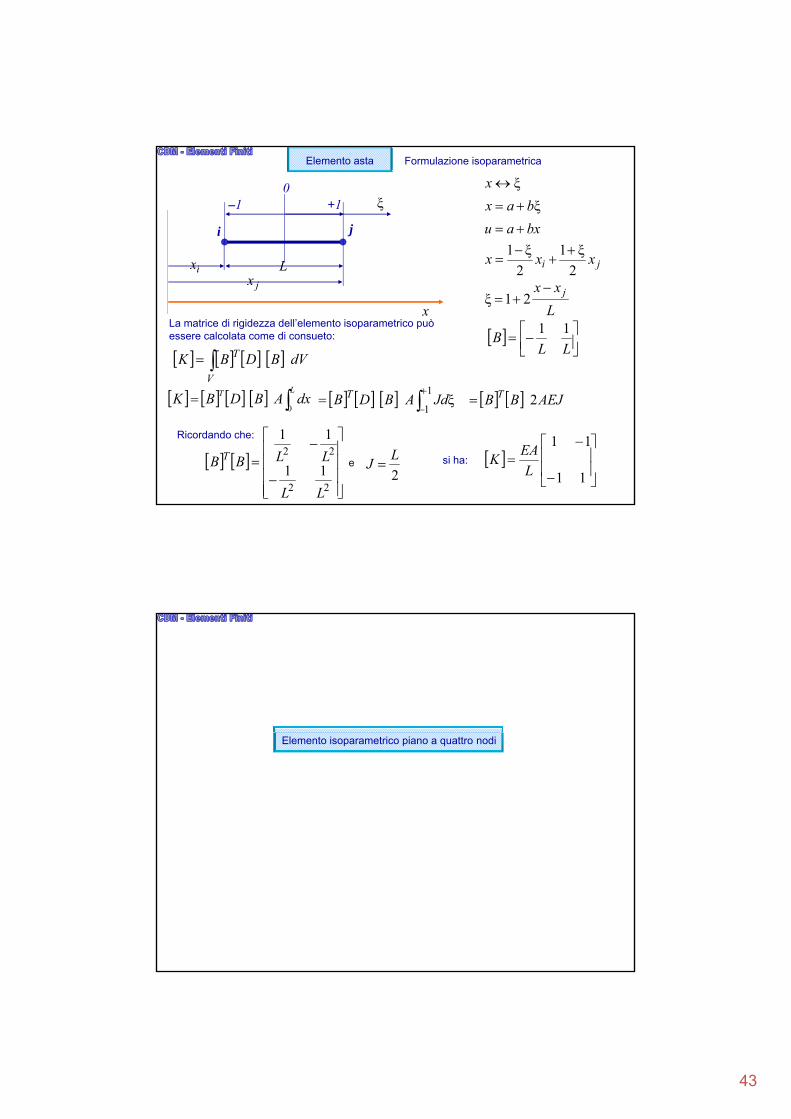
LLB
11La matrice di rigidezza dell’elemento isoparametrico può essere calcolata come di consueto:
V
T dVBDBK
LT dxABDBK
0
1
1ξJdABDB T AEJBB T 2
11
11
L
EAK
22
22
11
11
LL
LLBB T
Ricordando che:
2
LJ e si ha:
Elemento isoparametrico piano a quattro nodi

44
Elemento piano a 4 nodi Formulazione isoparametrica
y
ξ
η
ξ
η+1,+1-1,+1
34
4
3
Coordinate naturali
x
ξ
+1,-1-1,-11 2
cNx
dNu
44332211 yxyxyxyxc
4
12
y
v
44332211 vuvuvuvud
4321
4321
0000
0000
NNNN
NNNNN
Elemento piano a 4 nodi Formulazione isoparametrica
ξ
η+1,+1-1,+1y
ξ
η34
4
3
Coordinate naturali
+1,-1-1,-1
x
ξ1 2
12
ηN 1ξ14
11 ηN 1ξ1
4
12
4
ηN 1ξ14
13
4
ηN 1ξ14
14

45
Elemento piano a 4 nodi Formulazione isoparametrica
ξξξ
y
y
φx
x
φφ
xφ
Jφ ,,ξ
1211 JJ
J
yx ,, ξξ
yxφ ,In generale, data una funzione può essere definito lo jacobiano
η
y
y
φ
η
x
x
φ
η
φ
yη φJ
φ ,,
2221 JJJ
ηη yx ,,
1 J
ηy
x
φ
φ
φ
φ
,
,, ξ
,
può essere definito anche l’operatore inverso
Elemento piano a 4 nodi Formulazione isoparametrica
Nel caso dell’elemento isoparametrico piano a quattro nodi le funzioni da considerare sono :
xNxNxNxNxJ
44332211 uNuNuNuNu
44332211 vNvNvNvNv
4ξ,43ξ,32ξ,21ξ,1ξ11 , xNxNxNxNxJ
4,43,32,21,122 , yNyNyNyNyJ ηηηηη 4,43,32,21,121 , xNxNxNxNxJ ηηηηη 4ξ,43ξ,32ξ,21ξ,1ξ12 , yNyNyNyNyJ
J
4
1ξ,1
ηN
ηN 1ξ14
11
d
dNN 1
ξ,1
η
d
d1ξ1
4
1

46
Elemento piano a 4 nodi Formulazione isoparametrica
Nel caso dell’elemento isoparametrico piano a quattro nodi le funzioni da considerare sono :
xNxNxNxNxJ
44332211 uNuNuNuNu
44332211 vNvNvNvNv
4ξ,43ξ,32ξ,21ξ,1ξ11 , xNxNxNxNxJ
4,43,32,21,122 , yNyNyNyNyJ ηηηηη 4,43,32,21,121 , xNxNxNxNxJ ηηηηη 4ξ,43ξ,32ξ,21ξ,1ξ12 , yNyNyNyNyJ
J
4
1ξ,1
ηN
4
1ξ,2
ηN
4
1ξ,3
ηN
4
1ξ,4
ηN
4
ξ1,1
ηN
4
ξ1,2
ηN
4
ξ1,3
ηN
4
ξ1,4
ηN
Elemento piano a 4 nodi Formulazione isoparametrica
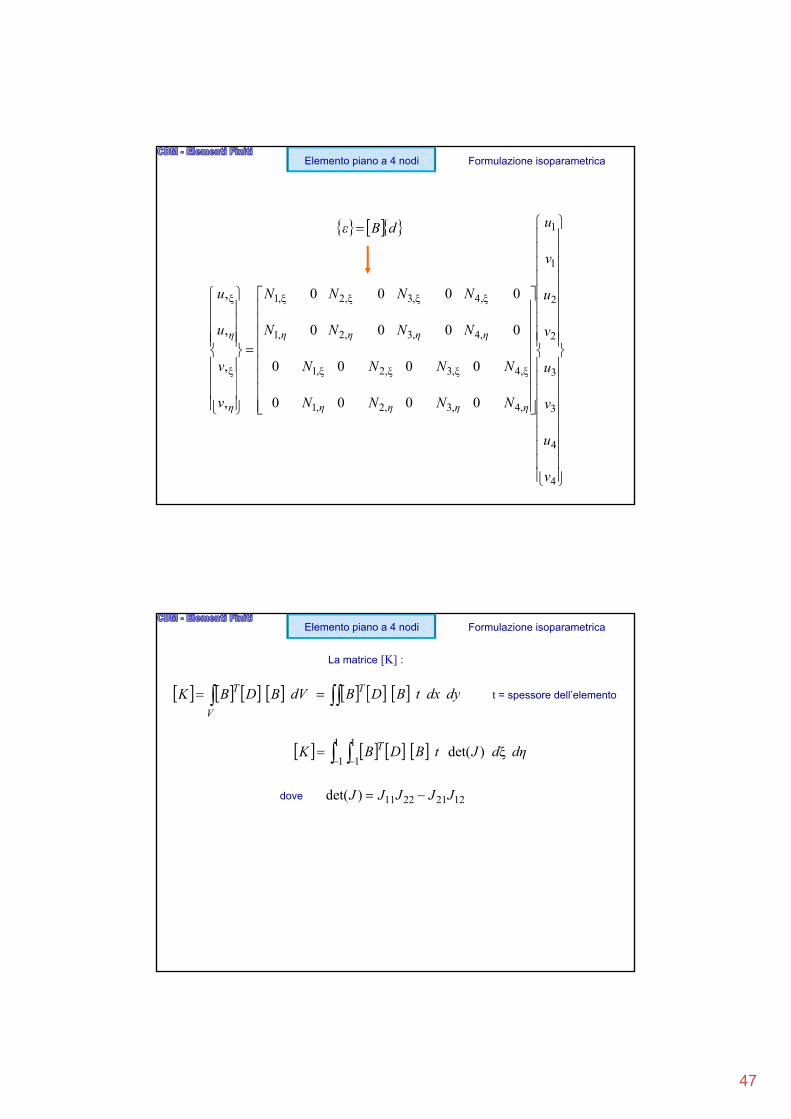
A questo punto ci sono tutti gli elementi per il calcolo della matrice [B] :
x
uεx
y
x
xu
uε
,
,0001
y
vεy
x
v
y
uxy
γ
y
x
xy
x
v
vεε
,
,0110
1000
γ
x uu ,00, ξ1211
η
η
y
x
y
v
v
u
v
v
u
,
,
,
00
00
00
,
,
,
ξ
2221
1211
2221
47
1
1
v
u
Elemento piano a 4 nodi Formulazione isoparametrica
dBε
3
2
2
1
ξ,4
,4
ξ,4
ξ,3
,3
ξ,3
ξ,2
,2
ξ,2
ξ,1
,1
ξ,1
ξ
ξ
0
0
0
0
0
0
0
0
0
0
0
0
,
,
,
u
v
u
N
N
N
N
N
N
N
N
N
N
N
N
v
u
u
ηηηηη
4
4
3,4,3,2,1 0000,
v
u
vNNNNv ηηηηη
Elemento piano a 4 nodi Formulazione isoparametrica
La matrice [K] :
V
T dVBDBK dydxtBDB Tt = spessore dell’elemento
1
1
1
1ξ)det( dηdJtBDBK T
12212211)det( JJJJJ dove

48
Il metodo EF in campo non lineare
Il metodo EF in campo non lineare
Cause di non linearità: materiale
geometria
relazione non lineare tra deformazione e tensione
spostamenti dovuti al carico comparabili con le dimensioni della struttura
contatto
dimensioni della struttura
forze esterne dipendenti dagli spostamenti della struttura

49
Il metodo EF in campo non lineare
Non linearità dovuta al materiale dBε
00 σεεσ D
D
εD
0Rd K
Formulazione generale EF
R Vettore che rappresenta i
R pp
carichi nodali esterni
0ε,σ F
Il metodo EF in campo non lineare
Non linearità dovuta al materiale 00 σεεσ D
0Rd KMetodo della rigidezza variabile
εD
dD 0Rdd K
Soluzione con procedimento iterativo
00 dKK
valutato in campo elastico Rd1
0
K
1
R
1d
Rd1
01 K
Rd1
12
K
11 dKK
Rd1
1
nn K nn KK d
………………………d0d
2d
Vd

50
Il metodo EF in campo non lineare
Non linearità dovuta al materiale 00 σεεσ D
Metodo della tensione iniziale
V
dVBF 0T
σ0 σ
K Rd1
0dRd K
Soluzione con procedimento iterativo
1R 0
1
0 Rd
K
1
1
1 Rd
K
R
R 10σ
2R 20σ
nn K Rd
2
1
2 Rd
K
nn K Rd1
………………
d0d
1d2d
Vd
nR n0σ 1d n
d
Il metodo EF in campo non lineare
Non linearità dovuta al materiale 00 σεεσ D
Metodo della deformazione iniziale
0dRd K
V
dVDBF 0T
ε0 ε
0dRd K
Soluzione con procedimento iterativo
1R 0
1
0 Rd
K
1
1
1 Rd
K
R
R 10
2R 20
2
1
2 Rd
K
nn K Rd1
………………
d0d
1d2d
Vd
nR n0 1d n
51
Il metodo EF in campo non lineare
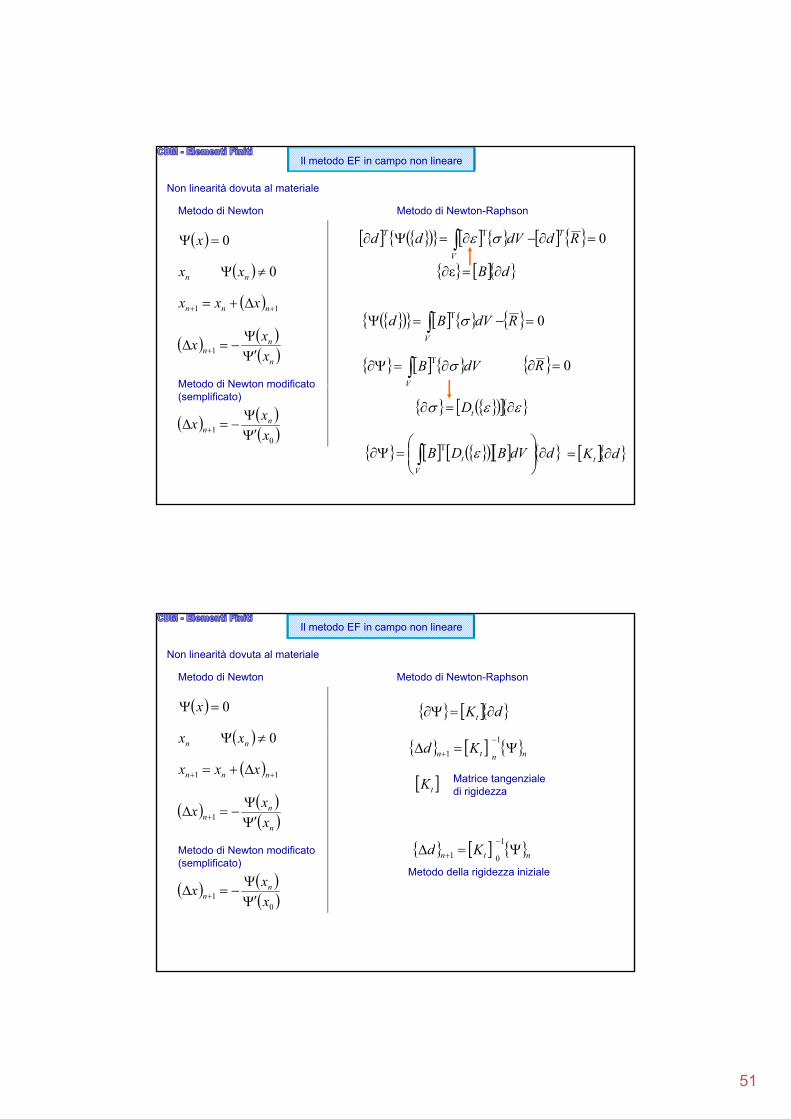
Non linearità dovuta al materiale
0 x
Metodo di Newton Metodo di Newton-Raphson
0T RddVdd T
V
T
nx 0 nx
11 nnn xxx
n
nn x
xx
1
Metodo di Newton modificato
dB ε
0T RdVBdV
V
dVB T 0R
0
1 x
xx n
n
Metodo di Newton modificato (semplificato)
V
tD
ddVBDBV
t
T dKt
Il metodo EF in campo non lineare
Non linearità dovuta al materiale
0 x
Metodo di Newton Metodo di Newton-Raphson
dKt
nx 0 nx
11 nnn xxx
n
nn x
xx
1
Metodo di Newton modificato
nntn Kd
1
1
tK Matrice tangenziale di rigidezza
Kd 1
0
1 x
xx n
n
Metodo di Newton modificato (semplificato)
ntn Kd 01
Metodo della rigidezza iniziale

52
Il metodo EF in campo non lineare
Non linearità dovuta al materiale
R
Metodo di Newton-Raphson
dKt
nd
nntn Kd
1
1
tK Matrice tangenziale di rigidezza
Kd 1
d0d
1d2d
Vd
Metodo della rigidezza iniziale
ntn Kd 01
Il metodo EF in campo non lineare
Non linearità dovuta al materiale
RddK nnn
nn f
nnn dBD
ndf
V
nn dVBF σT
RF nn
53
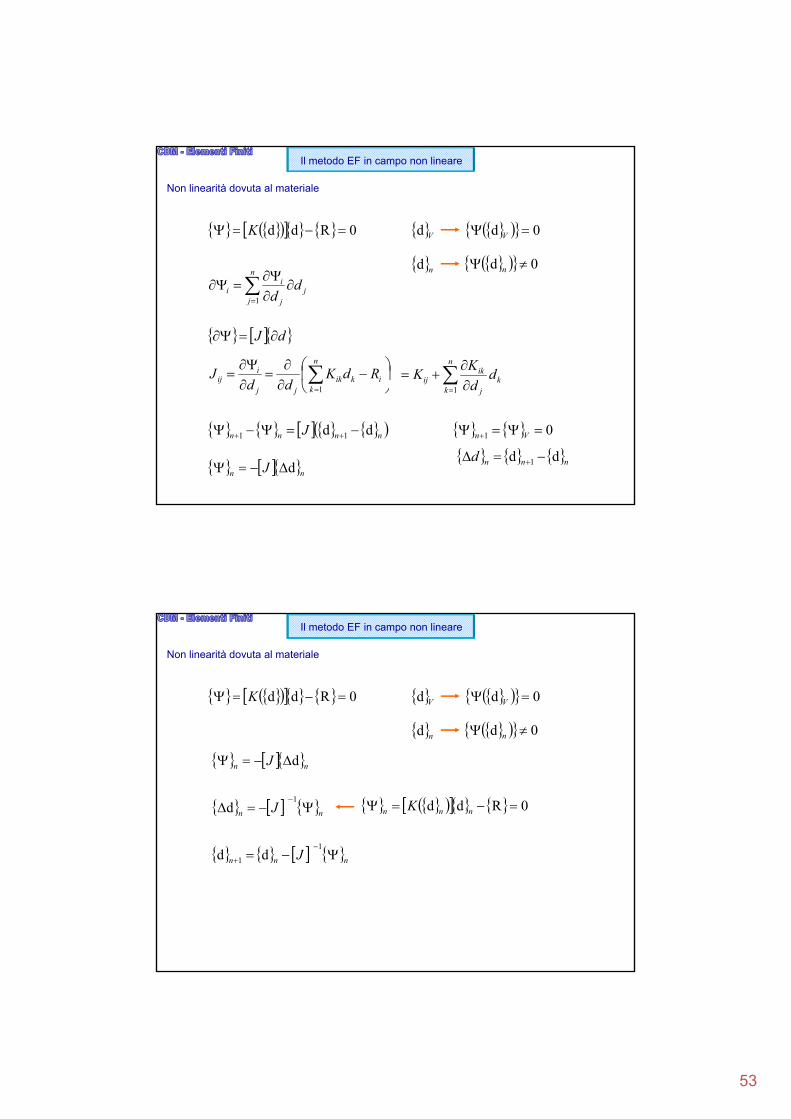
0Rdd K
Il metodo EF in campo non lineare
0d V
0d
Vd
d
Non linearità dovuta al materiale
0d n nd
n
jj
j
ii d
d1
dJ
n
ikiki
ij RdKdd
J
n
kik
ij dd
KK
kjj dd 1 k jd1
nnnn J dd 11 01 Vn
nn J d nnnd dd 1
0Rdd K
Il metodo EF in campo non lineare
0d V
0d
Vd
d
Non linearità dovuta al materiale
0d n nd
nn J d
nn J 1
d
J 1
dd
0Rdd nnn K
nnn J 1 dd

54
Il metodo EF in campo non lineare
Non linearità geometrica
0T
RdVBdV
B è funzione di d
ddB dBBB ddB LdBBB 0
εσ D se le deformazioni sono piccole è ancora utilizzabile una relazione lineare tra tensione e deformazione
d
0TT
VV
dVBdVB
Il metodo EF in campo non lineare
Non linearità geometrica
dBDD LBB
0T
dKdVBV
L LV
KKdVBDBK 0
T
dVBDBKT
V
dVBDBK 000
V
L
V
LL
V
LL dVBDBdVBDBdVBDBK 0
TTT
0
dKdVBV
L T
55
Il metodo EF in campo non lineare
Non linearità geometrica
dKKK L 0
ntn Kd 1