BASI TEORICHE DEL METODO DEGLI ELEMENTI FINITI (MEF) · rilevanti semplificazioni (travi, piastre,...
55
© Università di Pisa 2006 BASI TEORICHE DEL METODO DEGLI ELEMENTI FINITI (MEF) DOCENTE Leonardo BERTINI Dip. di Ingegneria Meccanica, Nucleare e della Produzione Tel. : 050-836621 E.mail : [email protected]
Transcript of BASI TEORICHE DEL METODO DEGLI ELEMENTI FINITI (MEF) · rilevanti semplificazioni (travi, piastre,...
© Università di Pisa 2006
BASI TEORICHE DELMETODO DEGLI ELEMENTI FINITI (MEF)
DOCENTELeonardo BERTINI
Dip. di Ingegneria Meccanica, Nucleare e della Produzione
Tel. : 050-836621
E.mail : [email protected]
© Università di Pisa 2006
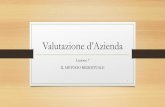
Sistemi di equazioni differenziali alle derivate parziali
Elasticità Elettromagnetismo
TermodinamicaFluidodinamica
Etc…
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
=+⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
+∂∂
∂∂
⋅−
+∇
=+⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
+∂∂
∂∂
⋅−
+∇
=+⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
+∂∂
∂∂
⋅−
+∇
021
1
021
1
021
1
2
2
2
GZ
zw
yv
xu
zw
GY
zw
yv
xu
yv
GX
zw
yv
xu
xu
ν
ν
ν
© Università di Pisa 2006
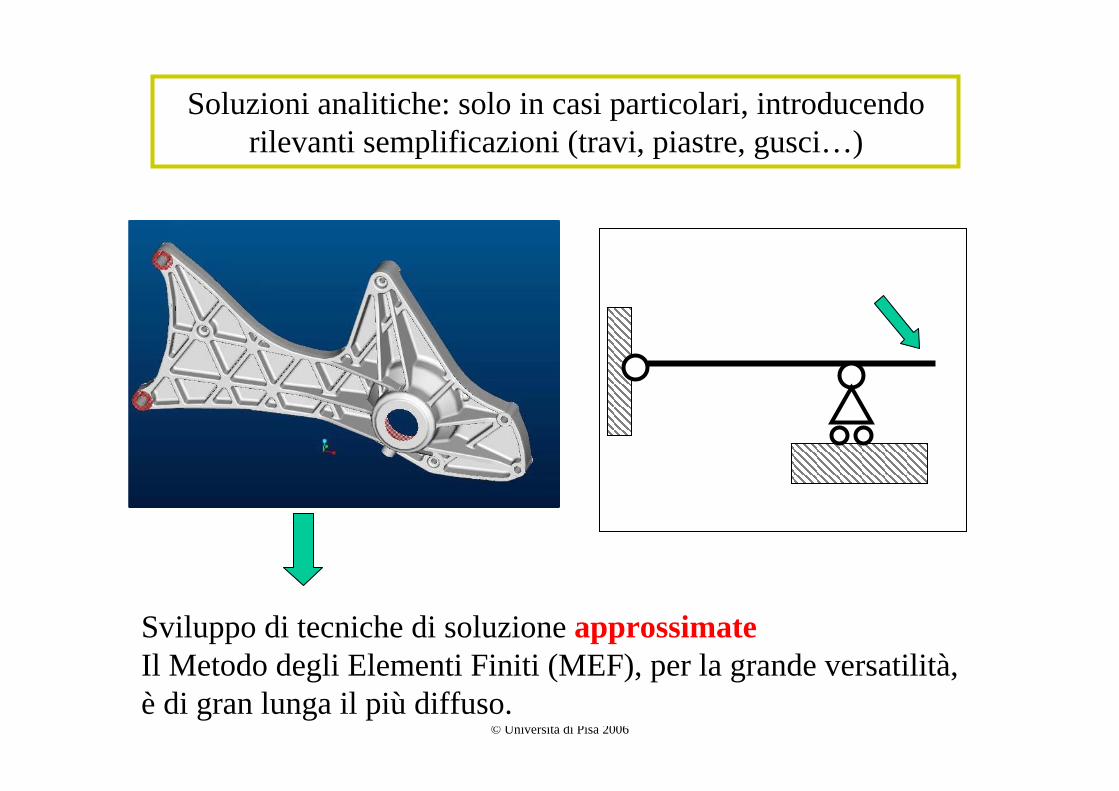
Soluzioni analitiche: solo in casi particolari, introducendo rilevanti semplificazioni (travi, piastre, gusci…)
Sviluppo di tecniche di soluzione approssimateIl Metodo degli Elementi Finiti (MEF), per la grande versatilità, è di gran lunga il più diffuso.
© Università di Pisa 2006
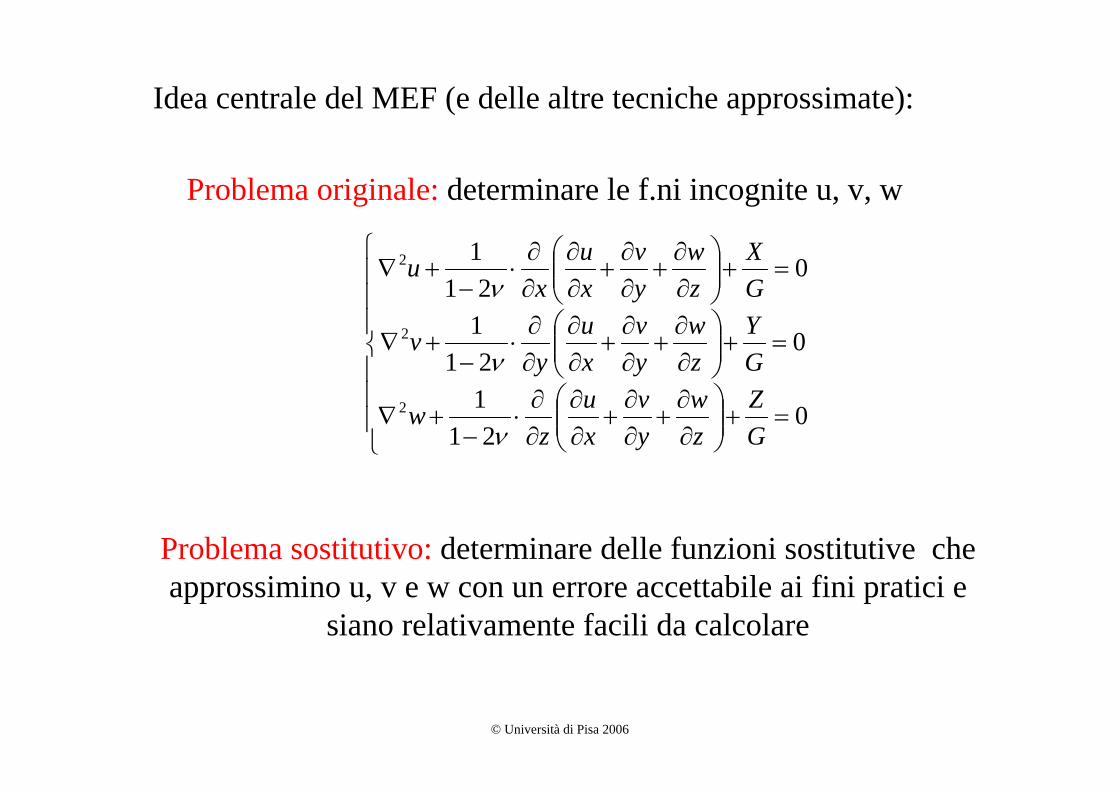
Idea centrale del MEF (e delle altre tecniche approssimate):
Problema originale: determinare le f.ni incognite u, v, w
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
=+⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
+∂∂
∂∂
⋅−
+∇
=+⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
+∂∂
∂∂
⋅−
+∇
=+⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
+∂∂
∂∂
⋅−
+∇
021
1
021
1
021
1
2
2
2
GZ
zw
yv
xu
zw
GY
zw
yv
xu
yv
GX
zw
yv
xu
xu
ν
ν
ν
Problema sostitutivo: determinare delle funzioni sostitutive che approssimino u, v e w con un errore accettabile ai fini pratici e
siano relativamente facili da calcolare
© Università di Pisa 2006
x
u(x)
u’(x)
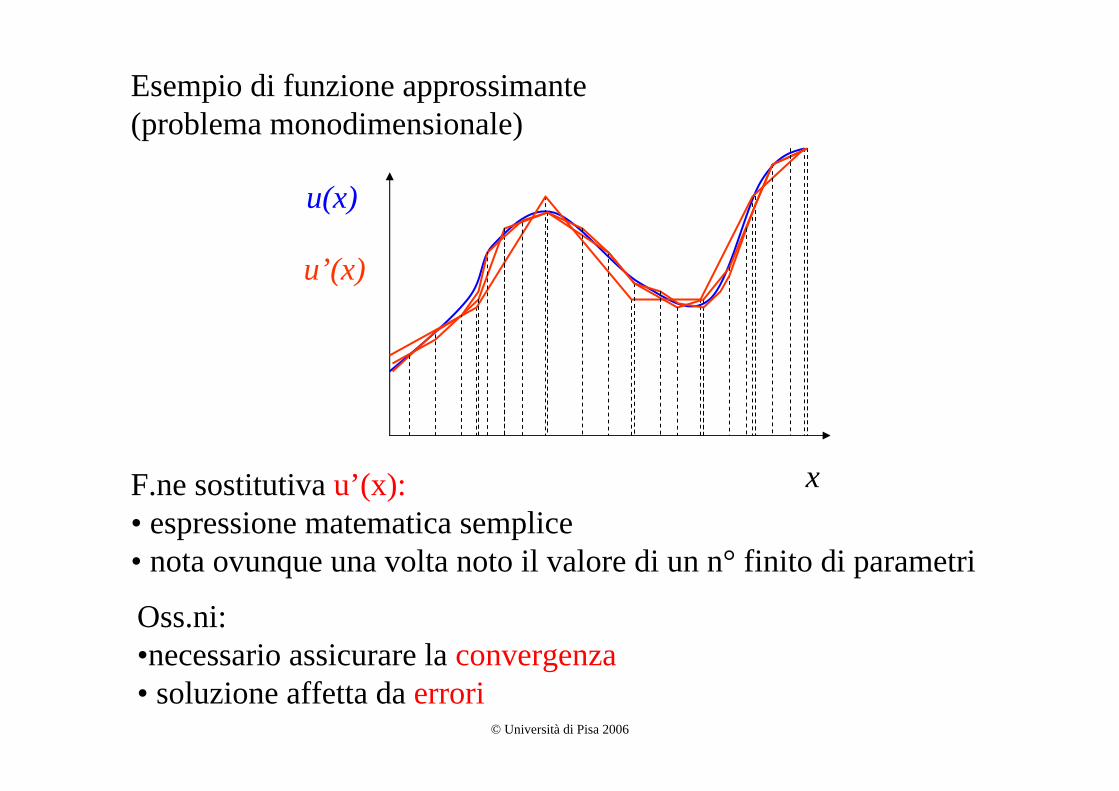
Esempio di funzione approssimante(problema monodimensionale)
F.ne sostitutiva u’(x):• espressione matematica semplice• nota ovunque una volta noto il valore di un n° finito di parametri
Oss.ni: •necessario assicurare la convergenza• soluzione affetta da errori

© Università di Pisa 2006
(a)elemento
nodo
(b)
Discretizzazione
Struttura Modello (“mesh”)

© Università di Pisa 2006
1 2 3 54 6
7 8 9 1110 12
13 14 15 1716 18
i = n° di elemento
1 2 3 54 6 7
8 9 10 1211 13 14
15 16 17 1918 20 21
22 23 24 2625 27 28
i = n° di nodo
Nodi ed elementi identificati da un numero univoco
© Università di Pisa 2006
x
y
7
7’
(g.d.l.)
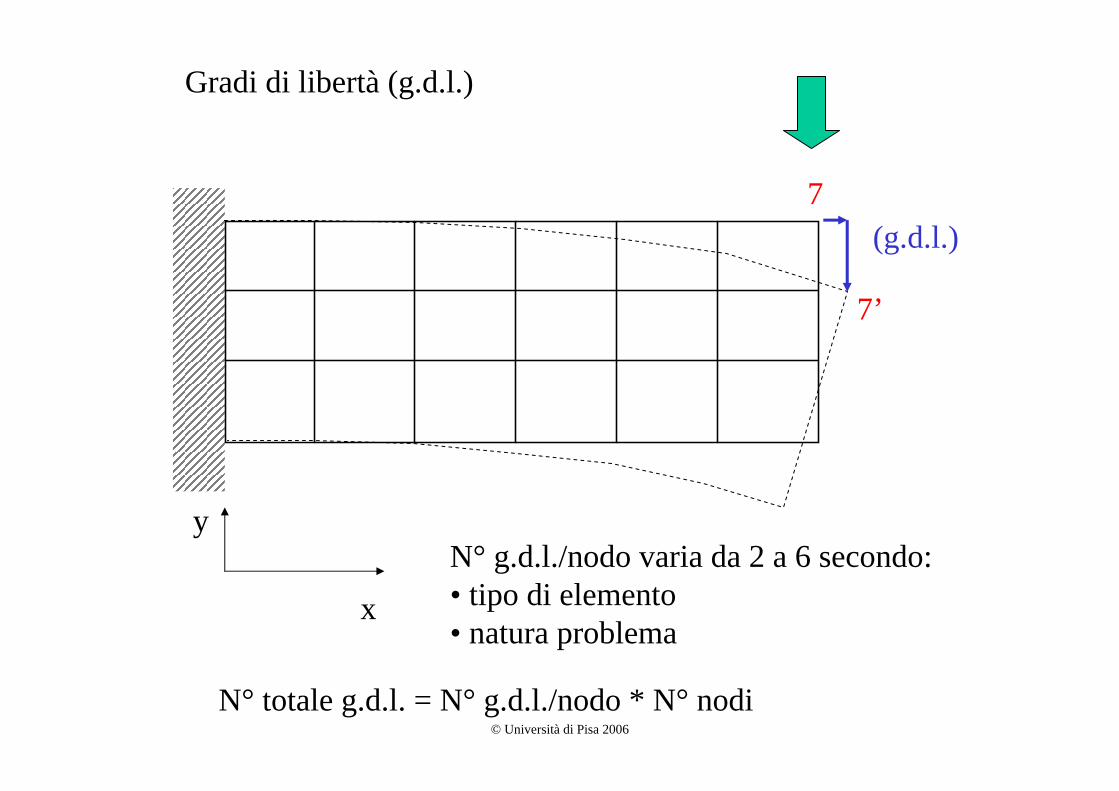
N° totale g.d.l. = N° g.d.l./nodo * N° nodi
N° g.d.l./nodo varia da 2 a 6 secondo:• tipo di elemento• natura problema
Gradi di libertà (g.d.l.)

© Università di Pisa 2006
i
j
k
e
x
y
vxj
vyj
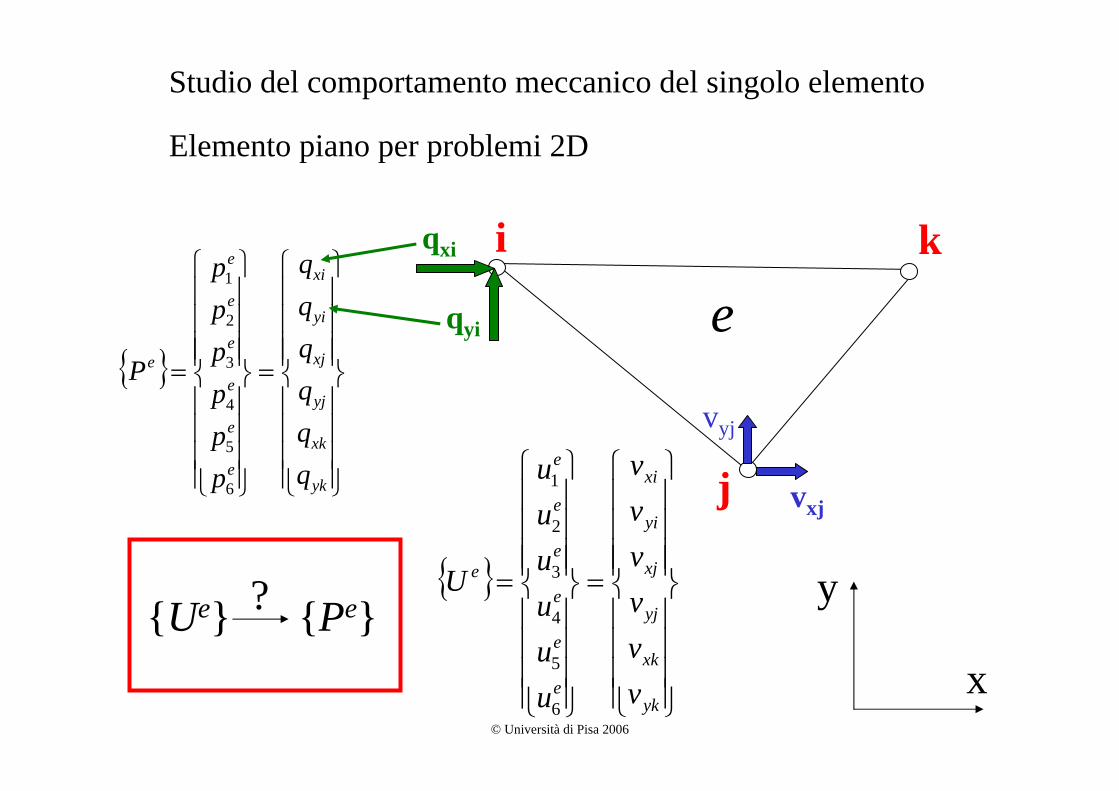
Studio del comportamento meccanico del singolo elemento
Elemento piano per problemi 2D
{ }
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
=
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
=
yk
xk
yj
xj
yi
xi
e
e
e
e
e
e
e
vvvvvv
uuuuuu
U
6
5
4
3
2
1
(6 x 1)
© Università di Pisa 2006
i
j
k
e
x
y
vxj
vyj
Studio del comportamento meccanico del singolo elemento
Elemento piano per problemi 2D
{ }
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
=
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
=
yk
xk
yj
xj
yi
xi
e
e
e
e
e
e
e
vvvvvv
uuuuuu
U
6
5
4
3
2
1
qyi
qxi
{ }
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
=
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
=
yk
xk
yj
xj
yi
xi
e
e
e
e
e
e
e
qqqqqq
pppppp
P
6
5
4
3
2
1
{Ue} {Pe}?
© Università di Pisa 2006
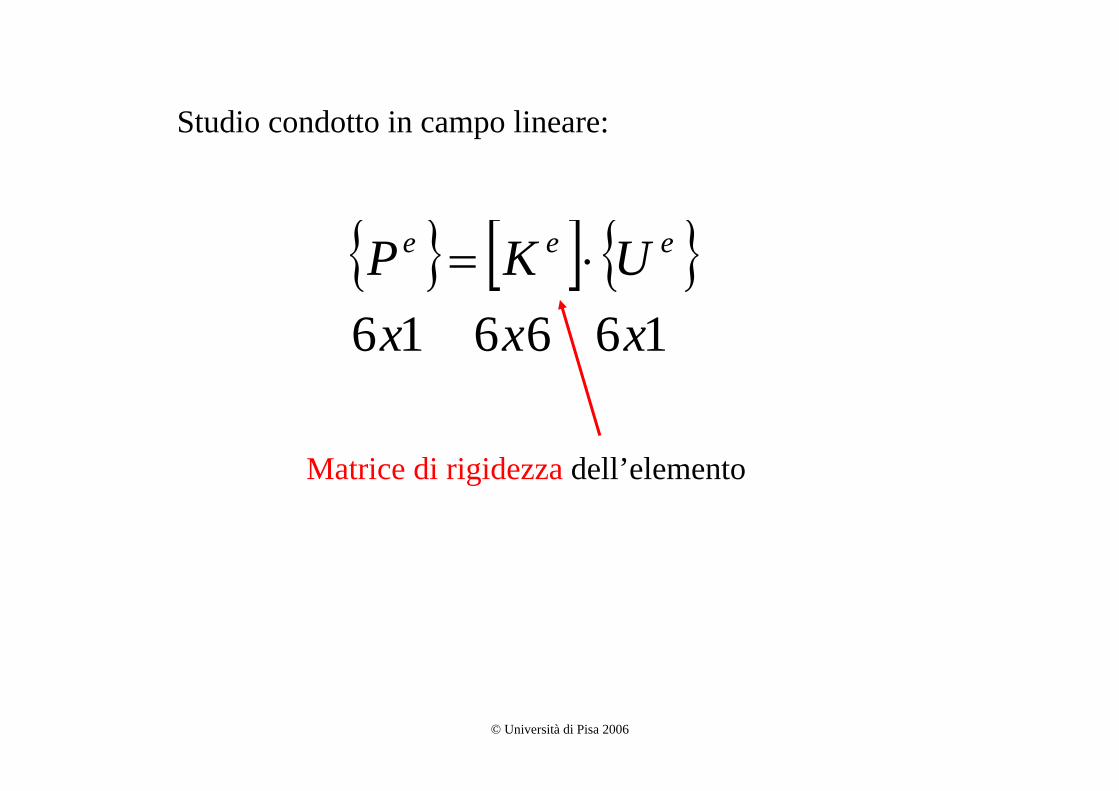
{ } [ ] { }166616 xxx
UKP eee ⋅=
Studio condotto in campo lineare:
Matrice di rigidezza dell’elemento
© Università di Pisa 2006
x
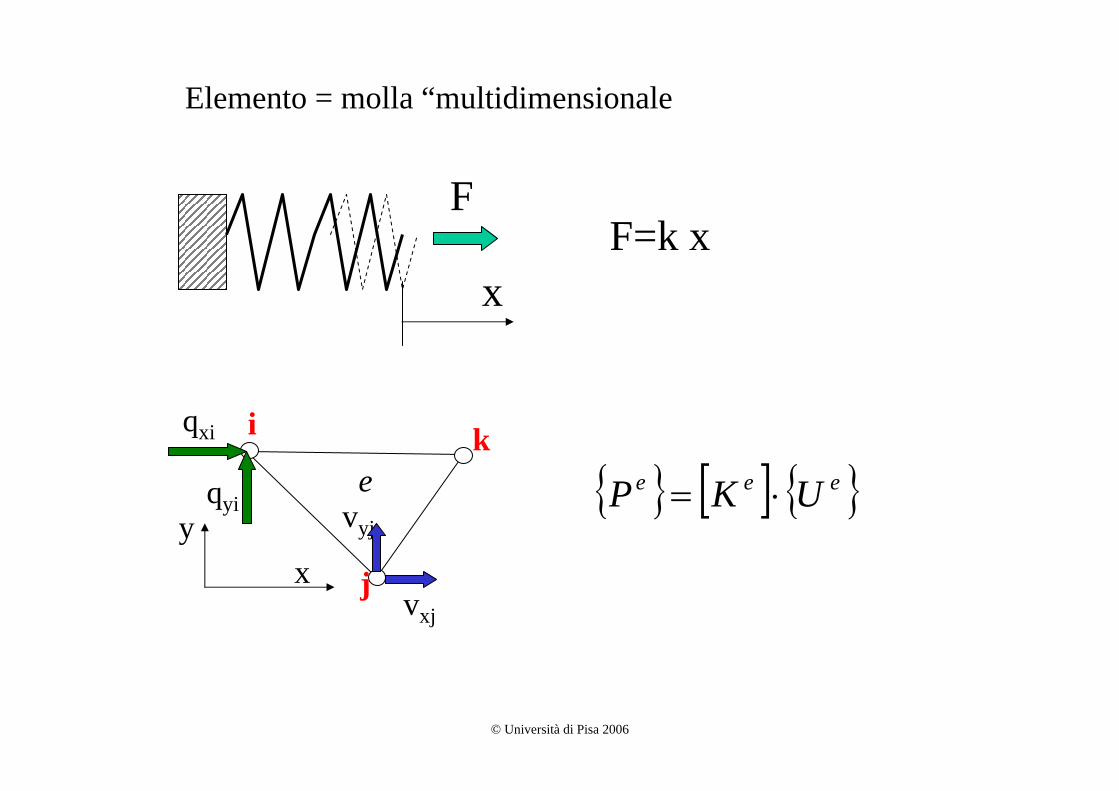
FF=k x
i
j
ke
xy
vxj
qyi
qxi
vyj{ } [ ] { }UKP eee ⋅=
Elemento = molla “multidimensionale
© Università di Pisa 2006
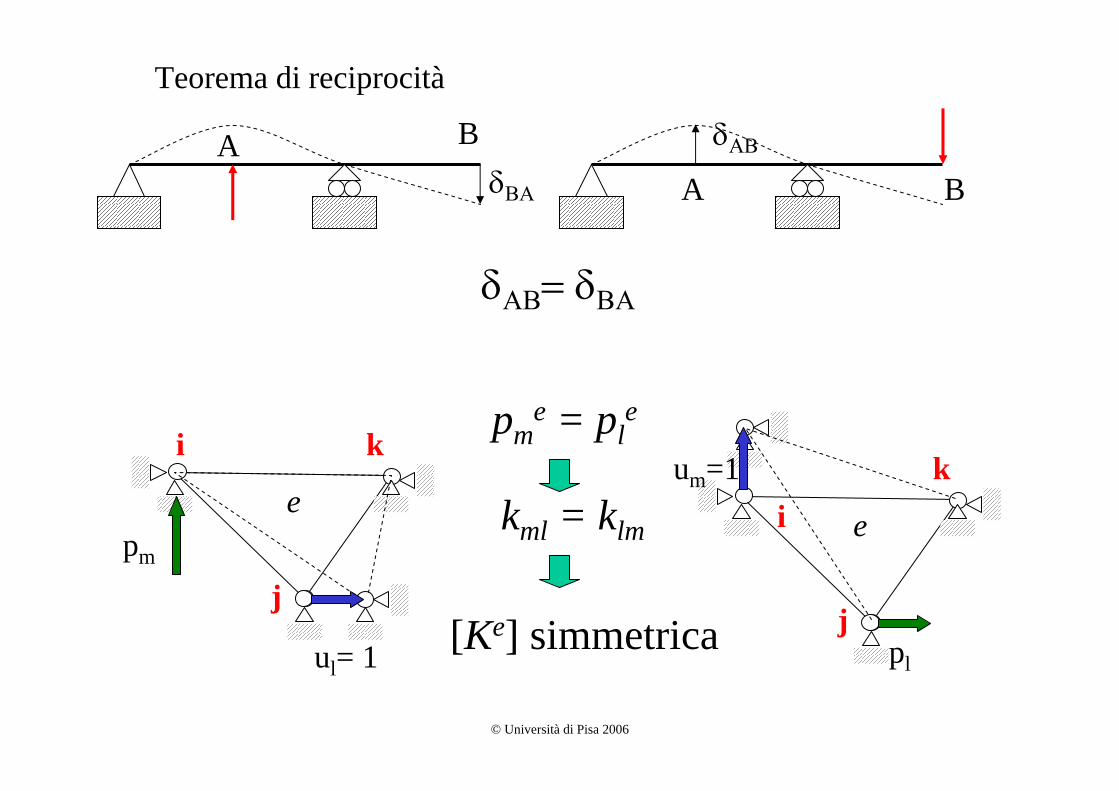
Teorema di reciprocità
pm
i
j
k
e
ul= 1j
k
e
pl
ium=1
A
δΑΒB
AδΒΑ
B
δΑΒ= δΒΑ
pme = pl
e
kml = klm
[Ke] simmetrica
© Università di Pisa 2006
i
j
ke
x
y vx
vy
P(x,y)
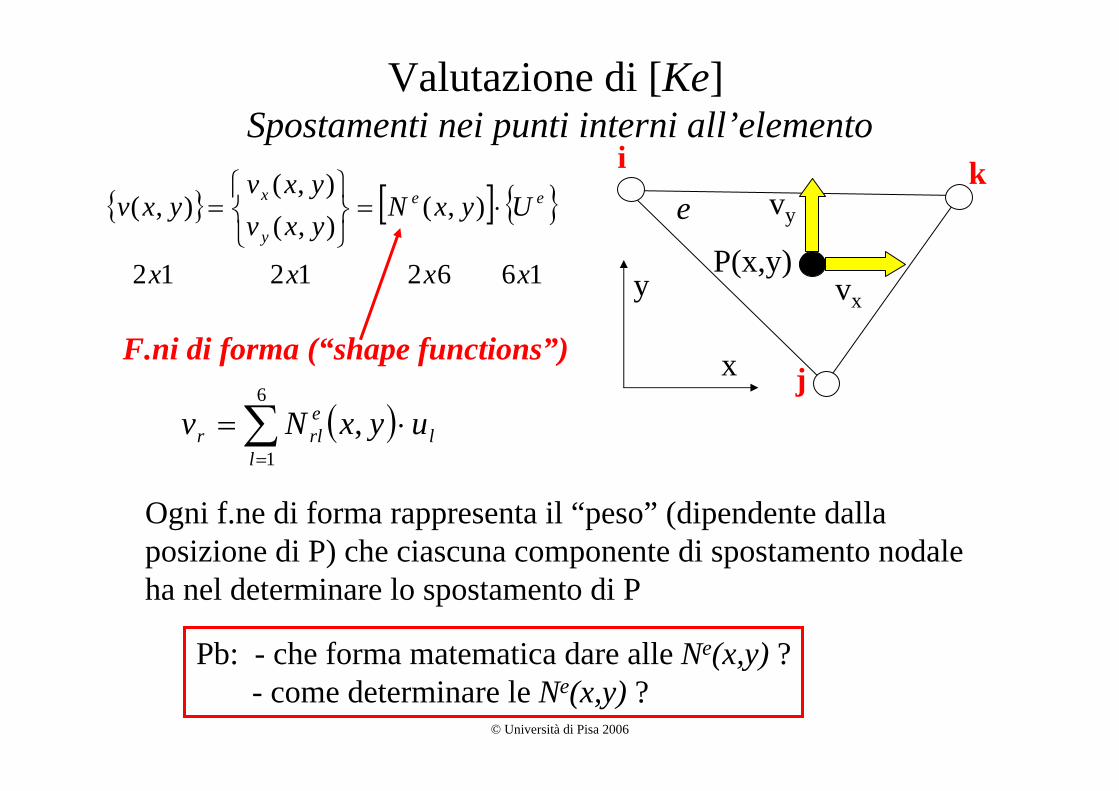
Valutazione di [Ke]Spostamenti nei punti interni all’elemento
{ } [ ] { }16621212
),(),(),(
),(
xxxx
UyxNyxvyxv
yxv ee
y
x ⋅=⎭⎬⎫
⎩⎨⎧
=
F.ni di forma (“shape functions”)
Pb: - che forma matematica dare alle Ne(x,y) ?- come determinare le Ne(x,y) ?
( )∑=
⋅=6
1,
ll
erlr uyxNv
Ogni f.ne di forma rappresenta il “peso” (dipendente dalla posizione di P) che ciascuna componente di spostamento nodale ha nel determinare lo spostamento di P
© Università di Pisa 2006
i
j
k
e
x
y
i
j
ke
vx
vy
P(x,y)
vxj
{ }
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
=
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
=
yk
xk
yj
xj
yi
xi
e
vvvvvv
uuuuuu
U
6
5
4
3
2
1
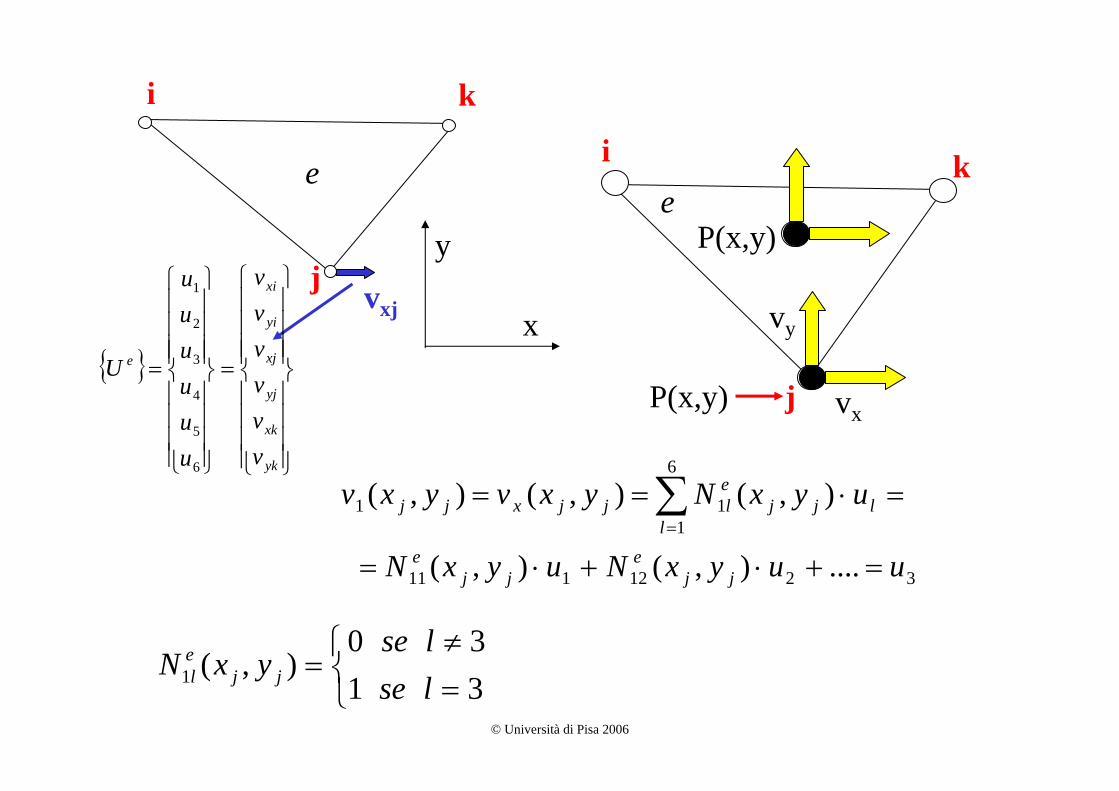
P(x,y)
⎩⎨⎧
=≠
=3130
),(1 lselse
yxN jjel
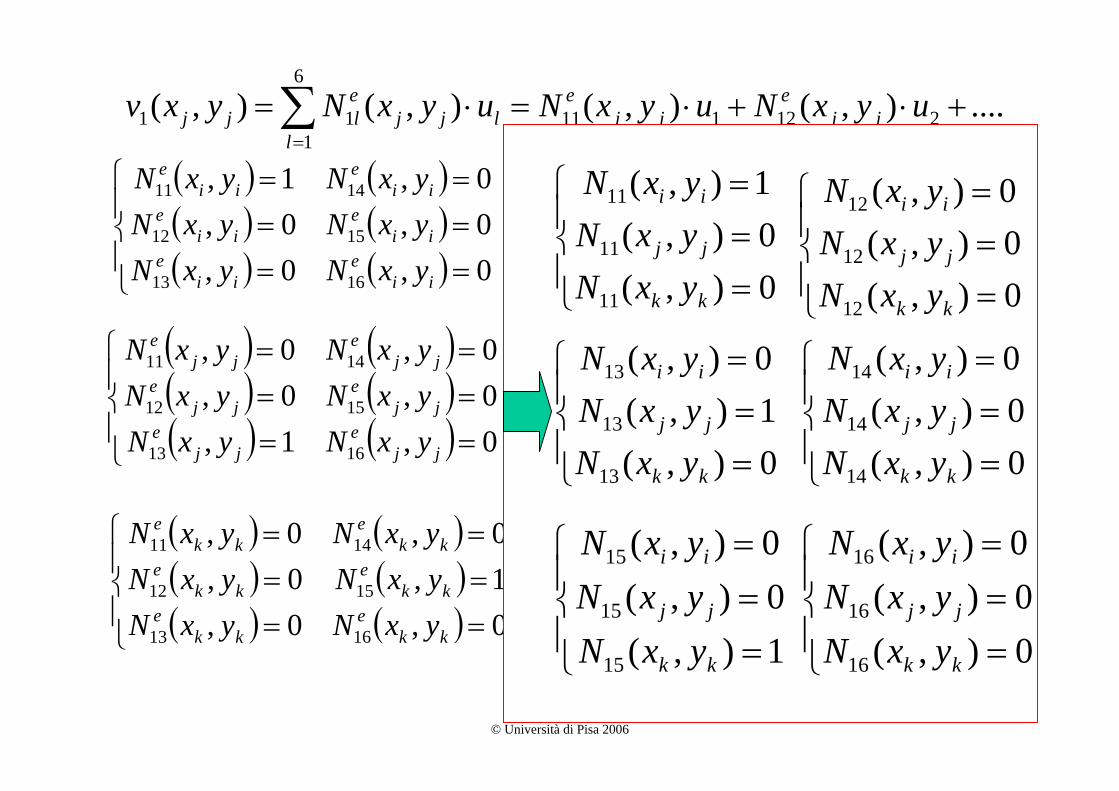
3212111
6
111
....),(),(
),(),(),(
uuyxNuyxN
uyxNyxvyxv
jje
jje
lljj
eljjxjj
=+⋅+⋅=
=⋅== ∑=
© Università di Pisa 2006
i
j
ke
....),(),(),(),( 212111
6
111 +⋅+⋅=⋅=∑
=
uyxNuyxNuyxNyxv jje
jje
lljj
eljj
{ }
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
=
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
=
yk
xk
yj
xj
yi
xi
e
vvvvvv
uuuuuu
U
6
5
4
3
2
1
( ) ( )( ) ( )( ) ( )⎪
⎩
⎪⎨
⎧
======
0,0,0,0,0,1,
1613
1512
1411
iie
iie
iie
iie
iie
iie
yxNyxNyxNyxNyxNyxN
vx
vy P(x,y)
( ) ( )( ) ( )( ) ( )⎪
⎩
⎪⎨
⎧
======
0,1,0,0,0,0,
1613
1512
1411
jje
jje
jje
jje
jje
jje
yxNyxNyxNyxNyxNyxN
( ) ( )( ) ( )( ) ( )⎪
⎩
⎪⎨
⎧
======
0,0,1,0,0,0,
1613
1512
1411
kke
kke
kke
kke
kke
kke
yxNyxNyxNyxNyxNyxN
vx
vy
P(x,y)
vx
vy
P(x,y)⎪⎩
⎪⎨
⎧
===
0),(0),(1),(
11
11
11
kk
jj
ii
yxNyxNyxN
⎪⎩
⎪⎨
⎧
===
0),(1),(0),(
13
13
13
kk
jj
ii
yxNyxNyxN
⎪⎩
⎪⎨
⎧
===
1),(0),(0),(
15
15
15
kk
jj
ii
yxNyxNyxN
⎪⎩
⎪⎨
⎧
===
0),(0),(0),(
12
12
12
kk
jj
ii
yxNyxNyxN
⎪⎩
⎪⎨
⎧
===
0),(0),(0),(
14
14
14
kk
jj
ii
yxNyxNyxN
⎪⎩
⎪⎨
⎧
===
0),(0),(0),(
16
16
16
kk
jj
ii
yxNyxNyxN
© Università di Pisa 2006
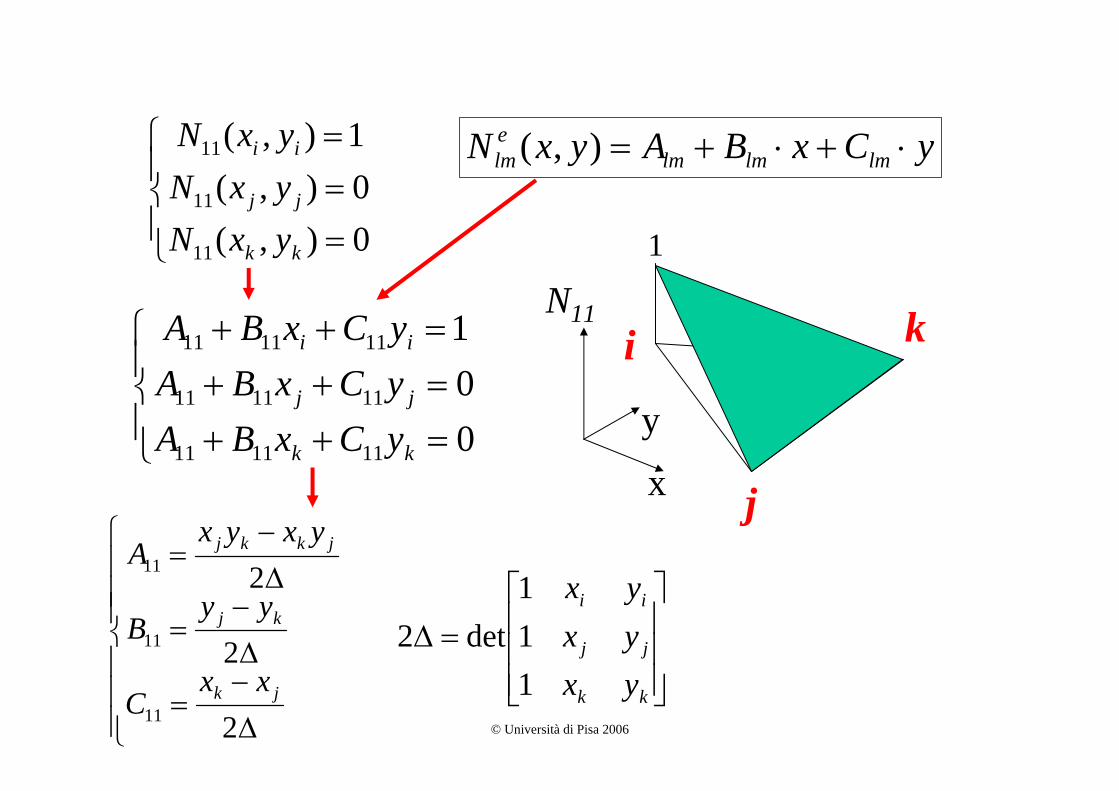
yCxBAyxN lmlmlmelm ⋅+⋅+=),(
⎪⎩
⎪⎨
⎧
===
0),(0),(1),(
11
11
11
kk
jj
ii
yxNyxNyxN
i
j
k
x
y
N11
1
⎪⎩
⎪⎨
⎧
=++=++=++
001
111111
111111
111111
kk
jj
ii
yCxBAyCxBAyCxBA
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
Δ−
=
Δ−
=
Δ−
=
2
2
2
11
11
11
jk
kj
jkkj
xxC
yyB
yxyxA
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=Δ
kk
jj
ii
yxyxyx
111
det2
© Università di Pisa 2006
i
j
k
x
y
N11
1
i
j
k
x
y
N13
1
i
j
k
x
y
N15
1

© Università di Pisa 2006
yCxBAyxN lmlmlmelm ⋅+⋅+=),(
⎪⎩
⎪⎨
⎧
===
0),(0),(0),(
12
12
12
kk
jj
ii
yxNyxNyxN
i
j
k
x
y
N12 0
⎪⎩
⎪⎨
⎧
=++=++=++
000
121212
121212
121212
kk
jj
ii
yCxBAyCxBAyCxBA
⎪⎩
⎪⎨
⎧
===
000
12
12
12
CBA
© Università di Pisa 2006
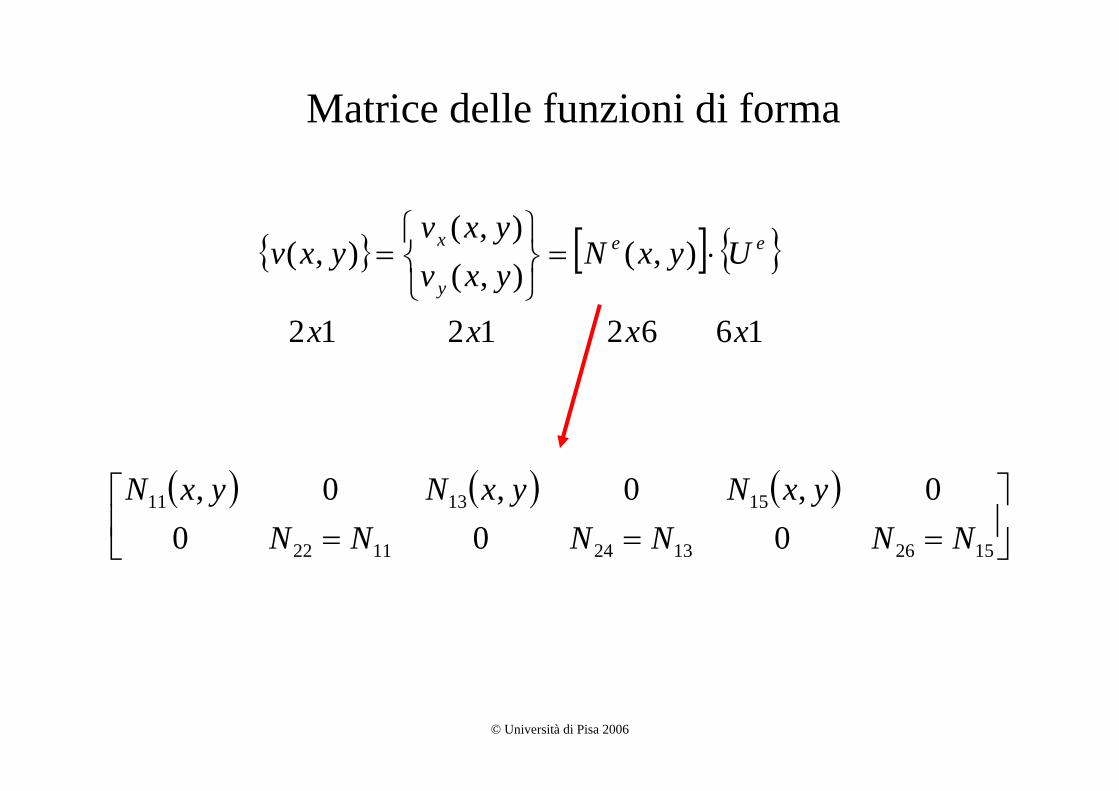
{ } [ ] { }16621212
),(),(),(
),(
xxxx
UyxNyxvyxv
yxv ee
y
x ⋅=⎭⎬⎫
⎩⎨⎧
=
( ) ( ) ( )⎥⎦
⎤⎢⎣
⎡=== 152613241122
151311
0000,0,0,
NNNNNNyxNyxNyxN
Matrice delle funzioni di forma
© Università di Pisa 2006
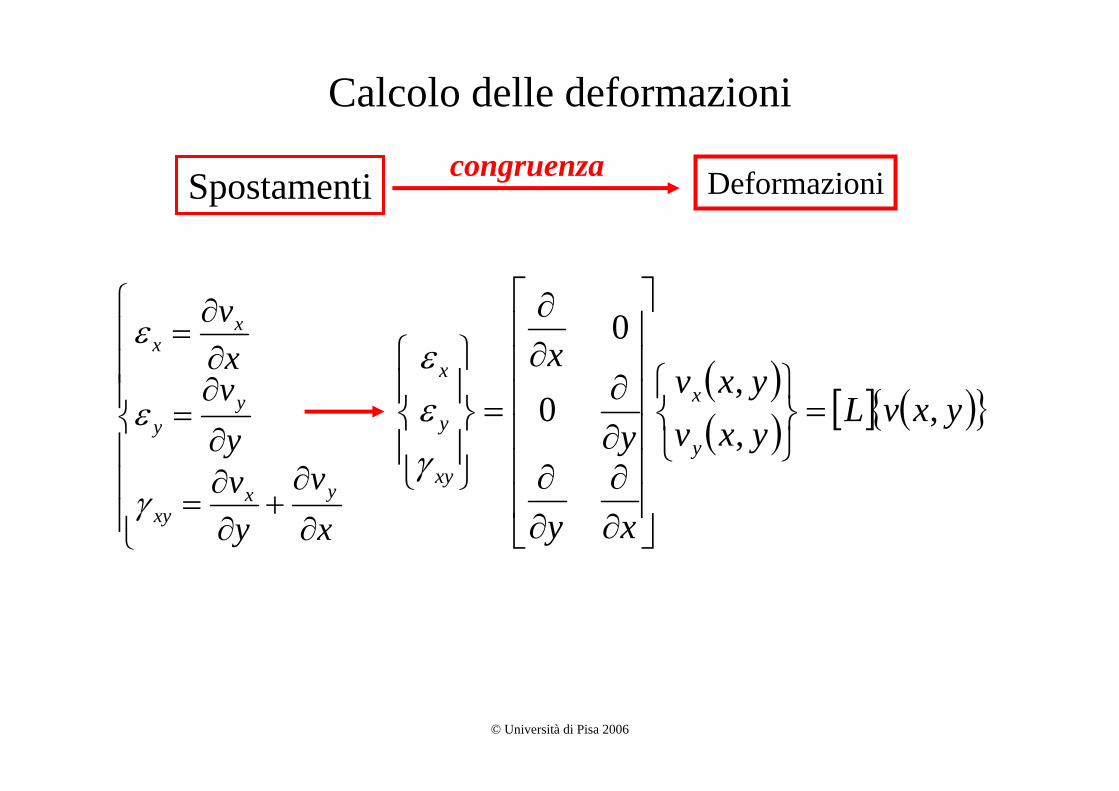
Calcolo delle deformazioni
Spostamenti Deformazionicongruenza
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
∂∂
+∂∂
=
∂∂
=
∂∂
=
xv
yvyvxv
yxxy
yy
xx
γ
ε
ε( )( ) [ ] ( ){ }yxvL
yxvyxv
xy
y
x
y
x
xy
y
x
,,,
0
0
=⎭⎬⎫
⎩⎨⎧
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
∂∂
∂∂
∂∂
∂∂
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
γεε
© Università di Pisa 2006
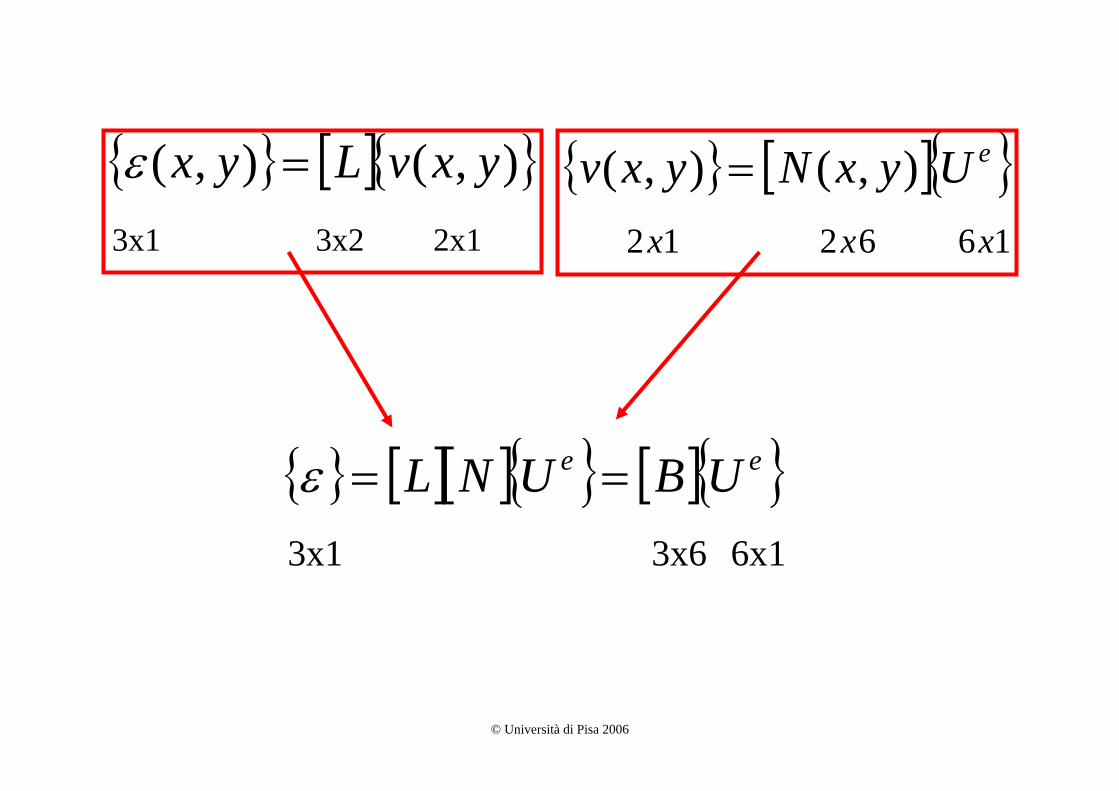
{ } [ ]{ }2x13x23x1
),(),( yxvLyx =ε { } [ ]{ }166212
),(),(xxx
eUyxNyxv =
{ } [ ][ ]{ } [ ]{ }6x13x63x1
ee UBUNL ==ε
© Università di Pisa 2006
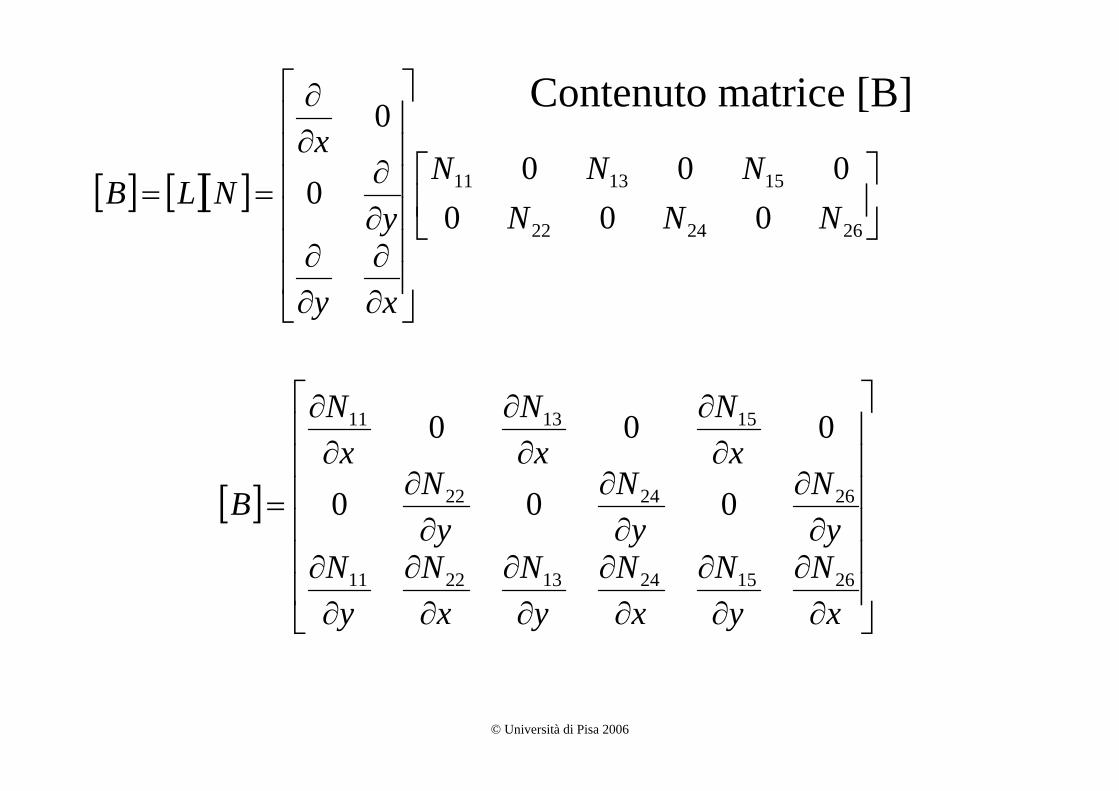
Contenuto matrice [B]
[ ] [ ][ ] ⎥⎦
⎤⎢⎣
⎡
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
∂∂
∂∂
∂∂
∂∂
==262422
151311
000000
0
0
NNNNNN
xy
y
xNLB
[ ]
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
=
xN
yN
xN
yN
xN
yN
yN
yN
yN
xN
xN
xN
B
261524132211
262422
151311
000
000

© Università di Pisa 2006
Relazioni costitutive
( )
{ } [ ]{ }εσ
γεε
νν
ν
ντσσ
D
E
xy
y
x
xy
y
x
=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
2/1000101
1 2
( )⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
+=
−=
−=
E
EE
EE
xyxy
xyy
yxx
τνγ
νσσε
νσσε
12
Esempio 1: stato piano di tensione, materiale isotropo
© Università di Pisa 2006
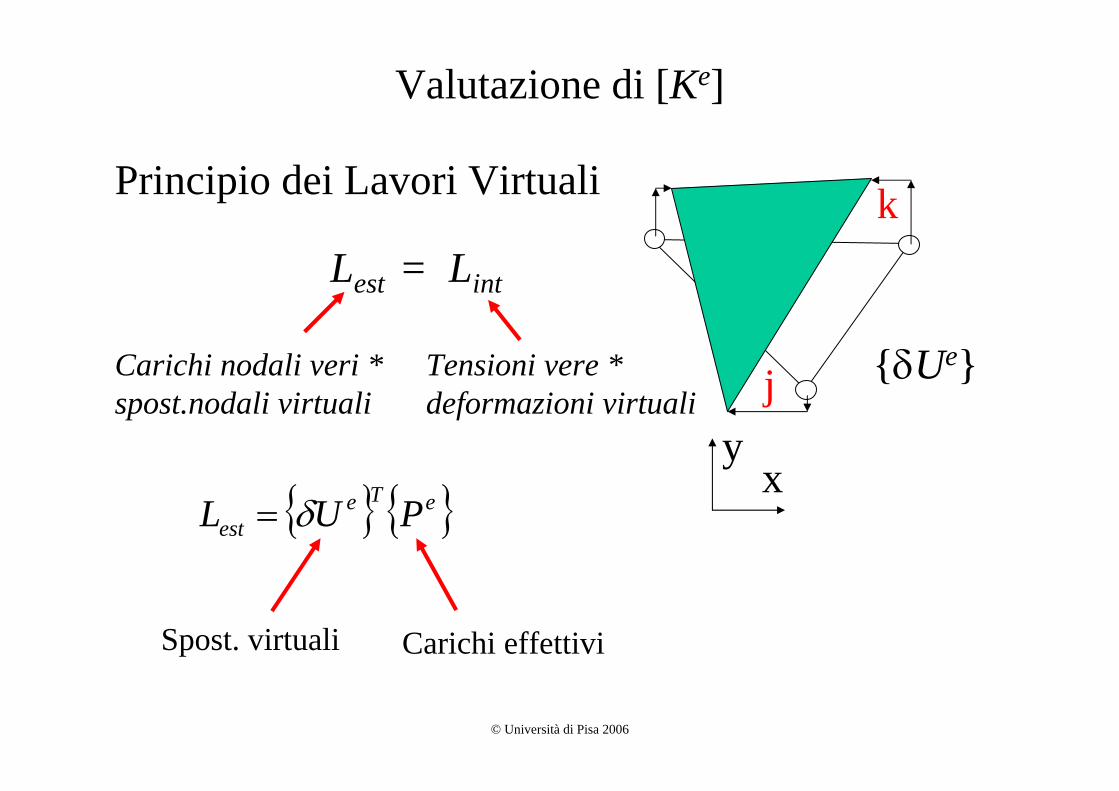
Valutazione di [Ke]
i
j
ke
xy
{δUe}
Principio dei Lavori Virtuali
Lest = Lint
{ } { }eTeest PUL δ=
Spost. virtuali Carichi effettivi
Carichi nodali veri * spost.nodali virtuali
Tensioni vere * deformazioni virtuali
© Università di Pisa 2006
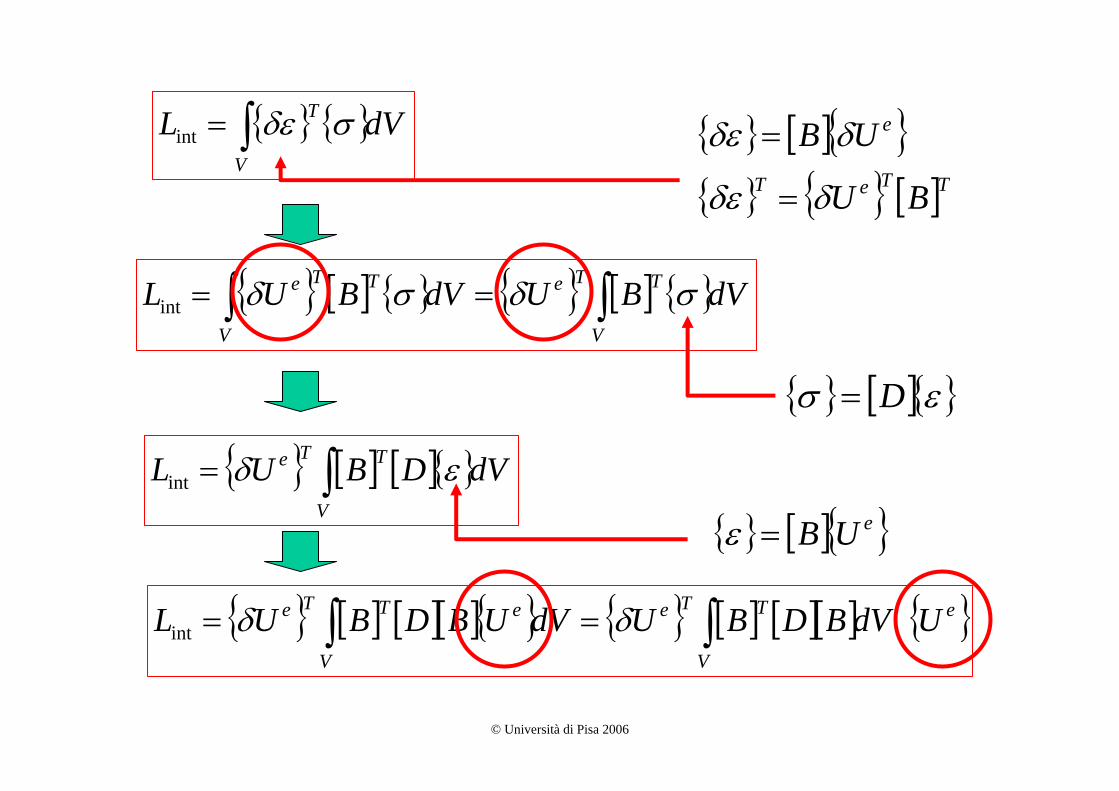
{ } { }dVLV
T∫= σδεint { } [ ]{ }{ } { } [ ]TTeT
e
BU
UB
δδε
δδε
=
=
{ } [ ] { } { } [ ] { }dVBUdVBULV
TTe
V
TTe ∫∫ == σδσδint
{ } [ ] [ ][ ]{ } { } [ ] [ ][ ] { }e
V
TTe
V
eTTe UdVBDBUdVUBDBUL ∫∫ == δδint
{ } [ ] [ ]{ }dVDBULV
TTe ∫= εδint
{ } [ ]{ }εσ D=
{ } [ ]{ }eUB=ε
© Università di Pisa 2006
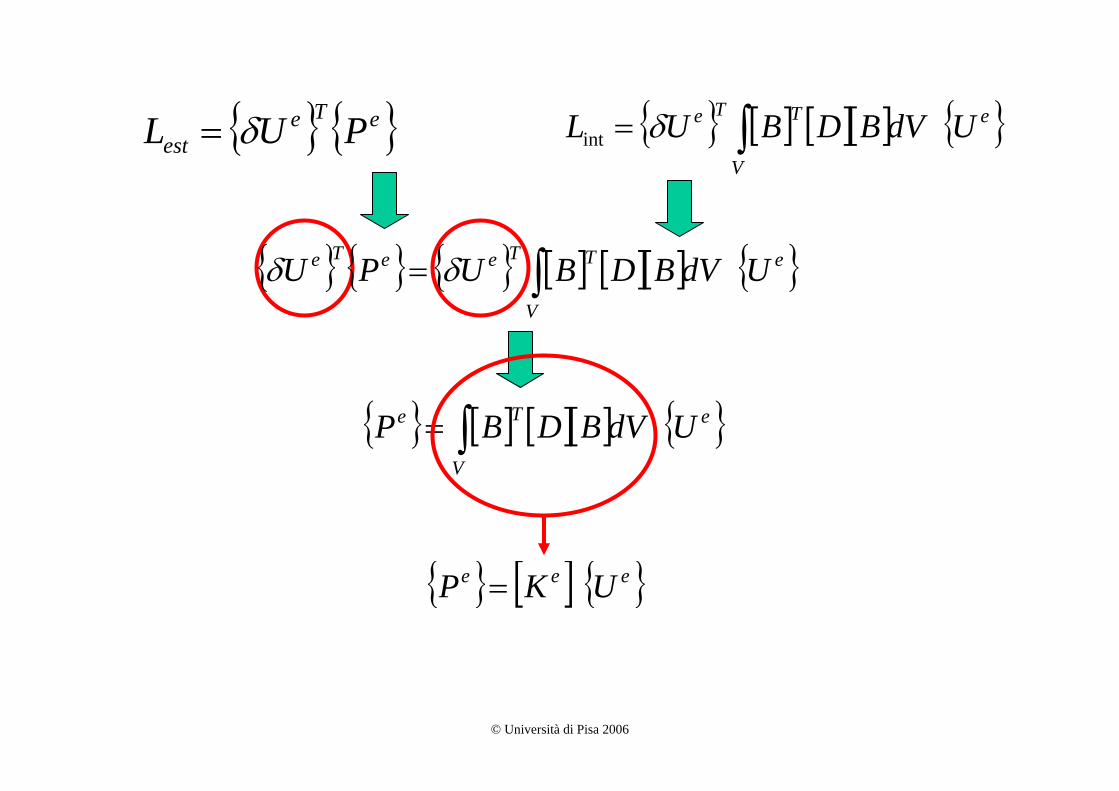
{ } [ ] [ ][ ] { }e
V
TTe UdVBDBUL ∫= δint{ } { }eTeest PUL δ=
{ } { } { } [ ] [ ][ ] { }e
V
TTeeTe UdVBDBUPU ∫= δδ
{ } [ ] [ ][ ] { }e
V
Te UdVBDBP ∫=
{ } [ ] { }eee UKP =
© Università di Pisa 2006
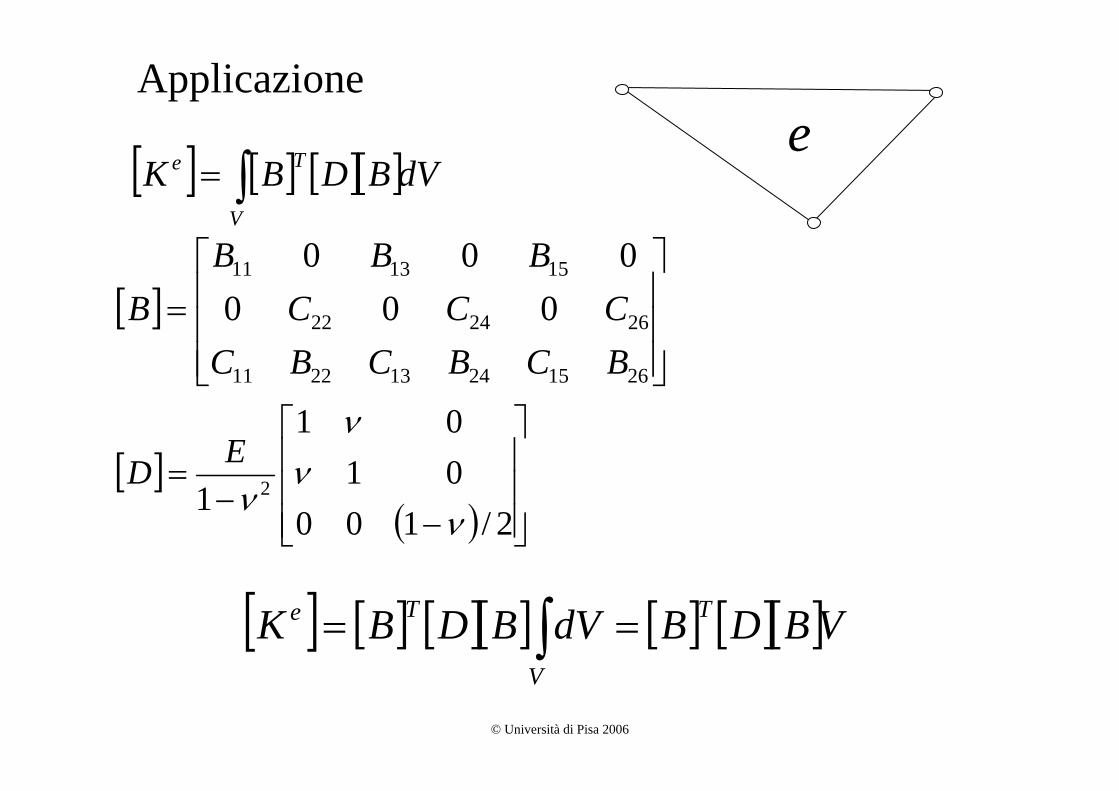
Applicazionee[ ] [ ] [ ][ ]dVBDBK
V
Te ∫=
[ ]⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
261524132211
262422
151311
000000
BCBCBCCCC
BBBB
[ ]( ) ⎥
⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−
=2/100
0101
1 2
νν
ν
νED
[ ] [ ] [ ][ ] [ ] [ ][ ]VBDBdVBDBK T
V
Te == ∫
© Università di Pisa 2006
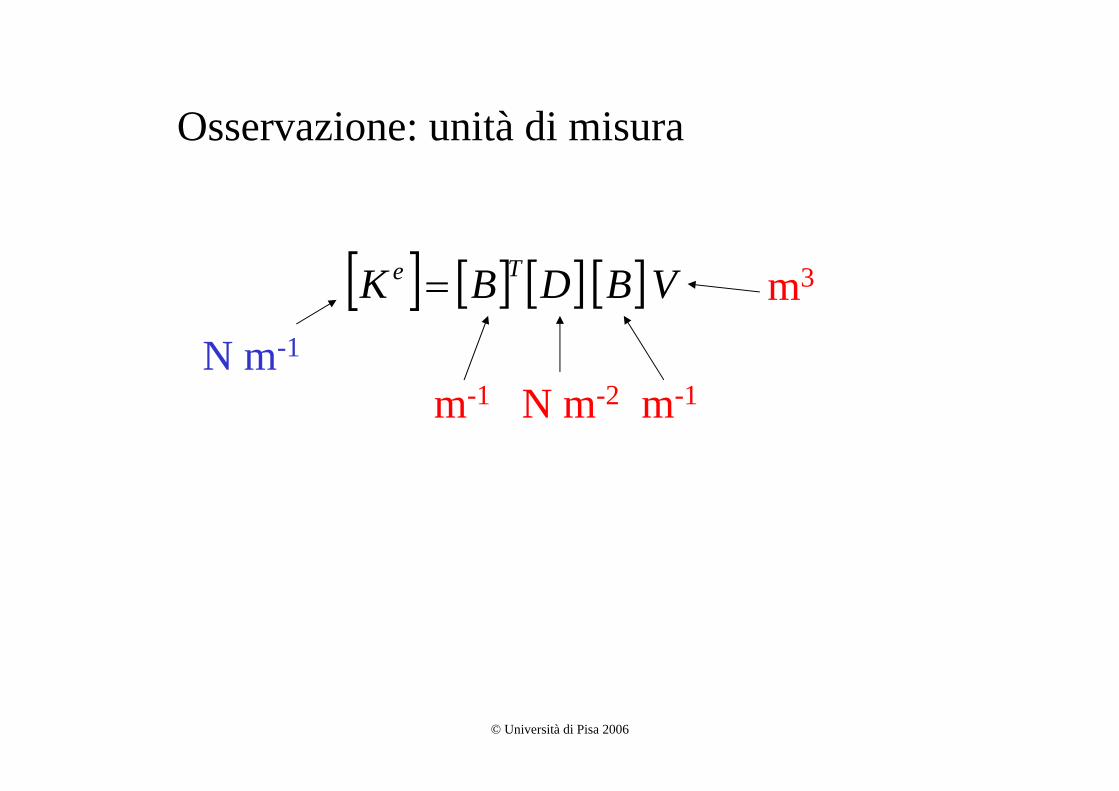
[ ] [ ] [ ] [ ]VBDBK Te =
Osservazione: unità di misura
m-1 m-1N m-2
m3
N m-1
© Università di Pisa 2006
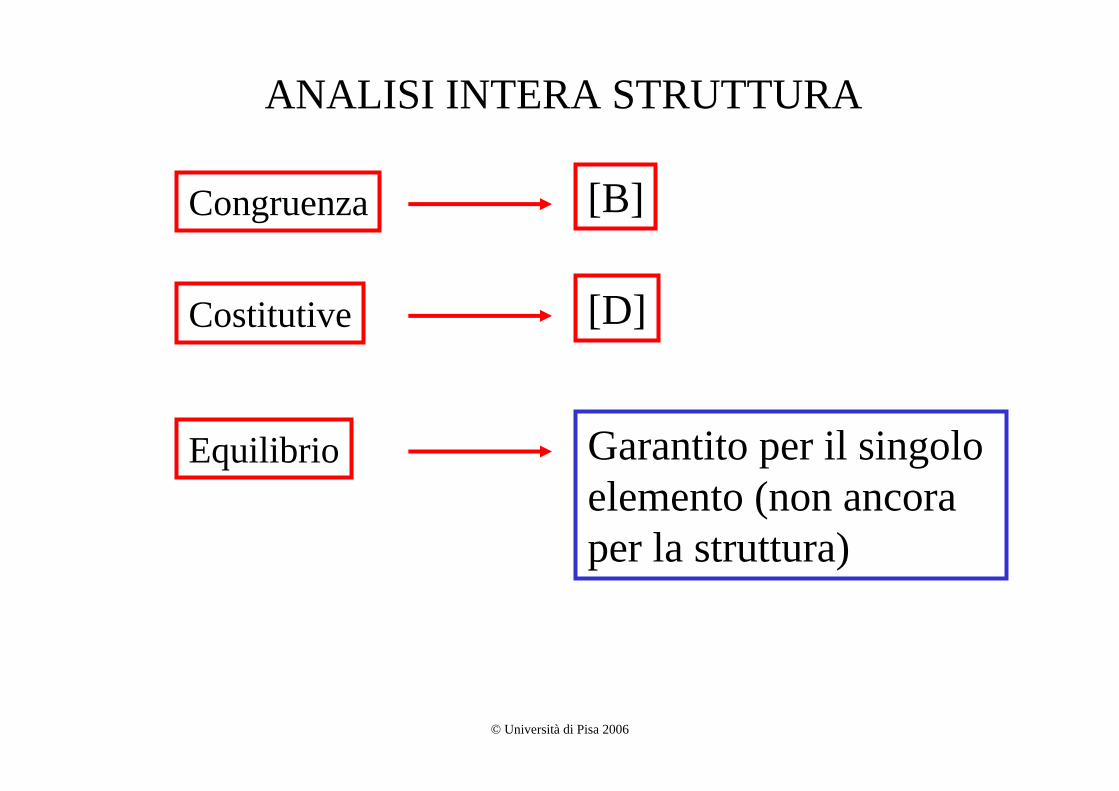
ANALISI INTERA STRUTTURA
Congruenza [B]
Costitutive [D]
Equilibrio Garantito per il singolo elemento (non ancora per la struttura)
© Università di Pisa 2006
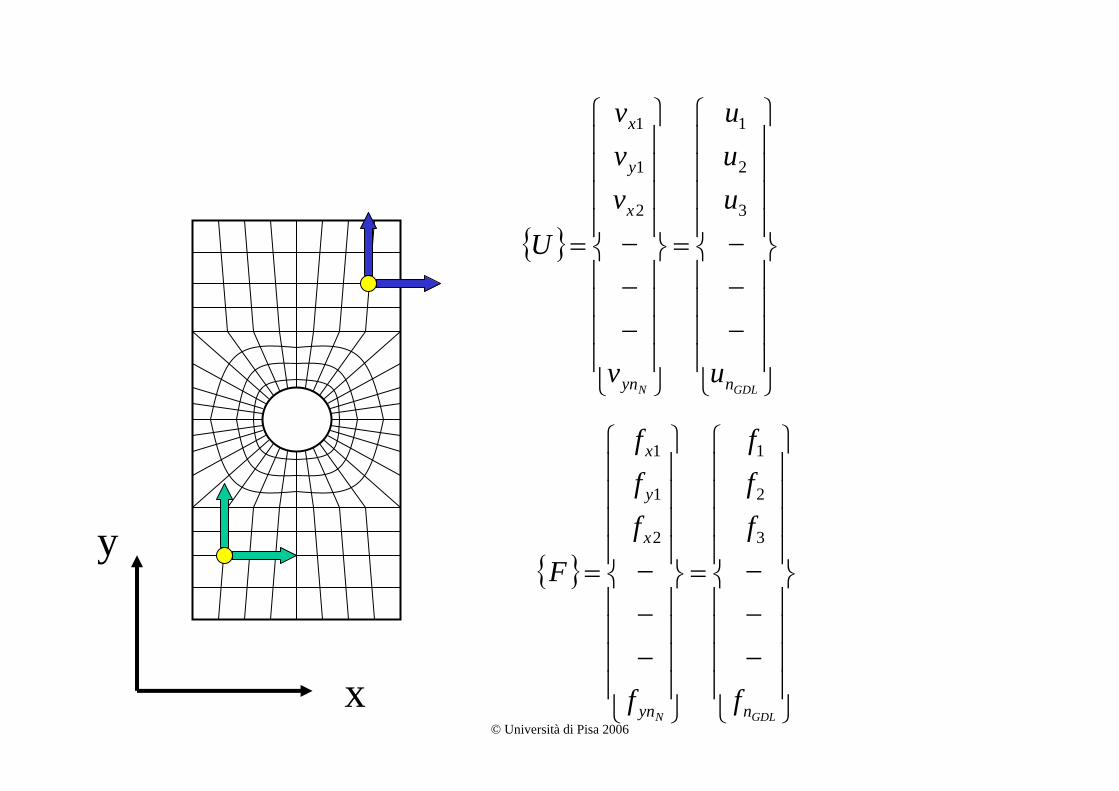
x
y
{ }
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
−−−=
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
−−−=
GDLN nyn
x
y
x
u
uuu
v
vvv
U3
2
1
2
1
1
{ }
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
−−−=
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
−−−=
GDLN nyn
x
y
x
f
fff
f
fff
F3
2
1
2
1
1
© Università di Pisa 2006
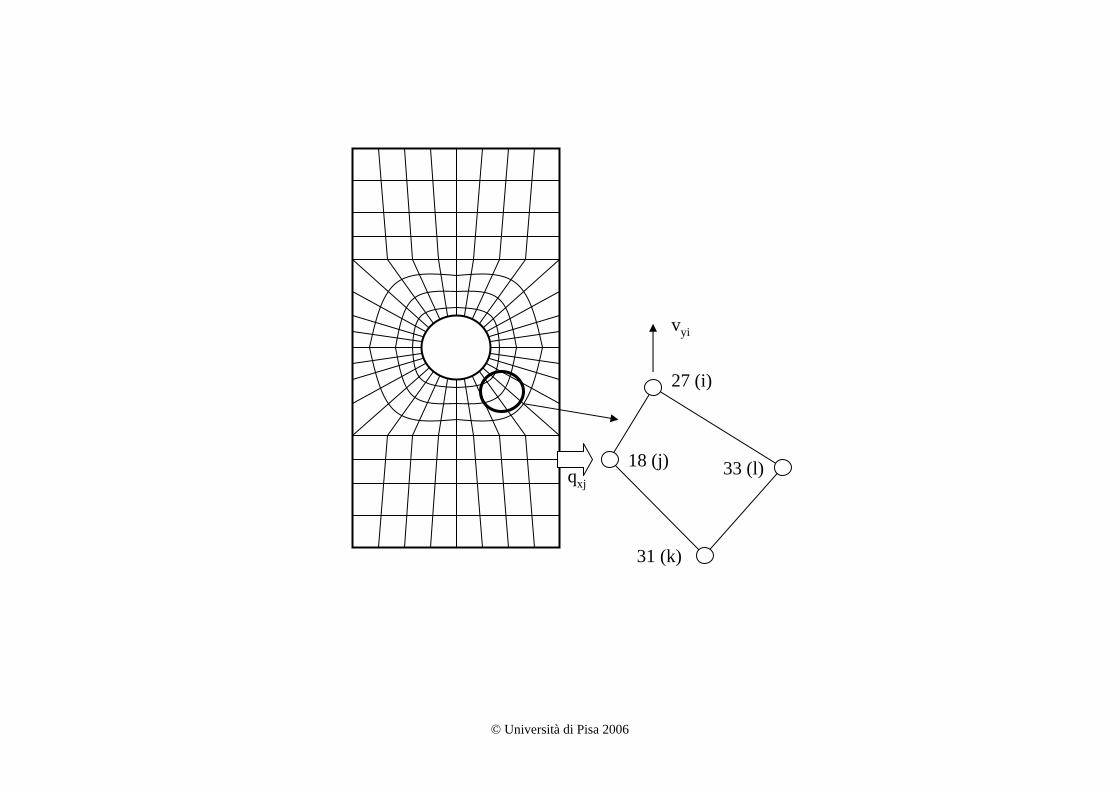
27 (i)
18 (j)
31 (k)
33 (l)
vyi
qxj

© Università di Pisa 2006
{ } [ ]{ }
18881818
...
...
...
...
...
..................
..................
..................
......
...
...
...
...
...
...
...
...
...
...
4,33,31,3
6,25,24,23,22,21,2
6,15,14,13,12,11,1
3
xxxx
vkkk
kkkkkkkkkkkk
pqUKP
eyi
eee
eeeeee
eeeeee
exjeee
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
=
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
⇒=e3,2k
27 (i)
18 (j)
31 (k)
33 (l)
vyi
qxj
{ } [ ]{ }
11..................
)(.........
..............................
..............................
..............................
..............................
...............000......
...............0)(0......
...............00......
..............................
..............................
..............................
...
...
...
...0
)(0.........
54
3*
35**
xnxnnxn
vupp
UKP
gdlgdlgdlgdl
eyi
eeee
⎪⎪⎪⎪⎪⎪⎪
⎭
⎪⎪⎪⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪⎪⎪
⎨
⎧
=
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
==
⎪⎪⎪⎪⎪⎪⎪
⎭
⎪⎪⎪⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪⎪⎪
⎨
⎧
=⇒=
e3,2
*e35,54 k
0k

© Università di Pisa 2006
e1
e4e3
e2fj
pje4*
pje1*
pje3*
pje2*
x
y
∑=
=En
e
ejj pf
1
*
01
* =−∑=
En
e
ejj pf
Carico esterno
Carico applicato nel nodo all’elemento “e”
© Università di Pisa 2006
i
n
i
n
e
eji
n
e
n
ii
eji
n
e
ejj ukukpf
gdl EE gdlE
∑ ∑∑ ∑∑= == ==
⎟⎟⎠
⎞⎜⎜⎝
⎛=⎟⎟
⎠
⎞⎜⎜⎝
⎛==
1 11 11
***
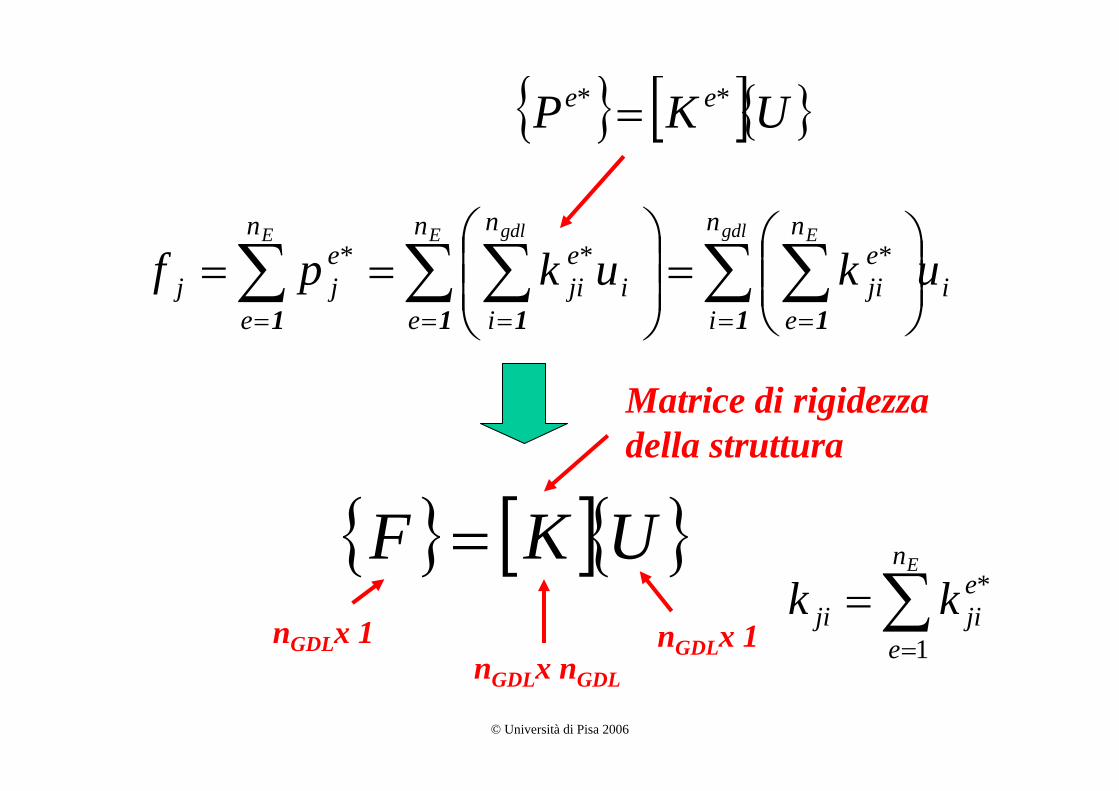
{ } [ ]{ }UKP ee ** =
{ } [ ]{ }UKF =
Matrice di rigidezza della struttura
nGDLx 1nGDLx nGDL
nGDLx 1∑=
=En
e
ejiji kk
1
*
© Università di Pisa 2006
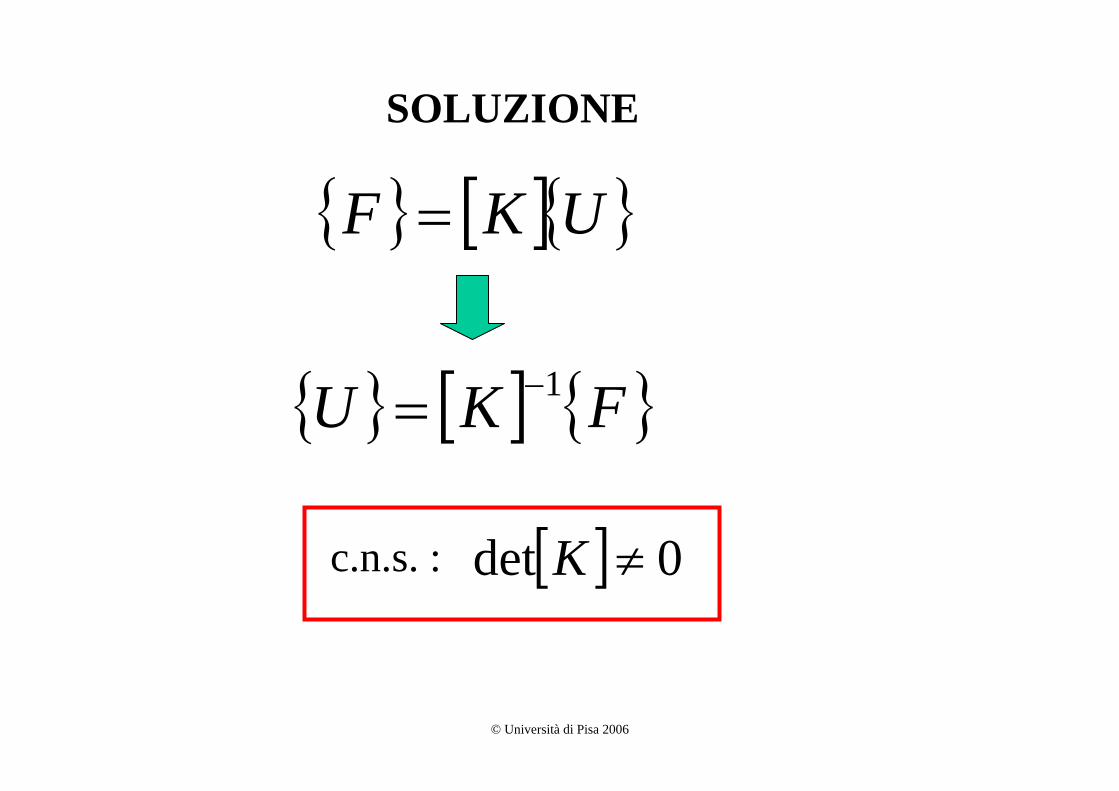
{ } [ ]{ }UKF =
SOLUZIONE
{ } [ ] { }FKU 1−=
c.n.s. : [ ] 0det ≠K
© Università di Pisa 2006
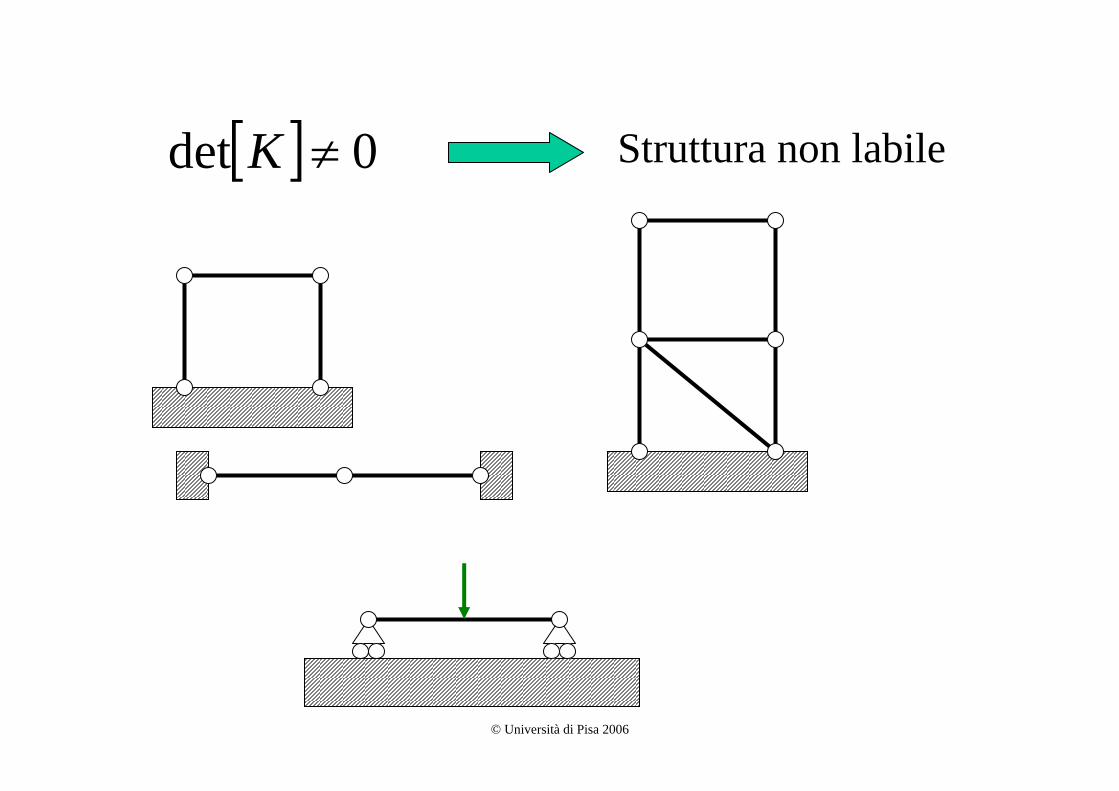
[ ] 0det ≠K Struttura non labile
© Università di Pisa 2006
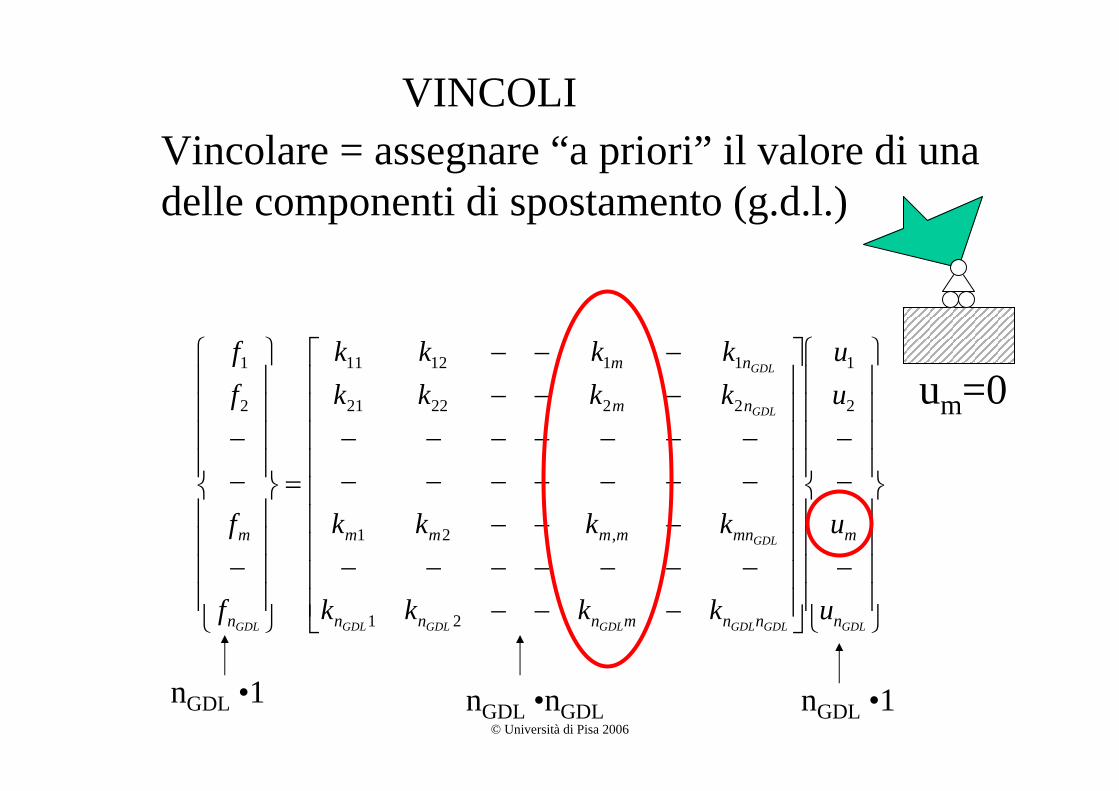
VINCOLIVincolare = assegnare “a priori” il valore di una delle componenti di spostamento (g.d.l.)
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
−
−−
⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−−−−−−−−−−
−−−−−−−−−−−−−−−−−
−−−−−−
=
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
−
−−
GDLGDLGDLGDLGDLGDL
GDL
GDL
GDL
GDL n
m
nnmnnn
mnmmmm
nm
nm
n
m
u
u
uu
kkkk
kkkk
kkkkkkkk
f
f
ff
2
1
21
,21
222221
111211
2
1
nGDL •1 nGDL •nGDL nGDL •1
um=0
© Università di Pisa 2006
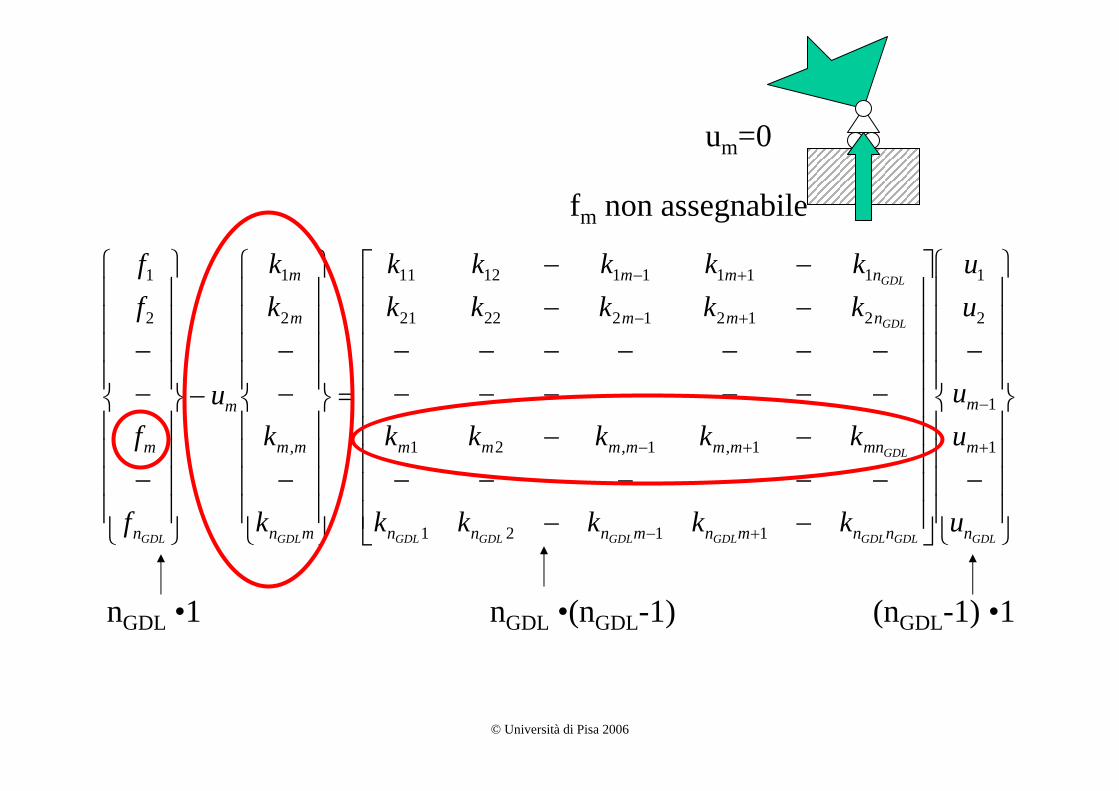
nGDL •1 nGDL •(nGDL-1) (nGDL-1) •1
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
−
−
⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−−−−−−−−−
−−−−−−−−−−−−−−−−
−−−−
=
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
−
−−
−
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
−
−−
+
−
+−
+−
+−
+−
GDLGDLGDLGDLGDLGDLGDL
GDL
GDL
GDL
GDLGDL n
m
m
nnmnmnnn
mnmmmmmm
nmm
nmm
mn
mm
m
m
m
n
m
u
uu
uu
kkkkk
kkkkk
kkkkkkkkkk
k
k
kk
u
f
f
ff
1
1
2
1
1121
1,1,21
212122221
111111211
,
2
1
2
1
um=0
fm non assegnabile
© Università di Pisa 2006
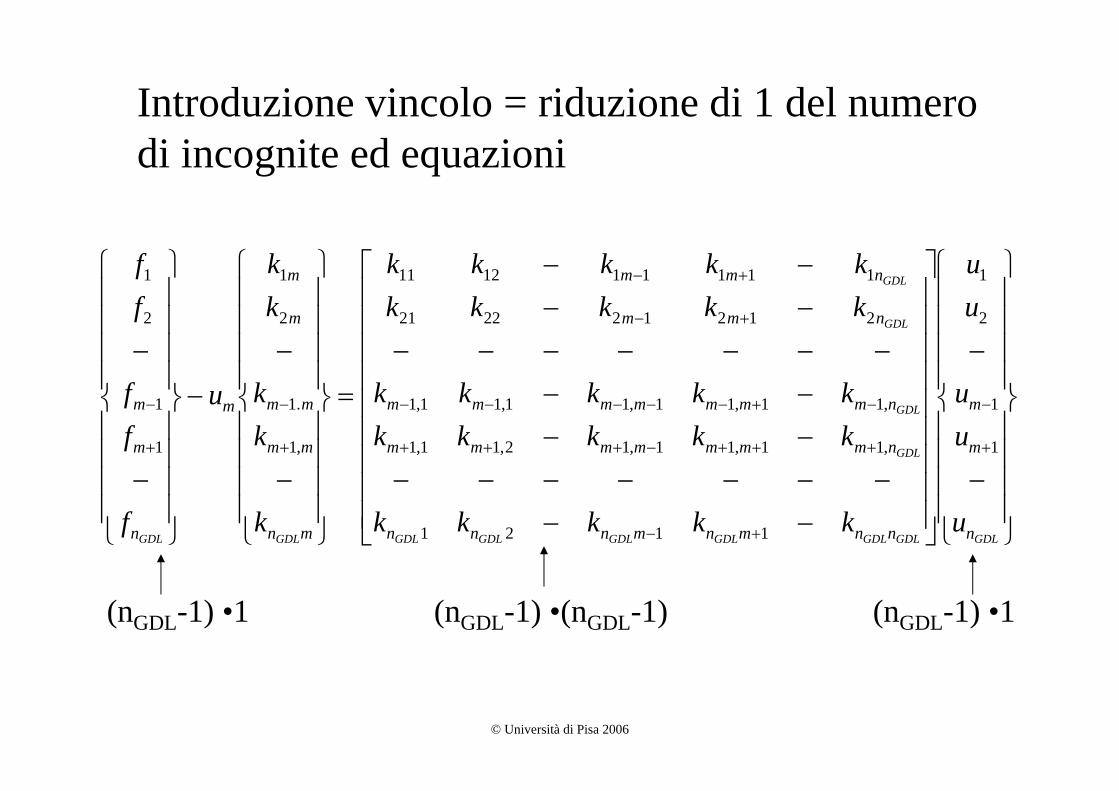
(nGDL-1) •1 (nGDL-1) •(nGDL-1) (nGDL-1) •1
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
−
−
⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−−−−−−−−−
−−−−
−−−−−−−−−−−
=
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
−
−
−
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
−
−
+
−
+−
+++−+++
−+−−−−−
+−
+−
+
−
+
−
GDLGDLGDLGDLGDLGDLGDL
GDL
GDL
GDL
GDL
GDLGDL n
m
m
nnmnmnnn
nmmmmmmm
nmmmmmmm
nmm
nmm
mn
mm
mm
m
m
m
n
m
m
u
uu
uu
kkkkk
kkkkkkkkkk
kkkkkkkkkk
k
kk
kk
u
f
ff
ff
1
1
2
1
1121
,11,11,12,11,1
,11,11,11,11,1
212122221
111111211
,1
.1
2
1
1
1
2
1
Introduzione vincolo = riduzione di 1 del numero di incognite ed equazioni
© Università di Pisa 2006
[ ]
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
XXXXXXXXXXMMIS
XXXXXXXXXX
XXXXXXX
XXXXXXXXXXX
K
.0000000000000000000000000000000000000000
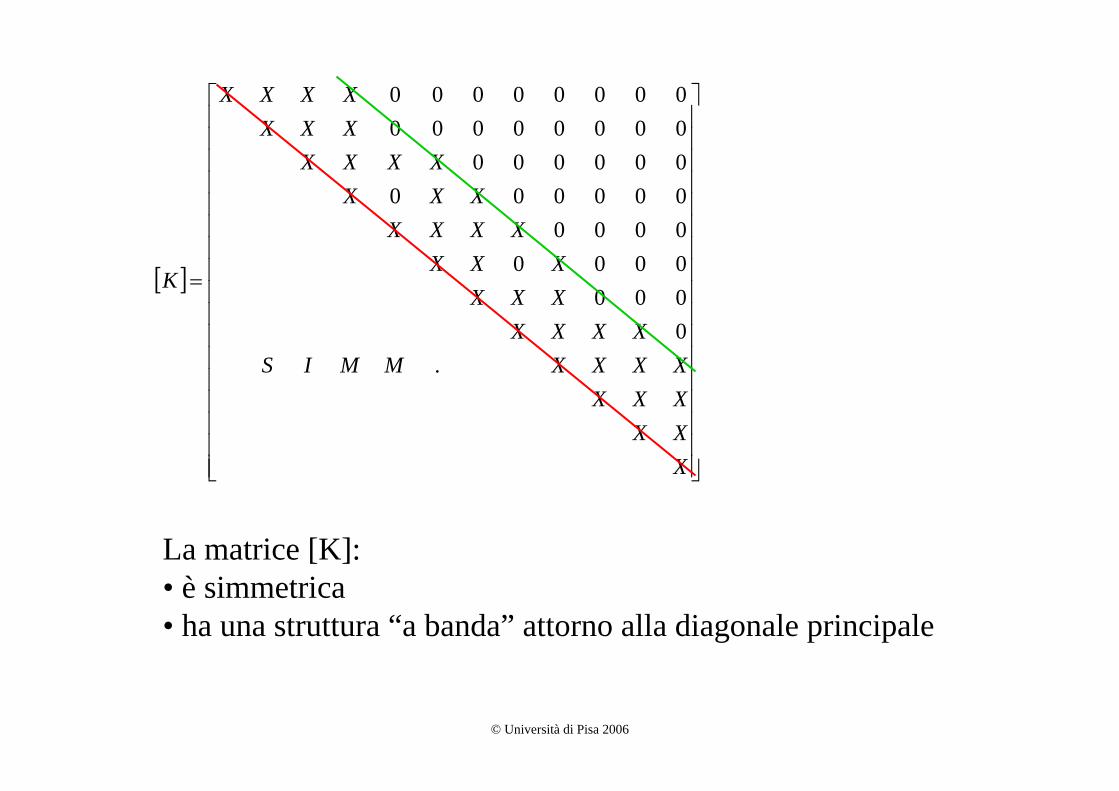
La matrice [K]:• è simmetrica• ha una struttura “a banda” attorno alla diagonale principale

© Università di Pisa 2006
Approssimazione effettiva del campo di spostamenti sul singolo elemento
i
j
k
x
y
vx
vix
vjx
vkx
© Università di Pisa 2006
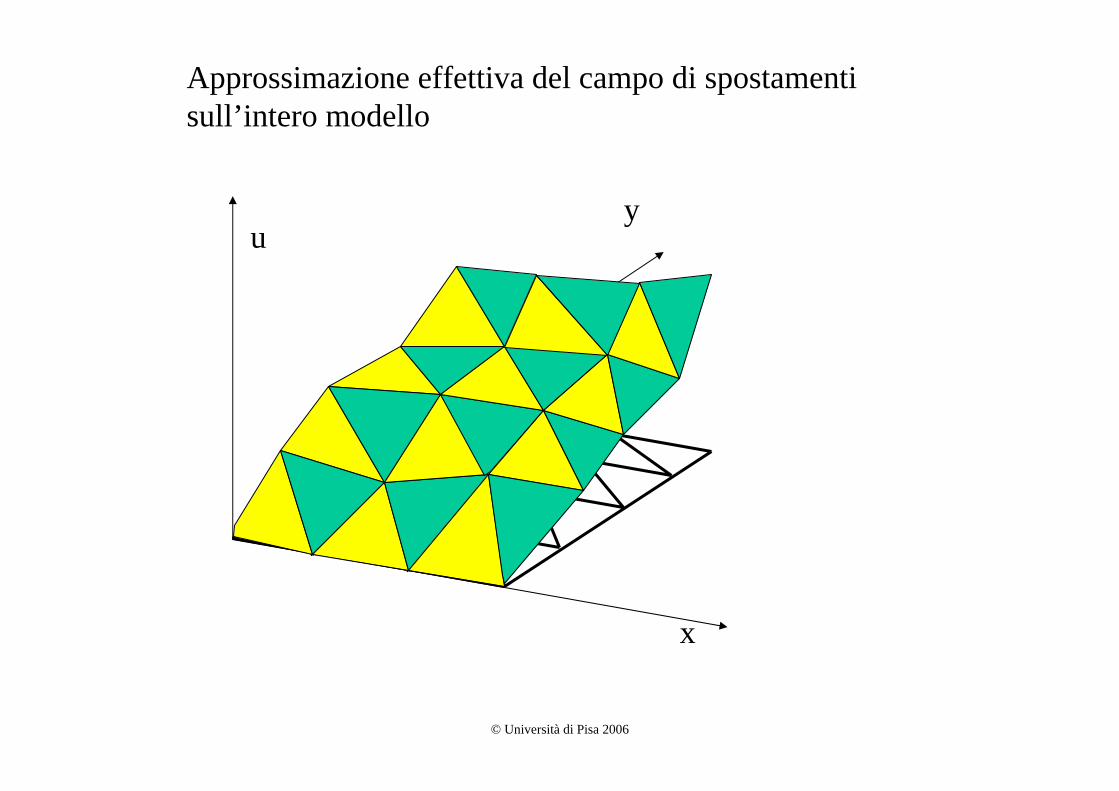
Approssimazione effettiva del campo di spostamenti sull’intero modello
u
x
y
© Università di Pisa 2006
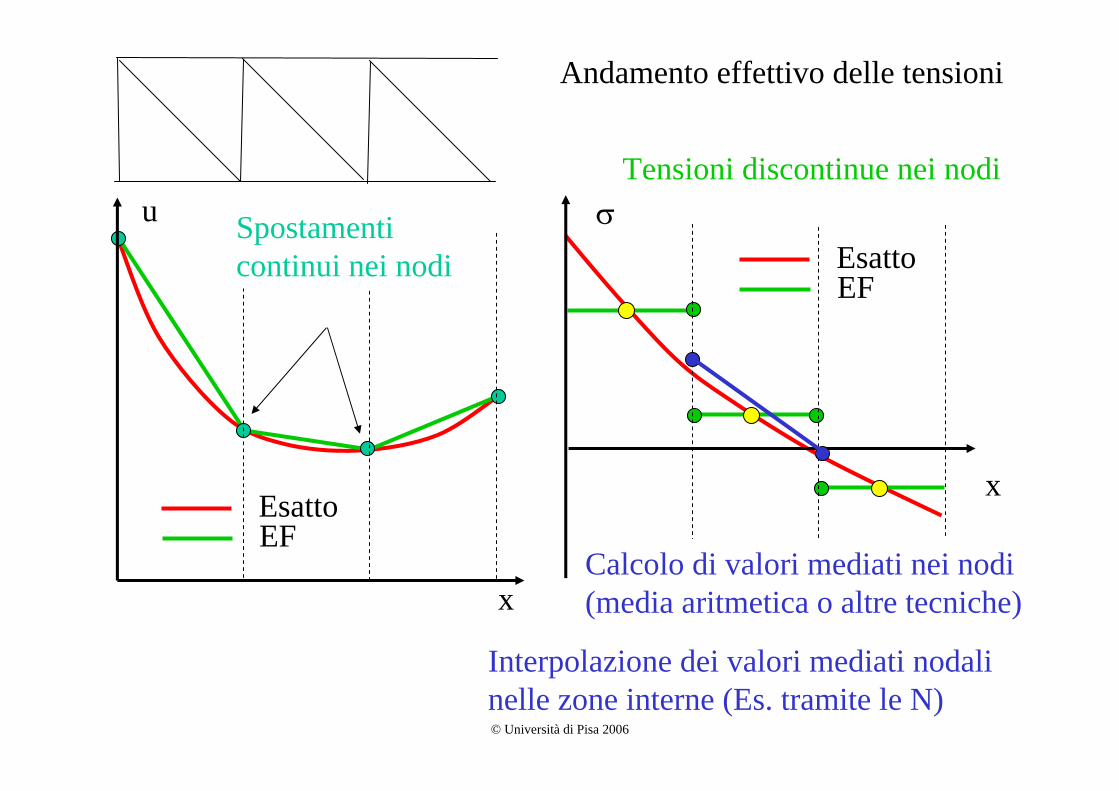
u
x
EsattoEF
Tensioni discontinue nei nodi
Andamento effettivo delle tensioni
Spostamenticontinui nei nodi Esatto
EF
σ
x
Calcolo di valori mediati nei nodi (media aritmetica o altre tecniche)
Interpolazione dei valori mediati nodali nelle zone interne (Es. tramite le N)
© Università di Pisa 2006
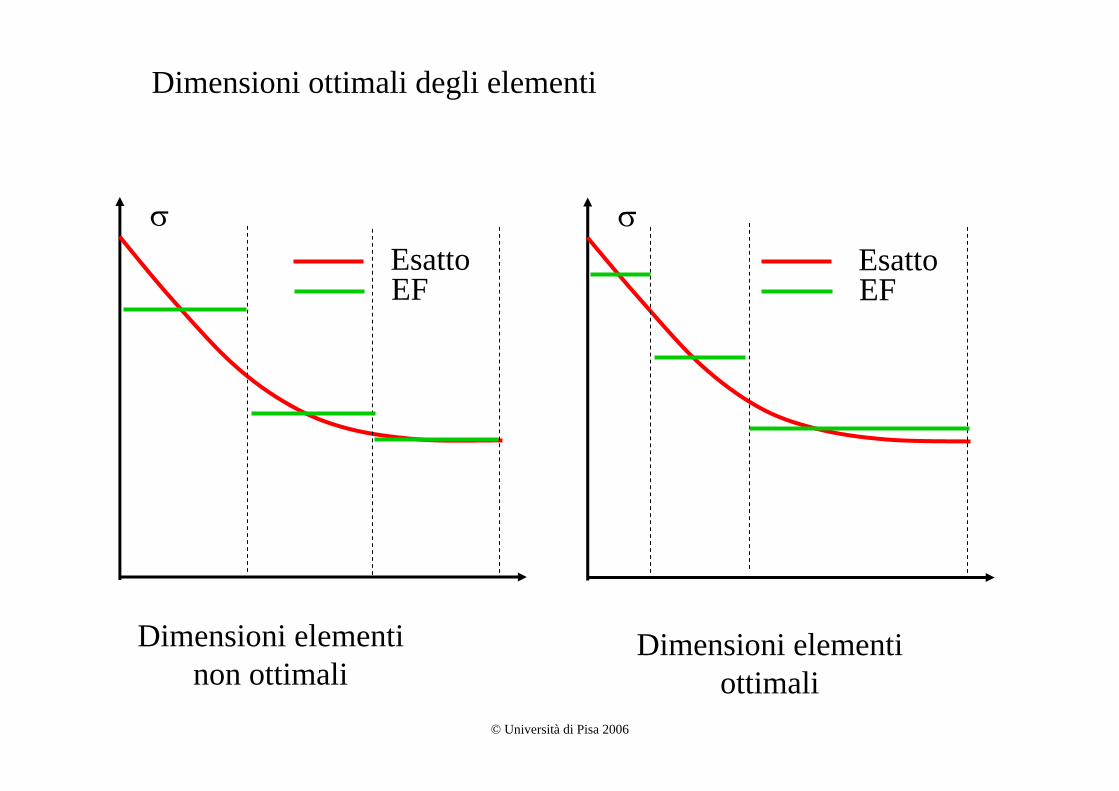
Dimensioni ottimali degli elementi
EsattoEF
σEsattoEF
σ
Dimensioni elementinon ottimali
Dimensioni elementiottimali
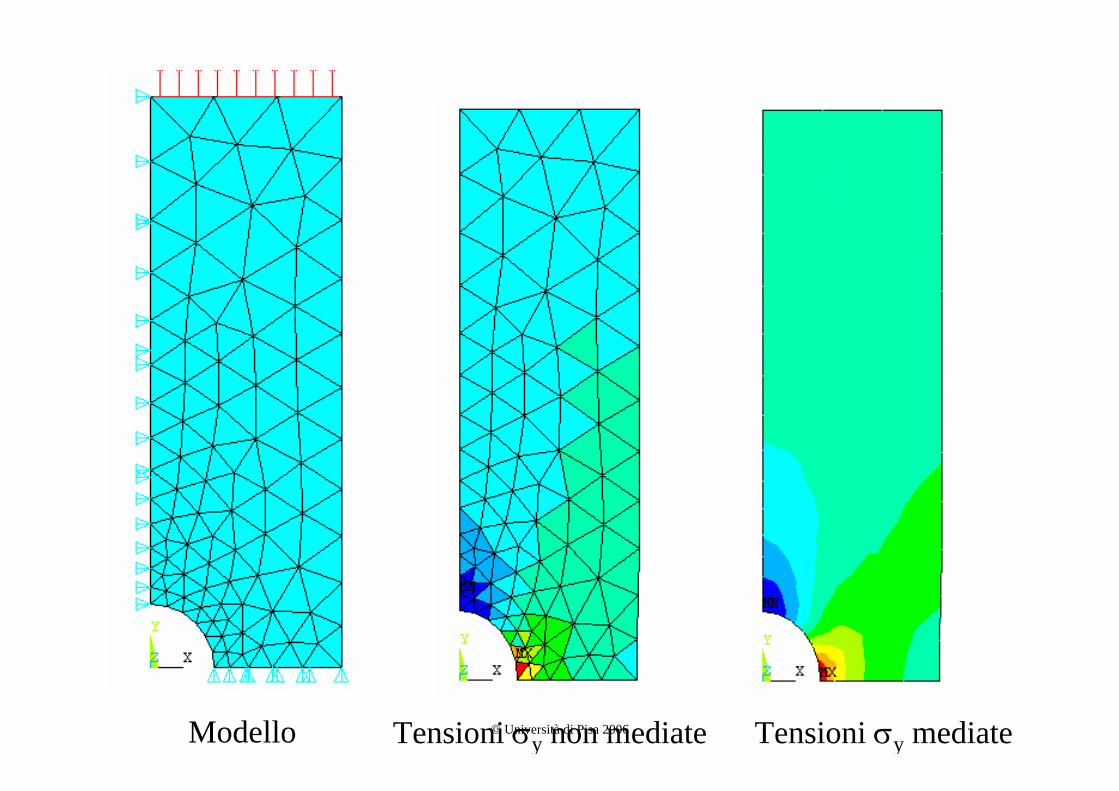
© Università di Pisa 2006Modello Tensioni σy non mediate Tensioni σy mediate

© Università di Pisa 2006
In casi in cui le tensioni sono intrinsecamente discontinue, l’operazione di media nei nodi può diminuire la precisione.Esempio 1 : Lastra in due materiali diversi, soggetta ad allungamento uniforme
E=105 MPa
E=2.1 105 MPa
xy
η
Mediate
Non mediate
η
σx
© Università di Pisa 2006
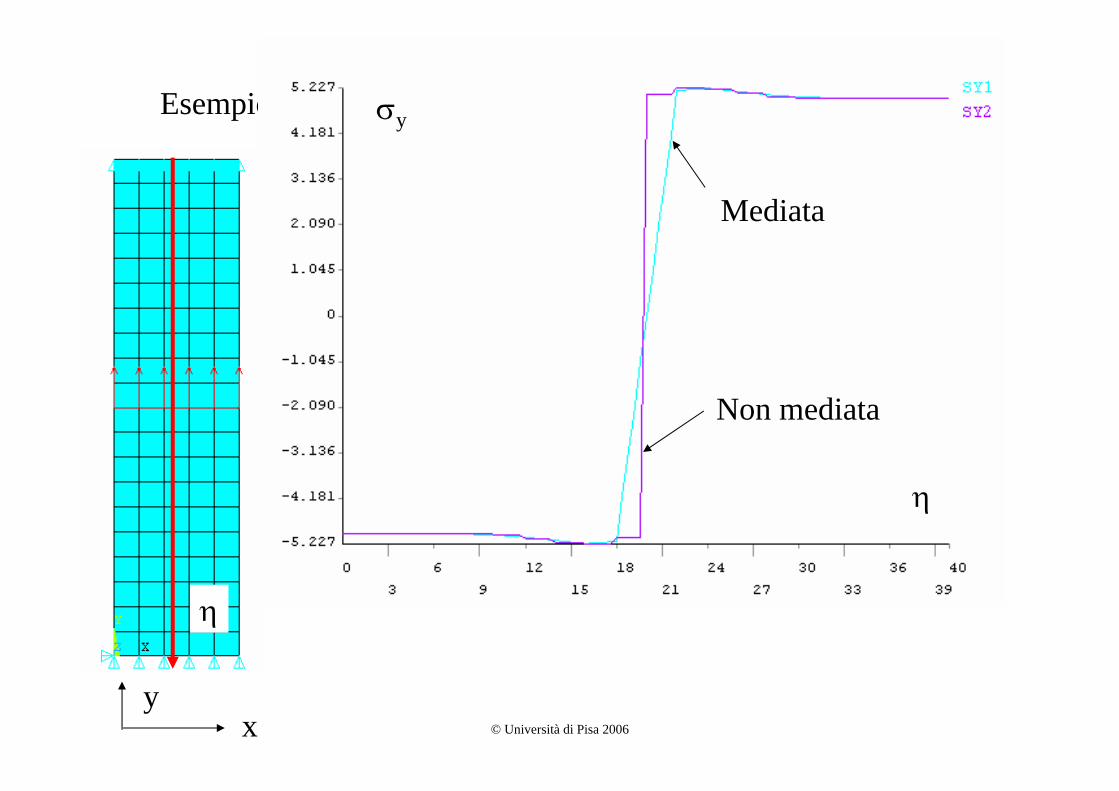
Esempio 2: lastra incastrata agli estremi e caricata al centro
xy
η
Mediata
Non mediata
σy
η

© Università di Pisa 2006
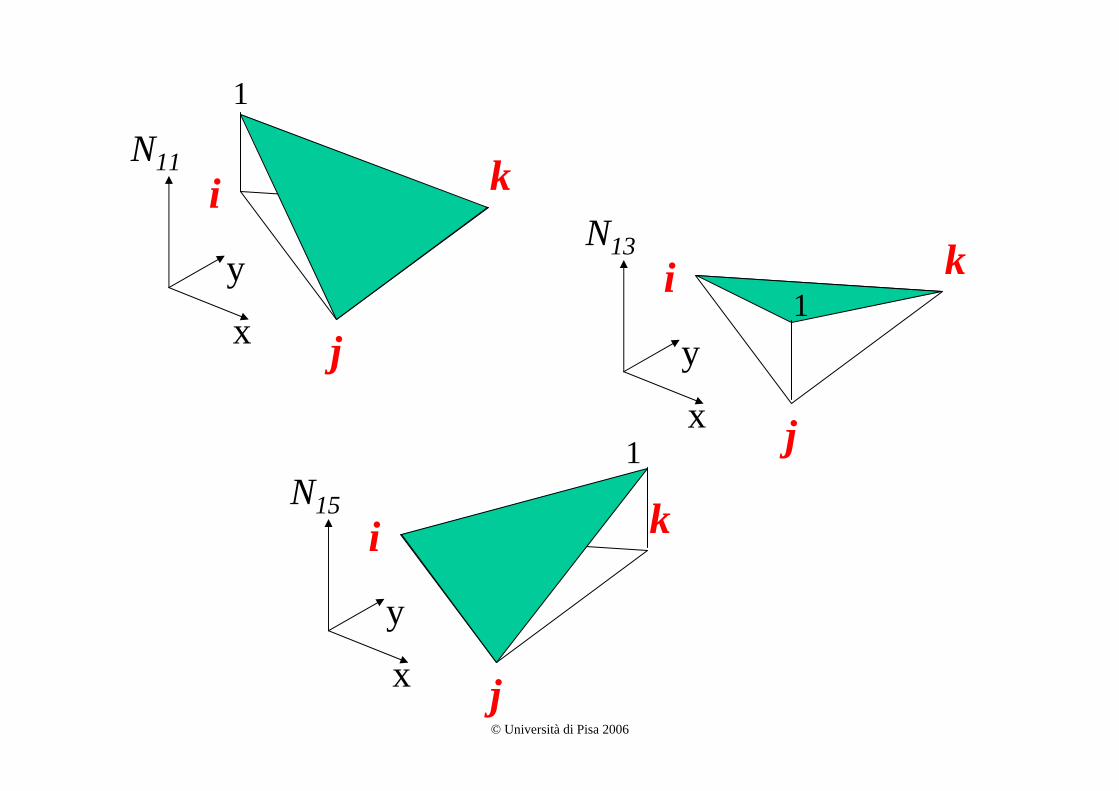
Elementi di ordine superiore
N11
1i
j
k
x
y
N11
1
i
j
k
x
y l m
n
yCxBAyxN lmlmlmelm ⋅+⋅+=),(
⎪⎩
⎪⎨
⎧
===
0),(0),(1),(
11
11
11
kk
jj
ii
yxNyxNyxN
xyFyExD
yCxBAyxN
lmlmlm
lmlmlmelm
⋅+⋅+⋅+
+⋅+⋅+=22
),(
⎪⎩
⎪⎨
⎧
===
0),(0),(1),(
11
11
11
kk
jj
ii
yxNyxNyxN
⎪⎩
⎪⎨
⎧
===
0),(0),(0),(
11
11
11
nn
mm
ll
yxNyxNyxN
© Università di Pisa 2006
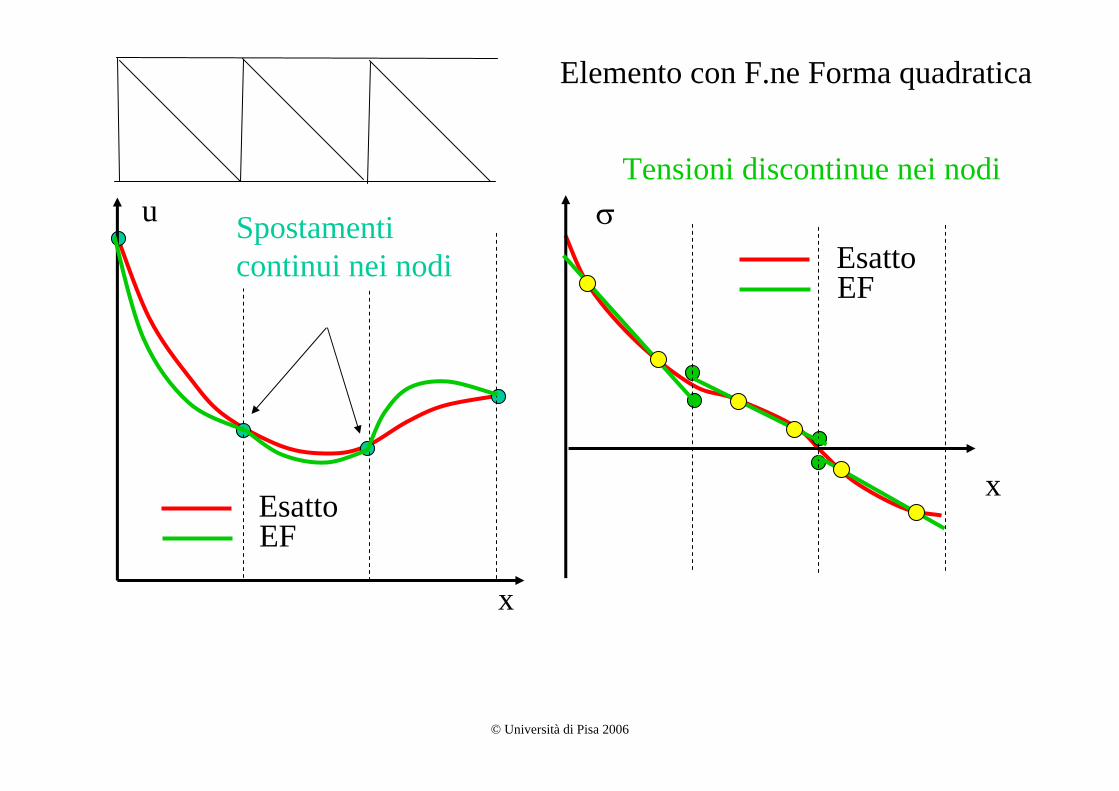
u
x
EsattoEF
Tensioni discontinue nei nodi
Elemento con F.ne Forma quadratica
Spostamenticontinui nei nodi Esatto
EF
σ
x
© Università di Pisa 2006
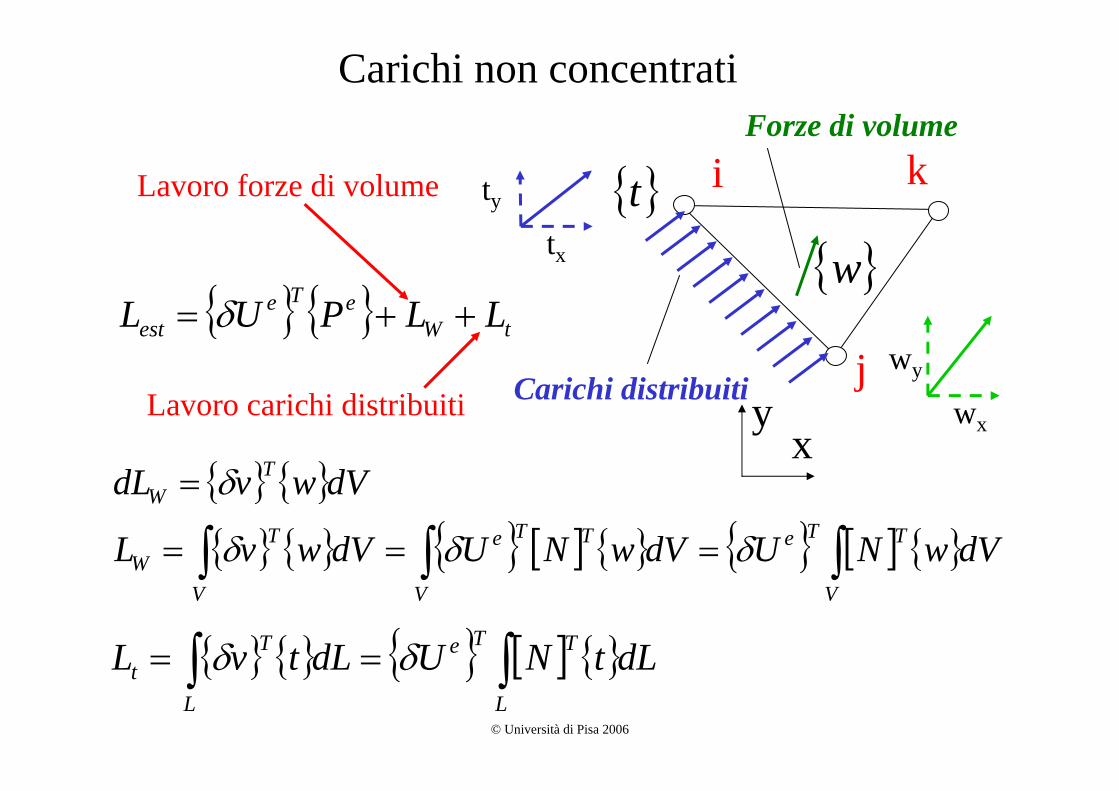
Carichi non concentrati
i
j
k
xy wx
wy
{ }w
{ }tForze di volume
Carichi distribuiti
tx
ty
{ } { } tWeTe
est LLPUL ++= δ
{ } { }{ } { } { } [ ] { } { } [ ] { }∫∫∫ ===
=
V
TTe
V
TTe
V
TW
TW
dVwNUdVwNUdVwvL
dVwvdL
δδδ
δ
Lavoro forze di volume
Lavoro carichi distribuiti
{ } {} { } [ ] { }∫∫ ==L
TTe
L
Tt dLtNUdLtvL δδ

© Università di Pisa 2006
{ } [ ]{ } { } { }et
eW
eee PPUKP ++=
{ } [ ] { }∫−=V
TeW dVwNP { } [ ] { }∫−=
L
Tet dLtNP
Reazioni vincolari conseguenti all’applicazione all’elemento delle forze distribuite e di volume = - carichi che l’elemento trasmette ai nodi in seguito alla presenza delle forze distribuite o di volume (carichi nodali)
© Università di Pisa 2006
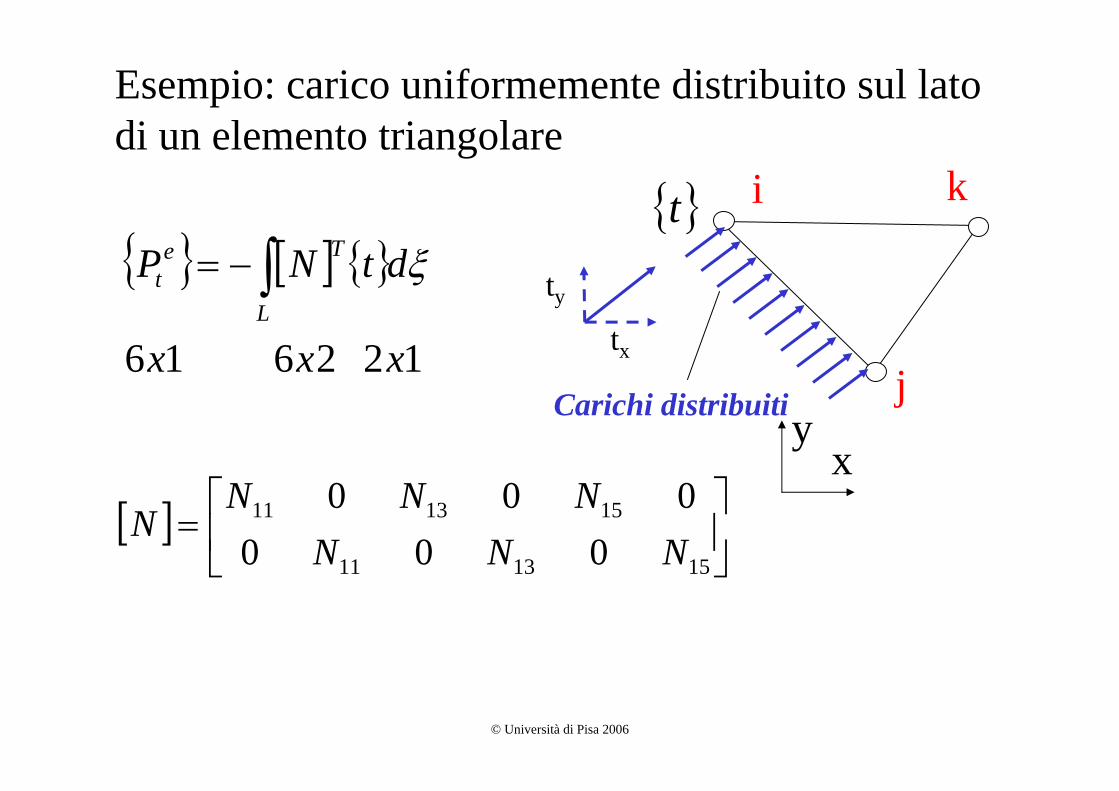
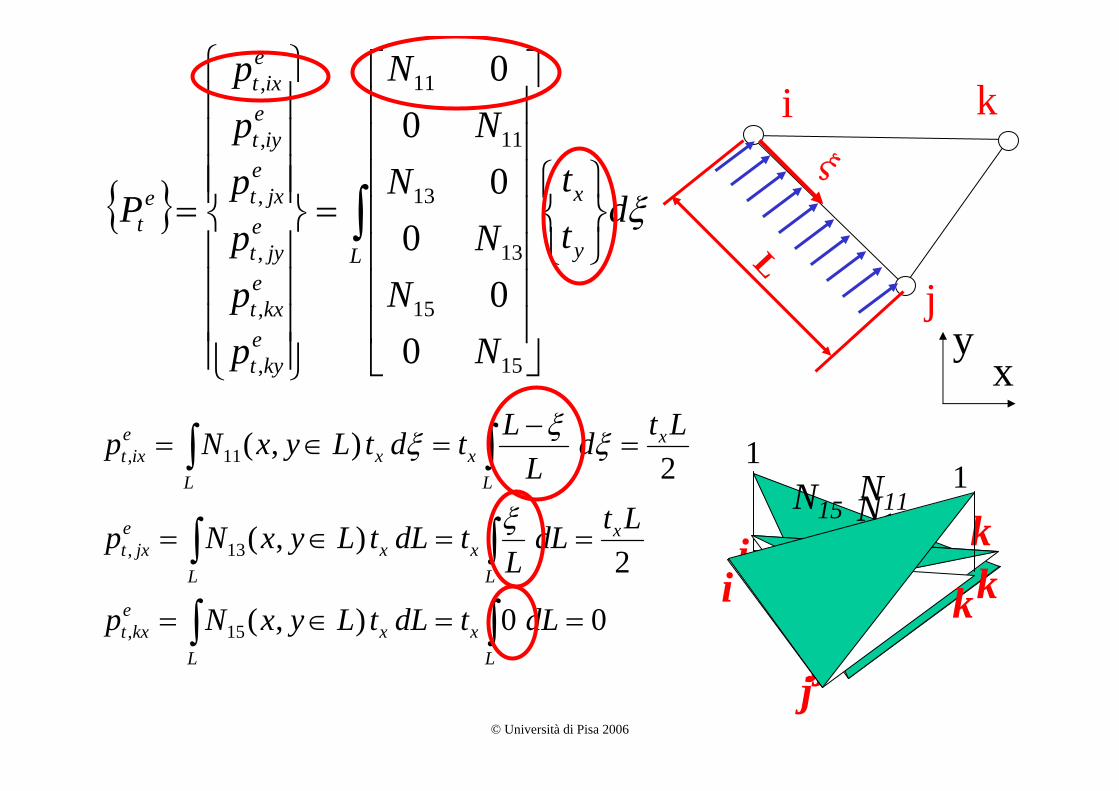
Esempio: carico uniformemente distribuito sul lato di un elemento triangolare
i
j
k
xy
{ }t
Carichi distribuiti
tx
ty{ } [ ] { }
122616 xxx
dtNPL
Tet ∫−= ξ
[ ] ⎥⎦
⎤⎢⎣
⎡=
151311
151311
000000
NNNNNN
N
© Università di Pisa 2006
{ } ξdtt
NN
NN
NN
pppppp
Py
x
L
ekyt
ekxt
ejyt
ejxt
eiyt
eixt
et
⎭⎬⎫
⎩⎨⎧
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
= ∫
15
15
13
13
11
11
,
,
,
,
,
,
00
00
00
00),(
2),(
2),(
15,
13,
11,
==∈=
==∈=
=−
=∈=
∫∫
∫∫
∫∫
Lx
Lx
ekxt
x
Lx
Lx
ejxt
x
Lx
Lx
eixt
dLtdLtLyxNp
LtdLL
tdLtLyxNp
LtdL
LtdtLyxNp
ξ
ξξξ
i
j
k
xy
L
ξ
i
j
kN11
1
i
j
k
N13
1i
j
k
N151
© Università di Pisa 2006
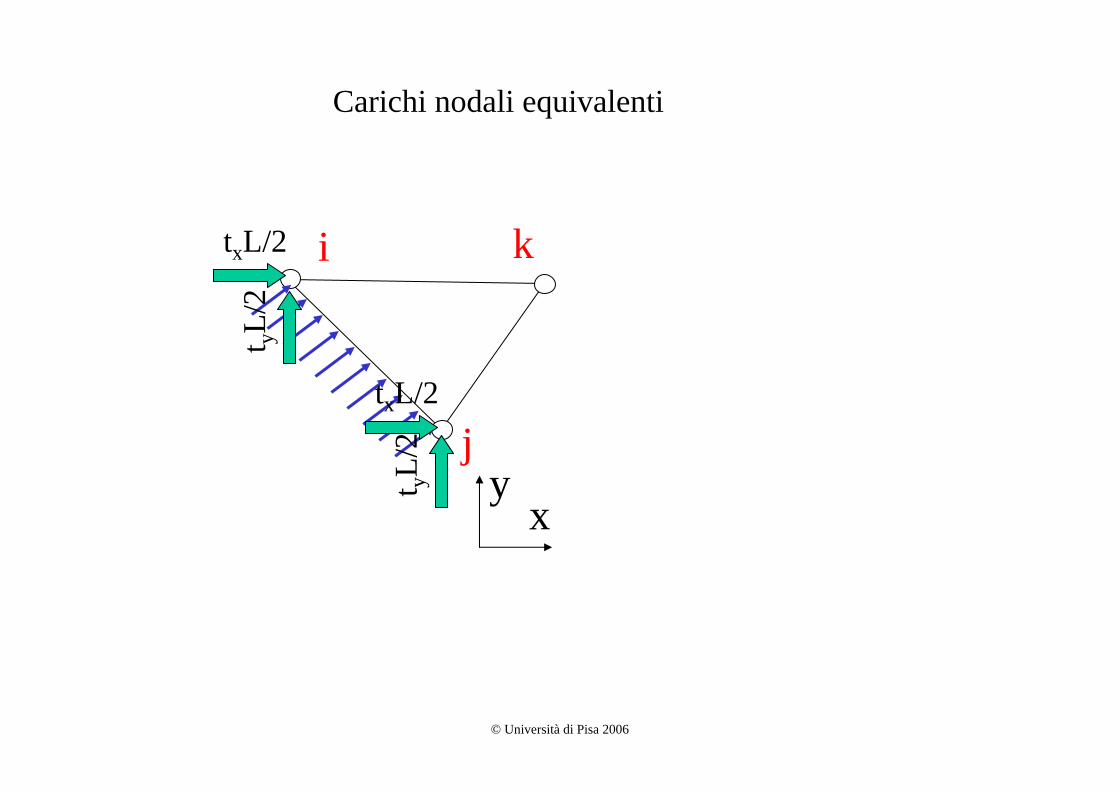
i
j
k
xy
txL/2
txL/2
t yL/2
t yL/2
Carichi nodali equivalenti