
LE MACCHINE SINCRONE -...
19
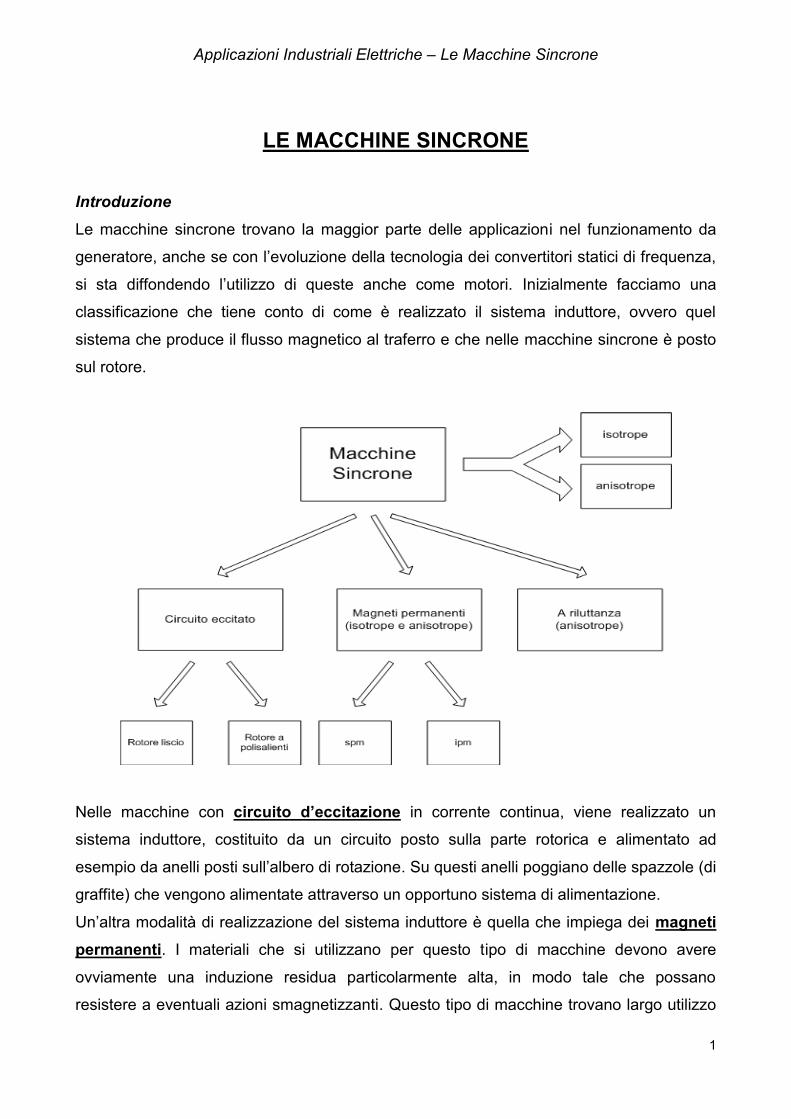
Applicazioni Industriali Elettriche – Le Macchine Sincrone 1 LE MACCHINE SINCRONE Introduzione Le macchine sincrone trovano la maggior parte delle applicazioni nel funzionamento da generatore, anche se con l’evoluzione della tecnologia dei convertitori statici di frequenza, si sta diffondendo l’utilizzo di queste anche come motori. Inizialmente facciamo una classificazione che tiene conto di come è realizzato il sistema induttore, ovvero quel sistema che produce il flusso magnetico al traferro e che nelle macchine sincrone è posto sul rotore. Nelle macchine con circuito d’eccitazione in corrente continua, viene realizzato un sistema induttore, costituito da un circuito posto sulla parte rotorica e alimentato ad esempio da anelli posti sull’albero di rotazione. Su questi anelli poggiano delle spazzole (di graffite) che vengono alimentate attraverso un opportuno sistema di alimentazione. Un’altra modalità di realizzazione del sistema induttore è quella che impiega dei magneti permanenti . I materiali che si utilizzano per questo tipo di macchine devono avere ovviamente una induzione residua particolarmente alta, in modo tale che possano resistere a eventuali azioni smagnetizzanti. Questo tipo di macchine trovano largo utilizzo
Transcript of LE MACCHINE SINCRONE -...
Applicazioni Industriali Elettriche – Le Macchine Sincrone
1
LE MACCHINE SINCRONE
Introduzione
Le macchine sincrone trovano la maggior parte delle applicazioni nel funzionamento da
generatore, anche se con l’evoluzione della tecnologia dei convertitori statici di frequenza,
si sta diffondendo l’utilizzo di queste anche come motori. Inizialmente facciamo una
classificazione che tiene conto di come è realizzato il sistema induttore, ovvero quel
sistema che produce il flusso magnetico al traferro e che nelle macchine sincrone è posto
sul rotore.
Nelle macchine con circuito d’eccitazione in corrente continua, viene realizzato un
sistema induttore, costituito da un circuito posto sulla parte rotorica e alimentato ad
esempio da anelli posti sull’albero di rotazione. Su questi anelli poggiano delle spazzole (di
graffite) che vengono alimentate attraverso un opportuno sistema di alimentazione.
Un’altra modalità di realizzazione del sistema induttore è quella che impiega dei magneti
permanenti. I materiali che si utilizzano per questo tipo di macchine devono avere
ovviamente una induzione residua particolarmente alta, in modo tale che possano
resistere a eventuali azioni smagnetizzanti. Questo tipo di macchine trovano largo utilizzo

Applicazioni Industriali Elettriche – Le Macchine Sincrone
2
soprattutto come motori per applicazioni industriali e sono caratterizzate da un’elevata
compattezza.
Una terza tipologia di macchine è quella cosiddetta delle macchine “a riluttanza”, queste
hanno una struttura anisotropa, e sono in grado di creare una coppia elettromagnetica
anche in assenza del circuito induttore, proprio sfruttando la particolare forma del rotore.
Ciascuna di queste categorie si può suddividere ulteriormente, come è evidente dallo
schema.
In particolare per le macchine che hanno un circuito di eccitazione in corrente continua
si ha la suddivisione in macchine con rotore a poli lisci e con rotore a poli salienti. La
prima delle due è utilizzata essenzialmente nella generazione nelle centrali elettriche ed è
una macchina isotropa; la seconda invece ha una struttura anisotropa ed è utilizzata nelle
centrali idrauliche, dove il numero di giri è relativamente basso (500- 1000 giri/min), si fa
questa scelta proprio perché per la struttura del rotore a poli salienti, se raggiungessimo
delle velocità troppo elevate, avremmo dei problemi fisici (dati ad esempio dalla forza
centrifuga).
Per le macchine a magneti permanenti si può fare una distinzione: spm, (isotrope) a
magneti permanenti montati superficialmente al rotore e ipm, (anisotrope) a magneti
permanenti montati internamente alla struttura rotorica.
La categoria delle macchine a riluttanza sono invece per loro natura delle macchine
anisotrope.
In questa trattazione faremo riferimento principalmente alle macchine a circuito
d’eccitazione, in particolare a quelle con rotore a poli salienti, dato che da queste è facile
risalire al funzionamento di quelle a rotore liscio, semplicemente imponendo una
condizione di isotropia.
Macchina Sincrona con Rotore a Poli Lisci
Le macchine a poli lisci hanno una struttura rotorica realizzata disponendo un albero di
rotazione al quale è collegato il motore primo che aziona la macchina; su questo è
calettata una struttura ferromagnetica che può essere di tipo laminare. In questa struttura,
ottenuta impaccando tutti i lamierini, vengono ricavate delle cave, dove poi disporremo i
conduttori dei rispettivi avvolgimenti, che saranno collegati in serie e percorsi da corrente
continua. Questo sistema produce un campo magnetico che ha intensità costante, e ruota
con la stessa velocità di rotazione del rotore.

Applicazioni Industriali Elettriche – Le Macchine Sincrone
3
NI BH
l S
(1.1)
Lo statore è realizzato con la forma di una corona circolare, utilizzando sempre dei
lamierini di opportuno spessore che vengono anch’essi impaccati tra di loro, come per il
rotore, in modo tale da ricavare delle cave che poi serviranno a disporre gli avvolgimenti
del circuito statorico, che saranno collegati ai morsetti trifase della macchina. I conduttori
di una stessa fase non sono tutti alloggiati all’interno della stessa cava, ma saranno
distribuiti tra più cave adiacenti in modo da occupare un certo numero di cave per polo e
per fase.
Questa macchina è isotropa come si può vedere dalla Fig. 1, in quanto il flusso che
attraversa il circuito magnetico trova sempre la stessa riluttanza, dato che questa è
determinata quasi esclusivamente dal traferro, la cui sezione si mantiene costante, e dato
che tra il rotore e lo statore vi è sempre interposta dell’aria.
Macchina Sincrona con Rotore a Poli Salienti
In questo tipo di macchine la struttura statorica è la stessa di quella precedentemente
descritta mentre quella rotorica è diversa. Sull’albero di rotazione viene realizzato un
mozzo e su questo sono fissate delle razze che sostengono un circuito magnetico. Sopra
queste vengono montate delle espansioni polari, attorno alle quali vengono avvolti dei
solenoidi. Il tutto è chiuso con le cosiddette scarpe polari, la cui funzione è quella di
distribuire il flusso al traferro della macchina. Questi tipi di rotori hanno a differenza di
quelli a poli lisci, che si espandono maggiormente nelle direzione assiale con un diametro
relativamente ridotto, un diametro più grande e una lunghezza assiale ridotta.
Applicazioni Industriali Elettriche – Le Macchine Sincrone
4
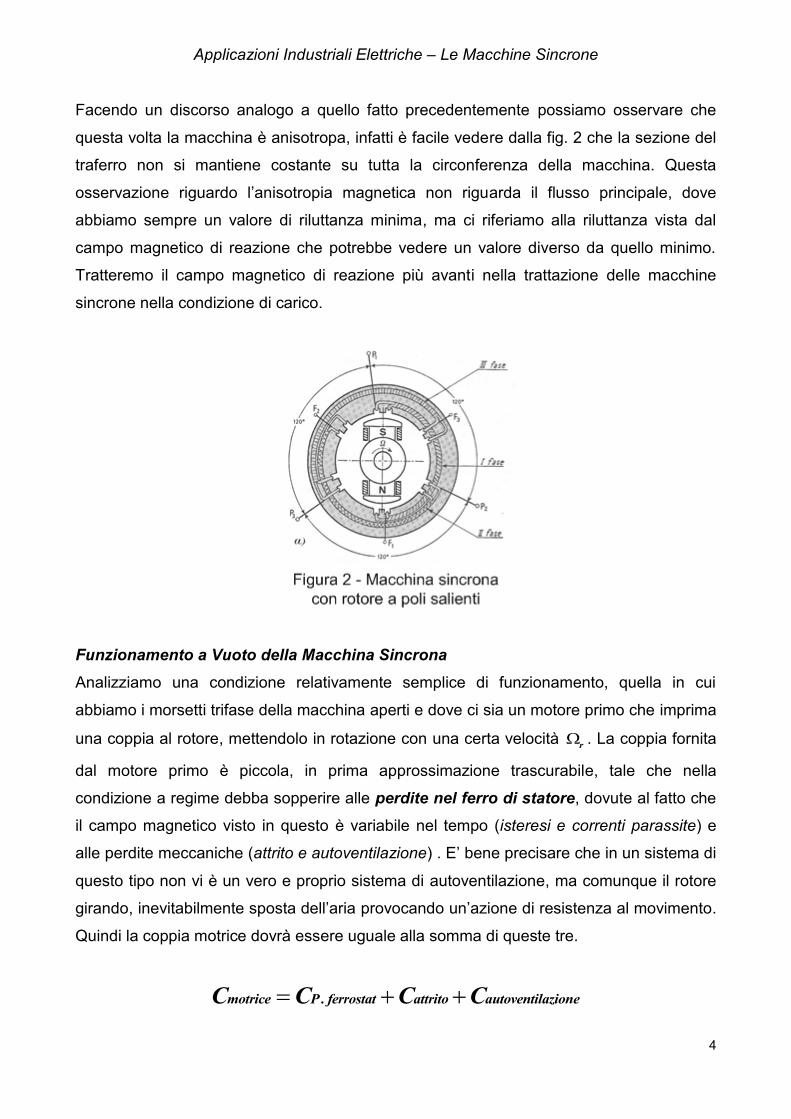
Facendo un discorso analogo a quello fatto precedentemente possiamo osservare che
questa volta la macchina è anisotropa, infatti è facile vedere dalla fig. 2 che la sezione del
traferro non si mantiene costante su tutta la circonferenza della macchina. Questa
osservazione riguardo l’anisotropia magnetica non riguarda il flusso principale, dove
abbiamo sempre un valore di riluttanza minima, ma ci riferiamo alla riluttanza vista dal
campo magnetico di reazione che potrebbe vedere un valore diverso da quello minimo.
Tratteremo il campo magnetico di reazione più avanti nella trattazione delle macchine
sincrone nella condizione di carico.
Funzionamento a Vuoto della Macchina Sincrona
Analizziamo una condizione relativamente semplice di funzionamento, quella in cui
abbiamo i morsetti trifase della macchina aperti e dove ci sia un motore primo che imprima
una coppia al rotore, mettendolo in rotazione con una certa velocità r
. La coppia fornita
dal motore primo è piccola, in prima approssimazione trascurabile, tale che nella
condizione a regime debba sopperire alle perdite nel ferro di statore, dovute al fatto che
il campo magnetico visto in questo è variabile nel tempo (isteresi e correnti parassite) e
alle perdite meccaniche (attrito e autoventilazione) . E’ bene precisare che in un sistema di
questo tipo non vi è un vero e proprio sistema di autoventilazione, ma comunque il rotore
girando, inevitabilmente sposta dell’aria provocando un’azione di resistenza al movimento.
Quindi la coppia motrice dovrà essere uguale alla somma di queste tre.
motrice P . ferrostat attrito autoventilazioneC C C C

Applicazioni Industriali Elettriche – Le Macchine Sincrone
5
Analizziamo ora cosa avviene più in dettaglio nell’avvolgimento statorico. Se prendo in
considerazione un sistema di riferimento solidale allo statore, osservo un campo
magnetico rotante con la stessa velocità di rotazione del rotore ( r ); questo flusso crea su
un avvolgimento una f.e.m. indotta sinusoidale, quindi ai morsetti statorici avremo un
sistema trifase simmetrico. La frequenza di queste f.e.m. è facilmente ottenibile attraverso
la (3.1) e la (3.2):
rr
2 n
60
(3.1)
s sr s
2 f
p p
(3.2)
essendo r la velocità di rotazione del rotore in rad/sec,
rn i giri al minuto del rotore,
s
la pulsazione delle f.e.m. indotte, sf la frequenza delle f.e.m. indotte e p il numero di
coppie polari della macchina.
Determinata la frequenza di queste f.e.m., dobbiamo determinarne il valore efficace, quindi
lo otteniamo con la (3.3) e la (3.4):
eccd
edt
(3.3) 0 s s ecc
E KN f (3.4)
dove K è la costante che tiene conto della forma d’onda dell’induzione al traferro, del fatto
che i conduttori induttori non sono alloggiati tutti all’interno della stessa cava, ma si
trovano sfasati di un certo angolo tra di loro e quindi le f.e.m. che si creano su questi
vanno sommate vettorialmente e non algebricamente. Inoltre K contiene anche un 2 per
poter esplicitare la frequenza delle grandezze elettriche statoriche sf .
ecc è ovviamente il
flusso provocato dal circuito d’eccitazione.
La 0E dipende quindi dal numero di giri del rotore al minuto e dal flusso d’eccitazione
prodotto dal circuito induttore.
Sappiamo che il circuito magnetico attraversato dal flusso d’eccitazione è composto da
piccoli tratti in aria (traferro) e da lunghi tratti in ferro. E’ evidente che la permeabilità nel
traferro è costante essendo quella dell’aria; non possiamo dire altrettanto per ciò che
riguarda quella del ferro: infatti siamo a conoscenza del fatto che nei materiali
ferromagnetici la caratteristica B H non è lineare, ma per valori elevati di B si verifica il
fenomeno della saturazione dei materiali ferromagnetici. Mettendo il flusso d’eccitazione in
Applicazioni Industriali Elettriche – Le Macchine Sincrone
6
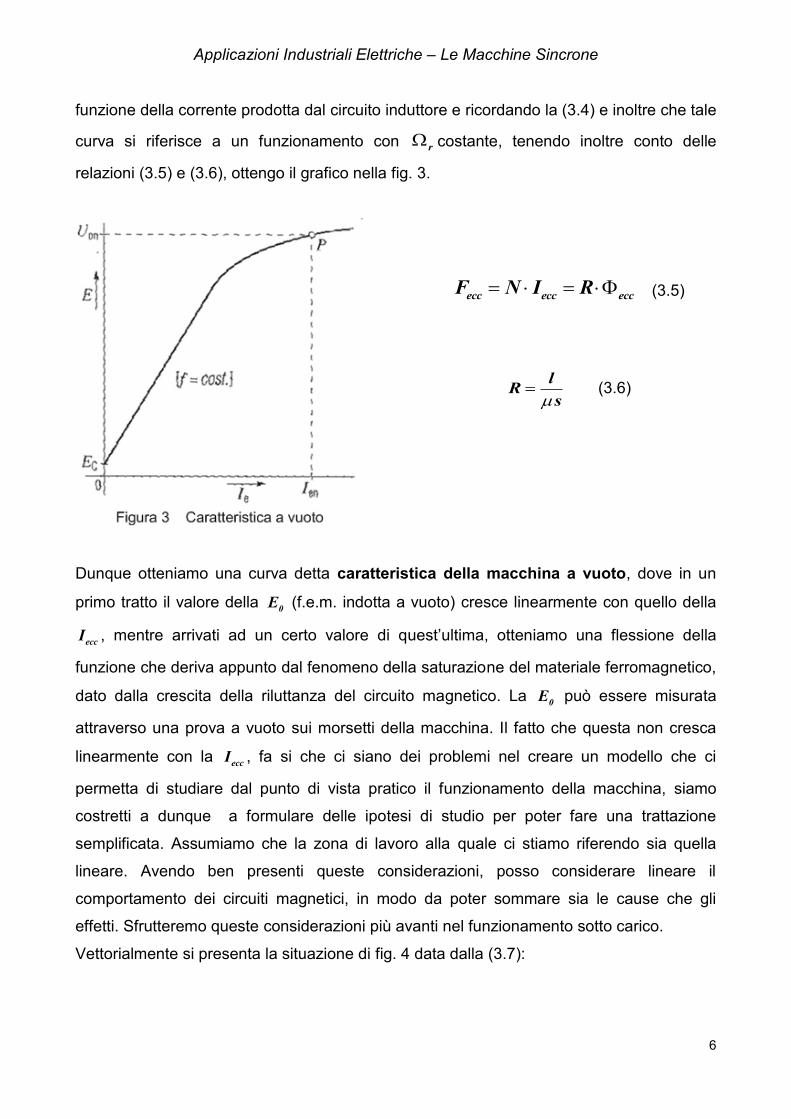
funzione della corrente prodotta dal circuito induttore e ricordando la (3.4) e inoltre che tale
curva si riferisce a un funzionamento con r costante, tenendo inoltre conto delle
relazioni (3.5) e (3.6), ottengo il grafico nella fig. 3.
ecc ecc eccF N I R (3.5)
lR
s (3.6)
Dunque otteniamo una curva detta caratteristica della macchina a vuoto, dove in un
primo tratto il valore della 0E (f.e.m. indotta a vuoto) cresce linearmente con quello della
eccI , mentre arrivati ad un certo valore di quest’ultima, otteniamo una flessione della
funzione che deriva appunto dal fenomeno della saturazione del materiale ferromagnetico,
dato dalla crescita della riluttanza del circuito magnetico. La 0E può essere misurata
attraverso una prova a vuoto sui morsetti della macchina. Il fatto che questa non cresca
linearmente con la eccI , fa si che ci siano dei problemi nel creare un modello che ci
permetta di studiare dal punto di vista pratico il funzionamento della macchina, siamo
costretti a dunque a formulare delle ipotesi di studio per poter fare una trattazione
semplificata. Assumiamo che la zona di lavoro alla quale ci stiamo riferendo sia quella
lineare. Avendo ben presenti queste considerazioni, posso considerare lineare il
comportamento dei circuiti magnetici, in modo da poter sommare sia le cause che gli
effetti. Sfrutteremo queste considerazioni più avanti nel funzionamento sotto carico.
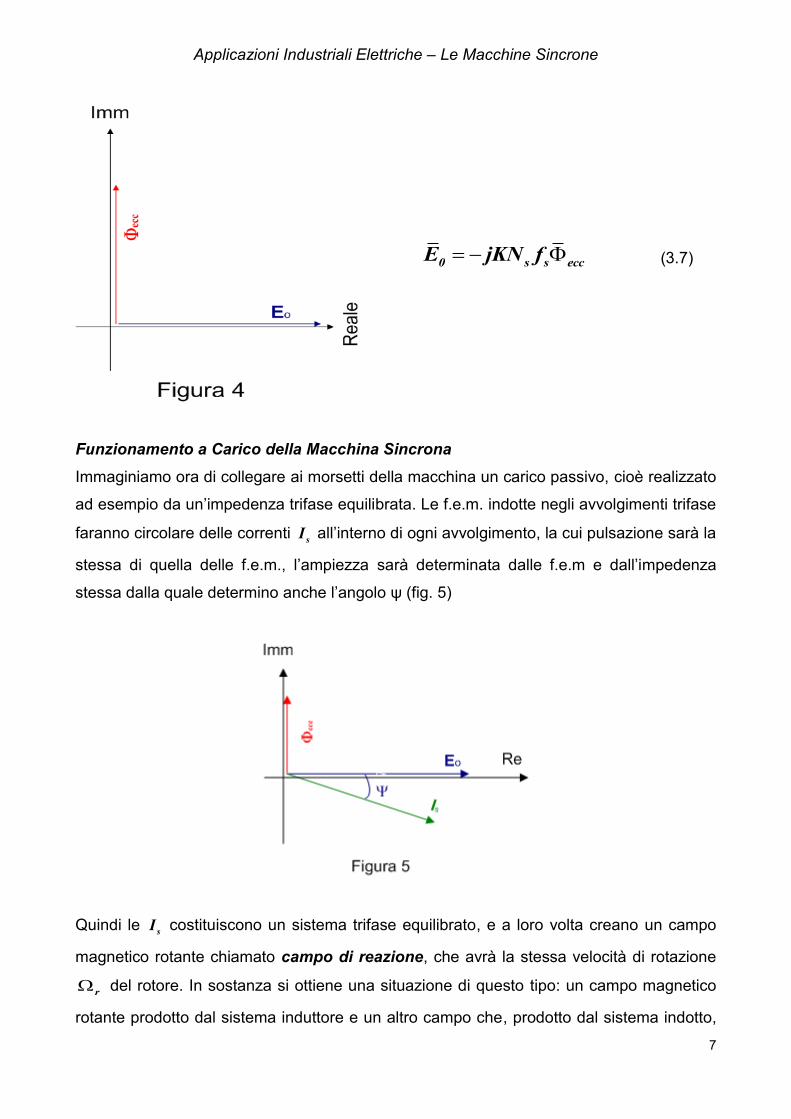
Vettorialmente si presenta la situazione di fig. 4 data dalla (3.7):
Applicazioni Industriali Elettriche – Le Macchine Sincrone
7
0 s s eccE jKN f (3.7)
Funzionamento a Carico della Macchina Sincrona
Immaginiamo ora di collegare ai morsetti della macchina un carico passivo, cioè realizzato
ad esempio da un’impedenza trifase equilibrata. Le f.e.m. indotte negli avvolgimenti trifase
faranno circolare delle correnti sI all’interno di ogni avvolgimento, la cui pulsazione sarà la
stessa di quella delle f.e.m., l’ampiezza sarà determinata dalle f.e.m e dall’impedenza
stessa dalla quale determino anche l’angolo ψ (fig. 5)
Quindi le sI costituiscono un sistema trifase equilibrato, e a loro volta creano un campo
magnetico rotante chiamato campo di reazione, che avrà la stessa velocità di rotazione
r del rotore. In sostanza si ottiene una situazione di questo tipo: un campo magnetico
rotante prodotto dal sistema induttore e un altro campo che, prodotto dal sistema indotto,
Applicazioni Industriali Elettriche – Le Macchine Sincrone
8
si va a sovrapporre a questo. Entrambi hanno la stessa velocità di rotazione
r s s/ p (questo è il motivo per cui si chiama motore sincrono), però una
relazione di fase diversa, in quanto possiamo dire che il flusso i
di reazione del sistema
indotto, sarà in fase con la corrente sI , essendo prodotto da una f.m.m.
iF (relativa alla
sI ) che agisce su un circuito magnetico di riluttanza
iR (
i i i sF R NI ).
Per le considerazioni fatte nel precedente paragrafo posso usare la sovrapposizione degli
effetti, molto utile in questa condizione di funzionamento, dato che ora ho due f.m.m., una
prodotta dal sistema indotto, mentre una è prodotta dal sistema induttore. In teoria noi
potremmo sommare queste due f.m.m., ma incontreremmo una difficoltà, dovuta al fatto
che mentre del ecc
sappiamo sempre quale è il circuito magnetico attraverso il quale
passa, ovvero quello con riluttanza minima, di i
non ne siamo a conoscenza, poiché
dipende dall’angolo di sfasamento ψ tra la corrente sI e la f.e.m.
0E . Riferendoci alla
situazione di fig. 5, possiamo osservare che se la sI fosse in fase con la
0E ,
i e
ecc
sarebbero sfasati di 90°, dunque avrei i
in direzione q (asse ad alta riluttanza) e ecc
in direzione d (asse a bassa riluttanza). Perciò a seconda dell’angolo di sfasamento tra
0E e
sI ho che
i agisce su un circuito di massima o minima riluttanza. Per ovviare al
problema di non conoscere l’effettivo percorso di i
, scompongo la sI in due componenti,
sdI e
sqI , tale da avere anche due componenti di
i : id e iq . Da quanto appena detto
si ottiene la relazione (4.1) con il grafico di fig. 6:
iqi idi id iq
i d q
FF F
R R R (4.1)
Come ecc
induce una f.e.m. 0E negli avvolgimenti statorici, così
id e
iq producono
rispettivamente delle f.e.m. idE e
iqE che gli si vanno a sommare. In sostanza si ottiene
che la U , tensione misurabile negli avvolgimenti statorici, sarà data dalla (4.2) come si
vede dalla fig. 7.
0 id iq 0 sd sd sq sqU E E E E jX I jX I (4.2)

Applicazioni Industriali Elettriche – Le Macchine Sincrone
9
Sapendo comunque che:
id s id s d sd id d sd
iq s iq s q sq iq q sq
E j j L I L I
E j j L I L I
(4.3)

Applicazioni Industriali Elettriche – Le Macchine Sincrone
10
Andando a sintetizzare ciò che si può dire sulla reazione d’armatura, osserviamo che la
componente sdI ha un effetto smagnetizzante o magnetizzante sul flusso al traferro a
seconda che la corrente sI si trovi in ritardo o in anticipo rispetto alla
0E : maggiore è lo
sfasamento in ritardo tra sI e
0E (si sta erogando su un carico induttivo), maggiore è la
componente sdI e maggiore è la riduzione dell’ampiezza di
0E (si riduce U ) a causa di
idE (
idE = -
sd sdjX I ) con effetto quindi smagnetizzante.
Nel caso in cui sI fosse in anticipo rispetto a
0E (si sta erogando su un carico capacitivo)
si avrebbe un effetto magnetizzante (si aumenta U ) poiché idE (
idE =
sd sdjX I ) va ad
aumentare l’ampiezza di 0E .
Per quanto riguarda l’altra componente sqI , questa è legata alla
sq sq sqE jX I la quale è
in ritardo di 90° rispetto alla 0E . La tensione che noi effettivamente abbiamo ai capi della
macchina è U , dove è l’angolo di sfasamento tra questa e la sI , caratteristico
dell’impedenza sulla quale la macchina sta erogando potenza, l’angolo è quello tra la sI
e la oE e infine l’angolo è chiamato angolo di carico della macchina.
Quest’ultimo è di fondamentale importanza e deriva dalla componente iq sq sqE jX I ,
ovvero dal fatto che la corrente ha una componente sull’asse q, e quindi che la reazione
d’armatura sia rappresentata anche con una componente di flusso (iq
) in quadratura con
ecc .
Se abbiamo due campi magnetici, tra di essi si crea una forza attrattiva o repulsiva che ha
valore massimo nel caso questi due siano in quadratura tra di loro (prodotto vettoriale). In
sostanza la componente di asse q della reazione d’armatura e quindi della corrente sI è
quella responsabile della coppia elettromotrice che si viene a determinare nella condizione
sotto carico della macchina. Ovviamente questa coppia nel funzionamento da generatore
sarà una coppia resistente mentre in quello da motore sarà motrice.
Quindi il motore primo, nel passaggio da funzionamento da vuoto a carico, dovrà fornire al
generatore una coppia decisamente più grande di quella vista in condizione di morsetti
statorici aperti, che corrisponde in termini elettrici alla potenza elettrica che viene erogata
dal generatore sincrono. Tale potenza vale:

Applicazioni Industriali Elettriche – Le Macchine Sincrone
11
e s e rP 3UI cos C (4.4)
Con quest’ultima espressione ricaviamo la coppia della macchina espressa dalla (4.5):
s
e
s
3 pUI cosC (4.5)
Dato che si vuole un’espressione in funzione dell’angolo di carico , che nasce quando
c’è la componente iq
in quadratura con la ecc
, otteniamo la coppia voluta attraverso i
seguenti passaggi partendo dalla (4.5):
ss
e s
s s s
3 pUI cos3 pUI cos 3 pC UI cos cos sen sen
tenendo conto che
s sq
s sd
I cos I
I sen I
e
0 sd sd
sq sq
U cos E X I
Usen X I
si ha
0e
s sq sd sd
E sen3 p Usen cos U cos senC U
X X X
e infine la
20e
s sd sq sd
E U3p sen2 1 1C sen U
X 2 X X (4.6)
La (4.6) è l’espressione della coppia fornita da una macchina sincrona anisotropa. Come
avevamo già accennato, questo tipo di espressione ci permette di ricavare la coppia per
una macchina sincrona con rotore a poli lisci, semplicemente imponendo la condizione di
isotropia:

Applicazioni Industriali Elettriche – Le Macchine Sincrone
12
S sd sqX X X
0
e
s S
E U3pC sen
X (4.7)
Tale espressione per la coppia può essere direttamente trovata considerando il
diagramma fasoriale di Fig. 7a, relativo a una macchina sincrona a poli lisci. Considerando
la relazione s s 0X I cos E sen si può scrivere
s 0
e
s s S
3 pUI cos 3 pUE senC
X (4.7a)
Se ora si considerasse invece di una macchina isotropa, una anisotropa priva di circuito
induttore, ma caratterizzata da una forte anisotropia (macchine a riluttanza), si avrebbe
una 0E nulla; ciò significa che la coppia diverrebbe:
2
e
s sq sd
3 p sen2 1 1C U
2 X X (4.8)

Applicazioni Industriali Elettriche – Le Macchine Sincrone
13
Figura 8 – Coppia in funzione dell’angolo di carico
Bisogna fare però una osservazione per quanto riguarda la stabilità della macchina: infatti
i punti in cui può realmente funzionare sono quelli compresi tra 0 e il massimo della
funzione (fig. 8), mentre nei punti tra il massimo e si verifica una condizione di
funzionamento pericolosa.
Analizziamo prima cosa accade nella zona di funzionamento stabile. Il rotore dal punto
di vista vettoriale è rappresentato dal ecc
; se il motore primo aumenta la coppia motrice, il
rotore accelera aumentando la velocità di rotazione; aumenta quindi l’angolo di carico e di
conseguenza la coppia resistente, con il raggiungimento di una nuova condizione di
equilibrio. Se invece la macchina stesse funzionando in una zona instabile, a un aumento
della coppia fornita dal motore primo, quindi della velocità del rotore e dell’angolo di carico,
otterrei la diminuzione della coppia resistente, quindi un nuovo incremento della velocità
del rotore; insomma la macchina come già detto si porta in una condizione pericolosa
caratterizzata dal fatto che il rotore aumenta la sua velocità fino a che il sistema
meccanico non ce la fa più a sopportare le sollecitazioni provocate dal funzionamento in
condizioni anomale della macchina. Si dice pertanto che il rotore si porta alla velocità di
fuga e esce dal sincronismo.
Circuito Equivalente della Macchina Sincrona
Per quanto riguarda il circuito equivalente, possiamo schematizzare quello che abbiamo
appena detto con l’equazione (5.1), mentre per una macchina isotropa si ottiene

Applicazioni Industriali Elettriche – Le Macchine Sincrone
14
l’equazione (5.2) aggiungendo per una maggior precisione il termine che tiene conto della
resistenza propria dell’avvolgimento statorico della macchina:
0 sd sd sq sqU E jX I JX I (5.1)
0 S s sU E JX I RI (5.2)
Quindi il circuito con il quale posso schematizzare la macchina è:
Per quanto riguarda il funzionamento da motore, la corrente circola nel verso contrario
rispetto al generatore, come vedremo più avanti. Il grafico vettoriale relativo al
funzionamento da generatore è quello di figura 9.
Il Rendimento di una Macchina Sincrona Isotropa
Per semplicità, faremo riferimento alle macchine isotrope. Il rendimento di una macchina
sincrona è in genere definita come:
erogata erogata sgeneratore
assorbita erogata persa m r
P P 3UI cos
P P P C (6.1)
La potenza assorbita dalla macchina coincide con quella fornita dal motore primo. In
sostanza le perdite di potenza apprezzabili sono: quelle per attriti meccanici, quelle nel
ferro, quelle per effetto Joule nello statore e nel circuito d’eccitazione.

Applicazioni Industriali Elettriche – Le Macchine Sincrone
15
persa attrito Fe Cu s Cu rP P P P P (6.2)
con 2
Cu s s sP 3R I (6.3)
L’ultimo termine non è presente nell’espressione nel caso in cui il circuito d’eccitazione sia
separato rispetto a quello statorico.
Manovra di Parallelo di un Generatore Sincrono ad una Rete di Potenza Infinita
Andiamo ad analizzare più da vicino il reale funzionamento di un generatore sincrono che
viene collegato in parallelo alla rete nazionale.
La macchina deve essere allacciata alla rete attraverso un interruttore (fig. 10) dopo aver
raggiunto una condizione appropriata di funzionamento, ottenuta attraverso la cosiddetta
manovra di parallelo.
Quello che otterrei non effettuando la manovra di parallelo prima di connettere i morsetti
trifase della macchina alla rete, sarebbero delle vibrazioni del rotore e delle correnti
assorbite molto elevate, con i relativi problemi connessi a queste.
Grazie al teorema di Thevenin, possiamo schematizzare la rete alla quale attaccheremo la
macchina con un circuito equivalente in modo da poterla considerare di potenza infinita, la
cui tensione a vuoto (U ) si mantiene costante qualsiasi cosa accade durante
funzionamento. Con questa ipotesi possiamo allacciare il nostro generatore ad una rete
con tensione fissa e impedenza nulla.
Per poter effettuare la manovra di parallelo, devo far sì che la 0E sia un vettore che abbia
la stessa AMPIEZZA, FASE e FREQUENZA di U , tensione a vuoto della rete.

Applicazioni Industriali Elettriche – Le Macchine Sincrone
16
Si può ottenere la regolazione della frequenza attraverso un numero di giri del rotore
adeguato, con le relazioni (3.1) e (3.2); l’ampiezza della 0E si può regolare con
un’opportuna scelta della eccI . L’ultima condizione da soddisfare è quella di avere i due
vettori in fase, in modo da non avere delle correnti dovute a una differenza di potenziale,
nel momento in cui aggancio la macchina. Tale condizione si ottiene variando leggermente
la velocità di rotazione del motore primo; in tal modo la frequenza, e quindi la pulsazione
elettrica, della fem 0E differisce di poco da quella della tensione di rete, permettendo ai
due fasori di raggiungere la situazione di uguaglianza di fase e di rimanere in tale
condizione per il tempo necessario all’operazione di chiusura dell’interruttore di parallelo.
A scopo di verifica della differenza di fase si usano degli strumenti di misura chiamati
sincronoscopi.
Una volta raggiunte le tre condizioni imposte, si può chiudere l’interruttore e la macchina
viene collegata alla rete. La macchina non erogherà alcuna corrente e potenza, come ci
eravamo preposti di fare.
Si vuole quindi regolare la potenza attiva e reattiva da erogare alla rete. Ricordando
l’espressione della coppia elettromagnetica, questa dipende dall’angolo ; quindi
dobbiamo creare obbligatoriamente uno sfasamento tra la 0E e la U (sempre
considerando ciò che si è detto riguardo la stabilità della macchina); devo far sì che la 0E
si porti in leggero anticipo rispetto alla U , con una conseguente produzione di potenza
attiva. Tale condizione si verifica di seguito all’incremento della coppia motrice impressa
dal motore primo all’albero di rotore del generatore sincrono. A seguito di ciò la situazione
ottenuta è quella in fig. 11 con la relazione (7.1):
0 s sE U jX I (7.1)
0 0s
s s
E U E UI j
jX X
(7.2)

Applicazioni Industriali Elettriche – Le Macchine Sincrone
17
Come si vede dal grafico, oltre a erogare potenza attiva, il generatore sincrono scambia
potenza reattiva capacitiva con la rete stessa, infatti la sI è in anticipo rispetto alla U . Per
regolare il valore e la natura della potenza reattiva si deve agire sulla eccI , e quindi sulla
0E , poiché U è costante, in modo da modificare l’angolo e quindi lo sfasamento della
sI . In tale modo è possibile immettere verso la rete potenza reattiva di tipo induttivo o
capacitivo, rispettivamente sovra-eccitando ( 0E U , Fig. 11a) o sotto-eccitando (
0E U )
la macchina.
Macchina Sincrona in Funzionamento da Motore
Andiamo ora ad analizzare il funzionamento di una macchina sincrona, qualora funzioni
come motore, cioè assorbendo potenza attiva dalla rete. Come per il generatore non è
possibile chiudere l’interruttore a macchina ferma: anche in questo caso deve essere

Applicazioni Industriali Elettriche – Le Macchine Sincrone
18
effettuata la manovra di parallelo, di cui si è già parlato. La manovra di parallelo viene
effettuata attraverso un motore di lancio, che porta alla velocità desiderata il rotore; poi
come si è già visto, si regola 0E attraverso
eccI e si portano in fase i due vettori verificando
con il sincronoscopio.
Quello che succede quando si connette la macchina alla rete, dopo aver effettuato la
manovra di parallelo, è che la 0E si porta in ritardo rispetto alla U , dato che il rotore, una
volta scollegato al motore di lancio e collegato al carico tramite una frizione, è rallentato
dal carico meccanico, così si viene a generare una coppia motrice che aggancia il rotore
(0E ) al campo magnetico rotante (U ): la situazione è quella in fig. 12, con il relativo
grafico vettoriale di fig. 13.
L’angolo di carico è tanto più grande, quanto maggiore sarà la condizione di carico della
macchina. Sempre intervenendo sul valore delle eccI e quindi della
0E , è possibile
decidere se la macchina debba funzionare assorbendo, oltre alla potenza attiva richiesta
dal carico meccanico, una potenza reattiva di tipo induttivo o capacitivo. A questo
proposito, è bene soffermarsi un attimo proprio sulle possibilità offerte dal motore sincrono
di lavorare come se fosse un banco di condensatori, che però offre il vantaggio di poter
regolare il valore di potenza reattiva che si vuole scambiare. In questa condizione di
funzionamento, il motore sincrono prende il nome di compensatore rotante o
compensatore sincrono. La macchina lavora come un motore nella condizione a vuoto,
quindi assorbendo una potenza attiva utile a compensare le perdite a vuoto della
macchina, ma scambia potenza reattiva di tipo induttivo o capacitivo con la rete a seconda
che venga sotto eccitata o sovraeccitata. Quindi, in generale, affinchè la macchina

Applicazioni Industriali Elettriche – Le Macchine Sincrone
19
sincrona possa immettere in rete la potenza reattiva richiesta per rifasare apparecchiature
e utenze di tipo resistivo-induttivo, è necessario che la macchina venga sovraeccitata: in
questo modo il motore sincrono ha un comportamento da carico capacitivo.
Il compensatore rotante viene utilizzato come “regolatore” di potenza reattiva, come se
fosse un banco di condensatori, quindi viene collegato alla rete in parallelo, soprattutto nei
nodi dove è necessario fornire la potenza reattiva richiesta dalle utenze. In genere, si evita
di fornire potenza reattiva direttamente dalle centrali elettriche di produzione, ma si
preferisce immetterla nei nodi di smistamento in prossimità delle utenze, in modo da
contenere la dissipazione di energia sulle linee elettriche di trasmissione e sui
trasformatori di alta tensione.

















