Lang_drachen Ricerca Comparativa Su Kite Gen

of 29
-
Upload
muscius3843 -
Category
Documents
-
view
215 -
download
0
Transcript of Lang_drachen Ricerca Comparativa Su Kite Gen
-
8/6/2019 Lang_drachen Ricerca Comparativa Su Kite Gen
1/29
1
Electrical Power Generation Using Kites
An Overview Study of Alternatives that Span PowerLevels from Municipal to Small Domestic Applications
David D. Lang Associatesfor the Drachen Foundation
25 Dec 2005
-
8/6/2019 Lang_drachen Ricerca Comparativa Su Kite Gen
2/29
2
Examination of Kite Power-Generation Schemes
ForwardThus far, we have identified these schemes for kite power generation:
1. Wubbo's scheme, called the Ladder Mill (see page 7)
2. Daves Linear-motion reel scheme, lets call it the "Reel" (see page 18)
3. Peter's Figure-8 scheme using a flying generator, the "Fly Gen" (see page 11)
4. Joes idea of using the Figure-8 maneuver, call it the "Buggy" (see page 15)
5. Jose Sainzs scheme, call it the "Sail" (see page 21)
6. Massimo Ippolitos scheme, call it the "KiwiGEN" (see page 24)
I summarize my attempt to compare all the above schemes of power-generation via an
evaluation table. The scoring and rationale behind my conclusions are provided under
the details and analysis notes for each scheme (later in the report). I dont address
specific kite foil-technology that might prove ideal for a particular scheme (for example,
the Reel scheme could potentially employ either a Sled or an Inflatable, etc).
Note: the first 5 pages of this report contain the summary, conclusions and
recommendations. Forpictorials and details of each scheme, see page 7 and beyond.
A Minor Digression
As background, I reiterate a basic concept: Work is defined as the component of a force
acting through, and in the direction of, a displacement. Power is the rate at which workis done; ie. the product of Force and displacement Rate (or Velocity) of the
corresponding displacement. BUT, remember that it is only the component of Force in
the direction of Velocity (or vice-versa) that counts. For instance, a kite surfer moving athigh speed, with the kite pulling hard, but positioned significantly off to one side (so that
line tension creates only a small force component in the direction of motion of the board),
may be generating very little Power of the kind that would run a toaster.
Evaluation Categories
Here is the list of categories against which each scheme is evaluated
1. Maximum Power Potential (called Potential kW in comparison table)An assessment of the maximum power a scheme might produce. For instance,given a single installation, what is the practical limit to its power production?
Installations can of course be clonedindefinitely, but that is not what thiscategory pertains to. This category also has an element ofrelativity to it;
otherwise, the Ladder Mill would have to be scored a 10, and by comparison,
all others a 0 in this category; rather. This category assesses the maximum
-
8/6/2019 Lang_drachen Ricerca Comparativa Su Kite Gen
3/29
3
power relative to the implied power regime in which the scheme might be
operating, for instance, municipal vs domestic (or supplemental home power).
2. ScalabilityThe ability of a design to be easily extended to accommodate a range of powerproduction within the power regime inherent in that design. This scalability
does not pertain to an absolute level of variability (ie. municipal domestic levels). For instance, what are the implications of adding (or
deleting) kites to a scheme to increase (or decrease) its power output?
3. PracticalityThe extent of a schemes potential application and the technical problems indeveloping it to a state of usefulness. This assessment would reflect
hardware/manufacturing costs, as well as complexity and technical risk.
4. Potential for Autonomous Operation (called Autonomy in comparison table)The ability to allow unattended autonomous operation, and to transition
between wind/no-wind conditions, or extreme winds. For instance,autonomous restart of a crashed kite in a system flying Figure-8 maneuvers
may pose a problem. Degrees of autonomy range from turn it on and forget
it (very desirable) to full time personnel/operational maintenance (least
desirable). The degree to which operational intervention is acceptable depends
upon power payoff, and other expectations of usage; a Ladder Mill could payfor full time operations personnel; at the other end of the spectrum some
homeowners minimizing grid power usage may find it acceptable to
periodically intervene to re-start a generation system after a period of wind
lull. Ideally, a scheme would exhibit full autonomy.
5. Manufacturing -Cost Relative to Return-on-InvestmentThis evaluates expense of manufacturing the design in relationship to the
potential for power production. For example a system that is expensive tobuild, but that also produces high power may have a better rating than a
system that costs a fraction of that, but produces only meager power.
6. Prototype CostExpense of developing a design to a level of convincing demonstration; but, towhom? This may be to ourselves, or potential grant sources, etc. Inherent in
this evaluation is an implied level of demonstration appropriate or effective
for a given intent; a demo may or may not need to exhibit full autonomy. Thisevaluation may have implications on the direction of our efforts.
7. ComplexityThe overall complexity of a design. For instance, schemes flying Figure-8s
pose a real problem in this category since a automated control mechanism to
reliably fly Figure-8s will likely be complex and difficult to attain.
8. Safety Relative to Design IntentAssessment of the safety hazards inherent in a design. For example: fallingkites (especially with weighty objects attached); ground based mechanisms
-
8/6/2019 Lang_drachen Ricerca Comparativa Su Kite Gen
4/29
4
with rapidly reciprocating elements; etc. Evaluation is performed in view of
the operating regime for each design. For instance, aircraft hazard is clearly aconsideration for the Ladder Mill, but that would be a problem naturally
expected to be addressed in the operations; thus given the great potential
benefits, this, in and of itself this would not necessarily represent a show-stopper. On the other hand, assuming a Reel scheme operating at, say, 1500
ft altitude, if illegally placed near an airport or other restricted airspace, may
constitute a safety hazard.
9. EnvironmentEvaluation of impact on the environment from the standpoint of: animal life,
pollution, noise, aesthetics, real-estate requirements, and regulatory issues.
10.Accommodating Wind Variability (called Variable Wind in comp. table)Ability of design to adapt to real-world wind conditions of variable speed and
azimuth, automatic restarting, very light winds, storm winds, etc.
11.Probability of Demo Success (called Demo Ease in comparison table)A very subjective gut feel of the likelihood of a prototype demo device
being successfully implemented; based on the overall evaluation.
12.Probability of Operational Success (called Going to Oper. in comparison table)A very subjective gut feel of the likelihood of a match between a useful
application and a production device being successfully implemented to meet a
need (a municipality, a farm, private off-grid use, etc).
Evaluation scale
Assessments vary from semi-analytical to totally qualitative; all are basically subjective
in nature. In all cases, the following evaluation scale will be used:
Subjective Value Qualitative Description
Best 10 - 9 Exhibits maximum of a desirable attribute
Good 8 - 7 While not best, fairly easily complied with by the scheme
Fair 6 - 4 Not exemplary, but acceptable
Poor 3 - 2 Little versatility and/or significant problemsBad 1 Sufficiently ill-suited to possibly be a show stopper
Summary Findings
Conclusions from the table below may or may not be obvious. Once we have decided
what we are trying to accomplish, how much resource the Foundation wants to put intothis, etc, the choice of a direction to proceed may become obvious from these findings.
The results below are my assessments alone. Some are backed up by fairly rigorous
-
8/6/2019 Lang_drachen Ricerca Comparativa Su Kite Gen
5/29
5
rationale (see assessment details for each scheme later in this report); others are just a
gut feel. It seems appropriate to challenge conclusions I may have come to.
LadderMill Reel Fly Gen Buggy Sail Kiwi
Potential kW Best (10) Poor (2) Poor (2) Bad (1) Fair (5) Good (7)
Scalability Best (10) Good (8)
Poor (2) Poor (2) Good (7) Good (9)
Practicality Poor (2) Fair (5) Poor (3) Poor (2) Fair (4) Fair (6)
Autonomy Fair (5) Good (9)
Poor (3) Poor (3) Good (7) Good (7)
Manufacturing Good (9) Good (7)
Good (8) Fair (4) Fair (6) Good (9)
Prototype Cost Poor (3) Good (8)
Best (10) Fair (5) Fair (6) Good (8)
Complexity Poor (2) Good (9)
Fair (4) Poor (3) Fair (6) Fair (6)
Relative Safety Good (7) Good (9)
Poor (3) Good (8) Good (8) Good (8)
Environment Fair (4) Good (9)Good (8) Good (8) Good (8) Good (8)
Variable Wind Poor (2) Good (8)Good (8) Fair (4) Fair (4) Best (10)
Demo Ease Fair (4) Good (8)
Fair (6) Poor (3) Fair (4) Good (7)
Going to Oper. Poor (3) Fair (4) Poor (3) Poor (2) Fair (5) Fair (6)
SCORE () 61 86 60 45 70 91
Total SCORE assumes all categories are weighted equallythis may be questionable; a perfect scorewould be 120.
Conclusions
I have tried to evaluate these schemes impartially. I would gracefully entertain challenges
to the high score I have awarded the Reel, especially since I introduced it
The envelope please:
-
8/6/2019 Lang_drachen Ricerca Comparativa Su Kite Gen
6/29
6
(1)Reel score = 86 {good features/easy to do, but net power output is suspect}(2)Sail score = 70 {way more complex than Reel, but likely better net power}(3)Ladder Mill score = 61 {a tough one to build, but power payoff is immense}(4)Fly Gen score = 60 {could be very complex, power payoff maybe OK}(5)Buggy score = 45 {could be even more complex, power production suspect}(6)KiwiGEN score = 91 {good tolerance to wind variability, hi power potential}
Recommendations: It is difficult to compare a Ladder Mill against other schemes sinceits potential/scale are so vastly different. Ladder Mill stakes are high - returns could be
great; political implications are present; both KiwiGEN and Reel present possibly
attractive targets for potential Drachen contribution. Here are some possible strategies:
Option A. An interesting opportunity presents itself to the Foundation to
demonstrate that something useful might be achieved for the domestic consumer
as well as intermediate sized consumers (small municipalities). This opportunityis a feasibility demonstration of the KiwiGEN or Reel; this would not only
provide an immediately useful contribution to the field, but would also establish a
Foundation track recordfor involvement in scientific contribution, or,
Option B. This option lowers the bar to demonstrating only that something
useful could be achieved for small domestic consumers (folks trying to live offthe grid), thus establishing a Foundation track record? Then, if successful, parlay
this credibility into something on the scale of the Ladder Mill or KiwiGEN, or,
Option C. Go right for the big prize and play a significant roll in demonstratingthat practical municipal power capability using kites may be possible; then rally
the troops (pronounced grants and grad students) around the Ladder Mill or
KiwiGEN. Note, my proposal for the initial Grant was a less ambitious (and morediffuse) version of what I am suggesting here (see Option B below for details).
Assuming Option A: I would focus on the Reel or KiwiGEN due to their desirable
features. Address their greatest need, an effective kite, possibly, a stiffened Sled with de-power capability for the Reel; for KiwiGEN, a four-line traction or special purpose kite
(variant of a Revolution design). For the KiwiGEN - build and fly a simplified rotating
carousel to confirm the concept; for the Reel build a simplified unit to confirmoperation and obtain actual power production data. Obtain actual power production data.
Assuming Option B: This, pretty much renders moot the foregoing relative evaluations
across the different schemes. For the Ladder Mill my recommendation would be to (1)design a prototype kite to do the over-the-top maneuver (drawing on existing envisioned
designs), (2) construct 5-10 kites, and (3) demonstrate stacking stability and a solid
over-the-top maneuver. This would represent a major contribution to that concept. Thiseffort, with its well defined and accomplishable goal, would credit the Foundation with a
significant contribution to this field, make noteworthypublication andpresentation
material, have a potential educational component, and provide Drachen a commanding
entre for further involvement and Grants if the Foundation so desired.
Detailed Analysis of Each Scheme:Details and Rationale follow:
-
8/6/2019 Lang_drachen Ricerca Comparativa Su Kite Gen
7/29
7
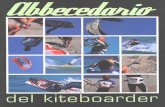
The Ladder Mill
Description and Overview
This is a continuously circulating loop of kites envisioned up to altitudes of 30,000 ft.
Kites on the up-bound (ie. power) side operate at full lift Angle of Attack (AOA)creating high tension in the up-bound cable; kites on the down-bound (ie. return) side of
the loop operate at near zero AOA, thus creating low tension in the retrieve-side cable.
These tension differentials on the order of 10,000 pounds, when applied to a capstan on
the ground (like a belt around a pulley) can generate significant shaft torque to turngenerating machinery. Cables can be made of (the rapidly emerging) Carbon Nano-tube
materials (on the order of 230 x stronger than steel by weight), greatly reducing the mass
of the long cables and eliminating a variety of potential cable handling problems.
The kites must be designed with a topology capable of negotiating the loops over the
top maneuver; such configurations will likely be in the form of split (or two sided)
kites. The ground station recycling of kites and cable from the return-side to the power-
side (which must avoid disrupting the harvesting of tension at the capstan) presents a verytricky design and operational consideration.
-
8/6/2019 Lang_drachen Ricerca Comparativa Su Kite Gen
8/29
8
Response of the system to wind variation (both speed and azimuth) presents design
issues. The kites must be able to be progressively retrieved until all kites are on theground to allow for (anticipated) periods of no wind. The base station mechanism must
be designed to accommodate some variation in wind azimuth; winds outside of this
azimuth would necessitate full retrieval of the loop (as in the no-wind case).
This system is envisioned as producing enough power to provide a significant fraction of
municipal usage or as a supplement to an regions power grid resources and fossil fueluseage. As such it is not unreasonable that a crew of personnel would be dedicated to the
care and tending of the system (much as done in modern conventional power-plants).
Strong Points:
a. Potentially provides power of municipal-scopeb. Does not create atmospheric pollutantsc. Not fossil fuel dependentd. Power output easily scaled up or downe. Operation is independent of ground-level winds
Weak Points:
a. Difficult to design so as to accommodate wind variability (especially azimuth)b. Re-circulating kites makes a complex mechanical design at ground stationc. Airspace encroachment problem may a significant regulatory issued. May require large easement rights (for possible safety and environment
encroachment issues)e. System start-up could be a difficult issue
Detail Assessment
Max kW Potential: Given aBest rating due to the designs ability to create powerthat is a significant fraction of municipal usage, rivaling conventional power sources
when installed in optimal environments.
Scalability: Given aBest rating due to the ability to scale power output (within its
regime of applicability) by a combination of: operational altitude; loop kite-density;kite size; and loop speed. Even though this adaptability is extreme, it is not practical
to scale down to the level of private (domestic) installations due to the complexityand cost of the ground handling system that can only be amortized over a large
municipal level power output.
Practicality: Given aPoor rating because of the engineering challenges inherent in
the design. Effective solutions to some of the problems are not evident, environmental
implications pose serious regulatory issues, usage will have to be at municipal powerlevels; that means head-on competition with conventional power sources for
economic viability.
-
8/6/2019 Lang_drachen Ricerca Comparativa Su Kite Gen
9/29
9
Potential for Autonomous Operation: Given aFair rating due to the fact that this
system will have to be attended by operations personnel 24-7, and can posesignificant transient operational procedures to shut-down and start-up. It will likely
require constant monitoring of high-quality meteorological data to plan and
orchestrate operations (a reasonable expectation consistent with conventional power-plants of similar output). Such complexity and operations cost can be amortized over
its potential for high power production.
Manufacturing Cost: Given a Goodrating. Manufacturing costs will be high, but
when compared to potential for high power output, is not exorbitant. This scheme hasbeen estimated to provide power on a potentially competitive basis with conventional
power sources. However, its actual cost would be high enough o possibly present a
barrier to its realization.
Prototyping Cost: Given aPoor rating for many reasons. First, it is likely that a newkite design will have to be done and 5-10 built (this design would have to be
compatible with unlimited stacking, and able to negotiate the over-the-top
maneuver. While a number of conceptual designs have been proposed, they have yet
to be built and tested. The issue of re-circulating kites at the ground-end of the loop,while it has been addressed conceptually, is also problematic; it is doubtful that this
phase of a demo prototype is feasible without gaining some grant assistance.
Complexity: Given aPoor due to (a) the problem of recycling kites from the return-
side to the Power-side at the ground station, and (b) operational response problems to
extreme wind environments (at great altitudes) as well as deployment-retrieval issues.
Safety: Given a Goodrating based on a design that would minimize kite and cablemass, thus minimizing damage on the ground in the event of a major cable failure.
Aircraft hazard would be dealt with via regulations. This would be a full industrial
strength facility with the usual OSHA worker safeguards, etc.
Environment Given aFair rating because of the implications of real-estate right-of-ways to operate the system (making a protective zone around the facility), and
regulatory issues associated with high altitude airways operation. The device would
undoubtedly carry aloft lights for night-aircraft safety; some might view this as
aesthetic pollution, others might view it as a beneficial work of space-art (it wouldbe fascinating to watch ). The device should be fairly quiet in operation.
Accommodating Wind Variability: Given aPoor rating. This will likely be one of
the major impediments to operational success. Changing wind speed and direction
present a serious issue here, and operations will require close liaison with
meteorological services. The entire Ladder will have to be retrieved (stowed) under
no-wind conditions. Regarding wind azimuth, should the base station function in all-directions, or be limited to some operational range of wind azimuth (with azimuths
outside this range requiring shutdown as though there were no wind)? Omni-
directional operation would to dictate a complex base station. Storm conditions
would probably not be a problem since the design must be robust enough for
-
8/6/2019 Lang_drachen Ricerca Comparativa Su Kite Gen
10/29
10
operation in the jet-stream, conditions that would be considered a storm if
encountered at ground level.
Probability of Demo Success: Given aFair due to many reasons. A full operationalprototype would be a complex (making such a prototype unlikely), however, a partial
(poor-mans) prototype might reasonable whereby the ground-station kite-recycling
issue is missing. This might be sufficient to obtain funding to a level that wouldsustain development to the next stage.
Probability of Operational Success: Given aPoor rating due to the scope of
investment to go fully operational. This scheme must be implemented on a large
enough scale to provide municipal-levels of power in order to be cost effective (toamortize manufacturing cost against power production). Operational usage would
likely depend upon it being competitive with conventional power production.
-
8/6/2019 Lang_drachen Ricerca Comparativa Su Kite Gen
11/29
11
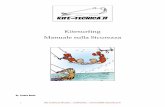
The Fly Gen
Description and Overview
I present the concept here as I envisioned it from reading Peter Lynns kite-powerdocument.
Prologue
This scheme attempts to harness the performance (orpower) that is experienced in
traction kiting. This scheme depends upon a maneuver common to traction kiting, the
Figure-8, in which the kite dives from high to low altitudes, trading potential energy
(altitude) for kinetic energy (speed). The resulting increase in speed induces high relative
winds at the kite, and thus high dynamic pressures which result in high lift on the kite
experienced as high tension in the kite lines. This technique is best sustained by kites with
high L/D (lift to drag ratio), since such aerodynamic configurations can generate lift with
minimum penalty in drag induced by the lift (meaning low speed attenuation). High L/D
is probably critical to the success of this technique because the kites mass is low
resulting in relatively low potential energy stored in the kite at peak altitude before
diving; this means the resulting kinetic energy of the dive is low even though the speed is
-
8/6/2019 Lang_drachen Ricerca Comparativa Su Kite Gen
12/29
12
high. Heavy objects mounted on the kite (such as a generator), while creating a greater
mass for the moving kite (thus making its speed less sensitive to drag load), is essentially
a wash in terms of overall power generation, since lofting a heavier kite back up to
altitude to restart the maneuver presents a bigger problem (ie a slower climb, thus a
longer time duration to replicate the Figure-8 maneuver which diminishes average power
output) . Hence, any significant load in a direction to counter speed (ie opposite the
relative wind) could serve to cause serious loss of speed and tension, as well as make the
climb back to altitude more difficult.
Scaling-up power output will likely be possible only via increasing kite size; adding kites
(stacking) will probably not be an option since the control system required to handle
Figure-8 maneuvers of a stack is probably not practically attainable or cost effective.
So, the scheme envisions a (traction) power-kite continuously performing Figure-8maneuvers that put the kite in the max wind window at high relative wind. Mounted on
the kite itself would be a high-rpm generator (thus lighter hardware than needed bytraditional low-RPM windmill power technology) run by a propeller (or ducted fan) that
takes advantage of cyclic periods of high relative wind induced on the kite by the Figure-
8 maneuvers. The force of significance here is not the kite line pull itself (since the linesare not connected to any power generation mechanism) but rather the drag load induced
by the rotating propeller opposite to the direction of motion of the kite itself. These loads
of course occur in response to the propellers aerodynamic transformation of relativewind into torque and RPM of the generator shaft (ie. drag induced in response to blade
lift that translates linear motion through the air into shaft rotation). Thus the act of
creating torque on the generator shaft unavoidably creates drag on the propeller blades,and acting opposite the direction of the relative wind on the kite itself. The down-side is
that it is this drag that would tend to impede the ability of a traction kite to accelerate to
high speed during a Figure-8 maneuver; this effect represents an unknown in this
schemes ability to generate significant power. Explanation: Inherent in the Figure-8maneuver of a traction kite is the act of the kites gaining altitude (using the wind to lift
the light weight of the kite), then diving to pick up speed (impeded only by the drag due
to the kites low drag coefficient). However, in the case of power-generation, the kitemust now lift not only its own weight to gain altitude, but also the weight of the
generator-propeller system that likely weighs more than the kite itself. Upon diving to
pick up speed, the kite is now impeded by the drag of the rotating propeller. This does not
necessarily render this concept invalid, but rather points to an unknown attribute of itsperformance in creating practical power.
Safety issues associated with an airborne generator moving at high speed my be cause forsome concern, as it has the potential to do some real damage if crashed.
Strong Points:
a. Places generator in high speed wind stream, exactly where it is most effectiveb. Low cost
-
8/6/2019 Lang_drachen Ricerca Comparativa Su Kite Gen
13/29
-
8/6/2019 Lang_drachen Ricerca Comparativa Su Kite Gen
14/29
14
Safety: Given aPoor rating based on the existence of a heavy generator performing
aerobatics. A crash could cause serious damage.
Environment: Given a Goodrating based on minimal environmental intrusion. The
main drawback might be that the high speed (generator) propeller may be noisy.
Accommodating Wind Variability: Given a Goodrating. The base station shouldbe reasonably small (just needs to be capable of mounting the Figure-8 control system
and electrical interfaces), thus permitting a rotational capability to accommodate wind
azimuth. Storm conditions may pose a problem requiring (partial or full) retrieval.
Probability of Demo Success: Given aFair rating because a limited prototypemight be possible that ducks the issue of automated Figure-8 maneuvering. Such a
prototype could be relatively inexpensive, technically not very risky, and serve to
demonstrate the level of power that might be realized here.Probability of Operational Success: Given aPoor rating because of problems with
autonomous operations, implied safety considerations, and general complexity of a
system capable of reliably flying automated Figure-8 maneuvers.
-
8/6/2019 Lang_drachen Ricerca Comparativa Su Kite Gen
15/29
15
The Buggy
Description and Overview
The Fly Gen and Buggy both utilize Figure-8 maneuvers; for details, read thePrologueto the Fly Gen (above). They also share many other aspects stemming from the Figure-8.
In the Fly Gen, the question was, can high relative wind induced at the kite be harvested
for useful power; for the Buggy, the question becomes.can transient high tensionperiods be converted into useful real power. The only way this can occur is for the kite to
be allowed to translate (ie. given a velocity), along the direction of the kite line (this
being the direction of the tension), thus creating the situation of a component ofdisplacement occurring in the direction of tension (a necessary requirement to generate
real power (see Minor Digression on page 1 of this report.noting that, velocity
perpendicular to the kite line provides zero power). So a mechanical scheme is needed on
the ground to create and harvest those periods for which real power is available.Simplistically, one might imagine a kite buggy being accelerated by the action of the kite;
practically, the buggy must be stopped, and the process repeated in the opposite direction
in order to contain the harvest mechanism in a reasonable size ground station. Thus a
reciprocating mechanical device must be conceived to harvest power in this scheme.
For autonomous operation three problems must be overcome: (1) a control system must
be designed to reliably fly Figure-8 maneuvers that will not impact the ground, and
additionally perform purposeful maneuvers to repeatedly reverse buggy motion (2) inthe event of ground contact (crash or no-wind), a scheme must be devised to (re-)launch
and (re-)commence flying; note, automated re-launch may prove very difficult due to the
-
8/6/2019 Lang_drachen Ricerca Comparativa Su Kite Gen
16/29
16
potential unruly behavior of traction kites (turning inside out, etc), and (3) the potential
size and bulk of the ground station necessary to contain the reciprocating powerharvesting mechanism may prove difficult to adapt to azimuth wind pointing. The
required control system effectors must be contained on the reciprocating buggy since
this is where the control lines of the kite terminate. Since no real design work has beendone on the scheme it remains a moot point whether power can be usefully harvested in
this fashion.
Strong Points:
a. Possibly harnesses potential of traction kites for power generationb. Relatively Low cost
Weak Points:a. Autonomous operation will be difficult (re-start problematic)b. Controller to fly reliable Figure-8s will be problematic and maybe costlyc. Reciprocating mechanism to harvest power may be complex and larged. Wind azimuth pointing of base station may be difficult due to base sizee. Reciprocating mechanism is potentially a safety hazard
Detail Assessment
Max kW Potential: Given aBadrating since an installation is limited essentiallyby the size of a single kite that can be flown effectively in Figure-8 maneuvers;
furthermore it is not clear how much energy this scheme can in fact extract from thewind stream..
Scalability: Given aPoor rating because, given the complexity of automated flyingof Figure-8 maneuvers, it appears impractical to stack power-kites and continue to
fly coordinated, stable, Figure-8 maneuvers. Furthermore, stacking traction kites
would also likely rule out autonomous operation due to complexity of re-start. This
leaves only the option of varying the single kites size to vary the power output (whilemaintaining autonomous capability).
Practicality: Given aPoor rating, because, while manually flying Figure-8maneuvers with a power kite appears simple, the complexity of an automated system
to successfully do this under a range of wind conditions poses a serious engineeringchallenge, and possibly manufacturing cost implications. The system also has
mechanical complexity associated with its reciprocating design. The issues of
autonomous operation also raise serious concern about practical use of such ascheme. Furthermore there are questions about the ability of this scheme to extract
significant energy from the air stream.
Potential for Autonomous Operation: Given aPoor rating because of the
implications of re-starting the system in the event of crash or low wind. This will
almost surely require human intervention. Furthermore, the automated flying ofFigure-8 maneuvers may prove to be an almost prohibitive aspect of the system.
-
8/6/2019 Lang_drachen Ricerca Comparativa Su Kite Gen
17/29
17
Manufacturing Cost: Given aFair rating since all this scheme needs is wind-
pointing base station of some dimension (to accommodate the reciprocatingmechanism), and a Figure-8 maneuvering control system; this control system may
prove costly, but that is undetermined at present.
Prototyping Cost: Given aFair rating because of the complexity of the ground base
station with a reciprocating member to harvest power, in conjunction with the need to
fly Figure-8s in a fashion compatible with the reciprocating member. This stronglyimplies a need for an automated scheme to fly Figure-8s. Also, the nature of a wind
pointing base station sufficient to contain the reciprocating mechanism may prove
costly.
Complexity: Given aPoor rating because of problems associated with flyingcontinuous Figure-8 maneuvers under varying wind conditions. In addition, this
system needs a mechanical reciprocating element to harvest power.
Safety: Given a Goodrating. The only real safety problem with this design is the
reciprocating mechanism mounted on a (relatively large) ground station.
Environment Given a Goodrating based on minimal environmental intrusion. The
main drawback might be that the wind-pointing base platform (relatively large) mayconsume some real estate.
Accommodating Wind Variability: Given aFair rating due to the implied size of
the base station needed to contain the reciprocating power mechanism; this could
pose a design problem for tracking wind azimuth. This size may rule out passive wind
re-orientation of the base station, thus requiring a powered system to control basestation azimuth. Storm conditions may pose a serious problem requiring (partial or
full) retrieval.
Probability of Demo Success: Given aPoor rating because this prototype really hasto demonstrate the ability to generate useful power via the reciprocating extraction
scheme driven by Figure-8 kite maneuvers. So nothing short of making such a
scheme (although full azimuth capability would not be required for this), andsomehow flying appropriate Figure-8s in this context would demonstrate viability.
Probability of Operational Success: Given aPoor rating because of problems with
autonomous operations, and general complexity of a system capable of reliably flying
automated Figure-8 maneuvers. It is not totally evident that the reciprocatingextraction scheme will be effective in producing usable power, and it also introducesproduction cost that may be unfavorable. The large base station also may pose a
problem adapting to wind azimuth variability for autonomous operations.
-
8/6/2019 Lang_drachen Ricerca Comparativa Su Kite Gen
18/29
18
The Reel
Description and Overview
This scheme might best be described as a plodding, low-tech approach to power
generation. It envisions a very stable kite that has a reasonably hard, steady pull, and that
can be de-powered in flight. The repetitive cycle of this scheme is simply to reel the kiteout, then reel it in using a capstan connected to a generator/motor. During the reel-out
(power stroke), the kite pulls maximum load (AOA); then it is de-powered and reeled
back in (return stroke). Power is harvested from the net energy gained during reel out,less that required to reel-in. This is a low tech solution requiring simple electrical andmechanical components.
The potential for autonomous operation seems optimal since the base station has aminimal ground foot-print making it relative easy to implement a wind azimuth tracking
capability. Furthermore, by attaching suspension balloons to the kite, the no-wind
situation might be accomplished fairly easily.the kite simply dangles aloft until thewind picks up. At some point the system senses wind and recommences cycling. Heavy
wind conditions might be partially dealt with by reeling the kites in closer to the ground
-
8/6/2019 Lang_drachen Ricerca Comparativa Su Kite Gen
19/29
19
and de-powering. The balloons also adds a element of stability to autonomous control-
system-free operation; any tendency of the kite to dive off to the side is persistentlycountered by the vertical pull of the balloons.
Scaling-up power output is possible via the following: (a) using larger kites, (b) stackingkites, and (c) operating at higher altitudes. Since the type of kites employed would likely
use dual lines (attached at opposite ends of the span), a stable stacking configuration will
be possible. Additionally, a third line (and maybe a fourth) will be needed to trigger de-powering. Added stability provided by balloons may allow significant de-powering to be
achieved. There seems to be few safety issues associated with the operation of this
scheme, except possibly running kites too high in restricted air space.
Strong Points:a. Power output easily scalableb. Inexpensive to manufacturec. Low tech, low risk designd. Autonomous operation seems feasiblee. Low safety hazard potentialf. Low environmental impact
Weak Points:
a. High steady-pull, stable kite technology may be a problemb. Generates only over half the ops cycle (looses power during other half)c. Level of kite de-powering is critical to its successd. Ability to generate useful power may be questionable (see b & c above)
Detail Assessment
Max kW Potential: Given aPoor rating. While its design permits power output to
be easily expanded (see Scalability evaluation below ), its actual useable power
output is still suspect. This is because power is generated only over half of itsreciprocating cycle, the other half actually extracting power; the feasibility of this
design is dependent upon the extent to which the kite can be de-powered.
Scalability: Given a Goodrating because total power output can be varied via three
mechanisms (a) stacking, kites, (b) increasing kite size, (c) adjusting operatingaltitude to vary wind energy exposure.
Practicality: Given aFair rating because of the relative simplicity of this scheme,its potential to produce a domestic level of power, and its potential for autonomous
operation.
Potential for Autonomous Operation: Given a Goodrating due to relative ease
with which a fully automated system may be achieved. Using kites in conjunction
with balloon suspension may maintain kite positions under no wind, providing anatural start-up configuration. Balloons would have minimal impact of power
-
8/6/2019 Lang_drachen Ricerca Comparativa Su Kite Gen
20/29
20
production, and also assist in maintaining stability resistance to any diving
transients.
Manufacturing Cost: Given a Goodrating because low-technology generationequipment can be utilized and the design will have a small wind pointing base station.
Virtually no complexity is inherent in this system. This must be tempered though by
the fact that power return could prove to be very modest, thus negating all these otheradvantages.
Prototyping Cost: Given a Goodrating due to the general simplicity of this scheme,and the fact that a prototype may well be able to even demonstrate autonomous
operation.
Complexity: Given a Goodrating because of general freedom from complexity.
There are few moving parts (all rotating shafts), no intricate maneuvers,straightforward means in which power is harvested, etc.
Safety: Given a Goodrating. The only real safety problem with this design is the
rotating shafts mounted on a (relatively small) ground station.
Environment Given a Goodrating based on minimal environmental intrusion. The
unit would be quiet and the wind-pointing base platform (relatively small) should
consume minimal real estate.
Accommodating Wind Variability: Given a Goodrating due to the small size ofthe base station; this should allow passive, wind-driven azimuth tracking. Low (or no)
wind conditions can be dealt with using (ever present) suspension balloons. Storm
conditions may be dealt with by partial (or full) retrievals.
Probability of Demo Success: Given a Goodrating due to the lack of technical risk,and inexpensive nature of a prototype.
Probability of Operational Success: Given aFair rating because even though this
design has very few drawbacks, there is still the question of its ability to generate a
useful level of power due to its half-cycle production. Net generation will dependcritically on the level of kite de-powering.
-
8/6/2019 Lang_drachen Ricerca Comparativa Su Kite Gen
21/29
21
The Sail
Description and Overview
This scheme might best be thought of as a ground-based harnessing of the power inherent
in nautical sailing technology. The pulling element is a movable ground-based mast/sailthat is trimmed to the optimal point of sail (beam reach?). Imagine a vertical mast (and its
sail) mounted on a movable member that reciprocates perpendicular to the wind. In such
a setup, the sail can luff, or it can be trimmed with the wind coming from either side ofthe mast. With the sail at an angle to the wind, the side-load moves the slider, activating
the reciprocating mechanism harvest the power. Power could be harvested via cable
arrangements and capstans putting torque on a generator. A nice feature of this scheme isthat it generates power in both directions of the reciprocating cycle (to the left AND
right).
With the exception of adapting to wind azimuth variation, this scheme seems to present a
very favorable potential for autonomous operation. The no-wind situation is handled
gracefully; high winds may be dealt with via luffing. The potential size and bulk of theground station necessary to contain the reciprocating slider may prove difficult to adapt
to wind azimuth pointing.
-
8/6/2019 Lang_drachen Ricerca Comparativa Su Kite Gen
22/29
22
Scaling up power can done via (a) a higher mast/sail (up to practical structural limits),
and (b) adding mast/sails mounted on the reciprocating. Note, adding masts will increasethe size of the ground station; this exacerbates the azimuth tracking problem.
The only apparent safety concerns might be hazards from human involvement with thereciprocating elements (especially if they move fairly rapidly).
Strong Points:a. Uses proven nautical sail designs for pulling elementsb. Generates power over total reciprocation cyclec. High potential for autonomous operationd. Relatively easy to scale-up power output (to a limit)
Weak Points:
a. Base station may be large to accommodate reciprocating power mechanismb. Wind azimuth tracking may be a problem due to base sizec. Reciprocating power mechanism may pose safety hazardd. May require large real-estate due to base size
Detail Assessment
Max kW Potential: Given aFair rating because it can be expanded to includemore and larger Sails (to increase power output) and because power generation is
continuous over the reciprocating power cycle. However, it is inherently limited by its
operating in the near-ground environment exposing it only to the lower energyground-air boundary layer.
Scalability: Given a Goodrating because the sail size can be increased (up to a limit)
and can be ganged to increase power output.
Practicality: Given aFair rating because the scheme is simple and likely capable ofgenerating useful power, notwithstanding: the mechanical complexity of this scheme
(masts, rigging, reciprocating parts, etc), and environmental impact related to large
base station. While it has potential to produce a domestic level of power, and operateautonomously, it suffers from a limited upper range of power output due to its
operation near the ground. Friction losses in this mechanism could be significant.Potential for Autonomous Operation: Given a Goodrating because of the natural
way in which the system would respond to the no-wind situation, with virtually
seamless start and stop operation; this is tempered by the potential difficulty inazimuth tracking aspect of autonomous operation.
Manufacturing Cost: Given aFair rating since this scheme needs a large base
station to accommodate the reciprocating mechanism, thus complicating the azimuth-
tracking design. Furthermore, the reciprocating mast system may prove expensive
compared to the amount of power actually produced.
-
8/6/2019 Lang_drachen Ricerca Comparativa Su Kite Gen
23/29
23
Prototyping Cost: Given aFair rating because of the complexity of the ground base
station with a reciprocating member to harvest power. Also, of concern are the mast-structures and the nature of a wind pointing base station sufficient to contain the
reciprocating mechanism.
Complexity: Given aFair rating due to general freedom from complexity.
Nevertheless, this system needs a mechanical reciprocating element to harvest power
and a sail management technique that may present complexity.
Safety: Given a Goodrating. The only real safety issue may be the reciprocatingmechanism mounted on a (relatively large) ground station.
Environment Given a Goodrating based on minimal environmental intrusion. The
main drawback might be that the wind-pointing base platform (relatively large) may
consume some real estate.
Accommodating Wind Variability: Given aFair rating due to the implied size of
the base station needed to contain the reciprocating power mechanism; this couldpose a design problem for tracking wind azimuth. This size may rule out passive wind
re-orientation of the base station, thus requiring a powered system to control azimuth.
Low (or no) wind conditions pose no problem. Storm conditions might be handled by
luffing or a roller-reefing scheme.
Probability of Demo Success: Given aFair rating because this prototype really has
to demonstrate the ability to generate useful power via the reciprocating extractionscheme and an operating mast-sail element. Little, short of making a functional demo
may convincingly demonstrate feasibility (although full azimuth capability may not
be required for this).
Probability of Operational Success: Given aFair rating due to simplicity of theconcept and the fact that it generates power continuously over its operation cycle.
This, notwithstanding the potential complexity of the reciprocating extraction
scheme, large base-station implications on wind azimuth pointing, and the fact thatthe system operates in the boundary layer.
-
8/6/2019 Lang_drachen Ricerca Comparativa Su Kite Gen
24/29
24
The KiwiGEN
Description and Overview
This scheme is a horizontal, rotating carousel with kites attached around the periphery.The vertical axis of the carousel is a shaft that drives generation equipment. The kites
would be robotically controlled for autonomous operation, and maneuvered to providehigh tangential loadon the down-wind sector of the carousel to maintain rotation ratefor power generation; kites on the opposing (up-wind) side would fly maneuvers
conducive to minimizing torque that acts to impede rotation. The types of maneuvers
-
8/6/2019 Lang_drachen Ricerca Comparativa Su Kite Gen
25/29
25
required would depend upon the type of power-kites employed. Kites could possibly bestackedfor additional power density for the installation.
This scheme seems to present a very favorable potential for autonomous operation,
although the robotic control of the kites is a challenge. To produce maximum power,kites would be of the traction variety (used for kite surfing, buggying, etc), or, other
specialty kites such as derivatives of the Revolution design (from Revolution
Enterprises). The Revolution is attractive because of its strong pull and extremely tightcontrollability, an attribute highly desirable for robotic automation.
By its very design, the KiwiGEN can have virtually total immunity to wind azimuth
variation. Such immunity may be implemented differently for each type of kite used, but
implementations would be enabled by the azimuthally-symmetric aspect of the design (ieits 360 deg symmetry about an axis vertical to the ground). The no-wind situation can
likely be handled gracefully via schemes varying from active buoyancy (via a few closedkite-cells containing light gases for traction kites), to, actively rotating the carousel to
create artificial relative wind for in-air kite stowage (a low power expenditure modewhile awaiting resumption of practical wind levels), to, kite stowage at the periphery of
the carousel (for hard kites such the Revolution).
The ground station seems to present no particular difficulty, and is reasonably compact. It
is not clear what flight altitudes may be practical for the kites since, the ratio of kite
altitude to- carousel diameter may be a critical design parameter in achievingsuccessful, non-interference of kite trajectories under robotic control; while traction kites
can be flown in fairly tight quarters (as in buggy-racing) and still maintain non-
interference, such maneuvering is done under the watchful, intelligent surveillance of thedrivers, who perform (what may be frequently clever) coordinated avoidance maneuvers.
A reliable robotics equivalent of this may be hard to achieve given random wind
disturbances.
The system seems inherently safe, given that such installations would be protected
against casual human interference.
Scaling up power can be done via two generic approaches; (1) Larger diameter carousels,
and (2) Stacking of kites. Approach (1) allows for a number of amplifications such as, (a)
larger torques (b) more kites around the periphery, (c) larger kites, (d) kites at higher
altitude, etc. There are a number of curious effects associated with scaling the KiwiGEN.The increasing of diameter and expected power benefits are subject to a number of
physical realities, such as:
1. The system would not be expected to generate power if the peripheral speed (ie.
tangential velocity) of the rotating carousel exceeds that of the ambient wind speed; to
rotate under these conditions would require the KiwiGEN toprovide power to, rather
than extract power from the environment.
-
8/6/2019 Lang_drachen Ricerca Comparativa Su Kite Gen
26/29
26
2. As rotation rate (RPM) increases, power increases, but so does peripheral speed. This
has two detrimental tendencies (a) it decreases relative wind on the kites in the down-wind sector, and (b) it increases relative wind on the upwind side. Note also that since
aerodynamic force varies as the square of relative wind speed, this has a potentially
doubly damaging attenuation on net torque.
3. As diameter increases, torque due to kite load increases; also, this allows more kites
can be flown at the periphery. Both serve to improve power output.
All of the above effects are inherent in the operation of the KiwiGEN and have been
included in a rudimentary power simulation to examine power output of the KiwiGEN as
a function of RPM and Diameter for the purposes of this report.
Specifically the effects included are:
- relative wind as the difference of wind speed and carousel peripheral speed
- kite force dependent upon Dynamic Pressure created by relative wind (V2
effect)
- tangential kite forces depending upon number of kites (one added every 20 m)
- net torque from combined kites as a function of diameter
- power as a function of torque and rpm
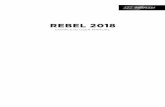
The graphs on the next page show the outcome of this simulation. Note that
1. The dark red plateau (of zero power) is the region where RPM & Diameter combine toproduce carousel peripheral speedgreater than the wind speed (ie. producing zero
relative wind on the Power-side).
2. The quantum steps in the power surface are because of the simulation of discretely
adding kites as the circumference grows with diameter.
3. By imagining (power surface intersections with) vertical planes at constant RPM orDiameter you can intuitively see what is going on with the KiwiGEN (said intersections
can also be seen in the "wire-frame" drawing-artifacts of the 3-D plot).
For instance you can see that at high RPM, increasing diameter quickly leads to zero
power output (dark red plateau). Or, for a particular diameter (say 50 m) power will
maximize at some (lower) RPM, and if RPM continues to increase, power will go to zero
(the dark red plateau again).
Also note (not shown in the graphs below) that as diameter grows without bound, the
power output will eventually drop to zero. Where this occurs depends upon the ambient
wind. For the graphs shown, the ambient wind is a uniform 25 knots; at this wind speed,
a 100 m diameter carousel will still be productive, given that it operates at about 1 RPM.
-
8/6/2019 Lang_drachen Ricerca Comparativa Su Kite Gen
27/29
27
Below is a contourplot showing the power topology for the KiwiGEN corresponding to
the 3-D plot above.
00
100
8
RPM
Diameter m
No-Power Region due to zero inducedrelative wind on kites as a function
of diameter and rotation rate.
Addin Kites and PowerMax Power
Low Power due to
combinations of low
rotation rate and small
diameter
RPM
Power
8100
0, 0, 0
Diameter (m)
No Power
re ion
25 knot
Uniform Wind Speed
-
8/6/2019 Lang_drachen Ricerca Comparativa Su Kite Gen
28/29
28
Strong Points:
a. System is essentially immune to wind-azimuth variability.b. Simple mechanical design.
c. High potential for autonomous operation.
d. Relatively easy to scale power output (to within limits).e. Environmentally benign.
f. Power output more than adequate for consumer usage.
g. Power output may be practical for municipal usage.h. May realize per-Watt cost superior to conventional modern wind-mills.
Weak Points:
a. Potentially difficult robotics challenge.
b. Possibly a lower limit on power scalability for small consumer needs.c. Reliability may be problem regarding no-wind conditions.
d. Potential for kite entanglement may be problematic.
Detail Assessment
Max kW Potential: Given a Goodrating because it can be expanded over apossible broad range of application (albeit, maybe not to the level of sustaining large
municipalities). Certainly it could be applicable over the upper range of consumer
users, and even for small municipalities and generation Farms.
Scalability: Given a Goodrating because the general scalability seems quite good
across a possibly large range (excepting possibly a lower and upper practical limit).
Practicality: Given aFair rating because the scheme will require some possibly
complex robotics mechanisms, and there is potential for kite entanglement and issuesof no-wind autonomy.
Potential for Autonomous Operation: Given a Goodrating because the system has
a natural immunity to wind-direction variability that is unique amongst all the
methods examined. There is a possible problem with the no wind situation, however,there are a number of possible (untested) solutions for that. Kite entanglement could
present a problem, but that can be dealt with by trading power (ie. kite density) for
entanglement immunity.
Manufacturing Cost: Given a Goodrating since once designed and tested couldprove to be quite economical to produce.
Prototyping Cost: Given a Goodrating because of the apparent simplicity of doing
aproof of power-production prototype that does not employ robotics control of kites(ie it uses humans to execute the kite power-maneuvers). While the robotics challenge
would remain un-prototyped at that point, once power production were proven, then
the impetus to move to the next stage of development could be succssful, thus
accomplishing the intent of initial prototyping.
-
8/6/2019 Lang_drachen Ricerca Comparativa Su Kite Gen
29/29
29
Complexity: Given aFair rating because while virtually all aspects of the system
would be fairly straightforward, the complexity of the robotics challenge loomssignificant.
Safety: Given a Goodrating. Likely no significant safety issues.
Environment Given a Goodrating based on minimal environmental intrusion. The
while the carousel will consume some real estate, the kites themselves should be
fairly unobtrusive and the system quiet of operation.
Accommodating Wind Variability: Given aBest rating because the system isnaturally immune to wind-direction variability; this is unique amongst all the methods
examined. There is a possible problem with the no wind situation, however, there are
a number of possible solutions for that (albeit untested).
Probability of Demo Success: Given a Goodrating because this prototype should befairly simple to devise. If demo success is defined as providing conclusive results,
whether it proves the concept viable or not, then such truth-via-prototype can be
accomplished fairly easily.
Probability of Operational Success: Given a Goodrating due to the fact that once
the robotic control of kites is achieved, this scheme has great potential to become anoperational alternative to conventional wind power.