LA PROGRAMMAZIONE LINEARE - Plone siteusers.dimi.uniud.it/~franca.rinaldi/PLdispensa2.pdf · 2007....
28
LA PROGRAMMAZIONE LINEARE Franca Rinaldi Dipartimento di Matematica e Informatica Universit` a degli Studi di Udine A.A. 2005 / 2006
Transcript of LA PROGRAMMAZIONE LINEARE - Plone siteusers.dimi.uniud.it/~franca.rinaldi/PLdispensa2.pdf · 2007....

LA PROGRAMMAZIONE LINEARE
Franca Rinaldi
Dipartimento di Matematica e Informatica
Universita degli Studi di Udine
A.A. 2005 / 2006

1 Introduzione
In un problema di programmazione lineare (PL) si vuole ottimizzare, cioe
minimizzare o massimizzare, una funzione obiettivo lineare
cx =n∑j=1
cjxj
sotto il vincolo che il vettore di variabili x = (x1, . . . , xn) ∈ IRn soddisfi un
assegnato insieme finito di vincoli lineari
Aix =n∑j=1
Aijxj ≤ (=, ≥) bi i = 1, . . . ,m.
L’importanza della programmazione lineare nell’ambito dell’ottimizzazione
si deve a due aspetti fondamentali. Da un lato la PL offre un modello for-
male per una ampia varieta di problemi che emergono in ambito applicativo,
ed in particolare nel contesto della gestione dei sistemi di produzione, di
distribuzione, di trasporto ecc., dall’altro rappresenta un elemento centrale
nella definizione di approcci risolutivi per problemi di programmazione li-
neare intera, e quindi, in particolare, per una larga varieta di problemi di
ottimizzazione combinatoria NP -hard.
2 Forme canoniche
Un problema di PL puo essere espresso senza perdita di generalita in una
delle due forme
forma canonica : min cx (1)
Ax ≥ b (2)
x ≥ 0 (3)
forma standard min cx (4)
Ax = b (5)
x ≥ 0 (6)
dove A e una matrice m×n detta matrice dei vincoli, c ∈ IRn e il vettore dei
costi e b ∈ IRm il vettore dei termini noti.
La riformulazione di un generico problema di programmazione lineare P in
forma canonica utilizza le seguenti semplici operazioni:
1

- ogni vincolo Aix ≤ bi viene riscritto nella forma −Aix ≥ −bi;
- ogni vincolo di eguaglianza Aix = bi viene sostituito con la coppia di
vincoli Aix ≥ bi e −Aix ≥ −bi;
- per ogni variabile xj libera, cioe non soggetta al vincolo di non negativita,
si introducono due nuove variabili x+j , x
−j ≥ 0 e si opera la sostituzione
xj = x+j − x−j .
E facile riconoscere che al variare di x+j , x
−j in IR+, xj puo assumere qualsiasi
valore reale.
Per esprimere un problema di programmazione lineare P in forma standard
e necessario riformulare eventuali vincoli di diseguaglianza come vincoli di
eguaglianza. A tale scopo, per ogni vincolo di diseguaglianza Aix ≤ bi (Aix ≥bi) viene introdotta una nuova variabile si ≥ 0 di costo nullo, detta variabile
di slack, ed il vincolo viene sostituito con Aix + si = bi (Aix − si = bi).
La variabile di slack si “misura” lo scostamento della soluzione x dal vincolo
corrispondente e la condizione di non negativita su si assicura l’ammissibilita
di x rispetto al vincolo originale. La variabile di slack si annulla se e solo se
tale vincolo e soddisfatto da x come eguaglianza.
Si noti che, sebbene le precedenti operazioni possano modificare il numero
di variabili e/o di vincoli del problema P , il problema P ′ che ne deriva risulta
equivalente a quello iniziale, nel senso che ogni soluzione ammissibile x di Pcorrisponde ad almeno una soluzione x′ di P ′ dello stesso costo e viceversa.
Quindi la soluzione x e ottima per P se e solo se x′ e ottima per P ′ ed i valori
ottimi dei due problemi sono uguali.
Infine, si noti che ogni problema di massimizzazione max{cx : x ∈ X} e
equivalente al problema di minimizzazione −min{−cx : x ∈ X}.
3 Geometria della PL
Ogni vincolo lineare Aix ≥ bi (Aix ≤ bi) definisce un semispazio chiuso di
IRn la cui frontiera e costituita dall’iperpiano Aix = bi. Tale iperpiano e
normale al vettore Ai ed Ai e diretto all’interno (all’esterno) del semispazio.
L’insieme di ammissibilita di un problema di PL, essendo intersezione di un
numero finito di semispazi e, per definizione, un poliedro. Si ricorda che un
punto di un poliedro P si dice un vertice se non puo essere espresso come
combinazione convessa propria di altri punti di P o, equivalentemente, se e
una faccia di dimensione 0 di P . Ancora, d ∈ Rn si dice una direzione di P
se x + αd ∈ P per ogni x ∈ P e α ≥ 0. Una direzione di P e una direzione
2

estrema di P se non puo essere espressa come combinazione conica propria
di altre direzioni di P o, equivalentemente, se esiste uno spigolo S di P tale
che S = {x : x = x+ αd, α ≥ 0} per un opportuno x ∈ P .
Il teorema che segue fornisce una caratterizzazione dei vertici e delle dire-
zioni estreme di un poliedro.
Teorema 1 Sia P = {x ∈ IRn : Ax ≤ b}.i) Un punto x ∈ P e un vertice di P se e solo se la sottomatrice A0 formata
dalle righe Ai di A tali che Aix = bi ha rango n;
ii) d ∈ IRn e una direzione estrema di P se e solo se Ad ≤ 0 e la sottomatrice
formata dalle righe Ai di A tali che Aix = 0 ha rango n− 1.
E’ facile dimostrare che, nel caso piu generale di un poliedro della forma
P ′ = {x : A1x ≤ b1, A2x ≥ b2, A3x = b3}, la parte i) del precedente
teorema rimane invariata, mentre nella parte ii) la condizione Ad ≤ 0 deve
essere sostituita con le condizioni A1d ≤ 0, A2d ≥ 0 e A3d = 0.
Dal Teorema 1 segue che ogni vertice di P giace su almeno n degli iperpiani
che definiscono la frontiera di P . Inoltre, ogni direzione estrema di P e una
direzione di almeno n− 1 delle degli iperpiani che definiscono la frontiera di
P .
Nel caso di un problema scritto in forma standard, il Teorema 1 puo essere
riformulato come segue.
Teorema 2 Sia P = {x : Ax = b, x ≥ 0}. Un punto x di P e un vertice se
e solo se le colonne di A che corrispondono a componenti di x strettamente
maggiori di 0 sono linearmente indipendenti.
Dimostrazione La matrice dei vincoli che definiscono P e A′ =
A
I
,dove I e la matrice identica n×n. Sia J = {j : xj = 0} ed A0 la sottomatrice
formata dalle righe di A e dalle righe Ij, j ∈ J . Per il Teorema 1, x e un
vertice di P se e solo se A0 ha rango n e quindi, contenendo A0 n colonne, se
e solo se le colonne di A0 sono linearmente indipendenti. Sia∑nj=1 αjA
j0 = 0.
Poiche Aj0, j ∈ J , e l’unica colonna di A0 con componente (m + j)–esima
diversa da 0, deve essere αj = 0 per ogni j ∈ J . Quindi le colonne di A0 sono
linearmente indipendenti se e solo se lo sono le colonne Aj0, j /∈ J . Poiche le
componenti di indice maggiore di m di queste colonne sono nulle, esse sono
linearmente indipendenti se e solo se lo sono le corrispondenti colonne di A.
In particolare, per il terorema precedente, se A ha m righe, ci possono
essere al piu m colonne di A linearmente indipendenti. Quindi ogni vertice
3

di P = {x : Ax = b, x ≥ 0} ha al piu m componenti strettamente maggiori
di 0.
Il seguente Teorema enuncia una proprieta fondamentale dei problemi di
PL.
Teorema 3 Teorema fondamentale della PL. Dato un problema di PL de-
finito in forma canonica o in forma standard, si verifica una delle seguenti
condizioni:
1. il problema e inammissibile;
2. il problema e illimitato;
3. esiste almeno un vertice di P ottimo.
Dimostrazione Sia P non vuoto. Poiche P e contenuto nell’ortante positi-
vo, P non contiene rette. In tal caso P = conv(vertex(P )) + cone(dext(P ))
e quindi ogni x in P risulta somma di una combinazione convessa di vertici
di P e di una direzione di P , cioe
x =∑i∈I
αivi + d
dove vi ∈ vertex(P ), αi ≥ 0 per ogni i ∈ I,∑i∈I αi = 1 e d e una direzione di
P . Se esiste una direzione d di P tale che cd < 0 il problema e illimitato. Sia
infatti x ∈ P . Allora x+αd ∈ P per ogni α ≥ 0 e risulta c(x+αd) = cx+αcd.
Per α → +∞ tale valore tende a −∞. In caso contrario cd ≥ 0 per ogni
direzione d di P e quindi cx ≤ c(x + d) per ogni x ∈ P e d direzione di P .
Dunque la ricerca di una soluzione ottima puo essere limitata al sottoinsieme
V = conv(vertex(P )). Poiche V e un insieme chiuso e limitato e la funzione
cx e continua, per il Teorema di Weierstrass il problema ammette ottimo su
V . Sia x =∑i∈I αivi una soluzione ottima. Da
cx =∑i∈I
αicvi ≥∑i∈I
αi mini∈I
cvi = mini∈I
cvi
segue che almeno un vertice vi, i ∈ I, e ottimo.
Per il teorema precedente un problema di PL, pur essendo un problema
continuo, puo essere risolto limitando la ricerca delle soluzioni ottime ad un
numero finito di punti, i vertici del suo insieme di ammissibilita. Ancora,
e necessario individuare eventuali direzioni di P lungo le quali la funzione
obiettivo tende a −∞. E facile riconoscere che una tale direzione esiste
se e solo se esiste una direzione estrema con la stessa proprieta, e quindi
uno spigolo del poliedro lungo il quale la funzione obiettivo assume valori
arbitrariamente bassi.
4

4 Il metodo del simplesso
Il teorema fondamentale della PL e alla base di un metodo classico per la
risoluzione dei problemi di PL, detto Metodo del simplesso, proposto da Dan-
tzig nei primi anni 50. Benche la complessita dell’algoritmo sia esponenziale,
tale metodo e ancora uno dei metodi piu largamente utilizzati.
L’idea base del metodo del simplesso e la seguente. Un problema di PL viene
dapprima espresso in forma standard, cosicche il suo insieme di ammissibilita
P , se non vuoto, contiene almeno un vertice. In una prima fase, il metodo
determina un vertice di P (o che P e vuoto). Nelle iterazioni successive la
procedura visita vertici di P , lasciando ogni vertice lungo uno spigolo su cui
la funzione decresce strettamente. Se tale spigolo e illimitato il problema e
illimitato, in caso contrario lo spostamento termina in un nuovo vertice di P ,
adiacente a quello precedente e di valore strettamente inferiore. Se il vertice
non soddisfa opportune condizioni di ottimalita, l’iterazione viene ripetuta.
Il metodo termina quando individua o un vertice ottimo o una direzione
estrema di P lungo la quale la funzione obiettivo decresce strettamente.
Per realizzare questa idea generale in un algoritmo, e necessario esplicitare
i seguenti aspetti: caratterizzare i vertici di P algebricamente, individuare
delle condizioni di ottimalita e illimitatezza e definire il passaggio da un
vertice ad uno adiacente. Infine, e necessario determinare un vertice iniziale
o dimostrare che il problema e inammissibile.
Vediamo questi diversi aspetti in dettaglio.
4.1 Vertici e soluzioni di base
Il metodo del simplesso opera su problemi di PL scritti in forma standard
cioe della forma
min cx (7)
Ax = b
x ≥ 0.
dove A e una matrice m × n con m < n. Questa assunzione non e restrit-
tiva dato che, se m ≥ n, o il sistema Ax = b e inammissibile (caso rango
A 6= rango (Ab)) o almeno m− n vincoli risultano combinazione lineare dei
rimanenti e possono essere eliminati ottenendo un sistema con m ≤ n. Se
m = n il sistema ammette una unica soluzione che puo essere calcolata per
via elementare. Nel seguito supporremo A di rango m. Questa condizione
5

puo essere sempre garantita eliminando eventuali vincoli linearmente dipen-
denti dagli altri (operazione che, se necessaria, viene effettuata durante la
prima fase del metodo del simplesso descritta in seguito).
Vediamo innanzitutto come i vertici di P vengano caratterizzati algebrica-
mente tramite il concetto di base e soluzione di base.
Si definisce base ogni sottoinsieme β ⊆ {1, . . . ,m}, |β| = m, tale che la
sottomatrice B formata dalle colonne di A con indice in β, detta matrice
di base, sia non singolare (e quindi invertibile). Data una particolare base
β, la matrice A puo essere partizionata in due sottomatrici B ed N dove
B e formata dalle colonne di A con indice in β, dette colonne in base, ed
N dalle colonne con indice in η = {1, . . . ,m} \ β, dette colonne fuori base.
Analogamente i vettori delle variabili e dei costi possono essere decomposti
in x = (xB, xN) e c = (cB, cN) in modo da evidenziare le componenti in base
e quelle fuori base.
Fissata una base, i vincoli Ax = b possono essere riscritti nella forma
BxB +NxN = b
ed ancora, essendo B invertibile, come
xB = B−1(b−NxN).
Di conseguenza il problema (7) puo essere riscritto come
min cBxB + cNxN (8)
xB = B−1(b−NxN) (9)
xB, xN ≥ 0. (10)
Dalla (9) risulta evidente che le variabili in base risultano univocamente
determinate dalle variabili fuori base. Si consideri la particolare la soluzione,
detta soluzione di base,
xB = B−1b, xN = 0
che si ottiene assegnando valore nullo a tutte le variabili fuori base. Tale
soluzione di base si dice ammissibile se xB ≥ 0. Inoltre si dice degenere se
(xB)i = 0 per qualche i = 1, . . . ,m, non degenere altrimenti.
Si noti che il numero di componenti non nulle di ogni soluzione di base e al
piu m ed e minore di m se e solo se la base e degenere.
Proposizione 1 i) Ogni soluzione di base ammissibile x e un vertice di P .
ii) Ogni vertice di P e soluzione di base per almeno una base.
6

Dimostrazione i) L’affermazione segue dal Teorema 2 dato che le colonne
di A corrispondenti a variabili maggiori di zero di x sono colonne di B e
risultano quindi linearmente indipendenti.
ii) Per il Teorema 2, le colonne di A corrispondenti a componenti non nulle
di un vertice di P sono linearmente indipendenti. Poiche A ha rango m, e
sempre possibile integrare l’insieme di queste colonne con altre colonne di A
in modo da ottenere una base di Rm. Gli indici delle colonne finali formano
evidentemente una base.
Si noti che se un vertice ha esattamente n−m componenti uguali a 0, cioe
giace su esattamente n degli iperpiani che definiscono la frontiera di P (gli
m piani definiti dai vincoli Aix = bi ed altri n − m piani del tipo xj = 0)
allora e soluzione di base per esattamente una base contenente gli indici delle
variabili ¿ 0. Al contrario, vertici di P che giacciono su piu di n piani della
frontiera possono essere soluzioni di base (degeneri) per basi diverse. Questo
avviene perche al passo ii) della dimostrazione precedente le colonne iniziali
possono essere integrate ad una base di IRm in modi diversi.
4.2 Condizioni di ottimalita
Sia B una matrice di base ammissibile e x = (B−1b,0) la corrispondente
soluzione di base. Il costo di x e pari a cBB−1b + cN0 = cBB
−1b. Dalla (9)
segue che il costo di una qualsiasi soluzione ammissibile puo essere espresso
come
cBxB +cNxN = cBB−1b+(cN−cBB−1N)xN = cx+(cN−cBB−1N)xN (11)
e risulta quindi somma del costo della soluzione di base corrente e del termine
(cN − cBB−1N)xN .
Le componenti
cj = cj − cBB−1Aj
del vettore cN = cN − cBB−1N vengono detti costi ridotti.
Dal fatto che xN ≥ 0 per ogni soluzione ammissibile, si ottiene imme-
diatamente la seguente condizione di ottimalita per la soluzione di base
corrente.
Teorema 4 Se cj ≥ 0 per ogni j ∈ η, la soluzione di base corrente e ottima.
La condizione di non negativita dei costi ridotti e in generale una condizione
sufficiente ma non necessaria per l’ottimalita della soluzione di base. Come
7

verra dimostrato nel paragrafo successivo, e anche necessaria se la soluzione
di base e non degenere.
Per capire il significato del costo ridotto di una variabile fuori base, si
immagini di poter aumentare una sola delle variabili fuori base, diciamo
xp, mantenendo tutte le altre a 0 e rimanendo in ammissibilita. Ponendo
xN = (0, . . . , xp, . . . , 0) nella espressione (9) si ottiene che, al crescere di xp,
la variazione nel valore della funzione obiettivo risulta pari a cpxp. Quin-
di il costo ridotto di una variabile rappresenta la variazione nel valore della
funzione obiettivo che si ottiene aumentando la relativa variabile fuori base
di una unita, mantenendo nulle tutte le altre variabili fuori base e facendo
variare le variabili in base in modo che il sistema Ax = b continui ad essere
soddisfatto.
Se tutti i costi ridotti delle variabili fuori base risultano non negativi, il
metodo termina fornendo in output la soluzione di base corrente che e ottima.
Osservazione Si noti che i costi ridotti possono essere definiti anche per le
variabili xj, j ∈ β. In questo caso si ottiene cB = cB − cBB−1B = 0. Quindi
i costi ridotti delle variabili in base sono sempre nulli.
4.3 Cambiamento di base
Si supponga che la condizione di ottimalita non sia soddisfatta e sia p ∈ ηun indice tale che cp < 0. Si consideri il problema di determinare il massimo
incremento della variabile xp che puo essere ottenuto mantenendo a zero le
altre variabili fuori base e l’ammissibilita della soluzione. Come visto nel
paragrafo precedente, un tale aumento comporta una variazione dei valori
delle variabili in base dato dalla
xB = B−1b−B−1Apxp (12)
ottenuta dalla (9) ponendo xj = 0 per ogni j ∈ η \ {p}. Si noti che una tale
variazione corrisponde ad un movimento lungo l’intersezione di n − 1 piani
della frontiera (i piani Ax = b ed i piani xj = 0, j ∈ η \ {p}), e quindi lungo
uno spigolo del poliedro uscente dalla soluzione di base corrente. Tale spigolo
ha direzione d = (−B−1Ap, 0, . . . , 1, . . .) dove la componente 1 compare in
corrispondenza alla variabile xp. In accordo con la (11), il costo del generico
punto y dello spigolo e dato da
cy = cx+ cpxp (13)
e, poiche cp < 0, il valore cx decresce strettamente lungo lo spigolo. Il punto
y e un punto ammissibile fin tanto che le variabili in base (12) rimangono
8

non negative. Si possono verificare due situazioni: o lo spigolo e illimitato
oppure lo spostamento lungo lo spigolo viene bloccato dal fatto che qualche
variabile in base raggiunge il valore 0 e quindi viene raggiunto un nuovo
vertice di P . Dal punto di vista algebrico, per stabilire qual e il massimo
incremento di xp compatibile con l’ammissibilita della soluzione, e sufficiente
determinare il massimo incremento di xp che mantiene tutte le variabili in
base non negative. Questo e dato dal massimo valore di xp ≥ 0 tale che
risulti xB − B−1Apxp ≥ 0 o, equivalentemente, B−1Apxp ≤ xB o ancora,
posto a = B−1Ap,
aixp ≤ (B−1b)i = (xB)i i = 1, . . .m. (14)
Il problema puo essere risolto in modo elementare. Essendo (xB)i ≥ 0, se
ai ≤ 0 la condizione (14) e soddisfatta da ogni xp ≥ 0. Di conseguenza,
se a ≤ 0, la variabile xp puo crescere indefinitamente. In questo caso in
base alla (13) il problema di PL e illimitato. In caso contrario, il massimo
incremento di xp e dato da
xp = mini:ai>0
{(xB)iai
}=
(xB)qaq
.
Si noti in particolare che risulta xp > 0 se la soluzione di base x e non
degenere. In caso di degenerazione puo anche essere xp = 0.
Sia q un indice tale che risulti xp = (xB)q
aqe si consideri la soluzione x′
ottenuta dalla soluzione di base corrente aumentando xp del valore xp. Le
componenti di x′ sono
x′B = xB − xpa, x′p = xp, x′j = 0 se j ∈ η \ {p}.
Poiche (x′B)q = 0, la soluzione x′ ha almeno n−m componenti nulle. E facile
riconoscere che x′ e la soluzione di base corrispondente alla base β′ che si
ottiene da β eliminando l’indice β(q) e introducendo l’indice p. Per dimo-
strare che la corrispondente matrice di base B′, ottenuta da B sostituendo la
q-esima colonna con Ap, e non singolare e sufficiente dimostrare che B−1B′ e
non singolare. Ora B−1Bi = I i per ogni i 6= q, mentre B−1(Ap) = a. Poiche
aq 6= 0 la matrice B−1B′ e non singolare.
Per poter eseguire una nuova iterazione a partire dalla nuova soluzione di
base e necessario aggiornare l’inversa della matrice di base. Cio puo essere
fatto senza ricalcolare direttamente l’inversa di B′ (calcolo di costo O(m3))
tenendo conto del fatto che B′ differisce da B solo per una colonna. Deno-
tando con W = B−1 e W ′ = B′−1, W ′ puo essere calcolata in O(m2) in base
alla seguente formula di aggiornamento delle righe di W
W ′i =
Wi − ai
aqWq if i 6= q
1aqWq if i = q.
(15)
9

4.4 Criteri per la scelta della variabile che entra in base
Per terminare la descrizione della generica iterazione del simplesso, vengono
elencati alcuni criteri utilizzabili nella scelta della variabile che entra in base
tra quelle che hanno costo ridotto negativo.
1. Si sceglie una variabile fuori base di costo ridotto minimo. Questo crite-
rio richiede di calcolare tutti i costi ridotti ed ha un costo computazio-
nale limitato. Si noti che tale criterio non comporta necessariamente il
decremento maggiore nel valore della funzione obiettivo. Infatti questo
e dato da cpxp e quindi dipende non solo dal valore del costo ridotto
ma anche dal massimo incremento possibile di xp.
2. Si sceglie la variabile che produce il piu alto decremento cpxp nella
funzione obiettivo. Questo criterio che sembra teoricamente attraente
e di fatto troppo oneroso dal punto di vista computazionale.
3. si sceglie la prima variabile fuori base il cui costo ridotto e negativo.
4.5 Prima fase del metodo del simplesso
Nei paragrafi precedenti e stata descritta la generica iterazione del metodo
del simplesso, basata sulla conoscenza di una particolare soluzione di base
ammissibile. Per completare la descrizione del metodo e ora necessario defi-
nire come determinare una soluzione di base ammissibile iniziale o stabilire
che il poliedro di ammissibilita e vuoto.
In alcuni casi particolari, una base ammissibile e immediatamente dispo-
nibile. Questo avviene, per esempio, quando si vuole risolvere un problema
P della forma {min cx : Ax ≤ b} con b ≥ 0. In questo caso la base che
contiene gli indici delle variabili di slack della forma standard di P e una
base ammissibile dato che risulta B = I = B−1 e quindi xB = Ib = b ≥ 0.
Quindi il problema artificiale e sempre ammissibile. Quando l’individuazione
di una base ammissibile non sia immediata e necessario eseguire una fase di
inizializzazione del metodo detta Prima fase del simplesso.
La prima fase del simplesso consiste nel risolvere un nuovo problema di
PL. Si riscriva il sistema Ax = b in modo che risulti b ≥ 0 e si consideri il
problema, detto problema artificiale,
PA : minm∑i=1
zi (16)
Ax+ Iz = b (17)
x, z ≥ 0 (18)
10

definito nelle variabili originali x ed in m nuove variabili zi, i = 1, . . . ,m,
associate ai vincoli e dette variabili artificiali. Si noti che, essendo b ≥ 0, la
base che contiene gli indici delle variabili artificiali e una base ammissibile
per il problema artificiale. Inoltre, per i vincoli z ≥ 0, il valore ottimo del
problema artificiale e non negativo.
Proposizione 2 Il problema artificiale ha valore ottimo nullo se e solo se il
problema originale e ammissibile.
Dimostrazione Se x ∈ P , (x,0) e una soluzione ammissibile di PA di valore
0 e quindi ottima. Viceversa, se (x, z) e una soluzione (ammissibile) ottima
di valore 0, allora deve necessariamente essere z = 0. Cio implica Ax = b,
x ≥ 0 e quindi x ∈ P .
Rimane da stabilire come ottenere una base ammissibile del problema ori-
ginale dalla base ottima del problema artificiale. Se la base ottima di PA
non contiene indici di variabili artificiali, allora e una base ammissibile per il
problema originale. In caso di degenerazione, puo pero accadere che qualche
variabile artificiale sia in base (con valore nullo). In questo caso e necessario
sostituirla con una variabile originale fuori base da scegliersi in modo che
la corrispondente matrice di base risulti non singolare. Piu precisamente,
supponiamo che la q–esima colonna della matrice di base BA ottima per il
problema artificiale corrisponda ad una variable artificiale e siano B ed N
le sottomatrici formate dalle colonne di A che sono attualmente in base e
fuori base nella base ottima del problema artificiale. Si vuole sostituire BqA
con una colonna Aj di N sotto la condizione che la matrice risultante B′
sia non singolare. Questa circostanza si verifica se e solo se B−1A B′ e non
singolare. Quest’ultima matrice coincide con la matrice identica su tutte le
colonne tranne la q–esima, data da B−1A Aj, e risulta quindi non singolare se e
solo se (B−1A Aj)q 6= 0. La ricerca della colonna Aj puo quindi essere operata
calcolando il vettore
f = eqB−1A N
Se fj 6= 0 per qualche indice j, l’indice j puo essere sostituito al q-esimo
elemento della base corrente. In caso contrario, poiche B non contiene la
q-esima colonna di BA, valgono le condizioni
eqB−1A B = 0 eqB
−1A N = 0
cioe eqB−1A A = 0 e le righe di A risultano linearmente dipendenti dato che la
loro combinazione lineare con vettore dei coefficienti eqB−1A e il vettore nullo.
Una riga Ai tale che (eqB−1A )i 6= 0, risultando linearmente dipendente dalle
altre, puo allora essere eliminata.
11

4.6 Complessita del metodo del simplesso
La complessita di ogni iterazione del metodo del simplesso e polinomiale ed e
dovuta al calcolo di u = cBB−1 (O(m2)), dei costi ridotti (O(m(n−m)), del-
l’incremento della variabile che entra in base (O(m2)) ed agli aggiornamenti
(O(m2)). Quindi il costo computazionale di queste operazioni e dominato
dal calcolo dei costi ridotti che richiede, nel caso peggiore, O(nm) operazioni
elementari.
La complessita finale dipende dal numero di passi richiesti per raggiungere
una condizione di terminazione. Come primo aspetto, consideriamo il pro-
blema della finitezza del metodo, cioe se sia vero che il metodo termina in
un numero finito di passi per qualsiasi istanza. La risposta e affermativa nel
caso di non degenerazione. Infatti, in questa ipotesi, iterazioni successive
corrispondono a soluzioni di base di costo strettamente decrescente e quindi
il metodo visita al piu una volta ogni soluzione di base. Poiche queste sono
in numero finito, il metodo termina in un numero finito di passi.
In caso di degenerazione, un vertice puo essere soluzione di base per basi
diverse e puo accadere che queste vengano visitate in iterazioni successive e
che il metodo torni su una base gia visitata. Questa circostanza viene detta
ciclaggio del metodo.
Per evitarla e necessario adottare delle opportune regole anticiclaggio. La
piu semplice e nota e la seguente regola di Bland che stabilisce un criterio
particolare per la scelta della variabile che entra in base e per quella della
variabile che esce dalla base.
Teorema 5 Si scelga l’indice p che entra in base con il criterio
p = min{j : cj < 0}
e l’indice β(q) che esce dalla base con il criterio
β(q) = min{β(i) :(xB)iai≤ (xB)k
akper ogni ak > 0}.
Allora il metodo del simplesso termina in un numero finito di passi.
Se vengono adottate regole anticiclaggio, il metodo del simplesso converge
in un numero finito di passi. In generale questo numero non e polinomiale.
Infatti sono state individuate istanze che vengono risolte dal simplesso in un
numero esponenziale di iterazioni.
12

Esempio (Klee and Minty 1972) Si considerino le istanze di PL definite da
min −xkεxj−1 ≤ xj ≤ 1− εxj−1 ∀j = 2, . . . , k
Se ε > 0 l’insieme di ammissibilita e un cubo leggermente deformato (si dise-
gni nel caso m = 2). Si puo dimostrare che le basi della forma standard del
problema sono tutte non degeneri e che esiste una sequenza di base adiacenti
con costo strettamente decrescente che corrisponde ad una sequenza di tutti
i 2m vertici del cubo (che sono esponenenziali rispetto al numero di variabili
n = k e di vincoli m = 2k della forma standard).
A discapito di questo risultato teorico negativo, il metodo e tuttora uno dei
piu frequentemente utilizzati nelle applicazioni. Studi sperimentali hanno
evidenziato che, mediamente, il numero di passi e lineare nel numero m dei
vincoli e sublineare nel numero n delle variabili.
5 Complessita della programmazione lineare
Il problema della polinomialita (o meno) della programmazione lineare e ri-
masto aperto per diversi anni ed ha avuto una risposta definitiva nel 1979
ad opera del matematico russo Leonard Khachiyan. Il metodo proposto da
Khachiyan, detto metodo dell’elissoide, consente di risolvere una istanza di
PL in tempo polinomiale rispetto alla lunghezza della sua codifica. Tale al-
goritmo, benche di fondamentale importanza dal punto di vista teorico, non
risulta pero adottabile nella pratica per l’alto grado del polinomio che defi-
nisce la complessita del metodo. Comunque tale procedura ha avuto anche
un ruolo importante nella definizione di algoritmi approssimati randomizza-
ti basati sulla programmazione semidefinita per problemi di ottimizzazione
combinatorica NP-hard. Il primo algoritmo polinomiale competitivo con il
metodo del simplesso segue un approccio completamente diverso da esso ed e
stato proposto dal matematico indiano Narendra Karmarkar nel 1984. Tale
metodo e le sue varianti sviluppate in seguito vengono dette metodi a pun-
ti interni proprio perche convergono verso un vertice ottimo visitando una
sequenza di soluzioni interne al poliedro.
13

6 Programmazione Lineare e Dualita
La teoria della dualita studia le importanti relazioni esistenti tra un problema
di ottimizzazione, detto problema primale, ed un problema ad esso correlato,
detto problema duale. Le variabili del problema duale hanno una interessante
interpretazione geometrica ed economica. In questo capitolo vengono presen-
tati i risultati di dualita nel caso in cui il problema primale sia un problema
di PL.
Si consideri un problema di PL della forma
P : v = min c1x1 + c2x2 (19)
A11x1 + A12x2 ≥ b1 (20)
A21x1 + A22x2 = b2 (21)
x1 ≥ 0 (22)
dove e stata evidenzata la decomposizione dei vincoli in vincoli di eguaglianza
e di diseguaglianza e delle variabili in variabili libere e non.
Il problema duale di P e il problema
D : d = max u1b1 + u2b2 (23)
u1A11 + u2A21 ≤ c1 (24)
u1A12 + u2A22 = c2 (25)
u1 ≥ 0. (26)
Il problema D e ancora un problema di PL ed ha una variabile per ogni
vincolo del primale ed un vincolo per ogni variabile del primale. Inoltre:
• il vettore dei costi del duale e il vettore dei termini noti del primale;
• il vettore dei termini noti del duale e il vettore dei costi del primale;
• la matrice dei vincoli del duale e la trasposta della matrice dei vincoli
del primale;
• una variabile duale e soggetta al vincolo di non negativita se e solo se
il corrispondente vincolo primale e di diseguaglianza;
• un vincolo duale e di diseguaglianza se e solo se la corrispondente
variabile primale e soggetta al vincolo di non negativita.
E facile verificare che il problema duale di D coincide con P .
14

Nel seguito indicheremo con Ai, i = 1, 2, la sottomatrice (Ai1Ai2) e con Ai,
i = 1, 2, la sottomatrice
A1i
A2i
.Un primo risultato di dualita, noto come dualita debole, stabilisce che il
valore ottimo del problema duale e sempre una limitazione inferiore del valore
ottimo primale.
Teorema 6 Risulta d ≤ v. In particolare, se uno dei due problemi e illimi-
tato, l’altro e inammissibile.
Dimostrazione Dimostrariamo innanzitutto che se x = (x1, x2) e u =
(u1, u2) sono due soluzioni ammissibili per P e D, allora ub ≤ cx. L’ammissi-
bilita di x ed u garantisce le seguenti relazioni: b1 ≤ A1x, u1 ≥ 0, b2 = A2x,
x1 ≥ 0, c1 ≥ uA1 e c2 = uA2. Di conseguenza
ub = u1b1 + u2b2 ≤ u1A1x+ u2A2x = uAx
e
cx = c1x1 + c2x2 ≥ uA1x1 + uA2x2 = uAx
da cui si ottiene
ub ≤ uAx ≤ cx. (27)
Poiche la (27) vale per due generiche soluzioni primale e duale, risulta d ≤ v.
In particolare, se il problema P (il problema D) ammette una soluzione x
(u), il valore cx (ub) rappresenta una limitazione superiore (inferiore) per d
(v) e quindi D (P) non puo essere illimitato.
La differenza v − d viene detta scarto di dualita.
Corollario 7 Siano x e u soluzioni ammissibili, rispettivamente, per P e D.
Se cx = ub, allora x e u sono ottimi.
La dualita debole e una proprieta verificata da ogni coppia primale duale
di problemi di ottimizzazione. Nel caso della PL tale condizione puo essere
rafforzata per il seguente fondamentale risultato che inverte la condizione
espressa nel Corollario 7.
Teorema 8 Il problema P ammette ottimo se e solo se il problema D am-
mette ottimo. In questo caso risulta d = v.
15

Dimostrazione Si consideri la forma standard P ′ del problema P . Il
problema P ammette ottimo se e solo P ′ ammette ottimo e questo avviene se e
solo se esiste una soluzione di base x = (B−1b,0) che soddisfa le condizioni di
ottimalita cN = cN−cBB−1N ≥ 0. Si consideri la soluzione duale u = cBB−1.
Essa e ammissibile per il problema duale D′ di P ′ se e solo se uA ≤ c. Poiche
risulta uB = cBB−1B = cB e uN = cBB
−1N ≤ cN per le condizioni di
ottimalita, u e ammissibile duale. Inoltre ub = cBB−1b = cBxB = cx. E ora
facile verificare che la soluzione u risulta ammissibile e quindi ottima anche
per D.
La non ammissibilita di uno dei due problemi non implica la illimitatezza
dell’altro. Infatti esistono istanze per cui sia il problema primale che il duale
sono non ammissibili e quindi lo scarto di dualita e infinito (si prenda ad
esempio A matrice nulla, b = 1 e c = −1).
Il Lemma di Farkas e la dualita forte
In questo paragrafo si considerano due problemi primale e duale scritti in
forma canonica
min cx (28)
Ax ≥ b (29)
x ≥ 0 (30)
ed il problema duale sia quindi
min ub (31)
uA ≤ c (32)
u ≥ 0. (33)
La dualita forte della PL puo essere dimostrata come conseguenza di un
importante risultato della teoria dei sistemi lineari noto come Lemma di
Farkas. Esistono diverse varianti di questo risultato, noti anche come Teoremi
dell’alternativa.
Teorema 9 Lemma di Farkas Data una matrice A ed un vettore b, esatta-
mente uno degli insiemi
- P = {x : Ax ≥ 0, cx < 0}- Q = {u : uA = c, u ≥ 0}e non vuoto.
16

Dimostrazione Sia Q 6= ∅ e u ≥ 0 tale che uA = c. Allora cx = uAx
per ogni x e quindi, se Ax ≥ 0 risulta necessariamente cx ≥ 0 cioe P = ∅.Viceversa supponiamo Q = ∅ e consideriamo l’insieme Z = {z : z = uA, u ≥0} cioe l’insieme delle combinazioni coniche delle righe di A. Poiche per
ipotesi c /∈ Z e Z e un insieme chiuso e convesso esiste un iperpiano xx = α,
x ∈ Rn e α ∈ R, che separa strettamente Z da c cioe tale che xc < α e
xz ≥ α per ogni z ∈ Z per un opportuno vettore . Poiche lo 0 appartiene
a Z risulta α ≤ 0. Quindi cx < 0. D’altra parte uAx ≥ 0 per ogni u ≥ 0
e questo implica Ax ≥ 0. Infatti, se fosse Aix < 0 per qualche i, ponendo
ui = 1 e uj = 0 se j 6= i si otterrebbe uAx = uiAix < 0. Da questo segue
che x ∈ P .
Il Lemma di Farkas ha la seguente interpretazione geometrica. Il poliedro
definito dai vincoli Ax ≥ 0 e un cono convesso ed ogni sup elemento di-
verso dal vettore nullo e una direzione del cono. La funzione cx e limitata
inferiormente sul cono se e solo se P e vuoto e quindi se e solo se c e una
combinazione conica combinazione conica delle righe di A.
Dimostrazione del Teorema 8. Supponiamo che il problema primale
ammetta soluzione ottima x∗ di valore v∗ (il caso simmetrico puo essere
trattato in modo analogo). Dimostreremo che allora esiste u∗ ammissibile
per il problema duale e tale che u∗b ≥ cx∗ da cui, per la dualita debole,
u∗b = cx∗. Per l’ottimalita di x∗ risulta non ammissibile il sistema
Ax ≥ b (34)
x ≥ 0 (35)
cx < v∗ (36)
Come primo passo dimostriamo che questo sistema e non compatibile se e
solo se e non compatibile il sistema omogeneo
Ax− λb ≥ 0 (37)
cx− λv∗ < 0 (38)
x ≥ 0, λ ≥ 0 (39)
Infatti, se esiste una soluzione x del primo sistema allora (x, 1) e una soluzione
del secondo sistema. Viceversa sia (x, λ) una soluzione del secondo sistema.
Se λ > 0, allora xλ
e una soluzione del primo. Se λ = 0 si ha Ax ≥ 0,
cx < 0 ed e allora facile verificare che la soluzione x = x+x∗ e una soluzione
ammissibile del primo sistema.
Quindi possiamo assumere che il sistema (37) sia non ammissibile. Esso puo
17

essere scritto nella formaA −bIn 0
0 1
x
λ
≥
0m
0n
0
(40)
(cT −v∗
) x
λ
< 0 (41)
Per il Lemma di Farkas esiste quindi un vettore (u, y, w) ≥ 0 tale che
(u, y, w)
A −bIn 0
0 1
=
cT
−v∗
.Questi vincoli possono essere riscritti nella forma
uA+ Iny = cT (42)
−ub+ w = −v∗ (43)
u, y, w ≥ 0 (44)
da cui risulta che u e una soluzione ammissibile duale (uA ≤ cT , u ≥ 0), tale
che ub ≥ v∗. Per la dualita debole deve allora essere ub = v∗.
6.1 Condizioni di complementarita
La dualita forte stabilisce una relazione tra i valori ottimi di P e D. Consi-
deriamo ora un insieme di condizioni, dette condizioni di complementarita,
che stabiliscono delle relazioni tra le soluzioni ottime dei due problemi.
Teorema 10 Due soluzioni x e u ammissibili rispettivamente per i problemi
P e D sono ottime se e solo se soddisfano le condizioni
u(Ax− b) = 0 (45)
(uA− c)x = 0. (46)
Dimostrazione Necessita Per quanto provato nella dimostrazione del Teo-
rema 6 risulta ub ≤ uAx ≤ cx. Dalla dualita forte cx = ub si ottiene
allora
ub = uAx = cx, (47)
18

da cui seguono le (45) e (46).
Sufficienza Le condizioni di complementarieta implicano la (47) e quindi le
due soluzioni sono ottime per il Corollario 7.
In ammissibilita, le condizioni di complementarita esprimono condizioni piu
forti rispetto alla semplice condizione di ortogonalita tra le coppie di vettori
u, Ax− b e uA− c, x. Si noti infatti che, per l’ammissibilita delle soluzioni x
e u, ogni termine della sommatoria u(Ax− b) =∑mi=1 ui(Aix− bi) risulta non
negativo. Infatti (Aix− bi) ≥ 0 e, se la diseguaglianza vale in senso stretto,
deve essere ui ≥ 0 per il vincolo di nonnegativita sulla variabile ui. Quindi
u(Ax − b), essendo una somma di termini non negativi, e nullo se e solo se
tutti i suoi termini sono nulli cioe se e solo se
ui(Aix− bi) = 0 ∀ i = 1, . . . ,m.
Analogamente si puo dimostrare che, in ammissibilita, la condizione (uA −c)x = 0 e equivalente alle n condizioni
(uAj − cj)xj = 0 ∀ j = 1, . . . , n.
In particolare, per il Teorema 10, in ottimalita valgono le seguenti implica-
zioni
Aix− bi > 0 → ui = 0 (48)
xj > 0 → uAj − cj = 0 (49)
uAj − cj < 0 → xj = 0 (50)
ui > 0 → Aix− bi = 0. (51)
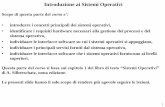
Interpretazione geometrica delle variabili duali ottime
Quanto affermato ci consente di interpretare geometricamente le variabili
duali ottime. Si consideri un problema primale nella forma {max cx : Ax ≤ b}(in cui la matrice A comprende tutti i vincoli e i vettori Ai puntano all’e-
sterno del poliedro primale, vedi Fig. 1), il cui problema duale e {maxub :
uA = c, u ≥ 0}. E facile riconoscere che le soluzioni ammissibili duali sono
tutti e soli i vettori dei coefficienti di combinazioni coniche delle righe di A
che danno il vettore c. Sia u una soluzione ottima duale. Per le condizioni
di complementarieta (48) possono essere diverse da zero solo le componenti
ui corrispondenti a vincoli primali soddisfatti come uguaglianza in ogni solu-
zione ottima primale. Quindi x e una soluzione ottima primale se e solo se c
e una combinazione conica delle righe di A che corrispondono a vincoli attivi
in x. Le variabili ottime duali sono proprio i coefficienti di tale combinazione
conica. Inoltre, essendo ub = cx per la dualita forte, l’iperpiano di equazione
cx = cx risulta una combinazione conica dei vincoli attivi in x.
19

A1
A2
A1
A2
cx*
A2
A2
A2
Figura 1: Cono dei vettori c per cui x∗ e soluzione ottima
6.2 Interpretazione economica delle variabili duali
Le variabili duali ottime di un problema di PL hanno anche una interessante
interpretazione economica.
Si consideri un problema in forma standard e siano β e x = (xB, xN) =
(B−1b,0) una base ottima e la corrispondente soluzione di base. Si supponga
ora di variare il q–esimo termine noto di una quantita ε, cioe si consideri un
nuovo vettore di termini della forma b′ = b+εeq, dove eq rappresenta il q-esimo
elemento della base canonica di Rm. Se la base β e non degenere, per valori
di ε sufficientemente piccoli, β e una base ammissibile anche per il problema
modificato e le variabili in base della corrispondente soluzione di base sono
x′B = B−1(b + εeq) ≥ 0. Poiche i costi ridotti non vengono modificati da
variazioni nel vettore b, β e ancora una base ottima. La variazione nel valore
ottimo dei due problemi e data da
cB(x′B − xB) = εcBB−1eq = εueq = εuq
dove u = cBB−1 e una soluzione duale ottima. Quindi uq rappresenta la va-
riazione nel valore ottimo conseguente ad una variazione unitaria del q-esimo
termino noto. Un valore uq < 0 (uq > 0) indica il decremento (aumento) nel
valore ottimo del problema corrispondente ad un incremento unitario del q–
esimo termine noto. Per tale motivo le variabili duali ottime possono essere
interpretate come prezzi connessi alla presenza dei vincoli e vengono anche
dette prezzi ombra.
Esempio Si consideri un problema di pianificazione della produzione. Una
azienda puo produrre n diversi prodotti utilizzando m risorse (materie prime,
ore lavoro ecc). Sia cj il profitto ottenibile da una unita del prodotto j, bi
la quantita di risorsa i e aij la quantita di risorsa i necessaria per produrre
una unita del prodotto j. Allora il problema di massimizzazione del profitto
totale puo essere espresso come
20

max cx (52)
Ax ≤ b (53)
x ≥ 0. (54)
Immaginiamo ora che l’azienda possa investire nell’acquisto di nuove risorse,
e sia ri il costo unitario della risorsa i-esima. Quali sono le risorse che e
conveniente acquistare e in quali quantita?
Se u∗ e la soluzione ottima duale, la generica componente u∗i indica l’aumen-
to nel valore della funzione ottenibile per un incremento unitario del termine
noto bi. Quindi il guadagno netto per aumento unitario della risorsa i e dato
da gi = u∗i − ri. Evidentemente conviene investire in una o piu risorse q
con valore gq massimo. Il ragionamento puo essere applicato purche la base
continui a rimanere ottima. Poiche una variazione dei termini noti non inci-
de sull’ottimalita, e sufficiente che la base continui a rimanere ammissibile e
quindi la quantita ∆bq deve essere tale che
B−1b+B−1∆bqeq ≥ 0,
cioe
∆bqB−1q ≥ −x∗B.
Se B−1q ≥ 0 questo incremento puo essere a priori illimitato e quindi con-
viene investire completamente nella risorsa i, in caso contrario il valore ∆bq
massimo e dato da
mink:B−1
kq<0
−x∗β(k)
B−1kq
.
Ogni altro incremento di bq non porterebbe a nessun vantaggio e conviene
investire su una diversa risorsa.
6.3 Simplesso e dualita
Si consideri un problema di PL espresso in forma standard
min cx (55)
Ax = b (56)
x ≥ 0 (57)
ed il suo problema duale
min ub (58)
uA ≤ c (59)
21

Ad ogni soluzione di base x = (xB,0) e associato il vettore
u = cBB−1
che, avendo dimensione m, puo essere interpretato come un vettore di varia-
bili duali.
Vediamo come si comporta questo particolare vettore u rispetto ai vincoli del
problema duale. Tali vincoli possono essere riscritti come u[BN ] ≤ [cBcN ]T
e quindi scomposti nei due gruppi
uB ≤ cB (60)
uN ≤ cN . (61)
Sostituendo a primo membro il vettore u = cBB−1 otteniamo che il primo
gruppo di vincoli e sempre soddisfatto con l’eguaglianza dato che cBB−1B =
cBI = cB, mentre il seconda gruppo di vincoli e equivalente a
cBB−1N ≤ cN ⇔ cN = cN − cBB−1N ≥ 0.
Quindi u e una soluzione ammissibile duale se e solo se i costi ridotti sono
tutti non negativi, cioe se e solo se e soddisfatta la condizione di ottimalita
richiesta dal simplesso. In generale, una soluzione duale u viene detta una
soluzione di base se risulta u = cBB−1 per una opportuna matrice di base B.
Da quanto detto si puo osservare che il metodo del simplesso lavora consi-
derando ad ogni passo una coppia di soluzioni primale e duale che soddisfano
le condizioni di complementarieta ed hanno lo stesso valore (si verifichi per
esercizio). Mentre la soluzione primale e ammissibile, la soluzione duale in
generale e non ammissibile e diventa ammissibile solo quando la soluzione
primale soddisfa le condizioni di ottimalita ed e quindi ottima.
7 Analisi di sensitivita o di post–ottimalita.
Molto spesso i parametri che intervengono nel modello matematico di un
problema reale contengono un certo grado di approssimazione rispetto ai
valori reali. Ha allora senso chiedersi quanto dell’informazione che si ottiene
risolvendo il modello matematico sia sensibile a possibili inaccuratezze del
modello, o, in altre parole, quanto la soluzione ottenuta sia robusta rispetto
a piccole modifiche dei dati. L’analisi di sensivita e una analisi a posteriori
che cerca di rispondere a queste domande.
I parametri che intervengono in un modello di PL sono: i costi, i termini
noti dei vincoli e gli elementi della matrice dei vincoli.
22

Sia x = (xB, xN) una soluzione di base ottima di un problema in forma
standard.
Consideriamo dapprima una variazione in uno dei termini noti del problema,
assumendo che il vettore b venga modificato in b′ = b+ εeq. Poiche una tale
modifica non altera i costi, la soluzione di base x′ = (x′B = B−1b′, x′N = 0)
soddifa ancora la condizione di ottimalita cN ≥ 0. Quindi, se ammissibile,
essa e anche ottima. Essendo tutte le variabili fuori base nulle, la condizione
di ammissibilita, posto W = B−1, e data da
x′B = Wb′ = W (b+ εeq) = xB + εW q ≥ 0.
L’intervallo di valori di ε per cui tale condizione e soddisfatta e allora
max{−(xB)iWiq
: Wiq > 0} ≤ ε ≤ min{−(xB)iWiq
: Wiq < 0}. (62)
Si noti che, essendo xB ≥ 0, l’intervallo in (62) contiene lo 0, valore corri-
spondente al problema di partenza.
Si consideri ora una variazione nel costo della p-esima variabile, cioe una
variazione nel vettore dei costi del tipo c′ = c + εep. Tale variazione non
modifica l’insieme di ammissibilita del problema e quindi x e una soluzione
di base ammissibile per il problema modificato. Quali sono i valori di ε per
cui verifica ancora le condizioni di ottimalita cN ≥ 0? Si devono distinguere
i due casi p ∈ η e p ∈ β. Nel primo caso una variazione di cp altera il
costo ridotto della sola variabile xp e quindi le condizioni di ottimalita sono
soddisfatte se e solo se
c′p = cp + ε ≥ 0 ⇐⇒ ε ≥ −cp. (63)
Nel secondo caso, sia p = β(q) il q-esimo elemento in base. Le condizioni di
ottimalita richiedono
c′N = cN − (cB + εeq)B−1N = cN − εeqB−1N ≥ 0. (64)
Sia a = eqB−1N. La (64) e equivalente alle condizioni
c′j = cj − εaj ≥ 0 per ogni j ∈ η.
Quindi x soddisfa le condizioni di ottimalita per ogni valore di ε nell’intervallo
max{ cjaj
: j ∈ η, aj < 0} ≤ ε ≤ min{ cjaj
: j ∈ η, aj > 0}. (65)
Si noti che, essendo cN ≥ 0, l’intervallo contiene lo 0.
23

Una analisi analoga puo essere condotta per studiare quali variazioni in un
termine della matrice dei vincoli A sono compatibili con l’ottimalita della
base corrente.
Si noti che modifiche nei termini noti e nei costi compatibili con le condizioni
(62), (63) e (65) , mantengono l’ottimalita della base corrente ma comportano
una variazione dei valori delle variabili ottime (nel primo caso) e del valore
ottimo del problema nel secondo caso. Cio che non varia e la base ottima.
Nel caso di variazioni dei parametri che non soddisfano tali condizioni sara
necessario eseguire una fase di riottimizzazione.
8 Algoritmo del simplesso duale
Si supponga di aver risolto un problema di PL in forma standard
min cx (66)
Ax = b (67)
x ≥ 0 (68)
con il metodo del simplesso determinando una soluzione di base ottima x∗ e
la corrispondente soluzione duale ottima u∗ date da
x∗ = (B−1b,0) u∗ = cBB−1
dove B e la matrice di base ottima.
Si assuma ora di modificare il problema in uno dei seguenti modi
a) variando il vettore dei termini noti b;
b) introducendo un nuovo vincolo;
e che questa variazione renda la soluzione x∗ inammissibile. Per risolvere il
nuovo problema con il metodo del simplesso si dovrebbe a questo punto far
ripartire la prima fase del metodo e quindi si perderebbe tutta l’informazione
precedentemente acquisita. Questo sembra poco sensato dato che una mo-
difica come quelle considerate probabilmente determina un problema la cui
soluzione ottima non e molto “distante” dalla soluzione ottima del problema
originale. Un metodo che consente di risolvere il nuovo problema a partire
dalla base corrente e il metodo del simplesso duale.
Si consideri dapprima una modifica del vettore dei termini noti b che renda
x∗ inammissibile. Tale modifica fa variare l’insieme ammissibile primale e
la funzione obiettivo duale, mentre non varia l’insieme ammissibile duale e
24

la funzione obiettivo primale. In particolare, se anche la soluzione ottima
primale x∗ non e piu ammissibile, la soluzione duale ottima u∗ e ancora
ammissibile. Eventualmente, essendo variata la funzione obiettivo del duale,
u∗ non sara piu ottima.
Nel caso b) in cui venga introdotto un nuovo vincolo primale
gx ≤ h
l’insieme dei vincoli del problema primale diventa
A =
A 0
g 1
≤ b
h
dove l’ultima riga si riferisce al nuovo vincolo ed e stata introdotta una nuova
variabile (di slack) e quindi una colonna della matrice identica. In questo
caso, poiche B e non singolare, anche
B =
B 0
gB 1
e non singolare. Si puo allora considerare la soluzione di base (B−1(b, h)T , 0)
e la corrispondente soluzione duale di base (cB, 0)B−1 = (u∗, 0)T . E facile
verificare che (u∗, 0) risulta ammissibile per il nuovo problema duale.
Vediamo ora come, a partire da una soluzione di base duale ammissibile, sia
possibile risolvere il nuovo problema primale.
L’algoritmo del simplesso duale
Si e gia visto come il metodo del simplesso lavori mantenendo ad ogni passo
una coppia di soluzioni primale-duale x, u con le seguenti proprieta: 1) x e u
soddisfano le condizioni di complementarita, 2) x e ammissibile, 3) uB = cB
e 4) la condizione uN − cN ≤ 0, equivalente alla condizione di ottimalita
cN ≥ 0, risulta soddisfatta solo in ottimalita.
Il metodo del simplesso duale opera in modo simmetrico, cioe ad ogni passo
considera una coppia di soluzioni primale e duale che soddisfano le condizioni
di complementarita e di cui solo la soluzione duale e ammissibile. L’obiettivo
e quello di portare la soluzione primale verso l’ammissibilita dato che questa
condizione implica l’ottimalita per il Teorema 10.
Alla generica iterazione la soluzione di base duale u = cBB−1 e ammissibile
mentre la soluzione di base primale (B−1b,0) e non ammissibile. Poiche
tutte le variabili fuori base sono nulle, questo implica che una variabile in
25

base deve avere un valore strettamente negativo. Sia essa la variabile di
indice β(q), cioe la q-esima variabile in base. Un modo per rendere questa
variabile non negativa e quello di portarla fuori base, sotto la condizione di
mantenere l’ammissibilita duale. Attualmente il vincolo duale corrispondente
alla colonna Bq risulta soddisfatto come uguaglianza. Portare la variabile
fuori base significa consentire che questo vincolo possa essere soddisfatto con
il ≤. L’obiettivo e allora quello di determinare una nuova soluzione duale u′
tale che risulti
u′B = cB − αeq (69)
u′N ≤ cN (70)
per un opportuno α ≥ 0. Inoltre, per ottenenere una nuova base, e necessario
individuare un valore di α per cui almeno uno dei vincoli corrispondenti alle
variabili fuori base risulti soddisfatto con l’eguaglianza. Per determinare un
tale valore si esplicitino le condizioni (70) sostituendo u′ = (cB − αeq)B−1
nel secondo blocco di disequazioni. Si ottiene
(cB − αeq)B−1N = cBB−1N − αeqB−1N ≤ cN .
Posto a = eqB−1N , il valore massimo di α e dato dalle condizioni
−αa ≤ cN − cBB−1N = cN .
Si noti che, essendo u = cBB−1 ammissibile, i costi ridotti cj, j ∈ η, sono
tutti ≥ 0. Ne segue che componenti aj ≥ 0 non pongono alcun impedimento
all’aumento di α. Quindi il valore massimo per α e dato da
α∗ = min{−cjaj
: j ∈ η, aj < 0}.
In particolare, se a ≥ 0, α∗ = +∞, cioe α puo tendere all’infinito mantenendo
la soluzione duale ammissibile. Il costo della nuova soluzione duale u′ e dato
da
u′b = cBB−1b− αeqB−1b = cBB
−1b− α∗xβq . (71)
Poiche xβq < 0, se α∗ = +∞ il valore della soluzione duale tende ad infinito
ed il problema duale e illimitato. Per il Teorema 6 si puo concludere che il
primale e inammissibile. In caso contrario, sia p una variabile fuori base per
cui risulta
α∗ =−cpap
.
Allora il vincolo u′Ap e soddisfatto con l’uguaglianza e la variabile p entra
in base. Considerando nuovamente la (71), si puo notare che, se α∗ > 0, il
valore duale e aumentato.
26

Analogamente a quanto fatto per il simplesso primale, si puo dimostrare
che la matrice di base ottenuta sostituendo la q–esima colonna di B con la
colonna Ap e non singolare, e che quindi u′ e una nuova soluzione di base.
Se le componenti della corrispondente soluzione di base primale sono tutte
non negative, allora la soluzioni di base primale corrente e ottima. In caso
contrario, si esegue una nuova iterazione.
Anche in questo caso, se vengono utilizzate regole anticiclaggio, il metodo
termina in un numero finito di passi o producendo una soluzione ottima o
determinando che il problema primale e inammissibile.
Bibliografia
Il materiale contenuto nella dispensa e ampiamente e liberamente tratto dal
testo: P. Serafini, Ottimizzazione, Zanichelli, 2000, (cap. 6 e 7).
Altri riferimenti bibliografici:
D. Goldfarb e M.J. Todd, Linear Programming, in Optimization, Handbooks
of Operations Research and Management Science, Vol. 1, North–Holland.
27